2017年 第43卷 第11期
2017, 43(11): 1869-1885.
doi: 10.16383/j.aas.2017.c170117
cstr: 32138.14.j.aas.2017.c170117
摘要:
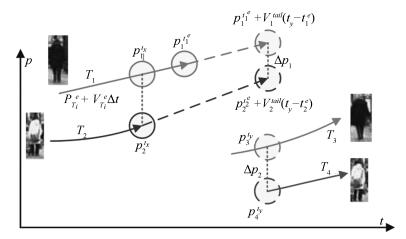
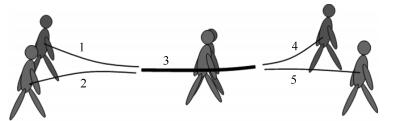
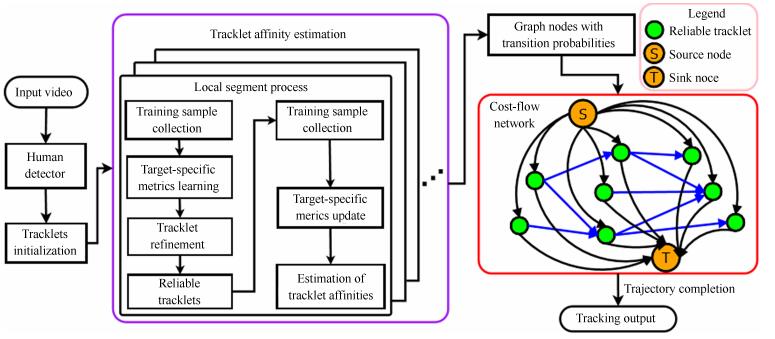
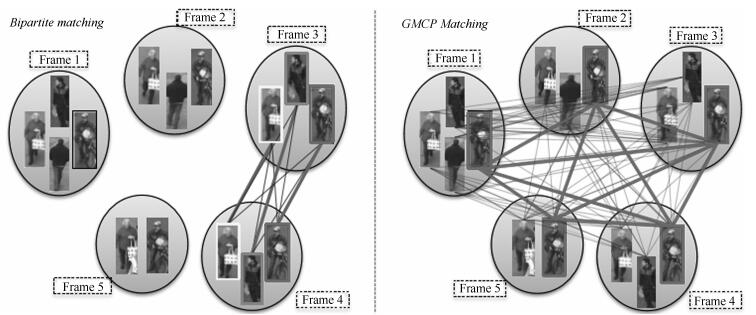
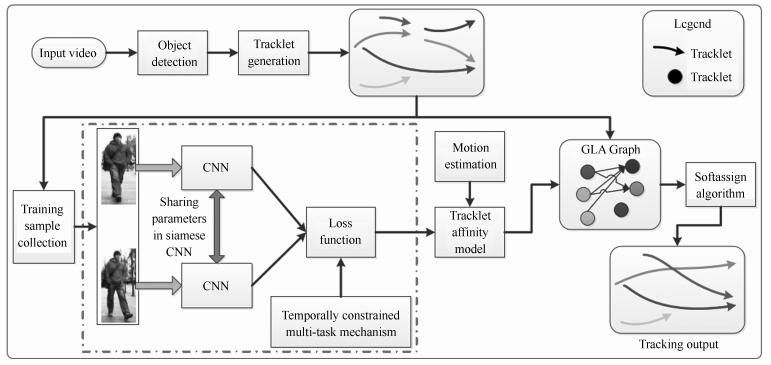
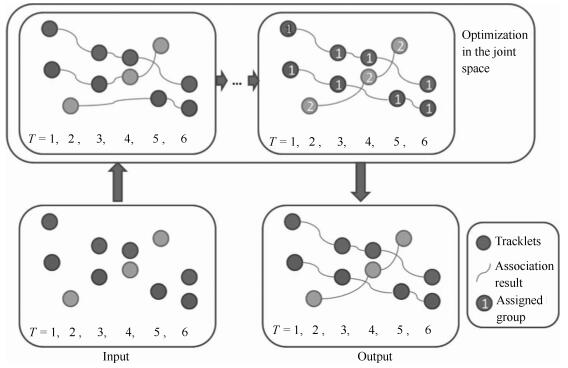
近年来,由于计算机视觉技术的发展和计算机硬件性能的提高,基于视觉的目标跟踪方法得到了飞速的发展.其中,基于踪片(Tracklet)关联的目标跟踪方法因为具有对目标遮挡的强鲁棒性、算法运行的快速性等优点得到了广泛关注,本文对这类方法的最新研究进展进行了综述.首先,简明地介绍了视觉目标跟踪的基本知识、研究意义和研究现状.然后,通过感兴趣目标检测、跟踪特征提取、踪片生成、踪片关联与补全四个步骤,系统详尽地介绍了基于踪片关联的目标跟踪方法,分析了近年来提出的一些踪片关联方法的优缺点.最后,本文指出了该研究问题的发展方向,一方面要提出更先进的目标跟踪模型,另一方面要采用平行视觉方法进行虚实互动的模型学习与评估.
近年来,由于计算机视觉技术的发展和计算机硬件性能的提高,基于视觉的目标跟踪方法得到了飞速的发展.其中,基于踪片(Tracklet)关联的目标跟踪方法因为具有对目标遮挡的强鲁棒性、算法运行的快速性等优点得到了广泛关注,本文对这类方法的最新研究进展进行了综述.首先,简明地介绍了视觉目标跟踪的基本知识、研究意义和研究现状.然后,通过感兴趣目标检测、跟踪特征提取、踪片生成、踪片关联与补全四个步骤,系统详尽地介绍了基于踪片关联的目标跟踪方法,分析了近年来提出的一些踪片关联方法的优缺点.最后,本文指出了该研究问题的发展方向,一方面要提出更先进的目标跟踪模型,另一方面要采用平行视觉方法进行虚实互动的模型学习与评估.

2017, 43(11): 1886-1897.
doi: 10.16383/j.aas.2017.c160690
cstr: 32138.14.j.aas.2017.c160690
摘要:
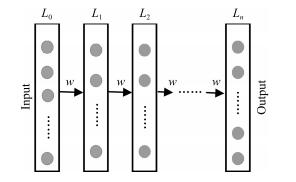
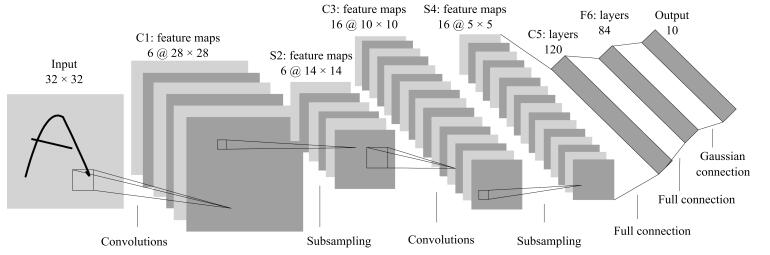
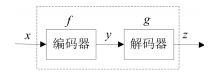
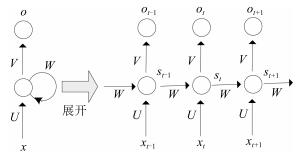
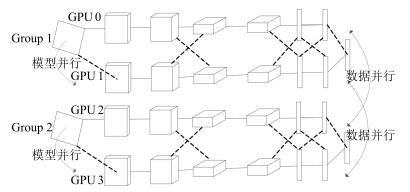
随着大数据和智能时代的到来,机器学习的研究重心已开始从感知领域转移到认知计算(Cognitive computing,CC)领域,如何提升对大规模数据的认知能力已成为智能科学与技术的一大研究热点,最近的深度学习有望开启大数据认知计算领域的研究新热潮.本文总结了近年来大数据环境下基于深度学习的认知计算研究进展,分别从深度学习数据表示、认知模型、深度学习并行计算及其应用等方面进行了前沿概况、比较和分析,对面向大数据的深度学习认知计算的挑战和发展趋势进行了总结、思考与展望.
随着大数据和智能时代的到来,机器学习的研究重心已开始从感知领域转移到认知计算(Cognitive computing,CC)领域,如何提升对大规模数据的认知能力已成为智能科学与技术的一大研究热点,最近的深度学习有望开启大数据认知计算领域的研究新热潮.本文总结了近年来大数据环境下基于深度学习的认知计算研究进展,分别从深度学习数据表示、认知模型、深度学习并行计算及其应用等方面进行了前沿概况、比较和分析,对面向大数据的深度学习认知计算的挑战和发展趋势进行了总结、思考与展望.

