2023年 第49卷 第6期
2023, 49(6): 1131-1154.
doi: 10.16383/j.aas.c220564
摘要:
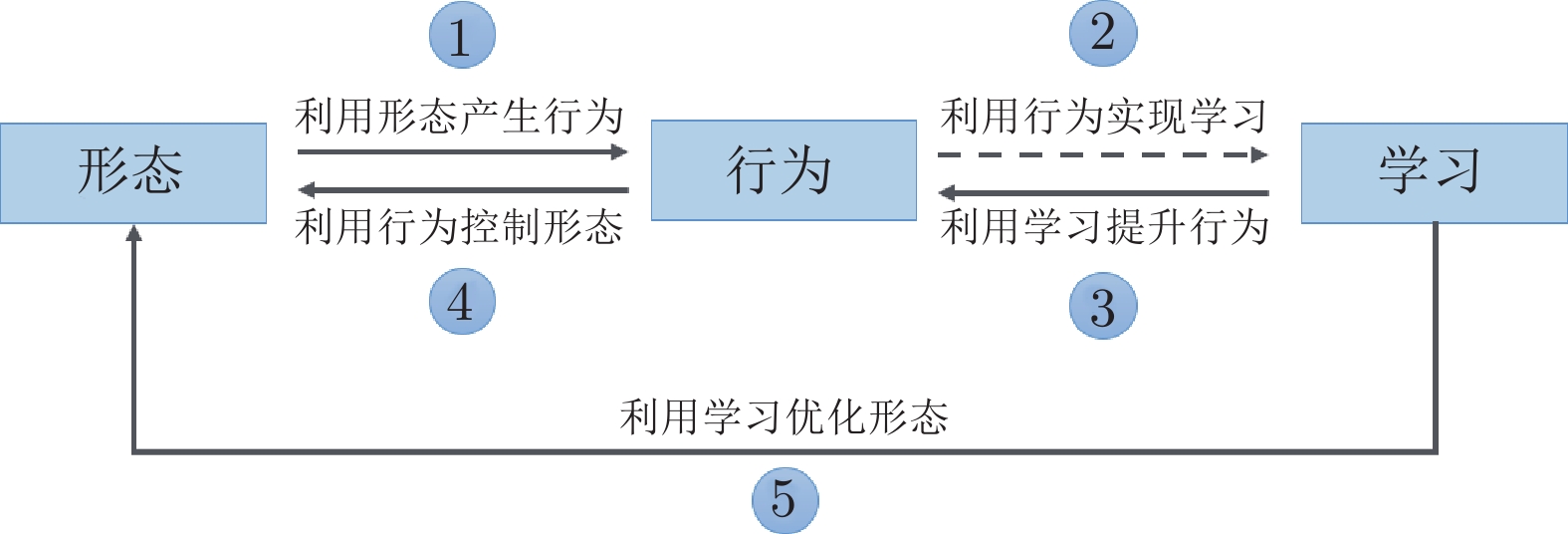
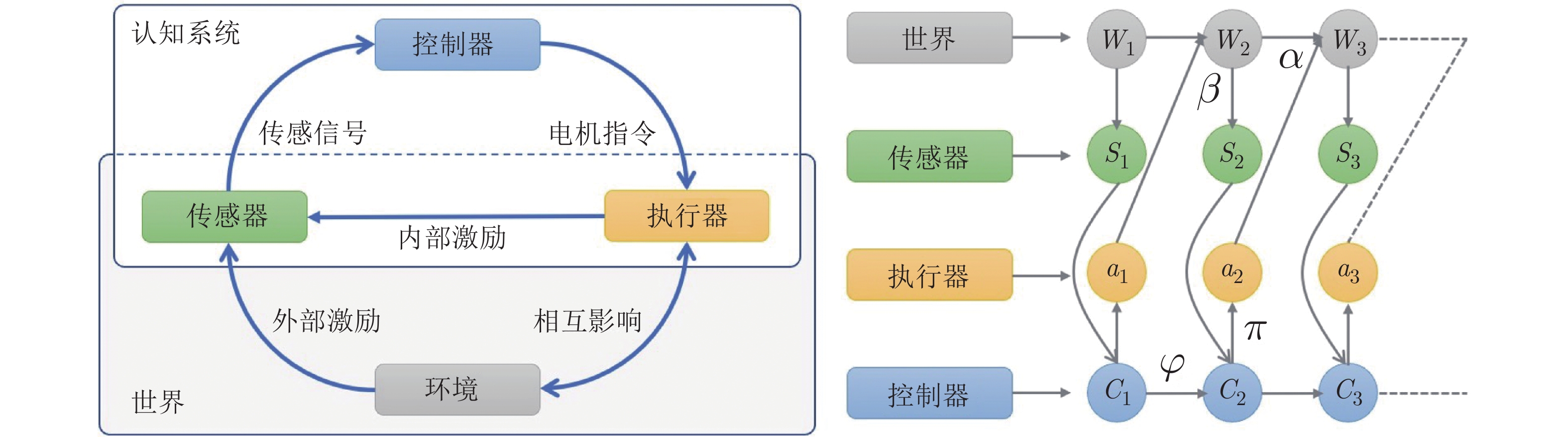
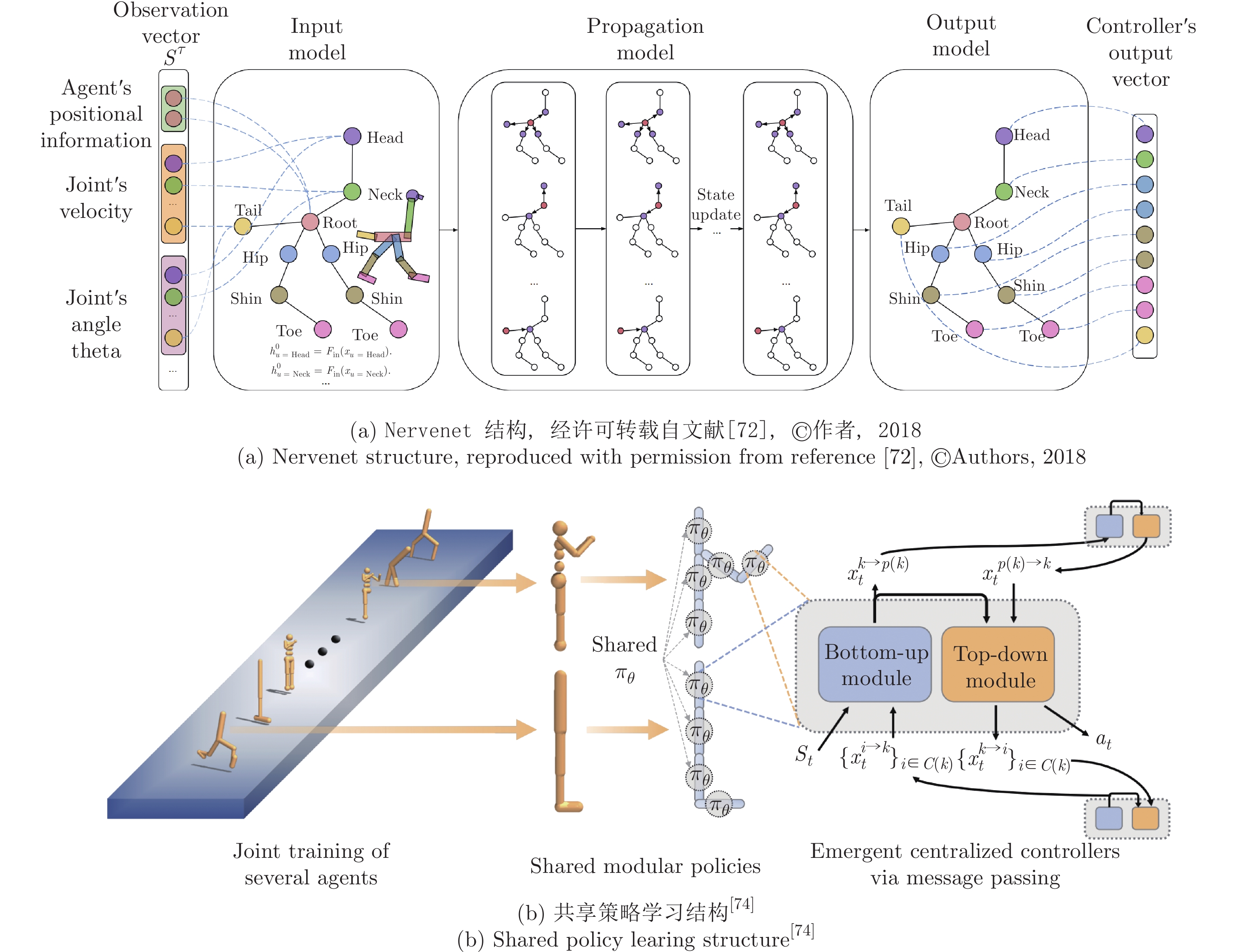
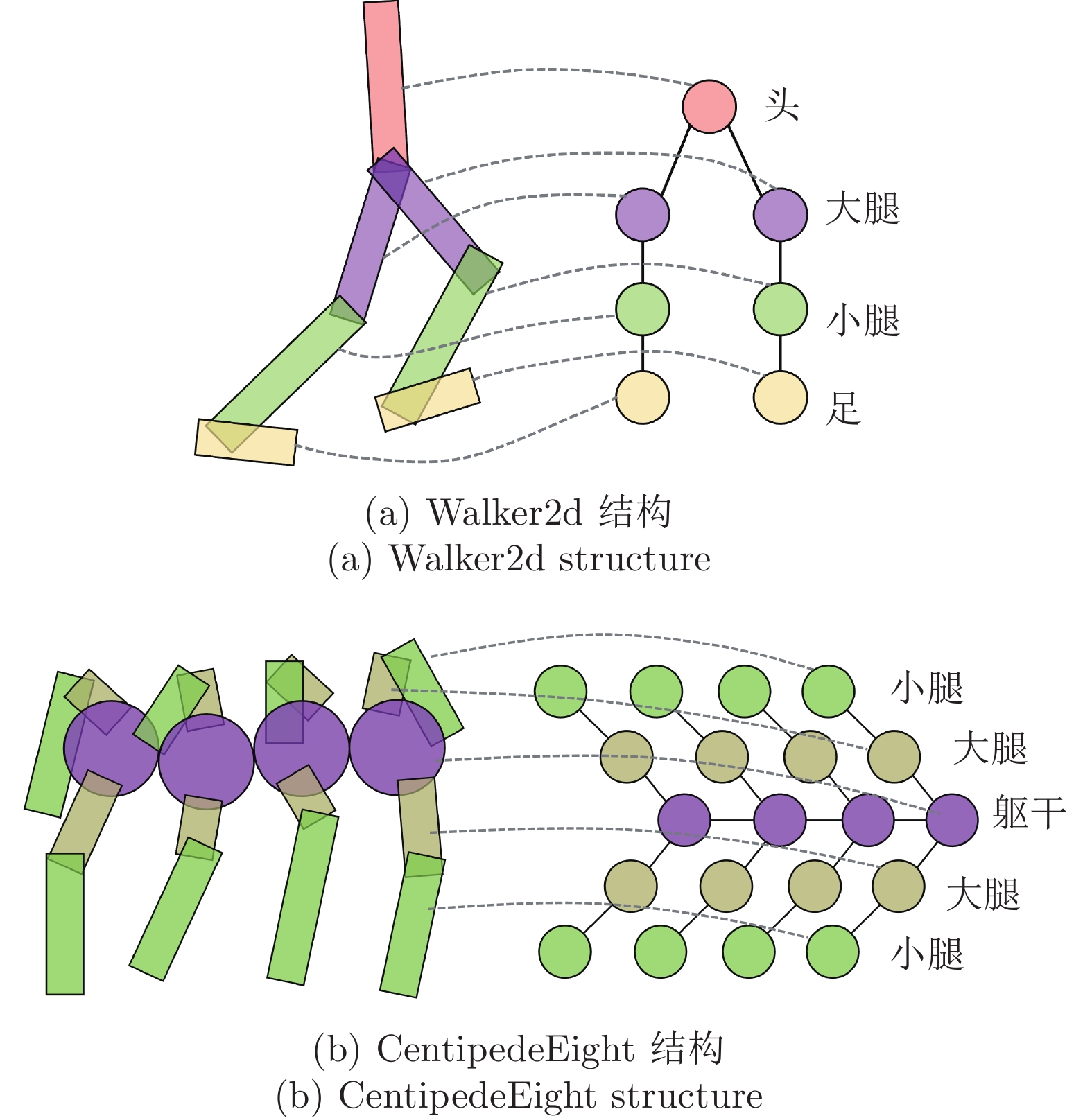
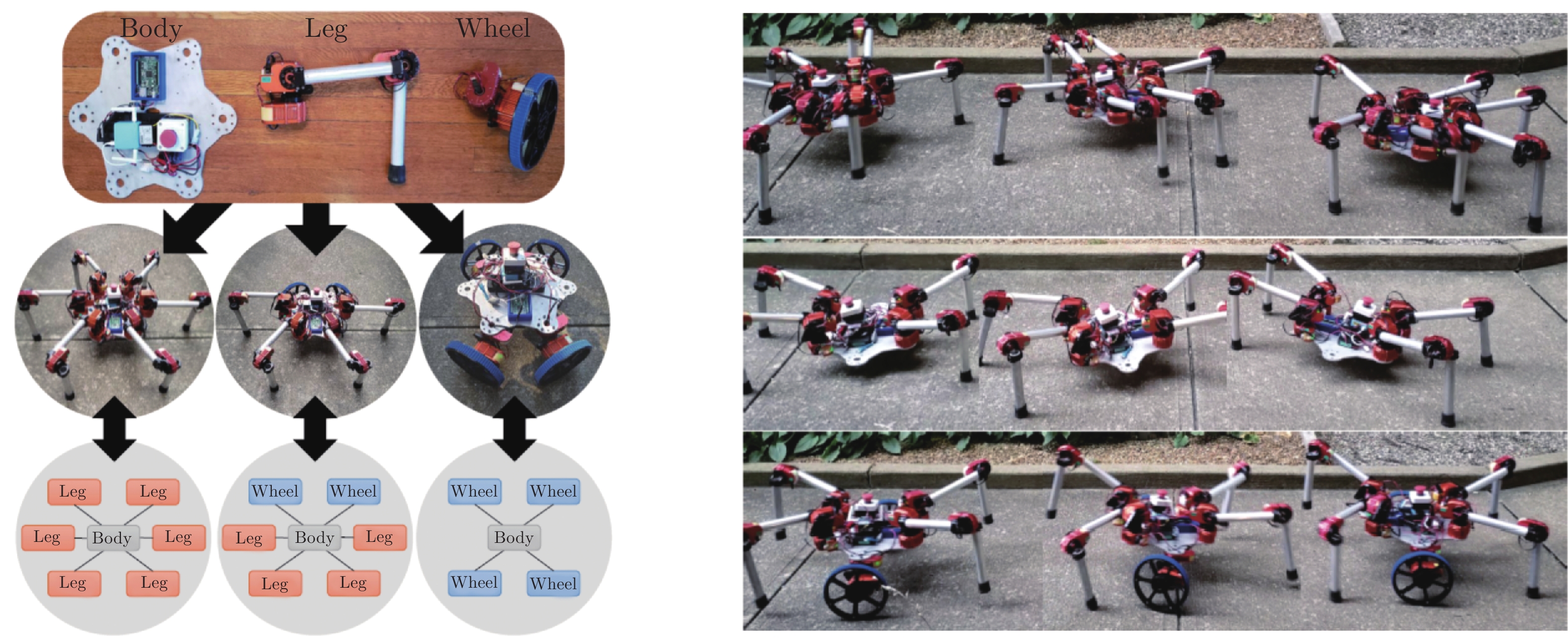
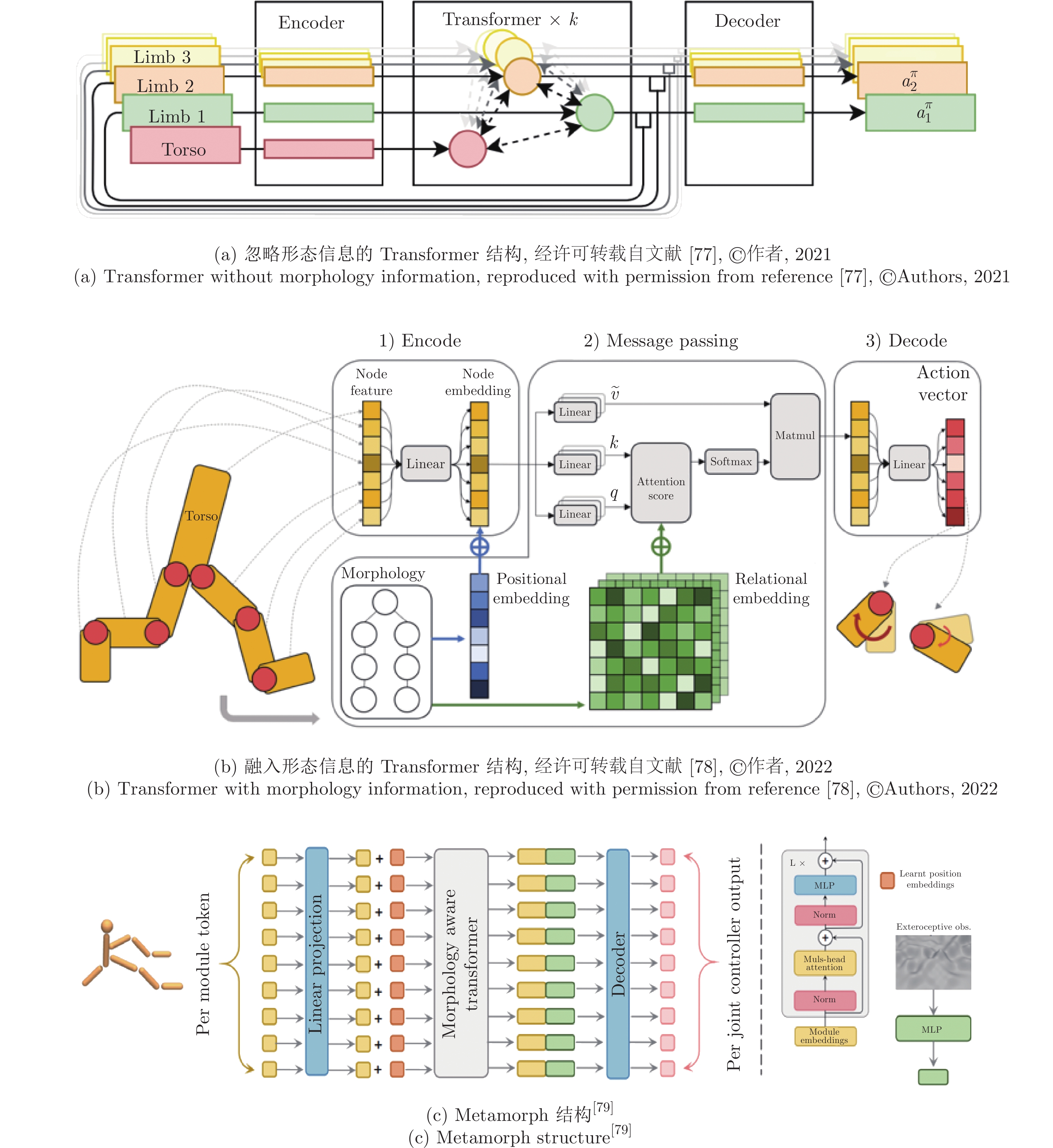
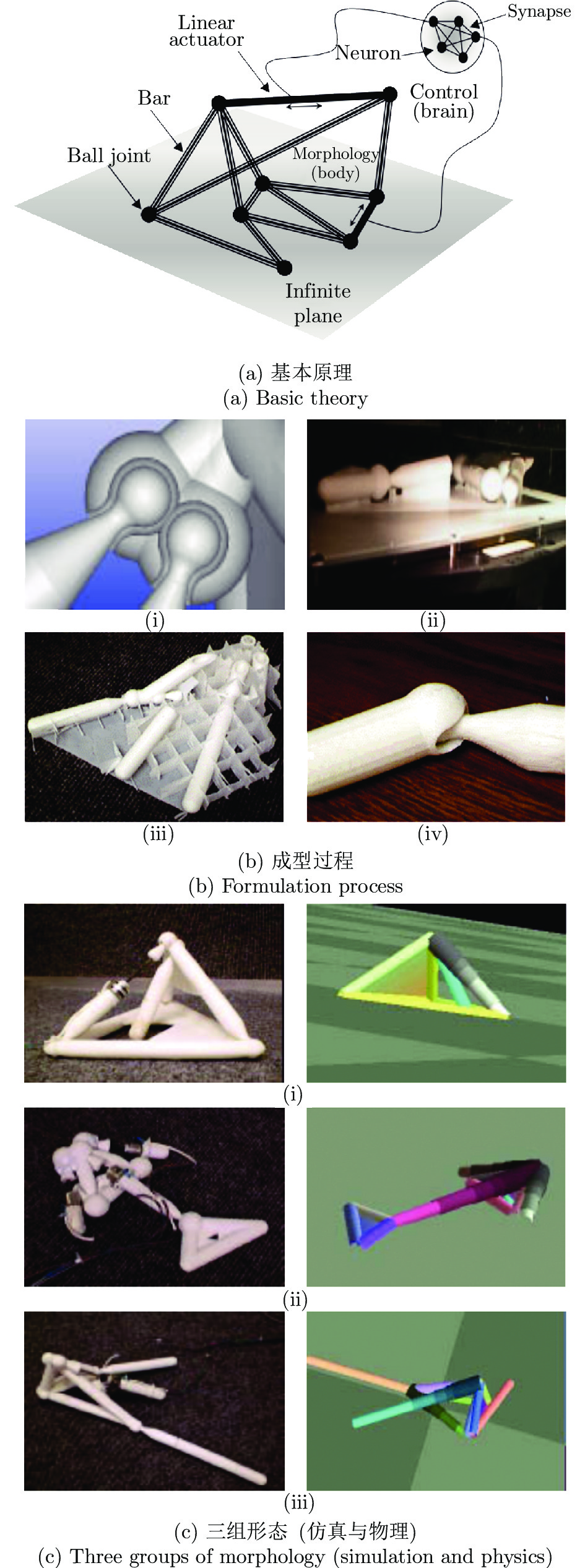
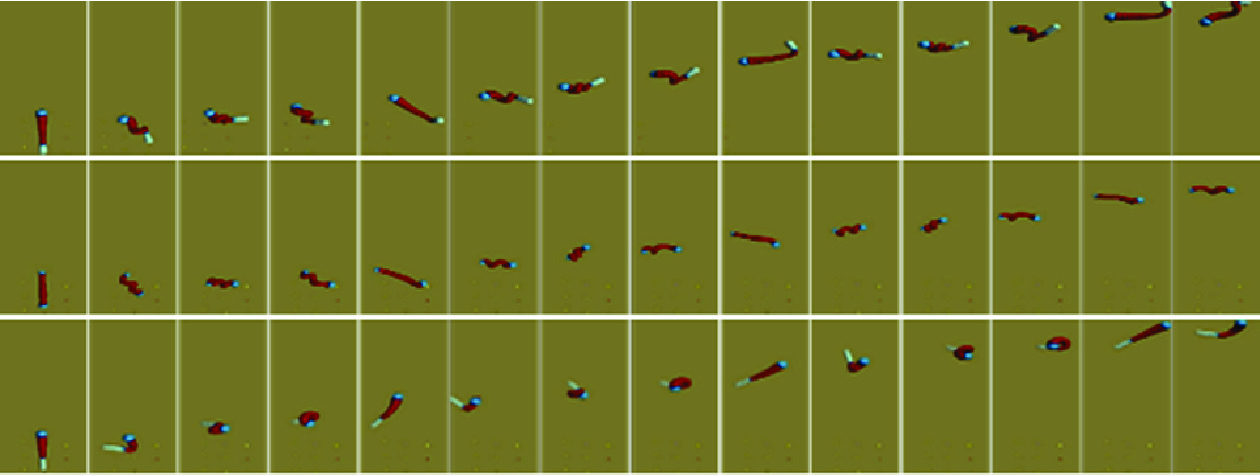
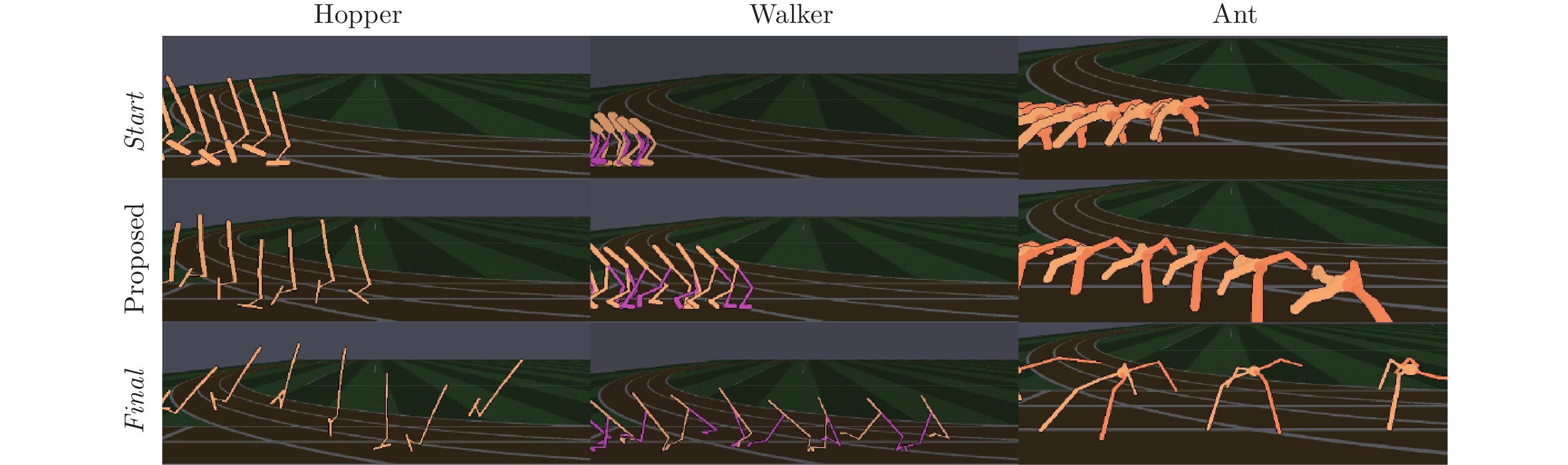
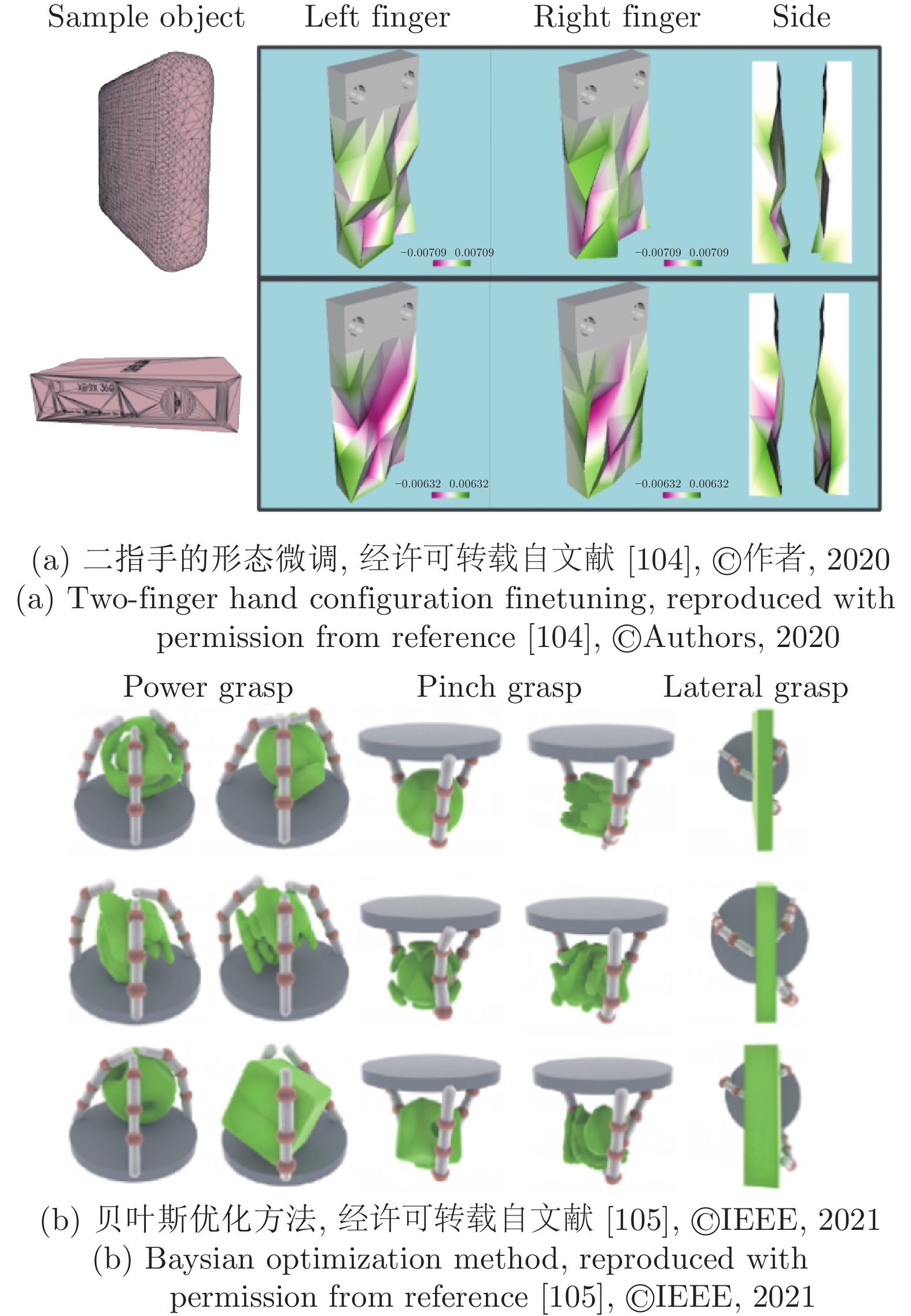
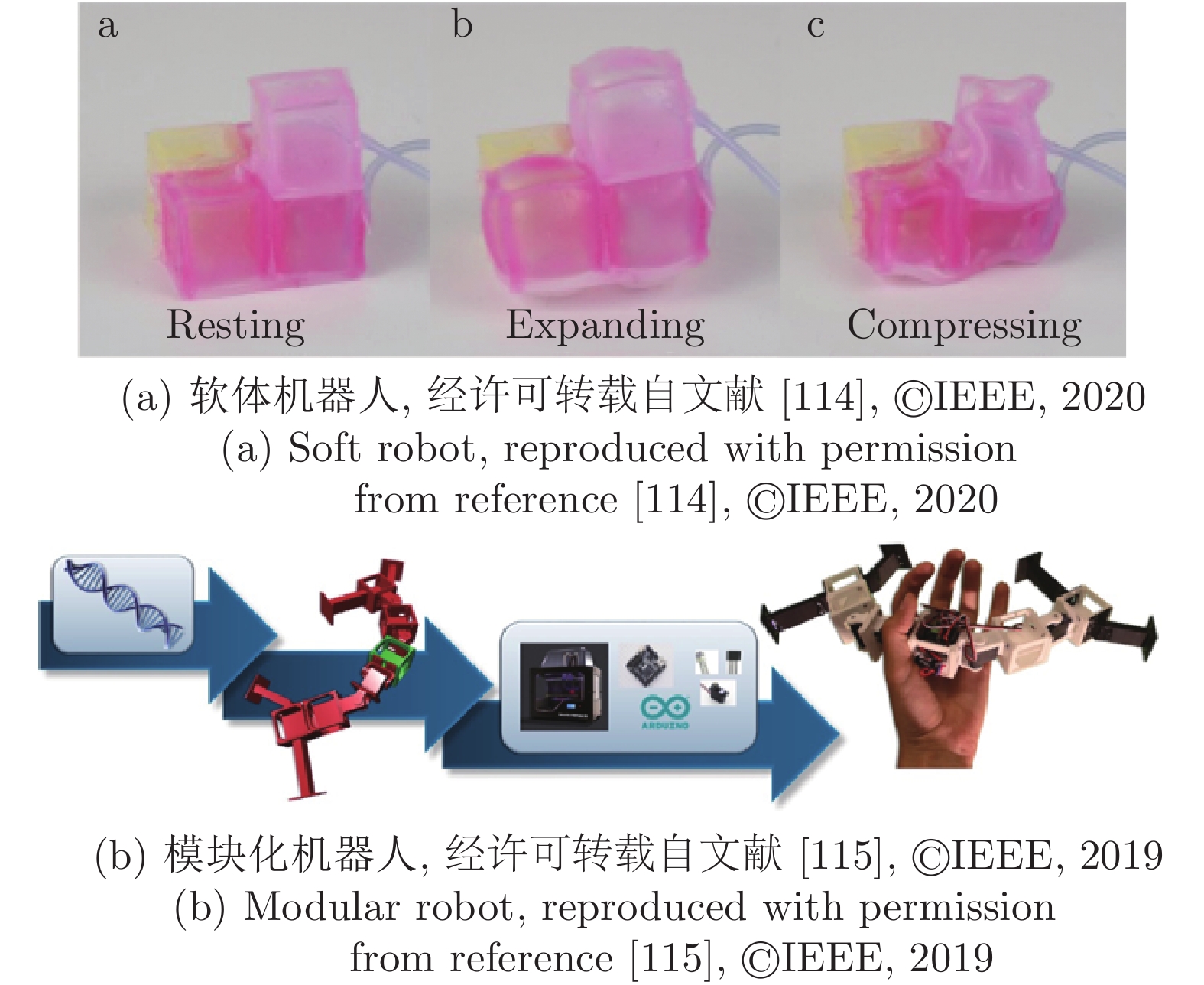
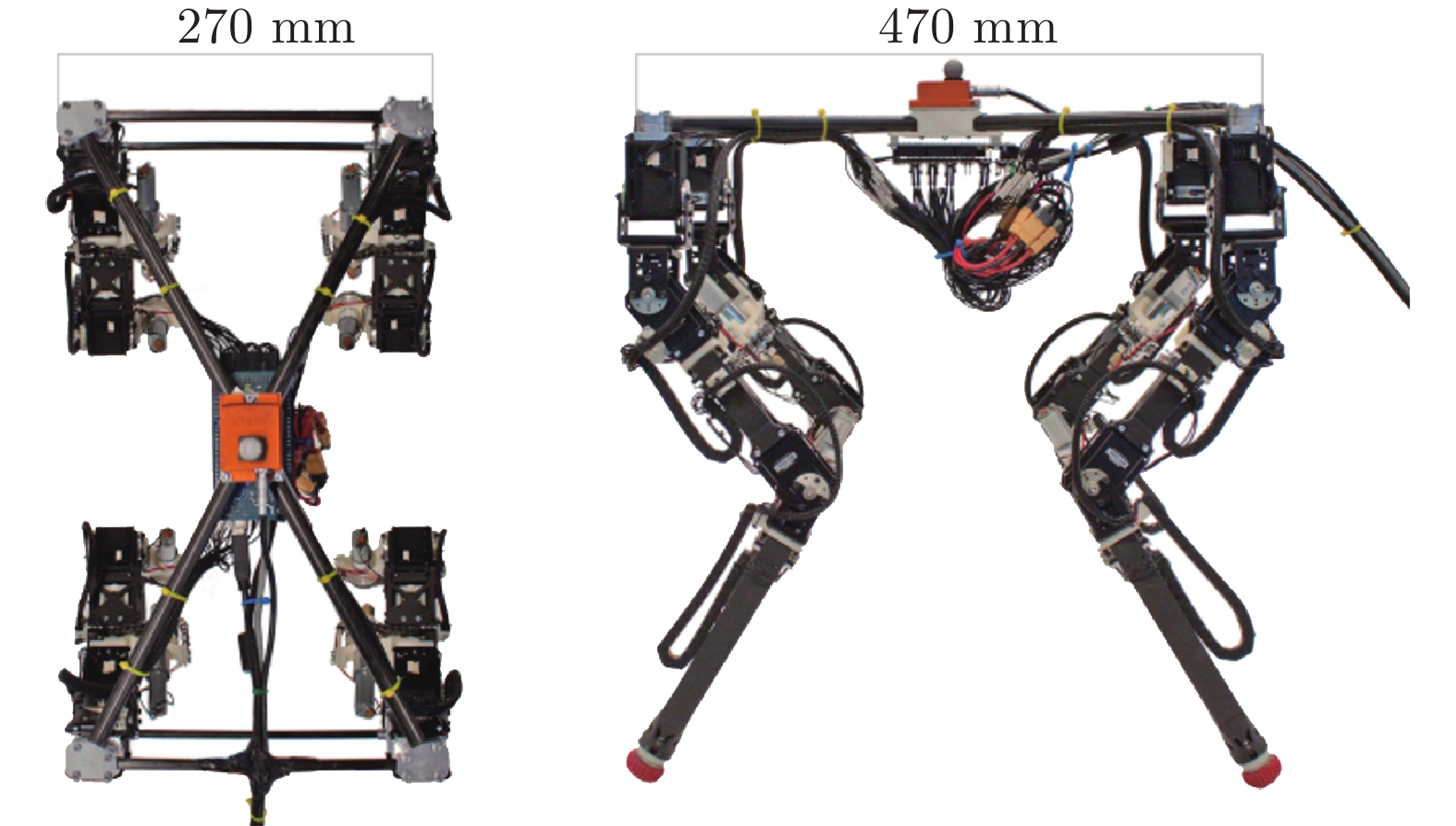
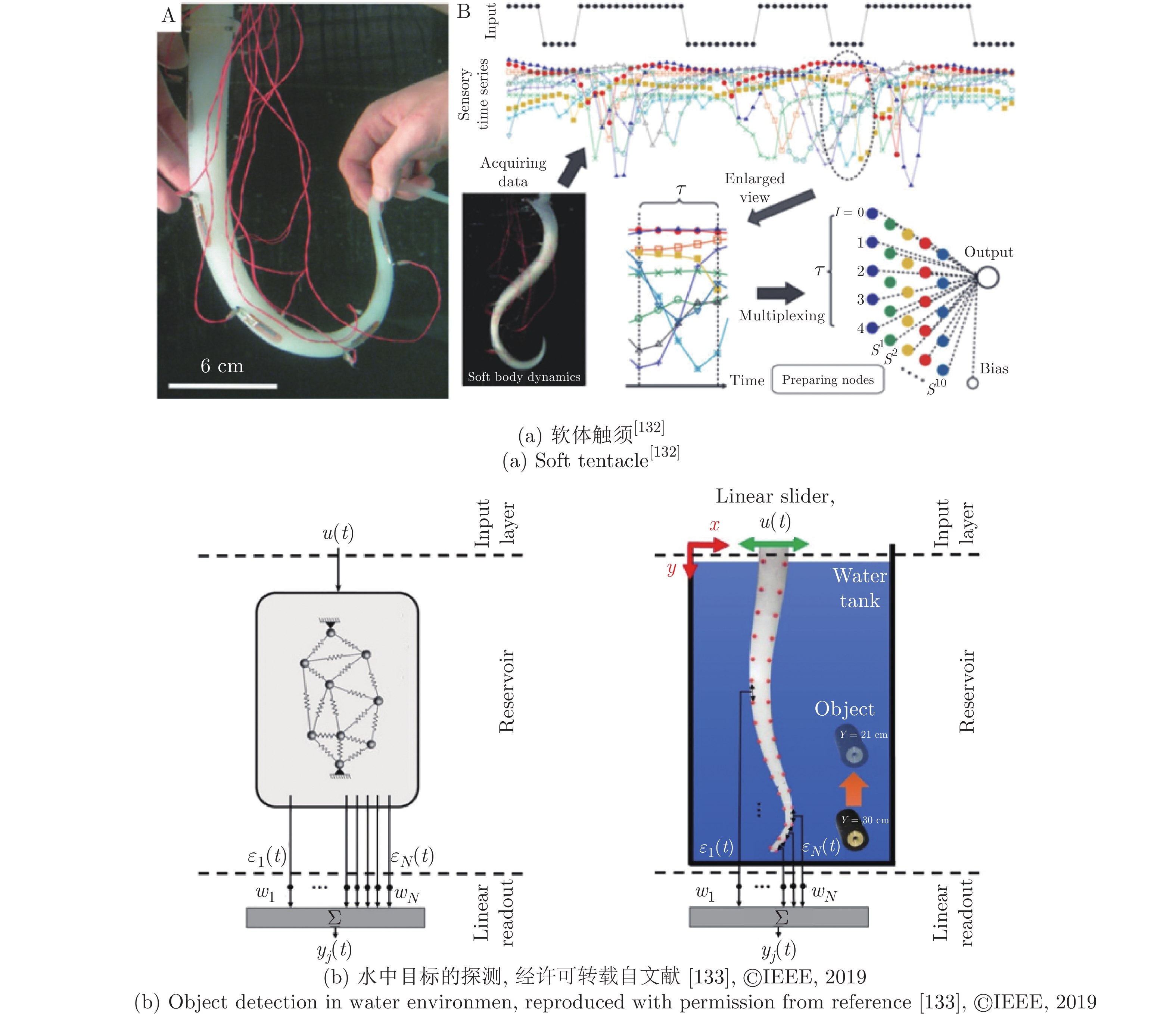
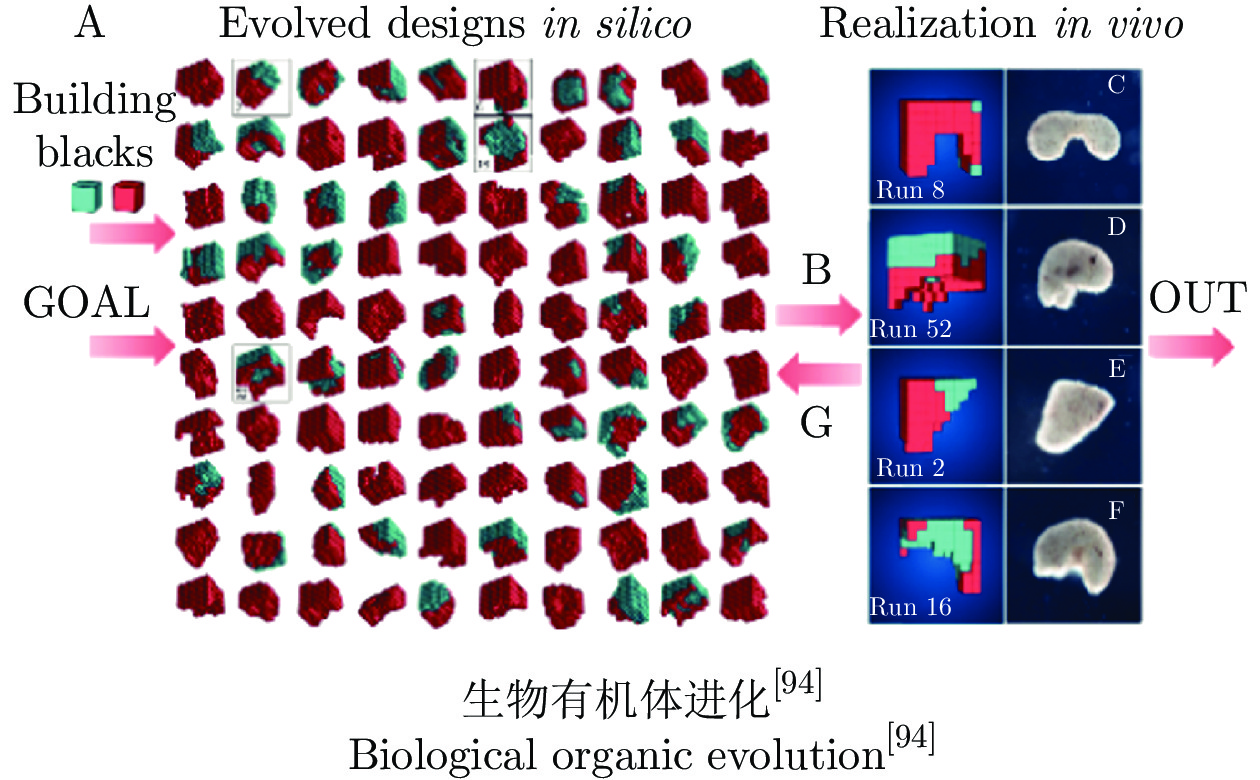
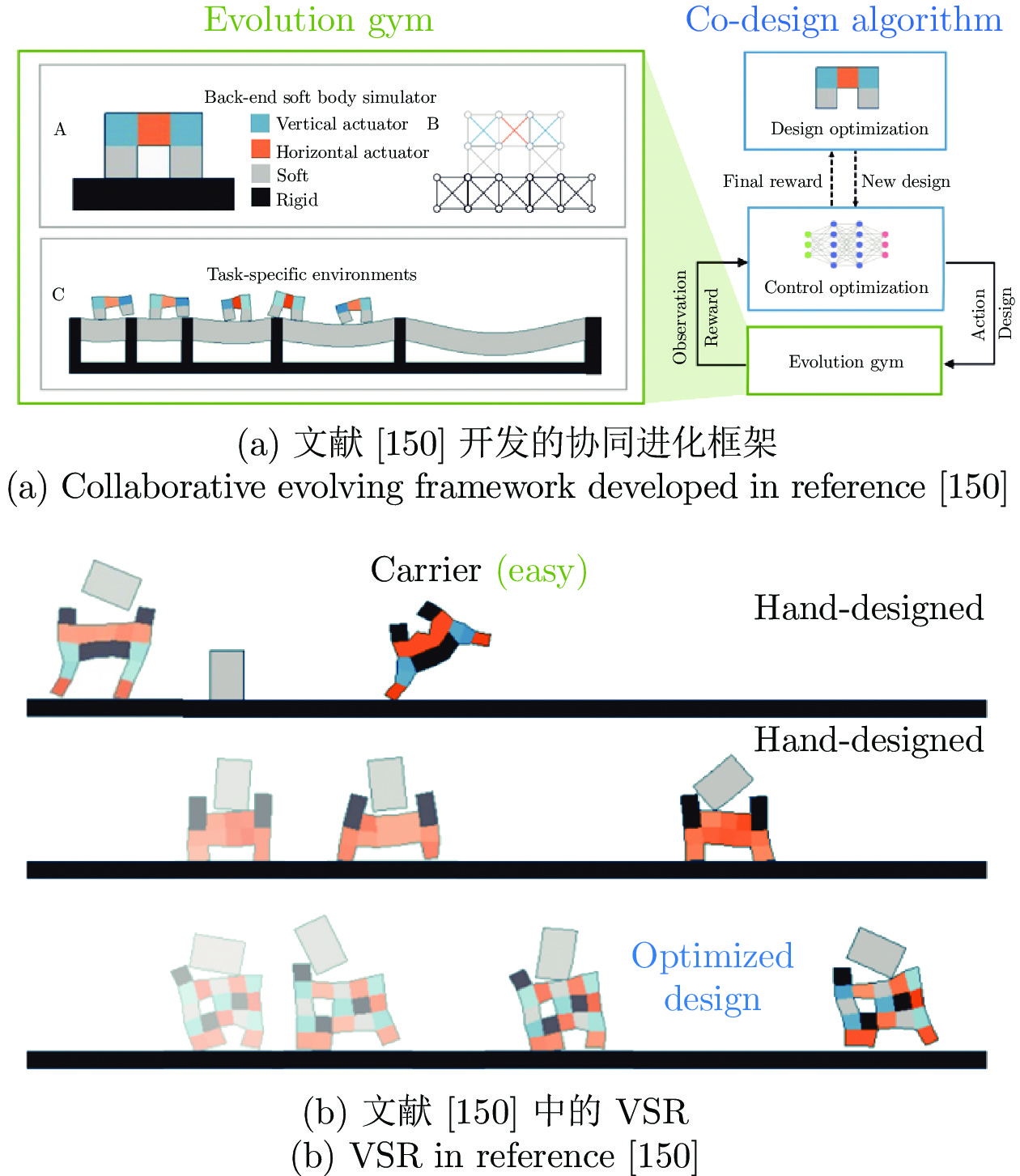
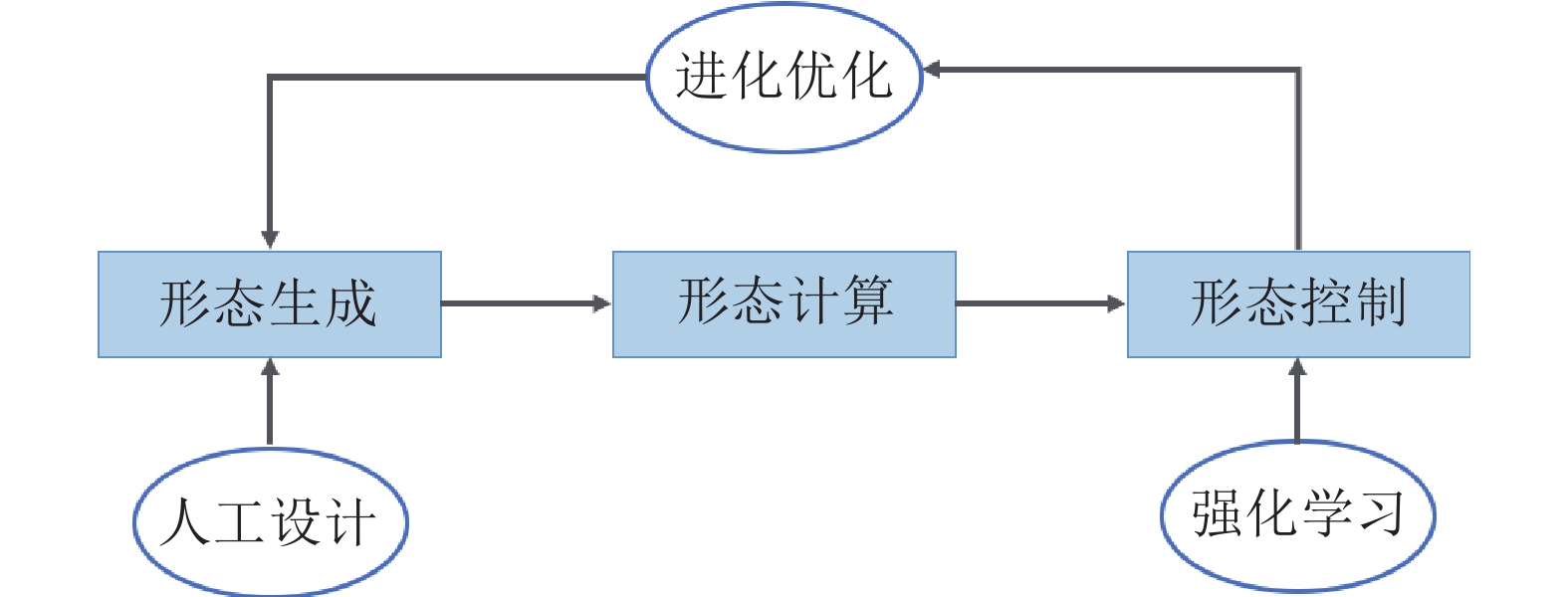
具身智能强调智能受脑、身体与环境协同影响, 更侧重关注智能体与环境的“交互”. 因此, 在具身智能的研究中, 智能体的物理形态与感知、学习、控制的关系起到至关重要的作用. 当前, 具身智能综合吸收了机构学领域关于形态、结构, 机器学习领域关于感知、学习, 以及机器人领域关于行为、控制等的相关研究成果, 形成了相对完整、独立并仍在蓬勃发展的学科分支. 但是, 目前尚无文献完整地梳理基于形态的具身智能研究进展. 本文从这个角度出发, 重点围绕基于形态计算的行为生成、基于学习的形态控制, 以及基于学习的形态优化这三方面总结重要的研究进展, 凝炼相关的科学问题, 并总结未来的发展方向, 可为具身智能的研究提供参考.
