

Research Development in Autonomous Carrier-Landing/Ship-Recovery Guidance and Control of Unmanned Aerial Vehicles
-
摘要: 舰载无人机正成为未来海战的重要组成部分,制导与控制是舰载无人机自主着舰/回收的关键技术.本文综述了舰载无人机自主着舰/回收制导与控制技术.概述了舰载无人机的发展历史,简单描述了舰载无人机跑道拦阻着舰、撞网回收、伞降回收、绳钩回收、天钩回收、过失速着舰、智能飞落着舰、风向筒回收、秋千式吊架回收等典型着舰回收方式.在深入分析无人机自主着舰/回收制导与控制关键问题的基础上,重点概述了无人机着舰/回收经典制导与现代制导技术,以及着舰/回收经典控制、现代控制、非线性与自适应控制、智能控制等飞行控制技术的研究现状.最后,对无人机自主着舰/回收制导与控制技术的发展状况进行总结,并对未来研究重点进行展望.Abstract: Carrier-based unmanned aerial vehicle (UAV) combat is becoming an important form of future naval warfare. Guidance and control is the key technology of UAVs autonomous carrier-landing/ship-recovery. This paper summarizes the research status of carrier-based UAVs automatic landing guidance and control technology. First a development history of carrier-based UAVs is presented. Then, the typical landing recovery modes are introduced such as arresting line landing, net recovery, parachute/parafoil recovery, cable hook recovery, skyhook recovery, post stall recovery, bio-inspired perched landing, wind sock recovery and trapeze recovery. And key technical problems of carrier-landing/ship-recovery are analyzed. After that, the research status of UAVs automatic landing using classical and modern guidance techniques and flight control techniques including classical control, modern control, nonlinear and adaptive control, and intelligent control are summarized. Finally, research development and future trend of UAVs autonomous carrier-landing/ship-recovery technology are forecasted.1) 本文责任编委 朱纪洪
-
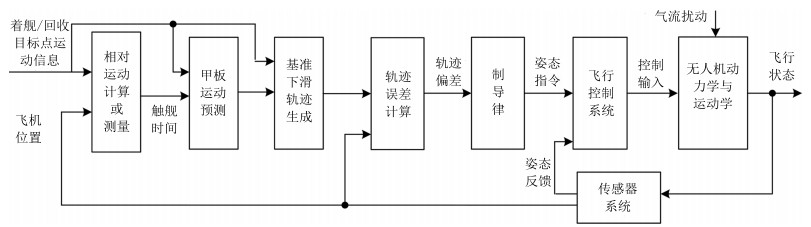
图 1 无人机自动着舰/回收制导与控制系统原理框图
Fig. 1 Guidance and control system diagram for automatic carrier-landing/ship-recovery of UAV
-
[1] Pu H Z, Zhen Z Y, Xia M. Flight control system of unmanned aerial vehicle. Transactions of Nanjing University of Aeronautics and Astronautics, 2015, 32(1):1-8 http://d.old.wanfangdata.com.cn/Periodical/shjtdxxb201506024 [2] Alkire B, Kallimani J G, Wilson P A, Moore L R. Applications for NAVY Unmanned Aircraft Systems. Technical Report MG-957-NAVY, National Defense Research Institute, USA, 2010. [3] Nader C E. An analysis of manpower requirements for the United States marine corps tiers Ⅱ and Ⅲ unmanned aerial systems family of systems program[Master thesis], Naval Postgraduate School, USA, 2007. [4] Perry J D. Navy unmanned air systems 1915-2011. In: Proceedings of the AIAA Centennial of Naval Aviation Forum "100 Years of Achievement and Progress". Virginia Beach, VA, USA: AIAA, 2011. [5] Kracinovich S, Engdahl J. Overview of US Navy UAS Programs of Record to TTCP, MAD UAS Meeting, ADA580879, Naval Air Systems Command, USA, 2012. [6] Anon. Jindivik Mk 4A Design Summary. Project Report B4A-C00-051, Aerospace Technologies of Australia, Australia, 1991. [7] Gautrey J E, Cook M V. LPV autopilot design of a Jindivik UAV. In: Proceedings of the 2009 AIAA Guidance, Navigation, and Control Conference. Chicago, Illinois, USA: AIAA, 2009. [8] Fitzgerald P. Model Flight Control System Design for the Jindivik UAV[Master thesis], Cranfield University, UK, 2000. [9] Zhen Z Y, Zhang Z B, Zhang J H. Guidance and control techniques of carrier based aircraft for automatic carrier landing. Transactions of Nanjing University of Aeronautics and Astronautics, 2017, 34(6):600-608 http://www.cnki.com.cn/Article/CJFDTotal-NJHY201706002.htm [10] 杨一栋, 甄子洋, 邱述斌, 徐佳龙.