2017, 43(11): 1898-1907.
doi: 10.16383/j.aas.2017.c160328
cstr: 32138.14.j.aas.2017.c160328
摘要:
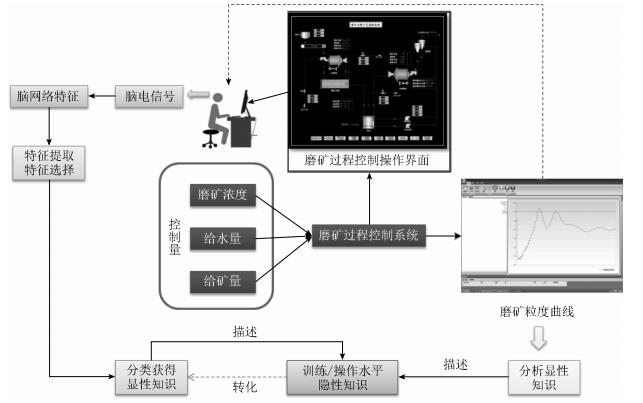
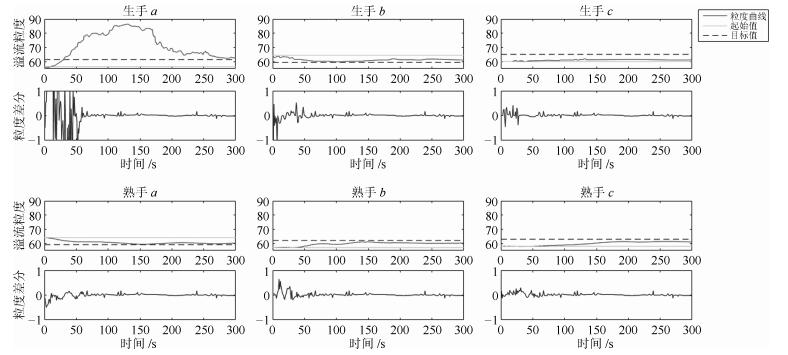
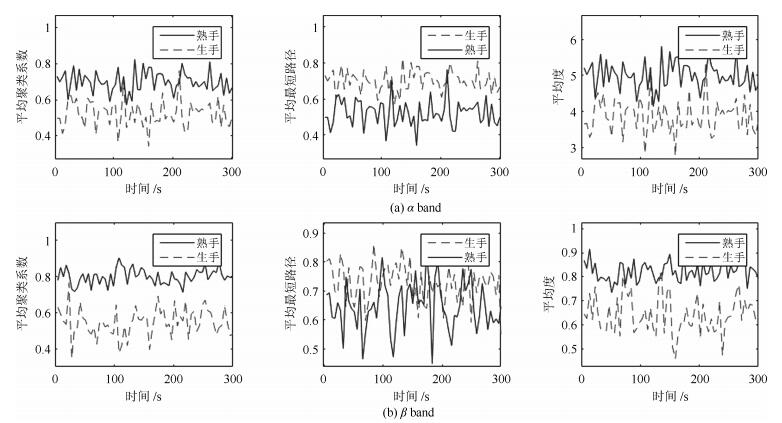
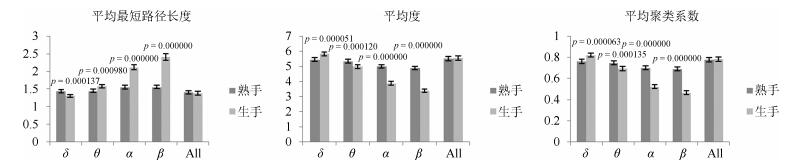
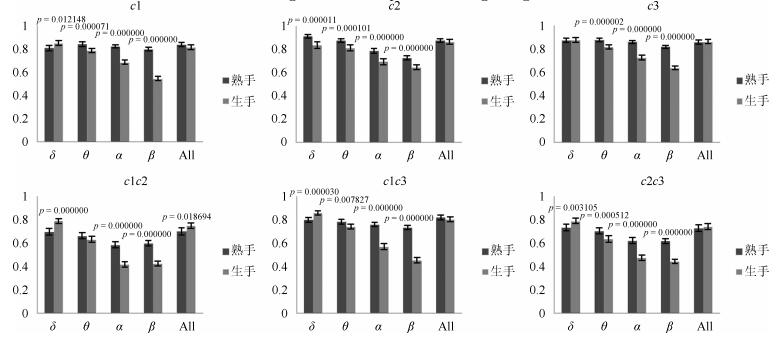
面向知识型工作自动化,研究了流程工业生产过程中操作人员的脑认知特征与操作控制水平之间的关键,建立了一种基于操作员脑网络特征的操作熟练程度隐性知识的显性化模型.采用关注信号瞬时相位、基于希尔伯特变换的相位锁方法,构建了脑功能网络(Functional brain network,FBN).基于磨矿系统操作员脑功能网络的图论参数与社区连接强度,建立了特征空间,采用支持向量机与神经网络进行特征分类.结果表明,在高频区,熟练操作员(熟手)的脑功能网络连接强度明显高于不熟练操作员(生手):在低频部分则生手的脑功能网络连接强度略高,其特征分类准确率为87.24%.磨矿系统操作过程中形成的溢流粒度(Grinding particle size,GPS)曲线可以初略地反映操作人员的熟练程度,本文在深入分析了其溢流粒度曲线与操作员脑网络特征的基础上,发现相对于溢流粒度曲线操作员的脑网络特征可以更全面地描述操作控制水平(特别在操作开始时间段),采用脑网络特征识别操作控制水平在时间上超前于溢流粒度曲线识别方法.本研究对于将知识工作者的认知特征引入到流程工业控制中,具有一定的借鉴意义.
面向知识型工作自动化,研究了流程工业生产过程中操作人员的脑认知特征与操作控制水平之间的关键,建立了一种基于操作员脑网络特征的操作熟练程度隐性知识的显性化模型.采用关注信号瞬时相位、基于希尔伯特变换的相位锁方法,构建了脑功能网络(Functional brain network,FBN).基于磨矿系统操作员脑功能网络的图论参数与社区连接强度,建立了特征空间,采用支持向量机与神经网络进行特征分类.结果表明,在高频区,熟练操作员(熟手)的脑功能网络连接强度明显高于不熟练操作员(生手):在低频部分则生手的脑功能网络连接强度略高,其特征分类准确率为87.24%.磨矿系统操作过程中形成的溢流粒度(Grinding particle size,GPS)曲线可以初略地反映操作人员的熟练程度,本文在深入分析了其溢流粒度曲线与操作员脑网络特征的基础上,发现相对于溢流粒度曲线操作员的脑网络特征可以更全面地描述操作控制水平(特别在操作开始时间段),采用脑网络特征识别操作控制水平在时间上超前于溢流粒度曲线识别方法.本研究对于将知识工作者的认知特征引入到流程工业控制中,具有一定的借鉴意义.




2017, 43(11): 1908-1919.
doi: 10.16383/j.aas.2017.c160357
cstr: 32138.14.j.aas.2017.c160357
摘要:
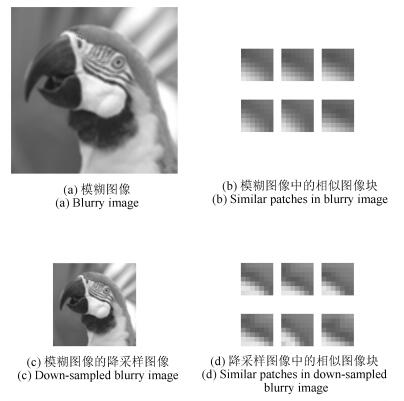
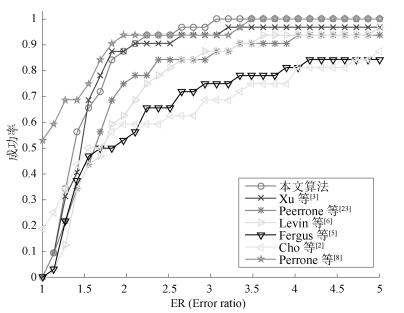
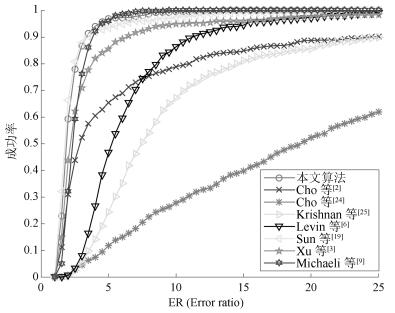
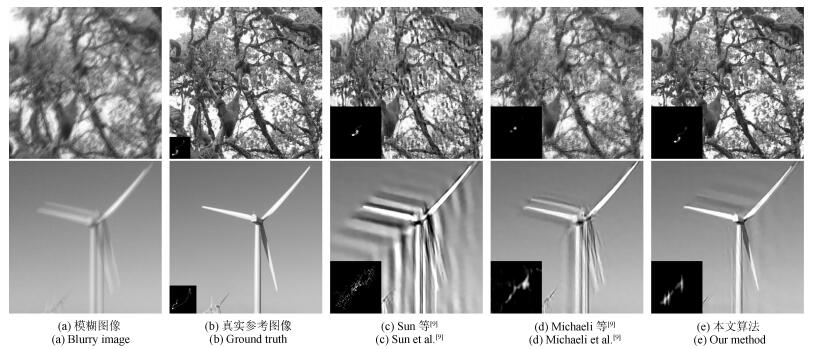
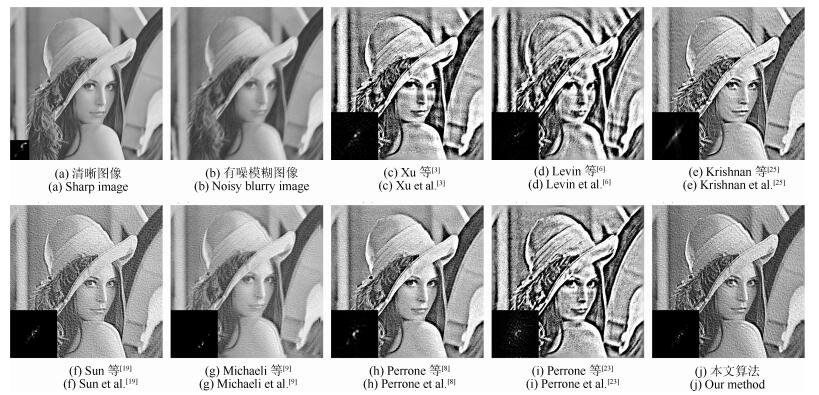
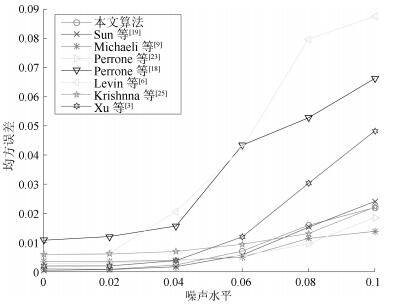
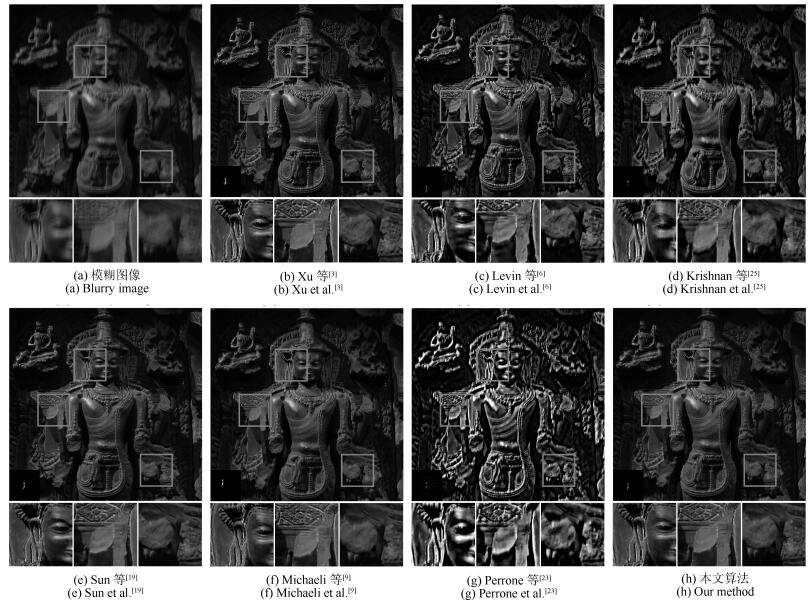
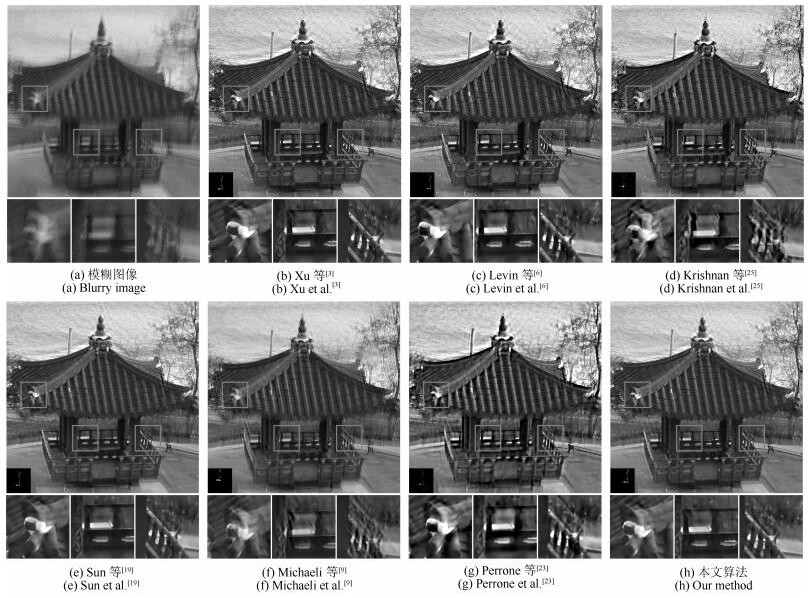
图像盲解卷积研究当模糊核未知时,如何从模糊图像复原出原始清晰图像.由于盲解卷积是一个欠定问题,现有的盲解卷积算法都直接或间接地利用各种先验知识.本文提出了一种结合稀疏表示与结构自相似性的单幅图像盲解卷积算法,该算法将图像的稀疏性先验和结构自相似性先验作为正则化约束加入到图像盲解卷积的目标函数中,并利用图像不同尺度间的结构自相似性,将观测模糊图像的降采样图像作为稀疏表示字典的训练样本,保证清晰图像在该字典下的稀疏性.最后利用交替求解的方式估计模糊核和清晰图像.模拟和真实数据上的实验表明本文算法能够准确估计模糊核,复原清晰的图像边缘,并具有很好的鲁棒性.
图像盲解卷积研究当模糊核未知时,如何从模糊图像复原出原始清晰图像.由于盲解卷积是一个欠定问题,现有的盲解卷积算法都直接或间接地利用各种先验知识.本文提出了一种结合稀疏表示与结构自相似性的单幅图像盲解卷积算法,该算法将图像的稀疏性先验和结构自相似性先验作为正则化约束加入到图像盲解卷积的目标函数中,并利用图像不同尺度间的结构自相似性,将观测模糊图像的降采样图像作为稀疏表示字典的训练样本,保证清晰图像在该字典下的稀疏性.最后利用交替求解的方式估计模糊核和清晰图像.模拟和真实数据上的实验表明本文算法能够准确估计模糊核,复原清晰的图像边缘,并具有很好的鲁棒性.


