

Finite-Time Integral Sliding-Mode Control for Multi-Agent Systems With Mismatched Disturbances
-
摘要: 针对动态多智能体系统协同控制问题,本文研究了带有不匹配干扰的二阶多智能体系统的有限时间包容控制,提出了基于非线性积分滑模控制(Integral sliding-mode control,ISMC)的复合分布式包容控制算法.首先利用Lyapunov稳定性和齐次性定理,分析了未受扰系统的有限时间包容控制问题;然后针对存在不匹配干扰的多智能体动态系统,设计非线性有限时间干扰观测器估算智能体的状态和干扰,提出基于干扰观测器的复合分布式积分滑模控制协议,结合现代控制理论和滑模控制理论,研究了带有不匹配干扰的多智能体系统有限时间包容控制问题.最后数值仿真证明了控制算法的有效性.Abstract: In this paper, the finite-time containment control problem is investigated for the second-order multi-agent systems with mismatched disturbances. A composite distributed containment control algorithm is proposed based on nonlinear integral sliding-mode control (ISMC). First of all, by using the Lyapunov stability and the homogeneity property, the finite-time containment control for the systems without disturbances is analyzed. Then for the multi-agent dynamic systems with mismatched disturbances, a nonlinear finite-time disturbance observer is constructed to estimate the states and mismatched disturbances. And then, a composite distributed control protocol is proposed based on disturbance observer. By using the modern control theory and sliding-mode control, the finite-time containment control for multi-agent systems with mismatched disturbances is studied. Finally, numerical simulation results illustrate the effectiveness of the proposed control algorithm.1) 本文责任编委 鲁仁全
-
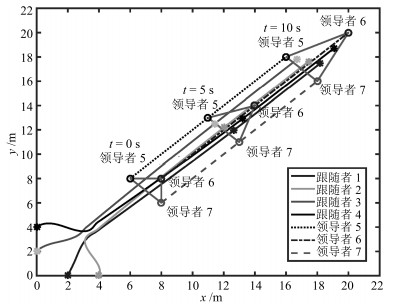
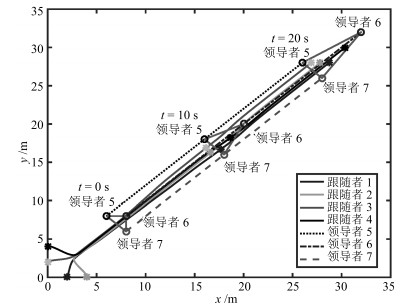
图 4 跟随者与动态领导者的位置关系
Fig. 4 The trajectories of position for the followers and dynamic leaders
-
[1] Mondal A, Behera L, Sahoo S R, Shukla A. A novel multi-agent formation control law with collision avoidance. IEEE/CAA Journal of Automatica Sinica, 2017, 4(3):558-568 doi: 10.1109/JAS.2017.7510565 [2] Wang Q, Chen Z, Liu P, Hua Q. Distributed multi-robot formation control in switching networks. Neurocomputing, 2017, 270:4-10 doi: 10.1016/j.neucom.2016.12.104 [3] 杨洪勇, 褚福芳.基于弱连通网络的多自主体系统群集运动.河南理工大学学报(自然科学版), 2015, 34(2):231-235 http://d.old.wanfangdata.com.cn/Periodical/jzgxyxb201502017Yang Hong-Yong, Chu Fu-Fang. Flocking motion of multi-agent system based weakly connected network. Journal of Henan Polytechnic University (Natural Science), 2015, 34(2):231-235 http://d.old.wanfangdata.com.cn/Periodical/jzgxyxb201502017 [4] 褚福芳, 杨洪勇.具有干扰的多自主体系统的群集运动与速度同步.复杂系统与复杂性科学, 2015, 12(1):85-91 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx201501013Chu Fu-Fang, Yang Hong-Yong. Flocking motion and speed synchronization of multi-agent system with disturbance. Complex Systems and Complexity Science, 2015, 12(1):85-91 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx201501013 [5] Lin P, Ren W, Song Y. Distributed multi-agent optimization subject to nonidentical constraints and communication delays. Automatica, 2016, 65:120-131 doi: 10.1016/j.automatica.2015.11.014 [6] Dong L, Li J, Liu Q. Relay tracking control for second-order multi-agent systems with damaged agents. ISA Transactions, 2017, 71:25-31 doi: 10.1016/j.isatra.2017.07.001 [7] Wang Q, Fu J, Wang J. Fully distributed containment control of high-order multi-agent systems with nonlinear dynamics. Systems and Control Letters. 2017, 99:33-39 doi: 10.1016/j.sysconle.2016.11.003 [8] 杨洪勇, 郭雷, 张玉玲, 姚秀明.