无人机着舰制导与控制.北京:国防工业出版社, 2013.Yang Yi-Dong, Zhen Zi-Yang, Qiu Shu-Bin, Xu Jia-Long. UAV Carrier Landing Guidance and Control. Beijing:National Defence Industrial Press, 2013. [11] 杨一栋, 郑峰婴, 王新华, 史卫民, 徐佳龙.舰载机等效模型及着舰控制规范.北京:国防工业出版社, 2013.Yang Yi-Dong, Zheng Feng-Ying, Wang Xin-Hua, Shi Wei-Min, Xu Jia-Long. Equivalent Models and Landing Control Criterion of Carrier Based Aircraft. Beijing:National Defence Industry Press, 2013. [12] 杨一栋.舰载飞机着舰引导与控制.北京:国防工业出版社, 2007.Yang Yi-Dong. Carrier Landing Guidance and Control of Carrier-based Aircraft. Beijing:National Defence Industry Press, 2007. [13] Holmberg J, Leonard J, King D, Cotting M. Flying qualities specifications and design standards for unmanned air vehicles. In: Proceedings of the 2013 AIAA Atmospheric Flight Mechanics Conference and Exhibit. Honolulu, Hawaii, USA: AIAA, 2013. [14] Harbaugh P M. Where stands the LSO. Naval Aviation News, NavWeps, 1962, 00-75R-3:16 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=10.1177/13670069000040020109 [15] Fitzgerald P. Flight Control System Design for Autonomous UAV Carrier Landing[Ph. D. dissertation], Cranfield University, UK, 2004. [16] 裴锦华.无人机撞网回收的技术发展.南京航空航天大学学报, 2009, 41(S1):6-11 http://d.old.wanfangdata.com.cn/Periodical/njhkht2009z2002Pei Jin-Hua. Technology development of UAV net recovery system. Journal of Nanjing University of Aeronautics and Astronautics, 2009, 41(S1):6-11 http://d.old.wanfangdata.com.cn/Periodical/njhkht2009z2002 [17] Fahlstrom P G, Gleason T J. Introduction to UAV Systems (4th edition). New York, USA:John Wiley and Sons, 2012. [18] McGillivary P. Design considerations for launch and recovery of autonomous systems from ships, including coast guard icebreakers. In: Proceedings of the 2010 Symposia on Launch and Recovery. Arlington, VA, USA, 2010. 1-22 [19] Skulstad R, Syversen C L, Merz M, Sokolova N, Fossen T I, Johansen T A. Net recovery of UAV with single-frequency RTK GPS. In: Proceedings of the 2015 IEEE Aerospace Conference. Big Sky, MT, USA: IEEE, 2015. 1-10 [20] Syversen C L, Skulstad R. Low-Cost Instrumentation System for Recovery of Fixed-Wing UAV in a Net[Master thesis], Norwegian University of Science and Technology, Trondheim, Norway, 2014. [21] Yoon S, Kim Y, Kim S. Pursuit guidance law and adaptive backstepping controller design for vision-based net-recovery UAV. In: Proceedings of the 2008 AIAA Guidance, Navigation, and Control Conference and Exhibit. Honolulu, Hawaii, USA: AIAA, 2008. [22] Yoon S, Kim H J, Kim Y. Spiral landing trajectory and pursuit guidance law design for vision-based net-recovery UAV. In: Proceedings of the 2009 AIAA Guidance, Navigation, and Control Conference. Chicago, Illinois, USA: AIAA, 2009. [23] Bradley C, Daniel J, Hanks D, Mckelvey J, Raanan J. UAV Mothership, ADA518429, Naval Surface Warfare Center Carderock Division, USA, 2009. [24] 郭亮, 张红英, 童明波.