2023年 第49卷 第5期
2023, 49(5): 913-928.
doi: 10.16383/j.aas.c210547
摘要:
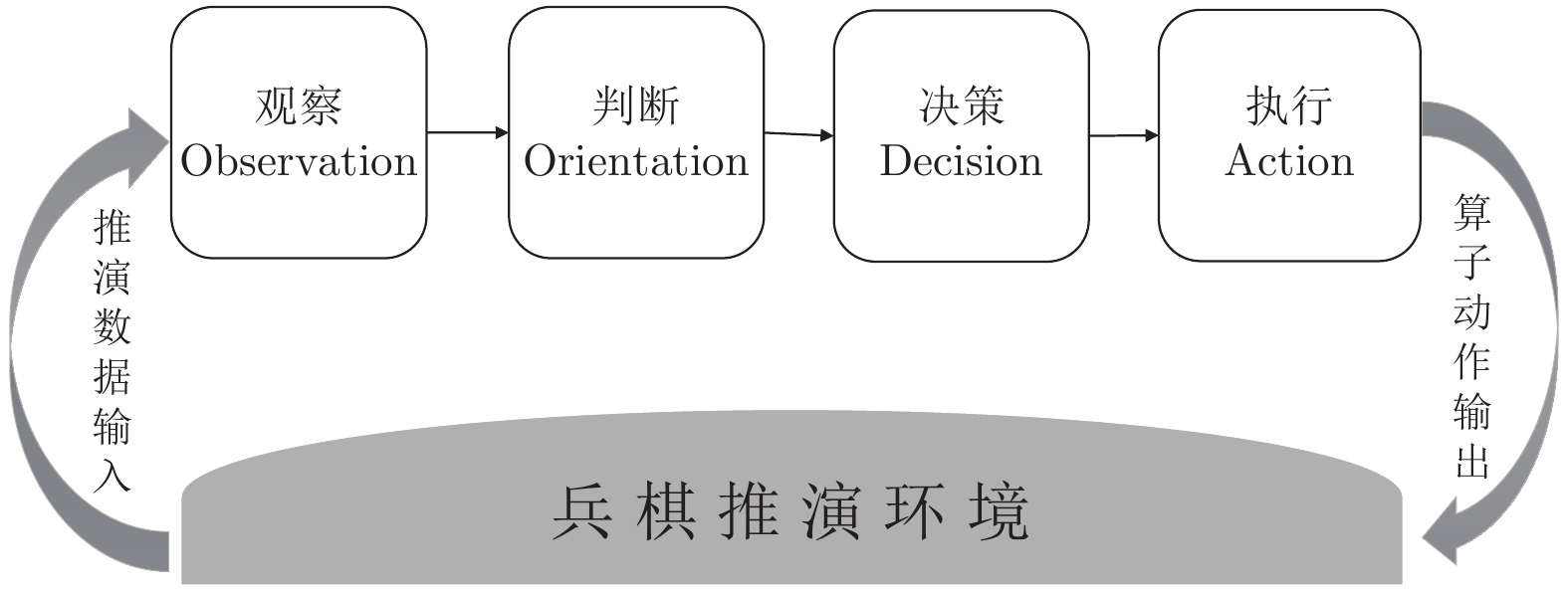
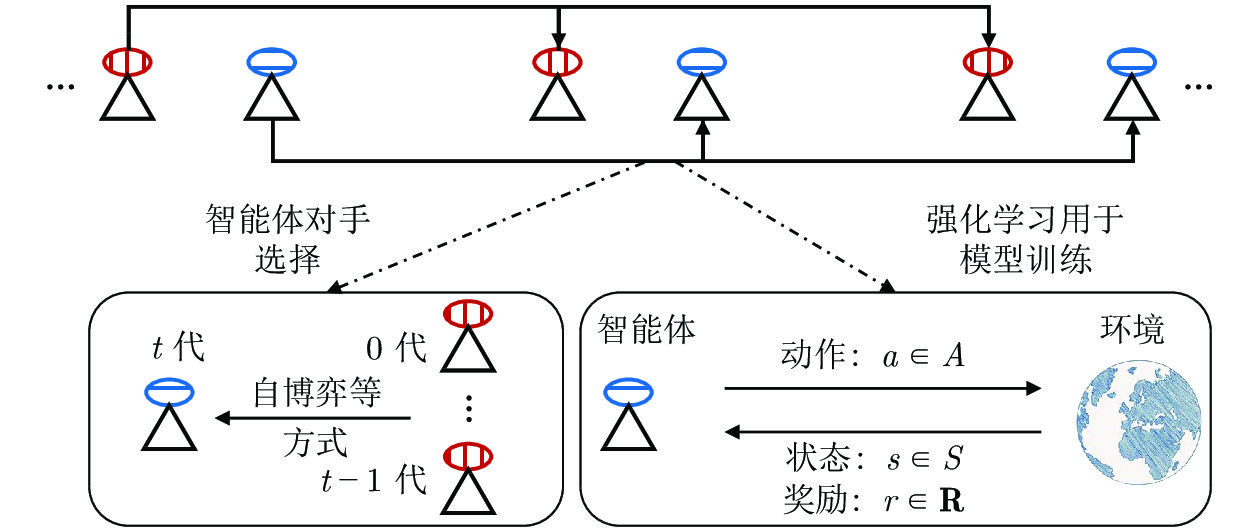
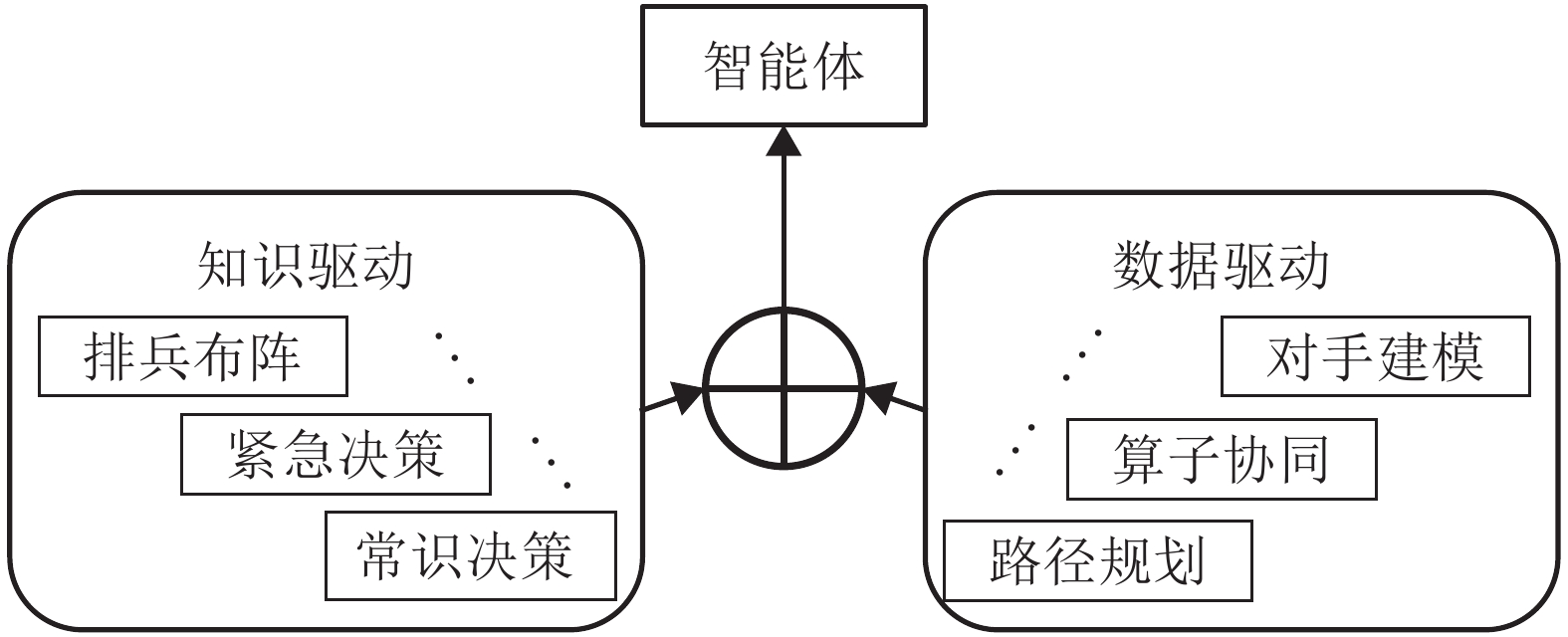
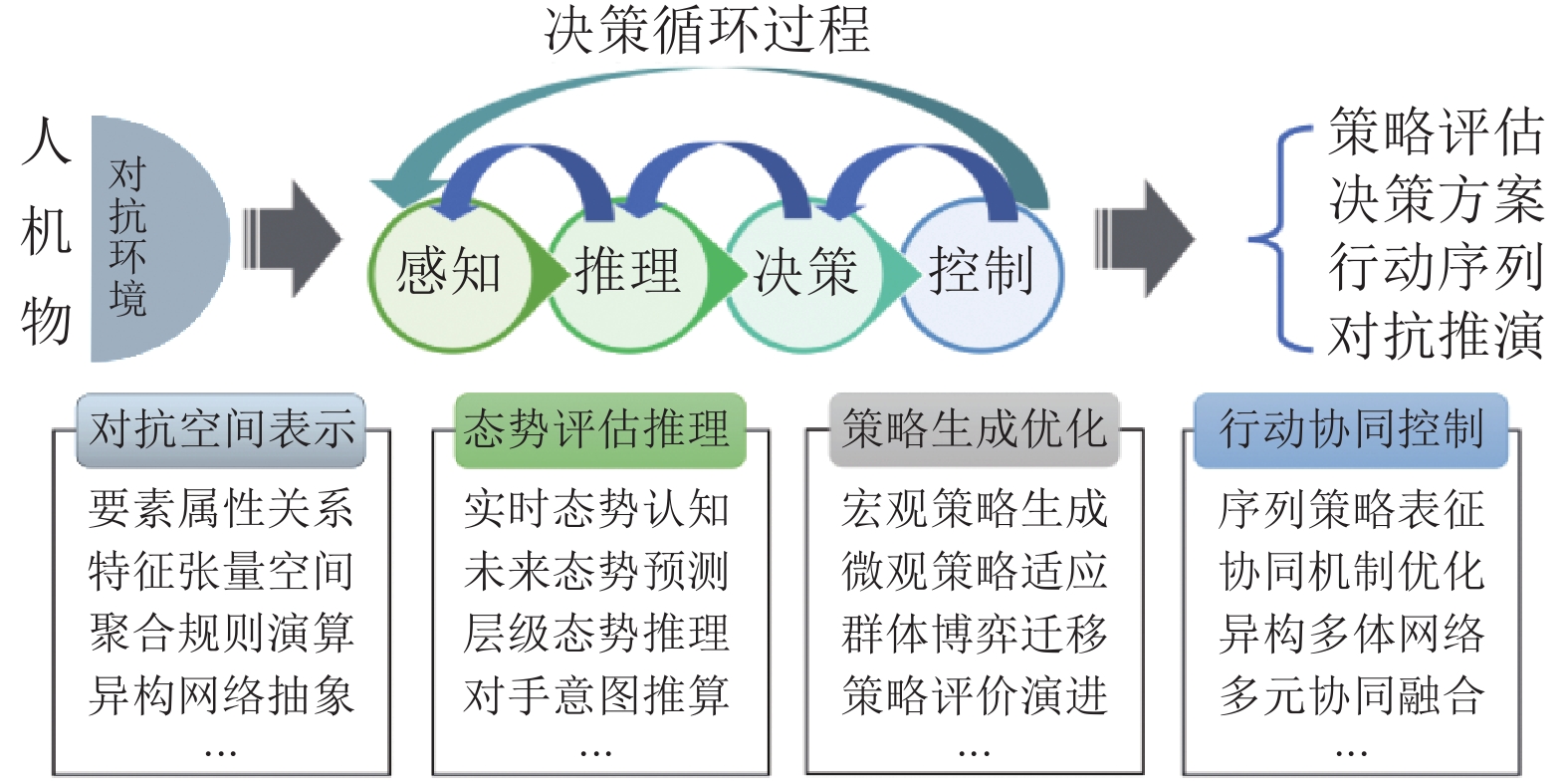
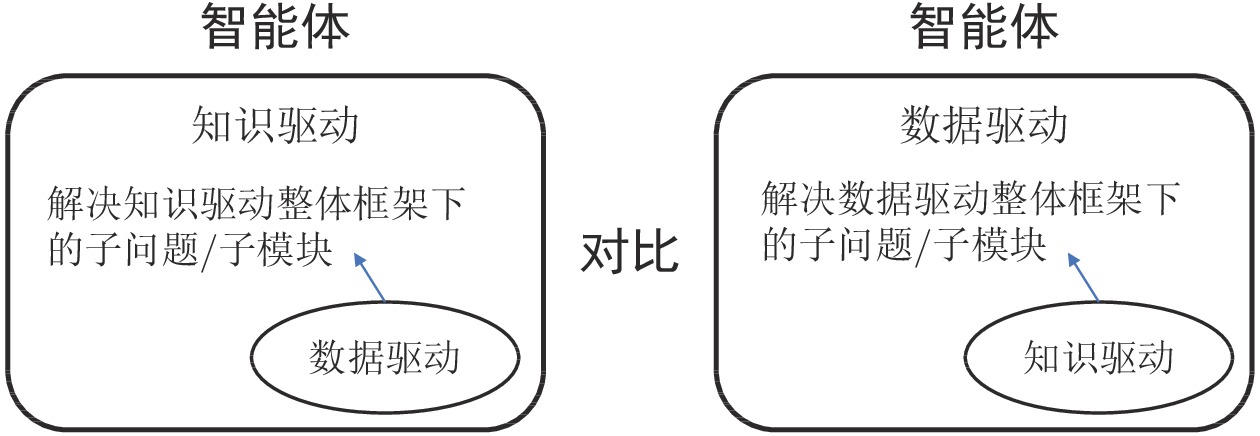
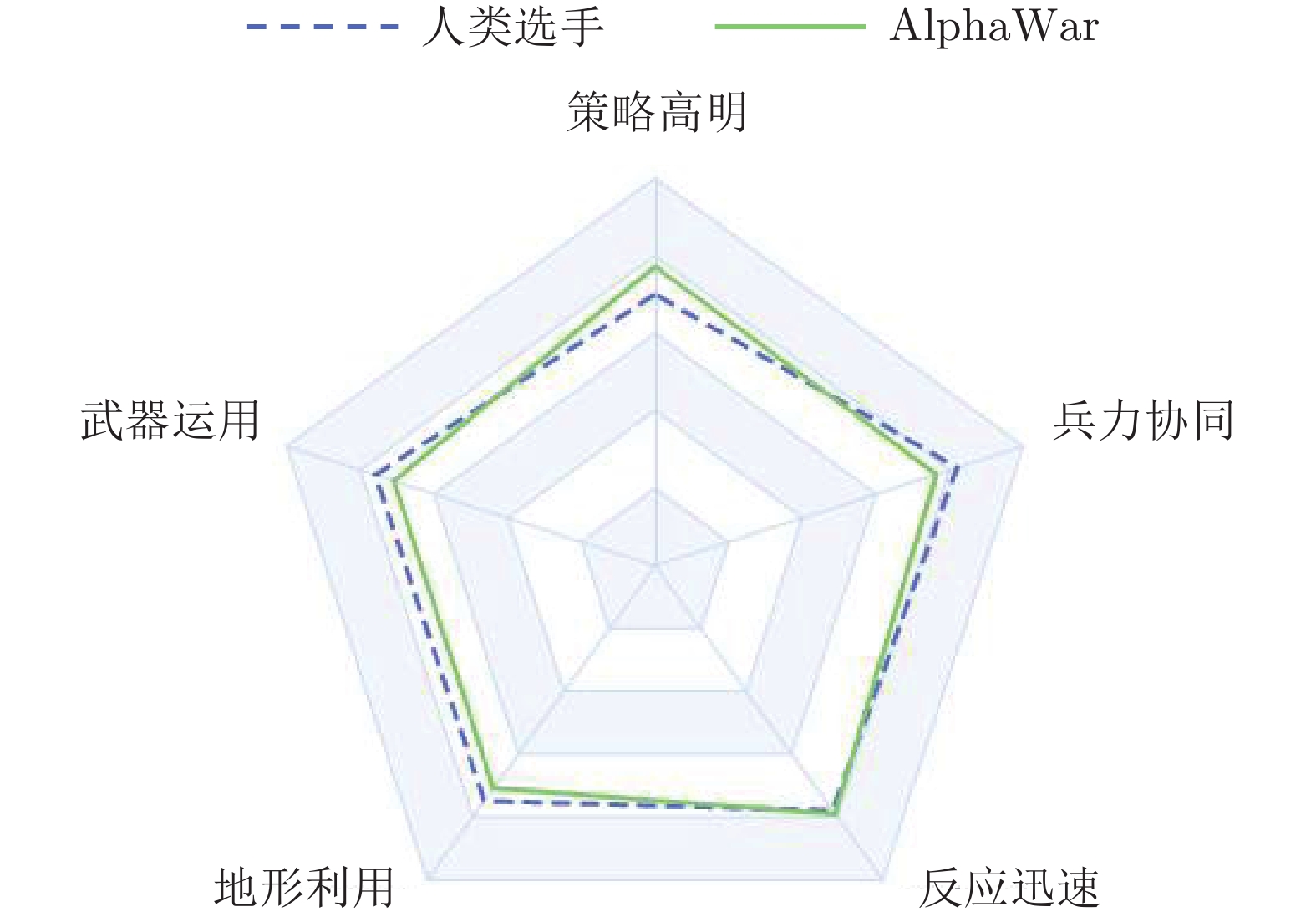
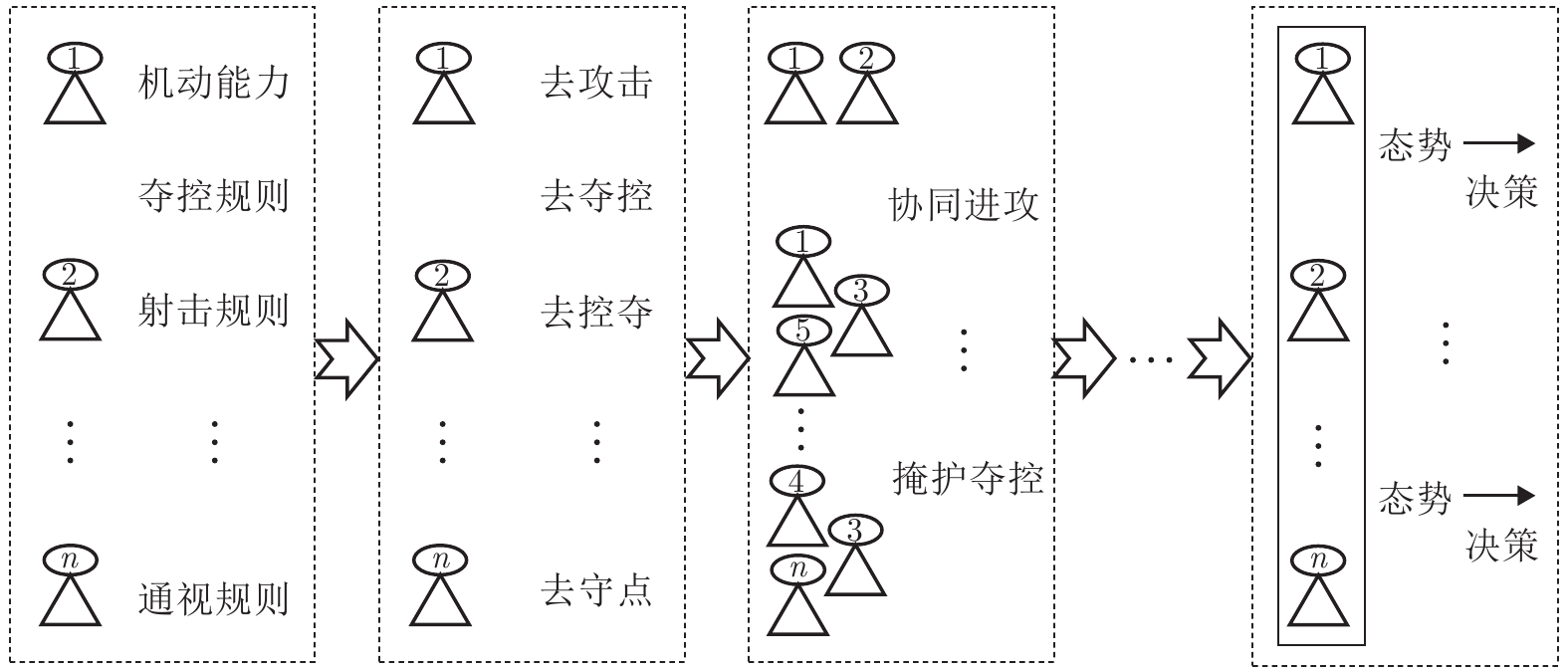
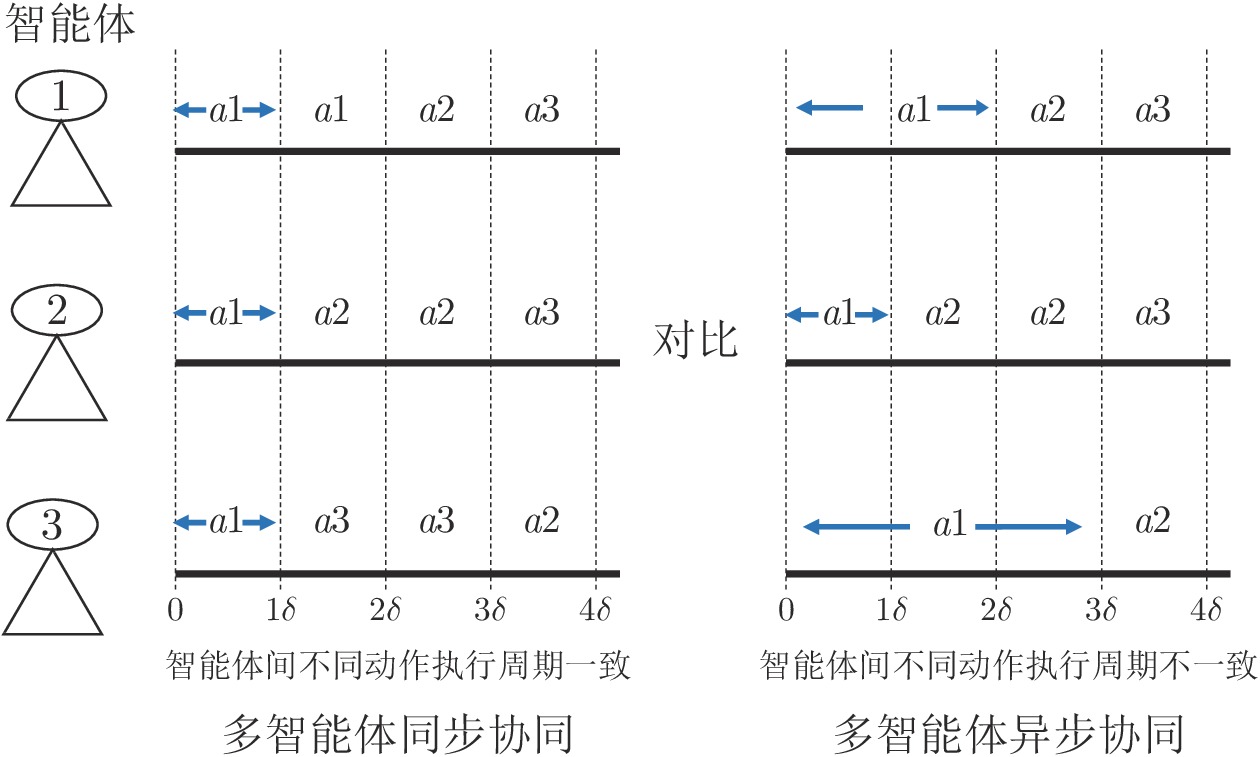
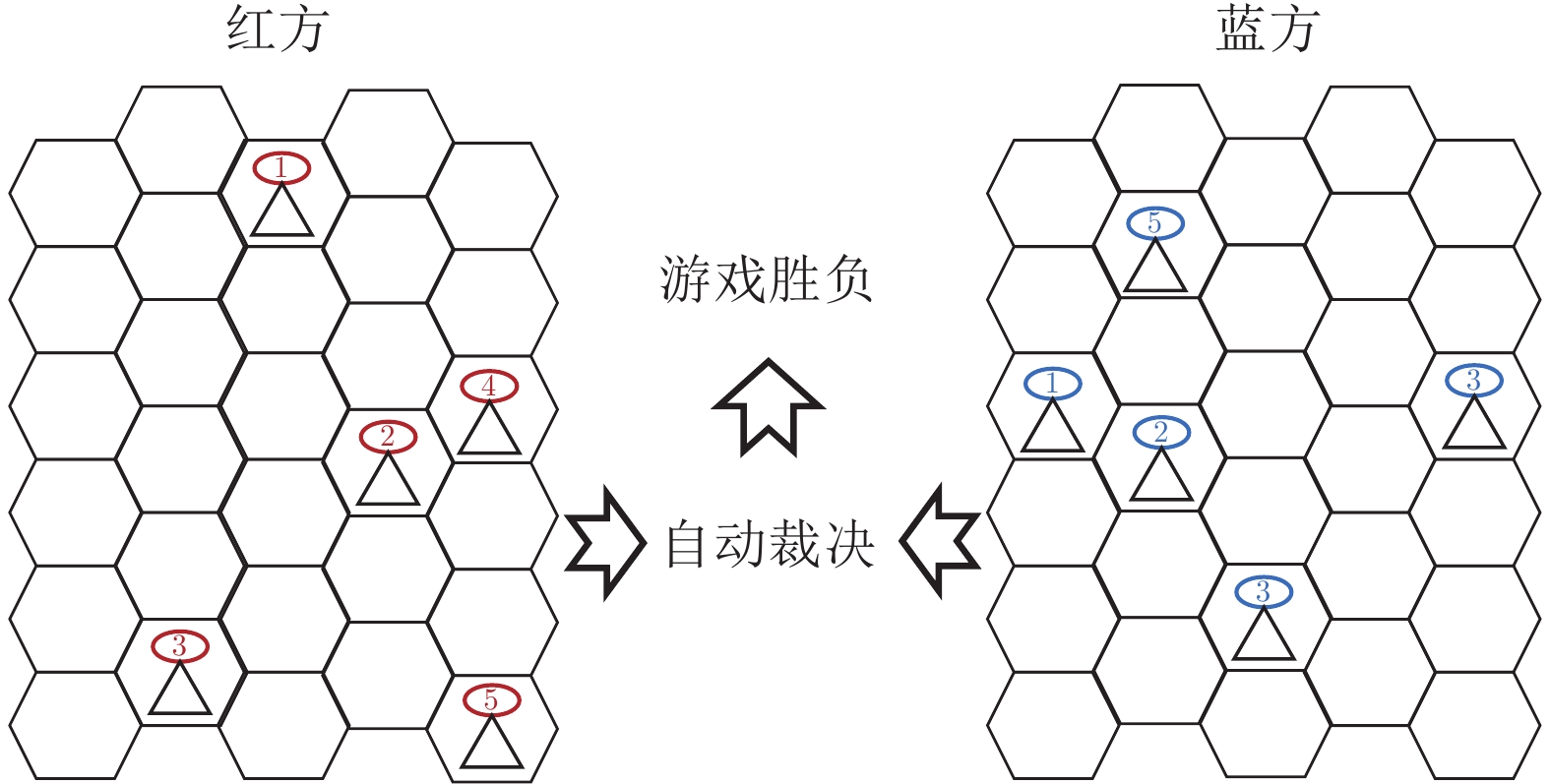
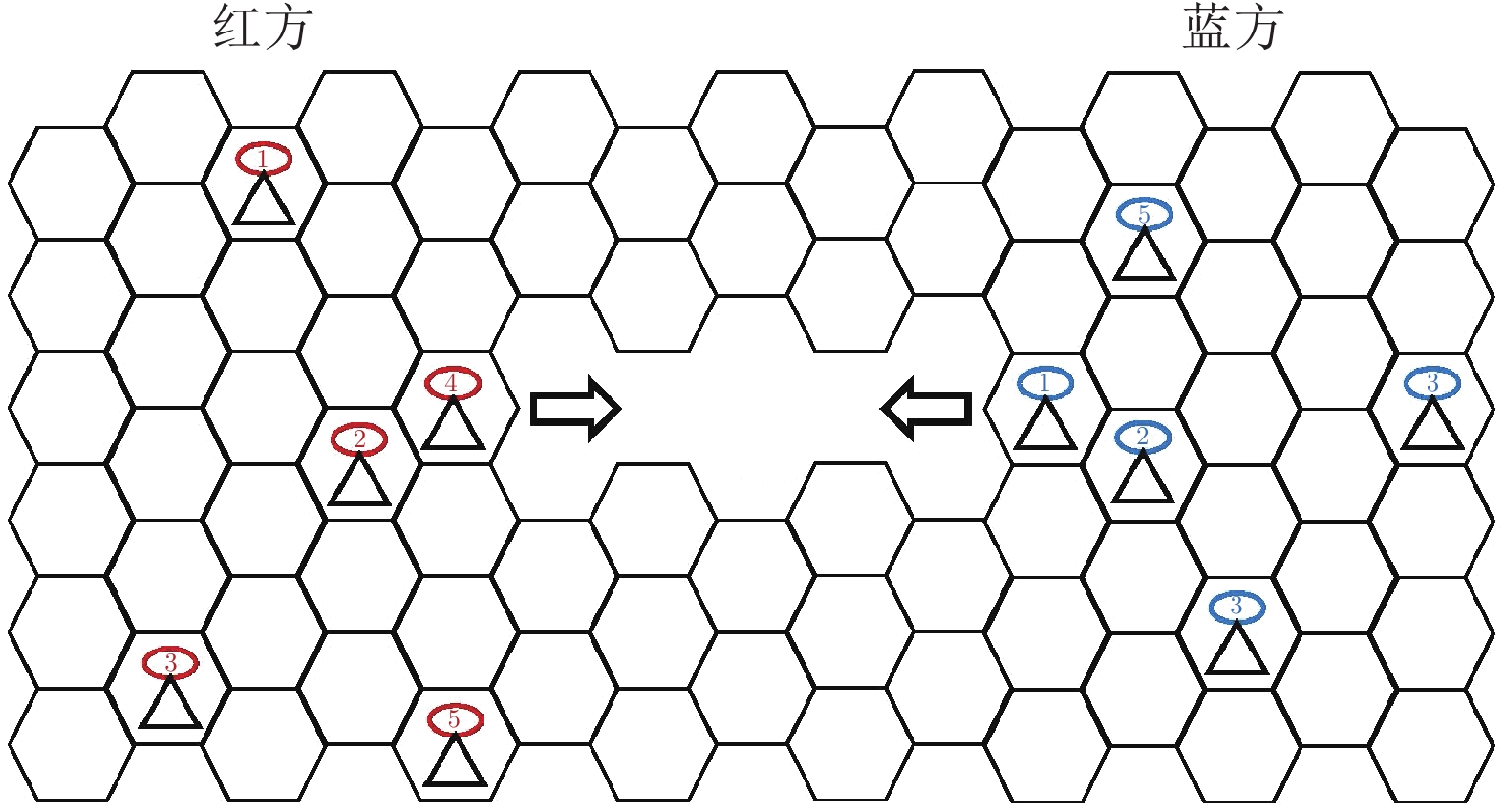
近年来, 以人机对抗为途径的智能决策技术取得了飞速发展, 人工智能(Artificial intelligence, AI)技术AlphaGo、AlphaStar等分别在围棋、星际争霸等游戏环境中战胜了顶尖人类选手. 兵棋推演作为一种人机对抗策略验证环境, 由于其非对称环境决策、更接近真实环境的随机性与高风险决策等特点, 受到智能决策技术研究者的广泛关注. 通过梳理兵棋推演与目前主流人机对抗环境(如围棋、德州扑克、星际争霸等)的区别, 阐述了兵棋推演智能决策技术的发展现状, 分析了当前主流技术的局限与瓶颈, 对兵棋推演中的智能决策技术研究进行了思考, 期望能对兵棋推演相关问题中的智能决策技术研究带来启发.
近年来, 以人机对抗为途径的智能决策技术取得了飞速发展, 人工智能(Artificial intelligence, AI)技术AlphaGo、AlphaStar等分别在围棋、星际争霸等游戏环境中战胜了顶尖人类选手. 兵棋推演作为一种人机对抗策略验证环境, 由于其非对称环境决策、更接近真实环境的随机性与高风险决策等特点, 受到智能决策技术研究者的广泛关注. 通过梳理兵棋推演与目前主流人机对抗环境(如围棋、德州扑克、星际争霸等)的区别, 阐述了兵棋推演智能决策技术的发展现状, 分析了当前主流技术的局限与瓶颈, 对兵棋推演中的智能决策技术研究进行了思考, 期望能对兵棋推演相关问题中的智能决策技术研究带来启发.



2023, 49(5): 929-948.
doi: 10.16383/j.aas.c210951
摘要:
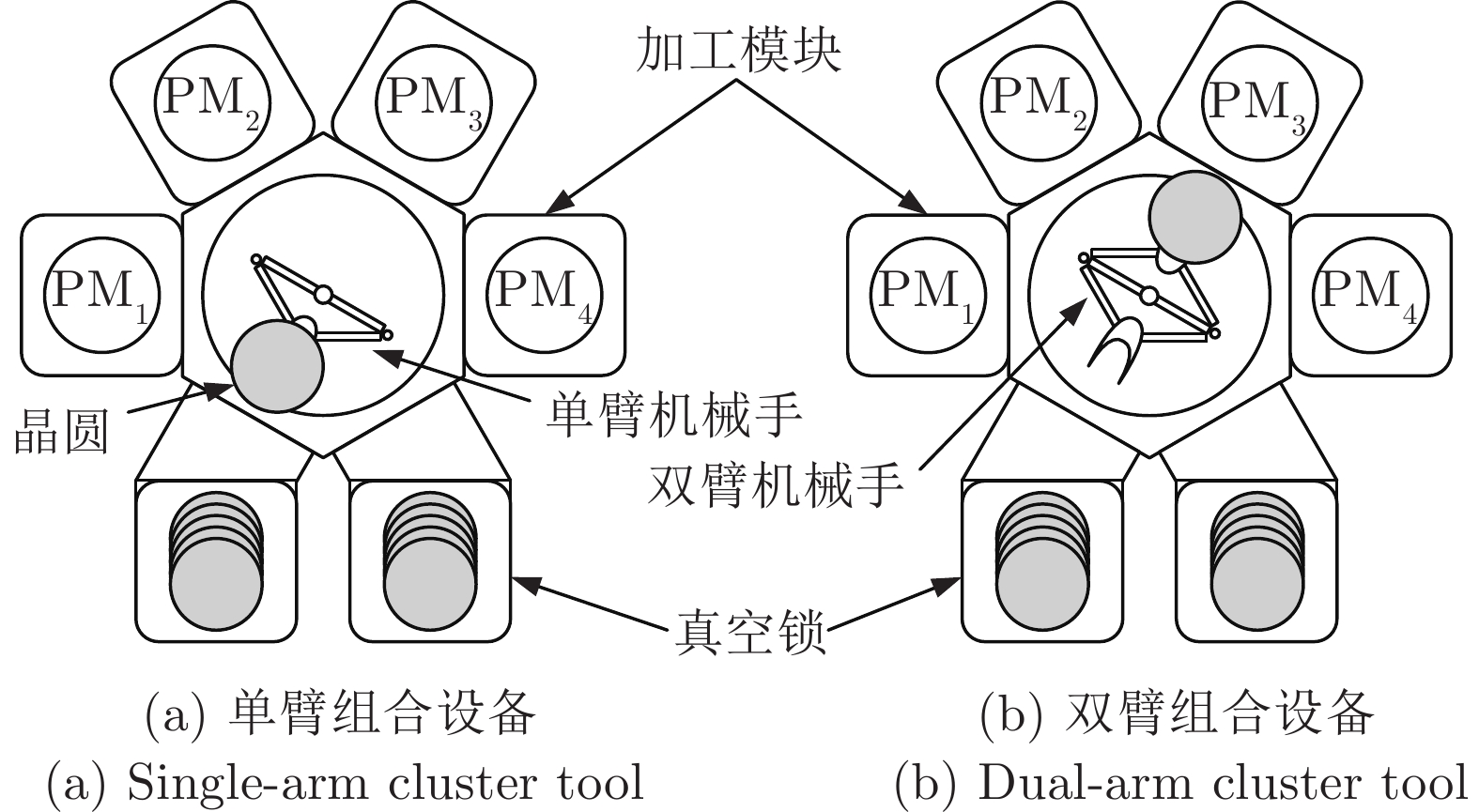
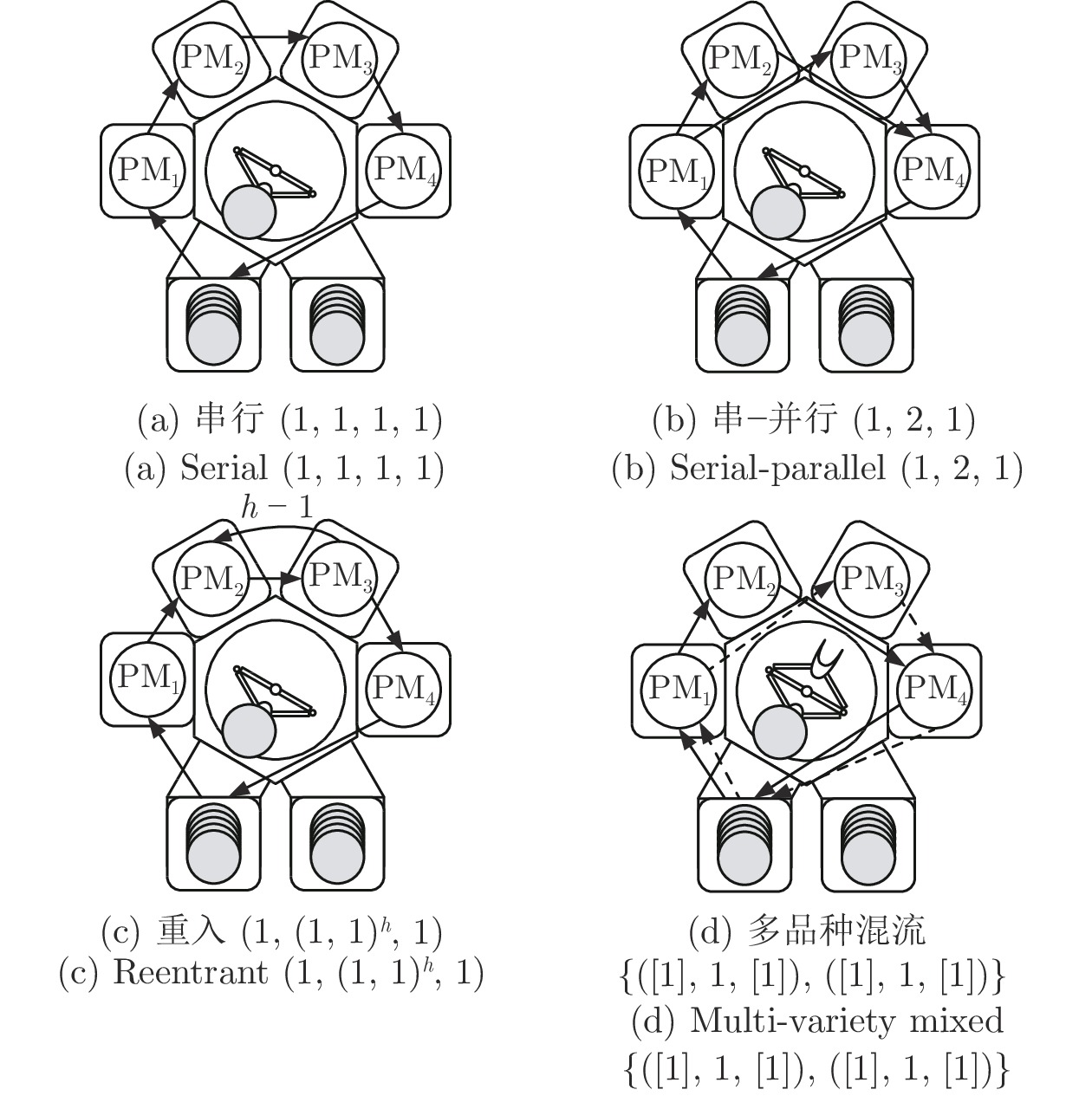
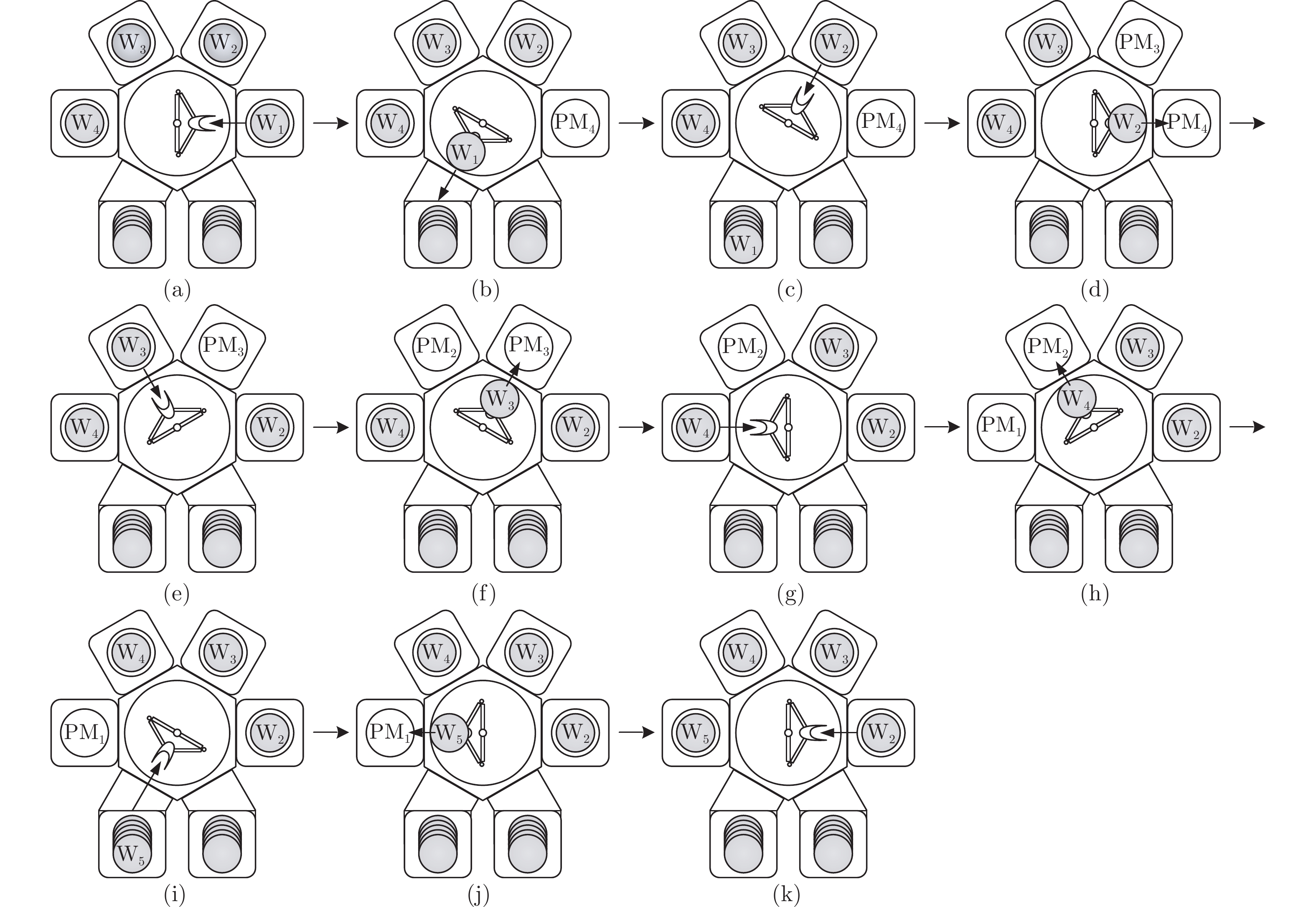
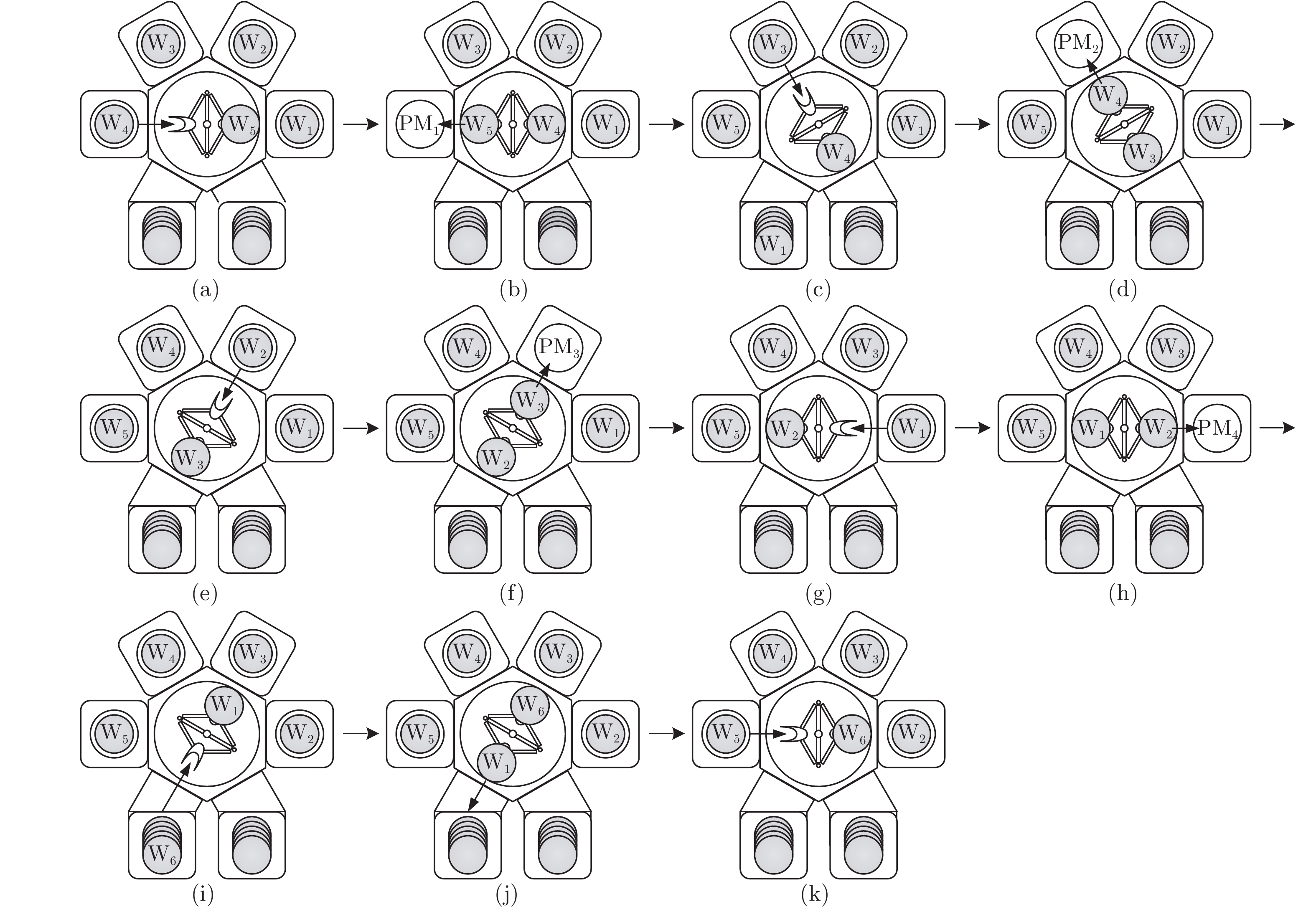
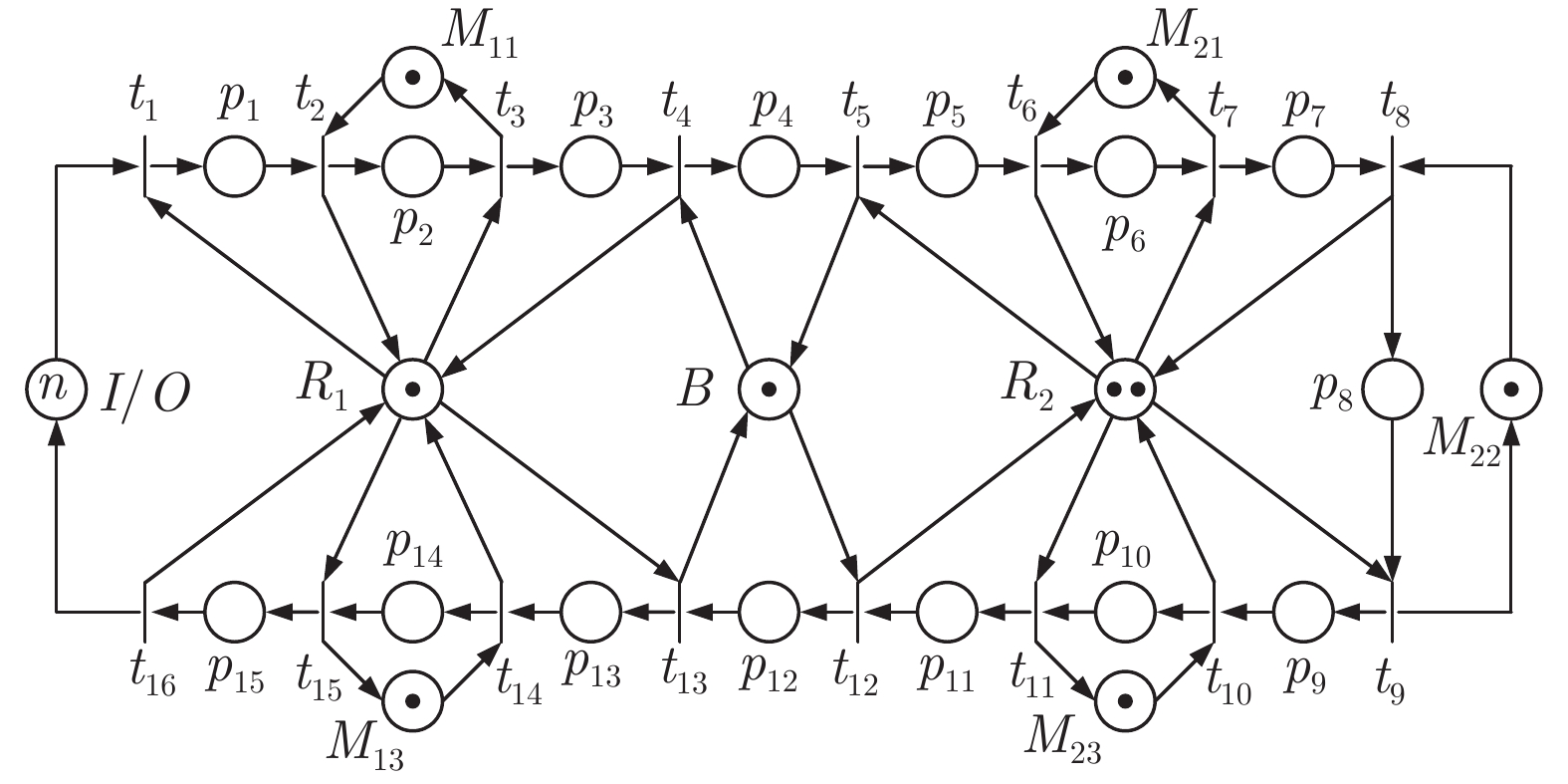
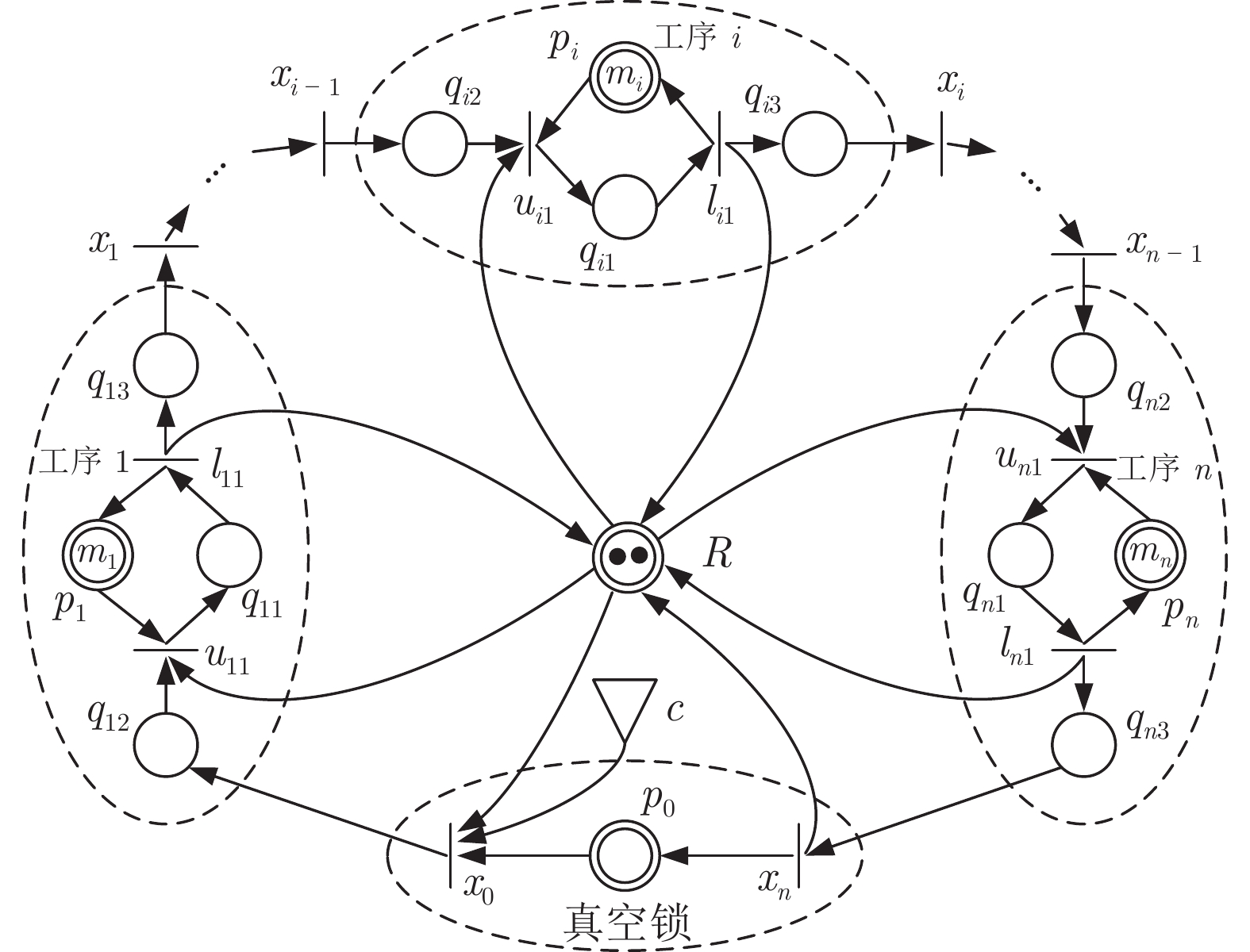
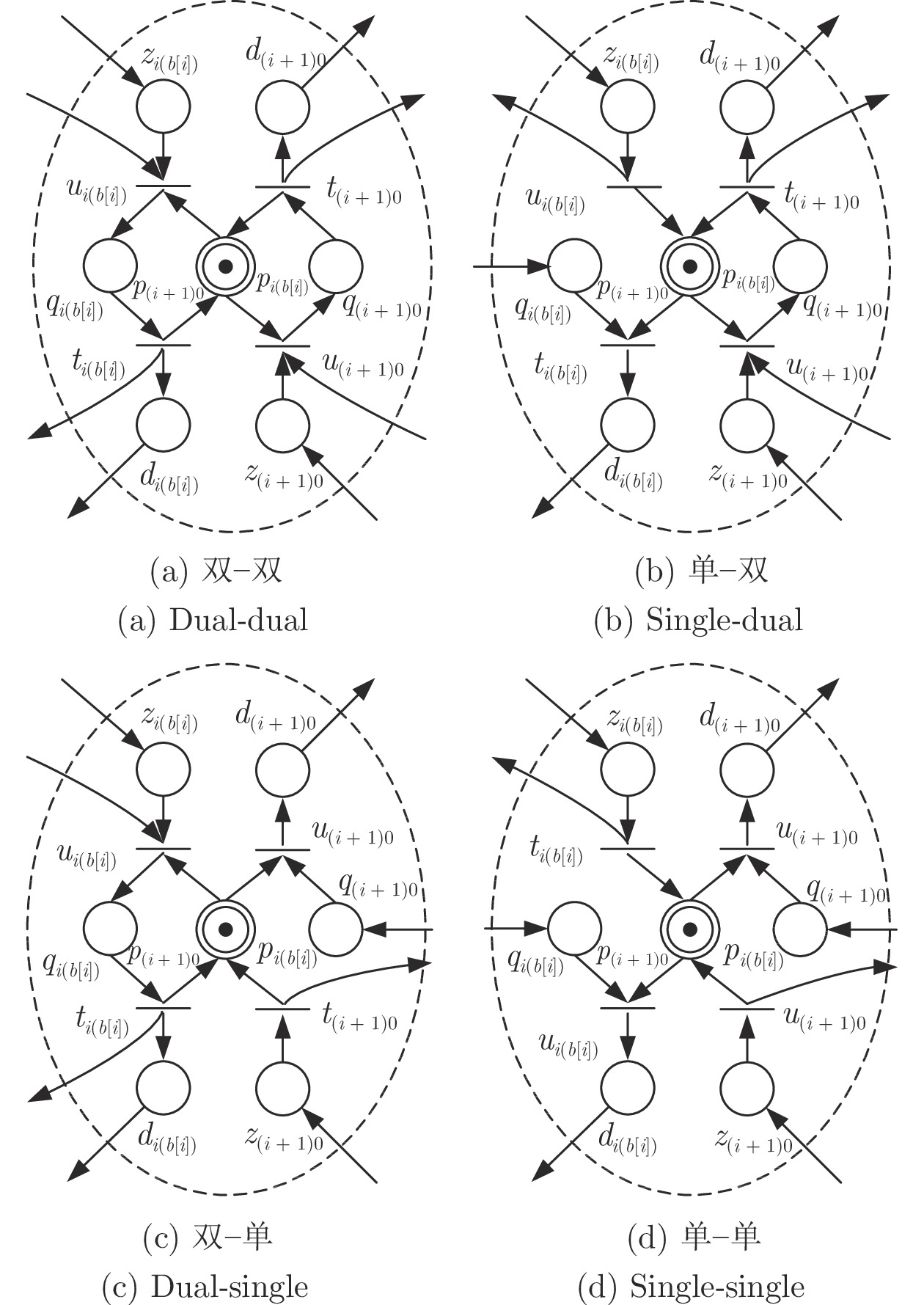
组合设备是半导体晶圆制造的核心装备, 其调度与控制优化是半导体制造领域极具挑战性的课题. Petri网因其强大的建模能力和简约的图形化表达优势, 被广泛地应用于组合设备的建模与调度. 对基于Petri网的组合设备建模与调度方法进行综述, 归纳总结了组合设备的结构类型、晶圆流模式、调度策略及Petri网建模方法, 并系统阐述组合设备的7类典型调度问题, 包括驻留时间约束、作业时间波动、晶圆重入加工、多品种晶圆加工、加工模块(Process module, PM)故障、PM清洗和组合设备群. 最后, 讨论了当前组合设备调度存在的挑战及后续可能的研究方向.
组合设备是半导体晶圆制造的核心装备, 其调度与控制优化是半导体制造领域极具挑战性的课题. Petri网因其强大的建模能力和简约的图形化表达优势, 被广泛地应用于组合设备的建模与调度. 对基于Petri网的组合设备建模与调度方法进行综述, 归纳总结了组合设备的结构类型、晶圆流模式、调度策略及Petri网建模方法, 并系统阐述组合设备的7类典型调度问题, 包括驻留时间约束、作业时间波动、晶圆重入加工、多品种晶圆加工、加工模块(Process module, PM)故障、PM清洗和组合设备群. 最后, 讨论了当前组合设备调度存在的挑战及后续可能的研究方向.




