2019年 第45卷 第4期
2019, 45(4): 637-656.
doi: 10.16383/j.aas.2018.c180274
cstr: 32138.14.j.aas.2018.c180274
摘要:
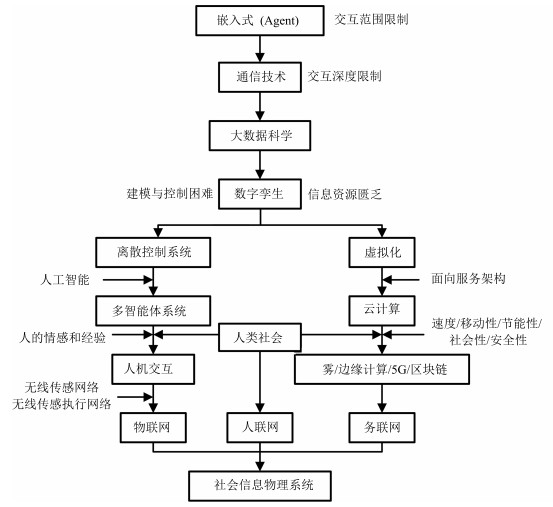
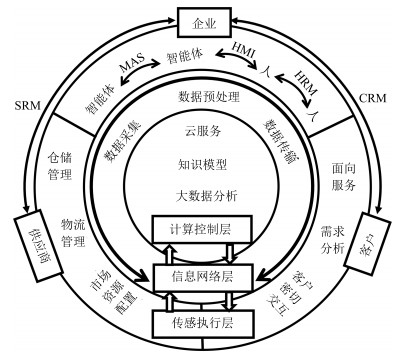
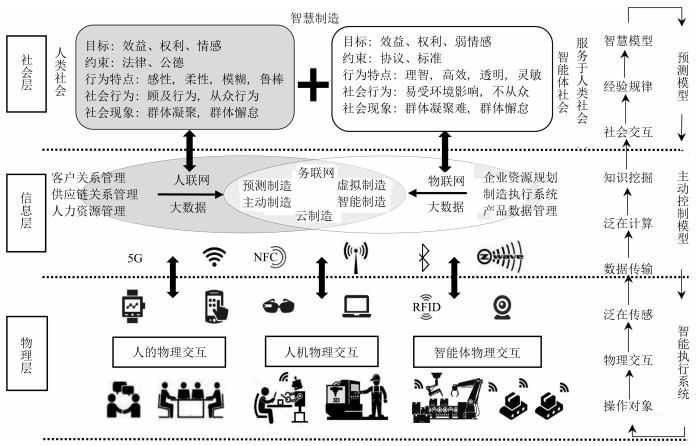
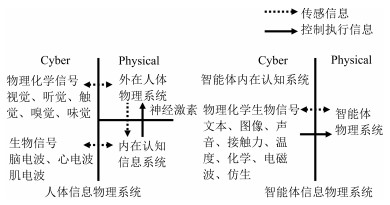
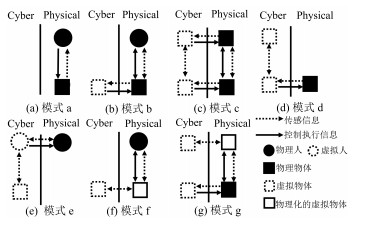
随着信息物理系统(Cyber-physical system,CPS)融合深度和融合广度的不断增加,信息物理生产系统(Cyber-physical production system,CPPS)呈现出显著的社会化趋势.通过对信息物理生产系统相关技术的研究,分析了信息物理生产系统的社会化演进历程,建立了社会信息物理生产系统(Social cyber-physical production system,SCPPS)模型;根据人与智能体的信息物理交互行为差异,基于对人类社会行为特点的分析,类比研究了智能体社会与人类社会融合的广义互联社会特点;归纳出信息物理系统的七种交互模式及其在社会信息物理生产系统中的应用;总结出社会信息物理生产系统面临标准化、人性化和安全化的挑战问题.
随着信息物理系统(Cyber-physical system,CPS)融合深度和融合广度的不断增加,信息物理生产系统(Cyber-physical production system,CPPS)呈现出显著的社会化趋势.通过对信息物理生产系统相关技术的研究,分析了信息物理生产系统的社会化演进历程,建立了社会信息物理生产系统(Social cyber-physical production system,SCPPS)模型;根据人与智能体的信息物理交互行为差异,基于对人类社会行为特点的分析,类比研究了智能体社会与人类社会融合的广义互联社会特点;归纳出信息物理系统的七种交互模式及其在社会信息物理生产系统中的应用;总结出社会信息物理生产系统面临标准化、人性化和安全化的挑战问题.
2019, 45(4): 657-668.
doi: 10.16383/j.aas.2018.c180236
cstr: 32138.14.j.aas.2018.c180236
摘要:
基于单幅图像的物体三维重建是计算机视觉领域的一个重要问题,近几十年来得到了广泛的关注.随着深度学习的不断发展,近年来基于单幅图像的物体三维重建取得了显著进展.本文对深度学习在基于单幅图像的物体三维重建领域的研究进展及具体应用进行了综述.首先介绍了基于单幅图像的三维重建的研究背景及其传统方法的研究现状,其次简要介绍了深度学习并详细综述了深度学习在基于单幅图像的物体三维重建中的应用,随后简要概述了三维物体重建的常用公共数据集,最后进行了分析与总结,指出了目前存在的问题及未来的研究方向.
基于单幅图像的物体三维重建是计算机视觉领域的一个重要问题,近几十年来得到了广泛的关注.随着深度学习的不断发展,近年来基于单幅图像的物体三维重建取得了显著进展.本文对深度学习在基于单幅图像的物体三维重建领域的研究进展及具体应用进行了综述.首先介绍了基于单幅图像的三维重建的研究背景及其传统方法的研究现状,其次简要介绍了深度学习并详细综述了深度学习在基于单幅图像的物体三维重建中的应用,随后简要概述了三维物体重建的常用公共数据集,最后进行了分析与总结,指出了目前存在的问题及未来的研究方向.
2019, 45(4): 669-681.
doi: 10.16383/j.aas.2018.c170261
cstr: 32138.14.j.aas.2018.c170261
摘要:
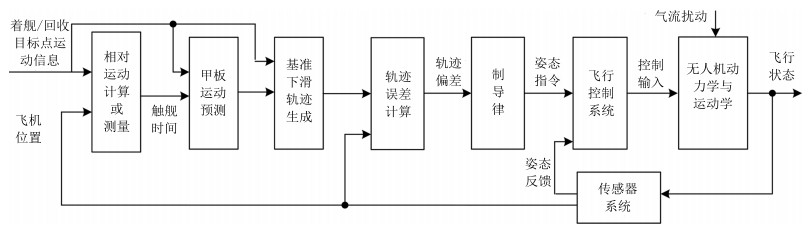
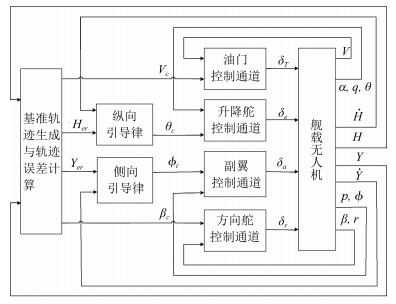
舰载无人机正成为未来海战的重要组成部分,制导与控制是舰载无人机自主着舰/回收的关键技术.本文综述了舰载无人机自主着舰/回收制导与控制技术.概述了舰载无人机的发展历史,简单描述了舰载无人机跑道拦阻着舰、撞网回收、伞降回收、绳钩回收、天钩回收、过失速着舰、智能飞落着舰、风向筒回收、秋千式吊架回收等典型着舰回收方式.在深入分析无人机自主着舰/回收制导与控制关键问题的基础上,重点概述了无人机着舰/回收经典制导与现代制导技术,以及着舰/回收经典控制、现代控制、非线性与自适应控制、智能控制等飞行控制技术的研究现状.最后,对无人机自主着舰/回收制导与控制技术的发展状况进行总结,并对未来研究重点进行展望.
舰载无人机正成为未来海战的重要组成部分,制导与控制是舰载无人机自主着舰/回收的关键技术.本文综述了舰载无人机自主着舰/回收制导与控制技术.概述了舰载无人机的发展历史,简单描述了舰载无人机跑道拦阻着舰、撞网回收、伞降回收、绳钩回收、天钩回收、过失速着舰、智能飞落着舰、风向筒回收、秋千式吊架回收等典型着舰回收方式.在深入分析无人机自主着舰/回收制导与控制关键问题的基础上,重点概述了无人机着舰/回收经典制导与现代制导技术,以及着舰/回收经典控制、现代控制、非线性与自适应控制、智能控制等飞行控制技术的研究现状.最后,对无人机自主着舰/回收制导与控制技术的发展状况进行总结,并对未来研究重点进行展望.

2019, 45(4): 682-692.