2017, 43(11): 1920-1930.
doi: 10.16383/j.aas.2017.c160479
cstr: 32138.14.j.aas.2017.c160479
摘要:
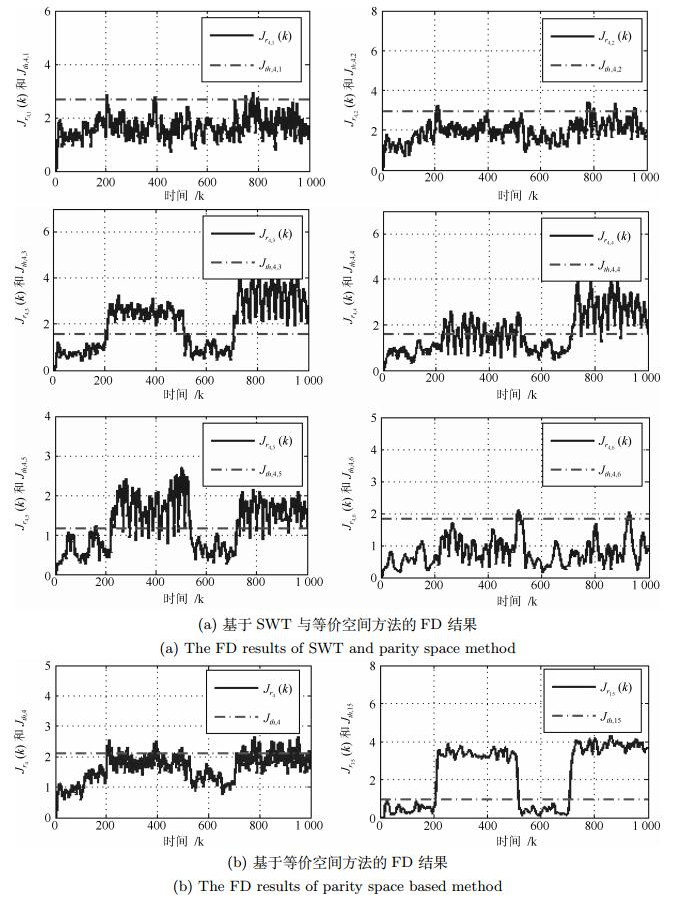
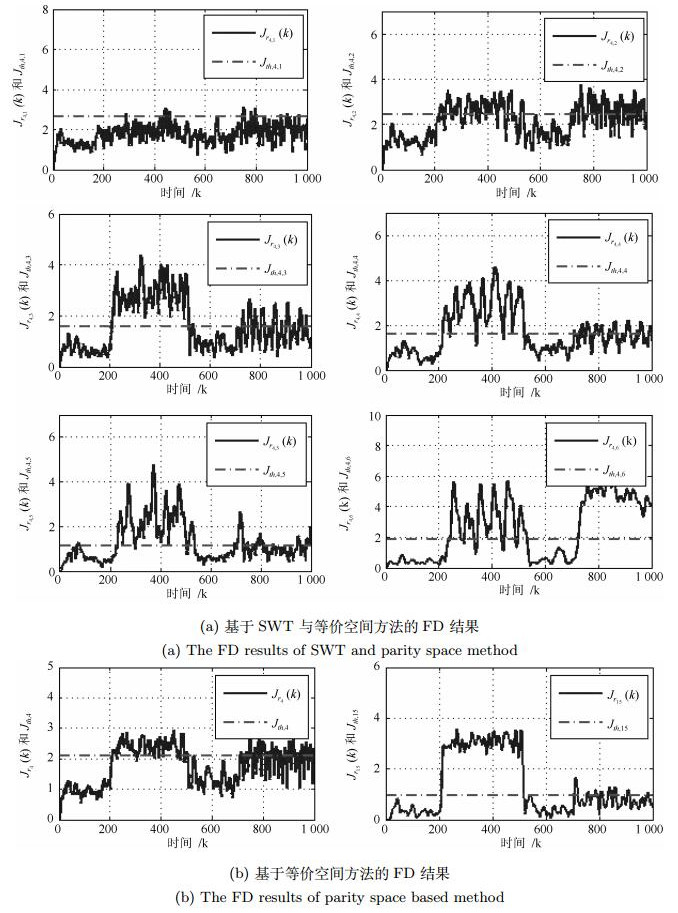
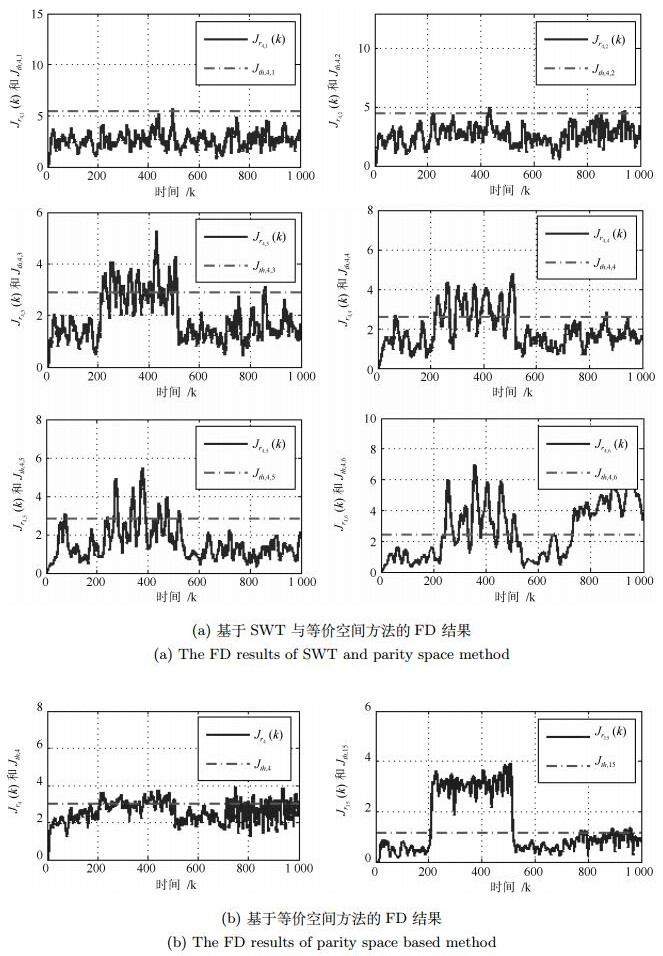
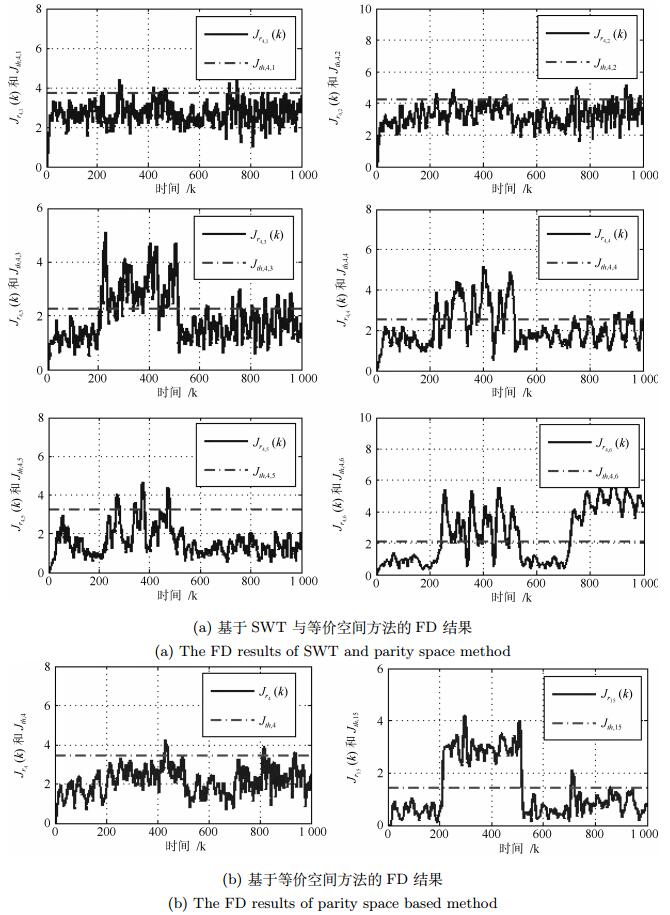
为提高基于等价空间的线性离散时变(Linear discrete time-varying,LDTV)系统故障检测的检测性能,本文提出一种基于平稳小波变换(Stationary wavelet transform,SWT)与等价空间的LDTV系统故障检测方法.通过引入SWT对基于低阶等价关系构造的残差进行多尺度滤波,将残差产生器设计转化为不同尺度下的多目标最优化问题,保证了各尺度下残差对干扰鲁棒性和对故障灵敏性指标的最小化,同时利用SWT快速算法获得一组多尺度残差信号.进一步,对产生的多尺度残差信号进行多分辨率分析,从而实现较宽频率范围内故障信号的检测,有效降低了故障漏报率.最后,通过仿真实验验证了本文方法的有效性.
为提高基于等价空间的线性离散时变(Linear discrete time-varying,LDTV)系统故障检测的检测性能,本文提出一种基于平稳小波变换(Stationary wavelet transform,SWT)与等价空间的LDTV系统故障检测方法.通过引入SWT对基于低阶等价关系构造的残差进行多尺度滤波,将残差产生器设计转化为不同尺度下的多目标最优化问题,保证了各尺度下残差对干扰鲁棒性和对故障灵敏性指标的最小化,同时利用SWT快速算法获得一组多尺度残差信号.进一步,对产生的多尺度残差信号进行多分辨率分析,从而实现较宽频率范围内故障信号的检测,有效降低了故障漏报率.最后,通过仿真实验验证了本文方法的有效性.
2017, 43(11): 1931-1940.
doi: 10.16383/j.aas.2017.c160633
cstr: 32138.14.j.aas.2017.c160633
摘要:
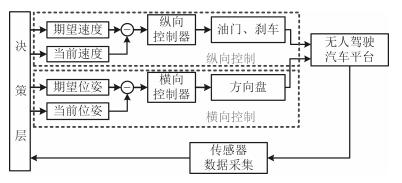
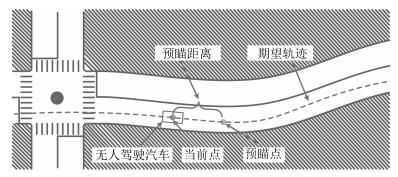
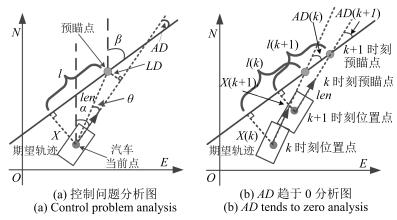
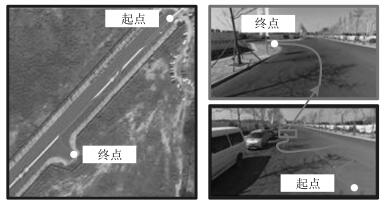
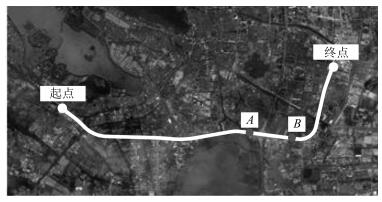
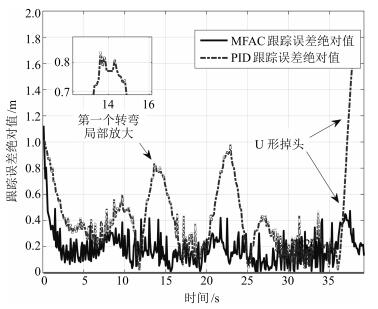
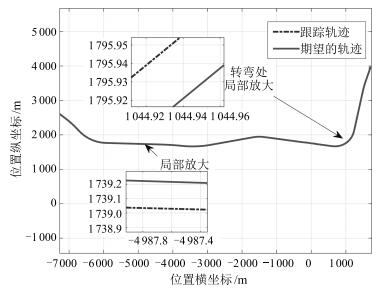
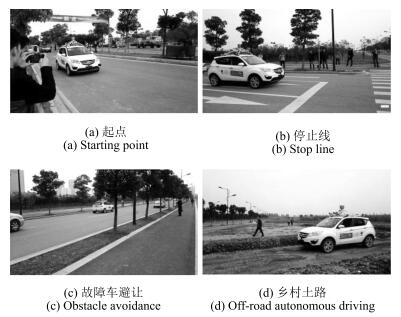
提出了一种基于无模型自适应控制的无人驾驶汽车横向控制方案.首先,将无人驾驶汽车循迹跟踪控制问题转化成预瞄偏差角跟踪问题,然后基于无人驾驶汽车横向控制系统的动态线性化数据模型,设计出无模型自适应控制算法、伪梯度估计算法和伪梯度重置算法,进而实现了自主车辆的无人驾驶.该方法的实现仅用到无人驾驶汽车运行时的输入输出数据,避免了对无人驾驶汽车进行复杂机理建模的难题,对于复杂的无人驾驶汽车运行过程具有很好的自适应性,对不同的无人驾驶车辆具有较强的可移植性.该方案已实际应用于清华大学无人驾驶汽车实验平台,在北京市丰台区的实地测试实验、在江苏省常熟市高速路的测试以及2015年"中国智能车未来挑战赛"的现场应用验证了所提方案的有效性.
提出了一种基于无模型自适应控制的无人驾驶汽车横向控制方案.首先,将无人驾驶汽车循迹跟踪控制问题转化成预瞄偏差角跟踪问题,然后基于无人驾驶汽车横向控制系统的动态线性化数据模型,设计出无模型自适应控制算法、伪梯度估计算法和伪梯度重置算法,进而实现了自主车辆的无人驾驶.该方法的实现仅用到无人驾驶汽车运行时的输入输出数据,避免了对无人驾驶汽车进行复杂机理建模的难题,对于复杂的无人驾驶汽车运行过程具有很好的自适应性,对不同的无人驾驶车辆具有较强的可移植性.该方案已实际应用于清华大学无人驾驶汽车实验平台,在北京市丰台区的实地测试实验、在江苏省常熟市高速路的测试以及2015年"中国智能车未来挑战赛"的现场应用验证了所提方案的有效性.






