

A Full Resource Predictive Control Approach to Control Systems Subject to Computational Constraint
-
摘要: 针对具有时变有限且不可预知计算资源的控制系统,提出了一种充分利用可用计算资源的预测控制策略和相应的控制器设计方法.该策略在控制系统可用计算资源充足时计算多步前向预测控制量,进而使用合适预测控制量在控制器因缺少计算资源无法运行时闭合系统,达到了在不要求额外计算资源前提下提升控制系统性能的效果.利用改进的模型预测控制方法设计了相应的控制器,并分别使用纯数值和MATLAB/LabVIEW联合仿真算例对所提出的方法进行了验证.Abstract: A computational resource aware predictive control strategy as well as the controller design method is proposed for control systems subject to limited, time-varying and unknown computational resources. The strategy calculates multi-step forward control predictions when the allocated computational resources allow so, which are then used to close the system when the available computational resources are too few to run the controller, thus enabling the improvement of the control performance at no cost of additional computational resources requirement. The controller is realized by a modified model predictive method, and both numerical simulation and MATLAB/LabVIEW co-simulation validate the effectiveness of the proposed approach.
-
Key words:
- Computational constraint /
- full resource /
- predictive control /
- co-simulation
1) 本文责任编委 曹向辉 -

图 1 具有时变不可预知计算资源的控制系统
Fig. 1 Control systems with time-varying and unpredictable computational resources
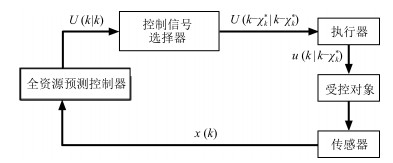
图 2 面向计算受限控制系统的全资源预测控制策略
Fig. 2 The full resource predictive control strategy for control systems subject to computational constraints
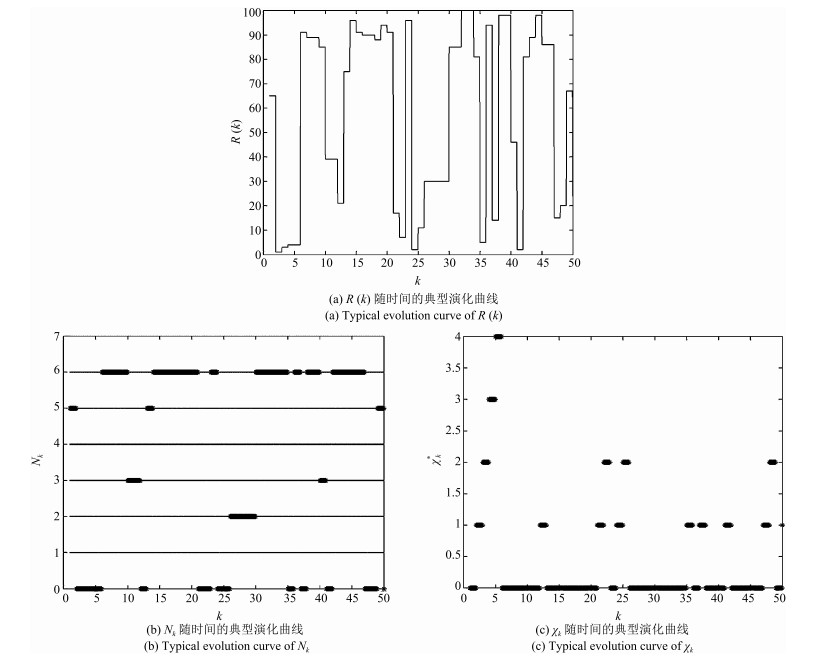
图 4 MATLAB仿真的$R(k)$, $N_k$和$\chi_k$随时间的典型演化曲线
Fig. 4 Typical evolution curves of $R(k)$, $N_k$ and $\chi_k$ in MATLAB simulation

