2026年 第52卷 第5期
2026, 52(5): 882-908.
doi: 10.16383/j.aas.c250507
cstr: 32138.14.j.aas.c250507
摘要:
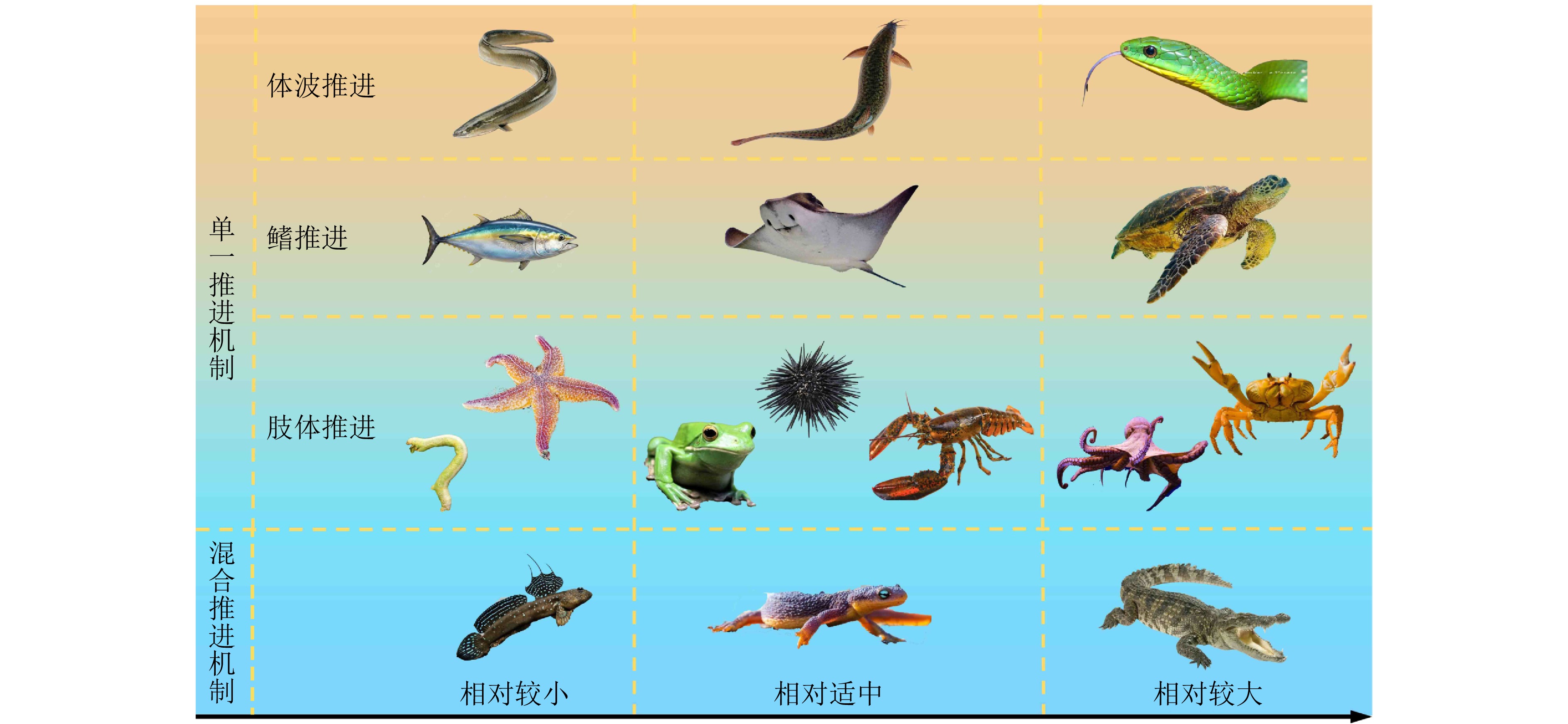
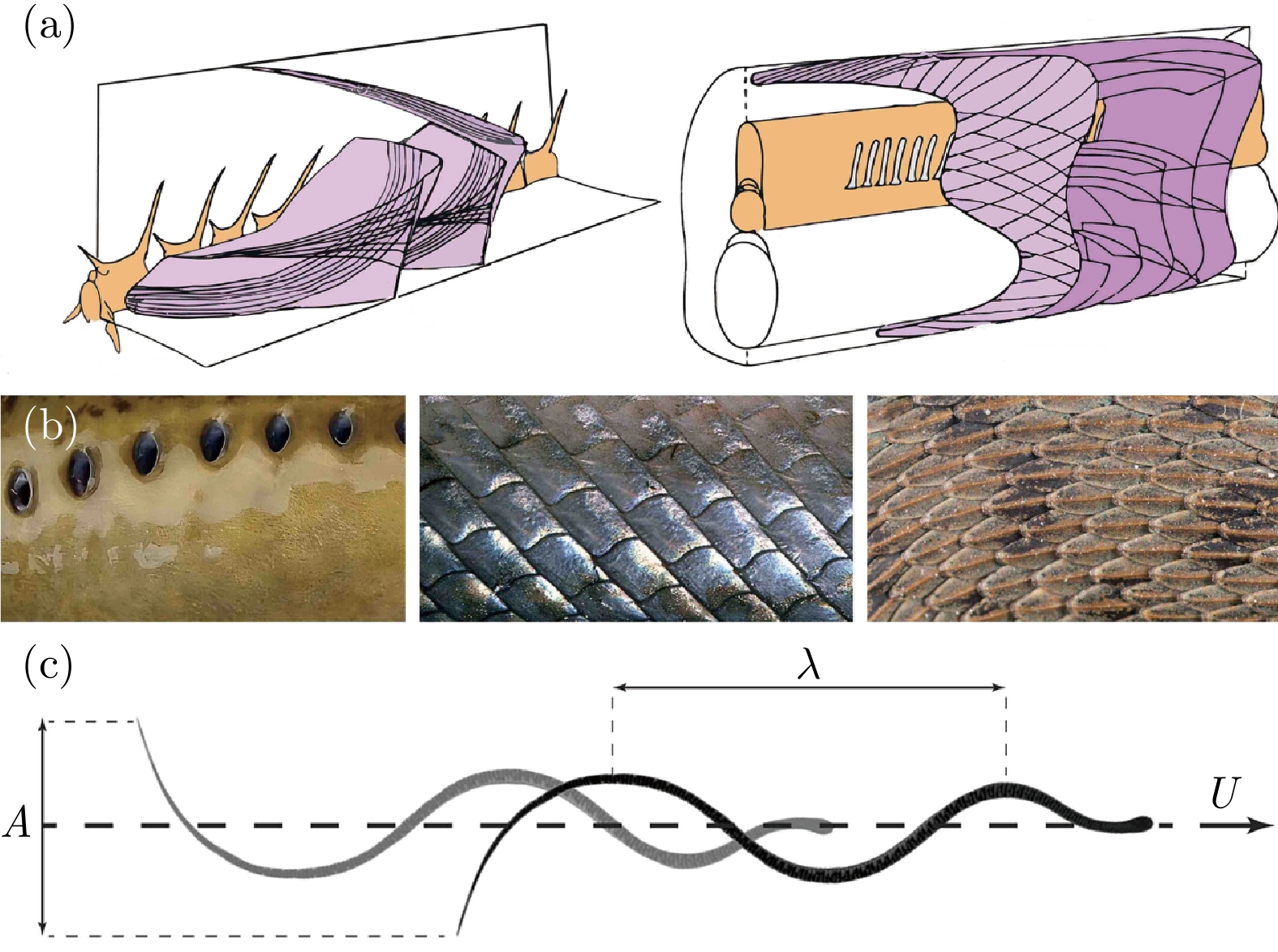
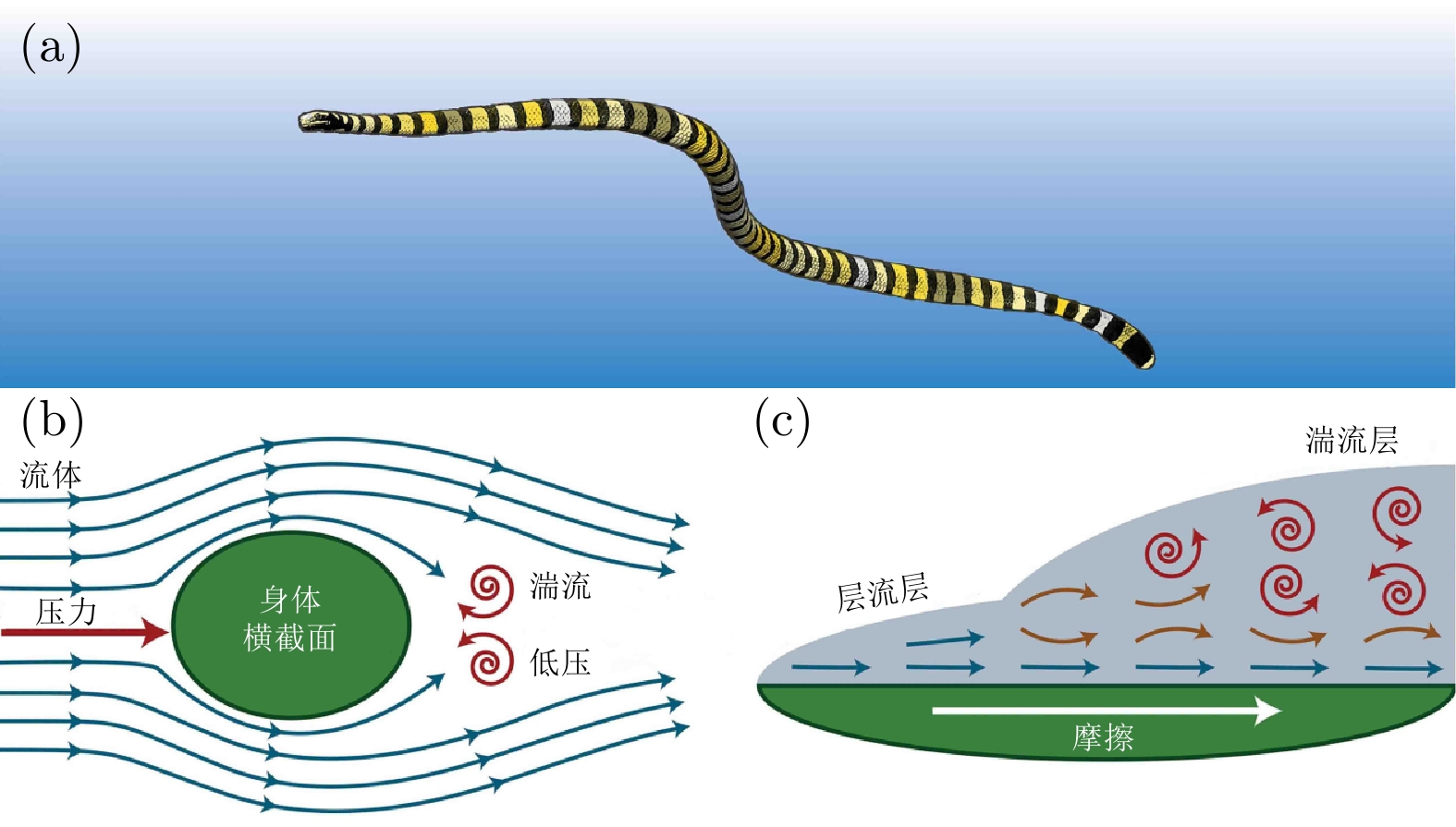
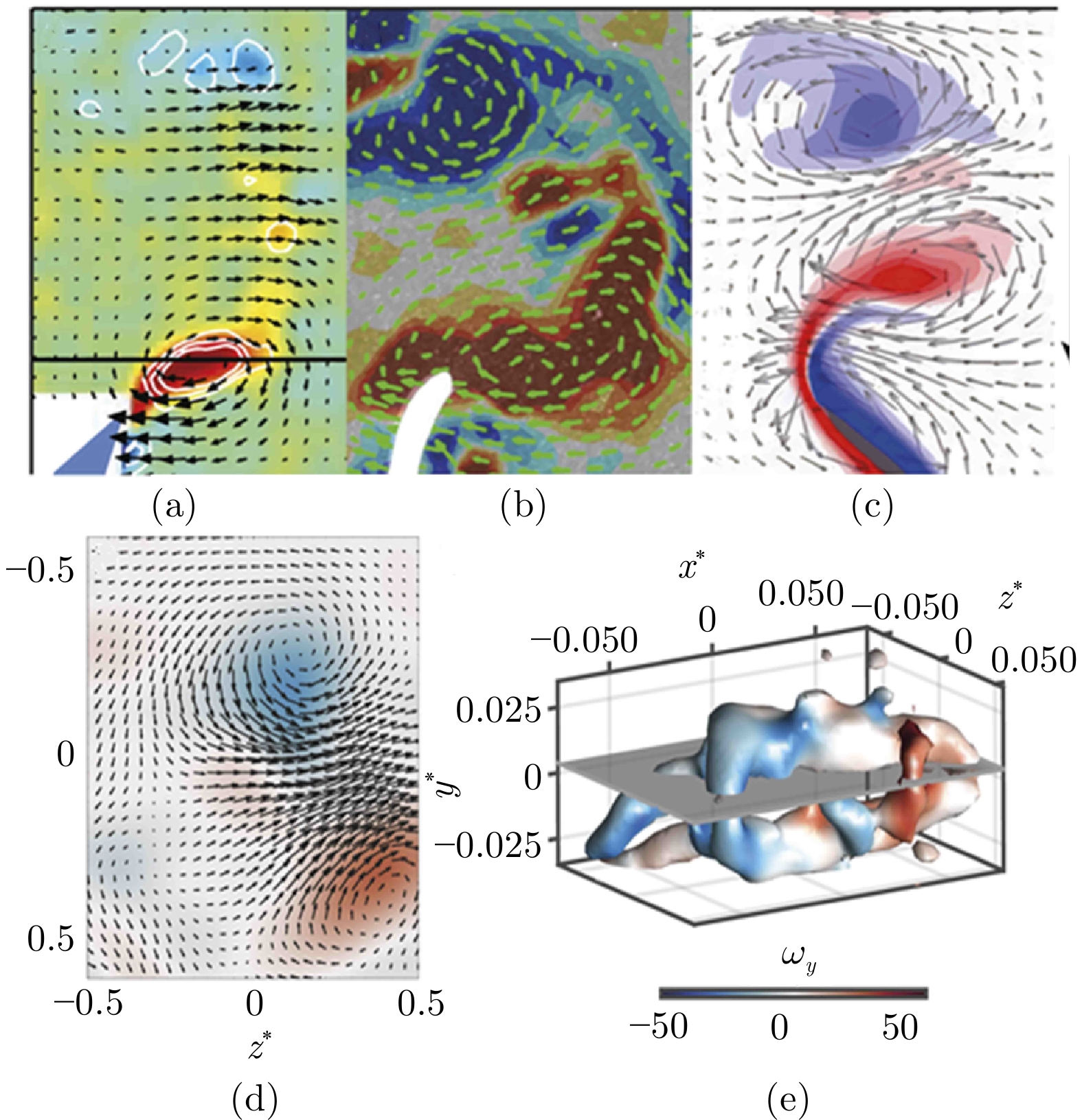
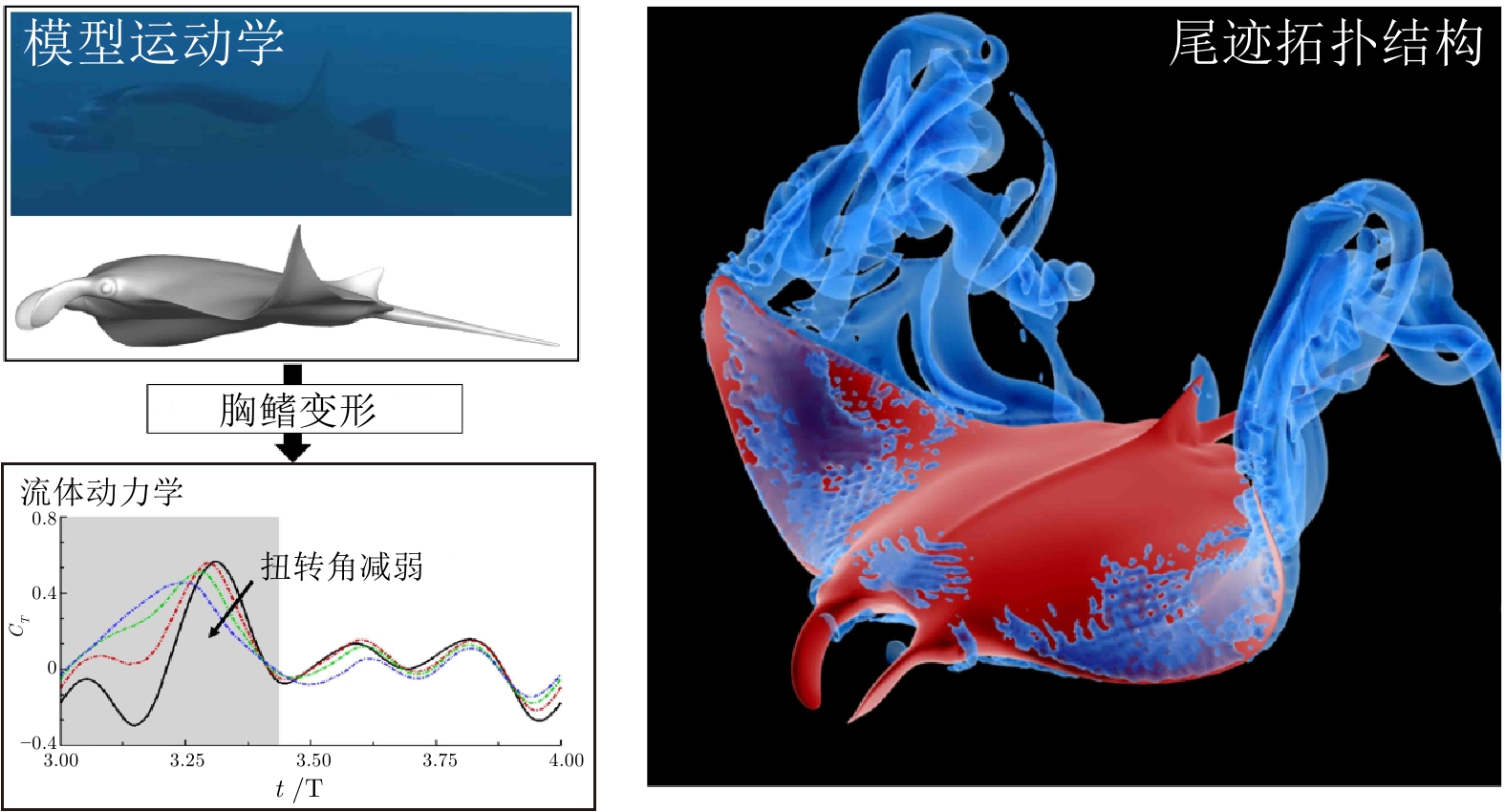
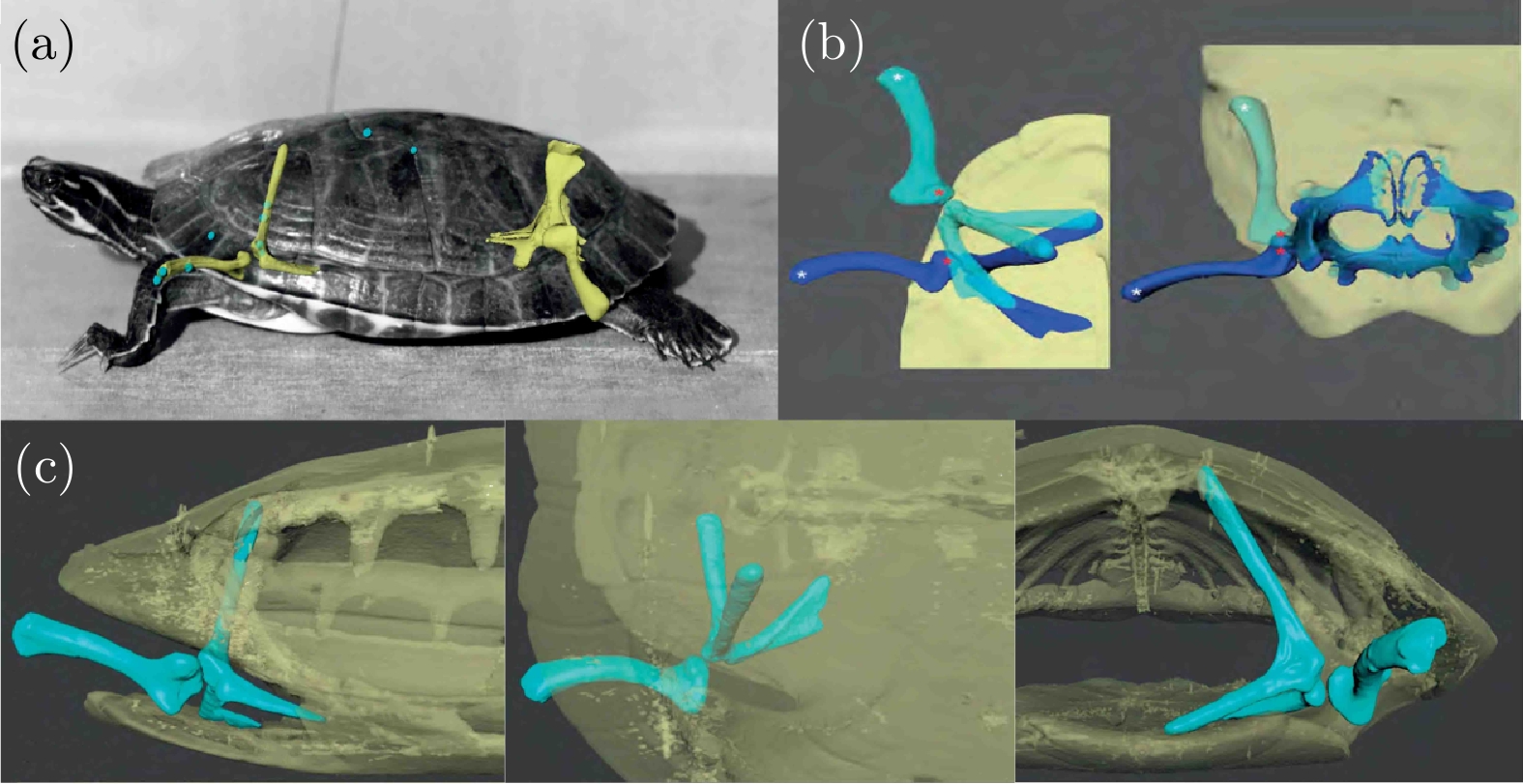
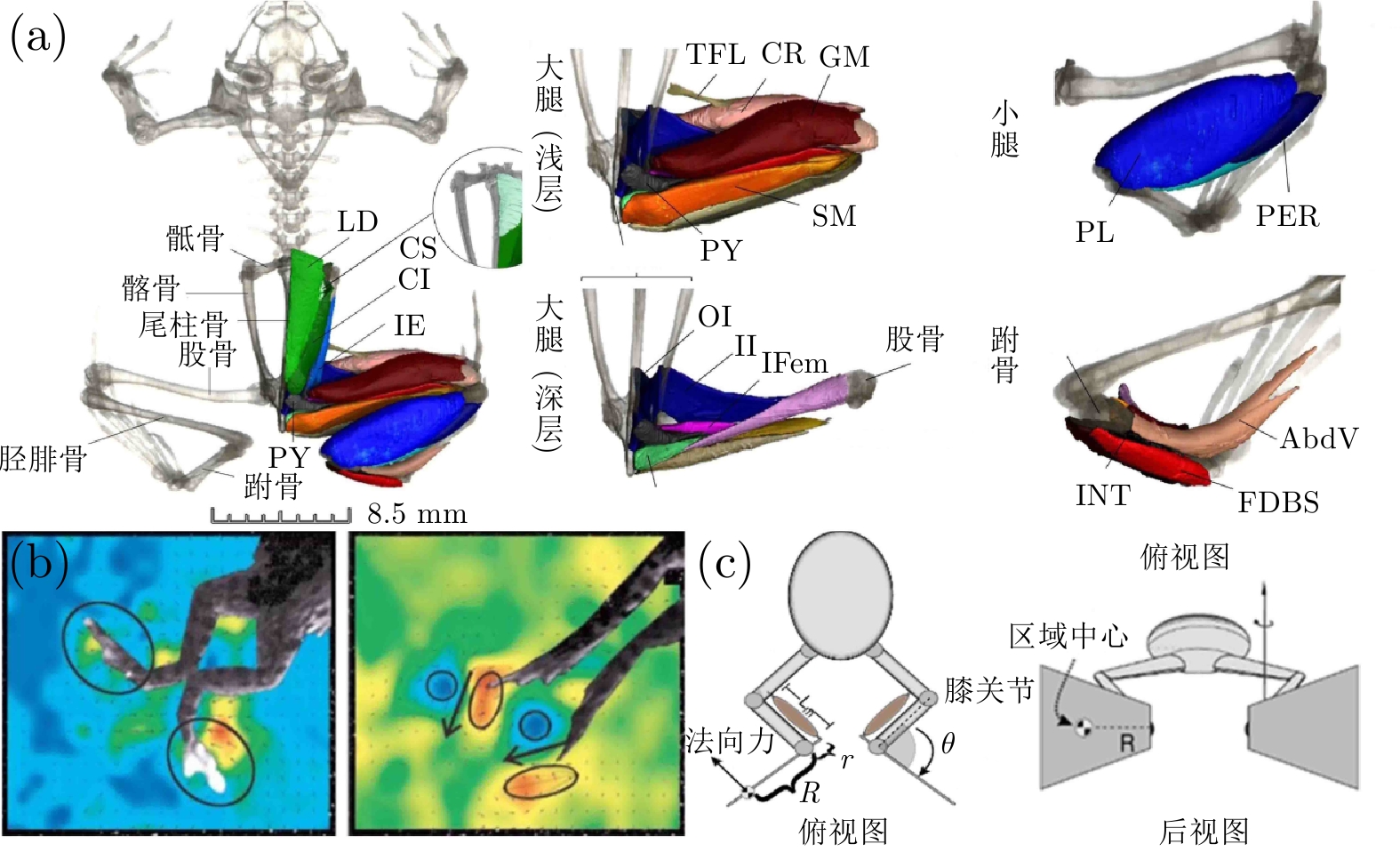
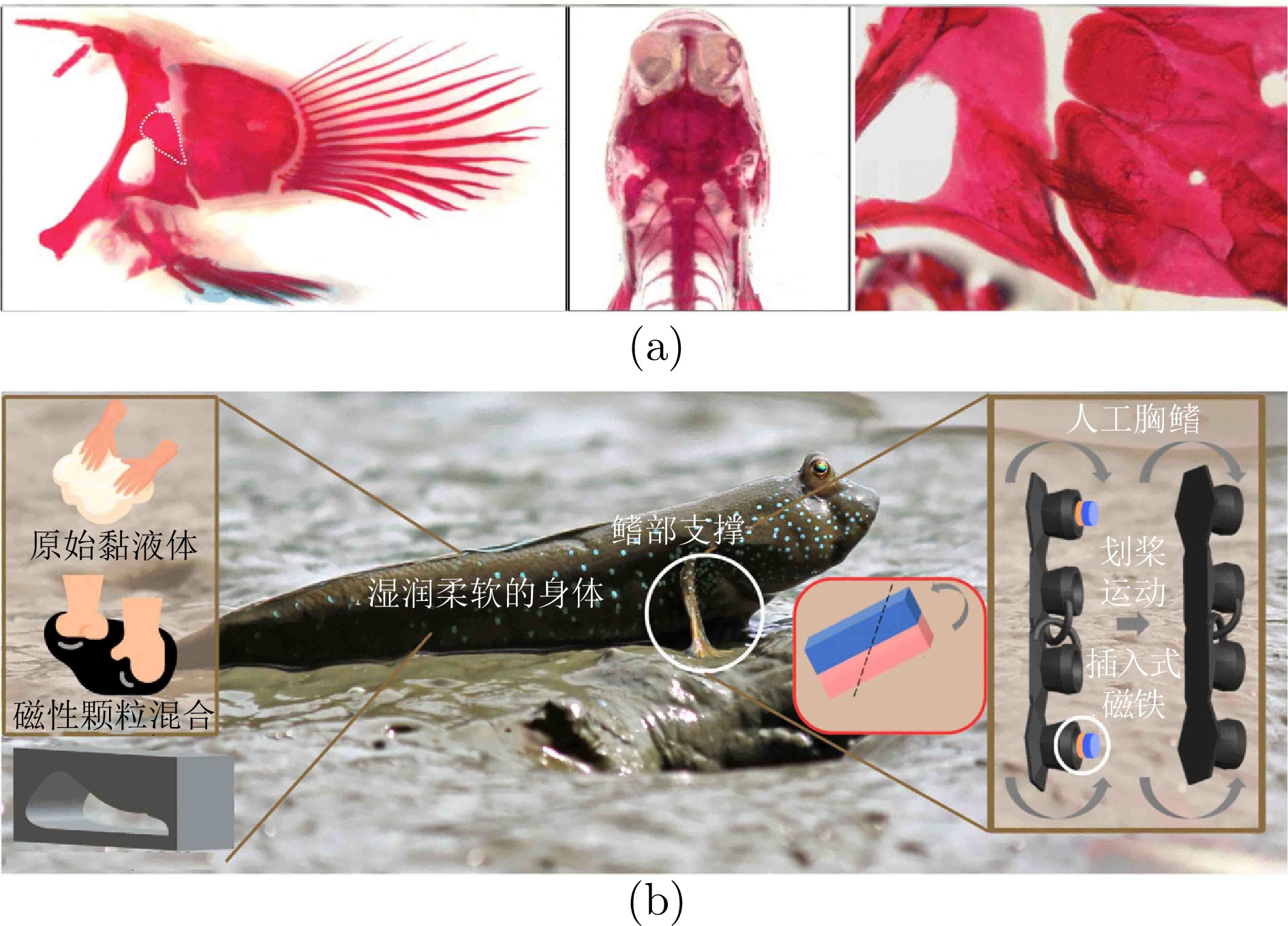
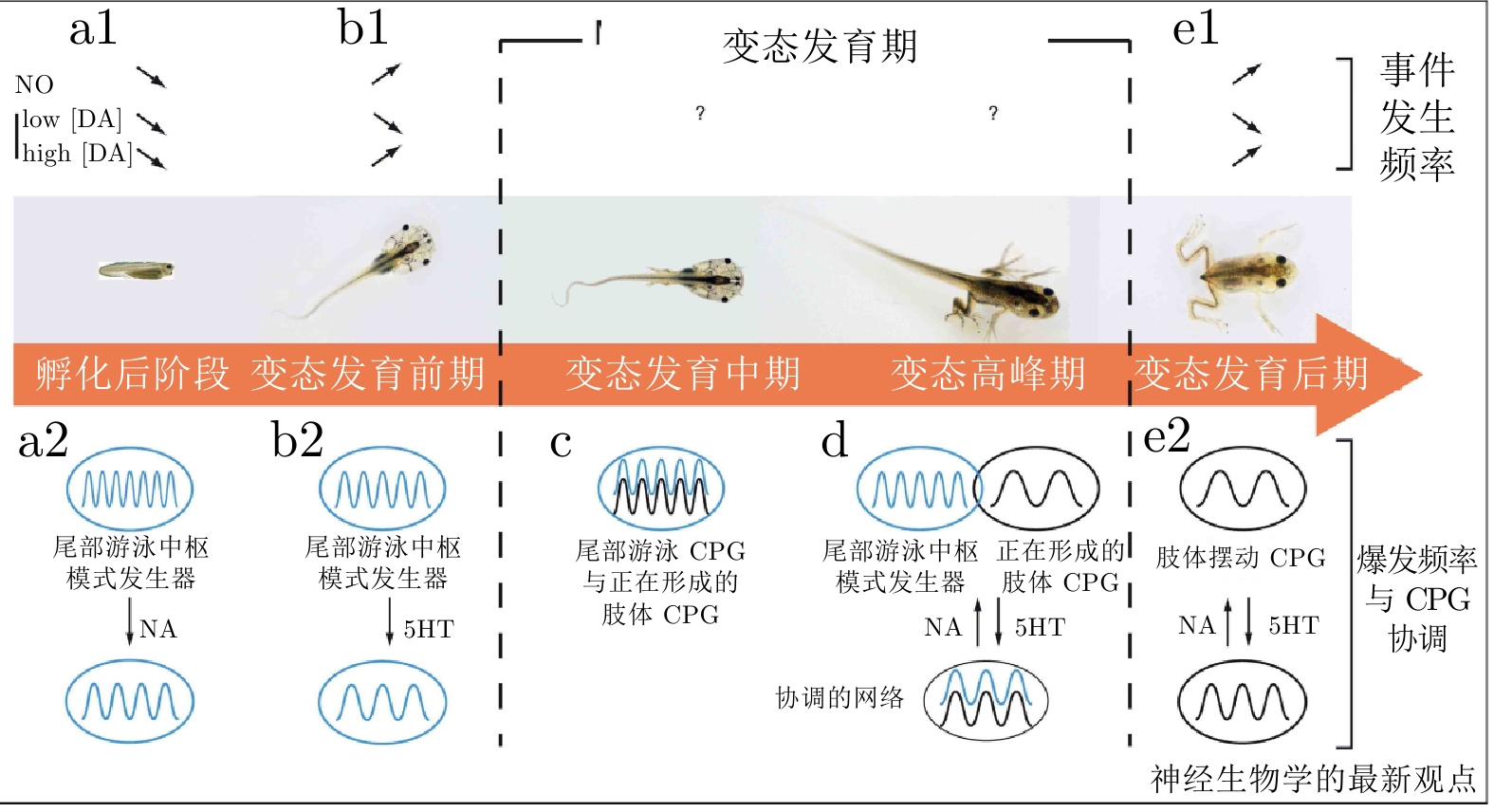
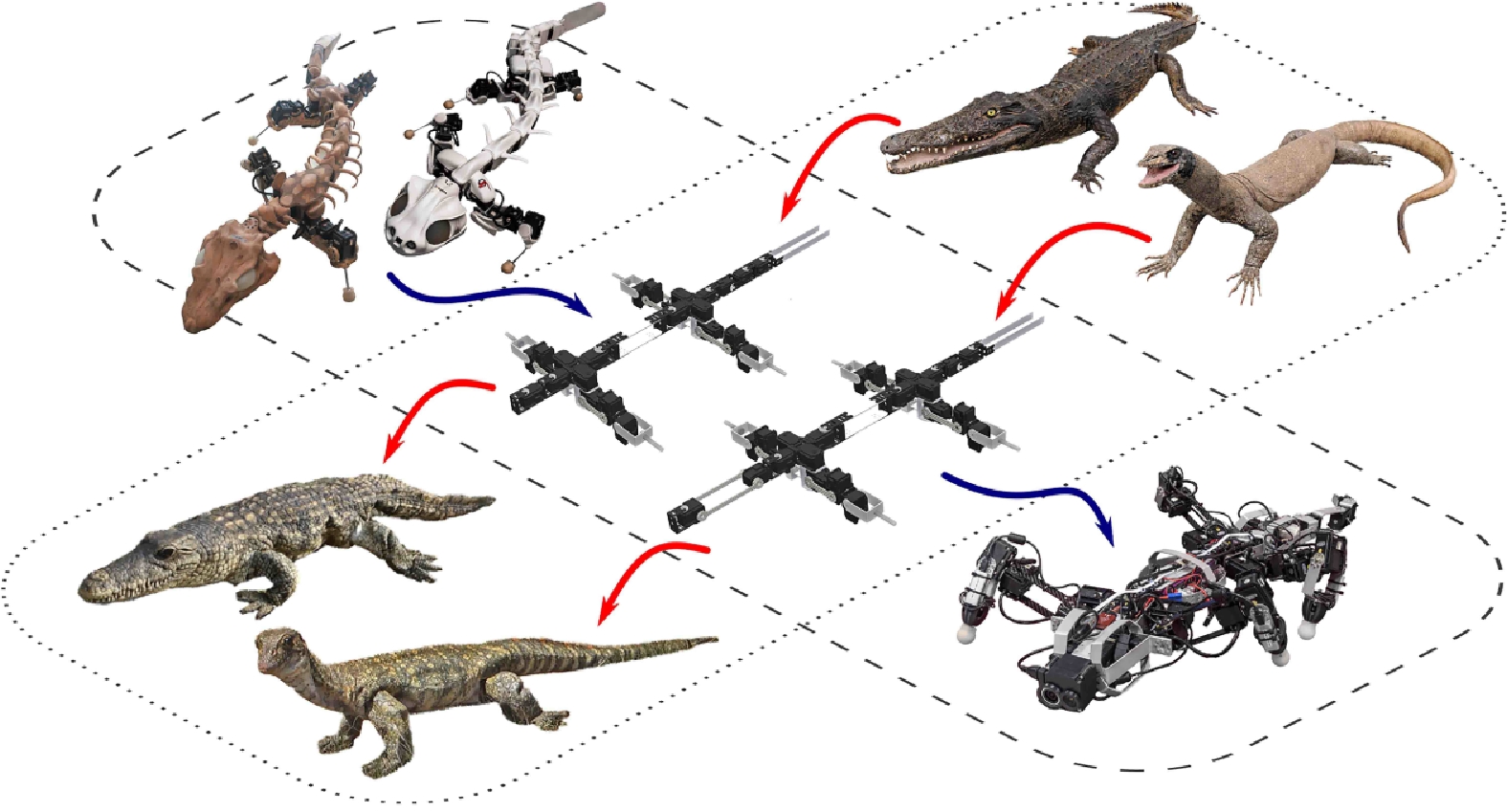
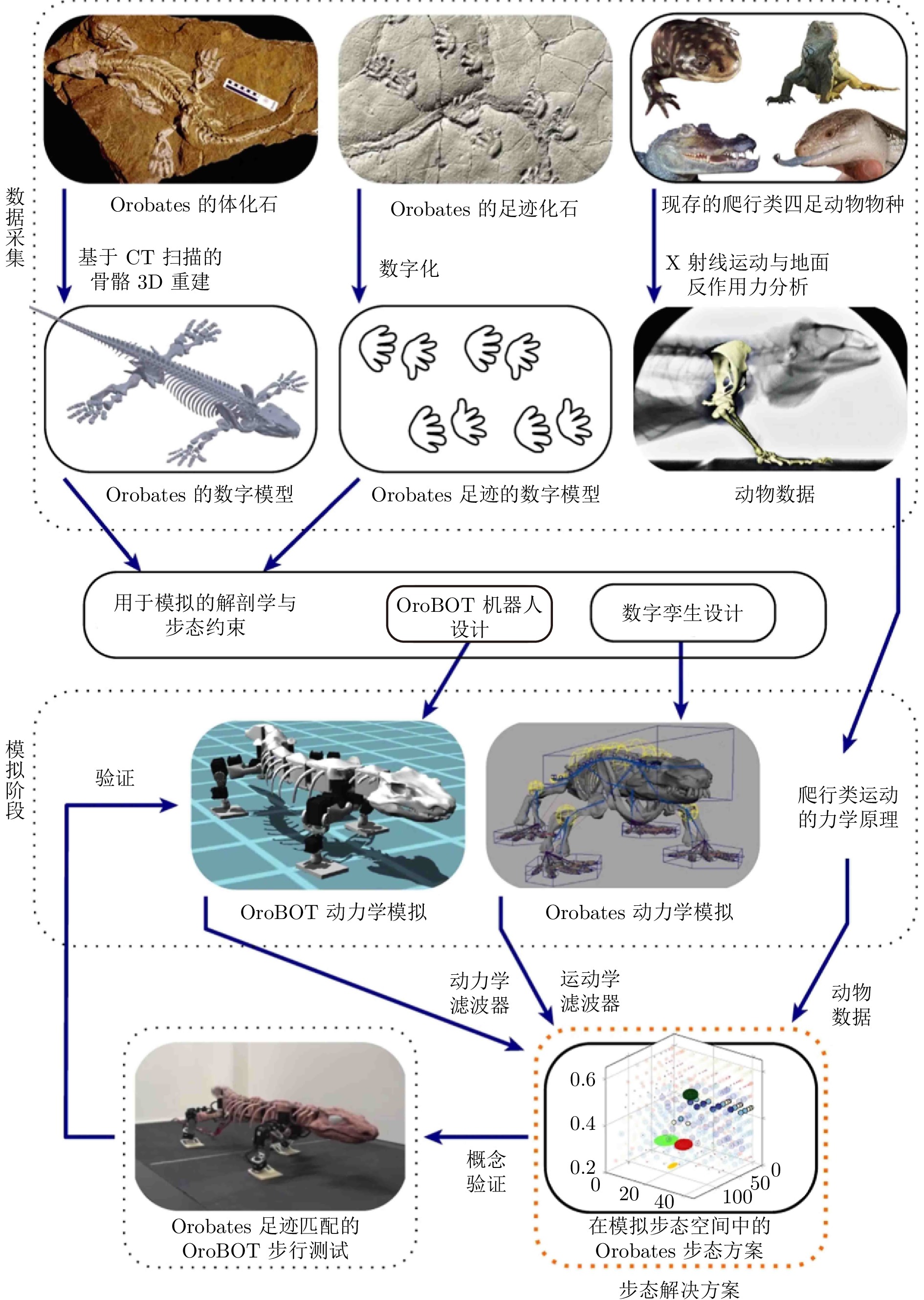
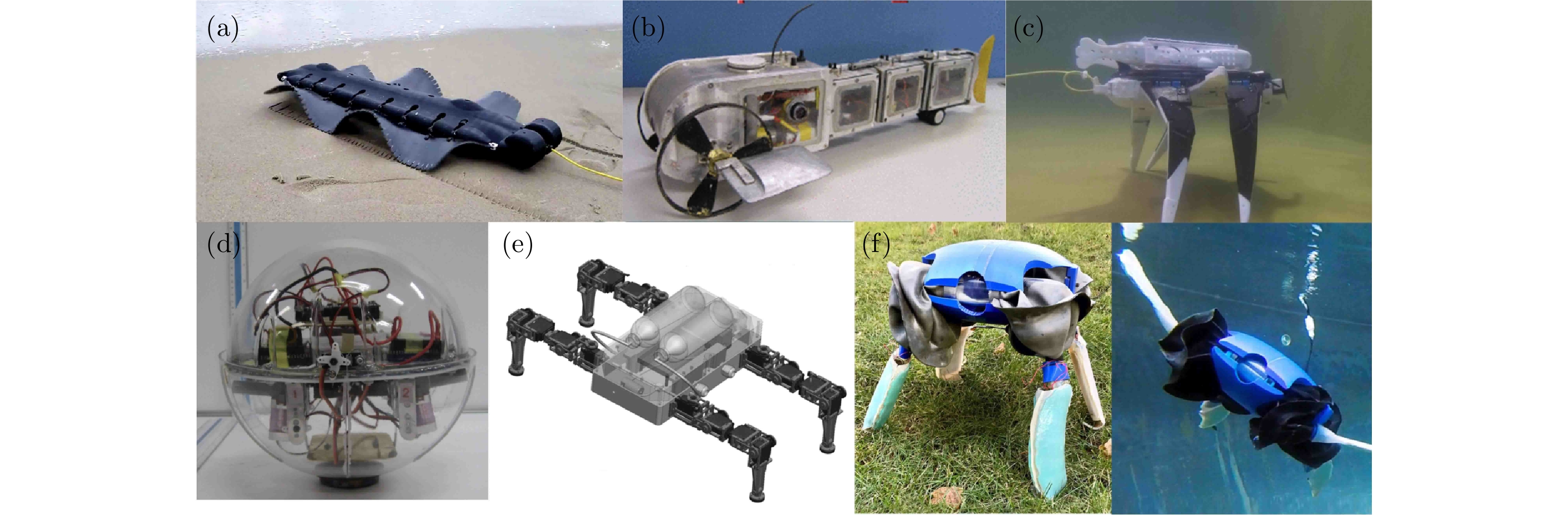
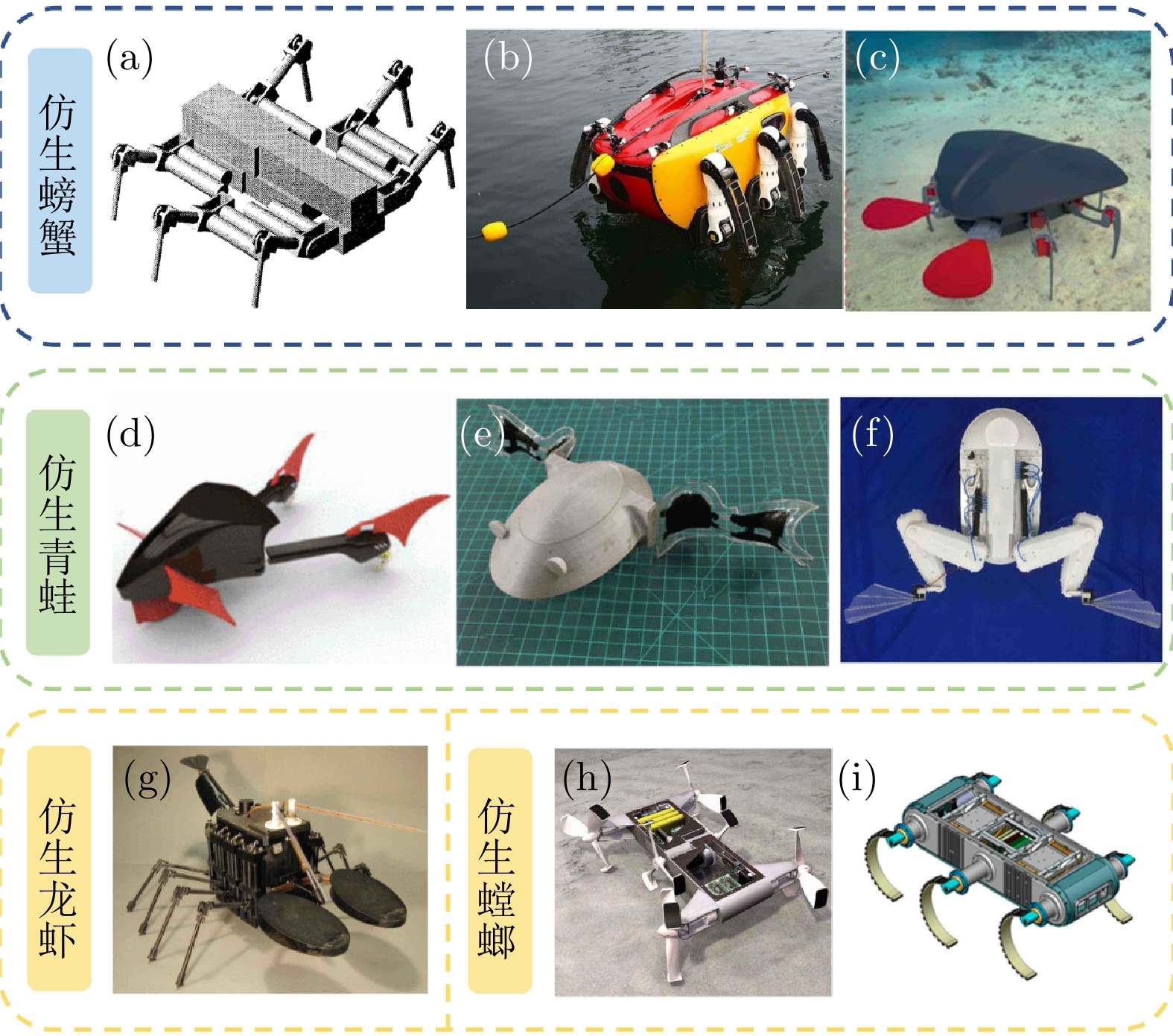
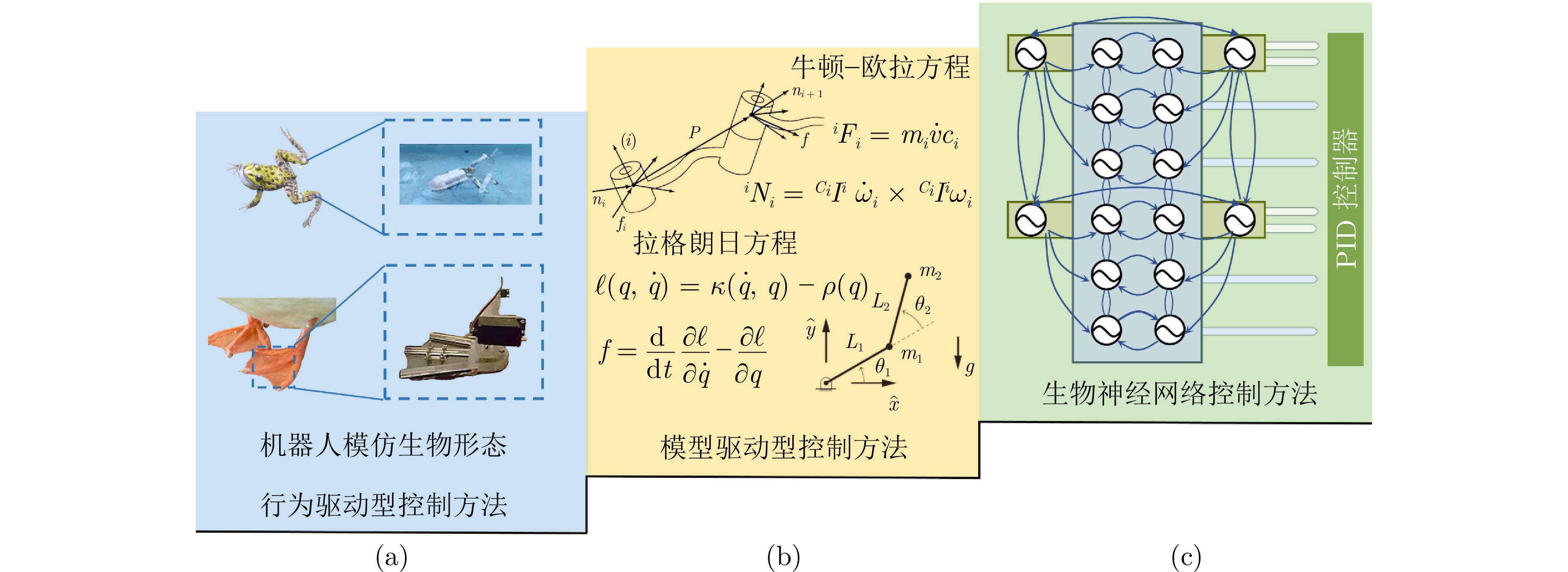
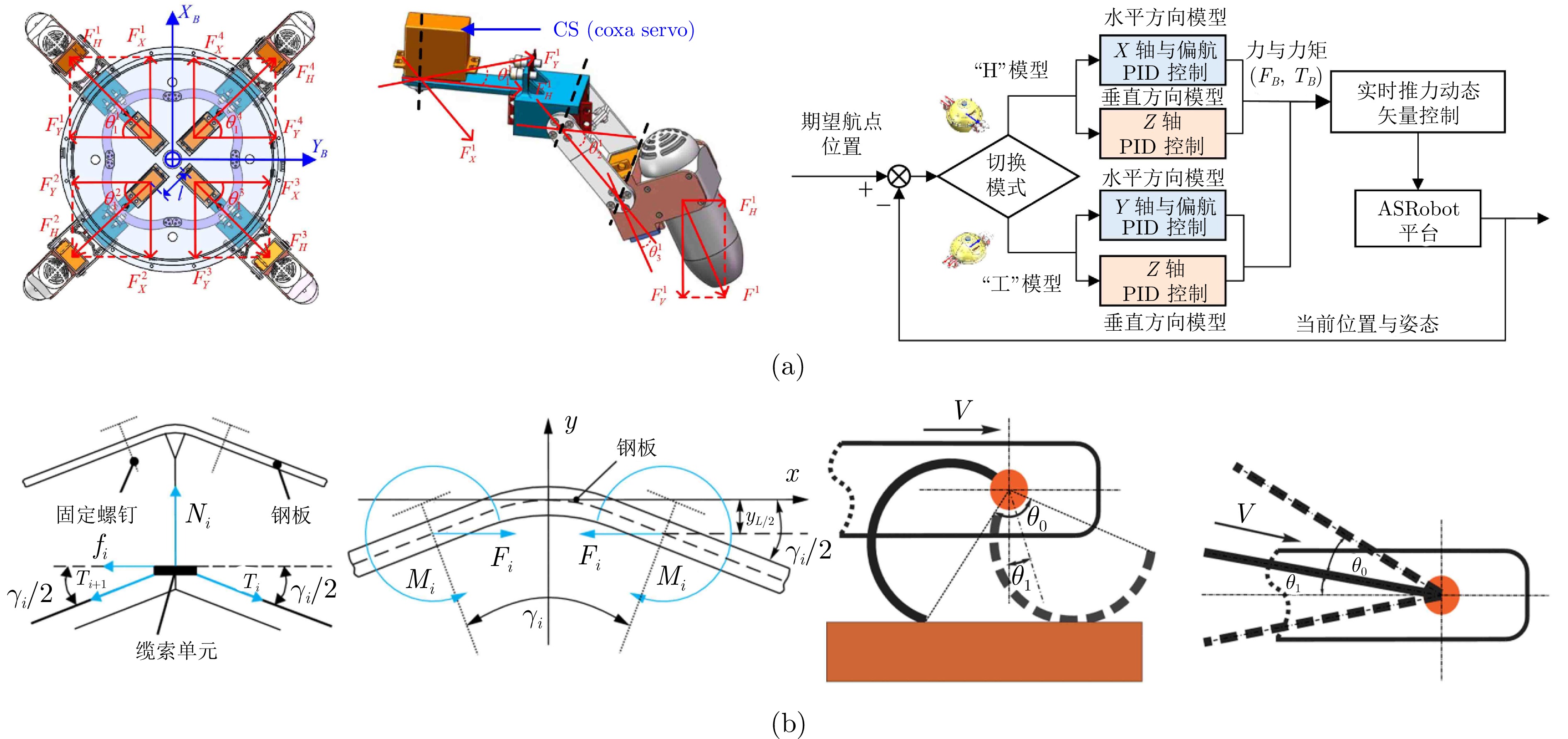
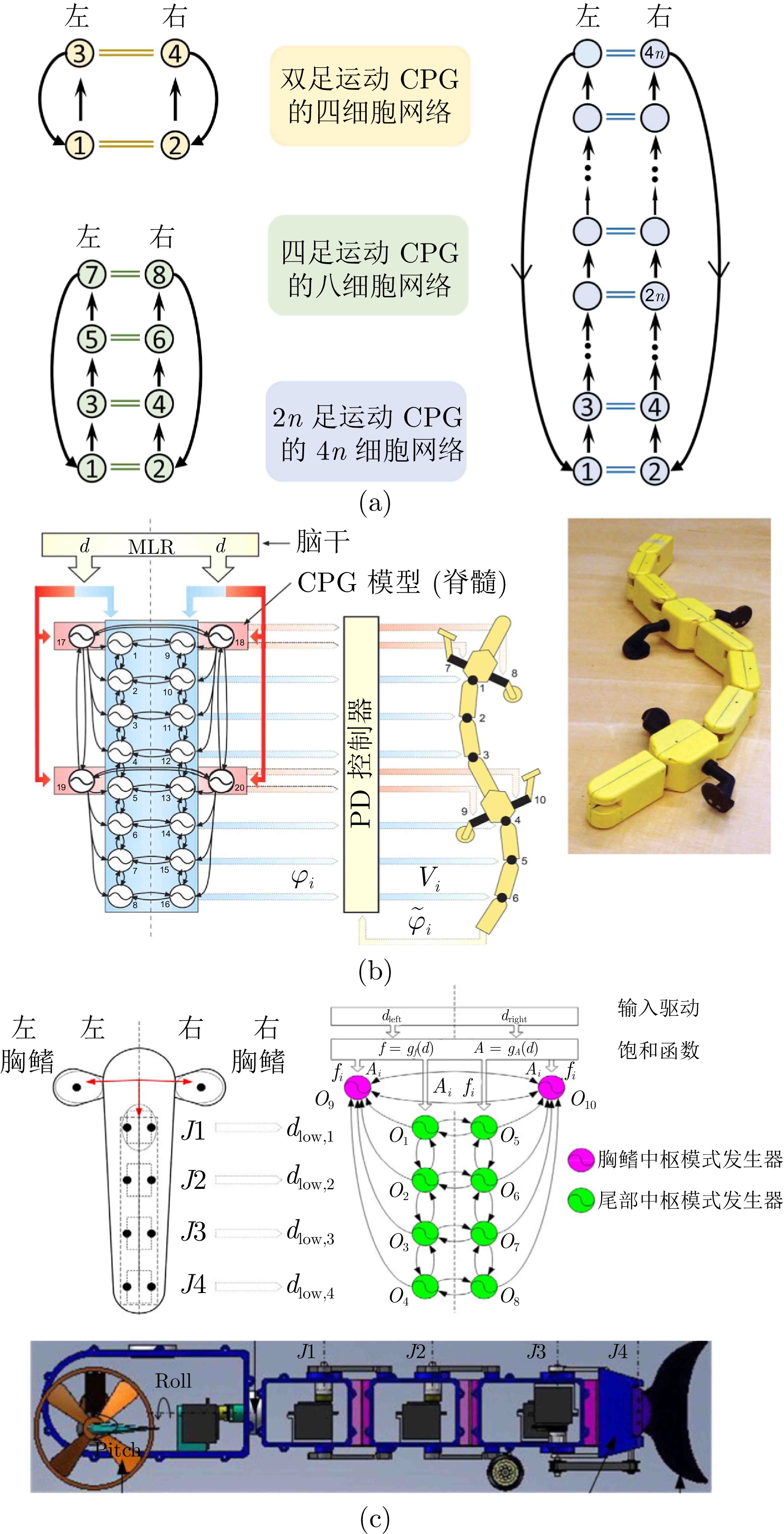
水陆两栖机器人凭借其跨介质运动能力, 在巡检、侦察、生态监测等多个领域展现出广阔的应用前景. 仿生学通过借鉴水陆两栖动物的形态结构与运动策略, 为提升机器人的环境适应性与运动机动性提供重要的设计思路. 首先, 系统梳理具有不同形态特征的典型水陆两栖生物, 并阐明其推进机制对机器人设计所产生的双向促进作用. 其次, 以推进策略为主线, 将现有两栖机器人划分为采用统一驱动的单一推进机制(包括鳍推进、刚性肢体推进、柔性肢体推进及连续体波推进)以及采用不同驱动方式的混合推进机制, 分别介绍各类代表性仿生两栖机器人原型样机, 并分析各种推进方式在不同介质的适应性变化及效能. 随后, 总结感知、驱动与控制等关键技术的当前发展状况, 比较不同推进模式下控制策略的共性与差异. 最后, 结合跨介质多场景运动、具身智能及物理智能等前沿理念, 探讨水陆仿生两栖机器人未来的研究方向与应用前景.
水陆两栖机器人凭借其跨介质运动能力, 在巡检、侦察、生态监测等多个领域展现出广阔的应用前景. 仿生学通过借鉴水陆两栖动物的形态结构与运动策略, 为提升机器人的环境适应性与运动机动性提供重要的设计思路. 首先, 系统梳理具有不同形态特征的典型水陆两栖生物, 并阐明其推进机制对机器人设计所产生的双向促进作用. 其次, 以推进策略为主线, 将现有两栖机器人划分为采用统一驱动的单一推进机制(包括鳍推进、刚性肢体推进、柔性肢体推进及连续体波推进)以及采用不同驱动方式的混合推进机制, 分别介绍各类代表性仿生两栖机器人原型样机, 并分析各种推进方式在不同介质的适应性变化及效能. 随后, 总结感知、驱动与控制等关键技术的当前发展状况, 比较不同推进模式下控制策略的共性与差异. 最后, 结合跨介质多场景运动、具身智能及物理智能等前沿理念, 探讨水陆仿生两栖机器人未来的研究方向与应用前景.

2026, 52(5): 909-931.
