

Monocrystalline Silicon Diameter Detection Image Threshold Segmentation Method Using Multi-objective Artificial Fish Swarm Algorithm
-
摘要: 为提高对硅单晶直径检测图像高亮光环的分割精度, 提出了一种基于多目标人工鱼群算法的二维直方图区域斜分多阈值分割方法.首先设计了一种多目标人工鱼群算法, 并且改进了快速构造Pareto非劣解集的方法, 然后以最大类间方差和最大熵同时作为测度函数, 搜索最优的二维直方图区域斜分分割阈值.仿真结果表明, 所设计的多目标人工鱼群优化算法具有较高的搜索精度, 硅单晶直径检测图像分割实验结果表明, 提出的改进二维直方图区域斜分多阈值分割方法对高亮光环具有较高的分割精度.
-
关键词:
- 硅单晶直径检测 /
- 阈值分割 /
- 二维直方图区域斜分法 /
- 多目标优化 /
- 人工鱼群算法
Abstract: Combined with the multi-objective artificial fish swarm algorithm (MAFSA), a 2D histogram multi-threshold oblique segmentation method is proposed to improve the segmentation accuracy of the highlight halo for monocrystalline silicon diameter detection. Firstly, a multi-objective artificial fish swarm algorithm is designed and the approach to find the non-dominating set in a population efficiently is improved. Then, the maximum between-class variance and maximum entropy are simultaneously employed as measure functions to search the best thresholds of 2D histogram oblique segmentation. Simulated experiments show that the designed MAFSA has a relatively high search accuracy. Meanwhile, image segmentation experiments conducted on practical monocrystalline silicon diameter detection demonstrate that the proposed 2D histogram multi-threshold oblique segmentation method achieves fine precision on segmenting the highlight halo. -

图 6 TDR-150单晶炉直径检测装置实物图
Fig. 6 Photos of TDR-150 single crystal silicon furnace diameter detecting device
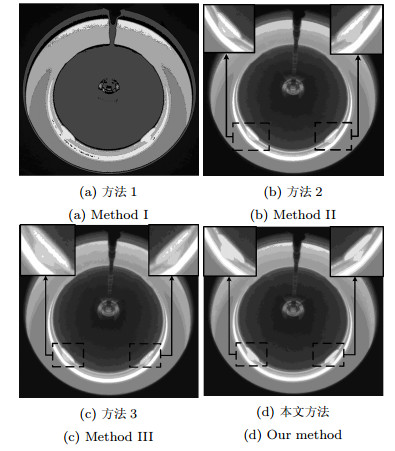
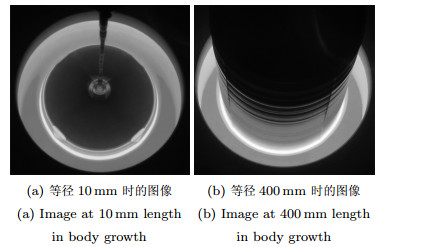
图 8 等径10 mm时四种方法的多阈值分割结果
Fig. 8 Results of different methods for multi-threshold image segmentation at 10 mm length in body growth
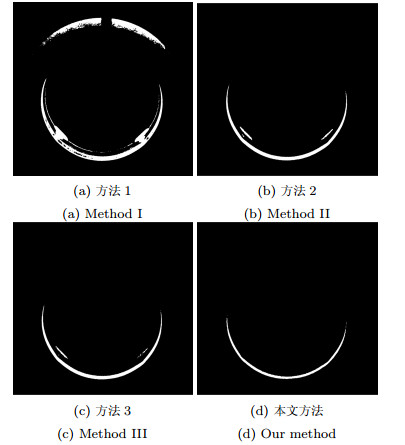
图 9 等径10 mm时四种方法的二值化图像
Fig. 9 Binarization image of different methods at 10 mm length in body growth
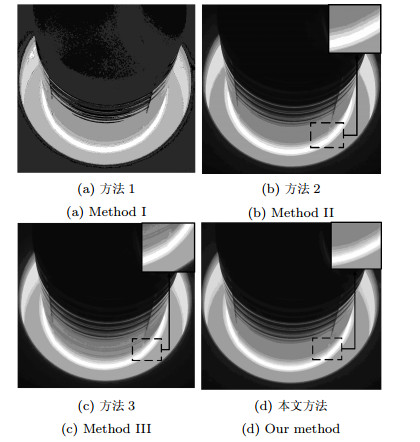
图 10 等径400 mm时四种方法的多阈值分割结果
Fig. 10 Results of different methods for multi-threshold image segmentation at 400 mm length in body growth
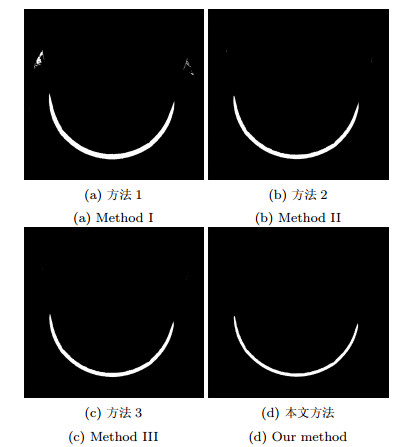
图 11 等径400 mm时四种方法的二值化图像
Fig. 11 Binarization image of different methods at 400 mm length in body growth
表 1 ZDT标准测试函数集
Table 1 ZDT standard test function set