2023, 49(5): 949-963.
doi: 10.16383/j.aas.c210524
摘要:
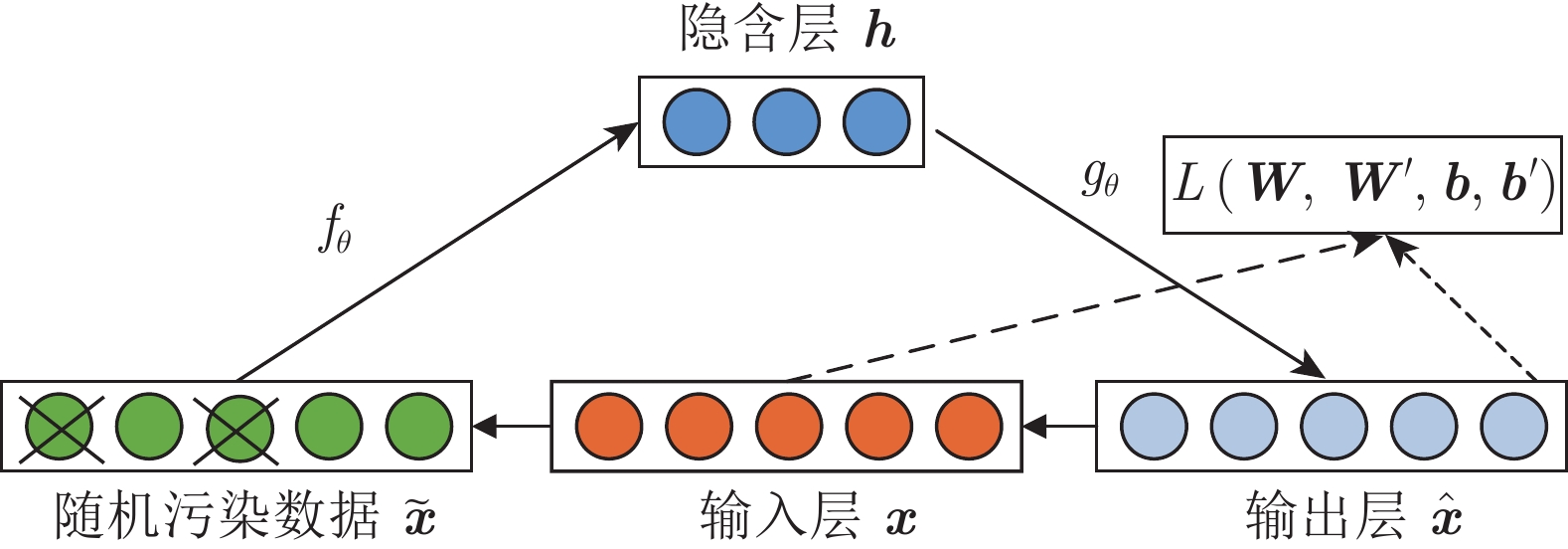
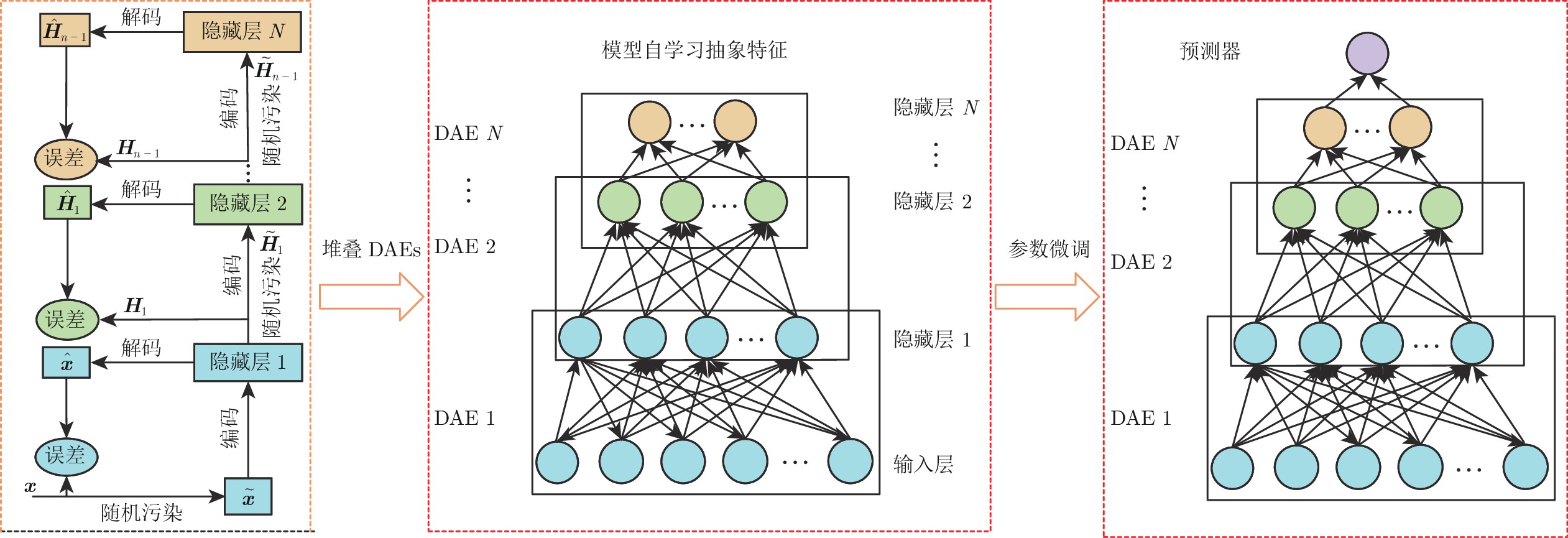
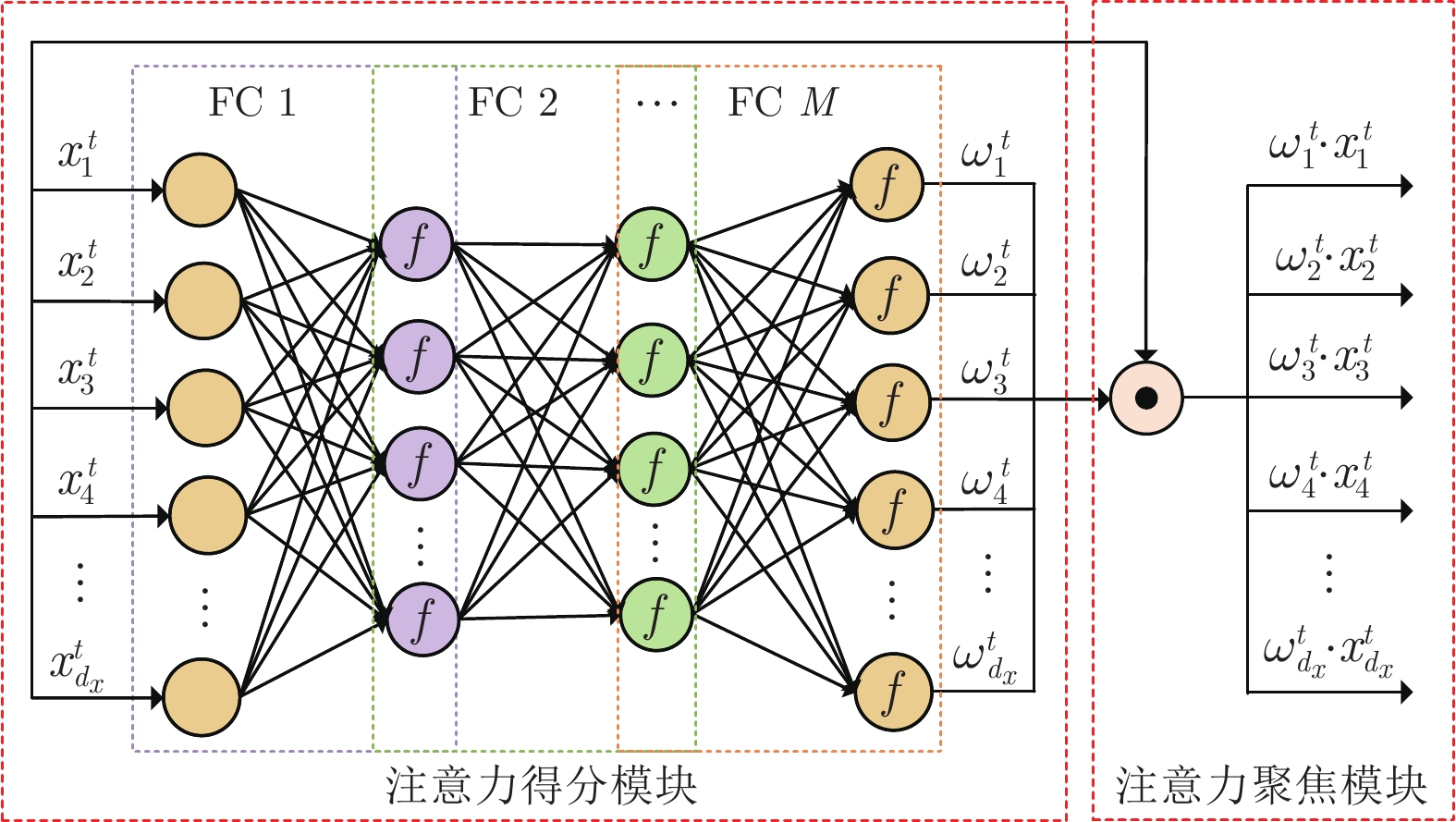
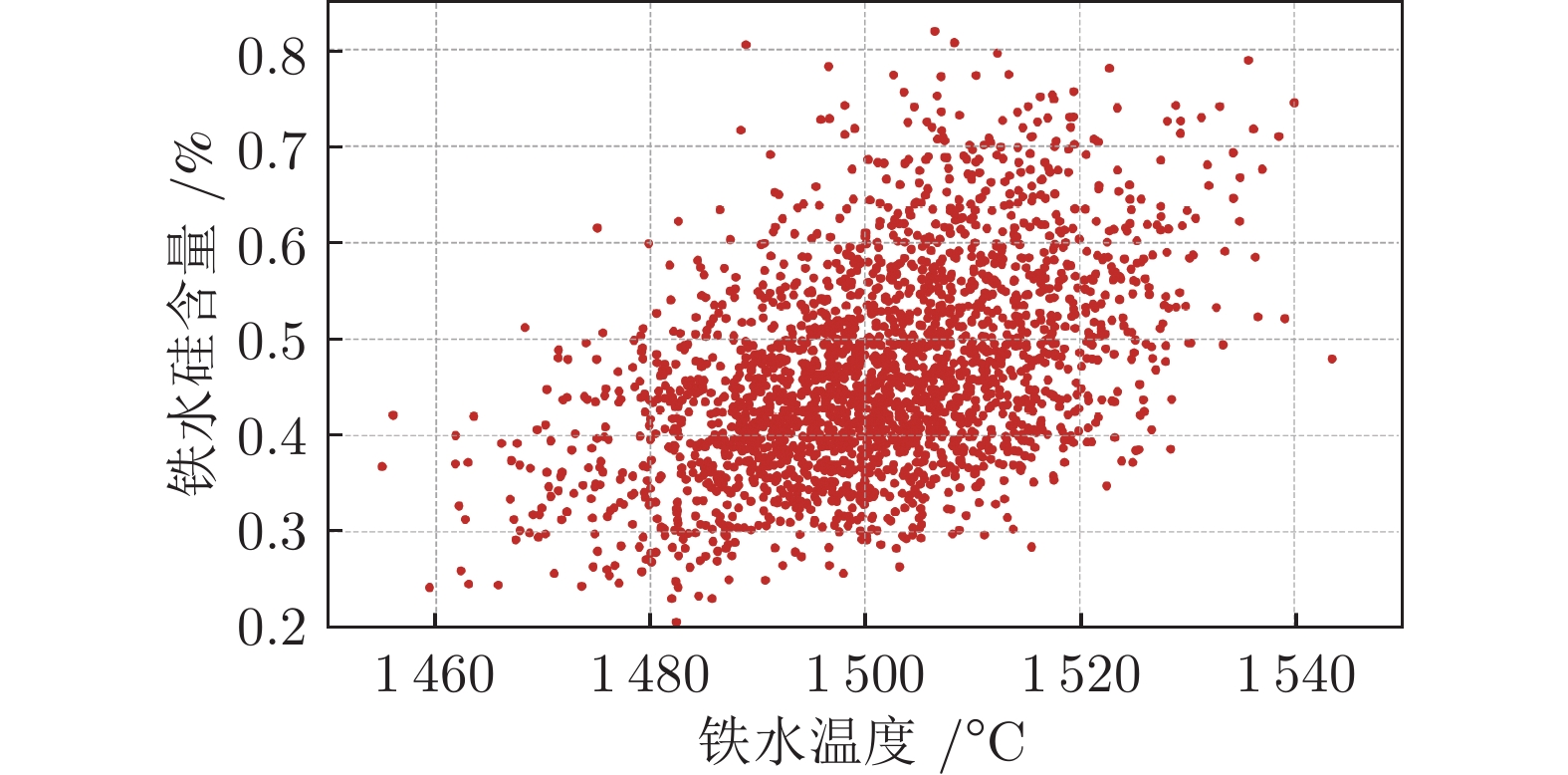
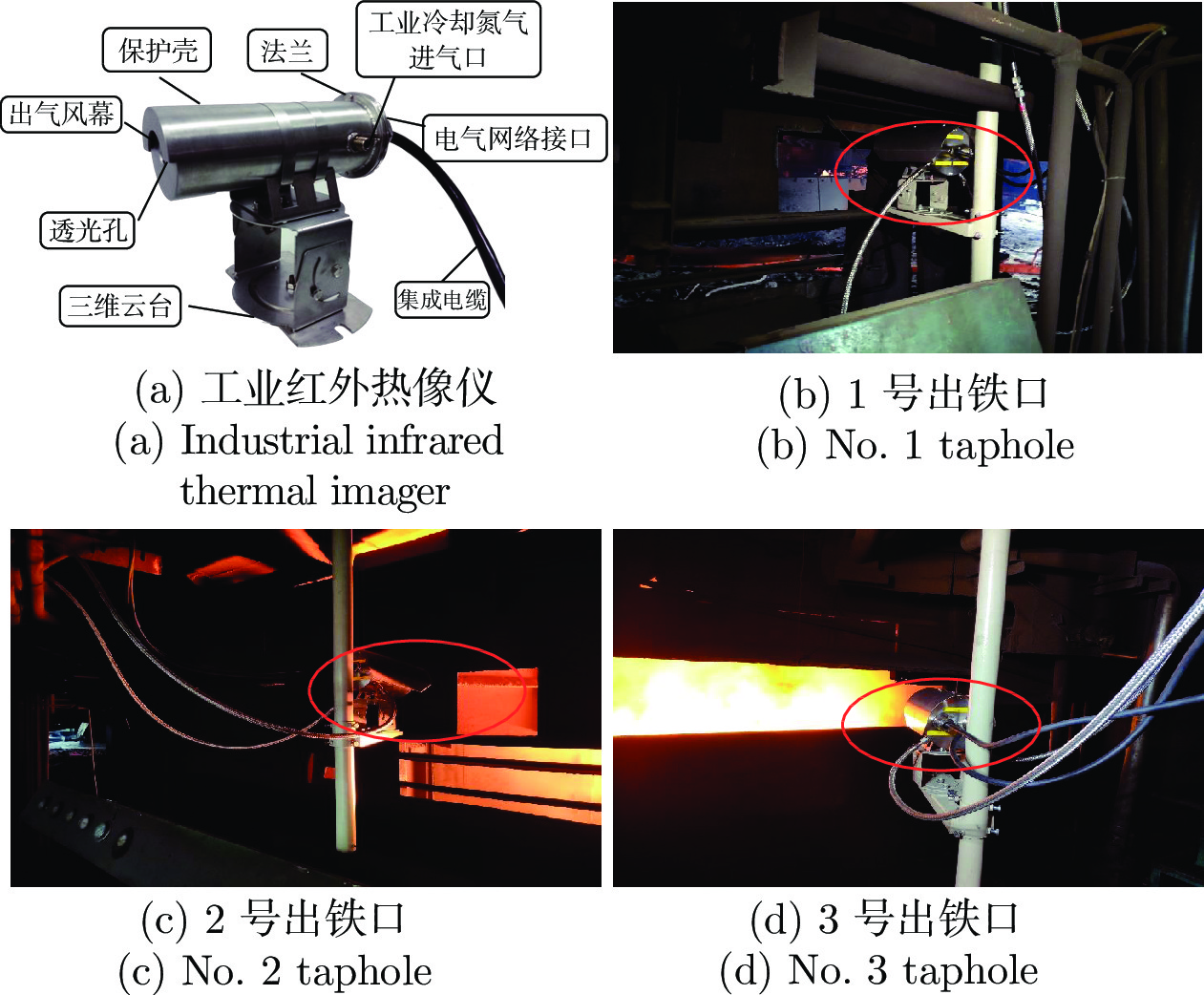
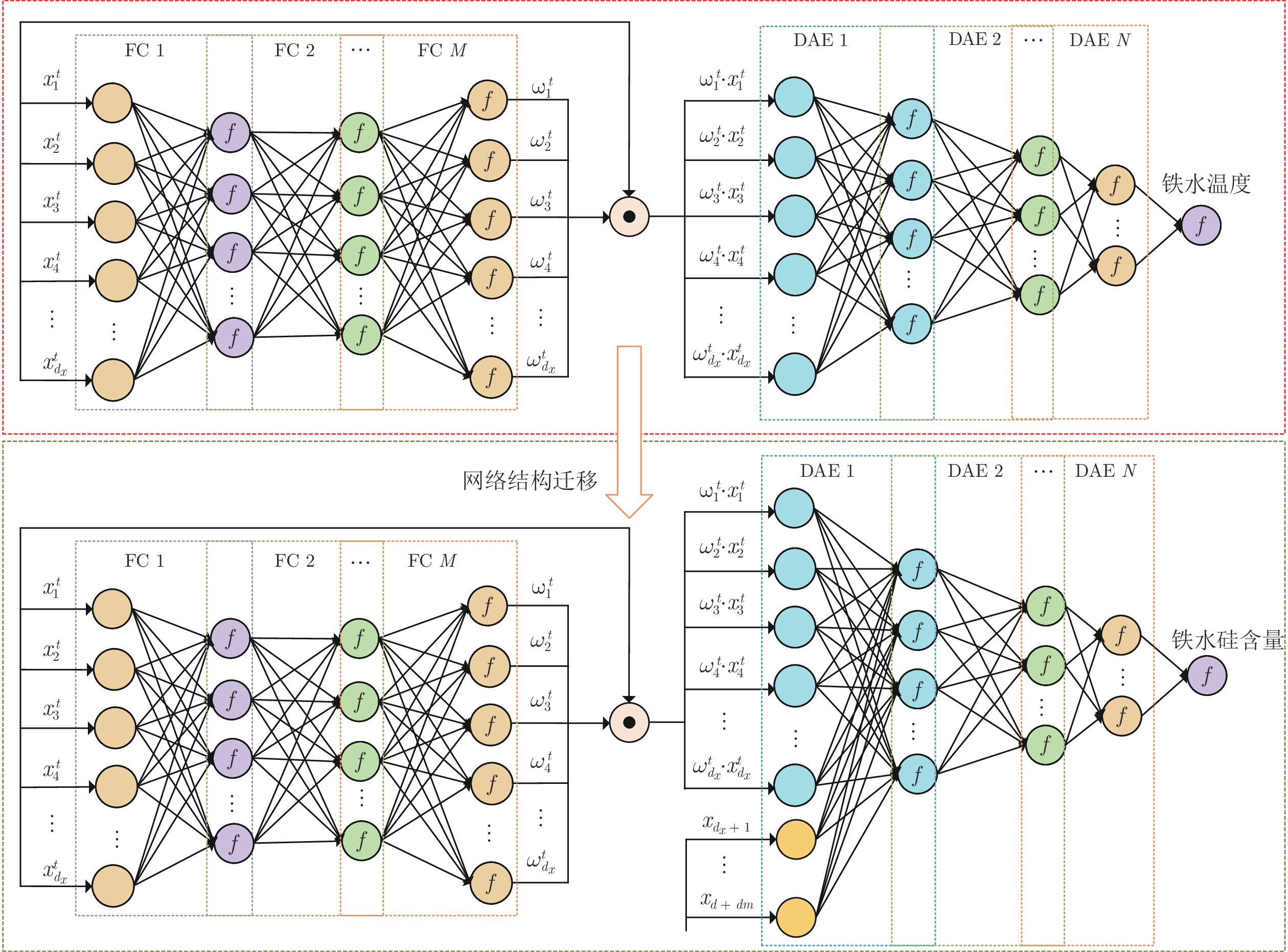
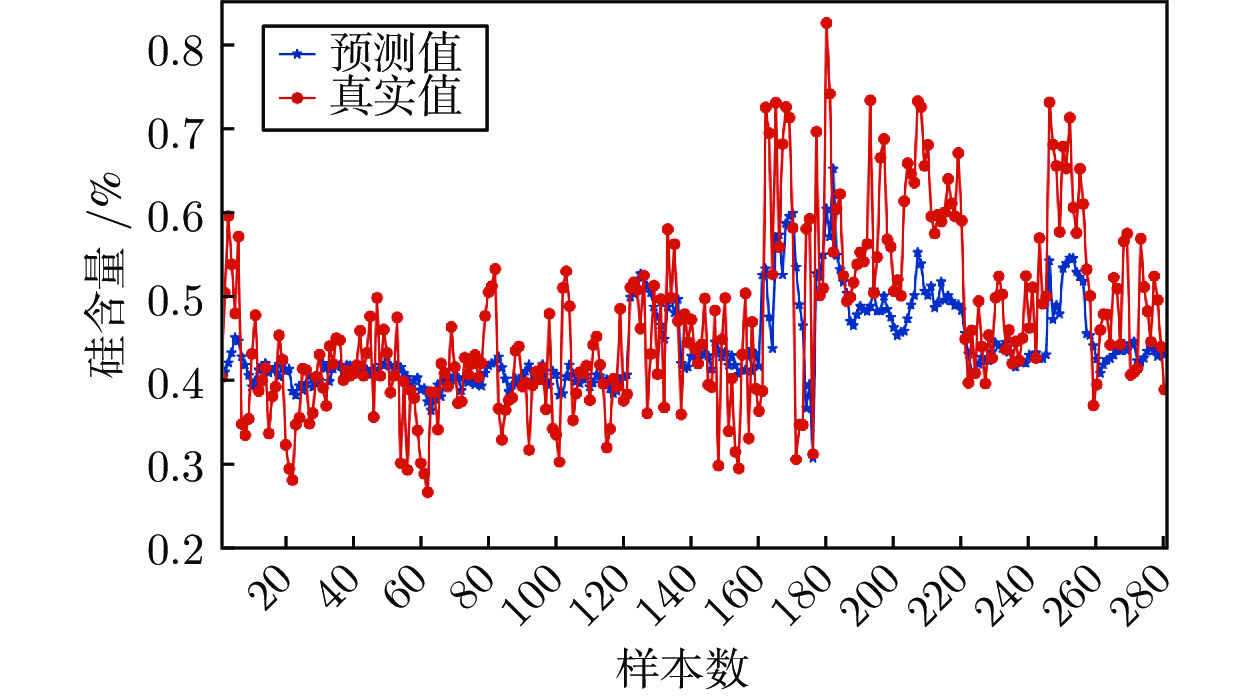
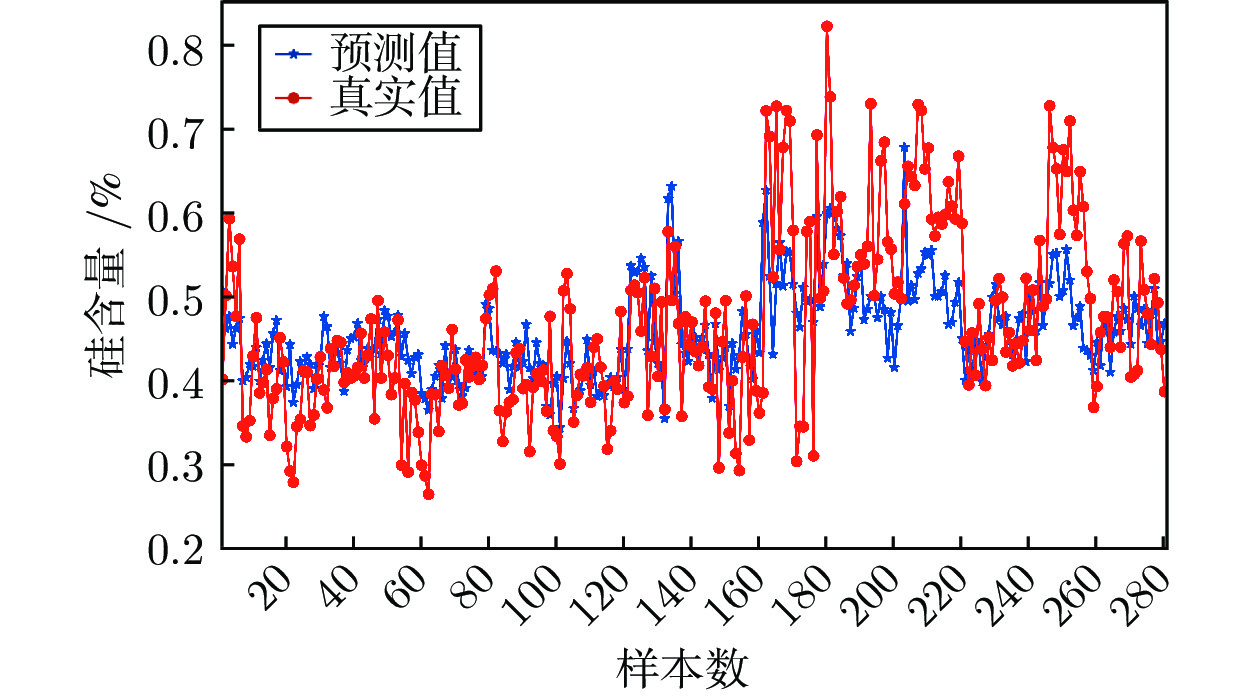
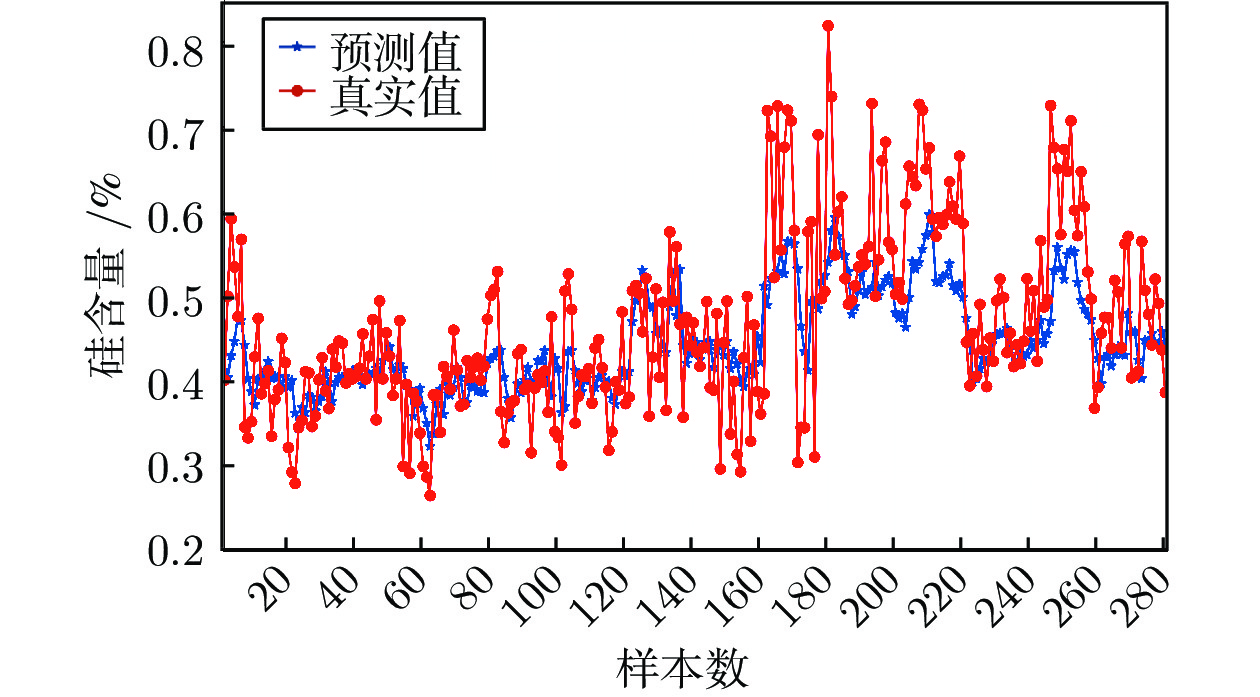
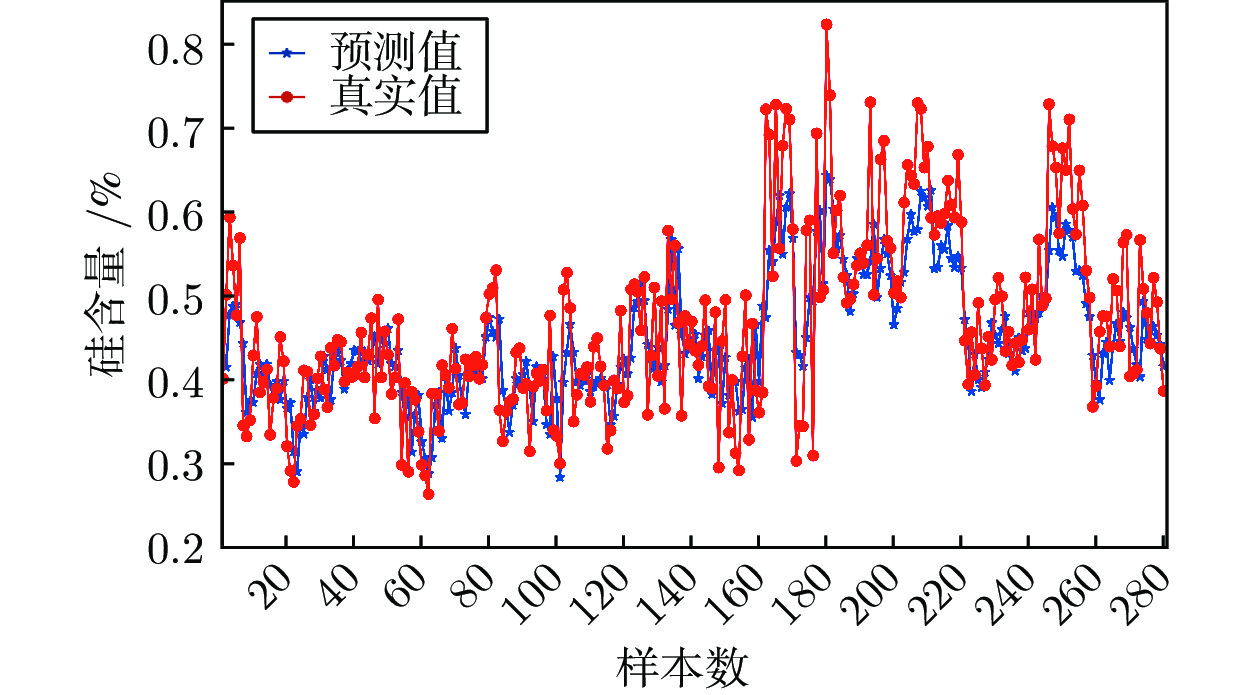
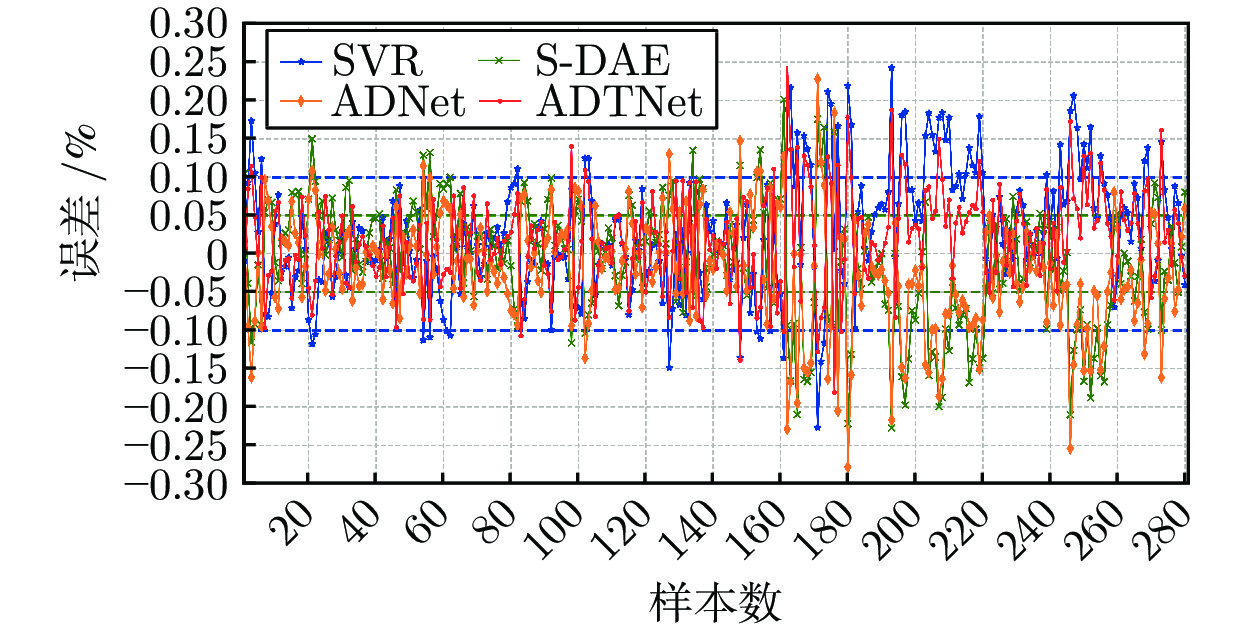
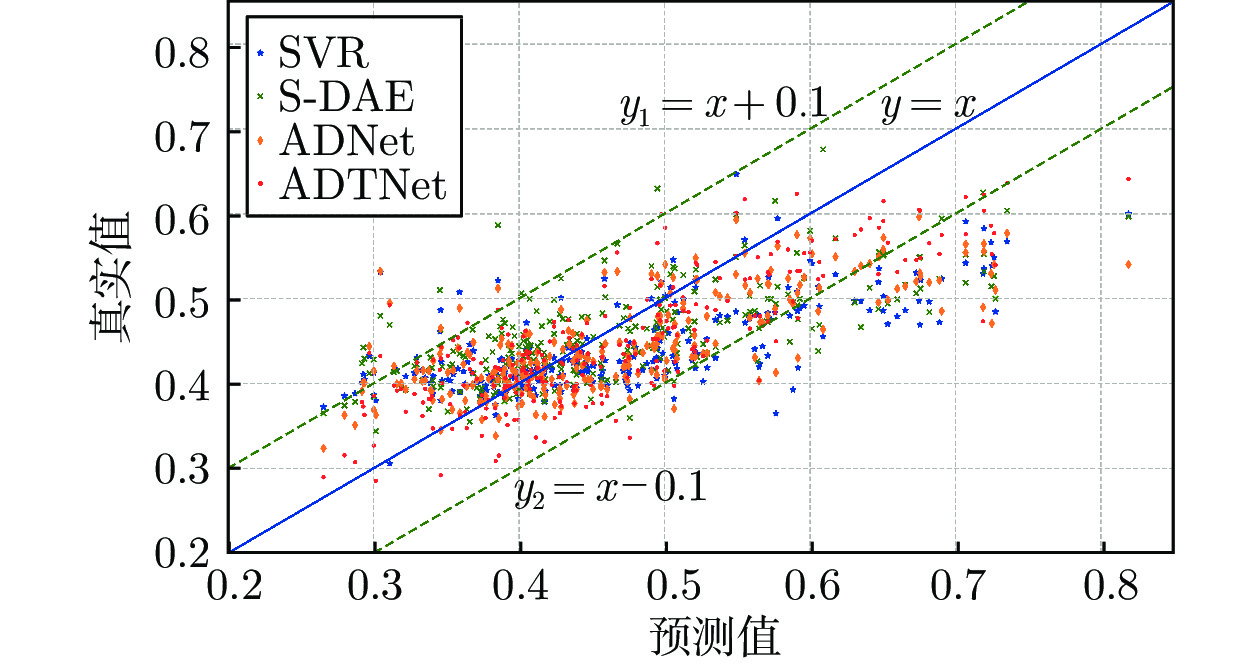
铁水硅含量是反映高炉冶炼过程中热状态变化的灵敏指示剂, 但无法实时在线检测, 造成铁水质量调控盲目. 为此, 提出一种基于动态注意力深度迁移网络(Attention deep transfer network, ADTNet)的高炉铁水硅含量在线预测方法. 首先, 针对传统深度网络静态建模思路无法准确描述过程变量与铁水硅含量之间的关系, 提出一种基于注意力机制模块的输入过程变量与输出硅含量之间的动态关系描述方法; 其次, 为降低硅含量预测模型训练时对标签数据的依赖, 考虑到铁水温度与硅含量数据之间的正相关性, 利用小时级硅含量标签数据微调基于分钟级铁水温度数据预训练好的深度模型的结构, 进而提高基于动态注意力深度迁移网络的硅含量预测精度; 同时, 为增强预测网络的可解释性, 实时给出了基于动态注意力机制模块计算的每个样本各过程变量对铁水硅含量的贡献度; 最后, 基于某钢铁厂2号高炉的工业实验, 验证了该方法的准确性、有效性和先进性.
铁水硅含量是反映高炉冶炼过程中热状态变化的灵敏指示剂, 但无法实时在线检测, 造成铁水质量调控盲目. 为此, 提出一种基于动态注意力深度迁移网络(Attention deep transfer network, ADTNet)的高炉铁水硅含量在线预测方法. 首先, 针对传统深度网络静态建模思路无法准确描述过程变量与铁水硅含量之间的关系, 提出一种基于注意力机制模块的输入过程变量与输出硅含量之间的动态关系描述方法; 其次, 为降低硅含量预测模型训练时对标签数据的依赖, 考虑到铁水温度与硅含量数据之间的正相关性, 利用小时级硅含量标签数据微调基于分钟级铁水温度数据预训练好的深度模型的结构, 进而提高基于动态注意力深度迁移网络的硅含量预测精度; 同时, 为增强预测网络的可解释性, 实时给出了基于动态注意力机制模块计算的每个样本各过程变量对铁水硅含量的贡献度; 最后, 基于某钢铁厂2号高炉的工业实验, 验证了该方法的准确性、有效性和先进性.