2017, 43(11): 1941-1949.
doi: 10.16383/j.aas.2017.c160393
cstr: 32138.14.j.aas.2017.c160393
摘要:
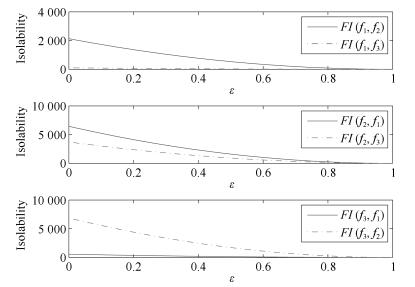
针对缺乏有效的非完全失效故障(Loss of effect,LOE)可诊断性量化分析方法的现状,本文提出了一种基于距离相似度的系统非完全失效故障的实际可诊断性评价方法.通过将状态空间描述的动态系统转换为时间堆栈动态模型,使故障的可诊断性评估分析问题转化为多元分布的相似度问题.给出系统非完全失效故障可检测性与可隔离性的相关定义,并对故障的可诊断性进行量化.通过求取最小二乘解计算最小巴氏距离,增大了算法适用范围.最后,通过仿真实例验证评价方法的有效性,并通过所提出的可诊断性评估算法求取非完全失效故障的最大可诊断效能系数.
针对缺乏有效的非完全失效故障(Loss of effect,LOE)可诊断性量化分析方法的现状,本文提出了一种基于距离相似度的系统非完全失效故障的实际可诊断性评价方法.通过将状态空间描述的动态系统转换为时间堆栈动态模型,使故障的可诊断性评估分析问题转化为多元分布的相似度问题.给出系统非完全失效故障可检测性与可隔离性的相关定义,并对故障的可诊断性进行量化.通过求取最小二乘解计算最小巴氏距离,增大了算法适用范围.最后,通过仿真实例验证评价方法的有效性,并通过所提出的可诊断性评估算法求取非完全失效故障的最大可诊断效能系数.


2017, 43(11): 1950-1961.
doi: 10.16383/j.aas.2017.c160384
cstr: 32138.14.j.aas.2017.c160384
摘要:
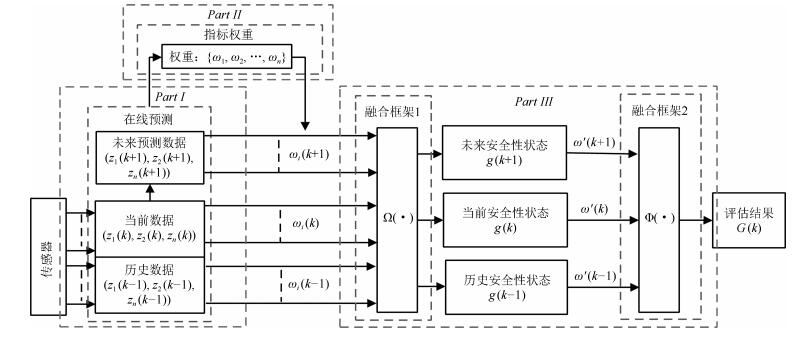
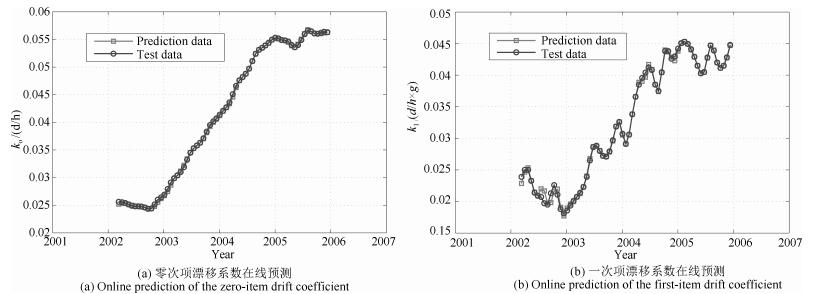
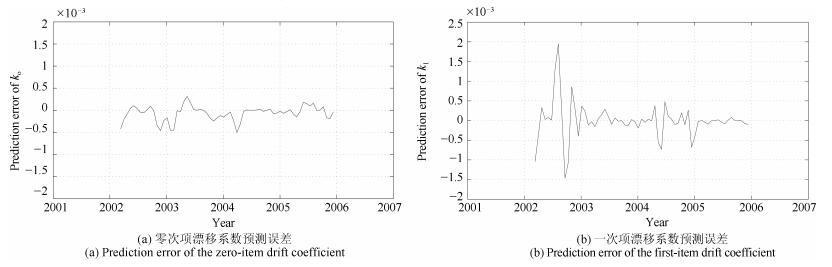
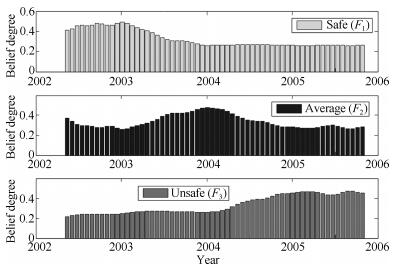
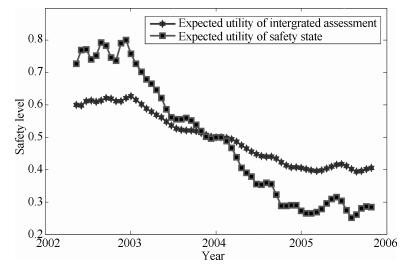
综合考虑动态系统历史记录、当前状态以及未来退化趋势信息来对其安全性进行在线评估是极其重要的.本文提出了一种基于证据推理(Evidential reasoning,ER)的安全性在线评估方法.该方法先融合多个安全性指标获得各个时刻的安全性状态,而后融合系统"历史"、"当前"、"未来"时刻的安全性状态,评估得到系统的综合安全性水平.首先,建立了基于三阶Volterra滤波器的在线预测模型,预测指标未来信息;然后,建立了指标最优自适应权重求取模型,计算并更新指标实时权重;最后,提出了基于证据推理方法的融合框架,对"历史"、"当前"、"未来"时刻的信息进行融合,得到系统当前时刻的综合安全性评估结果.通过对某惯性平台系统的安全性评估实例验证了所提方法的有效性.
综合考虑动态系统历史记录、当前状态以及未来退化趋势信息来对其安全性进行在线评估是极其重要的.本文提出了一种基于证据推理(Evidential reasoning,ER)的安全性在线评估方法.该方法先融合多个安全性指标获得各个时刻的安全性状态,而后融合系统"历史"、"当前"、"未来"时刻的安全性状态,评估得到系统的综合安全性水平.首先,建立了基于三阶Volterra滤波器的在线预测模型,预测指标未来信息;然后,建立了指标最优自适应权重求取模型,计算并更新指标实时权重;最后,提出了基于证据推理方法的融合框架,对"历史"、"当前"、"未来"时刻的信息进行融合,得到系统当前时刻的综合安全性评估结果.通过对某惯性平台系统的安全性评估实例验证了所提方法的有效性.