doi: 10.16383/j.aas.c250681
cstr: 32138.14.j.aas.c250681
摘要:
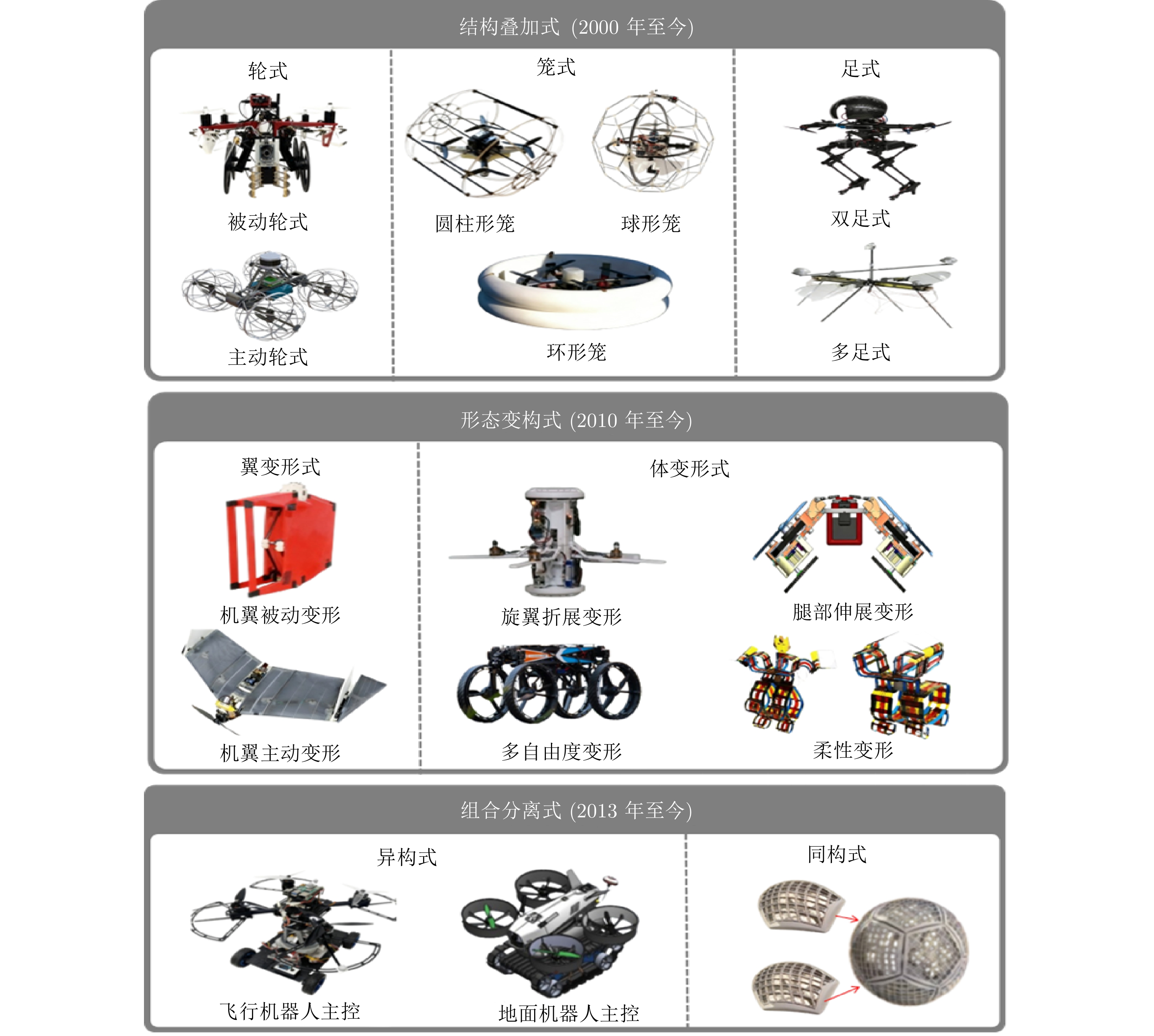
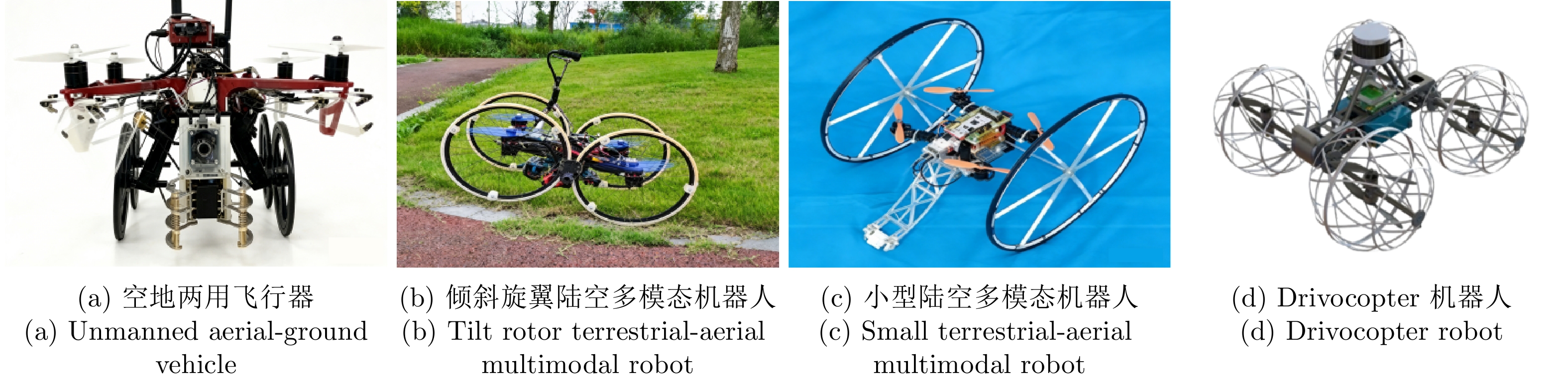
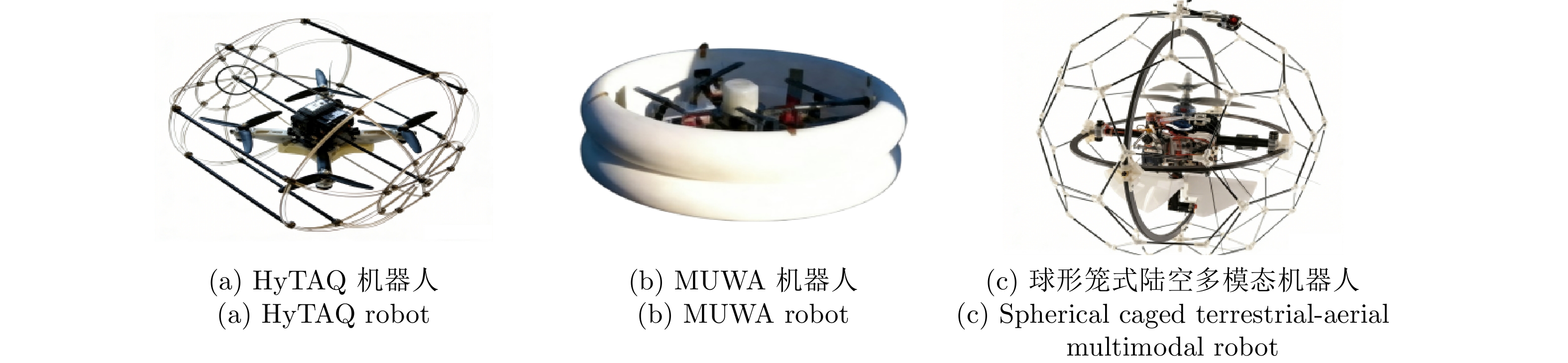
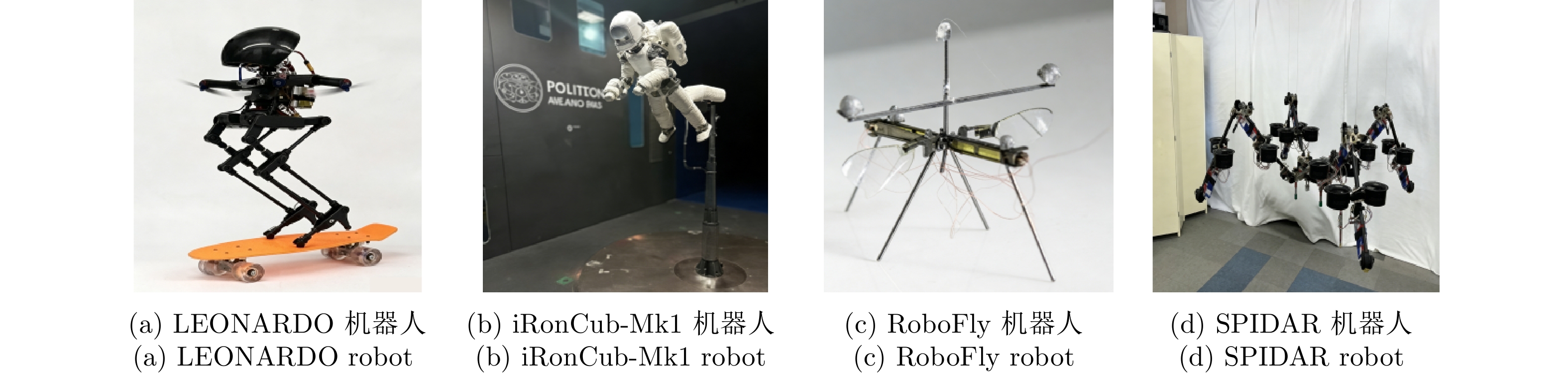
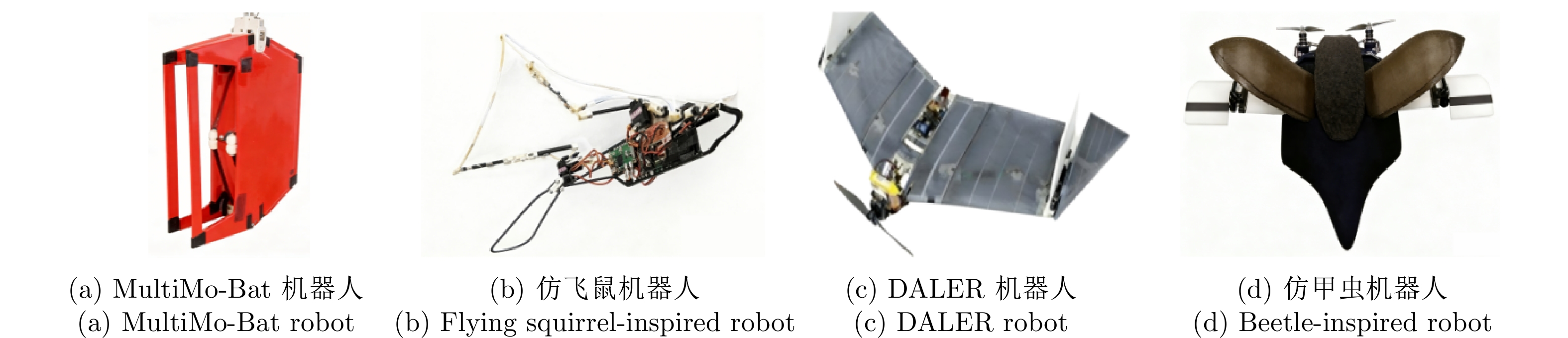
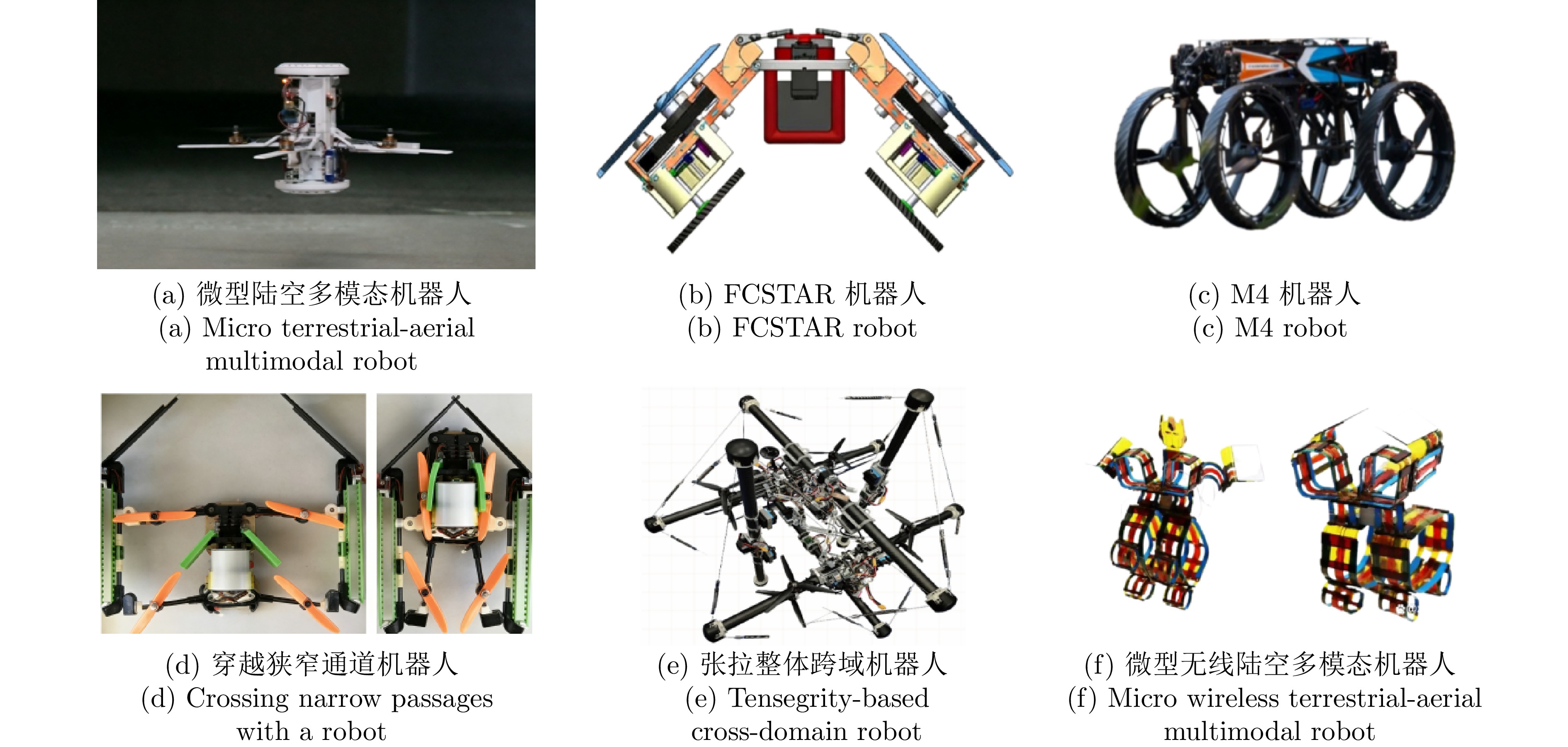
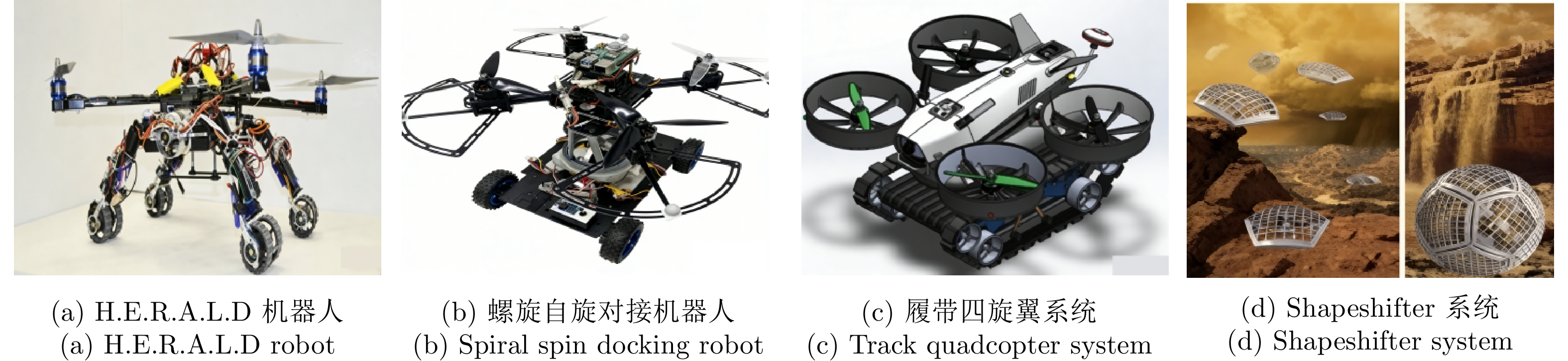
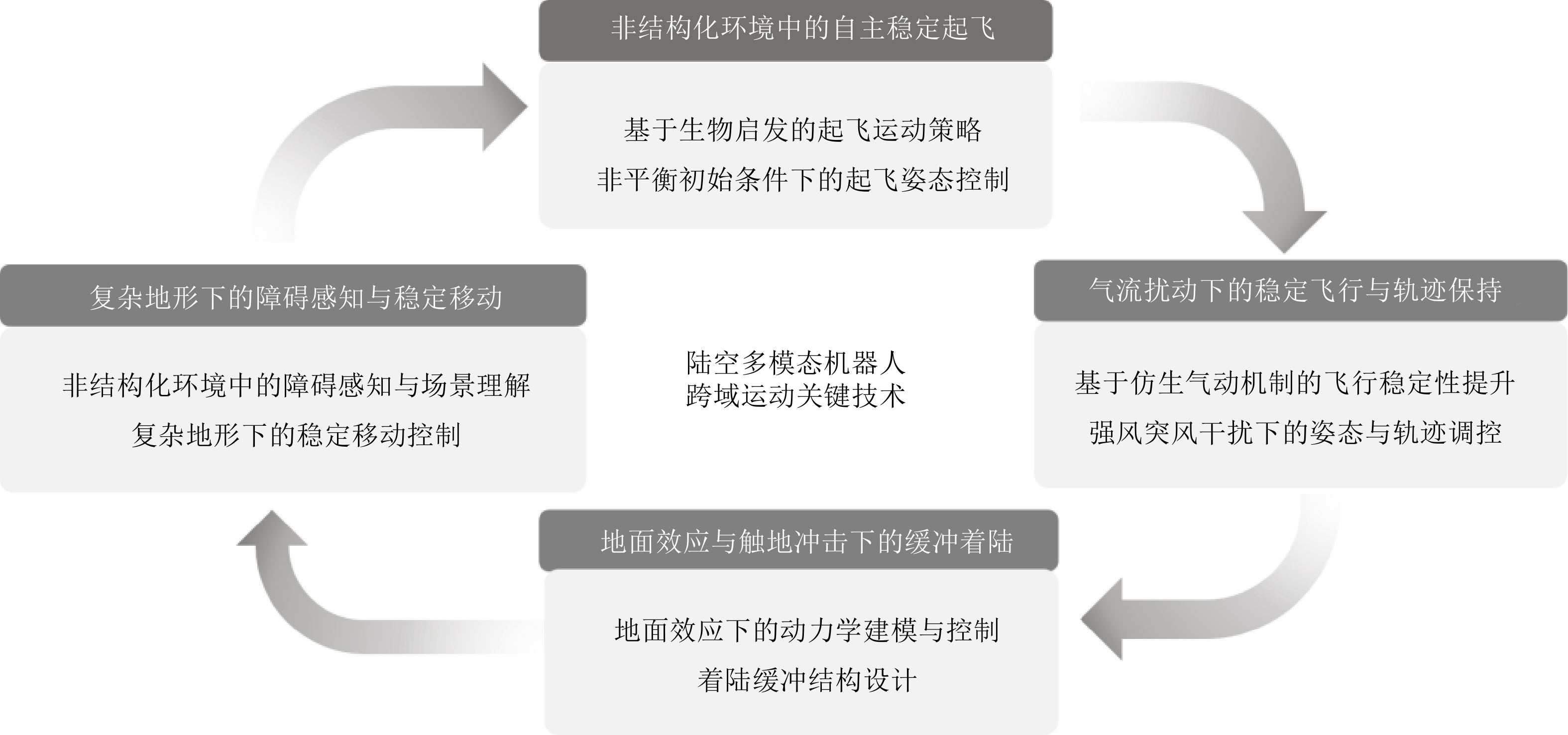
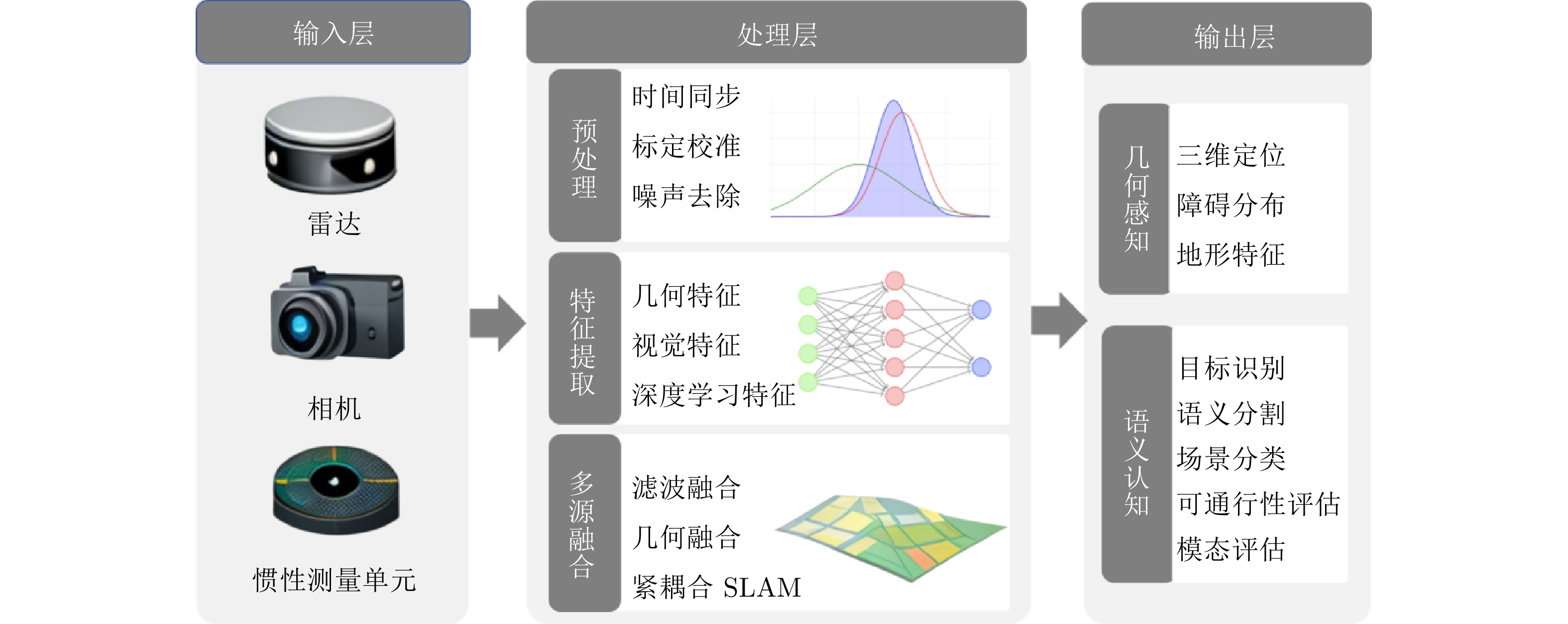
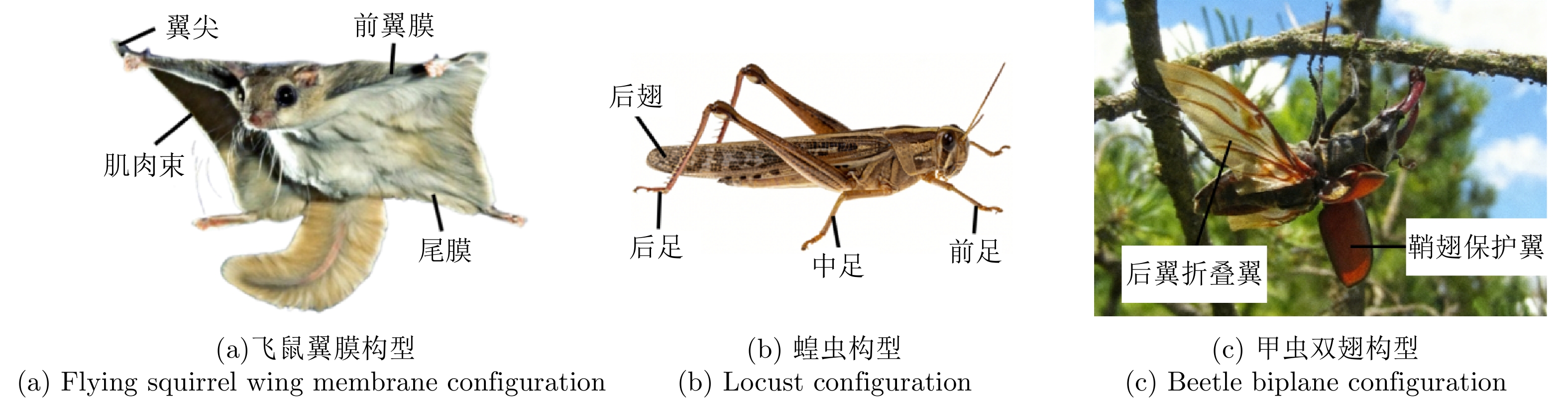
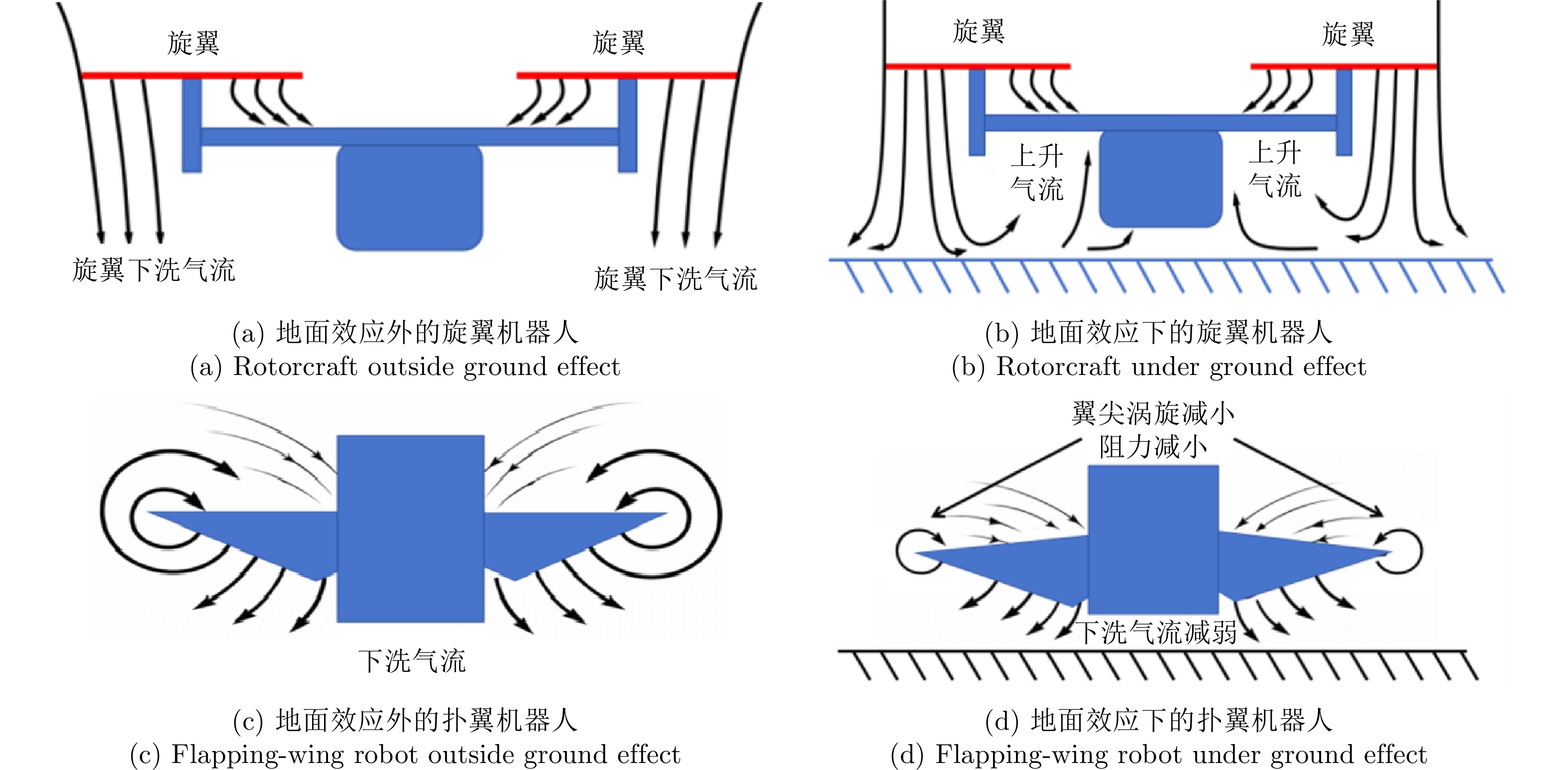
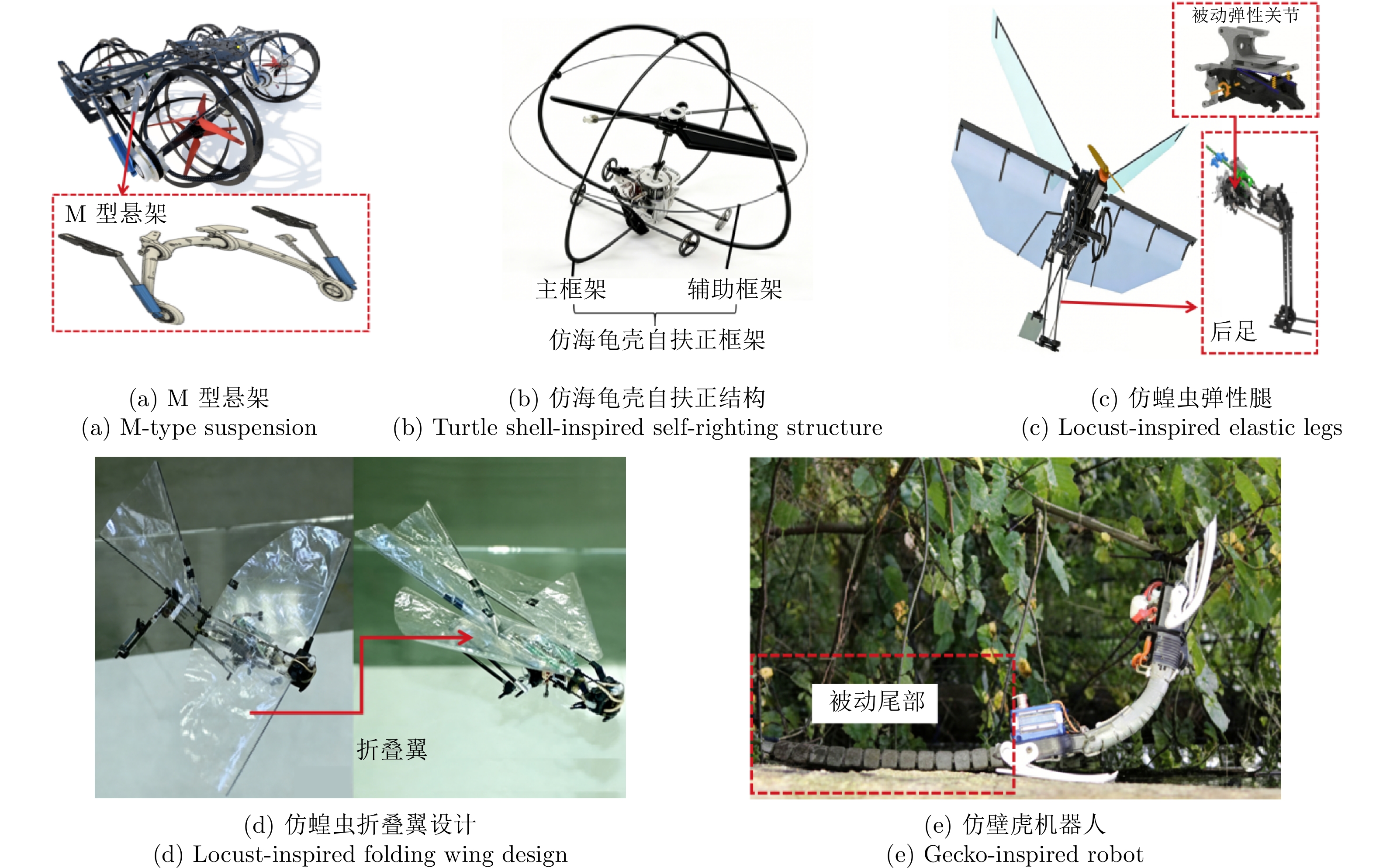
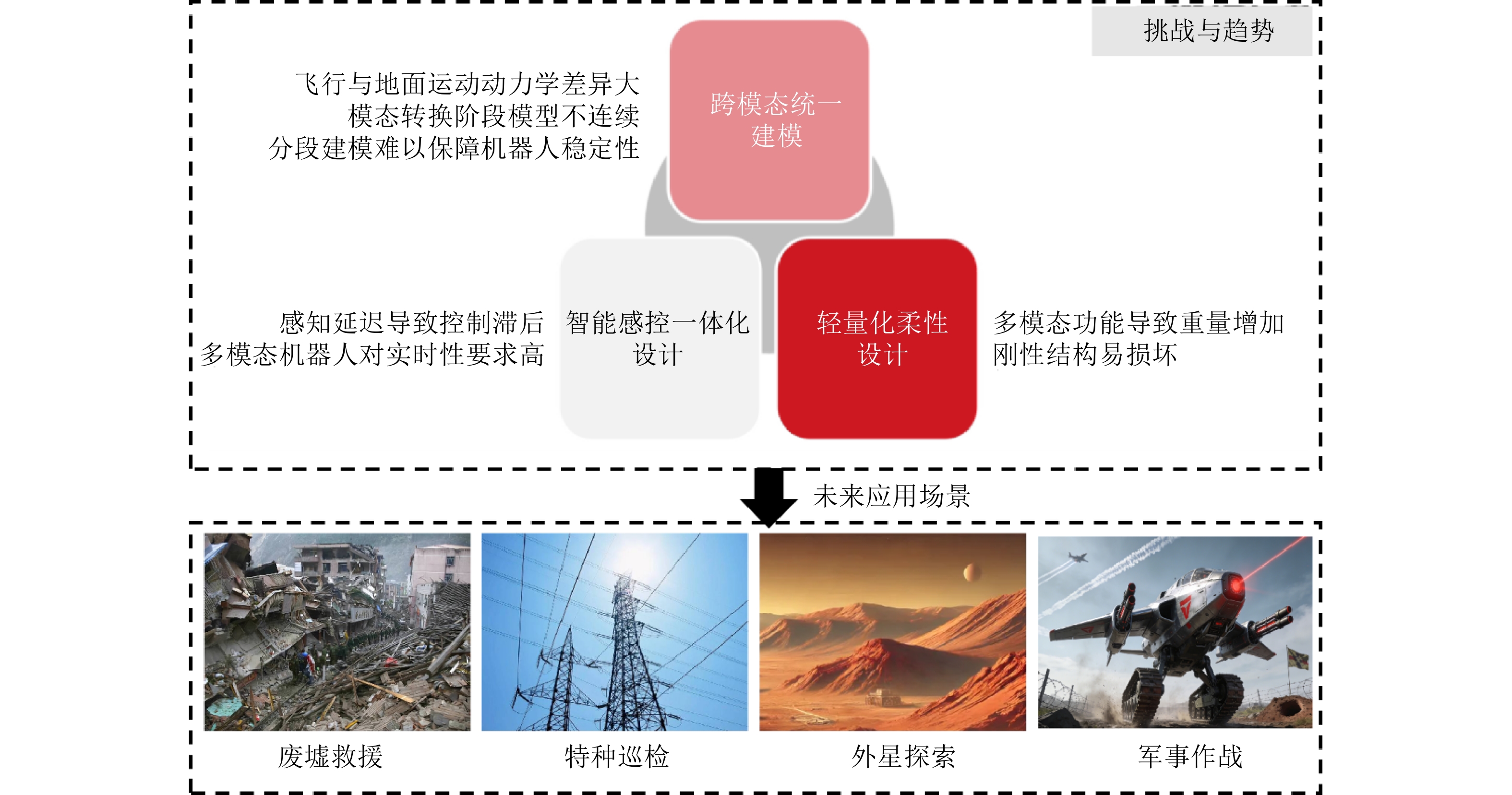
陆空多模态机器人在灾害救援、特种巡检、外星探索等方面展现出重要的应用潜力, 具有环境适应性强、续航时间长、任务连续性好等优势, 其运动过程涵盖地面移动、起飞、飞行与着陆等多个运动环节. 各模态下的精准运动控制及不同模态间的稳定转换, 是保障陆空多模态机器人高效、可靠执行探测与救援等任务的关键. 本文系统总结国内外陆空多模态机器人的近期研究, 阐述不同类型机器人的构型特点、驱动方式及运动机理. 在此基础上, 重点分析其在复杂地形下的障碍感知与稳定移动、非结构化环境中的自主稳定起飞、气流扰动下的稳定飞行与轨迹保持以及地面效应与触地冲击下的缓冲着陆等关键技术. 最后, 阐述陆空多模态机器人自主化与智能化运动面临的挑战及发展趋势.
陆空多模态机器人在灾害救援、特种巡检、外星探索等方面展现出重要的应用潜力, 具有环境适应性强、续航时间长、任务连续性好等优势, 其运动过程涵盖地面移动、起飞、飞行与着陆等多个运动环节. 各模态下的精准运动控制及不同模态间的稳定转换, 是保障陆空多模态机器人高效、可靠执行探测与救援等任务的关键. 本文系统总结国内外陆空多模态机器人的近期研究, 阐述不同类型机器人的构型特点、驱动方式及运动机理. 在此基础上, 重点分析其在复杂地形下的障碍感知与稳定移动、非结构化环境中的自主稳定起飞、气流扰动下的稳定飞行与轨迹保持以及地面效应与触地冲击下的缓冲着陆等关键技术. 最后, 阐述陆空多模态机器人自主化与智能化运动面临的挑战及发展趋势.

2026, 52(5): 932-941.
doi: 10.16383/j.aas.c250502
cstr: 32138.14.j.aas.c250502
摘要:
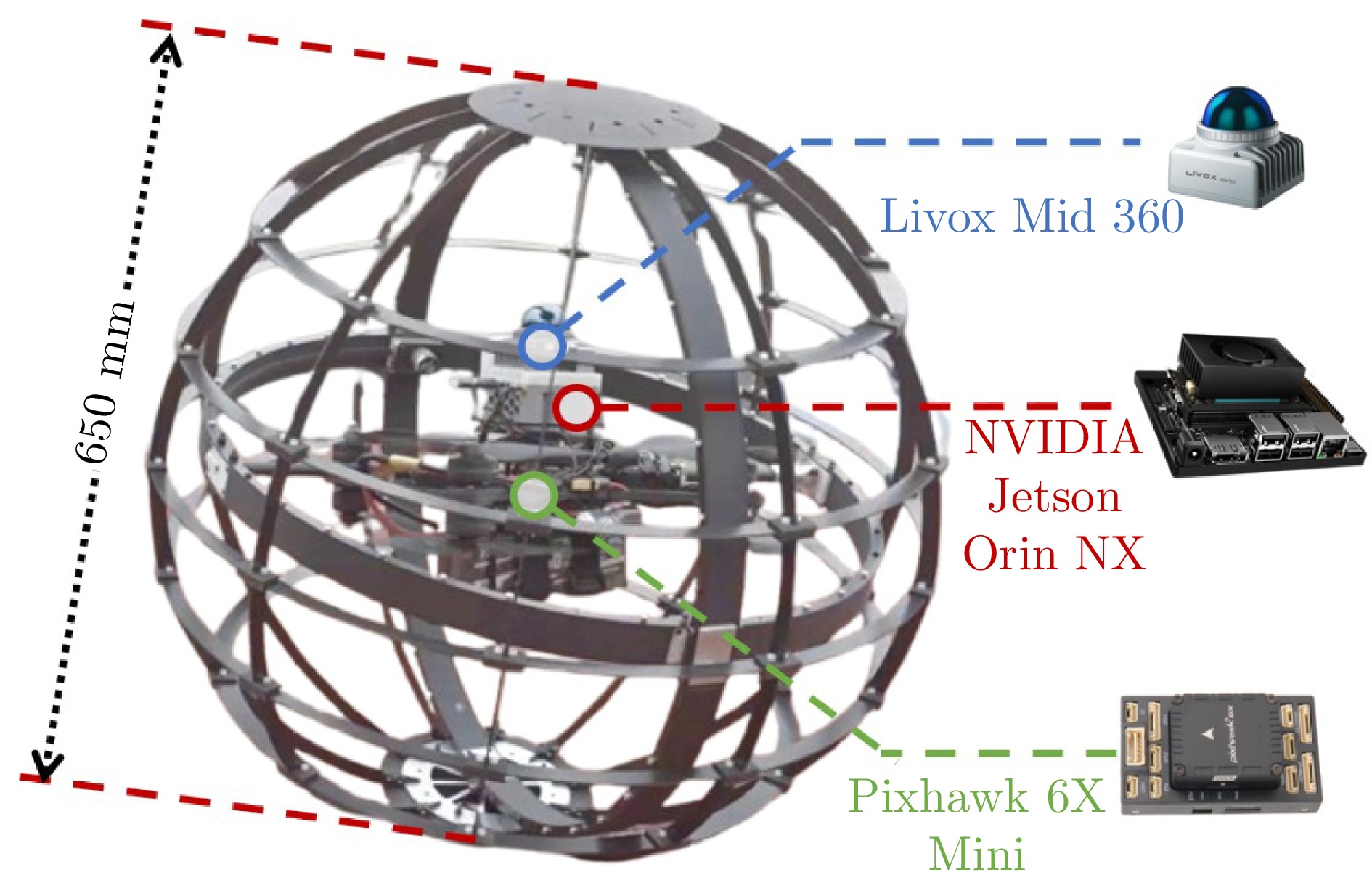
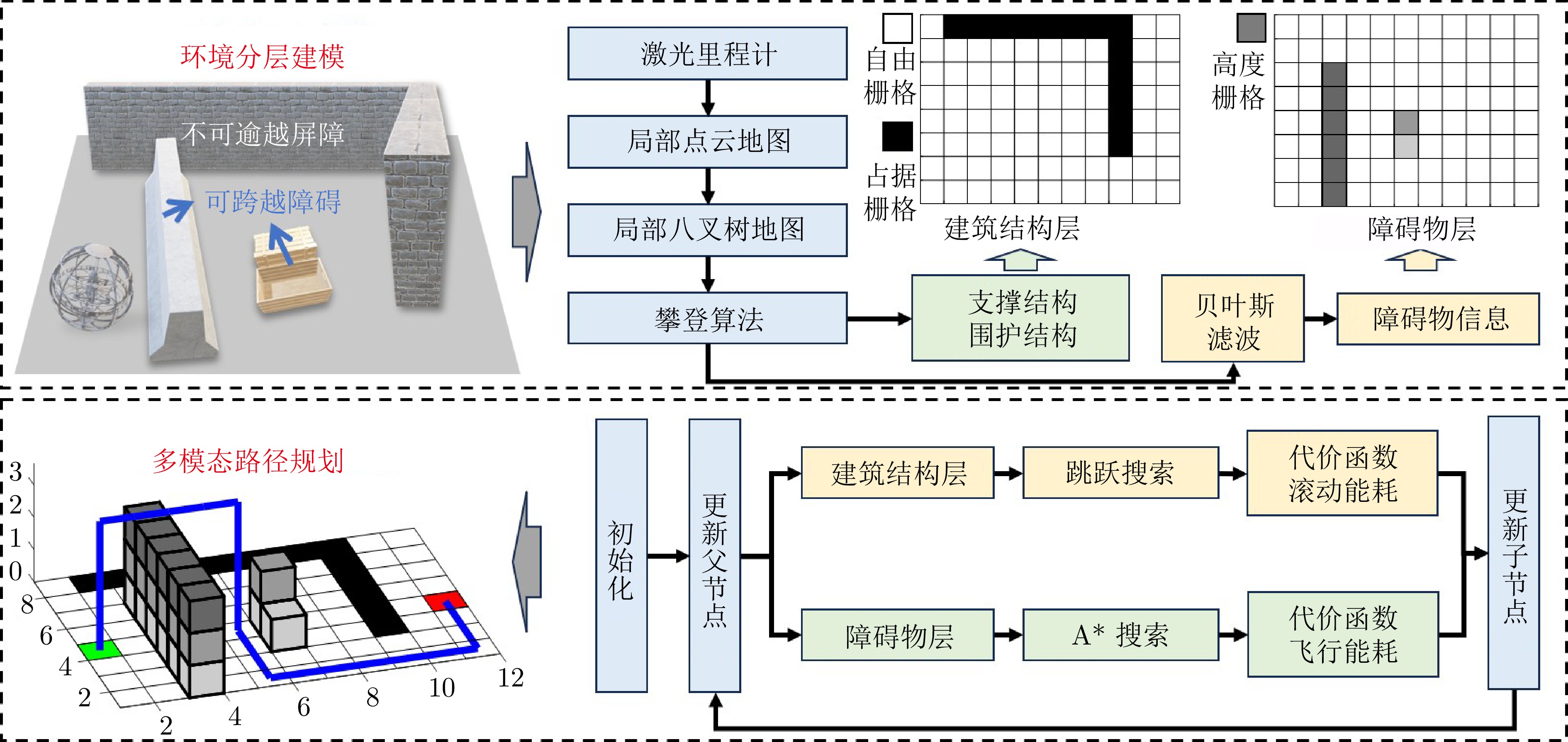
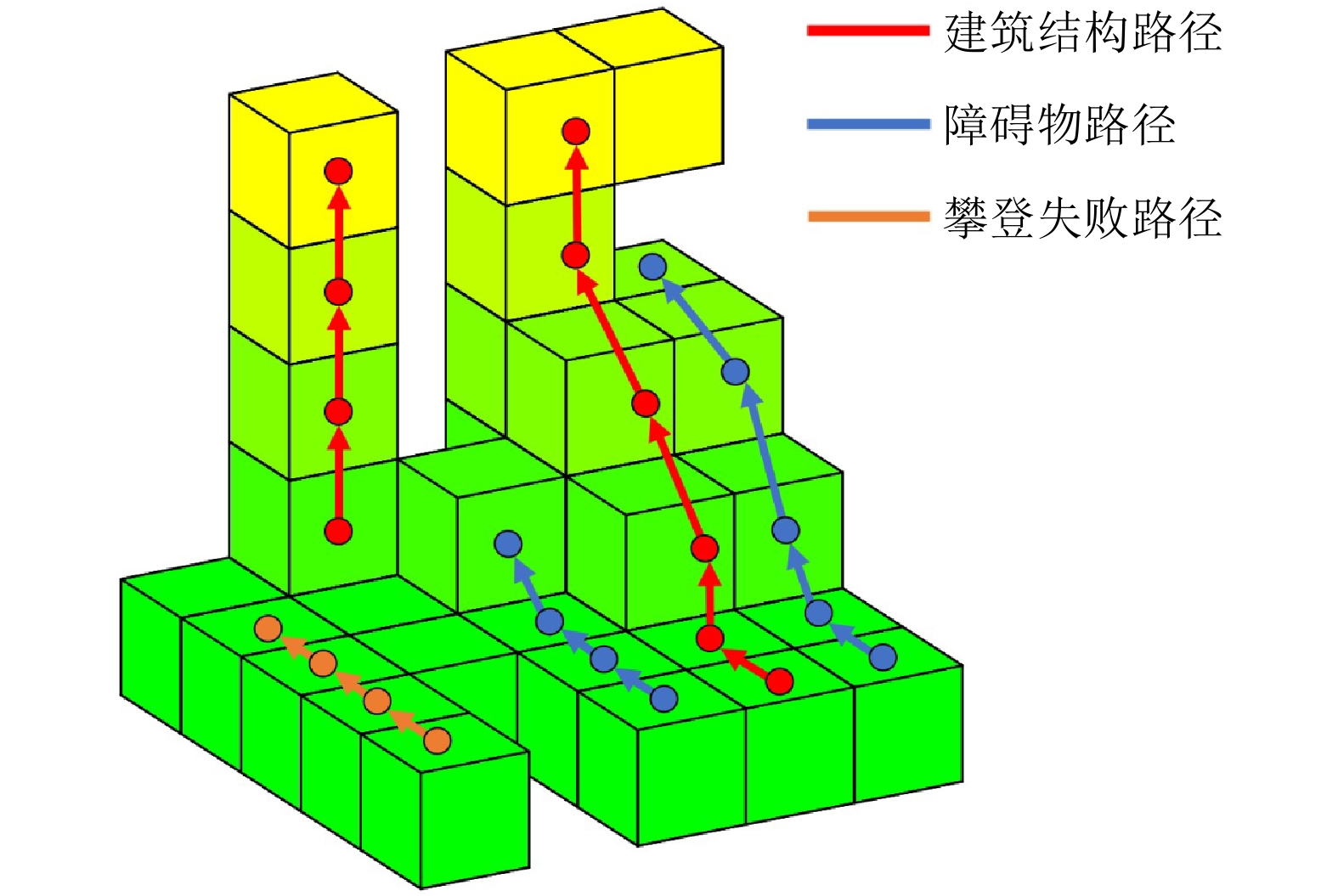
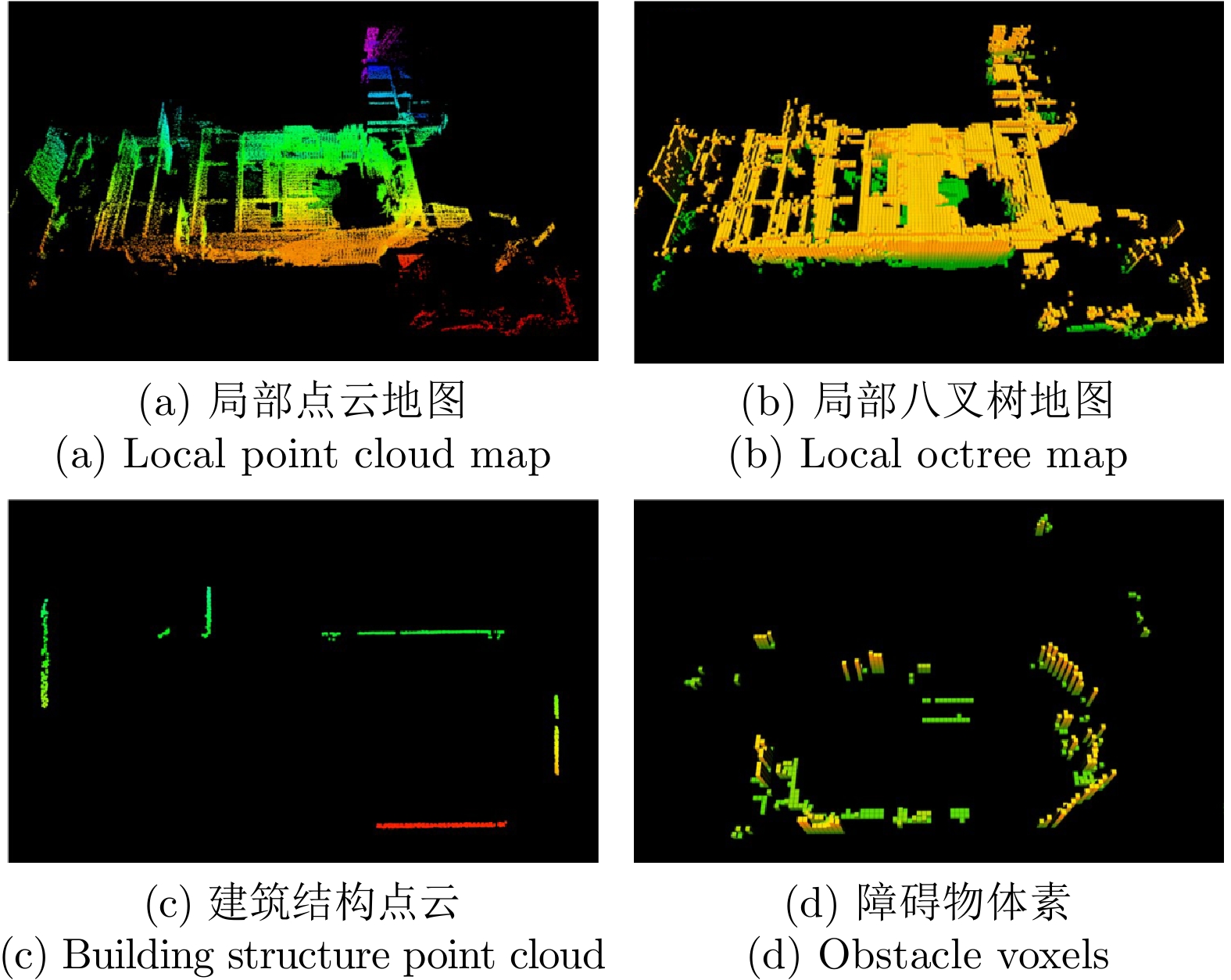
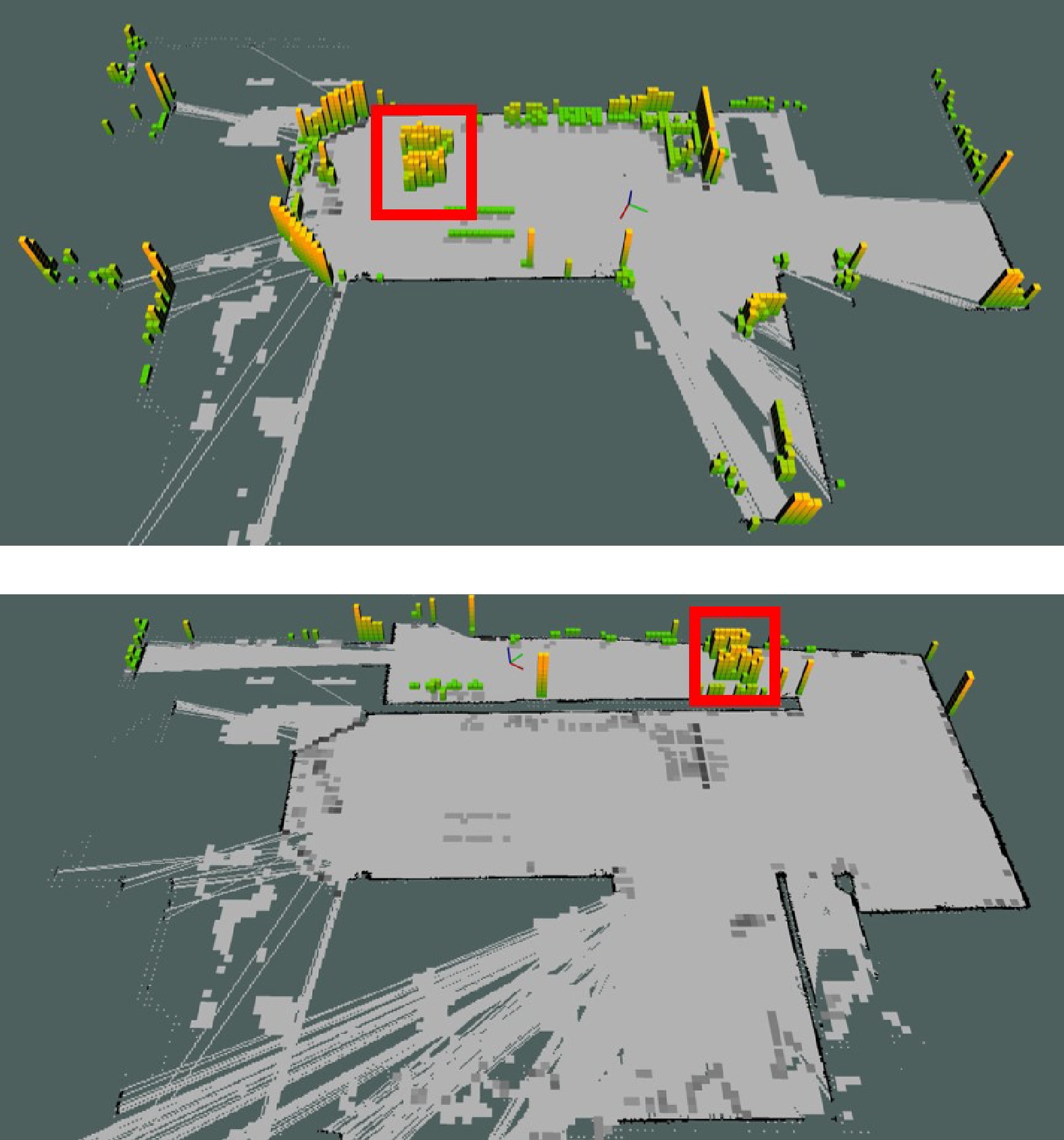
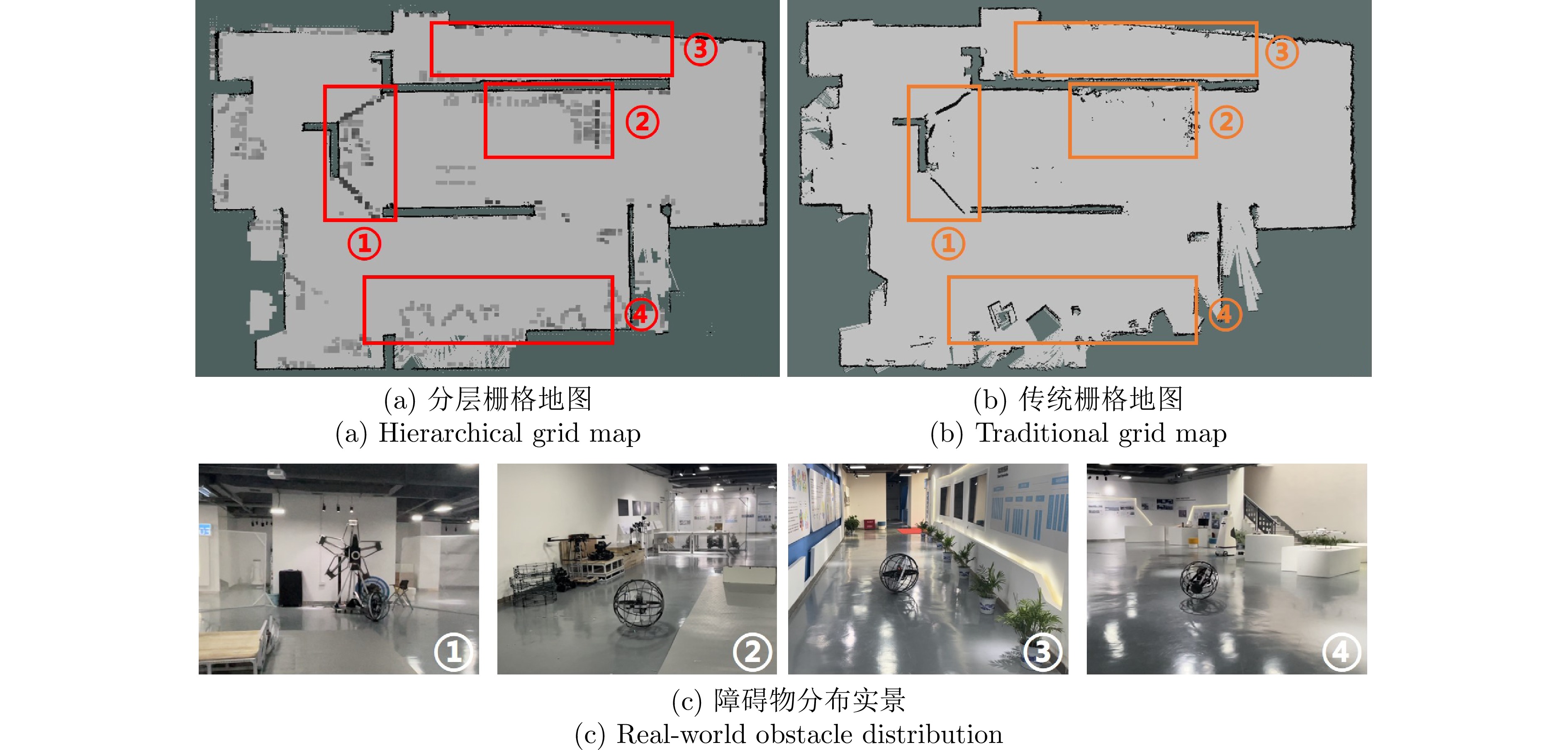
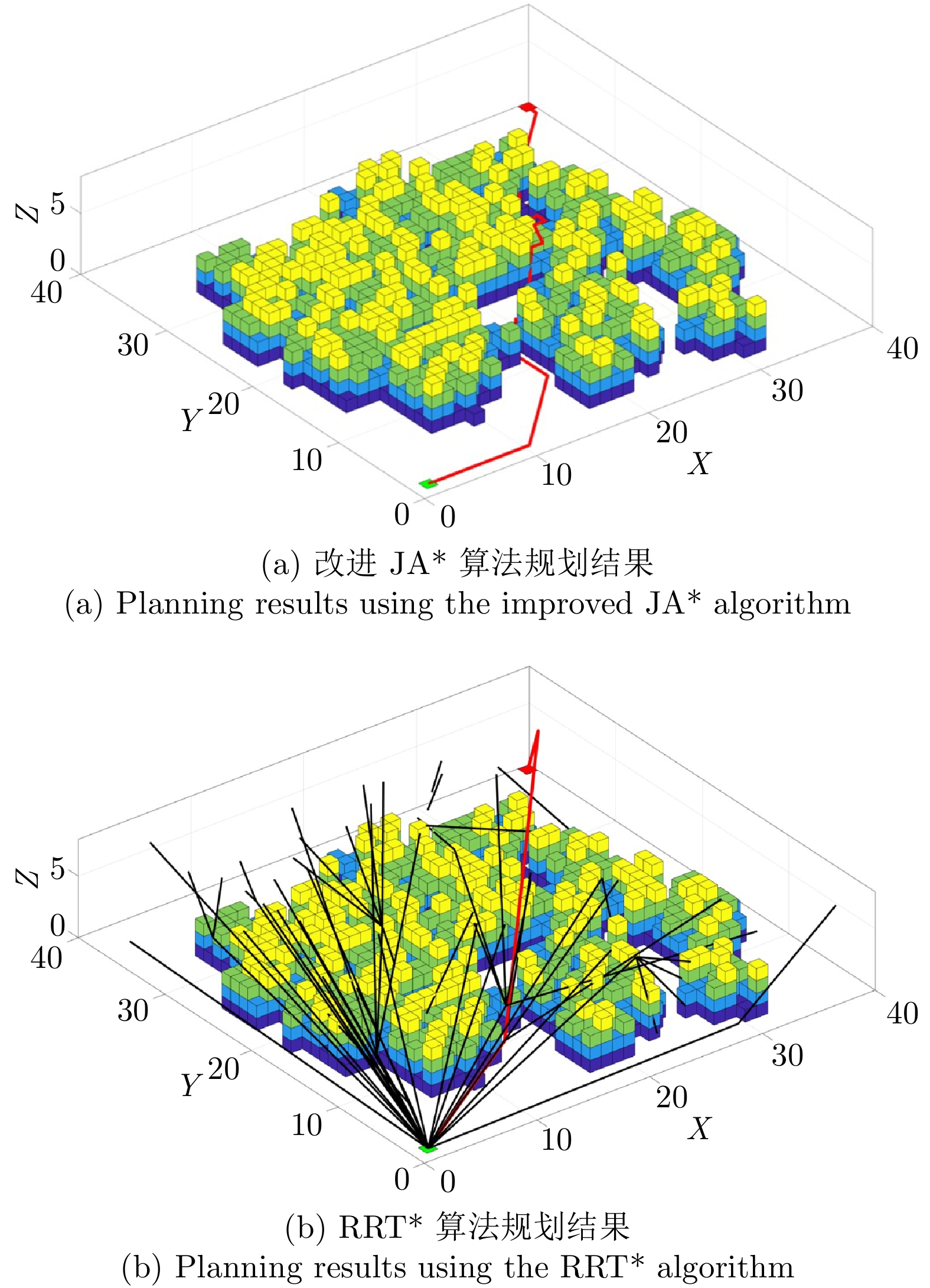
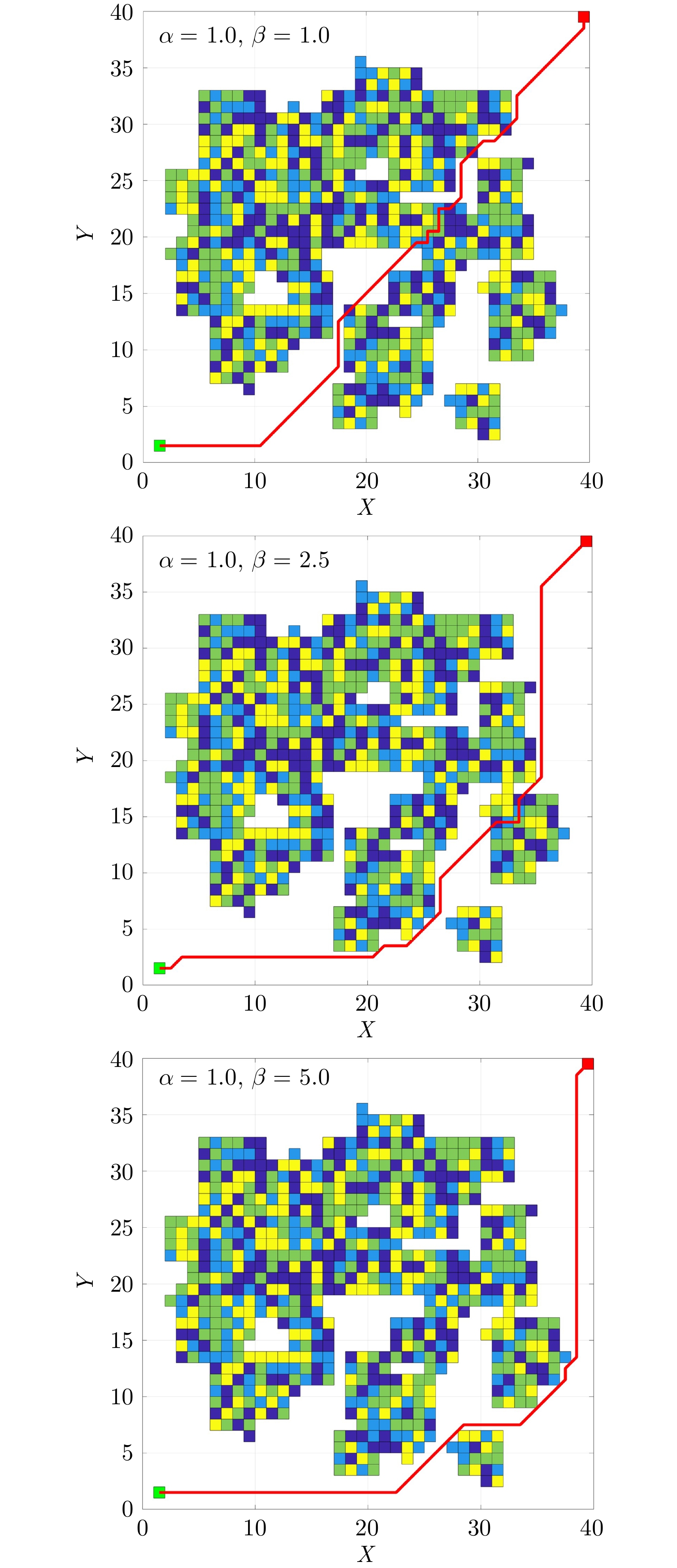
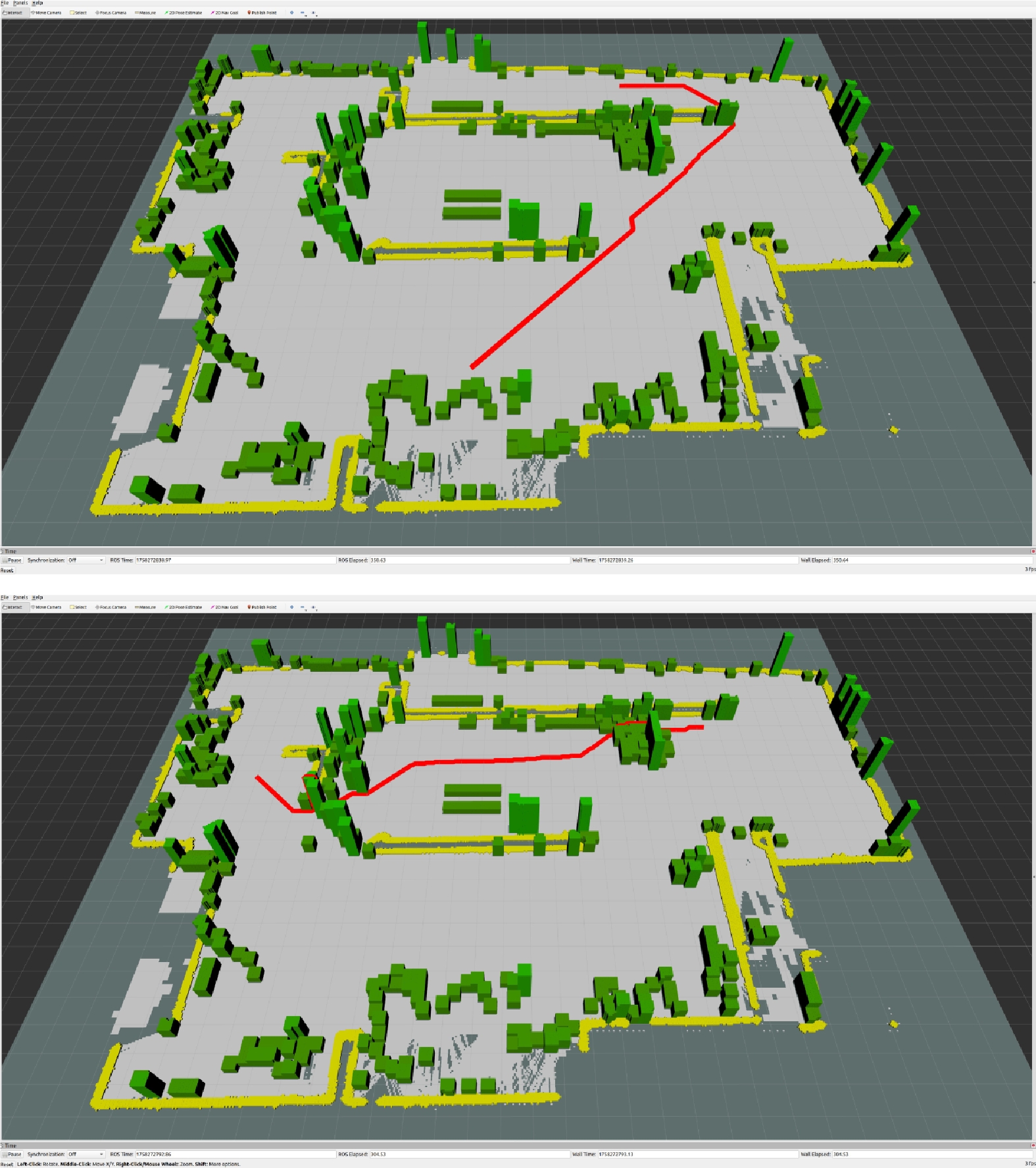
飞滚多模态球形机器人(飞滚机器人, FRR)兼具空中飞行与地面滚动的多模态移动能力, 在搜索救援和巡检侦察等任务中展现出巨大潜力, 然而其在室内环境下的自主导航仍面临环境建模复杂和路径规划效率不足的挑战. 自然界生物普遍通过环境简化与能效权衡以实现高效的空间位移, 因此本文受到生物启发, 提出一种基于分层栅格地图的飞滚多模态路径规划方法. 首先, 构建由建筑结构层与障碍物层组成的分层栅格地图, 以实现对室内环境关键要素的高效表征. 其次, 设计改进的Jump A* 算法, 在建筑结构层采用跳点搜索规划地面滚动路径, 在障碍物层采用A* 搜索规划空中飞行路径, 并在代价函数中引入能量损耗项, 通过可调权重实现移动距离与能量消耗的平衡. 实验结果表明, 该方法能够有效构建室内环境的分层栅格地图, 并可在该地图上根据不同的距离和能耗目标进行多模态路径规划, 为FRR在复杂室内场景下的自主导航提供了可行方案.
飞滚多模态球形机器人(飞滚机器人, FRR)兼具空中飞行与地面滚动的多模态移动能力, 在搜索救援和巡检侦察等任务中展现出巨大潜力, 然而其在室内环境下的自主导航仍面临环境建模复杂和路径规划效率不足的挑战. 自然界生物普遍通过环境简化与能效权衡以实现高效的空间位移, 因此本文受到生物启发, 提出一种基于分层栅格地图的飞滚多模态路径规划方法. 首先, 构建由建筑结构层与障碍物层组成的分层栅格地图, 以实现对室内环境关键要素的高效表征. 其次, 设计改进的Jump A* 算法, 在建筑结构层采用跳点搜索规划地面滚动路径, 在障碍物层采用A* 搜索规划空中飞行路径, 并在代价函数中引入能量损耗项, 通过可调权重实现移动距离与能量消耗的平衡. 实验结果表明, 该方法能够有效构建室内环境的分层栅格地图, 并可在该地图上根据不同的距离和能耗目标进行多模态路径规划, 为FRR在复杂室内场景下的自主导航提供了可行方案.
2026, 52(5): 942-952.
doi: 10.16383/j.aas.c250529
cstr: 32138.14.j.aas.c250529
摘要:
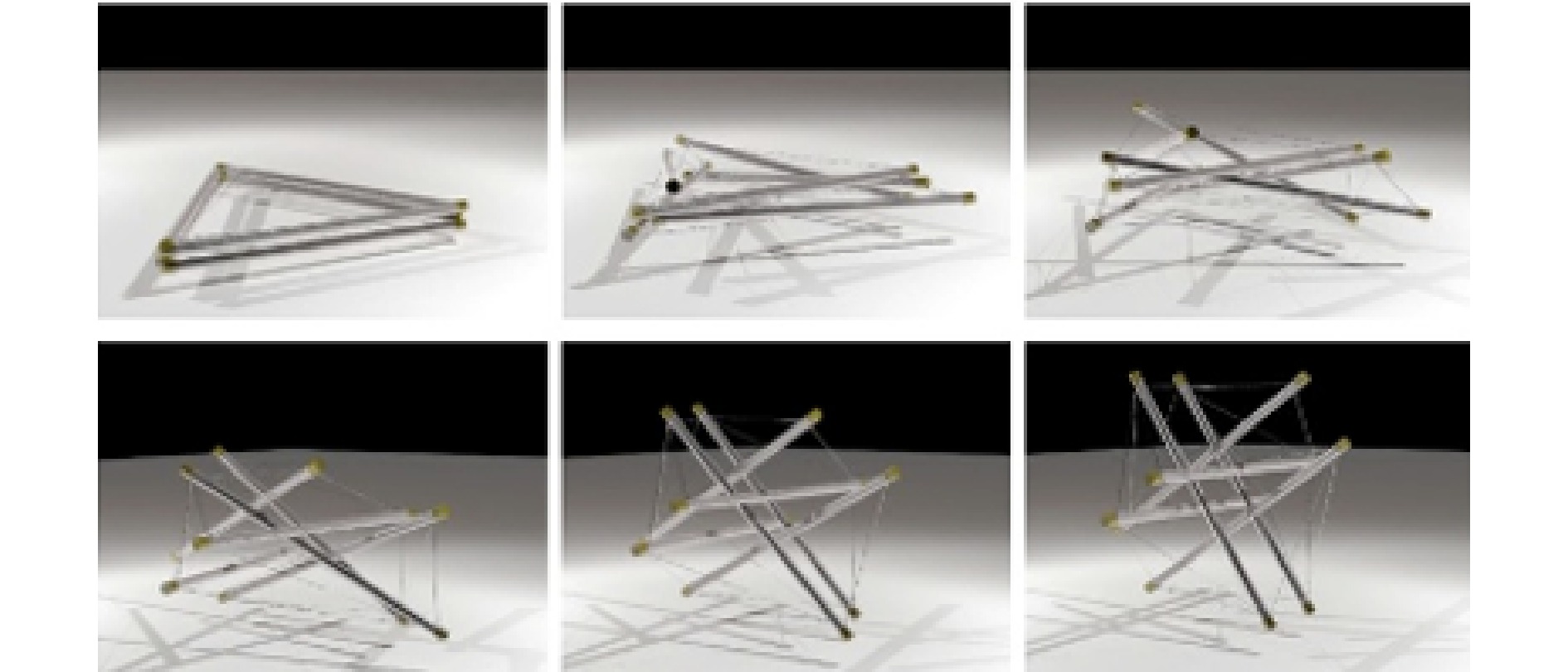
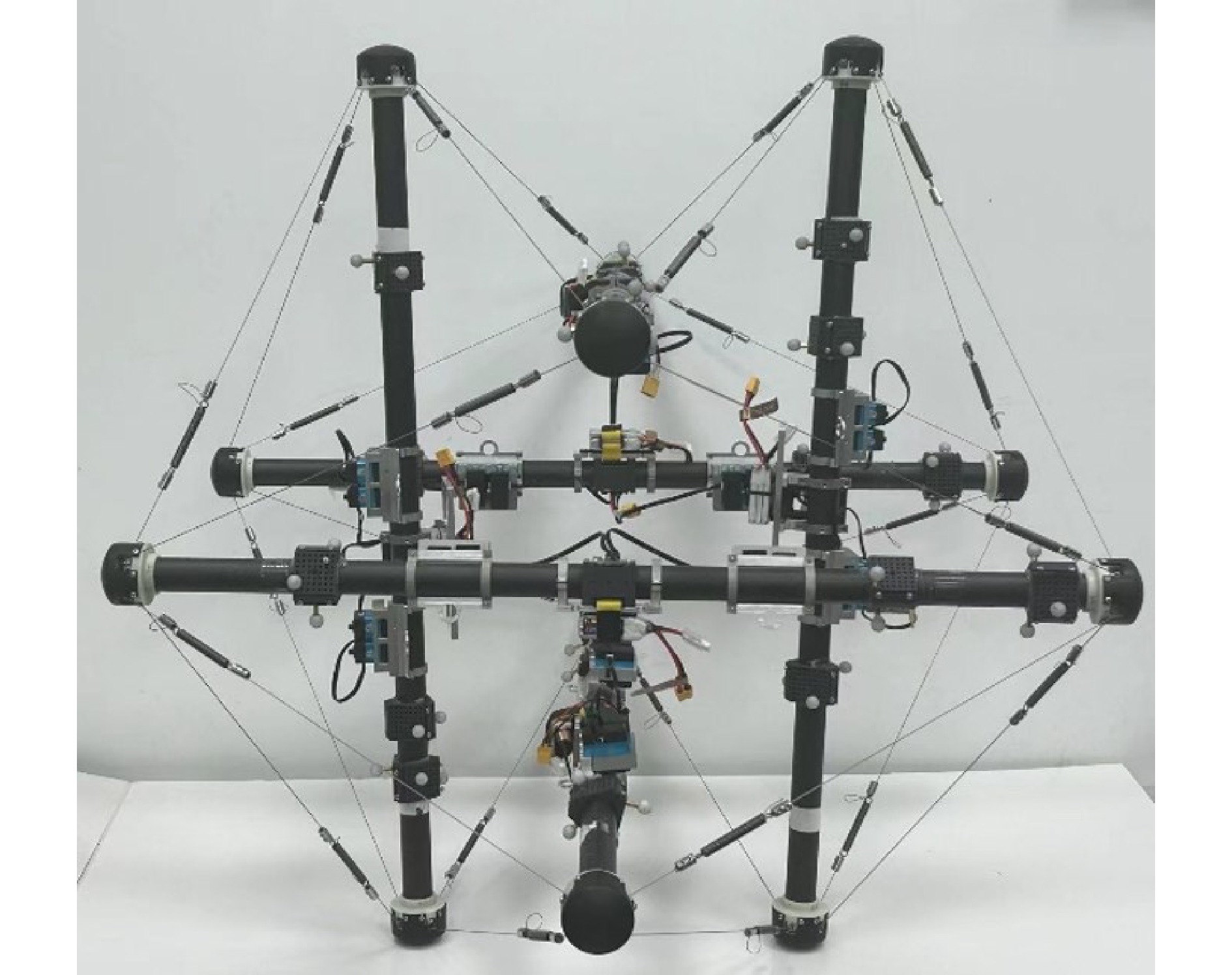
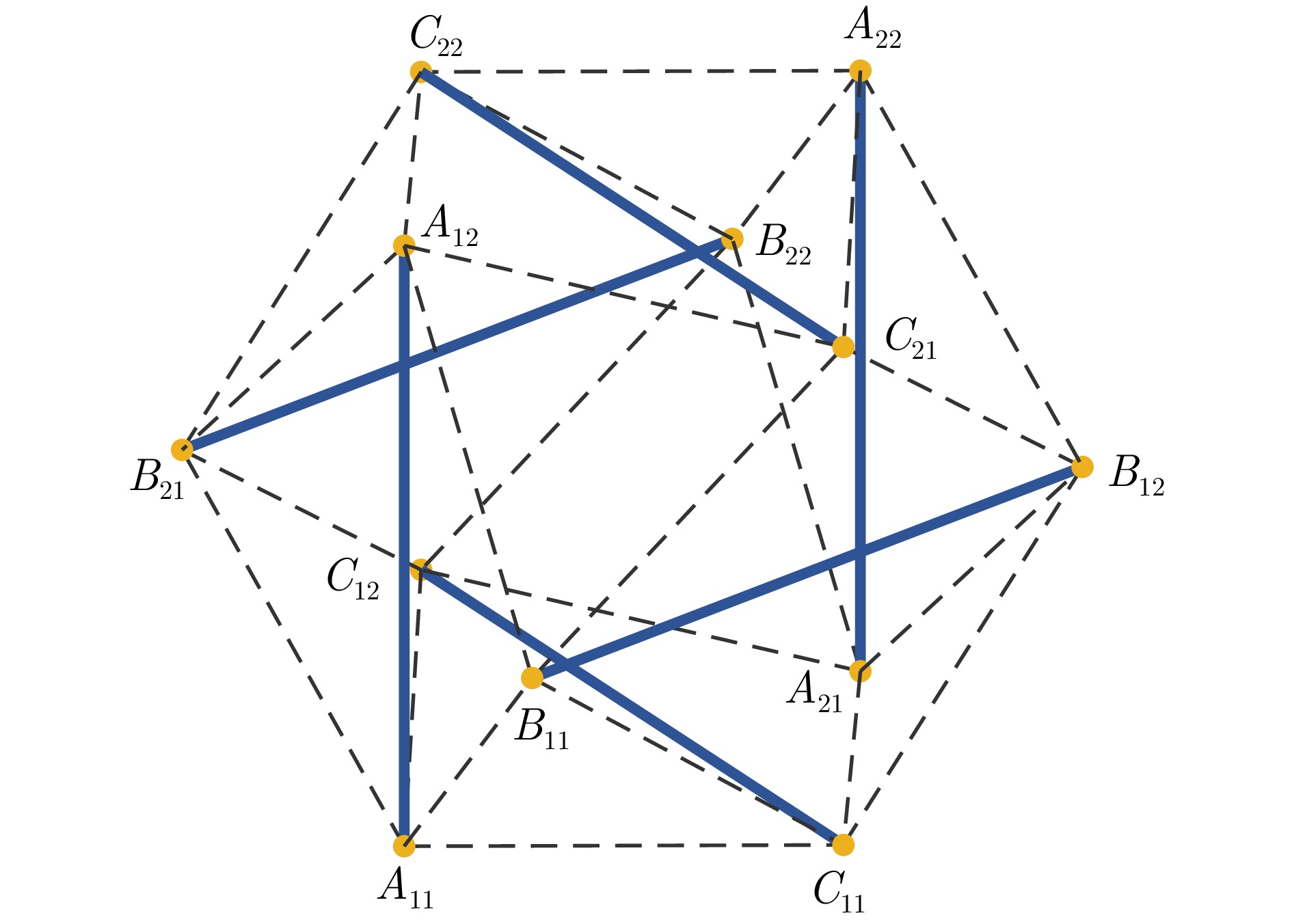
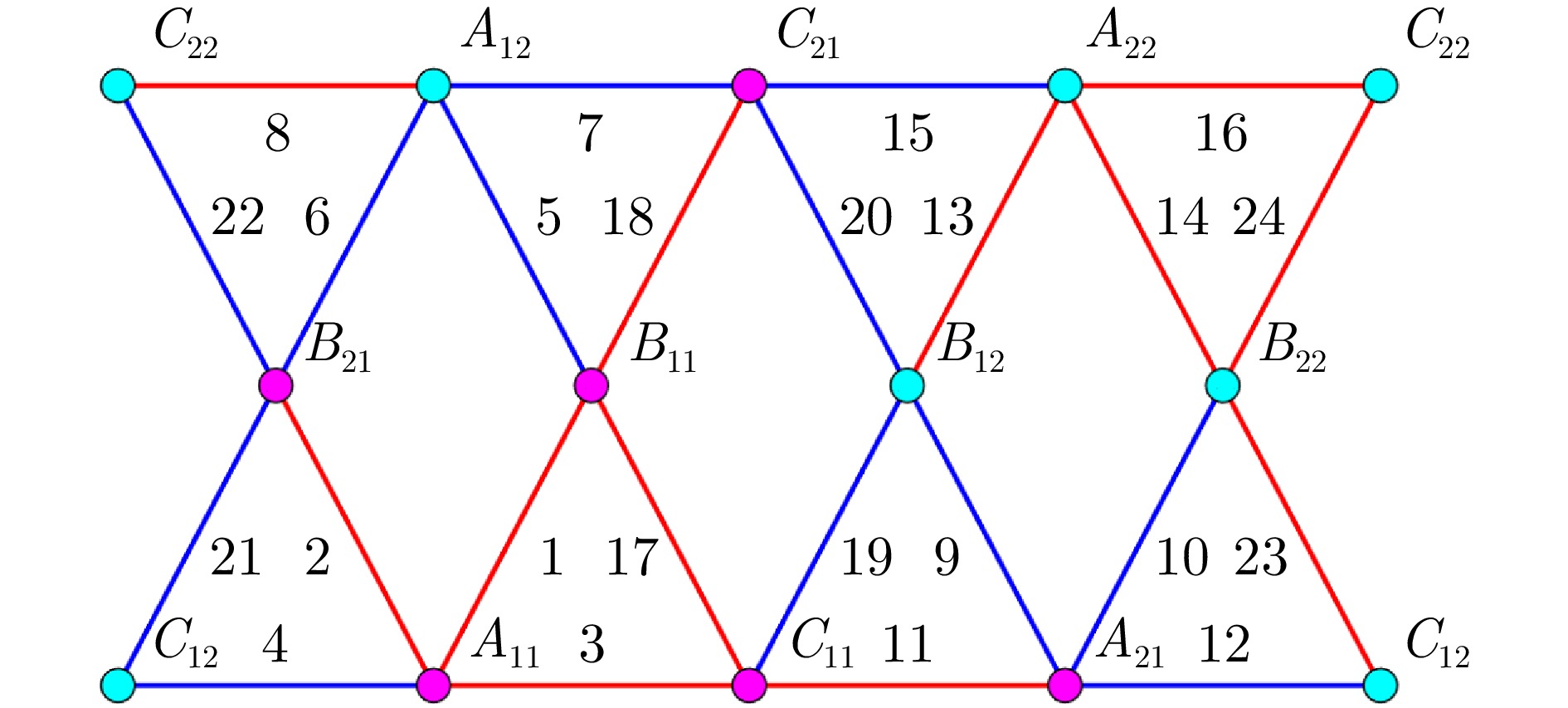
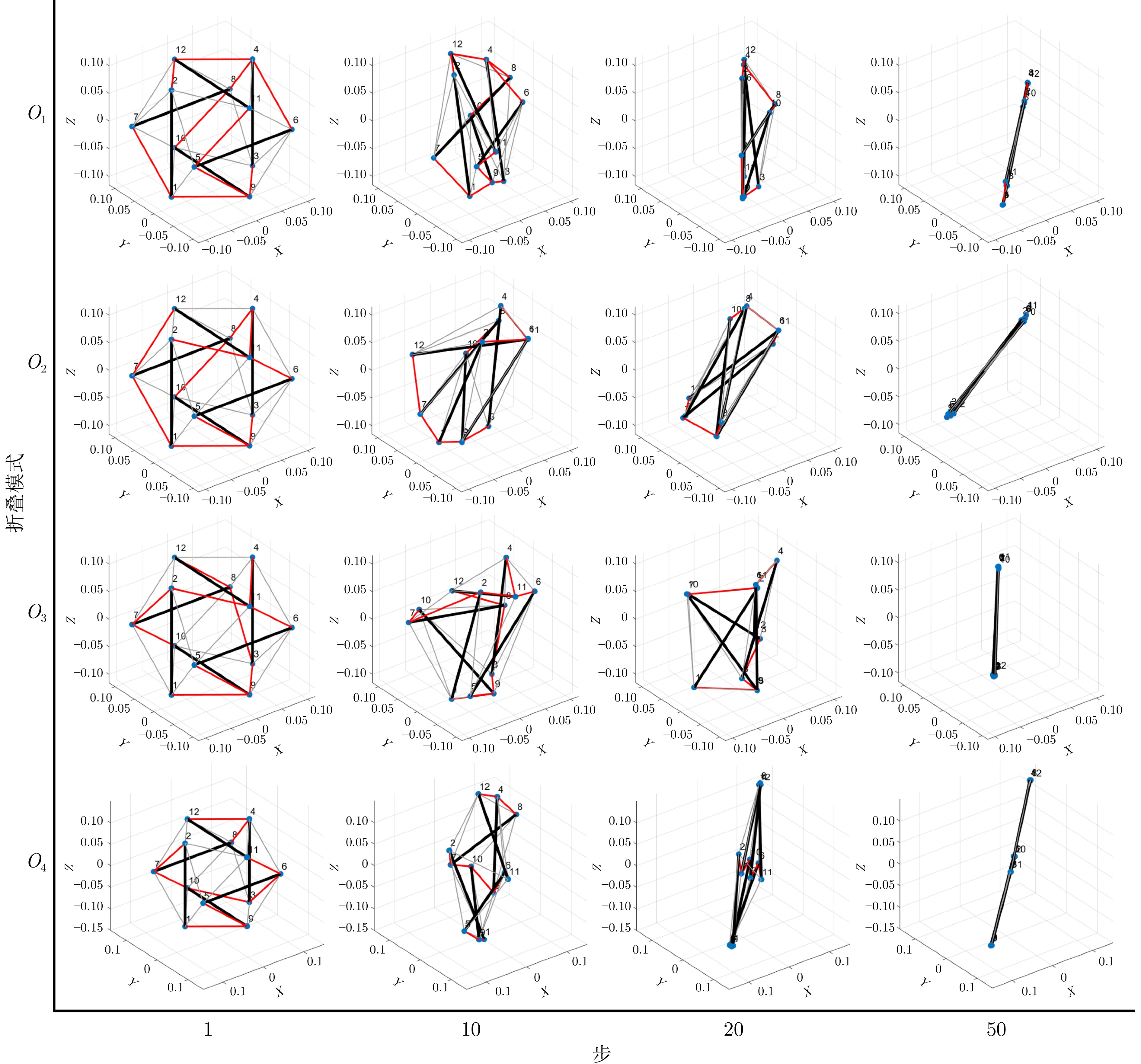
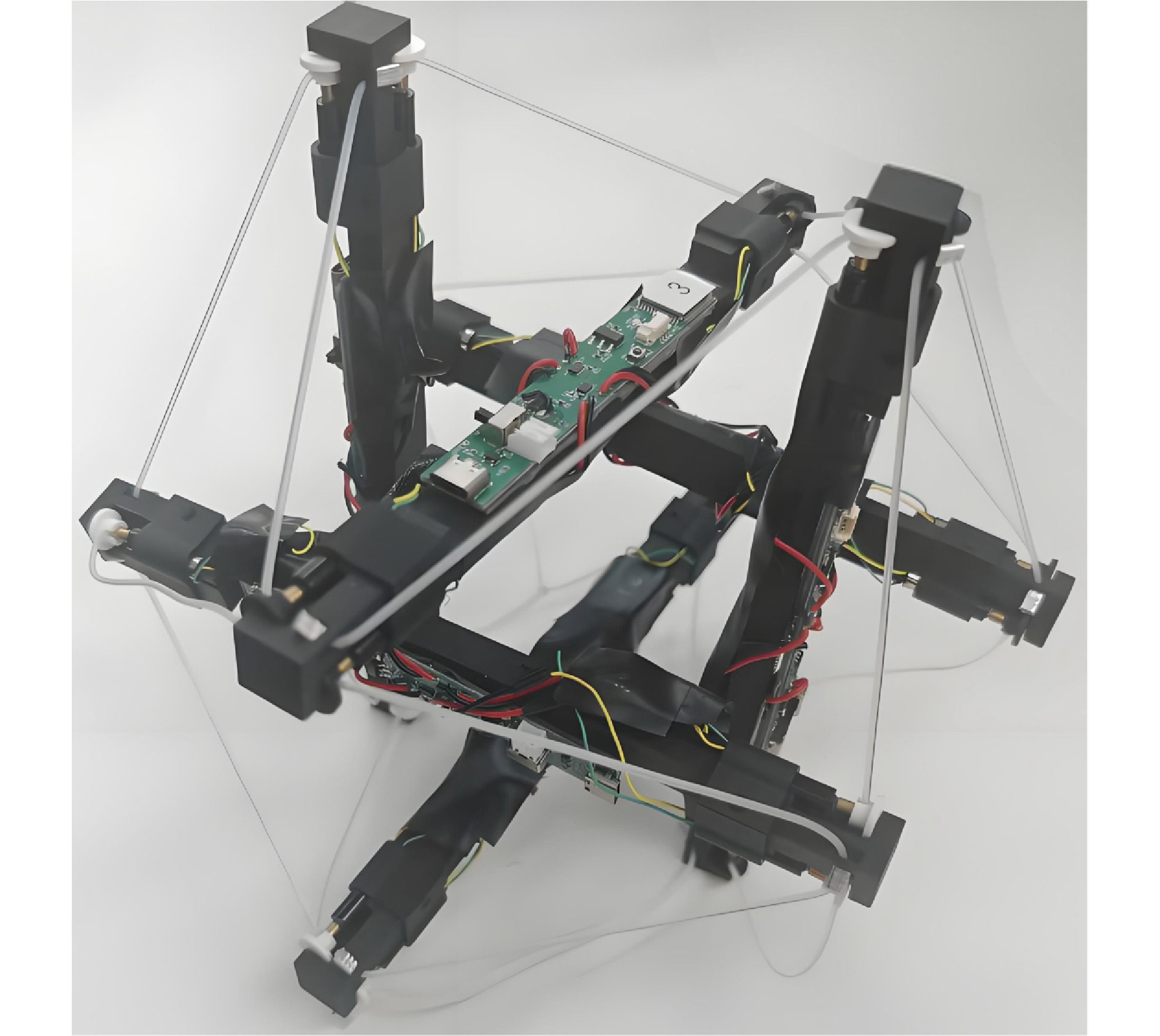
形态智能通常指机器人利用“身体”的物理特性、几何结构以及动力学特征等简化复杂的计算(如控制器设计), 具备良好的环境适应性特点, 是实现具身智能的核心机制. 本文针对六杆张拉整体完全折叠问题, 提出一种利用形态智能机理简化控制方法, 实现部分绳驱下机器人整体的等效折叠. 首先基于“端点聚拢”形态构造折叠目标, 通过结构对称性分析得到四种折叠模式及对应的绳长变化量. 再通过图论回路空间分析, 识别由几何构型产生的冗余绳长变化量, 基于此确定折叠过程中的被控绳. 然后在静力学框架下建立电机输入与绳长变化映射关系并给出可达性判据, 以此得到每种模式下简化控制策略. 最后通过MATLAB准静态仿真及实物实验, 验证所提方法的有效性. 四种折叠模式下的简化控制策略均能实现机器人完全折叠, 驱动绳的数量可由传统方法的24降低至9, 展现了形态智能在简化机器人控制器设计方面的潜力.
