

-
摘要: 为了给驾驶员完成标准机动动作提供决策支持, 提出一种使用哈密尔顿-雅克比(Hamilton-Jacobi)方程求解机动动作可行状态空间的研究方法.使用关键点将机动动作划分为不同阶段, 将各关键点的标准状态约束作为目标集, 逆时间求解目标集对应的可达集得到各阶段的边界状态范围, 目标集和可达集均由零水平集表示.使用该方法得到斤斗动作三维度运动模型下各阶段的可达集及斤斗动作的可行状态空间, 为了使运动模型的控制量与驾驶员实际操纵更为接近, 构建了以迎角变化率为控制量的四维度运动模型, 在此基础上对斤斗动作各阶段的可达集进行了分析.
-
关键词:
- 机动动作 /
- 可达集 /
- 哈密尔顿-雅克比方程 /
- 水平集方法 /
- 斤斗动作
Abstract: To help the pilots make decisions for aircraft maneuvers, a reachability analysis method using Hamilton-Jacobi partial differential equation is proposed in this paper. The aircraft maneuver is divided into several phases based on the key points. The restricted set of aircraft states at each key point is seen as the target set, and then a reachable set can be obtained by solving the Hamilton-Jacobi partial differential equation. The target set and the reachable set are both described by zero level set. For the three dimensional dynamical model of the aircraft, the reachable set of each key point and the feasible state space of the whole loop maneuver have been achieved. In order to make the analysis results more easy to use in practice, a four dimensional dynamical model of the aircraft which takes the rate of the angle of attack as the control parameter is formulated. Based on the four dimensional dynamical model, the reachable set is analyzed by means of the proposed method.-
Key words:
- Maneuver /
- reachable set /
- Hamilton-Jacobi equation /
- level set method /
- loop maneuver
-

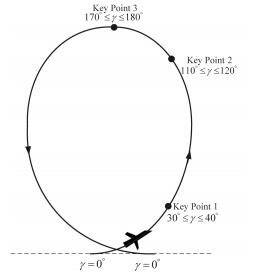
图 1 目标集与可达集的关系
Fig. 1 The relationship between target set and reachable set of the stages

