

-
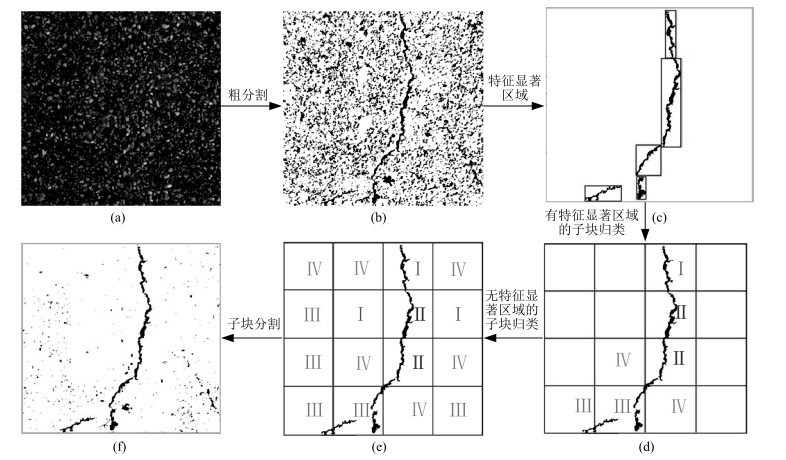
摘要: 沥青路面裂缝自动检测是制约公路养护科学决策的最主要瓶颈.针对现有裂缝检测算法在大规模应用特别是广地域、多路况等复杂环境下算法稳定性、可靠性及实时性等方面存在严重不足问题.本文在观察大量实际工程路面图像基础上, 对路面裂缝特征进行全新定义, 提出了一种基于空间聚集特征的沥青路面裂缝检测方法, 参考裂缝的空间分布、灰度、几何等特征, 以子块图像为处理单元, 采用逐步求精的策略对子块图像进行分割, 快速定位空间聚集区域, 再对聚集区域进行评估得到信度高的裂缝候选区域; 最后以裂缝候选区域为种子区域, 在准确估算裂缝发展趋势的基础上, 结合裂缝片段聚集及相似性等特性, 去除噪声同时合并连接断裂的裂缝, 实现了裂缝区域较为完整的检测.通过测试多路况、多采集环境下近万样本, 并采用不同的方法对测试结果进行评估, 结果显示, 算法对不同类型路面图像中具有不同特征的裂缝区域均具有良好的检测性能, 裂缝定位准确性达到95%以上, 裂缝区域检测的完整性达到90%以上.Abstract: Asphalt pavement crack detection is the main bottleneck of advanced decision support for road maintenance. A common problem associated with existing algorithms is lack of stability, reliability and timeliness in large-scale applications, especially in wide geographical areas and varying road conditions. In this paper, a new description of the cracks is proposed by observing a large number of pavement images. And an asphalt pavement crack detection using spatial clustering feature is proposed. Regions of aggregation are the primary targets segmented from original image via a coarse-to-fine methodology which comprehensively takes the spatial distribution, intensities and geometric features of cracks into account. Then candidate crack regions with sufficient confidence are extracted from regions of aggregation. Moreover, a new region growing algorithm is presented on the basis of an accurate estimate of cracks trend, which guarantees the accomplishment of providing complete cracks by merging operation for those highly similar regions and simultaneously eliminating distinct ones. A larger number of images of pavement surface have been taken for experiments, which cover a wide range of different road conditions and varying data collecting environments. The detection results show that our algorithm is satisfactory for a variety of different cracks. The detection accuracy is over 95% and more than 90% of coherent cracks without disconnected fragments have been correctly detected as the integrated ones.
-
Key words:
- Asphalt pavement /
- crack /
- clustering region /
- candidate region /
- growth direction
-
脊柱类疾病是比较常见的一种疾病, 手术是治疗脊柱类疾病的常见方式.图像引导的脊柱手术能够大大提高手术的成功率, 尤其是3D的图像能够给医生提供包括病人脊椎姿态的丰富信息.然而在术中获取病人的3D影像是十分困难的, 而获得2D的X-ray图像比较容易, 为了在术中给医生呈现病人的3D脊椎信息, 一个可行的方法便是对术前3D图像中的脊椎和术中2D图像中的脊椎进行配准, 从而间接地在术中为医生提供病人脊椎的3D姿态信息.
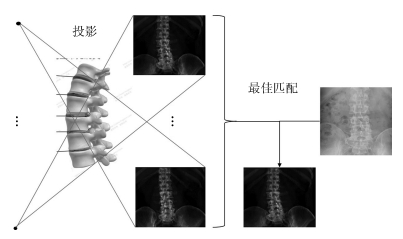
如图 1所示, 传统的2D/3D配准方法是基于搜索的策略, 是将3D图像模拟投影成一系列的2D图像, 将这些模拟投影图像与真实的2D图像进行相似性度量, 找到一个最佳匹配的模拟投影图像, 从而完成配准[1-4].在进行相似性度量时, 早期配准方法如[2, 4-7]是对整幅图像或感兴趣区域进行配准, 这样目标周围的组织也会对配准产生影响.为了避免邻近组织的影响, Pohl等在配准前先对目标进行分割, 使得配准更加的精确[8].在搜索的策略上, 由于投影空间复杂度较高为O(n6), 包括3个平移自由度和3个旋转自由度, 所以计算量巨大, 为了减小计算量, 有许多启发式搜索的方法被提出, 如Zollei等和Kim等使用梯度下降的方法来引导搜索[5-6], Chou等使用回归学习的方法建立灰度残差与投影参数改变量的关系来引导投影参数的搜索方向[9].这些基于启发式搜索的配准方法在一定程度上减小了计算量, 但是依然很难达到实时配准, 并且对初值敏感, 不易收敛.
由于基于搜索策略的配准方法计算量大, 越来越多的研究转向基于机器学习的方法[10-12].基于机器学习的配准方法主要是学习模拟投影图像与投影参数之间的关系, 从而避免搜索的过程, 大大提高了配准的效率.使用投影图像的哪些信息以及如何提取这些信息并建立与投影参数之间的关系是基于机器学习配准方法的一个重要的问题. Cyr等只使用了简单的轮廓信息, 而没有使用内部丰富的结构信息[10].文献[11]中建立了目标的纹理模型, 并学习纹理模型与投影参数之间的关系, 在精度和速度上都有较好的效果, 但是这个工作配准的对象是干扰较小的头部图像, 因此并没有分割的过程.文献[12]中使用标志点的统计分量来回归学习其与投影参数之间的关系, 但是其将分割、标志点定位和统计分量计算作为三个独立的问题进行处理, 且分割直接使用人工设定阈值的方法, 使得整个方法复杂且需要较多的人为干预, 稳定性和实用性欠佳.
为了更好地分割目标, 本文对脊椎建立了统计形状模型[13-14].统计形状模型最早应用于人脸分割上, 文献[15-16]将统计形状模型应用在医学影像的分割上, 得到了不错的效果.统计形状模型除了分割目标外, 还能提取形状分量、灰度分量、标志点位置等信息, 相比文献[12]中将这三个步骤作为三个独立的问题进行处理, 统计形状模型具有更高的稳定性和实用性.文献[11]中使用了灰度信息建立了纹理模型, 但是2D/3D配准是跨模态的, 灰度信息易受到模态的影响, 而形状信息并不会受到模态的影响, 因此本文采用形状信息建立与投影角度的关系, 即姿态模型.
另一方面, 可以证明6个投影参数, 在选择合理的投影方式下, 其中4个投影参数的效果可以等效为一个仿射变换, 有了标志点的位置, 可以通过几何的方法直接计算出这个仿射变换, 因此姿态模型只需要建立两个投影参数与形状分量的关系.
基于以上考虑, 本文提出了一个结合几何与学习的2D/3D脊椎配准方法, 该方法使用统计形状模型对目标脊椎进行分割并提取形状信息, 在一个本文构建的新的投影方式下, 两个参数通过学习求解, 其余4个投影参数通过几何求解.
本文的主要贡献如下:通过学习的方法建立投影图像与投影参数之间的关系, 构建了一个新的投影变换方式, 使用几何和学习相结合的方法计算投影参数.故而, 本文的方法实时性好, 准确性高, 鲁棒性好.
