2023年 第49卷 第2期
2023, 49(2): 229-245.
doi: 10.16383/j.aas.c211027
摘要:
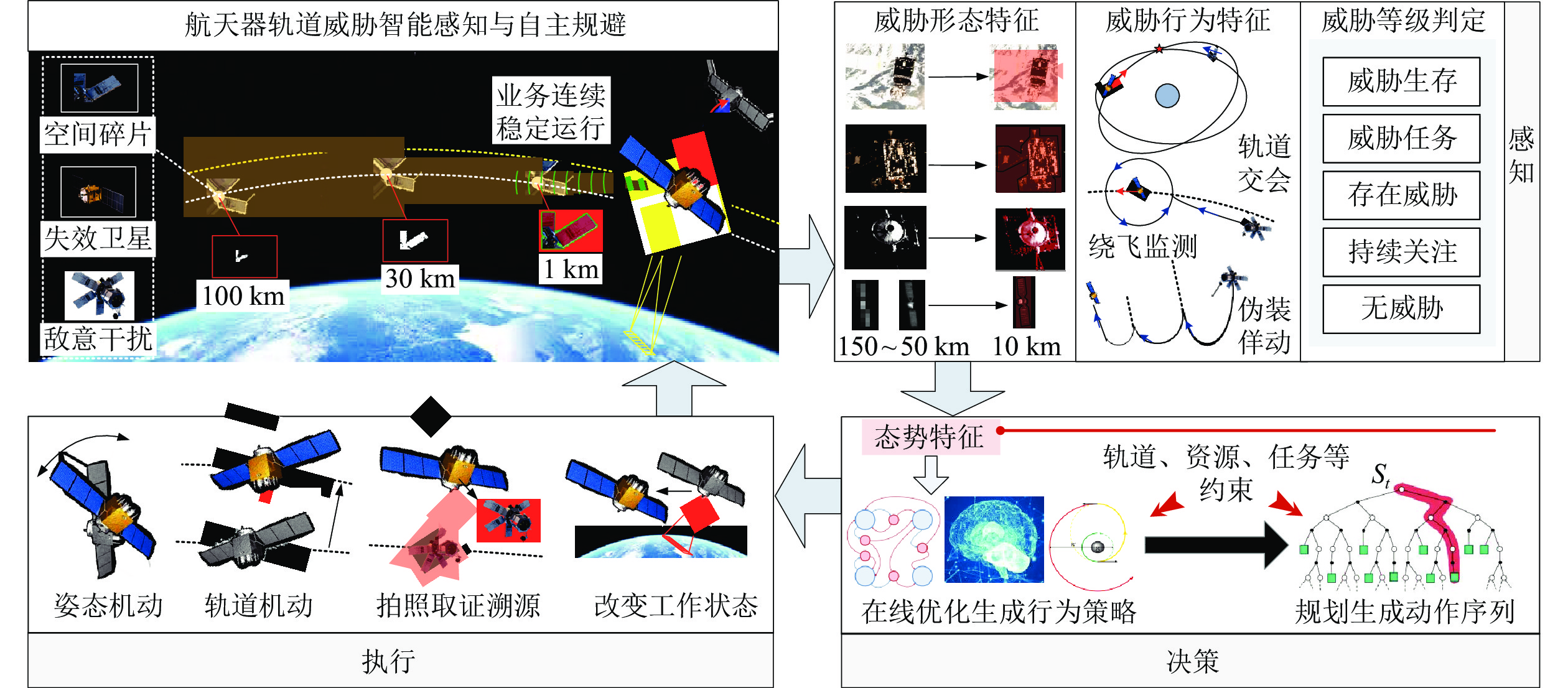
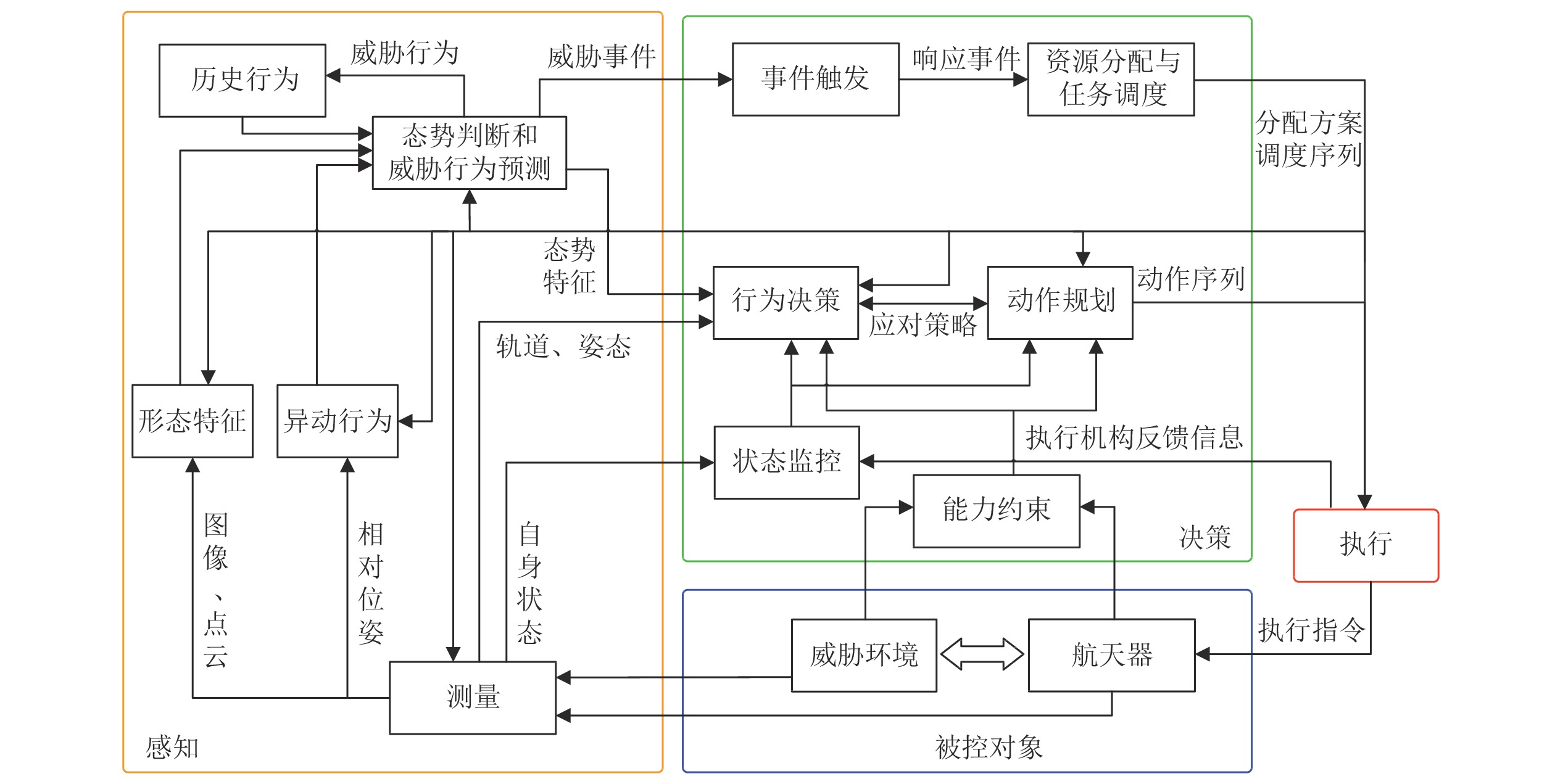
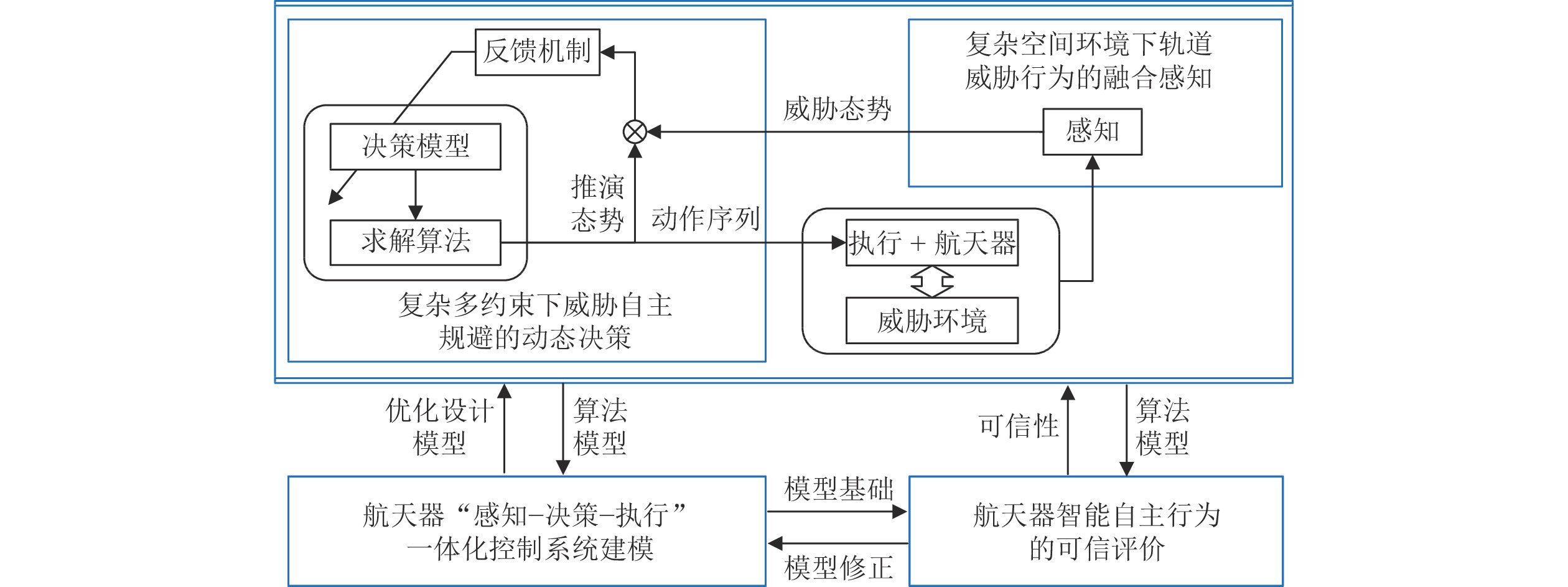
当前, 轨道空间日益拥挤、太空竞争不断加剧, 对航天器执行既定任务时的轨道威胁自主应对能力提出了新的挑战, 使得航天器智能自主控制技术迎来新的发展机遇. 在调研分析了轨道威胁感知、自主决策规划、规避机动动作执行、自主控制系统架构相关研究进展的基础上, 总结提出了威胁规避智能自主控制面临的主要瓶颈问题, 并分析指出发展“感知−决策−执行”一体化控制是破解瓶颈难题的有效手段, 最后从一体化控制系统建模、设计、分析与验证多方面, 系统讨论了威胁规避智能自主控制需要重点关注的若干基础问题, 为未来航天器智能自主控制的理论研究和技术发展提供启发和参考.
当前, 轨道空间日益拥挤、太空竞争不断加剧, 对航天器执行既定任务时的轨道威胁自主应对能力提出了新的挑战, 使得航天器智能自主控制技术迎来新的发展机遇. 在调研分析了轨道威胁感知、自主决策规划、规避机动动作执行、自主控制系统架构相关研究进展的基础上, 总结提出了威胁规避智能自主控制面临的主要瓶颈问题, 并分析指出发展“感知−决策−执行”一体化控制是破解瓶颈难题的有效手段, 最后从一体化控制系统建模、设计、分析与验证多方面, 系统讨论了威胁规避智能自主控制需要重点关注的若干基础问题, 为未来航天器智能自主控制的理论研究和技术发展提供启发和参考.
2023, 49(2): 246-271.
doi: 10.16383/j.aas.c220092
摘要:
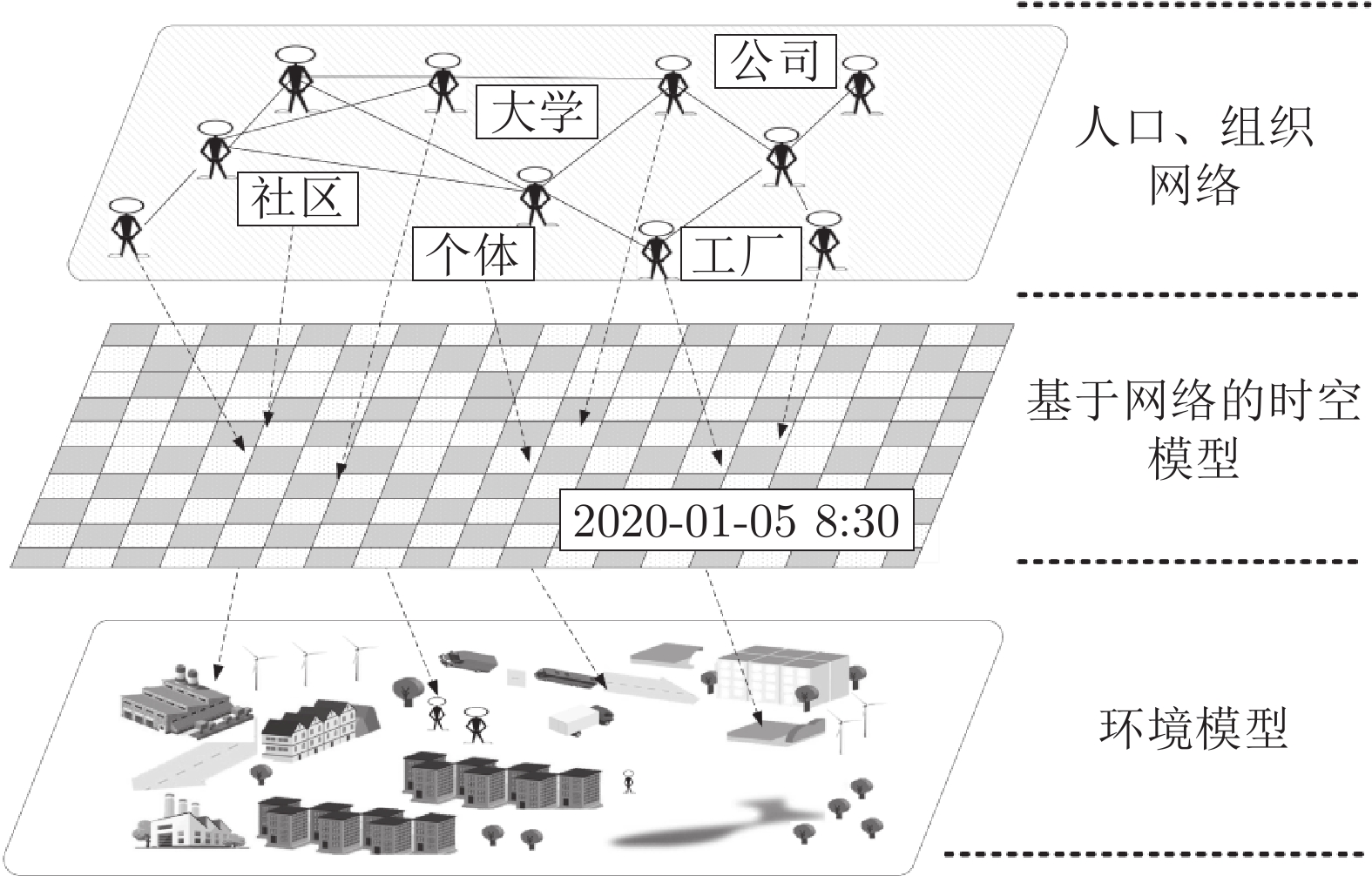
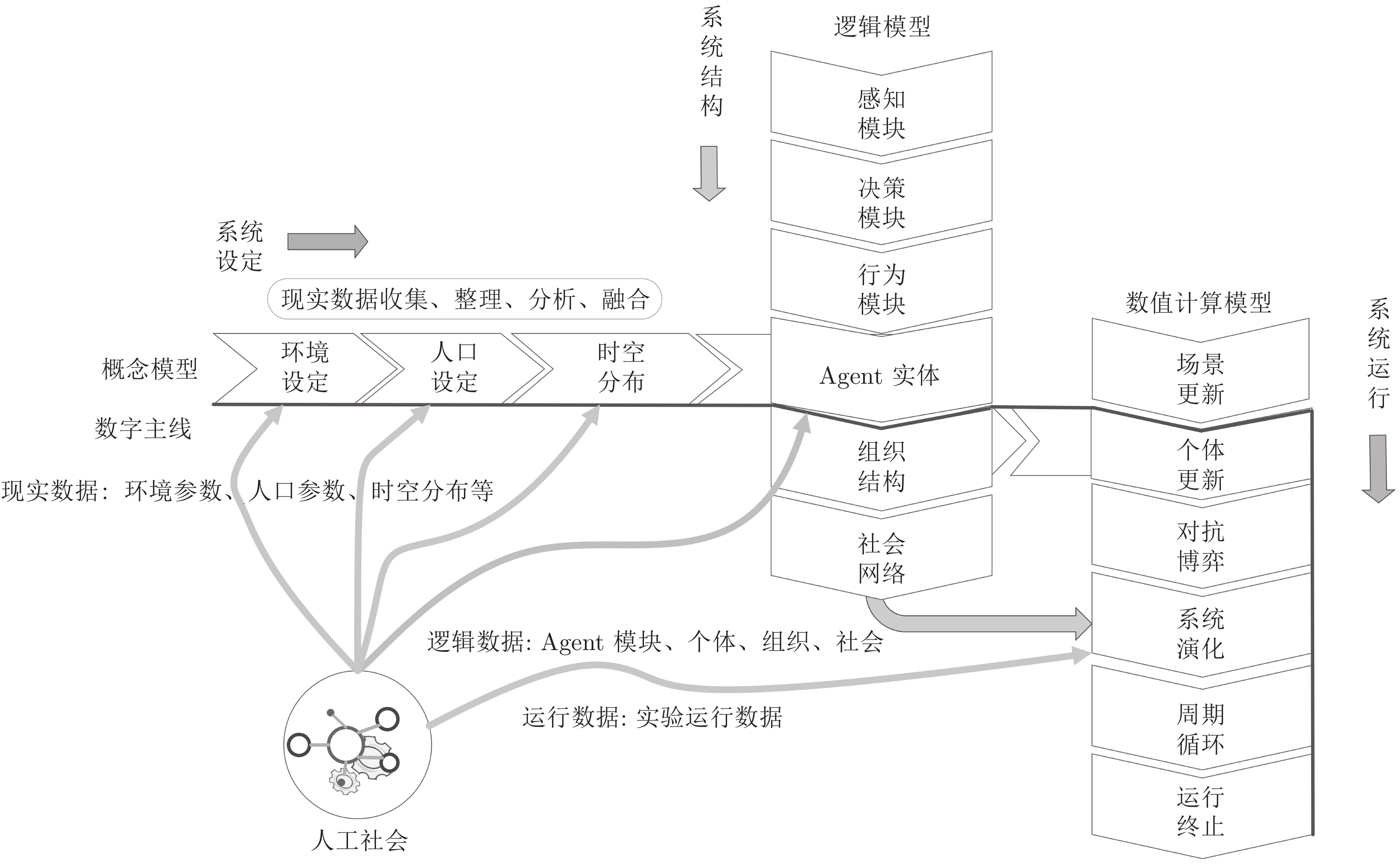
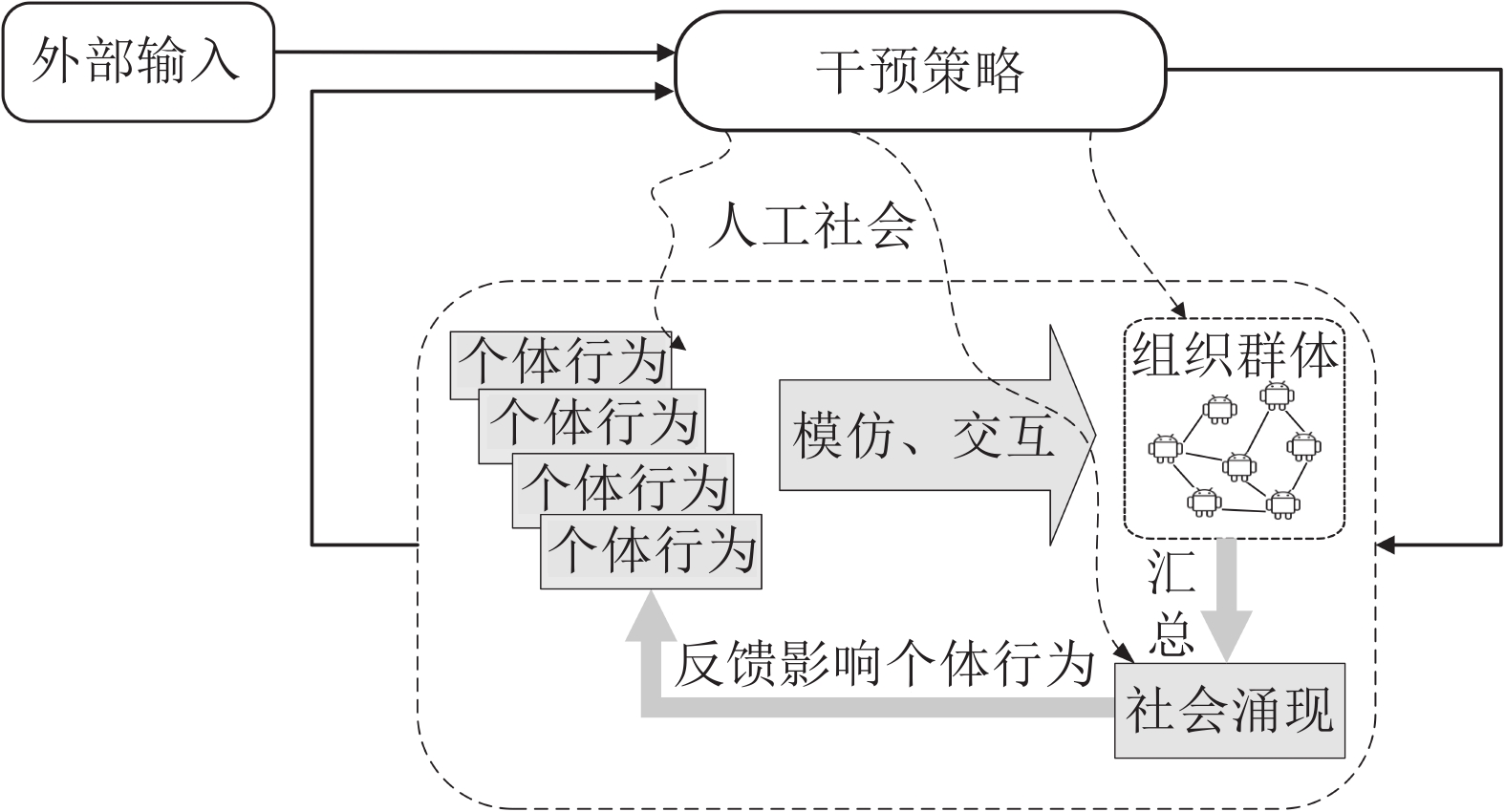
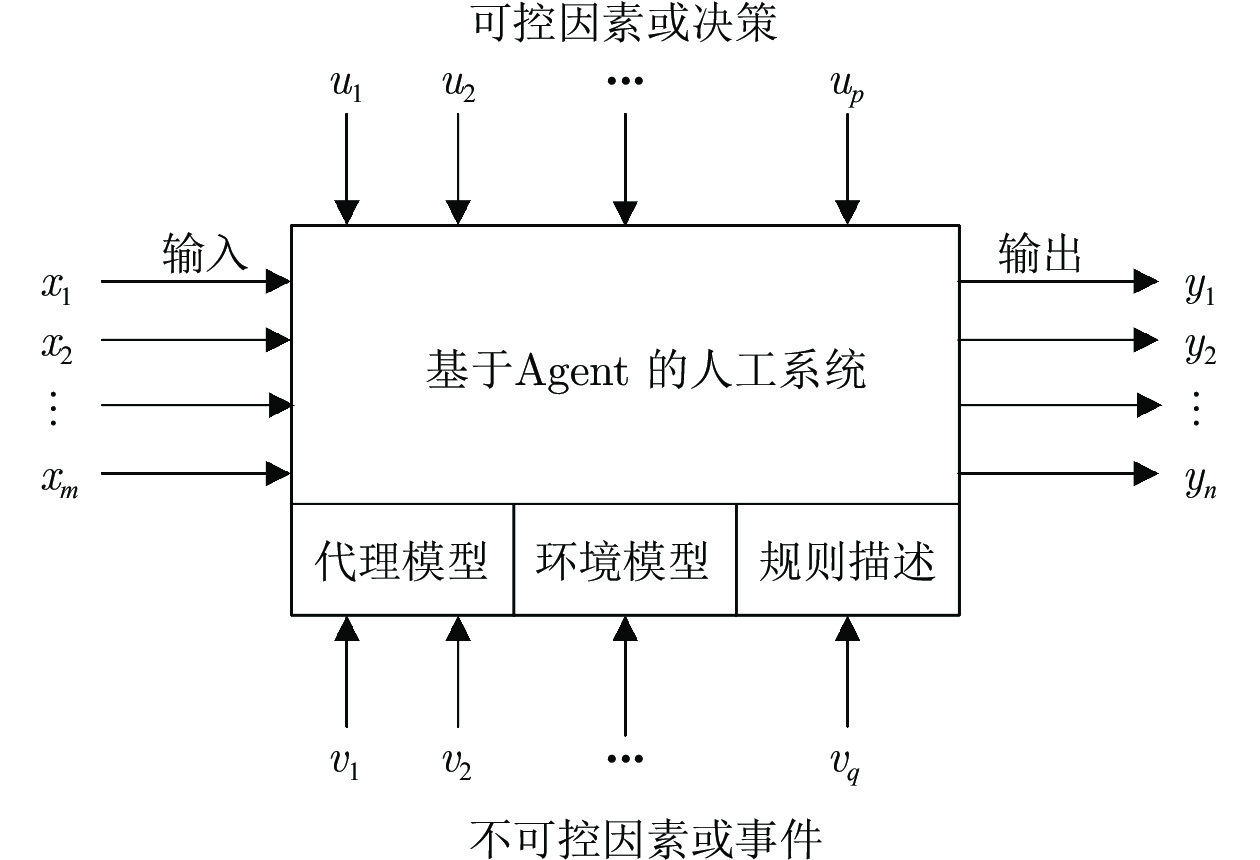
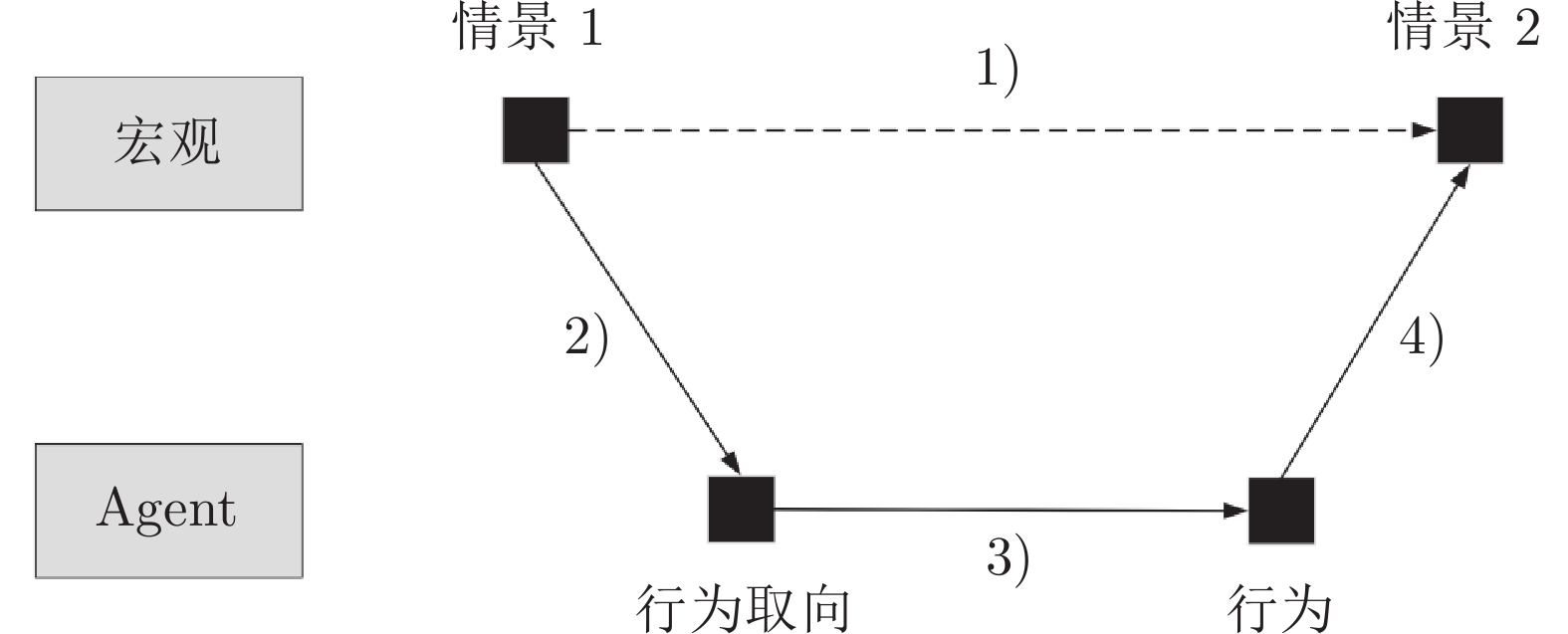
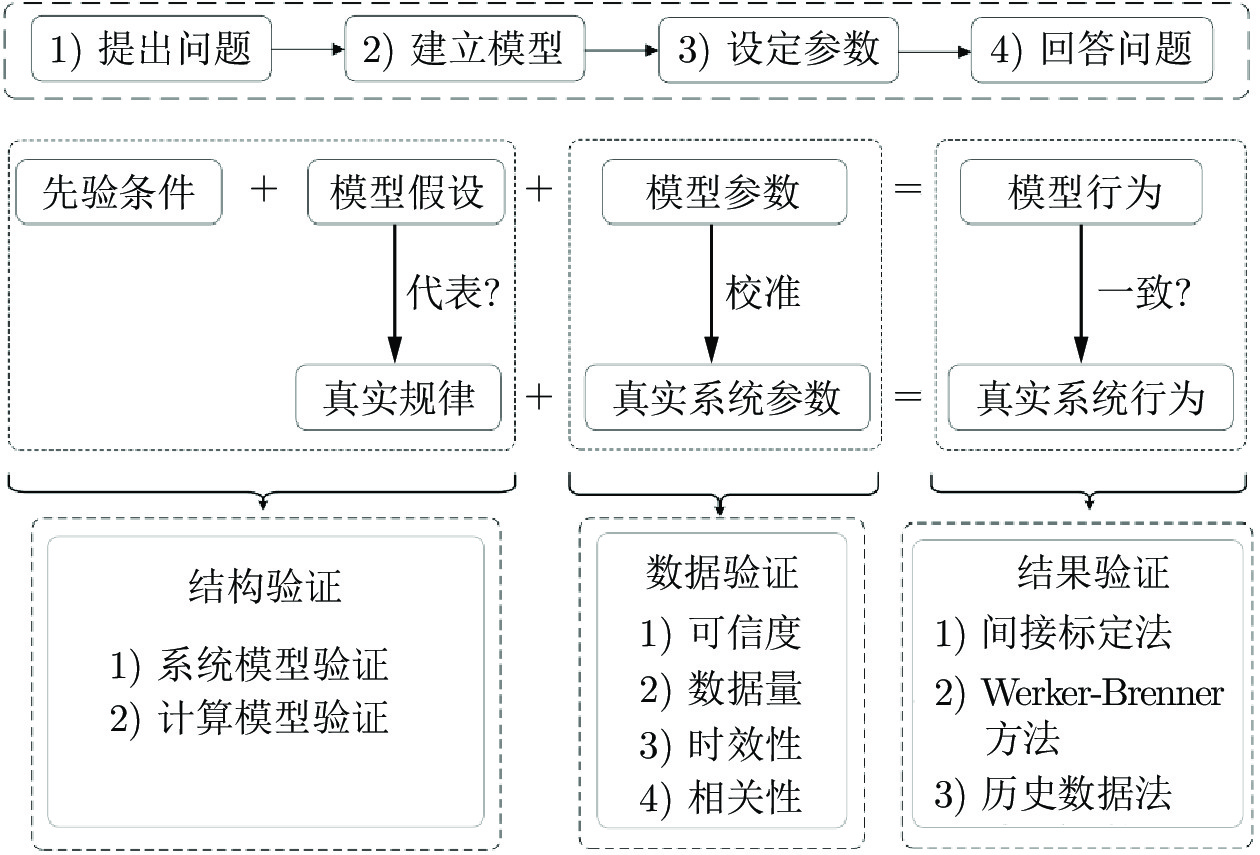
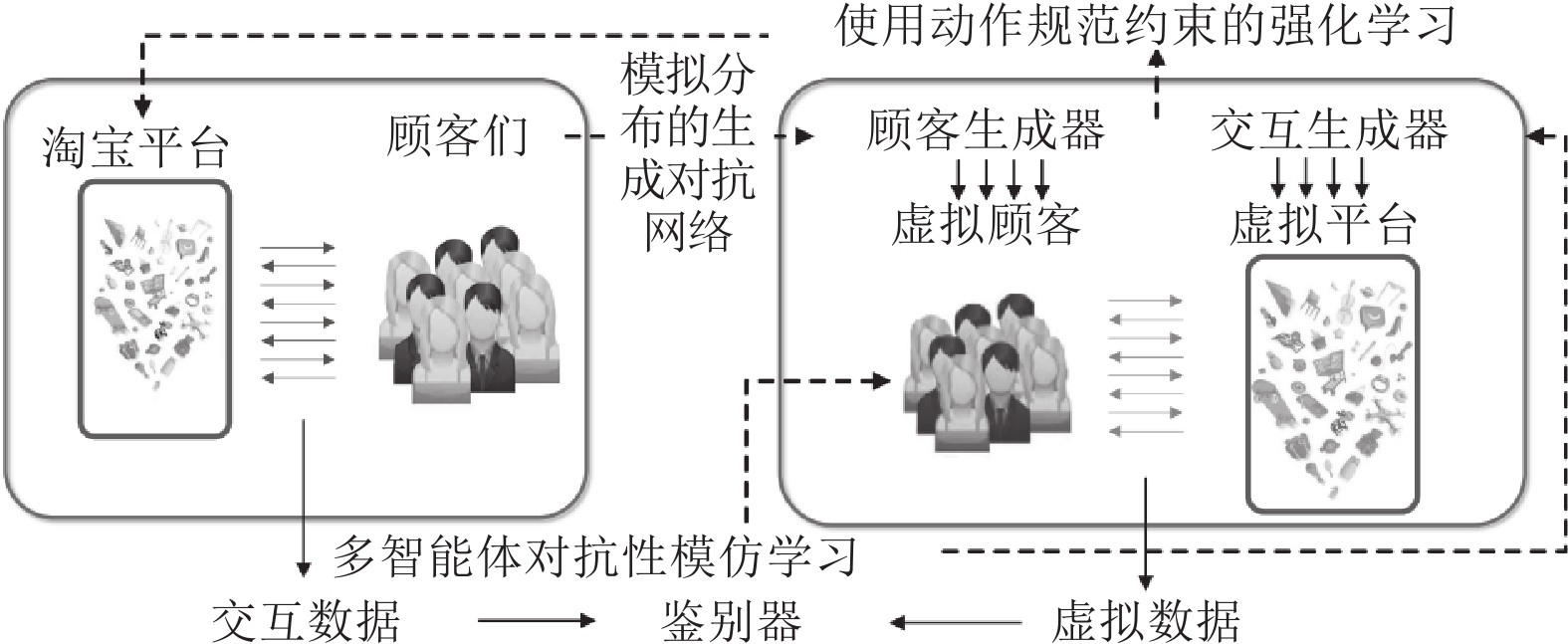
随着信息技术的发展, 复杂系统越来越多地呈现出社会、物理、信息相融合的特征. 因为这些系统涉及到了人和社会的因素, 其设计、分析、管理、控制和综合等问题正面临前所未有的挑战. 在这种背景下, 计算实验应运而生, 通过“反事实”的算法化, 为量化分析复杂系统提供了一种数字化和计算化方法. 对于计算实验方法的发展现状与未来挑战进行了全面梳理: 首先介绍了计算实验方法的概念起源与应用特征; 然后详细阐述了计算实验的方法框架与关键步骤; 接着展示了计算实验方法的典型应用, 包括现象解释、趋势预测与策略优化; 最后给出了计算实验方法所面临的一些关键问题与挑战. 旨在梳理出计算实验方法的技术框架, 为其快速发展与跨学科应用提供支撑.
随着信息技术的发展, 复杂系统越来越多地呈现出社会、物理、信息相融合的特征. 因为这些系统涉及到了人和社会的因素, 其设计、分析、管理、控制和综合等问题正面临前所未有的挑战. 在这种背景下, 计算实验应运而生, 通过“反事实”的算法化, 为量化分析复杂系统提供了一种数字化和计算化方法. 对于计算实验方法的发展现状与未来挑战进行了全面梳理: 首先介绍了计算实验方法的概念起源与应用特征; 然后详细阐述了计算实验的方法框架与关键步骤; 接着展示了计算实验方法的典型应用, 包括现象解释、趋势预测与策略优化; 最后给出了计算实验方法所面临的一些关键问题与挑战. 旨在梳理出计算实验方法的技术框架, 为其快速发展与跨学科应用提供支撑.














2023, 49(2): 272-287.
