2023年 第49卷 第3期
2023, 49(3): 476-493.
doi: 10.16383/j.aas.c220792
摘要:
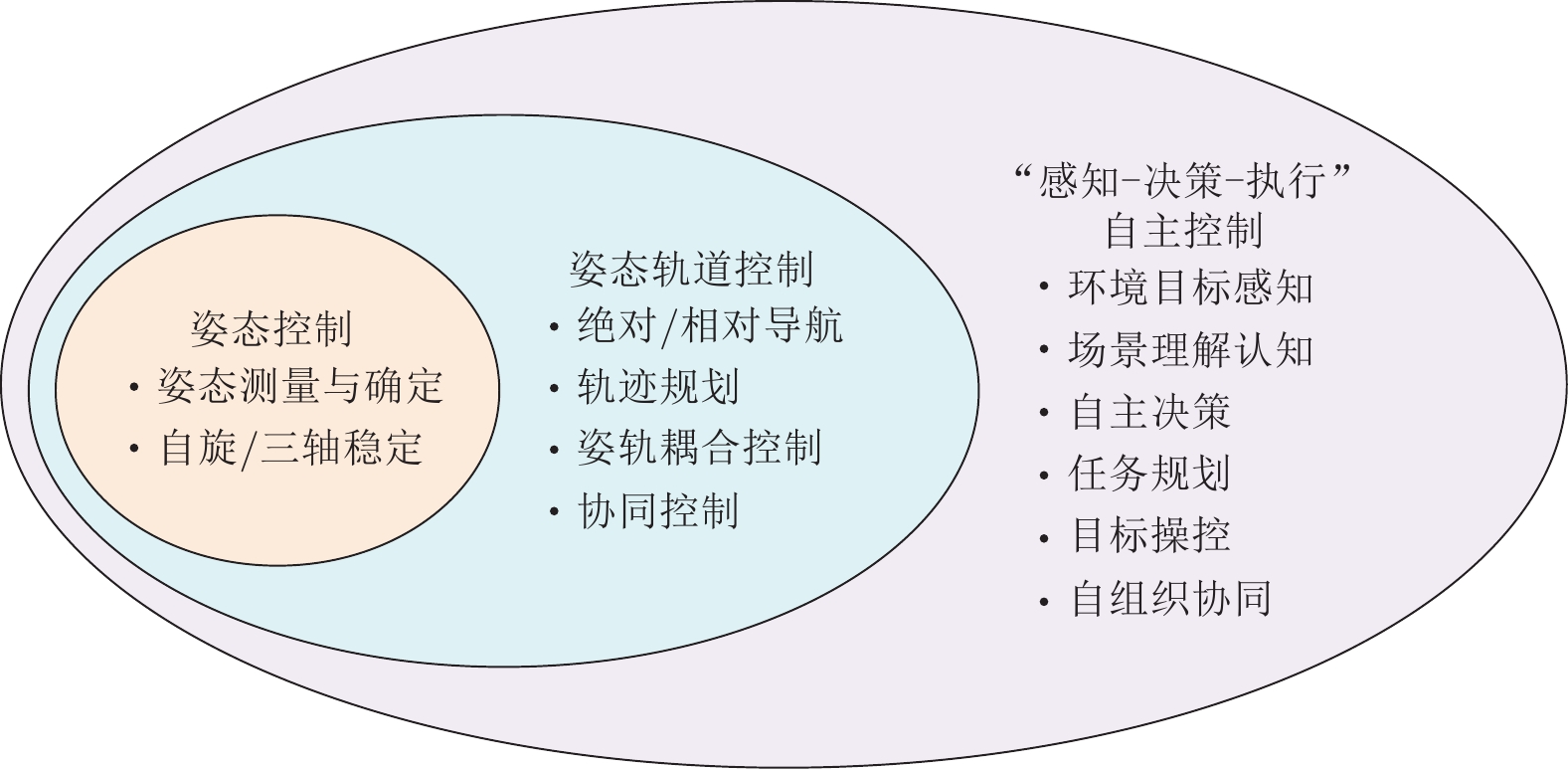
控制是航天器在空间环境下自主完成复杂任务的关键技术. 首先梳理了中国空间控制技术过去50多年来的发展成果, 总结划分为航天器姿态控制、姿态轨道控制、“感知−决策−执行” (Perception-decision-action, PDA)自主控制三个方面, 并在综述了各方面主要进展的基础上, 围绕超大结构航天器姿态轨道控制、轨道空间博弈控制、网络化航天器集群控制、地外探测智能无人系统控制、跨域航天器自主控制、在轨建造与维护(On-orbit servicing, assembly, and manufacturing, OSAM)控制6个技术方向, 提出面临的挑战和需要重点关注的基础性问题, 为空间控制技术未来的发展提供借鉴和参考.
控制是航天器在空间环境下自主完成复杂任务的关键技术. 首先梳理了中国空间控制技术过去50多年来的发展成果, 总结划分为航天器姿态控制、姿态轨道控制、“感知−决策−执行” (Perception-decision-action, PDA)自主控制三个方面, 并在综述了各方面主要进展的基础上, 围绕超大结构航天器姿态轨道控制、轨道空间博弈控制、网络化航天器集群控制、地外探测智能无人系统控制、跨域航天器自主控制、在轨建造与维护(On-orbit servicing, assembly, and manufacturing, OSAM)控制6个技术方向, 提出面临的挑战和需要重点关注的基础性问题, 为空间控制技术未来的发展提供借鉴和参考.
2023, 49(3): 494-513.
doi: 10.16383/j.aas.c220995
摘要:
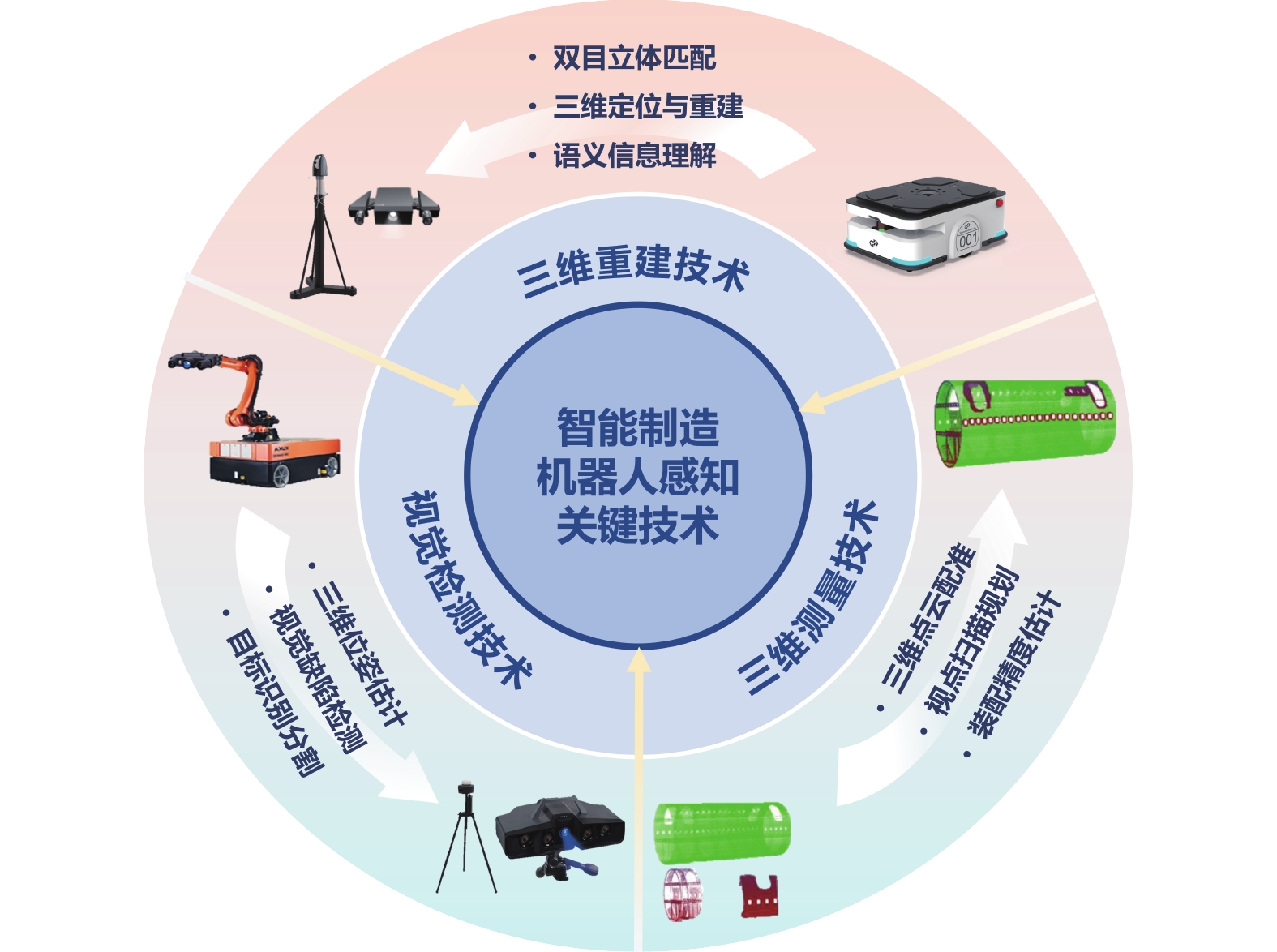
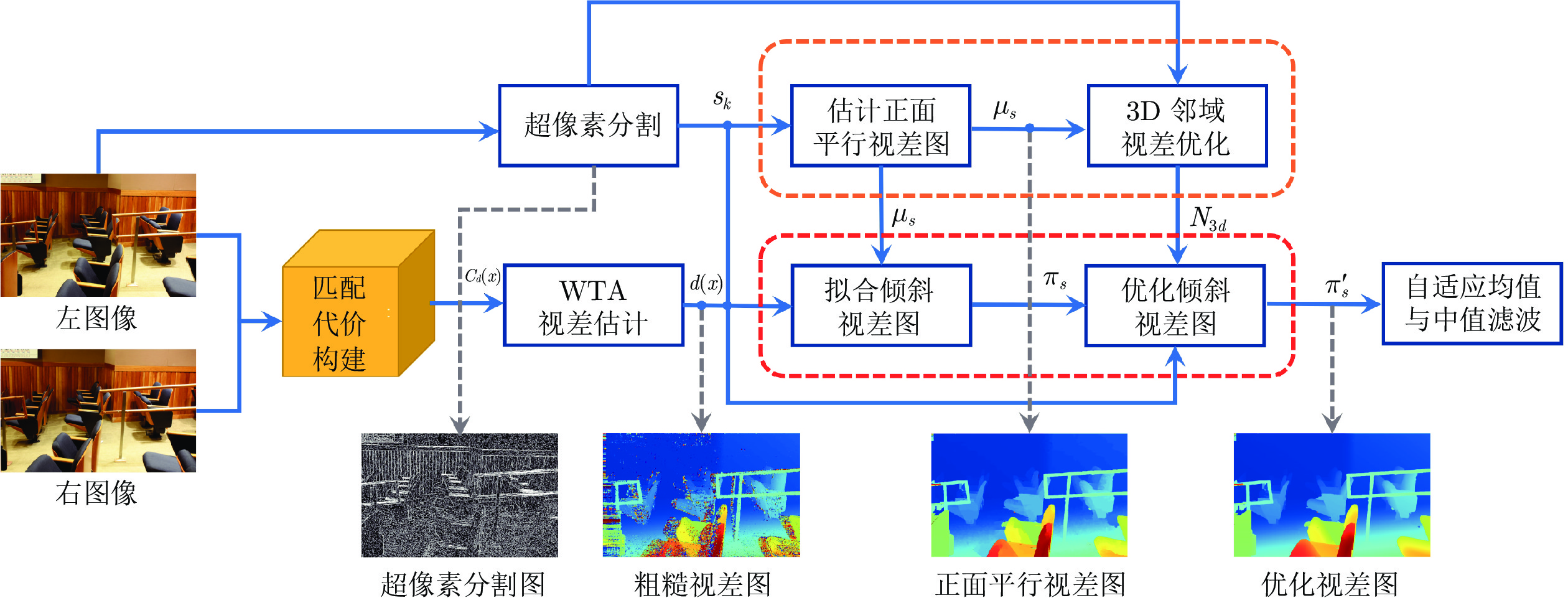
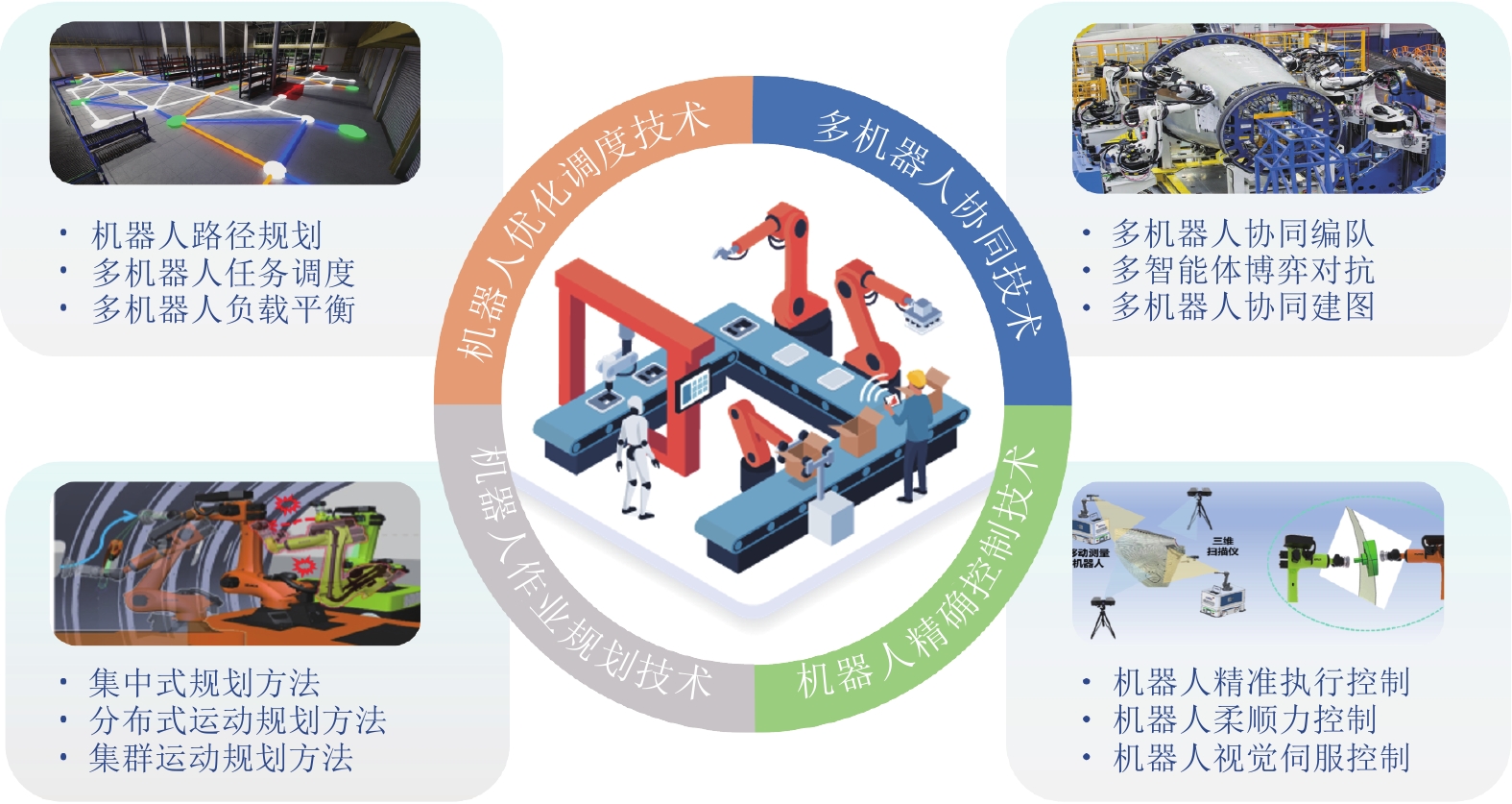
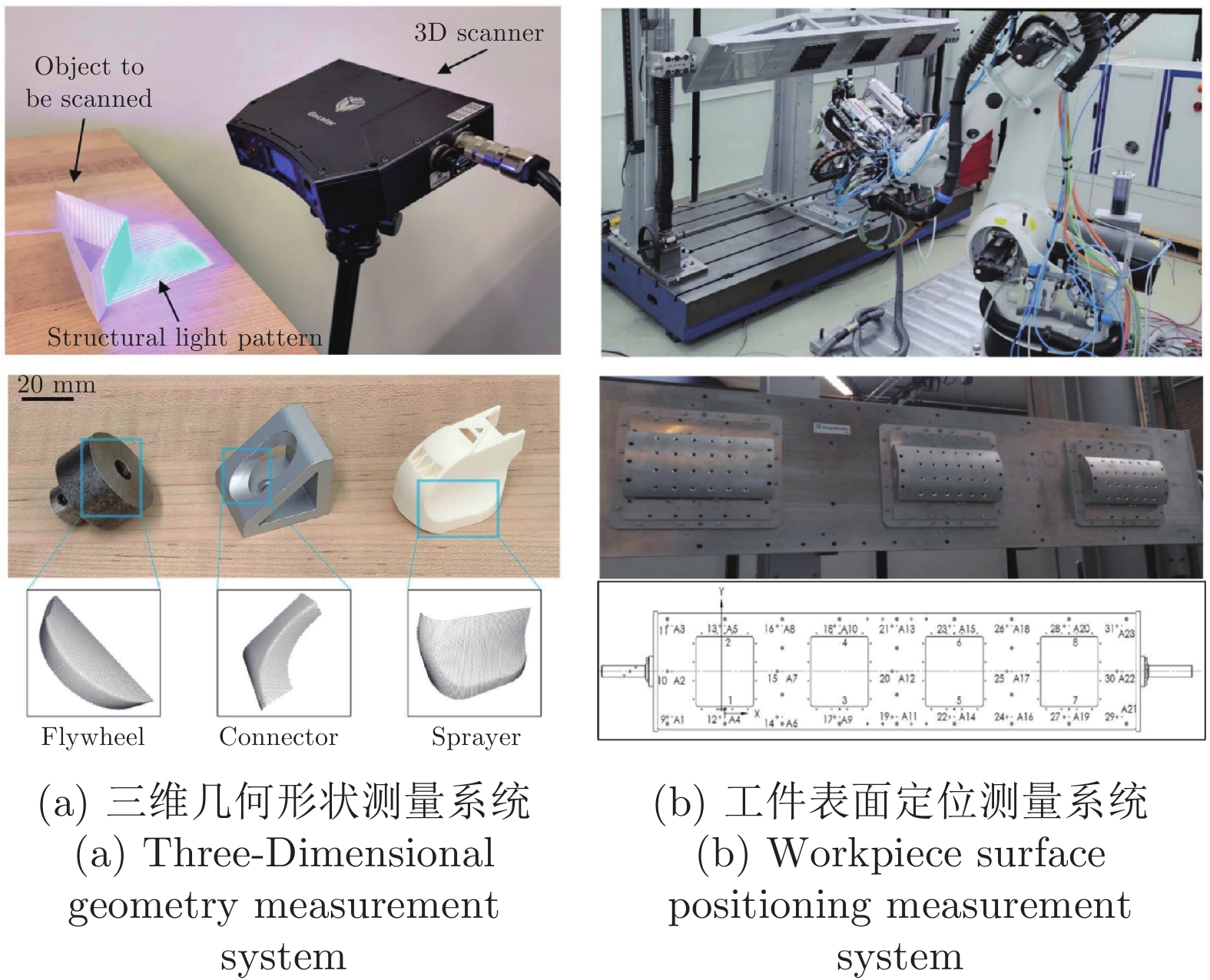
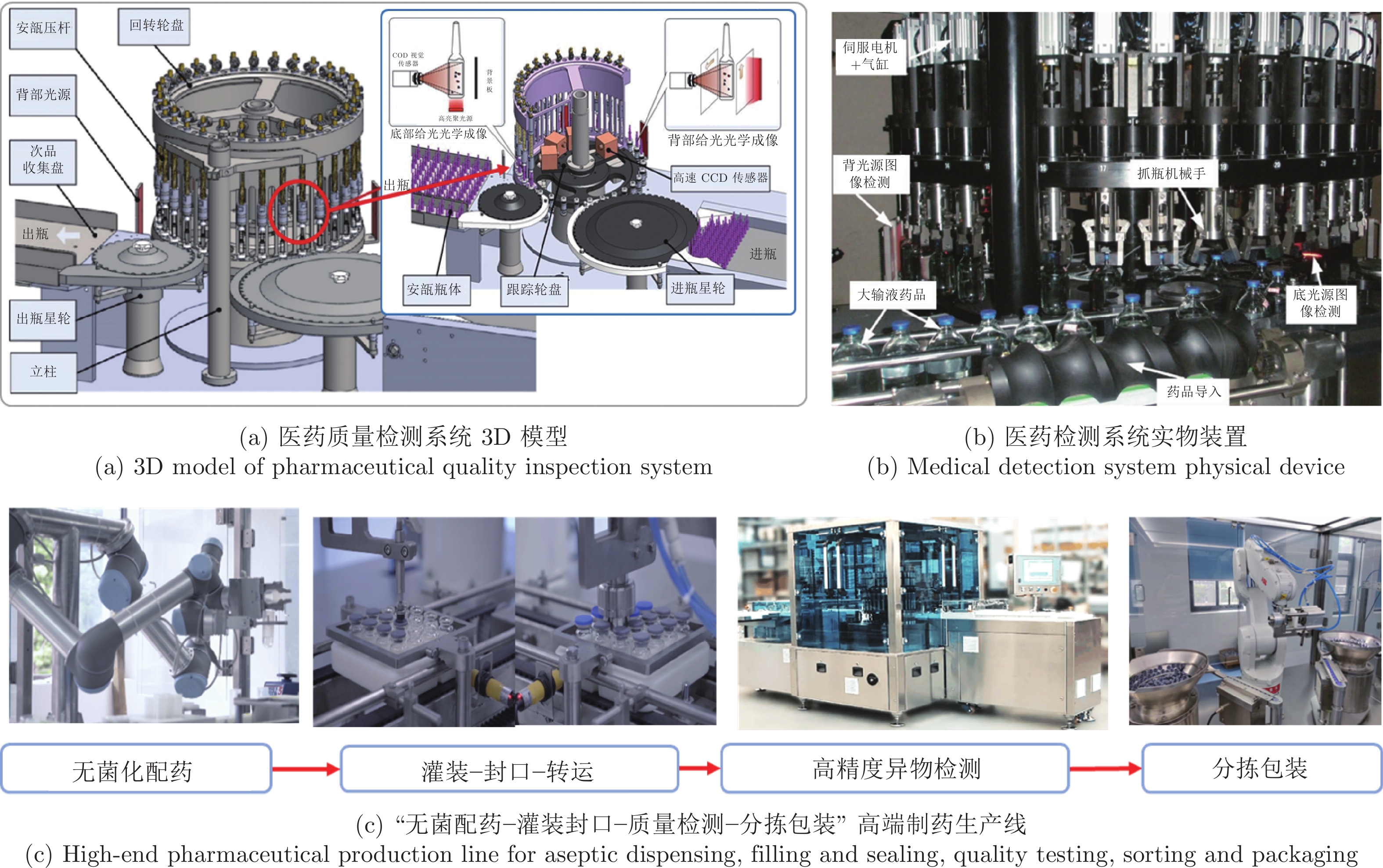
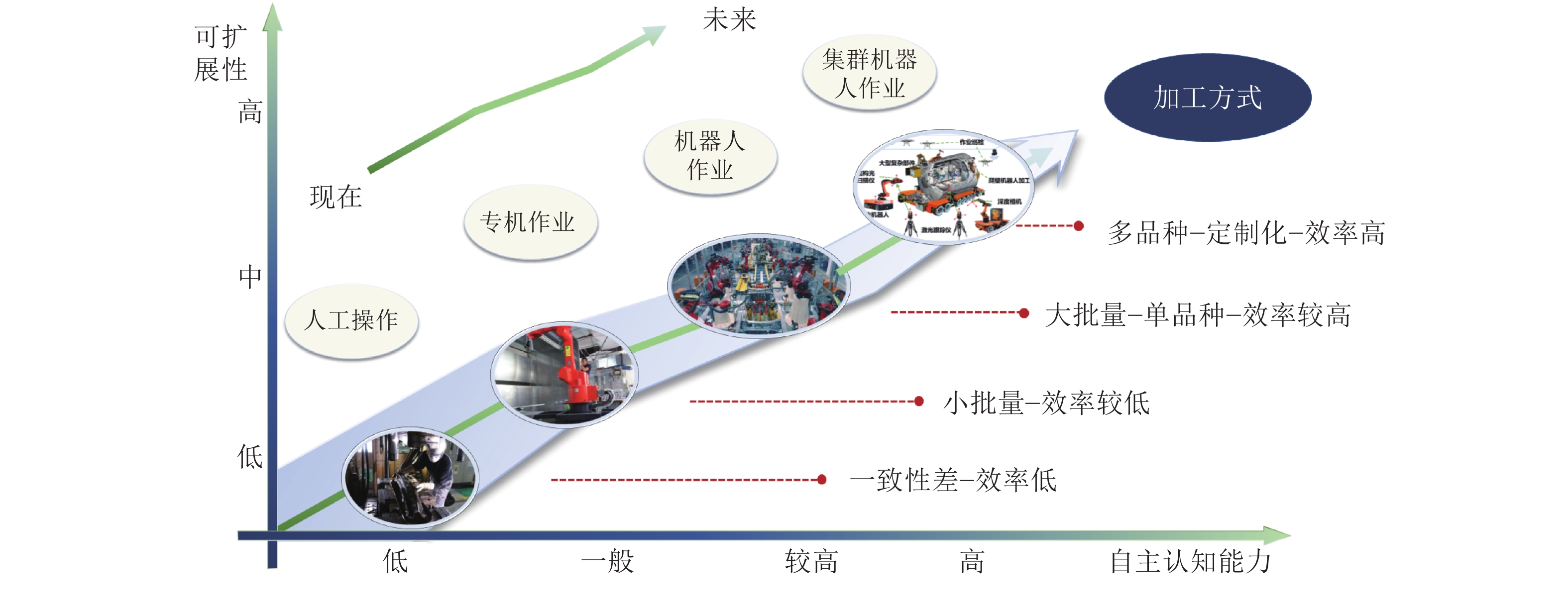
智能机器人在服务国家重大需求, 引领国民经济发展和保障国防安全中起到重要作用, 被誉为“制造业皇冠顶端的明珠”. 随着新一轮工业革命的到来, 世界主要工业国家都开始加快机器人技术的战略部署. 而智能机器人作为智能制造的重要载体, 在深入实施制造强国战略, 推动制造业的高端化、智能化、绿色化过程中将发挥重要作用. 本文从智能机器人的感知与控制等关键技术的视角出发, 重点阐述了机器人的三维环境感知、点云配准、位姿估计、任务规划、多机协同、柔顺控制、视觉伺服等共性关键技术的国内外发展现状. 然后, 以复杂曲面机器人三维测量、复杂部件机器人打磨、机器人力控智装配等机器人智能制造系统为例, 阐述了机器人的智能制造的应用关键技术, 并介绍了工程机械智能化无人工厂、无菌化机器人制药生产线等典型案例. 最后探讨了智能制造机器人的发展趋势和所面临的挑战.
智能机器人在服务国家重大需求, 引领国民经济发展和保障国防安全中起到重要作用, 被誉为“制造业皇冠顶端的明珠”. 随着新一轮工业革命的到来, 世界主要工业国家都开始加快机器人技术的战略部署. 而智能机器人作为智能制造的重要载体, 在深入实施制造强国战略, 推动制造业的高端化、智能化、绿色化过程中将发挥重要作用. 本文从智能机器人的感知与控制等关键技术的视角出发, 重点阐述了机器人的三维环境感知、点云配准、位姿估计、任务规划、多机协同、柔顺控制、视觉伺服等共性关键技术的国内外发展现状. 然后, 以复杂曲面机器人三维测量、复杂部件机器人打磨、机器人力控智装配等机器人智能制造系统为例, 阐述了机器人的智能制造的应用关键技术, 并介绍了工程机械智能化无人工厂、无菌化机器人制药生产线等典型案例. 最后探讨了智能制造机器人的发展趋势和所面临的挑战.