1. 方法
1.1 总体流程
如图 2所示, 本方法主要包括三个部分.第一部分为建立统计形状模型, 在术前使用训练集的CT图像投影生成2D的DRR (Digitally reconstructed radiograph)图像, 并和X-ray图像一起建立统计形状模型AAM (Active appearance model); 第二部分为建立姿态模型, 在术前对病人的CT图像进行DRR投影, 使用AAM模型分割DRR图像中目标脊椎, 并得到形状参数, 然后建立投影参数与形状参数之间的关系; 第三部分为配准, 在术中, 使用AAM模型对X-ray图像的目标脊椎进行分割, 并得到形状参数, 再使用姿态模型通过形状参数直接得到投影参数, 从而完成配准.
1.2 建立统计形状模型
统计形状模型广泛地应用在医学影像分割当中, 常用的统计形状模型包括ASM (Active shape model)[13]和AAM[14], 其中ASM只对形状信息进行建模, 而AAM不仅对形状信息进行建模同时也对灰度信息进行建模, 因此具有更好的分割性能, 因此本文采用AAM来建立统计形状模型.
本文将3D的CT图像投影成2D的DRR图像, 并对2D的DRR图像和X-ray图像进行AAM建模.为了可以使用同一个统计形状模型来对DRR图像和X-ray进行标志点的定位, 本文将DRR图像和X-ray图像放在一起建立一个统一的AAM模型.
为了提取建立AAM模型所需的标志点, 如图 3所示, 本文对每个样本使用人工提取的方法提取所需的标志点, 并使用普氏分析(Procrustes analysis)[17]将提取的标志点映射到一个共同的坐标系下, 使得每个样本标志点的重心为原点, 并消除平移、放缩、旋转对不同样本标志点的影响.
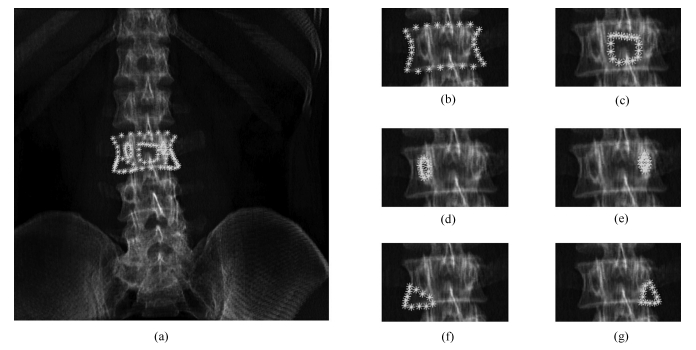 图 3 提取标志点(我们对每幅图像手动提取93个标志点, 所有标志点总体分为6个部分: (a)为所有的标志点, (b)、(c)、(d)、(e)、(f)、(g)为6个部分每个部分的标志点, 其中(b)为椎体轮廓, (c)为中央灰度凹陷, (d)和(e)接近于生理结构的椎弓根, (f)和(g)为椎体左右下切角)Fig. 3 Extract landmarks (We manually extract 93 landmarks for each image, all landmarks are divided into 6 parts, in which (a) contains all landmarks, while (b), (c), (d), (e), (f), (g) contain one of 6 parts, among them, (b) is vertebral body contour, (c) is the central gray depression, (d) and (e) are close to the pedicle of the physiological structure, and (f) and (g) are the left and right bottom of the vertebral body.)
图 3 提取标志点(我们对每幅图像手动提取93个标志点, 所有标志点总体分为6个部分: (a)为所有的标志点, (b)、(c)、(d)、(e)、(f)、(g)为6个部分每个部分的标志点, 其中(b)为椎体轮廓, (c)为中央灰度凹陷, (d)和(e)接近于生理结构的椎弓根, (f)和(g)为椎体左右下切角)Fig. 3 Extract landmarks (We manually extract 93 landmarks for each image, all landmarks are divided into 6 parts, in which (a) contains all landmarks, while (b), (c), (d), (e), (f), (g) contain one of 6 parts, among them, (b) is vertebral body contour, (c) is the central gray depression, (d) and (e) are close to the pedicle of the physiological structure, and (f) and (g) are the left and right bottom of the vertebral body.)1.2.1 形状模型
本文对映射到共同坐标系下的标志点使用PCA (Principal component analysis)得到形状模型(见文献[13]), 每个样本的特征点$x({x_1},{x_2}, \cdots ,{x_n})$可以表示为
$ x = \overline x + {P_s}{b_s} $
(1) 这里是$\overline x $平均形状, $P_s$是对标志点使用PCA得到的一组标准正交基, $b_s$是形状模型参数.
1.2.2 表观模型
我们把对所有的样本进行变形, 使得其特征点变形到平均形状上(使用三角算法)[18].我们把经过形状标准化的图像, 在其形状模型所覆盖的区域进行采样, 并对采样点进行归一化使其均值为0, 方差为1, 以消除亮度的影响, 从而得到$g$.对$g$我们使用PCA得到表观模型[14], 则$g$可以表示为
$ g = \bar g + {P_g}{b_g} $
(2) 这里$\bar{g}$是平均灰度, $P_g$是灰度模型的标准正交基, $b_g$是灰度模型参数.
1.2.3 联合模型
我们将形状模型参数和灰度模型参数串联起来建立一个联合模型.由于形状模型和灰度模型具有不同的量纲, 因此我们对形状模型加一个系数以统一量纲.
$ b = \left[ {\begin{array}{*{20}{c}} {{W_s}{b_s}}\\ {{b_g}} \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} {{W_s}P_s^{\rm{T}}(x - \bar x)}\\ {P_g^{\rm{T}}(g - \bar g)} \end{array}} \right] $
(3) 其中, $W_s$是一个对角阵来平衡形状模型和灰度模型参数的量纲(见文献[14]).
为了进一步挖掘形状模型和灰度模型之间相关性, 我们对串联的形状模型和灰度模型参数使用PCA得到联合模型(见文献[14]), 由于形状模型参数和灰度模型参数的均值为0, 所以$b$均值为0, 则有:
$ \hat{b}=Qc $
(4) $Q$是表征模型正交基, $c$是表征模型参数:这样我们可以更直接地使用$c$来表达形状和灰度
$ \hat{x}=\bar{x}+P_s W_s Q_s c, \quad\hat{g}=\bar{g}+P_g Q_g c $
(5) 其中
$ Q= \begin{bmatrix} Q_s\\ Q_g \end{bmatrix} $
(6) 1.2.4 分割模型
建立了形状和灰度的联合统计模型之后, 使用该统计模型对目标进行分割, 分割使用迭代的策略.为了使得分割迭代修正的过程更加高效, 分割模型使用了学习的方法, 使用一个线性模型去学习灰度的偏差与联合统计模型参数的偏移量之间的关系:
$ \delta c=A\delta I $
(7) 为了得到A, 在模型的参数上人为增加一个偏移量$\delta{c}$, 计算增加了偏移量之后图像灰度的变化$\delta I$, 使用多元线性回归来拟合$A$.为了拟合平移$t_x$、$t_y$、旋转$\theta$和尺度$s$的变化带来的变化, 在模型参数上增加额外的4个参数($s_x, s_y, t_x, t_y$), 其中$s_x=s \cos (\theta)$, $s_y=s \sin (\theta)$.同时将原图像的灰度$I$标准化后进行采样得到纹理$g$, 则偏移关系变为
$ \delta c=A\delta g $
(8) 其中
$ \delta g=g_s -g_m $
(9) $g_s$为原图像纹理, ${g}_m$为模型的当前迭代联合统计模型的纹理.
1.3 建立姿态模型
由于病人的CT图像可以在术前得到, 所以可以在术前从病人的CT图像中尽可能地获取信息以辅助术中的配准, 提高术中的配准速度和精度.
本节通过对病人术前CT图像投影生成一系列DRR图像, 并使用AAM模型对目标脊椎进行分割得到其统计模型参数, 从这个参数中得到目标脊椎的形状分量和灰度分量.