函数标号 目标函数 变量数 变量范围 采样点数 ZDT1 ${\left\{ \begin{array}{l} \min {f_1}(\mathit{\boldsymbol{x}}) = {x_1}\\ \min {f_2}(\mathit{\boldsymbol{x}}) = g(\mathit{\boldsymbol{x}})(1 - \sqrt {{x_1}/g(\mathit{\boldsymbol{x}})} )\\ {\rm{s}}.{\rm{t}}.\quad g(\mathit{\boldsymbol{x}}) = 1 + 9(\sum\nolimits_{i = 2}^n {{x_i}} )/(n - 1) \end{array} \right.}$ 30 xi ∈ [0, 1] 1 000 ZDT2 ${\left\{ \begin{array}{l} \min {f_1}(\mathit{\boldsymbol{x}}) = {x_1}\\ \min {f_2}(\mathit{\boldsymbol{x}}) = g(\mathit{\boldsymbol{x}})(1 - {({x_1}/g(\mathit{\boldsymbol{x}}))^2})\\ {\rm{s}}.{\rm{t}}.\quad g(\mathit{\boldsymbol{x}}) = 1 + 9(\sum\nolimits_{i = 2}^n {{x_i}} )/(n - 1) \end{array} \right.}$ 30 xi ∈ [0, 1] 1 000 ZDT3 ${\left\{ \begin{array}{l} \min {f_1}(\mathit{\boldsymbol{x}}) = {x_1}\\ \min {f_2}(\mathit{\boldsymbol{x}}) = g(\mathit{\boldsymbol{x}})(1 - \sqrt {({x_1}/g(\mathit{\boldsymbol{x}}))} - {x_1}\sin (10\pi {x_1})/g(\mathit{\boldsymbol{x}}))\\ {\rm{s}}.{\rm{t}}.\quad g(\mathit{\boldsymbol{x}}) = 1 + 9(\sum\nolimits_{i = 2}^n {{x_i}} )/(n - 1) \end{array} \right.}$ 30 xi ∈ [0, 1] 1 000 ZDT4 $\left\{ {\begin{array}{*{20}{l}} {\min {f_1}(\mathit{\boldsymbol{x}}) = {x_1}}\\ {\min {f_2}(\mathit{\boldsymbol{x}}) = g(\mathit{\boldsymbol{x}})(1 - \sqrt {{x_1}/g(\mathit{\boldsymbol{x}})} )}\\ {{\rm{s}}.{\rm{t}}.\quad g(\mathit{\boldsymbol{x}}) = 1 + 10(n - 1) + \sum\nolimits_{i = 2}^n {\left( {x_i^2 - 10\cos \left( {4\pi {x_i}} \right)} \right)} } \end{array}} \right.$ 10 xi ∈ [0, 1]
xi ∈ [-5, 5]
i=2, …, n1 000 ZDT6 $\left\{ {\begin{array}{*{20}{l}} {\min {f_1}(\mathit{\boldsymbol{x}}) = 1 - \exp ( - 4{x_1}){{\sin }^6}(6\pi {x_1})}\\ {\min {f_2}(\mathit{\boldsymbol{x}}) = g(\mathit{\boldsymbol{x}})(1 - {{({x_1}/g(\mathit{\boldsymbol{x}}))}^2})}\\ {{\rm{s}}.{\rm{t}}.\quad g(\mathit{\boldsymbol{x}}) = 1 + 10(n - 1) + \sum\nolimits_{i = 2}^n {\left( {x_i^2 - 10\cos \left( {4\pi {x_i}} \right)} \right)} } \end{array}} \right.$ 10 xi ∈ [0, 1] 1 000  下载: 导出CSV
下载: 导出CSV
表 2 多种算法对比实验结果
Table 2 Experimental results of different algorithms
对比方法 NSGA-Ⅱ p-OCEA peMOPSO MPSOCell 本文方法 测试函数 IGD 时间(s) IGD 时间(s) IGD 时间(s) IGD 时间(s) IGD 时间(s) ZDT1 0.0123 7 131.89 0.0826 6 288.28 0.0100 5 689.27 0.0172 2 599.12 0.0088 986.87 ZDT2 0.0207 6 367.91 0.0977 6 350.72 0.4995 3 190.81 0.0088 2 598.90 0.0211 829.74 ZDT3 0.0060 6 167.51 0.0532 6 531.65 0.0087 2 008.90 0.0116 1 285.60 0.0197 987.56 ZDT4 0.0354 6 443.92 0.0191 6 325.01 0.0138 1 107.43 7.5031 1 740.71 0.0597 551.46 ZDT6 96.8043 6 391.91 95.9782 6 656.29 71.1176 1 405.68 86.0420 917.85 0.4865 651.83
下载: 导出CSV
表 3 等径10 mm时各种方法分割结果的性能指标
Table 3 Results of efficiency among different methods for image segmentation at 10 mm length in body growth
方法 PSNR (dB) 分类误差率(%) 运行时间(s) 方法1 12.8480 0.8008 11.0274 方法2 30.0228 0.1849 4.6387 方法3 31.0546 0.1772 1.8061 本文方法 35.1589 0.0626 7.6084
下载: 导出CSV
表 4 等径400 mm时各种方法分割结果的性能指标