无人机伞回收动力学分析.南京航空航天大学学报, 2012, 44(1):14-19 doi: 10.3969/j.issn.1005-2615.2012.01.003Guo Liang, Zhang Hong-Ying, Tong Ming-Bo. Dynamics analysis on parachute recovery of unmanned aerial vehicle. Transactions of Nanjing University of Aeronautics and Astronautics, 2012, 44(1):14-19 doi: 10.3969/j.issn.1005-2615.2012.01.003 [25] Wyllie T. Parachute recovery for UAV systems. Aircraft Engineering and Aerospace Technology, 2001, 73(6):542-551 doi: 10.1108/00022660110696696 [26] Brown G, Haggard R, Fogleman J. Parafoils for shipboard recovery of UAVs. In: Proceedings of the 11th Aerodynamic Decelerator Systems Technology Conference. San Diego, CA, USA: AIAA, 1991. 48-53 [27] Crowther W J, Prassas K. Post stall landing for field retrieval of UAVs. In: Proceedings of the 14th Bristol International Unmanned Air Vehicle Systems Conference. Bristol, UK, 1999. [28] Walz M. Parasail launch and recovery of fixed wing UAVs. Unmanned Systems, 2002. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=CC027928547 [29] Dennis B D. Methods and Apparatuses for Capturing and Recovering Unmanned Aircraft, Including a Cleat for Capturing Aircraft on a Line, U.S. Patent 7059564, June 2006. [30] Gajjar B I, Zalewski J. A07:On-ship landing and takeoff of unmanned aerial vehicles (UAV's). IFAC Proceedings Volumes, 2004, 37(20):42-46 doi: 10.1016/S1474-6670(17)30568-2 [31] Khantsis S. Control System Design Using Evolutionary Algorithms for Autonomous Shipboard Recovery of Unmanned Aerial Vehicles[Ph. D. dissertation], Royal Melbourne Institute of Technology, Australia, 2006. [32] Khantsis S, Bourmistrova A. UAV controller design using evolutionary algorithms. In: Proceedings of the 18th Australian Joint Conference on Advances in Artificial Intelligence. Berlin, Germany: Springer, 2005. 1025-1030 [33] 卢伟, 马晓平, 周明, 孙林峰.无人机绳钩回收系统的动力学特性仿真分析.航空学报, 2015, 36(10):3295-3304 http://d.old.wanfangdata.com.cn/Periodical/hkxb201510010Lu Wei, Ma Xiao-Ping, Zhou Ming, Sun Lin-Feng. Simulation analysis of dynamic characteristic of UAV rope-hook recovery system. Acta Aeronautica et Astronautica Sinica, 2015, 36(10):3295-3304 http://d.old.wanfangdata.com.cn/Periodical/hkxb201510010 [34] Eriksson M, Ringman P. Launch and Recovery Systems for Unmanned Vehicles Onboard Ships. A Study and Initial Concepts[Master thesis], KTH Royal Institute of Technology, Sweden, 2015. [35] Mathisen S H, Gryte K, Johansen T, Fossen T I. Non-linear model predictive control for longitudinal and lateral guidance of a small fixed-wing UAV in precision deep stall landing. In: Proceedings of the 2016 AIAA Guidance, Navigation, and Control Conference. San Diego, USA: AIAA, 2016. 