doi: 10.16383/j.aas.c210231
摘要:
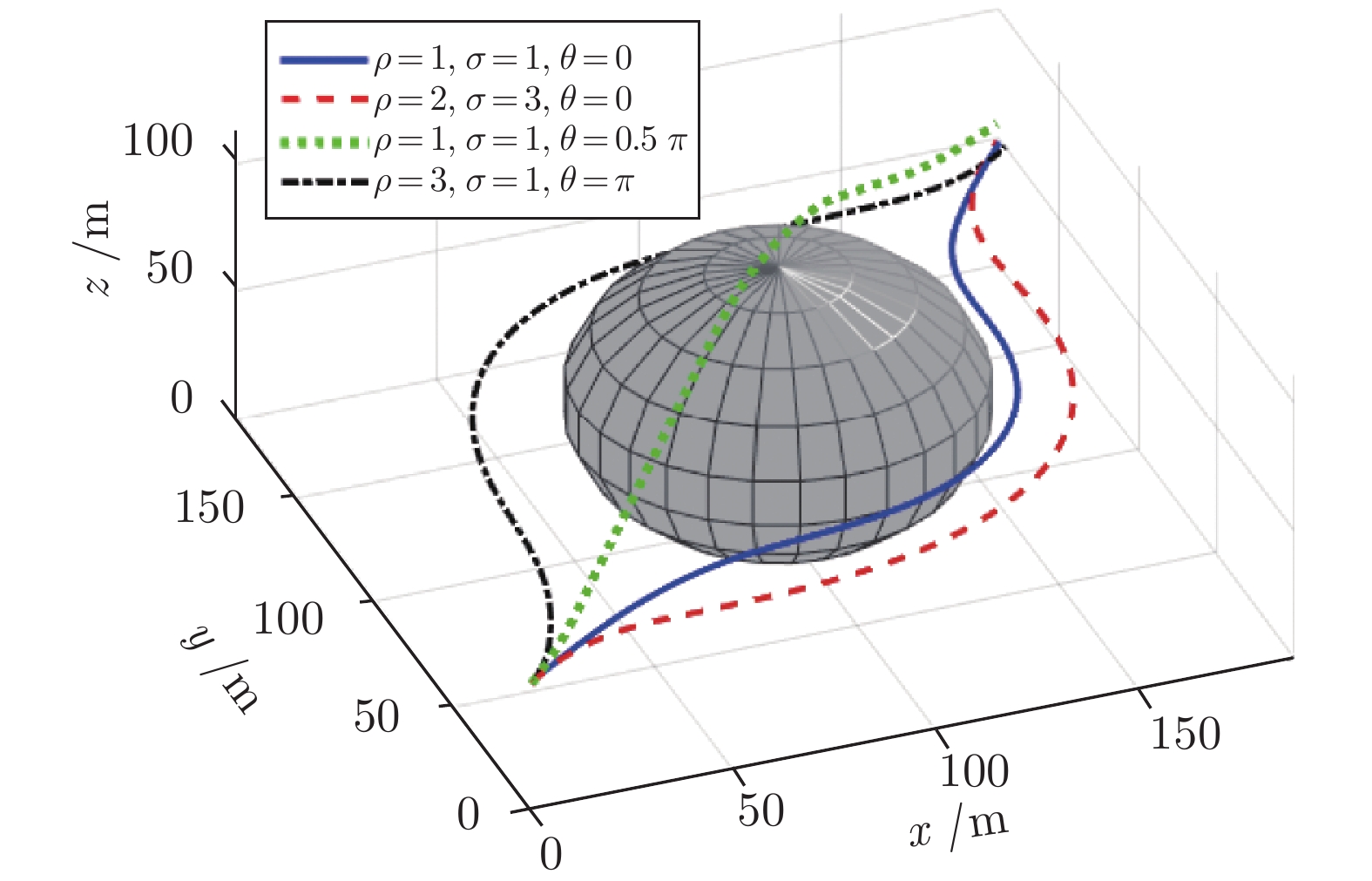
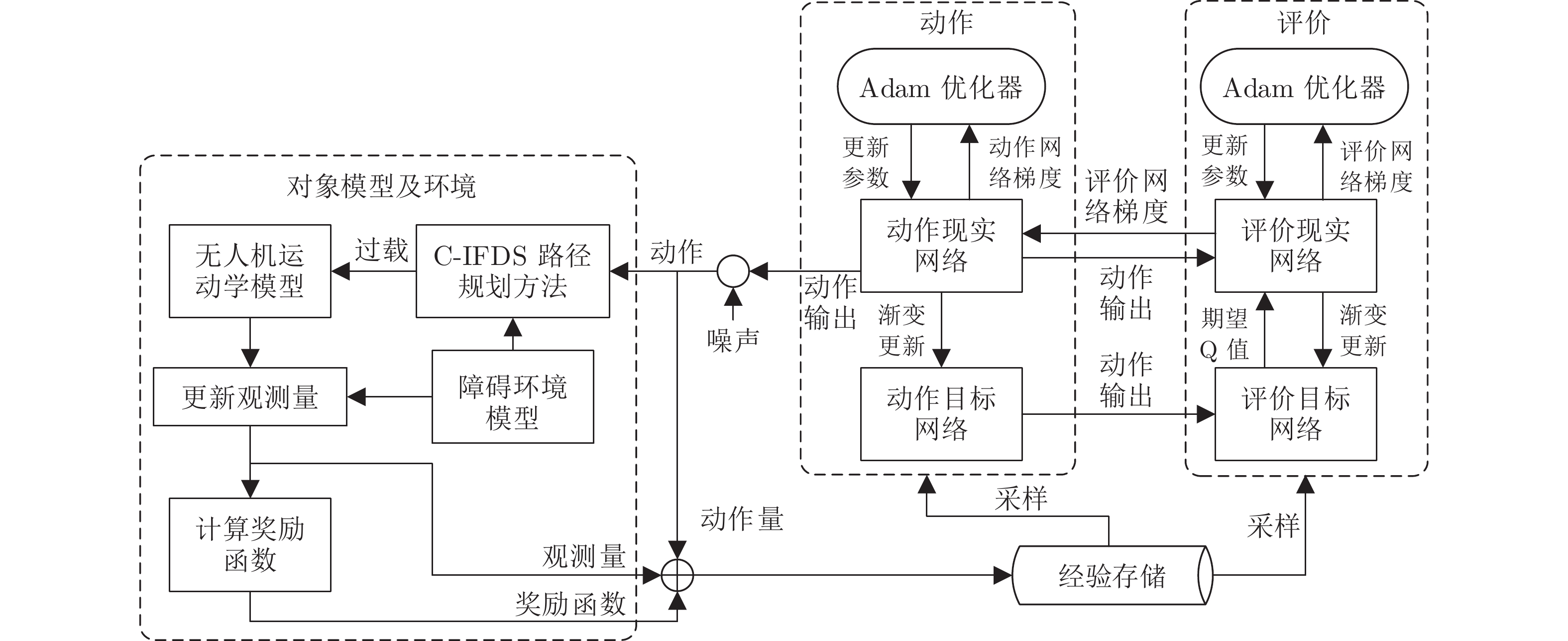
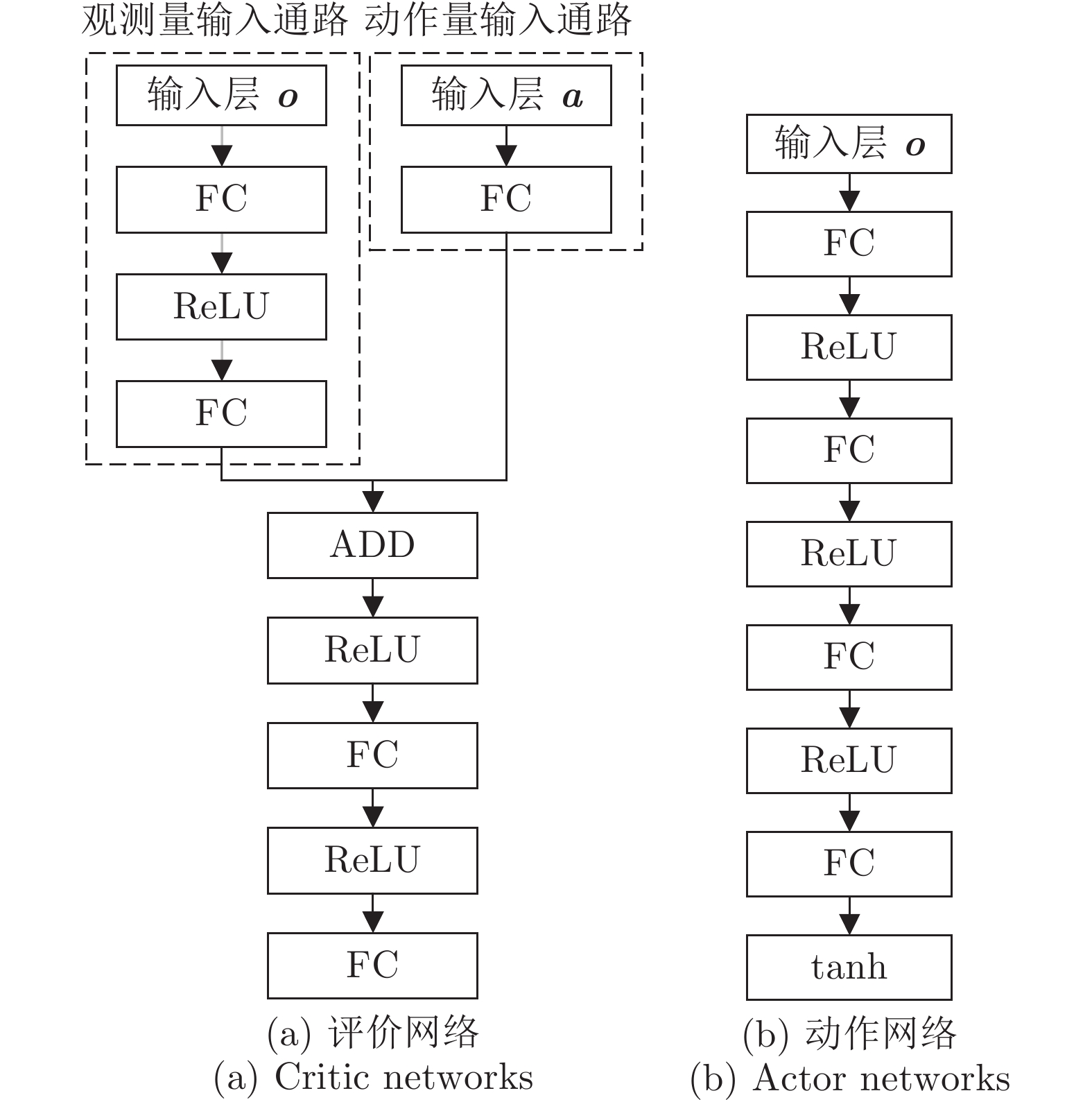
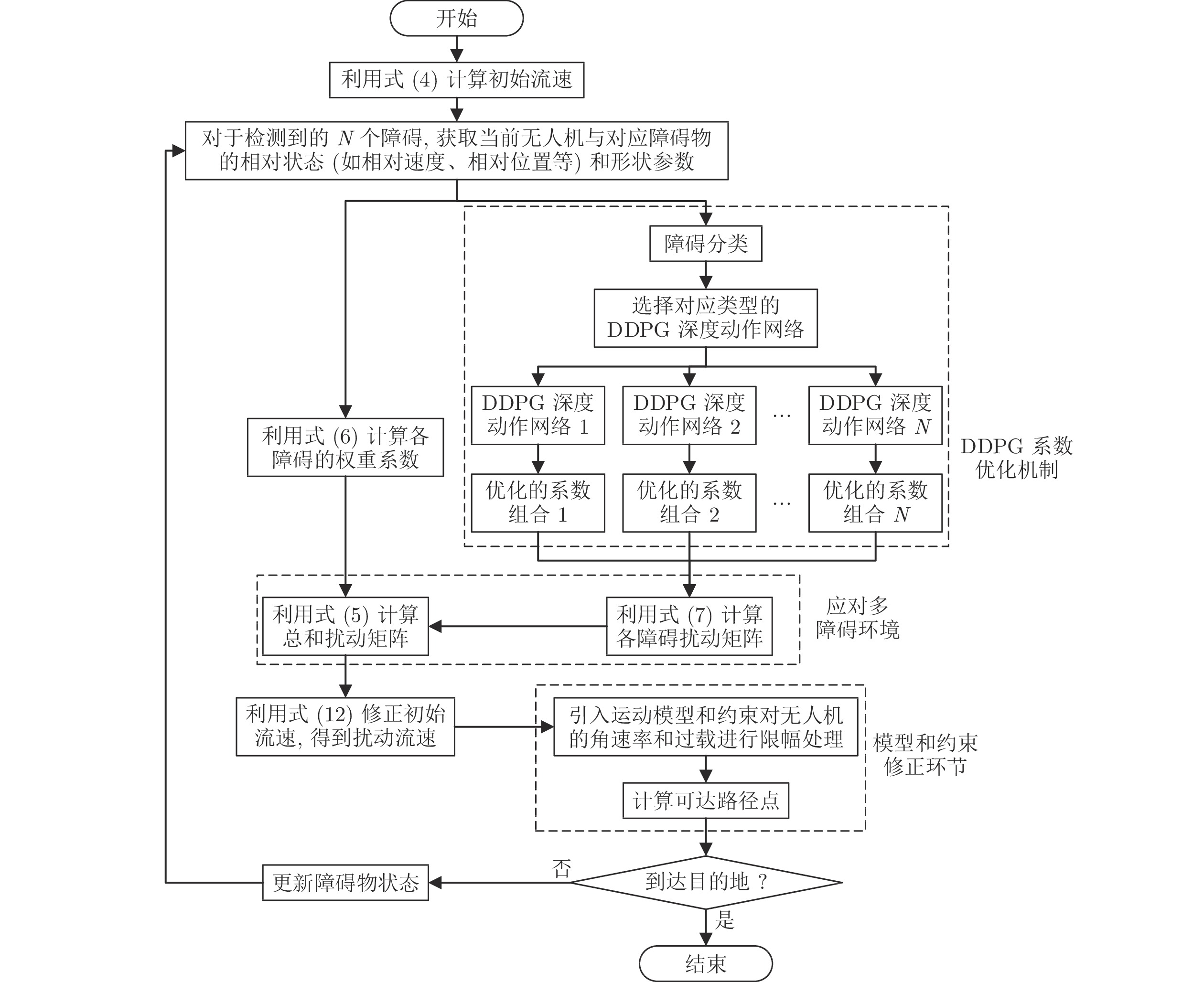
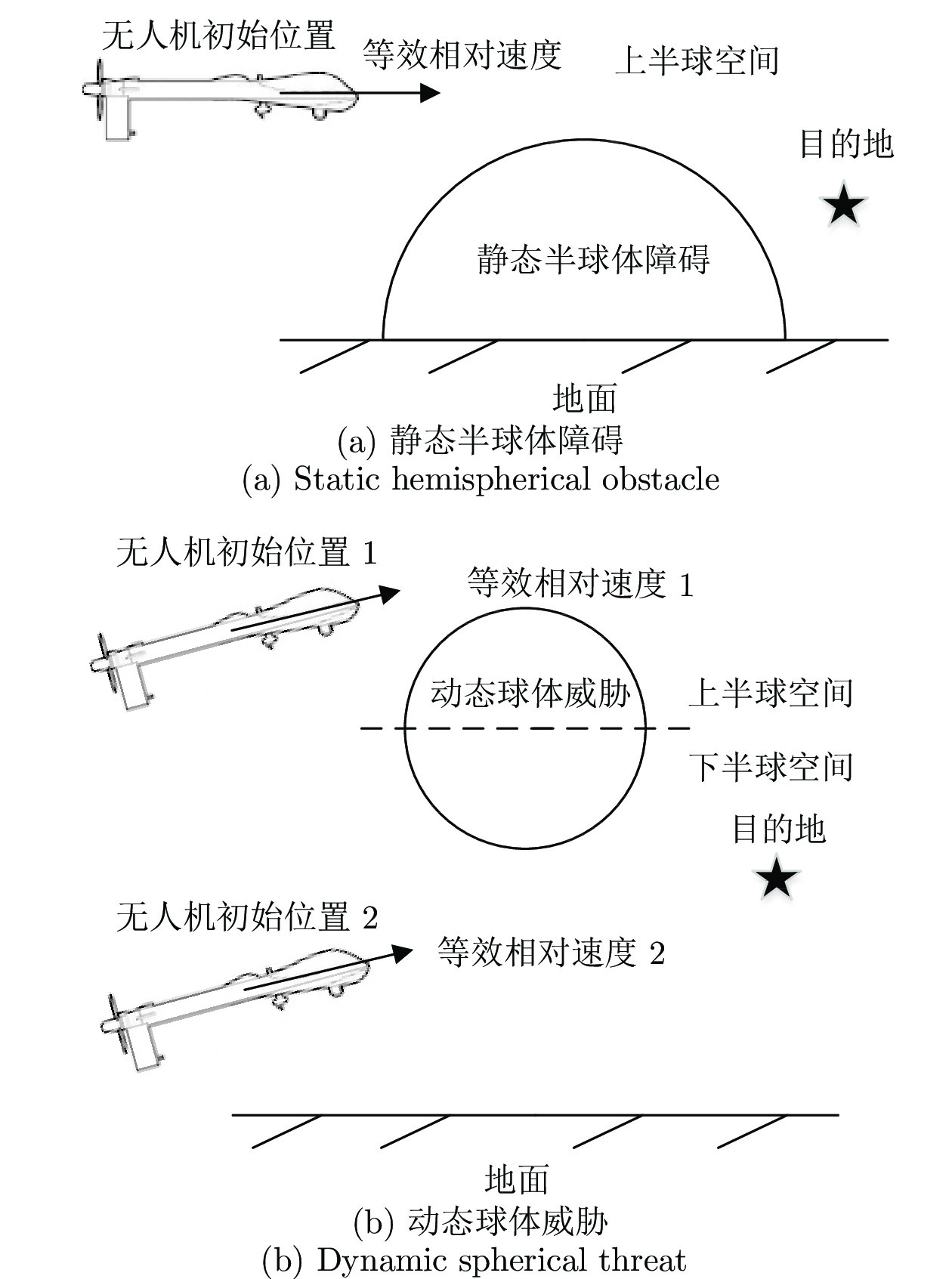
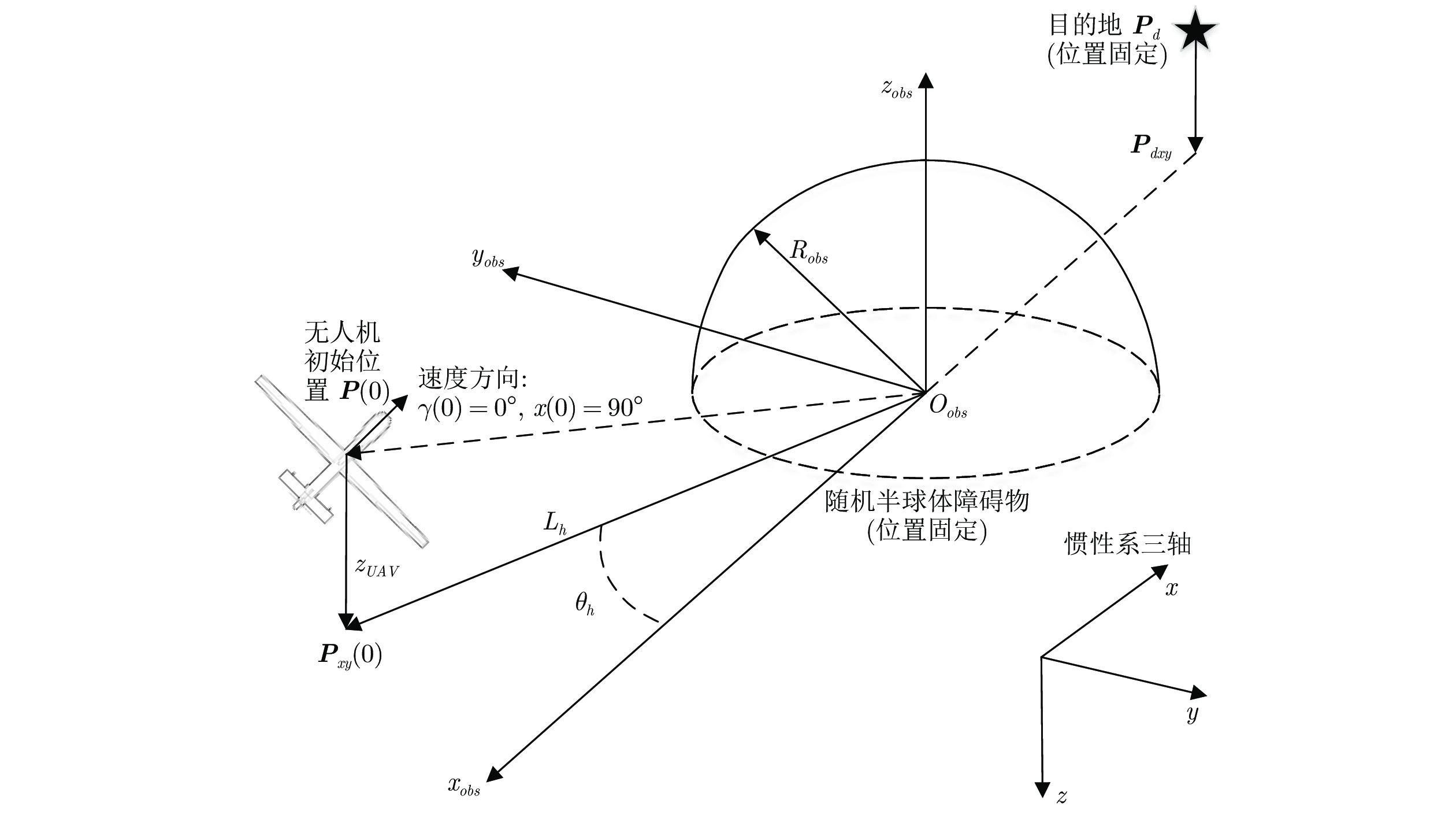
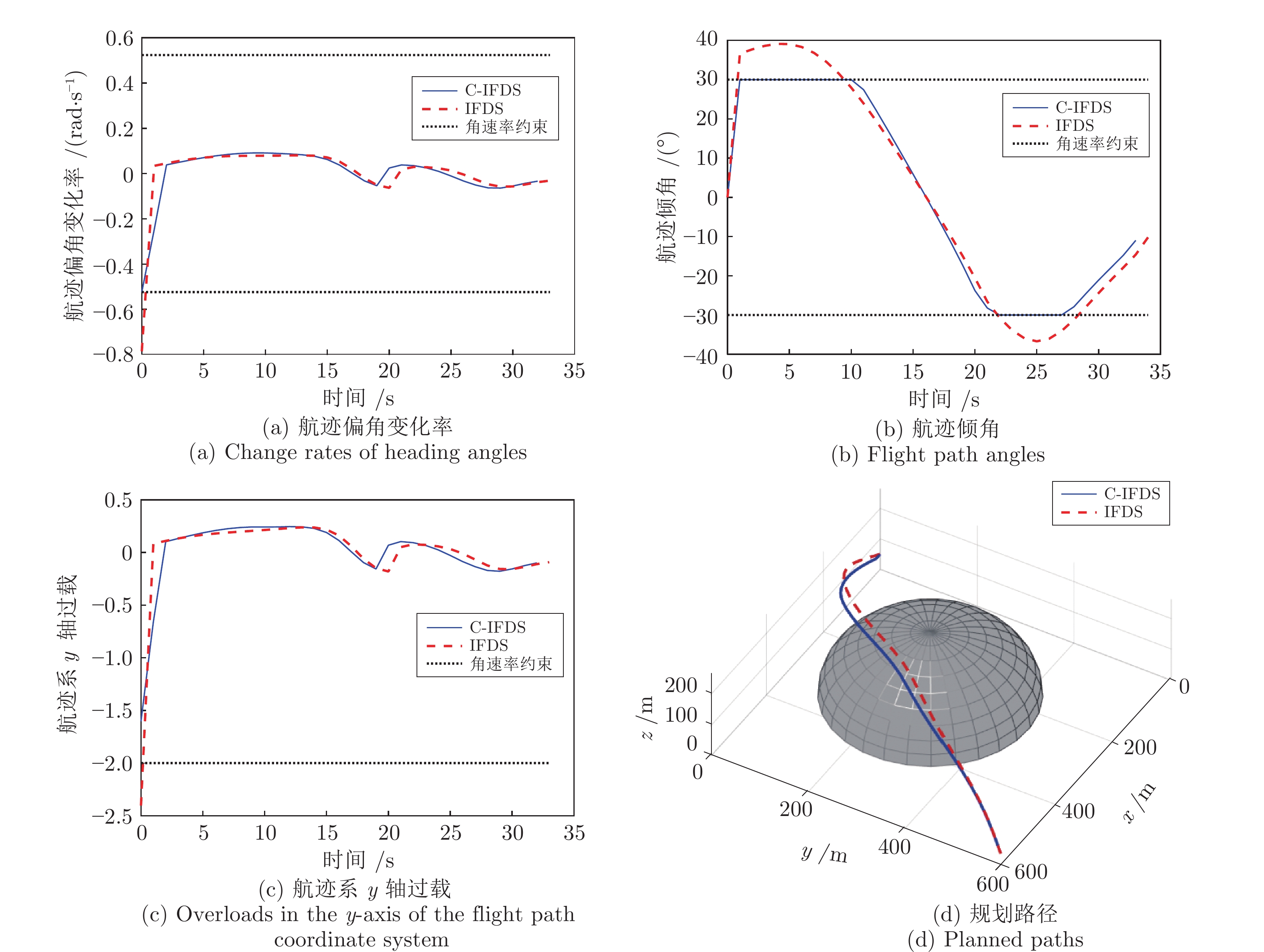
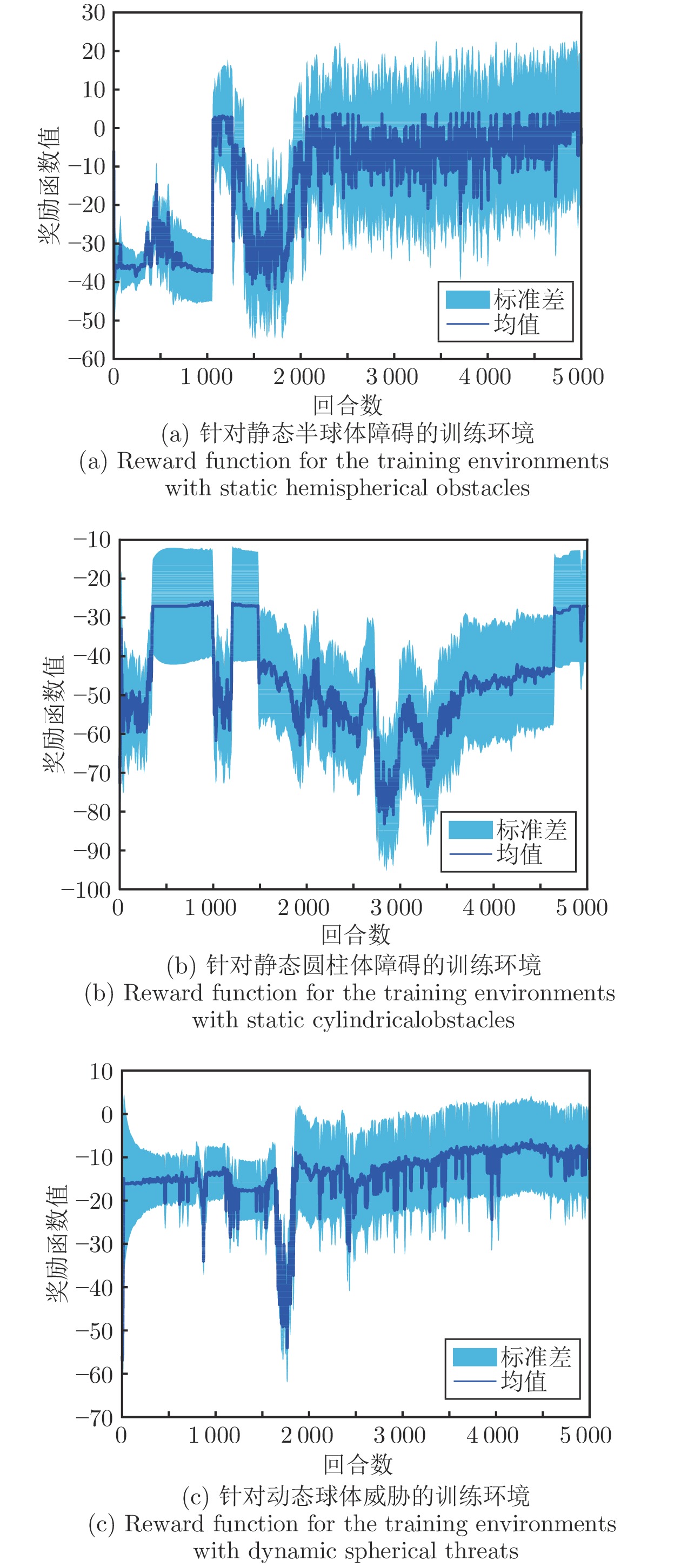
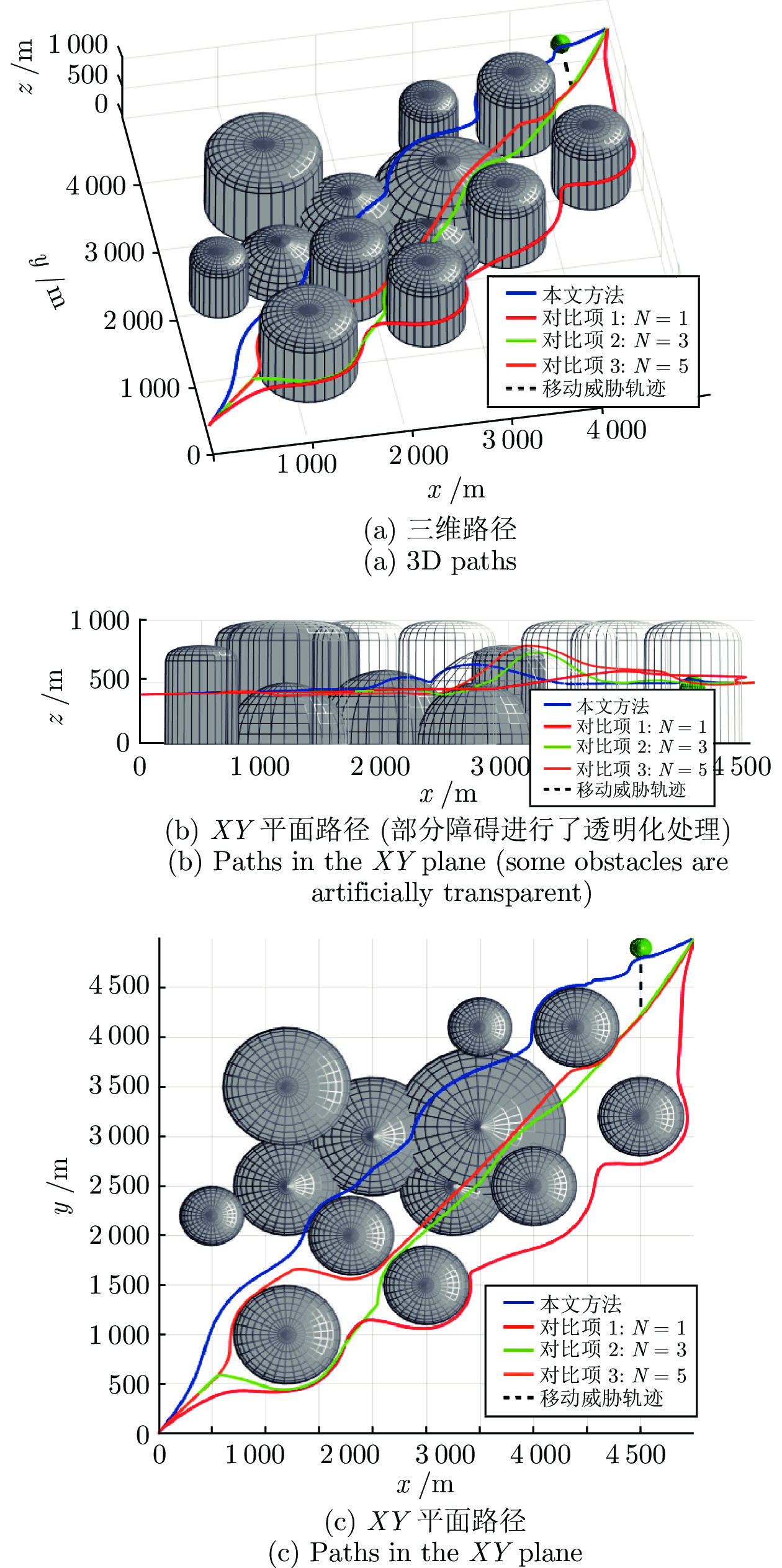
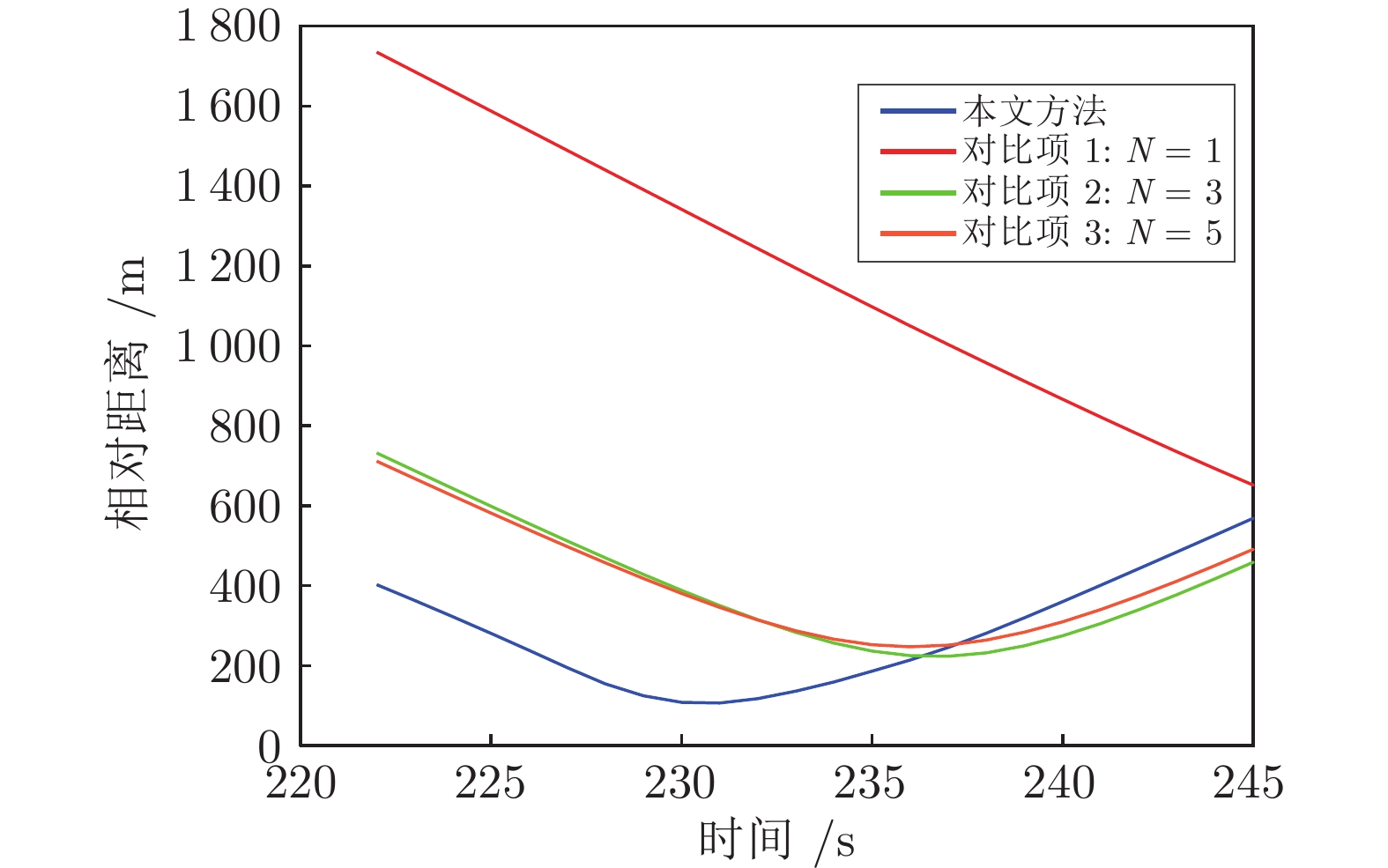
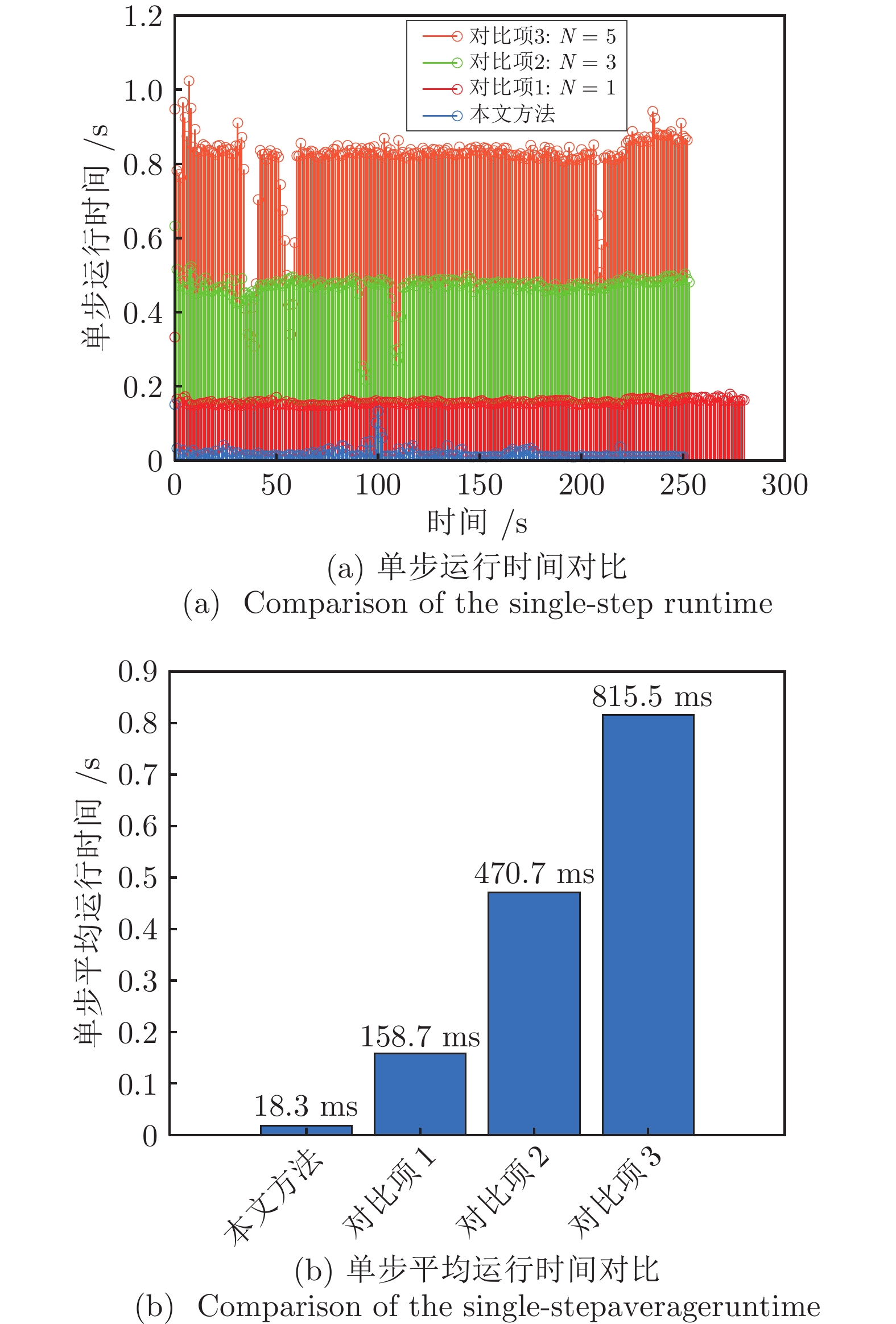
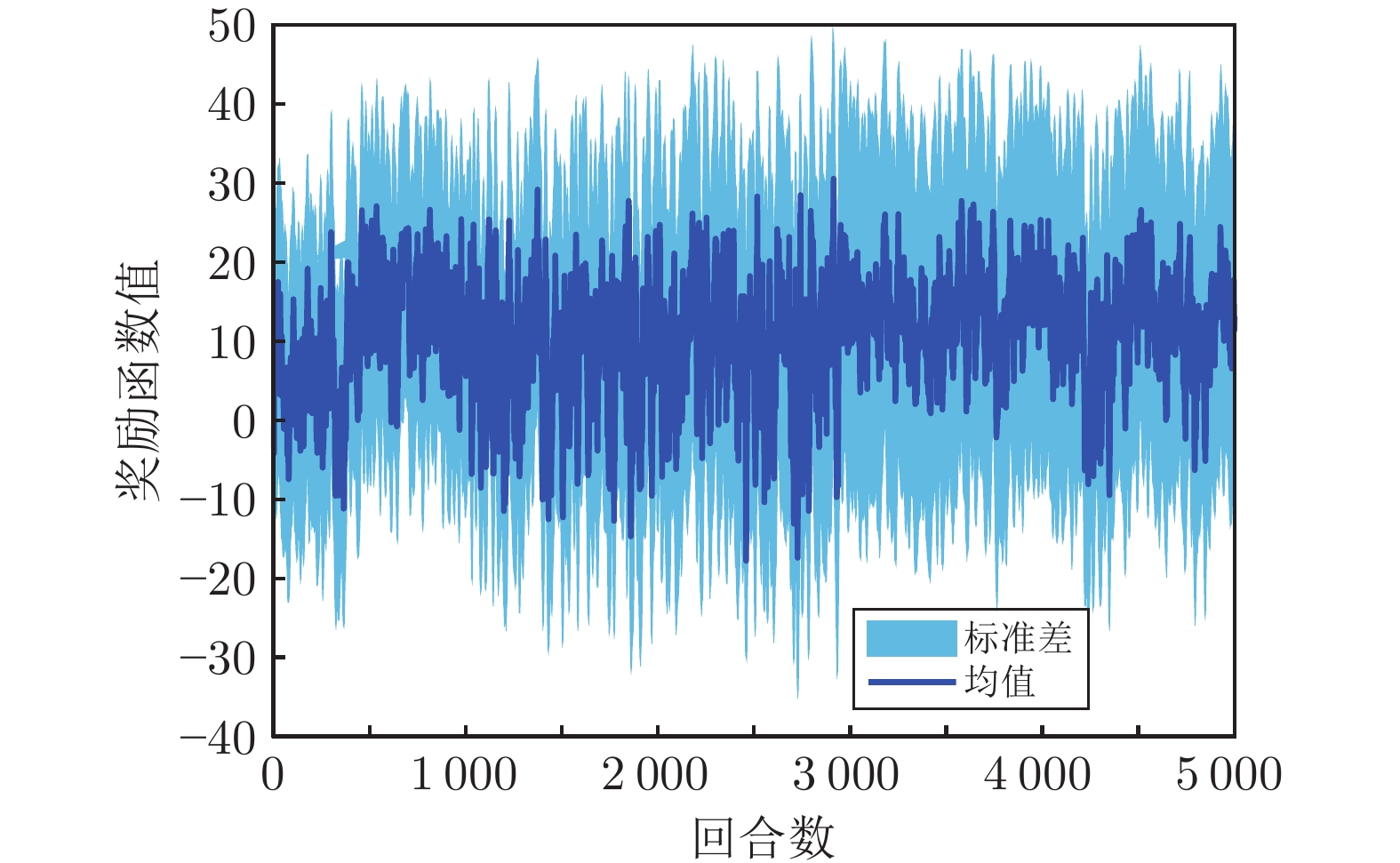
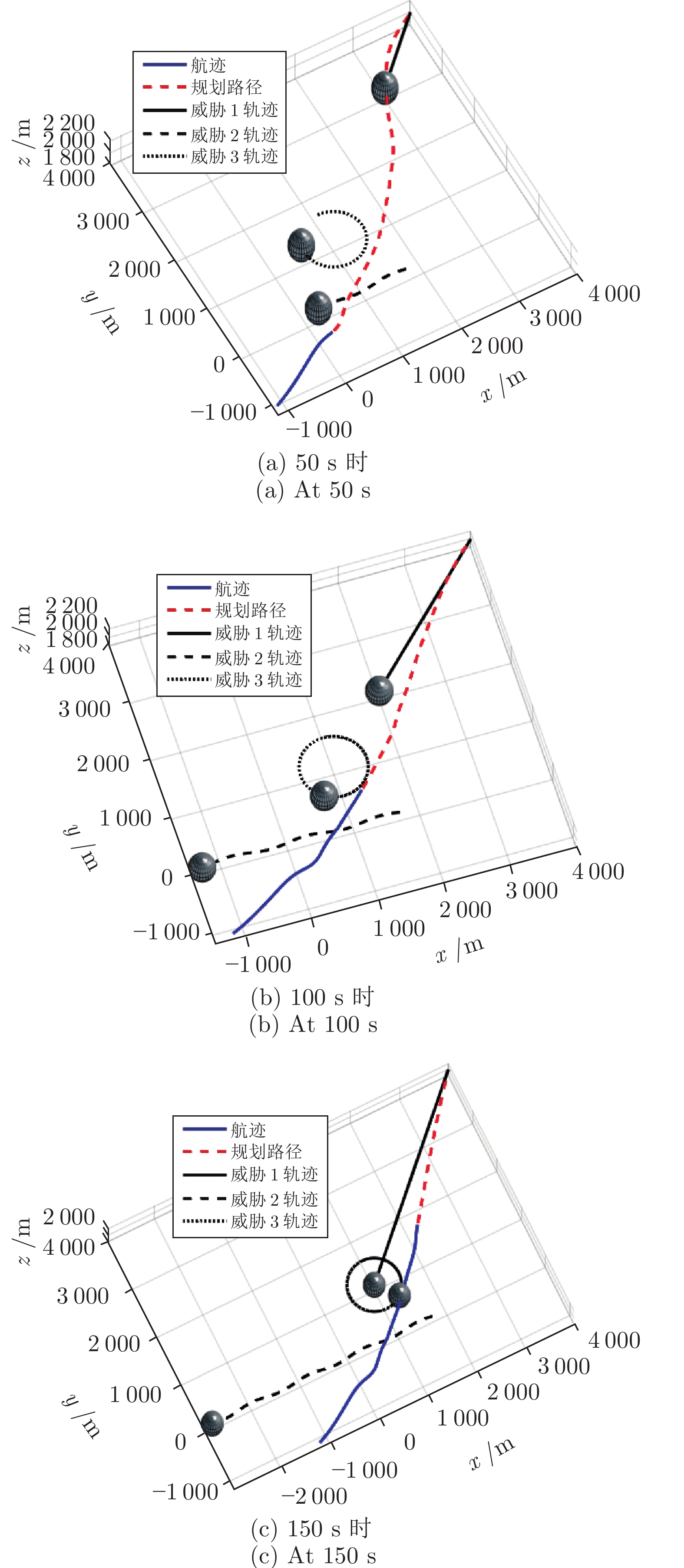
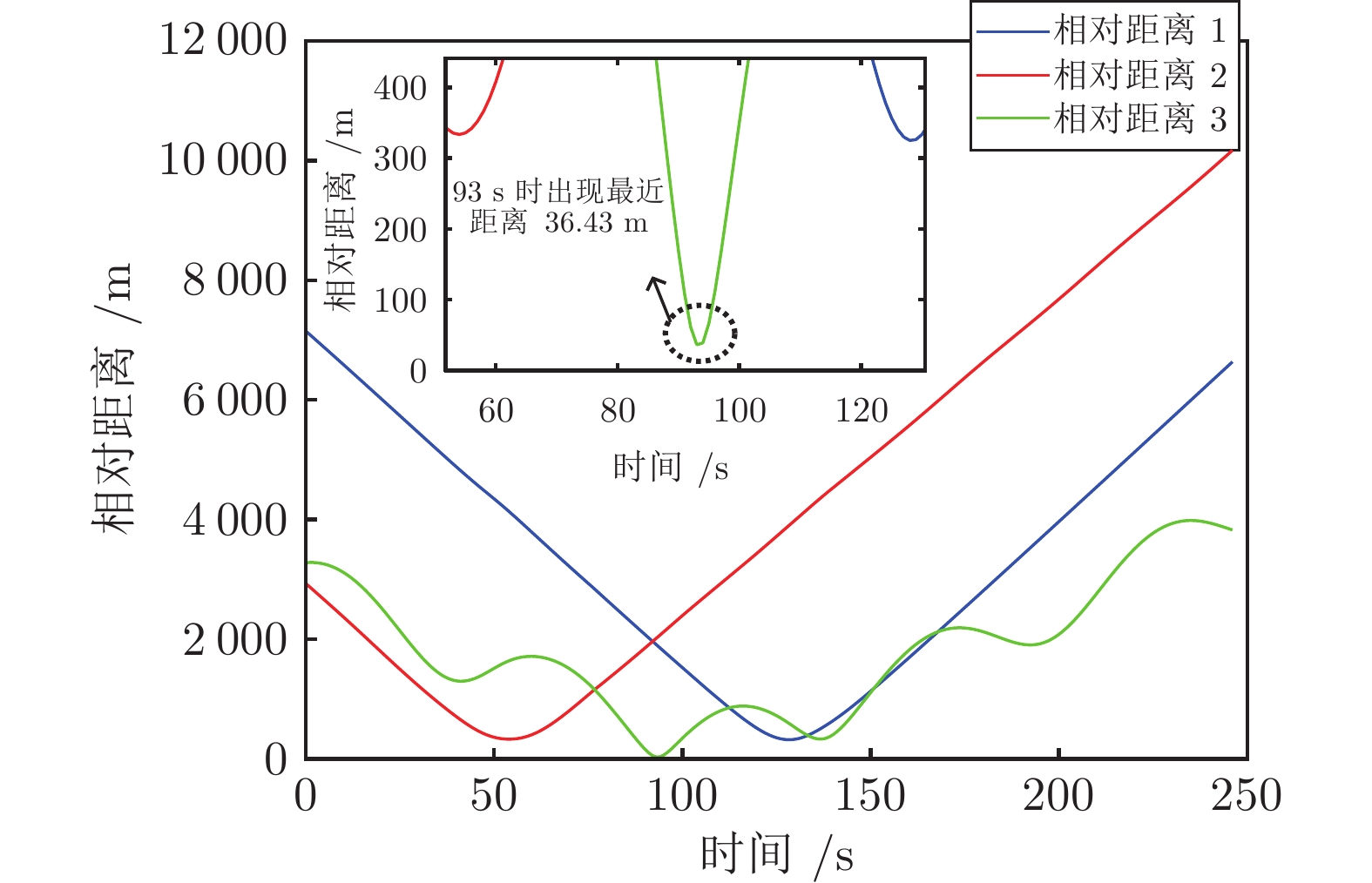
针对复杂三维障碍环境, 提出一种基于深度强化学习的无人机(Unmanned aerial vehicles, UAV) 反应式扰动流体路径规划架构. 该架构以一种受约束扰动流体动态系统算法作为路径规划的基本方法, 根据无人机与各障碍的相对状态以及障碍物类型, 通过经深度确定性策略梯度算法训练得到的动作网络在线生成对应障碍的反应系数和方向系数, 继而可计算相应的总和扰动矩阵并以此修正无人机的飞行路径, 实现反应式避障. 此外, 还研究了与所提路径规划方法相适配的深度强化学习训练环境规范性建模方法. 仿真结果表明, 在路径质量大致相同的情况下, 该方法在实时性方面明显优于基于预测控制的在线路径规划方法.
针对复杂三维障碍环境, 提出一种基于深度强化学习的无人机(Unmanned aerial vehicles, UAV) 反应式扰动流体路径规划架构. 该架构以一种受约束扰动流体动态系统算法作为路径规划的基本方法, 根据无人机与各障碍的相对状态以及障碍物类型, 通过经深度确定性策略梯度算法训练得到的动作网络在线生成对应障碍的反应系数和方向系数, 继而可计算相应的总和扰动矩阵并以此修正无人机的飞行路径, 实现反应式避障. 此外, 还研究了与所提路径规划方法相适配的深度强化学习训练环境规范性建模方法. 仿真结果表明, 在路径质量大致相同的情况下, 该方法在实时性方面明显优于基于预测控制的在线路径规划方法.

2023, 49(2): 288-306.