doi: 10.16383/j.aas.2018.c180269
cstr: 32138.14.j.aas.2018.c180269
摘要:
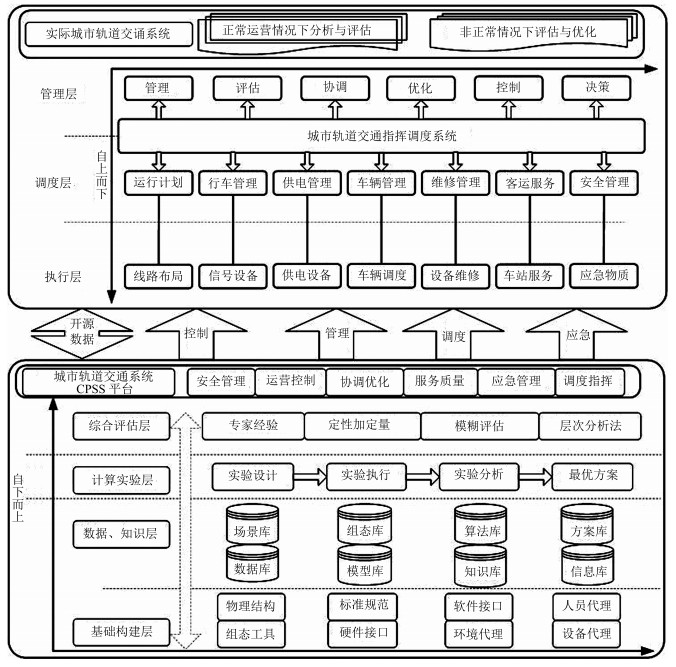
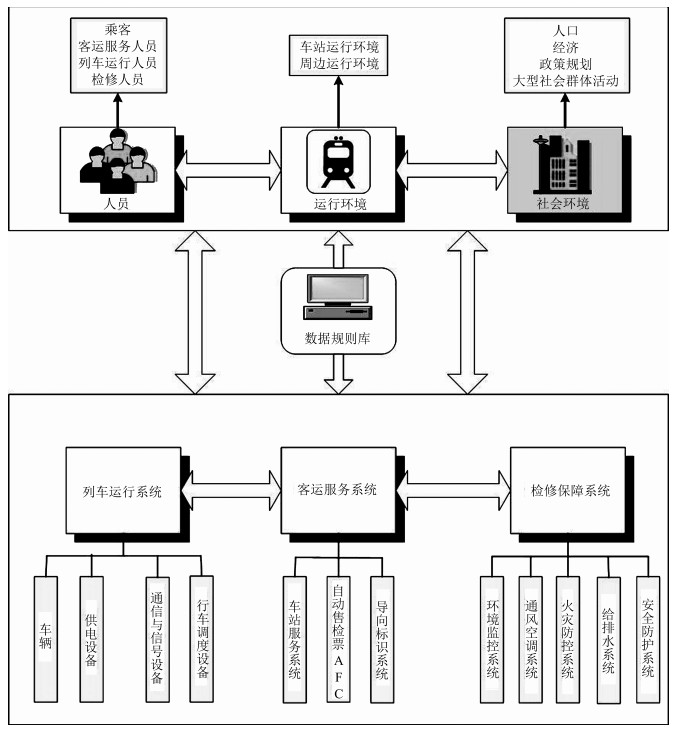
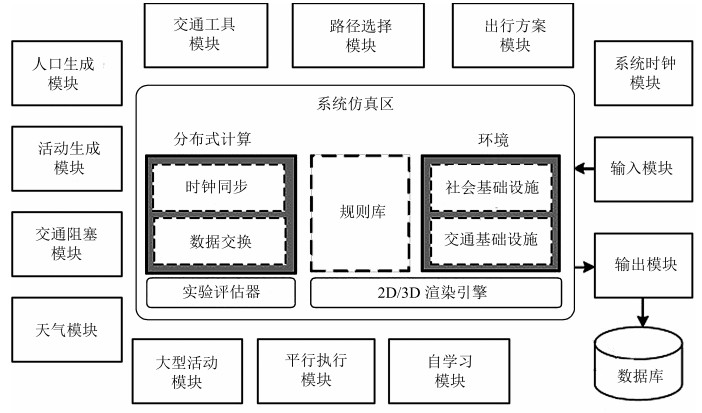
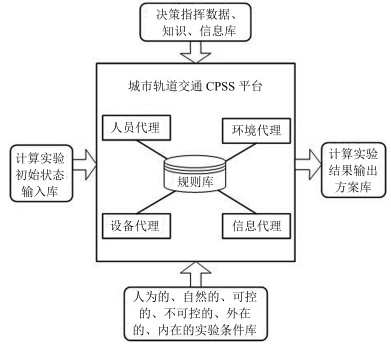
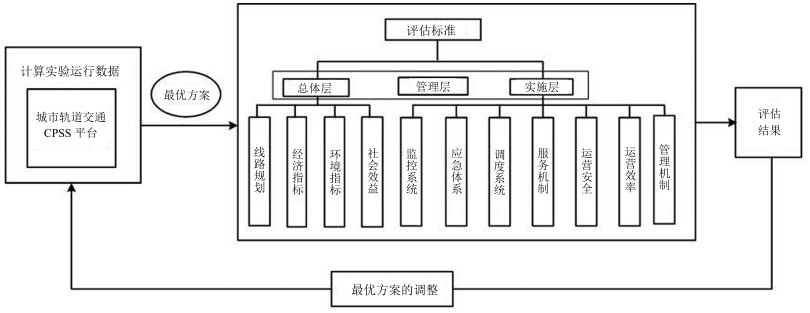
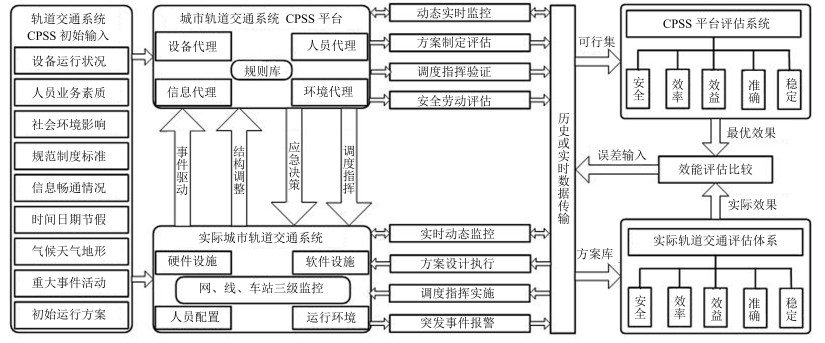
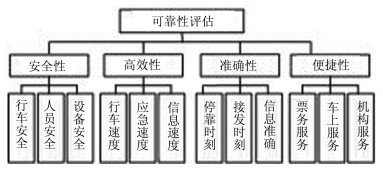
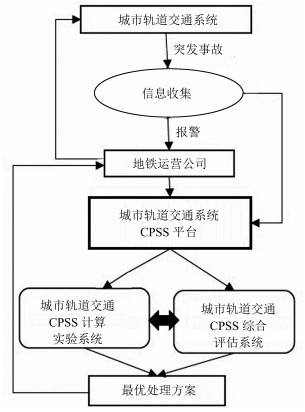
城市轨道交通系统同时涉及工程复杂性和社会复杂性,呈现动态性、开放性、交互性、自主性等特征,是社会物理信息系统(Cyber-physical-social system,CPSS)的典型代表,传统的仿真技术难以对其进行全面的研究和分析.本文研究并构建了城市轨道交通CPSS平台(包括物理系统模型、社会系统模型、Cyber系统模型),建立相应的计算实验平台和综合评估系统,描述其详细功能.通过CPSS平台可进行各种极限和常规实验,对城市轨道交通在正常情况下的评估优化和在突发事故下的应急管理进行研究,提高对城市轨道交通的建模、评估、分析和优化能力,还可为运行方案评估与规划、城市轨道交通设计、应急预案评价与优化、人员培训等方面提供技术支持.
城市轨道交通系统同时涉及工程复杂性和社会复杂性,呈现动态性、开放性、交互性、自主性等特征,是社会物理信息系统(Cyber-physical-social system,CPSS)的典型代表,传统的仿真技术难以对其进行全面的研究和分析.本文研究并构建了城市轨道交通CPSS平台(包括物理系统模型、社会系统模型、Cyber系统模型),建立相应的计算实验平台和综合评估系统,描述其详细功能.通过CPSS平台可进行各种极限和常规实验,对城市轨道交通在正常情况下的评估优化和在突发事故下的应急管理进行研究,提高对城市轨道交通的建模、评估、分析和优化能力,还可为运行方案评估与规划、城市轨道交通设计、应急预案评价与优化、人员培训等方面提供技术支持.


2019, 45(4): 693-705.
doi: 10.16383/j.aas.2018.c170397
cstr: 32138.14.j.aas.2018.c170397
摘要:
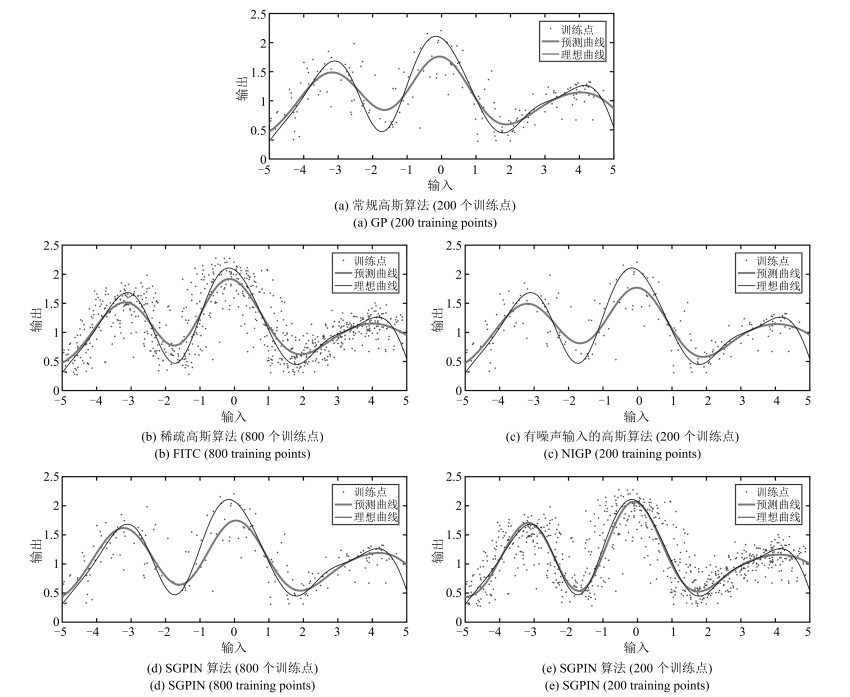
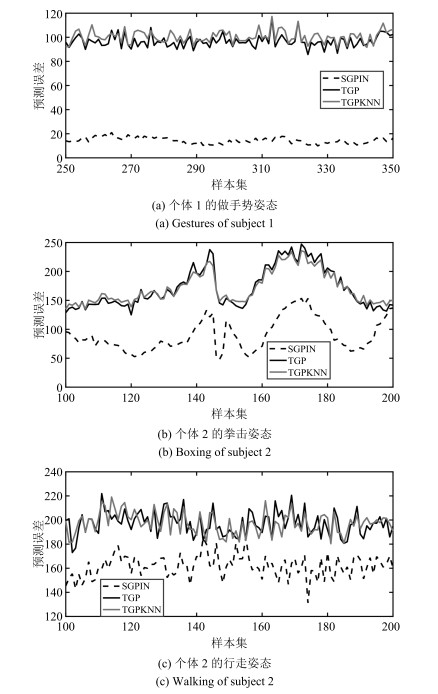
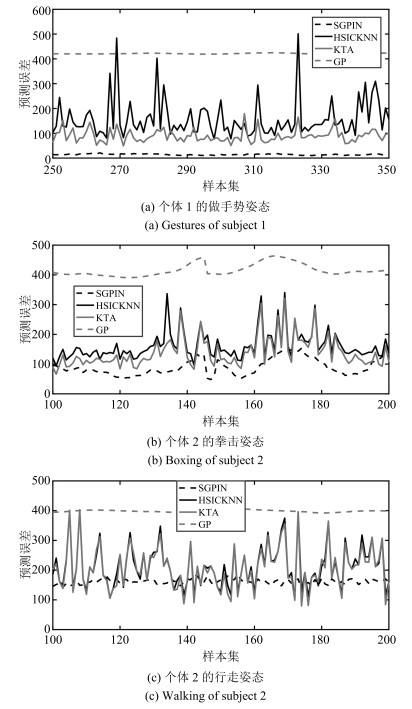
高斯过程回归(Gaussian process regression,GPR)是一种广泛应用的回归方法,可以用于解决输入输出均为多元变量的人体姿态估计问题.计算复杂度是高斯过程回归的一个重要考虑因素,而常用的降低计算复杂度的方法为稀疏表示算法.在稀疏算法中,完全独立训练条件(Fully independent training conditional,FITC)法是一种较为先进的算法,多用于解决输入变量彼此之间完全独立的回归问题.另外,输入变量的噪声问题是高斯过程回归的另一个需要考虑的重要因素.对于测试的输入变量噪声,可以通过矩匹配的方法进行解决,而训练输入样本的噪声则可通过将其转换为输出噪声的方法进行解决,从而得到更高的计算精度.本文基于以上算法,提出一种基于噪声输入的稀疏高斯算法,同时将其应用于解决人体姿态估计问题.本文实验中的数据集来源于之前的众多研究人员,其输入为从视频序列中截取的图像或通过特征提取得到的图像信息,输出为三维的人体姿态.与其他算法相比,本文的算法在准确性,运行时间与算法稳定性方面均达到了令人满意的效果.