为了避免配准搜索的过程, 本节建立了姿态模型, 即脊椎和投影参数之间的关系.由于DRR图像和X-ray图像属于不同的模态, 其灰度信息有一定的差异, 因此用DRR图像的灰度信息建立的姿态模型直接应用于X-ray图像并不合适.考虑到脊椎的形状信息不但受模态的影响小而且与投影参数也有较强的相关性, 所以本文使用形状信息来建立姿态模型.
在投影生成DRR图像时, 如果让CT以一些特定的方式变换, 4个投影参数的作用可以等效为一个仿射变换.这就意味着部分投影参数可被几何变换代替.本文构建了一种新的投影变换, 如图 4所示, ($r, \theta, \phi$)为球形坐标系的参数. ($u, v, w$)为投影对象自身姿态坐标系, 此姿态坐标系与球形坐标系联动, 姿态坐标系的$u$轴平行于球坐标系的纬线切线指向如图 4(b)中所示方向, $v$轴平行于球坐标系的经线指向如图 4(b)中所示方向, $w$轴沿径向方法指向背离圆心的方向.
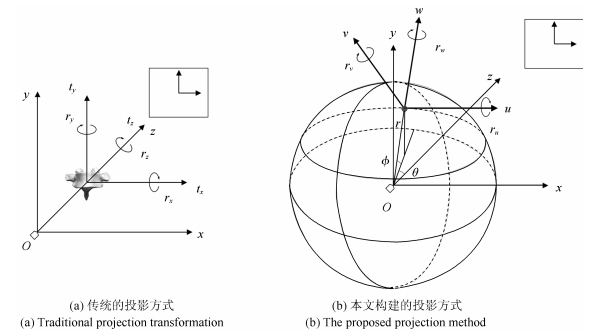 图 4 投影变换((a)图是传统的投影方式, ($x, y, z$)为世界坐标系, ($t_x, t_y, t_z$)是三个平移参数($r_x, r_y, r_z$)为三个旋转参数. (b)图是本文构建的投影方式, ($x, y, z$)为世界坐标系, ($x'O'y'$)为投影平面坐标系, 此坐标系沿世界坐标系$z$轴向投影与($xOy$)重合. ($r, \theta, \phi$)为球形坐标系的参数. ($u, v, w$)为投影对象自身姿态坐标系, 此姿态坐标系与球形坐标系联动, 姿态坐标系的$u$轴平行于球坐标系的纬线切线指向如图 4(b)中所示方向, $v$轴平行于球坐标系的经线指向如图 4(b)中所示所示方向, $w$轴沿径向方法指向背离圆心的方向.)Fig. 4 Projection transformation ((a) is traditional projection transformation, and ($x, y, z$)is world coordinate system, and ($t_x, t_y, t_z$) are three translation parameters, while ($r_x, r_y, r_z$) are three rotation parameters. b) is the proposed projection method. ($x, y, z$) is the world coordinate system, and $x'O'y'$) is the coordinate system of projective plane. This coordinate system coincides with the axial projection of $z$ in the world coordinate system ($xOy$). ($r, \theta, \phi$) are parameters for the spherical coordinate system. ($u, v, w$) is pose projection coordinates of object, and it coact with spherical coordinates as the (b) shows.)
图 4 投影变换((a)图是传统的投影方式, ($x, y, z$)为世界坐标系, ($t_x, t_y, t_z$)是三个平移参数($r_x, r_y, r_z$)为三个旋转参数. (b)图是本文构建的投影方式, ($x, y, z$)为世界坐标系, ($x'O'y'$)为投影平面坐标系, 此坐标系沿世界坐标系$z$轴向投影与($xOy$)重合. ($r, \theta, \phi$)为球形坐标系的参数. ($u, v, w$)为投影对象自身姿态坐标系, 此姿态坐标系与球形坐标系联动, 姿态坐标系的$u$轴平行于球坐标系的纬线切线指向如图 4(b)中所示方向, $v$轴平行于球坐标系的经线指向如图 4(b)中所示所示方向, $w$轴沿径向方法指向背离圆心的方向.)Fig. 4 Projection transformation ((a) is traditional projection transformation, and ($x, y, z$)is world coordinate system, and ($t_x, t_y, t_z$) are three translation parameters, while ($r_x, r_y, r_z$) are three rotation parameters. b) is the proposed projection method. ($x, y, z$) is the world coordinate system, and $x'O'y'$) is the coordinate system of projective plane. This coordinate system coincides with the axial projection of $z$ in the world coordinate system ($xOy$). ($r, \theta, \phi$) are parameters for the spherical coordinate system. ($u, v, w$) is pose projection coordinates of object, and it coact with spherical coordinates as the (b) shows.)为了使问题更加简化且清晰, 本文在对CT投影之前, 先将目标脊椎的中心移动到初始投影位置.对于新的投影方式, 投影过程可以表示为
$ I={ P}({T}(I_{3{\rm D}};r_u, r_v, r_w, r, \theta, \phi )) $
(10) 其中, $I_{3{\rm D}}$为3D图像, $T$为本文构建的三维空间变换, $P$为DRR投影, $I$为投影生成的2D的DRR图像.
由于我们获得X-ray图像生成时, 投影对象距离光源的大致距离$r_0$, 因此可以将$r_0$作为投影的基准值, 实际投影的距离可以表示为$r_0+\delta r$, 这样投影过程可以表示为
$ I={P}({T}(I_{3{\rm D}};r_u, r_v, r_w, r_0 +\delta r, \theta, \phi)) $
(11) 由于$\delta r\ll r_0$, 因此我们可以近似认为$\delta r$的改变所引起的投影图像的变化为一个放缩变换(证明详见附录A).
令
$ I_a={P}({T}(I_{\rm CT};r_u, r_v, 0, r_0, 0, 0)) $
(12) $ I_c={P}({T}(I_{\rm CT};r_u, r_v, r_w, r_0 +\delta r, \theta, \phi )) $
(13) $x^a$为$I^a$某点的坐标, $x^c$为$I^c$中$x^a$的对应点的坐标, 我们把二维的投影坐标系下的坐标点增广表示在三维的世界坐标系中则有$x^A={bmatrix} x^a\\ {h} {bmatrix}$, $x^C={bmatrix} x^c\\ {h} {bmatrix}$. $h$是光源到投影平面原点的距离.则有(证明过程详见附录A)
$ x^C=kRSx^A $
(14) 其中, $k$为一个系数使得等式右边的第三维为$h$, 且
$ S= \begin{bmatrix} s & 0 & 0\\ 0 & s & 0\\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} \cos r_w & \sin r_w & 0\\ - \sin r_w & \cos r_w & 0\\ 0 & 0 & 1 \end{bmatrix} $
(15) $ s=\frac{r_0}{(r_0+\Delta r)} $
(16) 其中
$ R= \begin{bmatrix} \cos \theta & 0 & \sin \theta\\ - \sin \theta & \sin \phi & \cos \theta \cos \phi\\ \sin \theta \sin \phi & \cos \phi & - \cos \theta \sin \phi \end{bmatrix} $
(17) $r_u$和$r_v$是空间的旋转参数, 表示的是脊椎的空间姿态, 我们称之为姿态参数, $r_w, \delta r, \theta, \phi$可以使用一个几何变换代替, 我们称之为几何参数.具有相同姿态参数的DRR图像之间可以使用几何变换(齐次空间下)相互转换, 这就意味着对相同的姿态参数只需要投影生成一张DRR图像, 其他相同姿态参数的DRR图像可以通过几何变换的方法得到.这样需要进行DRR投影的参数空间就可以从O($n^6$)减少为O($n^2$).对于图像上的标志点, 同样可以使用线性变换得到, 需要定位标志点位置的图像空间也可以从O($n^6$)减少为O($n^2$), 这样显著的减少了定位标志点的工作量.