doi: 10.16383/j.aas.c210525
摘要:
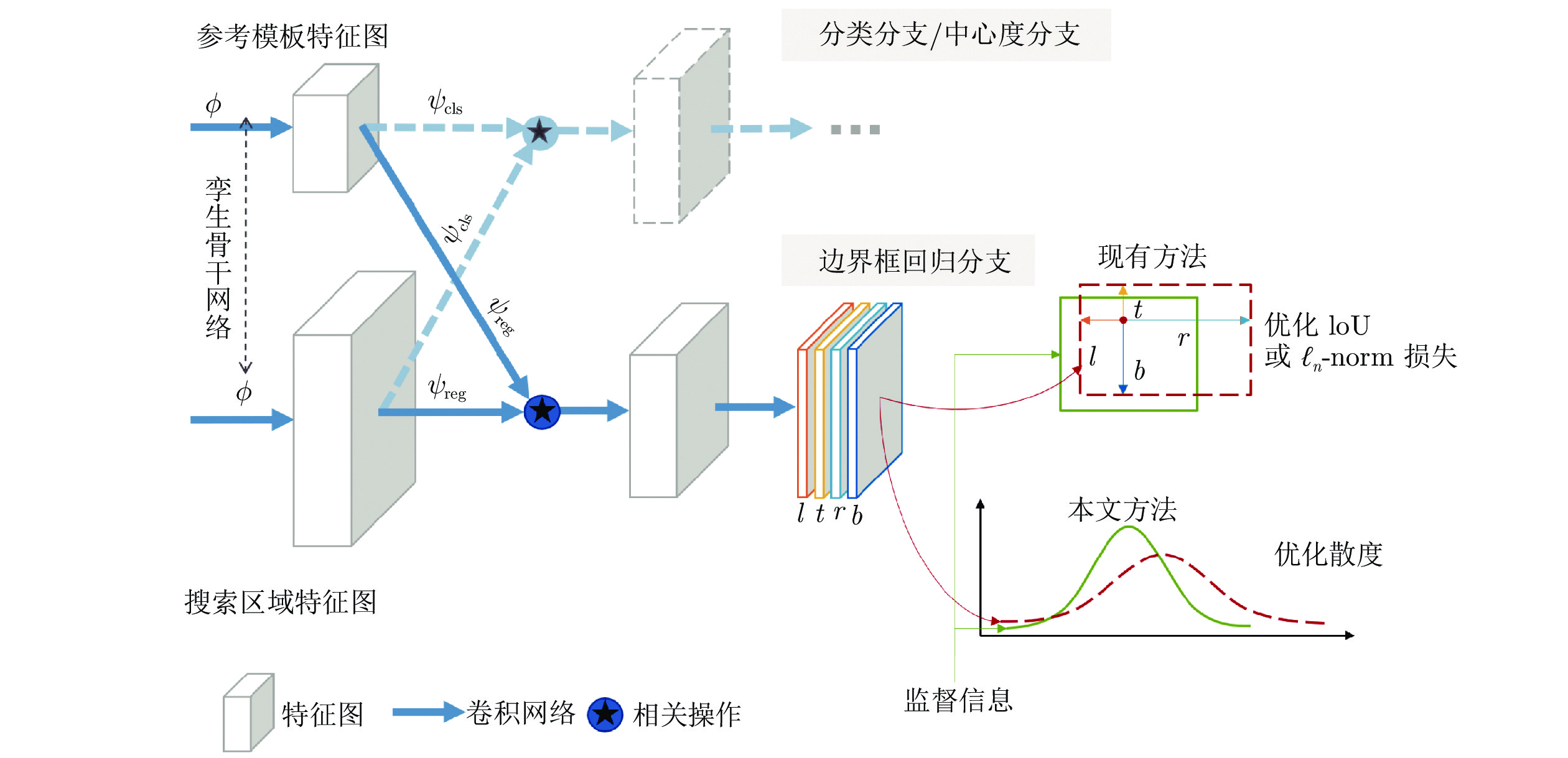
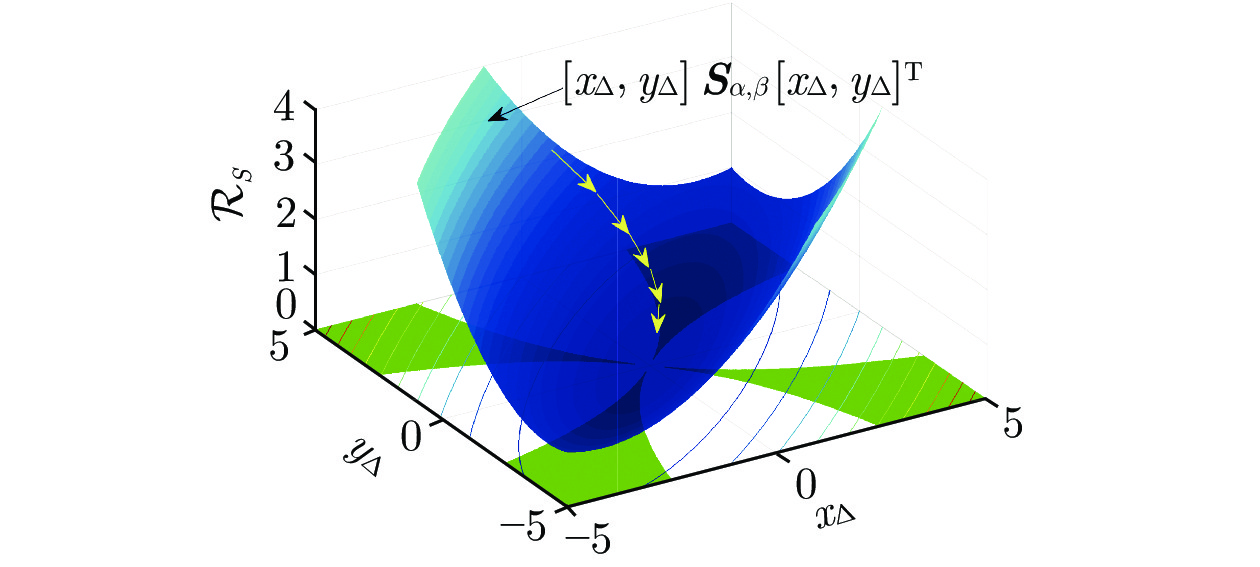
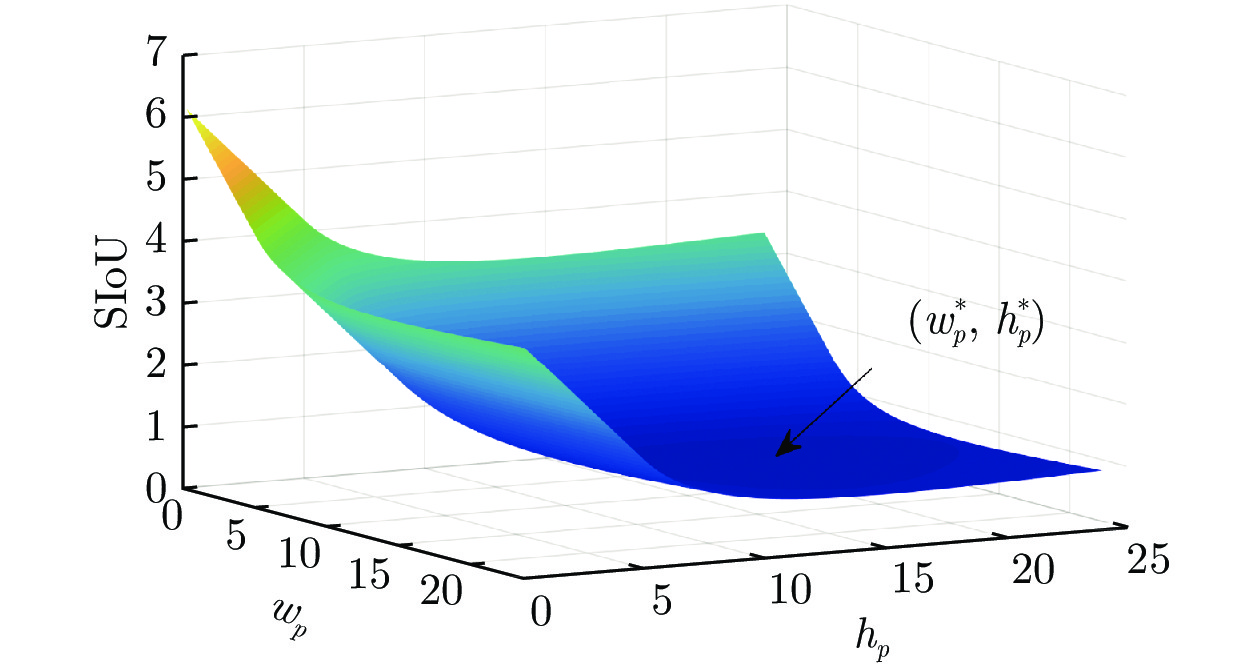
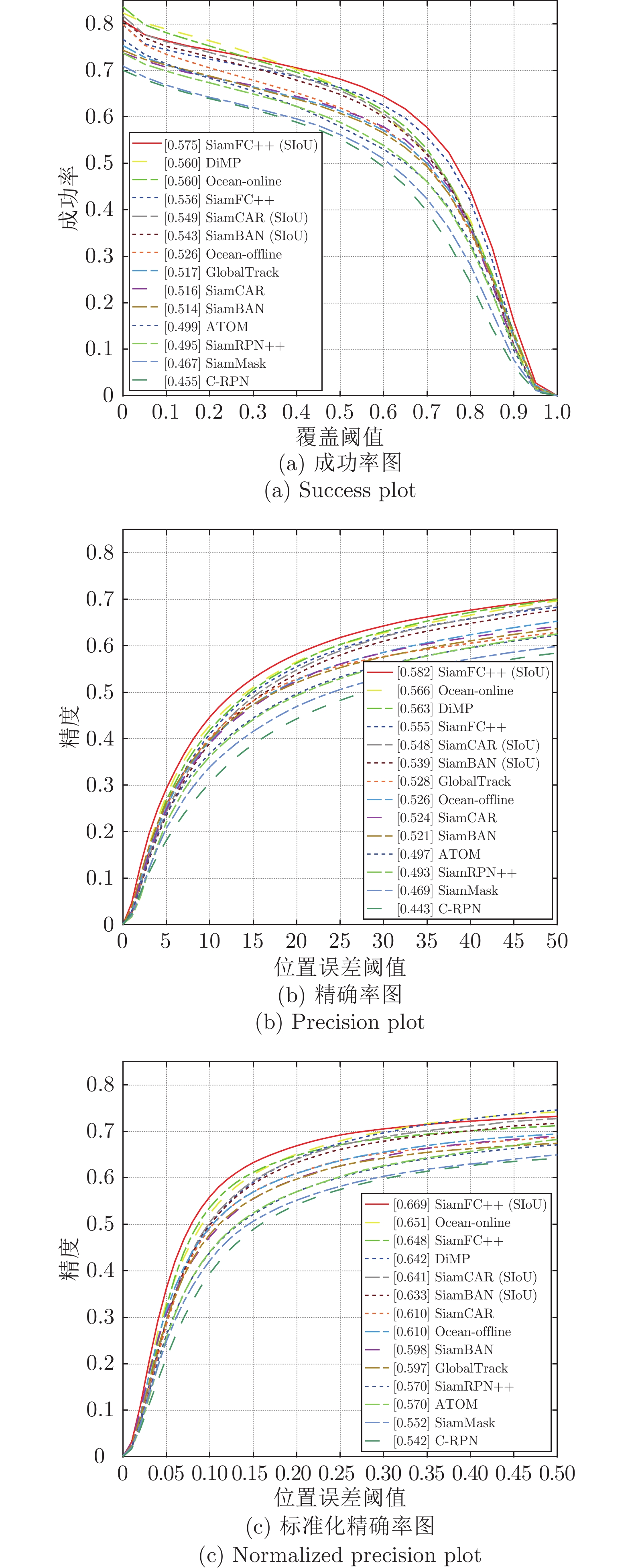
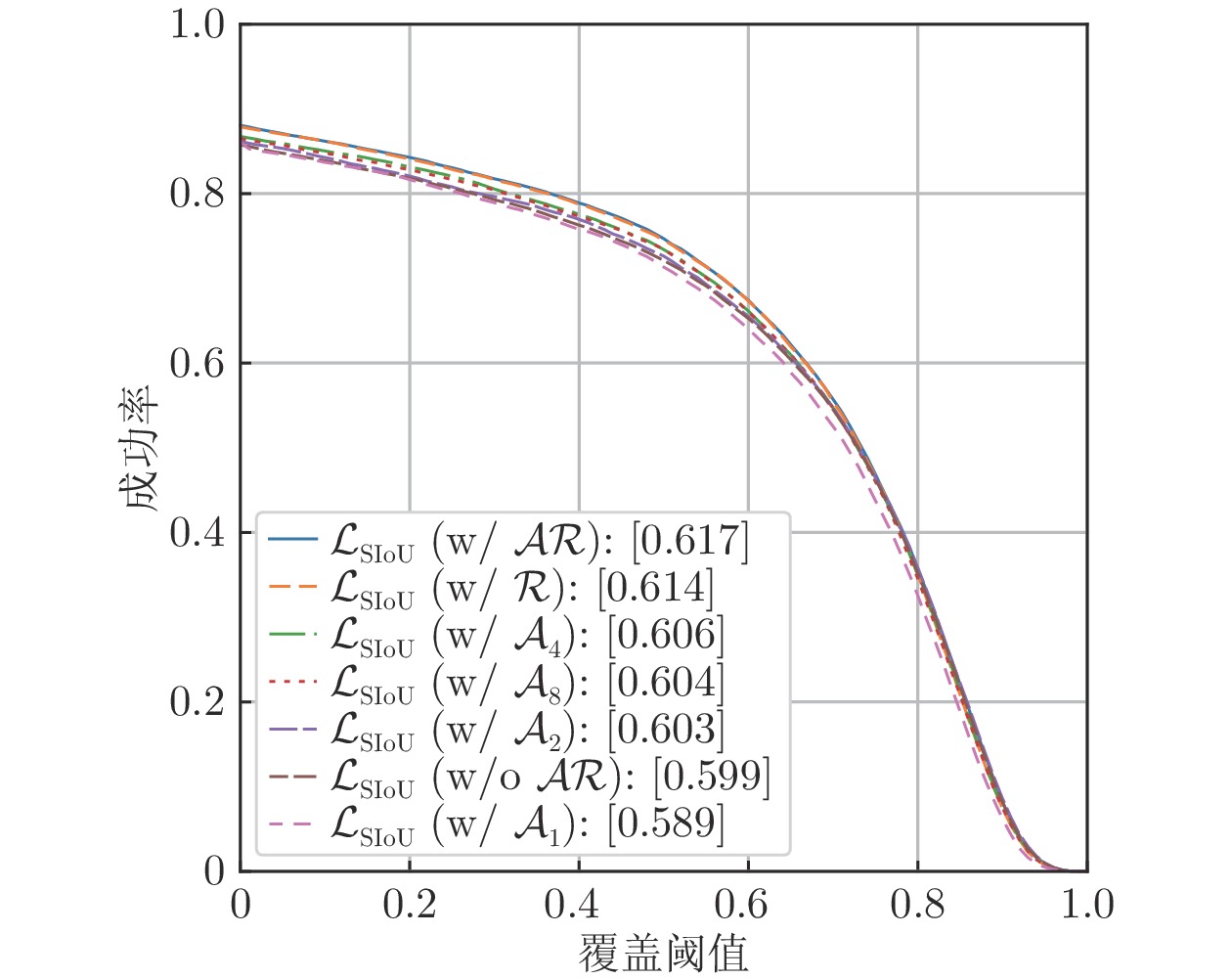
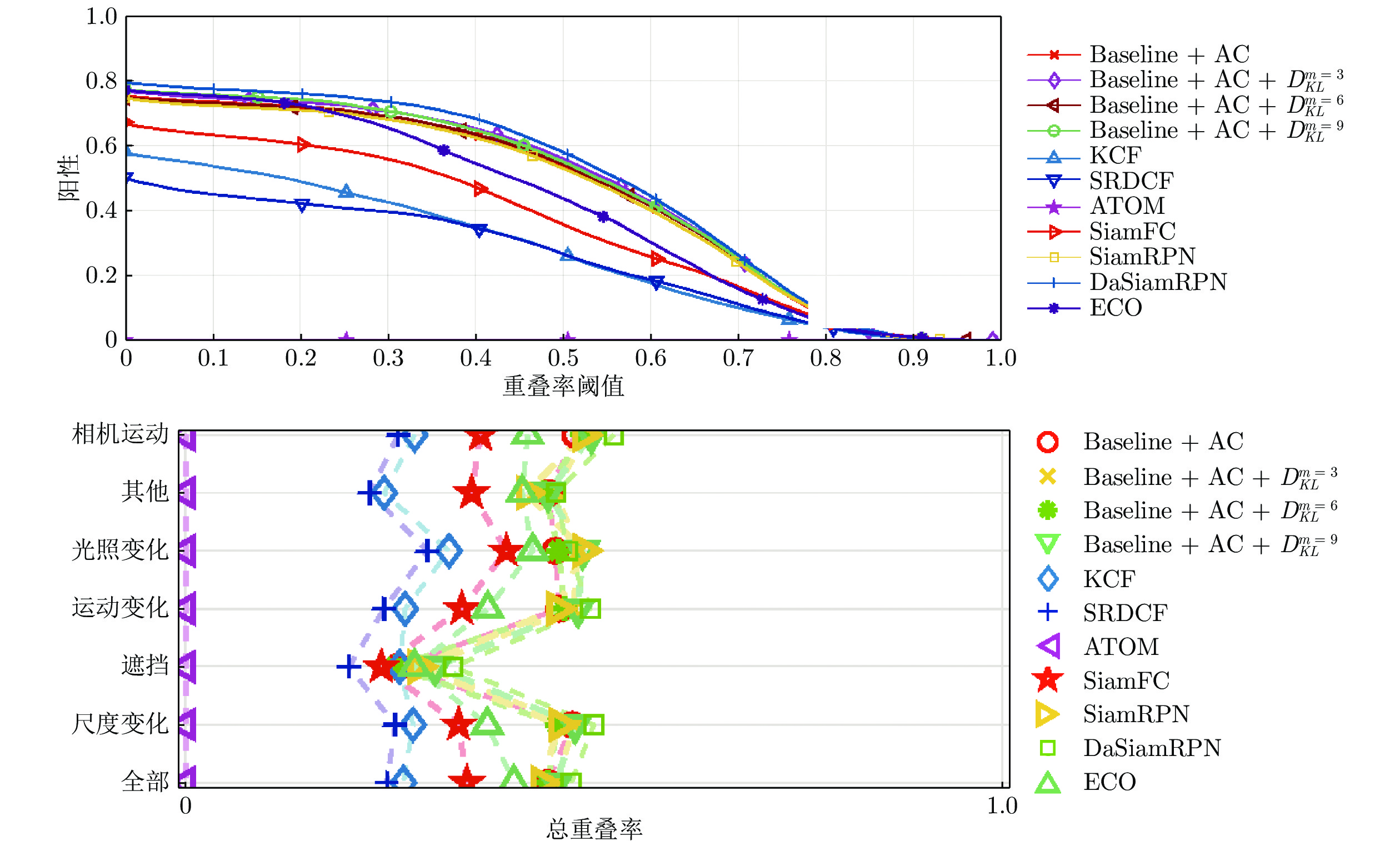
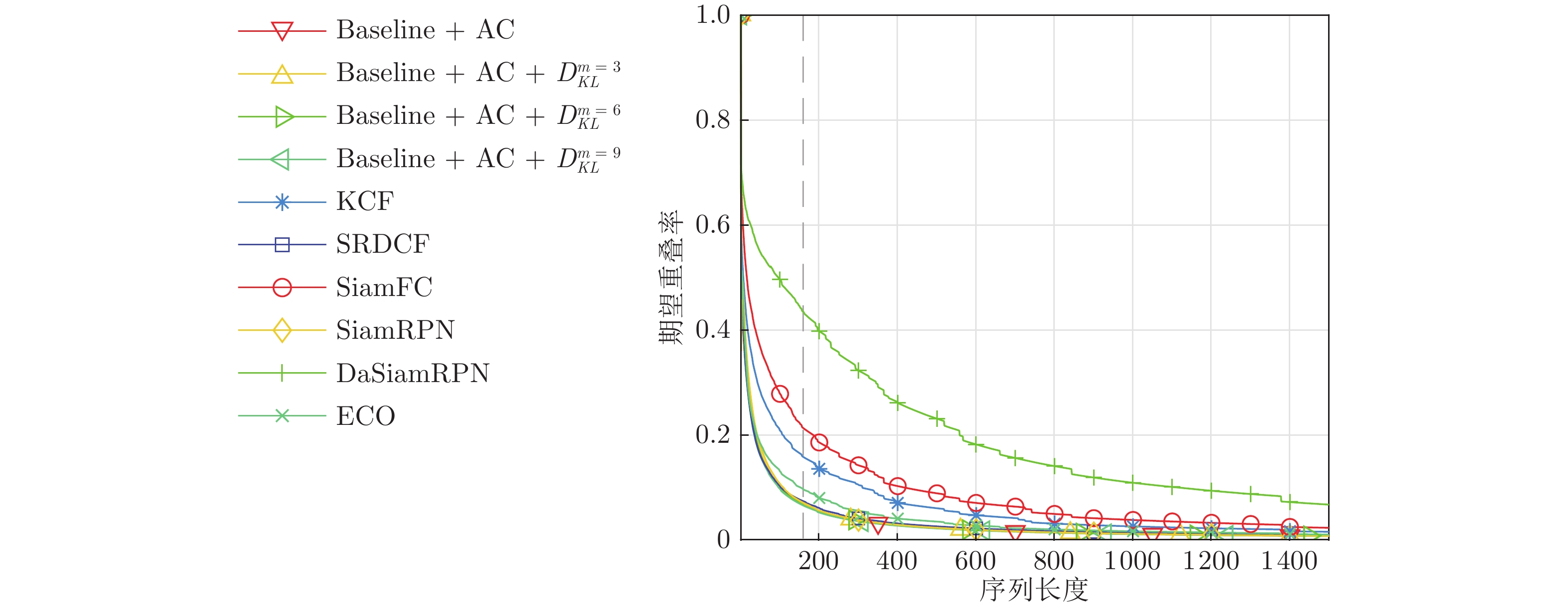
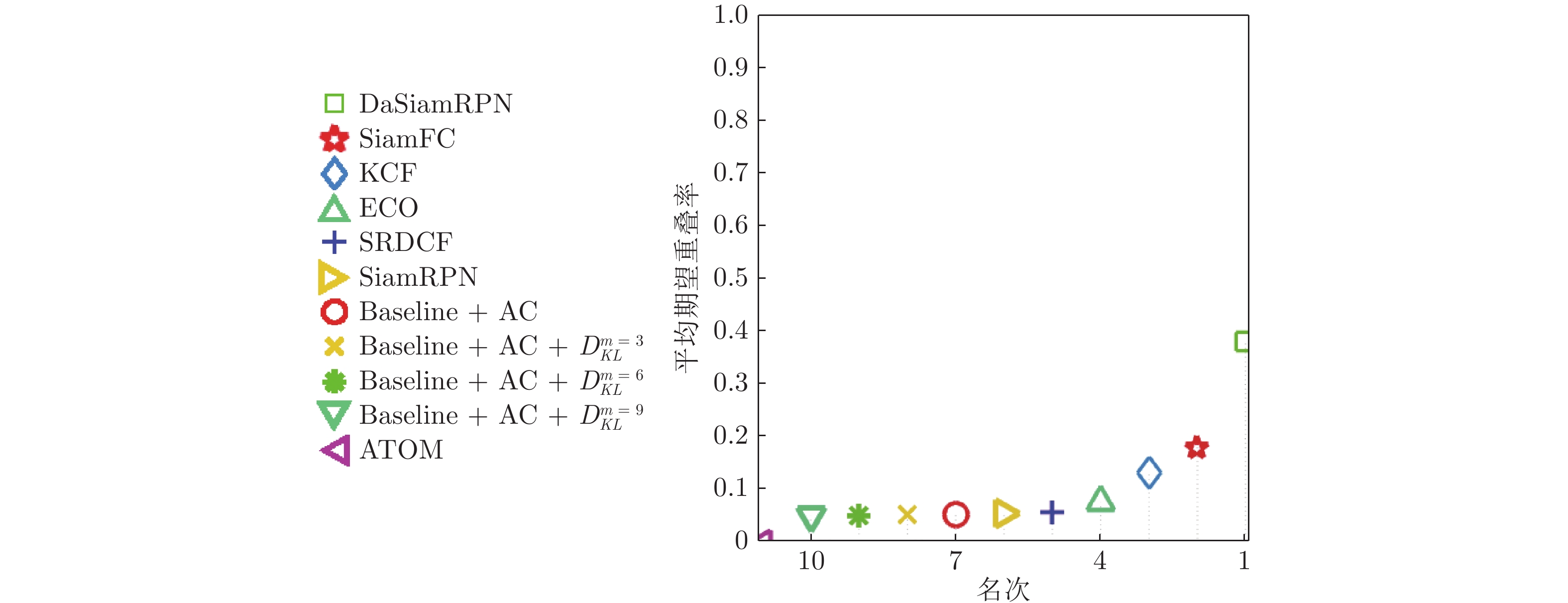
边界框回归分支是深度目标跟踪器的关键模块, 其性能直接影响跟踪器的精度. 评价精度的指标之一是交并比(Intersection over union, IoU). 基于IoU的损失函数取代了\begin{document}$ \ell_n $\end{document} ![]()
![]()
边界框回归分支是深度目标跟踪器的关键模块, 其性能直接影响跟踪器的精度. 评价精度的指标之一是交并比(Intersection over union, IoU). 基于IoU的损失函数取代了



2023, 49(2): 307-316.
doi: 10.16383/j.aas.c210480
摘要:
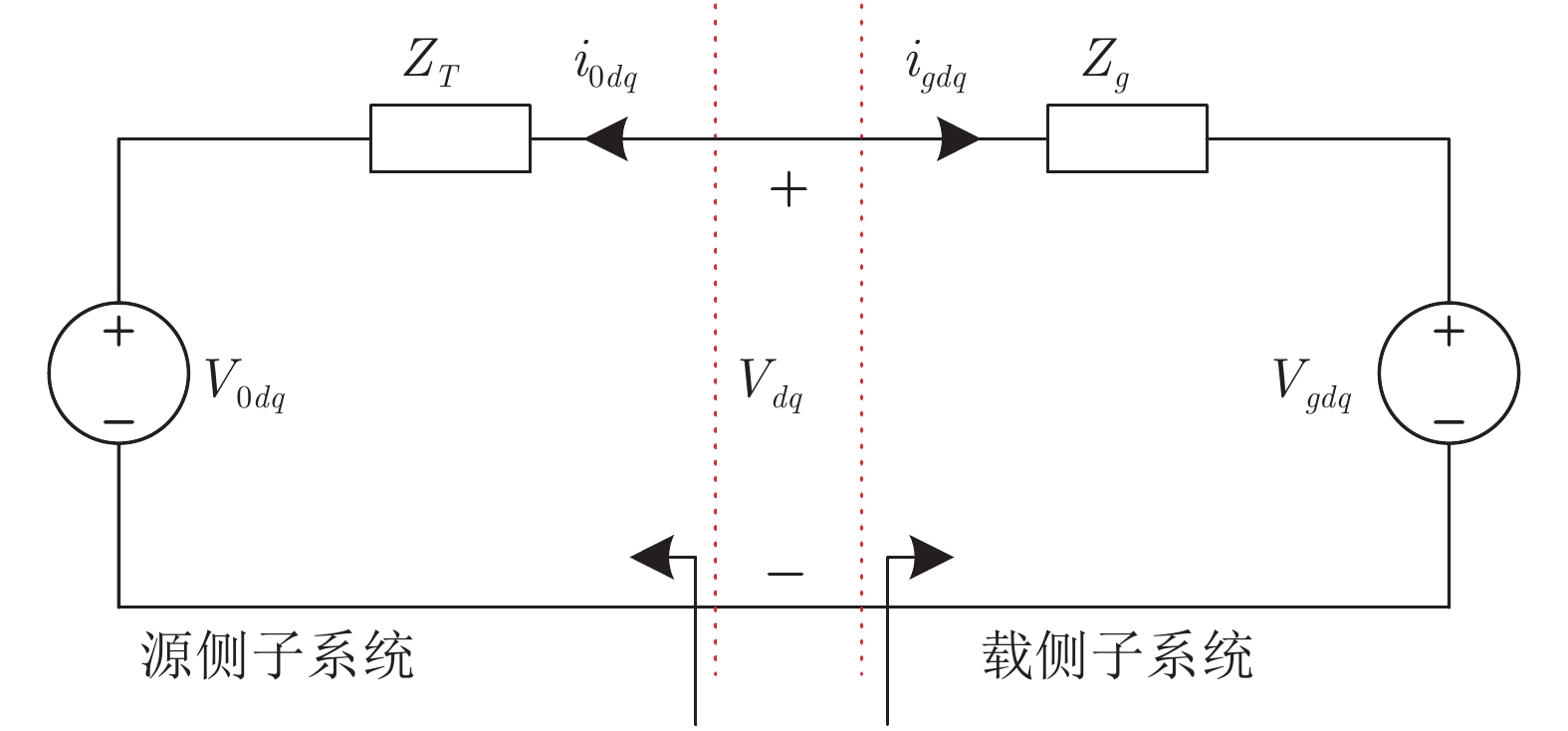
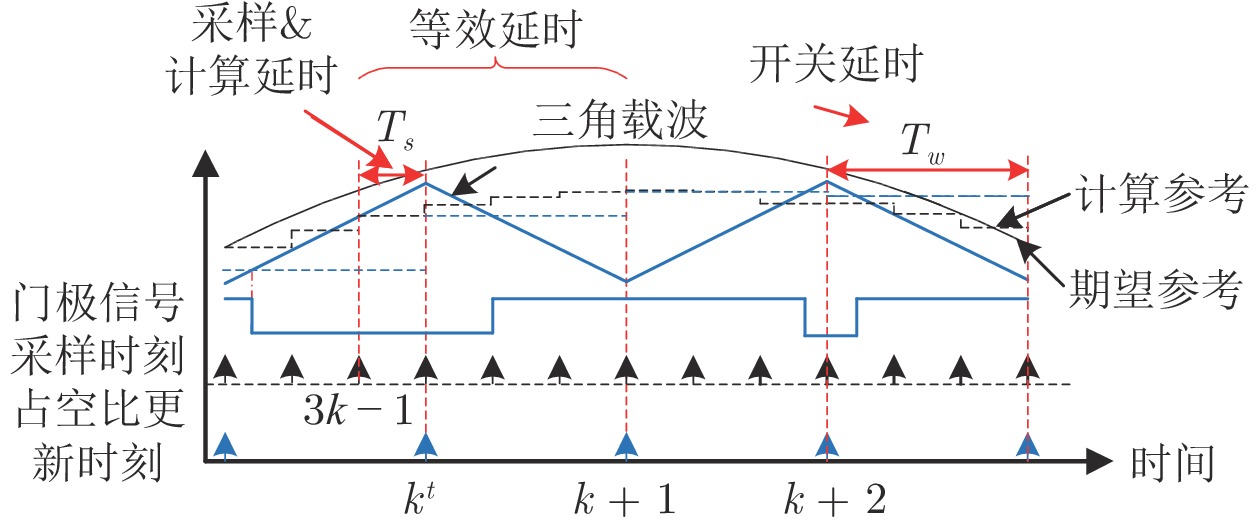
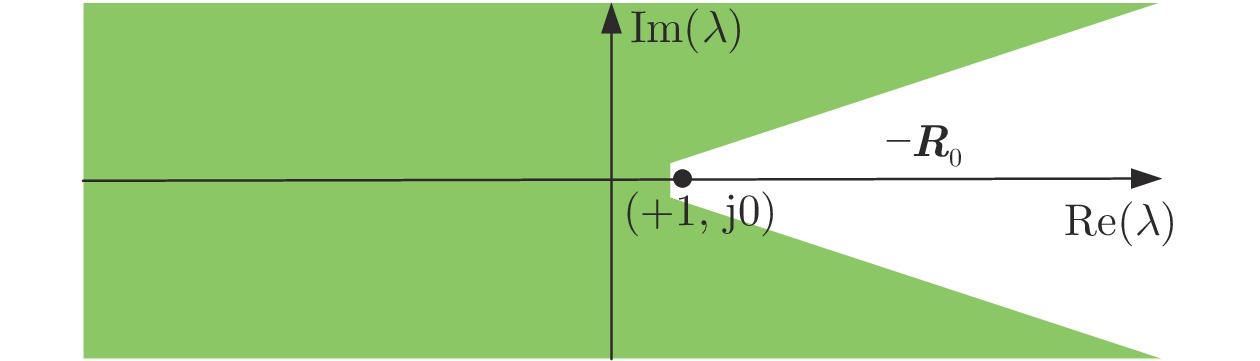
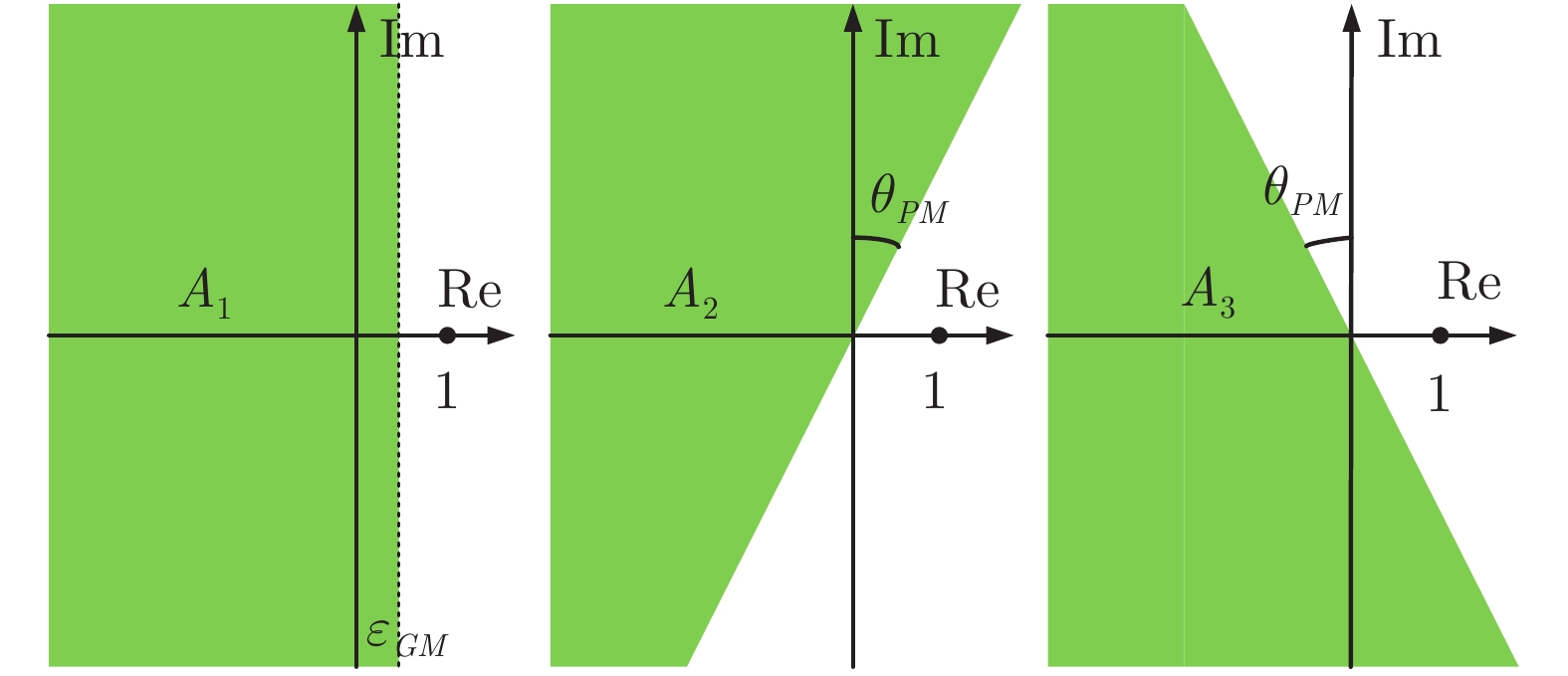
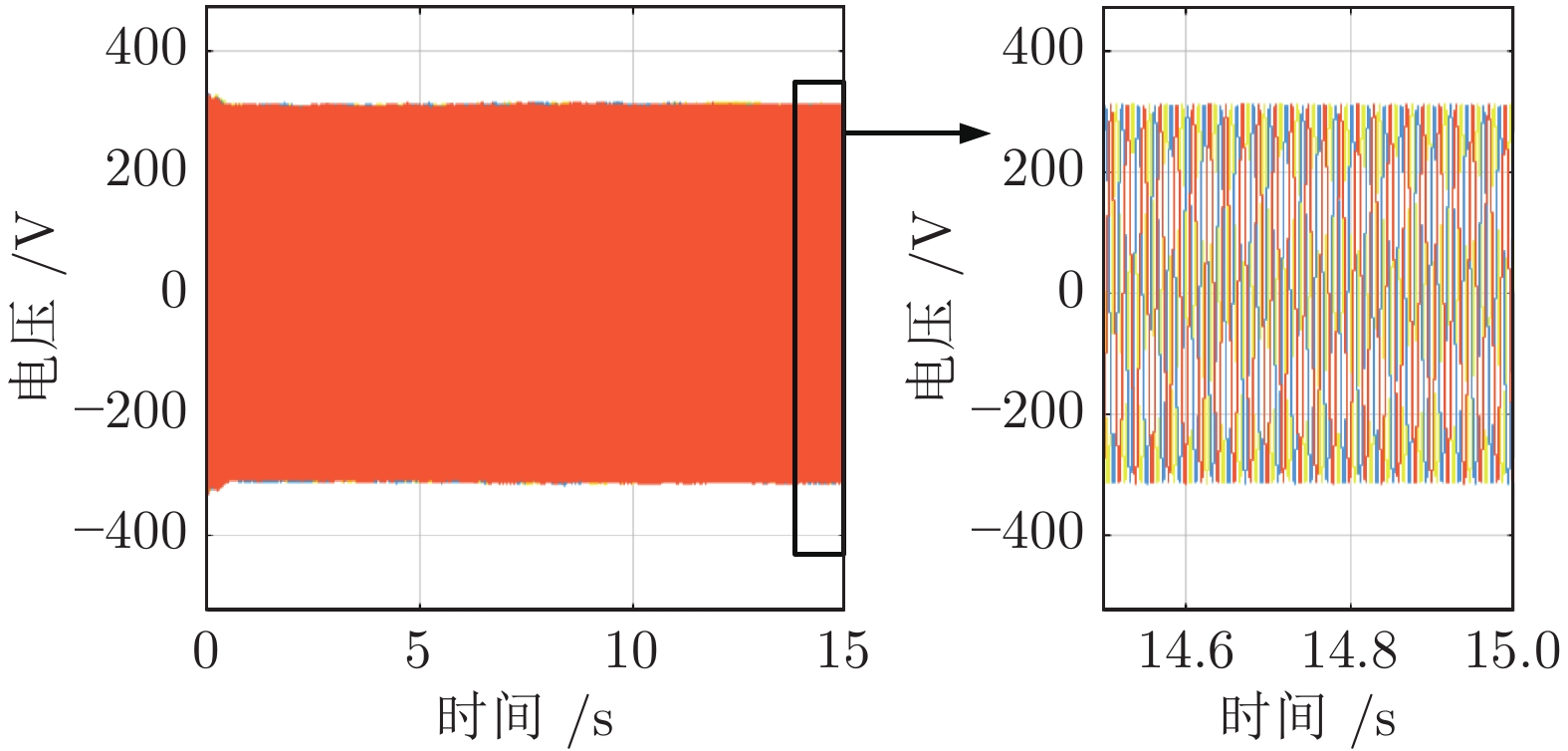
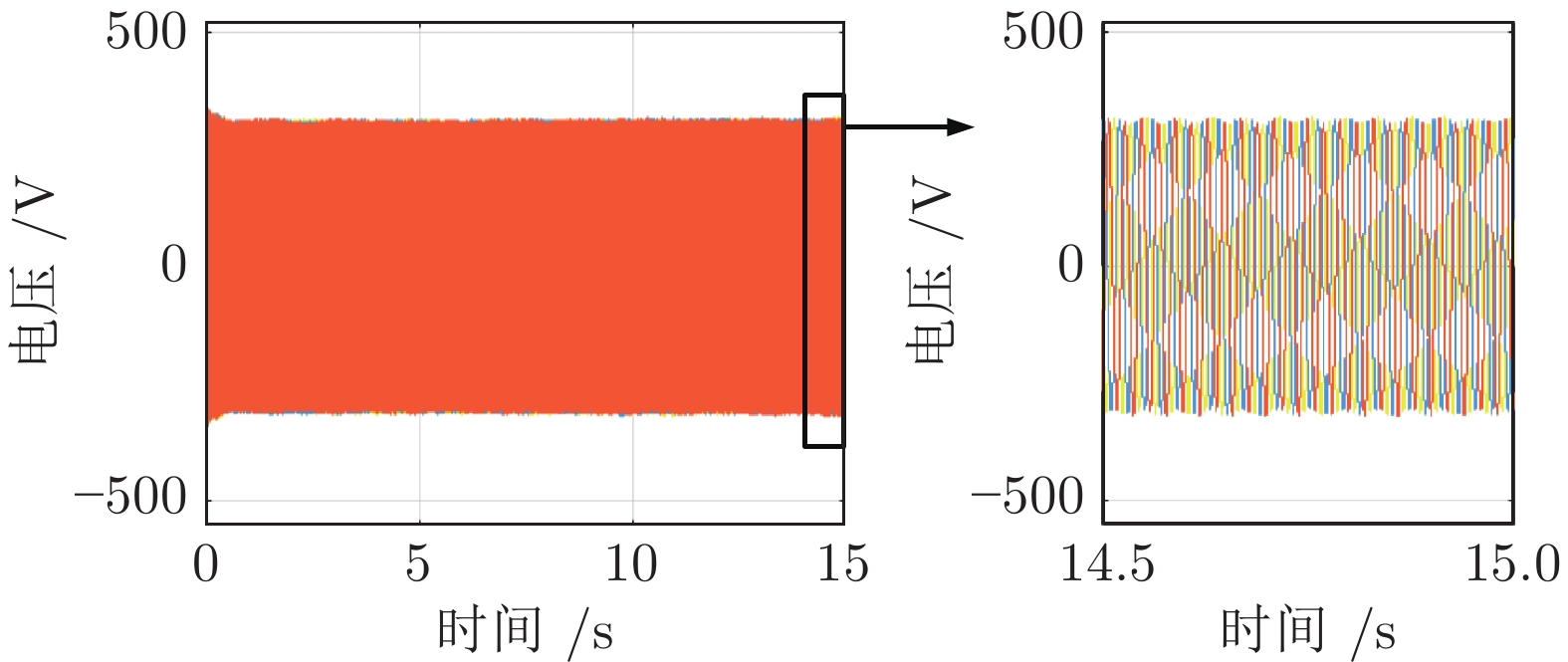
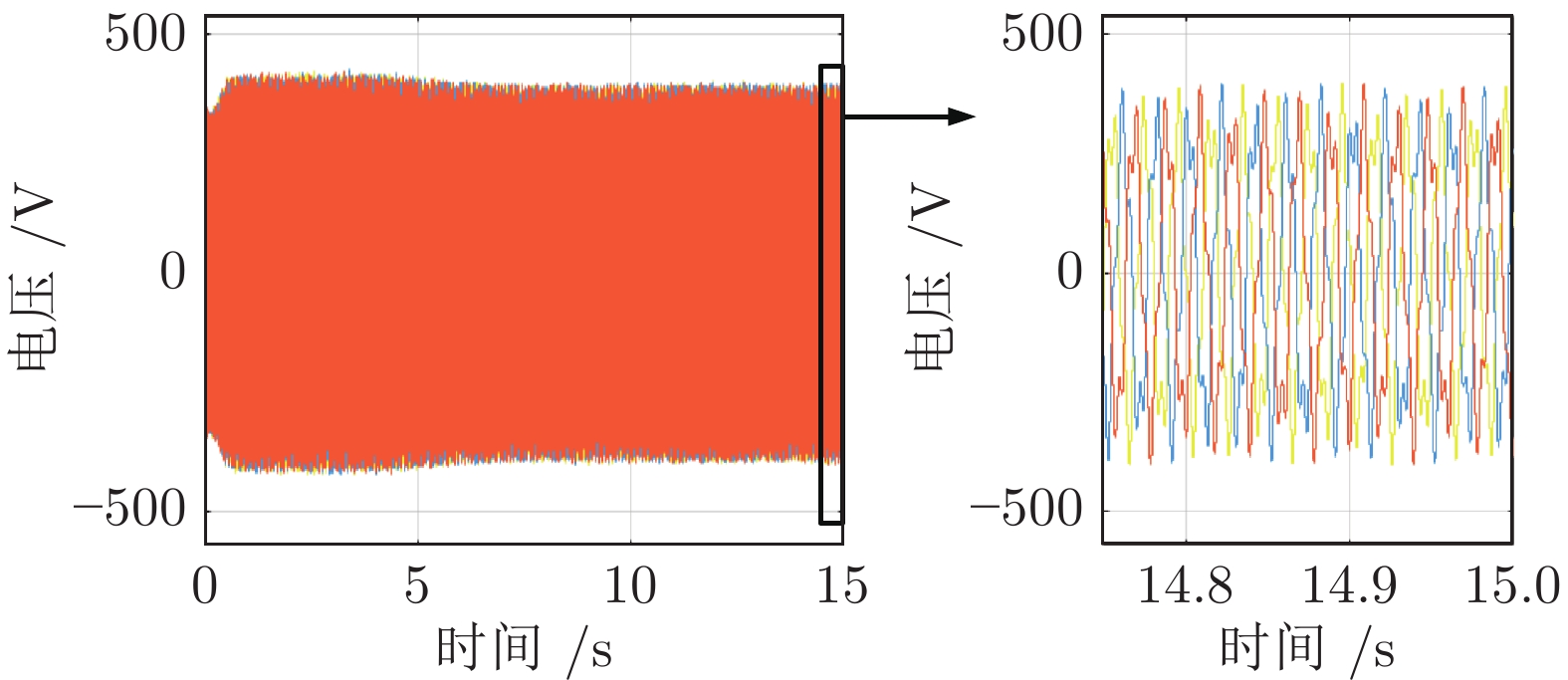
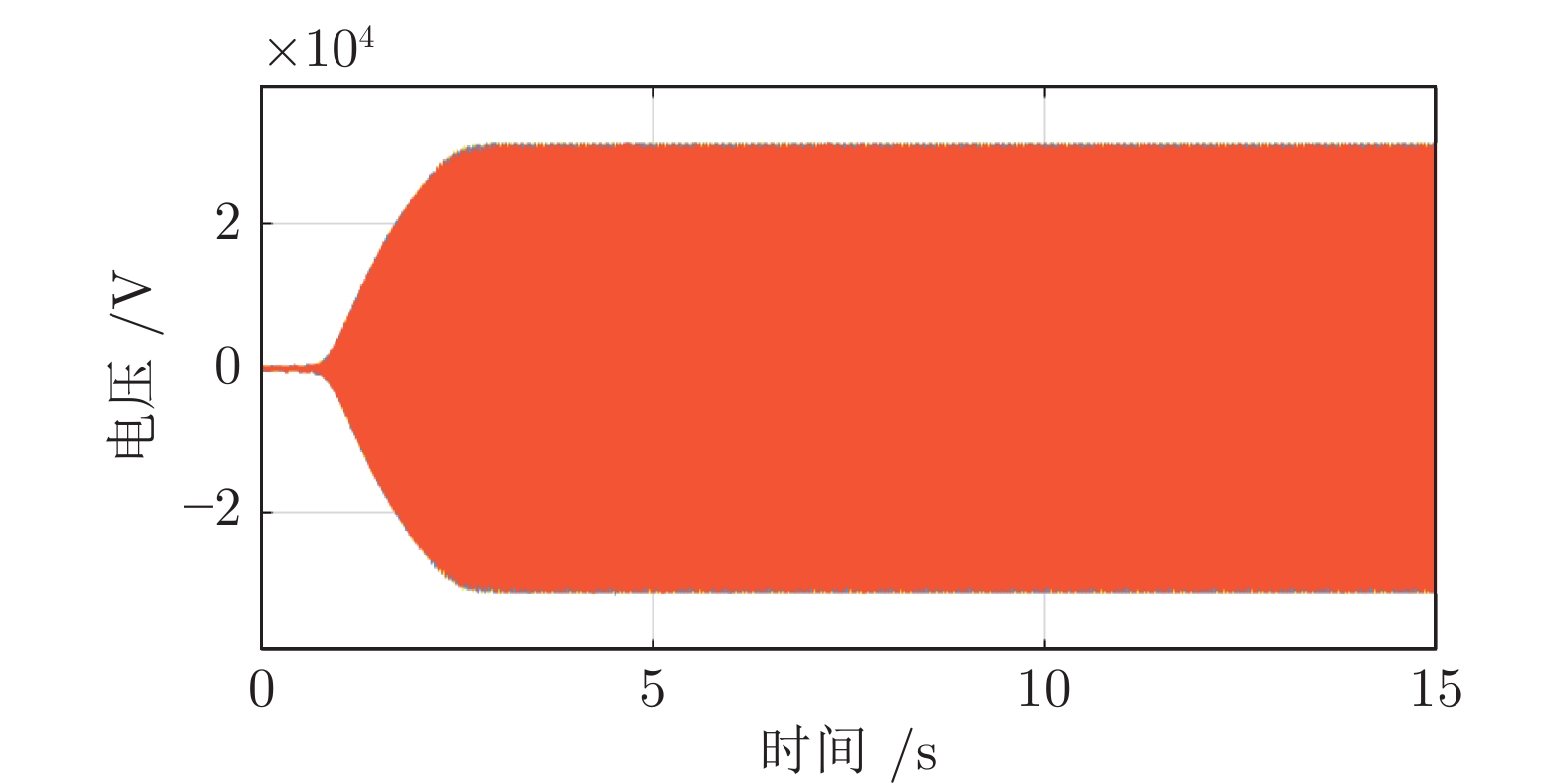
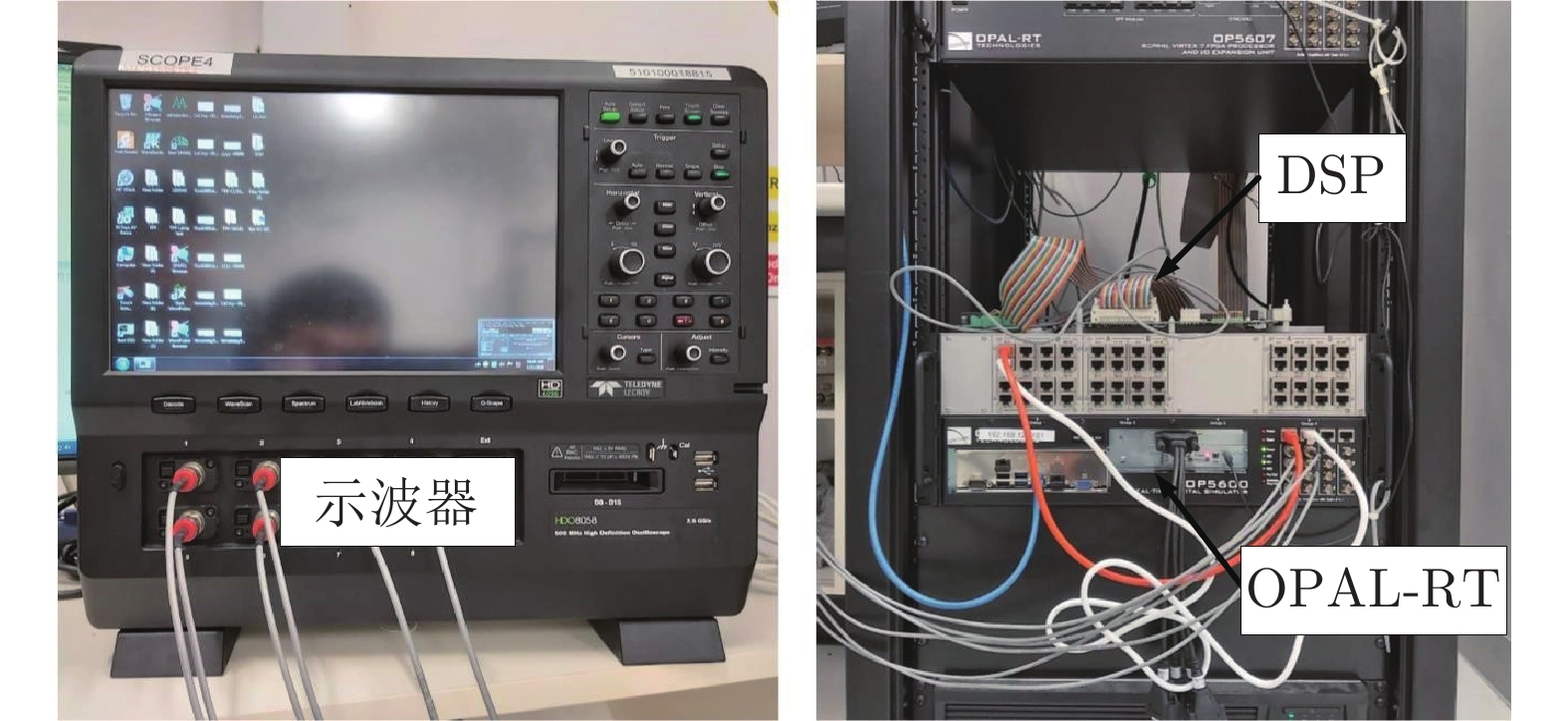
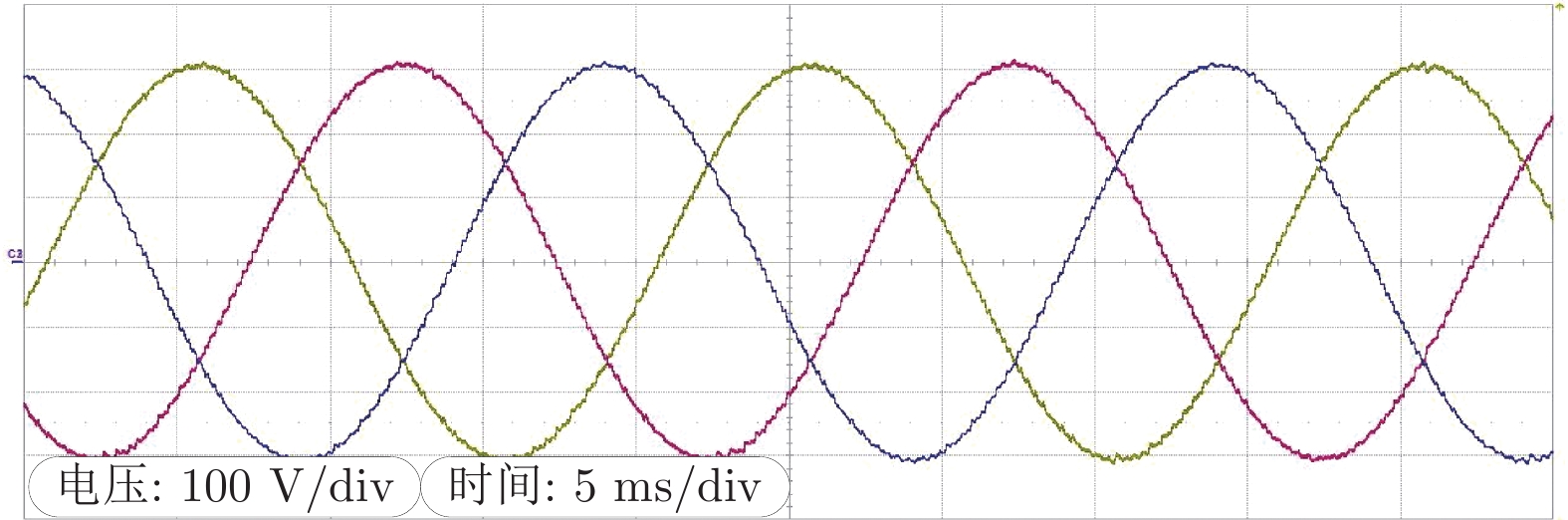
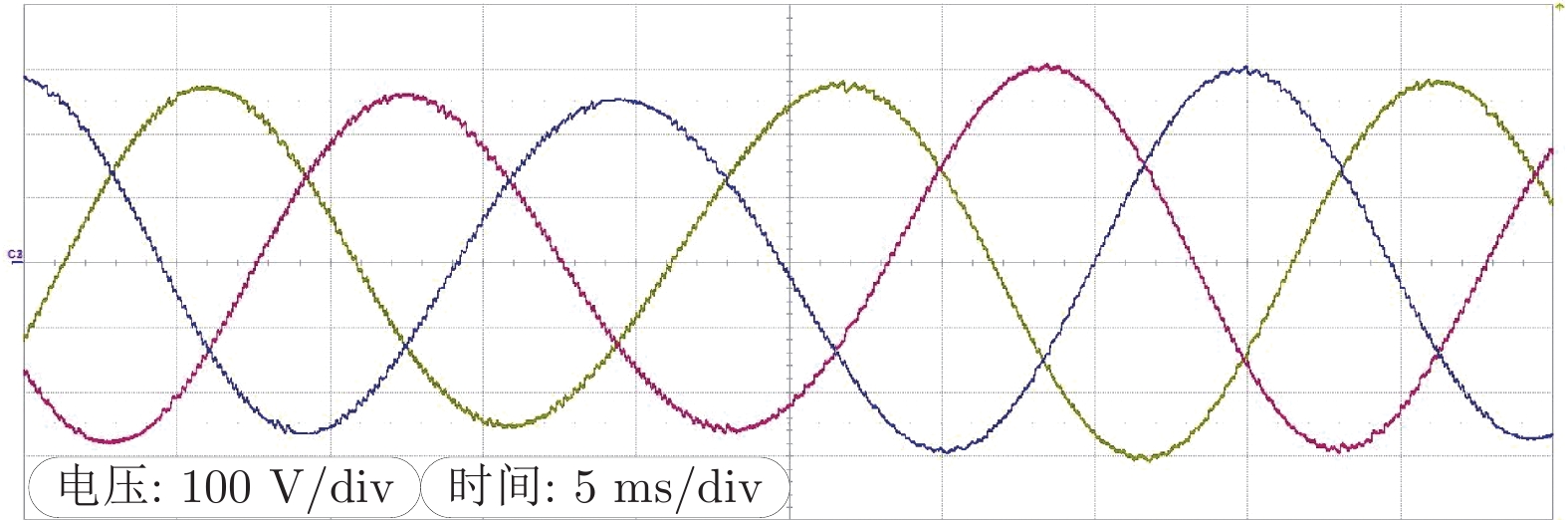
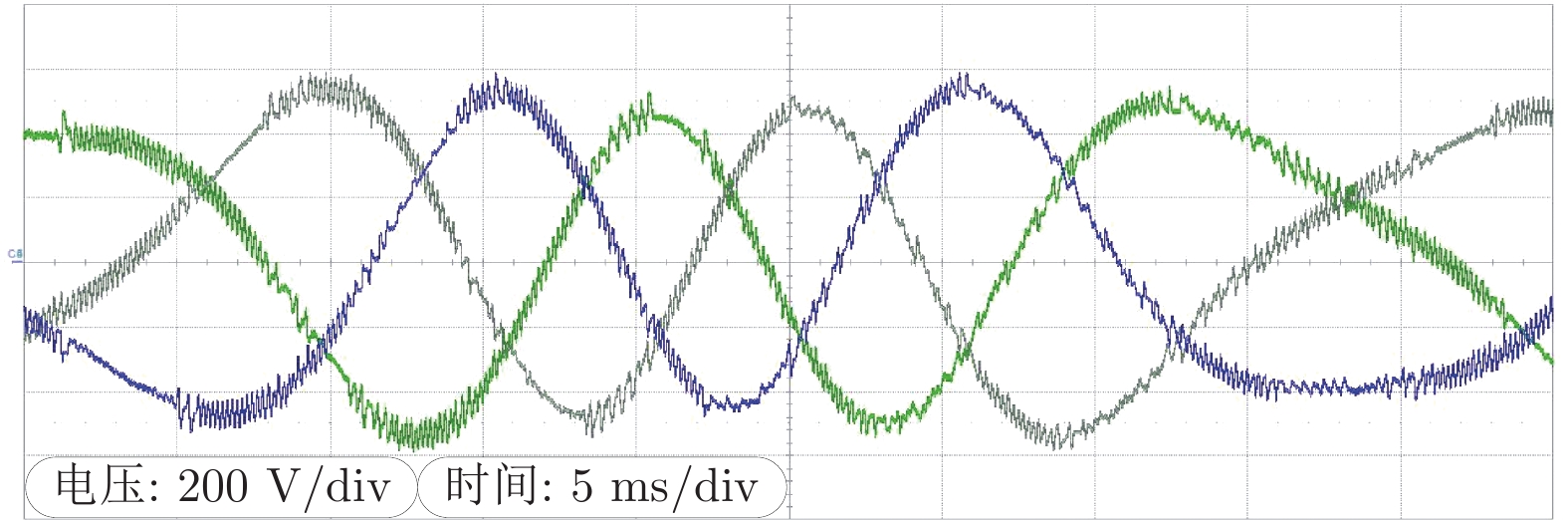
尽管信息物理系统的稳定性已经得到了广泛的研究, 但大部分的学者皆关注于通信网络延时或攻击下的信息物理系统的稳定性问题, 无网络通信的信息物理系统的信物融合稳定性分析策略亟待提出. 其中, 内嵌数字控制系统的并网逆变器系统是一种最简单、最典型的信息能源系统. 同时, 从效率的角度出发, 逆变器的开关/采样频率总是选择尽可能低的频率, 其势必产生系统固有延迟时间(控制理论中称为时间延迟). 这种延迟时间往往容易引起系统的低频/次同步振荡, 弱电网将加剧此现象. 为此, 提出一种信息能源系统的信−物融合稳定性分析技术. 首先, 基于柏德近似方法, 建立了具有等效延迟时间的信息物理系统阻抗模型. 该等效延迟时间由三部分组成, 即信息/物理层的采样延迟时间、信息层的计算延迟时间和物理层的脉宽调制延迟时间, 其有效地反映了信息−物理相互融合作用的影响. 进而设计了稳定禁止区域判据, 利用空间映射使开关/采样频率求解过程转化为Hurwitz矩阵辨识问题. 在这些空间映射的基础上, 最小开关/采样频率通过自适应步长搜索算法获得. 最后, 仿真和实验结果验证了该方法的有效性.
尽管信息物理系统的稳定性已经得到了广泛的研究, 但大部分的学者皆关注于通信网络延时或攻击下的信息物理系统的稳定性问题, 无网络通信的信息物理系统的信物融合稳定性分析策略亟待提出. 其中, 内嵌数字控制系统的并网逆变器系统是一种最简单、最典型的信息能源系统. 同时, 从效率的角度出发, 逆变器的开关/采样频率总是选择尽可能低的频率, 其势必产生系统固有延迟时间(控制理论中称为时间延迟). 这种延迟时间往往容易引起系统的低频/次同步振荡, 弱电网将加剧此现象. 为此, 提出一种信息能源系统的信−物融合稳定性分析技术. 首先, 基于柏德近似方法, 建立了具有等效延迟时间的信息物理系统阻抗模型. 该等效延迟时间由三部分组成, 即信息/物理层的采样延迟时间、信息层的计算延迟时间和物理层的脉宽调制延迟时间, 其有效地反映了信息−物理相互融合作用的影响. 进而设计了稳定禁止区域判据, 利用空间映射使开关/采样频率求解过程转化为Hurwitz矩阵辨识问题. 在这些空间映射的基础上, 最小开关/采样频率通过自适应步长搜索算法获得. 最后, 仿真和实验结果验证了该方法的有效性.