高斯过程回归(Gaussian process regression,GPR)是一种广泛应用的回归方法,可以用于解决输入输出均为多元变量的人体姿态估计问题.计算复杂度是高斯过程回归的一个重要考虑因素,而常用的降低计算复杂度的方法为稀疏表示算法.在稀疏算法中,完全独立训练条件(Fully independent training conditional,FITC)法是一种较为先进的算法,多用于解决输入变量彼此之间完全独立的回归问题.另外,输入变量的噪声问题是高斯过程回归的另一个需要考虑的重要因素.对于测试的输入变量噪声,可以通过矩匹配的方法进行解决,而训练输入样本的噪声则可通过将其转换为输出噪声的方法进行解决,从而得到更高的计算精度.本文基于以上算法,提出一种基于噪声输入的稀疏高斯算法,同时将其应用于解决人体姿态估计问题.本文实验中的数据集来源于之前的众多研究人员,其输入为从视频序列中截取的图像或通过特征提取得到的图像信息,输出为三维的人体姿态.与其他算法相比,本文的算法在准确性,运行时间与算法稳定性方面均达到了令人满意的效果.
2019, 45(4): 706-719.
doi: 10.16383/j.aas.c180215
cstr: 32138.14.j.aas.c180215
摘要:
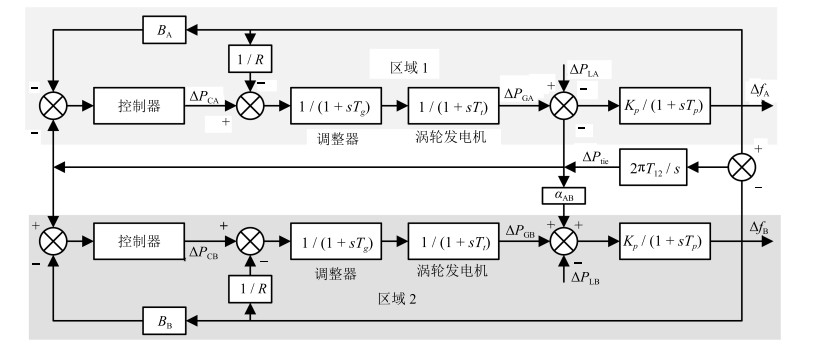
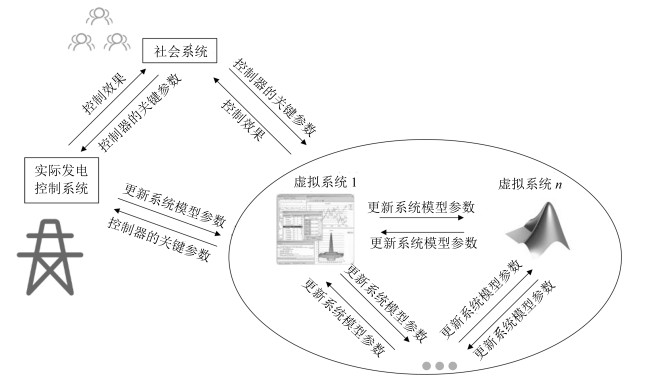
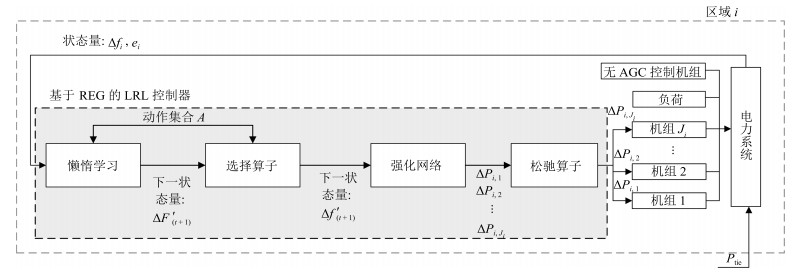
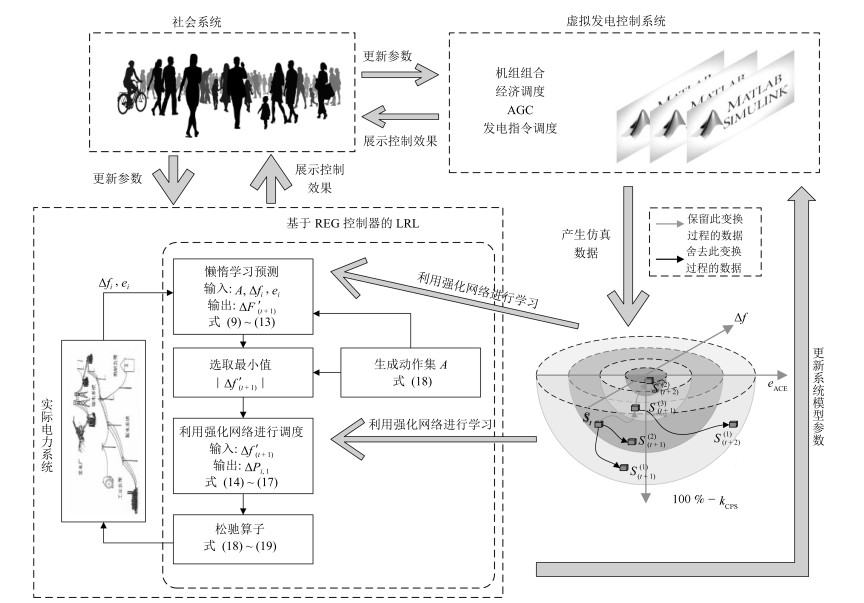
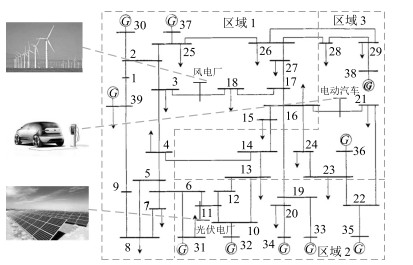
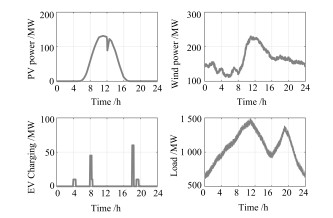
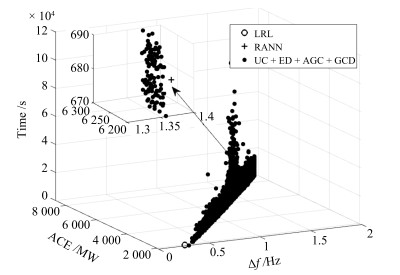
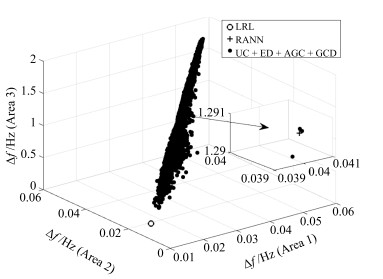
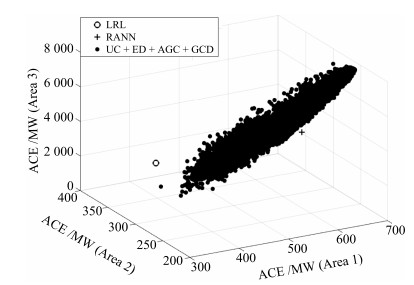
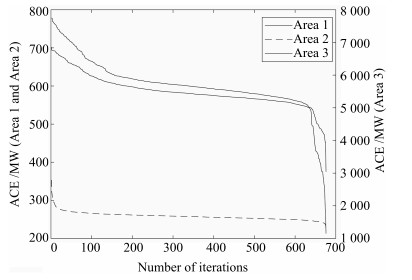
为解决电力系统中存在的多种时间尺度下经济调度和发电控制的协同问题,即长时间尺度下优化,短时间尺度下优化和实时控制的问题,本文提出了一种统一时间尺度的实时经济发电调度和控制框架,并为该框架提出了懒惰强化学习方法(Lazy reinforcement learning,LRL).该方法将懒惰控制器引入以人工社会——计算实验——平行执行和社会系统为基础的强化学习中,使得机组组合,经济调度,自动发电控制和发电命令调配的问题有机结合在一起,取代过去传统的发电控制框架.为了减少仿真所需的真实时间,平行系统包含多个虚拟系统和一个真实系统.仿真实验比较了懒惰学习算法,松弛人工网络以及4608种组合常规发电控制算法在IEEE新英格兰10机39节点仿真系统的控制效果.实验表明,懒惰强化学习方法的控制效果最优.仿真结果验证了懒惰强化学习方法在基于ACP和社会系统的REG框架下具有有效性和可行性.
为解决电力系统中存在的多种时间尺度下经济调度和发电控制的协同问题,即长时间尺度下优化,短时间尺度下优化和实时控制的问题,本文提出了一种统一时间尺度的实时经济发电调度和控制框架,并为该框架提出了懒惰强化学习方法(Lazy reinforcement learning,LRL).该方法将懒惰控制器引入以人工社会——计算实验——平行执行和社会系统为基础的强化学习中,使得机组组合,经济调度,自动发电控制和发电命令调配的问题有机结合在一起,取代过去传统的发电控制框架.为了减少仿真所需的真实时间,平行系统包含多个虚拟系统和一个真实系统.仿真实验比较了懒惰学习算法,松弛人工网络以及4608种组合常规发电控制算法在IEEE新英格兰10机39节点仿真系统的控制效果.实验表明,懒惰强化学习方法的控制效果最优.仿真结果验证了懒惰强化学习方法在基于ACP和社会系统的REG框架下具有有效性和可行性.


