

Morphology-based Embodied Intelligence: Historical Retrospect and Research Progress
-
摘要: 具身智能强调智能受脑、身体与环境协同影响, 更侧重关注智能体与环境的“交互”. 因此, 在具身智能的研究中, 智能体的物理形态与感知、学习、控制的关系起到至关重要的作用. 当前, 具身智能综合吸收了机构学领域关于形态、结构, 机器学习领域关于感知、学习, 以及机器人领域关于行为、控制等的相关研究成果, 形成了相对完整、独立并仍在蓬勃发展的学科分支. 但是, 目前尚无文献完整地梳理基于形态的具身智能研究进展. 本文从这个角度出发, 重点围绕基于形态计算的行为生成、基于学习的形态控制, 以及基于学习的形态优化这三方面总结重要的研究进展, 凝炼相关的科学问题, 并总结未来的发展方向, 可为具身智能的研究提供参考.Abstract: Embodied intelligence emphasizes that the intelligence is influenced by the interaction among brain, body and environment. It is more focused on the interaction between the agent and environment. Therefore, the relationship between the physical morphology and perception, learning, and control of the intelligent agent plays a vital role in the research of embodied intelligence. Currently, embodied intelligence comprehensively utilizes the research results from the communities of mechanism, machine learning, and robotics to form a new ever-growing branch. However, there is still no complete survey to summarize the research progress of the morphology-based embodied intelligence. In this paper, we focus on the aspects of morphology computation based behavior generation, learning based morphology control, and learning based morphology optimization to summarize important research progress, scientific issues and future development directions, which can provide reference for the embodied intelligence research.
-

图 2 瓦特发明的蒸汽机离心调速器与现代自动控制结构的对比
Fig. 2 The comparison between the steamer centrifugal governor invented by Watt and the structure of modern automatic control
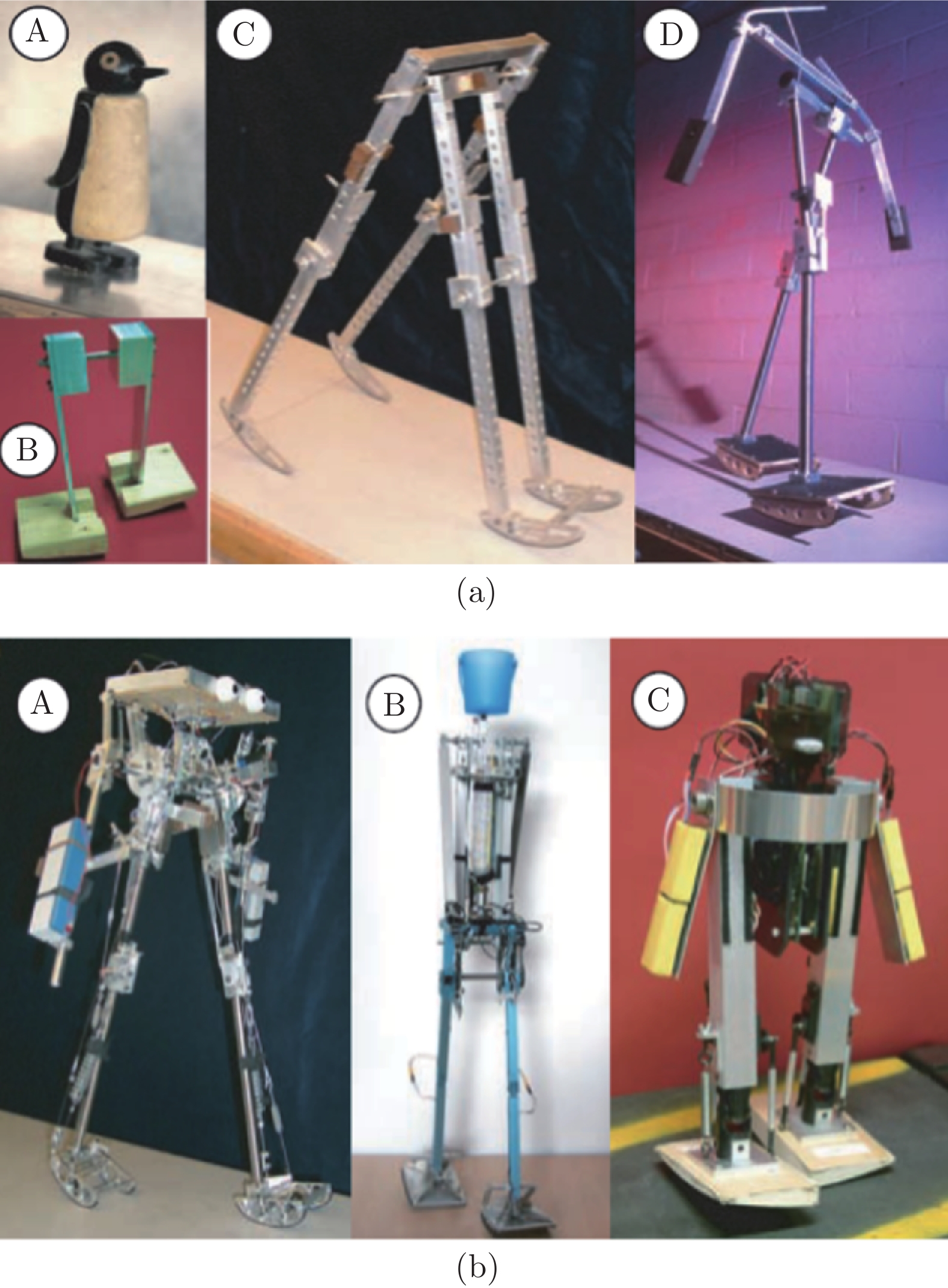
图 3 (a) 被动机器人原理样机[26], 经许可转载自文献[26], ©AAAS, 2005; (b) 三类机器人平台[26]: A: 康奈尔机器人; B: 德尔夫特机器人; C: MIT机器人, 经许可转载自文献[26], ©AAAS, 2005
Fig. 3 (a) Passive robot prototypes[26], reproduced with permission from reference [26], ©AAAS, 2005; (b) three robotic platforms[26]: A: Cornel robot; B: Delft robot; C: MIT robot, reproduced with permission from reference [26], ©AAAS, 2005
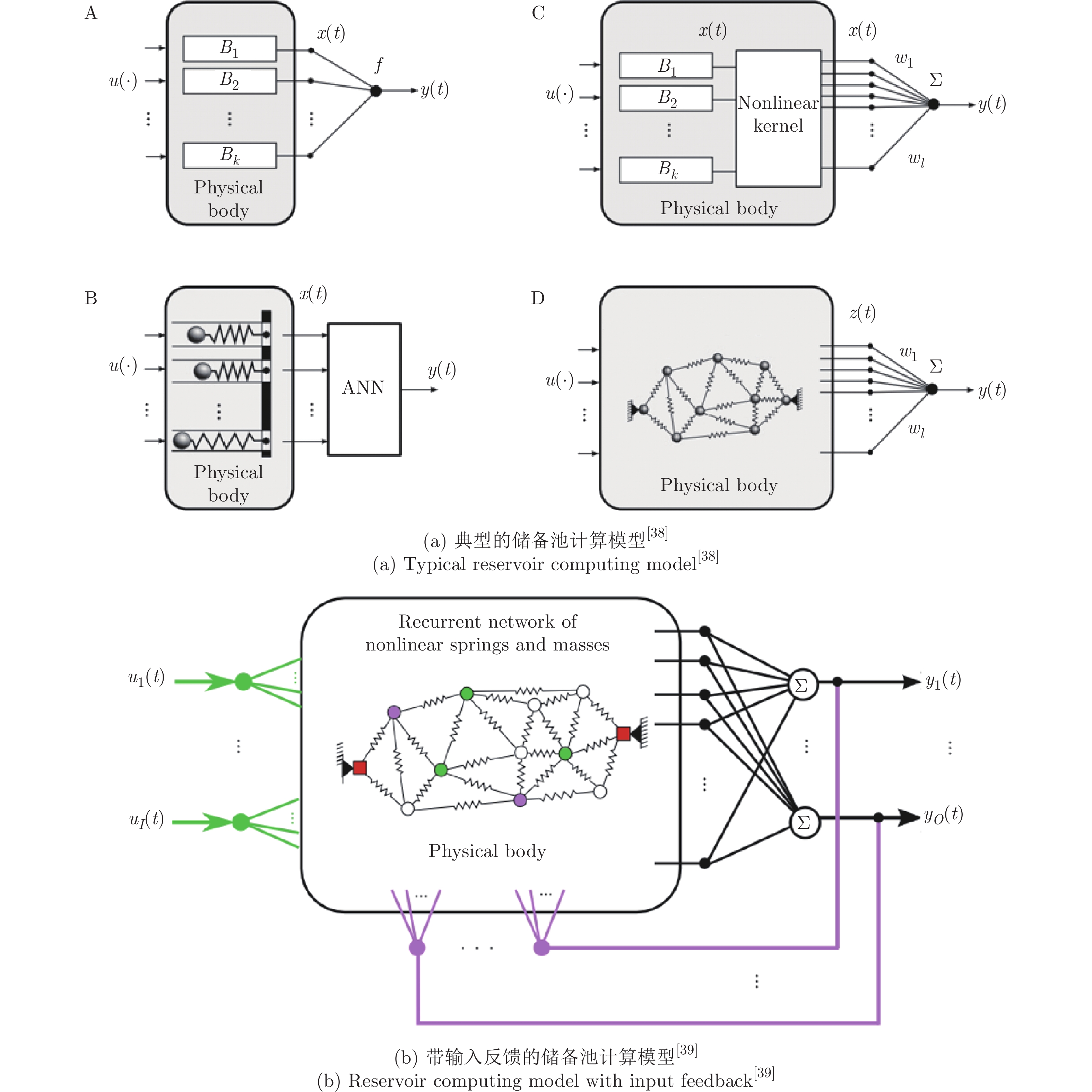
图 4 具身形态计算的储备池计算模型
Fig. 4 The reservoir computing models for embodied morphology computing
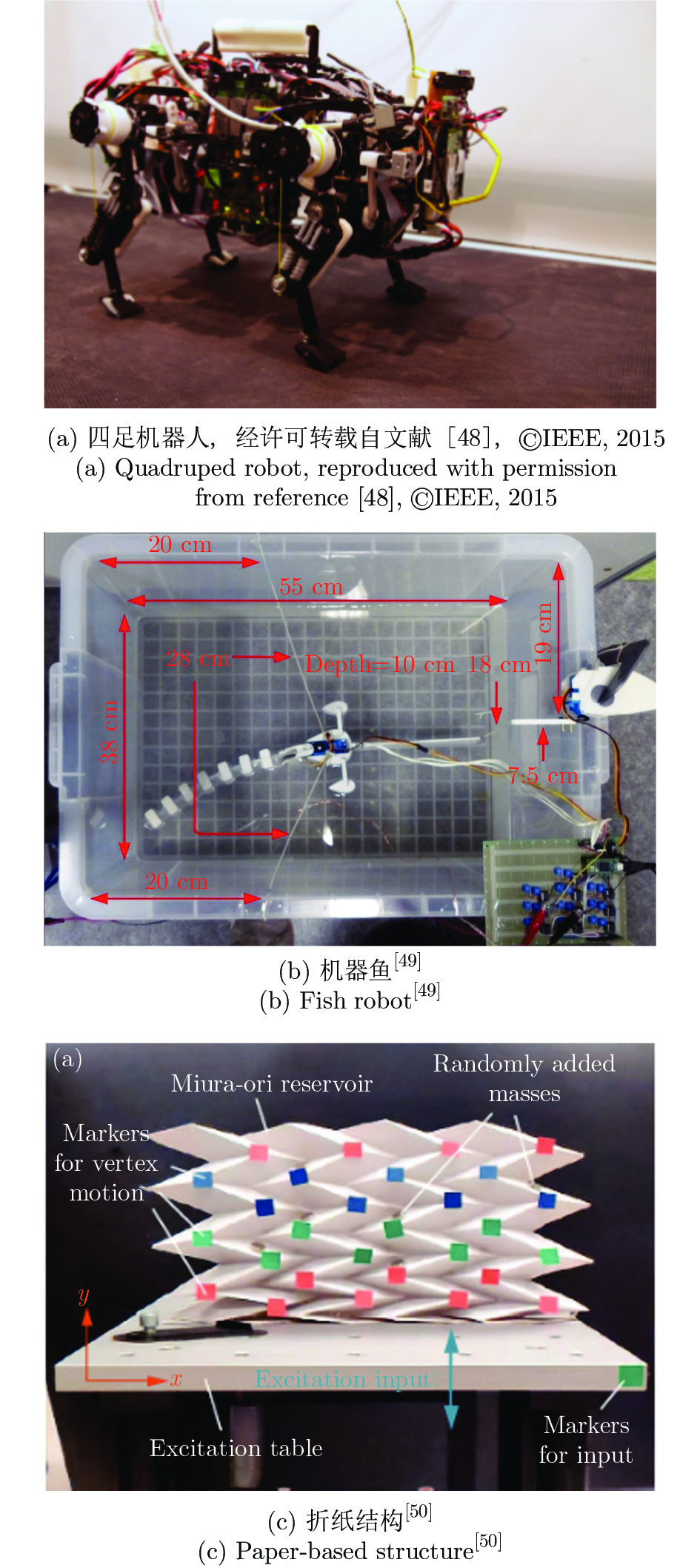
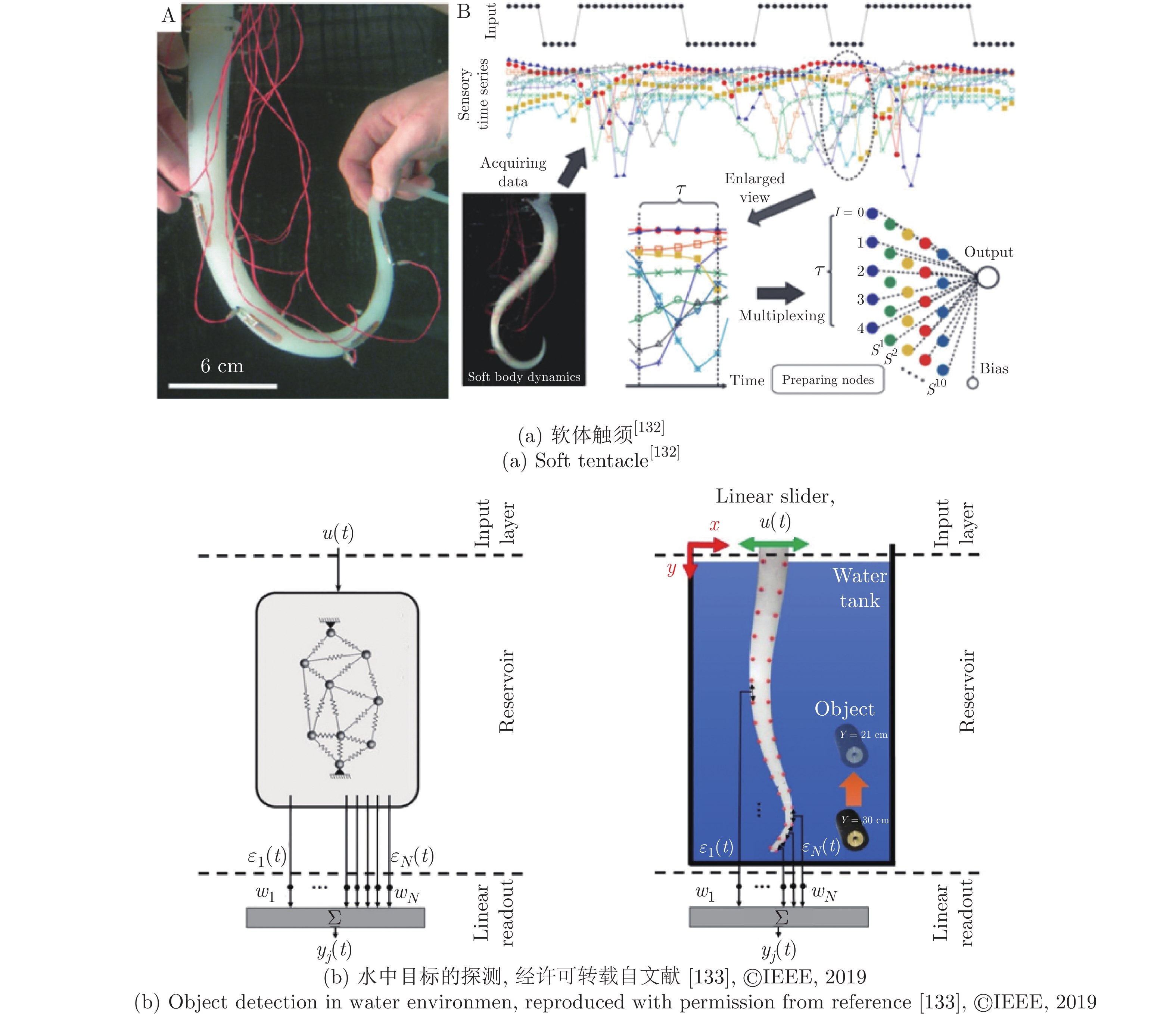
图 6 典型的储备池计算具身形态计算装置
Fig. 6 Typical embodied morphology computing devices of reservoir computing
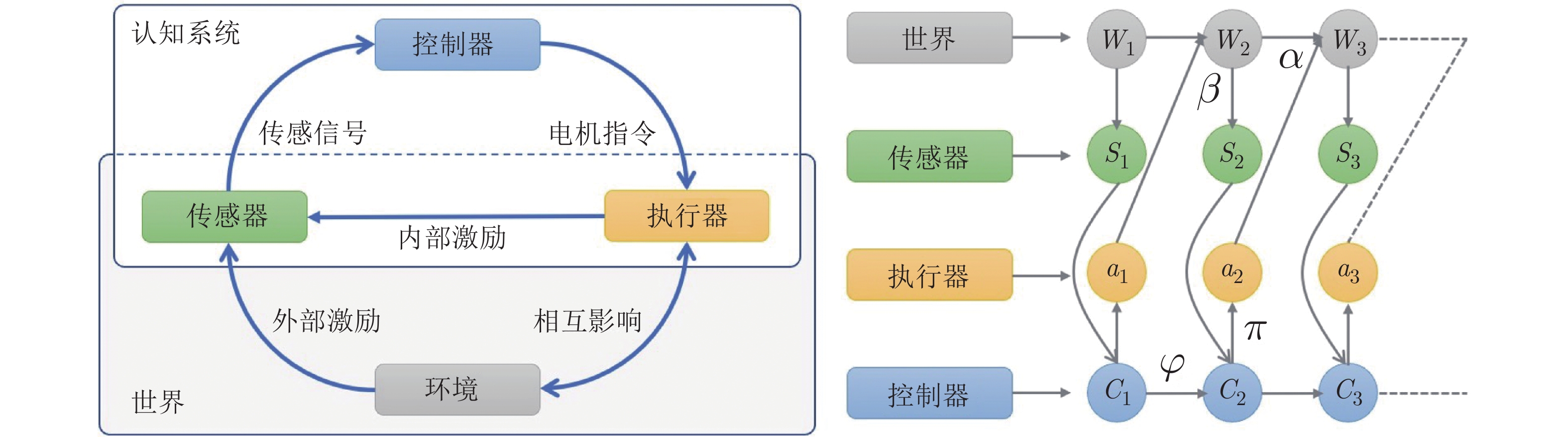
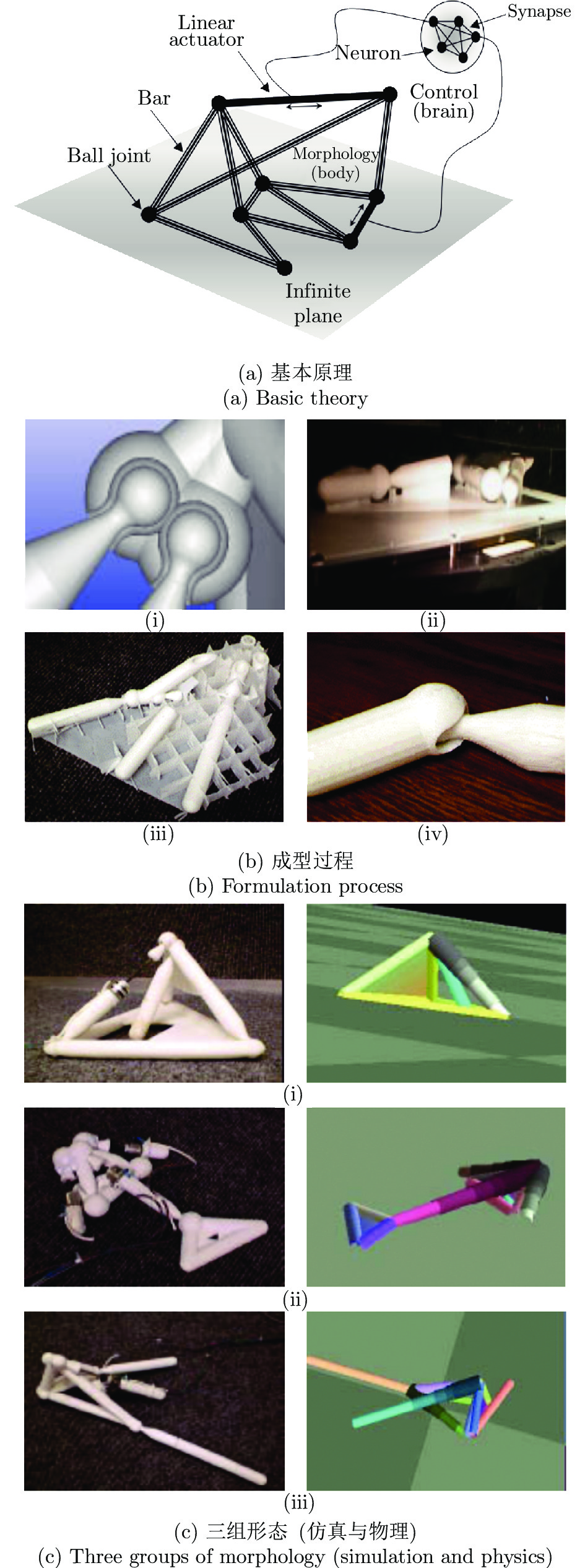
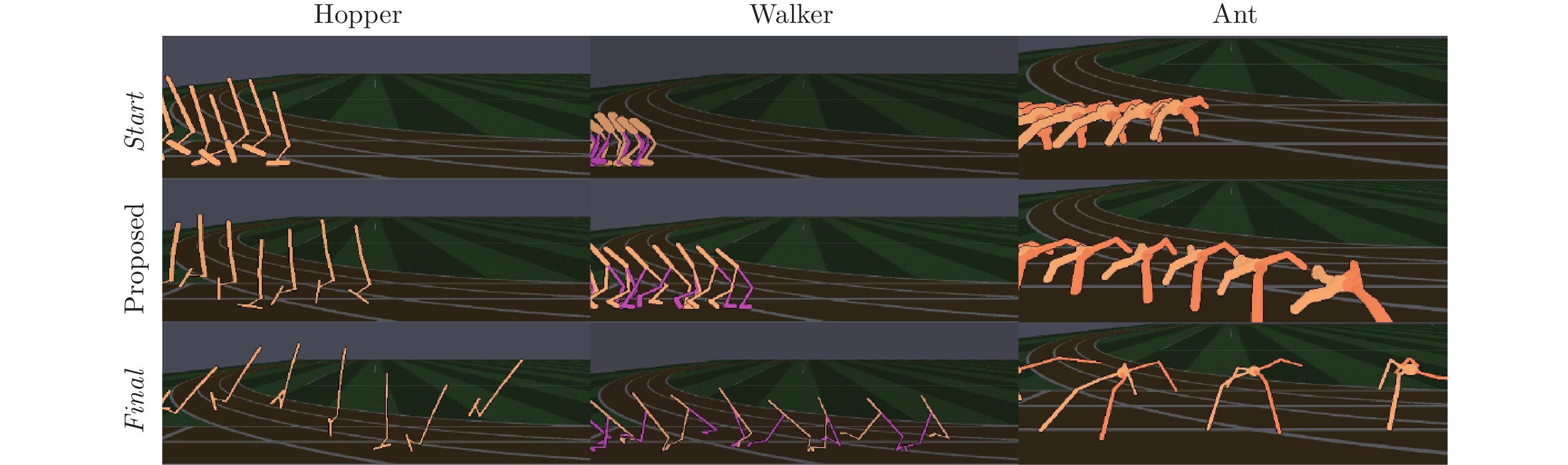

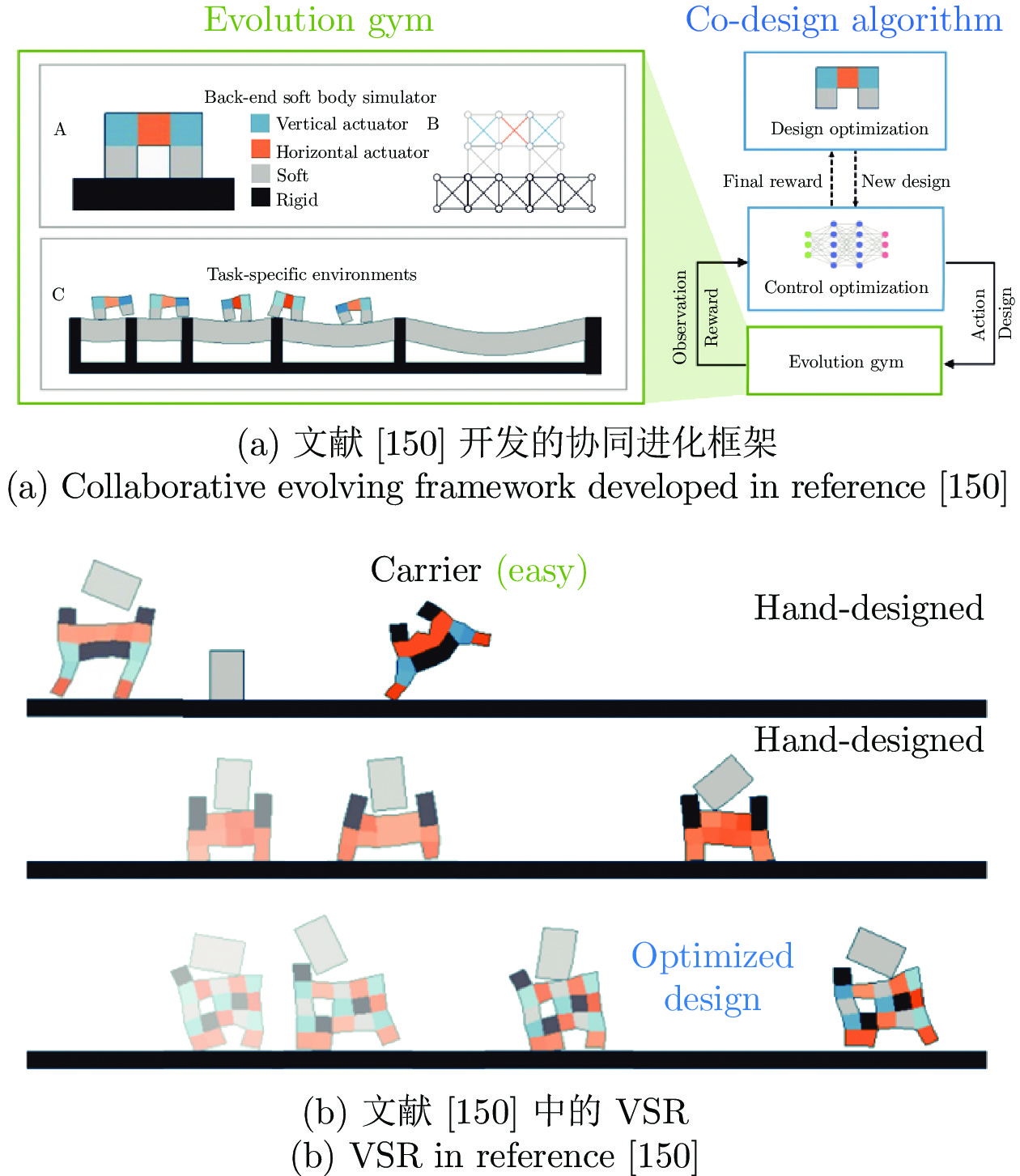
图 20 软体机器人形态进化(不同颜色对应不同的材料特性)
Fig. 20 Morphology evolving of soft robot (different colors correspond to different material characteristics)
-
[1] 张钹, 朱军, 苏航. 迈向第三代人工智能. 中国科学: 信息科学, 2020, 50(9): 1281-1302Zhang Bo, Zhu Jun, Su Hang. Toward the third generation artificial intelligence. Science China Information Sciences, 2023, 66(2): Article No. 121101 [2] Brooks R A. Intelligence without representation. Artificial Intelligence, 1991, 47(1-3): 139-159 doi: 10.1016/0004-3702(91)90053-M [3] Brooks R A. Intelligence without reason, computers and thought lecture. In: Proceedings of the 12th International Joint Conference on Artificial Intelligence. Morgan Sydney. Australia: Kaufmann Publishers Inc., 1991. 569−595 [4] Pfeifer R, Bongard J. How the Body Shapes the Way We Think: A New View of Intelligence. Cambridge: MIT Press, 2006. [5] Chrisley R. Embodied artificial intelligence. Artificial Intelligence, 2003, 149(1): 131-150 doi: 10.1016/S0004-3702(03)00055-9 [6] Anderson M L. Embodied cognition: A field guide. Artificial Intelligence, 2003, 149(1): 91-130 doi: 10.1016/S0004-3702(03)00054-7 [7] Husbands P, Shim Y, Garvie M, Dewar A, Domcsek N, Graham P, et al. Recent advances in evolutionary and bio-inspired adaptive robotics: Exploiting embodied dynamics. Applied Intelligence, 2021, 51(9): 6467-6496 doi: 10.1007/s10489-021-02275-9 [8] Roy N, Posner I, Barfoot T, Beaudoin P, Bengio Y, Bohg J, et al. From machine learning to robotics: Challenges and opportunities for embodied intelligence. arXiv preprint arXiv: 2110.15245, 2021. [9] Miriyev A, Kovač M. Skills for physical artificial intelligence. Nature Machine Intelligence, 2020, 2(11): 658-660 doi: 10.1038/s42256-020-00258-y [10] Shapiro L, Stolz S A. Embodied cognition and its significance for education. Theory and Research in Education, 2019, 17(1): 19-39 doi: 10.1177/1477878518822149 [11] Howard D, Eiben A E, Kennedy D F, Mouret J B, Valencia P, Winkler D. Evolving embodied intelligence from materials to machines. Nature Machine