

Adaptive Direct Fault-tolerant Control Design for Spacecraft Integrated Attitude and Orbit System
-
摘要: 针对航天器近距离操作过程中追踪航天器位姿控制系统执行器故障问题, 提出了一种直接自适应容错控制方法, 保证了追踪航天器在发生执行器故障下的自身稳定性和对目标航天器位姿状态的渐近跟踪性能. 基于对偶四元数的航天器位姿一体化控制系统模型, 首先, 假设故障已知, 设计标称控制信号; 然后, 设计自适应更新律对标称控制信号中的未知参数进行估计, 构成自适应控制信号; 最后, 利用多Lyapunov函数对多故障模式下的系统性能进行分析. 仿真结果表明了所提方法的有效性.Abstract: This paper proposes an adaptive direct fault-tolerant control method for the tracking spacecraft with actuator faults during proximity operations, to ensure the stability and the asymptotic tracking performance of the target spacecraft. Based on dual quaternion theory constructing the integrated spacecraft attitude and orbit control system, a nominal control signal is designed assuming that the faults are known; adaptive update laws are designed to estimate the unknown parameters in the nominal control signal to form the adaptive control law; and multiple Lyapunov functions are used to analyse the performance of the system with multiple actuator faults. Simulation results demonstrate the effectiveness of the proposed method.
-
随着现代航天技术的不断发展, 航天器在轨任务日益复杂. 除了传统的通讯、观测编队、近距离观测、交会对接、在轨加油、在轨维修、空间碎片抓捕以及组装大型航天器等, 在近地勘测和深空探测等领域有着巨大的应用潜力. 美国国家航空航天局 (National Aeronautics and Space Administration, NASA) 和欧洲空间局 (European Space Agency, ESA) 为探索宇宙间频率0.03 mHz ~ 0.1 Hz的引力波, 合作实施LISA (Laser interferometer space antenna)计划, 将3个相同的航天器以等边三角形的结构进行编队; 我国于2012年10月14日成功将实践九号A/B卫星送入预定轨道, 主要用于进行高可靠、高精度国产核心元器件和卫星编队等科学实验验[1]. 为了满足航天器近距离操作日益复杂化的任务约束和多样化的性能要求, 现代航天器需要具有高精度的位置和姿态控制性能. 又由于航天器长时间工作在温差大、强辐射的恶劣空间环境中, 其执行器极易发生故障, 如流量控制伐卡死等, 若不及时处理, 将严重影响航天器飞行性能, 甚至导致系统不稳定和整个航天器的丢失[2-5]. 例如发射于2013年的深空探测器Kepler上的动量轮发生故障, 导致航天器姿态失控, 最终终止了所有任务; 2016年3月, 由日本宇宙航空研究开发机构(Japan Aerospace Exploration Agency, JAXA) 与美国国家航空航天局NASA联合研发的天体观测卫星“瞳(HITOMI)” 因为控制系统故障, 致使卫星持续加速翻转, 最后使其解体. 因此为了保障航天器的安全运行, 其执行器故障的故障诊断、健康管理技术已成为航天技术领域重要研究课题之一[6-11].
在不同的应用场景中, 关于航天器姿态控制系统的故障诊断与容错控制策略的成果比较丰富[12], 国内外专家提出了一系列的控制算法, 如自适应控制[13-17]、滑模控制[18-19]等. 针对航天器位姿运动一体化执行器故障容错控制的研究成果较少. 在并联结构的刚体航天器6自由度位姿运动数学模型基础上, 考虑发生执行器故障, 采用航天器6自由度位姿并联建模系统, Jiang等[20]考虑航天器执行器失效故障下翻滚目标交会对接问题, 针对相对姿态和相对位置分别设计固定时间滑模控制器; Li等[21]考虑与翻滚目标自主交会对接的控制问题, 针对输入饱和及执行器故障, 设计鲁棒容错控制算法保证相对位置和姿态分别能收敛到原点的邻域内. Wang等[22]针对两航天器近距离操作过程追击航天器执行器故障问题, 采用基于鲁棒控制方法处理故障和外部干扰; Philip等[23]针对相对位置控制采用了相平面控制技术, 针对相对姿态控制采用四元数反馈控制方法; Hu等[24]针对航天器捕捉太空自由漂浮的翻滚物体, 结合滑模和自适应技术, 推导出鲁棒控制器, 能够实现对目标的精确位姿同步; Sun等[25]针对两航天器交会临近操作, 在输入饱和、全状态约束、参数不确定性以及匹配和不匹配扰动限制下分别对位置和姿态控制设计了自适应反步控制律. 但基于并联建模方式没有考虑航天器近距离操作时位置和姿态运动之间的耦合, 已无法满足6自由度协同跟踪控制任务的要求. 而对偶四元数作为6自由度相对运动的描述方式, 可以将转动和平移在同一框架下进行描述, 精度高且形式简单, 非常适用于航天器位姿运动一体化控制系统建模. 现有考虑基于对偶四元数描述的刚体航天器控制问题的文献较多[26-30], 但考虑其执行器故障容错控制问题的文献很少, 且多针对单一的故障类型, 未考虑多执行器故障的容错控制问题.
多执行器故障会引起系统参数和结构变化, 导致动态函数结构特性的有限次突变, 例如控制增益矩阵的有限次不确定突变, 是容错控制设计需要解决的难题. 针对该故障的航天器位姿一体化容错控制研究成果很少, 均采用控制增益矩阵的先验知识来处理其不确定性. 在作者之前的工作[31-32]中, 通过适当地选择Lyapunov候选函数来消除正定控制增益矩阵或者构造一个具有所有前主子式符号的新控制增益矩阵, 然后对新的控制增益矩阵的不确定进行分解和估计. 但是在某些情况下, 这种先验知识是不可得的.
本文针对航天器近距离操作过程中的位姿执行器故障问题, 提出一种直接自适应容错控制方法, 保证系统存在多执行器故障尤其是故障突变时刻的稳定性及对目标航天器的渐近跟踪性能. 本文的主要贡献如下:
1) 航天器位姿状态耦合非线性复杂, 本文基于对偶四元数描述建立航天器近距离相对运动的位姿一体化运动学和动力学模型, 保证追踪航天器对目标航天器跟踪的精确性.
2) 本文同时考虑追踪航天器位姿执行器失效故障与失控故障的多执行器故障, 处理由该故障引起的动态函数结构特性的有限次突变问题, 并给出了故障发生时刻、故障突变时刻稳定性的完整分析.
3) 本文通过构造两个正定矩阵的乘积来处理未知故障模式矩阵的不确定性. 并且通过适当地选择Lyapunov候选函数来消除其中的一个, 并直接估计另一个的逆矩阵.
本文其余部分结构如下: 第1节详细阐述了航天器近距离操作相对运动系统的位姿一体化运动学及动力学建模, 描述并构建了位姿执行器故障及其容错控制问题; 第2节给出了直接自适应容错控制方法的具体设计过程; 第3节给出了仿真条件及仿真结果, 验证了所设容错控制方法的有效性; 第4节总结全文.
1. 问题描述
本节主要介绍对偶数和对偶四元数的基本知识, 并建立基于对偶四元数描述的航天器近距离操作相对系统的运动学和动力学方程. 执行器故障的数学模型以及本文的控制目标也将在本节给出.
1.1 对偶数与对偶四元数
对偶数这一数学概念由Clifford[33]提出, 由Study等[34]进一步完善形成理论. 定义某一标量对偶数
$ \hat a\in{\hat{\bf{R}}} $ 为$$ \hat a = a_r+\varepsilon a_d $$ (1) 其中,
$ a_r,a_d\in{\bf{R}} $ 分别是对偶数$ \hat a $ 的实数部分与对偶部分, 算子$ \varepsilon $ 为一个对偶单元, 并且满足$ \varepsilon^2 = 0, \varepsilon\neq 0 $ ,$ {\hat{\bf{R}}} $ 表示对偶数域. 在本文中, 下标“$ r $ ”和“$ d $ ”分别表示对偶数的实数部分和对偶部分; 符号“^”表示对应数学量数域对偶数域. 同理, 对偶向量的实部与对偶部均为向量, 定义为$ {{\hat{\boldsymbol{b}}}} = {\boldsymbol{b}}_r+\varepsilon {\boldsymbol{b}}_d $ , 其中,$ {{\hat{\boldsymbol{b}}}}\in{\hat{\bf{R}}}^m $ ,$ {\boldsymbol{b}}_r,{\boldsymbol{b}}_d\in{{\bf{R}}}^m $ . 下面给出关于对偶数以及对偶向量的一些运算定义以及相关性质:$$ \hat a{{\hat{\boldsymbol{b}}}} = a_r{\boldsymbol{b}}_r+\varepsilon(a_r{\boldsymbol{b}}_d+a_d{\boldsymbol{b}}_r) $$ (2) $$ \hat a\odot{{\hat{\boldsymbol{b}}}} = a_r{\boldsymbol{b}}_r+\varepsilon a_d{\boldsymbol{b}}_d\hspace{35pt} $$ (3) $$ \begin{split} {{\hat{\boldsymbol{b}}}}_1\cdot{{\hat{\boldsymbol{b}}}}_2 =\;& {\boldsymbol{b}}_{1r}\cdot {\boldsymbol{b}}_{2r}+ \\ & \varepsilon({\boldsymbol{b}}_{1r}\cdot {\boldsymbol{b}}_{2d}+{\boldsymbol{b}}_{1d}\cdot {\boldsymbol{b}}_{2r}) \end{split} $$ (4) 其中, “
$\odot $ ” 表示对偶数和对偶向量的乘积, “$\cdot $ ” 表示对偶向量的内积运算,$ {{\hat{\boldsymbol{b}}}}_1, {{\hat{\boldsymbol{b}}}}_2\in{\hat{\bf{R}}}^m $ . 当$ {{\hat{\boldsymbol{b}}}}_1,{{\hat{\boldsymbol{b}}}}_2 $ 为3维对偶向量时, 还可以定义如下的对偶向量叉乘运算$$ \begin{split} {{\hat{\boldsymbol{b}}}}_1\times{{\hat{\boldsymbol{b}}}}_2 =\;& -{{\hat{\boldsymbol{b}}}}_2\times{{\hat{\boldsymbol{b}}}}_1 = {\boldsymbol{b}}_{1r}\times {\boldsymbol{b}}_{2r}\;+ \\ &({\boldsymbol{b}}_{1r}\times {\boldsymbol{b}}_{2d}+{\boldsymbol{b}}_{1d}\times {\boldsymbol{b}}_{2r}) \end{split} $$ (5) 与实数向量相似, 三维对偶向量叉乘也可由矩阵乘法表示,