2023, 49(5): 964-973.
doi: 10.16383/j.aas.c220227
摘要:
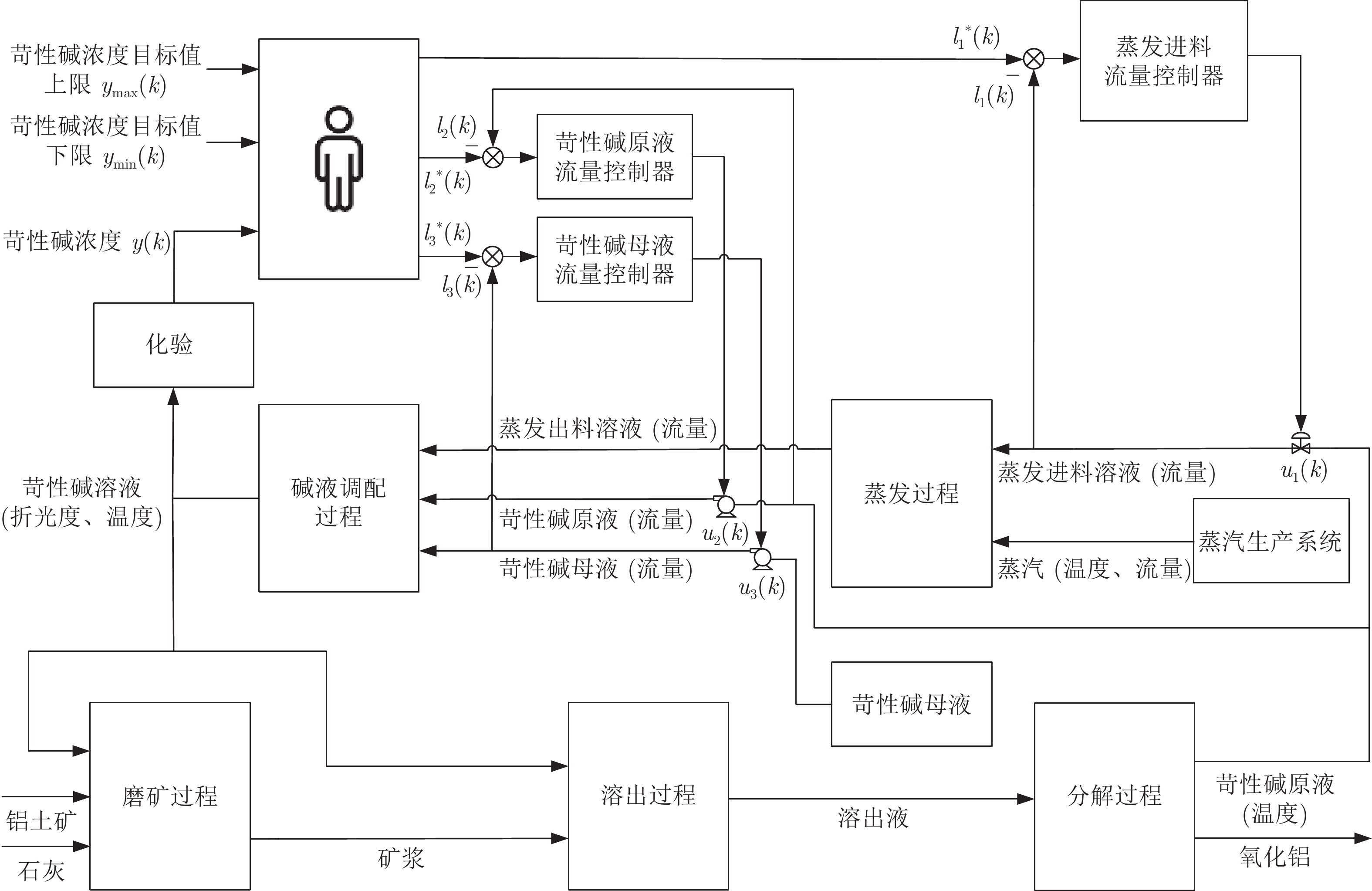
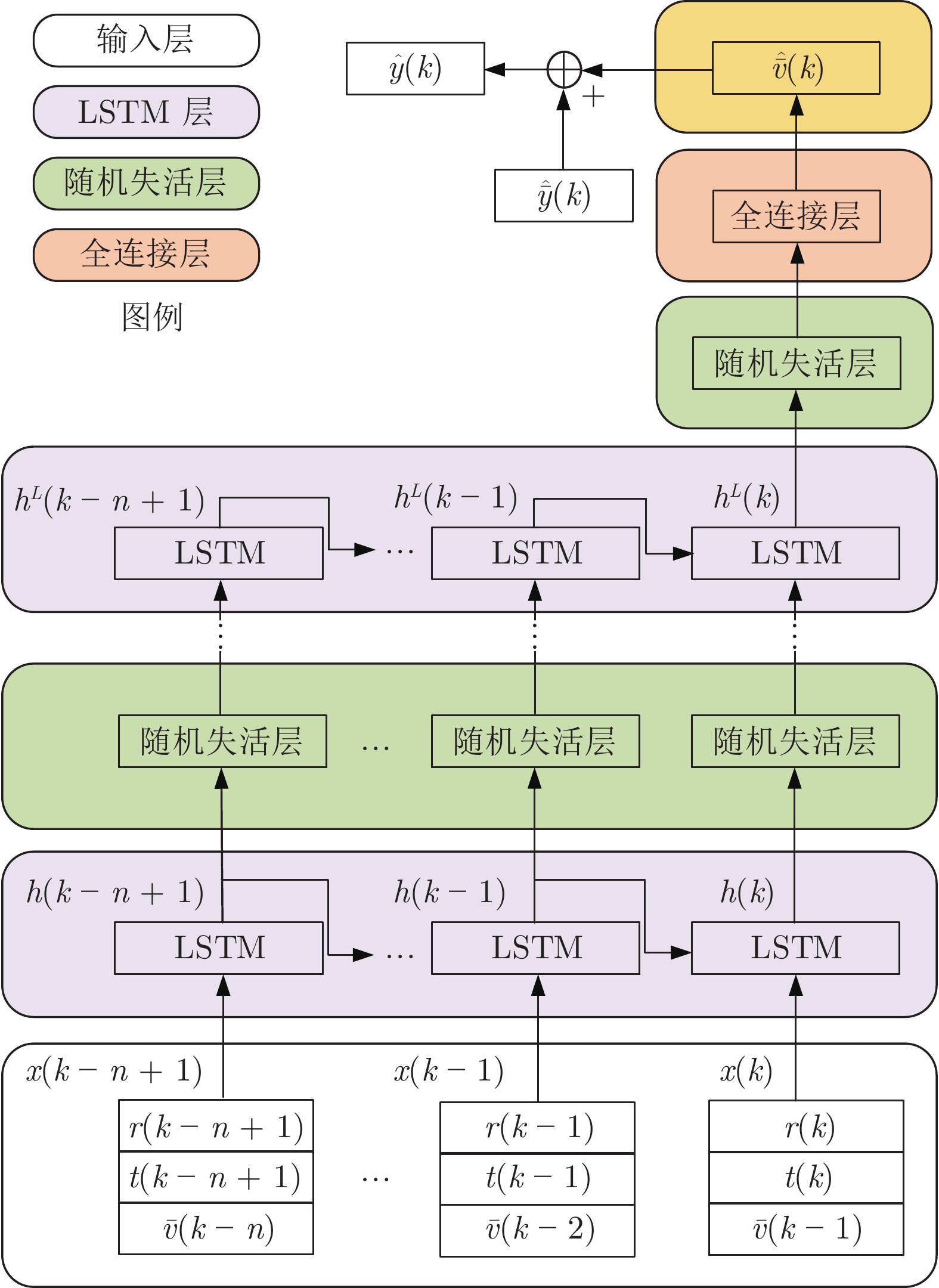
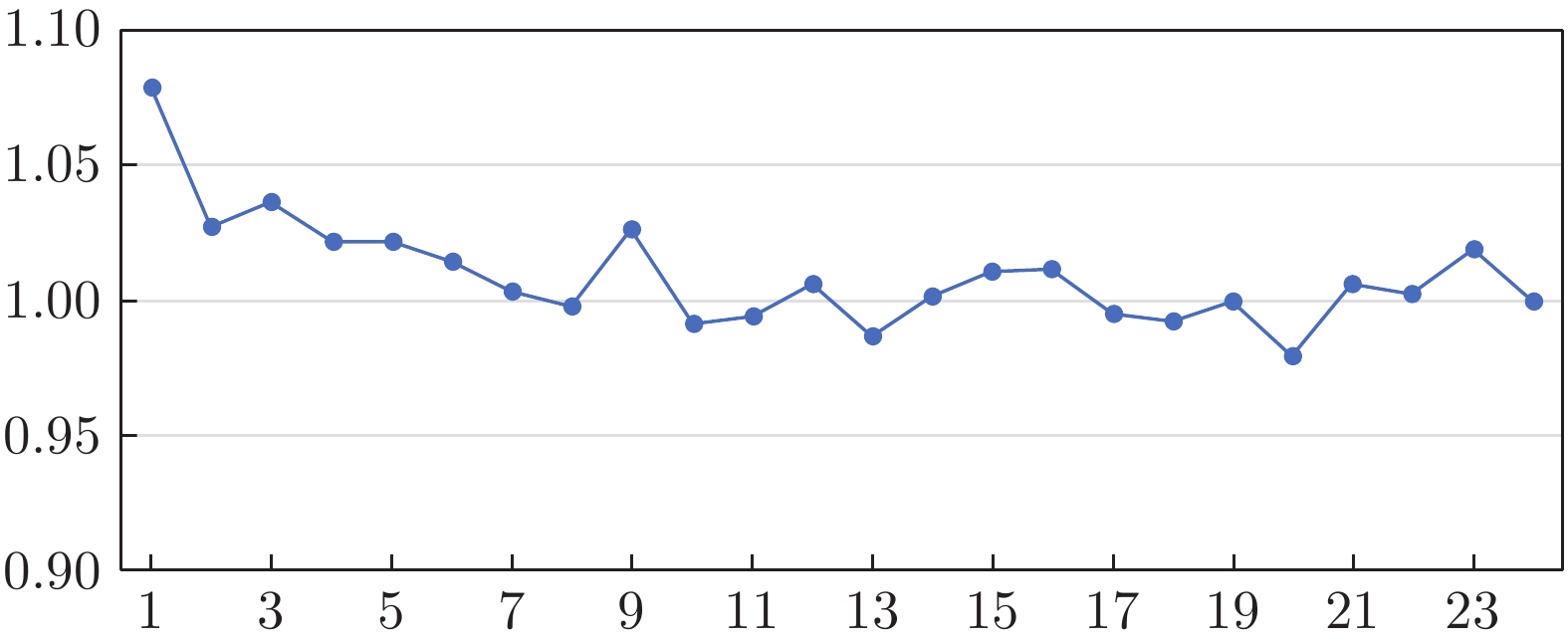
苛性碱溶液浓度是氧化铝生产过程中的重要运行指标, 由于苛性碱溶液的温度和浓度频繁波动, 导致目前的浓度检测仪表检测精度低, 只能采用人工化验获得苛性碱浓度值, 化验结果的严重滞后导致无法实现苛性碱浓度的自动控制, 影响氧化铝产品质量. 在分析苛性碱溶液浓度控制过程动态特性的基础上建立了由线性模型和未知非线性动态系统描述的苛性碱浓度预报模型, 将参数辨识与自适应深度学习相结合, 提出端边云协同的氧化铝生产过程苛性碱浓度智能预报方法, 并采用氧化铝生产企业的实际生产数据对本文所提方法进行应用验证. 应用结果表明, 所提的苛性碱浓度智能预报方法可以实时、准确预报苛性碱浓度, 为实现苛性碱浓度的闭环运行优化控制创造了条件.
苛性碱溶液浓度是氧化铝生产过程中的重要运行指标, 由于苛性碱溶液的温度和浓度频繁波动, 导致目前的浓度检测仪表检测精度低, 只能采用人工化验获得苛性碱浓度值, 化验结果的严重滞后导致无法实现苛性碱浓度的自动控制, 影响氧化铝产品质量. 在分析苛性碱溶液浓度控制过程动态特性的基础上建立了由线性模型和未知非线性动态系统描述的苛性碱浓度预报模型, 将参数辨识与自适应深度学习相结合, 提出端边云协同的氧化铝生产过程苛性碱浓度智能预报方法, 并采用氧化铝生产企业的实际生产数据对本文所提方法进行应用验证. 应用结果表明, 所提的苛性碱浓度智能预报方法可以实时、准确预报苛性碱浓度, 为实现苛性碱浓度的闭环运行优化控制创造了条件.


2023, 49(5): 974-984.
doi: 10.16383/j.aas.c220204
摘要:
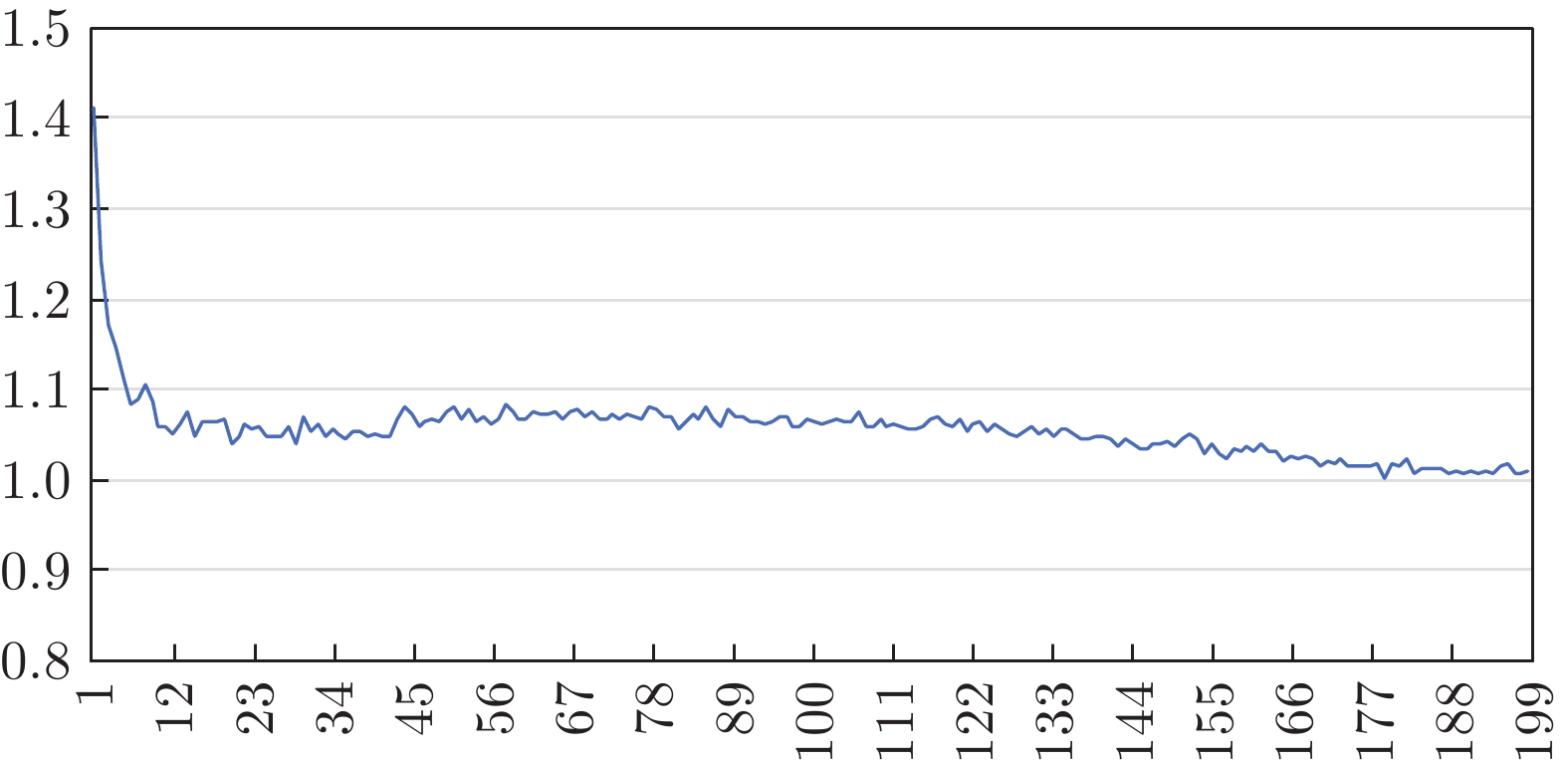
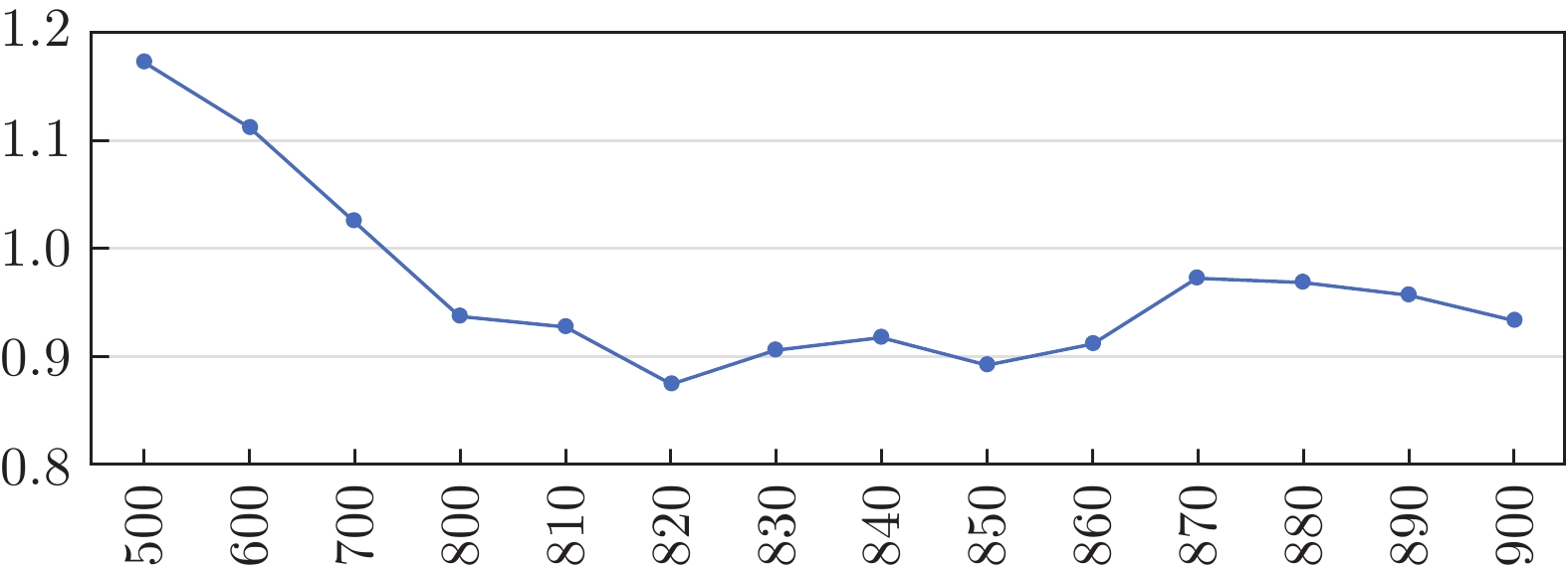
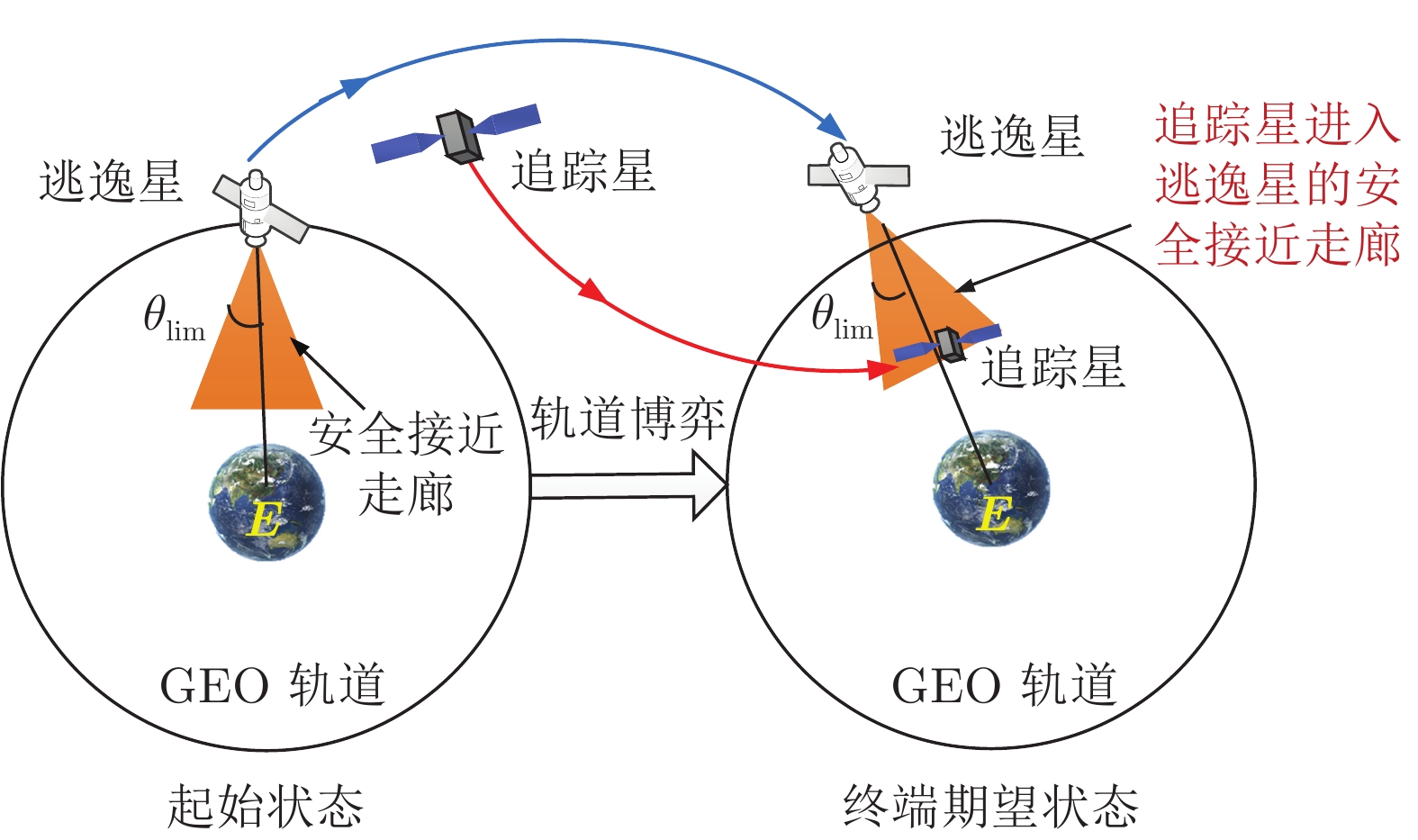
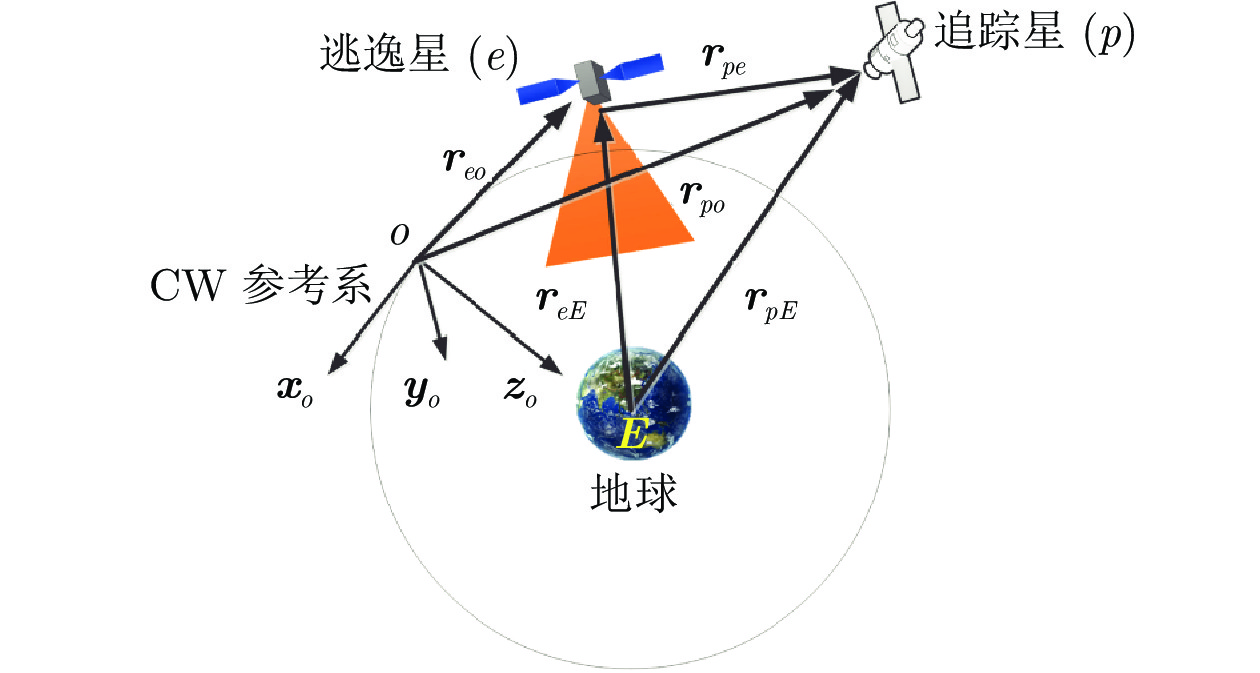
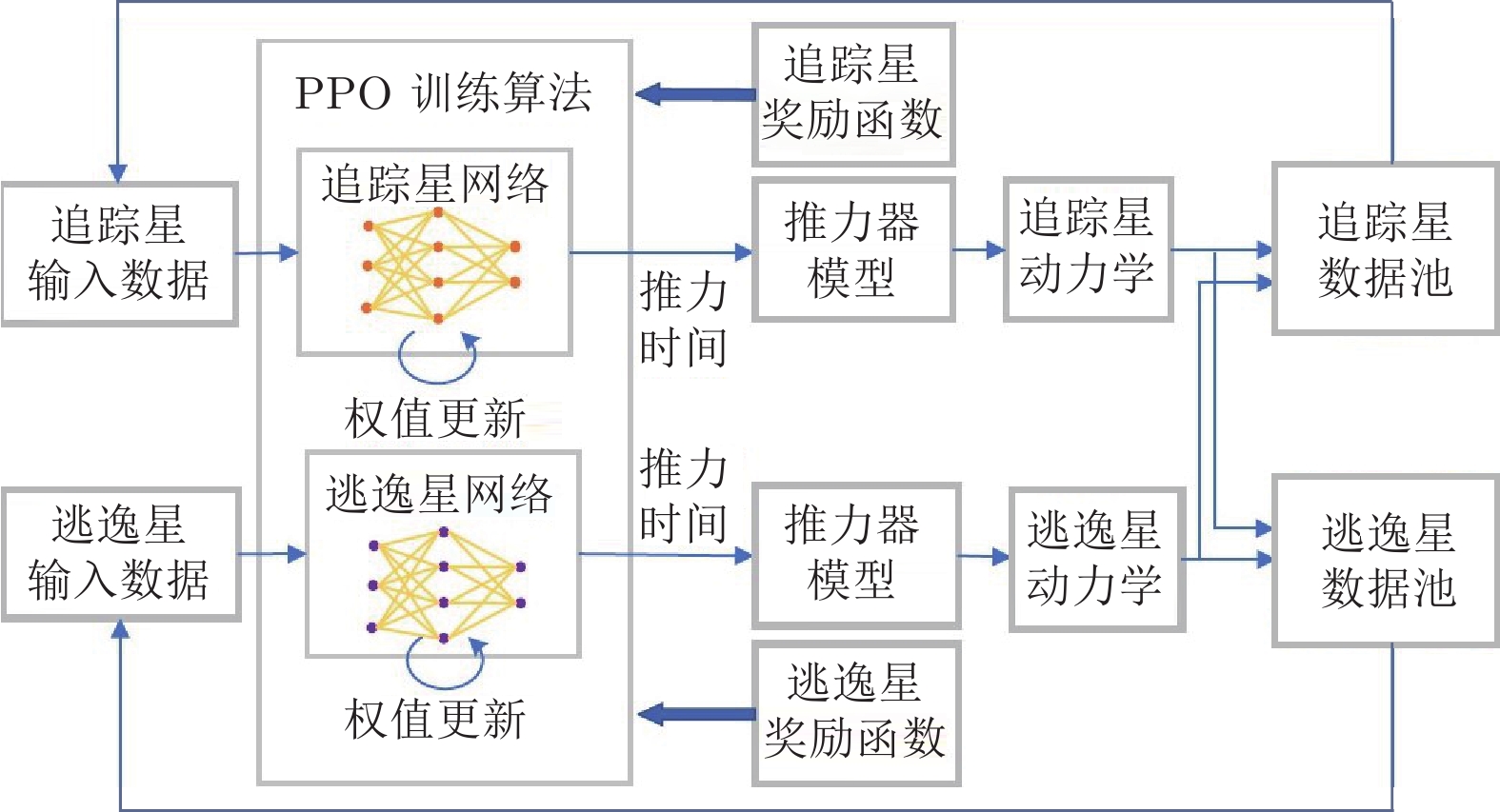
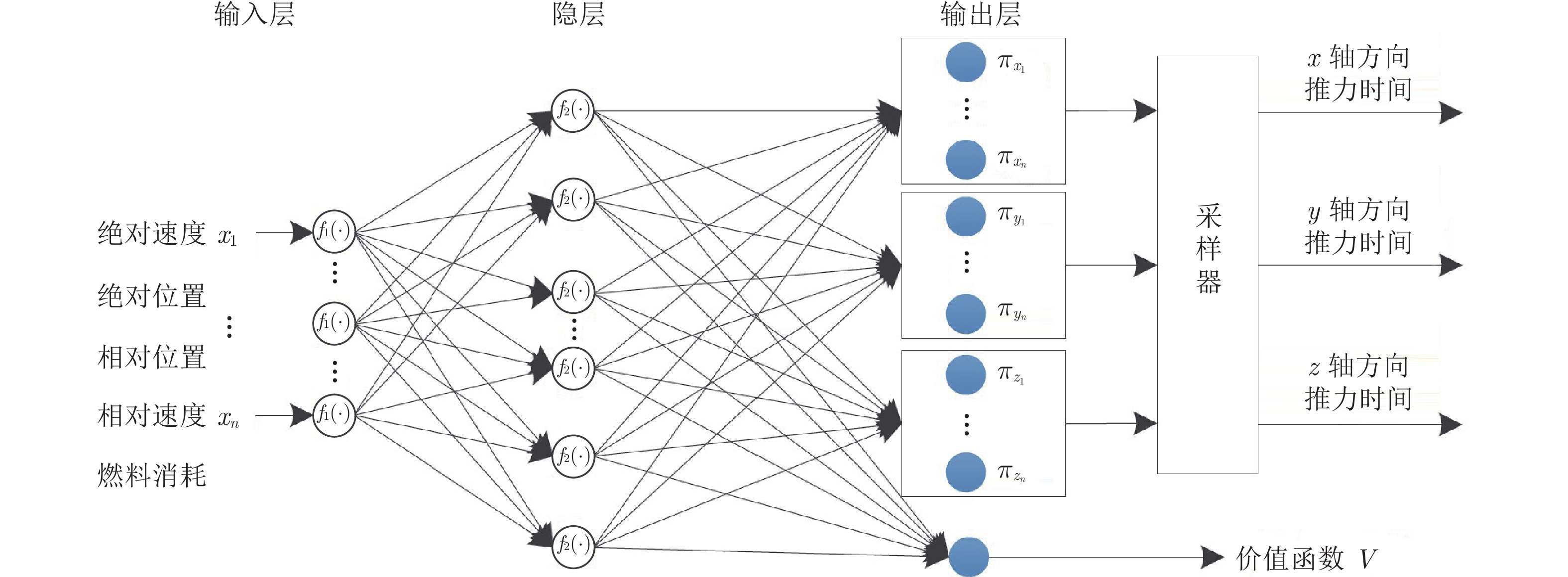
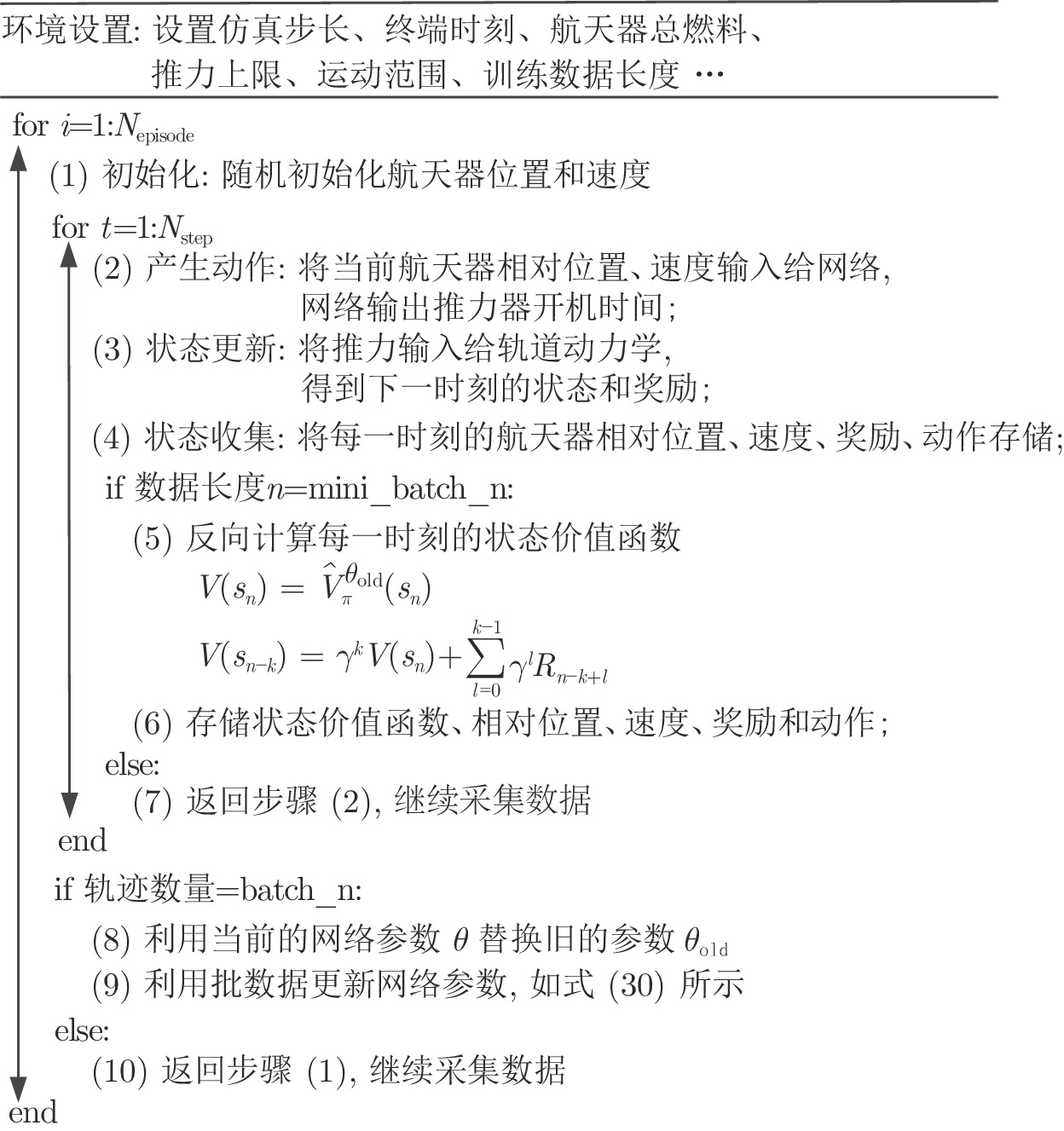
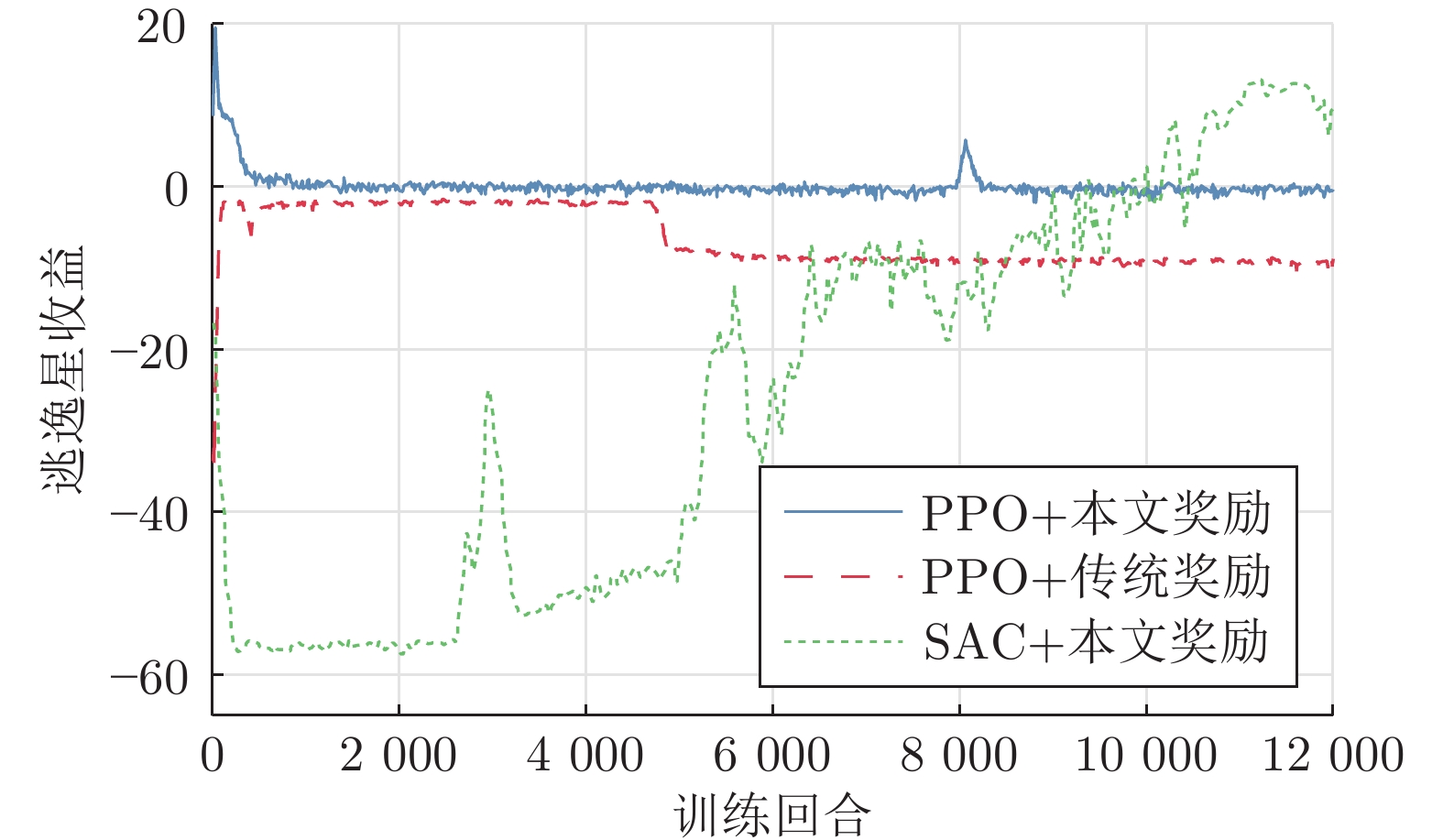
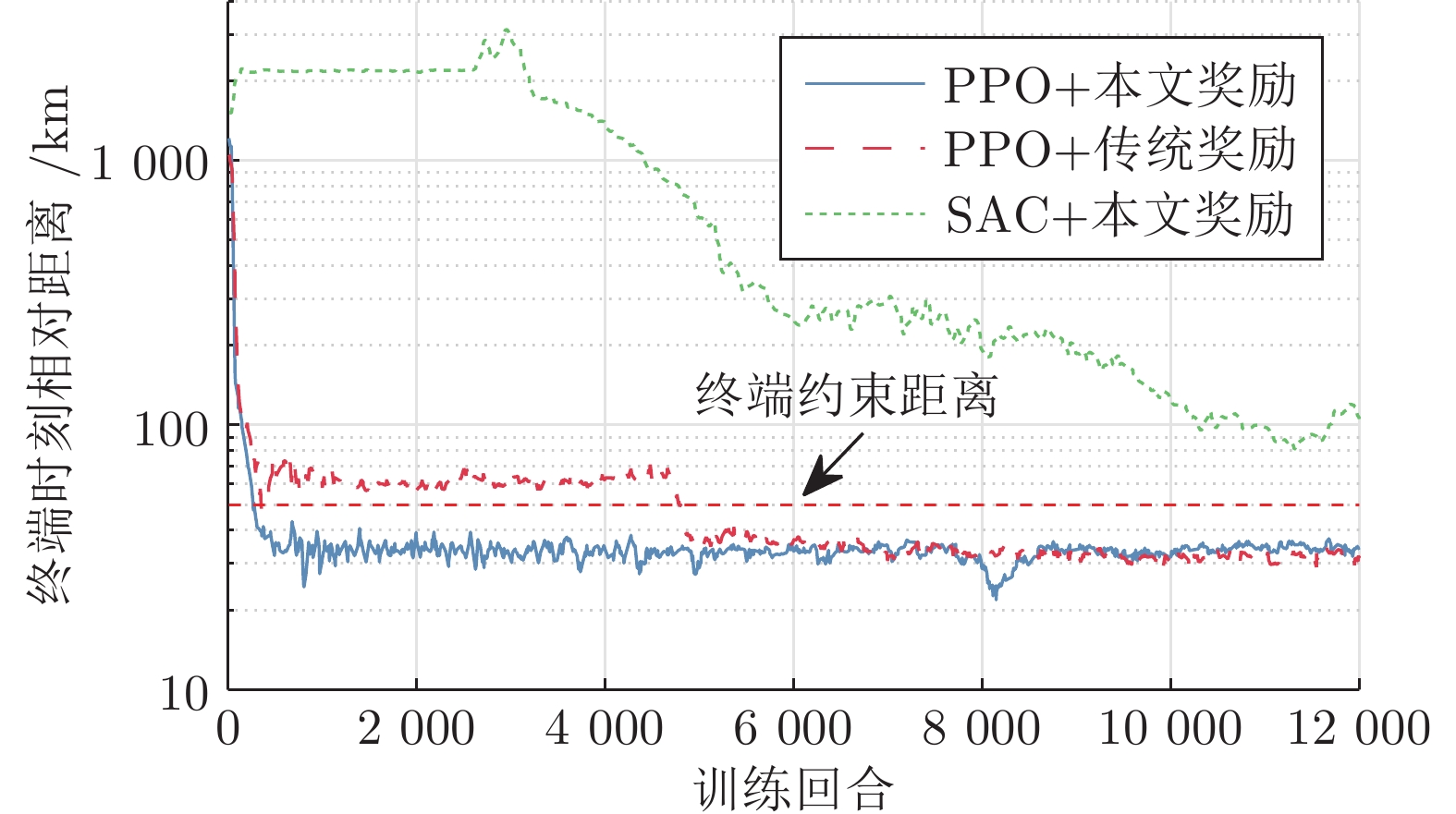
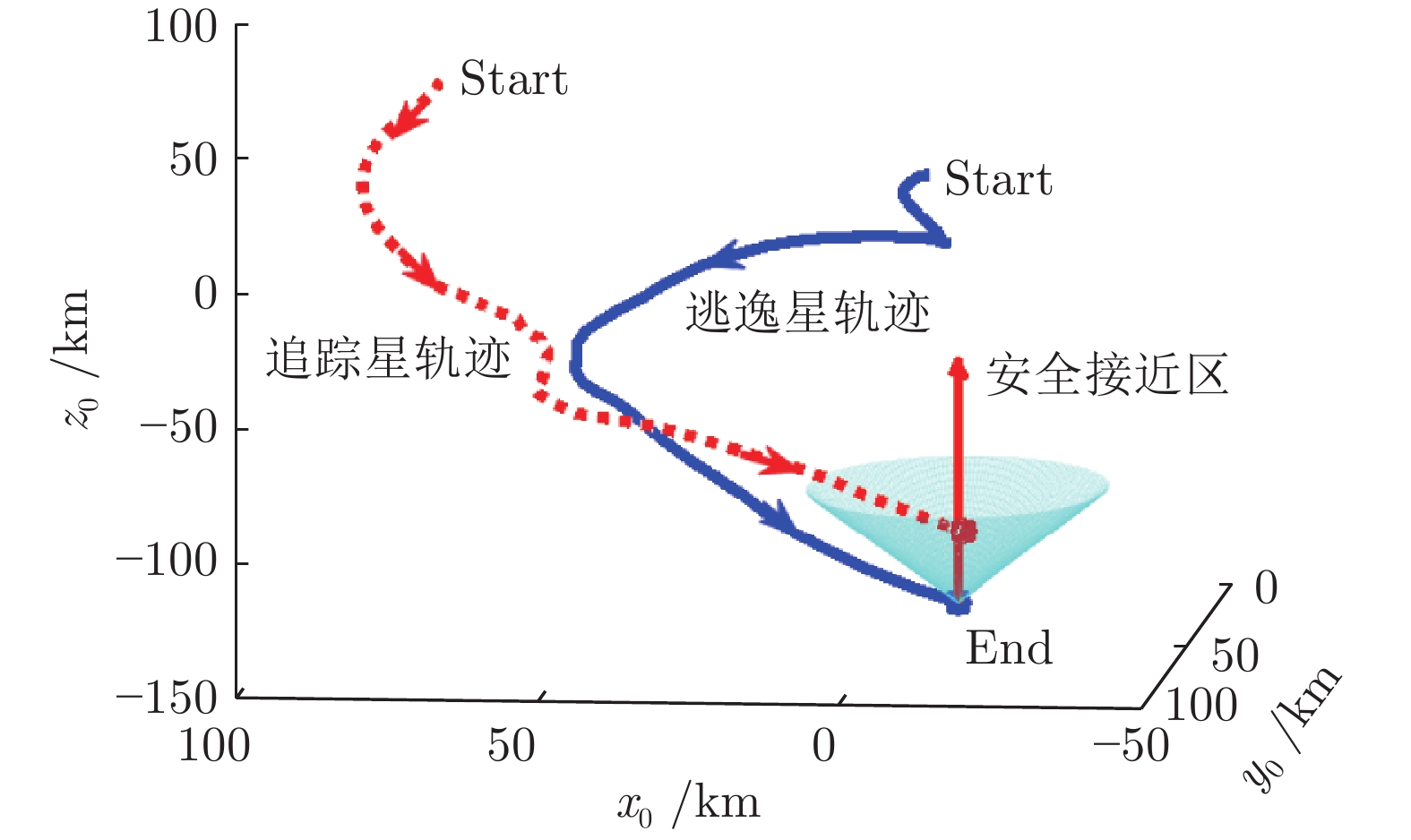
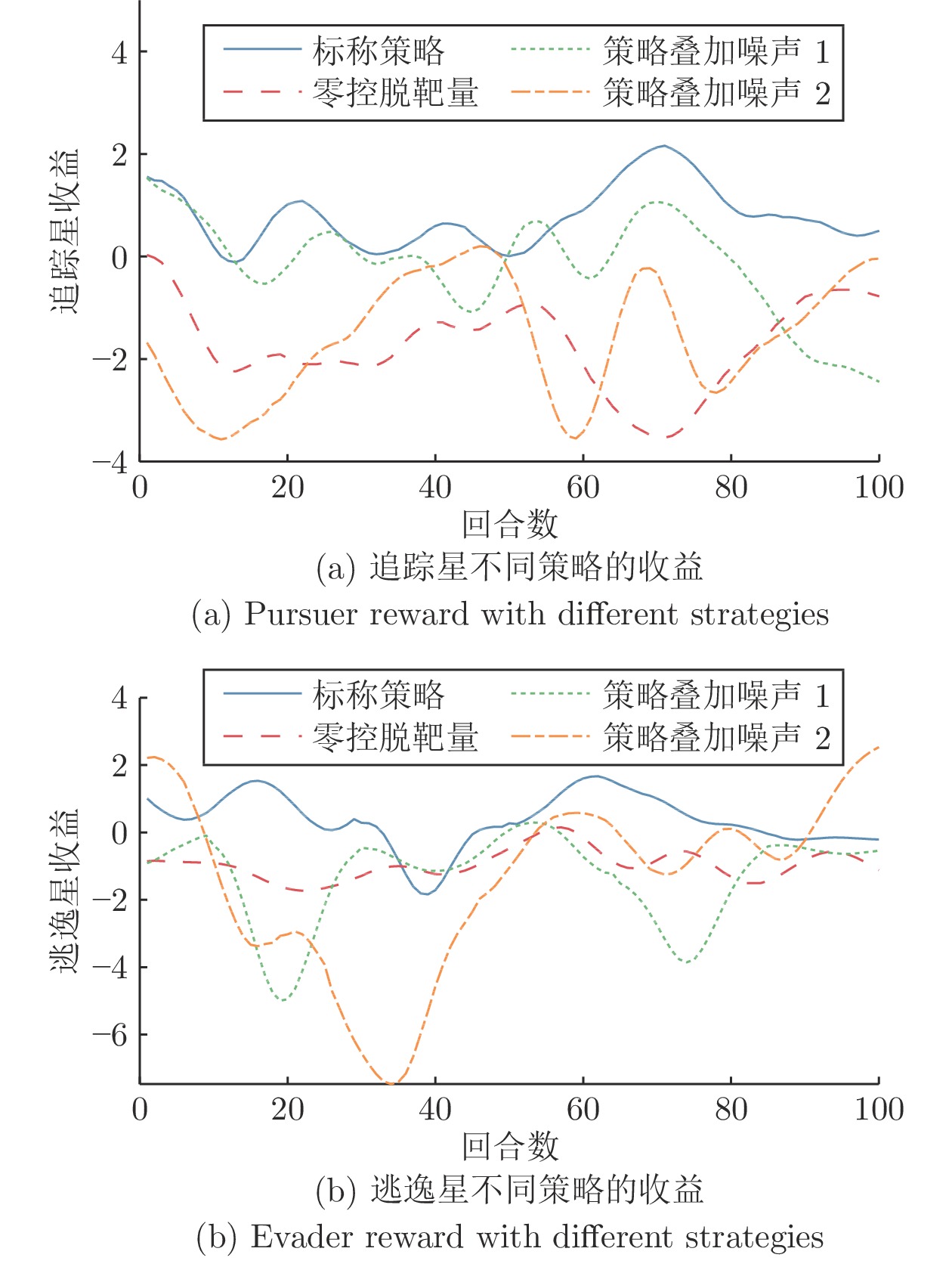
针对脉冲推力航天器轨道追逃博弈问题, 提出一种基于强化学习的决策方法, 实现追踪星在指定时刻抵近至逃逸星的特定区域, 其中两星都具备自主博弈能力. 首先, 充分考虑追踪星和逃逸星的燃料约束、推力约束、决策周期约束、运动范围约束等实际约束条件, 建立锥形安全接近区及追逃博弈过程的数学模型; 其次, 为了提升航天器面对不确定博弈对抗场景的自主决策能力, 以近端策略优化 (Proximal policy optimization, PPO) 算法框架为基础, 采用左右互搏的方式同时训练追踪星和逃逸星, 交替提升两星的决策能力; 在此基础上, 为了在指定时刻完成追逃任务, 提出一种终端诱导的奖励函数设计方法, 基于CW (Clohessy Wiltshire)方程预测两星在终端时刻的相对误差, 并将该预测误差引入奖励函数中, 有效引导追踪星在指定时刻进入逃逸星的安全接近区. 与现有基于当前误差设计奖励函数的方法相比, 所提方法能够有效提高追击成功率. 最后, 通过与其他学习方法仿真对比, 验证提出的训练方法和奖励函数设计方法的有效性和优越性.
针对脉冲推力航天器轨道追逃博弈问题, 提出一种基于强化学习的决策方法, 实现追踪星在指定时刻抵近至逃逸星的特定区域, 其中两星都具备自主博弈能力. 首先, 充分考虑追踪星和逃逸星的燃料约束、推力约束、决策周期约束、运动范围约束等实际约束条件, 建立锥形安全接近区及追逃博弈过程的数学模型; 其次, 为了提升航天器面对不确定博弈对抗场景的自主决策能力, 以近端策略优化 (Proximal policy optimization, PPO) 算法框架为基础, 采用左右互搏的方式同时训练追踪星和逃逸星, 交替提升两星的决策能力; 在此基础上, 为了在指定时刻完成追逃任务, 提出一种终端诱导的奖励函数设计方法, 基于CW (Clohessy Wiltshire)方程预测两星在终端时刻的相对误差, 并将该预测误差引入奖励函数中, 有效引导追踪星在指定时刻进入逃逸星的安全接近区. 与现有基于当前误差设计奖励函数的方法相比, 所提方法能够有效提高追击成功率. 最后, 通过与其他学习方法仿真对比, 验证提出的训练方法和奖励函数设计方法的有效性和优越性.




