

-
摘要: 提出了一种改进的高斯近似(Gaussian approximate, GA)滤波方法, 推导了它的一般解和特殊解, 并证明了现有的高斯近似滤波方法是所提出的方法的一种特例.在提出的方法中, 不需要基于高斯假设重复地产生求积点, 而是直接地更新求积点.与现有的高斯近似滤波方法相比, 提出的方法利用了量测求积点修正状态求积点, 从而可以更好地捕获状态一步预测密度和状态后验密度的非高斯信息和高阶矩信息.此外, 提出的方法不仅适用于确定的系统模型而且还适用于随机的系统模型.单变量非平稳增长模型、垂直落体模型、再入飞行器目标跟踪的仿真验证了提出的高斯近似滤波方法的有效性和与现有方法相比的优越性.Abstract: In this paper, an improved Gaussian approximate (GA) filtering method is proposed. Its general solution and special solution are derived, and the existing GA filtering method is proved to be its special case of the proposed method. In the proposed method, the quadrature points are no longer generated repeatedly based on Gaussian assumption, but updated directly. As compared with the existing GA filtering method, the proposed method can better capture the non-Gaussian information and high-order moment information of the one-step predicted density and posterior density of state, since the measurement quadrature points in the proposed method are used to correct the state quadrature points. Moreover, the proposed method is suitable for not only deterministic process model but also random process model. The efficiency and superiority of the proposed method are illustrated by simulations of univariate non-stationary growth model, vertically falling body model, and target tracking of re-entry vehicle.
-
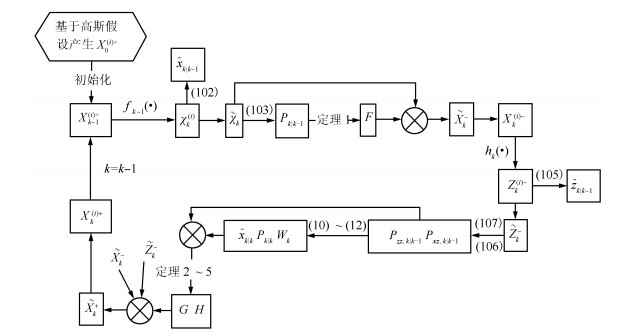
图 1 提出的改进高斯近似滤波算法的流程图
Fig. 1 Diagram of the proposed improved Gaussian approximate filtering algorithm
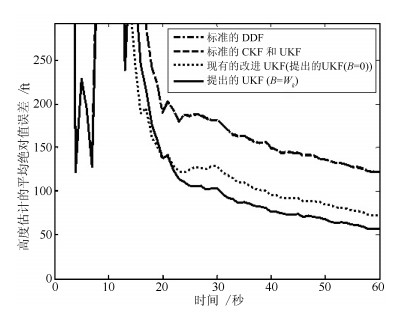
图 4 不同滤波方法的高度估计平均绝对值误差
Fig. 4 Averaged absolute error of the altitude of different filtering methods
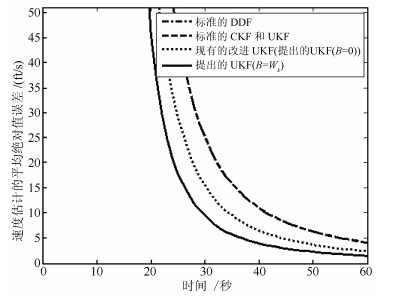
图 5 不同滤波方法的速度估计平均绝对值误差
Fig. 5 Averaged absolute error of the velocity of different filtering methods
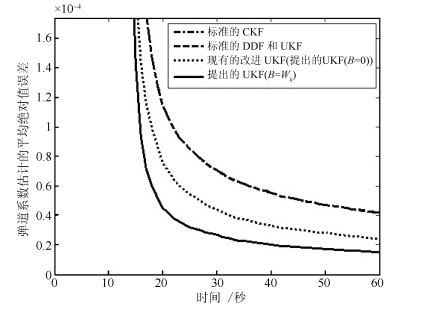
图 6 不同滤波方法的弹道系数估计平均绝对值误差
Fig. 6 Averaged absolute error of the ballistic coefficient of different filtering methods
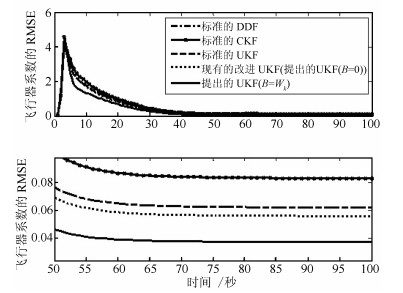
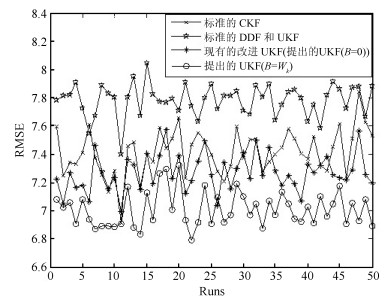
图 9 不同滤波方法的飞行器系数RMSE
Fig. 9 RMSEs of the vehicle coefficient of different filtering methods
