

Generalized Manifold Learning for High Resolution Remote Sensing Image Object Classification
-
摘要: 针对传统的流形学习算法不能对位于黎曼流形上的协方差描述子进行有效降维这一问题,本文提出一种推广的流形学习算法,即基于Log-Euclidean黎曼核的自适应半监督正交局部保持投影(Log-Euclidean Riemannian kernel-based adaptive semi-supervised orthogonal locality preserving projection,LRK-ASOLPP),并将其成功用于高分辨率遥感影像目标分类问题.首先,提取图像每个像素点处的几何结构特征,计算图像特征的协方差描述子;其次,通过采用Log-Euclidean黎曼核将协方差描述子投影到再生核Hilbert空间;然后,基于流形学习理论,建立黎曼流形上半监督正交局部保持投影算法模型,利用交替迭代更新算法对目标函数进行优化求解,同时获得相似性权矩阵和低维投影矩阵;最后,利用求得的低维投影矩阵计算测试样本的低维投影,并用K—近邻、支持向量机(Support victor machine,SVM)等分类器对其进行分类.三个高分辨率遥感影像数据集上的实验结果说明了该算法的有效性与可行性.
-
关键词:
- 协方差矩阵 /
- Log-Euclidean黎曼核 /
- 流形学习 /
- 目标分类
Abstract: It is not adequate to use classical manifold learning techniques to reduce the dimension of covariance descriptors lied on Riemannian manifold. A generalized manifold learning method named Log-Euclidean Riemannian kernel-based adaptive semi-supervised orthogonal locality preserving projection (LRK-ASOLPP) is proposed, and successfully applied to the high resolution remote sensing image classification issue. Firstly, geometric features of each pixel in the image are extracted, and covariance descriptor of each image is calculated. Secondly, the covariance descriptors are mapped into the reproducing kernel Hilbert space by using the Log-Euclidean Riemann kernel. Thirdly, the model of semi-supervised orthogonal locality preserving projection algorithm on Riemannian manifold is constructed based on manifold learning theory. Fourthly, by using the alternating iteration optimization algorithm to solve the objective function, the similarity weight matrix and low dimensional projection matrix are obtained simultaneously. Finally, low dimensional projections of test samples are computed by using the low dimensional projection matrix, and then classifiers such as K-NN, support victor machine (SVM), etc. are used to classify them. Experiment results on three high-resolution satellite images datasets demonstrate the feasibility and effectiveness of the proposed algorithm.1) 本文责任编委 胡清华 -

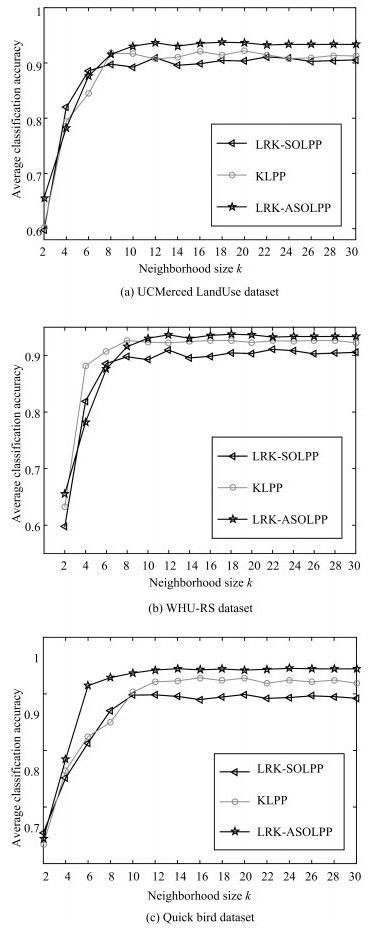
图 3 最佳分类精度随特征维数变化曲线图
Fig. 3 The varying curves of the optimal classiflcation accuracy with feature dimension
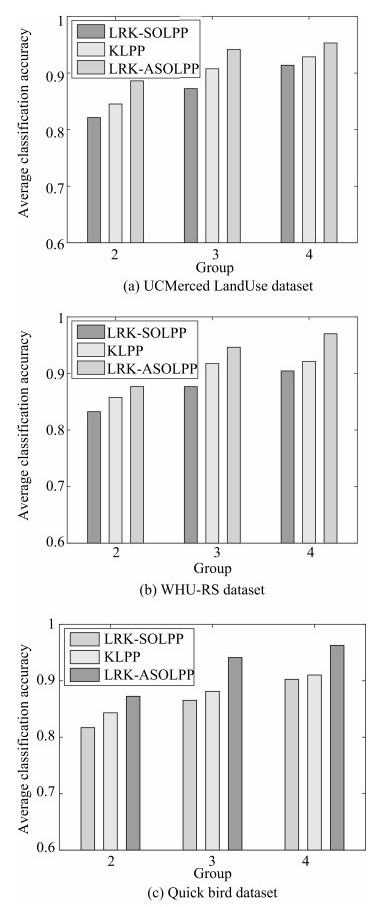
图 4 三个数据集上不同训练样本数算法最佳平均分类精度
Fig. 4 The average classification accuracy of different training sample number on three datasets
表 1 最佳分类精度(Ac)及对应特征维数($r$)
Table 1 The classification accuracy (Ac) and the corresponding feature dimension ($r$)
数据集 UCMerced WHU-RS Quick bird 算法 Ac (%) $r$ Ac (%) $r$ Ac (%) $r$ LRK-SOLPP 92.32 45 92.68 25 91.87 45 KLPP 93.15 20 93.64 50 92.84 25 LRK-ASOLPP 94.89 35 96.43 25 95.69 20  下载: 导出CSV
下载: 导出CSV
表 2 UCMerced LandUse dataset上的最佳分类精度(Ac)及对应特征维数(r)
Table 2 The classiflcation accuracy (Ac) and the feature dimension (r) on UCMerced LandUse dataset
