

Adaptive Direct Fault-tolerant Control Design for Spacecraft Integrated Attitude and Orbit System
-
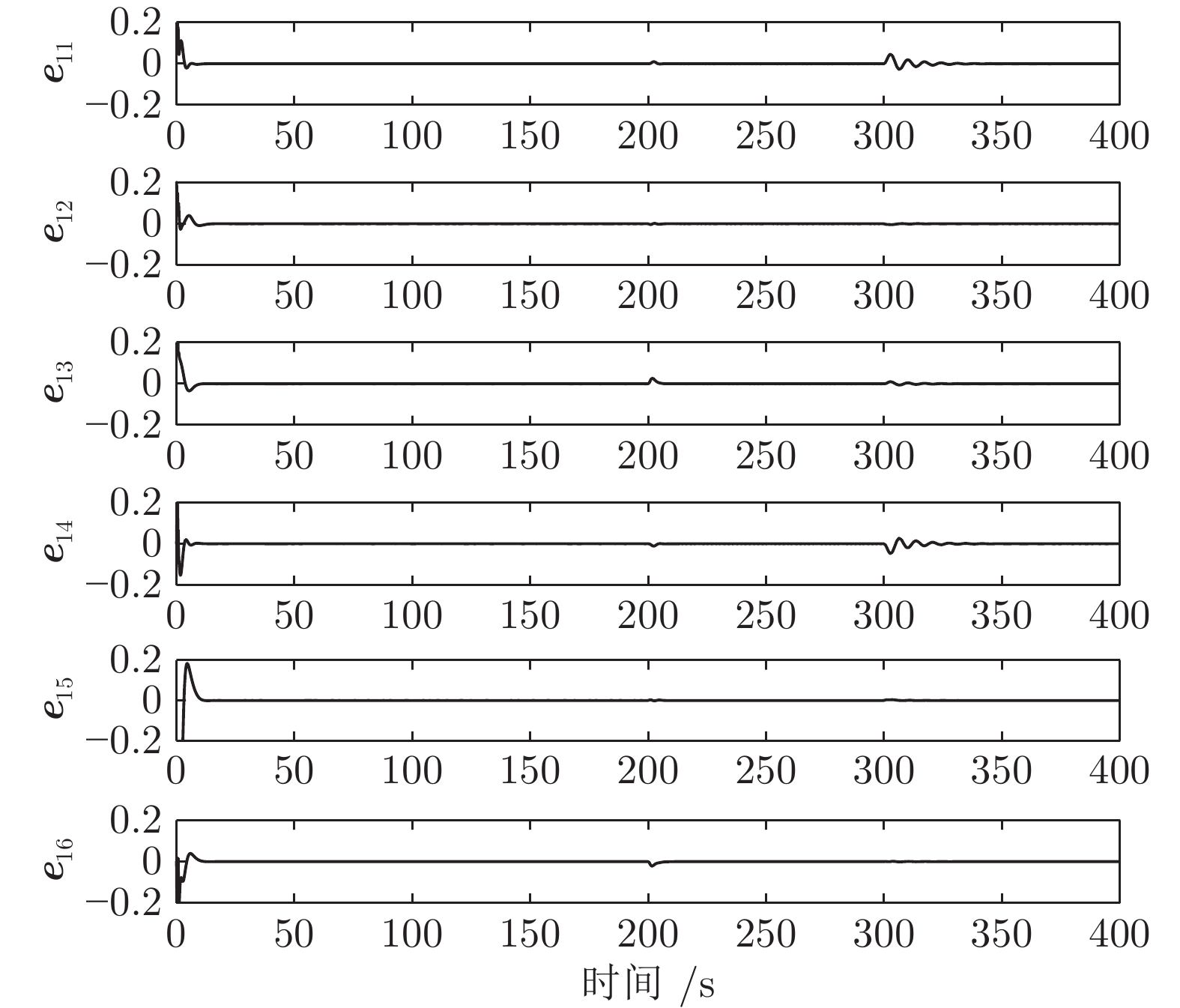
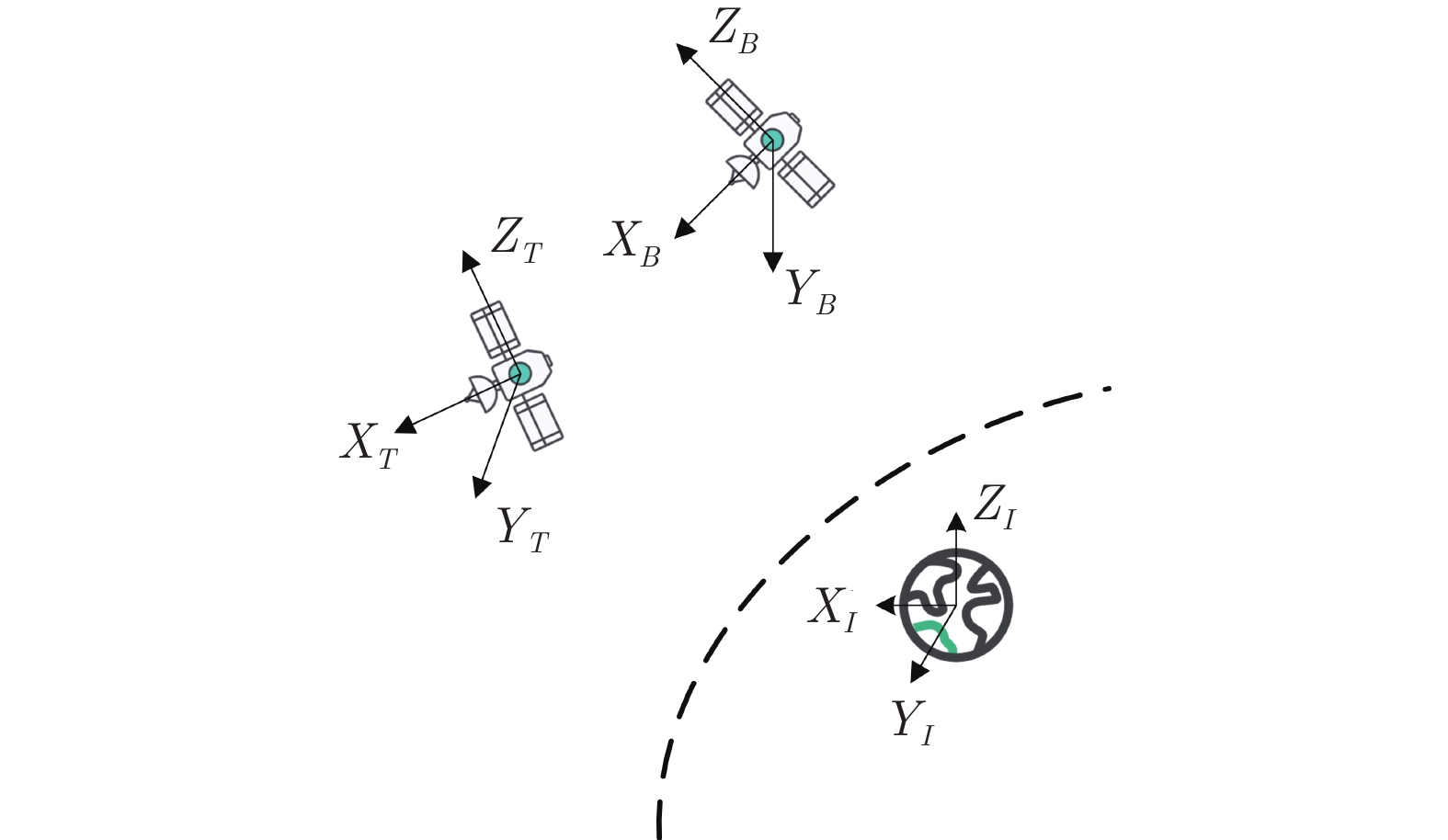
摘要: 针对航天器近距离操作过程中追踪航天器位姿控制系统执行器故障问题, 提出了一种直接自适应容错控制方法, 保证了追踪航天器在发生执行器故障下的自身稳定性和对目标航天器位姿状态的渐近跟踪性能. 基于对偶四元数的航天器位姿一体化控制系统模型, 首先, 假设故障已知, 设计标称控制信号; 然后, 设计自适应更新律对标称控制信号中的未知参数进行估计, 构成自适应控制信号; 最后, 利用多Lyapunov函数对多故障模式下的系统性能进行分析. 仿真结果表明了所提方法的有效性.Abstract: This paper proposes an adaptive direct fault-tolerant control method for the tracking spacecraft with actuator faults during proximity operations, to ensure the stability and the asymptotic tracking performance of the target spacecraft. Based on dual quaternion theory constructing the integrated spacecraft attitude and orbit control system, a nominal control signal is designed assuming that the faults are known; adaptive update laws are designed to estimate the unknown parameters in the nominal control signal to form the adaptive control law; and multiple Lyapunov functions are used to analyse the performance of the system with multiple actuator faults. Simulation results demonstrate the effectiveness of the proposed method.
-
[1] 郑重, 李鹏, 钱默抒. 具有角速度和输入约束的航天器姿态协同控制. 自动化学报, 2021, 47(6): 1444-1452Zheng Zhong, Li Peng, Qian Mo-Shu. Spacecraft attitude coordination control with angular velocity and input constraints. Acta Automatica Sinca, 2021, 47(6): 1444-1452 [2] 耿云海, 金荣玉, 陈雪芹, 李冬柏. 执行机构故障的航天器姿态容错控制. 宇航学报, 2017, 38(11): 1186-1194 doi: 10.3873/j.issn.1000-1328.2017.11.007Geng Yun-Hai, Jin Rong-Yu, Chen Xue-Qin, Li Dong-Bai. Spacecraft attitude fault tolerant control with actuator fault, Journal of Astronautics, 2017, 38(11): 1186-1194 doi: 10.3873/j.issn.1000-1328.2017.11.007 [3] Wang D, Fu F, Li W, Tu Y, Liu C, Liu W. A review of the diagnosability of control systems