2023, 49(3): 514-527.
doi: 10.16383/j.aas.c230055
摘要:
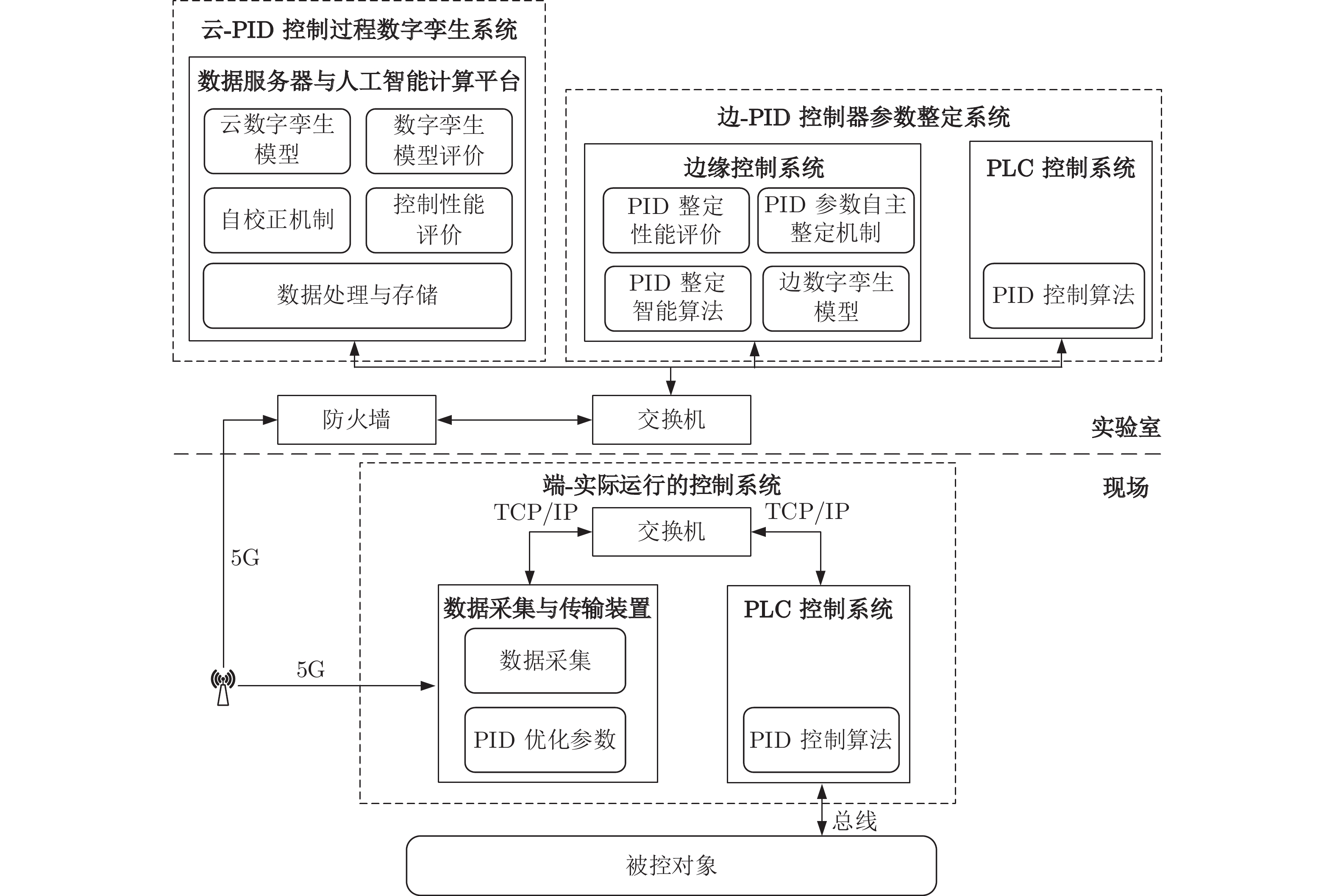
本文在分析智能制造对PID整定的新需求及PID整定面临的挑战难题的基础上, 将自动化的建模、控制与优化和人工智能的深度学习与强化学习深度融合与协同, 提出了自适应与自主的PID整定的智能优化方法, 包括端边云协同的PID控制过程数字孪生模型和强化学习与数字孪生模型相结合的PID整定算法. 将工业互联网的端边云协同技术与PLC控制系统相结合, 研制了PID整定智能系统, 并在重大耗能设备 — 电熔镁炉成功应用. 该系统安全、可靠与优化运行, 取得显著的节能减排效果. 最后, 提出了控制系统智能化研究方向需要进一步深入研究的内容.
本文在分析智能制造对PID整定的新需求及PID整定面临的挑战难题的基础上, 将自动化的建模、控制与优化和人工智能的深度学习与强化学习深度融合与协同, 提出了自适应与自主的PID整定的智能优化方法, 包括端边云协同的PID控制过程数字孪生模型和强化学习与数字孪生模型相结合的PID整定算法. 将工业互联网的端边云协同技术与PLC控制系统相结合, 研制了PID整定智能系统, 并在重大耗能设备 — 电熔镁炉成功应用. 该系统安全、可靠与优化运行, 取得显著的节能减排效果. 最后, 提出了控制系统智能化研究方向需要进一步深入研究的内容.











2023, 49(3): 528-539.
doi: 10.16383/j.aas.c220737
摘要:
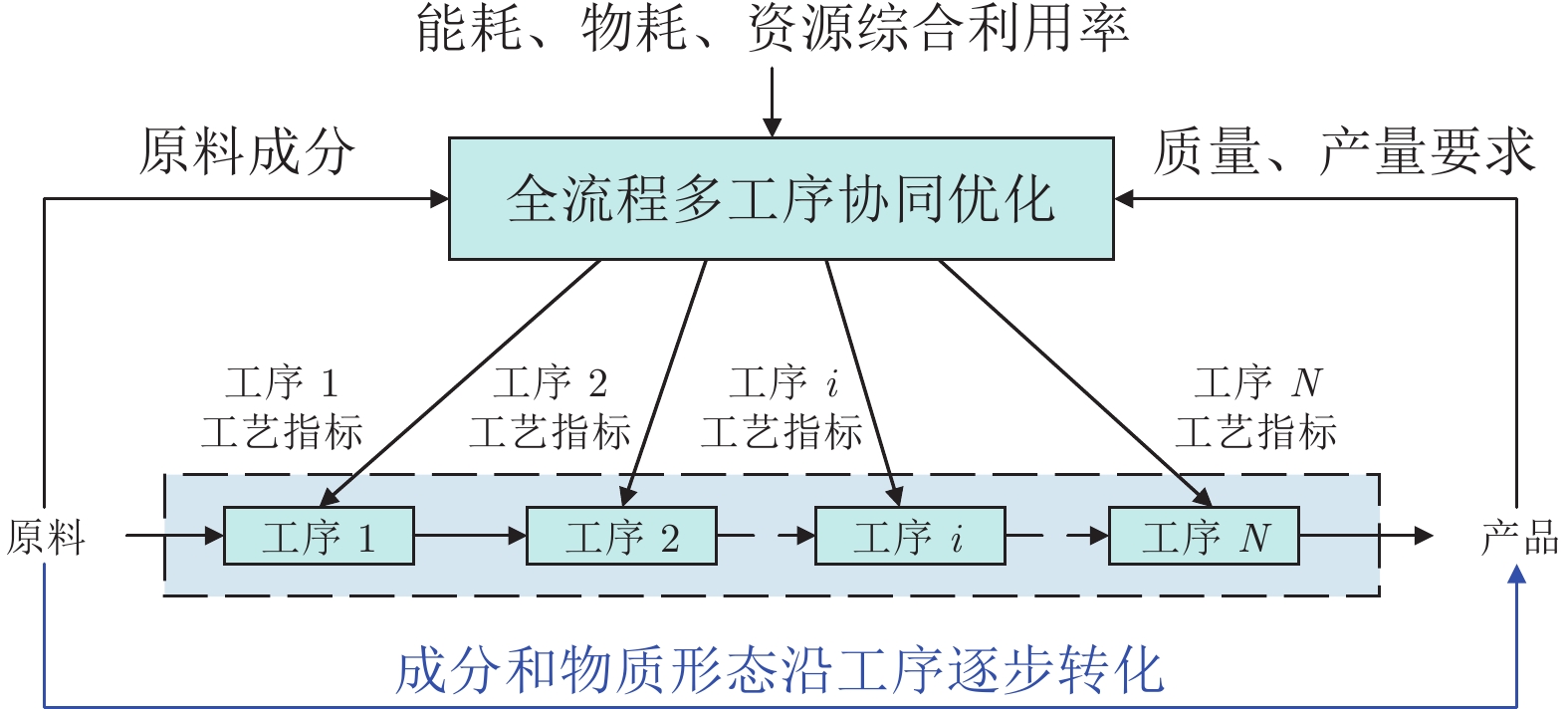
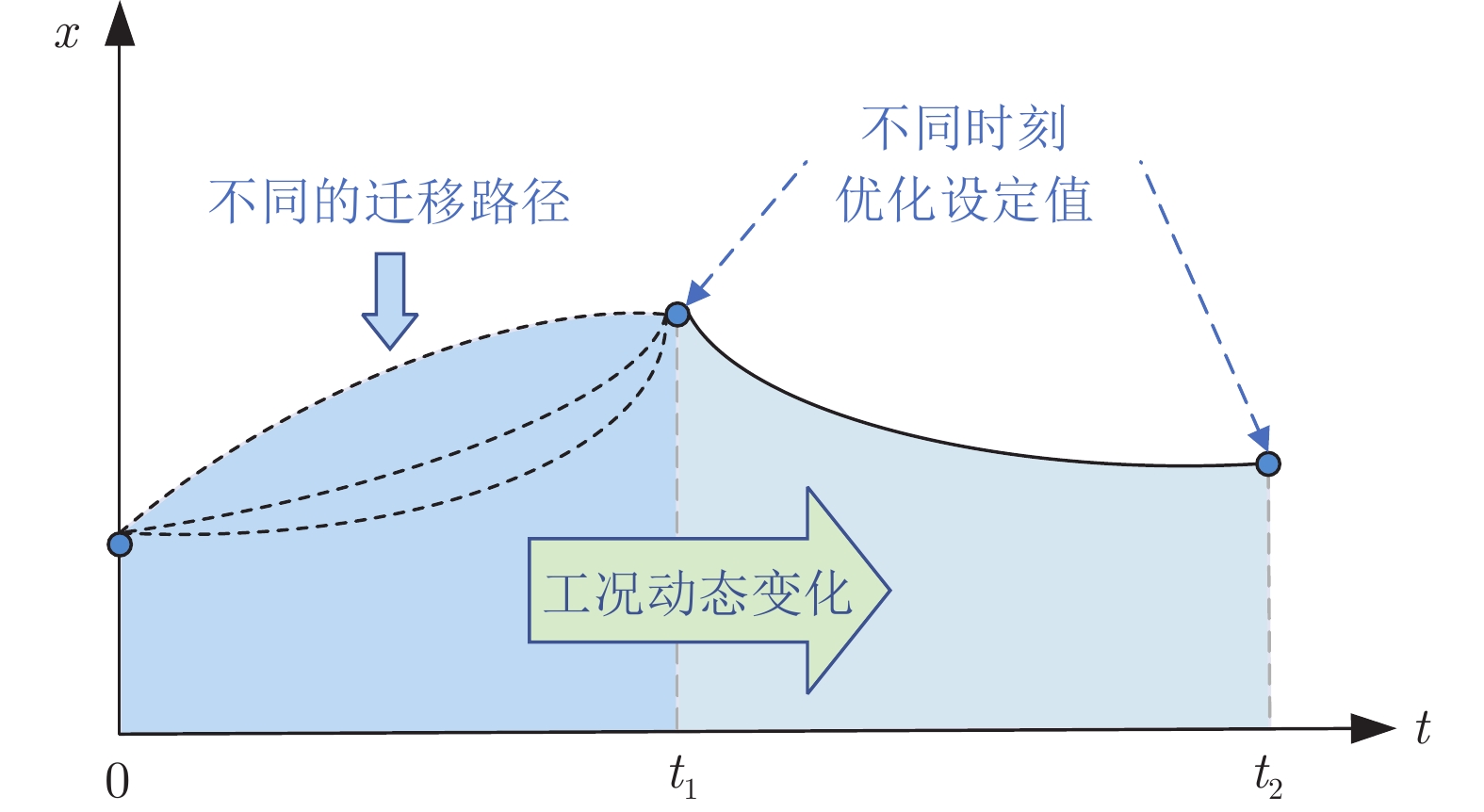
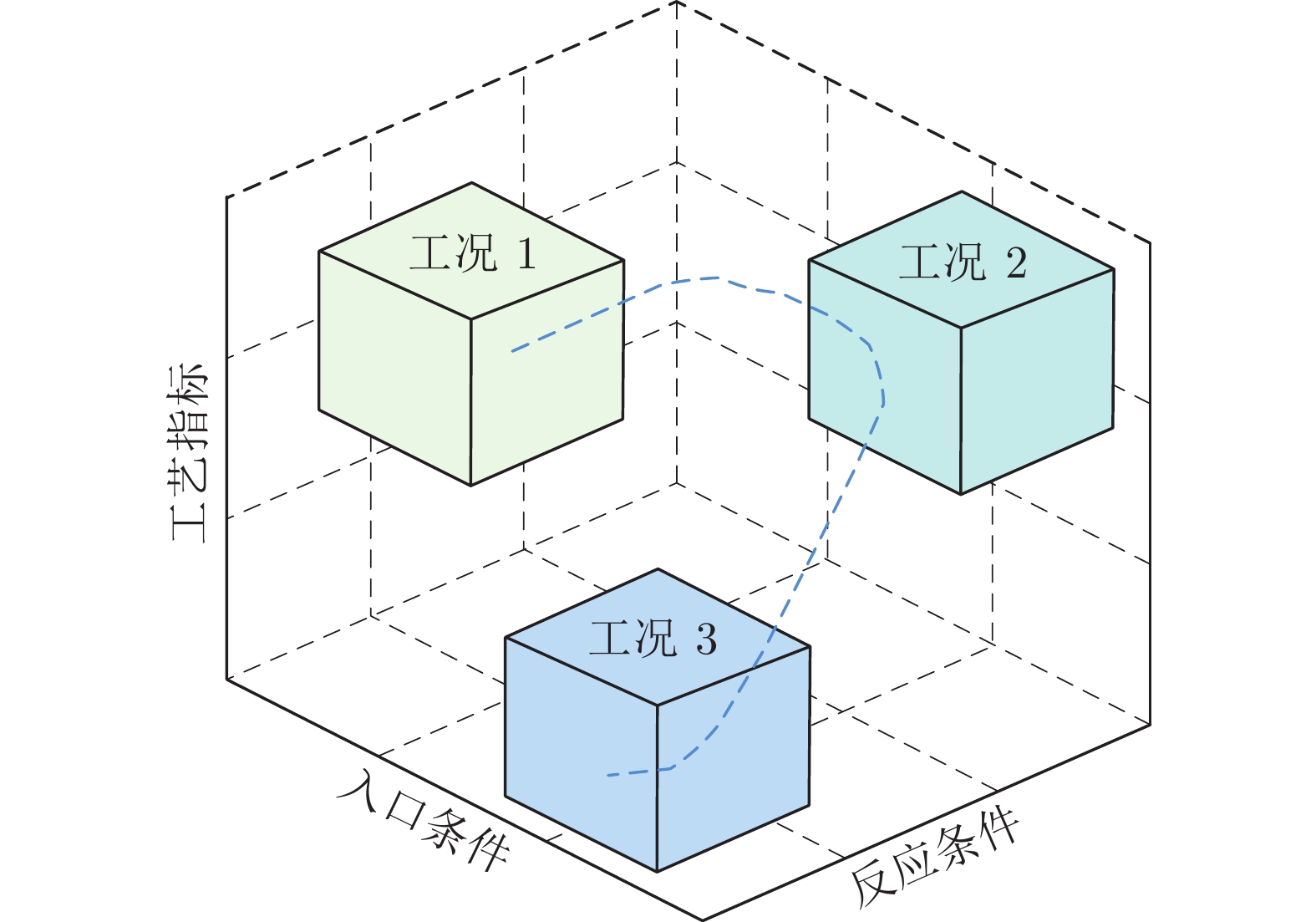
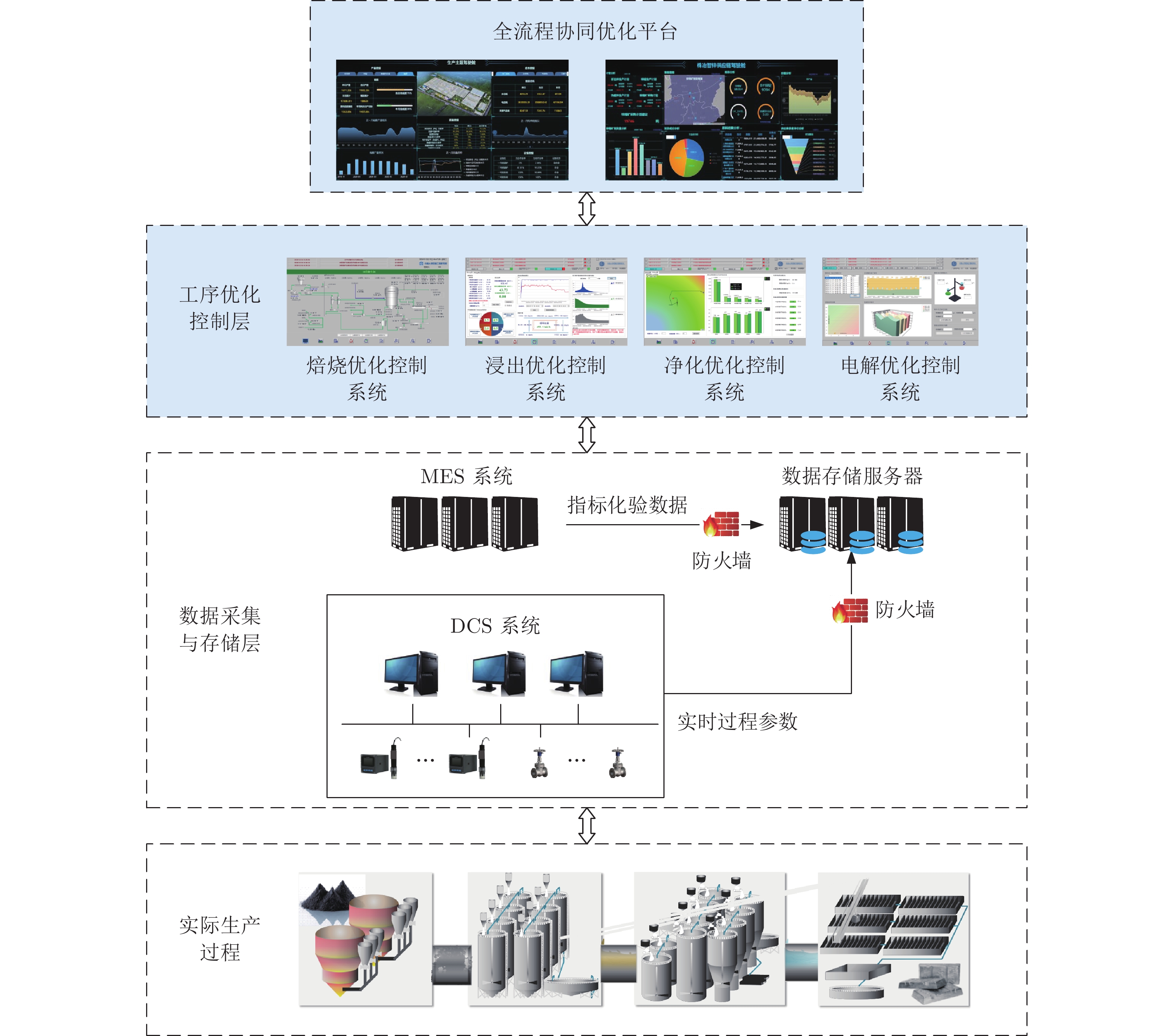
我国流程行业原料来源复杂, 如何优化调控工艺指标使复杂生产流程适应原料波动, 是保障产品质量、降低物耗能耗的关键. 本文结合全流程、工序、反应器等不同生产层级的工艺特点, 系统研究复杂生产流程协同优化和智能控制方法. 针对全流程多工序关联的特点, 提出了操作模式优化方法和操作模式动态匹配的全流程多工序协同优化方法; 针对单元工序多反应器级联的特点, 分析了工序内不同反应器的物质转化效率差异, 提出了反应器指标梯度协同优化方法; 针对反应器多反应共存、工况多变的特点, 研究了基于完备状态空间的动态特性描述框架, 建立了竞争−促进反应体系机理模型, 提出了工况全覆盖的模型参数自主辨识方法和基于分工况智能综合调节的反应器操作参数精细化调控方法. 通过锌冶炼智能工厂建设案例阐述了所提方法在提高工艺原料适应能力、生产效率、质量稳定性等方面的成效. 最后, 结合我国流程行业智能化发展现状和需求, 分析了需进一步研究的问题.
我国流程行业原料来源复杂, 如何优化调控工艺指标使复杂生产流程适应原料波动, 是保障产品质量、降低物耗能耗的关键. 本文结合全流程、工序、反应器等不同生产层级的工艺特点, 系统研究复杂生产流程协同优化和智能控制方法. 针对全流程多工序关联的特点, 提出了操作模式优化方法和操作模式动态匹配的全流程多工序协同优化方法; 针对单元工序多反应器级联的特点, 分析了工序内不同反应器的物质转化效率差异, 提出了反应器指标梯度协同优化方法; 针对反应器多反应共存、工况多变的特点, 研究了基于完备状态空间的动态特性描述框架, 建立了竞争−促进反应体系机理模型, 提出了工况全覆盖的模型参数自主辨识方法和基于分工况智能综合调节的反应器操作参数精细化调控方法. 通过锌冶炼智能工厂建设案例阐述了所提方法在提高工艺原料适应能力、生产效率、质量稳定性等方面的成效. 最后, 结合我国流程行业智能化发展现状和需求, 分析了需进一步研究的问题.



2023, 49(3): 540-549.