Table 4 Results of efficiency among different methods for image segmentation at 400 mm length in body growth
方法 PSNR (dB) 分类误差率(%) 运行时间(s) 方法1 13.9686 0.6600 12.1390 方法2 32.1443 0.1042 4.6601 方法3 32.0341 0.0944 2.5306 本文方法 34.8116 0.0826 7.5028
下载: 导出CSV
-
[1] 张新雨, 刘丁, 杨文, 杨延西.基于人工鱼群霍夫变换的单晶硅直径检测.仪器仪表学报, 2014, 35(4):940-947 http://www.cnki.com.cn/Article/CJFDTOTAL-YQXB201404031.htmZhang Xin-Yu, Liu Ding, Yang Wen, Yang Yan-Xi. Diameter detection of single crystal silicon based on artificial fish swarm algorithm-Hough transform. Chinese Journal of Scientific Instrument, 2014, 35(4):940-947 http://www.cnki.com.cn/Article/CJFDTOTAL-YQXB201404031.htm [2] Lan C W. Recent progress of crystal growth modeling and growth control. Chemical Engineering Science, 2004, 59(7):1437-1457 doi: 10.1016/j.ces.2004.01.010 [3] Hurle D T J. Control of diameter in Czochralski and related crystal growth techniques. Journal of Crystal Growth, 1977, 42:473-482 doi: 10.1016/0022-0248(77)90233-0 [4] Takagi K, Ikeda T, Fukazawa T, Ishii M. Growth striae in single crystals of gadolinium gallium garnet grown by automatic diameter control. Journal of Crystal Growth, 1977, 38(2):206-212 doi: 10.1016/0022-0248(77)90299-8 [5] Liu D, Liang J L. A Bayesian approach to diameter estimation in the diameter control system of silicon single crystal growth. IEEE Transactions on Instrumentation and Measurement, 2011, 60(4):1307-1315 doi: 10.1109/TIM.2010.2086610 [6] Cai H M, Yang Z, Cao X H, Xia W M, Xu X Y. A new iterative triclass thresholding technique in image segmentation. IEEE Transactions on Image Processing, 2014, 23(3):1038-1046 doi: 10.1109/TIP.2014.2298981 [7] Gong M G, Liang Y, Shi J, Ma W P, Ma J J. Fuzzy C-means clustering with local information and kernel metric for image segmentation. IEEE Transactions on Image Processing, 2013, 22(2):573-584 doi: 10.1109/TIP.2012.2219547 [8] Zhu L J, Gao Y, Appia V, Yezzi A, Arepalli C, Faber T, Stillman A, Tannenbaum A. Automatic delineation of the myocardial wall from CT images via shape segmentation and variational region growing. IEEE Transactions on Bio-Medical Engineering, 2013, 60(10):2887-2895 doi: 10.1109/TBME.2013.2266118 [9] Jalba A C, Westenberg M A, Roerdink J B T M. Interactive segmentation and visualization of DTI data using a hierarchical watershed representation. IEEE Transactions on Image Processing, 2015, 24(3):1025-1035 doi: 10.1109/TIP.2015.2390139 [10] Wang F L, Wang F. Void detection in TSVs with X-ray image multithreshold segmentation and artificial neural networks. IEEE Transactions on Components, Packaging and Manufacturing Technology, 2014, 4(7):1245-1250 doi: 10.1109/TCPMT.2014.2322907 [11] Wang D, Xie X, Li G L, Yin Z, Wang Z H. A lumen detection-based intestinal direction vector acquisition method for wireless endoscopy systems. IEEE Transactions on BioMedical Engineering, 2015, 62(3):807-819 doi: 10.1109/TBME.2014.2365016 [12] 刘健庄, 栗文清.