with applications to spacecraft. Annual Reviews in control, 2020, 49: 212-229 doi: 10.1016/j.arcontrol.2020.03.004 [4] Fu F, Xue T, Wu Z, Wang D. A fault diagnosability evaluation method for dynamic systems without distribution knowledge. IEEE Transactions on Cybernetics, 2022, 52(6): 5113-5123 doi: 10.1109/TCYB.2020.3027549 [5] 王大轶, 屠园园, 刘成瑞, 何英姿, 李文博. 航天器控制系统可重构性的内涵与研究综述. 自动化学报, 2017, 43(10): 1687-1702Wang Da-Yi, Tu Yuan-Yuan, Liu Cheng-Rui, He Ying-Zi, Li Wen-Bo. Connotation and research of reconfigurability for spacecraft control systems: a review. Acta Automatica Sinca, 2017, 43(10): 1687-1702 [6] 文利燕, 陶钢, 姜斌, 杨杰. 非线性动态突变系统的多模型自适应执行器故障补偿设计. 自动化学报, 2022, 48(1): 207-222 doi: 10.16383/j.aas.c200318Wen Li-Yan, Tao Gang, Jiang Bin, Yang Jie. A multiple-model based adaptive actuator failure compensation scheme for nonlinear systems with dynamic mutations. Acta Automatica Sinica, 2022, 48(1): 207-222 doi: 10.16383/j.aas.c200318 [7] 张绍杰, 吴雪, 刘春生. 执行器故障不确定非线性系统最优自适应输出跟踪控制. 自动化学报, 2018, 44(12): 2188-2197Zhang Shao-Jie, Wu Xue, Liu Chun-Sheng. Optimal adaptive output tracking control for a class of uncertain nonlinear systems with actuator failures. Acta Automatica Sinica, 2018, 44(12): 2188-2197 [8] 张福桢, 金磊. 使用SGCMGs航天器滑模姿态容错控制. 北京航空航天大学学报, 2017, 43(4): 806-813Zhang Fu-Zhen, Jin Lei. Sliding-mode fault-tolerant attitude control for spacecraft using SGCMGs. Journal of Beijing University of Aeronautics and Astronsutics, 2017, 43(4): 806-813. [9] Zhu X, Zheng H, Chen J. Dual quaternion-based adaptive iterative learning control for flexible spacecraft rendezvous. Acta Astronautica, 2021, 189: 99-118 doi: 10.1016/j.actaastro.2021.08.040 [10] 梅亚飞, 廖瑛, 龚轲杰, 罗达. SE(3) 上航天器姿轨耦合固定时间容错控制. 航空学报, 2021, 42(11): 525089-1−14Mei Ya-Fei, Liao Ying, Gong Ke-Jie, Luo Da. Fixed-time fault-tolerant control for coupled spacecraft on SE(3). Acta Astronautica et Astronautica Sinca, 2021, 42(11): 525089-1−14 [11] 沈毅, 李利亮, 王振华. 