$ {\hat{\boldsymbol{b}}}_1\times{\hat{\boldsymbol{b}}}_2 = {\hat{\boldsymbol{b}}}^\times_1{\hat{\boldsymbol{b}}}_2 $ ,$ {\hat{\boldsymbol{b}}}^\times = -({\hat{\boldsymbol{b}}}^\times)^{\rm{T}} = {\boldsymbol{b}}_r^\times+{\boldsymbol{b}}_d^\times $ 称为对偶向量的反对称矩阵, 其定义为$$ {{\hat{\boldsymbol{b}}}}^\times = \left[ \begin{array}{rrr} 0\,\;\; & -\hat{b}_3 & \hat{b}_2\\ \hat{b}_3 & 0\;\;\, & -\hat{b}_1\\ -\hat{b}_2 & \hat{b}_1 & 0\;\;\\ \end{array} \right] $$ (6) 其中,
$ \hat{b}_i = b_{ir}+\varepsilon b_{id},i = 1,2,3 $ 为$ {\hat{\boldsymbol{b}}} $ 的对应元素, 即$ {\hat{\boldsymbol{b}}} = [\hat{b}_1,\hat{b}_2,\hat{b}_3]^{\rm{T}} $ .考虑一般意义下的对偶矩阵, 它的实数部分和对偶部分具有相同的维度:
$\hat X = X_r+\hat X_d,X_r, X_d\in{{\bf{R}}}^{n\times m}$ , 则其遵循对偶向量的基本运算法则. 当$ X_r,X_d $ 均为方阵时, 可定义如下的对偶矩阵逆运算:$ {\hat X}^{-1} = X_r^{-1}-\varepsilon(X_r^{-1}X_dX_r^{-1}). $ 对偶四元数是传统四元数与对偶数的结合, 其定义为
$$ {\hat{\bar{\boldsymbol{q}}}} = {\bar{\boldsymbol{q}}}_r+\varepsilon {\bar{\boldsymbol{q}}}_d $$ (7) 其中,
$ {\hat{\bar{\boldsymbol{q}}}}\in\hat{H} $ ,$ {\bar{\boldsymbol{q}}}_r,{\bar{\boldsymbol{q}}}_d\in H $ 为传统的四元数,$ H $ 为四元数的集合,$ \hat{H} $ 为对偶四元数的集合. 与传统四元数类似, 对偶四元数$ {\hat{\bar{\boldsymbol{q}}}} $ 也可以表示为:$ {\hat{\bar{\boldsymbol{q}}}} = [\hat\eta,{\hat{{\boldsymbol{\xi}}}}^{\rm{T}}]^{\rm{T}} $ ,$ \hat\eta\in{\hat{\bf{R}}} $ ,$ {\hat{{\boldsymbol{\xi}}}}\in{\hat{\bf{R}}}^3 $ 分别表示$ {\hat{\bar{\boldsymbol{q}}}} $ 的标量部分和矢量部分. 以下是对偶四元数的一些运算性质$$ {\hat{\bar{\boldsymbol{q}}}}^* = [\hat\eta,-{\hat{{\boldsymbol{\xi}}}}^{\rm{T}}]^{\rm{T}} \hspace{95pt}$$ (8) $$ {\hat{\bar{\boldsymbol{q}}}}_1\pm{\hat{\bar{\boldsymbol{q}}}}_2 = [\hat\eta_1\pm\hat\eta_2,{\hat{{\boldsymbol{\xi}}}}_1^{\rm{T}}\pm{\hat{{\boldsymbol{\xi}}}}_2^{\rm{T}}]^{\rm{T}}\hspace{33pt} $$ (9) $$ \mathrm{vec}({\hat{\bar{\boldsymbol{q}}}}) = {\hat{{\boldsymbol{\xi}}}}\hspace{112pt} $$ (10) $$ \begin{split} {\hat{\bar{\boldsymbol{q}}}}_1\otimes{\hat{\bar{\boldsymbol{q}}}}_2 = \;&[\hat\eta_1\hat\eta_2-{\hat{{\boldsymbol{\xi}}}}_1^{\rm{T}}{\hat{{\boldsymbol{\xi}}}}_2, \\ &(\hat\eta_1{\hat{{\boldsymbol{\xi}}}}_2+\hat\eta_2{\hat{{\boldsymbol{\xi}}}}_1+{\hat{{\boldsymbol{\xi}}}}_1\times{\hat{{\boldsymbol{\xi}}}}_2)^{\rm{T}}]^{\rm{T}} \end{split} $$ (11) 其中,
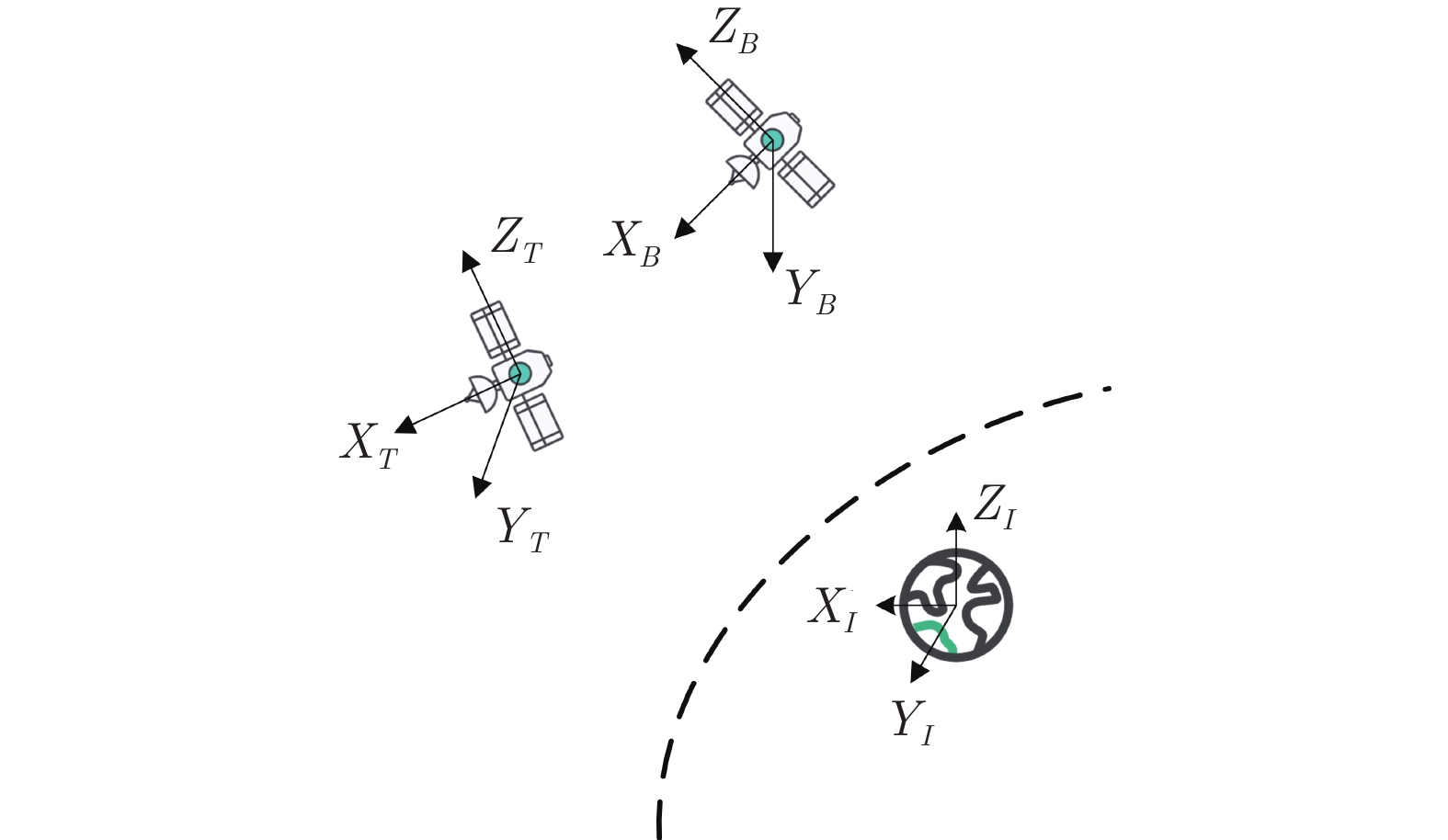
$ {\hat{\bar{\boldsymbol{q}}}}_1,{\hat{\bar{\boldsymbol{q}}}}_2\in\hat{H} $ . 考虑如图1所示的追踪航天器和目标航天器质心本体坐标系, 分别为$ {\cal{B}}(O_BX_BY_BZ_B $ ) 和$ {\cal{T}} ( O_TX_TY_TZ_T $ ), 标记惯性坐标系为$ {\cal{N}} ( O_IX_I\times Y_IZ_I $ ), 坐标系$ {\cal{B}} $ 相对于$ {\cal{T}} $ 的对偶四元数定义为$$ \begin{split} {\hat{\bar{\boldsymbol{q}}}}_{bt} =\;& {\boldsymbol{q}}_{bt}+\varepsilon\frac{1}{2}{\boldsymbol{q}}_{bt}\otimes{\boldsymbol{r}}_{bt}^{b} = \\& {\boldsymbol{q}}_{bt}+\varepsilon\frac{1}{2}{\boldsymbol{r}}_{bt}^r\otimes{\boldsymbol{q}}_{bt} \end{split} $$ (12) 其中,
$ {\boldsymbol{r}}_{bt} $ 为$ {\cal{T}} $ 的坐标原点到$ {\cal{B}} $ 的坐标原点的位置矢量,$ {\boldsymbol{r}}_{bt}^t $ 和$ {\boldsymbol{r}}_{bt}^b $ 分别为$ {\boldsymbol{r}}_{bt} $ 在$ {\cal{T}} $ 和$ {\cal{B}} $ 下的不同表示. 当$ {\hat{\boldsymbol{q}}}_{bt} $ 表示一个单位对偶四元数时, 易得$ {\hat{\boldsymbol{q}}}_{bt}^{\rm{T}}\otimes {\hat{\boldsymbol{q}}}_{bt} = 1 $ .1.2 相对运动的动力学和运动学
基于对偶四元数描述下的航天器近距离操作6自由度相对运动学和动力学分别表示为
$$ {\dot{\hat{\boldsymbol{q}}}}_{bt} = \frac{1}{2}\hat{f}_1({\hat{\boldsymbol{q}}}_{bt}){\hat{\boldsymbol{\omega}}}_{bt}^b\hspace{80pt} $$ (13) $$ \begin{split} \hat{J}_b{\dot{\hat{\boldsymbol{\omega}}}}_{bt}^b =\;& {\hat{\boldsymbol{\omega}}}_{bi}^b\times(\hat{J}_b{\hat{\boldsymbol{\omega}}}_{bi}^b)+ \\ &\hat{J}_b{\dot{\hat{\boldsymbol{\omega}}}}_{bt}^b\times({\hat{\boldsymbol{q}}}_{bt}^*\otimes{\hat{\boldsymbol{\omega}}}_{ti}^t\otimes{\hat{\boldsymbol{q}}}_{bt})\;- \\ &\hat{J}_b({\hat{\boldsymbol{q}}}_{bt}^*\otimes{\dot{\hat{\boldsymbol{\omega}}}}_{ti}^t\otimes{\hat{\boldsymbol{q}}}_{bt})+\hat{D}\odot{\hat{\boldsymbol{u}}} \end{split} $$ (14) 其中,
$ {\hat{\boldsymbol{\omega}}}_{bi}^b = {\boldsymbol{\omega}}_{bi}^b+\varepsilon({\dot{\boldsymbol{r}}}_{bi}^b+{\boldsymbol{\omega}}_{bi}^b\times{\boldsymbol{r}}_{bi}^b) $ 为追踪航天器在$ {\cal{B}} $ 中相对于惯性坐标系$ {\cal{N}} $ 的对偶角速度,$ {\boldsymbol{\omega}}_{bi}^b $ ,$ {\boldsymbol{r}}_{bi}^b $ 和$ {\dot{\boldsymbol{r}}}_{bi}^b $ 分别为追踪航天器在$ {\cal{B}} $ 中相对于$ {\cal{N}} $ 的角速度、位置矢量和速度矢量, 对偶部分$ {\dot{\boldsymbol{r}}}_{bi}^b+{\boldsymbol{\omega}}_{bi}^b\times {\boldsymbol{r}}_{bi}^b $ 表示$ {\boldsymbol{r}}_{bi}^b $ 相对于$ {\cal{N}} $ 的“绝对变化率”,${\hat{\boldsymbol{\omega}}}_{ti}^t = {\boldsymbol{\omega}}_{ti}^t+ \varepsilon({\dot{\boldsymbol{r}}}_{ti}^b+{\boldsymbol{\omega}}_{ti}^t\times{\boldsymbol{t}}_{ti}^t)$ 为目标航天器在$ {\cal{T}} $ 中相对于$ {\cal{N}} $ 的对偶角速度,$ {\boldsymbol{\omega}}_{ti}^t $ ,$ {\boldsymbol{r}}_{ti}^t $ 和$ {\dot{\boldsymbol{r}}}_{ti}^t $ 分别为追踪航天器在$ {\cal{T}} $ 中相对于$ {\cal{N}} $ 的角速度、位置矢量和速度矢量,$ {\hat{\boldsymbol{\omega}}}_{bt}^b = {\boldsymbol{\omega}}_{bt}^b+\varepsilon({\dot{\boldsymbol{r}}}_{bt}^b+{\boldsymbol{\omega}}_{bt}^b\times{\boldsymbol{r}}_{bt}^b) $ 为追踪航天器在$ {\cal{B}} $ 中相对于惯性坐标系$ {\cal{T}} $ 的对偶角速度,$ {\boldsymbol{\omega}}_{bt}^t $ ,$ {\boldsymbol{r}}_{bt}^t $ 和$ {\dot{\boldsymbol{r}}}_{bt}^t $ 分别为追踪航天器在$ {\cal{B}} $ 中相对于$ {\cal{T}} $ 的角速度、位置矢量和速度矢量,$ {\dot{\hat{\boldsymbol{\omega}}}}_{ti}^t = \hat{{\boldsymbol{q}}}_{ti}^*\otimes{\dot{\hat{\boldsymbol{\omega}}}}_{ti}^i\otimes{\hat{\boldsymbol{q}}}_{ti} $ 的时间导数为$ {\hat{\boldsymbol{\omega}}}_{ti}^i $ 的时间导数, 表示目标航天器相对于$ {\cal{N}} $ 且表示在$ {\cal{T}} $ 中的对偶加速度, 表达式中的$ \hat{{\boldsymbol{q}}}_{ti} $ 为目标航天器相对于$ {\cal{N}} $ 的惯性四元数,${\dot{\hat{\boldsymbol{\omega}}}}_{ti}^i = {\boldsymbol{\alpha}}_{ti}^t+\varepsilon({\boldsymbol{\alpha}}_{ti}^t- {\boldsymbol{\alpha}}_{ti}^t\times{\boldsymbol{r}}_{ti}^t- {\boldsymbol{\omega}}_{ti}^t\times{\boldsymbol{v}}_{ti}^t)$ 表示目标航天器相对于$ {\cal{N}} $ 且表示在$ {\cal{N}} $ 中的对偶加速度,$ {\boldsymbol{r}}_{ti}^t $ ,$ {\boldsymbol{v}}_{ti}^t $ ,$ {\boldsymbol{\omega}}_{ti}^t $ 和$ {\boldsymbol{\alpha}}_{ti}^t $ 分别表示目标航天器相对于$ {\cal{N}} $ 且表示在$ {\cal{N}} $ 中的位置矢量、线速度、角速度和线加速度,$ {\boldsymbol{r}}_{ti}^t $ ,$ {\boldsymbol{v}}_{ti}^t $ 和$ {\boldsymbol{\alpha}}_{ti}^t $ 可以利用初始轨道参数对二体轨道公式积分产生, 故而$ {\dot{\hat{\boldsymbol{\omega}}}}_{ti}^i $ 可由目标航天器的轨道信息和角速度计算得到, 参数矩阵$ \hat{E}(\cdot) $ 可以定义为$$ \hat{f}_1({\hat{\boldsymbol{q}}}) = \left[ \begin{array}{c} -{\hat{{\boldsymbol{\xi}}}}^{\rm{T}}\\ \hat{\eta}\boldsymbol{1}_{3\times3}+{\hat{{\boldsymbol{\xi}}}}^\times\\ \end{array} \right] $$ (15) 且
${\hat{\boldsymbol{u}}} = {\boldsymbol{u}}_r+\varepsilon{\boldsymbol{u}}_d$ 为实际对偶输入信号,${\boldsymbol{u}}_r = [u_{r1},\cdots, u_{r4}]^{\rm{T}}$ 和$ {\boldsymbol{u}}_d = [u_{d1},\cdots,u_{d4}]^{\rm{T}} $ 分别为应用在位置控制和姿态控制上的力和力矩,$\hat J_b = m\boldsymbol{1}_{3\times3}+(\frac{\mathrm{d}}{\mathrm{d}\varepsilon})J$ ,$ m $ 和$ J $ 分别为追踪航天器的质量和转动惯量矩阵,$ \hat D = D_r+\varepsilon D_d $ 表示对偶控制分配矩阵,$ D_r,D_d\in {{\bf{R}}}^{3\times4} $ 分别为能够提供双向输出的4个推力器和4个反作用轮的控制分配矩阵, 对于任意对偶向量$ {\hat{\boldsymbol{b}}} = {\boldsymbol{b}}_r+\varepsilon {\boldsymbol{b}}_d,\frac{\mathrm{d}}{\mathrm{d}\varepsilon}{\hat{\boldsymbol{b}}} = \frac{\mathrm{d}}{\mathrm{d}\varepsilon}({\boldsymbol{b}}_r+\varepsilon {\boldsymbol{b}}_d) = {\boldsymbol{b}}_d $ 成立. 令$\hat{f}_2({\hat{\boldsymbol{q}}}_{bt}, {\hat{\boldsymbol{\omega}}}_{bt}^b) \;=\; {\hat{\boldsymbol{\omega}}}_{bi}^b\times(\hat{J}_b{\hat{\boldsymbol{\omega}}}_{bi}^b)\; +$ $\hat{J}_b{\dot{\hat{\boldsymbol{\omega}}}}_{bt}^b\;\times\;({\hat{\boldsymbol{q}}}_{bt}^*\otimes{\hat{\boldsymbol{\omega}}}_{ti}^t\otimes{\hat{\boldsymbol{q}}}_{bt}) -$ $\hat{J}_b{\hat{\boldsymbol{q}}}_{bt}^*\otimes{\dot{\hat{\boldsymbol{\omega}}}}_{ti}^t\otimes{\hat{\boldsymbol{q}}}_{bt} $ , 那么相对动力学方程(14)可以推导为$$ \hat{J}_b{\dot{\hat{\boldsymbol{\omega}}}}_{bt}^b = \hat{f}_2({\hat{\boldsymbol{q}}}_{bt},{\hat{\boldsymbol{\omega}}}_{bt}^b)+\hat{D}\odot{\hat{\boldsymbol{u}}} $$ (16) 1.3 执行器故障建模与冗余条件
在建立航天器近距离操作相对运动的位姿运动学和动力学(13)和(14)后, 本节将对执行器故障进行数学建模. 执行器故障可以建模为
$$ {\hat{\boldsymbol{u}}} = \hat{\sigma}\odot{\hat{\boldsymbol{v}}}+{\hat{\bar{\boldsymbol{u}}}} $$ (17) 其中,
$ {\hat{\boldsymbol{v}}} = {\boldsymbol{v}}_r+\varepsilon{\boldsymbol{v}}_d $ 表示需要设计的控制信号,$ {\boldsymbol{v}}_r = [v_{r1},\cdots,v_{r4}]^{\rm{T}} $ 和$ {\boldsymbol{v}}_d = [v_{d1},\cdots,v_{d4}]^{\rm{T}} $ 分别为其实数部分与对偶部分,$ {\hat{\bar{\boldsymbol{u}}}} = {\bar{\boldsymbol{u}}}_r+\varepsilon{\bar{\boldsymbol{u}}}_d $ ,$ {\bar{\boldsymbol{u}}}_r = [\bar u_{r1},\dots,\bar u_{r4}]^{\rm{T}} $ 和$ {\bar{\boldsymbol{u}}}_d = [\bar u_{d1},\dots,\bar u_{d4}]^{\rm{T}} $ 表示对偶故障值,$\hat{\sigma} = \sigma_r+ \varepsilon\sigma_d$ ,$\sigma_r = \mathrm{diag}\{\sigma_{r1},\cdots,\sigma_{r4}\}$ ,$\sigma_d = \mathrm{diag}\{\sigma_{d1},\cdots,\sigma_{d4}\}$ 表示对偶故障模式矩阵.本文考虑多执行器故障, 即故障模式矩阵
$ \hat{\sigma} $ 和故障值$ {\hat{\bar{\boldsymbol{u}}}} $ 的每个分量都是分段常数, 即在一段有限时间内是固定的. 令有限序列次数为$ N $ . 当$ \hat{\sigma} = \hat{\sigma}_{(i)} $ ,${\hat{\bar{\boldsymbol{u}}}} = {\hat{\bar{\boldsymbol{u}}}}_{(i)}$ 在时间间隔$ (T_i,T_{i+1}) $ 固定不变,$T_0 = 0,T_N = \infty$ ,$ i = 0,1,\cdots,N-1 $ .为使航天器能够在保证自身稳定性、安全性的条件下追踪目标航天器, 文中设计的容错控制方案需要航天器有执行器冗余的条件下进行. 即需要在发生执行器故障后仍存在正常健康的执行器能够处理由故障产生的不确定性且使航天器正常完成任务. 因此航天器位姿一体化控制系统需满足如下条件
$$ \mathrm{rank}(D_r\sigma_r(t)) = 3 $$ (18) $$ \mathrm{rank}(D_d\sigma_d(t)) = 3 $$ (19) 其中,
$ D_r $ 和$ D_d $ 分别表示航天器位置和姿态控制系统的执行器安装矩阵,$ \sigma_r(t) $ 和$ \sigma_d(t) $ 表示对应的故障模式矩阵.1.4 控制目标
本文的控制目标是设计一个对偶自适应控制信号
$ {\hat{\boldsymbol{v}}} $ , 使得带有位姿执行器失控与失效故障的航天器6自由度相对运动系统中多有的闭环信号都有界, 并且在$ t\rightarrow\infty $ 时,$ {\hat{\boldsymbol{q}}}_{bt}\rightarrow[1,0,0,0]^{\rm{T}}+\varepsilon[0,0,0,0]^{\rm{T}} $ 以及$ {\boldsymbol{\omega}}_{bt}^t\rightarrow[0,0,0]^{\rm{T}}+\varepsilon[0,0,0]^{\rm{T}} $ .考虑
$ {\hat{\bar{\boldsymbol{q}}}}_{bt} = [\hat\eta_{bt},{\hat{{\boldsymbol{\xi}}}}^{\rm{T}}_{bt}]^{\rm{T}} = {\bar{\boldsymbol{q}}}_{btr}+\varepsilon{\bar{\boldsymbol{q}}}_{btd} $ ,${\bar{\boldsymbol{q}}}_{btr} = {\bar{\boldsymbol{q}}}_{bt} = [\eta_{r},{\boldsymbol{\xi}}^{\rm{T}}_{r}]^{\rm{T}}$ ,${\bar{\boldsymbol{q}}}_{btd} = (1/2){\bar{\boldsymbol{q}}}_{bt}\otimes{\boldsymbol{r}}_{bt}^t = [\eta_{d},{\boldsymbol{\xi}}^{\rm{T}}_{d}]^{\rm{T}}$ , 定义${\boldsymbol{e}}_{1r} = {\boldsymbol{\xi}}_r\in{{\bf{R}}}^3$ ,$ {\boldsymbol{e}}_{1d} = {\boldsymbol{\xi}}_d\in{{\bf{R}}}^3 $ ,${\boldsymbol{e}}_1 = [{\boldsymbol{e}}_{1r}^{\rm{T}},{\boldsymbol{e}}_{1d}^{\rm{T}}]^{\rm{T}} \in {{\bf{R}}}^6$ . 令${\hat{\boldsymbol{\omega}}}_{bt}^b = {\boldsymbol{e}}_{2r}+\varepsilon{\boldsymbol{e}}_{2d},$ $ {\boldsymbol{e}}_{2r} = {\boldsymbol{\omega}}_{bt}^b,\;{\boldsymbol{e}}_{2d} = {\dot{\boldsymbol{r}}}_{bt}^b+{\boldsymbol{\omega}}_{bt}^b\times{\boldsymbol{r}}_{bt}^b, $ ${\boldsymbol{e}}_2 = [{\boldsymbol{e}}_{2r}^{\rm{T}},{\boldsymbol{e}}_{2d}^{\rm{T}}]^{\rm{T}}\in{{\bf{R}}}^6$ . 相对运动学和相对动力学可以转化为$$ {\dot{\boldsymbol{e}}}_1 = \left[ \begin{array}{c} {\dot{\boldsymbol{\xi}}}_r\\ {\dot{\boldsymbol{\xi}}}_d \end{array} \right] = f_1({\boldsymbol{q}}_{btr},{\boldsymbol{q}}_{btd}){{\boldsymbol{e}}}_2 $$ (20) $$ J_b{\dot{\boldsymbol{e}}}_2 = f_2({\hat{\boldsymbol{q}}}_{bt},{\hat{\boldsymbol{\omega}}}_{bt}^b)+D_b(\sigma{\boldsymbol{v}}+{\bar{\boldsymbol{u}}}) $$ (21) 其中,
