

-
摘要: 随着信息物理系统(Cyber-physical system,CPS)融合深度和融合广度的不断增加,信息物理生产系统(Cyber-physical production system,CPPS)呈现出显著的社会化趋势.通过对信息物理生产系统相关技术的研究,分析了信息物理生产系统的社会化演进历程,建立了社会信息物理生产系统(Social cyber-physical production system,SCPPS)模型;根据人与智能体的信息物理交互行为差异,基于对人类社会行为特点的分析,类比研究了智能体社会与人类社会融合的广义互联社会特点;归纳出信息物理系统的七种交互模式及其在社会信息物理生产系统中的应用;总结出社会信息物理生产系统面临标准化、人性化和安全化的挑战问题.
-
关键词:
- 信息物理系统 /
- 信息物理生产系统 /
- 社会信息物理生产系统 /
- 物联网 /
- 交互模式
Abstract: With the increasing fusion depth and breadth of cyber and physical spaces, the cyber-physical production system (CPPS) presents a significant social trend. In this paper, through investigations on related CPPS technologies, we expound the social evolution of CPPS, and establish a social cyber-physical production system (SCPPS) model. According to the difference of cyber-physical interaction between humans and agents, we derive the behavior characteristics of the networked society of agents and humans based on an analogical analysis of the characteristics of human society. We also discuss the cyber-physical interaction models and their application in SCPPS, as well as the challenges of SCPPS in terms of standardization, humanization and security.1) 本文责任编委 陈龙 -
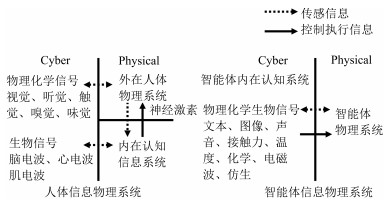
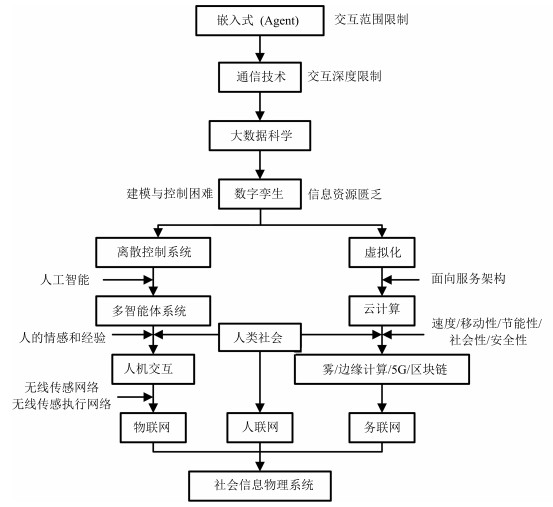
图 4 人类和智能体的信息物理系统对比图
Fig. 4 Cyber-physical interaction system comparison between human and agent
-
[1] Lee E A. Cyber-physical systems-are computing foundations adequate? Position Paper for NSF Workshop on Cyber, 2006:6-14 https://www.semanticscholar.org/paper/Cyber-Physical-Systems-Are-Computing-Foundations-Lee/7e17f766050b6847566424c0d8bf602b6099f779 [2] Cyber Physical Systems PWG. Framework for CyberPhysical Systems Release 1.0[Online], avaliable: https://s3.amazonaws.com/nist-sgcps/cpspwg/flles/pwgglobal/CPS_PWG_Framework_for_Cyber_Physical_Systems_Release_10_Final.pdf, March 21, 2018 [3] The European Union0s Seventh Framework Programme. CyPhERS. Cyber-Physical EuropeanRoadmap and Strategy[Online], avaliable: http://cyphers.eu/sites/default/flles/d6.1+2report.pdf, March 21, 2018 [4] Acatech. Living in a networked world[Online], avaliable: http://www.cyphers.eu/sites/default/flles/acatechSTUDIEagendaCPSengANSICHT.pdf, March 21, 2018 [5] Thoben K D, Wiesner S A, Wuest T. Industrie 4.0 and smart manufacturing-a review of research issues and application examples. International Journal of Automation Technology, 2017, 11(1):4-16 doi: 10.20965/ijat.2017.p0004 [6] Kagermann H, Wahlster W, Helbig J. Recommendations for Implementing the Strategic Initiative INDUSTRIE 4.0: Securing the Future of German Manufacturing Industry, Final Report of the Industrie 4.0 Working Group, 2013. [7] Weyer S, Meyer T, Ohmer M, Gorecky D, Zühlke D. Future modeling and simulation of CPS-based factories:an example from the automotive industry. IFAC-PapersOnLine, 2016, 49(31):97-102 doi: 10.1016/j.ifacol.2016.12.168 [8] Li L. China0s manufacturing locus in 2025:with a comparison of "Made-in-China 2025" and "Industry 4.0". Technological Forecasting and Social Change, 2018, 135:66-74 doi: 10.1016/j.techfore.2017.05.028 [9] Zhang Y F, Zhang G, Wang J Q, Sun S D, Si S B, Yang T. Real-time information capturing and integration framework of the internet of manufacturing things. International Journal of Computer Integrated Manufacturing, 2015, 28(8):811-822 doi: 10.1080/0951192X.2014.900874 [10] Monostori L. Cyber-physical production systems:roots, expectations and R & D challenges. Procedia CIRP, 2014, 17:9-13 doi: 10.1016/j.procir.2014.03.115 [11] Lee J, Bagheri B, Kao H A. A Cyber-Physical Systems architecture for industry 4.0-based manufacturing systems. Manufacturing Letters, 2015, 3:18-23 doi: 10.1016/j.mfglet.2014.12.001 [12] Wiesner S, Marilungo E, Thoben K D. Cyber-physical product-service systems-challenges for requirements engineering. International Journal of Automation Technology, 2017, 11(1):17-28 doi: 10.20965/ijat.2017.p0017 [13] Ecer G. Soziotechnisches potenzial cyber-physischer systeme. ZWF Zeitschrift fuer Wirtschaftlichen Fabrikbetrieb, 2015, 110(3):142-144 doi: 10.3139/104.111298 [14] 姚锡凡, 练肇通, 杨屹, 张毅, 金鸿.智慧制造-面向未来互联网的人机物协同制造新模式.计算机集成制造系统, 2014, 20(6):1490-1498 http://www.cnki.com.cn/article/cjfdtotal-jsjj201406028.htmYao Xi-Fan, Lian Zhao-Tong, Yang Yi, Zhang Yi, Jin Hong. Wisdom manufacturing:new humans-computersthings collaborative manufacturing model. Computer Integrated Manufacturing Systems, 2014, 20(6):1490-1498 http://www.cnki.com.cn/article/cjfdtotal-jsjj201406028.htm [15] Yao X F, Zhou J J, Lin Y Z, Li Y, Yu H N, Liu Y. Smart manufacturing based on Cyber-Physical Systems and beyond. Journal of Intelligent Manufacturing, 2017:1-13 doi: 10.1007/s10845-017-1384-5 [16] 王飞跃.软件定义的系统与知识自动化:从牛顿到默顿的平行升华.自动化学报, 2015, 41(1):1-8 doi: 10.3969/j.issn.1003-8930.2015.01.001Wang Fei-Yue. Software deflned systems and knowledge automation:a parallel paradigm shift from Newton to Merton. Acta Automatica Sinica, 2015, 41(1):1-8 doi: 10.3969/j.issn.1003-8930.2015.01.001 [17] Wang F Y. The emergence of intelligent enterprises:from CPS to CPSS. Social Learning, 2010:85-88 https://www.researchgate.net/publication/220628939_The_emergence_of_intelligent_enterprises_From_CPS_to_CPSS?_sg=rg7ekrVzyJVshX-jOc_CPJ48VpHvDBWZ456Y3V2ikh_2KYtFzZliouyq9UzMcl04NrzCWcYlFLZrsYj0lPeryg [18] 王飞跃.从社会计算到社会制造:一场即将来临的产业革命.