

-
摘要: 提出了一种基于无模型自适应控制的无人驾驶汽车横向控制方案.首先,将无人驾驶汽车循迹跟踪控制问题转化成预瞄偏差角跟踪问题,然后基于无人驾驶汽车横向控制系统的动态线性化数据模型,设计出无模型自适应控制算法、伪梯度估计算法和伪梯度重置算法,进而实现了自主车辆的无人驾驶.该方法的实现仅用到无人驾驶汽车运行时的输入输出数据,避免了对无人驾驶汽车进行复杂机理建模的难题,对于复杂的无人驾驶汽车运行过程具有很好的自适应性,对不同的无人驾驶车辆具有较强的可移植性.该方案已实际应用于清华大学无人驾驶汽车实验平台,在北京市丰台区的实地测试实验、在江苏省常熟市高速路的测试以及2015年"中国智能车未来挑战赛"的现场应用验证了所提方案的有效性.Abstract: In this paper, a control scheme based on model free adaptive control is proposed for the lateral control problem of self-driving car. First, the trajectory tracking problem for self-driving car is converted into the stabilization problem concerning a preview-deviation-yaw. Then, the lateral control system of the self-driving car is converted into a virtual dynamical linearization data model via a novel dynamic linearization technique. After that, a model free adaptive control algorithm, and its corresponding pseudo gradient estimating algorithm and pseudo gradient resetting algorithm are designed, such that the automatic drive of the self-driving car can be realized. The implementation of the proposed method only utilizes the input and output data of the self-driving car, avoiding complex modeling of the self-driving car. Thus, it has good adaptability to complex operation processes of self-driving car and is also applicable to other self-driving cars. Furthermore, the proposed scheme is employed in the experimental platform of self-driving car developed by Tsinghua University. Finally, the effectiveness of the proposed method is verified via the field tests in Fengtai District, Beijing, the field tests in the freeway of Changshu, Jiangsu, and the field applications in "2015 Chinese Intelligent Car Future Challenge Competition".1) 本文责任编委 魏庆来
-
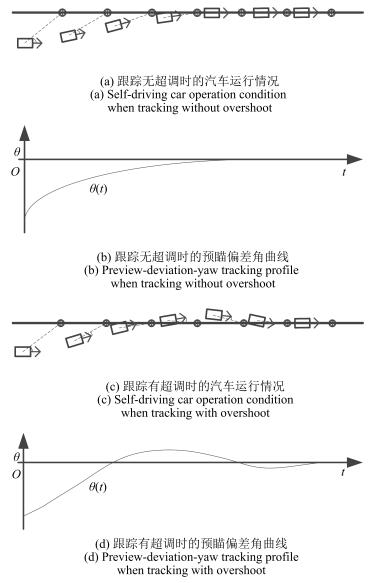
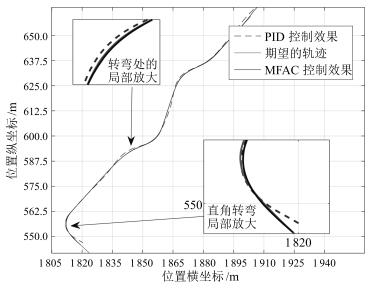
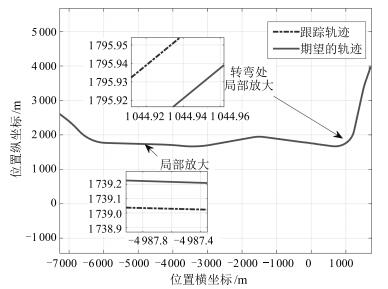
图 5 预瞄偏差角跟踪情况与汽车运行情况图
Fig. 5 Preview-deviation-yaw tracking condition and self-driving car operation condition
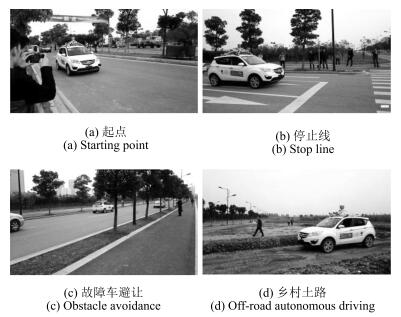
图 14 2015年“中国智能车未来挑战赛”部分项目
Fig. 14 Several competition items at "2015 Chinese Intelligent Car Future Challenge"
表 1 定位定姿和环境感知设备的作用
Table 1 Navigation and environmental perception equipments
常用设备 作用 64线激光雷达 感知周边环境信息 4线激光雷达 探测障碍物 GPS天线 定位以获取当前汽车位置信息 黑白摄像头 检测车道线 彩色摄像头 获取路口红绿灯、交通标志信息 毫米波雷达 检测汽车前方障碍物信息 其他车载传感器 检测汽车速度、汽车加速度等  下载: 导出CSV
下载: 导出CSV
表 2 常用概念符号意义
Table 2 The meaning of common concepts and symbols
图示符号 意义 $ O$, $E$, $N$ 坐标原点、正东方、正北方 $\alpha$ 汽车航向角(汽车运行方向与正北方向夹角) $\beta$ 预瞄点航向角(预瞄点运动方向与正北方向夹角) $l$ 预瞄距离 $len$ 当前点和预瞄点之间的距离 $LD$ 汽车预瞄点与汽车运行方向延长线的距离 $AD$ 预瞄点航向角与汽车航向角的差 $X$ 汽车当前点与预瞄点运行方向延长线的距离 $\theta$ 当前点与预瞄点连线和汽车运行方向形成的角度
下载: 导出CSV
表 3 汽车状态数据符号及意义
