

-
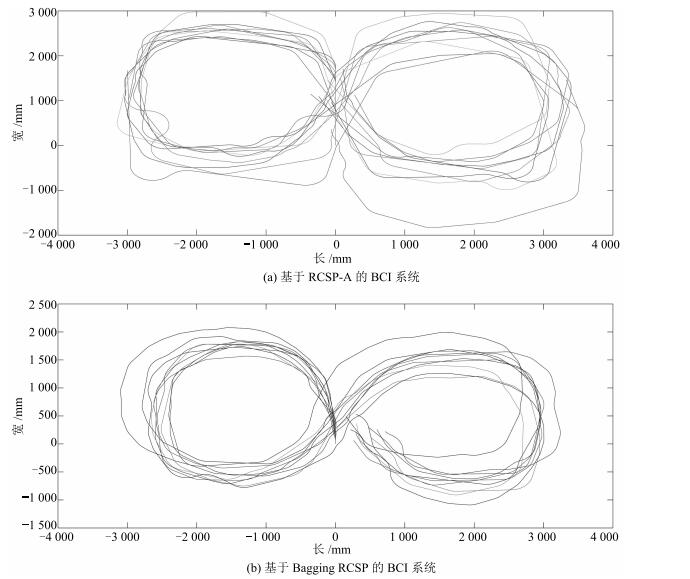
摘要: 正则化共空间模式(Regularized common spatial pattern,RCSP)解决了共空间模式(Common spatial pattern,CSP)对噪声敏感的问题,但它在小样本脑电数据集中的表现并不理想.针对上述问题,本文提出了Bagging RCSP(BRCSP)算法,通过Bagging方法重复选取训练数据来构造一个个包,并提取RCSP特征,再利用线性判别分析(Linear discriminant analysis,LDA)将特征向量映射到低维空间中,最后采用最近邻(Nearest neighborhood classifier,NNC)算法判定分类结果.线下实验证明,相比较聚合正则化共空间模式(RCSP with aggregation,RCSP-A),BRCSP的平均准确率提高了2.92%,且方差更小,鲁棒性更好.最后,在智能轮椅平台上,10位受试者利用BRCSP算法实现左右手运动想象脑电信号控制轮椅完成"8"字形路径的实验,证明了该算法在脑电信号特征提取中的有效性.
-
关键词:
- 脑电信号 /
- 特征提取 /
- RCSP-A /
- Bagging RCSP
Abstract: The regularized common spatial pattern (RCSP) has solved the problem that the common spatial pattern (CSP) is sensitive to noise. However, its performance on small sample of electro encephalon graph (EEG) data set is not ideal. To deal with this problem, a Bagging RCSP (BRCSP) algorithm is proposed, which divides training samples into packets and extracts RCSP features by Bagging to choose training packets. Furthermore, the feature vector is projected into the lower space with linear discriminant analysis (LDA) and a classification algorithm based on nearest neighborhood classifier (NNC) is adopted. Compared to RCSP with aggregation (RCSP-A), the accuracy of BRCSP increases by 2.92% in average and the variance is smaller and has better robustness. Results of the experiment, in which 10 subjects control an intelligent wheelchair of a fixed "8" glyph trajectory, demonstrate that the BRCSP is effective in the EEG feature extraction.-
Key words:
- Electro encephalon graph (EEG) /
- feature extraction /
- RCSP-A /
- Bagging RCSP
1) 本文责任编委 赵新刚 -
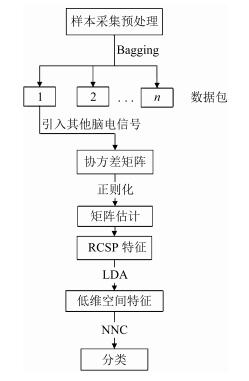
图 1 基于Bagging RCSP的左右手运动想象脑电信号处理过程
Fig. 1 The process of EEG induced by the left hand and right hand motor imagery based on Bagging RCSP
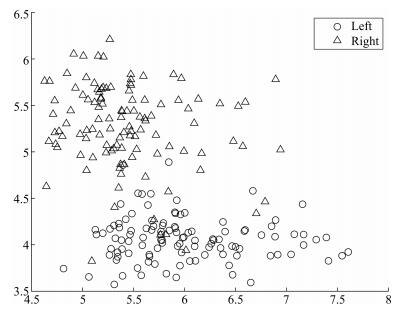
图 3 左右手运动想象脑电信号的特征值分布
Fig. 3 The distribution of eigenvalue of EEG induced by the left hand and right hand motor imagery
表 1 CSP、RCSP和Bagging RCSP在BCI Competition Ⅲ数据集IVa上的识别率比较
Table 1 The recognition rate comparison of CSP, RCSP and Bagging RCSP on Competition Ⅲ data set IVa (%)
算法 aa al av aw ay 平均 耗时(s) CSP 66.1 98.2 59.2 88.4 61.1 74.6 5.5 LW-CSP 69.6 100.0 56.6 93.3 67.1 77.3 17.6 SSCSP 73.2 96.4 54.8 70.5 73.4 73.5 6.7 RCSP-A 76.8 98.2 74.5 92.9 77.0 83.9 62.2 FERCSP 79.5 96.4 77.6 94.2 82.5 86.0 300.3 BRCSP 79.3 98.6 78.3 92.9 82.5 86.3 63.3  下载: 导出CSV
下载: 导出CSV
表 2 RCSP-A和BRCSP算法下的离线识别率(%)
Table 2 The recognition rate of off-line based on RCSP-A and BRCSP (%)
受试者 RCSP-A BRCSP A1 80.53 86.16 A2 95.81 93.04 A3 75.56 81.08 A4 84.74 87.56 A5 78.06 83.61 A6 87.78 90.56 A7 84.72 87.50 A8 93.83 96.06 A9 85.42 87.56 A10 76.29 78.78
下载: 导出CSV
表 3 RCSP-A和BRCSP算法的t-test结果
Table 3 The result of t-test based on RCSP-A and BRCSP