Intelligence, 2019, 1(1): 12-19 doi: 10.1038/s42256-018-0009-9 [12] Jin D D, Zhang L. Embodied intelligence weaves a better future. Nature Machine Intelligence, 2020, 2(11): 663-664 doi: 10.1038/s42256-020-00250-6 [13] Aubin C A, Gorissen B, Milana E, Buskohl P R, Lazarus N, Slipher G A, et al. Towards enduring autonomous robots via embodied energy. Nature, 2022, 602(7897): 393-402 doi: 10.1038/s41586-021-04138-2 [14] Isaac A M C. Embodied cognition as analog computation. Reti, Saperi, Linguaggi, 2018, 5(2): 239-262 [15] Qiao H, Zhong S L, Chen Z Y, Wang H Z. Improving performance of robots using human-inspired approaches: A survey. Science China Information Sciences, 2022, 65(12): Article No. 221201 doi: 10.1007/s11432-022-3606-1 [16] Duan J F, Yu S, Tan H L, Zhu H Y, Tan C. A survey of embodied AI: From simulators to research tasks. IEEE Transactions on Emerging Topics in Computational Intelligence, 2022, 6(2): 230-244 doi: 10.1109/TETCI.2022.3141105 [17] 司马双霖, 黄岩, 何科技, 安东, 袁辉, 王亮. 视觉语言导航研究进展. 自动化学报, 2023, 49(1): 1-14 doi: 10.16383/j.aas.c210352Sima Shuang-Lin, Huang Yan, He Ke-Ji, An Dong, Yuan Hui, Wang Liang. Recent advances in vision-and-language navigation. Acta Automatica Sinica, 2023, 49(1): 1-14 doi: 10.16383/j.aas.c210352 [18] Sitti M. Physical intelligence as a new paradigm. Extreme Mechanics Letters, 2021, 46: Article No. 101340 doi: 10.1016/j.eml.2021.101340 [19] Liao J C. Neuromuscular control of trout swimming in a vortex street: Implications for energy economy during the Karman gait. Journal of Experimental Biology, 2004, 207(20): 3495-3506 doi: 10.1242/jeb.01125 [20] Müller V C, Hoffmann M. What is morphological computation? On how the body contributes to cognition and control. Artificial Life, 2017, 23(1): 1-24 doi: 10.1162/ARTL_a_00219 [21] Cangelosi A, Bongard J, Fischer M H, Nolfi S. Embodied intelligence. Springer Handbook of Computational Intelligence. Berlin: Springer, 2015. 697−714 [22] Ho V A, Liu H B, Wang L Y, Iida F, Hirai S. Special issue on ‘morphological computation in soft robotics’. Advanced Robotics, 2018, 32(7): Article No. 339 doi: 10.1080/01691864.2018.1454287 [23] Nurzaman S G, Wang L Y, Iida F, Lipton J, Floreano F, Rus D. Design optimization of soft robots [from the guest editors]. IEEE Robotics & Automation Magazine, 2020, 27(4): 10-11 [24] Pedersen I, Iliadis A. Embodied Computing: Wearables, Implantables, Embeddables, Ingestibles. Cambridge: MIT Press, 2020. [25] McGeer T. Passive dynamic walking. The International Journal of Robotics Research, 1990, 9(2): 62-82 doi: 10.1177/027836499000900206 [26] Collins S, Ruina A, Tedrake R, Wisse M. Efficient bipedal robots based on passive-dynamic walkers. Science, 2005, 307(5712): 1082-1085 doi: 10.1126/science.1107799 [27] Iida F, Pfeifer R. Sensing through body dynamics. Robotics and Autonomous Systems, 2006, 54(8): 631-640 doi: 10.1016/j.robot.2006.03.005 [28] Ziegler M, Iida F, Pfeifer R. “Cheap” underwater locomotion: Roles of morphological properties and behavioural diversity. In: Proceedings of the 9th International Conference on Climbing and Walking Robots. Brussels, Belgium: Artificial Intelligence Lab, 2006. [29] Pfeifer R, Gómez G. Morphological computation-connecting brain, body, and environment. Creating Brain-Like Intelligence: From Basic Principles to Complex Intelligent Systems. Berlin: Springer, 2009. 66−83 [30] Pfeifer R, Bongard J [著], 俞文伟, 陈卫东, 杨建国, 许敏, 横井浩史, 金丹[译]. 身体的智能: 智能科学新视角. 北京: 科学出版社, 2009.Pfeifer R, Bongard J [Author], Yu Wen-Wei, Chen Wei-Dong, Chen Jian-Guo, Xu Min, Hiroshi Yokoi, Jin Dan [Translator]. Body Intelligence. Beijing: Science Press, 2009. [31] Folkertsma G A, van der Schaft A J, Stramigioli S. Morphological computation in a fast-running quadruped with elastic spine. IFAC-PapersOnLine, 2015, 48(13): 170-175 doi: 10.1016/j.ifacol.2015.10.234 [32] Li L C, Ma S G, Tokuda I, Asano F, Nokata M, Tian Y, et al. Generation of efficient rectilinear gait based on dynamic morphological computation and its theoretical analysis. IEEE Robotics and Automation Letters, 2021, 6(2): 841-848 doi: 10.1109/LRA.2021.3052421 [33] Bernth J E, Ho V A, Liu H B. Morphological computation in haptic sensation and interaction: From nature to robotics. Advanced Robotics, 2018, 32(7): 340-362 doi: 10.1080/01691864.2018.1447393 [34] Woodward M A, Sitti M. Morphological intelligence counters foot slipping in the desert locust and dynamic robots. Proceedings of the National Academy of Sciences of the United