中国科学院院刊, 2012, 6(27):658-669 http://d.old.wanfangdata.com.cn/Periodical/zgkxyyk201206002Wang Fei-Yue. From social computing to social manufacturing:The coming industrial revolution and new frontier in cyber-physical-social pace. Bulletin of the Chinese Academy of Sciences, 2012, 6(27):658-669 http://d.old.wanfangdata.com.cn/Periodical/zgkxyyk201206002 [19] Yao X F, Lin Y Z. Emerging manufacturing paradigm shifts for the incoming industrial revolution. The International Journal of Advanced Manufacturing Technology, 2016, 85(5-8):1665-1676 doi: 10.1007/s00170-015-8076-0 [20] Lee J, Jin C, Bagheri B. Cyber physical systems for predictive production systems. Production Engineering, 2017, 11(2):155-165 doi: 10.1007/s11740-017-0729-4 [21] Lam H Y, Ho G T S, Wu C H, Choy K L. Customer relationship mining system for efiective strategies formulation. Industrial Management and Data Systems, 2014, 114(5):711-733 doi: 10.1108/IMDS-08-2013-0329 [22] Xu Y P, Chen G X, Zheng J L. An integrated solutionKAGFM for mass customization in customer-oriented product design under cloud manufacturing environment. The International Journal of Advanced Manufacturing Technology, 2016, 84(1-4):85-101 doi: 10.1007/s00170-015-8074-2 [23] Hsiao W P, Chiu M C. A mass personalization methodology based on co-creation. Moving Integrated Product Development to Service Clouds in the Global Economy, 2014, 1:698-705 http://ebooks.iospress.nl/publication/37920 [24] Bertolotti I C, Hu T T. Modular design of an open-source, networked embedded system. Computer Standards and Interfaces, 2015, 37:41-52 doi: 10.1016/j.csi.2014.05.004 [25] Stark R, Kind S, Neumeyer S. Innovations in digital modelling for next generation manufacturing system design. CIRP Annals, 2017, 66(1):169-172 doi: 10.1016/j.cirp.2017.04.045 [26] Tan C B, Hu S J, Chung H, Barton K, Piya C, Ramani K, et al. Product personalization enabled by assembly architecture and cyber physical systems. CIRP Annals, 2017, 66(1):33-36 doi: 10.1016/j.cirp.2017.04.106 [27] Mladineo M, Veza I, Gjeldum N. Solving partner selection problem in cyber-physical production networks using the HUMANT algorithm. International Journal of Production Research, 2017, 55(9):2506-2521 doi: 10.1080/00207543.2016.1234084 [28] Wang X V, Lopez N B N, Ijomah W, Wang L H, Li J H. A smart cloud-based system for the WEEE recovery/recycling. Journal of Manufacturing Science and Engineering, 2015, 137(6):061010 doi: 10.1115/1.4030304 [29] Qiu X, Luo H, Xu G Y, Zhong R Y, Huang G Q. Physical assets and service sharing for IoT-enabled supply Hub in industrial park (SHIP). International Journal of Production Economics, 2015, 159:4-15 doi: 10.1016/j.ijpe.2014.09.001 [30] Addo-Tenkorang R, Helo P T, Kantola J. Concurrent enterprise:a conceptual framework for enterprise supplychain network activities. Enterprise Information Systems, 2017, 11(4):474-511 doi: 10.1080/17517575.2016.1212274 [31] Noseworthy J, Leeser M. E-cient communication between the embedded processor and the reconflgurable logic on an FPGA. IEEE Transactions on Very Large Scale Integration (VLSI) Systems, 2008, 16(8):1083-1090 doi: 10.1109/TVLSI.2008.2000525 [32] Long Y H, Zhou Z D, Liu Q, Chen B Y, Zhou H L. Embedded-based modular NC systems. The International Journal of Advanced Manufacturing Technology, 2009, 40(7-8):749-759 doi: 10.1007/s00170-008-1384-x [33] 徐钢, 张晓彤, 黎敏, 徐金梧.基于嵌入式CPS模型的产品质量在线管控方法.机械工程学报, 2017, 53(12):94-101 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201712012Xu Gang, Zhang Xiao-Tong, Li Min, Xu Jin-Wu. Online monitoring and control method of product quality based on embedded cyber-physical system models. Journal of Mechanical Engineering, 2017, 53(12):94-101 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201712012 [34] Lien S Y, Liau T H, Kao C Y, Chen K C. Cooperative access class barring for machine-to-machine communications. IEEE Transactions on Wireless Communications, 2012, 11(1):27-32 doi: 10.1109/TWC.2011.111611.110350 [35] Agiwal M, Roy A, Saxena N. Next generation 5G wireless networks:a comprehensive survey. IEEE Communications Surveys and Tutorials, 2016, 18(3):1617-1655 doi: 10.1109/COMST.2016.2532458 [36] Kamel M, Hamouda W, Youssef A. Ultra-dense networks:a survey. IEEE Communications Surveys and Tutorials, 2016, 18(4):2522-2545 doi: 10.1109/COMST.2016.2571730 [37] Gao Z, Dai L L, Mi D, Wang Z C, Imran M A, Shakir M Z. MmWave massive-MIMO-based wireless backhaul for the 5G ultra-dense network. IEEE Wireless Communications, 2015, 22(5):13-21 doi: 10.1109/MWC.2015.7306533 [38] Noura M, Nordin R. A survey on interference management for device-to-device (D2D) communication and its challenges in 5G networks. Journal of Network and Computer Applications, 2016, 71:130-150 doi: 10.1016/j.jnca.2016.04.021 [39] Farhang-Boroujeny B, Moradi H. OFDM inspired waveforms for 5G. IEEE Communications Surveys and Tutorials, 2016, 18(4):2474-2492 doi: 10.1109/COMST.2016.2565566 [40] Thembelihle D, Rossi M, Munaretto D. Softwarization of mobile network functions towards agile and energy e-cient 5G architectures: a survey. Wireless Communications and Mobile Computing, 2017, 2017: Article ID 8618364 [41] Su Z, Xu Q C. Content distribution over content centric mobile social networks in 5G. IEEE Communications Magazine, 2015, 53(6):66-72 doi: 10.1109/MCOM.2015.7120047 [42] Liang C C, Yu F R, Zhang X. Information-centric network function virtualization over 5G mobile wireless networks. IEEE Network, 2015, 29(3):68-74 doi: 10.1109/MNET.2015.7113228 [43] Liu L, Zhao S L, Yu Z L, Dai H J. A big data inspired chaotic solution for fuzzy feedback linearization model in cyber-physical systems. Ad Hoc Networks, 2015, 35:97-104 doi: 10.1016/j.adhoc.2015.07.010 [44] Venkatesan M, Arunkumar T, Prabhavathy P. A novel CpTree-based co-located classifler for big data analysis. International Journal of Communication Networks and Distributed Systems, 2015, 15(2-3):191-211 [45] 姚锡凡, 周佳军, 张存吉, 刘敏.主动制造-大数据驱动的新兴制造范式.