表 1 不同滤波方法的平均RMSE
Table 1 The averaged RMSEs of different filtering methods
滤波器 标准的CKF 标准的DDF2和UKF (n=1时等价) 现有的改进UKF 提出的UKF 平均RMSE 7.417 7.787 7.271 7.009  下载: 导出CSV
下载: 导出CSV
表 2 不同滤波方法的单步运行时间
Table 2 The run time of different filtering methods at single step
滤波器 标准的CKF 标准的DDF2和UKF (n=1时等价) 现有的改进UKF 提出的UKF 单步运行时间(秒) 0.21 × 10-3 0.22 × 10-3 0.28 × 10-3 0.32 × 10-3
下载: 导出CSV
表 3 不同滤波方法在最后30秒内的平均绝对值误差的均值
Table 3 The means of averaged absolute errors of different filtering methods over the last 30 s
滤波器 高度估计的平均绝对值
误差的均值(ft)速度估计的平均绝对值
误差的均值(ft/s)弹道系数估计的平均
绝对值误差的均值标准的DDF2 143.701 9.636 5.174 ×10-5 标准的CKF和UKF(n=3时等价) 144.003 9.659 5.182 ×10-5 现有的改进UKF 92.060 5.723 3.087 ×10-5 提出的UKF 73.210 3.499 1.886 ×10-5
下载: 导出CSV
表 4 不同滤波方法的单步运行时间
Table 4 The run time of different filtering methods at single step
滤波器 标准的DDF2 标准的CKF和UKF (n=3时等价) 现有的改进UKF 提出的UKF 单步运行时间(秒) 0.28 × 10-3 0.25 × 10-3 0.35 × 10-3 0.50 × 10-3
下载: 导出CSV
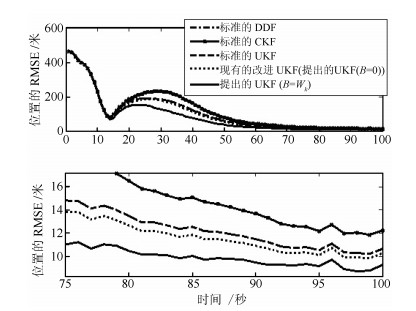
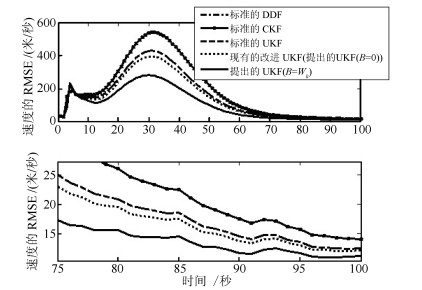
表 5 不同滤波方法在最后25秒内的平均RMSE
Table 5 The averaged RMSEs of different filtering methods over the last 25 s
滤波器 位置的平均RMSE(m) 速度的平均RMSE(m/s) 飞行器系数的平均RMSE 标准的DDF2 12.142 17.023 6.212 × 10-2 标准的CKF 14.577 20.747 8.323 × 10-2 标准的UKF 12.143 17.025 6.213 × 10-2 现有的改进UKF 11.505 16.026 5.601 × 10-2 提出的UKF 9.844 13.332 3.726 × 10-2
下载: 导出CSV
表 6 不同滤波方法的单步运行时间
Table 6 The run time of different filtering methods at single step
滤波器 标准的DDF2 标准的CKF 标准的UKF 现有的改进UKF 提出的UKF 单步运行时间(秒) 1.08 × 10-3 0.97 × 10-3 1.02 × 10-3 1.16 × 10-3 1.20 × 10-3
下载: 导出CSV
-
[1] 张勇刚, 黄玉龙, 赵琳.一种带多步随机延迟量测高斯滤波器的一般框架解.自动化学报, 2015, 41(1):122-135 http://www.aas.net.cn/CN/Y2015/V41/I1/122Zhang Yong-Gang, Huang Yu-Long, Zhao Lin. A general framework solution to Gaussian filter with multiple-step randomly-delayed measurements. Acta Automatica Sinica, 2015, 41(1):122-135 http://www.aas.net.cn/CN/Y2015/V41/I1/122 [2] 张勇刚, 黄玉龙, 李宁, 赵琳.带一步随机延迟量测非线性序列贝叶斯估计的条件后验克拉美罗下界.