具身智能强调智能受脑、身体与环境协同影响, 更侧重关注智能体与环境的“交互”. 因此, 在具身智能的研究中, 智能体的物理形态与感知、学习、控制的关系起到至关重要的作用. 当前, 具身智能综合吸收了机构学领域关于形态、结构, 机器学习领域关于感知、学习, 以及机器人领域关于行为、控制等的相关研究成果, 形成了相对完整、独立并仍在蓬勃发展的学科分支. 但是, 目前尚无文献完整地梳理基于形态的具身智能研究进展. 本文从这个角度出发, 重点围绕基于形态计算的行为生成、基于学习的形态控制, 以及基于学习的形态优化这三方面总结重要的研究进展, 凝炼相关的科学问题, 并总结未来的发展方向, 可为具身智能的研究提供参考.


2023, 49(6): 1155-1169.
doi: 10.16383/j.aas.c220768
摘要:
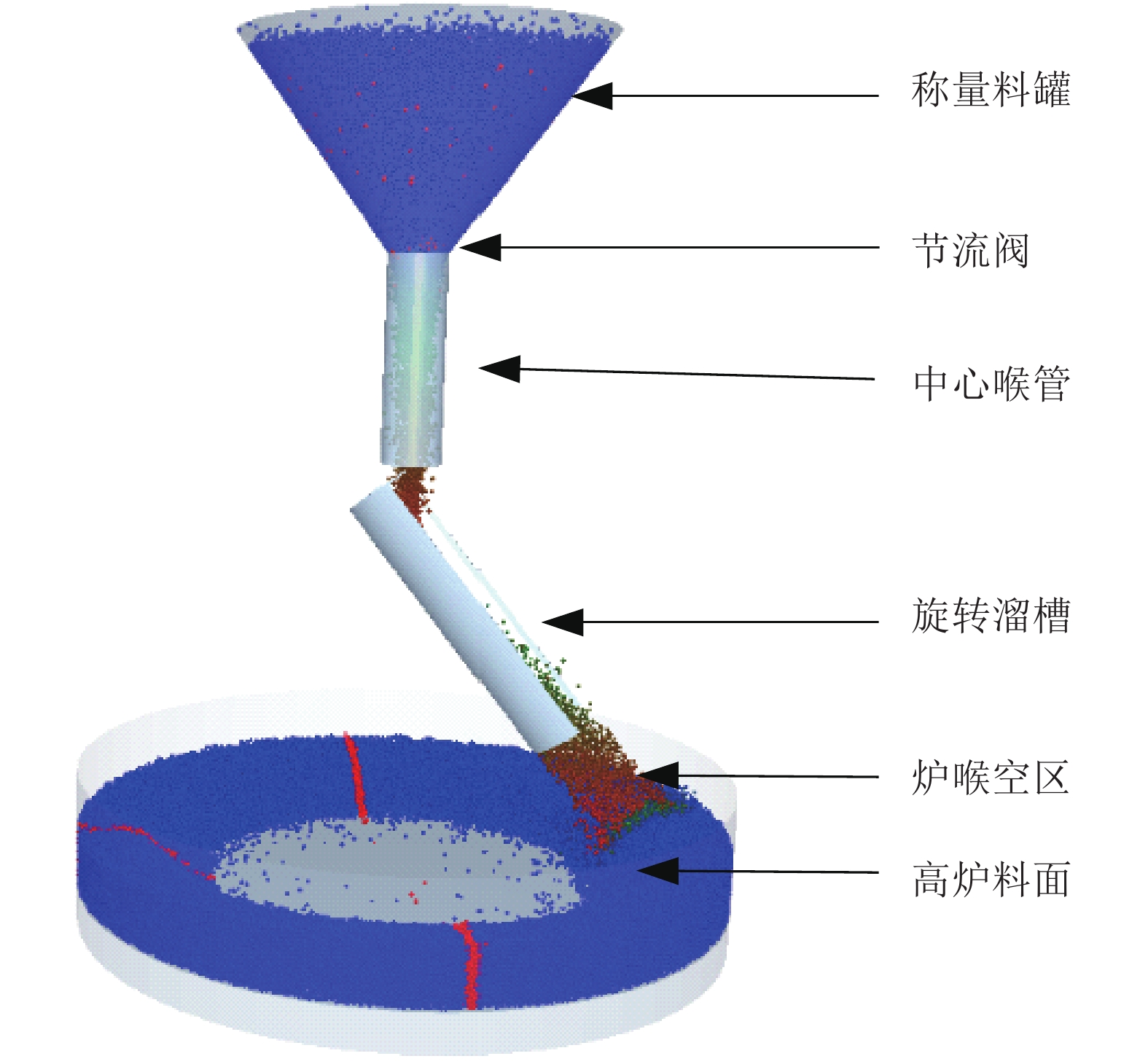
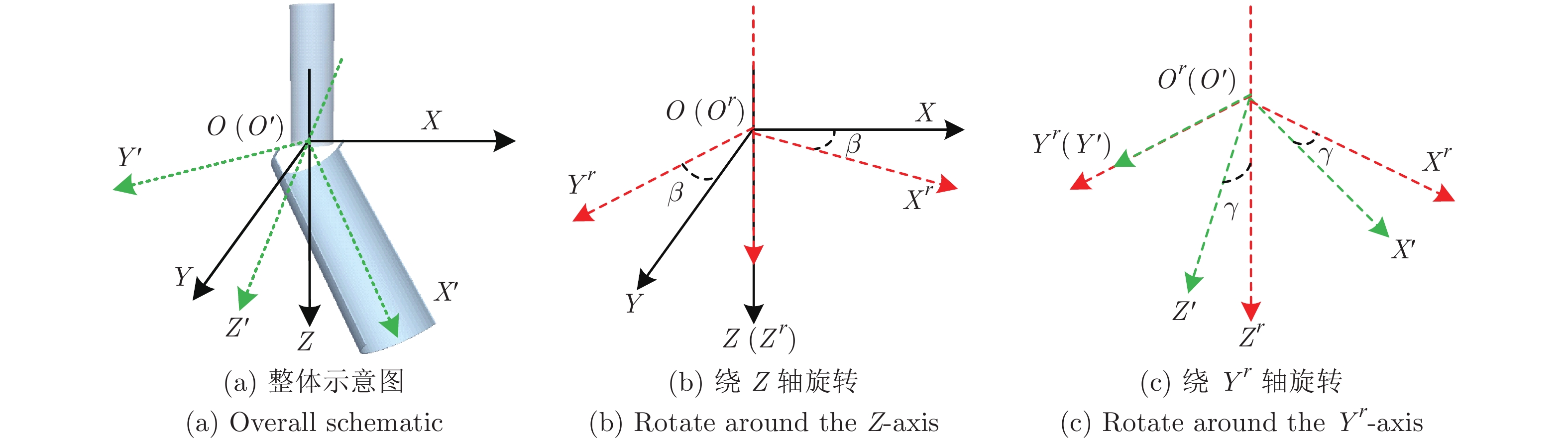
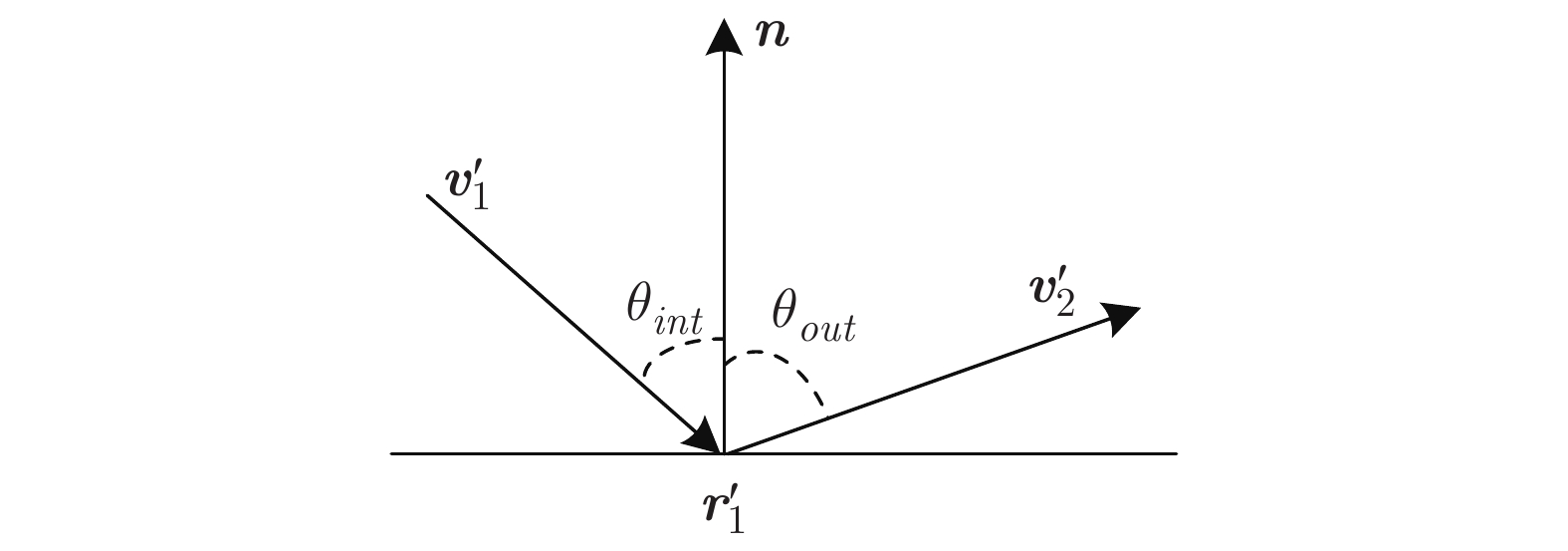
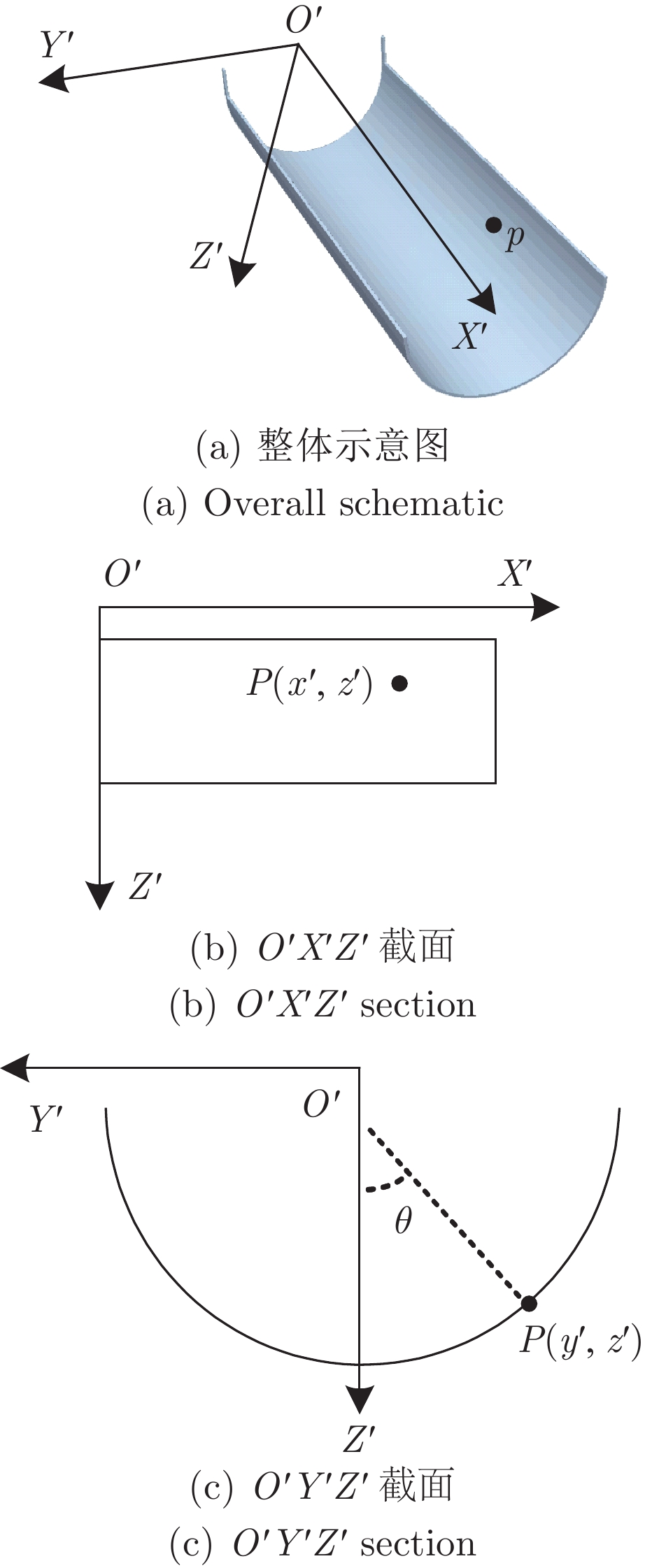
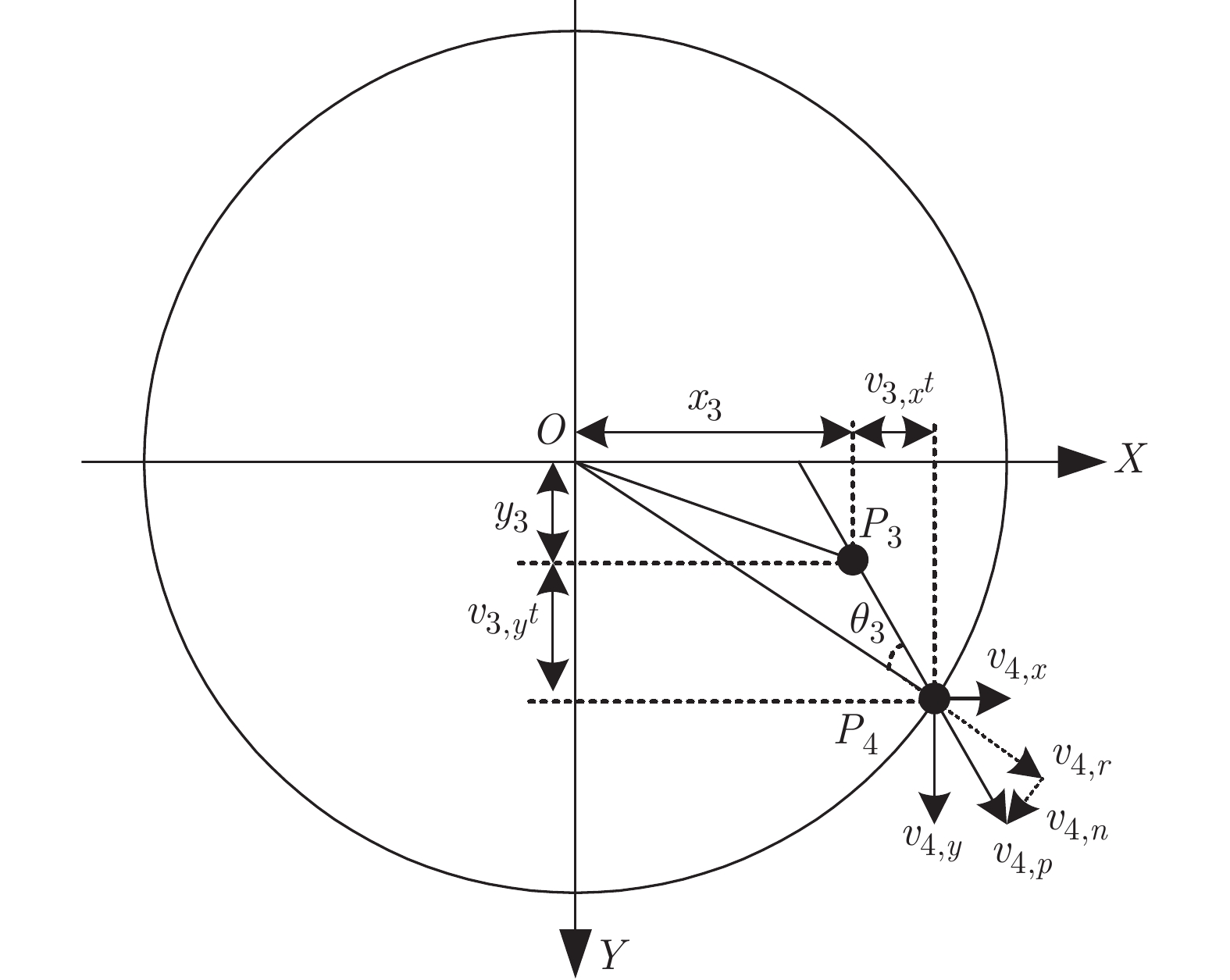
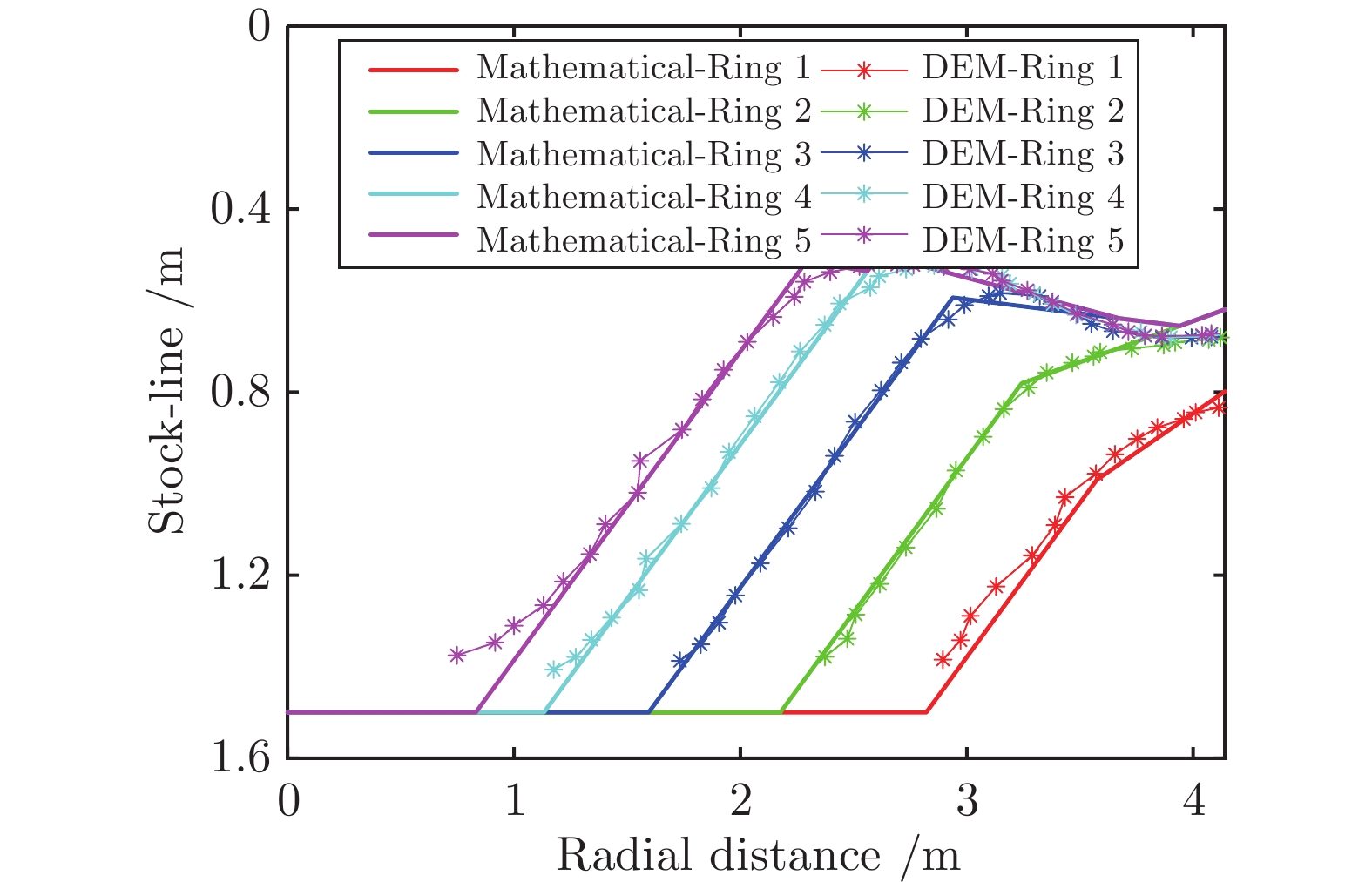
高炉料面形貌是反映煤气流分布和煤气利用率的关键指标, 研究高炉料面炉料堆积形状数学建模方法对实现高炉精准布料控制和“双碳”战略在钢铁行业落地具有重要意义. 针对高炉多环布料情况下料面堆积形状预测难的问题, 本文提出了一种基于炉料运动轨迹和径向移动距离的高炉料面炉料堆积形状建模方法. 首先, 提出了一种与炉料初始状态和溜槽状态相关的炉料运动轨迹建模方法, 获取炉料从节流阀至料面的炉料运动轨迹, 并确定炉料在炉喉空区的内轨迹曲线和外轨迹曲线. 然后, 基于炉料运动轨迹和初始料面形状, 以体积守恒原则为约束, 提出了一种基于炉料径向移动距离的高炉料面炉料堆积形状数学建模方法, 获取炉料在料面的堆积形状. 最后, 基于某钢铁厂2# 高炉的尺寸建立离散单元法 (Discrete element method, DEM) 仿真模型, 模型仿真结果验证了所提方法的准确性和有效性.
高炉料面形貌是反映煤气流分布和煤气利用率的关键指标, 研究高炉料面炉料堆积形状数学建模方法对实现高炉精准布料控制和“双碳”战略在钢铁行业落地具有重要意义. 针对高炉多环布料情况下料面堆积形状预测难的问题, 本文提出了一种基于炉料运动轨迹和径向移动距离的高炉料面炉料堆积形状建模方法. 首先, 提出了一种与炉料初始状态和溜槽状态相关的炉料运动轨迹建模方法, 获取炉料从节流阀至料面的炉料运动轨迹, 并确定炉料在炉喉空区的内轨迹曲线和外轨迹曲线. 然后, 基于炉料运动轨迹和初始料面形状, 以体积守恒原则为约束, 提出了一种基于炉料径向移动距离的高炉料面炉料堆积形状数学建模方法, 获取炉料在料面的堆积形状. 最后, 基于某钢铁厂2# 高炉的尺寸建立离散单元法 (Discrete element method, DEM) 仿真模型, 模型仿真结果验证了所提方法的准确性和有效性.



2023, 49(6): 1170-1180.
doi: 10.16383/j.aas.c220230
摘要:
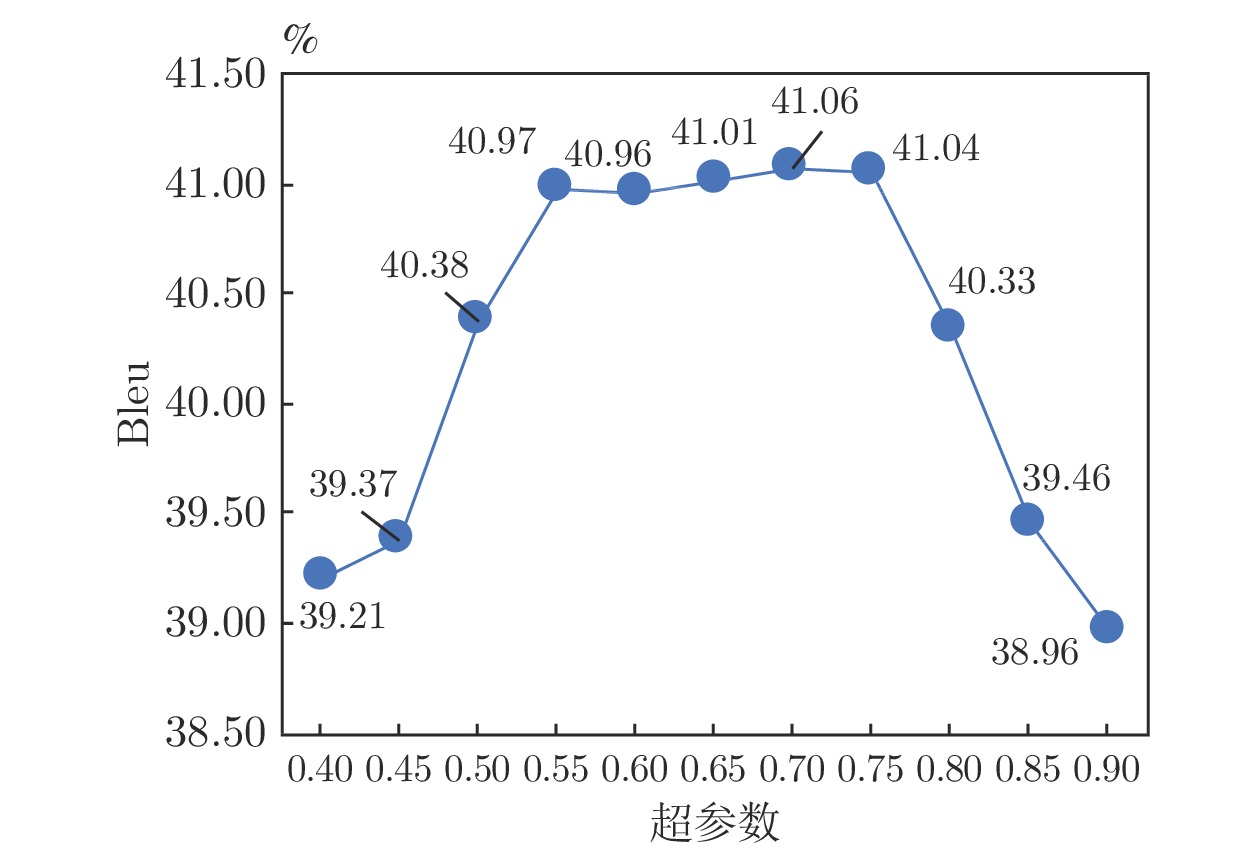
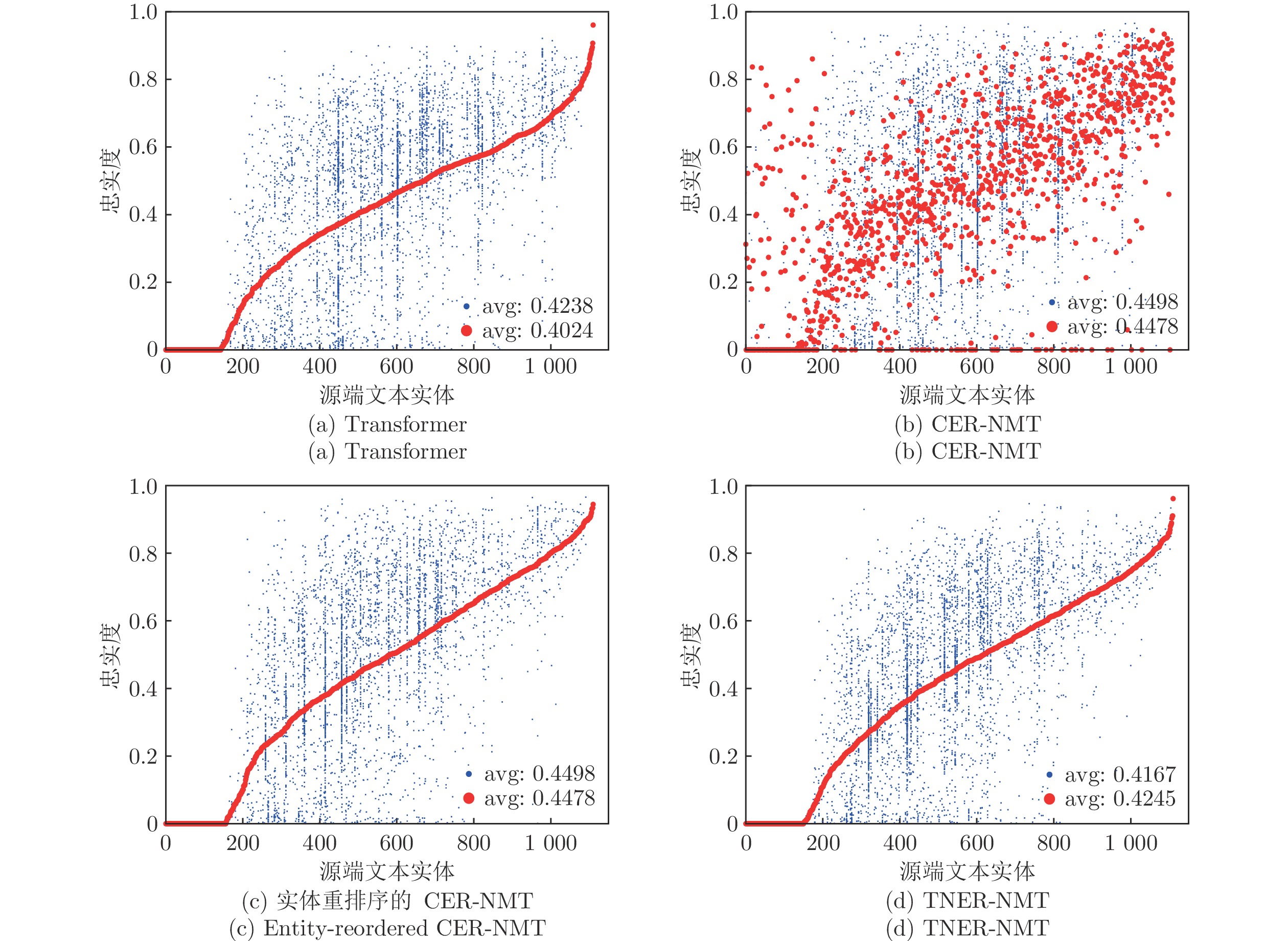
现有多模态机器翻译(Multi-modal machine translation, MMT)方法将图片与待翻译文本进行句子级别的语义融合. 这些方法存在视觉信息作用不明确和模型对视觉信息不敏感等问题, 并进一步造成了视觉信息与文本信息无法在翻译模型中充分融合语义的问题. 针对这些问题, 提出了一种跨模态实体重构(Cross-modal entity reconstruction, CER)方法. 区别于将完整的图片输入到翻译模型中, 该方法显式对齐文本与图像中的实体, 通过文本上下文与一种模态的实体的组合来重构另一种模态的实体, 最终达到实体级的跨模态语义融合的目的, 通过多任务学习方法将CER模型与翻译模型结合, 达到提升翻译质量的目的. 该方法在多模态翻译数据集的两个语言对上取得了最佳的翻译准确率. 进一步的分析实验表明, 该方法能够有效提升模型在翻译过程中对源端文本实体的忠实度.
现有多模态机器翻译(Multi-modal machine translation, MMT)方法将图片与待翻译文本进行句子级别的语义融合. 这些方法存在视觉信息作用不明确和模型对视觉信息不敏感等问题, 并进一步造成了视觉信息与文本信息无法在翻译模型中充分融合语义的问题. 针对这些问题, 提出了一种跨模态实体重构(Cross-modal entity reconstruction, CER)方法. 区别于将完整的图片输入到翻译模型中, 该方法显式对齐文本与图像中的实体, 通过文本上下文与一种模态的实体的组合来重构另一种模态的实体, 最终达到实体级的跨模态语义融合的目的, 通过多任务学习方法将CER模型与翻译模型结合, 达到提升翻译质量的目的. 该方法在多模态翻译数据集的两个语言对上取得了最佳的翻译准确率. 进一步的分析实验表明, 该方法能够有效提升模型在翻译过程中对源端文本实体的忠实度.


2023, 49(6): 1181-1194.
doi: 10.16383/j.aas.c210004
摘要:
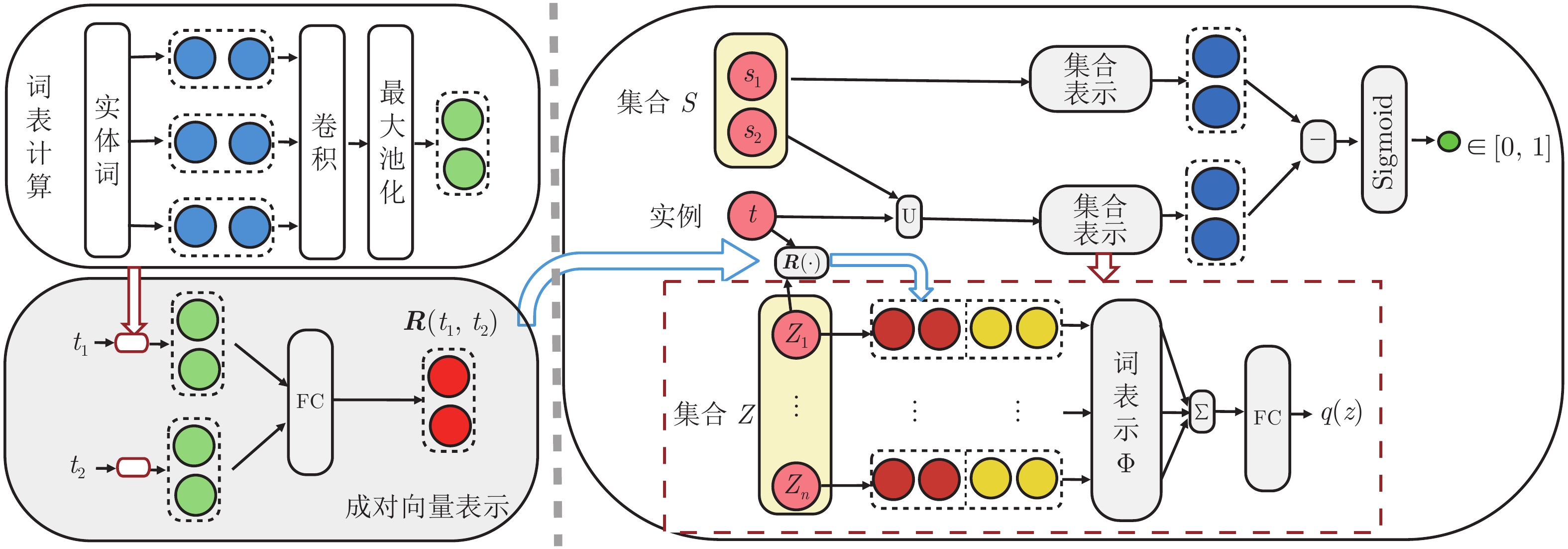
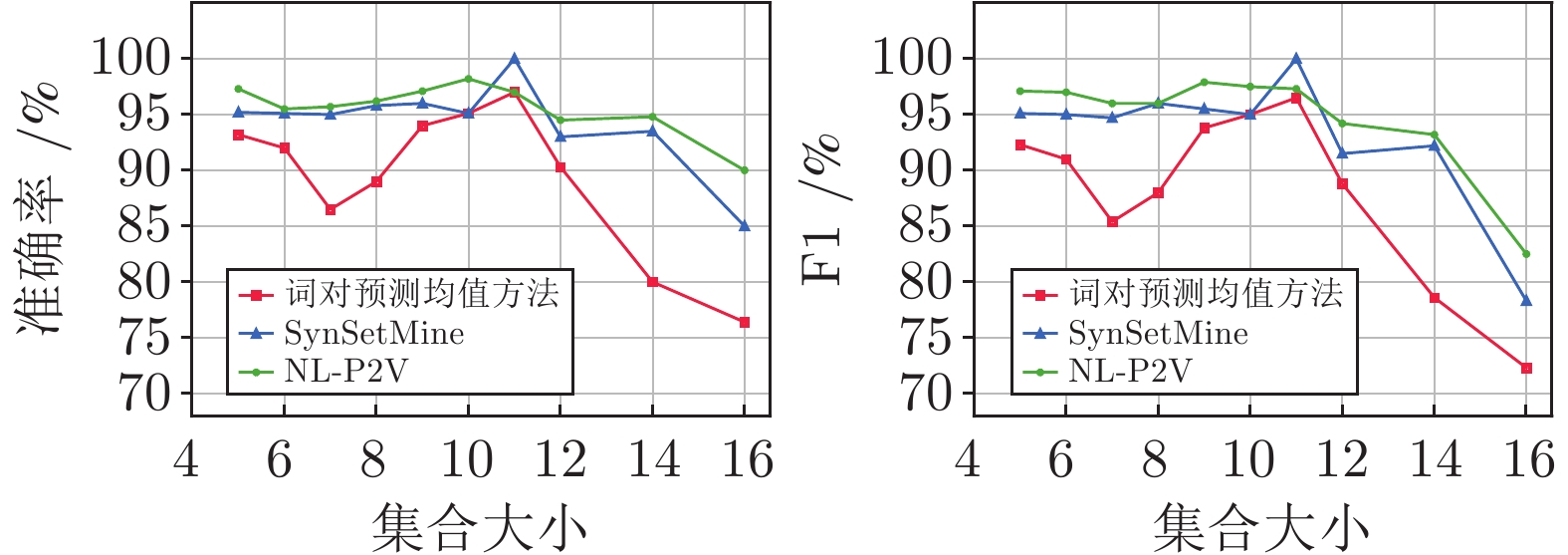
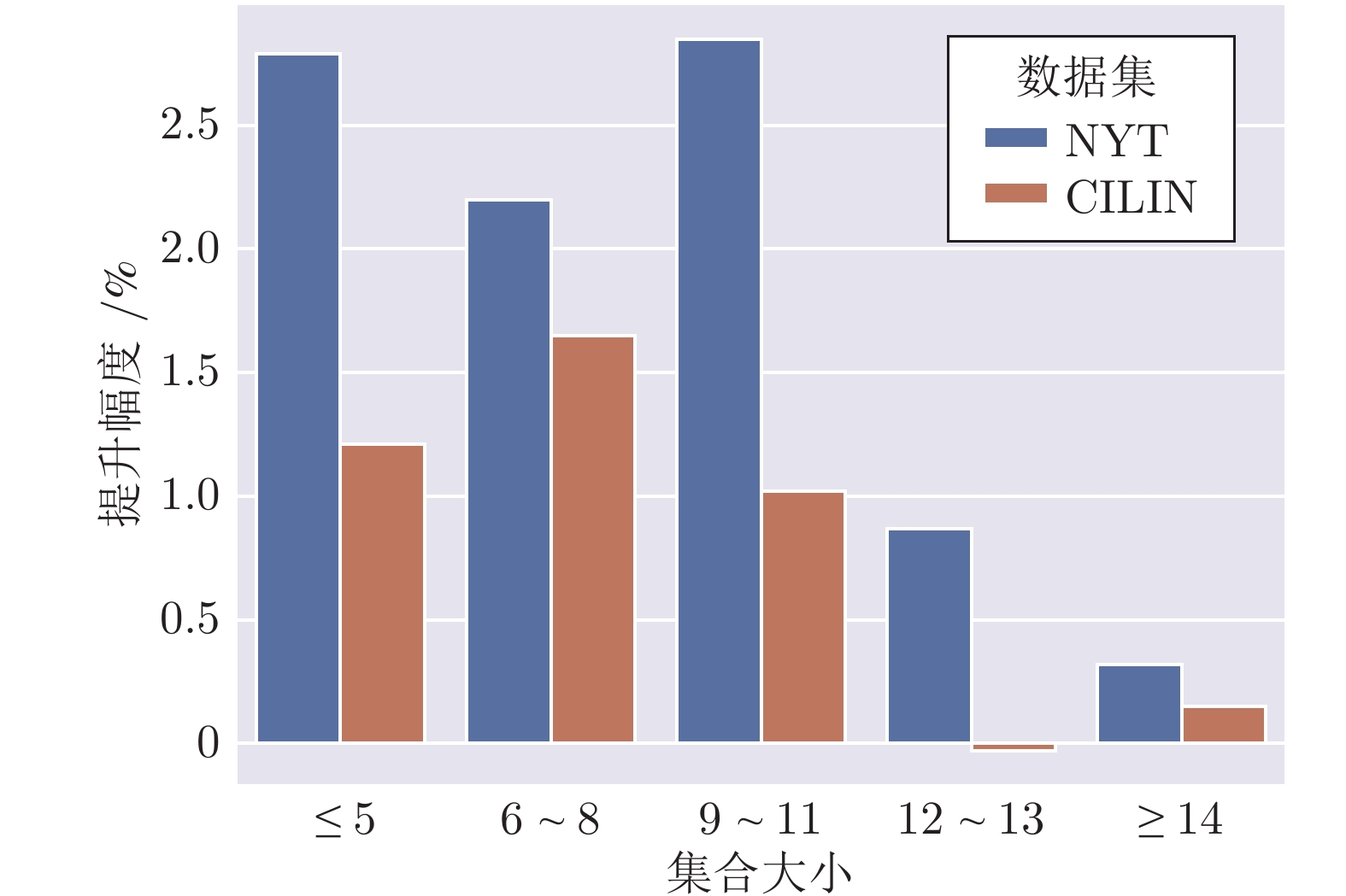
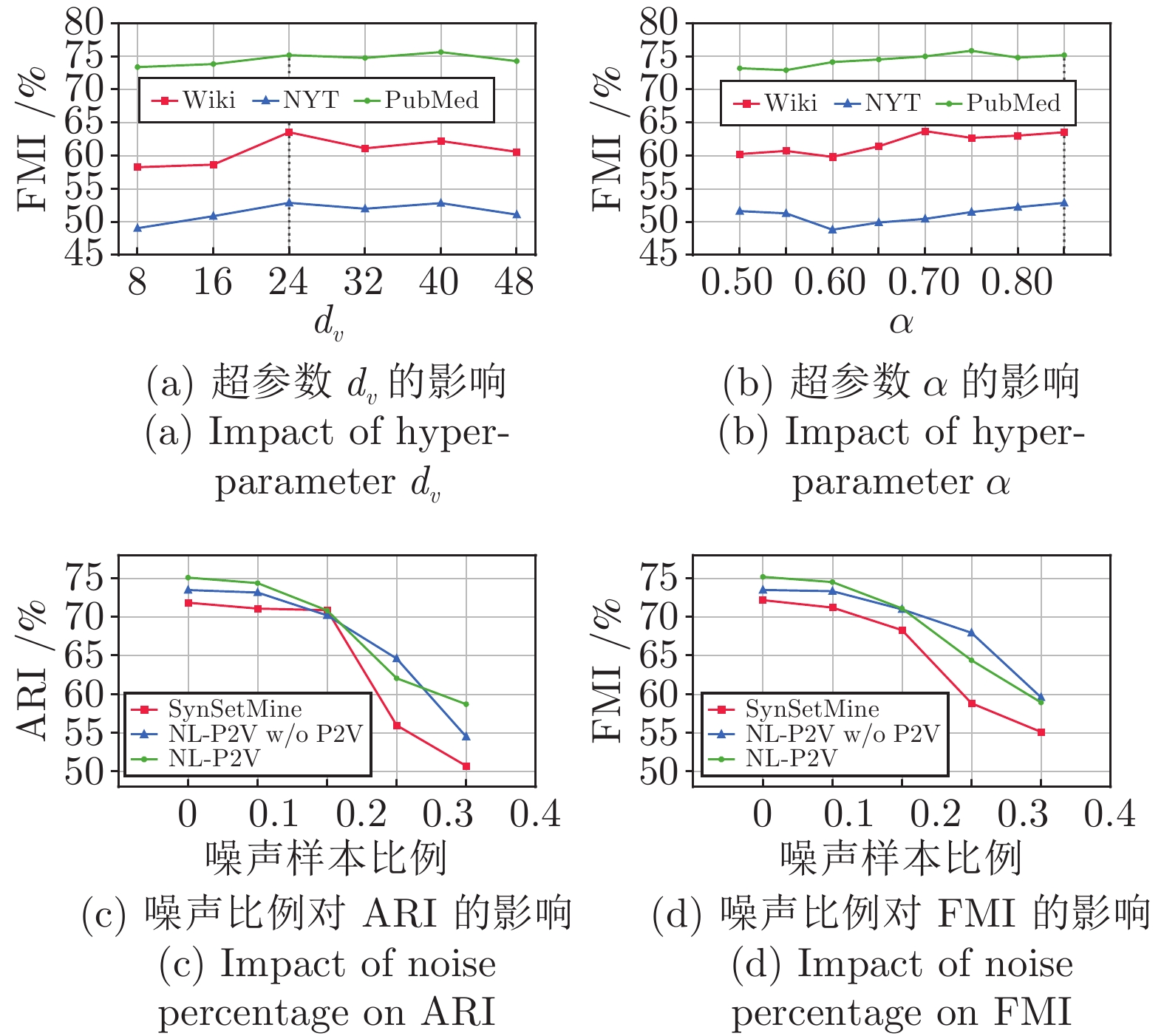
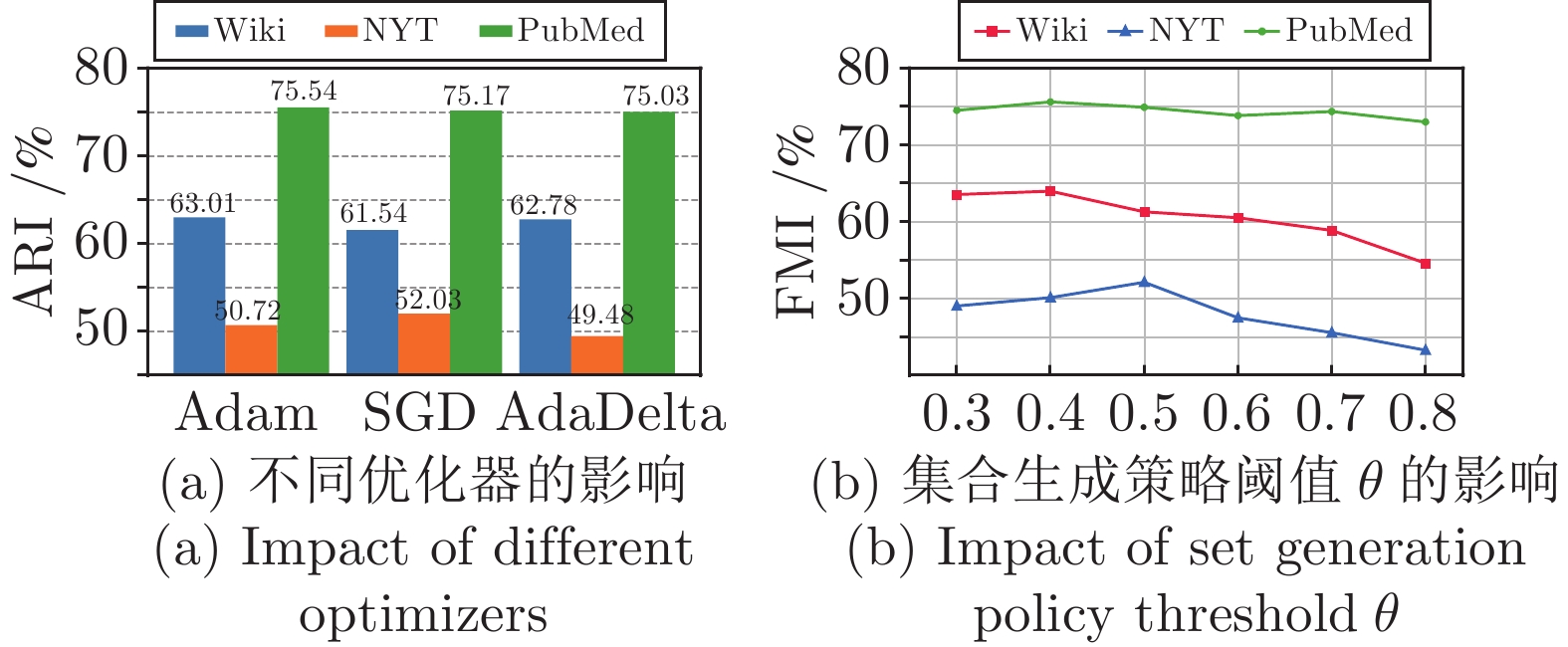
同义词挖掘是自然语言处理中一项重要任务. 为了构建大规模训练语料, 现有研究利用远程监督、点击图筛选等方式抽取同义词种子, 而这几种方式都不可避免地引入了噪声标签, 从而影响高质量同义词挖掘模型的训练. 此外, 由于大量实体词所具有的少样本特性、领域分布差异性和预训练词向量训练目标与同义词挖掘任务的不一致性, 在同义词挖掘任务中, 词级别的预训练词向量很难产生高质量的实体语义表示. 为解决这两个问题, 提出了一种利用成对字向量和噪声鲁棒学习框架的同义词挖掘模型. 模型利用预训练的成对字向量增强实体语义表示, 并利用自动标注的噪声标签通过交替优化的方式, 估计真实标签的分布并产生伪标签, 希望通过这些改进提升模型的表示能力和鲁棒性. 最后, 使用WordNet分析和过滤带噪声数据集, 并在不同规模、不同领域的同义词数据集上进行了实验验证. 实验结果和分析表明, 该同义词挖掘模型在各种数据分布和噪声比例下, 与有竞争力的基准方法相比, 均提升了同义词判别和同义词集合生成的效果.
同义词挖掘是自然语言处理中一项重要任务. 为了构建大规模训练语料, 现有研究利用远程监督、点击图筛选等方式抽取同义词种子, 而这几种方式都不可避免地引入了噪声标签, 从而影响高质量同义词挖掘模型的训练. 此外, 由于大量实体词所具有的少样本特性、领域分布差异性和预训练词向量训练目标与同义词挖掘任务的不一致性, 在同义词挖掘任务中, 词级别的预训练词向量很难产生高质量的实体语义表示. 为解决这两个问题, 提出了一种利用成对字向量和噪声鲁棒学习框架的同义词挖掘模型. 模型利用预训练的成对字向量增强实体语义表示, 并利用自动标注的噪声标签通过交替优化的方式, 估计真实标签的分布并产生伪标签, 希望通过这些改进提升模型的表示能力和鲁棒性. 最后, 使用WordNet分析和过滤带噪声数据集, 并在不同规模、不同领域的同义词数据集上进行了实验验证. 实验结果和分析表明, 该同义词挖掘模型在各种数据分布和噪声比例下, 与有竞争力的基准方法相比, 均提升了同义词判别和同义词集合生成的效果.