2019, 45(4): 720-729.
doi: 10.16383/j.aas.2017.c170318
cstr: 32138.14.j.aas.2017.c170318
摘要:
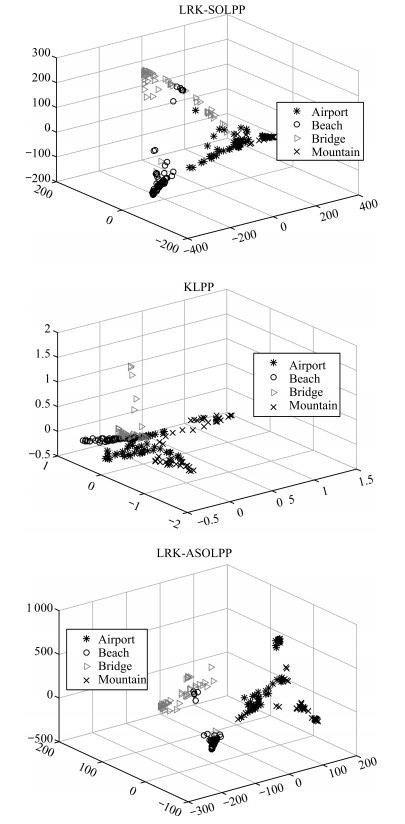
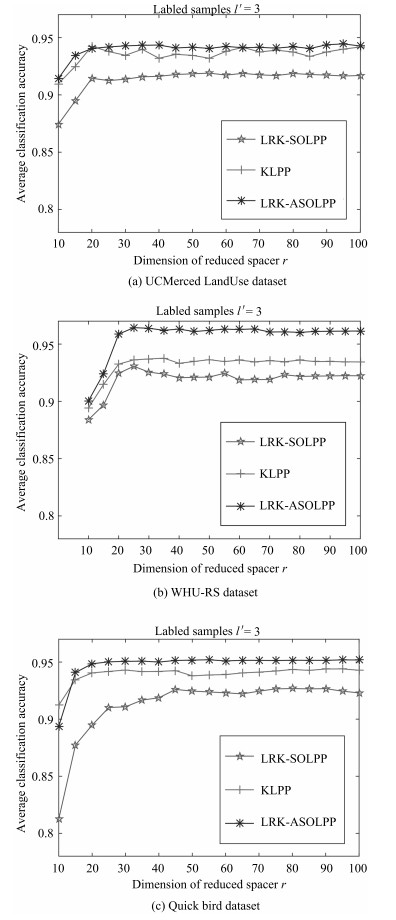
针对传统的流形学习算法不能对位于黎曼流形上的协方差描述子进行有效降维这一问题,本文提出一种推广的流形学习算法,即基于Log-Euclidean黎曼核的自适应半监督正交局部保持投影(Log-Euclidean Riemannian kernel-based adaptive semi-supervised orthogonal locality preserving projection,LRK-ASOLPP),并将其成功用于高分辨率遥感影像目标分类问题.首先,提取图像每个像素点处的几何结构特征,计算图像特征的协方差描述子;其次,通过采用Log-Euclidean黎曼核将协方差描述子投影到再生核Hilbert空间;然后,基于流形学习理论,建立黎曼流形上半监督正交局部保持投影算法模型,利用交替迭代更新算法对目标函数进行优化求解,同时获得相似性权矩阵和低维投影矩阵;最后,利用求得的低维投影矩阵计算测试样本的低维投影,并用K—近邻、支持向量机(Support victor machine,SVM)等分类器对其进行分类.三个高分辨率遥感影像数据集上的实验结果说明了该算法的有效性与可行性.
针对传统的流形学习算法不能对位于黎曼流形上的协方差描述子进行有效降维这一问题,本文提出一种推广的流形学习算法,即基于Log-Euclidean黎曼核的自适应半监督正交局部保持投影(Log-Euclidean Riemannian kernel-based adaptive semi-supervised orthogonal locality preserving projection,LRK-ASOLPP),并将其成功用于高分辨率遥感影像目标分类问题.首先,提取图像每个像素点处的几何结构特征,计算图像特征的协方差描述子;其次,通过采用Log-Euclidean黎曼核将协方差描述子投影到再生核Hilbert空间;然后,基于流形学习理论,建立黎曼流形上半监督正交局部保持投影算法模型,利用交替迭代更新算法对目标函数进行优化求解,同时获得相似性权矩阵和低维投影矩阵;最后,利用求得的低维投影矩阵计算测试样本的低维投影,并用K—近邻、支持向量机(Support victor machine,SVM)等分类器对其进行分类.三个高分辨率遥感影像数据集上的实验结果说明了该算法的有效性与可行性.


2019, 45(4): 730-738.
doi: 10.16383/j.aas.c180398
cstr: 32138.14.j.aas.c180398
摘要:
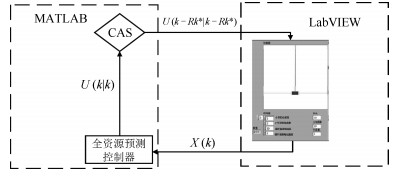
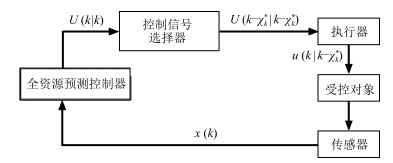
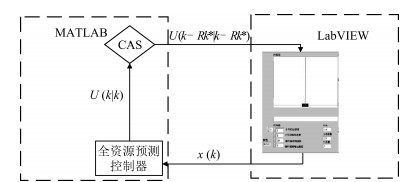
针对具有时变有限且不可预知计算资源的控制系统,提出了一种充分利用可用计算资源的预测控制策略和相应的控制器设计方法.该策略在控制系统可用计算资源充足时计算多步前向预测控制量,进而使用合适预测控制量在控制器因缺少计算资源无法运行时闭合系统,达到了在不要求额外计算资源前提下提升控制系统性能的效果.利用改进的模型预测控制方法设计了相应的控制器,并分别使用纯数值和MATLAB/LabVIEW联合仿真算例对所提出的方法进行了验证.
针对具有时变有限且不可预知计算资源的控制系统,提出了一种充分利用可用计算资源的预测控制策略和相应的控制器设计方法.该策略在控制系统可用计算资源充足时计算多步前向预测控制量,进而使用合适预测控制量在控制器因缺少计算资源无法运行时闭合系统,达到了在不要求额外计算资源前提下提升控制系统性能的效果.利用改进的模型预测控制方法设计了相应的控制器,并分别使用纯数值和MATLAB/LabVIEW联合仿真算例对所提出的方法进行了验证.




2019, 45(4): 739-748.
doi: 10.16383/j.aas.c180377
cstr: 32138.14.j.aas.c180377
摘要:
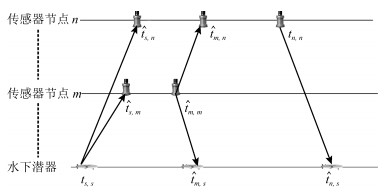
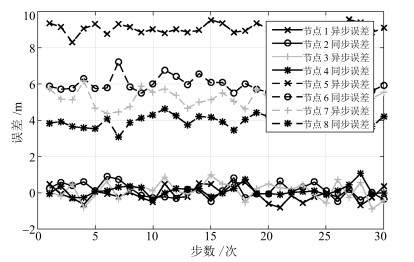
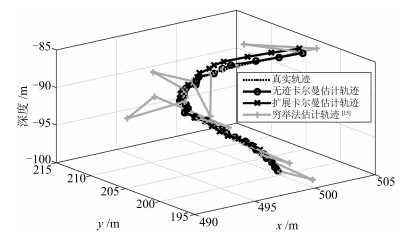
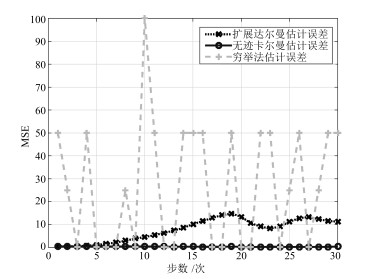
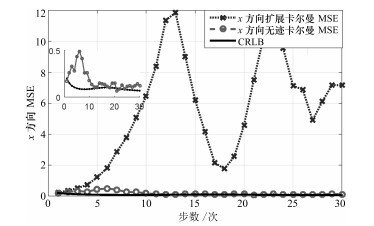
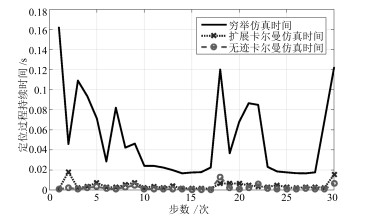
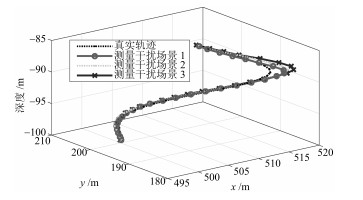
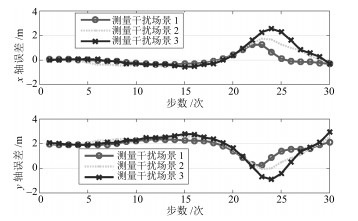
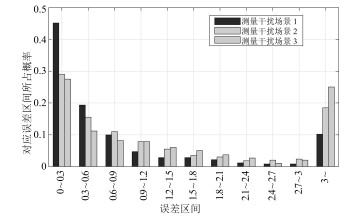
在异步时钟下研究了一种基于信息物理融合的水下潜器协同定位问题.首先,构建了由浮标、传感器和潜器组成的水下信息物理融合系统架构.然后,考虑水下异步时钟影响,设计了基于传感器与潜器交互通信的异步定位策略,给出了潜器协同定位问题.为求解上述协同定位问题,分别提出了基于扩展卡尔曼滤波(Extended Kalman filter,EKF)与无迹卡尔曼滤波(Unscented Kalman filter,UKF)的水下潜器协同定位算法.最后,对上述定位算法的有界性以及克拉美罗下界(Cramér-Rao lower bound,CRLB)进行了分析.仿真结果表明,上述算法可有效消除异步时钟对水下定位的影响.同时基于无迹卡尔曼滤波的定位算法可提高定位精度.
在异步时钟下研究了一种基于信息物理融合的水下潜器协同定位问题.首先,构建了由浮标、传感器和潜器组成的水下信息物理融合系统架构.然后,考虑水下异步时钟影响,设计了基于传感器与潜器交互通信的异步定位策略,给出了潜器协同定位问题.为求解上述协同定位问题,分别提出了基于扩展卡尔曼滤波(Extended Kalman filter,EKF)与无迹卡尔曼滤波(Unscented Kalman filter,UKF)的水下潜器协同定位算法.最后,对上述定位算法的有界性以及克拉美罗下界(Cramér-Rao lower bound,CRLB)进行了分析.仿真结果表明,上述算法可有效消除异步时钟对水下定位的影响.同时基于无迹卡尔曼滤波的定位算法可提高定位精度.