为了学习姿态参数与目标脊椎形状参数之间的关系, 对CT图像生成$n$幅DRR图像.对于$n$幅生成的投影图像, 使用AAM分割目标脊椎并获得$n$组形状参数${\pmb B}=(b_1, b_2, \cdots, b_n)$, 每个投影图像对应的姿态参数为
$ \begin{bmatrix} \pmb {R_u} \\ \pmb {R_v} \end{bmatrix} = \begin{bmatrix} r_{u1} & r_{u2} & \cdots & r_{un} \\ r_{v1} & r_{v2} & \cdots & r_{vn} \end{bmatrix} $
本文使用一个线性模型$M$去学习形状参数与姿态参数之间的关系,
$ \begin{equation} \begin{bmatrix} \pmb {R_u} \\ \pmb {R_v} \end{bmatrix} =M{\pmb B} \end{equation} $
(18) $ \begin{equation} M= \begin{bmatrix} \pmb {R_u} \\ \pmb {R_v} \end{bmatrix} {\pmb B}^{\rm T}({\pmb B}{\pmb B}^{\rm T})^{-1} \end{equation} $
(19) 则$M$即是我们需要的姿态模型.通过该姿态模型, 我们可以使用形状参数直接求出对应的投影姿态参数.给定一幅图像目标脊椎的形状参数$b$, 则其对应的姿态参数为
$ \begin{equation} \begin{bmatrix} r_u \\ r_v \end{bmatrix} =Mb \end{equation} $
(20) 1.4 配准
如图 5所示, 在术前, 针对由CT投影生成的DRR图像, 首先用AAM模型分割目标脊椎得到其形状参数, 然后建立姿态模型, 即形状参数与投影角度之间的关系; 在术中, 先对X-ray图像使用AAM模型分割目标脊椎得到形状参数, 然后通过术前得到的姿态模型求取投影参数.具体如下:
对于术中待配准的X-ray图像$I_{ \mbox{X-ray}}$, 我们使用AAM模型分割目标脊椎(需手动指定初始位置)并获得其形状参数$b_{ \mbox{X-ray}}$, 则其对应的姿态参数为
$ \begin{equation} \begin{bmatrix} r_u \\ r_v \end{bmatrix} =Mb_{ \mbox{X-ray}} \end{equation} $
(21) 获得了姿态参数后, 使用此姿态参数生成对应的DRR图像.利用生成的DRR图像和X-ray图像上标志点的几何变换关系, 我们可以求出几何参数.具体如下:
我们根据得出的姿态参数对目标CT图像$I_{\rm CT}$进行DRR投影, 得到对应的DRR图像$I_{\rm DRR}$, 有:
$ \begin{equation} I_{\rm DRR}={P(T}(I_{\rm CT};r_u, r_v, 0, r_0, 0, 0)) \end{equation} $
(22) $x_{ \mbox{X-ray}}$是$I_{\mbox{X-ray}}$中一点(齐次坐标下), $x_{\rm DRR}$是$I_{\rm DRR}$中的$x_{ \mbox{X-ray}}$的对应点(齐次坐标下).
$ \begin{equation} x_{ \mbox{X-ray}}=kRSx_{\rm DRR} \end{equation} $
(23) 对于$I_{\mbox{X-ray}}$中目标脊椎的标志点的点集为$X_{ \mbox{X-ray}}$, 和$I_{\rm DRR}$中目标脊椎的标志点的点集为$X_{\rm DRR}$. $X_{ \mbox{X-ray}}$的重心在二维投影平面的坐标为$(cx, cy)$; 由于CT中目标脊椎的中心在投影初始位置, 所以我们可以通过$X_{ \mbox{X-ray}}$重心的位置求出$\theta$和$\phi$,
$ \begin{equation} \theta ={\rm arctan}\left(-\frac{cx}{{h}}\right), \quad \phi={\rm arctan}\left(\frac{cy}{{h}}\right) \end{equation} $
(24) 通过$\theta$和$\phi$我们可以得到$R$, 于是我们可以消除球面旋转的影响:
$ \begin{equation} k^{-1}R^{-1}x_{ \mbox{X-ray}}=Sx_{\rm DRR} \end{equation} $
(25) 此时, 我们只需要求出相似矩阵$S$的旋转系数和放缩系数就可以求出X-ray图像与CT的配准关系.我们使用以下目标函数来求相似矩阵$S$的旋转系数$r_z$和放缩系数$s$.
$ \begin{equation} \begin{aligned} (r_z, s)= \arg \min\limits_{(r_z, s)}\left(\sum\limits_{i=1}^{n}\parallel {k_i}^{-1}R^{-1}x_i-Sy_i\parallel \right), \\ x_i\in X_{ \mbox{X-ray}}, \ y_i\in X_{\rm DRR} \end{aligned} \end{equation} $
(26) 得到$(r_z, s)$之后, 我们可以使用$s$和$r_0$求出$\delta r$
$ \begin{equation} \frac{r_0}{(r_0+\Delta r)}=s\Rightarrow \Delta r=\frac{r_0(1-s)}{s} \end{equation} $
(27) 这样我们就求出了和X-ray相对应的DRR图像的所有投影参数, 即完成了配准.
2. 实验
2.1 实验数据和实验环境
CT数据由北京医院提供. CT采集设备为GE公司的Discovery HD720, CT数据分辨率为0.24 mm × 0.24 mm × 0.7 mm.有6组CT数据和与其对应的冠状面X光图像, 构建统计形状模型时, 本文又同时使用没有对应图像的另外5个CT数据和20个X-ray冠状面图像.处理数据和运行算法是在一台个人电脑上进行的, 配置为Intel(R) Core(TM) i5-2400 CPU @ 3.10 GHz, 4 GB内存.运行算法平台为Matlab R2014b.
2.2 生成DRR投影图像
对于有6组有对应冠状面X-ray图像的CT图像, 本文使用式(7)所示的投影方式, 投影参数$r_u\in(-5^\circ , 5^\circ) $, $r_v\in(-10^\circ , 10^\circ )$, 且以$1°$为间隔, 其他参数$r_w\in(-45^\circ , 45^\circ )$, $\Delta r\in(-50 mm, 50 mm)$, $\theta \in(-10^\circ , 10^\circ )$, $\phi \in(-10^\circ , 10^\circ )$, 在区间内随机指定, 每个CT投影生成$11 \times 21=231$张图像.对于没有对应冠状面X-ray图像的CT, 本文投影参数的范围控制在$r_u\in(-5^\circ , 5^\circ )$, $r_v\in(-10^\circ , 10^\circ )$, $r_w\in(-45^\circ , 45^\circ )$, $\Delta r\in(-50 mm, 50 mm)$, $\theta \in(-10^\circ , 10^\circ )$, $\phi \in(-10^\circ , 10^\circ )$, 在这个投影参数空间中随机投影生成15张DRR图像.在进行DRR投影时, 投影源到投影平面的距离$h=1 000$ mm, 投影对象的初始距离$r_0=500$ mm.
2.3 实验过程
为了充分利用数据, 我们对6组有配套CT和X-ray图像的数据使用留一交叉验证.每次我们使用这6组数据中的5组作为训练集, 剩下的一组作为测试集.我们使用训练集的5组数据和没有对应图像的另外5个CT和20个X-ray数据来建立AAM模型, 使用测试集的CT数据来建立姿态模型, 使用测试集的X-ray数据来与测试集的CT数据进行配准来验证本文方法的性能.
在建立AAM模型时, 本文从每个CT投影生成的DRR图像中随机不重复的抽取15张图像, 并和其他的X-ray图像一起建立AAM模型, 这样用来建立AAM模型的图像共有$(5+5) \times 15+5+20=175$幅图像.我们对每幅图像手动提取93个标志点, 如图 2所示.
在建立姿态模型时, 本文使用测试集的CT投影生成的DRR图像来建立姿态模型.同时为了比较线性模型和更高阶模型如二次、三次、四次模型, 本文也做了对比实验.为了比较$r_u$和$rv$在不同采样间隔下建立的姿态模型的性能, 本文也对1°、2°、3°采样间隔下建立的姿态模型做了对比.