形态智能通常指机器人利用“身体”的物理特性、几何结构以及动力学特征等简化复杂的计算(如控制器设计), 具备良好的环境适应性特点, 是实现具身智能的核心机制. 本文针对六杆张拉整体完全折叠问题, 提出一种利用形态智能机理简化控制方法, 实现部分绳驱下机器人整体的等效折叠. 首先基于“端点聚拢”形态构造折叠目标, 通过结构对称性分析得到四种折叠模式及对应的绳长变化量. 再通过图论回路空间分析, 识别由几何构型产生的冗余绳长变化量, 基于此确定折叠过程中的被控绳. 然后在静力学框架下建立电机输入与绳长变化映射关系并给出可达性判据, 以此得到每种模式下简化控制策略. 最后通过MATLAB准静态仿真及实物实验, 验证所提方法的有效性. 四种折叠模式下的简化控制策略均能实现机器人完全折叠, 驱动绳的数量可由传统方法的24降低至9, 展现了形态智能在简化机器人控制器设计方面的潜力.



2026, 52(5): 953-965.
doi: 10.16383/j.aas.c250508
cstr: 32138.14.j.aas.c250508
摘要:
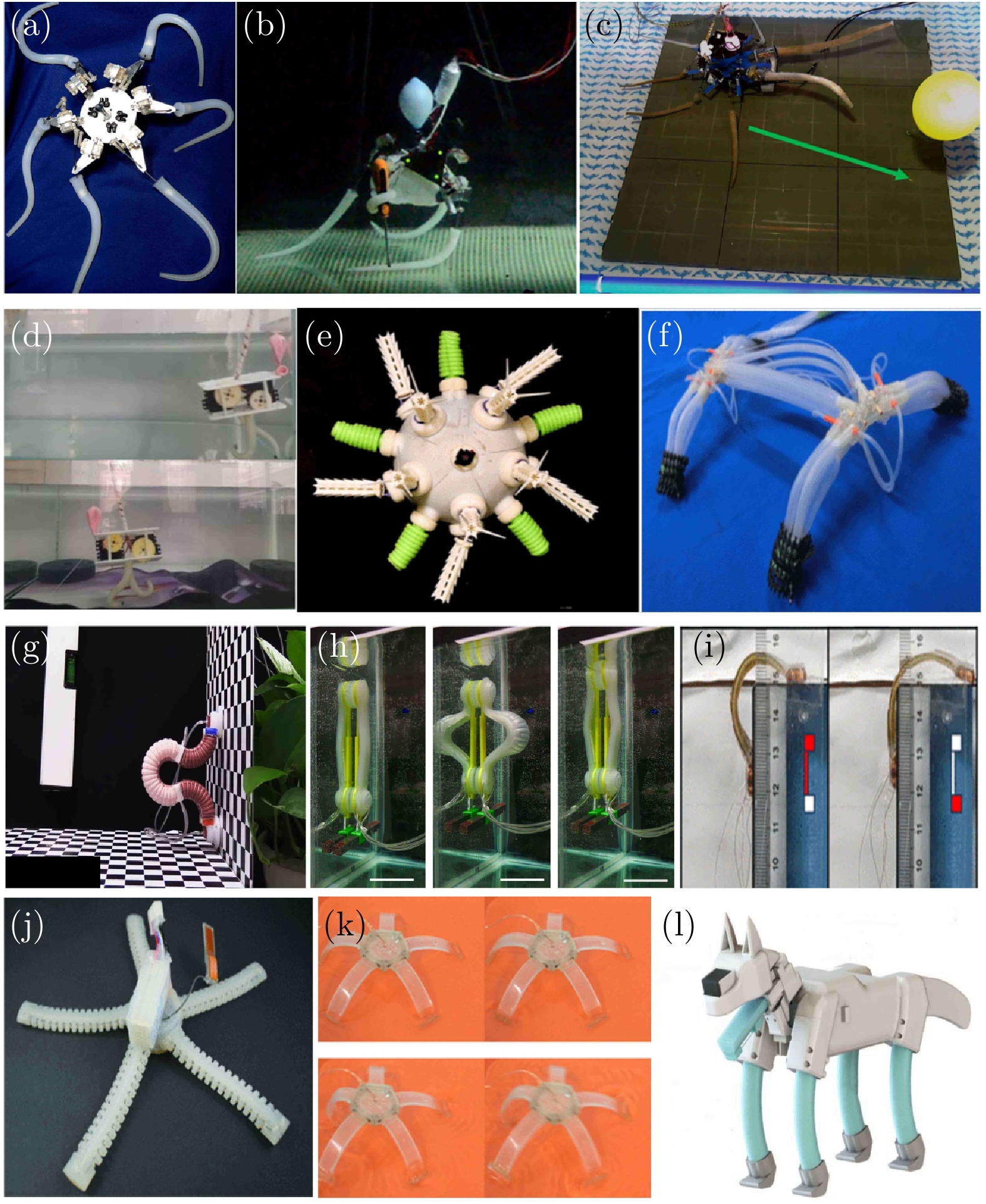
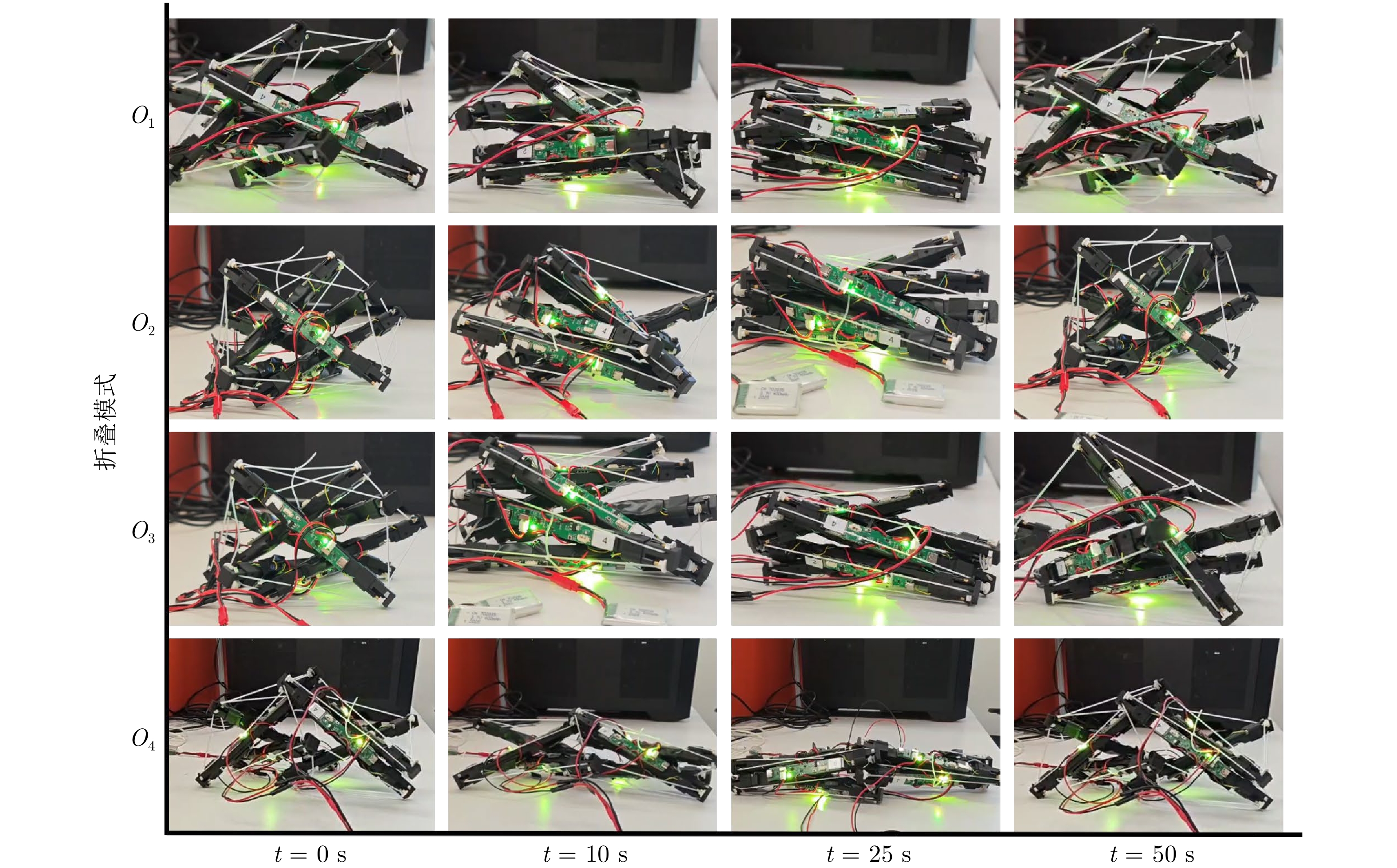
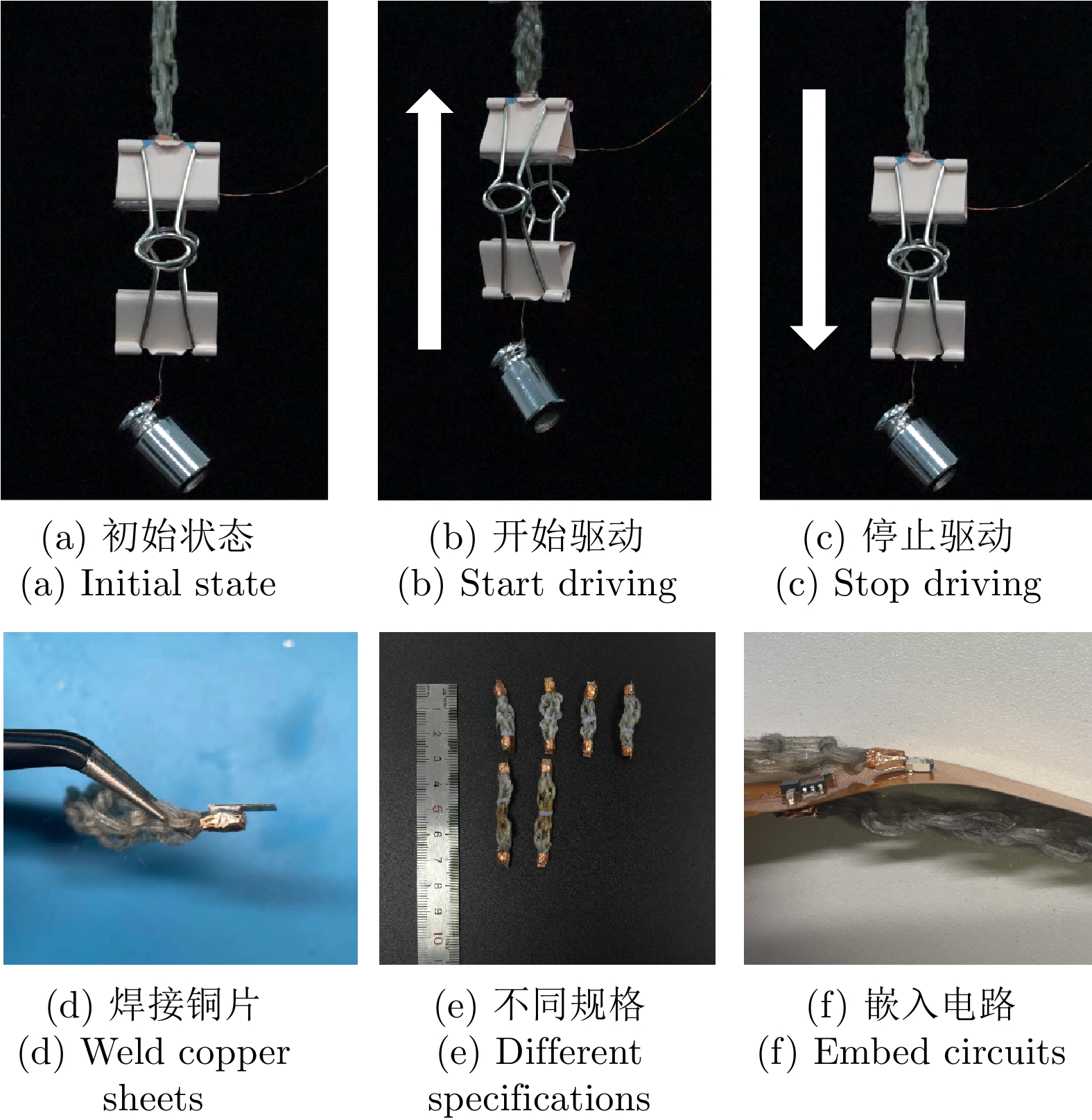
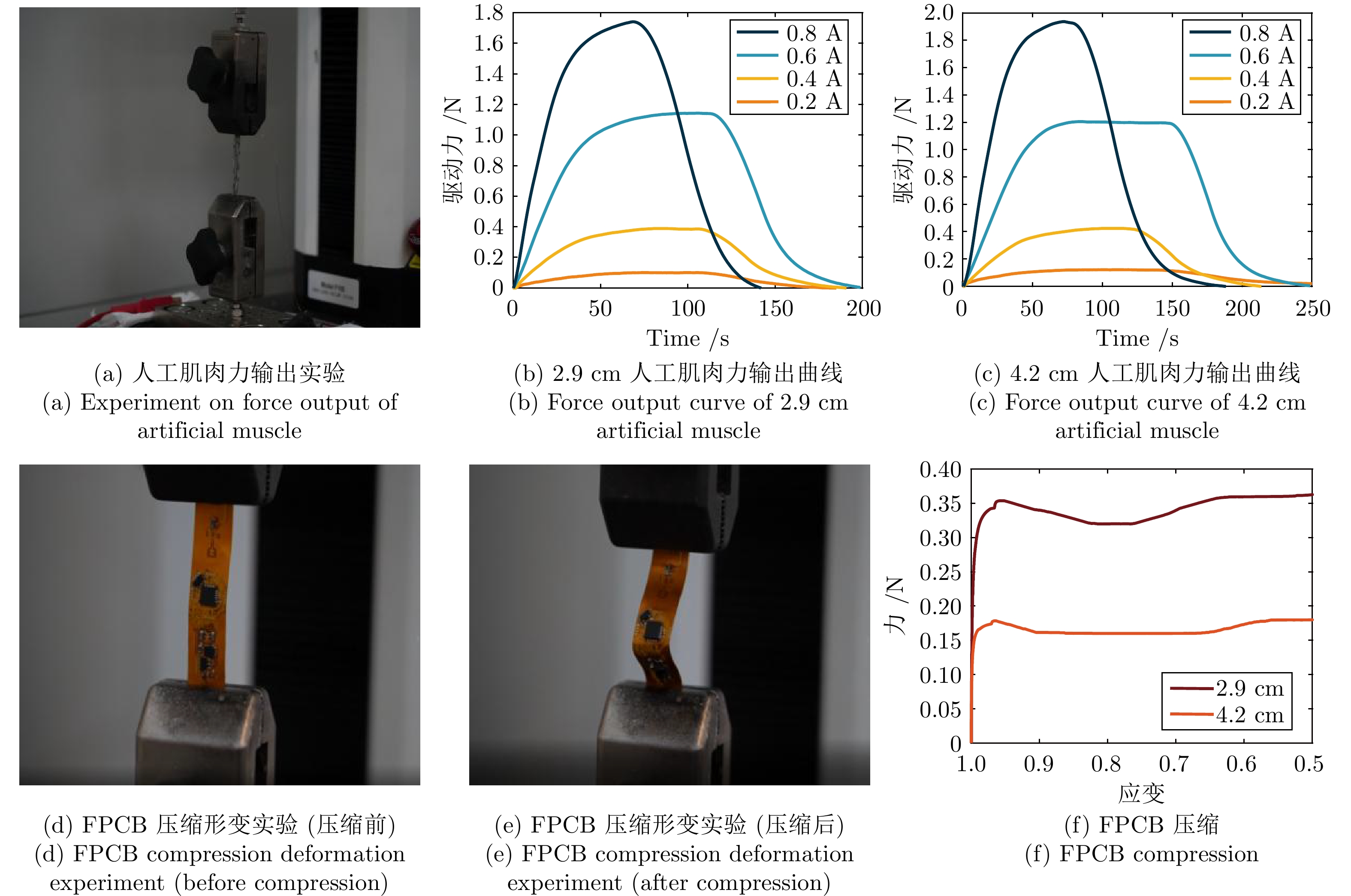
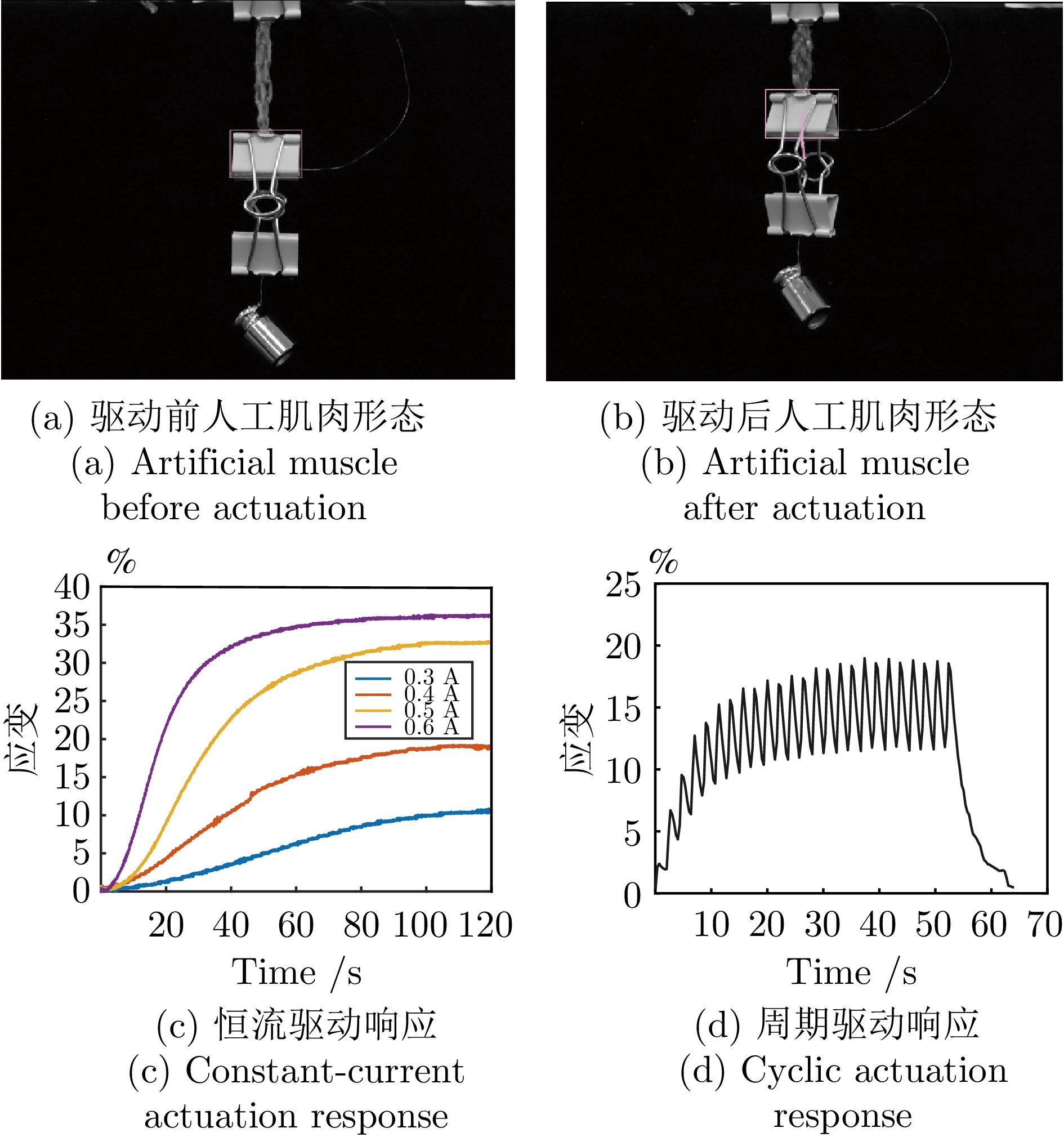
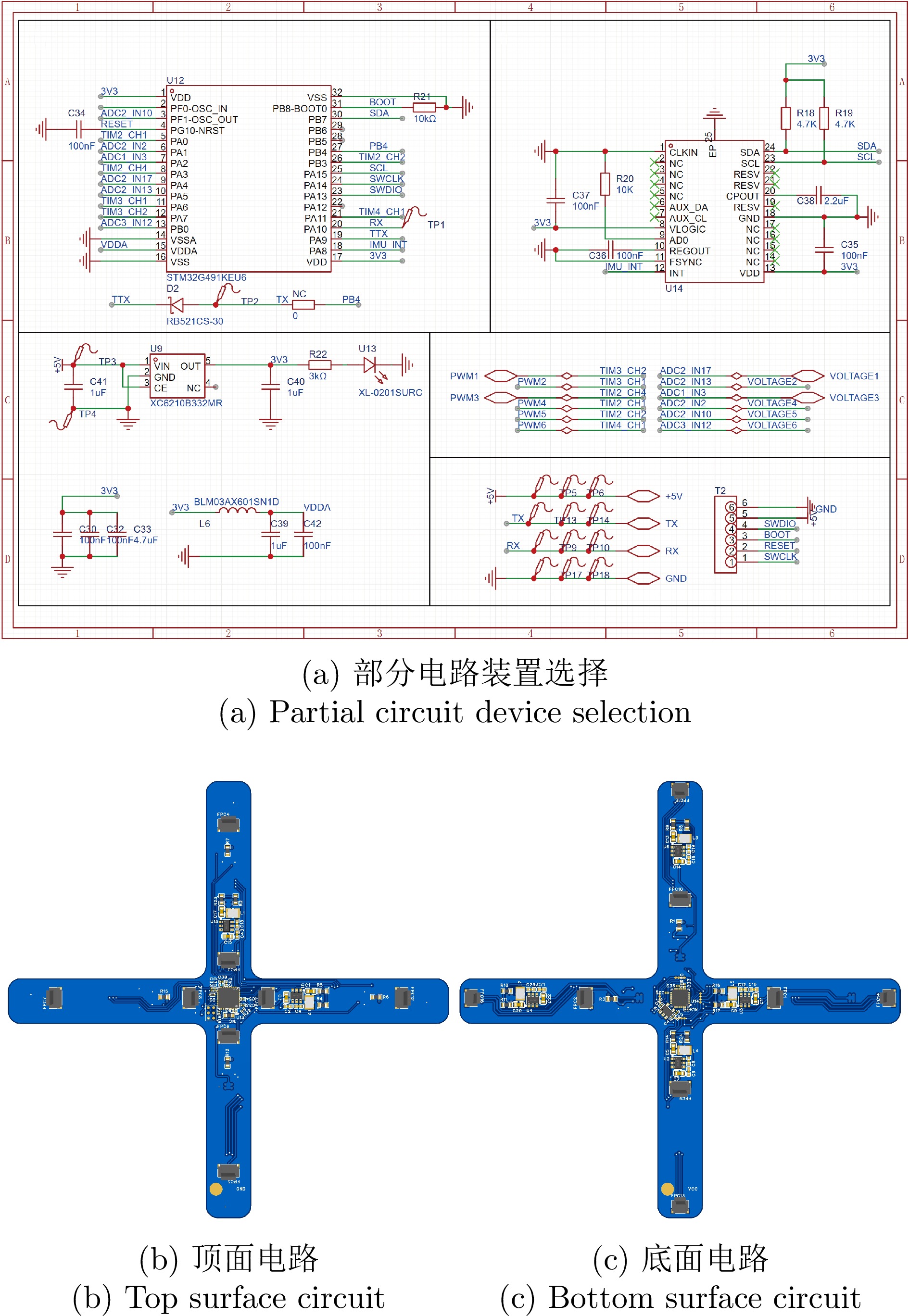
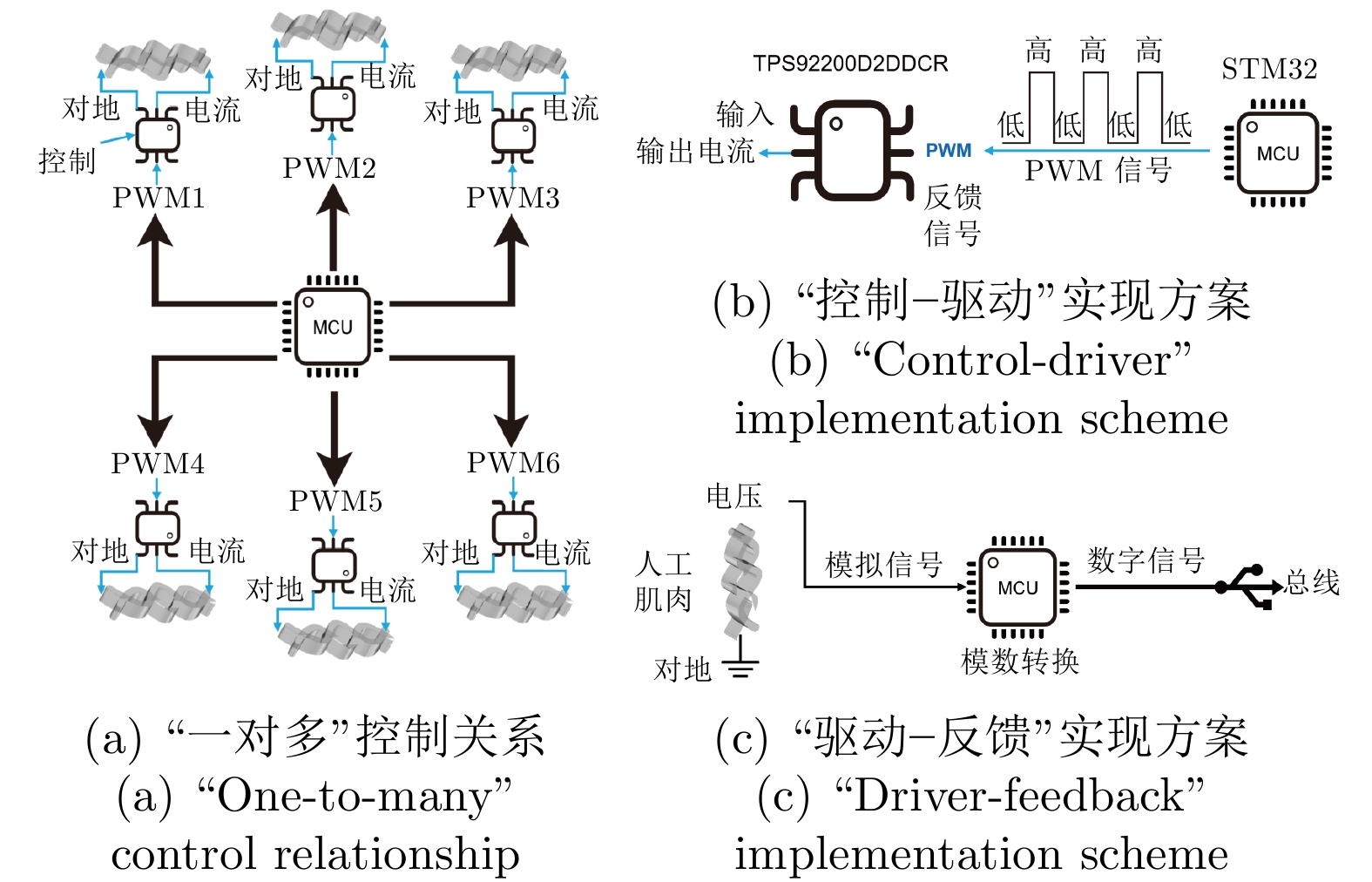
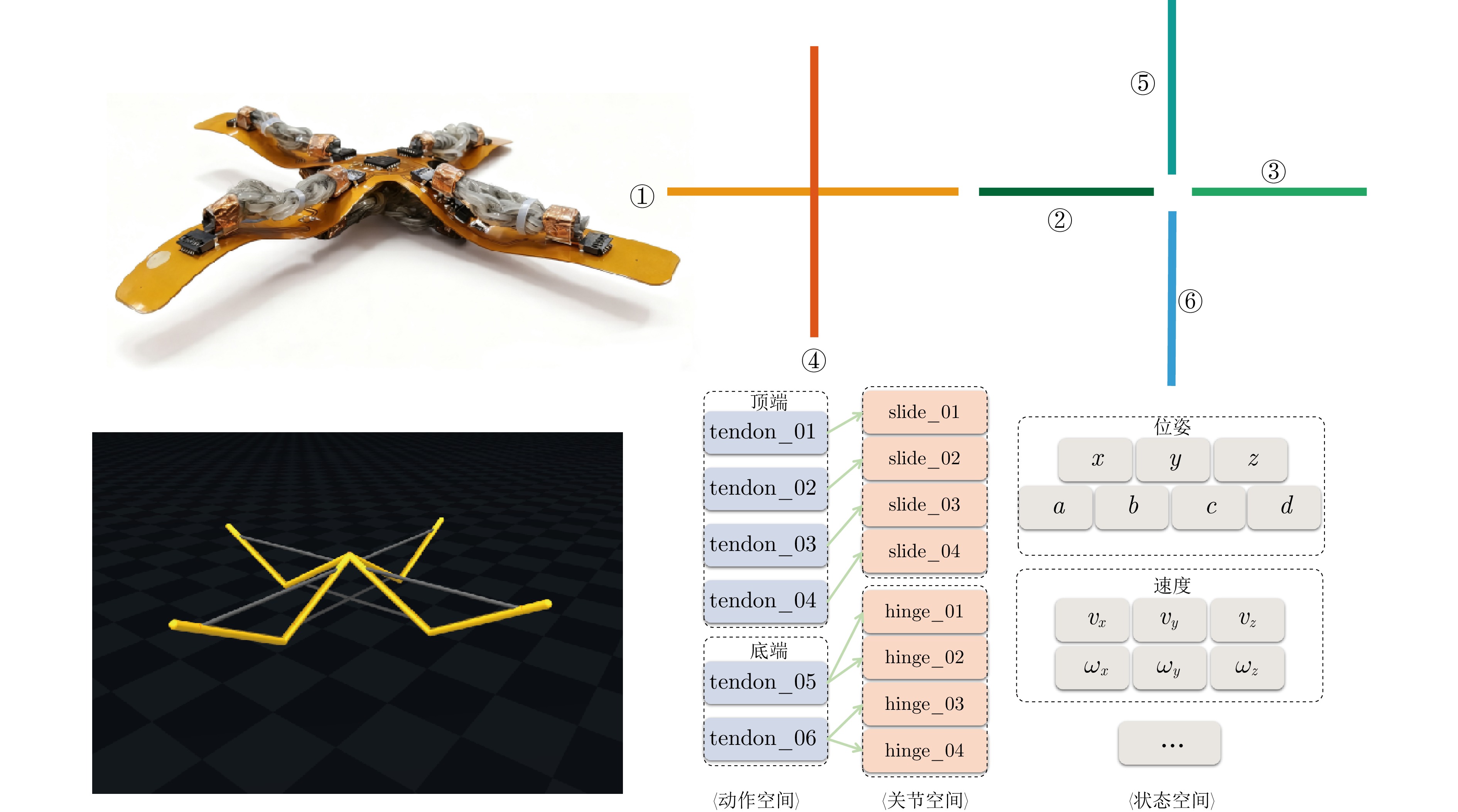
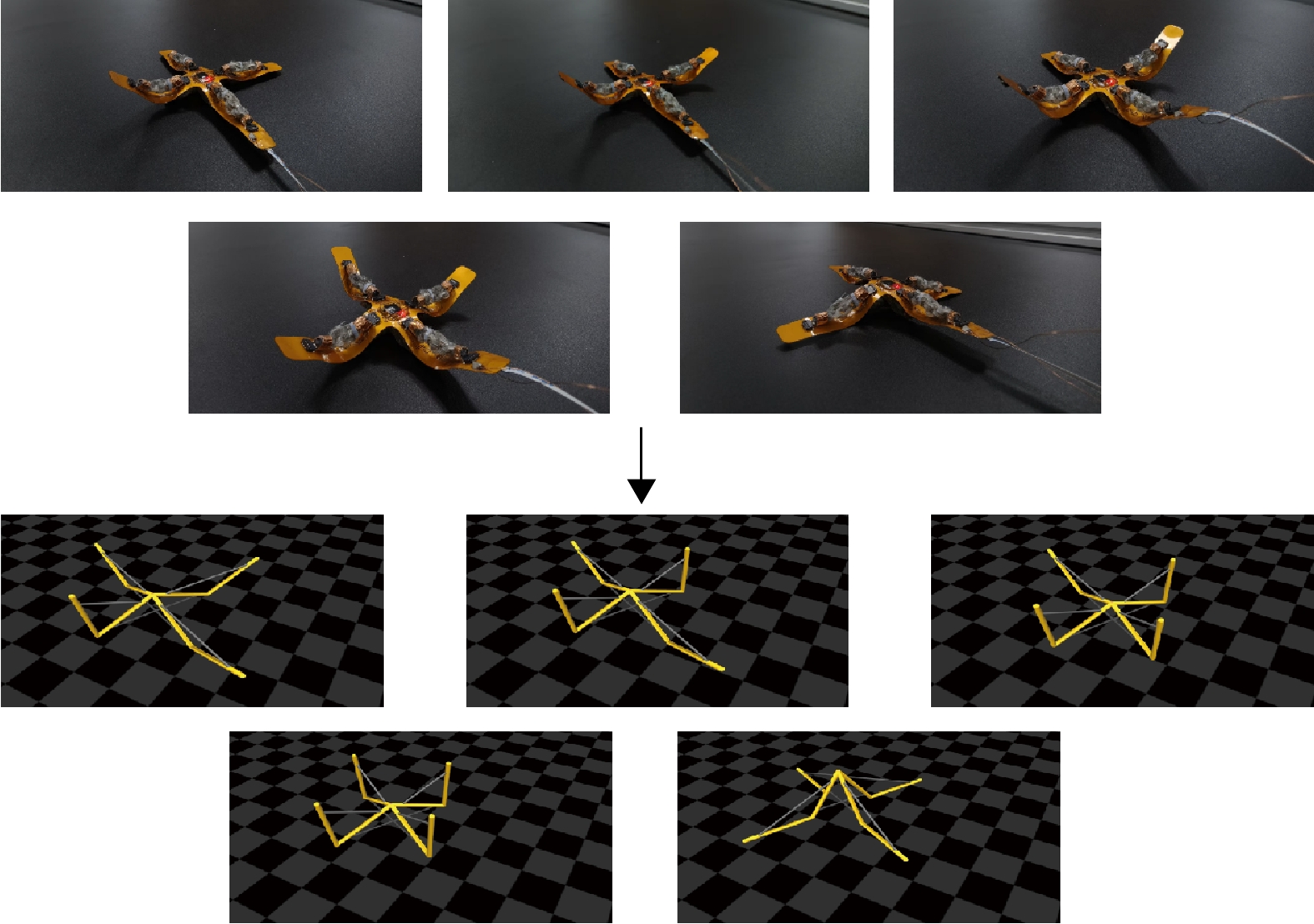
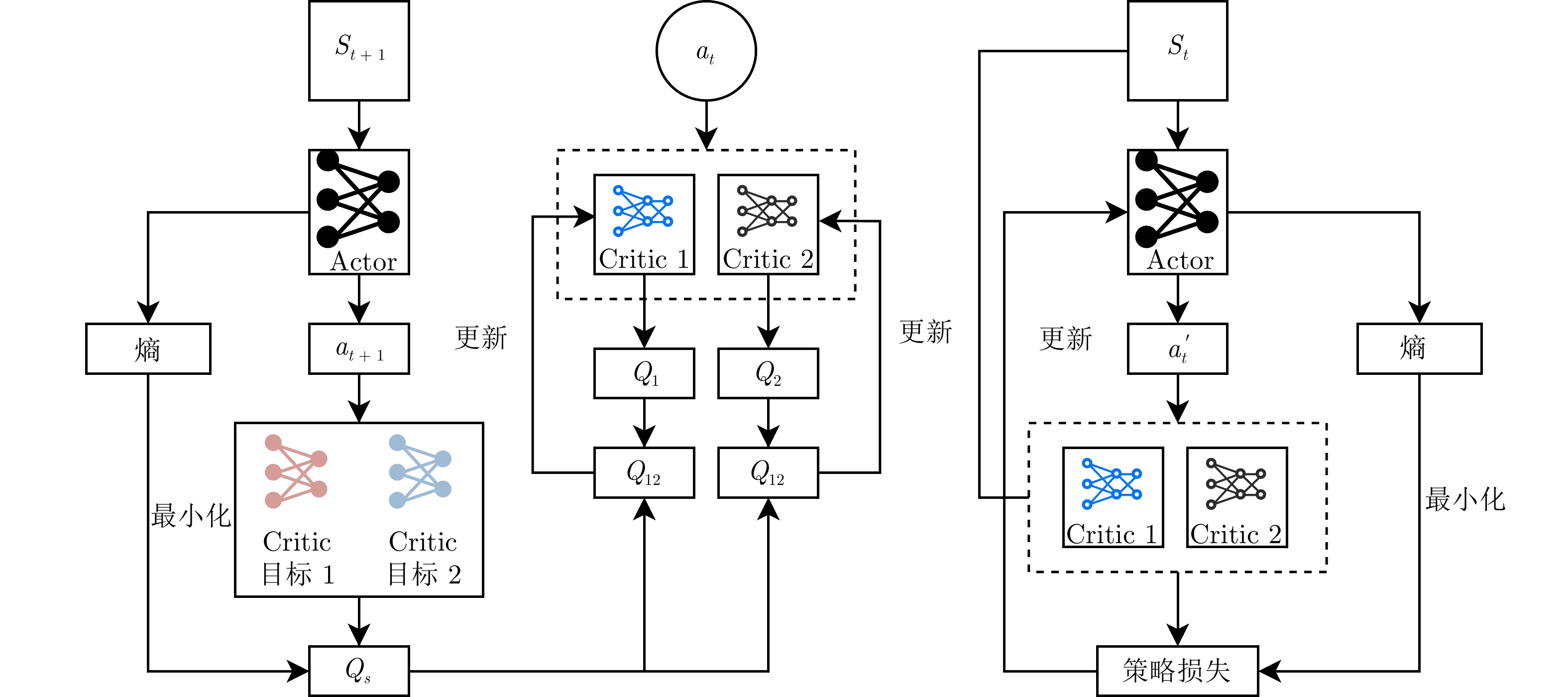
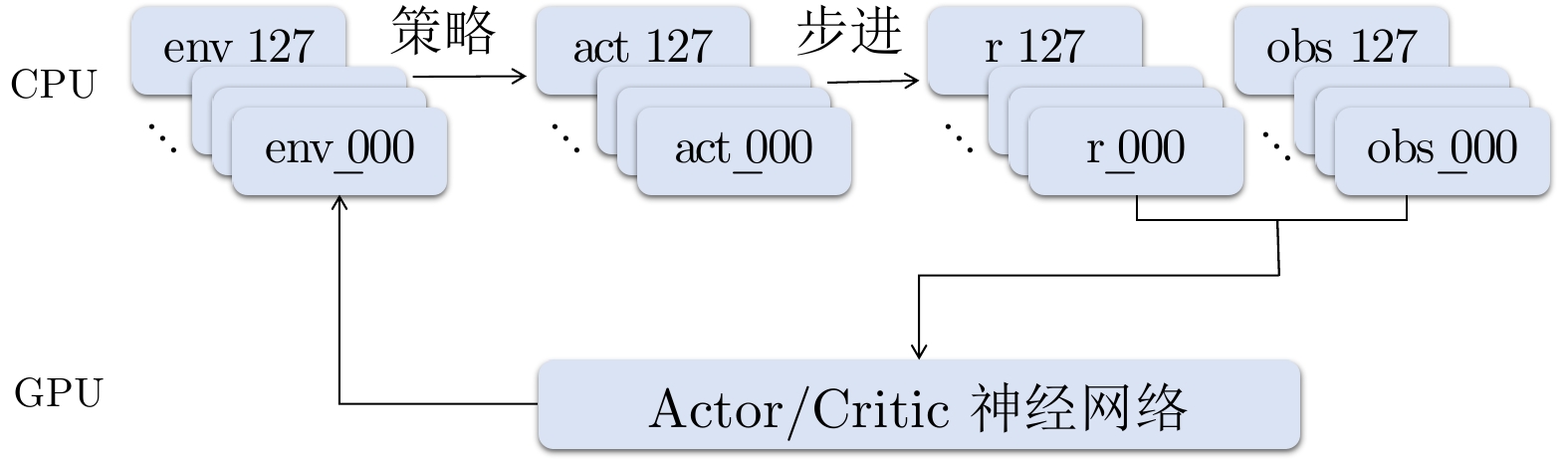
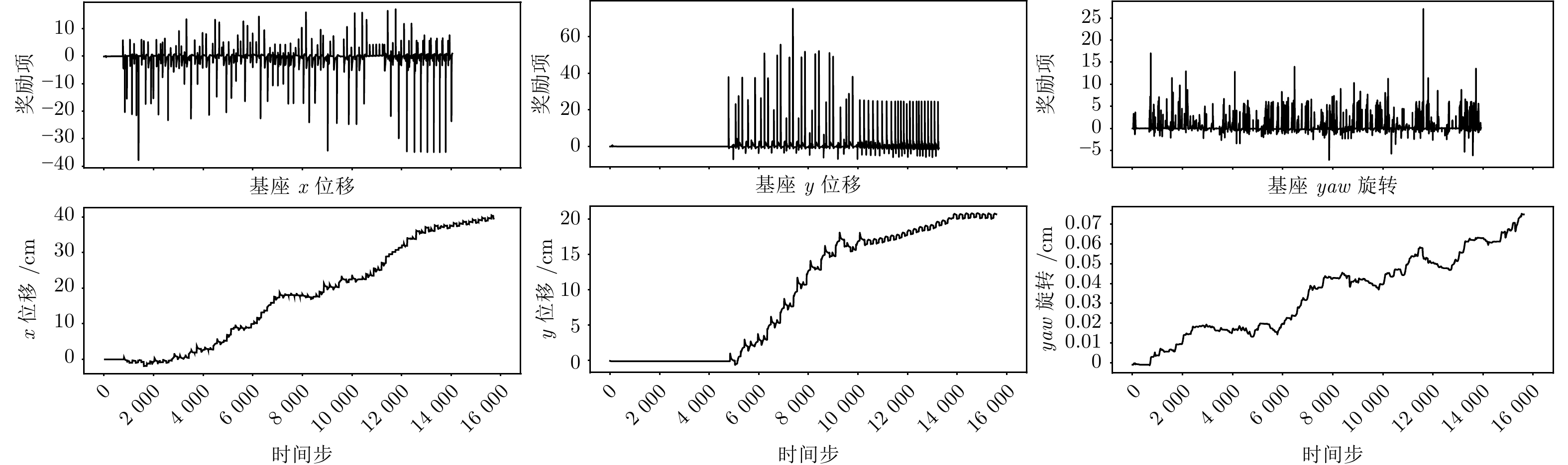
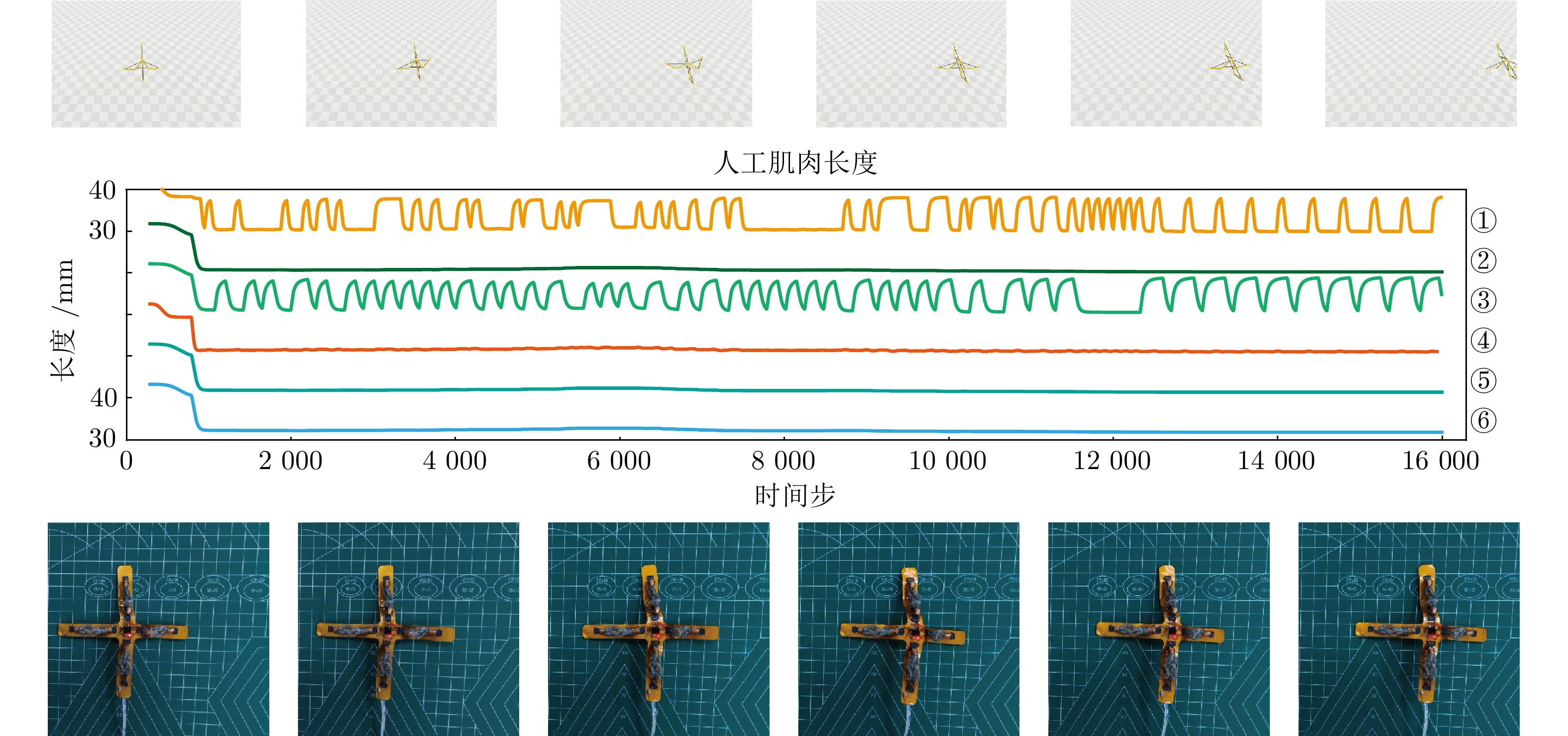
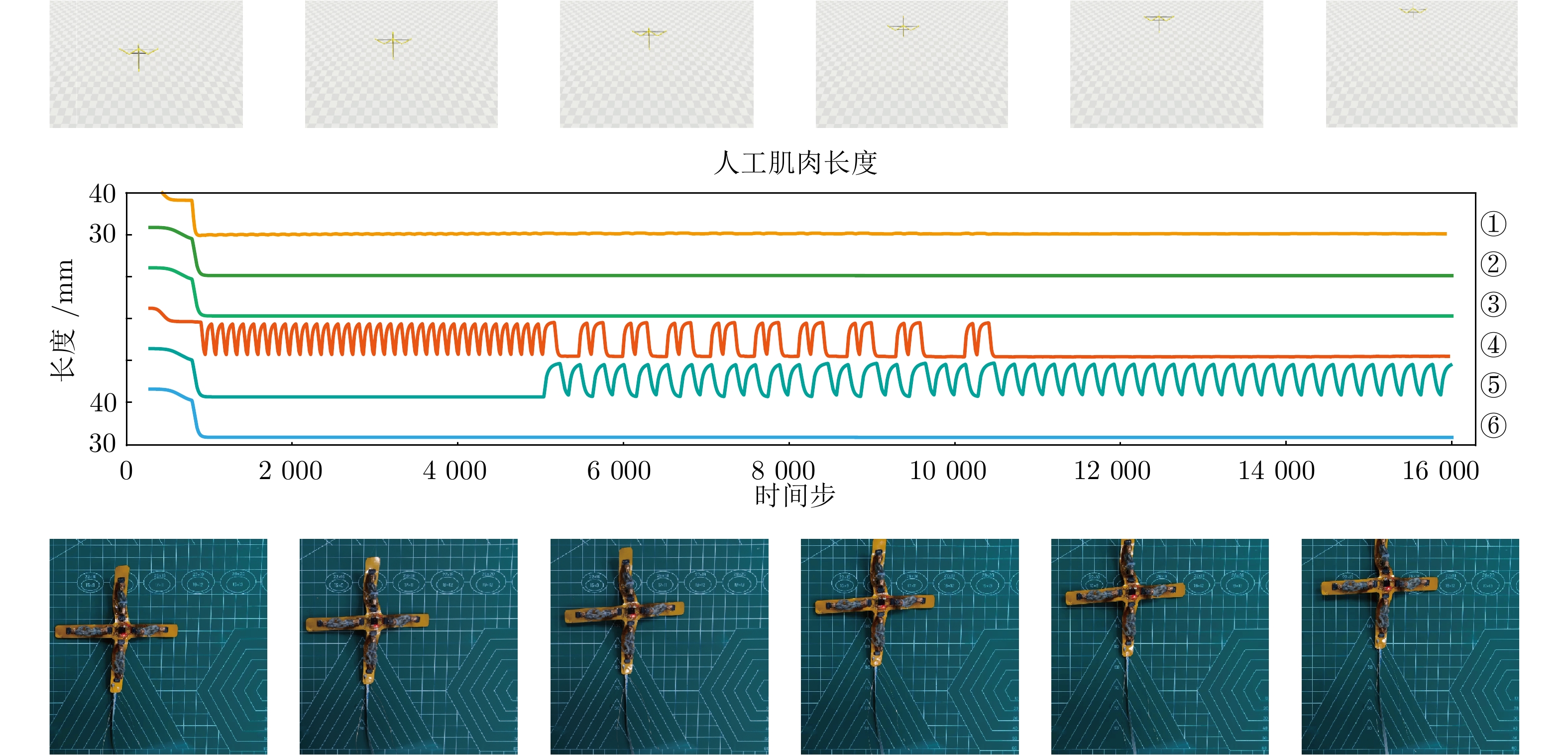
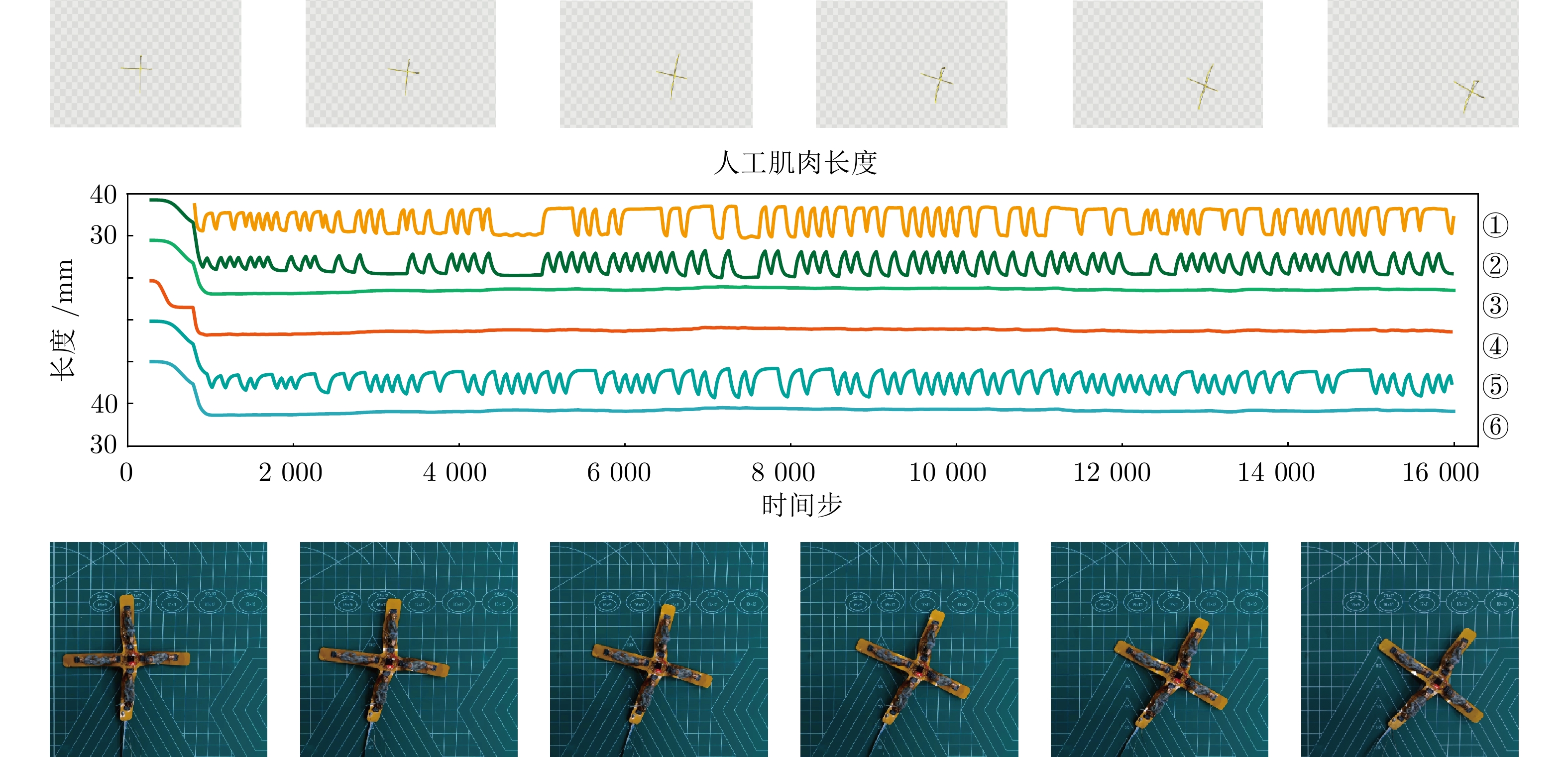
人工肌肉是仿生机器人的核心驱动部件, 然而当前人工肌肉的应用与真实生物相差甚远, 缺乏像生物一样的冗余多肌肉协同. 针对上述问题, 围绕仿生机器人的复杂人工肌肉驱动与协同, 本文提出一种由多股人工肌肉并联驱动的软体机器人设计, 并围绕这种设计建立基于强化学习的运动控制策略. 研制了以柔性十字形电路板为主体, 集成六路液晶弹性体人工肌肉与驱动电路的原型样机, 并测试获得其应变特性与响应性能; 针对原型样机形变−运动特点, 在仿真环境中构建基于绳腱驱动的简化模型. 通过合理设计状态空间、动作空间及奖励函数等, 以 soft Actor-Critic算法进行强化学习并行训练, 得到平移与旋转运动肌肉协同策略. 将运动策略中稳定周期段以离线方式驱动实物样机, 实现有效的多向平移与旋转运动, 验证了采用强化学习控制复杂人工肌肉系统的可行性.
人工肌肉是仿生机器人的核心驱动部件, 然而当前人工肌肉的应用与真实生物相差甚远, 缺乏像生物一样的冗余多肌肉协同. 针对上述问题, 围绕仿生机器人的复杂人工肌肉驱动与协同, 本文提出一种由多股人工肌肉并联驱动的软体机器人设计, 并围绕这种设计建立基于强化学习的运动控制策略. 研制了以柔性十字形电路板为主体, 集成六路液晶弹性体人工肌肉与驱动电路的原型样机, 并测试获得其应变特性与响应性能; 针对原型样机形变−运动特点, 在仿真环境中构建基于绳腱驱动的简化模型. 通过合理设计状态空间、动作空间及奖励函数等, 以 soft Actor-Critic算法进行强化学习并行训练, 得到平移与旋转运动肌肉协同策略. 将运动策略中稳定周期段以离线方式驱动实物样机, 实现有效的多向平移与旋转运动, 验证了采用强化学习控制复杂人工肌肉系统的可行性.