States of America, 2018, 115(36): E8358-E8367 [35] Paul C. Morphological computation: A basis for the analysis of morphology and control requirements. Robotics and Autonomous Systems, 2006, 54(8): 619-630 doi: 10.1016/j.robot.2006.03.003 [36] Füchslin R M, Dzyakanchuk A, Flumini D, Hauser H, Hunt K J, Luchsinger R H, et al. Morphological computation and morphological control: Steps toward a formal theory and applications. Artificial Life, 2013, 19(1): 9-34 doi: 10.1162/ARTL_a_00079 [37] Nakajima K, Fischer I. Reservoir Computing: Theory, Physical Implementations, and Applications. Singapore: Springer, 2021. [38] Hauser H, Ijspeert A J, Füchslin R M, Pfeifer R, Maass W. Towards a theoretical foundation for morphological computation with compliant bodies. Biological Cybernetics, 2011, 105(5): 355-370 [39] Hauser H, Ijspeert A J, Füchslin R M, Pfeifer R, Maass W. The role of feedback in morphological computation with compliant bodies. Biological Cybernetics, 2012, 106(10): 595-613 doi: 10.1007/s00422-012-0516-4 [40] Urbain G, Degrave J, Carette B, Dambre J, Wyffels F. Morphological properties of mass-spring networks for optimal locomotion learning. Frontiers in Neurorobotics, 2017, 11: Article No. 16 [41] Komatsu M, Yaguchi T, Nakajima K. Algebraic approach towards the exploitation of “softness”: The input-output equation for morphological computation. The International Journal of Robotics Research, 2021, 40(1): 99-118 doi: 10.1177/0278364920912298 [42] 路达, 刘金国, 高海波. 星球表面着陆巡视一体化探测机器人研究进展. 航空学报, 2021, 42(1): Article No. 523742Lu Da, Liu Jin-Guo, Gao Hai-Bo. Integrated exploration robots for planetary surface landing and patrolling: A review. Acta Aeronauticaet Astronautica Sinica, 2021, 42(1): Article No. 523742 [43] Caluwaerts K, Despraz J, Işçen A, Sabelhaus A P, Bruce J, Schrauwen B, et al. Design and control of compliant tensegrity robots through simulation and hardware validation. Journal of the Royal Society Interface, 2014, 11(98): Article No. 20140520 doi: 10.1098/rsif.2014.0520 [44] Caluwaerts K, D$’$Haene M, Verstraeten D, Schrauwen B. Locomotion without a brain: Physical reservoir computing in tensegrity structures. Artificial Life, 2013, 19(1): 35-66 doi: 10.1162/ARTL_a_00080 [45] Burms J, Caluwaerts K, Dambre J. Reward-modulated hebbian plasticity as leverage for partially embodied control in compliant robotics. Frontiers in Neurorobotics, 2015, 9: Article No. 9 [46] Shah D S, Booth J W, Baines R L, Wang K, Vespignani M, Bekris K, et al. Tensegrity robotics. Soft Robotics, 2022, 9(4): 639-656 doi: 10.1089/soro.2020.0170 [47] Liu Y X, Bi Q, Yue X M, Wu J, Yang B, Li Y B. A review on tensegrity structures-based robots. Mechanism and Machine Theory, 2022, 168: Article No. 104571 doi: 10.1016/j.mechmachtheory.2021.104571 [48] Degrave J, Caluwaerts K, Dambre J, Wyffels F. Developing an embodied gait on a compliant quadrupedal robot. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Hamburg, Germany: IEEE, 2015. 4486−4491 [49] Horii Y, Inoue K, Nishikawa S, Nakajima K, Niiyama R, Kuniyoshi Y. Physical reservoir computing in a soft swimming robot. In: Proceedings of the Conference on Artificial Life (ALIFE). MIT Press, 2021. Article No. 92 [50] Bhovad P, Li S Y. Physical reservoir computing with origami and its application to robotic crawling. Scientific Reports, 2021, 11(1): Article No. 13002 doi: 10.1038/s41598-021-92257-1 [51] Musha A, Daihara M, Shigemune H, Sawada H. Morphological computation of skin focusing on fingerprint structure. In: Proceedings of the 29th International Conference on Artificial Neural Networks (ICANN). Bratislava, Slovakia: Springer, 2020. 470−481 [52] Tanaka K, Yang S H, Tokudome Y, Minami Y, Lu Y Y, Arie T, et al. Flapping-wing dynamics as a natural detector of wind direction. Advanced Intelligent Systems, 2021, 3(2): Article No. 2000174 doi: 10.1002/aisy.202000174 [53] Tanaka G, Yamane T, Héroux J B, Nakane R, Kanazawa N, Takeda S, et al. Recent advances in physical reservoir computing: A review. Neural Networks, 2019, 115: 100-123 doi: 10.1016/j.neunet.2019.03.005 [54] Nakajima K. Physical reservoir computing-an introductory perspective. Japanese Journal of Applied Physics, 2020, 59(6): Article No. 060501 [55] Wright L G, Onodera T, Stein M M, Wang T Y, Schachter D T, Hu Z, et al. Deep physical neural networks trained with backpropagation. Nature, 2022, 601(7894): 549-555 doi: 10.1038/s41586-021-04223-6 [56] Bartolozzi C, Indiveri G, Donati E. Embodied neuromorphic