2019, 45(4): 749-758.
doi: 10.16383/j.aas.c180315
cstr: 32138.14.j.aas.c180315
摘要:
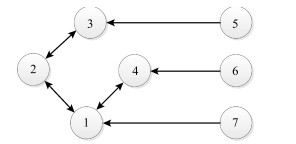
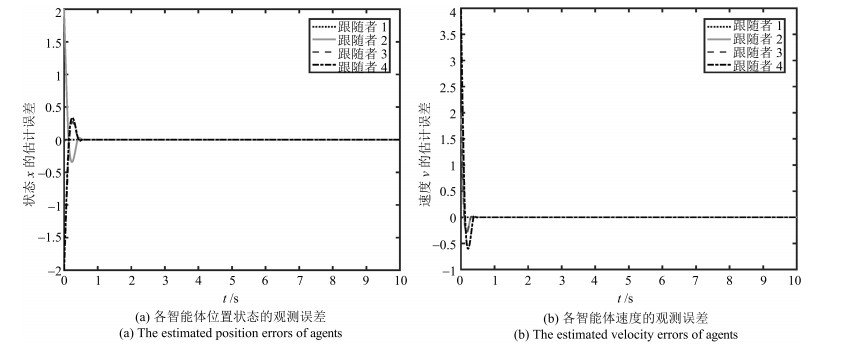
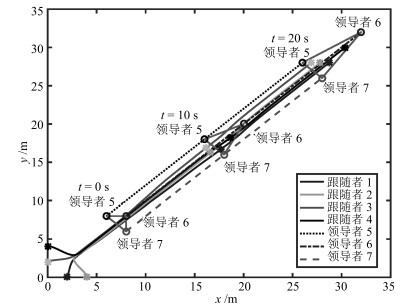
针对动态多智能体系统协同控制问题,本文研究了带有不匹配干扰的二阶多智能体系统的有限时间包容控制,提出了基于非线性积分滑模控制(Integral sliding-mode control,ISMC)的复合分布式包容控制算法.首先利用Lyapunov稳定性和齐次性定理,分析了未受扰系统的有限时间包容控制问题;然后针对存在不匹配干扰的多智能体动态系统,设计非线性有限时间干扰观测器估算智能体的状态和干扰,提出基于干扰观测器的复合分布式积分滑模控制协议,结合现代控制理论和滑模控制理论,研究了带有不匹配干扰的多智能体系统有限时间包容控制问题.最后数值仿真证明了控制算法的有效性.
针对动态多智能体系统协同控制问题,本文研究了带有不匹配干扰的二阶多智能体系统的有限时间包容控制,提出了基于非线性积分滑模控制(Integral sliding-mode control,ISMC)的复合分布式包容控制算法.首先利用Lyapunov稳定性和齐次性定理,分析了未受扰系统的有限时间包容控制问题;然后针对存在不匹配干扰的多智能体动态系统,设计非线性有限时间干扰观测器估算智能体的状态和干扰,提出基于干扰观测器的复合分布式积分滑模控制协议,结合现代控制理论和滑模控制理论,研究了带有不匹配干扰的多智能体系统有限时间包容控制问题.最后数值仿真证明了控制算法的有效性.


2019, 45(4): 759-770.
doi: 10.16383/j.aas.2018.c170552
cstr: 32138.14.j.aas.2018.c170552
摘要:
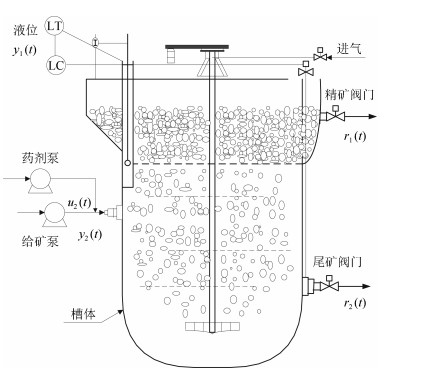
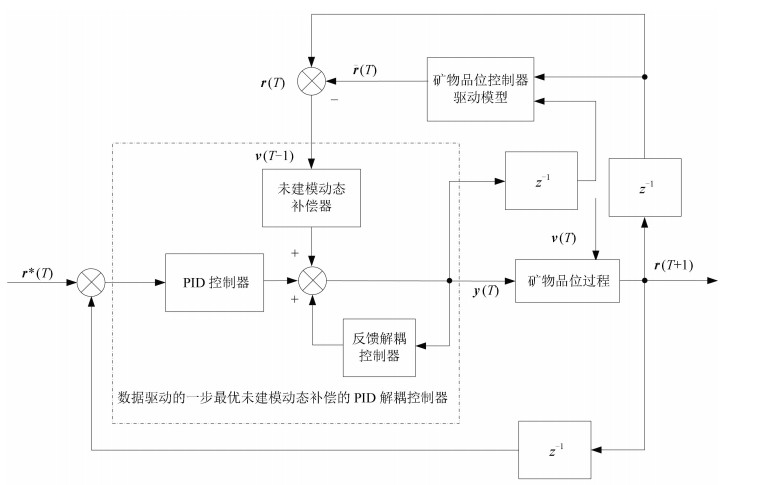
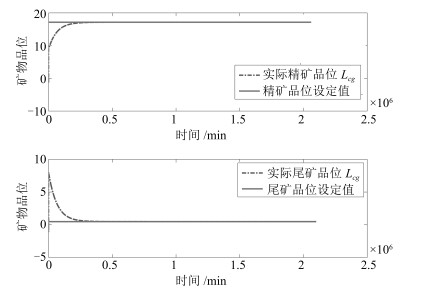
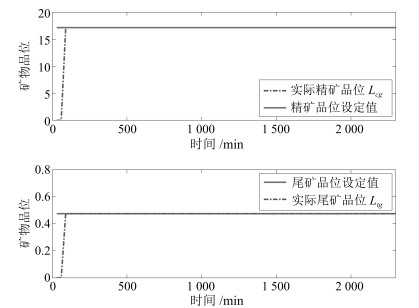
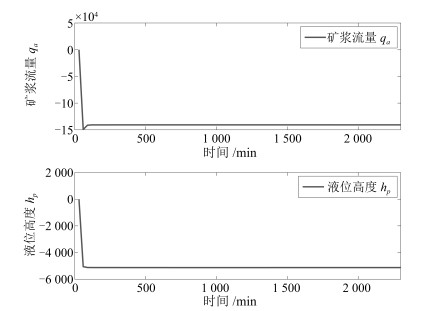
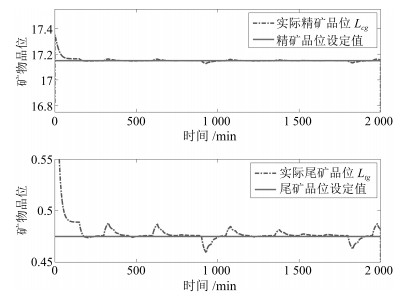
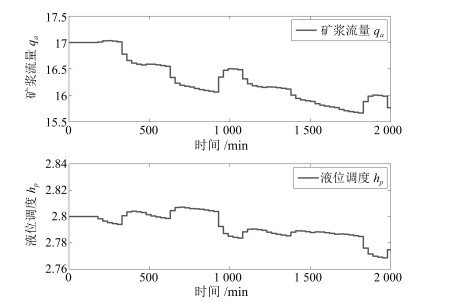
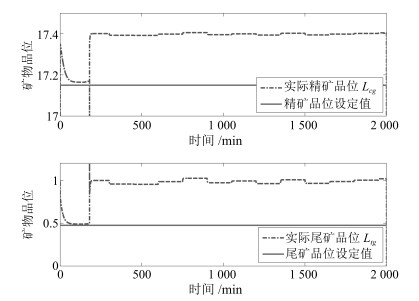
浮选过程是利用矿物本身的亲水或疏气性质或经药剂处理得到的亲水或疏气性质进行矿物分离的物理过程.本文通过建立以矿浆液位和矿浆流量为输入,以浮选过程的精矿品位与尾矿品位为输出的多变量、强耦合、非线性、时变的运行过程模型,利用未建模动态前一拍可测的特点,提出了包括矿物品位运行过程控制器驱动模型、PID控制器、反馈解耦控制器、未建模动态补偿器的数据驱动的一步最优未建模动态补偿PID解耦控制方法,实现了消除稳态误差、静态解耦与未建模动态的补偿,通过浮选过程运行反馈控制仿真实验验证了本文所提方法的有效性.
浮选过程是利用矿物本身的亲水或疏气性质或经药剂处理得到的亲水或疏气性质进行矿物分离的物理过程.本文通过建立以矿浆液位和矿浆流量为输入,以浮选过程的精矿品位与尾矿品位为输出的多变量、强耦合、非线性、时变的运行过程模型,利用未建模动态前一拍可测的特点,提出了包括矿物品位运行过程控制器驱动模型、PID控制器、反馈解耦控制器、未建模动态补偿器的数据驱动的一步最优未建模动态补偿PID解耦控制方法,实现了消除稳态误差、静态解耦与未建模动态的补偿,通过浮选过程运行反馈控制仿真实验验证了本文所提方法的有效性.




2019, 45(4): 771-786.
