2023年 第49卷 第4期
2023, 49(4): 687-704.
doi: 10.16383/j.aas.c220352
摘要:
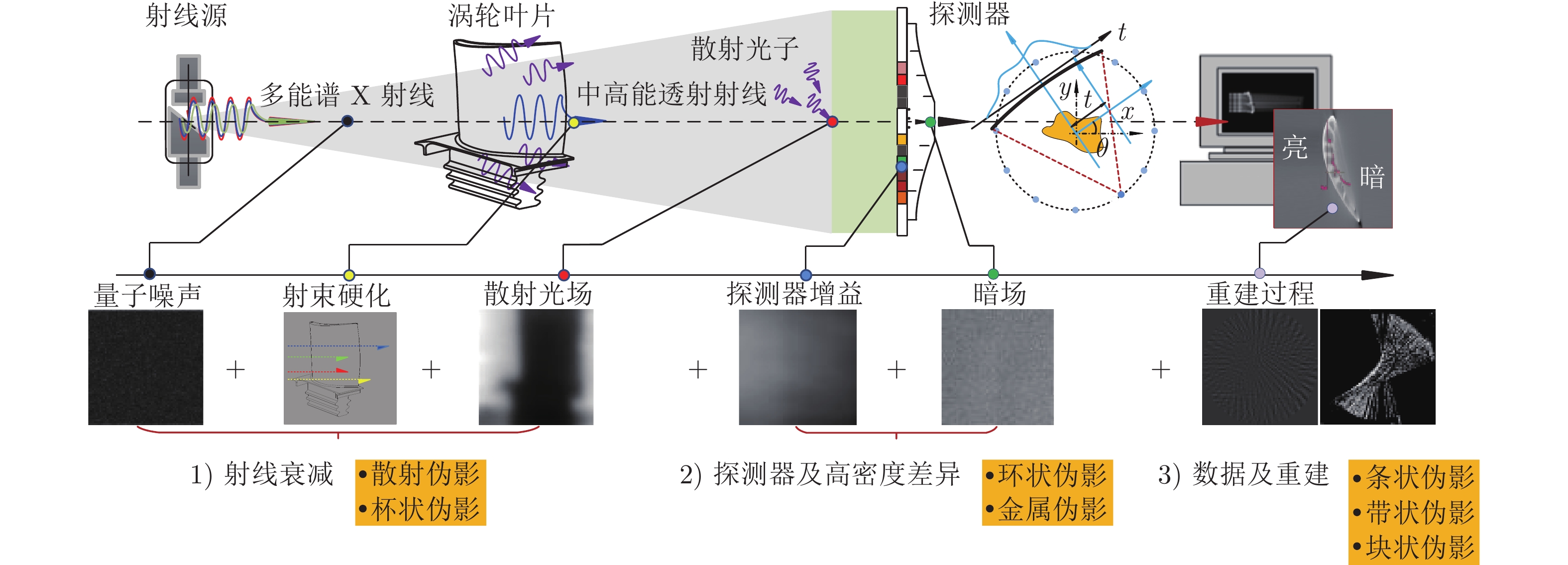
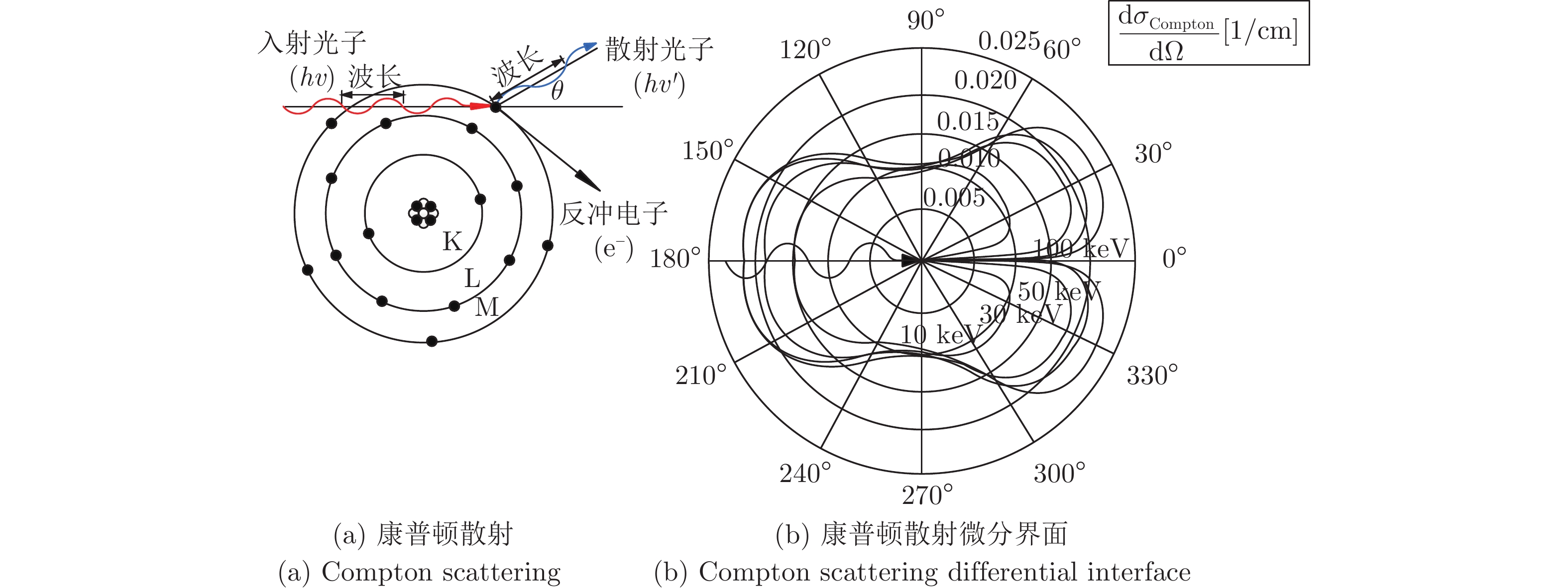
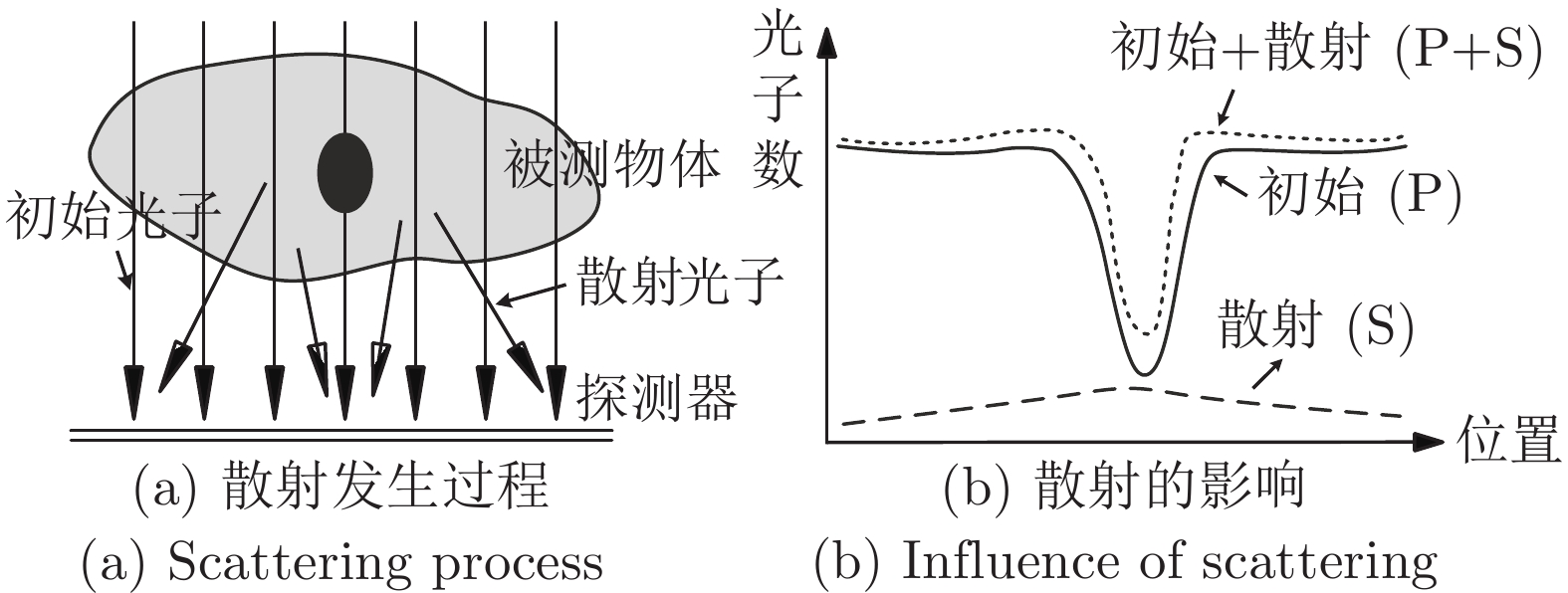
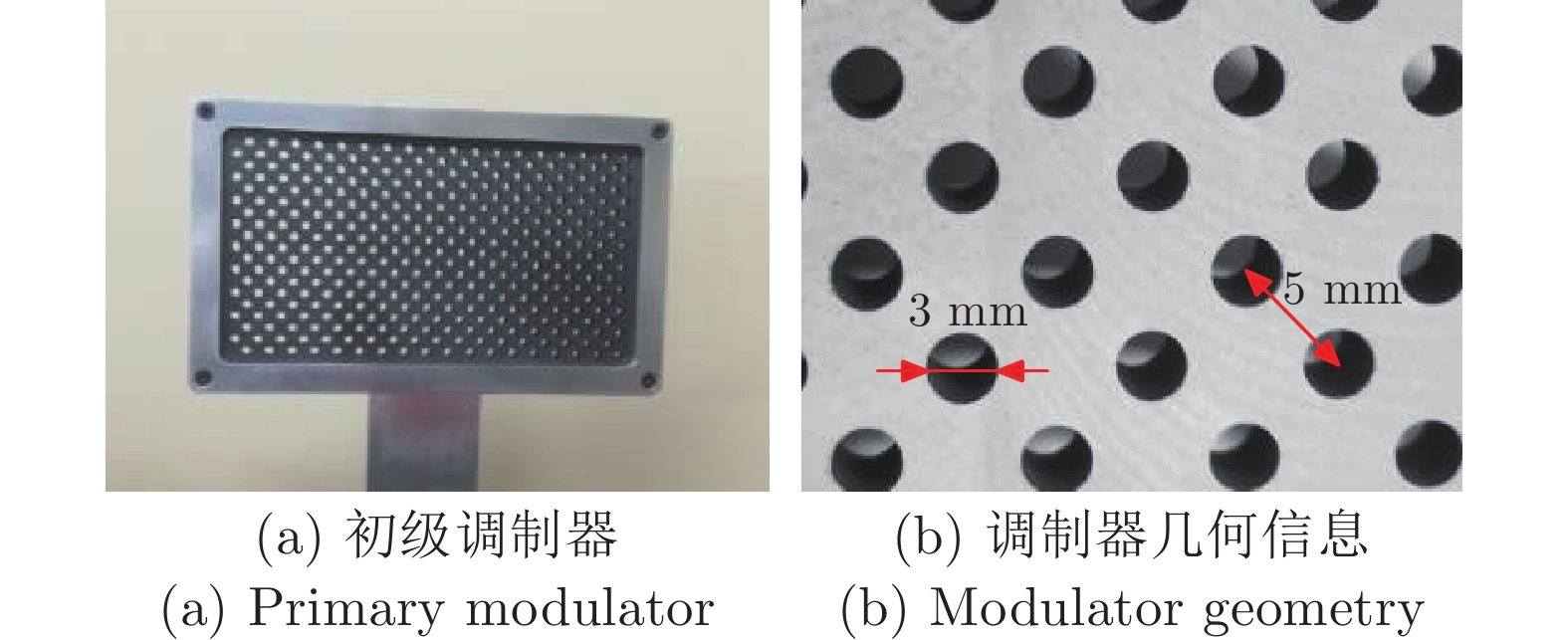
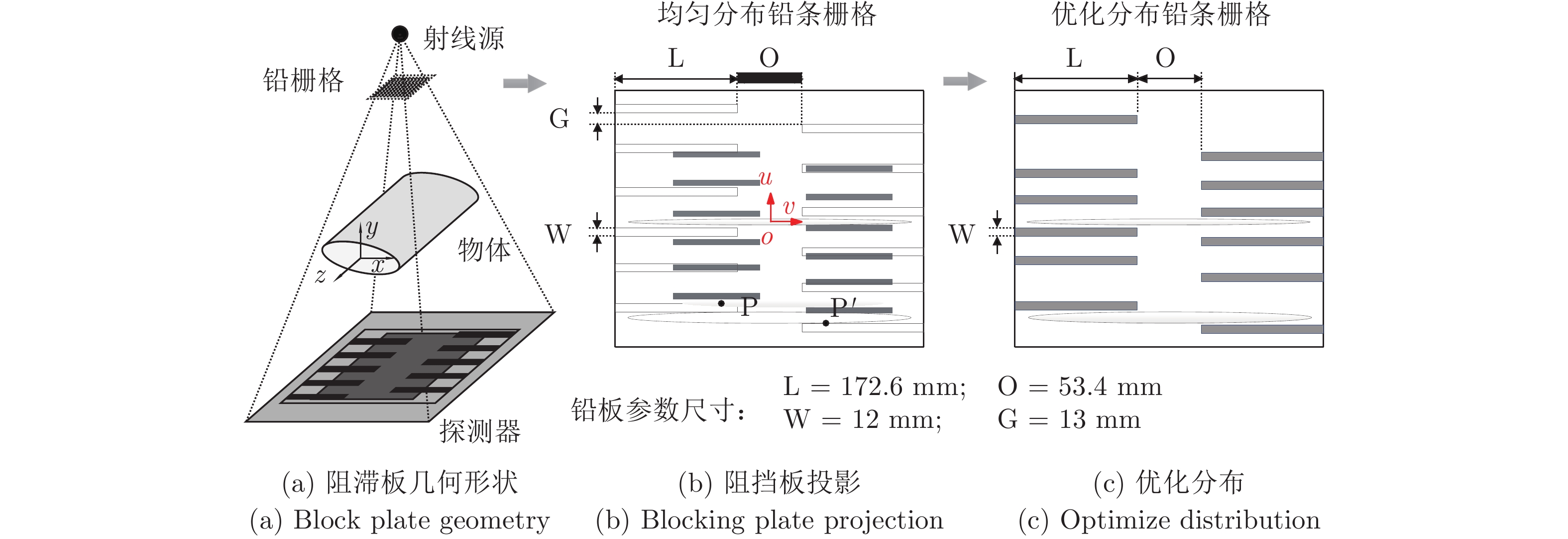
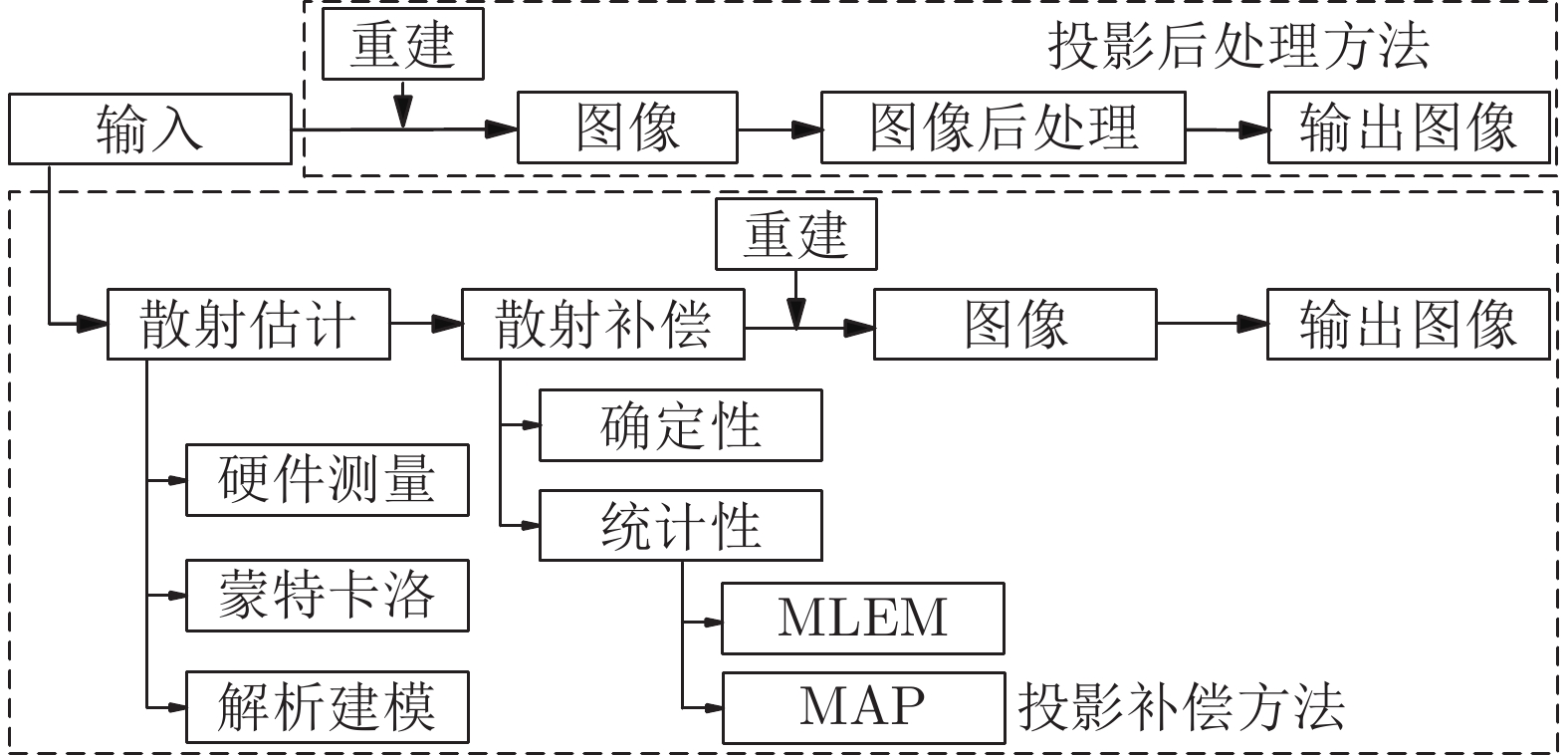
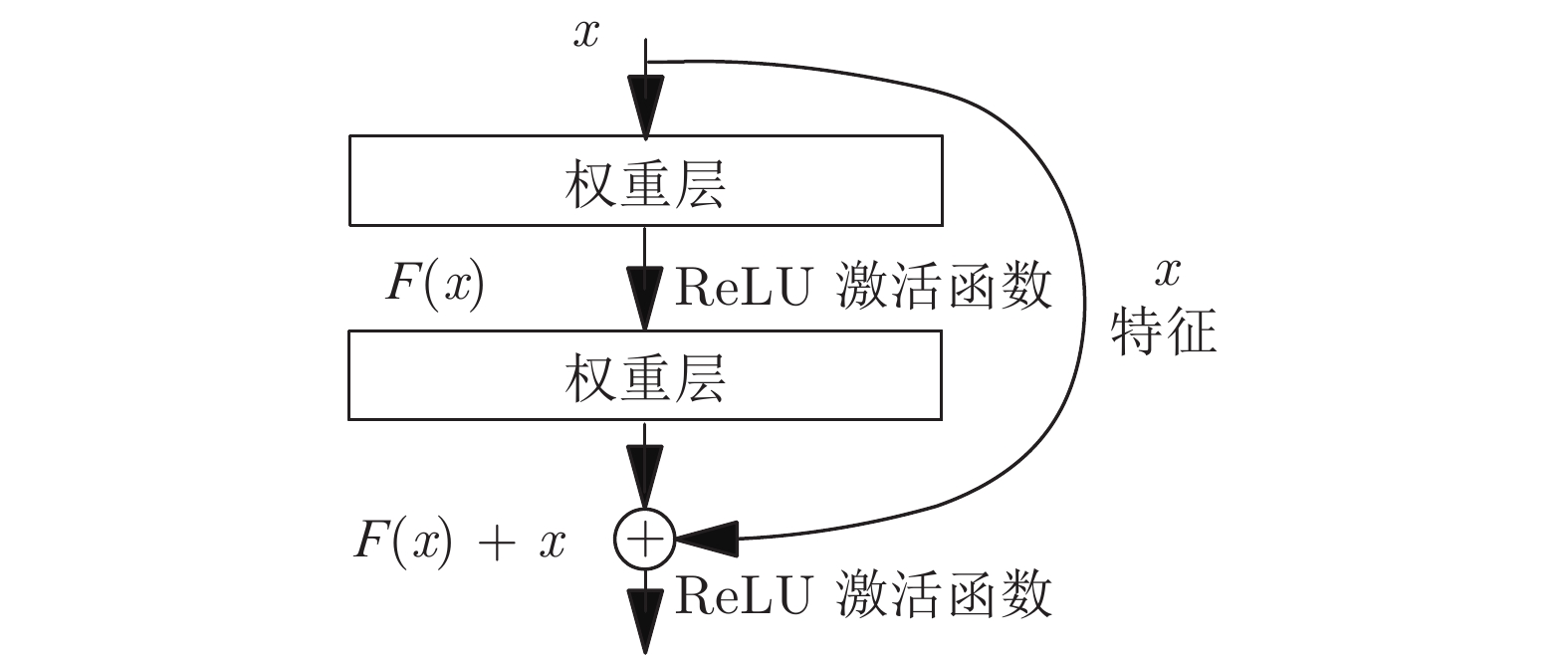
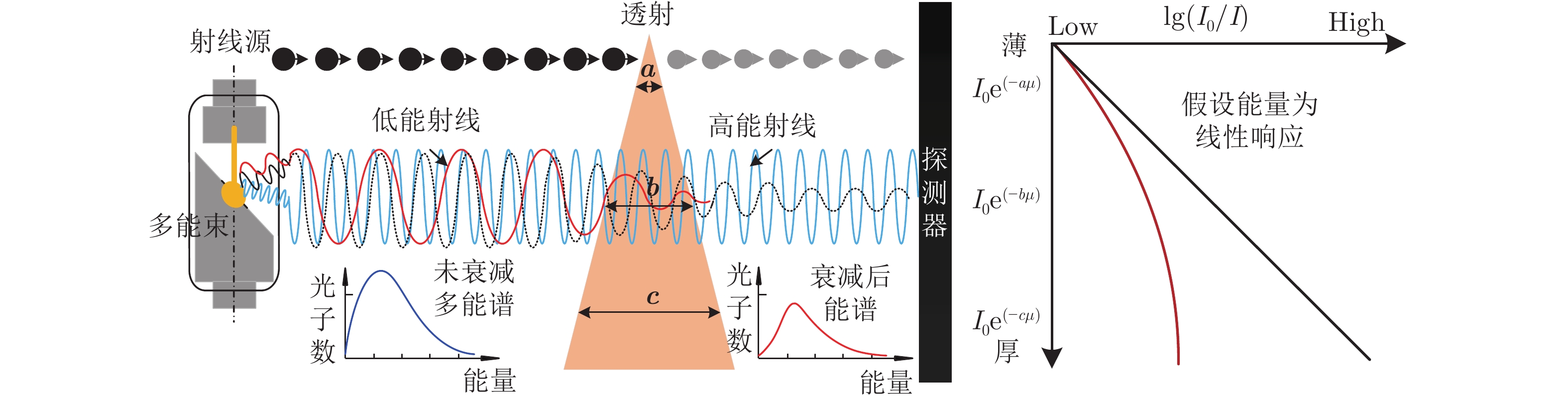
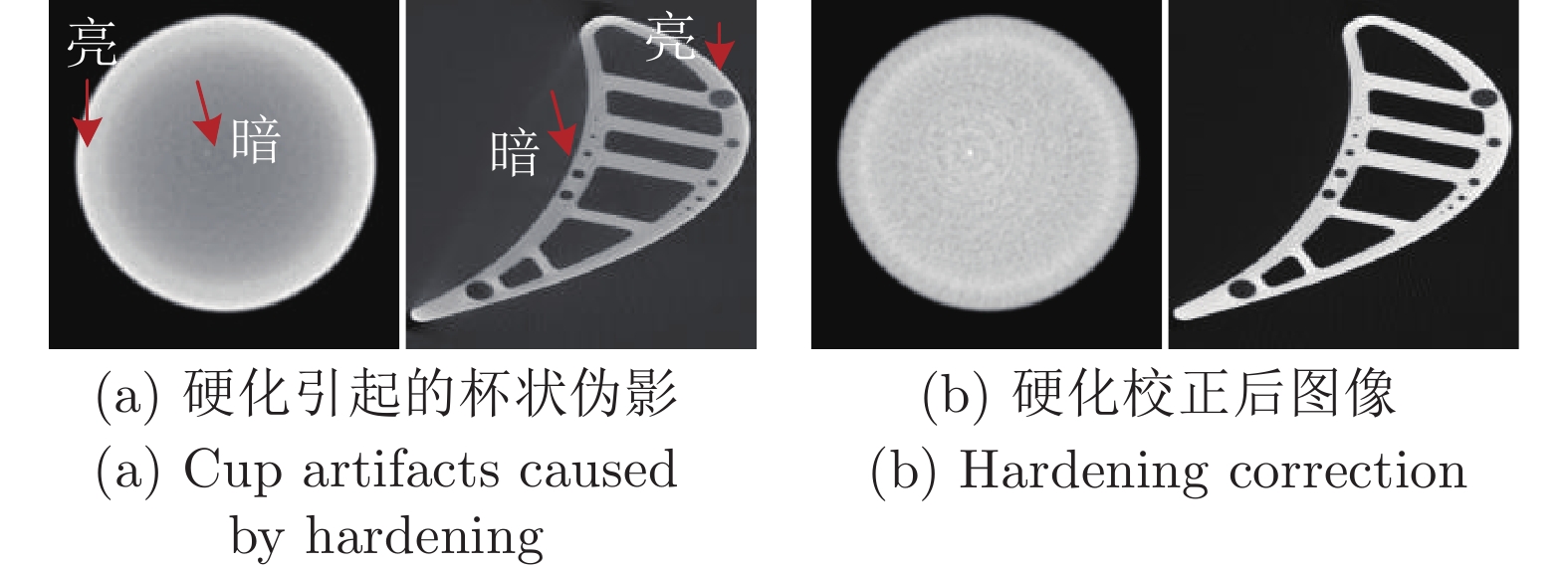
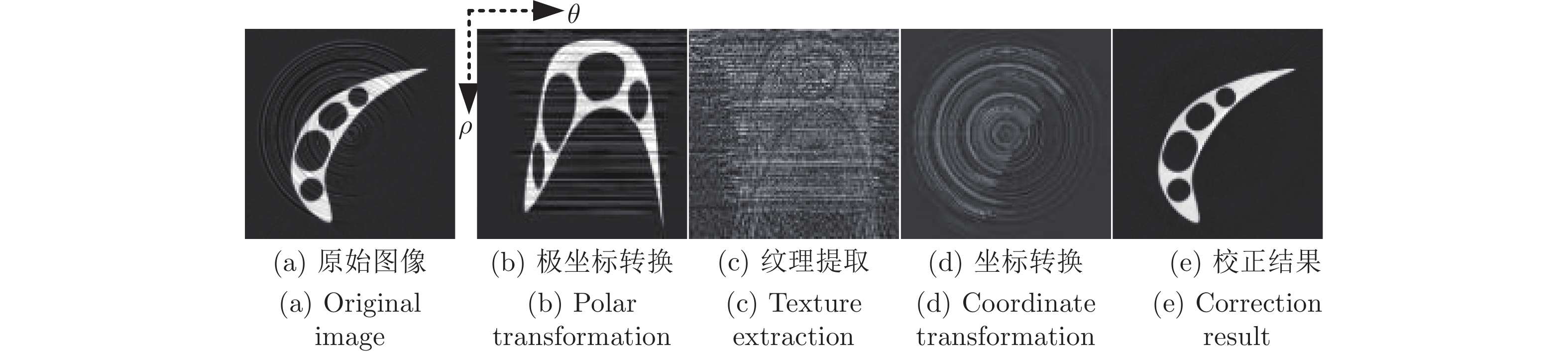
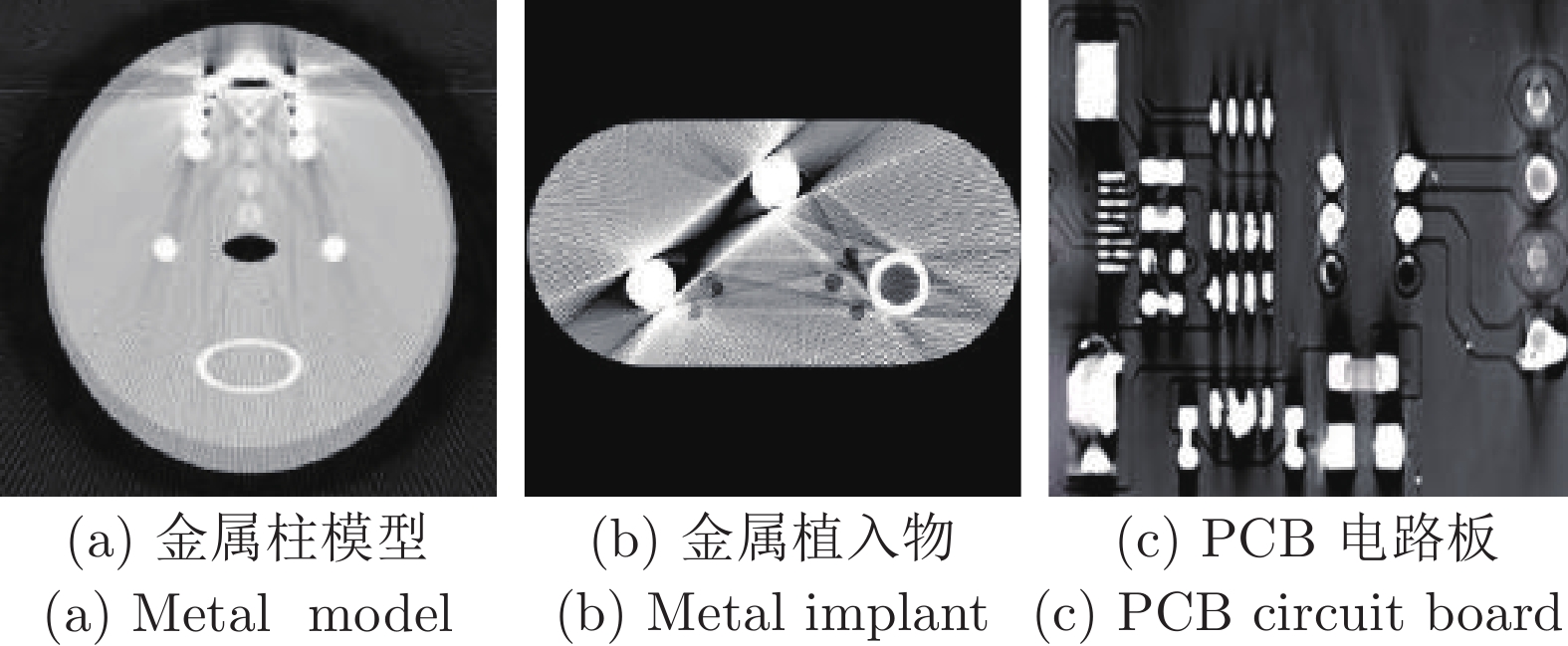
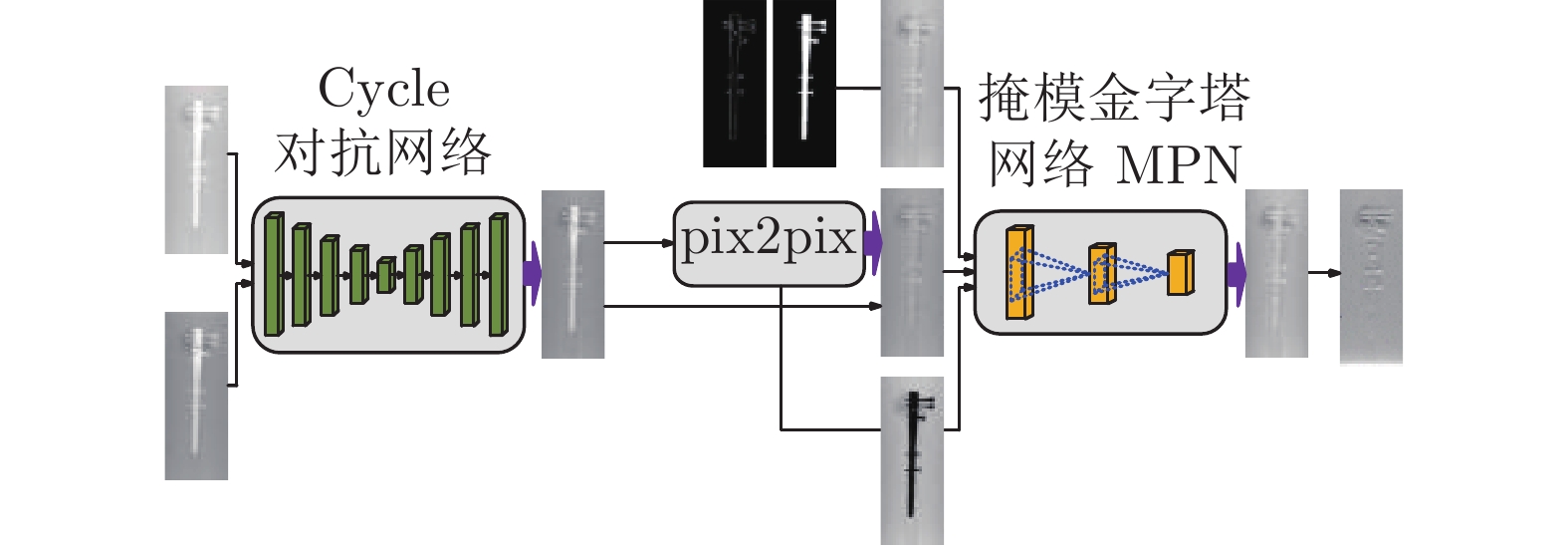
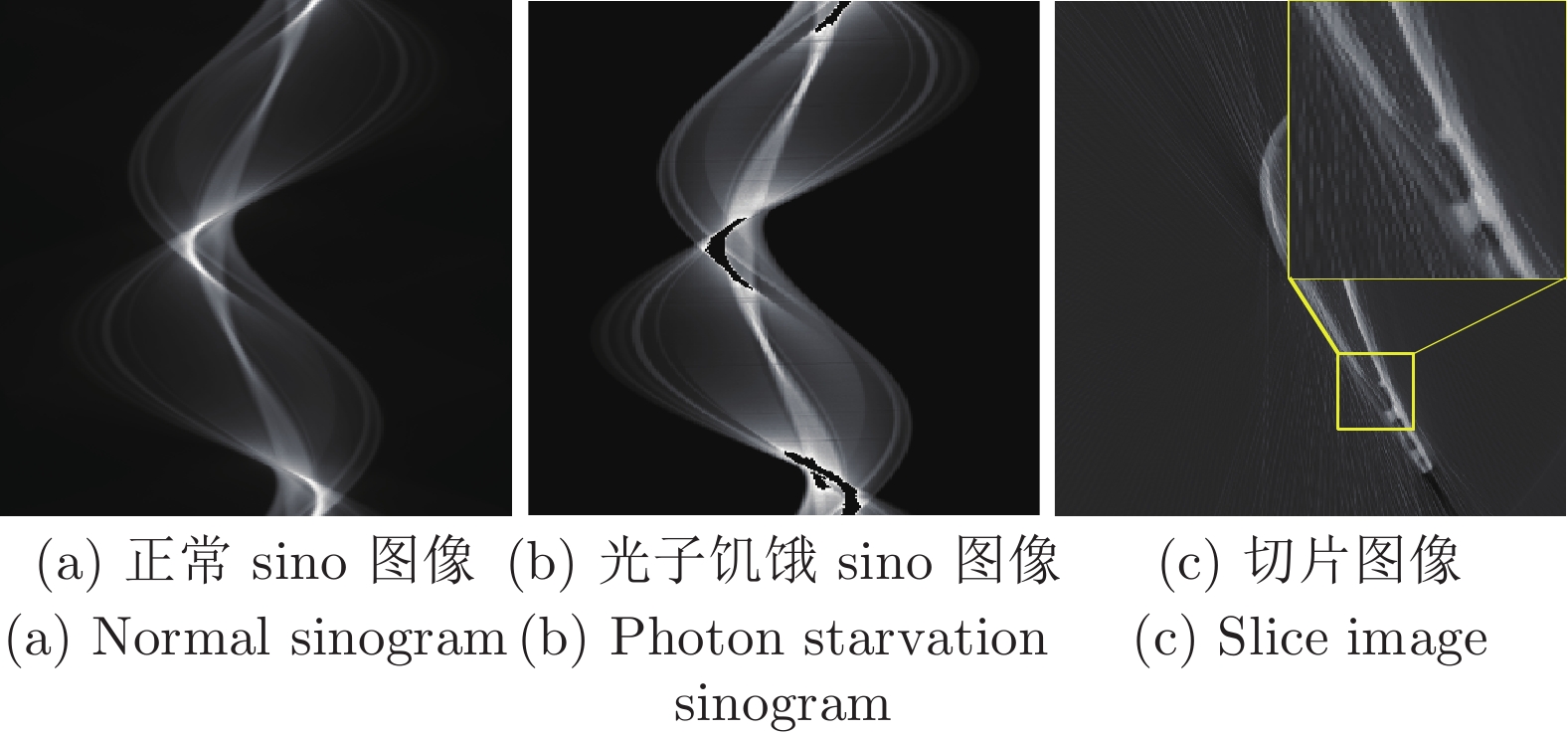
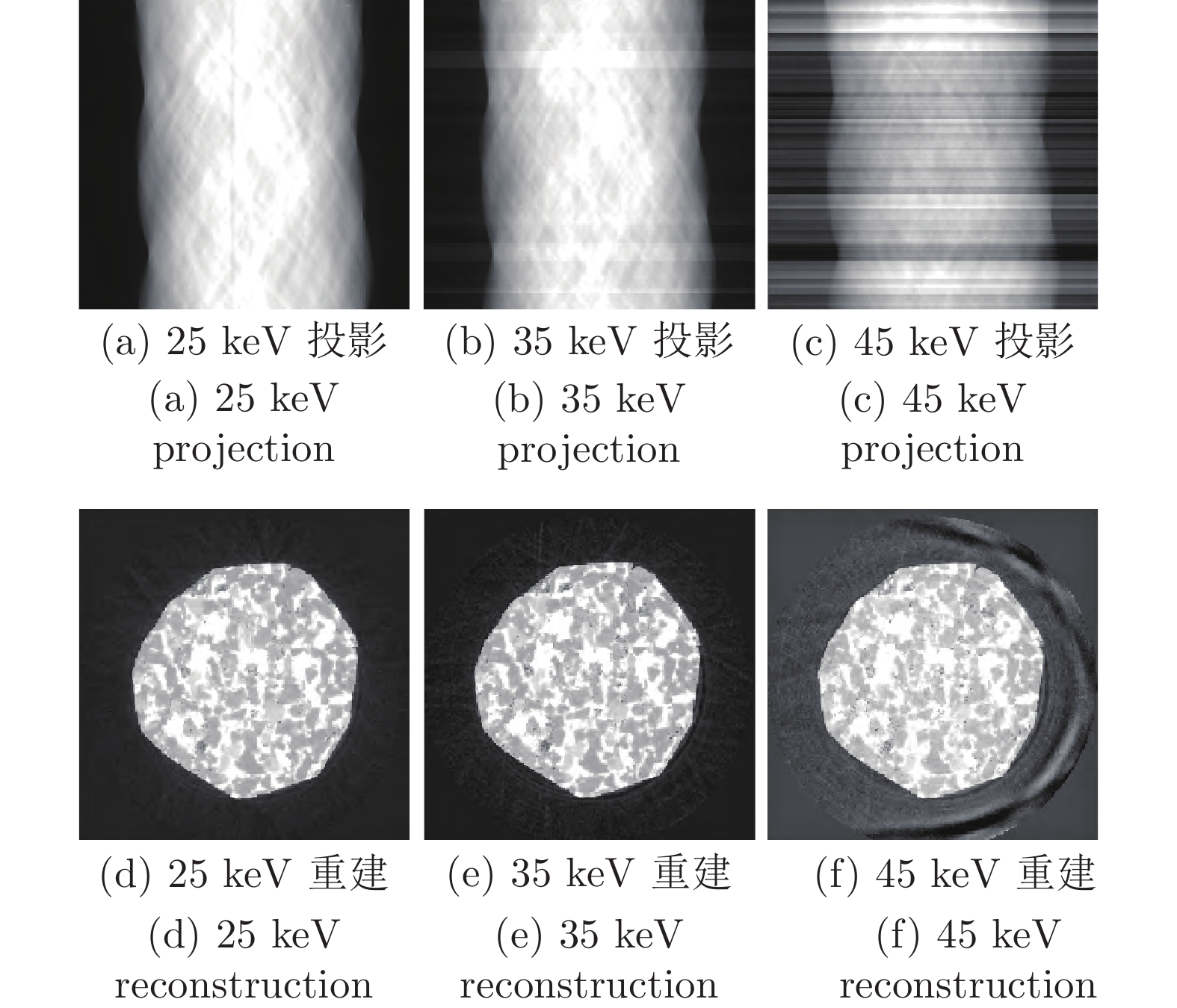
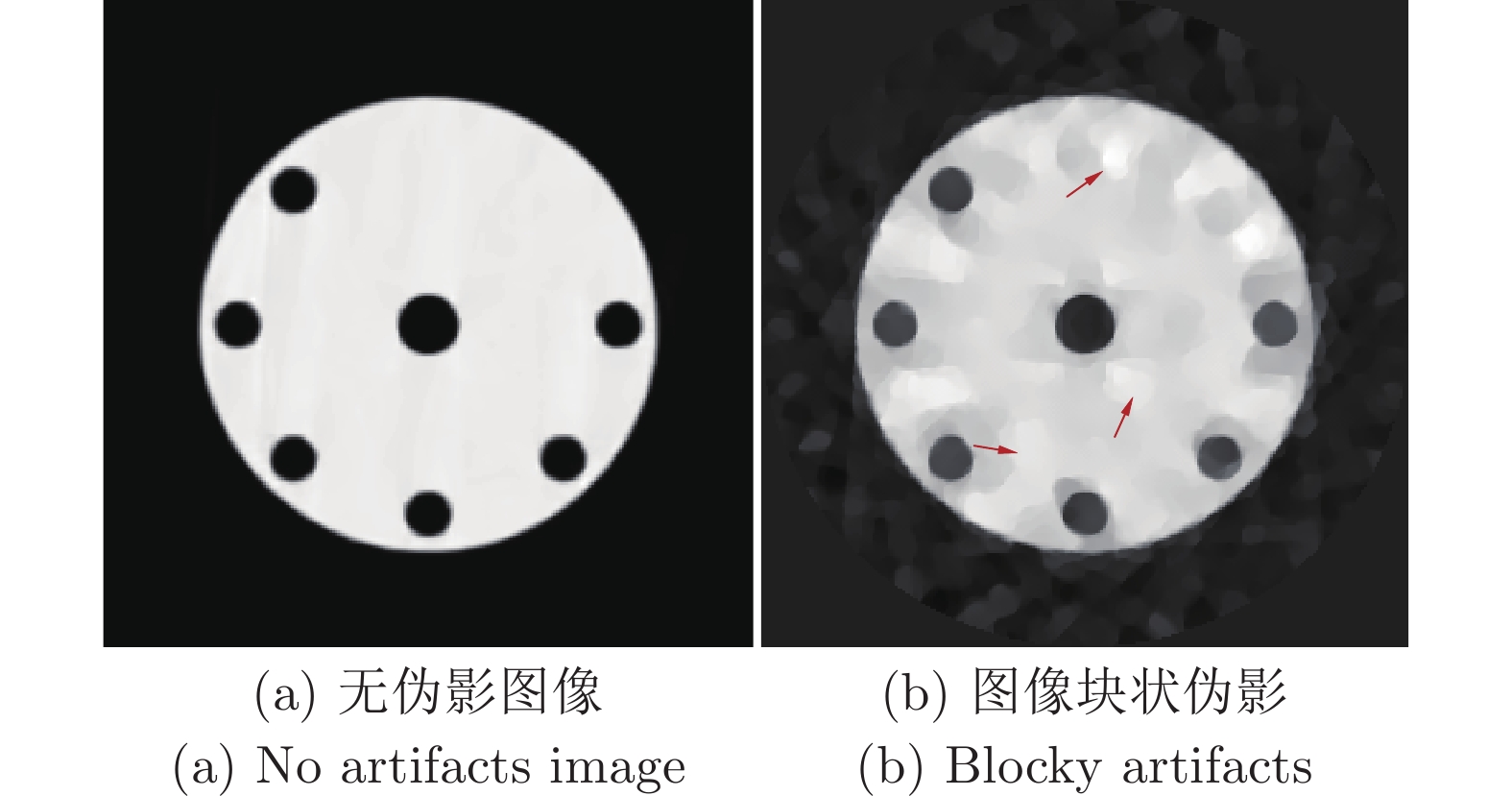
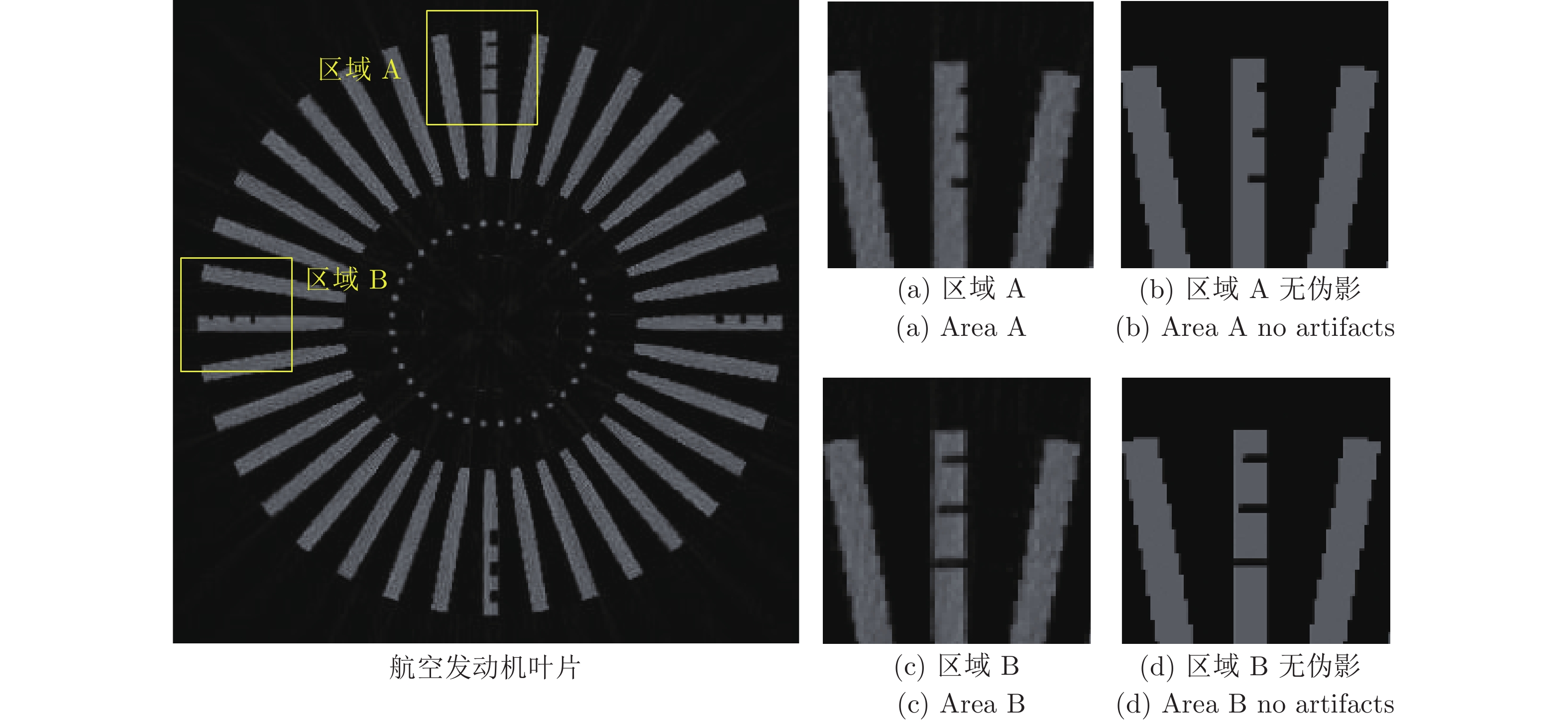
X射线工业计算机断层(Computerized tomography, CT)技术是一种先进的非接触式无损三维检测技术, 能在无损伤情况下以灰度图像的形式对物体内部结构进行全面、详细地分析, 在航空航天、工业生产、安检等领域发挥着重要的作用. 针对工业CT伪影严重降低图像质量问题, 对工业CT成像过程复杂伪影形成机理进行分析, 对不同类型伪影抑制方法进行归纳总结. 阐述了基于射线衰减、探测器及高密度差异、采样数据及重建等不同过程伪影成因及伪影消除相关算法的最新技术进展, 并对近年来人工智能深度学习背景下新兴的基于深度学习及神经网络的工业CT无损检测研究与发展方向进行了总结和展望.
X射线工业计算机断层(Computerized tomography, CT)技术是一种先进的非接触式无损三维检测技术, 能在无损伤情况下以灰度图像的形式对物体内部结构进行全面、详细地分析, 在航空航天、工业生产、安检等领域发挥着重要的作用. 针对工业CT伪影严重降低图像质量问题, 对工业CT成像过程复杂伪影形成机理进行分析, 对不同类型伪影抑制方法进行归纳总结. 阐述了基于射线衰减、探测器及高密度差异、采样数据及重建等不同过程伪影成因及伪影消除相关算法的最新技术进展, 并对近年来人工智能深度学习背景下新兴的基于深度学习及神经网络的工业CT无损检测研究与发展方向进行了总结和展望.