计算机集成制造系统, 2017, 23(1):172-185 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jsjjczzxt201701019Yao Xi-Fan, Zhou Jia-Jun, Zhang Cun-Ji, Liu Min. Proactive manufacturing-a big-data driven emerging manufacturing paradigm. Computer Integrated Manufacturing Systems, 2017, 23(1):172-185 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jsjjczzxt201701019 [46] Babiceanu R F, Seker R. Manufacturing cyber-physical systems enabled by complex event processing and big data environments: a framework for development. In: Proceedings of the 2015 Service Orientation in Holonic and MultiAgent Manufacturing. Cham: Springer, 2015, 594: 165-173 [47] Chen J H, Yang J Z, Zhou H C, Xiang H, Zhu Z H, Li Y S, et al. CPS modeling of CNC machine tool work processes using an instruction-domain based approach. Engineering, 2015, 1(2):247-260 doi: 10.15302/J-ENG-2015054 [48] Kuang L, Tang X, Yu M Q, Huang Y J, Guo K H. A comprehensive ranking model for tweets big data in online social network. EURASIP Journal on Wireless Communications and Networking, 2016, 2016:46 doi: 10.1186/s13638-016-0532-5 [49] Glaessgen E, Stargel D. The digital twin paradigm for future NASA and U.S. air force vehicles. In: Proceedings of the 53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference. Honolulu, Hawaii, USA: AIAA, 2012. [50] Grieves M. Digital Twin: Manufacturing Excellence through Virtual Factory Replication, White Paper, 2015. [51] Ma J H, Ning H S, Huang R H, Liu H, Yang L T, Chen J J, et al. Cybermatics:a holistic fleld for systematic study of Cyber-Enabled new worlds. IEEE Access, 2015, 3:2270-2280 doi: 10.1109/ACCESS.2015.2498288 [52] Alam K M, El Saddik A. C2PS:a digital twin architecture reference model for the cloud-based cyber-physical systems. IEEE Access, 2017, 5:2050-2062 doi: 10.1109/ACCESS.2017.2657006 [53] Tao F, Zhang M, Cheng J J, Qi Q L. Digital twin workshop:a new paradigm for future workshop. Computer Integrated Manufacturing Systems, 2017, 23(1):1-9 [54] Tao F, Cheng J F, Qi Q L, Zhang M, Zhang H, Sui F Y. Digital twin-driven product design, manufacturing and service with big data. The International Journal of Advanced Manufacturing Technology, 2018, 94(9-12):3563-3576 doi: 10.1007/s00170-017-0233-1 [55] Schroeder G N, Steinmetz C, Pereira C E, Espindola D B. Digital twin data modeling with automationML and a communication methodology for data exchange. IFAC-PapersOnLine, 2016, 49(30):12-17 https://www.sciencedirect.com/science/article/pii/S2405896316325538 [56] Misik S, Cela A, Bradac Z. Distributed systems-a brief review of theory and practice. IFAC-PapersOnLine, 2016, 49(25):318-323 doi: 10.1016/j.ifacol.2016.12.057 [57] Akyildiz I F, Su W, Sankarasubramaniam Y, Cayirci E. Wireless sensor networks:a survey. Computer Networks, 2002, 38(4):393-422 doi: 10.1016/S1389-1286(01)00302-4 [58] Gupta R A, Chow M Y. Networked control system:overview and research trends. IEEE Transactions on Industrial Electronics, 2010, 57(7):2527-2535 doi: 10.1109/TIE.2009.2035462 [59] Mangharam R, Pajic M. Distributed control for cyberphysical systems. Journal of the Indian Institute of Science, 2013, 93(3):353-387 [60] Lu C Y, Saifullah A, Li B, Sha M, Gonzalez H, Gunatilaka D, et al. Real-time wireless sensor-actuator networks for industrial cyber-physical systems. Proceedings of the IEEE, 2016, 104(5):1013-1024 doi: 10.1109/JPROC.2015.2497161 [61] Ge X H, Yang F W, Han Q L. Distributed networked control systems:a brief overview. Information Sciences, 2017, 380:117-131 doi: 10.1016/j.ins.2015.07.047 [62] Adamson G, Wang L H, Moore P. Feature-based control and information framework for adaptive and distributed manufacturing in cyber physical systems. Journal of Manufacturing Systems, 2017, 43:305-315 doi: 10.1016/j.jmsy.2016.12.003 [63] García-Valls M, Calva-Urrego C, De La Puente J A, Alonso A. Adjusting middleware knobs to assess scalability limits of distributed cyber-physical systems. Computer Standards and Interfaces, 2017, 51:95-103 doi: 10.1016/j.csi.2016.11.003 [64] Etxeberria-Agiriano I, Calvo I, Noguero A, Zulueta E. Towards middleware-based cooperation topologies for the next generation of CPS. International Journal of Online Engineering, 2012, 8:20-27 http://d.old.wanfangdata.com.cn/OAPaper/oai_doaj-articles_6f6c1866e720cc0a852b5c3bd7b98c9a [65] Ishizaki T, Sandberg H, Kashima K, Imura J I, Aihara K. Dissipativity-preserving model reduction for large-scale distributed control systems. IEEE Transactions on Automatic Control, 2015, 60(4):1023-1037 doi: 10.1109/TAC.2014.2370271 [66] Zarrin J, Aguiar R L, Barraca J P. Resource discovery for distributed computing systems:a comprehensive survey. Journal of Parallel and Distributed Computing, 2018, 113:127-166 doi: 10.1016/j.jpdc.2017.11.010 [67] Ren L T, Xie S S, Zhang Y, Peng J B, Zhang L D. Chattering analysis for discrete sliding mode control of distributed control systems. Journal of Systems Engineering and Electronics, 2016, 27(5):1096-1107 doi: 10.21629/JSEE.2016.05.17 [68] Cao Y C, Yu W W, Ren W, Chen G R. An overview of recent progress in the study of distributed multi-agent coordination. IEEE Transactions on Industrial Informatics, 2013, 9(1):427-438 doi: 10.1109/TII.2012.2219061 [69] Valckenaers P, Van Brussel H, Holvoet T. Fundamentals of holonic systems and their implications for selfadaptive and self-organizing systems. In: Proceedings of the 2nd IEEE International Conference on Self-Adaptive and Self-Organizing Systems Workshops. Venice, Veneto, Italy: IEEE, 2008. 168-173 [70] Barbosa J, Leit~ao P, Adam E, Trentesaux D. Dynamic self-organization in holonic multi-agent manufacturing systems:the ADACOR evolution. Computers in Industry, 2015, 66:99-111 doi: 10.1016/j.compind.2014.10.011 [71] Sanislav T, Zeadally S, Mois G, Fouchal H. Multi-agent architecture for reliable cyber-physical systems (CPS). In: Proceedings of the 2017 IEEE Symposium on Computers and Communications. Heraklion, Greece: IEEE, 2017. 