doi: 10.16383/j.aas.2017.c170221
cstr: 32138.14.j.aas.2017.c170221
摘要:
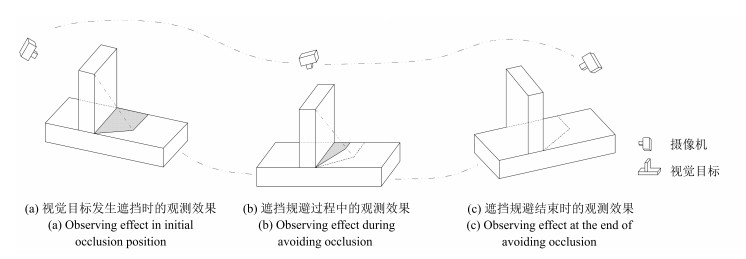
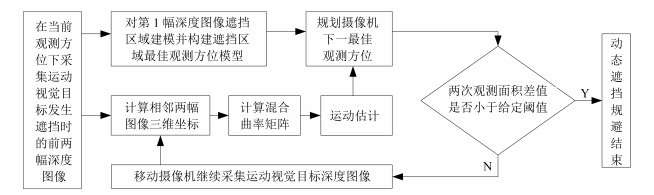
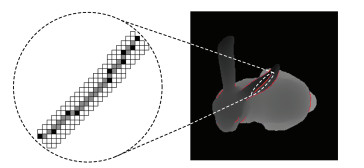
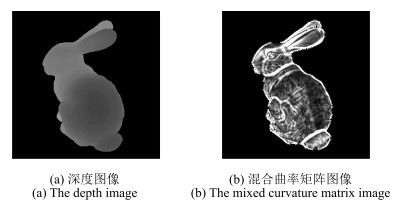
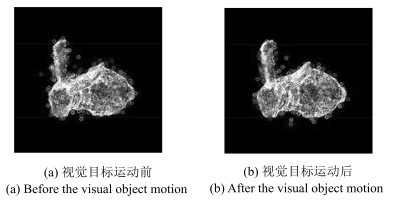
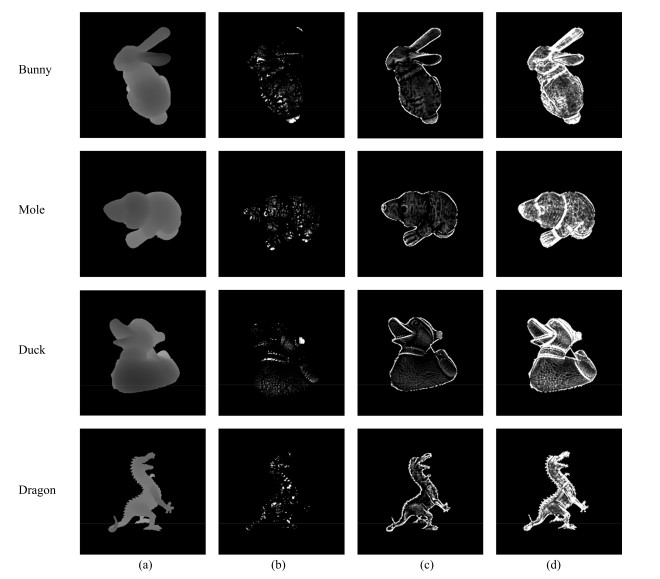
对于运动视觉目标,如何对遮挡区域进行规避是视觉领域一个具有挑战性的问题.本文提出了一种新颖的基于运动视觉目标深度图像利用遮挡信息实现动态遮挡规避的方法.该方法主要利用遮挡区域最佳观测方位模型和视觉目标运动估计方程,通过合理规划摄像机的观测方位逐渐完成对遮挡区域的观测.主要贡献在于:1)提出了深度图像遮挡边界中关键点的概念,利用其构建关键线段对遮挡区域进行快速建模;2)基于关键线段和遮挡区域建模结果,提出了一种构建遮挡区域最佳观测方位模型的方法;3)提出一种混合曲率特征,通过计算深度图像对应的混合曲率矩阵,增加了图像匹配过程中提取特征点的数量,有利于准确估计视觉目标的运动.实验结果验证了所提方法的可行性和有效性.
对于运动视觉目标,如何对遮挡区域进行规避是视觉领域一个具有挑战性的问题.本文提出了一种新颖的基于运动视觉目标深度图像利用遮挡信息实现动态遮挡规避的方法.该方法主要利用遮挡区域最佳观测方位模型和视觉目标运动估计方程,通过合理规划摄像机的观测方位逐渐完成对遮挡区域的观测.主要贡献在于:1)提出了深度图像遮挡边界中关键点的概念,利用其构建关键线段对遮挡区域进行快速建模;2)基于关键线段和遮挡区域建模结果,提出了一种构建遮挡区域最佳观测方位模型的方法;3)提出一种混合曲率特征,通过计算深度图像对应的混合曲率矩阵,增加了图像匹配过程中提取特征点的数量,有利于准确估计视觉目标的运动.实验结果验证了所提方法的可行性和有效性.






2019, 45(4): 787-798.
doi: 10.16383/j.aas.2018.c170419
cstr: 32138.14.j.aas.2018.c170419
摘要:
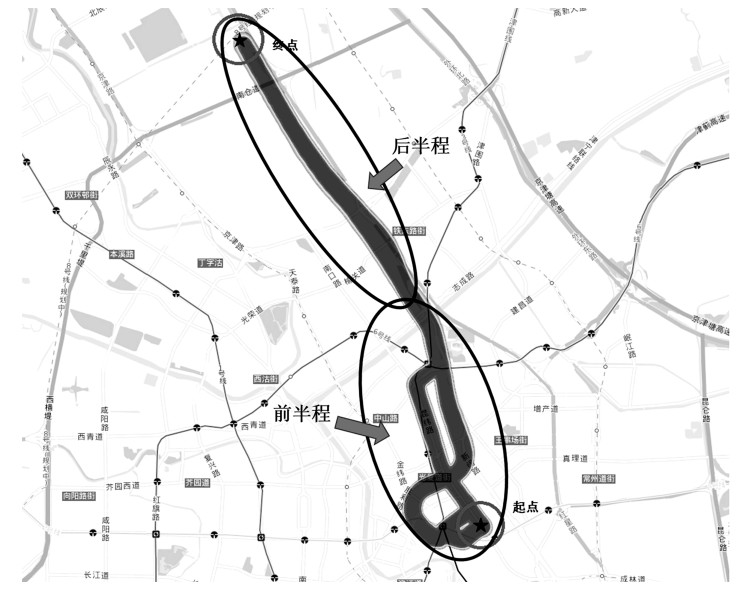
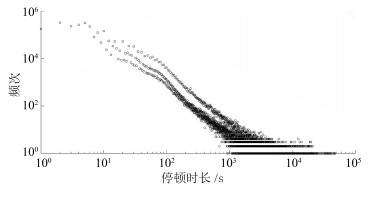
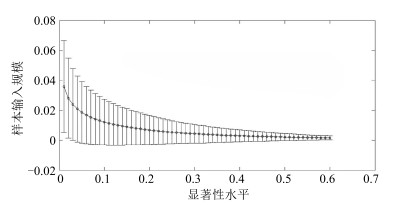
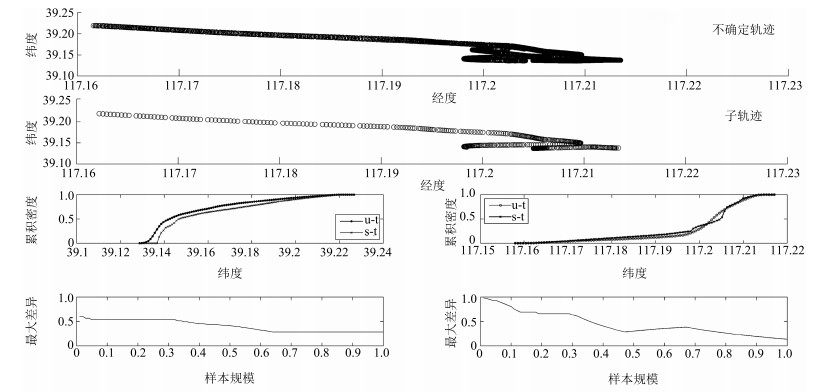
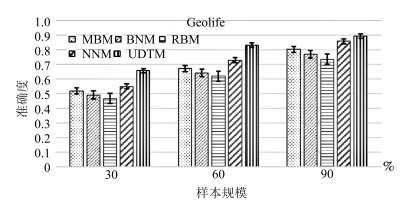
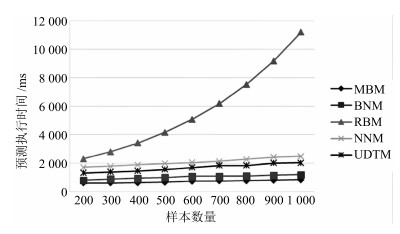
随着大量移动设备的出现,准确和高效的轨迹预测有助于提高面向位置的应用和服务的质量和水平.针对现有方法对轨迹不确定性缺乏有效建模的问题,提出了基于非参数密度估计的不确定轨迹终点预测方法.在轨迹建模及模型训练阶段,利用非参数估计对起点与终点相同的轨迹构建基于密度分布的不确定轨迹模型;在轨迹预测阶段,将待预测轨迹视为轨迹数据流,并通过KS(Kolmogorov-Smirnov)检验方法与具有相同起点的不确定轨迹模型进行匹配,其中匹配程度最高的不确定轨迹即为预测轨迹.通过真实轨迹数据集上的实验表明,与现有各类主要轨迹预测方法相比,本方法在不同条件下的预测效率与准确性都有较明显优势.
随着大量移动设备的出现,准确和高效的轨迹预测有助于提高面向位置的应用和服务的质量和水平.针对现有方法对轨迹不确定性缺乏有效建模的问题,提出了基于非参数密度估计的不确定轨迹终点预测方法.在轨迹建模及模型训练阶段,利用非参数估计对起点与终点相同的轨迹构建基于密度分布的不确定轨迹模型;在轨迹预测阶段,将待预测轨迹视为轨迹数据流,并通过KS(Kolmogorov-Smirnov)检验方法与具有相同起点的不确定轨迹模型进行匹配,其中匹配程度最高的不确定轨迹即为预测轨迹.通过真实轨迹数据集上的实验表明,与现有各类主要轨迹预测方法相比,本方法在不同条件下的预测效率与准确性都有较明显优势.


2019, 45(4): 799-807.