2017, 43(11): 1962-1972.
doi: 10.16383/j.aas.2017.c160443
cstr: 32138.14.j.aas.2017.c160443
摘要:
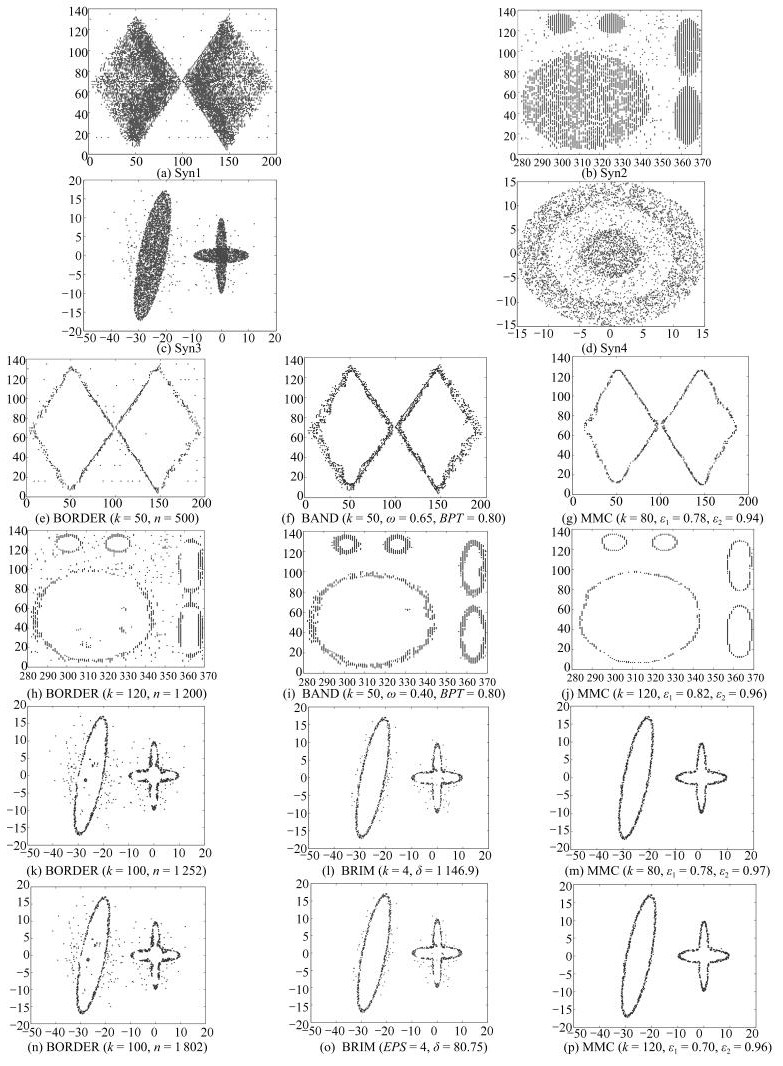
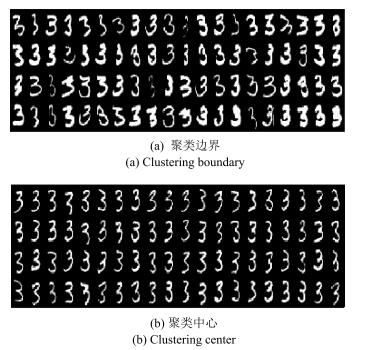
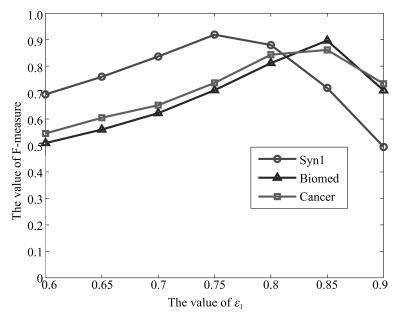
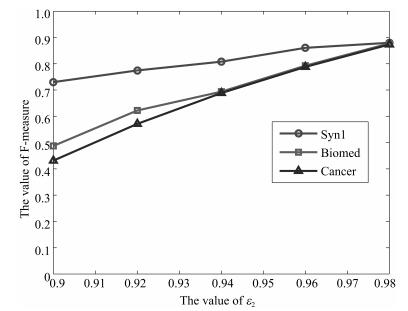
流形学习关注于寻找合适的嵌入方式将高维空间映射至低维空间,但映射子空间依然可能具有较高的维度,难以解决高维空间的数据挖掘任务.本文建立一种简单的矩阵模型判断数据点k近邻空间关于该点的对称性,并使用对称率进行边界提取,提出一种基于矩阵模型的高维聚类边界检测技术(Clustering boundary detection based on matrix model,MMC).该模型构造简单、直接、易于理解和使用.理论分析以及在人工合成和真实数据集的实验结果表明MMC算法能够有效地检测出低维和高维空间的聚类边界.
流形学习关注于寻找合适的嵌入方式将高维空间映射至低维空间,但映射子空间依然可能具有较高的维度,难以解决高维空间的数据挖掘任务.本文建立一种简单的矩阵模型判断数据点k近邻空间关于该点的对称性,并使用对称率进行边界提取,提出一种基于矩阵模型的高维聚类边界检测技术(Clustering boundary detection based on matrix model,MMC).该模型构造简单、直接、易于理解和使用.理论分析以及在人工合成和真实数据集的实验结果表明MMC算法能够有效地检测出低维和高维空间的聚类边界.






2017, 43(11): 1973-1983.
doi: 10.16383/j.aas.2017.c160504
cstr: 32138.14.j.aas.2017.c160504
摘要:
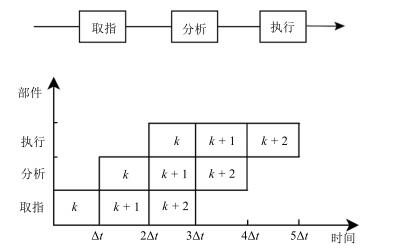
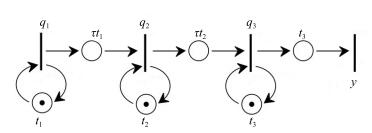
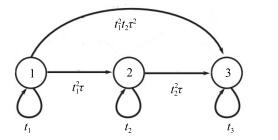
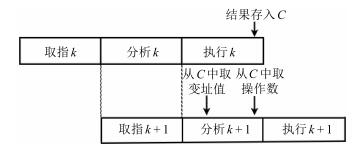
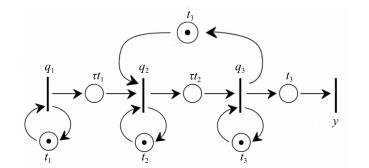
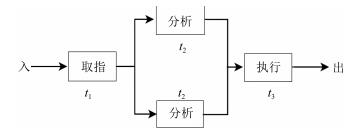
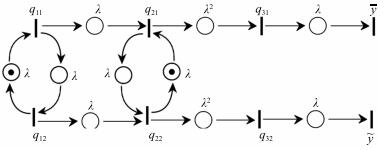
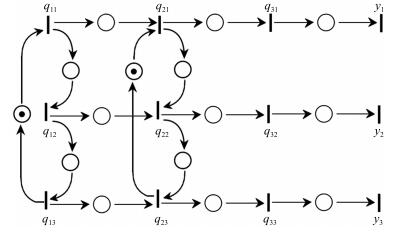
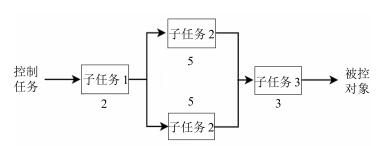
利用Petri网模拟云控制系统的并行处理过程,引入并行处理系统的时钟周期、吞吐率和任务完成时间性能指标,运用极大-加代数方法分析和优化云控制系统并行处理性能.采用子过程细分的优化方式,通过求解一类最优控制问题,设计并行任务分配优化方案,以保证任务完成时间最短,并给出计算最短任务完成时间的有效算法.同时,采用重复设置多套瓶颈段并联的方式提高并行处理能力,并运用Petri网实现瓶颈子过程的并联控制,且给出并联控制在协同云控制系统中的一个应用.
利用Petri网模拟云控制系统的并行处理过程,引入并行处理系统的时钟周期、吞吐率和任务完成时间性能指标,运用极大-加代数方法分析和优化云控制系统并行处理性能.采用子过程细分的优化方式,通过求解一类最优控制问题,设计并行任务分配优化方案,以保证任务完成时间最短,并给出计算最短任务完成时间的有效算法.同时,采用重复设置多套瓶颈段并联的方式提高并行处理能力,并运用Petri网实现瓶颈子过程的并联控制,且给出并联控制在协同云控制系统中的一个应用.