复杂分数阶多自主体系统的运动一致性.自动化学报, 2014, 40(3):489-496 http://www.aas.net.cn/CN/abstract/abstract18314.shtmlYang Hong-Yong, Guo Lei, Zhang Yu-Ling, Yao Xiu-Ming. Movement consensus of complex fractional-order multi-agent systems. Acta Automatica Sinica, 2014, 40(3):489-496 http://www.aas.net.cn/CN/abstract/abstract18314.shtml [9] 杨洪勇, 郭雷, 张玉玲, 姚秀明.离散时间分数阶多自主体系统的时延一致性.自动化学报, 2014, 40(9):2022-2028 http://www.aas.net.cn/CN/abstract/abstract18474.shtmlYang Hong-Yong, Guo Lei, Zhang Yu-Ling, Yao Xiu-Ming. Delay consensus of fractional-order multi-agent systems with sampling delays. Acta Automatica Sinica, 2014, 40(9):2022-2028 http://www.aas.net.cn/CN/abstract/abstract18474.shtml [10] Zhang D, Xu Z, Wang Q G, Zhao Y B. Leader-follower H_∞ consensus of linear multi-agent systems with aperiodic sampling and switching connected topologies. ISA Transactions, 2017, 68:150-159 doi: 10.1016/j.isatra.2017.01.001 [11] Li W, Xie L, Zhang J F. Containment control of leader-following multi-agent systems with Markovian switching network topologies and measurement noises. Automatica, 2015, 51:263-267 doi: 10.1016/j.automatica.2014.10.070 [12] Wang F Y, Yang H Y, Zhang S N, Han F J. Containment control for first-order multi-agent systems with time-varying delays and uncertain topologies. Communications in Theoretical Physics, 2016, 66(8):249-255 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=b68f4ac26a29ba85c46222ac3108dda2 [13] Wang F Y, Yang H Y, Liu Z X, Chen Z Q. Containment control of leader-following multi-agent systems with jointly-connected topologies and time-varying delays. Neurocomputing, 2017, 260:341-348 doi: 10.1016/j.neucom.2017.04.049 [14] Yang H Y, Wang F Y, Han F J. Containment control of fractional order multi-agent systems with time delays. IEEE/CAA Journal of Automatica Sinica, 2016, 99:1-6 http://d.old.wanfangdata.com.cn/Periodical/zdhxb-ywb201803009 [15] Bhat S P, Bernstein D S. Finite-time stability of continuous autonomous systems. SIAM Journal on Control and Optimization, 2000, 38(3):751-766 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=a9daee27936319bef2f6eca3d9279ba8 [16] Xiao Q Y, Wu Z H, Peng L. Fast finite-time consensus tracking of second-order multi-agent systemswith a virtual leader. Journal of Networks, 2014, 9(12):3268-3274 [17] Wang X, Li S, Shi P. Distributed finite-time containment control for double-integrator multiagent systems. IEEE Transactions on Cybernetics, 2017, 44(9):1518-1528 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ff7c3e8abb919b2cecbff395e91edd86 [18] 庄昊, 杨洪勇.联合连通拓扑下的二阶多自主体系统有限时间包容控制.智能系统学报, 2017, 12(2):188-195 http://d.old.wanfangdata.com.cn/Periodical/xdkjyc201702010Zhuang Hao, Yang Hong-Yong. Finite-time containment control of second-ordermulti-agent systems with jointly connected topologies. CAAI transactions on intelligent systems, 2017, 12(2):188-195 http://d.old.wanfangdata.com.cn/Periodical/xdkjyc201702010 [19] 刘源, 闵海波, 王仕成, 张金生, 刘志国.时延网络中Euler-Lagrange系统的分布式自适应协调控制.