2023, 49(5): 985-998.
doi: 10.16383/j.aas.c220753
摘要:
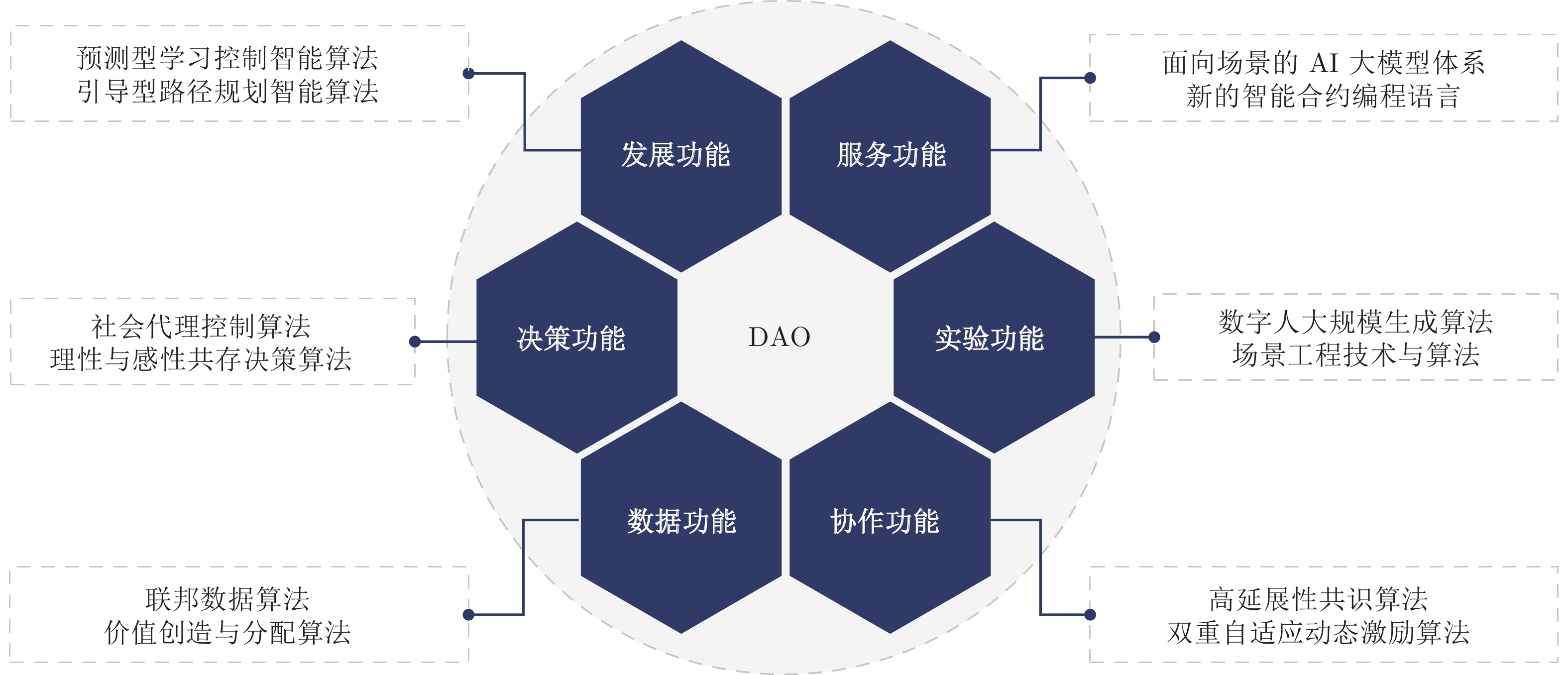
Web3技术催生的去中心化自治组织 (Decentralized autonomous organization, DAO) 正以颠覆性的方式重新定义要素资源、变革生产关系与塑造组织形态. 为了更好地响应DAO研究与应用需求, 本文从组织和运营两个角度重新解析DAO, 认为其应当被更广义而精确地定义为去中心化自治组织与运营 (Decentralized autonomous organization and operation). 在此基础上, 阐述DAO的关键原理与基本要求, 探讨社会物理信息系统、平行智能等基础设施以及数字孪生、元宇宙、Web3等支撑技术, 构建涵盖组织层、协调层以及执行层等的DAO五层智能新架构, 提出DAO的闭环方程以及功能导向的智能新算法, 分析个体、组织与社会视角下的DAO治理机制, 研究面向生物人、机器人与数字人的DAO激励机制, 并介绍DAO的典型与潜在应用场景. 最后, 总结全文并展望DAO未来研究方向.
Web3技术催生的去中心化自治组织 (Decentralized autonomous organization, DAO) 正以颠覆性的方式重新定义要素资源、变革生产关系与塑造组织形态. 为了更好地响应DAO研究与应用需求, 本文从组织和运营两个角度重新解析DAO, 认为其应当被更广义而精确地定义为去中心化自治组织与运营 (Decentralized autonomous organization and operation). 在此基础上, 阐述DAO的关键原理与基本要求, 探讨社会物理信息系统、平行智能等基础设施以及数字孪生、元宇宙、Web3等支撑技术, 构建涵盖组织层、协调层以及执行层等的DAO五层智能新架构, 提出DAO的闭环方程以及功能导向的智能新算法, 分析个体、组织与社会视角下的DAO治理机制, 研究面向生物人、机器人与数字人的DAO激励机制, 并介绍DAO的典型与潜在应用场景. 最后, 总结全文并展望DAO未来研究方向.


2023, 49(5): 999-1009.
doi: 10.16383/j.aas.c210408
摘要:
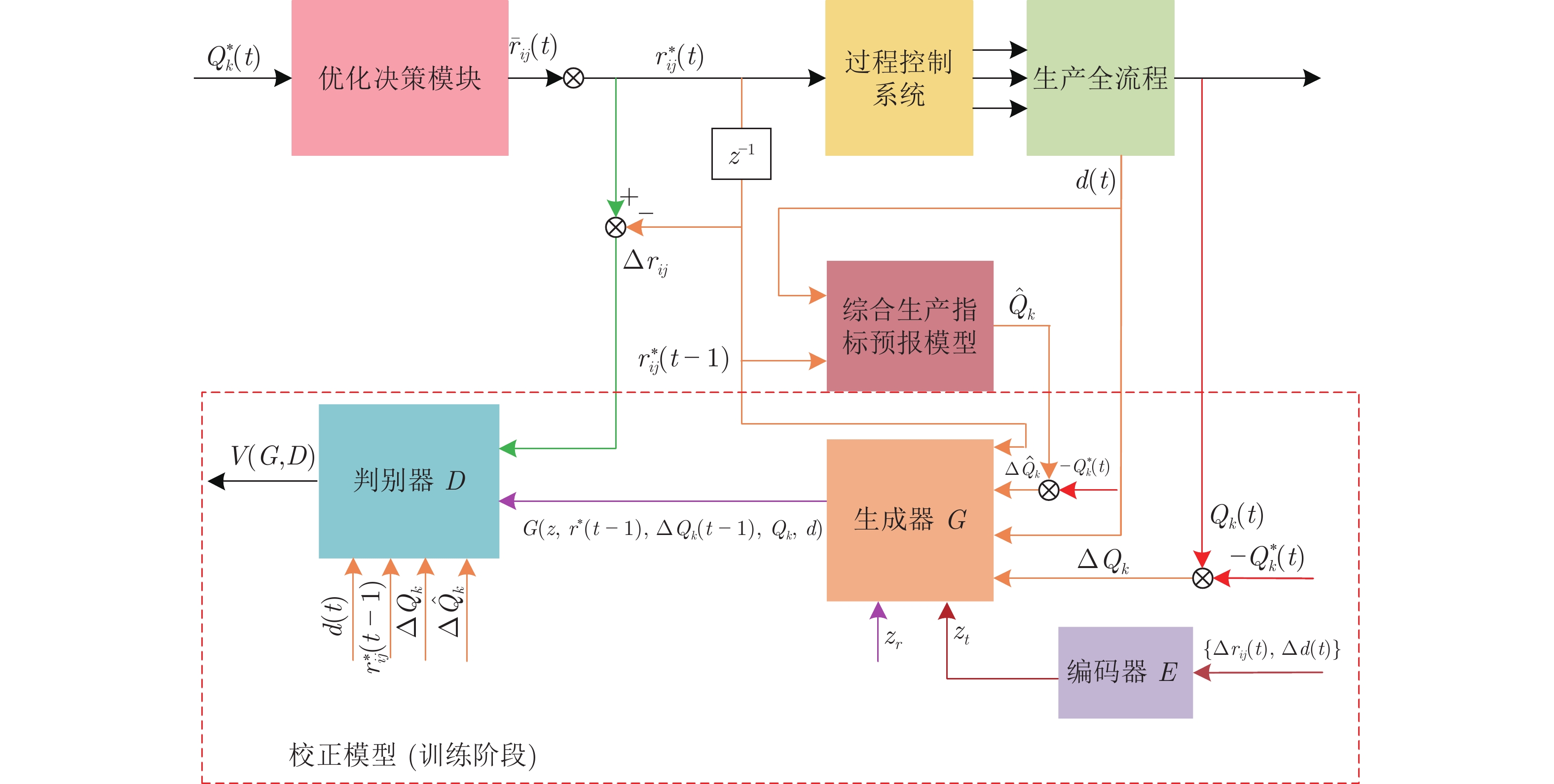
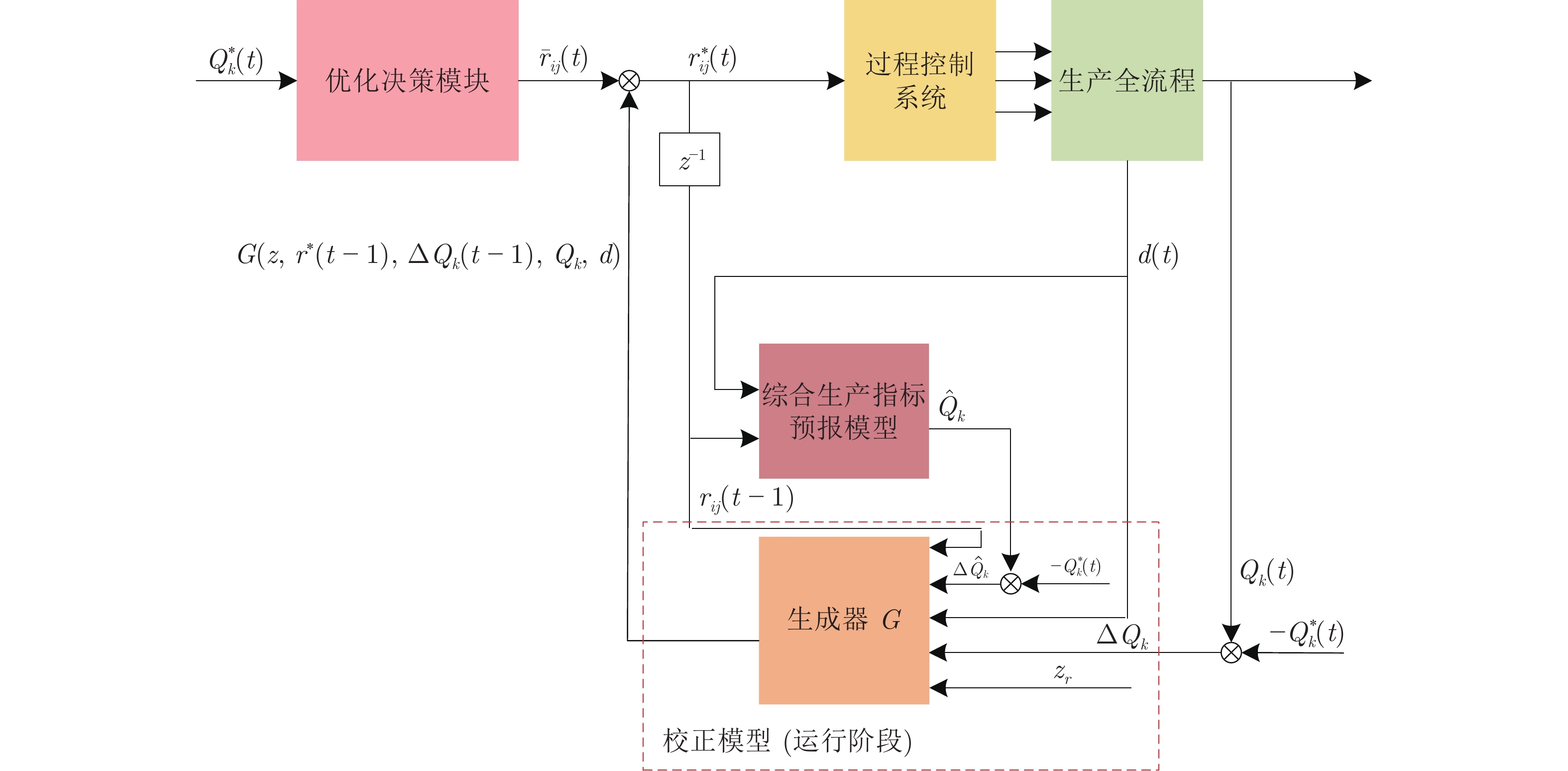
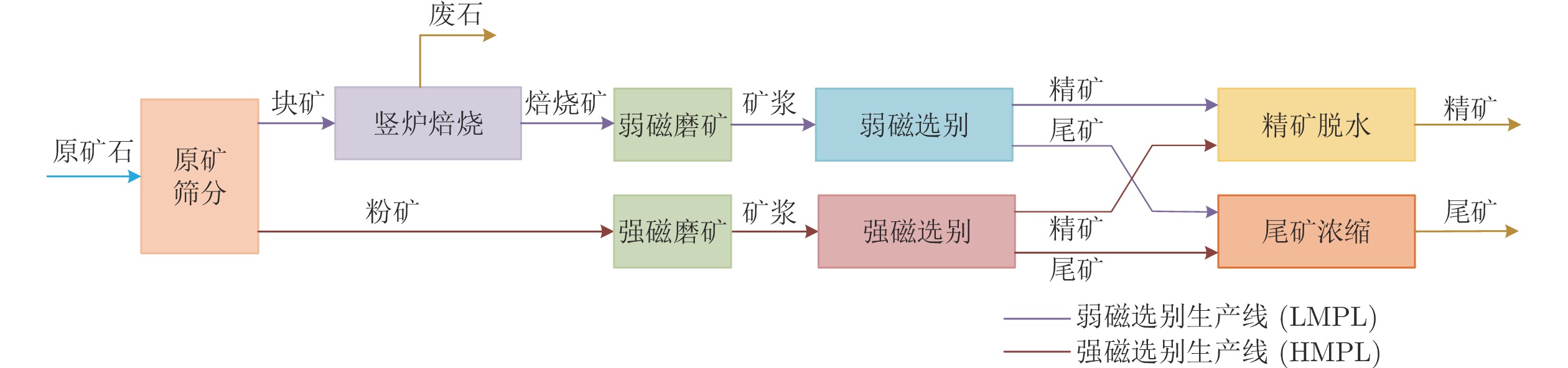
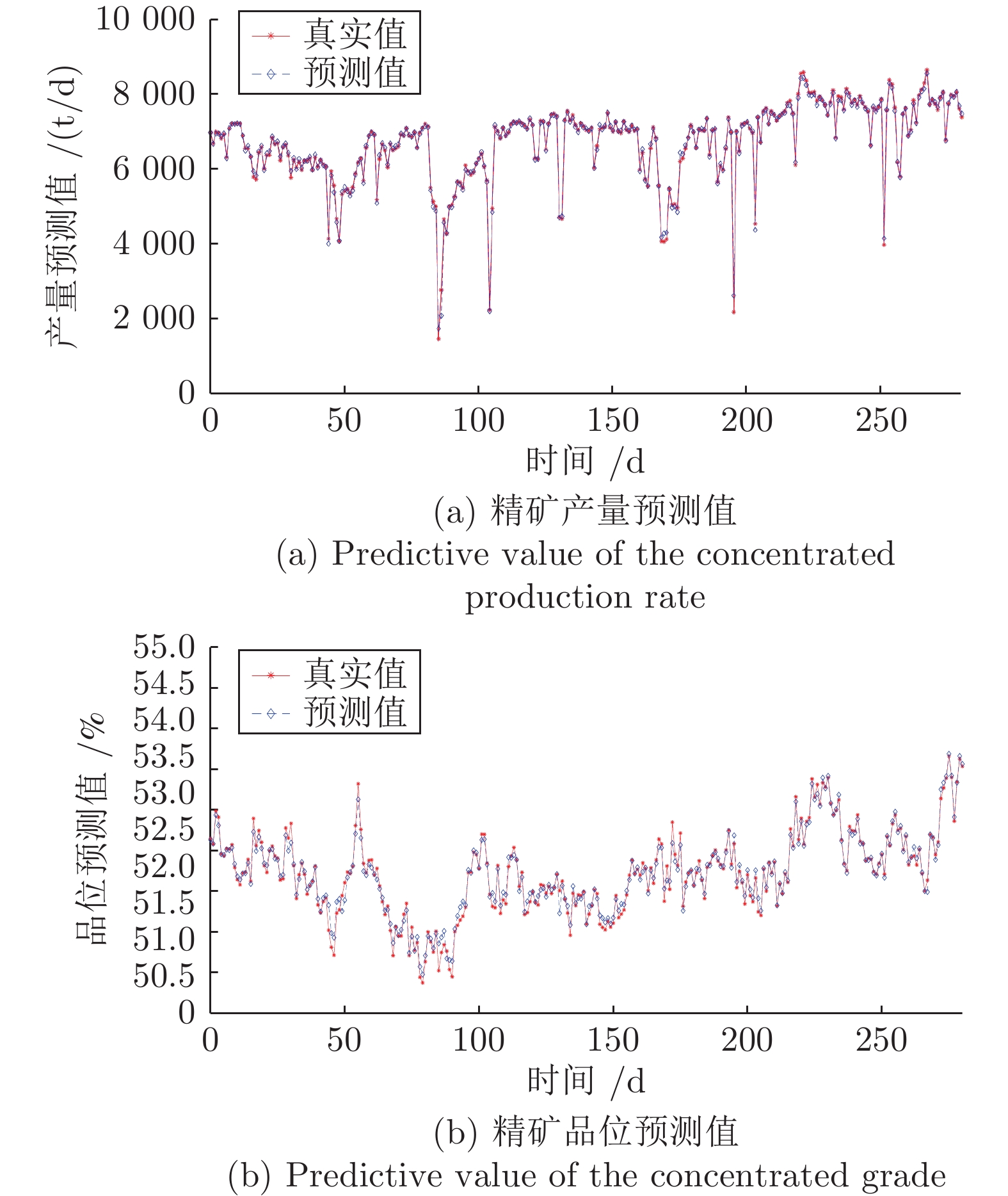
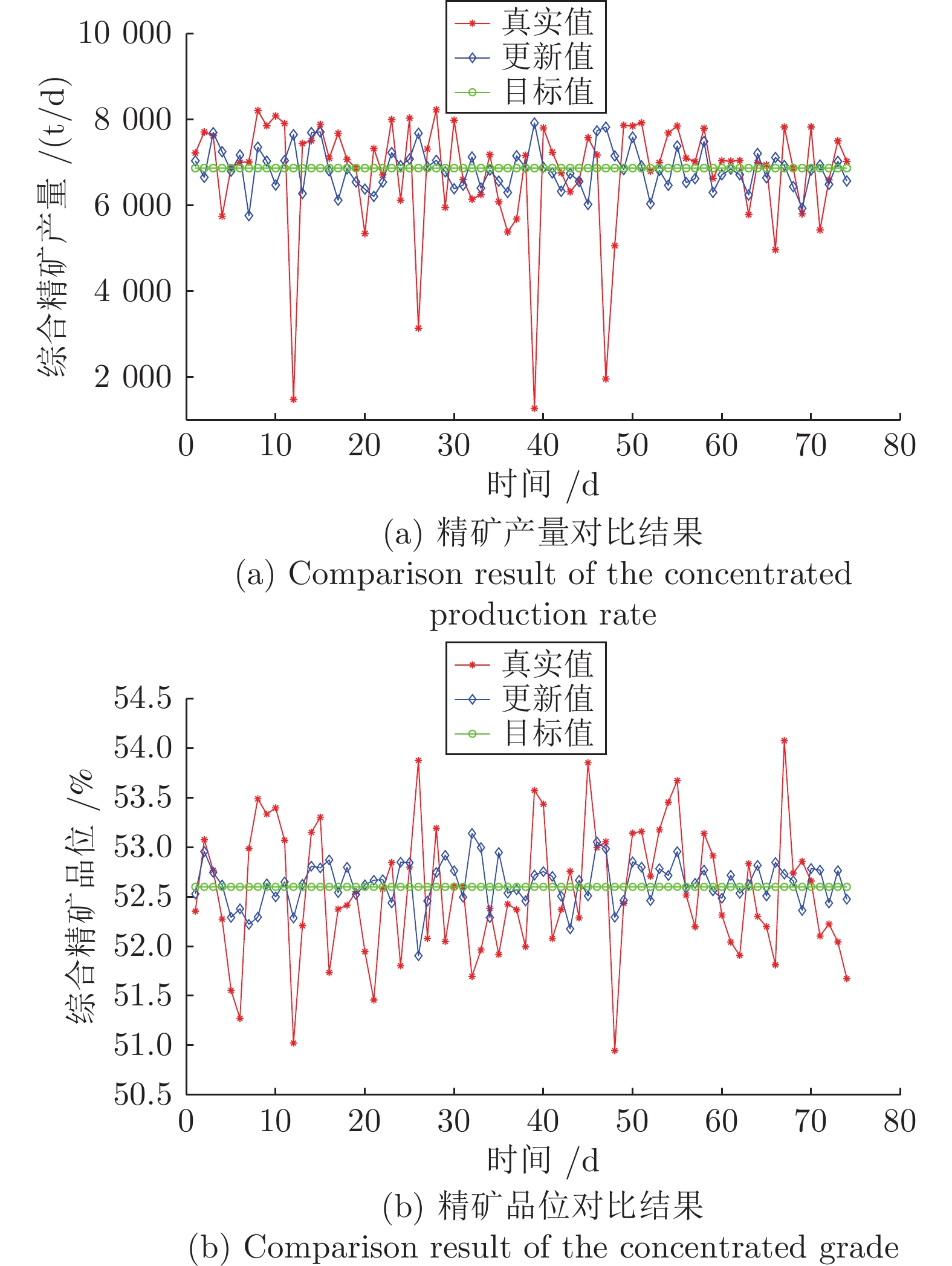
针对工业过程运行指标反馈校正存在滞后及一步推理校正模型可解释性差的问题, 提出了基于递归注意力生成对抗网络(Recurrent attention generative adversarial networks, RAGAN)的运行指标前馈−反馈多步校正方法. 该方法采用基于负相关正则化的集成随机权神经网络, 建立综合生产指标预报模型, 为校正提供前馈信息补偿反馈校正的滞后性. 提出的RAGAN校正, 采用多步校正实现一次调整的思想, 将当前时刻运行指标映射到低维潜变量空间简化数据复杂度, 利用长短期记忆 (Long short-term memory, LSTM)模型实现数据的分步输入, 提高模型可解释性; 采用分布式注意力(Distributed attention, DA)机制构建数据读入网络, 使校正环节获取任务相关性更高的数据, 降低任务复杂度, 减小噪声干扰, 利用校正后的运行指标, 保证系统的综合指标尽可能地跟随设定值运行. 采用中国西部地区最大选矿厂实际数据的仿真实验, 验证了所提方法的有效性.
针对工业过程运行指标反馈校正存在滞后及一步推理校正模型可解释性差的问题, 提出了基于递归注意力生成对抗网络(Recurrent attention generative adversarial networks, RAGAN)的运行指标前馈−反馈多步校正方法. 该方法采用基于负相关正则化的集成随机权神经网络, 建立综合生产指标预报模型, 为校正提供前馈信息补偿反馈校正的滞后性. 提出的RAGAN校正, 采用多步校正实现一次调整的思想, 将当前时刻运行指标映射到低维潜变量空间简化数据复杂度, 利用长短期记忆 (Long short-term memory, LSTM)模型实现数据的分步输入, 提高模型可解释性; 采用分布式注意力(Distributed attention, DA)机制构建数据读入网络, 使校正环节获取任务相关性更高的数据, 降低任务复杂度, 减小噪声干扰, 利用校正后的运行指标, 保证系统的综合指标尽可能地跟随设定值运行. 采用中国西部地区最大选矿厂实际数据的仿真实验, 验证了所提方法的有效性.



2023, 49(5): 1010-1018.
doi: 10.16383/j.aas.c210798
摘要:
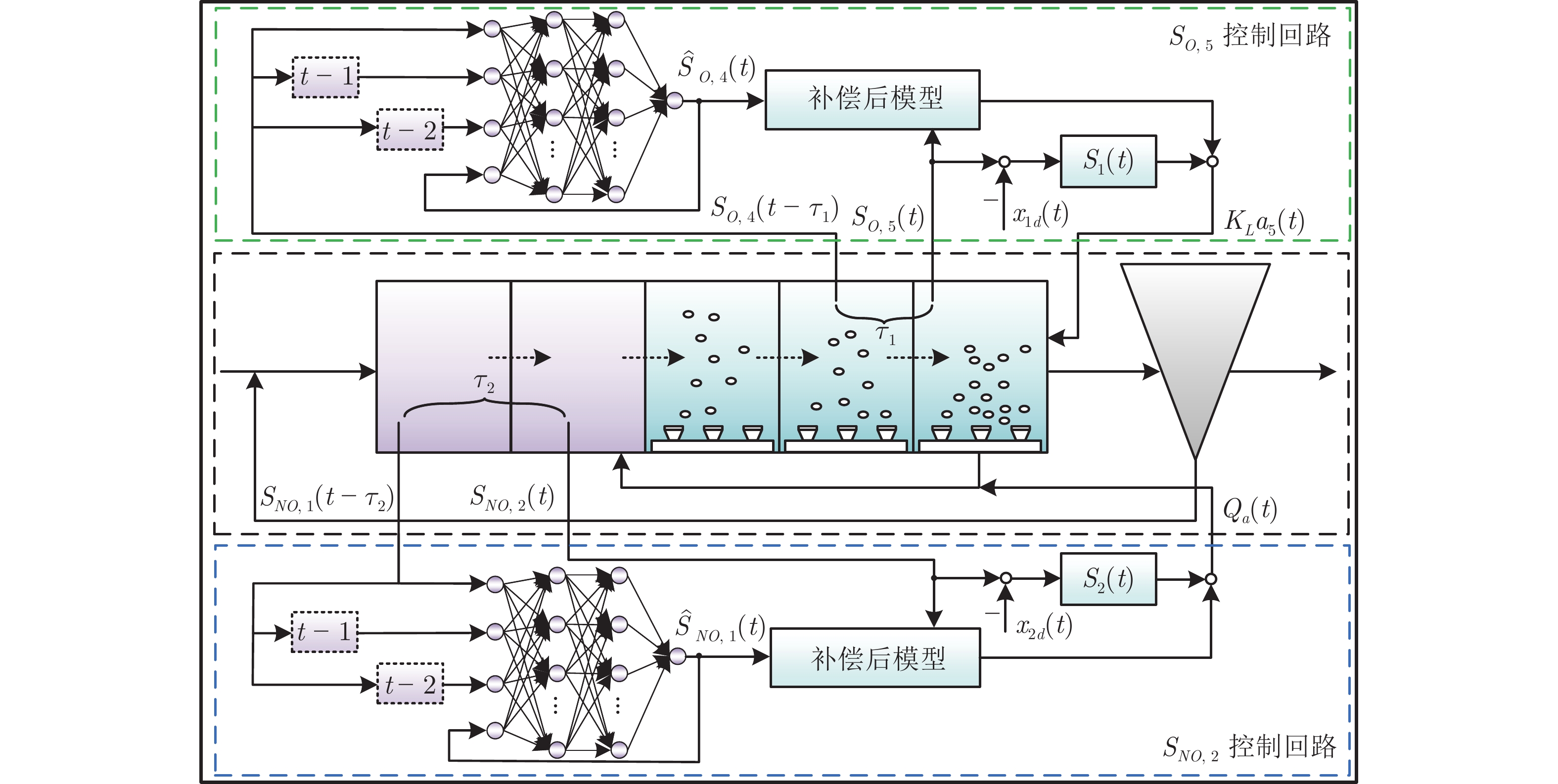
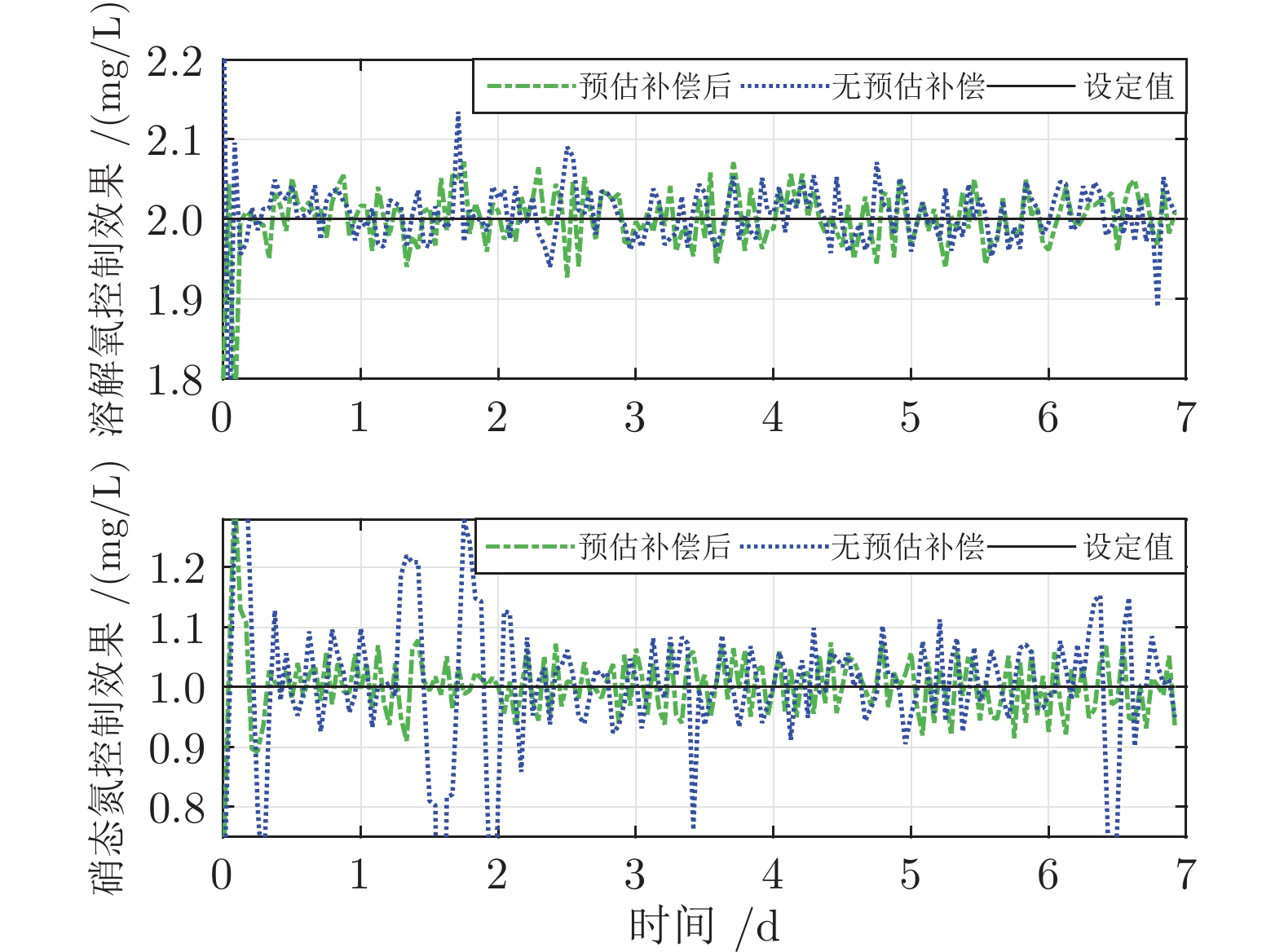
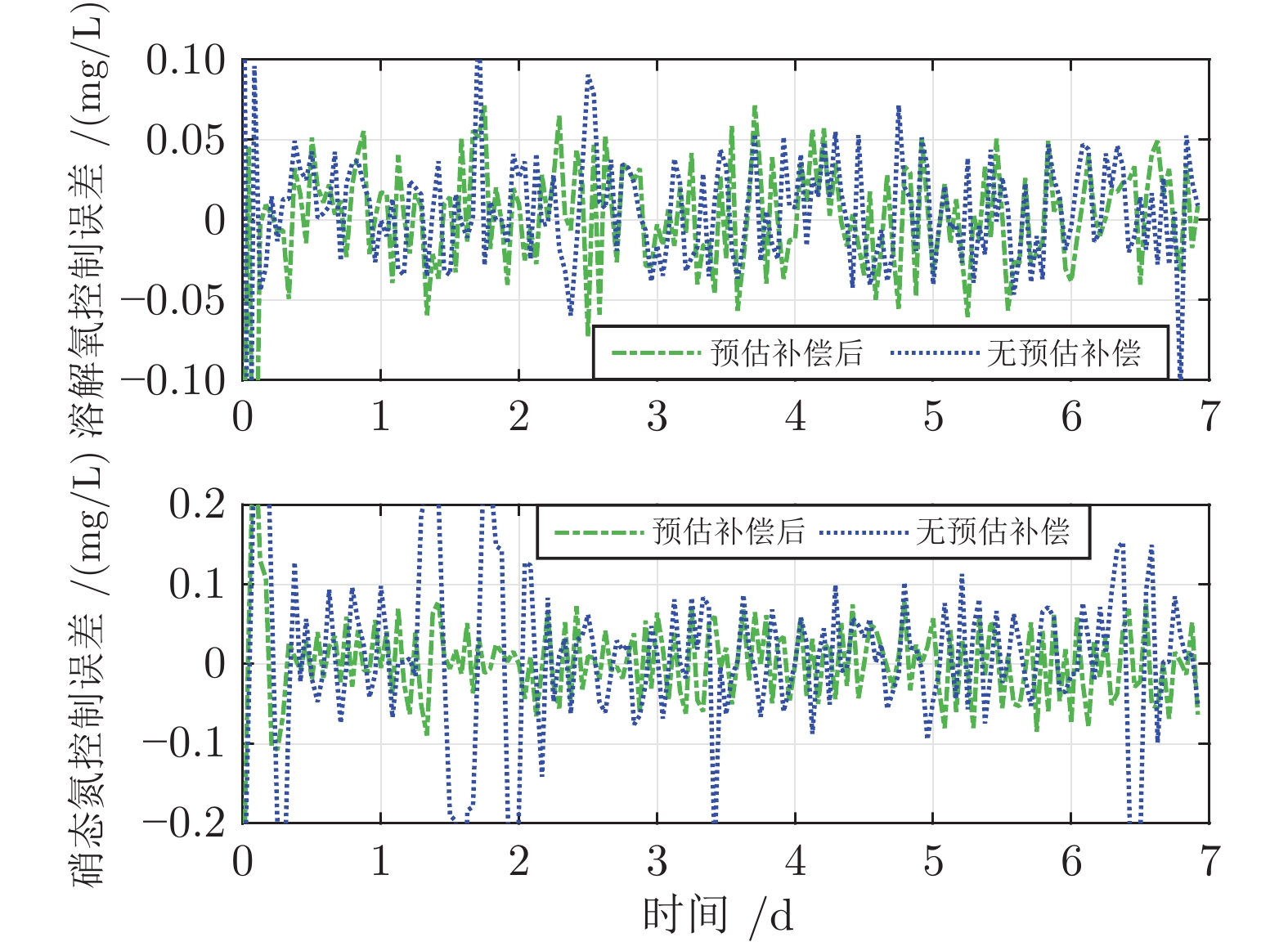
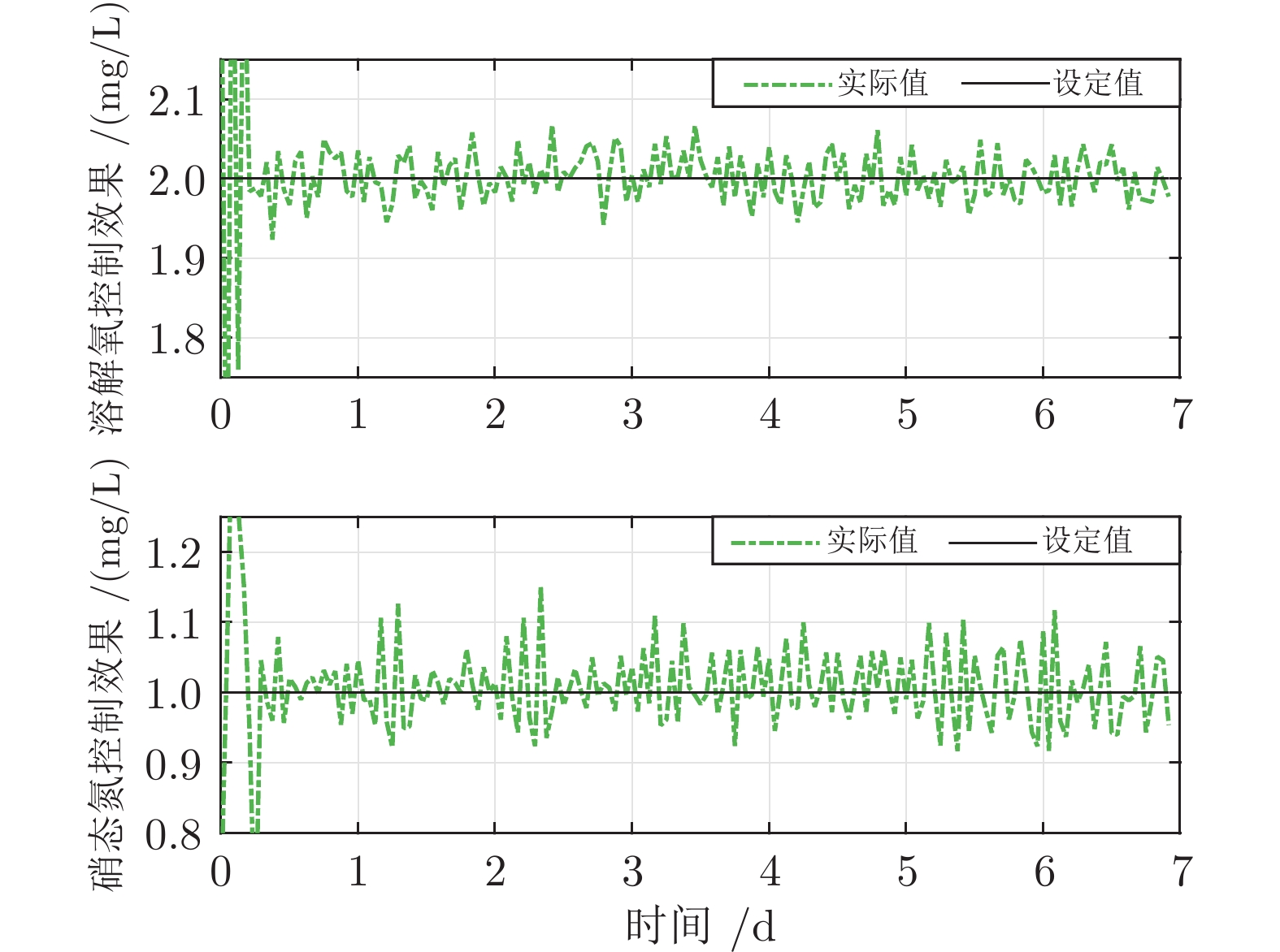
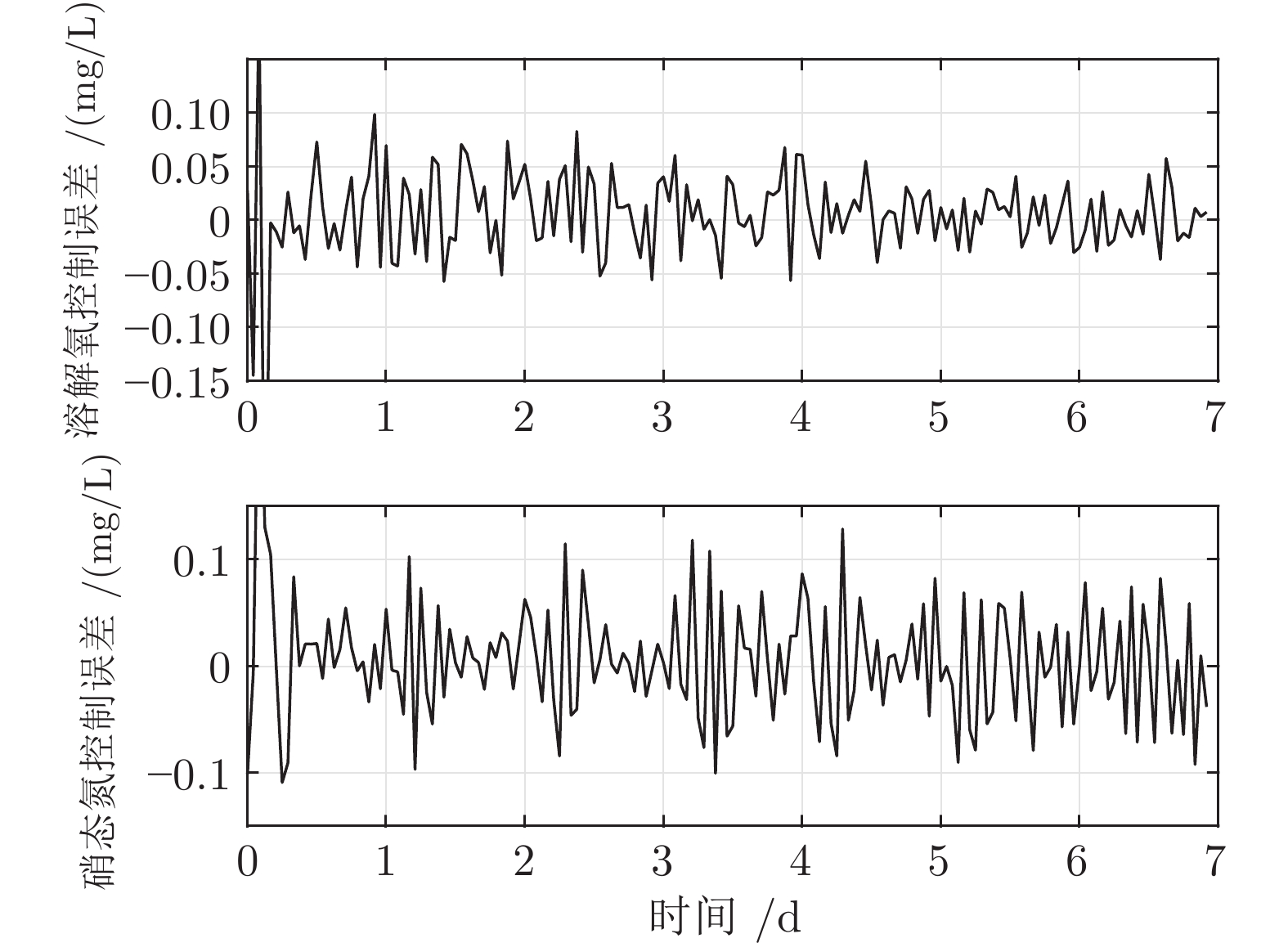
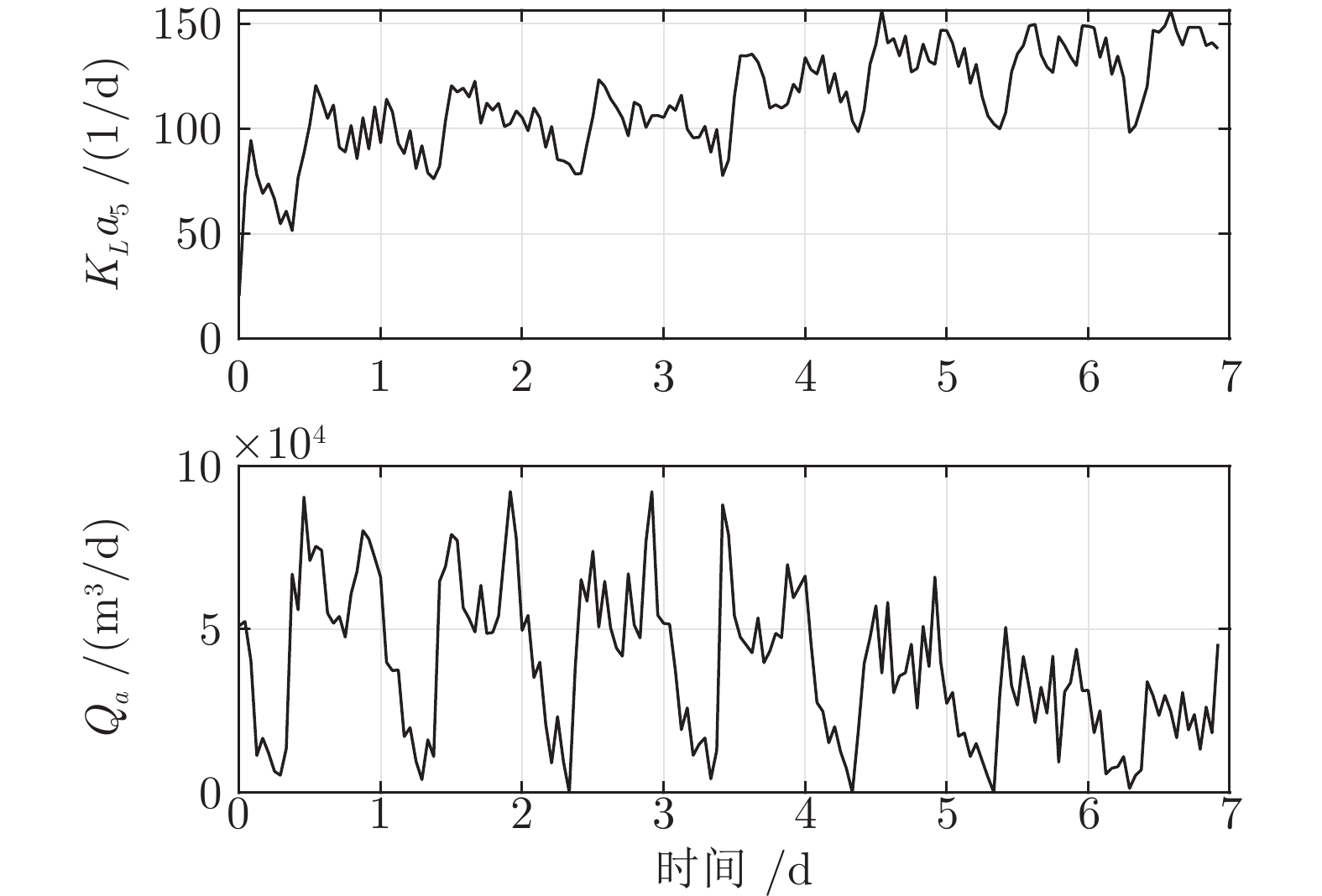
针对城市污水处理过程时滞导致难以稳定控制的问题, 提出一种自适应滑模控制方法(Adaptive sliding mode control, ASMC). 首先, 分析推流时滞对城市污水处理生化反应过程的影响, 建立时滞影响下的城市污水处理运行控制模型; 其次, 设计一种基于模糊神经网络的预估补偿模型, 完成滞后变量的准确预测, 实现控制模型中变量时刻的统一; 最后, 设计一种具有自适应开关增益系数的滑模控制器(Sliding mode control, SMC), 实现溶解氧和硝态氮的稳定控制. 将提出的自适应滑模控制方法应用于城市污水处理过程基准仿真平台, 实验结果显示该方法能够实现城市污水处理运行过程稳定控制.
针对城市污水处理过程时滞导致难以稳定控制的问题, 提出一种自适应滑模控制方法(Adaptive sliding mode control, ASMC). 首先, 分析推流时滞对城市污水处理生化反应过程的影响, 建立时滞影响下的城市污水处理运行控制模型; 其次, 设计一种基于模糊神经网络的预估补偿模型, 完成滞后变量的准确预测, 实现控制模型中变量时刻的统一; 最后, 设计一种具有自适应开关增益系数的滑模控制器(Sliding mode control, SMC), 实现溶解氧和硝态氮的稳定控制. 将提出的自适应滑模控制方法应用于城市污水处理过程基准仿真平台, 实验结果显示该方法能够实现城市污水处理运行过程稳定控制.