$f_1({\boldsymbol{q}}_{btr}, {\boldsymbol{q}}_{btd}) = (1/2)[Q({\boldsymbol{q}}_{btr}), 0;Q({\boldsymbol{q}}_{btd}), Q({\boldsymbol{q}}_{btr})],$ $ Q(\cdot)\in {{\bf{R}}}^{6\times6} $ 是关于四元数$ {\hat{\bar{\boldsymbol{q}}}} = [\hat\eta,{\hat{{\boldsymbol{\xi}}}}^{\rm{T}}]^{\rm{T}} $ 的函数, 表示为$Q({\boldsymbol{q}}) = \eta \boldsymbol{1}_{3\times3}+\pmb{\xi}^\times$ , 令$\hat{f}_2({\hat{\boldsymbol{q}}}_{bt},{\hat{\boldsymbol{\omega}}}_{bt}^b) = f_{2r}+ \varepsilon f_{2d}, {f}_2({\hat{\boldsymbol{q}}}_{bt},{\hat{\boldsymbol{\omega}}}_{bt}^b) = [f_{2r}^{\rm{T}},f_{2d}^{\rm{T}}]\in{{\bf{R}}}^6$ ,$J_b = [m\boldsymbol{1}_{3\times3},\mathrm{0}_{3\times3};\mathrm{0}_{3\times3}, J]\in {{\bf{R}}}^{6\times6}$ ,$ D_b = \mathrm{diag}\{D_r,D_d\}\in{{\bf{R}}}^{6\times8} $ ,$\sigma = \mathrm{diag}\{\sigma_r, \sigma_d\}\in{{\bf{R}}}^{8\times8}$ ,$ {\boldsymbol{v}} = [v_r^{\rm{T}},v_d^{\rm{T}}]^{\rm{T}}\in{{\bf{R}}}^8 $ ,$ {\bar{\boldsymbol{u}}} = [\bar{u}_r^{\rm{T}},\bar{u}_d^{\rm{T}}]^{\rm{T}}\in{{\bf{R}}}^8 $ . 所以可以推导出$ {{\boldsymbol{r}}}_{bt}^b = Q({\boldsymbol{q}}_{btr})^{-1}{\boldsymbol{\xi}}_d $ , 即如果${\boldsymbol{\xi}}_d\rightarrow[0,0, 0]^{\rm{T}}$ , 那么$ {{\boldsymbol{r}}}_{bt}^b\rightarrow[0,0,0]^{\rm{T}} $ .因此, 本文的控制目标转化为
${\hat{{\boldsymbol{\xi}}}}_{bt}\rightarrow[0,\;0, 0]^{\rm{T}}+ \varepsilon[0,\;0,\;0]^{\rm{T}}$ ,${\hat{\boldsymbol{\omega}}}_{bt}^b\rightarrow[0,\;0,\;0]^{\rm{T}}+\varepsilon[0,\;0,\;0]^{\rm{T}}$ , 即,$\lim_{t\to \infty}{{\boldsymbol{e}}}_1 = 0$ ,$ \lim_{t\to \infty}{{\boldsymbol{e}}}_2 = 0 $ .2. 直接自适应容错控制设计
针对航天器近距离操作相对运动系统以及位姿执行器故障问题, 本节设计一个直接自适应容错控制信号.
2.1 运动学虚拟控制设计
考虑相对运动的运动学方程(13), 将
$ {\boldsymbol{e}}_2 $ 视为一个虚拟控制信号. 对于整个航天器近距离操作的相对运动控制系统而言, 可首先设计一个运动学的虚拟控制信号$ {\boldsymbol{\alpha}} $ , 使得当$ {\boldsymbol{e}}_2 = {\boldsymbol{\alpha}} $ 时,$ \lim_{t\to \infty}{{\boldsymbol{e}}}_1 = 0 $ . 而后设计控制信号$ {\boldsymbol{v}}(t) $ 使得$ \lim_{t\to \infty}({{\boldsymbol{e}}}_2-{\boldsymbol{\alpha}}) = 0 $ , 从而保证期望的性能. 定义$ \Delta =(1/2)\hat{f}_1({\hat{\boldsymbol{q}}}_{bt})\in{{\bf{R}}}^{6\times 6} $ , 本节设计的运动学的虚拟控制信号为$$ {\boldsymbol{\alpha}} = -k_1\Delta^{-1}{{\boldsymbol{e}}}_1 $$ (22) 其中,
$ k_1>0 $ 为一个选定的常数.首先分析虚拟控制信号
$ {\boldsymbol{\alpha}} $ 的控制性能. 定义跟踪误差$$ {{\boldsymbol{e}}}_3 = {{\boldsymbol{e}}}_2-{\boldsymbol{\alpha}} $$ (23) 选择如下的正定函数
$$ V_1 = \frac{1}{2}{{\boldsymbol{e}}}_1^{\rm{T}}{{\boldsymbol{e}}}_1 $$ (24) 由式(22)可得
$ V_1 $ 的导数为$$ \dot V_1 = -k_1{{\boldsymbol{e}}}_1^{\rm{T}}{{\boldsymbol{e}}}_1+{{\boldsymbol{e}}}_1^{\rm{T}}\Delta{{\boldsymbol{e}}}_3 $$ (25) 式(25)中, 如果
$ {\boldsymbol{e}}_3\to 0 $ 则$ \dot V_1\leq 0 $ . 下面设计控制信号$ {\boldsymbol{v}}(t) $ , 使得$ \lim_{t\to \infty}{{\boldsymbol{e}}}_3 = \lim_{t\to \infty}({{\boldsymbol{e}}}_2-{\boldsymbol{\alpha}}) = 0 $ , 以保证期望的相对运动系统性能.本文中的控制信号重构为
$$ {\boldsymbol{v}} = D_b^{\rm{T}}{\boldsymbol{v}}_0 $$ (26) 其中,
$ {\boldsymbol{v}}_0 $ 是一个需要设计的中间控制信号. 结合执行故障模型(17), 则式(21) 中的相对动力学方程可以进一步表示为$$ J_b{\dot{\boldsymbol{e}}}_2 = f_2({\hat{\boldsymbol{q}}}_{bt},{\hat{\boldsymbol{\omega}}}_{bt}^b)+D_b(\sigma D_b^{\rm{T}}{\boldsymbol{v}}_0+{\bar{\boldsymbol{u}}}) $$ (27) 由式(23)可以得到
$$ \begin{split} J_b{\dot{\boldsymbol{e}}}_3 =\;& f_2({\hat{\boldsymbol{q}}}_{bt},{\hat{\boldsymbol{\omega}}}_{bt}^b)+ \\ &D_b(\sigma D_b^{\rm{T}}{\boldsymbol{v}}_0+{\bar{\boldsymbol{u}}})-J_b{\dot{\boldsymbol{\alpha}}} \end{split} $$ (28) 其中,
$ {\dot{\boldsymbol{\alpha}}} $ 表示反步控制信号$ {\boldsymbol{\alpha}} $ 的导数.由式(18)和式(19)所示执行器冗余条件可知, 矩阵
$ D_b\sigma D_b^{\rm{T}}\in{{\bf{R}}}^{6\times6} $ 为对称正定矩阵, 但由于对偶故障模式矩阵$ {\sigma} $ 未知, 故$ D_b{\sigma} D_b^{\rm{T}} $ 未知.2.2 标称控制设计
假设对偶故障模式矩阵与对偶故障值已知, 设计标称控制信号. 令
$ G = (D_b\sigma D_b^{\rm{T}})^{-1} $ 且由于不确定故障模式矩阵$ \sigma $ , 对偶矩阵$ G $ 未知. 设计标称中间控制信号为$$ {\boldsymbol{v}}_0^* = G(-k_2{\boldsymbol{e}}_3-f_2-\Delta^{\rm{T}}{\boldsymbol{e}}_1-{\bar{\boldsymbol{u}}}_0+J_b{\dot{\boldsymbol{\alpha}}}) $$ (29) 其中,
$ {\bar{\boldsymbol{u}}}_0 = D_b{\bar{\boldsymbol{u}}} $ ,$ k_2>0 $ 是一个选定的常数. 标称控制信号是在假设对系统的全部已知情况下设计的, 带有中间控制信号$ {\boldsymbol{v}}_0^*(t) $ 的控制信号$ {\boldsymbol{v}}(t) $ 能够保证所有闭环信号的稳定性以及$ \lim_{t\to \infty}{{\boldsymbol{e}}}_1 = 0 $ 和$ \lim_{t\to \infty}{{\boldsymbol{e}}}_2 = 0 $ , 即控制目标达成.选择如下Lyapunov候选函数
$$ V_2^* = \frac{1}{2}{{\boldsymbol{e}}}_1^{\rm{T}}{{\boldsymbol{e}}}_1+\frac{1}{2}{{\boldsymbol{e}}}_3^{\rm{T}} J_b{{\boldsymbol{e}}}_3 $$ (30) 结合式(28)所示误差
$ {\dot{\boldsymbol{e}}}_3 $ 方程和式(29)所示标称中间控制信号,$ V_2^* $ 的导数可以推导为$$ \begin{split} \dot{V}_2^* =\;& -k_1{{\boldsymbol{e}}}_1^{\rm{T}}{{\boldsymbol{e}}}_1+{{\boldsymbol{e}}}_1^{\rm{T}}\Delta{{\boldsymbol{e}}}_3+{{\boldsymbol{e}}}_3^{\rm{T}} J_b{{\dot{\boldsymbol{e}}}}_3 = \\ &-k_1{{\boldsymbol{e}}}_1^{\rm{T}}{{\boldsymbol{e}}}_1-k_2{{\boldsymbol{e}}}_3^{\rm{T}}{{\boldsymbol{e}}}_3\leq0 \end{split}$$ (31) 这表明