2023, 49(6): 1195-1213.
doi: 10.16383/j.aas.c220208
摘要:
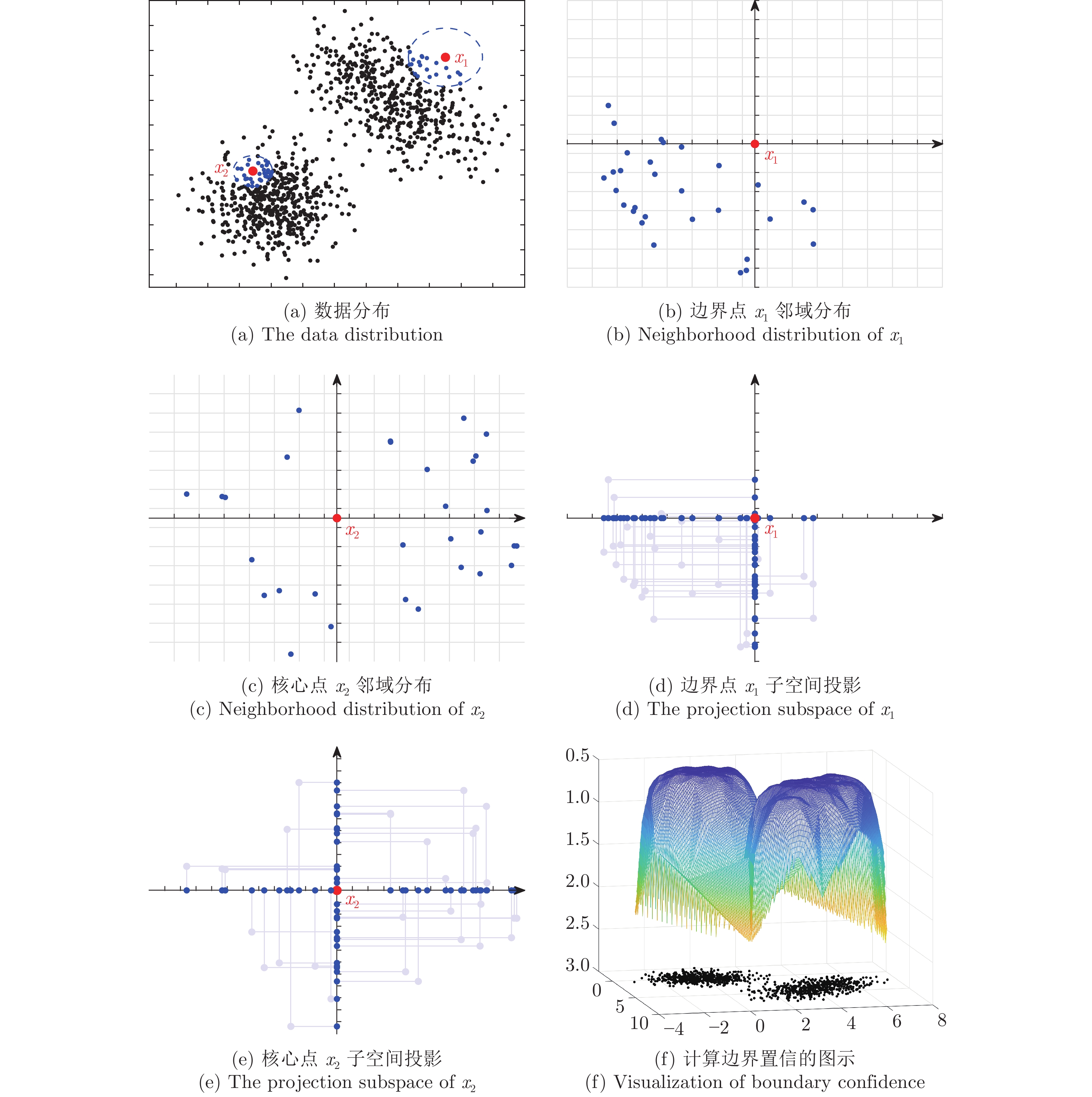
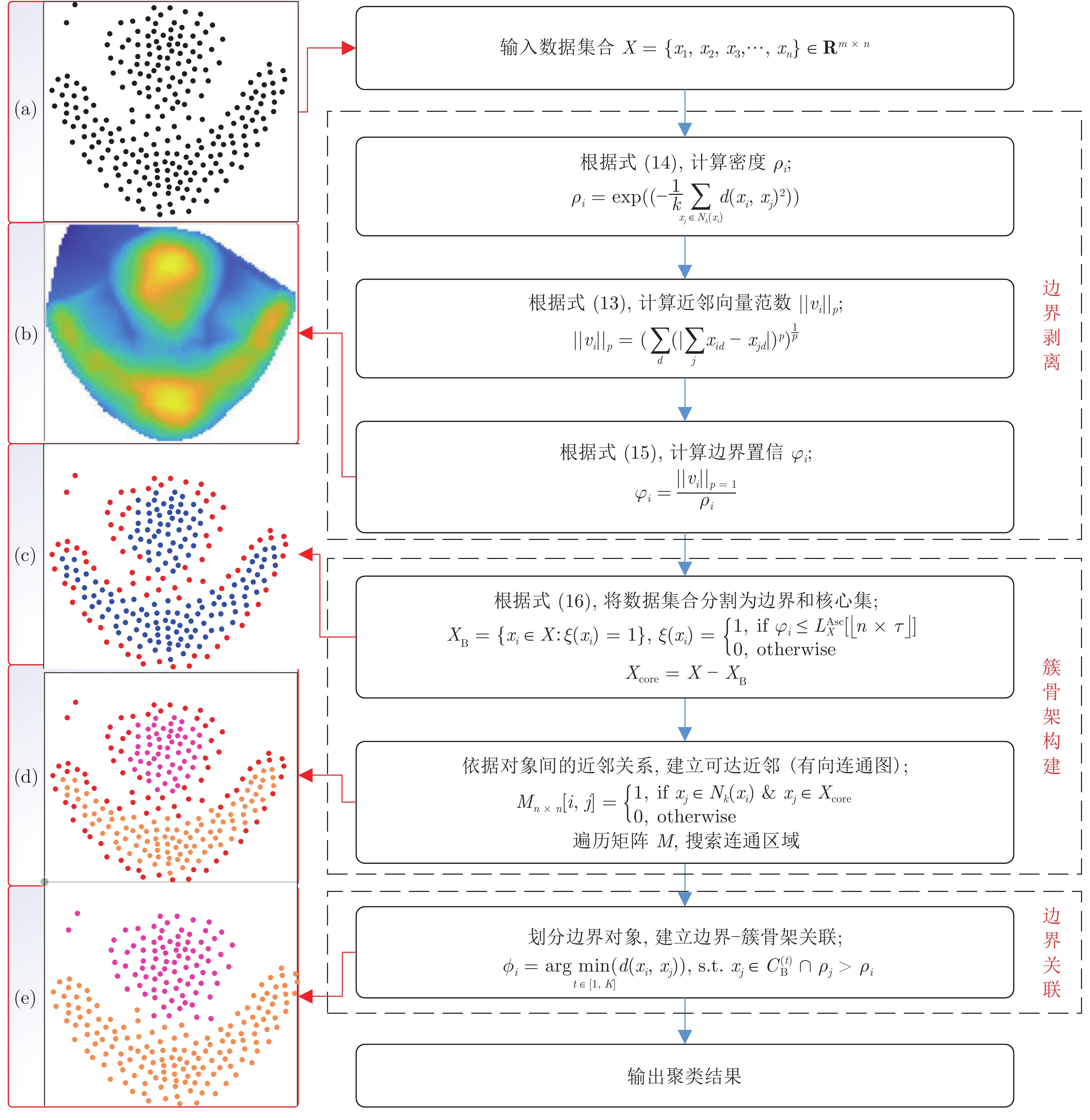
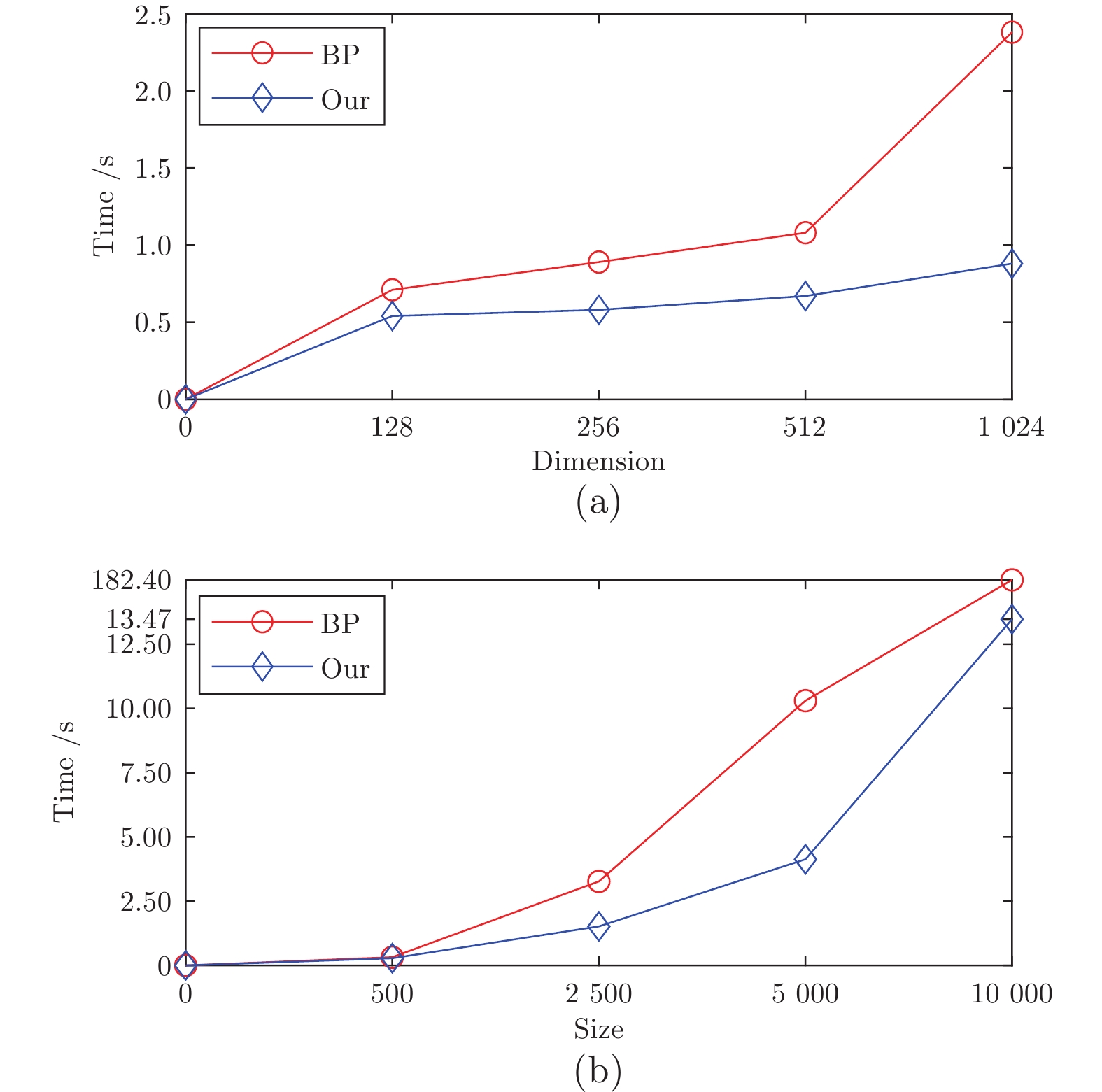
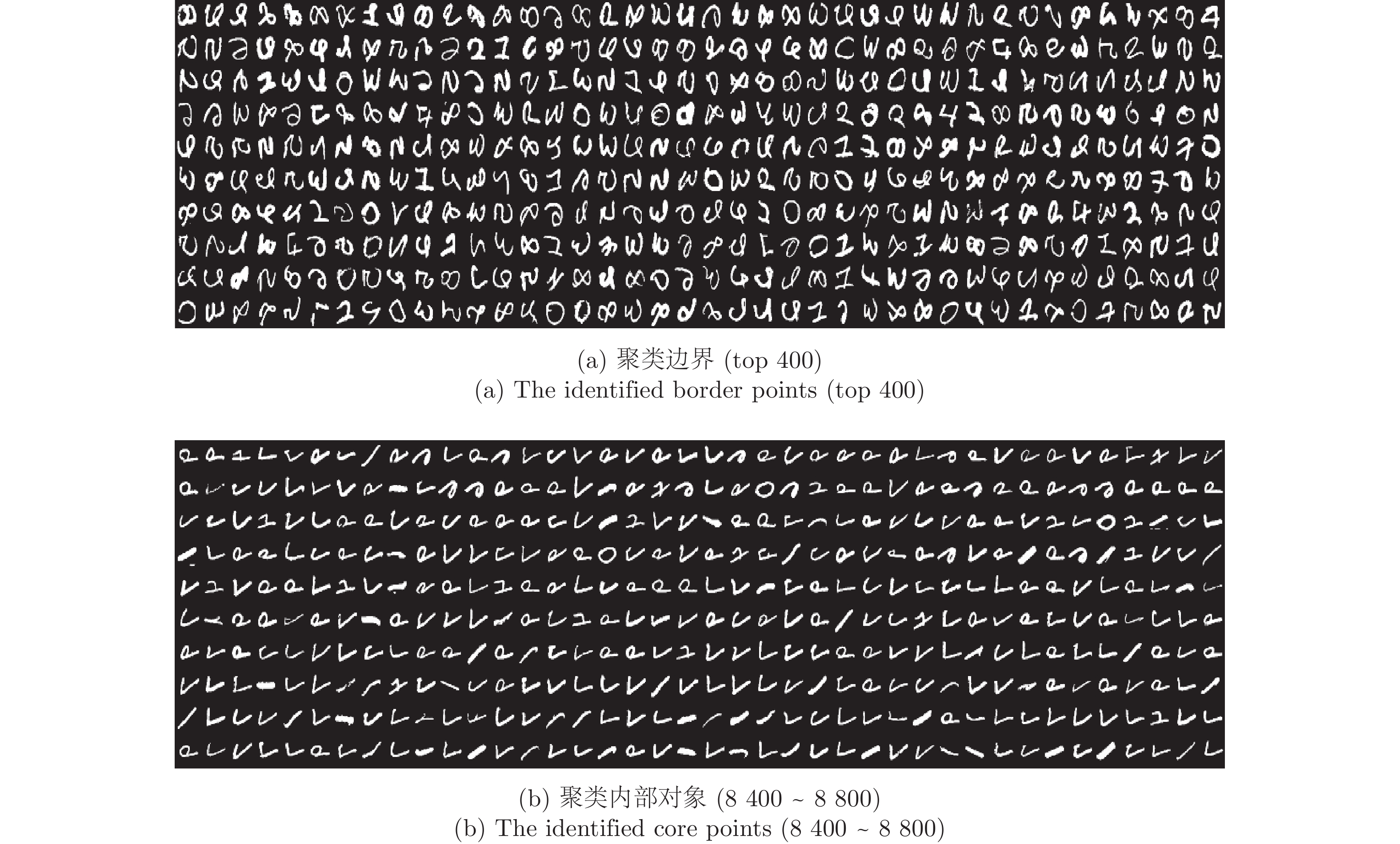
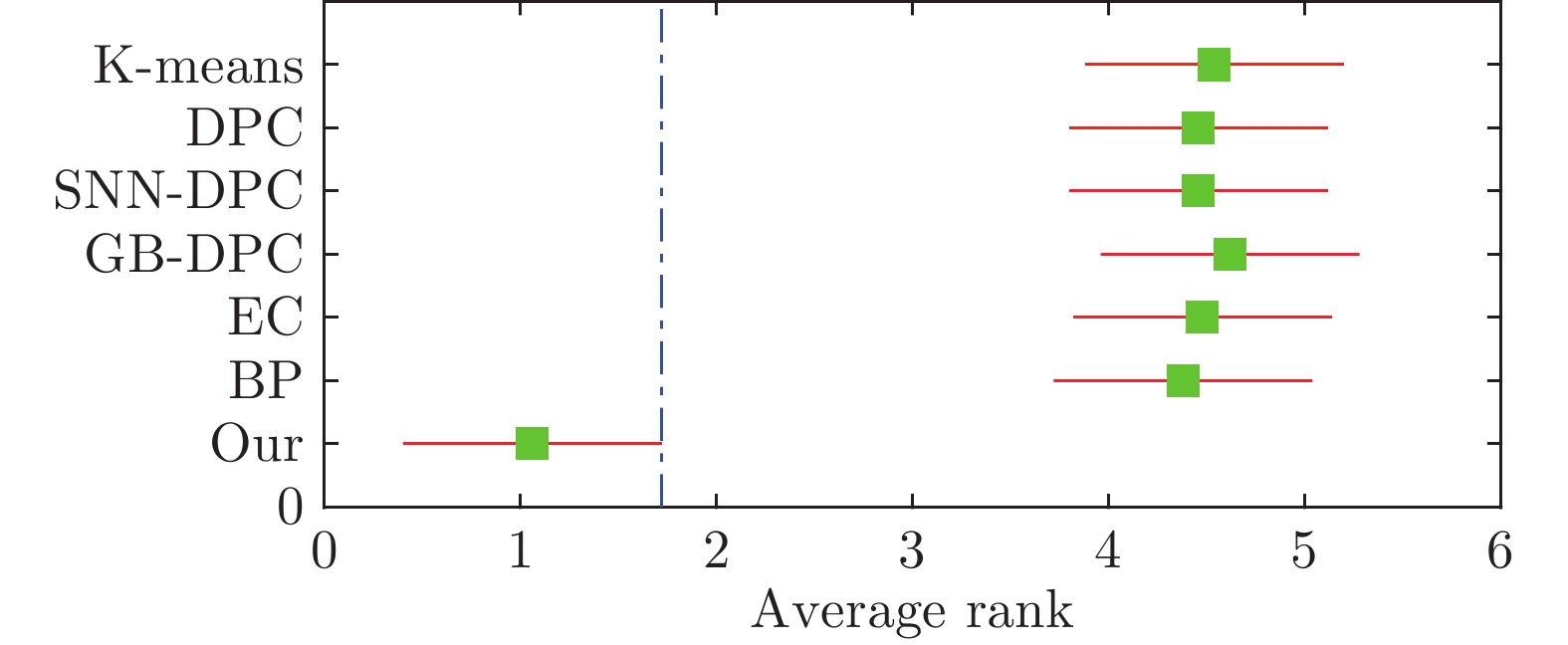
作为聚类的重要组成部分, 边界点在引导聚类收敛和提升模式识别能力方面起着重要作用, 以BP (Border-peeling clustering)为最新代表的边界剥离聚类借助潜在边界信息来确保簇核心区域的空间隔离, 提高了簇骨架代表性并解决了边界隶属问题. 然而, 现有边界剥离聚类仍存在判别特征不完备、判别模式单一、嵌套迭代等约束. 为此, 提出了基于空间向量分解的边界剥离密度聚类(Density clustering based on the border-peeling using space vector decomposition, CBPVD), 以投影子空间和原始数据空间为基准, 从分布稀疏性(紧密性)和方向偏斜性(对称性)两个视角强化边界的细粒度特征, 进而通过主动边界剥离反向建立簇骨架并指导边界隶属. 与同类算法相比, 40个数据集(人工、UCI、视频图像)上的实验结果以及4个视角的理论分析表明了CBPVD在高维聚类和边界模式识别方面具有良好的综合表现.
作为聚类的重要组成部分, 边界点在引导聚类收敛和提升模式识别能力方面起着重要作用, 以BP (Border-peeling clustering)为最新代表的边界剥离聚类借助潜在边界信息来确保簇核心区域的空间隔离, 提高了簇骨架代表性并解决了边界隶属问题. 然而, 现有边界剥离聚类仍存在判别特征不完备、判别模式单一、嵌套迭代等约束. 为此, 提出了基于空间向量分解的边界剥离密度聚类(Density clustering based on the border-peeling using space vector decomposition, CBPVD), 以投影子空间和原始数据空间为基准, 从分布稀疏性(紧密性)和方向偏斜性(对称性)两个视角强化边界的细粒度特征, 进而通过主动边界剥离反向建立簇骨架并指导边界隶属. 与同类算法相比, 40个数据集(人工、UCI、视频图像)上的实验结果以及4个视角的理论分析表明了CBPVD在高维聚类和边界模式识别方面具有良好的综合表现.



2023, 49(6): 1214-1227.
doi: 10.16383/j.aas.c220461
摘要:
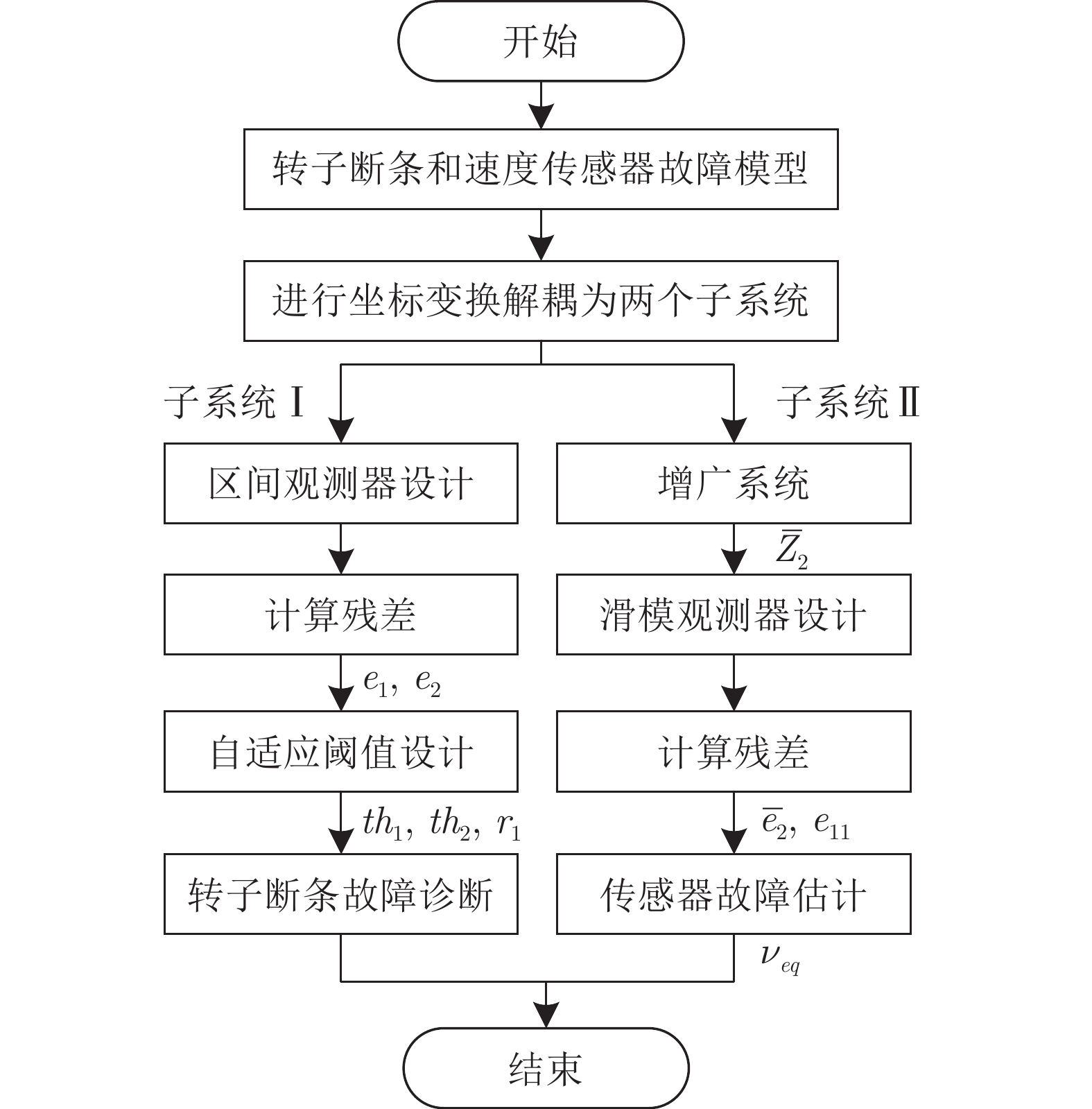
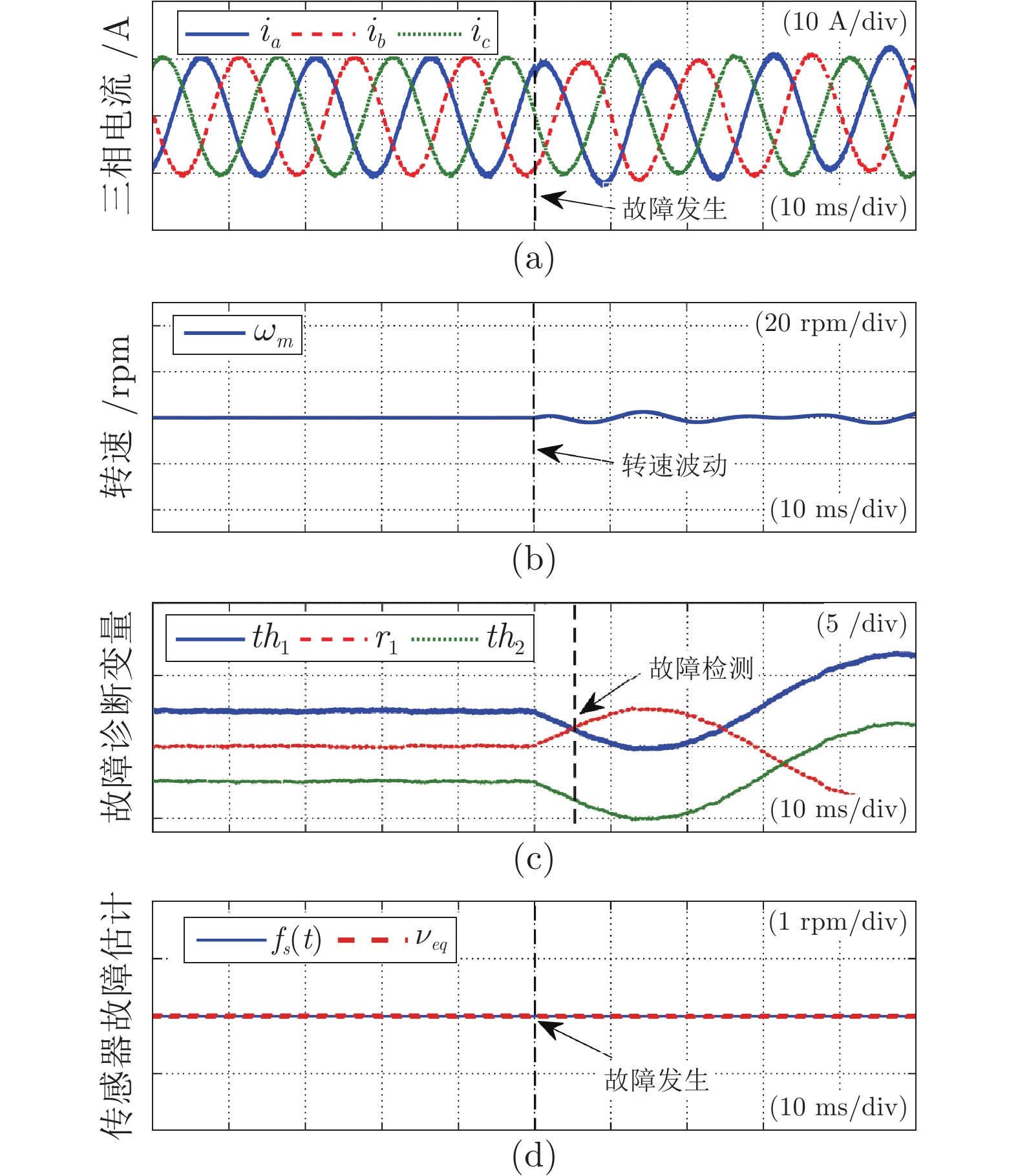
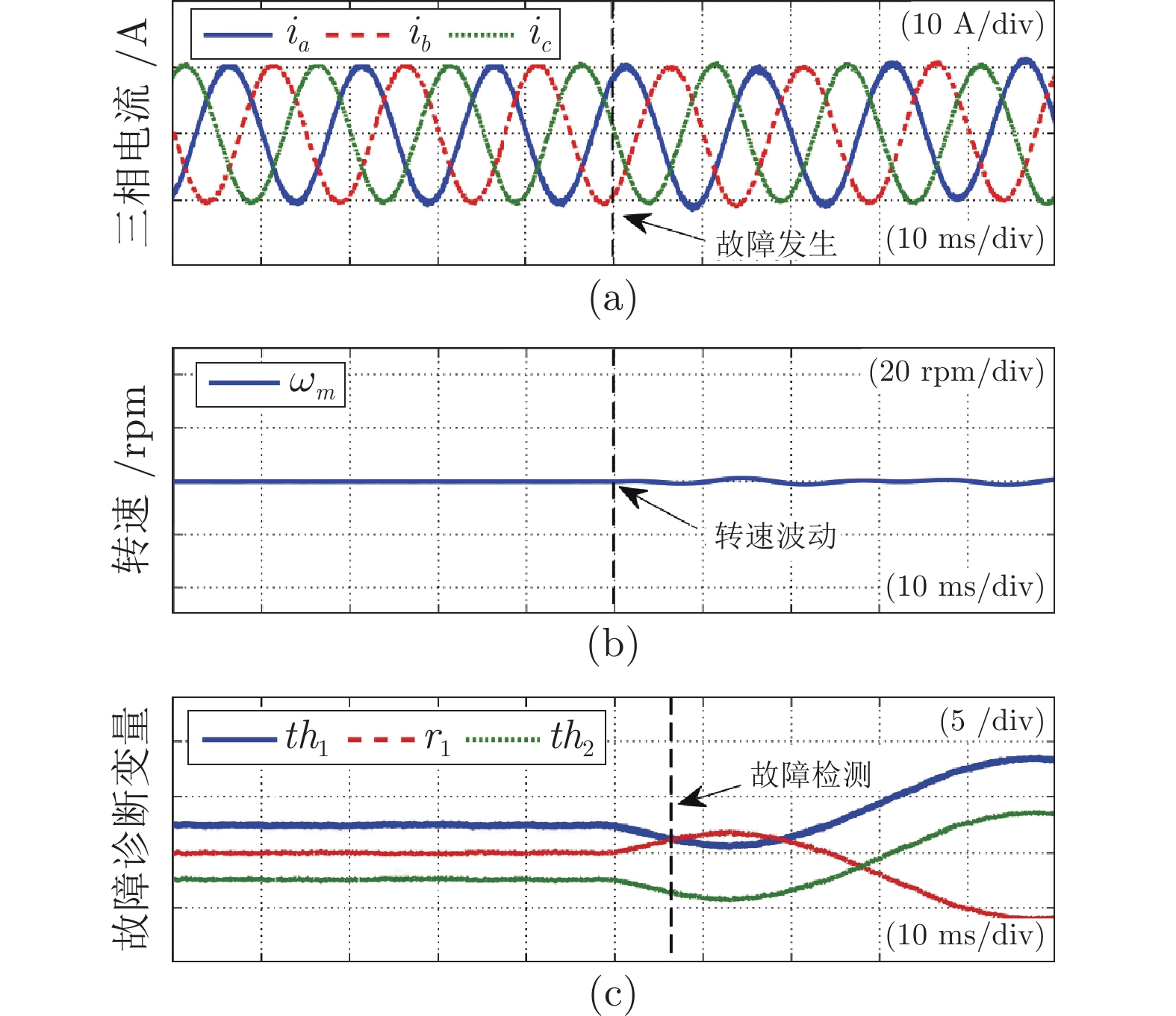
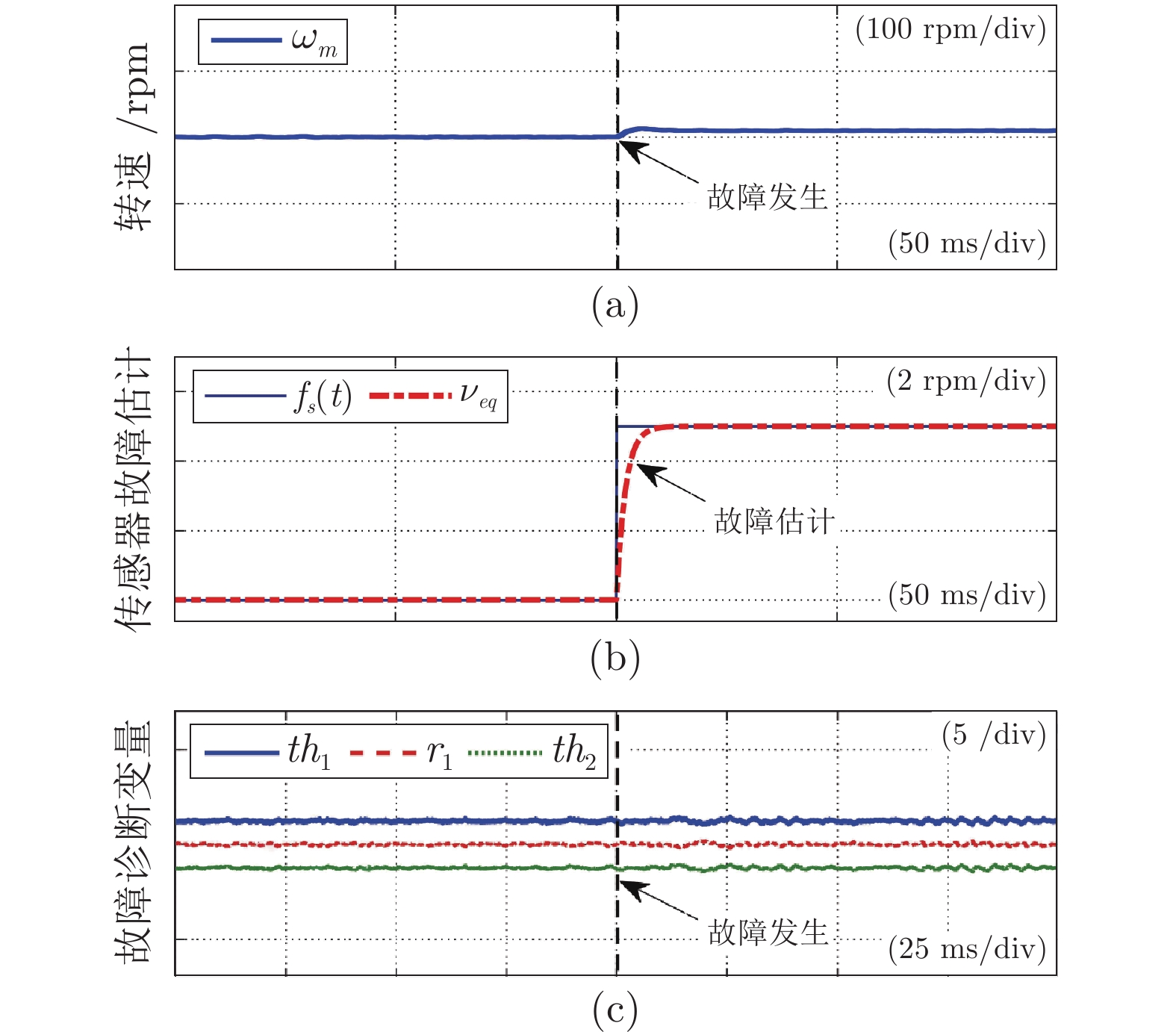
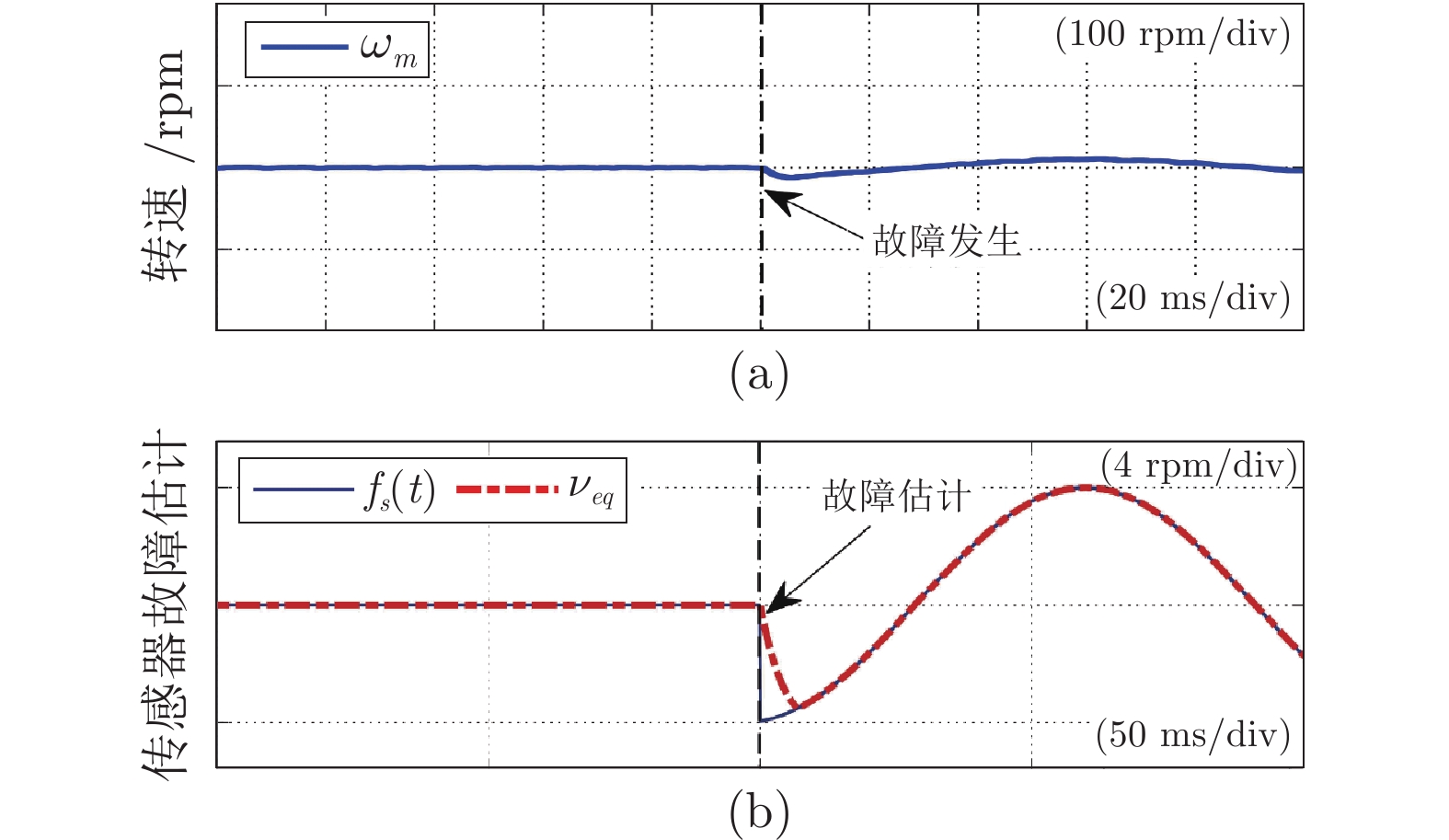
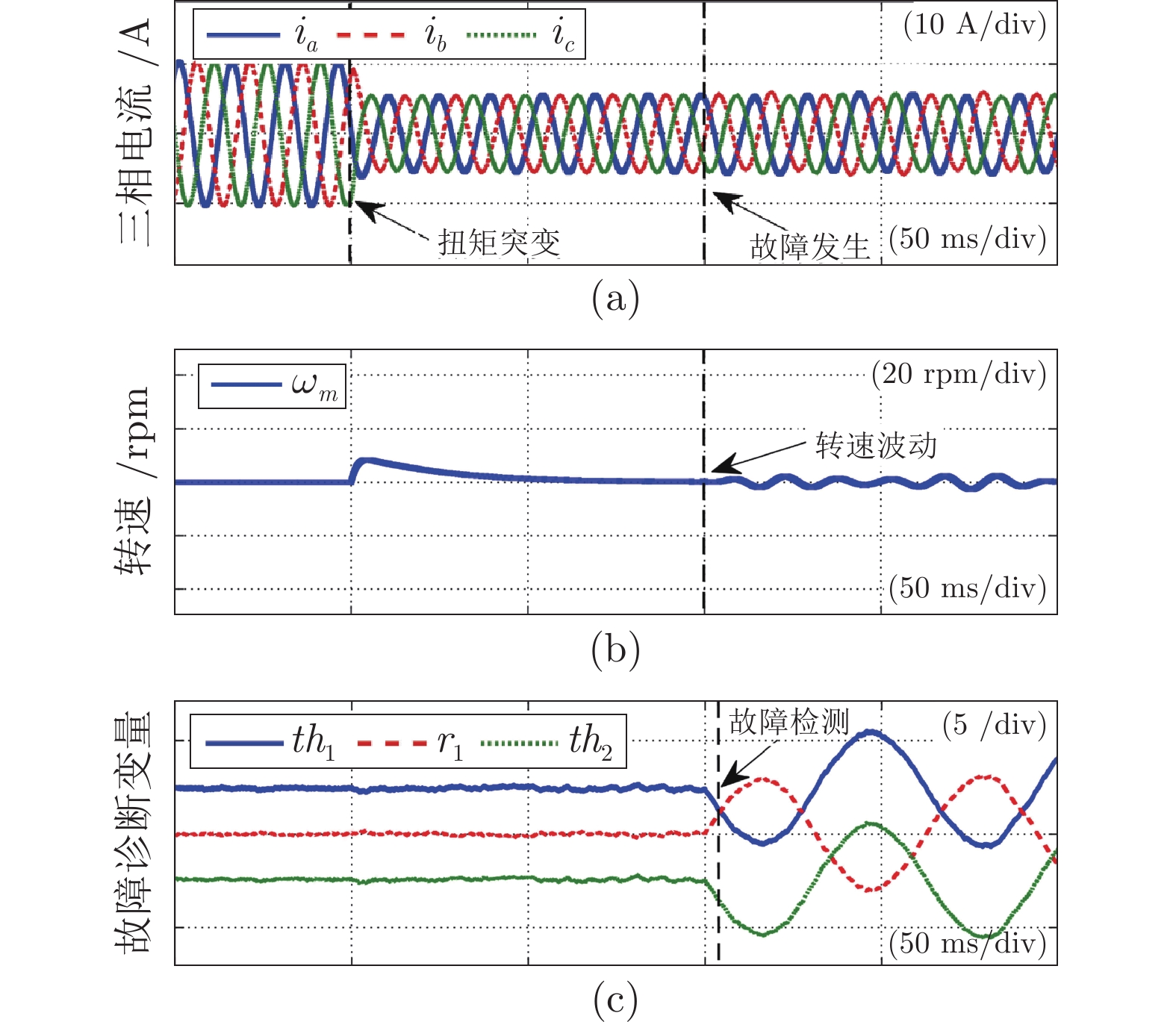
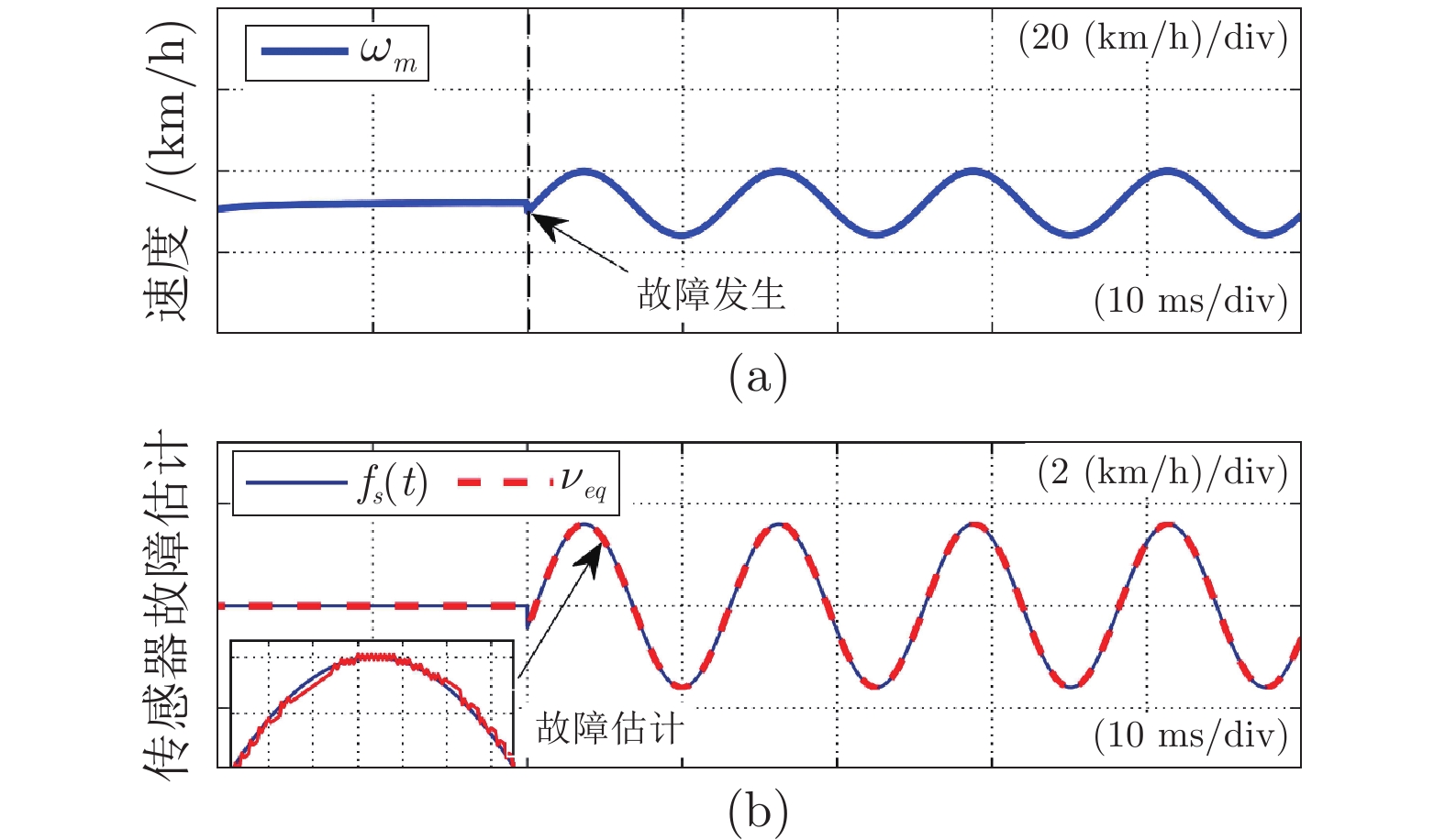
为提升高速列车牵引系统的稳定性和可靠性, 针对其牵引电机提出一种基于未知输入观测器的转子断条和速度传感器故障联合诊断方法. 首先, 通过非奇异坐标变换, 将牵引电机系统解耦为两个分别只包含转子断条故障和速度传感器故障的子系统, 实现转子断条故障与速度传感器故障的解耦, 并进一步利用一阶低通滤波器将含速度传感器故障的子系统转化为增广系统. 其次, 对含转子断条故障的子系统和速度传感器故障增广系统分别设计未知输入区间观测器和未知输入滑模观测器. 在此基础上, 采用未知输入区间观测器上界和下界构建转子断条故障诊断的检测变量和自适应阈值, 利用未知输入滑模观测器的等效输出控制原理实现速度传感器故障估计. 最后, 通过仿真和TDCS-FIB平台实验验证了所提方法的有效性和鲁棒性.
为提升高速列车牵引系统的稳定性和可靠性, 针对其牵引电机提出一种基于未知输入观测器的转子断条和速度传感器故障联合诊断方法. 首先, 通过非奇异坐标变换, 将牵引电机系统解耦为两个分别只包含转子断条故障和速度传感器故障的子系统, 实现转子断条故障与速度传感器故障的解耦, 并进一步利用一阶低通滤波器将含速度传感器故障的子系统转化为增广系统. 其次, 对含转子断条故障的子系统和速度传感器故障增广系统分别设计未知输入区间观测器和未知输入滑模观测器. 在此基础上, 采用未知输入区间观测器上界和下界构建转子断条故障诊断的检测变量和自适应阈值, 利用未知输入滑模观测器的等效输出控制原理实现速度传感器故障估计. 最后, 通过仿真和TDCS-FIB平台实验验证了所提方法的有效性和鲁棒性.