2023, 49(4): 705-717.
doi: 10.16383/j.aas.c230107
摘要:
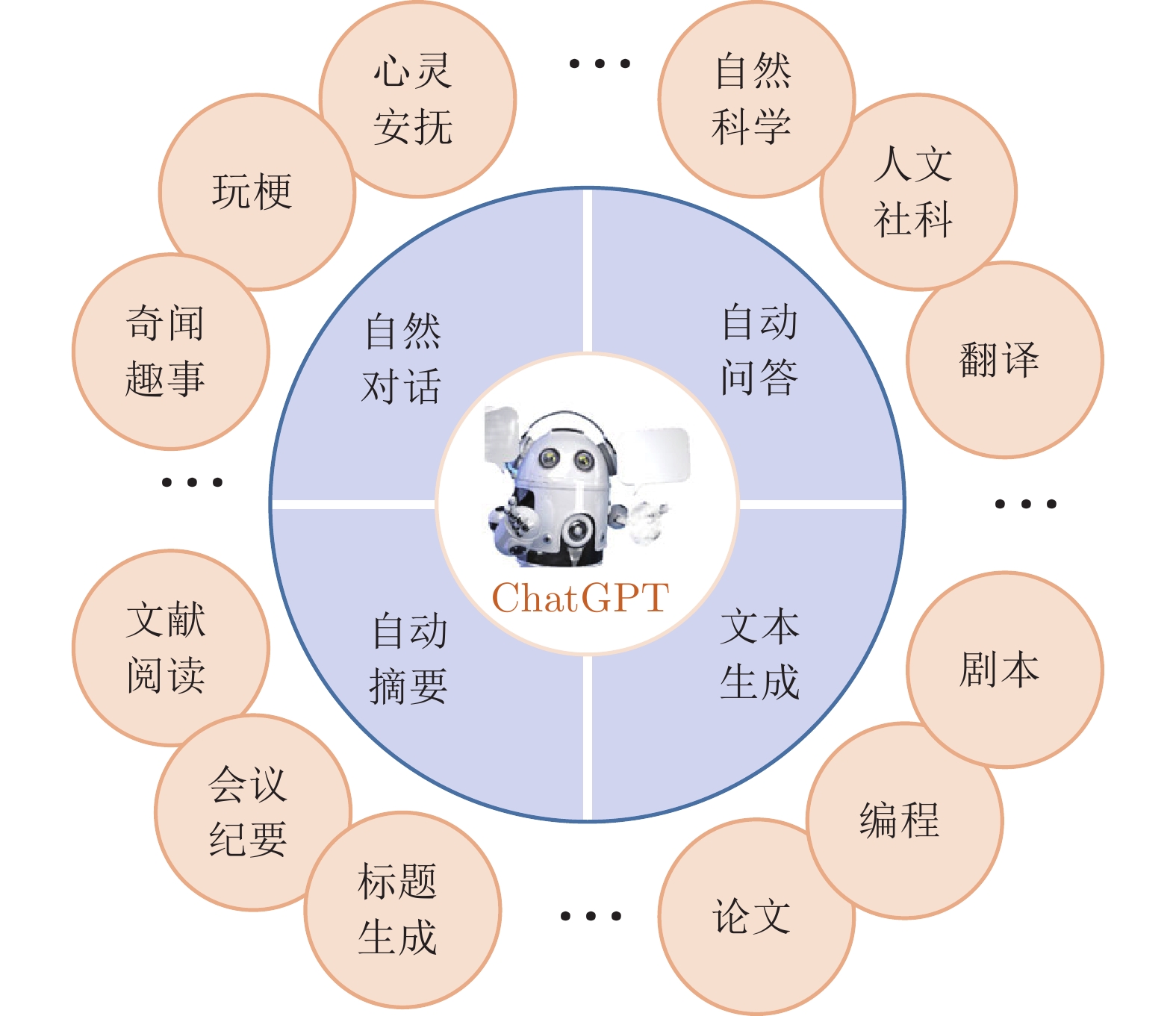
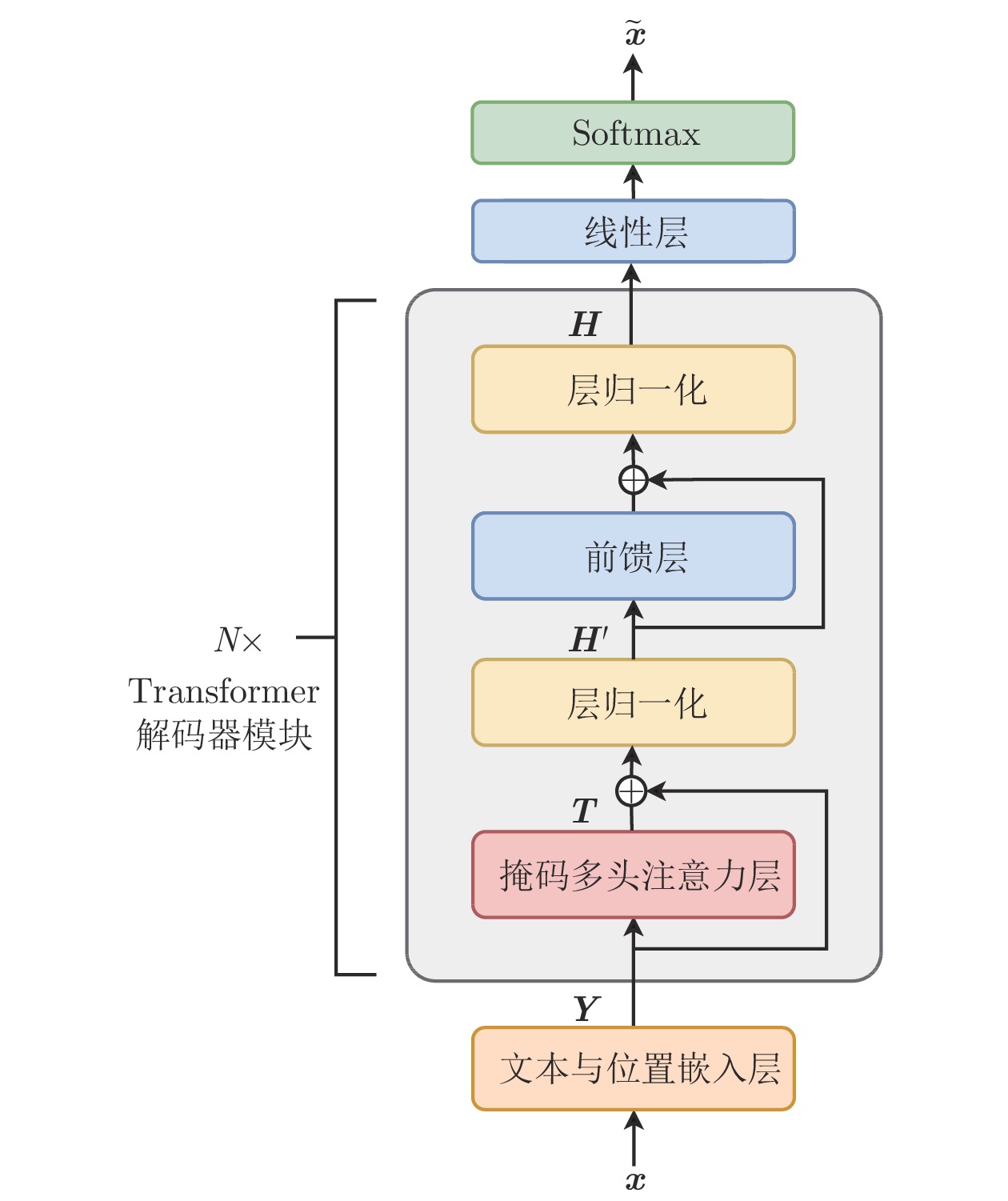
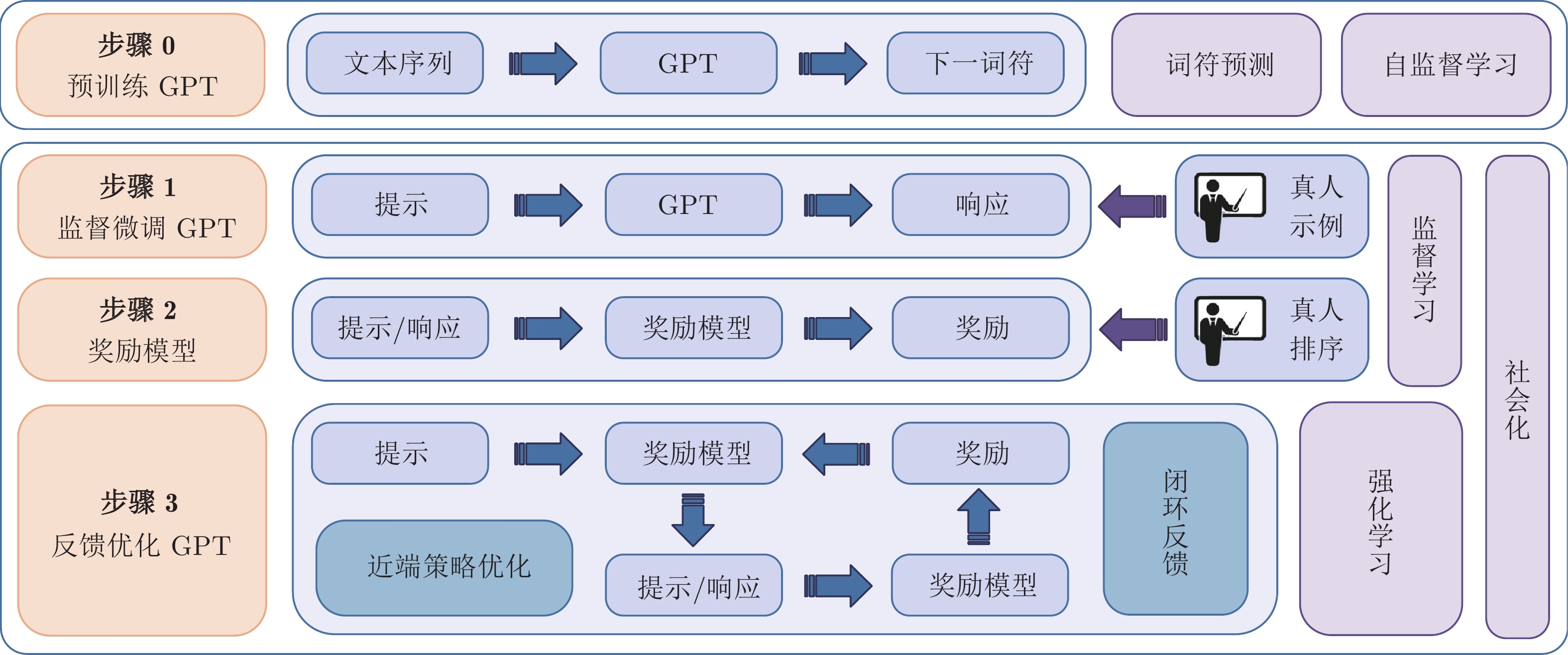
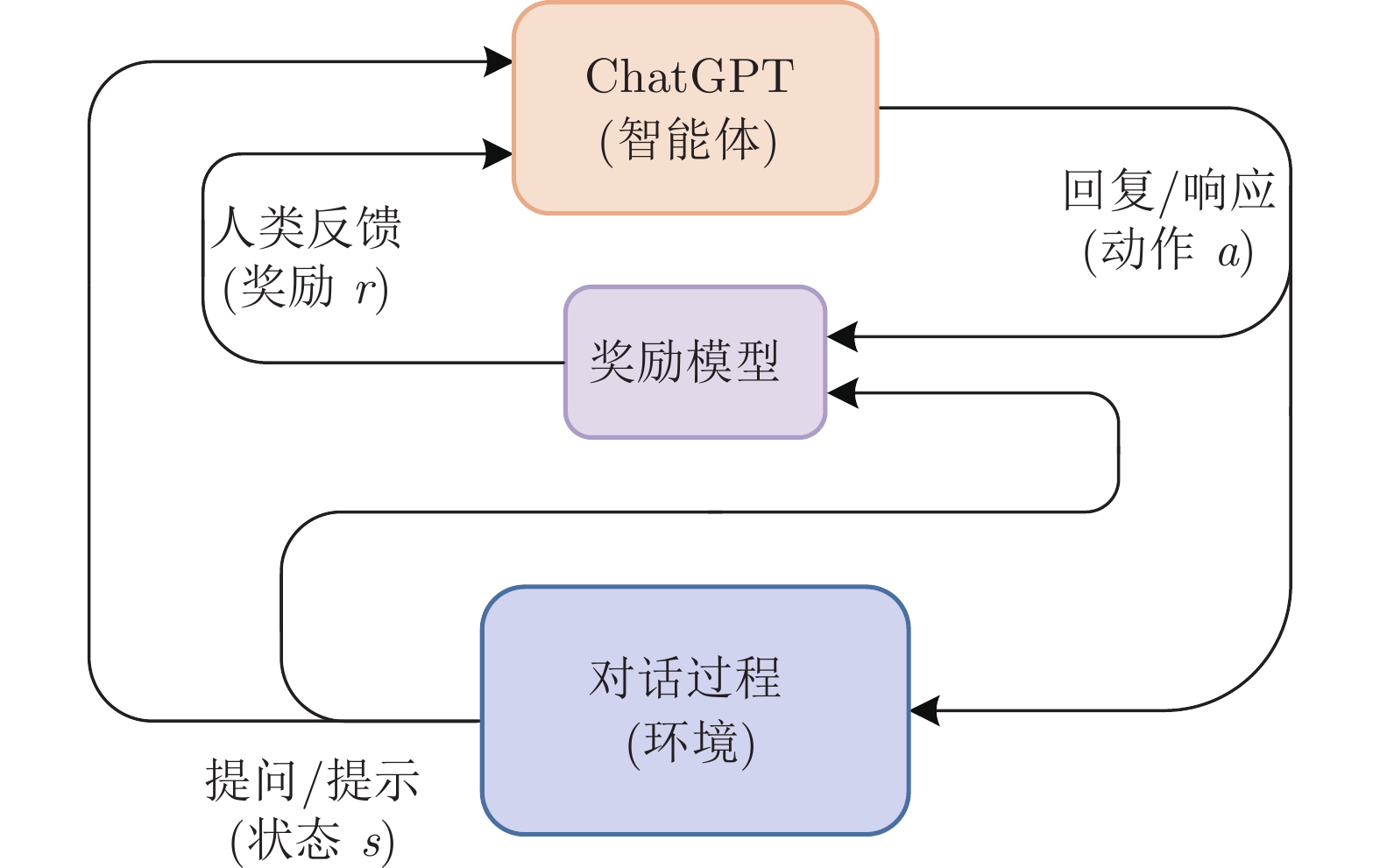
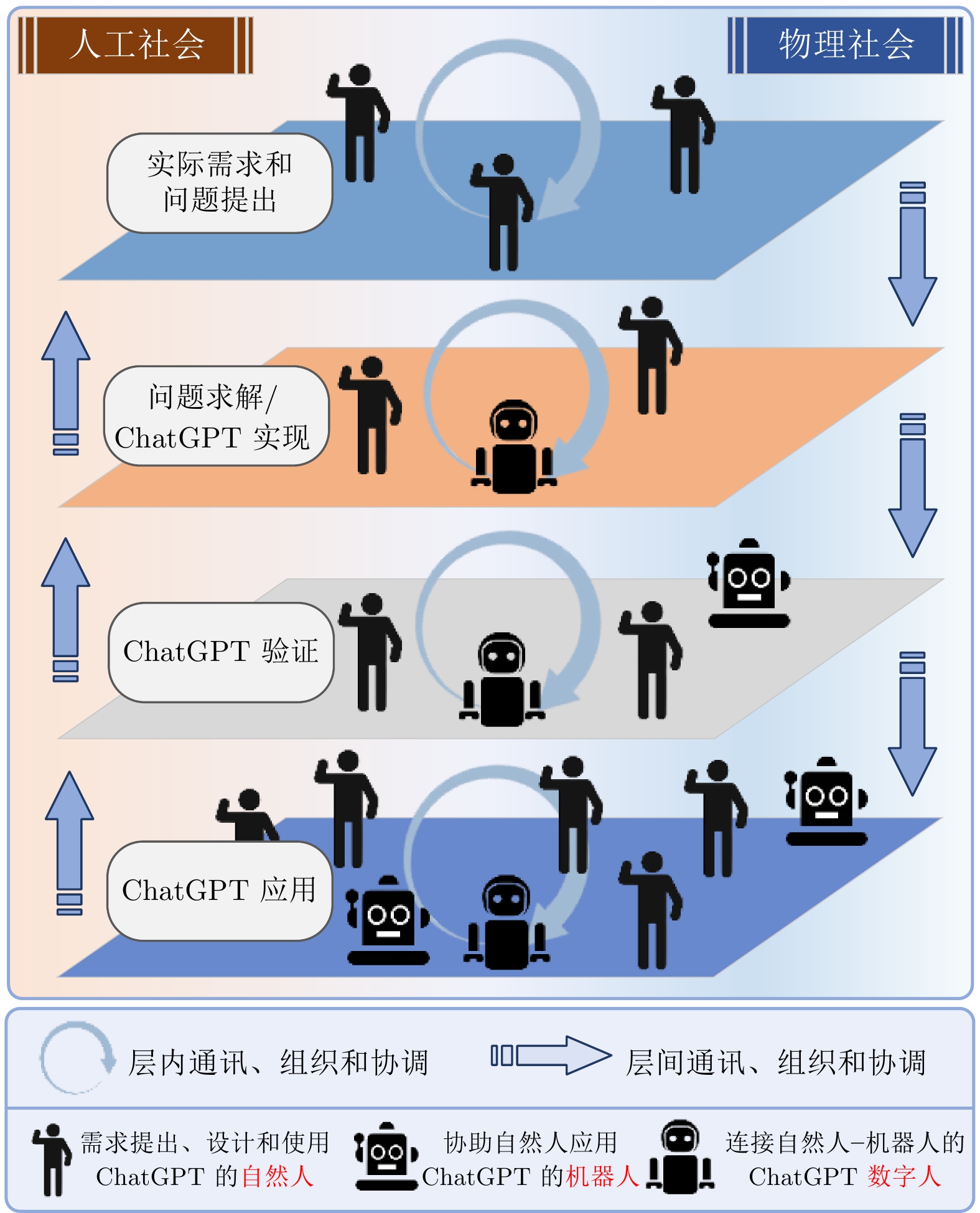
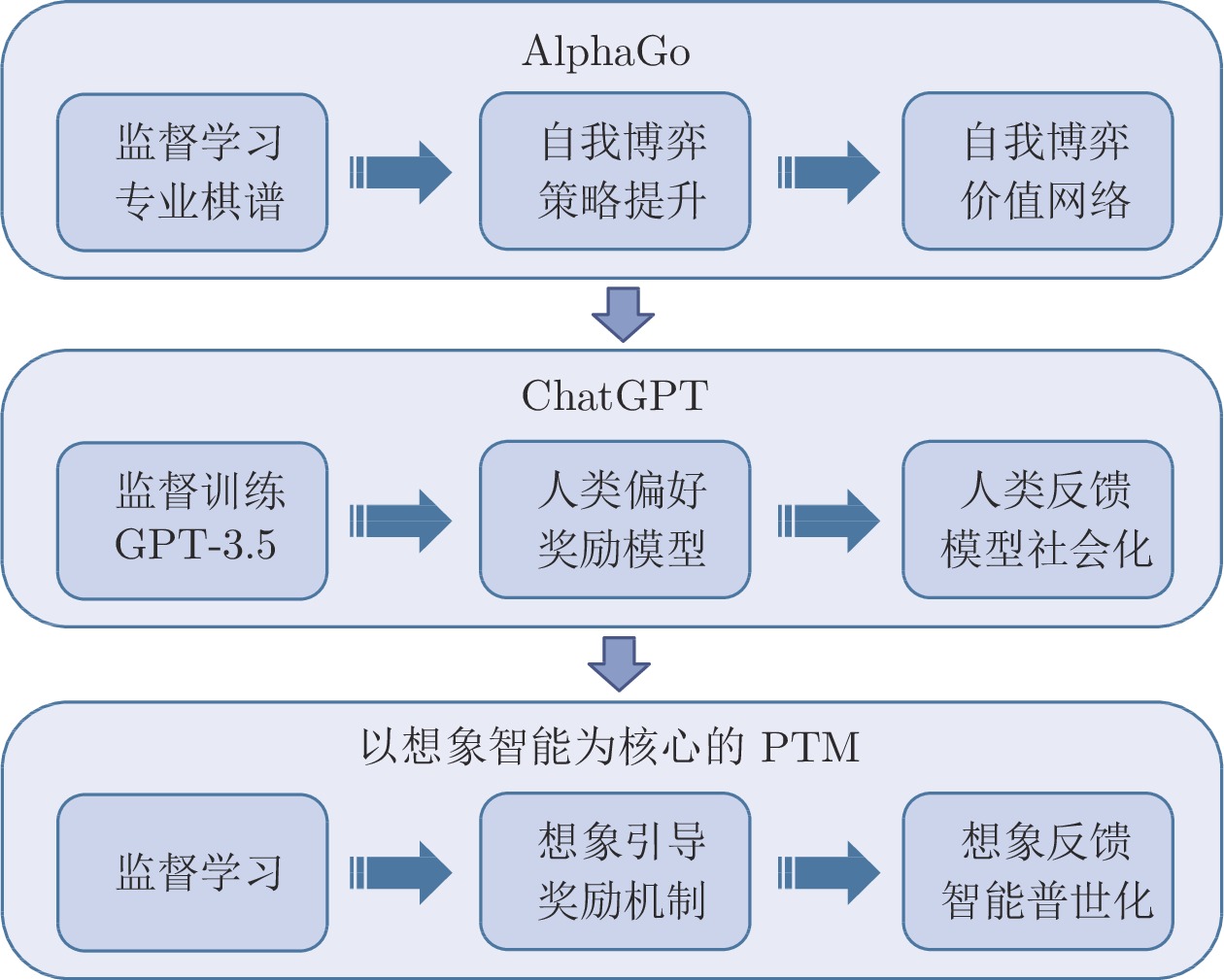
超大预训练模型(Pre-trained model, PTM)是人工智能领域近年来迅速崛起的研究方向, 在自然语言处理(Natural language processing, NLP)和计算机视觉等多种任务中达到了有史以来的最佳性能, 促进了人工智能生成内容(Artificial intelligence-generated content, AIGC)的发展和落地. ChatGPT作为当下最火热的PTM, 更是以优异的表现获得各界的广泛关注. 本文围绕ChatGPT展开. 首先概括PTM的基本思想并对其发展历程进行梳理; 接着, 详细探讨ChatGPT的技术细节, 并以平行智能的视角阐述ChatGPT; 最后, 从技术、范式以及应用等多个方面对PTM的发展趋势进行展望.
超大预训练模型(Pre-trained model, PTM)是人工智能领域近年来迅速崛起的研究方向, 在自然语言处理(Natural language processing, NLP)和计算机视觉等多种任务中达到了有史以来的最佳性能, 促进了人工智能生成内容(Artificial intelligence-generated content, AIGC)的发展和落地. ChatGPT作为当下最火热的PTM, 更是以优异的表现获得各界的广泛关注. 本文围绕ChatGPT展开. 首先概括PTM的基本思想并对其发展历程进行梳理; 接着, 详细探讨ChatGPT的技术细节, 并以平行智能的视角阐述ChatGPT; 最后, 从技术、范式以及应用等多个方面对PTM的发展趋势进行展望.

2023, 49(4): 718-730.
doi: 10.16383/j.aas.c200806
摘要:
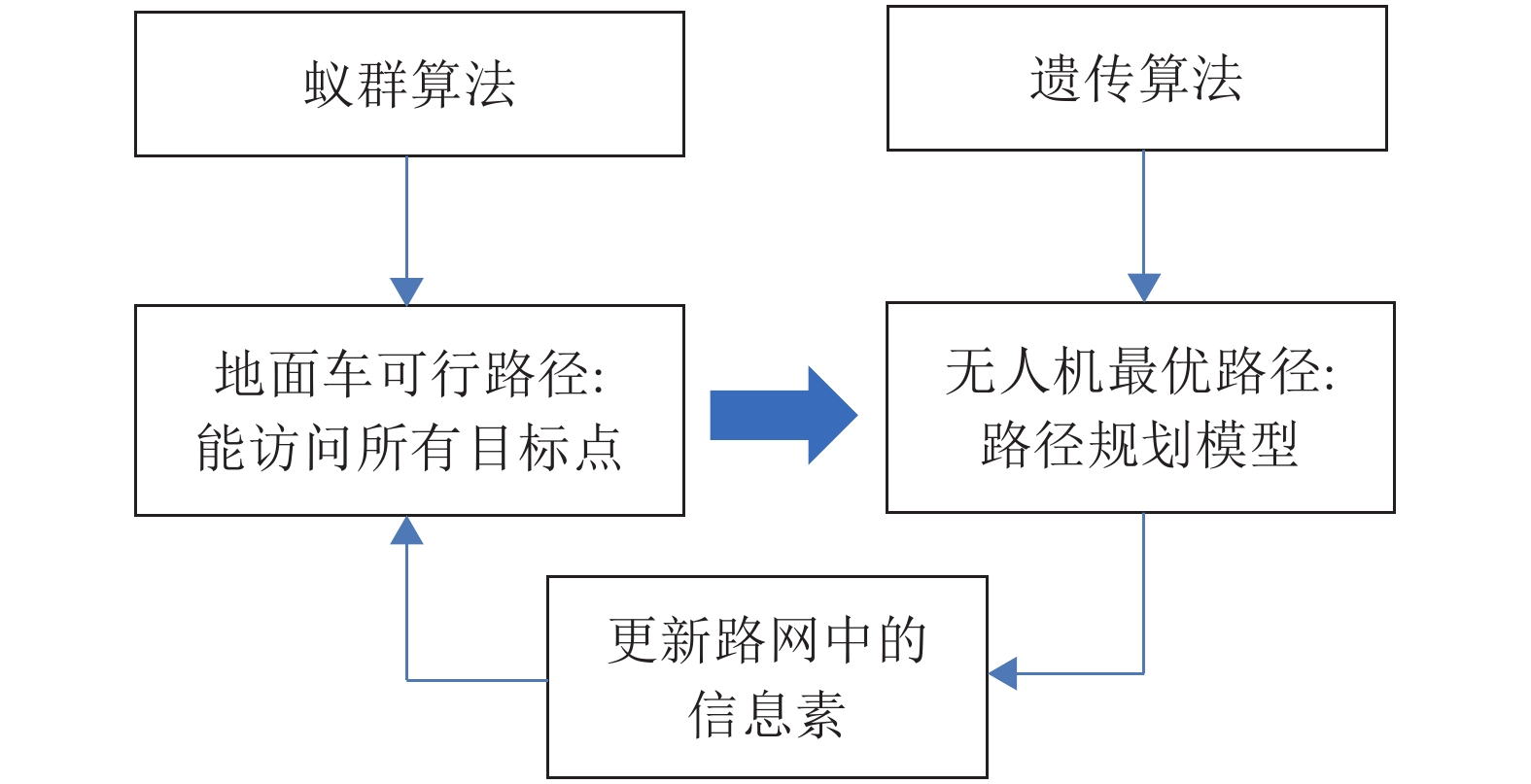
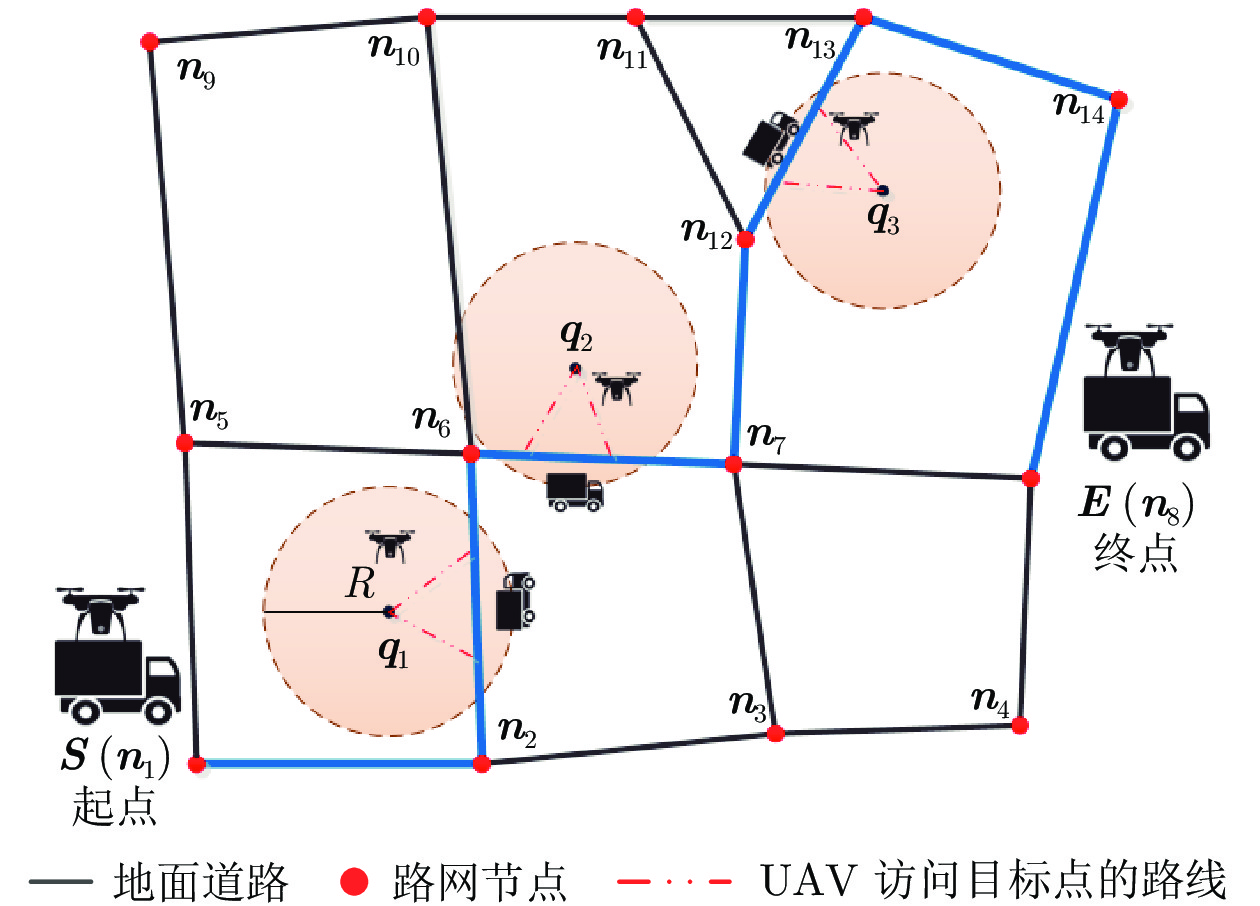
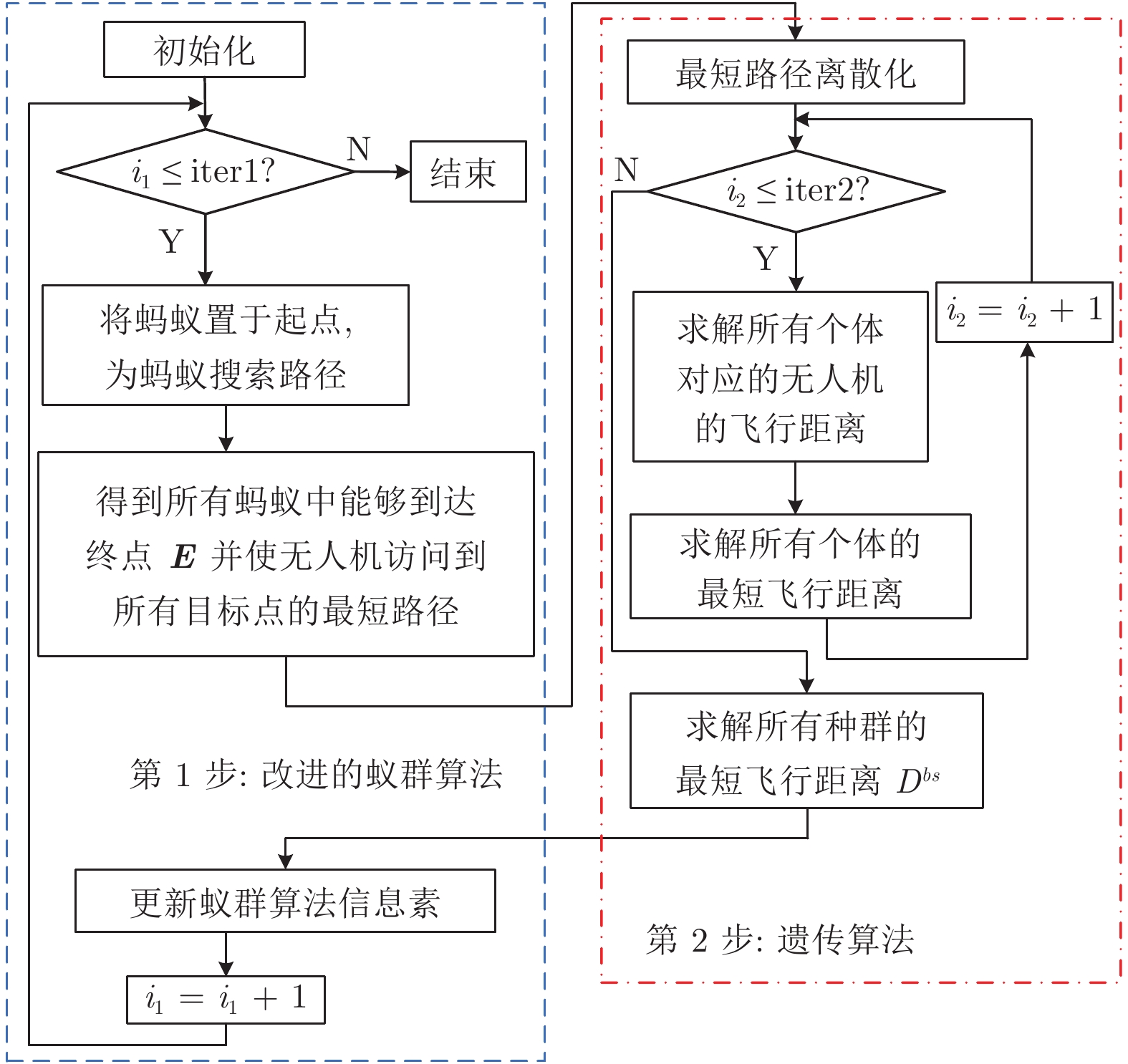
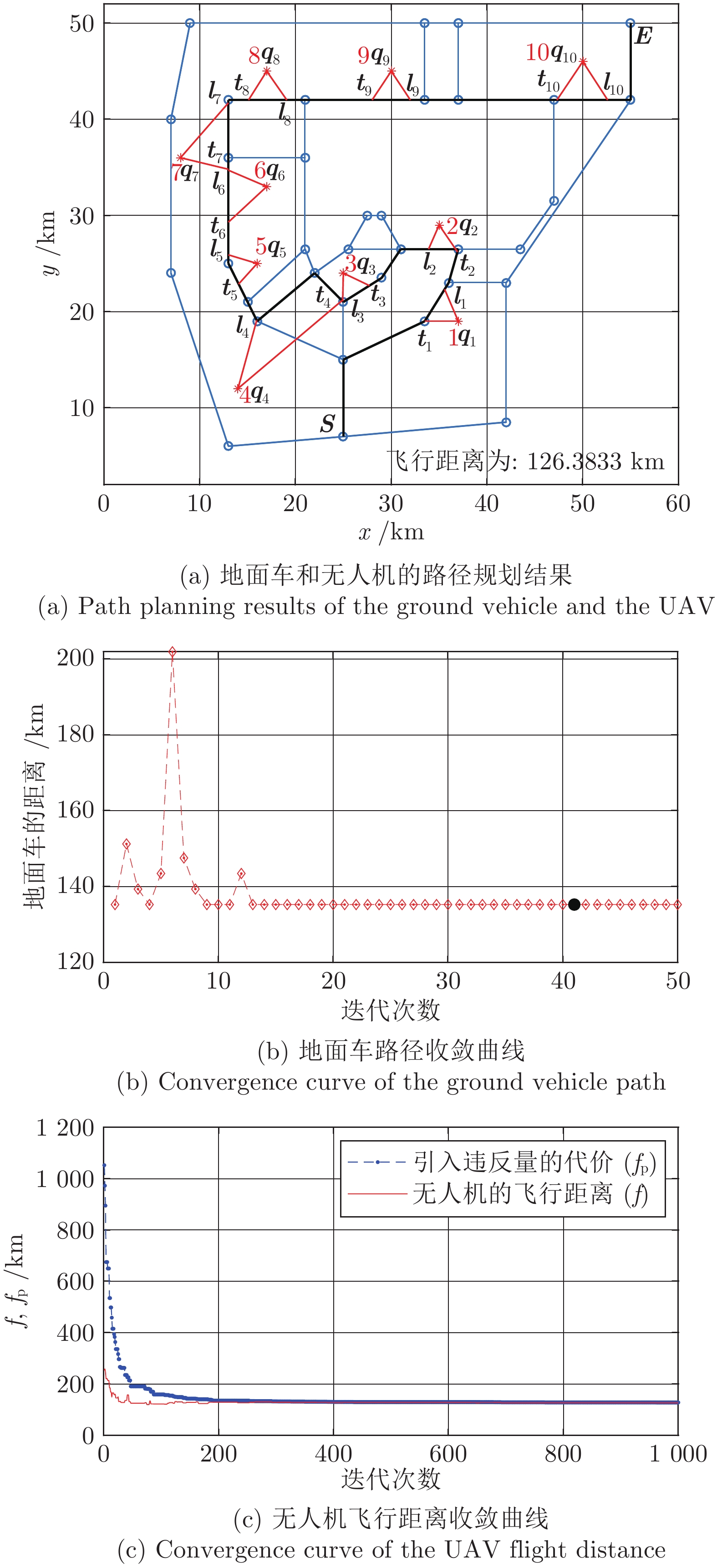
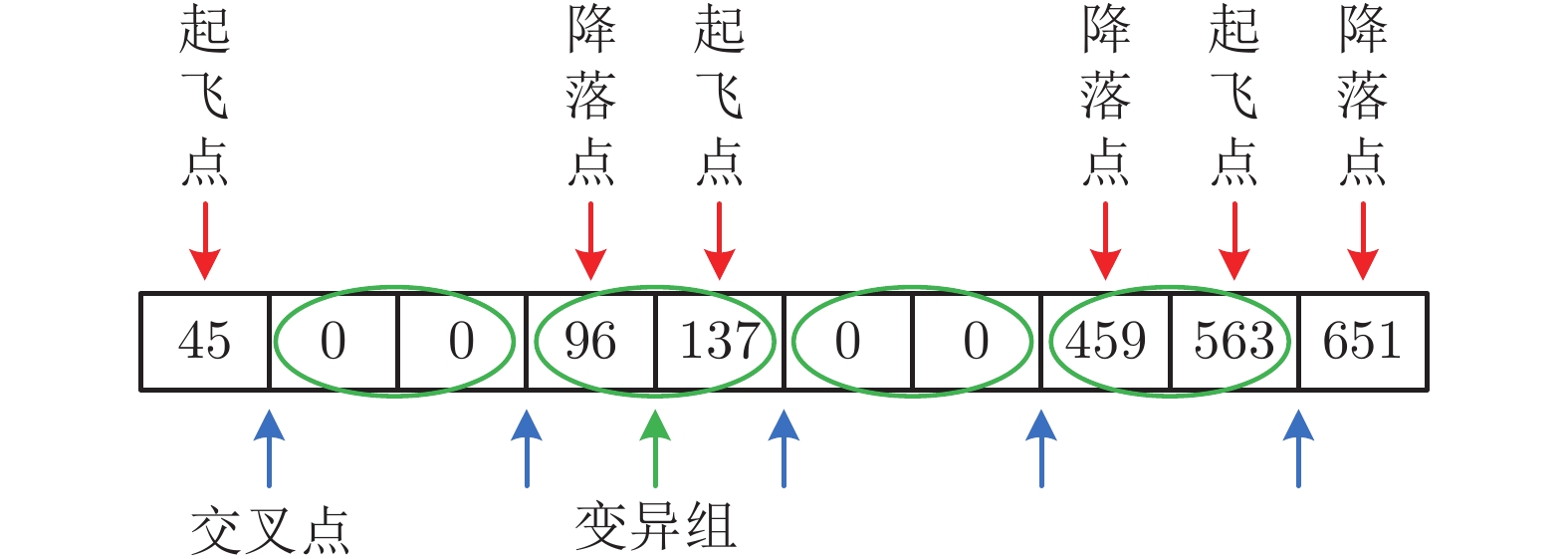
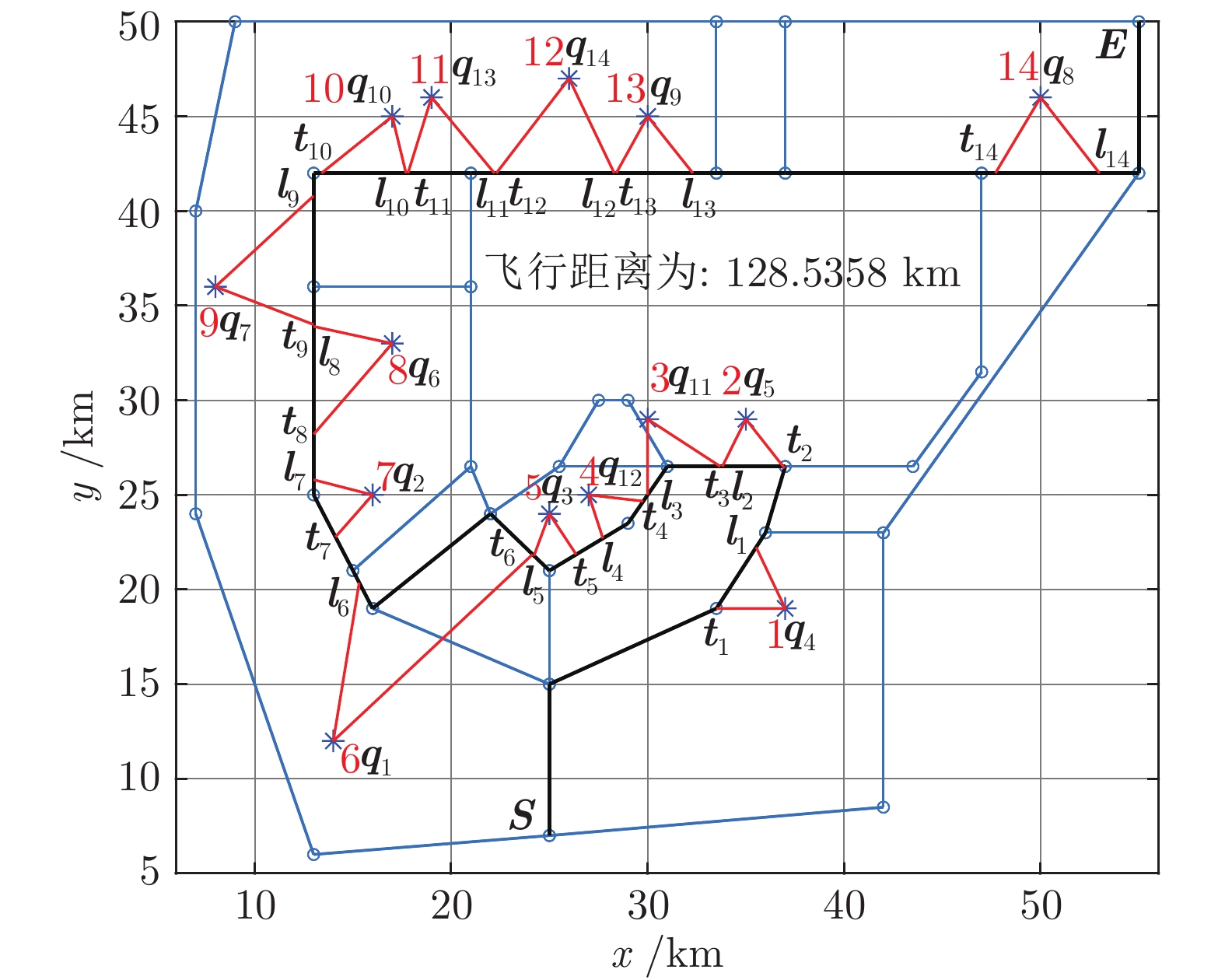
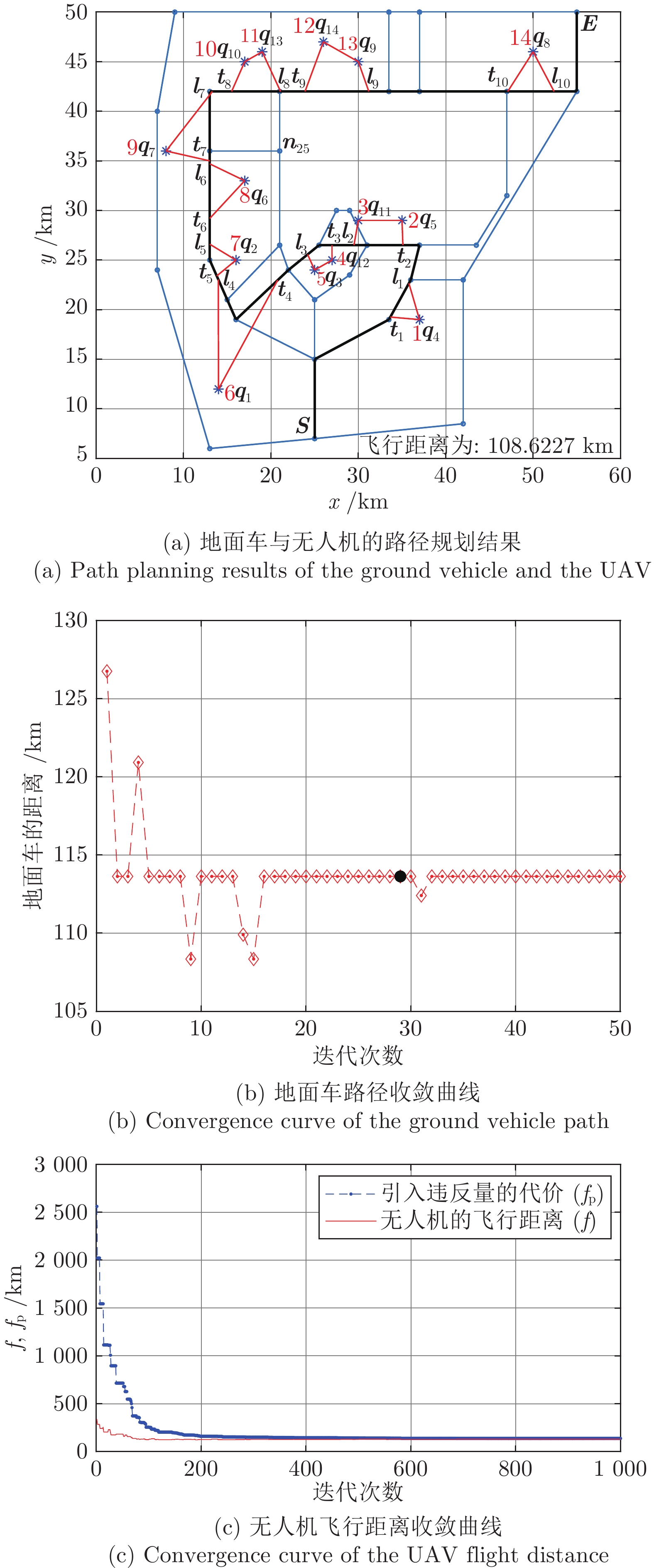
由无人机(Unmanned aerial vehicles, UAV)和地面移动机器人组成的异构机器人系统在协作执行任务时, 可以充分发挥两类机器人各自的优势. 无人机运动灵活, 但通常续航能力有限; 地面机器人载荷多, 适合作为无人机的着陆平台和移动补给站, 但运动受路网约束. 本文研究这类异构机器人系统协作路径规划问题. 为了降低完成任务的时间代价, 提出一种由蚁群算法(Ant colony optimization, ACO)和遗传算法(Genetic algorithm, GA)相结合的两步法对地面机器人和无人机的路线进行解耦, 同时规划地面机器人和无人机的路线. 第1步使用蚁群算法为地面机器人搜索可行路线. 第2步对无人机的最优路径建模, 采用遗传算法求解并将无人机路径长度返回至第1步中, 用于更新路网的信息素参数, 从而实现异构协作系统路径的整体优化. 另外, 为了进一步降低无人机的飞行时间代价, 研究了无人机在其续航能力内连续完成多任务的协作路径规划问题. 最后, 通过大量仿真实验验证了所提方法的有效性.
由无人机(Unmanned aerial vehicles, UAV)和地面移动机器人组成的异构机器人系统在协作执行任务时, 可以充分发挥两类机器人各自的优势. 无人机运动灵活, 但通常续航能力有限; 地面机器人载荷多, 适合作为无人机的着陆平台和移动补给站, 但运动受路网约束. 本文研究这类异构机器人系统协作路径规划问题. 为了降低完成任务的时间代价, 提出一种由蚁群算法(Ant colony optimization, ACO)和遗传算法(Genetic algorithm, GA)相结合的两步法对地面机器人和无人机的路线进行解耦, 同时规划地面机器人和无人机的路线. 第1步使用蚁群算法为地面机器人搜索可行路线. 第2步对无人机的最优路径建模, 采用遗传算法求解并将无人机路径长度返回至第1步中, 用于更新路网的信息素参数, 从而实现异构协作系统路径的整体优化. 另外, 为了进一步降低无人机的飞行时间代价, 研究了无人机在其续航能力内连续完成多任务的协作路径规划问题. 最后, 通过大量仿真实验验证了所提方法的有效性.

2023, 49(4): 731-743.
doi: 10.16383/j.aas.c201082
摘要:
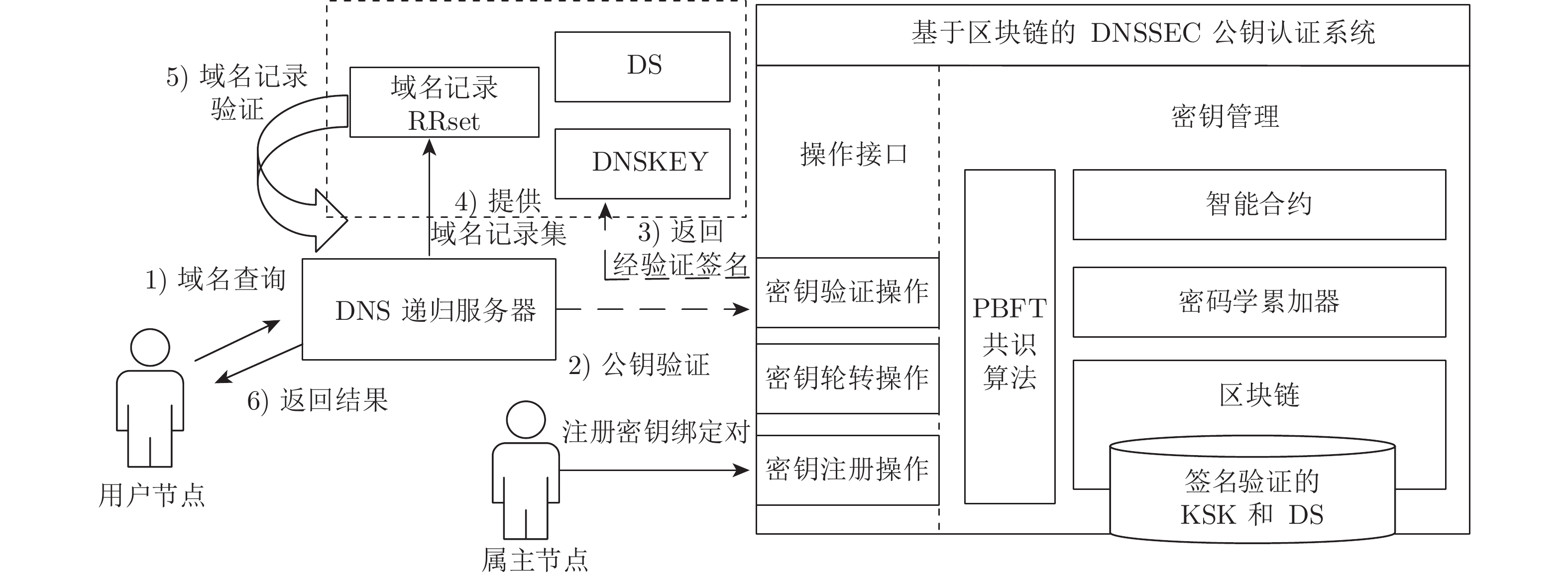
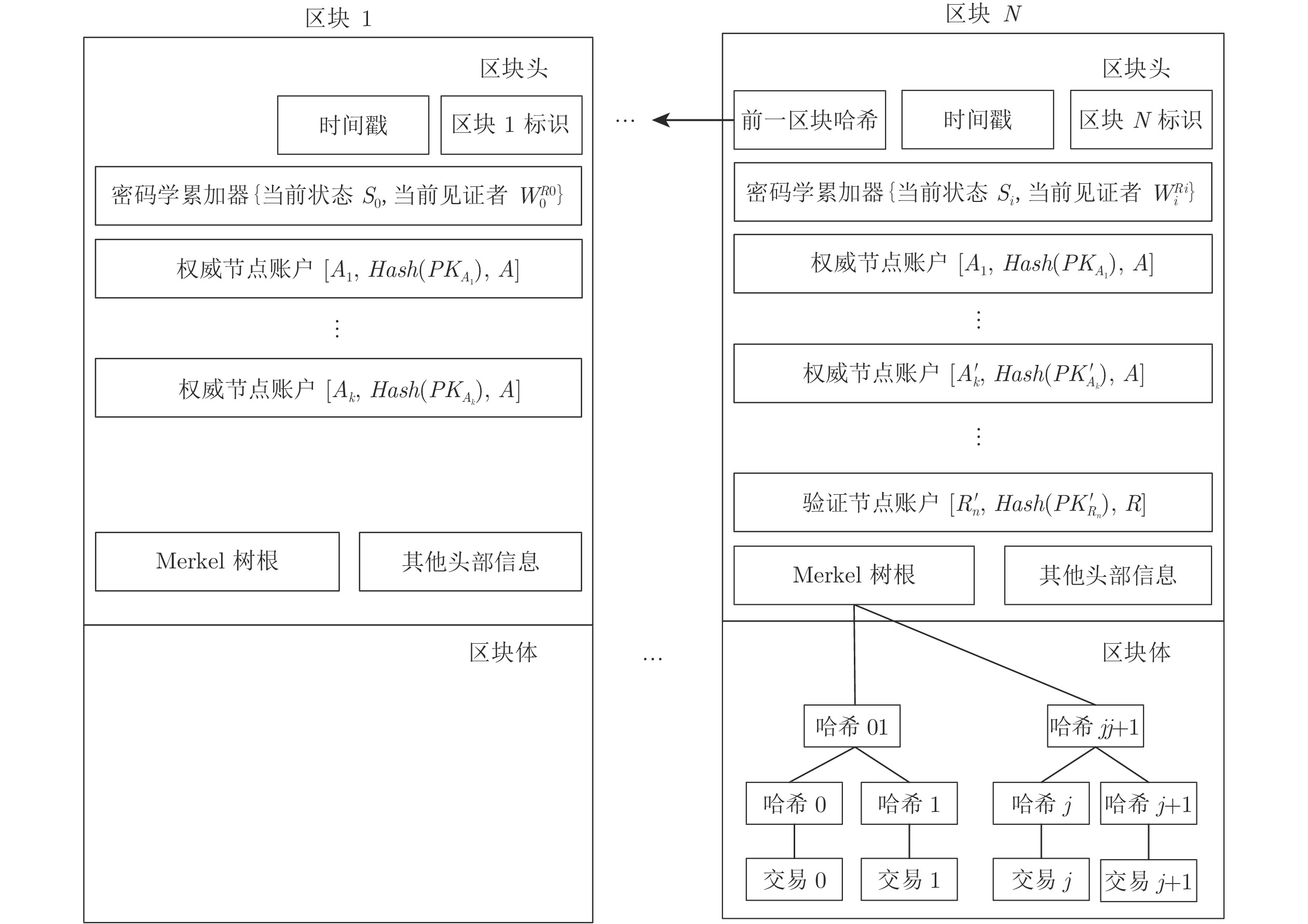
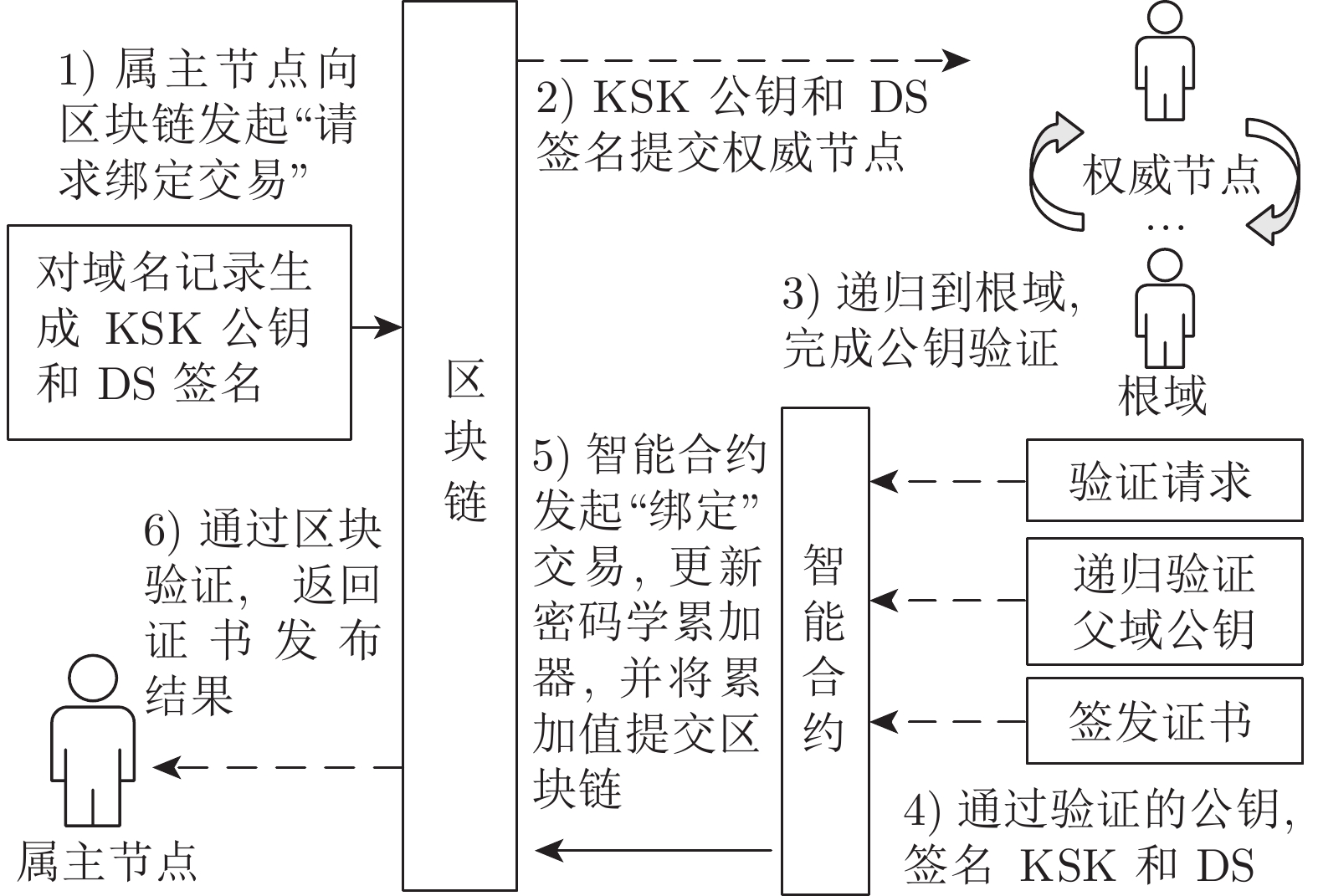
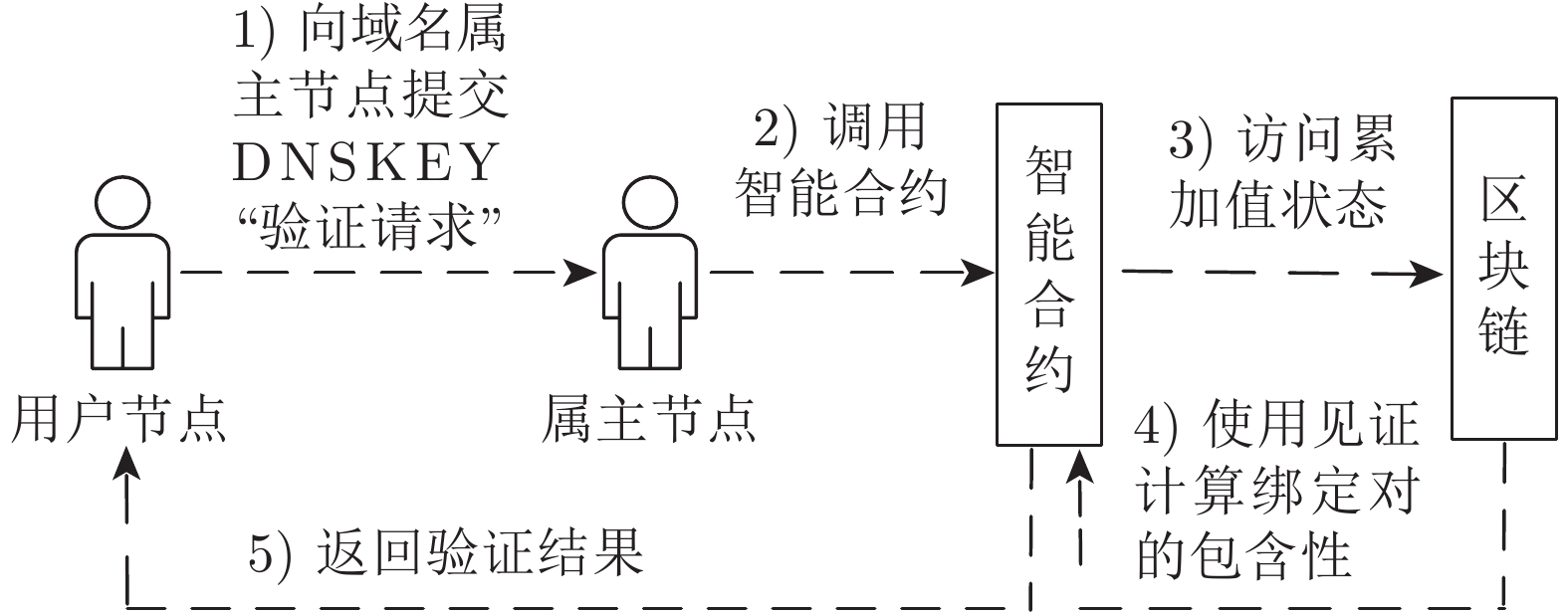
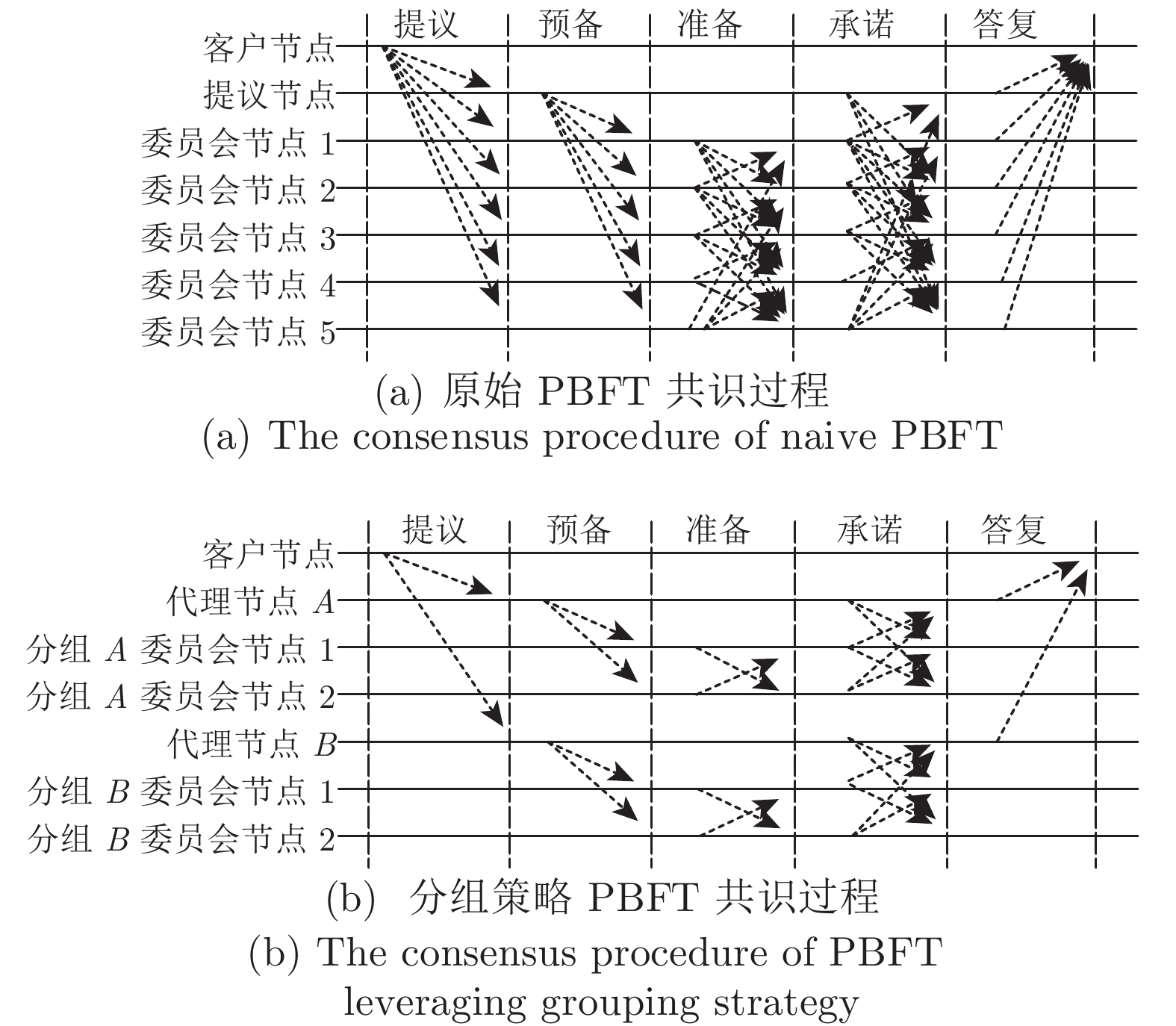
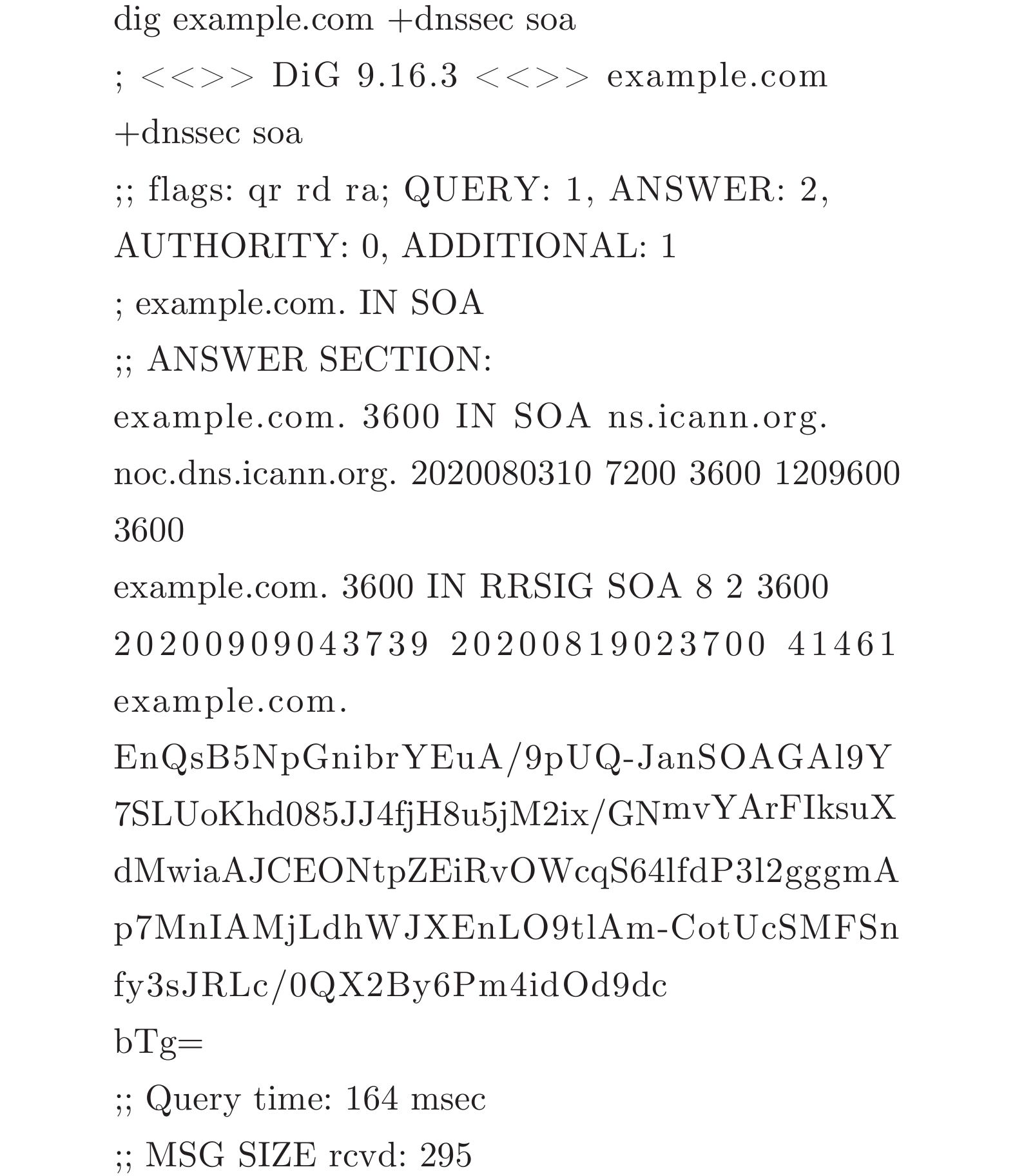
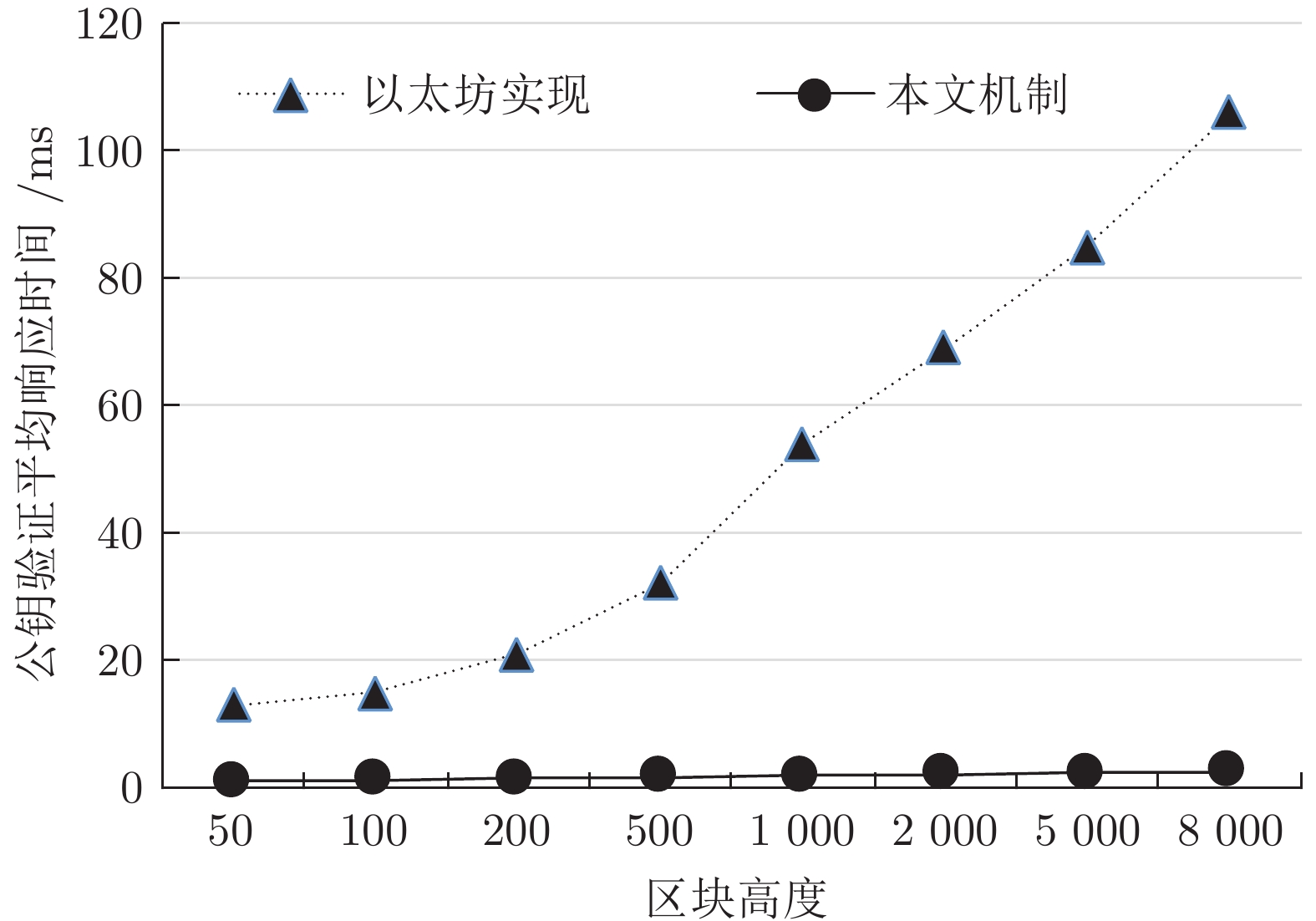
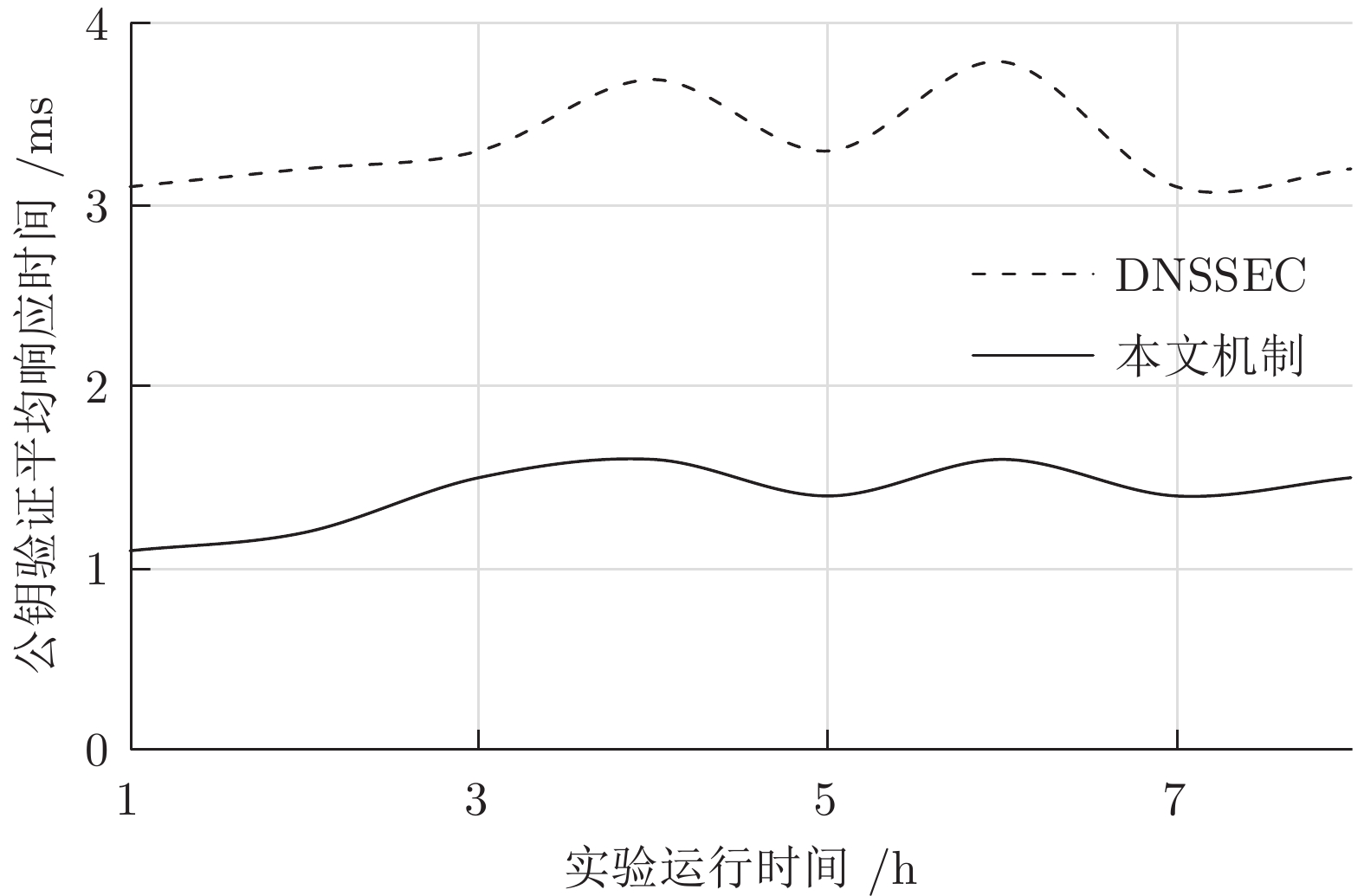
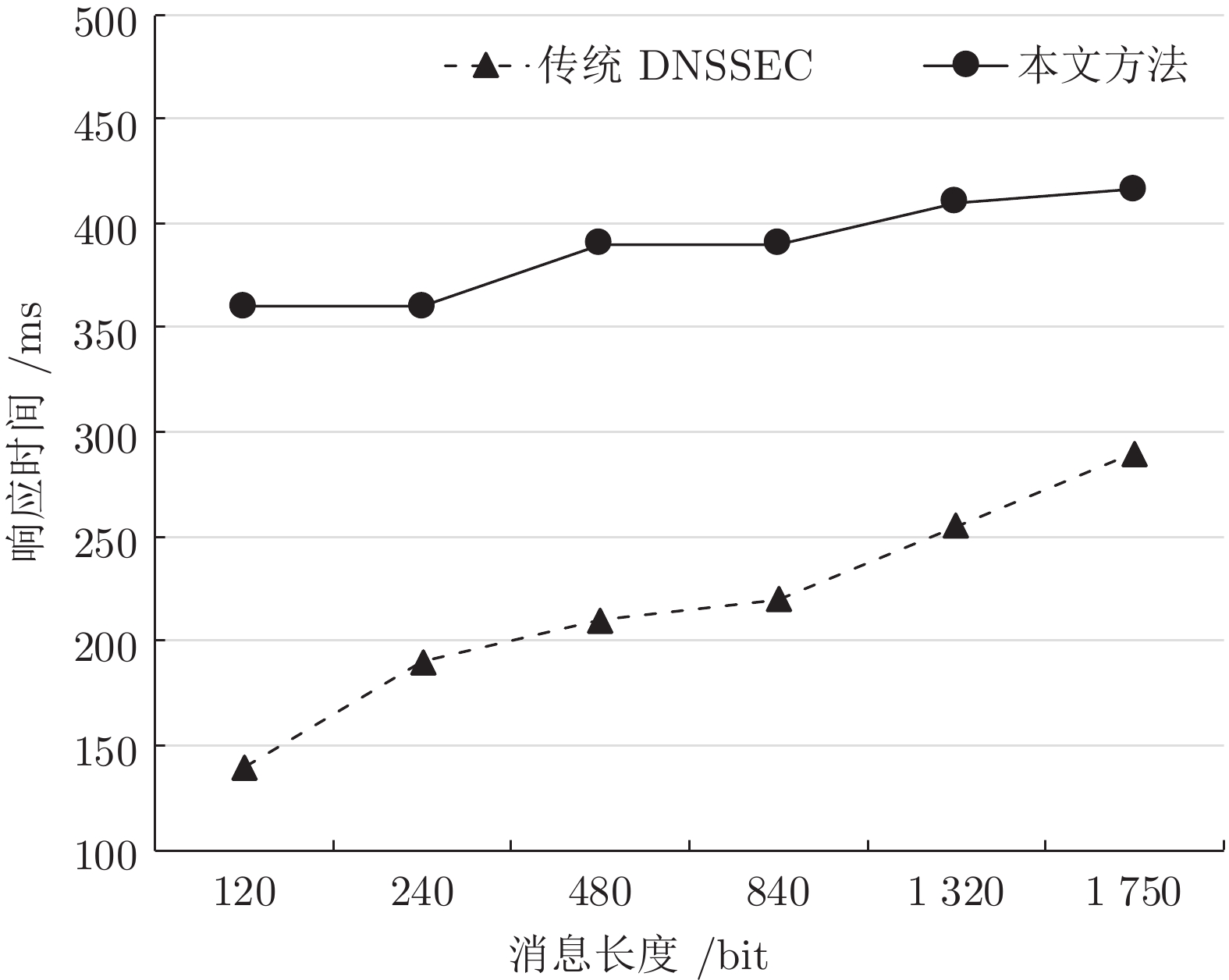
针对中心化域名安全扩展(Domain name system security extensions, DNSSEC)架构所导致的信任链复杂性和单边控制模式, 提出了一种去中心化的DNSSEC公钥验证机制. 该机制结合区块链结构、密码学累加器和共识算法设计, 创新性地实现使用区块链技术的密钥绑定、轮转和验证操作, 无需中心化权威节点即可使用可信公钥验证域名记录. 进一步分析和实验表明, 所提出的机制在保证密钥管理安全性的同时, 提高了密钥验证的效率.
针对中心化域名安全扩展(Domain name system security extensions, DNSSEC)架构所导致的信任链复杂性和单边控制模式, 提出了一种去中心化的DNSSEC公钥验证机制. 该机制结合区块链结构、密码学累加器和共识算法设计, 创新性地实现使用区块链技术的密钥绑定、轮转和验证操作, 无需中心化权威节点即可使用可信公钥验证域名记录. 进一步分析和实验表明, 所提出的机制在保证密钥管理安全性的同时, 提高了密钥验证的效率.