2023, 49(5): 1019-1030.
doi: 10.16383/j.aas.c220429
摘要:
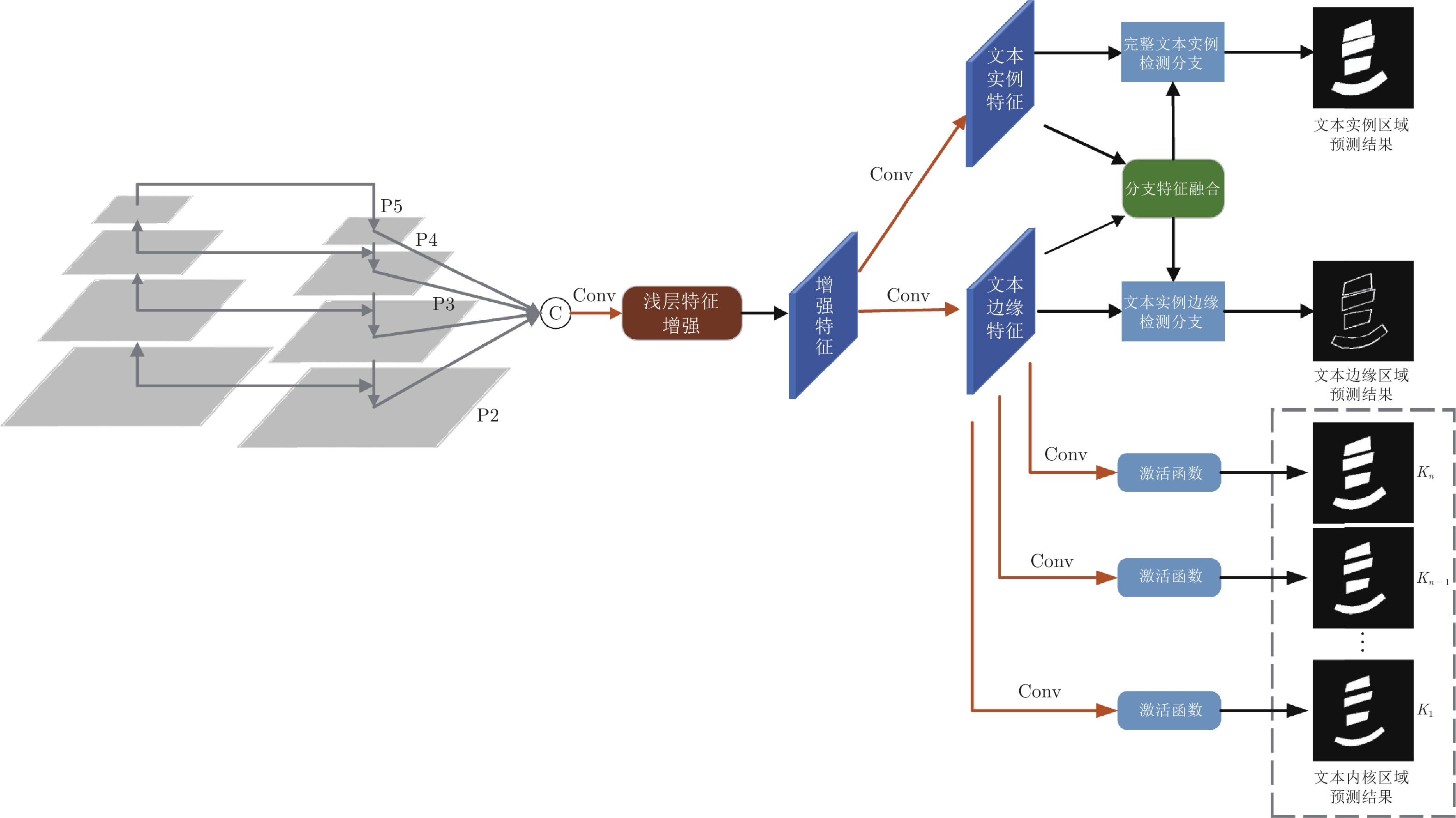
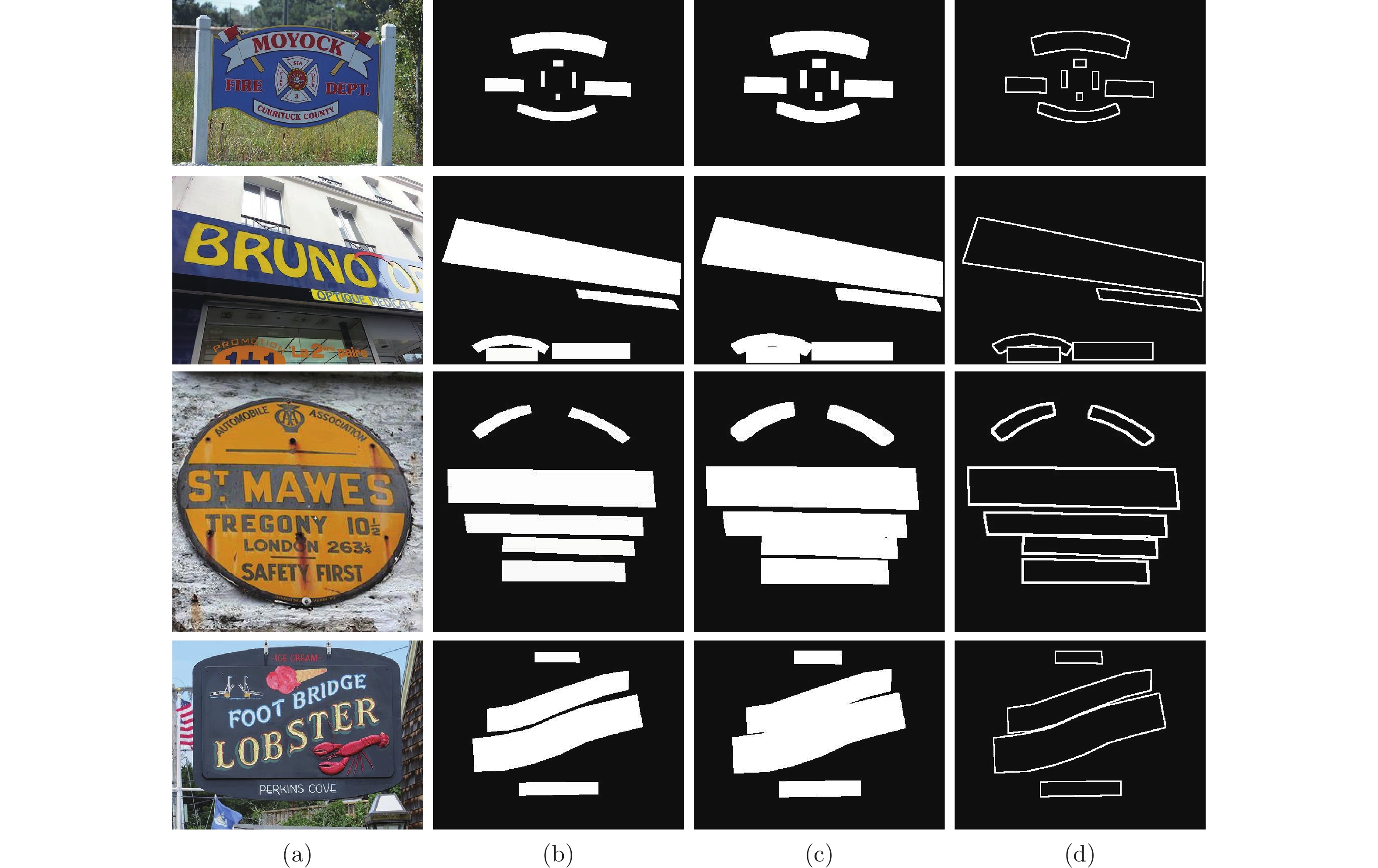
在场景文本检测方法中, 文本实例的边缘特征与其他特征在大多数模型中都是以同样的方式进行处理, 而准确检测相邻文本边缘区域是正确识别任意形状文本区域的关键之一. 如果对边缘特征进行增强并使用独立分支进行建模, 必能有效提高模型的标识准确率. 为此, 提出了三个用以增强边缘特征的网络模块. 其中, 浅层特征增强模块可有效增强包含更多边缘特征的浅层特征; 边缘区域检测分支将普通特征和边缘特征进行区分以对目标的边缘特征进行显式建模; 而分支特征融合模块可将两种特征在识别过程进行更好的融合. 在将这三个模块引入渐进尺度扩张网络 (Progressive scale expansion network, PSENet) 之后, 相关消融实验表明这三个模块的单独使用及其组合均可进一步增加网络的预测准确率. 此外, 在三个常用公开数据集上与其他十个最新模型的比较结果表明, 改进后得到边缘特征增强网络 (Edge-oriented feature reinforcing network, EFRNet) 的识别结果具有较高的F1值.
在场景文本检测方法中, 文本实例的边缘特征与其他特征在大多数模型中都是以同样的方式进行处理, 而准确检测相邻文本边缘区域是正确识别任意形状文本区域的关键之一. 如果对边缘特征进行增强并使用独立分支进行建模, 必能有效提高模型的标识准确率. 为此, 提出了三个用以增强边缘特征的网络模块. 其中, 浅层特征增强模块可有效增强包含更多边缘特征的浅层特征; 边缘区域检测分支将普通特征和边缘特征进行区分以对目标的边缘特征进行显式建模; 而分支特征融合模块可将两种特征在识别过程进行更好的融合. 在将这三个模块引入渐进尺度扩张网络 (Progressive scale expansion network, PSENet) 之后, 相关消融实验表明这三个模块的单独使用及其组合均可进一步增加网络的预测准确率. 此外, 在三个常用公开数据集上与其他十个最新模型的比较结果表明, 改进后得到边缘特征增强网络 (Edge-oriented feature reinforcing network, EFRNet) 的识别结果具有较高的F1值.




2023, 49(5): 1031-1049.
doi: 10.16383/j.aas.c211178
摘要:
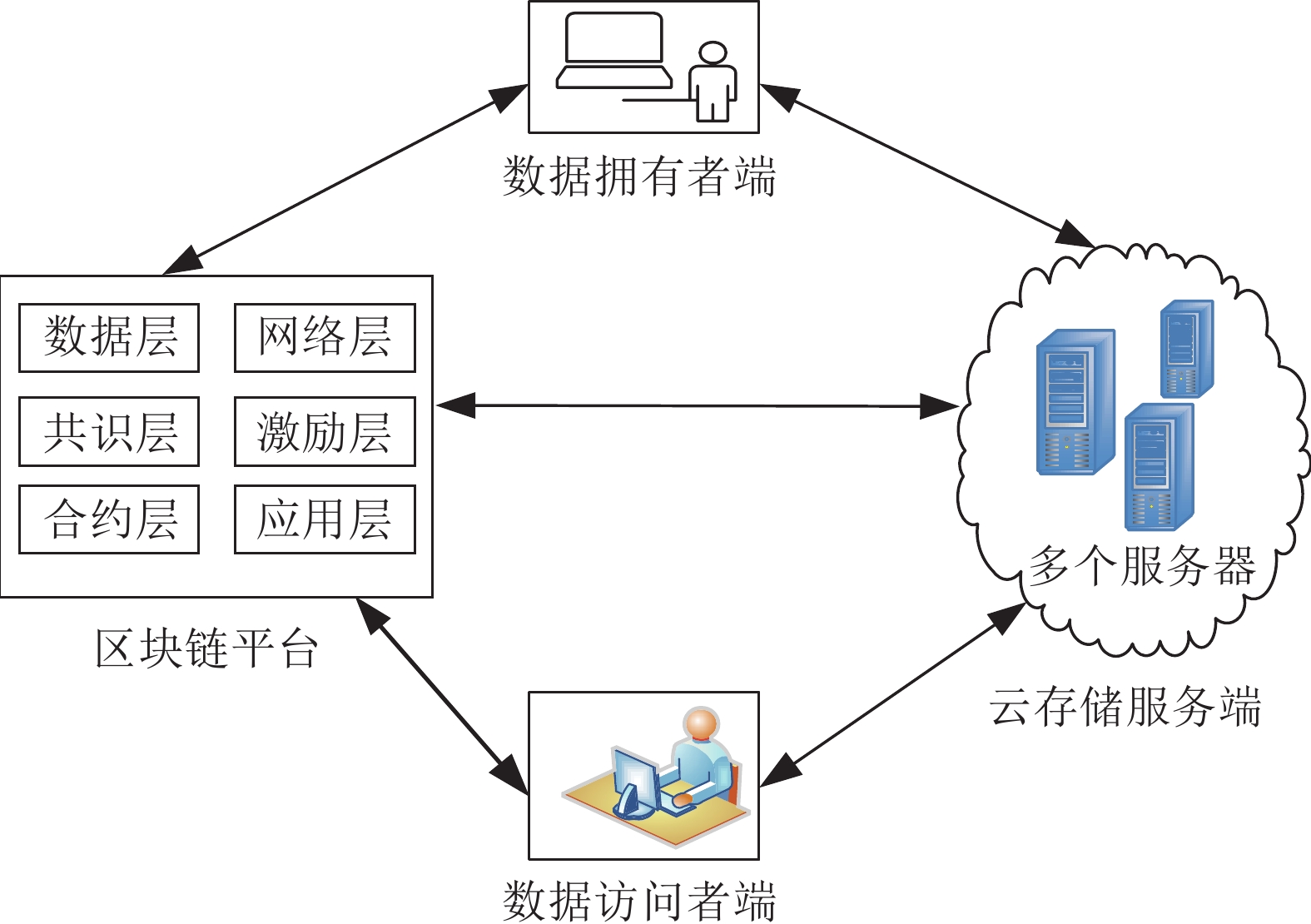
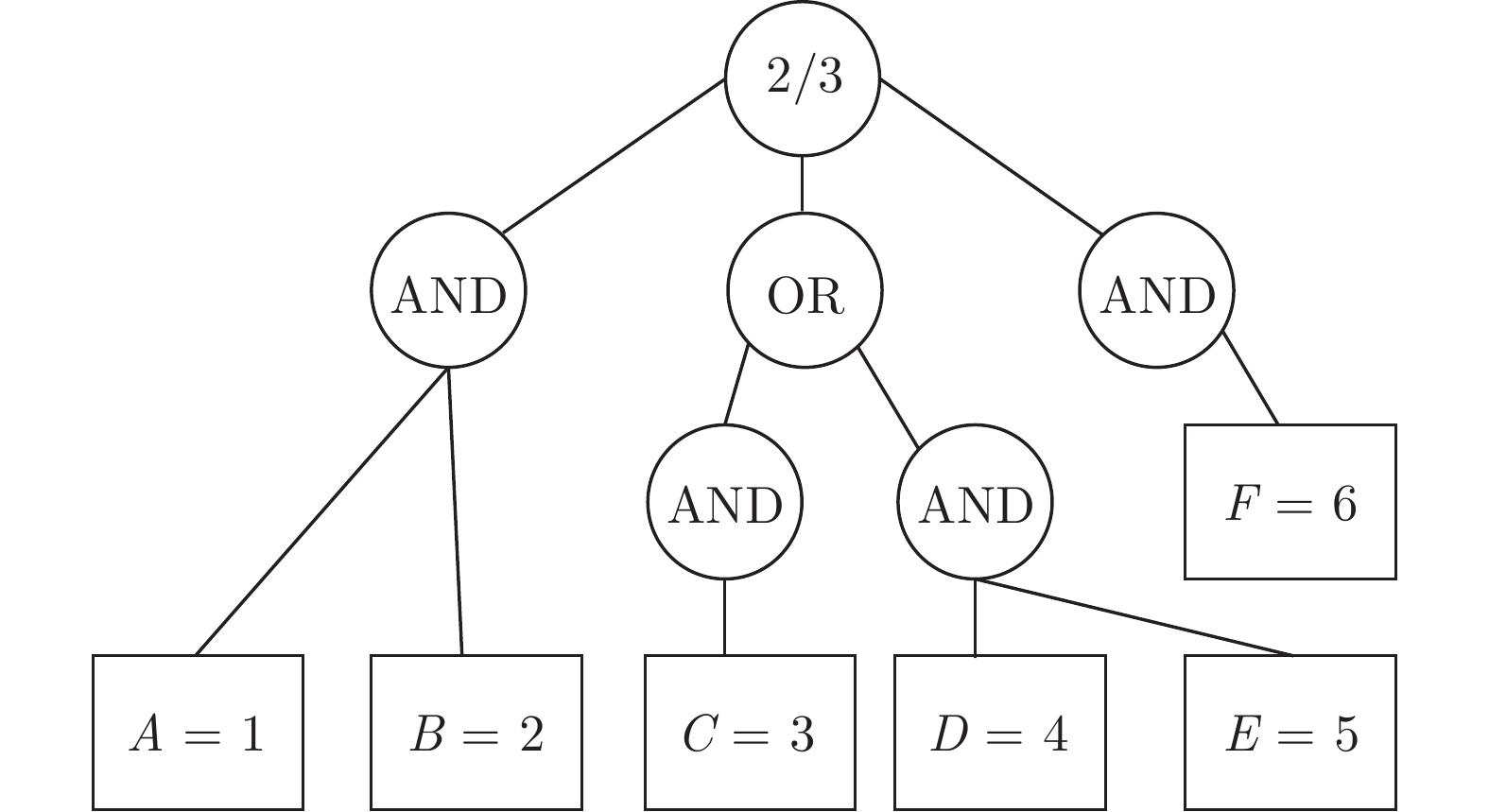
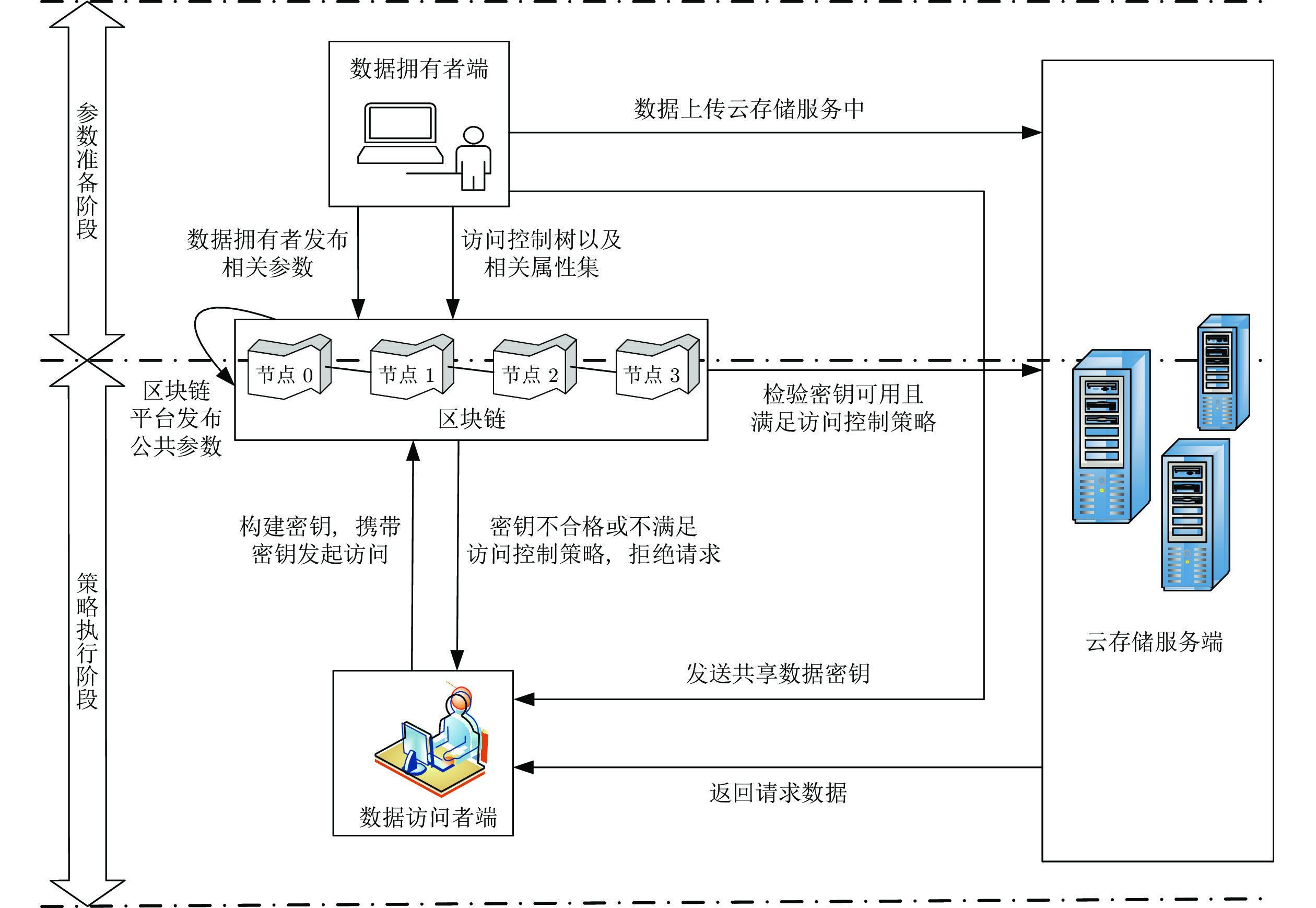
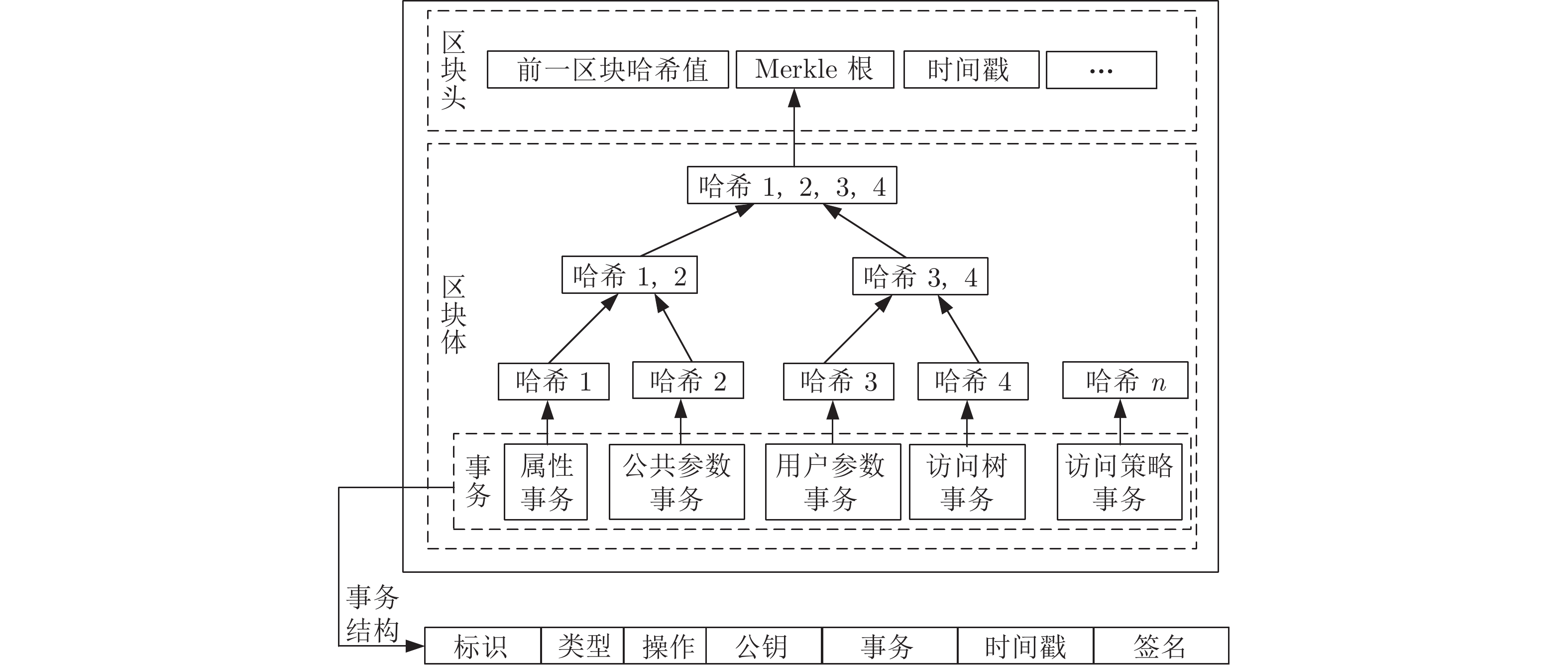
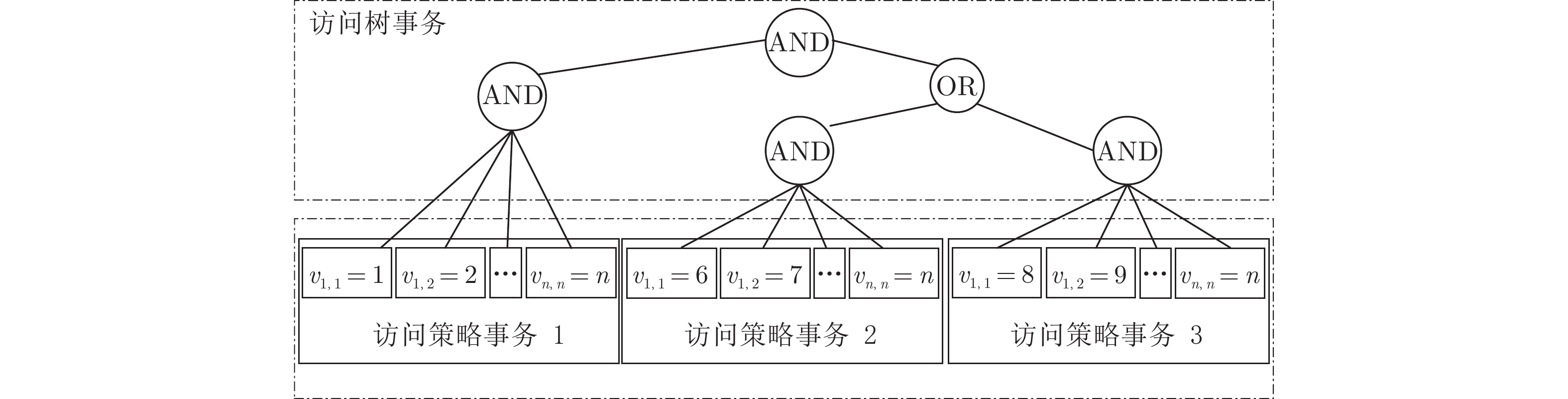
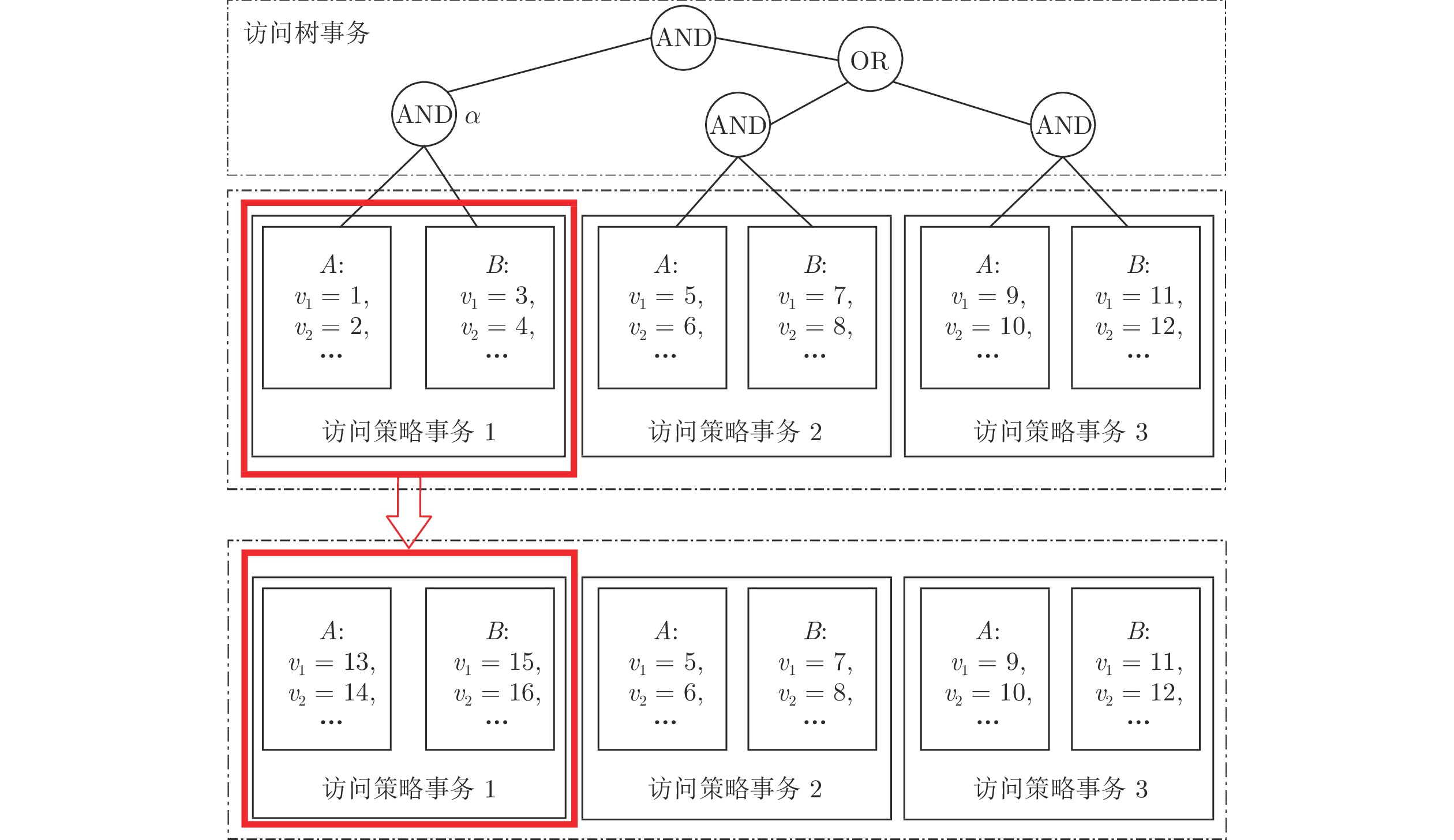
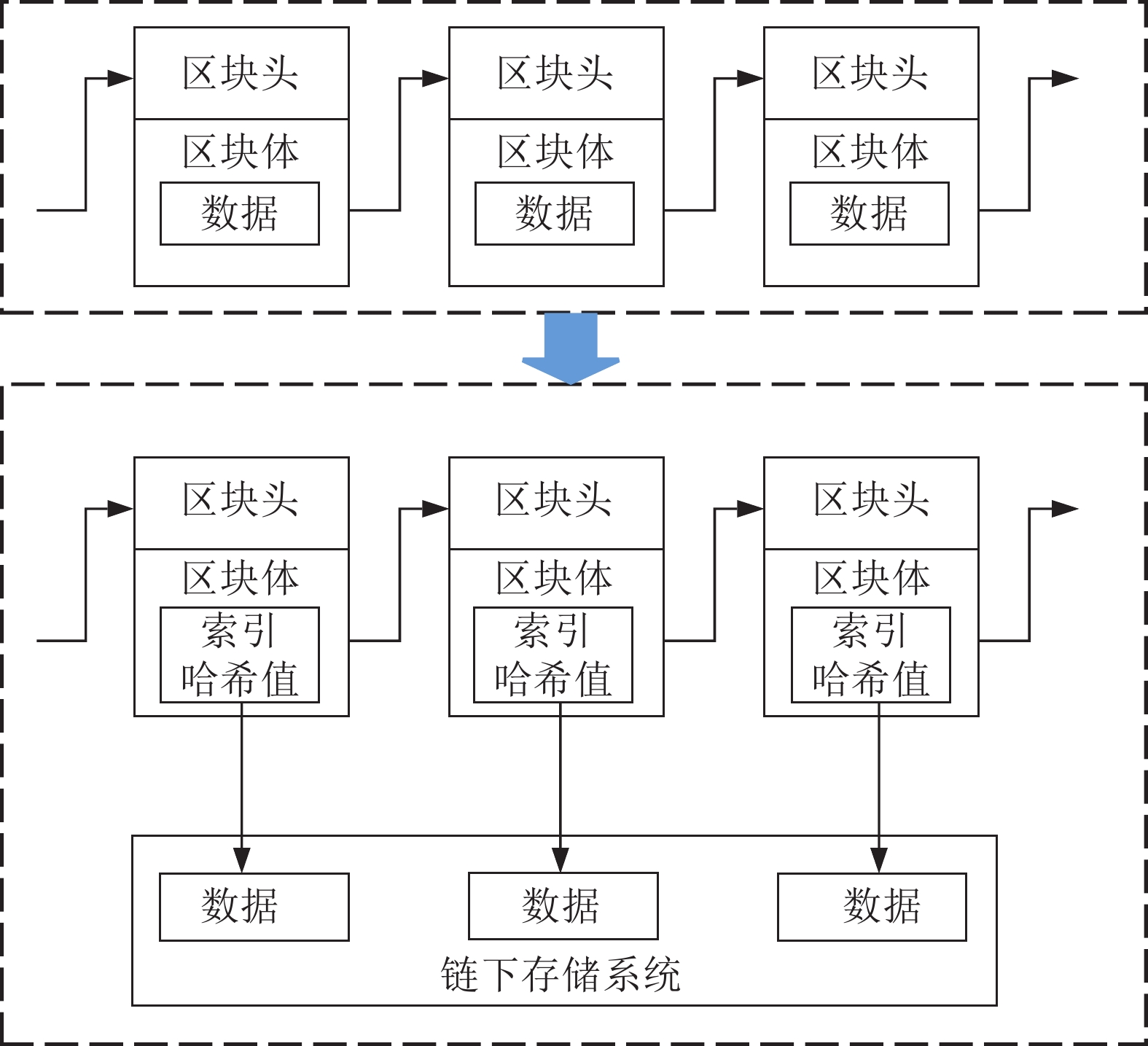
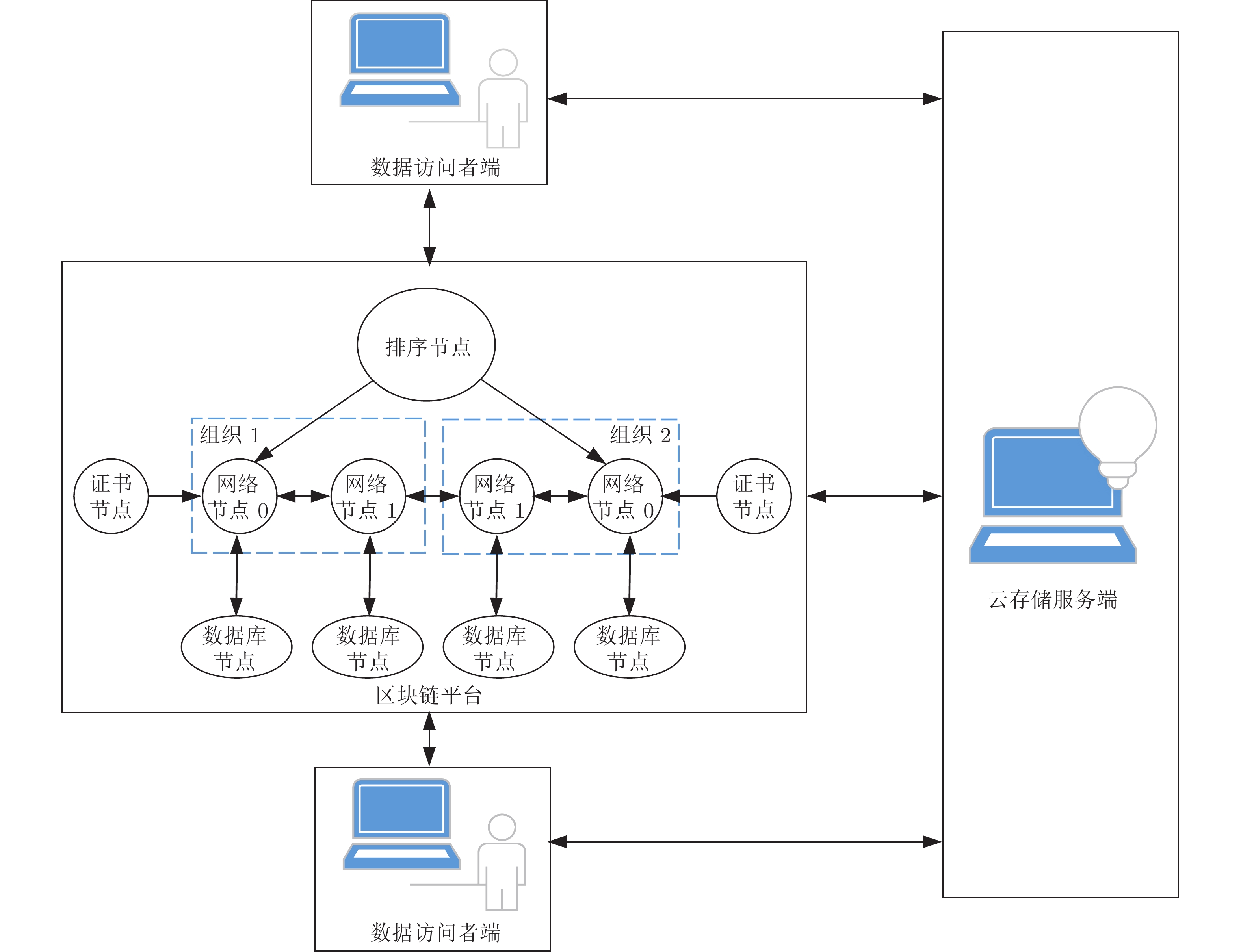
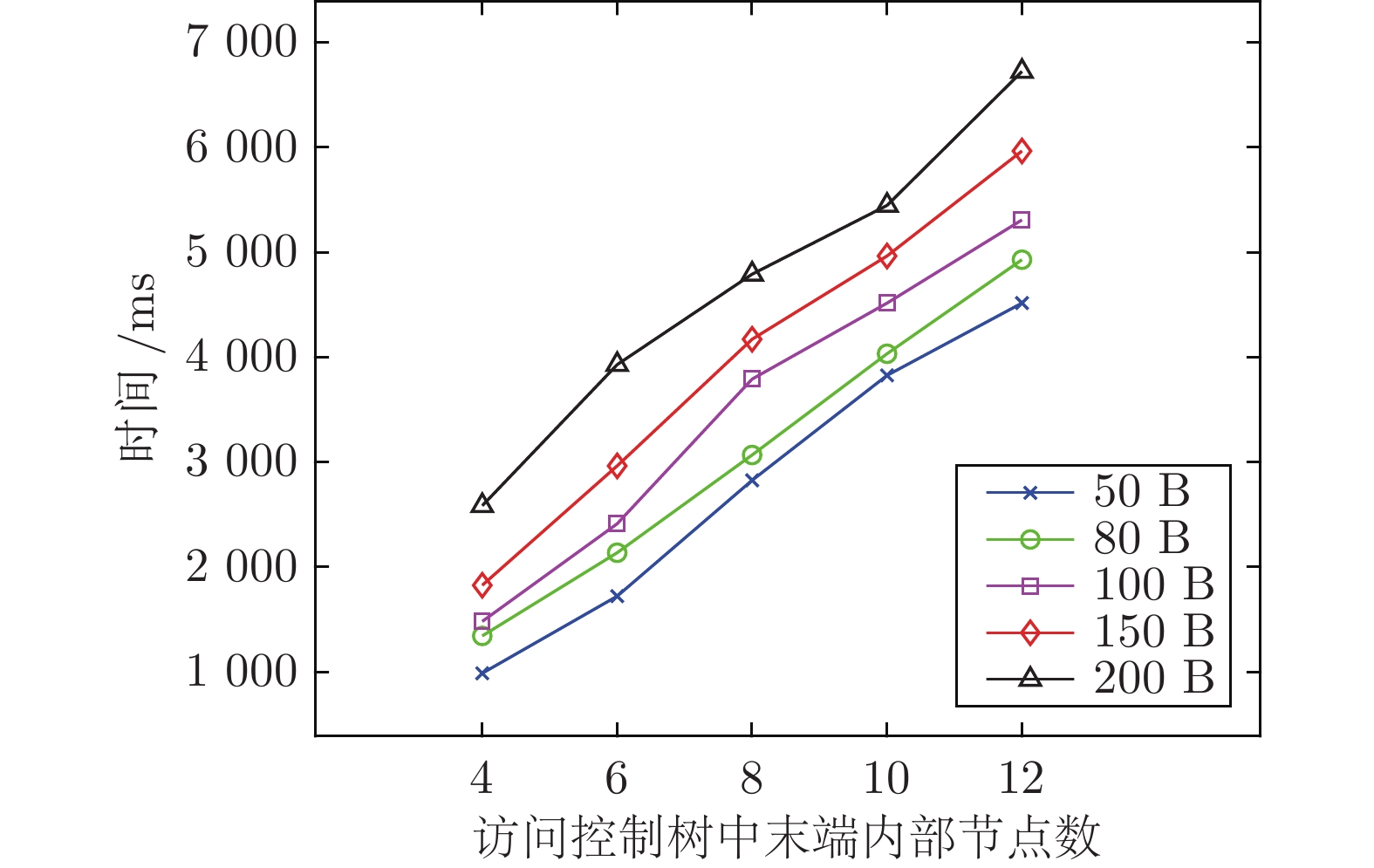
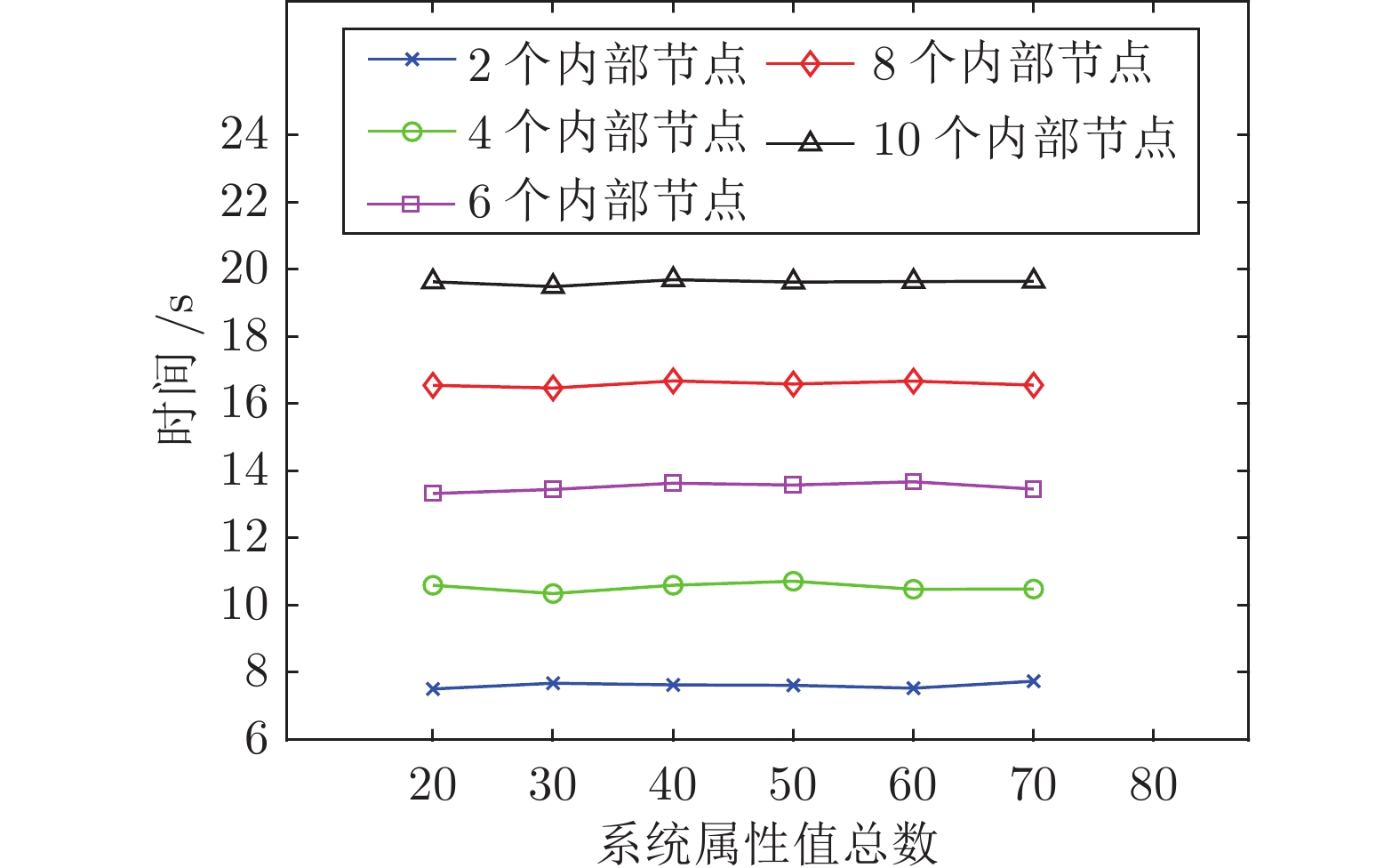
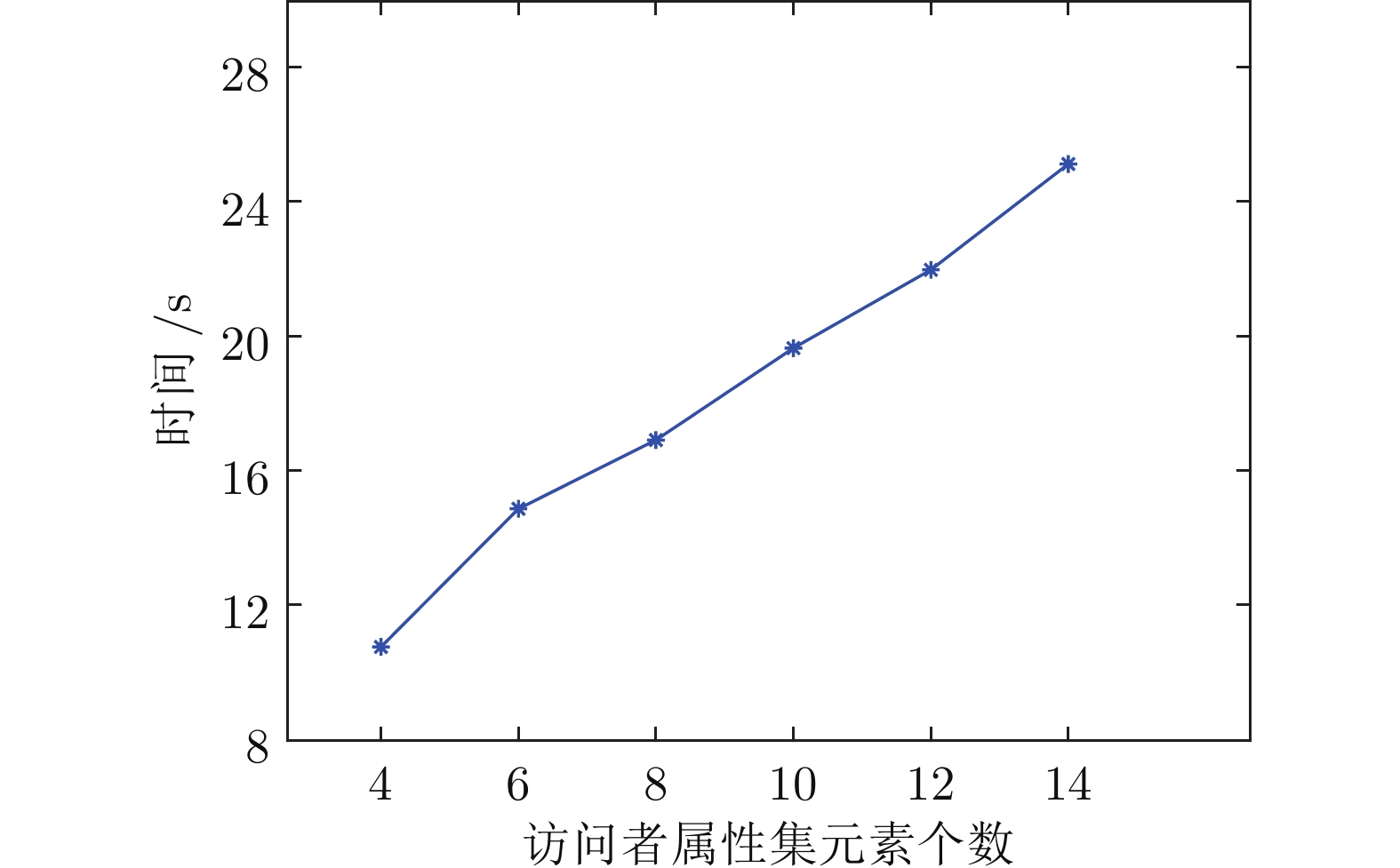
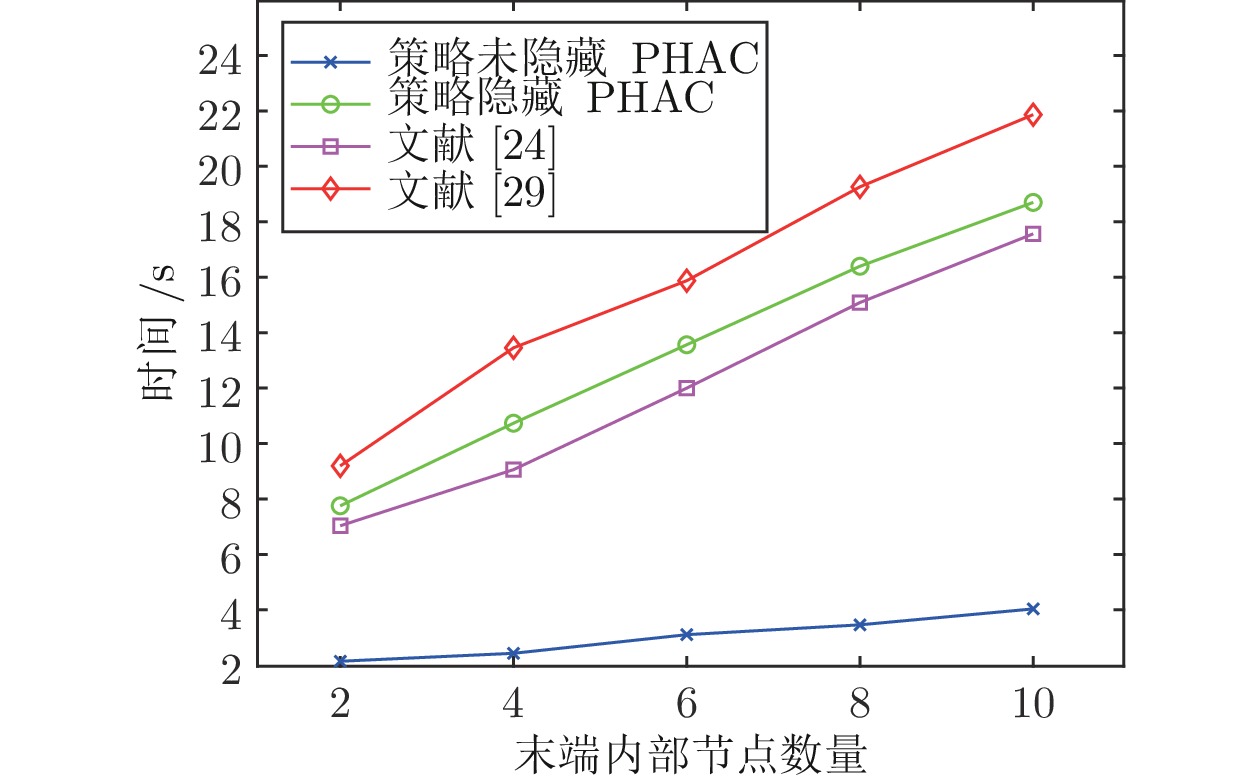
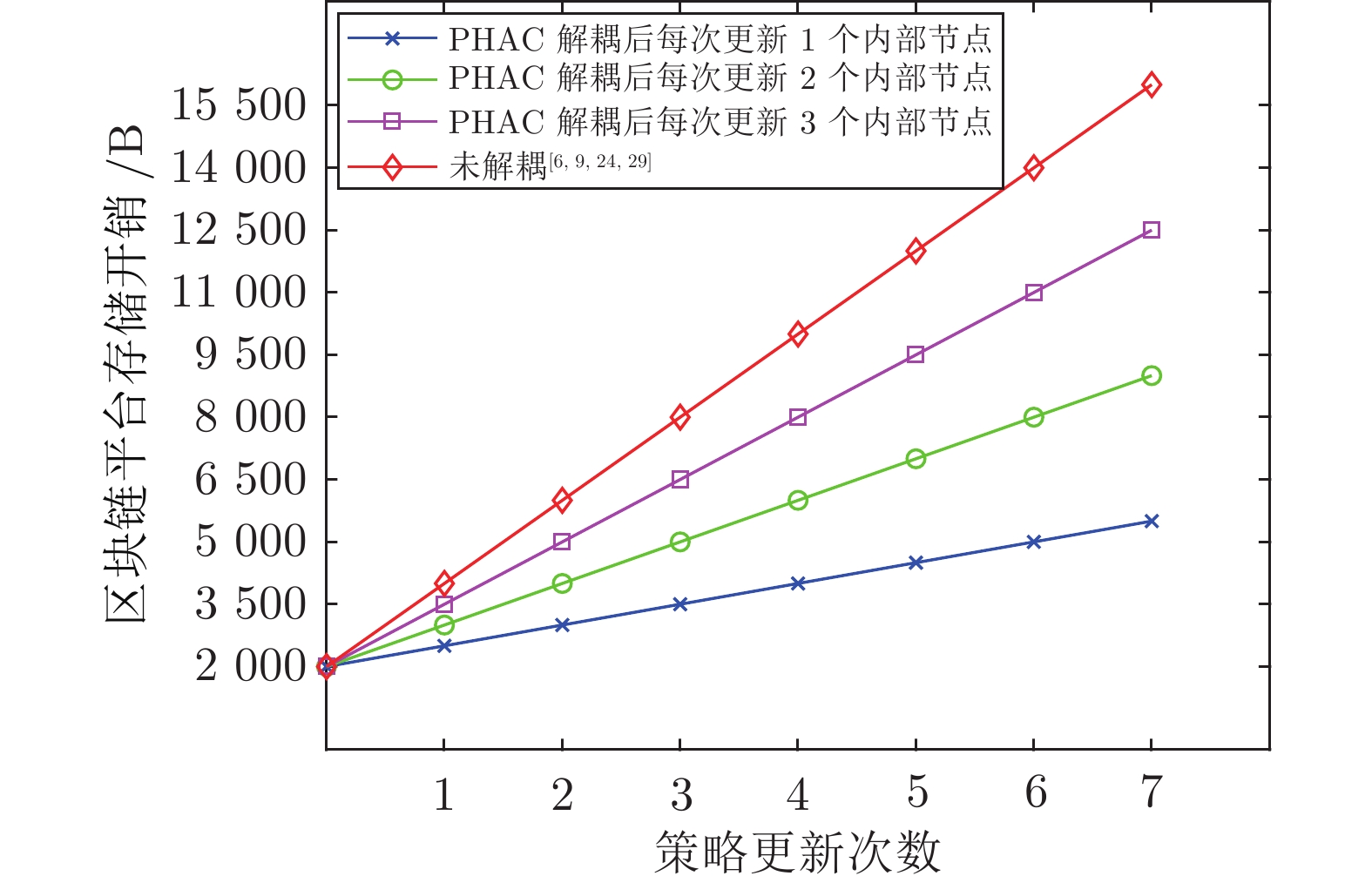
针对大数据应用中用户共享数据的访问控制由半可信云服务商实施所带来的隐私泄露、策略和访问日志易被篡改等问题, 提出一种基于区块链的策略隐藏大数据访问控制方法 (A policy-hidden big data access control method based on blockchain, PHAC). 该方法采用区块链技术实施访问控制以减少对服务商的信任依赖, 引入属性基加密(Attribute-based encryption, ABE)以及双线性映射技术, 实现在不泄露访问控制策略的前提下, 通过智能合约正确执行访问控制策略. 同时, 解耦访问控制策略, 简化用户策略的发布、更新和执行. 并应用链上和链下存储相结合方式, 解决智能合约和访问控制策略占用区块链节点资源不断增大的问题. 最后, 对该方法进行了理论分析和HyperLedger Fabric环境下的实验评估, 结果表明该方法能在策略隐藏情况下有效实现访问控制, 但不会给数据拥有者、区块链节点增加过多额外计算和存储开销.
针对大数据应用中用户共享数据的访问控制由半可信云服务商实施所带来的隐私泄露、策略和访问日志易被篡改等问题, 提出一种基于区块链的策略隐藏大数据访问控制方法 (A policy-hidden big data access control method based on blockchain, PHAC). 该方法采用区块链技术实施访问控制以减少对服务商的信任依赖, 引入属性基加密(Attribute-based encryption, ABE)以及双线性映射技术, 实现在不泄露访问控制策略的前提下, 通过智能合约正确执行访问控制策略. 同时, 解耦访问控制策略, 简化用户策略的发布、更新和执行. 并应用链上和链下存储相结合方式, 解决智能合约和访问控制策略占用区块链节点资源不断增大的问题. 最后, 对该方法进行了理论分析和HyperLedger Fabric环境下的实验评估, 结果表明该方法能在策略隐藏情况下有效实现访问控制, 但不会给数据拥有者、区块链节点增加过多额外计算和存储开销.