2023, 49(2): 317-328.
doi: 10.16383/j.aas.c210400
摘要:
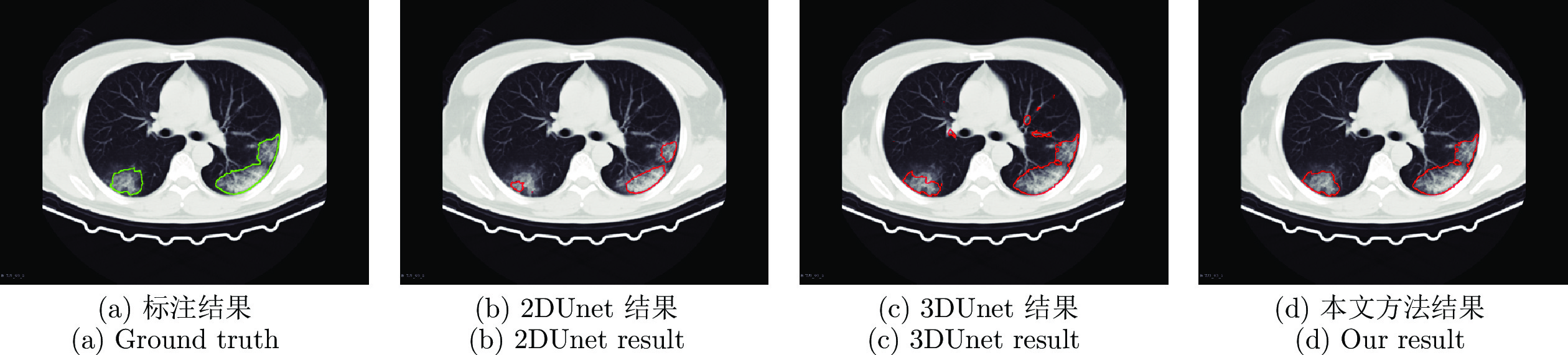
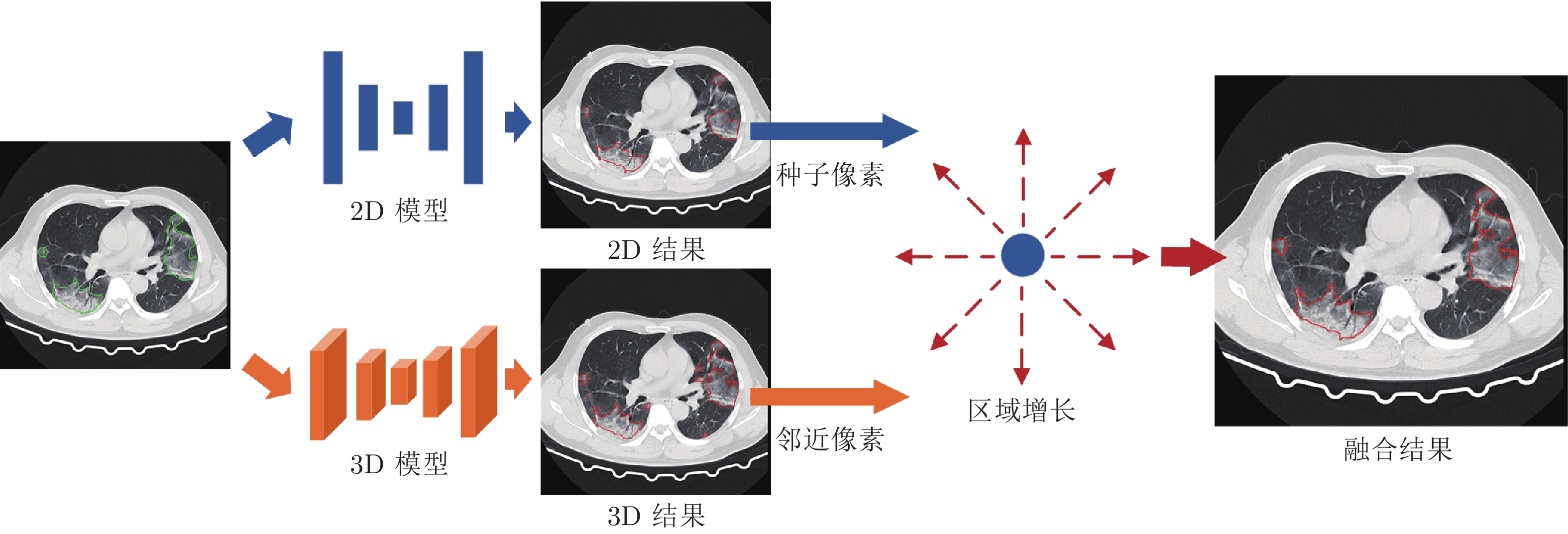
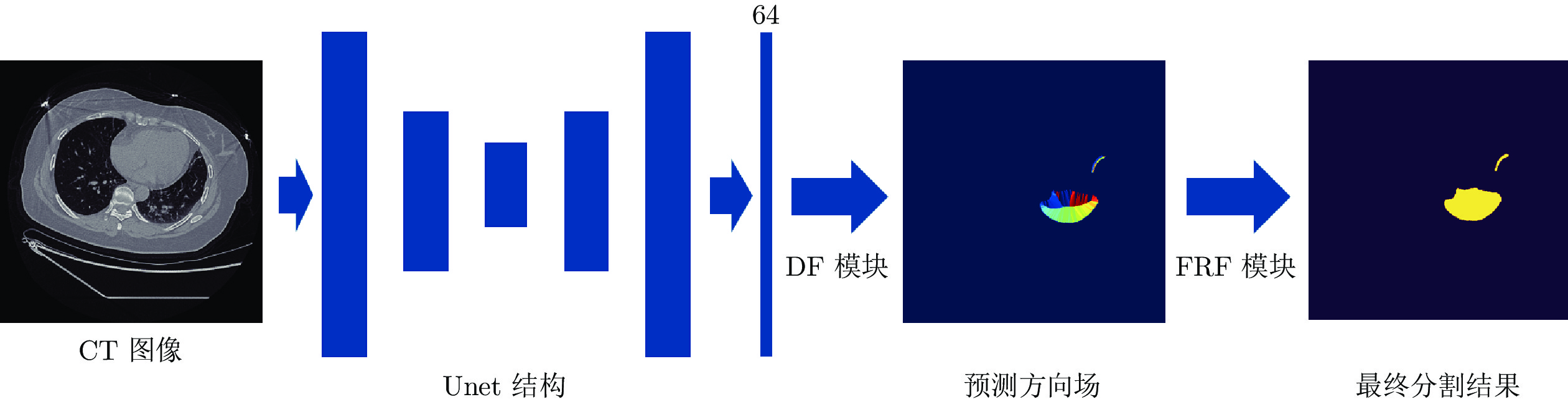
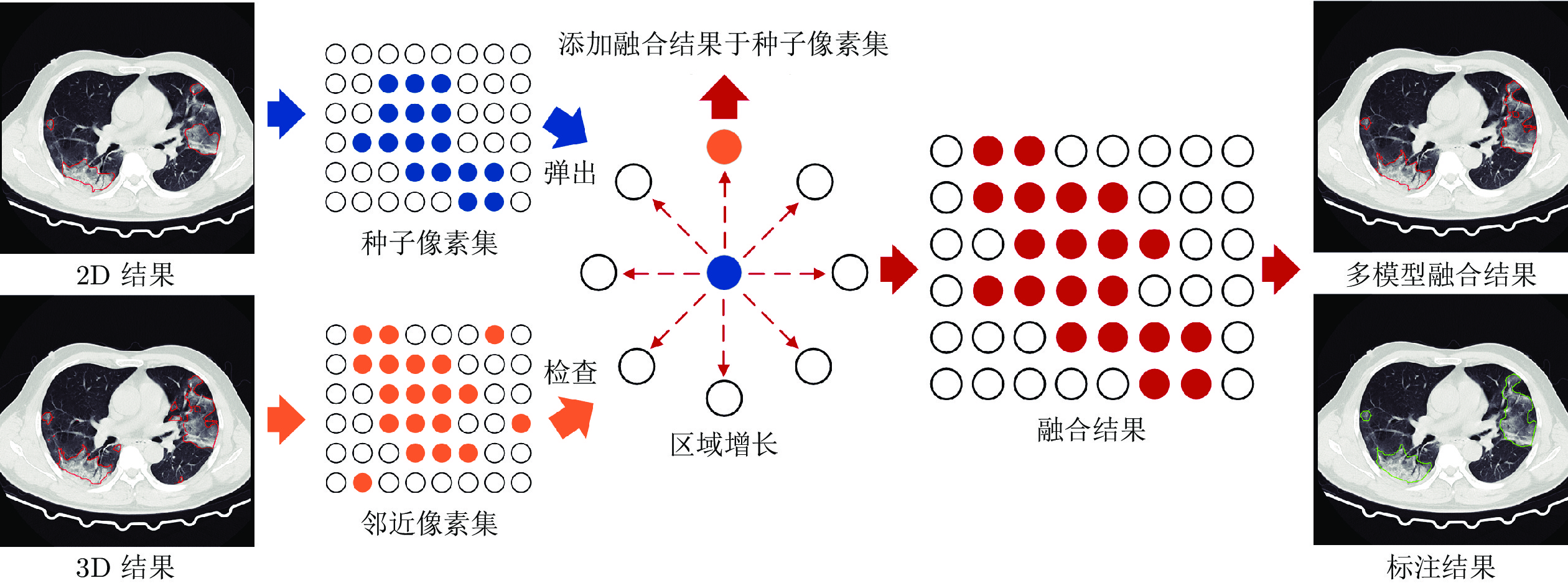
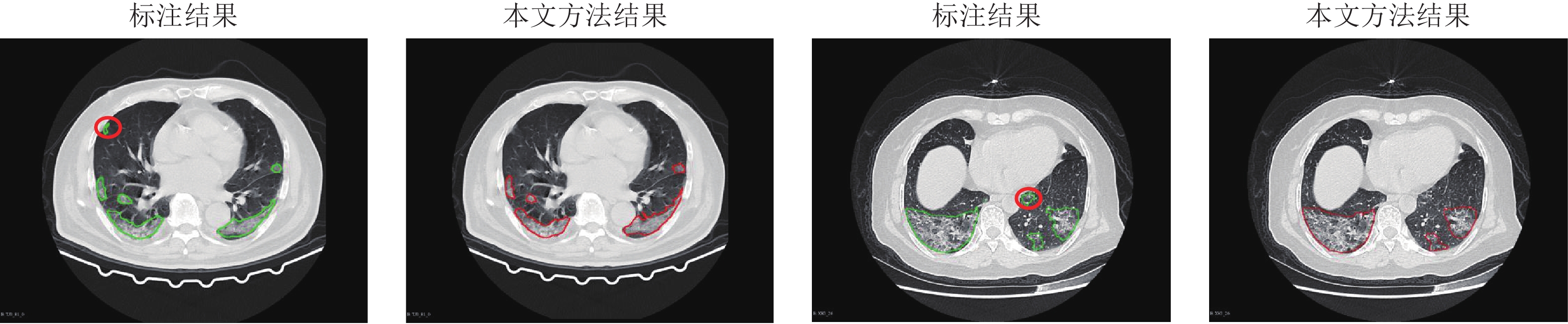
自2019年末以来, 全球蔓延的新型冠状病毒(Coronavirus disease 2019, Covid-19)已经给世界人民造成了严重的健康威胁. 其中新型冠状病毒患者的计算机断层扫描(Computer tomography, CT)图像通过肺炎病灶分割技术可以为医学诊断提供有价值的量化信息. 虽然目前基于深度学习的方法已经在新型冠状病毒肺炎病灶分割任务上取得了良好的效果, 但是在面对不同中心数据的情况下分割效果往往会大幅下降. 因此, 研究一种具有更好泛化性能的新型冠状病毒肺炎病灶分割算法具有重要意义. 提出一种新冠肺炎病灶多模型融合分割方法. 通过训练3DUnet模型和2DUnet结合方向场(Direction field, DF)模型, 利用多种模型各自优点进行分割结果的融合, 得到更好的泛化性能. 通过同中心和跨中心数据集的实验, 证明该方法能够有效提高新冠肺炎病灶分割的泛化性能, 为医学诊断分析提供帮助.
自2019年末以来, 全球蔓延的新型冠状病毒(Coronavirus disease 2019, Covid-19)已经给世界人民造成了严重的健康威胁. 其中新型冠状病毒患者的计算机断层扫描(Computer tomography, CT)图像通过肺炎病灶分割技术可以为医学诊断提供有价值的量化信息. 虽然目前基于深度学习的方法已经在新型冠状病毒肺炎病灶分割任务上取得了良好的效果, 但是在面对不同中心数据的情况下分割效果往往会大幅下降. 因此, 研究一种具有更好泛化性能的新型冠状病毒肺炎病灶分割算法具有重要意义. 提出一种新冠肺炎病灶多模型融合分割方法. 通过训练3DUnet模型和2DUnet结合方向场(Direction field, DF)模型, 利用多种模型各自优点进行分割结果的融合, 得到更好的泛化性能. 通过同中心和跨中心数据集的实验, 证明该方法能够有效提高新冠肺炎病灶分割的泛化性能, 为医学诊断分析提供帮助.



2023, 49(2): 329-342.
doi: 10.16383/j.aas.c220091
摘要:
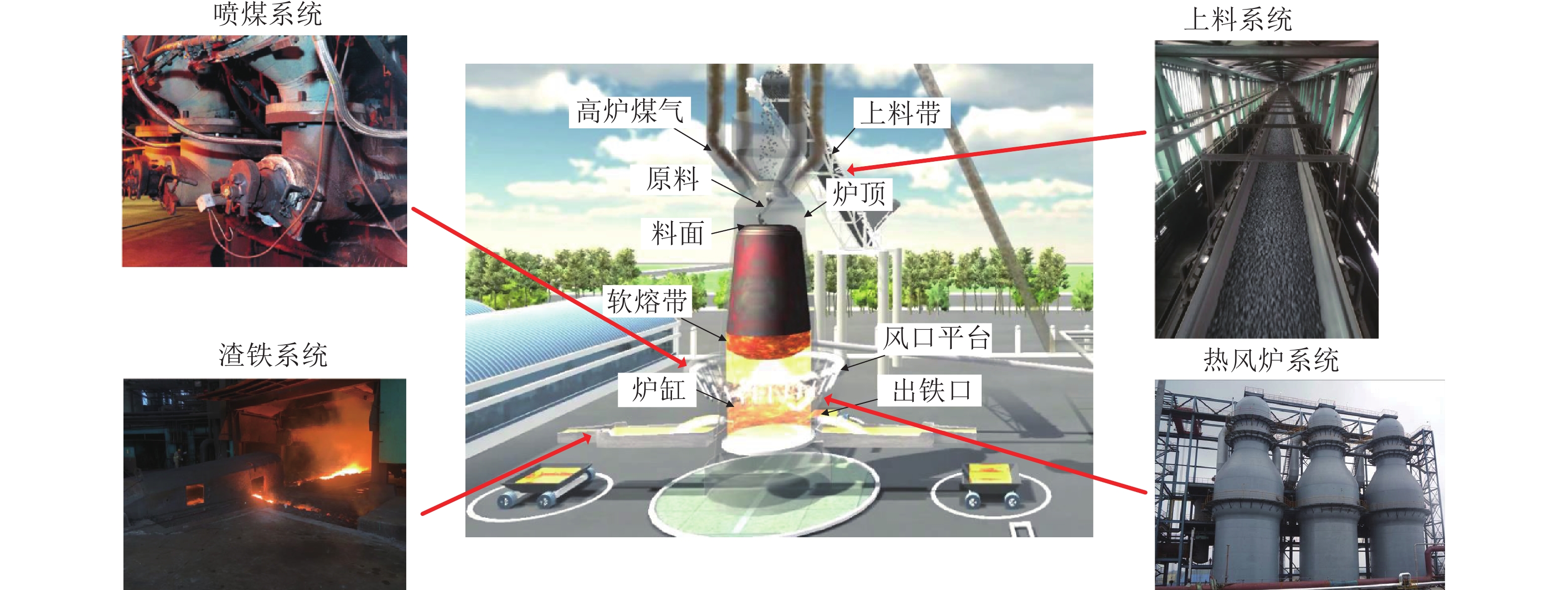
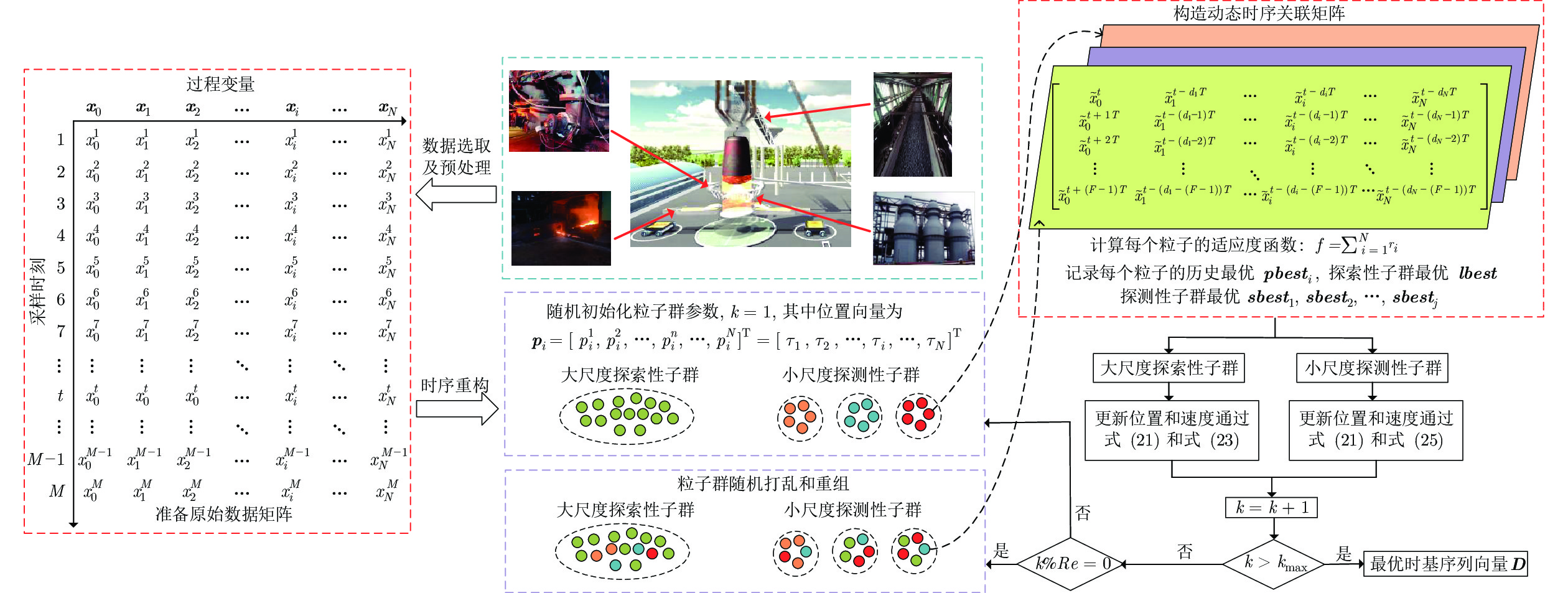
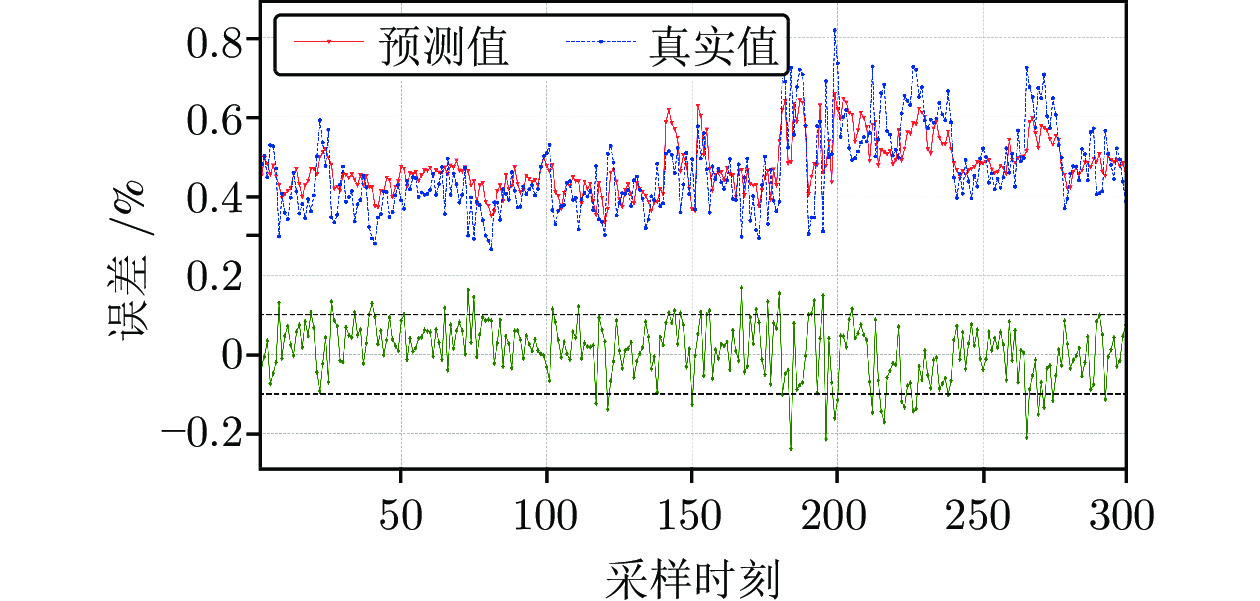
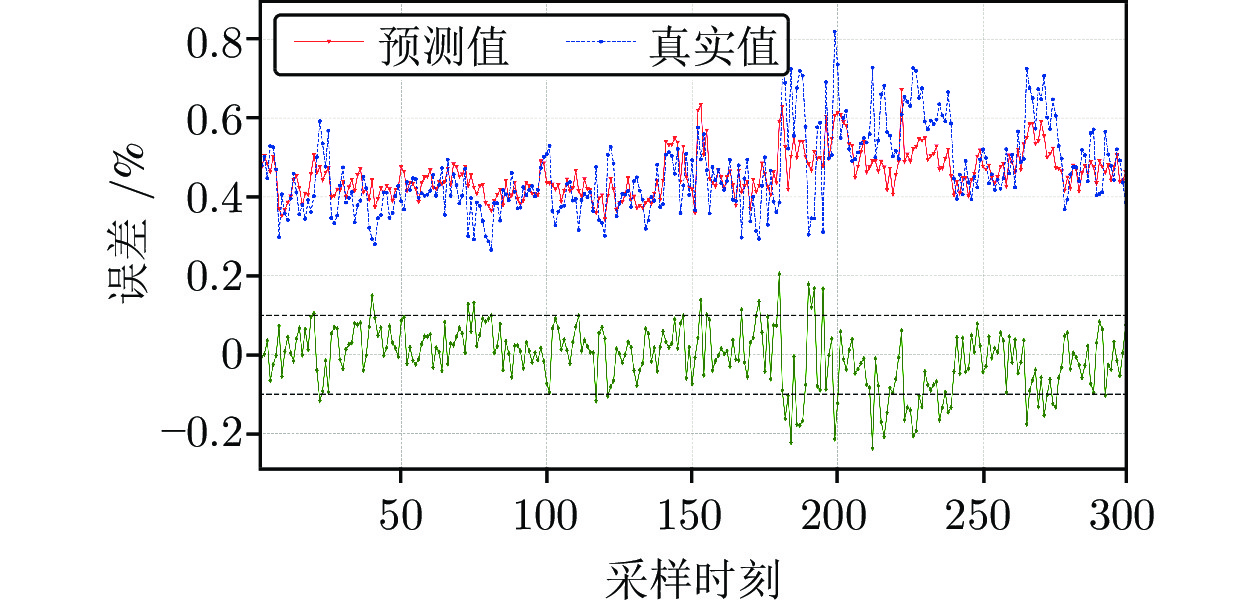
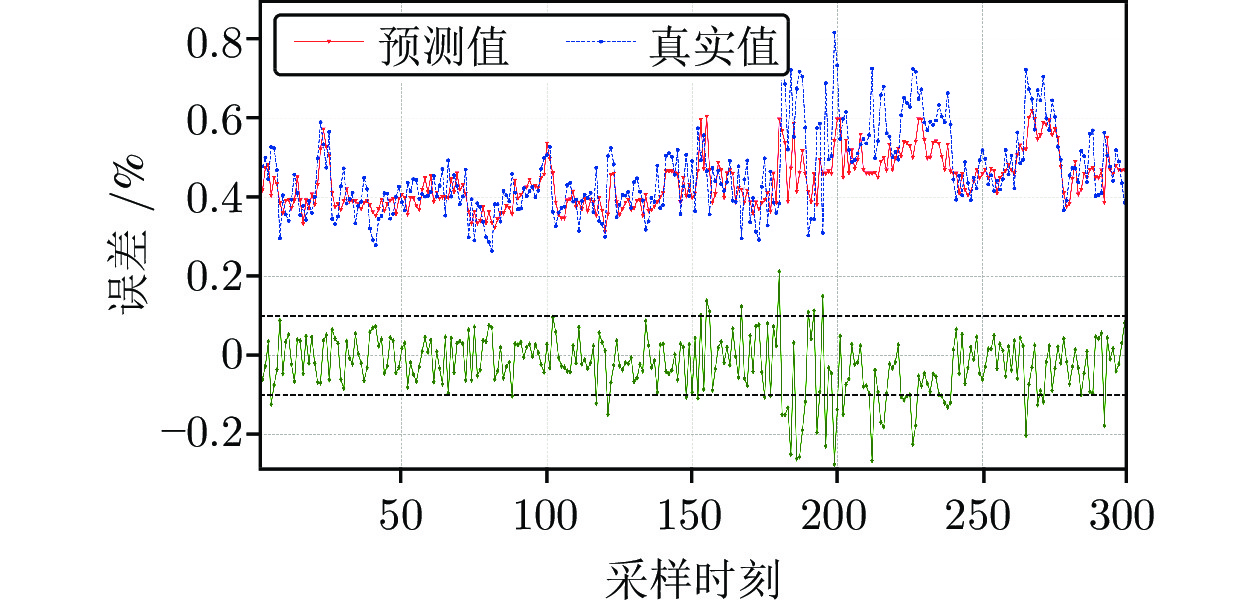
高炉冶炼过程由炉料传输反应时间和冶炼单元在空间和时间分布上的差异带来的变量时延影响了数据的准确性和真实因果关系, 因此有效地估计过程变量间的时延信息, 并在时序上配准数据, 是后续过程建模、优化控制与性能评估的核心. 考虑到变量间时延的多重关联性, 提出了一种基于时序关联矩阵的时延参数估计方法. 首先, 根据过程变量的时延参数在时空上重构对应的时序关联矩阵, 并引入灰色关联分析量化时序矩阵的多重关联相关性; 接着, 考虑到穷举所有时序关联矩阵的时间复杂度, 提出了一种双尺度协同搜索策略的动态多群粒子群算法用于快速寻找最优的时延参数, 提出的粒子群算法能兼顾全局探索能力和局部探测能力并跳出局部最优解; 最后, 基于一个数值仿真和某钢铁厂2# 高炉的工业实验验证了所提时延参数估计方法的可行性和有效性, 且通过所提方法在时序上重构的数据能有效提高后续硅含量软测量模型性能.
高炉冶炼过程由炉料传输反应时间和冶炼单元在空间和时间分布上的差异带来的变量时延影响了数据的准确性和真实因果关系, 因此有效地估计过程变量间的时延信息, 并在时序上配准数据, 是后续过程建模、优化控制与性能评估的核心. 考虑到变量间时延的多重关联性, 提出了一种基于时序关联矩阵的时延参数估计方法. 首先, 根据过程变量的时延参数在时空上重构对应的时序关联矩阵, 并引入灰色关联分析量化时序矩阵的多重关联相关性; 接着, 考虑到穷举所有时序关联矩阵的时间复杂度, 提出了一种双尺度协同搜索策略的动态多群粒子群算法用于快速寻找最优的时延参数, 提出的粒子群算法能兼顾全局探索能力和局部探测能力并跳出局部最优解; 最后, 基于一个数值仿真和某钢铁厂2# 高炉的工业实验验证了所提时延参数估计方法的可行性和有效性, 且通过所提方法在时序上重构的数据能有效提高后续硅含量软测量模型性能.



2023, 49(2): 343-365.
doi: 10.16383/j.aas.c220012
摘要:
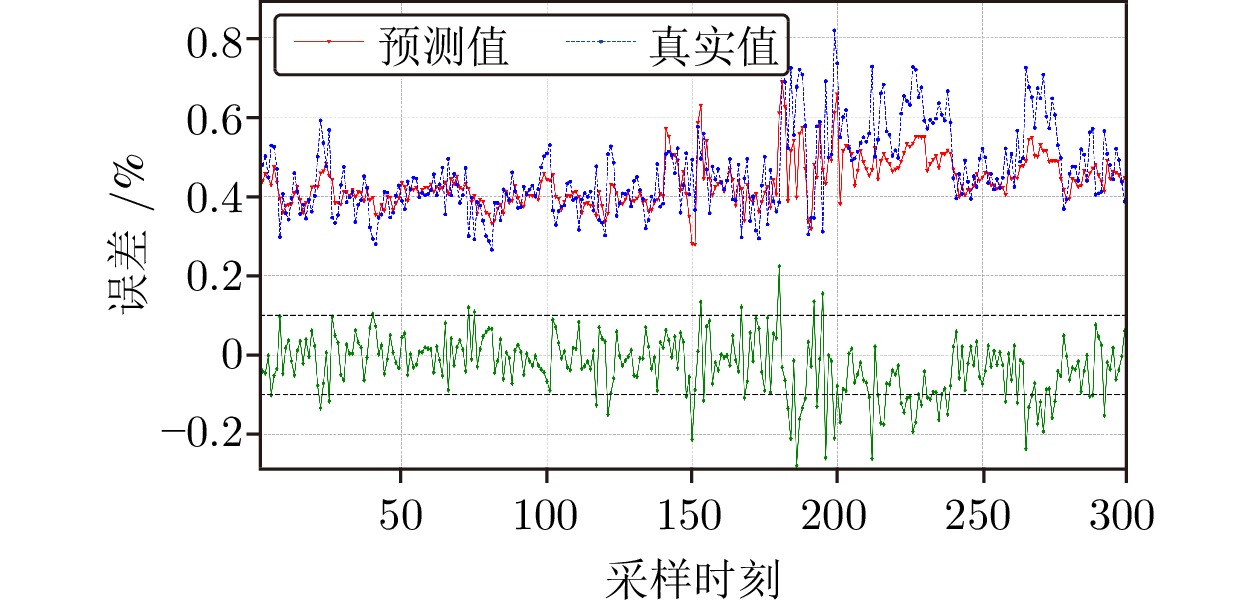
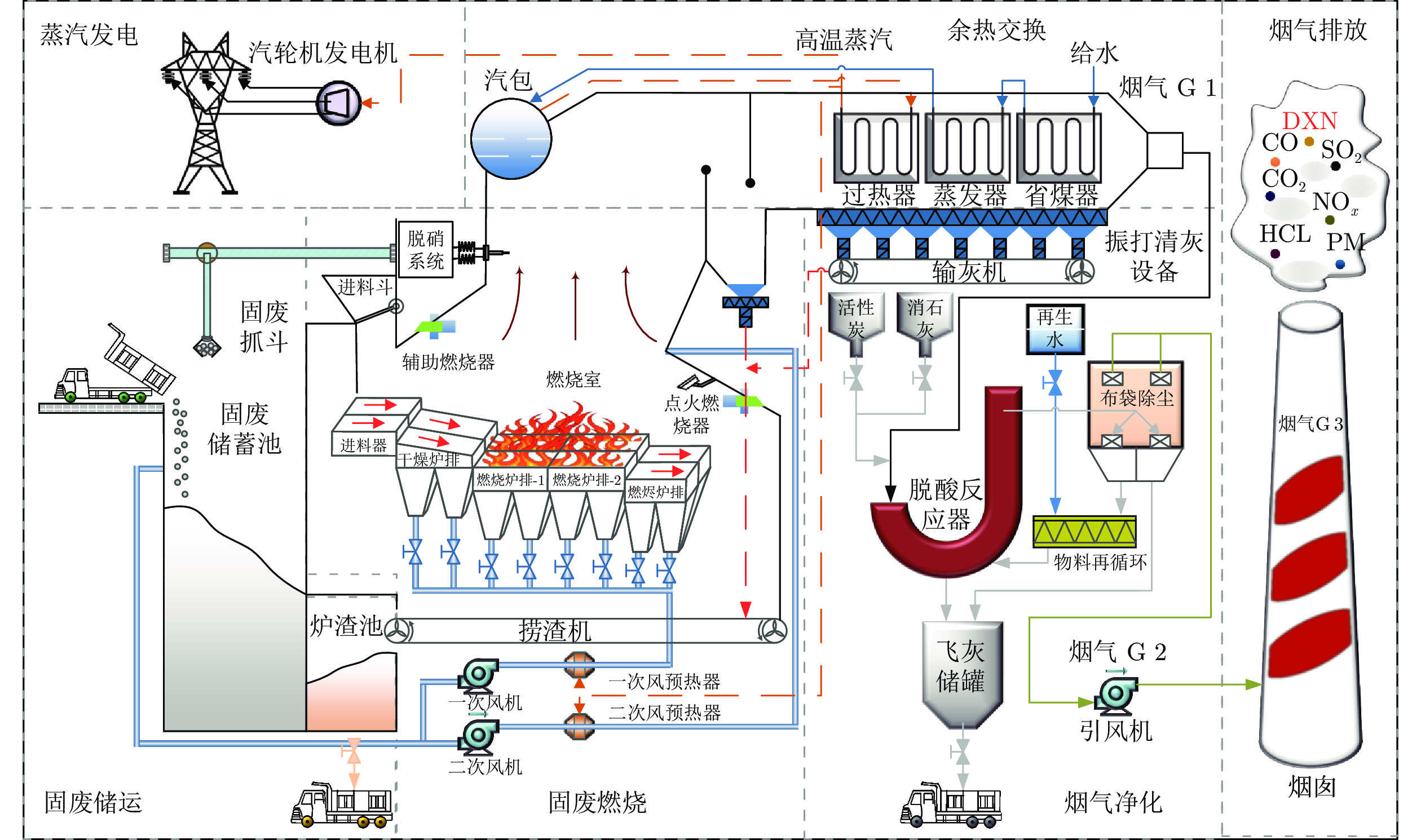