2017, 43(11): 1984-1992.
doi: 10.16383/j.aas.2017.c160330
cstr: 32138.14.j.aas.2017.c160330
摘要:
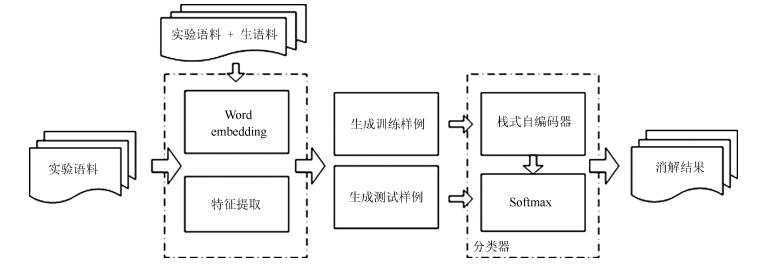
针对维吾尔语名词短语指代现象,提出了一种利用栈式自编码深度学习算法进行基于语义特征的指代消解方法.通过对维吾尔语名词短语指称性的研究,提取出利于消解任务的13项特征.为提高特征对文本语义的表达,在特征集中引入富含词汇语义及上下文位置关系的Word embedding.利用深度学习机制无监督的提取隐含的深层语义特征,训练Softmax分类器进而完成指代消解任务.该方法在维吾尔语指代消解任务中的准确率为74.5%,召回率为70.6%,F值为72.4%.实验结果证明,深度学习模型较浅层的支持向量机更合适于本文的指代消解任务,对Word embedding特征项的引入,有效地提高了指代消解模型的性能.
针对维吾尔语名词短语指代现象,提出了一种利用栈式自编码深度学习算法进行基于语义特征的指代消解方法.通过对维吾尔语名词短语指称性的研究,提取出利于消解任务的13项特征.为提高特征对文本语义的表达,在特征集中引入富含词汇语义及上下文位置关系的Word embedding.利用深度学习机制无监督的提取隐含的深层语义特征,训练Softmax分类器进而完成指代消解任务.该方法在维吾尔语指代消解任务中的准确率为74.5%,召回率为70.6%,F值为72.4%.实验结果证明,深度学习模型较浅层的支持向量机更合适于本文的指代消解任务,对Word embedding特征项的引入,有效地提高了指代消解模型的性能.

2017, 43(11): 1993-2002.
doi: 10.16383/j.aas.2017.c150875
cstr: 32138.14.j.aas.2017.c150875
摘要:
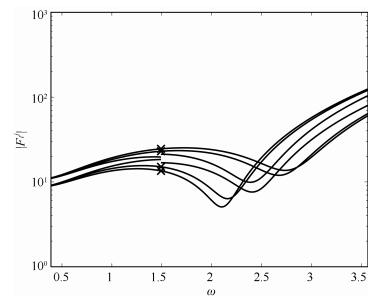
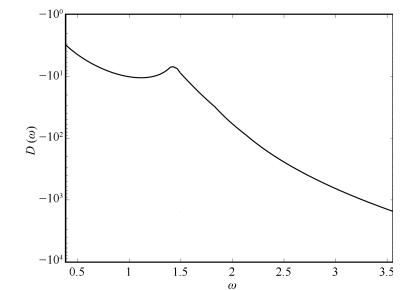
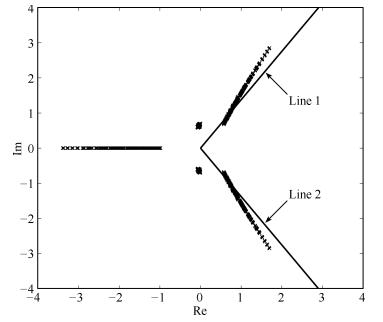
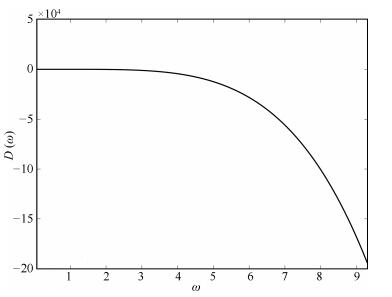
针对含有一个分数阶项的区间分数阶被控对象,提出了采用分数阶PIλ控制器的闭环系统可镇定性判定准则.将闭环系统的特征函数分解为扰动函数和标称函数,给出了扰动函数值集顶点的构造方法.根据被控对象分数阶阶次和控制器的阶次,研究了值集形状是否切换和切换频率的计算方法.此外,给出了测试频率区间的上下界,以实现在有限频率区间内判定闭环系统值集与原点的位置关系.在假设值集顶点函数在测试频率区间内不为零和闭环标称系统稳定的情况下,以解析的方式提出了采用分数阶PIλ控制器闭环系统的可镇定性判定准则.最后,通过对数值算例的可镇定性分析,验证了提出的判定准则的有效性.
针对含有一个分数阶项的区间分数阶被控对象,提出了采用分数阶PIλ控制器的闭环系统可镇定性判定准则.将闭环系统的特征函数分解为扰动函数和标称函数,给出了扰动函数值集顶点的构造方法.根据被控对象分数阶阶次和控制器的阶次,研究了值集形状是否切换和切换频率的计算方法.此外,给出了测试频率区间的上下界,以实现在有限频率区间内判定闭环系统值集与原点的位置关系.在假设值集顶点函数在测试频率区间内不为零和闭环标称系统稳定的情况下,以解析的方式提出了采用分数阶PIλ控制器闭环系统的可镇定性判定准则.最后,通过对数值算例的可镇定性分析,验证了提出的判定准则的有效性.






2017, 43(11): 2003-2013.
doi: 10.16383/j.aas.2017.c160464
cstr: 32138.14.j.aas.2017.c160464
摘要:
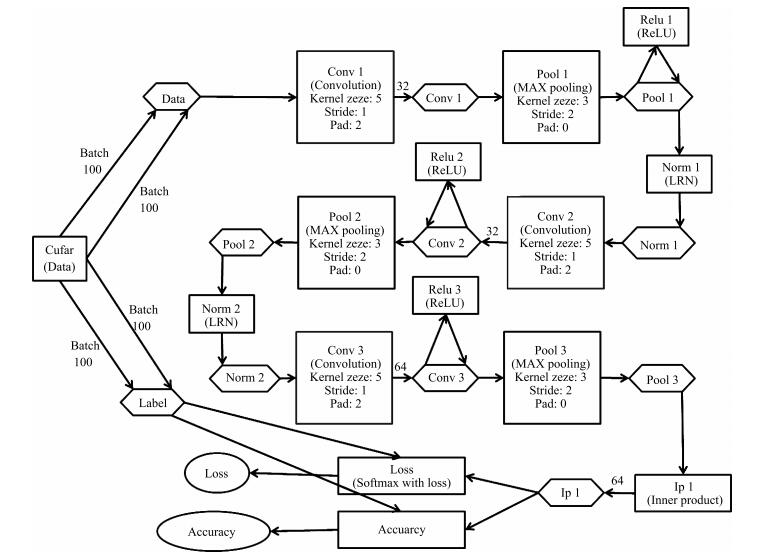
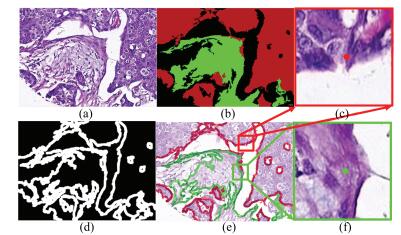
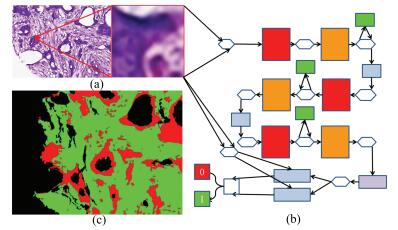
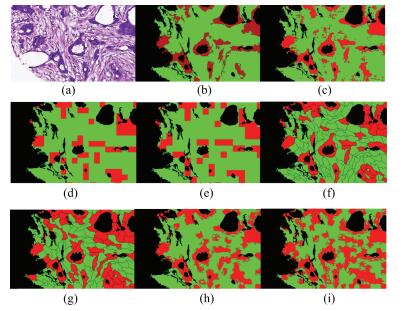
上皮和间质组织是乳腺组织病理图像中最基本的两种组织,约80%的乳腺肿瘤起源于乳腺上皮组织.为了构建基于乳腺组织病理图像分析的计算机辅助诊断系统和分析肿瘤微环境,上皮和间质组织的自动分割是重要的前提条件.本文构建一种基于逐像素点深度卷积网络(CN-PI)模型的上皮和间质组织的自动分割方法.1)以病理医生标注的两类区域边界附近具有类信息为标签的像素点为中心,构建包含该像素点上下文信息的正方形图像块的训练集.2)以每个正方形图像块包含的像素的彩色灰度值作为特征,以这些图像块中心像素类信息为标签训练CN模型.在测试阶段,在待分割的组织病理图像上逐像素点地取包含每个中心像素点上下文信息的正方形图像块,并输入到预先训练好的CN网络模型,以预测该图像块中心像素点的类信息.3)以每个图像块中心像素为基础,逐像素地遍历图像中的每一个像素,将预测结果作为该图像块中心像素点类信息的预测标签,实现对整幅图像的逐像素分割.实验表明,本文提出的CN-PI模型的性能比基于图像块分割的CN网络(CN-PA)模型表现出了更优越的性能.
上皮和间质组织是乳腺组织病理图像中最基本的两种组织,约80%的乳腺肿瘤起源于乳腺上皮组织.为了构建基于乳腺组织病理图像分析的计算机辅助诊断系统和分析肿瘤微环境,上皮和间质组织的自动分割是重要的前提条件.本文构建一种基于逐像素点深度卷积网络(CN-PI)模型的上皮和间质组织的自动分割方法.1)以病理医生标注的两类区域边界附近具有类信息为标签的像素点为中心,构建包含该像素点上下文信息的正方形图像块的训练集.2)以每个正方形图像块包含的像素的彩色灰度值作为特征,以这些图像块中心像素类信息为标签训练CN模型.在测试阶段,在待分割的组织病理图像上逐像素点地取包含每个中心像素点上下文信息的正方形图像块,并输入到预先训练好的CN网络模型,以预测该图像块中心像素点的类信息.3)以每个图像块中心像素为基础,逐像素地遍历图像中的每一个像素,将预测结果作为该图像块中心像素点类信息的预测标签,实现对整幅图像的逐像素分割.实验表明,本文提出的CN-PI模型的性能比基于图像块分割的CN网络(CN-PA)模型表现出了更优越的性能.