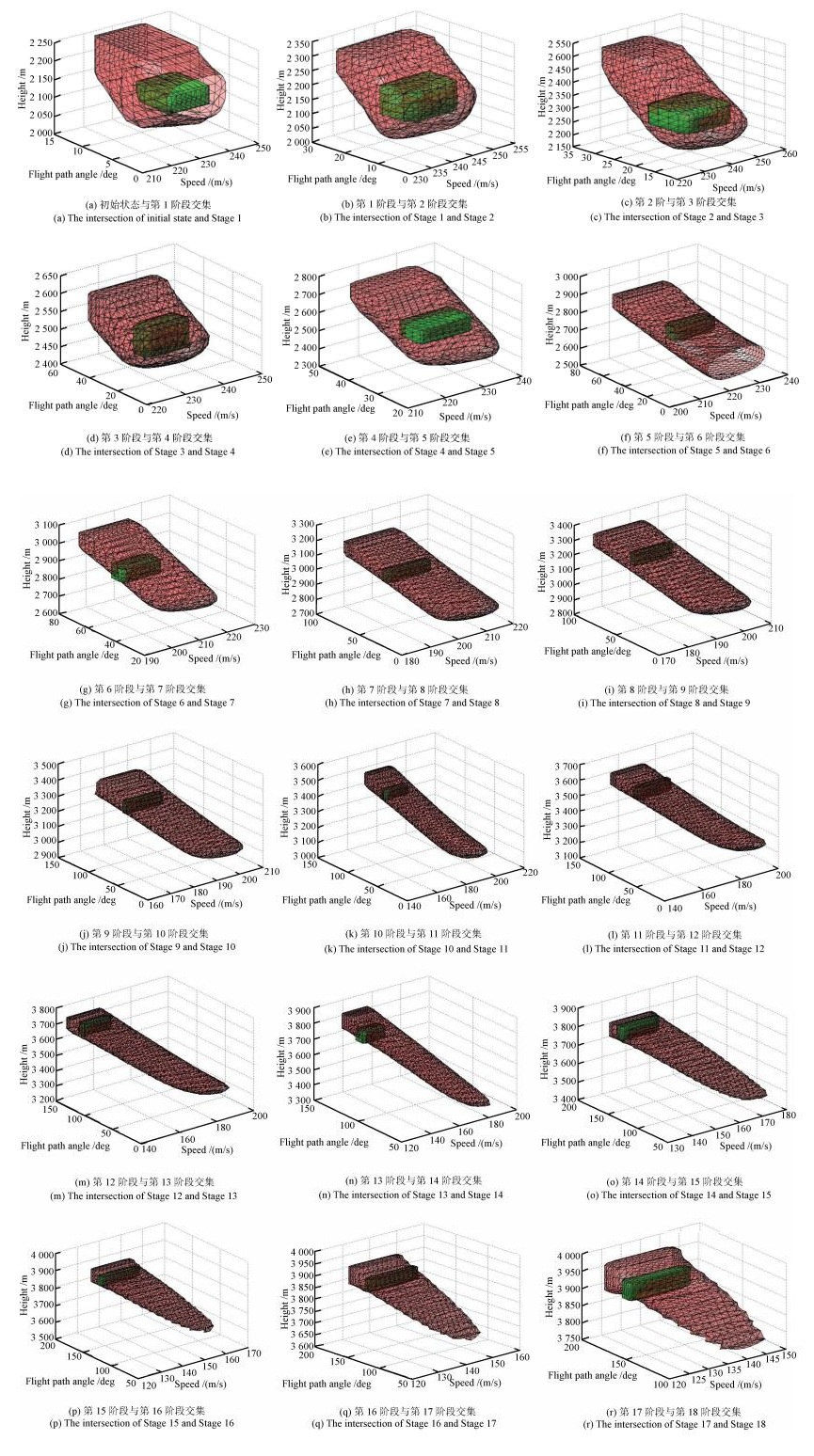
图 3 三维度可达集顶视图及前视图
Fig. 3 The three dimensions reachable set of each stage and the corresponded top view and front view
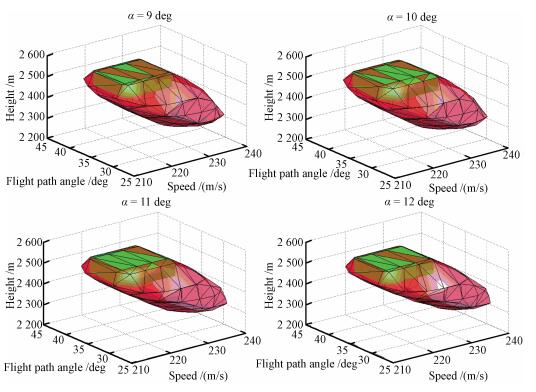
图 5 第一阶段四维度可达集
Fig. 5 The reachable set of the first stage under the condition of four dimension motion equation

图 6 第二阶段四维度可达集
Fig. 6 The reachable set of the second stage under the condition of four dimension motion equation