2.4 评价准则
对于最终的配准性能的评价, 本文使用平均目标误差(Mean target register error, mTRE).对X-ray图像和配准得到的其对应的DRR图像, 手动分割出目标脊椎的轮廓, 衡量两个轮廓之间的误差来衡量配准的性能.若$G$为X-ray图像的脊椎轮廓点集, $H$为配准得到的DRR图像的脊椎轮廓的点集, 则$G$和$H$的mTRE为
$ \begin{equation} \begin{aligned} m(G, H)=\frac{\sum\limits_{i=1}^{n}{\rm min}_{j=1}^{m}d(g_i, h_j)}{n}, \\ g_i\in G, h_j\in H \end{aligned} \end{equation} $
(28) 其中, $d(g_i, h_j)$为$g_i$和$h_j$的欧氏距离.
3. 结果
图 6(a)和(b)展示了在建立姿态模型时, 分别使用线性、二次、三次和四次的模型在采样间隔为1°和2°时对$r_u$和$r_v$进行拟合时的预测误差. 图 6(c)和(d)展示了使用线性模型时, 训练样本使用1°、2°、3°采样间隔的$r_u$和$r_v$来进行拟合时的$r_u$和$r_v$的预测误差.其表明相比之下在1°采样间隔和使用线性模型来建立姿态模型时, 具有较好的性能.
 图 6 线性和高阶拟合((a)和(b))与不同采样间隔下预测误差的变化((c)和(d))Fig. 6 The difference of prediction error between linear model and high order model (a), (b) and by difference sampling intervals (c), (d)
图 6 线性和高阶拟合((a)和(b))与不同采样间隔下预测误差的变化((c)和(d))Fig. 6 The difference of prediction error between linear model and high order model (a), (b) and by difference sampling intervals (c), (d)图 7是配准结果, 第一行是每个病人的X-ray图像, 黑线是目标脊椎的轮廓; 第二行是配准后对应的DRR图像, 白线是目标脊椎的轮廓; 第三行是配准结果, 底图是X-ray图像, 黑线是X-ray图像中目标脊椎的轮廓, 白线是DRR中目标脊椎轮廓对应到X-ray图像中的显示.
表 1是每组CT在采样间隔为1°和使用线性模型下的姿态预测误差, 配准的平均轮廓距离和配准(包含分割)所耗费时间, 其中可以看出本文的方法精度较高, 实时性好. 表 2为本文方法与其他方法在配准精度和时间上的对比, 可以看出本文方法具有一定的优越性.
表 1 配准结果Table 1 Results of registration对象 姿态误差ru(°) 姿态误差rv(°) mTRE (mm) 时间(s) PA1 0.92±0.69 0.88±0.71 0.88±0.73 0.96 PA2 0.62±0.51 0.70±0.62 1.13±0.75 0.88 PA3 0.52±0.44 0.70±0.58 1.01±0.62 0.88 PA4 1.43±1.05 1.13±0.92 0.77±0.58 0.89 PA5 0.78±0.61 0.62±0.48 0.73±0.45 0.88 PA6 0.76±0.63 0.81±0.64 0.68±0.46 0.88 平均 0.84 0.81 0.87 0.90 表 2 各种方法对比Table 2 Comparison with other methods作者 方法框架 相似度度量 mTRE (mm) 时间(s) Russakof 基于搜索 互信息 1.3 - Russakof 基于搜索 交叉相关 1.5 - Russakof 基于搜索 梯度相关 1.3 - Russakof 基于搜索 灰度模式 1.6 - Russakof 基于搜索 梯度差 1.3 - Russakof 基于搜索 Diff.图像熵 1.9 - Otake 基于搜索 NGI - 6.3 ~ 54 Philipp 基于学习 纹理 1.05 0.02 本文 基于学习 形状 0.87 0.90 4. 讨论
如图 6所示, 在建立姿态模型时, 本文同时实验了使用线性、二次、三次、四次的模型来拟合姿态模型, 但是其预测结果却并不如简单的线性模型好, 说明形状参数与姿态参数之间具有较好的线性关系, 使用高次的模型反而容易过拟合.同时我们测试了在线性模型下使用不同的采样间隔的预测性能, 在测试范围内的趋势为采样越密集模型的预测性能就越好, 在采样间隔为1°时既能有较好的预测性能又不用生成过多的投影图像.在1°采样间隔下, 使用线性模型的预测平均误差$r_u$仅为0.84°, $r_v$仅为0.81° (表 1), 这说明了用线性模型来回归学习形状参数和姿态参数的关系是有效的.因此本文配准采用的姿态模型为1°采样间隔和线性回归学习下的模型.
表 1展示了拟合姿态模型的误差和配准误差, 可以看出本文使用学习的策略来预测投影姿态的角度误差在0.5°度到1.4°度之间, 平均预测误差$r_u$为0.84°, $r_v$为0.81°.其中第4组数据的误差比较大, 主要在于第4组数据的图像质量明显不如其他的几组数据, 因此其角度误差有明显增大.若除去第4组数据, 投影姿态角度预测误差在0.5°到0.9°之间, 平均为0.72°和0.74°.配准误差在0.6 mm ~ 1.2 mm之间, 平均0.87 mm, 配准速度平均为0.9 s, 可以看出本方法具有精度较高.传统的基于搜索策略的2D/3D配准, 搜索空间的复杂度为O($n^6$), 很难达到实时配准, 而本文的方法仅需要0.9 s, 能够满足实际应用的实时配准需求.
总体来说, 本文使用机器学习的方法, 通过建立姿态模型, 即形状参数与投影角度之间的关系, 来进行2D/3D配准, 避免了繁重的搜索.在计算投影参数时, 使用机器学习和几何变换相结合的方法, 使用几何变换的方法计算出6个投影参数中的4个, 使用机器学习的方法学习剩余的两个, 大大减小了要学习的参数空间.因此, 本方法具有实时性好, 准确性高, 鲁棒性强的优点.本文的配准方法在普通PC配置, 没有GPU加速, 以及使用计算效率并不高的MATLAB且并未对代码进行太多优化的情况下依然能够在1 s以内完成配准, 完全可以达到实时配准.
在建立DRR图像与投影参数的关系时, 本文并没有使用DRR图像的灰度信息作为学习的对象, 而是使用了形状信息, 由于形状信息与投影参数有非常好的线性相关性, 所以能够得到较好的配准结果.在学习投影参数时, 本文使用了新的投影方式, 使直接的投影图像空间和需要定位标志点的图像空间均从O($n^6$)减少到了O($n^2$), 大大减少了术前的工作量.在新的投影方式下, 几何参数和姿态参数相互独立, 因此可以用几何的方法求几何参数, 用学习的方法求姿态参数, 两者之间不会交叉影响, 也使得配准更加有效率, 结果也更准确.
本文的方法是基于分割与标志点的定位之上的, 标志点定位的效果对配准的影响较大, 本文的方法时间开销也主要耗费在分割和标志点定位上, 如果分割和标志点定位能够更加准确、快速, 本文的方法也能够更准确, 实时性更好.
附录. A
本文构建的投影方式可以表示为
$ \begin{equation} I={P(T}(I_{3{\rm D}};r_u, r_v, r_w, r, \theta, \phi )) \end{equation} $
(A1) 对象的姿态坐标系(图 3(b)所示)的基底$\beta$在世界坐标系下的表示为
$ \begin{align} \begin{aligned} \beta _E= & \begin{bmatrix} u & v & w \end{bmatrix} =\nonumber\\ &\begin{bmatrix} \cos \theta & - \sin \theta \cos \phi & \sin \theta \sin \phi \\ 0 & \sin \phi & \cos \phi \\ \sin \theta & \cos \theta \cos \phi & - \cos \theta \sin \phi \end{bmatrix} \end{aligned} \end{align} $
(A2) 在实际的操作中, 由于我们可以得到X-ray投影时投影对象与X-ray光源的大致距离$r_0$, 因此对$I_3D$进行DRR投影时可令$r$的初始值为$r_0$, 而$r$的实际影值可表示为为$r_0+\Delta r$, 投影过程可以表示为
$ \begin{equation} I={P(T}(I_{3{\rm D}};r_u, r_v, r_w, r_0+\Delta r, \theta, \phi )) \end{equation} $
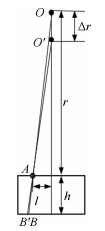
(A3) 由于$\Delta r\ll r_0$, 因此我们可以近似认为$\Delta r$的改变并不引起图像结构的变化.如图A1所示, 从$O$点发出的X-ray射线经过$A$点从$B$点穿出, 当$O$点移动$\Delta r$到$O'$时, X-ray射线经过$A$点从$B'$点穿出.则
$ \begin{equation} BB'=\frac{\Delta rlh}{(r-\Delta r)r} \end{equation} $
(A4) 脊椎的厚度和宽度均远远小于投影距离, 因此$l\ll r, h\ll r$, 有$BB'\approx 0$, 这样可以近似地认为放射源经过$Delta r$的移动经过$A$点在脊椎内部通过的路径并没有发生变化, 即经过$A$点成的像的灰度值没有变化.