自动化学报, 2015, 41(3):559-574 doi: 10.16383/j.aas.2015.c140391Zhang Yong-Gang, Huang Yu-Long, Li Ning, Zhao Lin. Conditional posterior Cramér-Rao lower bound for nonlinear sequential Bayesian estimation with one-step randomly delayed measurements. Acta Automatica Sinica, 2015, 41(3):559-574 doi: 10.16383/j.aas.2015.c140391 [3] Lei M, van Wyk B J, Qi Y. Online estimation of the approximate posterior Cramer-Rao lower bound for discrete-time nonlinear filtering. IEEE Transactions on Aerospace and Electronic systems, 2011, 47(1):37-57 doi: 10.1109/TAES.2011.5705658 [4] Arasaratnam I, Haykin S. Cubature Kalman filters. IEEE Transactions on Automatic Control, 2009, 54(6):1254-1269 doi: 10.1109/TAC.2009.2019800 [5] Gordon N J, Salmond D J, Smith A F M. Novel approach to nonlinear/non-Gaussian Bayesian state estimation. IEE Proceedings F:Radar and Signal Processing, 1993, 140(2):107-113 doi: 10.1049/ip-f-2.1993.0015 [6] Guo D, Wang X D. Quasi-Monte Carlo filtering in nonlinear dynamic systems. IEEE Transactions on Signal Processing, 2006, 54(6):2087-2098 doi: 10.1109/TSP.2006.873585 [7] Wang X X, Liang Y, Pan Q, Zhao C H. Gaussian filter for nonlinear systems with one-step randomly delayed measurements. Automatica, 2013, 49(4):976-986 doi: 10.1016/j.automatica.2013.01.012 [8] Arasaratnam I, Haykin S, Elliott R J. Discrete-time nonlinear filtering algorithms using Gauss-Hermite quadrature. Proceedings of the IEEE, 2007, 95(5):953-977 doi: 10.1109/JPROC.2007.894705 [9] Julier S J, Uhlman J K, Durrant-Whyte H F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Transactions on Automatic Control, 2000, 45(3):477-482 doi: 10.1109/9.847726 [10] Julier S J, Uhlman J K. Unscented filtering and nonlinear estimation. Proceedings of the IEEE, 2004, 92(3):401-422 doi: 10.1109/JPROC.2003.823141 [11] Wu Y X, Hu D W, Wu M P, Hu X P. A numerical-integration perspective on Gaussian filters. IEEE Transactions on Signal Processing, 2006, 54(8):2910-2921 doi: 10.1109/TSP.2006.875389 [12] Norgaard M, Poulsen N K, Ravn O. New developments in state estimation for nonlinear systems. Automatica, 2000, 36(11):1627-1638 doi: 10.1016/S0005-1098(00)00089-3 [13] Ito K, Xiong K Q. Gaussian filters for nonlinear filtering problems. IEEE Transactions on Automatic Control, 2000, 45(5):910-927 doi: 10.1109/9.855552 [14] Jia B, Xin M, Cheng Y. High-degree cubature Kalman filter. Automatica, 2013, 49(2):510-518 doi: 10.1016/j.automatica.2012.11.014 [15] Jia B, Xin M, Cheng Y. Sparse-grid quadrature nonlinear filtering. Automatica, 2012, 48(2):327-341 doi: 10.1016/j.automatica.2011.08.057 [16] Duník J, Straka O, Šimandl M. Stochastic integration filter. IEEE Transactions on Automatic Control, 2013, 58(6):1561-1566 doi: 10.1109/TAC.2013.2258494 [17] Zhang X C. A novel cubature Kalman filter for nonlinear state estimation. In:Proceedings of the 2013 IEEE 52nd Annual Conference on Decision and Control. Firenze:IEEE, 2013. 7797-7802 [18] Zhang Y G, Huang Y L, Li N, Zhao L. Embedded cubature Kalman filter with adaptive setting of free parameter. Signal Processing, 2015, 114:112-116 doi: 10.1016/j.sigpro.2015.02.022 [19] Wang S Y, Feng J C, Tse C K. Spherical simplex-radial cubature Kalman filter. IEEE Signal Processing Letters, 2014, 21(1):43-46 doi: 10.1109/LSP.2013.2290381 [20] 张勇刚, 黄玉龙, 武哲民, 李宁.一种高阶无迹卡尔曼滤波方法.自动化学报, 2014, 40(5):838-848 http://www.aas.net.cn/CN/Y2014/V40/I5/838Zhang Yong-Gang, Huang Yu-Long, Wu Zhe-Min, Li Ning. A high order unscented Kalman filtering method. Acta Automatica Sinica, 2014, 40(5):838-848 http://www.aas.net.cn/CN/Y2014/V40/I5/838 [21] Chang L B, Hu B Q, Li A, Qin F J. Transformed unscented Kalman filter. IEEE Transactions on Automatic Control, 2013, 58(1):252-257 doi: 10.1109/TAC.2012.2204830 [22] Zhang Y G, Huang Y L, Li N, Zhao L. Interpolatory cubature Kalman filters. IET Control Theory and Applications, 2015, 9(11):1731-1739 doi: 10.1049/iet-cta.2014.0873 [23] Tian Y, Cheng Y. Novel measurement update method for quadrature-based Gaussian filters. In:Proceedings of the 2013 AIAA Guidance, Navigation, and Control Conference. Boston:AIAA, 2013. 