intelligence. Nature Communications, 2022, 13(1): Article No. 1024 doi: 10.1038/s41467-022-28487-2 [57] Ghazi-Zahedi K. Morphological Intelligence: Measuring the Body's Contribution to Intelligence. Cham: Springer, 2019. [58] Haeufle D F B, Stollenmaier K, Heinrich I, Schmitt S, Ghazi-Zahedi K. Morphological computation increases from lower- to higher-level of biological motor control hierarchy. Frontiers in Robotics and AI, 2020, 7: Article No. 511265 doi: 10.3389/frobt.2020.511265 [59] Langer C, Ay N. How morphological computation shapes integrated information in embodied agents. Frontiers in Psychology, 2021, 12: Article No. 716433 doi: 10.3389/fpsyg.2021.716433 [60] Rückert E A, Neumann G. Stochastic optimal control methods for investigating the power of morphological computation. Artificial Life, 2013, 19(1): 115-131 doi: 10.1162/ARTL_a_00085 [61] Bongard J, Laschi C, Lipson H, Cheney N, Corucci F. Material properties affect evolutions ability to exploit morphological computation in growing soft-bodied creatures. In: Proceedings of the 15th International Conference on the Synthesis and Simulation of Living Systems (ALIFE). Cancun, Mexico: MIT Press, 2016. 234−241 [62] Pervan A, Murphey T D. Algorithmic design for embodied intelligence in synthetic cells. IEEE Transactions on Automation Science and Engineering, 2021, 18(3): 864-875 doi: 10.1109/TASE.2020.3042492 [63] Polani D. An informational perspective on how the embodiment can relieve cognitive burden. In: Proceedings of the IEEE Symposium on Artificial Life (ALIFE). Paris, France: IEEE, 2011. 78−85 [64] Gupta A, Devin C, Liu Y X, Abbeel P, Levine S. Learning invariant feature spaces to transfer skills with reinforcement learning. In: Proceedings of the 5th International Conference on Learning Representations. Toulon, France: OpenReview.net, 2017. [65] Chen T, Murali A, Gupta A. Hardware conditioned policies for multi-robot transfer learning. In: Proceedings of the 32nd International Conference on Neural Information Processing Systems (NeurIPS). Montreal, Canada: Curran Associates Inc., 2018. 9355−9366 [66] Hejna D J, Pinto L, Abbeel P. Hierarchically decoupled imitation for morphological transfer. In: Proceedings of the International Conference on Machine Learning. PMLR, 2020. 4159−4171 [67] Noguchi Y, Matsushima T, Matsuo Y, Gu S S. Tool as embodiment for recursive manipulation. arXiv preprint arXiv: 2112.00359, 2021. [68] Yang F, Yang C, Guo D, Liu H P, Sun F C. Fault-aware robust control via adversarial reinforcement learning. In: Proceedings of the 11th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER). Jiaxing, China: IEEE, 2021. 109−115 [69] Shoeleh F, Asadpour M. Graph based skill acquisition and transfer learning for continuous reinforcement learning domains. Pattern Recognition Letters, 2017, 87: 104-116 doi: 10.1016/j.patrec.2016.08.009 [70] Sanchez-Gonzalez A, Heess N, Springenberg J T, Merel J, Riedmiller M A, Hadsell R, et al. Graph networks as learnable physics engines for inference and control. In: Proceedings of the 35th International Conference on Machine Learning (ICML). Stockholmsmassan, Sweden: PMLR, 2018. 4467−4476 [71] Scarselli F, Gori M, Tsoi A C, Hagenbuchner M, Monfardini G. The graph neural network model. IEEE Transactions on Neural Networks, 2009, 20(1): 61-80 doi: 10.1109/TNN.2008.2005605 [72] Wang T W, Liao R J, Ba J, Fidler S. NerveNet: Learning structured policy with graph neural networks. In: Proceedings of the 6th International Conference on Learning Representations (ICLR). Vancouver, Canada: OpenReview.net, 2018. [73] Blake C, Kurin V, Igl M, Whiteson S. Snowflake: Scaling GNNs to high-dimensional continuous control via parameter freezing. In: Proceedings of the 35th Conference on Neural Information Processing Systems (NeurIPS). 2021. 23983−23992 [74] Huang W L, Mordatch I, Pathak D. One policy to control them all: Shared modular policies for agent-agnostic control. In: Proceedings of the 37th International Conference on Machine Learning (ICML). PMLR, 2020. 4455−4464 [75] Whitman J, Travers M, Choset H. Learning modular robot control policies. arXiv preprint arXiv: 2105.10049, 2021. [76] 田永林, 王雨桐, 王建功, 王晓, 王飞跃. 视觉Transformer研究的关键问题: 现状及展望. 