2023, 49(4): 744-753.
doi: 10.16383/j.aas.c200457
摘要:
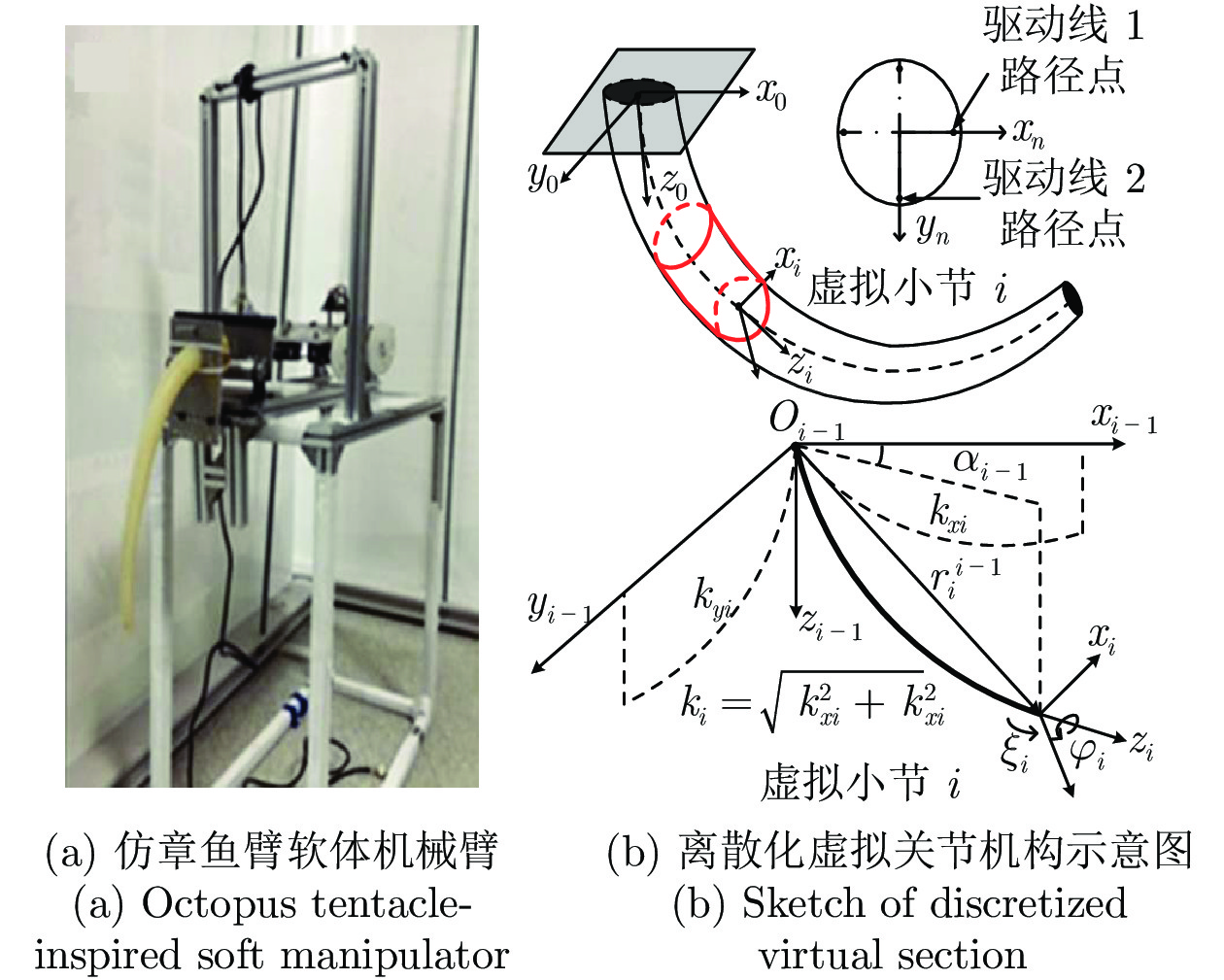
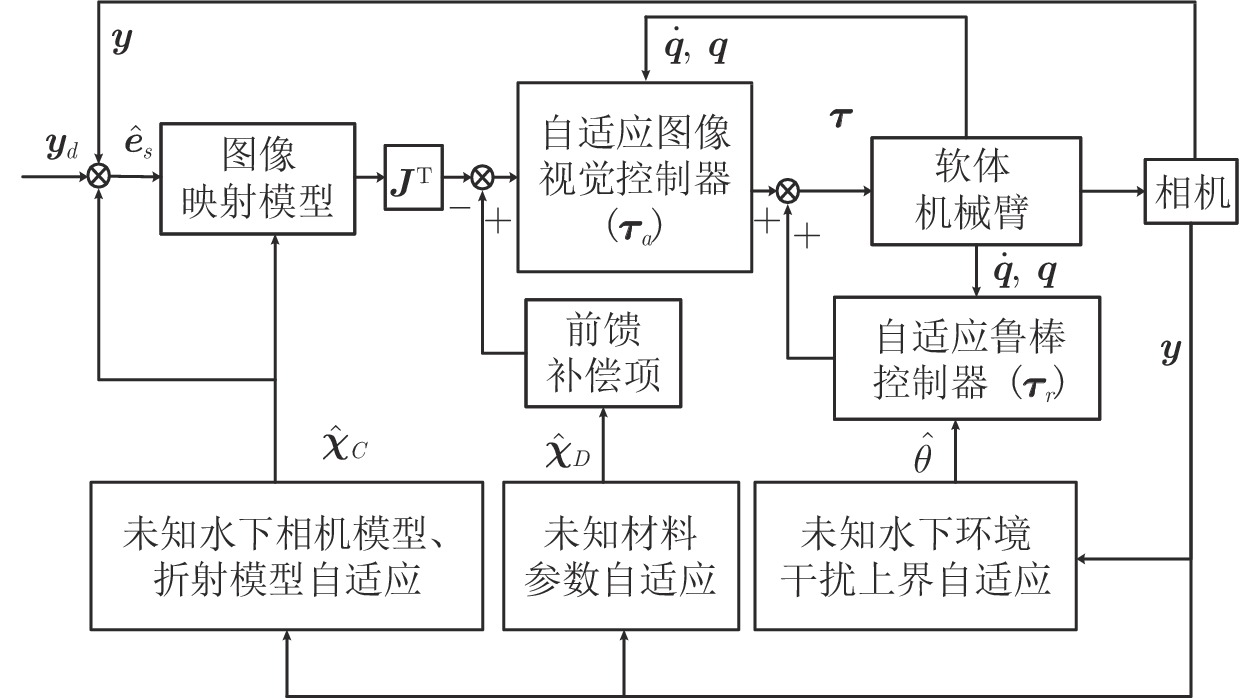
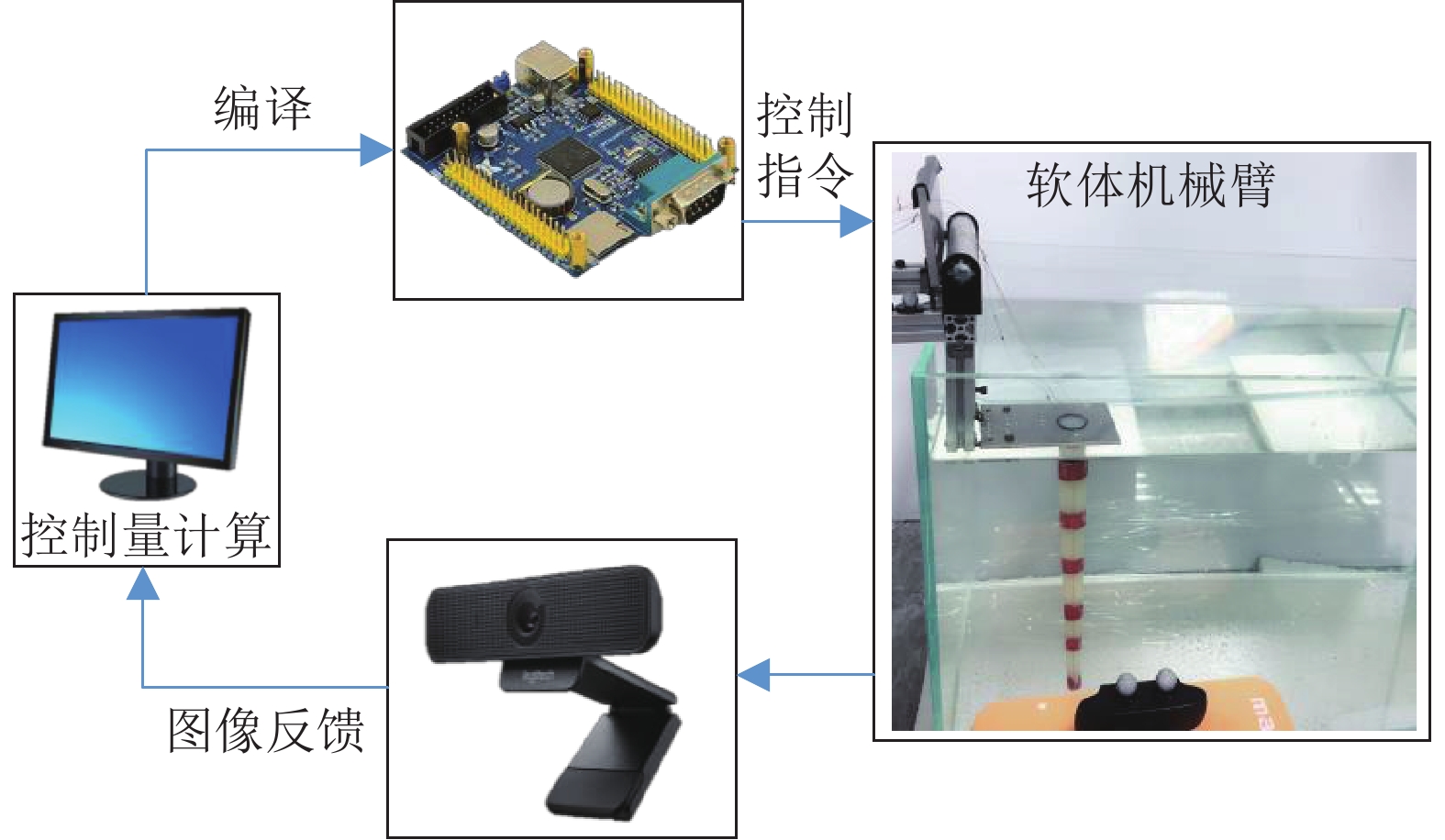
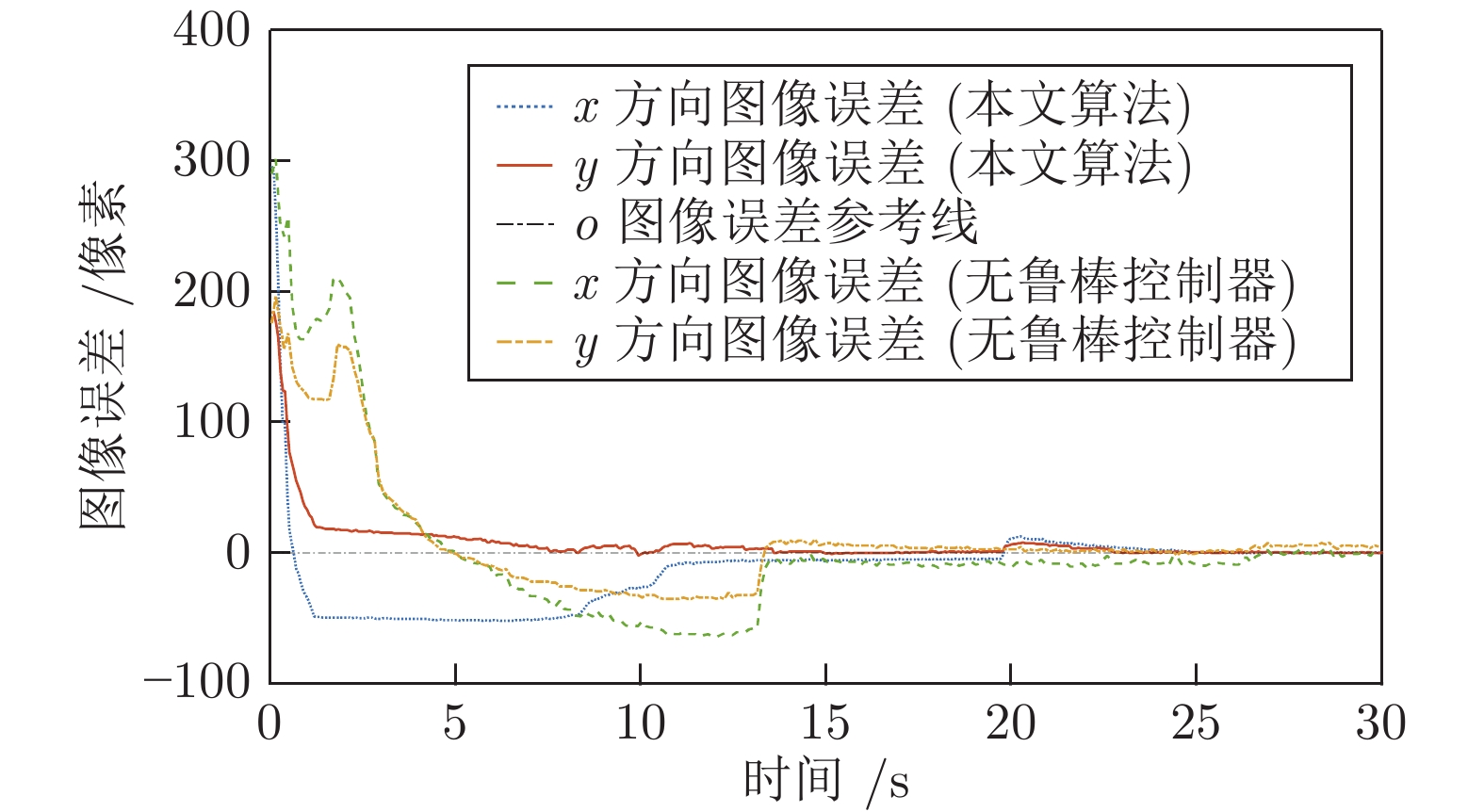
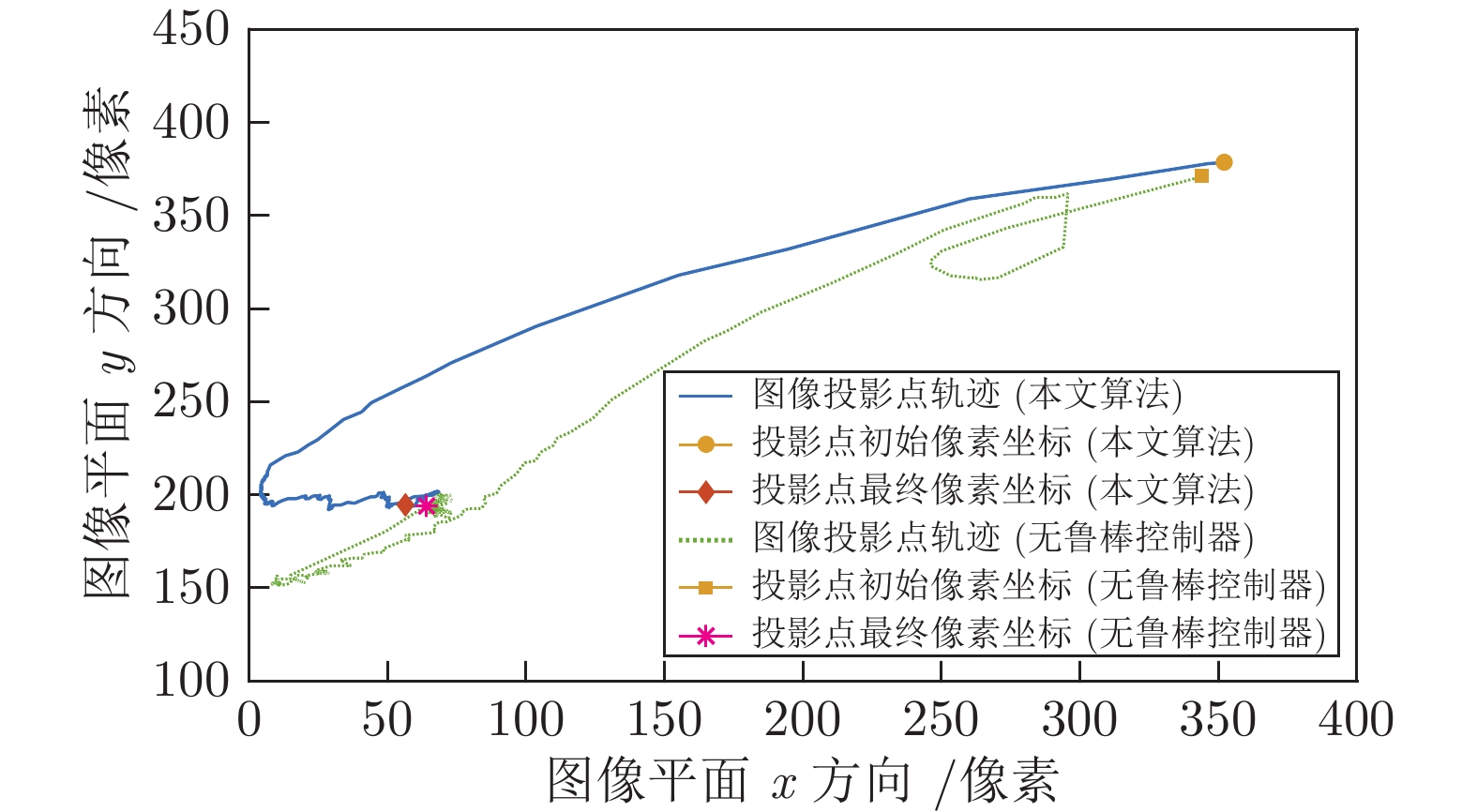
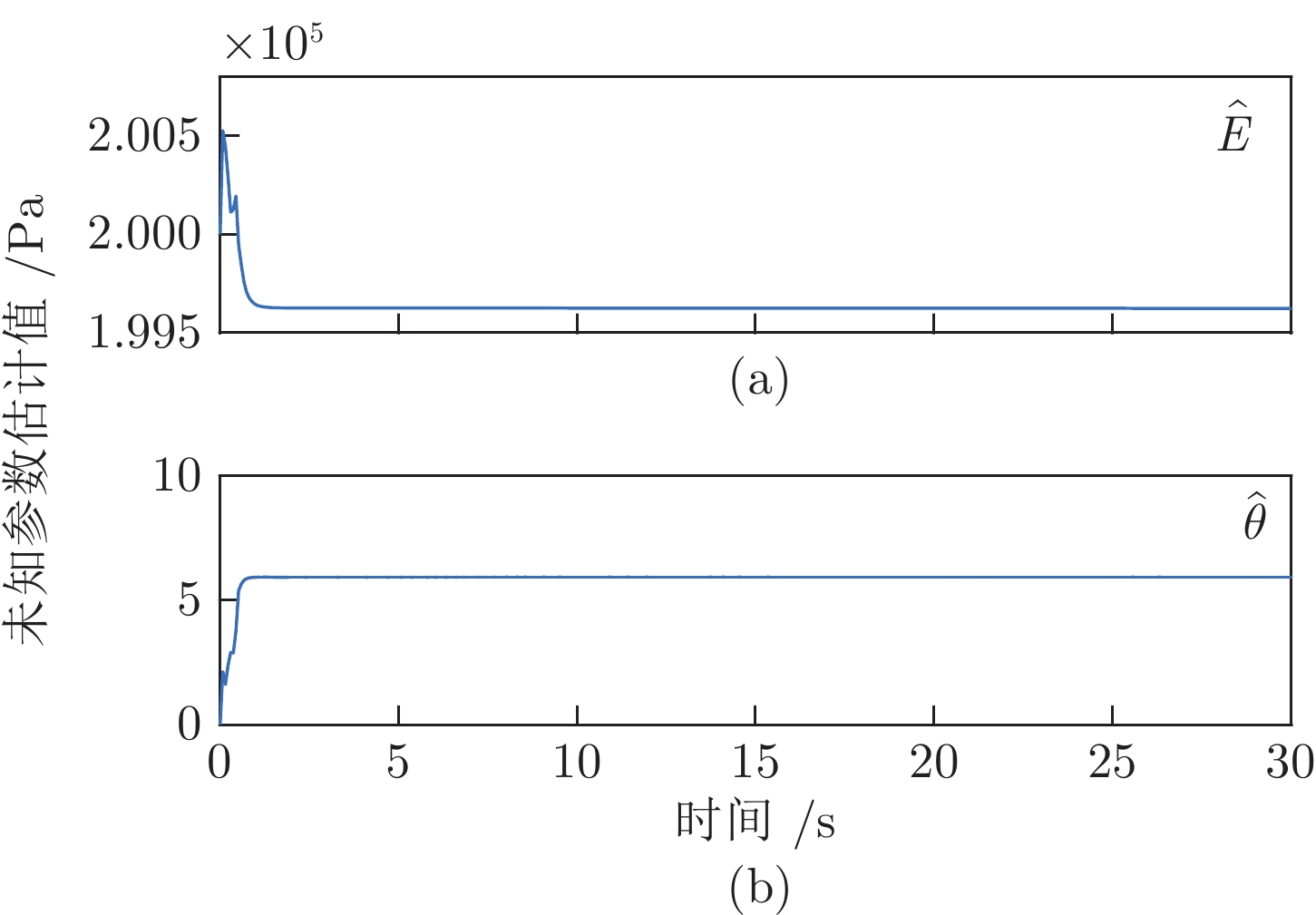
水下仿生软体机器人在水底环境勘测, 水下生物观测等方面具有极高的应用价值. 为进一步提升仿章鱼臂软体机器人在特殊水下环境中控制效果, 提出一种自适应鲁棒视觉伺服控制方法, 实现其在干扰无标定环境中的高精度镇定控制. 基于水底动力学模型, 设计保证动力学稳定的控制器; 针对柔性材料离线标定过程繁琐、成本高, 提出材料参数自适应估计算法; 针对水下特殊工作条件, 设计自适应鲁棒视觉伺服控制器, 实现折射效应的在线补偿, 并通过自适应未知环境干扰上界, 避免先验环境信息的求解. 所提算法在软体机器人样机中验证其镇定控制性能, 为仿生软体机器人的实际应用提供理论基础.
水下仿生软体机器人在水底环境勘测, 水下生物观测等方面具有极高的应用价值. 为进一步提升仿章鱼臂软体机器人在特殊水下环境中控制效果, 提出一种自适应鲁棒视觉伺服控制方法, 实现其在干扰无标定环境中的高精度镇定控制. 基于水底动力学模型, 设计保证动力学稳定的控制器; 针对柔性材料离线标定过程繁琐、成本高, 提出材料参数自适应估计算法; 针对水下特殊工作条件, 设计自适应鲁棒视觉伺服控制器, 实现折射效应的在线补偿, 并通过自适应未知环境干扰上界, 避免先验环境信息的求解. 所提算法在软体机器人样机中验证其镇定控制性能, 为仿生软体机器人的实际应用提供理论基础.



2023, 49(4): 754-768.
doi: 10.16383/j.aas.c220034
摘要:
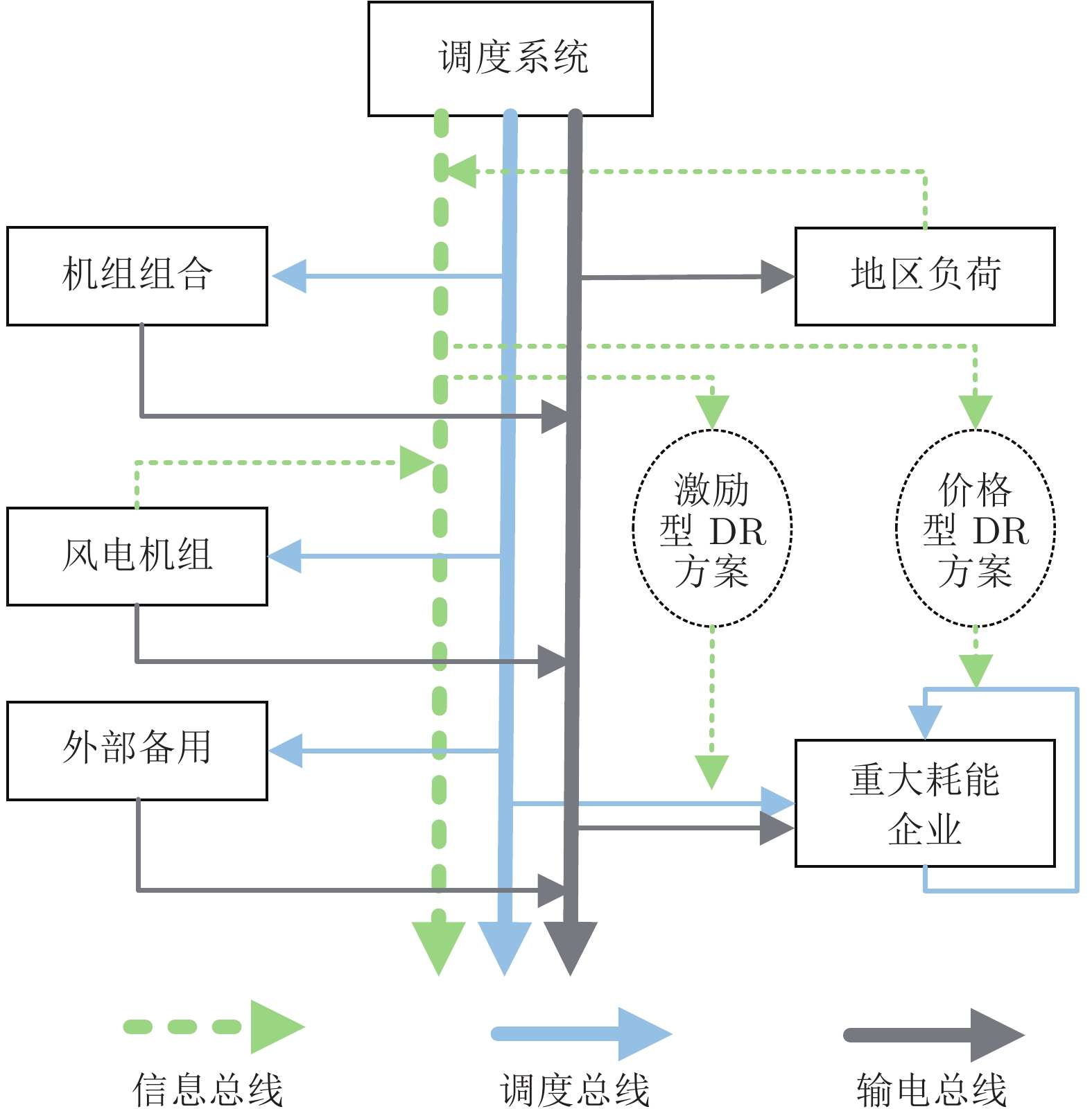
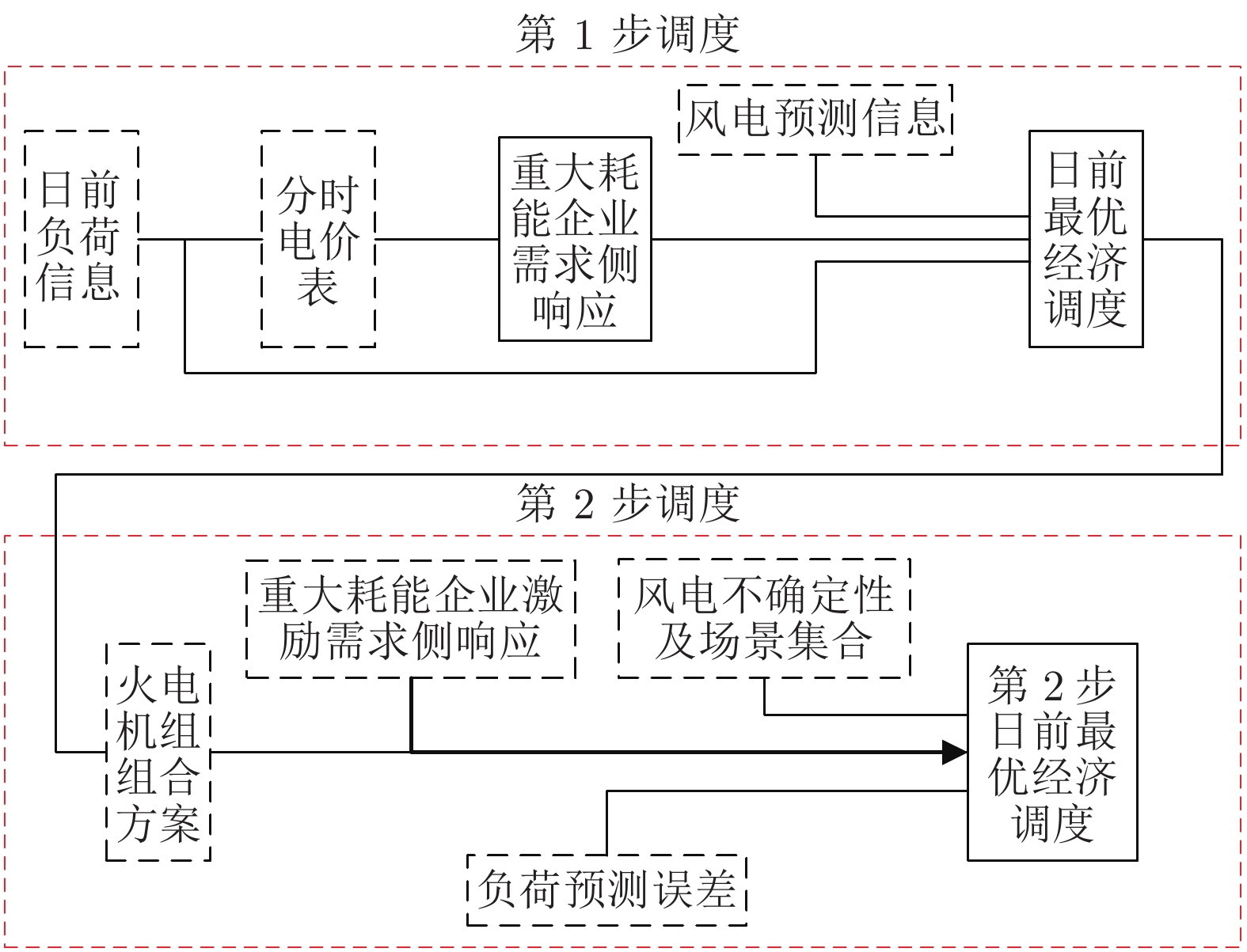
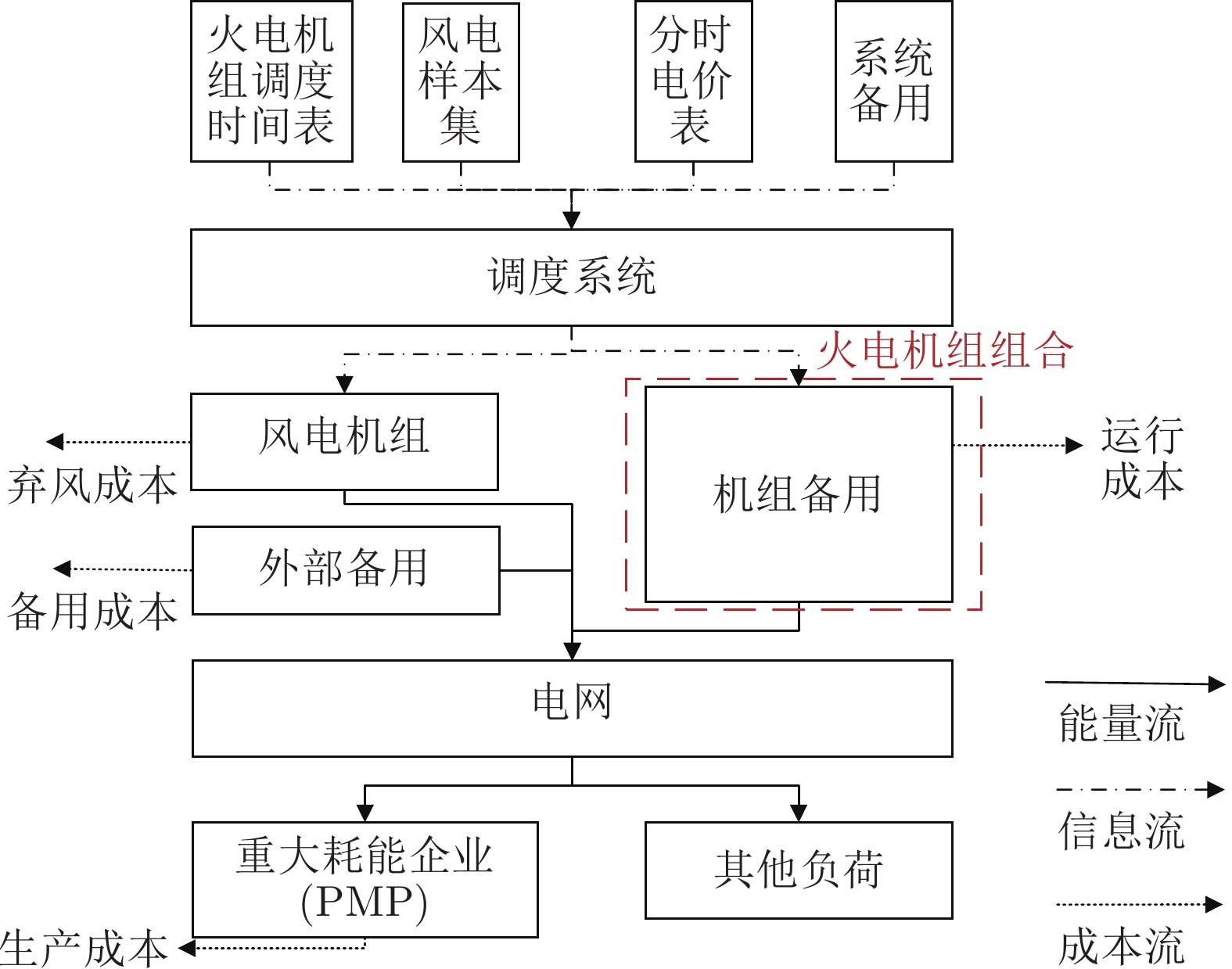
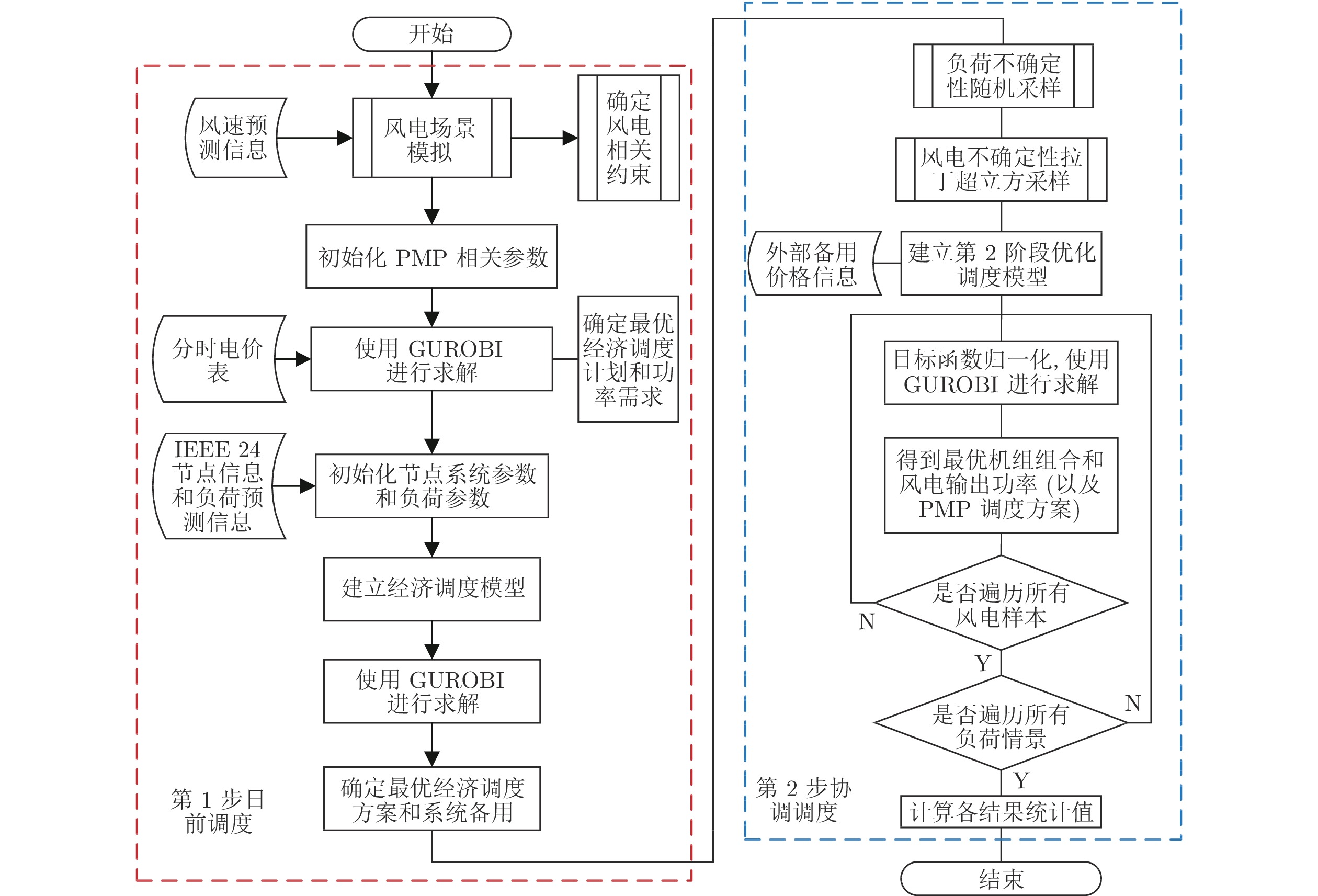
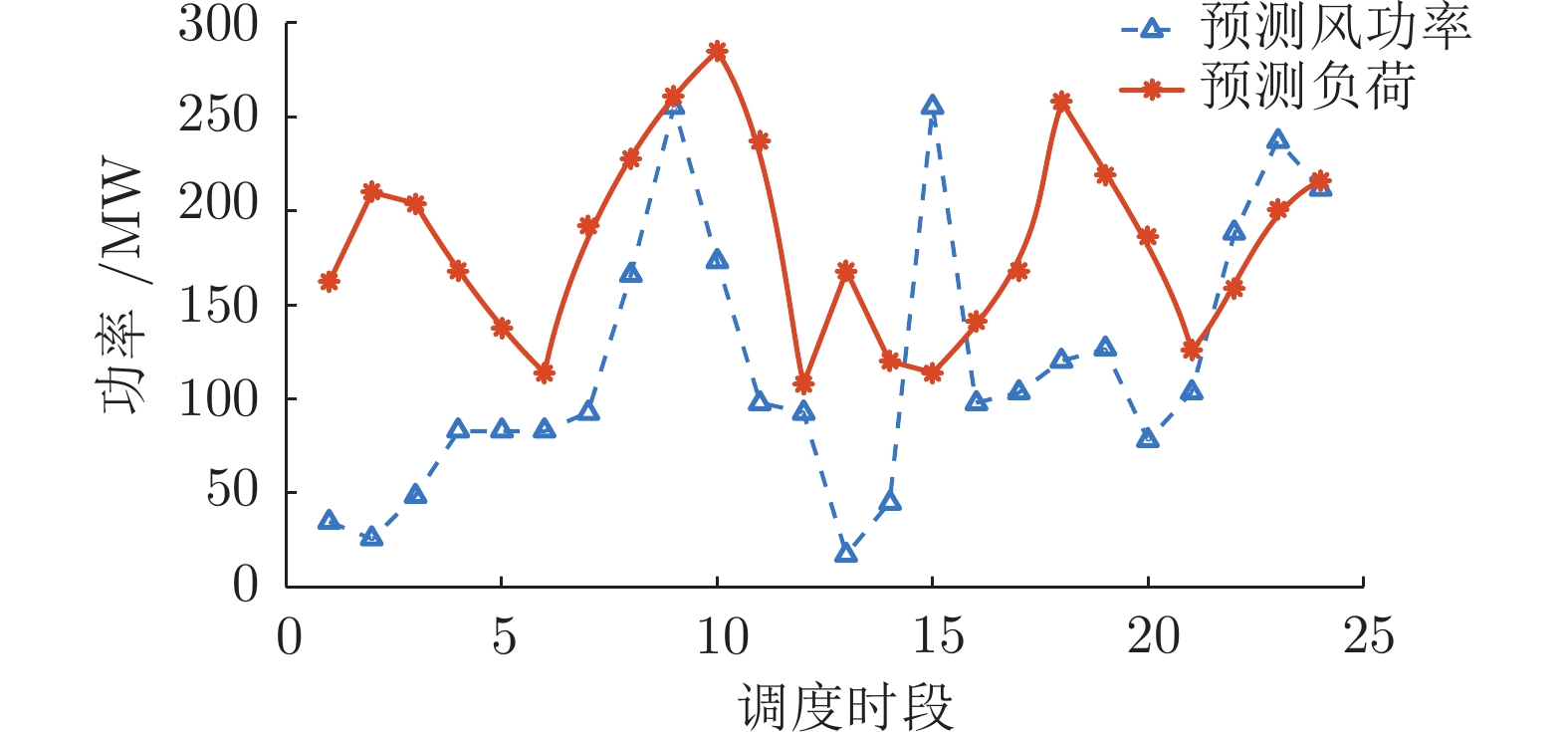
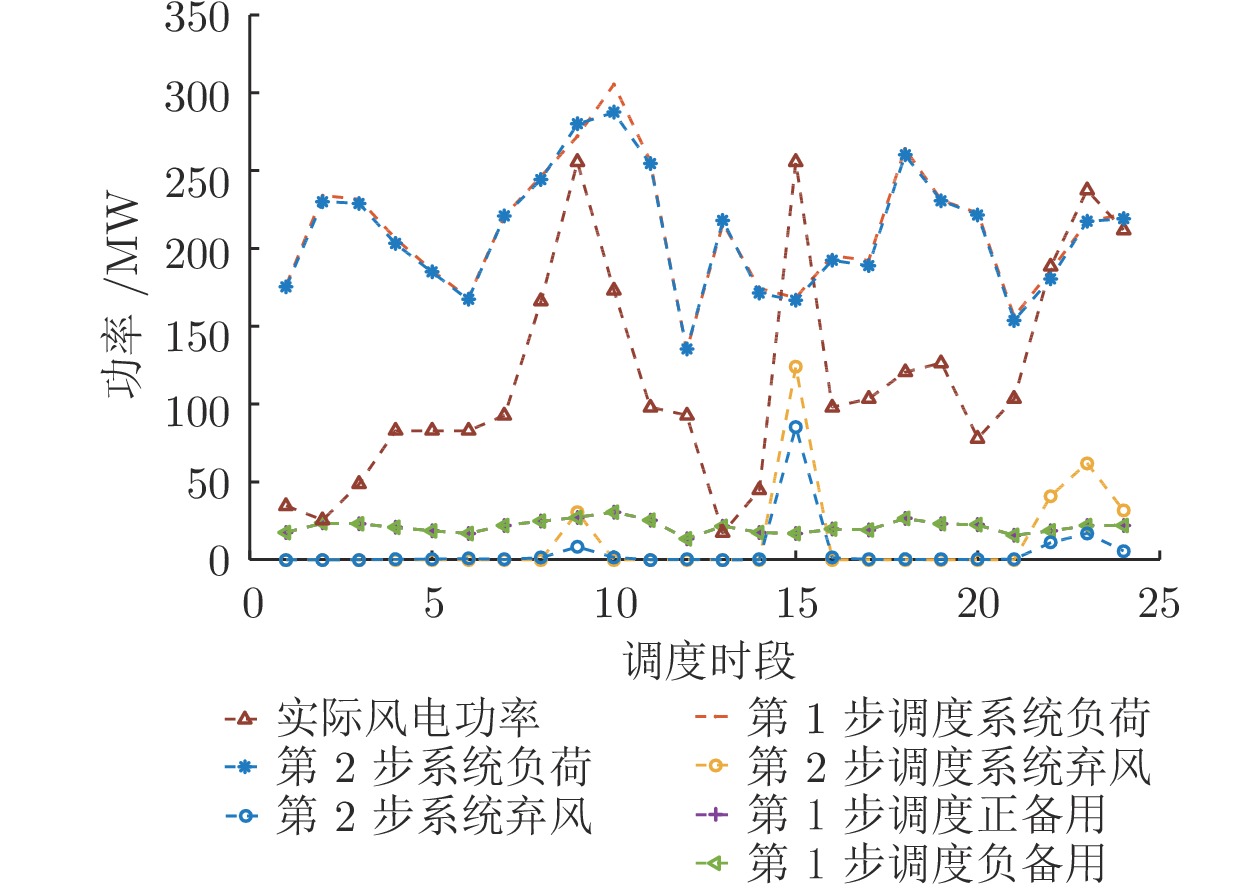
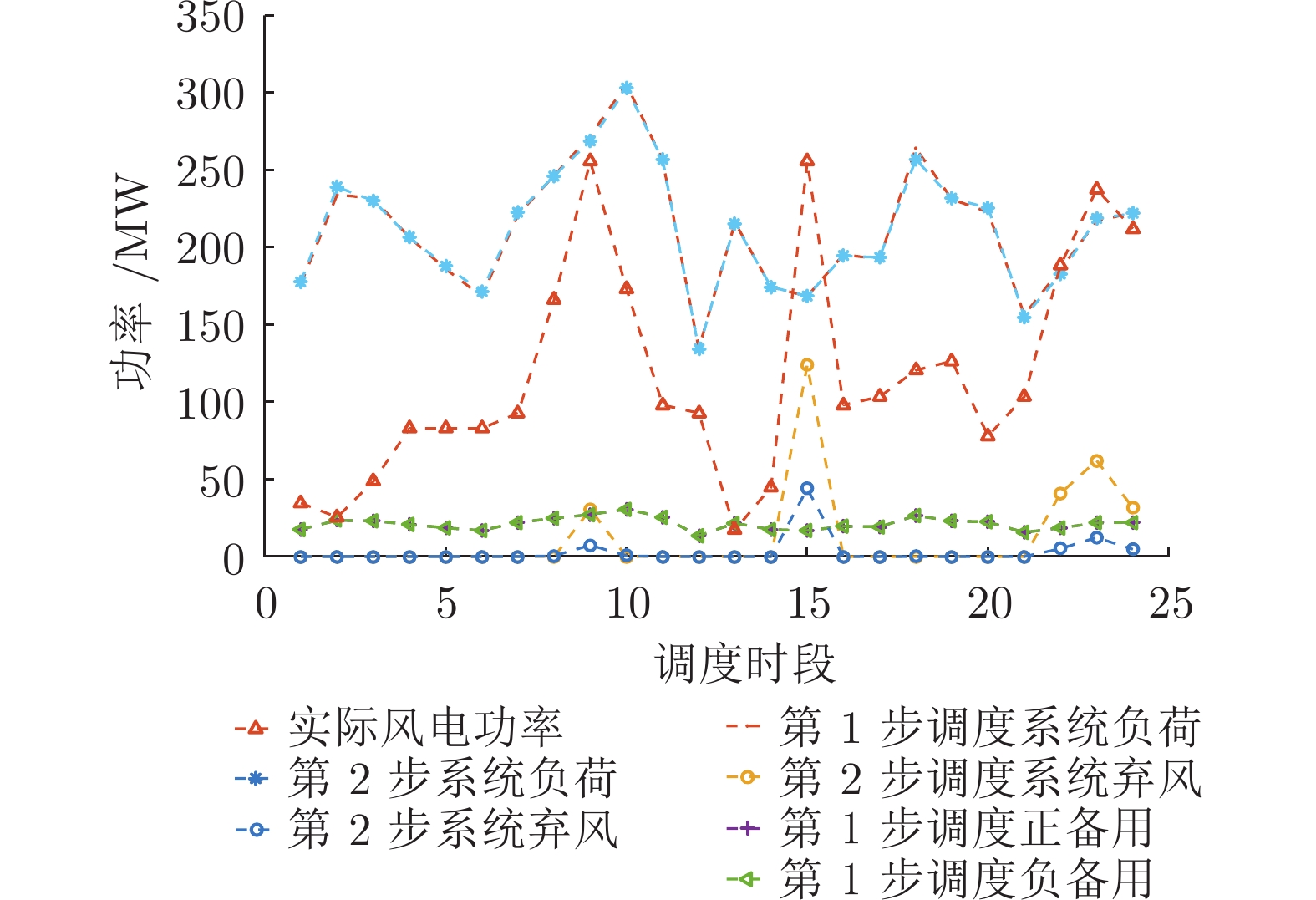
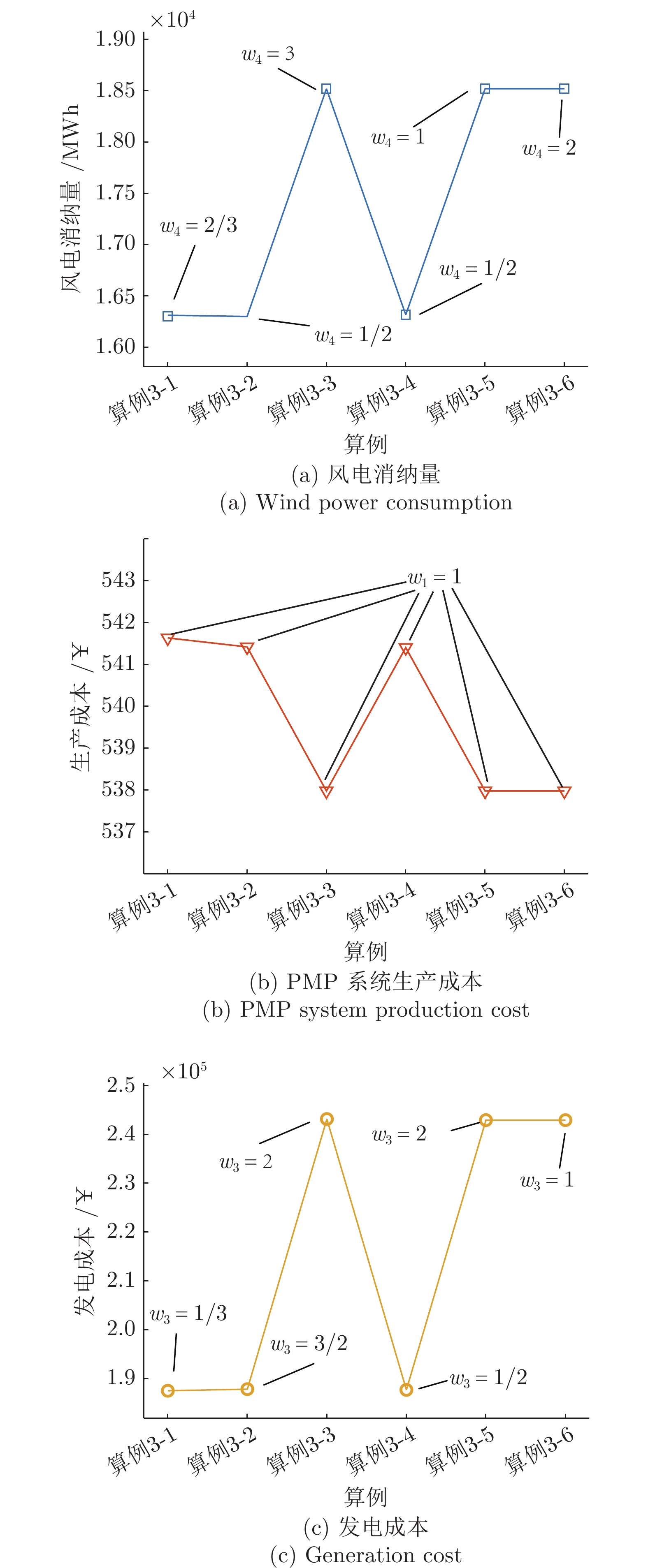
随着国家“双碳”重大战略的提出, 高比例新能源并网将成为我国电力能源转型的重要态势. 针对火电机组、配电网和需求侧关联的系列运行约束制约了电网对高比例新能源的有效消纳这一问题, 本文提出重大耗能企业这一主要电力负荷参与网需求响应(Demand response, DR)的研究思路, 通过重大耗能企业与电网协调调度促进新能源消纳, 并获得经济补偿以减少运行成本. 研究首先基于混合需求侧响应机制, 提出以重大耗能企业、新能源、火电机组为核心的协调调度方法, 并根据新能源预测值−预测误差的信息依存顺序提出了两步调度策略. 在此基础上, 进行生产过程行为建模以实现重大耗能企业需求侧响应决策描述, 并建立高比例新能源并网的重大耗能企业需求响应与电网协调调度优化模型. 最后, 基于烟台电网实际系统进行算例分析, 验证了重大耗能企业通过需求响应参与电网协调调度以及两步调度策略的有效性.
随着国家“双碳”重大战略的提出, 高比例新能源并网将成为我国电力能源转型的重要态势. 针对火电机组、配电网和需求侧关联的系列运行约束制约了电网对高比例新能源的有效消纳这一问题, 本文提出重大耗能企业这一主要电力负荷参与网需求响应(Demand response, DR)的研究思路, 通过重大耗能企业与电网协调调度促进新能源消纳, 并获得经济补偿以减少运行成本. 研究首先基于混合需求侧响应机制, 提出以重大耗能企业、新能源、火电机组为核心的协调调度方法, 并根据新能源预测值−预测误差的信息依存顺序提出了两步调度策略. 在此基础上, 进行生产过程行为建模以实现重大耗能企业需求侧响应决策描述, 并建立高比例新能源并网的重大耗能企业需求响应与电网协调调度优化模型. 最后, 基于烟台电网实际系统进行算例分析, 验证了重大耗能企业通过需求响应参与电网协调调度以及两步调度策略的有效性.