1-15 [24] van der Merwe R. Sigma-Point Kalman Filters for Probabilistic Inference in Dynamic State-Space Models[Ph., D. dissertation], Oregon Health & Science University, Portland, OR, USA, 2004 [25] Cheng Y, Tian Y, Crassidis J L. Extension of the sparse grid quadrature filter. In:Proceedings of the 17th International Conference on Information Fusion (FUSION). Salamanca:IEEE, 2014. 1-7 [26] Golub G H, Van Loan C F. Matrix Computations (Fourth edition). Baltimore, Maryland:The Johns Hopkins University Press, 2013. [27] 黄玉龙, 张勇刚, 李宁, 赵琳.一种带有色量测噪声的非线性系统辨识方法.自动化学报, 2015, 41(11):1877-1892 http://www.aas.net.cn/CN/Y2015/V41/I11/1877Huang Yu-Long, Zhang Yong-Gang, Li Ning, Zhao Lin. An identification method for nonlinear systems with colored measurement noise. Acta Automatica Sinica, 2015, 41(11):1877-1892 http://www.aas.net.cn/CN/Y2015/V41/I11/1877 [28] Šimandl M, Duník J. Derivative-free estimation methods:new results and performance analysis. Automatica, 2009, 45(7):1749-1757 [29] Lee J H. Nonlinear estimation and multiple sensor fusion using unscented information filtering. IEEE Signal Processing Letters, 2008, 15:861-864 doi: 10.1109/LSP.2008.2005447 期刊类型引用(39)
1. 杨涛. 基于机器学习的语音增强技术. 电声技术. 2024(03): 39-41 .  百度学术
百度学术2. 杨波. 基于卷积神经网络的实时语音分割优化研究. 电声技术. 2024(05): 46-48 . 百度学术3. 张文安,林安迪,杨旭升,俞立,杨小牛. 融合深度学习的贝叶斯滤波综述. 自动化学报. 2024(08): 1502-1516 . 本站查看4. 郑盼盼,闫东. 基于深度卷积神经网络的城市噪声识别研究. 电声技术. 2024(09): 41-43 . 百度学术5. 胡翔,杨洋,蒋长江,潘自强,匡仲琴. 一种基于深度神经网络的电力系统调度控制语音识别模型. 电子器件. 2023(01): 90-95 . 百度学术6. 高建清,屠彦辉,马峰,付中华. 基于渐进比率掩蔽目标的自适应噪声估计方法. 计算机应用. 2023(04): 1303-1308 . 百度学术7. 李鑫元,黄鹤鸣. 基于并行卷积循环网络的单通道语音增强系统. 计算机工程与设计. 2023(04): 1181-1188 . 百度学术8. 沈学利,田桂源,姜彦吉,马琳琳. 基于双阶段Conv-Transformer的时频域语音增强算法. 计算机工程. 2023(06): 123-130 . 百度学术9. 陈晋音,吴长安,郑海斌,王巍,温浩. 基于通用逆扰动的对抗攻击防御方法. 自动化学报. 2023(10): 2172-2187 . 本站查看10. 李辉,景浩,严康华,徐良浩. 基于卷积循环网络与非局部模块的语音增强方法. 电子科技. 2022(03): 8-15 . 百度学术11. 徐秋平,任玲,樊玺炫,王义华. 语音识别技术在轨道交通AFC系统中的应用研究. 现代城市轨道交通. 2022(04): 31-35 . 百度学术12. 许春冬,徐琅,周滨. 结合优化U-Net和残差神经网络的单通道语音增强算法. 现代电子技术. 2022(09): 35-40 . 百度学术13. 李文志,屈晓旭. 基于注意力机制和残差卷积网络的语音增强. 舰船电子工程. 2022(05): 96-100 . 百度学术14. 李辉,景浩,严康华,邹波蓉,侯庆华,武会斌. 基于双通道卷积注意力网络的语音增强方法. 河南理工大学学报(自然科学版). 2022(05): 127-136 . 