$ {\boldsymbol{e}}_1,{\boldsymbol{e}}_3\in L^\infty\cap L^2 $ . 结合式(13), (28)和(29), 可以进一步得到$ {\boldsymbol{v}}_0^*,{\dot{\boldsymbol{e}}}_1 $ 和$ {\dot{\boldsymbol{e}}}_3\in L^\infty $ . 综上所述, 可得所有的闭环信号都是有界的, 且根据Barbalat引理,$ \lim_{t\to \infty}{{\boldsymbol{e}}}_1 = 0 $ 以及$ \lim_{t\to \infty}{{\boldsymbol{e}}}_2 = 0 $ , 即控制目标完成.2.3 自适应控制设计
通过直接估计标称中间控制信号(29)中的不确定参数
$ G $ 和$ {\bar{\boldsymbol{u}}}_0 $ , 可以推导得到一个应用于本航天器6自由度相对运动系统的自适应控制信号.2.3.1 控制信号
令
$ \bar{G} $ 和$ {\bar{\bar{\boldsymbol{u}}}}_0 $ 分别表示不确定参数$ G $ 和$ {\bar{\boldsymbol{u}}}_0 $ 的自适应估计值, 且估计误差为:$ \tilde{G} = G-\bar{G} $ 以及$ {\tilde{\bar{\boldsymbol{u}}}}_0 = {\bar{\boldsymbol{u}}}_0-{\bar{\bar{\boldsymbol{u}}}}_0 $ , 则自适应中间控制信号$ {\boldsymbol{v}}_0(t) $ 可以设计为$$ {\boldsymbol{v}}_0 = \bar{G}(-k_2{\boldsymbol{e}}_3-f_2-\Delta^{\rm{T}}{\boldsymbol{e}}_1-{\bar{\bar{\boldsymbol{u}}}}_0+J_b{\dot{\boldsymbol{\alpha}}}) $$ (32) 2.3.2 自适应律
为构建自适应中间控制信号
$ {\boldsymbol{v}}_0 $ , 需要设计参数$ \bar{G} $ 和$ {\bar{\bar{\boldsymbol{u}}}}_0 $ 的自适应律, 本文选择如下:$$ \dot{\bar{G}} = -\gamma_g{\boldsymbol{e}}_3{\boldsymbol{v}}_1^{\rm{T}} $$ (33) $$ {\dot{\bar{\bar{\boldsymbol{u}}}}}_0 = \Gamma_{{\bar{u}}_0}{\boldsymbol{e}}_3 \;\;\;$$ (34) 其中,
$ \gamma_g>0 $ 是被选定的常数,$ \Gamma_{{\bar{u}}_0}\in{{\bf{R}}}^{6\times6} $ 是被选定的对称正定矩阵, 以及$$ {\boldsymbol{v}}_1 = -k_2{\boldsymbol{e}}_3-f_2-\Delta^{\rm{T}}{\boldsymbol{e}}_1-{\bar{\bar{\boldsymbol{u}}}}_0+J_b{\dot{\boldsymbol{\alpha}}} $$ (35) 2.4 系统性能分析
整个系统的性能分析如下所述.
定理 1. 本文为航天器近距离操作相对运动系统运动学(13)及动力学(14)设计的、带有中间控制信号(32)及自适应律(33)和(34)更新的自适应控制信号(26), 能够保证在冗余条件(18)和(19)下发生位姿执行器故障(17)时, 所有闭环信号的有界性以及系统状态误差的渐近收敛性能:
$ \lim_{t\to \infty}{{\boldsymbol{e}}}_1 = 0 $ 以及$ \lim_{t\to \infty}{{\boldsymbol{e}}}_2 = 0. $ 证明. 本文将分单故障和多故障两种情况进行整个系统的性能分析. 在单故障情况下给出了处理不确定控制增益矩阵的性能分析; 而在多故障情况下给出了处理多执行器故障和故障突发时间稳定性能的分析.
1) 单故障情况
考虑式(21)中的故障模式矩阵
$ \sigma $ 和故障值$ {\bar{\boldsymbol{u}}} $ 是固定的, 结合$ G = (D_b\sigma D_b^{\rm{T}})^{-1} $ 以及式(32)和式(35), 相对运动误差系统(23)可以推导为$$ \begin{split} J_b{\dot{\boldsymbol{e}}}_3 =\;& f_2({\hat{\boldsymbol{q}}}_{bt},{\hat{\boldsymbol{\omega}}}_{bt}^b)+G^{-1}\bar{G}{\boldsymbol{v}}_1- \\ &G^{-1}G{\boldsymbol{v}}_1+G^{-1}G{\boldsymbol{v}}_1+{\bar{\boldsymbol{u}}}_0-J_b{\dot{\boldsymbol{\alpha}}} = \\ &-k_2{{\boldsymbol{e}}}_3-\Delta^{\rm{T}}{{\boldsymbol{e}}}_1-G^{-1}\tilde{G}{\boldsymbol{v}}_1+{\tilde{\bar{\boldsymbol{u}}}}_0 \end{split} $$ (36) 选择如下的Lyapunov候选函数
$$ \begin{split} V_2 =\;& \frac{1}{2}{{\boldsymbol{e}}}_1^{\rm{T}}{{\boldsymbol{e}}}_1+\frac{1}{2}{{\boldsymbol{e}}}_3^{\rm{T}} J_b{{\boldsymbol{e}}}_3+ \\ &\frac{1}{2}{\tilde{\bar{\boldsymbol{u}}}}_0^{\rm{T}}{\tilde{\bar{\boldsymbol{u}}}}_0+\frac{1}{2}\gamma_g^{-1}\mathrm{tr}(\tilde{G}^{\rm{T}} G^{-1}\tilde{G}) \end{split} $$ (37) 其中, 未知矩阵
$ G^{-1} $ 用于获得$ \bar{G} $ (用于处理控制增益矩阵的不确定性)的自适应律. 结合式(13)和式(36),$ V_2 $ 的导数可以推导为$$ \begin{split} \dot{V}_2 =\;& -k_1{{\boldsymbol{e}}}_1^{\rm{T}}{{\boldsymbol{e}}}_1-k_2{{\boldsymbol{e}}}_3^{\rm{T}}{{\boldsymbol{e}}}_3-{{\boldsymbol{e}}}_3^{\rm{T}}{\tilde{\bar{\boldsymbol{u}}}}_0\;- \\ & {{\boldsymbol{e}}}_3^{\rm{T}} G^{-1}\tilde{G}{\boldsymbol{v}}_1+{\tilde{\bar{\boldsymbol{u}}}}_0^{\rm{T}}\Gamma_{{\bar{u}}_0}^{-1}{\dot{\tilde{\bar{\boldsymbol{u}}}}}_0+ \mathrm{tr}(\tilde{G}^{\rm{T}} G^{-1}\dot{\tilde{G}}) \end{split} $$ (38) 由于
${{\boldsymbol{e}}}_3^{\rm{T}}{\tilde{\bar{\boldsymbol{u}}}}_0 \;=\; {\tilde{\bar{\boldsymbol{u}}}}_0^{\rm{T}}{{\boldsymbol{e}}}_3$ ,${{\boldsymbol{e}}}_3^{\rm{T}} G^{-1}\tilde{G}{\boldsymbol{v}}_1 \;=\; \mathrm{tr}({\boldsymbol{v}}_1{\boldsymbol{e}}_3^{\rm{T}} G^{-1}\tilde{G}) = \mathrm{tr}(\tilde{G}^{\rm{T}} G^{-1}{\boldsymbol{e}}_3{\boldsymbol{v}}_1^{\rm{T}})$ . 结合式(35)中定义的信号$ {\boldsymbol{v}}_1 $ ,$\dot{\tilde{G}} = -\dot{\bar{G}}$ ,$ {\dot{\tilde{\bar{\boldsymbol{u}}}}}_0 = -{\dot{\bar{\bar{\boldsymbol{u}}}}}_0 $ 以及式(33)和式(34)中的自适应律, 且$ k_1,k_2>0 $ , 式(38) 中的$ \dot{V}_2 $ 推导为$$ \dot{V}_2 = -k_1{{\boldsymbol{e}}}_1^{\rm{T}}{{\boldsymbol{e}}}_1-k_2{{\boldsymbol{e}}}_3^{\rm{T}}{{\boldsymbol{e}}}_3\leq 0 $$ (39) 这表明
$ {{\boldsymbol{e}}}_1,{{\boldsymbol{e}}}_3,{\tilde{G}},{\tilde{\bar{\boldsymbol{u}}}}_0\in L^\infty $ , 以及$ {{\boldsymbol{e}}}_1,{{\boldsymbol{e}}}_3\in L^2 $ . 结合式(20) ~ (23), (26), (32)和(36), 可得$ {\boldsymbol{\alpha}},{\dot{\boldsymbol{\alpha}}}, {\boldsymbol{v}}_0, {\boldsymbol{v}},{\dot{\boldsymbol{e}}}_1, {\dot{\boldsymbol{e}}}_3\in L^\infty $ . 最后根据Barbalat引理, 可得所有的闭环信号有界且$ \lim_{t\to \infty}{{\boldsymbol{e}}}_1 = 0 $ 以及$ \lim_{t\to \infty}{{\boldsymbol{e}}}_3 = 0 $ , 最终可得$ \lim_{t\to \infty}{{\boldsymbol{e}}}_2 = 0 $ .2) 多故障情况
考虑故障模式矩阵
$ \sigma = \sigma_{(i)} $ 及故障值$ {\bar{\boldsymbol{u}}} = {\bar{\boldsymbol{u}}}_{(i)} $ 在时间间隔$(T_i,T_{i+1}),T_0 = 0,T_N = \infty,i = 0,1,\cdots, N-1$ 内是固定的, 其中$ N $ 是有限序列次数. 基于发生单故障时对系统的性能分析, 对于多执行器故障, 可以分析在发生故障时间内Lyapunov函数$ V_2 $ 的有界性, 即$ V_2(T_{i+1}),i = 0,1,\cdots,N-2 $ .针对每一种故障模式, 定义