2017, 43(11): 2014-2032.
doi: 10.16383/j.aas.2017.c160300
cstr: 32138.14.j.aas.2017.c160300
摘要:
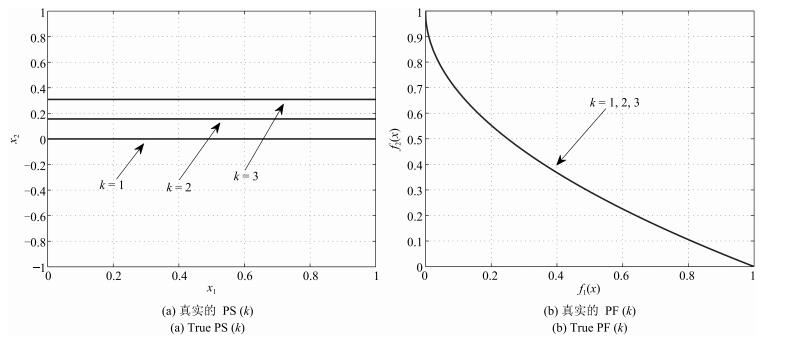
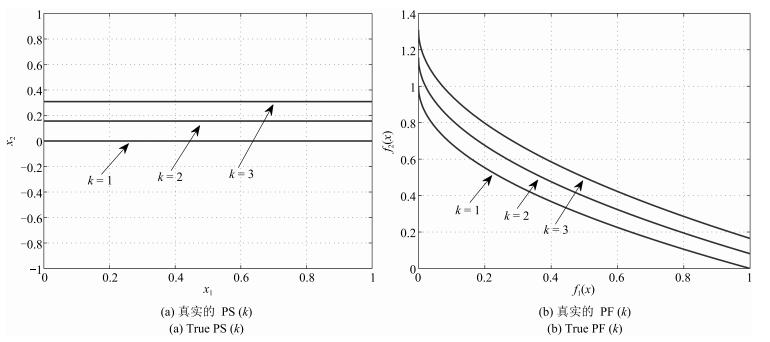
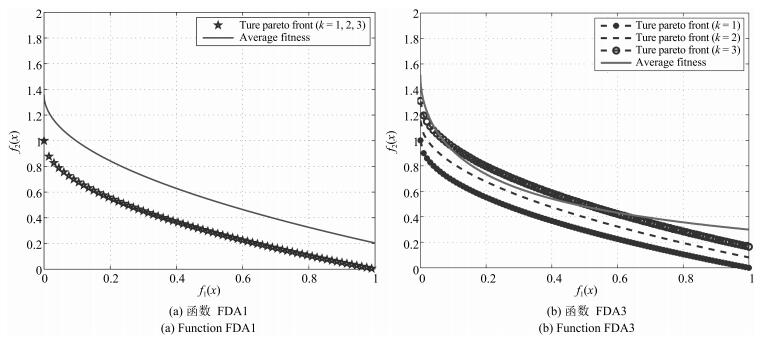
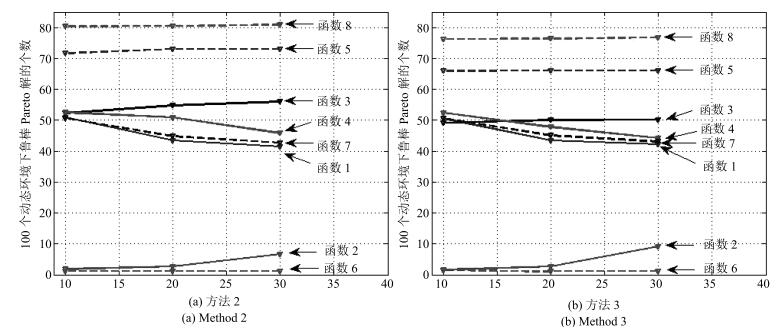
传统动态多目标优化问题(Dynamic multi-objective optimization problems,DMOPs)的求解方法,通常需要在新环境下,通过重新激发寻优过程,获得适应该环境的Pareto最优解.这可能导致较高的计算代价和资源成本,甚至无法在有限时间内执行该优化解.由此,提出一类寻找动态鲁棒Pareto最优解集的进化优化方法.动态鲁棒Pareto解集是指某一时刻下的Pareto较优解可以以一定稳定性阈值,逼近未来多个连续动态环境下的真实前沿,从而直接作为这些环境下的Pareto解集,以减小计算代价.为合理度量Pareto解的环境适应性,给出了时间鲁棒性和性能鲁棒性定义,并将其转化为两类鲁棒优化模型.引入基于分解的多目标进化优化方法和无惩罚约束处理方法,构建了动态多目标分解鲁棒进化优化方法.特别是基于移动平均预测模型实现了未来动态环境下适应值的多维时间序列预测.基于提出的两类新型性能评价测度,针对8个典型动态测试函数的仿真实验,结果表明该方法得到满足决策者精度要求,且具有较长平均生存时间的动态鲁棒Pareto最优解.
传统动态多目标优化问题(Dynamic multi-objective optimization problems,DMOPs)的求解方法,通常需要在新环境下,通过重新激发寻优过程,获得适应该环境的Pareto最优解.这可能导致较高的计算代价和资源成本,甚至无法在有限时间内执行该优化解.由此,提出一类寻找动态鲁棒Pareto最优解集的进化优化方法.动态鲁棒Pareto解集是指某一时刻下的Pareto较优解可以以一定稳定性阈值,逼近未来多个连续动态环境下的真实前沿,从而直接作为这些环境下的Pareto解集,以减小计算代价.为合理度量Pareto解的环境适应性,给出了时间鲁棒性和性能鲁棒性定义,并将其转化为两类鲁棒优化模型.引入基于分解的多目标进化优化方法和无惩罚约束处理方法,构建了动态多目标分解鲁棒进化优化方法.特别是基于移动平均预测模型实现了未来动态环境下适应值的多维时间序列预测.基于提出的两类新型性能评价测度,针对8个典型动态测试函数的仿真实验,结果表明该方法得到满足决策者精度要求,且具有较长平均生存时间的动态鲁棒Pareto最优解.





2017, 43(11): 2033-2043.
doi: 10.16383/j.aas.2017.c160559
cstr: 32138.14.j.aas.2017.c160559
摘要:
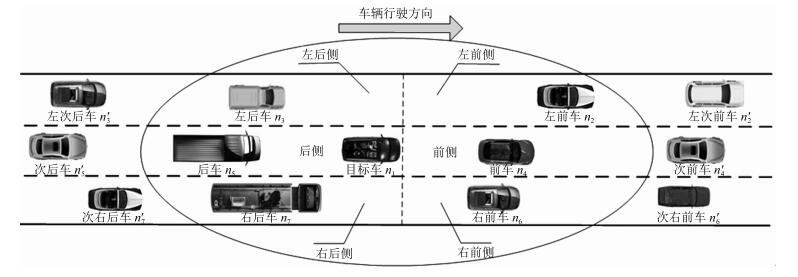
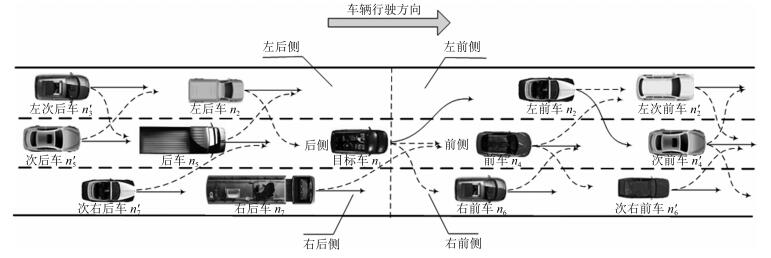
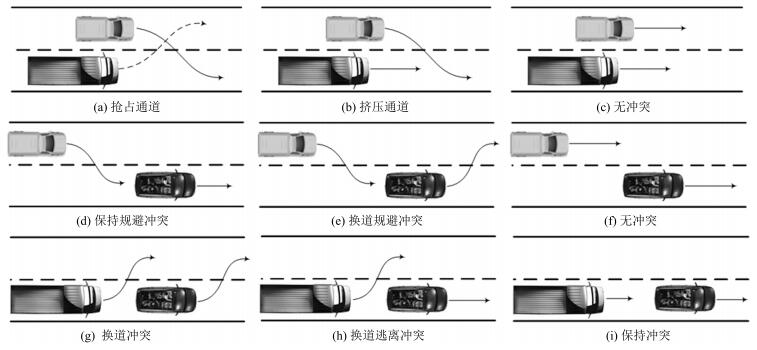
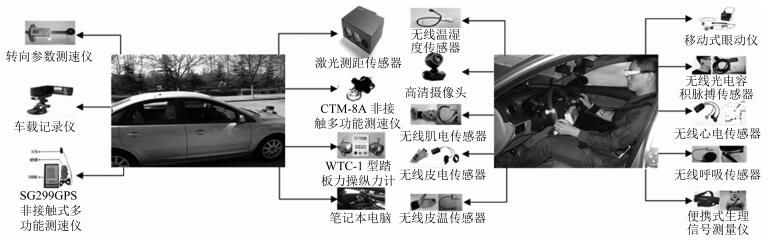
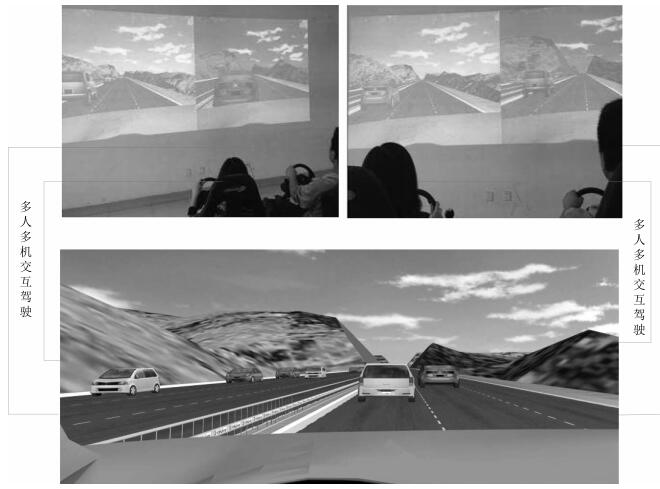
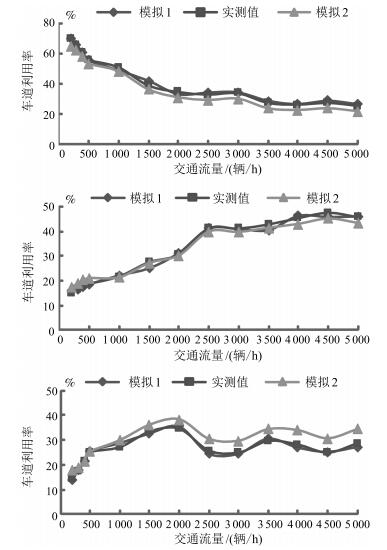
建立汽车安全驾驶辅助系统(包括安全驾驶预警系统)是保证交通安全的有效手段.准确预测车辆集群态势是汽车安全辅助驾驶的前提,车道选择是车辆集群态势发生转移最为根本的原因,也是交通流理论研究的基本内容.以往研究没有综合考虑车辆集群复杂态势下各运动实体特征及其操控者类型,以及多个车道间车辆的冲突对车道选择的影响.为此,本文综合考虑各运动实体特征及其操控者类型,基于混合模糊多人多目标非合作博弈方法,建立城市快速路基本路段上的驾驶员车道选择模型.通过分析各方驾驶员在不同车道选择策略下的收益,确定换道博弈的Nash均衡,得到驾驶员最优车道选择策略.研究结果表明:基于混合模糊多人多目标非合作博弈方法建构的驾驶员车道选择模型,其预测准确率可达到85.2%.
建立汽车安全驾驶辅助系统(包括安全驾驶预警系统)是保证交通安全的有效手段.准确预测车辆集群态势是汽车安全辅助驾驶的前提,车道选择是车辆集群态势发生转移最为根本的原因,也是交通流理论研究的基本内容.以往研究没有综合考虑车辆集群复杂态势下各运动实体特征及其操控者类型,以及多个车道间车辆的冲突对车道选择的影响.为此,本文综合考虑各运动实体特征及其操控者类型,基于混合模糊多人多目标非合作博弈方法,建立城市快速路基本路段上的驾驶员车道选择模型.通过分析各方驾驶员在不同车道选择策略下的收益,确定换道博弈的Nash均衡,得到驾驶员最优车道选择策略.研究结果表明:基于混合模糊多人多目标非合作博弈方法建构的驾驶员车道选择模型,其预测准确率可达到85.2%.