doi: 10.16383/j.aas.c220571
摘要:
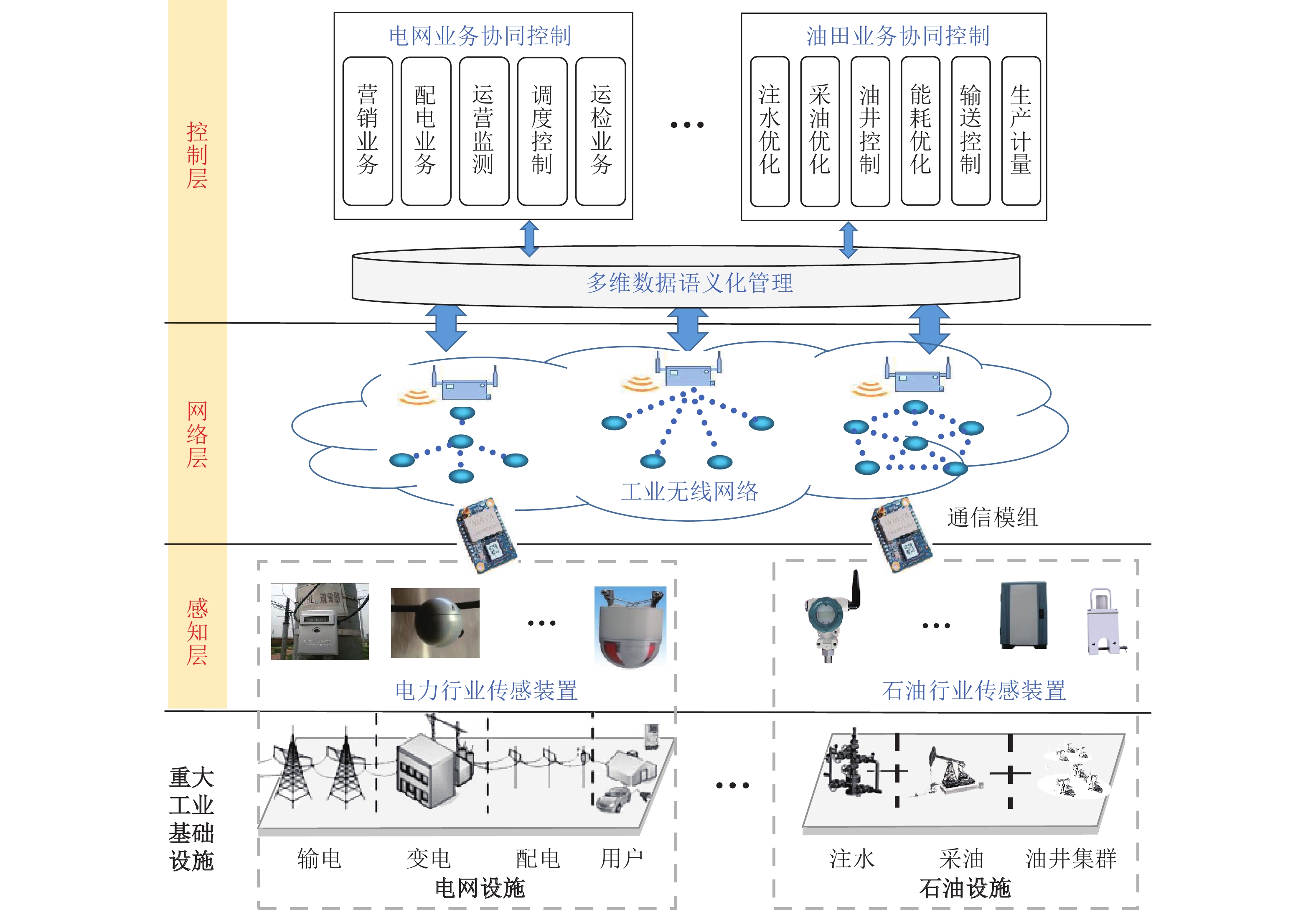
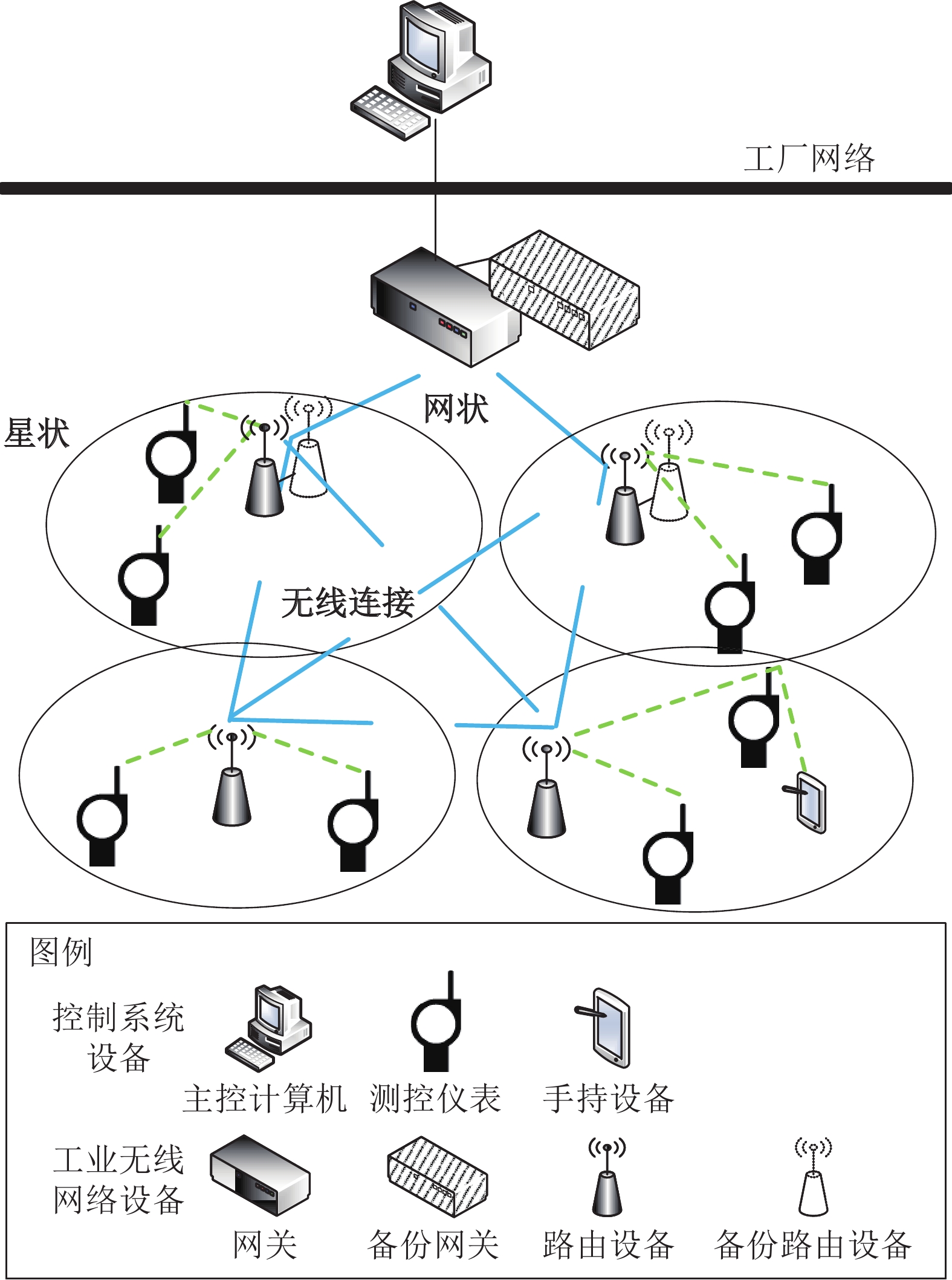
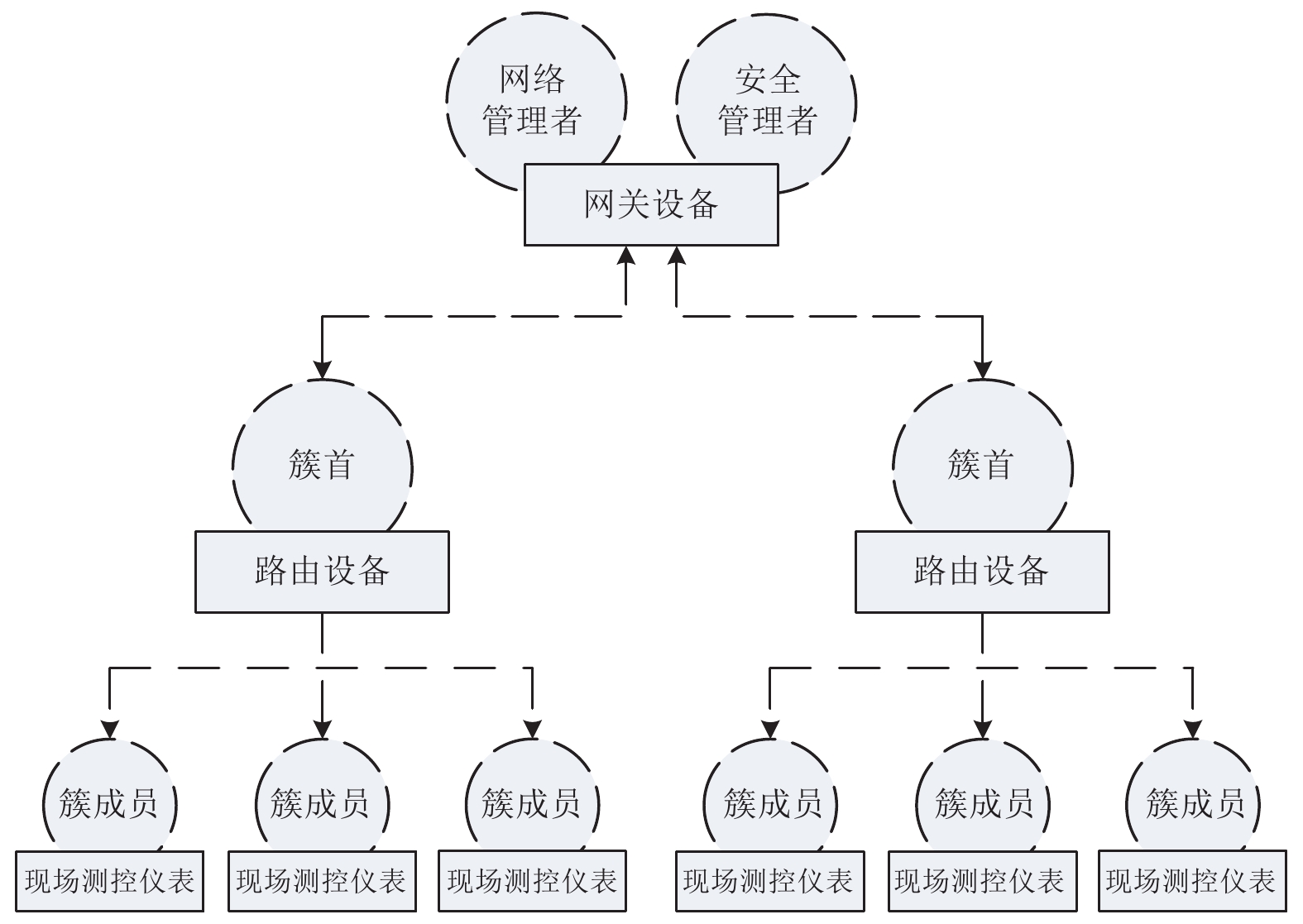
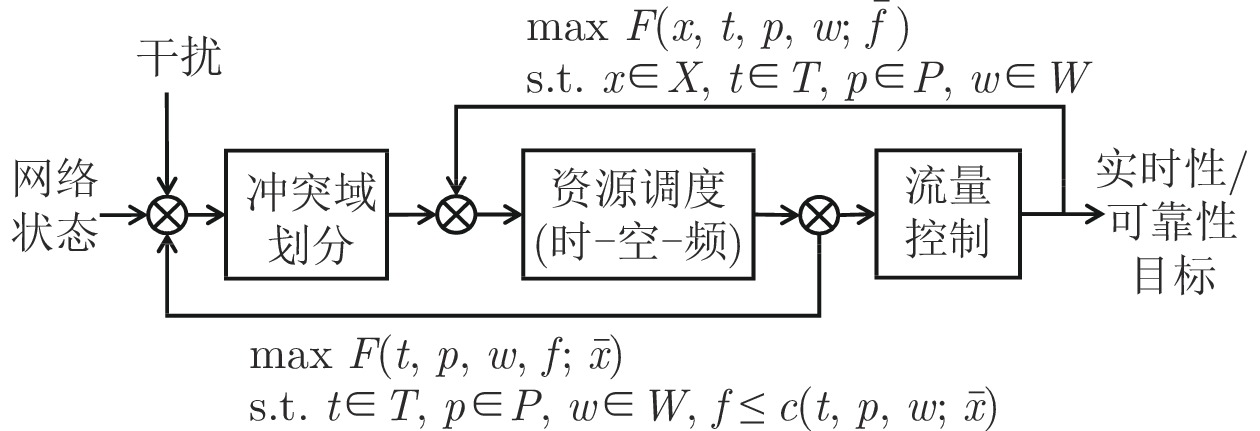
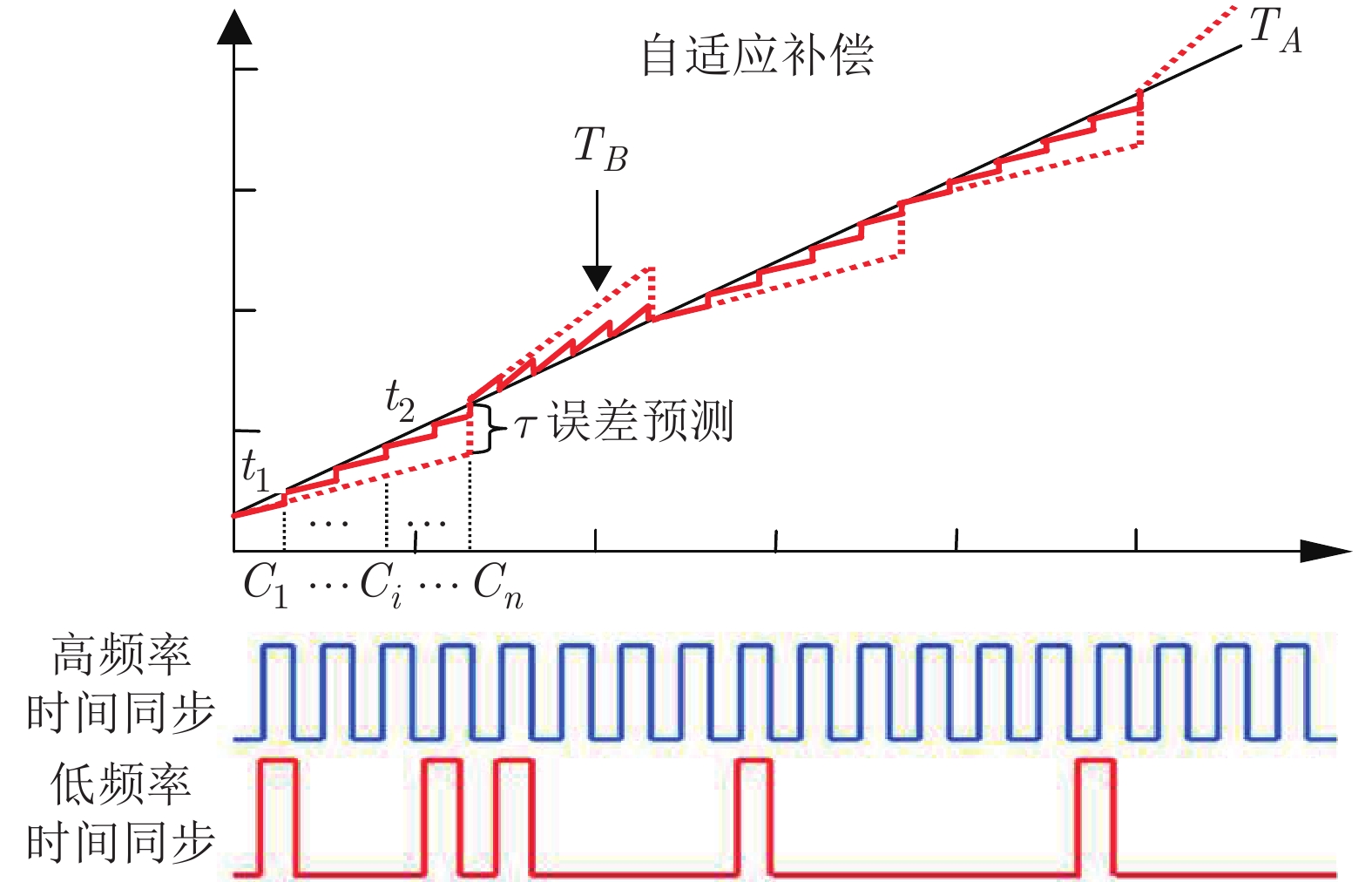
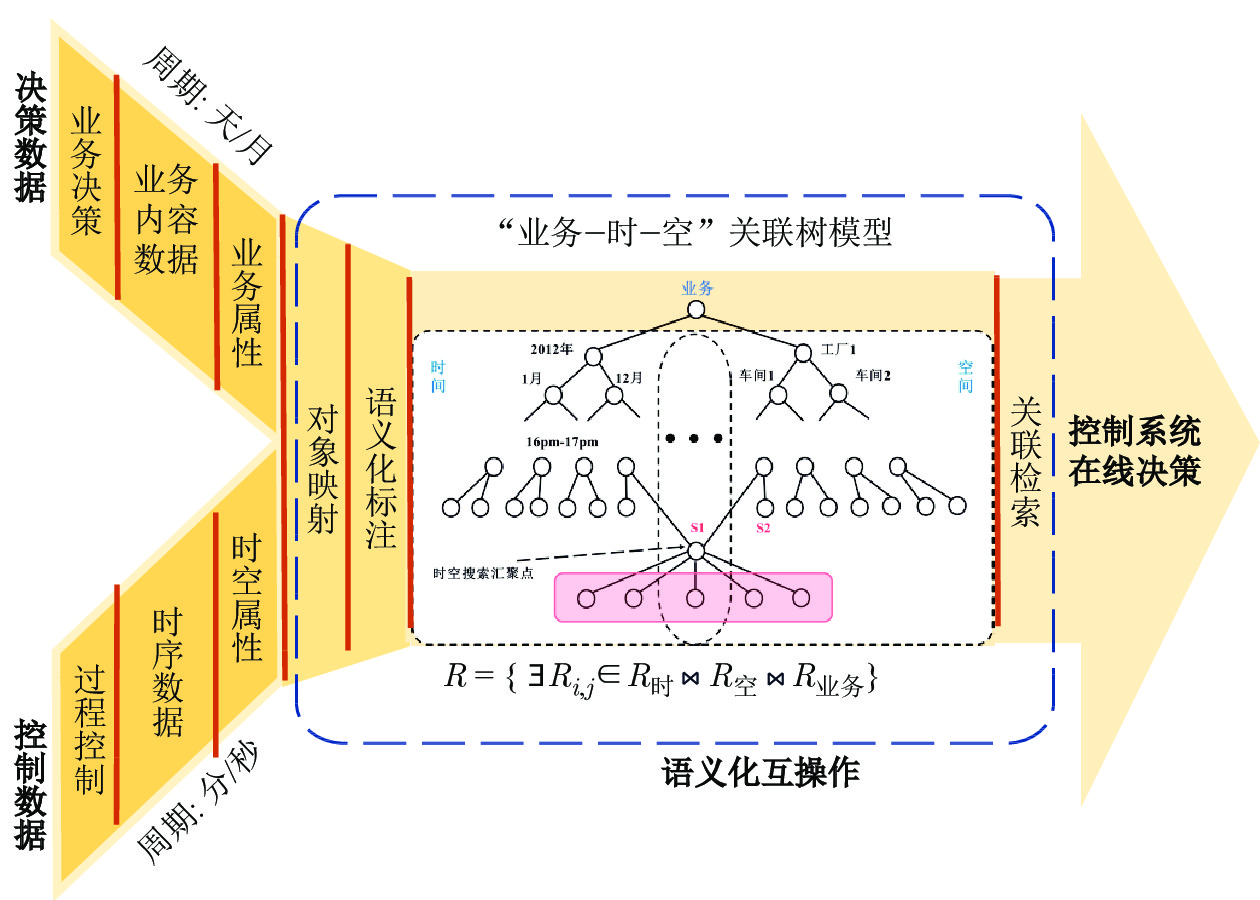
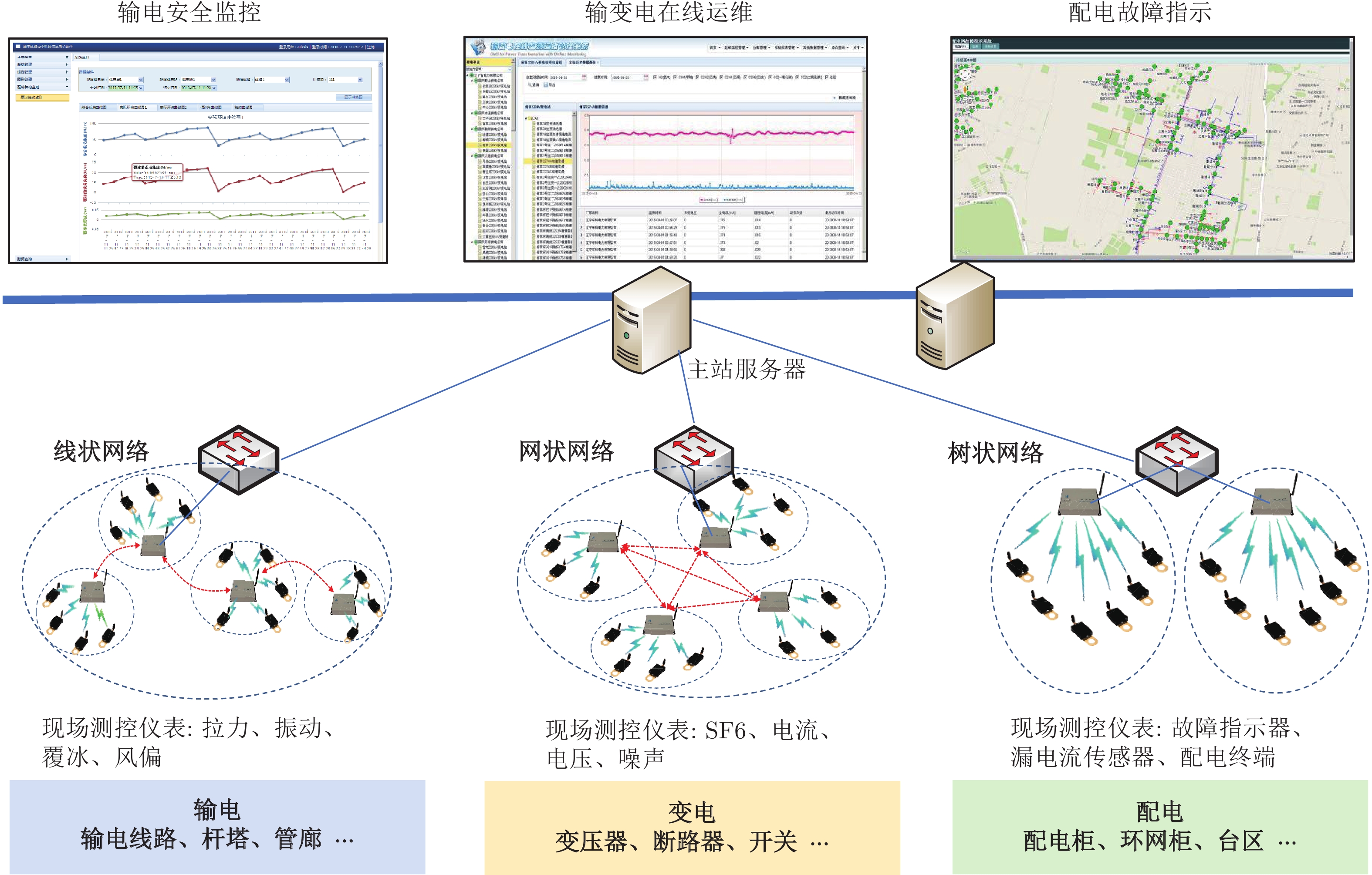
大型生产设施的安全与能效监控, 迫切需要低功耗、高精度的泛在感知, 高实时、高可靠的无线传输以及动态灵活的生产管控. 为此, 本文首先提出一种扁平架构的无线化工业控制系统. 然后, 围绕感知、传输和控制等核心功能需求, 系统阐述了高实时高可靠的工业无线网络设计及其时−空−频三元联合调控方法, 感知终端的变周期精益采样和高能效精准时间同步方法, 以及管控平台的语义化互操作和赋时工作流模型等核心关键技术. 最后, 研发了面向石油高效采收和电网全域安全监测的无线化工业控制系统, 介绍了应用效果和成效.
大型生产设施的安全与能效监控, 迫切需要低功耗、高精度的泛在感知, 高实时、高可靠的无线传输以及动态灵活的生产管控. 为此, 本文首先提出一种扁平架构的无线化工业控制系统. 然后, 围绕感知、传输和控制等核心功能需求, 系统阐述了高实时高可靠的工业无线网络设计及其时−空−频三元联合调控方法, 感知终端的变周期精益采样和高能效精准时间同步方法, 以及管控平台的语义化互操作和赋时工作流模型等核心关键技术. 最后, 研发了面向石油高效采收和电网全域安全监测的无线化工业控制系统, 介绍了应用效果和成效.



2023, 49(3): 550-566.
doi: 10.16383/j.aas.c220570
摘要:
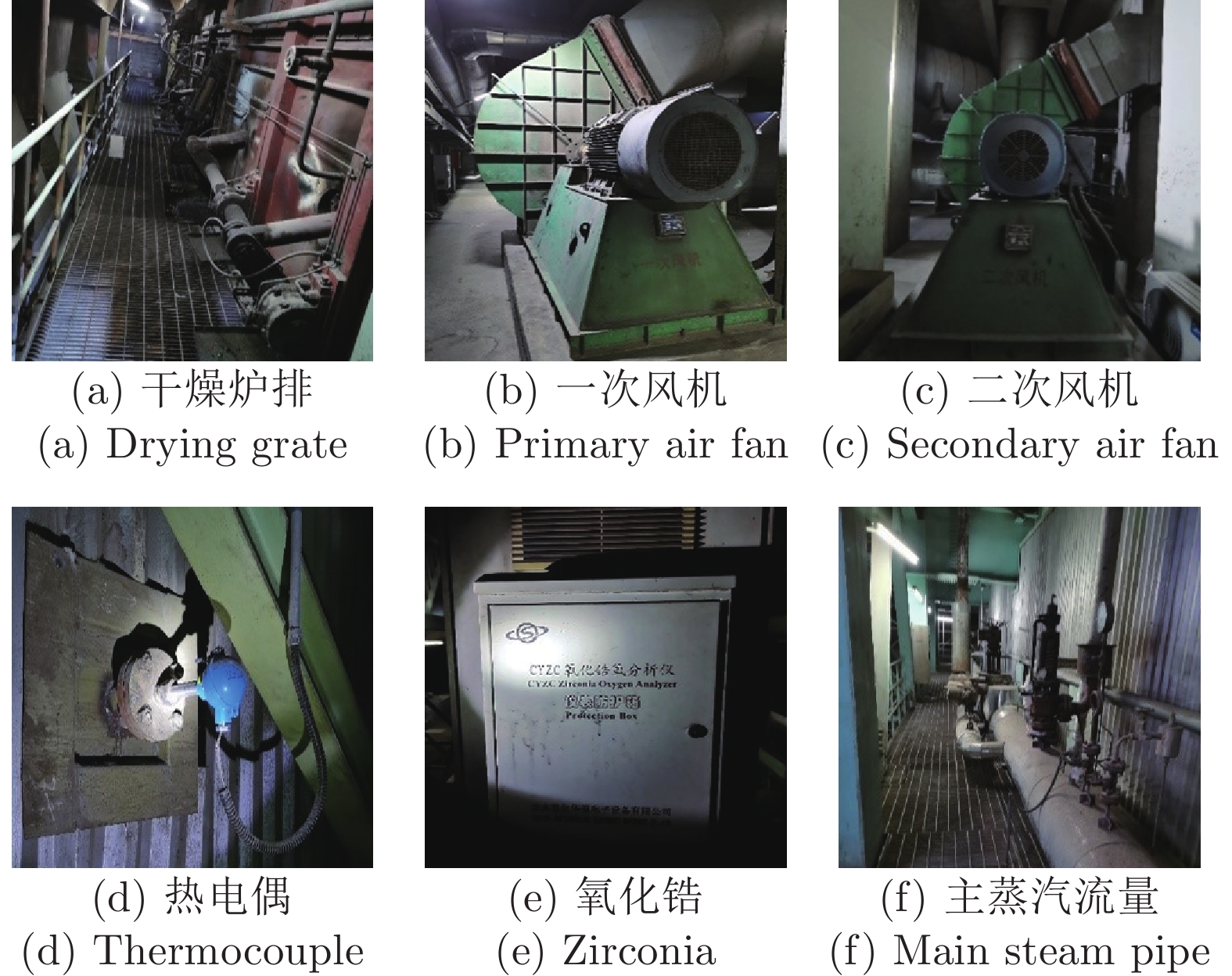
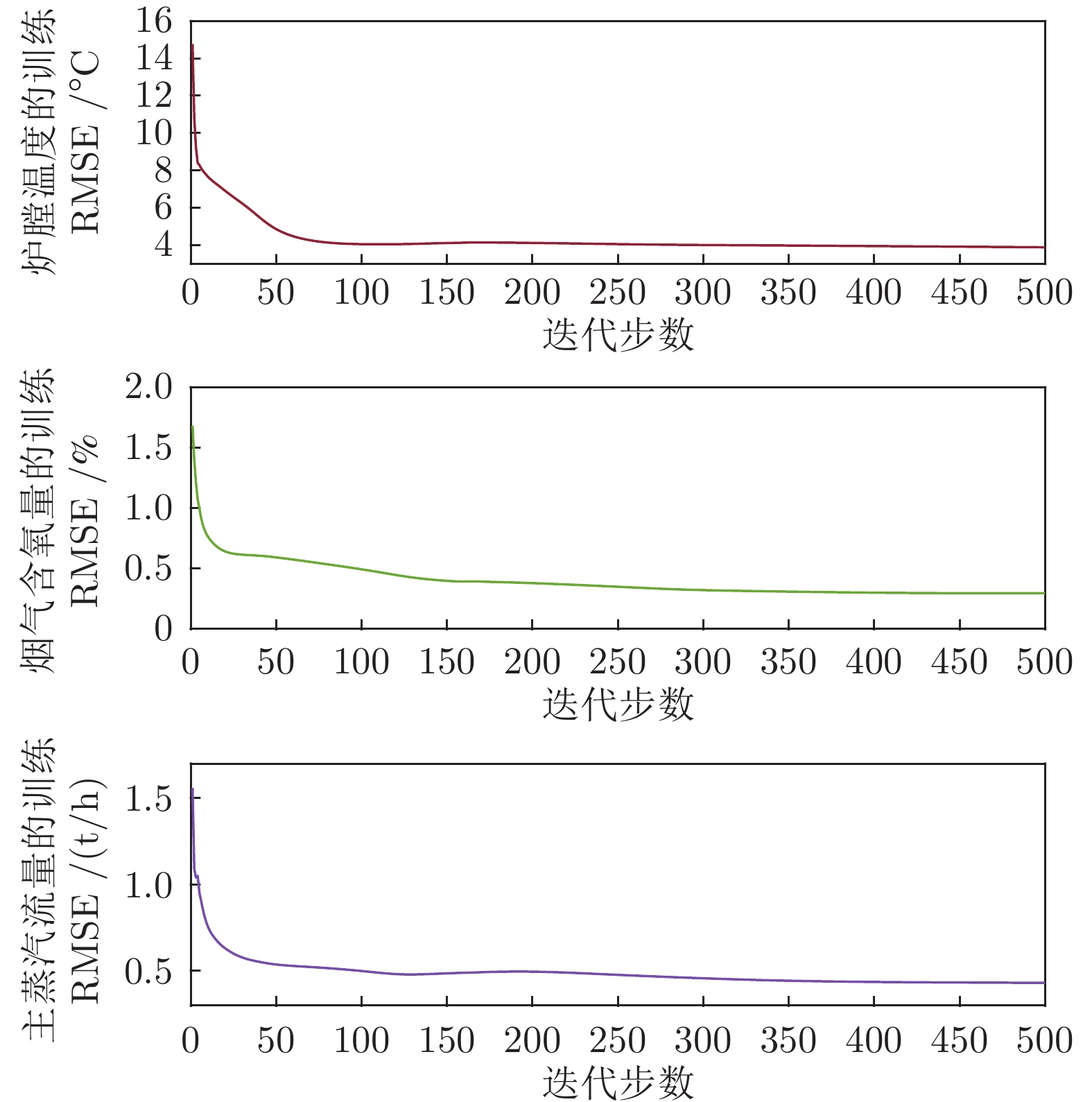
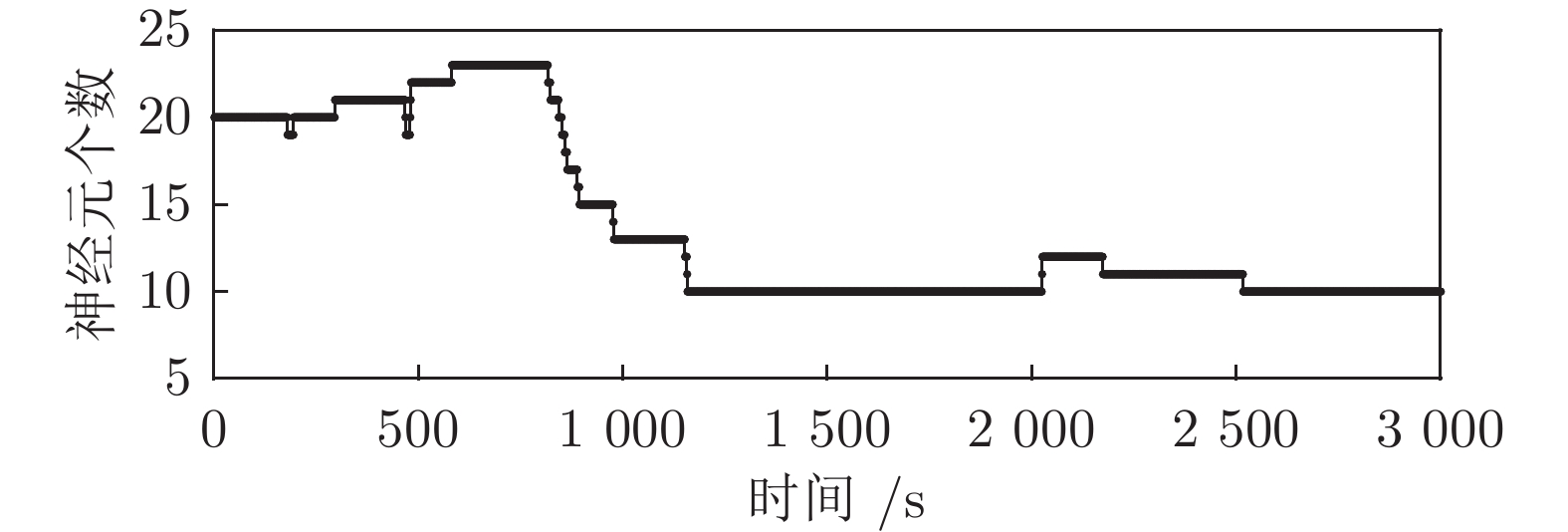
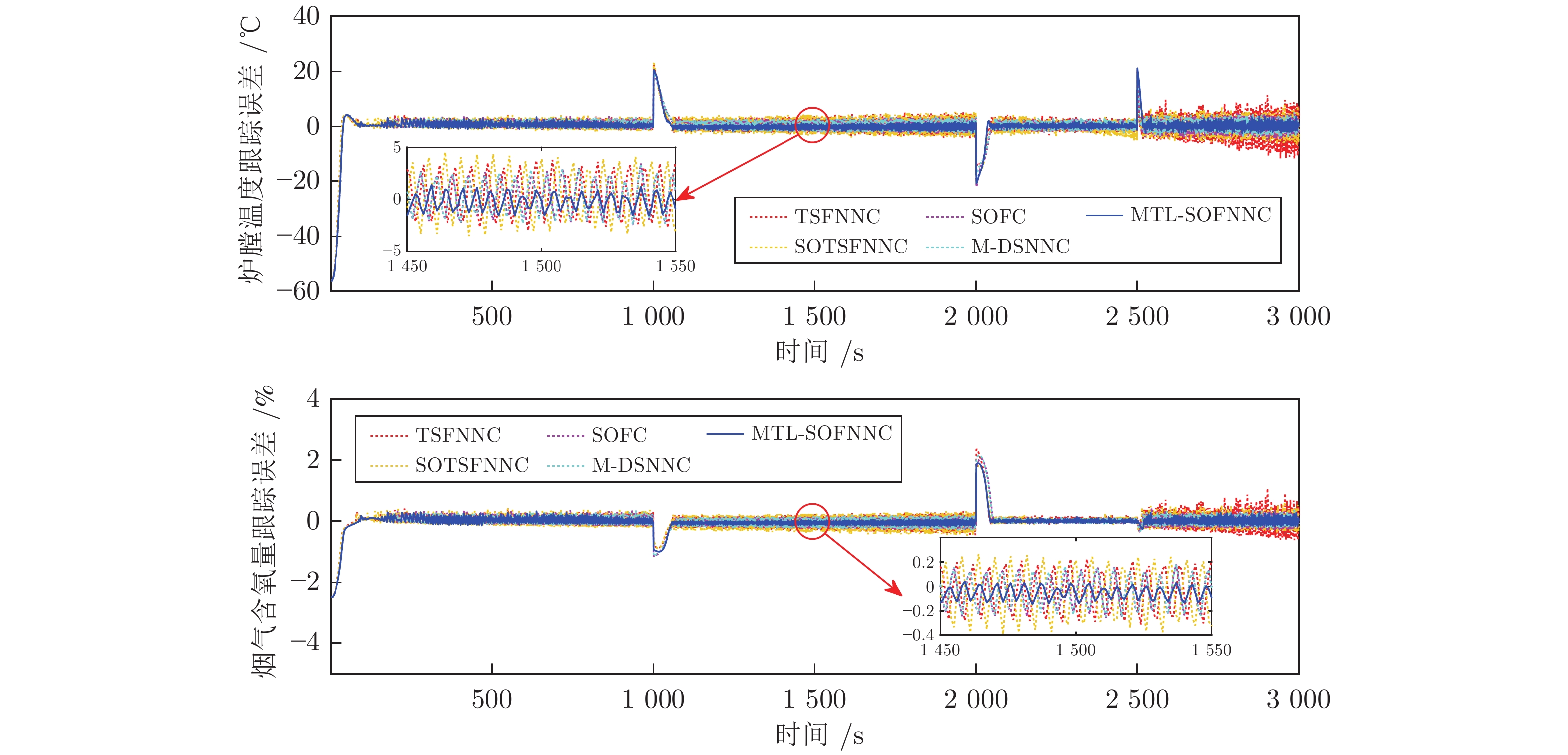
城市固废焚烧(Municipal solid waste incineration, MSWI)是处置城市固废(Municipal solid waste, MSW) 的主要手段之一. 中国MSW来源范围广、组分复杂、热值波动大, 其焚烧过程通常依靠人工干预, 这导致MSWI过程智能化水平较低且难以满足日益提升的控制需求. MSWI具有多变量耦合、工况漂移等诸多不确定性特征, 因而难以建立其被控对象模型并设计在线控制器. 针对以上问题, 提出了一种面向MSWI过程的数据驱动建模与自组织控制方法. 首先, 构建了基于多输入多输出Takagi Sugeno 模糊神经网络(Multi-input multi-output Takagi Sugeno fuzzy neural network, MIMO-TSFNN) 的被控对象模型; 然后, 设计了基于多任务学习的自组织模糊神经网络控制器(Multi-task learning self-organizing fuzzy neural network controller, MTL-SOFNNC)用于同步控制炉膛温度与烟气含氧量, 其通过计算神经元的相似度与多任务学习(Multi-task learning, MTL)能力对控制器结构进行自组织调整; 接着, 通过Lyapunov定理对MTL-SOFNNC稳定性进行了证明; 最后, 通过北京市某MSWI厂的过程数据验证了模型与控制器的有效性.