航天器故障诊断与容错控制技术研究综述. 宇航学报, 2020, 41(6): 647-656 doi: 10.3873/j.issn.1000-1328.2020.06.002Shen Yi, Li Li-Liang, Wang Zhen-Hua. A review of fault diagnosis and fault-tolerant control techniques for spacecraft. Journal of Astronautics, 2020, 41(6): 647-656 doi: 10.3873/j.issn.1000-1328.2020.06.002 [12] 金小峥, 杨光红, 常晓恒, 车伟伟. 容错控制系统鲁棒H∞和自适应补偿设计. 自动化学报, 2013, 39(1): 31-42 doi: 10.1016/S1874-1029(13)60004-XJin Xiao-Zheng, Yang Guang-Hong, Chang Xiao-Heng, Che Wei-Wei. Robust fault-tolerant H∞ control with adaptive compensation. Acta Automatica Sinica, 2013, 39(1): 31-42 doi: 10.1016/S1874-1029(13)60004-X [13] Xiao B, Hu Q, Singhose W. Reaction wheel fault compensation and disturbance rejection for spacecraft attitude tracking. Journal of Guidance, Control, and Dynamics, 2013, 36: 1565-1575 doi: 10.2514/1.59839 [14] Yao X, Tao G, Ma Y, Jiang B. Adaptive actuator failure compensation design for spacecraft attitude control. IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(3): 1021-1034 doi: 10.1109/TAES.2016.130802 [15] Gui H, Ruiter A. Adaptive fault-tolerant spacecraft pose tracking with control allocation. IEEE Transactions on Control Systems Technology, 2019, 27(2): 479-494 doi: 10.1109/TCST.2017.2771374 [16] Xia K, Zou Y. Adaptive saturated fault-tolerant control for spacecraft rendezvous with redundancy thrusters. IEEE Transactions on Control Systems Technology, 2021, 29(2): 502-513 doi: 10.1109/TCST.2019.2950399 [17] Xia K, Zou Y. Adaptive fixed-time fault-tolerant control for noncooperative spacecraft proximity using relative motion information. Nonlinear Dynamics, 2020, 100: 2521-2535 doi: 10.1007/s11071-020-05634-2 [18] 胡庆雷, 姜博严, 石忠. 基于新型终端滑模的航天器执行器故障容错姿态控制. 