1-16 [36] Crowther W J. Perched landing and takeoff for fixed wing UAVs. In: Proceedings of the 2000 Applied Vehicle Technology Symposium on Unmanned Vehicles for Aerial, Ground and Naval Military Operations. Ankara, Turkey, 2000. [37] Nagendran A, Crowther W, Richardson R. Biologically inspired legs for UAV perched landing. IEEE Aerospace and Electronic Systems Magazine, 2012, 27(2):4-13 doi: 10.1109/MAES.2012.6163608 [38] Xie P, Ma O, Zhang L, Zhao Z. A bio-inspired UAV leg-foot mechanism for landing, grasping and perching tasks. In: Proceedings of the 2015 AIAA Atmospheric Flight Mechanics Conference. Kissimmee, Florida, USA: AIAA, 2015. 1-15 [39] Nagendran A, Richardson R C, Crowther W J. Bell shaped impedance control to minimize jerk while capturing delicate moving objects. In: Proceedings of the 4th International Conference on Informatics in Control, Automation and Robotics, Robotics and Automation. Angers, France, 2007. 504-511 [40] Frick H E. Retrieving and/or Launching System, U.S. Patent 4523729, February 1982. [41] Sarigul-Klijn N, Sarigulklijn M. A novel sea launch and recovery concept for fixed wing UAVs. In: Proceedings of the 54th AIAA Aerospace Sciences Meeting. San Diego, California, USA: AIAA, 2016. 1-11 [42] Joseph M, Sweger F. Design Specifications Development for Unmanned Aircraft Carrier Landings: A Simulation Approach. U.S.N.A. Trident Scholar Project Report No. 316, United States Naval Academy Annapolis, Maryland, USA, 2003. [43] Perh D. A Study into Advanced Guidance Laws Using Computational Methods[Master thesis], Naval Postgraduate School, USA, 2011. [44] 甄子洋, 杨一栋, 王新华, 江驹.一种雷达引导无人机自动着舰制导与控制系统及其控制方法, 中国. ZL201510747257.8, 2018.Zhen Zi-Yang, Yang Yi-Dong, Wang Xin-Hua, Jiang Ju. Radar Guided Uav Automatic Landing Guidance and Control System and Control Method, China. Patent ZL201510747257.8, 2018. [45] 甄子洋, 王新华, 江驹, 杨一栋.一种GPS引导的无人机自动着舰自适应控制系统及方法, 中国. CN201510572353.3, 2015.Zhen Zi-Yang, Wang Xin-Hua, Jiang Ju, Yang Yi-Dong. GPS guided UAV automatic landing adaptive control system and method, China. Patent CN201510572353.3, 2015. [46] Skulstad R, Syversen C, Merz M, Sokolova N, Fossen T, Robert J T. Autonomous net recovery of fixed-wing UAV with single-frequency carrier-phase differential GNSS. IEEE Aerospace and Electronic Systems Magazine, 2015, 30(5):18-27 doi: 10.1109/MAES.2015.7119821 [47] Kim H J, Kim M, Lim H, Park C, Yoon S, Lee D, et al. Fully autonomous vision-based net-recovery landing system for a fixed-wing UAV. IEEE/ASME Transactions on Mechatronics, 2013, 18(4):1320-1333 doi: 10.1109/TMECH.2013.2247411 [48] You D I, Jung Y D, Cho S W, Shin H M, Lee S H, Shim D H. A guidance and control law design for precision automatic take-off and landing of fixed-wing UAVs. In: Proceedings of the 2012 AIAA Guidance, Navigation, and Control Conference. Minneapolis, Minnesota, USA: AIAA, 2012. 1-19 [49] 郑峰婴, 龚华军, 甄子洋.基于坐标系动态变化的无人机着舰引导算法.