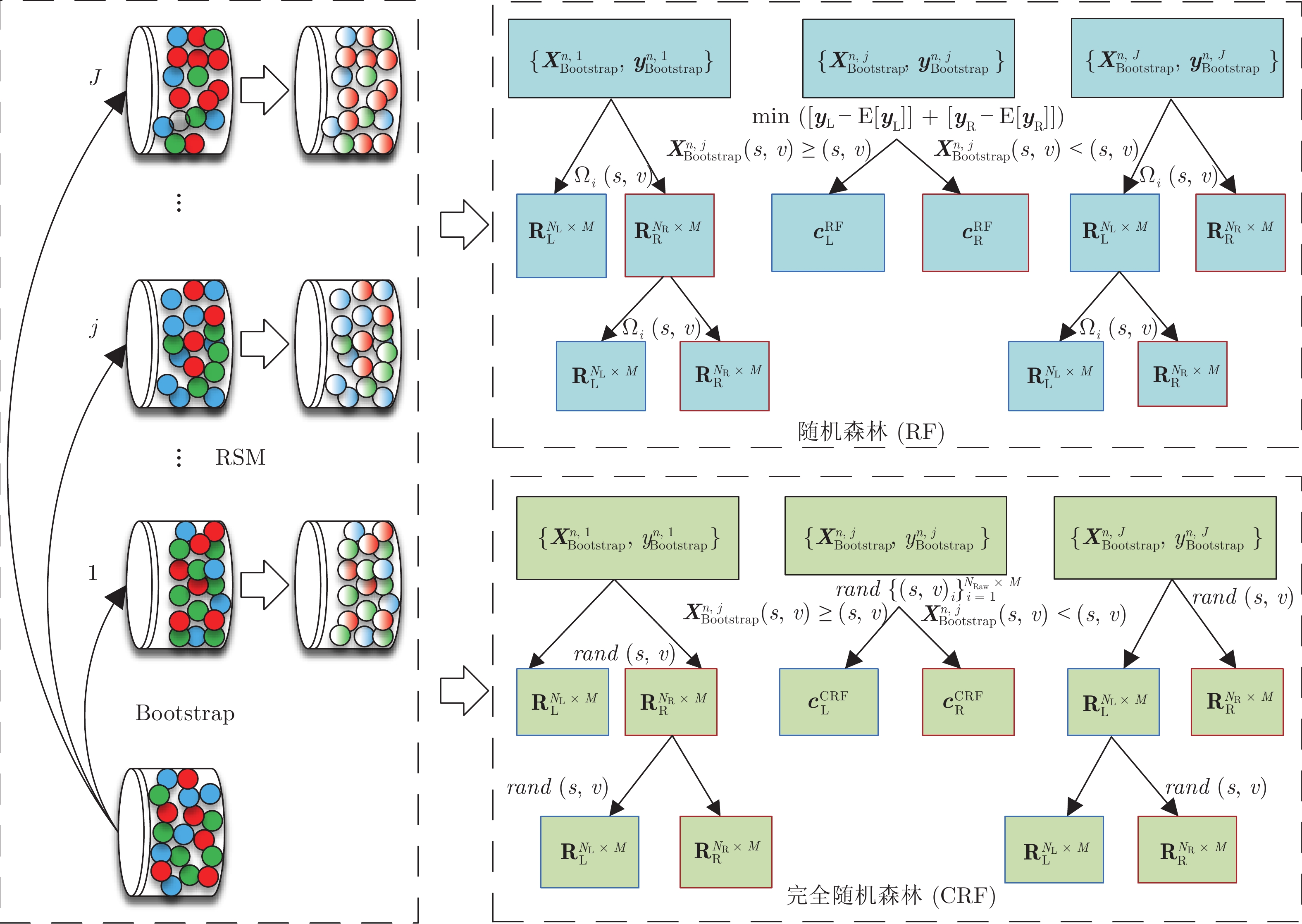
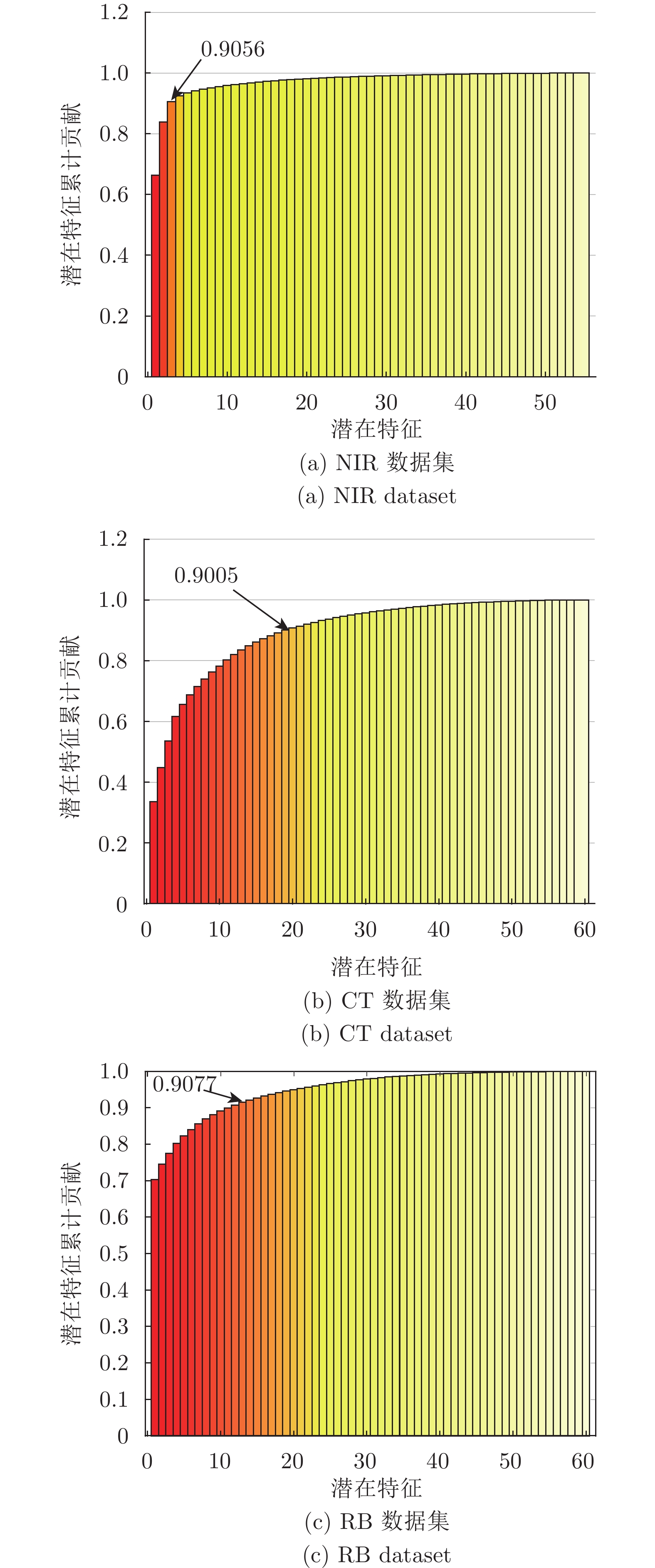
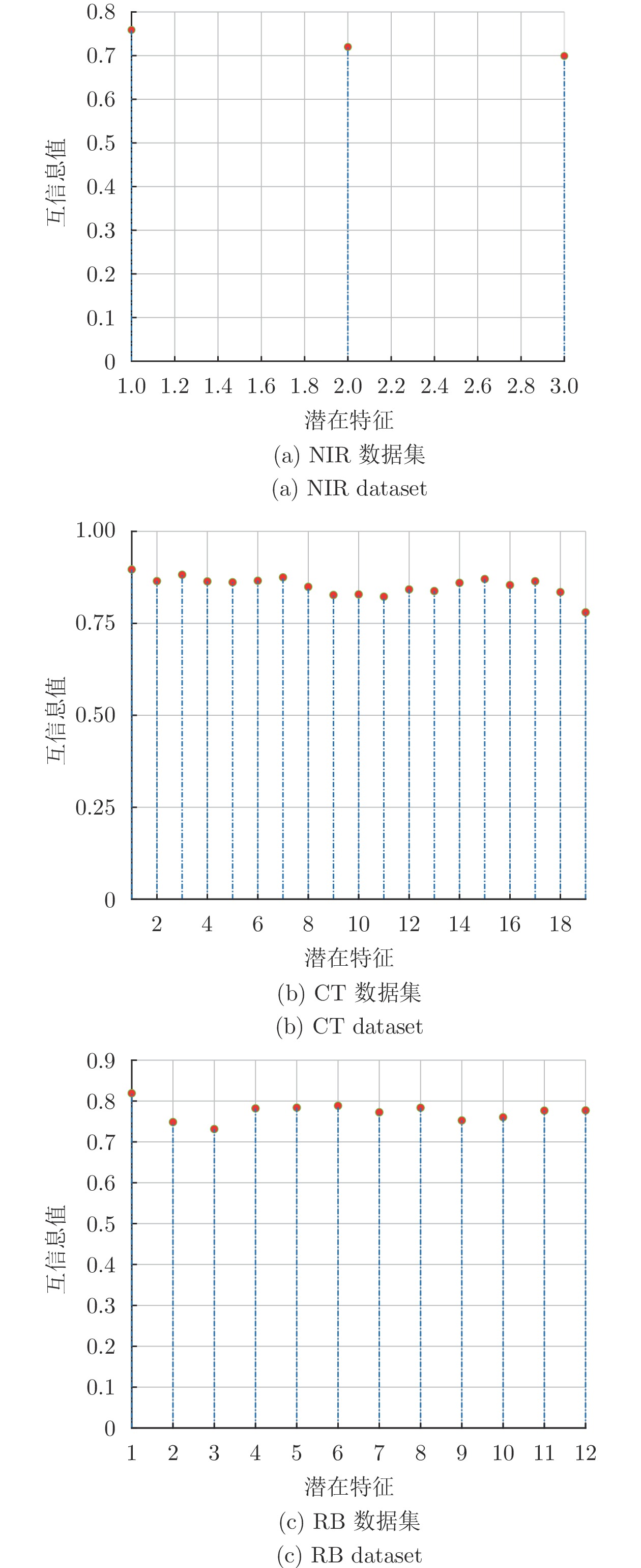
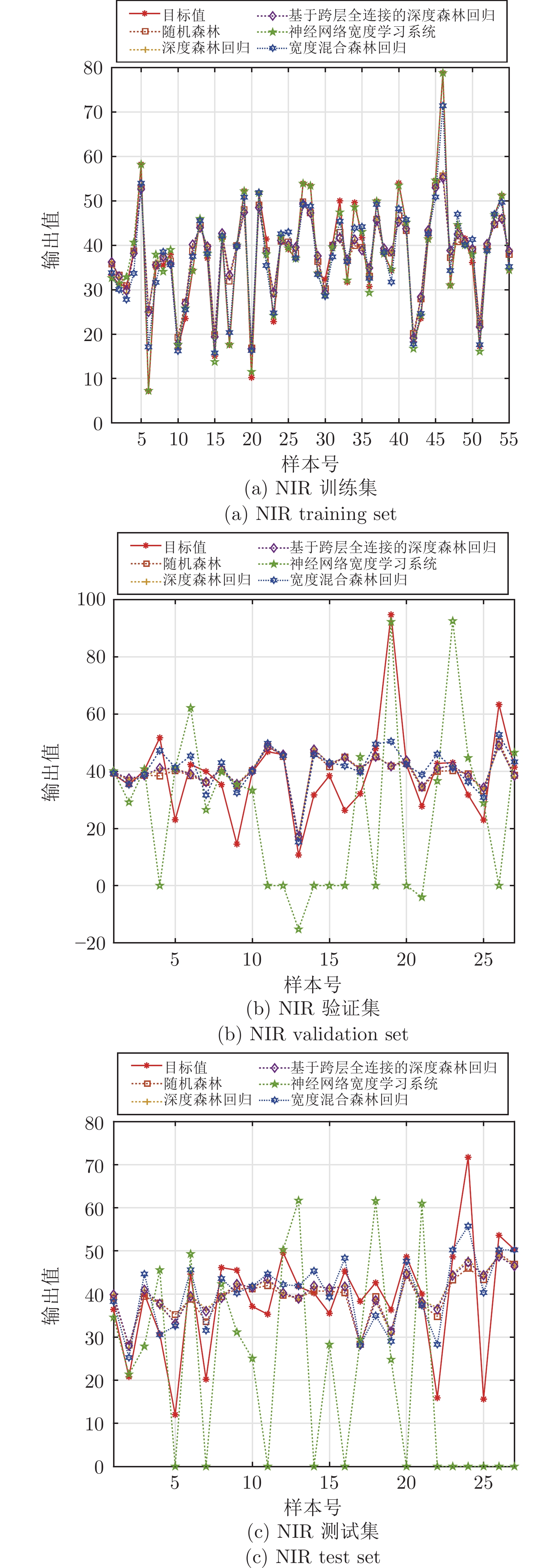
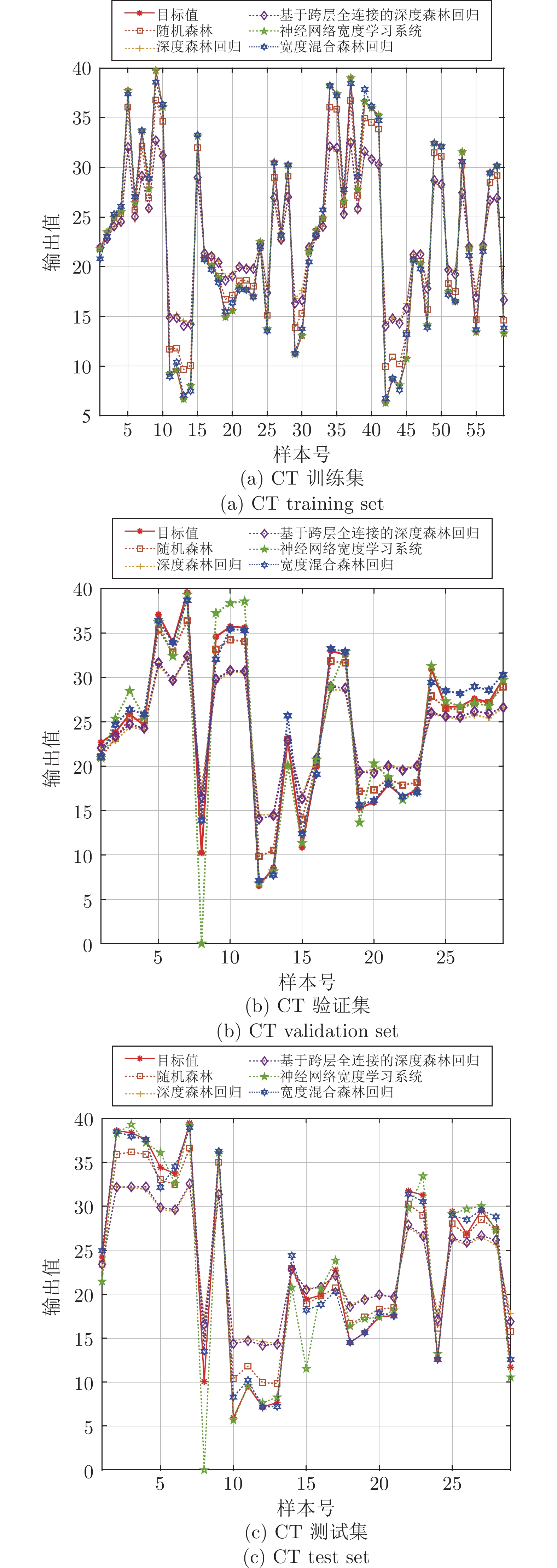
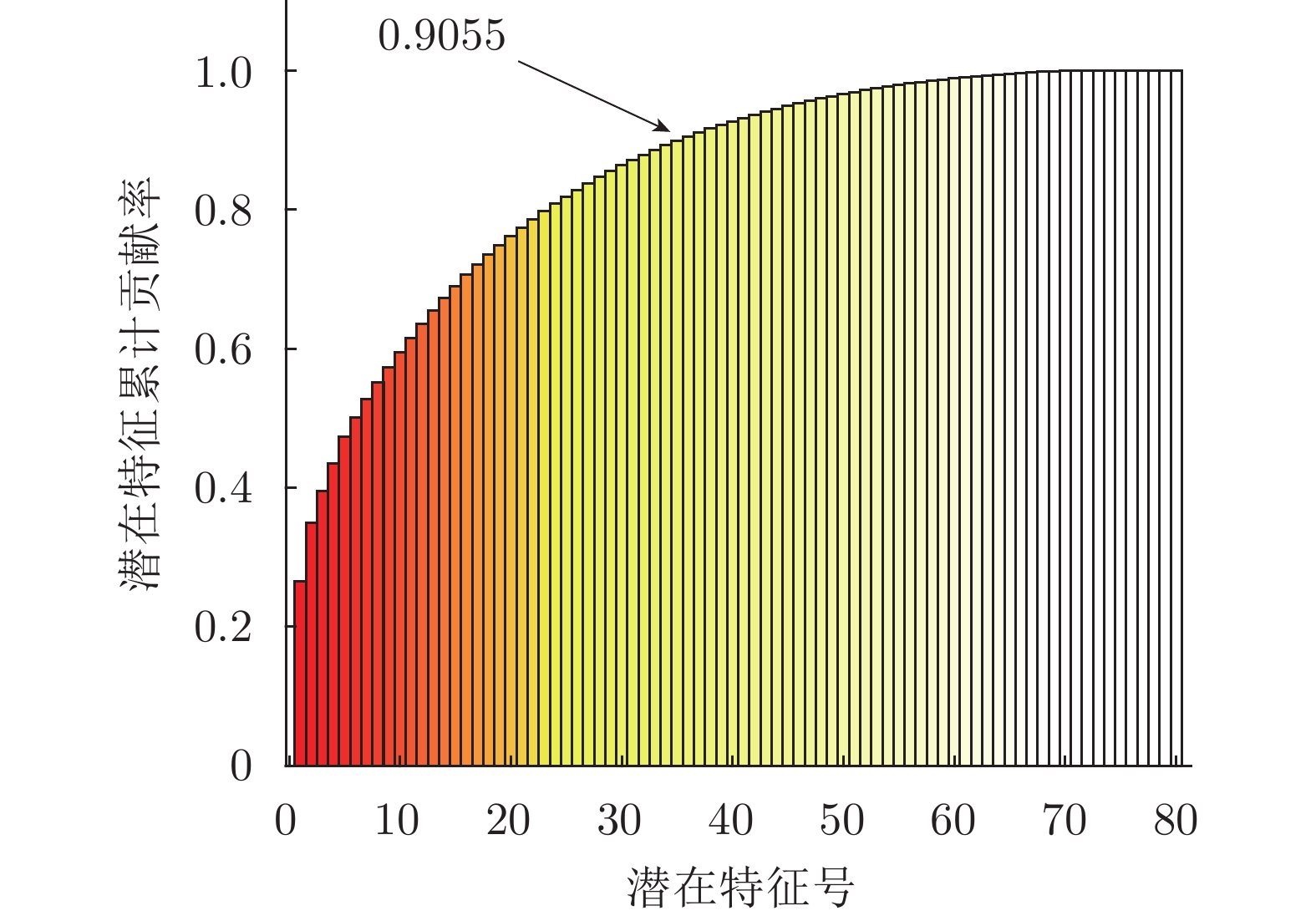
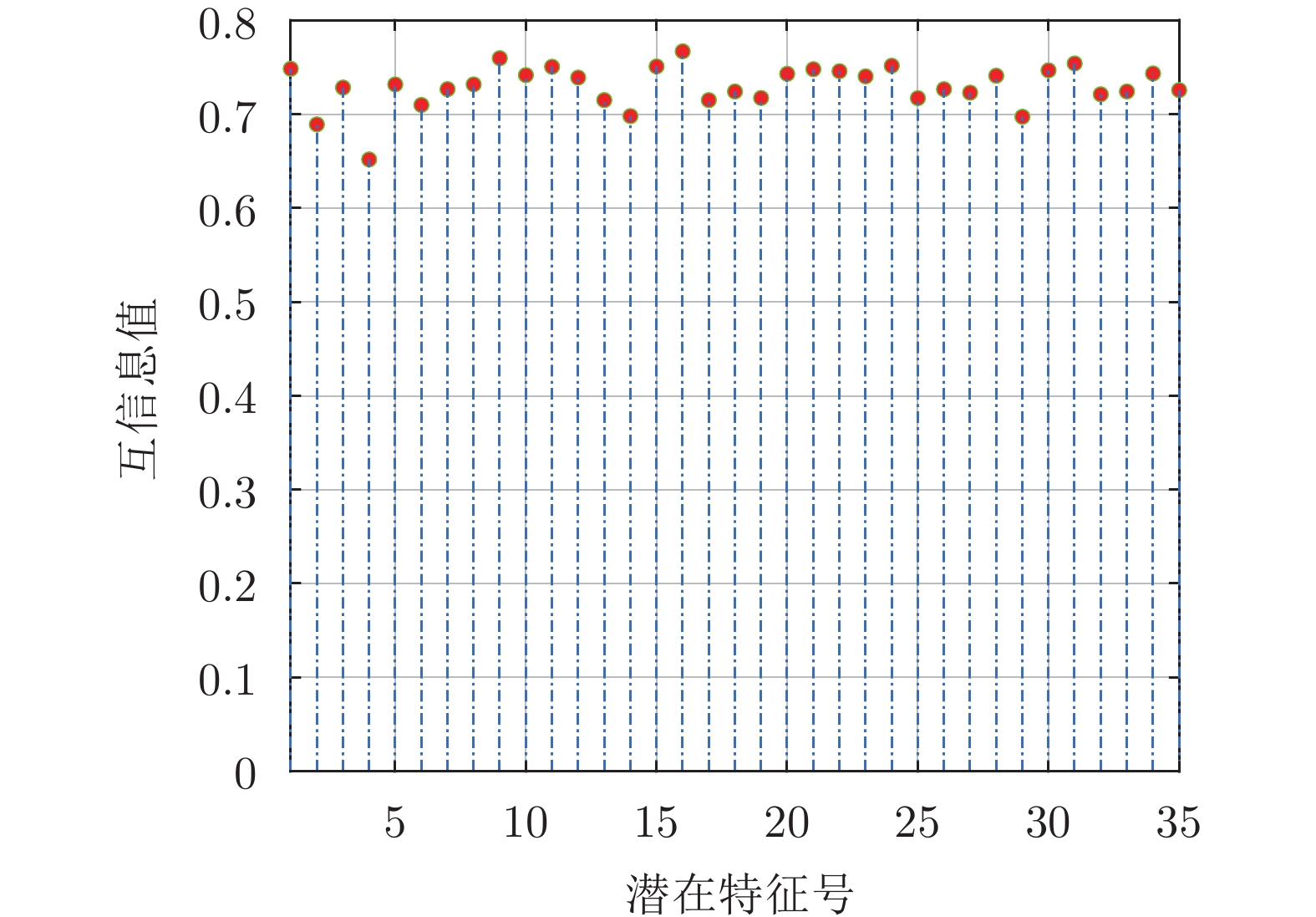
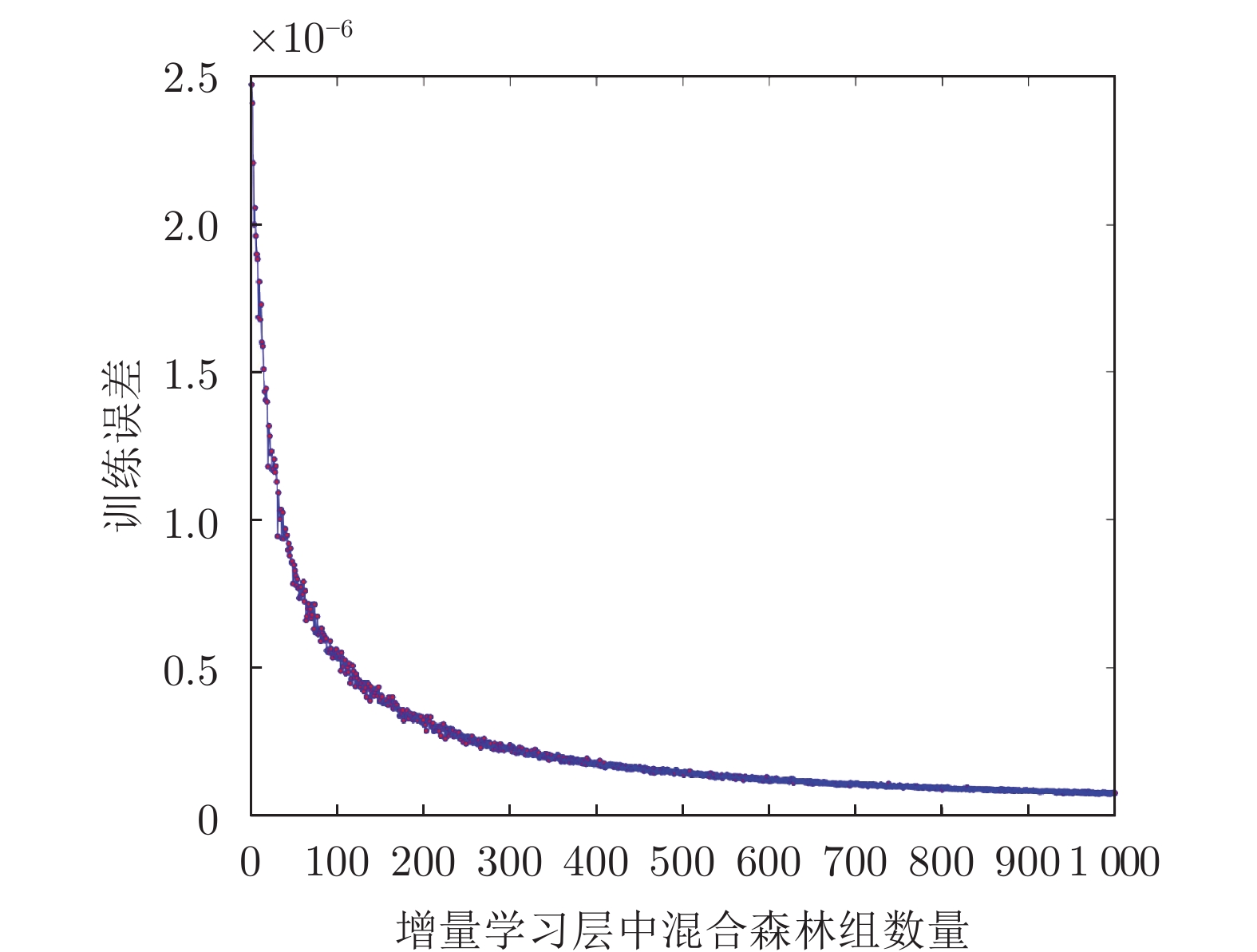
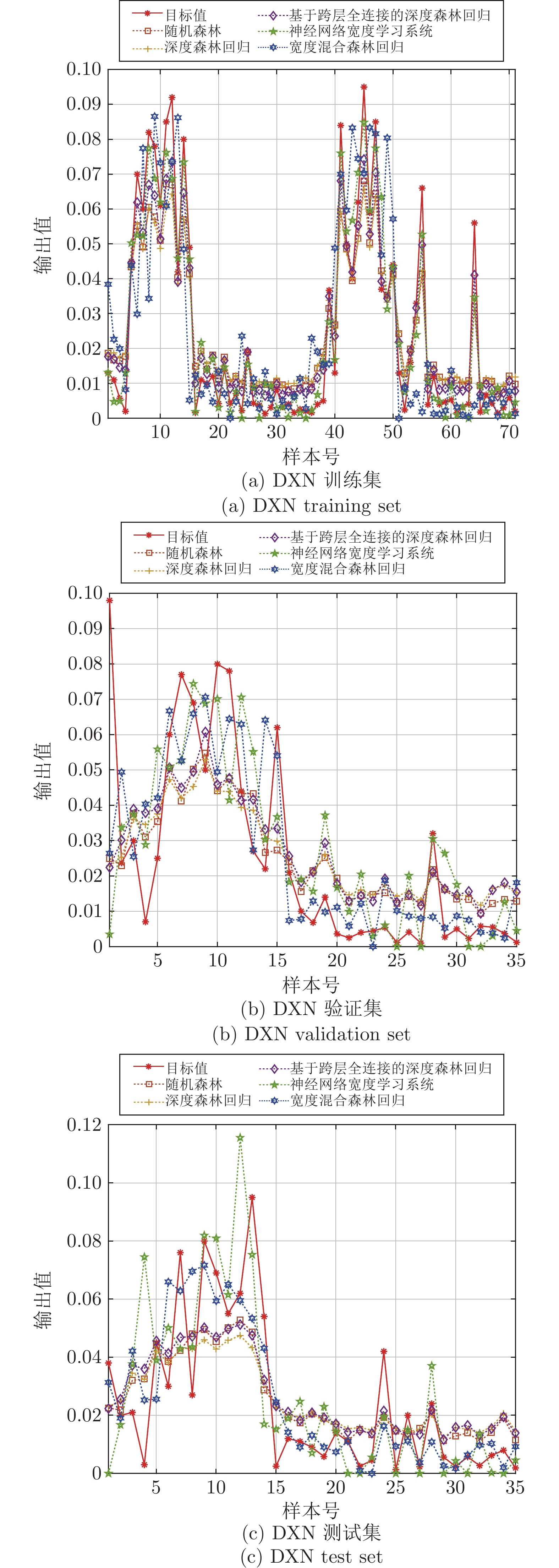
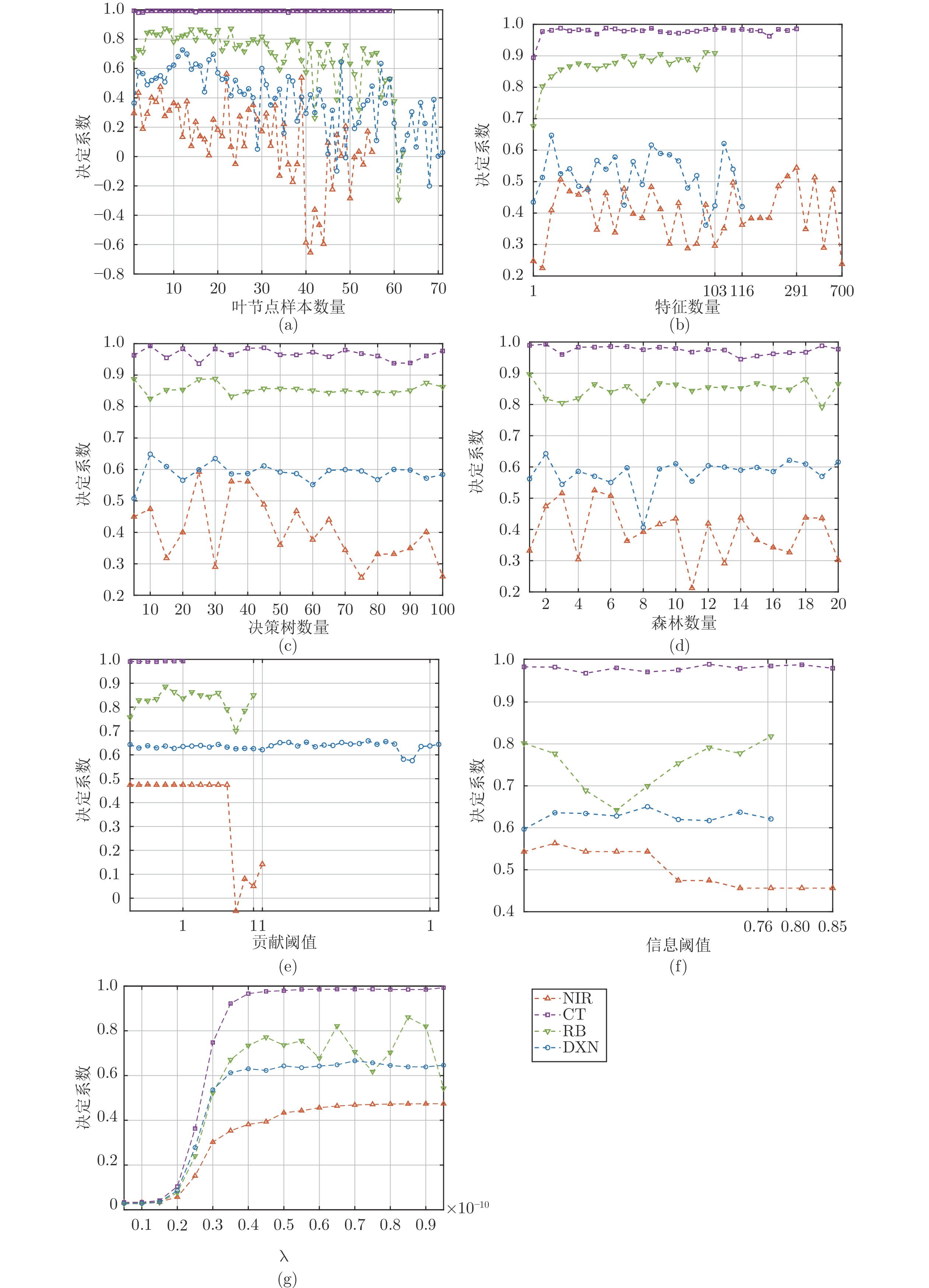
二噁英是城市固废焚烧过程排放的痕量有机污染物. 受限于相关技术的复杂度和高成本, 二噁英排放浓度检测的大时滞已成为制约城市固废焚烧过程优化控制的关键因素之一. 虽然具有低成本、快响应、高精度等特点的数据驱动软测量模型能够有效解决上述问题, 但二噁英建模方法必须要契合数据的小样本、高维度特性. 对此, 提出了由特征映射层、潜在特征提取层、特征增强层和增量学习层组成的宽度混合森林回归软测量方法. 首先, 构建由随机森林和完全随机森林构成的混合森林组进行高维特征映射; 其次, 依据贡献率对全联接混合矩阵进行潜在特征提取, 采用信息度量准则保证潜在有价值信息的最大化传递和最小化冗余, 降低模型的复杂度和计算消耗; 然后, 基于所提取潜在信息训练特征增强层以增强特征表征能力; 最后, 通过增量式学习策略构建增量学习层后采用Moore-Penrose伪逆获得权重矩阵. 在基准数据集和城市固废焚烧过程二噁英数据集上的实验结果表明了方法的有效性和优越性.
二噁英是城市固废焚烧过程排放的痕量有机污染物. 受限于相关技术的复杂度和高成本, 二噁英排放浓度检测的大时滞已成为制约城市固废焚烧过程优化控制的关键因素之一. 虽然具有低成本、快响应、高精度等特点的数据驱动软测量模型能够有效解决上述问题, 但二噁英建模方法必须要契合数据的小样本、高维度特性. 对此, 提出了由特征映射层、潜在特征提取层、特征增强层和增量学习层组成的宽度混合森林回归软测量方法. 首先, 构建由随机森林和完全随机森林构成的混合森林组进行高维特征映射; 其次, 依据贡献率对全联接混合矩阵进行潜在特征提取, 采用信息度量准则保证潜在有价值信息的最大化传递和最小化冗余, 降低模型的复杂度和计算消耗; 然后, 基于所提取潜在信息训练特征增强层以增强特征表征能力; 最后, 通过增量式学习策略构建增量学习层后采用Moore-Penrose伪逆获得权重矩阵. 在基准数据集和城市固废焚烧过程二噁英数据集上的实验结果表明了方法的有效性和优越性.



2023, 49(2): 366-382.
doi: 10.16383/j.aas.c200237
摘要:
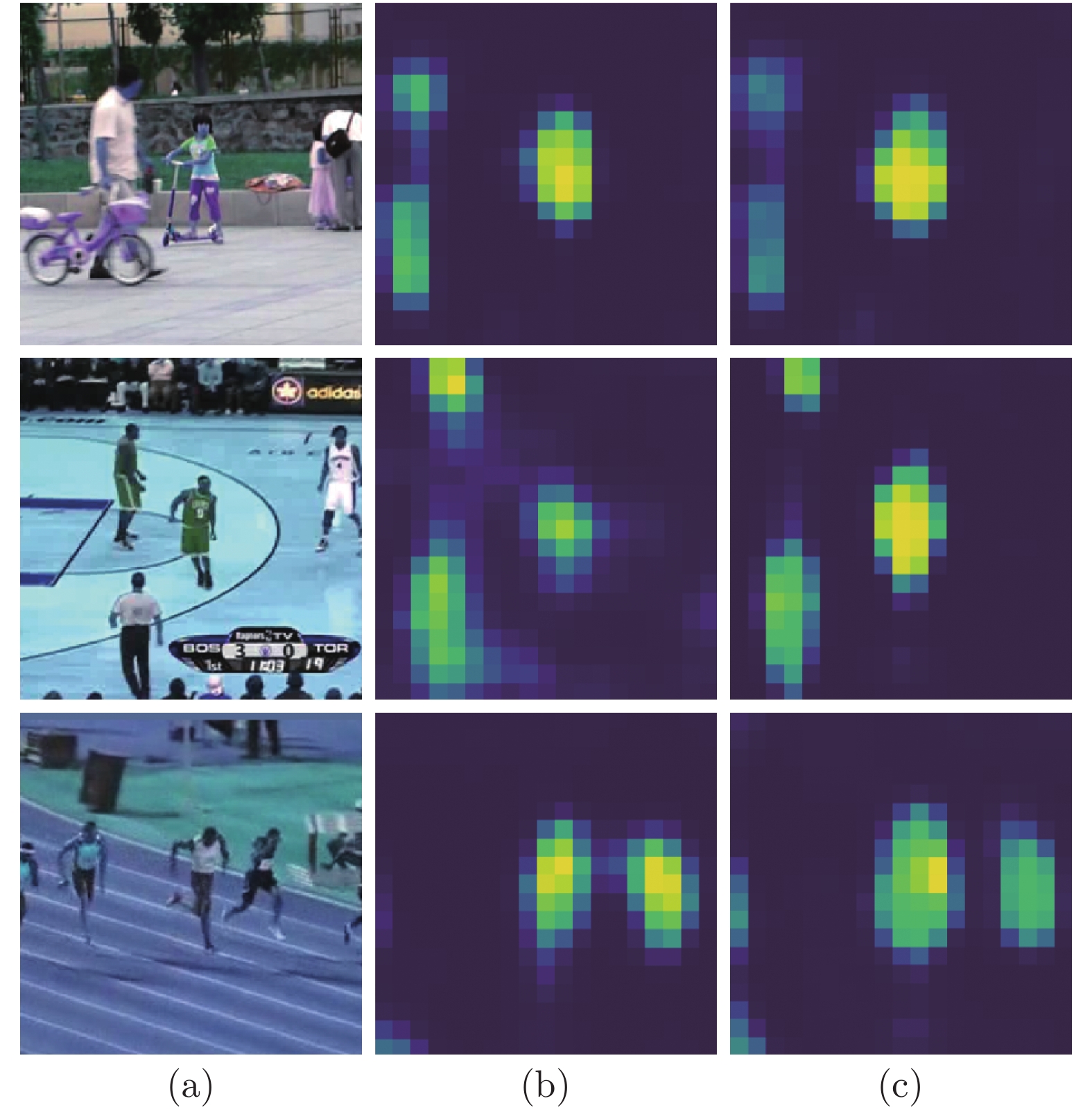
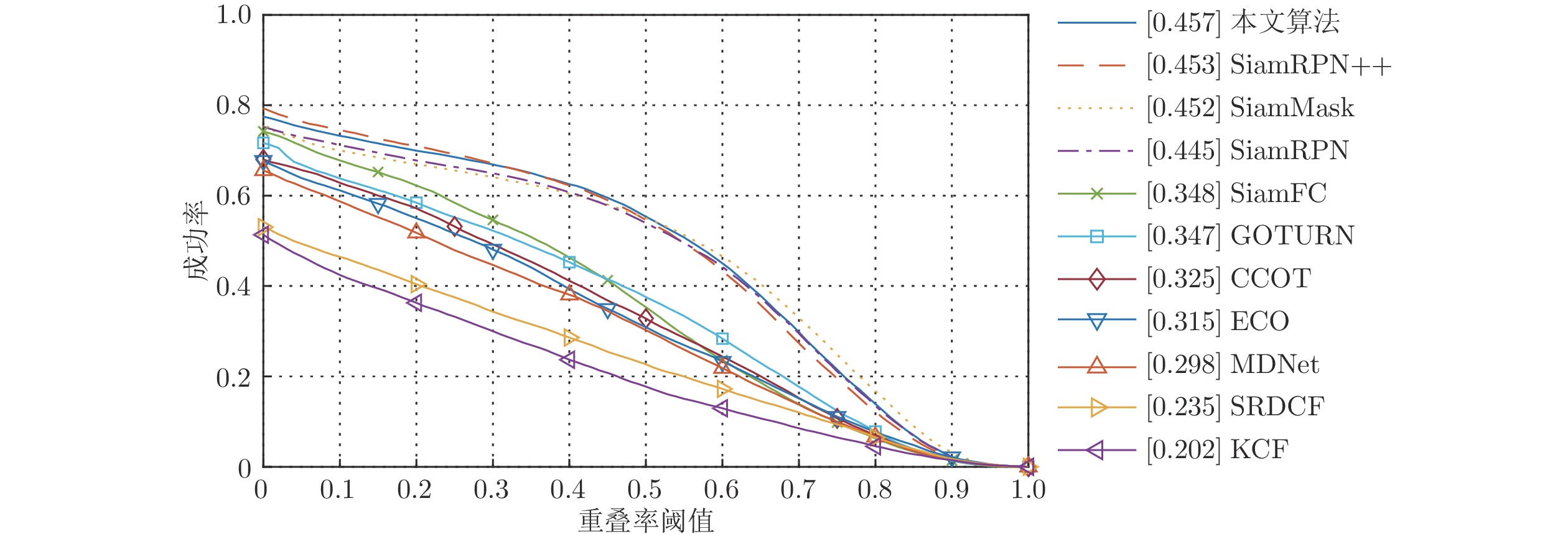
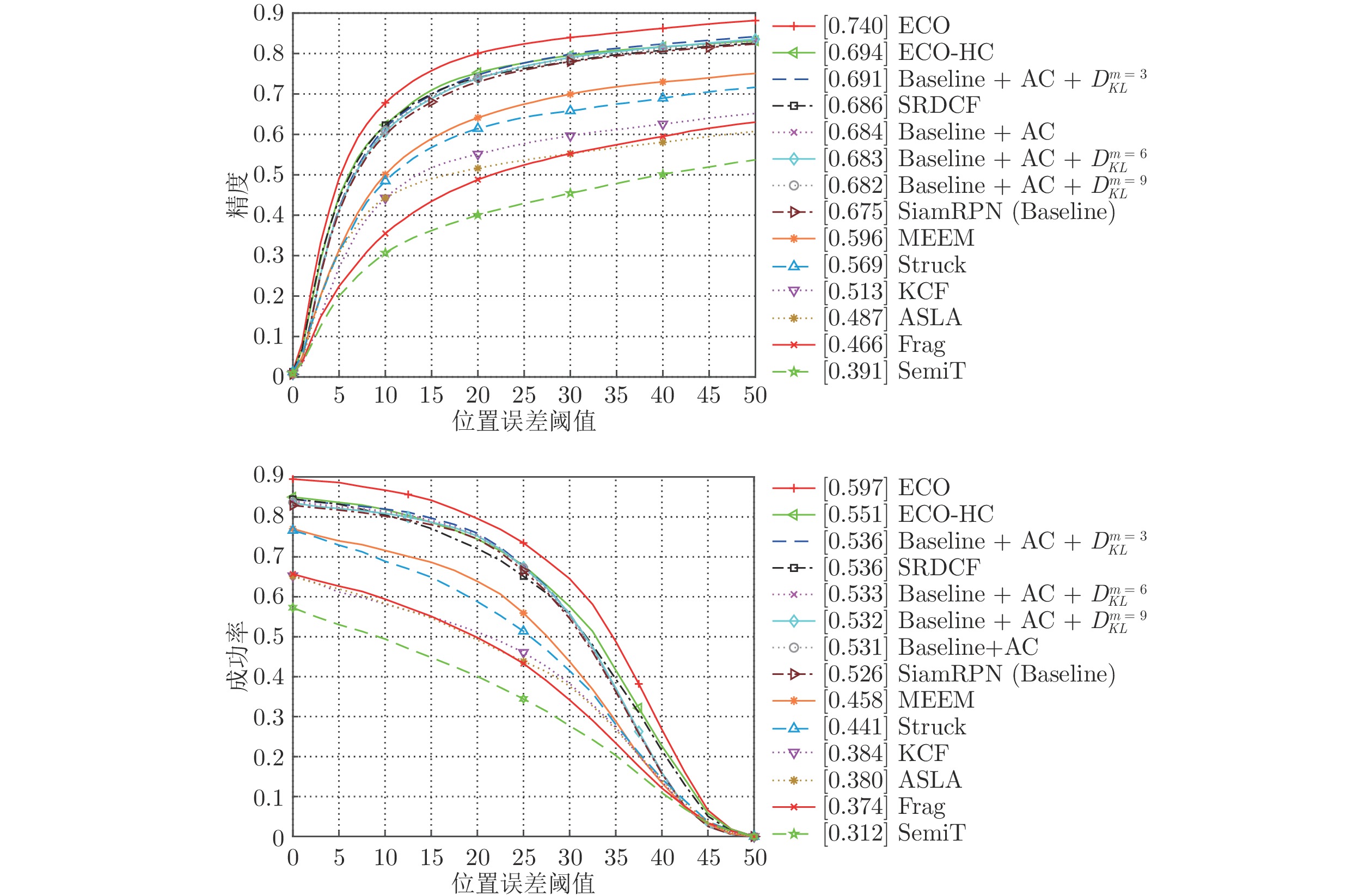
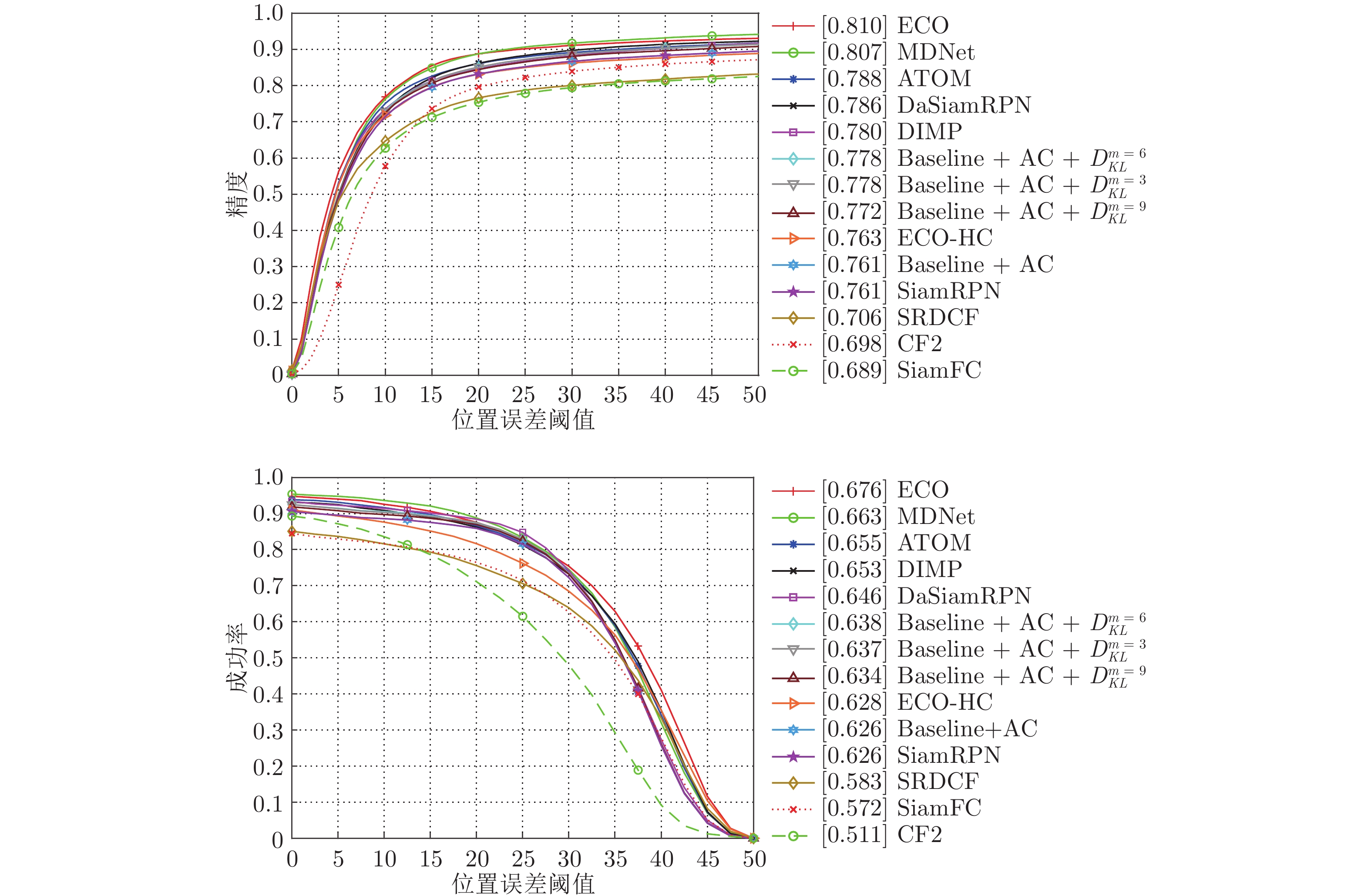
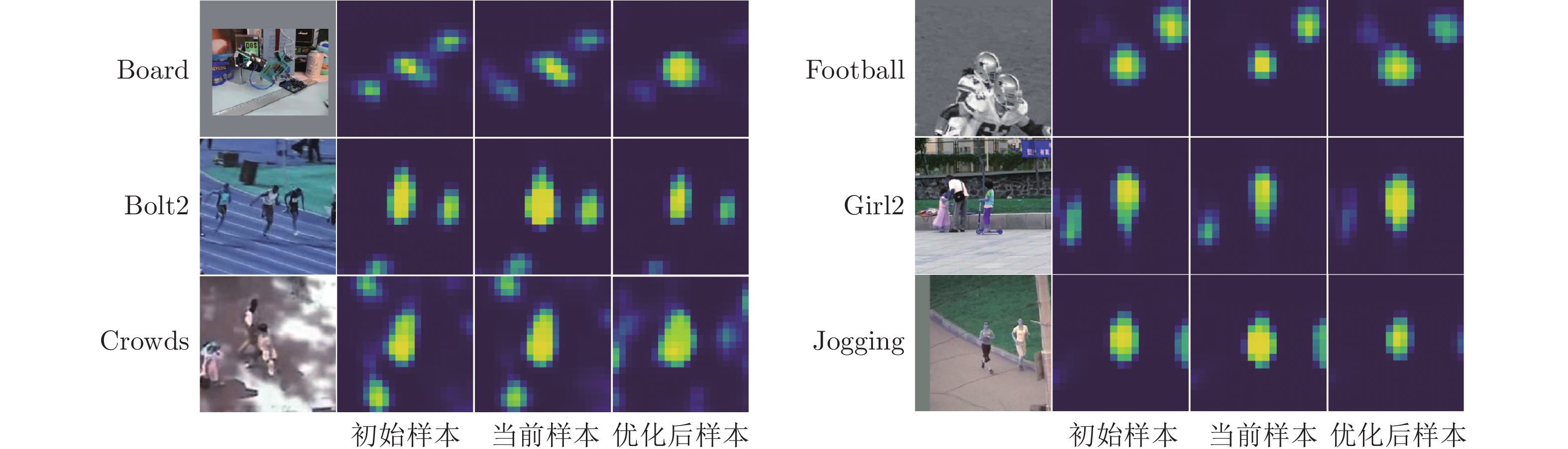
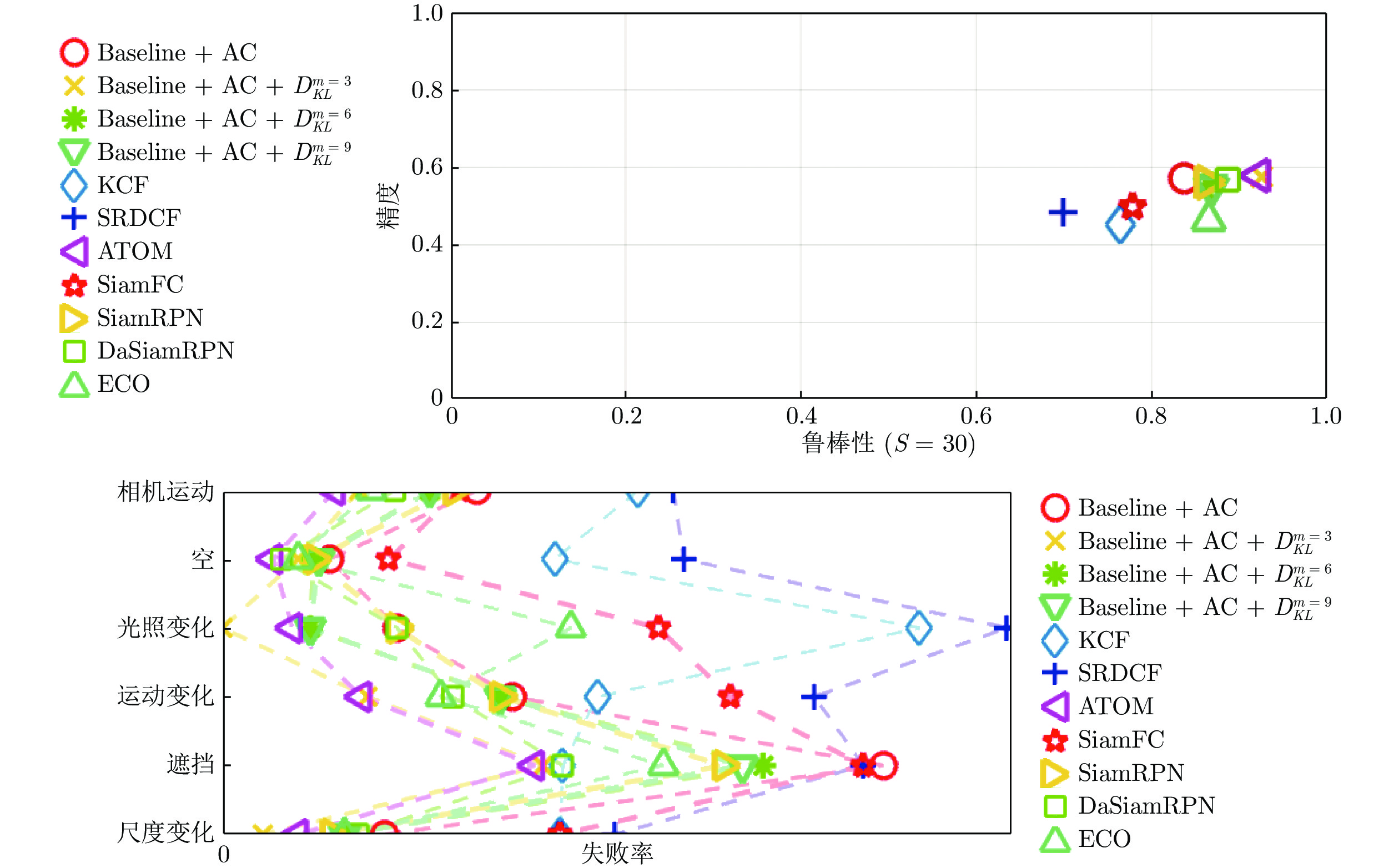
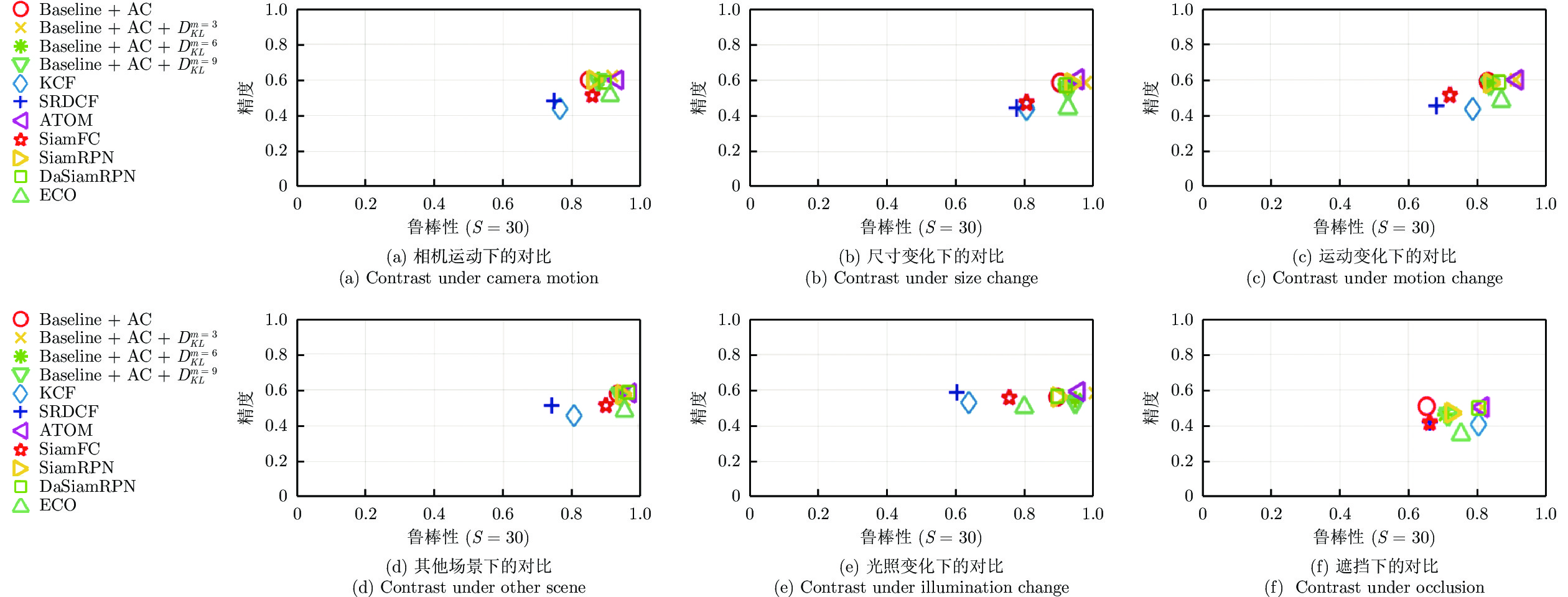
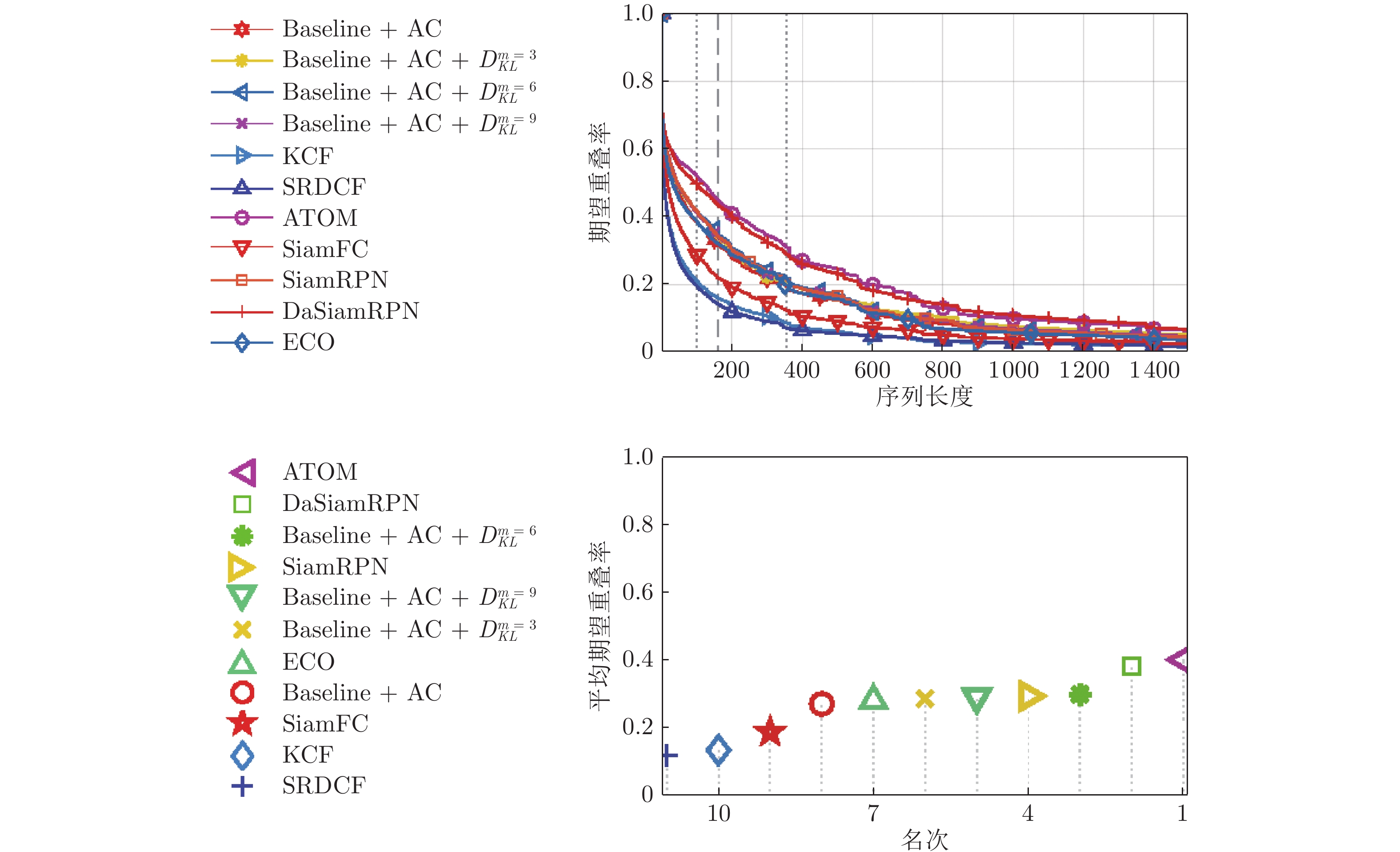
现有基于孪生网络的单目标跟踪算法能够实现很高的跟踪精度, 但是这些跟踪器不具备在线更新的能力, 而且其在跟踪时很依赖目标的语义信息, 这导致基于孪生网络的单目标跟踪算法在面对具有相似语义信息的干扰物时会跟踪失败. 为了解决这个问题, 提出了一种异步相关响应的计算模型, 并提出一种高效利用不同帧间目标语义信息的方法. 在此基础上, 提出了一种新的具有判别性的跟踪算法. 同时为了解决判别模型使用一阶优化算法收敛慢的问题, 使用近似二阶优化的方法更新判别模型. 为验证所提算法的有效性, 分别在Got-10k、TC128、OTB和VOT2018 数据集上做了对比实验, 实验结果表明, 该方法可以明显地改进基准算法的性能.
现有基于孪生网络的单目标跟踪算法能够实现很高的跟踪精度, 但是这些跟踪器不具备在线更新的能力, 而且其在跟踪时很依赖目标的语义信息, 这导致基于孪生网络的单目标跟踪算法在面对具有相似语义信息的干扰物时会跟踪失败. 为了解决这个问题, 提出了一种异步相关响应的计算模型, 并提出一种高效利用不同帧间目标语义信息的方法. 在此基础上, 提出了一种新的具有判别性的跟踪算法. 同时为了解决判别模型使用一阶优化算法收敛慢的问题, 使用近似二阶优化的方法更新判别模型. 为验证所提算法的有效性, 分别在Got-10k、TC128、OTB和VOT2018 数据集上做了对比实验, 实验结果表明, 该方法可以明显地改进基准算法的性能.