航空学报, 2014, 35(1): 249-258Hu Qing-Lei, Jiang Bo-Yan, Shi-Zhong. Novel terminal sliding mode based fault tolerant attitude control for spacecraft under actuator faults. Acta Astronautica et Astronautica Sinca, 2014, 35(1): 249-258 [19] 于彦波, 胡庆雷, 董宏洋, 马广富. 执行器故障与饱和受限的航天器滑模容错控制. 航空学报, 2016, 48(4): 20-25Yu Yan-Bo, Hu Qing-Lei, Dong Hong-Yang, Ma Guang-Fu. Sliding mode fault tolerant control for spacecraft under actuator fault and saturation. Journal of Harbin Institute of Technology, 2016, 48(4): 20-25 [20] Jiang B, Hu Q, Friswell M. Fixed-time rendezvous control of spacecraft with a tumbling target under loss of actuator effectiveness. IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(4): 1576-1586 doi: 10.1109/TAES.2016.140406 [21] Li Q, Yuan J, Sun C. Robust fault-tolerant saturated control for spacecraft proximity operations with actuator saturation and faults. Advances in Space Research, 2019, 63(5): 1541-1553 doi: 10.1016/j.asr.2018.11.004 [22] Wang Y, Liu K, Ji H. Adaptive robust fault-tolerant control scheme for spacecraft proximity operations under external disturbances and input saturation. Nonlinear Dynamics, 2022, 108(1): 207-222 doi: 10.1007/s11071-021-07182-9 [23] Philip N, Ananthasayanam M. Relative position and attitude estimation and control schemes for the final phase of an autonomous docking mission of spacecraft. Acta Astronautica, 2003, 52(7): 511-522 doi: 10.1016/S0094-5765(02)00125-X [24] Hu Q, Shao X, Chen W. Robust fault-tolerant tracking control for spacecraft proximity operations using time-varying sliding mode. IEEE Transactions on Aerospace and electronic Systems, 2018, 54(1): 2-17 doi: 10.1109/TAES.2017.2729978 [25] Sun L, Huo W, Jiao Z. Adaptive backstepping control of spacecraft rendezvous and proximity operations with input saturation and full-state constraint. IEEE Transactions