

-
摘要: 沥青路面裂缝自动检测是制约公路养护科学决策的最主要瓶颈.针对现有裂缝检测算法在大规模应用特别是广地域、多路况等复杂环境下算法稳定性、可靠性及实时性等方面存在严重不足问题.本文在观察大量实际工程路面图像基础上, 对路面裂缝特征进行全新定义, 提出了一种基于空间聚集特征的沥青路面裂缝检测方法, 参考裂缝的空间分布、灰度、几何等特征, 以子块图像为处理单元, 采用逐步求精的策略对子块图像进行分割, 快速定位空间聚集区域, 再对聚集区域进行评估得到信度高的裂缝候选区域; 最后以裂缝候选区域为种子区域, 在准确估算裂缝发展趋势的基础上, 结合裂缝片段聚集及相似性等特性, 去除噪声同时合并连接断裂的裂缝, 实现了裂缝区域较为完整的检测.通过测试多路况、多采集环境下近万样本, 并采用不同的方法对测试结果进行评估, 结果显示, 算法对不同类型路面图像中具有不同特征的裂缝区域均具有良好的检测性能, 裂缝定位准确性达到95%以上, 裂缝区域检测的完整性达到90%以上.Abstract: Asphalt pavement crack detection is the main bottleneck of advanced decision support for road maintenance. A common problem associated with existing algorithms is lack of stability, reliability and timeliness in large-scale applications, especially in wide geographical areas and varying road conditions. In this paper, a new description of the cracks is proposed by observing a large number of pavement images. And an asphalt pavement crack detection using spatial clustering feature is proposed. Regions of aggregation are the primary targets segmented from original image via a coarse-to-fine methodology which comprehensively takes the spatial distribution, intensities and geometric features of cracks into account. Then candidate crack regions with sufficient confidence are extracted from regions of aggregation. Moreover, a new region growing algorithm is presented on the basis of an accurate estimate of cracks trend, which guarantees the accomplishment of providing complete cracks by merging operation for those highly similar regions and simultaneously eliminating distinct ones. A larger number of images of pavement surface have been taken for experiments, which cover a wide range of different road conditions and varying data collecting environments. The detection results show that our algorithm is satisfactory for a variety of different cracks. The detection accuracy is over 95% and more than 90% of coherent cracks without disconnected fragments have been correctly detected as the integrated ones.
-
Key words:
- Asphalt pavement /
- crack /
- clustering region /
- candidate region /
- growth direction
-
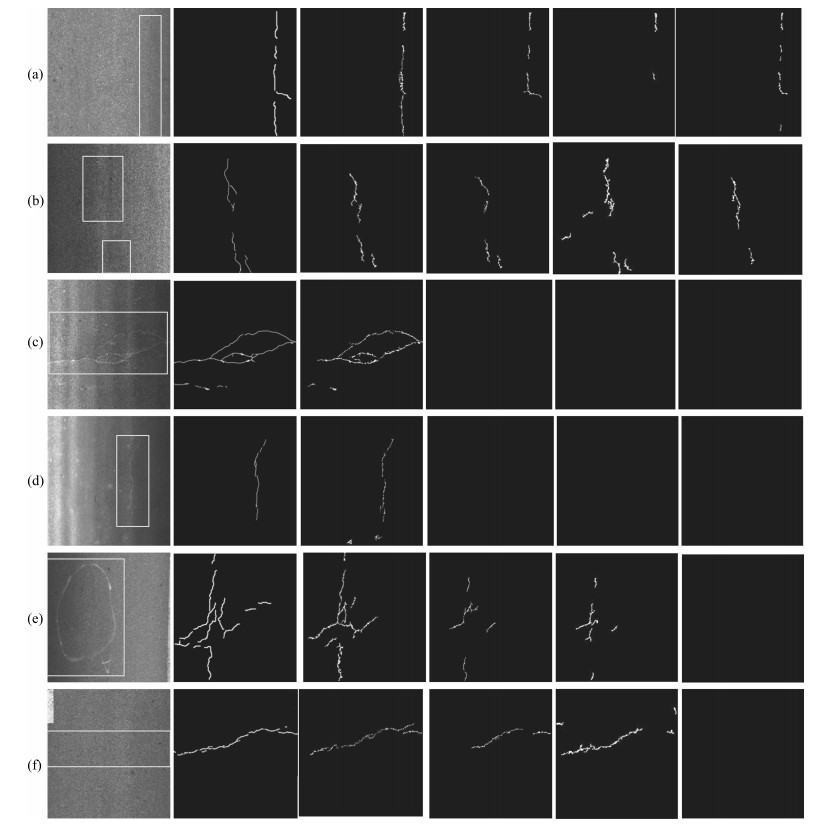
图 6 从左到右分别为原始图像、人工描点、本文算法、CrackTree、VCrack、WeightedCrack检测效果
Fig. 6 The performance for some of the representative crack examples with distinctive characteristics (From top to bottom are pavement images, manually detected results, the proposed detection algorithm results, CrackTree detection algorithm results, VCrack detection algorithm results, and WeightedCrack detection algorithm results.)