由于我们近似地认为$\Delta r$的变化并不引起投影图像的灰度值的变化, 那么$\Delta r$的改变仅引起投影图像大小的变化(A2), 大小的变化可以使用一个放缩变换来代替.
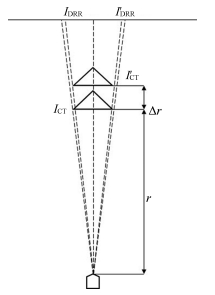 图 A2 $\Delta r$近似等效于相似变换Fig. A2 The effect of $\Delta r$ approximate to similar transformation
图 A2 $\Delta r$近似等效于相似变换Fig. A2 The effect of $\Delta r$ approximate to similar transformation为了方便证明$r_w, \Delta r, \theta, \phi$的改变引起的投影图像的变化可以使用几何变换来代替, 我们将投影变换拆解成3部分(如图A 3所示):
首先, 如图A3(a)所示, 初始化投影对象的位置为球形坐标系中$r=r_0, \theta =0, \phi =0$.然后对投影对象沿$u$轴旋转$r_u$, 沿$v$轴旋转$r_v$.投影过程可以表示为
$ \begin{equation} I^a={P(T}(I_{\rm CT};r_u, r_v, 0, r_0, 0, 0 )) \end{equation} $
(A5) 如图A3所示, 在图A3(b)的基础上, 对投影对象沿$w$轴旋转$r_w$, 并沿径向方向向外移动$\Delta r$.投影过程可以表示为
$ \begin{equation} I^b={P(T}(I_{\rm CT};r_u, r_v, r_w, r_0+\Delta r, 0, 0 )) \end{equation} $
(A6) 如图A3(c)所示, 在图A3(b)的基础上, 对投影对象沿$x$轴旋转$\theta$, 然后沿$y$轴旋转$\phi$.投影过程可以表示为
$ \begin{equation} I^c={P(T}(I_{\rm CT};r_u, r_v, r_w, r_0+\Delta r, \theta, \phi )) \end{equation} $
(A7) 我们令$x^a$为$I^a$某点的坐标, $x^b$为$I^b$中$x^a$的对应点的坐标, $x^c$为$I^c$中$x^b$的对应点的坐标, 我们把二维的投影坐标系下的坐标点增广到齐次坐标系下则有$x^A={bmatrix} x^a \\ {h} {bmatrix}$, $x^B={bmatrix} x^b \\ {h} {bmatrix}$ $x^C={bmatrix} x^c \\ {h} {bmatrix}$. $h$是光源到投影平面原点的距离.
图A3(b)过程可以使用一个旋转变换和一个放缩变换来代替. $x^A$和$x^B$之间的关系可以表示为
$ \begin{equation} x^B=Sx^A \end{equation} $
(A8) 其中
$ \begin{align} \begin{aligned} &S= \begin{bmatrix} s & 0 & 0 \\ 0 & s & 0 \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} \cos r_w & \sin r_w & 0 \\ - \sin r_w & \cos r_w & 0 \\ 0 & 0 & 1 \end{bmatrix} , \\ &s=\frac{r_0}{(r_0+\Delta r)} \end{aligned} \end{align} $
(A9) 图A3(c)过程可以等价为成像平面以相同的坐标轴为轴沿相反的方向旋转, 这个过程可以等价为计算机视觉中的相机纯旋转. $x^B$和$x^C$之间的关系可以表示为
$ \begin{equation} x^C=kRx^B \end{equation} $
(A10) 其中
$ \begin{align} \begin{aligned} R= &[E]_{\beta }=([\beta]_E)^{\rm T}=\beta^{\rm T} =\\ &\begin{bmatrix} \cos \theta & 0 & \sin \theta \\ - \sin \theta \cos \phi & \sin \phi & \cos \theta \cos \phi \\ \sin \theta \sin \phi & \cos \theta & - \cos \theta \sin \phi \end{bmatrix} \end{aligned} \end{align} $
(A11) $E$为世界坐标系的基底, $k$为一个平衡系数使得$x^C$的第三维为$h$.
从以上可得:
$ \begin{equation} x^C=kRSx^A \end{equation} $
(A12) 其中
$ \begin{align} \begin{aligned} &S= \begin{bmatrix} s & 0 & 0 \\ 0 & s & 0 \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} \cos r_w & \sin r_w & 0 \\ - \sin r_w & \cos r_w & 0 \\ 0 & 0 & 1 \end{bmatrix} \\ &s=\frac{r_0}{(r_0+\Delta r)} \end{aligned} \end{align} $
(A13) $ \begin{equation} R= \begin{bmatrix} \cos \theta & 0 & \sin \theta \\ - \sin \theta \cos \phi & \sin \phi & \cos \theta \cos \phi \\ \sin \theta \sin \phi & \cos \theta & - \cos \theta \sin \phi \end{bmatrix} \end{equation} $
(A14) -
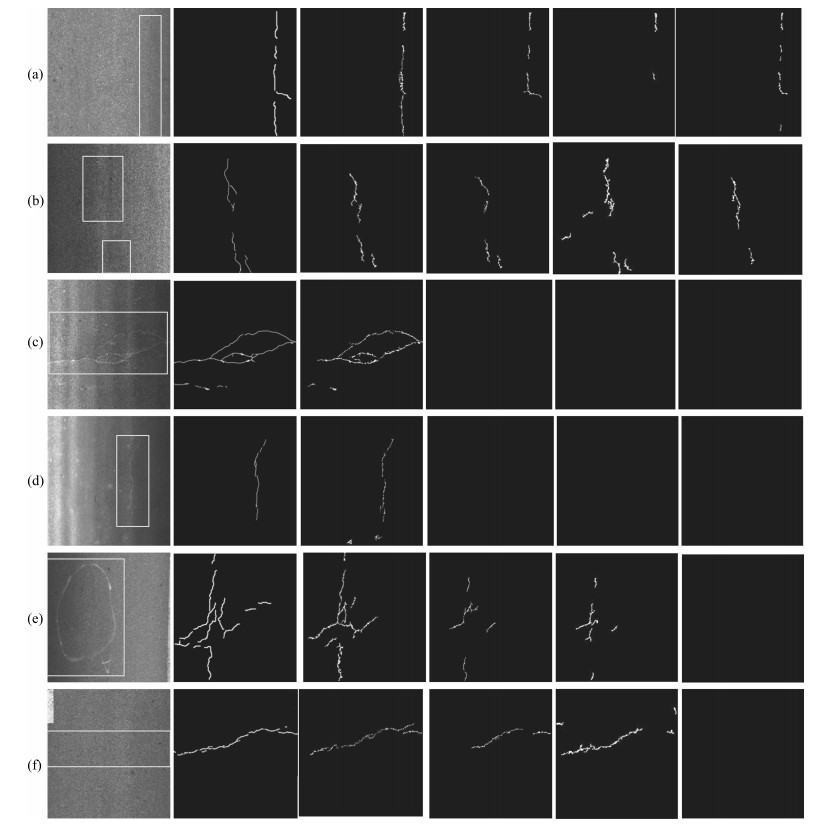
图 6 从左到右分别为原始图像、人工描点、本文算法、CrackTree、VCrack、WeightedCrack检测效果
Fig. 6 The performance for some of the representative crack examples with distinctive characteristics (From top to bottom are pavement images, manually detected results, the proposed detection algorithm results, CrackTree detection algorithm results, VCrack detection algorithm results, and WeightedCrack detection algorithm results.)