doi: 10.16383/j.aas.2018.c170431
cstr: 32138.14.j.aas.2018.c170431
摘要:
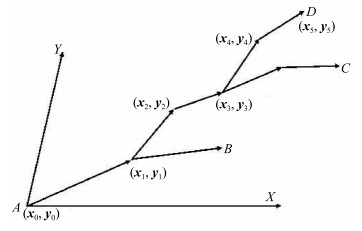
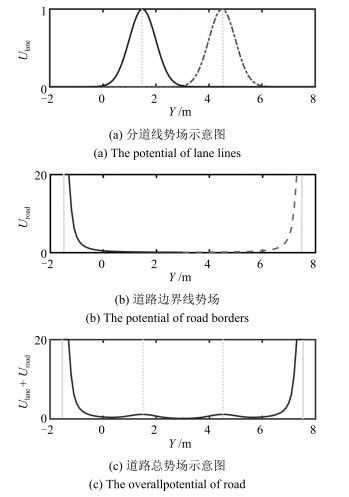
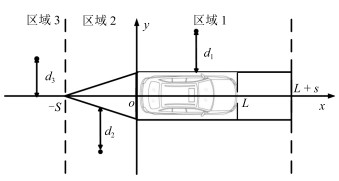
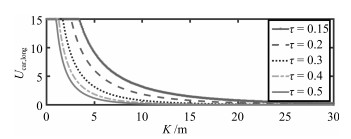
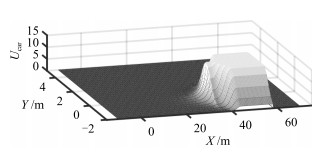
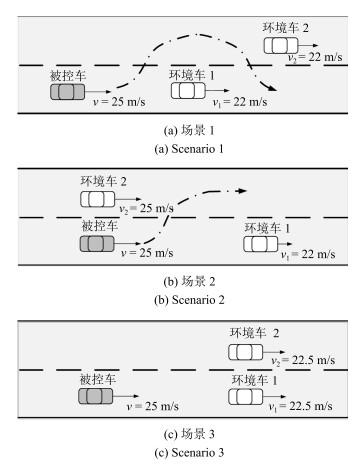
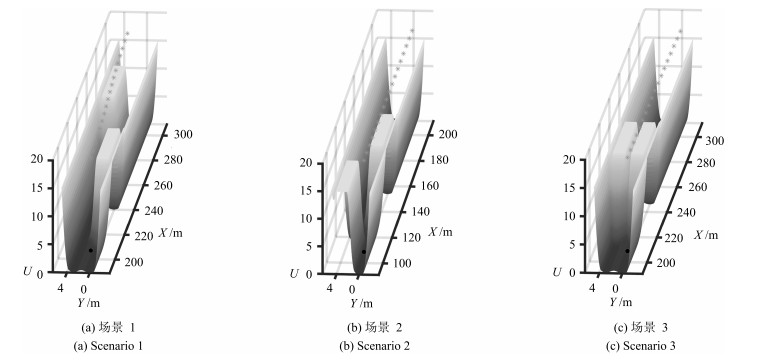
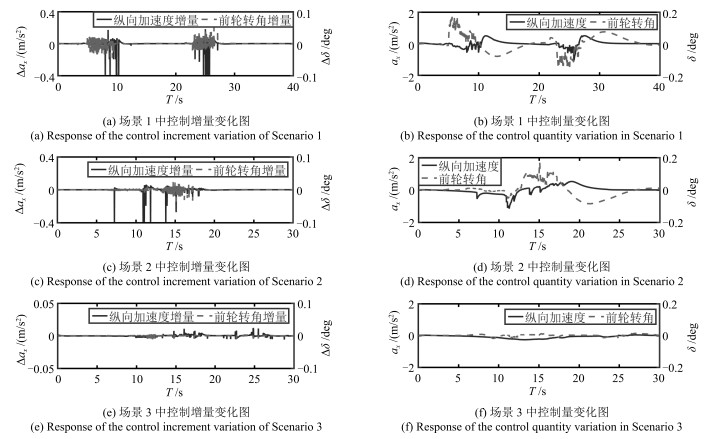
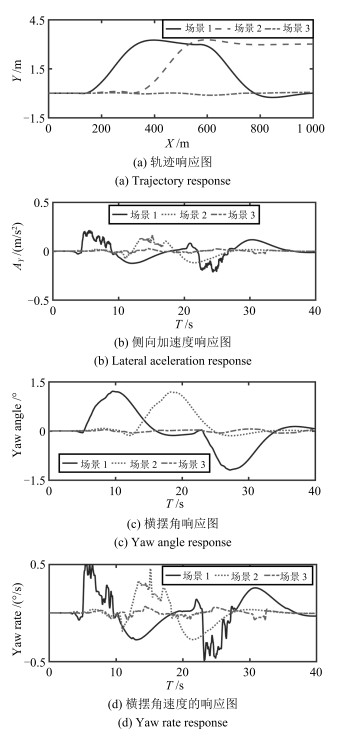
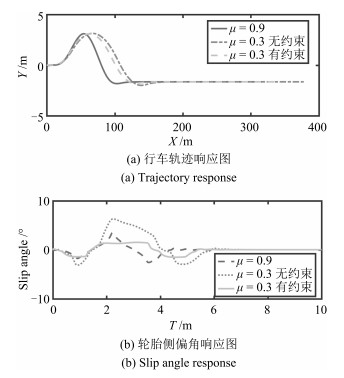
无人车辆的轨迹规划与跟踪控制是实现自动驾驶的关键.轨迹规划与跟踪控制一般分为两个部分,即先根据车辆周边环境信息以及自车运动状态信息规划出参考轨迹,再依此轨迹来调节车辆纵横向输出以实现跟随控制.本文通过对无人车辆的轨迹规划与跟踪进行统一建模,基于行车环境势场建模与车辆动力学建模,利用模型预测控制中的优化算法来选择人工势场定义下的局部轨迹,生成最优的参考轨迹,并在实现轨迹规划的同时进行跟踪控制.通过CarSim与MATLAB/Simulink的联合仿真实验表明,该方法可在多种场景下实现无人车辆的动态避障.
无人车辆的轨迹规划与跟踪控制是实现自动驾驶的关键.轨迹规划与跟踪控制一般分为两个部分,即先根据车辆周边环境信息以及自车运动状态信息规划出参考轨迹,再依此轨迹来调节车辆纵横向输出以实现跟随控制.本文通过对无人车辆的轨迹规划与跟踪进行统一建模,基于行车环境势场建模与车辆动力学建模,利用模型预测控制中的优化算法来选择人工势场定义下的局部轨迹,生成最优的参考轨迹,并在实现轨迹规划的同时进行跟踪控制.通过CarSim与MATLAB/Simulink的联合仿真实验表明,该方法可在多种场景下实现无人车辆的动态避障.

2019, 45(4): 808-818.
doi: 10.16383/j.aas.2018.c170374
cstr: 32138.14.j.aas.2018.c170374
摘要:
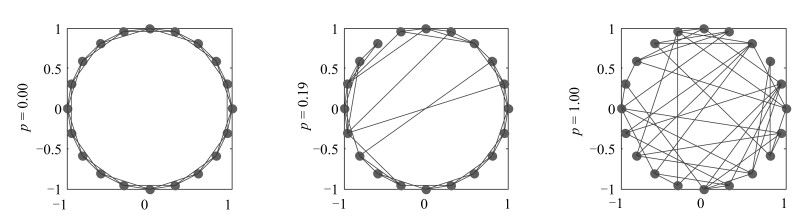
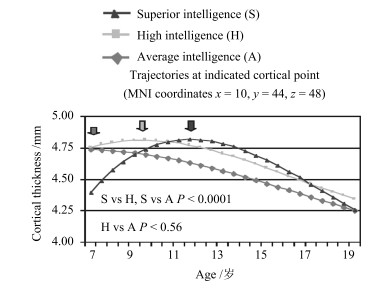
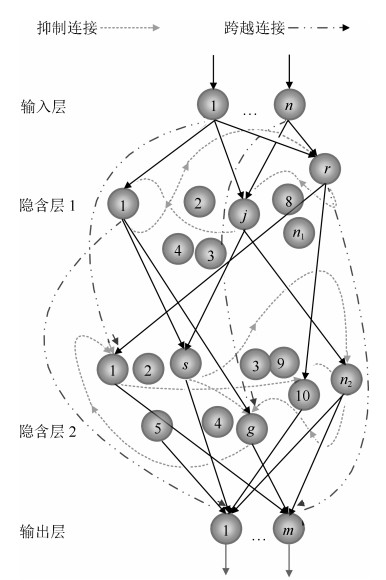
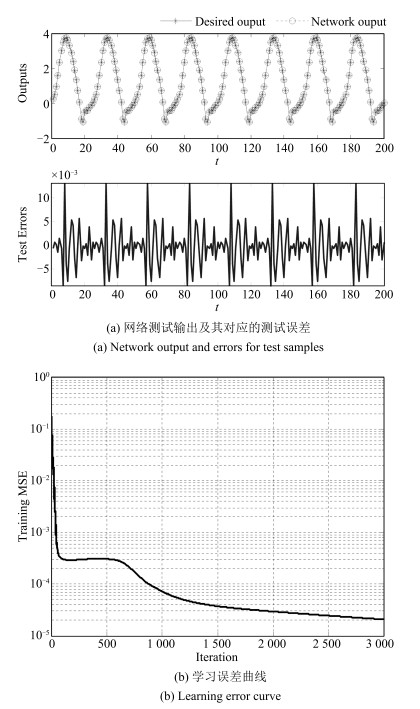
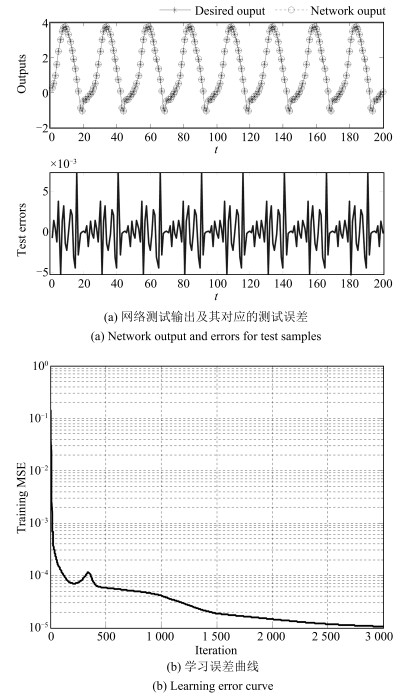
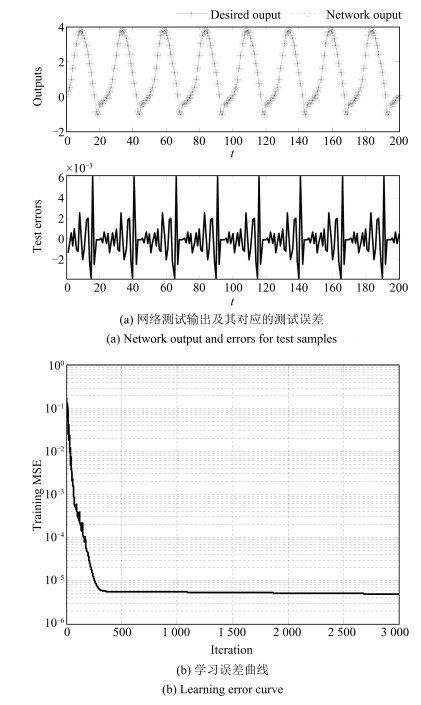
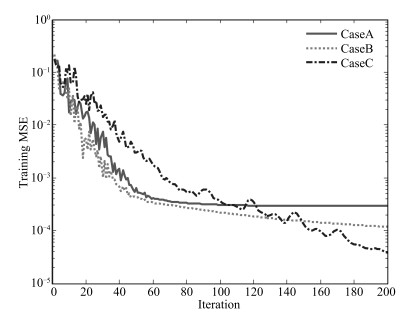
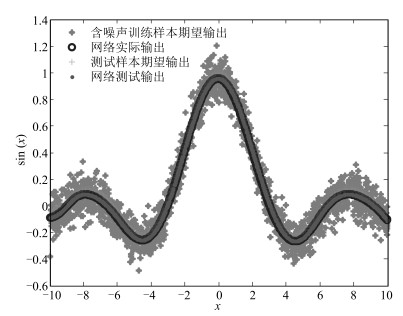
针对跨越——侧抑制神经网络(Span-lateral inhibition neural network,S-LINN)的结构调整及参数学习问题,结合生物神经系统中神经元的稀疏连接特性,依据儿童及青少年智力发展水平与大脑皮层发育之间的相互关系,提出以小世界网络连接模式进行初始稀疏化的连接自组织发育稀疏跨越——侧抑制神经网络设计方法.定义网络连接稀疏度及神经元输出贡献率,设计网络连接增长——修剪规则,根据智力超常组皮层发育与智力水平的对应关系调整和控制网络连接权值,动态调整网络连接实现网络智力的自组织发育.通过非线性动力学系统辨识及函数逼近基准问题的求解,证明在同等连接复杂度的情况下,稀疏连接的跨越——侧抑制神经网络具有更好的泛化能力.