2026, 52(5): 966-979.
doi: 10.16383/j.aas.c250513
cstr: 32138.14.j.aas.c250513
摘要:
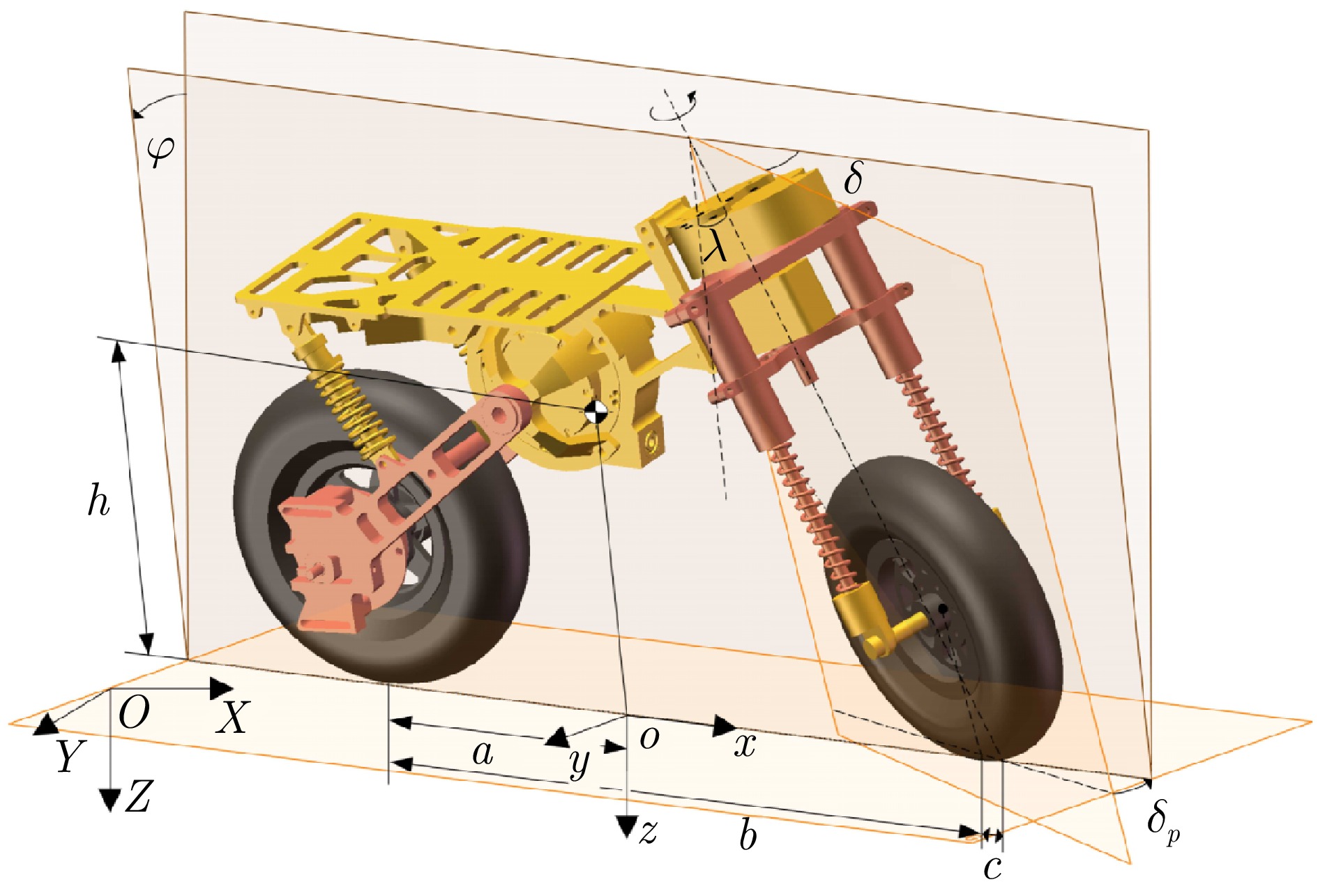
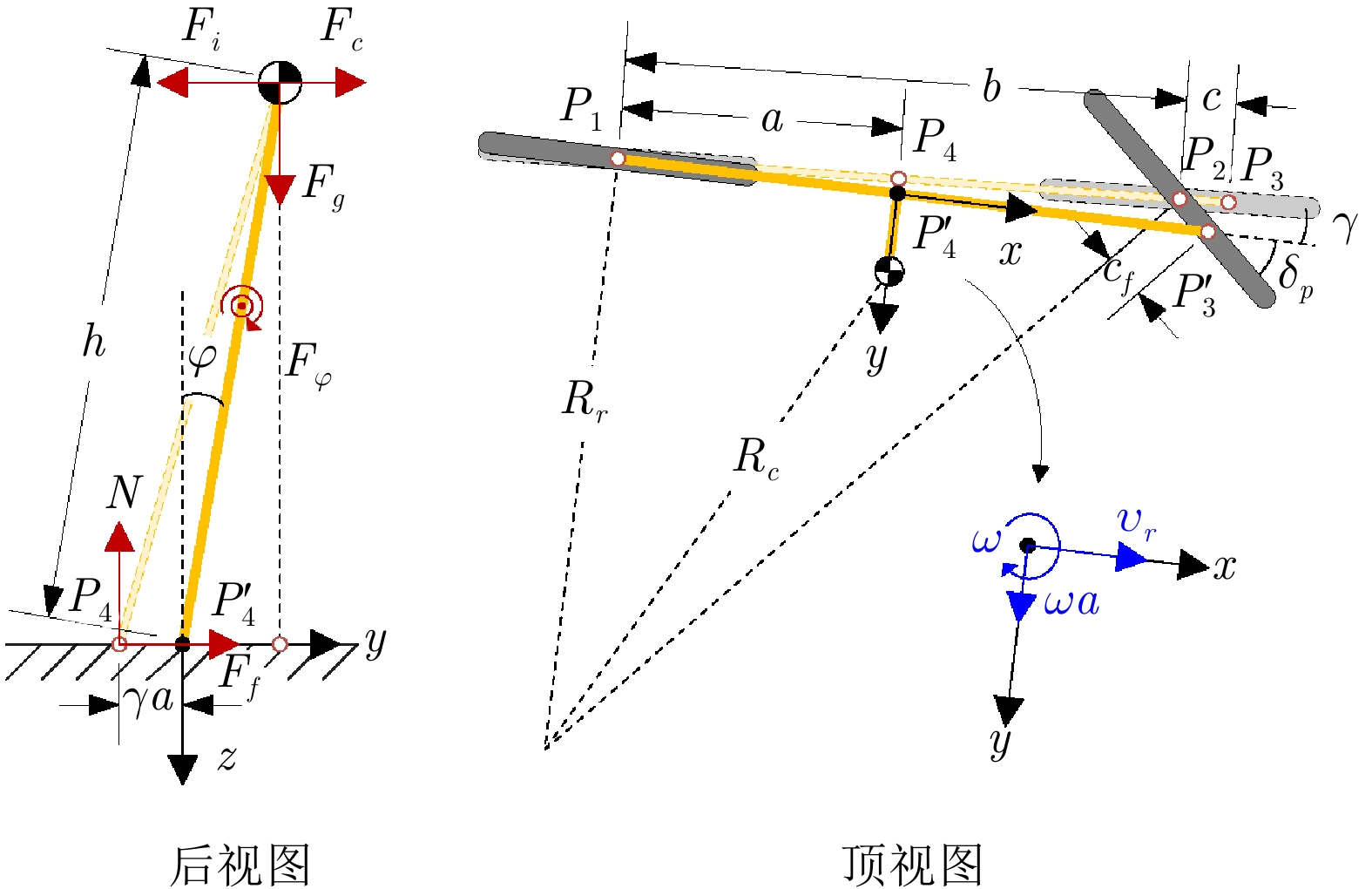
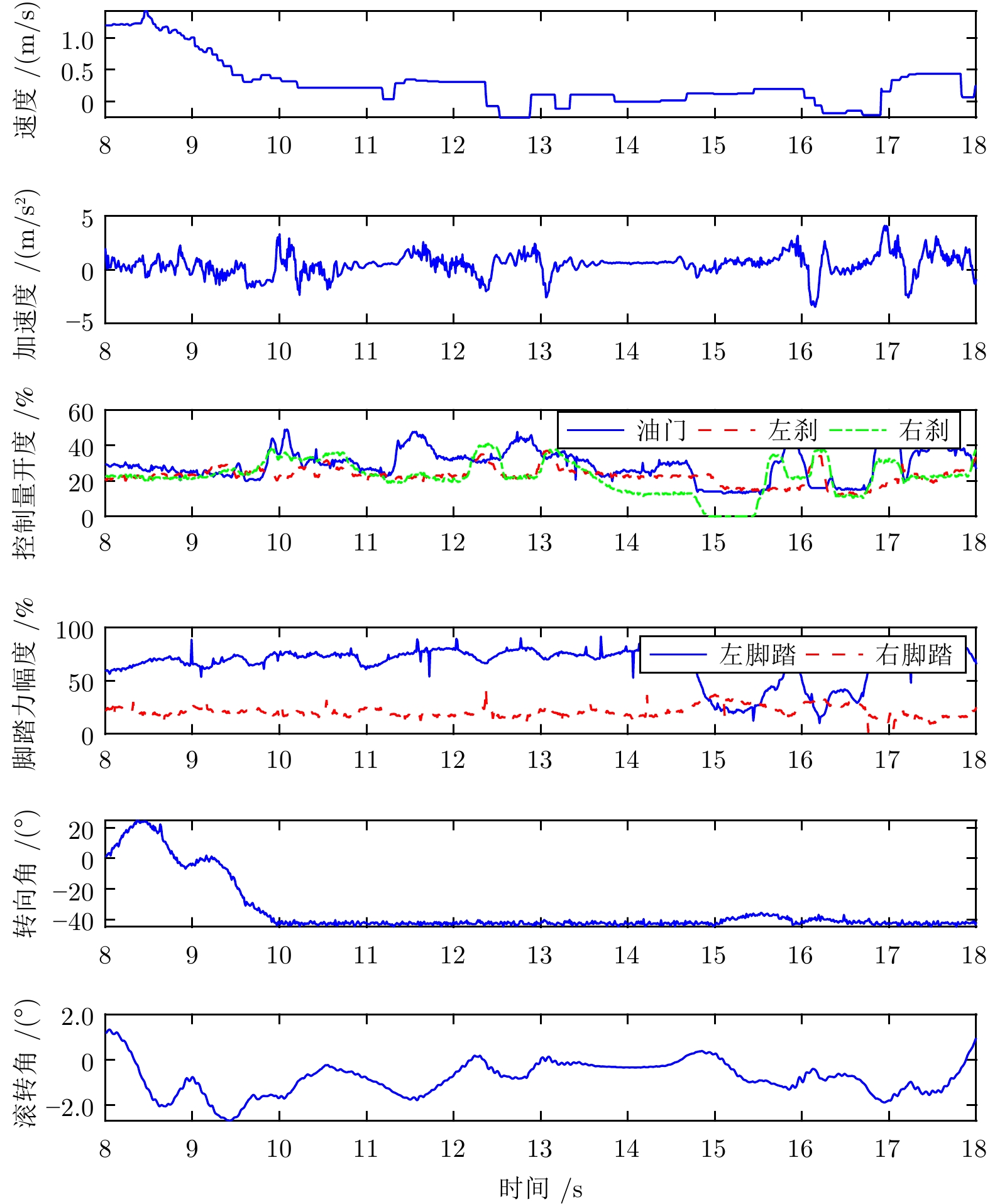
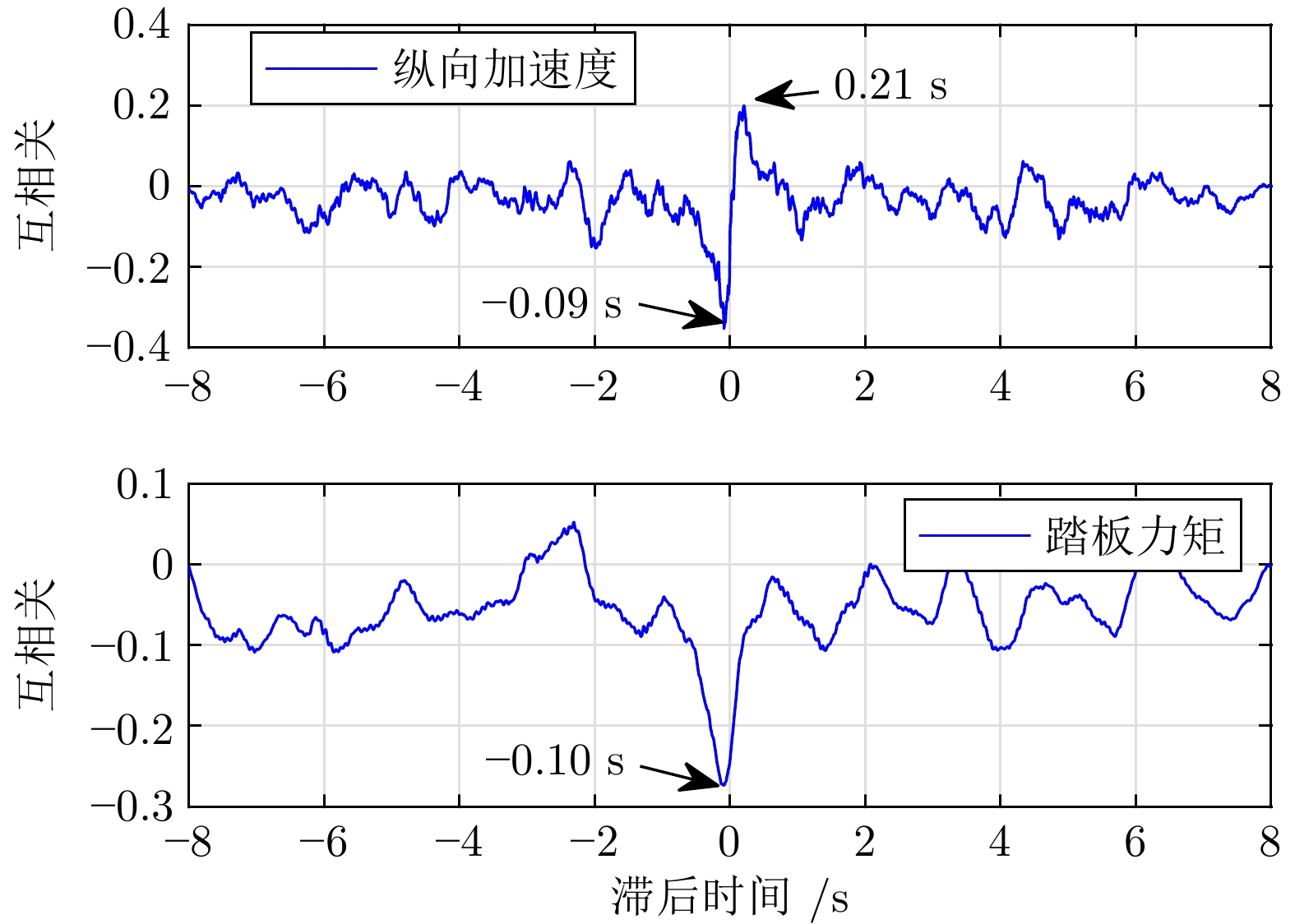
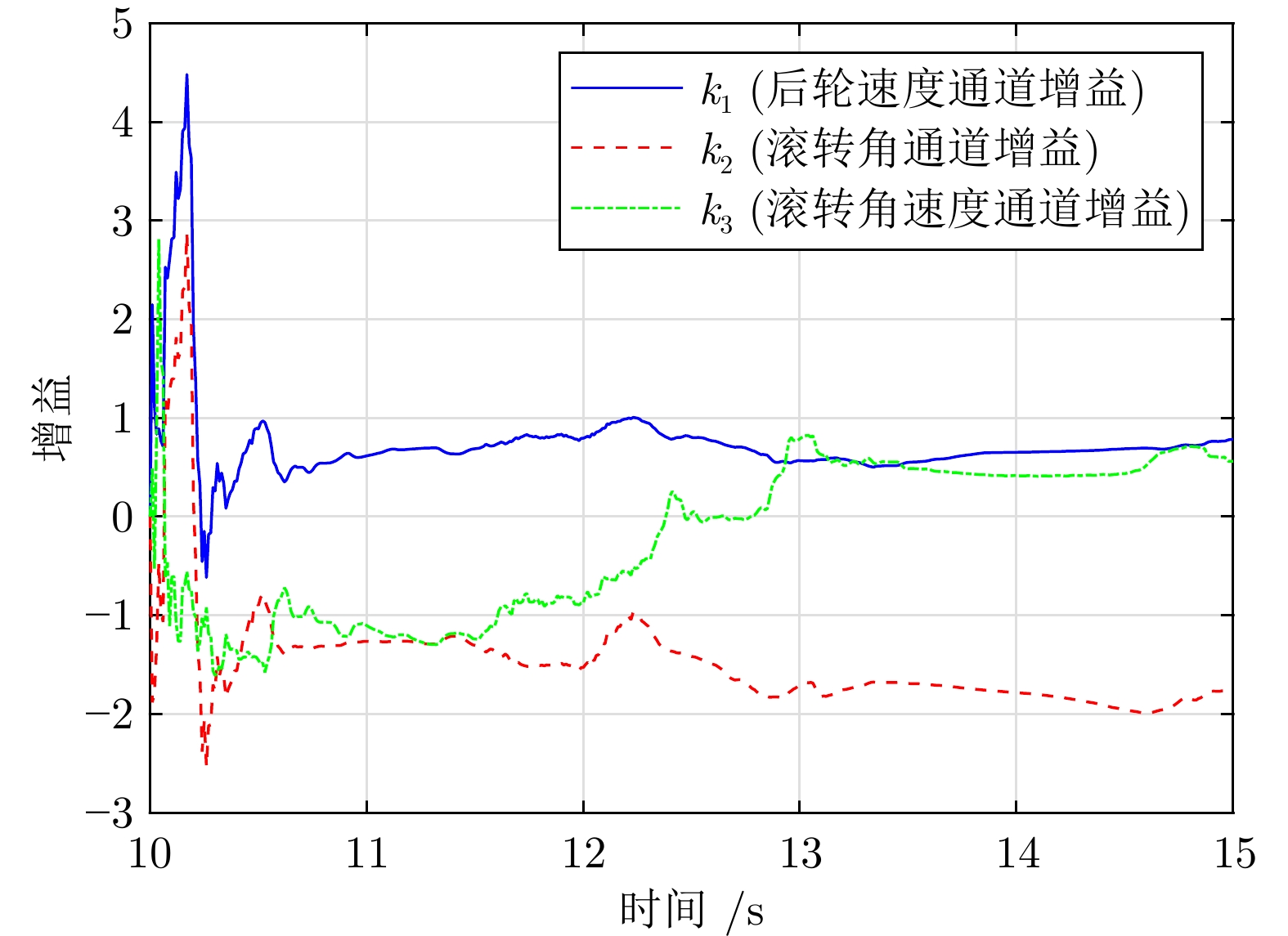
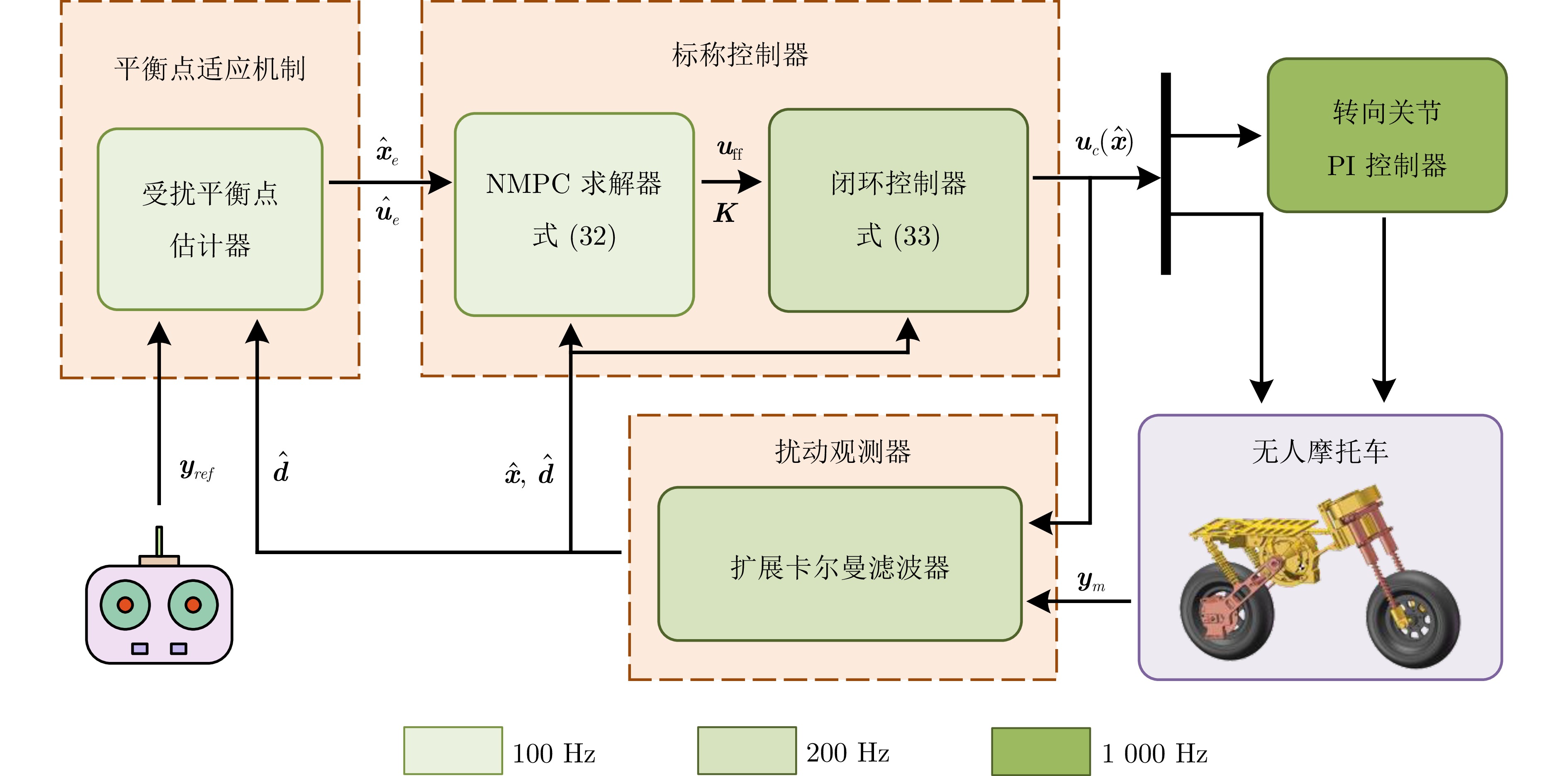
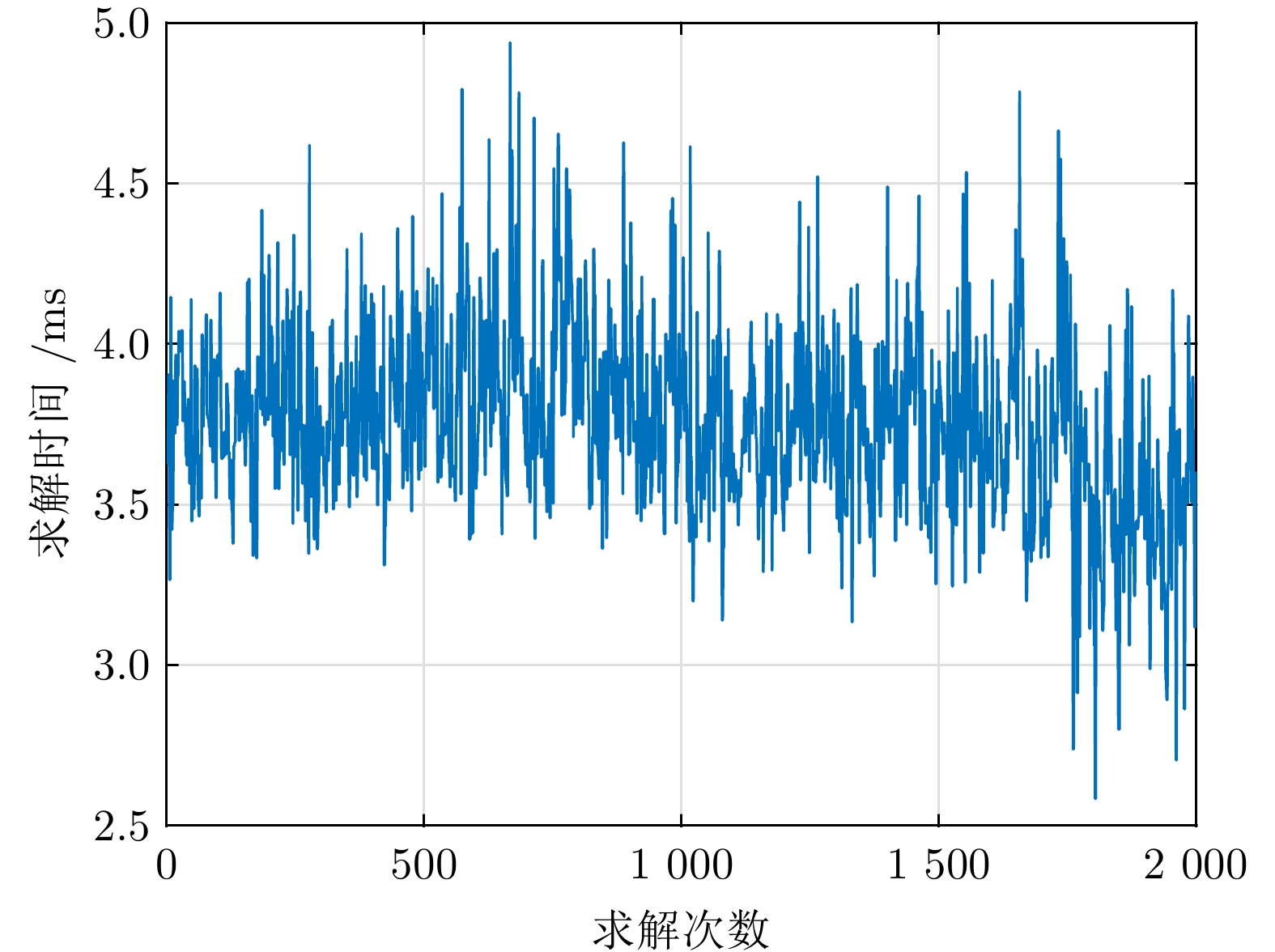
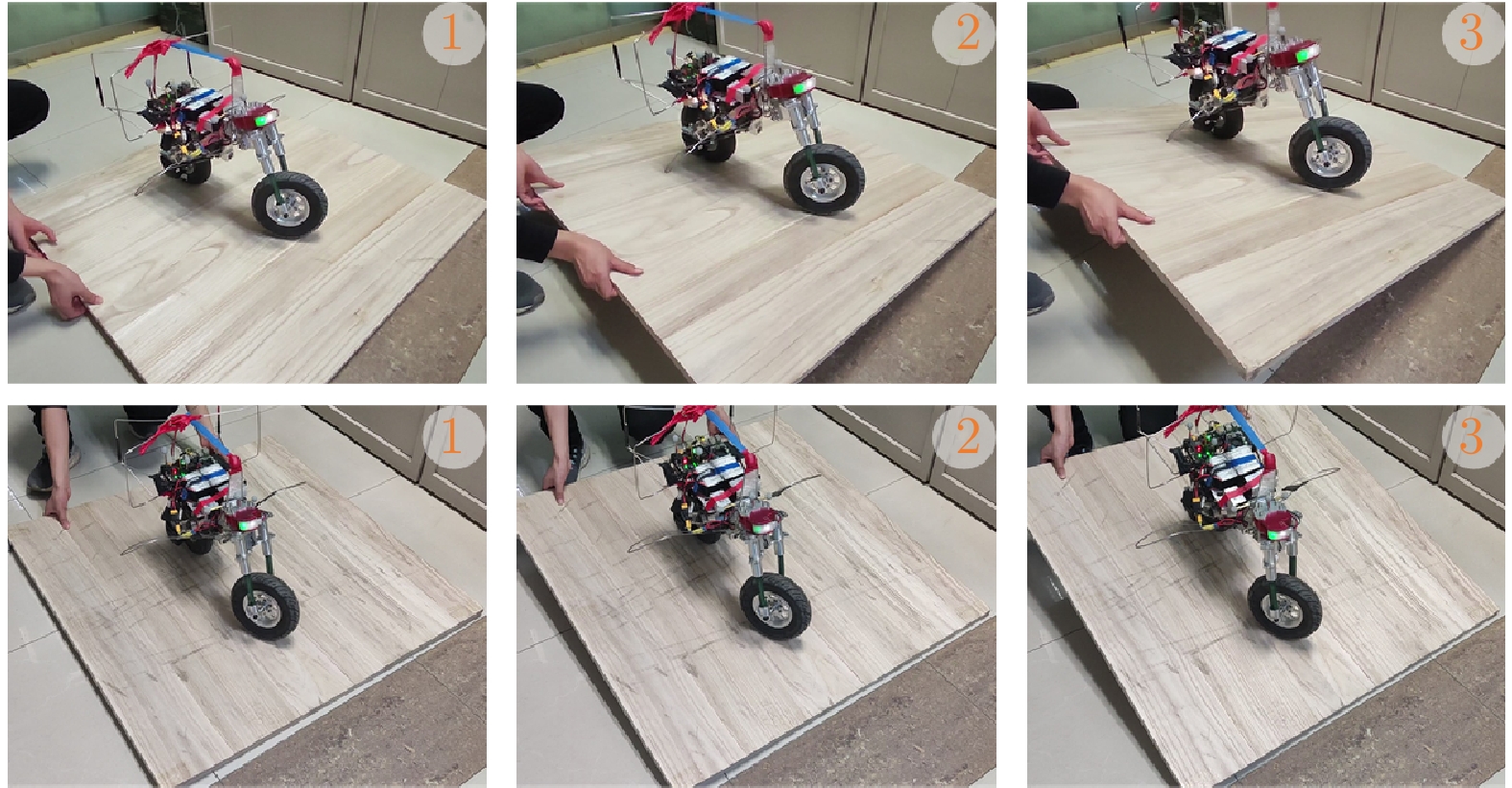
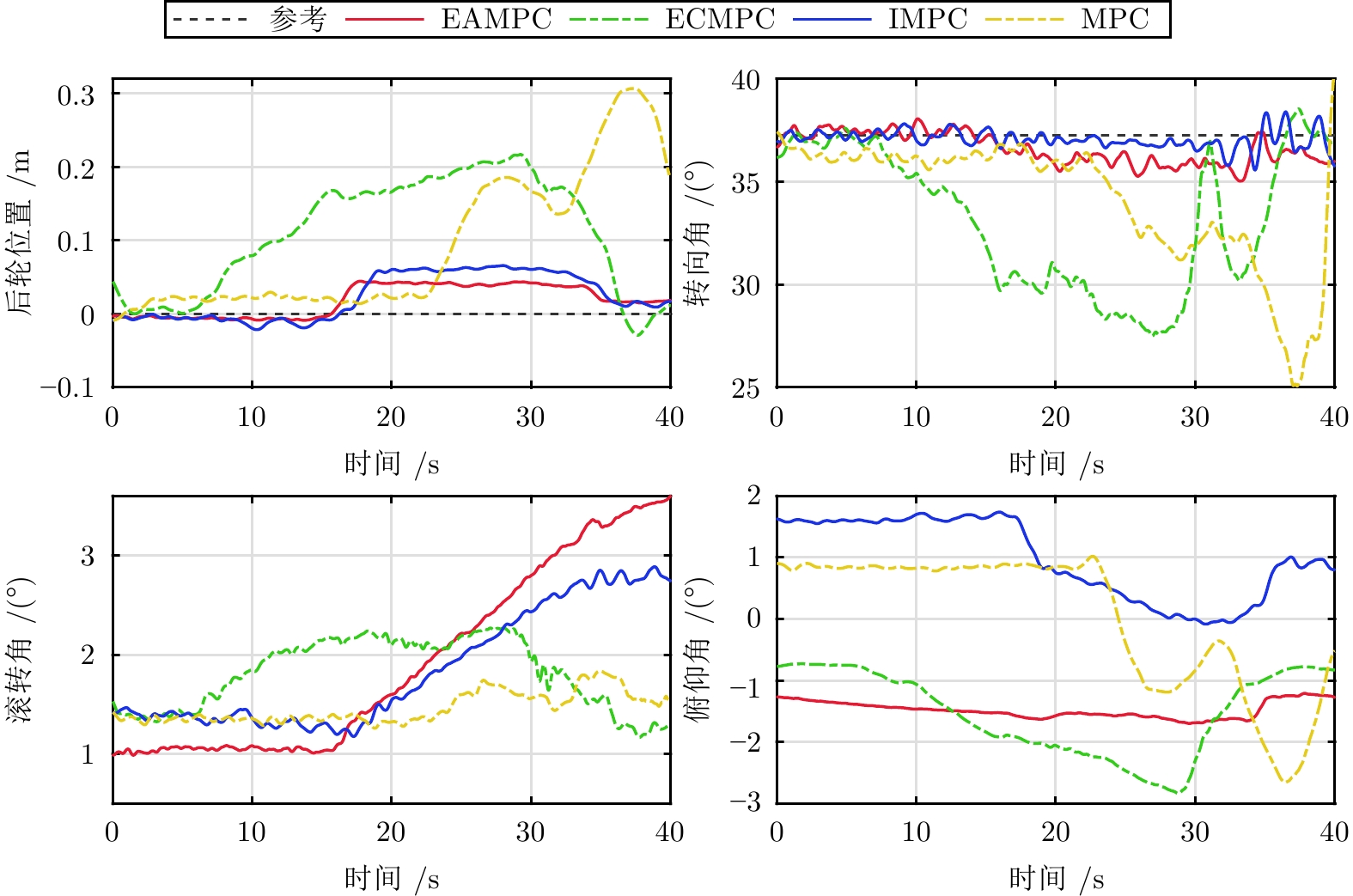
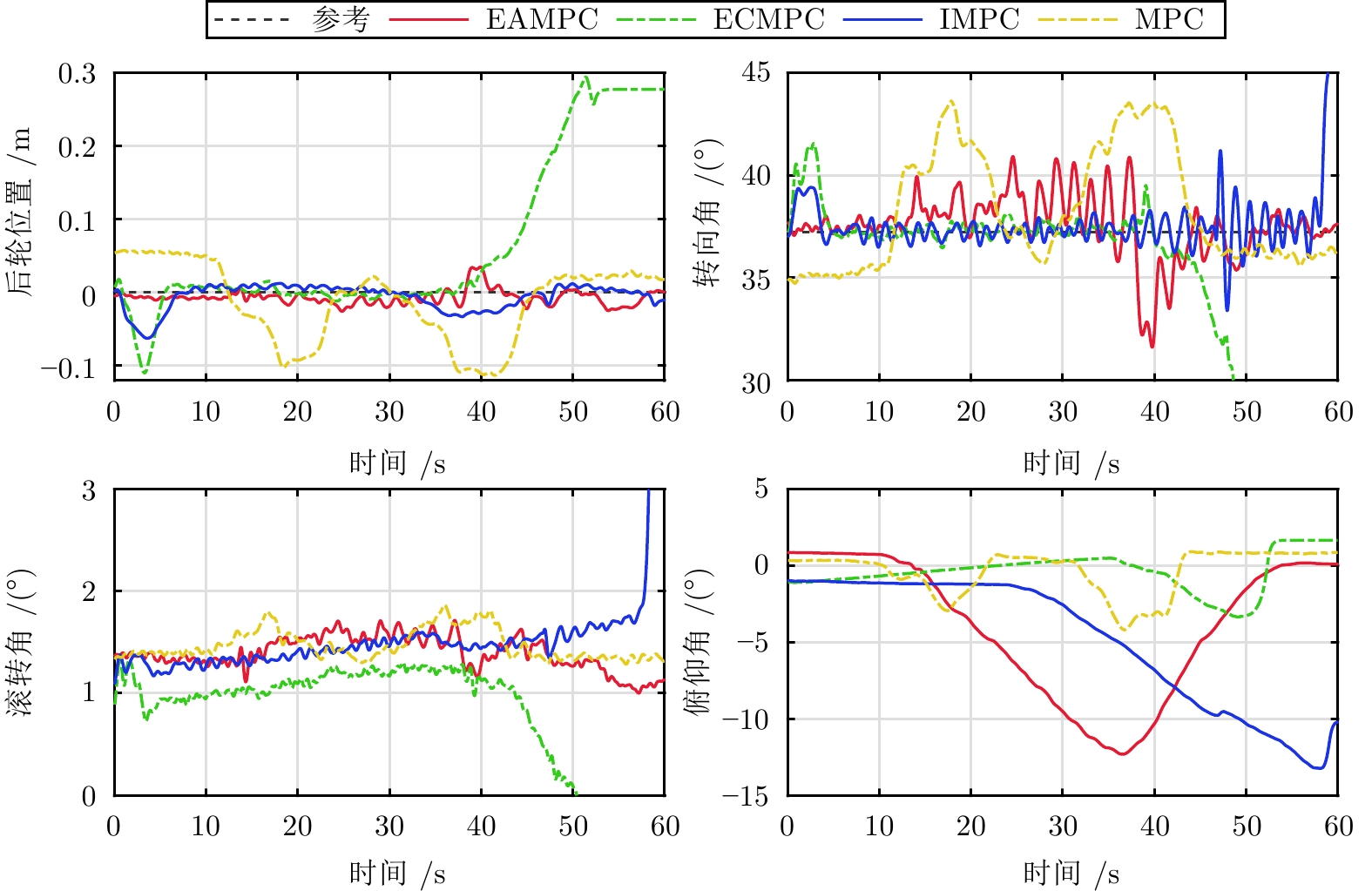
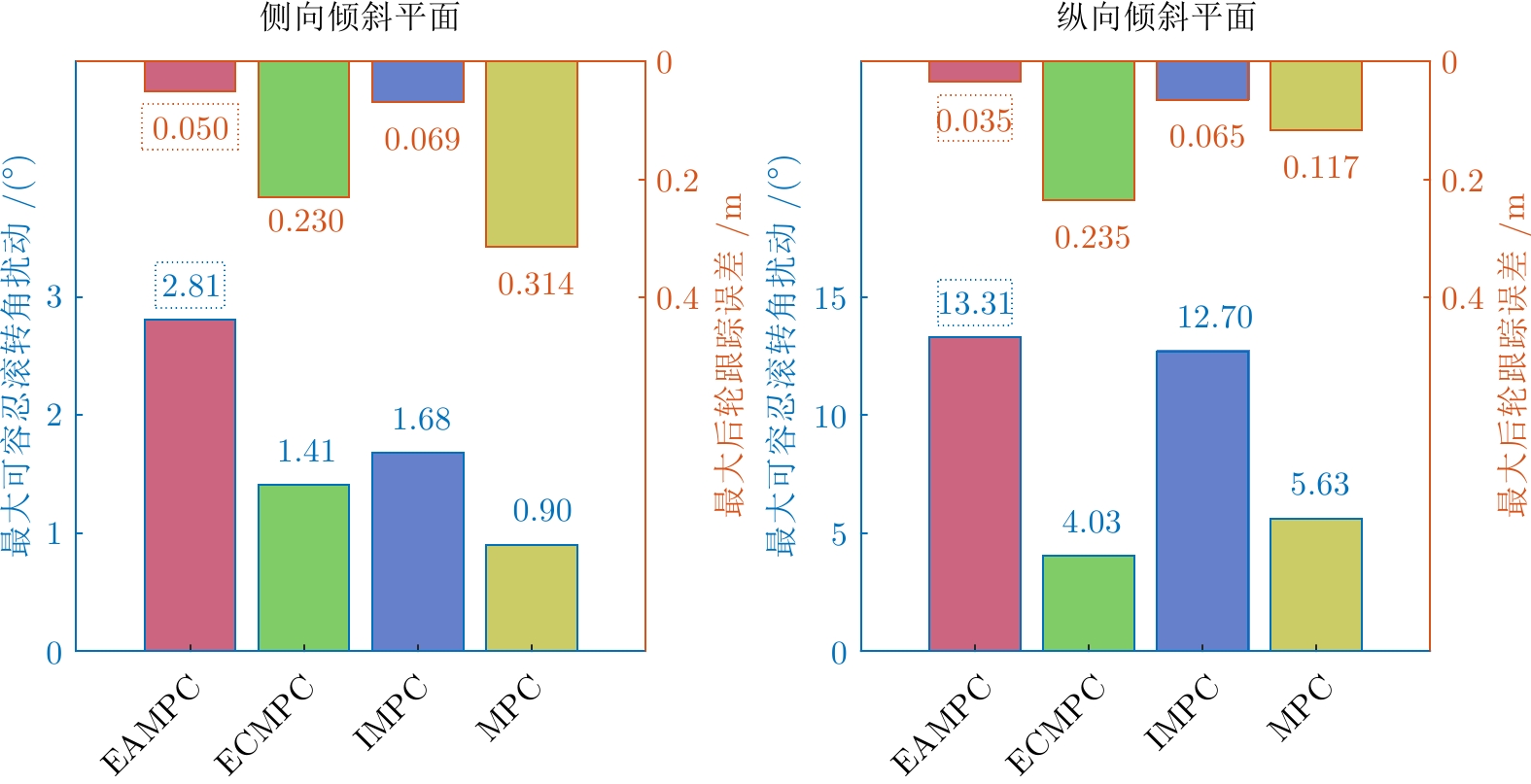
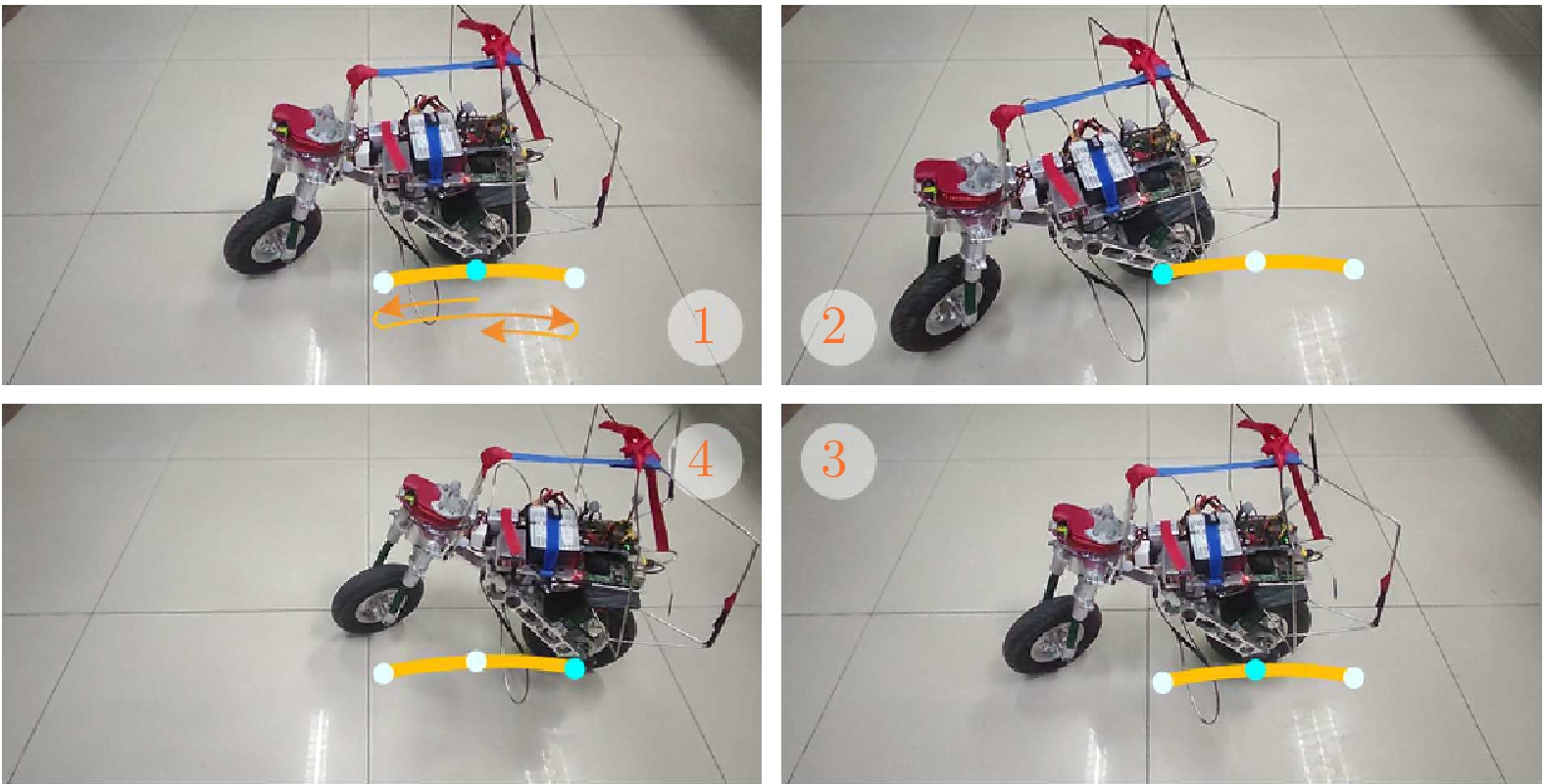
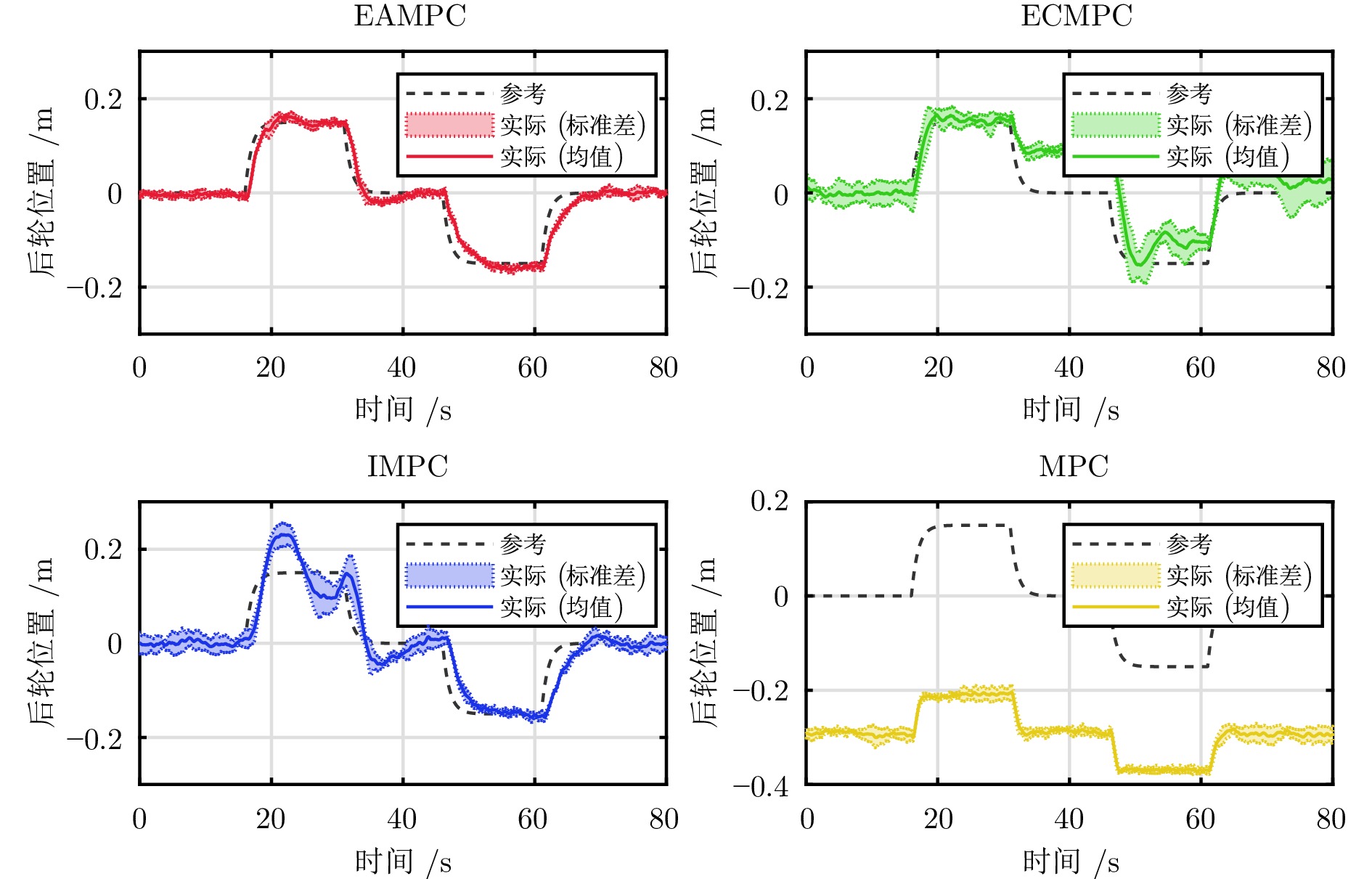
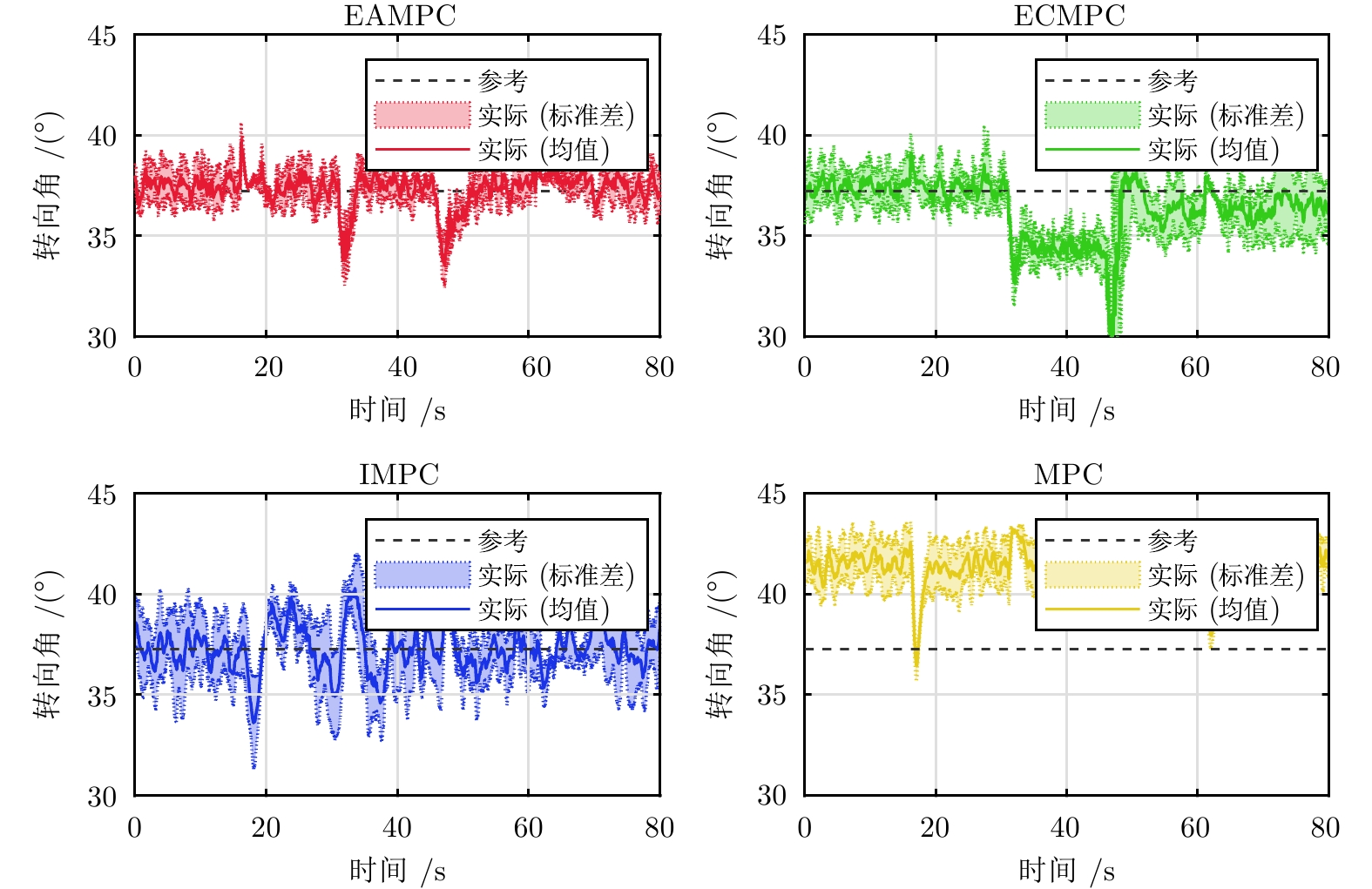
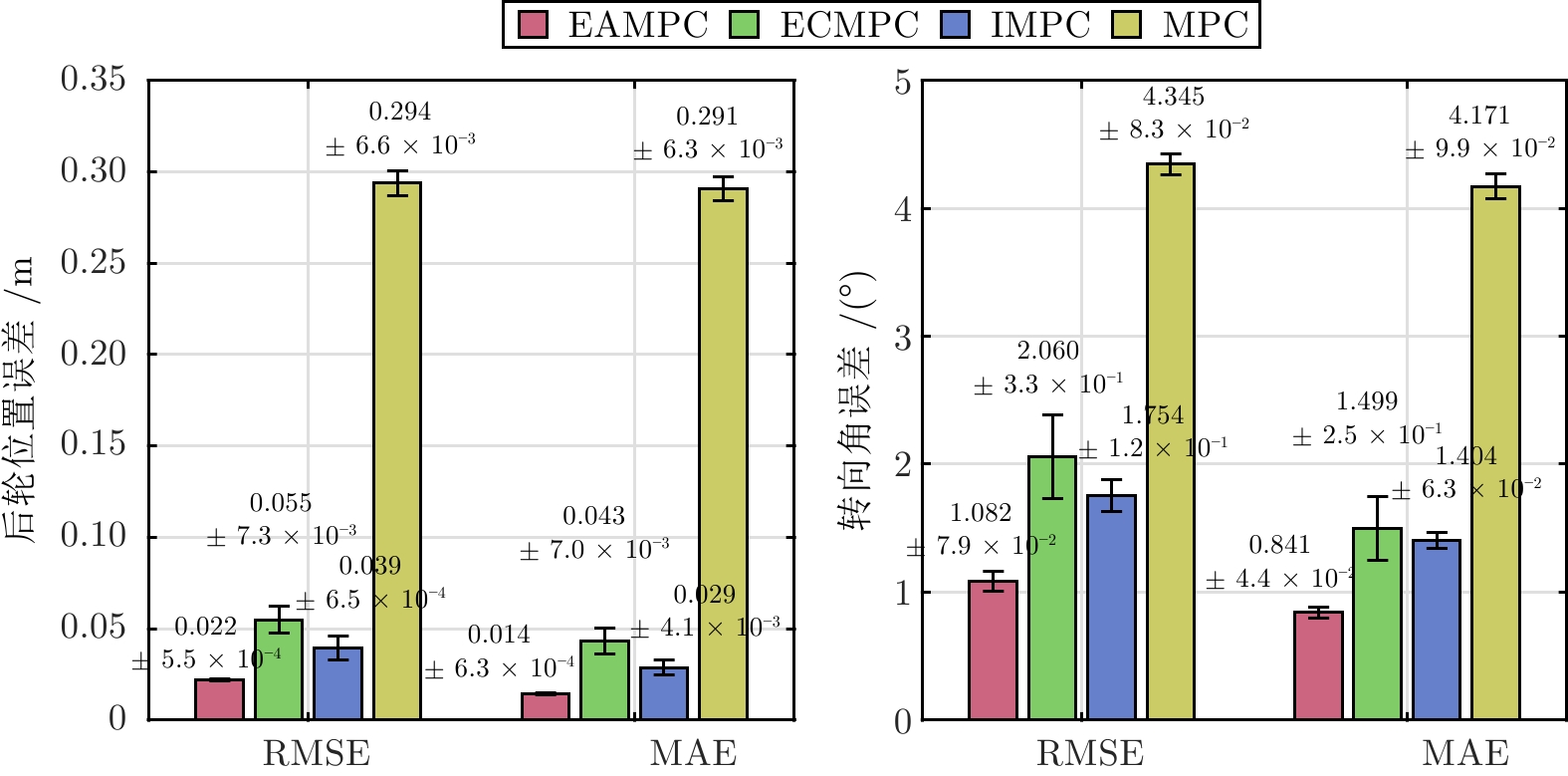
无人摩托车静止时离心力效应失效, 导致其平衡控制具有极大的挑战性, 目前仍缺乏一种鲁棒且高效的控制机制. 受摩托车手定车技巧启发, 提出一种基于仿人操控的无人摩托静止平衡控制方法, 阐明定车原理并基于其实现后驱无人摩托静止平衡控制. 通过建立动力学模型并结合骑手实验, 从模型和数据两个维度分析定车机理, 揭示骑手在定车中保持平衡与地形适应的原理, 在此基础上提出平衡点自适应鲁棒定车控制方法. 该方法利用扰动观测器估计的扰动计算受扰平衡点, 进而使用非线性模型预测控制实现扰动下的平衡控制. 证明了所提方法的无静差跟踪特性, 通过实验验证方法的有效性, 该方法在侧向/纵向斜面定车任务中将可容忍扰动分别提升至普通模型预测控制的约3.1倍和2.4倍, 在后轮位置跟踪任务中将跟踪误差降低一个数量级.
无人摩托车静止时离心力效应失效, 导致其平衡控制具有极大的挑战性, 目前仍缺乏一种鲁棒且高效的控制机制. 受摩托车手定车技巧启发, 提出一种基于仿人操控的无人摩托静止平衡控制方法, 阐明定车原理并基于其实现后驱无人摩托静止平衡控制. 通过建立动力学模型并结合骑手实验, 从模型和数据两个维度分析定车机理, 揭示骑手在定车中保持平衡与地形适应的原理, 在此基础上提出平衡点自适应鲁棒定车控制方法. 该方法利用扰动观测器估计的扰动计算受扰平衡点, 进而使用非线性模型预测控制实现扰动下的平衡控制. 证明了所提方法的无静差跟踪特性, 通过实验验证方法的有效性, 该方法在侧向/纵向斜面定车任务中将可容忍扰动分别提升至普通模型预测控制的约3.1倍和2.4倍, 在后轮位置跟踪任务中将跟踪误差降低一个数量级.




2026, 52(5): 980-991.
doi: 10.16383/j.aas.c250518
cstr: 32138.14.j.aas.c250518
摘要:
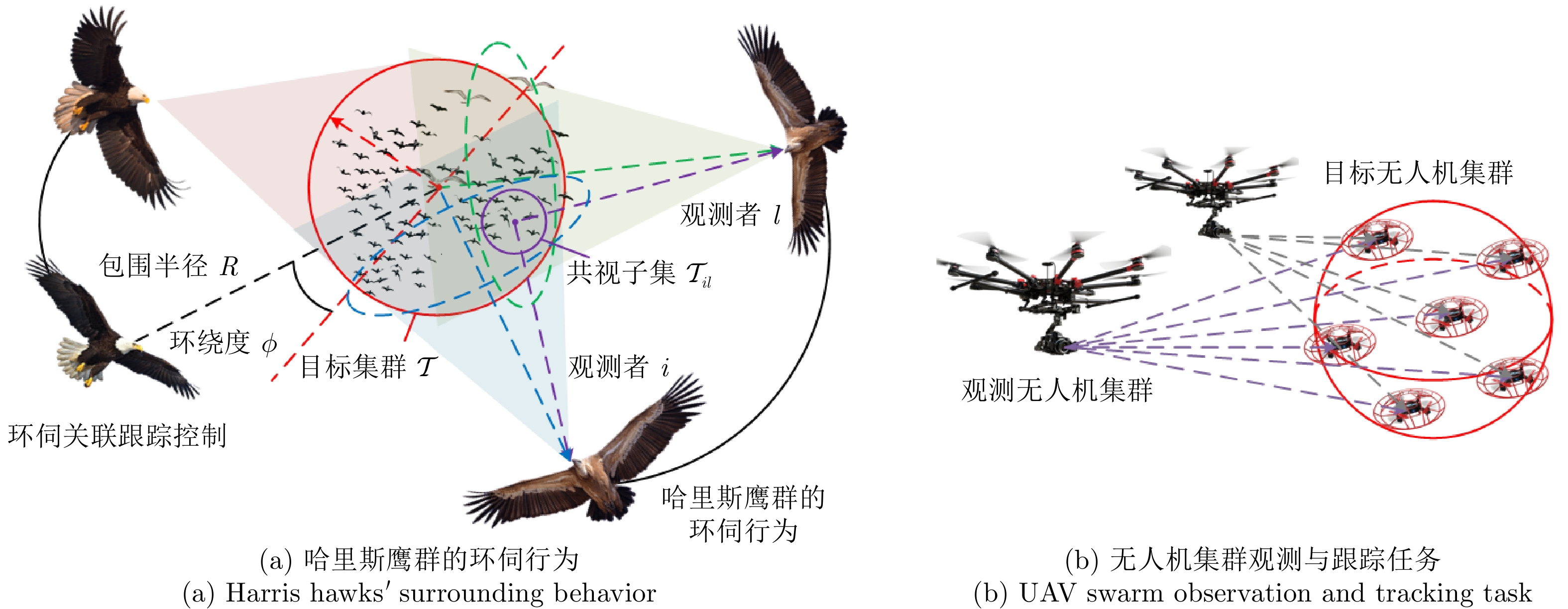
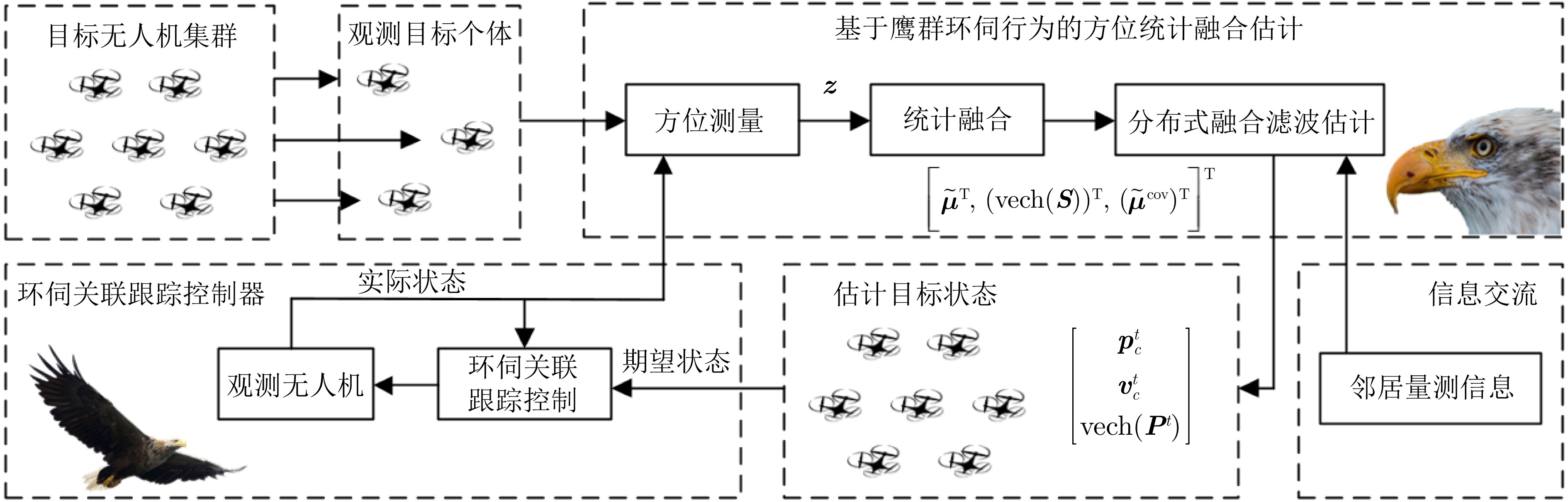
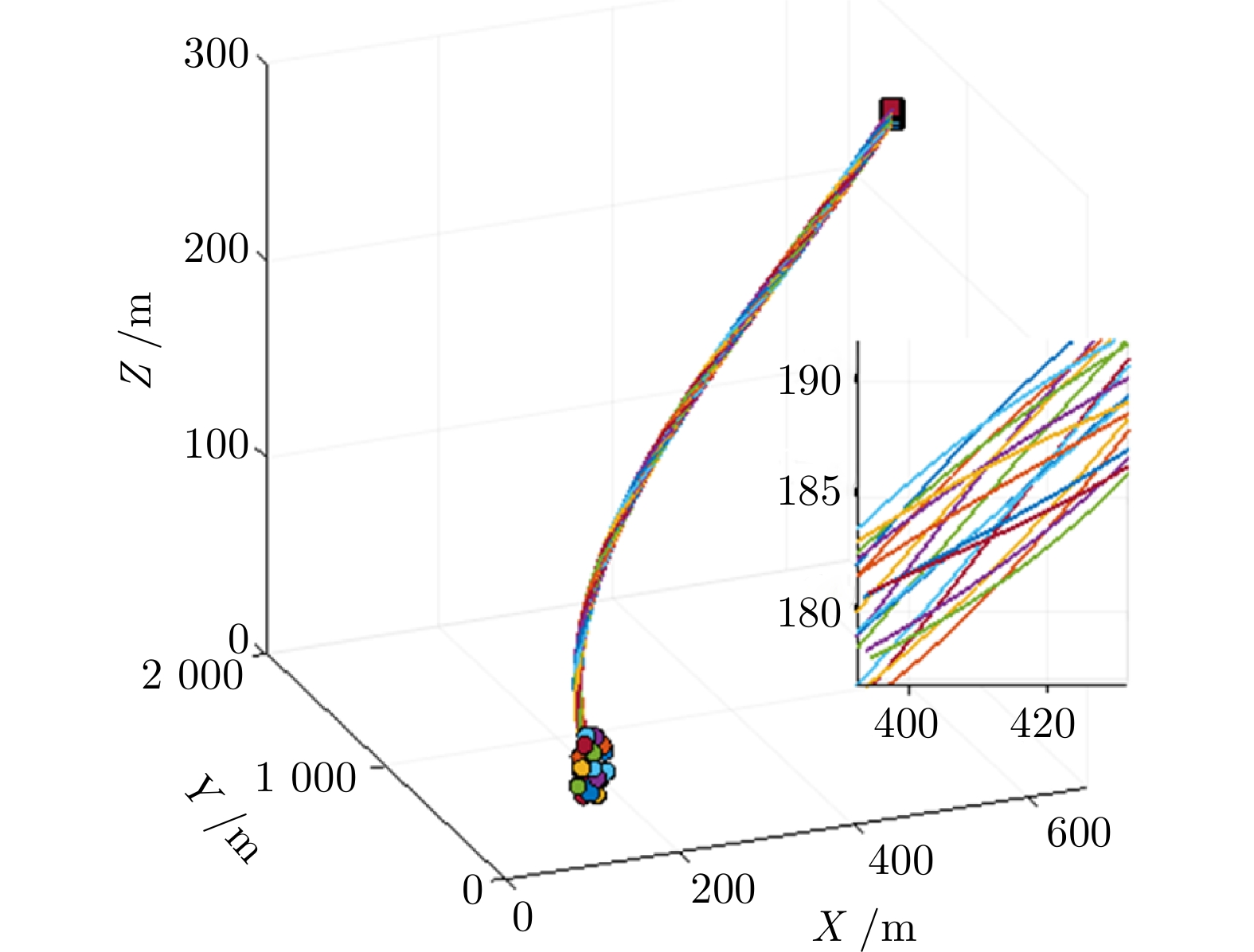
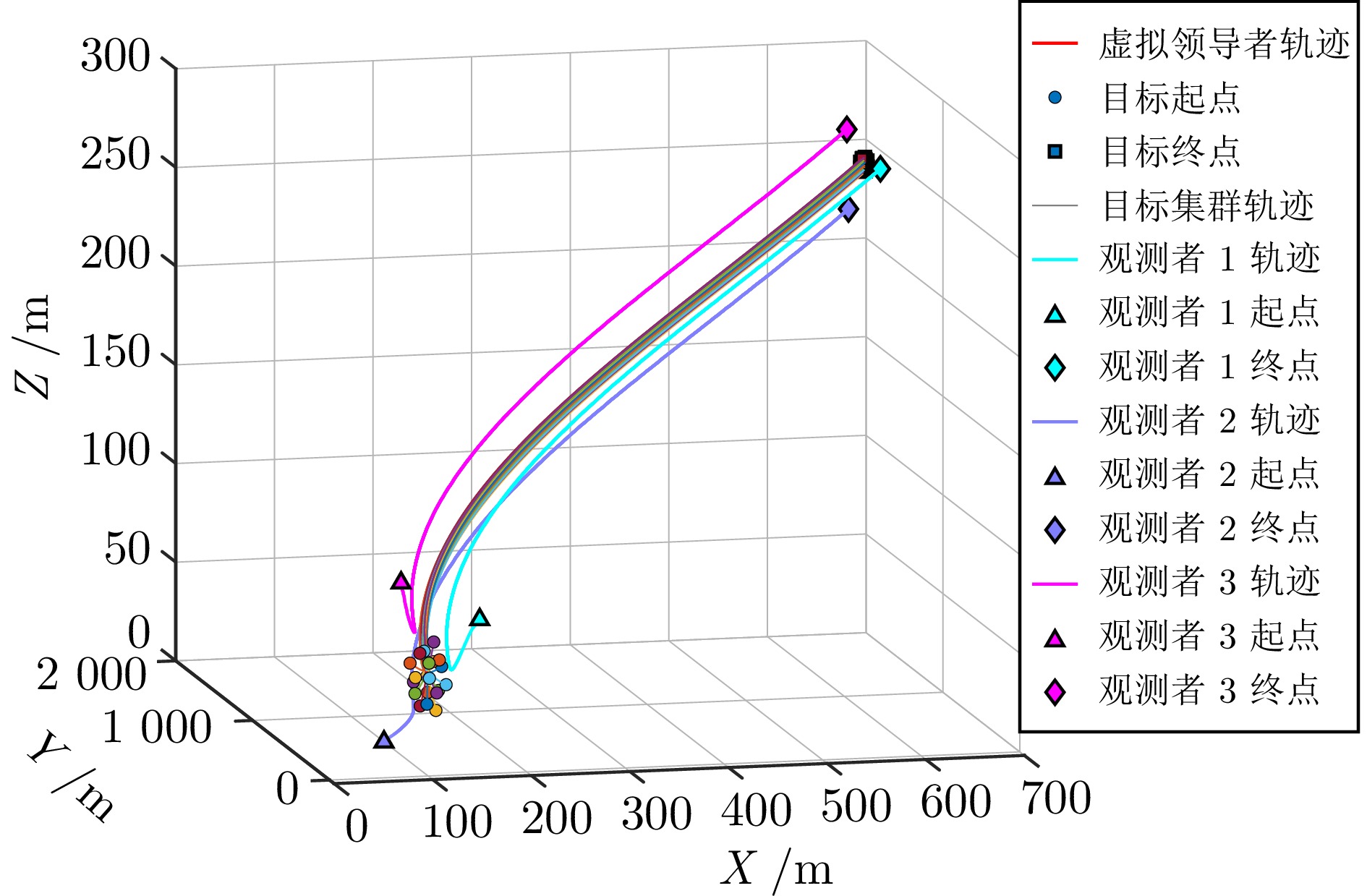
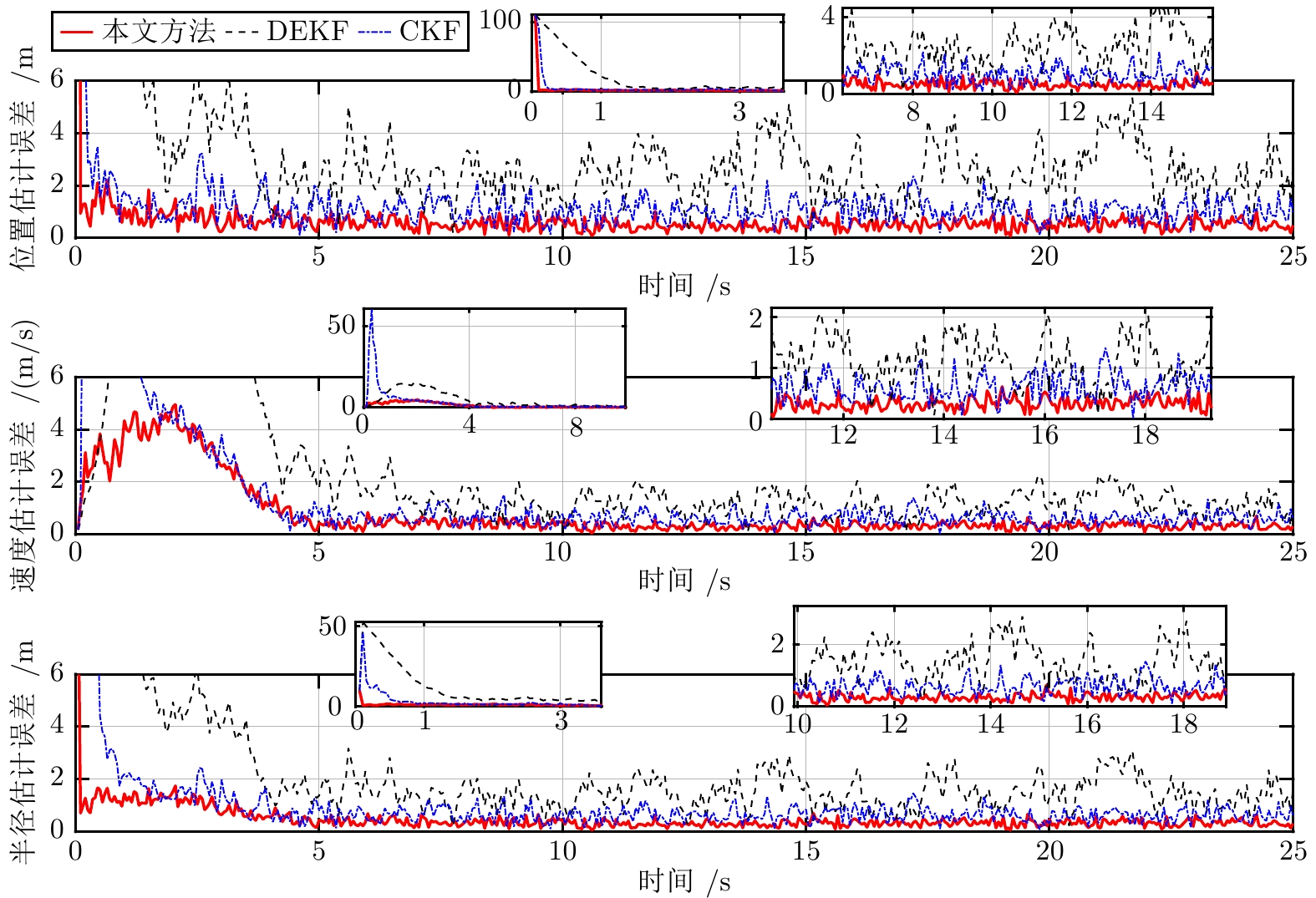
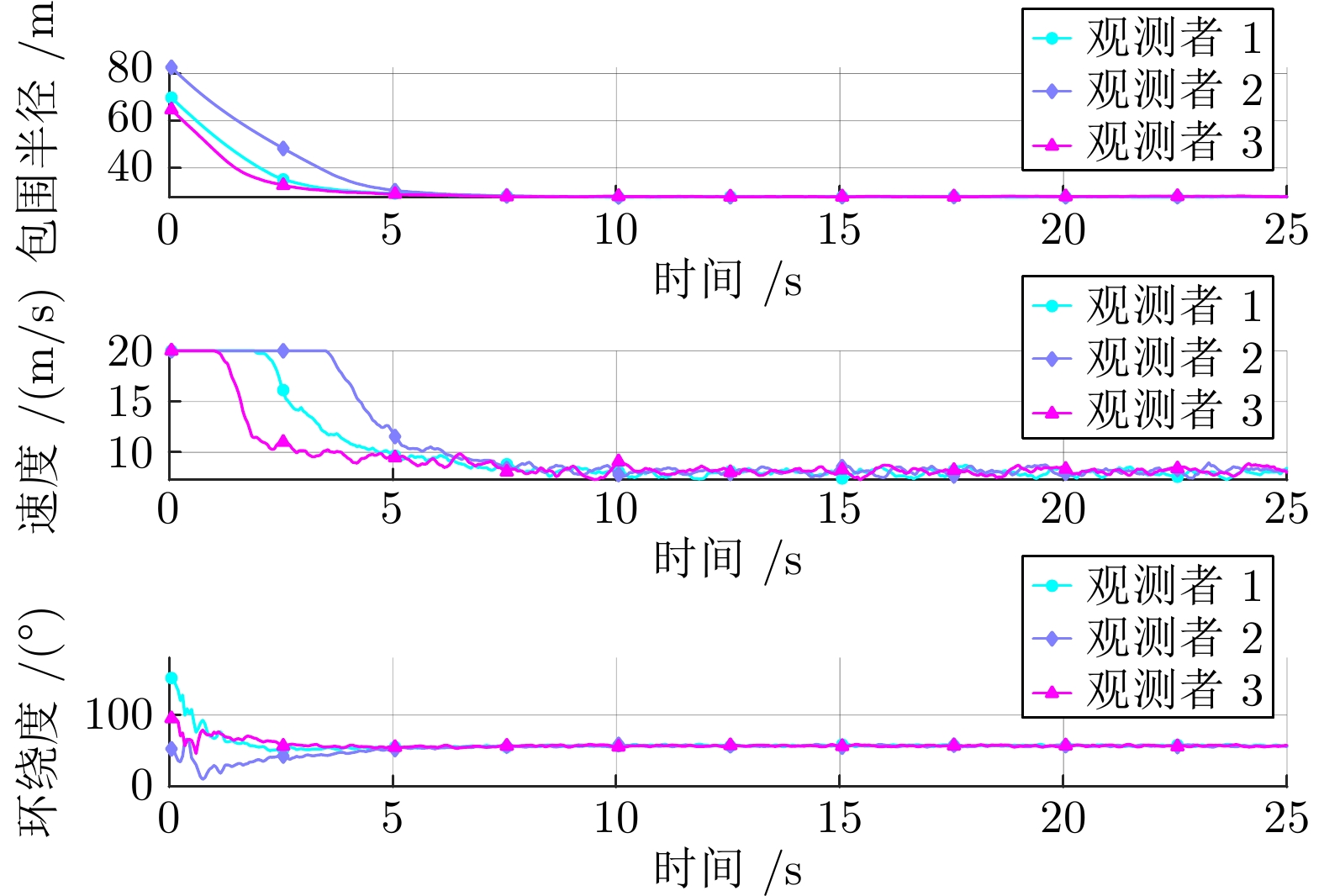
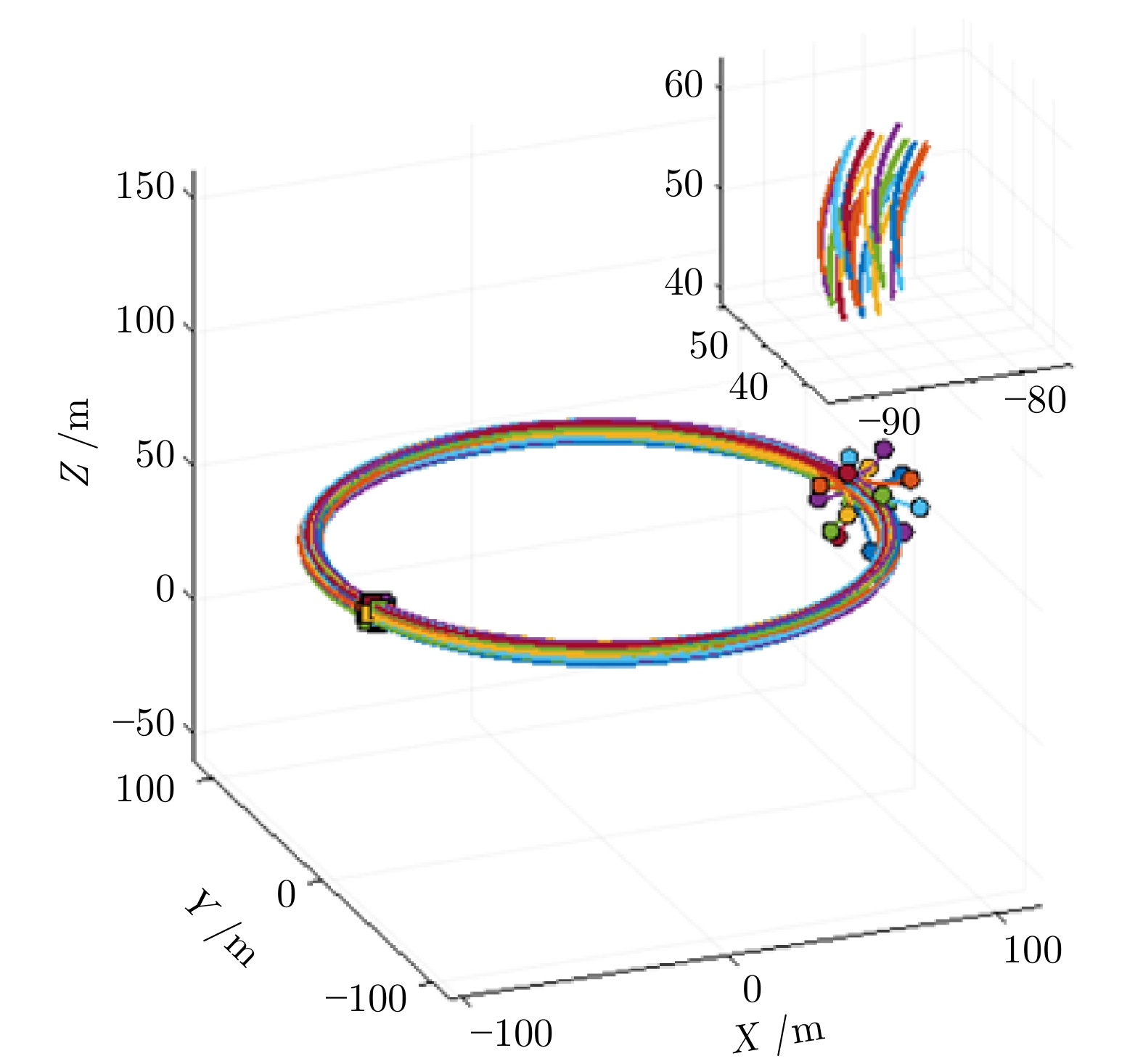
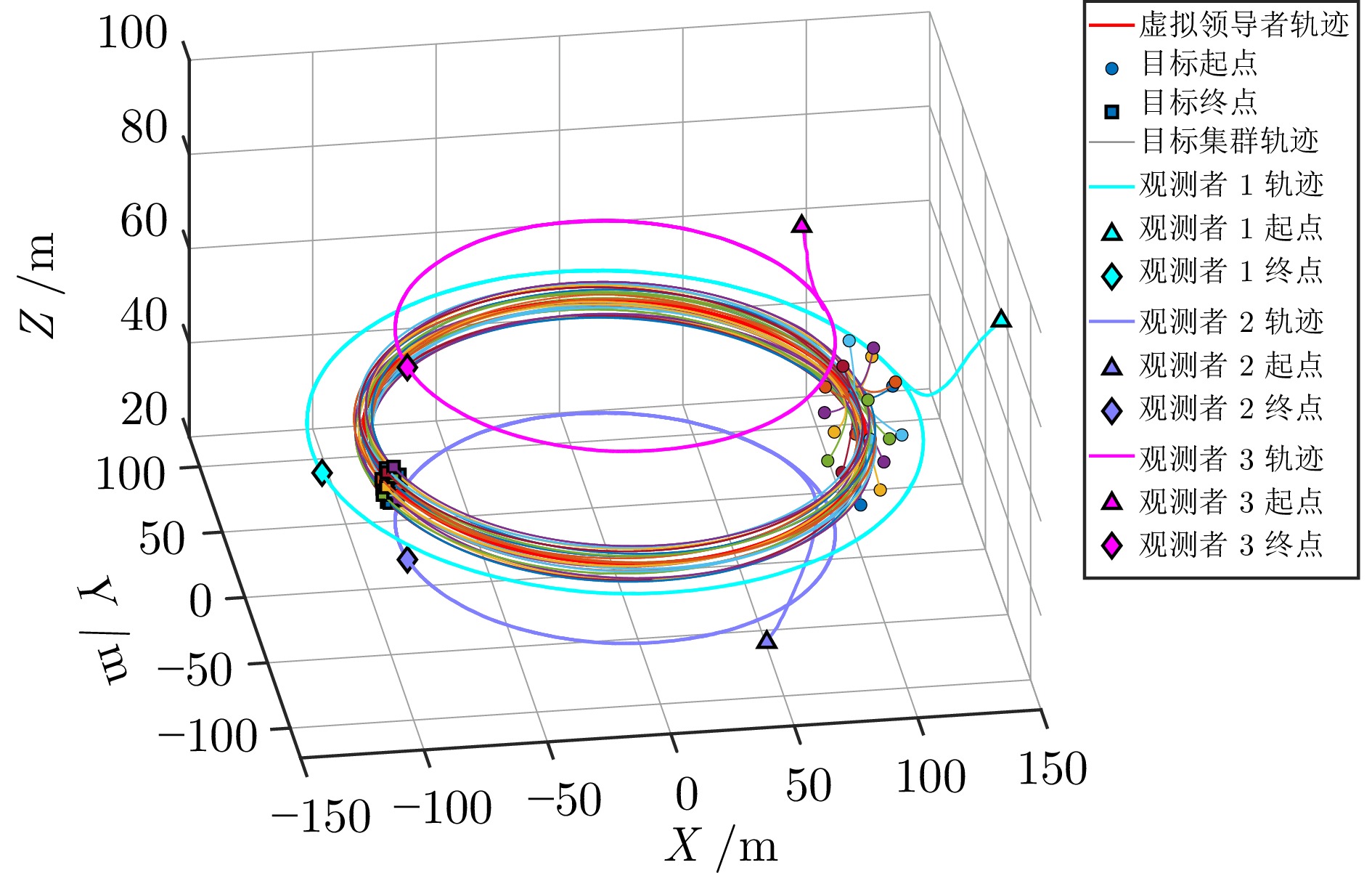
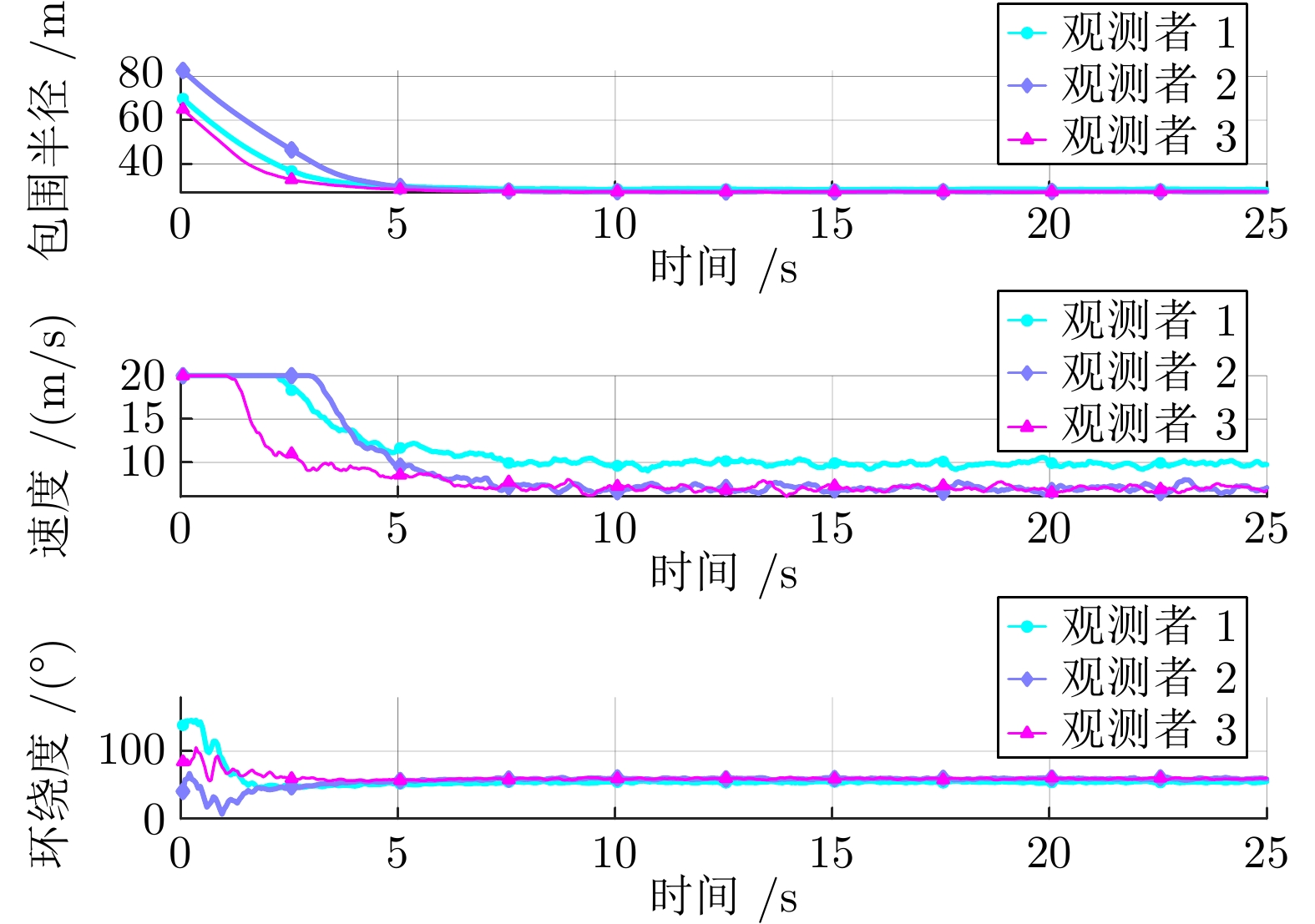
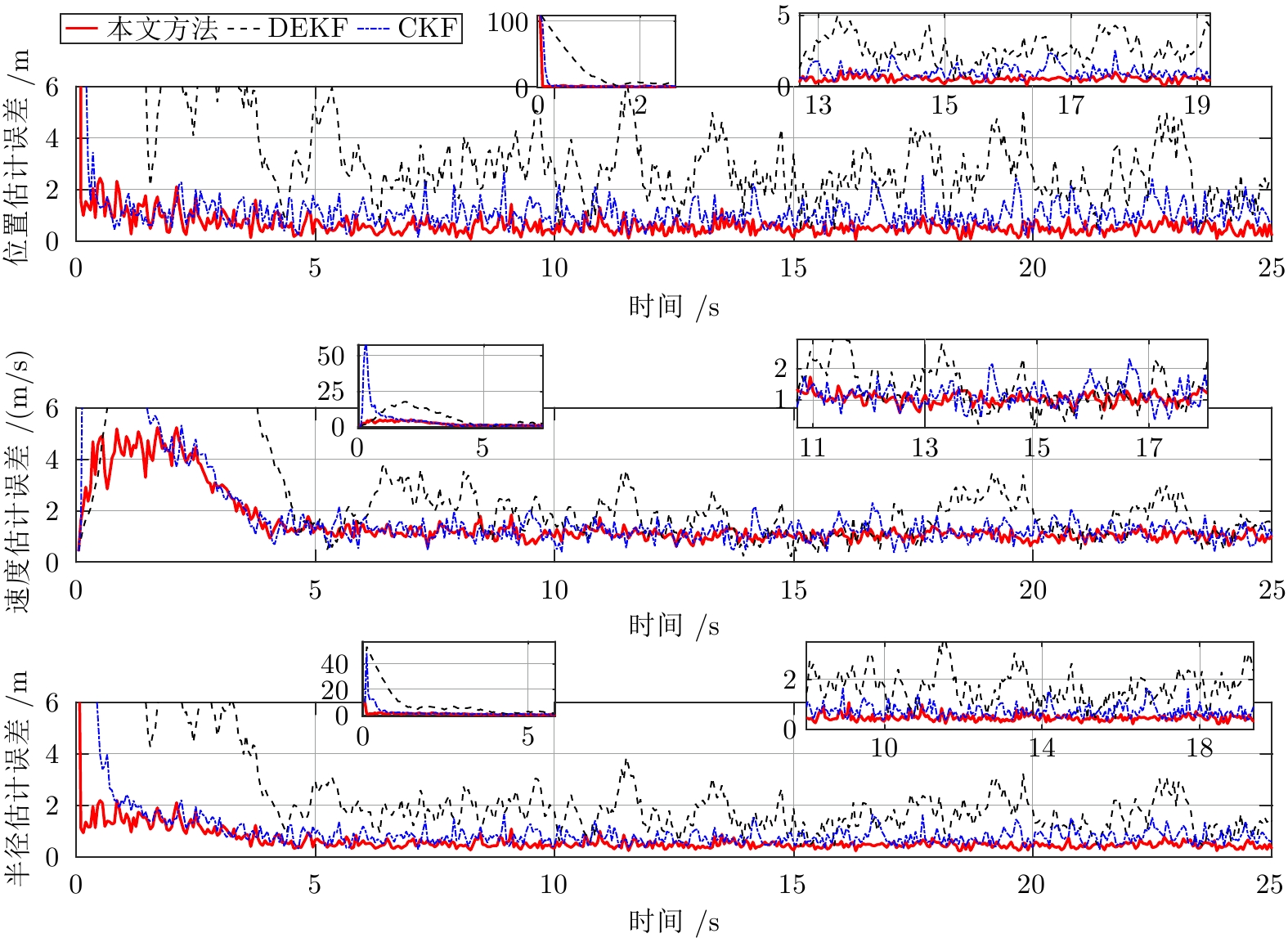
针对无人机集群在纯方位测量下协同跟踪动态目标集群时面临的强非线性、高维度以及估计−控制耦合等关键难题, 提出一种基于哈里斯鹰群环伺行为的分布式协同估计−控制闭环系统. 基于鹰群在环伺猎物时形成的多视角感知特性, 提出一种方位统计融合估计方法, 将贝叶斯统计与分布式滤波相融合, 引入共视子集的量测结构, 通过伪线性的方位统计降低估计问题中的计算维度, 并保持系统的可观性. 依据鹰群的动态封锁机制, 提出一种环伺关联跟踪控制器, 使观测无人机能够主动维持最优环伺态势, 从而提升估计质量及稳定性. 理论分析证明了该闭环系统的Lyapunov稳定性与估计误差的有界性, 数值仿真验证了所提方法的有效性.