2023, 49(2): 383-398.
doi: 10.16383/j.aas.c220172
摘要:
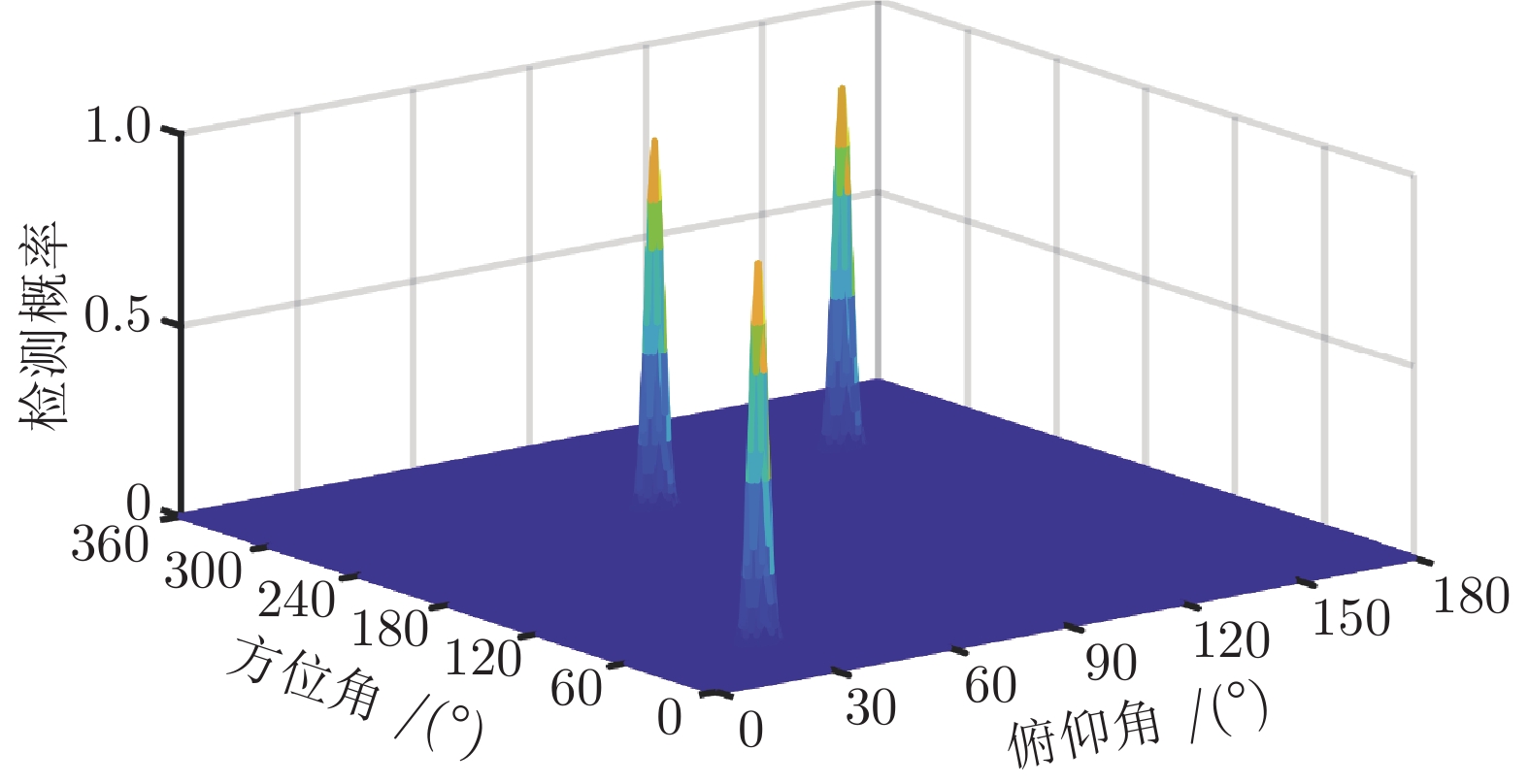
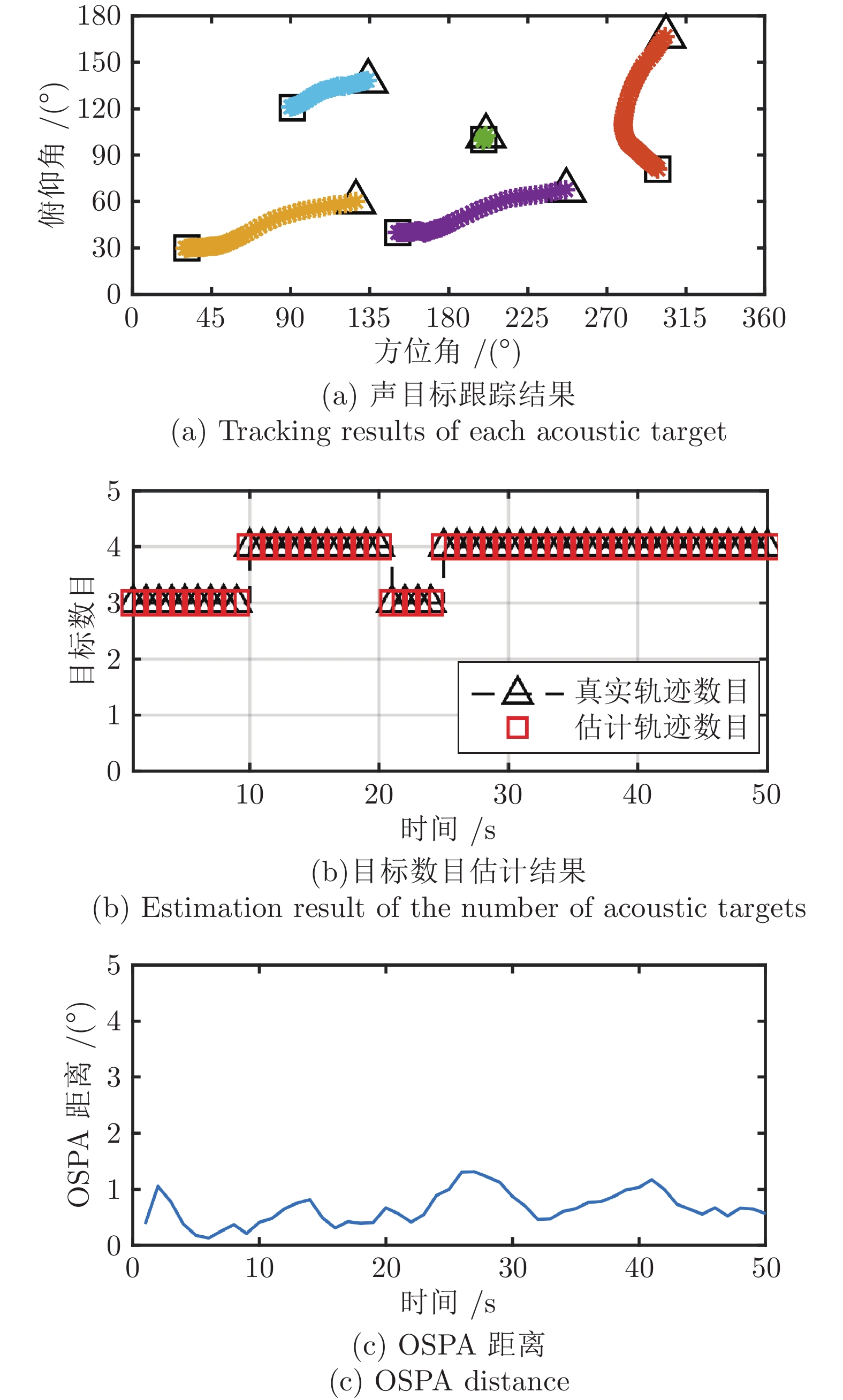
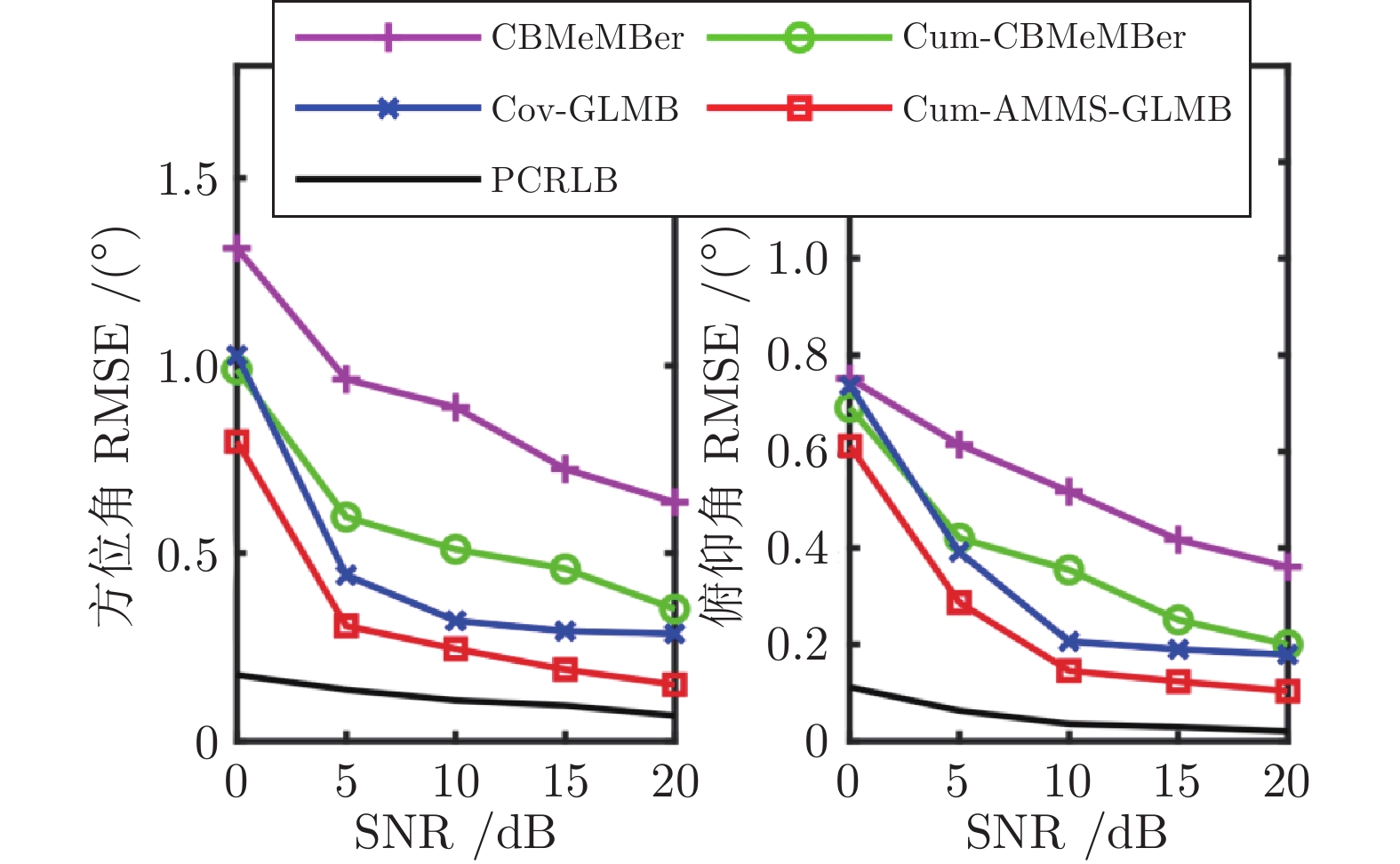
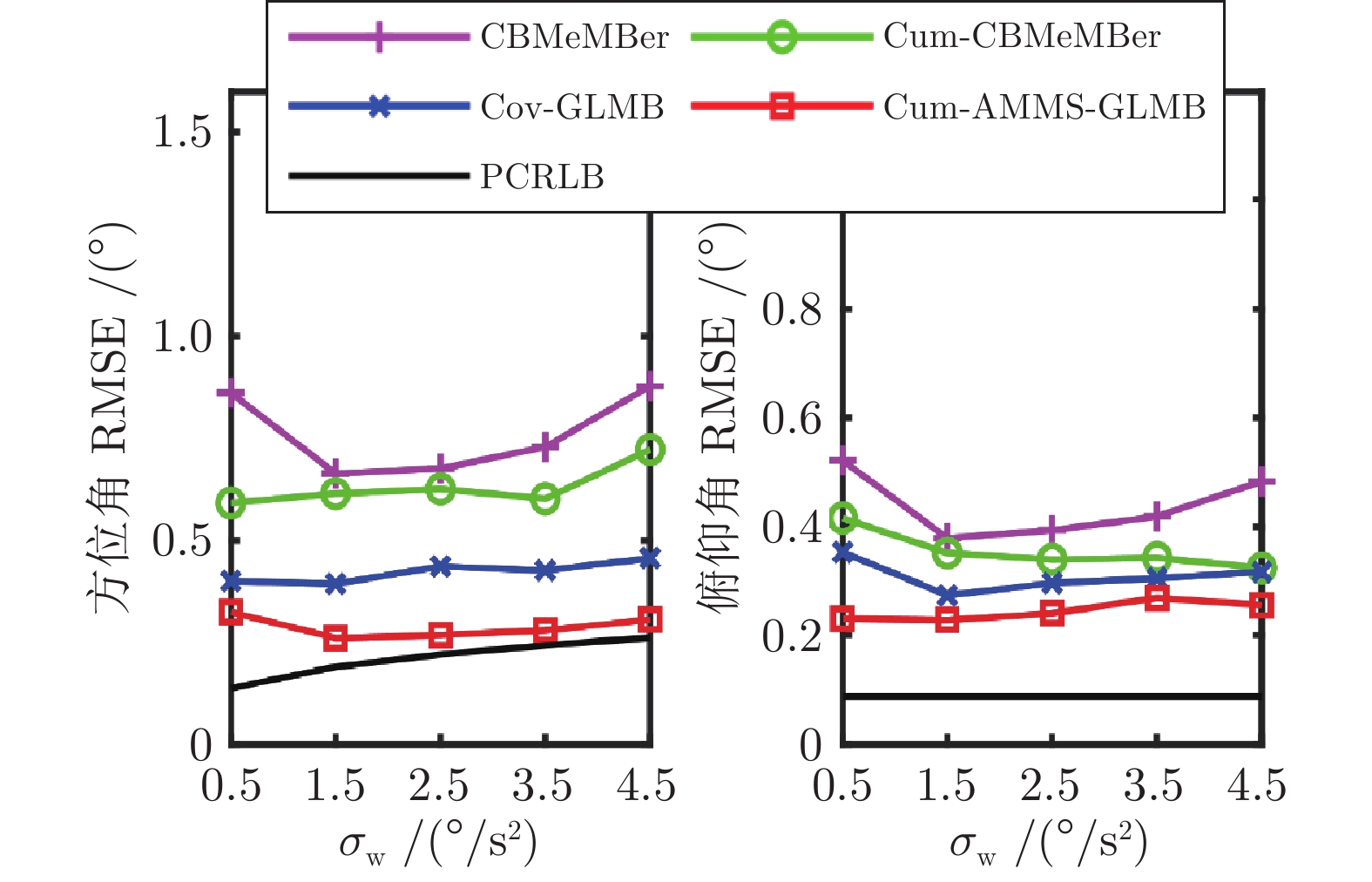
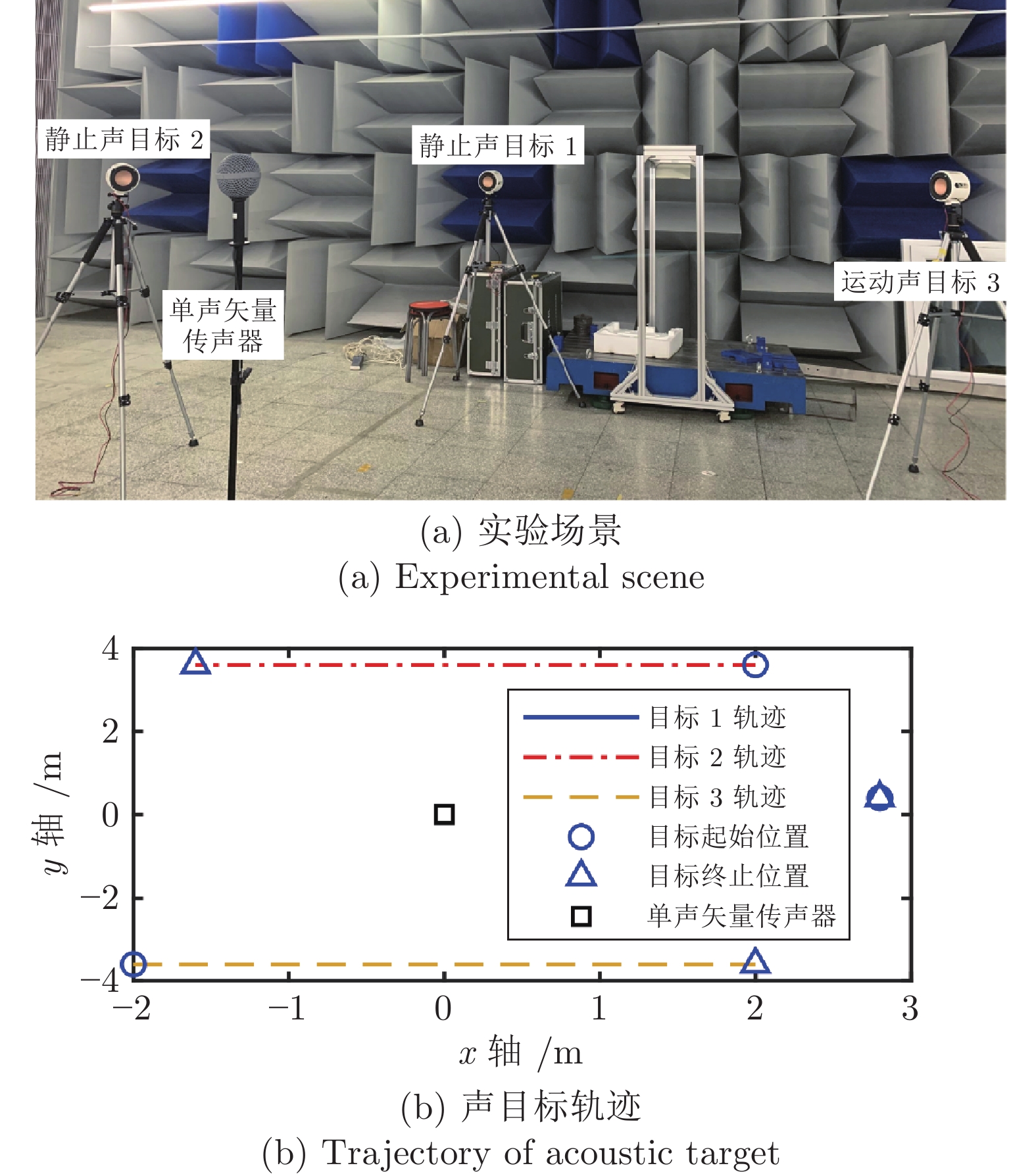
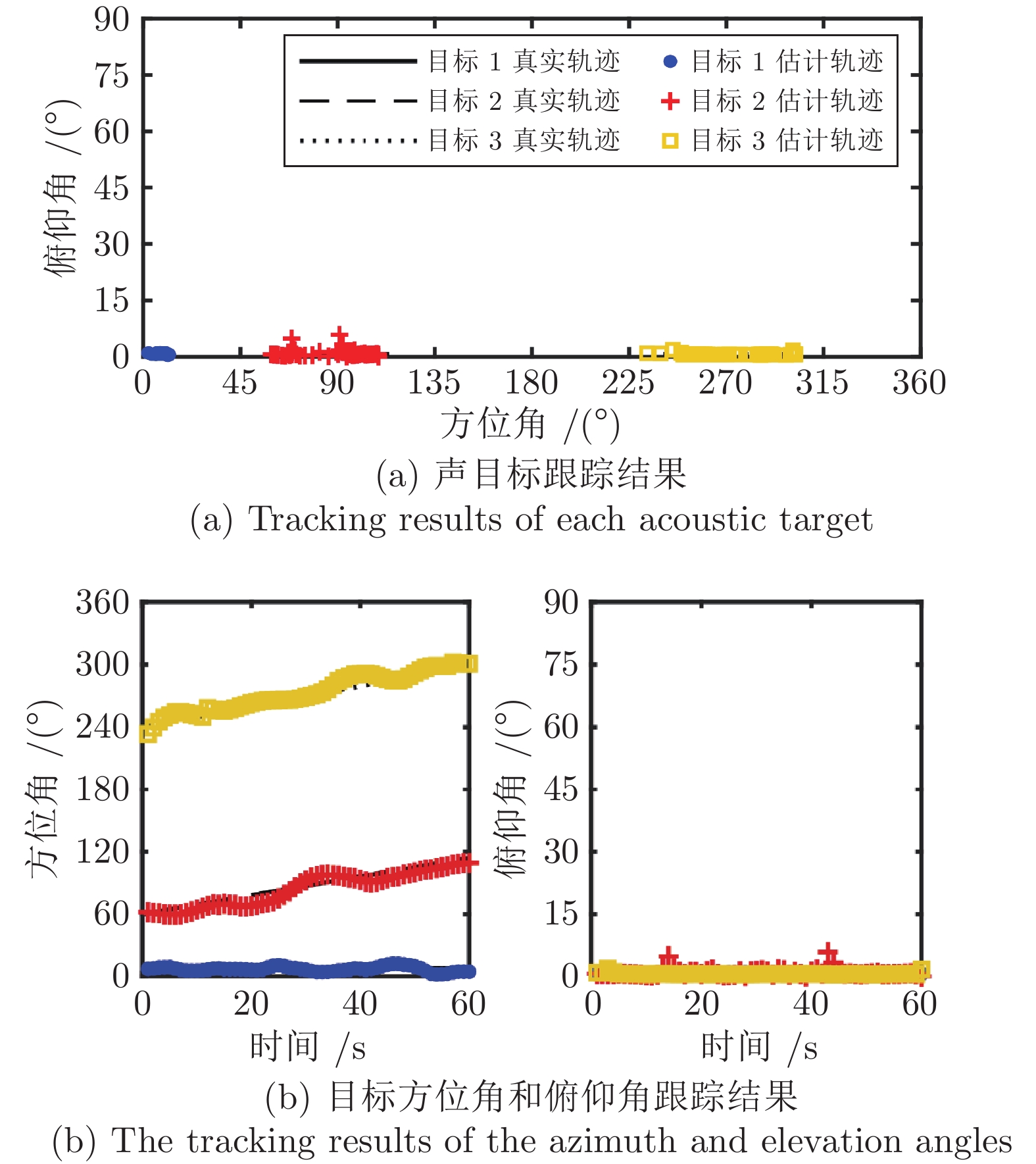
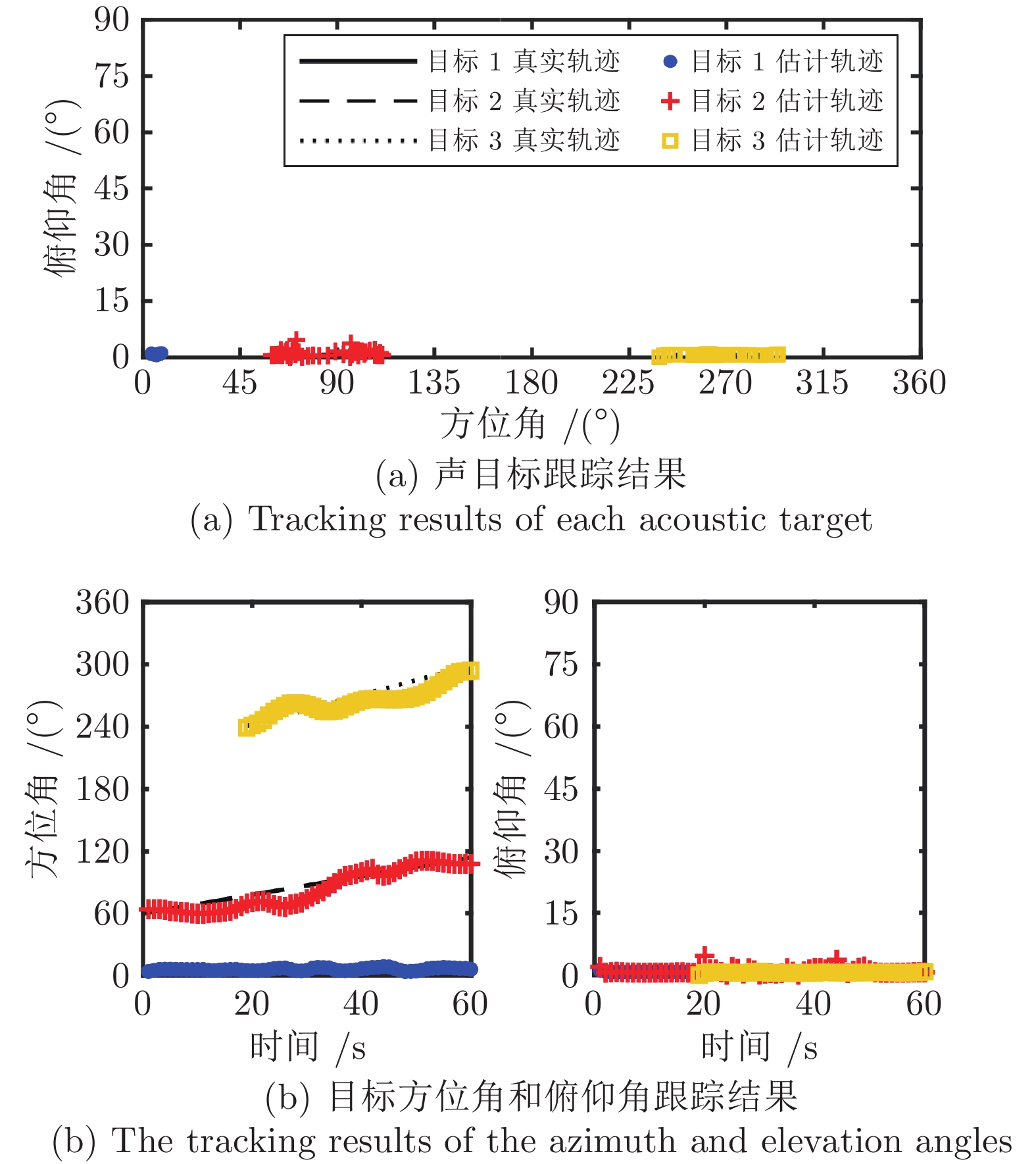
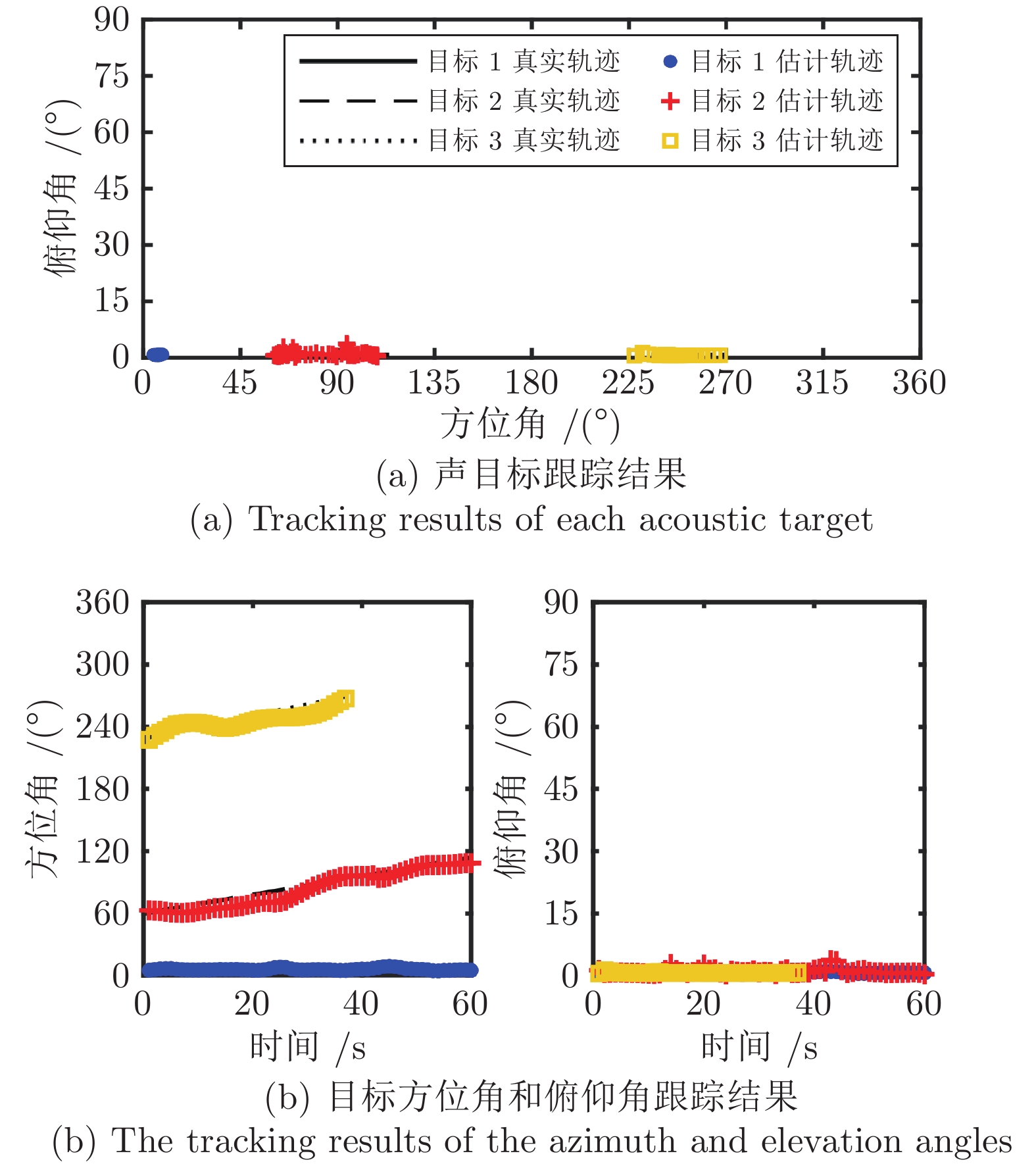
为解决单声矢量传声器(Acoustic vector sensor, AVS)可跟踪声目标数目少、跟踪性能差的问题, 提出了基于AVS虚拟扩展的多机动声目标跟踪算法. 首先, 引入高阶累积量预处理过程并建立高阶似然函数, 不仅能够抑制高斯噪声、提高估计精度, 还可通过AVS的虚拟扩展增加可跟踪目标数目. 然后, 在边缘化\begin{document}$\delta$\end{document} ![]()
![]()
\begin{document}$\delta$\end{document} ![]()
![]()
\begin{document}$\delta$\end{document} ![]()
![]()
\begin{document}$\delta$\end{document} ![]()
![]()
\begin{document}$\delta$\end{document} ![]()
![]()
\begin{document}$\acute{e}$\end{document} ![]()
![]()
为解决单声矢量传声器(Acoustic vector sensor, AVS)可跟踪声目标数目少、跟踪性能差的问题, 提出了基于AVS虚拟扩展的多机动声目标跟踪算法. 首先, 引入高阶累积量预处理过程并建立高阶似然函数, 不仅能够抑制高斯噪声、提高估计精度, 还可通过AVS的虚拟扩展增加可跟踪目标数目. 然后, 在边缘化

2023, 49(2): 399-414.
doi: 10.16383/j.aas.c210696
摘要:
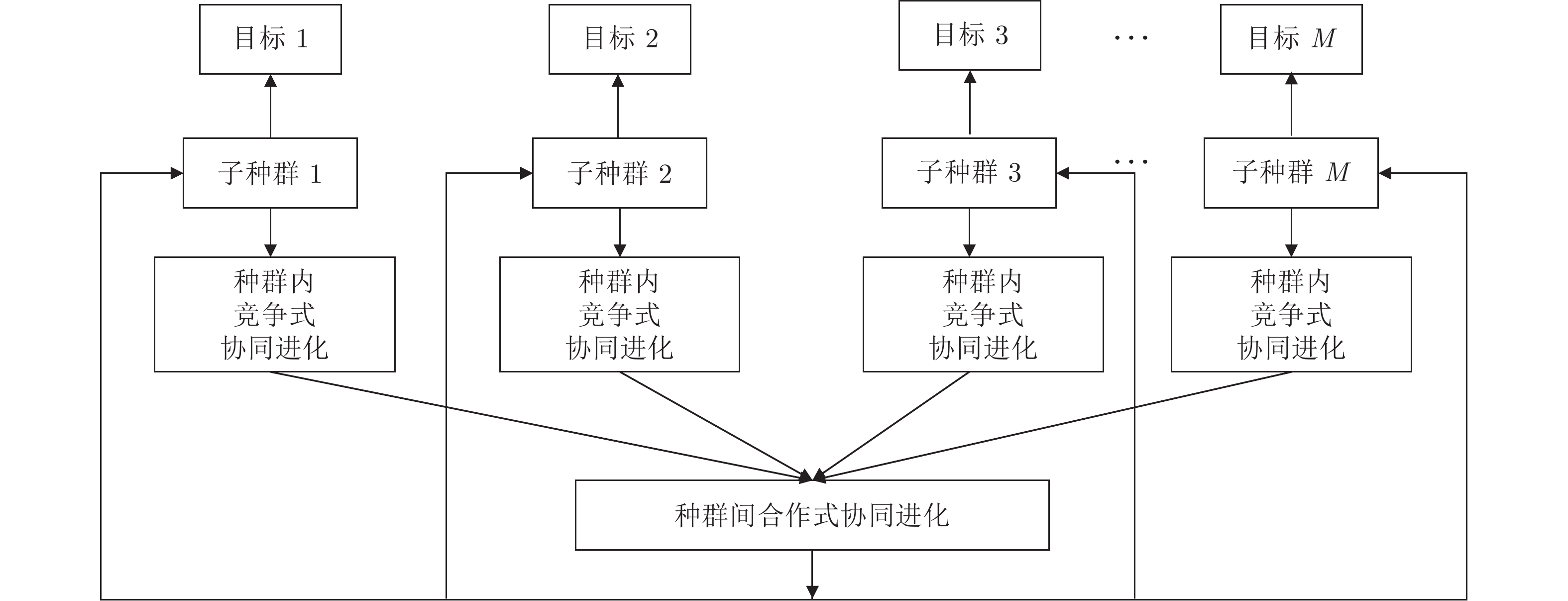
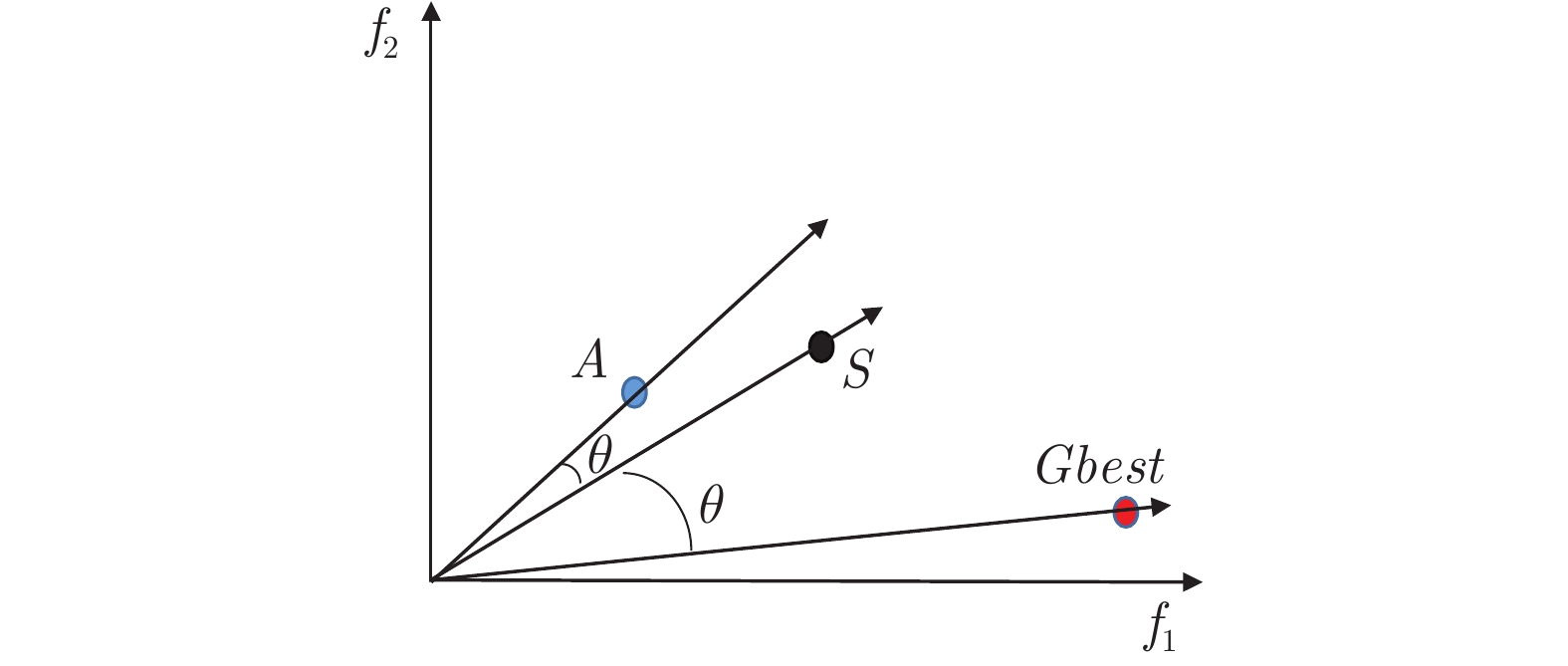
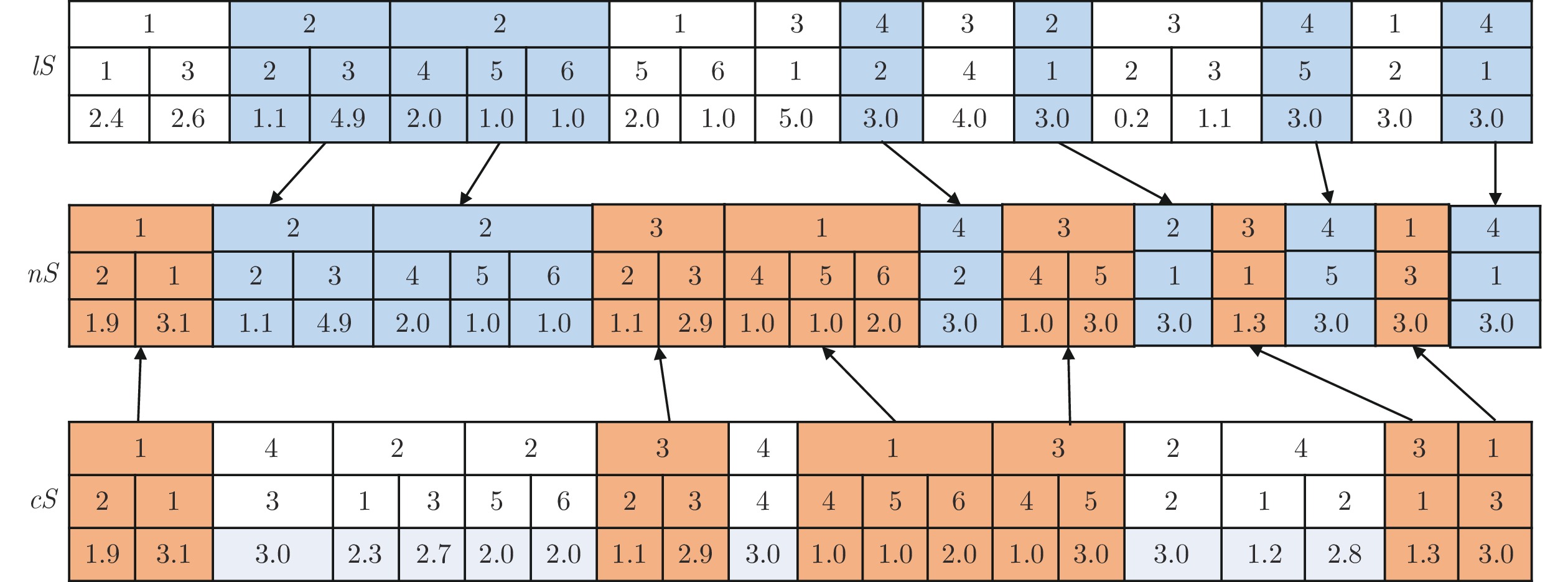
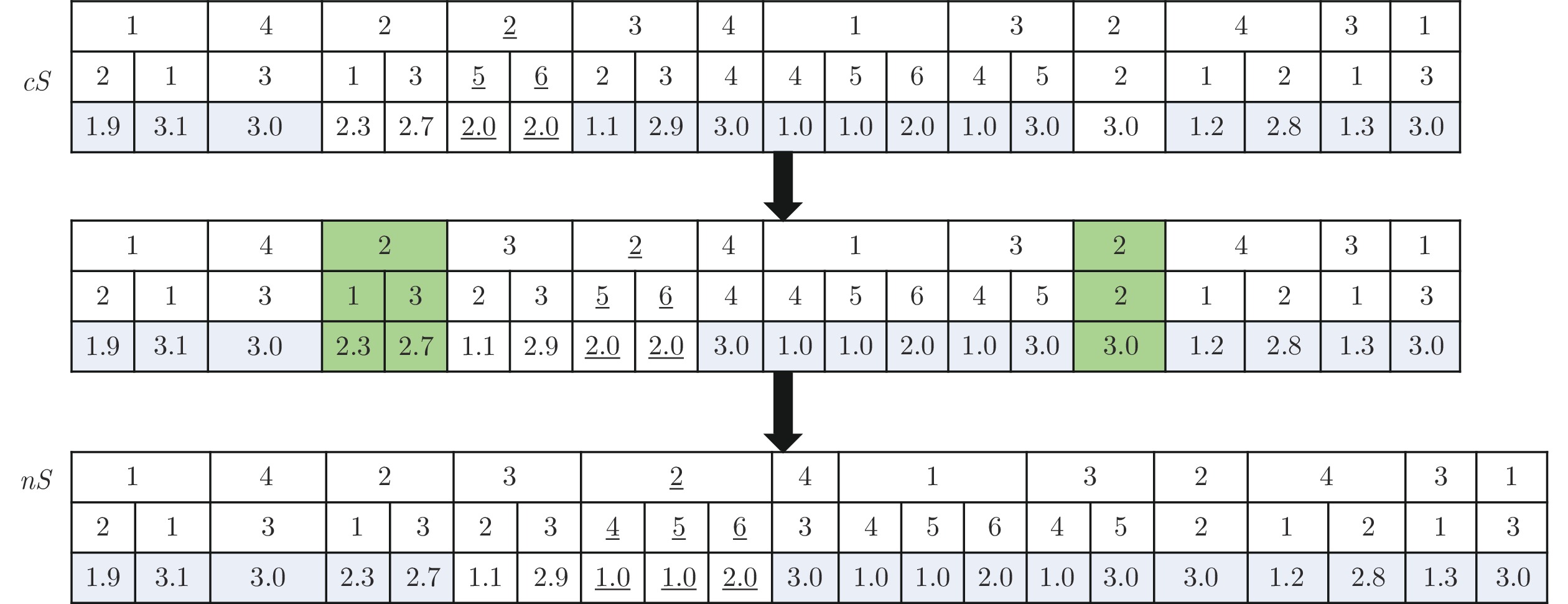
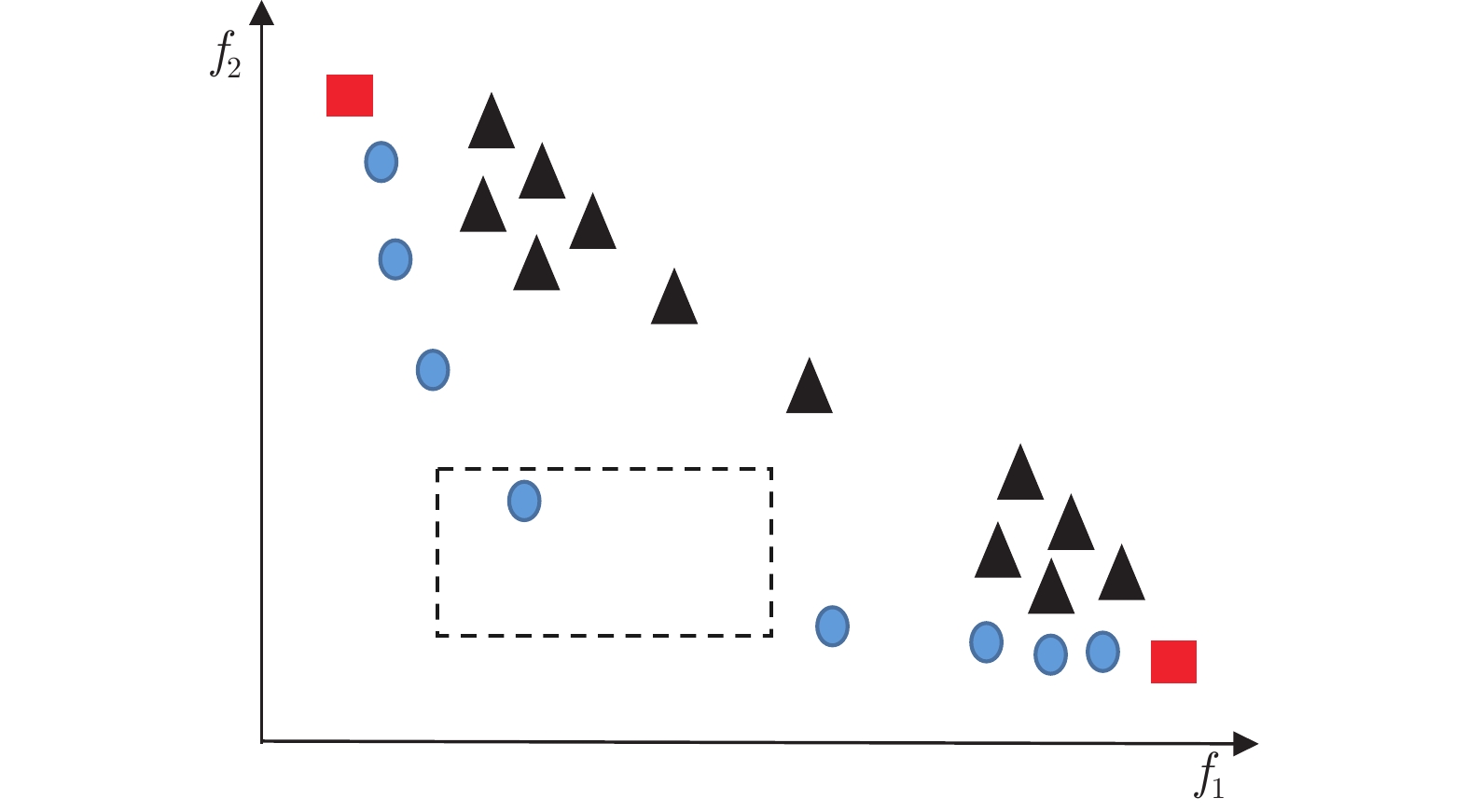
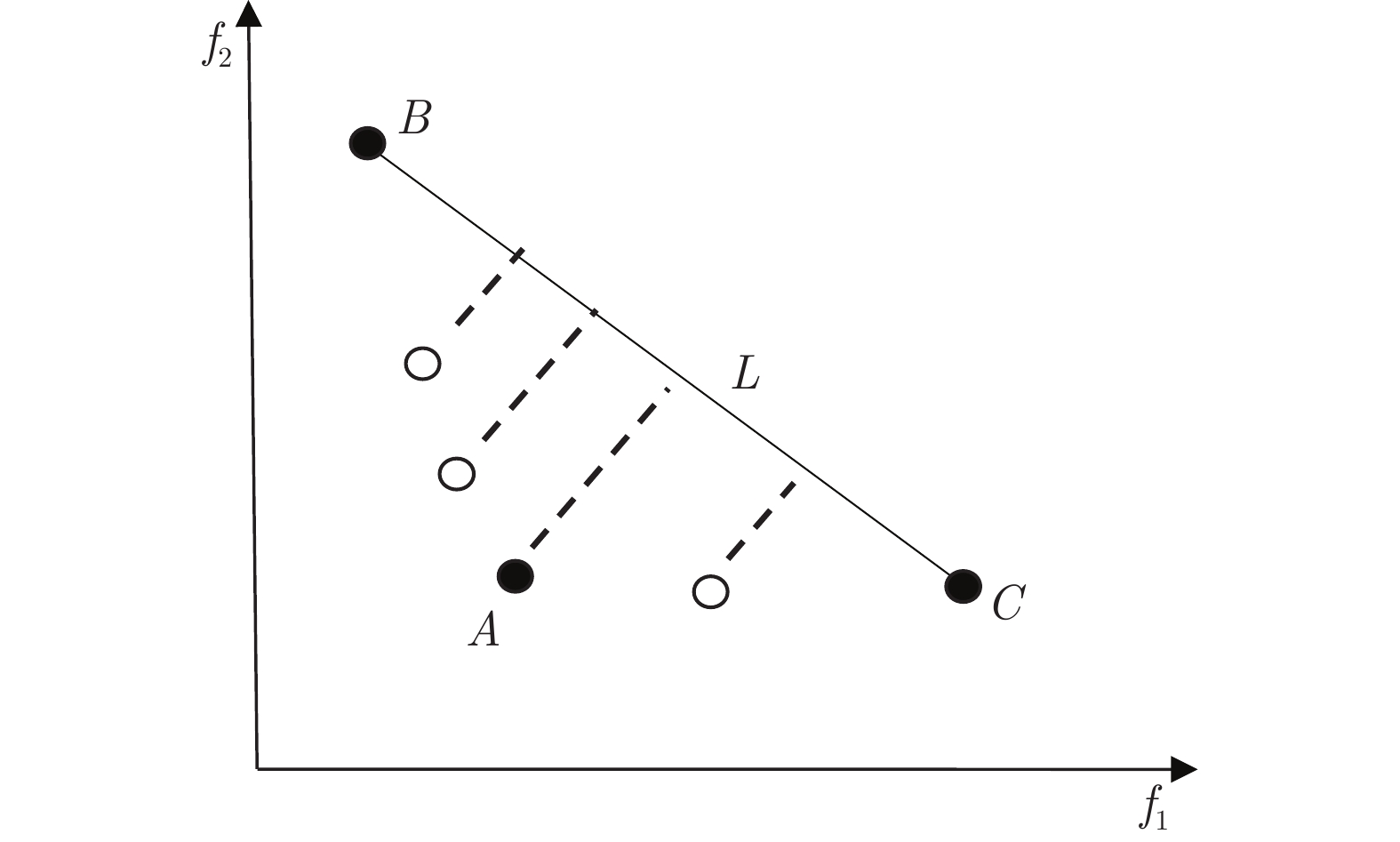
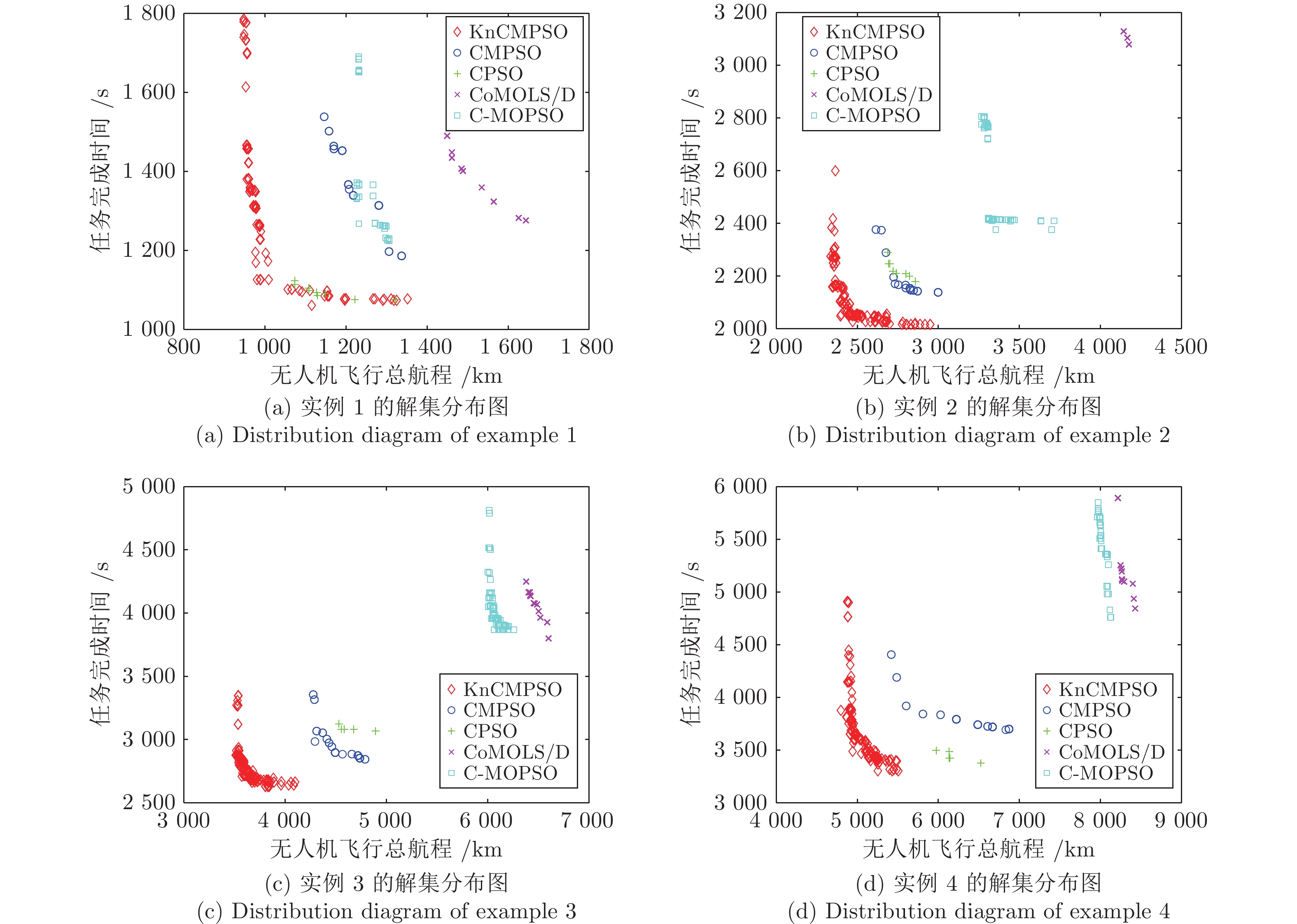
随着无人机(Unmanned aerial vehicle, UAV)技术的广泛应用和执行任务的日益复杂, 无人机多机协同控制面临着新的挑战. 以无人机总飞行距离和任务完成时间为优化目标, 同时考虑异构无人机类型、任务执行时序等多种实际约束, 构建基于多种约束条件的异构无人机协同多任务分配模型. 该模型不仅包含混合变量, 同时还存在多个复杂的约束条件, 因此, 传统的多目标优化算法并不能有效地处理混合变量及对问题空间进行搜索并生成满足多种约束条件的可行解. 为高效求解上述模型, 提出一种基于拐点的协同多目标粒子群优化算法(Knee point based coevolution multi-objective particle swarm optimization, KnCMPSO), 该算法引入基于拐点的学习策略来更新外部档案集, 在保证收敛性的同时增加种群的多样性, 使算法能搜索到更多可行的任务分配结果; 并基于二进制交叉方法, 引入基于学习的粒子更新策略来提升算法的收敛性及基于区间扰动的局部搜索策略以提升算法的多样性. 最后通过在四组实例上的仿真实验验证了所提算法在求解异构无人机协同多任务分配问题上的有效性.
随着无人机(Unmanned aerial vehicle, UAV)技术的广泛应用和执行任务的日益复杂, 无人机多机协同控制面临着新的挑战. 以无人机总飞行距离和任务完成时间为优化目标, 同时考虑异构无人机类型、任务执行时序等多种实际约束, 构建基于多种约束条件的异构无人机协同多任务分配模型. 该模型不仅包含混合变量, 同时还存在多个复杂的约束条件, 因此, 传统的多目标优化算法并不能有效地处理混合变量及对问题空间进行搜索并生成满足多种约束条件的可行解. 为高效求解上述模型, 提出一种基于拐点的协同多目标粒子群优化算法(Knee point based coevolution multi-objective particle swarm optimization, KnCMPSO), 该算法引入基于拐点的学习策略来更新外部档案集, 在保证收敛性的同时增加种群的多样性, 使算法能搜索到更多可行的任务分配结果; 并基于二进制交叉方法, 引入基于学习的粒子更新策略来提升算法的收敛性及基于区间扰动的局部搜索策略以提升算法的多样性. 最后通过在四组实例上的仿真实验验证了所提算法在求解异构无人机协同多任务分配问题上的有效性.