自动化学报, 2022, 48(4): 957-979Tian Yong-Lin, Wang Yu-Tong, Wang Jian-Gong, Wang Xiao, Wang Fei-Yue. Key problems and progress of vision Transformers: The state of the art and prospects. Acta Automatica Sinica, 2022, 48(4): 957-979 [77] Kurin V, Igl M, Rocktäschel T, Boehmer W, Whiteson S. My body is a cage: The role of morphology in graph-based incompatible control. In: Proceedings of the 9th International Conference on Learning Representations (ICLR). Austria: OpenReview.net, 2021. [78] Hong S, Yoon D, Kim K E. Structure-aware transformer policy for inhomogeneous multi-task reinforcement learning. In: Proceedings of the 10th International Conference on Learning Representations (ICLR). OpenReview.net, 2022. [79] Gupta A, Fan L X, Ganguli S, Li F F. Metamorph: Learning universal controllers with transformers. arXiv preprint arXiv: 2203.11931. [80] Harvey I, Husbands P, Cliff D, Thompson A, Jakobi N. Evolutionary robotics: The Sussex approach. Robotics and Autonomous Systems, 1997, 20(2-4): 205-224 doi: 10.1016/S0921-8890(96)00067-X [81] Sims K. Evolving 3D morphology and behavior by competition. Artificial Life, 1994, 1(4): 353-372 doi: 10.1162/artl.1994.1.4.353 [82] Lund H H, Hallam J, Lee W P. Evolving robot morphology. In: Proceedings of the IEEE International Conference on Evolutionary Computation (ICEC). Indianapolis, USA: IEEE, 1997. 197−202 [83] Lipson H, Pollack J B. Automatic design and manufacture of robotic lifeforms. Nature, 2000, 406(6799): 974-978 doi: 10.1038/35023115 [84] Pollack J B, Lipson H. The GOLEM project: Evolving hardware bodies and brains. In: Proceedings of the Second NASA/DoD Workshop on Evolvable Hardware. Palo Alto, CA, USA: IEEE, 2000. 37−42 [85] Mautner C, Belew R K. Evolving robot morphology and control. Artificial Life and Robotics, 2000, 4(3): 130-136 doi: 10.1007/BF02481333 [86] Hornby G S, Pollack J B. Body-brain co-evolution using L-systems as a generative encoding. In: Proceedings of the 3rd Annual Conference on Genetic and Evolutionary Computation. San Francisco, USA: Morgan Kaufmann Publishers Inc., 2001. 868−875 [87] Stanley K O, Miikkulainen R. A taxonomy for artificial embryogeny. Artificial Life, 2003, 9(2): 93-130 doi: 10.1162/106454603322221487 [88] Bongard J C, Pfeifer R. Evolving complete agents using artificial ontogeny. Morpho-Functional Machines: The New Species: Designing Embodied Intelligence. Tokyo: Springer, 2003. 237−258 [89] Auerbach J E, Bongard J C. Dynamic resolution in the co-evolution of morphology and control. In: Proceedings of the 12th International Conference on the Synthesis and Simulation of Living Systems. Odense, Denmark: MIT Press, 2010. 451−458 [90] Auerbach J E, Bongard J C. On the relationship between environmental and morphological complexity in evolved robots. In: Proceedings of the 14th Annual Conference on Genetic and Evolutionary Computation. Philadelphia, USA: ACM, 2012. 521−528 [91] Howard D, Glette K, Cheney N. Editorial: Evolving robotic morphologies. Frontiers in Robotics and AI, 2022, 9: Article No. 874853 doi: 10.3389/frobt.2022.874853 [92] Cheney N, MacCurdy R, Clune J, Lipson H. Unshackling evolution: Evolving soft robots with multiple materials and a powerful generative encoding. ACM SIGEVOlution, 2014, 7(1): 11-23 doi: 10.1145/2661735.2661737 [93] Pagliuca P, Nolfi S. The dynamic of body and brain co-evolution. Adaptive Behavior, 2022, 30(3): 245-255 doi: 10.1177/1059712321994685 [94] Kriegman S, Blackiston D, Levin M, Bongard J. A scalable pipeline for designing reconfigurable organisms. Proceedings of the National Academy of Sciences of the United States of America, 2020, 117(4): 1853-1859 doi: 10.1073/pnas.1910837117 [95] Wang T W, Zhou Y H, Fidler S, Ba J. Neural graph evolution: Towards efficient automatic robot design. In: Proceedings of the 7th International Conference on Learning Representations (ICLR). New Orleans, USA: OpenReview.net, 2019. [96] Gupta A, Savarese S, Ganguli S, Fei-Fei L. Embodied intelligence via learning and evolution. Nature Communications, 2021, 12(1): Article No. 5721 doi: 10.1038/s41467-021-25874-z [97] Schaff C, Yunis D, Chakrabarti A, Walter M R. Jointly learning to construct and control agents using deep reinforcement learning. In: Proceedings of the International Conference on Robotics and Automation (ICRA). Montreal, Canada: IEEE, 2019. 