算法 LRK-SOLPP KLPP LRK-ASOLPP 分类器 Ac(%) $r$ Ac(%) $r$ Ac(%) $r$ K-NN 84.45 20 84.38 20 90.18 35 K-means 85.65 20 89.06 25 91.16 25 SVM 87.25 15 90.76 15 94.27 20 BP-ANN 89.82 20 91.64 20 95.34 25
下载: 导出CSV
表 3 WHU-RS dataset上的最佳分类精度(Ac)及对应特征维数(r)
Table 3 The classiflcation accuracy (Ac) and the feature dimension (r) on WHU-RS dataset
算法 LRK-SOLPP KLPP LRK-ASOLPP 分类器 Ac(%) $r$ Ac(%) $r$ Ac(%) $r$ K-NN 85.32 30 88.04 20 90.25 20 K-means 88.58 20 89.64 50 90.87 25 SVM 87.68 35 91.76 15 95.79 20 BP-ANN 90.47 20 90.43 20 96.18 25
下载: 导出CSV
表 4 Quick bird dataset上的最佳分类精度(Ac)及对应特征维数(r)
Table 4 The classiflcation accuracy (Ac) and the feature dimension (r) on Quick bird dataset
算法 LRK-SOLPP KLPP LRK-ASOLPP 分类器 Ac(%) $r$ Ac(%) $r$ Ac(%) $r$ K-NN 84.98 25 93.65 20 94.18 35 K-means 86.62 20 92.06 50 96.28 25 SVM 88.76 25 90.38 25 93.69 20 BP-ANN 89.45 20 92.56 30 95.89 25
下载: 导出CSV
-
[1] 明冬萍, 骆剑承, 沈占锋, 汪闽, 盛昊.高分辨率遥感影像信息提取与目标识别技术研究.测绘科学, 2005, 30(3):18-20 doi: 10.3771/j.issn.1009-2307.2005.03.004Ming Dong-Ping, Luo Jian-Cheng, Shen Zhan-Feng, Wang Min, Sheng Hao. Research on information extraction and target recognition from high resolution remote sensing image. Science of Surveying and Mapping, 2005, 30(3):18-20 doi: 10.3771/j.issn.1009-2307.2005.03.004 [2] 刘扬, 付征叶, 郑逢斌.高分辨率遥感影像目标分类与识别研究进展.地球信息科学学报, 2015, 17(9):1080-1091 http://d.old.wanfangdata.com.cn/Periodical/dqxxkx201509010Liu Yang, Fu Zheng-Ye, Zheng Feng-Bin. Review on high resolution remote sensing image classification and recognition. Journal of Geo-Information Science, 2015, 17(9):1080-1091 http://d.old.wanfangdata.com.cn/Periodical/dqxxkx201509010 [3] 汤玉奇. 面向对象的高分辨率影像城市多特征变化检测研究[博士学位论文], 武汉大学, 中国, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10486-1013209584.htmTang Yu-Qi. Object-Oriented Change Detection with Multi-Feature in Urban High-Resolution Remote Sensing Imagery[Ph. D. dissertation], Wuhan University, China, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10486-1013209584.htm [4] Dai D X, Yang W. Satellite image classification via two-layer sparse coding with biased image representation. IEEE Geoscience and Remote Sensing Letters, 2011, 8(1):173-176 doi: 10.1109/LGRS.2010.2055033 [5] 郭迎春, 袁浩杰, 吴鹏.基于Local特征和Regional特征的图像显著性检测.自动化学报, 2013, 39(8):1214-1224 http://www.aas.net.cn/CN/abstract/abstract18152.shtmlGuo Ying-Chun, Yuan Hao-Jie, Wu Peng. Image saliency detection based on local and regional features. Acta Automatica Sinica, 2013, 39(8):1214-1224 http://www.aas.net.cn/CN/abstract/abstract18152.shtml [6] 李擎, 唐欢, 迟健男, 邢永跃, 李华通.基于改进最大类间方差法的手势分割方法研究.