Table 3 Symbols and meanings of self-driving car0s state data
符号 意义 $x$, $y$, $\alpha$ 汽车当前点的横坐标、纵坐标、航向角 $x^*$, $y^*$, $\beta$ 预瞄点的横坐标、纵坐标、航向角 $v$ 汽车当前的纵向速度 $a$ 汽车当前的纵向加速度 $w$ 汽车当前点航向角的角速度
下载: 导出CSV
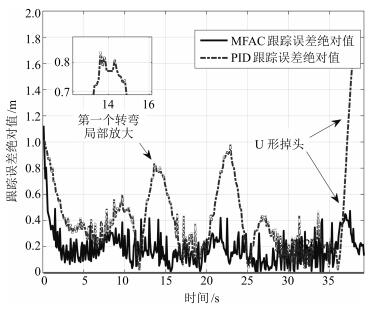
表 4 两种控制算法性能对比列表
Table 4 The performance of two control algorithms
项目 PID MFAC 预瞄偏差角最大绝对值(rad) 0.5945 0.4828 预瞄偏差角均方根 0.2259 0.1498 跟踪误差的均方根 0.5257 0.3320 建立时间(s) 8 5
下载: 导出CSV
-
[1] 陈虹, 宫洵, 胡云峰, 刘奇芳, 高炳钊, 郭洪艳.汽车控制的研究现状与展望.自动化学报, 2013, 39(4):322-346 http://www.aas.net.cn/CN/abstract/abstract17932.shtmlChen Hong, Gong Xun, Hu Yun-Feng, Liu Qi-Fang, Gao Bing-Zhao, Guo Hong-Yan. Automotive control:the state of the art and perspective. Acta Automatica Sinica, 2013, 39(4):322-346 http://www.aas.net.cn/CN/abstract/abstract17932.shtml [2] Jo K, Kim J, Kim D, Jang C, Sunwoo M. Development of autonomous car, Part Ⅰ:distributed system architecture and development process. IEEE Transactions on Industrial Electronics, 2014, 61(12):7131-7140 doi: 10.1109/TIE.2014.2321342 [3] 郭景华, 罗禹贡, 李克强.智能电动车辆横纵向协调与重构控制.控制理论与应用, 2014, 31(9):1238-1244 http://d.wanfangdata.com.cn/Periodical/kzllyyy201409013Guo Jing-Hua, Luo Yu-Gong, Li Ke-Qiang. Cooperative and reconfigurable lateral and longitudinal control of intelligent electric vehicles. Control Theory and Applications, 2014, 31(9):1238-1244 http://d.wanfangdata.com.cn/Periodical/kzllyyy201409013 [4] Yanakiev D, Kanellakopoulos I. Longitudinal control of automated CHVs with significant actuator delays. IEEE Transactions on Vehicular Technology, 2001, 50(5):1289-1297 doi: 10.1109/25.950330 [5] Xia Y Q, Pu F, Li S F, Gao Y. Lateral path tracking control of autonomous land vehicle based on ADRC and differential flatness. IEEE Transactions on Industrial Electronics, 2016, 63(5):3091-3099 doi: 10.1109/TIE.2016.2531021 [6] Wu S J, Chiang H H, Perng J W, Chen C J, Wu B F, Lee T T. The heterogeneous systems integration design and implementation for lane keeping on a vehicle. IEEE Transactions on Intelligent Transportation Systems, 2008, 9(2):246-263 doi: 10.1109/TITS.2008.922874 [7] Falcone P, Borrelli F, Asgari J, Tseng H E, Hrovat D. Predictive active steering control for autonomous vehicle systems. IEEE Transactions on Control Systems Technology, 2007, 15(3):566-580 doi: 10.1109/TCST.2007.894653 [8] Sotelo M A. Lateral control strategy for autonomous steering of Ackerman-like vehicles. Robotics and Autonomous Systems, 2003, 45(3-4):223-233 doi: 10.1016/j.robot.2003.09.002 [9] Pérez J, Milanés V, Onieva E. Cascade architecture for lateral control in autonomous vehicles. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(1):73-82 doi: 10.1109/TITS.2010.2060722 [10] Guardabassi G O, Savaresi S M. Virtual reference direct design method:an off-line approach to data-based control system design. IEEE Transactions on Automatic Control, 2000, 45(5):954-959 doi: 10.1109/9.855559 [11] Campi M C, Lecchini A, Savaresi S M. Virtual reference feedback tuning:a direct method for the design of feedback controllers. Automatica, 2002, 38(8):1337-1346 doi: 10.1016/S0005-1098(02)00032-8 [12] 张吉烈, 张化光, 罗艳红, 梁洪晶.基于广义模糊双曲模型的自适应动态规划最优控制设计.自动化学报, 2013, 39(2):142-149 http://www.aas.net.cn/CN/abstract/abstract17824.shtmlZhang Ji-Lie, Zhang Hua-Guang, Luo Yan-Hong, Liang Hong-Jing. Nearly optimal control scheme using adaptive dynamic programming based on generalized fuzzy hyperbolic model. Acta Automatica Sinica, 2013, 39(2):142-149 http://www.aas.net.cn/CN/abstract/abstract17824.shtml [13] Zhang J L, Zhang H G, Liu Z W, Wang Y C. Model-free optimal controller design for continuous-time nonlinear systems by adaptive dynamic programming based on a precompensator. ISA Transactions, 2015, 57:63-70 doi: 10.1016/j.isatra.2014.08.018 [14] Wei Q L, Liu D R, Yang X. Infinite horizon self-learning optimal control of nonaffine discrete-time nonlinear systems. IEEE Transactions on Neural Networks and Learning Systems, 2015, 26(4):866-879 doi: 10.1109/TNNLS.2015.2401334 [15] Wei Q L, Liu D R, Lin H Q. Value iteration adaptive dynamic programming for optimal control of discrete-time nonlinear systems. IEEE Transactions on Cybernetics, 2016, 46(3):840-853 doi: 10.1109/TCYB.2015.2492242 [16] 侯忠生, 许建新.数据驱动控制理论及方法的回顾和展望.自动化学报, 2009, 35(6):650-667 http://www.aas.net.cn/CN/abstract/abstract13327.shtmlHou Zhong-Sheng, Xu Jian-Xin. On data-driven control theory:the state of the art and perspective. Acta Automatica Sinica, 2009, 35(6):650-667 http://www.aas.net.cn/CN/abstract/abstract13327.shtml [17] Xu J X, Hou Z S. Notes on data-driven system approaches. Acta Automatica Sinica, 2009, 35(6):668-675 https://www.sciencedirect.com/science/article/pii/S1874102908600907 [18] Hou Z S, Jin S T. Model Free Adaptive Control:Theory and Applications. Boca Raton, USA:CRC Press, 2014. [19] Lu C, Zhao Y, Men K, Tu L, Han Y D. Wide-area power system stabiliser based on model-free adaptive control. IET Control Theory and Applications, 2015, 9(13):1996-2007 doi: 10.1049/iet-cta.2014.1289 [20] Pang Z H, Liu G P, Zhou D H, Sun D H. Data-based predictive control for networked nonlinear systems with network-induced delay and packet dropout. IEEE Transactions on Industrial Electronics, 2016, 63(2):1249-1257 doi: 10.1109/TIE.2015.2497206 [21] Wang X F, Li X, Wang J H, Fang X K, Zhu X F. Data-driven model-free adaptive sliding mode control for the multi degree-of-freedom robotic exoskeleton. Information Sciences, 2016, 327:246-257 doi: 10.1016/j.ins.2015.08.025 [22] Zhang H G, Zhou J G, Sun Q Y, Guerrero J M, Ma D Z. Data-driven control for interlinked AC/DC microgrids via model-free adaptive control and dual-droop control. IEEE Transactions on Smart Grid, 2015, DOI:10.1109/TSG.2015. 