2023, 49(6): 1228-1241.
doi: 10.16383/j.aas.c211235
摘要:
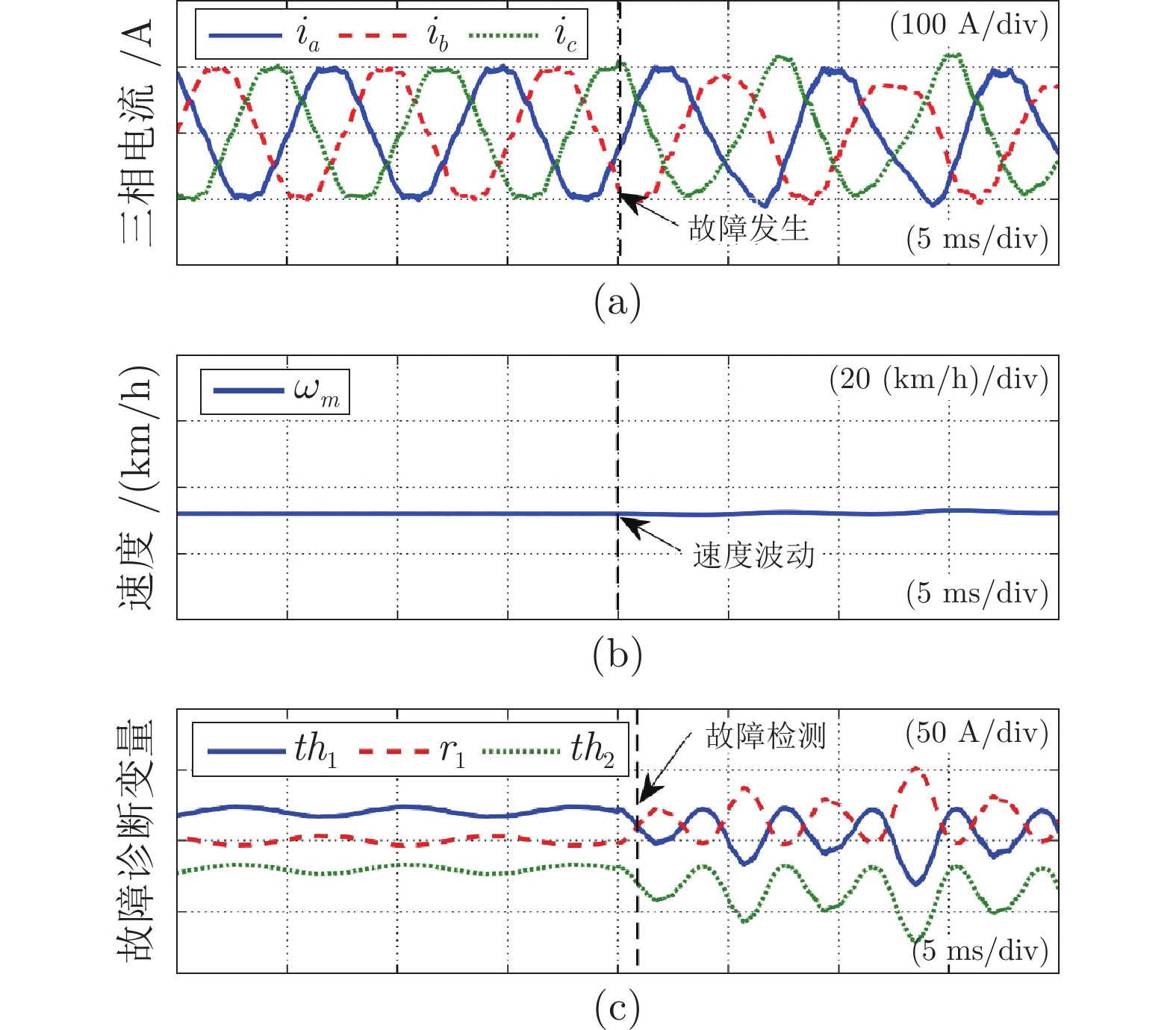
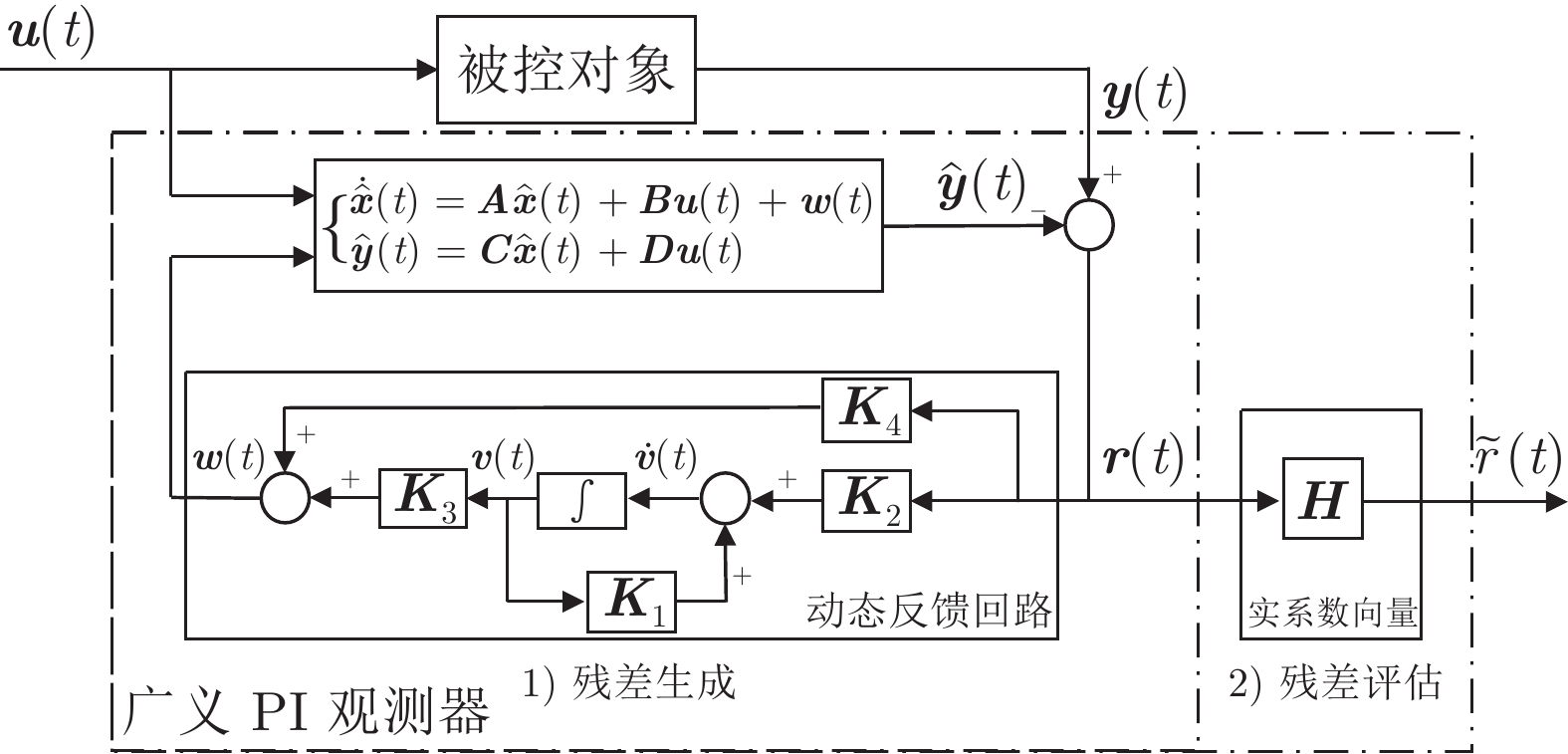
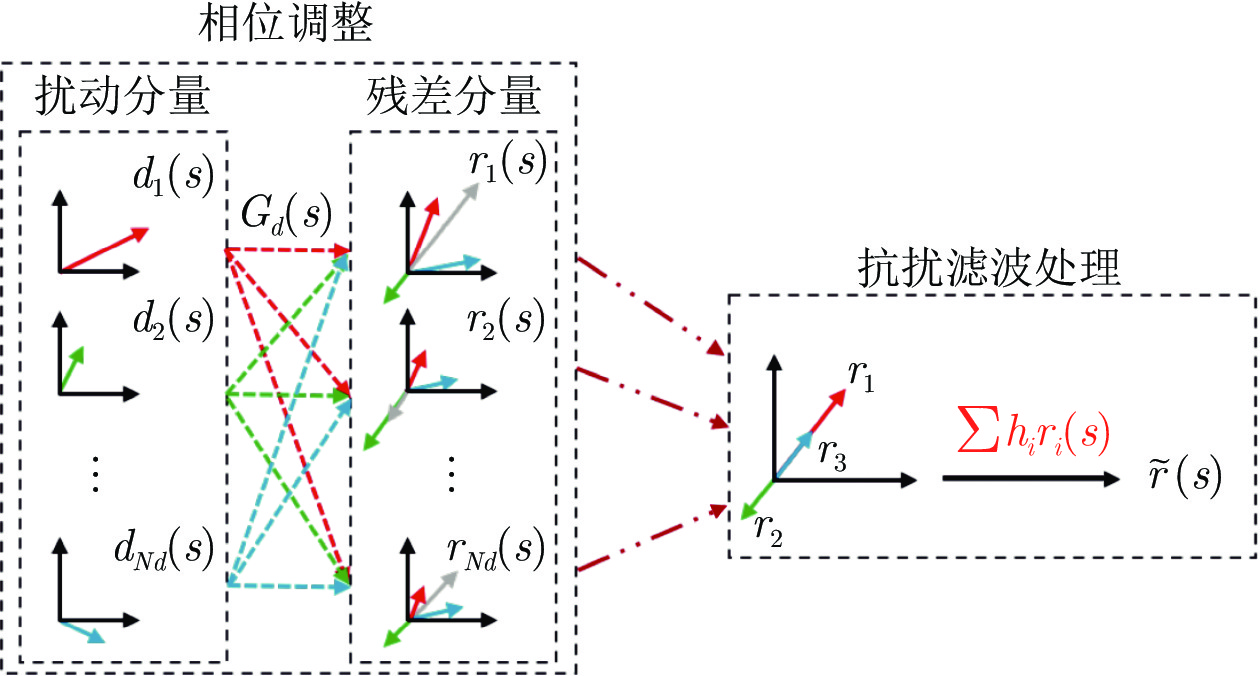
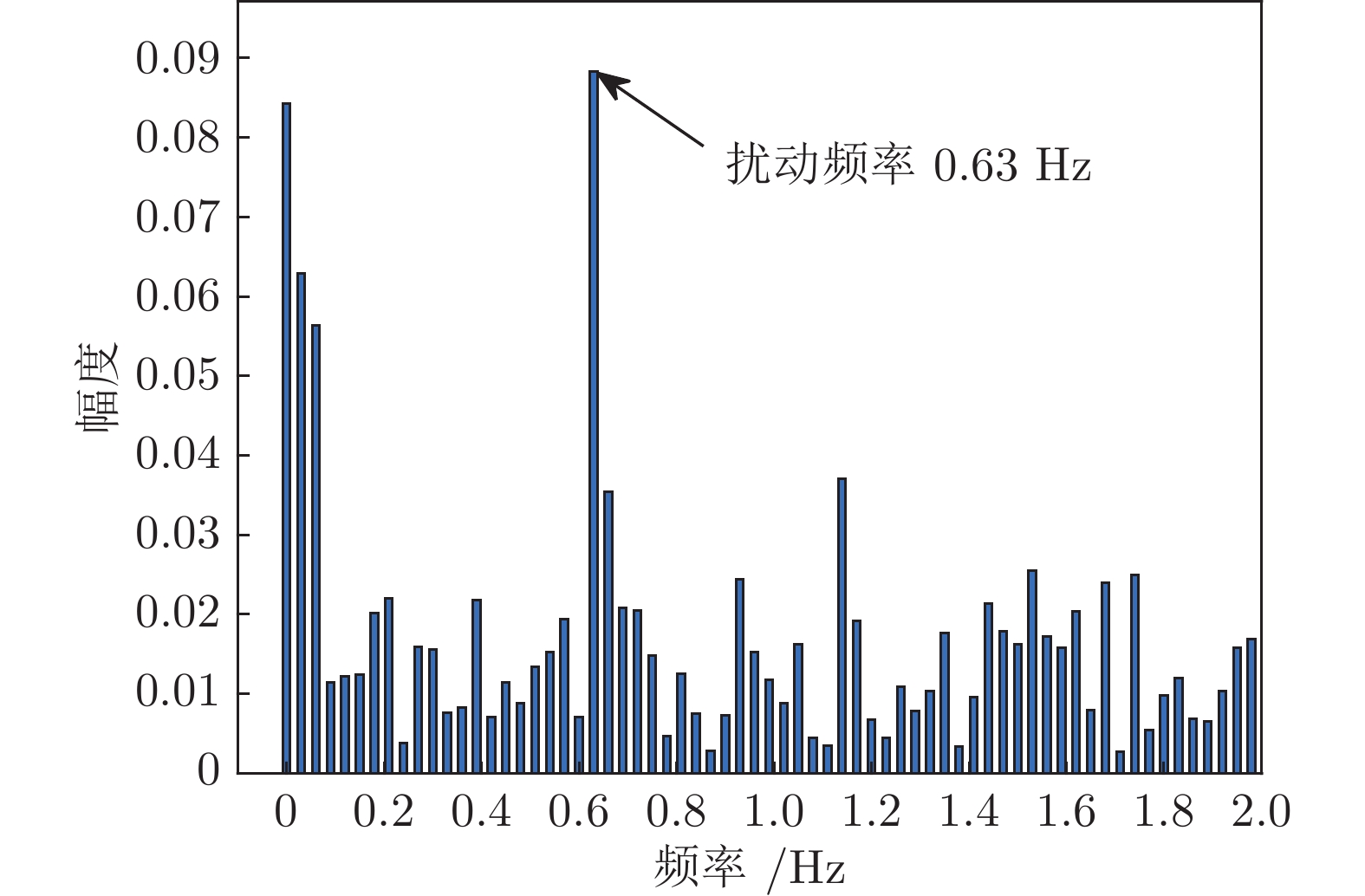
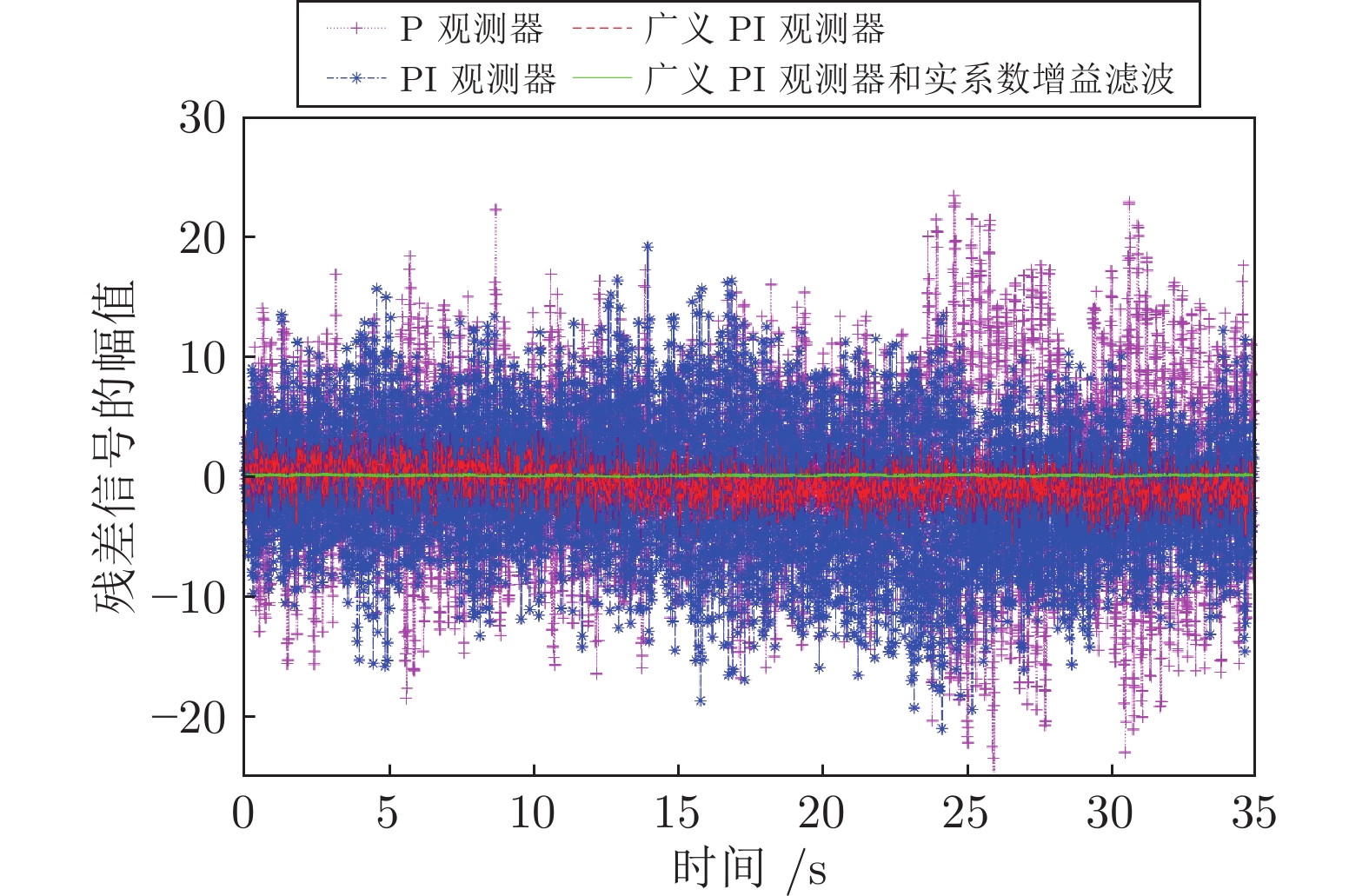
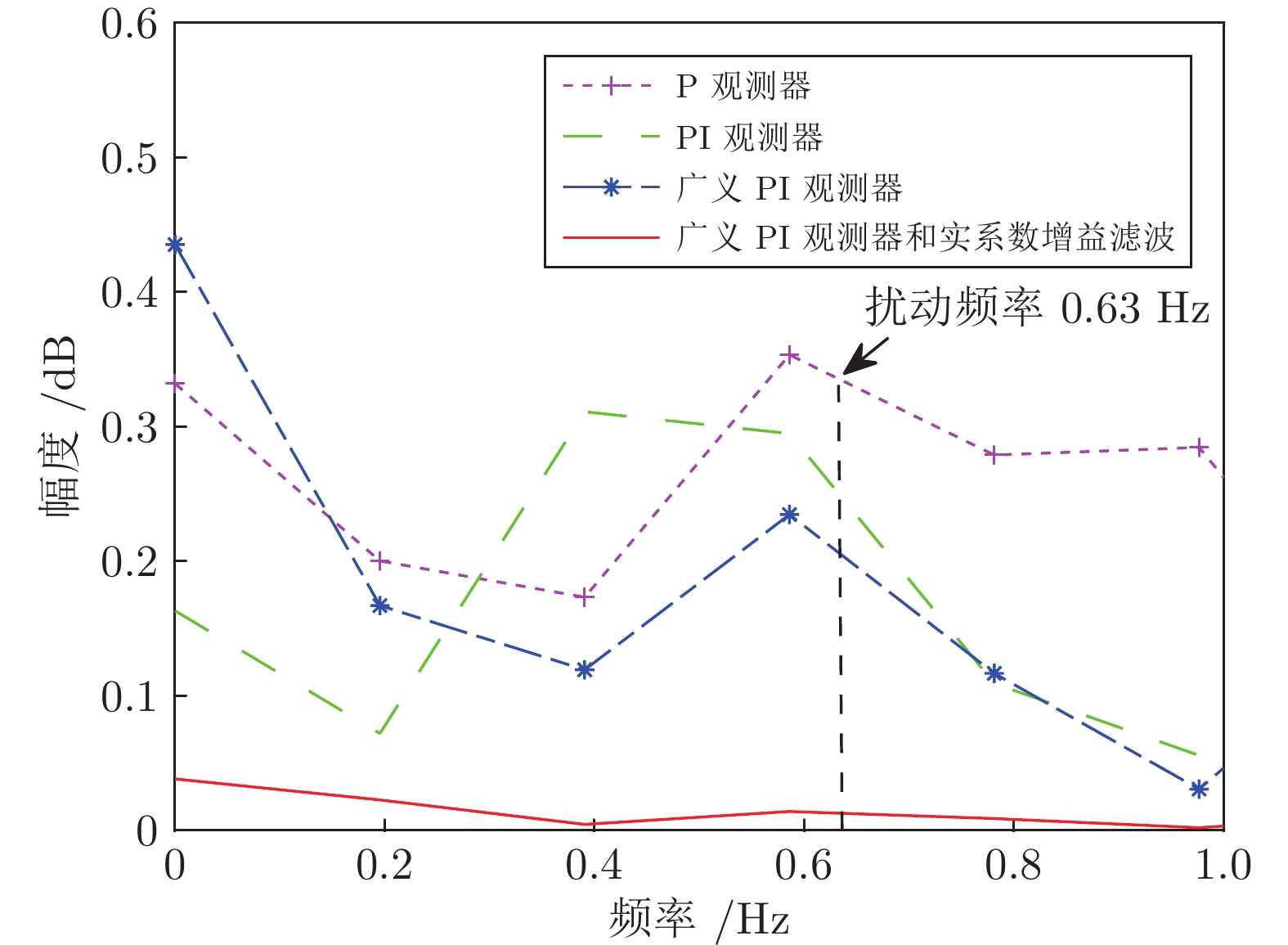
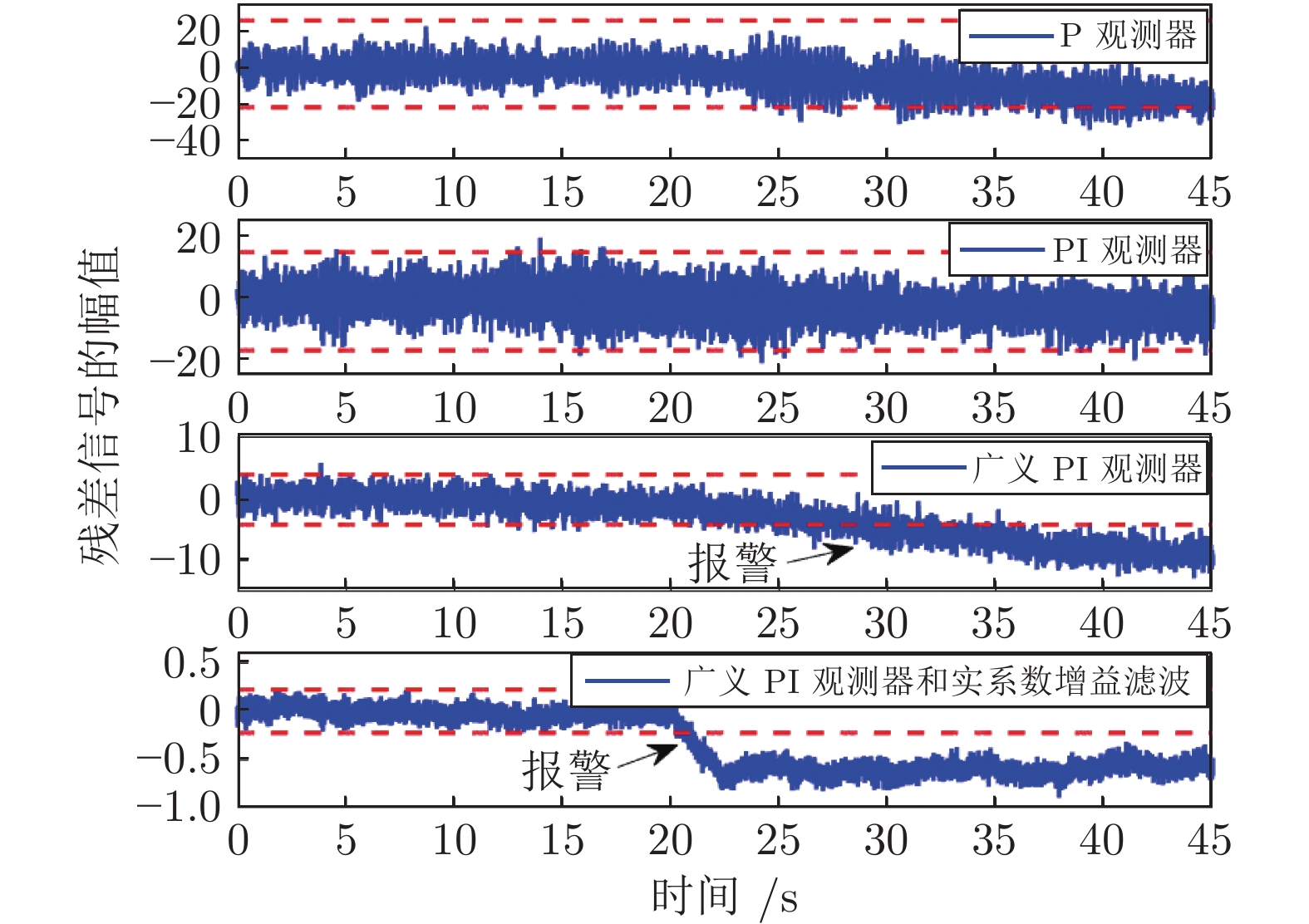
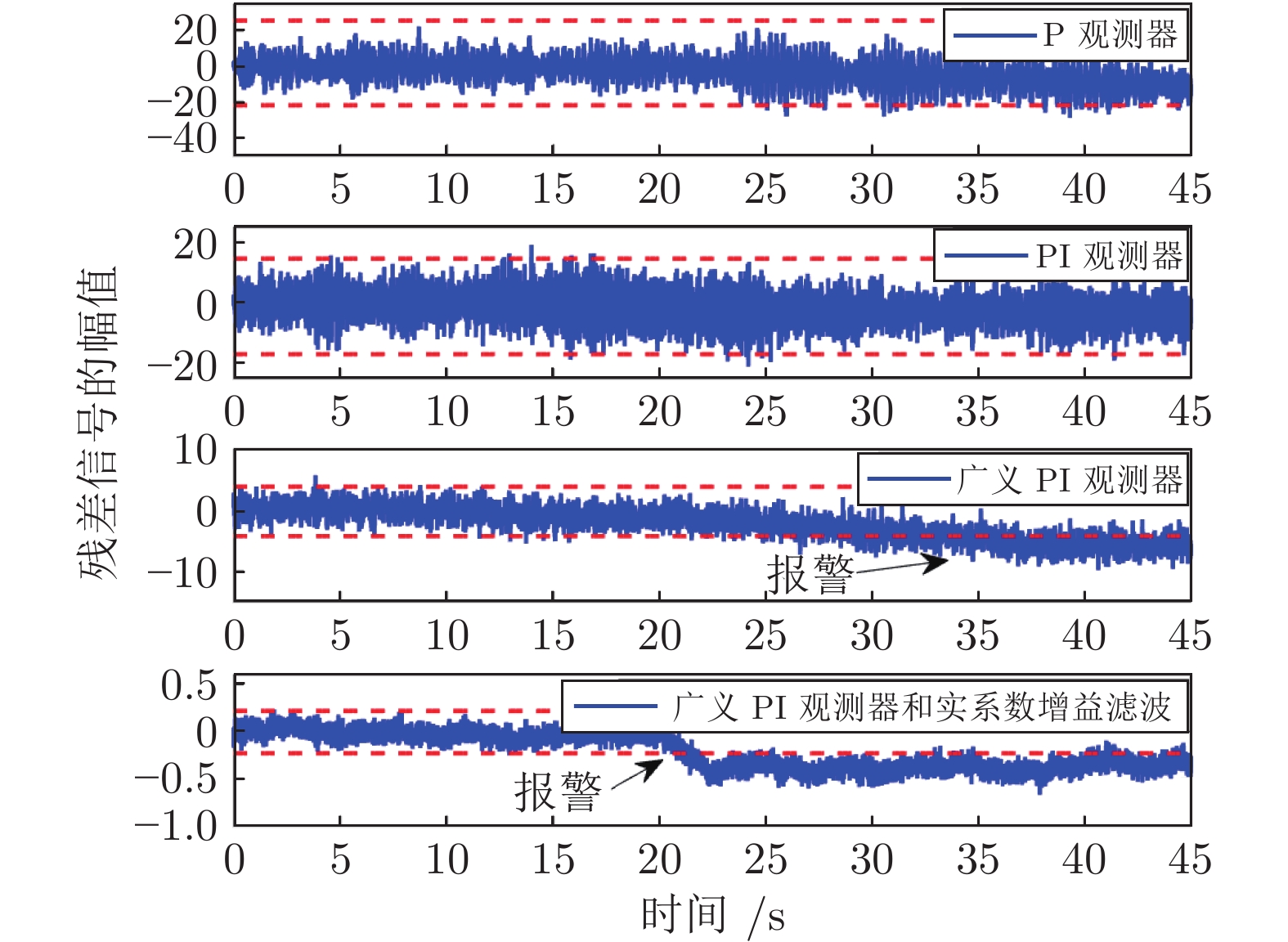
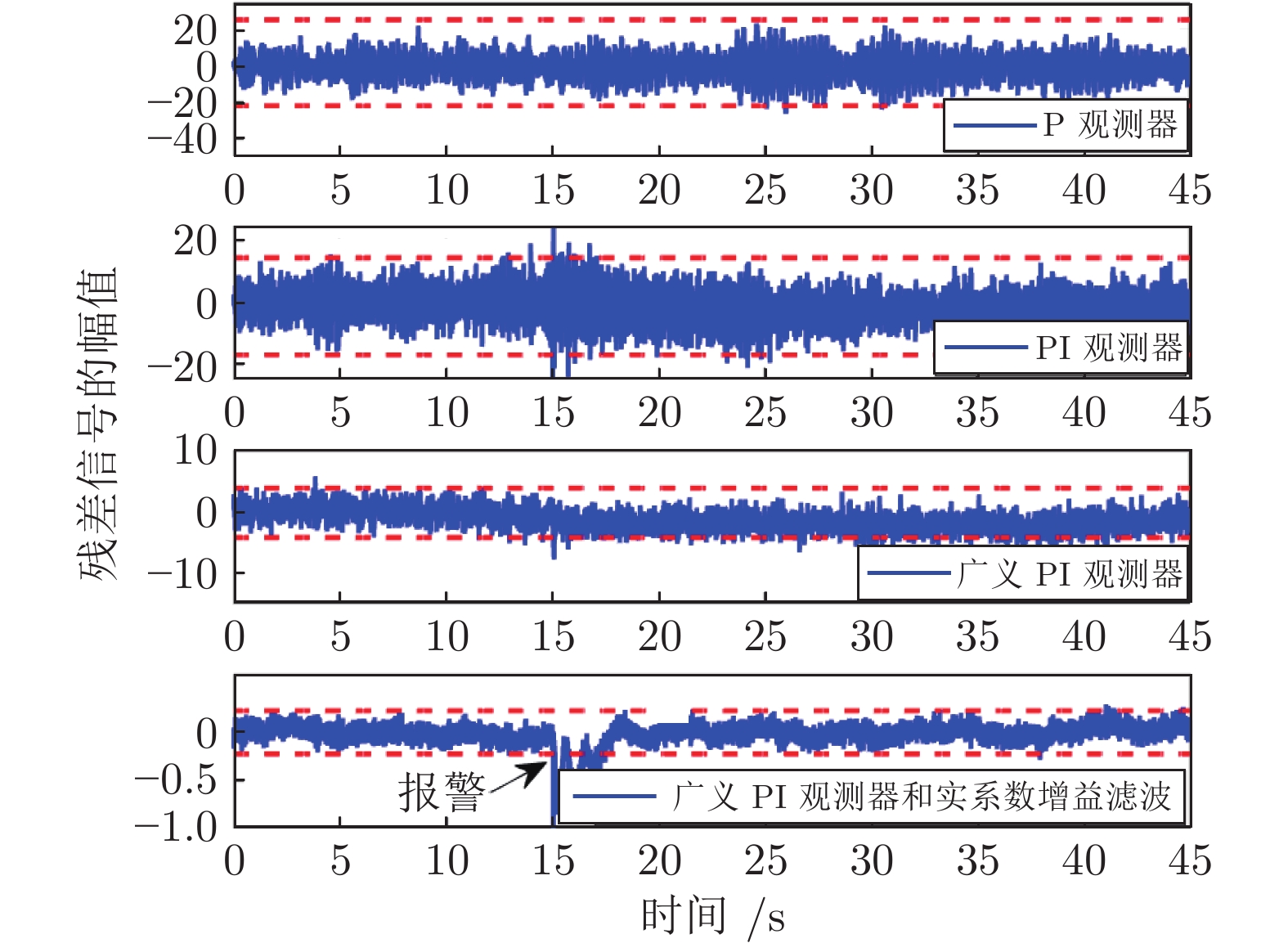
针对一类存在周期性扰动的系统, 提出一种新型的基于广义比例积分(Proportional-integral, PI)观测器零点配置的抗扰残差评估框架. 充分利用广义PI观测器的零点可配置性, 通过调整传递函数矩阵在阻塞零点处的相位响应, 并利用该频点处矩阵的零特征向量对残差信号进行滤波, 实现残差信号与周期性扰动的解耦. 此外, 还创新性地提出一种基于矩阵条件数的优化目标函数, 改善了残差信号对故障的敏感性. 最后, 通过两轮自平衡小车的仿真对比实验和实物测试, 验证了所提方法在残差抑扰和故障检测方面的有效性.
针对一类存在周期性扰动的系统, 提出一种新型的基于广义比例积分(Proportional-integral, PI)观测器零点配置的抗扰残差评估框架. 充分利用广义PI观测器的零点可配置性, 通过调整传递函数矩阵在阻塞零点处的相位响应, 并利用该频点处矩阵的零特征向量对残差信号进行滤波, 实现残差信号与周期性扰动的解耦. 此外, 还创新性地提出一种基于矩阵条件数的优化目标函数, 改善了残差信号对故障的敏感性. 最后, 通过两轮自平衡小车的仿真对比实验和实物测试, 验证了所提方法在残差抑扰和故障检测方面的有效性.

2023, 49(6): 1242-1255.
doi: 10.16383/j.aas.c210498
摘要:
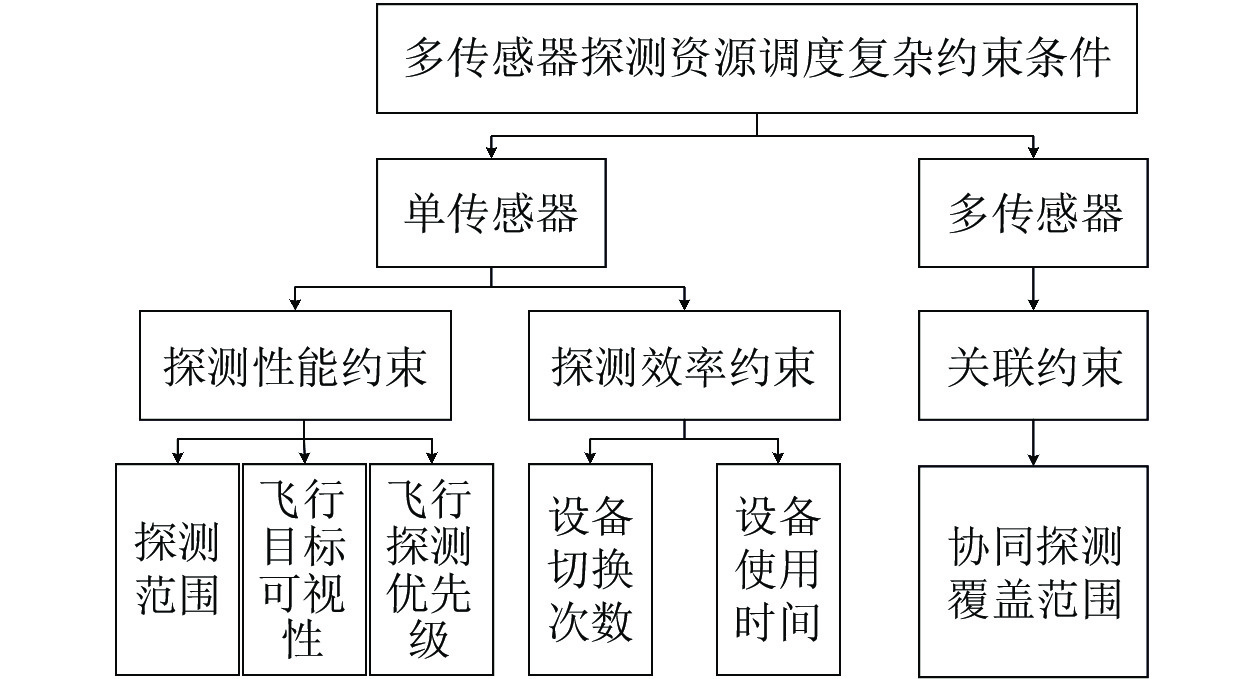
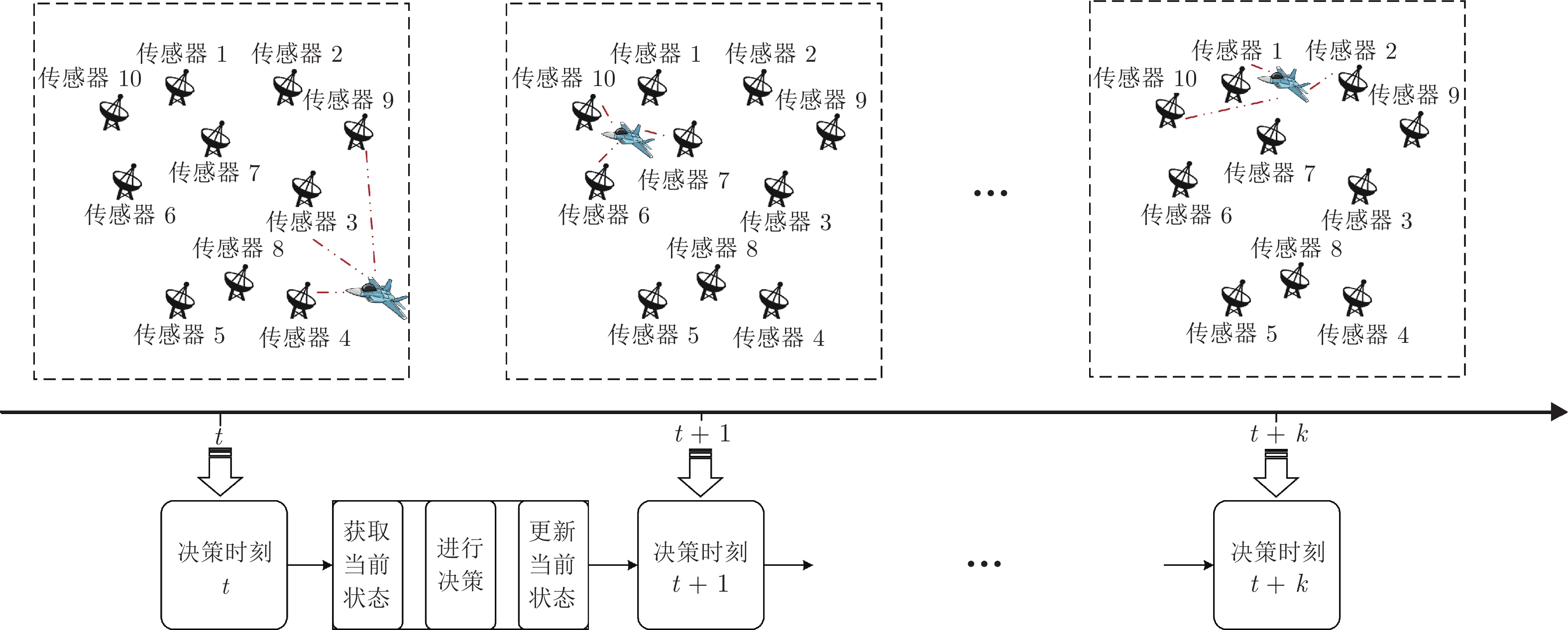
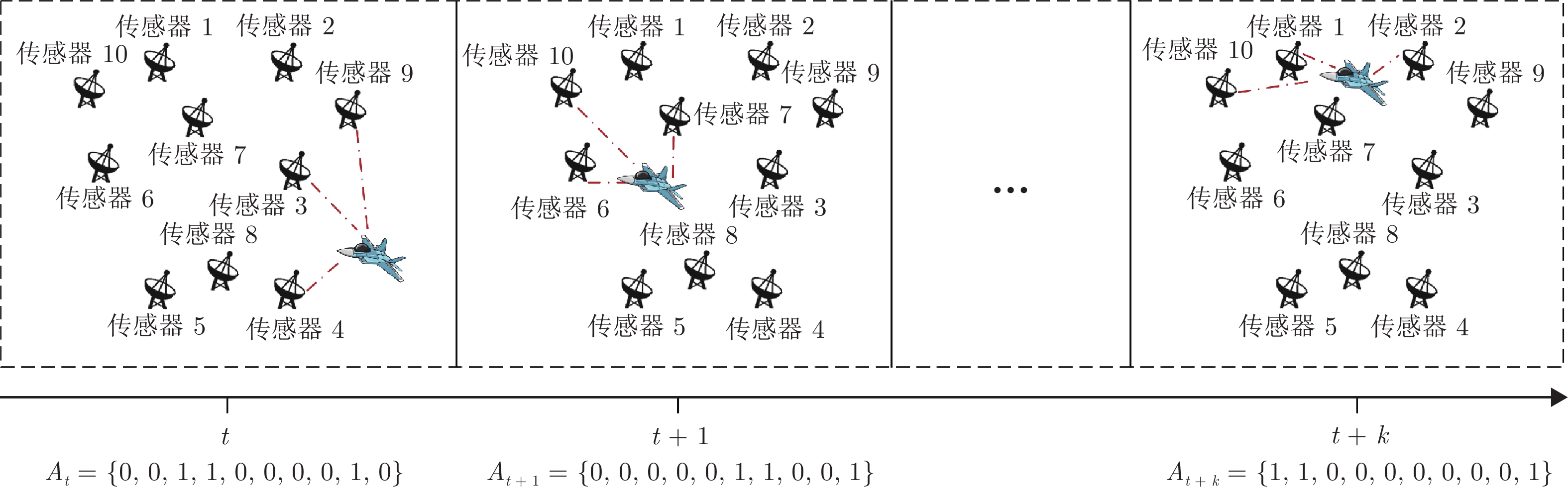
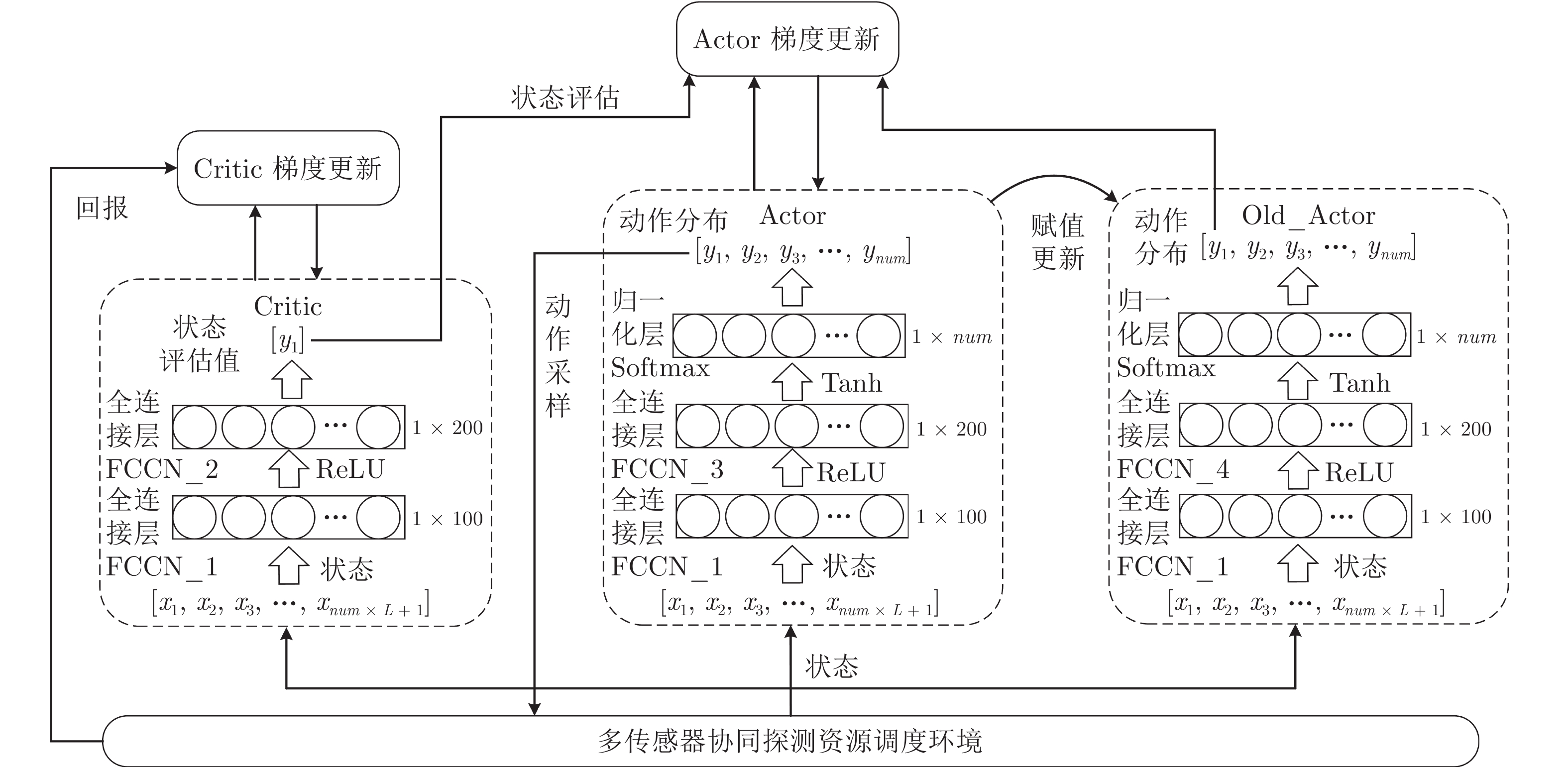
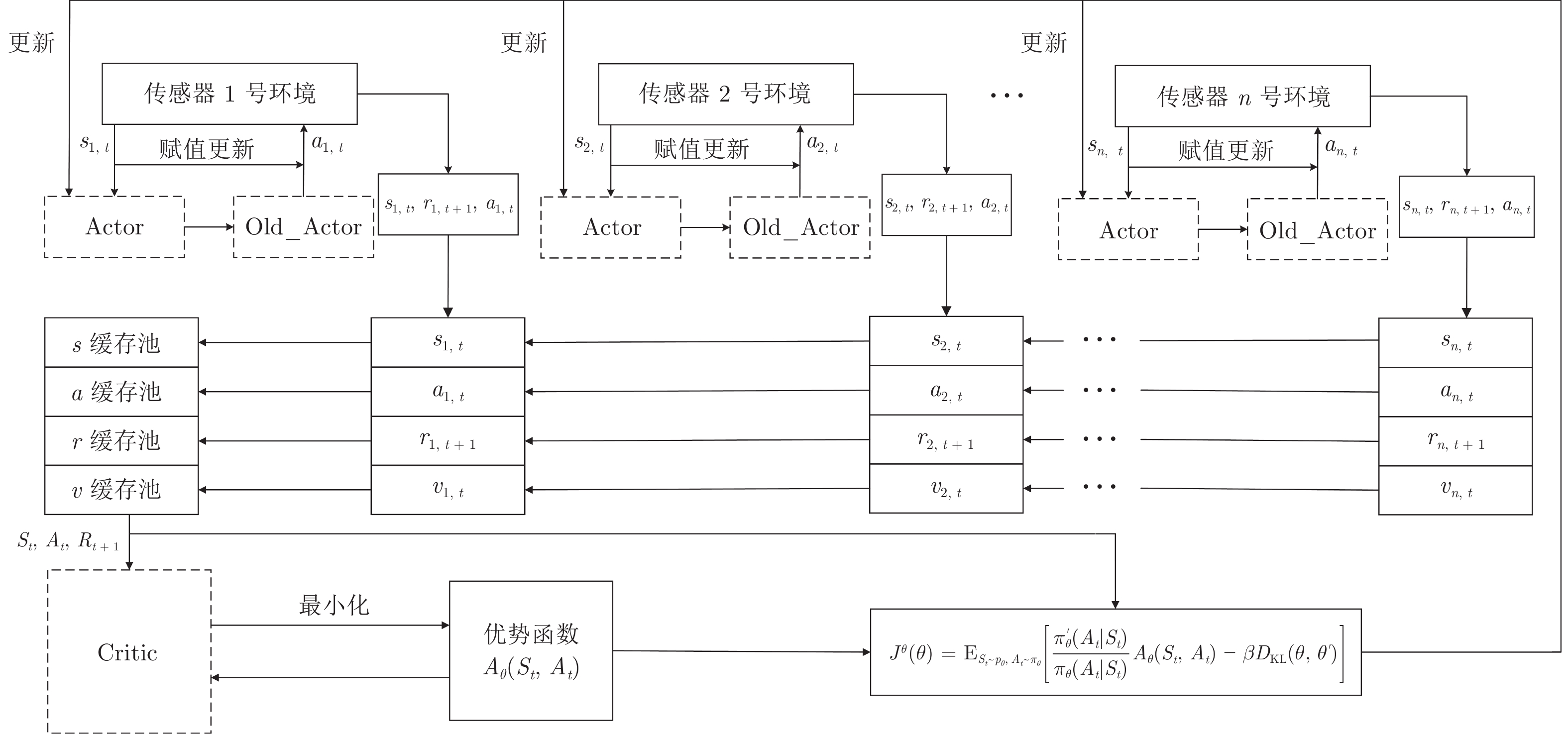
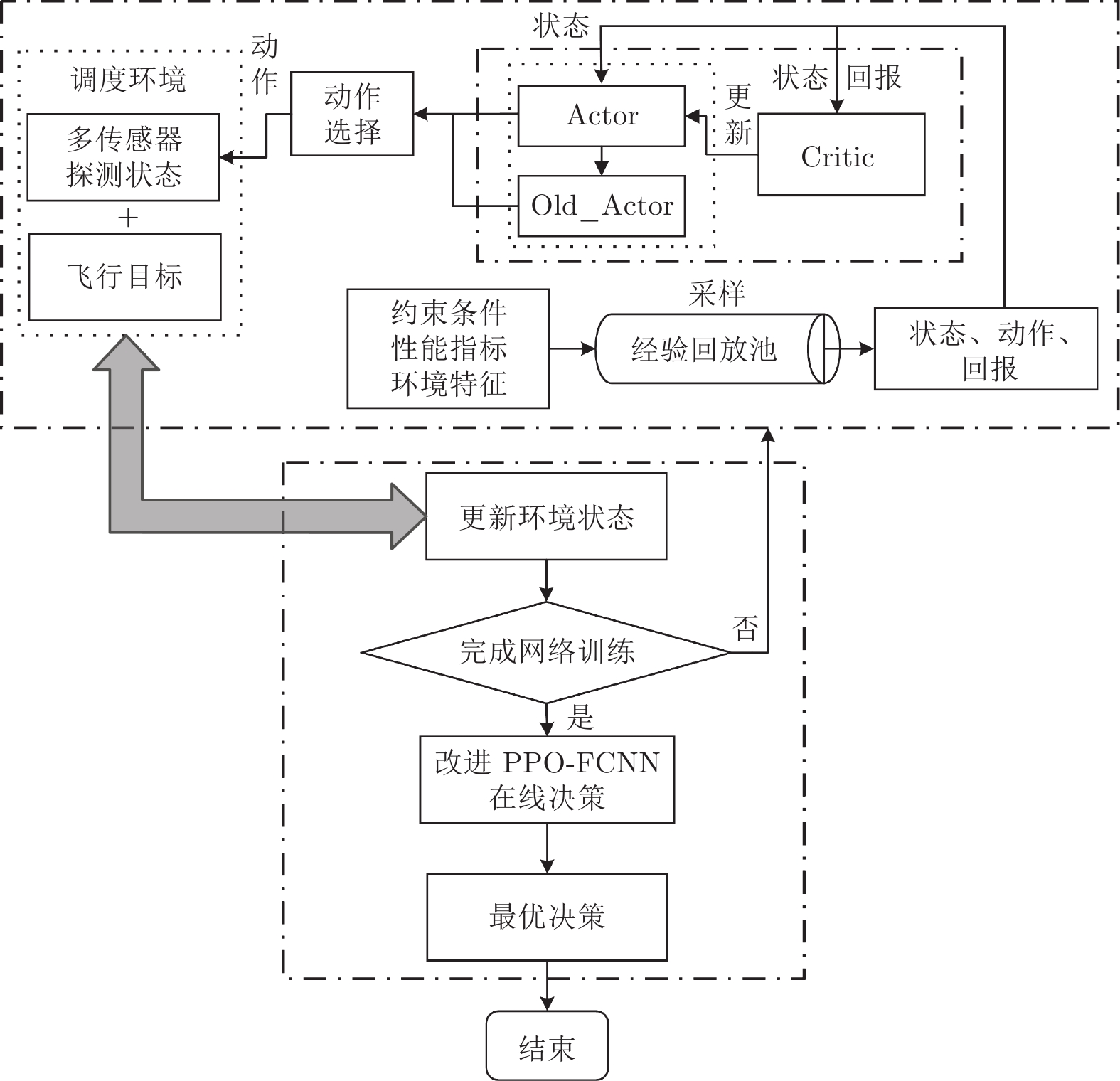
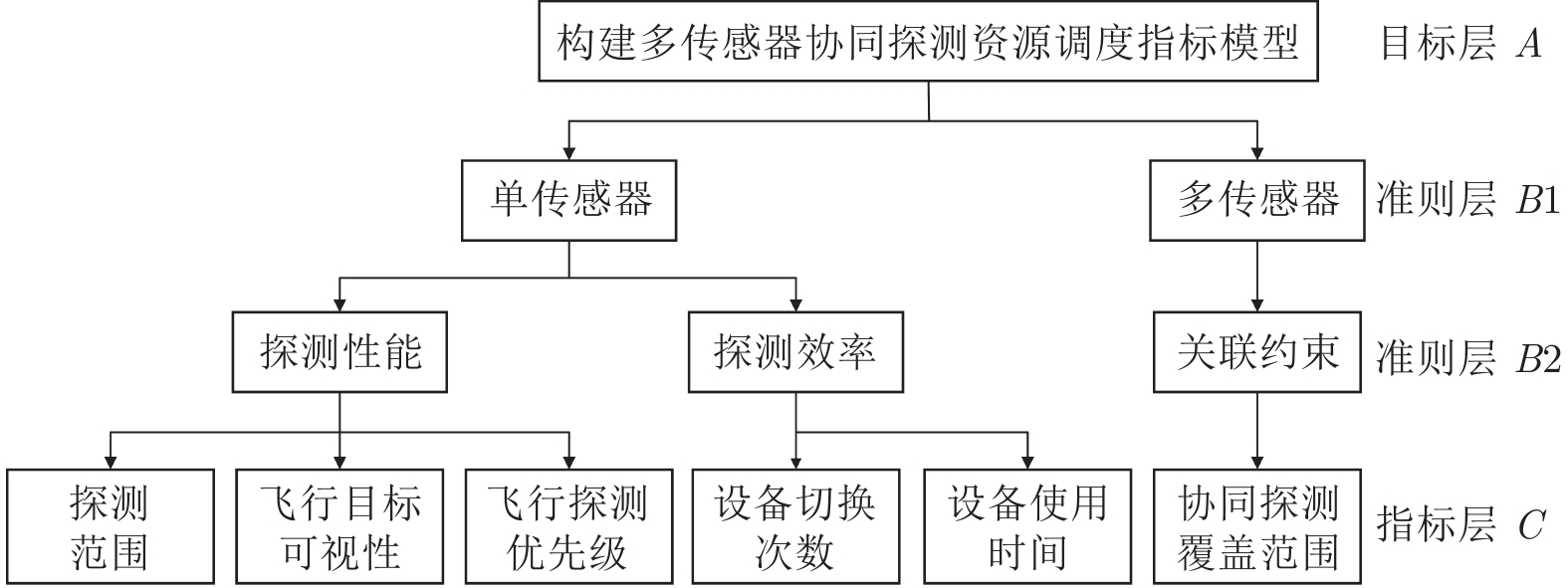
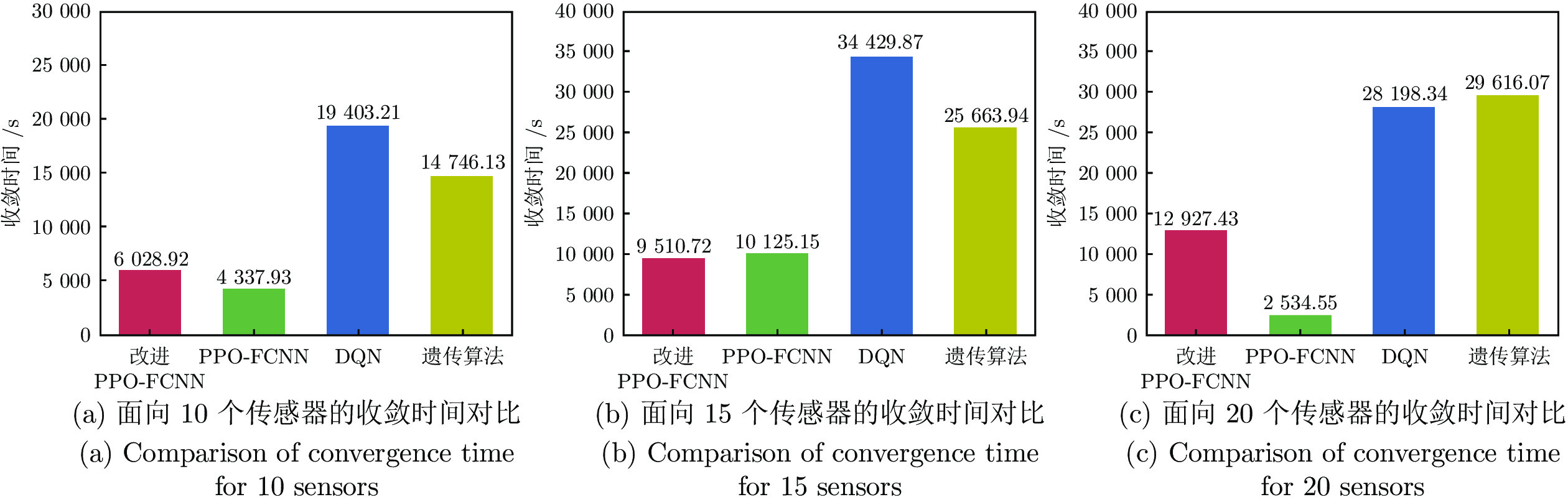
针对飞行目标机动性带来的多传感器协同探测资源调度动态性需求, 提出一种新的基于近端策略优化(Proximal policy optimization, PPO)与全连接神经网络结合的多传感器协同探测资源调度算法. 首先, 分析影响多传感器协同探测资源调度的复杂约束条件, 形成评价多传感器协同探测资源调度过程指标; 然后, 引入马尔科夫决策过程(Markov decision process, MDP)模拟多传感器协同探测资源调度过程, 并为提高算法稳定性, 将Adam算法与学习率衰减算法结合, 控制学习率调整步长; 最后, 基于改进近端策略优化与全卷积神经网络结合算法求解动态资源调度策略, 并通过对比实验表明该算法的优越性.