针对跨越——侧抑制神经网络(Span-lateral inhibition neural network,S-LINN)的结构调整及参数学习问题,结合生物神经系统中神经元的稀疏连接特性,依据儿童及青少年智力发展水平与大脑皮层发育之间的相互关系,提出以小世界网络连接模式进行初始稀疏化的连接自组织发育稀疏跨越——侧抑制神经网络设计方法.定义网络连接稀疏度及神经元输出贡献率,设计网络连接增长——修剪规则,根据智力超常组皮层发育与智力水平的对应关系调整和控制网络连接权值,动态调整网络连接实现网络智力的自组织发育.通过非线性动力学系统辨识及函数逼近基准问题的求解,证明在同等连接复杂度的情况下,稀疏连接的跨越——侧抑制神经网络具有更好的泛化能力.

2019, 45(4): 819-828.
doi: 10.16383/j.aas.c170369
cstr: 32138.14.j.aas.c170369
摘要:
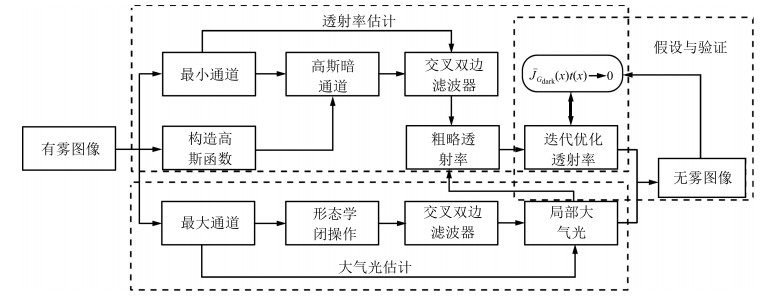
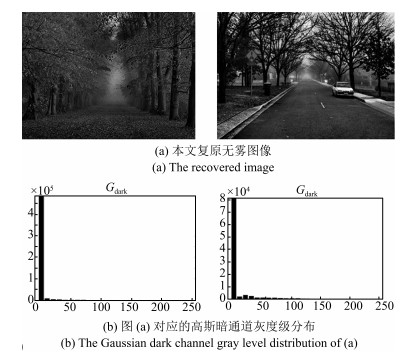
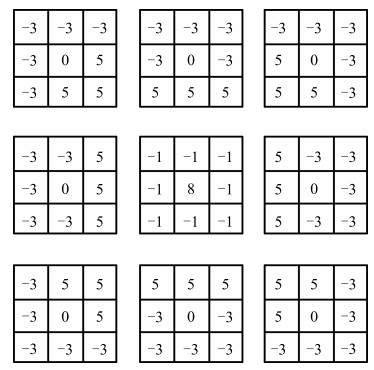
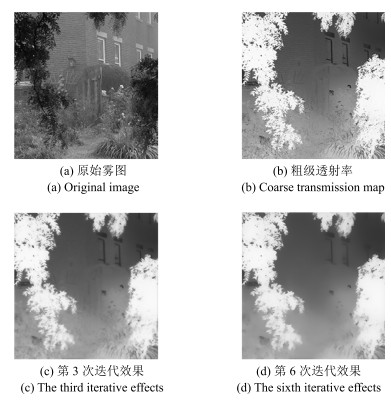
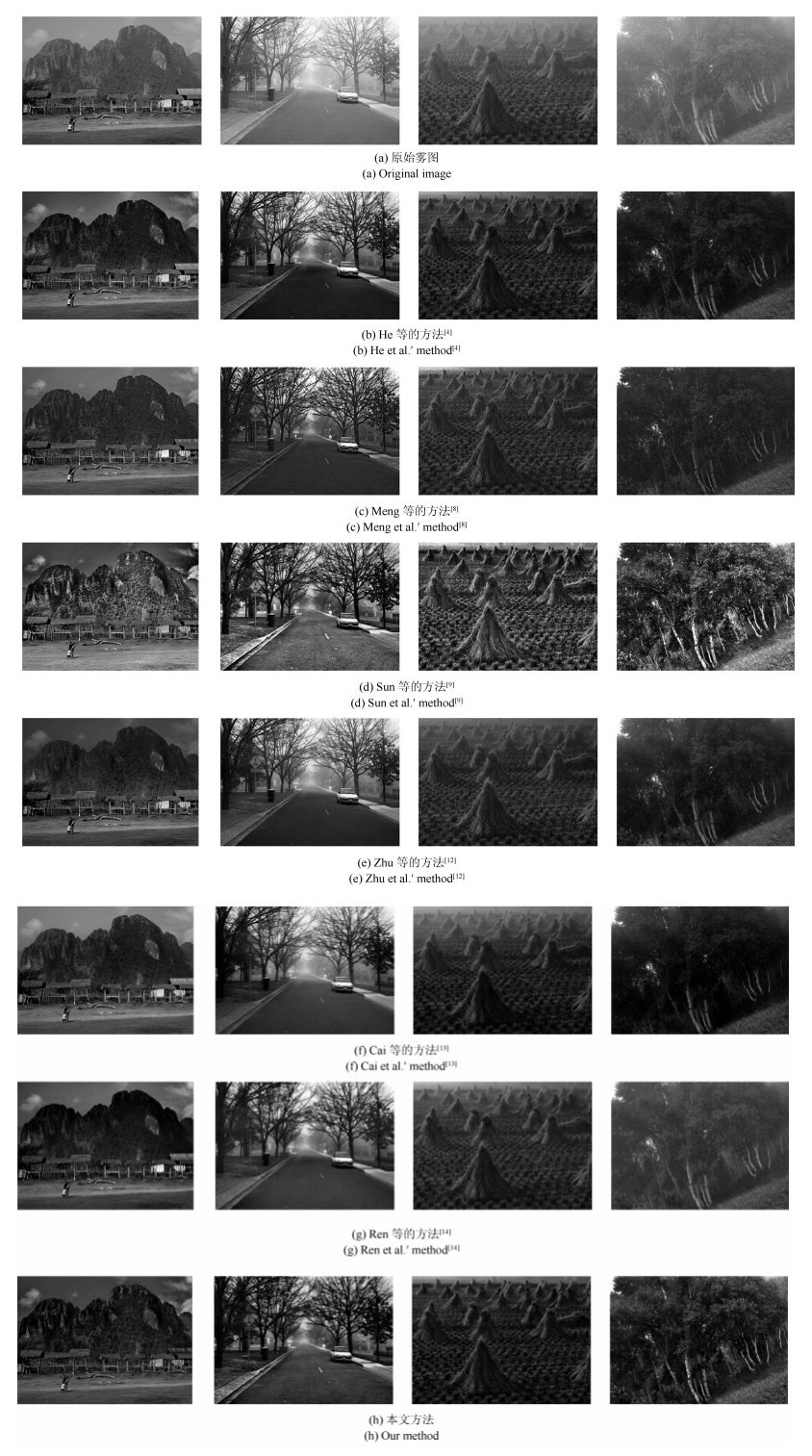
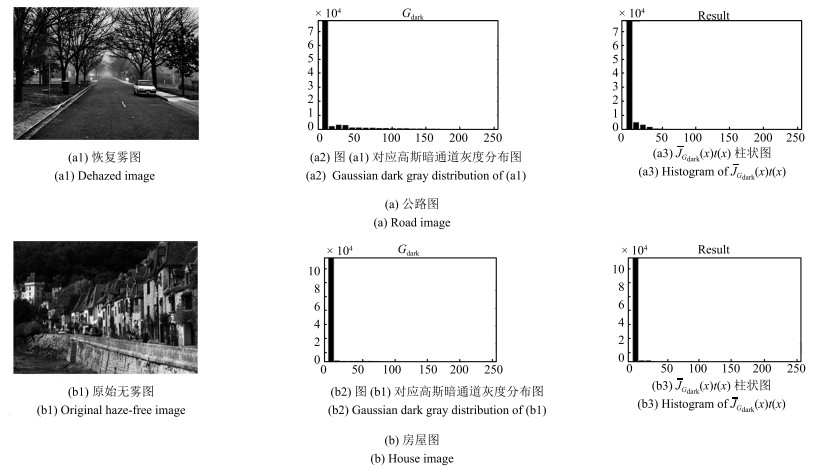
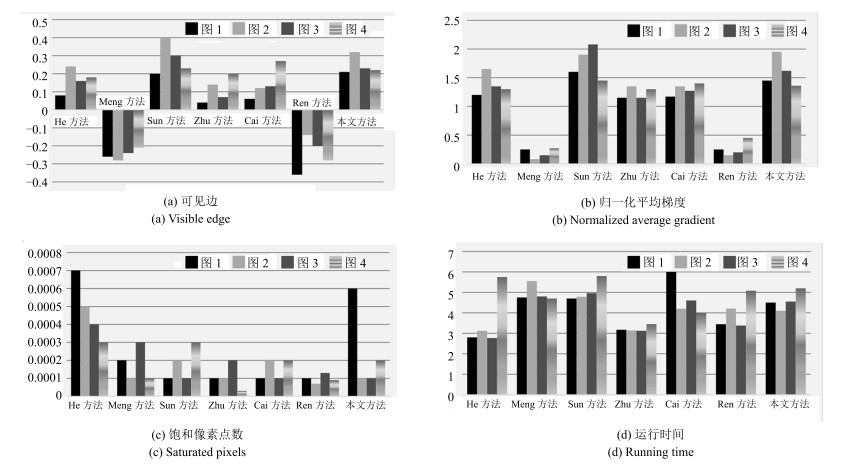
针对暗通道先验算法最小滤波使用的不足,提出一种基于高斯权重衰减的迭代优化去雾方法.该方法首先利用Kirsch算子滤波构造高斯函数逼近暗通道操作,然后用交叉双边滤波消除纹理效应,其次,在透射率为最优的前提下,利用高斯暗通道来简化大气散射模型,从而得到粗略透射率;为了得到最优透射率,使用Kirsch和Laplacian算子构成的一组高阶滤波器进行迭代处理,从而获得最优效果;最后,结合大气散射模型复原无雾图像.通过大量实验测试验证,所提假设成立,复原的图像细节明显,明亮度适宜,并且在客观评价中也体现出了优势.
针对暗通道先验算法最小滤波使用的不足,提出一种基于高斯权重衰减的迭代优化去雾方法.该方法首先利用Kirsch算子滤波构造高斯函数逼近暗通道操作,然后用交叉双边滤波消除纹理效应,其次,在透射率为最优的前提下,利用高斯暗通道来简化大气散射模型,从而得到粗略透射率;为了得到最优透射率,使用Kirsch和Laplacian算子构成的一组高阶滤波器进行迭代处理,从而获得最优效果;最后,结合大气散射模型复原无雾图像.通过大量实验测试验证,所提假设成立,复原的图像细节明显,明亮度适宜,并且在客观评价中也体现出了优势.