2500269 [23] 侯忠生, 董航瑞, 金尚泰.基于坐标补偿的自动泊车系统无模型自适应控制.自动化学报, 2015, 41(4):823-831 http://d.wanfangdata.com.cn/Periodical/zdhxb201504013Hou Zhong-Sheng, Dong Hang-Rui, Jin Shang-Tai. Model-free adaptive control with coordinates compensation for automatic car parking systems. Acta Automatica Sinica, 2015, 41(4):823-831 http://d.wanfangdata.com.cn/Periodical/zdhxb201504013 [24] Su K F, Deng Z D, Huang Z. Novel SLAM algorithm for UGVs based on unscented Kalman filtering. In:Proceedings of the 2012 IEEE International Conference on Computer Science and Automation Engineering (CSAE). Zhangjiajie, China:IEEE, 2012. 63-67 https://www.mendeley.com/research-papers/novel-slam-algorithm-ugvs-based-unscented-kalman-filtering/ [25] Yao W T, Deng Z D, Zhou L P. Road curb detection using 3D lidar and integral laser points for intelligent vehicles. In:Proceedings of the Joint 6th International Conference on Soft Computing and Intelligent Systems (SCIS) and 13th International Symposium on Advanced Intelligent Systems (ISIS). Kobe, Japan:IEEE, 2012. 100-105 http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=6505310 [26] Yao W T, Deng Z D. Robust real-time lane marking detection for intelligent vehicles in urban environment. Advances in Automation and Robotics. Berlin Heidelberg, Germany:Springer-Verlag, 2012. 421-428 [27] Møgelmose A, Trivedi M M, Moeslund T B. Vision-based traffic sign detection and analysis for intelligent driver assistance systems:perspectives and survey. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(4):1484-1497 doi: 10.1109/TITS.2012.2209421 [28] Ungoren A Y, Peng H. An adaptive lateral preview driver model. Vehicle System Dynamics, 2005, 43(4):245-259 doi: 10.1080/00423110412331290419 [29] Sales K R, Billings S A. Self-tuning control of non-linear ARMAX models. International Journal of Control, 1990, 51(4):753-769 doi: 10.1080/00207179008934096 [30] Pröll T, Karim M N. Real-time design of an adaptive nonlinear predictive controller. International Journal of Control, 1994, 59(3):863-889 doi: 10.1080/00207179408923108 [31] Chen S, Billings S A. Representations of non-linear systems:the NARMAX model. International Journal of Control, 1989, 49(3):1013-1032 doi: 10.1080/00207178908559683 -

 下载:
下载:






计量
- 文章访问数: 4238
- HTML全文浏览量: 1333
- PDF下载量: 1591
- 被引次数: 0