百度学术15. 李江和,王玫. 一种用于因果式语音增强的门控循环神经网络. 计算机工程. 2022(11): 77-82 . 百度学术16. 陈晋音,沈诗婧,苏蒙蒙,郑海斌,熊晖. 车牌识别系统的黑盒对抗攻击. 自动化学报. 2021(01): 121-135 . 本站查看17. SHI Wenhua,ZHANG Xiongwei,ZOU Xia,SUN Meng,LI Li,REN Zhengbing. Time-frequency mask estimation-based speech enhancement using deep encoder-decoder neural network. Chinese Journal of Acoustics. 2021(01): 141-154 . 必应学术18. 董宏越,马建芬,张朝霞. 基于时域波形映射-频域谐波损失的语音增强. 计算机工程与设计. 2021(06): 1677-1683 . 百度学术19. 唐艳凤,林俊强,马振丰. 基于Cauchy模型的行人轮廓提取及目标检测. 计算机测量与控制. 2021(07): 41-45 . 百度学术20. 王钇翔,吕忆蓝,台文鑫,孙建强,蓝天. 基于区域自适应多尺度卷积的单声道语音增强算法. 计算机应用研究. 2021(11): 3264-3267 . 百度学术21. 储有亮,李梁. 基于DBLSTM-DCNN的骨导和气导语音转换. 声学技术. 2021(06): 815-821 . 百度学术22. 连海伦,周健,胡雨婷,郑文明. 利用深度卷积神经网络将耳语转换为正常语音. 声学学报. 2020(01): 137-144 . 百度学术23. 娄迎曦,袁文浩,彭荣群. 基于准循环神经网络的语音增强方法. 计算机工程. 2020(04): 316-320 . 百度学术24. 时文华,张雄伟,邹霞,孙蒙,李莉. 联合深度编解码网络和时频掩蔽估计的单通道语音增强. 声学学报. 2020(03): 299-307 . 百度学术25. 刘晓宇,武鲁,许少华. 一种深层过程神经网络及其在信号分类中的应用. 软件导刊. 2020(03): 60-64 . 百度学术26. 董兴磊,胡英,黄浩,吾守尔·斯拉木. 基于卷积非负矩阵部分联合分解的强噪声单声道语音分离. 自动化学报. 2020(06): 1200-1209 . 本站查看27. 刘虹,袁三男. 基于多尺度残差深度卷积神经网络的语音识别. 计算机应用与软件. 2020(11): 275-279 . 百度学术28. 许春冬,徐琅,周滨,凌贤鹏. 单通道语音增强技术的研究现状与发展趋势. 江西理工大学学报. 2020(05): 55-64 . 百度学术29. 袁文浩,娄迎曦,夏斌,孙文珠. 基于卷积门控循环神经网络的语音增强方法. 华中科技大学学报(自然科学版). 2019(04): 13-18 . 百度学术30. 袁文浩,娄迎曦,梁春燕,王志强. 感知联合优化的深度神经网络语音增强方法. 西安电子科技大学学报. 2019(02): 89-94 . 百度学术31. 姚红革,沈新霞,李宇,喻钧,雷松泽. 多模态融合的深度学习脑肿瘤检测方法. 光子学报. 2019(07): 165-176 . 百度学术32. 袁文浩,梁春燕,夏斌. 基于深度神经网络的因果形式语音增强模型. 计算机工程. 2019(08): 255-259 . 百度学术33. 韦博轩,张冀聪. EEG及MEG痫样棘波检测算法研究现状. 中国医疗设备. 2019(11): 30-33 . 百度学术34. 黄志东. 鲁棒性语音识别技术研究综述. 信息通信. 2019(11): 20-22 . 百度学术35. 陈郑平,米为民,林静怀,王恒,王昊,董根源. 电网调控操作智能助手方案探讨. 电力系统自动化. 2019(22): 173-179+186 . 百度学术36. 任晓霞. 基于Dropout深度卷积神经网络的ST段波形分类算法. 传感技术学报. 2018(08): 1217-1222 . 百度学术37. 刘亚,王静,田新诚. 基于C#和Matlab混合编程的轴承故障诊断系统. 计算机应用. 2018(S2): 236-238+242 . 百度学术38. 罗秀芝,马本学,李小霞,胡洋洋,王文霞,雷声渊. 基于卷积神经网络干制哈密大枣纹理分级. 新疆农业科学. 2018(12): 2220-2227 . 百度学术39. 吴耀春,赵荣珍,靳伍银,何天经,武杰. 利用DCNN融合多传感器特征的故障诊断方法. 振动.测试与诊断. 2021(02): 362-369+416 . 百度学术其他类型引用(39)
-


计量
- 文章访问数: 3397
- HTML全文浏览量: 224
- PDF下载量: 1319
- 被引次数: 78