170-175 [72] Taboun M S, Brennan R W. An embedded multi-agent systems based industrial wireless sensor network. Sensors, 2017, 17(9):2112 doi: 10.3390/s17092112 [73] Verma P K, Verma R, Prakash A, Agrawal A, Naik K, Tripathi R, et al. Machine-to-machine (M2M) communications:a survey. Journal of Network and Computer Applications, 2016, 66:83-105 doi: 10.1016/j.jnca.2016.02.016 [74] Xu X Y, Hua Q S. Industrial big data analysis in smart factory:current status and research strategies. IEEE Access, 2017, 5:17543-17551 doi: 10.1109/ACCESS.2017.2741105 [75] Zhang Y F, Qian C, Lv J X, Liu Y. Agent and cyberphysical system based self-organizing and self-adaptive intelligent shopfloor. IEEE Transactions on Industrial Informatics, 2017, 13(2):737-747 doi: 10.1109/TII.2016.2618892 [76] Jiang Z Q, Jin Y, Mingcheng E, Li Q. Distributed dynamic scheduling for cyber-physical production systems based on a multi-agent system. IEEE Access, 2017, 6:1855-1869 https://www.onacademic.com/detail/journal_1000040194012310_ce3f.html [77] Dworschak B, Zaiser H. Competences for cyber-physical systems in manufacturing-flrst flndings and scenarios. In: Proceedings of the International Conference on Digital Enterprise Technology-DET 2014 Disruptive Innovation in Manufacturing Engineering towards the 4th Industrial Revolution. Stuttgart, Germany: Elsevier, 2014. 345-350 [78] Castelli F, Michieletto S, Ghidoni S, Pagello E. A machine learning-based visual servoing approach for fast robot control in industrial setting. International Journal of Advanced Robotic Systems, 2017, 14(6):1-10 doi: 10.1177/1729881417738884 [79] Vafadar M, Behrad A. A vision based system for communicating in virtual reality environments by recognizing human hand gestures. Multimedia Tools and Applications, 2015, 74(18):7515-7535 doi: 10.1007/s11042-014-1989-z [80] Xu T, Zhang H, Yu C. See you see me: the role of Eye contact in multimodal human-robot interaction. ACM Transactions on Interactive Intelligent Systems, 2016, 6(1): Article No. 2 [81] Rascon C, Meza I, Fuentes G, Salinas L, Pineda L A. Integration of the multi-DOA estimation functionality to human-robot interaction. International Journal of Advanced Robotic Systems, 2015, 12(2):8 doi: 10.5772/59993 [82] Alonso-Martín F, Gamboa-Montero J J, Castillo J C, Castro-GonzÁlez A, Salichs M A. Detecting and classifying Á human touches in a social robot through acoustic sensing and machine learning. Sensors, 2017, 17(5):1138 doi: 10.3390/s17051138 [83] Gastaldo P, Pinna L, Seminara L, Valle M, Zunino R. A tensor-based approach to touch modality classiflcation by using machine learning. Robotics and Autonomous Systems, 2015, 63:268-278 doi: 10.1016/j.robot.2014.09.022 [84] Cherubini A, Passama R, Fraisse P, Crosnier A. A unifled multimodal control framework for human-robot interaction. Robotics and Autonomous Systems, 2015, 70:106-115 doi: 10.1016/j.robot.2015.03.002 [85] Katona J, Kovari A. EEG-based computer control interface for brain-machine interaction. International Journal of Online Engineering, 2015, 11(6):43-48 doi: 10.3991/ijoe.v11i6.5119 [86] Saproo S, Faller J, Shih V, Sajda P, Waytowich N R, Bohannon A, et al. Cortically coupled computing:a new paradigm for synergistic human-machine interaction. Computer, 2016, 49(9):60-68 doi: 10.1109/MC.2016.294 [87] Ma J X, Zhang Y, Cichocki A, Matsuno F. A novel EOG/EEG hybrid human-machine interface adopting eye movements and ERPs:application to robot control. IEEE Transactions on Biomedical Engineering, 2015, 62(3):876-889 doi: 10.1109/TBME.2014.2369483 [88] Karunanayaka K, Johari N, Hariri S, Camelia H, Bielawski K S, Cheok A D. New thermal taste actuation technology for future multisensory virtual reality and internet. IEEE Transactions on Visualization and Computer Graphics, 2018, 24(4):1496-1505 doi: 10.1109/TVCG.2018.2794073 [89] Frank J A, Krishnamoorthy S P, Kapila V. Toward mobile mixed-reality interaction with multi-robot systems. IEEE Robotics and Automation Letters, 2017, 2(4):1901-1908 doi: 10.1109/LRA.2017.2714128 [90] Esposito A, Esposito A M, Vogel C. Needs and challenges in human computer interaction for processing social emotional information. Pattern Recognition Letters, 2015, 66:41-51 doi: 10.1016/j.patrec.2015.02.013 [91] Cooney M D, Nishio S, Ishiguro H. Importance of touch for conveying afiection in a multimodal interaction with a small humanoid robot. International Journal of Humanoid Robotics, 2015, 12(1):1550002 doi: 10.1142/S0219843615500024 [92] Hossain M S, Muhammad G. Audio-visual emotion recognition using multi-directional regression and Ridgelet transform. Journal on Multimodal User Interfaces, 2016, 10(4):325-333 doi: 10.1007/s12193-015-0207-2 [93] Matsas E, Vosniakos G C, Batras D. Prototyping proactive and adaptive techniques for human-robot collaboration in manufacturing using virtual reality. Robotics and Computer-Integrated Manufacturing, 2018, 50:168-180 doi: 10.1016/j.rcim.2017.09.005 [94] Mancisidor A, Zubizarreta A, Cabanes I, Portillo E, Jung J H. Virtual sensors for advanced controllers in rehabilitation robotics. Sensors, 2018, 18(3):785 https://www.ncbi.nlm.nih.gov/pmc/articles/PMC5876757/ [95] Tabbache B, Benbouzid M E H, Kheloui A, Bourgeot J M. Virtual-sensor-based maximum-likelihood voting approach for fault-tolerant control of electric vehicle powertrains. IEEE Transactions on Vehicular Technology, 2013, 62(3):1075-1083 doi: 10.1109/TVT.2012.2230200 [96] Brizzi F, Peppoloni L, Graziano A, Di Stefano E, Avizzano C A, Rufialdi E. Efiects of augmented reality on the performance of teleoperated industrial assembly tasks in a robotic embodiment. IEEE Transactions on HumanMachine Systems, 2018, 48(2):197-206 doi: 10.1109/THMS.2017.2782490 [97] Soete N, Claeys A, Hoedt