中南大学学报(自然科学版), 2016, 47(8):2685-2693 http://d.old.wanfangdata.com.cn/Periodical/zngydxxb201608020Zheng Feng-Ying, Gong Hua-Jun, Zhen Zi-Yang. Carrier UAV autonomous landing algorithm based on dynamic change of coordinate system. Journal of Central South University (Science and Technology), 2016, 47(8):2685-2693 http://d.old.wanfangdata.com.cn/Periodical/zngydxxb201608020 [50] Storvik M. Guidance System for Automatic Approach to a Ship[Master thesis], Norwegian University of Science and Technology, Norwegian, 2003. [51] Chwa D, Choi J Y, Anavatti S G. Observer-based adaptive guidance law considering target uncertainties and control loop dynamics. IEEE Transactions on Control Systems Technology, 2006, 14(1):112-123 doi: 10.1109/TCST.2005.860529 [52] Kim B S, Calise A J, Sattigeri R. Adaptive, integrated guidance and control design for line-of-sight-based formation flight. Journal of Guidance, Control, and Dynamics, 2007, 30(5):1386-1399 doi: 10.2514/1.27758 [53] Oshman Y, Rad D A. Differential-game-based guidance law using target orientation observations. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(1):316-326 doi: 10.1109/TAES.2006.1603425 [54] Shinar J, Shima T, Weiss H. New interceptor guidance law integrating time varying and estimation-delay models. Journal of Guidance, Control, and Dynamics, 2003, 26(2):295-303 doi: 10.2514/2.5046 [55] 蒋毅, 孙春贞, 王凯.舰载无人机撞网回收自适应制导技术.飞行力学, 2015, 33(1):43-47 http://d.old.wanfangdata.com.cn/Periodical/fxlx201501011Jiang Yi, Sun Chun-Zhen, Wang Kai. Ship-board UAV net recovery adaptive guidance technology. Flight Dynamics, 2015, 33(1):43-47 http://d.old.wanfangdata.com.cn/Periodical/fxlx201501011 [56] De Lellis E, Di Vito V, Ruby M, Salbego N. Adaptive algorithm for fixed wing UAV autolanding on aircraft carrier. In: Proceedings of the 2013 AIAA Guidance, Navigation, and Control and Co-located Conferences. Boston, MA, USA: AIAA, 2013. [57] 郭庆, 张炜, 张怡哲, 宋笔锋.舰载无人机精确着舰轨迹控制及飞行验证.飞行力学, 2012, 30(5):448-453 http://d.old.wanfangdata.com.cn/Periodical/fxlx201205016Guo Qing, Zhang Wei, Zhang Yi-Zhe, Song Bi-Feng. Accurate landing glide path control system of carrier-based UAV and its flight test. Flight Dynamics, 2012, 30(5):448-453 http://d.old.wanfangdata.com.cn/Periodical/fxlx201205016 [58] Kahn A, Edwards D. Navigation, guidance and control for the CICADA expendable micro air vehicle. In: Proceedings of the 2012 AIAA Guidance, Navigation and Control Conference. Minneapolis, Minnesota, USA: AIAA, 2012. [59] Wang S, Zhen Z Y, Jiang J, Wang X H. Flight tests of autopilot integrated with fault-tolerant control of a small fixed-wing UAV. Mathematical Problems in Engineering, 2016, 2016: Article ID 2141482 [60] Wang S, Zhen Z Y, Zheng F Y, Wang X H. Design of autonomous flight control system for small-scale UAV. In: Proceedings of the 2014 IEEE Chinese Guidance, Navigation and Control Conference. Yantai, China: IEEE, 2014. 1885-1888 [61] Zhen Z Y, Jiang J, Wang X H, Wang D B. Information fusion-based optimal attitude control for an alterable thrust direction unmanned aerial vehicle. International Journal of Advanced Robotic System, 2013, 10(1):43 doi: 10.5772/54886 [62] 甄子洋.