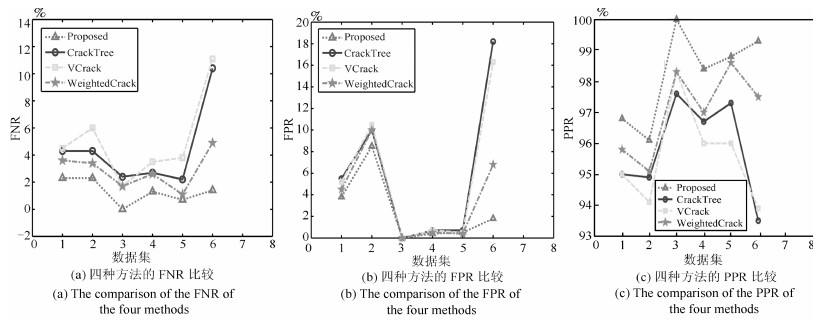
图 7 四种方法三个指标的比较
Fig. 7 The comparison of the FNR, FPR, PPR of Proposed, CrackTree, VCrack, and WeightedCrack methods
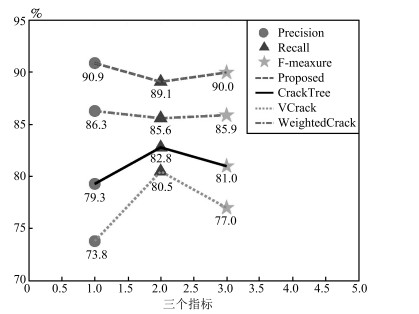
图 8 裂缝检测完整性评估结果
Fig. 8 Performance evaluation of the completeness of the detected cracks
表 1 不同1/p对检测结果的影响
Table 1 The influence of different values of 1/p over detection results
工程名 图片大小 图片数量 1/p 漏检率(%) 误检率(%) 0.10 5.12 7.83 0.12 5.03 8.01 工程1 2048×2048 3320 0.14 4.87 8.13 0.16 4.84 8.19 0.18 4.82 8.22 0.20 4.82 8.31 0.10 4.54 6.25 0.12 4.49 6.28 工程2 2048×2048 7648 0.14 4.42 6.29 0.16 4.39 6.33 0.18 4.38 6.35 0.20 4.38 6.41  下载: 导出CSV
下载: 导出CSV
表 2 路面图像分类结果统计表
Table 2 Statistics for accuracy of crack localization
DB Method P N TP TN FN FP FNR(%) FPR(%) PPR(%) Proposed 1255 1180 30 50 2.3 3.8 96.8 DB1 CrackTree 1285 1230 1230 1158 55 72 4.3 5.5 95.0 VCrack 1227 1163 58 67 4.5 5.2 95.0 WeightedCrack 1238 1171 47 59 3.6 4.5 95.8 Proposed 344 632 8 32 2.3 8.5 96.1 DB2 CrackTree 352 664 337 627 15 37 4.3 10.0 94.9 VCrack 331 625 21 39 6.0 10.5 94.1 WeightedCrack 340 626 12 38 3.4 10.0 95.1 Proposed 540 0 0 0 0 0 100 DB3 CrackTree 540 0 527 0 13 0 2.4 0 97.6 VCrack 531 0 9 0 1.7 0 98.3 WeightedCrack 531 0 9 0 1.7 0 98.3 Proposed 2351 90 30 9 1.3 0.4 98.4 DB4 CrackTree 2381 99 2316 83 65 16 2.7 0.7 96.7 VCrack 2298 84 83 17 3.5 0.7 96.0 WeightedCrack 2319 87 62 12 2.6 0.5 97.0 Proposed 1373 90 10 7 0.7 0.5 98.8 DB5 CrackTree 1383 97 1352 88 31 9 2.2 0.7 97.3 VCrack 1330 90 53 7 3.8 0.5 96.0 WeightedCrack 1368 92 15 5 1.1 0.4 98.6 Proposed 426 1560 6 8 1.4 1.8 99.3 DB6 CrackTree 432 1568 387 1482 45 86 10.4 18.2 93.5 VCrack 384 1493 48 75 11.1 16.3 93.9 WeightedCrack 411 1538 21 30 4.9 6.8 97.5
下载: 导出CSV
-
[1] Zhang J P, Wang F Y, Wang K F, Lin W H, Xu X, Chen C. Data-driven intelligent transportation systems:a survey. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4):1624-1639 doi: 10.1109/TITS.2011.2158001 [2] Kamaliardakani M, Sun L, Ardakani M. Sealed-crack detection algorithm using heuristic thresholding approach. Journal of Computing in Civil Engineering, 2014, DOI: 10.1061/(ASCE)CP.1943-5487.0000447 [3] He Y Q, Qiu H X. A method of cracks image segmentation based on the means of multiple thresholds. Journal of Communication and Computer, 2012, 9(10):1147-1151 http://www.cqvip.com/QK/88584X/201210/43862638.html [4] Chambon S, Moliard J. Automatic road pavement assessment with image processing:review and comparison. International Journal of Geophysics, 2011, 2011:Article ID 989354 https://www.hindawi.com/journals/ijge/2011/989354/ [5] Lee B Y, Kim Y Y, Yi S T, Kim J K. Automated image processing technique for detecting and analysing concrete surface cracks. Structure and Infrastructure Engineering, 2013, 9(6):567-577 doi: 10.1080/15732479.2011.593891 [6] Oliveira H, Correia P L. Automatic road crack detection and characterization. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(1):155-168 doi: 10.1109/TITS.2012.2208630 [7] Mathavan S, Rahman M, Kamal K. Use of a self-organizing map for crack detection in highly textured pavement images. Journal of Infrastructure Systems, 2015, 21(3):04014052 doi: 10.1061/(ASCE)IS.1943-555X.0000237 [8] Nejad F M, Zakeri H. An optimum feature extraction method based on wavelet-radon transform and dynamic neural network for pavement distress classification. Expert Systems with Applications, 2011, 38(8):9442-9460 doi: 10.1016/j.eswa.2011.01.089 [9] Xu W, Tang Z M, Zhou J, Ding J D. Pavement crack detection based on saliency and statistical features. In:Proceedings of the 20th International Conference on Image Processing (ICIP). Melbourne, Australia:IEEE, 2013. 4093-4097 [10] Huang Y X, Xu B G. Automatic inspection of pavement cracking distress. Journal of Electronic Imaging, 2006, 15(1):013017 doi: 10.1117/1.2177650 [11] Sun L, Kamaliardakani M, Zhang Y. Weighted neighborhood pixels segmentation method for automated detection of cracks on pavement surface images. Journal of Computing in Civil Engineering, 2015, DOI: 10.1061/(ASCE)CP.1943-5487.0000488 [12] Zalama E, Gómez-García-Bermejo J, Medina R, Llamas J. Road crack detection using visual features extracted by Gabor filters. Computer-Aided Civil and Infrastructure Engineering, 2014, 29(5):342-358 doi: 10.1111/mice.2014.29.issue-5 [13] Ouyang A, Dong Q, Wang Y, Liu Y. The classification of pavement crack image based on Beamlet algorithm. Computer and Computing Technologies in Agriculture VII. Berlin Heidelberg:Springer, 2014. 