S, Mahy B, Cottyn J. Towards mixed reality in SCADA applications. IFAC-PapersOnLine, 2015, 48(3):2417-2422 [98] Wang X V, KemÉny Z, VÁncza J, Wang L H. Human-robot collaborative assembly in cyber-physical production:classiflcation framework and implementation. CIRP Annals, 2017, 66(1):5-8 doi: 10.1016/j.cirp.2017.04.101 [99] Hu W L, Akash K, Jain N, Reid T. Real-time sensing of trust in human-machine interactions. IFAC-PapersOnLine, 2016, 49(32):48-53 doi: 10.1016/j.ifacol.2016.12.188 [100] Rezazadegan F, Geng J, Ghirardi M, Menga G, MurÉ S, Camuncoli G, et al. Risked-based design for the physical human-robot interaction (pHRI):an overview. Chemical Engineering Transactions, 2015, 43:1249-1254 https://iris.polito.it/handle/11583/2626949#.XMU-XPmfCPI [101] Peng G, Zhou G, Nguyen D T, Qi X, Yang Q, Wang S Q. Continuous authentication with touch behavioral biometrics and voice on wearable glasses. IEEE Transactions on Human-Machine Systems, 2017, 47(3):404-416 doi: 10.1109/THMS.2016.2623562 [102] 沈苏彬, 范曲立, 宗平, 毛燕琴, 黄维.物联网的体系结构与相关技术研究.南京邮电大学学报(自然科学版), 2009, 29(6):1-11 doi: 10.3969/j.issn.1673-5439.2009.06.001Shen Su-Bin, Fan Qu-Li, Zong Ping, Mao Yan-Qin, Huang Wei. Study on the architecture and associated technologies for internet of things. Journal of Nanjing University of Posts and Telecommunications (Nature Science), 2009, 29(6):1-11 doi: 10.3969/j.issn.1673-5439.2009.06.001 [103] Kafle V P, Fukushima Y, Harai H. Internet of things standardization in ITU and prospective networking technologies. IEEE Communications Magazine, 2016, 54(9):43-49 https://ieeexplore.ieee.org/abstract/document/7565271 [104] Vermesan O, Friess P, Guillemin P, Gusmeroli S, Sundmaeker H, Bassi A, et al. Internet of Things Strategic Research Roadmap. The Cluster of European Research Projects, Technical Report, 2009. [105] 温家宝. 2010年政府工作报告[Online], avaliable: , 2018年5月25日Wen Jia-Bao. Report on Government Work[Online], avaliable: http://www.gov.cn/2010lh/content1555767.htm, May 252018 [106] Romaniuk R S. IoT-review of critical issues. International Journal of Electronics and Telecommunications, 2018, 64(1):95-102 http://journals.pan.pl/Content/102764/PDF/IJET_1_2018_15_1210.pdf [107] Ma H D. Internet of things:objectives and scientiflc challenges. Journal of Computer Science and Technology, 2011, 26(6):919-924 doi: 10.1007/s11390-011-1189-5 [108] Cheng B, Zhu D, Zhao S, Chen J L. Situation-aware IoT service coordination using the event-driven SOA paradigm. IEEE Transactions on Network and Service Management, 2016, 13(2):349-361 doi: 10.1109/TNSM.2016.2541171 [109] Shokrollahi S, Shams F. Rich Device-Services (RDS):a service-oriented approach to the internet of things (IoT). Wireless Personal Communications, 2017, 97(2):3183-3201 doi: 10.1007/s11277-017-4669-2 [110] Batalla J M, Gajewski M, Latoszek W, Krawiec P, Mavromoustakis C X, Mastorakis G. ID-based service-oriented communications for unifled access to IoT. Computers and Electrical Engineering, 2016, 52:98-113 doi: 10.1016/j.compeleceng.2016.02.020 [111] Binu A, Kumar G S. Virtualization techniques: a methodical review of XEN and KVM. In: Proceedings of the 1st International Conference on Advances in Computing and Communications. Kochi, India: Springer Verlag, 2011. 399-410 [112] Ahmad R W, Gani A, Hamid S H A, Shiraz M, Yousafzai A, Xia F. A survey on virtual machine migration and server consolidation frameworks for cloud data centers. Journal of Network and Computer Applications, 2015, 52:11-25 doi: 10.1016/j.jnca.2015.02.002 [113] Manohar N. A survey of virtualization techniques in cloud computing. In: Proceedings of the 2013 International Conference on VLSI, Communication, Advanced Devices, Signals and Systems and Networking. Bengaluru, Karnataka, India: Springer Verlag, 2013. 461-470 [114] Mell P, Grance T:The NIST Deflnition of Cloud Computing:Recommendations of the National Institute of Standards and Technology. Nova Science Publishers, Inc, USA, 2012. 97-101 [115] Morariu O, Borangiu T, Raileanu S. VMES:virtualization aware manufacturing execution system. Computers in Industry, 2015, 67:27-37 doi: 10.1016/j.compind.2014.11.003 [116] Shu Z G, Wan J F, Zhang D Q, Li D. Cloud-integrated cyber-physical systems for complex industrial applications. Mobile Networks and Applications, 2016, 21(5):865-878 doi: 10.1007/s11036-015-0664-6 [117] Li D, Tang H, Wang S Y, Liu C L. A big data enabled loadbalancing control for smart manufacturing of industry 4.0. Cluster Computing, 2017, 20(2):1855-1864 doi: 10.1007/s10586-017-0852-1 [118] Dehury C K, Sahoo P K. Design and implementation of a novel service management framework for IoT devices in cloud. Journal of Systems and Software, 2016, 119:149-161 doi: 10.1016/j.jss.2016.06.059 [119] Mourtzis D, Vlachou E. Cloud-based cyber-physical systems and quality of services. The TQM Journal, 2016, 28(5):704-733 doi: 10.1108/TQM-10-2015-0133 [120] Colombo A W, Bangemann T, Karnouskos S, Delsing J, Stluka P, Harrison R, et al. Industrial Cloud-Based CyberPhysical Systems:The IMC-AESOP Approach. Switzerland:Springer International Publishing, 2014. [121] Wang P, Gao R X, Fan Z Y. Cloud computing for cloud manufacturing:beneflts and limitations. Journal of Manufacturing Science and Engineering, 2015, 137(4):040901 http://d.old.wanfangdata.com.cn/OAPaper/oai_doaj-articles_c946c96245a3b8f84df392232be9dc0d [122] MezgÁr I, Rauschecker U. The challenge of networked enterprises for cloud computing interoperability. Computers in Industry, 2014, 65(4):657-674 doi: 10.1016/j.compind.2014.01.017 [123] Hu P F, Dhelim S, Ning H S, Qiu T. Survey on fog computing:architecture, key technologies, applications and open issues. Journal of Network and Computer Applications, 2017, 98:27-42 doi: 10.1016/j.jnca.2017.09.002 [124] Kumar V S, Marathe M V, Parthasarathy S, Srinivasan A. Distributed algorithms for end-to-end packet scheduling in wireless ad hoc networks. ACM Transactions on Algorithms, 2016, 12(3): Article No. 28 https://www.researchgate.net/publication/301646415_Distributed_Algorithms_for_End-to-End_Packet_Scheduling_in_Wireless_Ad_Hoc_Networks [125] El-Sayed H, Sankar S, Prasad M, Puthal D, Gupta A, Mohanty M, et al. Edge of things:the big picture on the integration of edge, IoT and the cloud in a distributed computing environment. IEEE Access, 2017, 6:1706-1717 https://www.researchgate.net/publication/321638174_Edge_of_Things_The_Big_Picture_on_the_Integration_of_Edge_IoT_and_the_Cloud_in_a_Distributed_Computing_Environment [126] Osanaiye O, Chen S, Yan Z, Lu R X, Choo K K R, Dlodlo M. From cloud to fog computing:a review and a conceptual live VM migration framework. IEEE Access, 2017, 5:8284-8300 doi: 10.1109/ACCESS.2017.2692960 [127] Wu D Z, Liu S P, Zhang L, Terpenny J, Gao R X, Kurfess T, et al. A fog computing-based framework for process monitoring and prognosis in cyber-manufacturing. Journal of Manufacturing Systems, 2017, 43:25-34 doi: 10.1016/j.jmsy.2017.02.011 [128] Georgakopoulos D, Jayaraman P P, Fazia M, Villari M, Ranjan R. Internet of things and edge cloud computing roadmap for manufacturing. IEEE Cloud Computing, 2016, 3(4):66-73 doi: 10.1109/MCC.2016.91 [129] Vilalta R, Lopez V, Giorgetti A, Peng S P, Orsini V, Velasco L, et al. TelcoFog:a unifled flexible fog and cloud computing architecture for 5G networks. IEEE Communications Magazine, 2017, 55(8):36-43 doi: 10.1109/MCOM.2017.1600838 [130] Yang P, Zhang N, Bi Y G, Yu L, Shen X S. Catalyzing cloud-fog interoperation in 5G wireless networks:an SDN approach. IEEE Network, 2017, 31(5):14-20 doi: 10.1109/MNET.2017.1600078 [131] Nakamoto S. Bitcoin: a peer-to-peer electronic cash system[Online], available: https://bitcoin.org/bitcoin.pdf, April 2, 2018 [132] Gomber P, Kaufiman R J, Parker C, Weber B W. On the flntech revolution:interpreting the forces of innovation, disruption, and transformation in flnancial services. Journal of Management Information Systems, 2018, 35(1):220-265 doi: 10.1080/07421222.2018.1440766 [133] Nordrum A. Govern by blockchain dubai wants one platform to rule them all, while Illinois will try anything. IEEE Spectrum, 2017, 54(10):54-55 doi: 10.1109/MSPEC.2017.8048841 [134] Kang J W, Yu R, Huang X M, Maharjan S, Zhang Y, Hossain E. Enabling localized peer-to-peer electricity trading among plug-in hybrid electric vehicles using consortium blockchains. IEEE Transactions on Industrial Informatics, 2017, 13(6):3154-3164 doi: 10.1109/TII.2017.2709784 [135] Zhang J, Xue N, Huang X. A secure system for pervasive social network-based healthcare. IEEE Access, 2016, 4:9239-9250 doi: 10.1109/ACCESS.2016.2645904 [136] Li Z, Wang W M, Liu G, Liu L, He J D, Huang G Q. Toward open manufacturing:a cross-enterprises knowledge and services exchange framework based on blockchain and edge computing. Industrial Management and Data Systems, 2018, 118(1):303-320 doi: 10.1108/IMDS-04-2017-0142 [137] 袁勇, 王飞跃.区块链技术发展现状与展望.自动化学报, 2016, 42(4):481-494 http://www.aas.net.cn/CN/abstract/abstract18837.shtmlYuan Yong, Wang Fei-Yue. Blockchain:the state of the art and future trends. Acta Automatica Sinica, 2016, 42(4):481-494 http://www.aas.net.cn/CN/abstract/abstract18837.shtml [138] 袁勇, 周涛, 周傲英, 段永朝, 王飞跃.区块链技术:从数据智能到知识自动化.自动化学报, 2017, 43(9):1485-1490 http://www.aas.net.cn/CN/abstract/abstract19125.shtmlYuan Yong, Zhou Tao, Zhou Ao-Ying, Duan Yong-Chao, Wang Fei-Yue. Blockchain technology:from data intelligence to knowledge automation. Acta Automatica Sinica, 2017, 43(9):1485-1490 http://www.aas.net.cn/CN/abstract/abstract19125.shtml [139] Petersen M, Hackius N, Kersten W. Blockchain for manufacturing and logistics:basics, beneflts, and use cases. ZWF Zeitschrift für Wirtschaftlichen Fabrikbetrieb, 2016, 111(10):626-629 doi: 10.3139/104.111603 [140] Preuveneers D, Joosen W, Ilie-Zudor E. Trustworthy datadriven networked production for customer-centric plants. Industrial Management and Data Systems, 2017, 117(10):2305-2324 doi: 10.1108/IMDS-10-2016-0419 [141] Huckle S, White M. Socialism and the blockchain. Future Internet, 2016, 8(4):49 doi: 10.3390/fi8040049 [142] Atzori L, Iera A, Morabito G, Nitti M. The social internet of things (SIoT)-when social networks meet the internet of things:concept, architecture and network characterization. Computer Networks, 2012, 56(16):3594-3608 doi: 10.1016/j.comnet.2012.07.010 [143] 王飞跃, 王晓, 袁勇, 王涛, 林懿伦.社会计算与计算社会:智慧社会的基础与必然.科学通报, 2015, 60(5-6):460-469 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx200404002Wang Fei-Yue, Wang Xiao, Yuan Yong, Wang Tao, Lin YiLun. Social computing and computational societies:the foundation and consequence of smart societies. Chinese Science Bulletin, 2015, 60(5-6):460-469 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx200404002 [144] Chen Z K, Ling R C, Huang C M, Zhu X. A scheme of access service recommendation for the social internet of things. International Journal of Communication Systems, 2016, 29(4):694-706 doi: 10.1002/dac.v29.4 [145] Shen H Y, Liu J W, Chen K, Liu J W, Moyer S. SCPS:a social-aware distributed cyber-physical human-centric search engine. IEEE Transactions on Computers, 2015, 64(2):518-532 doi: 10.1109/TC.2013.211 [146] Ahmad A, Paul A, Rathore M M, Chang H. Smart cyber society:integration of capillary devices with high usability based on cyber-physical system. Future Generation Computer Systems, 2016, 56:493-503 doi: 10.1016/j.future.2015.08.004 [147] Ding K, Jiang P Y. Social Sensors (S2ensors):a kind of hardware-software-integrated mediators for social manufacturing systems under mass individualization. Chinese Journal of Mechanical Engineering, 2017, 30(5):1150-1161 doi: 10.1007/s10033-017-0167-4 [148] Milgram S. The small world problem. Psychology Today, 1967, 2(1):60-67 http://d.old.wanfangdata.com.cn/OAPaper/oai_arXiv.org_1305.0513 [149] 姚锡凡, 张剑铭, Lin Ying-Zi.