$ \tilde{G}_{(i)} = G_{(i)}-\bar{G}_{(i)} $ 以及$ {\tilde{\bar{\boldsymbol{u}}}}_{0{(i)}} = {\bar{\boldsymbol{u}}}_{0{(i)}}-{\bar{\bar{\boldsymbol{u}}}}_{0{(i)}} $ ,$t\in(T_i,T_{i+1}),T_0 = 0, T_N = \infty,i = 0,1, \cdots,N -1.$ 为简单起见, 在本文中令$ \Gamma_{{\bar{u}}_0} = \boldsymbol{1}_{6\times6} ,$ $ \gamma_{g} = 1. $ 在式(37)的基础上, 本文选择$$ \begin{split} V_{2(i)} =\;& \frac{1}{2}{{\boldsymbol{e}}}_1^{\rm{T}}{{\boldsymbol{e}}}_1+\frac{1}{2}{{\boldsymbol{e}}}_3^{\rm{T}} J_b{{\boldsymbol{e}}}_3+\frac{1}{2}{\tilde{\bar{\boldsymbol{u}}}}_{0{(i)}}^{\rm{T}}{\tilde{\bar{\boldsymbol{u}}}}_{0{(i)}}+ \\ &\frac{1}{2}\gamma_g^{-1}\mathrm{tr}(\tilde{G}_{(i)}^{\rm{T}} G_{(i)}^{-1}\tilde{G}_{(i)}) \end{split} $$ (40) 结合式(39), 进一步可得
$$ \left\{\begin{aligned} & \dot{V}_{2(0)}(t) \leq0,t\in[0,T_1) \\ &\dot{V}_{2(i)}(t) \leq0,t\in(T_i,T_{i+1}),i = 1,\cdots,N-2 \\ &\dot{V}_{2(N-1)}(t) \leq0,t\in(T_{N-1},\infty) \end{aligned} \right.$$ (41) 由式(41)可得
$$ \left\{\begin{aligned} &{V}_{2(0)}(0) \geq{V}_{2(0)}(T_1) \\ &{V}_{2(i)}(T_i) \geq{V}_{2(i)}(T_{i+1}),i = 1,\cdots,N-2 \\ &{V}_{2(N-1)}(T_{N-1}) \geq{V}_{2(N-1)}(t),t\geq T_{N-1} \end{aligned} \right.$$ (42) 令
$ \lambda_{\max} $ 和$ \lambda_{\min} $ 分别为$ G_{(i)}^{-1} $ 的最大和最小特征值, 并且$ \lambda_{\max}>\lambda_{\min}>0 $ . 分别令$ \Pi_1 = {\tilde{\bar{\boldsymbol{u}}}}_{0{(i+1)}}^{\rm{T}}{\tilde{\bar{\boldsymbol{u}}}}_{0{(i+1)}} $ 以及$ \Pi_2 = \mathrm{tr}(\tilde{G}_{(i+1)}^{\rm{T}} G_{(i+1)}^{-1}\tilde{G}_{(i+1)}) $ , 对其进一步推导, 可得$$ \qquad\begin{split} \Pi_1 =\;& ({\bar{\boldsymbol{u}}}_{0{(i+1)}}-{\bar{\bar{\boldsymbol{u}}}}_{0})^{\rm{T}}({\bar{\boldsymbol{u}}}_{0{(i+1)}}-{\bar{\bar{\boldsymbol{u}}}}_{0}) = \\ &({\bar{\boldsymbol{u}}}_{0{(i+1)}}-{{\bar{\boldsymbol{u}}}}_{0(i)}+{\tilde{\bar{\boldsymbol{u}}}}_{0{(i)}})^{\rm{T}} \\ &({\bar{\boldsymbol{u}}}_{0{(i+1)}}-{\bar{\boldsymbol{u}}}_{0(i)}+{\tilde{\bar{\boldsymbol{u}}}}_{0{(i)}})\leq \\ &2{\tilde{\bar{\boldsymbol{u}}}}_{0{(i)}}^{\rm{T}}{\tilde{\bar{\boldsymbol{u}}}}_{0{(i)}}+2({\bar{\boldsymbol{u}}}_{0{(i+1)}}-{{\bar{\boldsymbol{u}}}}_{0(i)})^{\rm{T}} \\ &({\bar{\boldsymbol{u}}}_{0{(i+1)}}-{{\bar{\boldsymbol{u}}}}_{0(i)}) \end{split} $$ (43) $$ \qquad\begin{split} \Pi_2\leq\;& \lambda_{\max}\mathrm{tr}((G_{(i+1)}-\bar{G})^{\rm{T}}(G_{(i+1)}-\bar{G})) = \\ &\lambda_{\max}\mathrm{tr}(G_{(i+1)}-G_{(i)}+\tilde{G}_{i})^{\rm{T}} \\ &((G_{(i+1)}-G_{(i)}+\tilde{G}_{i}) = \\ &\lambda_{\max}(\mathrm{tr}(\tilde{G}_{i}^{\rm{T}}\tilde{G}_{i})+ \\ &\mathrm{tr}((G_{(i+1)}-G_{(i)})^{\rm{T}}(G_{(i+1)}-G_{(i)}))+ \\ &2\mathrm{tr}(\tilde{G}_{i}^{\rm{T}}(G_{(i+1)}-G_{(i)}))\leq \\ &2\lambda_{\max}\mathrm{tr}(\tilde{G}_{i}^{\rm{T}}\tilde{G}_{i})+2\lambda_{\max}\mathrm{tr}((G_{(i+1)}-G_{(i)})^{\rm{T}} \\ & (G_{(i+1)}-G_{(i)})) \end{split} $$ (44) $$\;\;\quad\mathrm{tr}(\tilde{G}_{(i)}^{\rm{T}} G_{(i)}^{-1}\tilde{G}_{(i)})\geq\lambda_{\min}\mathrm{tr}(\tilde{G}_{i}^{\rm{T}}\tilde{G}_{i}) $$ (45) 令
$\kappa_{(i+1)} = 2({\bar{\boldsymbol{u}}}_{0{(i+1)}}-{{\bar{\boldsymbol{u}}}}_{0(i)})^{\rm{T}}({\bar{\boldsymbol{u}}}_{0{(i+1)}}-{{\bar{\boldsymbol{u}}}}_{0(i)})+$ $2\lambda_{\max}\mathrm{tr}((G_{(i+1)}-G_{(i)})^{\rm{T}}(G_{(i+1)}-G_{(i)})),i = 0,1,\cdots,$ $N-2 $ , 且$ k_{\max} = \max\{1,4\lambda_{\max}\} $ . 结合式(43)和式(44), 进一步可得$$ \begin{split} V_{2(i+1)}\leq\;& \frac{1}{2}{{\boldsymbol{e}}}_1^{\rm{T}}{{\boldsymbol{e}}}_1+\frac{1}{2}{{\boldsymbol{e}}}_3^{\rm{T}} J_b{{\boldsymbol{e}}}_3+\frac{1}{2}{\tilde{\bar{\boldsymbol{u}}}}_{0{(i)}}^{\rm{T}}{\tilde{\bar{\boldsymbol{u}}}}_{0{(i)}}+ \\ &2\lambda_{\max}\mathrm{tr}(\tilde{G}_{(i)}^{\rm{T}} \tilde{G}_{(i)})+\kappa_{(i+1)}\leq \\ &k_{\max}(\frac{1}{2}{{\boldsymbol{e}}}_1^{\rm{T}}{{\boldsymbol{e}}}_1+\frac{1}{2}{{\boldsymbol{e}}}_3^{\rm{T}} J_b{{\boldsymbol{e}}}_3+\frac{1}{2}{\tilde{\bar{\boldsymbol{u}}}}_{0{(i)}}^{\rm{T}}{\tilde{\bar{\boldsymbol{u}}}}_{0{(i)}}+ \\ &\frac{1}{2}\mathrm{tr}(\tilde{G}_{(i)}^{\rm{T}} G_{(i)}^{-1}\tilde{G}_{(i)}))+\kappa_{(i+1)} \\[-10pt] \end{split}$$ (46) 另一方面, 令
$ k_{\min} = \min\{1,\lambda_{\min}\} $ , 基于不等式(45)可得$$ \begin{split} V_{2(i)}\geq\;& \frac{1}{2}{{\boldsymbol{e}}}_1^{\rm{T}}{{\boldsymbol{e}}}_1+\frac{1}{2}{{\boldsymbol{e}}}_3^{\rm{T}} J_b{{\boldsymbol{e}}}_3+\frac{1}{2}{\tilde{\bar{\boldsymbol{u}}}}_{0{(i)}}^{\rm{T}}{\tilde{\bar{\boldsymbol{u}}}}_{0{(i)}}+ \\ &\frac{\lambda_{\min}}{2}\mathrm{tr}(\tilde{G}_{(i)}^{\rm{T}} \tilde{G}_{(i)})\geq \\ &k_{\min}(\frac{1}{2}{{\boldsymbol{e}}}_1^{\rm{T}}{{\boldsymbol{e}}}_1+\frac{1}{2}{{\boldsymbol{e}}}_3^{\rm{T}} J_b{{\boldsymbol{e}}}_3+\frac{1}{2}{\tilde{\bar{\boldsymbol{u}}}}_{0{(i)}}^{\rm{T}}{\tilde{\bar{\boldsymbol{u}}}}_{0{(i)}}+ \\ &\frac{1}{2}\mathrm{tr}(\tilde{G}_{(i)}^{\rm{T}} \tilde{G}_{(i)})) \end{split} $$ (47) 基于不等式(46)和(47), 可得
$$ V_{2(i+1)}\leq\frac{k_{\min}}{k_{\max}}V_{2(i)}+\kappa_{(i+1)} $$ (48) 结合不等式组(42), 进一步可得
$$ \left\{\begin{aligned} &{V}_{2(1)}(T_1)\leq \frac{k_{\min}}{k_{\max}}{V}_{2(0)}(T_1)+\kappa_{(1)}\leq \\ &\;\;\;\;\;\;\;\;\;\;\; \;\;\;\;\;\;\;\;\frac{k_{\min}}{k_{\max}}{V}_{2(0)}(0)+\kappa_{(1)} \\ &{V}_{2(i+1)}(T_{i+1})\leq \frac{k_{\min}}{k_{\max}}{V}_{2(i)}(T_{i+1})+\kappa_{(i+1)}\leq \\ &\;\;\;\;\;\;\;\; \;\;\;\;\;\;\;\;\;\;\qquad \frac{k_{\min}}{k_{\max}}{V}_{2(i)}(T_{i})+\kappa_{(i+1)} \\ &{V}_{2(N-1)}(t) \leq{V}_{2(N-1)}(T_{N-1}),t\leq T_{N-1} \end{aligned}\right. $$ (49) 结合式(41)中的不等式组, 考虑多执行器故障, Lyapunov函数
$ V_2(t) $ 有界. □3. 仿真验证
本节将设计的自适应容错控制方案应用于控制航天器近距离操作相对运动系统来验证其有效性.