自动化学报, 2012, 38(8):1270-1279 http://www.aas.net.cn/CN/abstract/abstract13659.shtmlLiu Yuan, Min Hai-Bo, Wang Shi-Cheng, Zhang Jin-Sheng, Liu Zhi-Guo. Distributed adaptive synchronization of networked euler-lagrange systems with communication delays. Acta Automatica Sinica, 2012, 38(8):1270-1279 http://www.aas.net.cn/CN/abstract/abstract13659.shtml [20] Wang M, Ren X, Chen Q. Robust tracking and distributed synchronization control of a multi-motor servomechanism with H∞ performance. ISA Transactions, 2017, 72:147-160 [21] Sun Z, Zhang G, Lu Y, Zhang W. Leader-follower formation control of underactuated surface vehicles based on sliding mode control and parameter estimation. ISA Transactions, 2017, 72:15-24 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ef66dfe24e054f17e80a1f3e07cf5140 [22] Zhang Q, Li L, Yan X G, Spurgeon S K. Sliding mode control for singular stochastic Markovian jump systems with uncertainties. Automatica, 2017, 79:27-34 doi: 10.1016/j.automatica.2017.01.002 [23] Zhao Q, Dong X, Liang Z, Ren Z. Distributed cooperative guidance for multiple missiles with fixed and switching communication topologies. Chinese Journal of Aeronautics, 2017, 30(4):1570-1581 doi: 10.1016/j.cja.2017.06.009 [24] Yang J, Zolotas A, Chen W H, Michail K, Li S. Robust control of nonlinear MAGLEV suspension system with mismatched uncertainties via DOBC approach. ISA Transactions, 2011, 50(3):389-396 doi: 10.1016/j.isatra.2011.01.006 [25] Li S H, Yang J, Chen W H, Chen X. Disturbance Observer-Based Control: Methods and Applications. Boca Raton, Florida, USA: CRC Press, Inc. 2014. 52-85 [26] Wang X Y, Li S H, James Lam. Distributed active anti-disturbance output consensus algorithms for higher-order multi-agent systems with mismatched disturbances. Automatica, 2016, 74:30-37 doi: 10.1016/j.automatica.2016.07.010 [27] 刘凡, 李玉玲, 杨洪勇.基于多源干扰的Leader-follower多智能体系统的一致性.信息与控制, 2018, 47(1):111-118, 128 http://d.old.wanfangdata.com.cn/Periodical/xxykz201801018Liu Fan, Li Yu-Ling, Yang Hong-Yong. Consensus for leader-follower multi-agent systems with mismatched disturbance and correlated uncertainties. Information and control, 2018, 47(1):111-118, 128 http://d.old.wanfangdata.com.cn/Periodical/xxykz201801018 [28] 李玉玲, 杨洪勇, 刘凡, 杨怡泽.带有不匹配干扰的二阶多自主体系统有限时间包容控制.自动化学报, 2018. https://doi.org/10.16383/j.aas.2018.c170571, August 25, 2018 http://youxian.cnki.com.cn/yxdetail.aspx?filename=MOTO2018050300C&dbname=CAPJ2018Li Yu-Ling, Yang Hong-Yong, Liu Fan, Yang Yi-Ze. Finite-time containment control of second-order multi-agent systems with unmatched disturbances. Acta Automatica Sinica, 2018. https://doi.org/10.16383/j.aas.2018.c170571, August 25, 2018 http://youxian.cnki.com.cn/yxdetail.aspx?filename=MOTO2018050300C&dbname=CAPJ2018 [29] Zhang Z, Li S, Luo S. Terminal guidance laws of missile based on ISMC and NDOB with impact angle constraint. Aerospace Science and Technology, 2013, 31(1):30-41 doi: 10.1016/j.ast.2013.09.003 [30] Khalil H K. Nonlinear Systems (3rd ed). New York, USA:Prentice Hall. 2002. 120-125 [31] 卜祥伟, 吴晓燕, 陈永兴, 白瑞阳.基于非线性干扰观测器的高超声速飞行器滑模反演控制.控制理论与应用, 2014, 31(11):1473-1479 doi: 10.7641/CTA.2014.40260Bu Xiang-Wei, Wu Xiao-Yan, Chen Yong-Xing, Bai Rui-Yang. Nonlinear-disturbance-observer-based sliding mode backstepping control of hypersonic vehicles. Control Theroy and Applications, 2014, 31(11):1473-1479 doi: 10.7641/CTA.2014.40260 -

 下载:
下载:



图(5)
计量
- 文章访问数: 2760
- HTML全文浏览量: 1310
- PDF下载量: 924
- 被引次数: 0