9798−9805 [98] Schaff C, Sedal A, Walter M R. Soft robots learn to crawl: Jointly optimizing design and control with sim-to-real transfer. arXiv preprint arXiv: 2202.04575, 2022. [99] Pathak D, Lu C, Darrell T, Isola P, Efros A A. Learning to control self-assembling morphologies: A study of generalization via modularity. In: Proceedings of the 33rd International Conference on Neural Information Processing Systems (NeurIPS). Vancouver, Canada: Curran Associates Inc., 2019. Article No. 206 [100] Ha D. Reinforcement learning for improving agent design. Artificial Life, 2019, 25(4): 352-365 doi: 10.1162/artl_a_00301 [101] Yuan Y, Song Y D, Luo Z Y, Sun W, Kitani K M. Transform2Act: Learning a transform-and-control policy for efficient agent design. In: Proceedings of the 10th International Conference on Learning Representations (ICLR). OpenReview.net, 2022. [102] Luck K S, Amor H B, Calandra R. Data-efficient co-adaptation of morphology and behaviour with deep reinforcement learning. In: Proceedings of the 3rd Annual Conference on Robot Learning. Osaka, Japan: PMLR, 2020. 854−869 [103] Luck K S, Calandra R, Mistry M. What robot do I need? Fast co-adaptation of morphology and control using graph neural networks. arXiv preprint arXiv: 2111.02371, 2021. [104] Alet F, Bauza M, Jeewajee A K, Thomsen M, Rodriguez A, Kaelbling L P, et al. Robotic gripper design with evolutionary strategies and graph element networks. In: Proceedings of the 34th Conference on Neural Information Processing Systems (NeurIPS). Vancouver, Canada: Curran Associates Inc., 2020. [105] Pan X L, Garg A, Anandkumar A, Zhu Y K. Emergent hand morphology and control from optimizing robust grasps of diverse objects. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Xi'an, China: IEEE, 2021. 7540−7547 [106] Xu J, Chen T, Zlokapa L, Foshey M, Matusik W, Sueda S, et al. An end-to-end differentiable framework for contact-aware robot design. arXiv preprint arXiv: 2107.07501, 2021. [107] Hornby G S, Lipson H, Pollack J B. Generative representations for the automated design of modular physical robots. IEEE Transactions on Robotics and Automation, 2003, 19(4): 703-719 doi: 10.1109/TRA.2003.814502 [108] Bongard J, Zykov V, Lipson H. Resilient machines through continuous self-modeling. Science, 2006, 314(5802): 1118-1121 doi: 10.1126/science.1133687 [109] Koos S, Mouret J B, Doncieux S. The transferability approach: Crossing the reality gap in evolutionary robotics. IEEE Transactions on Evolutionary Computation, 2013, 17(1): 122-145 doi: 10.1109/TEVC.2012.2185849 [110] Rosser K, Kok J, Chahl J, Bongard J. Sim2real gap is non-monotonic with robot complexity for morphology-in-the-loop flapping wing design. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Paris, France: IEEE, 2020. 7001−7007 [111] Collins J, Geles W, Howard D, Maire F. Towards the targeted environment-specific evolution of robot components. In: Proceedings of the Genetic and Evolutionary Computation Conference. Kyoto, Japan: ACM, 2018. 61−68 [112] Samuelsen E, Glette K. Real-world reproduction of evolved robot morphologies: Automated categorization and evaluation. In: Proceedings of the 18th European Conference on the Applications of Evolutionary Computation. Copenhagen, Denmark: Springer, 2015. 771−782 [113] Nygaard T F, Samuelsen E, Glette K. Overcoming initial convergence in multi-objective evolution of robot control and morphology using a two-phase approach. In: Proceedings of the 20th European Conference on the Applications of Evolutionary Computation. Amsterdam, The Netherlands: Springer, 2017. 825−836 [114] Kriegman S, Nasab A M, Shah D, Steele H, Branin G, Levin M, et al. Scalable sim-to-real transfer of soft robot designs. In: Proceedings of the 3rd IEEE International Conference on Soft Robotics (RoboSoft). New Haven: IEEE, 2020. 359−366 [115] Auerbach J E, Concordel A, Kornatowski P M, Floreano D. Inquiry-based learning with RoboGen: An open-source software and hardware platform for robotics and artificial intelligence. IEEE Transactions on Learning Technologies, 2019, 12(3): 356-369 doi: 10.1109/TLT.2018.2833111 [116] Brodbeck L, Hauser S, Iida F. Morphological evolution of physical robots through model-free phenotype development. PLoS One, 2015, 10(6): Article No. e0128444 doi: 10.1371/journal.pone.0128444 [117] Nygaard T F, Martin C P, Howard D, Torresen J, Glette K. Environmental adaptation of robot morphology and control through real-world evolution. Evolutionary Computation, 2021, 29(4): 441-461 doi: 10.1162/evco_a_00291 [118] Nygaard T F, Martin C P, Torresen J, Glette K. Self-modifying morphology experiments with dyret: Dynamic robot for embodied testing. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Montreal, QC, Canada: IEEE, 2019. 