2023, 49(4): 769-777.
doi: 10.16383/j.aas.c200217
摘要:
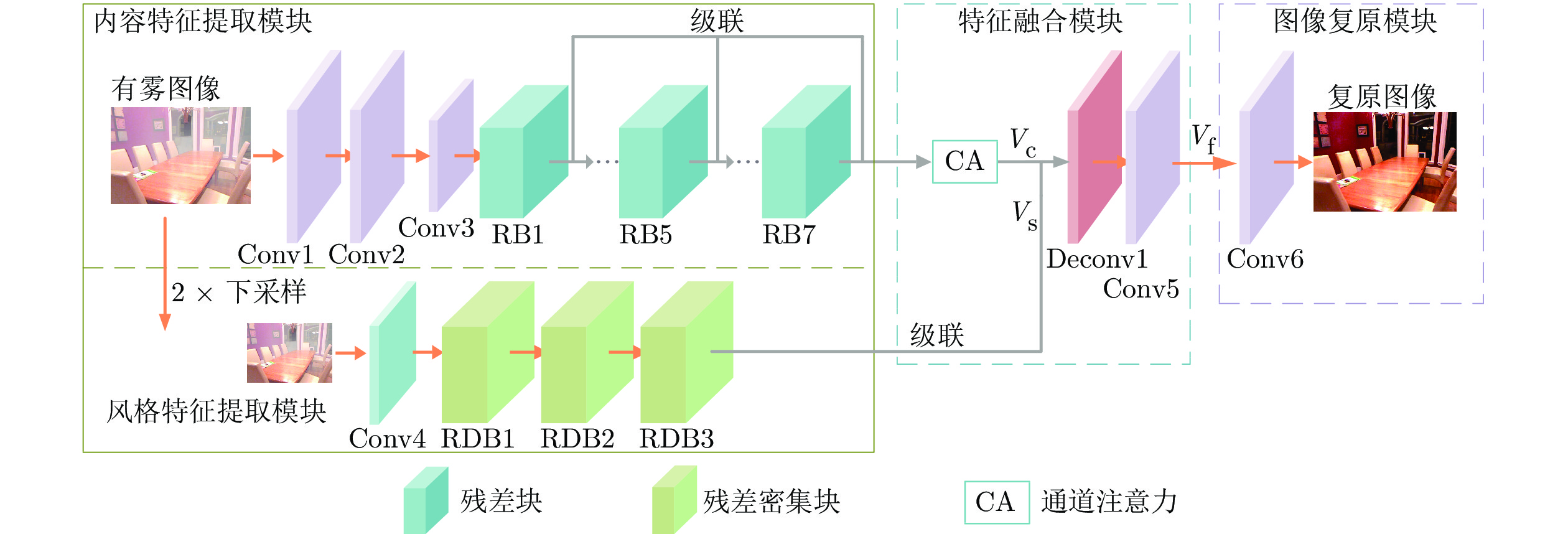
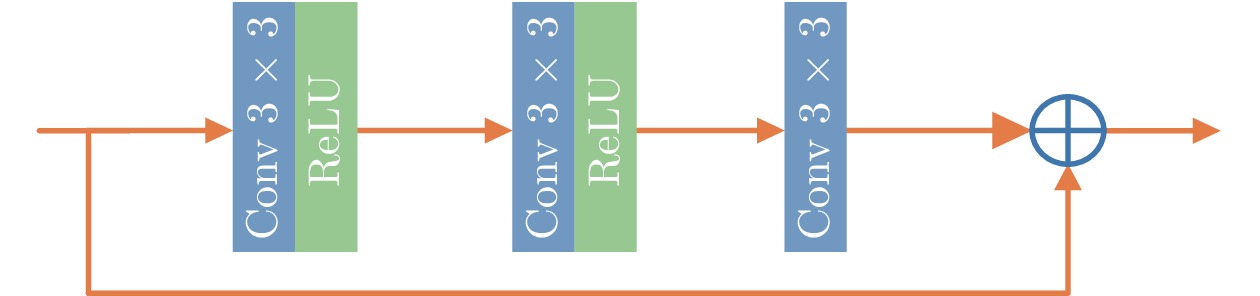
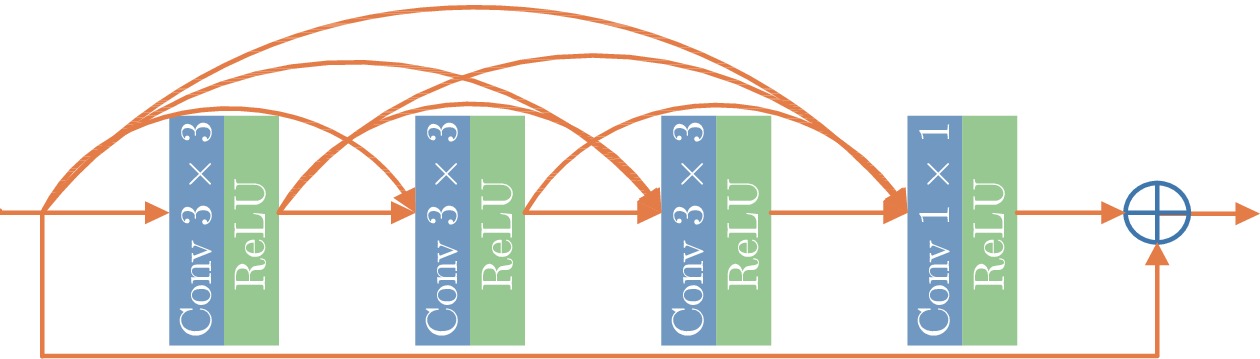
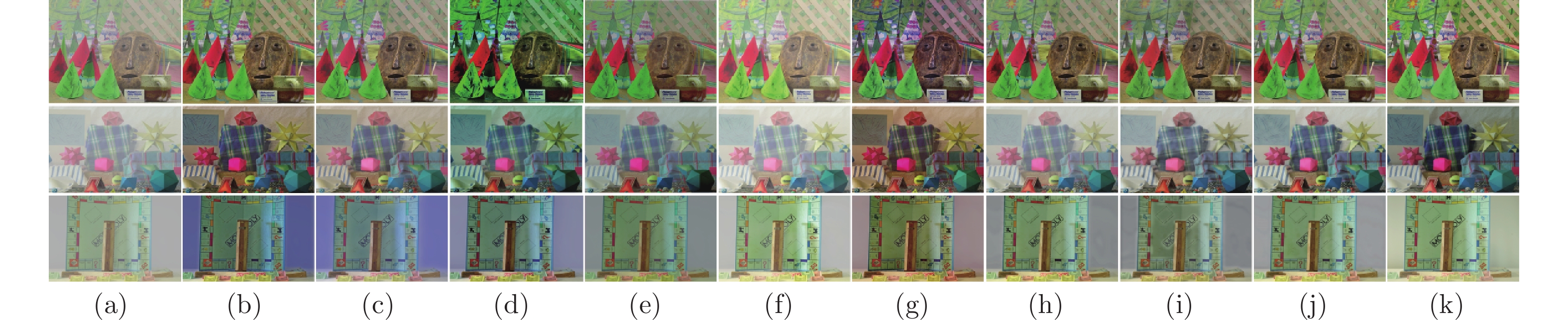
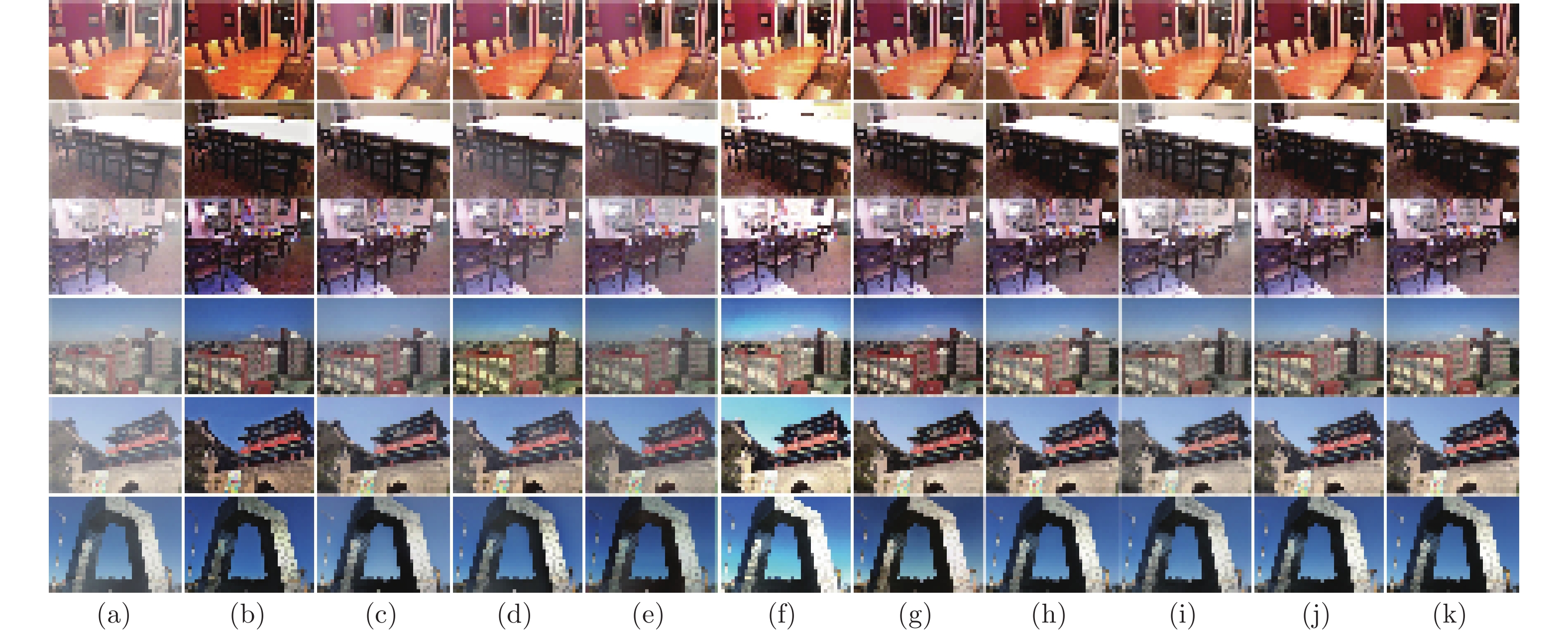
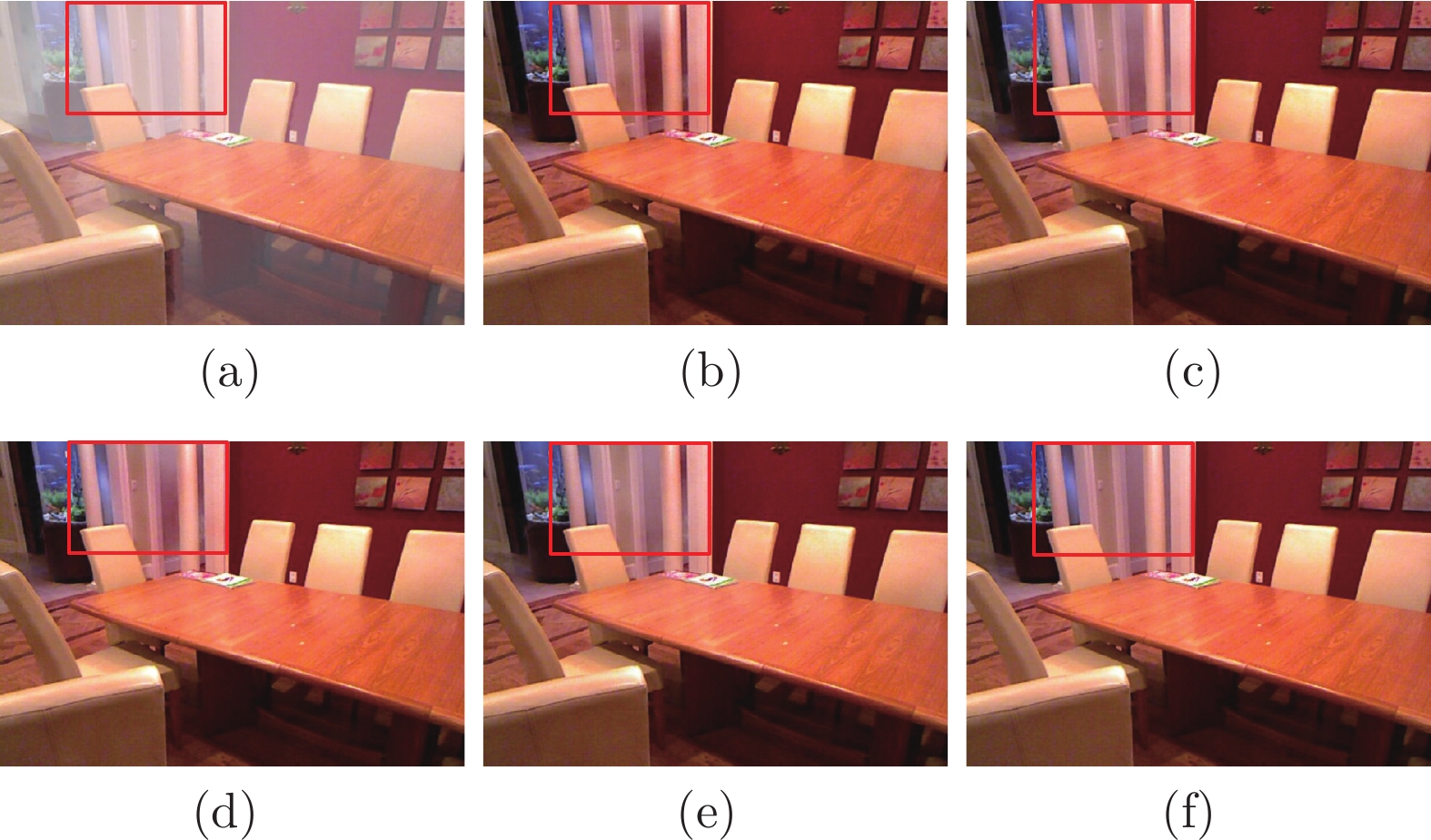
基于深度学习的方法在去雾领域已经取得了很大进展, 但仍然存在去雾不彻底和颜色失真等问题. 针对这些问题, 本文提出一种基于内容特征和风格特征相融合的单幅图像去雾网络. 所提网络包括特征提取、特征融合和图像复原三个子网络, 其中特征提取网络包括内容特征提取模块和风格特征提取模块, 分别用于学习图像内容和图像风格以实现去雾的同时可较好地保持原始图像的色彩特征. 在特征融合子网络中, 引入注意力机制对内容特征提取模块输出的特征图进行通道加权实现对图像主要特征的学习, 并将加权后的内容特征图与风格特征图通过卷积操作相融合. 最后, 图像复原模块对融合后的特征图进行非线性映射得到去雾图像. 与已有方法相比, 所提网络对合成图像和真实图像均可取得理想的去雾结果, 同时可有效避免去雾后的颜色失真问题.
基于深度学习的方法在去雾领域已经取得了很大进展, 但仍然存在去雾不彻底和颜色失真等问题. 针对这些问题, 本文提出一种基于内容特征和风格特征相融合的单幅图像去雾网络. 所提网络包括特征提取、特征融合和图像复原三个子网络, 其中特征提取网络包括内容特征提取模块和风格特征提取模块, 分别用于学习图像内容和图像风格以实现去雾的同时可较好地保持原始图像的色彩特征. 在特征融合子网络中, 引入注意力机制对内容特征提取模块输出的特征图进行通道加权实现对图像主要特征的学习, 并将加权后的内容特征图与风格特征图通过卷积操作相融合. 最后, 图像复原模块对融合后的特征图进行非线性映射得到去雾图像. 与已有方法相比, 所提网络对合成图像和真实图像均可取得理想的去雾结果, 同时可有效避免去雾后的颜色失真问题.


2023, 49(4): 778-789.
doi: 10.16383/j.aas.c200144
摘要:
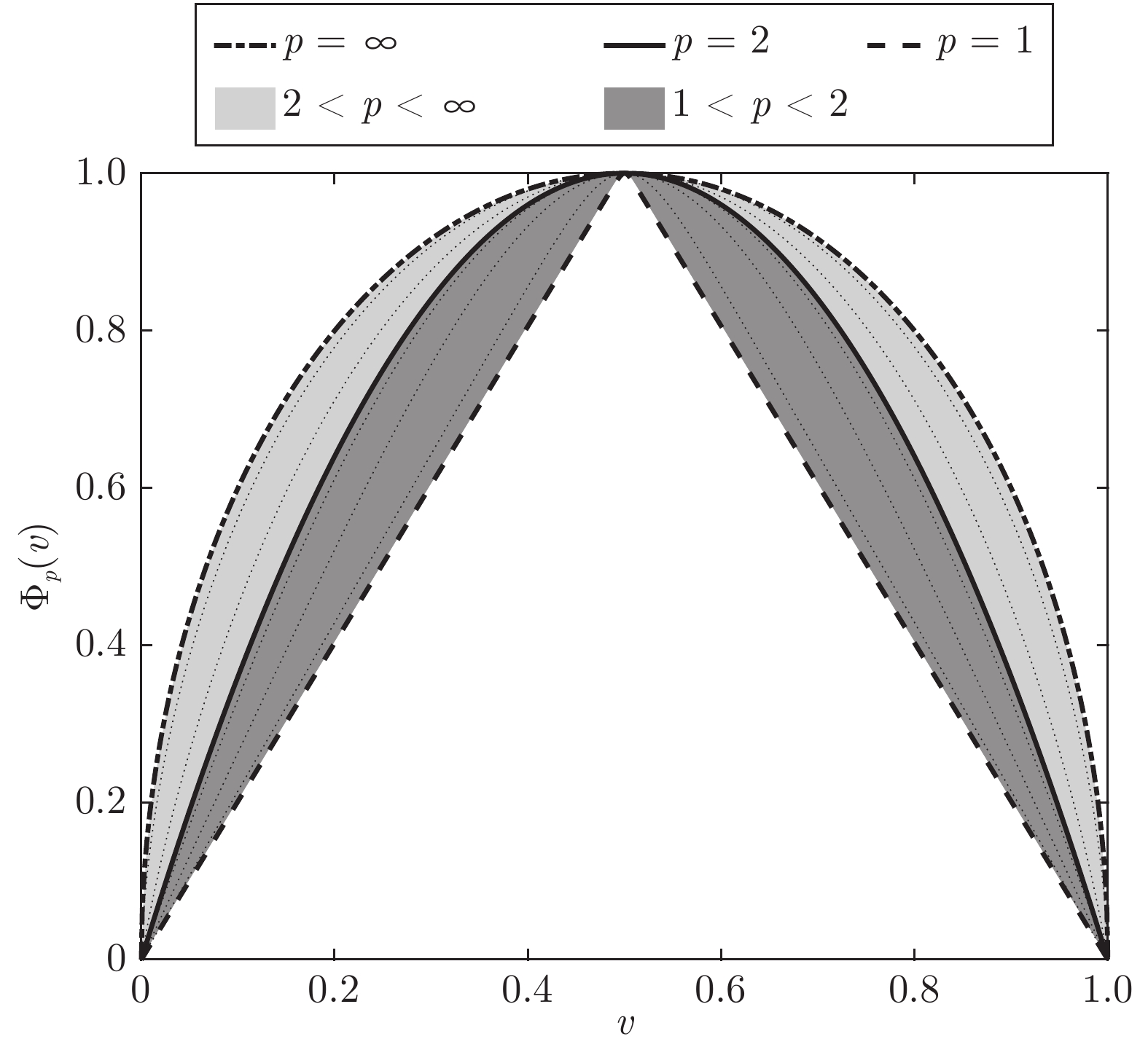
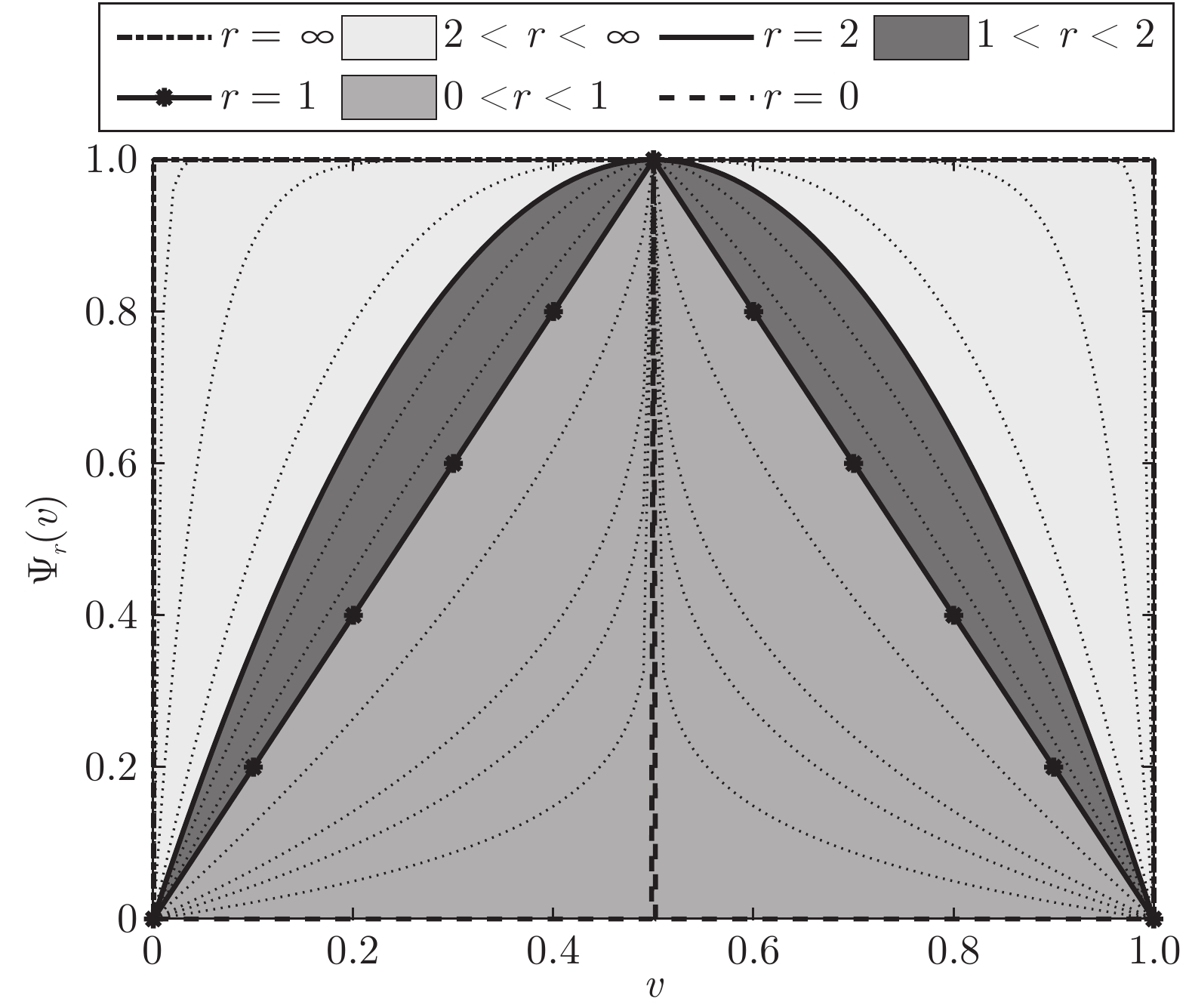
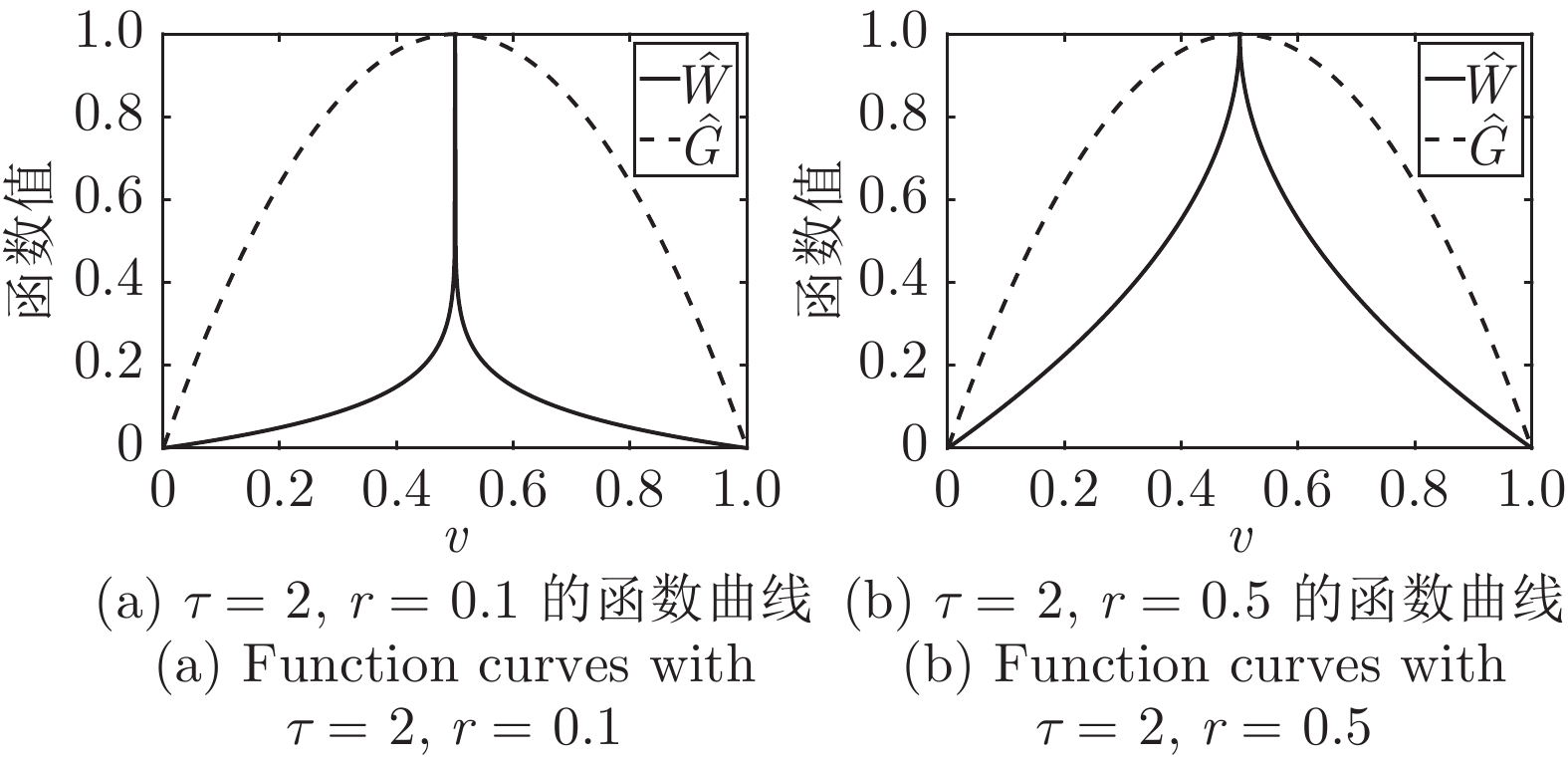
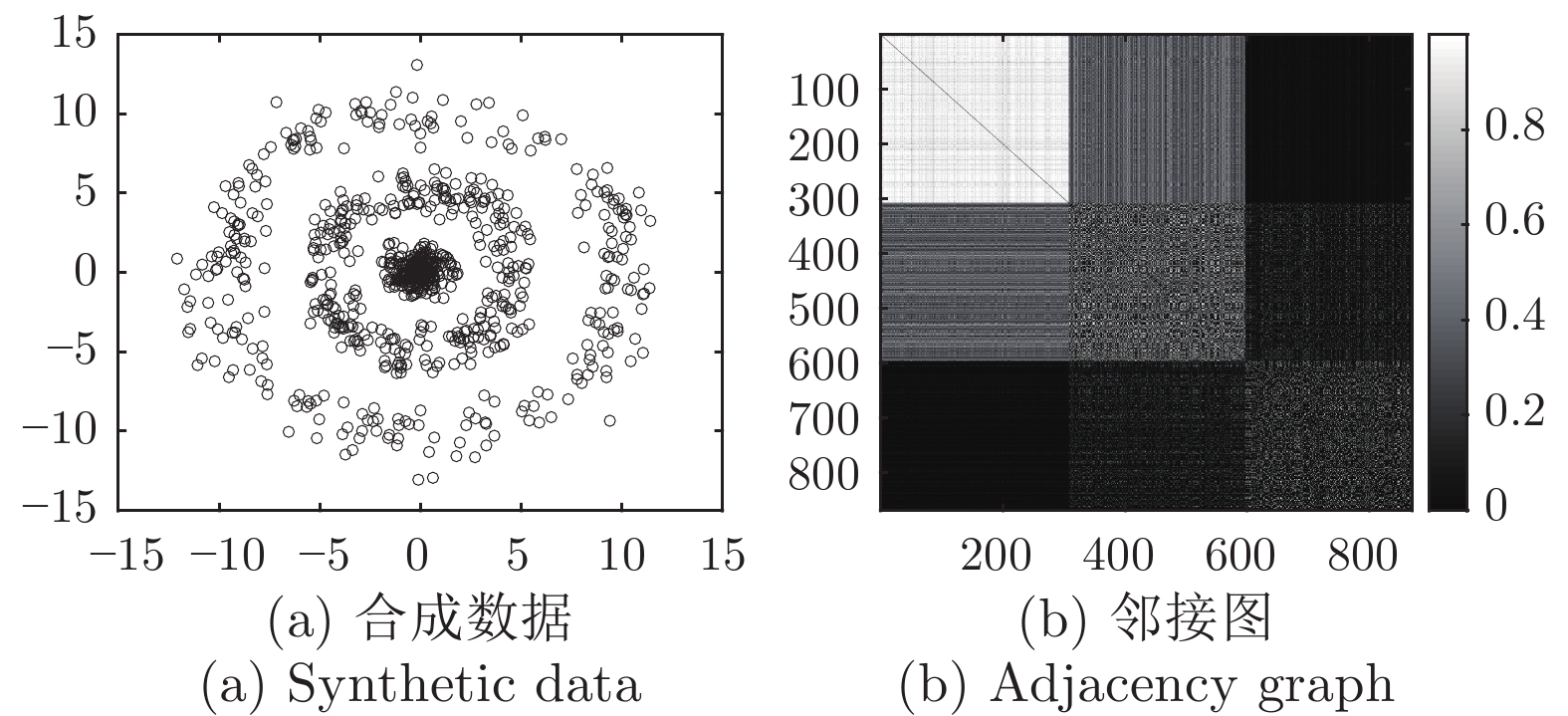
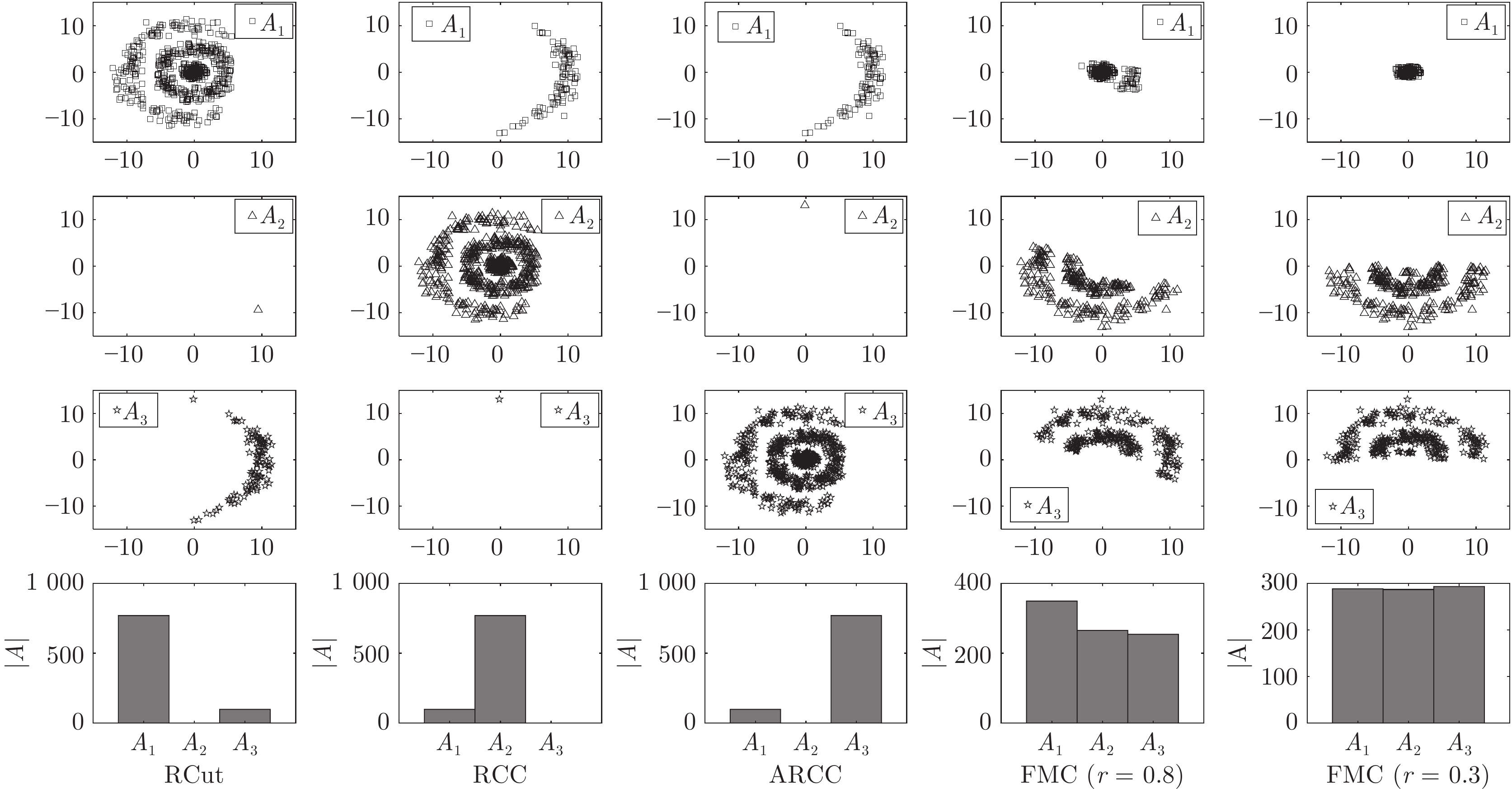
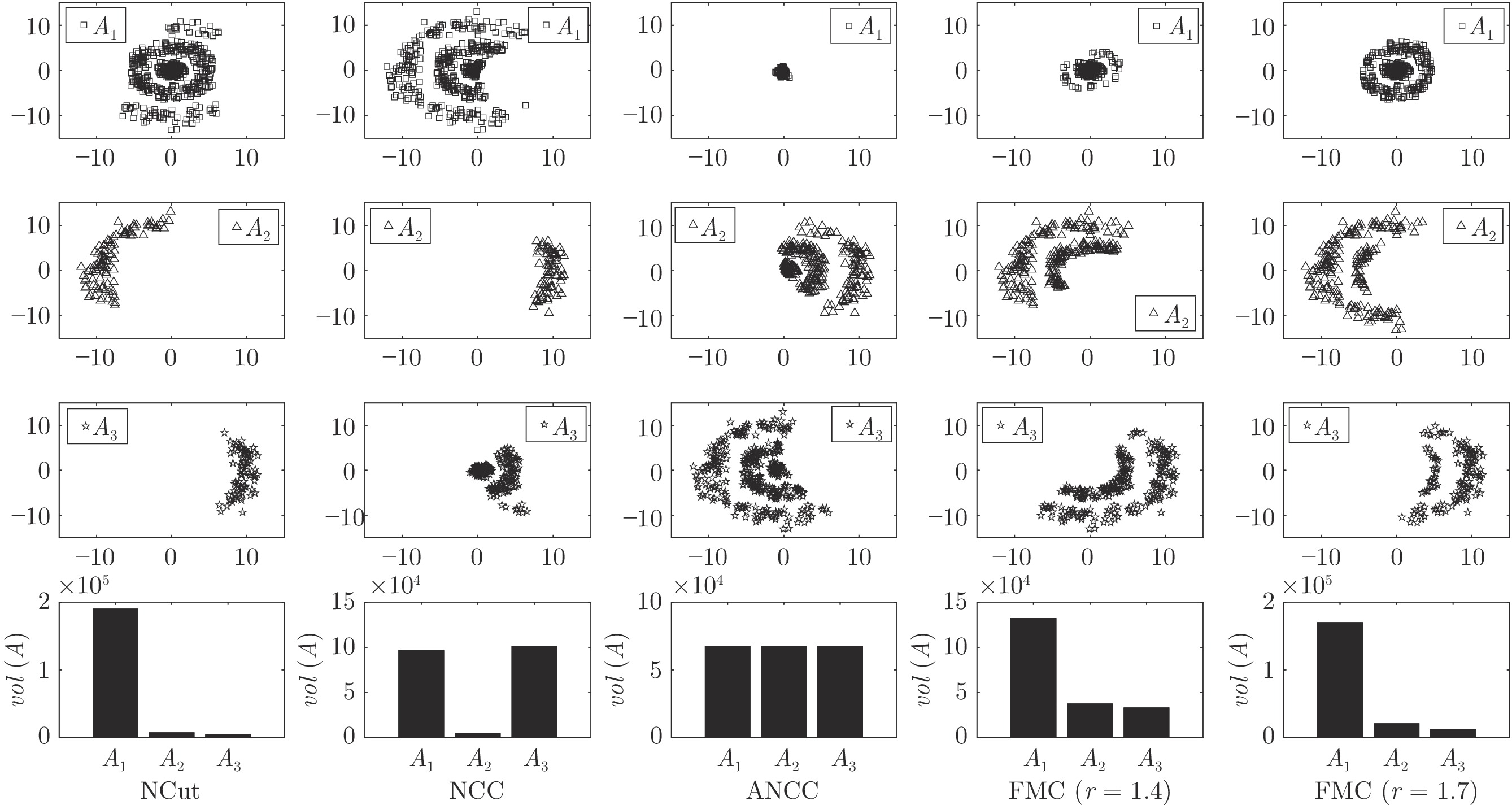
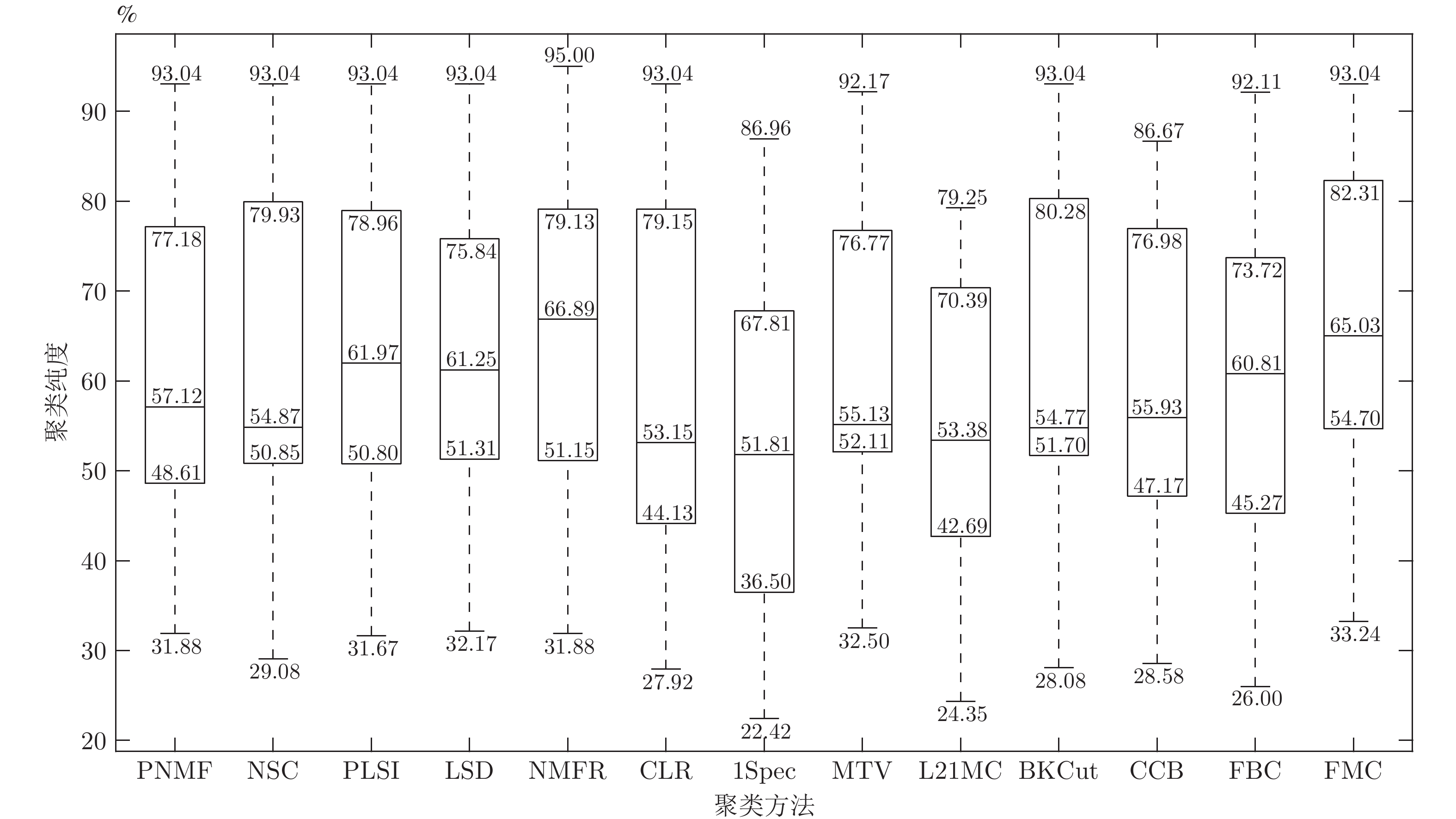
现有的图聚类方法主要存在两方面的问题, 一是对各个类规模一致的假设, 在许多实际应用中并不成立; 二是在处理多类聚类问题时, 其所常借助的递归技术或启发式算法会影响聚类的性能. 为此, 本文提出一种基于灵活平衡约束的多类图聚类方法. 其能够覆盖从绝对平衡约束到无平衡约束的范围, 可同时处理类别规模一致和不一致的问题. 为有效求解新方法中的参数, 进一步提出一个紧松弛方法来使所提出的图聚类方法不仅易于求解, 且在处理多类聚类问题时不必依赖递归技术, 而能直接得到聚类结果. 另外, 本文还给出一种实现松弛图聚类的有效求解算法. 在合成数据和真实数据上的实验结果表明, 所提出的方法具有良好的性能.
现有的图聚类方法主要存在两方面的问题, 一是对各个类规模一致的假设, 在许多实际应用中并不成立; 二是在处理多类聚类问题时, 其所常借助的递归技术或启发式算法会影响聚类的性能. 为此, 本文提出一种基于灵活平衡约束的多类图聚类方法. 其能够覆盖从绝对平衡约束到无平衡约束的范围, 可同时处理类别规模一致和不一致的问题. 为有效求解新方法中的参数, 进一步提出一个紧松弛方法来使所提出的图聚类方法不仅易于求解, 且在处理多类聚类问题时不必依赖递归技术, 而能直接得到聚类结果. 另外, 本文还给出一种实现松弛图聚类的有效求解算法. 在合成数据和真实数据上的实验结果表明, 所提出的方法具有良好的性能.
2023, 49(4): 790-804.
doi: 10.16383/j.aas.c210302
摘要:
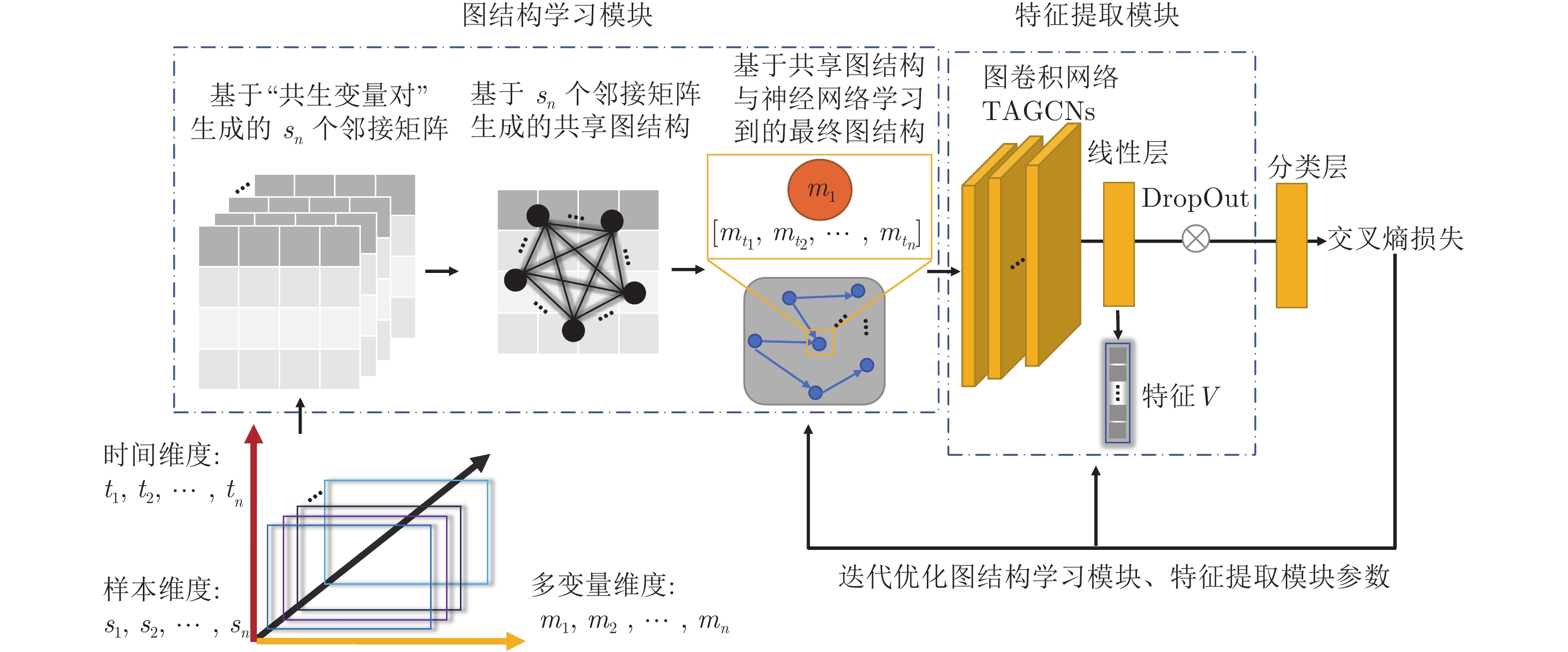
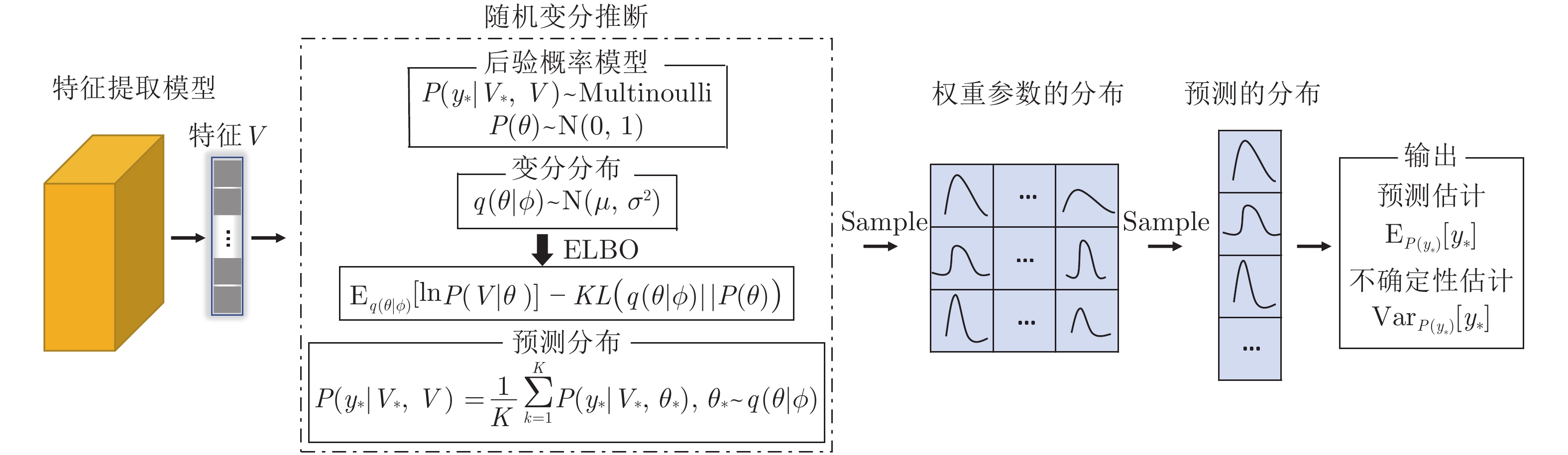
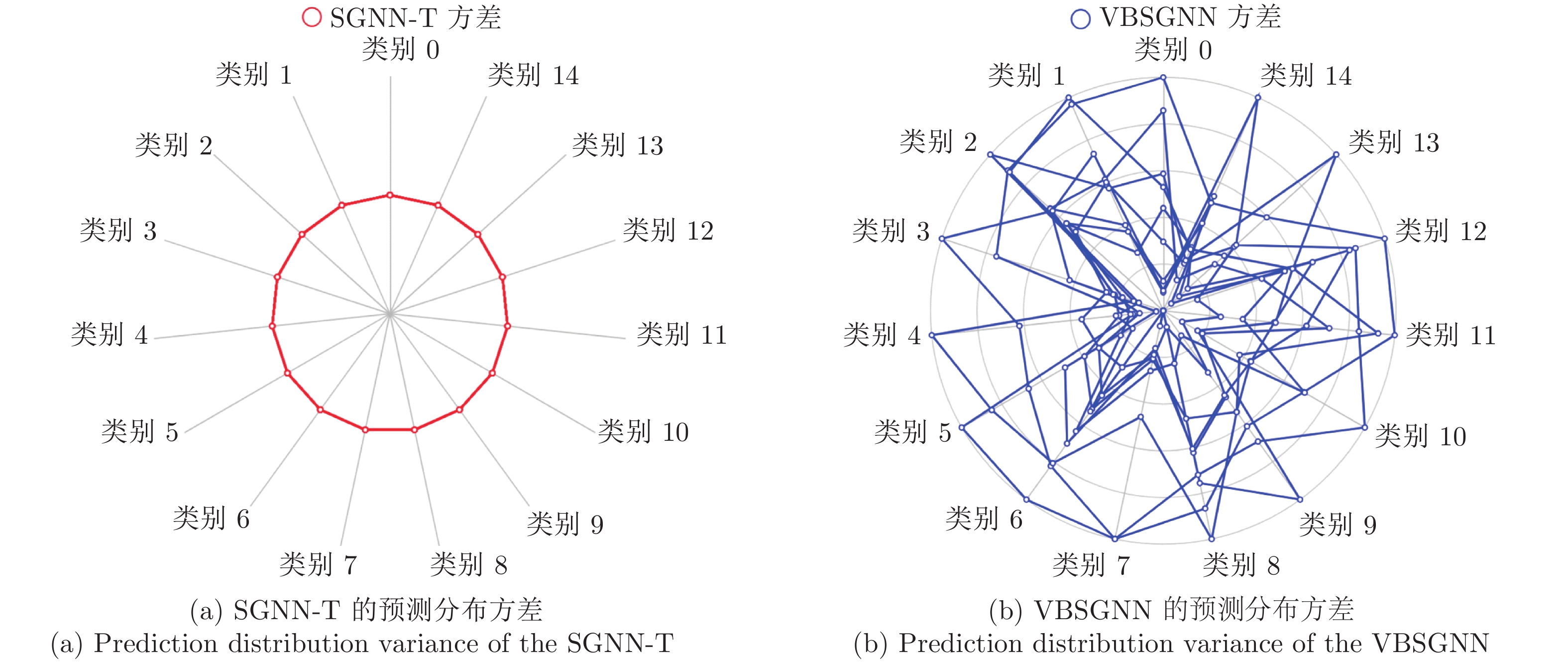
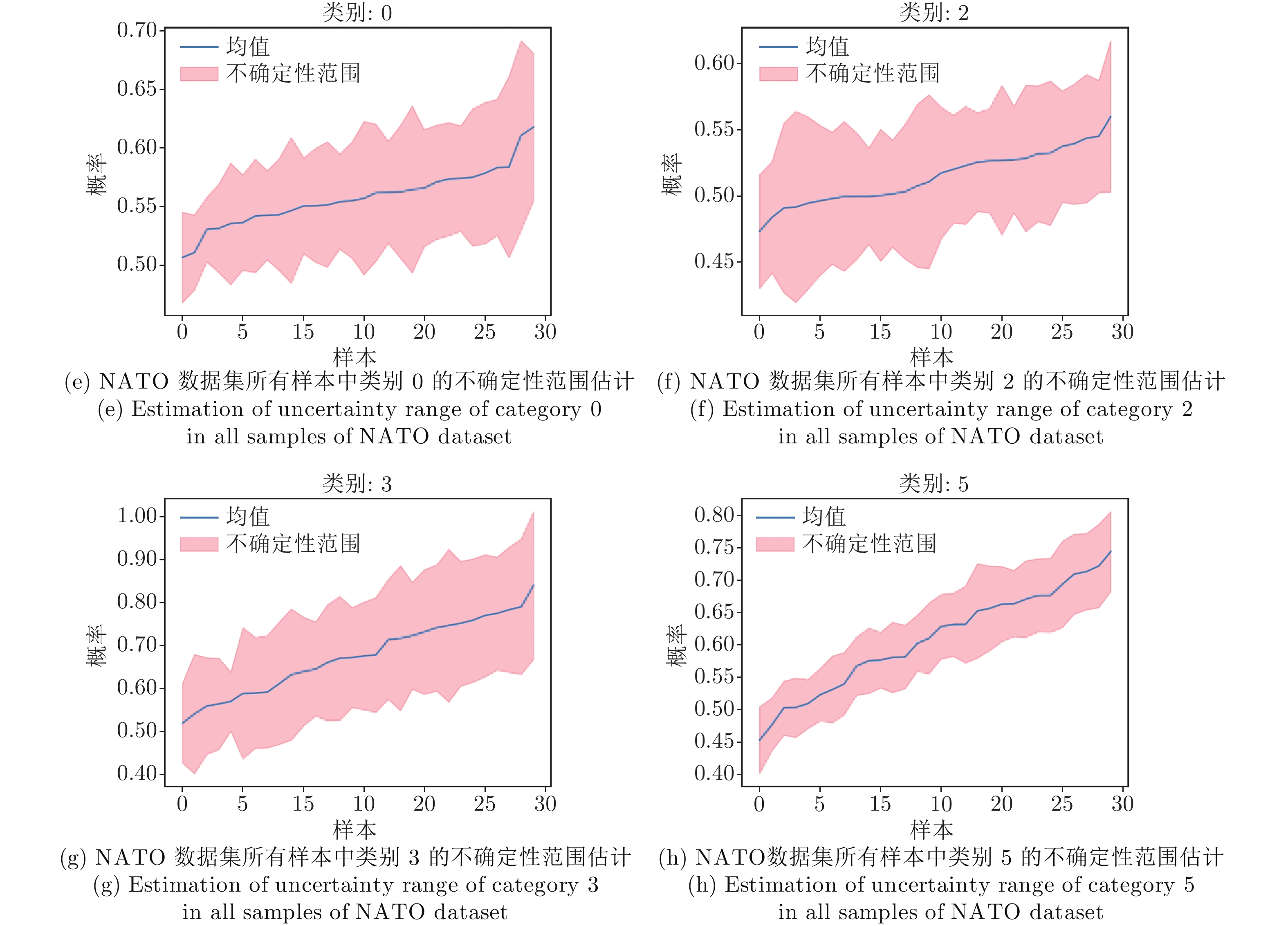
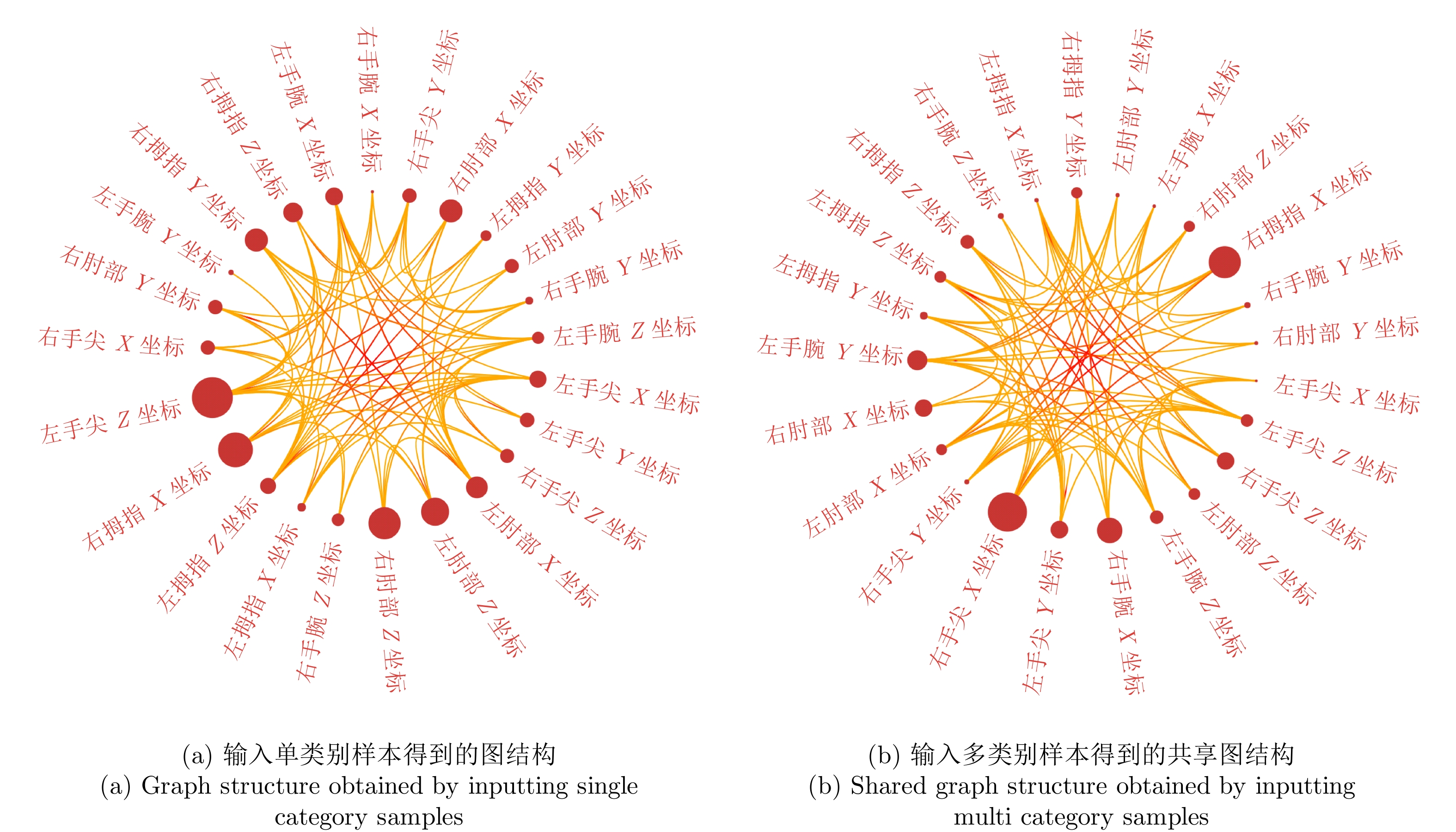
多元时间序列(Multivariate time series, MTS)分类是许多领域中的重要问题, 准确的分类结果可以有效地帮助决策. 当前的MTS分类算法在个体的表征学习阶段难以自动建模多元变量之间复杂的交互关系, 并且无法评估分类结果的可信度, 这会导致模型性能受限, 以及缺乏具备统计意义的可靠性解释. 本文提出了一种基于不确定性的多元时间序列分类算法, 变分贝叶斯共享图神经网络, 即VBSGNN (Variational Bayes shared graph neural network). 首先通过图神经网络(Graph neural network, GNN)提取多元变量之间的交互特征, 然后利用贝叶斯神经网络(Bayesian neural network, BNN)为预测过程引入了不确定性. 最后在10个公开MTS数据集上进行了算法实验, 并与当前提出的7类算法进行了比较, 结果表明VBSGNN可有效学习多元变量之间的交互关系, 提升了分类效果, 并使得模型具备一定的可靠性评估能力.
多元时间序列(Multivariate time series, MTS)分类是许多领域中的重要问题, 准确的分类结果可以有效地帮助决策. 当前的MTS分类算法在个体的表征学习阶段难以自动建模多元变量之间复杂的交互关系, 并且无法评估分类结果的可信度, 这会导致模型性能受限, 以及缺乏具备统计意义的可靠性解释. 本文提出了一种基于不确定性的多元时间序列分类算法, 变分贝叶斯共享图神经网络, 即VBSGNN (Variational Bayes shared graph neural network). 首先通过图神经网络(Graph neural network, GNN)提取多元变量之间的交互特征, 然后利用贝叶斯神经网络(Bayesian neural network, BNN)为预测过程引入了不确定性. 最后在10个公开MTS数据集上进行了算法实验, 并与当前提出的7类算法进行了比较, 结果表明VBSGNN可有效学习多元变量之间的交互关系, 提升了分类效果, 并使得模型具备一定的可靠性评估能力.