城市固废焚烧(Municipal solid waste incineration, MSWI)是处置城市固废(Municipal solid waste, MSW) 的主要手段之一. 中国MSW来源范围广、组分复杂、热值波动大, 其焚烧过程通常依靠人工干预, 这导致MSWI过程智能化水平较低且难以满足日益提升的控制需求. MSWI具有多变量耦合、工况漂移等诸多不确定性特征, 因而难以建立其被控对象模型并设计在线控制器. 针对以上问题, 提出了一种面向MSWI过程的数据驱动建模与自组织控制方法. 首先, 构建了基于多输入多输出Takagi Sugeno 模糊神经网络(Multi-input multi-output Takagi Sugeno fuzzy neural network, MIMO-TSFNN) 的被控对象模型; 然后, 设计了基于多任务学习的自组织模糊神经网络控制器(Multi-task learning self-organizing fuzzy neural network controller, MTL-SOFNNC)用于同步控制炉膛温度与烟气含氧量, 其通过计算神经元的相似度与多任务学习(Multi-task learning, MTL)能力对控制器结构进行自组织调整; 接着, 通过Lyapunov定理对MTL-SOFNNC稳定性进行了证明; 最后, 通过北京市某MSWI厂的过程数据验证了模型与控制器的有效性.







2023, 49(3): 567-579.
doi: 10.16383/j.aas.c220888
摘要:
近年来, 非线性系统的安全分析与控制已成为控制领域中的热门研究方向, 而障碍函数则是该方向的一种重要工具. 基于障碍函数的安全分析与控制方法具有计算效率高、鲁棒性强等优点. 本文首先从多个角度介绍了基于障碍函数的非线性系统安全性分析的理论成果, 并进一步综述了障碍函数方法在非线性系统安全控制中的最新进展. 最后, 简要地介绍了当前基于障碍函数的安全分析与控制理论中一系列尚未解决的问题, 并指出了未来可能发展的一些研究方向.
近年来, 非线性系统的安全分析与控制已成为控制领域中的热门研究方向, 而障碍函数则是该方向的一种重要工具. 基于障碍函数的安全分析与控制方法具有计算效率高、鲁棒性强等优点. 本文首先从多个角度介绍了基于障碍函数的非线性系统安全性分析的理论成果, 并进一步综述了障碍函数方法在非线性系统安全控制中的最新进展. 最后, 简要地介绍了当前基于障碍函数的安全分析与控制理论中一系列尚未解决的问题, 并指出了未来可能发展的一些研究方向.
2023, 49(3): 580-613.
doi: 10.16383/j.aas.c220680
摘要:
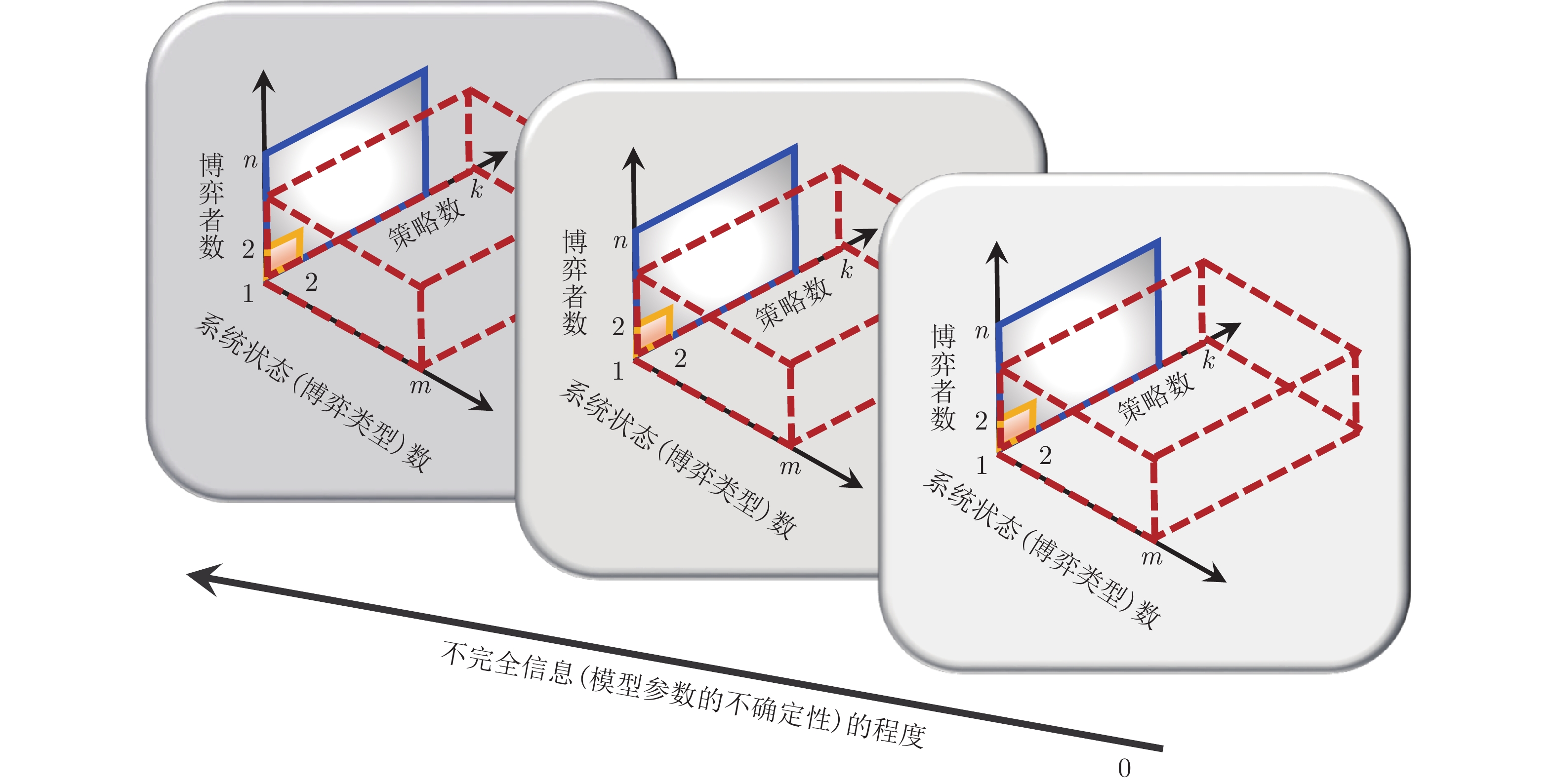
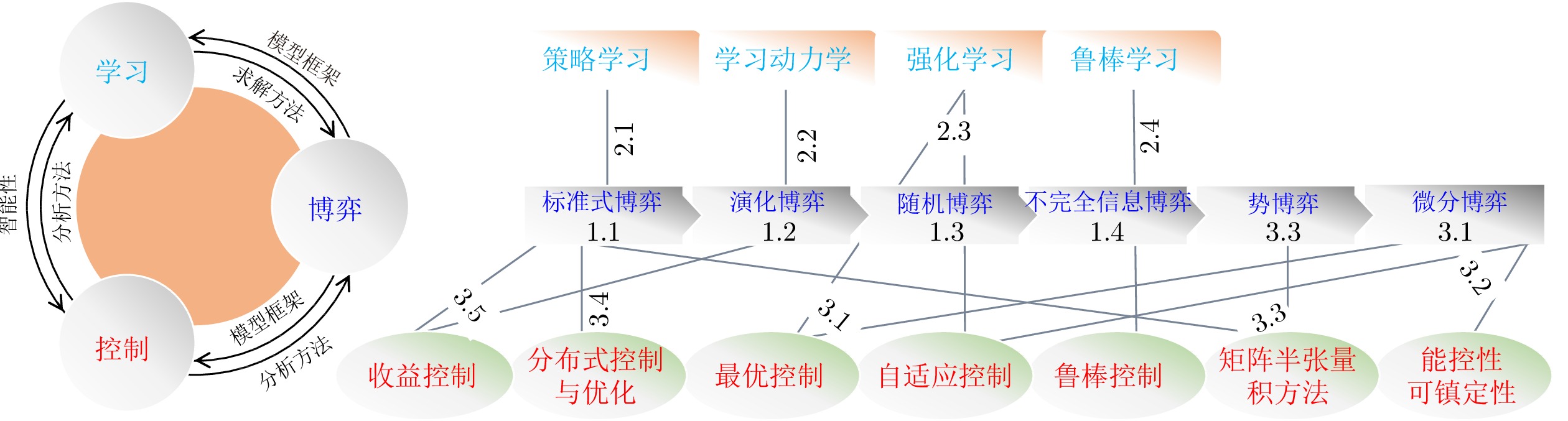
近年来, 人工智能(Artificial intelligence, AI)技术在棋牌游戏、计算机视觉、自然语言处理和蛋白质结构解析与预测等研究领域取得了众多突破性进展, 传统学科之间的固有壁垒正在被逐步打破, 多学科深度交叉融合的态势变得越发明显. 作为现代智能科学的三个重要组成部分, 博弈论、多智能体学习与控制论自诞生之初就逐渐展现出一种“你中有我, 我中有你” 的关联关系. 特别地, 近年来在AI技术的促进作用下, 这三者间的交叉研究成果正呈现出一种井喷式增长的态势. 为及时反映这一学术动态和趋势, 本文对这三者的异同、联系以及最新的研究进展进行了系统梳理. 首先, 介绍了作为纽带连接这三者的四种基本博弈形式, 进而论述了对应于这四种基本博弈形式的多智能体学习方法; 然后, 按照不同的专题, 梳理了这三者交叉研究的最新进展; 最后, 对这一新兴交叉研究领域进行了总结与展望.