on Industrial Electronics, 2017, 64(1): 480-492 doi: 10.1109/TIE.2016.2609399 [26] Sveier A, Myhre T, Egeland O. Pose estimation with dual quaternions and iterative closest point. Advances in Computing and Communications, 2018: 1913-1920 [27] Dong H, Hu Q, Friswell M, Ma G. Dual-quaternion-based fault-tolerant control for spacecraft tracking With finite-time convergence. IEEE Transactions on Control Systems Technology, 2016, 24(4): 1231-1242 [28] Yang J, Stoll E. Adaptive sliding mode control for spacecraft proximity operations based on dual quaternions. Journal of Guidance, Control, and Dynamics, 2019, 42(11): 2356-2368 doi: 10.2514/1.G004435 [29] Geng Y, Biggs J, Li C. Pose regulation via the dual unitary group: an application to spacecraft rendezvous. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(6): 3734-3748 doi: 10.1109/TAES.2021.3090929 [30] Dong H, Hu Q, Akella M, Mazenc F. Partial lyapunov strictification: dual-quaternion-based observer for 6-DOF tracking control. IEEE Transactions on Control Systems Technology, 2019, 27(6): 2453-2469 doi: 10.1109/TCST.2018.2864723 [31] Ma Y, Jiang B, Tao G, Cheng Y. A direct adaptive actuator failure compensation scheme for satellite attitude control systems. Journal of Aerospace Engineering, 2014, 228(4): 542-556 [32] Ma Y, Jiang B, Tao G, Cheng Y. Uncertainty decomposition-based fault-tolerant adaptive control of flexible spacecraft. IEEE Transactions on Aerospace and Electronic System, 2015, 51(2): 1053-1068 doi: 10.1109/TAES.2014.130032 [33] Clifford W. A Preliminary Sketch of Biquaternions. Proceedings of the London Mathematics Society, 1873, 1-4(1): 381-395 [34] Study E. Von den Bewegungen und Umlegungen. Mathematische Annalen, 1891: 441-565 -

 下载:
下载:











图(4)
计量
- 文章访问数: 3422
- HTML全文浏览量: 391
- PDF下载量: 522
- 被引次数: 0