自动化学报, 2017, 43(4):528-537 http://www.aas.net.cn/CN/abstract/abstract19031.shtmlLi Qing, Tang Huan, Chi Jian-Nan, Xing Yong-Yue, Li Hua-Tong. Gesture segmentation with improved maximum between-cluster variance algorithm. Acta Automatica Sinica, 2017, 43(4):528-537 http://www.aas.net.cn/CN/abstract/abstract19031.shtml [7] Tuzel O, Porikl F, Meer P. Human detection via classification on Riemannian manifolds. In:Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition. Minneapolis, MN, USA:IEEE, 2007. [8] Jayasumana S, Hartley R, Salzmann M. Kernels on Riemannian manifolds. Turaga P, Srivastava A (eds). Riemannian Computing in Computer Vision. Cham:Springer, 2016. 45-67 [9] Lunga D, Prasad S, Crawfrd M M, Ersoy O. Manifold-learning-based feature extraction for classification of hyperspectral data:a review of advances in manifold learning. IEEE Signal Processing Magazine, 2014, 31(1):55-66 http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=6678226 [10] Zhou Y J, Bao L, Lin Y Q. Fast second-order orthogonal tensor subspace analysis for face recognition. Journal of Applied Mathematics, 2014, 2014:Article No. 871565 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=Doaj000002867627 [11] Huang H B, Huo H, Fang T. Hierarchical manifold learning with applications to supervised classification for high-resolution remotely sensed images. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(3):1677-1692 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=3b9bc444d224062d81838c870471f256 [12] 宗薇.一种新的视频流动态目标跟踪算法.计算机应用研究, 2015, 32(3):954-956 doi: 10.3969/j.issn.1001-3695.2015.03.073Zong Wei. New video stream dynamic target tracking algorithm. Application Research of Computers, 2015, 32(3):954-956 doi: 10.3969/j.issn.1001-3695.2015.03.073 [13] Ertan C H, Wright M J, Thompson P M, Vidal R. Segmentation of high angular resolution diffusion MRI using sparse Riemannian manifold clustering. IEEE Transactions on Medical Imaging, 2014, 33(2):301-317 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=91770beb1865261b51d252a5d2c423d4 [14] Zhang Y Y, Wang Z P, Lv X D. Saliency detection via sparse reconstruction errors of covariance descriptors on Riemannian manifolds. Circuits, Systems, and Signal Processing, 2016, 35(12):4372-4389 doi: 10.1007/s00034-016-0267-x [15] Tenenbaum J B, de Silva V, Langford J C. A global geometric framework for nonlinear dimensionality reduction. Science, 2002, 290(5500):2319-2323 doi: 10.1126-science.290.5500.2319/ [16] Roweis S T, Saul L K. Nonlinear dimensionality reduction by locally linear embedding. Science, 2000, 290(5500):2323-2326 doi: 10.1126/science.290.5500.2323 [17] Belkin M, Niyogi P. Laplacian eigenmaps for dimensionality reduction and data representation. Neural Computation, 2003, 15(6):1373-1396 doi: 10.1162/089976603321780317 [18] Zhang Z Y, Zha H Y. Principal manifolds and nonlinear dimensionality reduction via tangent space alignment. SIAM Journal on Scientific Computing, 2005, 26(1):313-338 http://d.old.wanfangdata.com.cn/Periodical/shdxxb-e200404005 [19] Weiberger K Q, Sha F, Saul K L. Learning a kernel matrix for nonlinear dimensionality reduction. In:Proceedings of the 21st International