RCSP-A BRCSP 均值 0.842740 0.871910 标准差 0.0691799 0.0523412 相关系数 0.955 t -3.741 df 9 sig. (双侧) 0.005
下载: 导出CSV
-
[1] Wolpaw J R, Birbaumer N, McFarland D J, Pfurtscheller G, Vaughan T M. Brain-computer interfaces for communication and control. Clinical Neurophysiology, 2002, 113(6):767-791 doi: 10.1016/S1388-2457(02)00057-3 [2] 王行愚, 金晶, 张宇, 王蓓.脑控:基于脑——机接口的人机融合控制.自动化学报, 2013, 39(3):208-221 http://www.aas.net.cn/CN/abstract/abstract17800.shtmlWang Xing-Yu, Jin Jing, Zhang Yu, Wang Bei. Brain control:human-computer integration control based on brain-computer interface. Acta Automatica Sinica, 2013, 39(3):208-221 http://www.aas.net.cn/CN/abstract/abstract17800.shtml [3] Iturrate I, Antelis J M, Kübler A, Minguez J. A noninvasive brain-actuated wheelchair based on a P300 neurophysiological protocol and automated navigation. IEEE Transactions on Robotics, 2009, 25(3):614-627 doi: 10.1109/TRO.2009.2020347 [4] 伏云发, 徐保磊, 李永程, 李洪谊, 王越超, 余正涛.基于运动相关皮层电位握力运动模式识别研究.自动化学报, 2014, 40(6):1045-1057 http://www.aas.net.cn/CN/abstract/abstract18374.shtmlFu Yun-Fa, Xu Bao-Lei, Li Yong-Cheng, Li Hong-Yi, Wang Yue-Chao, Yu Zheng-Tao. Recognition of actual grip force movement modes based on movement-related cortical potentials. Acta Automatica Sinica, 2014, 40(6):1045-1057 http://www.aas.net.cn/CN/abstract/abstract18374.shtml [5] 张毅, 杨柳, 李敏, 罗元.基于AR和SVM的运动想象脑电信号识别.华中科技大学学报(自然科学版), 2011, 39(S2):103-106 http://d.wanfangdata.com.cn/Conference/7642363Zhang Yi, Yang Liu, Li Min, Luo Yuan. Recognition of motor imagery EEG based on AR and SVM. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2011, 39(S2):103-106 http://d.wanfangdata.com.cn/Conference/7642363 [6] Hsu W Y. EEG-based motor imagery classification using neuro-fuzzy prediction and wavelet fractal features. Journal of Neuroscience Methods, 2010, 189(2):295-302 doi: 10.1016/j.jneumeth.2010.03.030 [7] 孙会文, 伏云发, 熊馨, 杨俊, 刘传伟, 余正涛.基于HHT运动想象脑电模式识别研究.自动化学报, 2015, 41(9):1686-1692 http://www.aas.net.cn/CN/abstract/abstract18742.shtmlSun Hui-Wen, Fu Yun-Fa, Xiong Xin, Yang Jun, Liu Chuan-Wei, Yu Zheng-Tao. Identification of EEG induced by motor imagery based on Hilbert-Huang transform. Acta Automatica Sinica, 2015, 41(9):1686-1692 http://www.aas.net.cn/CN/abstract/abstract18742.shtml [8] Reuderink B, Poel M. Robustness of the Common Spatial Patterns Algorithm in the BCI-pipeline. Centre for Telematics and Information Technology, University of Twente, Twente, Netherlands, 2008. https://research.utwente.nl/en/publications/robustness-of-the-common-spatial-patterns-algorithm-in-the-bci-pi [9] Kang H, Nam Y, Choi S. Composite common spatial pattern for subject-to-subject transfer. IEEE Signal Processing Letters, 2009, 16(8):683-686 doi: 10.1109/LSP.2009.2022557 [10] Arvaneh M, Guan C T, Ang K K, Quek H C. Spatially sparsed common spatial pattern to improve BCI performance. In:Proceedings of the 2011 IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP). Prague, Czech Republic:IEEE, 2011. 