图 5 MATLAB仿真的系统响应和控制量曲线
Fig. 5 The system responses and control signals in MATLAB simulation
-
[1] 王飞跃, 张军, 张俊, 王晓.工业智联网:基本概念、关键技术与核心应用.自动化学报, 2018, 44(9):1606-1617 http://www.aas.net.cn/CN/abstract/abstract19342.shtmlWang Fei-Yue, Zhang Jun, Zhang Jun, Wang Xiao. Industrial internet of minds:concept, technology and application. Acta Automatica Sinica, 2018, 44(9):1606-1617 http://www.aas.net.cn/CN/abstract/abstract19342.shtml [2] Wang B L, Kang Y, Qin J H, Li Y M. Optimization algorithms for predictive control approach to networked bilinear systems. Acta Automatica Sinica, 2017, 43(1):1234-1240 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zdhxb201707012 [3] Stankovic J A. Research directions for the internet of things. IEEE Internet of Things Journal, 2014, 1(1):3-9 http://ieeexplore.ieee.org/document/6774858 [4] 夏元清.云控制系统及其面临的挑战.自动化学报, 2016, 42(1): 1-12 doi: 10.3969/j.issn.1003-8930.2016.01.001Xia Yuan-Qing. Cloud control systems and their challenges. Acta Automatica Sinica, 2016, 42(1):1-12 doi: 10.3969/j.issn.1003-8930.2016.01.001 [5] Lu C Y, Saifullah A, Li B, Sha M, Gonzalez H, Gunatilaka D, Wu C J, Nie L S, Chen Y X. Real-time wireless sensor-actuator networks for industrial cyber-physical systems. Proceedings of the IEEE, 2016, 104(5):1013-1024 doi: 10.1109/JPROC.2015.2497161 [6] Saifullah A, Xu Y, Lu C Y, Chen Y X. End-to-end communication delay analysis in industrial wireless networks. IEEE Transactions on Computers, 2015, 64(5):1361-1374 doi: 10.1109/TC.2014.2322609 [7] Zhang D, Wang Q G, Yu L. Filtering and Control of Wireless Networked Systems. Springer International Publishing, 2017. [8] Al-Dabbagh A W, Chen T W. Design considerations for wireless networked control systems. IEEE Transactions on Industrial Electronics, 2016, 63(9):5547-5557 doi: 10.1109/TIE.2016.2564950 [9] Al-Areqi S, GÉrges D, Steven L. Event-based networked control and scheduling codesign with guaranteed performance. Automatica, 2015, 57:128-134 doi: 10.1016/j.automatica.2015.04.003 [10] Pang Z H, Liu G P, Zhou D H, Sun D H. Data-based predictive control for networked nonlinear systems with networkinduced delay and packet dropout. IEEE Transactions on Industrial Electronics, 2016, 63(2):1249-1257 doi: 10.1109/TIE.2015.2497206 [11] Tan C, Yin X, Liu G P, Huang J J, Zhao Y B. Prediction based approach to output consensus of heterogeneous multi-agent systems with delays. IET Control Theory and Applications, 2018, 12(1):20-28 doi: 10.1049/iet-cta.2017.0844 [12] Dimarogonas D V, Johansson K H. Stability analysis for multi-agent systems using the incidence matrix:quantized communication and formation control. Automatica, 2010, 46(4):695-700 doi: 10.1016/j.automatica.2010.01.012 [13] Nunes D, Silva J S, Boavida F. A Practical Introduction to Human-in-the-Loop Cyber-Physical Systems, Willy-IEEE Press, 2018. [14] Christos G, Cassandras. Smart cities as cyber-physical social systems. Engineering, 2016, 2(2):156-158 doi: 10.1016/J.ENG.2016.02.012 [15] Marti P, Velasco M, Fuertes J M, Camacho A, Buttazzo G. Design of an embedded control system laboratory experiment. IEEE Transactions on Industrial Electronics, 2010, 57(10):3297-3307 doi: 10.1109/TIE.2010.2040559 [16] Adimoolam A, Dang T, DonzÉ A, Kapins J, Jin X, Classiflcation and Coverage-based Falsiflcation for Embedded Control Systems. Springer International Publishing, 2017. 483- 503 [17] Ling L, Chen C L, Hua C Q, Zhu S Y, Guan X P. Co-design of Stabilisation and transmission scheduling for wireless control systems. IET Control Theory and Applications, 2017, 11(11):1767-1778 doi: 10.1049/iet-cta.2016.0871 [18] Henriksson E, Quevedo D E, Peters E G W, Sandberg H, Johansson K H. Multiple-loop self-triggered model predictive control for network scheduling and control. IEEE Transactions on Control Systems Technology, 2015, 23(6):2167- 2181 doi: 10.1109/TCST.2015.2404308 [19] Liu K, Fridman E, Johansson K H. Networked control with stochastic scheduling. IEEE Transactions on Automatic Control, 2015, 60(11):3071-3076 doi: 10.1109/TAC.2015.2414812 [20] Bhattachary R, Balas G. Anytime control algorithm:model reduction approach. Journal of Guidance Control and Dynamics, 2004, 27(5):767-776 doi: 10.2514/1.9457 [21] Xi Y G, Li D W, Lin S. Model predictive control-status and challenges. Acta Automatica Sinica, 2013, 39(3):222-236 doi: 10.1016/S1874-1029(13)60024-5 -

 下载:
下载:



计量
- 文章访问数: 1909
- HTML全文浏览量: 377
- PDF下载量: 417
- 被引次数: 0