图 7 第三阶段四维度可达集
Fig. 7 The reachable set of the third stage under the condition of four dimension motion equation
表 1 关键点状态约束条件
Table 1 quad The range of state variables at the key points
Key points Three dimensional dynamical model Four dimensional dynamical model 1 $ 213 {\rm {m/s}}\leq V\leq 231 m/s$
$ 30^{\circ}\leq\gamma\leq40^{\circ}$
$ 2 450 {\rm m}\leq h\leq2 550 {\rm m}$$ 213 {\rm {m/s}}\leq V\leq 231 $ m/s
$ 30^{\circ}\leq\gamma\leq 40^{\circ}$
$ 2 450 {\rm m}\leq h\leq 2 550 $ m
$ 6^{\circ}\leq\alpha\leq 10^{\circ}$2 $ 213 {\rm {m/s}}\leq V\leq231$ m/s
$ 110^{\circ}\leq\gamma\leq120^{\circ}$
$ 3 500 {\rm m}\leq h\leq3 700 $ m$ 213 {\rm {m/s}}\leq V\leq231 $ m/s
$ 110^{\circ}\leq\gamma\leq120^{\circ}$
$ 3 500 {\rm m}\leq h\leq3 700 $ m
$ 10^{\circ}\leq\alpha\leq13^{\circ}$3 $ 110 {\rm {m/s}}\leq V\leq130$ m/s
$ 170^{\circ}\leq\gamma\leq180^{\circ}$
$ 3 900 {\rm m}\leq h\leq4 000 {\rm m}$$ 110 {\rm {m/s}}\leq V\leq130$ m/s
$ 170^{\circ}\leq\gamma\leq180^{\circ}$
$ 3 900 {\rm m}\leq h\leq4 000$ m
$ 8^{\circ}\leq\alpha\leq11^{\circ}$ 下载: 导出CSV
下载: 导出CSV
表 2 斤斗动作飞行包线及控制量的取值范围
Table 2 Aerodynamic envelope and the range of control variables
Aerodynamic envelope Control Three dimensional dynamical model $ 90 {\rm {m/s}}\leq V\leq240$ m/s
$ 0^{\circ}\leq\gamma\leq180^{\circ}$
$ 1 800 {\rm m}\leq h\leq4 200$ m$-2^{\circ}\leq\alpha\leq21^{\circ}$ Four dimensional dynamical model $ 90 {\rm {m/s}}\leq V\leq240$ m/s
$ 0^{\circ}\leq\gamma\leq180^{\circ}$
$ 1 800 {\rm m}\leq h\leq4 200$ m
$ -2^{\circ}\leq\alpha\leq21^{\circ}$$ -0. 35\leq c\leq0. 35$
下载: 导出CSV
表 3 状态空间网格划分
Table 3 Grid division of the state space
Parameters Speed Flight path angle Height AOA Range $ 90 {\rm {m/s}}\leq V\leq240$ m/s $ 0^{\circ}\leq\gamma\leq180^{\circ}$ $ 1 800 {\rm m}\leq h\leq4 200$ m $ -2^{\circ}\leq\alpha\leq21^{\circ}$ Grid number 250 180 500 24 Step size 1 1 4.8 1
下载: 导出CSV
表 4 可达集对应的状态参数范围
Table 4 The range of state variables corresponding with the reachable set
Stage Range of the state parameters 1 $ 213 {\rm {m/s}}\leq V\leq236$ m/s
$ 25^{\circ}\leq\gamma\leq40^{\circ}$
$ 2 440 {\rm m}\leq h\leq2 550 $ m2 $ 150 {\rm {m/s}}\leq V\leq235$ m/s
$ 90^{\circ}\leq\gamma\leq120^{\circ}$
$ 3 410 {\rm m}\leq h\leq3 700$ m3 $ 110 {\rm {m/s}}\leq V\leq130$ m/s
$ 170^{\circ}\leq\gamma\leq180^{\circ}$
$ 3 900 {\rm m}\leq h\leq4 000$ m
下载: 导出CSV
-
[1] 徐邦年.飞行安全评估概论.北京:蓝天出版社, 2005. 1-4Xu Bang-Nian. Flight Security Evaluation Generality. Beijing:Blue Sky Press, 2005. 1-4 [2] Bekiaris-Liberis N, Bayen A M. Nonlinear stabilization of a viscous Hamilton-Jacobi PDE. In:Proceedings of the 2014 IEEE 53rd Annual Conference on Decision and Control (CDC). Los Angeles, CA:IEEE, 2014. 2858-2863 [3] Weekly K, Tinka A, Anderson L, Bayen A M. Autonomous river navigation using the Hamilton-Jacobi framework for underactuated vehicles. IEEE Transactions on Robotics, 2014, 30(5):1250-1255 doi: 10.1109/TRO.2014.2327288 [4] Gillula J H, Hoffmann G M, Huang H M, Vitus M P, Tomlin C J. Applications of hybrid reachability analysis to robotic aerial vehicles. The International Journal of Robotics Research, 2011, 30(3):335-354 doi: 10.1177/0278364910387173 [5] Bayen A M, Mitchell I M, Osihi M K, Tomlin C J. Aircraft autolander safety analysis through optimal control-based reach set computation. Journal of Guidance, Control, and Dynamics, 2007, 30(1):68-77 doi: 10.2514/1.21562 [6] Van Oort E R, Chu Q P, Mulder J A. Maneuver envelope determination through reachability analysis. Advances in Aerospace Guidance, Navigation and Control. Berlin Heidelberg:Springer, 2011. 