近年来, 人工智能(Artificial intelligence, AI)技术在棋牌游戏、计算机视觉、自然语言处理和蛋白质结构解析与预测等研究领域取得了众多突破性进展, 传统学科之间的固有壁垒正在被逐步打破, 多学科深度交叉融合的态势变得越发明显. 作为现代智能科学的三个重要组成部分, 博弈论、多智能体学习与控制论自诞生之初就逐渐展现出一种“你中有我, 我中有你” 的关联关系. 特别地, 近年来在AI技术的促进作用下, 这三者间的交叉研究成果正呈现出一种井喷式增长的态势. 为及时反映这一学术动态和趋势, 本文对这三者的异同、联系以及最新的研究进展进行了系统梳理. 首先, 介绍了作为纽带连接这三者的四种基本博弈形式, 进而论述了对应于这四种基本博弈形式的多智能体学习方法; 然后, 按照不同的专题, 梳理了这三者交叉研究的最新进展; 最后, 对这一新兴交叉研究领域进行了总结与展望.

2023, 49(3): 614-634.
doi: 10.16383/j.aas.c230015
摘要:
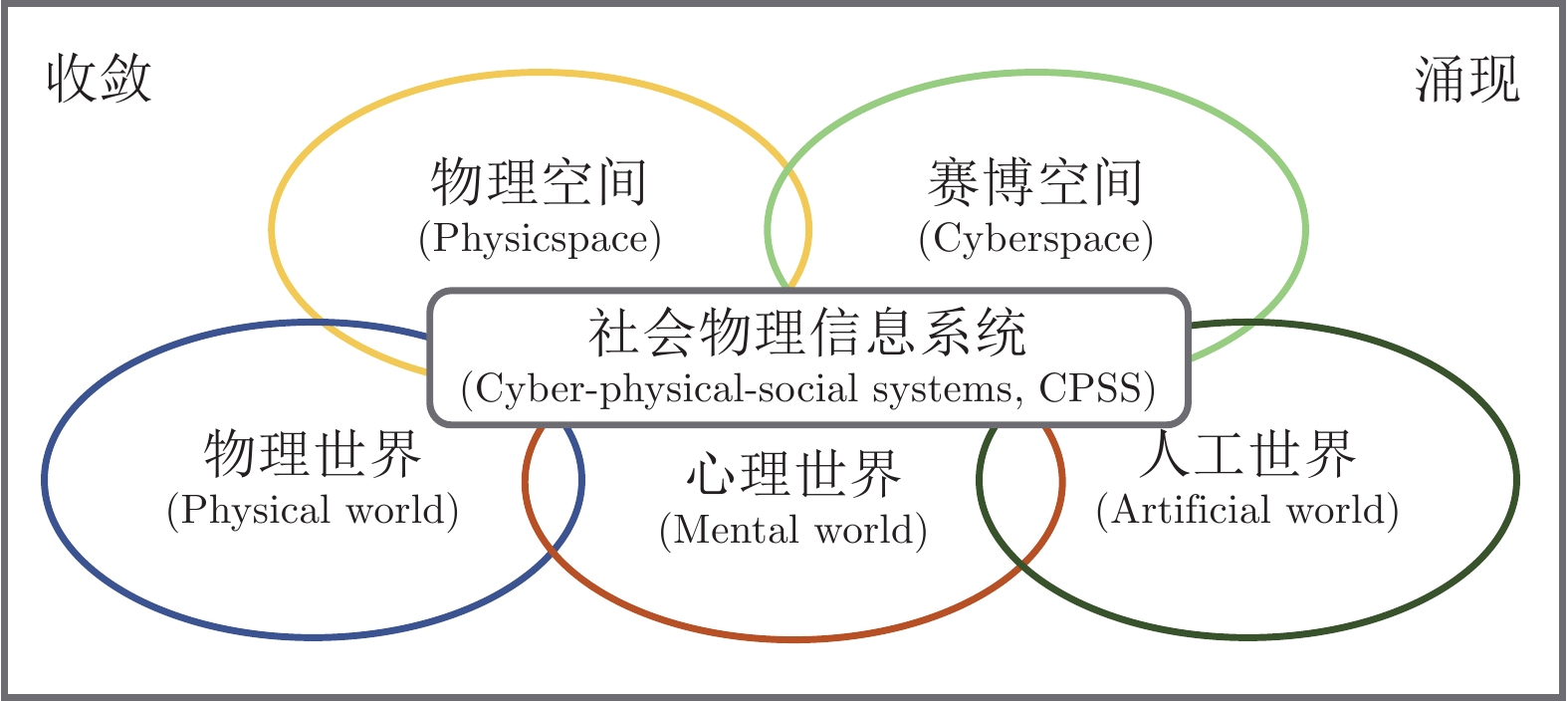
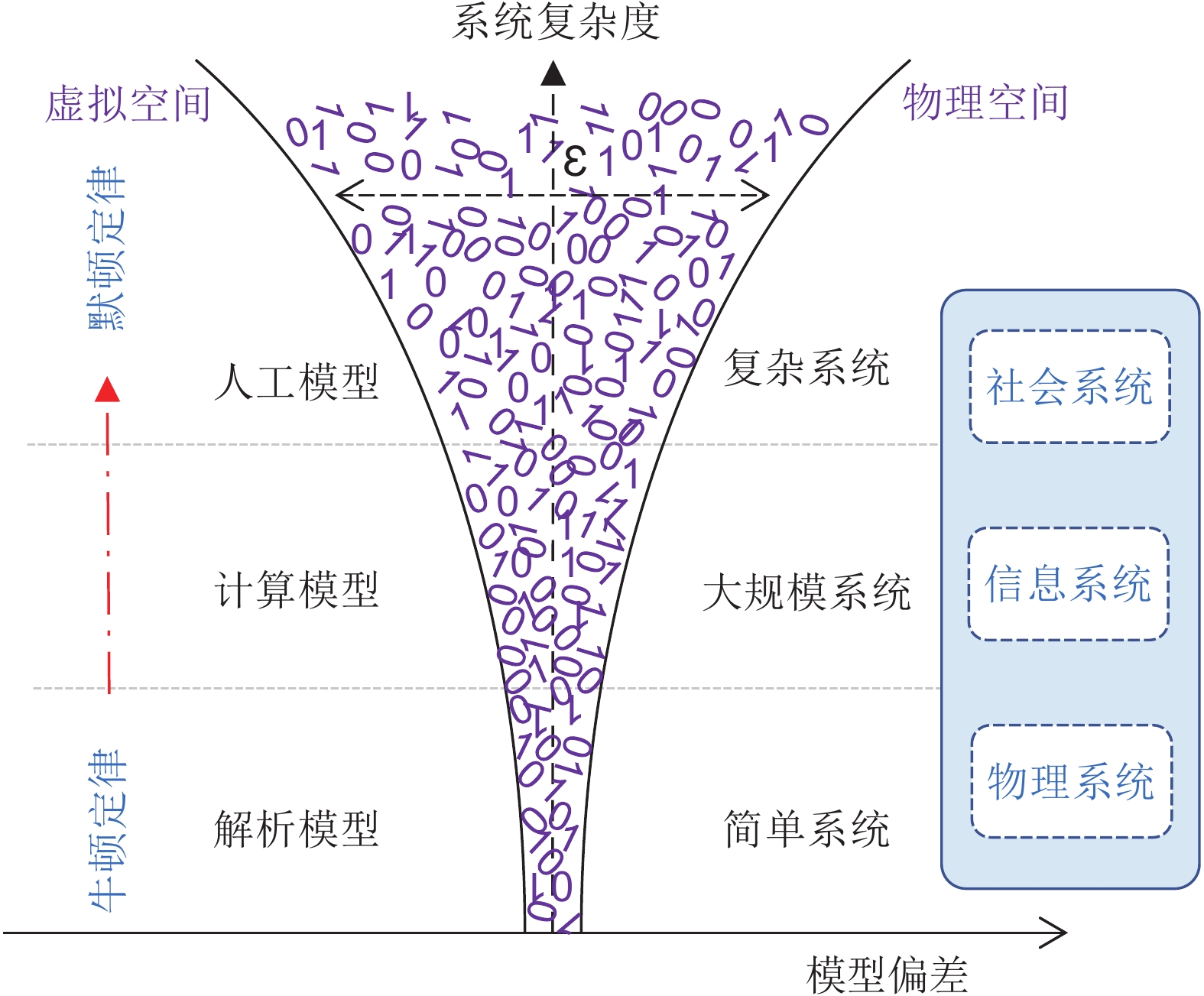
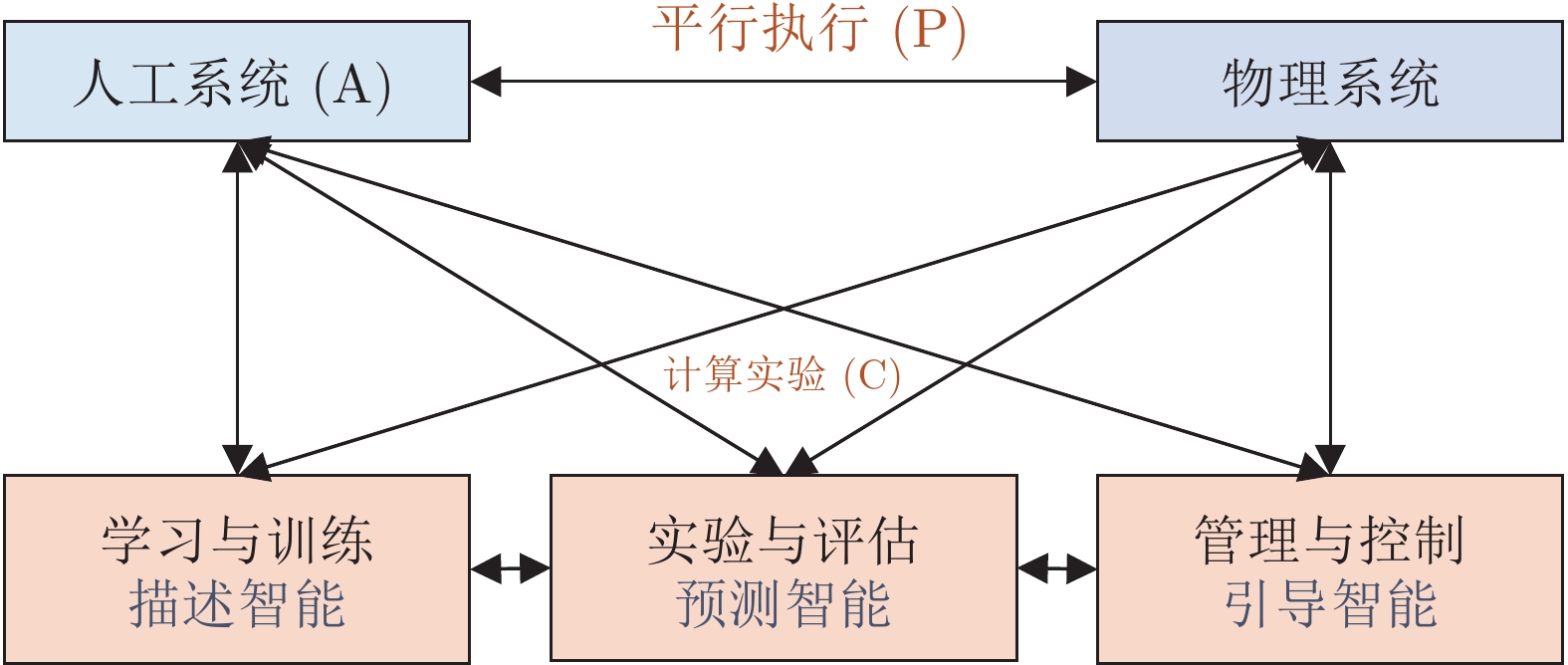
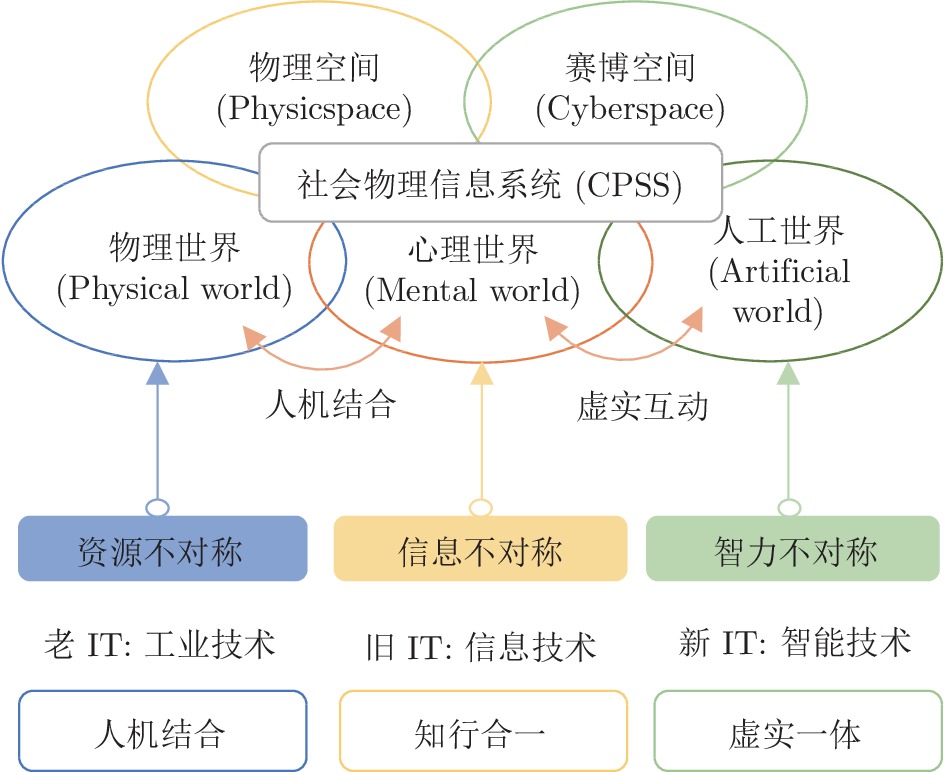
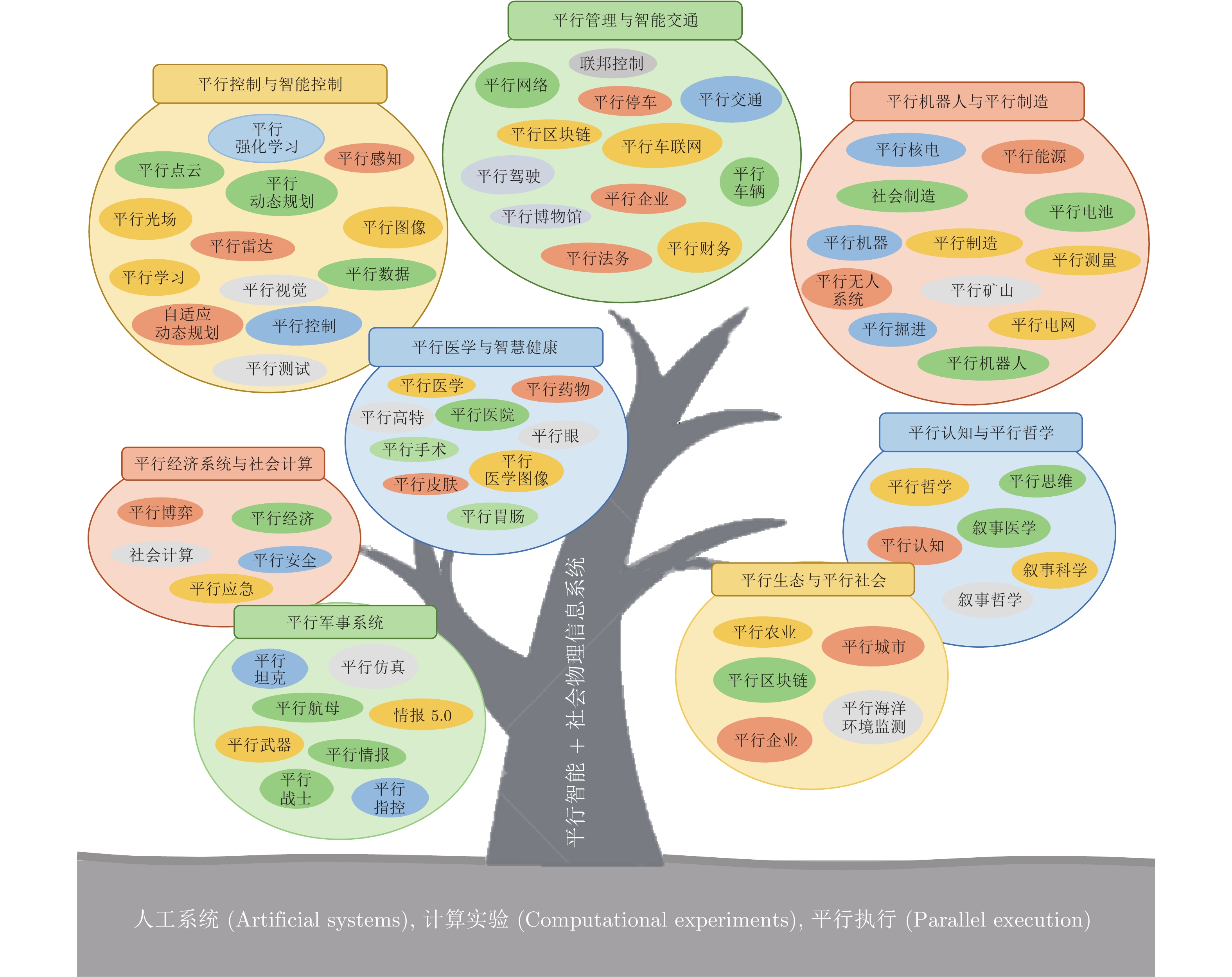
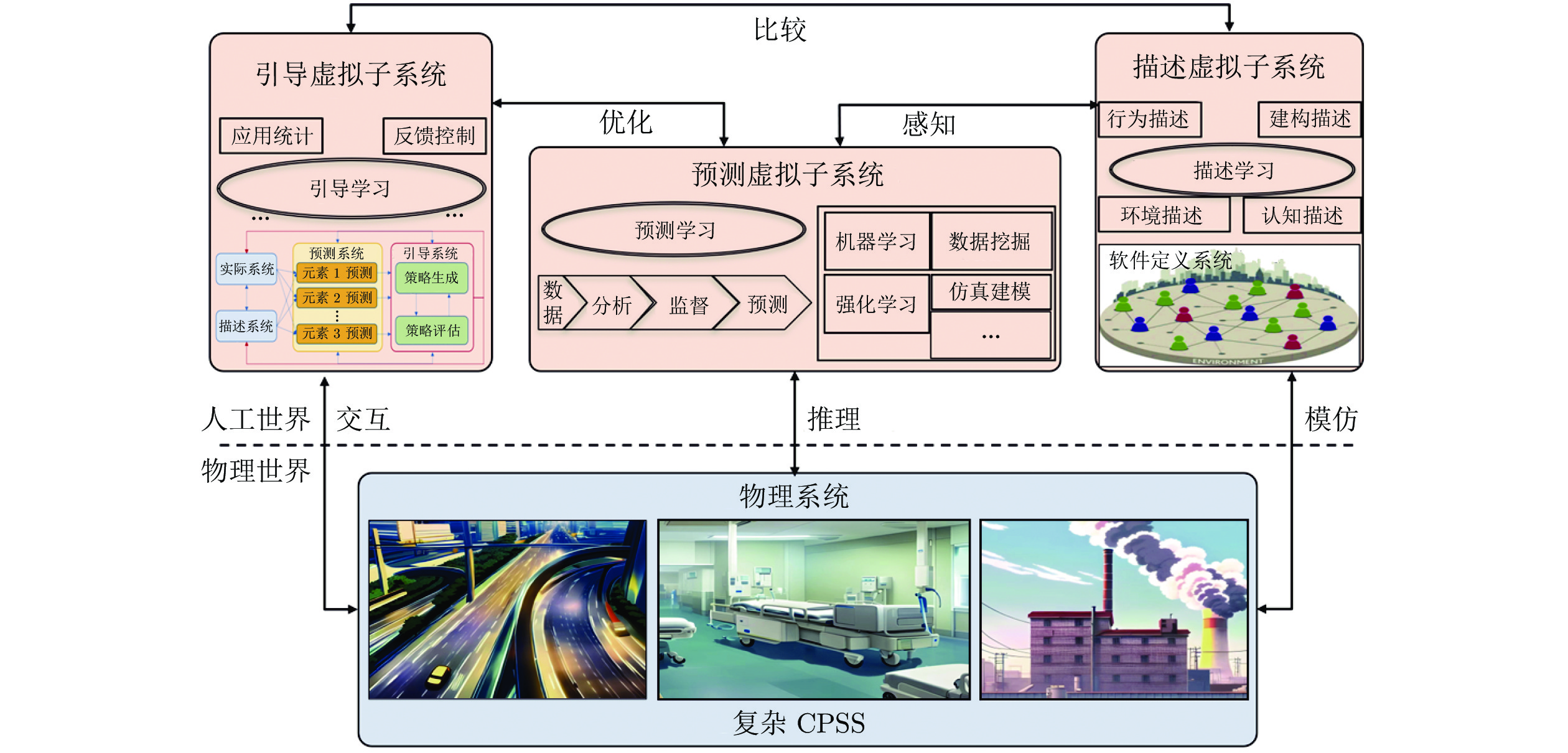
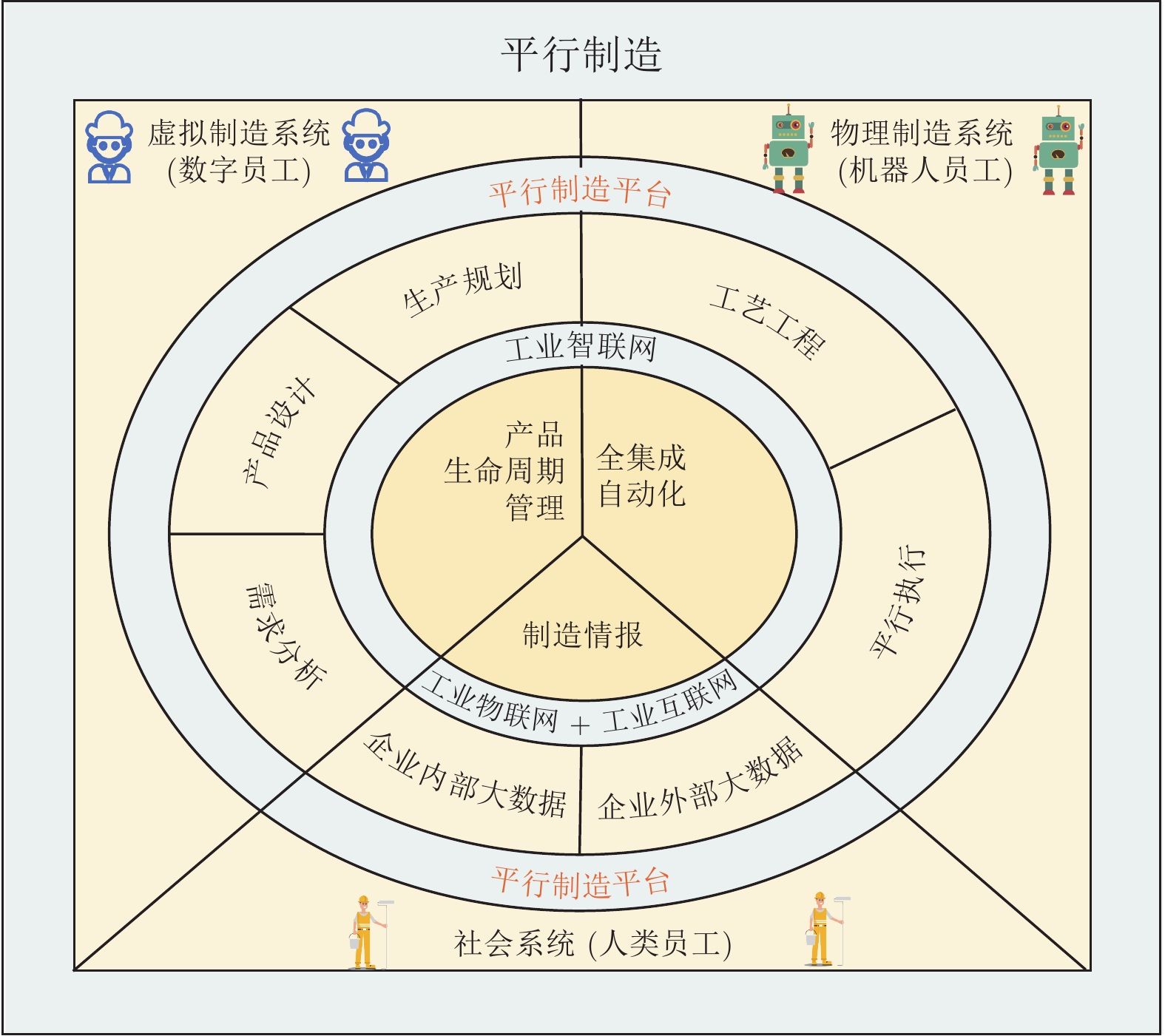
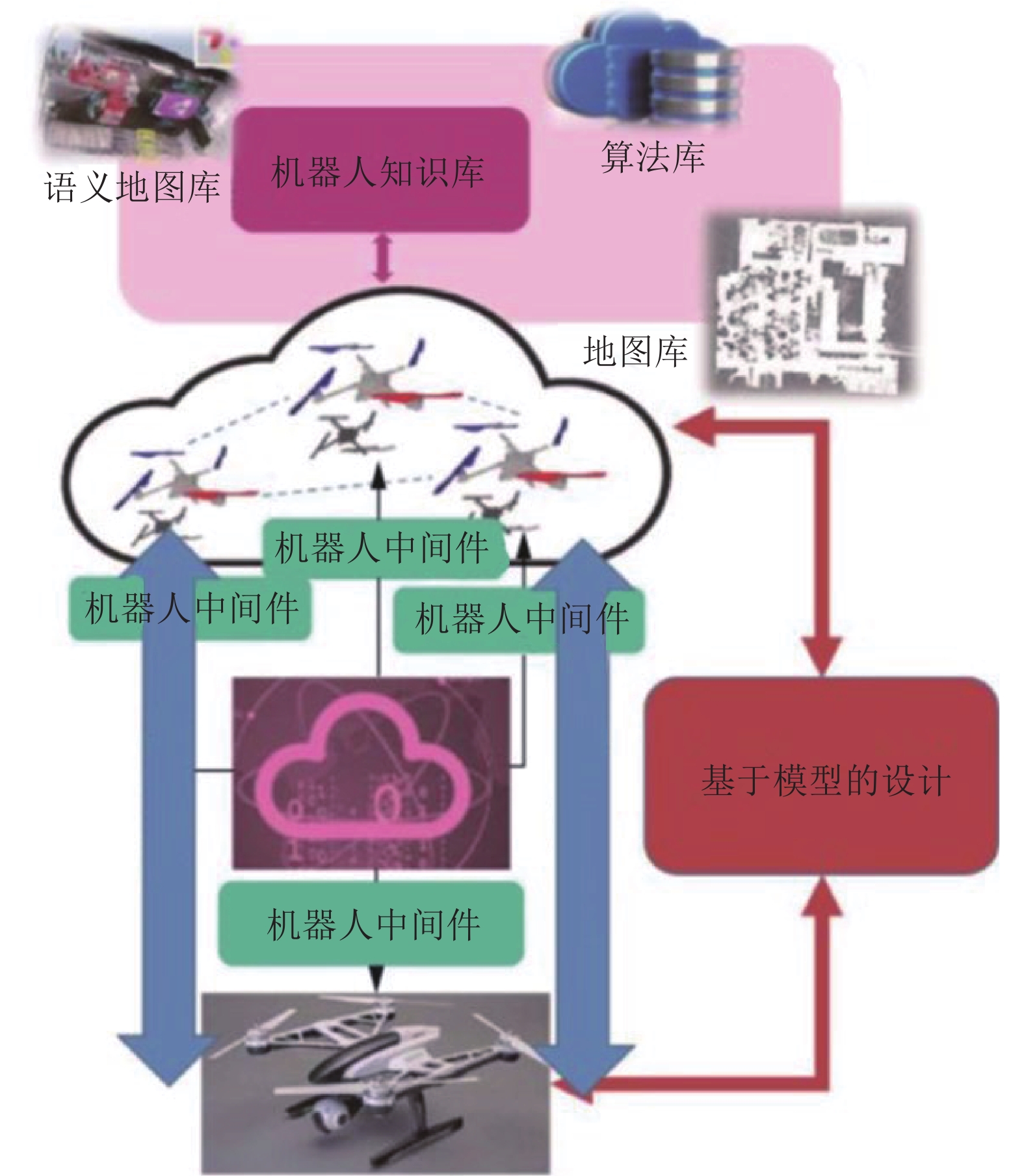
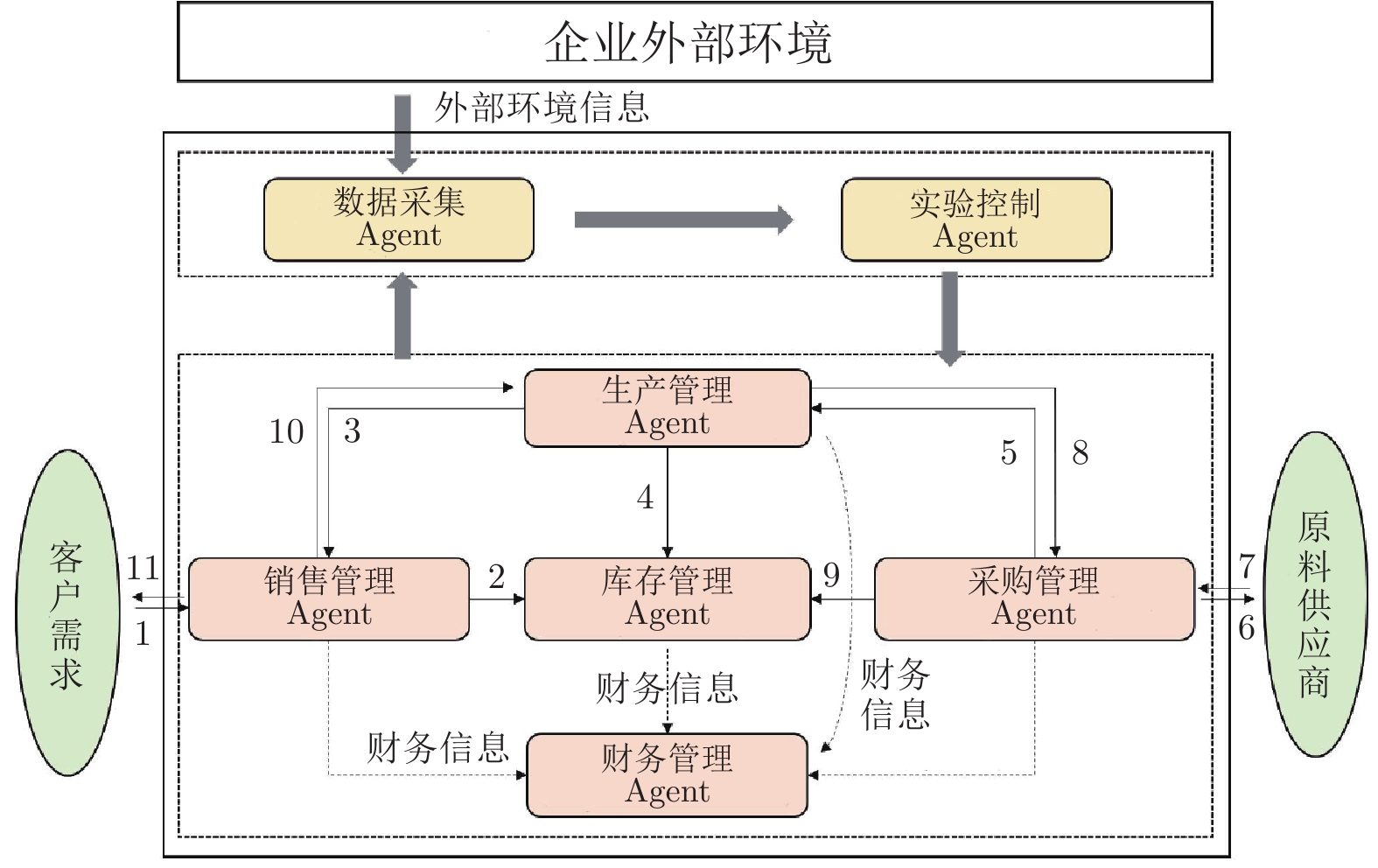
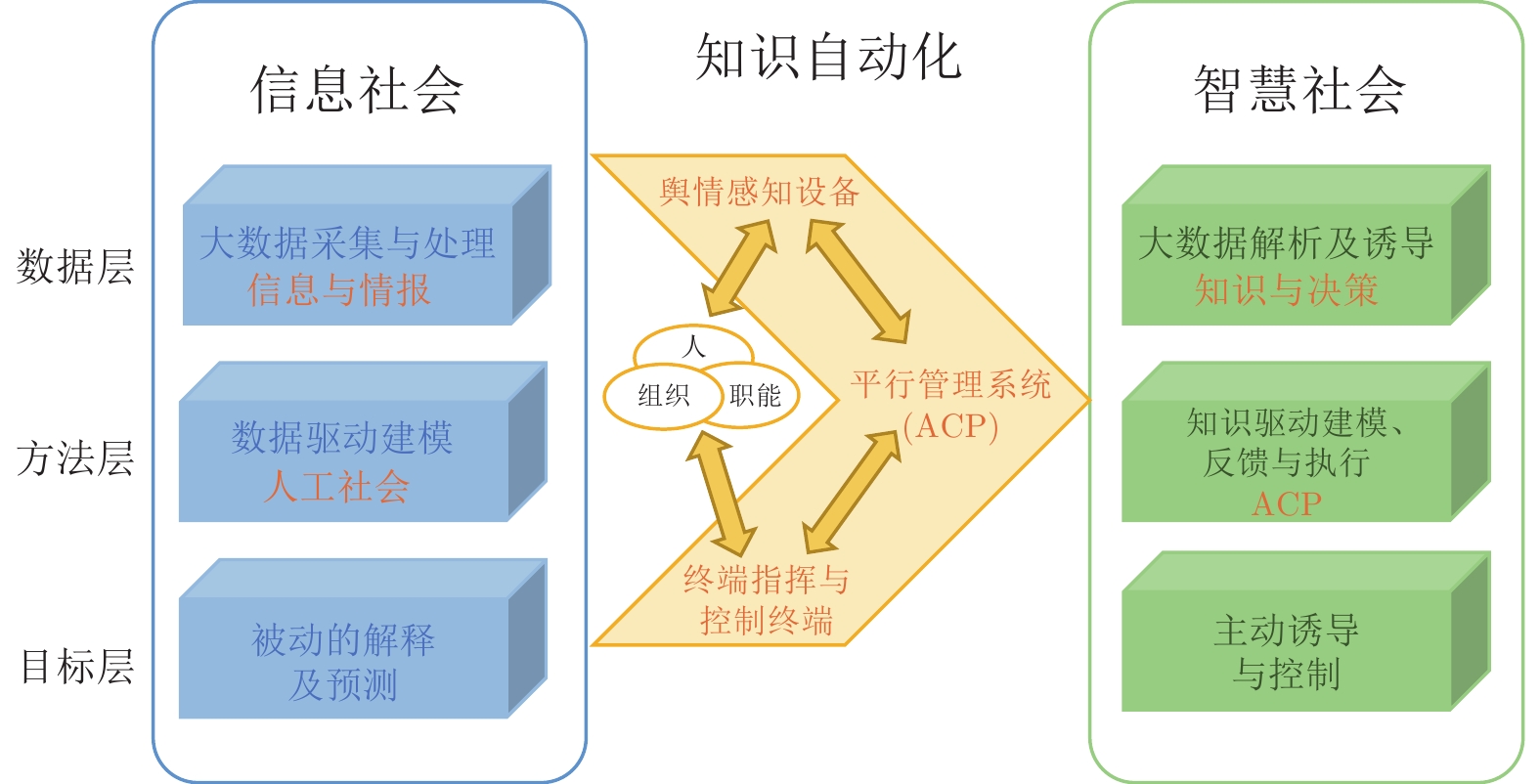
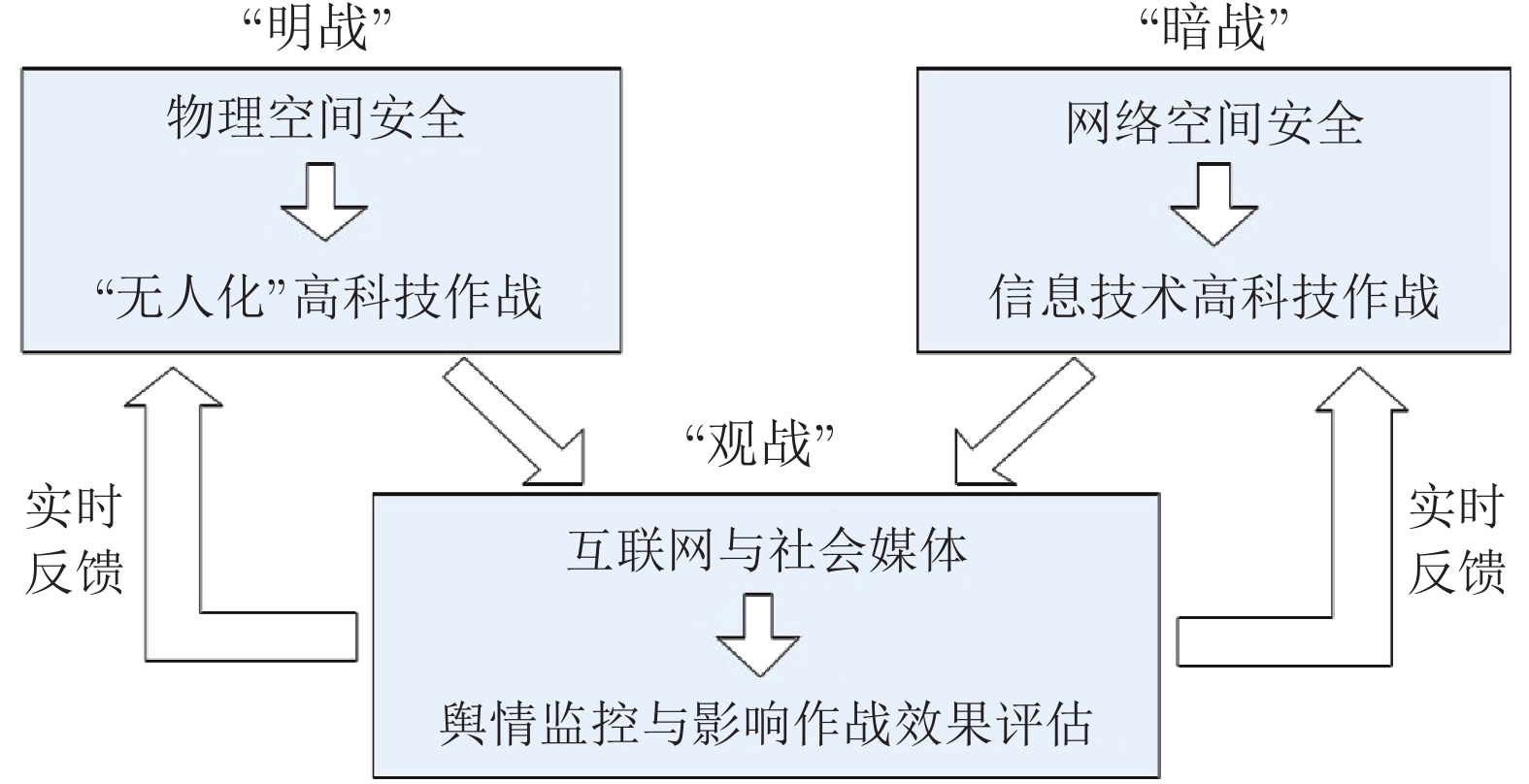
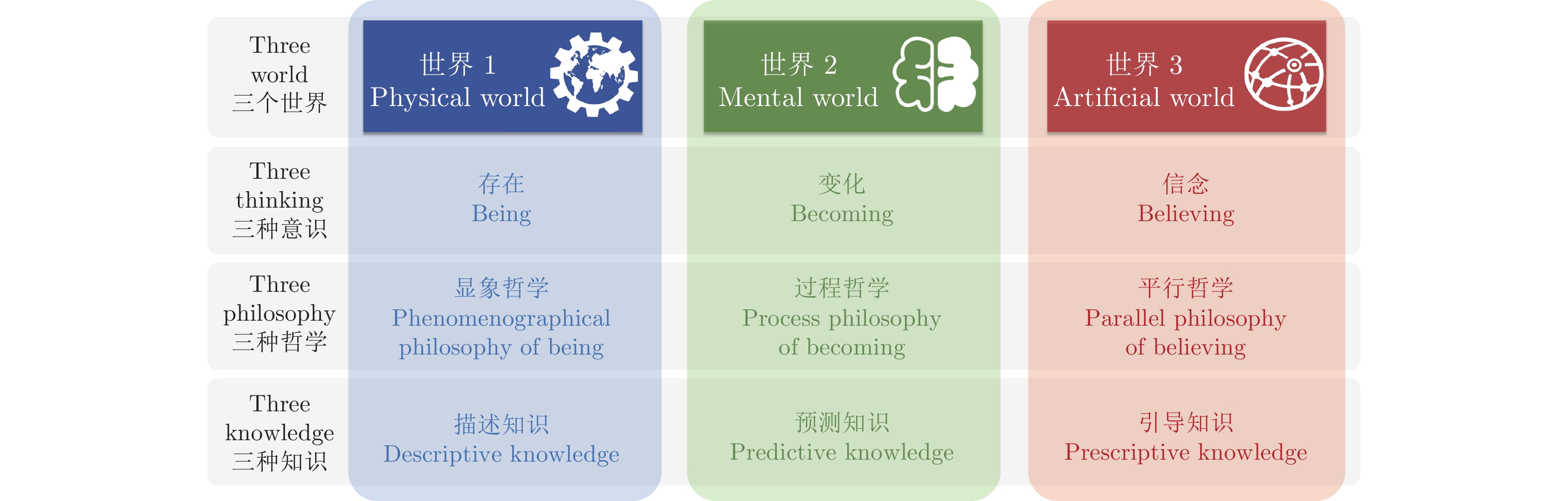
社会物理信息系统 (Cyber-physical-social systems, CPSS)在传统物理信息系统 (Cyber-physical systems, CPS)的基础上纳入对社会信号及社会关系的考虑, 利用网络世界近乎无限的人力、数据和信息资源, 突破物理世界有限的资源约束以及时空的限制. 然而, CPSS中人类和社会行为的复杂性加剧了实际系统和其模型之间的建模鸿沟, 使得系统的形态演变为“默顿系统”. 对此, 以ACP方法为核心的平行智能 (Parallel intelligence, PI) 框架通过组合人工系统 (Artificial systems, A)、计算实验 (Computational experiments, C)、平行执行 (Parallel execution, P)三个过程, 为跨越这一鸿沟提供了可行的路径. 具体而言, ACP将模型从系统解析器转变为数据生成器, 使原本难以控制的“默顿系统”可测试、可计算、可验证, 为复杂系统中“涌现”和“收敛”的对立统一确立了方法基础. 本文从平行控制与智能控制、平行机器人与平行制造、平行管理与智能交通、平行医学与智慧健康、平行生态与平行社会、平行经济系统与社会计算、平行军事系统以及平行认知与平行哲学这八个方面阐述面向CPSS的平行智能应用成果. 最后, 对CPSS未来的发展方向和技术趋势进行了讨论与展望.