2023, 49(4): 805-819.
doi: 10.16383/j.aas.c210667
摘要:
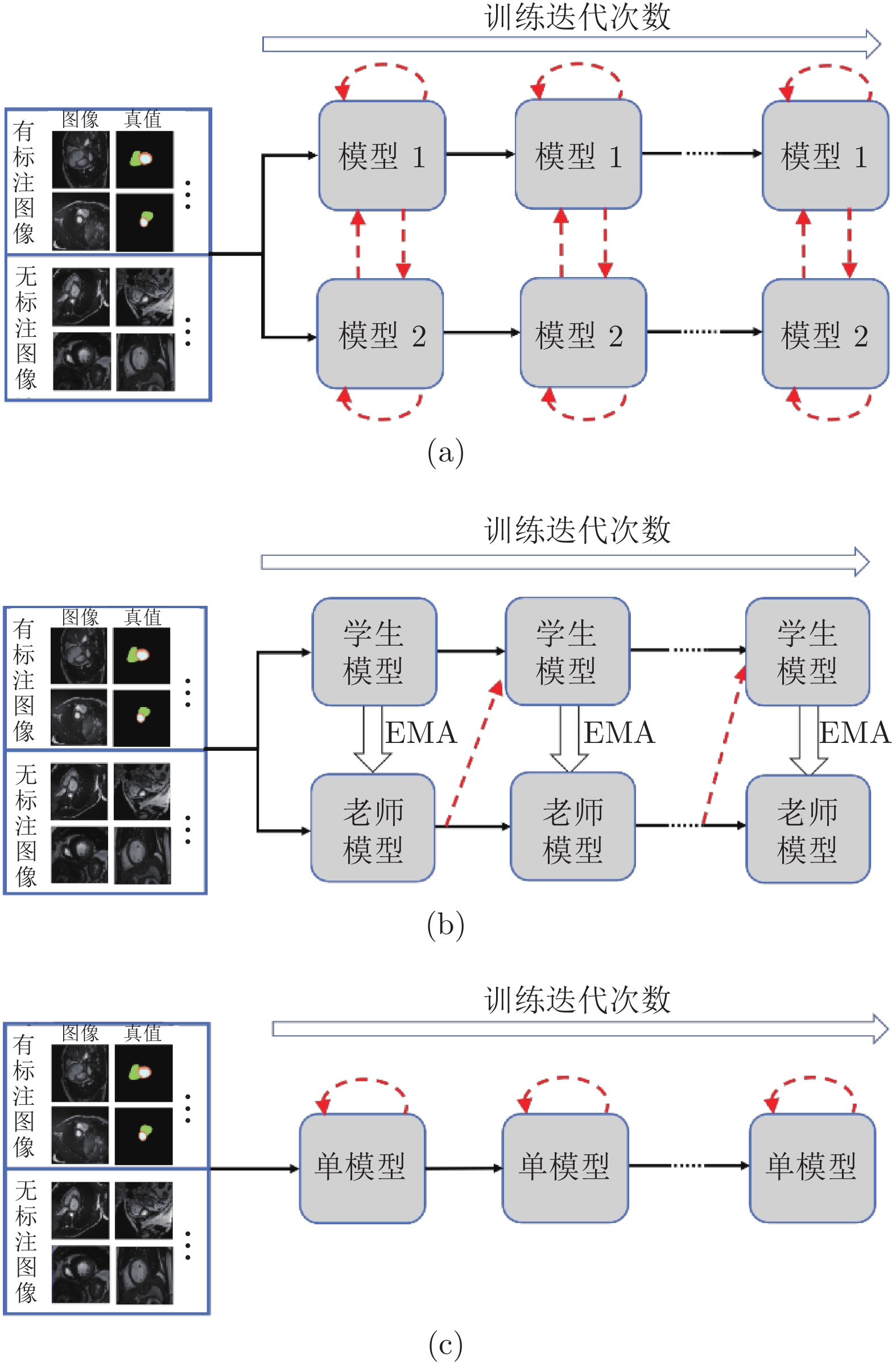
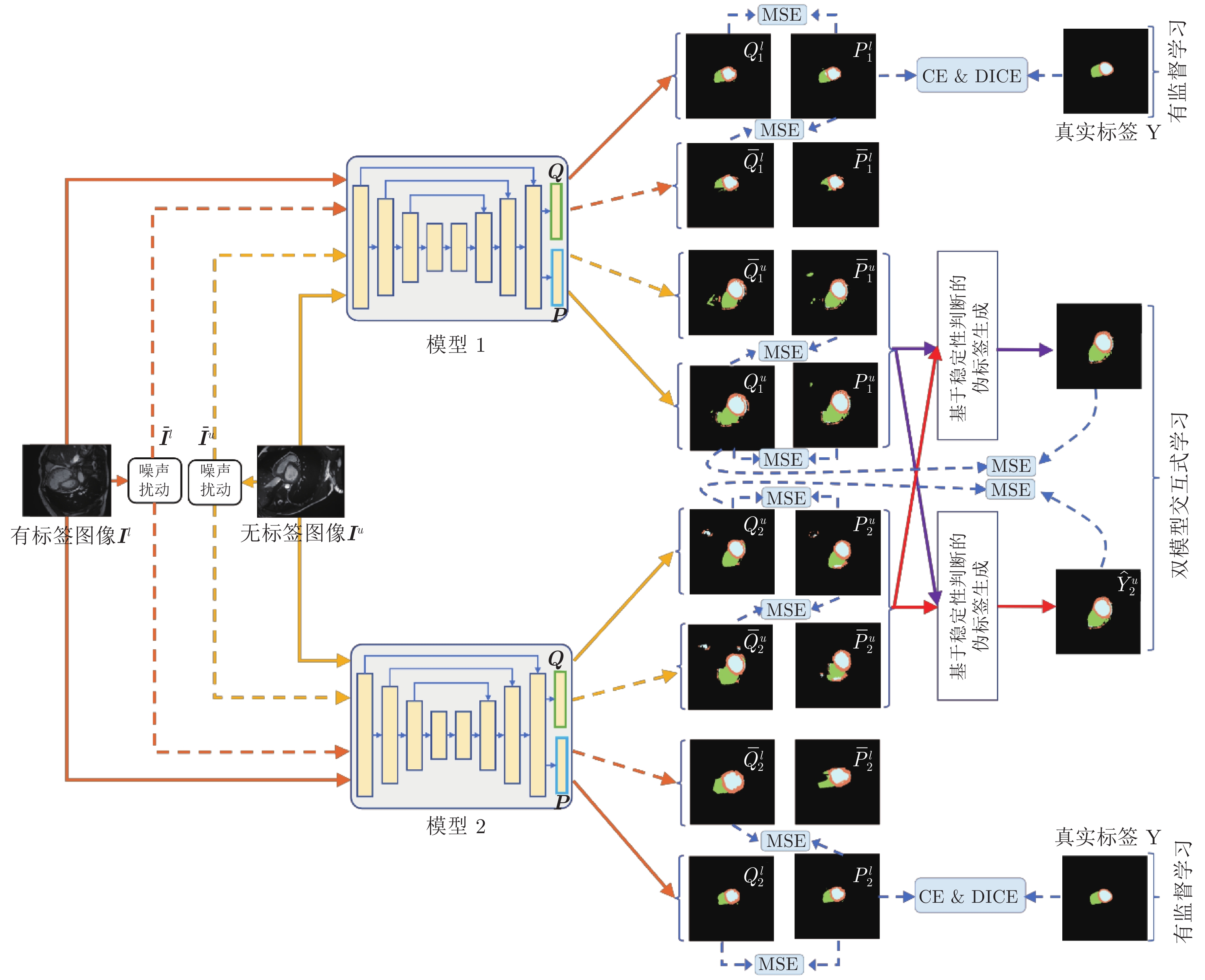
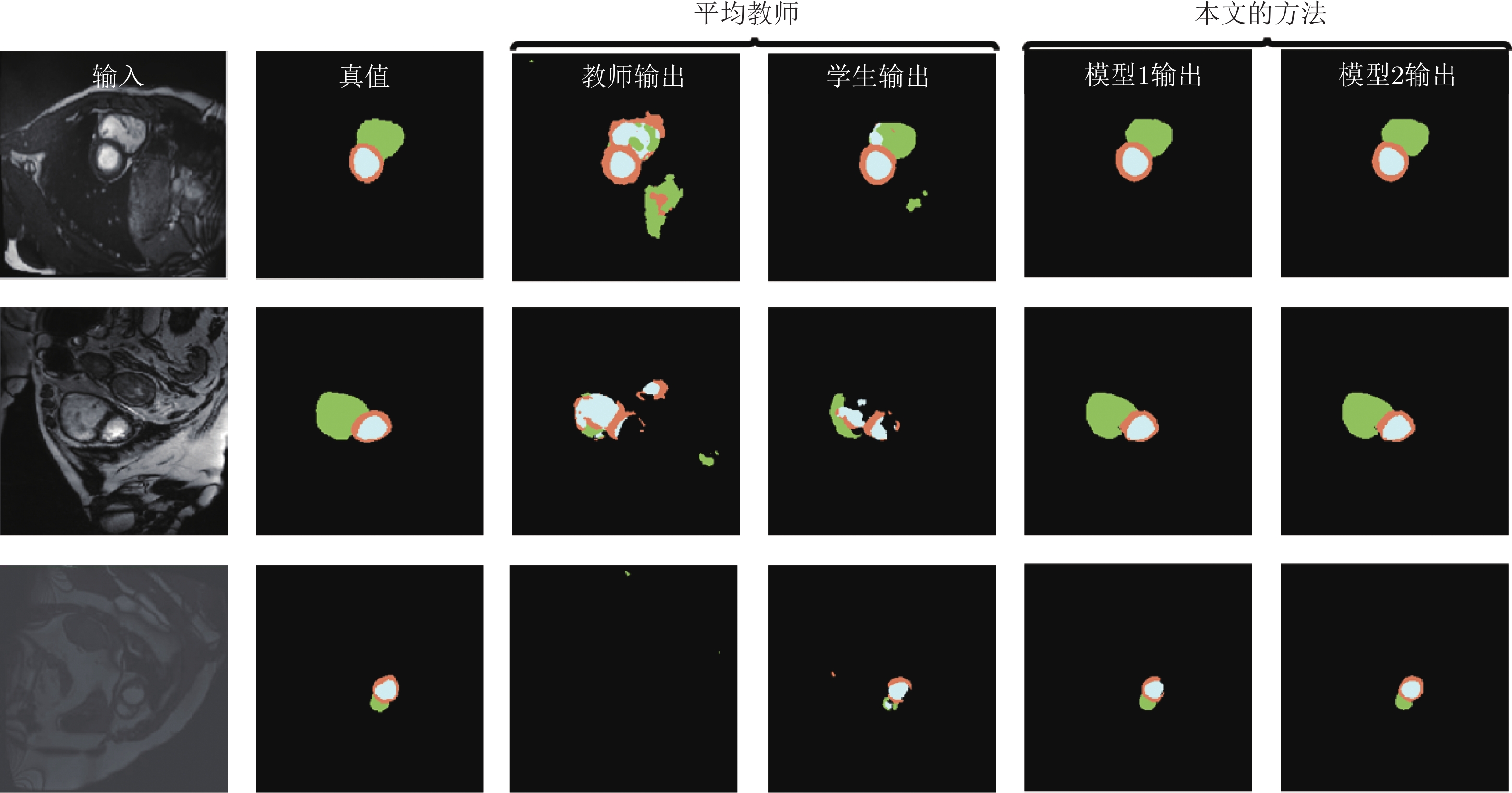
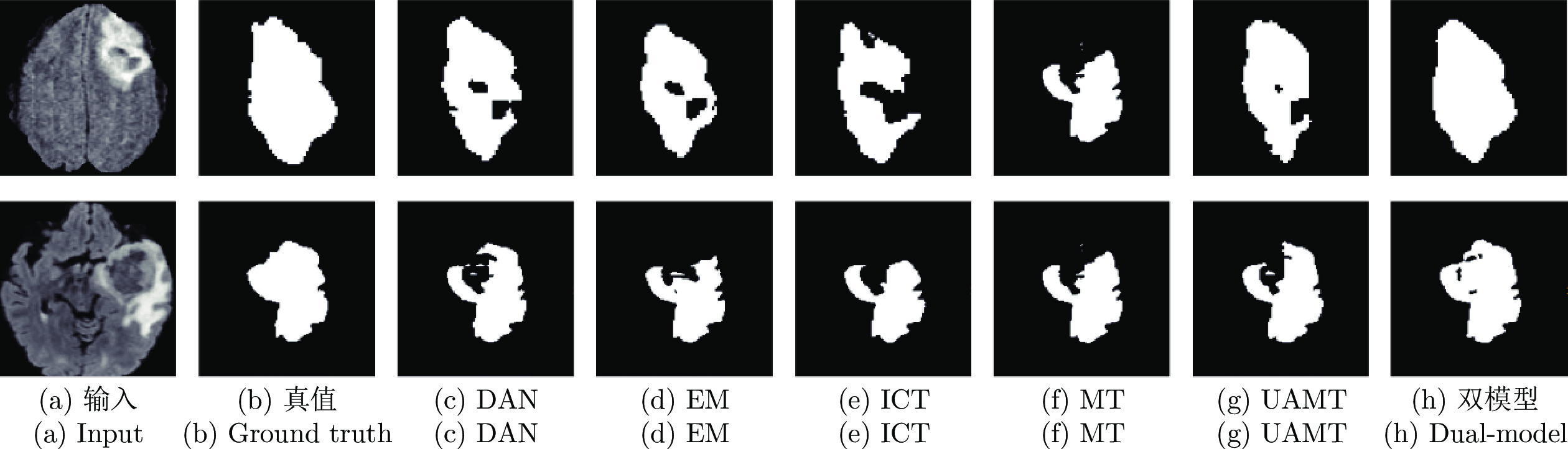
在医学图像中, 器官或病变区域的精准分割对疾病诊断等临床应用有着至关重要的作用, 然而分割模型的训练依赖于大量标注数据. 为减少对标注数据的需求, 本文主要研究针对医学图像分割的半监督学习任务. 现有半监督学习方法广泛采用平均教师模型, 其缺点在于, 基于指数移动平均(Exponential moving average, EMA)的参数更新方式使得老师模型累积学生模型的错误知识. 为避免上述问题, 提出一种双模型交互学习方法, 引入像素稳定性判断机制, 利用一个模型中预测结果更稳定的像素监督另一个模型的学习, 从而缓解了单个模型的错误经验的累积和传播. 提出的方法在心脏结构分割、肝脏肿瘤分割和脑肿瘤分割三个数据集中取得优于前沿半监督方法的结果. 在仅采用30%的标注比例时, 该方法在三个数据集上的戴斯相似指标(Dice similarity coefficient, DSC)分别达到89.13%, 94.15%, 87.02%.
在医学图像中, 器官或病变区域的精准分割对疾病诊断等临床应用有着至关重要的作用, 然而分割模型的训练依赖于大量标注数据. 为减少对标注数据的需求, 本文主要研究针对医学图像分割的半监督学习任务. 现有半监督学习方法广泛采用平均教师模型, 其缺点在于, 基于指数移动平均(Exponential moving average, EMA)的参数更新方式使得老师模型累积学生模型的错误知识. 为避免上述问题, 提出一种双模型交互学习方法, 引入像素稳定性判断机制, 利用一个模型中预测结果更稳定的像素监督另一个模型的学习, 从而缓解了单个模型的错误经验的累积和传播. 提出的方法在心脏结构分割、肝脏肿瘤分割和脑肿瘤分割三个数据集中取得优于前沿半监督方法的结果. 在仅采用30%的标注比例时, 该方法在三个数据集上的戴斯相似指标(Dice similarity coefficient, DSC)分别达到89.13%, 94.15%, 87.02%.


2023, 49(4): 820-829.
doi: 10.16383/j.aas.c200510
摘要:
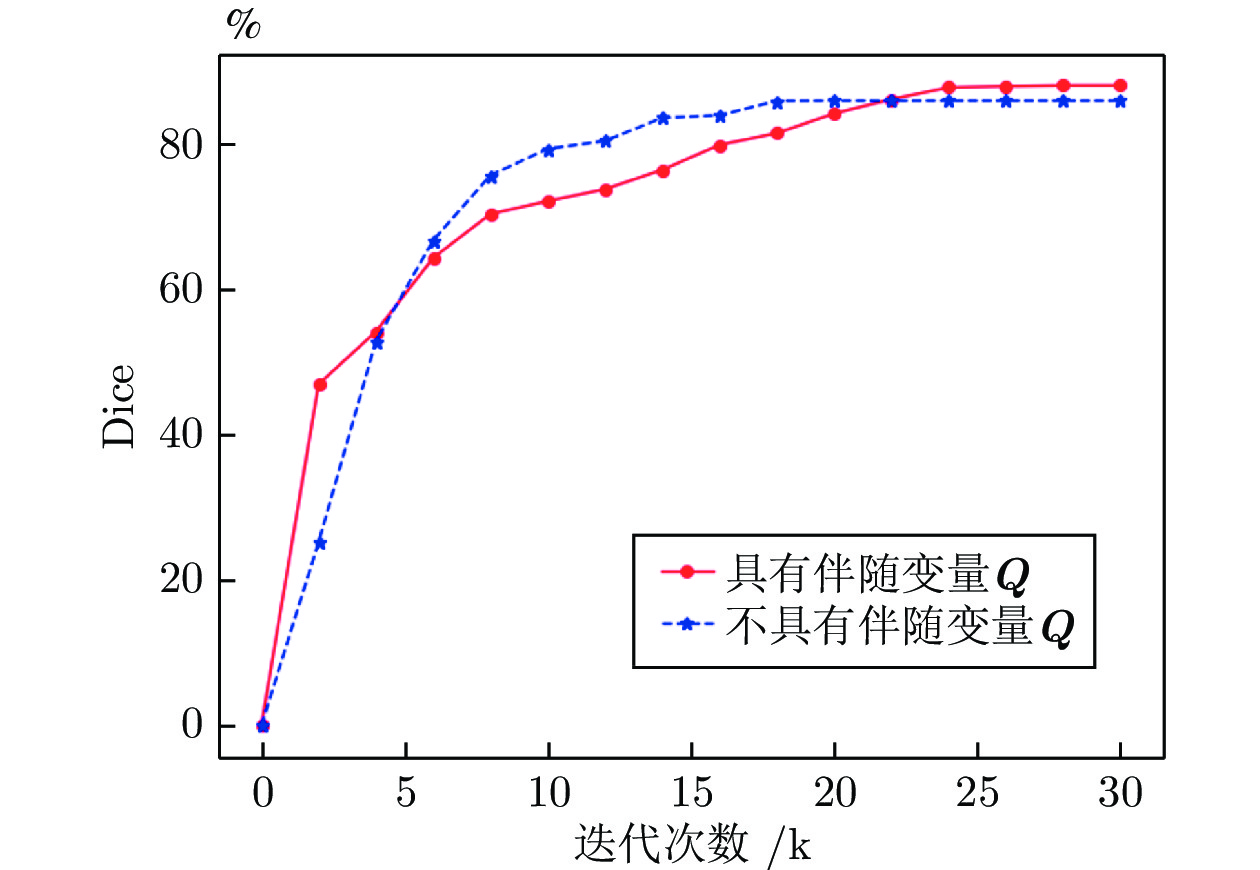
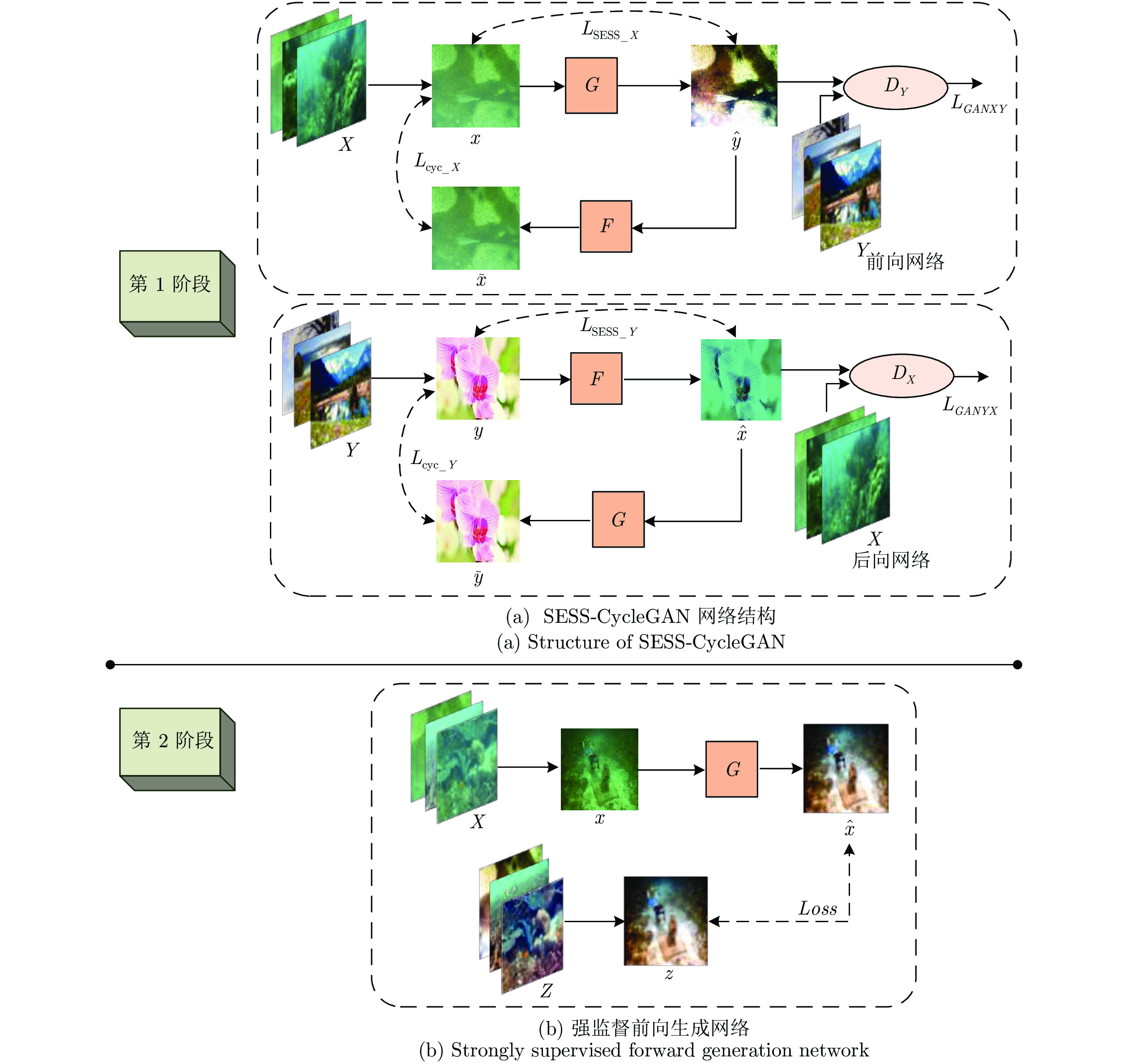
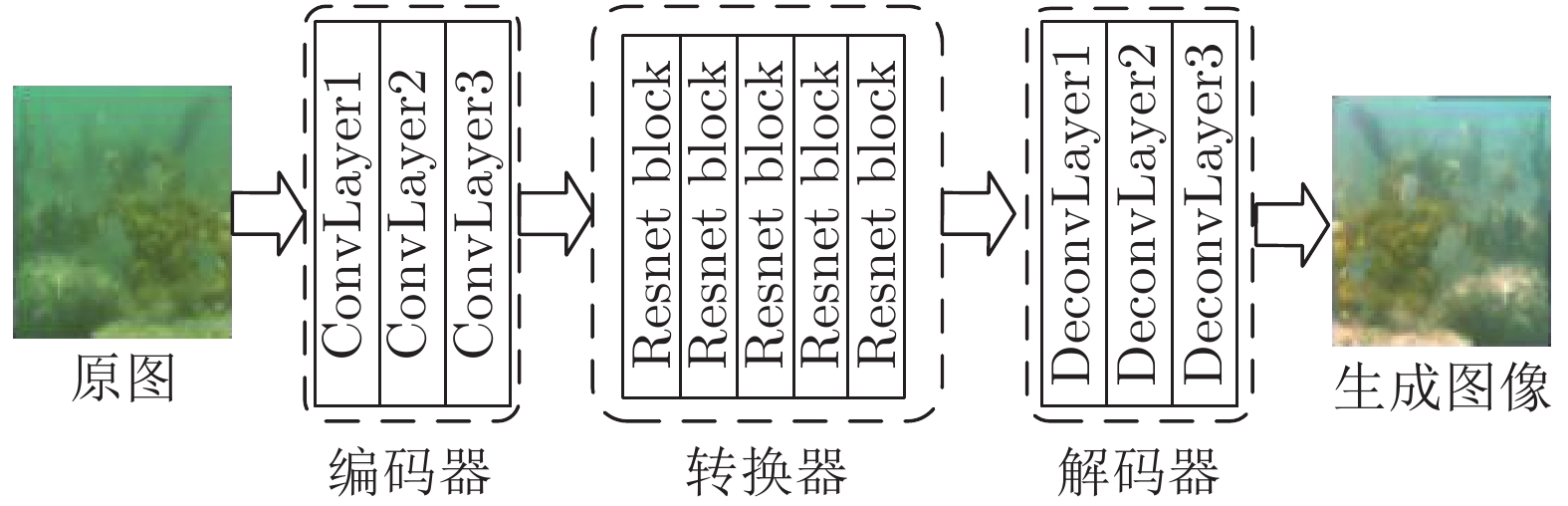
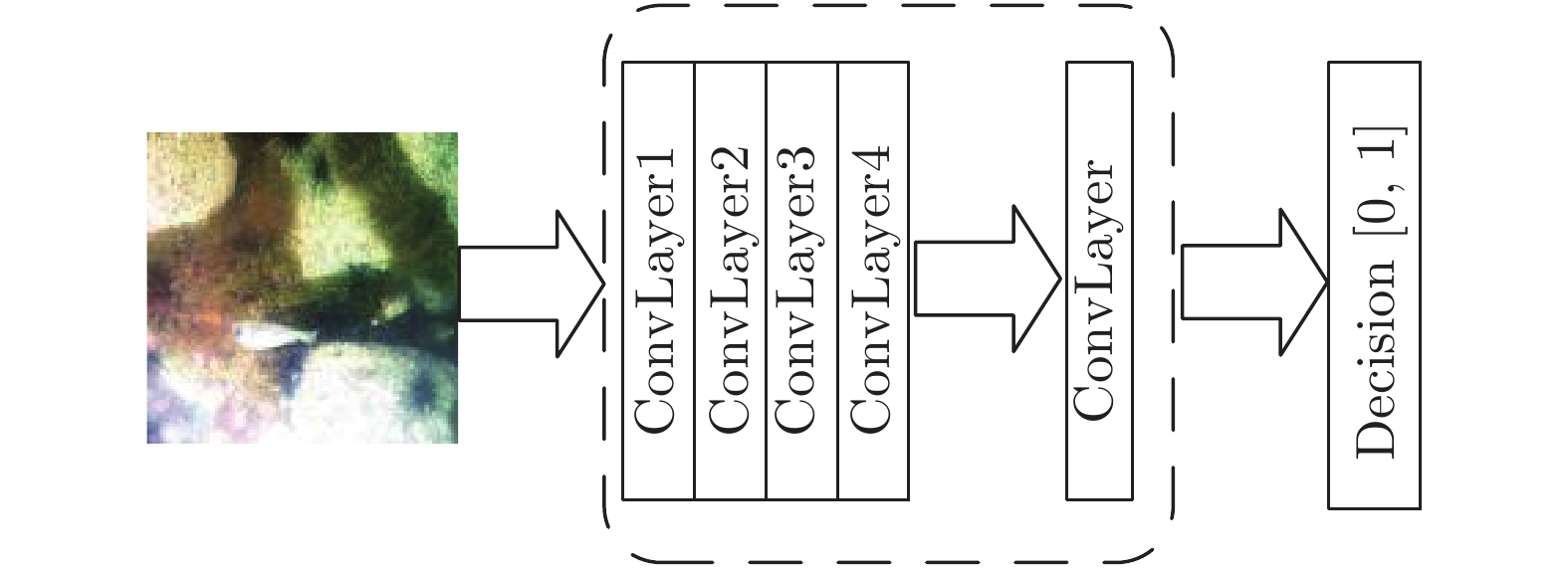
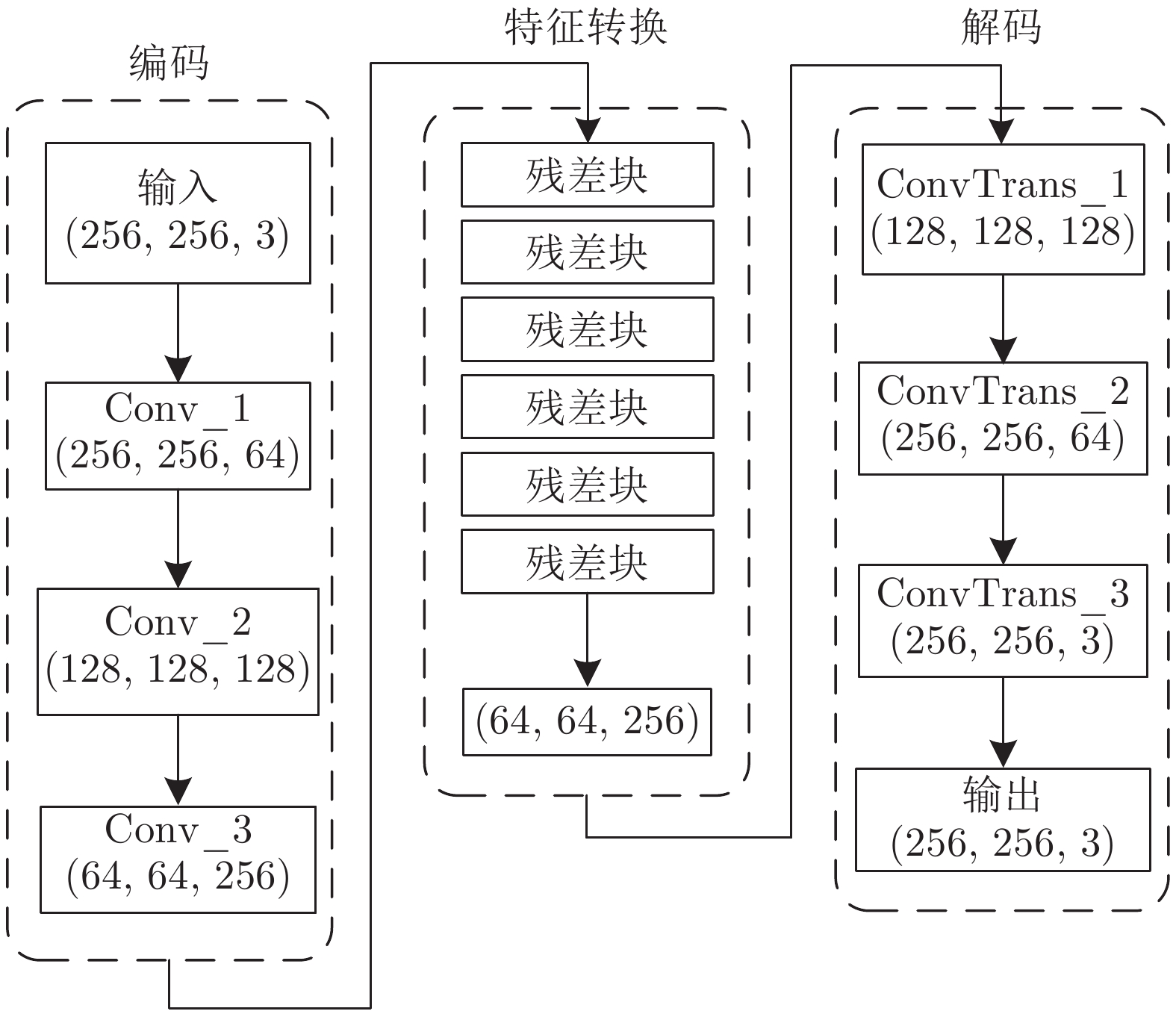
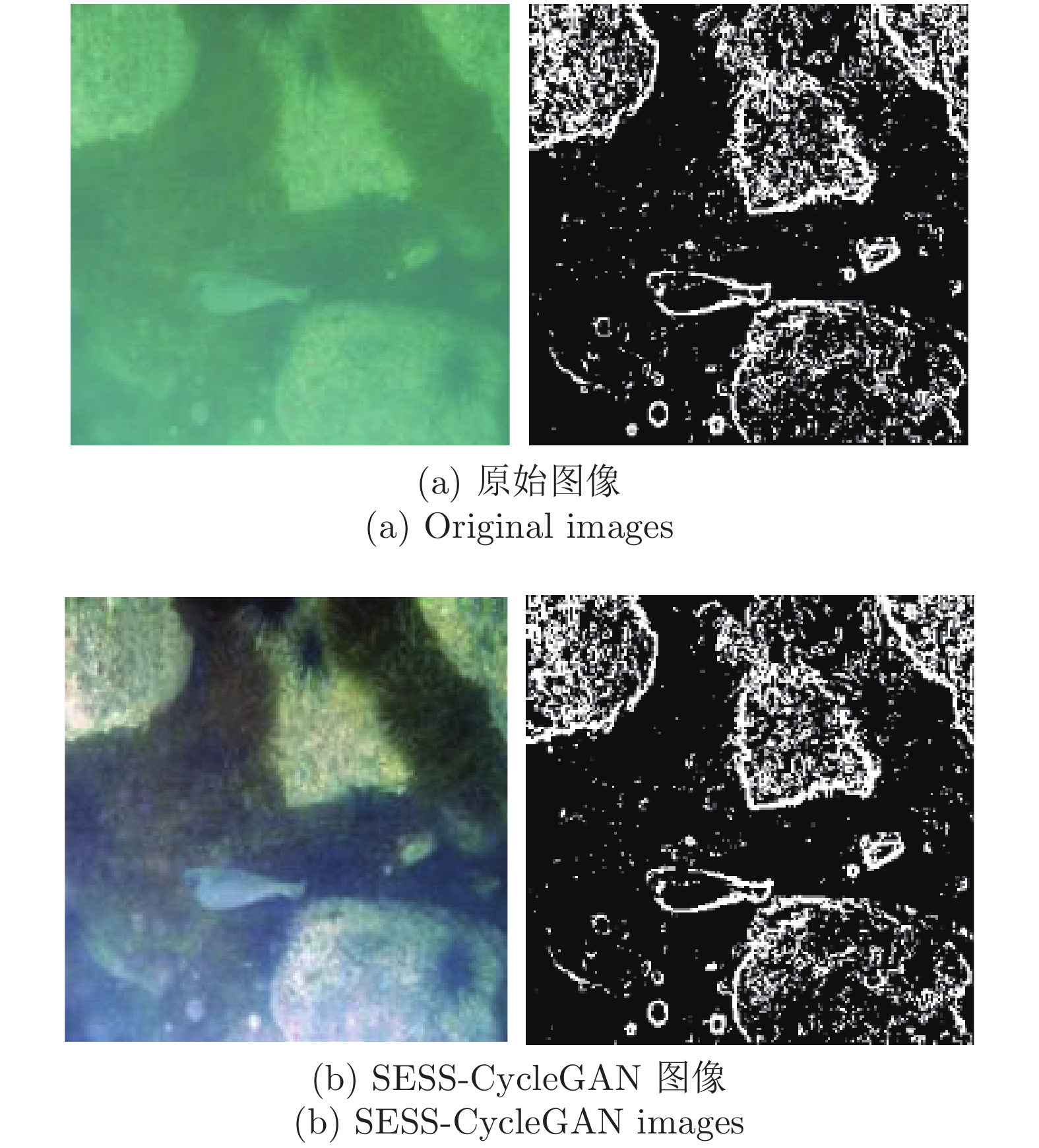
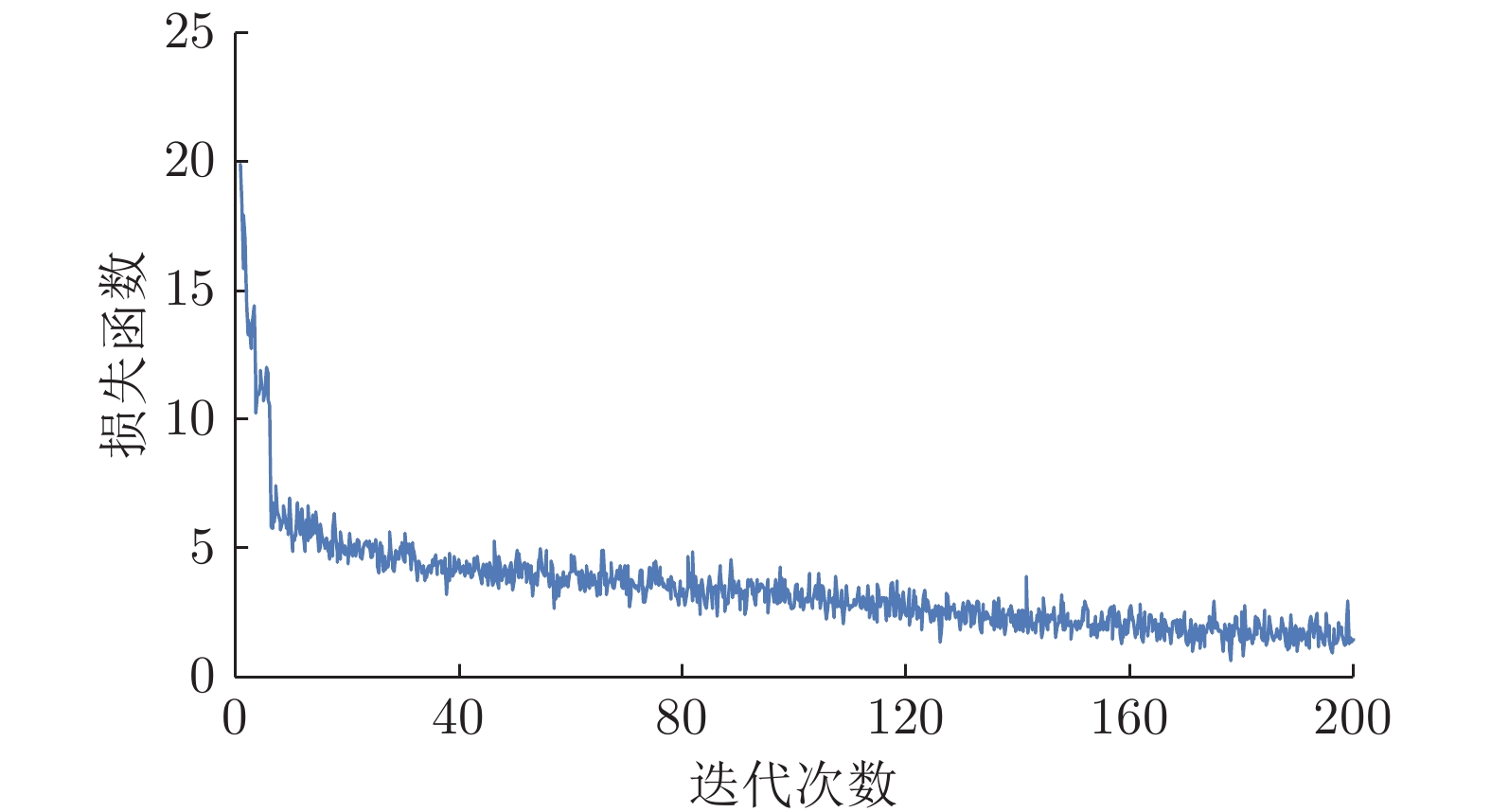
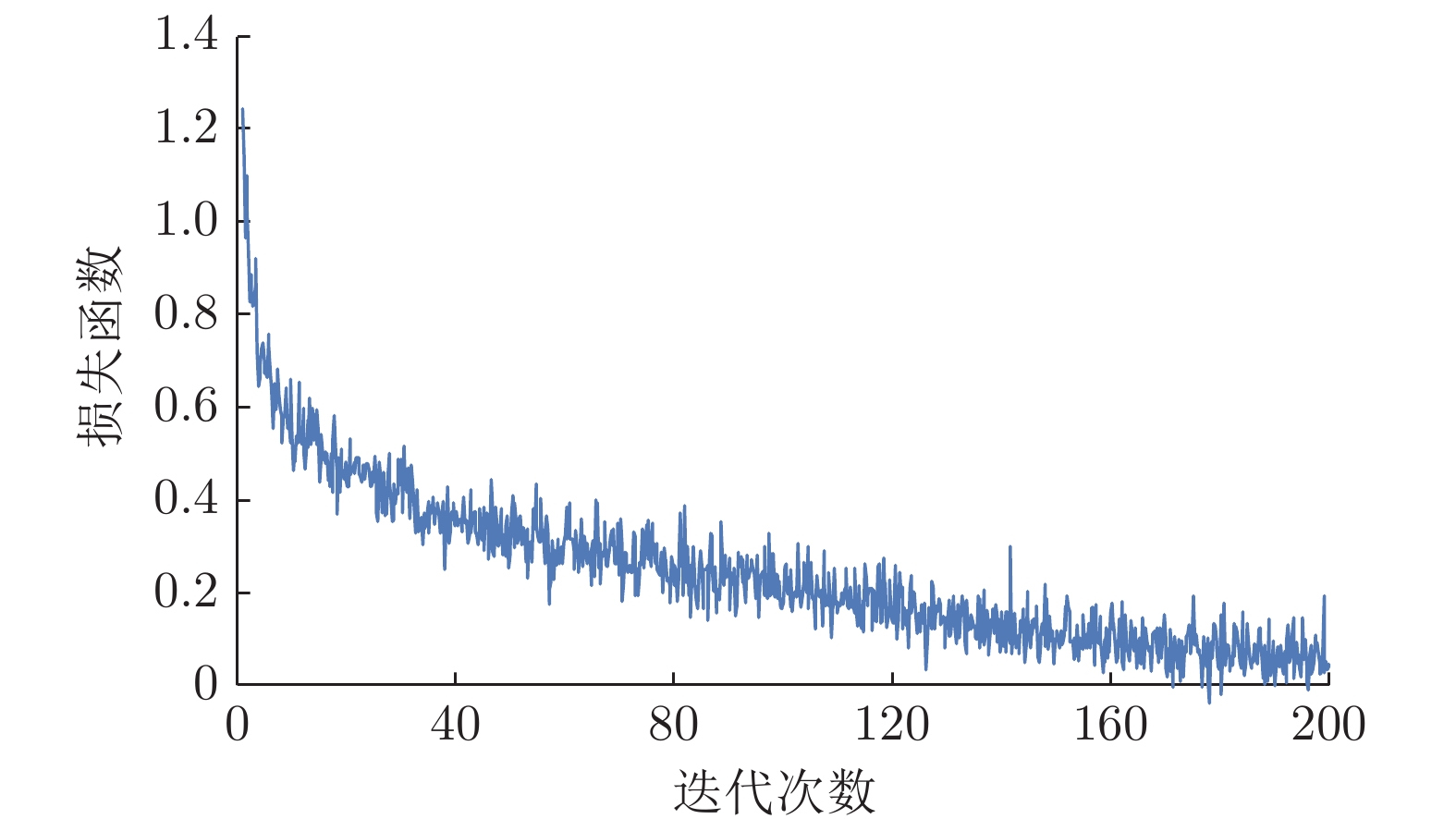
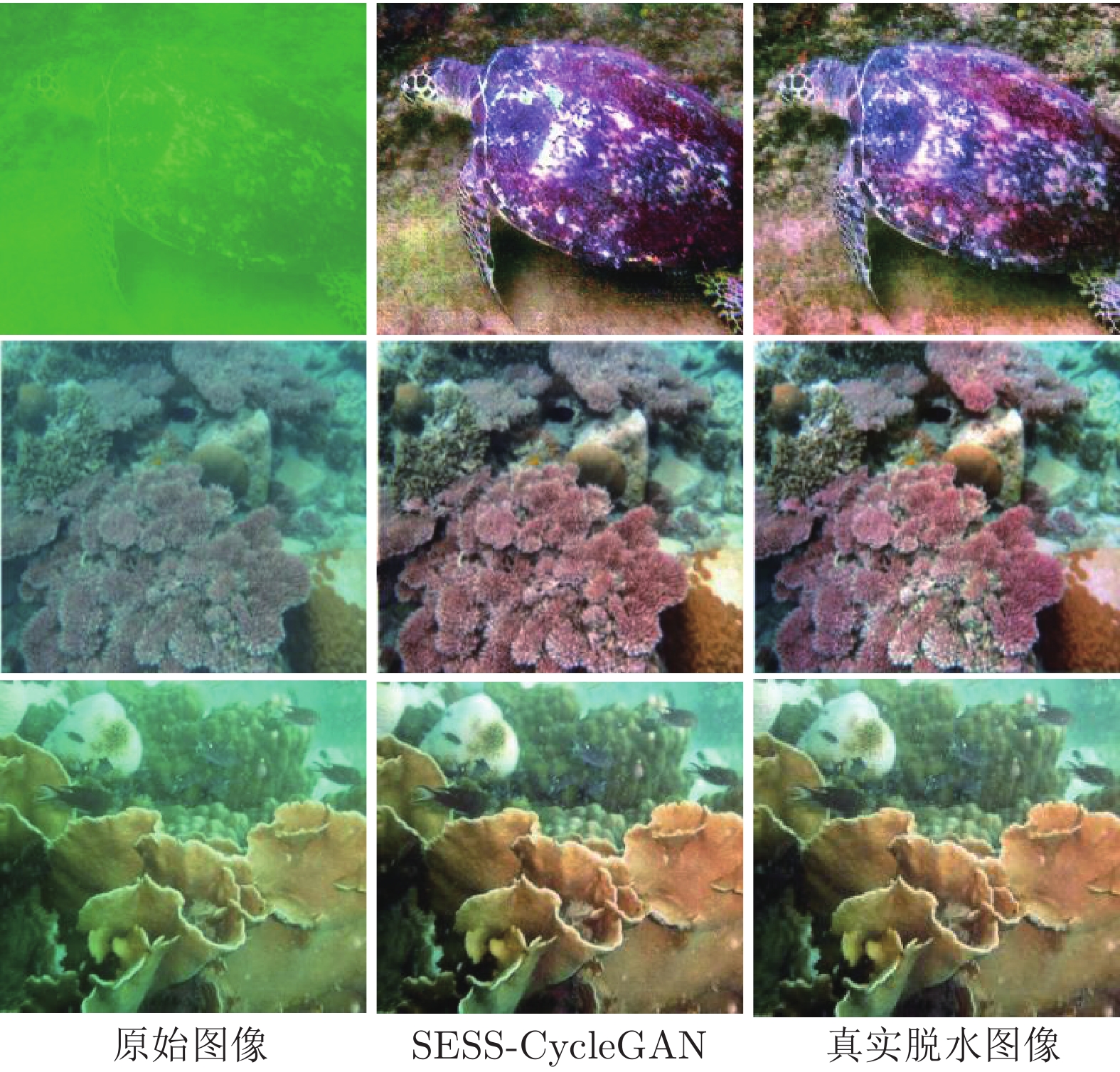
针对水下观测图像的颜色失真和散射模糊问题, 提出一种基于改进循环一致性生成对抗网络(Cycle-consistent generative adversarial networks, CycleGAN)的水下图像颜色校正与增强算法. 为了利用CycleGAN学习水下降质图像到空气中图像的映射关系, 对传统CycleGAN的损失函数进行了改进, 提出了基于图像强边缘结构相似度(Strong edge and structure similarity, SESS)损失函数的SESS-CycleGAN, SESS-CycleGAN可以在保留原水下图像的边缘结构信息的前提下实现水下降质图像的颜色校正和对比度增强. 为了确保增强后图像和真实脱水图像颜色的一致性, 建立了SESS-CycleGAN和正向生成网络G相结合的网络结构; 并提出了两阶段学习策略, 即先利用非成对训练集以弱监督方式进行SESS-CycleGAN学习, 然后再利用少量成对训练集以强监督方式进行正向生成网络G的监督式学习. 实验结果表明: 本文算法在校正水下图像颜色失真的同时还增强了图像对比度, 且较好地实现了增强后图像和真实脱水图像视觉颜色的一致性.
针对水下观测图像的颜色失真和散射模糊问题, 提出一种基于改进循环一致性生成对抗网络(Cycle-consistent generative adversarial networks, CycleGAN)的水下图像颜色校正与增强算法. 为了利用CycleGAN学习水下降质图像到空气中图像的映射关系, 对传统CycleGAN的损失函数进行了改进, 提出了基于图像强边缘结构相似度(Strong edge and structure similarity, SESS)损失函数的SESS-CycleGAN, SESS-CycleGAN可以在保留原水下图像的边缘结构信息的前提下实现水下降质图像的颜色校正和对比度增强. 为了确保增强后图像和真实脱水图像颜色的一致性, 建立了SESS-CycleGAN和正向生成网络G相结合的网络结构; 并提出了两阶段学习策略, 即先利用非成对训练集以弱监督方式进行SESS-CycleGAN学习, 然后再利用少量成对训练集以强监督方式进行正向生成网络G的监督式学习. 实验结果表明: 本文算法在校正水下图像颜色失真的同时还增强了图像对比度, 且较好地实现了增强后图像和真实脱水图像视觉颜色的一致性.