2412-2415 http://ieeexplore.ieee.org/document/5946970/ [11] Lotte F, Guan C. Regularizing common spatial patterns to improve BCI designs:unified theory and new algorithms. IEEE Transactions on Biomedical Engineering, 2011, 58(2):355-362 doi: 10.1109/TBME.2010.2082539 [12] Su Y X, Li Y L, Wang S J. Filter ensemble regularized common spatial pattern for EEG classification. In:Proceedings of the 7th International Conference on Digital Image Processing (ICDIP15). Los Angeles, USA:SPIE, 2015. Article No. 963124 http://proceedings.spiedigitallibrary.org/article.aspx?articleid=2389141 [13] Ang K K, Chin Z Y, Zhang H, Guan C T. Filter bank common spatial pattern (FBCSP) in brain-computer interface. In:Proceedings of the 2008 IEEE International Joint Conference on Neural Networks, 2008. Hong Kong, China:IEEE, 2008. 2390-2397 https://www.mendeley.com/research-papers/filter-bank-common-spatial-pattern-fbcsp-braincomputer-interface-5/ [14] Data set IVa for the BCI competition Ⅲ[Online], available:http://www.bbci.de/competition/iii/, December 18, 2015 [15] Tangermann M, Müller K R, Aertsen A, Birbaumer N, Braun C, Brunner C, Leeb R, Mehring C, Miller K J, Müller-Putz G R, Nolte G, Pfurtscheller G, Preissl H, Schalk G, Schlögl A, Vidaurre C, Waldert S, Blankertz B. Review of the BCI competition Ⅳ. Frontiers in Neuroscience, 2012, 6:Article No. 55 http://europepmc.org/articles/PMC3396284 [16] Bamdadian A, Guan C T, Ang K K, Xu J X. Online semi-supervised learning with KL distance weighting for motor imagery-based BCI. In:Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). San Diego, CA, USA:IEEE, 2012. 2732-2735 http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=6346529 [17] Long J Y, Li Y Q, Wang H T, Yu T Y, Pan J H, Li F. A hybrid brain computer interface to control the direction and speed of a simulated or real wheelchair. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2012, 20(5):720-729 doi: 10.1109/TNSRE.2012.2197221 [18] Yoo J, Yan L, El-Damak D, Altaf M A B, Shoeb A H, Chandrakasan A P. An 8-channel scalable EEG acquisition SoC with patient-specific seizure classification and recording processor. IEEE Journal of Solid-State Circuits, 2013, 48(1):214-228 doi: 10.1109/JSSC.2012.2221220 [19] Neu D, Mairesse O, Verbanck P, Linkowski P, Le Bon O. Non-REM sleep EEG power distribution in fatigue and sleepiness. Journal of Psychosomatic Research, 2014, 76(4):286-291 doi: 10.1016/j.jpsychores.2014.02.002 -

 下载:
下载:




计量
- 文章访问数: 2685
- HTML全文浏览量: 571
- PDF下载量: 470
- 被引次数: 0