灰度图象的二维Otsu自动阈值分割法.自动化学报, 1993, 19(1):101-105 http://www.aas.net.cn/CN/Y1993/V19/I01/101Liu Jian-Zhuang, Li Wen-Qing. The automatic thresholding of gray-level pictures VLA two-dimension Otsu method. Acta Automatica Sinica, 1993, 19(1):101-105 http://www.aas.net.cn/CN/Y1993/V19/I01/101 [13] 吴一全, 吴文怡, 潘喆.二维直方图区域斜分Otsu阈值分割的快速迭代算法.工程图学学报, 2009, 30(5):89-96 http://www.cnki.com.cn/Article/CJFDTOTAL-GCTX200905016.htmWu Yi-Quan, Wu Wen-Yi, Pan Zhe. A fast iterative algorithm of the Otsu threshold based on two-dimensional histogram oblique segmentation. Journal of Engineering Graphics, 2009, 30(5):89-96 http://www.cnki.com.cn/Article/CJFDTOTAL-GCTX200905016.htm [14] 吴一全, 潘喆, 吴文怡.二维直方图区域斜分的最大熵阈值分割算法.模式识别与人工智能, 2009, 22(1):162-168 http://www.cnki.com.cn/Article/CJFDTOTAL-MSSB200901026.htmWu Yi-Quan, Pan Zhe, Wu Wen-Yi. Maximum entropy image thresholding based on two-dimensional histogram oblique segmentation. Pattern Recognition and Artificial Intelligence, 2009, 22(1):162-168 http://www.cnki.com.cn/Article/CJFDTOTAL-MSSB200901026.htm [15] Guo W Y, Wang X F, Xia X Z. Two-dimensional Otsu's thresholding segmentation method based on grid box filter. Optik-International Journal for Light and Electron Optics, 2014, 125(18):5234-5240 doi: 10.1016/j.ijleo.2014.05.003 [16] 范朝冬, 张英杰, 欧阳红林, 肖乐意.基于改进斜分Otsu法的回转窑火焰图像分割.自动化学报, 2014, 40(11):2480-2489 http://www.aas.net.cn/CN/Y2014/V40/I11/2480Fan Chao-Dong, Zhang Ying-Jie, Ouyang Hong-Lin, Xiao Le-Yi. Improved Otsu method based on histogram oblique segmentation for segmentation of rotary kiln flame image. Acta Automatica Sinica, 2014, 40(11):2480-2489 http://www.aas.net.cn/CN/Y2014/V40/I11/2480 [17] Deb K, Pratap A, Agarwal S, Meyarivan T. A fast and elitist multiobjective genetic algorithm:NSGA-II. IEEE Transactions on Evolutionary Computation, 2002, 6(2):182-197 doi: 10.1109/4235.996017 [18] Coello C A C, Pulido G T, Lechuga M S. Handling multiple objectives with particle swarm optimization. IEEE Transactions on Evolutionary Computation, 2004, 8(3):256-279 doi: 10.1109/TEVC.2004.826067 [19] 左兴权, 王春露, 赵新超.一种结合多目标免疫算法和线性规划的双行设备布局方法.