91-102 [7] Glizer V T, Turetsky V. Increasing pursuer capturability by using hybrid dynamics. International Journal of Applied Mathematics and Computer Science, 2015, 25(1):77-92 [8] Lin Y C, Saripalli S. Collision avoidance for UAVs using reachable sets. In:Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS). Denver, CO:IEEE, 2015. 226-235 [9] Alam A, Gattami A, Johansson K H, Tomlin C J. Guaranteeing safety for heavy duty vehicle platooning:safe set computations and experimental evaluations. Control Engineering Practice, 2014, 24:33-41 doi: 10.1016/j.conengprac.2013.11.003 [10] Ding J, Sprinkle J, Tomlin C J, Sastry S S, Paunicka J L. Reachability calculations for vehicle safety during manned/unmanned vehicle interaction. Journal of Guidance, Control, and Dynamics, 2012, 35(1):138-152 doi: 10.2514/1.53706 [11] Datar M, Ketkar V, Mejari M, Gupta A, Singh N, Kazi F. Motion planning for the three wheel mobile robot using the reachable set computation under constraints. In:Proceedings of the 3rd International Conference on Advances in Control and Optimization of Dynamical Systems. Kanpur, India:IFAC, 2014. 787-793 [12] 张军英, 许进, 保铮.遗传交叉运算的可达性研究.自动化学报, 2002, 28(1):120-125 http://www.aas.net.cn/CN/abstract/abstract15509.shtmlZhang Jun-Ying, Xu Jin, Bao Zheng. Attainability of genetic crossover operator. Acta Automatica Sinica, 2002, 28(1):120-125 http://www.aas.net.cn/CN/abstract/abstract15509.shtml [13] Wu M, Yan G F, Lin Z Y. Reachability of affine systems on polytopes. Acta Automatica Sinica, 2009, 35(12):1528-1533 doi: 10.1016/S1874-1029(08)60121-4 [14] Tomlin C J, Lygeros J, Sastry S S. A game theoretic approach to controller design for hybrid systems. Proceedings of the IEEE, 2000, 88(7):949-970 doi: 10.1109/5.871303 [15] Mitchell I M. A toolbox of level set methods, Tech. Rep. TR-2004-09, Department of Computer Science, University of British Columbia, Vancouver, BC, Canada, 2004. [16] 贾鹤鸣, 张利军, 程相勤, 边信黔, 严浙平, 周佳加.基于非线性迭代滑模的欠驱动UUV三维航迹跟踪控制.自动化学报, 2012, 38(2):308-314 doi: 10.3724/SP.J.1004.2012.00308Jia He-Ming, Zhang Li-Jun, Cheng Xiang-Qin, Bian Xin-Qian, Yan Zhe-Ping, Zhou Jia-Jia. Three-dimensional path following control for an underactuated UUV based on nonlinear iterative sliding mode. Acta Automatica Sinica, 2012, 38(2):308-314 doi: 10.3724/SP.J.1004.2012.00308 [17] Osher S, Fedkiw R. Level Set Methods and Dynamic Implicit Surfaces. New York:Springer, 2003. 25-37 [18] 李治平.偏微分方程数值解讲义.北京:北京大学出版社, 2010. 94-97Li Zhi-Ping. Numerical Solution of Partial Differential Equation. Beijing:Peking University Press, 2010. 94-97 [19] 刘瑛, 李敏强, 张瑞峰.复杂机动动作最优航迹控制模型及操纵特性分析.控制理论与应用, 2014, 31(5):566-576 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201405003.htmLiu Ying, Li Min-Qiang, Zhang Rui-Feng. The optimal trajectory control model of the aircraft maneuver and its operation characteristics. Control Theory & Applications, 2014, 31(5):566-576 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201405003.htm [20] 刘瑛, 李敏强, 陈富赞.飞行器机动动作风险定量评估模型.系统工程与电子技术, 2014, 36(3):469-475 http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201403012.htmLiu Ying, Li Min-Qiang, Chen Fu-Zan. Risk quantitative evaluation model of the aircraft maneuver. Systems Engineering and Electronics, 2014, 36(3):469-475 http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201403012.htm -

 下载:
下载:

计量
- 文章访问数: 3126
- HTML全文浏览量: 412
- PDF下载量: 796
- 被引次数: 0