针对飞行目标机动性带来的多传感器协同探测资源调度动态性需求, 提出一种新的基于近端策略优化(Proximal policy optimization, PPO)与全连接神经网络结合的多传感器协同探测资源调度算法. 首先, 分析影响多传感器协同探测资源调度的复杂约束条件, 形成评价多传感器协同探测资源调度过程指标; 然后, 引入马尔科夫决策过程(Markov decision process, MDP)模拟多传感器协同探测资源调度过程, 并为提高算法稳定性, 将Adam算法与学习率衰减算法结合, 控制学习率调整步长; 最后, 基于改进近端策略优化与全卷积神经网络结合算法求解动态资源调度策略, 并通过对比实验表明该算法的优越性.

2023, 49(6): 1256-1271.
doi: 10.16383/j.aas.c220524
摘要:
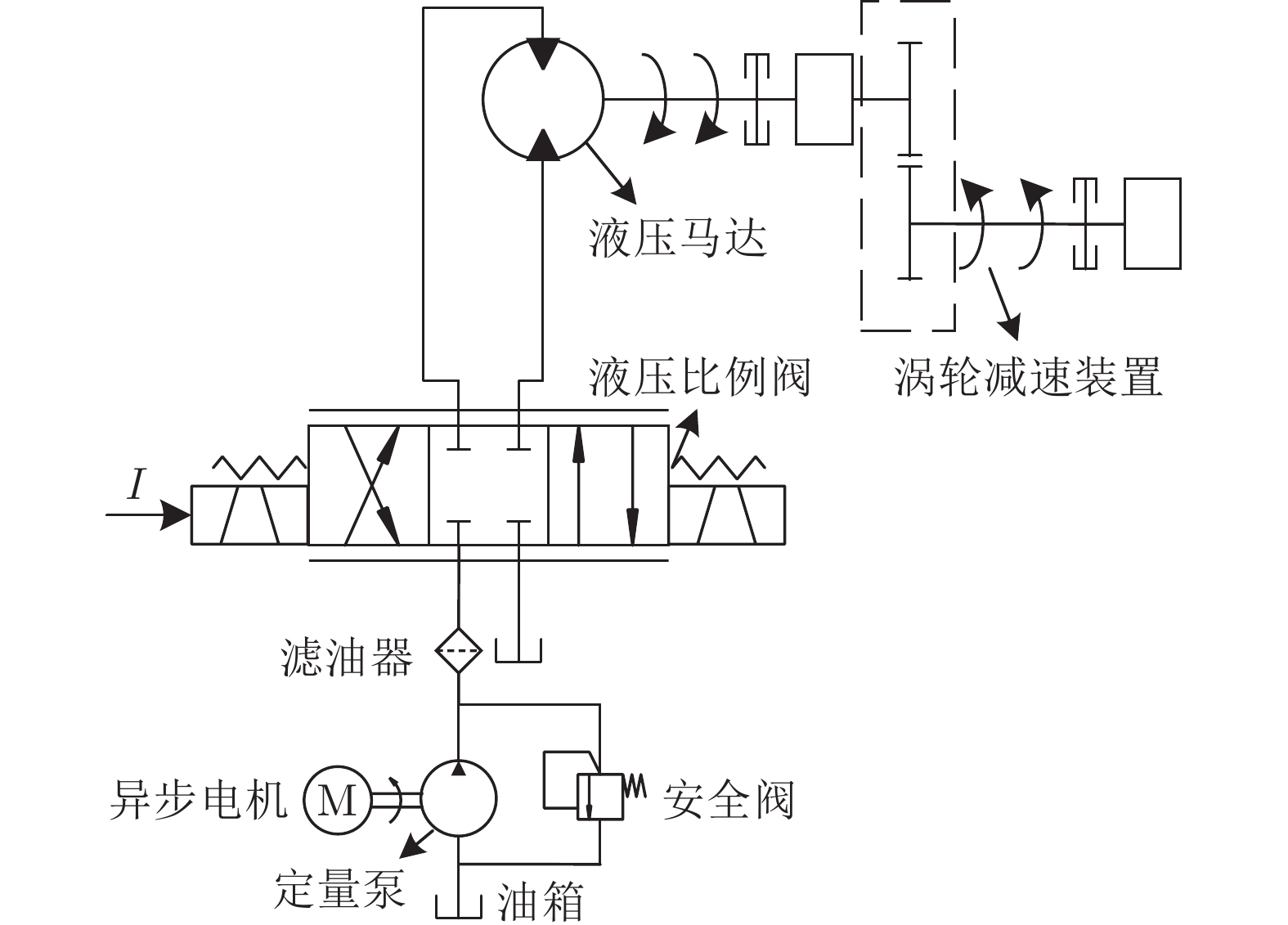
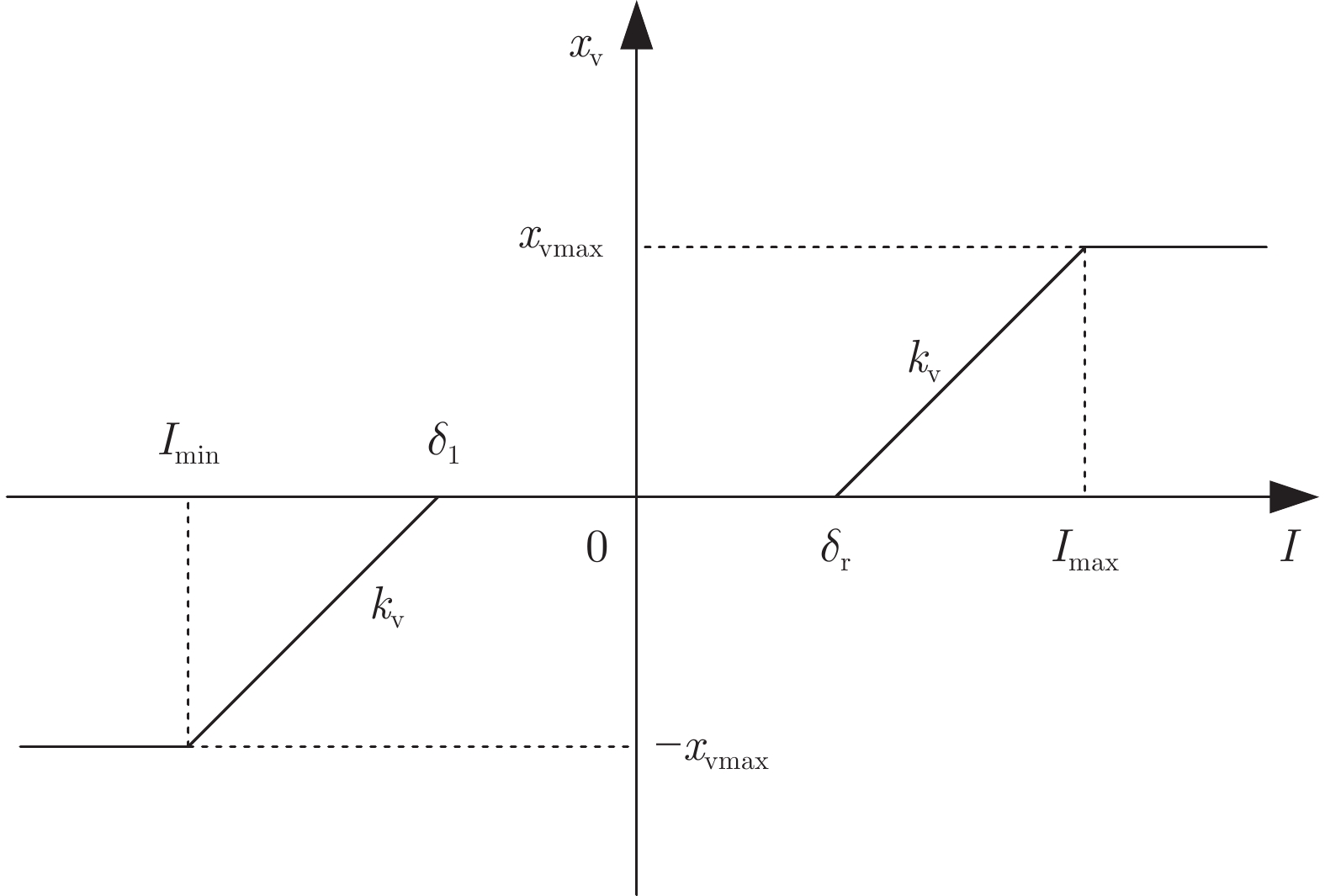
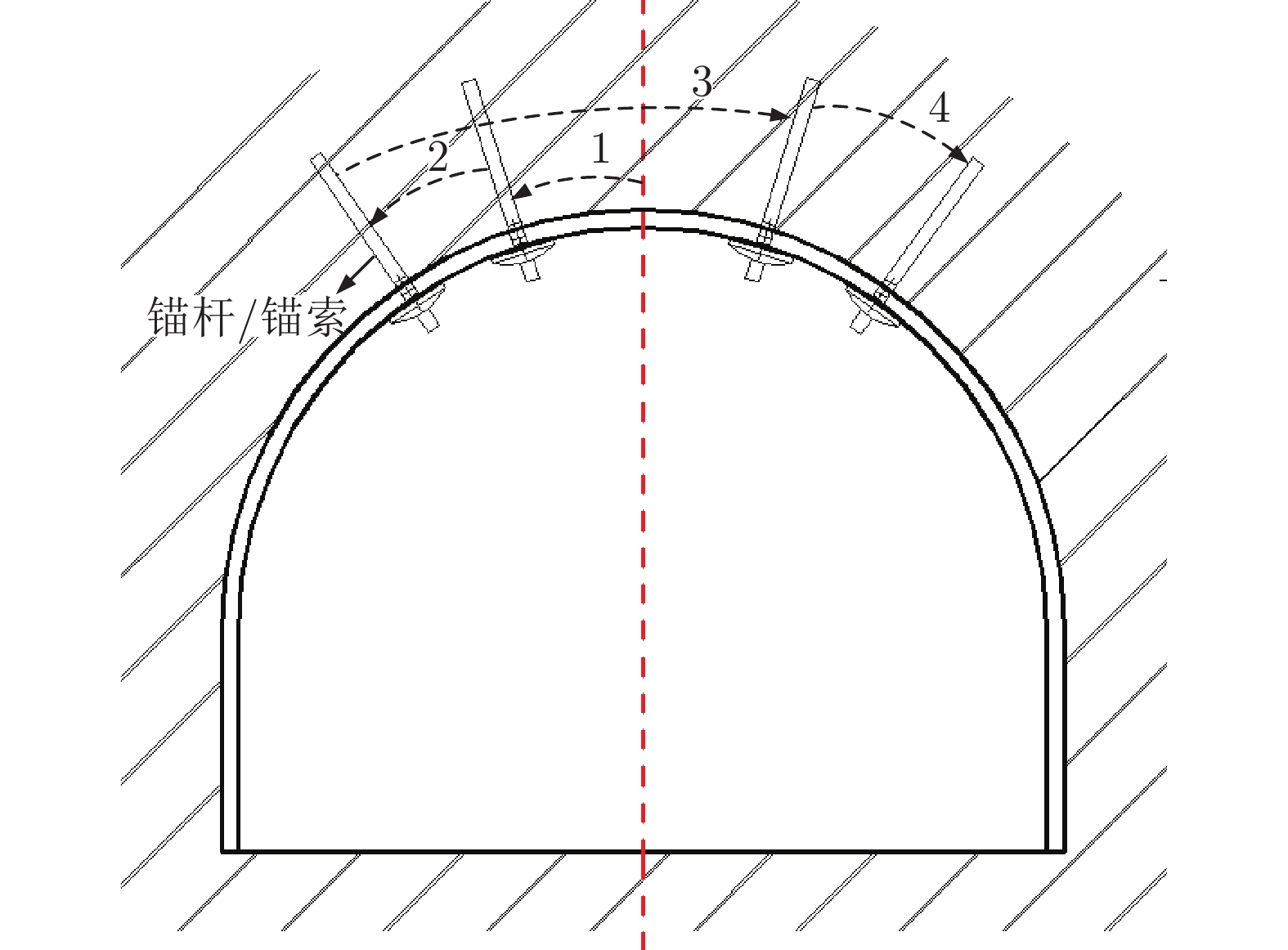
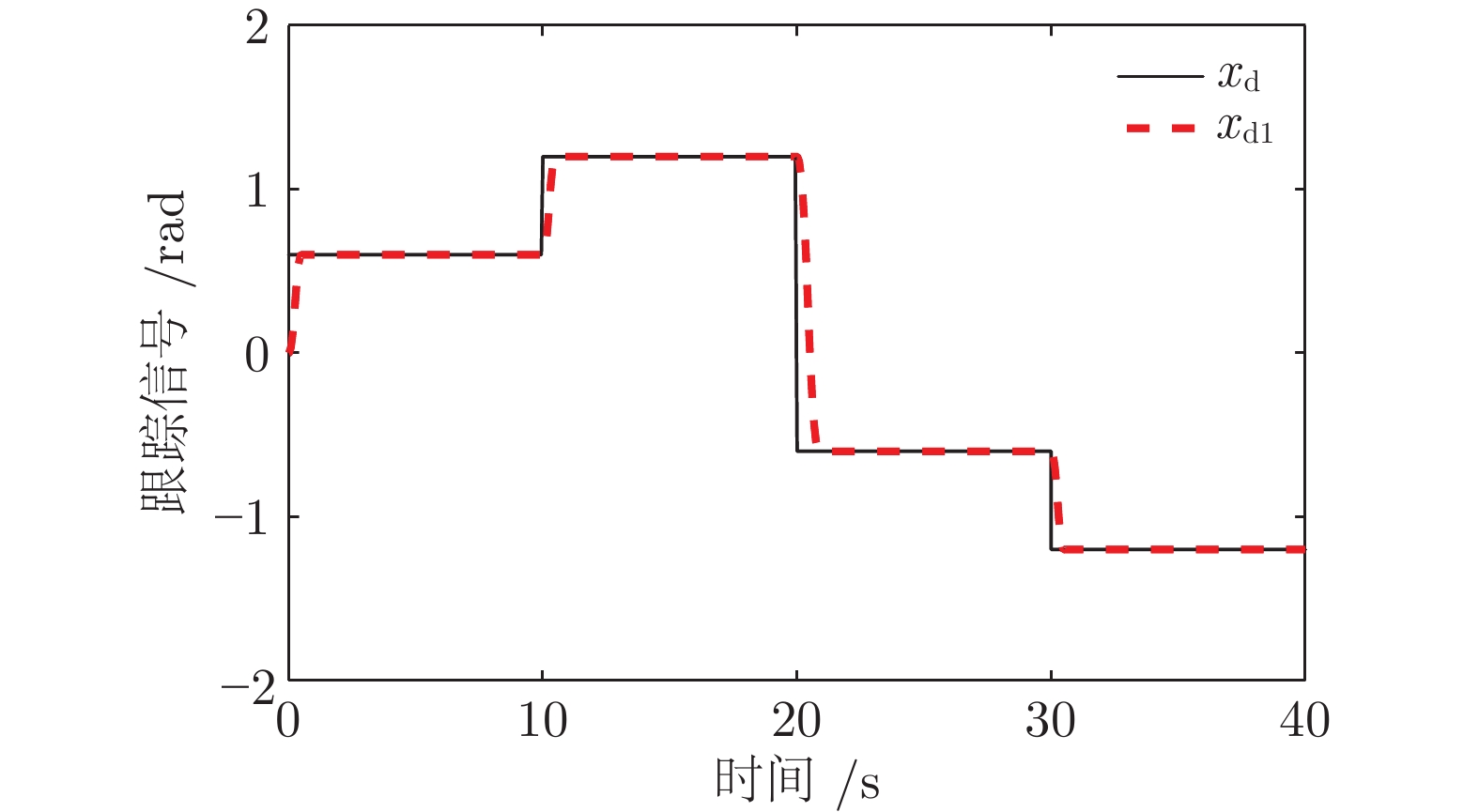
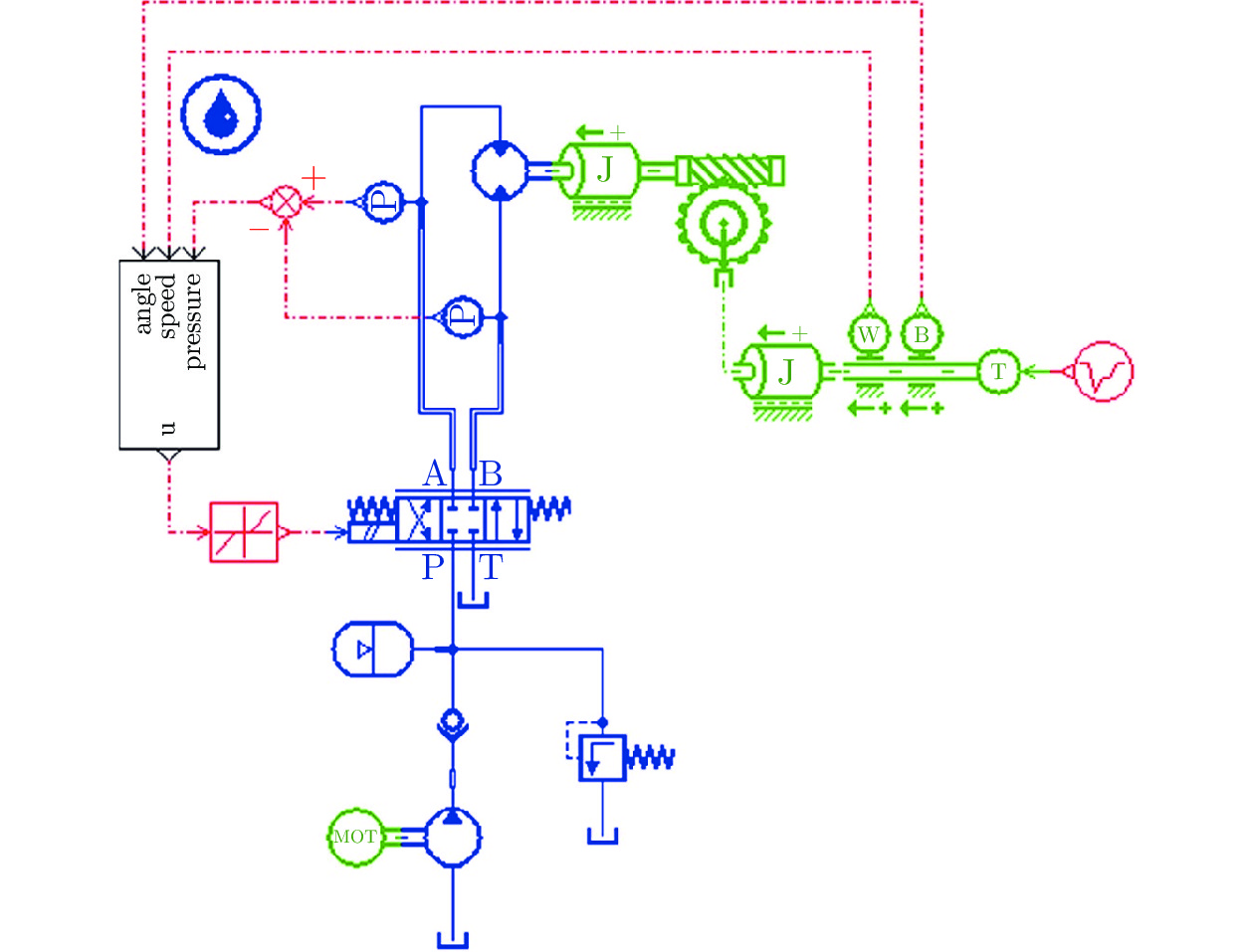
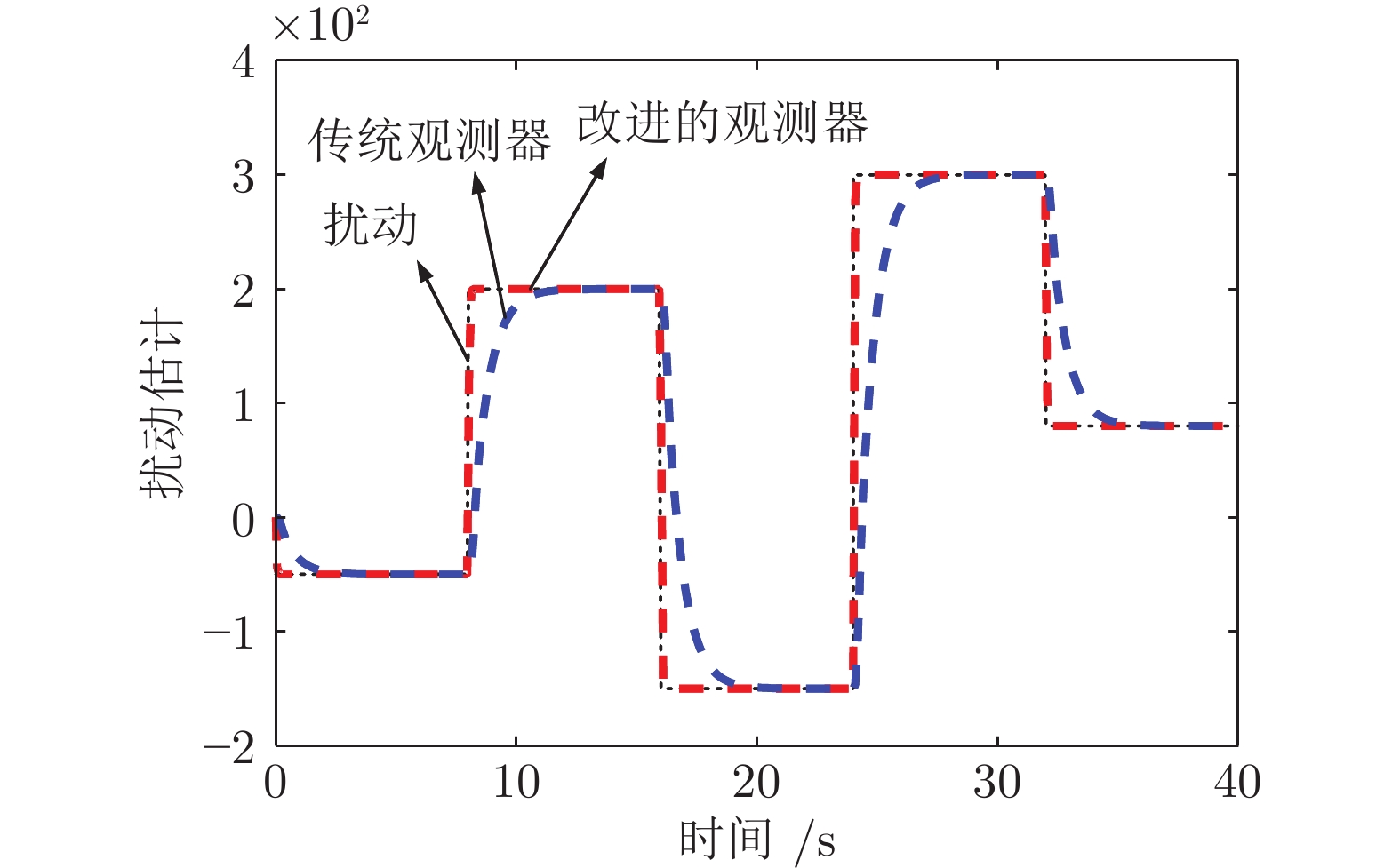
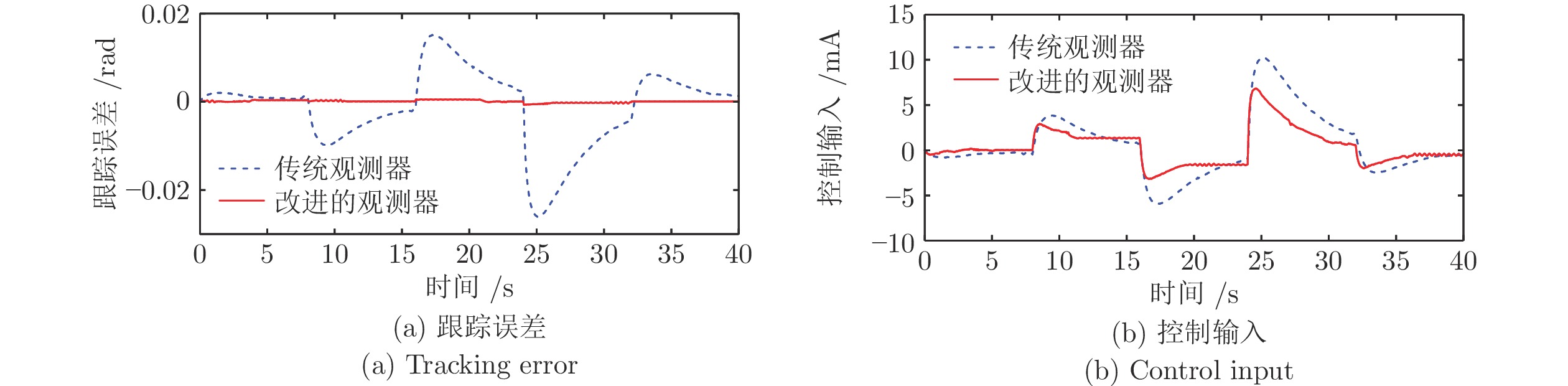
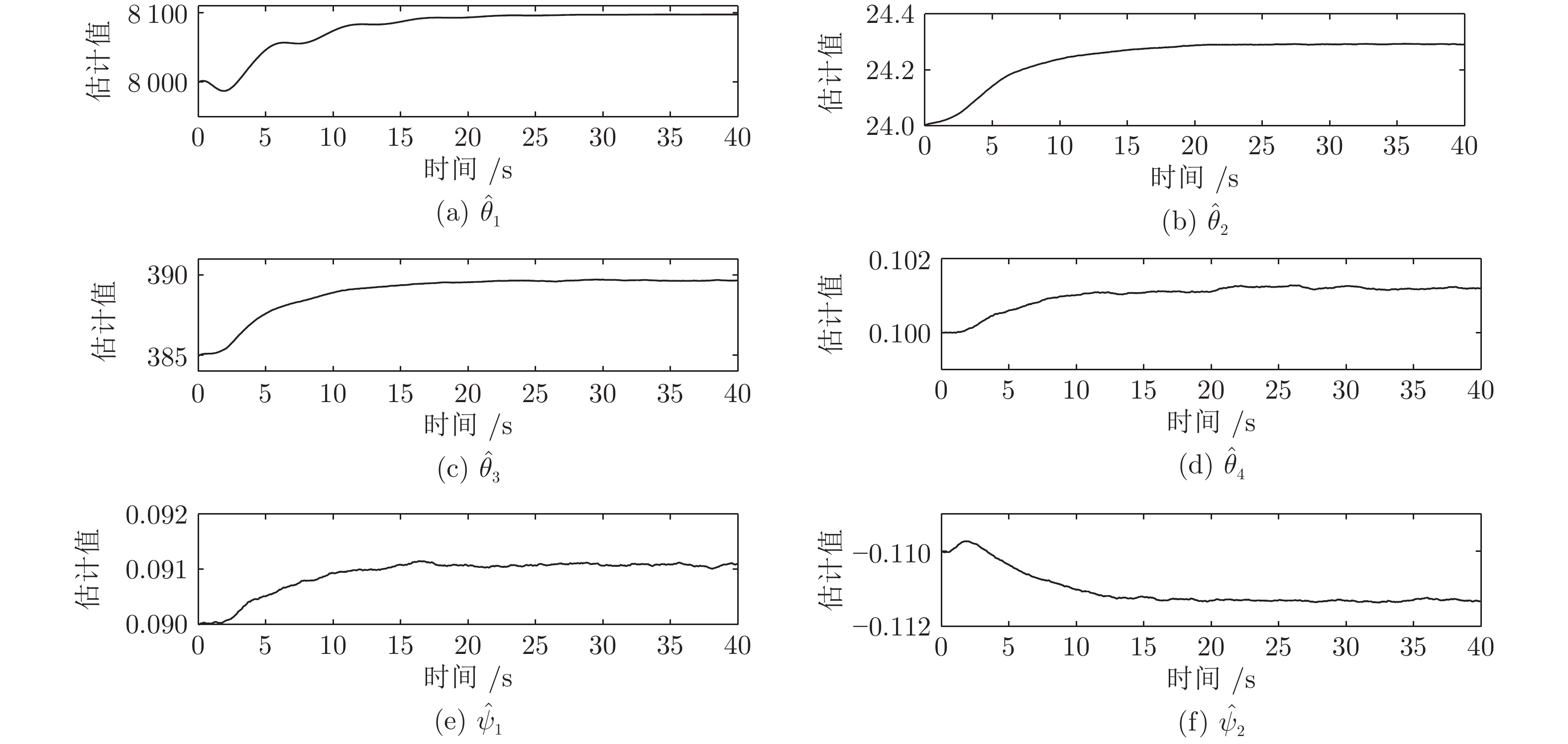
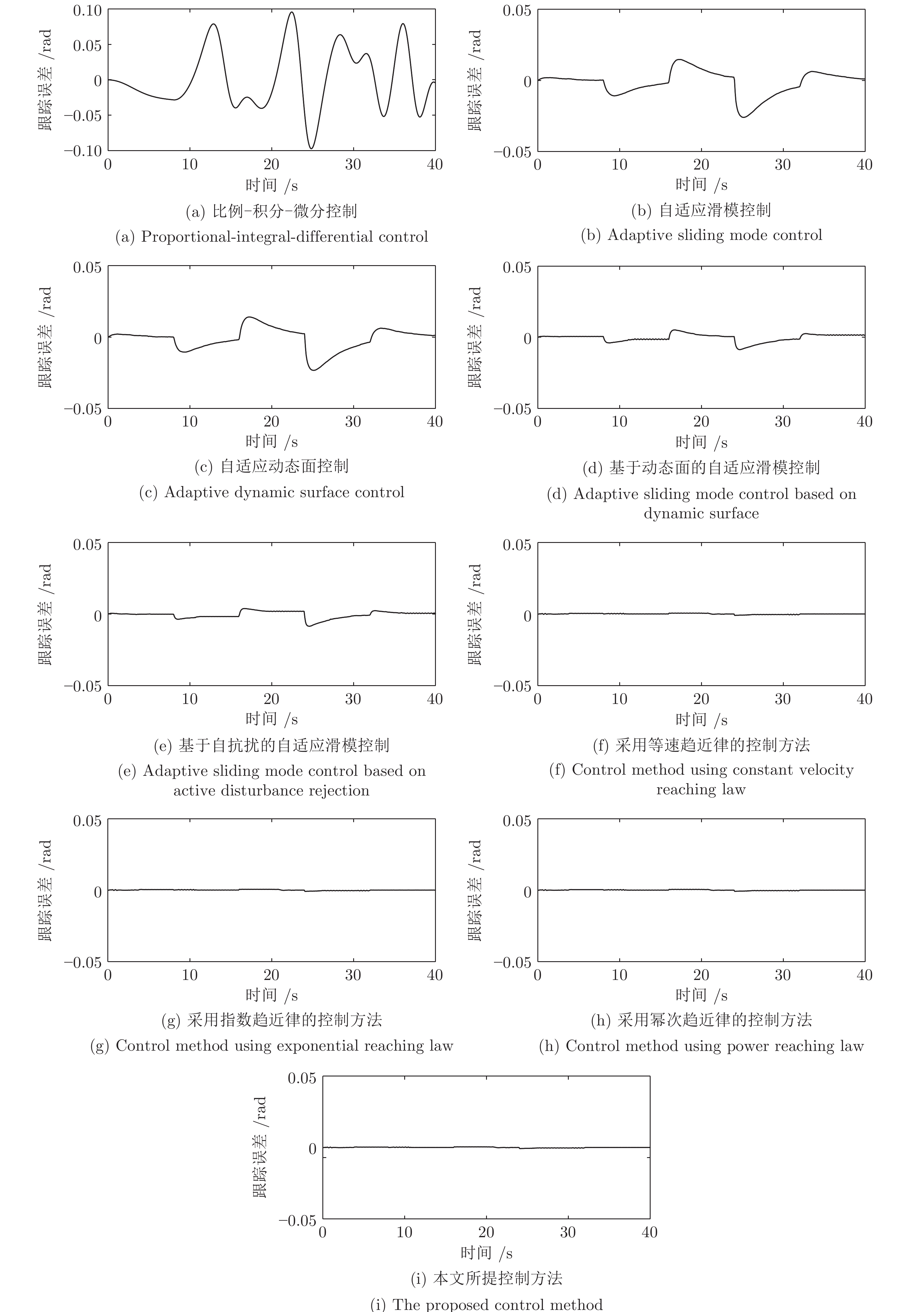
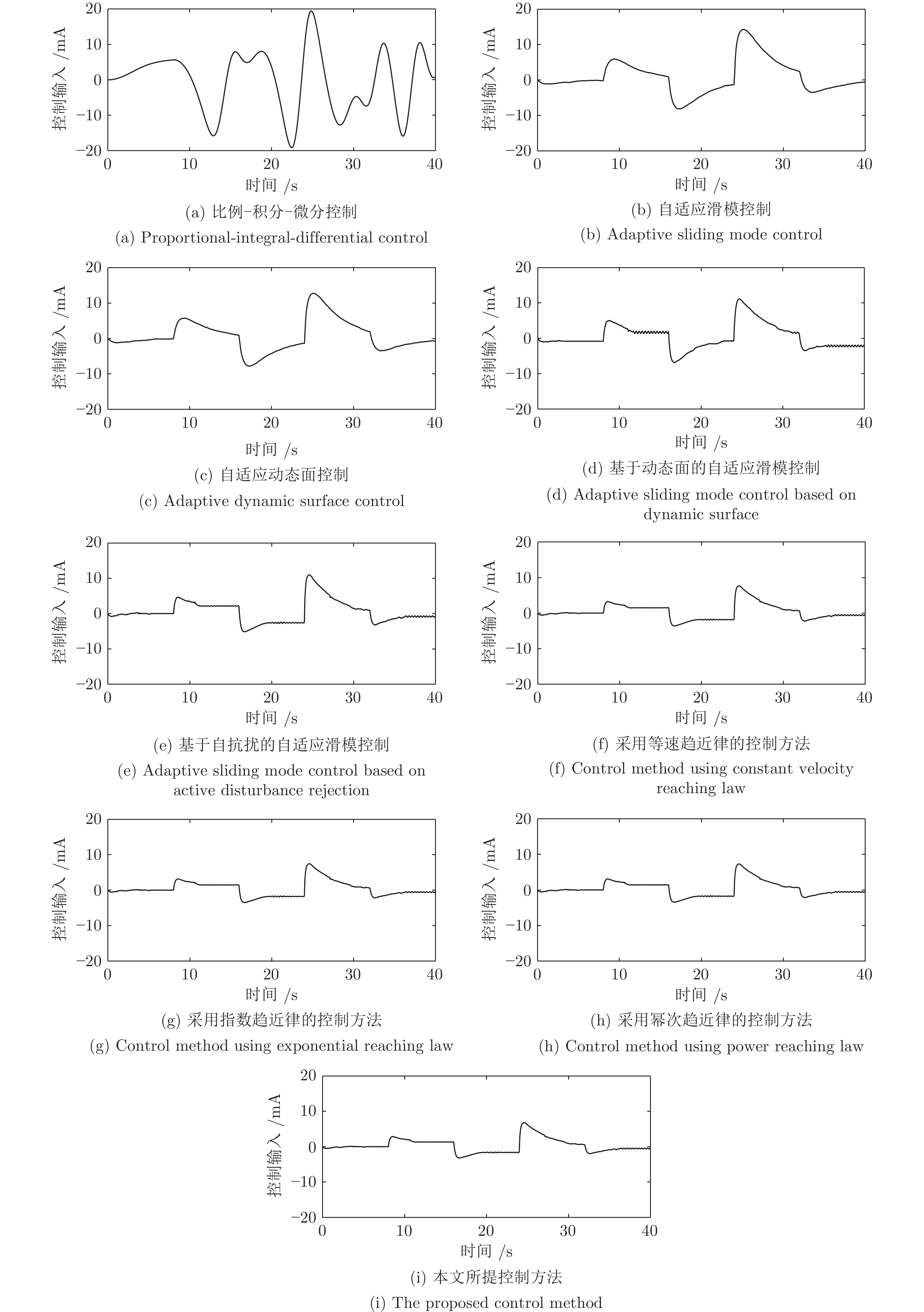
液压锚杆钻机摆角系统固有的死区、干扰和时变参数严重影响其动态和稳态性能. 为解决该问题, 通过融合动态面方法、滑模方法和扩展状态观测器, 提出一种基于改进非线性扩展状态观测器的液压锚杆钻机自适应滑模摆角控制方法. 首先, 引入一种死区补偿方法, 建立摆角系统的死区补偿模型. 其次, 为提高系统的抗扰动能力和抑制噪声, 设计一种改进的非线性扩展状态观测器. 此外, 构造一种自适应滑模控制律, 这其中, 基于性能函数和动态面方法设计一种新型的滑模面, 以提高控制精度; 随后, 设计一种新的滑模趋近律, 以提高系统滑模响应速度和消除滑模抖振. 进一步, 分别设计估计误差自适应律和参数自适应律以补偿扰动估计误差和抑制时变参数的影响. 最后, 通过将所提出的控制方法与8种控制方法进行比较, 验证其有效性.
液压锚杆钻机摆角系统固有的死区、干扰和时变参数严重影响其动态和稳态性能. 为解决该问题, 通过融合动态面方法、滑模方法和扩展状态观测器, 提出一种基于改进非线性扩展状态观测器的液压锚杆钻机自适应滑模摆角控制方法. 首先, 引入一种死区补偿方法, 建立摆角系统的死区补偿模型. 其次, 为提高系统的抗扰动能力和抑制噪声, 设计一种改进的非线性扩展状态观测器. 此外, 构造一种自适应滑模控制律, 这其中, 基于性能函数和动态面方法设计一种新型的滑模面, 以提高控制精度; 随后, 设计一种新的滑模趋近律, 以提高系统滑模响应速度和消除滑模抖振. 进一步, 分别设计估计误差自适应律和参数自适应律以补偿扰动估计误差和抑制时变参数的影响. 最后, 通过将所提出的控制方法与8种控制方法进行比较, 验证其有效性.


2023, 49(6): 1272-1282.
doi: 10.16383/j.aas.c200267
摘要:
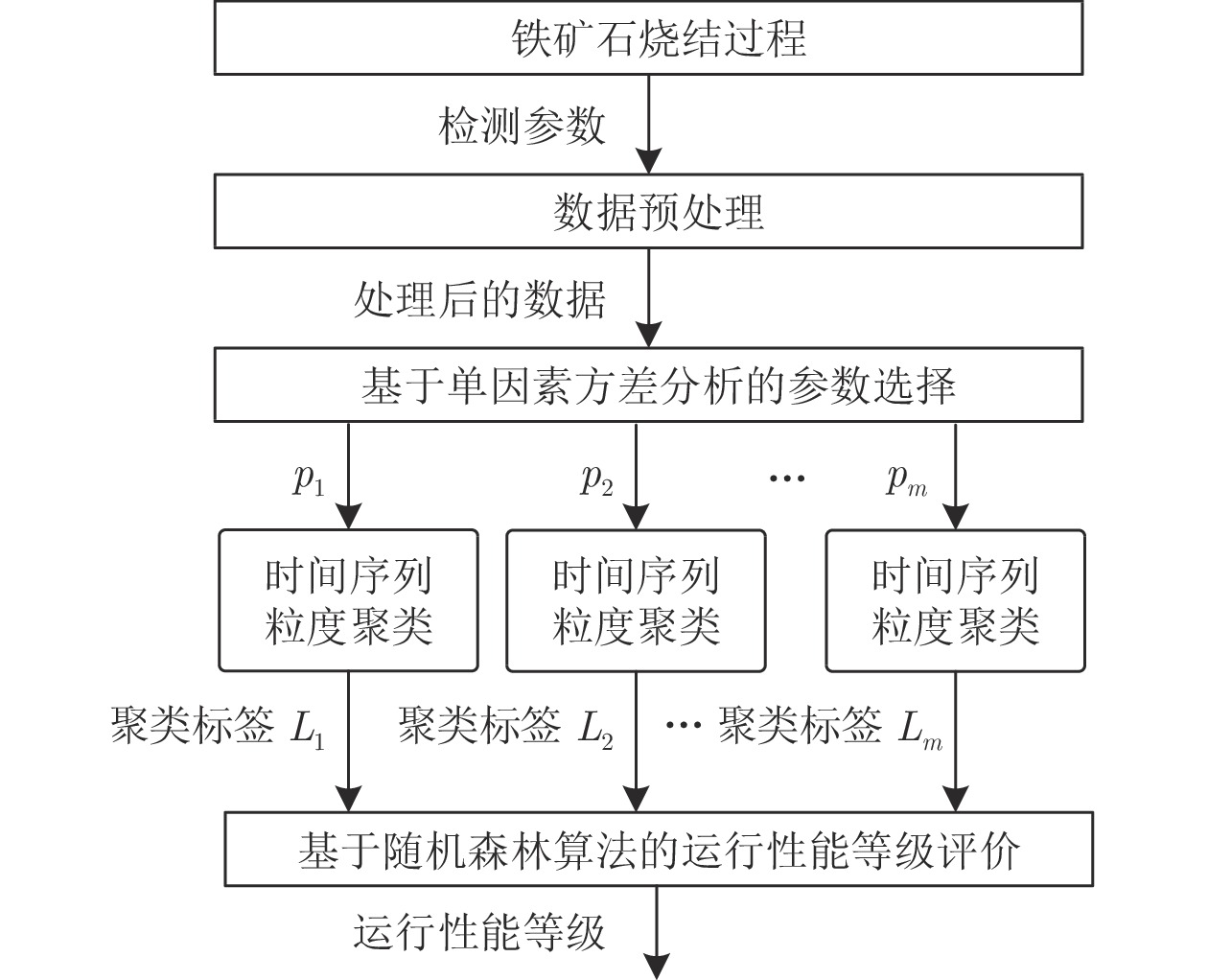
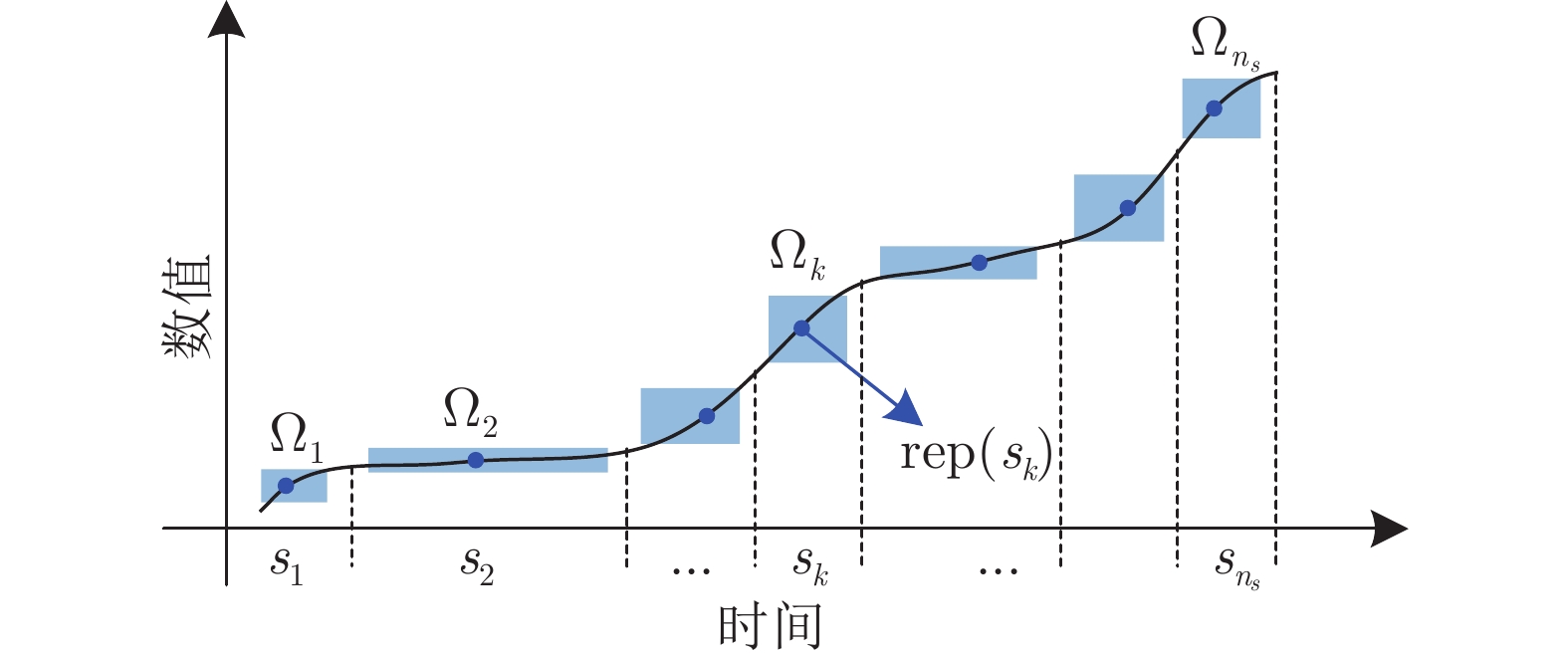
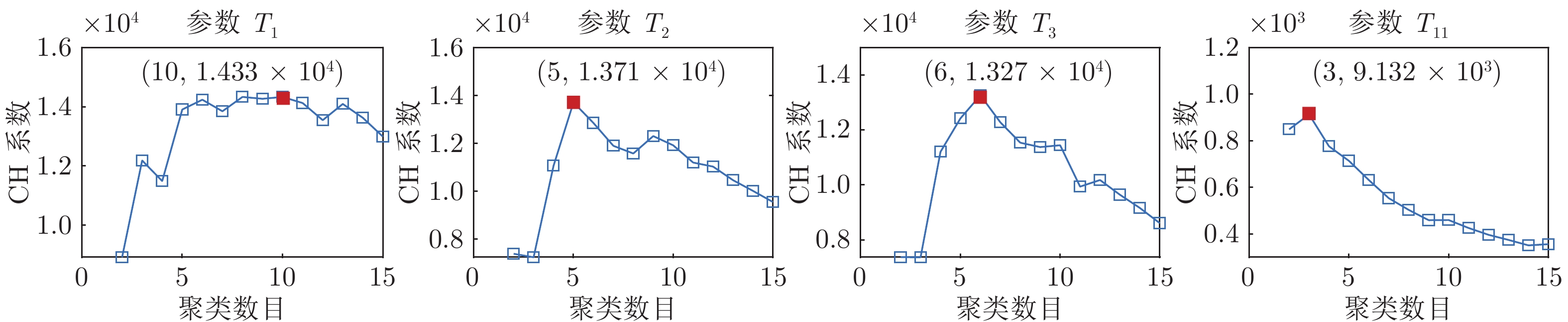
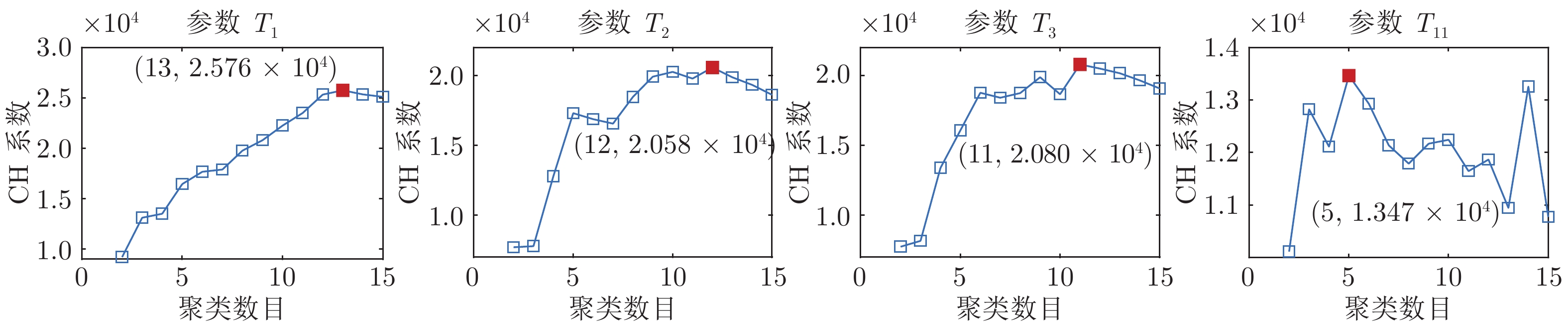
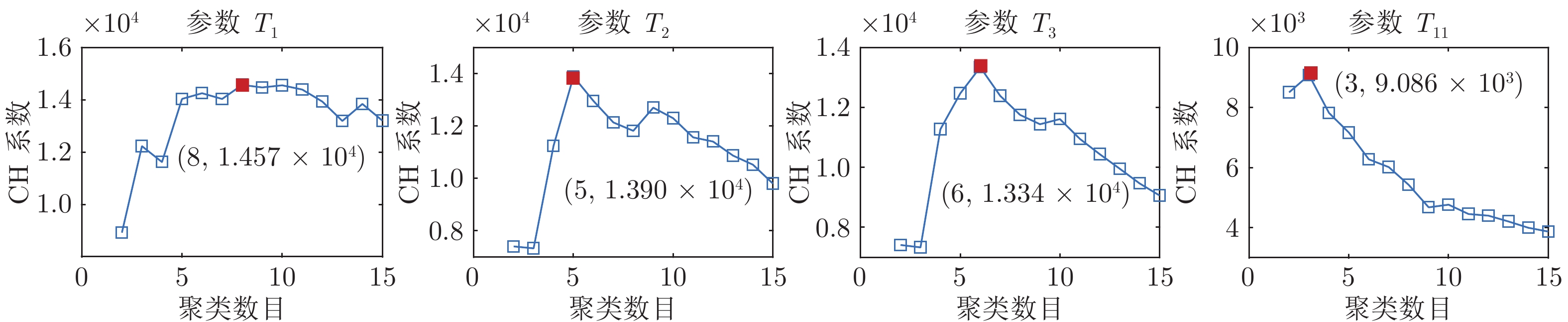
烧结过程的运行性能是生产效率和能源利用的综合表现. 运行性能评价是保持烧结过程的运行性能处于最优等级的前提. 考虑到时间序列数据的冗余, 提出一种基于粒度聚类的铁矿石烧结过程运行性能评价方法. 首先, 利用单因素方差分析方法选取影响运行性能等级的检测参数; 然后, 采用多粒度区间信息粒化实现检测参数时间序列数据的降维, 并进行粒度聚类, 得到聚类标签; 最后, 以聚类得到的聚类标签为输入, 利用随机森林算法进行运行性能等级评价. 利用实际钢铁企业的运行数据进行实验, 构建两个对比实验, 分别采用基于时间序列数据聚类(Time series data clustering, TSDC)方法和基于时间序列特征聚类(Time series feature clustering, TSFC)方法. 实验结果表明, 该方法为有效评价烧结过程的运行性能提供了一套可行方案, 为操作人员提升烧结过程运行性能提供了有力的指导.