针对无人机集群在纯方位测量下协同跟踪动态目标集群时面临的强非线性、高维度以及估计−控制耦合等关键难题, 提出一种基于哈里斯鹰群环伺行为的分布式协同估计−控制闭环系统. 基于鹰群在环伺猎物时形成的多视角感知特性, 提出一种方位统计融合估计方法, 将贝叶斯统计与分布式滤波相融合, 引入共视子集的量测结构, 通过伪线性的方位统计降低估计问题中的计算维度, 并保持系统的可观性. 依据鹰群的动态封锁机制, 提出一种环伺关联跟踪控制器, 使观测无人机能够主动维持最优环伺态势, 从而提升估计质量及稳定性. 理论分析证明了该闭环系统的Lyapunov稳定性与估计误差的有界性, 数值仿真验证了所提方法的有效性.
2026, 52(5): 992-1007.
doi: 10.16383/j.aas.c250512
cstr: 32138.14.j.aas.c250512
摘要:
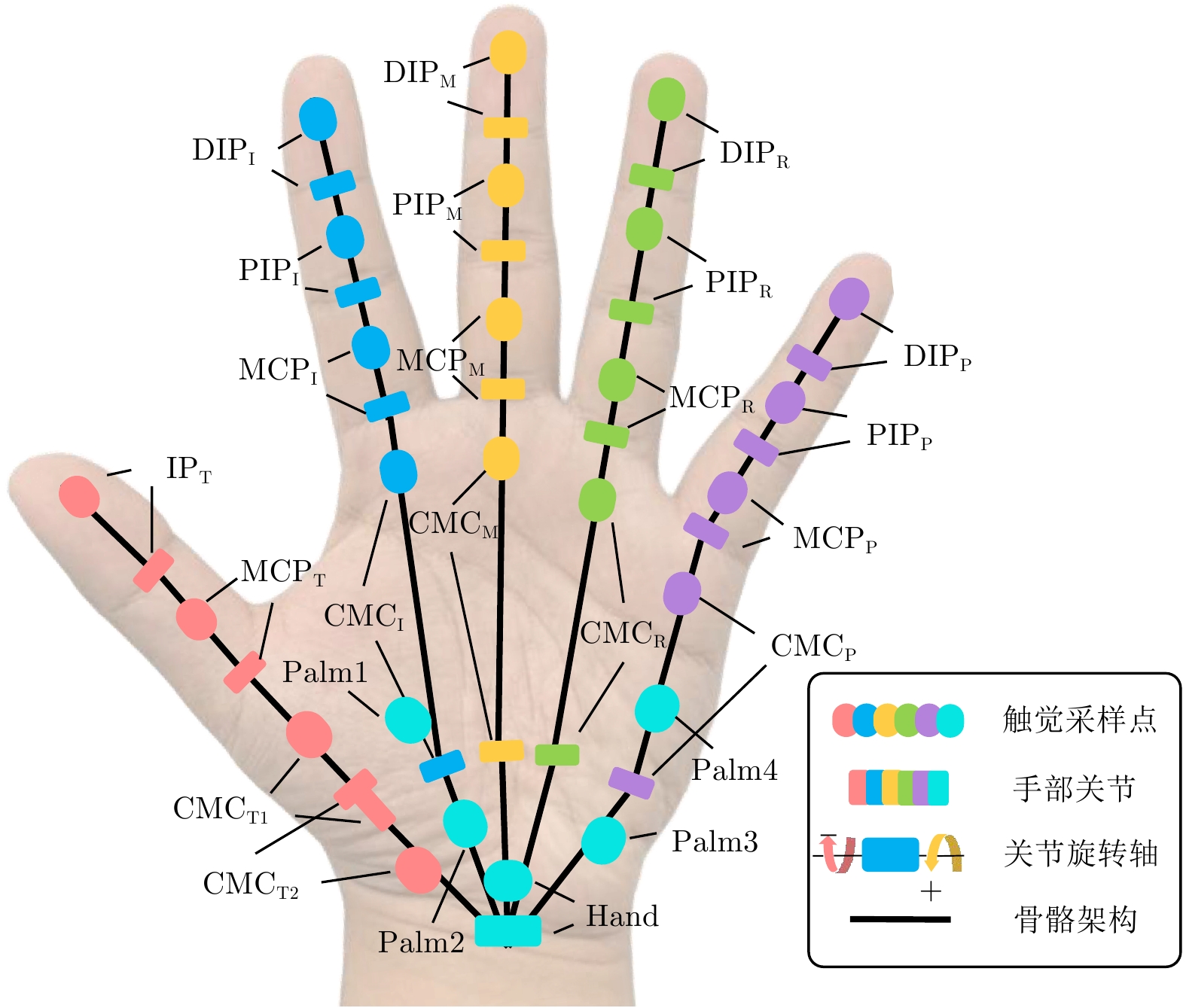
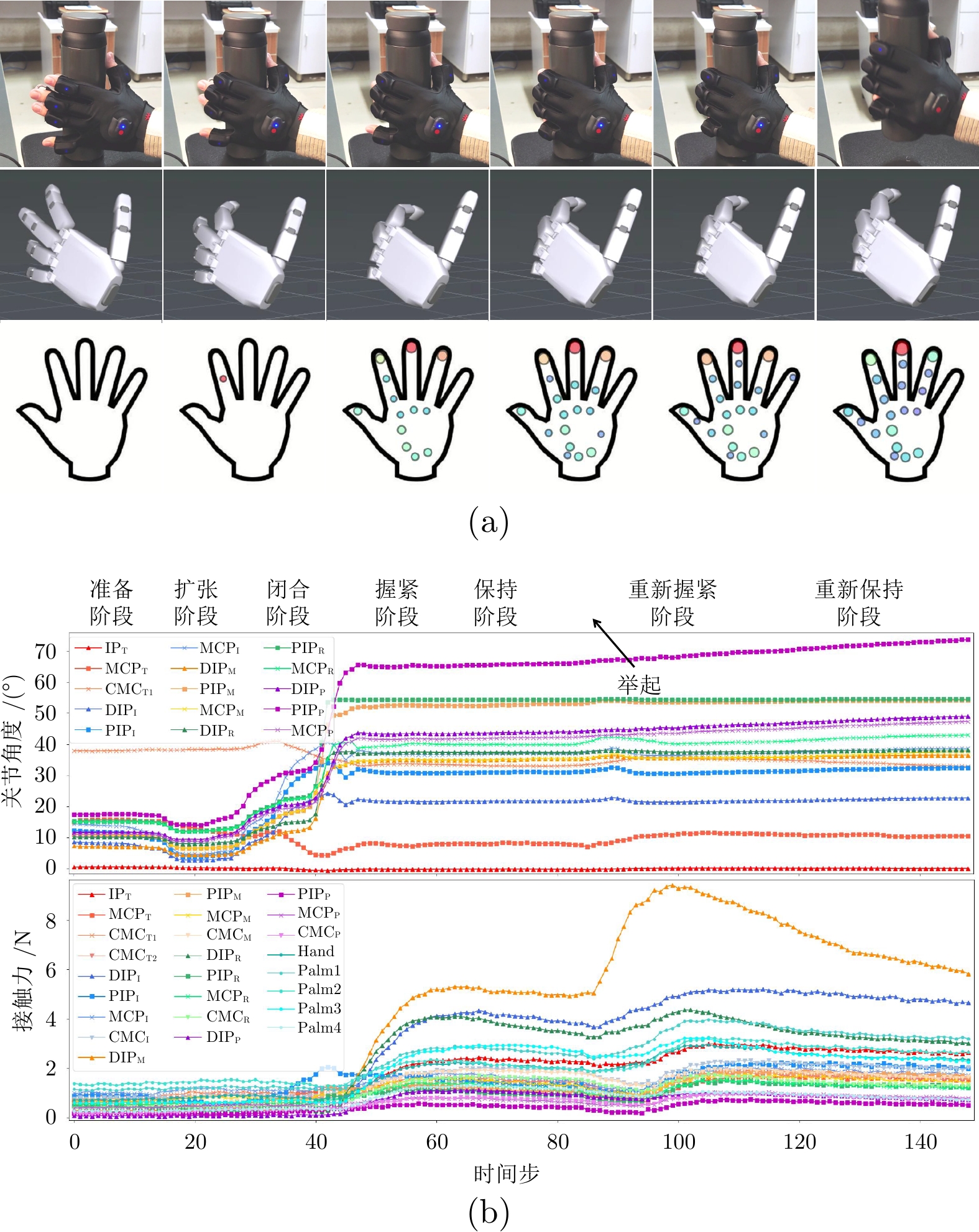
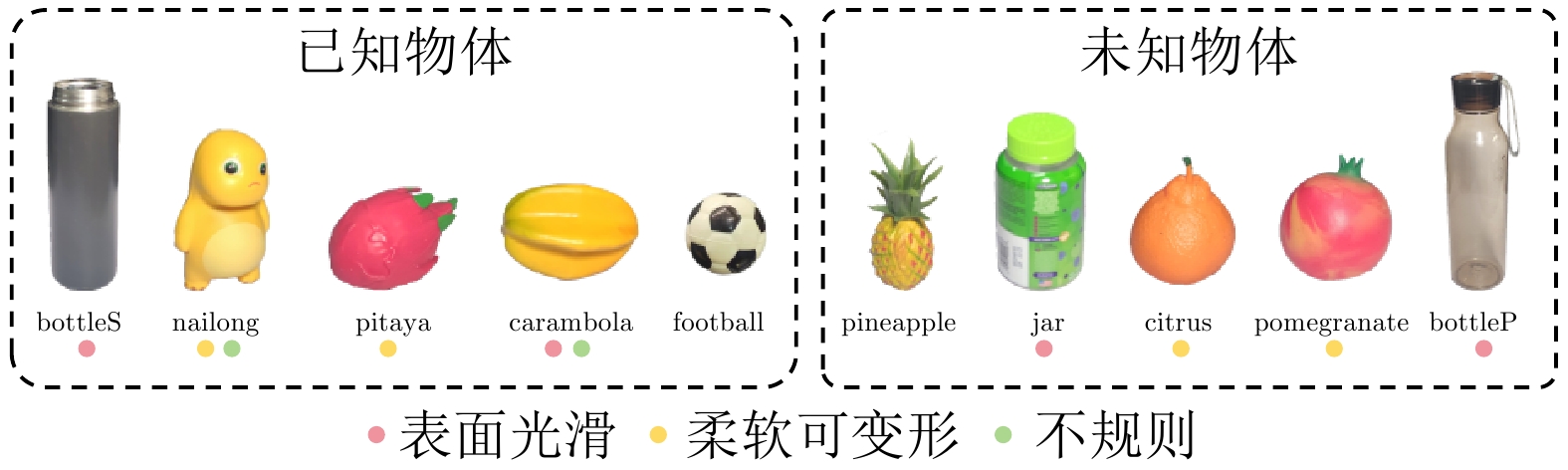
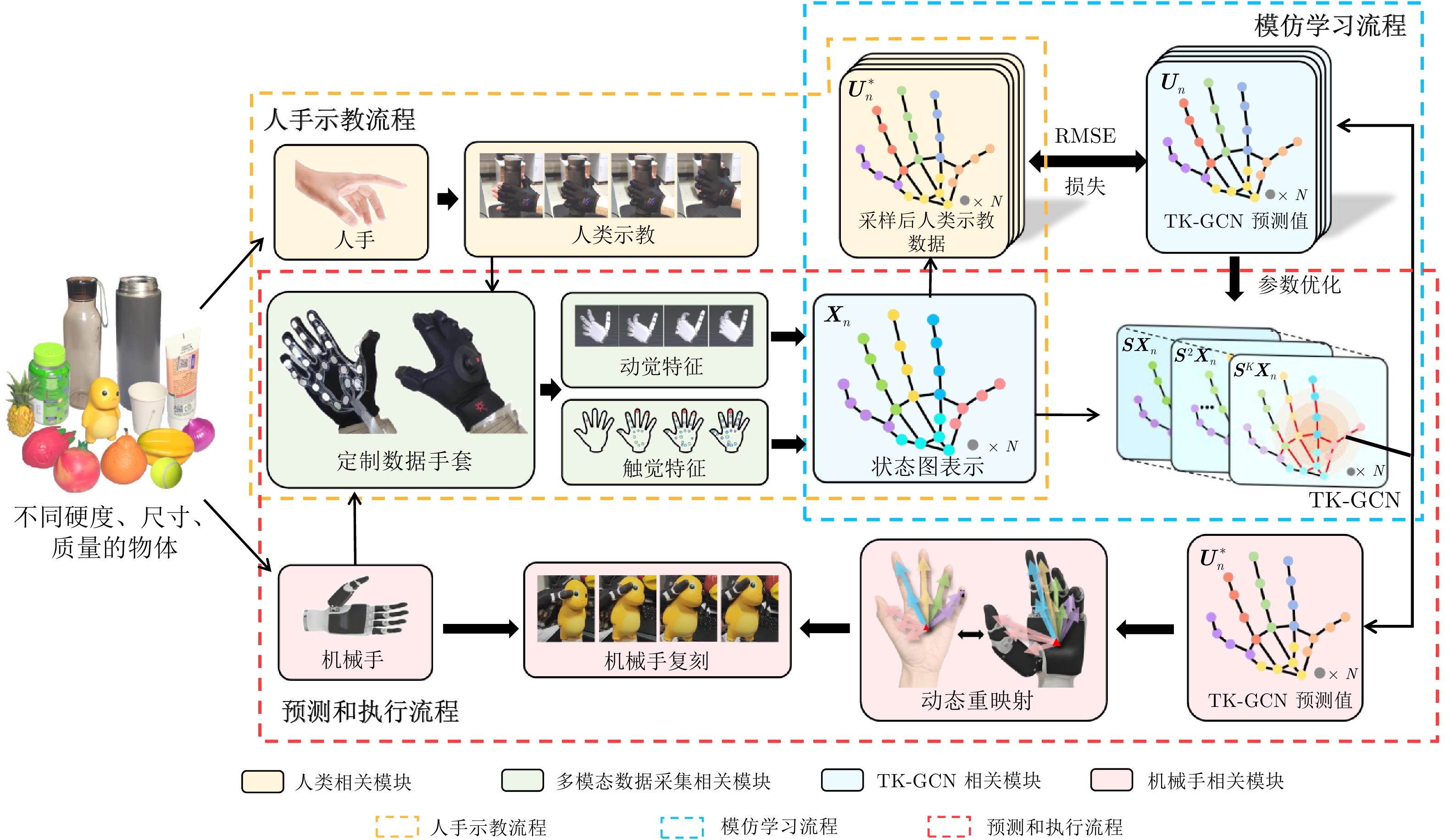
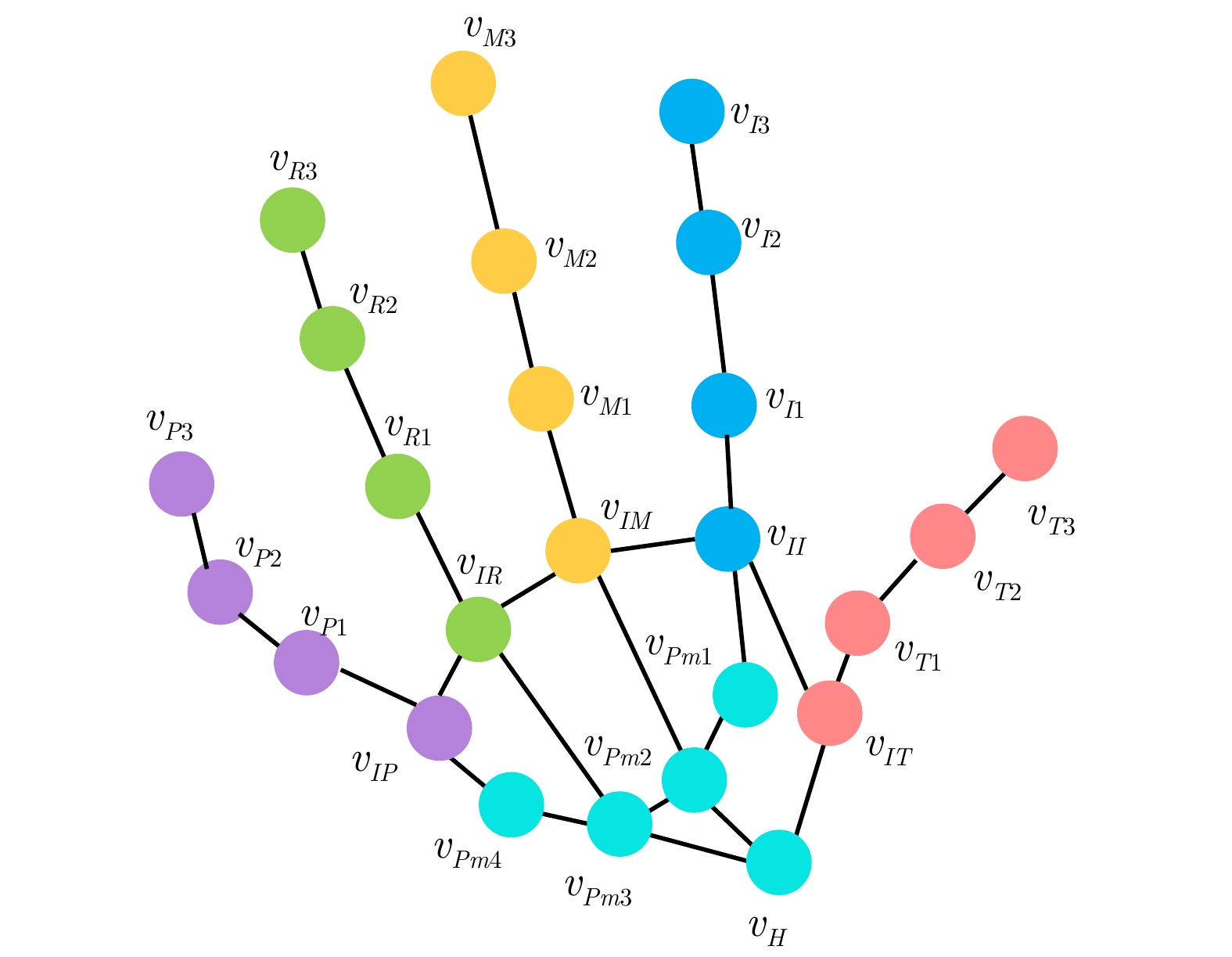
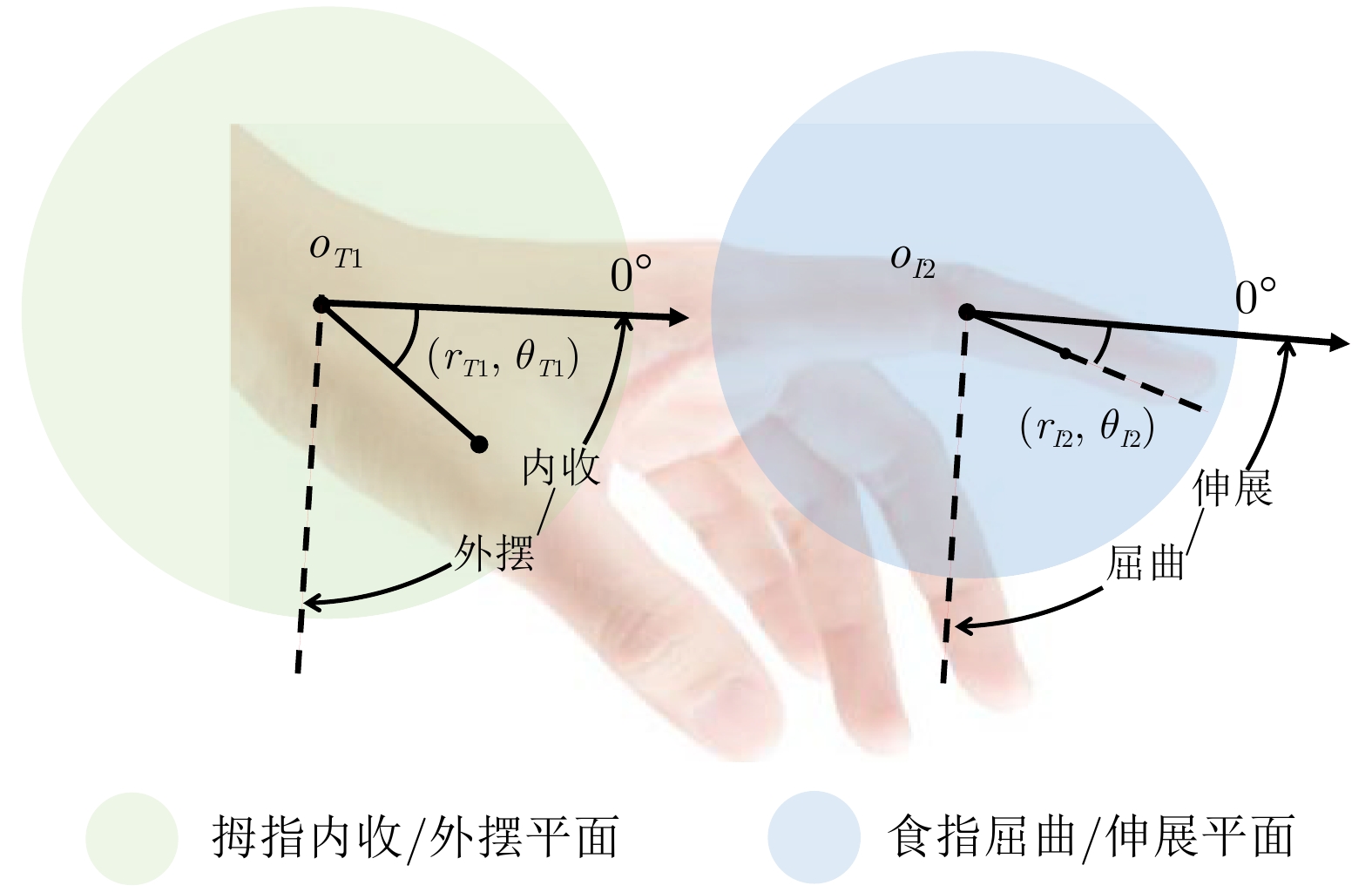
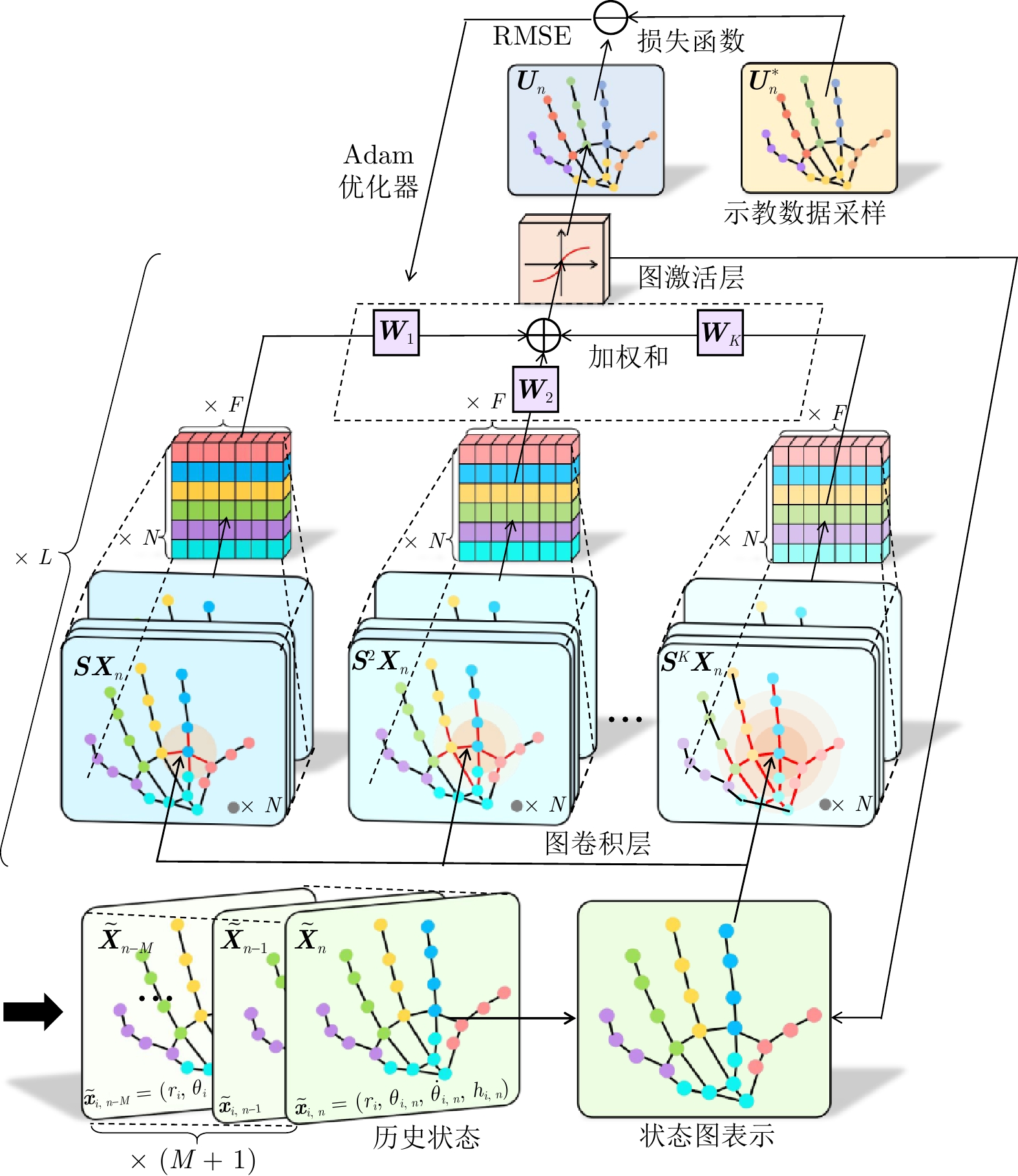
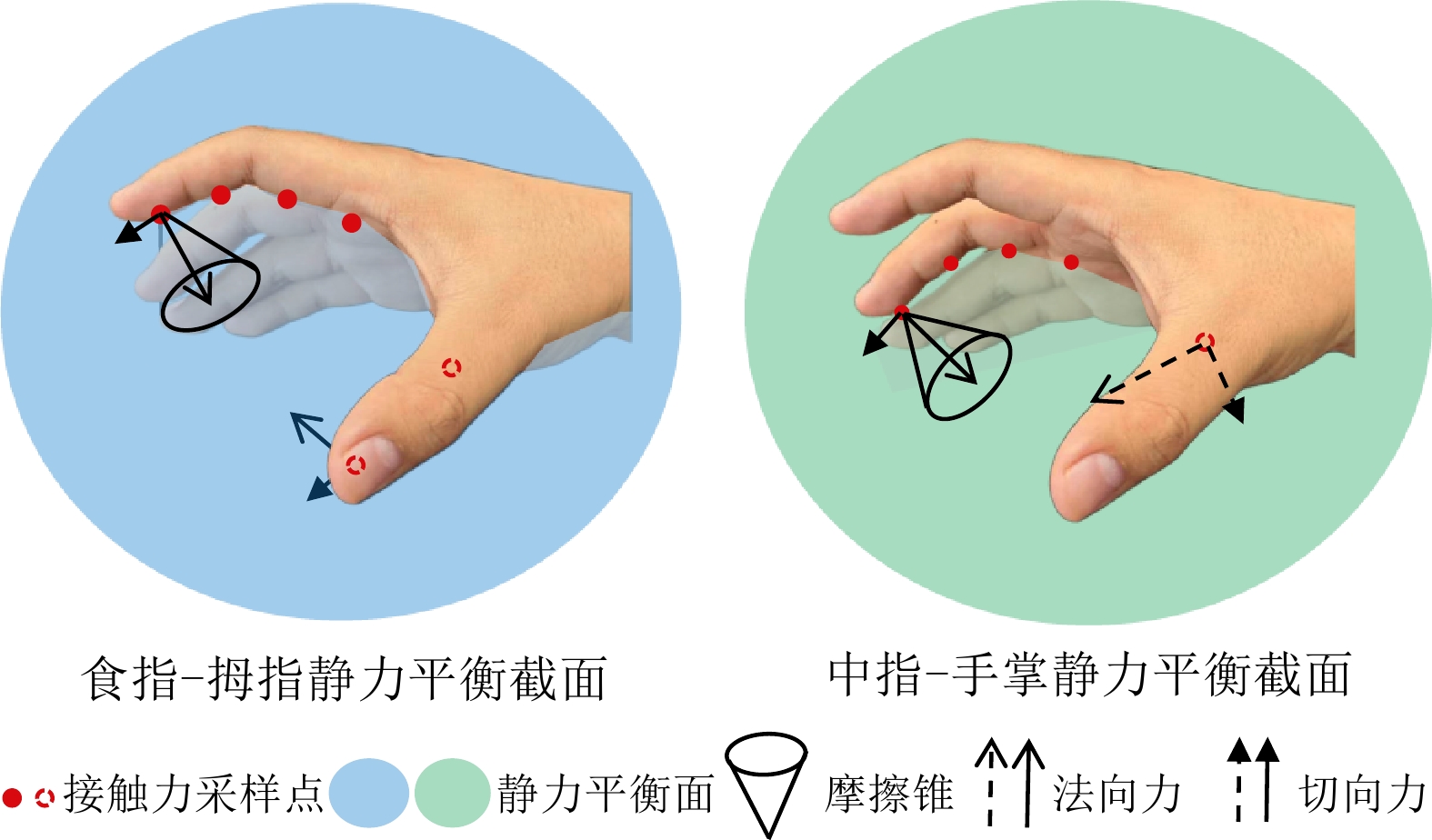
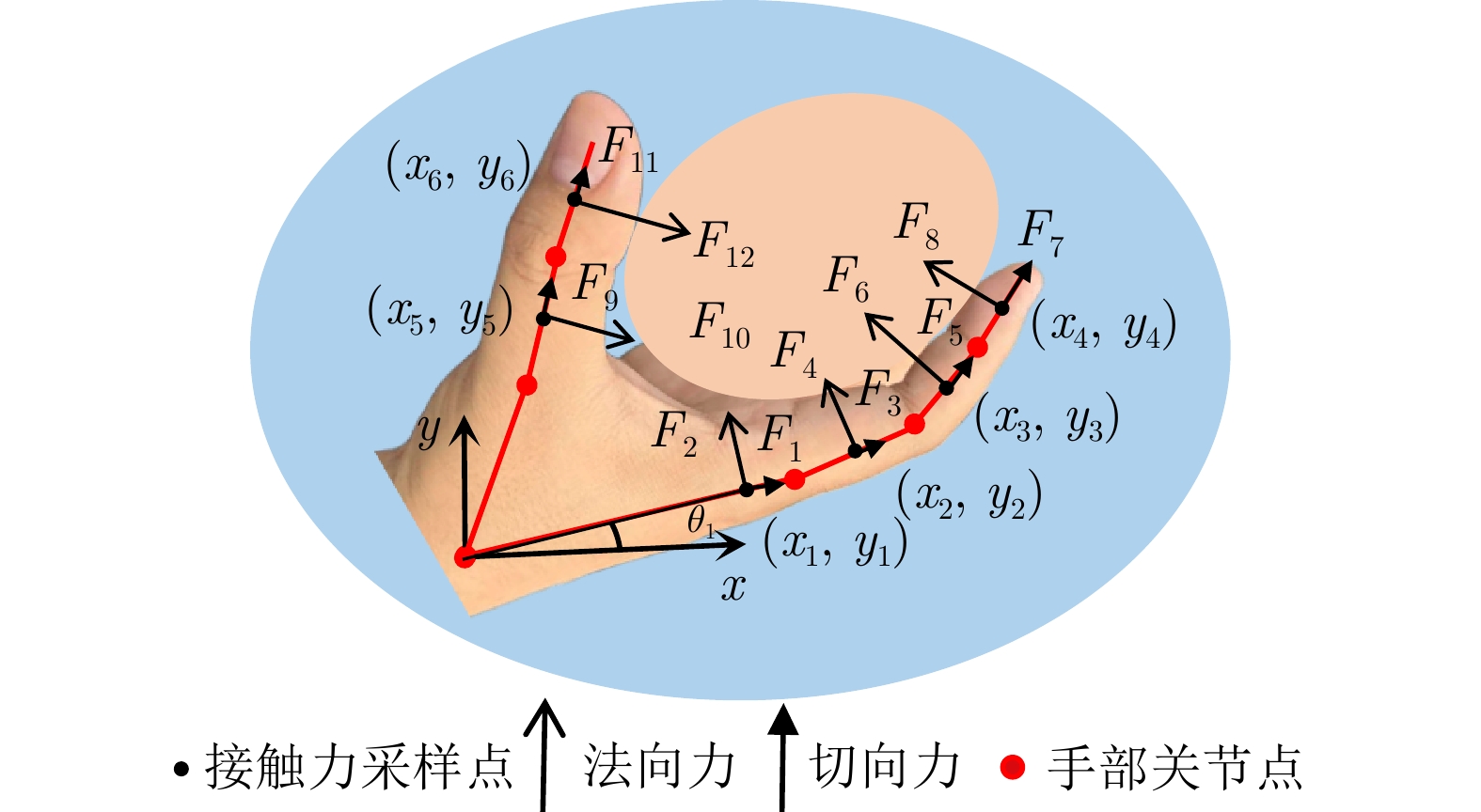
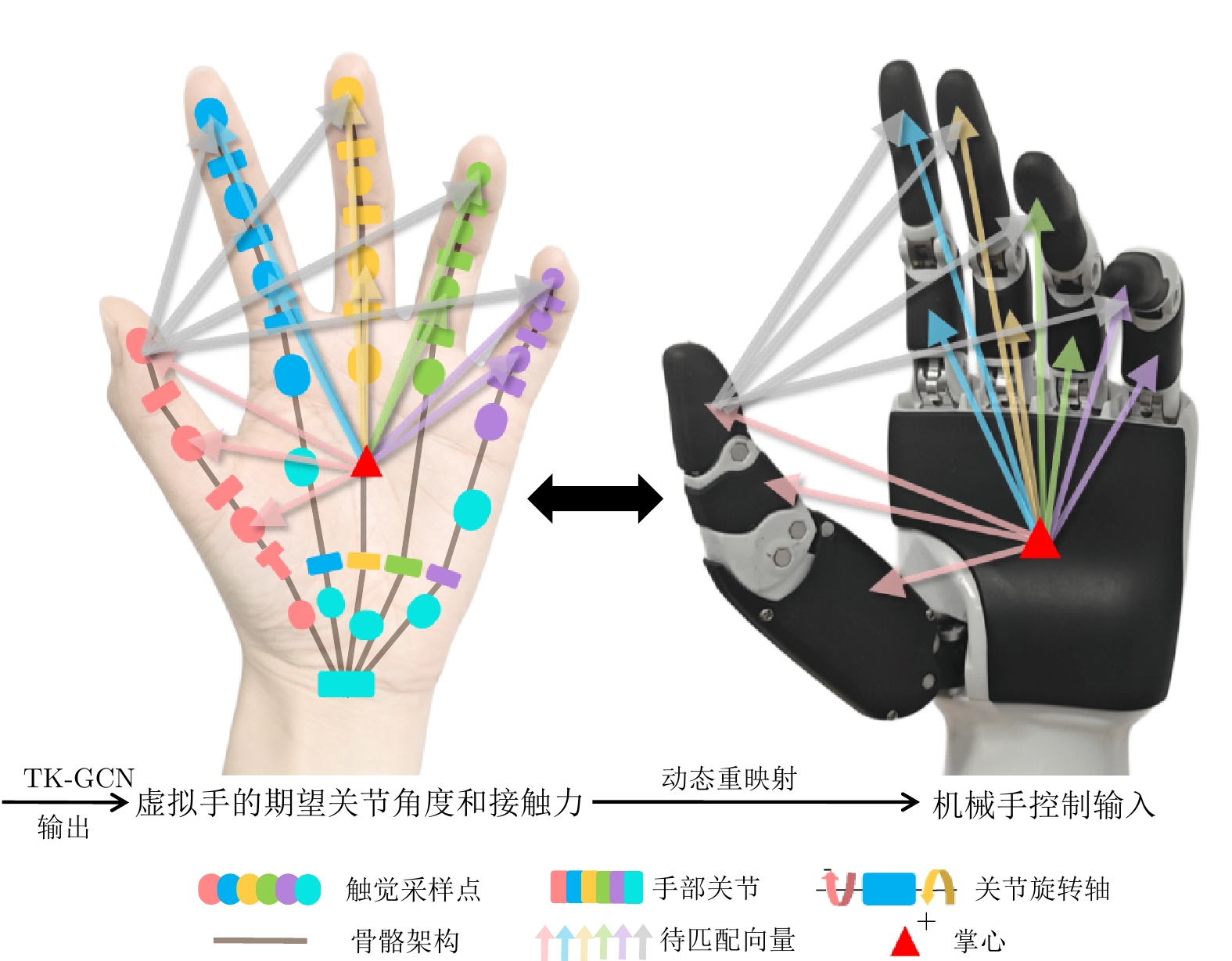
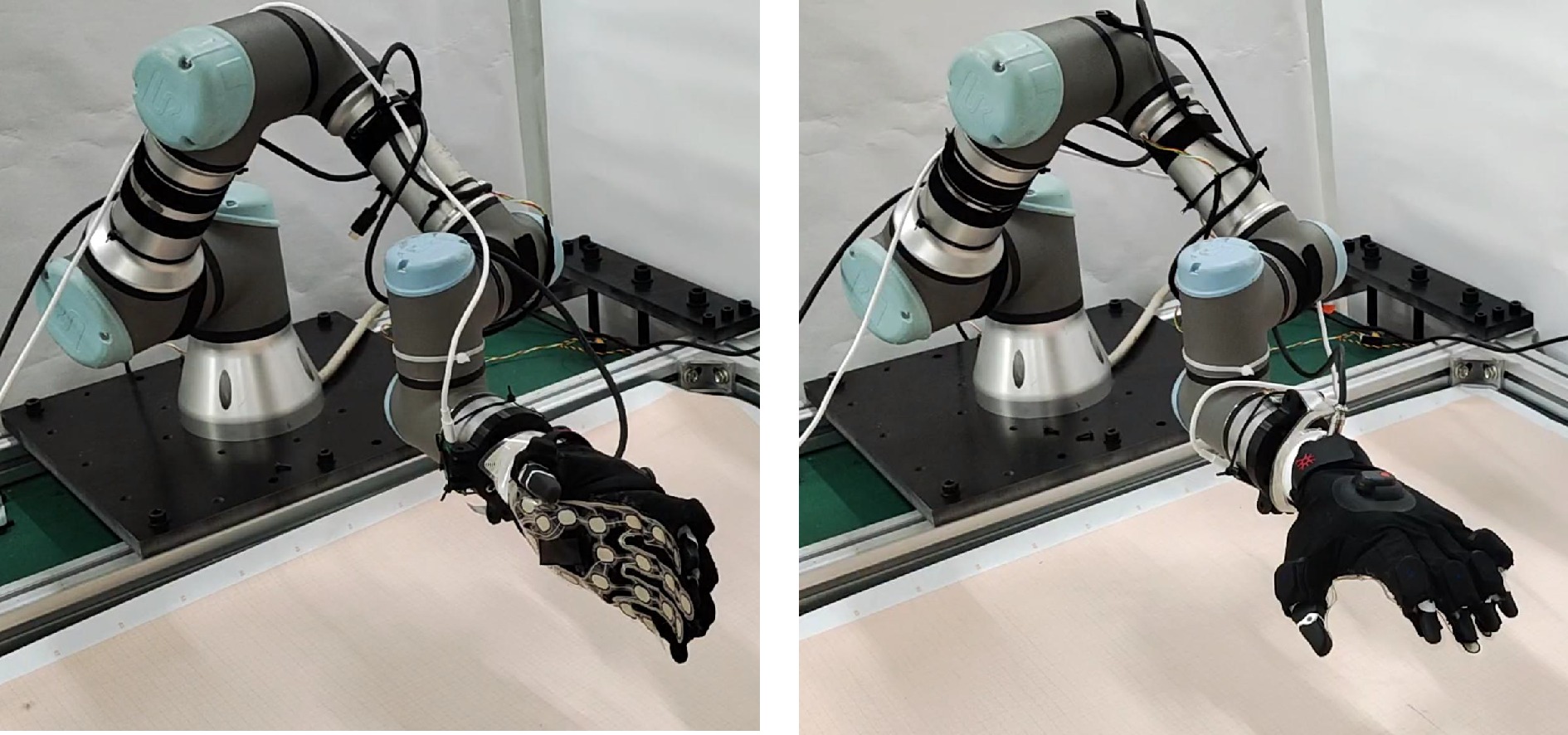
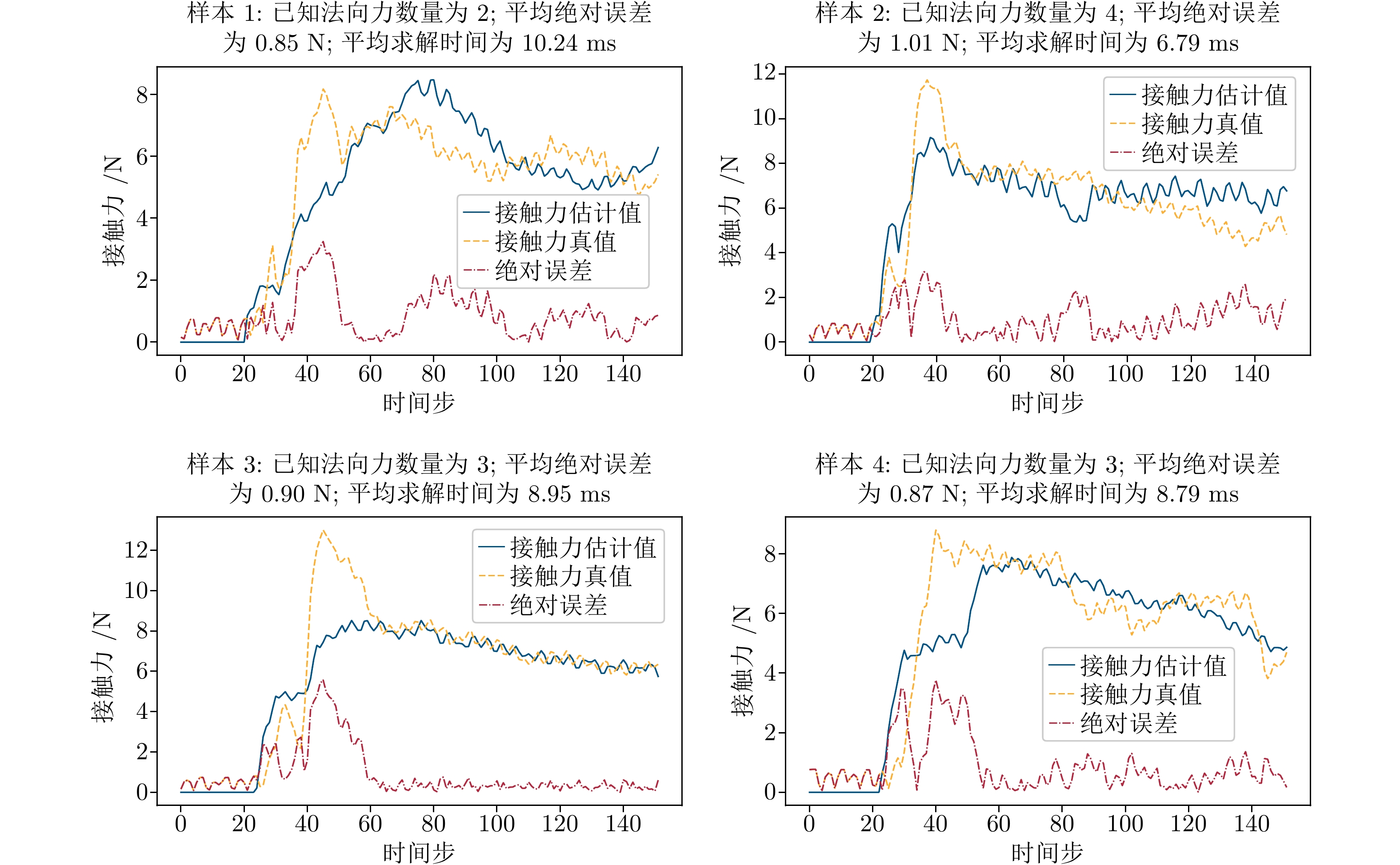
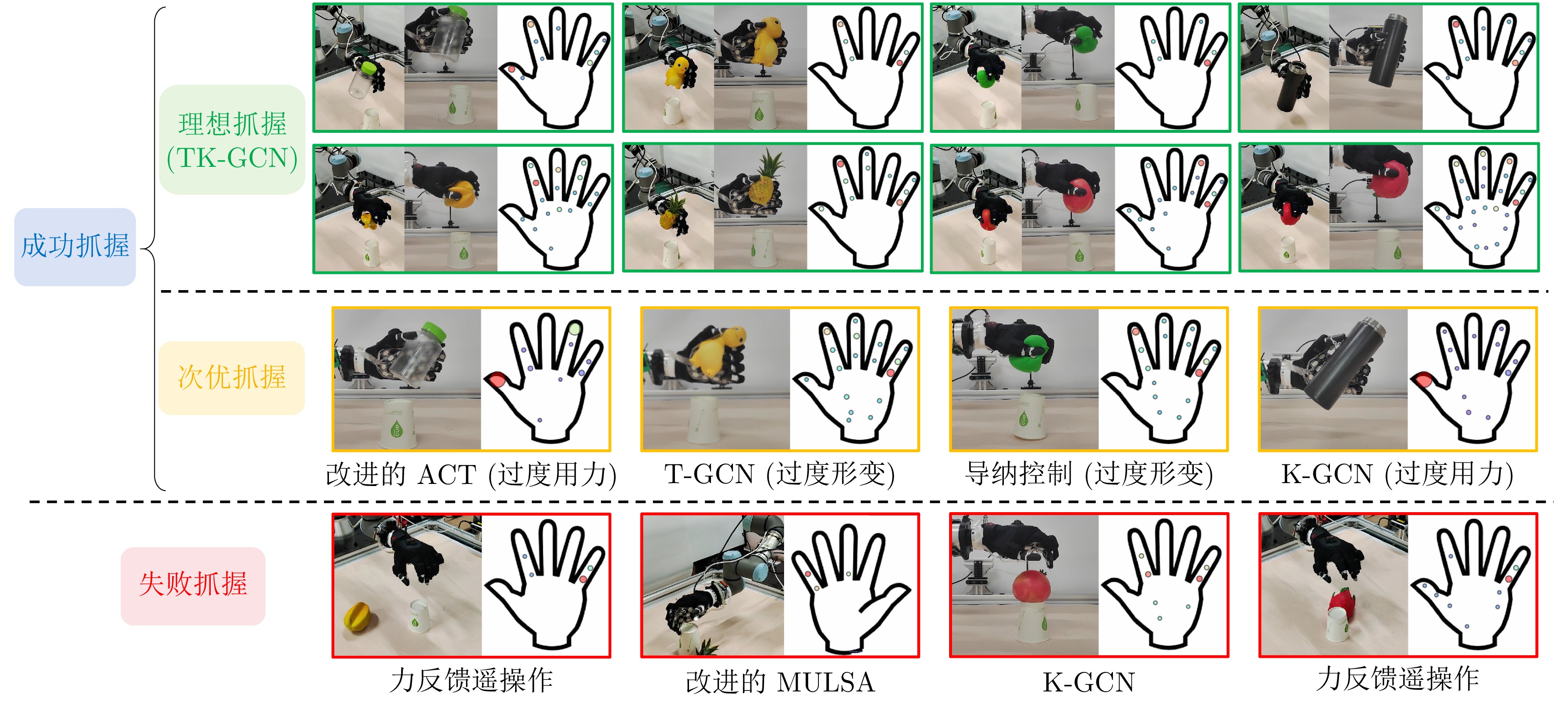
模仿学习是实现从人手到机械手技能传递的有效方式. 传统示教方法面临示教方式不够直观、示教数据难以复用、触觉和动觉感知特征难以有效传递等问题. 为解决上述问题, 设计一款能够同时采集触觉和动觉特征的数据手套, 并提出以该手套为媒介的抓握技能传递方案, 包括基于图结构和极坐标的多模态特征表示、静力平衡假设下未知接触力估计、基于期望关节角度和接触力分布的动态重映射方法等. 实验证明, 对于可变形、不规则等多种属性的物体, 该方案能够在实现较高抓握成功率的同时保持合理的接触力控制, 相比于其他基准方案, 实现了相对更接近人手直接抓握的效果.
模仿学习是实现从人手到机械手技能传递的有效方式. 传统示教方法面临示教方式不够直观、示教数据难以复用、触觉和动觉感知特征难以有效传递等问题. 为解决上述问题, 设计一款能够同时采集触觉和动觉特征的数据手套, 并提出以该手套为媒介的抓握技能传递方案, 包括基于图结构和极坐标的多模态特征表示、静力平衡假设下未知接触力估计、基于期望关节角度和接触力分布的动态重映射方法等. 实验证明, 对于可变形、不规则等多种属性的物体, 该方案能够在实现较高抓握成功率的同时保持合理的接触力控制, 相比于其他基准方案, 实现了相对更接近人手直接抓握的效果.