3.1 航天器模型与仿真初值
目标航天器的轨道参数参考文献[12], 追踪航天器的质量和转动惯量矩阵分别为
$$ m = 15\;{\rm{kg}}\hspace{103pt} $$ $$ J = \left[ \begin{array}{ccc} 3.0514 & 0 & 0\\ 0 & 2.6628 & 0\\ 0 & 0 & 2.1879 \end{array} \right] $$ 追踪航天器用于位置和姿态的执行机构分别为推力器和飞轮, 共计有4个推力器和4个反作用飞轮. 设定追踪航天器的对偶控制分配矩阵为
$$ D_r = \frac{\sqrt{2}}{2}\left[ \begin{array}{cccc} 0 & \;0 & 1 & 1\\ 1 & -1\;\;\, & 1 & 1\\ 1 & \;1 & 0 & 0\\ \end{array} \right] $$ $$ D_d = \frac{1}{3}\left[ \begin{array}{cccc} 3 & 0 & 0 & \sqrt{3}\\ 0 & 3 & 0 & \sqrt{3}\\ 0 & 0 & 3 & \sqrt{3}\\ \end{array} \right] $$ 设置考虑的位姿执行器故障模式如下:
1)
$u_{r1}(t) = 0.6v_{r1}(t),u_{d1}(t) = 0.6v_{d1}(t),$ $ t\geq100\;{\rm{s}} $ ;2)
$u_{r2}(t) = 0.3v_{r1}(t)\;+\;0.4,u_{d1}(t) = 0.3v_{d2}(t)+ 0.4$ ,$ t\geq200\;{\rm{s}} $ ;3)
$ u_{r4}(t) = 0,u_{d1}(t) = 0 $ ,$t\geq300\;{\rm{s}}$ ;4)
$ {\hat{\boldsymbol{u}}}(t) = {\hat{\boldsymbol{v}}}(t) $ , 其他时刻.针对仿真, 设计如下的初值,
$ k_1 = 1 $ ,$ k_2 = 1 $ ,$ \gamma_g = 1 $ ,$ \Gamma_{{\bar{u}}_0} = {\boldsymbol{1}}_{6\times6} $ . 设定追踪航天器相对期望坐标系的对偶四元数为:${\hat{\boldsymbol{q}}}_{bt} = [0.5,0.5,0.5,0.5]^{\rm{T}}+ \varepsilon[0, 0,-5,0]^{\rm{T}}$ , 追踪航天器相对期望坐标系的对偶角速度为:$ {\hat{\boldsymbol{\omega}}}_{bt} = [0,0.2,0]^{\rm{T}}+\varepsilon[0,0.2,0]^{\rm{T}} $ . 积分环节的仿真初值设定为:$ {\bar{\bar{\boldsymbol{u}}}}(0) = [0,0,0,0,0,0]^{\rm{T}} $ , 以及$$ \bar{G}(0) = \left[ \begin{array}{cccccc} 1 & 0 & 0 & 0 & 0 & 0\\ 0 & 0.5 & 0 & 0 & 0 & 0\\ 0 & 0 & 1 & 0 & 0 & 0\\ 0 & 0 & 0 &\;\;\; 0.8333 & -0.1667 & -0.1667\\ 0 & 0 & 0 & -0.1667 &\;\;\; 0.8333 & -0.1667\\ 0 & 0 & 0 & -0.1667 & -0.1667 &\;\;\; 0.8333\\ \end{array} \right] $$ 3.2 仿真结果
将本文设计的直接自适应容错控制方案应用到上述追踪航天器模型上, 配置系统参数和仿真初值, 注入执行器故障, 得到如下仿真结果.
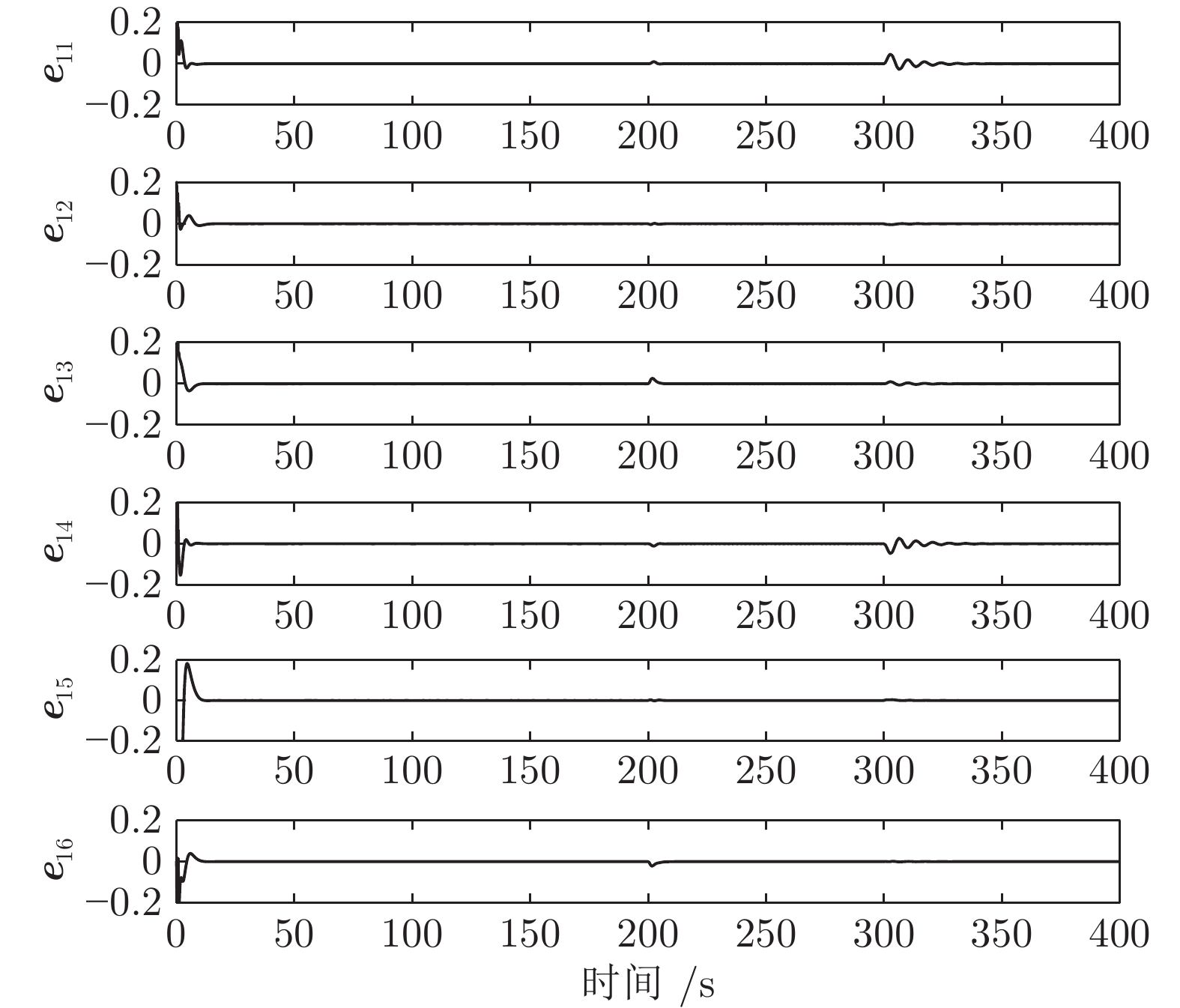
图2 ~ 4分别表示系统运动学误差
$ {\boldsymbol{e}}_1 $ 、动力学误差$ {\boldsymbol{e}}_2 $ 以及对偶控制力矩$ {\hat{\boldsymbol{u}}} $ 与对偶控制信号$ {\hat{\boldsymbol{v}}} $ . 由图2 ~ 4可以看出, 本文设计的自适应控制器保证了追踪航天器的位姿控制系统在发生执行器故障后: 1) 系统所有闭环信号的有界性, 包括系统跟踪误差, 系统运动学及动力学状态和控制信号; 2) 在$ 0\leq t<100 $ s内, 未发生故障, 跟踪误差都能收敛到0, 当100 s, 200 s, 300 s发生新故障时, 在短暂响应后, 系统的跟踪性能恢复, 设计的自适应直接容错控制方案能够在有故障情况下保证系统的性能. 图 4 对偶控制力矩
图 4 对偶控制力矩$ {\hat{\boldsymbol{u}}}$ 与对偶控制信号$ {\hat{\boldsymbol{v}}}$ Fig. 4 Dual control torque$ {\hat{\boldsymbol{u}}}$ and dual control signal$ {\hat{\boldsymbol{v}}}$ 4. 结束语
针对航天器近距离操作位姿相对运动系统多执行器故障问题, 提出了一种同时考虑失效故障和失控故障的直接自适应容错控制方案. 本文采用对偶四元数对航天器位姿耦合系统精确建模. 在没有先验知识的情况下处理了故障模式矩阵的不确定性. 并提供了一个新的性能分析, 用以证明多执行器故障有限次突变时刻的稳定性. 该控制律保证了在无故障情况下或在有故障情况下跟踪误差的全局渐近稳定性. 仿真中假设故障参数为常数或分段常数, 系统在所有故障情况下都是可控的, 验证了该结论的有效性. 未来将考虑带有挠性附件的航天器近距离操作过程中的位姿相对运动系统执行器故障问题, 并将质量及转动惯量不确定性考虑在内.