2023, 49(5): 1050-1061.
doi: 10.16383/j.aas.c220482
摘要:
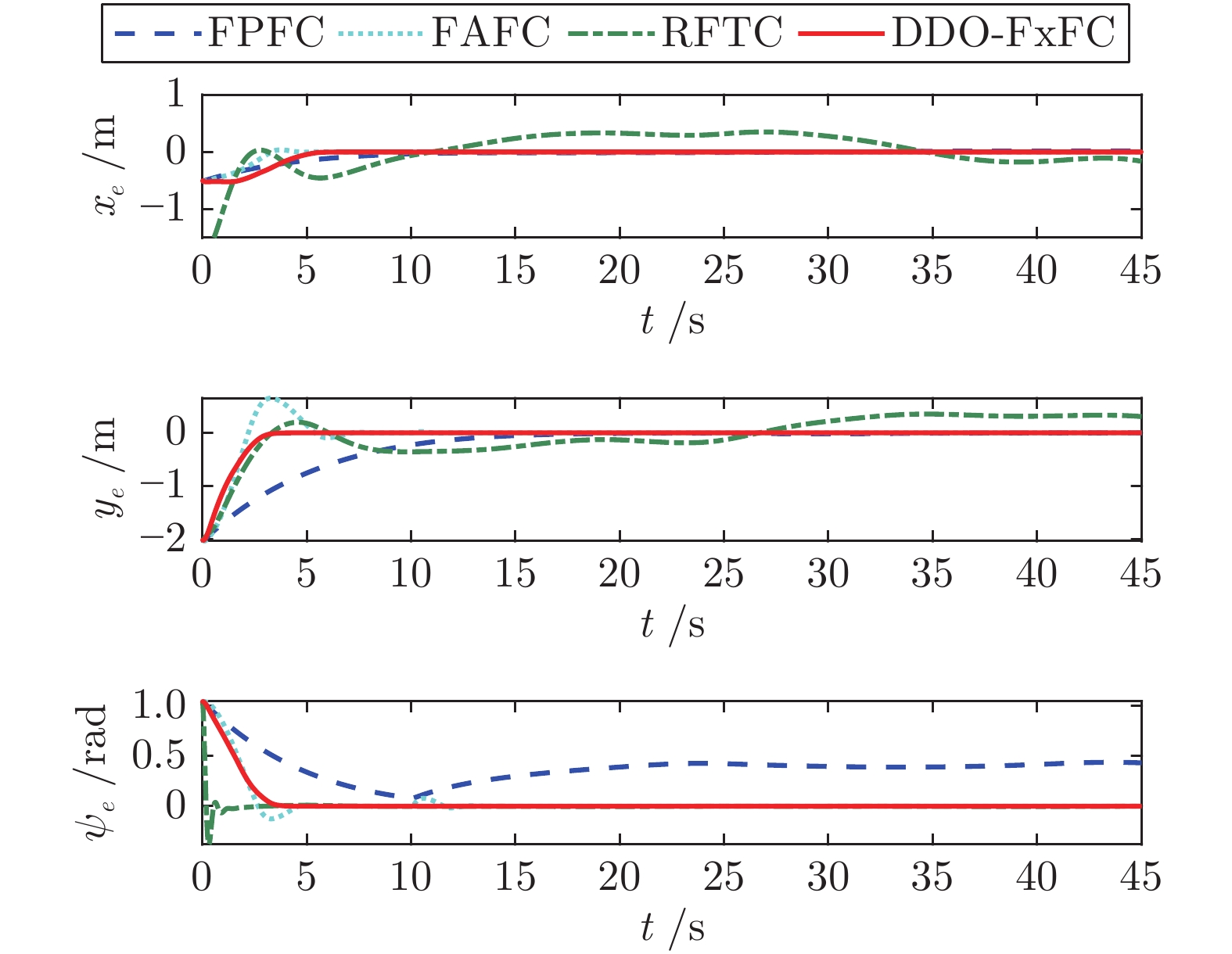
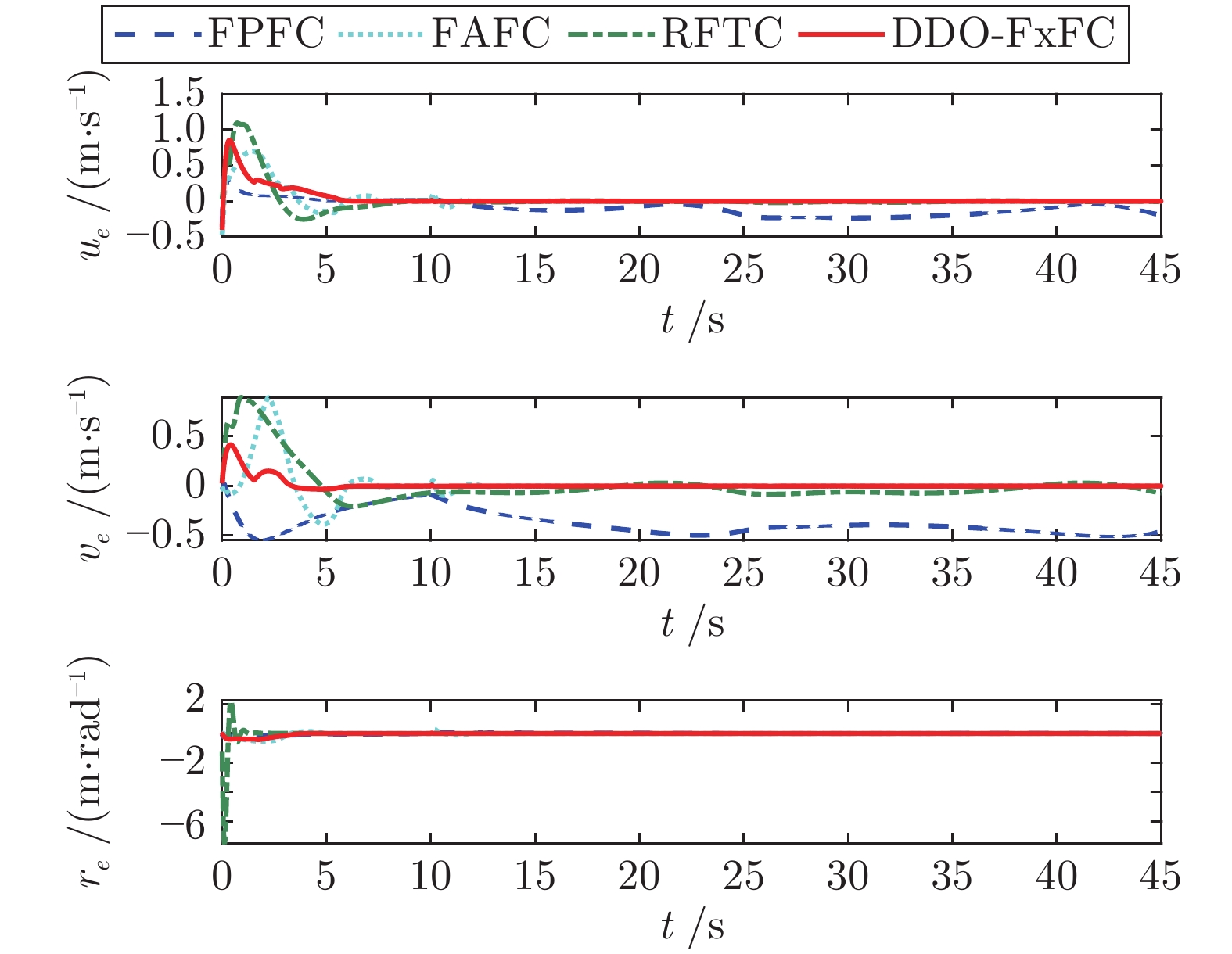
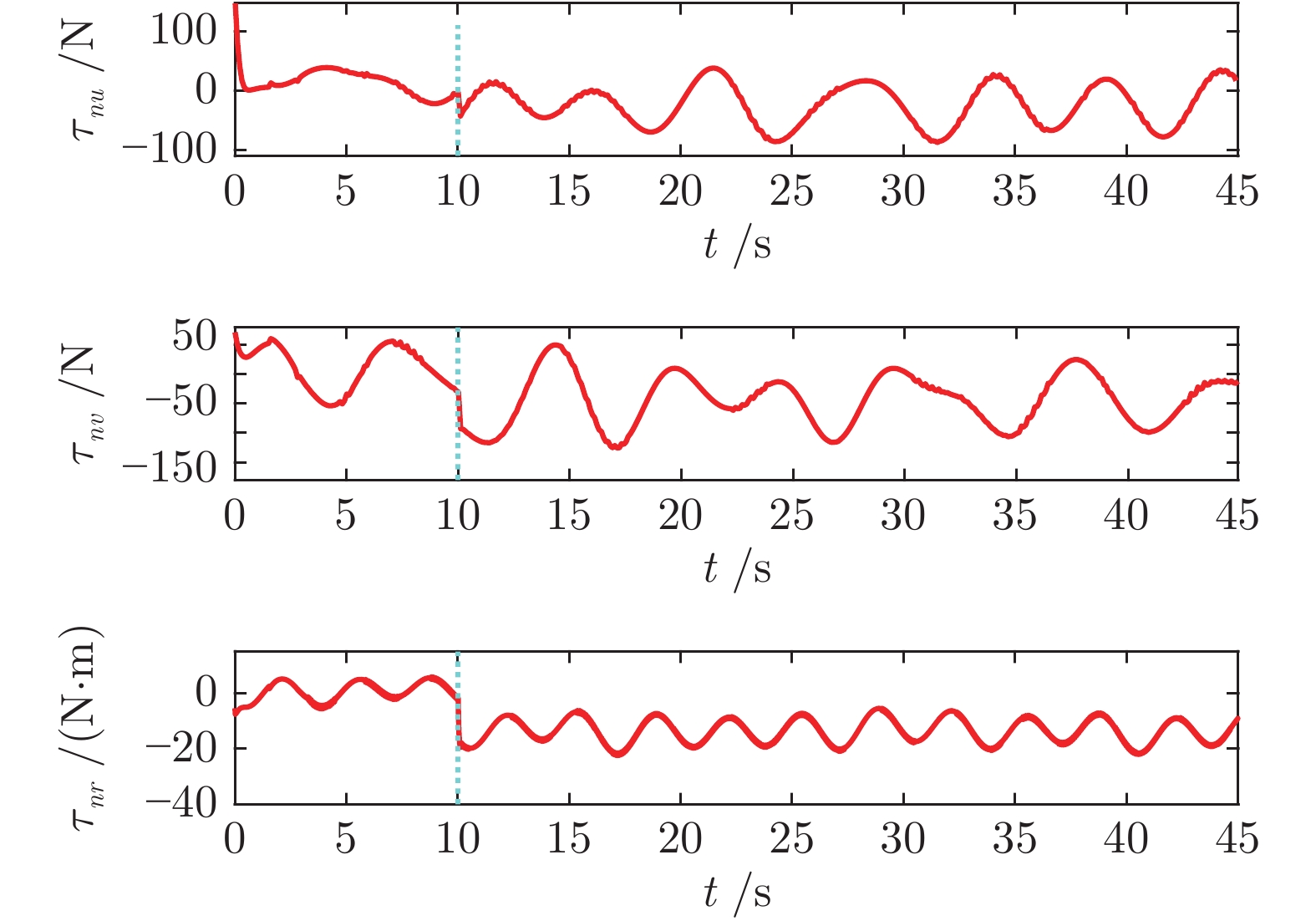
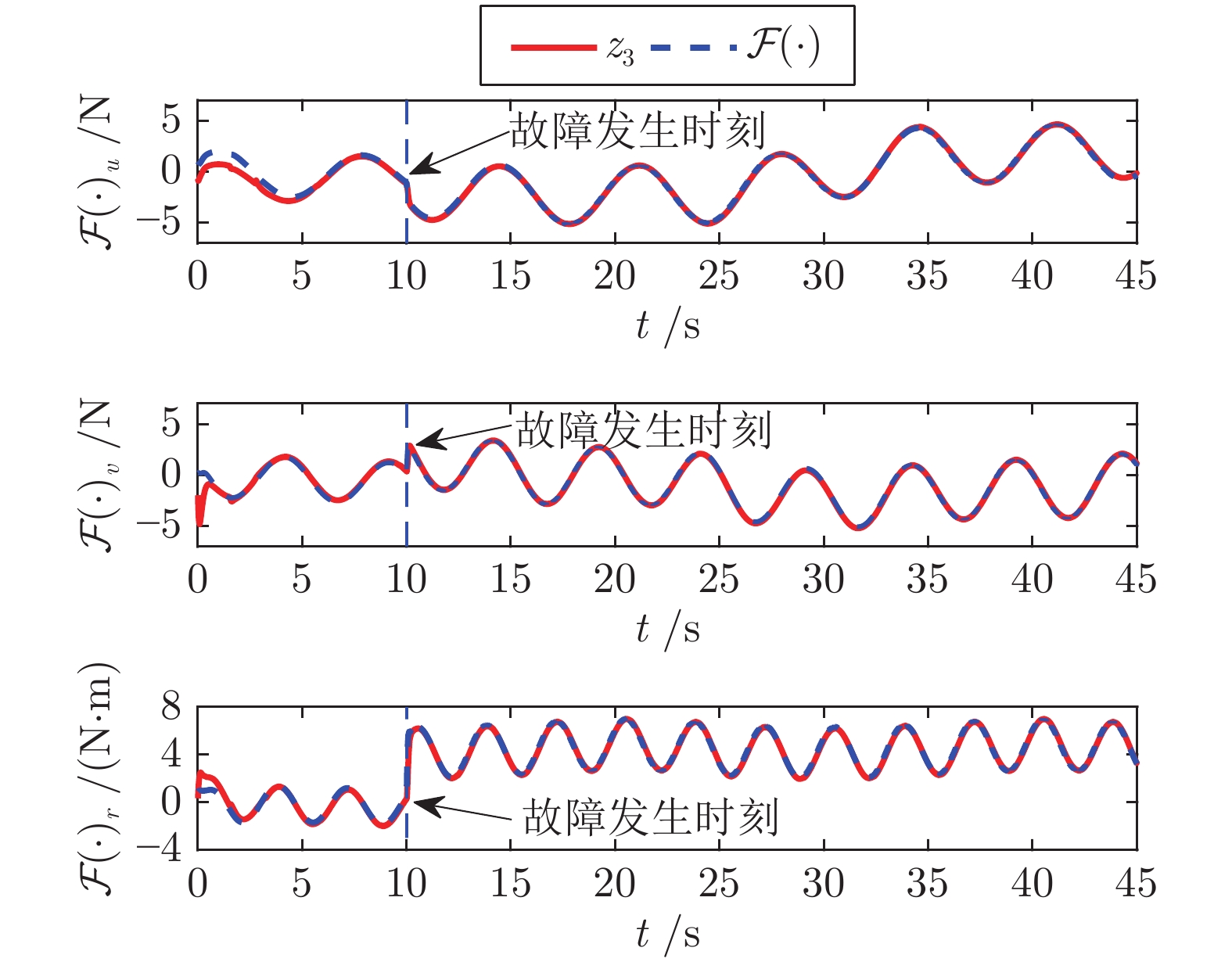
针对含有推进器故障和状态测量不确定的无人艇(Unmanned surface vehicle, USV)系统, 提出一种基于双扰动观测器的固定时间容错跟踪控制(Double disturbance observer-based fixed-time fault-tolerance control, DDO-FxFC)方法. 设计两个固定时间扰动观测器, 分别估计状态测量不确定性产生的非匹配干扰和包含推进器故障的集总非线性, 同时自适应实时补偿未知观测误差; 采用测量位姿跟踪误差及其动态, 设计快速非奇异终端滑模面, 构建DDO-FxFC框架; 理论分析证明DDO-FxFC方法能够确保跟踪误差固定时间收敛, 其中收敛时间的上界独立于系统初始状态; 针对原型USV的仿真结果和综合对比验证所提出DDO-FxFC技术的有效性和优越性.
针对含有推进器故障和状态测量不确定的无人艇(Unmanned surface vehicle, USV)系统, 提出一种基于双扰动观测器的固定时间容错跟踪控制(Double disturbance observer-based fixed-time fault-tolerance control, DDO-FxFC)方法. 设计两个固定时间扰动观测器, 分别估计状态测量不确定性产生的非匹配干扰和包含推进器故障的集总非线性, 同时自适应实时补偿未知观测误差; 采用测量位姿跟踪误差及其动态, 设计快速非奇异终端滑模面, 构建DDO-FxFC框架; 理论分析证明DDO-FxFC方法能够确保跟踪误差固定时间收敛, 其中收敛时间的上界独立于系统初始状态; 针对原型USV的仿真结果和综合对比验证所提出DDO-FxFC技术的有效性和优越性.


2023, 49(5): 1062-1072.
doi: 10.16383/j.aas.c211207
摘要:
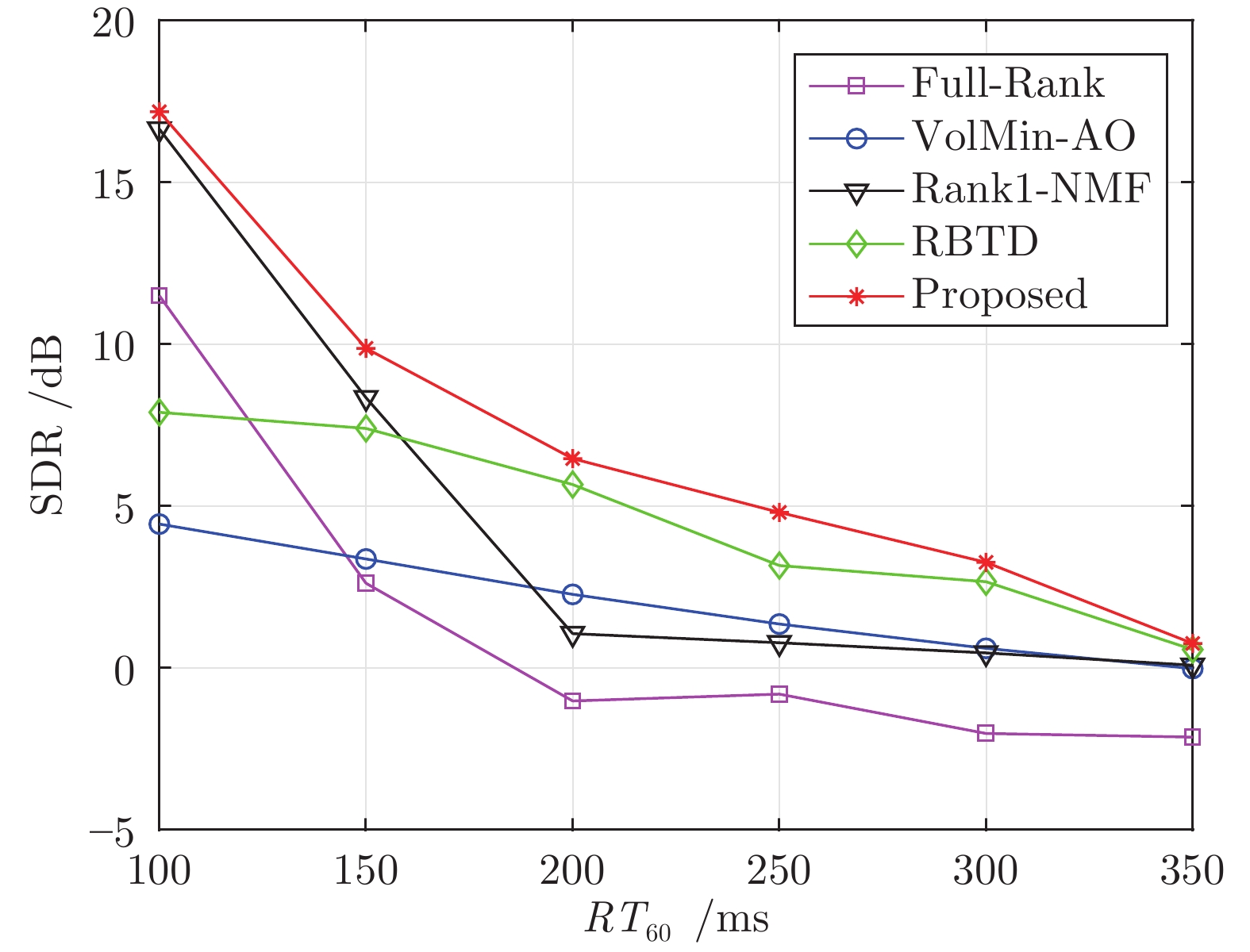
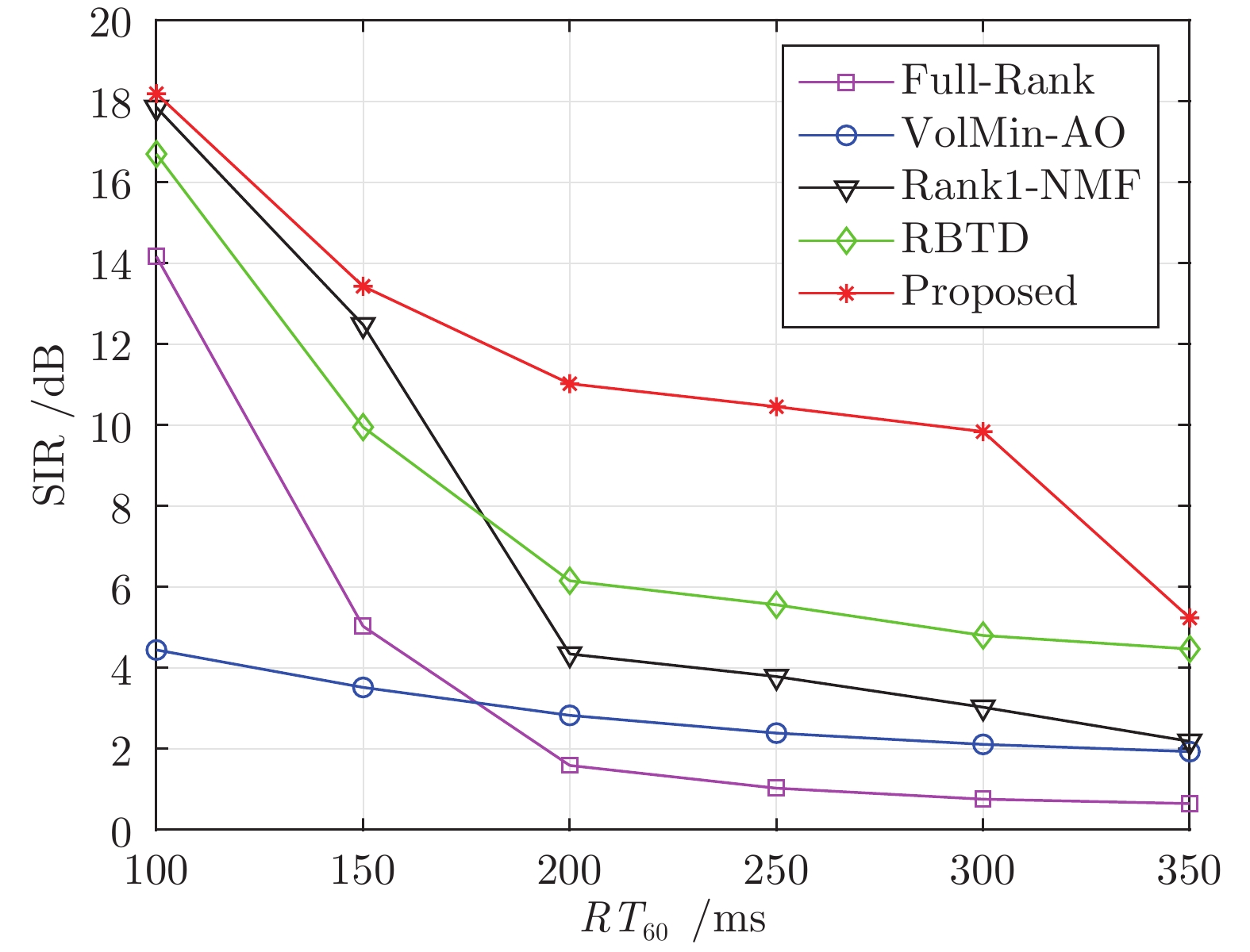
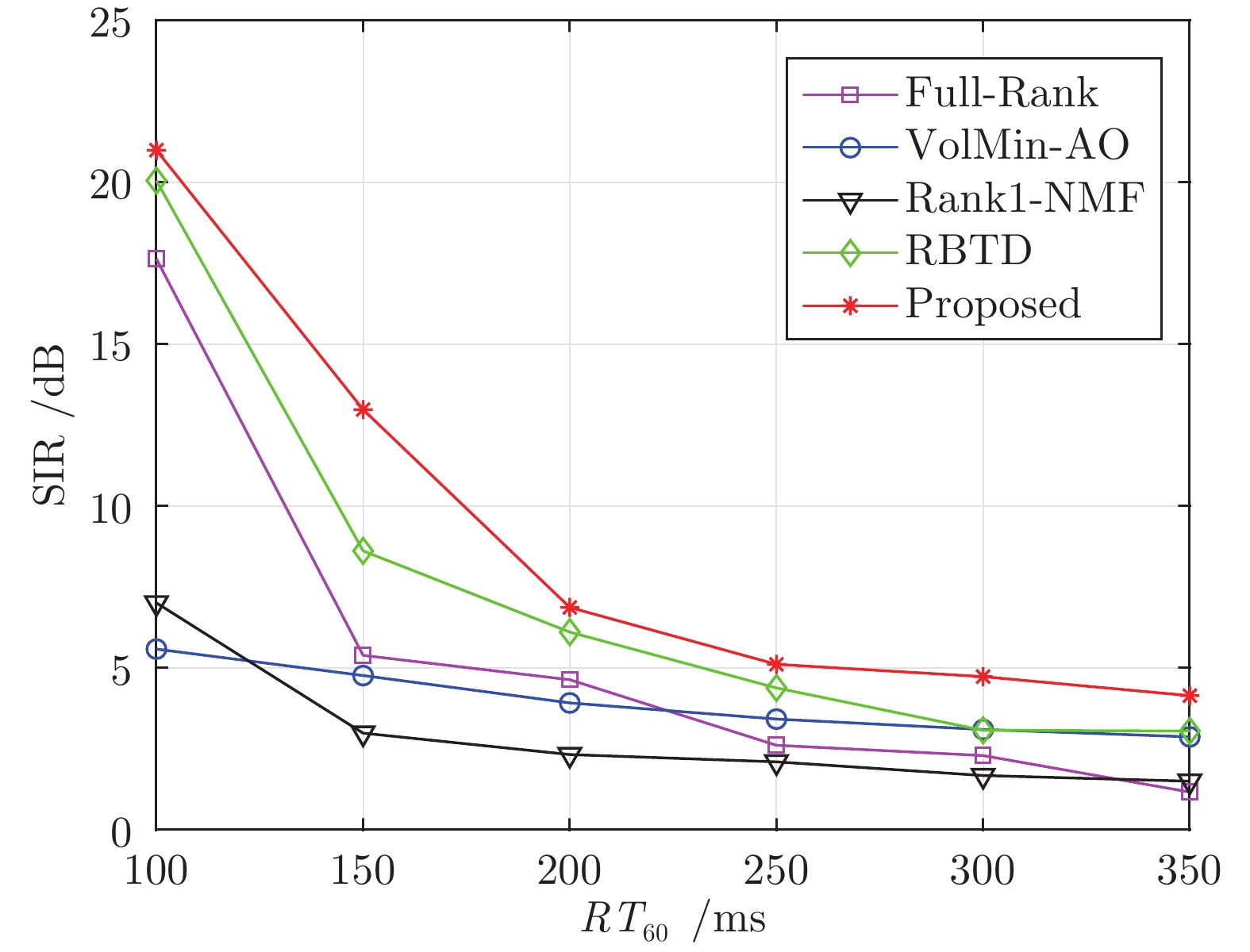
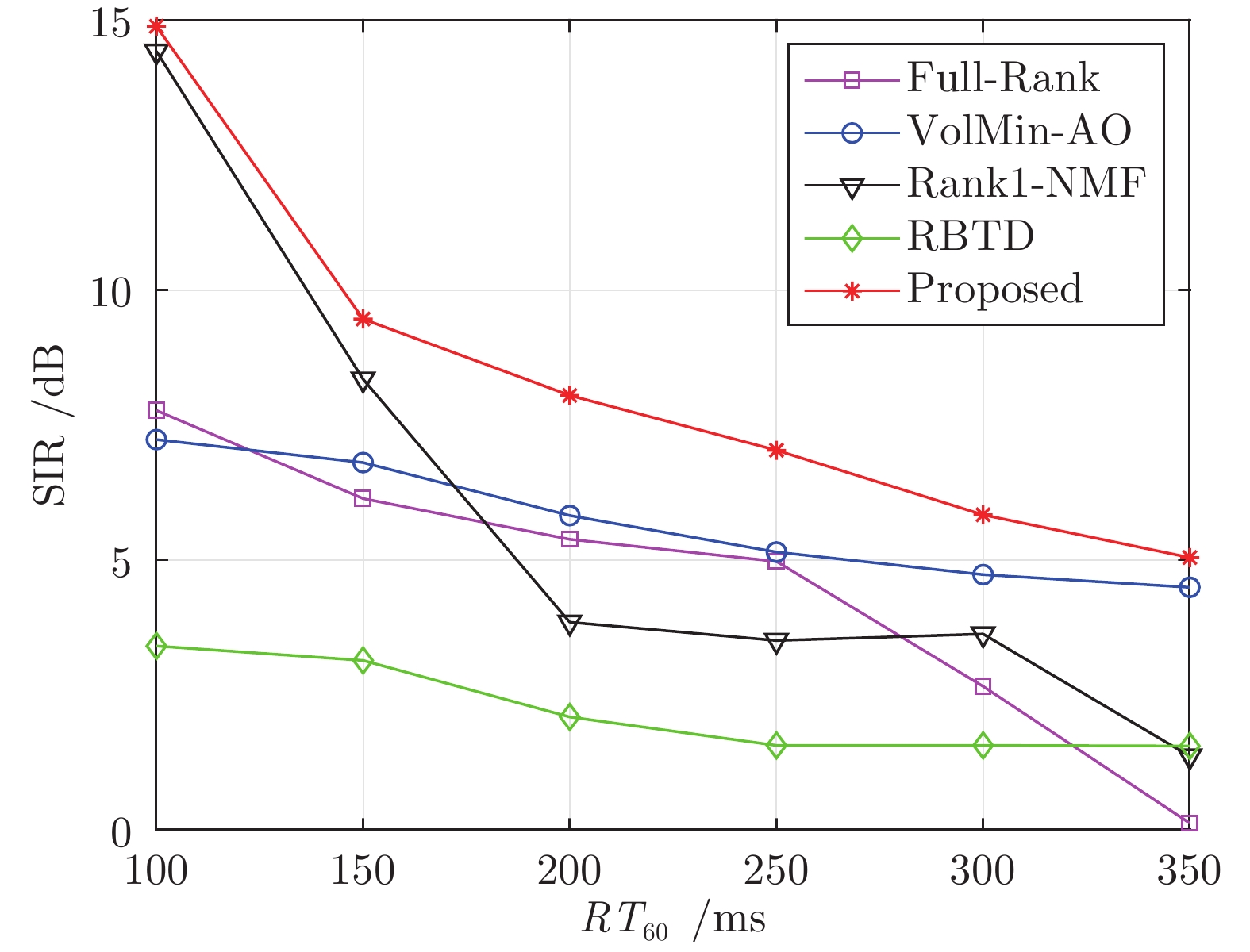
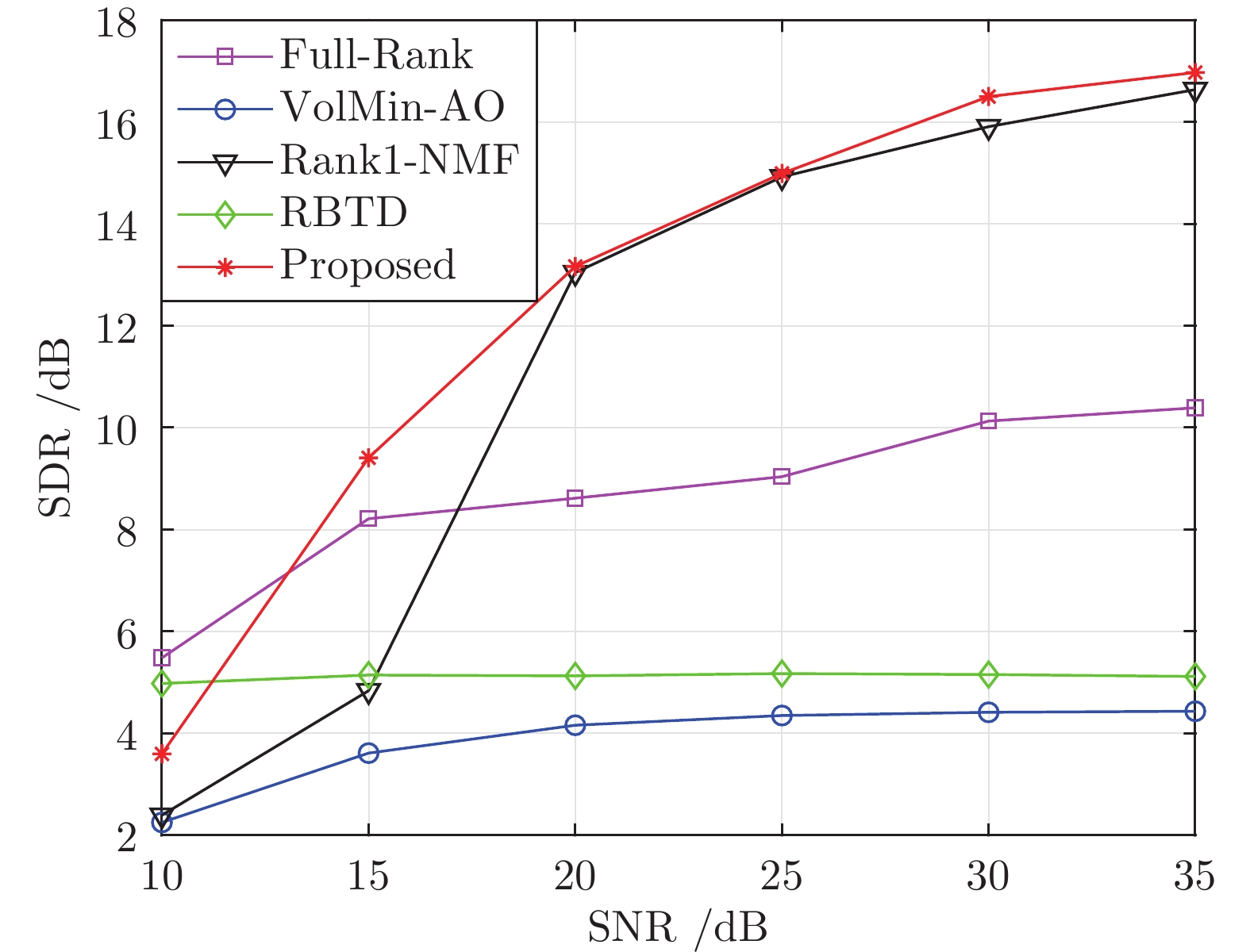
卷积混叠环境下的盲源分离(Blind source separation, BSS)是一个极具挑战性和实际意义的问题. 本文在独立分量分析框架下, 建立非负矩阵分解(Nonnegative matrix factorization, NMF)模型, 设计新的优化目标函数, 通过严格的数学理论推导, 得到新的模型参数更新规则; 并对解混叠矩阵进行标准化处理, 避免幅度歧义性问题; 在源信号的重构阶段, 通过实时更新非负矩阵分解模型参数, 避免源信号的排序歧义性问题. 实验结果验证了所提算法在分离中英文语音混叠信号、音乐混叠信号时的有效性和优越性.
卷积混叠环境下的盲源分离(Blind source separation, BSS)是一个极具挑战性和实际意义的问题. 本文在独立分量分析框架下, 建立非负矩阵分解(Nonnegative matrix factorization, NMF)模型, 设计新的优化目标函数, 通过严格的数学理论推导, 得到新的模型参数更新规则; 并对解混叠矩阵进行标准化处理, 避免幅度歧义性问题; 在源信号的重构阶段, 通过实时更新非负矩阵分解模型参数, 避免源信号的排序歧义性问题. 实验结果验证了所提算法在分离中英文语音混叠信号、音乐混叠信号时的有效性和优越性.