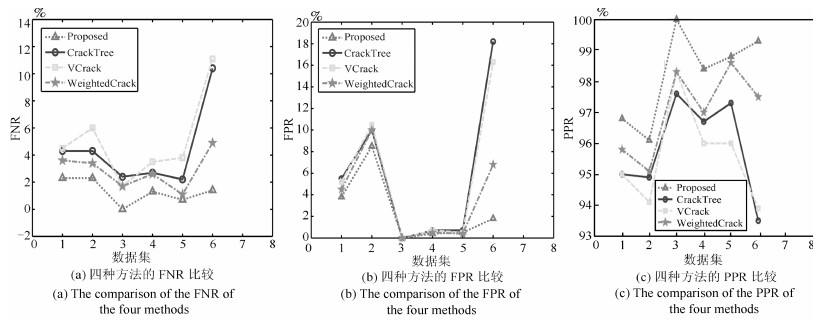
图 7 四种方法三个指标的比较
Fig. 7 The comparison of the FNR, FPR, PPR of Proposed, CrackTree, VCrack, and WeightedCrack methods
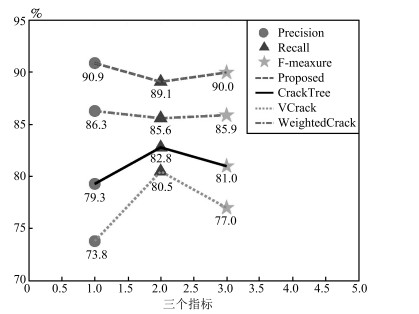
图 8 裂缝检测完整性评估结果
Fig. 8 Performance evaluation of the completeness of the detected cracks
表 1 不同1/p对检测结果的影响
Table 1 The influence of different values of 1/p over detection results
工程名 图片大小 图片数量 1/p 漏检率(%) 误检率(%) 0.10 5.12 7.83 0.12 5.03 8.01 工程1 2048×2048 3320 0.14 4.87 8.13 0.16 4.84 8.19 0.18 4.82 8.22 0.20 4.82 8.31 0.10 4.54 6.25 0.12 4.49 6.28 工程2 2048×2048 7648 0.14 4.42 6.29 0.16 4.39 6.33 0.18 4.38 6.35 0.20 4.38 6.41  下载: 导出CSV
下载: 导出CSV
表 2 路面图像分类结果统计表
Table 2 Statistics for accuracy of crack localization
DB Method P N TP TN FN FP FNR(%) FPR(%) PPR(%) Proposed 1255 1180 30 50 2.3 3.8 96.8 DB1 CrackTree 1285 1230 1230 1158 55 72 4.3 5.5 95.0 VCrack 1227 1163 58 67 4.5 5.2 95.0 WeightedCrack 1238 1171 47 59 3.6 4.5 95.8 Proposed 344 632 8 32 2.3 8.5 96.1 DB2 CrackTree 352 664 337 627 15 37 4.3 10.0 94.9 VCrack 331 625 21 39 6.0 10.5 94.1 WeightedCrack 340 626 12 38 3.4 10.0 95.1 Proposed 540 0 0 0 0 0 100 DB3 CrackTree 540 0 527 0 13 0 2.4 0 97.6 VCrack 531 0 9 0 1.7 0 98.3 WeightedCrack 531 0 9 0 1.7 0 98.3 Proposed 2351 90 30 9 1.3 0.4 98.4 DB4 CrackTree 2381 99 2316 83 65 16 2.7 0.7 96.7 VCrack 2298 84 83 17 3.5 0.7 96.0 WeightedCrack 2319 87 62 12 2.6 0.5 97.0 Proposed 1373 90 10 7 0.7 0.5 98.8 DB5 CrackTree 1383 97 1352 88 31 9 2.2 0.7 97.3 VCrack 1330 90 53 7 3.8 0.5 96.0 WeightedCrack 1368 92 15 5 1.1 0.4 98.6 Proposed 426 1560 6 8 1.4 1.8 99.3 DB6 CrackTree 432 1568 387 1482 45 86 10.4 18.2 93.5 VCrack 384 1493 48 75 11.1 16.3 93.9 WeightedCrack 411 1538 21 30 4.9 6.8 97.5
下载: 导出CSV
-
[1] Zhang J P, Wang F Y, Wang K F, Lin W H, Xu X, Chen C. Data-driven intelligent transportation systems:a survey. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4):1624-1639 doi: 10.1109/TITS.2011.2158001 [2] Kamaliardakani M, Sun L, Ardakani M. Sealed-crack detection algorithm using heuristic thresholding approach. Journal of Computing in Civil Engineering, 2014, DOI: 10.1061/(ASCE)CP.1943-5487.0000447 [3] He Y Q, Qiu H X. A method of cracks image segmentation based on the means of multiple thresholds. Journal of Communication and Computer, 2012, 9(10):1147-1151 http://www.cqvip.com/QK/88584X/201210/43862638.html [4] Chambon S, Moliard J. Automatic road pavement assessment with image processing:review and comparison. International Journal of Geophysics, 2011, 2011:Article ID 989354 https://www.hindawi.com/journals/ijge/2011/989354/ [5] Lee B Y, Kim Y Y, Yi S T, Kim J K. Automated image processing technique for detecting and analysing concrete surface cracks. Structure and Infrastructure Engineering, 2013, 9(6):567-577 doi: 10.1080/15732479.2011.593891 [6] Oliveira H, Correia P L. Automatic road crack detection and characterization. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(1):155-168 doi: 10.1109/TITS.2012.2208630 [7] Mathavan S, Rahman M, Kamal K. Use of a self-organizing map for crack detection in highly textured pavement images. Journal of Infrastructure Systems, 2015, 21(3):04014052 doi: 10.1061/(ASCE)IS.1943-555X.0000237 [8] Nejad F M, Zakeri H. An optimum feature extraction method based on wavelet-radon transform and dynamic neural network for pavement distress classification. Expert Systems with Applications, 2011, 38(8):9442-9460 doi: 10.1016/j.eswa.2011.01.089 [9] Xu W, Tang Z M, Zhou J, Ding J D. Pavement crack detection based on saliency and statistical features. In:Proceedings of the 20th International Conference on Image Processing (ICIP). Melbourne, Australia:IEEE, 2013. 4093-4097 [10] Huang Y X, Xu B G. Automatic inspection of pavement cracking distress. Journal of Electronic Imaging, 2006, 15(1):013017 doi: 10.1117/1.2177650 [11] Sun L, Kamaliardakani M, Zhang Y. Weighted neighborhood pixels segmentation method for automated detection of cracks on pavement surface images. Journal of Computing in Civil Engineering, 2015, DOI: 10.1061/(ASCE)CP.1943-5487.0000488 [12] Zalama E, Gómez-García-Bermejo J, Medina R, Llamas J. Road crack detection using visual features extracted by Gabor filters. Computer-Aided Civil and Infrastructure Engineering, 2014, 29(5):342-358 doi: 10.1111/mice.2014.29.issue-5 [13] Ouyang A, Dong Q, Wang Y, Liu Y. The classification of pavement crack image based on Beamlet algorithm. Computer and Computing Technologies in Agriculture VII. Berlin Heidelberg:Springer, 2014. 129-137 doi: 10.1007%2F978-3-642-54341-8_13 [14] Shu Z B, Guo Y Q. Algorithm on contourlet domain in detection of road cracks for pavement images. Journal of Algorithms and Computational Technology, 2013, 7(1):15-26 doi: 10.1260/1748-3018.7.1.15 [15] Nejad F M, Zakeri H. A comparison of multi-resolution methods for detection and isolation of pavement distress. Expert Systems with Applications, 2011, 38(3):2857-2872 doi: 10.1016/j.eswa.2010.08.079 [16] Oliveira H, Correia P L. Automatic road crack segmentation using entropy and image dynamic thresholding. In:Proceedings of the 17th European Signal Processing Conference. Glasgow, Scotland:IEEE, 2009. 622-626 [17] Wang S C, Tang W S. Pavement crack segmentation algorithm based on local optimal threshold of cracks density distribution. Advanced Intelligent Computing. Berlin Heidelberg:Springer, 2012. 