Conference on Machine Learning. Banff, Alberta, Canada:ACM, 2004. [20] Donoho D L, Grimes C E. Hessian eigenmaps:locally linear embedding techniques for high-dimensional data. Proceedings of the National Academy of Sciences of the United States of America, 2003, 100(10):5591-5596 doi: 10.1073/pnas.1031596100 [21] Zhang T H, Li X L, Tao D C, Yang J. Local coordinates alignment and its linearization. Neural Information Processing. Berlin, Heidelberg:Springer-Verlag, 2008. 643-652 [22] He X F, Niyogi P. Locality preserving projections. In:Proceedings of the 2003 Conference on Advances in Neural Information Processing Systems. Chicago, IL, USA:MIT Press, 2003. 186-197 [23] Kokiopoulou E, Saad Y. Orthogonal neighborhood preserving projections:a projection-based dimensionality reduction technique. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2007, 29(12):2143-2156 doi: 10.1109/TPAMI.2007.1131 [24] He X F, Cai D, Yan S C, Zhan H J. Neighborhood preserving embedding. In:Proceedings of the 10th IEEE International Conference on Computer Vision. Beijing, China:IEEE, 2005. 1208-1213 [25] Lu G, Zuo J. Two-dimensional neighborhood preserving discriminant analysis for face recognition. Pattern Recognition Letters, 2010, 30(10):902-907 [26] Shen J F, Zuo X, Liu H, Wang H R, Yang W K, Qian C S. Supervised local high-order differential channel feature learning for pedestrian detection. Neural Processing Letters, 2017, 45(3):1025-1037 doi: 10.1007/s11063-016-9561-7 [27] Tuzel O, Porikli F, Meer P. Region covariance:a fast descriptor for detection and classification. In:Proceedings of the 2006 European Conference on Computer Vision. Berlin, Heidelberg, Germany:Springer, 2006. 589-600 [28] 王瑞霞, 彭国华.基于黎曼流形稀疏编码的图像检索算法.自动化学报, 2017, 43(5):778-788 http://www.aas.net.cn/CN/abstract/abstract19055.shtmlWang Rui-Xia, Peng Guo-Hua. An image retrieval method with sparse coding based on Riemannian manifold. Acta Automatica Sinica, 2017, 43(5):778-788 http://www.aas.net.cn/CN/abstract/abstract19055.shtml [29] Yang Y, Newsam S. Bag-of-visual-words and spatial extensions for land-use classification. In:Proceedings of the 18th SIGSPATIAL International Conference on Advances in Geographic Information Systems. San Jose, California, USA:ACM, 2010. 270-279 [30] Xia G S, Yang W, Delon J, Gousseau Y, Sun H, Maître H. Structural high-resolution satellite image indexing. In:Proceedings of the 2010 Symposium:100 Years-International Society for Photogrammetry and Remote Sensing-Advancing Remote Sensing Science. Vienna, Austria:ISPRS, 2010. 298-303 [31] Li P H, Wang Q L, Zuo W M, Zhang L. Log-Euclidean kernels for sparse representation and dictionary learning. In:Proceedings of the 2013 IEEE International Conference on Computer Vision (ICCV). Sydney, NSW, Australia:IEEE, 2013. 1601-1608 -

 下载:
下载:

计量
- 文章访问数: 2481
- HTML全文浏览量: 380
- PDF下载量: 528
- 被引次数: 0