2023, 49(5): 1073-1088.
doi: 10.16383/j.aas.c200578
摘要:
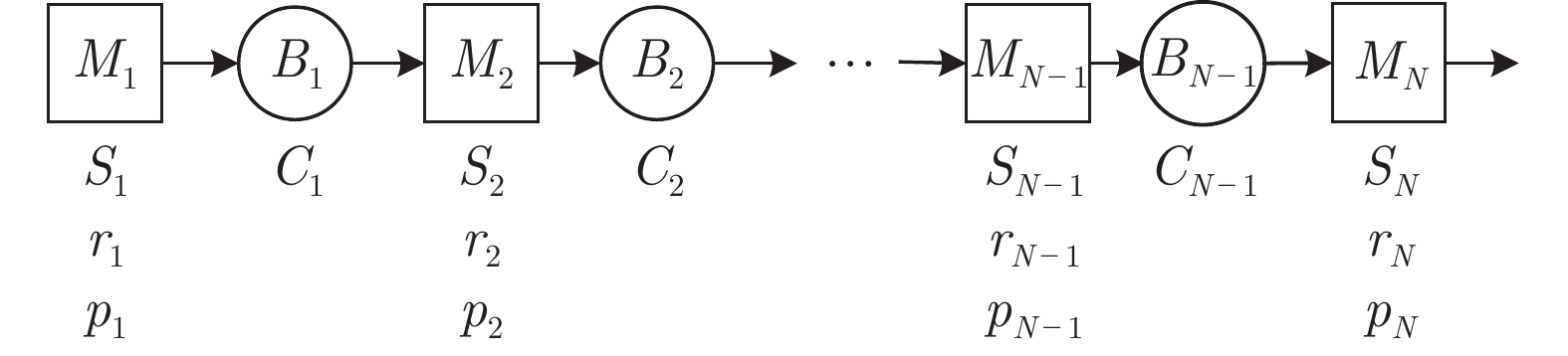
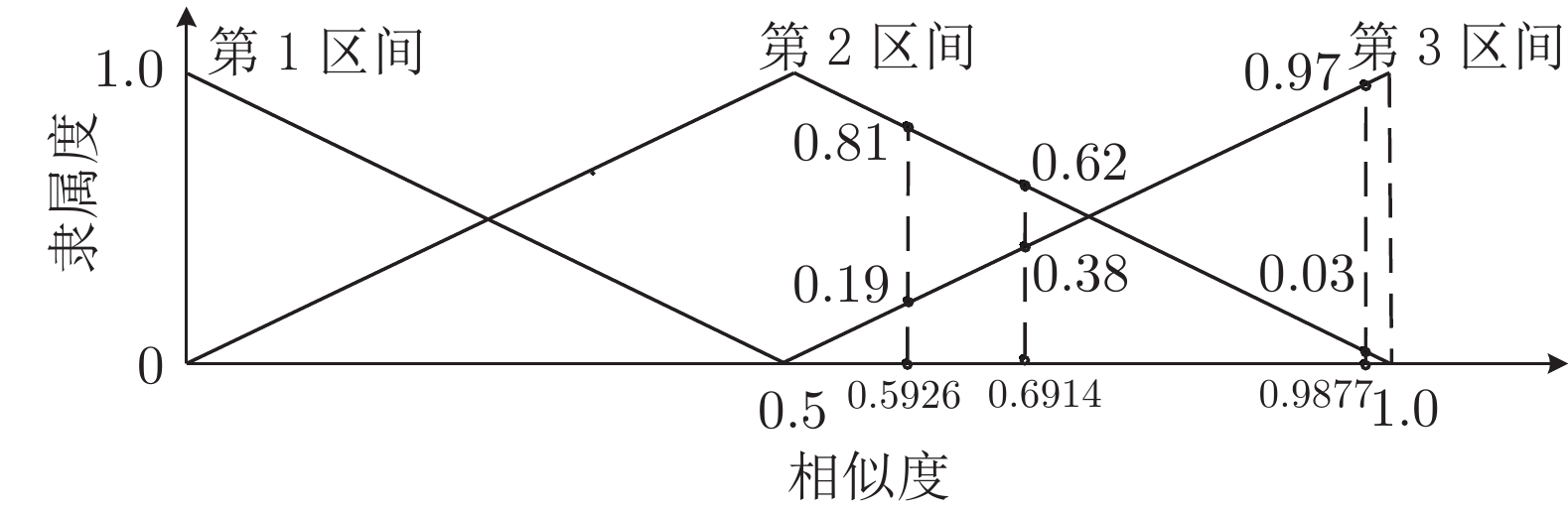
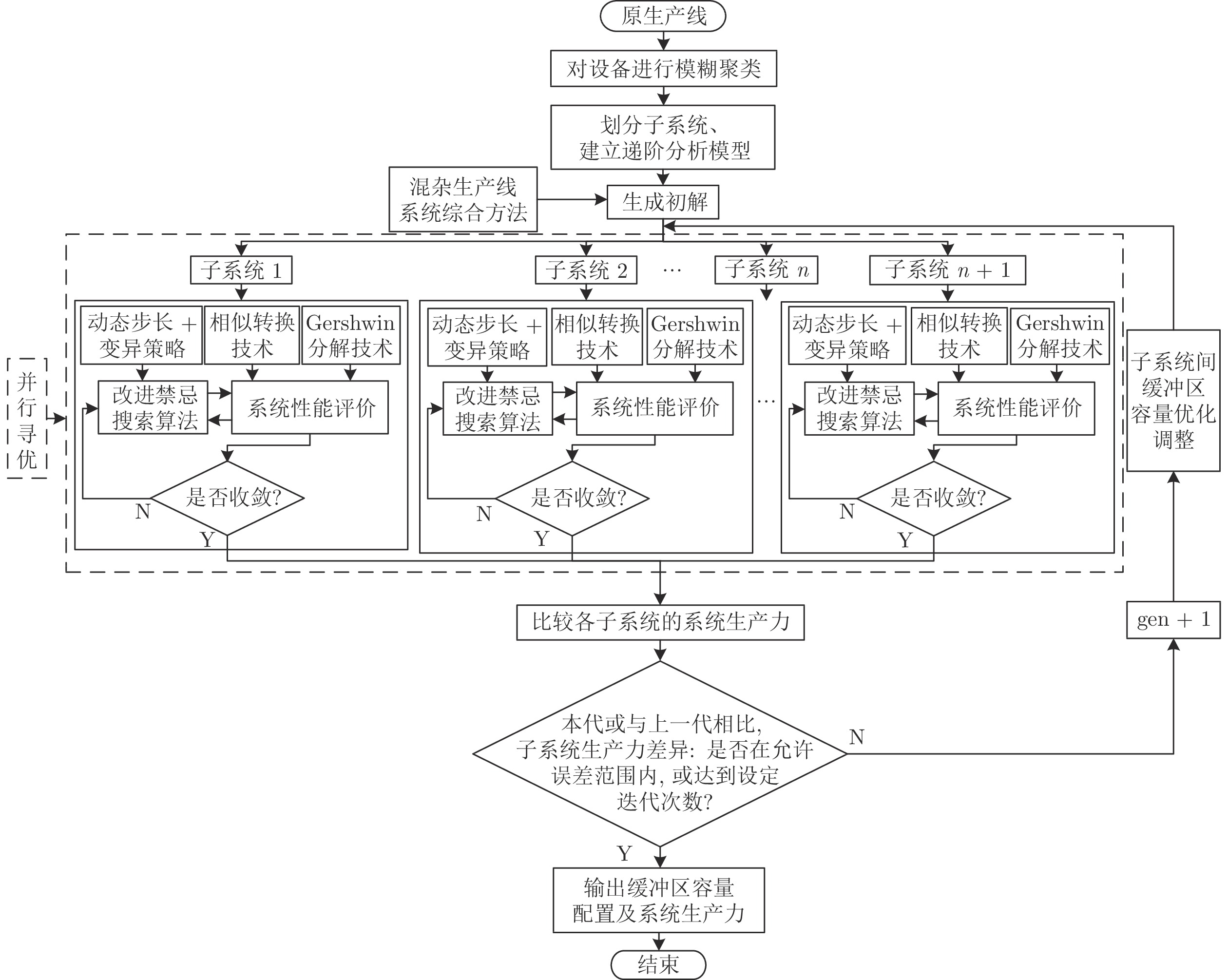
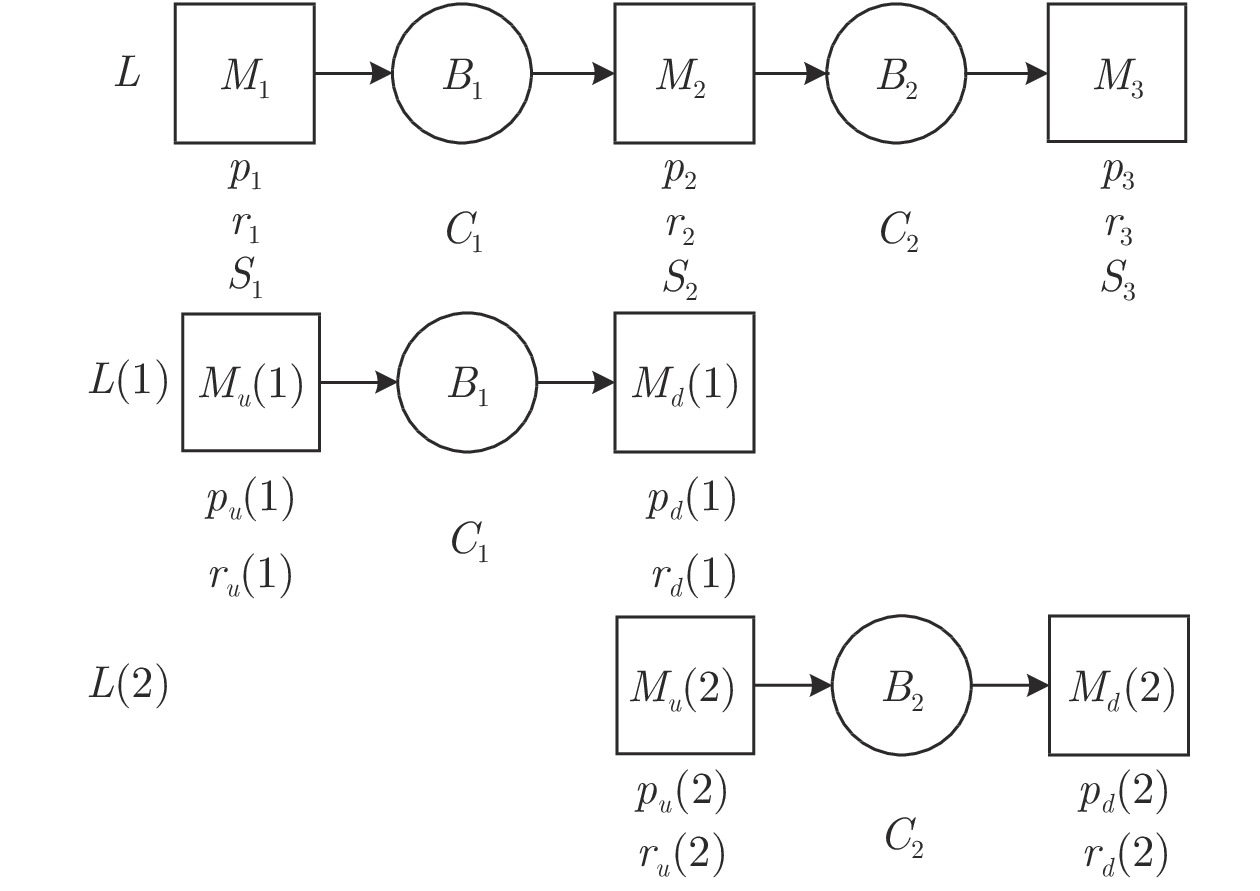
针对传统技术难以解决规模化混杂生产线缓冲区容量分配问题(Buffer allocation problem, BAP), 提出了一种规模化生产线递阶分解建模并行寻优技术(Hierarchical decomposition modeling parallel optimizing technique of large-scale production lines, HDMPOT). 该技术结合混杂生产线系统综合方法与分解方法的技术思想, 兼顾生产线平衡性与系统规模, 将原系统递阶分解为包含虚拟生产线在内的n + 1个子生产线系统, 通过求解子系统的最优解构造原系统的渐近最优解, 并在系统递阶建模阶段, 提出了一种设备模糊聚类的辅助方式; 同时, 基于混杂生产线系统综合方法, 提出了一种系统渐次综合的初解改进确定方法; 并提出了一种通过构造动态步长来设计领域结构的改进型禁忌搜索算法(Simple tabu search, STS), 对子系统进行并行寻优. 最后, 对技术算法的收敛性进行了证明. 提出的生产线递阶分解建模并行寻优技术具有一般性, 对受设备随机故障等随机事件影响的生产线, 尤其是规模化生产线系统其他优化、控制问题也具有借鉴和参考价值.
针对传统技术难以解决规模化混杂生产线缓冲区容量分配问题(Buffer allocation problem, BAP), 提出了一种规模化生产线递阶分解建模并行寻优技术(Hierarchical decomposition modeling parallel optimizing technique of large-scale production lines, HDMPOT). 该技术结合混杂生产线系统综合方法与分解方法的技术思想, 兼顾生产线平衡性与系统规模, 将原系统递阶分解为包含虚拟生产线在内的n + 1个子生产线系统, 通过求解子系统的最优解构造原系统的渐近最优解, 并在系统递阶建模阶段, 提出了一种设备模糊聚类的辅助方式; 同时, 基于混杂生产线系统综合方法, 提出了一种系统渐次综合的初解改进确定方法; 并提出了一种通过构造动态步长来设计领域结构的改进型禁忌搜索算法(Simple tabu search, STS), 对子系统进行并行寻优. 最后, 对技术算法的收敛性进行了证明. 提出的生产线递阶分解建模并行寻优技术具有一般性, 对受设备随机故障等随机事件影响的生产线, 尤其是规模化生产线系统其他优化、控制问题也具有借鉴和参考价值.



2023, 49(5): 1089-1098.
doi: 10.16383/j.aas.c200045
摘要:
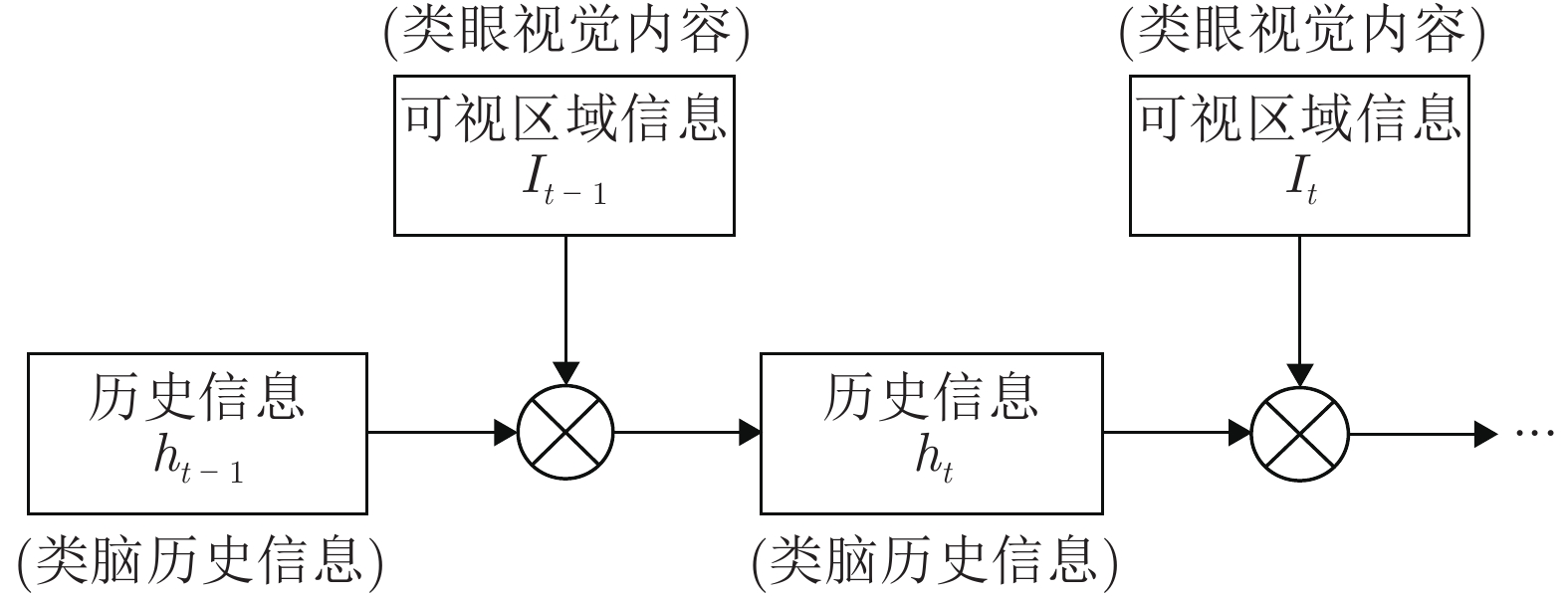
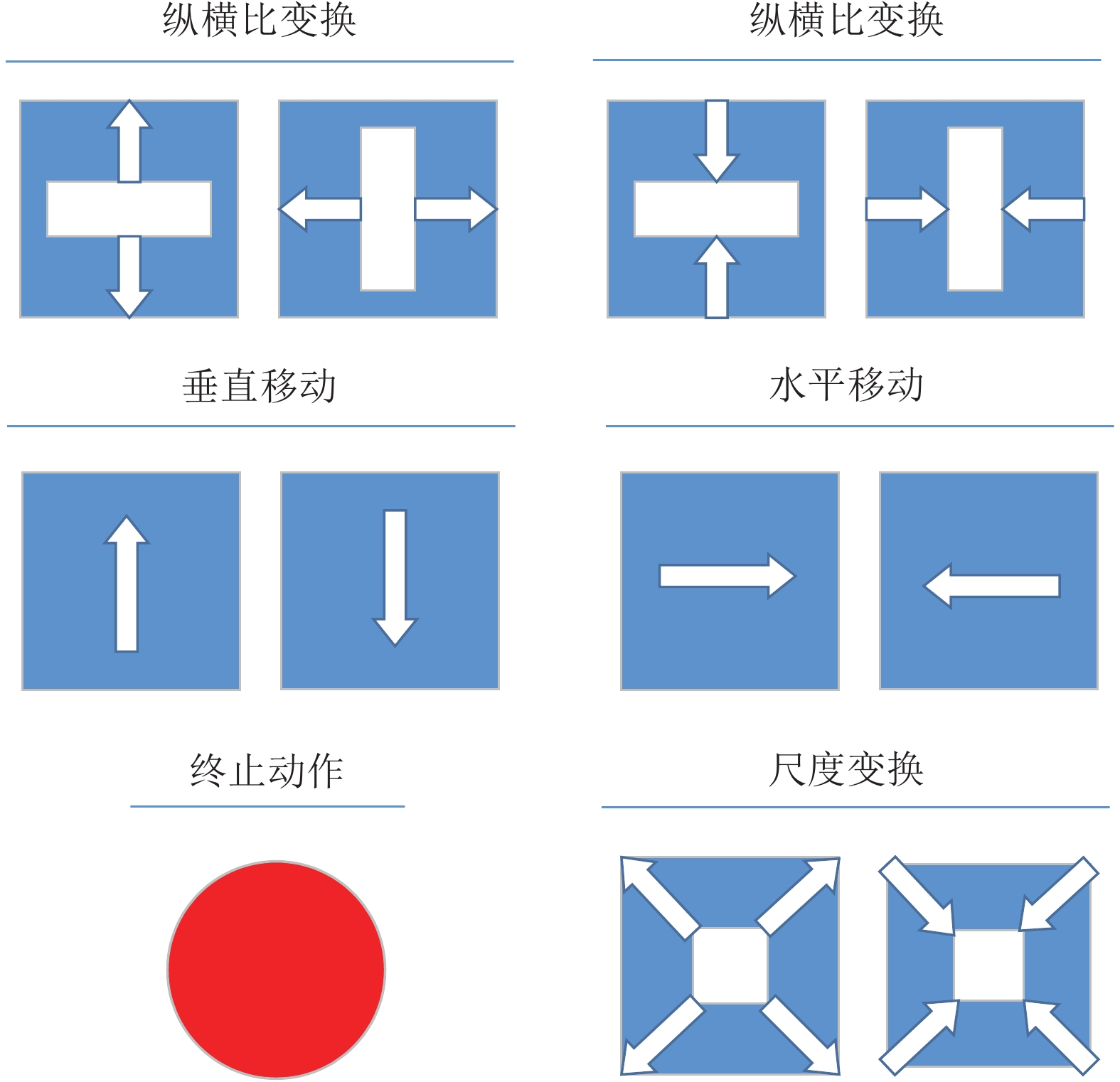
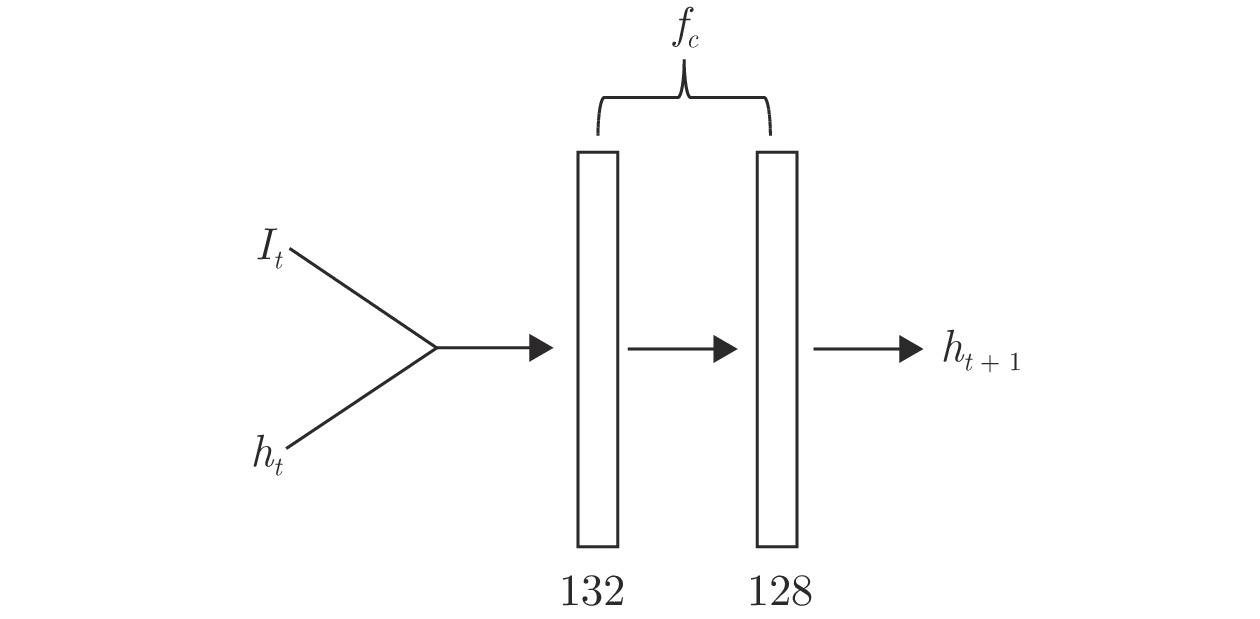
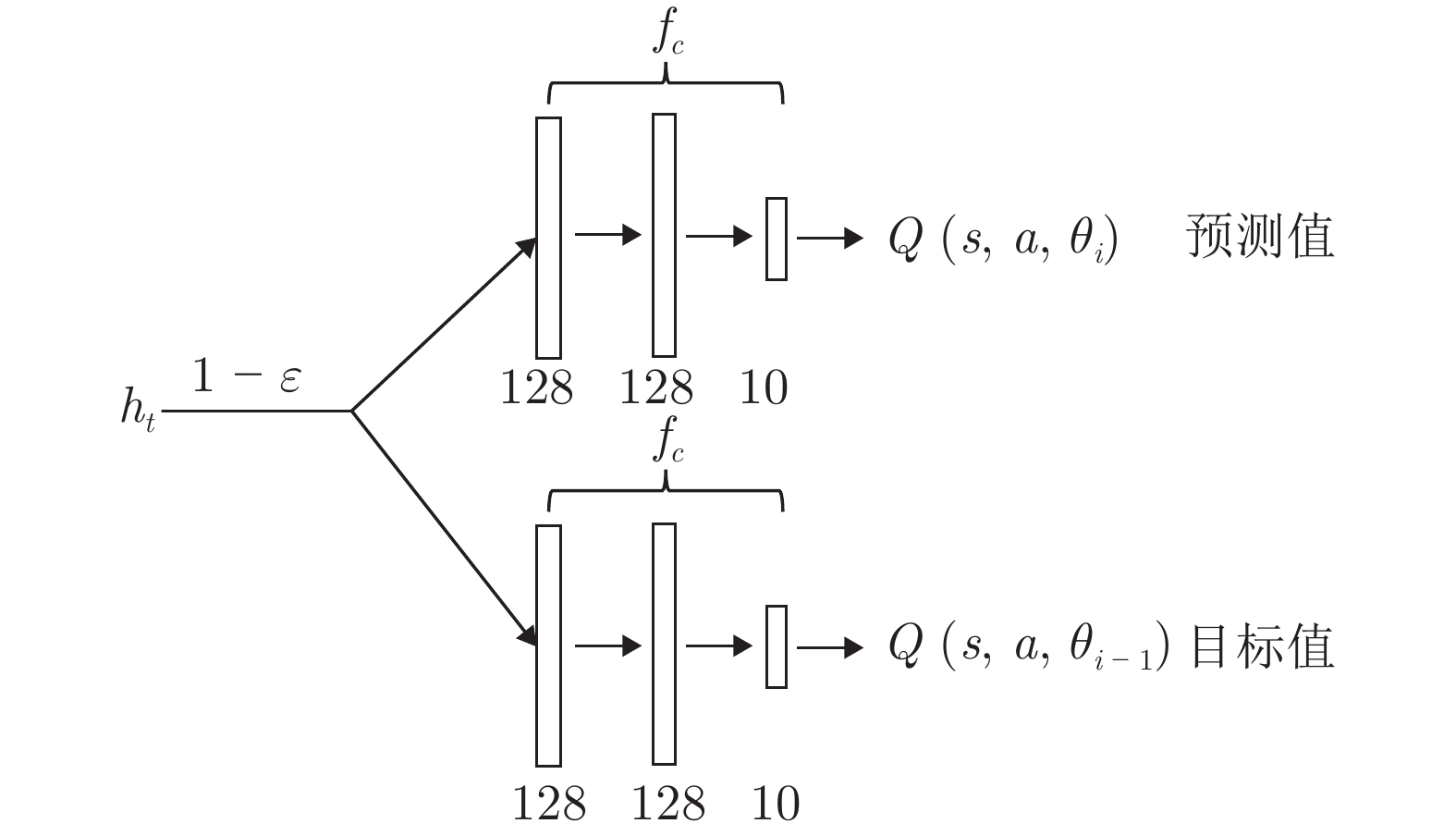
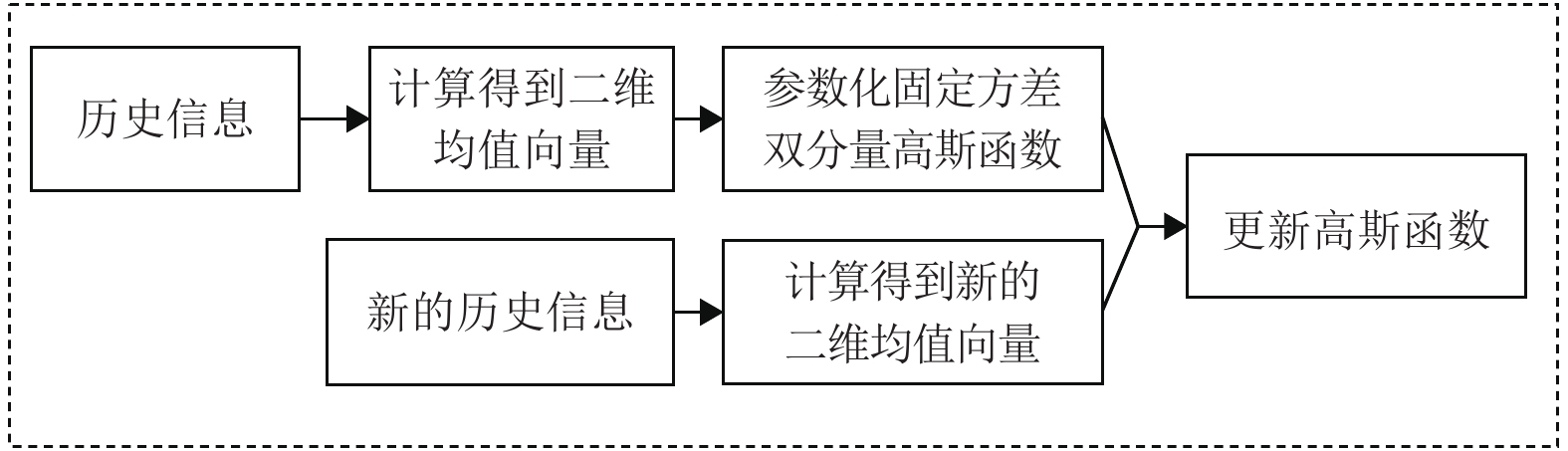
为了模拟人眼的视觉注意机制, 快速、高效地搜索和定位图像目标, 提出了一种基于循环神经网络(Recurrent neural network, RNN)的联合回归深度强化学习目标定位模型. 该模型将历史观测信息与当前时刻的观测信息融合, 并做出综合分析, 以训练智能体快速定位目标, 并联合回归器对智能体所定位的目标包围框进行精细调整. 实验结果表明, 该模型能够在少数时间步内快速、准确地定位目标.
为了模拟人眼的视觉注意机制, 快速、高效地搜索和定位图像目标, 提出了一种基于循环神经网络(Recurrent neural network, RNN)的联合回归深度强化学习目标定位模型. 该模型将历史观测信息与当前时刻的观测信息融合, 并做出综合分析, 以训练智能体快速定位目标, 并联合回归器对智能体所定位的目标包围框进行精细调整. 实验结果表明, 该模型能够在少数时间步内快速、准确地定位目标.