预见控制理论及应用研究进展.自动化学报, 2016, 42(2):172-188 http://www.aas.net.cn/CN/abstract/abstract18808.shtmlZhen Zi-Yang. Research development in preview control theory and applications. Acta Automatica Sinica, 2016, 42(2):172-188 http://www.aas.net.cn/CN/abstract/abstract18808.shtml [63] 甄子洋, 王志胜, 王道波.基于信息融合估计的离散线性系统预见控制.自动化学报, 2010, 36(2):347-352 http://www.aas.net.cn/CN/abstract/abstract13523.shtmlZhen Zi-Yang, Wang Zhi-Sheng, Wang Dao-Bo. Information fusion estimation based preview control for discrete linear system. Acta Automatica Sinica, 2010, 36(2):347-352 http://www.aas.net.cn/CN/abstract/abstract13523.shtml [64] Zhen Z Y, Ma K, Kumar B A. Automatic carrier landing control for unmanned aerial vehicles based on preview control. Transactions of Nanjing University of Aeronautics and Astronautics, 2017, 34(4):413-419 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=njhkhtdxxb-e201704011 [65] 甄子洋, 邵敏敏, 龚华军, 江驹.一种基于鲁棒预见控制的舰载机自动着舰控制方法, 中国. ZL201510158509.3, 2017.Zhen Zi-Yang, Shao Min-Min, Gong Hua-Jun, Jiang Ju. Robust preview control based automatic carrier landing control for carrier-based aircraft, China. ZL201510158509.3, 2017. [66] Zhen Z Y, Jiang S Y, Jiang J. Preview control and particle filtering for automatic carrier landing. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(6):2662-2674 doi: 10.1109/TAES.2018.2826398 [67] Zhen Z Y, Jiang S Y, Ma K. Automatic carrier landing control for unmanned aerial vehicles based on preview control and particle filtering. Aerospace Science and Technology, 2018, 81:99-107 doi: 10.1016/j.ast.2018.07.039 [68] 王硕, 甄子洋, 王新华, 江驹, 孙一力.一种舰载无人机自主着舰的飞行控制系统及方法, 中国. CN201410726947.0, 2015.Wang Shuo, Zhen Zi-Yang, Wang Xin-Hua, Jiang Ju, Sun Yi-Li. Flight control system and method for carrier-based UAV autonomous landing, China. Patent CN201410726947. 0, 2015. [69] Denison N A. Automated Carrier Landing of an Unmanned Combat Aerial Vehicle Using Dynamic Inversion, Air Force Institute of Technology, USA, 2007. [70] Boskovic J D, Redding J. An autonomous carrier landing system for Unmannned Aerial Vehicles. In: Proceedings of the 2009 AIAA Guidance, Navigation, and Control Conference and Exhibit. Chicago, Illinois, USA: AIAA, 2009. 1-17 [71] 李若兰, 甄子洋, 龚华军.基于趋近律滑模最优控制的无人机撞网回收轨迹控制.电光与控制, 2014, 21(9):58-60, 84 doi: 10.3969/j.issn.1671-637X.2014.09.013Li Ruo-Lan, Zhen Zi-Yang, Gong Hua-Jun. Trajectory control of a UAV during net recovery based on sliding mode control and optimal control. Electronics Optics and Control, 2014, 21(9):58-60, 84 doi: 10.3969/j.issn.1671-637X.2014.09.013 [72] 郑峰婴, 龚华军, 甄子洋.基于积分滑模控制的无人机自动着舰系统.系统工程与电子技术, 2015, 37(7):1621-1628 http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs201507023Zheng Feng-Ying, Gong Hua-Jun, Zhen Zi-Yang. Carrier UAV autonomous landing system based on integral sliding mode control. Systems Engineering and Electronics, 2015, 37(7):1621-1628 http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs201507023 [73] Zheng F Y, Gong H J, Zhen Z Y. Tradeoff analysis of factors affecting longitudinal carrier landing performance for small UAV based on backstepping controller. Transactions of Nanjing University of Aeronautics and Astronautics, 2015, 32(1):97-109 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=njhkhtdxxb-e201501013 [74] Goodwin G C, Graebe S F, Salgado M E. Control System Design. New Jersey:Prentice-Hall, 2001. [75] 甄子洋, 陶钢, 江驹, 王新华.