烧结过程的运行性能是生产效率和能源利用的综合表现. 运行性能评价是保持烧结过程的运行性能处于最优等级的前提. 考虑到时间序列数据的冗余, 提出一种基于粒度聚类的铁矿石烧结过程运行性能评价方法. 首先, 利用单因素方差分析方法选取影响运行性能等级的检测参数; 然后, 采用多粒度区间信息粒化实现检测参数时间序列数据的降维, 并进行粒度聚类, 得到聚类标签; 最后, 以聚类得到的聚类标签为输入, 利用随机森林算法进行运行性能等级评价. 利用实际钢铁企业的运行数据进行实验, 构建两个对比实验, 分别采用基于时间序列数据聚类(Time series data clustering, TSDC)方法和基于时间序列特征聚类(Time series feature clustering, TSFC)方法. 实验结果表明, 该方法为有效评价烧结过程的运行性能提供了一套可行方案, 为操作人员提升烧结过程运行性能提供了有力的指导.



2023, 49(6): 1283-1294.
doi: 10.16383/j.aas.c211041
摘要:
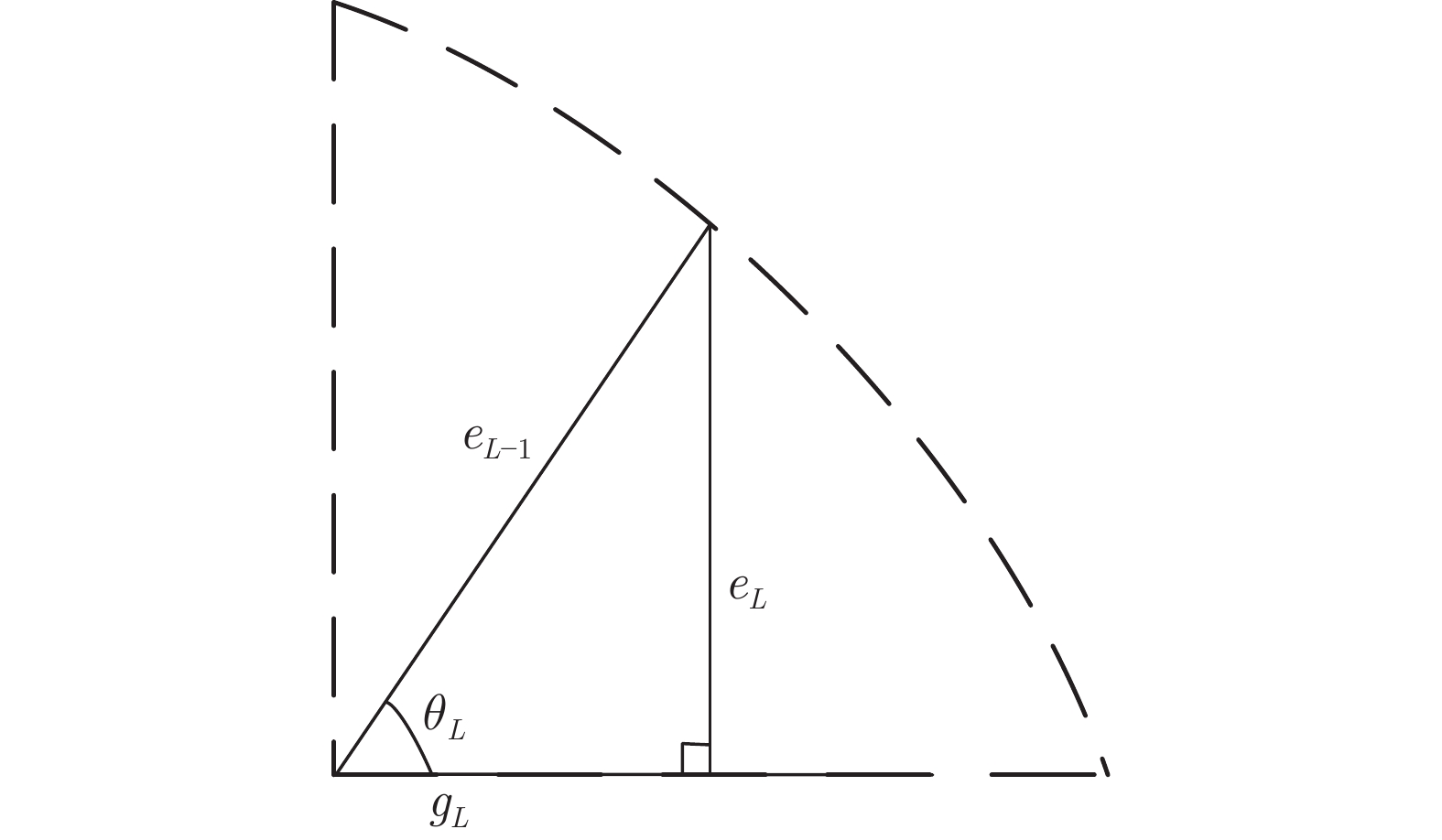
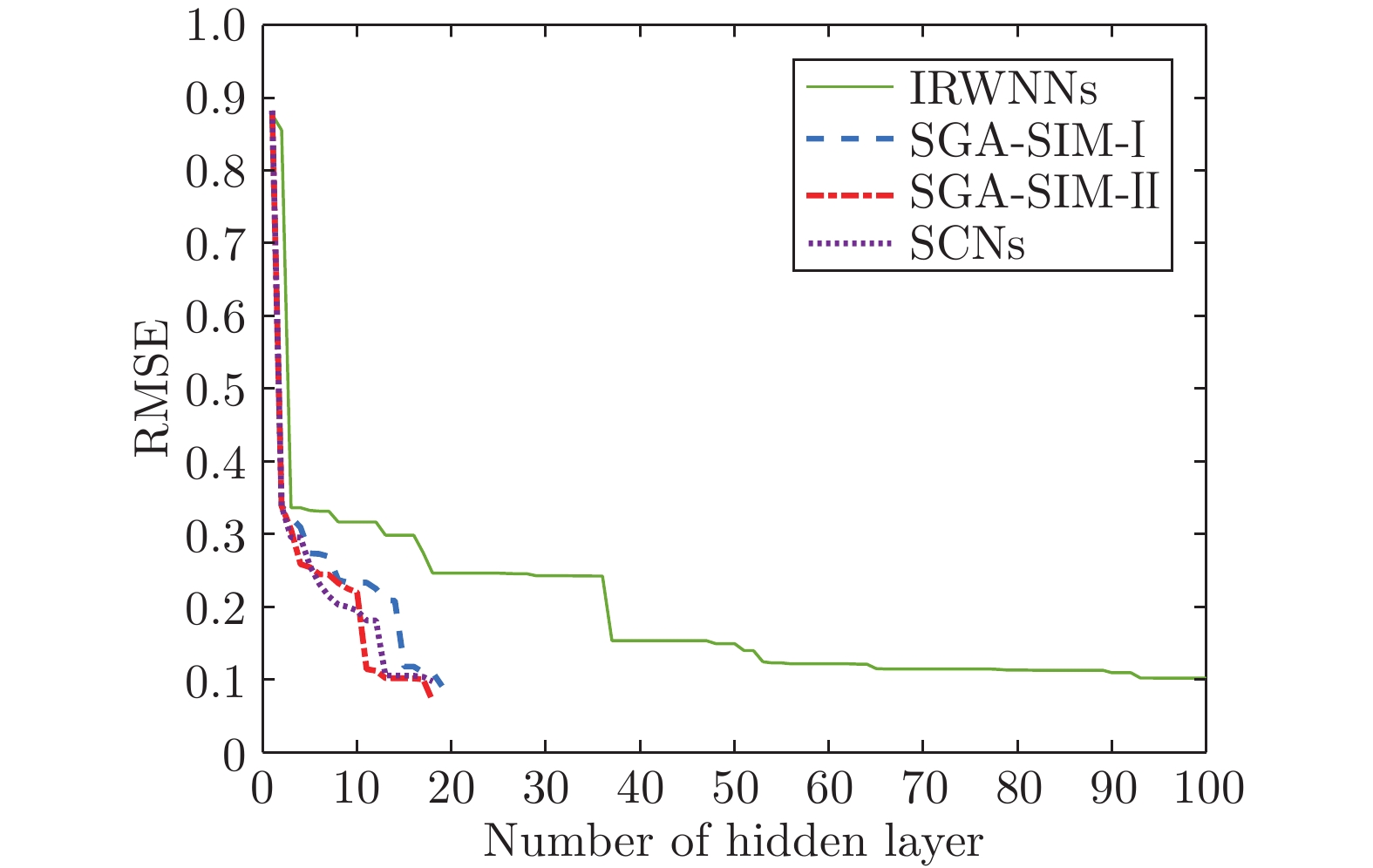
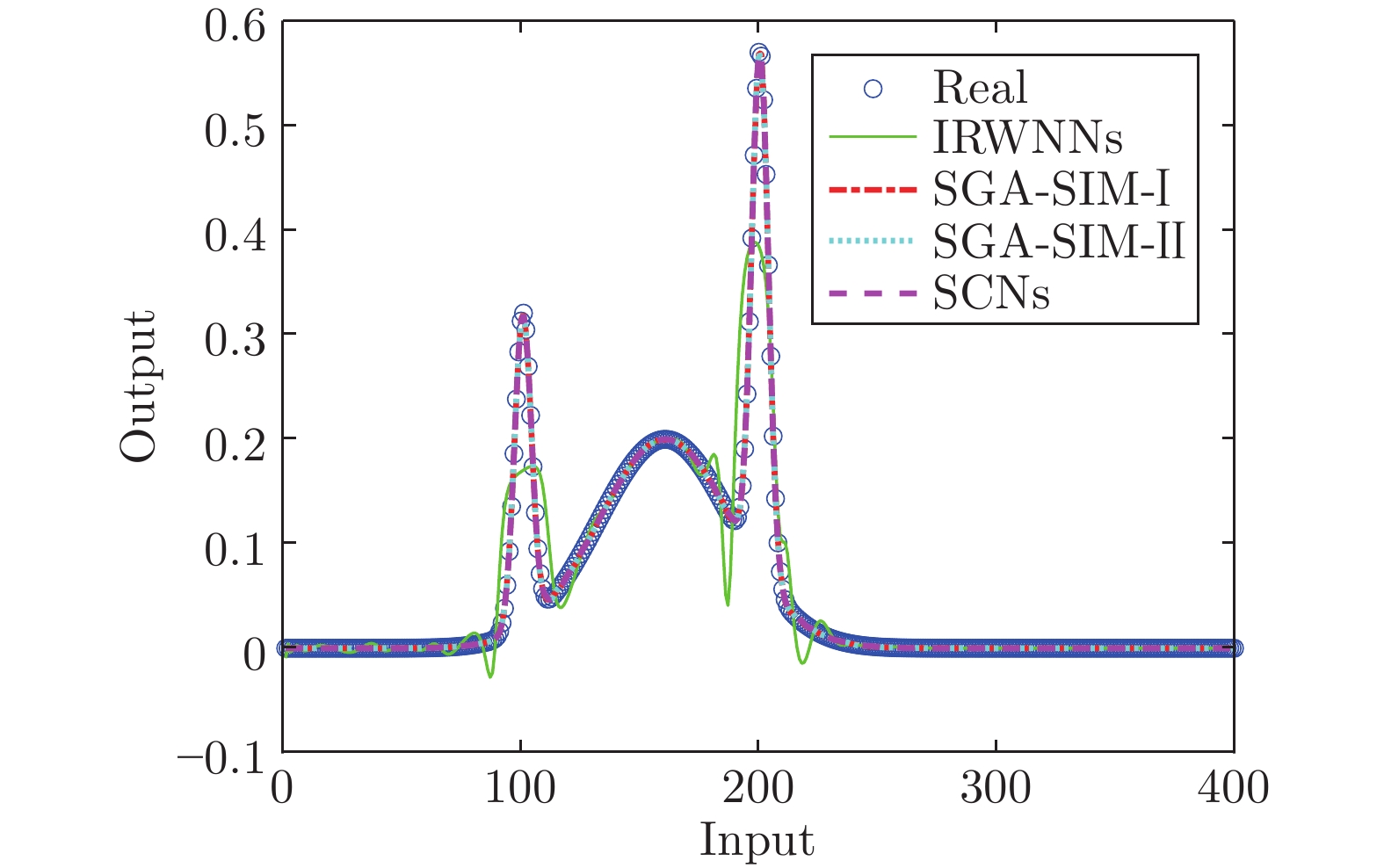
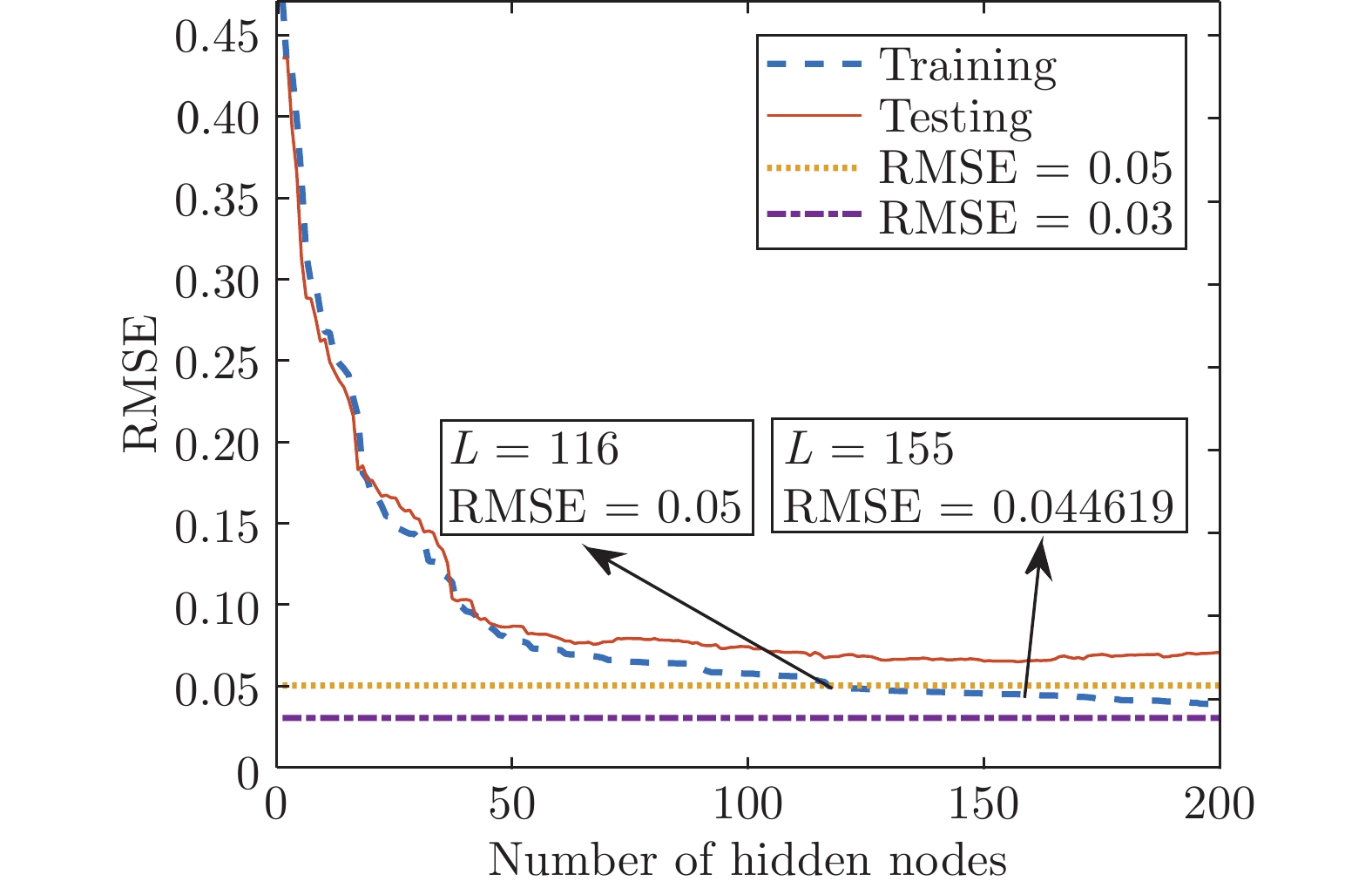
针对随机权神经网络(Random weight neural networks, RWNNs)隐含层节点随机生成过程可解释性不足和节点随机生成而导致的网络结构不紧致等问题, 提出了一种空间几何角度最大化随机增量学习模型(Stochastic incremental learning model with maximizing spatial geometry angle, SGA-SIM). 首先, 以空间几何视角深入分析随机增量学习过程, 建立了具有可解释性的空间几何角度最大化约束, 以改善隐含层节点质量, 并证明该学习模型具有无限逼近特性; 同时, 引入格雷维尔迭代法优化学习模型输出权值计算方法, 提高模型学习效率. 在真实的分类和回归数据集以及数值模拟实例上的实验结果表明, 所提增量学习模型在建模速度、模型精度和模型网络结构等多个方面具有明显优势.
针对随机权神经网络(Random weight neural networks, RWNNs)隐含层节点随机生成过程可解释性不足和节点随机生成而导致的网络结构不紧致等问题, 提出了一种空间几何角度最大化随机增量学习模型(Stochastic incremental learning model with maximizing spatial geometry angle, SGA-SIM). 首先, 以空间几何视角深入分析随机增量学习过程, 建立了具有可解释性的空间几何角度最大化约束, 以改善隐含层节点质量, 并证明该学习模型具有无限逼近特性; 同时, 引入格雷维尔迭代法优化学习模型输出权值计算方法, 提高模型学习效率. 在真实的分类和回归数据集以及数值模拟实例上的实验结果表明, 所提增量学习模型在建模速度、模型精度和模型网络结构等多个方面具有明显优势.
2023, 49(6): 1295-1305.
doi: 10.16383/j.aas.c211123
摘要:
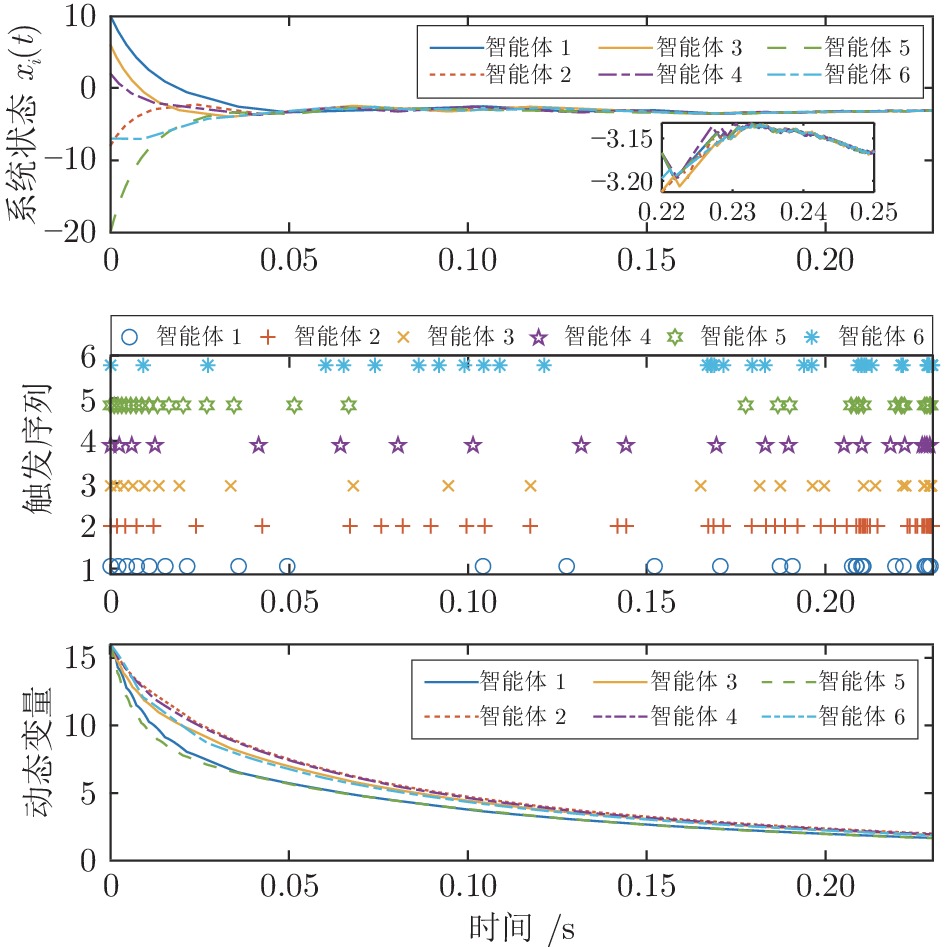
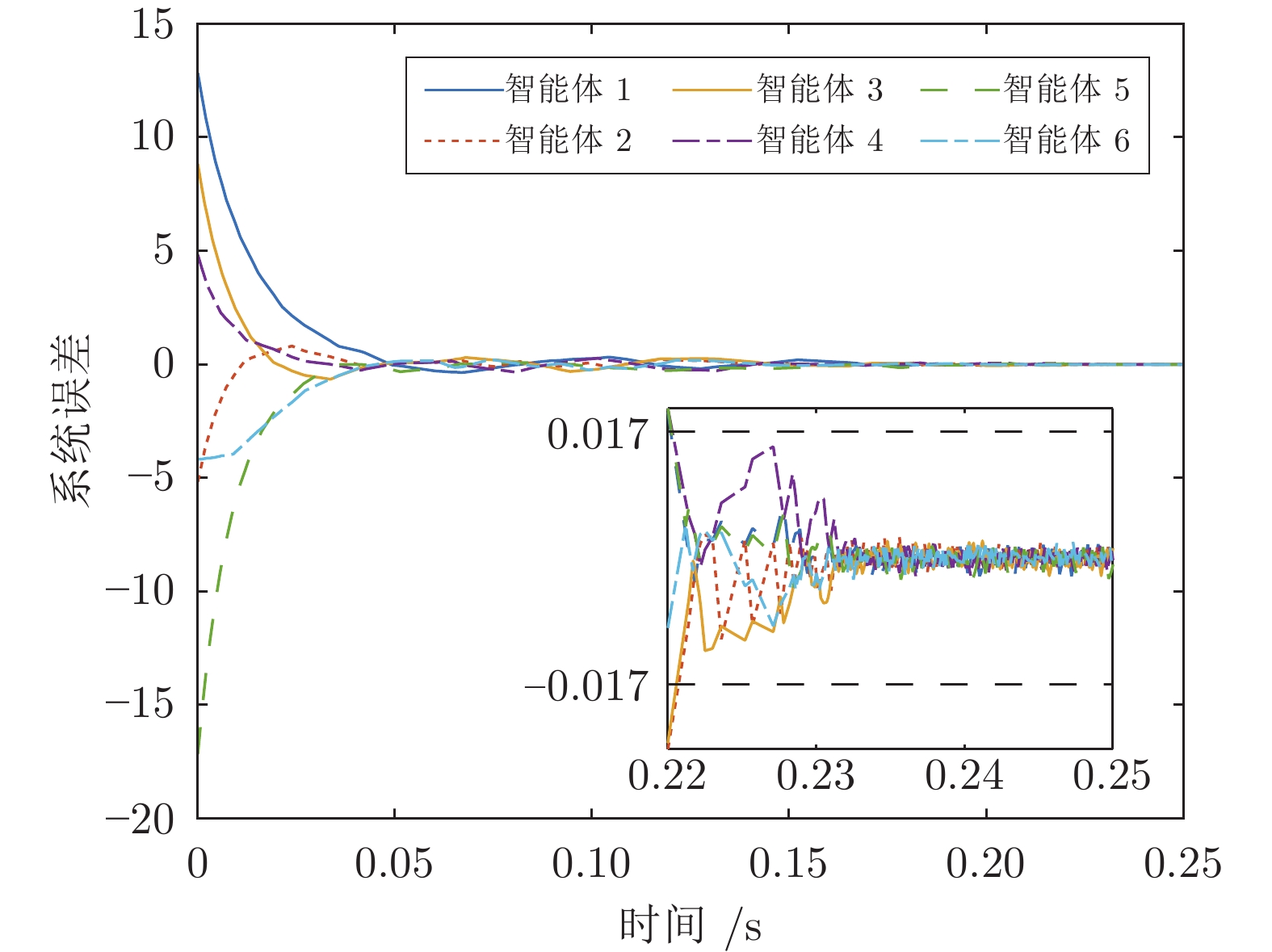
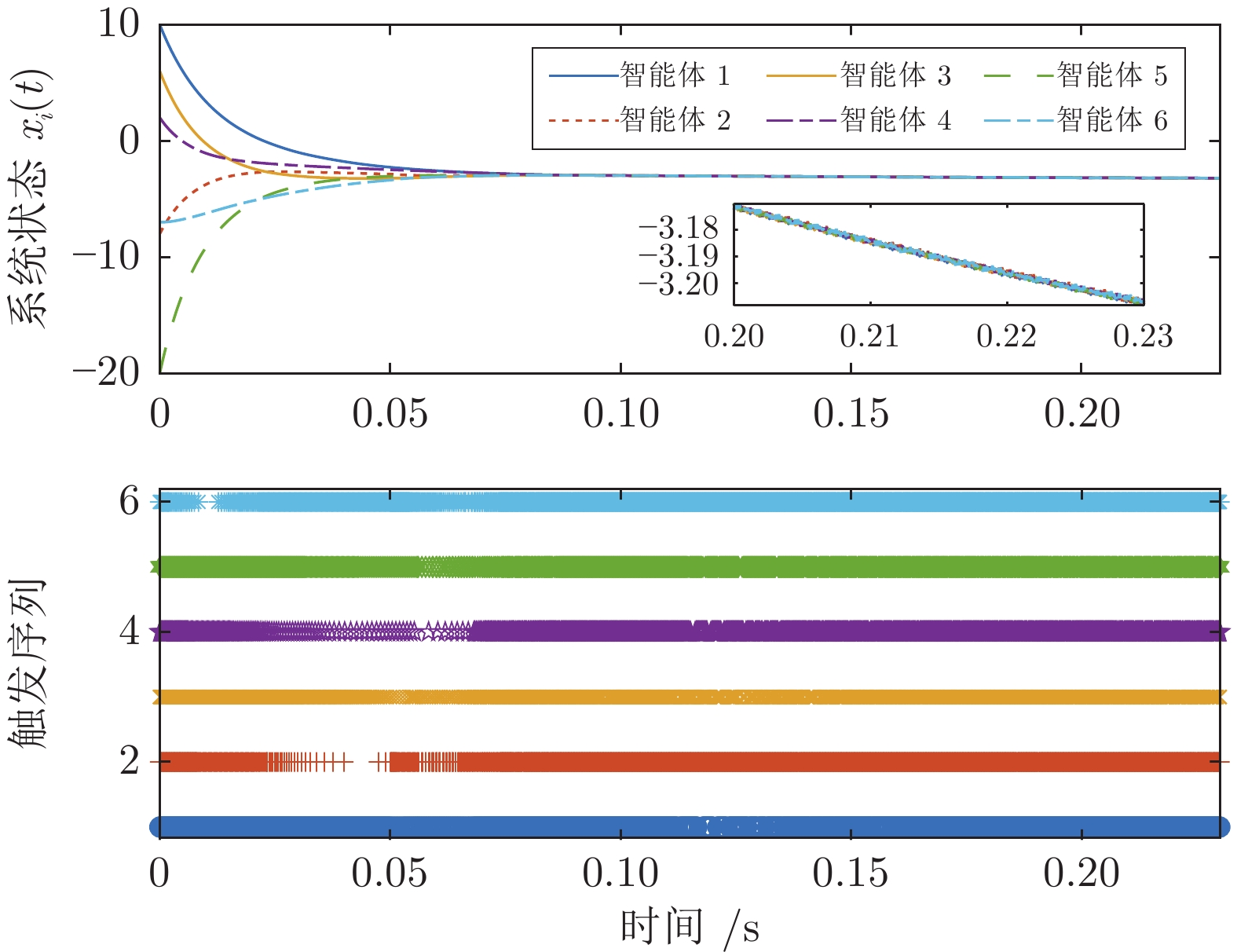
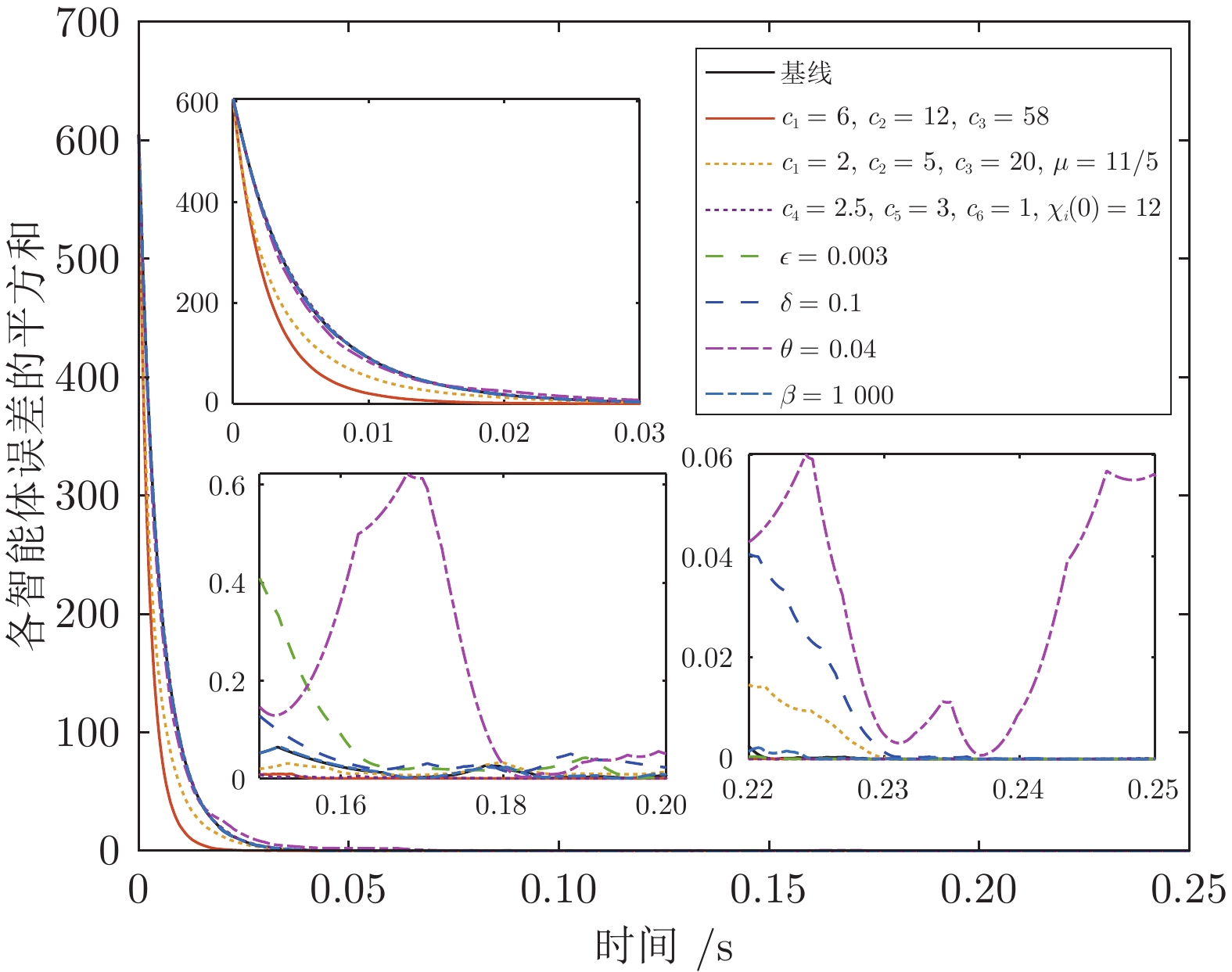
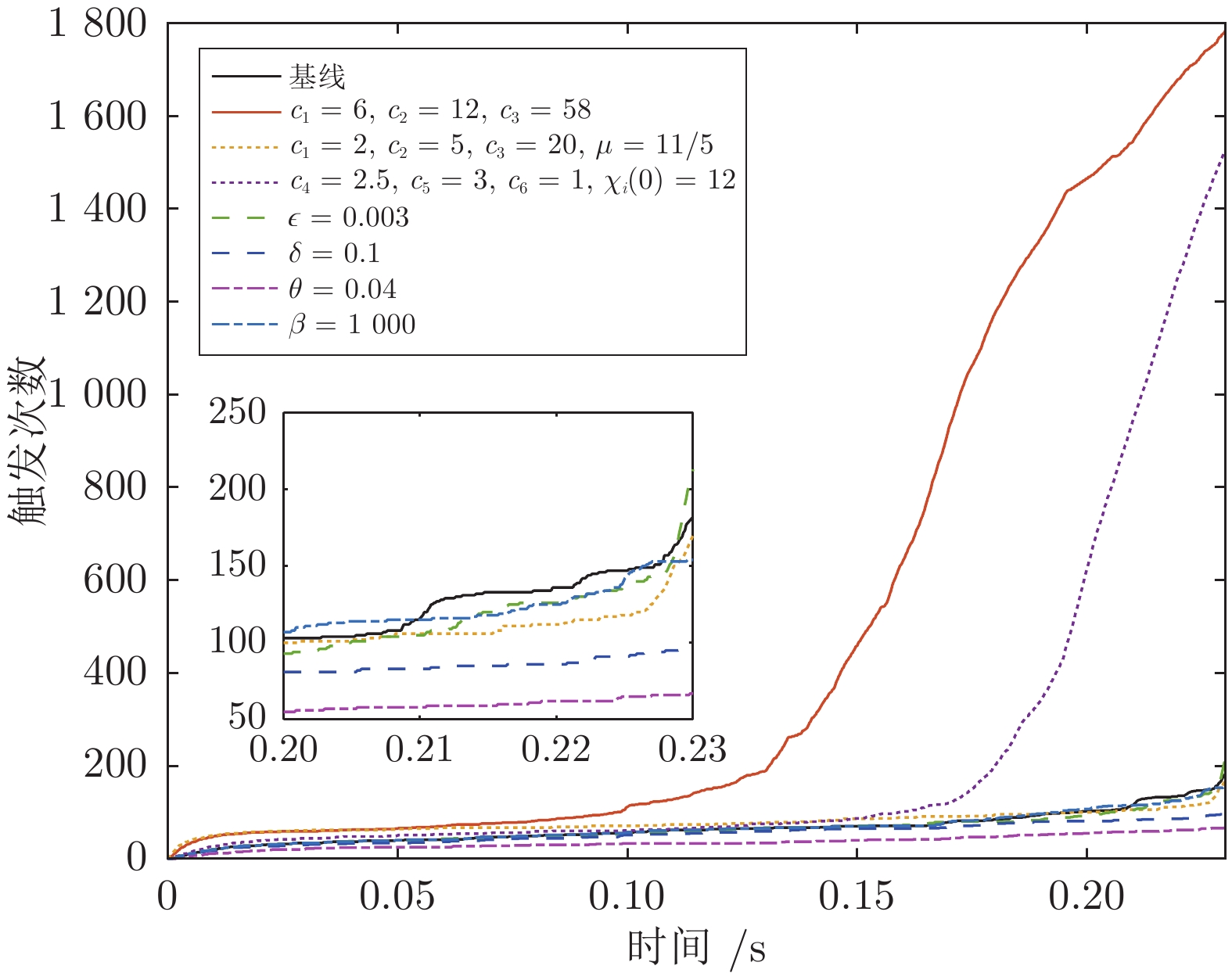
针对有扰动的一阶非线性多智能体系统在切换拓扑下的实际固定时间平均一致性问题, 提出了基于动态事件触发机制的固定时间一致性协议. 该一致性协议在节约更多资源的情况下, 使多智能体系统以更快的速度达到一致. 相对于有限时间一致性控制算法, 固定时间一致性控制算法的收敛时间不依赖于初始状态, 并且可以通过选择合适的控制器参数设定相应的收敛时间上界. 通过设计一个包含双曲正切函数的测量误差, 证明系统不存在Zeno行为. 由于内部动态变量的引入, 大量不必要的触发被取消, 从而节省能量损耗. 最后, 通过仿真实验验证算法的可行性和有效性.
针对有扰动的一阶非线性多智能体系统在切换拓扑下的实际固定时间平均一致性问题, 提出了基于动态事件触发机制的固定时间一致性协议. 该一致性协议在节约更多资源的情况下, 使多智能体系统以更快的速度达到一致. 相对于有限时间一致性控制算法, 固定时间一致性控制算法的收敛时间不依赖于初始状态, 并且可以通过选择合适的控制器参数设定相应的收敛时间上界. 通过设计一个包含双曲正切函数的测量误差, 证明系统不存在Zeno行为. 由于内部动态变量的引入, 大量不必要的触发被取消, 从而节省能量损耗. 最后, 通过仿真实验验证算法的可行性和有效性.
2023, 49(6): 1306-1325.
doi: 10.16383/j.aas.c220387
摘要:
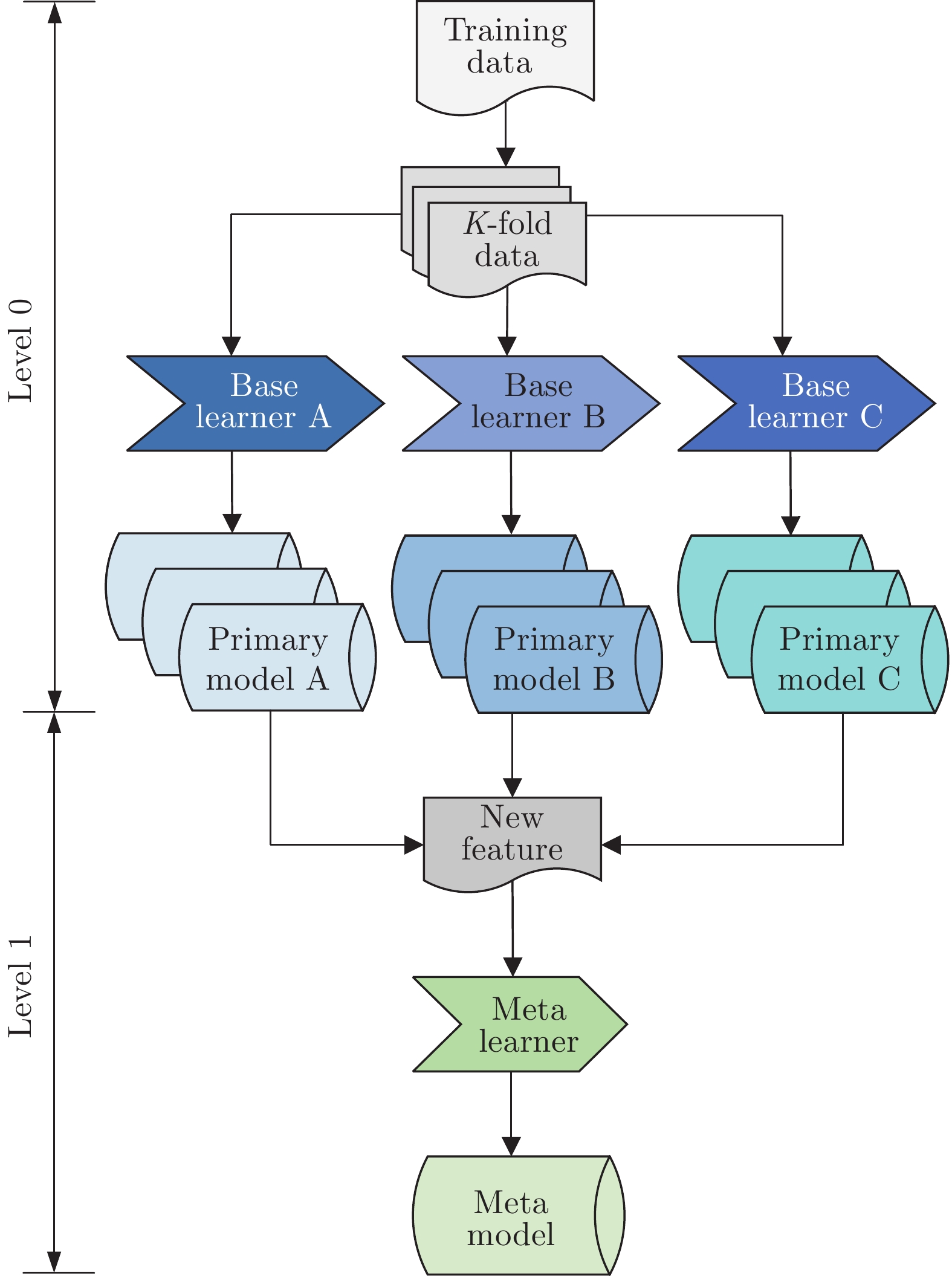
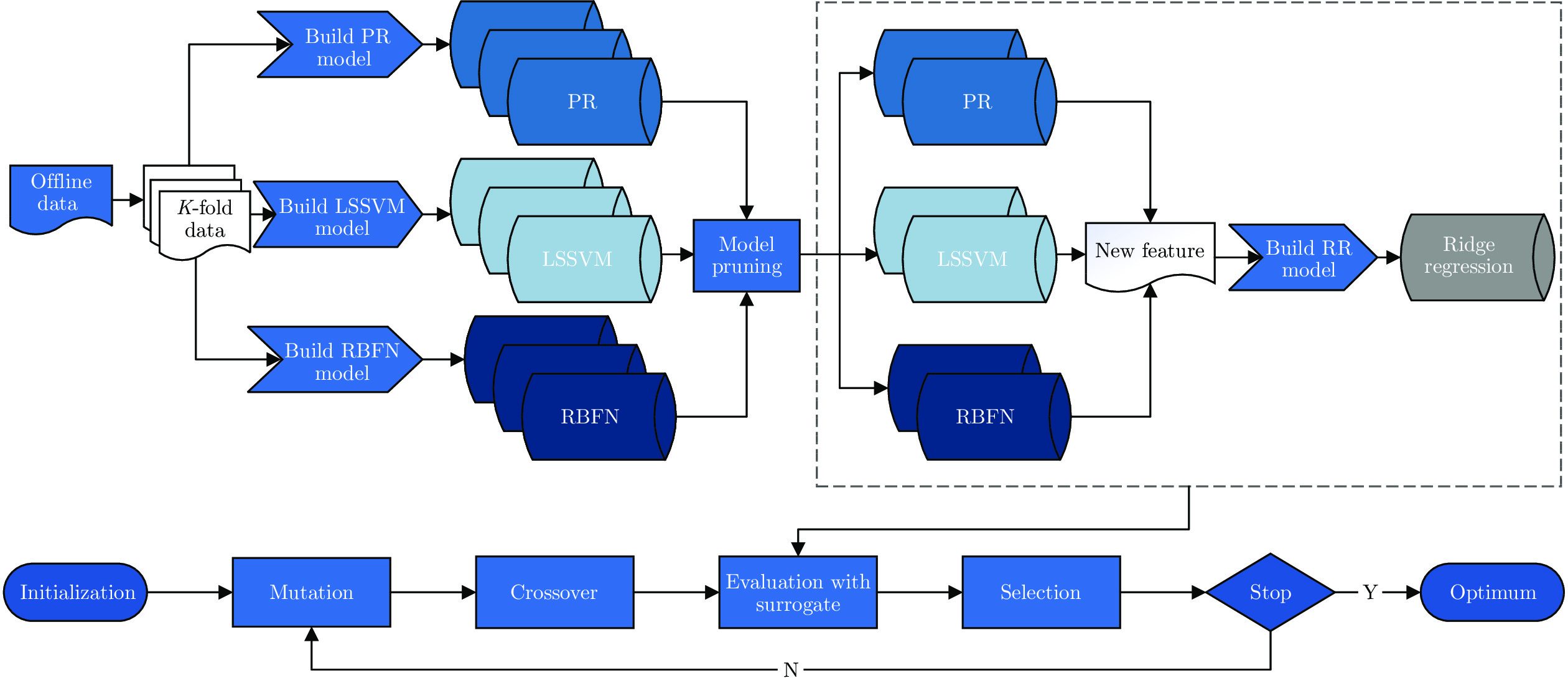
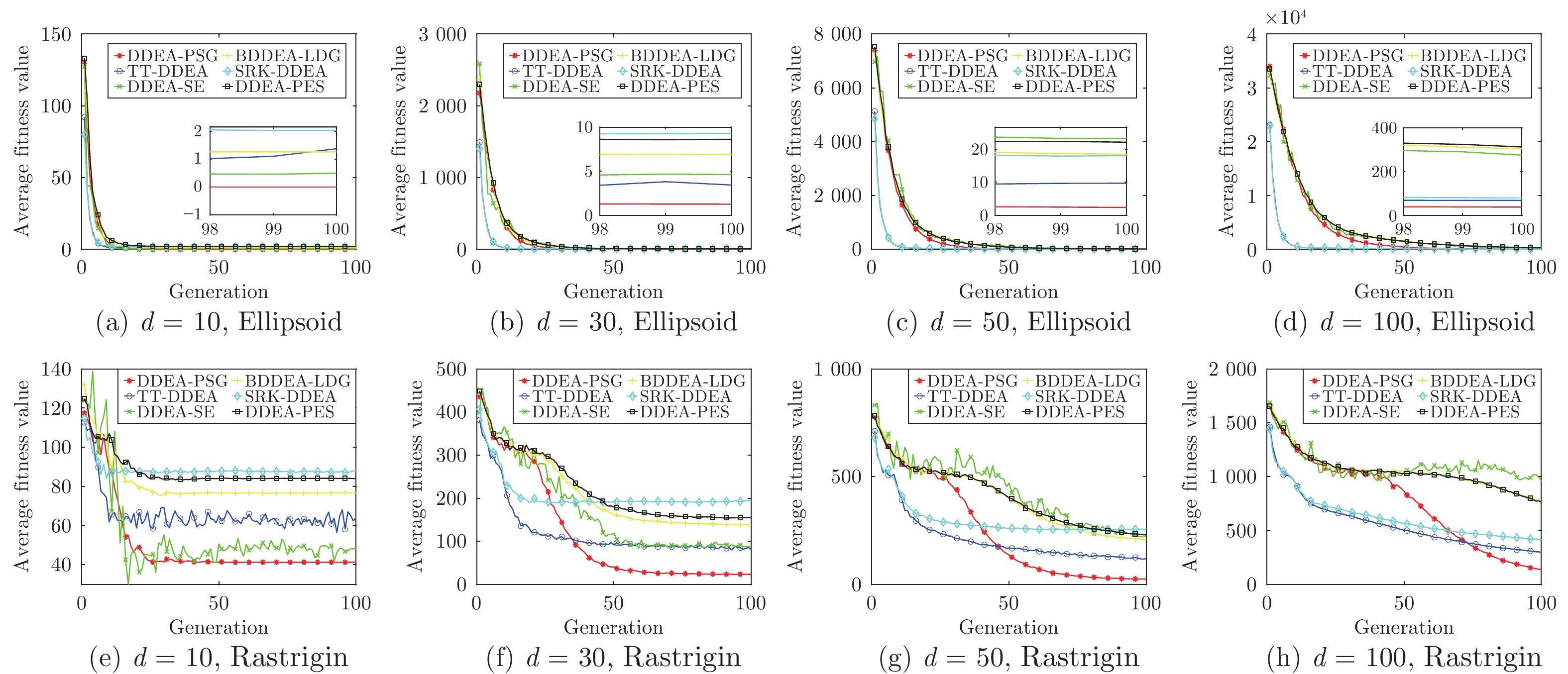
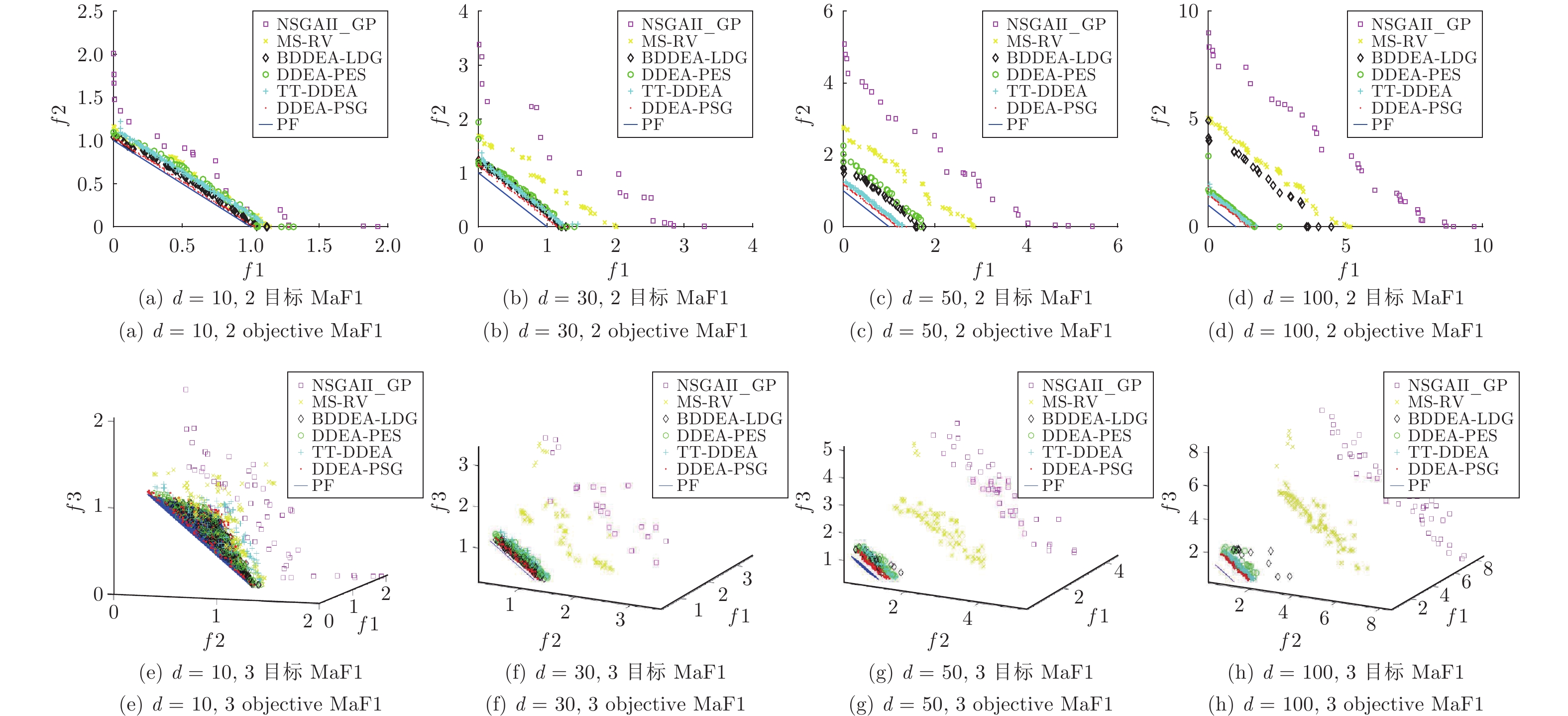
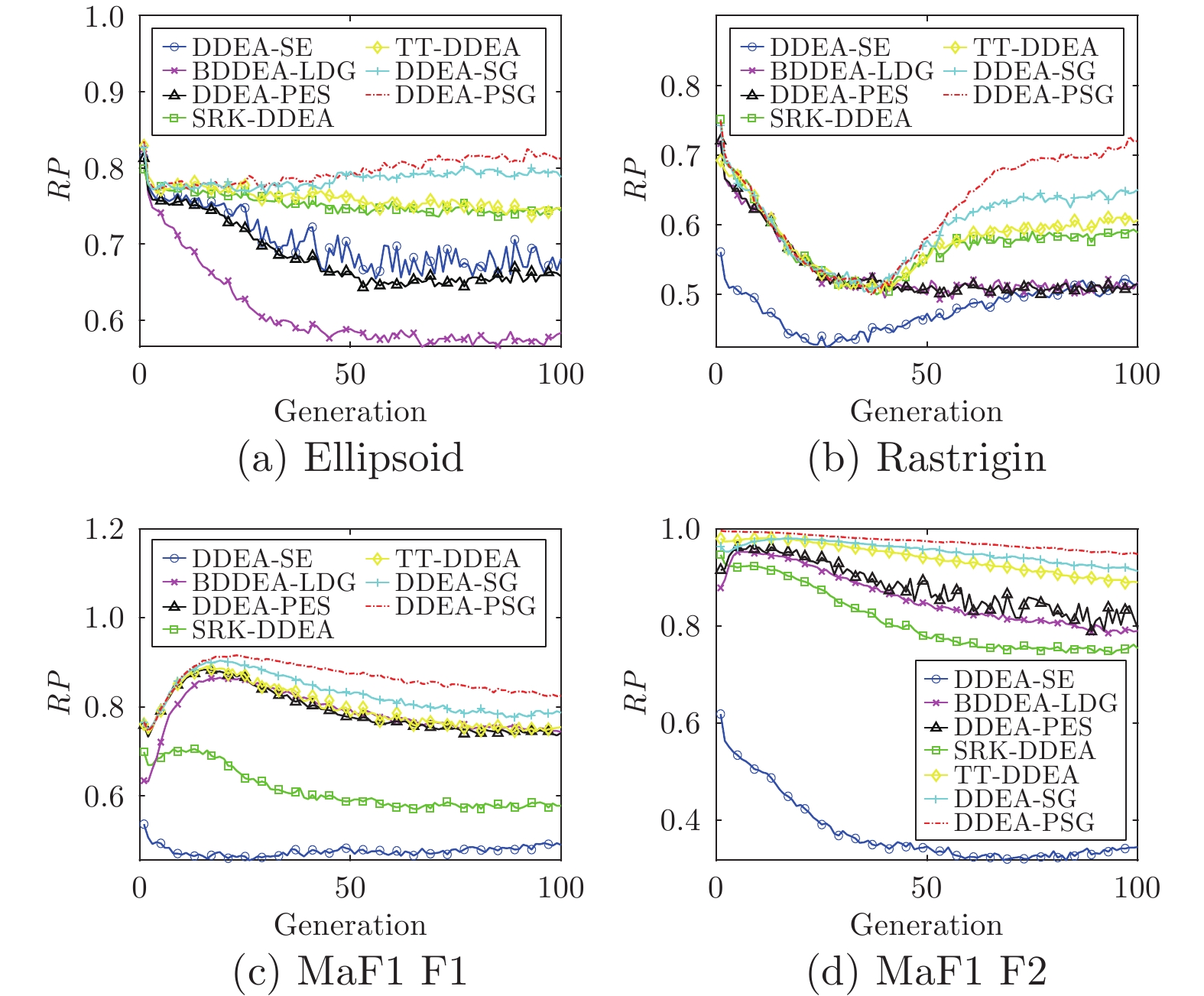
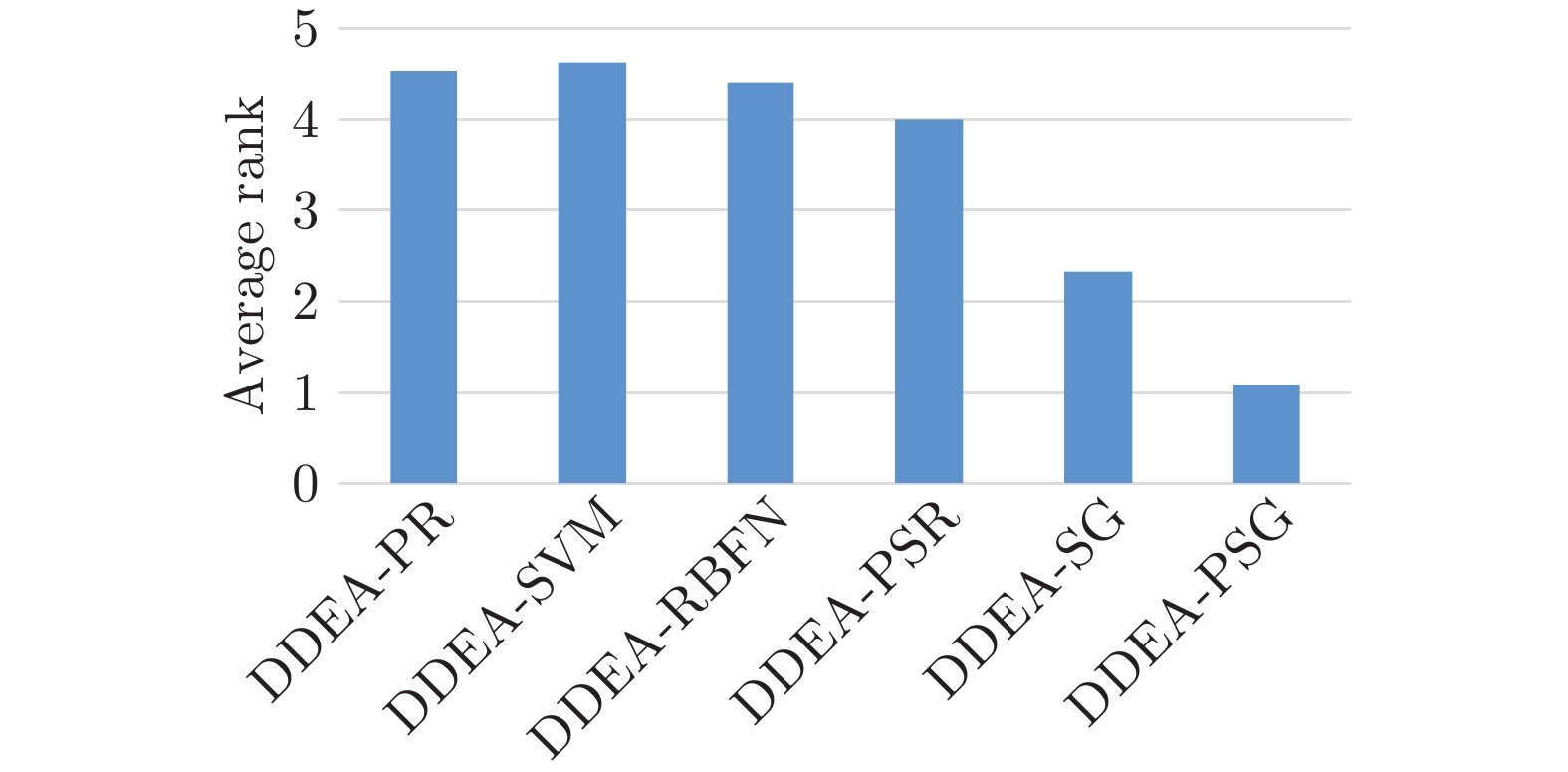
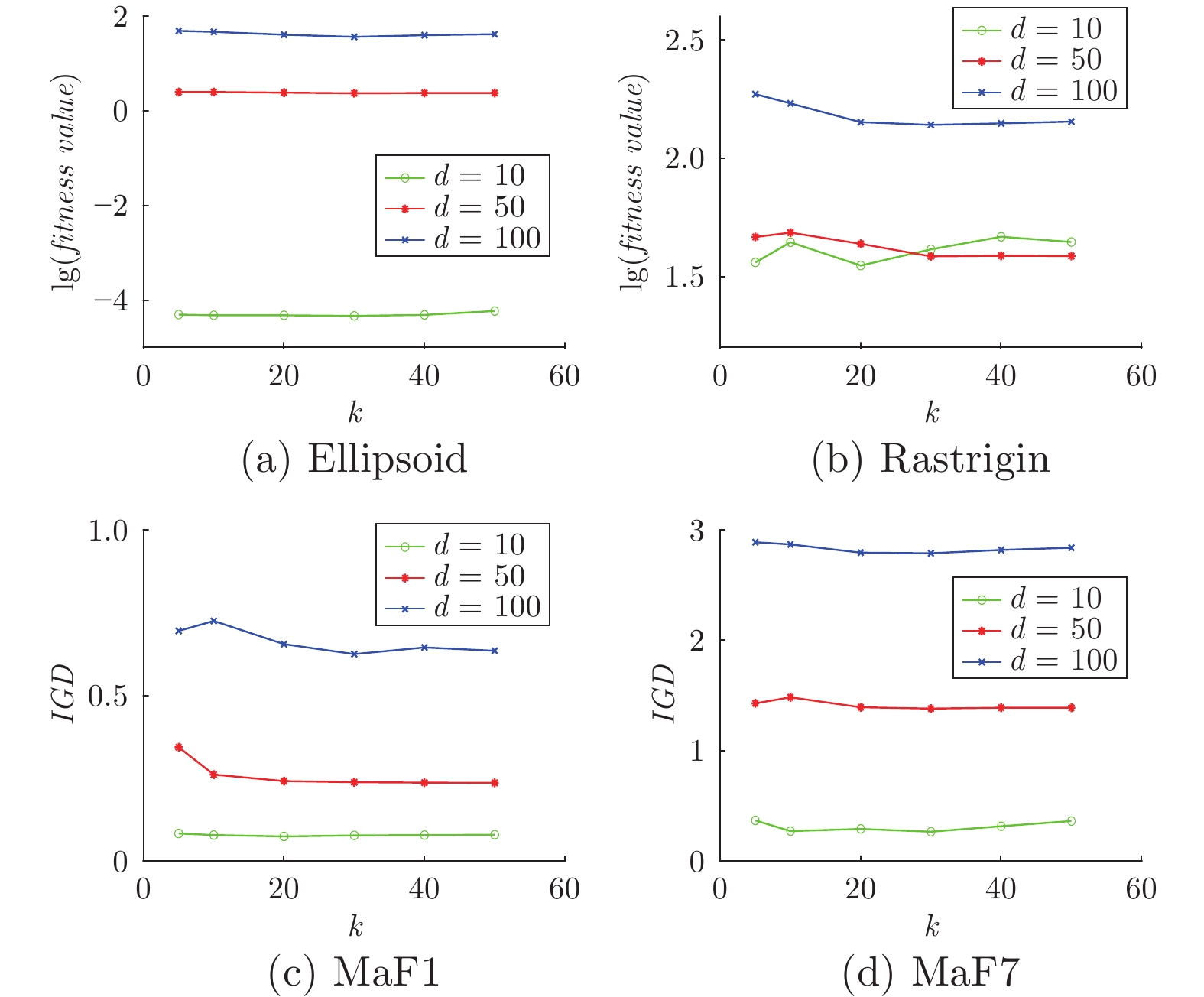
现实世界中存在很多目标函数的计算非常昂贵, 甚至目标函数难以建模的复杂优化问题. 常规优化方法在解决此类问题时要么无从入手, 要么效率低下. 离线数据驱动的进化优化方法不需对真实目标函数进行评估, 跳出了传统优化方法的固铚, 极大推动了昂贵优化问题和不可建模优化问题的求解. 但离线数据驱动进化优化的效果严重依赖于所采用代理模型的质量. 为提升离线数据驱动进化优化的性能, 提出了一个基于剪枝堆栈泛化(Stacked generalization, SG)代理模型构建方法. 具体而言, 一方面基于异构的基学习器建立初级模型池, 再采用学习方式对各初级模型进行组合, 以提升代理模型的通用性和准确率. 另一方面基于等级保护指标对初级模型进行剪枝, 在提高初级模型集成效率的同时进一步提升最终代理模型的准确率, 并更好地指导种群的搜索. 为验证所提方法的有效性, 与7个最新的离线数据驱动的进化优化算法在12个基准测试问题上进行对比, 实验结果表明所提出的方法具有明显的优势.