2026, 52(5): 1008-1017.
doi: 10.16383/j.aas.c250509
cstr: 32138.14.j.aas.c250509
摘要:
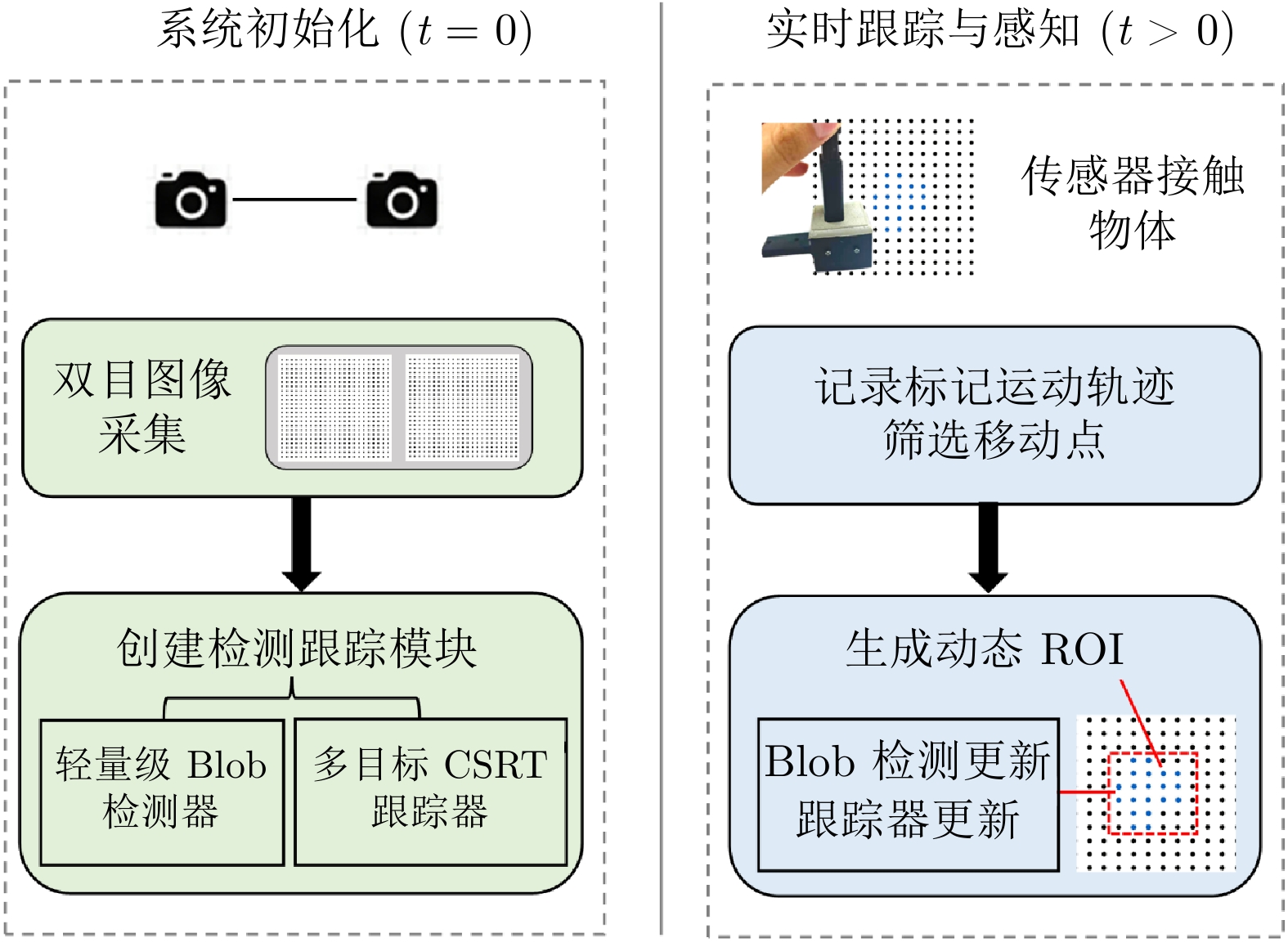
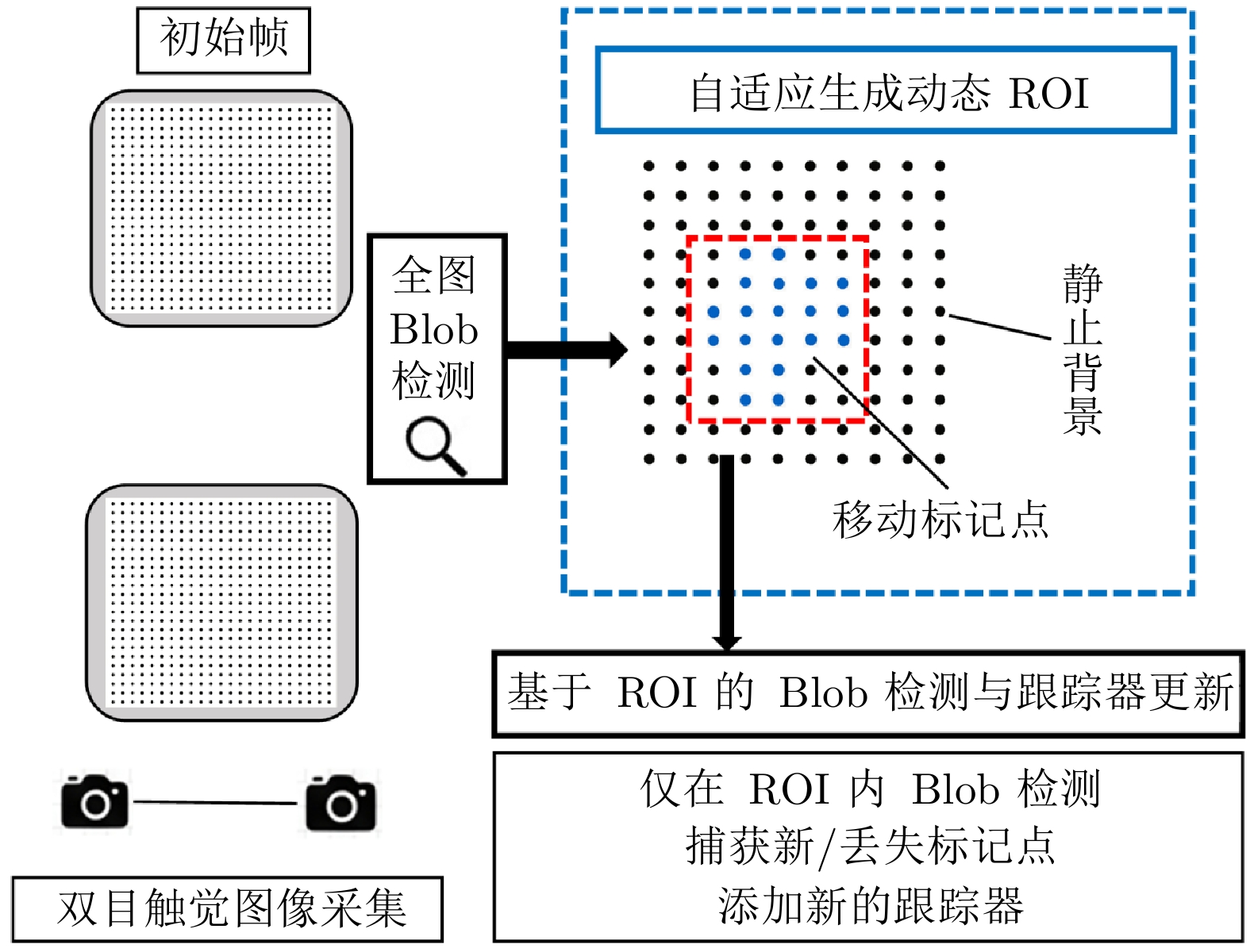
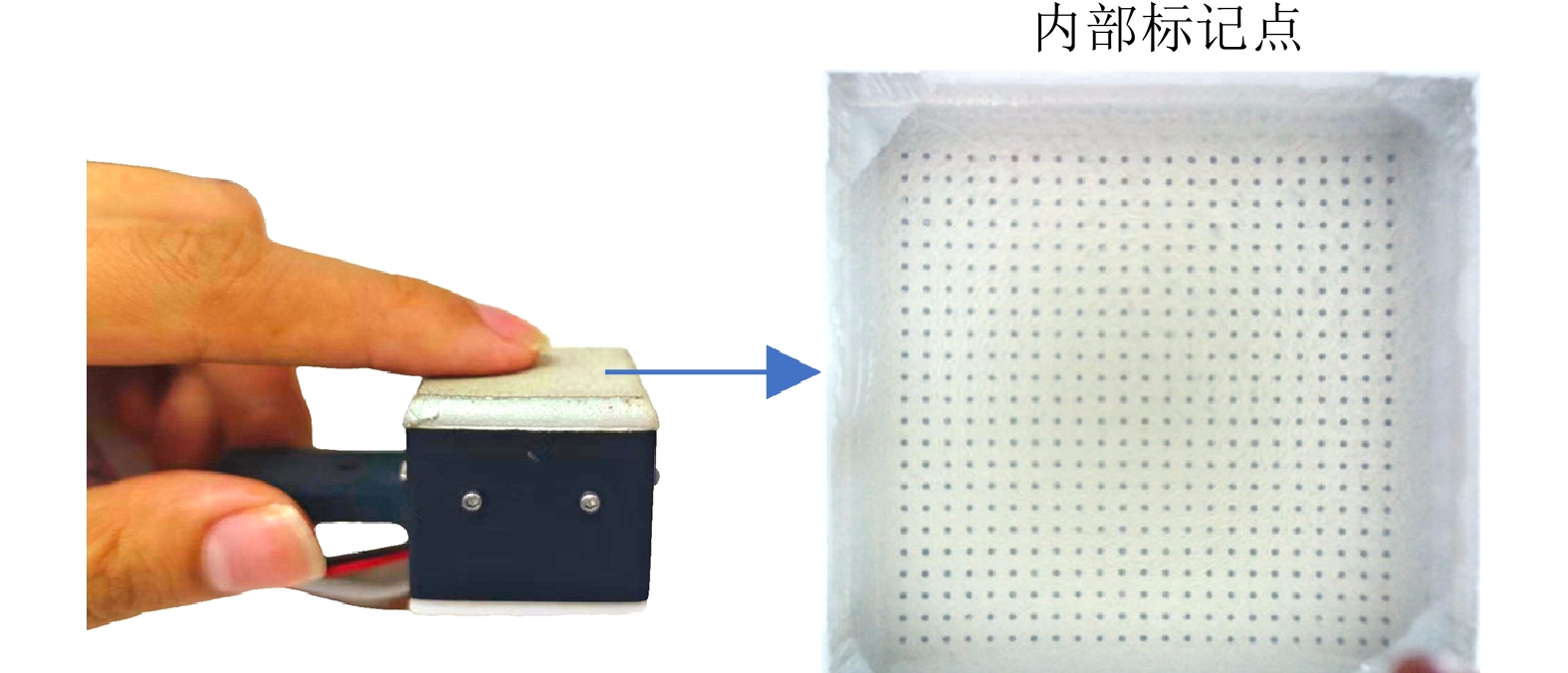
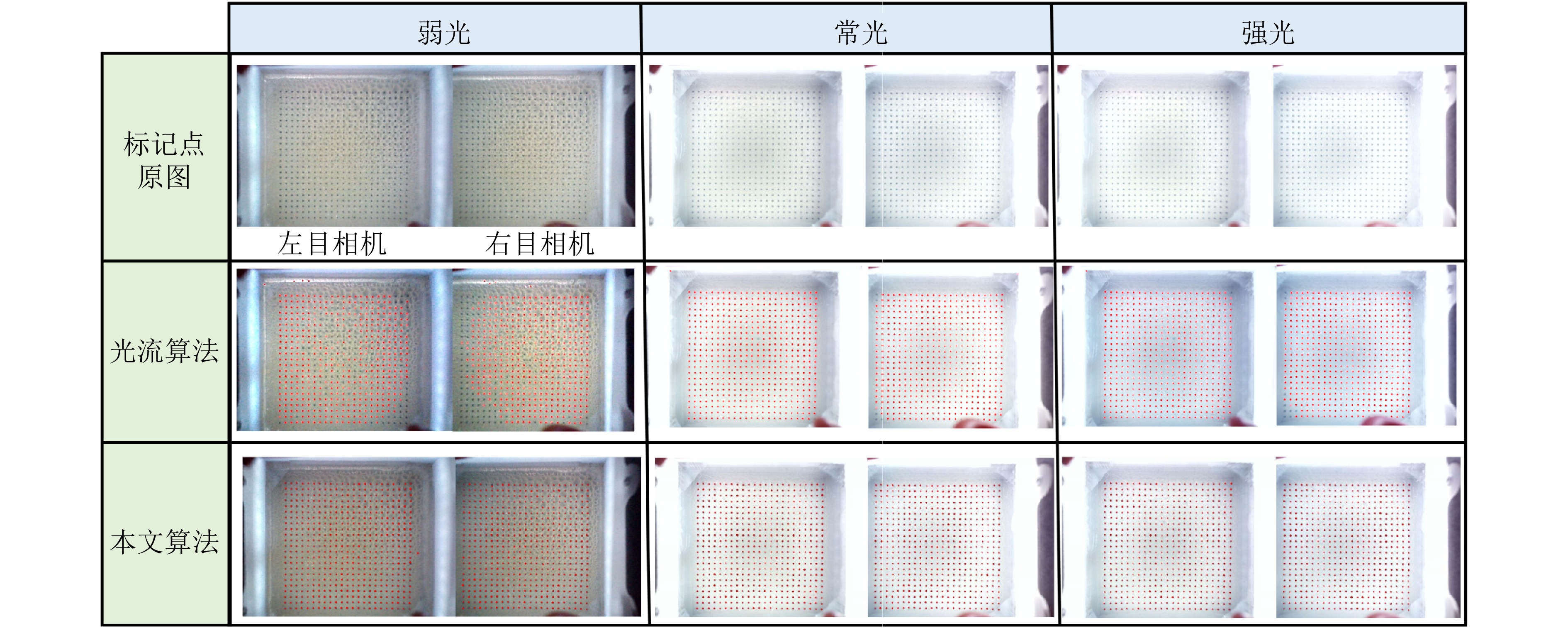
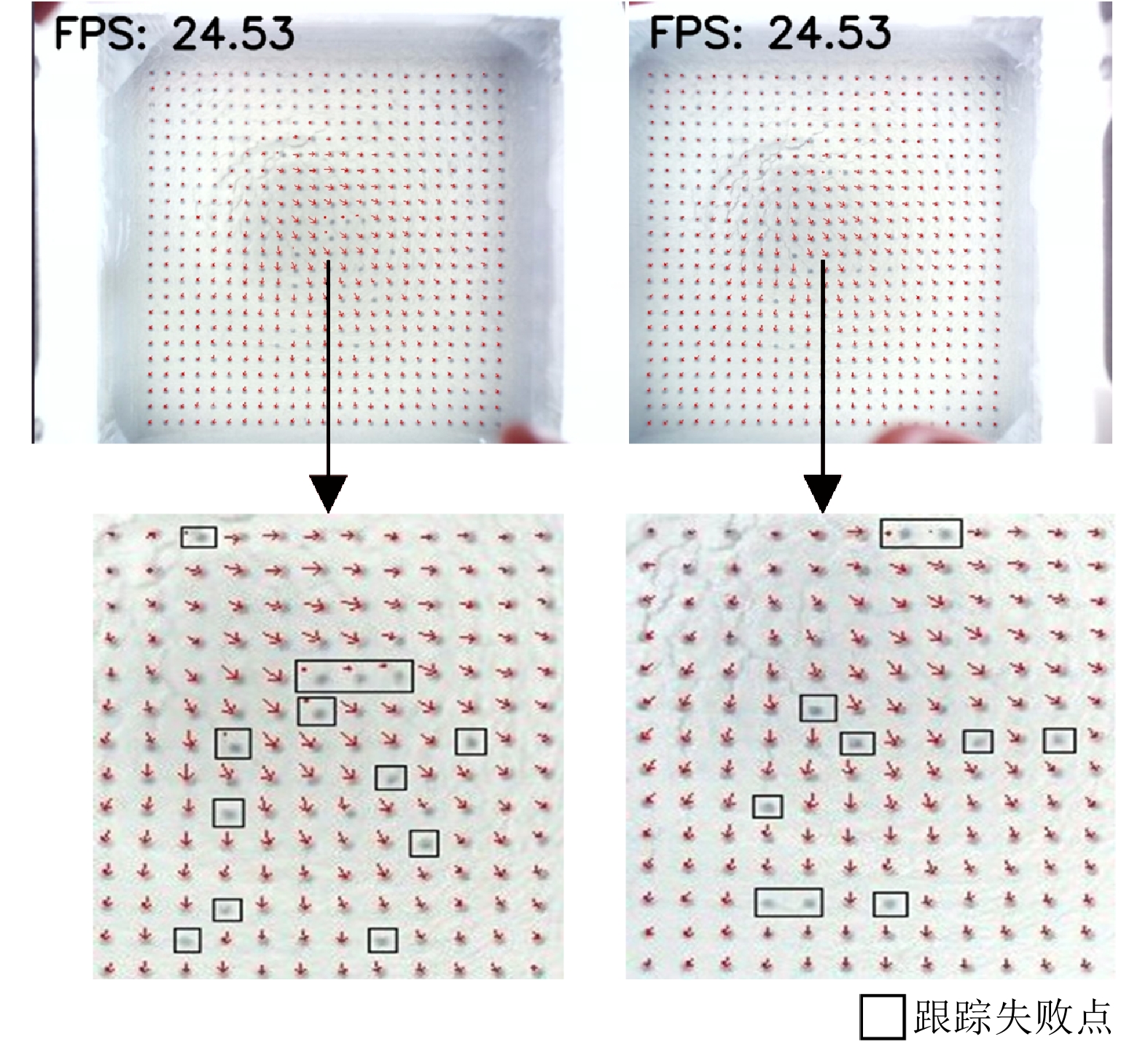
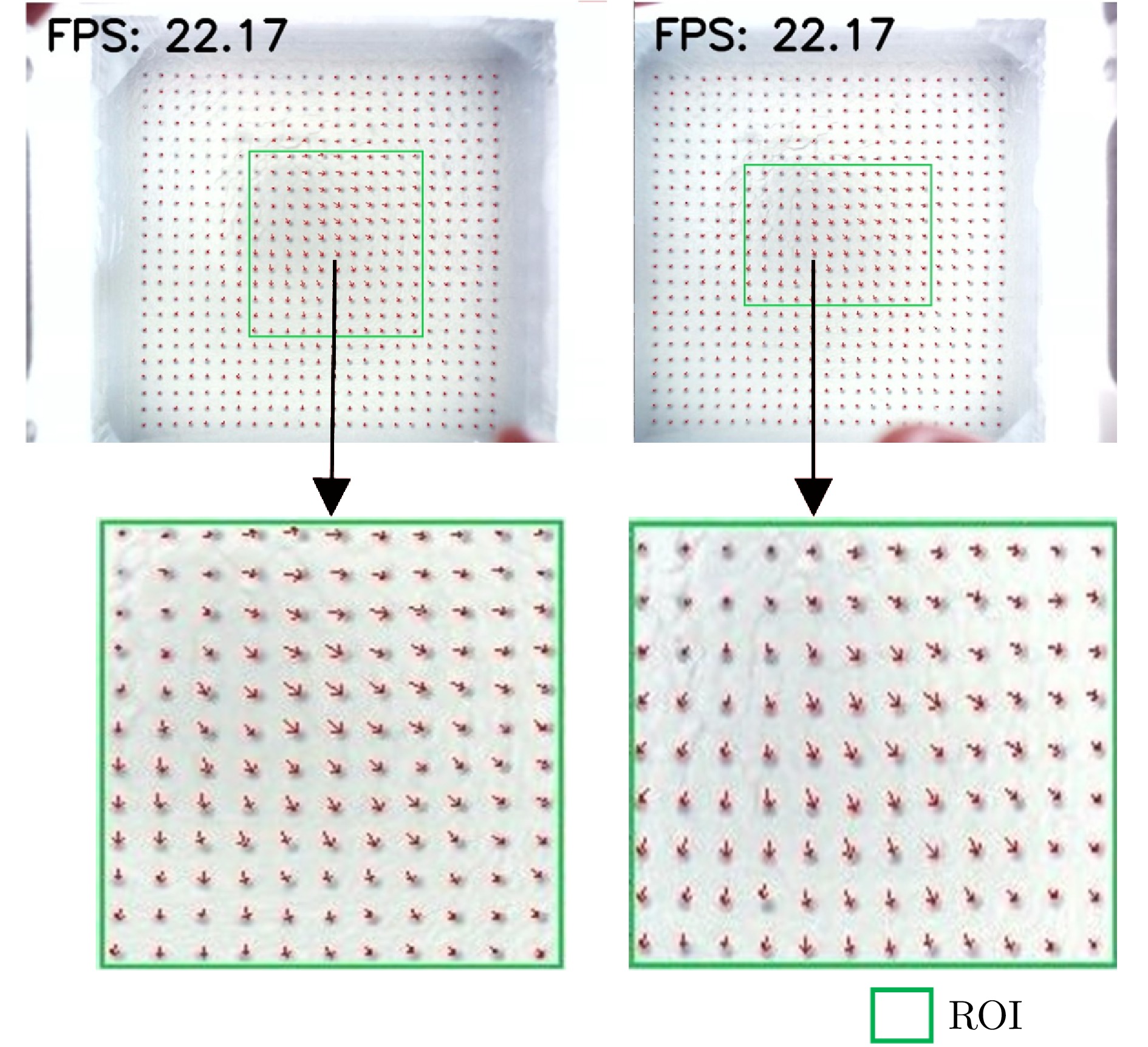
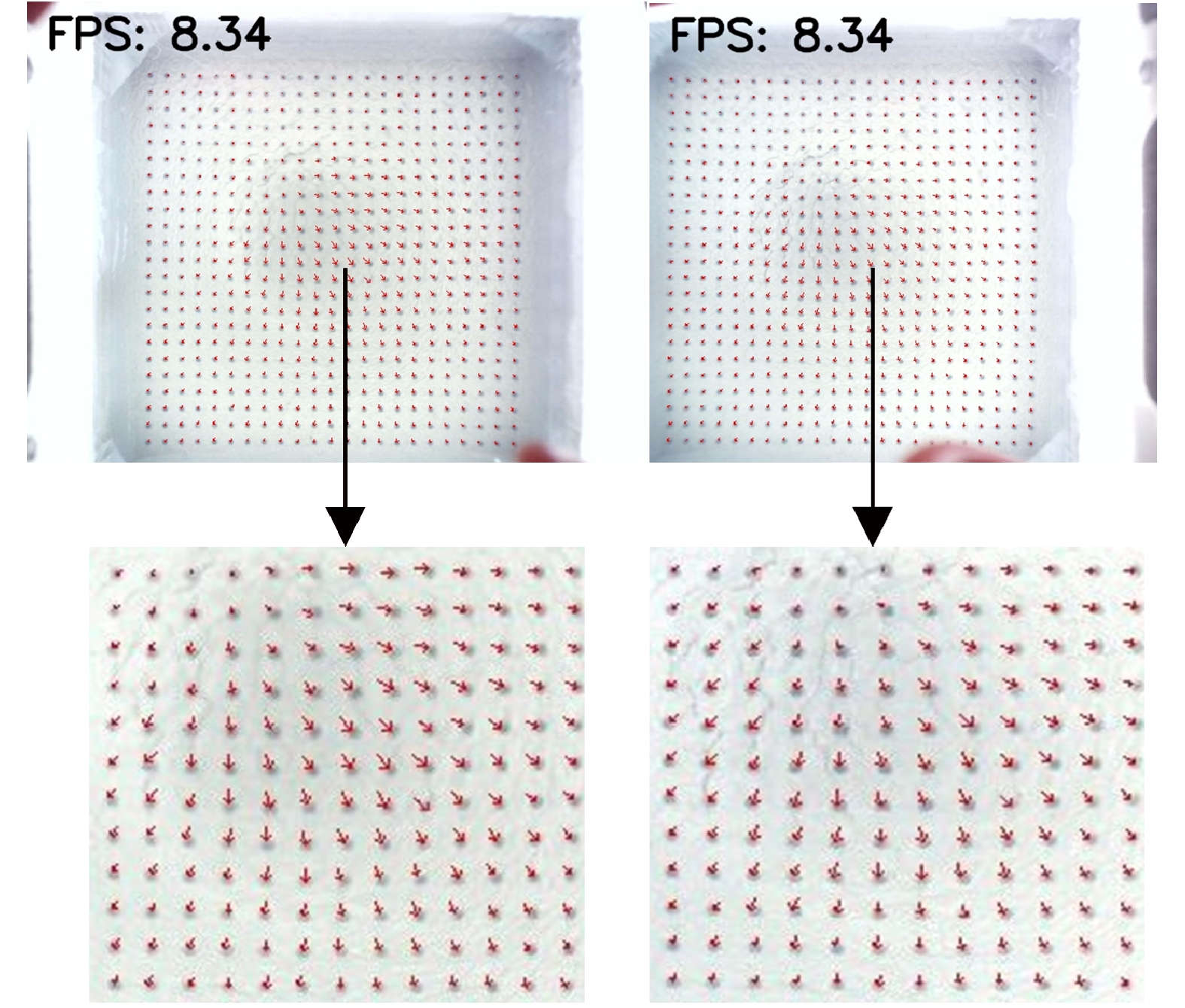
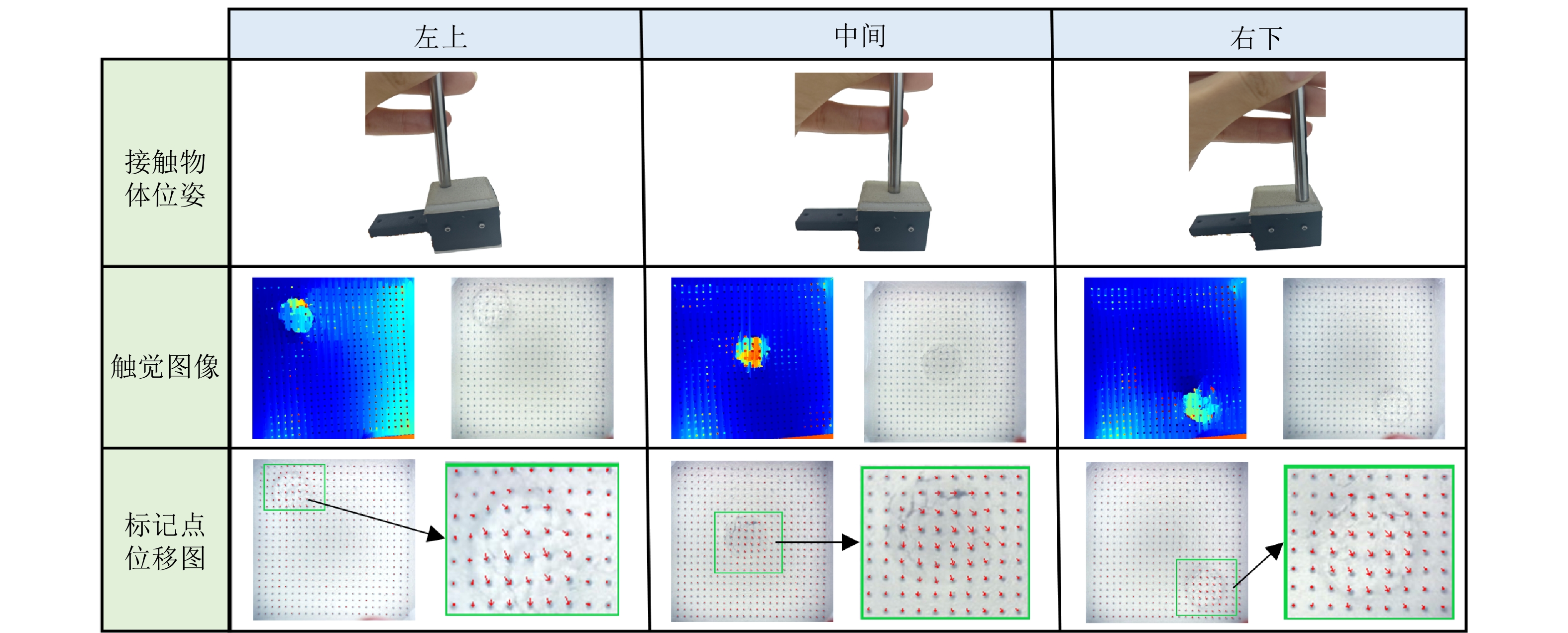
针对仿生视触觉传感器中密集标记点目标在动态环境下检测精度与实时性难以兼顾、传统光流算法对光照敏感导致检测精度低的问题, 提出一种融合斑点检测与动态感兴趣区域(ROI)优化机制的改进CSRT算法. 以GelStereo型传感器为硬件平台, 通过轻量级斑点检测实现标记点目标初始定位, 并依据其运动轨迹自适应生成ROI, 显著降低了计算复杂度, 提升系统实时性. 实验结果表明, 所提算法在多种光照条件下均保持优越性能, 检测准确率、召回率与F1分数分别达0.9991 、0.9953 、0.9972 , 较光流算法F1分数提升17.48%; 跟踪持续率为99.41%, FPS提升至22.17, 是CSRT的2.66倍. 该算法有效平衡了检测鲁棒性、跟踪精度与实时性, 为仿生机器人高精度实时触觉感知提供了可行的技术方案.
针对仿生视触觉传感器中密集标记点目标在动态环境下检测精度与实时性难以兼顾、传统光流算法对光照敏感导致检测精度低的问题, 提出一种融合斑点检测与动态感兴趣区域(ROI)优化机制的改进CSRT算法. 以GelStereo型传感器为硬件平台, 通过轻量级斑点检测实现标记点目标初始定位, 并依据其运动轨迹自适应生成ROI, 显著降低了计算复杂度, 提升系统实时性. 实验结果表明, 所提算法在多种光照条件下均保持优越性能, 检测准确率、召回率与F1分数分别达
2026, 52(5): 1018-1031.
doi: 10.16383/j.aas.c250690
cstr: 32138.14.j.aas.c250690
摘要:
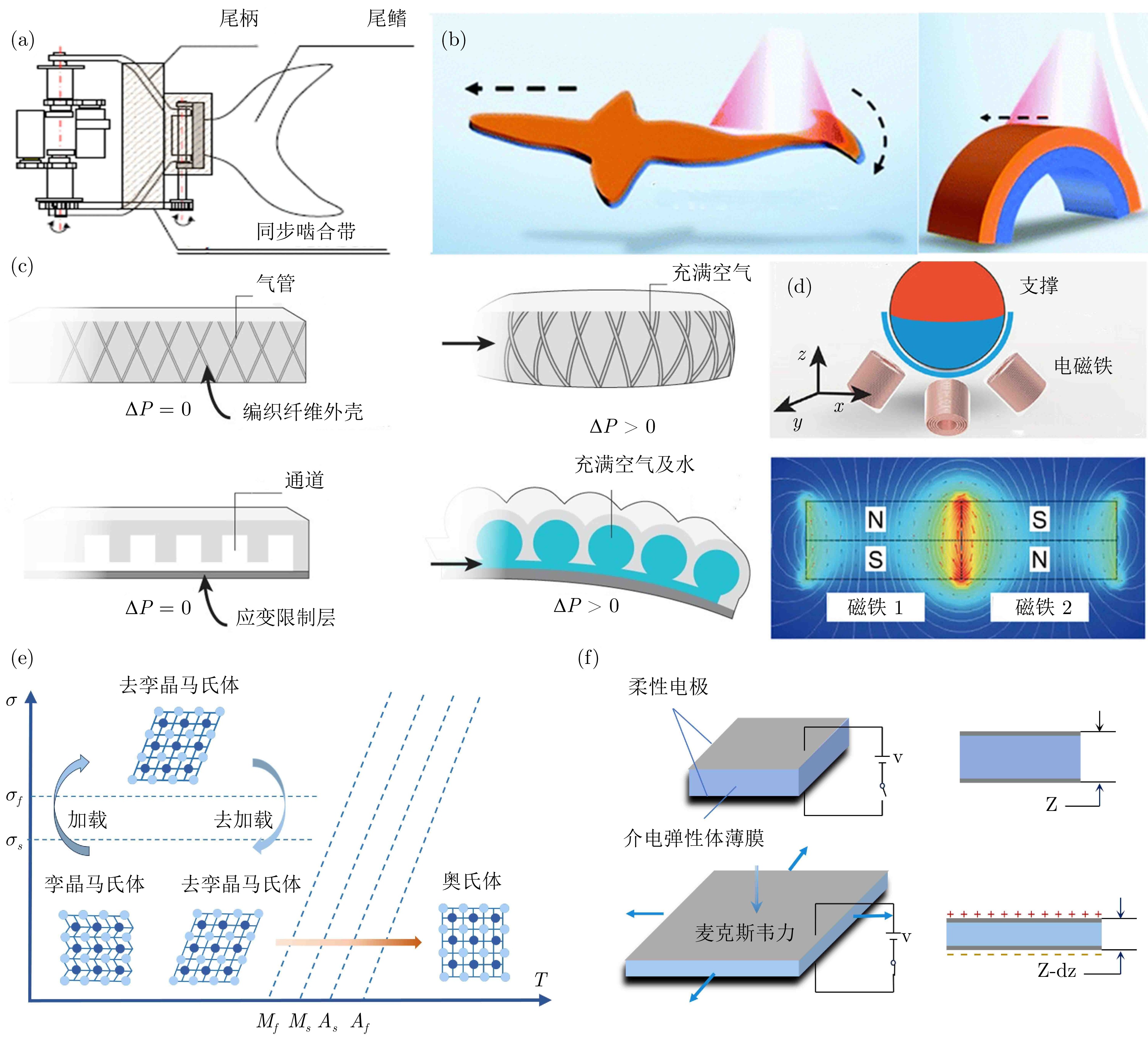
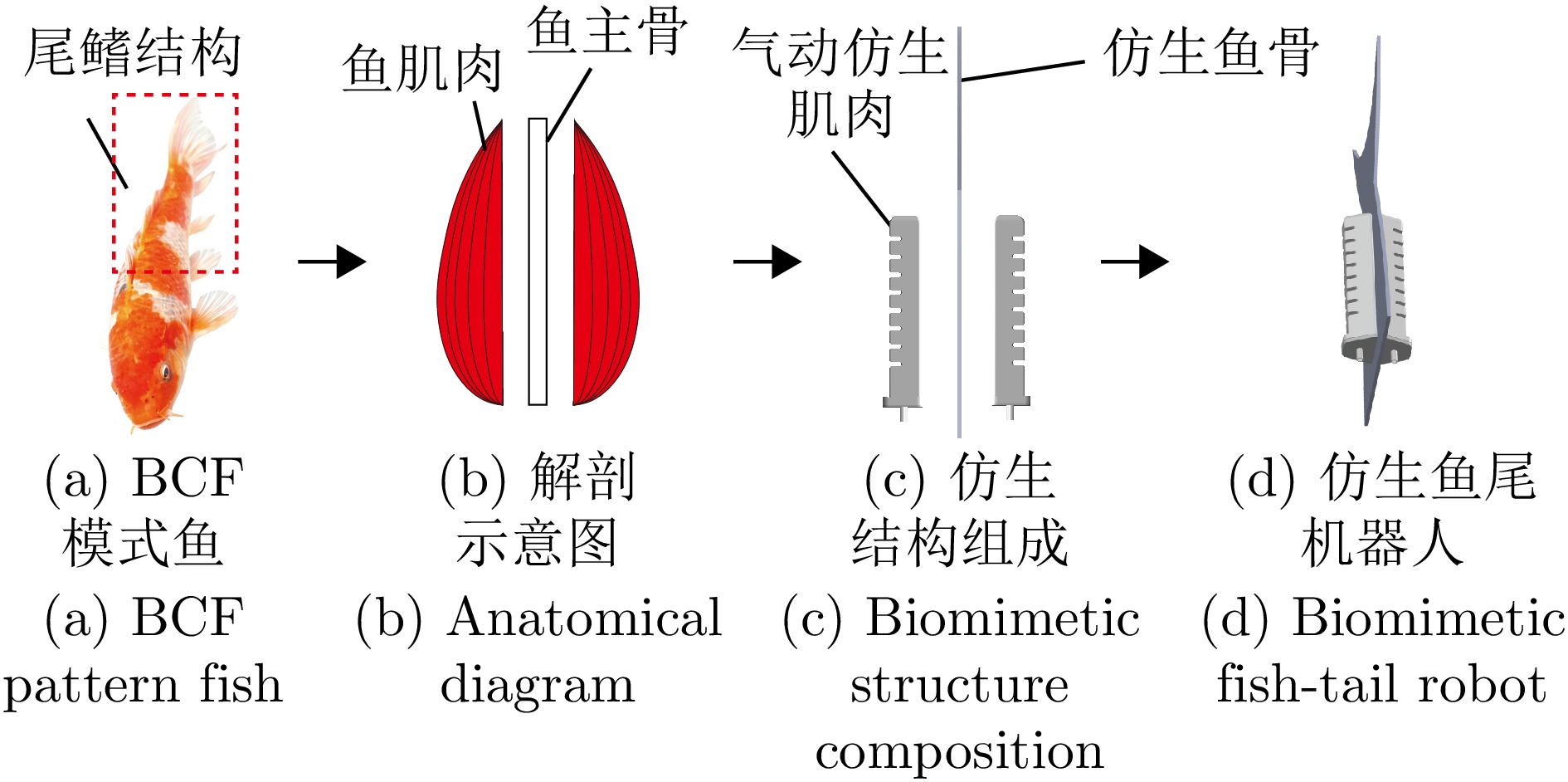
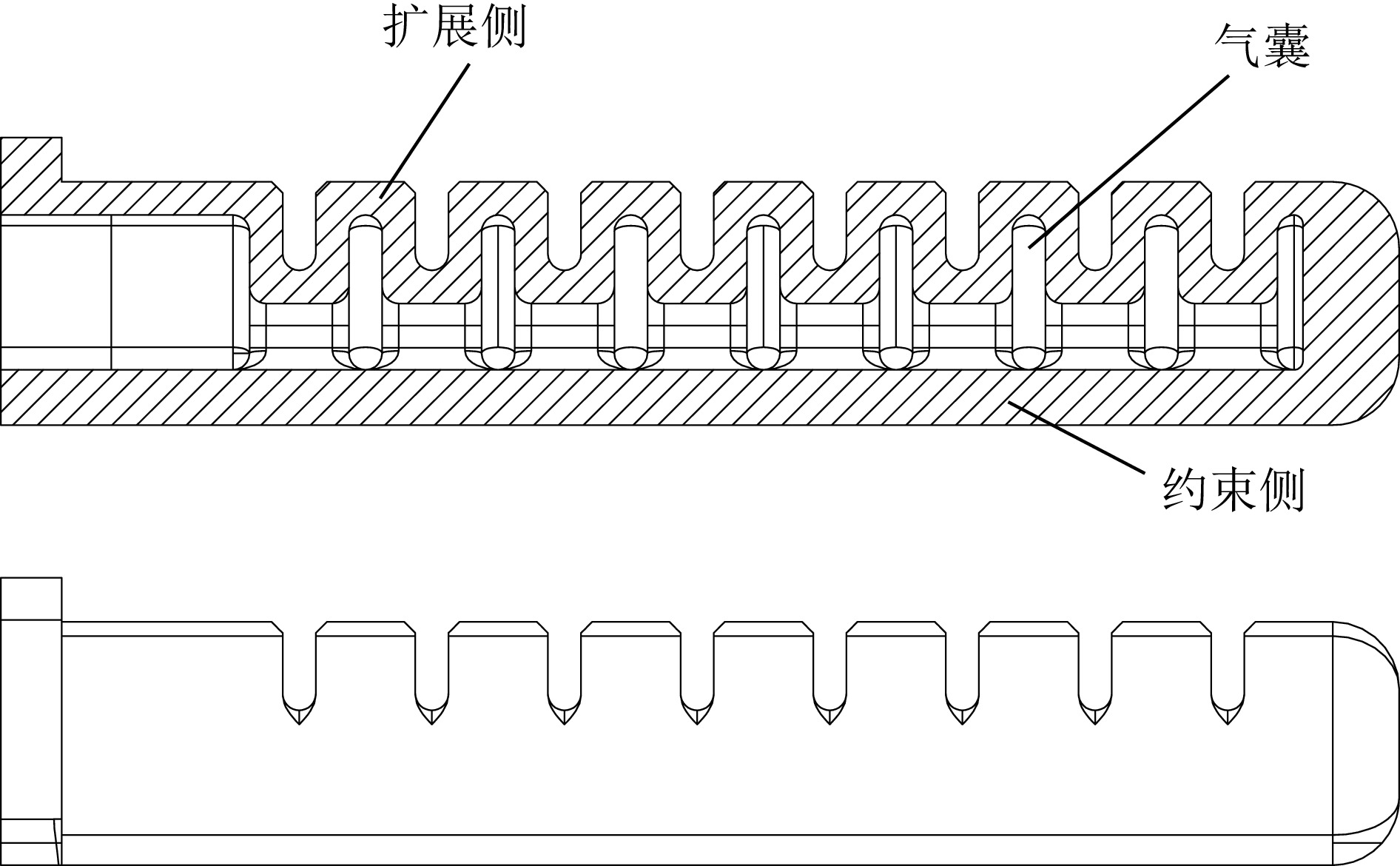
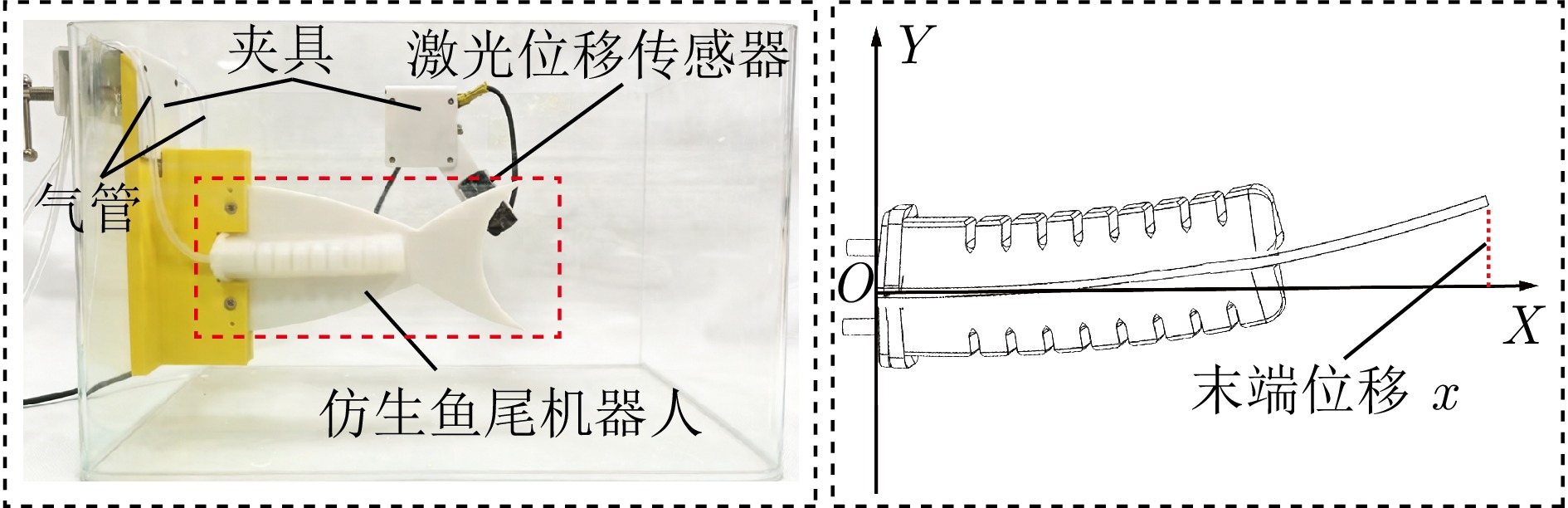
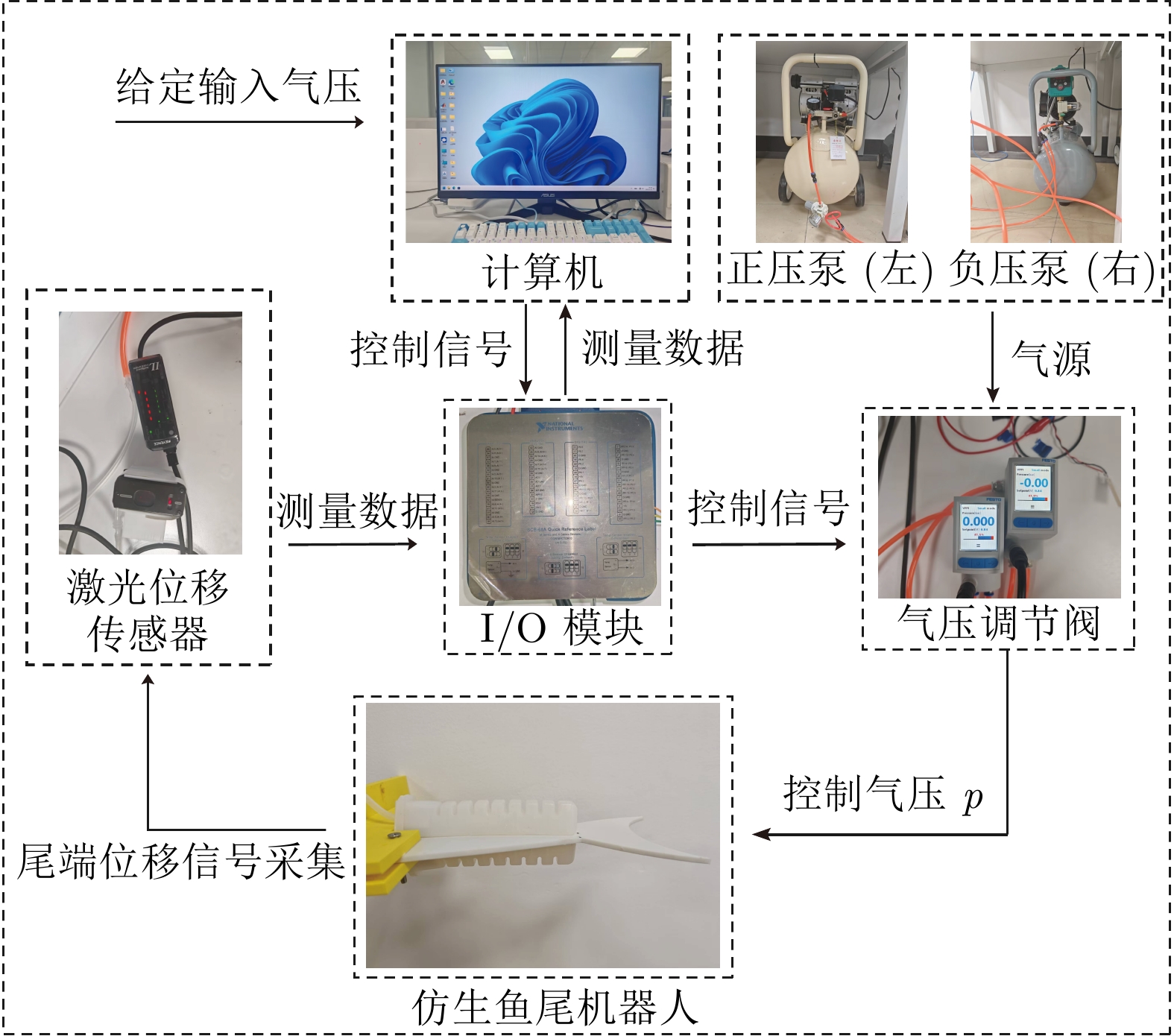
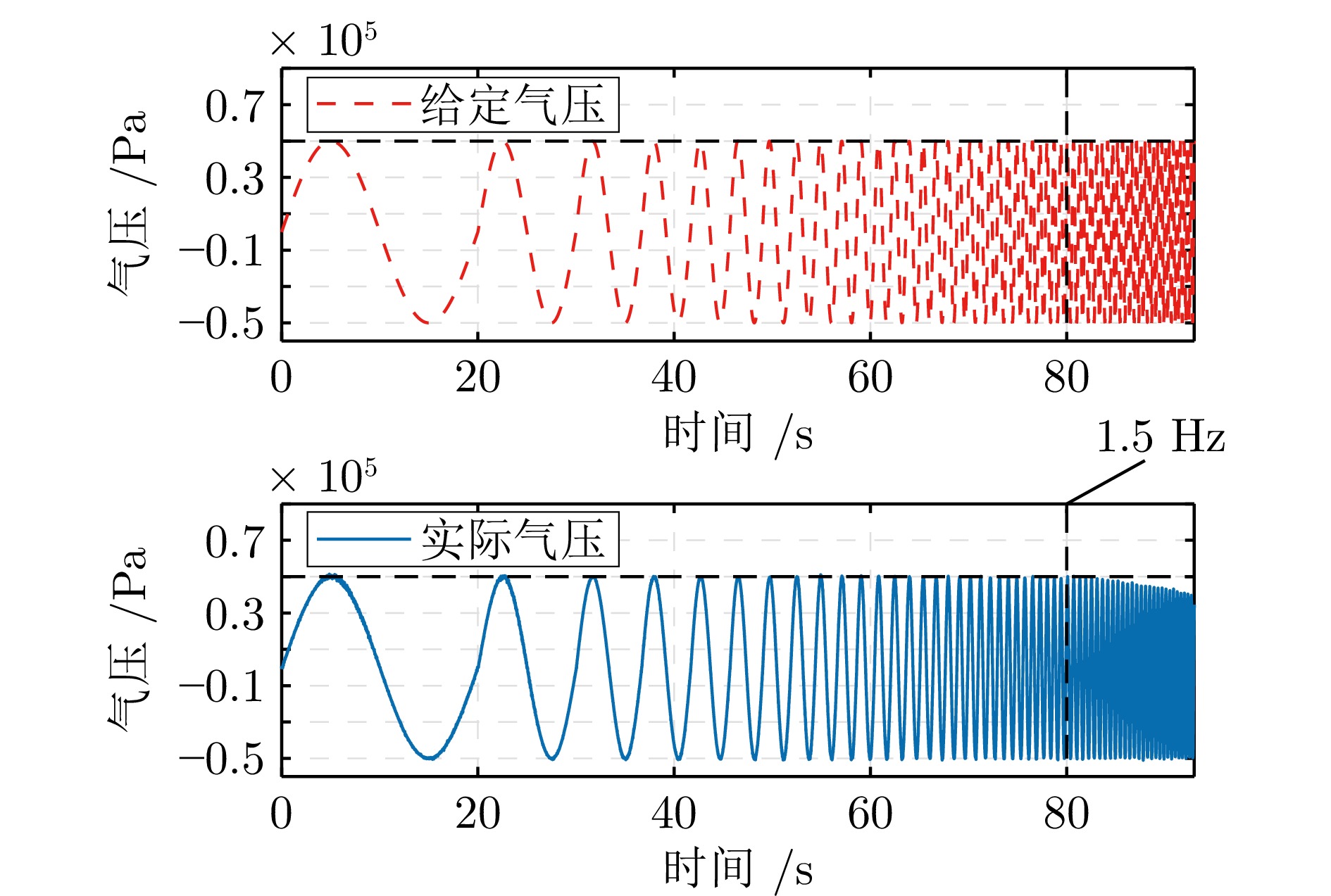
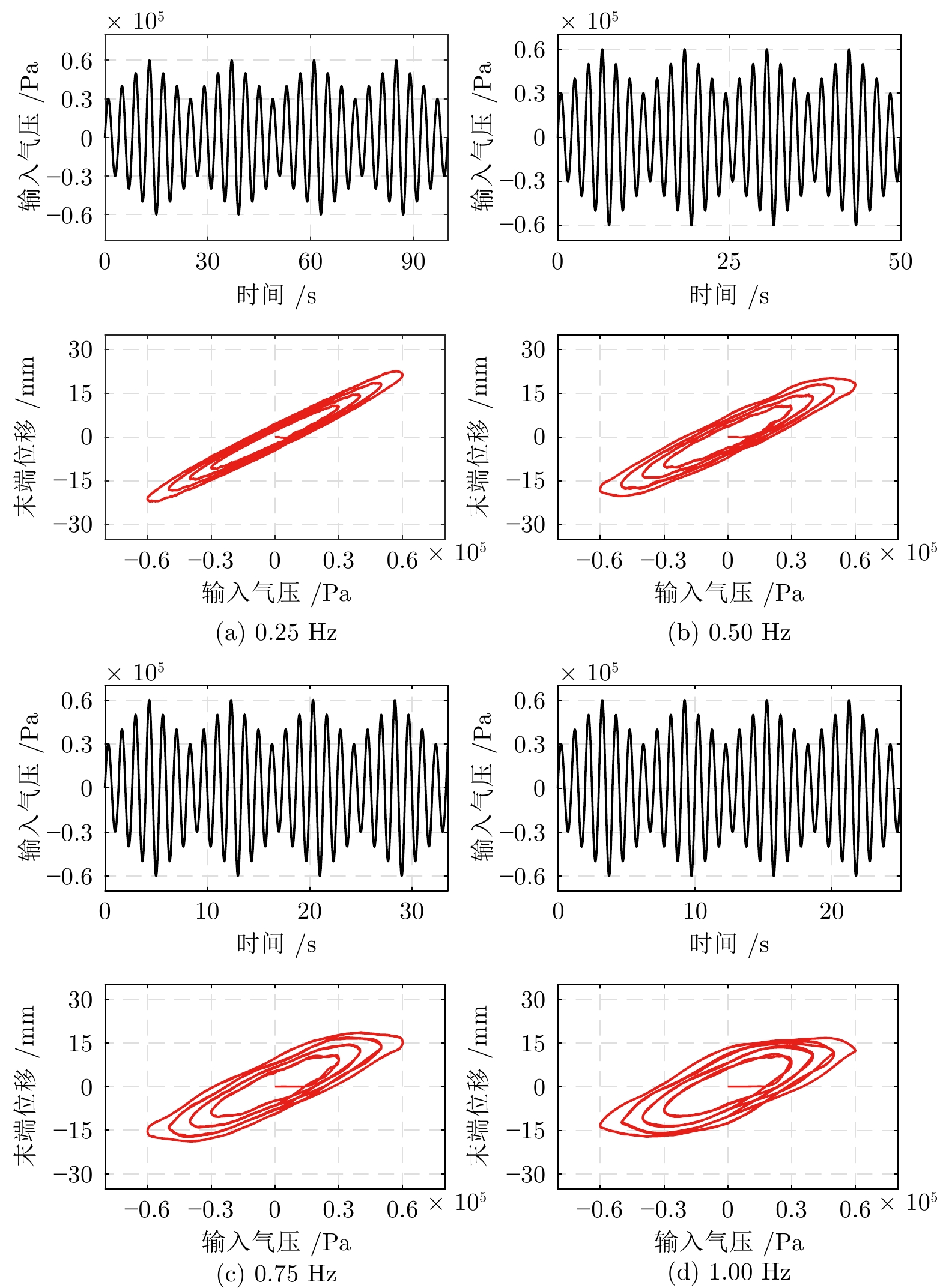
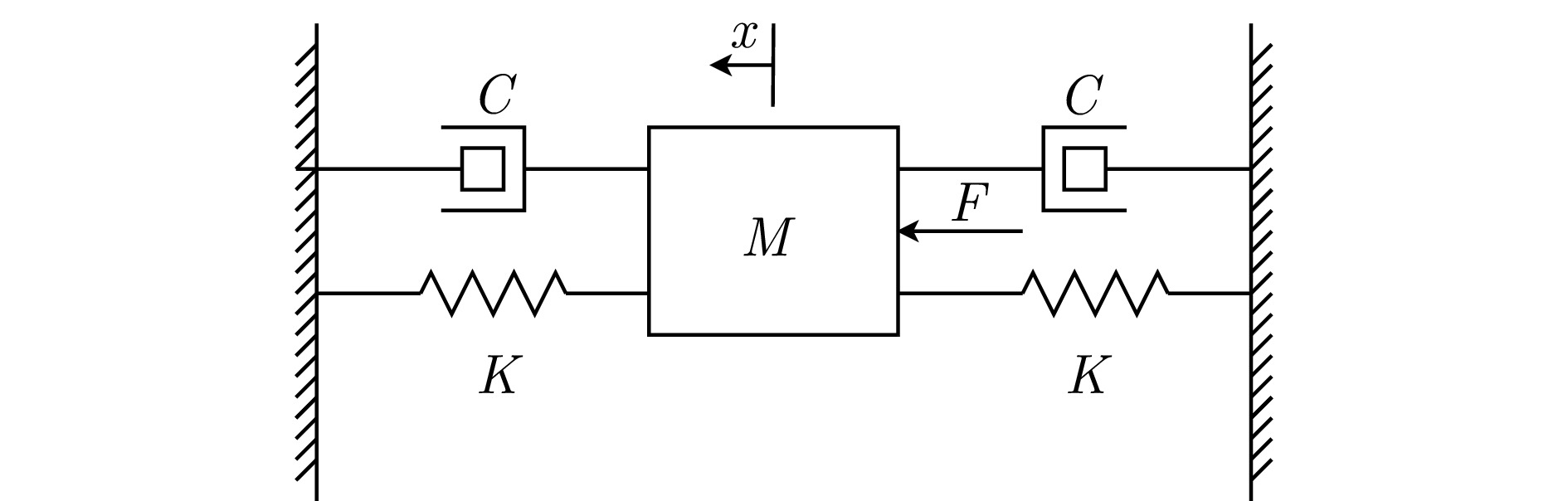
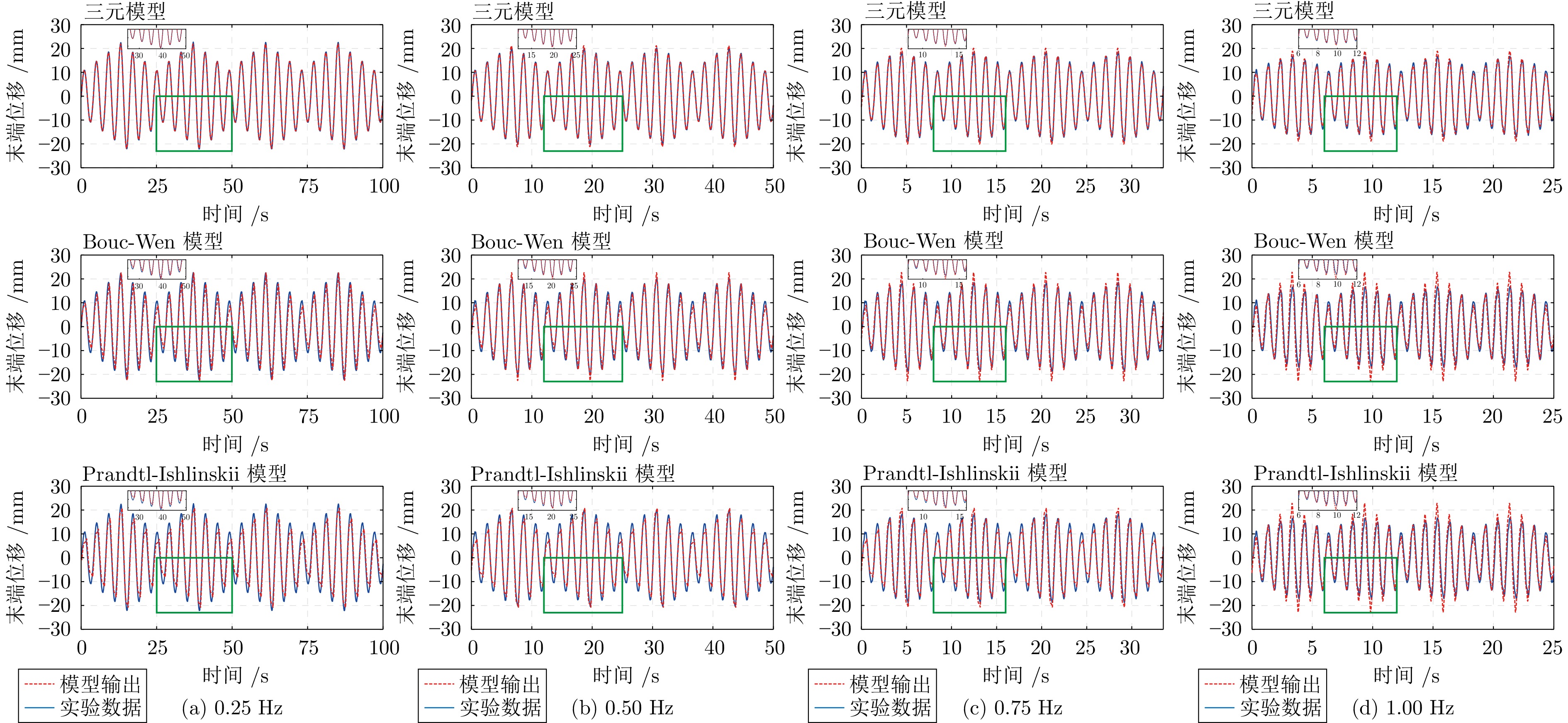
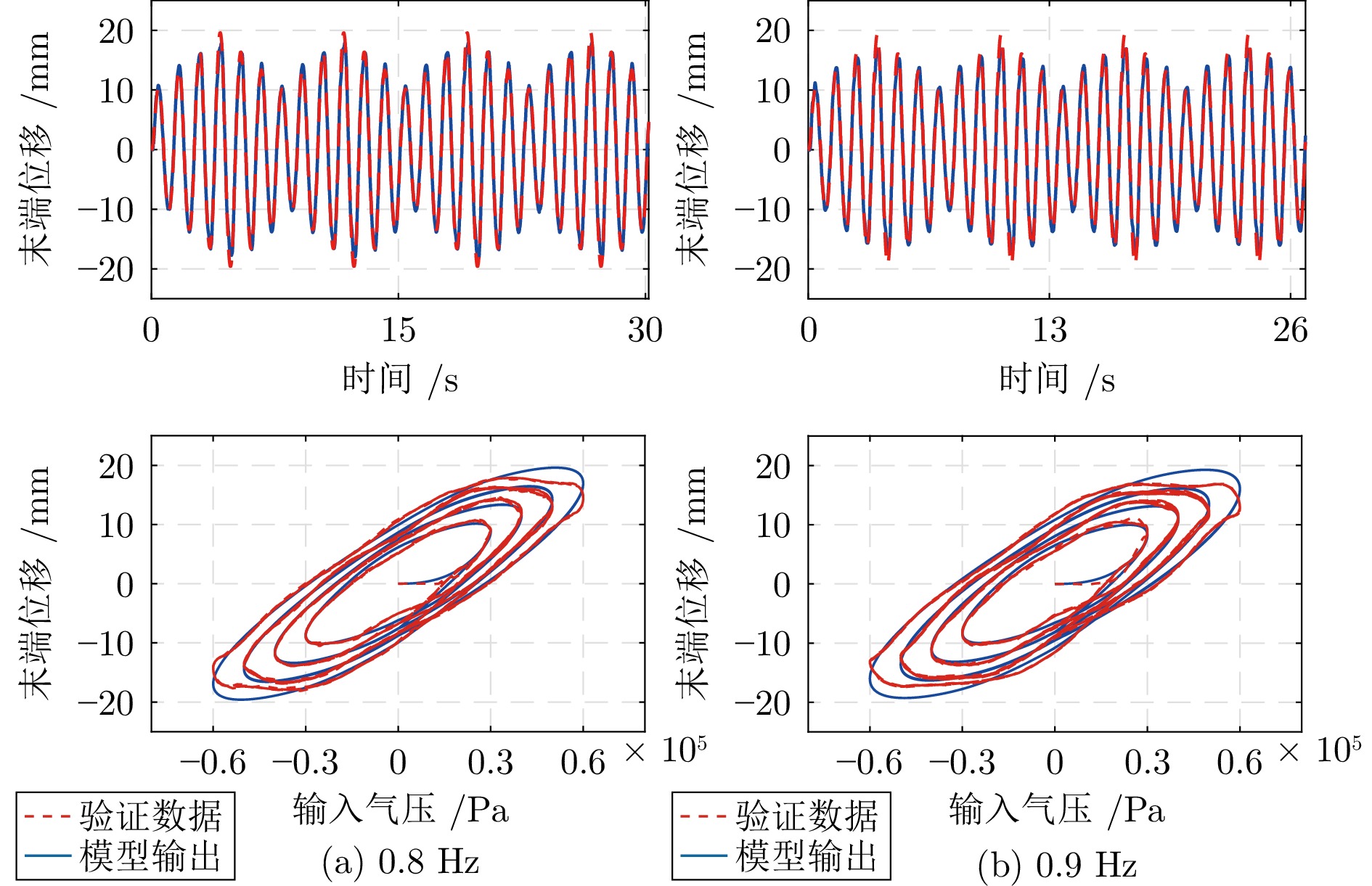
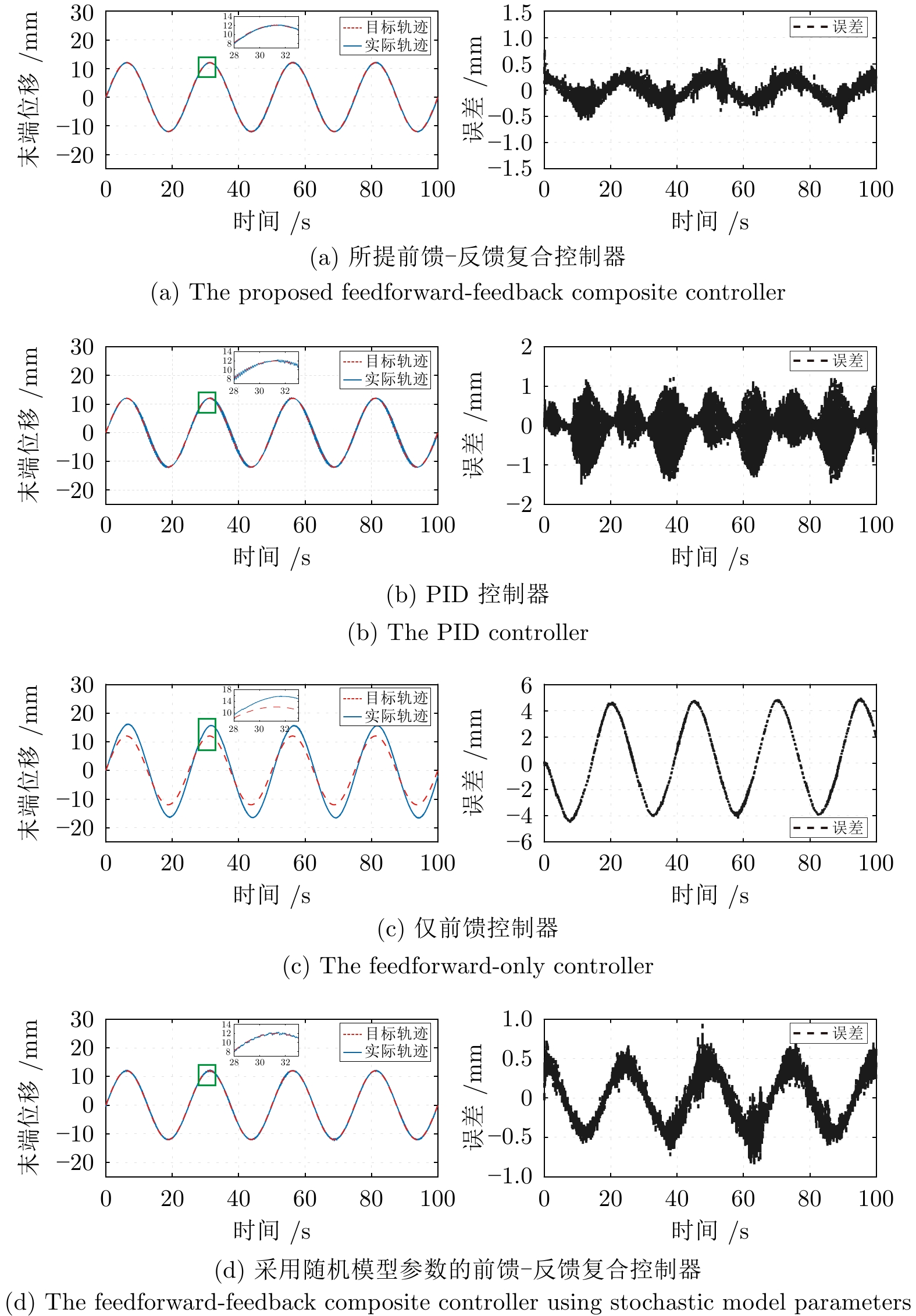
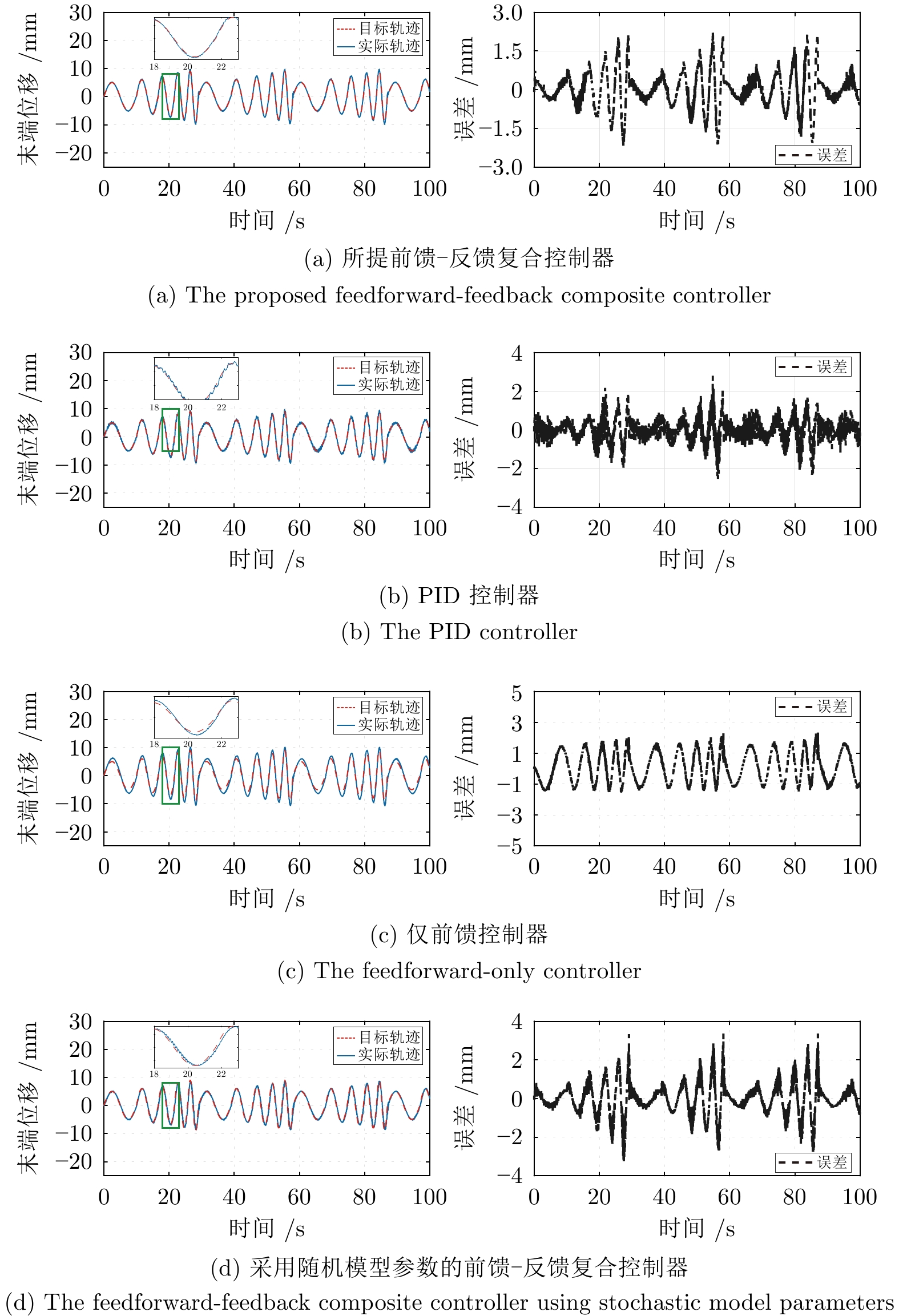
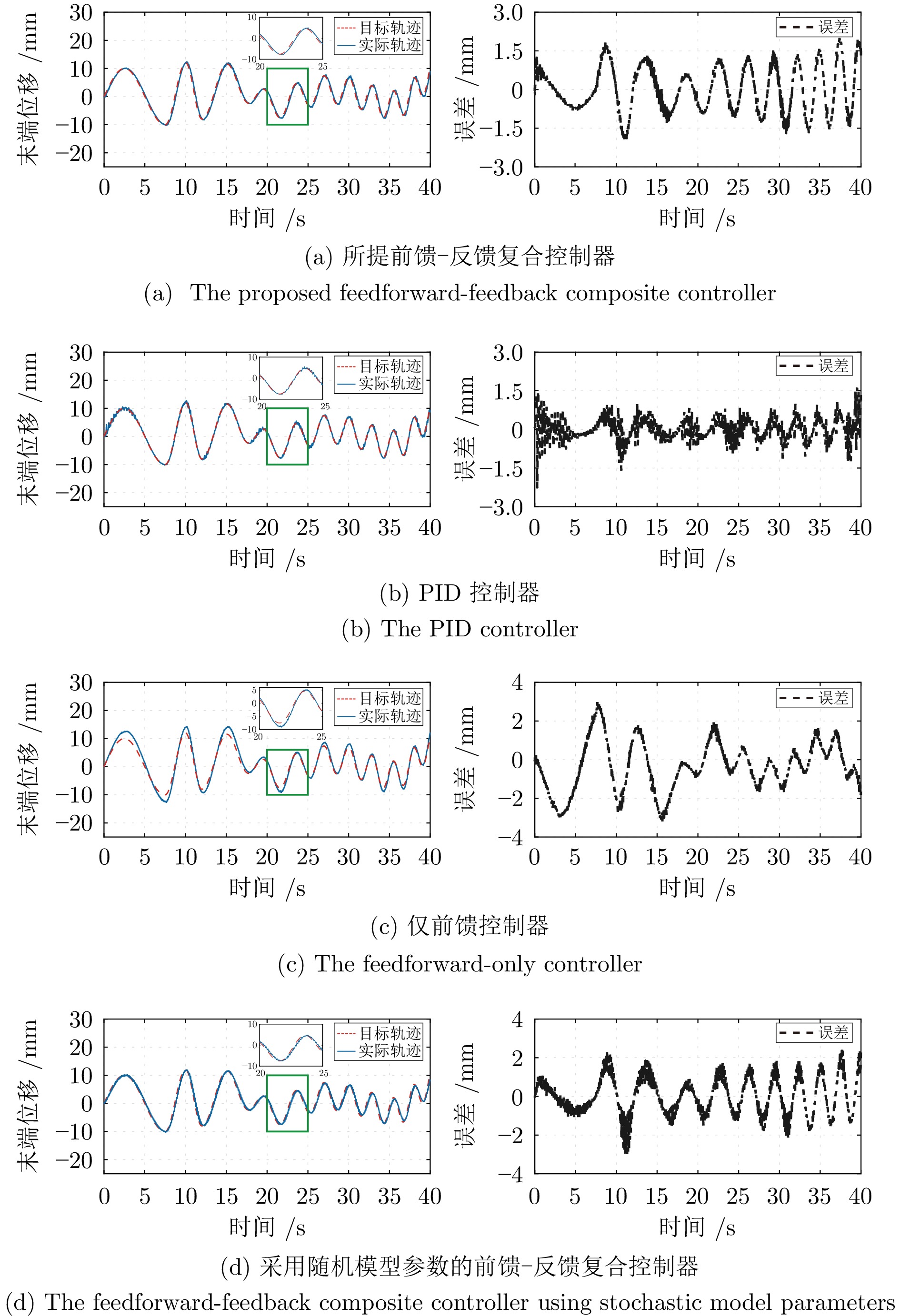
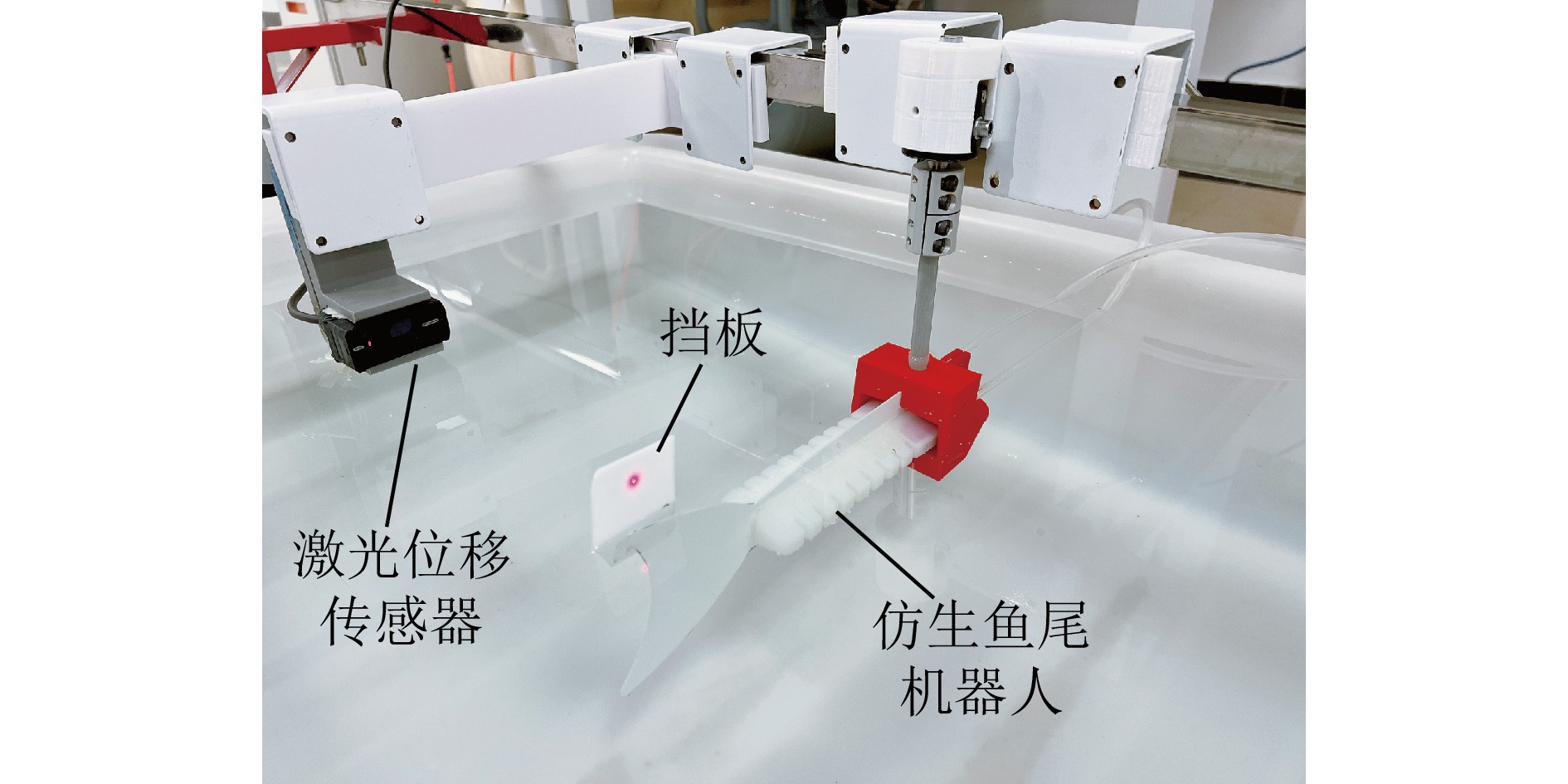
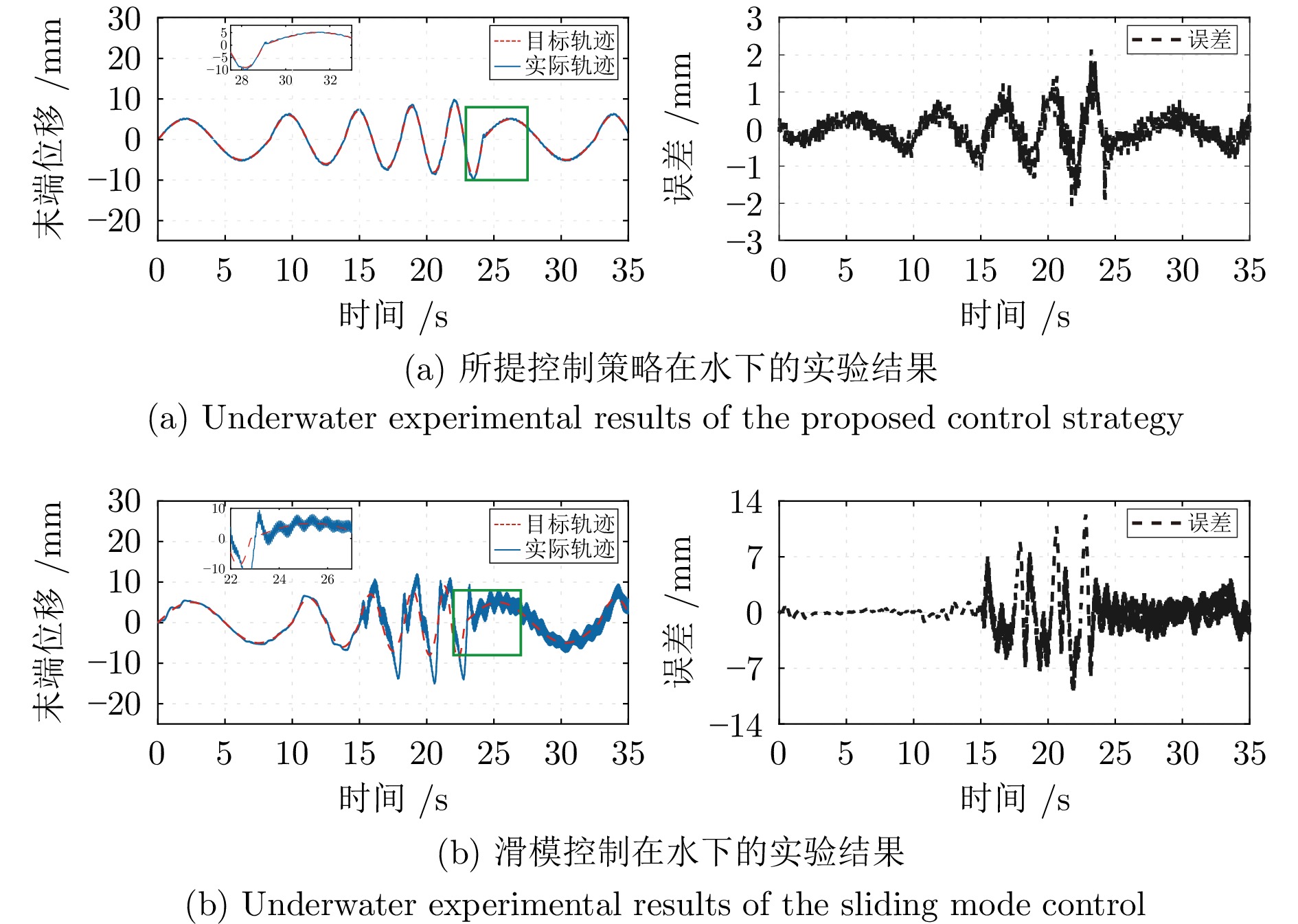
随着水下机器人技术的发展, 基于气动驱动的仿生鱼尾机器人因其高灵活性和低噪声特性受到广泛关注. 然而, 气动驱动器固有的非线性迟滞效应与柔顺特性为鱼尾的精确动力学建模与摆动控制带来挑战. 为此, 针对气动仿生鱼尾机器人建立包含弹簧、质量与阻尼的三元动力学模型, 并通过实验数据实现参数辨识, 有效描述该机器人的复杂非线性动力学行为. 进而提出一种前馈−反馈复合控制方法, 基于所建立的模型生成前馈输入以提升响应速度, 结合PID反馈抑制建模误差与外部扰动, 同时基于Lyapunov理论证明系统的渐近稳定性. 实验结果表明, 在定频正弦、变幅变频及随机轨迹等多种工况下, 该方法相较传统PID控制, 具有更高的跟踪精度与动态适应能力, 同时, 反馈补偿与参数辨识也被证明对提升跟踪性能具有关键作用. 水下实验进一步验证了所提方法对辨识误差、未建模动态及外部扰动的适应能力.