无人机自动撞网着舰轨迹自适应跟踪控制.哈尔滨工程大学学报, 2017, 38(12):1922-1927 http://d.old.wanfangdata.com.cn/Periodical/hebgcdxxb201712015Zhen Zi-Yang, Tao Gang, Jiang Ju, Wang Xin-Hua. Adaptive tracking control of automatic net landing trajectory for carrier-based unmanned aerial vehicle. Journal of Harbin Engineering University, 2017, 38(12):1922-1927 http://d.old.wanfangdata.com.cn/Periodical/hebgcdxxb201712015 [76] 甄子洋, 王新华, 杨一栋.基于模型参考自适应控制的舰载无人机自动着舰控制装置, 中国. ZL201610917907.3, 2018.Zhen Zi-Yang, Wang Xin-Hua, Yang Yi-Dong. Carrier-based UAV automatic landing control device based on model reference adaptive control, China. Patent ZL201610917907.3, 2018. [77] Zheng F Y, Gong H J, Zhen Z Y. Adaptive constraint backstepping fault-tolerant control for small carrier-based unmanned aerial vehicle with uncertain parameters. Proceedings of the Institution of Mechanical Engineers, Part G:Journal of Aerospace Engineering, 2016, 230(3):407-425 doi: 10.1177/0954410015592169 [78] Zheng F Y, Zhen Z Y, Gong H J. Observer-based backstepping longitudinal control for carrier-based UAV with actuator faults. Journal of Systems Engineering and Electronics, 2017, 28(2):322-337 doi: 10.21629/JSEE.2017.02.14 [79] Wadley J, Tallant G, Ruszkowski R. Adaptive flight control of a carrier based unmanned air vehicle. In: Proceedings of the 2003 AIAA Guidance, Navigation, and Control Conference and Exhibit. Austin, Texas, USA: AIAA, 2003. 1-9 [80] Bourmistrova A, Khantsis S. Control system design optimisation via genetic programming. In: Proceedings of the 2007 IEEE Congress on Evolutionary Computation. Singapore, Singapore: IEEE, 2007. 1993-2000 [81] Kahn A. Adaptive control for small fixed-wing unmanned air vehicles. In: Proceedings of the 2010 AIAA Guidance, Navigation, and Control Conference. Toronto, Ontario, Canada: AIAA, 2010. 1-17 [82] 甄子洋, 王新华, 江驹, 杨一栋.舰载机自动着舰引导与控制研究进展.航空学报, 2017, 38(2):1-22 http://d.old.wanfangdata.com.cn/Periodical/hkxb201702012Zhen Zi-Yang, Wang Xin-Hua, Jiang Ju, Yang Yi-Dong. Research progress in guidance and control of automatic carrier landing of carrier-based aircraft. Acta Aeronautica et Astronautica Sinica, 2017, 38(2):1-22 http://d.old.wanfangdata.com.cn/Periodical/hkxb201702012 [83] Lin S G, Garratt M, Lambert A, Li P. 6DoF motion estimation for UAV landing on a moving shipdeck using real-time on-board vision. In: Proceedings of the 2015 Australasian Conference on Robotics and Automation. Canberra, ACT, Australia, 2015. 1-10 [84] Khan A A, Marion K E, Bil C, Simic M. Motion prediction for ship-based autonomous air vehicle operations. In: Proceedings of the 2016 Intelligent Interactive Multimedia Systems and Services. Cham: Springer, 2016. 