

-
摘要: 无人车辆的轨迹规划与跟踪控制是实现自动驾驶的关键.轨迹规划与跟踪控制一般分为两个部分,即先根据车辆周边环境信息以及自车运动状态信息规划出参考轨迹,再依此轨迹来调节车辆纵横向输出以实现跟随控制.本文通过对无人车辆的轨迹规划与跟踪进行统一建模,基于行车环境势场建模与车辆动力学建模,利用模型预测控制中的优化算法来选择人工势场定义下的局部轨迹,生成最优的参考轨迹,并在实现轨迹规划的同时进行跟踪控制.通过CarSim与MATLAB/Simulink的联合仿真实验表明,该方法可在多种场景下实现无人车辆的动态避障.Abstract: Trajectory planning and tracking control of unmanned vehicles are the keys to autonomy. Generally, trajectory planning and tracking control are two functions in charge of generating reference trajectory according to the vehicle surrounding information and vehicle state information, and controlling vehicle motions according to the reference trajectory, respectively. In this paper, a unified modeling method to integrate trajectory planning and tracking control is presented. Based on the artificial potential field approach and vehicle dynamics modeling, the optimization algorithm of model predictive control is used to select the optimal local trajectory defined by the artificial potential field as the reference trajectory, which can be then tracked through vehicle motion control. A joint simulation of CarSim and MATLAB/Simulink shows that this method can effectively accomplish obstacle avoidance for the unmanned vehicle in several traffic scenarios.1) 本文责任编委 李力
-
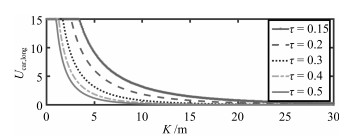
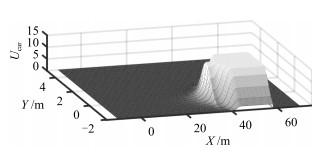
图 3 环境车的纵向势场值随距离变化图
Fig. 3 Longitudinal potential of the environment vehicle with respect to the relative distance
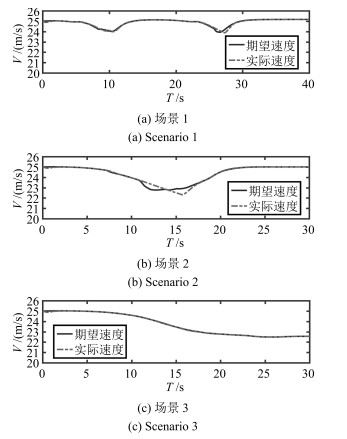
图 7 各场景的被控车速度变化图
Fig. 7 Speed variation diagram of the subject vehicle in several scenarios
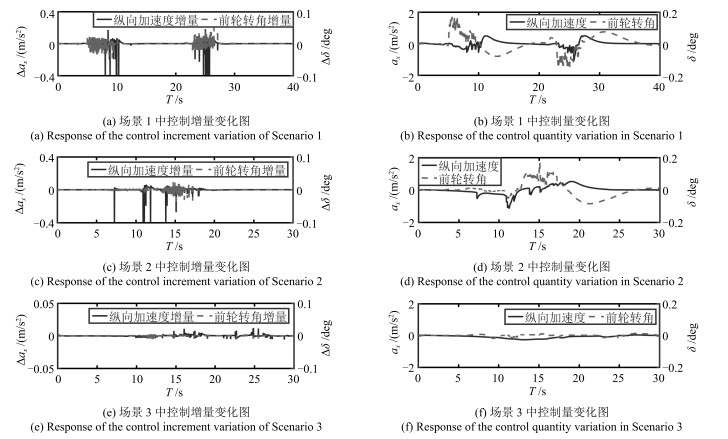
图 8 各场景的控制增量以及控制量变化图
Fig. 8 Responses of the control increment and the control quantity variation in several scenarios
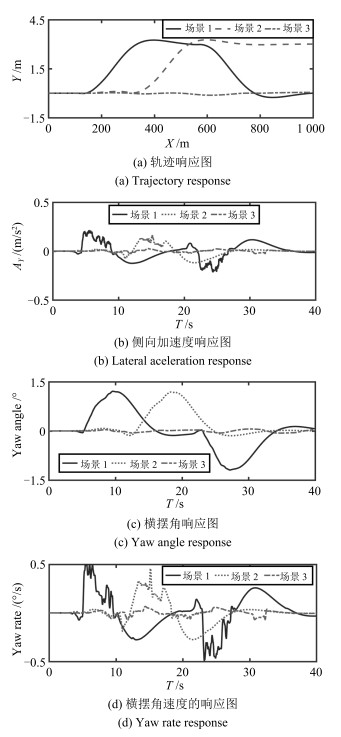
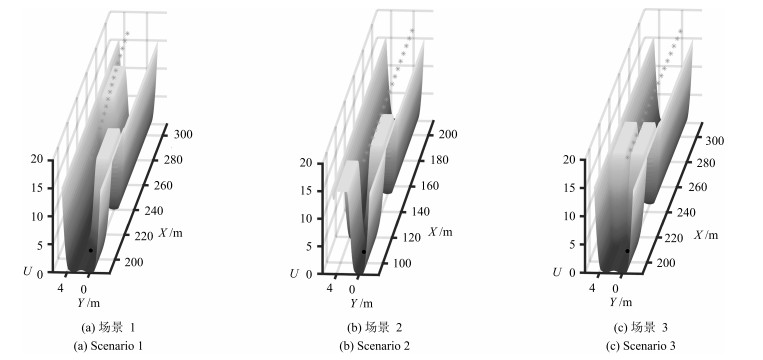
图 9 仿真场景中被控车的轨迹、侧向加速度、横摆角、横摆角速度的响应图
Fig. 9 Responses of the trajectory, lateral acceleration, yaw angle and yaw rate of the controlled vehicle in the simulation scenarios
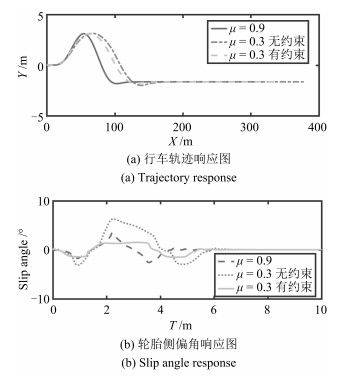
图 10 场景4的行车轨迹和轮胎侧偏角响应图
Fig. 10 Responses of the trajectory and the slip angle in Scenario 4
表 1 控制器参数