自动化学报, 2015, 41(3):528-540 http://www.aas.net.cn/CN/Y2015/V41/I3/528Zuo Xing-Quan, Wang Chun-Lu, Zhao Xin-Chao. Combining multi-objective immune algorithm and linear programming for double row layout problem. Acta Automatica Sinica, 2015, 41(3):528-540 http://www.aas.net.cn/CN/Y2015/V41/I3/528 [20] 朱大林, 詹腾, 张屹, 郑小东.多策略差分进化的元胞多目标粒子群算法.电子学报, 2014, 42(9):1831-1838 http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201409026.htmZhu Da-Lin, Zhan Teng, Zhang Yi, Zheng Xiao-Dong. Cellular multi-objective particle swarm algorithm based on multi-strategy differential evolution. Acta Electronica Sinica, 2014, 42(9):1831-1838 http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201409026.htm [21] 胡旺, Yen G G, 张鑫.基于Pareto熵的多目标粒子群优化算法.软件学报, 2014, 25(5):1025-1050 http://www.cnki.com.cn/Article/CJFDTOTAL-RJXB201405009.htmHu Wang, Yen G G, Zhang Xin. Multiobjective particle swarm optimization based on Pareto entropy. Journal of Software, 2014, 25(5):1025-1050 http://www.cnki.com.cn/Article/CJFDTOTAL-RJXB201405009.htm [22] 汪照, 李有明, 陈斌, 邹婷.基于鱼群算法的OFDMA自适应资源分配.物理学报, 2013, 62(12):128802-1-128802-7 http://www.cnki.com.cn/Article/CJFDTOTAL-WLXB201312072.htmWang Zhao, Li You-Ming, Chen Bin, Zou Ting. OFDMA adaptive resource allocation based on fish swarm algorithm. Acta Physica Sinica, 2013, 62(12):128802-1-128802-7 http://www.cnki.com.cn/Article/CJFDTOTAL-WLXB201312072.htm [23] 孔维健, 柴天佑, 丁进良, 吴志伟.镁砂熔炼过程全厂电能分配实时多目标优化方法研究.自动化学报, 2014, 40(1):51-61 http://www.aas.net.cn/CN/Y2014/V40/I1/51Kong Wei-Jian, Chai Tian-You, Ding Jin-Liang, Wu Zhi-Wei. A real-time multiobjective electric energy allocation optimization approach for the smelting process of magnesia. Acta Automatica Sinica, 2014, 40(1):51-61 http://www.aas.net.cn/CN/Y2014/V40/I1/51 [24] 夏立荣, 李润学, 刘启玉, 耿志强.基于动态层次分析的自适应多目标粒子群优化算法及其应用.控制与决策, 2015, 30(2):215-221 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201502003.htmXia Li-Rong, Li Run-Xue, Liu Qi-Yu, Geng Zhi-Qiang. An adaptive multi-objective particle swarm optimization algorithm based on dynamic AHP and its application. Control and Decision, 2015, 30(2):215-221 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201502003.htm [25] Carreno Jara E. Multi-optimization by using evolutionary algorithms:the p-optimality criteria. IEEE Transactions on Evolutionary Computation, 2014, 18(2):167-179 doi: 10.1109/TEVC.2013.2243455 期刊类型引用(3)
1. 杨雪梅,陈霞,宋小贝. 基于需求导向理念的康复护理干预对老年脑卒中后吞咽障碍患者吞咽功能及生存质量的影响. 中国当代医药. 2021(04): 231-234 .  百度学术
百度学术2. 陈杰,程胜,徐梦,史豪斌. 面向医疗辅助诊断的可视化多属性决策方法. 计算机工程与应用. 2020(08): 249-255 . 百度学术3. 马宁. 球囊扩张训练式护理对脑出血术后吞咽功能障碍患者吞咽功能的影响. 中国药物与临床. 2020(21): 3683-3685 . 百度学术其他类型引用(1)
-


计量
- 文章访问数: 2641
- HTML全文浏览量: 274
- PDF下载量: 1069
- 被引次数: 4