9446−9452. [119] Nygaard T F, Martin C P, Torresen J, Glette K, Howard D. Real-world embodied AI through a morphologically adaptive quadruped robot. Nature Machine Intelligence, 2021, 3(5): 410-419 doi: 10.1038/s42256-021-00320-3 [120] Kim D, Kim S H, Kim T, Kang B B, Lee M, Park W, et al. Review of machine learning methods in soft robotics. PLoS One, 2021, 16(2): Article No. e0246102 doi: 10.1371/journal.pone.0246102 [121] Galloway K C, Becker K P, Phillips B, Kirby J, Licht S, Tchernov D, et al. Soft robotic grippers for biological sampling on deep reefs. Soft Robotics, 2016, 3(1): 23-33 doi: 10.1089/soro.2015.0019 [122] Culha U, Wani U, Nurzaman S G, Clemens F, Iida F. Motion pattern discrimination for soft robots with morphologically flexible sensors. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago, USA: IEEE, 2014. 567−572 [123] Fang B, Sun F C, Wu L Y, Liu F K, Wang X X, Huang H M, et al. Multimode grasping soft gripper achieved by layer jamming structure and tendon-driven mechanism. Soft Robotics, 2022, 9(2): 233-249 doi: 10.1089/soro.2020.0065 [124] Laschi C, Cianchetti M, Mazzolai B, Margheri L, Follador M, Dario P. Soft robot arm inspired by the octopus. Advanced Robotics, 2012, 26(7): 709-727 doi: 10.1163/156855312X626343 [125] Liu F K, Sun F C, Fang B, Li X, Sun S Y, Liu H P. Hybrid robotic grasping with a soft multimodal gripper and a deep multistage learning scheme. IEEE Transactions on Robotics, DOI: 10.1109/TRO.2023.3238910 [126] Ho V A, Yamashita H, Wang Z K, Hirai S, Shibuya K. Morphological computation in tactile sensing: The role of wrinkle. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Singapore: IEEE, 2017. 4977−4984 [127] Nguyen N H, Ngo T D, Nguyen D Q, Ho V A. Contact distance estimation by a soft active whisker sensor based on morphological computation. In: Proceedings of the 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob). New York, USA: IEEE, 2020. 322−327 [128] Di Lallo A, Catalano M, Garabini M, Grioli G, Gabiccini M, Bicchi A. Dynamic morphological computation through damping design of soft material robots: Application to under-actuated grippers. In: Proceedings of the International Conference on Robotics and Automation (ICRA). Montreal, Canada: IEEE, 2019. 5155−5161 [129] Laschi C, Mazzolai B. Lessons from animals and plants: The symbiosis of morphological computation and soft robotics. IEEE Robotics & Automation Magazine, 2016, 23(3): 107-114 [130] Nakajima K, Hauser H, Kang R J, Guglielmino E, Caldwell D G, Pfeifer R. A soft body as a reservoir: Case studies in a dynamic model of octopus-inspired soft robotic arm. Frontiers in Computational Neuroscience, 2013, 7: Article No. 91 [131] Nakajima K, Hauser H, Li T, Pfeifer R. Information processing via physical soft body. Scientific Reports, 2015, 5: Article No. 10487 doi: 10.1038/srep10487 [132] Nakajima K, Hauser H, Li T, Pfeifer R. Exploiting the dynamics of soft materials for machine learning. Soft Robotics, 2018, 5(3): 339-347 doi: 10.1089/soro.2017.0075 [133] Judd E, Soter C, Rossiter J, Hauscr H. Sensing through the body-non-contact object localisation using morphological computation. In: Proceedings of the 2nd IEEE International Conference on Soft Robotics (RoboSoft). Seoul, South Korea: IEEE, 2019. 558−563 [134] Eder M, Hisch F, Hauser H. Morphological computation-based control of a modular, pneumatically driven, soft robotic arm. Advanced Robotics, 2018, 32(7): 375-385 doi: 10.1080/01691864.2017.1402703 [135] Xu F, Wang H S. Soft robotics: Morphology and morphology-inspired motion strategy. IEEE/CAA Journal of Automatica Sinica, 2021, 8(9): 1500-1522 doi: 10.1109/JAS.2021.1004105 [136] Bhagat S, Banerjee H, Tse Z T H, Ren H L. Deep reinforcement learning for soft, flexible robots: Brief review with impending challenges. Robotics, 2019, 8(1): Article No. 4 doi: 10.3390/robotics8010004 [137] Satheeshbabu S, Uppalapati N K, Fu T S, Krishnan G. Continuous control of a soft continuum arm using deep reinforcement learning. In: Proceedings of the 3rd IEEE International Conference on Soft Robotics (RoboSoft). New Haven, USA: IEEE, 2020. 497−503 [138] Uppalapati N K, Walt B T, Havens A J, Mahdian A, Chowdhary G, Krishnan G. A berry picking robot with a hybrid soft-rigid arm: Design and task space control. In: Proceedings of the 16th Robotics: Science and Systems. MIT Press, 2020. [139] Vikas V, Grover P, Trimmer B. Model-free control framework for multi-limb soft robots. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Hamburg, Germany: IEEE, 2015. 