2023, 49(4): 830-844.
doi: 10.16383/j.aas.c210051
摘要:
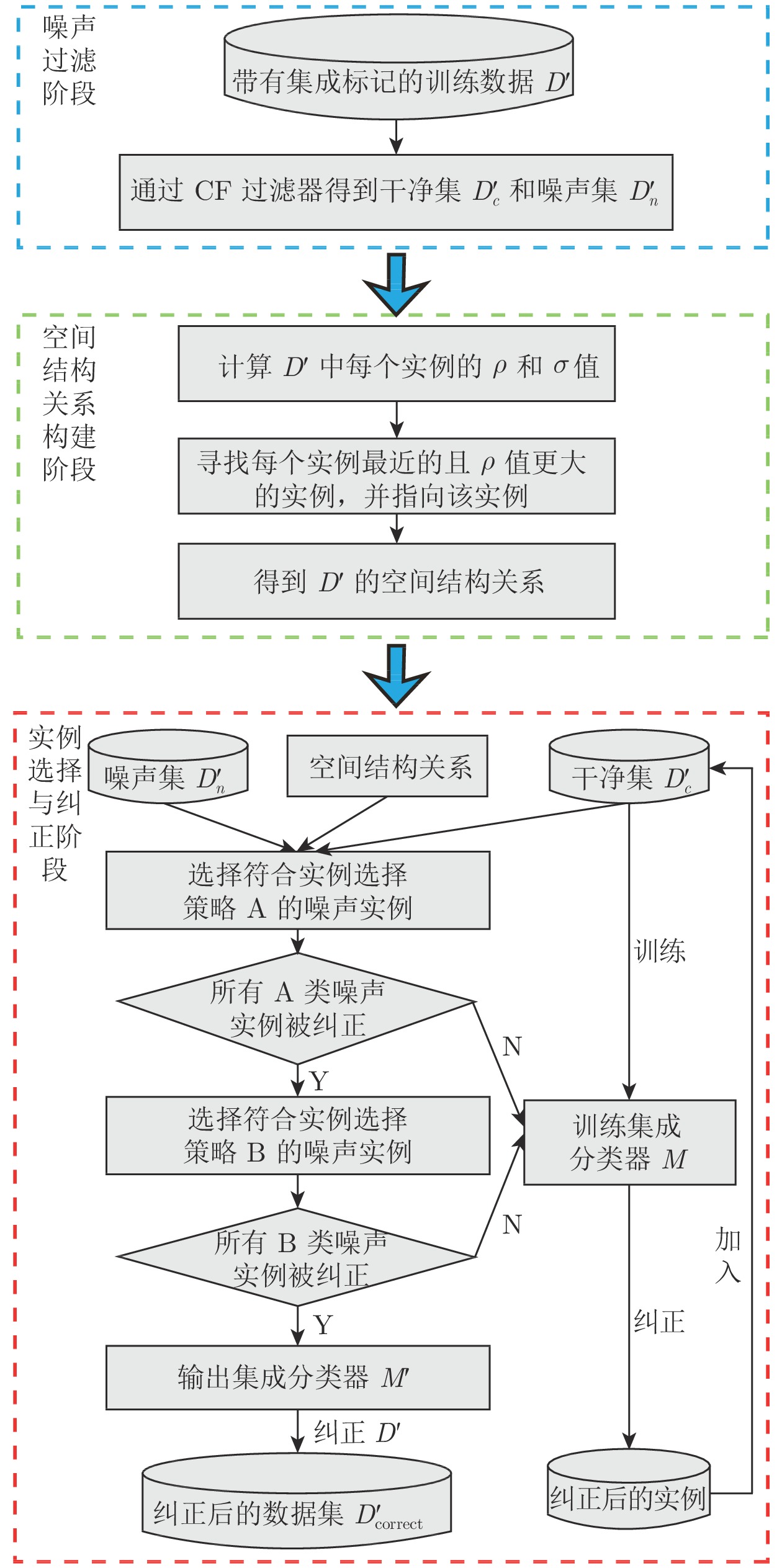
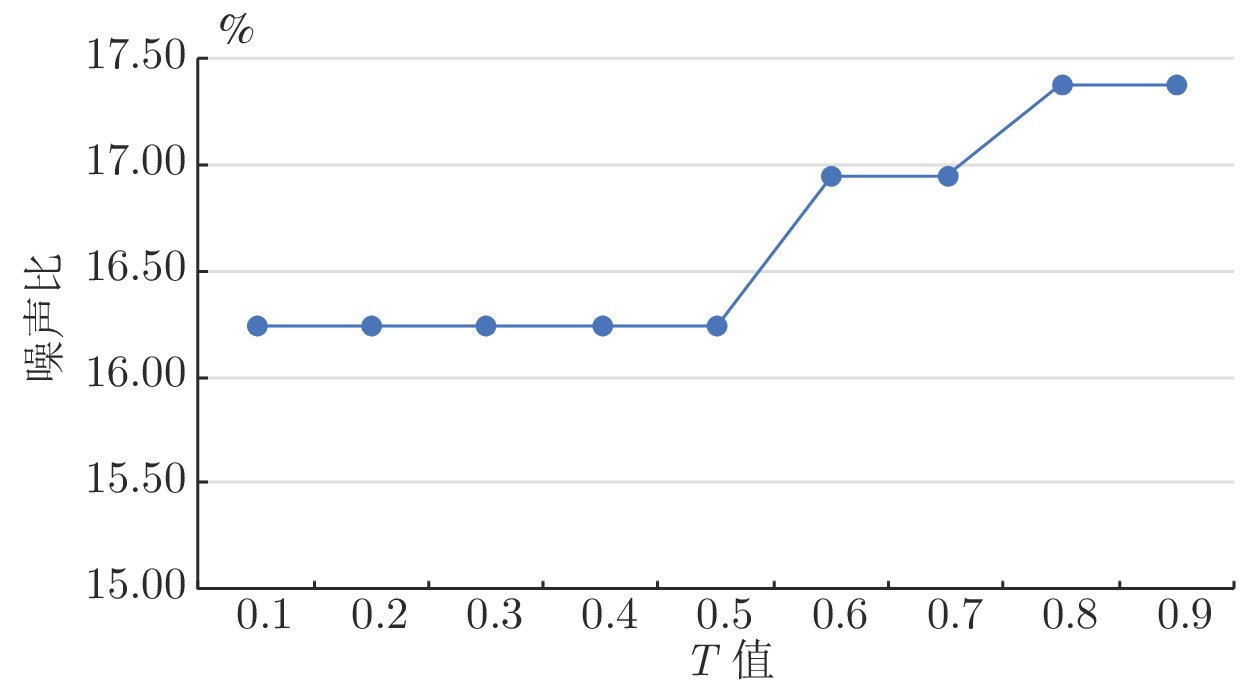
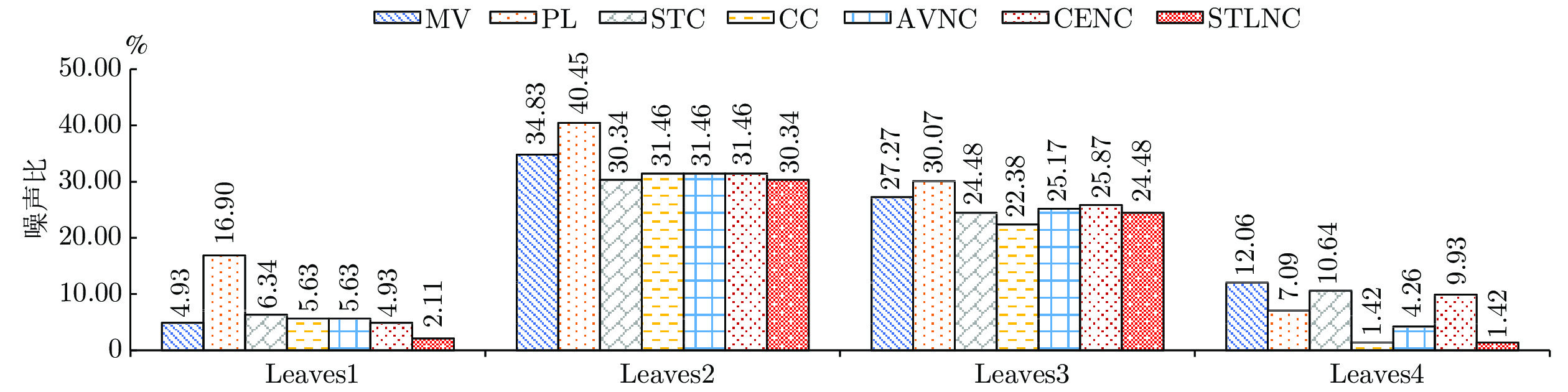
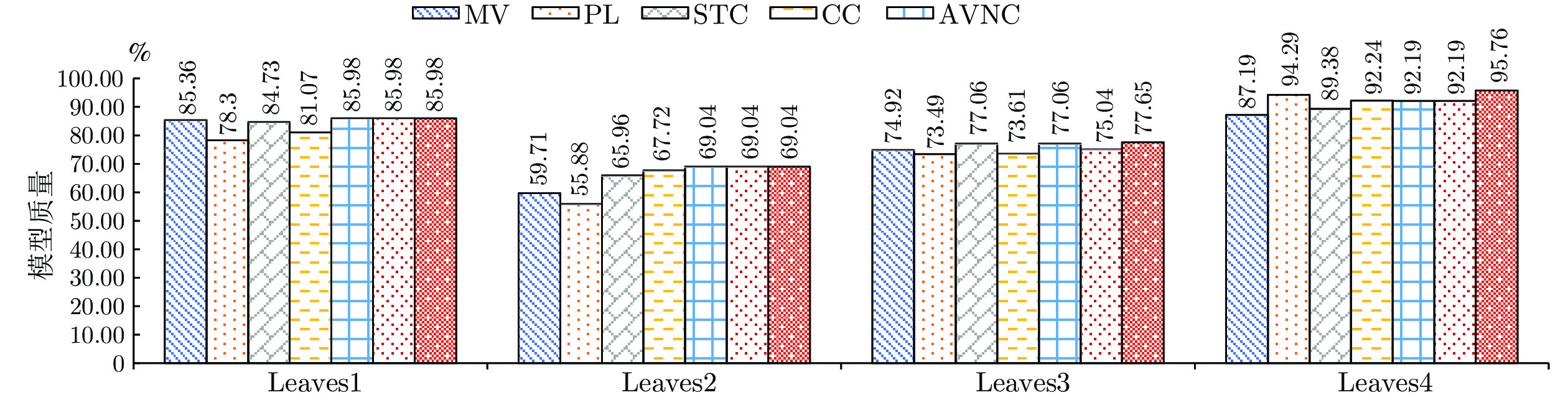
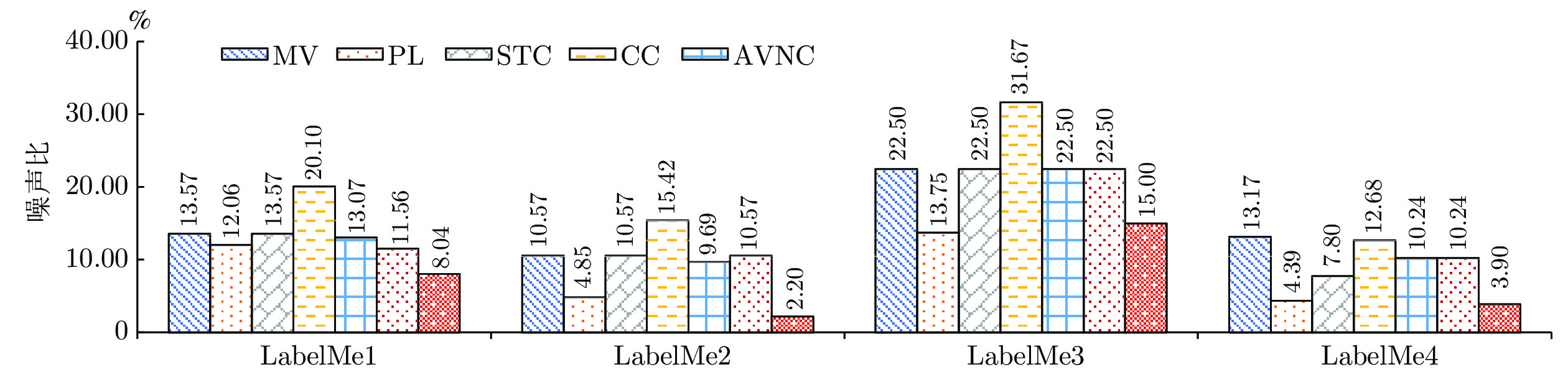
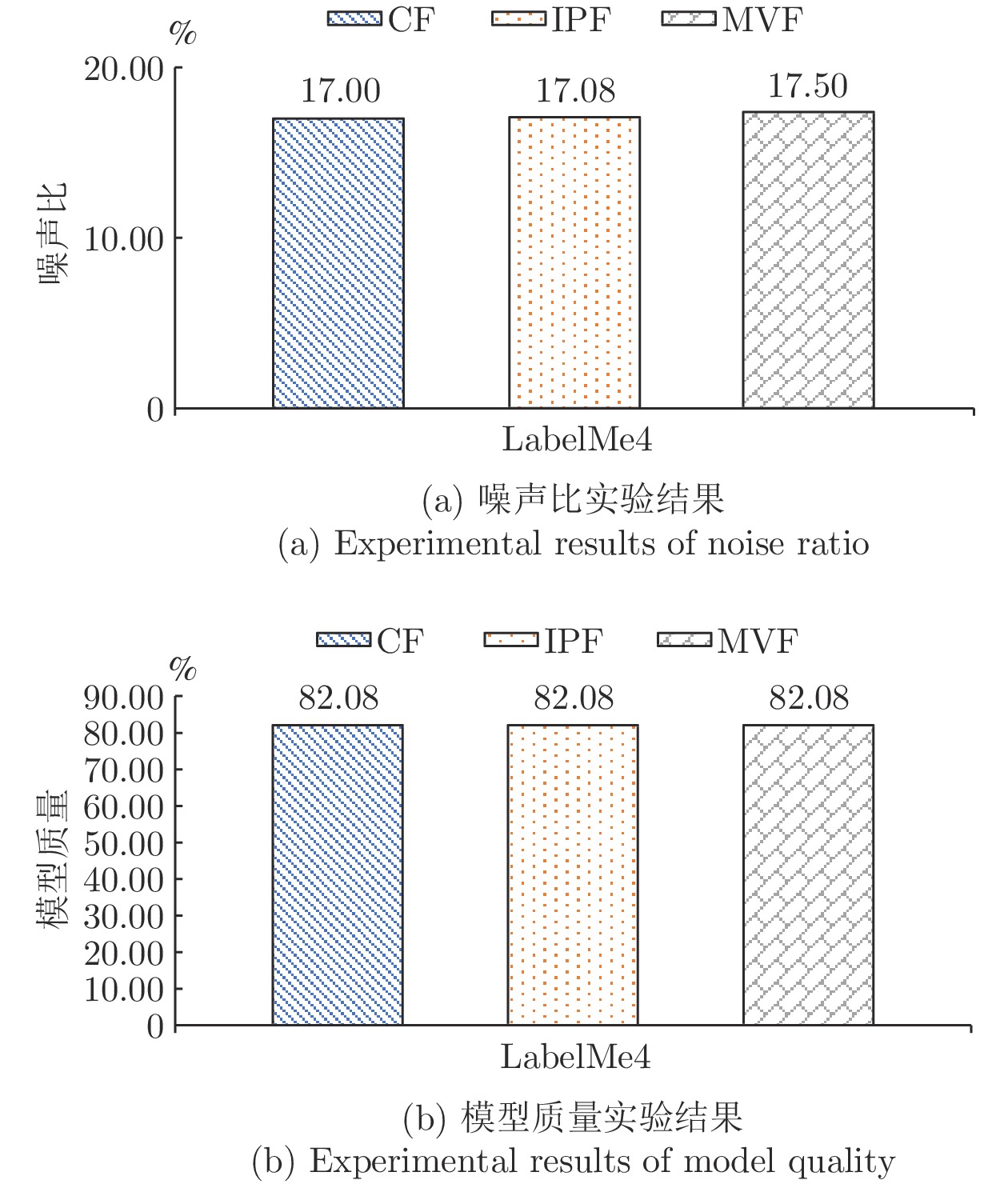
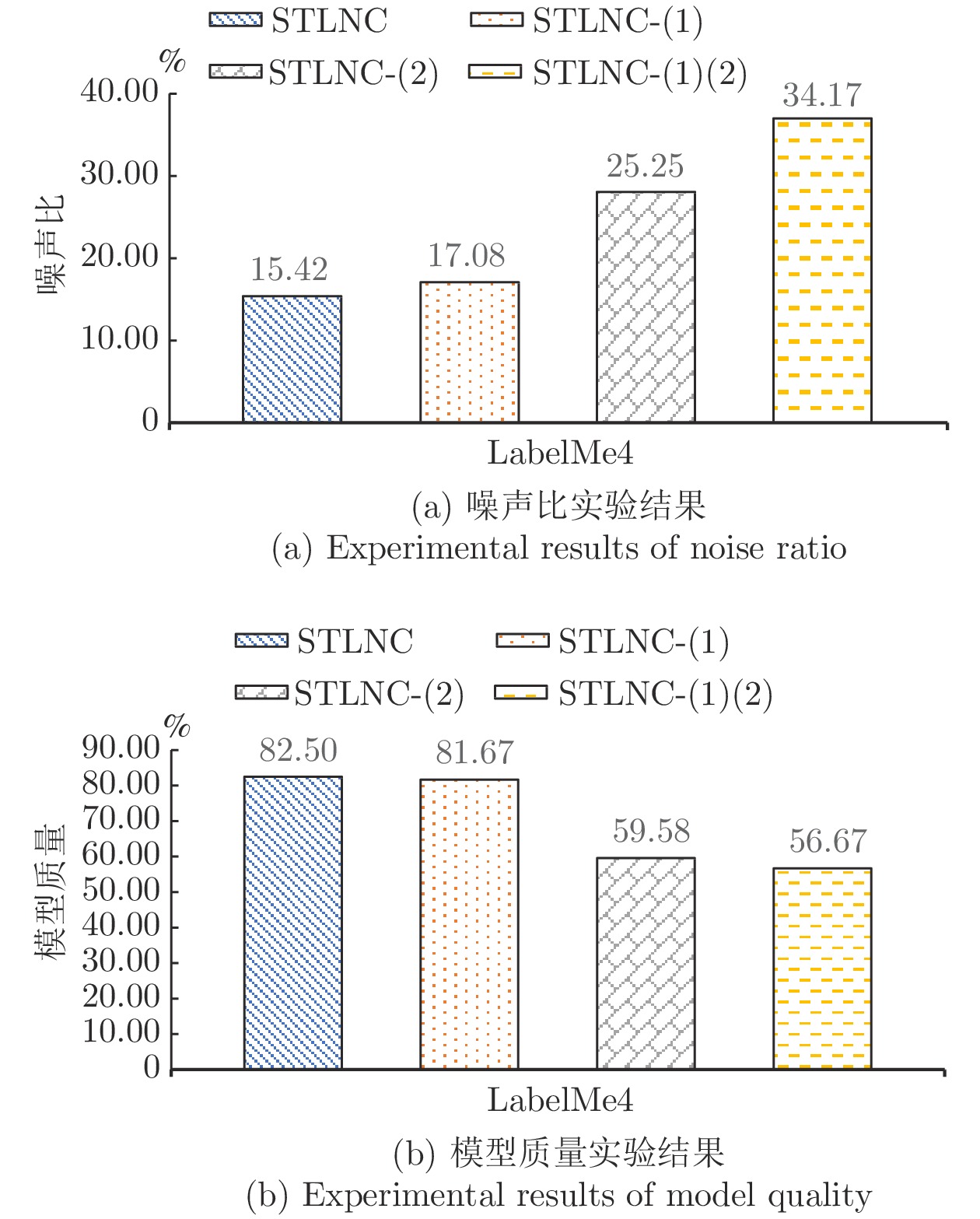
针对众包标记经过标记集成后仍然存在噪声的问题, 提出了一种基于自训练的众包标记噪声纠正算法(Self-training-based label noise correction, STLNC). STLNC整体分为3个阶段: 第1阶段利用过滤器将带集成标记的众包数据集分为噪声集和干净集. 第2阶段利用加权密度峰值聚类算法构建数据集中低密度实例指向高密度实例的空间结构关系. 第3阶段首先根据发现的空间结构关系设计噪声实例选择策略; 然后利用在干净集上训练的集成分类器对选择的噪声实例按照设计的实例纠正策略进行纠正, 并将纠正后的实例加入到干净集, 再重新训练集成分类器; 重复实例选择与纠正过程直到噪声集中所有的实例被纠正; 最后用最后一轮训练得到的集成分类器对所有实例进行纠正. 在仿真标准数据集和真实众包数据集上的实验结果表明STLNC比其他5种最先进的噪声纠正算法在噪声比和模型质量两个度量指标上表现更优.
针对众包标记经过标记集成后仍然存在噪声的问题, 提出了一种基于自训练的众包标记噪声纠正算法(Self-training-based label noise correction, STLNC). STLNC整体分为3个阶段: 第1阶段利用过滤器将带集成标记的众包数据集分为噪声集和干净集. 第2阶段利用加权密度峰值聚类算法构建数据集中低密度实例指向高密度实例的空间结构关系. 第3阶段首先根据发现的空间结构关系设计噪声实例选择策略; 然后利用在干净集上训练的集成分类器对选择的噪声实例按照设计的实例纠正策略进行纠正, 并将纠正后的实例加入到干净集, 再重新训练集成分类器; 重复实例选择与纠正过程直到噪声集中所有的实例被纠正; 最后用最后一轮训练得到的集成分类器对所有实例进行纠正. 在仿真标准数据集和真实众包数据集上的实验结果表明STLNC比其他5种最先进的噪声纠正算法在噪声比和模型质量两个度量指标上表现更优.

2023, 49(4): 845-856.
doi: 10.16383/j.aas.c200842
摘要:
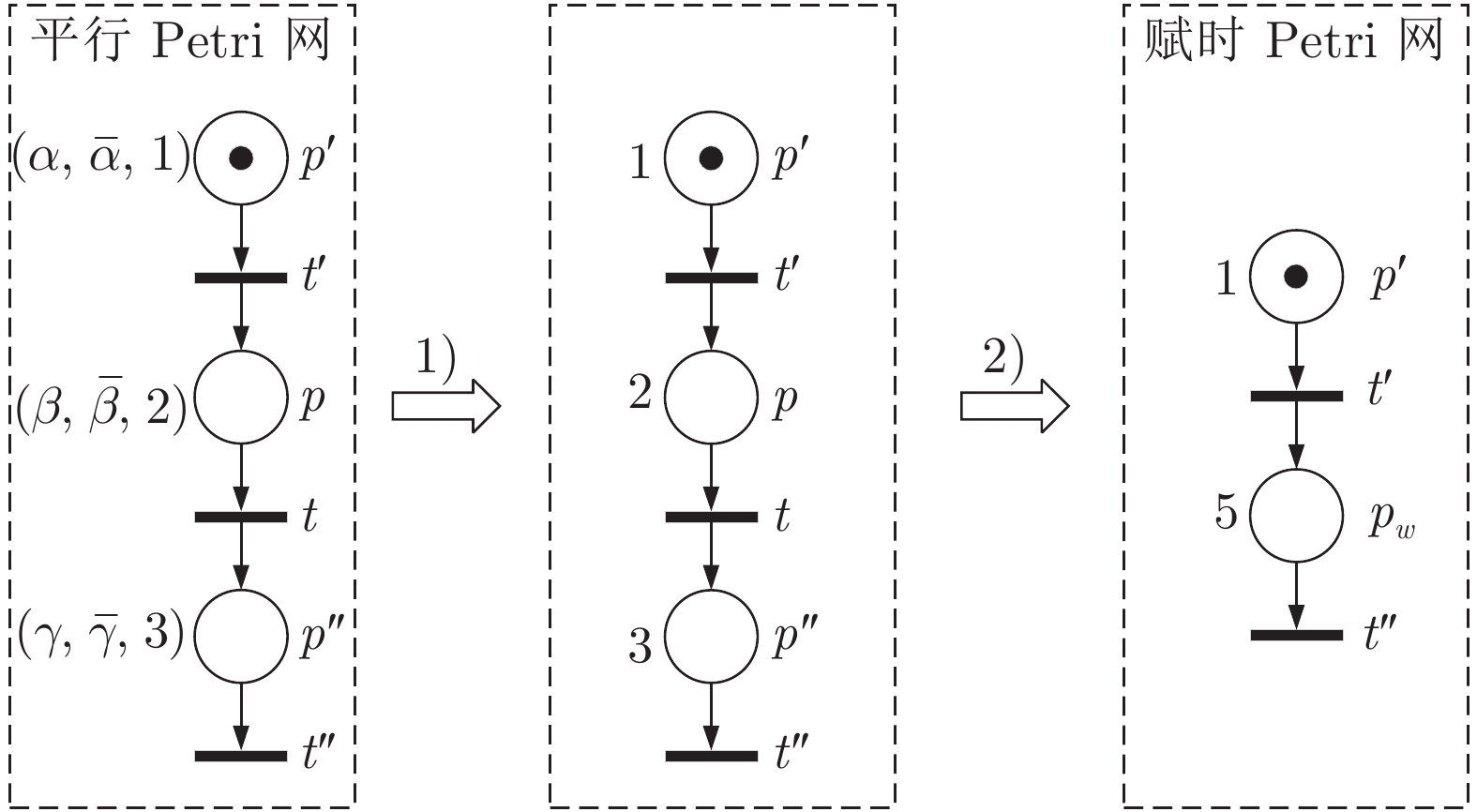
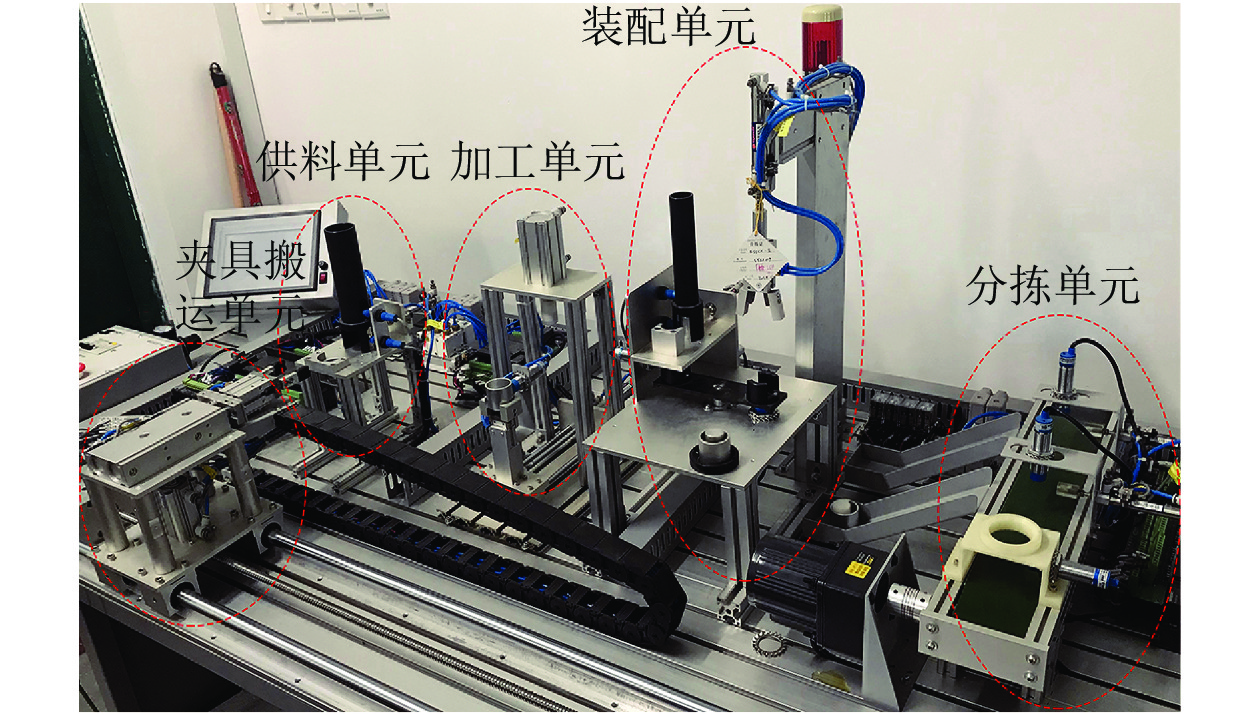
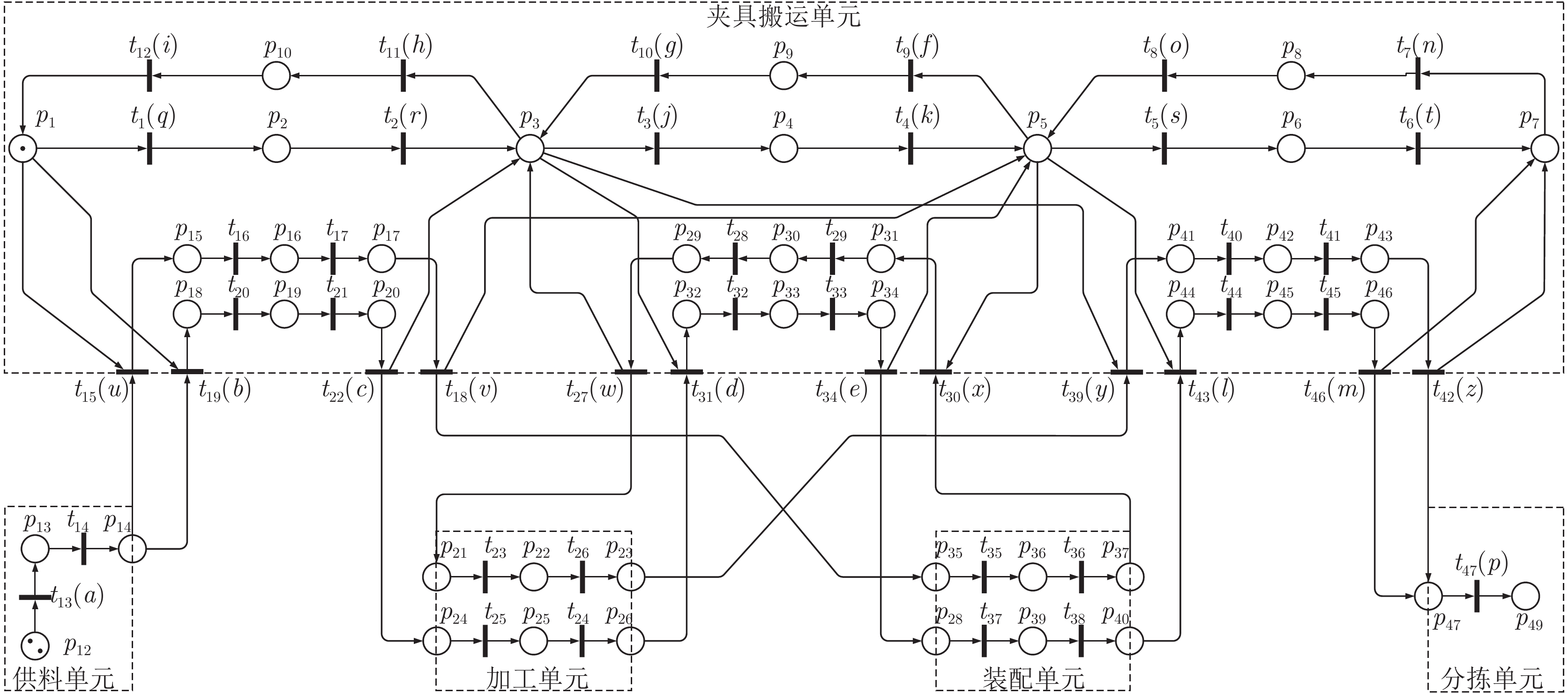
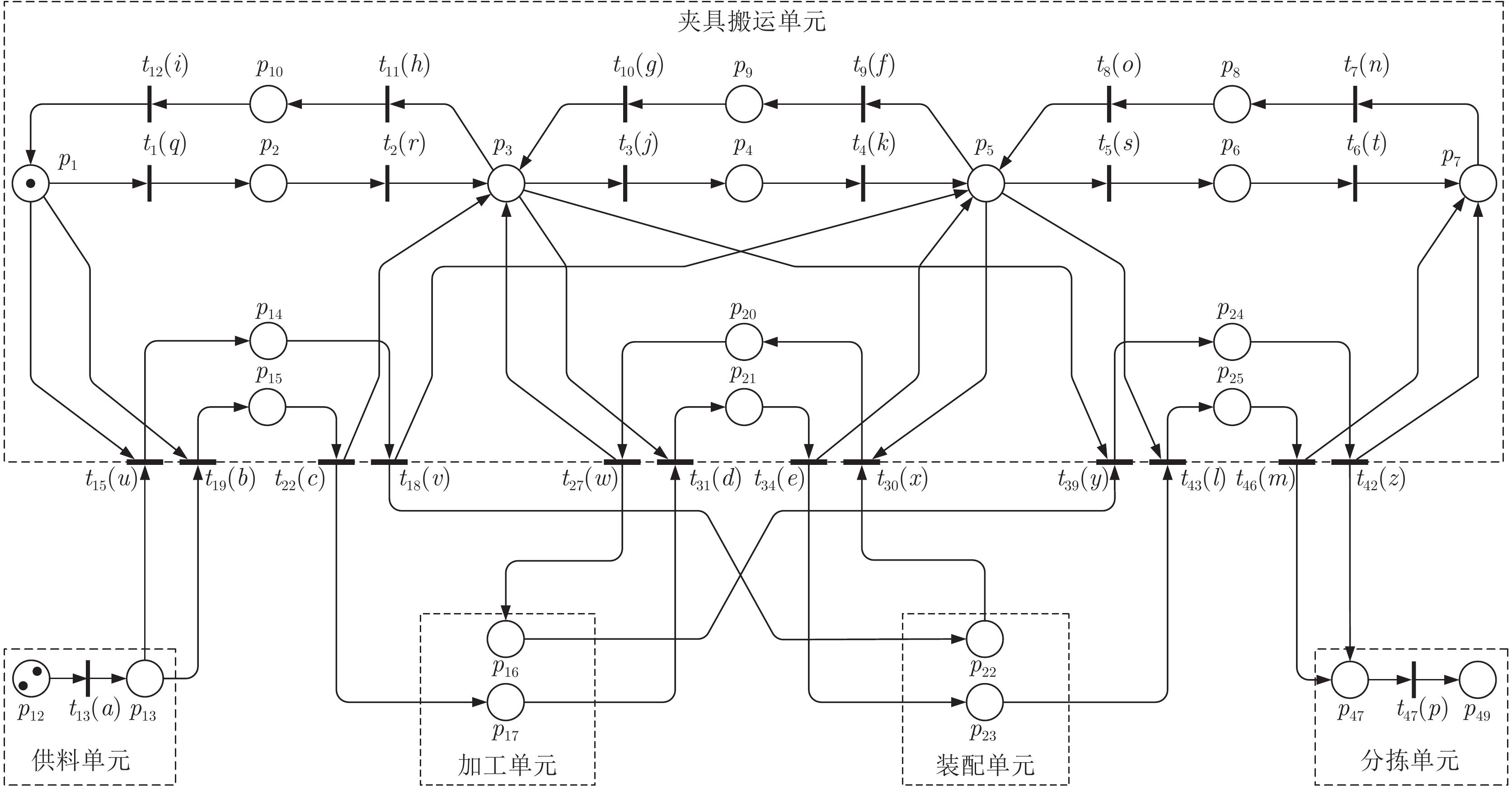
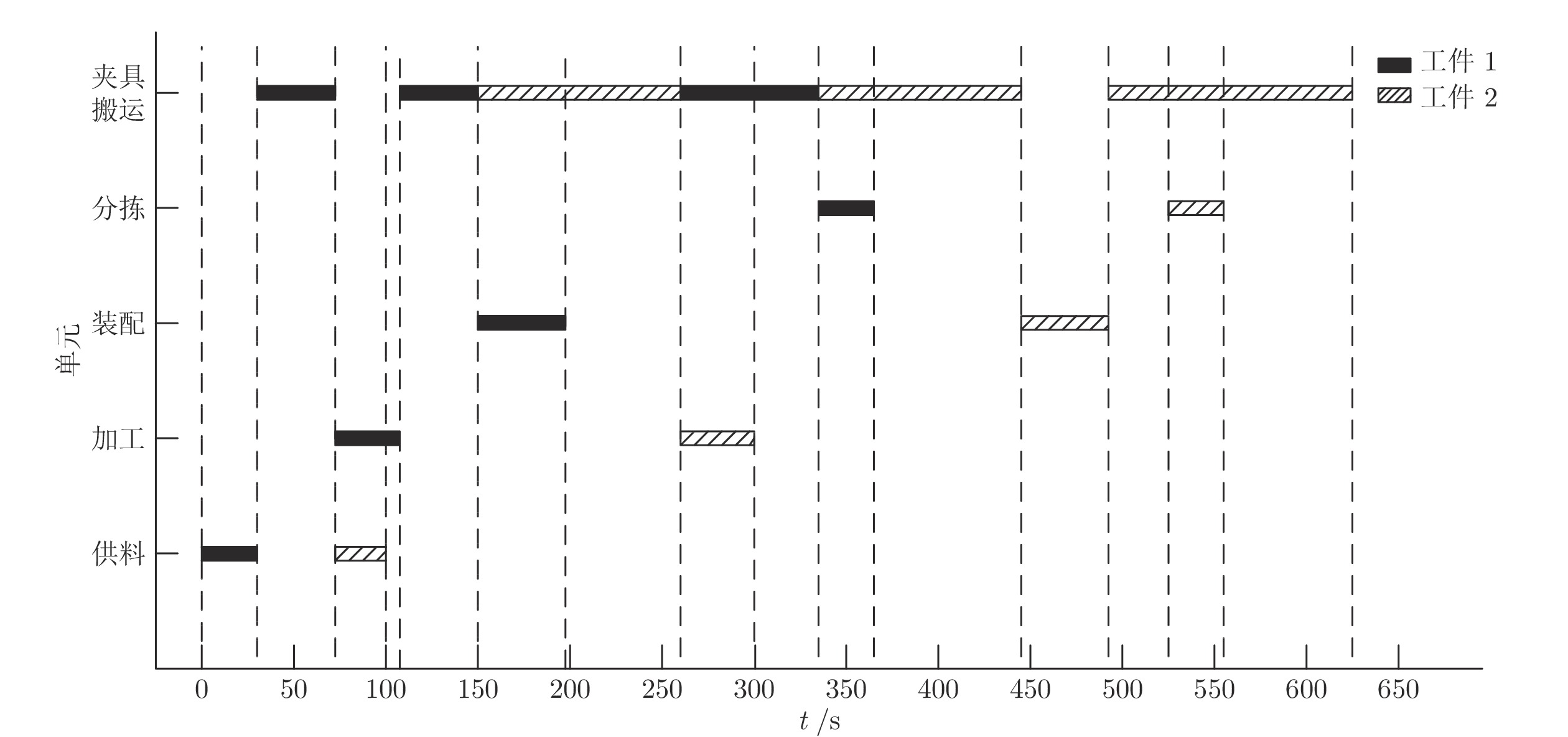
为了消除制造系统调度层与控制层之间的隔阂, 实现对生产事件快速灵活响应, 本文提出了一种调度与控制一体化的方法. 首先, 定义了一种新型Petri网模型, 即平行Petri网, 从而集成地描述了传感器、执行器、任务和资源信息, 构建制造系统的信息物理系统模型; 其次, 提出了一种从平行Petri网到赋时Petri网的抽象简化方法, 大规模压缩优化调度所需搜索的状态空间; 再次, 定义了策略Petri网以描述最优调度策略. 最后, 给出了平行Petri网与策略Petri网同步执行算法, 使得平行Petri网与物理系统同步执行.
为了消除制造系统调度层与控制层之间的隔阂, 实现对生产事件快速灵活响应, 本文提出了一种调度与控制一体化的方法. 首先, 定义了一种新型Petri网模型, 即平行Petri网, 从而集成地描述了传感器、执行器、任务和资源信息, 构建制造系统的信息物理系统模型; 其次, 提出了一种从平行Petri网到赋时Petri网的抽象简化方法, 大规模压缩优化调度所需搜索的状态空间; 再次, 定义了策略Petri网以描述最优调度策略. 最后, 给出了平行Petri网与策略Petri网同步执行算法, 使得平行Petri网与物理系统同步执行.