现实世界中存在很多目标函数的计算非常昂贵, 甚至目标函数难以建模的复杂优化问题. 常规优化方法在解决此类问题时要么无从入手, 要么效率低下. 离线数据驱动的进化优化方法不需对真实目标函数进行评估, 跳出了传统优化方法的固铚, 极大推动了昂贵优化问题和不可建模优化问题的求解. 但离线数据驱动进化优化的效果严重依赖于所采用代理模型的质量. 为提升离线数据驱动进化优化的性能, 提出了一个基于剪枝堆栈泛化(Stacked generalization, SG)代理模型构建方法. 具体而言, 一方面基于异构的基学习器建立初级模型池, 再采用学习方式对各初级模型进行组合, 以提升代理模型的通用性和准确率. 另一方面基于等级保护指标对初级模型进行剪枝, 在提高初级模型集成效率的同时进一步提升最终代理模型的准确率, 并更好地指导种群的搜索. 为验证所提方法的有效性, 与7个最新的离线数据驱动的进化优化算法在12个基准测试问题上进行对比, 实验结果表明所提出的方法具有明显的优势.

2023, 49(6): 1326-1338.
doi: 10.16383/j.aas.c230020
摘要:
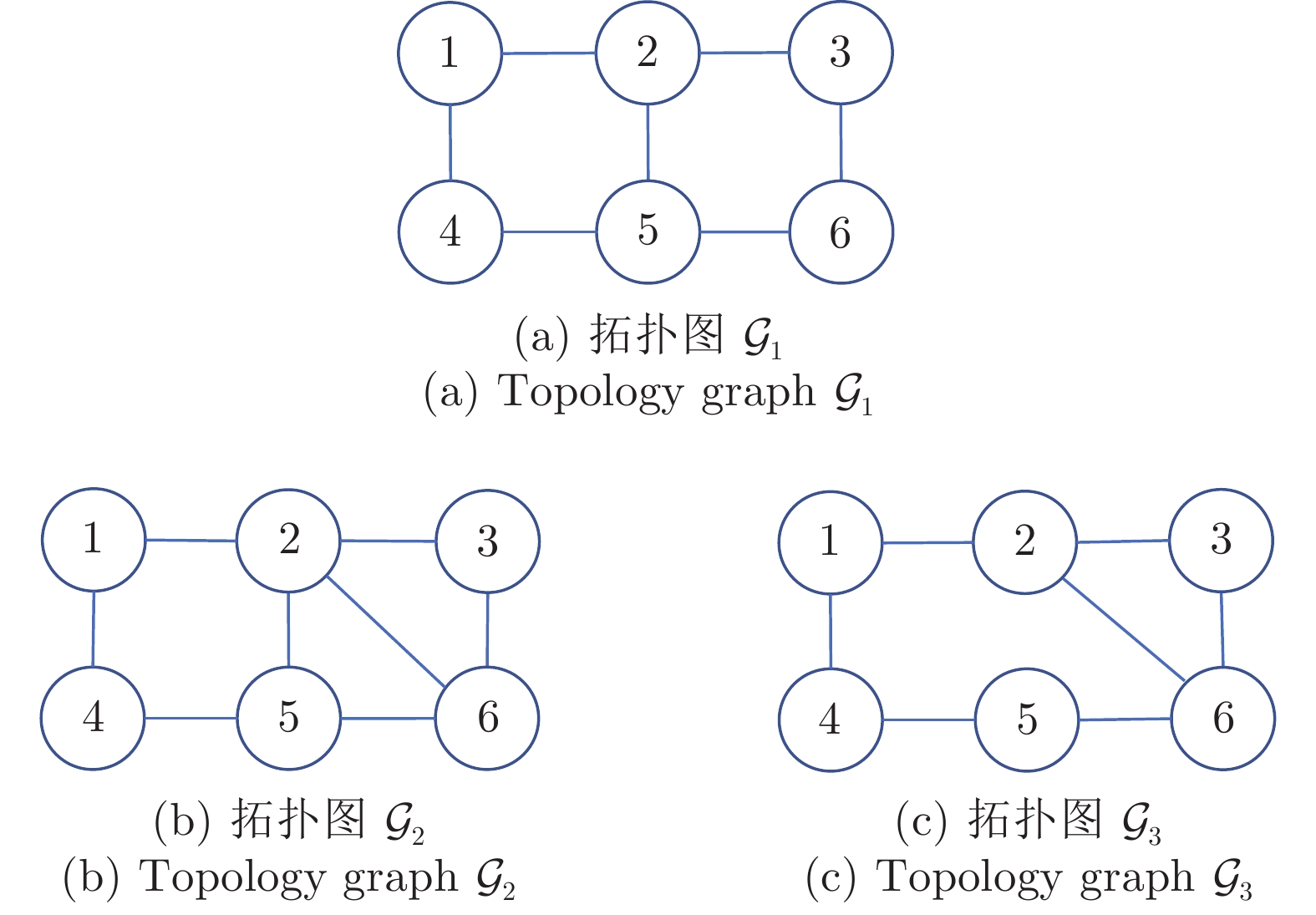
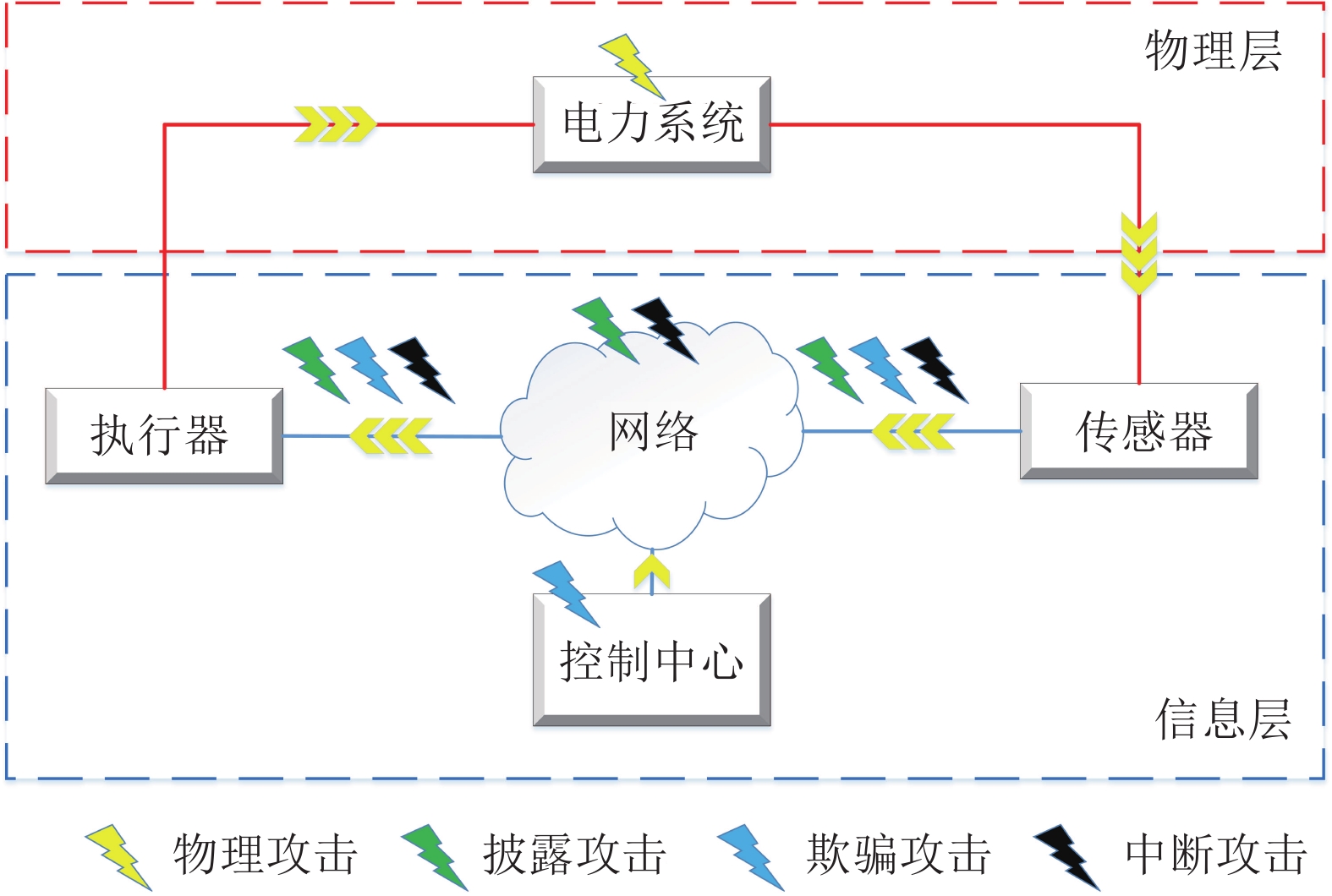
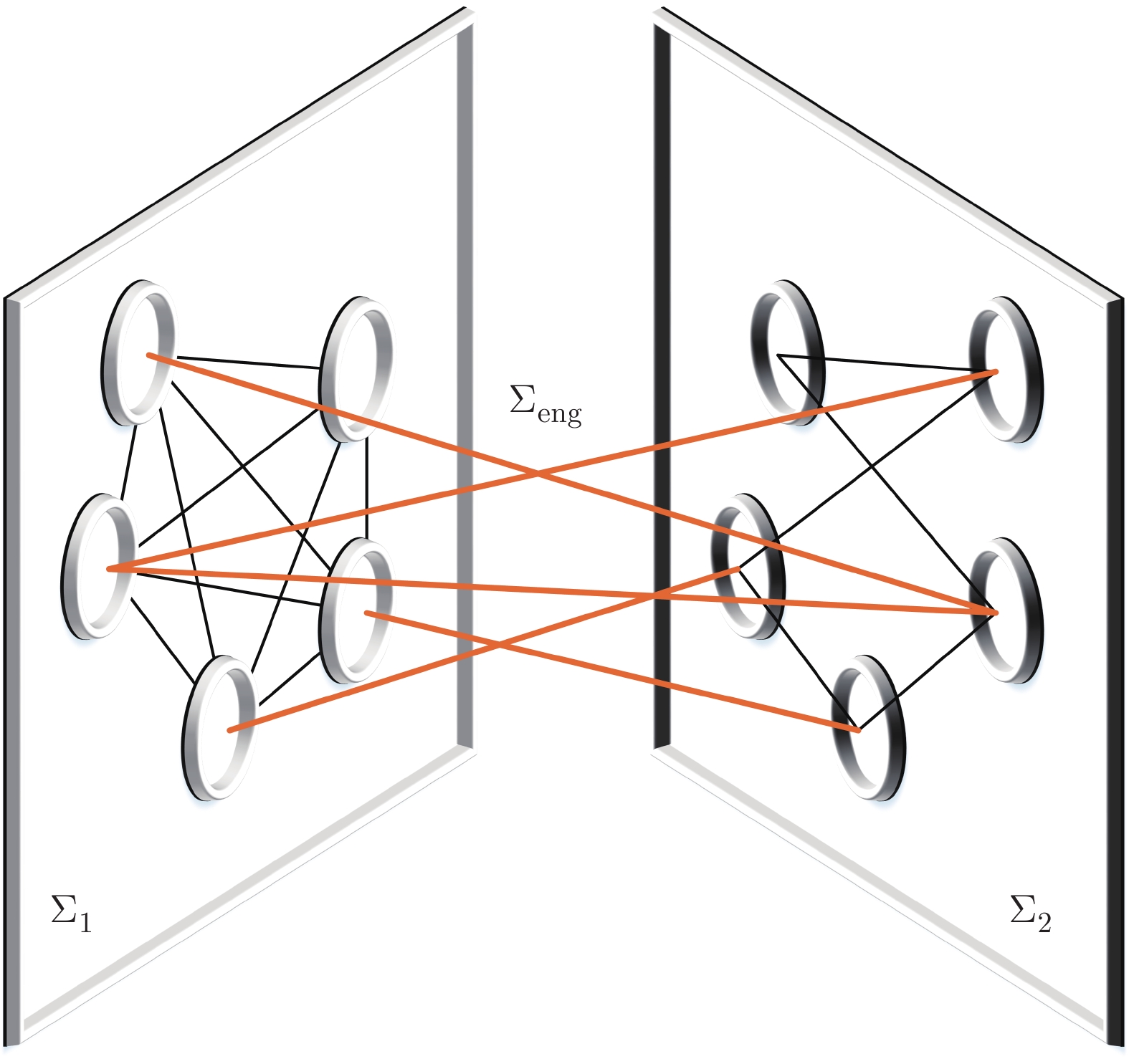
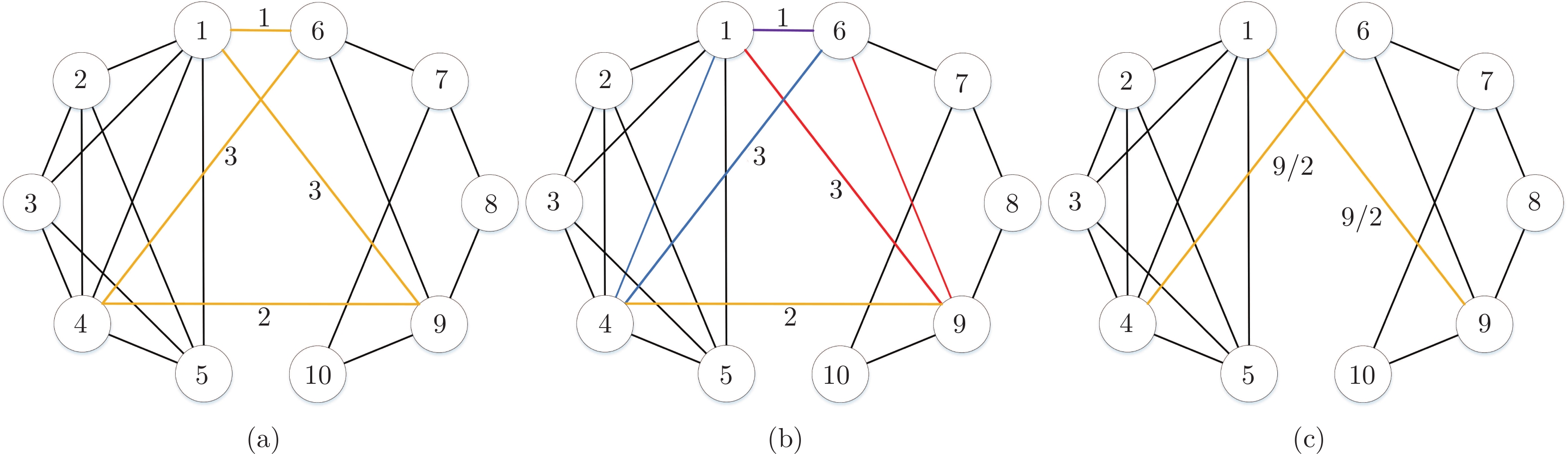
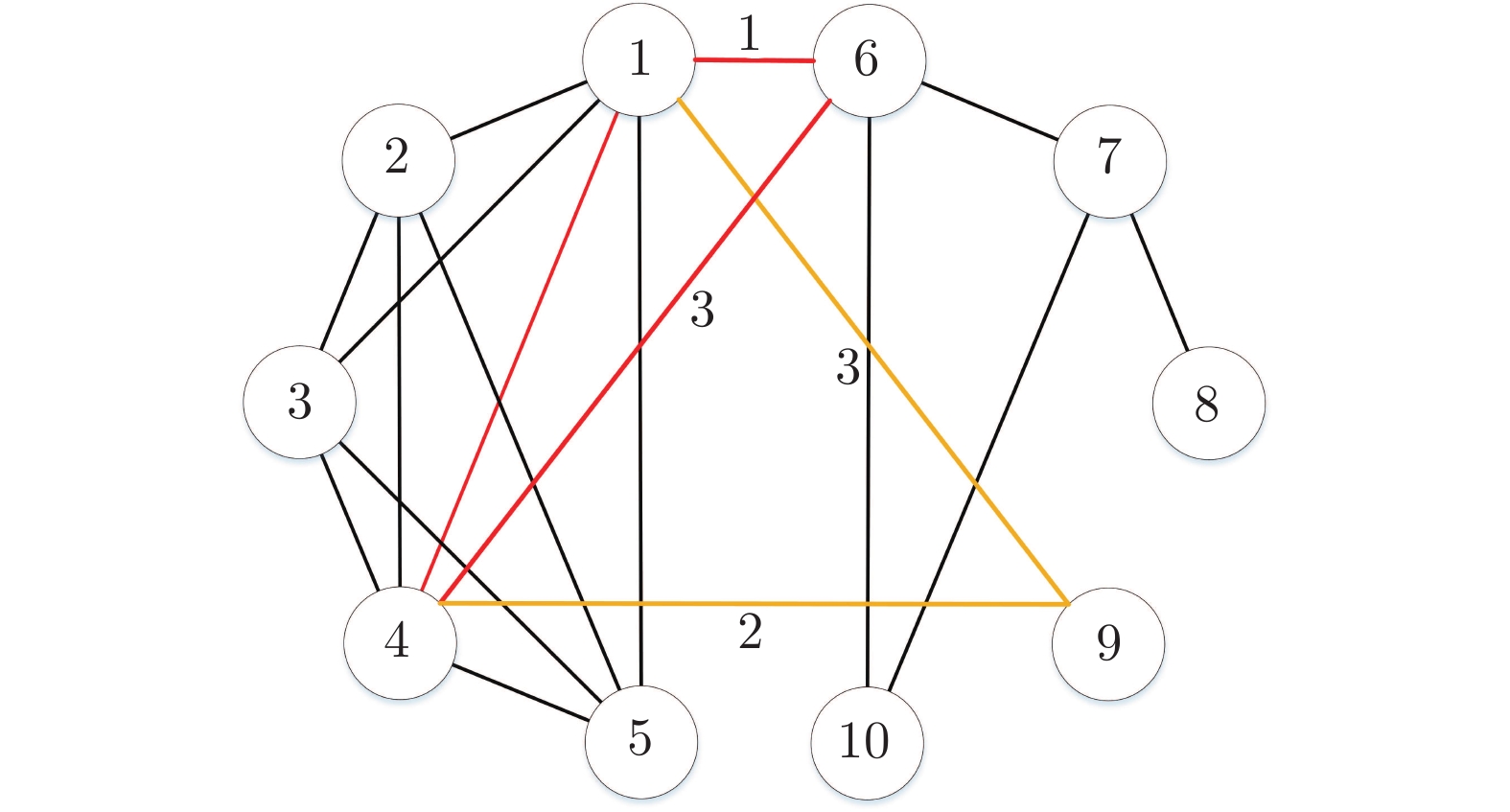
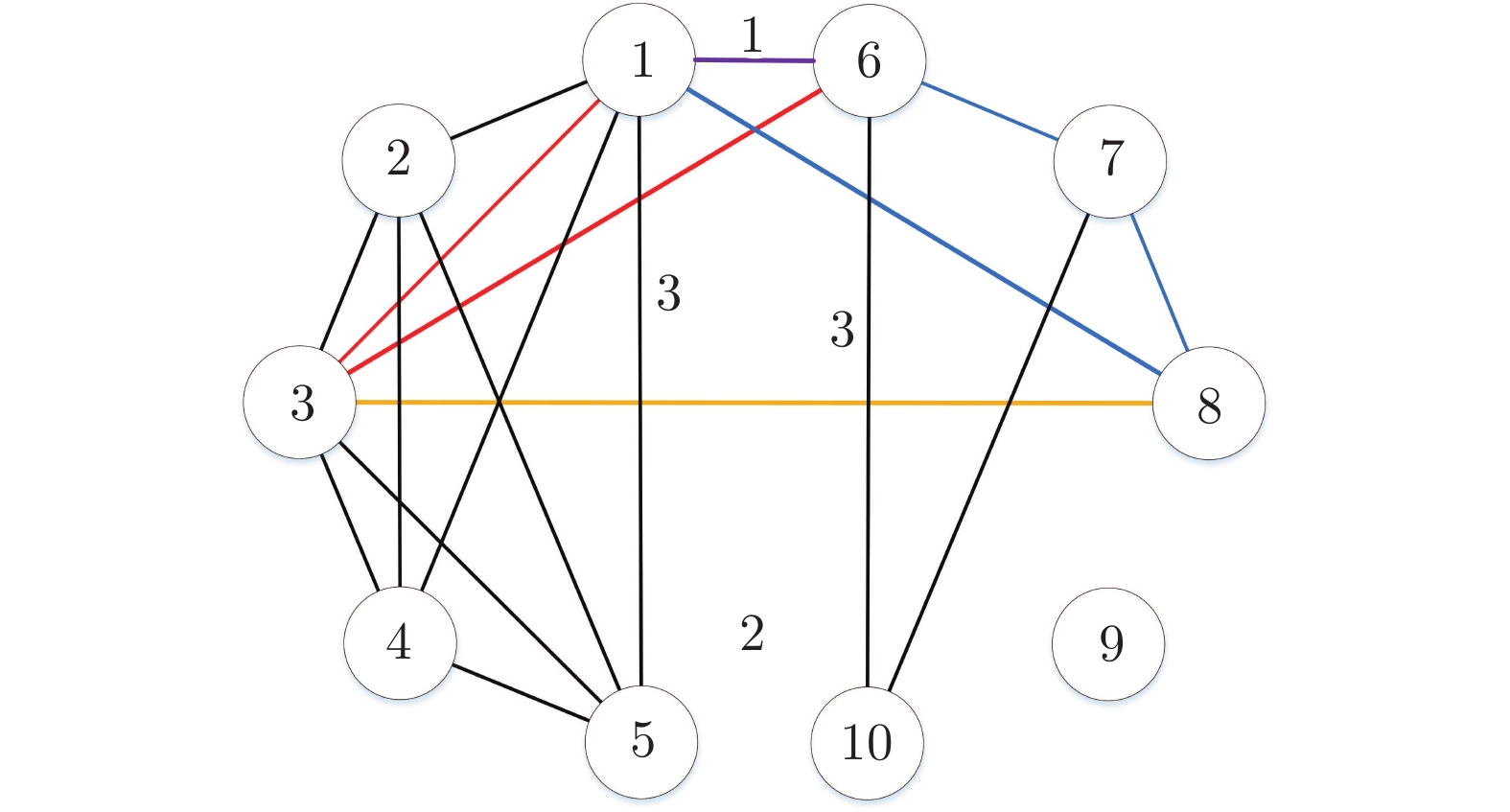
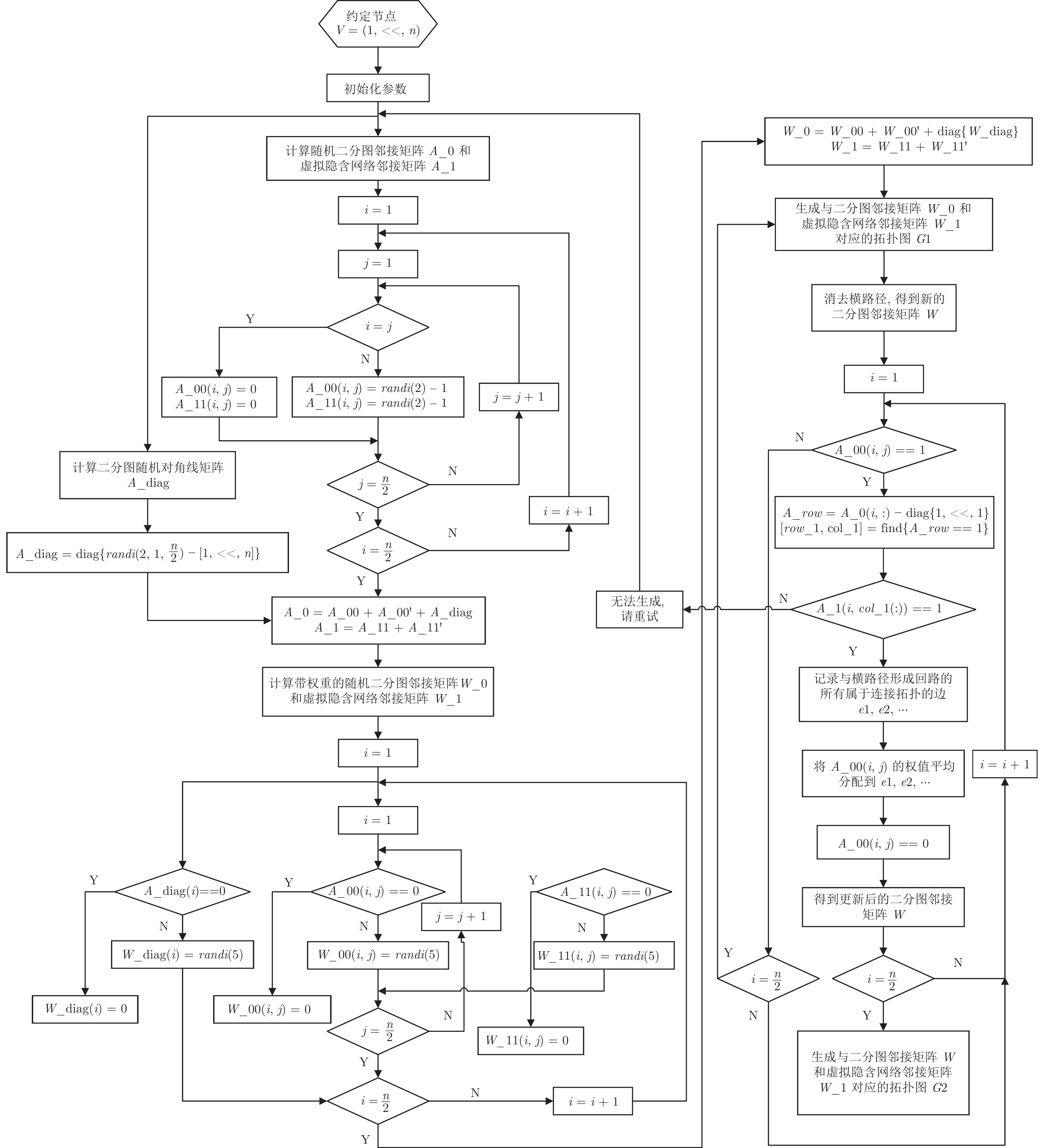
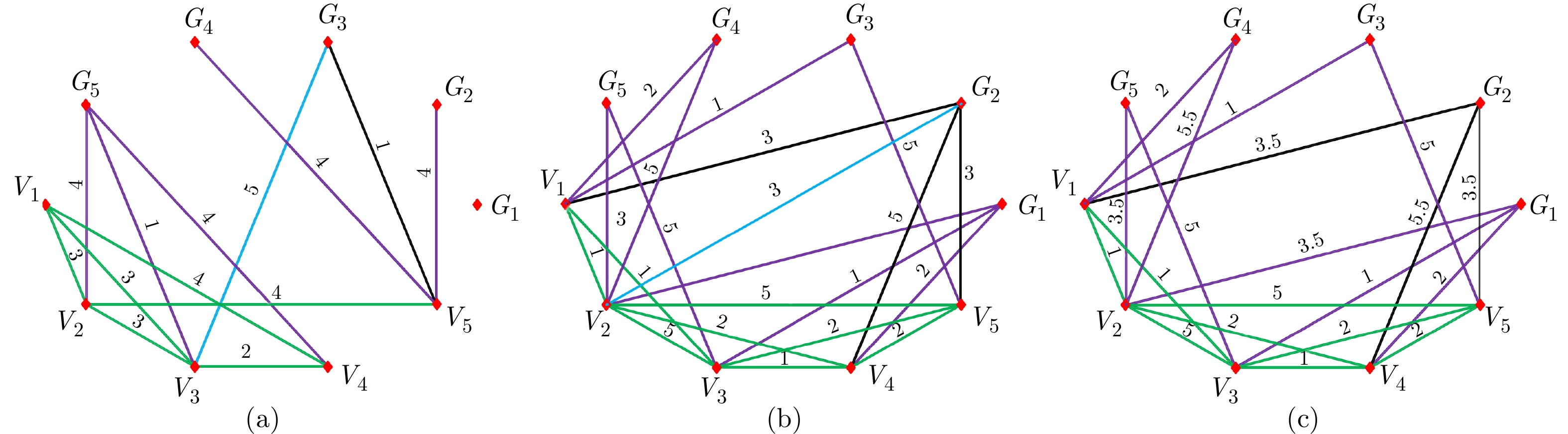
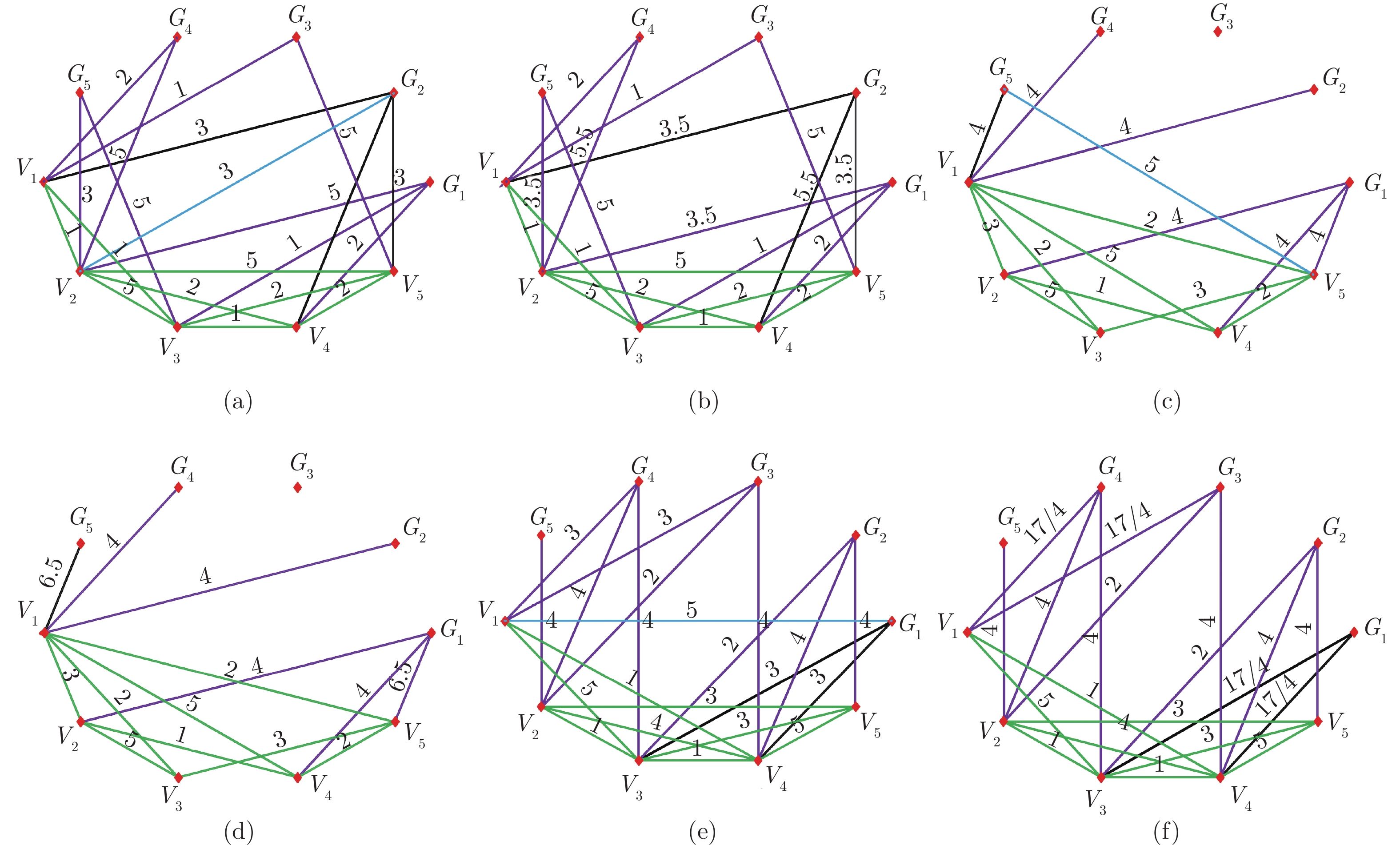
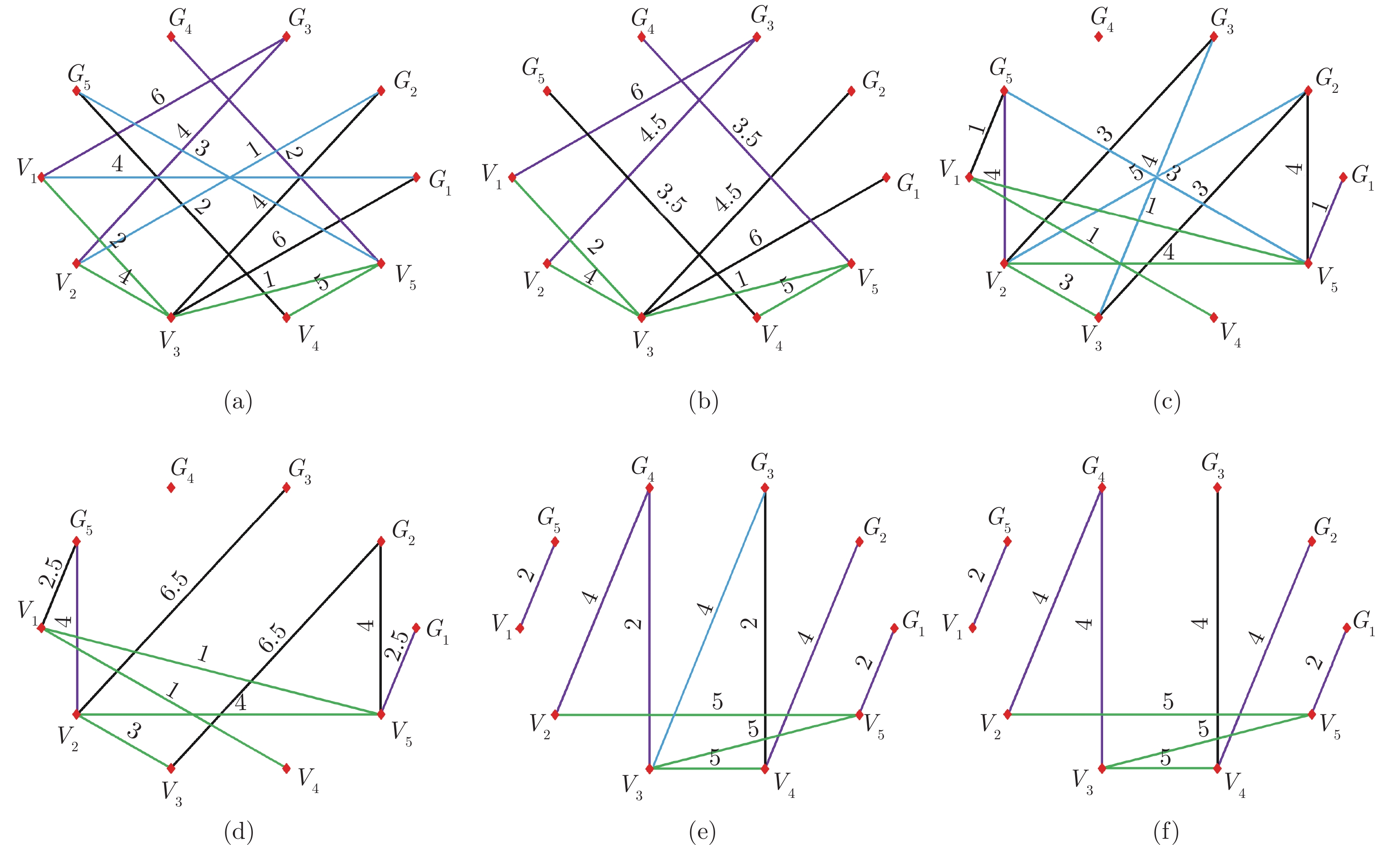
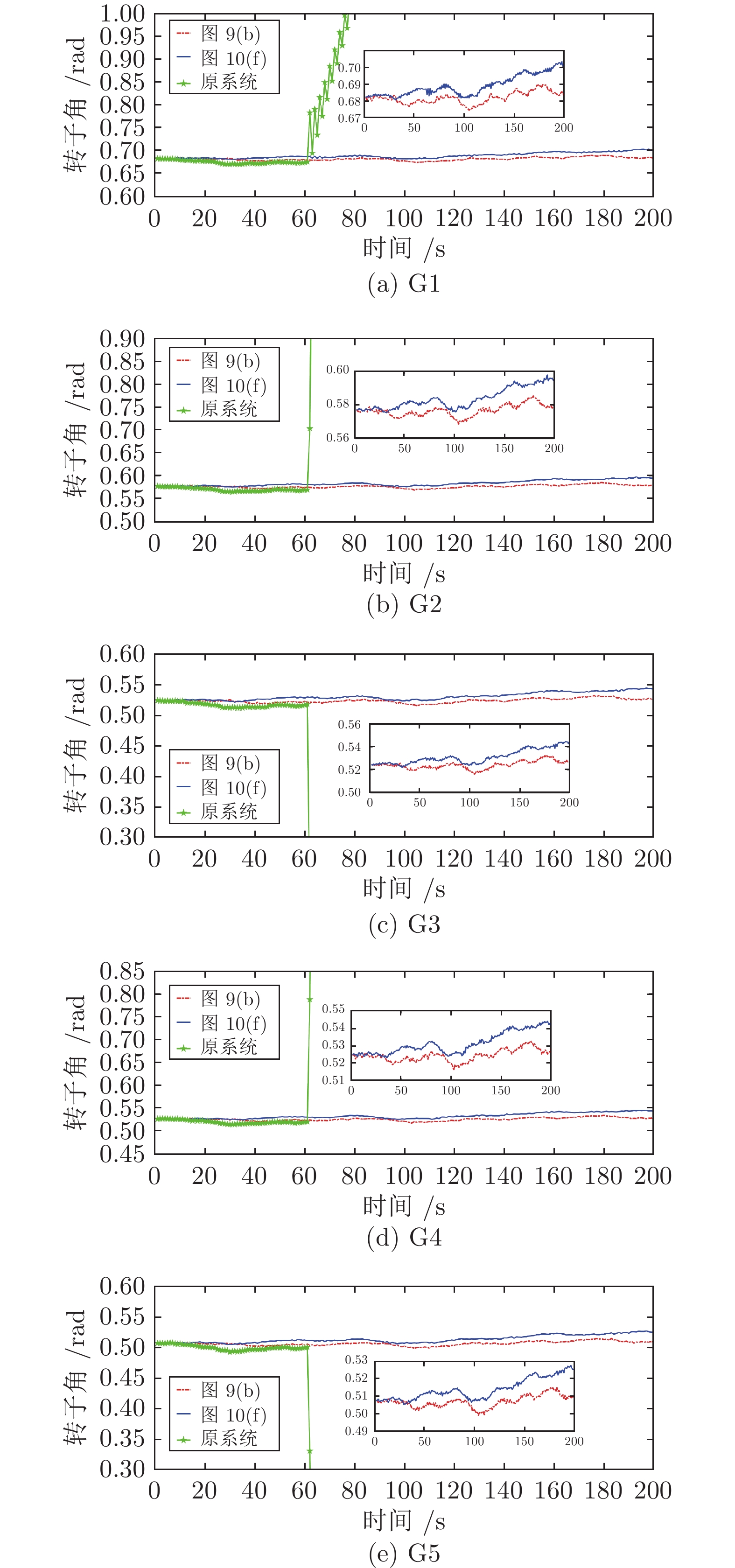
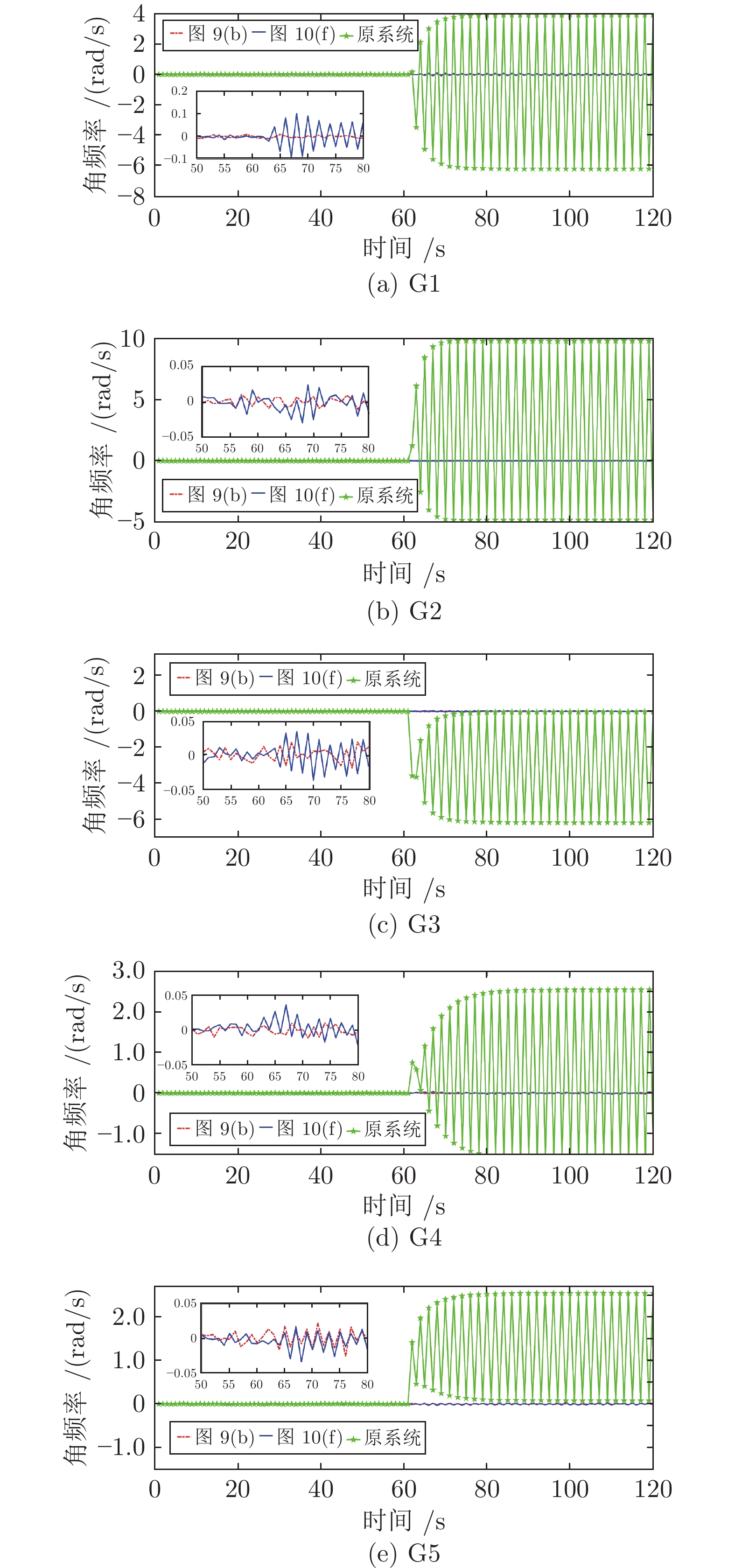
基于虚拟隐含网络的虚假数据注入攻击(False data injection attack, FDIA)防御控制策略, 本文提出了一种基于图论的拓扑优化算法来提高其防御性能. 首先, 提出了一种图的等效变换方法 — 权值分配法, 实现二分图连接拓扑与二分图拉普拉斯矩阵的一一对应; 进而基于网络拓扑的连通度以及连通图的可去边理论, 给出了虚拟隐含网络和二分图连接网络的拓扑选择依据; 在考虑拓扑权值的基础上, 给出了权值拓扑优化的指标评价函数; 通过求解指标评价函数的最小化代价实现拓扑优化选择, 从而改善基于虚拟隐含网络的虚假数据注入攻击防御方法的性能. 最后, 通过在IEEE-14总线电网系统上的仿真验证了所提算法的有效性.