1111−1116 [140] Almeida J D, Schydlo P, Dehban A, Santos-Victor J. SENSORIMOTOR GRAPH: Action-conditioned graph neural network for learning robotic soft hand dynamics. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Prague, Czech Republic: IEEE, 2021. 9569−9576 [141] Alkhodary A, Gur B. Kinematics transformer: Solving the inverse modeling problem of soft robots using transformers. arXiv preprint arXiv: 2211.06643, 2022. [142] Naughton N, Sun J R, Tekinalp A, Parthasarathy T, Chowdhary G, Gazzola M. Elastica: A compliant mechanics environment for soft robotic control. IEEE Robotics and Automation Letters, 2021, 6(2): 3389-3396 doi: 10.1109/LRA.2021.3063698 [143] Schegg P, Ménager E, Khairallah E, Marchal D, Dequidt J, Preux P, et al. SofaGym: An open platform for reinforcement learning based on soft robot simulations. Soft Robot, 2023, 10(2): 410-430 doi: 10.1089/soro.2021.0123 [144] Graule M A, McCarthy T P, Teeple C B, Werfel J, Wood R J. SoMoGym: A toolkit for developing and evaluating controllers and reinforcement learning algorithms for soft robots. IEEE Robotics and Automation Letters, 2022, 7(2): 4071-4078 doi: 10.1109/LRA.2022.3149580 [145] Hiller J D, Lipson H. Multi material topological optimization of structures and mechanisms. In: Proceedings of the 11th Annual Conference on Genetic and Evolutionary Computation. Montreal, Canada: ACM, 2009. 1521−1528 [146] Cheney N, Clune J, Lipson H. Evolved electrophysiological soft robots. In: Proceedings of the 14th International Conference on the Synthesis and Simulation of Living Systems (ALIFE). New York, USA: MIT Press, 2014. 222−229 [147] Ferigo A, Iacca G, Medvet E, Pigozzi F. Evolving Hebbian learning rules in voxel-based soft robots. IEEE Transactions on Cognitive and Developmental Systems, DOI: 10.36227/techrxiv.17091218.v1 [148] Medvet E, Bartoli A, Pigozzi F, Rochelli M. Biodiversity in evolved voxel-based soft robots. In: Proceedings of the Genetic and Evolutionary Computation Conference. Lille, France: ACM, 2021. 129−137 [149] Joachimczak M, Suzuki R, Arita T. Artificial metamorphosis: Evolutionary design of transforming, soft-bodied robots. Artificial Life, 2016, 22(3): 271-298 doi: 10.1162/ARTL_a_00207 [150] Bhatia J S, Jackson H, Tian Y S, Xu J, Matusik W. Evolution gym: A large-scale benchmark for evolving soft robots. arXiv preprint arXiv: 2201.09863, 2022. [151] Chaplot D S, Jiang H, Gupta S, Gupta A. Semantic curiosity for active visual learning. In: Proceedings of the 16th European Conference on Computer Vision. Glasgow, UK: Springer, 2020. 309−326 [152] Chaplot D S, Dalal M, Gupta S, Malik J, Salakhutdinov R. SEAL: Self-supervised embodied active learning using exploration and 3D consistency. In: Proceedings of the 35th Conference on Neural Information Processing Systems (NeurIPS). 2021. 13086−13098 [153] Nilsson D, Pirinen A, Gärtner E, Sminchisescu C. Embodied visual active learning for semantic segmentation. In: Proceedings of the 35th AAAI Conference on Artificial Intelligence. AAAI, 2021. 2373−2383 [154] Fang Z Y, Jain A, Sarch G, Harley A W, Fragkiadaki K. Move to see better: Self-improving embodied object detection. In: Proceedings of the 32nd British Machine Vision Conference (BMVC). BMVA Press, 2021. Article No. 270 [155] Pinto L, Gandhi D, Han Y F, Park Y L, Gupta A. The curious robot: Learning visual representations via physical interactions. In: Proceedings of the 14th European Conference on Computer Vision. Amsterdam, The Netherlands: Springer, 2016. 3−18 [156] 张天栋, 王睿, 程龙, 王宇, 王硕. 鱼集群游动的节能机理研究综述. 自动化学报, 2021, 47(3): 475-488 doi: 10.16383/j.aas.c200293Zhang Tian-Dong, Wang Rui, Cheng Long, Wang Yu, Wang Shuo. Research on energy-saving mechanism of fish schooling: A review. Acta Automatica Sinica, 2021, 47(3): 475-488 doi: 10.16383/j.aas.c200293 [157] Zhu F D, Zhu Y, Lee V C S, Liang X D, Chang X J. Deep learning for embodied vision navigation: A survey. arXiv preprint arXiv: 2108.04097, 2021. [158] Li X H, Guo D, Liu H P, Sun F C. Embodied semantic scene graph generation. In: Proceedings of the Conference on Robot Learning. London, UK: PMLR, 2021. 1585−1594 [159] Tan S N, Ge M M, Guo D, Liu H P, Sun F C. Knowledge-based embodied question answering. arXiv preprint arXiv: 2109.07872, 2021. [160] Yang W, Wang X L, Farhadi A, Gupta A, Mottaghi R. Visual semantic navigation using scene priors. In: Proceedings of the 7th International Conference on Learning Representations (ICLR). New Orleans, USA: OpenReview.net, 2019. -

 下载:
下载:

计量
- 文章访问数: 7592
- HTML全文浏览量: 6341
- PDF下载量: 8621
- 被引次数: 0