2023, 49(4): 857-871.
doi: 10.16383/j.aas.c200148
摘要:
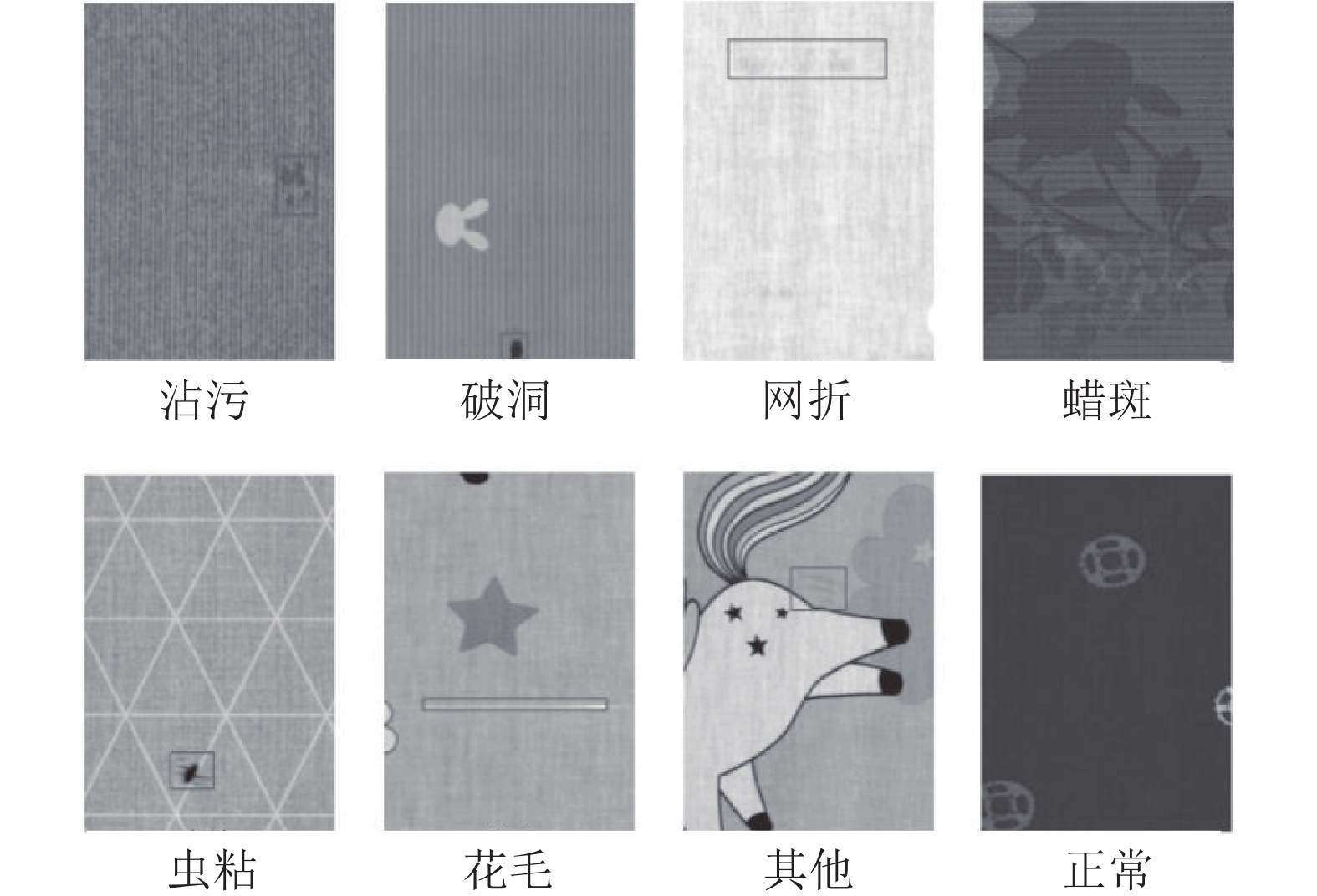
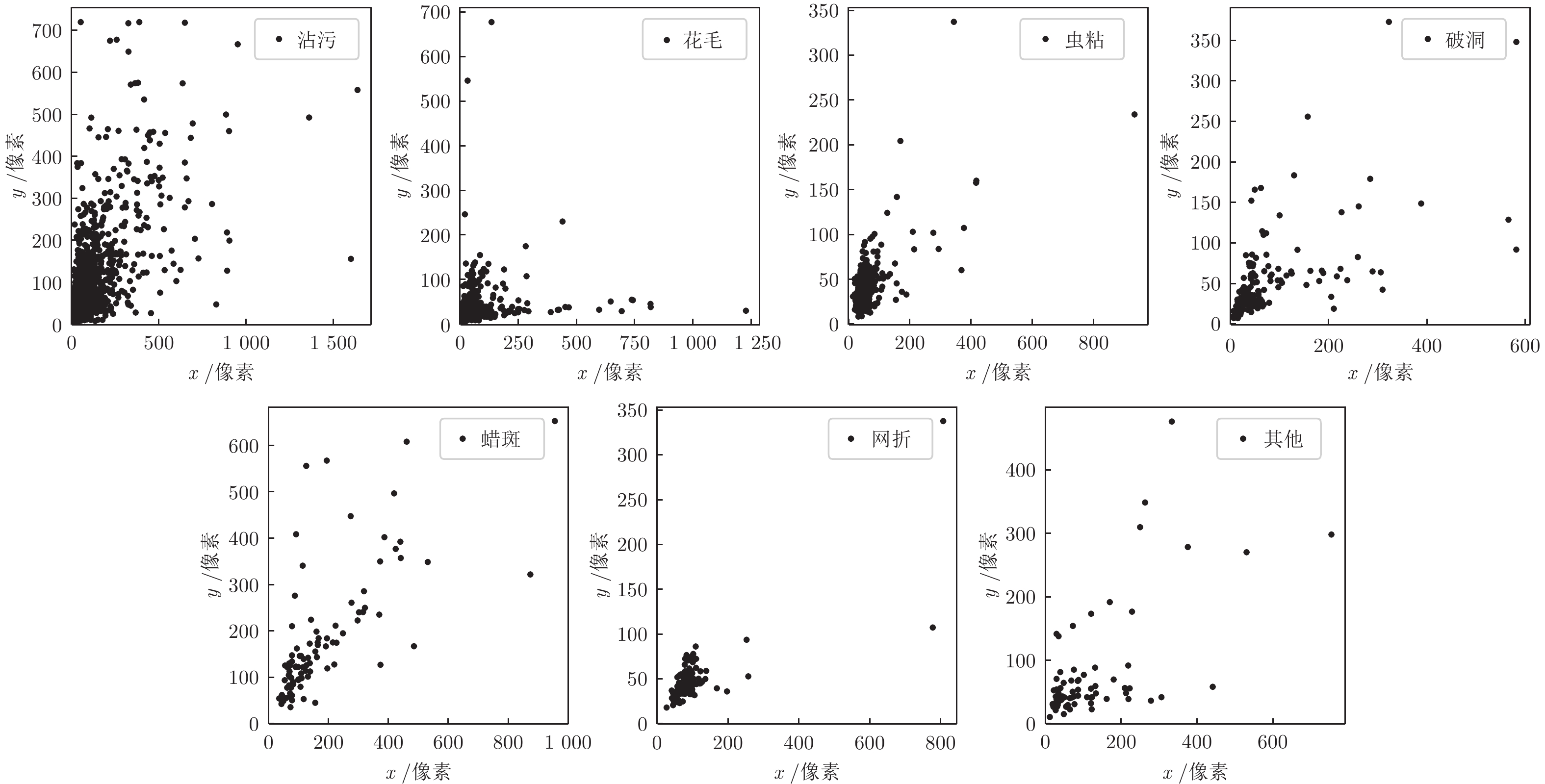
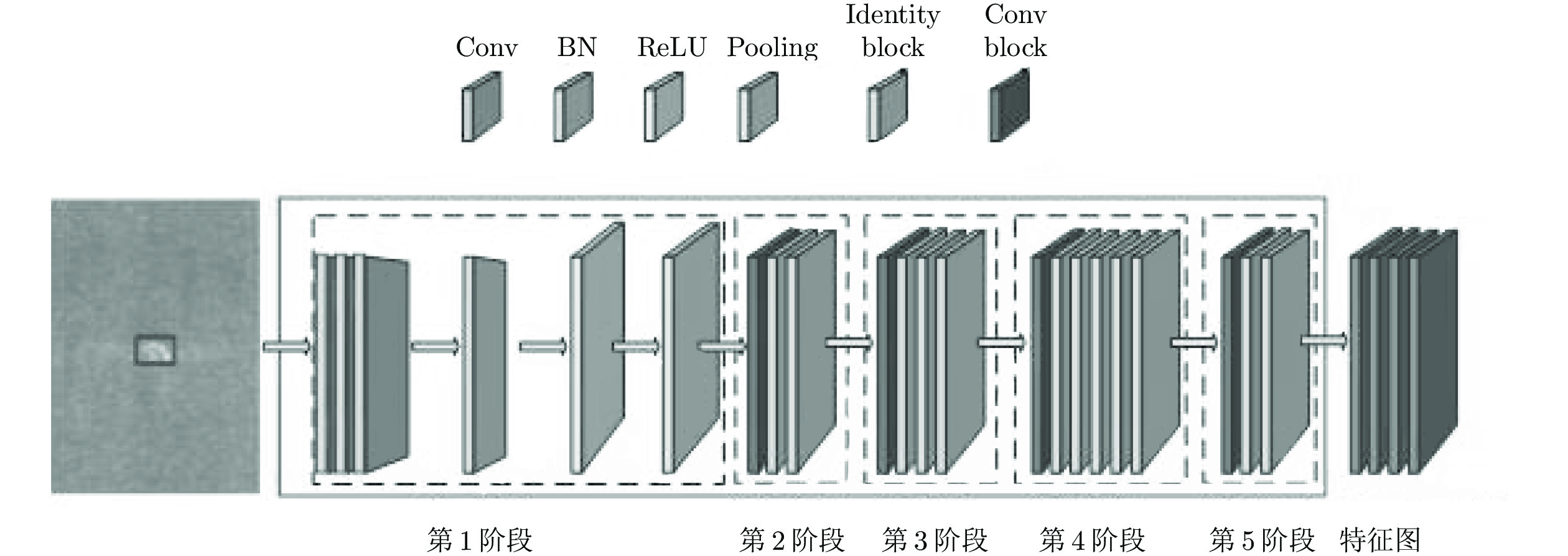
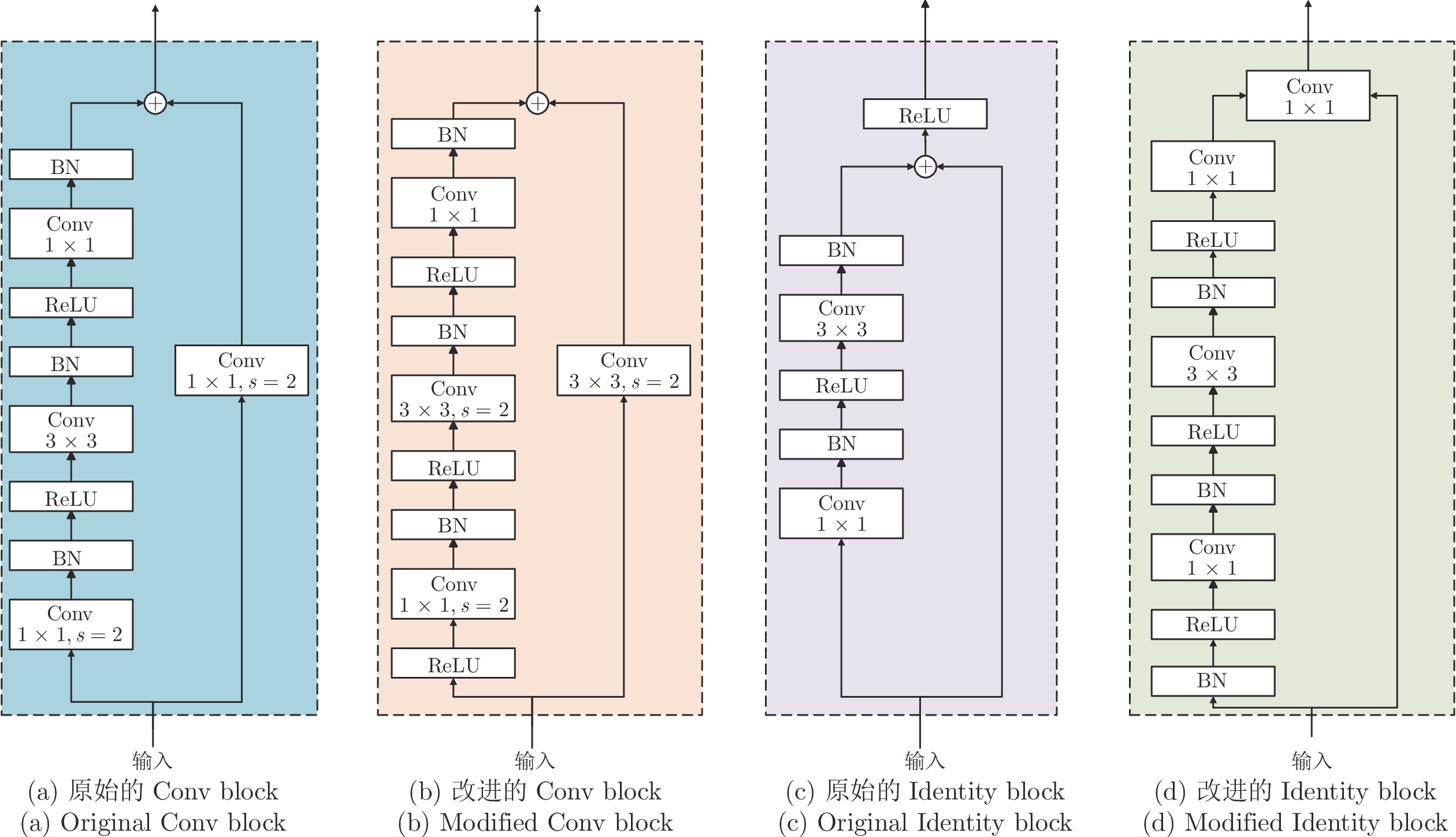
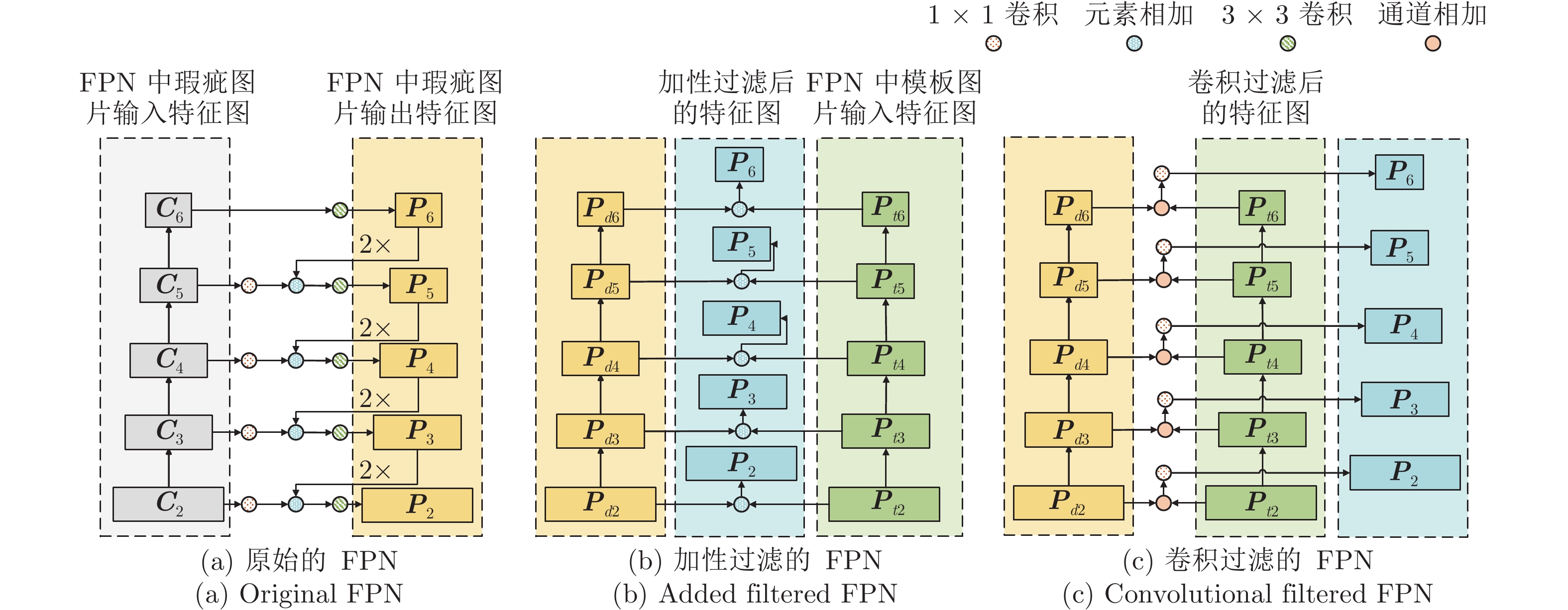
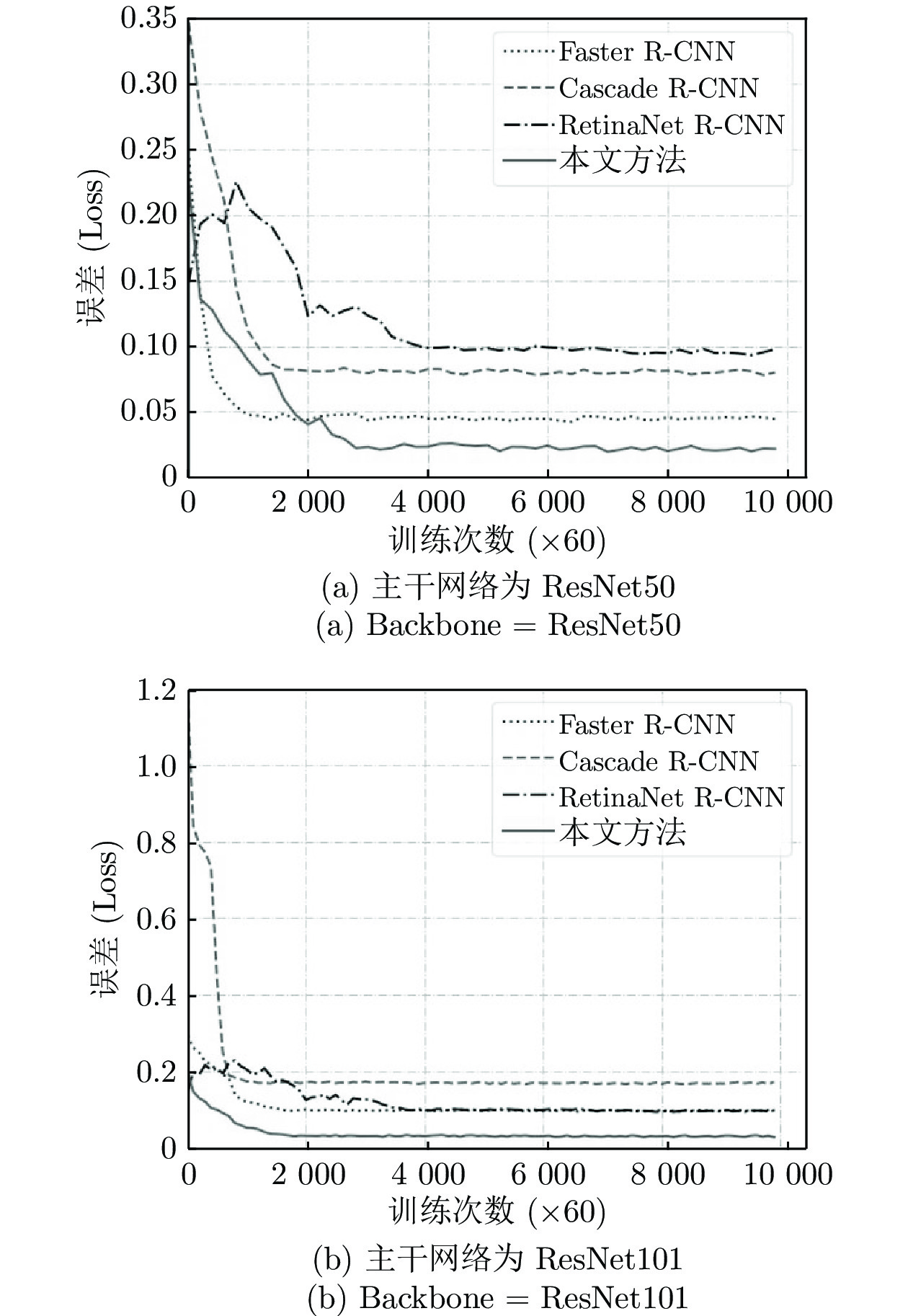
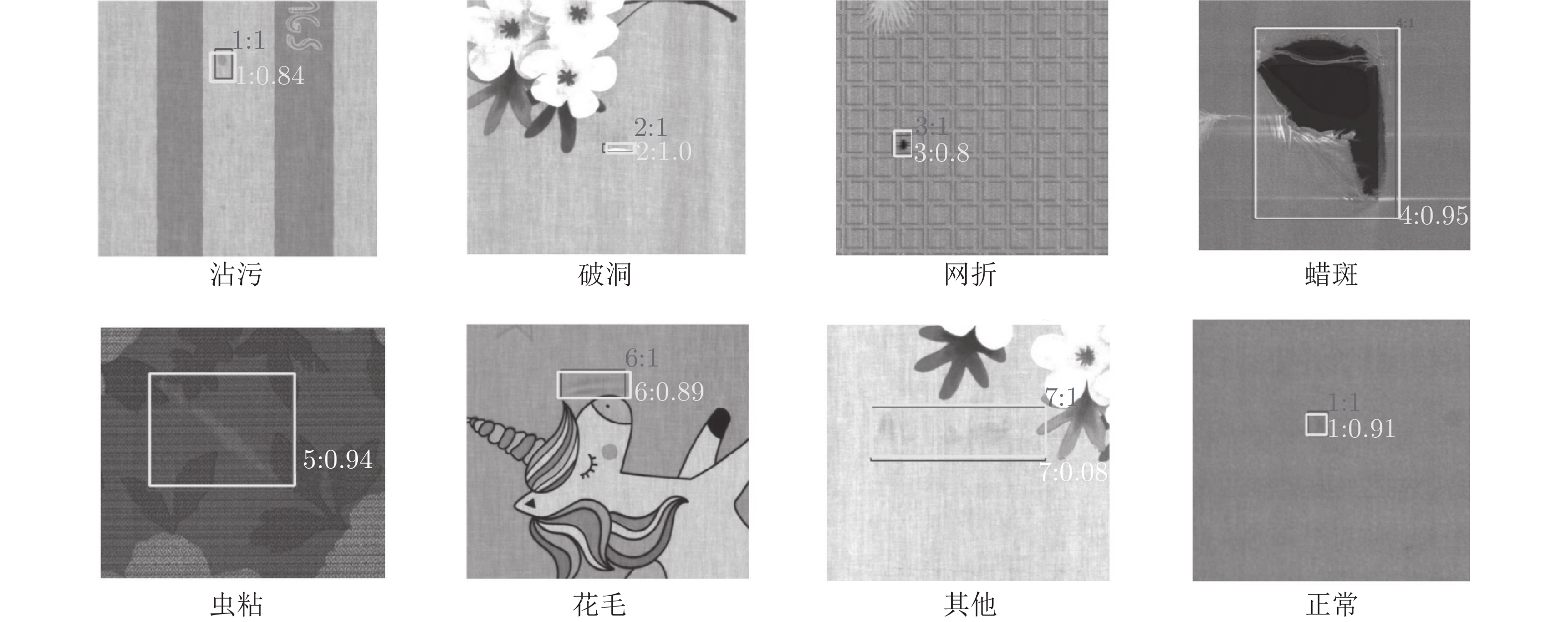
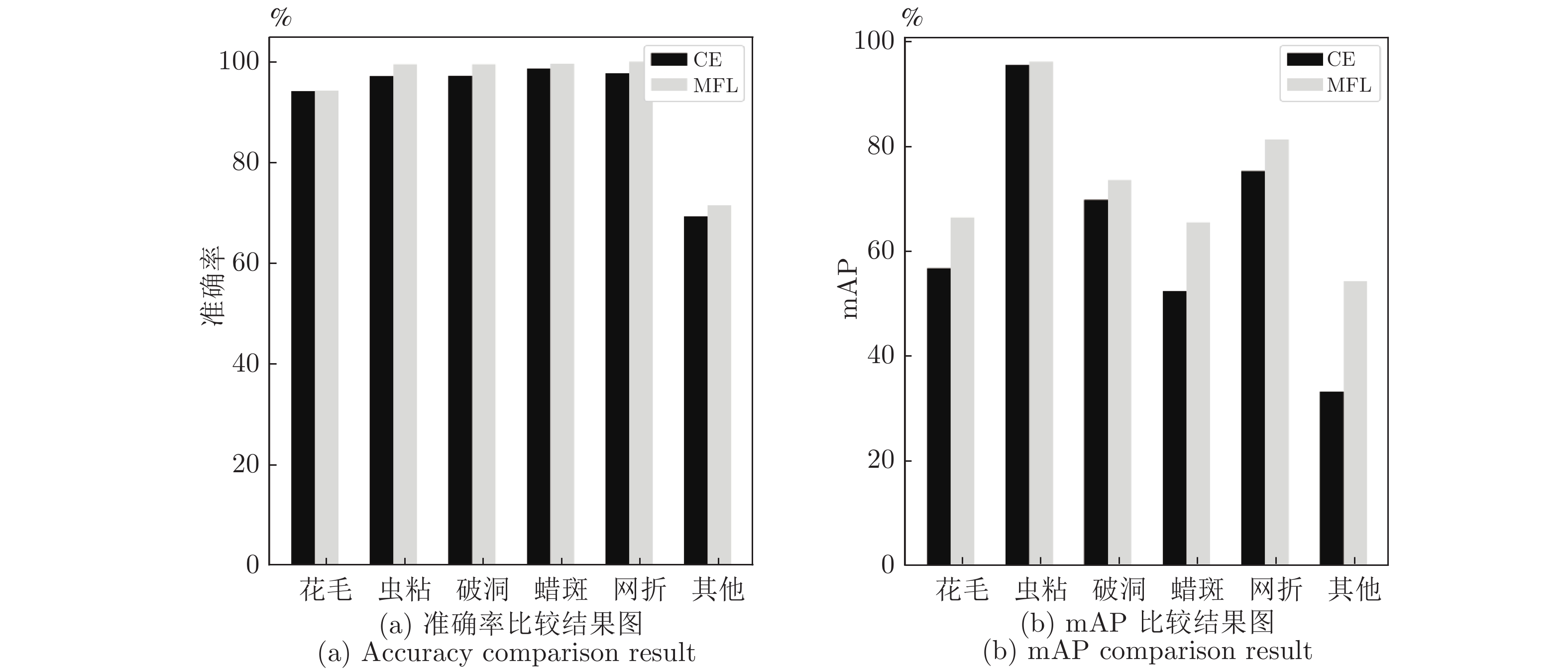
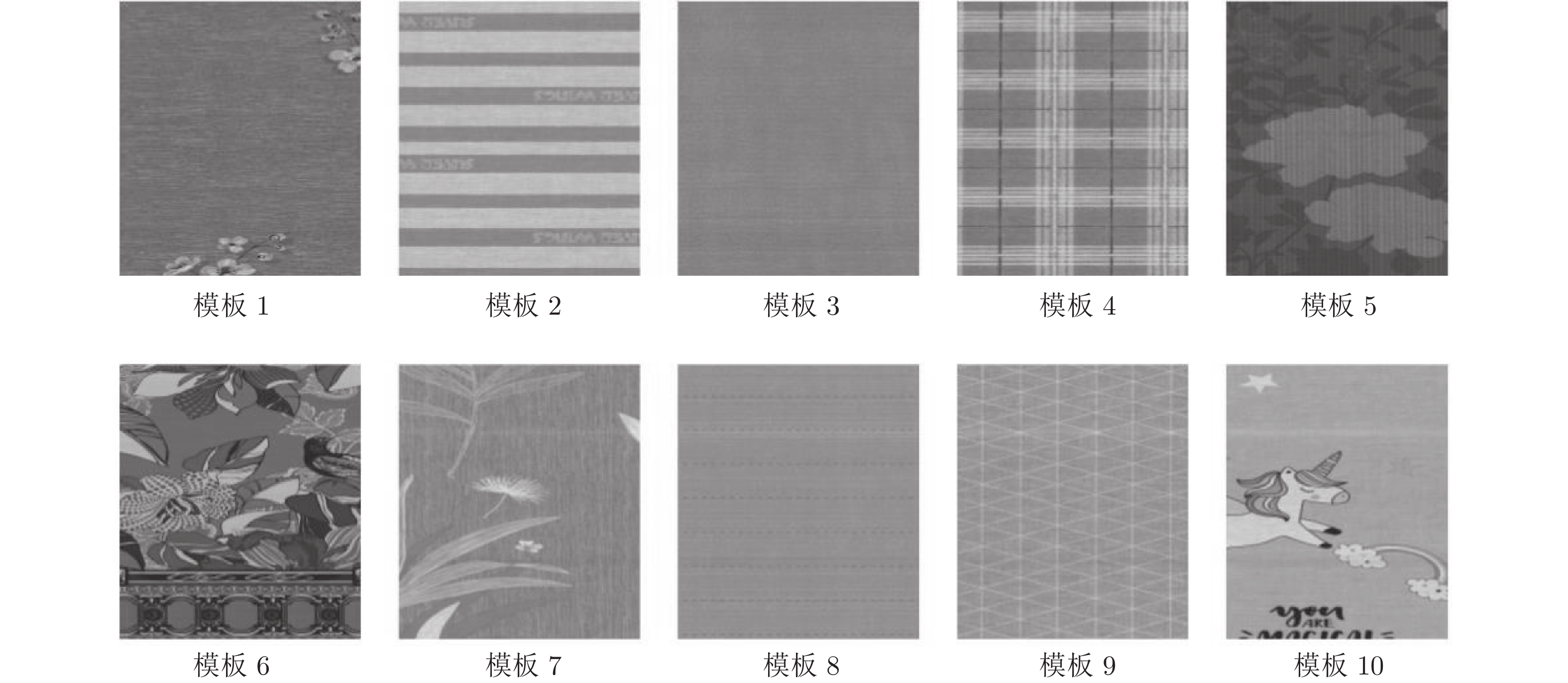
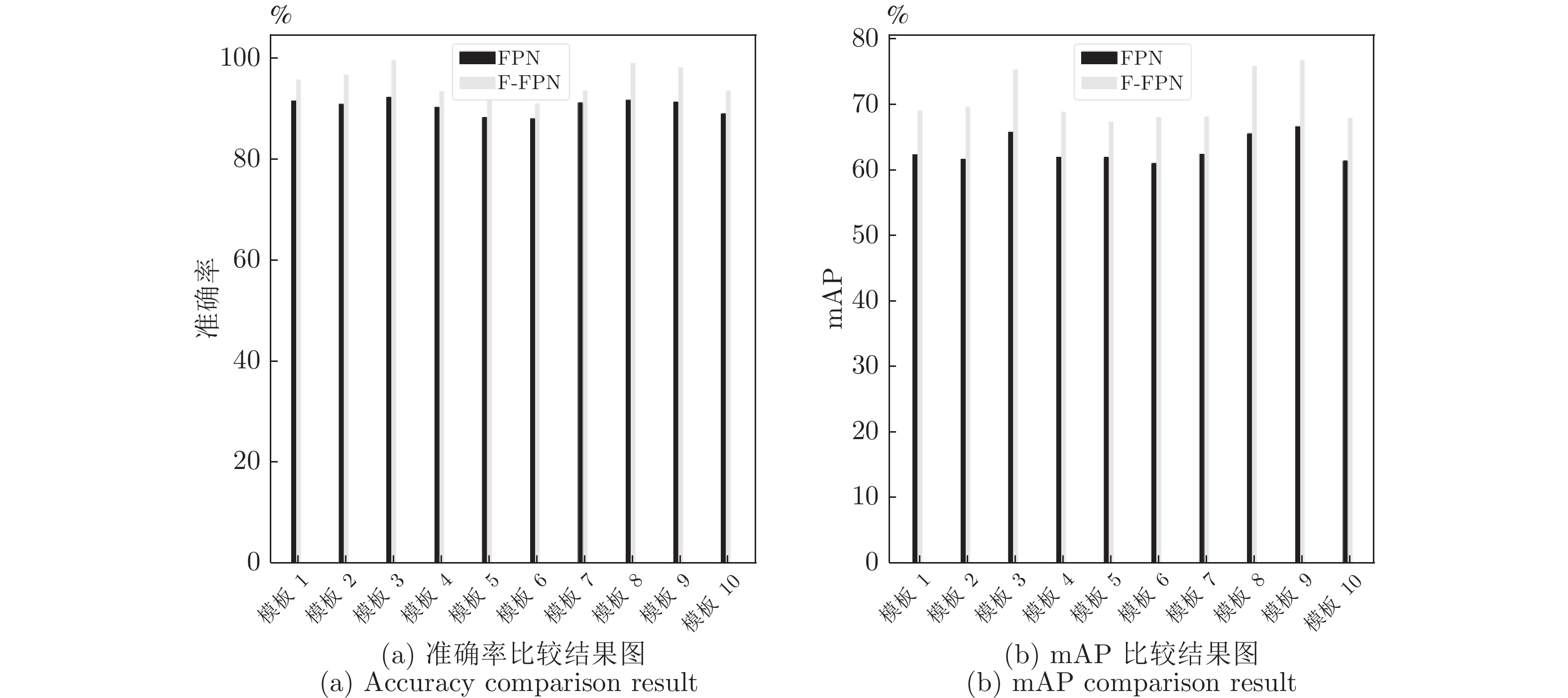
布匹瑕疵检测是纺织工业中产品质量评估的关键环节, 实现快速、准确、高效的布匹瑕疵检测对于提升纺织工业的产能具有重要意义. 在实际布匹生产过程中, 布匹瑕疵在形状、大小及数量分布上存在不平衡问题, 且纹理布匹复杂的纹理信息会掩盖瑕疵的特征, 加大布匹瑕疵检测难度. 本文提出基于深度卷积神经网络的分类不平衡纹理布匹瑕疵检测方法(Detecting defects in imbalanced texture fabric based on deep convolutional neural network, ITF-DCNN), 首先建立一种基于通道叠加的ResNet50卷积神经网络模型(ResNet50+)对布匹瑕疵特征进行优化提取; 其次提出一种冗余特征过滤的特征金字塔网络(Filter-feature pyramid network, F-FPN)对特征图中的背景特征进行过滤, 增强其中瑕疵特征的语义信息; 最后构造针对瑕疵数量进行加权的MFL (Multi focal loss)损失函数, 减轻数据集不平衡对模型的影响, 降低模型对于少数类瑕疵的不敏感性. 通过实验对比, 提出的方法能有效提升布匹瑕疵检测的准确率及定位精度, 同时降低了布匹瑕疵检测的误检率和漏检率, 明显优于当前主流的布匹瑕疵检测算法.
布匹瑕疵检测是纺织工业中产品质量评估的关键环节, 实现快速、准确、高效的布匹瑕疵检测对于提升纺织工业的产能具有重要意义. 在实际布匹生产过程中, 布匹瑕疵在形状、大小及数量分布上存在不平衡问题, 且纹理布匹复杂的纹理信息会掩盖瑕疵的特征, 加大布匹瑕疵检测难度. 本文提出基于深度卷积神经网络的分类不平衡纹理布匹瑕疵检测方法(Detecting defects in imbalanced texture fabric based on deep convolutional neural network, ITF-DCNN), 首先建立一种基于通道叠加的ResNet50卷积神经网络模型(ResNet50+)对布匹瑕疵特征进行优化提取; 其次提出一种冗余特征过滤的特征金字塔网络(Filter-feature pyramid network, F-FPN)对特征图中的背景特征进行过滤, 增强其中瑕疵特征的语义信息; 最后构造针对瑕疵数量进行加权的MFL (Multi focal loss)损失函数, 减轻数据集不平衡对模型的影响, 降低模型对于少数类瑕疵的不敏感性. 通过实验对比, 提出的方法能有效提升布匹瑕疵检测的准确率及定位精度, 同时降低了布匹瑕疵检测的误检率和漏检率, 明显优于当前主流的布匹瑕疵检测算法.

2023, 49(4): 872-880.
doi: 10.16383/j.aas.c210626
摘要:
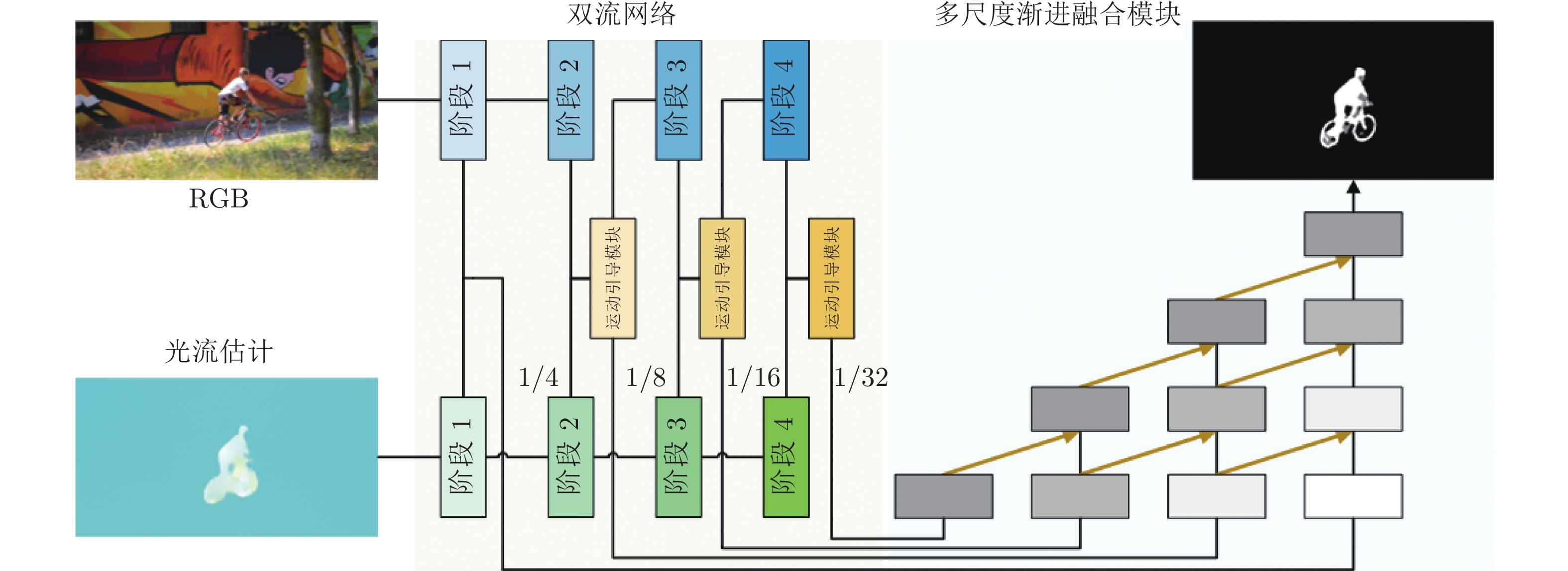
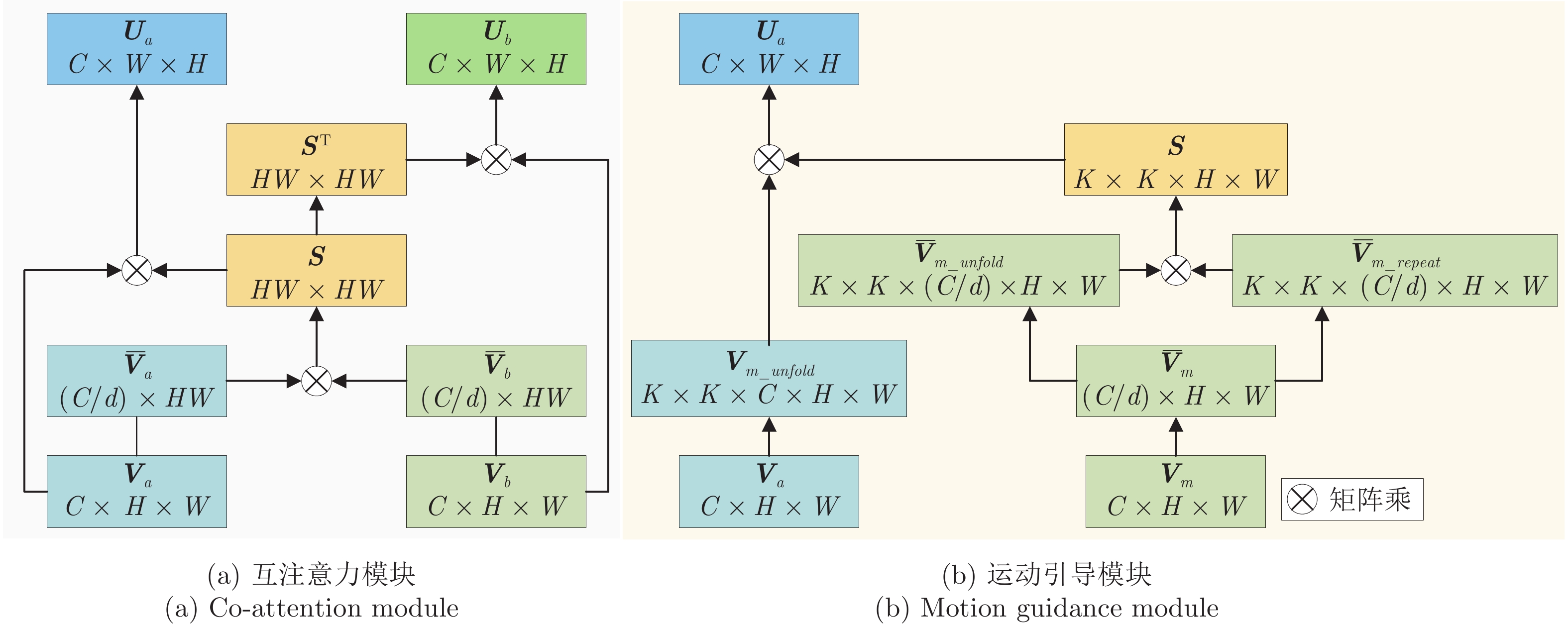
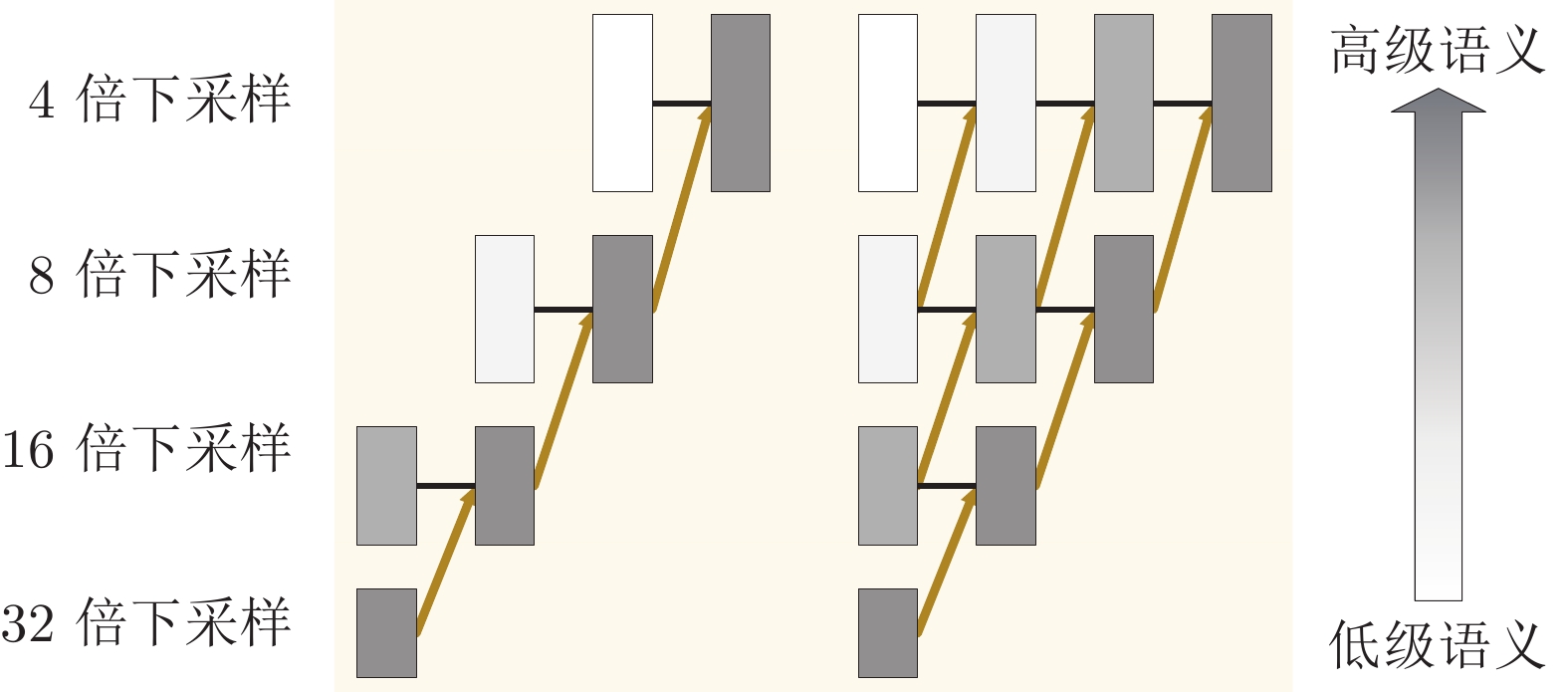
大量基于深度学习的无监督视频目标分割(Unsupervised video object segmentation, UVOS)算法存在模型参数量与计算量较大的问题, 这显著限制了算法在实际中的应用. 提出了基于运动引导的视频目标分割网络, 在大幅降低模型参数量与计算量的同时, 提升视频目标分割性能. 整个模型由双流网络、运动引导模块、多尺度渐进融合模块三部分组成. 具体地, 首先, RGB图像与光流估计输入双流网络提取物体外观特征与运动特征; 然后, 运动引导模块通过局部注意力提取运动特征中的语义信息, 用于引导外观特征学习丰富的语义信息; 最后, 多尺度渐进融合模块获取双流网络的各个阶段输出的特征, 将深层特征渐进地融入浅层特征, 最终提升边缘分割效果. 在3个标准数据集上进行了大量评测, 实验结果表明了该方法的优越性能.
大量基于深度学习的无监督视频目标分割(Unsupervised video object segmentation, UVOS)算法存在模型参数量与计算量较大的问题, 这显著限制了算法在实际中的应用. 提出了基于运动引导的视频目标分割网络, 在大幅降低模型参数量与计算量的同时, 提升视频目标分割性能. 整个模型由双流网络、运动引导模块、多尺度渐进融合模块三部分组成. 具体地, 首先, RGB图像与光流估计输入双流网络提取物体外观特征与运动特征; 然后, 运动引导模块通过局部注意力提取运动特征中的语义信息, 用于引导外观特征学习丰富的语义信息; 最后, 多尺度渐进融合模块获取双流网络的各个阶段输出的特征, 将深层特征渐进地融入浅层特征, 最终提升边缘分割效果. 在3个标准数据集上进行了大量评测, 实验结果表明了该方法的优越性能.


2023, 49(4): 881-890.
doi: 10.16383/j.aas.c211127
摘要:
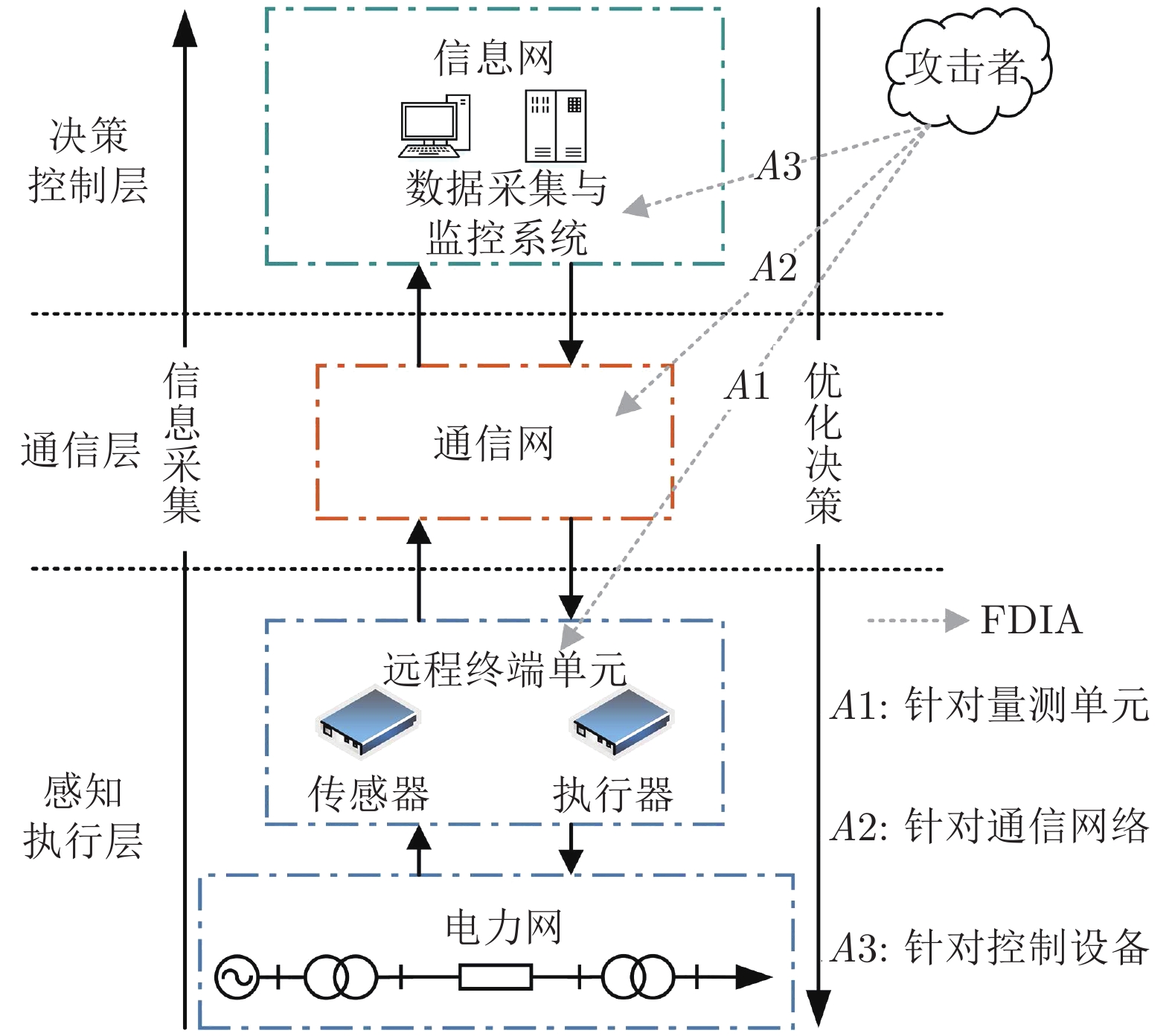
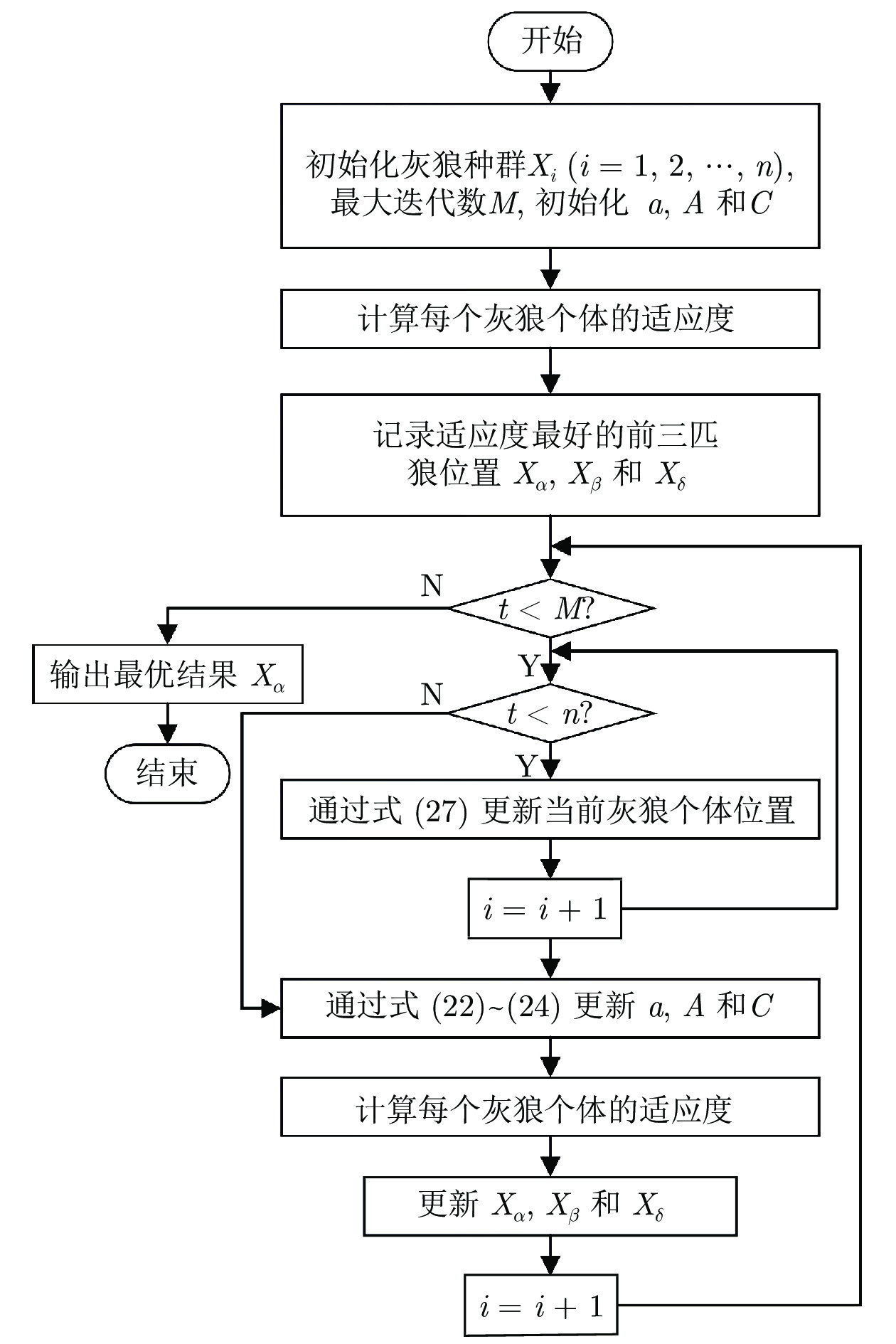
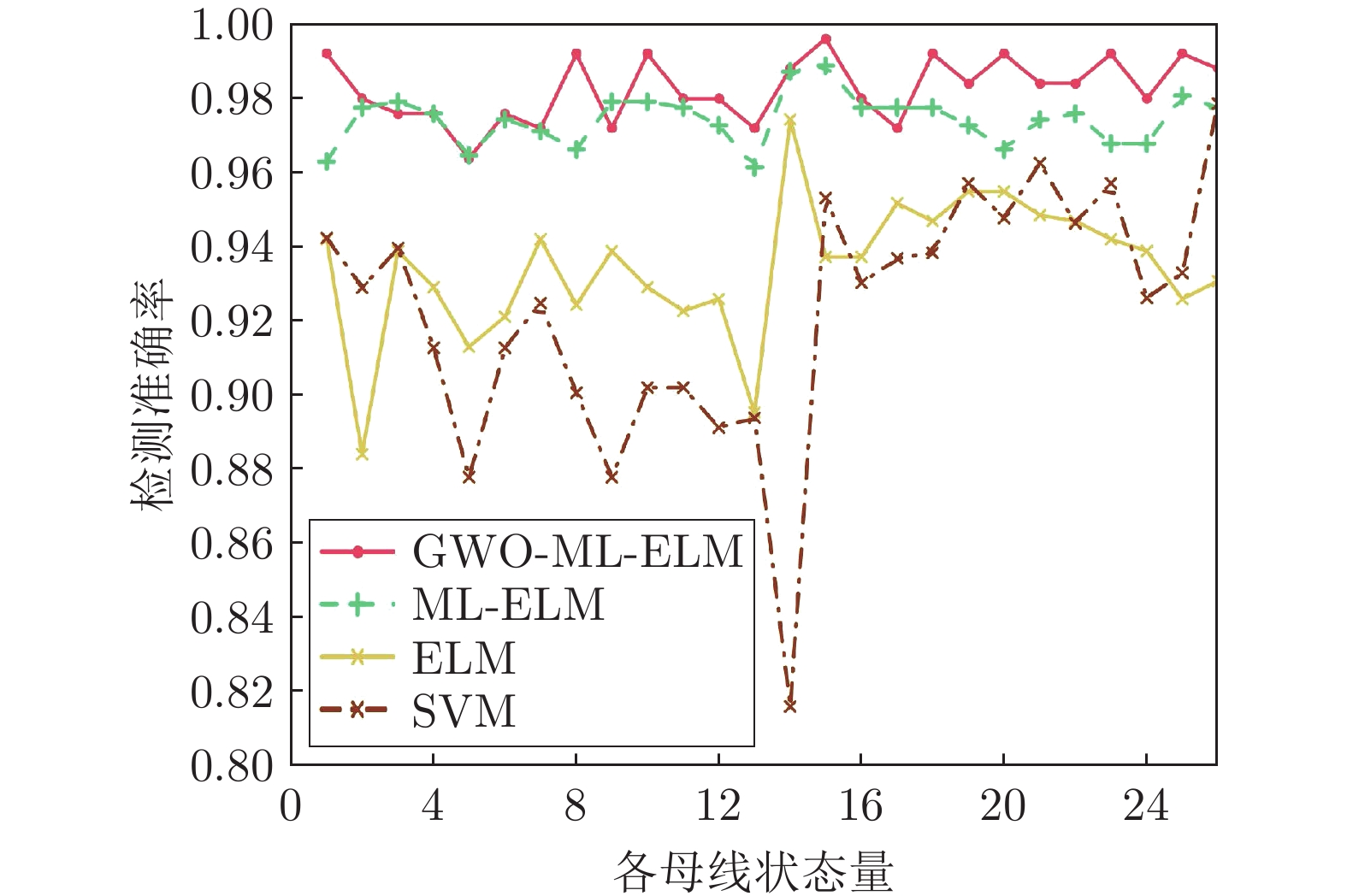
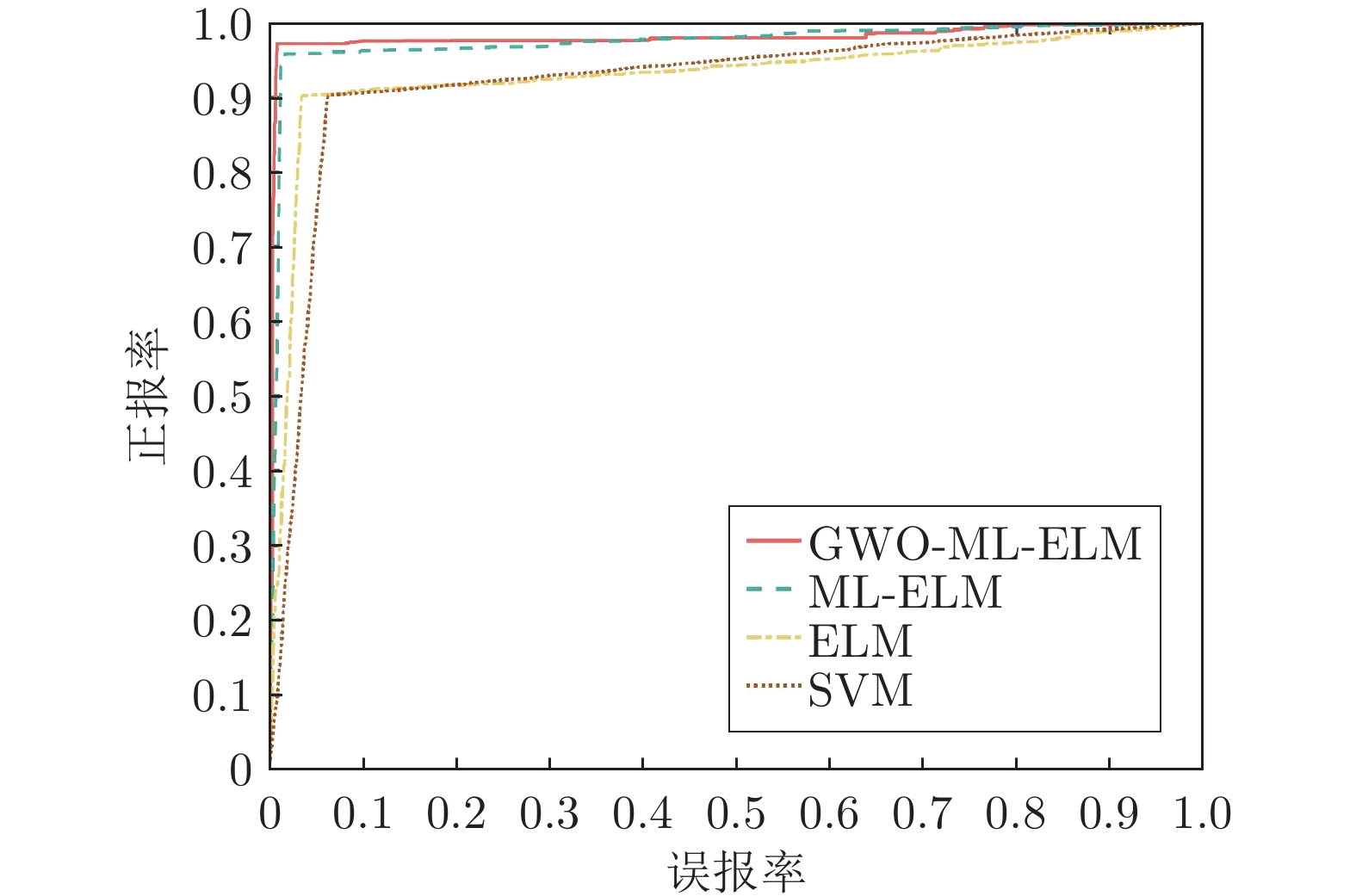
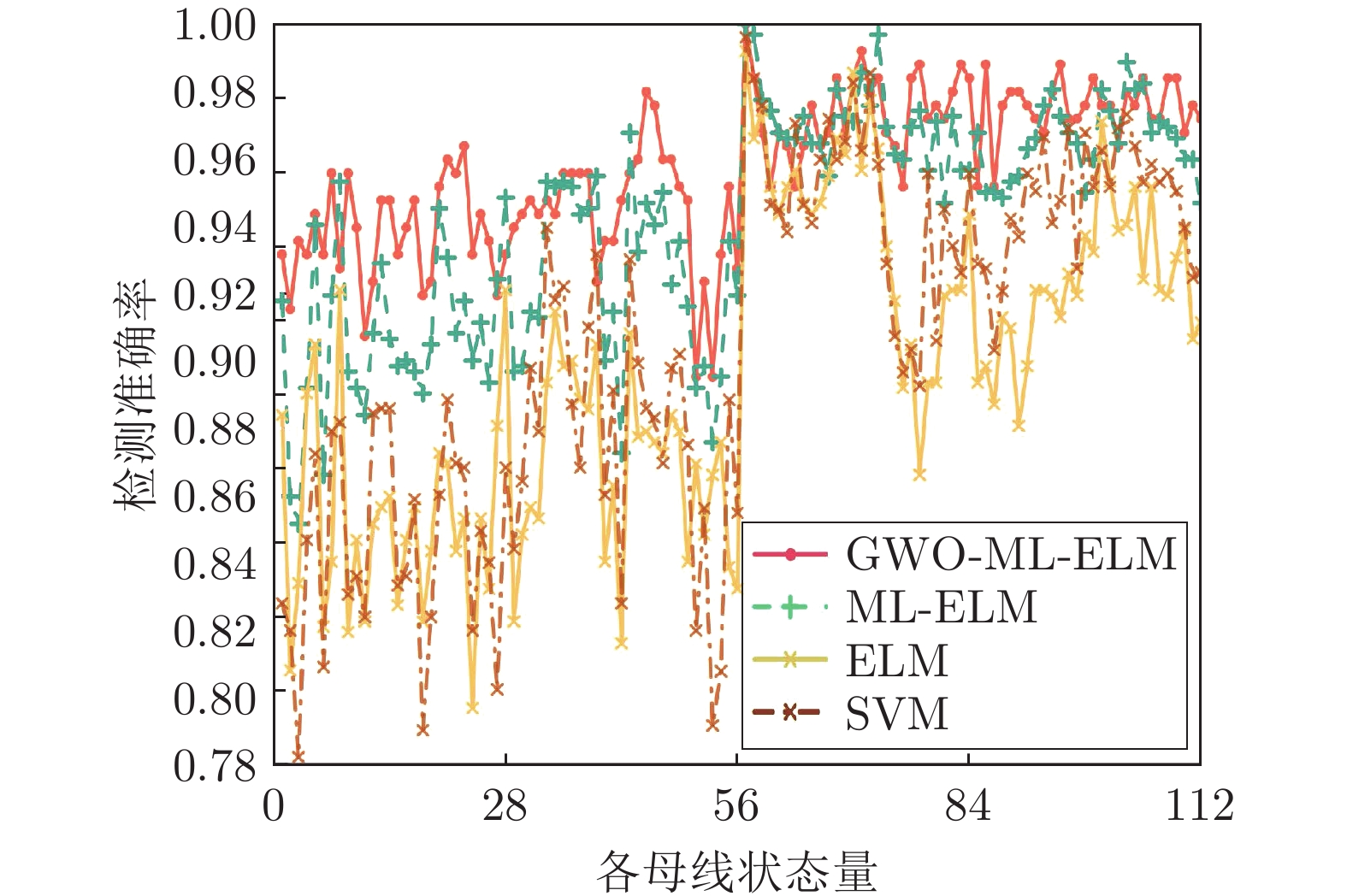
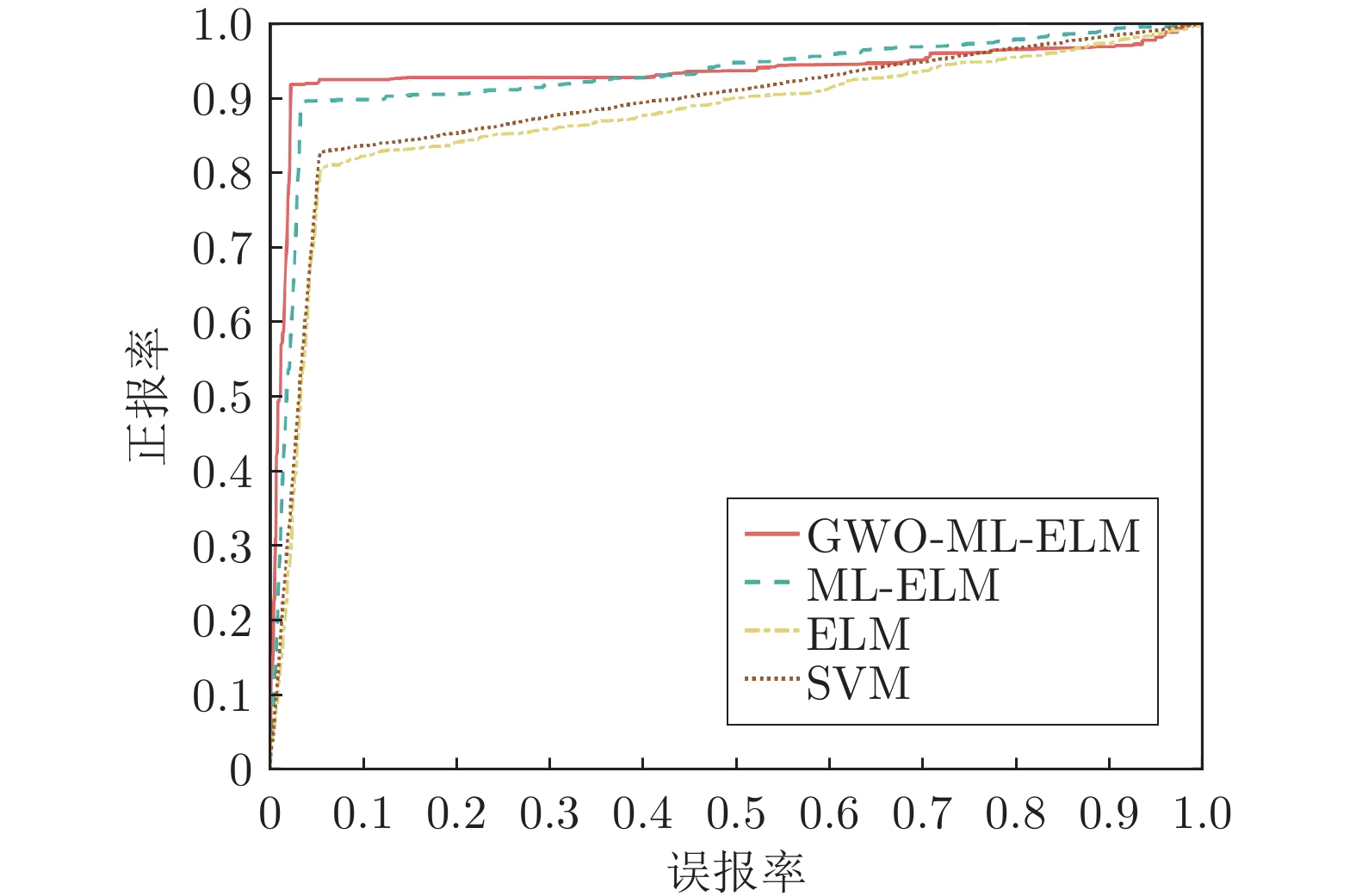
虚假数据注入攻击(False data injection attacks, FDIA)严重威胁了电力信息物理系统(Cyber-physical system, CPS)的状态估计, 而目前大多数检测方法侧重于攻击存在性检测, 无法获取准确的受攻击位置. 故本文提出了一种基于灰狼优化(Gray wolf optimization, GWO)多隐层极限学习机(Multi layer extreme learning machine, ML-ELM)的电力信息物理系统虚假数据注入攻击检测方法. 所提方法将攻击检测看作是一个多标签二分类问题, 不仅将用于特征提取与分类训练的极限学习机由单隐层变为多隐层, 以解决极限学习机特征表达能力有限的问题, 且融入了具有强全局搜索能力的灰狼优化算法以提高多隐层极限学习机分类精度和泛化性能. 进而自动识别系统各个节点状态量的异常, 获取受攻击的精确位置. 通过在不同场景下对IEEE-14和57节点测试系统上进行大量实验, 验证了所提方法的有效性, 且分别与极限学习机、未融入灰狼优化的多隐层极限学习机以及支持向量机(Support vector machine, SVM)相比, 所提方法具有更精确的定位检测性能.
虚假数据注入攻击(False data injection attacks, FDIA)严重威胁了电力信息物理系统(Cyber-physical system, CPS)的状态估计, 而目前大多数检测方法侧重于攻击存在性检测, 无法获取准确的受攻击位置. 故本文提出了一种基于灰狼优化(Gray wolf optimization, GWO)多隐层极限学习机(Multi layer extreme learning machine, ML-ELM)的电力信息物理系统虚假数据注入攻击检测方法. 所提方法将攻击检测看作是一个多标签二分类问题, 不仅将用于特征提取与分类训练的极限学习机由单隐层变为多隐层, 以解决极限学习机特征表达能力有限的问题, 且融入了具有强全局搜索能力的灰狼优化算法以提高多隐层极限学习机分类精度和泛化性能. 进而自动识别系统各个节点状态量的异常, 获取受攻击的精确位置. 通过在不同场景下对IEEE-14和57节点测试系统上进行大量实验, 验证了所提方法的有效性, 且分别与极限学习机、未融入灰狼优化的多隐层极限学习机以及支持向量机(Support vector machine, SVM)相比, 所提方法具有更精确的定位检测性能.