社会物理信息系统 (Cyber-physical-social systems, CPSS)在传统物理信息系统 (Cyber-physical systems, CPS)的基础上纳入对社会信号及社会关系的考虑, 利用网络世界近乎无限的人力、数据和信息资源, 突破物理世界有限的资源约束以及时空的限制. 然而, CPSS中人类和社会行为的复杂性加剧了实际系统和其模型之间的建模鸿沟, 使得系统的形态演变为“默顿系统”. 对此, 以ACP方法为核心的平行智能 (Parallel intelligence, PI) 框架通过组合人工系统 (Artificial systems, A)、计算实验 (Computational experiments, C)、平行执行 (Parallel execution, P)三个过程, 为跨越这一鸿沟提供了可行的路径. 具体而言, ACP将模型从系统解析器转变为数据生成器, 使原本难以控制的“默顿系统”可测试、可计算、可验证, 为复杂系统中“涌现”和“收敛”的对立统一确立了方法基础. 本文从平行控制与智能控制、平行机器人与平行制造、平行管理与智能交通、平行医学与智慧健康、平行生态与平行社会、平行经济系统与社会计算、平行军事系统以及平行认知与平行哲学这八个方面阐述面向CPSS的平行智能应用成果. 最后, 对CPSS未来的发展方向和技术趋势进行了讨论与展望.










2023, 49(3): 635-660.
doi: 10.16383/j.aas.c220588
摘要:
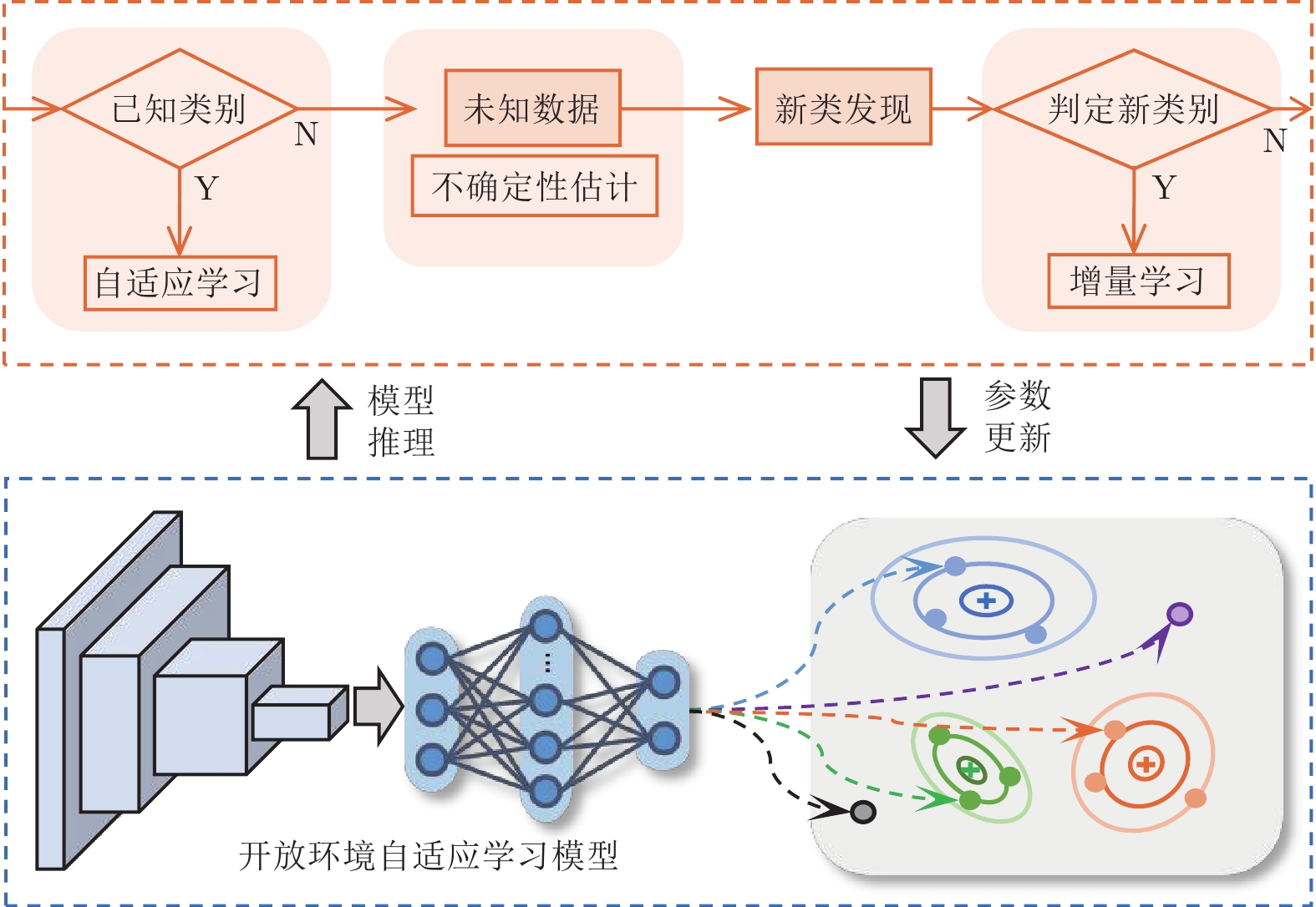
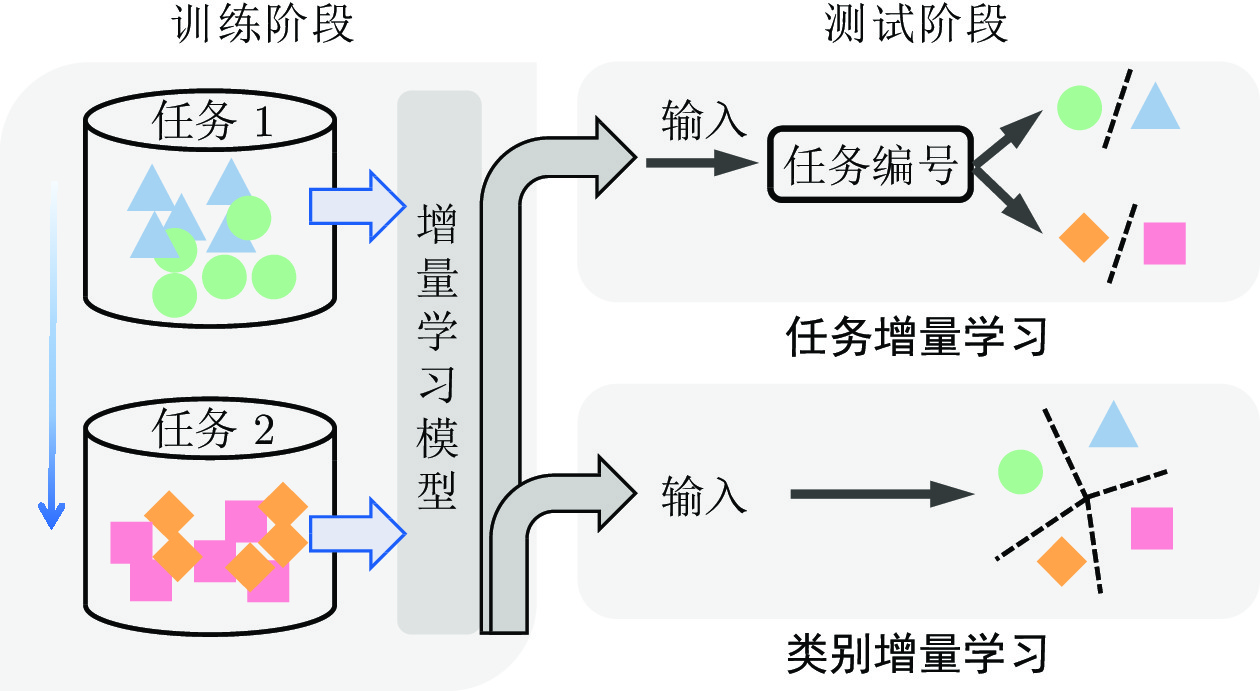
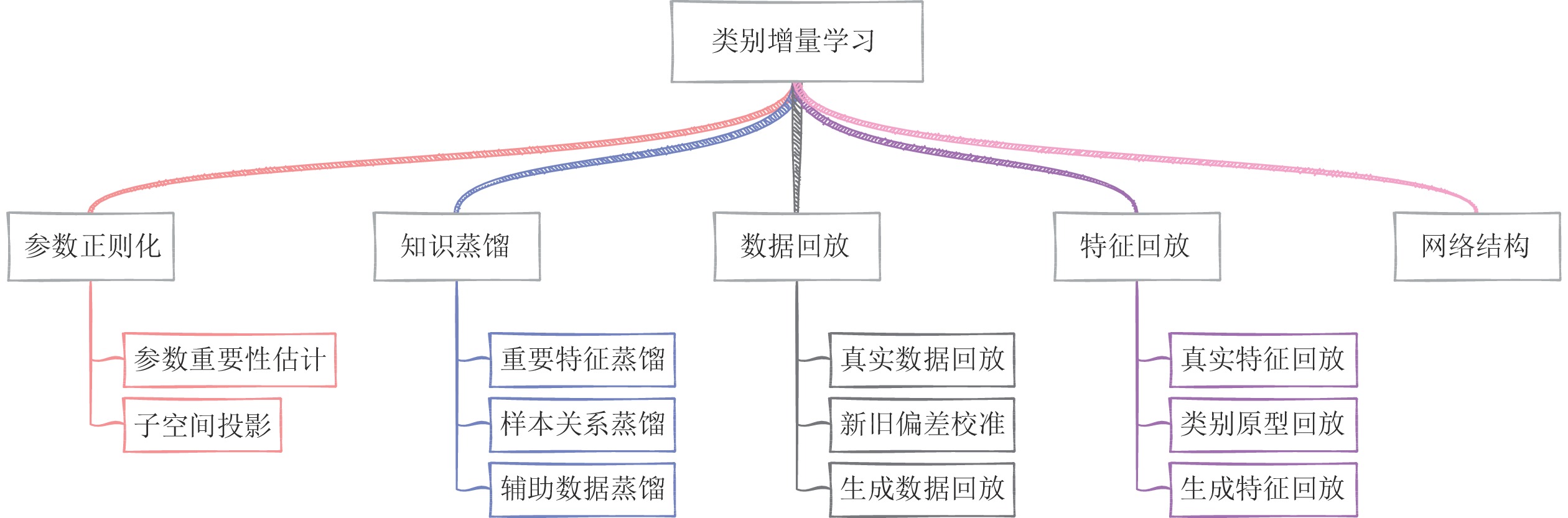
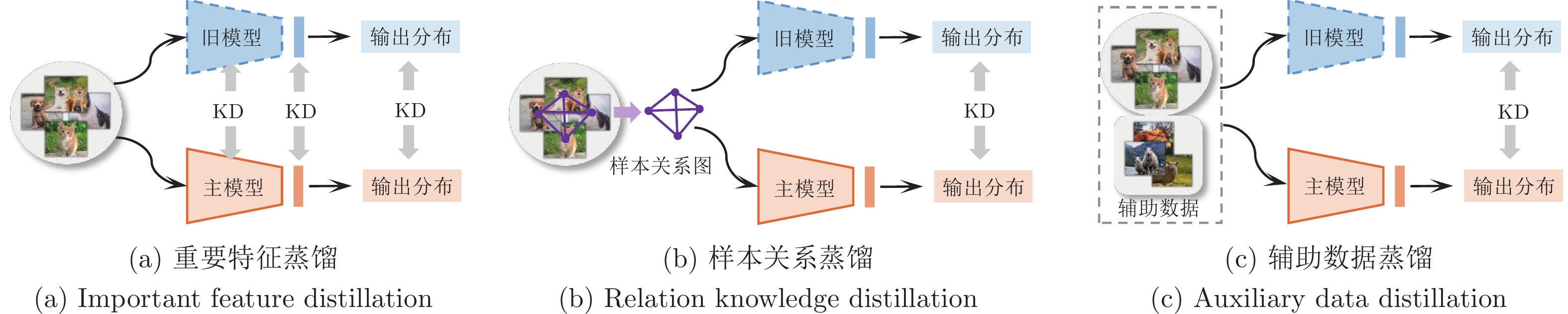
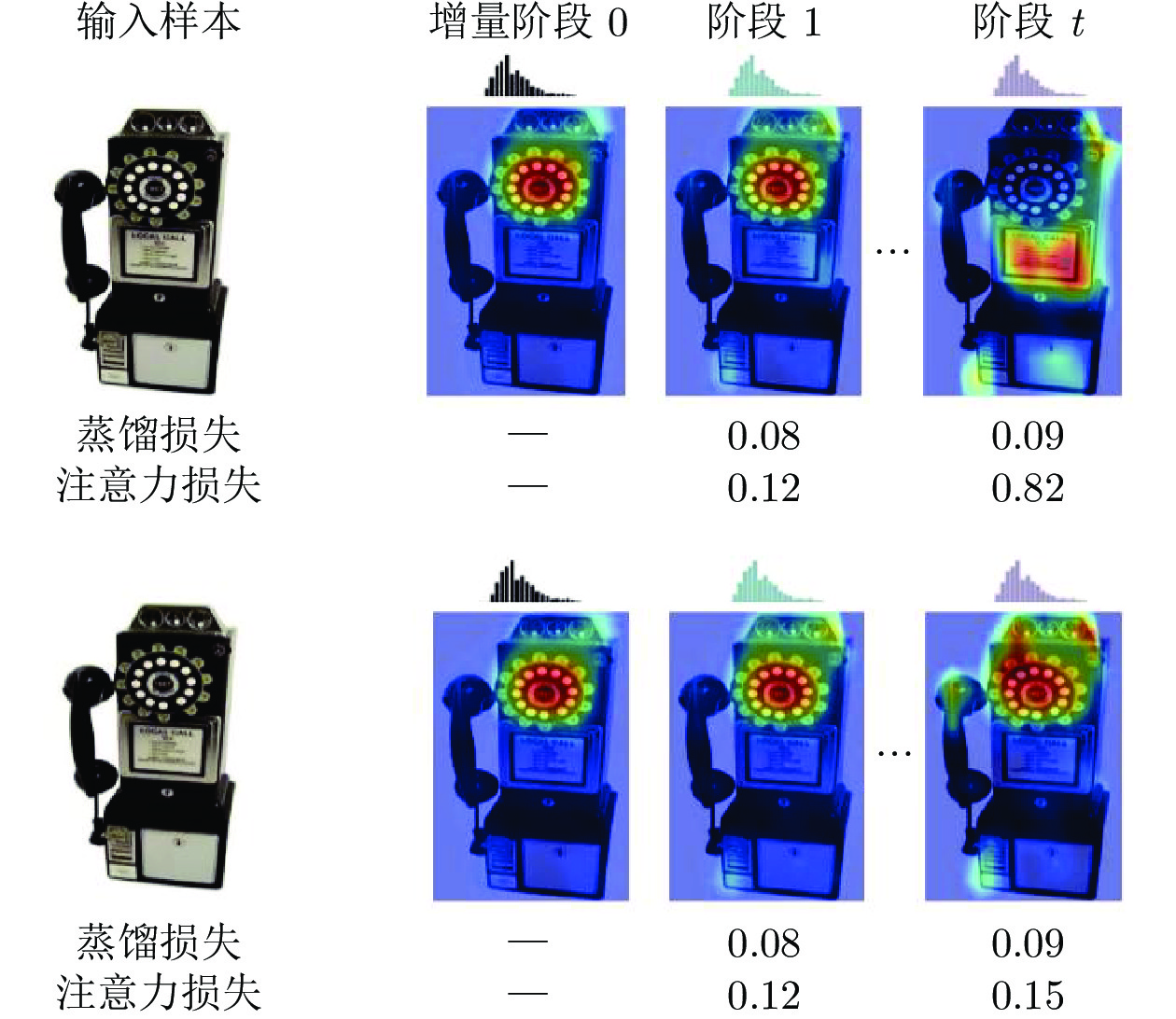
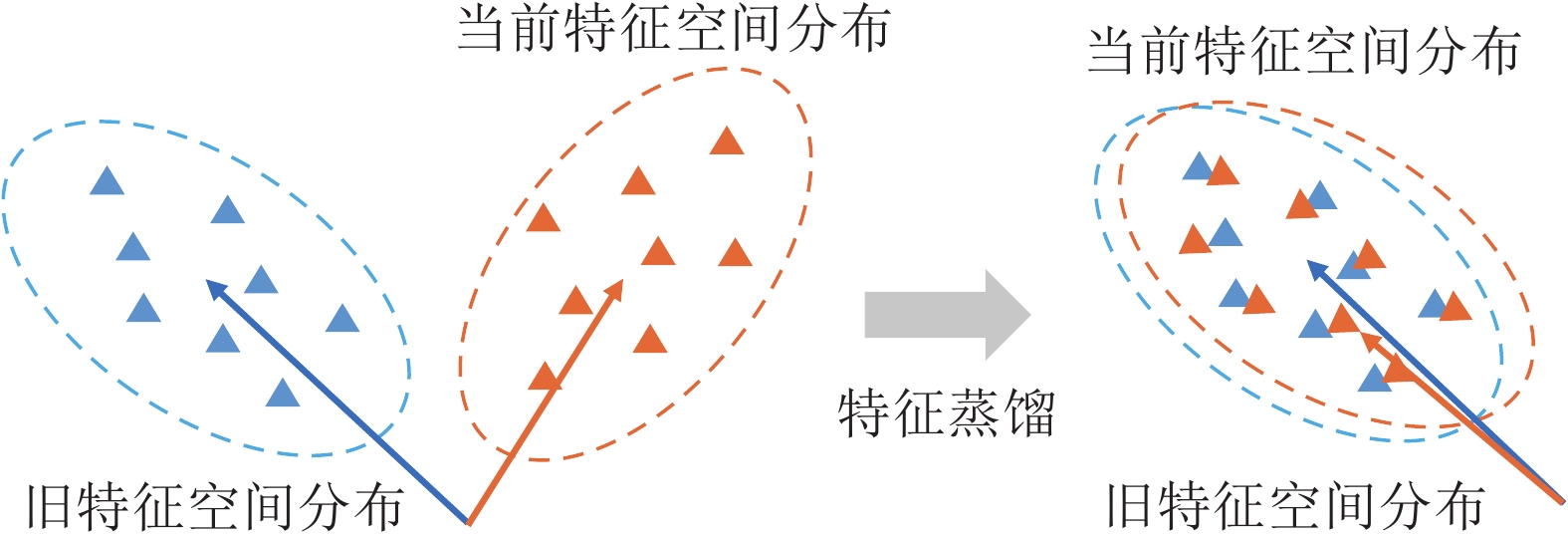
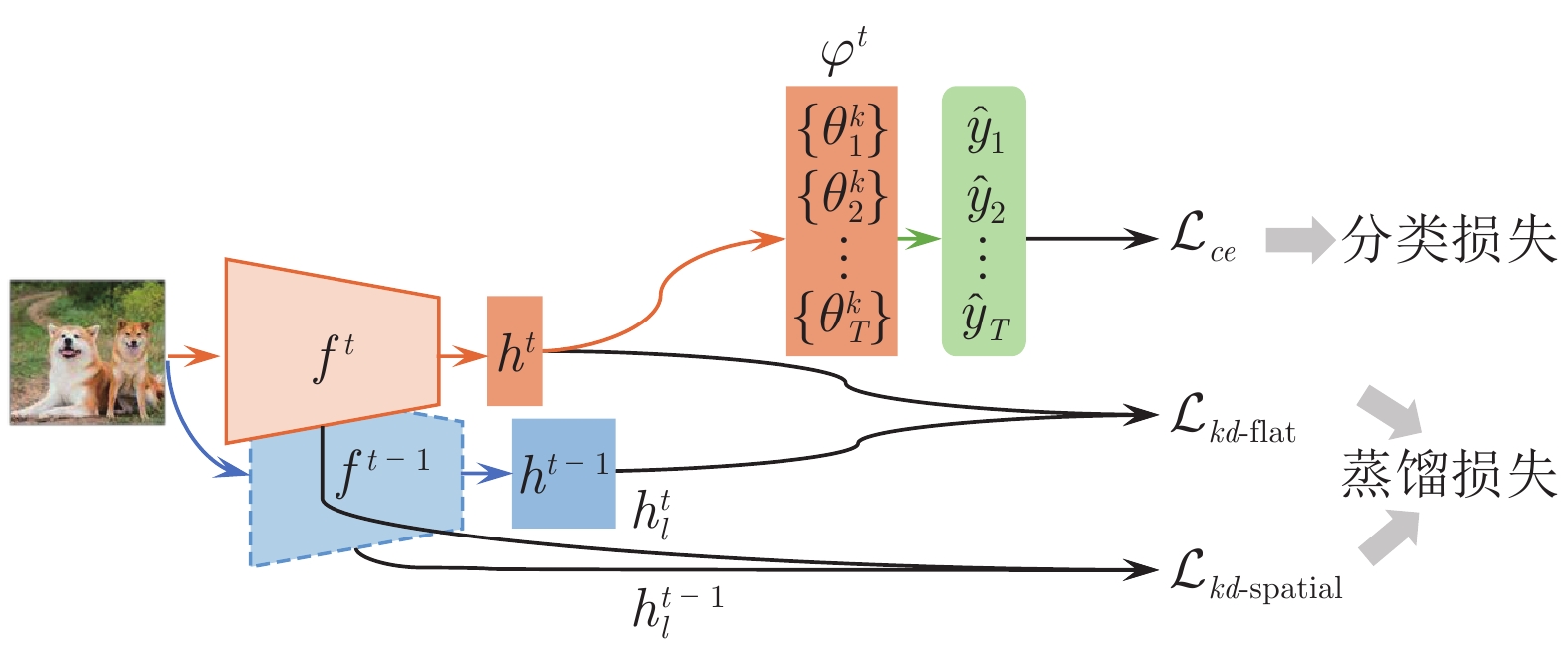