-
[1] 郑重, 李鹏, 钱默抒. 具有角速度和输入约束的航天器姿态协同控制. 自动化学报, 2021, 47(6): 1444-1452Zheng Zhong, Li Peng, Qian Mo-Shu. Spacecraft attitude coordination control with angular velocity and input constraints. Acta Automatica Sinca, 2021, 47(6): 1444-1452 [2] 耿云海, 金荣玉, 陈雪芹, 李冬柏. 执行机构故障的航天器姿态容错控制. 宇航学报, 2017, 38(11): 1186-1194 doi: 10.3873/j.issn.1000-1328.2017.11.007Geng Yun-Hai, Jin Rong-Yu, Chen Xue-Qin, Li Dong-Bai. Spacecraft attitude fault tolerant control with actuator fault, Journal of Astronautics, 2017, 38(11): 1186-1194 doi: 10.3873/j.issn.1000-1328.2017.11.007 [3] Wang D, Fu F, Li W, Tu Y, Liu C, Liu W. A review of the diagnosability of control systems with applications to spacecraft. Annual Reviews in control, 2020, 49: 212-229 doi: 10.1016/j.arcontrol.2020.03.004 [4] Fu F, Xue T, Wu Z, Wang D. A fault diagnosability evaluation method for dynamic systems without distribution knowledge. IEEE Transactions on Cybernetics, 2022, 52(6): 5113-5123 doi: 10.1109/TCYB.2020.3027549 [5] 王大轶, 屠园园, 刘成瑞, 何英姿, 李文博. 航天器控制系统可重构性的内涵与研究综述. 自动化学报, 2017, 43(10): 1687-1702Wang Da-Yi, Tu Yuan-Yuan, Liu Cheng-Rui, He Ying-Zi, Li Wen-Bo. Connotation and research of reconfigurability for spacecraft control systems: a review. Acta Automatica Sinca, 2017, 43(10): 1687-1702 [6] 文利燕, 陶钢, 姜斌, 杨杰. 非线性动态突变系统的多模型自适应执行器故障补偿设计. 自动化学报, 2022, 48(1): 207-222 doi: 10.16383/j.aas.c200318Wen Li-Yan, Tao Gang, Jiang Bin, Yang Jie. A multiple-model based adaptive actuator failure compensation scheme for nonlinear systems with dynamic mutations. Acta Automatica Sinica, 2022, 48(1): 207-222 doi: 10.16383/j.aas.c200318 [7] 张绍杰, 吴雪, 刘春生. 执行器故障不确定非线性系统最优自适应输出跟踪控制. 自动化学报, 2018, 44(12): 2188-2197Zhang Shao-Jie, Wu Xue, Liu Chun-Sheng. Optimal adaptive output tracking control for a class of uncertain nonlinear systems with actuator failures. Acta Automatica Sinica, 2018, 44(12): 2188-2197 [8] 张福桢, 金磊. 使用SGCMGs航天器滑模姿态容错控制. 北京航空航天大学学报, 2017, 43(4): 806-813Zhang Fu-Zhen, Jin Lei. Sliding-mode fault-tolerant attitude control for spacecraft using SGCMGs. Journal of Beijing University of Aeronautics and Astronsutics, 2017, 43(4): 806-813. [9] Zhu X, Zheng H, Chen J. Dual quaternion-based adaptive iterative learning control for flexible spacecraft rendezvous. Acta Astronautica, 2021, 189: 99-118 doi: 10.1016/j.actaastro.2021.08.040 [10] 梅亚飞, 廖瑛, 龚轲杰, 罗达. SE(3) 上航天器姿轨耦合固定时间容错控制. 航空学报, 2021, 42(11): 525089-1−14Mei Ya-Fei, Liao Ying, Gong Ke-Jie, Luo Da. Fixed-time fault-tolerant control for coupled spacecraft on SE(3). Acta Astronautica et Astronautica Sinca, 2021, 42(11): 525089-1−14 [11] 沈毅, 李利亮, 王振华. 航天器故障诊断与容错控制技术研究综述. 宇航学报, 2020, 41(6): 647-656 doi: 10.3873/j.issn.1000-1328.2020.06.002Shen Yi, Li Li-Liang, Wang Zhen-Hua. A review of fault diagnosis and fault-tolerant control techniques for spacecraft. Journal of Astronautics, 2020, 41(6): 647-656 doi: 10.3873/j.issn.1000-1328.2020.06.002 [12] 金小峥, 杨光红, 常晓恒, 车伟伟. 容错控制系统鲁棒H∞和自适应补偿设计. 自动化学报, 2013, 39(1): 31-42 doi: 10.1016/S1874-1029(13)60004-XJin Xiao-Zheng, Yang Guang-Hong, Chang Xiao-Heng, Che Wei-Wei. Robust fault-tolerant H∞ control with adaptive compensation. Acta Automatica Sinica, 2013, 39(1): 31-42 doi: 10.1016/S1874-1029(13)60004-X [13] Xiao B, Hu Q, Singhose W. Reaction wheel fault compensation and disturbance rejection for spacecraft attitude tracking. Journal of Guidance, Control, and Dynamics, 2013, 36: 1565-1575 doi: 10.2514/1.59839 [14] Yao X, Tao G, Ma Y, Jiang B. Adaptive actuator failure compensation design for spacecraft attitude control. IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(3): 1021-1034 doi: 10.1109/TAES.2016.130802 [15] Gui H, Ruiter A. Adaptive fault-tolerant spacecraft pose tracking with control allocation. IEEE Transactions on Control Systems Technology, 2019, 27(2): 479-494 doi: 10.1109/TCST.2017.2771374 [16] Xia K, Zou Y. Adaptive saturated fault-tolerant control for spacecraft rendezvous with redundancy thrusters. IEEE Transactions on Control Systems Technology, 2021, 29(2): 502-513 doi: 10.1109/TCST.2019.2950399 [17] Xia K, Zou Y. Adaptive fixed-time fault-tolerant control for noncooperative spacecraft proximity using relative motion information. Nonlinear Dynamics, 2020, 100: 2521-2535 doi: 10.1007/s11071-020-05634-2 [18] 胡庆雷, 姜博严, 石忠. 基于新型终端滑模的航天器执行器故障容错姿态控制. 航空学报, 2014, 35(1): 249-258Hu Qing-Lei, Jiang Bo-Yan, Shi-Zhong. Novel terminal sliding mode based fault tolerant attitude control for spacecraft under actuator faults. Acta Astronautica et Astronautica Sinca, 2014, 35(1): 249-258 [19] 于彦波, 胡庆雷, 董宏洋, 马广富. 执行器故障与饱和受限的航天器滑模容错控制. 航空学报, 2016, 48(4): 20-25Yu Yan-Bo, Hu Qing-Lei, Dong Hong-Yang, Ma Guang-Fu. Sliding mode fault tolerant control for spacecraft under actuator fault and saturation. Journal of Harbin Institute of Technology, 2016, 48(4): 20-25 [20] Jiang B, Hu Q, Friswell M. Fixed-time rendezvous control of spacecraft with a tumbling target under loss of actuator effectiveness. IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(4): 1576-1586 doi: 10.1109/TAES.2016.140406 [21] Li Q, Yuan J, Sun C. Robust fault-tolerant saturated control for spacecraft proximity operations with actuator saturation and faults. Advances in Space Research, 2019, 63(5): 1541-1553 doi: 10.1016/j.asr.2018.11.004 [22] Wang Y, Liu K, Ji H. Adaptive robust fault-tolerant control scheme for spacecraft proximity operations under external disturbances and input saturation. Nonlinear Dynamics, 2022, 108(1): 207-222 doi: 10.1007/s11071-021-07182-9 [23] Philip N, Ananthasayanam M. Relative position and attitude estimation and control schemes for the final phase of an autonomous docking mission of spacecraft. Acta Astronautica, 2003, 52(7): 511-522 doi: 10.1016/S0094-5765(02)00125-X [24] Hu Q, Shao X, Chen W. Robust fault-tolerant tracking control for spacecraft proximity operations using time-varying sliding mode. IEEE Transactions on Aerospace and electronic Systems, 2018, 54(1): 2-17 doi: 10.1109/TAES.2017.2729978 [25] Sun L, Huo W, Jiao Z. Adaptive backstepping control of spacecraft rendezvous and proximity operations with input saturation and full-state constraint. IEEE Transactions on Industrial Electronics, 2017, 64(1): 480-492 doi: 10.1109/TIE.2016.2609399 [26] Sveier A, Myhre T, Egeland O. Pose estimation with dual quaternions and iterative closest point. Advances in Computing and Communications, 2018: 1913-1920 [27] Dong H, Hu Q, Friswell M, Ma G. Dual-quaternion-based fault-tolerant control for spacecraft tracking With finite-time convergence. IEEE Transactions on Control Systems Technology, 2016, 24(4): 1231-1242 [28] Yang J, Stoll E. Adaptive sliding mode control for spacecraft proximity operations based on dual quaternions. Journal of Guidance, Control, and Dynamics, 2019, 42(11): 2356-2368 doi: 10.2514/1.G004435 [29] Geng Y, Biggs J, Li C. Pose regulation via the dual unitary group: an application to spacecraft rendezvous. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(6): 3734-3748 doi: 10.1109/TAES.2021.3090929 [30] Dong H, Hu Q, Akella M, Mazenc F. Partial lyapunov strictification: dual-quaternion-based observer for 6-DOF tracking control. IEEE Transactions on Control Systems Technology, 2019, 27(6): 2453-2469 doi: 10.1109/TCST.2018.2864723 [31] Ma Y, Jiang B, Tao G, Cheng Y. A direct adaptive actuator failure compensation scheme for satellite attitude control systems. Journal of Aerospace Engineering, 2014, 228(4): 542-556 [32] Ma Y, Jiang B, Tao G, Cheng Y. Uncertainty decomposition-based fault-tolerant adaptive control of flexible spacecraft. IEEE Transactions on Aerospace and Electronic System, 2015, 51(2): 1053-1068 doi: 10.1109/TAES.2014.130032 [33] Clifford W. A Preliminary Sketch of Biquaternions. Proceedings of the London Mathematics Society, 1873, 1-4(1): 381-395 [34] Study E. Von den Bewegungen und Umlegungen. Mathematische Annalen, 1891: 441-565 期刊类型引用(1)
1. 岳程斐,霍涛,陈雪芹,沈强,曹喜滨. 航天器姿态受限的协同势函数族设计方法. 自动化学报. 2024(01): 54-65 .  本站查看
本站查看其他类型引用(4)
-

















































 下载:
下载:



































































































































































































































































 下载:
下载:
计量
- 文章访问数: 3147
- HTML全文浏览量: 260
- PDF下载量: 487
- 被引次数: 5