智慧制造系统的基础理论与技术体系.系统工程理论与实践, 2016, 36(10):2699-2711 doi: 10.12011/1000-6788(2016)10-2699-13Yao Xi-Fan, Zhang Jian-Ming, Lin Ying-Zi. The basic theory and technical framework for wisdom manufacturing systems. Systems Engineering Theory and Practice, 2016, 36(10):2699-2711 doi: 10.12011/1000-6788(2016)10-2699-13 [150] Szolnoki A, Xie N G, Ye Y, Perc M. Evolution of emotions on networks leads to the evolution of cooperation in social dilemmas. Physical Review E, 2013, 87(4):042805 doi: 10.1103/PhysRevE.87.042805 [151] Ang J H, Goh C, Li Y. Smart design for ships in a smart product through-life and industry 4.0 environment. In: Proceedings of the 2016 IEEE Congress on Evolutionary Computation. Vancouver, BC, Canada: IEEE, 2016. 5301-5308 [152] Lou S H, Feng Y X, Tian G D, Lv Z H, Li Z W, Tan J R. A cyber-physical system for product conceptual design based on an intelligent psycho-physiological approach. IEEE Access, 2017, 5:5378-5387 doi: 10.1109/ACCESS.2017.2686986 [153] Galambos P, Csapó A, Zentay P, Fülöp I M, Haidegger T, Baranyi P, et al. Design, programming and orchestration of heterogeneous manufacturing systems through VRpowered remote collaboration. Robotics and ComputerIntegrated Manufacturing, 2015, 33:68-77 doi: 10.1016/j.rcim.2014.08.012 [154] Berg L P, Vance J M. An industry case study:investigating early design decision making in virtual reality. Journal of Computing and Information Science in Engineering, 2016, 17(1):011001 doi: 10.1115/1.4034267 [155] Carulli M, Bordegoni M, Cugini U. An approach for capturing the voice of the customer based on virtual prototyping. Journal of Intelligent Manufacturing, 2013, 24(5):887-903 doi: 10.1007/s10845-012-0662-5 [156] Doshi A, Smith R T, Thomas B H, Bouras C. Use of projector based augmented reality to improve manual spotwelding precision and accuracy for automotive manufacturing. The International Journal of Advanced Manufacturing Technology, 2017, 89(5-8):1279-1293 doi: 10.1007/s00170-016-9164-5 [157] Cheng F T, Tieng H, Yang H C, Hung M H, Lin Y C, Wei C F, et al. Industry 4.1 for wheel machining automation. IEEE Robotics and Automation Letters, 2016, 1(1):332-339 doi: 10.1109/LRA.2016.2517208 [158] Putman N M, Maturana F, Barton K, Tilbury D M. Virtual fusion:a hybrid environment for improved commissioning in manufacturing systems. International Journal of Production Research, 2017, 55(21):6254-6265 doi: 10.1080/00207543.2017.1334974 [159] Mourtzis D, Vlachou A, Zogopoulos V. Cloud-based augmented reality remote maintenance through shop-floor monitoring:a product-service system approach. Journal of Manufacturing Science and Engineering, 2017, 139(6):061011 doi: 10.1115/1.4035721 [160] Liu C, Cao S, Tse W, Xu X. Augmented reality-assisted intelligent window for cyber-physical machine tools. Journal of Manufacturing Systems, 2017, 44:280-286 doi: 10.1016/j.jmsy.2017.04.008 [161] Turner C J, Hutabarat W, Oyekan J, Tiwari A. Discrete event simulation and virtual reality use in industry:new opportunities and future trends. IEEE Transactions on Human-Machine Systems, 2016, 46(6):882-894 doi: 10.1109/THMS.2016.2596099 [162] Fainshmidt S, Frazier M L. What facilitates dynamic capabilities? The role of organizational climate for trust. Long Range Planning, 2017, 50(5):550-566 doi: 10.1016/j.lrp.2016.05.005 [163] Luo N, Zhang M L, Hu M, Wang Y. How community interactions contribute to harmonious community relationships and customers0 identiflcation in online brand community. International Journal of Information Management, 2016, 36(5):673-685 doi: 10.1016/j.ijinfomgt.2016.04.016 [164] Wang B, Childerhouse P, Kang Y F, Huo B F, Mathrani S. Enablers of supply chain integration:interpersonal and interorganizational relationship perspectives. Industrial Management and Data Systems, 2016, 116(4):838-855 doi: 10.1108/IMDS-09-2015-0403 [165] Pticek M, Podobnik V, Jezic G. Beyond the internet of things: the social networking of machines. International Journal of Distributed Sensor Networks, 2016, 2016: Article ID 8178417 [166] Ding K, Jiang P Y, Su S L. RFID-enabled social manufacturing system for inter-enterprise monitoring and dispatching of integrated production and transportation tasks. Robotics and Computer-Integrated Manufacturing, 2018, 49:120-133 doi: 10.1016/j.rcim.2017.06.009 [167] Leng J W, Jiang P Y. Mining and matching relationships from interaction contexts in a social manufacturing paradigm. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2017, 47(2):276-288 https://ieeexplore.ieee.org/abstract/document/7747452 [168] Chen L J, Feldmann A, Tang O. The relationship between disclosures of corporate social performance and flnancial performance:evidences from GRI reports in manufacturing industry. International Journal of Production Economics, 2015, 170:445-456 doi: 10.1016/j.ijpe.2015.04.004 [169] Jiang P Y, Ding K, Leng J W. Towards a cyberphysical-social-connected and service-oriented manufacturing paradigm:social manufacturing. Manufacturing Letters, 2016, 7:15-21 doi: 10.1016/j.mfglet.2015.12.002 [170] Ye J M. Optimization path of industrial real estate development under the mass entrepreneurship and innovation environment. Boletin Tecnico, 2017, 55(14):231-235 http://boletintecnico.com/index.php/bt/article/view/1353 [171] Yoo B, Ko H, Chun S. Prosumption perspectives on additive manufacturing:reconflguration of consumer products with 3D printing. Rapid Prototyping Journal, 2016, 22(4):691-705 doi: 