2017, 43(11): 2044-2050.
doi: 10.16383/j.aas.2017.c160094
cstr: 32138.14.j.aas.2017.c160094
摘要:
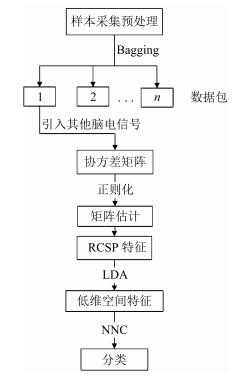
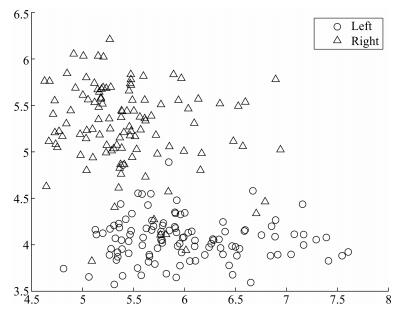
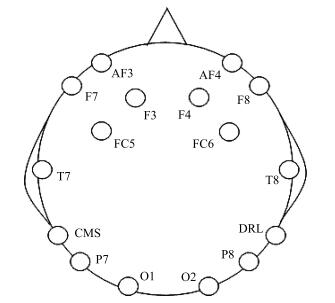
正则化共空间模式(Regularized common spatial pattern,RCSP)解决了共空间模式(Common spatial pattern,CSP)对噪声敏感的问题,但它在小样本脑电数据集中的表现并不理想.针对上述问题,本文提出了Bagging RCSP(BRCSP)算法,通过Bagging方法重复选取训练数据来构造一个个包,并提取RCSP特征,再利用线性判别分析(Linear discriminant analysis,LDA)将特征向量映射到低维空间中,最后采用最近邻(Nearest neighborhood classifier,NNC)算法判定分类结果.线下实验证明,相比较聚合正则化共空间模式(RCSP with aggregation,RCSP-A),BRCSP的平均准确率提高了2.92%,且方差更小,鲁棒性更好.最后,在智能轮椅平台上,10位受试者利用BRCSP算法实现左右手运动想象脑电信号控制轮椅完成"8"字形路径的实验,证明了该算法在脑电信号特征提取中的有效性.
正则化共空间模式(Regularized common spatial pattern,RCSP)解决了共空间模式(Common spatial pattern,CSP)对噪声敏感的问题,但它在小样本脑电数据集中的表现并不理想.针对上述问题,本文提出了Bagging RCSP(BRCSP)算法,通过Bagging方法重复选取训练数据来构造一个个包,并提取RCSP特征,再利用线性判别分析(Linear discriminant analysis,LDA)将特征向量映射到低维空间中,最后采用最近邻(Nearest neighborhood classifier,NNC)算法判定分类结果.线下实验证明,相比较聚合正则化共空间模式(RCSP with aggregation,RCSP-A),BRCSP的平均准确率提高了2.92%,且方差更小,鲁棒性更好.最后,在智能轮椅平台上,10位受试者利用BRCSP算法实现左右手运动想象脑电信号控制轮椅完成"8"字形路径的实验,证明了该算法在脑电信号特征提取中的有效性.




2017, 43(11): 2051-2060.
doi: 10.16383/j.aas.2017.c160273
cstr: 32138.14.j.aas.2017.c160273
摘要:
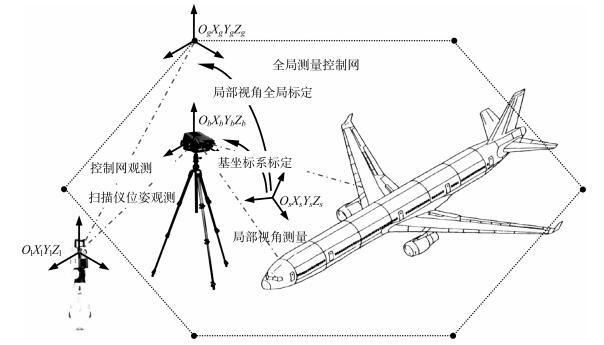
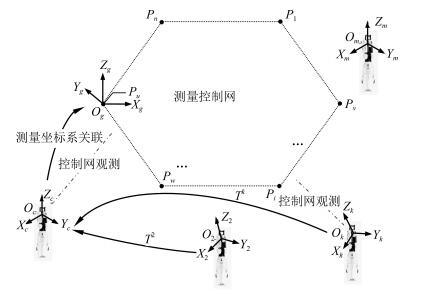
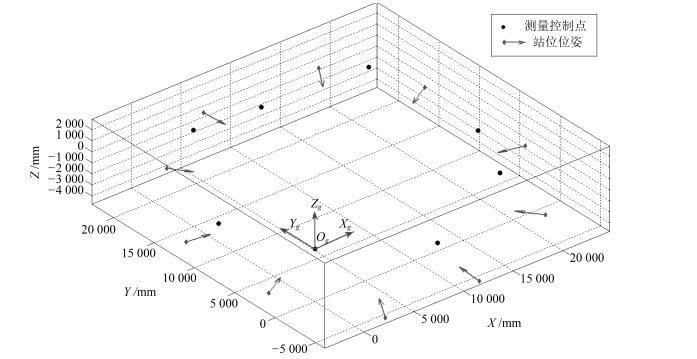
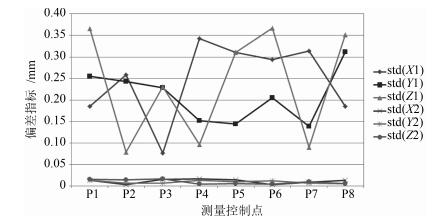
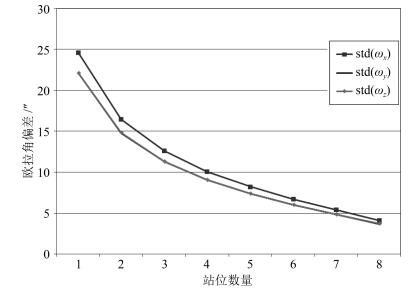
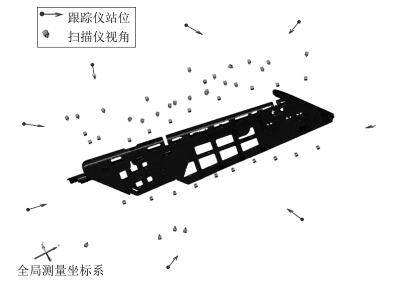
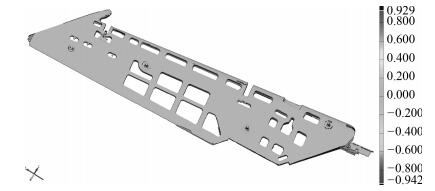
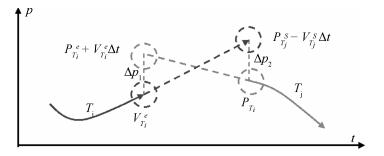
为解决大尺寸复杂形状全局测量与局部精度控制的矛盾,提出以大空间测量设备为全局控制手段,集成终端近距离测量设备的组合测量、全局标定与数据融合方法.在多站位下观测测量控制网以获取冗余观测数据,利用测量平差优化技术完成控制网的高精度标定.建立全局测量坐标系与测量控制网的物理关联,实现测量空间基准定义的唯一性.布设扫描仪观测目标并建立基准坐标系,为扫描仪位姿空间定位提供观测目标.建立扫描仪坐标映射模型,基于平差优化技术完成模型的高精度标定.测量过程中通过移动扫描仪获取多视角精密测量数据,利用激光跟踪仪完成局部视角位姿的动态跟踪,结合控制网的坐标观测实现局部视角测量数据的全局标定与数据融合.实验结果表明,所提出的组合测量与标定方法有效地拓展了测量空间并控制了全局测量误差,同时避免了额外标定设备与标定操作的介入对测量工作的干扰.
为解决大尺寸复杂形状全局测量与局部精度控制的矛盾,提出以大空间测量设备为全局控制手段,集成终端近距离测量设备的组合测量、全局标定与数据融合方法.在多站位下观测测量控制网以获取冗余观测数据,利用测量平差优化技术完成控制网的高精度标定.建立全局测量坐标系与测量控制网的物理关联,实现测量空间基准定义的唯一性.布设扫描仪观测目标并建立基准坐标系,为扫描仪位姿空间定位提供观测目标.建立扫描仪坐标映射模型,基于平差优化技术完成模型的高精度标定.测量过程中通过移动扫描仪获取多视角精密测量数据,利用激光跟踪仪完成局部视角位姿的动态跟踪,结合控制网的坐标观测实现局部视角测量数据的全局标定与数据融合.实验结果表明,所提出的组合测量与标定方法有效地拓展了测量空间并控制了全局测量误差,同时避免了额外标定设备与标定操作的介入对测量工作的干扰.