2023, 49(4): 891-903.
doi: 10.16383/j.aas.c200621
摘要:
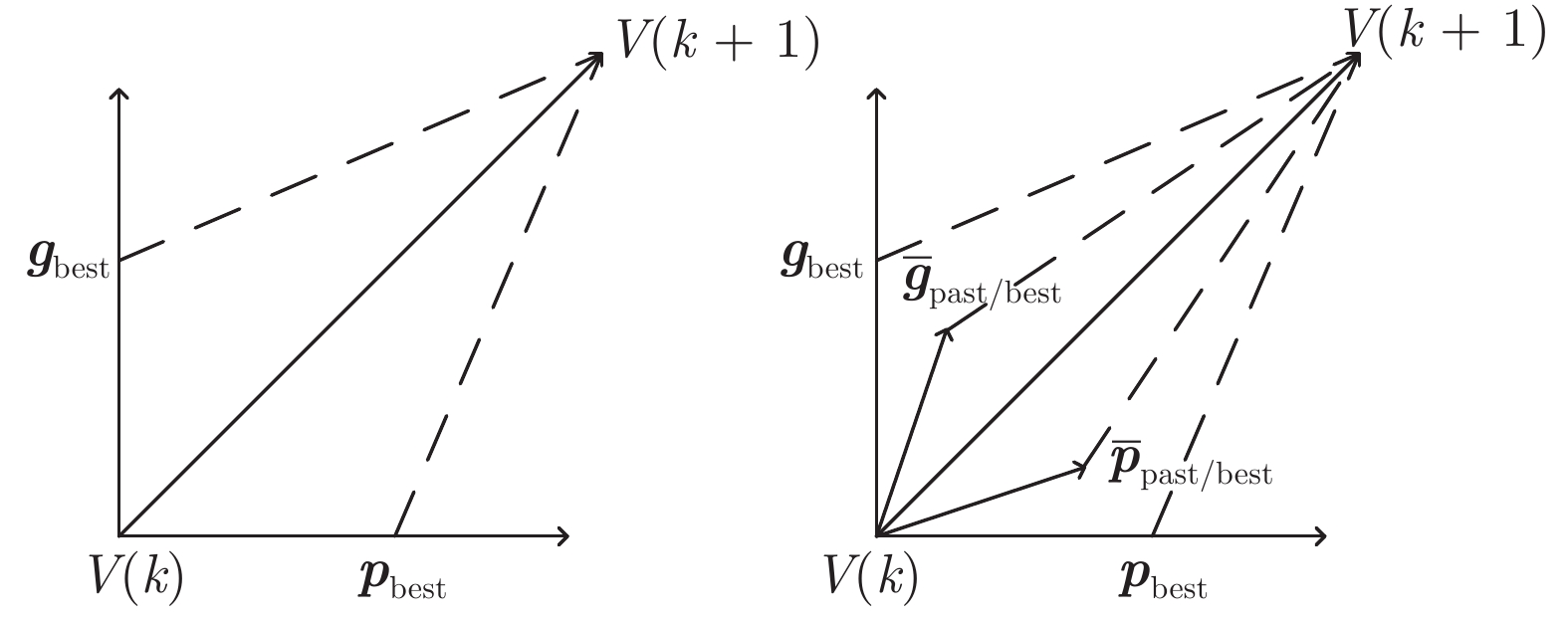
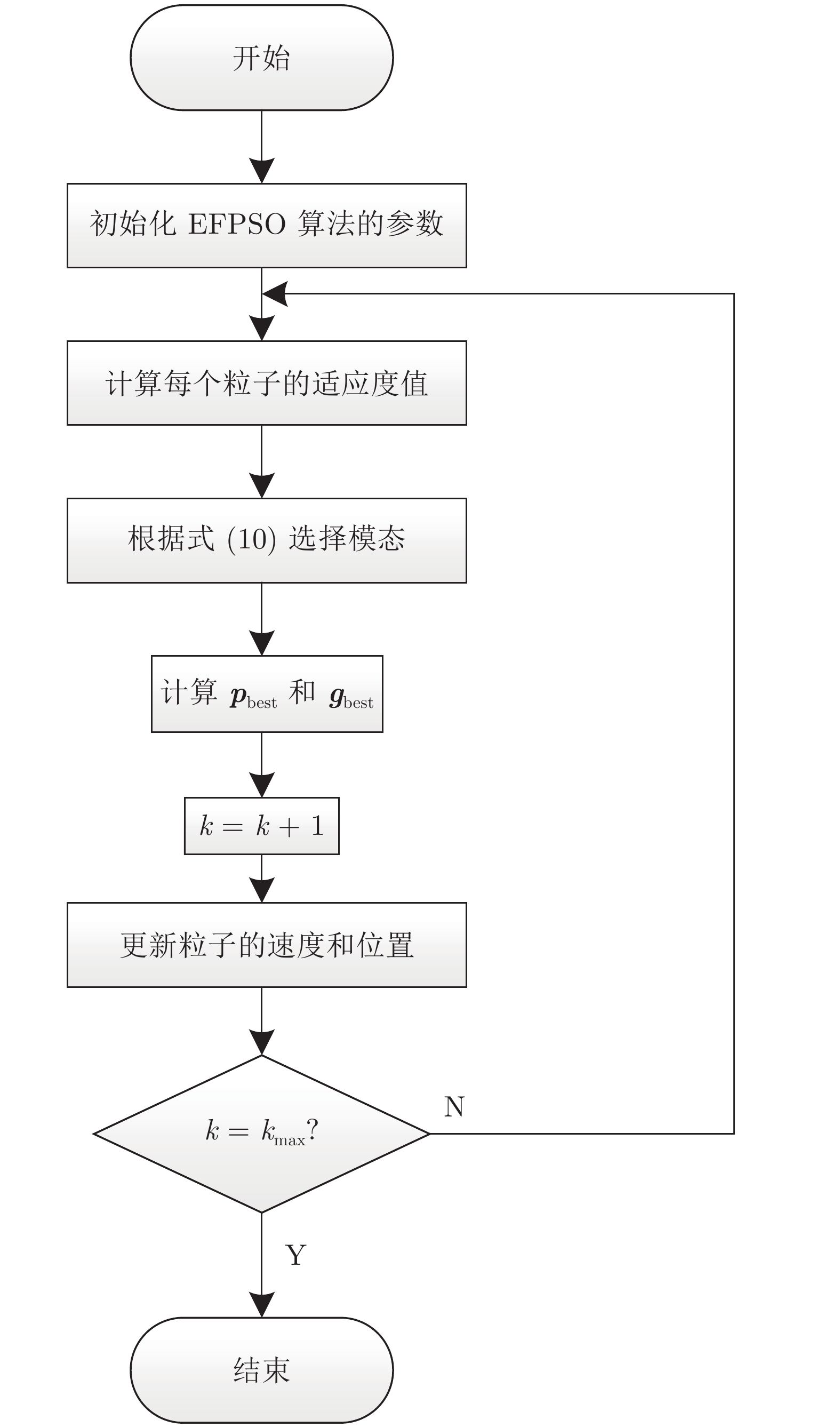
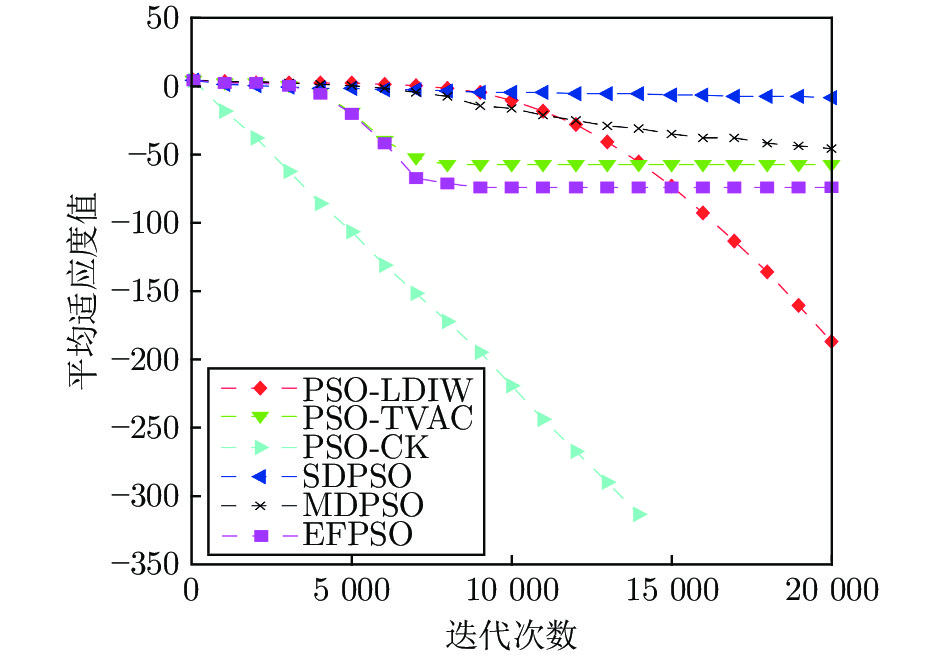
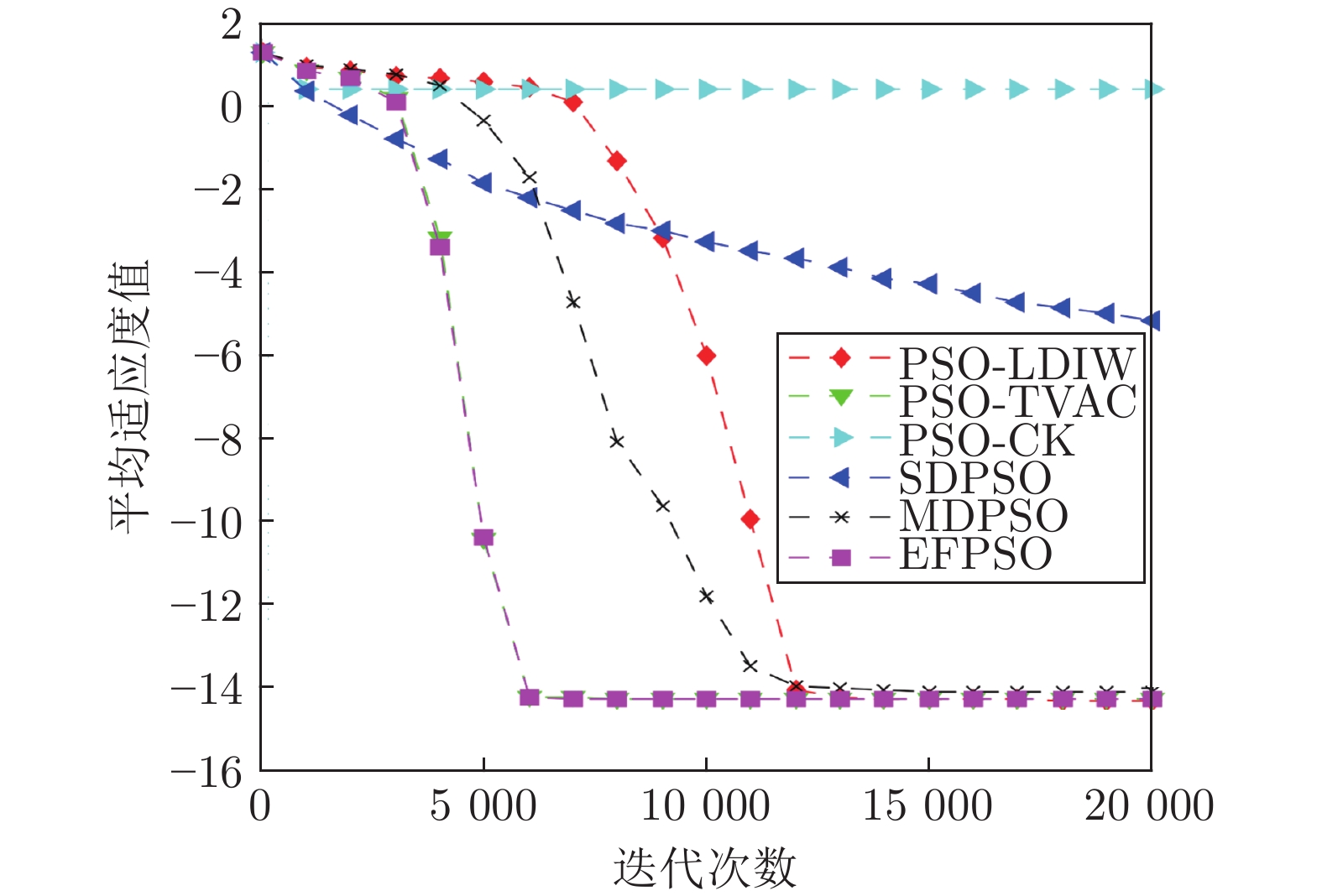
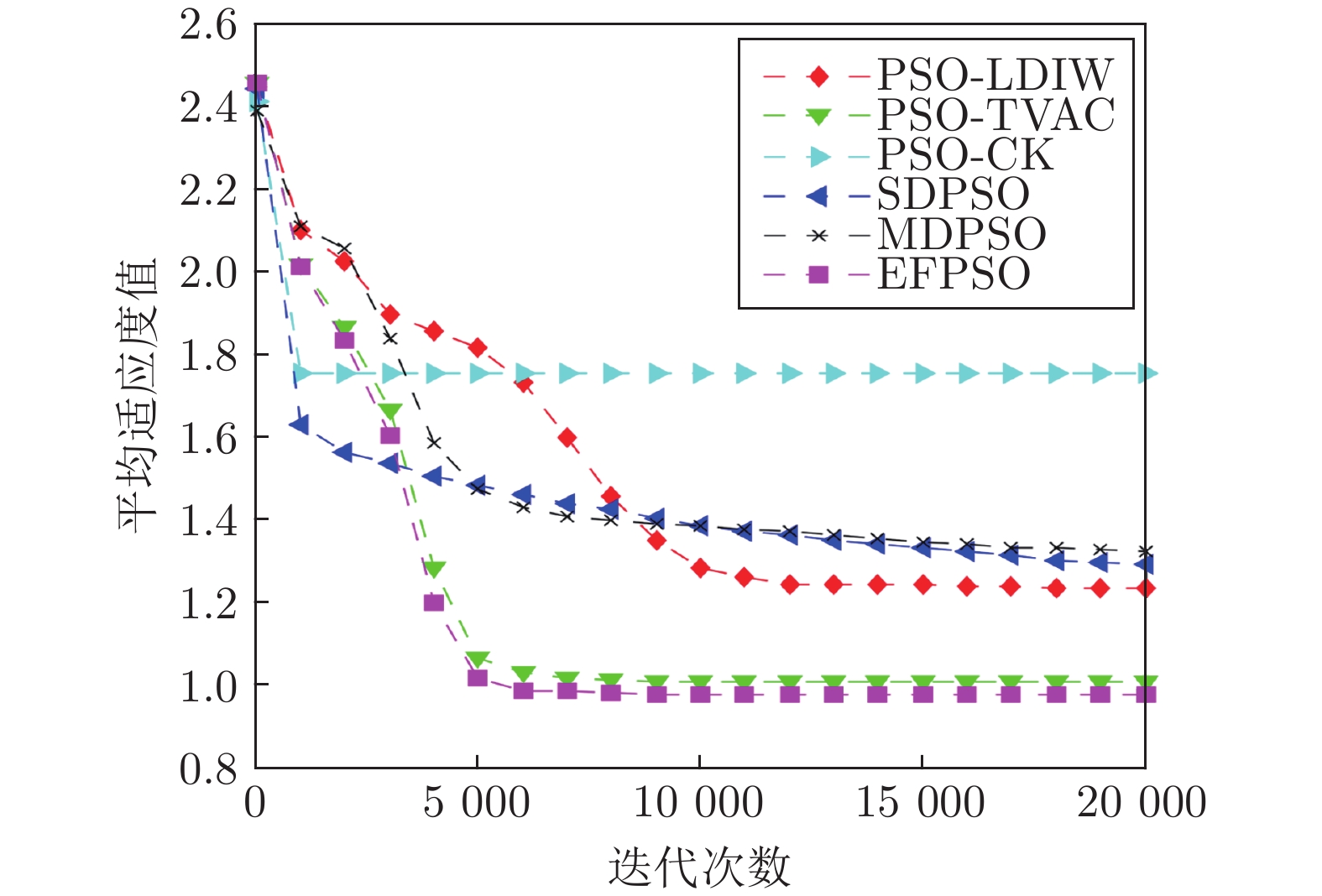
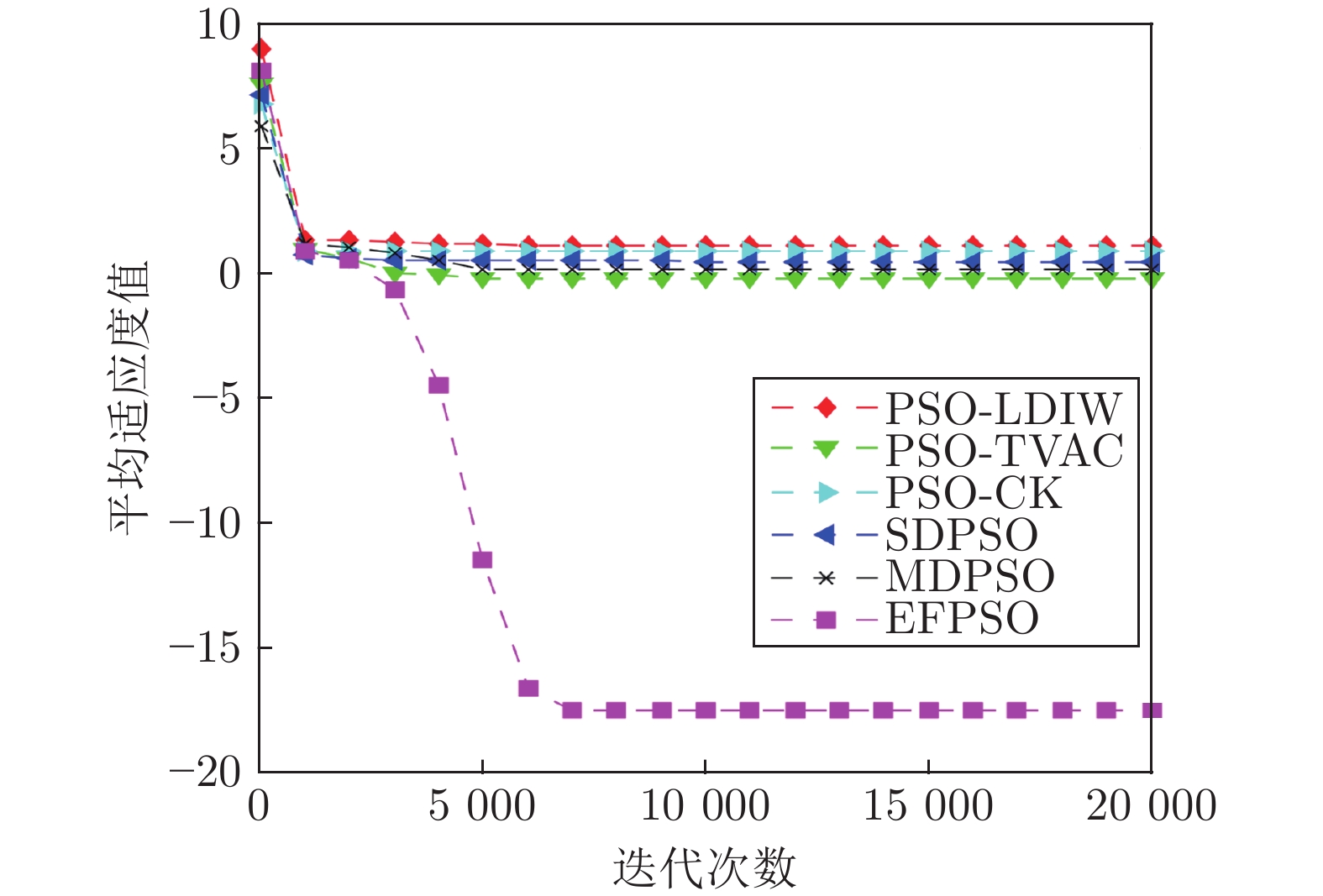
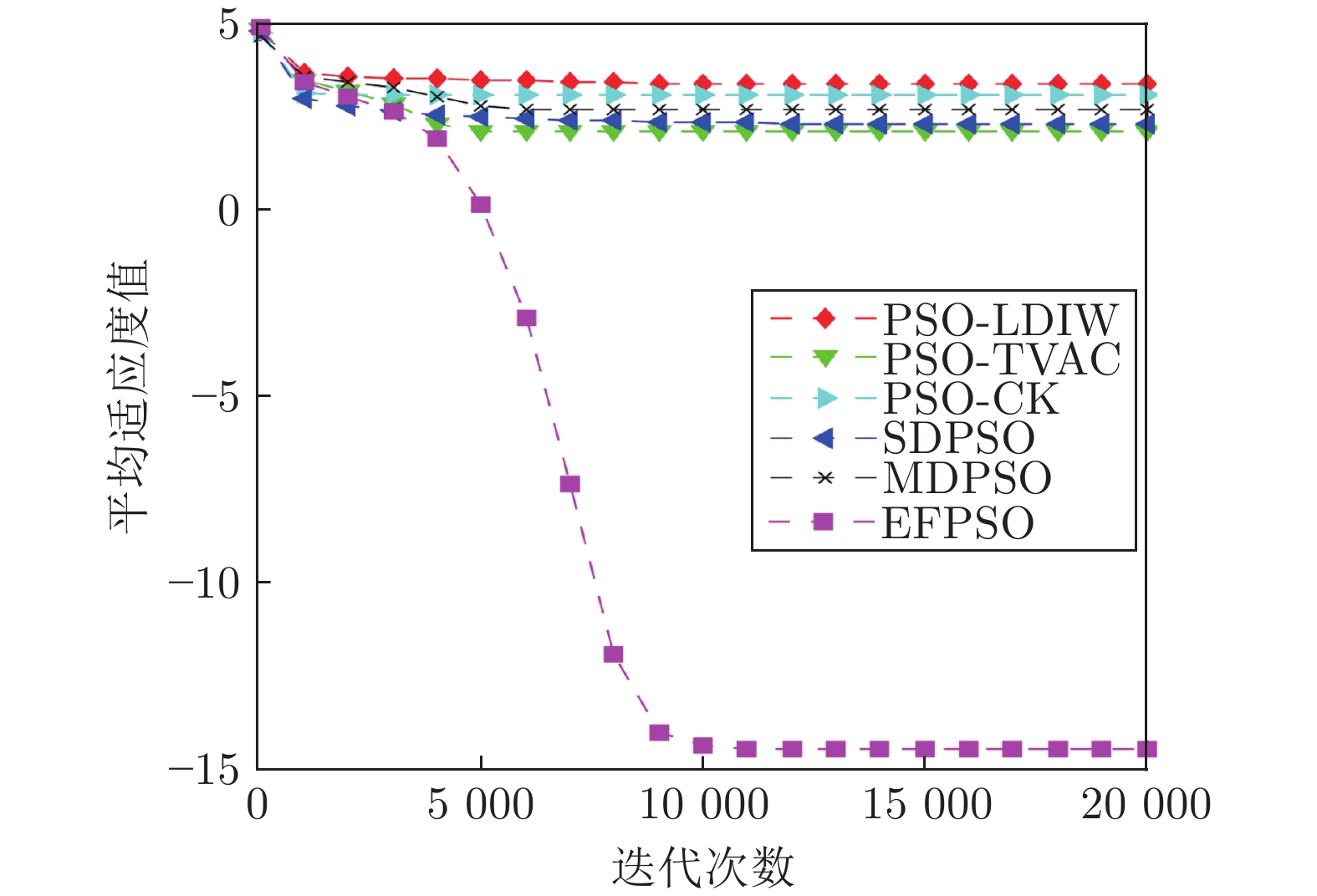
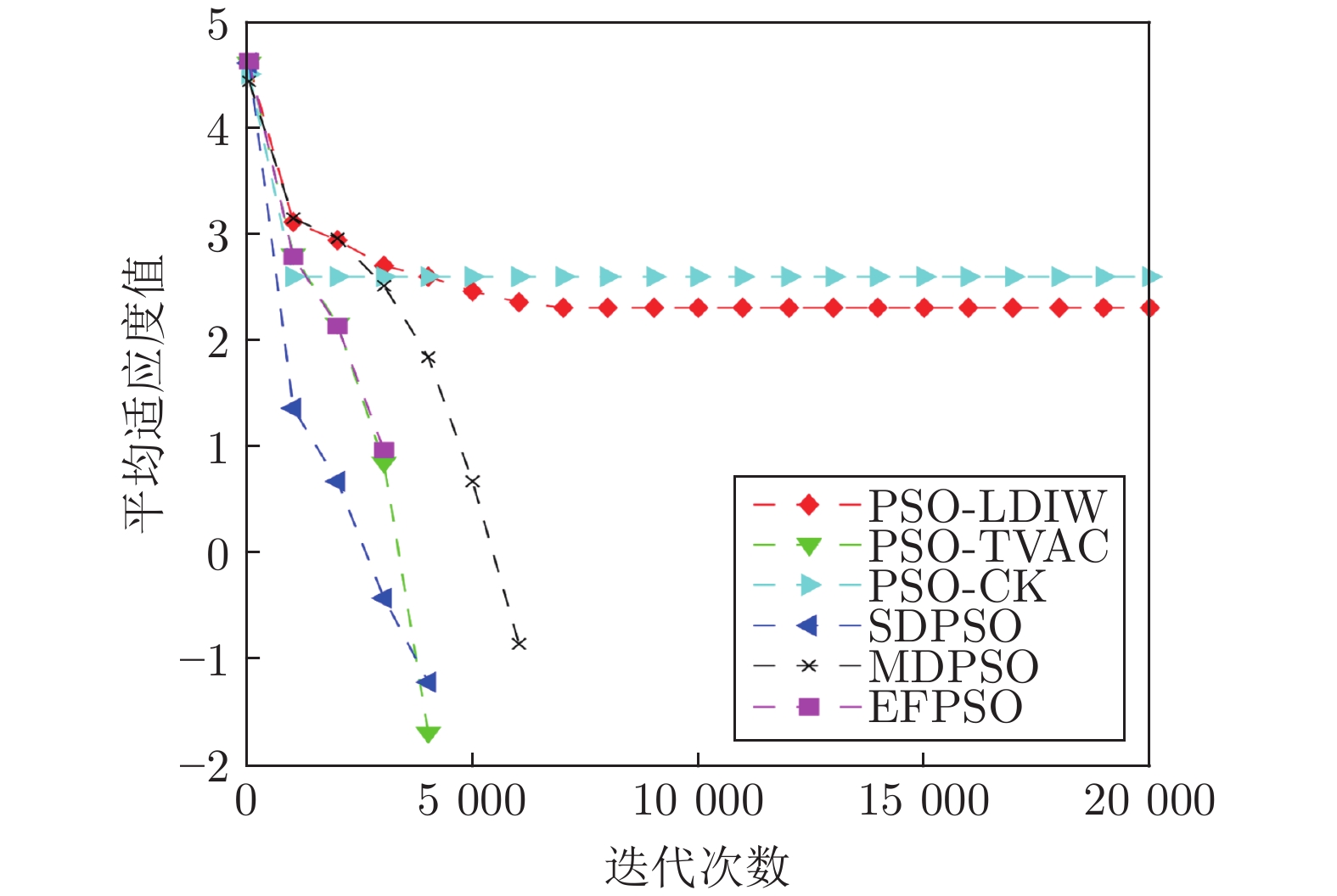
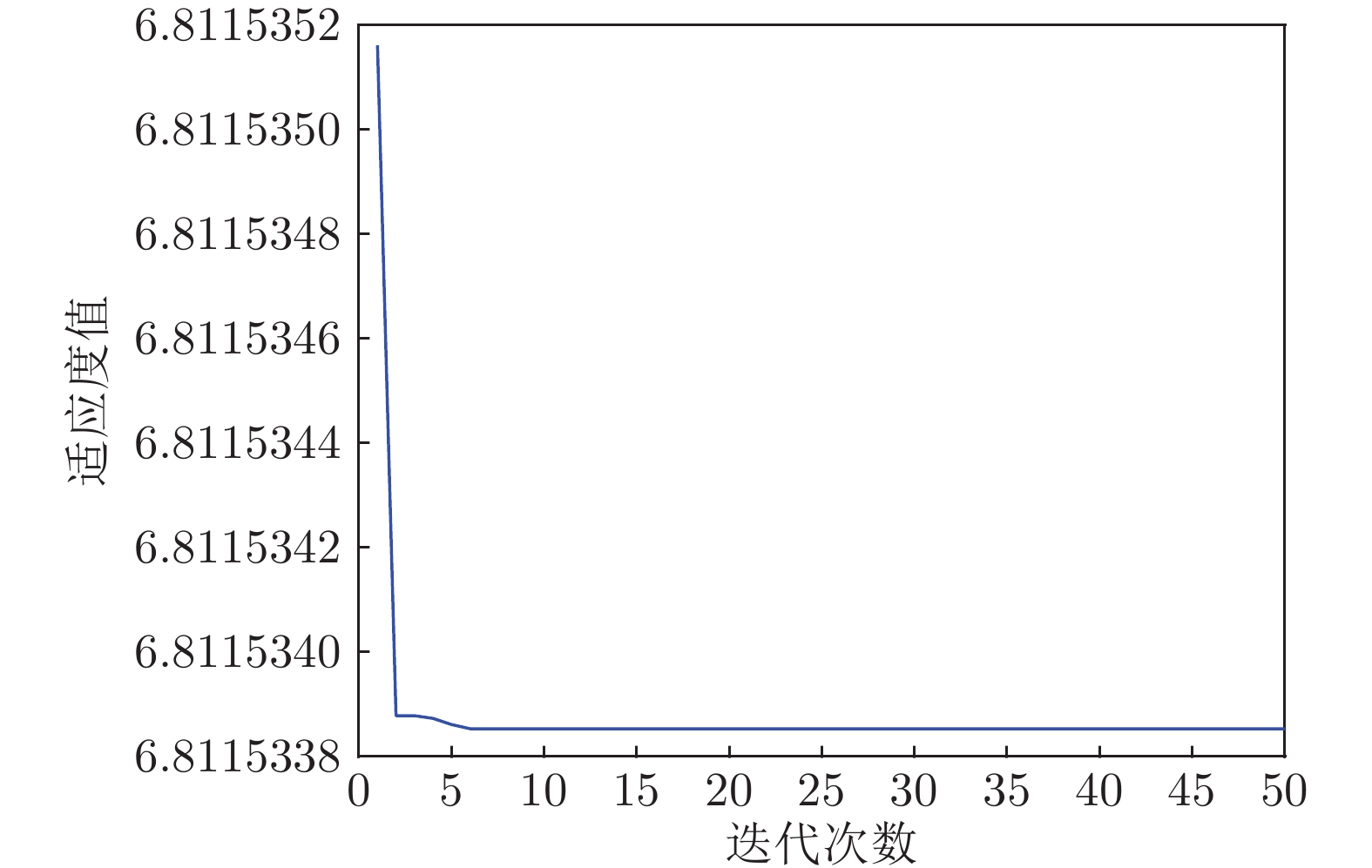
针对标准粒子群优化算法存在早熟收敛和容易陷入局部最优的问题, 本文提出了一种基于事件触发的全信息粒子群优化算法(Event-triggering-based full-information particle swarm optimization, EFPSO). 首先, 引入一类基于粒子空间特性的事件触发策略实现粒子群优化算法(Particle swarm optimization, PSO) 的模态切换, 更好地维持了算法搜索和收敛能力之间的动态平衡. 然后, 鉴于引入历史信息能够降低算法陷入局部最优的可能性, 提出一种全信息策略来克服PSO算法搜索能力不足的缺陷. 数值仿真实验表明, EFPSO算法在种群多样性、收敛率、成功率方面优于其他改进的PSO算法. 最后, 应用EFPSO算法对变分模态分解(Variational mode decomposition, VMD)去噪算法进行改进, 并在现场管道信号去噪取得了很好的效果.
针对标准粒子群优化算法存在早熟收敛和容易陷入局部最优的问题, 本文提出了一种基于事件触发的全信息粒子群优化算法(Event-triggering-based full-information particle swarm optimization, EFPSO). 首先, 引入一类基于粒子空间特性的事件触发策略实现粒子群优化算法(Particle swarm optimization, PSO) 的模态切换, 更好地维持了算法搜索和收敛能力之间的动态平衡. 然后, 鉴于引入历史信息能够降低算法陷入局部最优的可能性, 提出一种全信息策略来克服PSO算法搜索能力不足的缺陷. 数值仿真实验表明, EFPSO算法在种群多样性、收敛率、成功率方面优于其他改进的PSO算法. 最后, 应用EFPSO算法对变分模态分解(Variational mode decomposition, VMD)去噪算法进行改进, 并在现场管道信号去噪取得了很好的效果.



2023, 49(4): 904-912.
doi: 10.16383/j.aas.c200726
摘要:
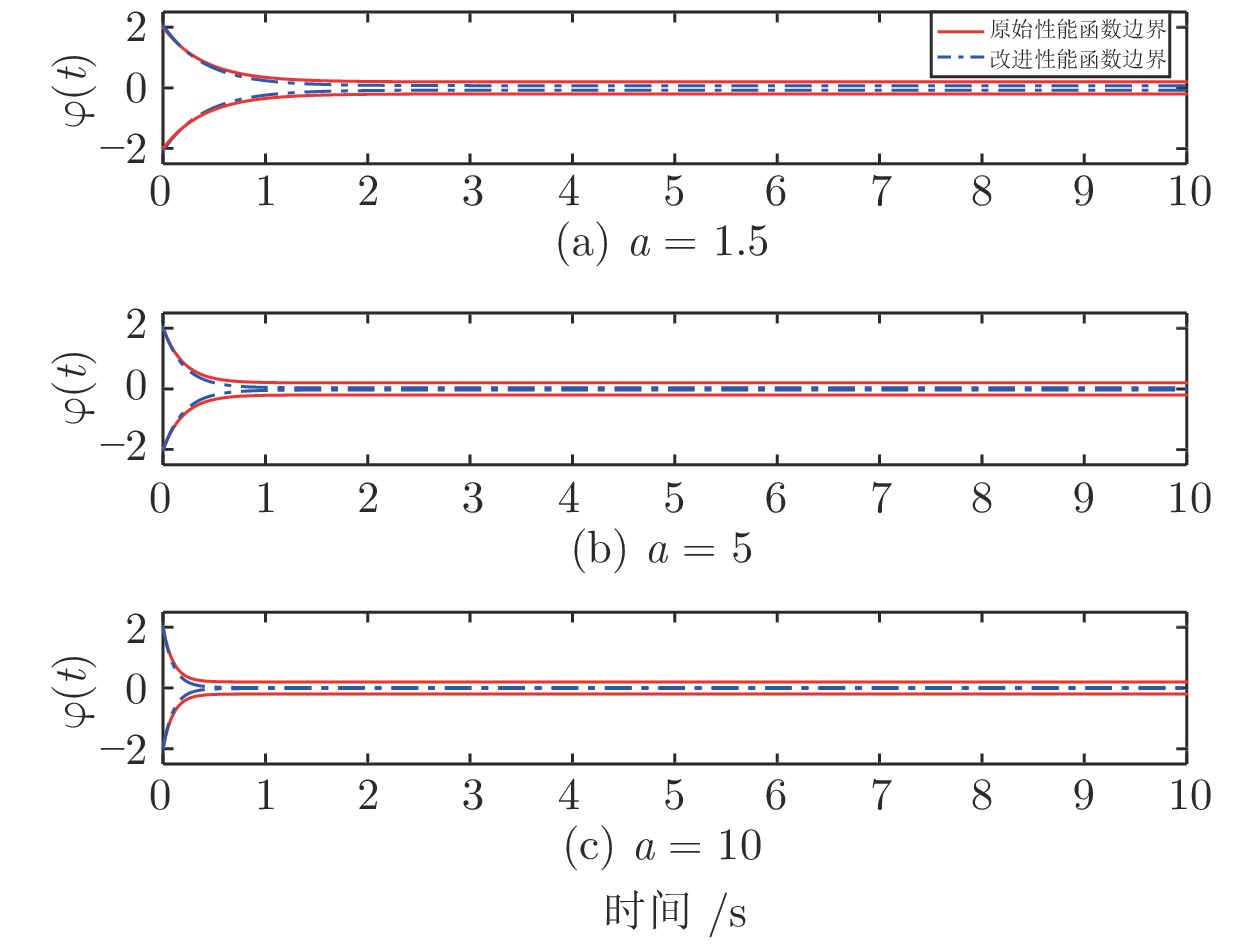
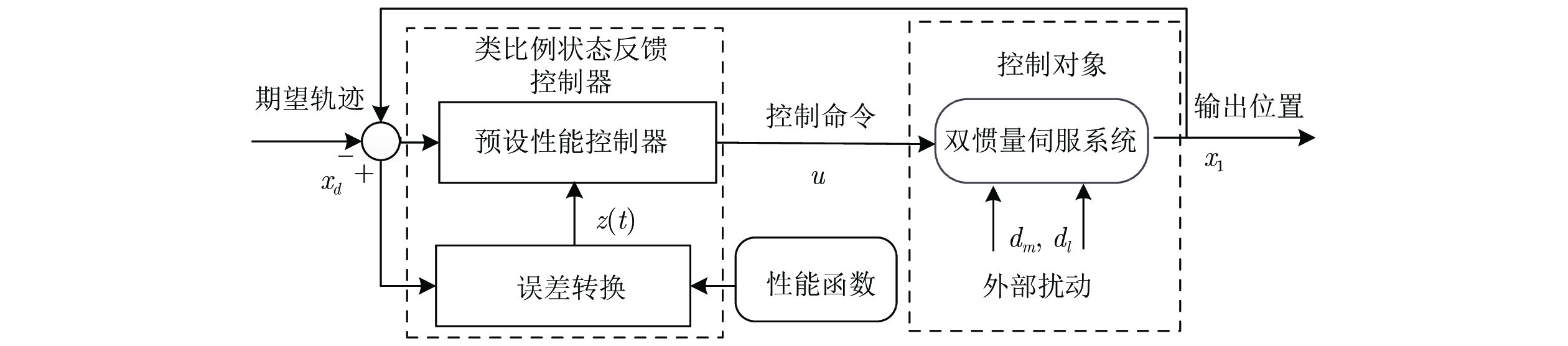
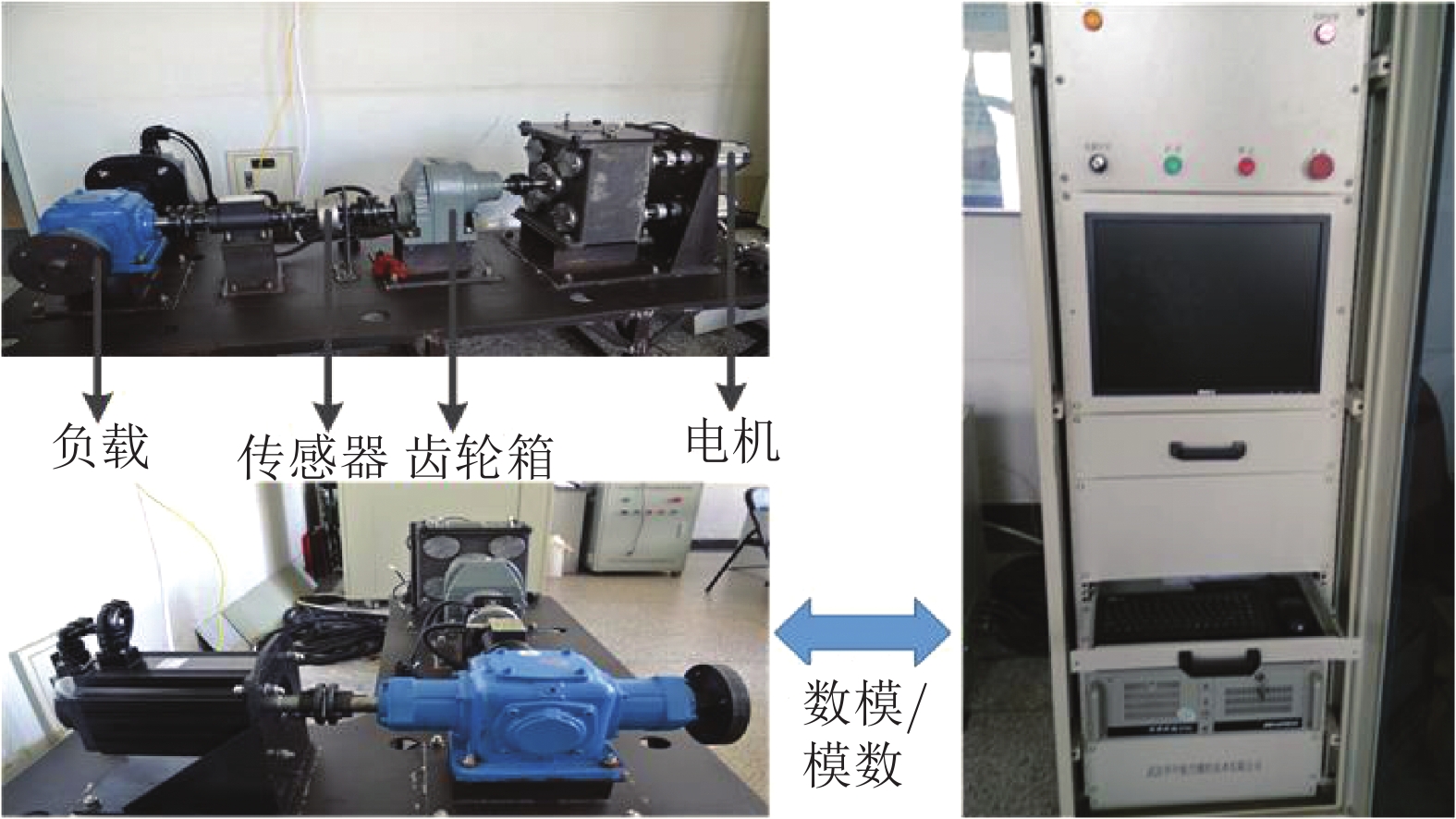
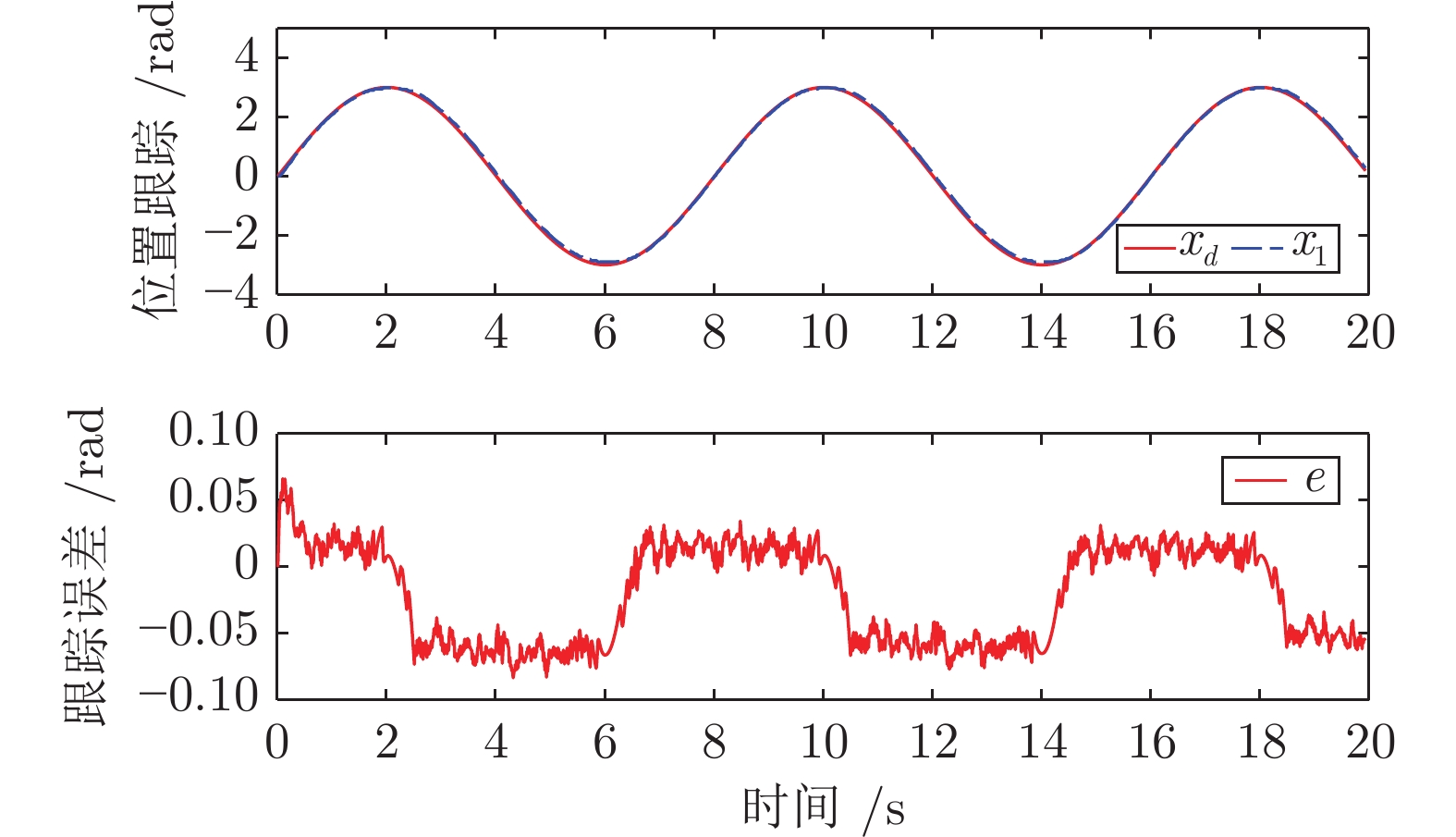
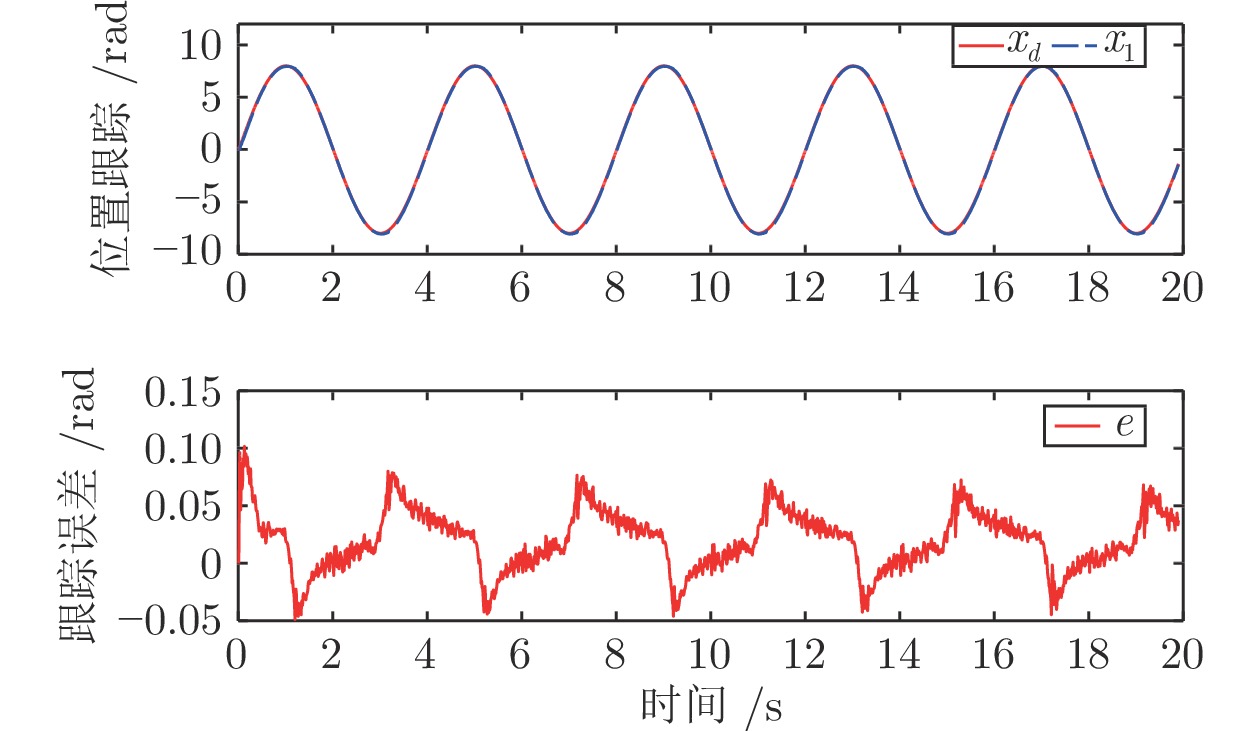
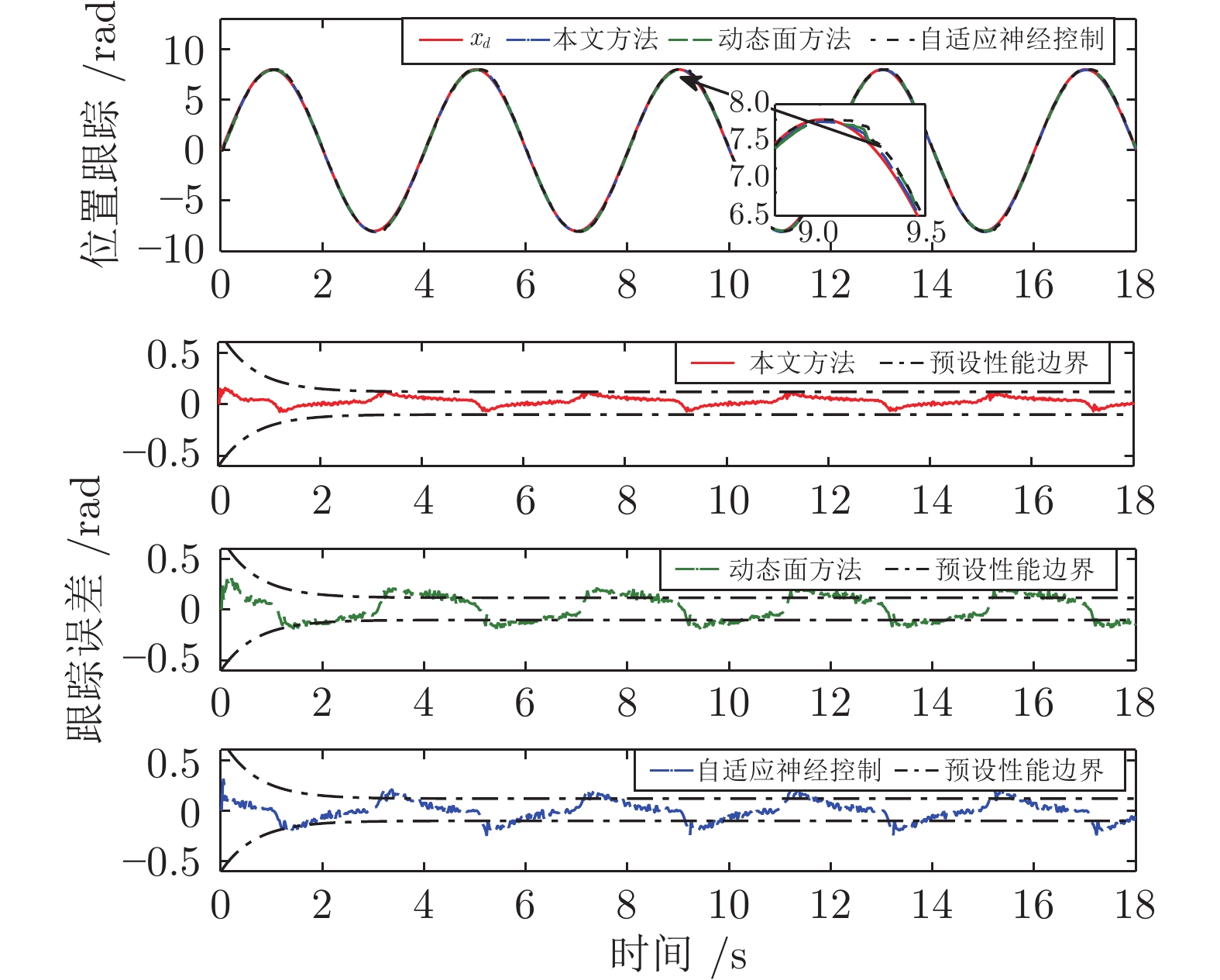
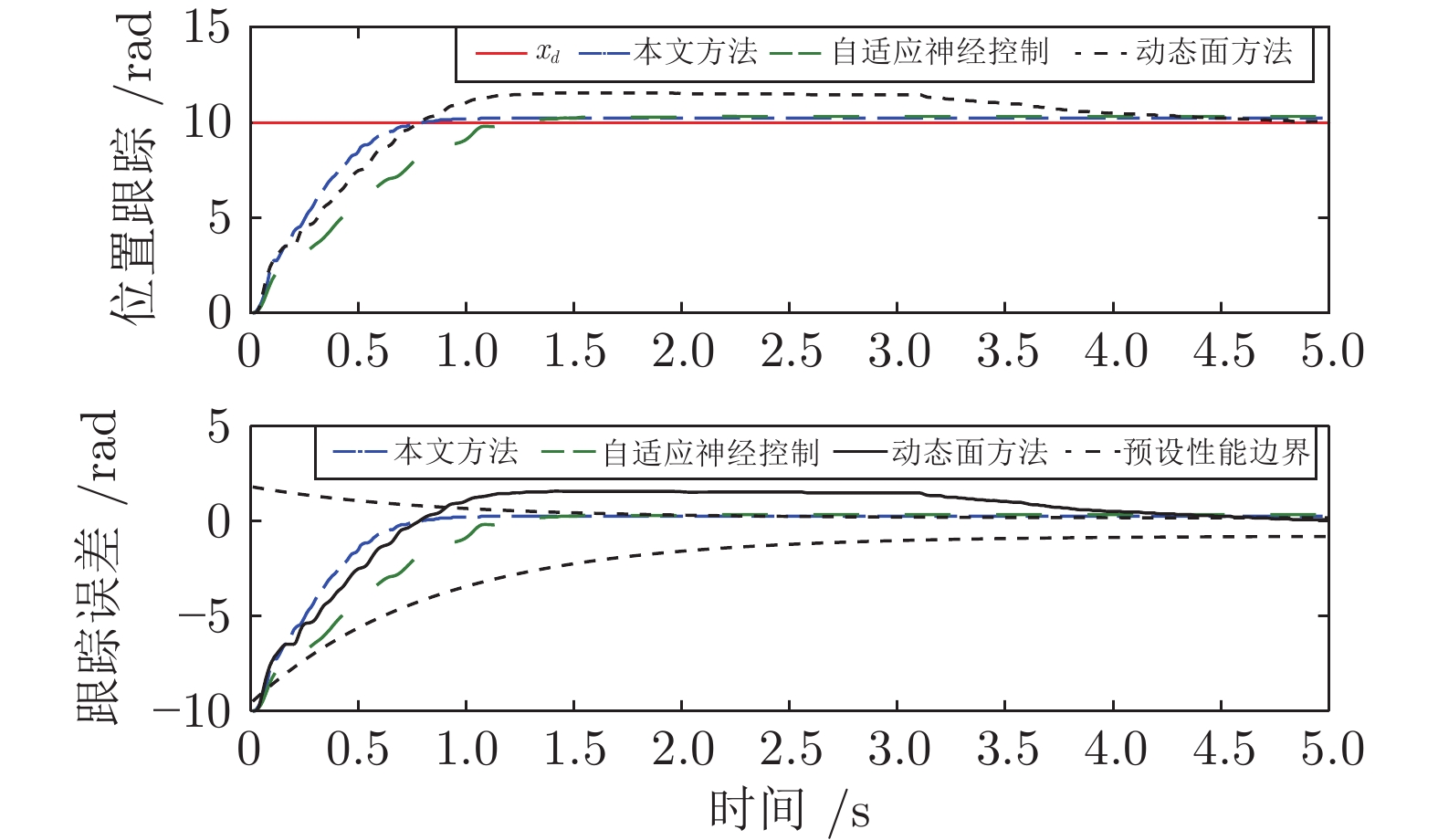
为避免使用函数逼近器(神经网络或模糊系统), 并提高双惯量伺服系统的瞬态响应和稳态性能, 针对含外部扰动的双惯量伺服系统, 提出一种基于预设性能函数(Prescribed performance function, PPF)的类比例状态反馈控制策略. 首先, 提出一种改进的带有最大超调、收敛速率以及稳态误差的预设性能函数, 并将该函数融入控制器设计使二惯量伺服的跟踪误差保持在预定的边界之内. 其次, 基于预设性能函数设计了类比例状态反馈控制器实现跟踪控制. 与传统基于函数逼近控制方法相比较, 该方法可降低控制系统计算复杂度同时消除反演控制中存在的复杂度爆炸问题. 最后, 利用双惯量伺服系统实验平台开展了对比实验, 验证了所提出方法的有效性.
为避免使用函数逼近器(神经网络或模糊系统), 并提高双惯量伺服系统的瞬态响应和稳态性能, 针对含外部扰动的双惯量伺服系统, 提出一种基于预设性能函数(Prescribed performance function, PPF)的类比例状态反馈控制策略. 首先, 提出一种改进的带有最大超调、收敛速率以及稳态误差的预设性能函数, 并将该函数融入控制器设计使二惯量伺服的跟踪误差保持在预定的边界之内. 其次, 基于预设性能函数设计了类比例状态反馈控制器实现跟踪控制. 与传统基于函数逼近控制方法相比较, 该方法可降低控制系统计算复杂度同时消除反演控制中存在的复杂度爆炸问题. 最后, 利用双惯量伺服系统实验平台开展了对比实验, 验证了所提出方法的有效性.