10.1108/RPJ-01-2015-0004 [172] Yang C, Lan S L, Shen W M, Huang G Q, Wang X B, Lin T Y. Towards product customization and personalization in IoT-enabled cloud manufacturing. Cluster Computing, 2017, 20(2):1717-1730 doi: 10.1007/s10586-017-0767-x [173] Patel P, Intizar Ali M, Sheth A. On using the intelligent edge for IoT analytics. IEEE Intelligent Systems, 2017, 32(5):64-69 doi: 10.1109/MIS.2017.3711653 [174] Thames L, Schaefer D. Software-deflned cloud manufacturing for industry 4.0. Procedia CIRP, 2016, 52:12-17 doi: 10.1016/j.procir.2016.07.041 [175] Calvo I, López F, Zulueta E, GonzÁlez-Nalda P. Towards a methodology to build virtual reality manufacturing systems based on free open software technologies. International Journal on Interactive Design and Manufacturing, 2017, 11(3):569-580 doi: 10.1007/s12008-016-0311-x [176] Weber A. GE "predix" the future of manufacturing. Assembly, 2017, 60(3):GE70-GE76 [177] Trappey A J C, Trappey C V, Govindarajan U H, Sun J J, Chuang A C. A review of technology standards and patent portfolios for enabling cyber-physical systems in advanced manufacturing. IEEE Access, 2016, 4:7356-7382 doi: 10.1109/ACCESS.2016.2619360 [178] Jirkovsky V, Obitko M, Marik V. Understanding data heterogeneity in the context of cyber-physical systems integration. IEEE Transactions on Industrial Informatics, 2017, 13(2):660-667 doi: 10.1109/TII.2016.2596101 [179] Guan Y Q, Ji Z J, Zhang L, Wang L. Controllability of heterogeneous multi-agent systems under directed and weighted topology. International Journal of Control, 2016, 89(5):1009-1024 doi: 10.1080/00207179.2015.1110756 [180] Sztipanovits J, Koutsoukos X, Karsai G, Kottenstette N, Antsaklis P, Gupta V, et al. Toward a science of cyberphysical system integration. Proceedings of the IEEE, 2012, 100(1):29-44 https://www.researchgate.net/publication/220473367_Toward_a_Science_of_Cyber-Physical_System_Integration?citationList=incoming [181] Chen T S, Du Z D, Sun N H, Wang J, Wu C Y, Chen Y J, et al. DianNao: a small-footprint high-throughput accelerator for ubiquitous machine-learning. In: Proceedings of the 19th International Conference on Architectural Support for Programming Languages and Operating Systems. Salt Lake City, UT, USA: ACM, 2014. 269-284 https://www.researchgate.net/publication/261845797_DianNao_A_Small-Footprint_High-Throughput_Accelerator_for_Ubiquitous_Machine-Learning [182] Luo T, Liu S L, Li L, Wang Y Q, Zhang S J, Chen T S, et al. DaDianNao:a neural network supercomputer. IEEE Transactions on Computers, 2017, 66(1):73-88 https://www.researchgate.net/publication/303695762_DaDianNao_A_Neural_Network_Supercomputer [183] Akopyan F, Sawada J, Cassidy A, Alvarez-Icaza R, Arthur J, Merolla P, et al. TrueNorth:design and tool flow of a 65 mW 1 million neuron programmable neurosynaptic chip. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 2015, 34(10):1537-1557 doi: 10.1109/TCAD.2015.2474396 [184] Cavallo F, Semeraro F, Fiorini L, Magyar G, Sin·cÁk P, Dario P. Emotion modelling for social robotics applications:a review. Journal of Bionic Engineering, 2018, 15(2):185-203 doi: 10.1007/s42235-018-0015-y [185] Hui T K L, Sherratt R S. Towards disappearing user interfaces for ubiquitous computing:human enhancement from sixth sense to super senses. Journal of Ambient Intelligence and Humanized Computing, 2017, 8(3):449-465 doi: 10.1007/s12652-016-0409-9 [186] Tian Y H, Chen X L, Xiong H K, Li H L, Dai L R, Chen J, et al. Towards human-like and transhuman perception in AI 2.0:a review. Frontiers of Information Technology and Electronic Engineering, 2017, 18(1):58-67 doi: 10.1631/FITEE.1601804 [187] Bu T Z, Xiao T X, Yang Z W, Liu G X, Fu X P, Nie J H, et al. Stretchable triboelectric-photonic smart skin for tactile and gesture sensing. Advanced Materials, 2018, 30(16):1800066 doi: 10.1002/adma.v30.16 [188] Persaud K C. Towards bionic noses. Sensor Review, 2017, 37(2):165-171 doi: 10.1108/SR-10-2016-0238 [189] 邓良辰, 刘艳丽, 余贻鑫, 柏天缘.考虑故障处理全过程的配电网信息物理系统可靠性评估.电力自动化设备, 2017, 37(12):22-29 http://d.old.wanfangdata.com.cn/Periodical/dlzdhsb201712005Deng Liang-Chen, Liu Yan-Li, Yu Yi-Xin, Bai Tian-Yuan. Reliability assessment of distribution network CPS considering whole fault processing. Electric Power Automation Equipment, 2017, 37(12):22-29 http://d.old.wanfangdata.com.cn/Periodical/dlzdhsb201712005 [190] Sajid A, Abbas H, Saleem K. Cloud-assisted IoT-based SCADA systems security:a review of the state of the art and future challenges. IEEE Access, 2016, 4:1375-1384 doi: 10.1109/ACCESS.2016.2549047 [191] Styugin M. Establishing systems secure from research with implementation in encryption algorithms. International Journal of Network Security, 2018, 20(1):35-40 http://ijns.femto.com.tw/contents/ijns-v20-n1/ijns-2018-v20-n1-p35-40.pdf [192] Coutinho M, de Oliveira Albuquerque R, Borges F, Villalba L J G, Kim T H. Learning perfectly secure cryptography to protect communications with adversarial neural cryptography. Sensors, 2018, 18(5):1306 doi: 10.3390/s18051306 [193] Lee W, Kim N. Security policy scheme for an e-cient security architecture in software-deflned networking. Information, 2017, 8:65 doi: 10.3390/info8020065 [194] Khan M A, Salah K. IoT security:review, blockchain solutions, and open challenges. Future Generation Computer Systems, 2018, 82:395-411 doi: 10.1016/j.future.2017.11.022 [195] De Graaf M M A. An ethical evaluation of human-robot relationships. International Journal of Social Robotics, 2016, 8(4):589-598 doi: 10.1007/s12369-016-0368-5 [196] Pagallo U. When morals ain0t enough:robots, ethics, and the rules of the law. Minds and Machines, 2017, 27(4):625-638 doi: 10.1007/s11023-017-9418-5 -

 下载:
下载:

图(5)
计量
- 文章访问数: 4405
- HTML全文浏览量: 869
- PDF下载量: 1254
- 被引次数: 0