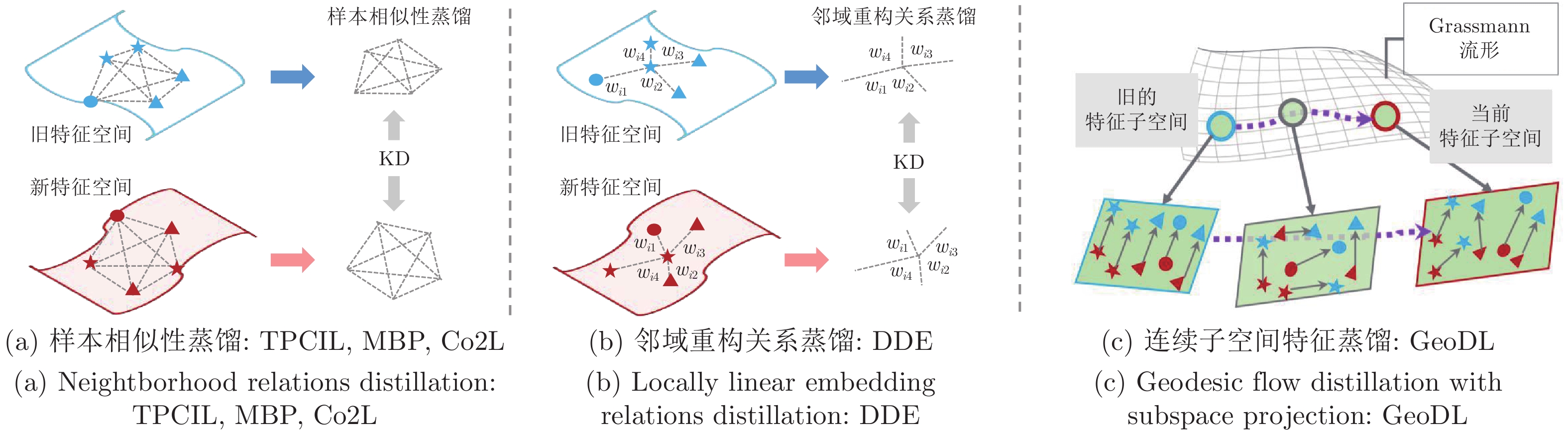
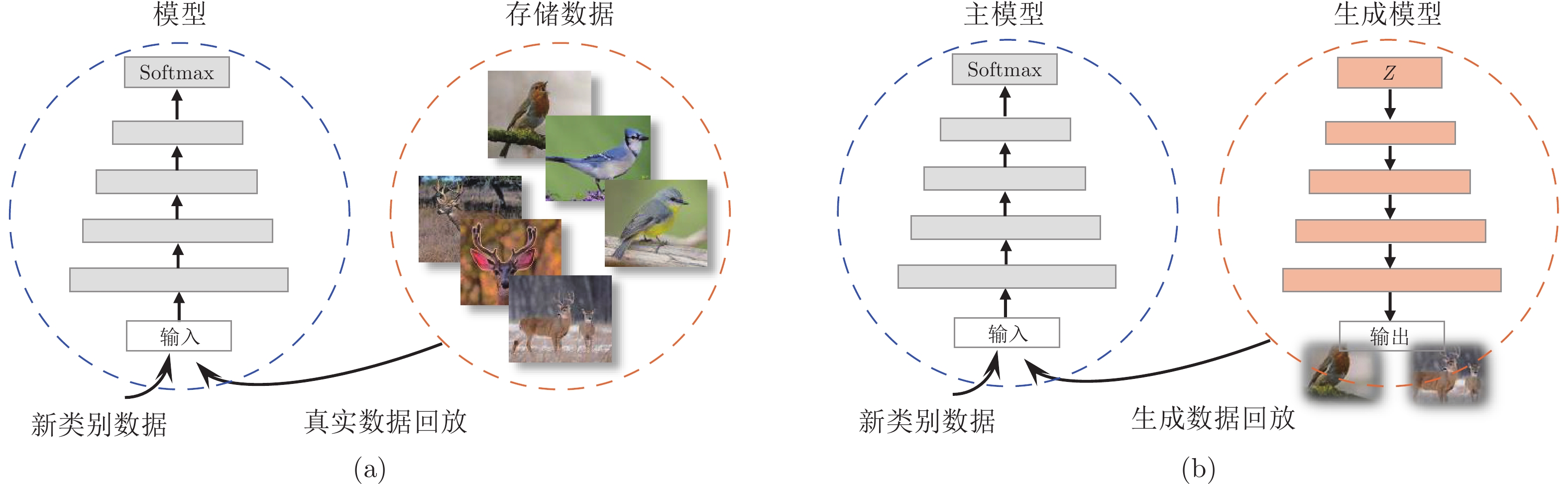
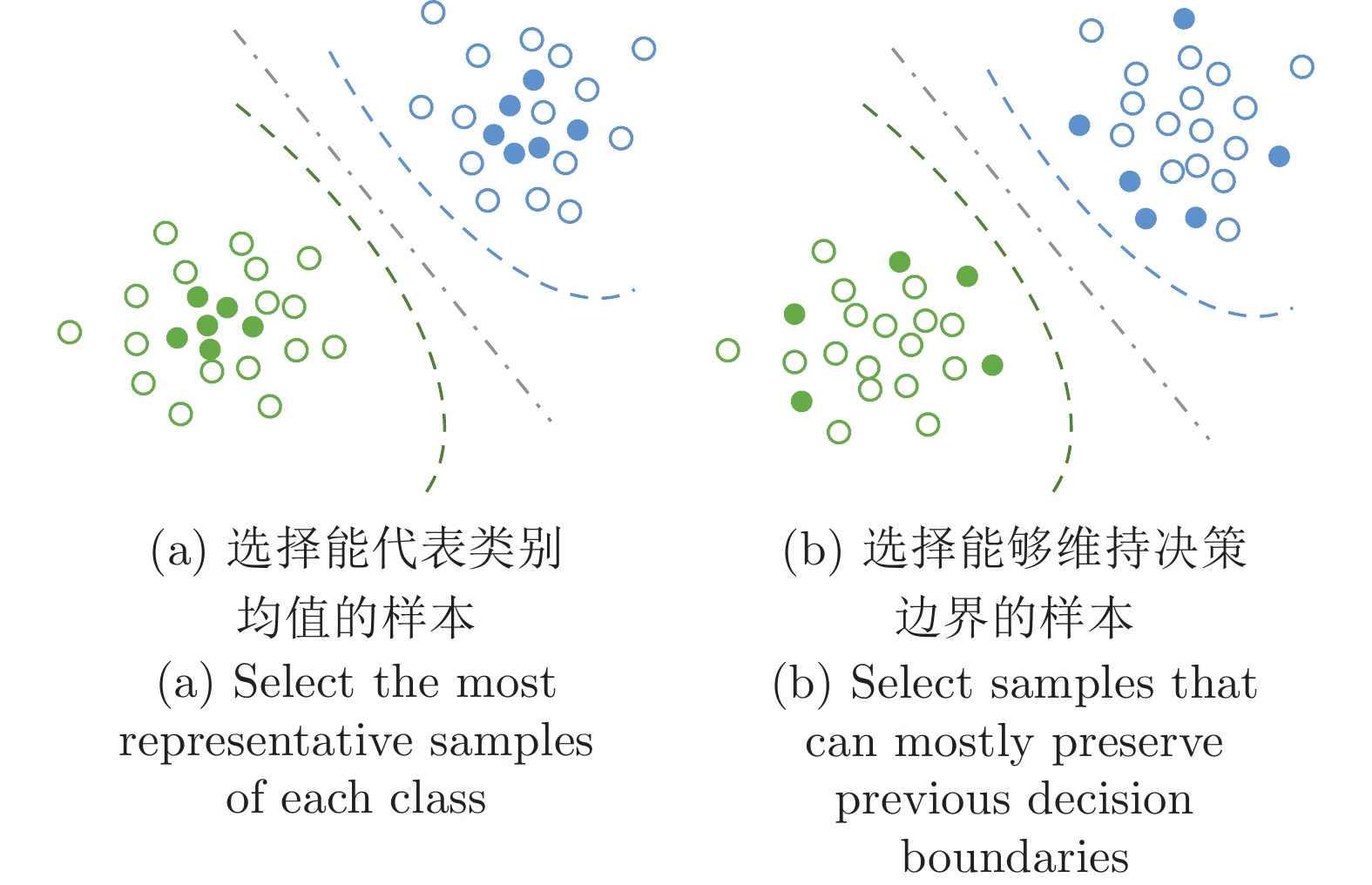
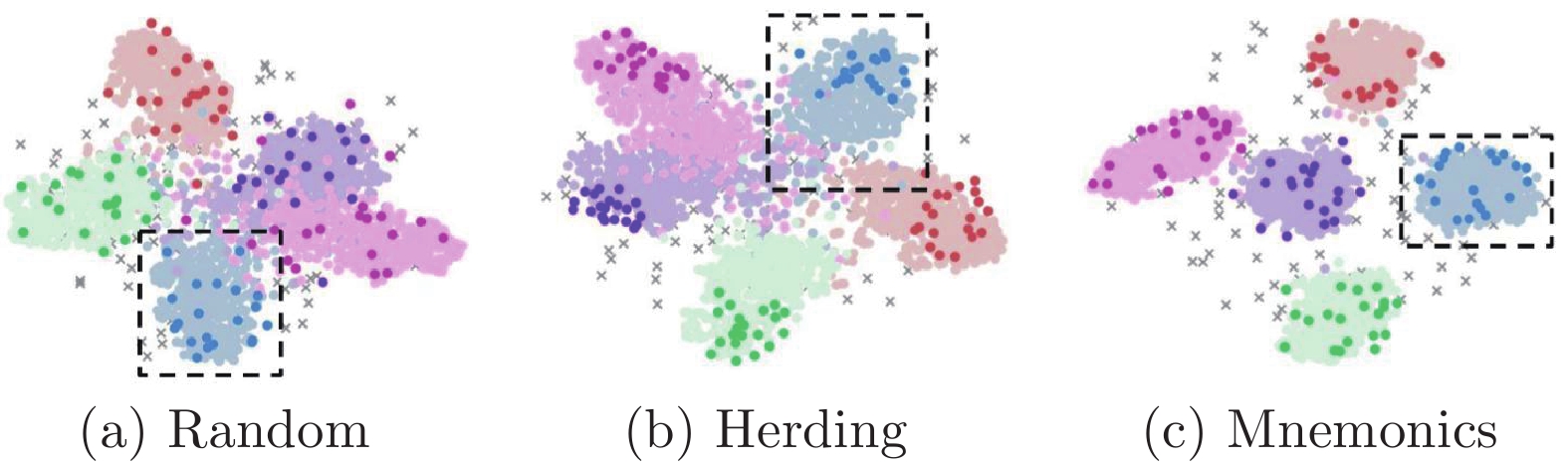
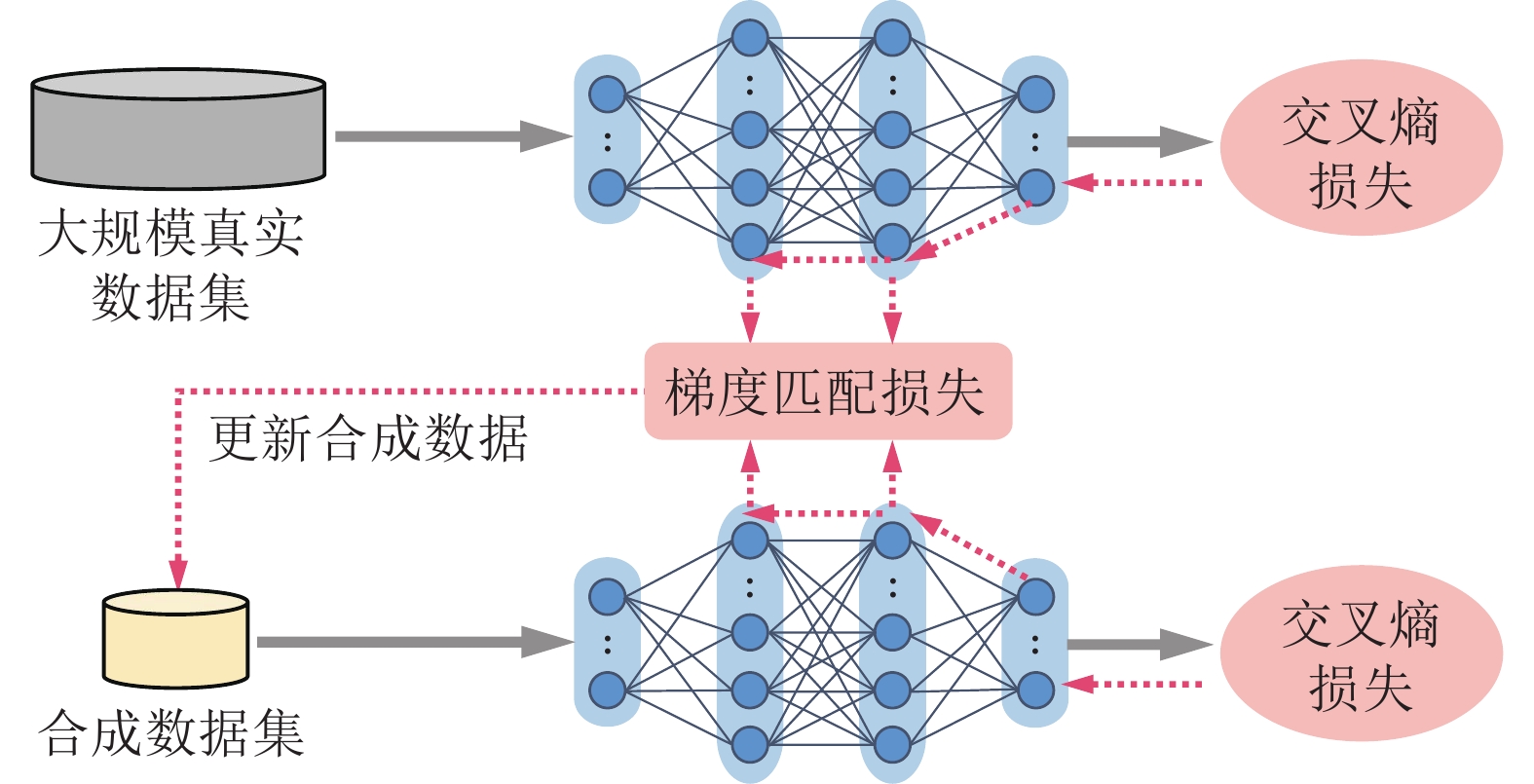
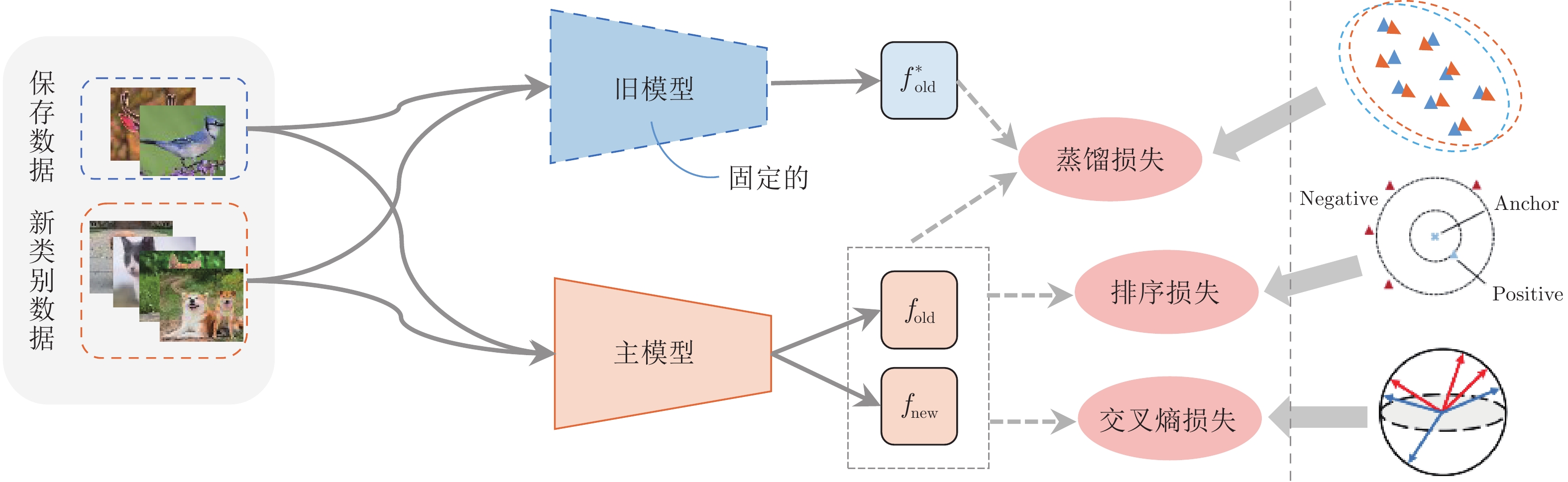
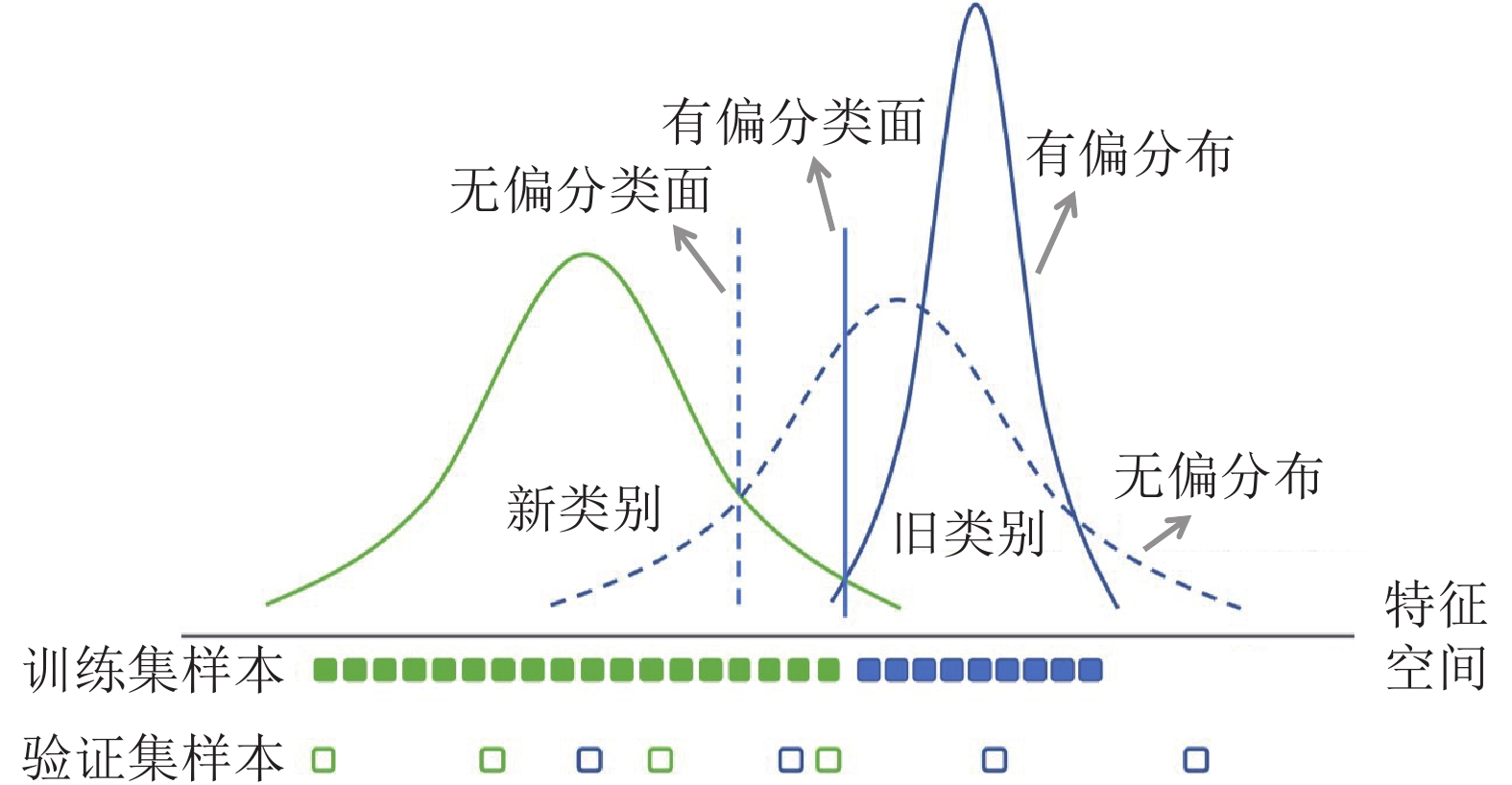
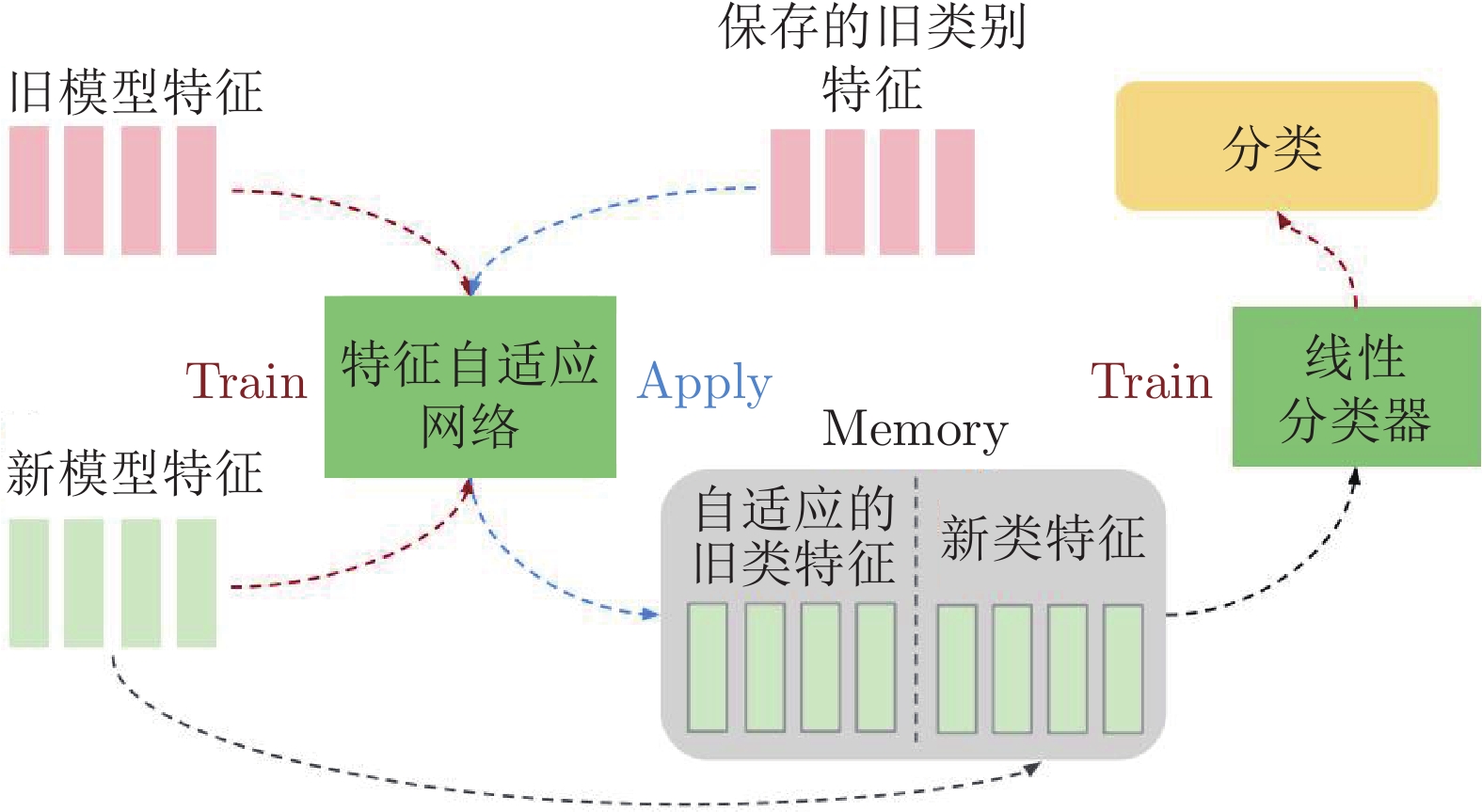
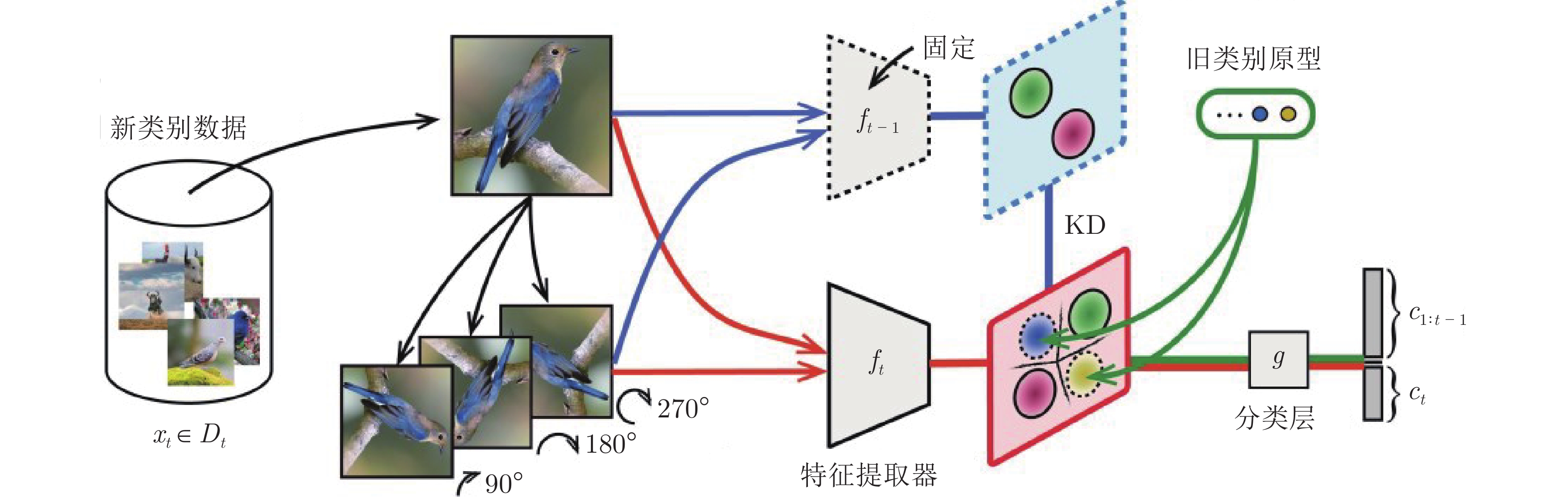
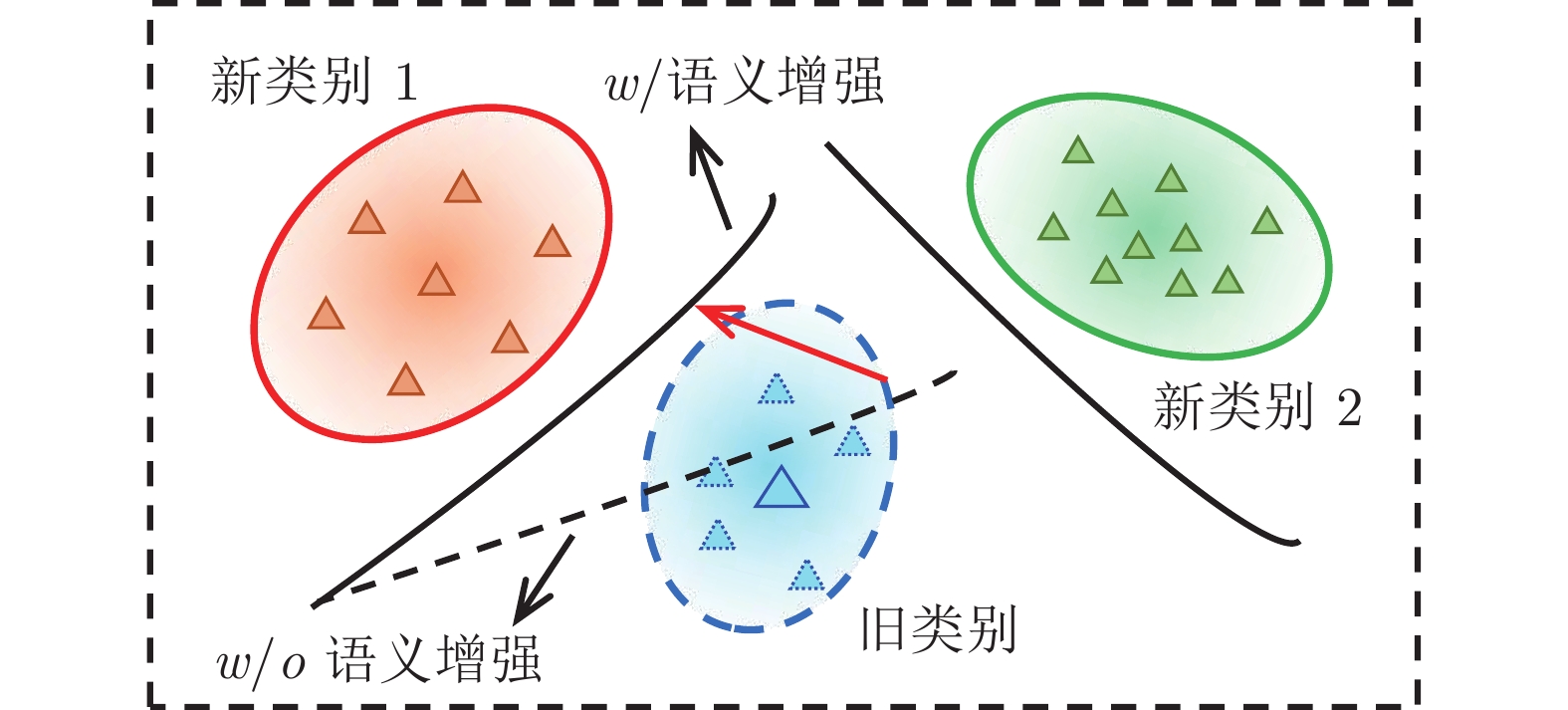
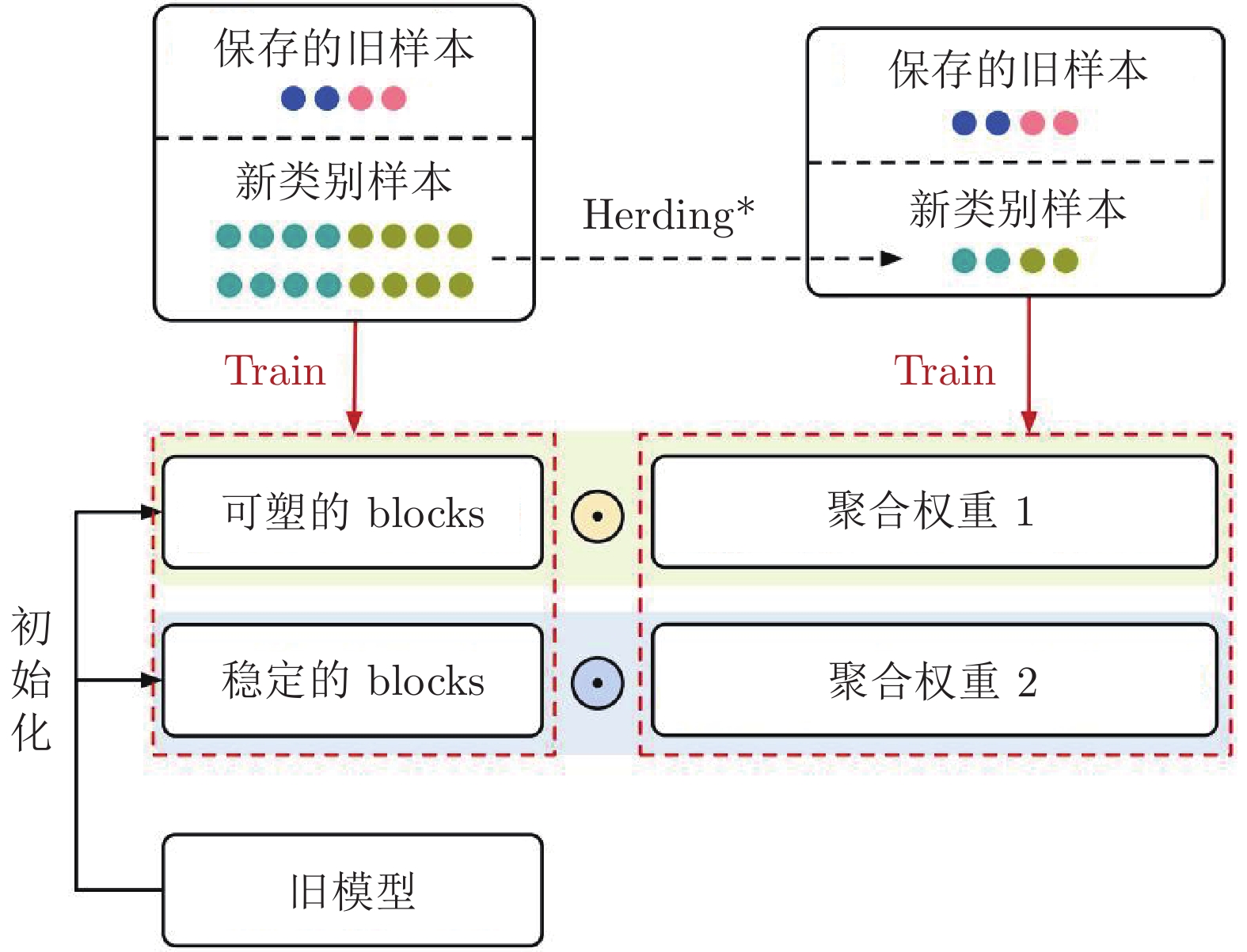
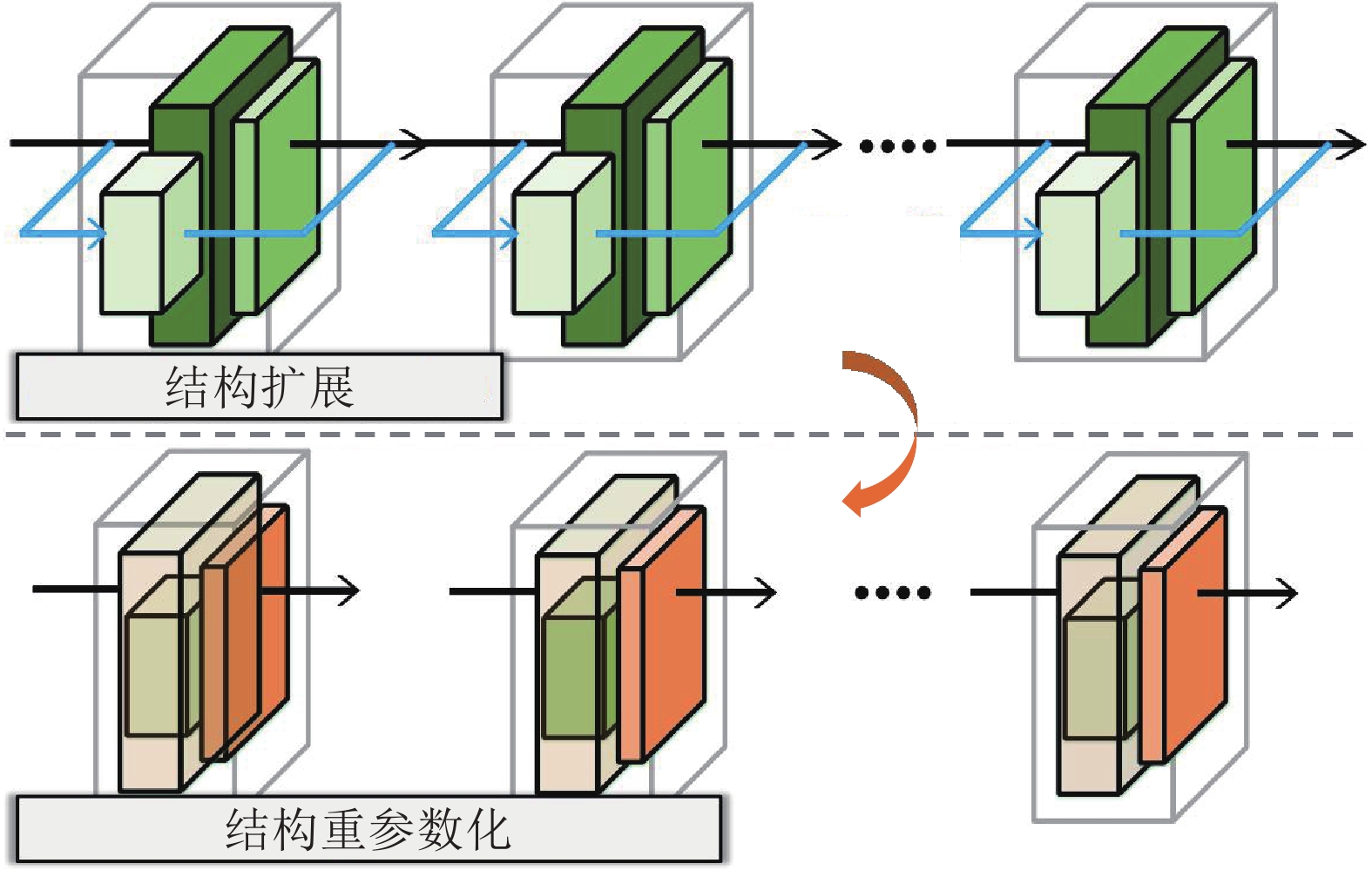
机器学习技术成功地应用于计算机视觉、自然语言处理和语音识别等众多领域. 然而, 现有的大多数机器学习模型在部署后类别和参数是固定的, 只能泛化到训练集中出现的类别, 无法增量式地学习新类别. 在实际应用中, 新的类别或任务会源源不断地出现, 这要求模型能够像人类一样在较好地保持已有类别知识的基础上持续地学习新类别知识. 近年来新兴的类别增量学习研究方向, 旨在使得模型能够在开放、动态的环境中持续学习新类别的同时保持对旧类别的判别能力(防止“灾难性遗忘”). 本文对类别增量学习(Class-incremental learning, CIL)方法进行了详细综述. 根据克服遗忘的技术思路, 将现有方法分为基于参数正则化、基于知识蒸馏、基于数据回放、基于特征回放和基于网络结构的五类方法, 对每类方法的优缺点进行了总结. 此外, 本文在常用数据集上对代表性方法进行了实验评估, 并通过实验结果对现有算法的性能进行了比较分析. 最后, 对类别增量学习的研究趋势进行展望.