随着水下机器人技术的发展, 基于气动驱动的仿生鱼尾机器人因其高灵活性和低噪声特性受到广泛关注. 然而, 气动驱动器固有的非线性迟滞效应与柔顺特性为鱼尾的精确动力学建模与摆动控制带来挑战. 为此, 针对气动仿生鱼尾机器人建立包含弹簧、质量与阻尼的三元动力学模型, 并通过实验数据实现参数辨识, 有效描述该机器人的复杂非线性动力学行为. 进而提出一种前馈−反馈复合控制方法, 基于所建立的模型生成前馈输入以提升响应速度, 结合PID反馈抑制建模误差与外部扰动, 同时基于Lyapunov理论证明系统的渐近稳定性. 实验结果表明, 在定频正弦、变幅变频及随机轨迹等多种工况下, 该方法相较传统PID控制, 具有更高的跟踪精度与动态适应能力, 同时, 反馈补偿与参数辨识也被证明对提升跟踪性能具有关键作用. 水下实验进一步验证了所提方法对辨识误差、未建模动态及外部扰动的适应能力.
2026, 52(5): 1032-1045.
doi: 10.16383/j.aas.c250534
cstr: 32138.14.j.aas.c250534
摘要:
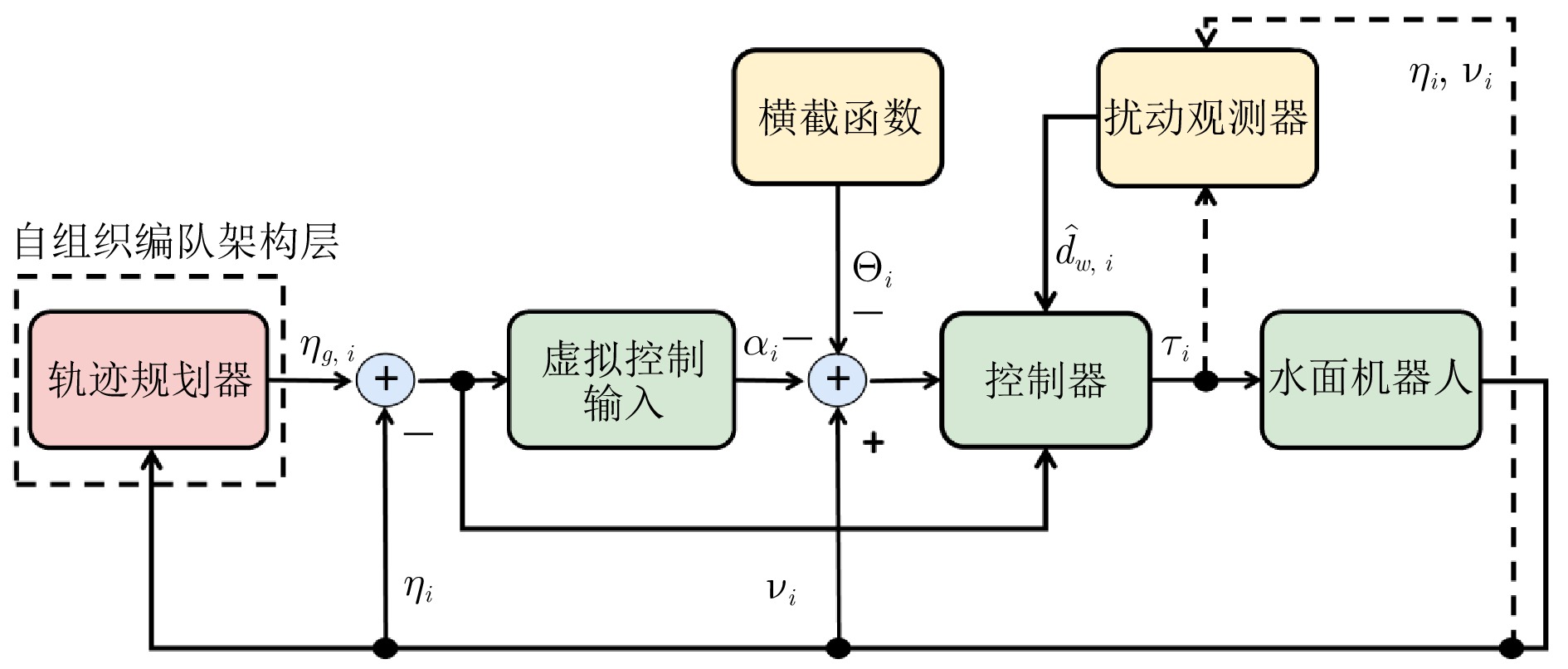
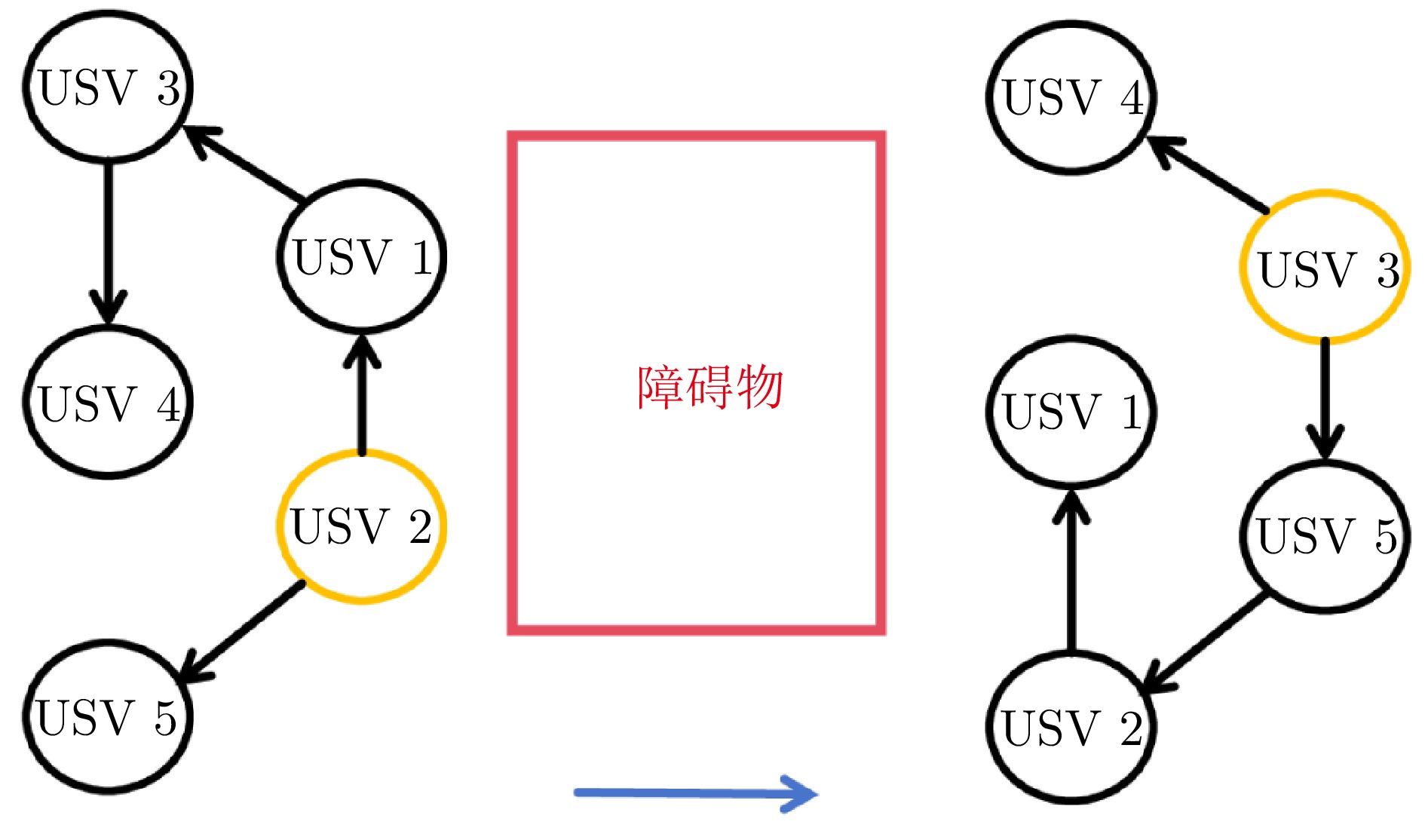
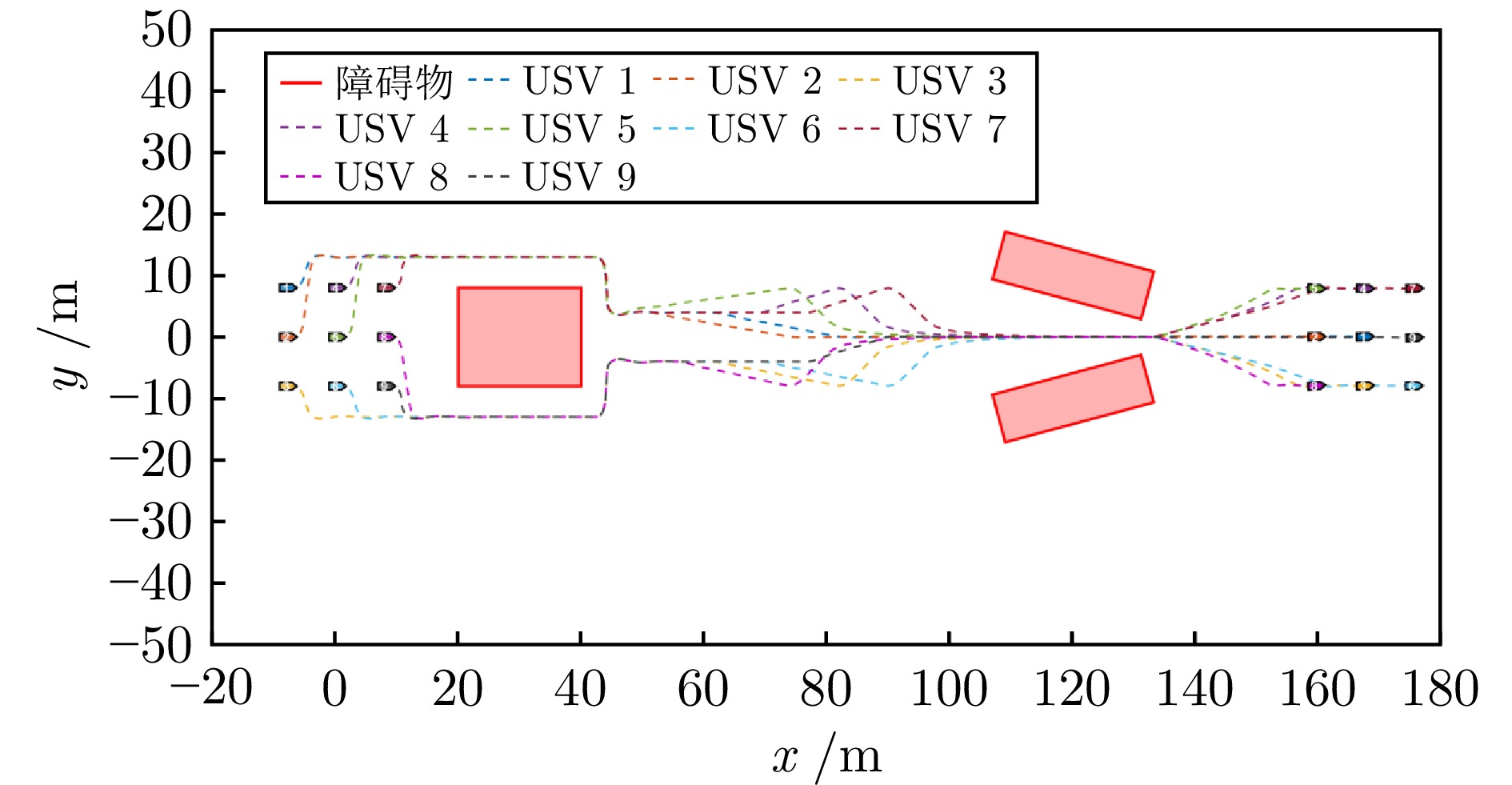
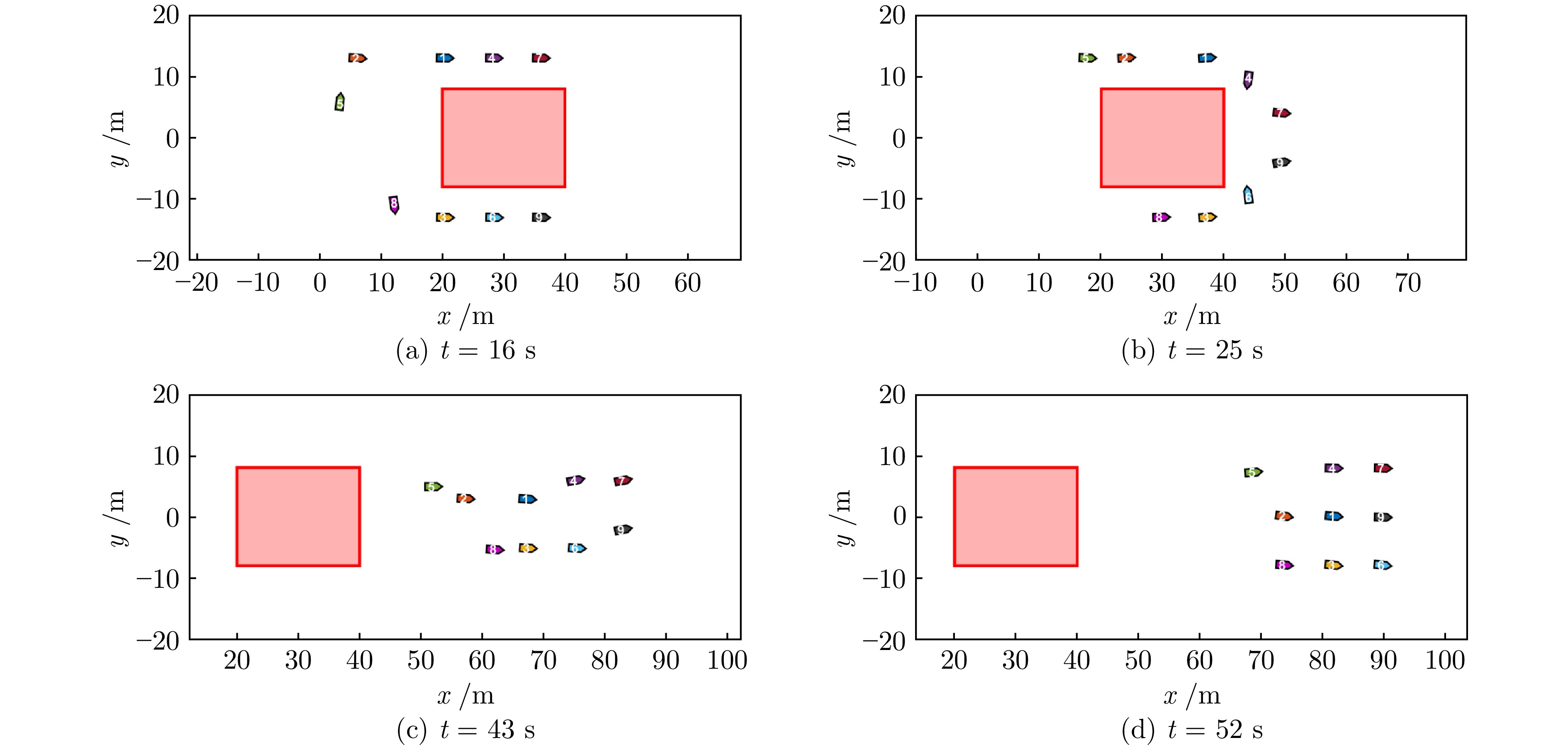
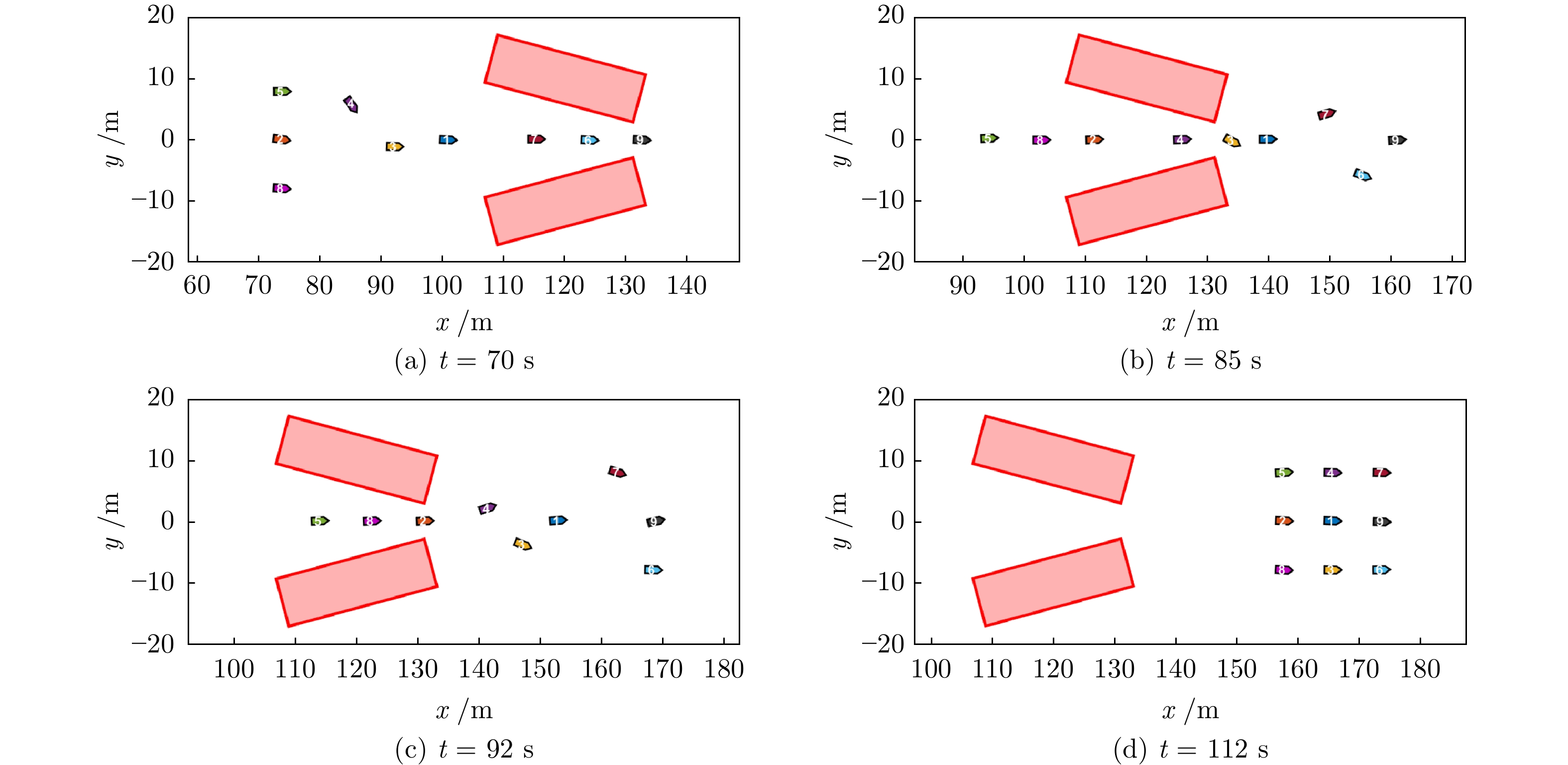
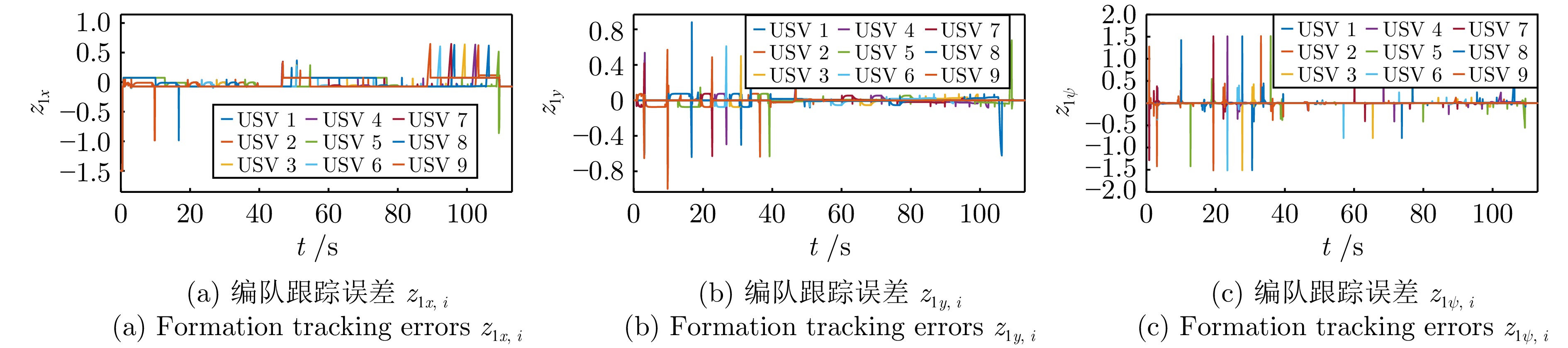
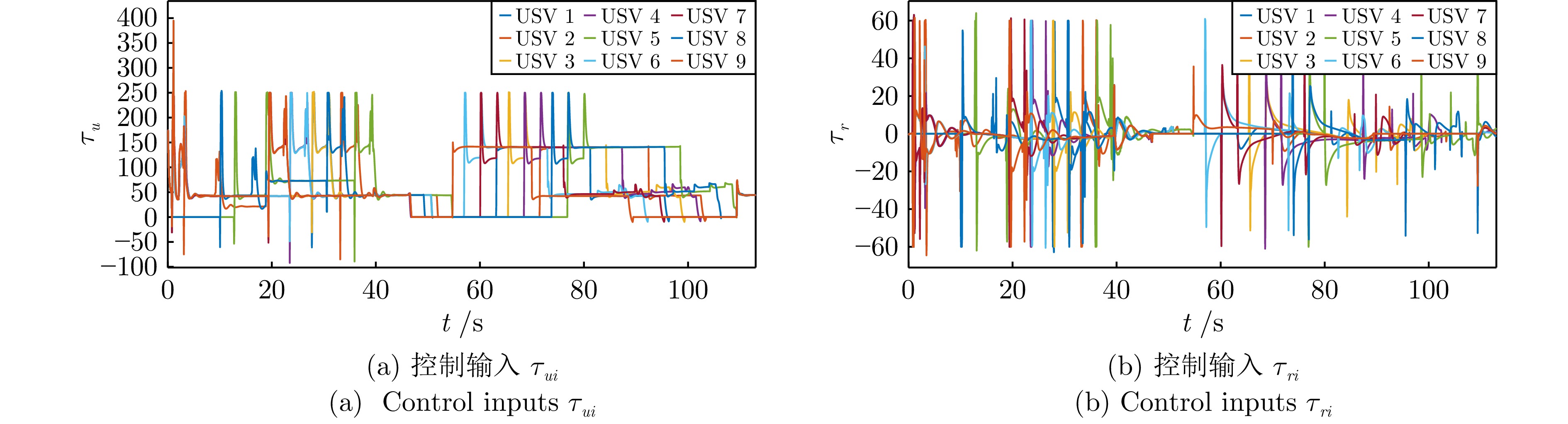
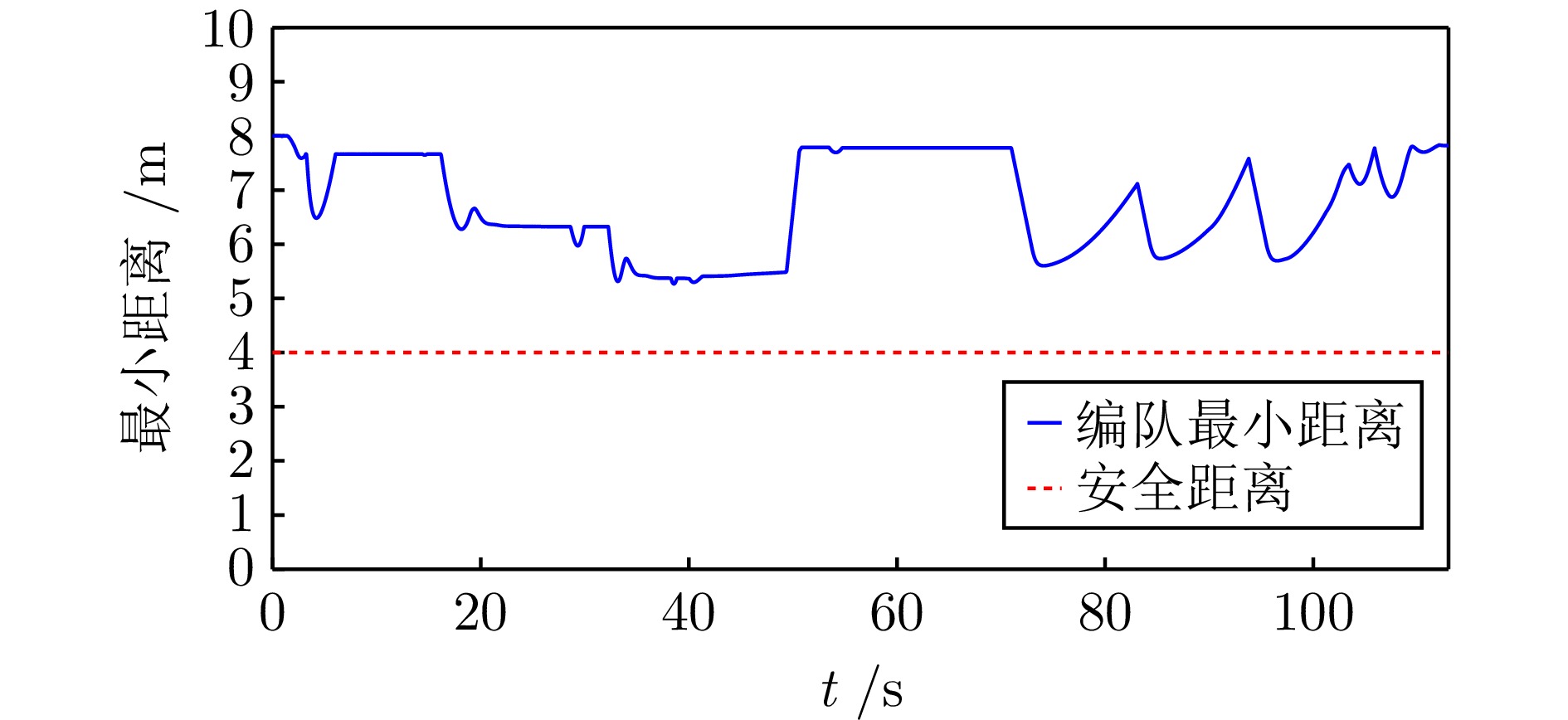
受鱼群自组织行为启发, 提出一种面向欠驱动水面机器人(USV)的自组织编队架构, 以解决复杂海洋环境下多USV编队重构控制问题. 该架构采用分布式策略, 支持任意USV按需担任临时领导者并重构树状拓扑, 使编队构型随环境自适应调整. 在此基础上, 首先基于鱼群穿越狭窄通道的疏散行为机制, 提出一种仿鱼群疏散编队重构算法, 将通行优势排序与有限状态机切换结合, 实现受限环境中的高效、平滑重构. 然后, 基于鱼群逃逸行为机制, 设计自组织动态分裂−合并编队重构算法, 将重构问题建模为多智能体路径规划问题, 并结合Dubins路径和改进遗传算法优化满足USV运动学与安全间距约束的重构轨迹. 最后, 结合横截函数法设计编队控制律, 并利用Lyapunov理论证明闭环稳定性. 仿真结果表明, 所提方法在狭窄通道和大型障碍物场景下具有良好的适应性与重构效果.
受鱼群自组织行为启发, 提出一种面向欠驱动水面机器人(USV)的自组织编队架构, 以解决复杂海洋环境下多USV编队重构控制问题. 该架构采用分布式策略, 支持任意USV按需担任临时领导者并重构树状拓扑, 使编队构型随环境自适应调整. 在此基础上, 首先基于鱼群穿越狭窄通道的疏散行为机制, 提出一种仿鱼群疏散编队重构算法, 将通行优势排序与有限状态机切换结合, 实现受限环境中的高效、平滑重构. 然后, 基于鱼群逃逸行为机制, 设计自组织动态分裂−合并编队重构算法, 将重构问题建模为多智能体路径规划问题, 并结合Dubins路径和改进遗传算法优化满足USV运动学与安全间距约束的重构轨迹. 最后, 结合横截函数法设计编队控制律, 并利用Lyapunov理论证明闭环稳定性. 仿真结果表明, 所提方法在狭窄通道和大型障碍物场景下具有良好的适应性与重构效果.
2026, 52(5): 1046-1057.
doi: 10.16383/j.aas.c250680
cstr: 32138.14.j.aas.c250680
摘要:
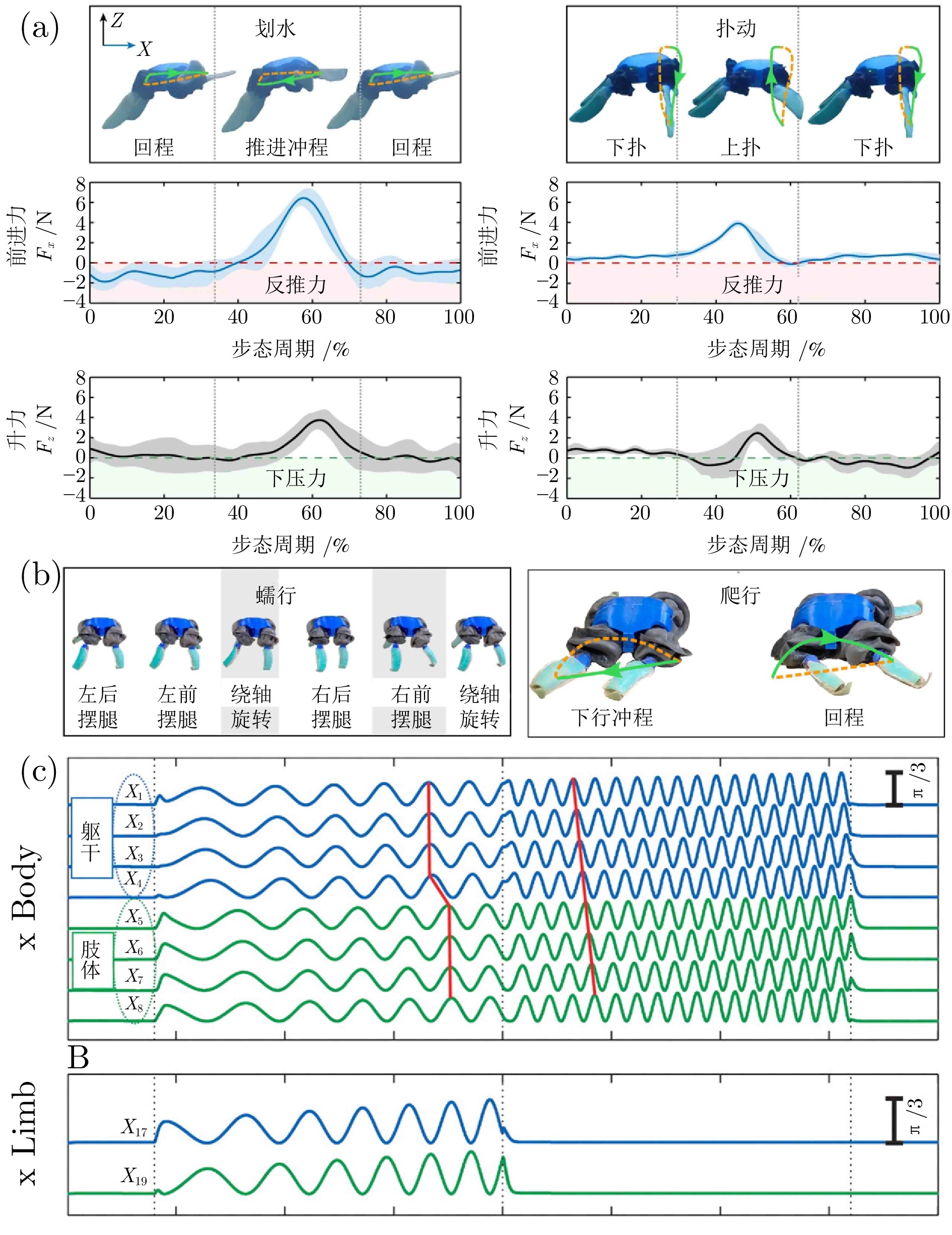
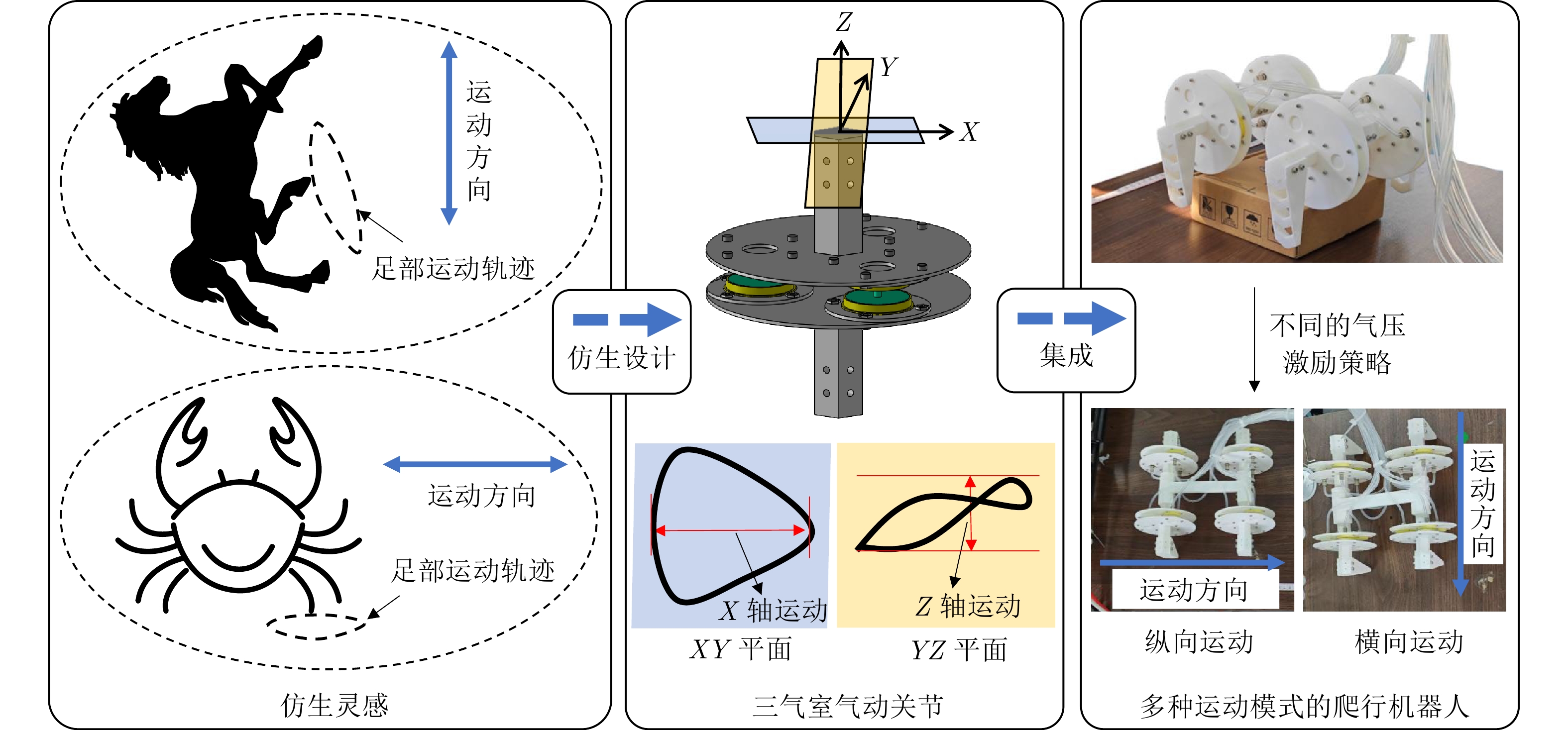
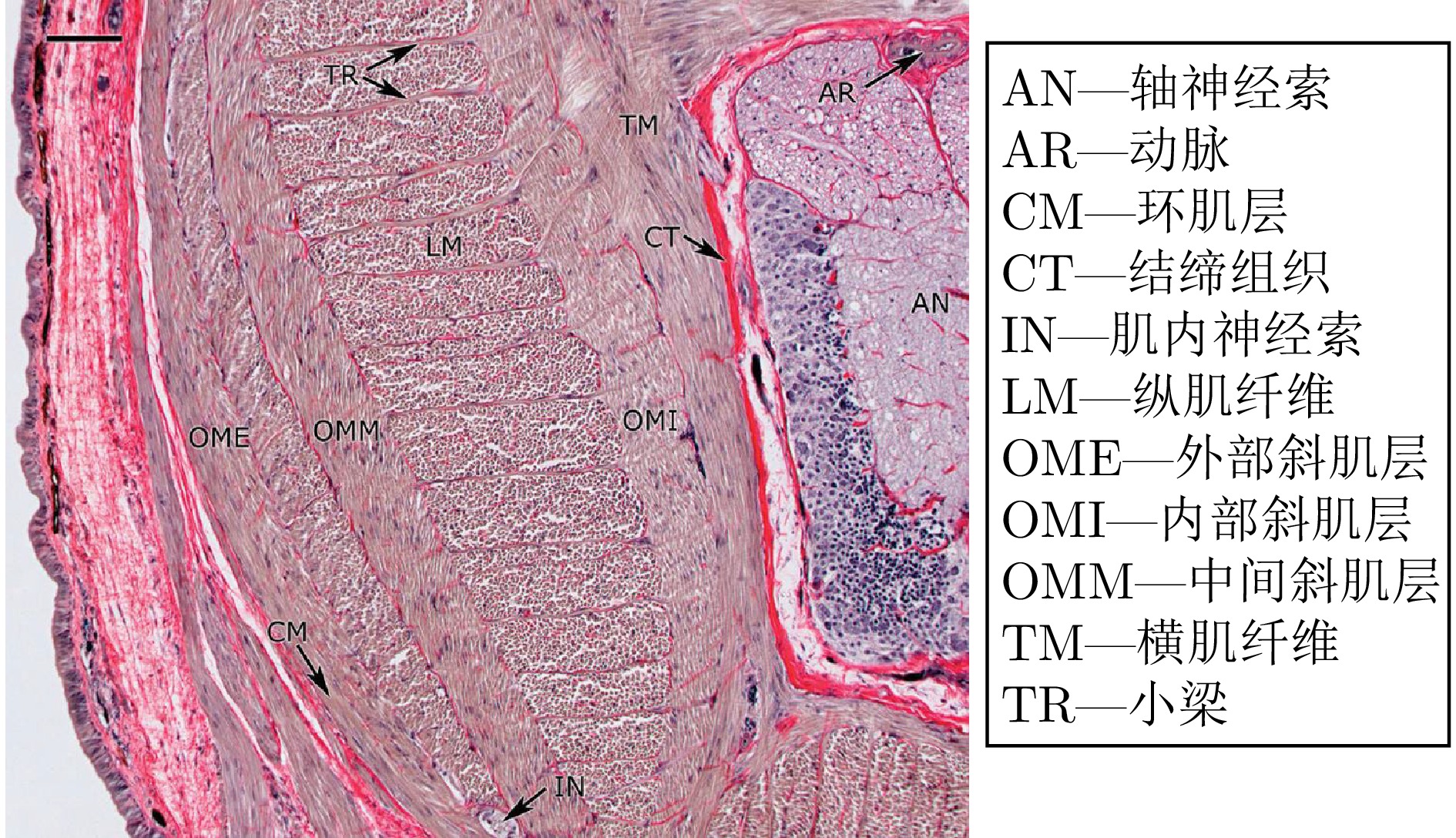
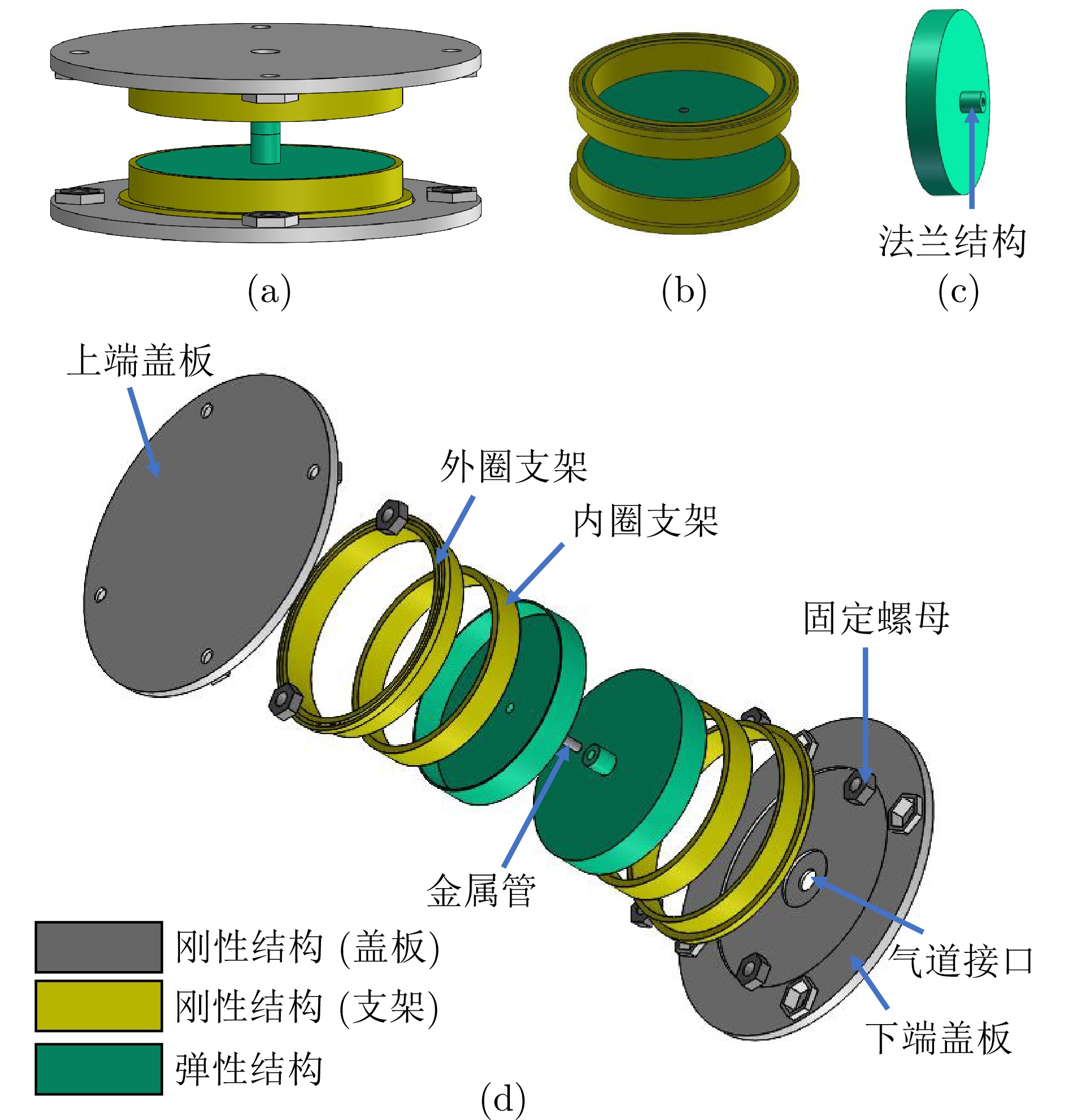
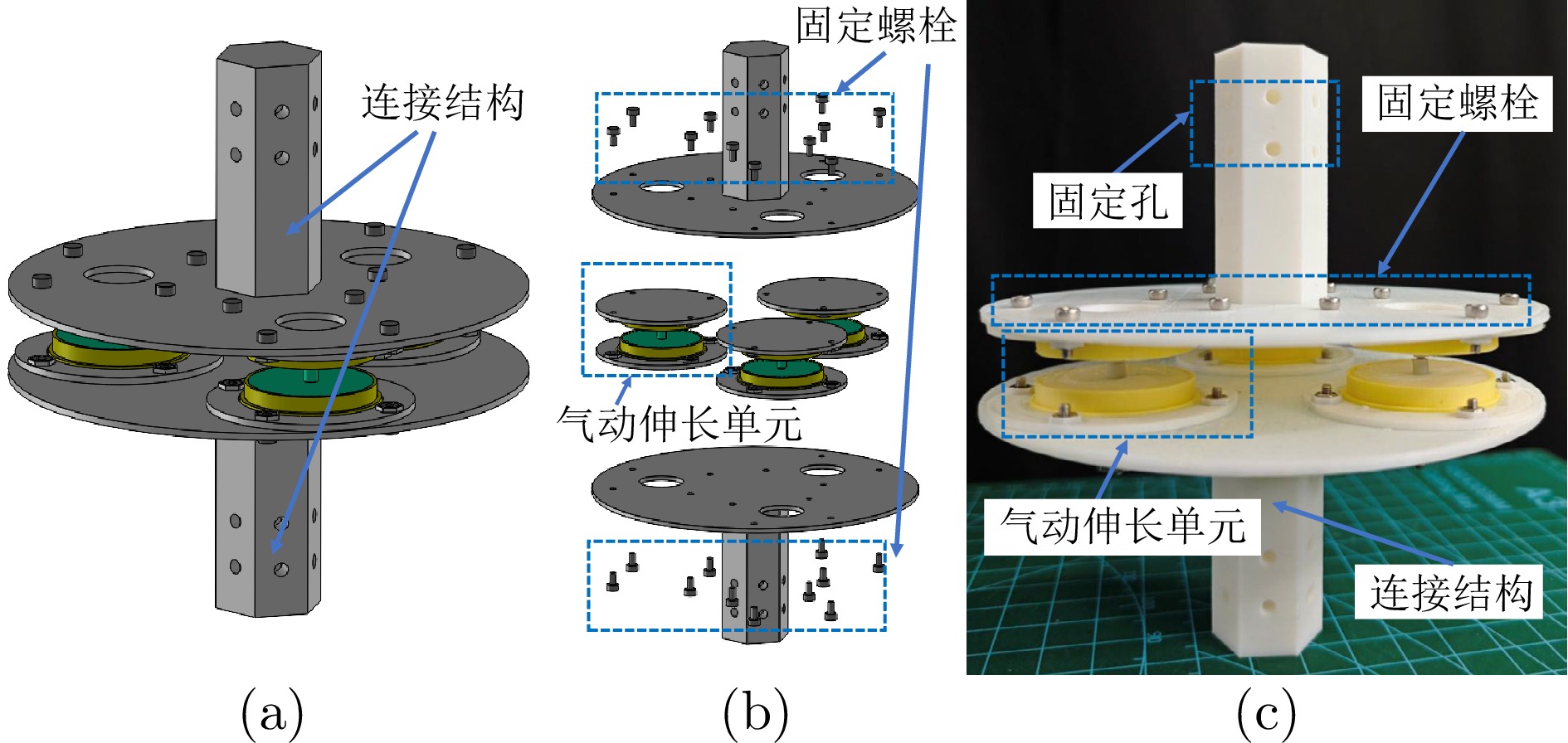
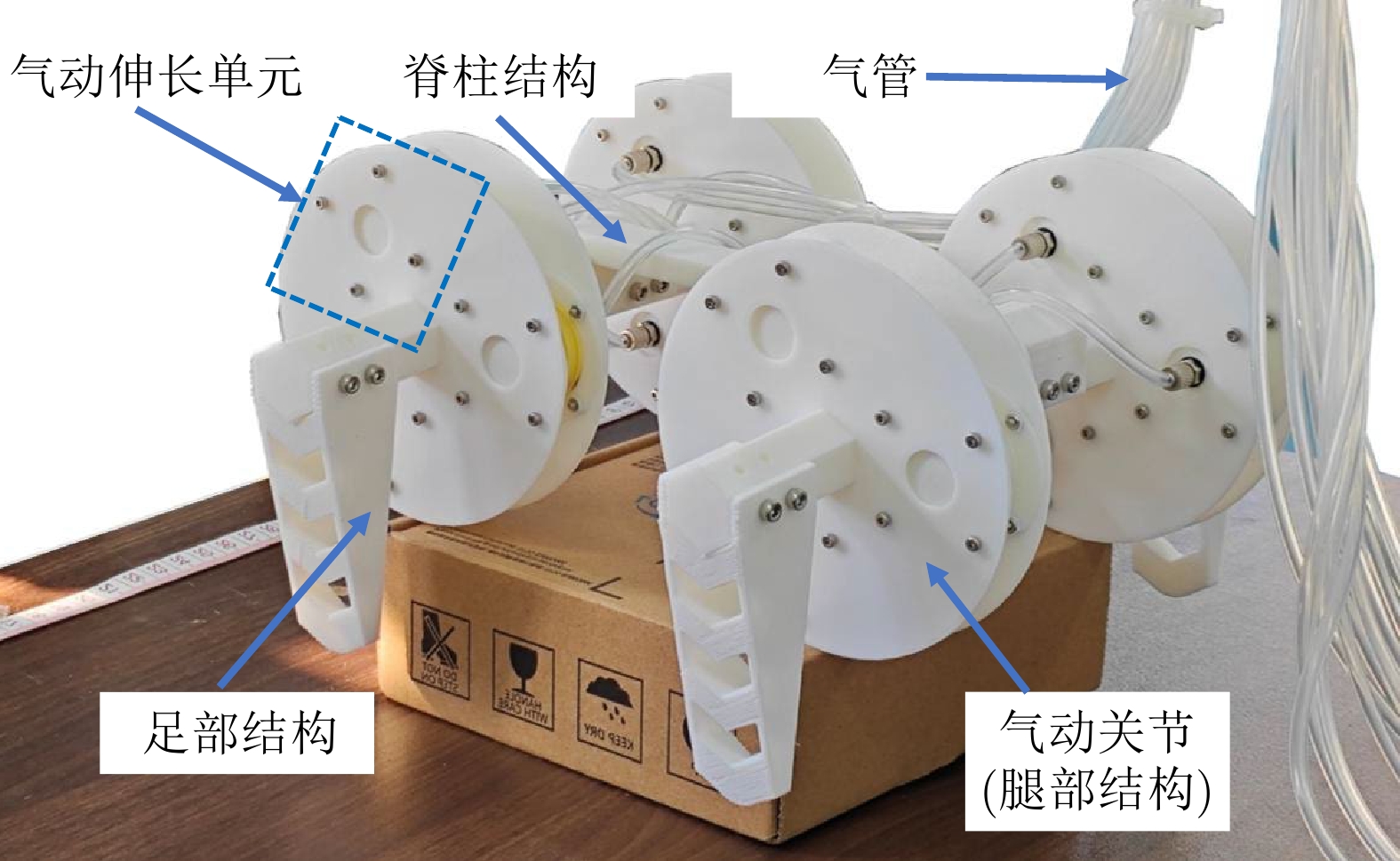
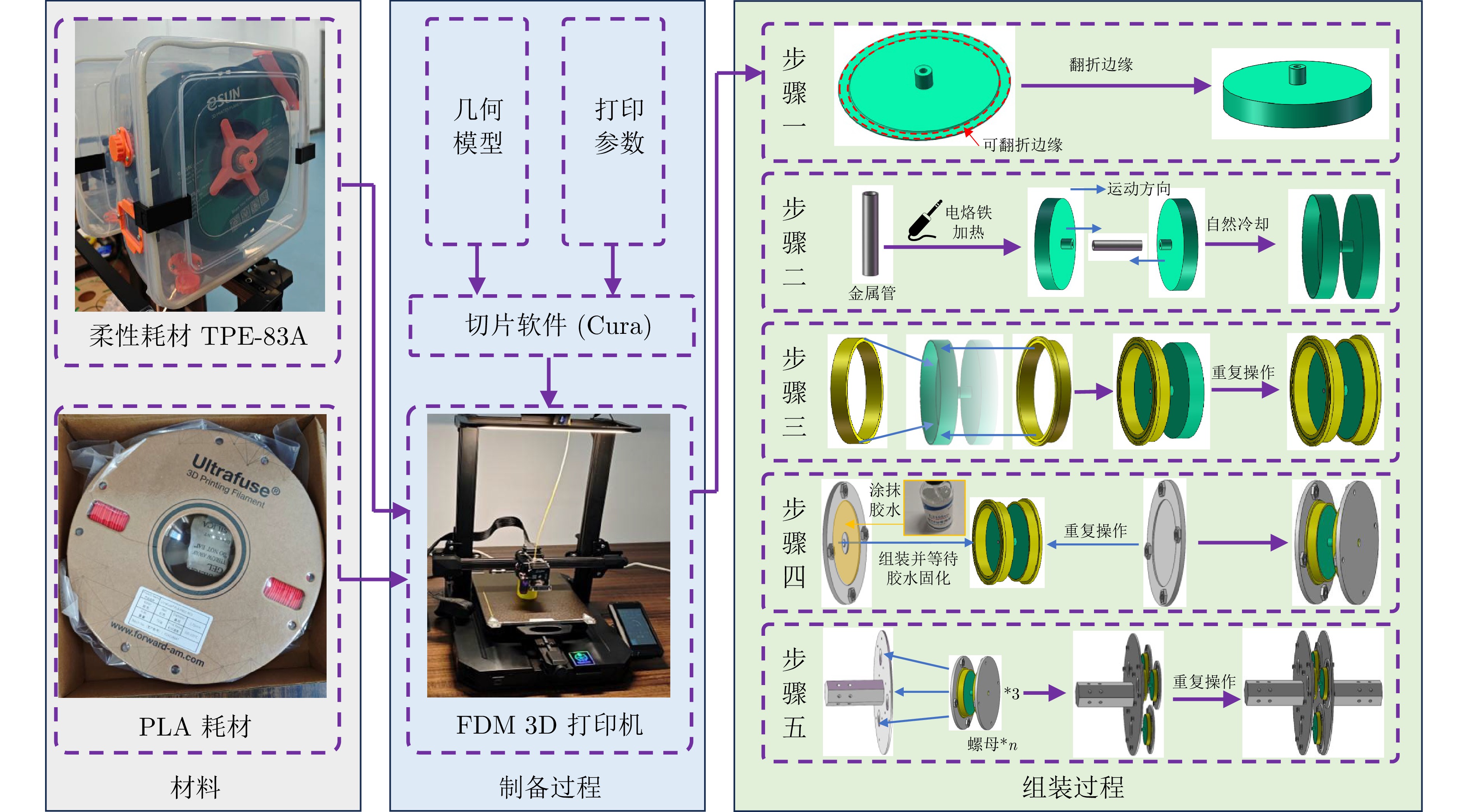
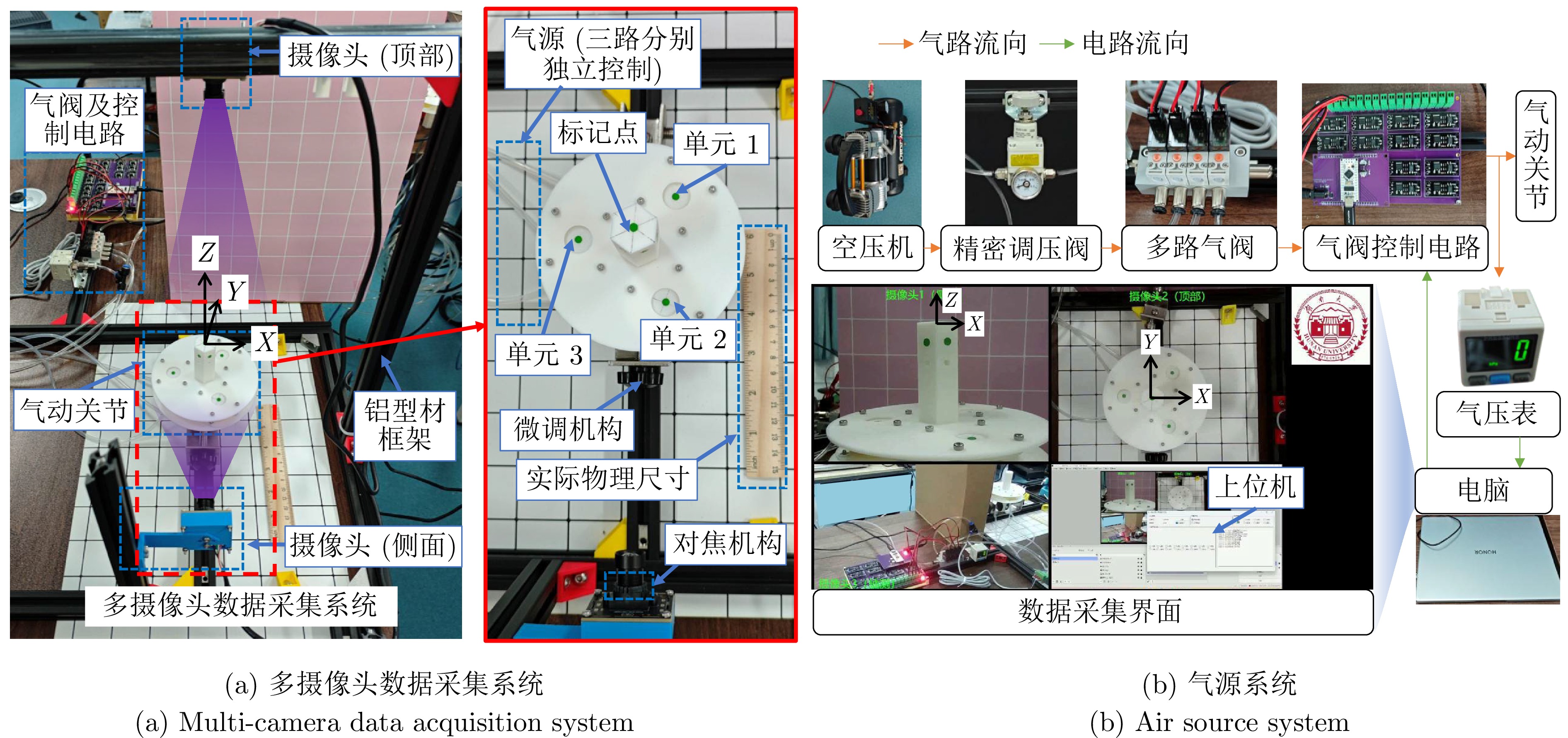
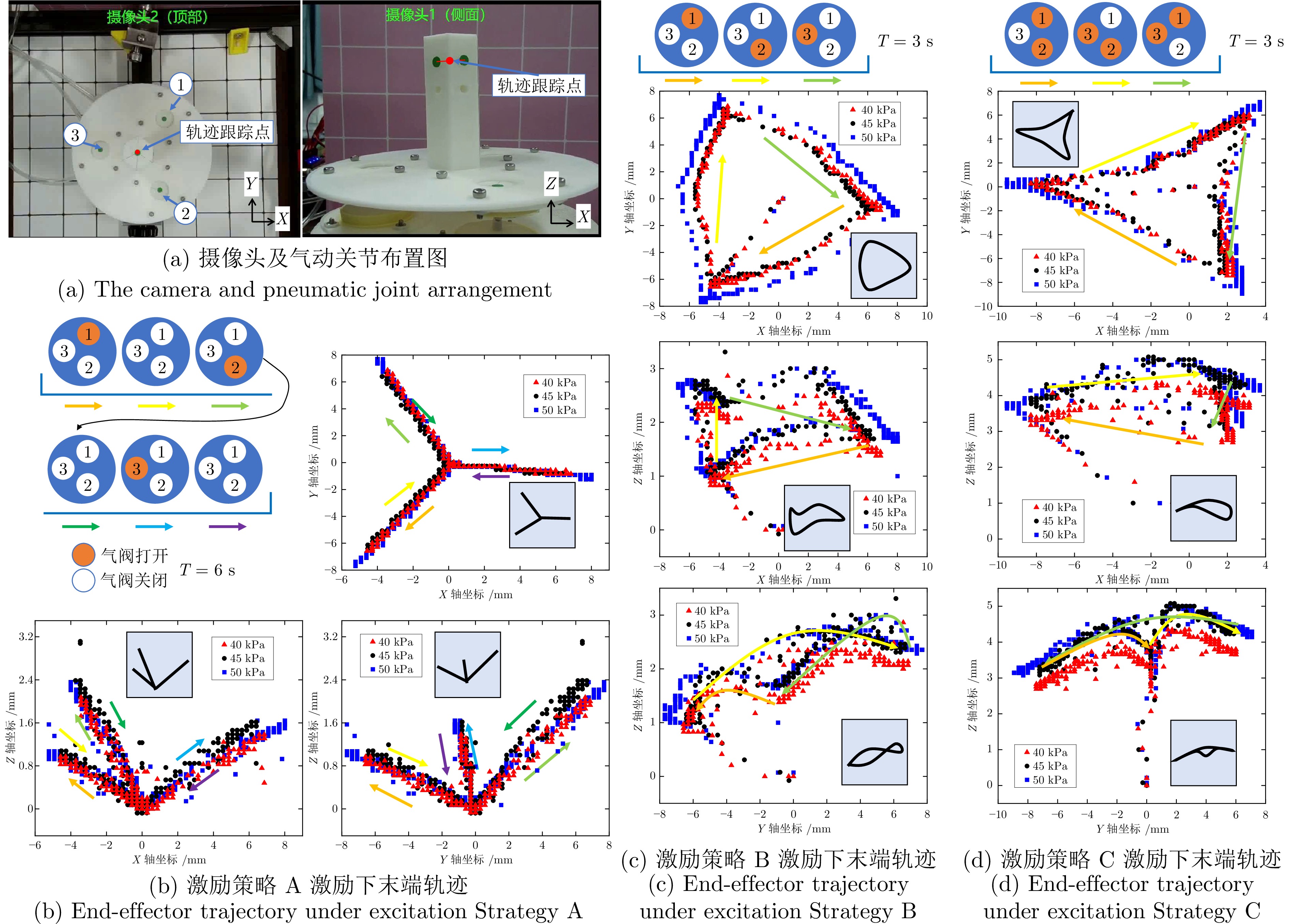
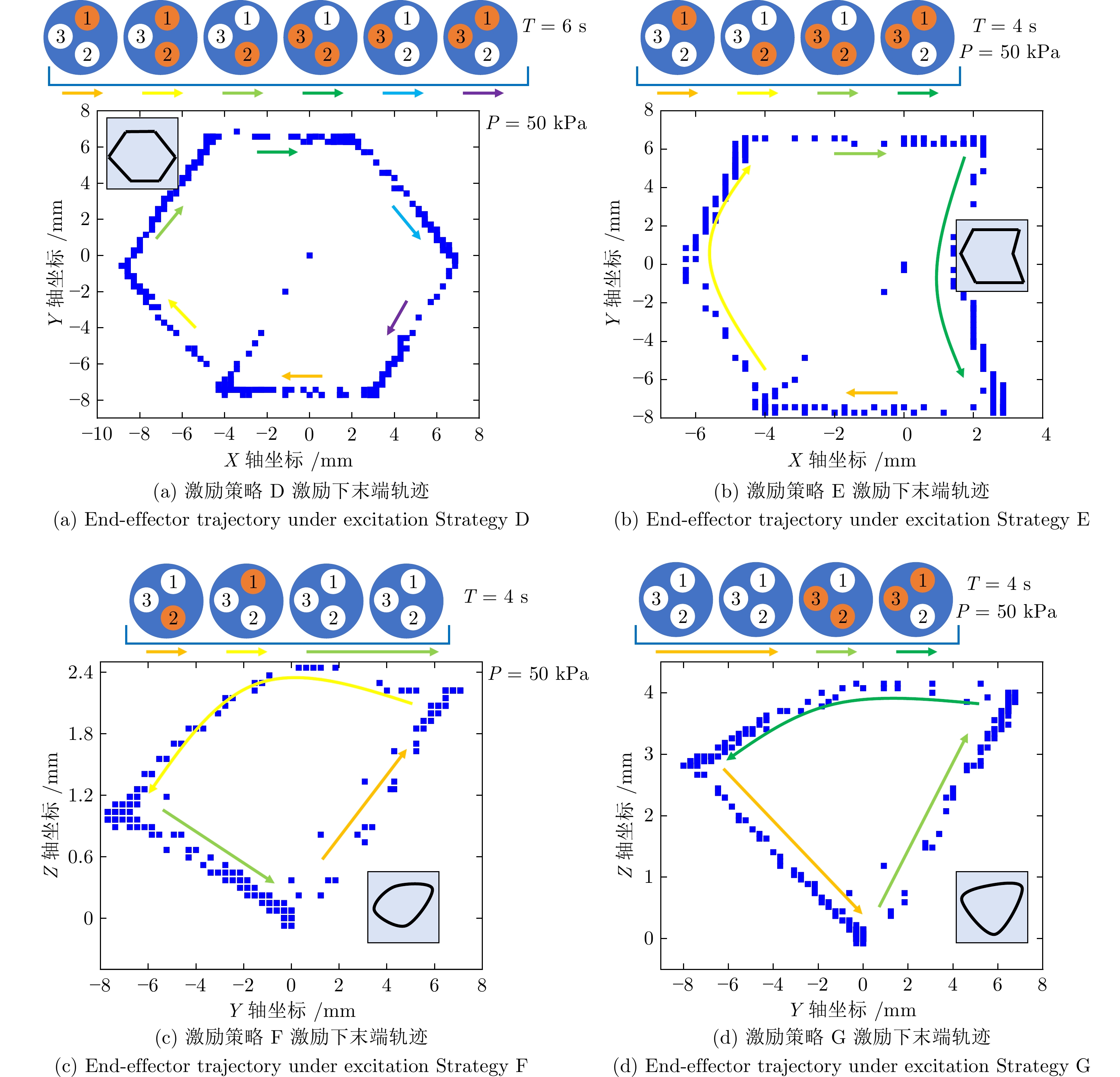
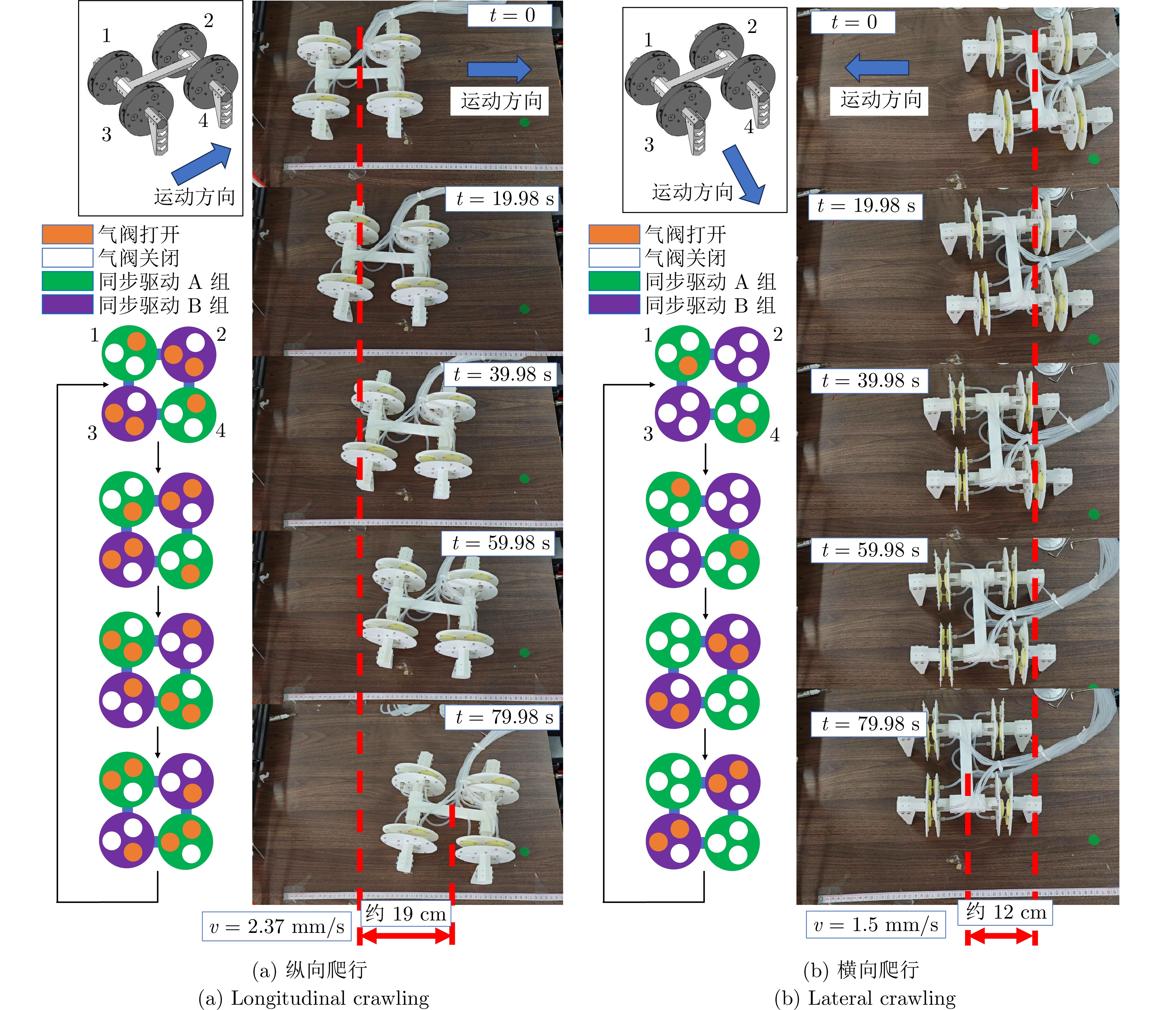
仿生关节结构和多模式爬行机器人对复杂环境下的柔顺运动具有重要意义. 针对现有爬行机器人运动模式单一的问题, 首先设计一种受章鱼触腕肌肉结构启发的三腔气动关节. 该关节实现模块化设计和三维空间的差异化轨迹运动. 基于该关节提出并研制一种兼具多种运动模式的仿生爬行机器人. 通过选择不同的气压激励方式, 机器人在同一平台上实现类似蜥蜴的纵向爬行和类似螃蟹的横向爬行, 分别实现142.54 mm/min和90.02 mm/min的移动速度. 本文围绕关节设计原理、结构实现、制造工艺及机器人集成与运动验证进行系统研究, 为气动关节设计和多模式仿生爬行机器人的开发提供新的技术途径.
仿生关节结构和多模式爬行机器人对复杂环境下的柔顺运动具有重要意义. 针对现有爬行机器人运动模式单一的问题, 首先设计一种受章鱼触腕肌肉结构启发的三腔气动关节. 该关节实现模块化设计和三维空间的差异化轨迹运动. 基于该关节提出并研制一种兼具多种运动模式的仿生爬行机器人. 通过选择不同的气压激励方式, 机器人在同一平台上实现类似蜥蜴的纵向爬行和类似螃蟹的横向爬行, 分别实现142.54 mm/min和90.02 mm/min的移动速度. 本文围绕关节设计原理、结构实现、制造工艺及机器人集成与运动验证进行系统研究, 为气动关节设计和多模式仿生爬行机器人的开发提供新的技术途径.