323-333 [85] Moriarty P, Sheehy R, Doody P. Neural networks to aid the autonomous landing of a UAV on a ship. In: Proceedings of the 28th Irish Signals and Systems Conference. Killarney, Ireland: IEEE, 2017. 1-4 [86] Koo S, Kim S, Suk J. Model predictive control for UAV automatic landing on moving carrier deck with heave motion. IFAC-Papers OnLine, 2015, 48(5):59-64 doi: 10.1016/j.ifacol.2015.06.464 [87] 甄子洋, 邵敏敏, 龚华军, 王新华, 江驹.一种含舰尾气流补偿的舰载机自动着舰复合控制方法, 中国. ZL201510243842.4, 2017.Zhen Zi-Yang, Shao Min-Min, Gong Hua-Jun, Wang Xin-Hua, Jiang Ju. Airwake compen-sation based automatic carrier landing composite control for carrier-based aircraft: China. ZL201510243842.4. 2017. [88] 江驹, 甄子洋, 王新华, 杨一栋, 袁锁中, 焦鑫.抑制舰尾气流扰动的舰载机着舰引导与控制系统及方法, 中国. ZL201110287699.0, 2014.Jiang Ju, Zhen Zi-Yang, Wang Xin-Hua, Yang Yi-Dong, Yuan Suo-Zhong, Jiao Xin. Airwake disturbance rejection based carrier landing guidance and control system of carrier-based aircraft. ZL201110287699.0. 2014. [89] Ye L Q, Zong Q, Crassidis J L, Tian B L. Output-redefinition-based dynamic inversion control for a nonminimum phase hypersonic vehicle. IEEE Transactions on Industrial Electronics, 2018, 65(4):3447-3457 doi: 10.1109/TIE.2017.2760246 [90] Apaza-Perez W A, Moreno J A, Fridman L M. Dissipative approach to sliding mode observers design for uncertain mechanical systems. Automatica, 2018, 87:330-336 doi: 10.1016/j.automatica.2017.10.016 [91] Wang D D, Zong Q, Tian B L, Shao S K, Zhang X Y, Zhao X Y. Neural network disturbance observer-based distributed finite-time formation tracking control for multiple unmanned helicopters. ISA Transactions, 2018, 73:208-226 doi: 10.1016/j.isatra.2017.12.011 [92] Wang H Q, Shi P, Li H Y, Zhou Q. Adaptive neural tracking control for a class of nonlinear systems with dynamic uncertainties. IEEE Transactions on Cybernetics, 2017, 47(10):3075-3087 doi: 10.1109/TCYB.2016.2607166 [93] 甄子洋, 孙一力, 浦黄忠, 王道波.一种基于大脑情感学习的无人机推力变向智能控制方法, 中国. ZL201510264667.7, 2017.Zhen Zi-Yang, Sun Yi-Li, Pu Huang-Zhong, Wang Dao-Bo. UAV thrust vectoring intelligent control method based on brain emotion learning, China. Patent ZL201510264667.7, 2017. [94] Yu X, Li P, Zhang Y M. The design of fixed-time observer and finite-time fault-tolerant control for hypersonic gliding vehicles. IEEE Transactions on Industrial Electronics, 2018, 65(5):4135-4144 doi: 10.1109/TIE.2017.2772192 [95] Klausen K, Moe J B, Van Den Hoorn J C, Gomola A, Fossen T I, Johansen T A. Coordinated control concept for recovery of a fixed-wing UAV on a ship using a net carried by multirotor UAVs. In: Proceedings of the 2016 International Conference on Unmanned Aircraft Systems. Arlington, VA, USA: IEEE, 2016. 964-973 [96] Ryan J C. Investigating possible effects of UAVs on aircraft carrier deck operations. Humans and Automation Laboratory, Cambridge, MA, USA, 2011. -

 下载:
下载:


图(3)
计量
- 文章访问数: 6049
- HTML全文浏览量: 1212
- PDF下载量: 1137
- 被引次数: 0