2023, 49(2): 415-424.
doi: 10.16383/j.aas.c200261
摘要:
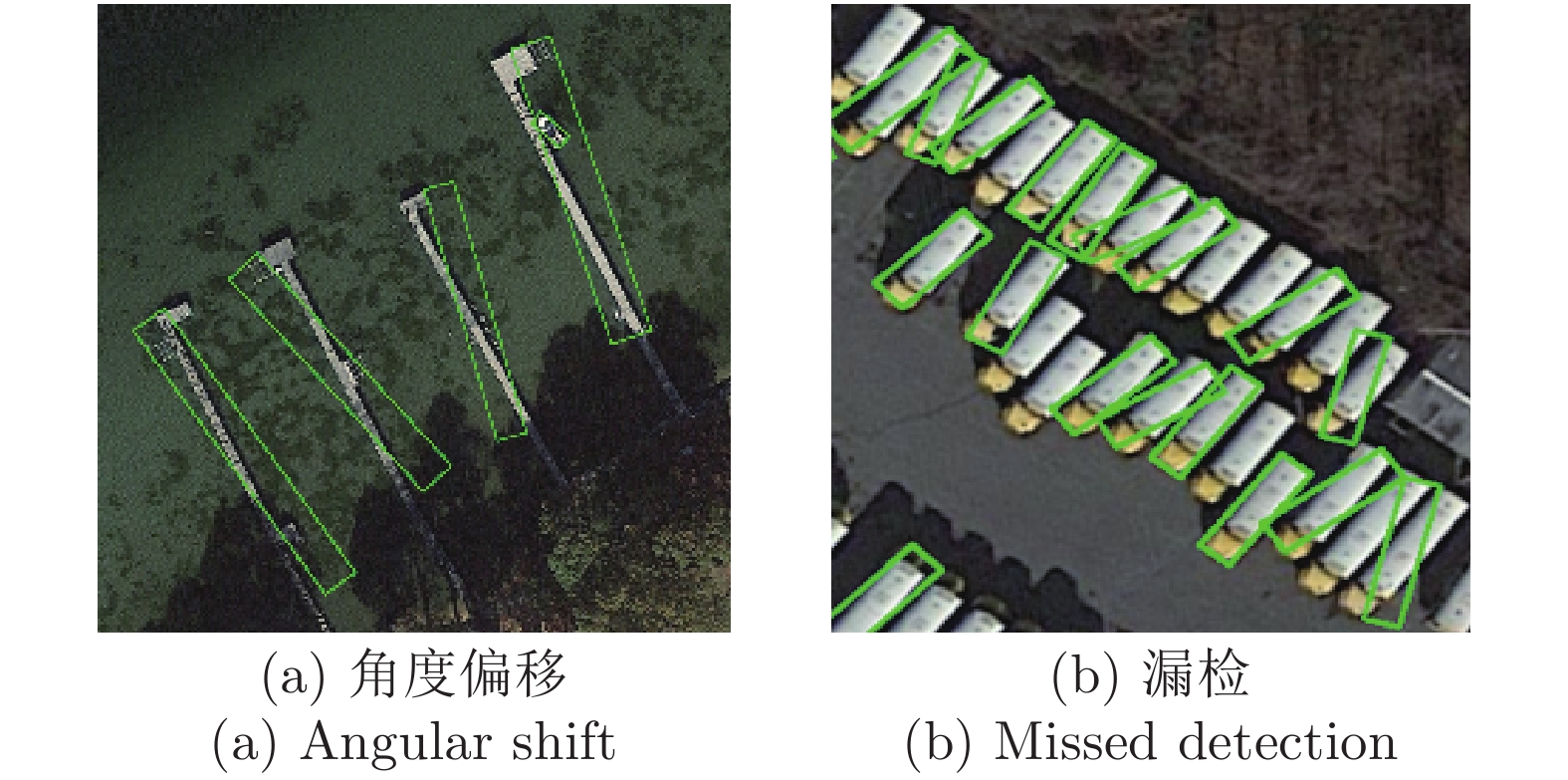
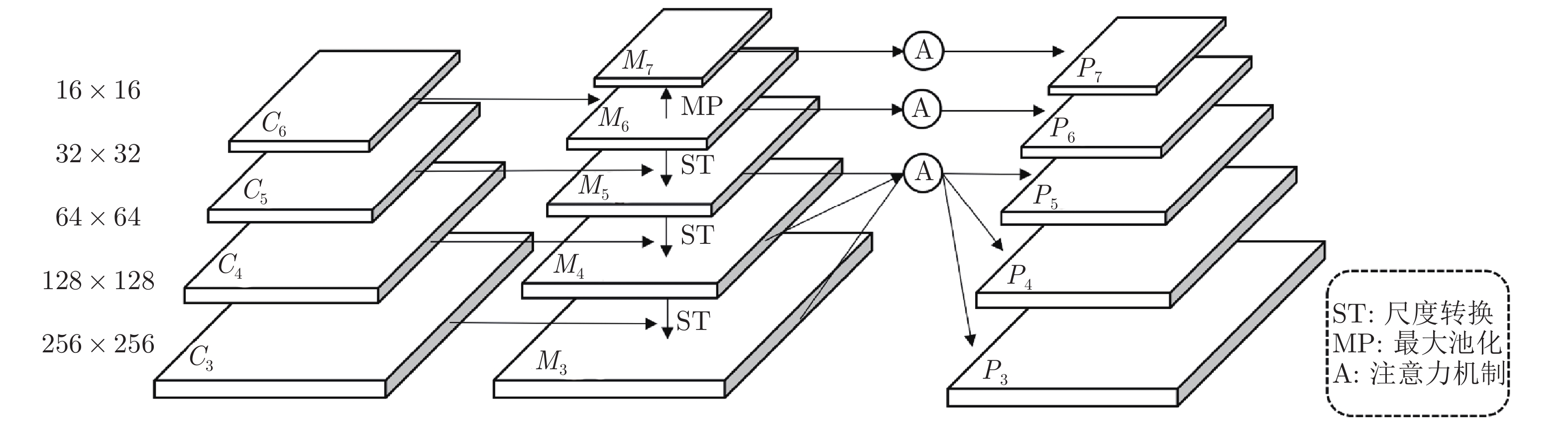
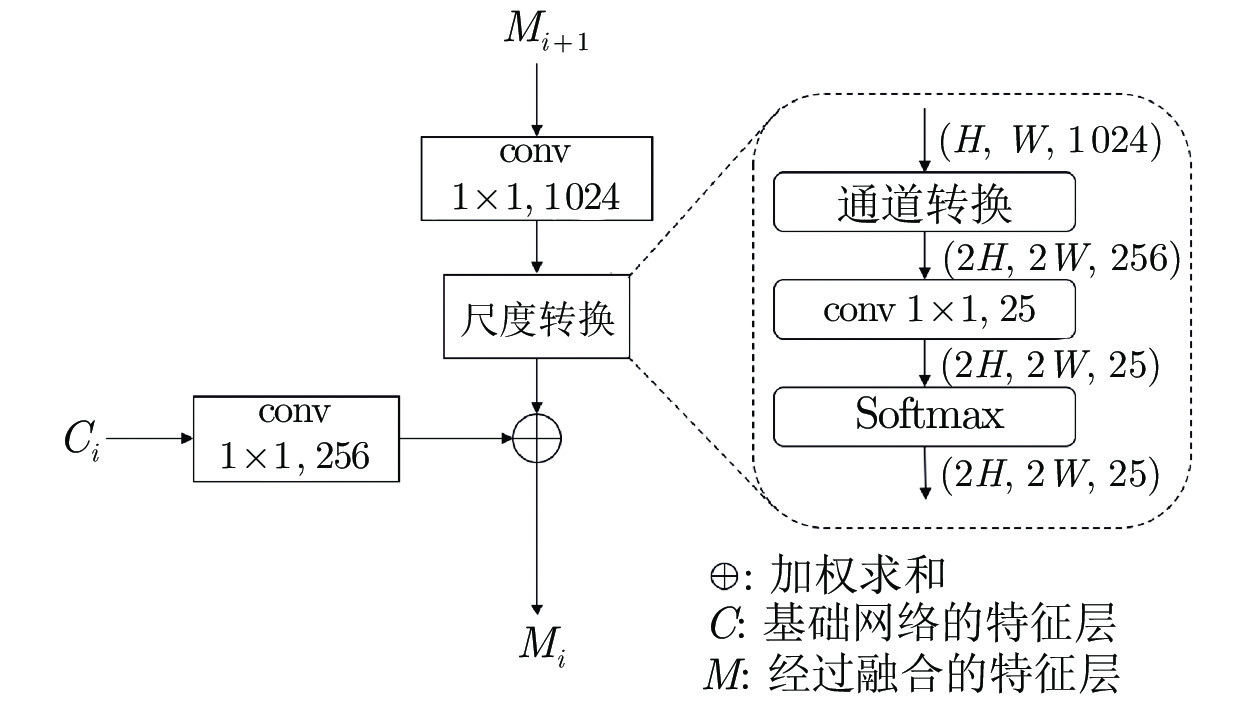
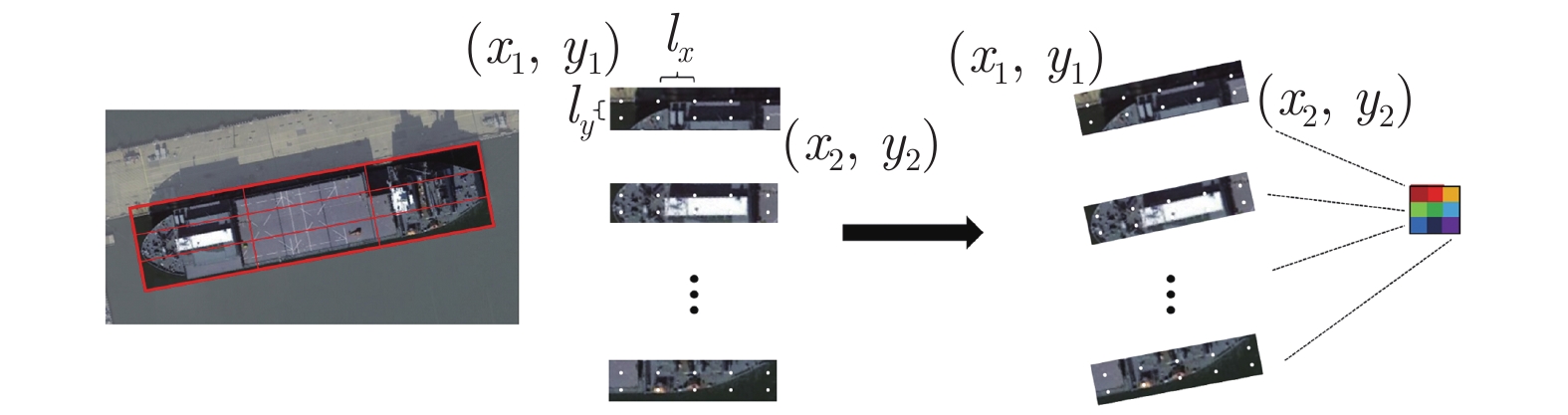
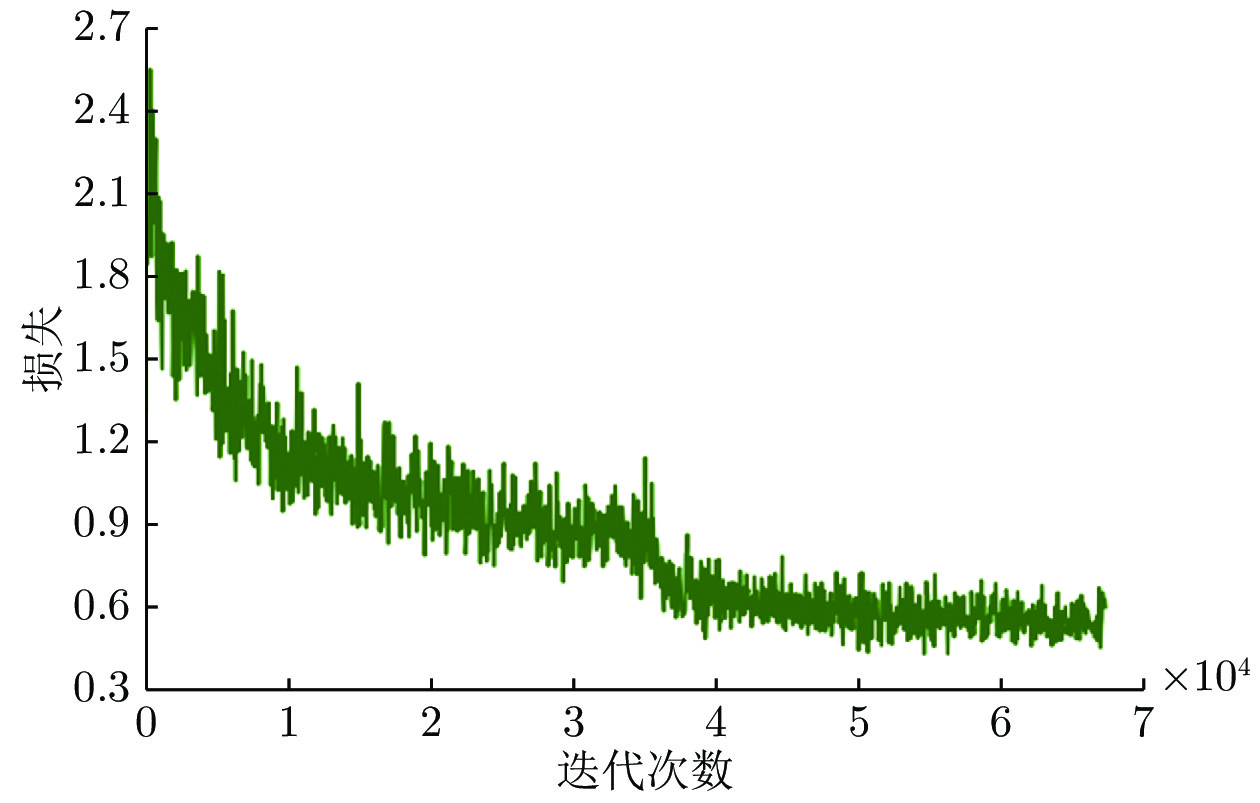
遥感图像中的目标往往呈现出任意方向排列, 而常见的目标检测算法均采用水平框检测, 并不能满足这类场景的应用需求. 因此提出一种旋转框检测网络R2-FRCNN. 该网络利用粗调与细调两阶段实现旋转框检测, 粗调阶段将水平框转换为旋转框, 细调阶段进一步优化旋转框的定位. 针对遥感图像存在较多小目标的特点, 提出像素重组金字塔结构, 融合深浅层特征, 提升复杂背景下小目标的检测精度. 此外, 为了在金字塔各层中提取更加有效的特征信息, 在粗调阶段设计一种积分与面积插值法相结合的感兴趣区域特征提取方法, 同时在细调阶段设计旋转框区域特征提取方法. 最后在粗调和细调阶段均采用全连接层与卷积层相结合的预测分支, 并且利用SmoothLn作为网络的回归损失函数, 进一步提升算法性能. 提出的网络在大型遥感数据集DOTA上进行评估, 评估指标平均准确率达到0.7602. 对比实验表明了R2-FRCNN网络的有效性.
遥感图像中的目标往往呈现出任意方向排列, 而常见的目标检测算法均采用水平框检测, 并不能满足这类场景的应用需求. 因此提出一种旋转框检测网络R2-FRCNN. 该网络利用粗调与细调两阶段实现旋转框检测, 粗调阶段将水平框转换为旋转框, 细调阶段进一步优化旋转框的定位. 针对遥感图像存在较多小目标的特点, 提出像素重组金字塔结构, 融合深浅层特征, 提升复杂背景下小目标的检测精度. 此外, 为了在金字塔各层中提取更加有效的特征信息, 在粗调阶段设计一种积分与面积插值法相结合的感兴趣区域特征提取方法, 同时在细调阶段设计旋转框区域特征提取方法. 最后在粗调和细调阶段均采用全连接层与卷积层相结合的预测分支, 并且利用SmoothLn作为网络的回归损失函数, 进一步提升算法性能. 提出的网络在大型遥感数据集DOTA上进行评估, 评估指标平均准确率达到0.7602. 对比实验表明了R2-FRCNN网络的有效性.





2023, 49(2): 425-436.
doi: 10.16383/j.aas.c210889
摘要:
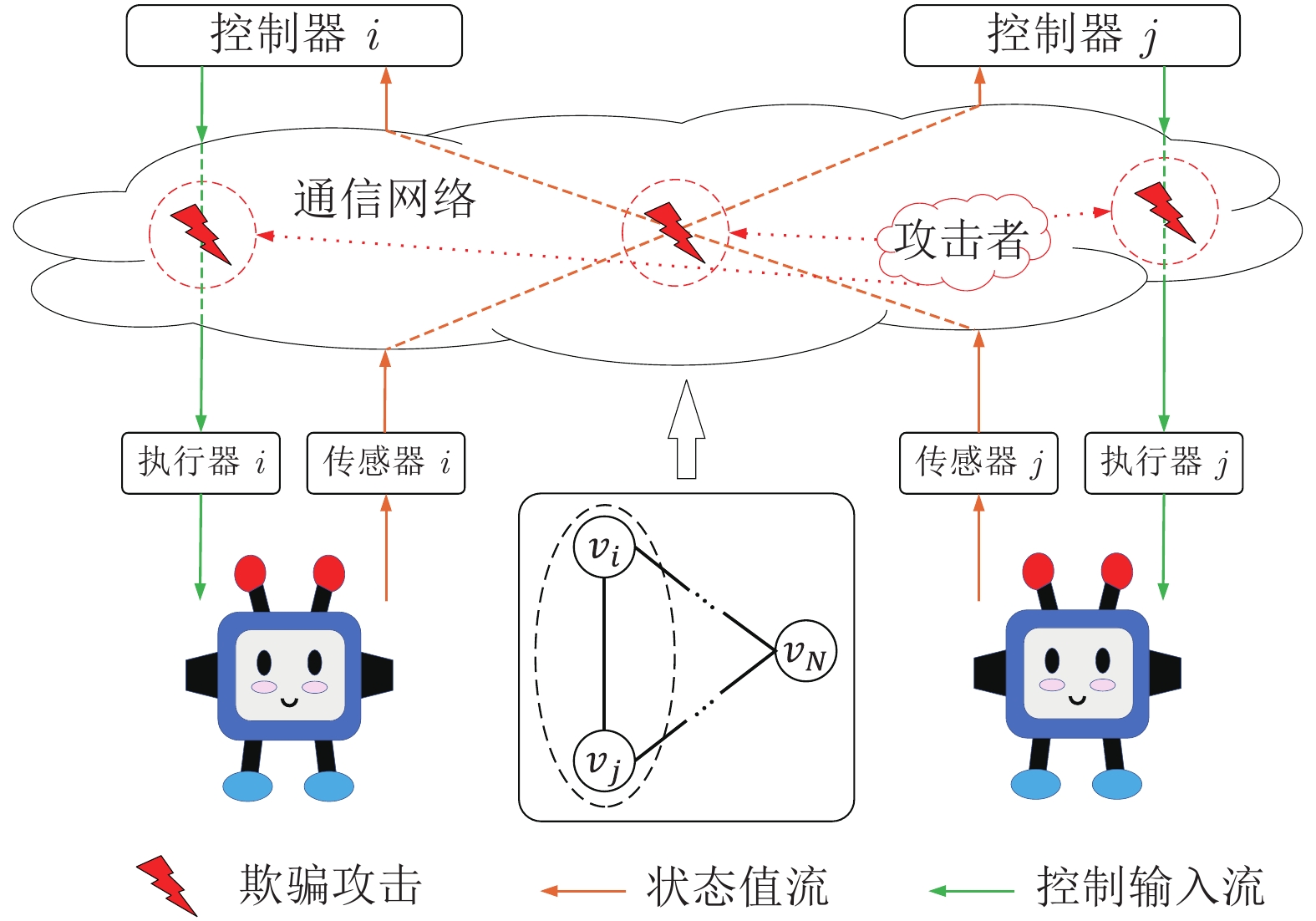
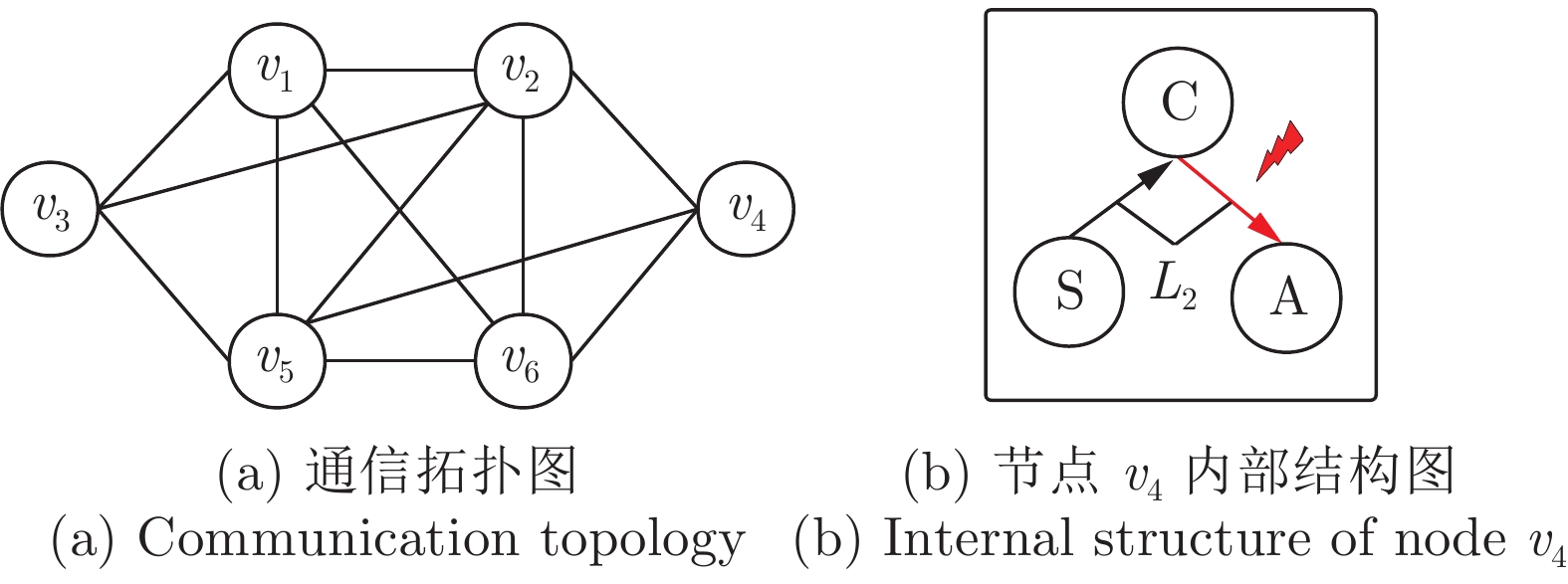
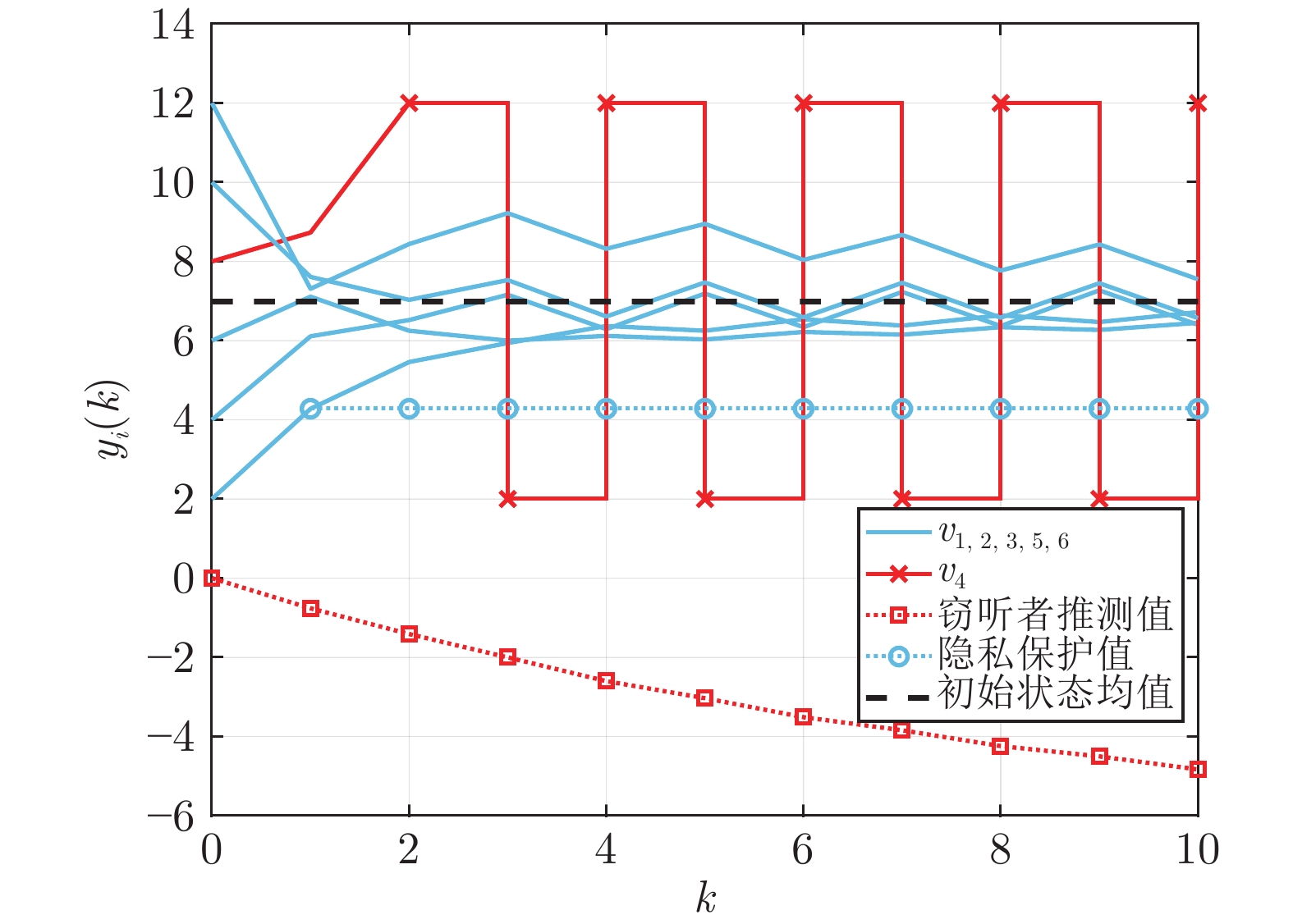
针对通信网络遭受欺骗攻击的离散时间多智能体系统, 研究其均值趋同和隐私保护问题. 首先, 考虑链路信道存在窃听者的情形, 提出一种基于状态分解思想的分布式网络节点值重构方法, 以阻止系统初始信息的泄露. 其次, 针对所构建的欺骗攻击模型, 利用重构后节点状态信息并结合现有的安全接受广播算法, 提出一种适用于无向通信网络的多智能体系统均值趋同控制方法. 理论分析表明, 该方法能够有效保护节点初始状态信息的隐私, 并能消除链路中欺骗攻击的影响, 实现分布式系统中所有节点以初始值均值趋同. 最后, 通过数值仿真实验验证了该方法的有效性.
针对通信网络遭受欺骗攻击的离散时间多智能体系统, 研究其均值趋同和隐私保护问题. 首先, 考虑链路信道存在窃听者的情形, 提出一种基于状态分解思想的分布式网络节点值重构方法, 以阻止系统初始信息的泄露. 其次, 针对所构建的欺骗攻击模型, 利用重构后节点状态信息并结合现有的安全接受广播算法, 提出一种适用于无向通信网络的多智能体系统均值趋同控制方法. 理论分析表明, 该方法能够有效保护节点初始状态信息的隐私, 并能消除链路中欺骗攻击的影响, 实现分布式系统中所有节点以初始值均值趋同. 最后, 通过数值仿真实验验证了该方法的有效性.





2023, 49(2): 437-447.
doi: 10.16383/j.aas.c211068
摘要:
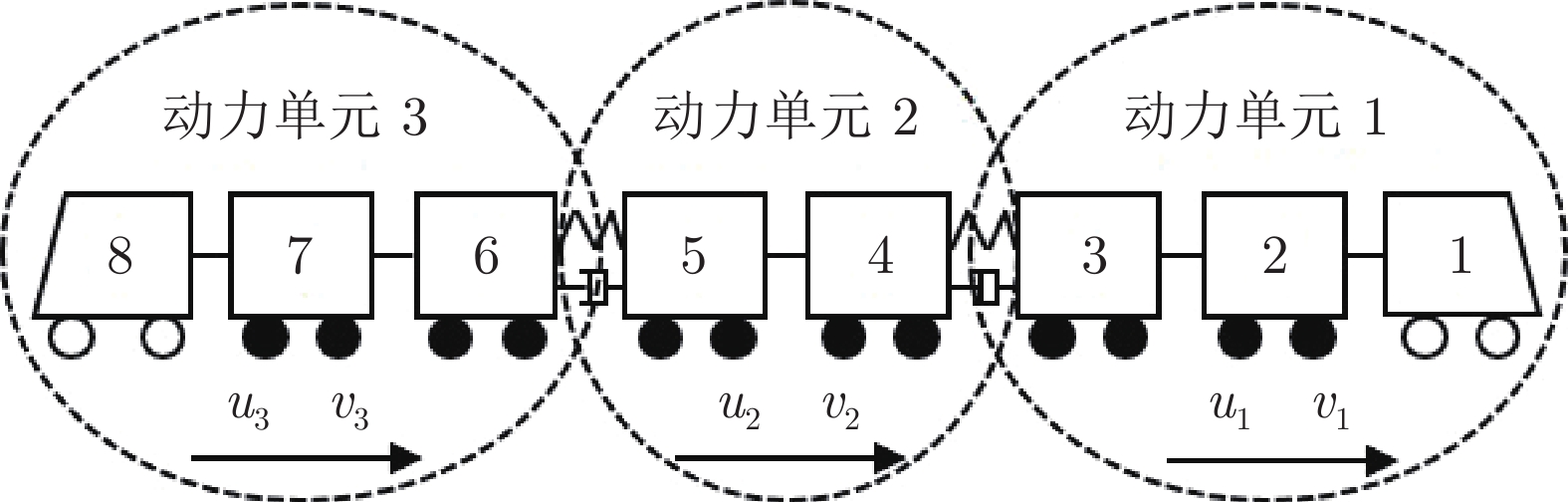
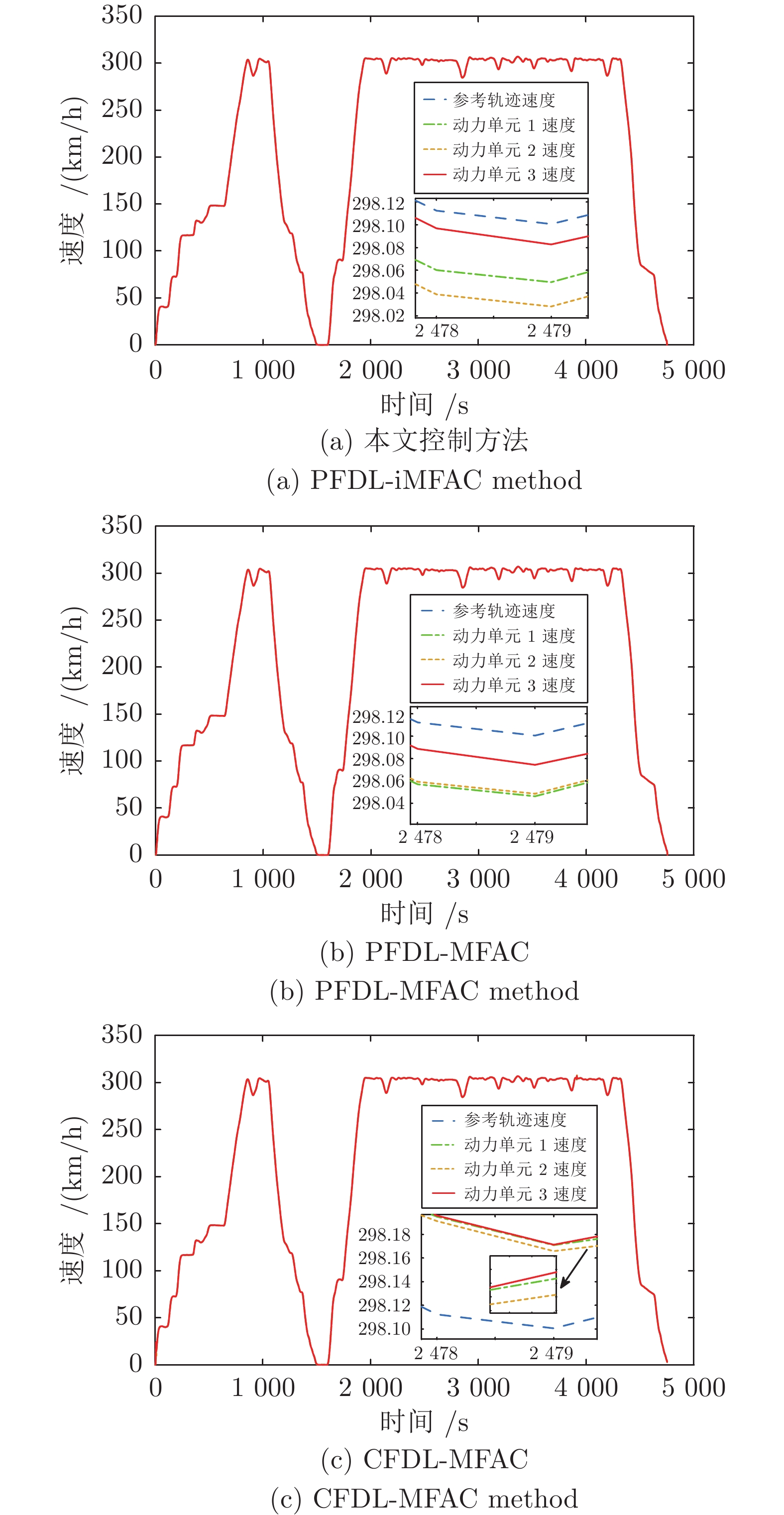
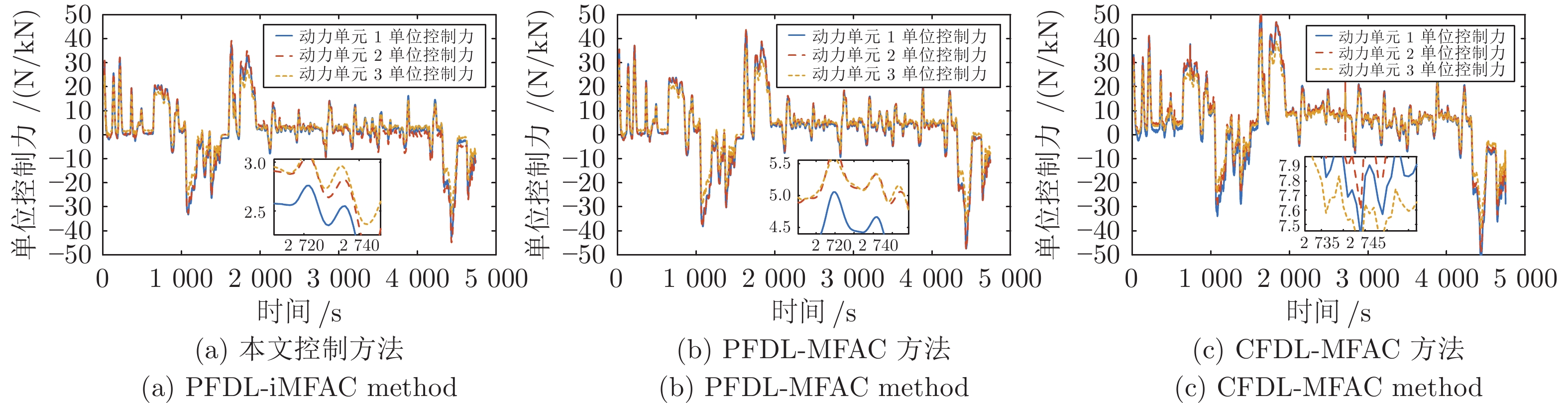
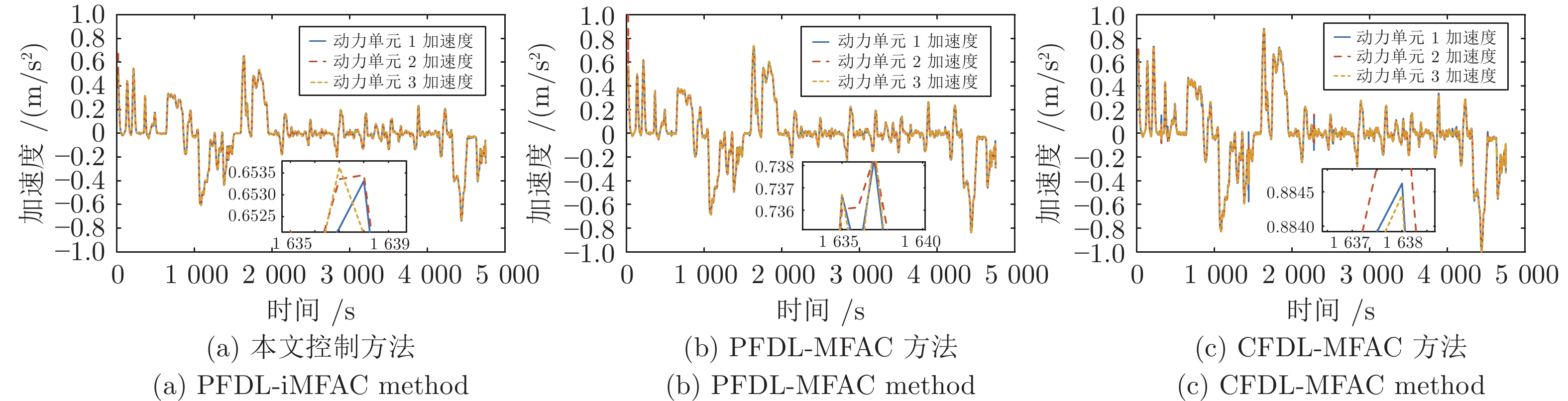
针对动车组的速度跟踪控制问题, 同时考虑到现有基于模型的控制方法对系统动力学模型的依赖性, 以及传统无模型自适应控制时变参数估计算法的复杂性, 将改进的多输入多输出(Multiple-input multiple-output, MIMO)偏格式动态线性化无模型自适应控制(Partial form dynamic linearization-improved model-free adaptive control, PFDL-iMFAC)方法引入到动车组自动驾驶系统中. 该控制方法在无模型自适应控制的基础上, 考虑滑动时间窗口, 增加了可调自由度和设计灵活性, 并在输入准则函数中加上对能量函数的惩罚项, 减少能量损耗, 为动车组的跟踪精度和节能运行提供了一种优化的方法, 在满足动车组速度跟踪效果好的前提下实现节能运行. 最后以CRH380A动车组为对象进行仿真实验, 通过与传统无模型自适应控制对比: 所提出的控制算法各动力单元速度跟踪误差在 ±0.2 km/h以内, 加速度在 ±0.65 m/s2以内且变化平稳, 比传统无模型自适应控制方法节约9.86%的能量.
针对动车组的速度跟踪控制问题, 同时考虑到现有基于模型的控制方法对系统动力学模型的依赖性, 以及传统无模型自适应控制时变参数估计算法的复杂性, 将改进的多输入多输出(Multiple-input multiple-output, MIMO)偏格式动态线性化无模型自适应控制(Partial form dynamic linearization-improved model-free adaptive control, PFDL-iMFAC)方法引入到动车组自动驾驶系统中. 该控制方法在无模型自适应控制的基础上, 考虑滑动时间窗口, 增加了可调自由度和设计灵活性, 并在输入准则函数中加上对能量函数的惩罚项, 减少能量损耗, 为动车组的跟踪精度和节能运行提供了一种优化的方法, 在满足动车组速度跟踪效果好的前提下实现节能运行. 最后以CRH380A动车组为对象进行仿真实验, 通过与传统无模型自适应控制对比: 所提出的控制算法各动力单元速度跟踪误差在 ±0.2 km/h以内, 加速度在 ±0.65 m/s2以内且变化平稳, 比传统无模型自适应控制方法节约9.86%的能量.



2023, 49(2): 448-460.