机器学习技术成功地应用于计算机视觉、自然语言处理和语音识别等众多领域. 然而, 现有的大多数机器学习模型在部署后类别和参数是固定的, 只能泛化到训练集中出现的类别, 无法增量式地学习新类别. 在实际应用中, 新的类别或任务会源源不断地出现, 这要求模型能够像人类一样在较好地保持已有类别知识的基础上持续地学习新类别知识. 近年来新兴的类别增量学习研究方向, 旨在使得模型能够在开放、动态的环境中持续学习新类别的同时保持对旧类别的判别能力(防止“灾难性遗忘”). 本文对类别增量学习(Class-incremental learning, CIL)方法进行了详细综述. 根据克服遗忘的技术思路, 将现有方法分为基于参数正则化、基于知识蒸馏、基于数据回放、基于特征回放和基于网络结构的五类方法, 对每类方法的优缺点进行了总结. 此外, 本文在常用数据集上对代表性方法进行了实验评估, 并通过实验结果对现有算法的性能进行了比较分析. 最后, 对类别增量学习的研究趋势进行展望.




2023, 49(3): 661-677.
doi: 10.16383/j.aas.c220823
摘要:
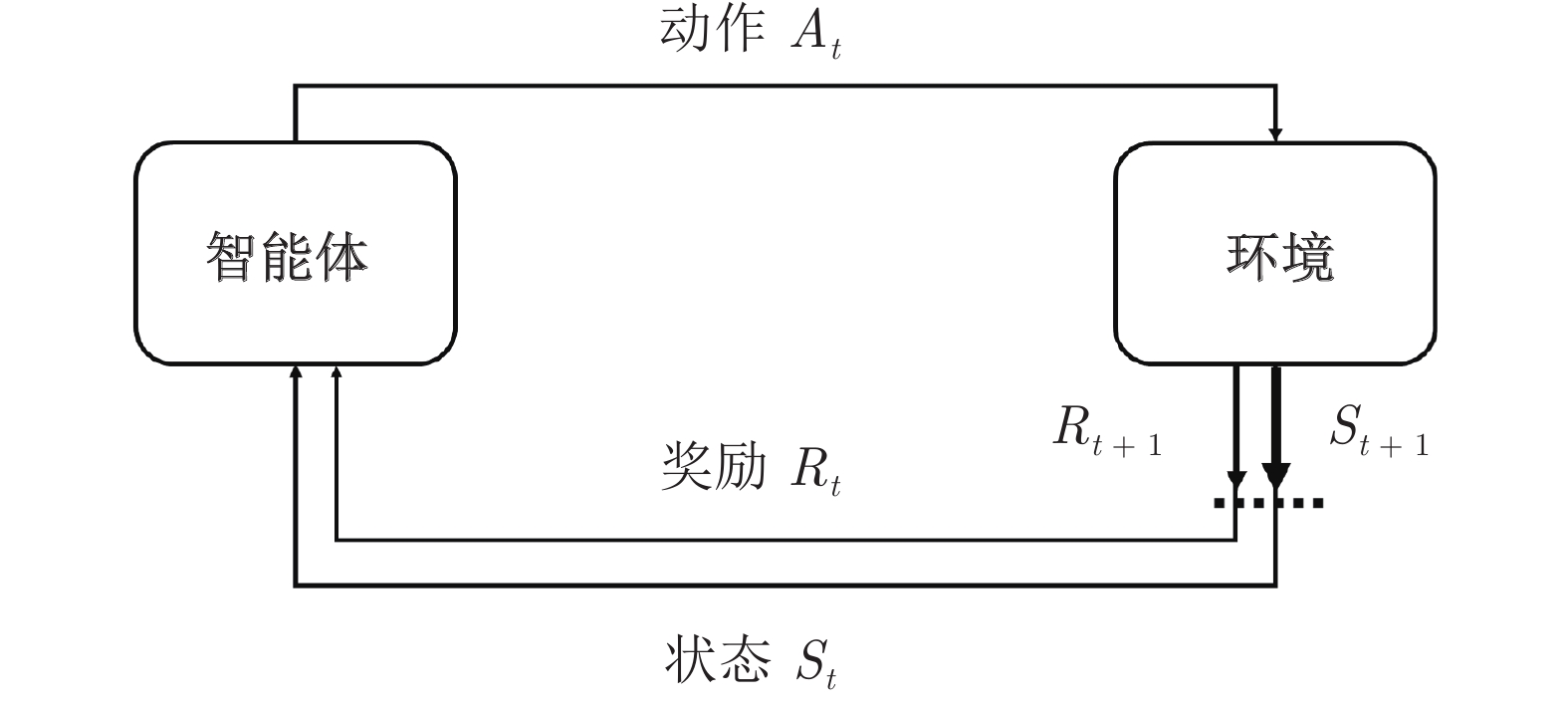
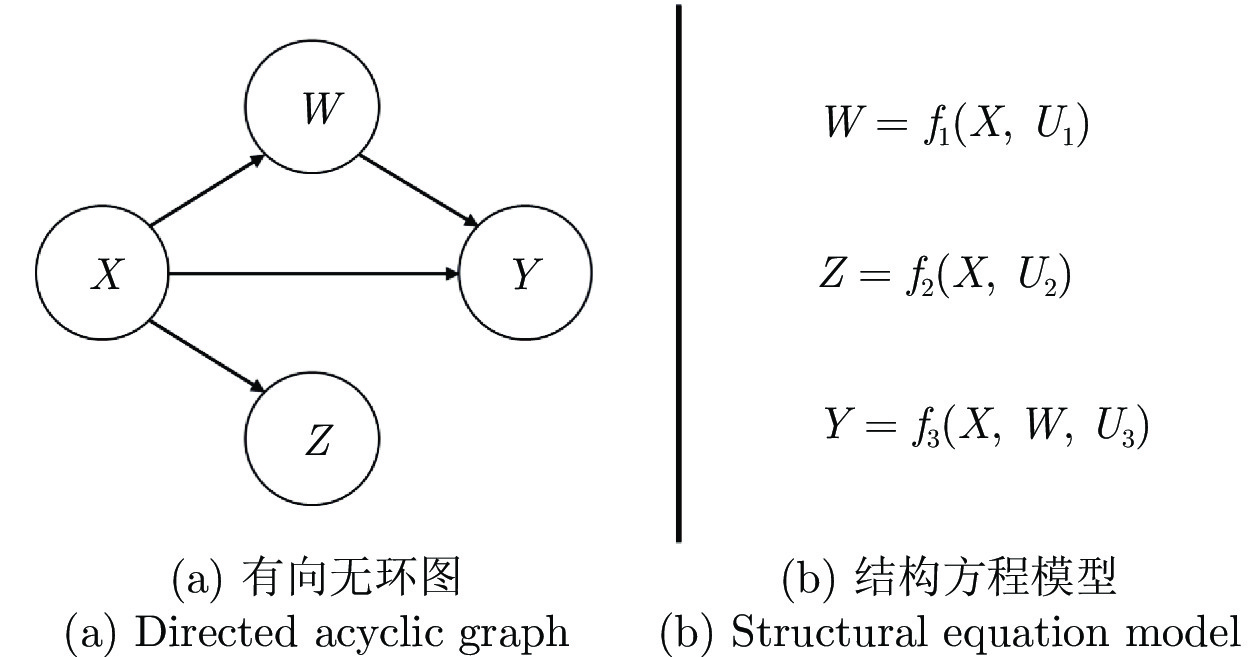
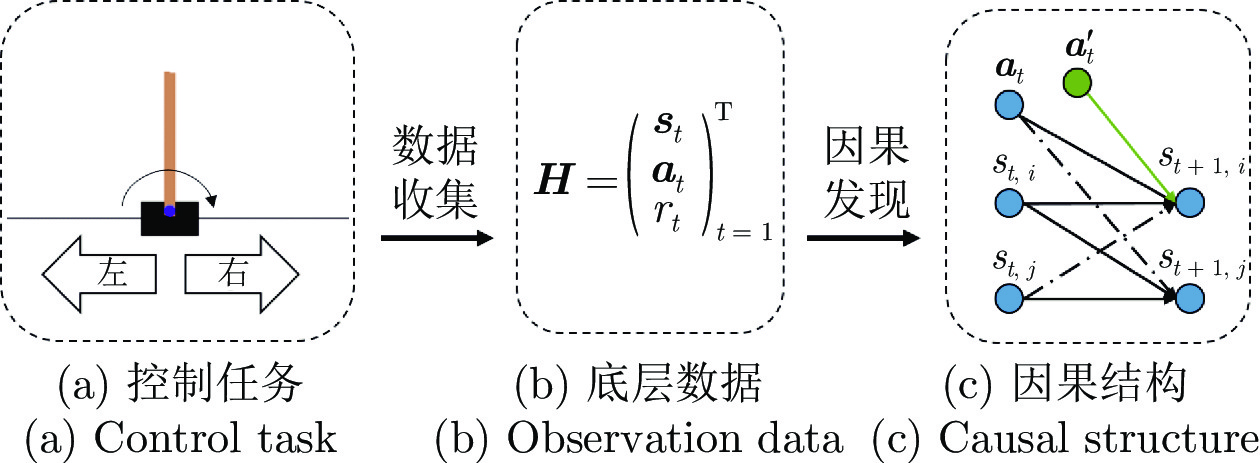
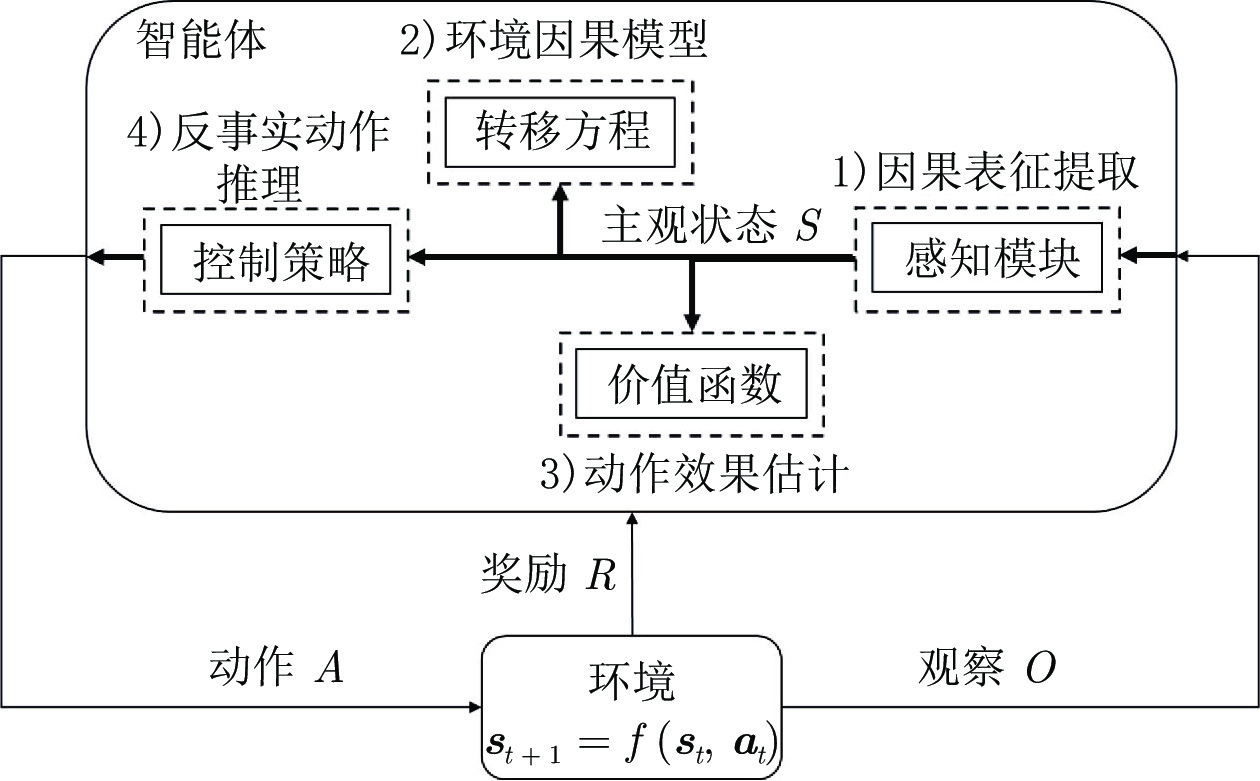
基于因果建模的强化学习技术在智能控制领域越来越受欢迎. 因果技术可以挖掘控制系统中的结构性因果知识, 并提供了一个可解释的框架, 允许人为对系统进行干预并对反馈进行分析. 量化干预的效果使智能体能够在复杂的情况下 (例如存在混杂因子或非平稳环境) 评估策略的性能, 提升算法的泛化性. 本文旨在探讨基于因果建模的强化学习控制技术 (以下简称因果强化学习) 的最新进展, 阐明其与控制系统各个模块的联系. 首先介绍了强化学习的基本概念和经典算法, 并讨论强化学习算法在变量因果关系解释和迁移场景下策略泛化性方面存在的缺陷. 其次, 回顾了因果理论的研究方向, 主要包括因果效应估计和因果关系发现, 这些内容为解决强化学习的缺陷提供了可行方案. 接下来, 阐释了如何利用因果理论改善强化学习系统的控制与决策, 总结了因果强化学习的四类研究方向及进展, 并整理了实际应用场景. 最后, 对全文进行总结, 指出了因果强化学习的缺点和待解决问题, 并展望了未来的研究方向.
基于因果建模的强化学习技术在智能控制领域越来越受欢迎. 因果技术可以挖掘控制系统中的结构性因果知识, 并提供了一个可解释的框架, 允许人为对系统进行干预并对反馈进行分析. 量化干预的效果使智能体能够在复杂的情况下 (例如存在混杂因子或非平稳环境) 评估策略的性能, 提升算法的泛化性. 本文旨在探讨基于因果建模的强化学习控制技术 (以下简称因果强化学习) 的最新进展, 阐明其与控制系统各个模块的联系. 首先介绍了强化学习的基本概念和经典算法, 并讨论强化学习算法在变量因果关系解释和迁移场景下策略泛化性方面存在的缺陷. 其次, 回顾了因果理论的研究方向, 主要包括因果效应估计和因果关系发现, 这些内容为解决强化学习的缺陷提供了可行方案. 接下来, 阐释了如何利用因果理论改善强化学习系统的控制与决策, 总结了因果强化学习的四类研究方向及进展, 并整理了实际应用场景. 最后, 对全文进行总结, 指出了因果强化学习的缺点和待解决问题, 并展望了未来的研究方向.

2023, 49(3): 678-686.
doi: 10.16383/j.aas.c220501
摘要:
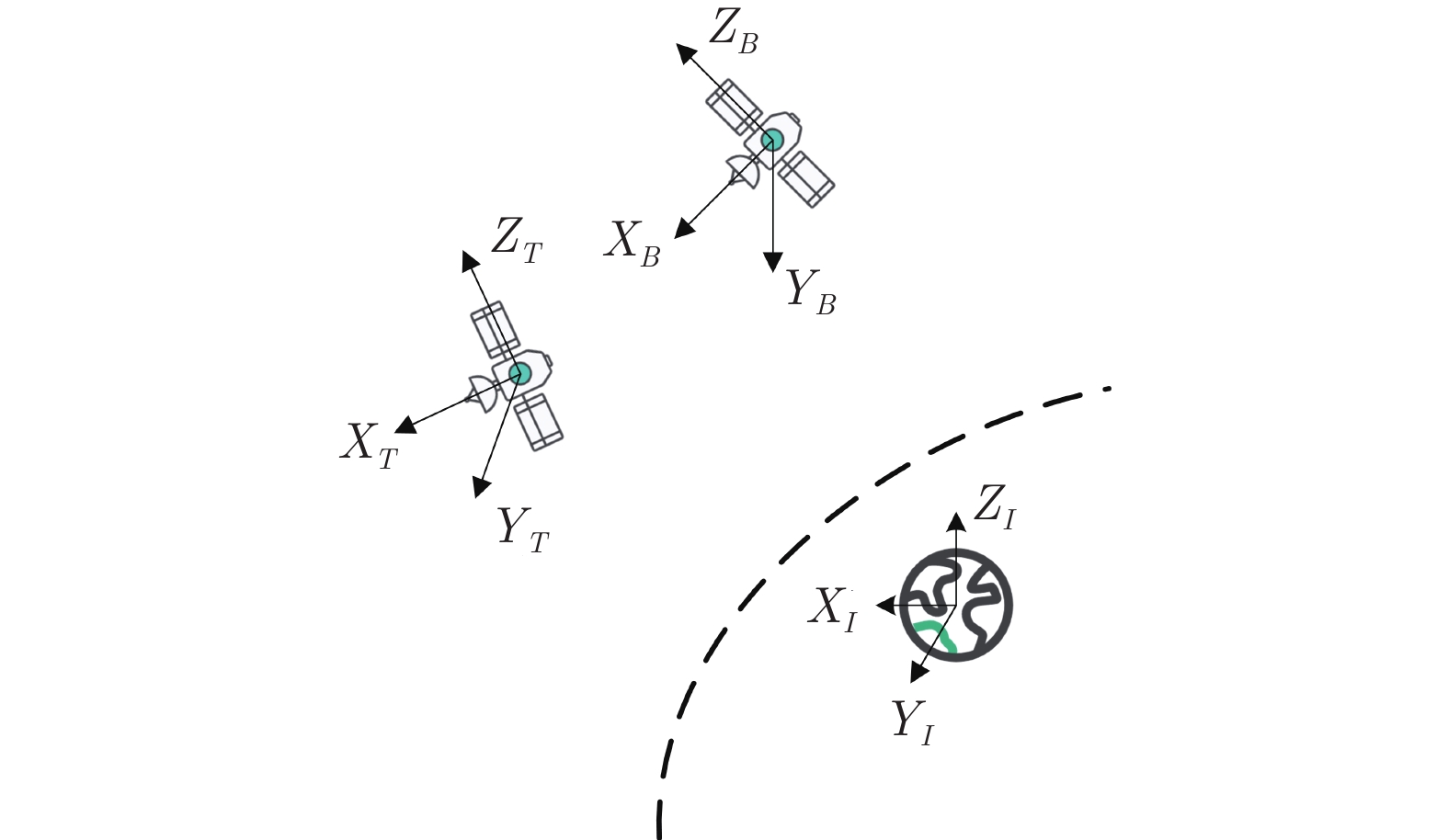
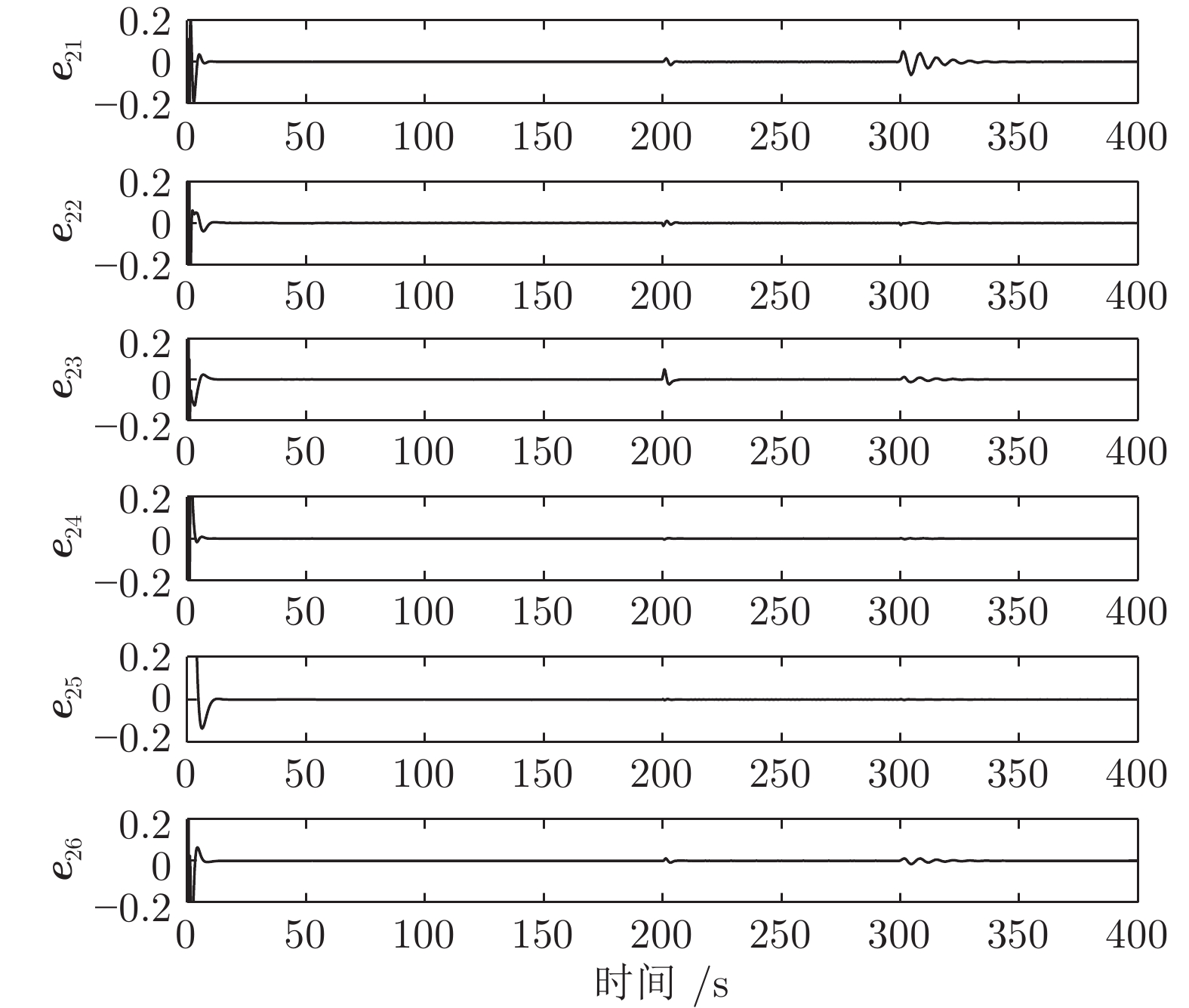
针对航天器近距离操作过程中追踪航天器位姿控制系统执行器故障问题, 提出了一种直接自适应容错控制方法, 保证了追踪航天器在发生执行器故障下的自身稳定性和对目标航天器位姿状态的渐近跟踪性能. 基于对偶四元数的航天器位姿一体化控制系统模型, 首先, 假设故障已知, 设计标称控制信号; 然后, 设计自适应更新律对标称控制信号中的未知参数进行估计, 构成自适应控制信号; 最后, 利用多Lyapunov函数对多故障模式下的系统性能进行分析. 仿真结果表明了所提方法的有效性.
针对航天器近距离操作过程中追踪航天器位姿控制系统执行器故障问题, 提出了一种直接自适应容错控制方法, 保证了追踪航天器在发生执行器故障下的自身稳定性和对目标航天器位姿状态的渐近跟踪性能. 基于对偶四元数的航天器位姿一体化控制系统模型, 首先, 假设故障已知, 设计标称控制信号; 然后, 设计自适应更新律对标称控制信号中的未知参数进行估计, 构成自适应控制信号; 最后, 利用多Lyapunov函数对多故障模式下的系统性能进行分析. 仿真结果表明了所提方法的有效性.