基于虚拟隐含网络的虚假数据注入攻击(False data injection attack, FDIA)防御控制策略, 本文提出了一种基于图论的拓扑优化算法来提高其防御性能. 首先, 提出了一种图的等效变换方法 — 权值分配法, 实现二分图连接拓扑与二分图拉普拉斯矩阵的一一对应; 进而基于网络拓扑的连通度以及连通图的可去边理论, 给出了虚拟隐含网络和二分图连接网络的拓扑选择依据; 在考虑拓扑权值的基础上, 给出了权值拓扑优化的指标评价函数; 通过求解指标评价函数的最小化代价实现拓扑优化选择, 从而改善基于虚拟隐含网络的虚假数据注入攻击防御方法的性能. 最后, 通过在IEEE-14总线电网系统上的仿真验证了所提算法的有效性.

2023, 49(6): 1339-1353.
doi: 10.16383/j.aas.c200156
摘要:
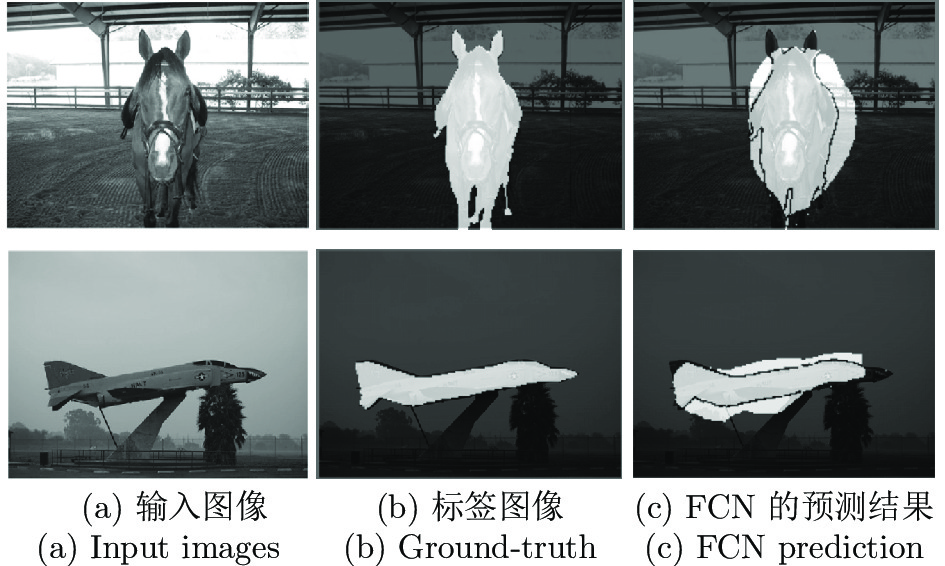
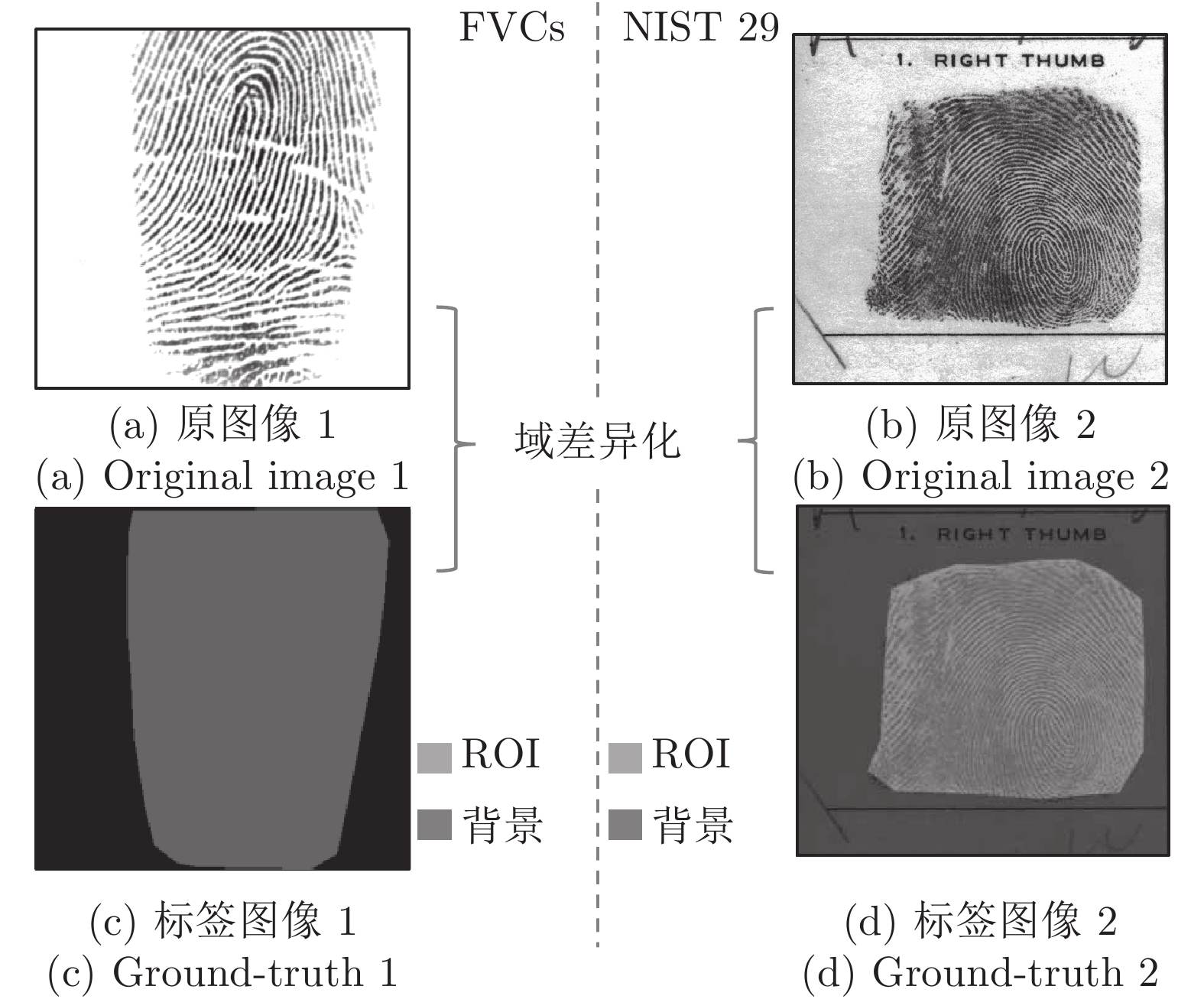
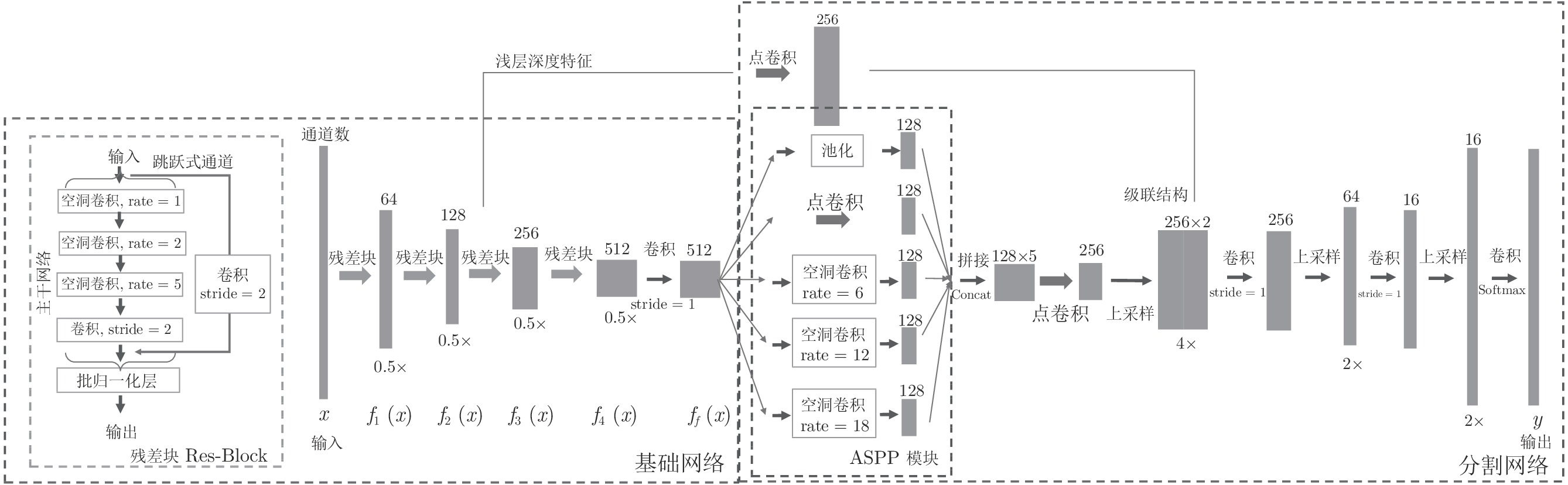
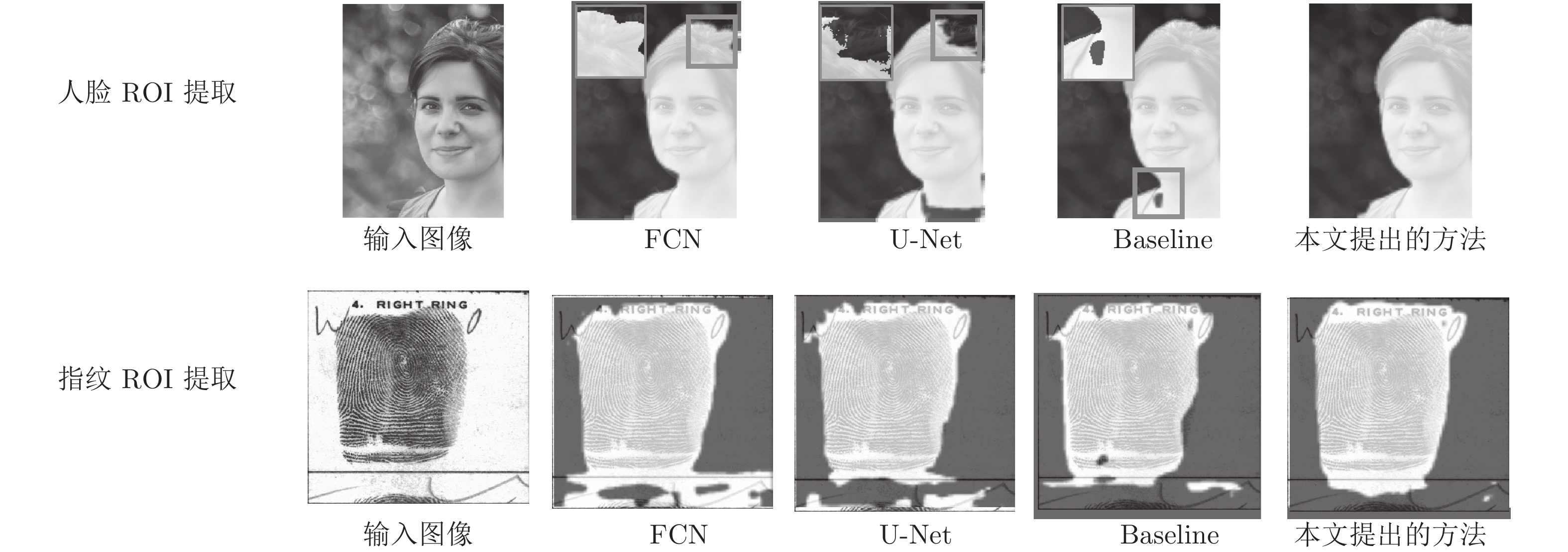
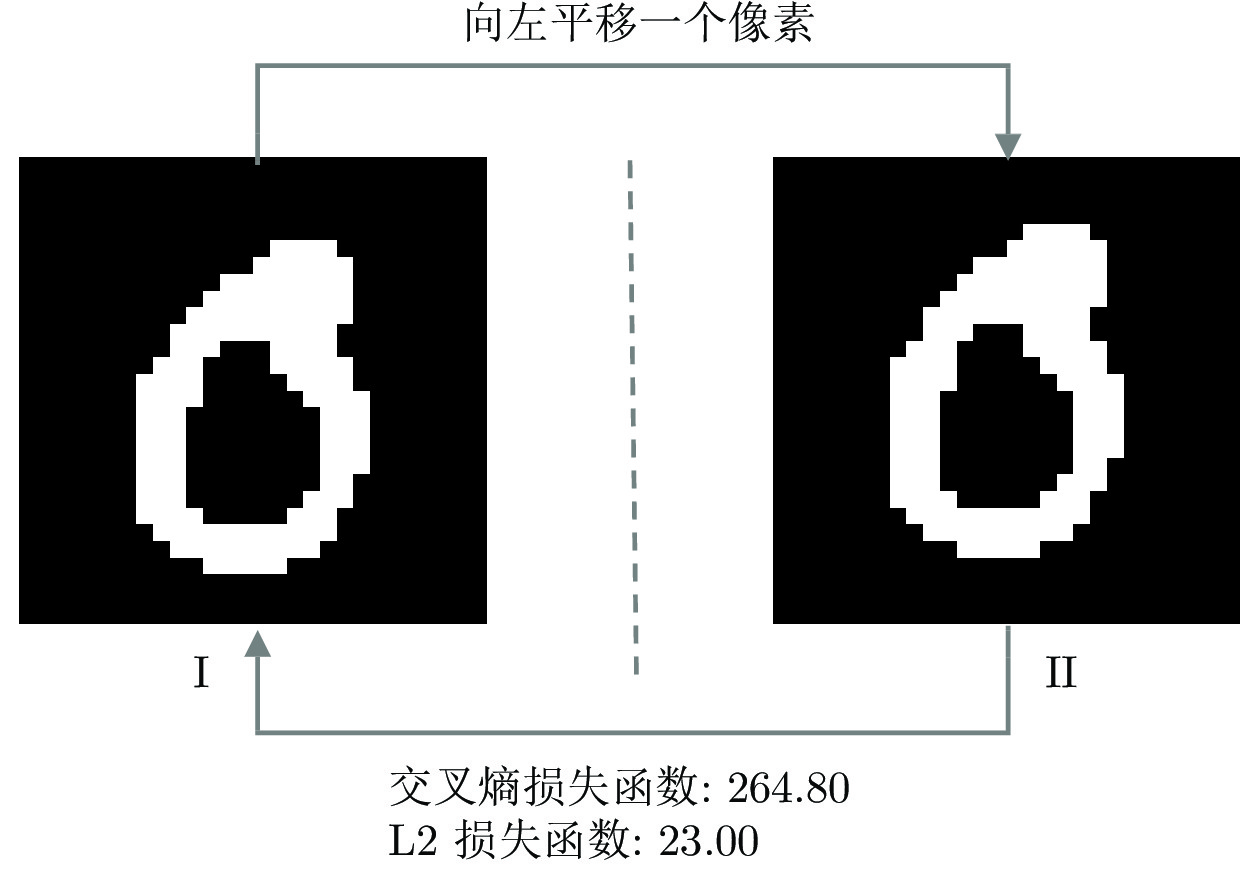
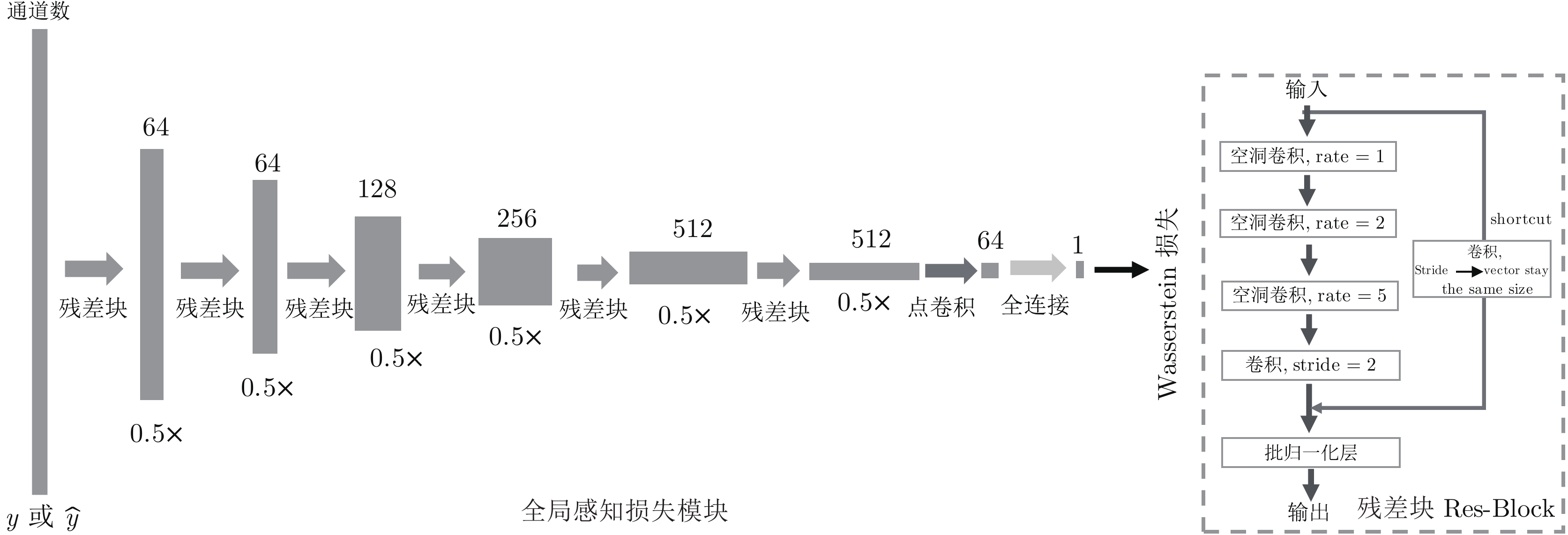
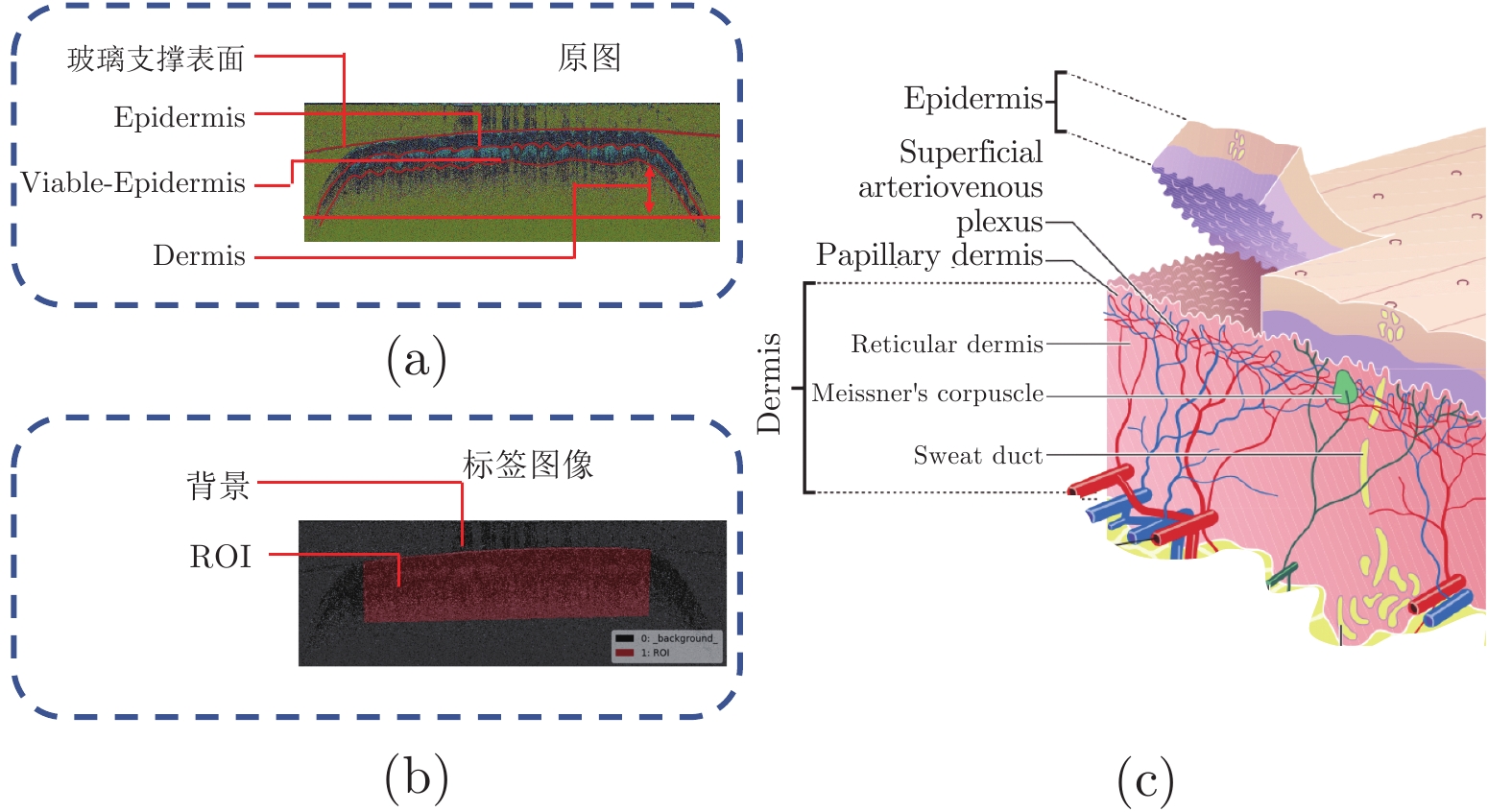
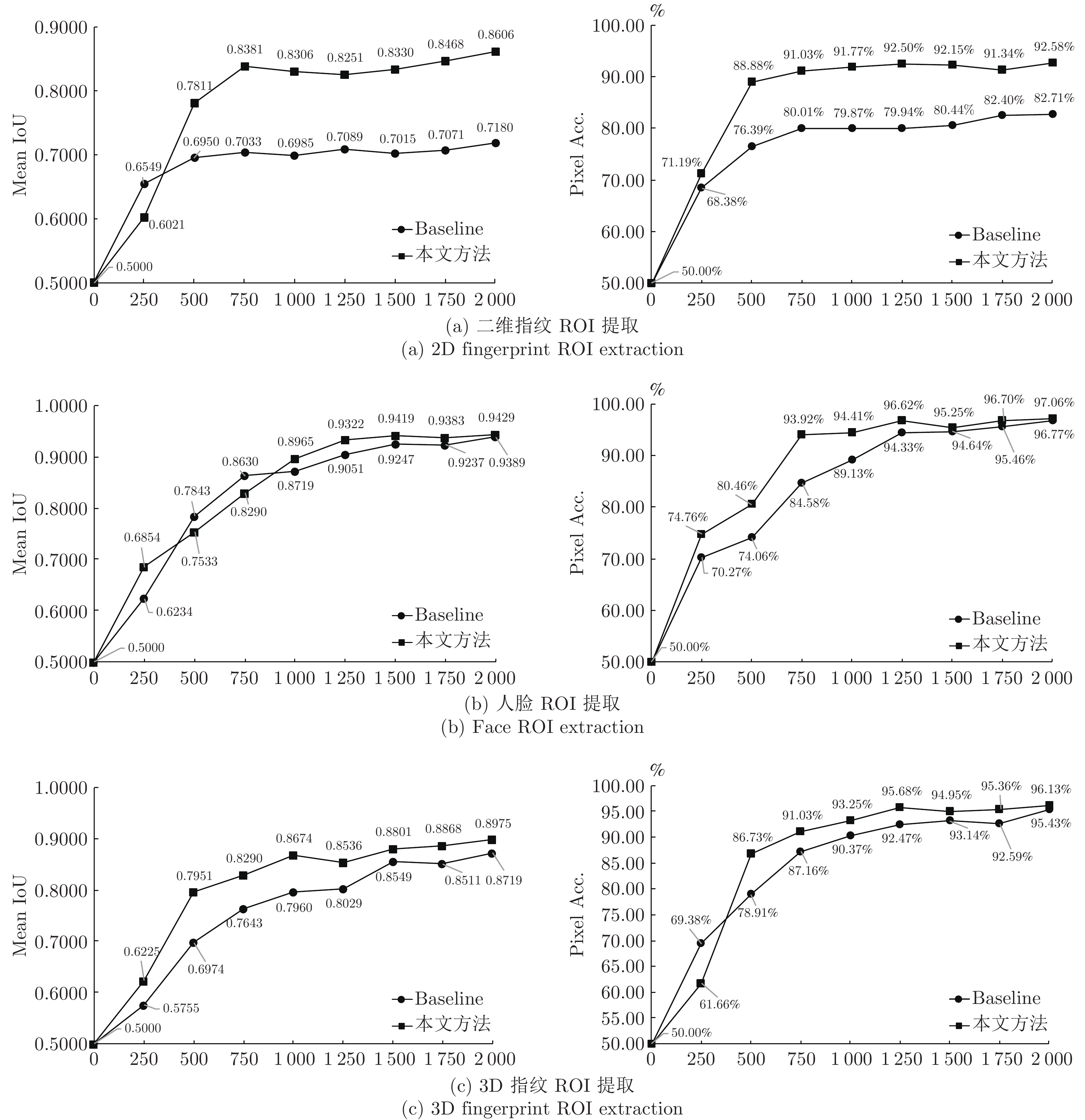
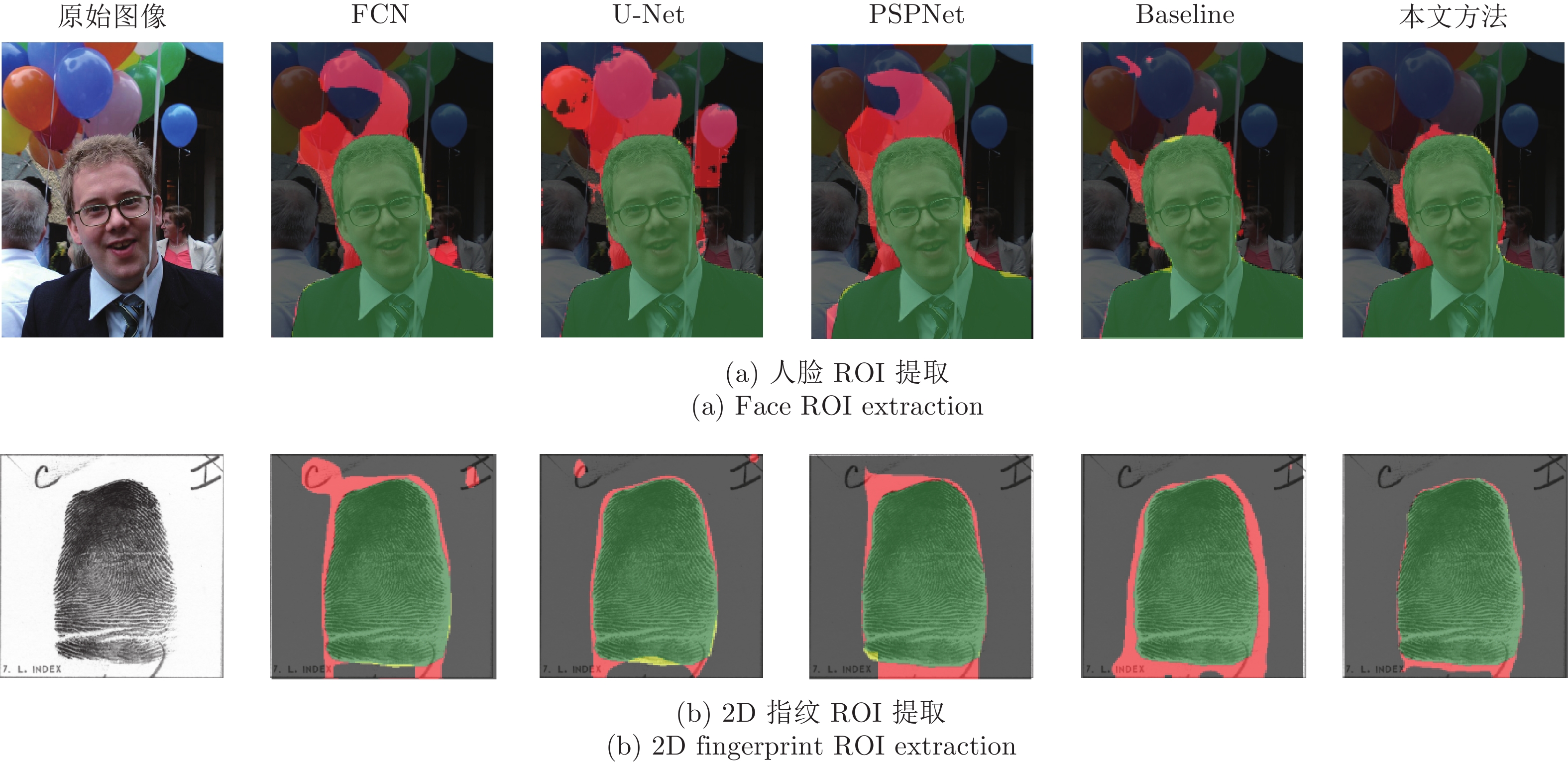
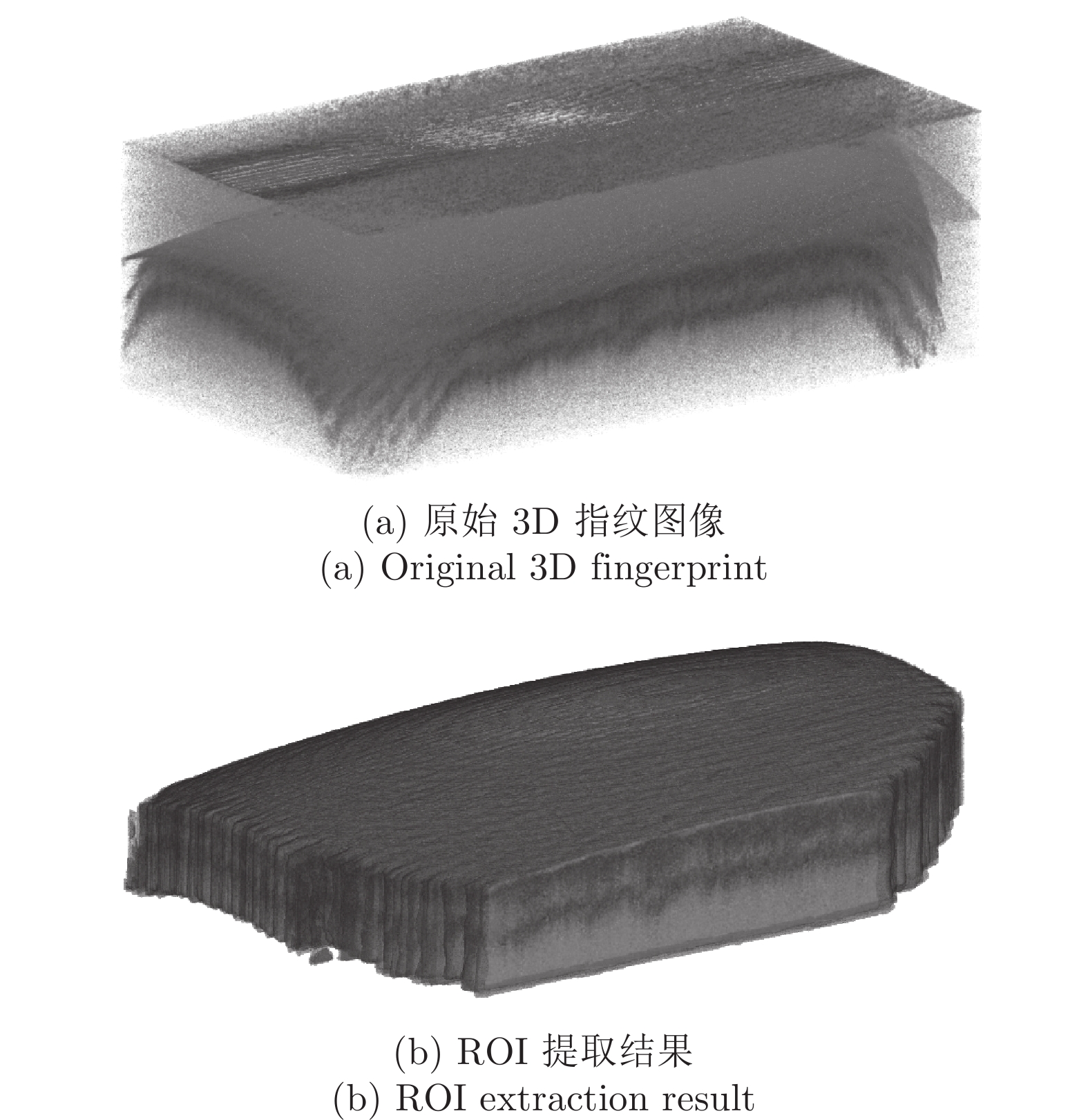
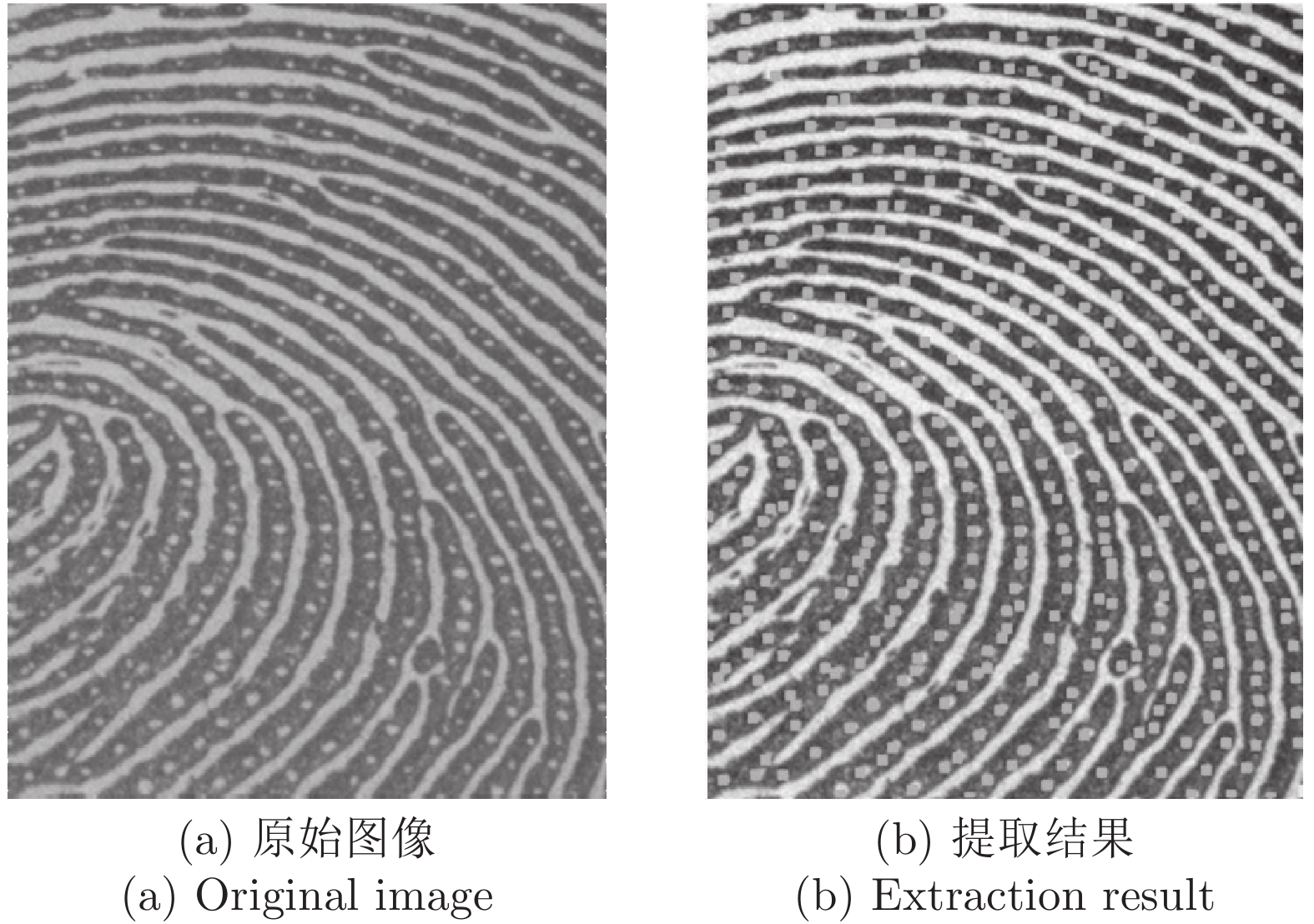
感兴趣区域(Region of interest, ROI) 提取在生物特征识别中, 常用于减少后续处理的计算消耗, 提高识别模型的准确性, 是生物识别系统中预处理的关键步骤. 针对生物识别数据, 提出了一种鲁棒的ROI提取方法. 方法使用语义分割模型作为基础, 通过增加全局感知模块, 与分割模型形成对抗结构, 为模型提供先验知识, 补充全局视觉模式信息, 解决了语义分割模型的末端收敛困难问题, 提高了模型的鲁棒性和泛化能力. 在传统二维(2D)指纹、人脸、三维(3D)指纹和指纹汗孔数据集中验证了方法的有效性. 实验结果表明, 相比于现有方法, 所提出的ROI提取方法更具鲁棒性和泛化能力, 精度最高.
感兴趣区域(Region of interest, ROI) 提取在生物特征识别中, 常用于减少后续处理的计算消耗, 提高识别模型的准确性, 是生物识别系统中预处理的关键步骤. 针对生物识别数据, 提出了一种鲁棒的ROI提取方法. 方法使用语义分割模型作为基础, 通过增加全局感知模块, 与分割模型形成对抗结构, 为模型提供先验知识, 补充全局视觉模式信息, 解决了语义分割模型的末端收敛困难问题, 提高了模型的鲁棒性和泛化能力. 在传统二维(2D)指纹、人脸、三维(3D)指纹和指纹汗孔数据集中验证了方法的有效性. 实验结果表明, 相比于现有方法, 所提出的ROI提取方法更具鲁棒性和泛化能力, 精度最高.


2023, 49(6): 1354-1368.
doi: 10.16383/j.aas.c220694
摘要:
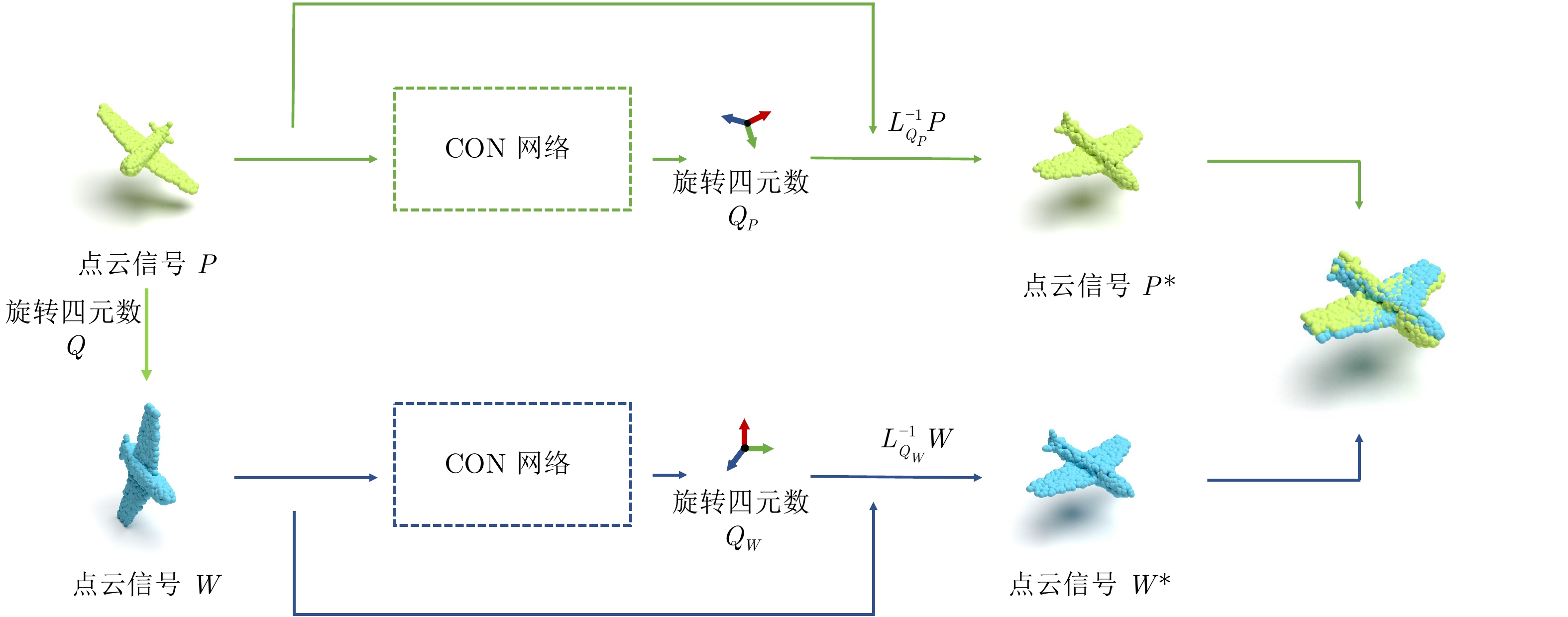
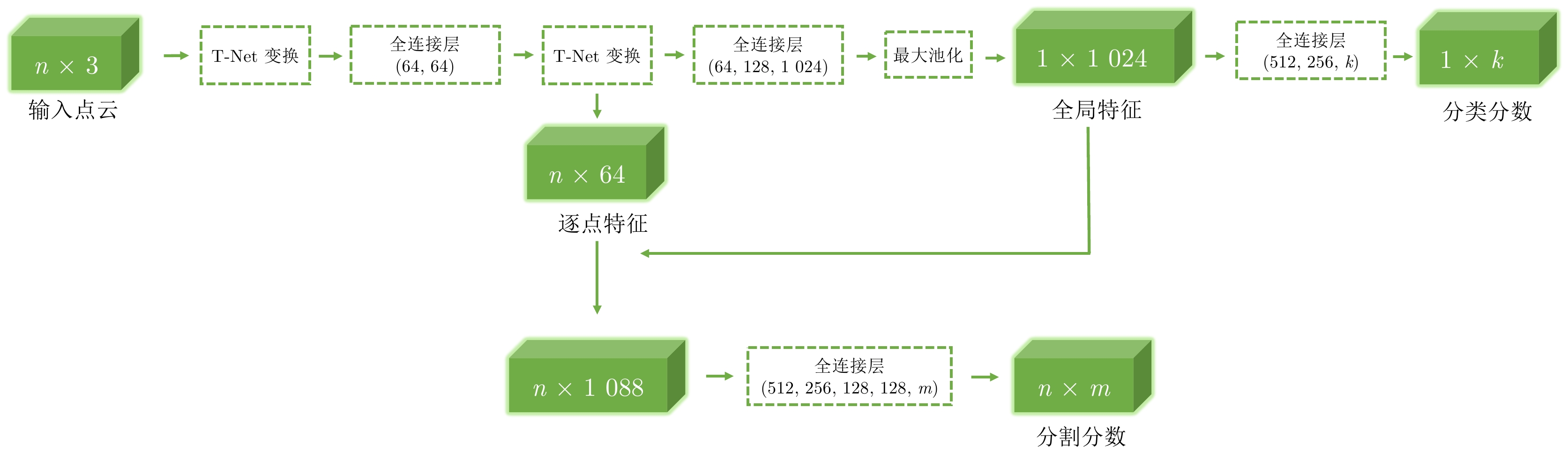
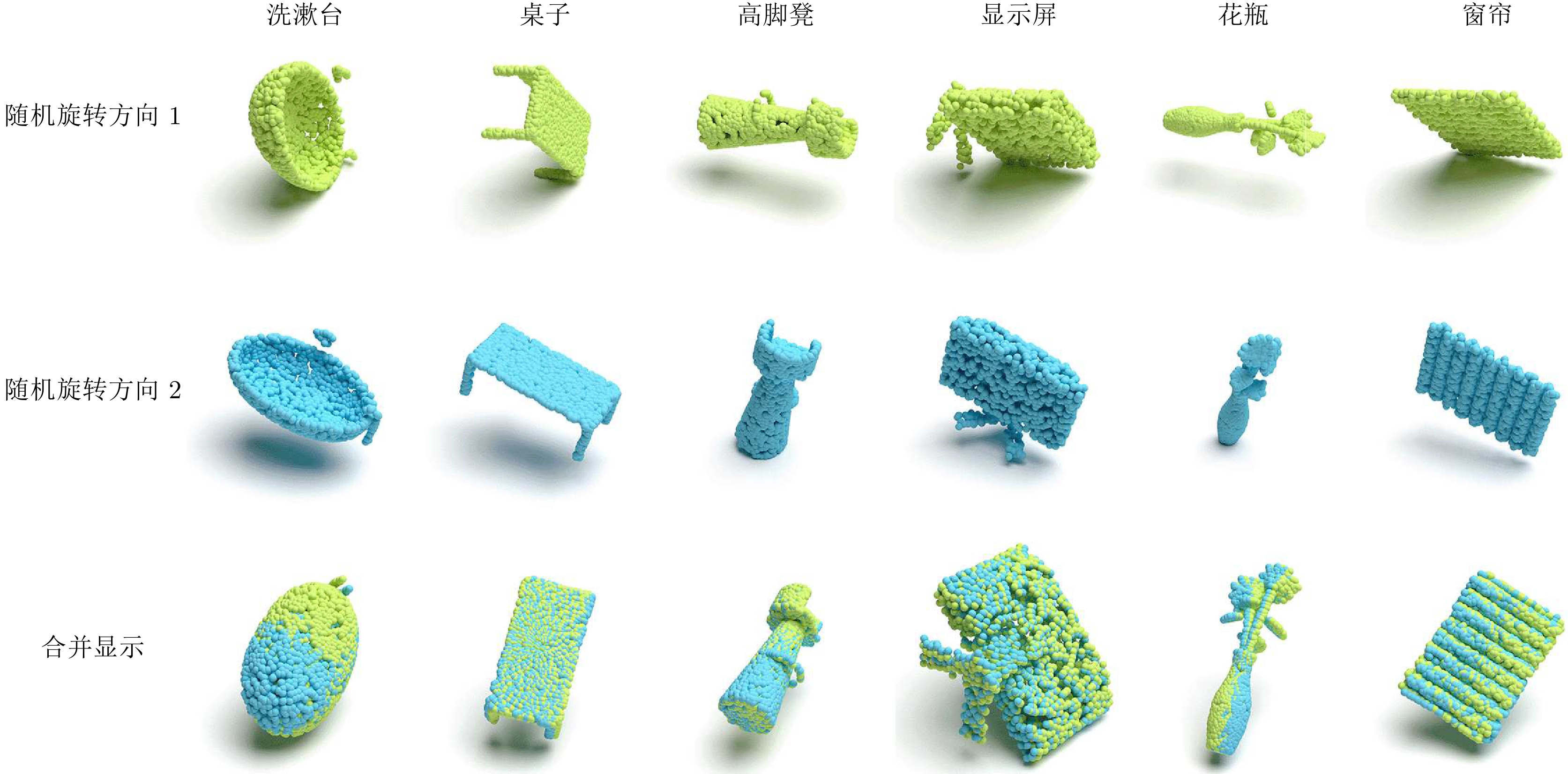
在三维视觉任务中, 三维目标的未知旋转会给任务带来挑战, 现有的部分神经网络框架对经过未知旋转后的三维目标进行识别或分割较为困难. 针对上述问题, 提出一种基于自监督学习方式的矢量型球面卷积网络, 用于学习三维目标的旋转信息, 以此来提升分类和分割任务的表现. 首先, 对三维点云信号进行球面采样, 映射到单位球上; 然后, 使用矢量球面卷积网络提取旋转特征, 同时将随机旋转后的三维点云信号输入相同结构的矢量球面卷积网络提取旋转特征, 利用自监督网络训练学习旋转信息; 最后, 对随机旋转的三维目标进行目标分类实验和部分分割实验. 实验表明, 所设计的网络在测试数据随机旋转的情况下, 在ModelNet40数据集上分类准确率提升75.75%, 在ShapeNet数据集上分割效果显著, 交并比(Intersection over union, IoU)提升51.48%.
在三维视觉任务中, 三维目标的未知旋转会给任务带来挑战, 现有的部分神经网络框架对经过未知旋转后的三维目标进行识别或分割较为困难. 针对上述问题, 提出一种基于自监督学习方式的矢量型球面卷积网络, 用于学习三维目标的旋转信息, 以此来提升分类和分割任务的表现. 首先, 对三维点云信号进行球面采样, 映射到单位球上; 然后, 使用矢量球面卷积网络提取旋转特征, 同时将随机旋转后的三维点云信号输入相同结构的矢量球面卷积网络提取旋转特征, 利用自监督网络训练学习旋转信息; 最后, 对随机旋转的三维目标进行目标分类实验和部分分割实验. 实验表明, 所设计的网络在测试数据随机旋转的情况下, 在ModelNet40数据集上分类准确率提升75.75%, 在ShapeNet数据集上分割效果显著, 交并比(Intersection over union, IoU)提升51.48%.