doi: 10.16383/j.aas.c220400
摘要:
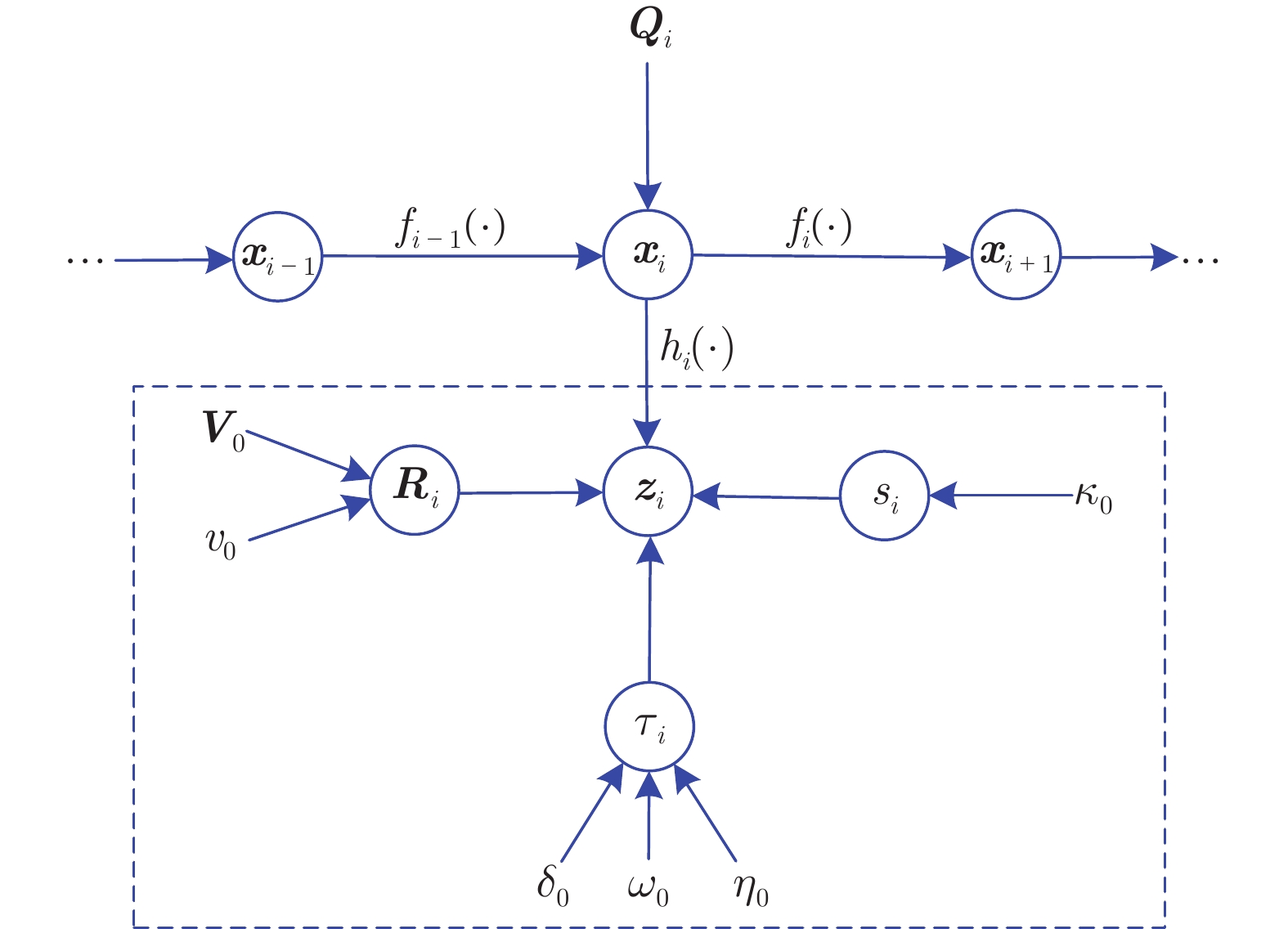
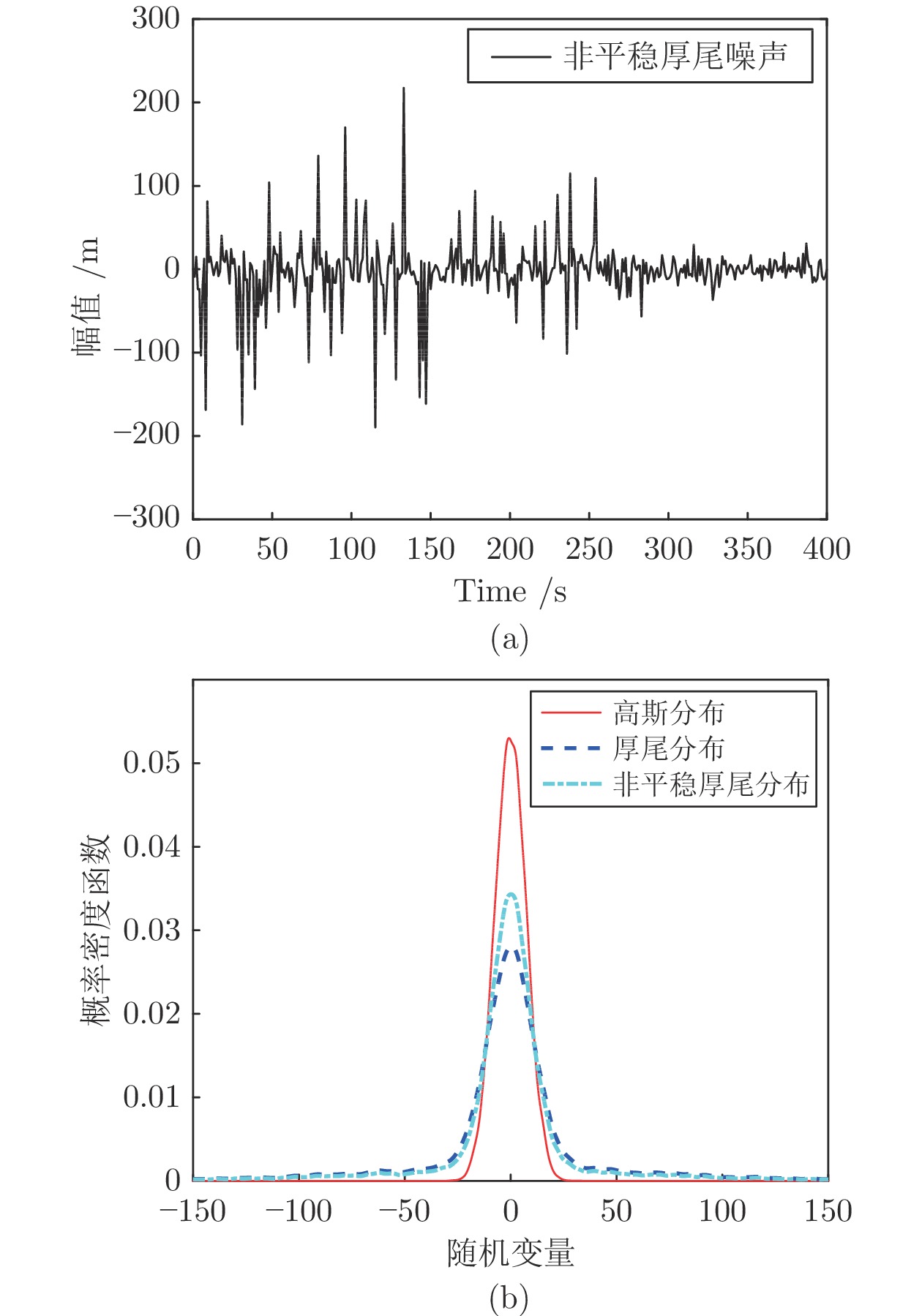
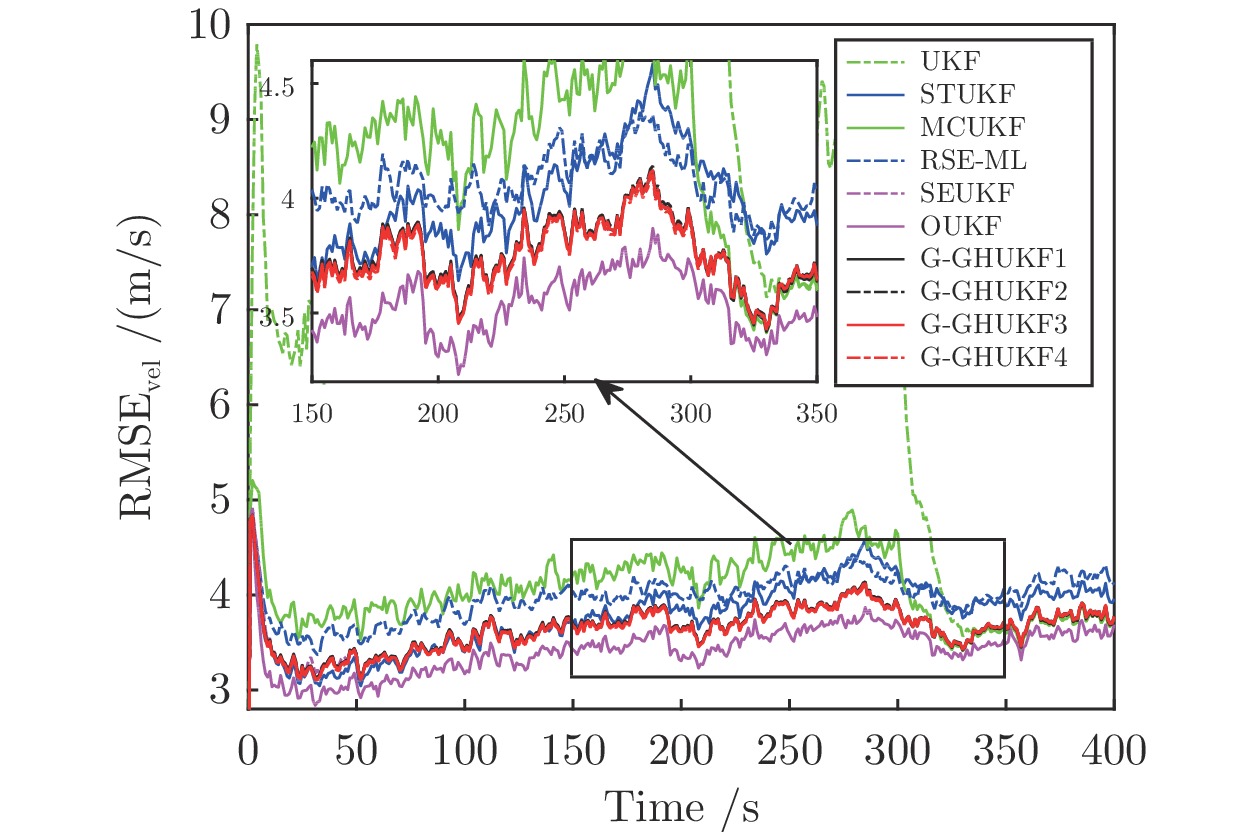
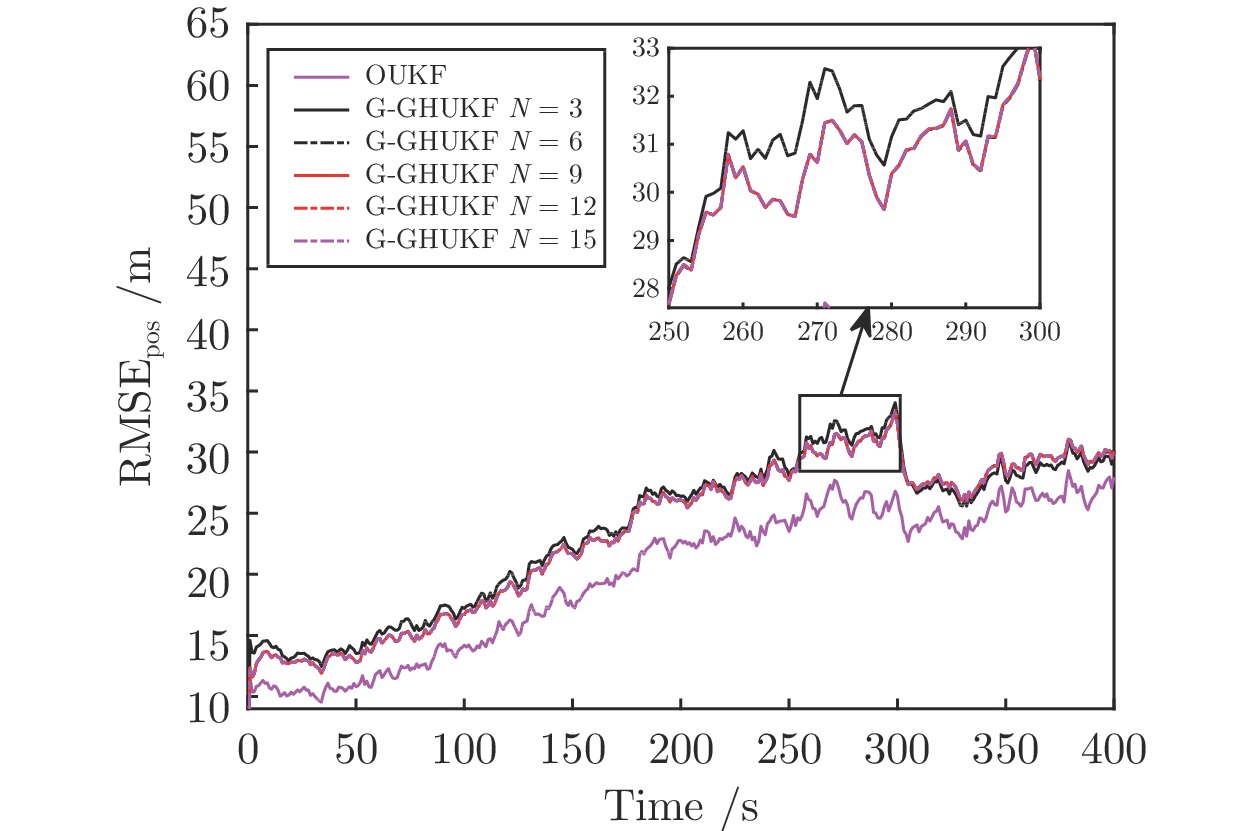
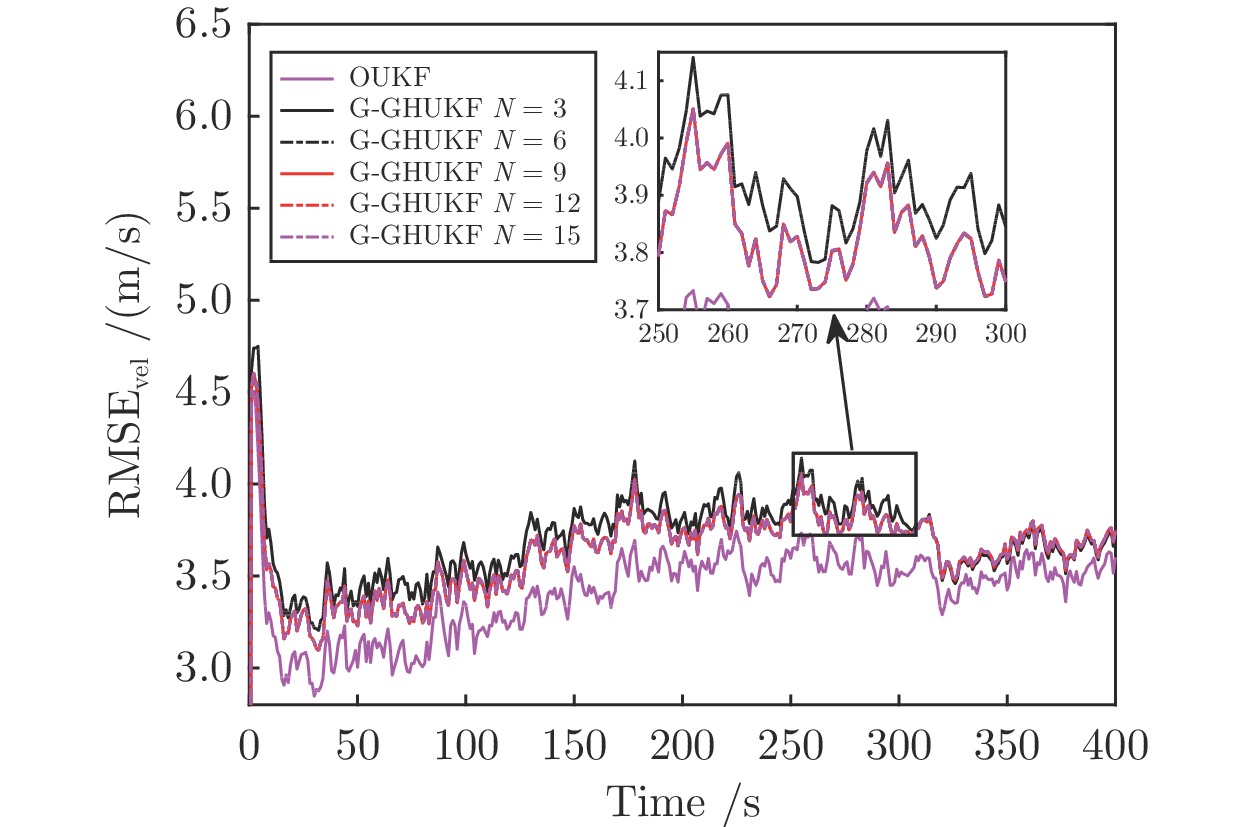
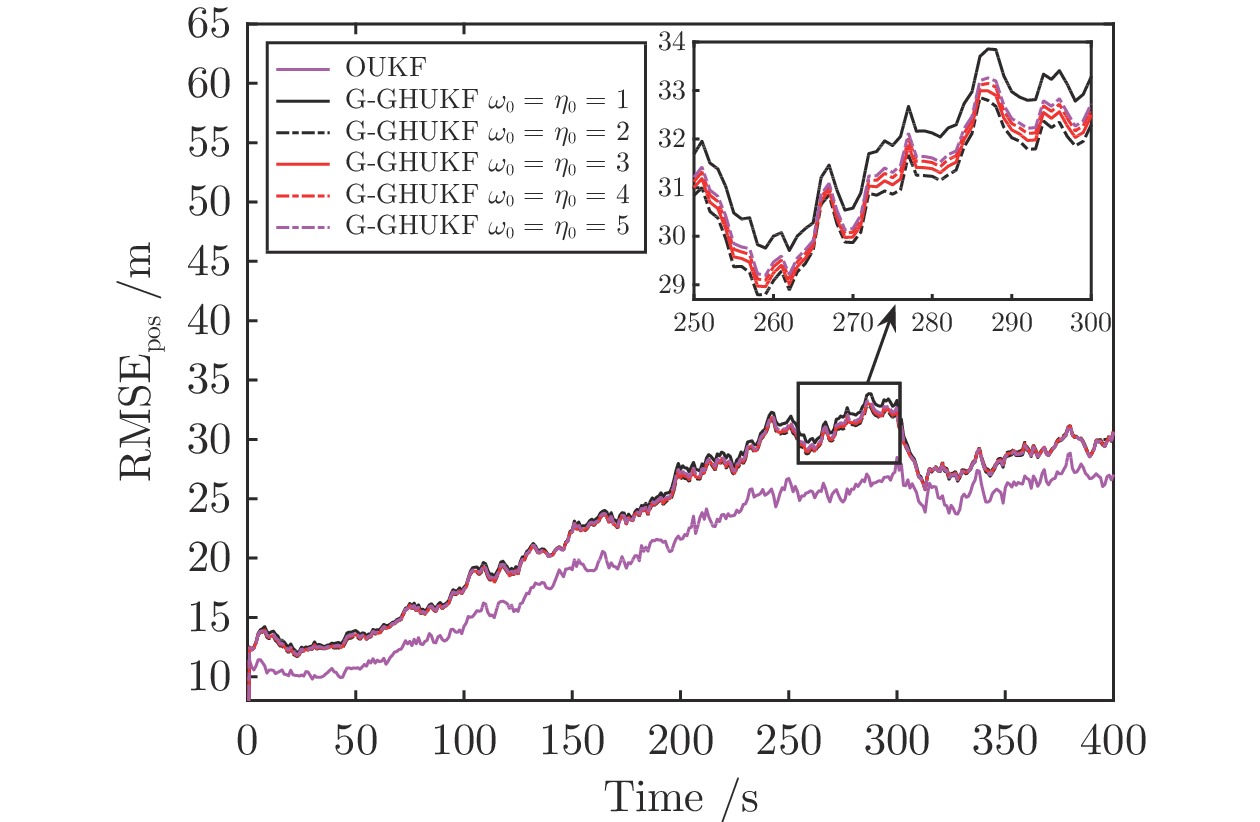
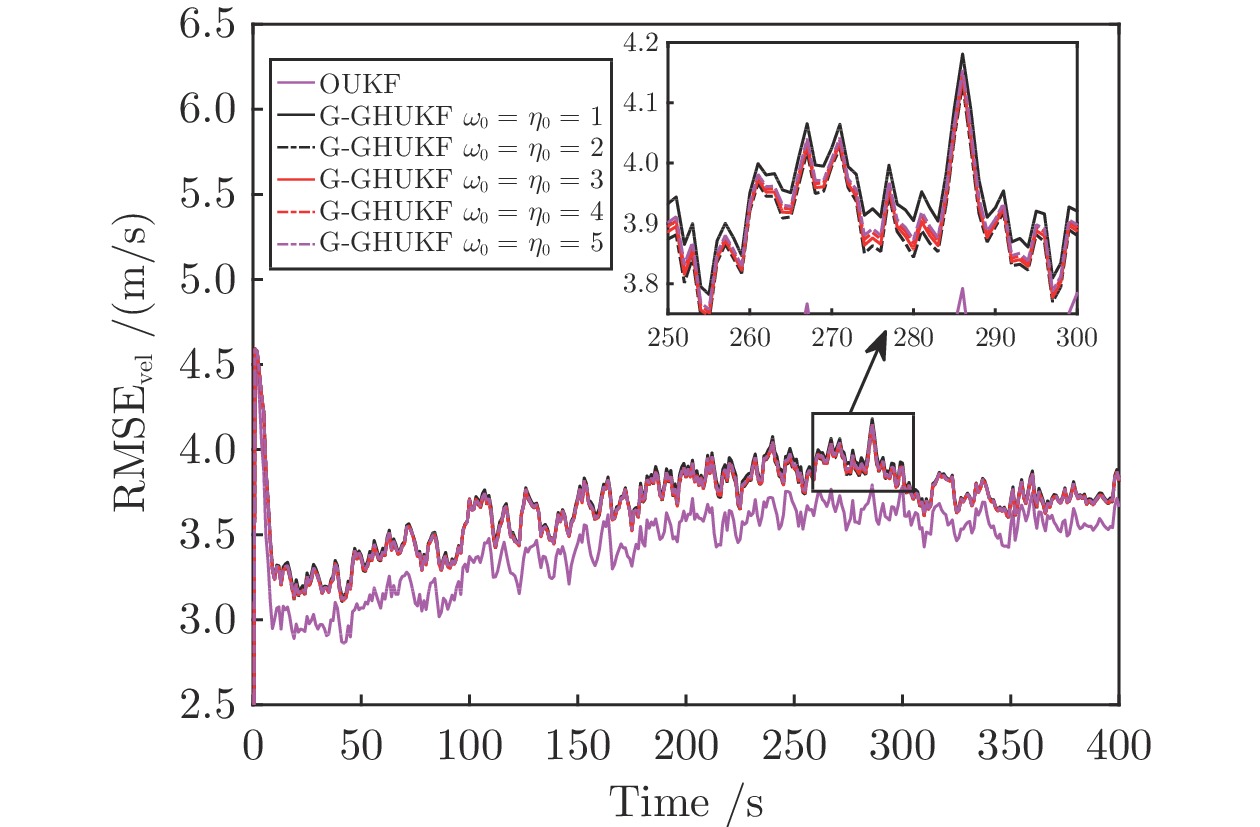
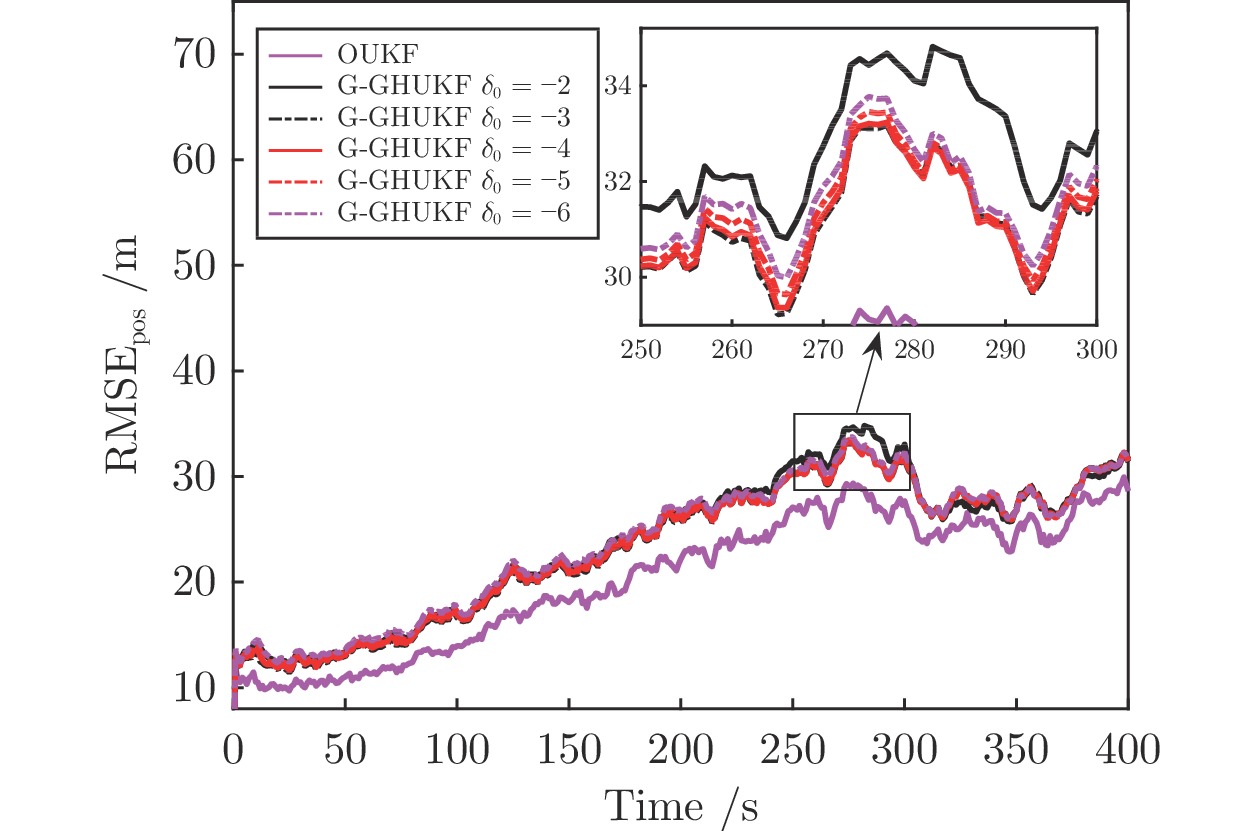
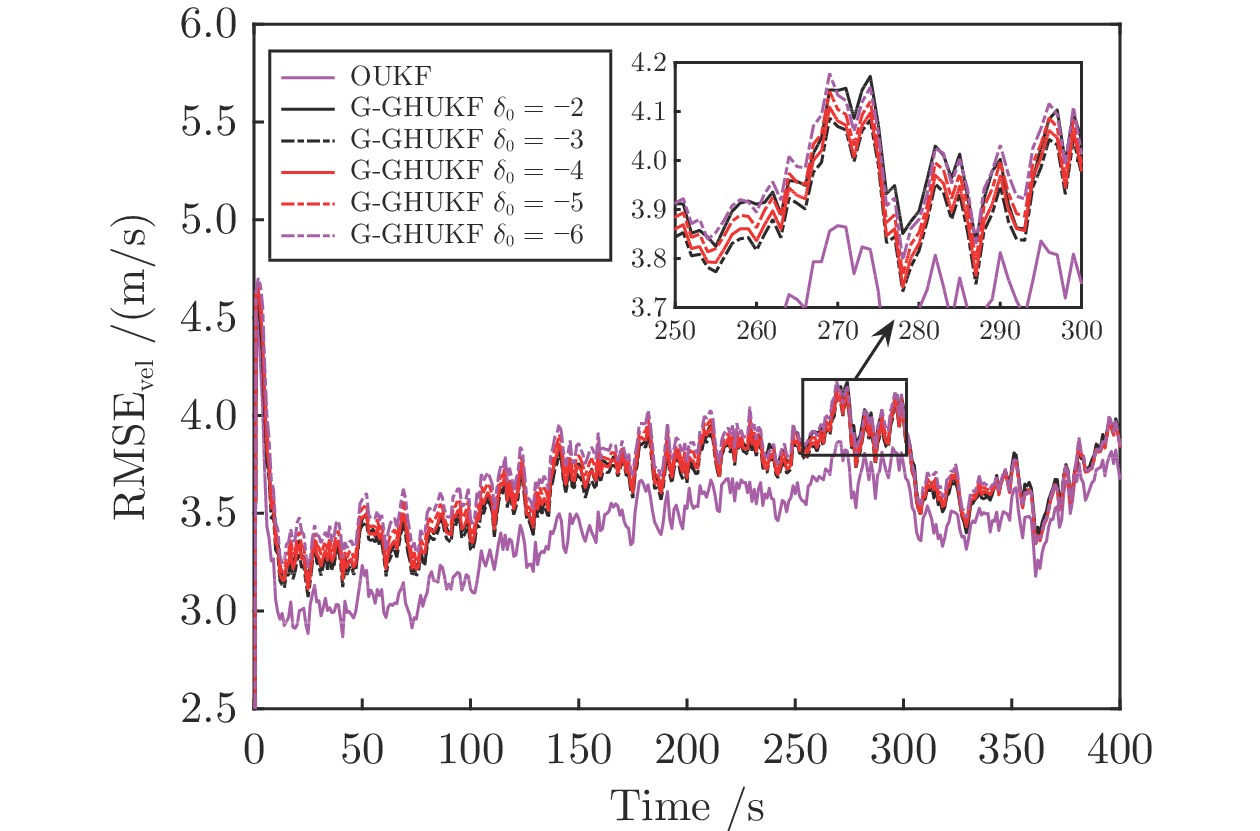
本文研究带非平稳厚尾非高斯量测噪声的非线性系统状态估计问题. 考虑到广义双曲分布包含多种常见厚尾分布特例, 且其混合分布为共轭的广义逆高斯分布, 选用广义双曲分布建模厚尾噪声; 进而引入伯努利变量构建高斯–广义双曲混合分布来建模非平稳厚尾噪声, 并利用该分布的高斯分层结构得到系统的概率模型. 随后采用变分贝叶斯方法实现对系统状态以及噪声参数的后验估计, 得到针对此类噪声系统的卡尔曼滤波 (Kalman filter, KF) 框架, 现有的几种鲁棒滤波算法均是本文算法的特例. 机器人跟踪仿真实验表明, 所提算法与同类算法相比具有更好的估计精度和数值稳定性, 且对于初始参数具有较好的鲁棒性.
本文研究带非平稳厚尾非高斯量测噪声的非线性系统状态估计问题. 考虑到广义双曲分布包含多种常见厚尾分布特例, 且其混合分布为共轭的广义逆高斯分布, 选用广义双曲分布建模厚尾噪声; 进而引入伯努利变量构建高斯–广义双曲混合分布来建模非平稳厚尾噪声, 并利用该分布的高斯分层结构得到系统的概率模型. 随后采用变分贝叶斯方法实现对系统状态以及噪声参数的后验估计, 得到针对此类噪声系统的卡尔曼滤波 (Kalman filter, KF) 框架, 现有的几种鲁棒滤波算法均是本文算法的特例. 机器人跟踪仿真实验表明, 所提算法与同类算法相比具有更好的估计精度和数值稳定性, 且对于初始参数具有较好的鲁棒性.


2023, 49(2): 461-472.
doi: 10.16383/j.aas.c210983
摘要:
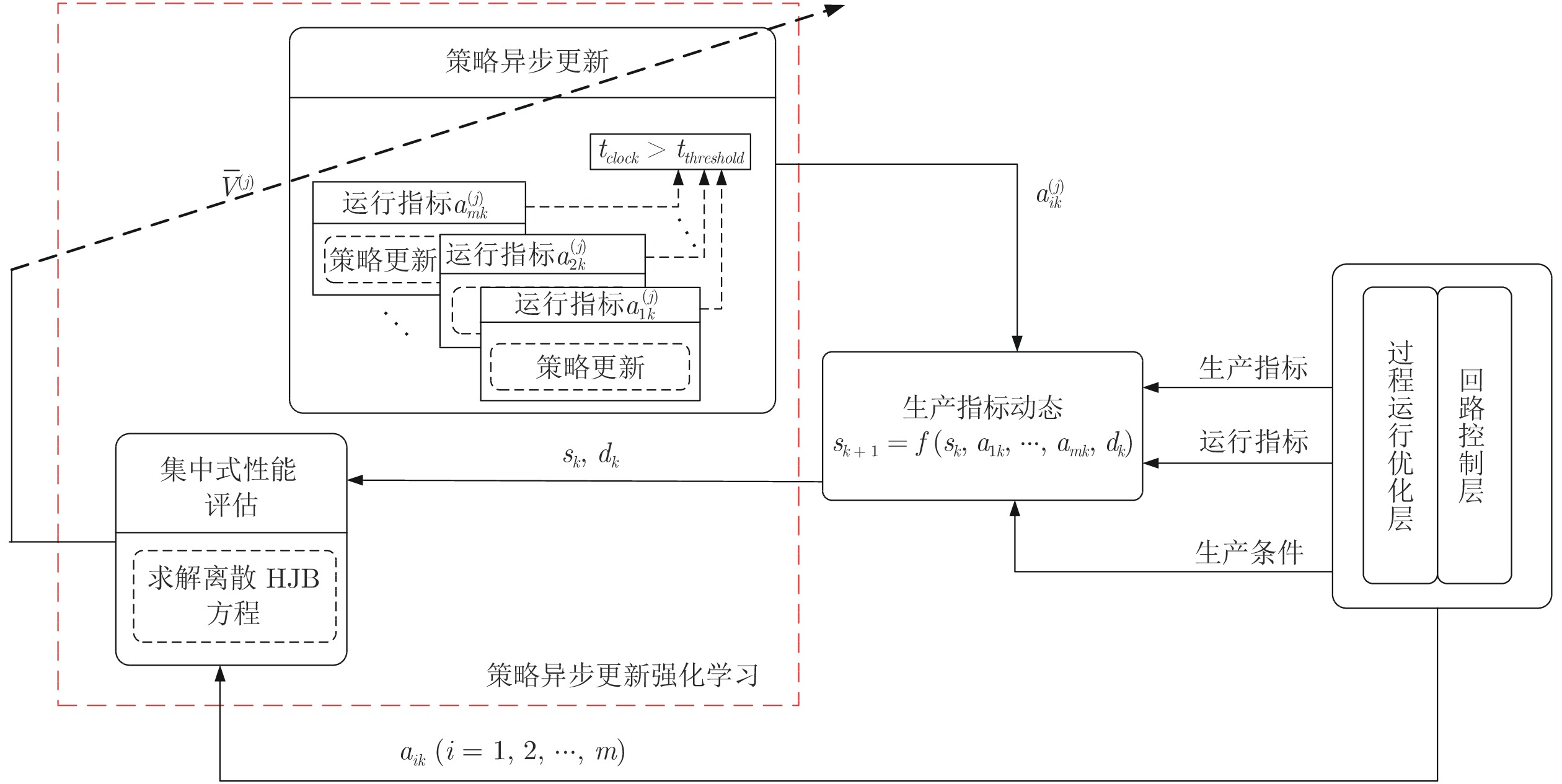
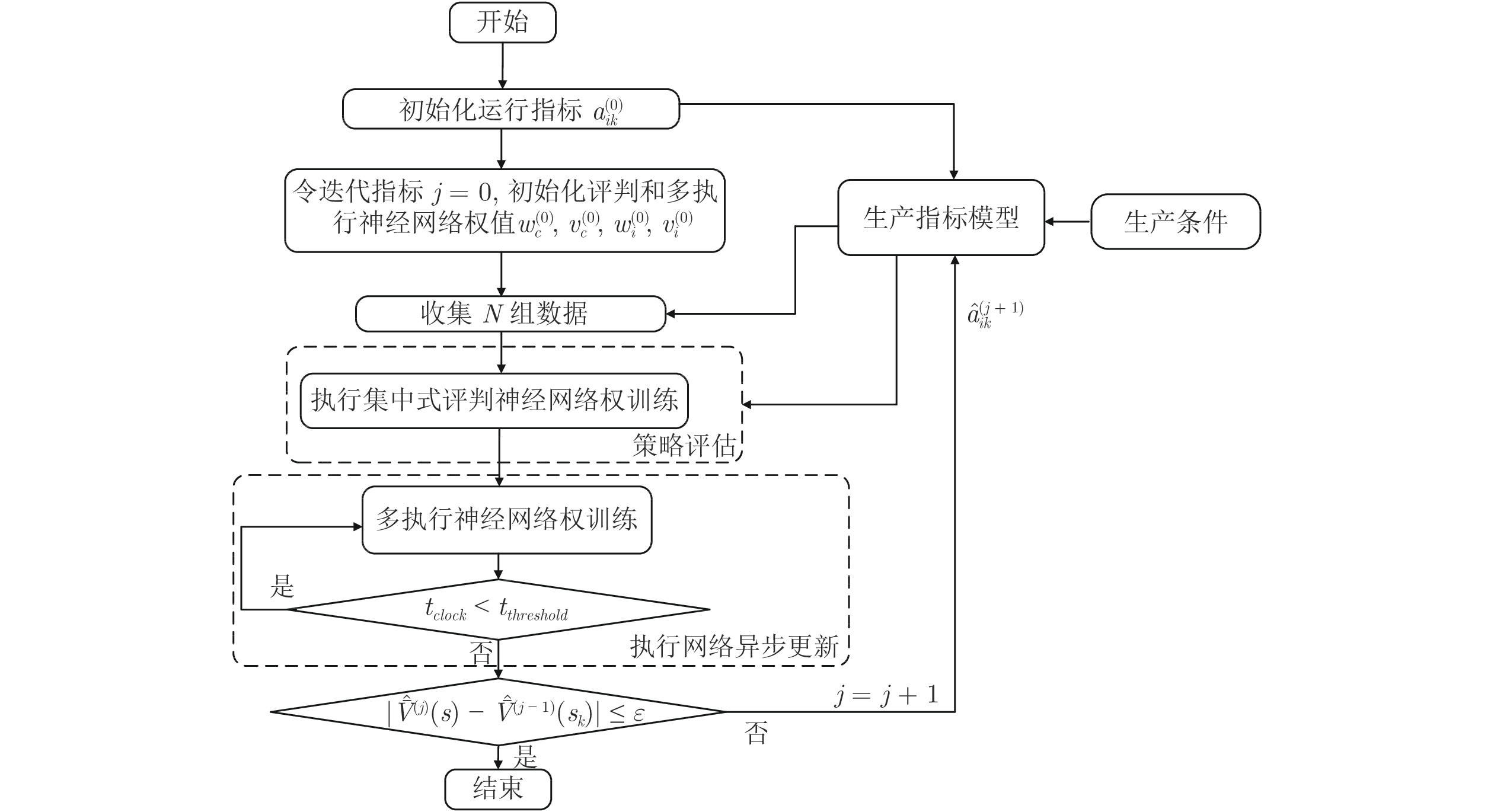
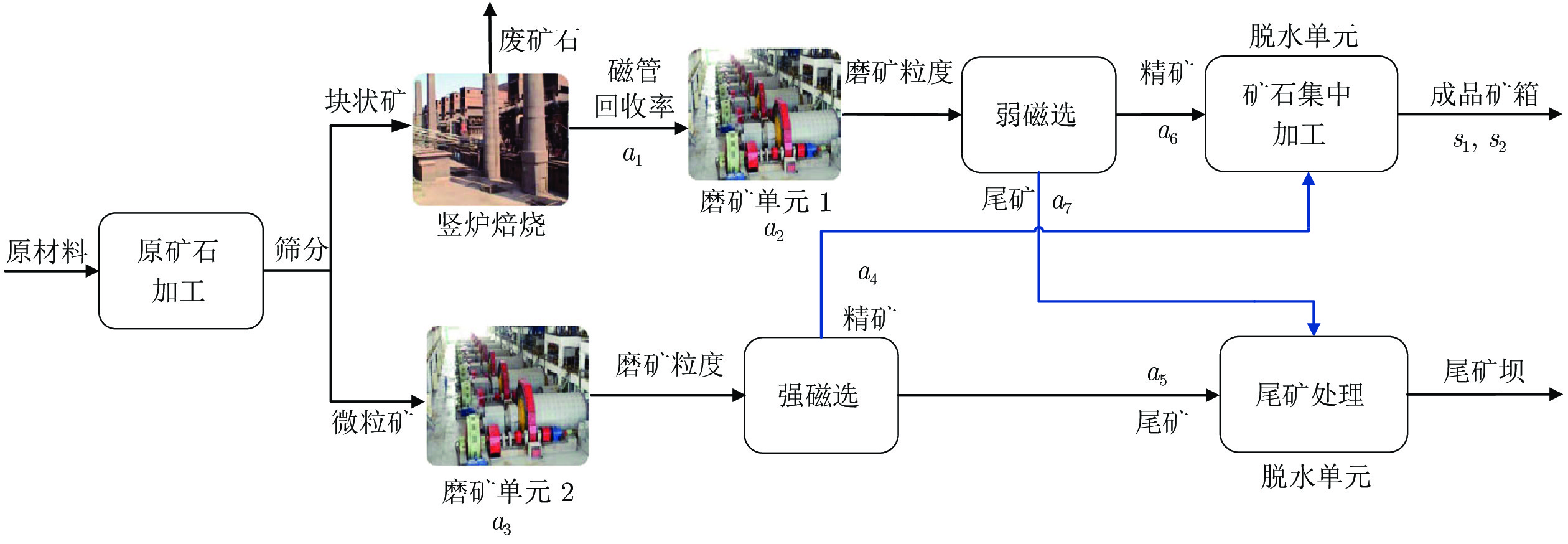
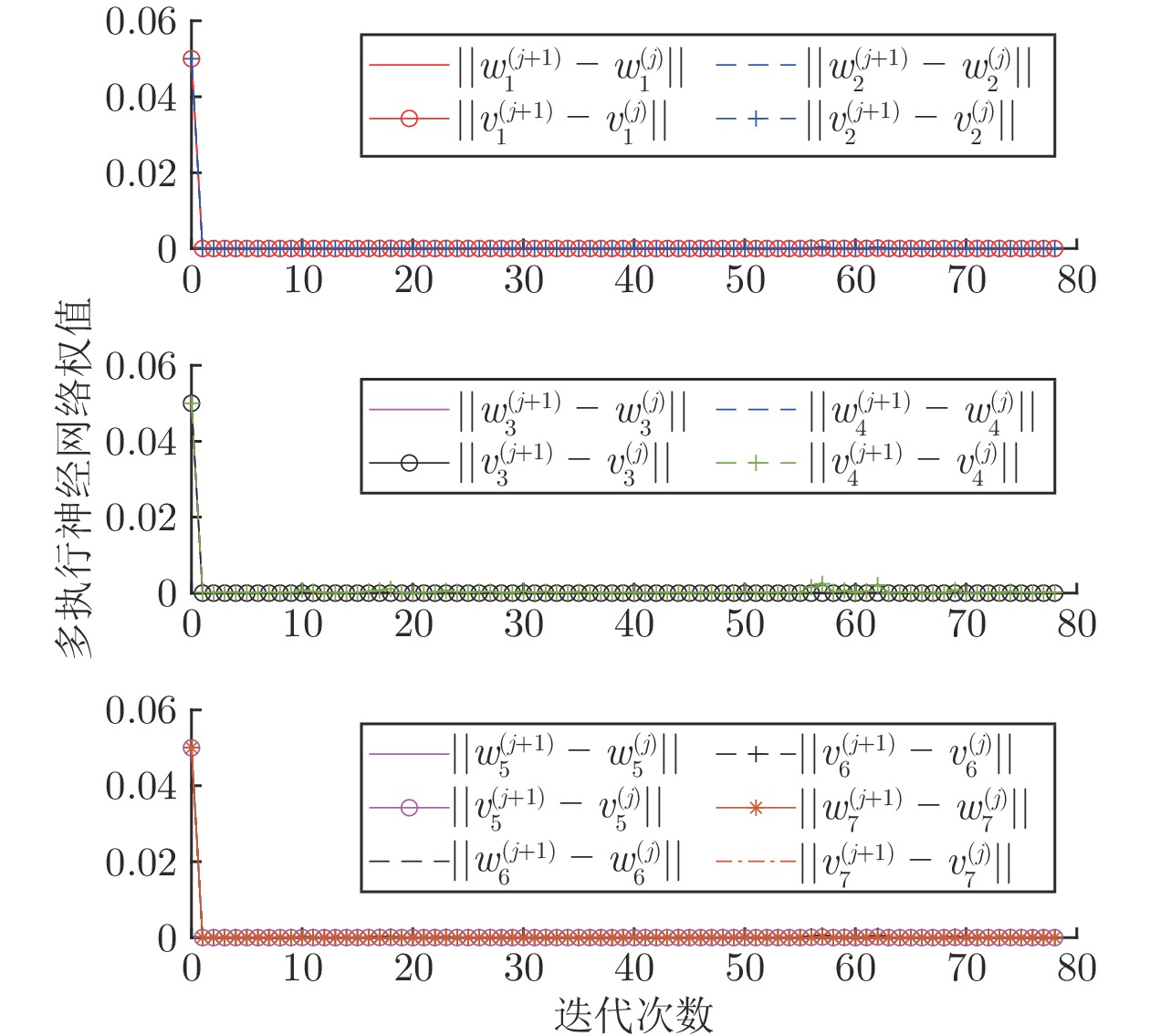
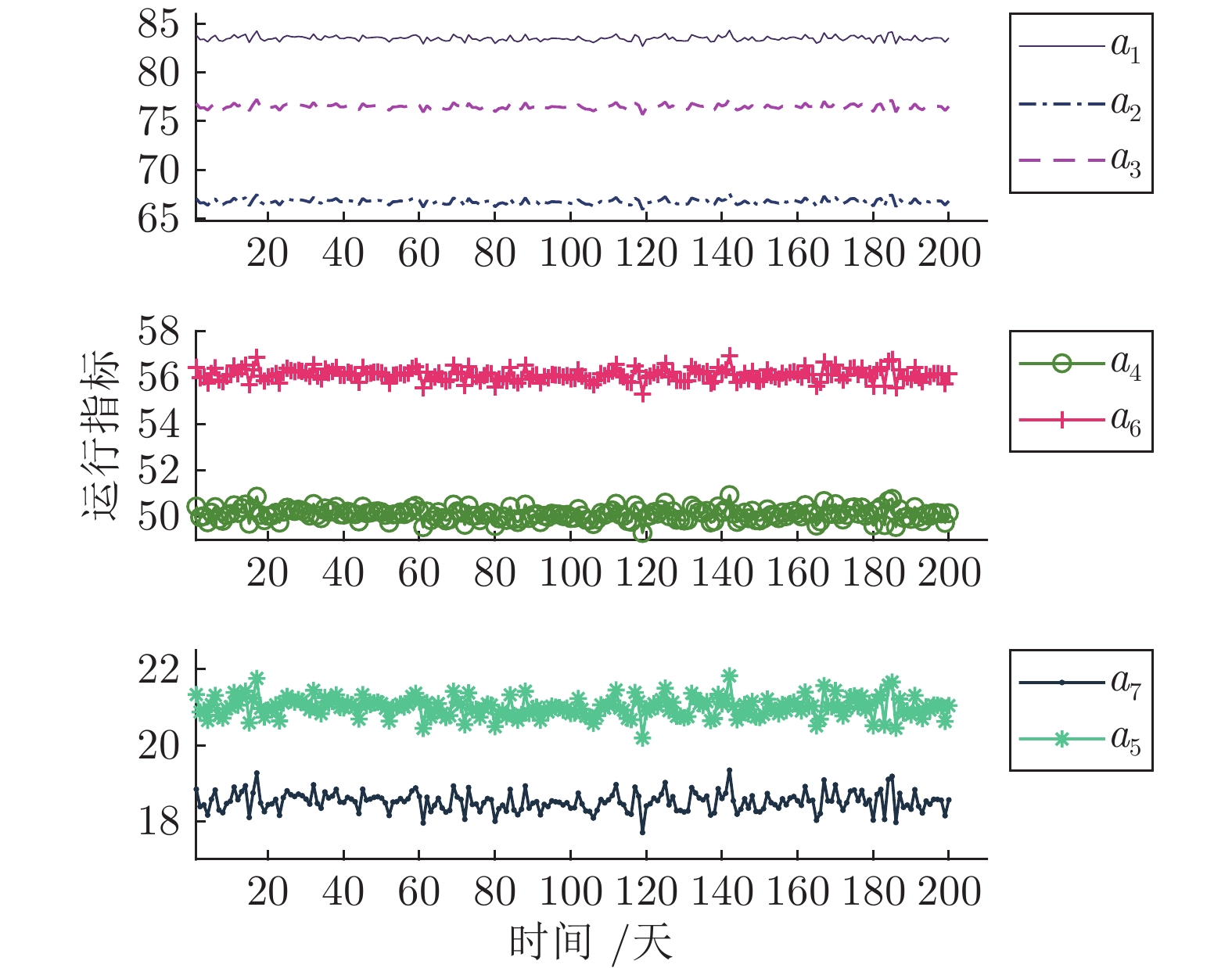
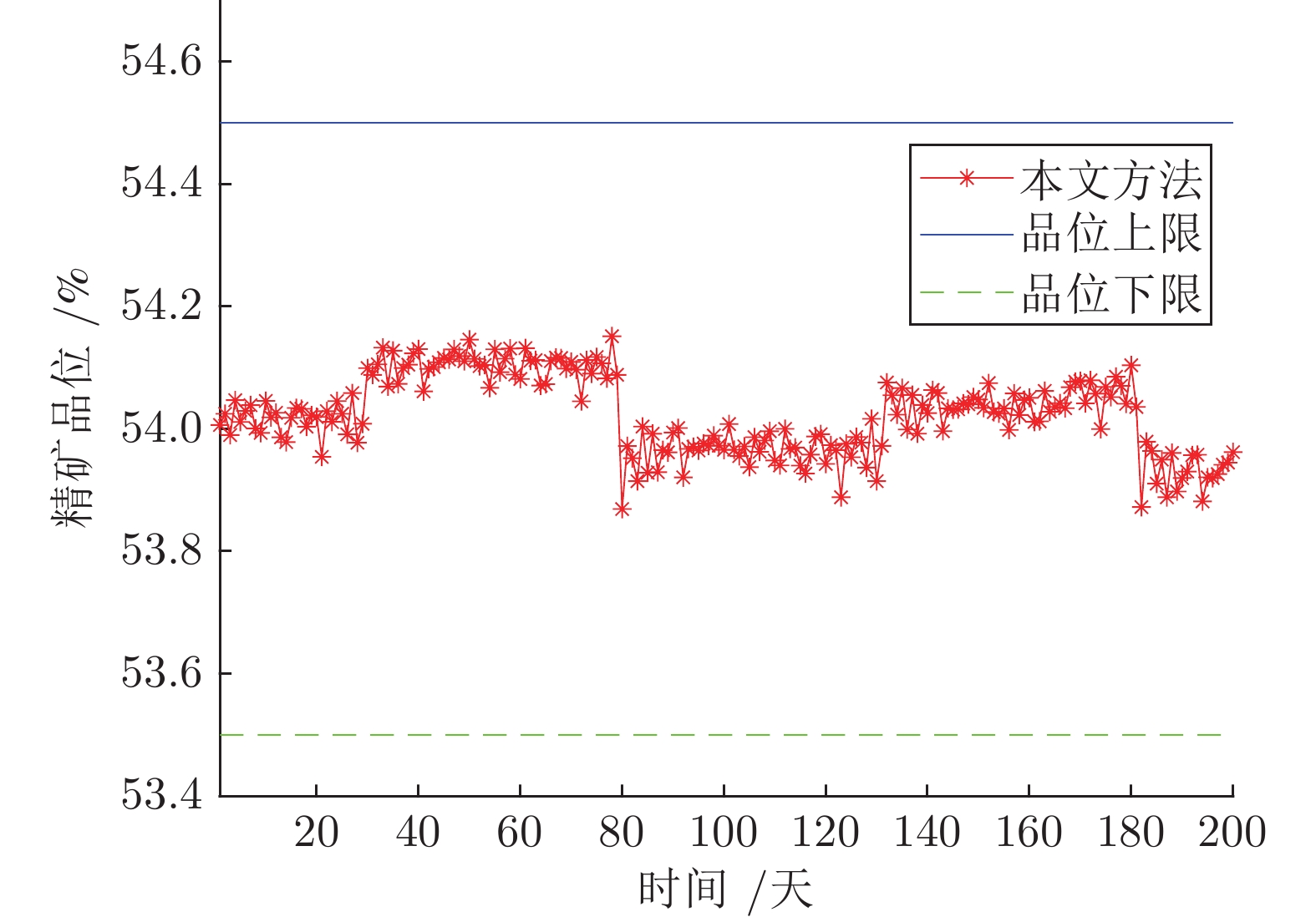
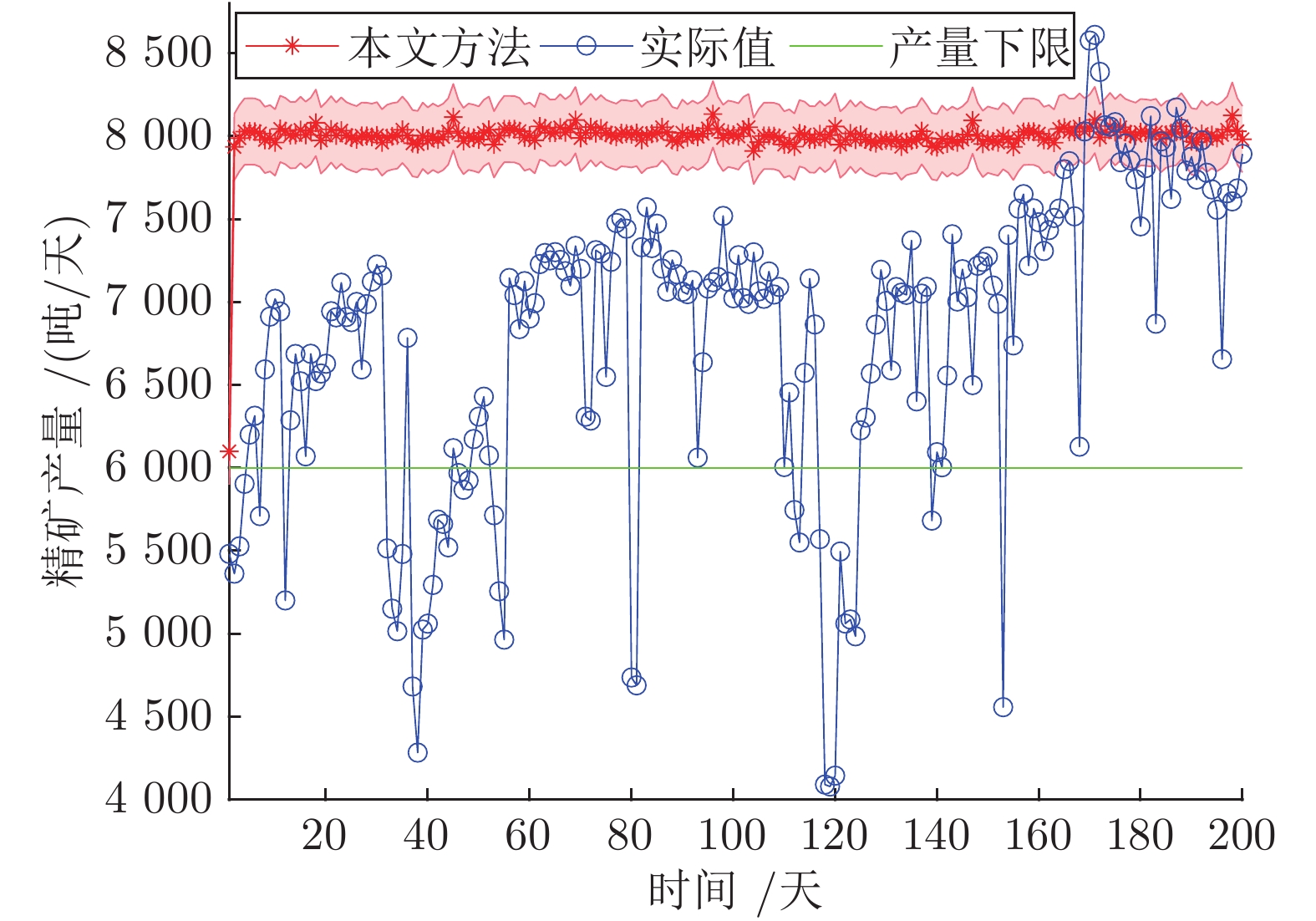
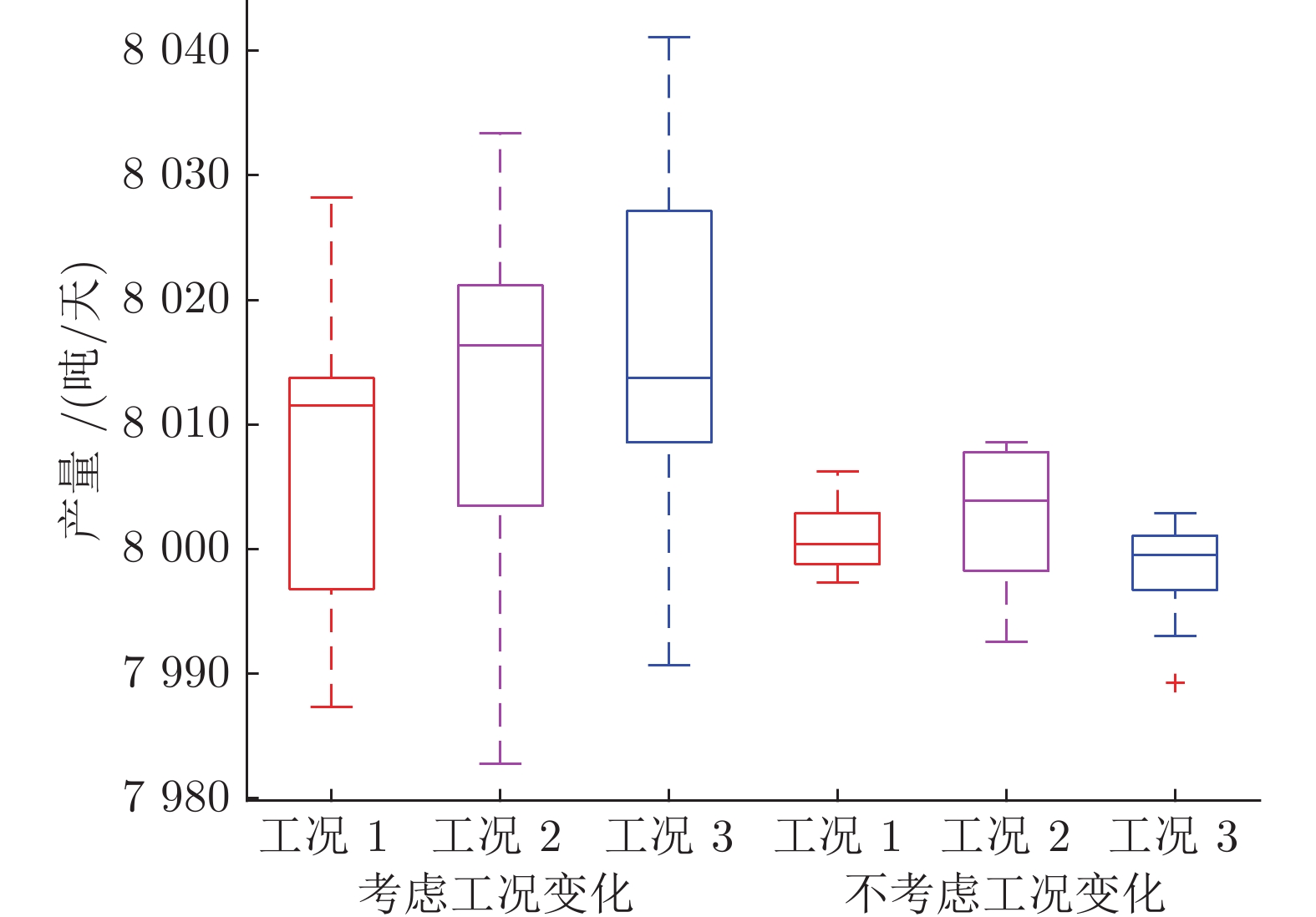
运行指标决策问题是实现工业过程运行安全和生产指标优化的关键. 考虑到多运行指标决策问题求解的复杂性和工业过程生产条件动态波动引发生产指标状态的不确定性, 提出了一种策略异步更新强化学习算法自学习决策运行指标, 并给出算法收敛性的理论证明. 该算法在随机自适应动态规划框架下, 利用样本均值代替计算生产指标状态转移概率矩阵, 因此无需要求生产指标状态转移概率矩阵已知. 并且通过引入时钟和定义其阈值, 采用集中式策略评估、多策略异步更新方式用以简化求解多运行指标决策问题, 提高强化学习的学习效率. 利用可测量数据, 自学习得到的运行指标能够保证生产指标优化, 并且限制在规定范围之内. 最后, 采用中国西部某大型选矿厂的实际数据进行仿真验证, 表明该方法的有效性.
运行指标决策问题是实现工业过程运行安全和生产指标优化的关键. 考虑到多运行指标决策问题求解的复杂性和工业过程生产条件动态波动引发生产指标状态的不确定性, 提出了一种策略异步更新强化学习算法自学习决策运行指标, 并给出算法收敛性的理论证明. 该算法在随机自适应动态规划框架下, 利用样本均值代替计算生产指标状态转移概率矩阵, 因此无需要求生产指标状态转移概率矩阵已知. 并且通过引入时钟和定义其阈值, 采用集中式策略评估、多策略异步更新方式用以简化求解多运行指标决策问题, 提高强化学习的学习效率. 利用可测量数据, 自学习得到的运行指标能够保证生产指标优化, 并且限制在规定范围之内. 最后, 采用中国西部某大型选矿厂的实际数据进行仿真验证, 表明该方法的有效性.