2023, 49(5): 1099-1115.
doi: 10.16383/j.aas.c210963
摘要:
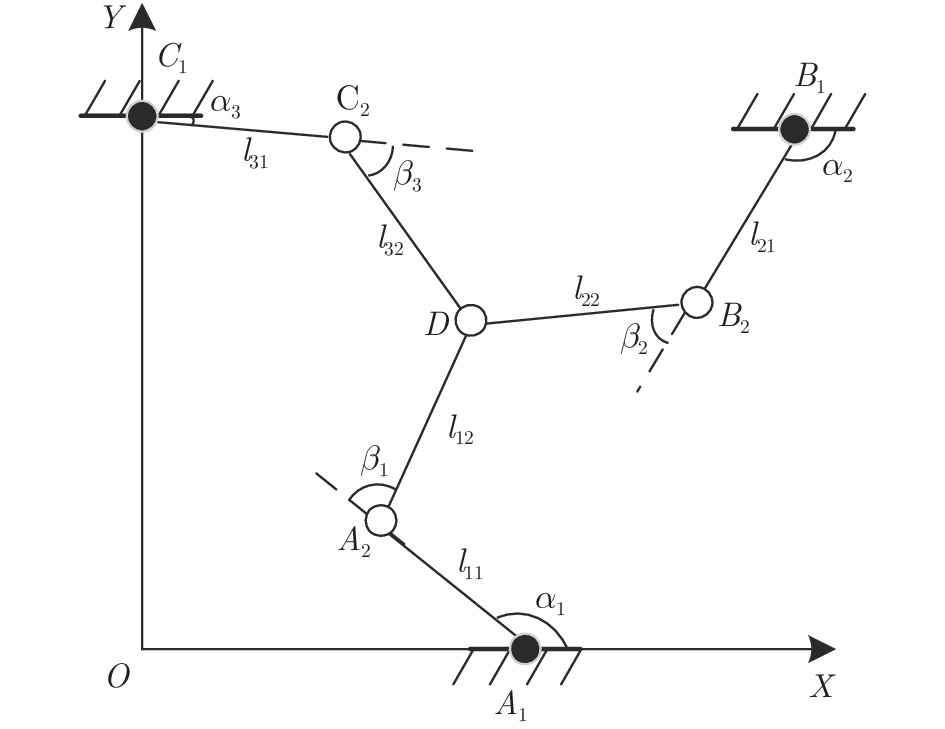
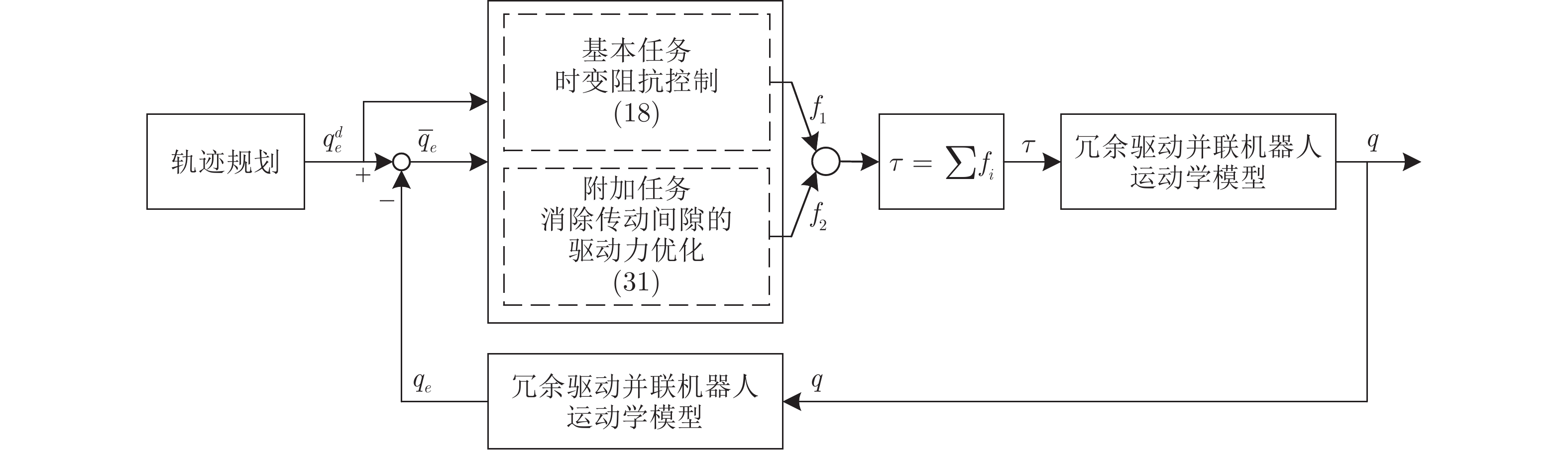
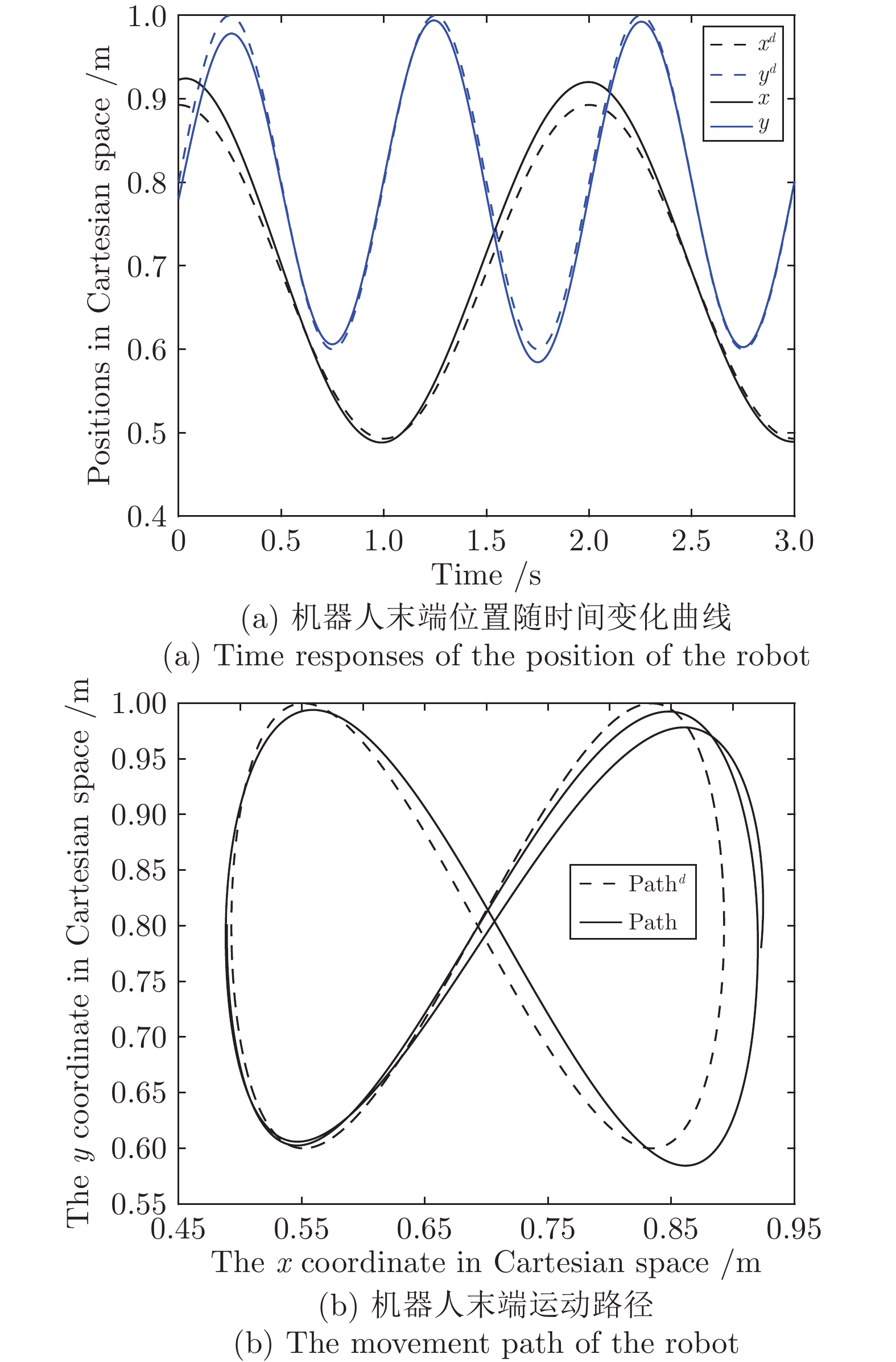
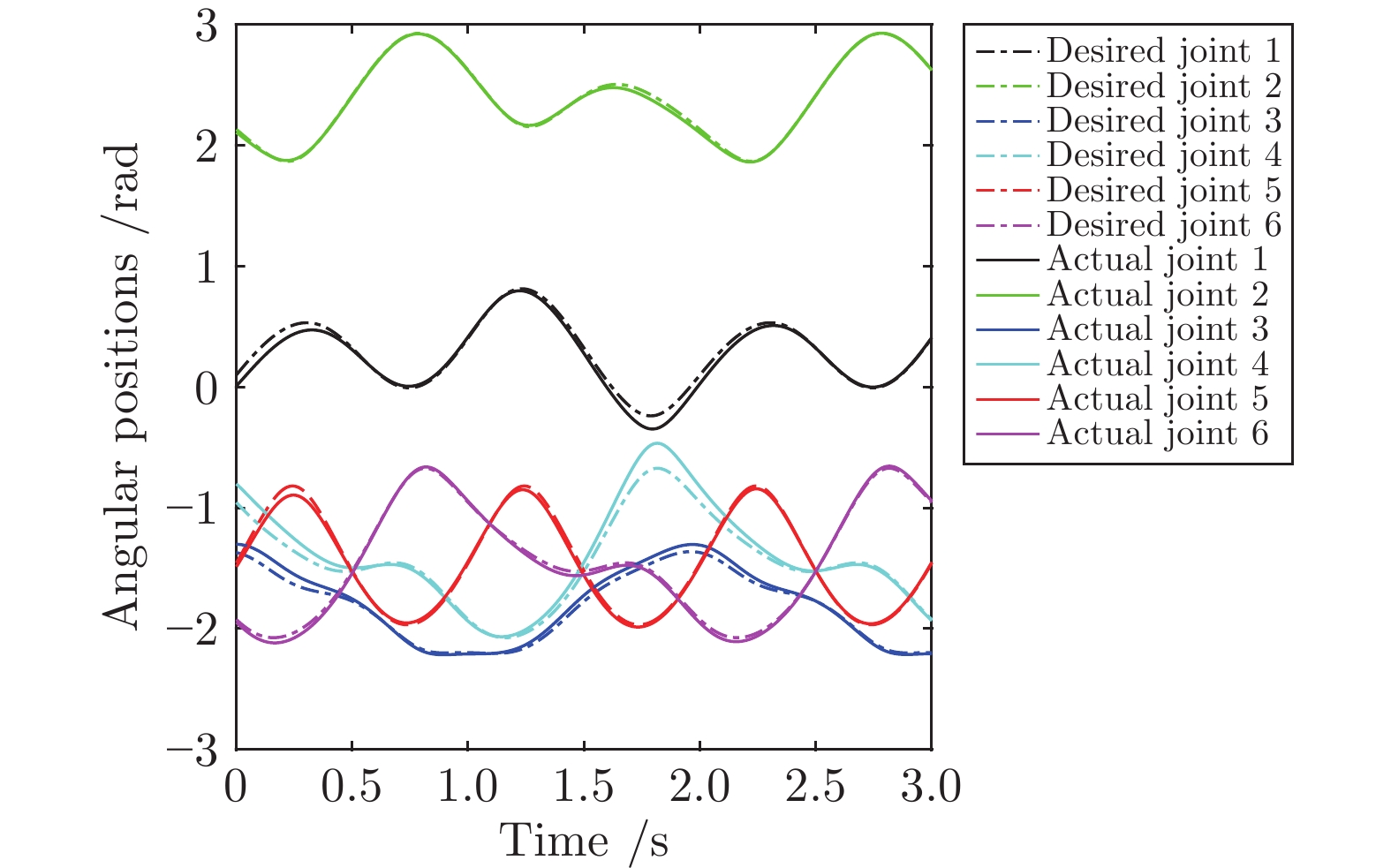
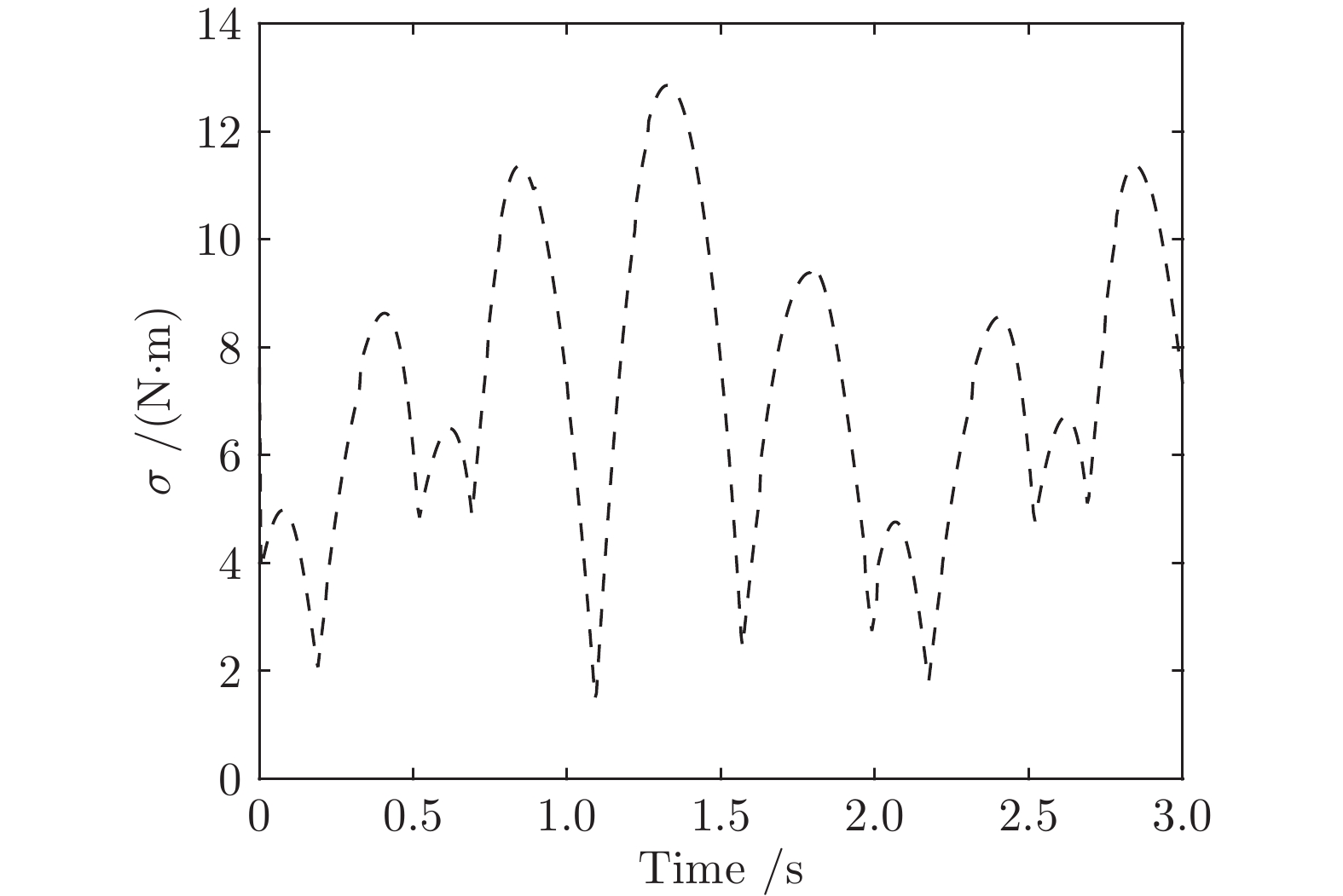
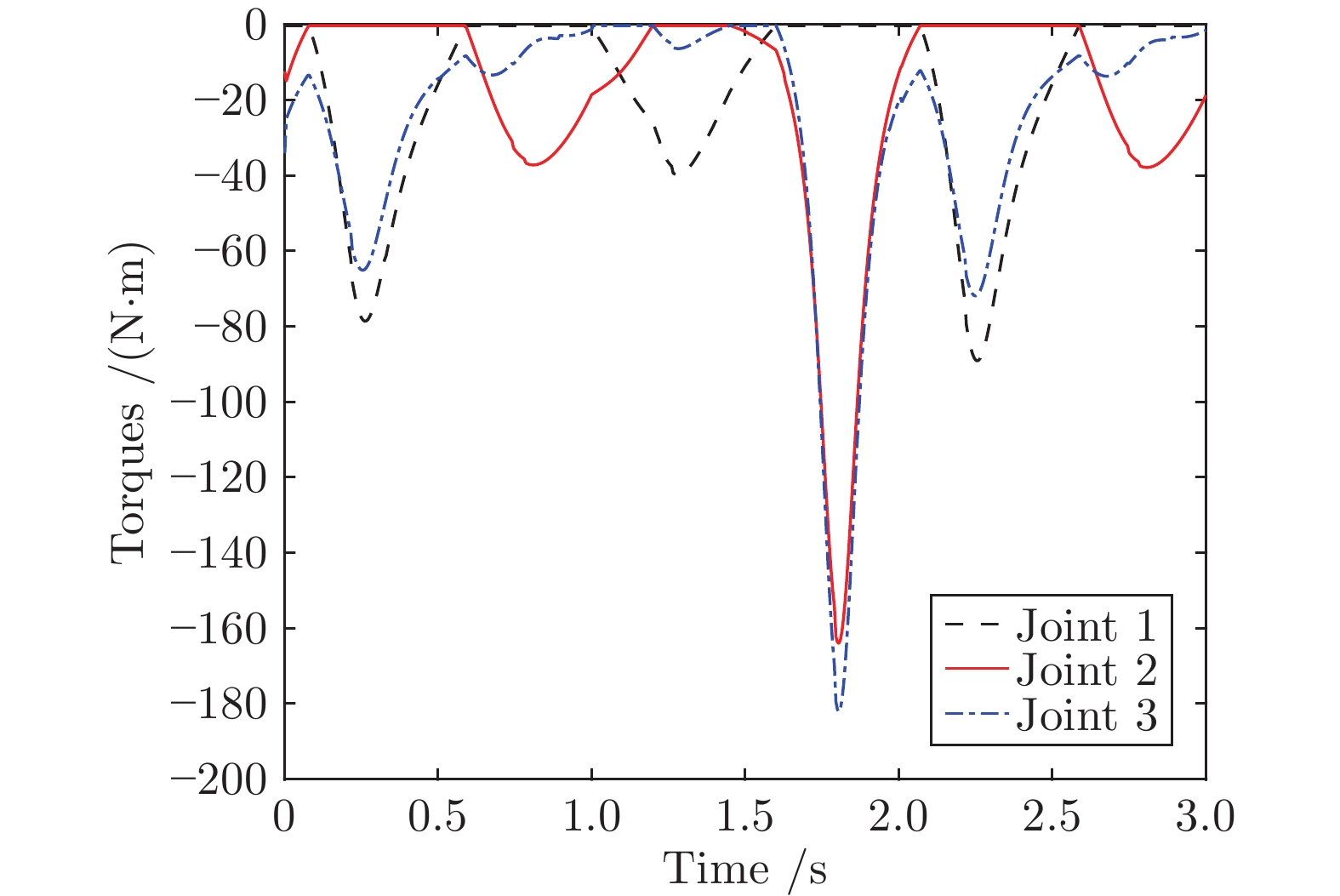
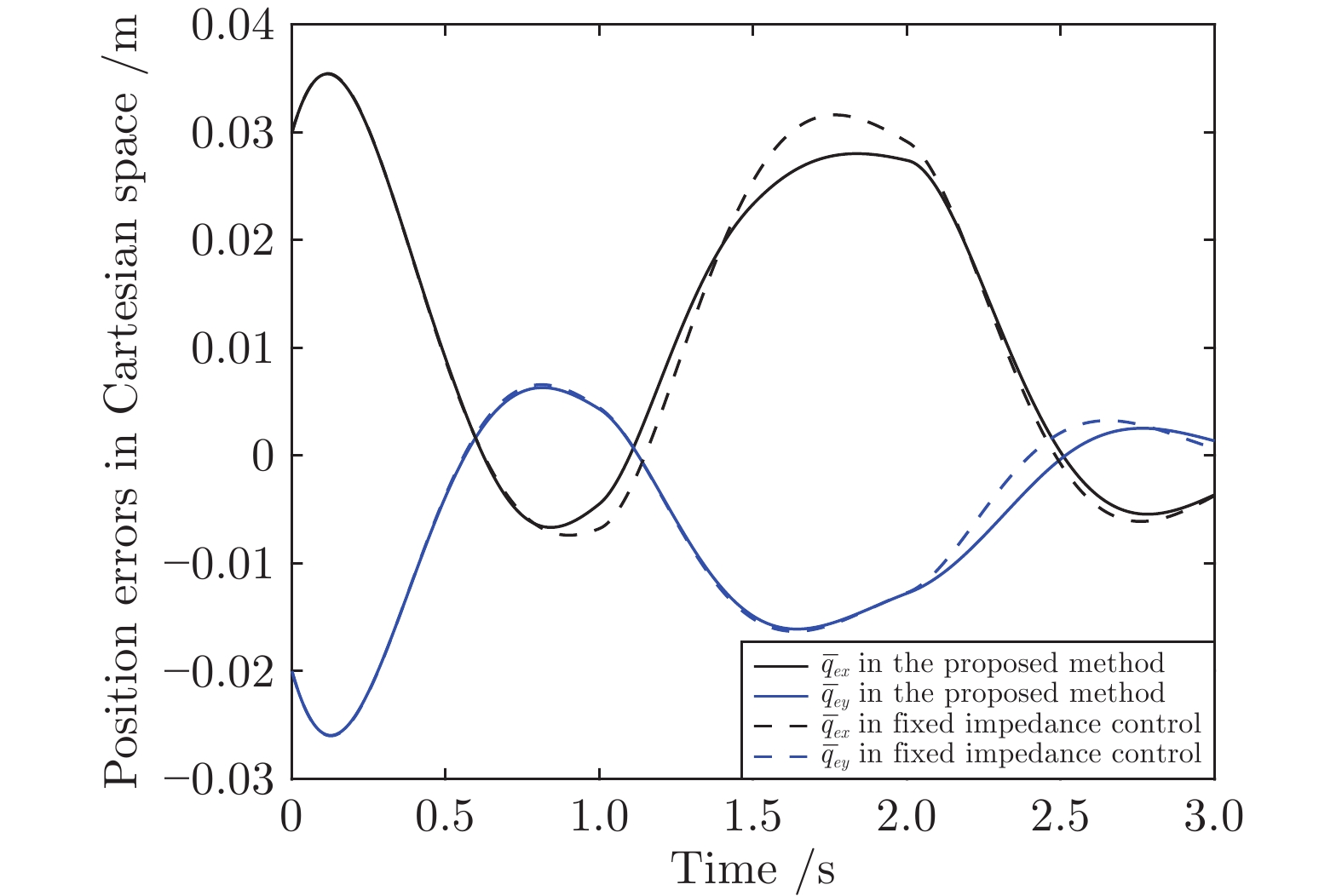
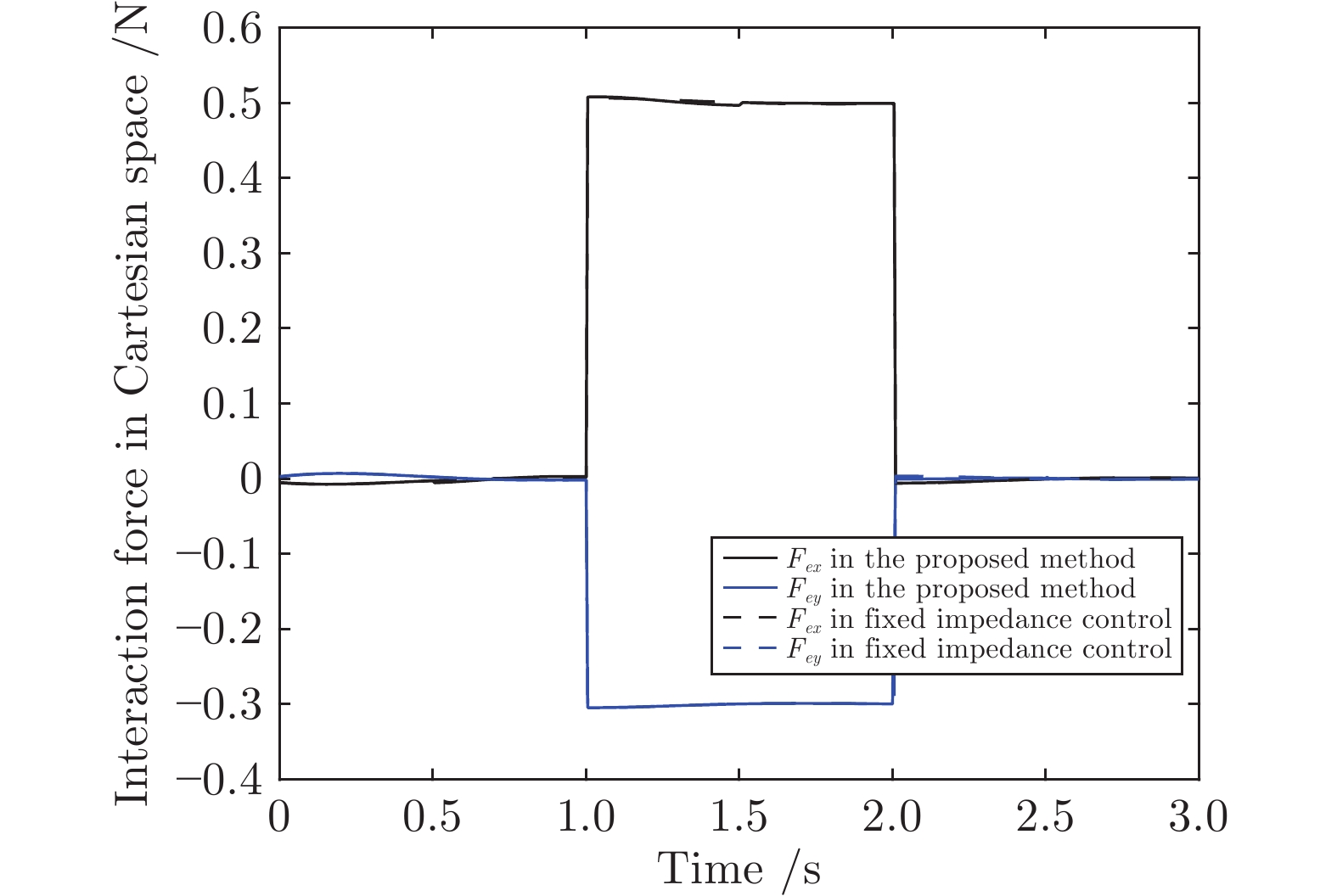
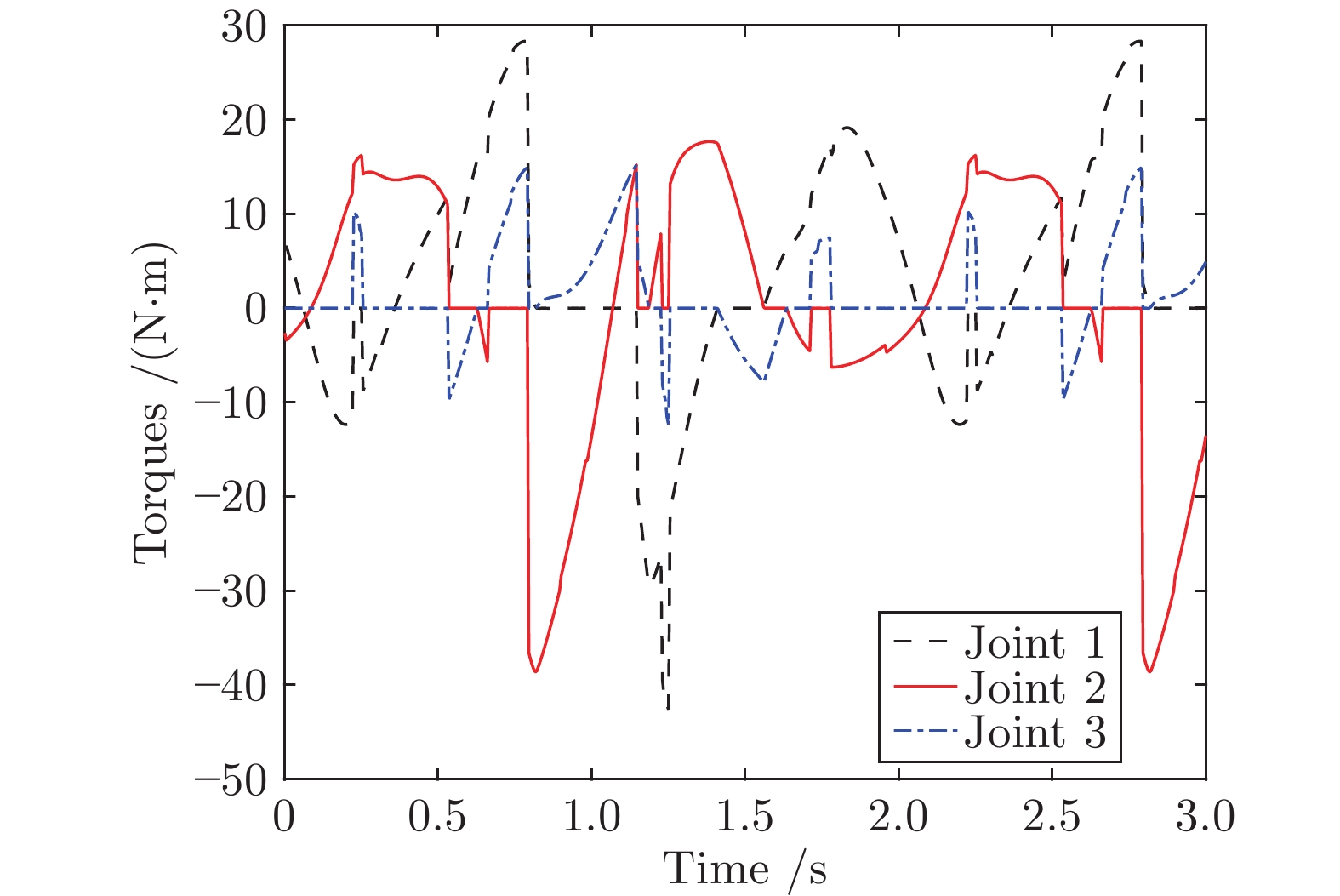
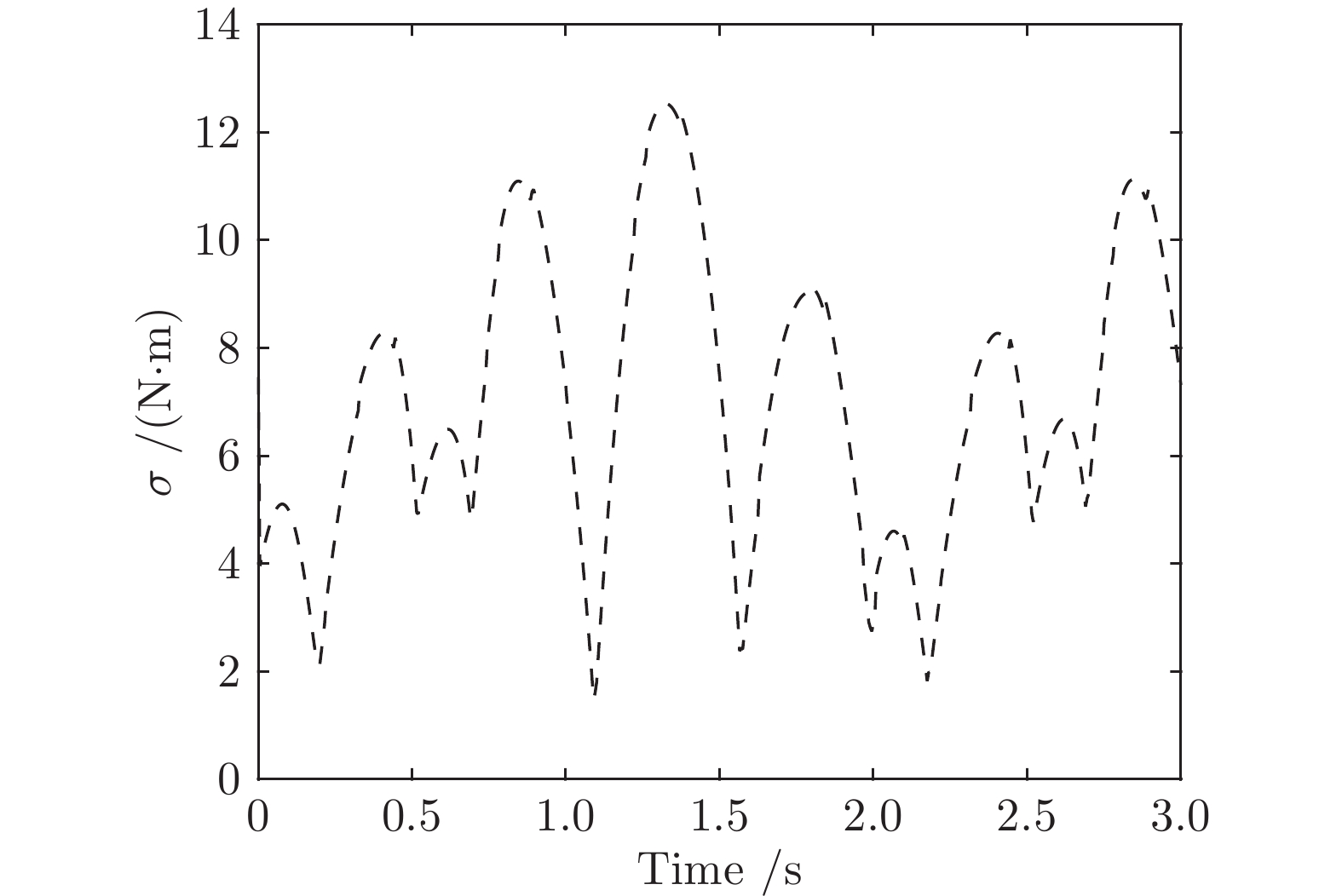
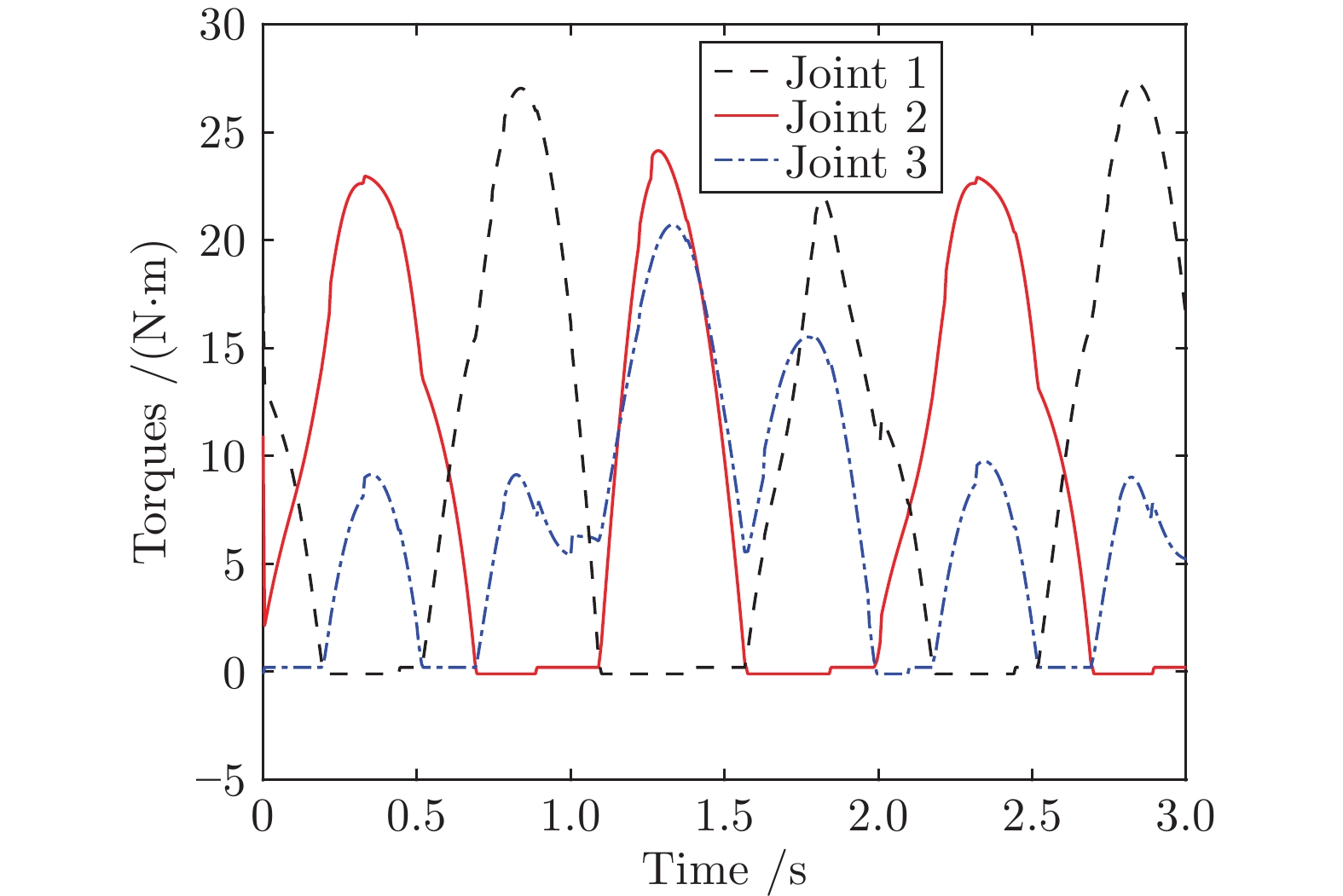
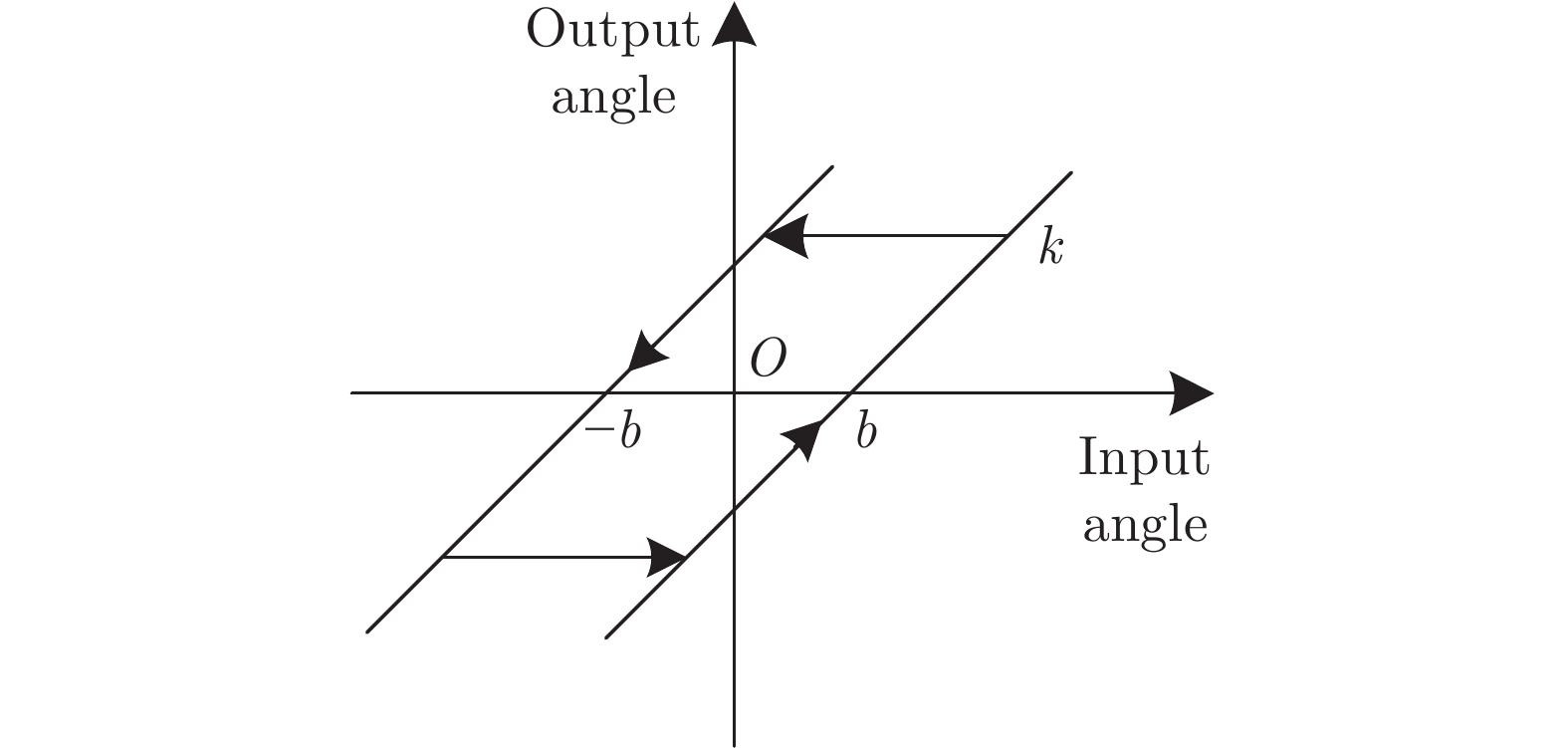
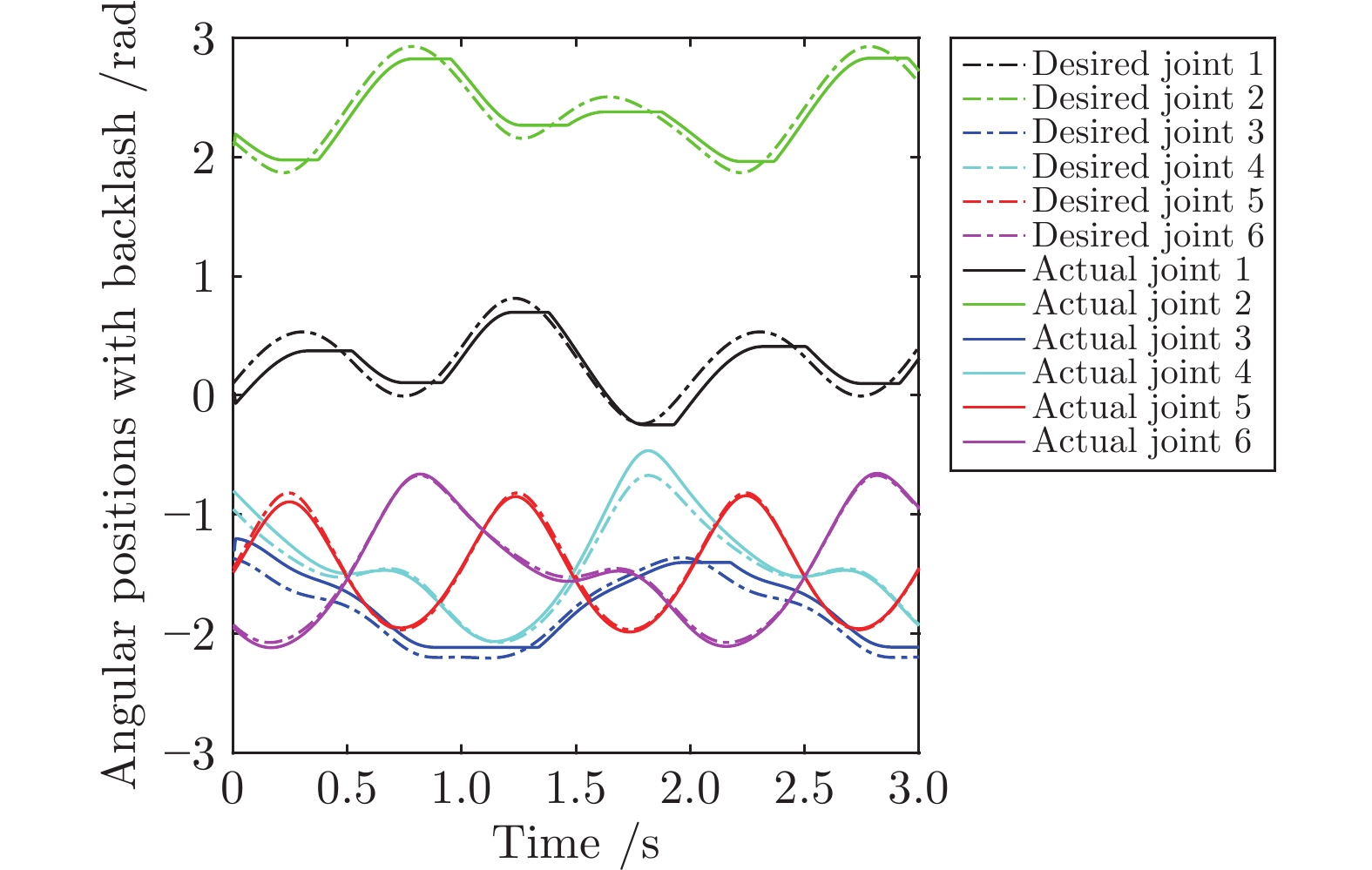
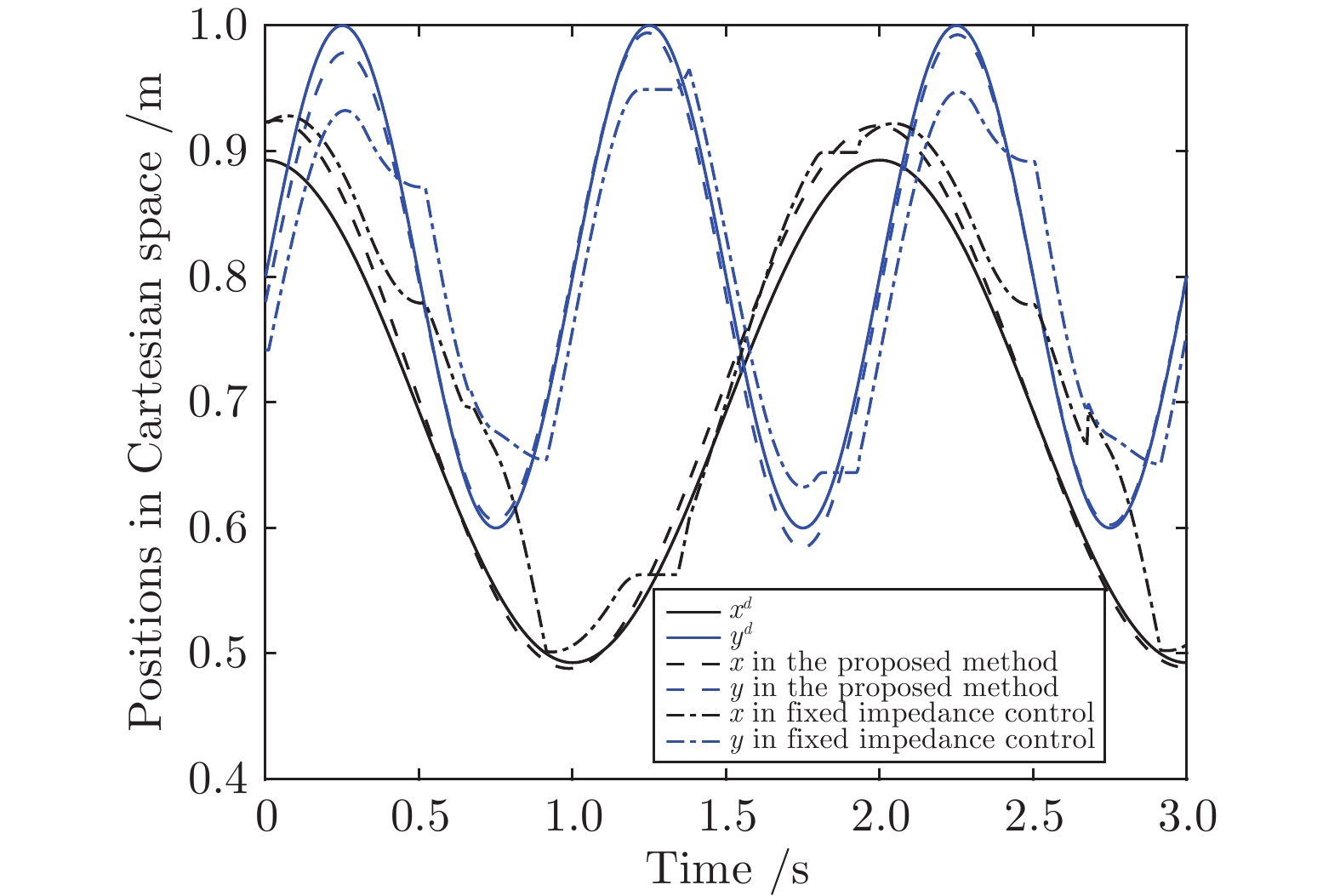
由于冗余驱动的存在, 冗余驱动并联机器人系统逆动力学模型存在无限组可跟踪期望轨迹的控制力矩解, 这使得机器人在运行过程中具有完成附加任务的能力. 以实现骨科机器人的安全精准操控为目的, 提出了基于变阻抗控制的冗余驱动并联机器人多目标内力优化方法. 首先, 采用支链分解法对冗余驱动并联机器人的动力学进行建模. 其次, 为实现机器人的安全操作, 设计了冗余驱动并联机器人时变阻抗控制器, 利用李雅普诺夫理论分析了系统的稳定性; 在此基础上, 以消除冗余驱动并联机器人运动过程中的传动间隙为附加任务, 提出了一种以力矩传递性能、驱动功率和控制力为优化目标的多目标融合驱动力优化方法. 最后, 通过仿真实验与对比分析, 验证了所提方法的有效性, 实现了机器人系统传动间隙的消除.
由于冗余驱动的存在, 冗余驱动并联机器人系统逆动力学模型存在无限组可跟踪期望轨迹的控制力矩解, 这使得机器人在运行过程中具有完成附加任务的能力. 以实现骨科机器人的安全精准操控为目的, 提出了基于变阻抗控制的冗余驱动并联机器人多目标内力优化方法. 首先, 采用支链分解法对冗余驱动并联机器人的动力学进行建模. 其次, 为实现机器人的安全操作, 设计了冗余驱动并联机器人时变阻抗控制器, 利用李雅普诺夫理论分析了系统的稳定性; 在此基础上, 以消除冗余驱动并联机器人运动过程中的传动间隙为附加任务, 提出了一种以力矩传递性能、驱动功率和控制力为优化目标的多目标融合驱动力优化方法. 最后, 通过仿真实验与对比分析, 验证了所提方法的有效性, 实现了机器人系统传动间隙的消除.







2023, 49(5): 1116-1130.
doi: 10.16383/j.aas.c220544
摘要:
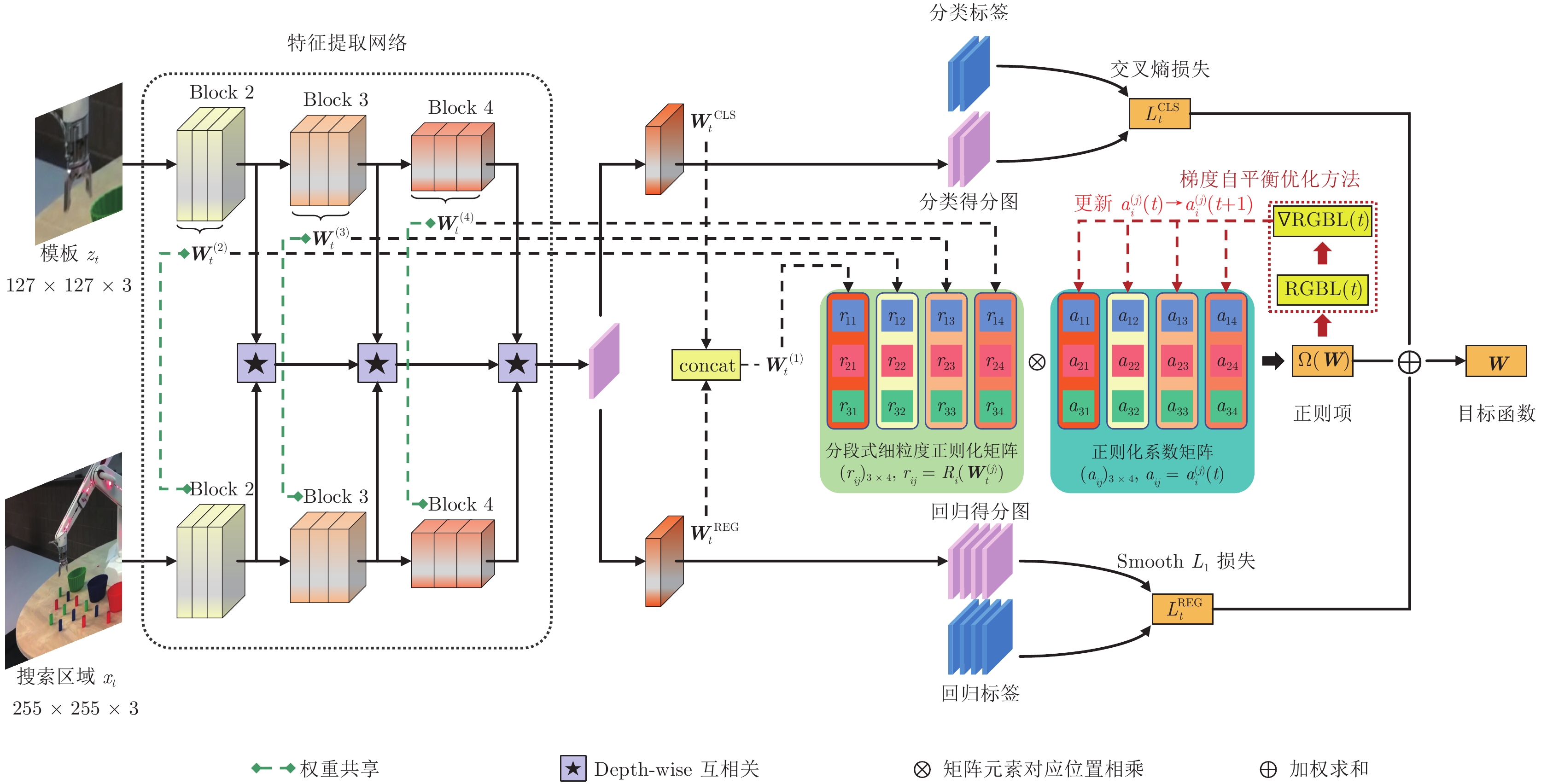
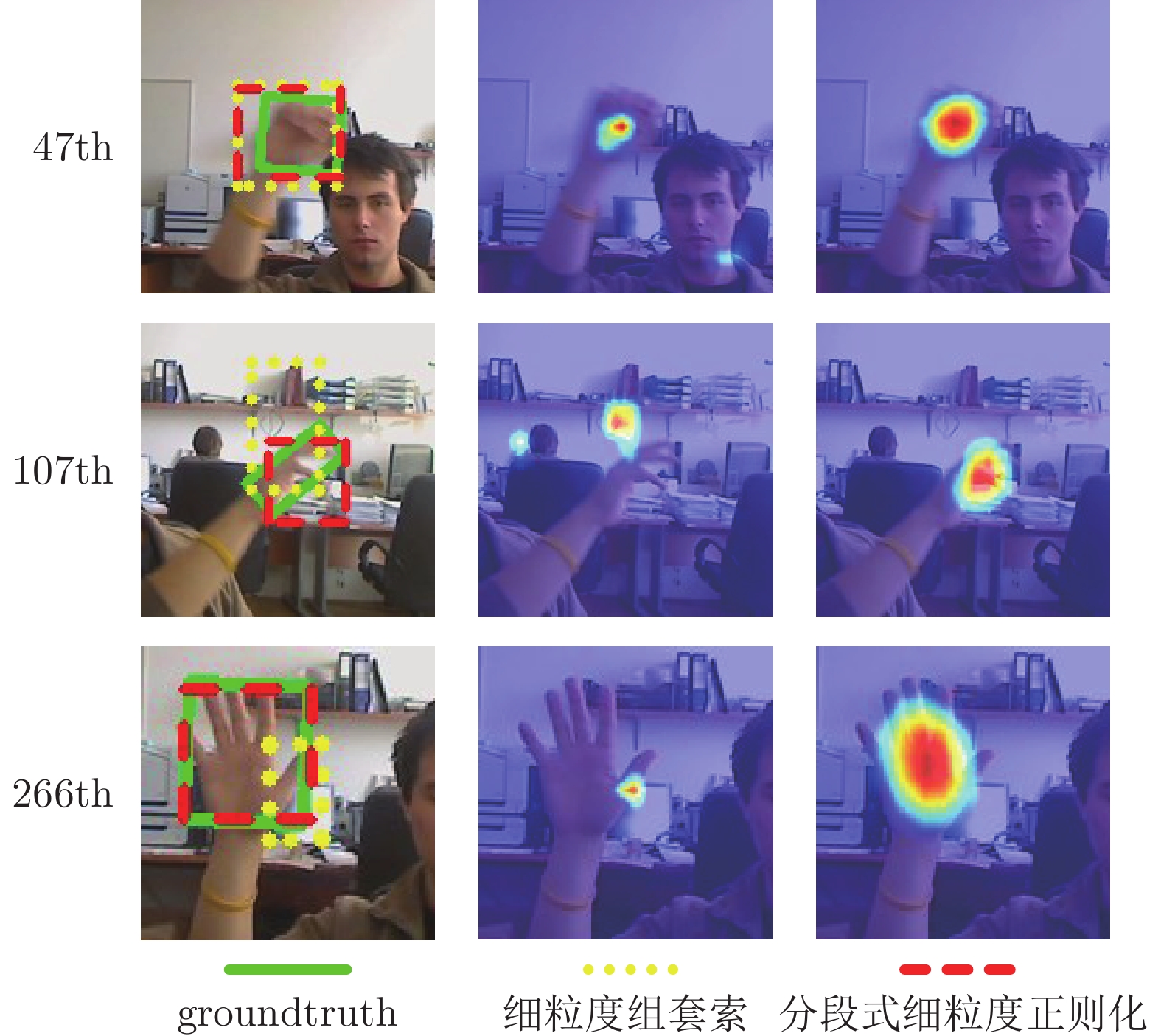
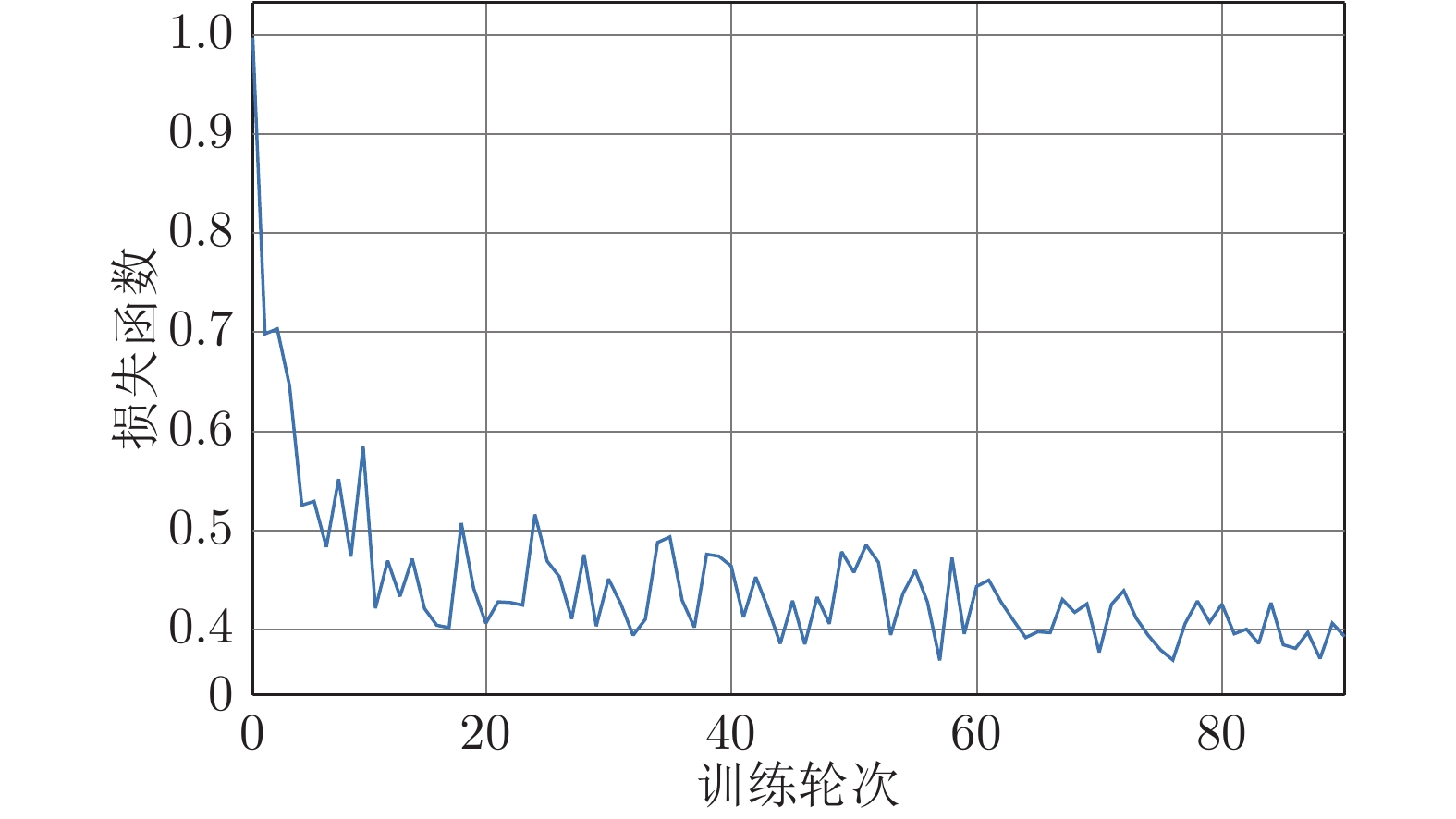
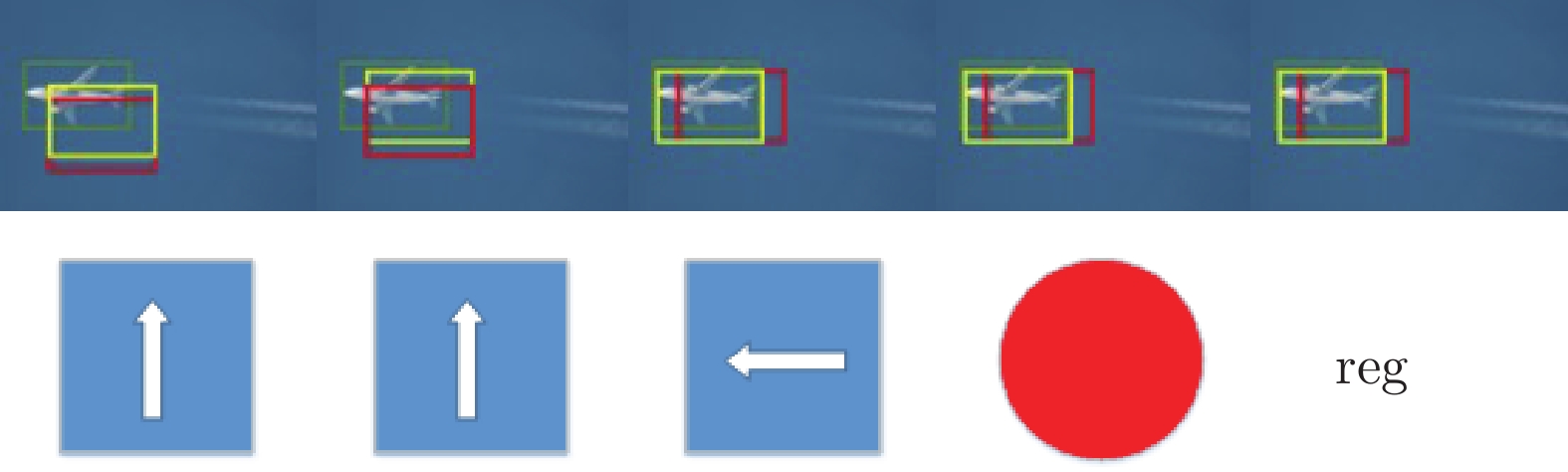
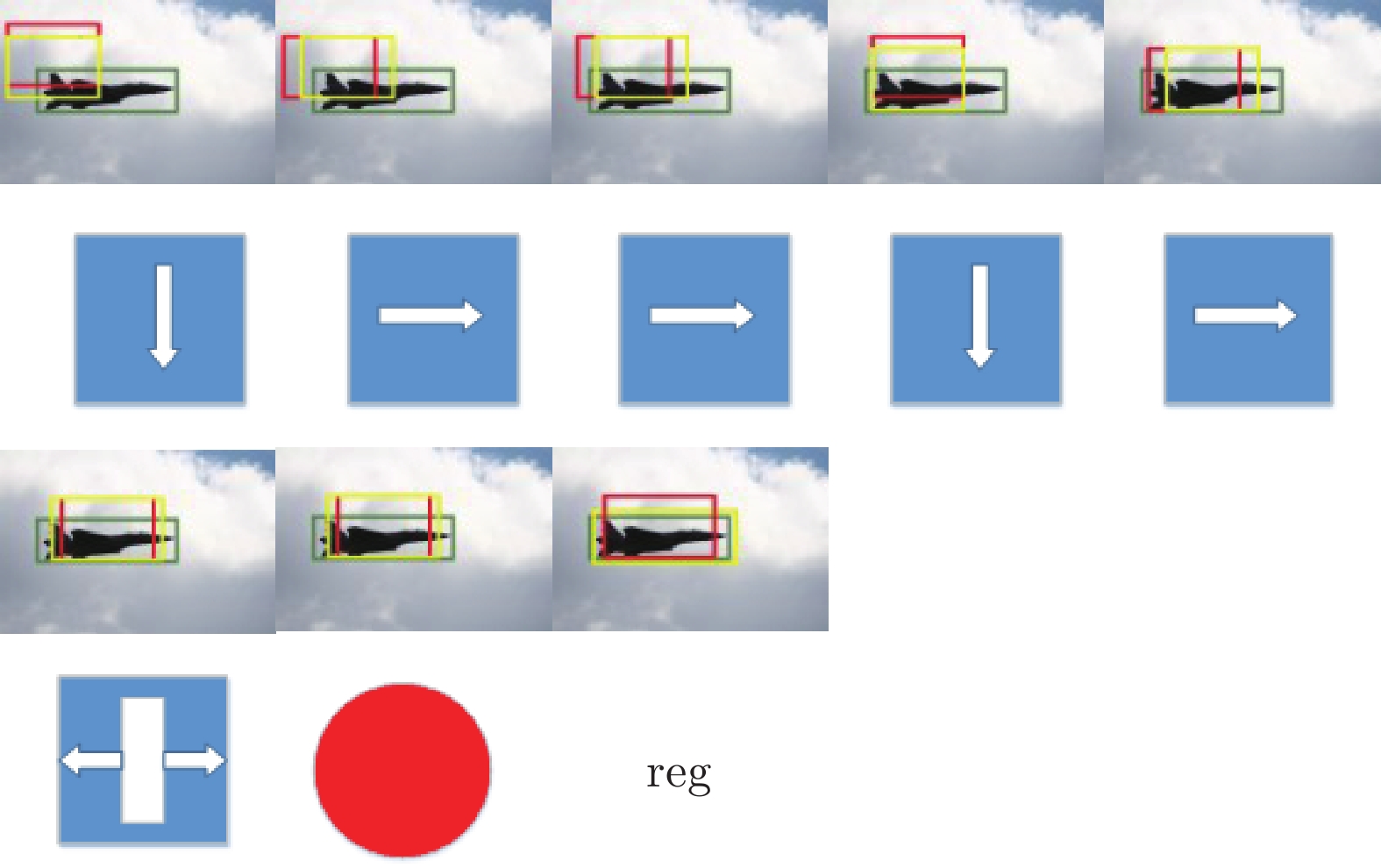
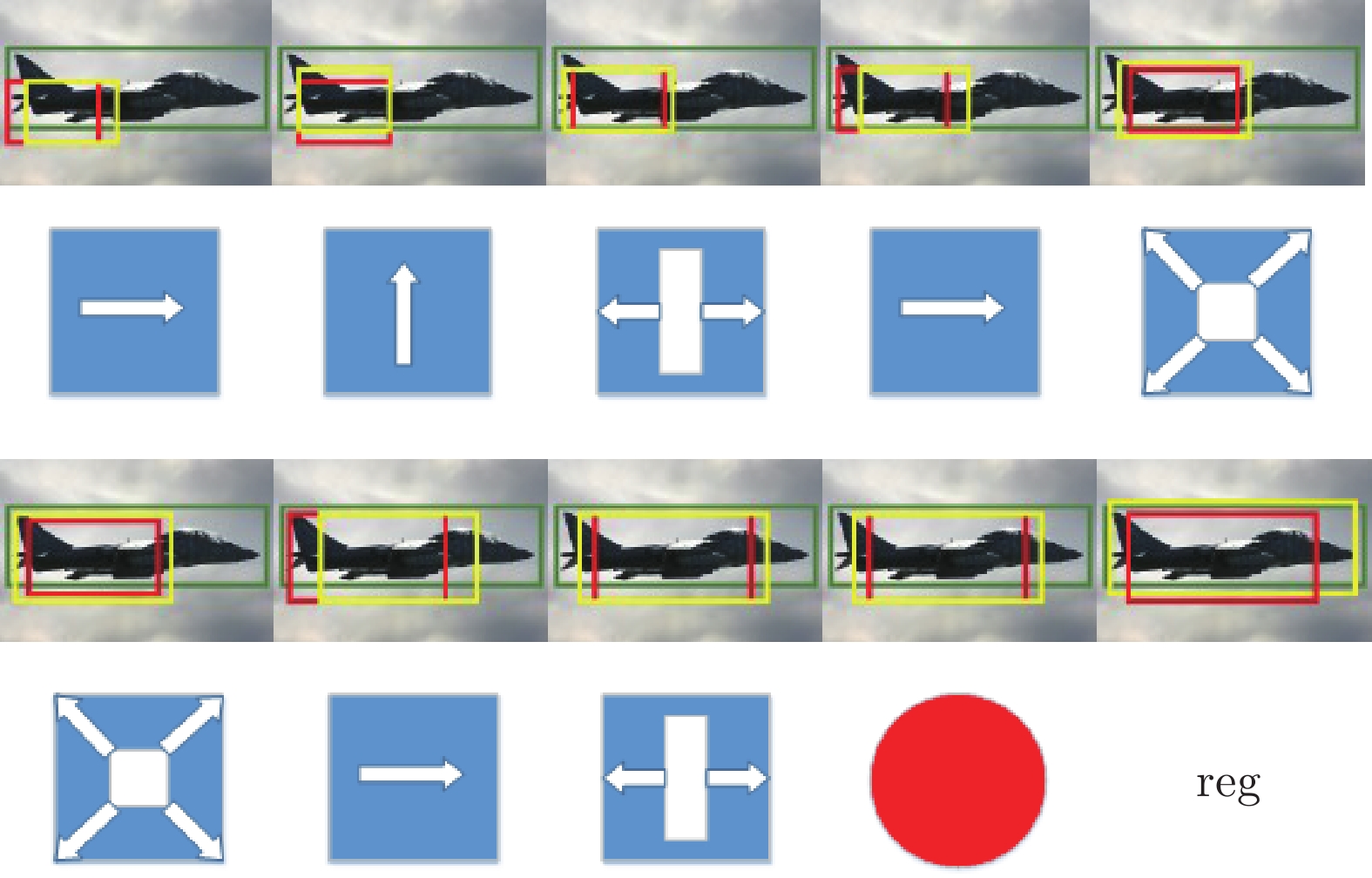
孪生网络跟踪算法在训练阶段多数采用\begin{document}$ {L_2}$\end{document} ![]()
![]()
孪生网络跟踪算法在训练阶段多数采用