Table 1 Controller parameters
参数 值 单位 参数 值 单位 $\sigma_{\rm lane}$, $A_{\rm lane}$ 0.8 $-$ $I_{z}$ 2 031 ${\rm kg}\cdot {\rm m}^{2}$ $\sigma_{\rm car}$ 0.53 $-$ $m$ 1 231 ${\rm kg}$ $A_{\rm road}$ 1 $-$ $a$, $b$ 1.04, 1.56 $\rm m$ $A_{\rm car}$ 15 $-$ $\varepsilon$, $\kappa$ 2, 0.01 $-$ $S_{\rm min}$ 3 ${\rm m}$ $C_{f}$ 61 224 $\rm N/rad$ $\rho$ 0.3 $-$ $C_{r}$ 42 500 ${\rm N/rad}$ $\lambda$ 0.5 $-$ $N_{p}$ 25 $-$ $A_{\rm car, long}$ 10 $-$ $N_{c}$ 2 $-$  下载: 导出CSV
下载: 导出CSV
-
[1] Karaman S, Frazzoli E. Sampling-based algorithms for optimal motion planning. The International Journal of Robotics Research, 2011, 30(7):864-894 http://d.old.wanfangdata.com.cn/OAPaper/oai_arXiv.org_1204.6453 [2] 陈成, 何玉庆, 卜春光, 韩建达.基于四阶贝塞尔曲线的无人车可行轨迹规划.自动化学报, 2015, 41(3):486-496 http://www.aas.net.cn/CN/abstract/abstract18627.shtmlChen Cheng, He Yu-Qing, Bu Chun-Guang, Han Jian-Da. Feasible trajectory generation for autonomous vehicles based on quartic Bézier curve. Acta Automatica Sinica, 2015, 41(3):486-496 http://www.aas.net.cn/CN/abstract/abstract18627.shtml [3] Frazzoli E, Dahleh M A, Feron E. Real-time motion planning for agile autonomous vehicles. In:Proceedings of the 2001 American Control Conference. Arlington, VA, USA:IEEE, 2001. 43-49 [4] Carvalho A, Gao Y, Lefevre S. Stochastic predictive control of autonomous vehicles in uncertain environments. In:Proceedings of the 12th International Symposium on Advanced Vehicle Control. Fuchu, Japan:IEEE, 2014. 712-719 [5] 姜岩, 王琦, 龚建伟, 陈慧岩.无人驾驶车辆局部路径规划的时间一致性与鲁棒性研究.自动化学报, 2015, 41(3):518-527 http://www.aas.net.cn/CN/abstract/abstract18630.shtmlJiang Yan, Wang Qi, Gong Jian-Wei, Chen Hui-Yan. Research on temporal consistency and robustness in local planning of intelligent vehicles. Acta Automatica Sinica, 2015, 41(3):518-527 http://www.aas.net.cn/CN/abstract/abstract18630.shtml [6] Khatib O. Real-time obstacle avoidance for manipulators and mobile robots. The International Journal of Robotics Research, 1986, 5(1):90-98 doi: 10.1177/027836498600500106 [7] Wang J Q, Wu J, Yang L. The driving safety field based on driver-vehicle-road interactions. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4):2203-2214 doi: 10.1109/TITS.2015.2401837 [8] Wolf M T, Burdick J W. Artificial potential functions for highway driving with collision avoidance. In:Proceedings of the 2008 IEEE International Conference on Robotics and Automation (ICRA). Pasadena, CA, USA:IEEE, 2008. 3731-3736 [9] Cao H T, Song X L, Huang Z Y, Pan L B. Simulation research on emergency path planning of an active collision avoidance system combined with longitudinal control for an autonomous vehicle. Proceedings of the Institution of Mechanical Engineers, Part D:Journal of Automobile Engineering, 2016, 230(12):1624-1653 doi: 10.1177/0954407015618533 [10] Ji J, Khajepour A, Melek W W, Huang Y J. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints. IEEE Transactions on Vehicular Technology, 2017, 66(2):952-964 doi: 10.1109/TVT.2016.2555853 [11] Abbas M A, Milman R, Eklund J M. Obstacle avoidance in real time with nonlinear model predictive control of autonomous vehicles. Canadian Journal of Electrical and Computer Engineering, 2017, 40(1):12-22 https://ieeexplore.ieee.org/document/6901109 [12] Park J M, Kim D W, Yoon Y S, Kim H J, Yi K S. Obstacle avoidance of autonomous vehicles based on model predictive control. Proceedings of the Institution of Mechanical Engineers, Part D:Journal of Automobile Engineering, 2009, 223(12):1499-1516 doi: 10.1243/09544070JAUTO1149 [13] Mousavi M A, Heshmati Z, Moshiri B. LTV-MPC based path planning of an autonomous vehicle via convex optimization. In:Proceedings of the 21st Iranian Conference on Electrical Engineering (ICEE). Mashhad, Iran:IEEE, 2013. 1-7 [14] Huang Z C, Wu Q, Ma J, Fan S Q. An APF and MPC combined collaborative driving controller using vehicular communication technologies. Chaos, Solitons & Fractals, 2016, 89:232-242 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=286a7c93ea663fb33c3546755a36aa2c [15] Yamamoto M, Koibuchi K, Fukada Y, Inagaki S. Vehicle stability control in limit cornering by active brake. JSAE Review, 1995, 16(3):323 https://www.sciencedirect.com/science/article/pii/038943049595150S -

 下载:
下载:



计量
- 文章访问数: 4424
- HTML全文浏览量: 1333
- PDF下载量: 1337
- 被引次数: 0