129-137 doi: 10.1007%2F978-3-642-54341-8_13 [14] Shu Z B, Guo Y Q. Algorithm on contourlet domain in detection of road cracks for pavement images. Journal of Algorithms and Computational Technology, 2013, 7(1):15-26 doi: 10.1260/1748-3018.7.1.15 [15] Nejad F M, Zakeri H. A comparison of multi-resolution methods for detection and isolation of pavement distress. Expert Systems with Applications, 2011, 38(3):2857-2872 doi: 10.1016/j.eswa.2010.08.079 [16] Oliveira H, Correia P L. Automatic road crack segmentation using entropy and image dynamic thresholding. In:Proceedings of the 17th European Signal Processing Conference. Glasgow, Scotland:IEEE, 2009. 622-626 [17] Wang S C, Tang W S. Pavement crack segmentation algorithm based on local optimal threshold of cracks density distribution. Advanced Intelligent Computing. Berlin Heidelberg:Springer, 2012. 298-302 https://www.researchgate.net/publication/220777974_Pavement_Crack_Segmentation_Algorithm_Based_on_Local_Optimal_Threshold_of_Cracks_Density_Distribution [18] Zou Q, Cao Y, Li Q Q, Mao Q Z, Wang S. CrackTree:automatic crack detection from pavement images. Pattern Recognition Letters, 2012, 33(3):227-238 doi: 10.1016/j.patrec.2011.11.004 [19] Sun Y, Salari E, Chou E. Automated pavement distress detection using advanced image processing techniques. In:Proceedings of the 2009 IEEE International Conference on Electro/Information Technology. Windsor, Ontario, Canada:IEEE, 2009. 373-377 [20] Liu F F, Xu G A, Yang Y X, Niu X X, Pan Y L. Novel approach to pavement cracking automatic detection based on segment extending. In:Proceedings of the 2008 IEEE International Symposium on Knowledge Acquisition and Modeling. Wuhan, China:IEEE, 2008. 610-614 [21] Oliveira H, Correia P L. Automatic crack detection on road imagery using anisotropic diffusion and region linkage. In:Proceedings of the 18th European Signal Processing Conference. Aalborg, Denmark:IEEE, 2010. 274-278 [22] Sonka M, Hlavac V, Boyle R. Image Processing, Analysis, and Machine Vision (4th edition). Boston:CL Engineering, 2014. http://qpdf.aratasushinyc.com/image-processing-analysis-and-machine-phd-hlavac-vaclav-120470.pdf [23] 王德方, 曾卫明, 王倪传.基于改进K-means算法的不均匀光照下道路裂缝检测.计算机应用与软件, 2015, 32(7):244-247 http://edu.wanfangdata.com.cn/Periodical/Detail/jsjyyyrj201507059Wang De-Fang, Zeng Wei-Ming, Wang Ni-Zhuan. Road crack detection under uneven illumination using improved k-means algorithm. Computer Applications and Software, 2015, 32(7):244-247 http://edu.wanfangdata.com.cn/Periodical/Detail/jsjyyyrj201507059 [24] Robert J M, Toussaint G T. Computational geometry and facility location. In:Proceedings of the 1990 International Conference on Operations Research and Management Science. Manila, Philippines:Springer, 1990. 11-15 期刊类型引用(31)
1. 黄荣杰,王亚刚. 基于可视图与改进遗传算法的机器人平滑路径规划. 控制工程. 2024(04): 678-686 .  百度学术
百度学术2. 李歆莹,房建武. 城市环境下基于A~*算法和DWA算法的无人机路径规划方法研究. 无人系统技术. 2023(02): 61-70 . 百度学术3. 陈家宝,文家燕,谢广明. 基于改进A~*算法的移动机器人路径规划. 广西科技大学学报. 2022(01): 78-84 . 百度学术4. 赵江,孟晨阳,王晓博,郝崇清,李冉,刘慧贤,王昭雷. 特征点提取下的AGV栅格法建模与分析. 计算机工程与应用. 2022(08): 156-167 . 百度学术5. 杨明亮,李宁. 改进A~*算法的移动机器人路径规划. 机械科学与技术. 2022(05): 795-800 . 百度学术6. 赵家波,游晓明,刘升. 结合价格波动策略与动态回溯机制的蚁群算法. 计算机科学与探索. 2022(06): 1390-1404 . 百度学术7. 王澳刚,智鹏飞,朱琬璐. 风险因素影响下无人船智能路径规划方法. 兵器装备工程学报. 2022(09): 15-20 . 百度学术8. 刘洋,马建伟,臧绍飞,闵义博. 基于融合Bezier优化遗传算法的路径规划. 控制工程. 2021(02): 284-292 . 百度学术9. 张松灿,普杰信,司彦娜,孙力帆. 基于种群相似度的自适应改进蚁群算法及应用. 计算机工程与应用. 2021(08): 70-77 . 百度学术10. 柴红杰,李建军,姚明. 改进的A~*算法移动机器人路径规划. 电子器件. 2021(02): 362-367 . 百度学术11. 杨芳清,刘吉成. 融合改进A~*算法与动态窗口法的移动机器人路径规划. 工业控制计算机. 2021(05): 106-108+112 . 百度学术12. 武悦,阮晓钢,黄静,柴洁. 一种改进的皮层网络环境认知模型. 自动化学报. 2021(06): 1401-1411 . 本站查看13. 李子涵,孙建红,王永利. 基于A~*算法的电子游戏路径优化处理. 电子设计工程. 2021(13): 1-5 . 百度学术14. 刘志强,江海凡,付建林,丁国富. 基于Cardinal样条曲线的虚拟漫游路径优化. 计算机应用研究. 2021(09): 2857-2860 . 百度学术15. 张松灿,普杰信,司彦娜,孙力帆. 蚁群算法在移动机器人路径规划中的应用综述. 计算机工程与应用. 2020(08): 10-19 . 百度学术16. 王洪斌,尹鹏衡,郑维,王红,左佳铄. 基于改进的A~*算法与动态窗口法的移动机器人路径规划. 机器人. 2020(03): 346-353 . 百度学术17. 赵江,王晓博,郝崇清,刘慧贤,薛文艳,王昭雷. 栅格图特征提取下的路径规划建模与应用. 计算机工程与应用. 2020(10): 254-260 . 百度学术18. 郭兴海,计明军,刘双福. 融合多目标与能耗控制的无人仓库内AGV路径规划. 计算机集成制造系统. 2020(05): 1268-1276 . 百度学术19. 高志伟,代学武,郑志达. 基于运动控制和频域分析的移动机器人能耗最优轨迹规划. 自动化学报. 2020(05): 934-945 . 本站查看20. 蒋林,李峻,马先重,聂文康,朱建阳,雷斌. 一种改进骨架提取的Voronoi路径规划. 机械工程学报. 2020(13): 138-148 . 百度学术21. 王鹤,陈静,滕瑛瑶. 基于新型栅格启发式算法的矿井机器人路径规划. 工矿自动化. 2020(08): 64-69 . 百度学术22. 杨洋,张建敏,刘艺林,宋馨. 基于改进蚁群算法的无人仓的多AGV避碰路径优化策略. 数学的实践与认识. 2020(16): 1-9 . 百度学术23. 朱颖,李元鹏,张亚婉,黎伟健. 基于改进人工势场法的搬运机器人路径规划. 电子测量技术. 2020(17): 101-104 . 百度学术24. 段焜. 蚁群算法在移动机器人路径规划中的应用. 电子测试. 2020(21): 117-118 . 百度学术25. 侯力扬,李金宝. 煤矿井下水仓智能清淤机器人的路径规划算法研究. 电子测量技术. 2020(19): 75-79 . 百度学术26. 童心赤,张华军,郭航. 多方向无人水面艇路径规划算法. 计算机应用. 2020(11): 3373-3378 . 百度学术27. 吕恩利,阮清松,刘妍华,王飞仁,林伟加,董冰. 基于动态识别区和B样条曲线的智能叉车避障路径规划. 农业机械学报. 2019(01): 359-366 . 百度学术28. 陈敏,李笑,武交峰. 基于改进RRT算法的差动机器人路径规划. 计算机应用与软件. 2019(09): 276-280 . 百度学术29. 陶德俊,姜媛媛,刘延彬,辛元芳,罗俊. 煤矿救援机器人路径平滑算法研究. 工矿自动化. 2019(10): 49-54 . 百度学术30. 王洪斌,郝策,张平,张明泉,尹鹏衡,张永顺. 基于A~*算法和人工势场法的移动机器人路径规划. 中国机械工程. 2019(20): 2489-2496 . 百度学术31. 刘满禄,李铭浩,敖天翔,赵皓. 危险环境消防侦察机器人视轴规划算法研究. 计算机工程与应用. 2018(23): 217-222 . 百度学术其他类型引用(37)
-

 下载:
下载:






计量
- 文章访问数: 2202
- HTML全文浏览量: 219
- PDF下载量: 1055
- 被引次数: 68