298-302 https://www.researchgate.net/publication/220777974_Pavement_Crack_Segmentation_Algorithm_Based_on_Local_Optimal_Threshold_of_Cracks_Density_Distribution [18] Zou Q, Cao Y, Li Q Q, Mao Q Z, Wang S. CrackTree:automatic crack detection from pavement images. Pattern Recognition Letters, 2012, 33(3):227-238 doi: 10.1016/j.patrec.2011.11.004 [19] Sun Y, Salari E, Chou E. Automated pavement distress detection using advanced image processing techniques. In:Proceedings of the 2009 IEEE International Conference on Electro/Information Technology. Windsor, Ontario, Canada:IEEE, 2009. 373-377 [20] Liu F F, Xu G A, Yang Y X, Niu X X, Pan Y L. Novel approach to pavement cracking automatic detection based on segment extending. In:Proceedings of the 2008 IEEE International Symposium on Knowledge Acquisition and Modeling. Wuhan, China:IEEE, 2008. 610-614 [21] Oliveira H, Correia P L. Automatic crack detection on road imagery using anisotropic diffusion and region linkage. In:Proceedings of the 18th European Signal Processing Conference. Aalborg, Denmark:IEEE, 2010. 274-278 [22] Sonka M, Hlavac V, Boyle R. Image Processing, Analysis, and Machine Vision (4th edition). Boston:CL Engineering, 2014. http://qpdf.aratasushinyc.com/image-processing-analysis-and-machine-phd-hlavac-vaclav-120470.pdf [23] 王德方, 曾卫明, 王倪传.基于改进K-means算法的不均匀光照下道路裂缝检测.计算机应用与软件, 2015, 32(7):244-247 http://edu.wanfangdata.com.cn/Periodical/Detail/jsjyyyrj201507059Wang De-Fang, Zeng Wei-Ming, Wang Ni-Zhuan. Road crack detection under uneven illumination using improved k-means algorithm. Computer Applications and Software, 2015, 32(7):244-247 http://edu.wanfangdata.com.cn/Periodical/Detail/jsjyyyrj201507059 [24] Robert J M, Toussaint G T. Computational geometry and facility location. In:Proceedings of the 1990 International Conference on Operations Research and Management Science. Manila, Philippines:Springer, 1990. 11-15 期刊类型引用(9)
1. 陈震,张道文,张聪炫,汪洋. 基于深度匹配的由稀疏到稠密大位移运动光流估计. 自动化学报. 2022(09): 2316-2326 .  本站查看
本站查看2. 庄波,崔宝同,楼旭阳,陈娟. 基于反步法的耦合分数阶反应扩散系统边界输出反馈控制. 自动化学报. 2022(11): 2729-2743 . 本站查看3. 宿海涛,张廷华. 图像序列的变分光流计算. 光学技术. 2020(01): 124-128 . 百度学术4. 许美玲,邢通,韩敏. 基于时空Kriging方法的时空数据插值研究. 自动化学报. 2020(08): 1681-1688 . 本站查看5. 高敏娟,党宏社,魏立力,王海龙,张选德. 结合全局与局部变化的图像质量评价. 自动化学报. 2020(12): 2662-2671 . 本站查看6. 韩敏,闫阔,秦国帅. 基于改进KAZE的无人机航拍图像拼接算法. 自动化学报. 2019(02): 305-314 . 本站查看7. 张桂梅,李艳兵. 结合纹理结构的分数阶TV模型的图像修复. 中国图象图形学报. 2019(05): 700-713 . 百度学术8. 贾迪,朱宁丹,杨宁华,吴思,李玉秀,赵明远. 图像匹配方法研究综述. 中国图象图形学报. 2019(05): 677-699 . 百度学术9. 霍其润,李建武,陆耀,秦明. 基于变分的CT图像环形伪影校正. 自动化学报. 2019(09): 1713-1726 . 本站查看其他类型引用(15)
-



计量
- 文章访问数: 2200
- HTML全文浏览量: 218
- PDF下载量: 1055
- 被引次数: 24