2026, 52(5): 1058-1068.
doi: 10.16383/j.aas.c250526
cstr: 32138.14.j.aas.c250526
摘要:
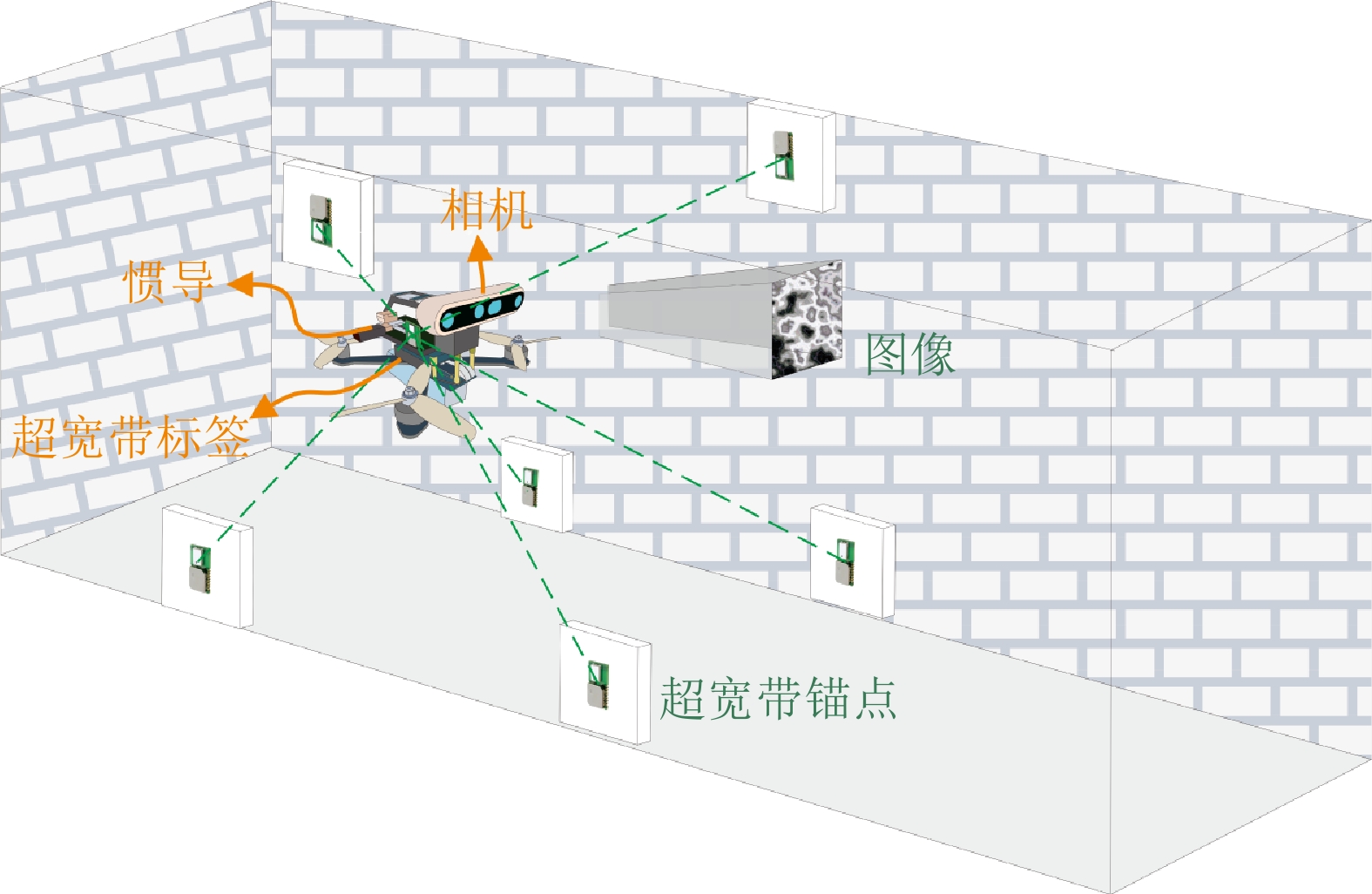
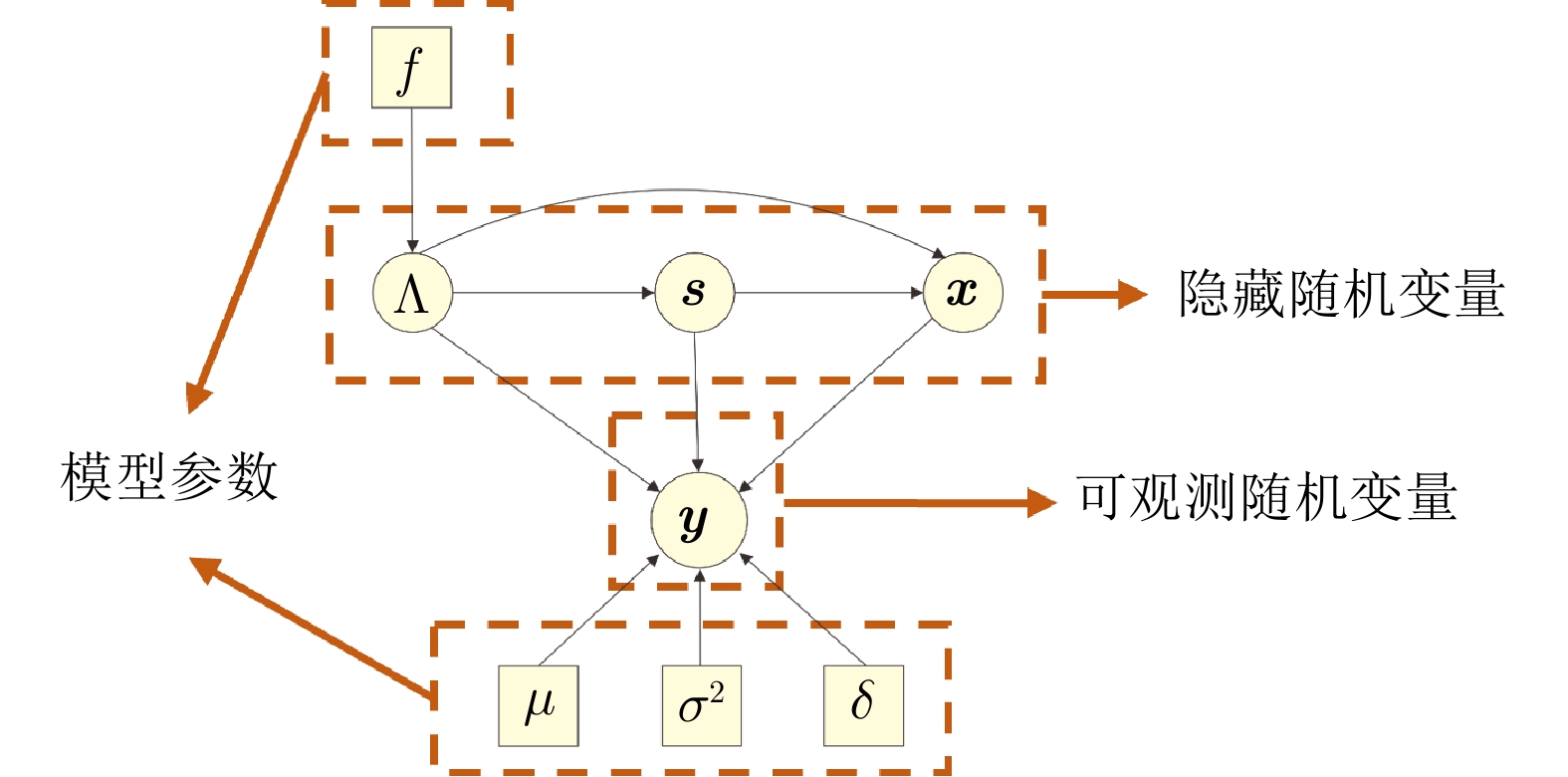
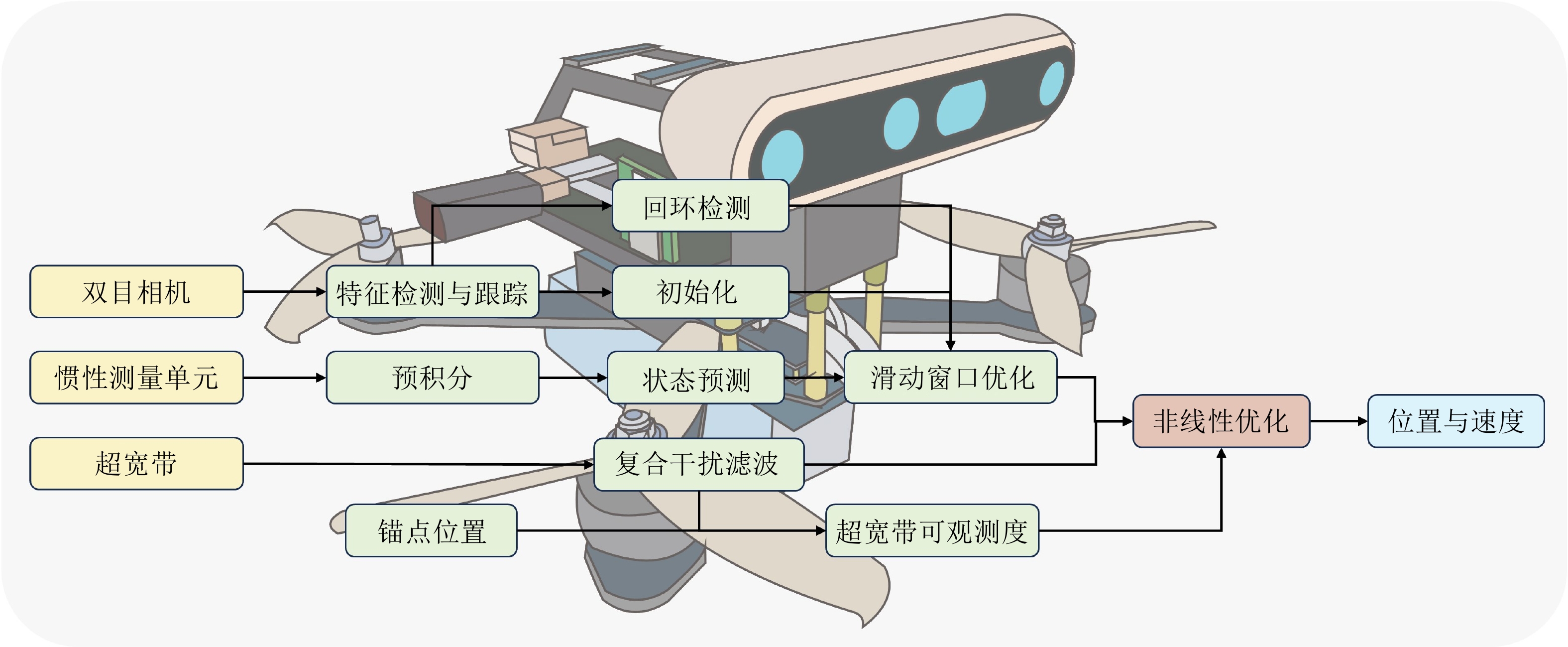
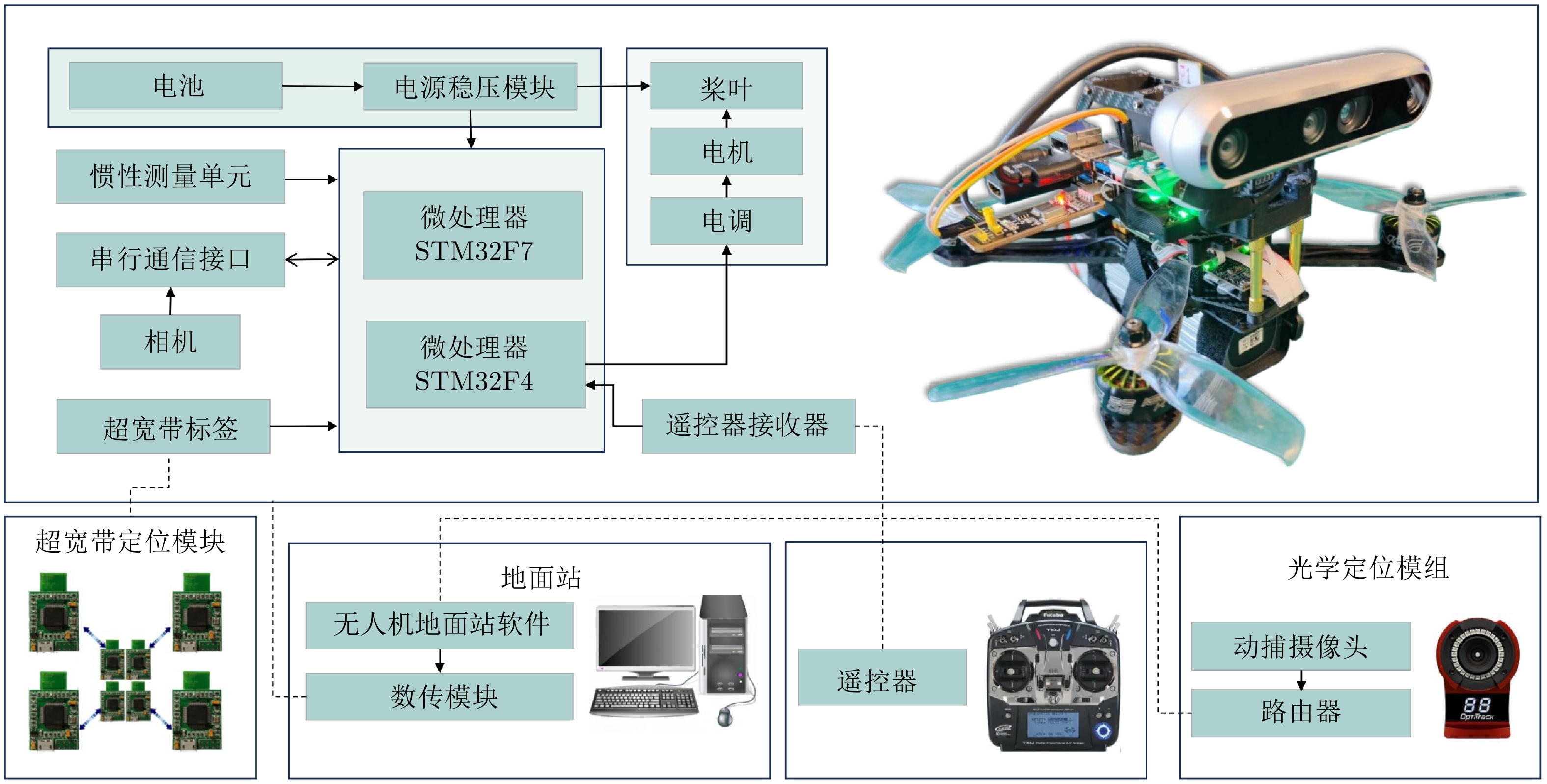
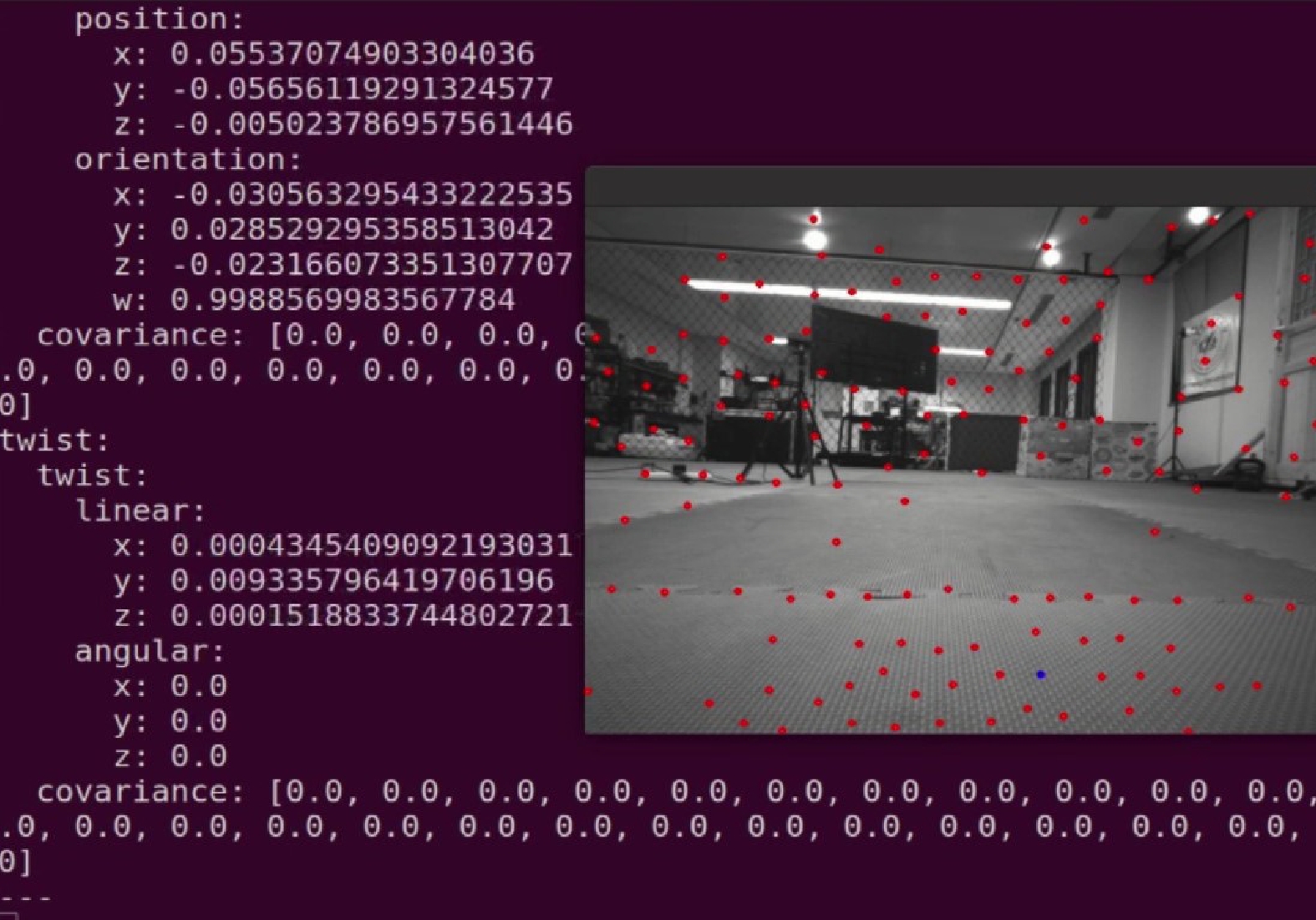
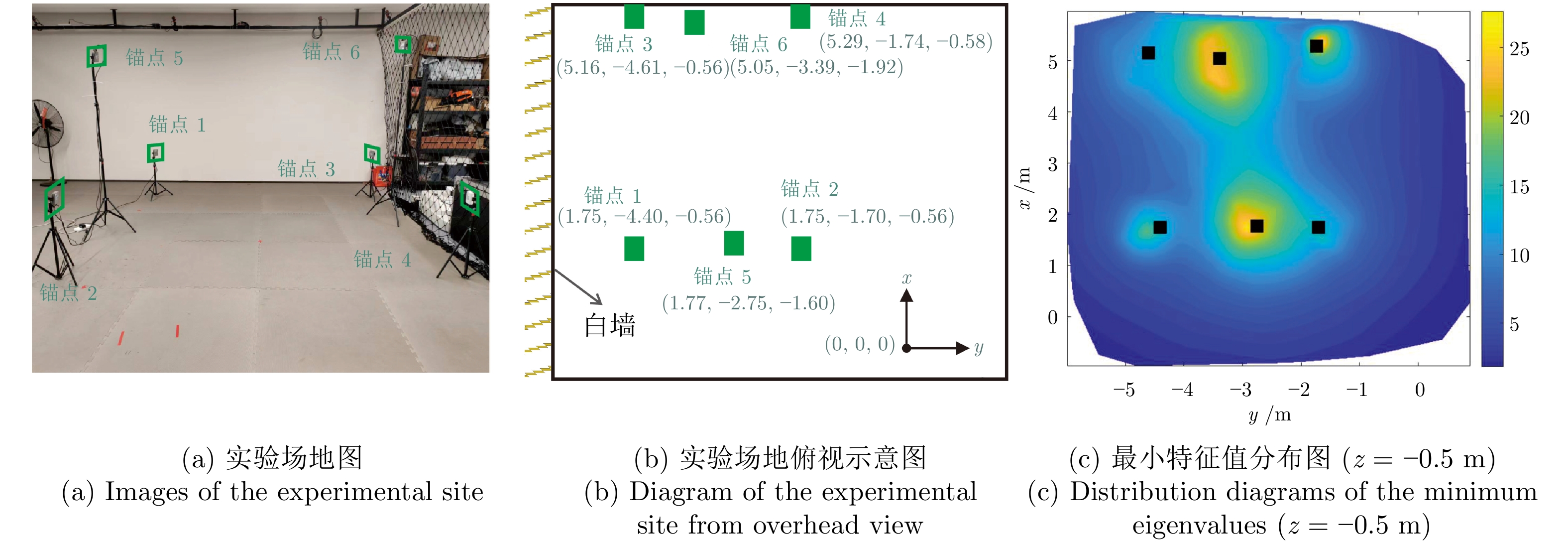
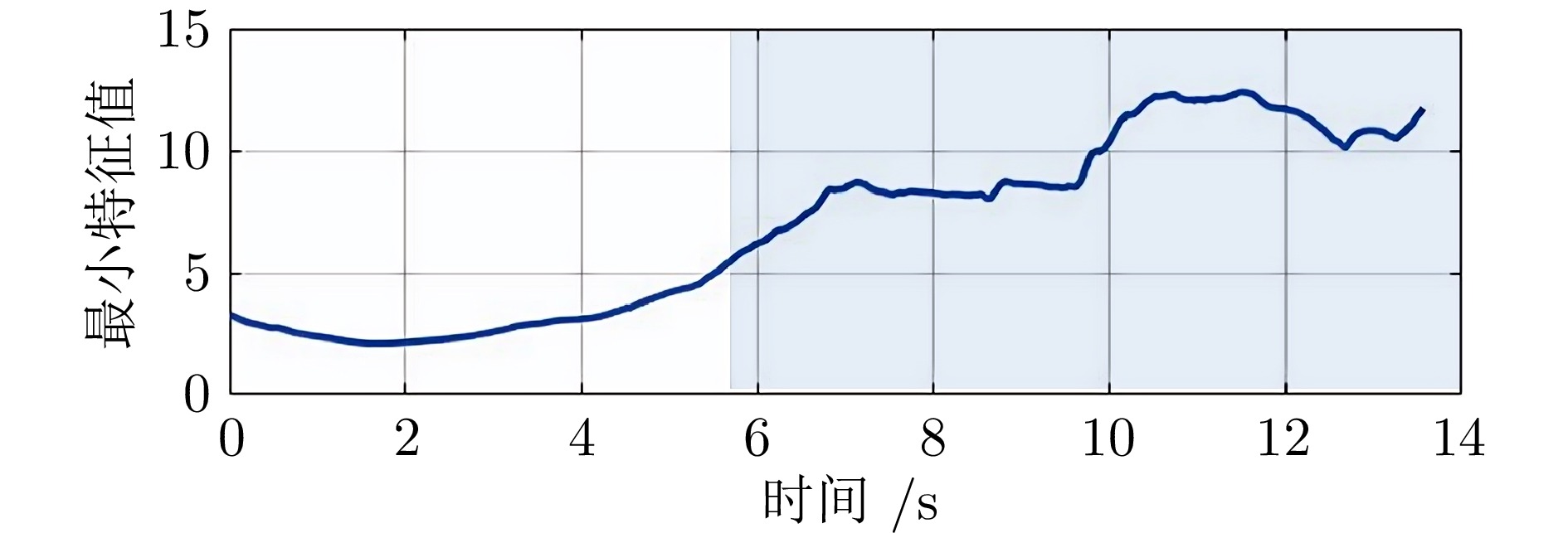
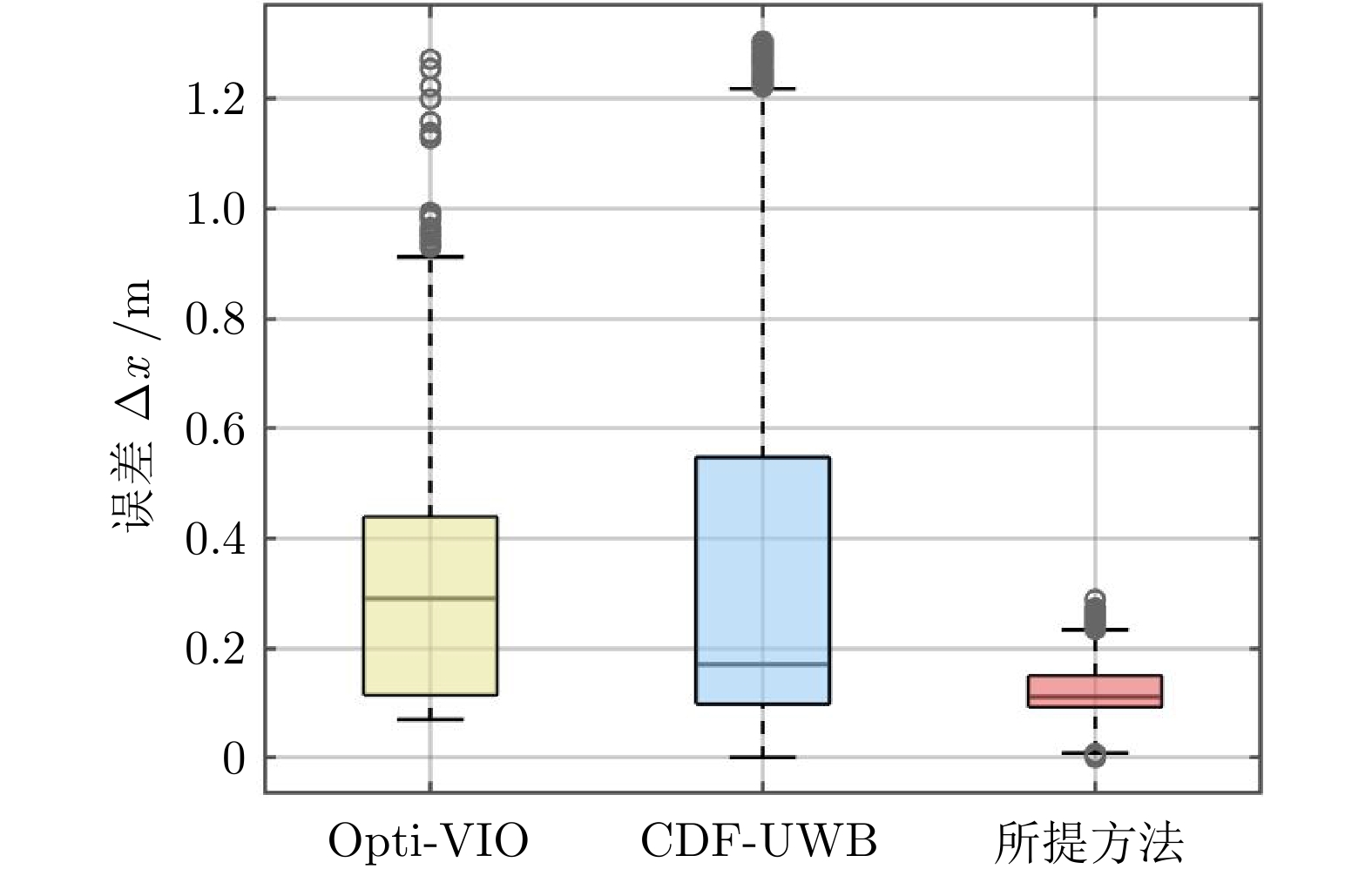
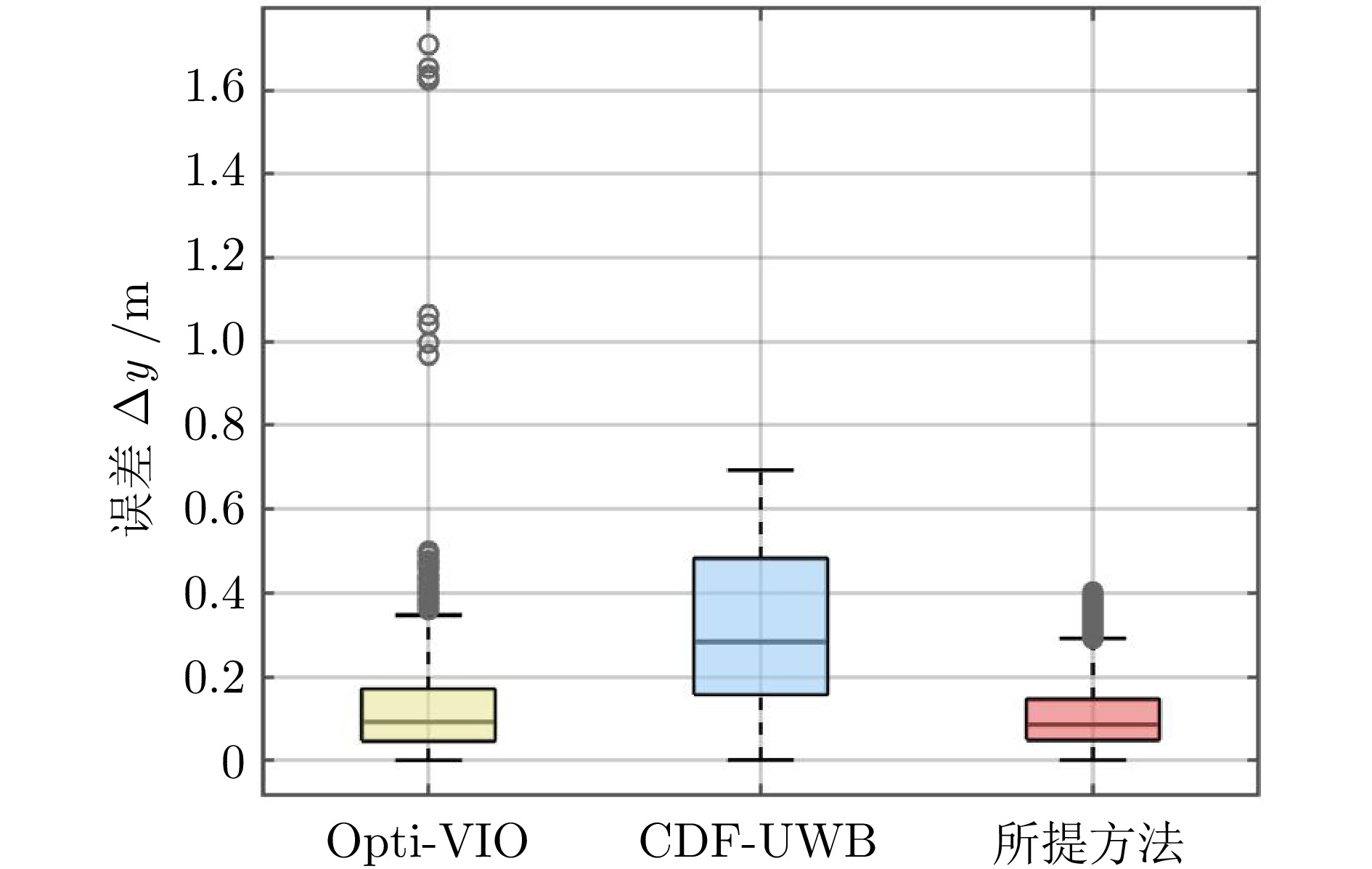
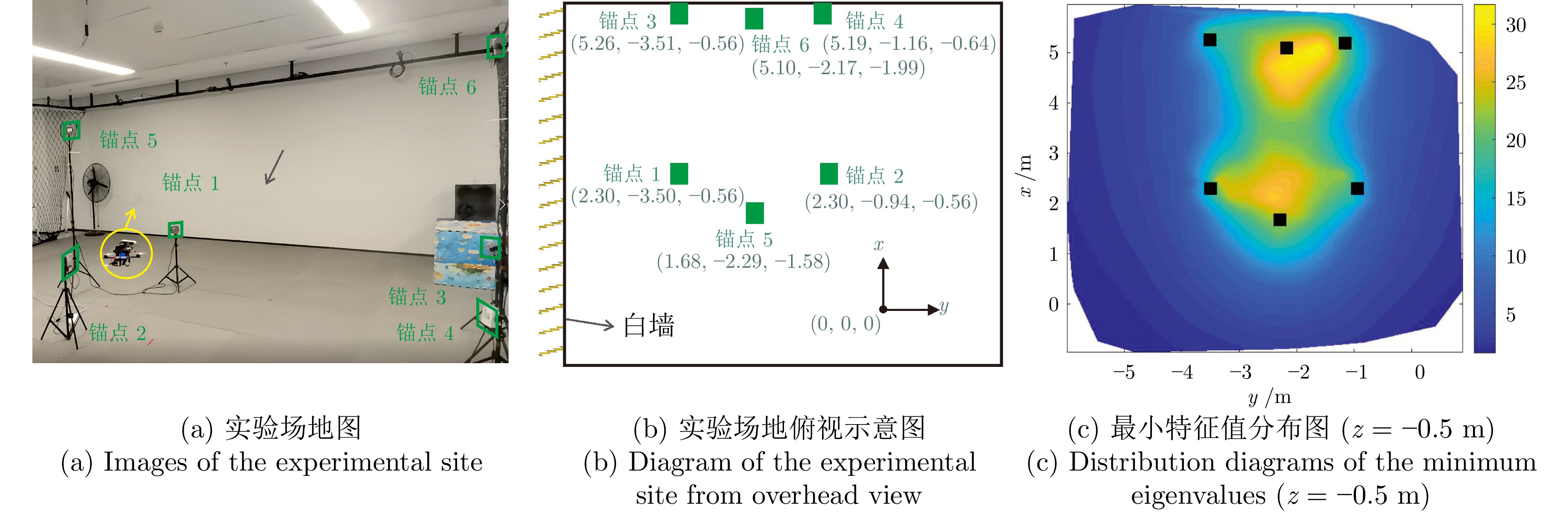
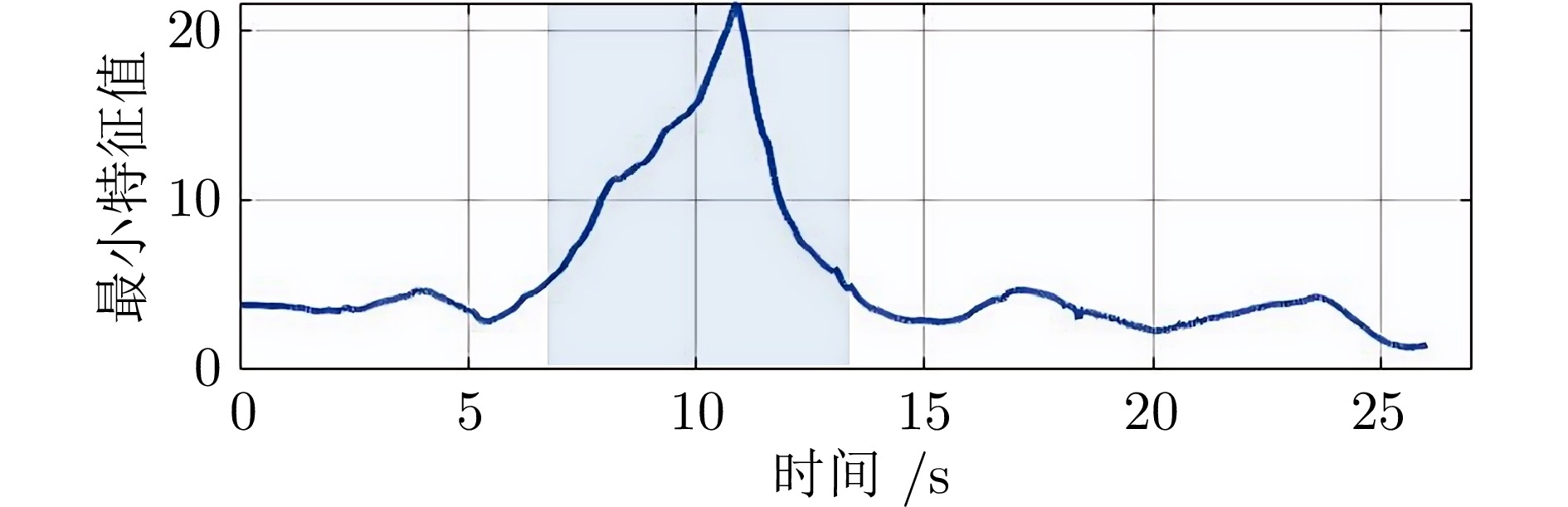
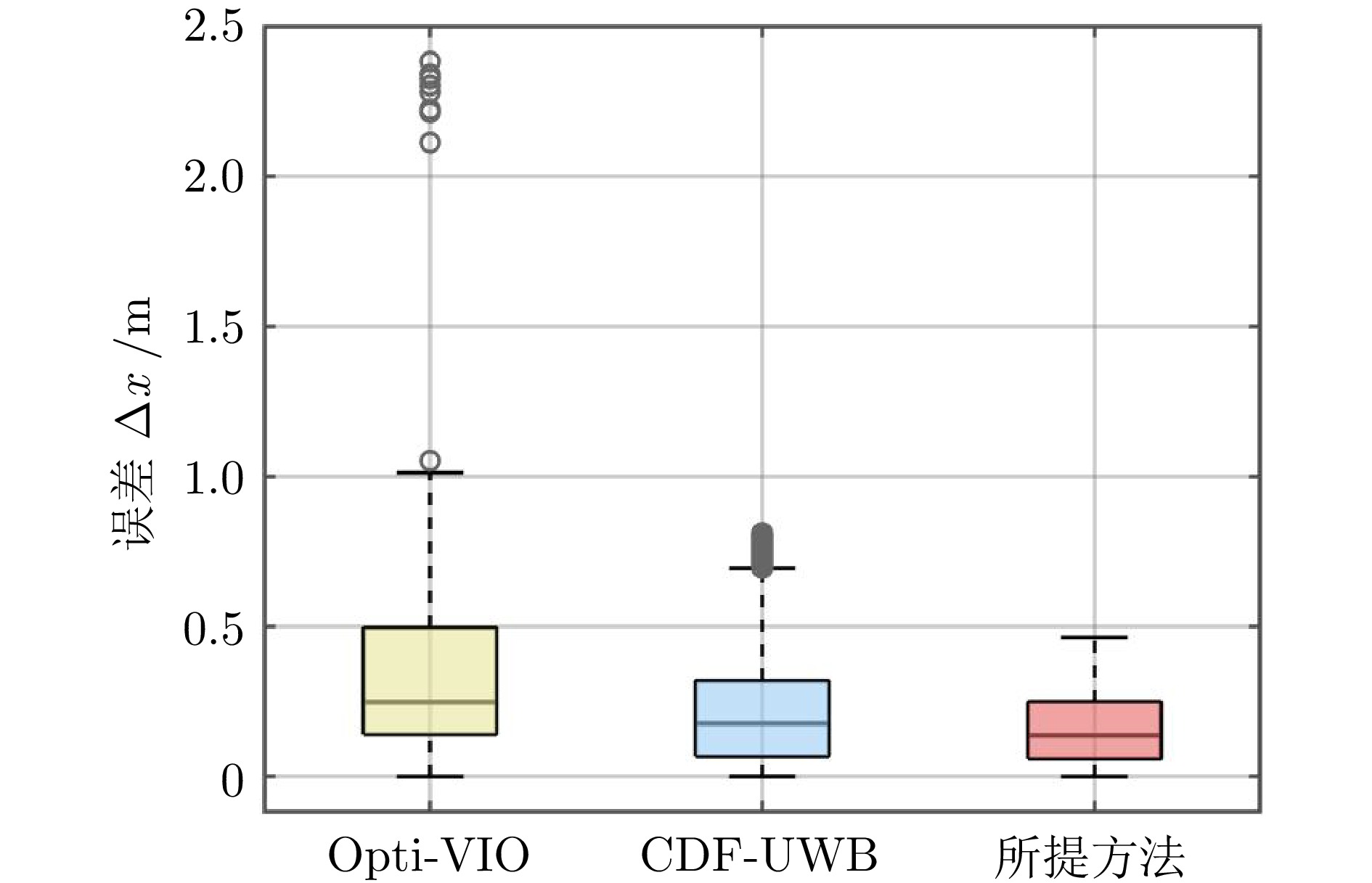
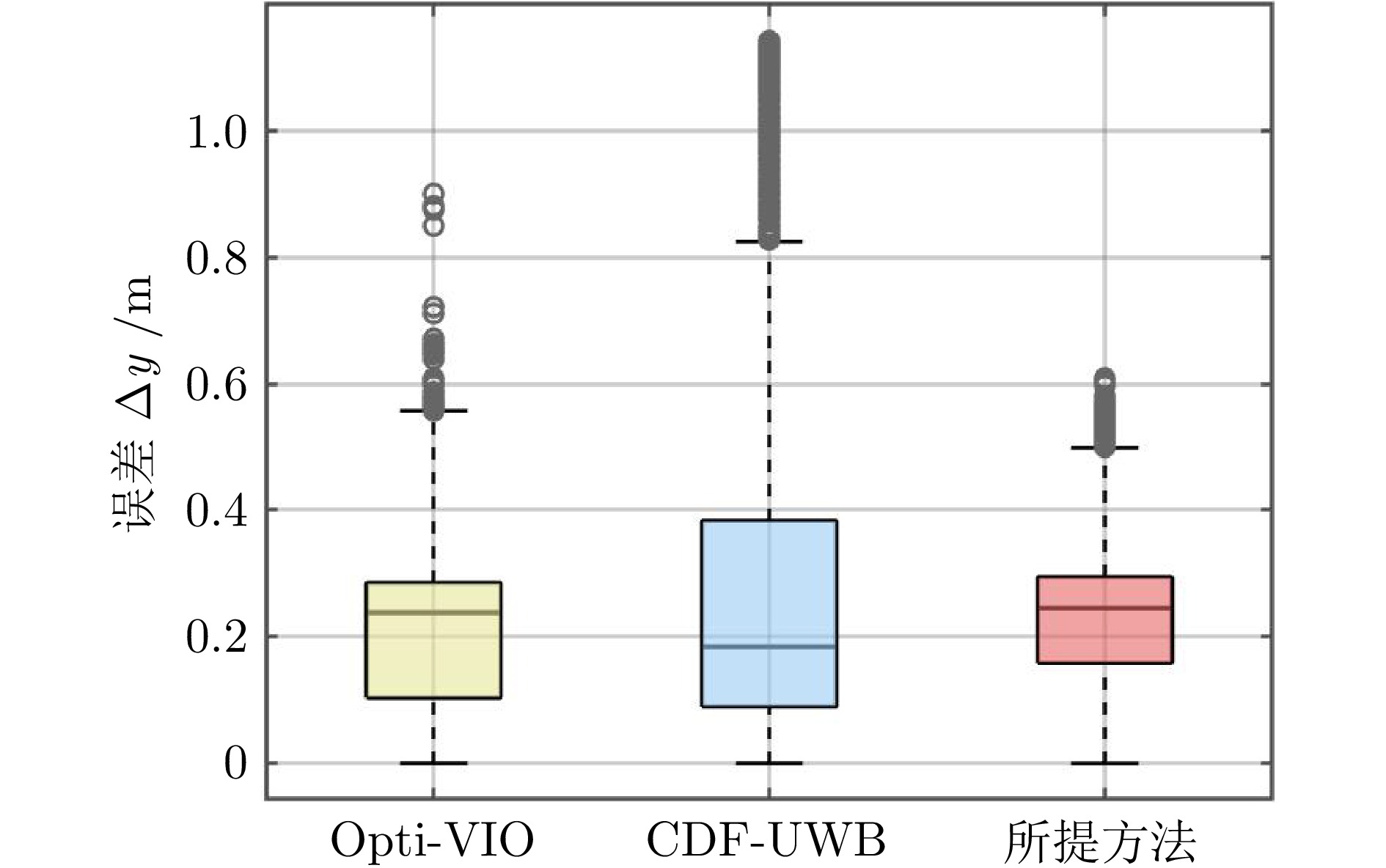
在卫星信号拒止环境中实现无人机的高精度定位是一项关键且具有挑战性的任务. 针对这一难题, 提出一种基于超宽带信息智能决策的无人机自主精确定位方法, 通过超宽带的全局测距校正视觉惯性里程计的累积误差, 从而显著提升定位结果的精确性与鲁棒性. 具体来说, 采用复合干扰滤波方法对超宽带定位中存在的多源异质干扰进行处理; 同时构建超宽带信息评估模块, 对定位结果的可靠性进行量化评估. 实验结果表明, 所提基于超宽带信息智能决策的无人机自主精确定位方法可以有效提高无人机的定位精度.
在卫星信号拒止环境中实现无人机的高精度定位是一项关键且具有挑战性的任务. 针对这一难题, 提出一种基于超宽带信息智能决策的无人机自主精确定位方法, 通过超宽带的全局测距校正视觉惯性里程计的累积误差, 从而显著提升定位结果的精确性与鲁棒性. 具体来说, 采用复合干扰滤波方法对超宽带定位中存在的多源异质干扰进行处理; 同时构建超宽带信息评估模块, 对定位结果的可靠性进行量化评估. 实验结果表明, 所提基于超宽带信息智能决策的无人机自主精确定位方法可以有效提高无人机的定位精度.
2026, 52(5): 1069-1082.
doi: 10.16383/j.aas.c250691
cstr: 32138.14.j.aas.c250691
摘要:
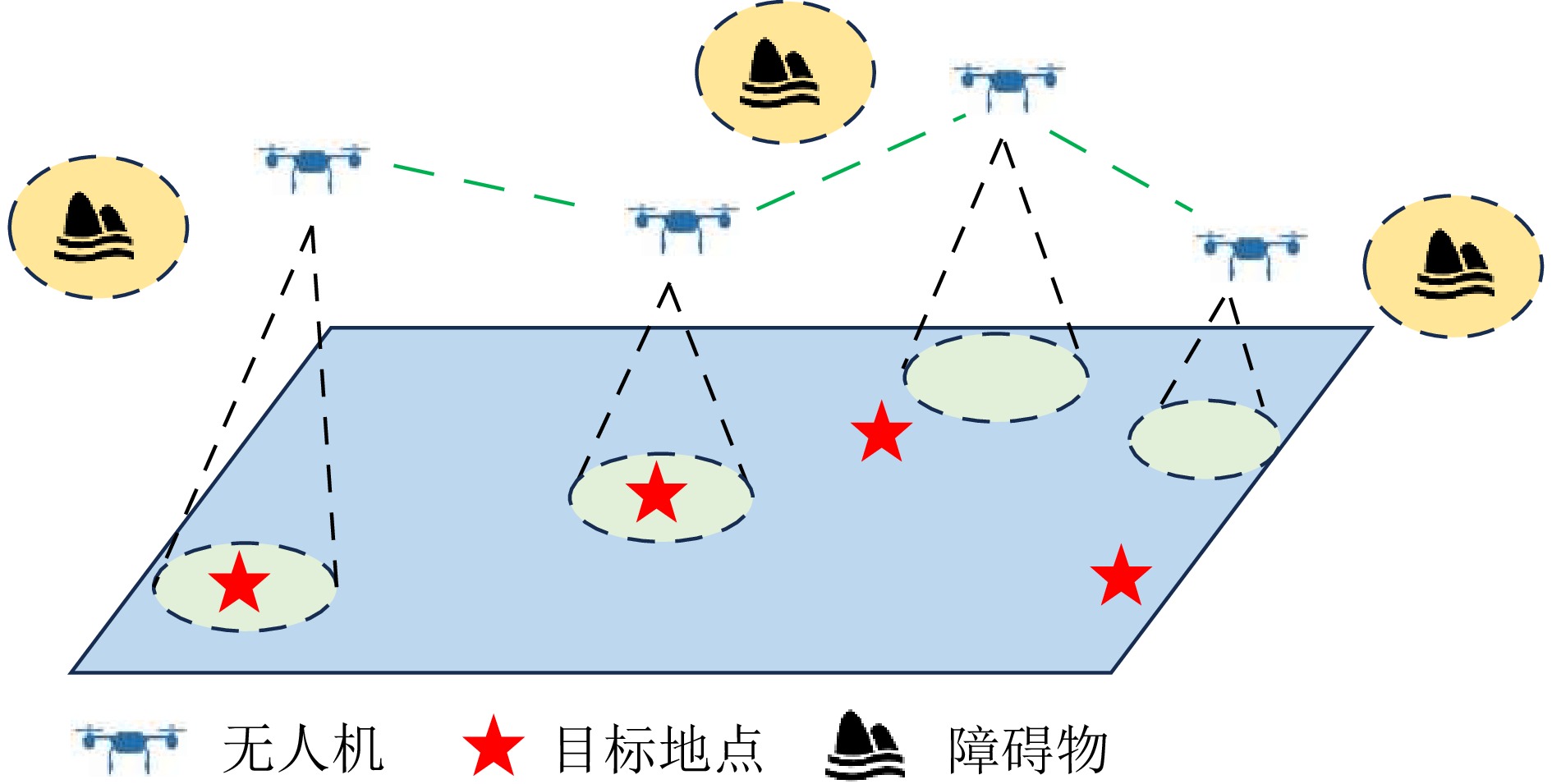
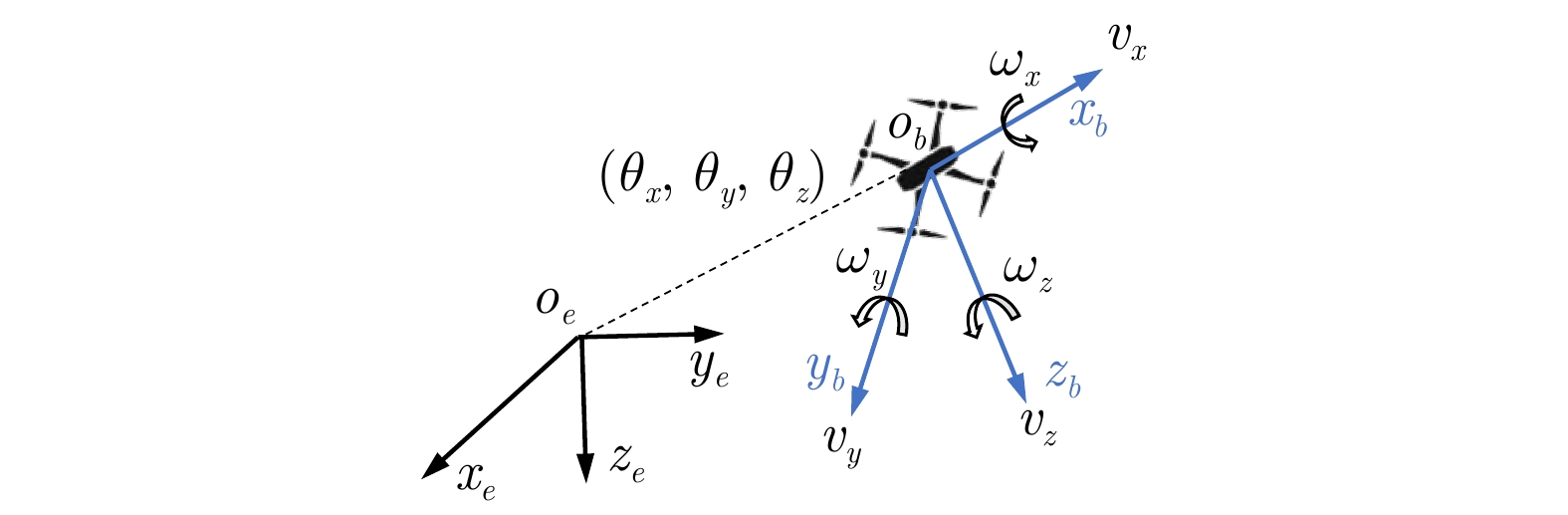
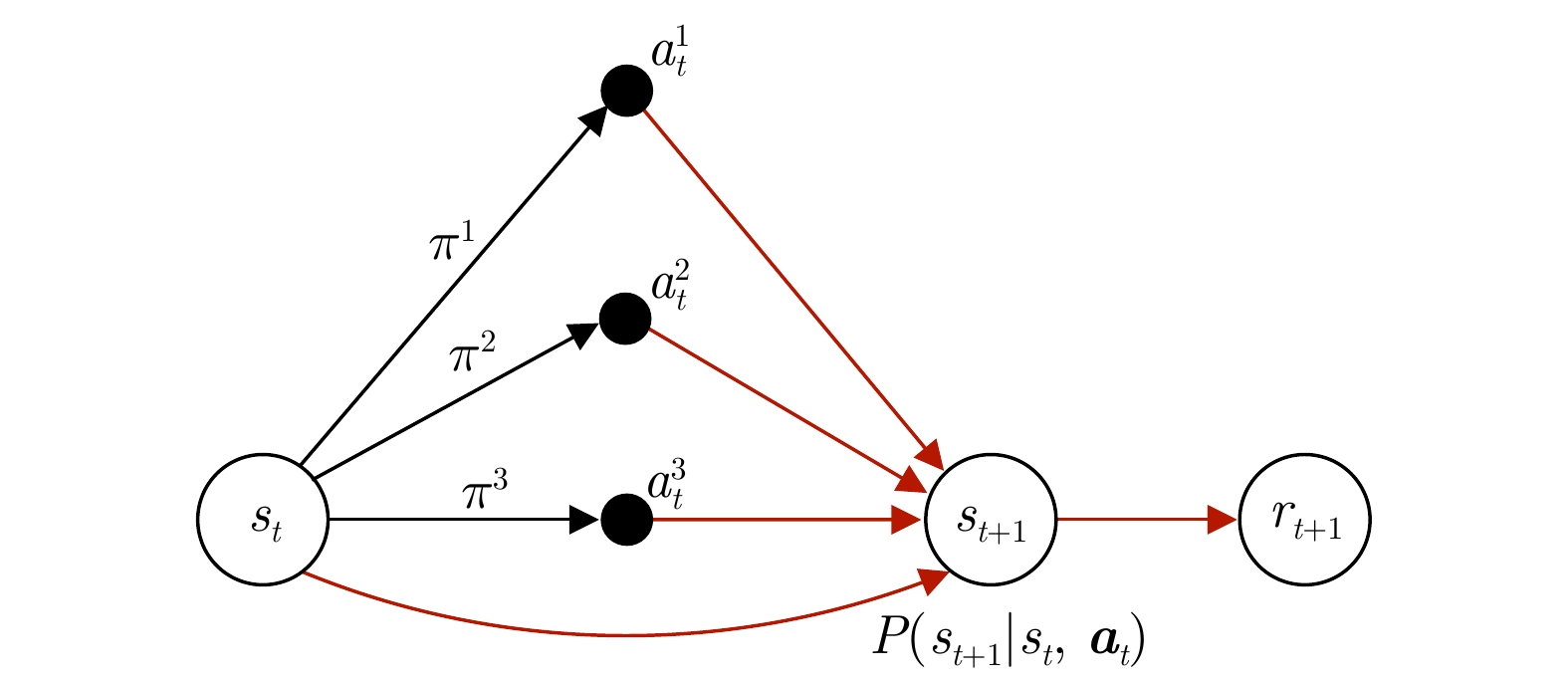
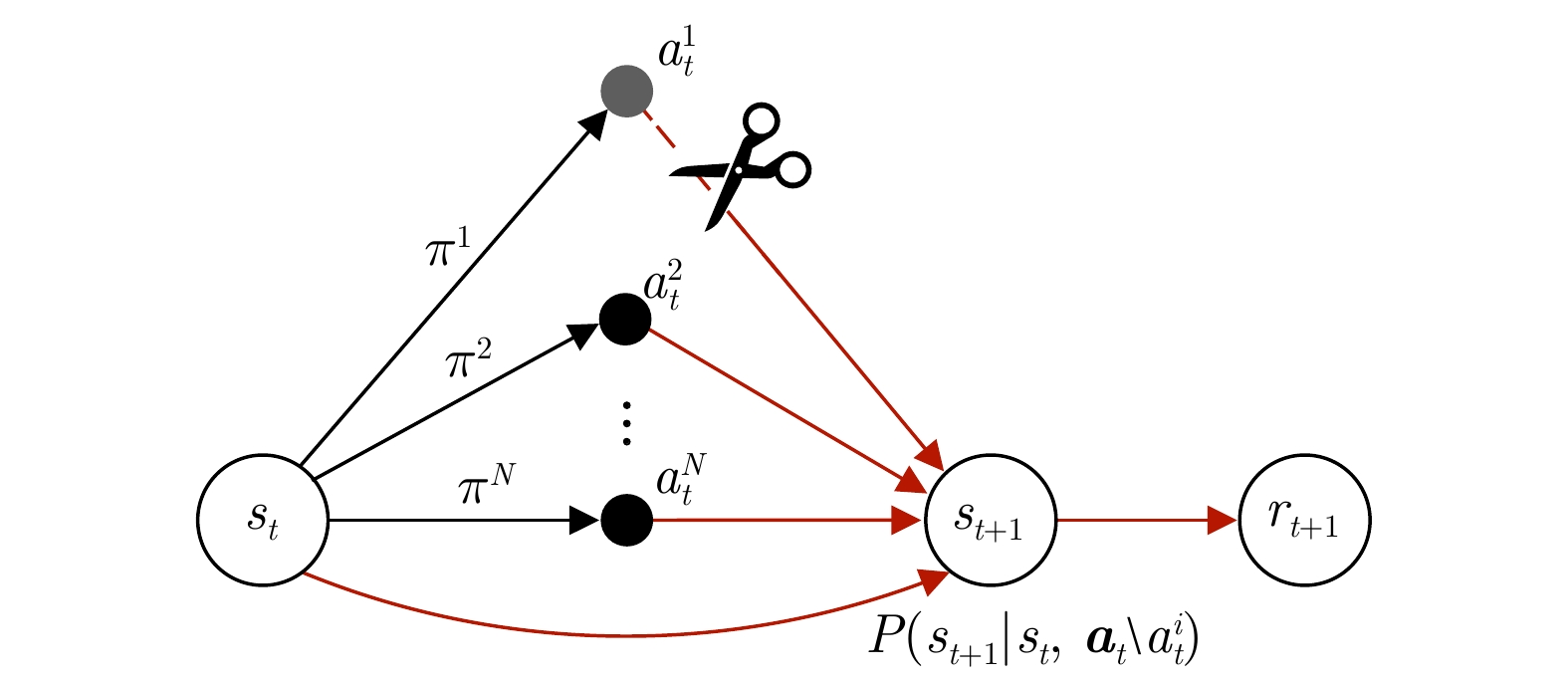
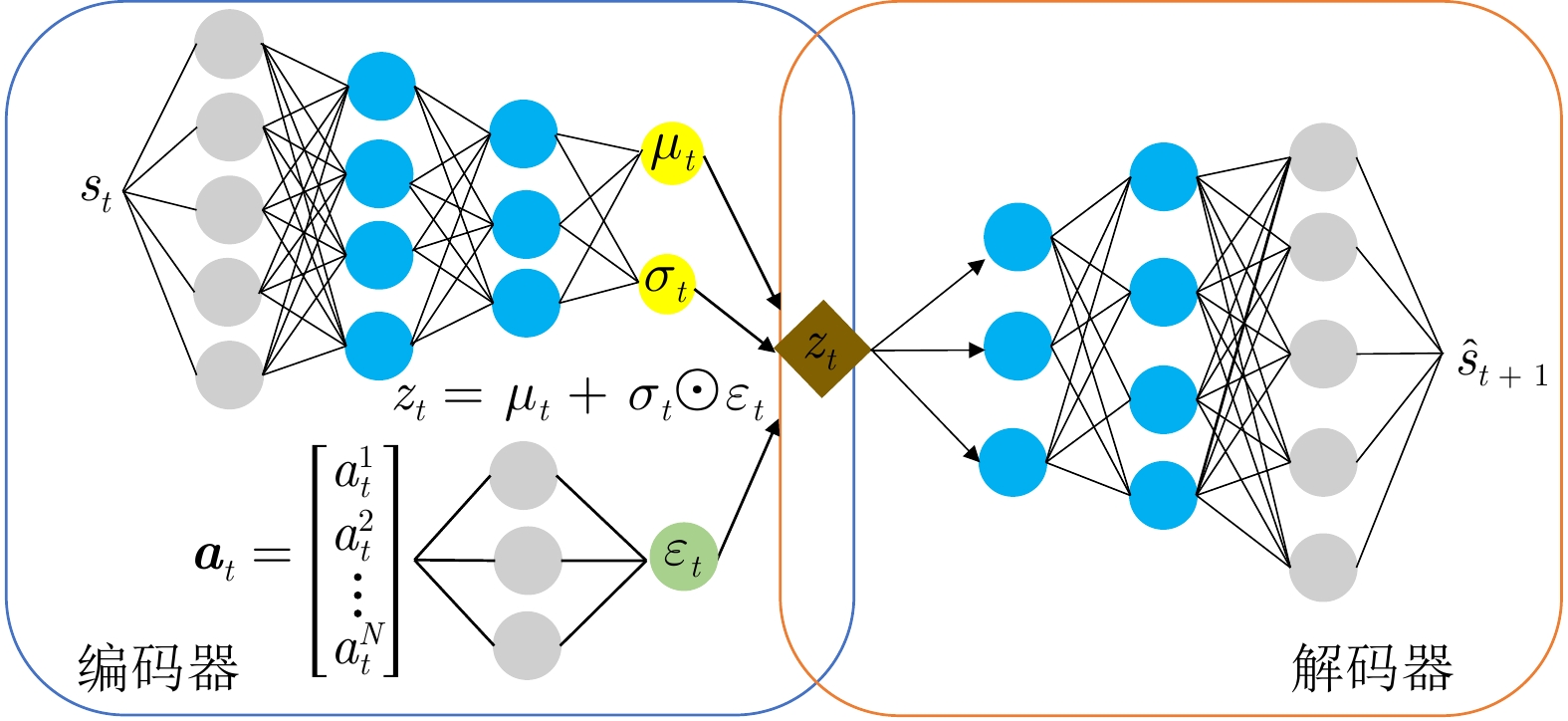
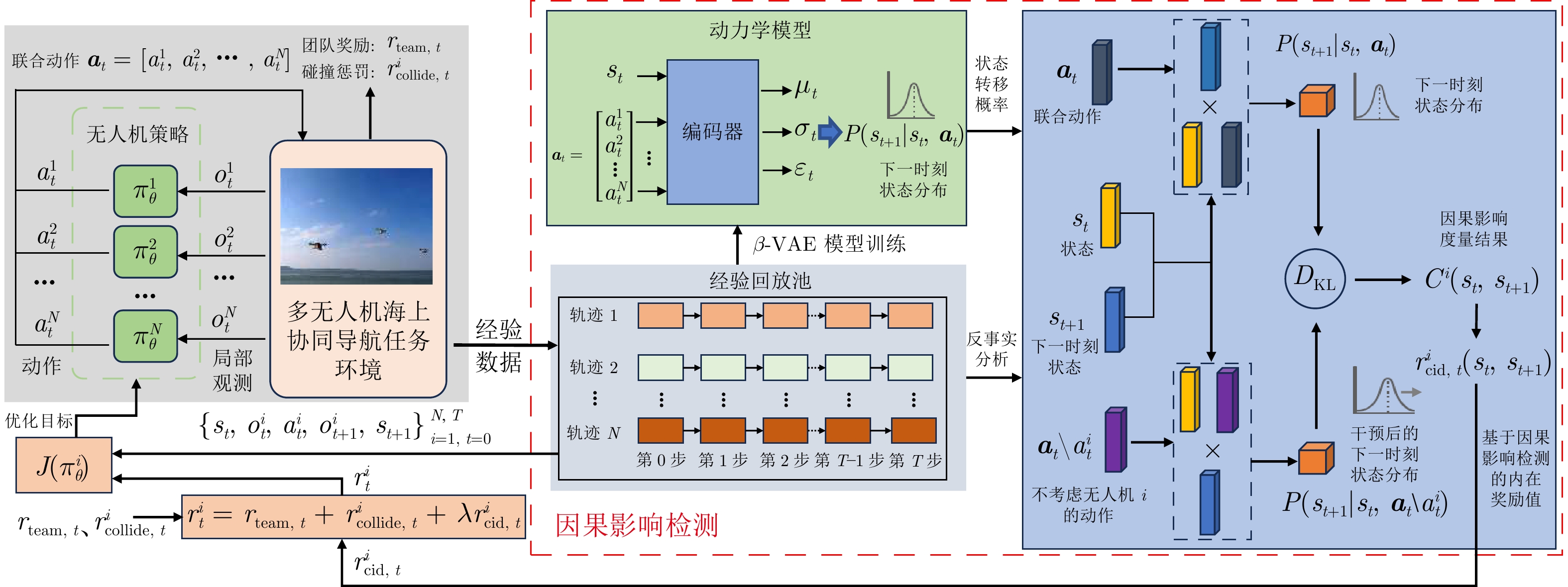
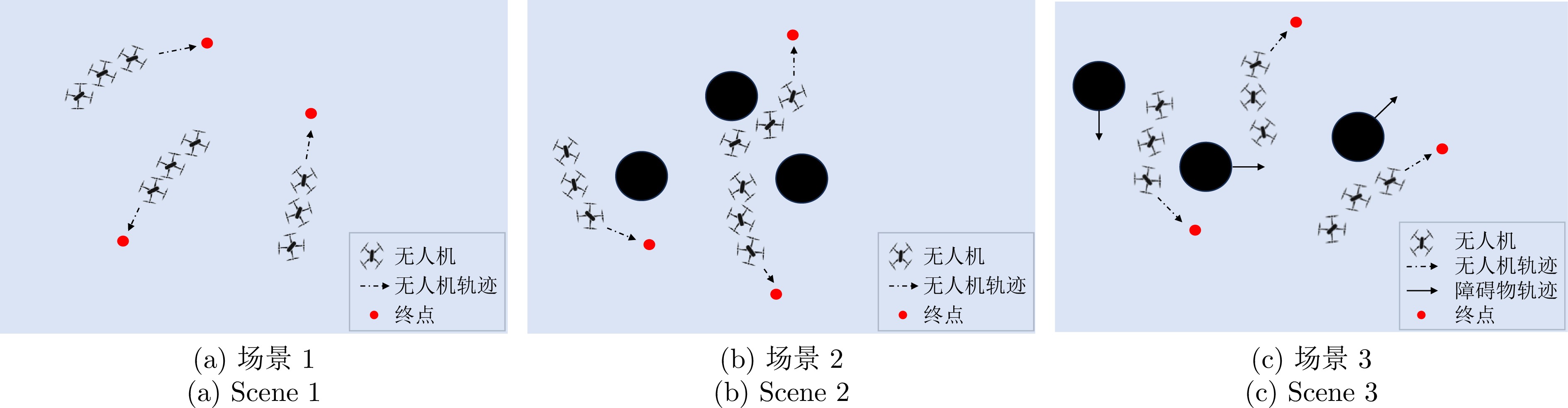
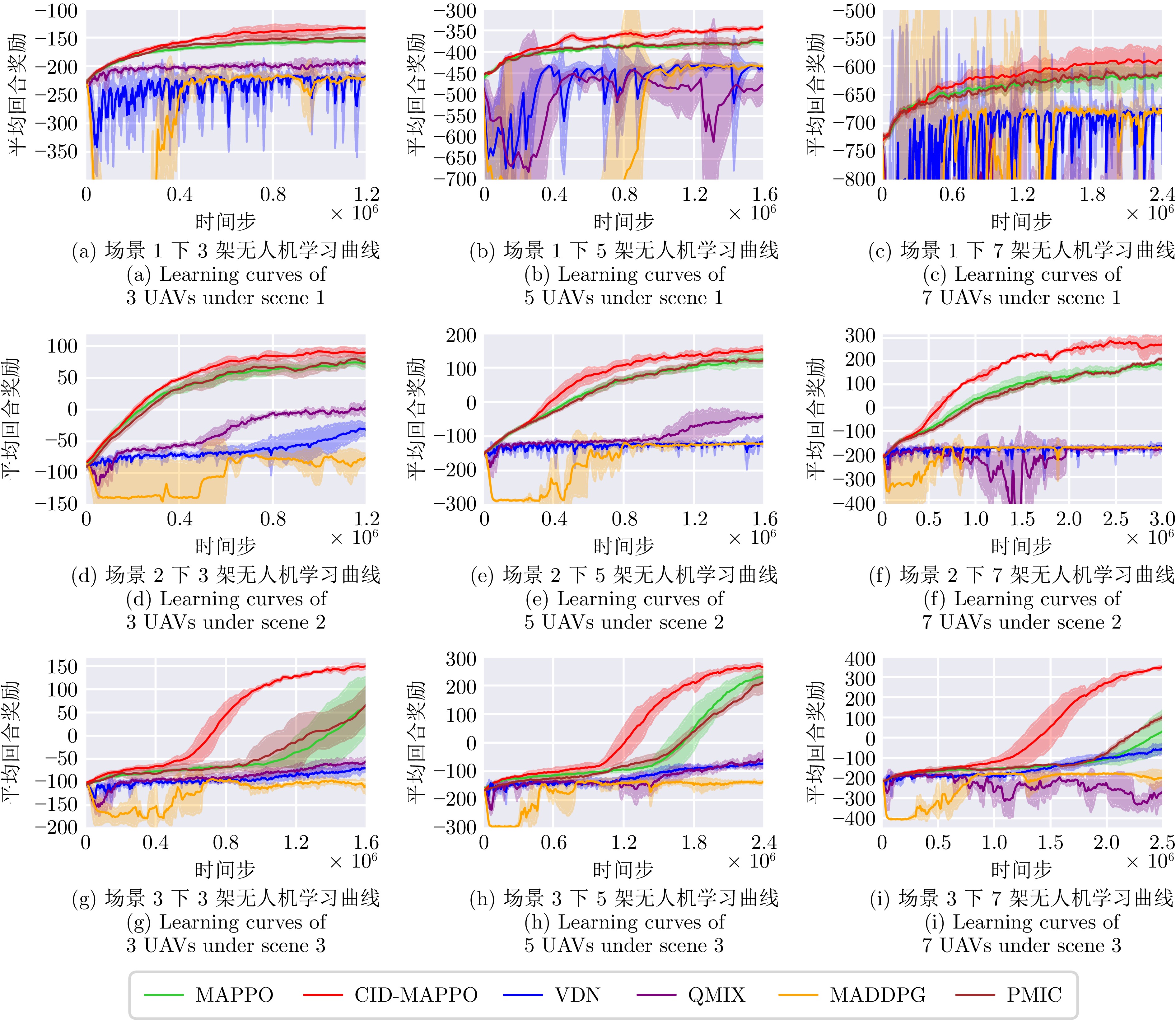
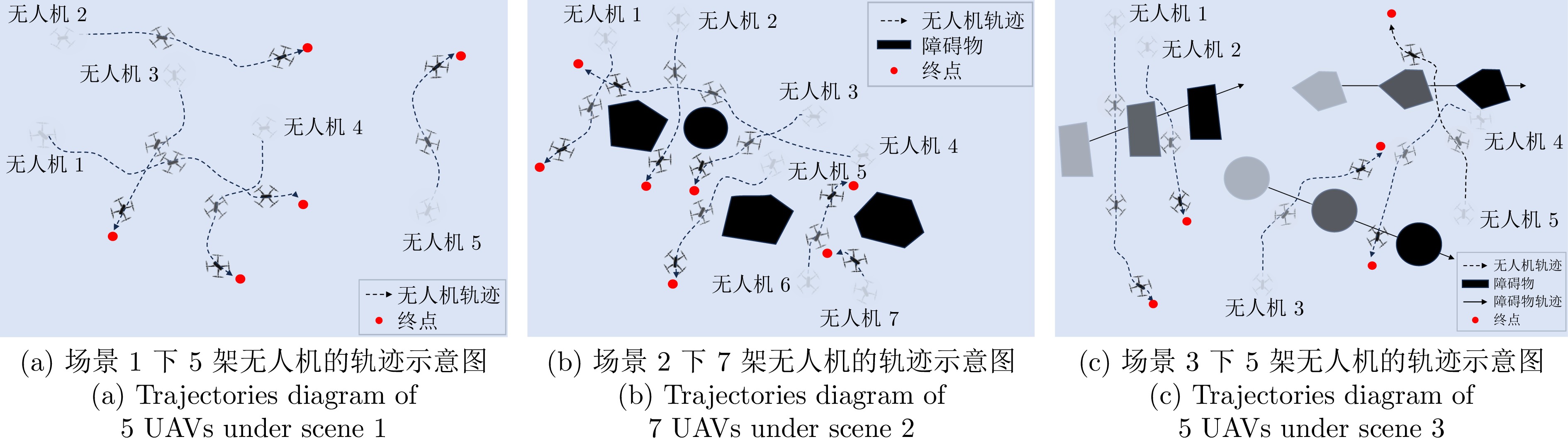
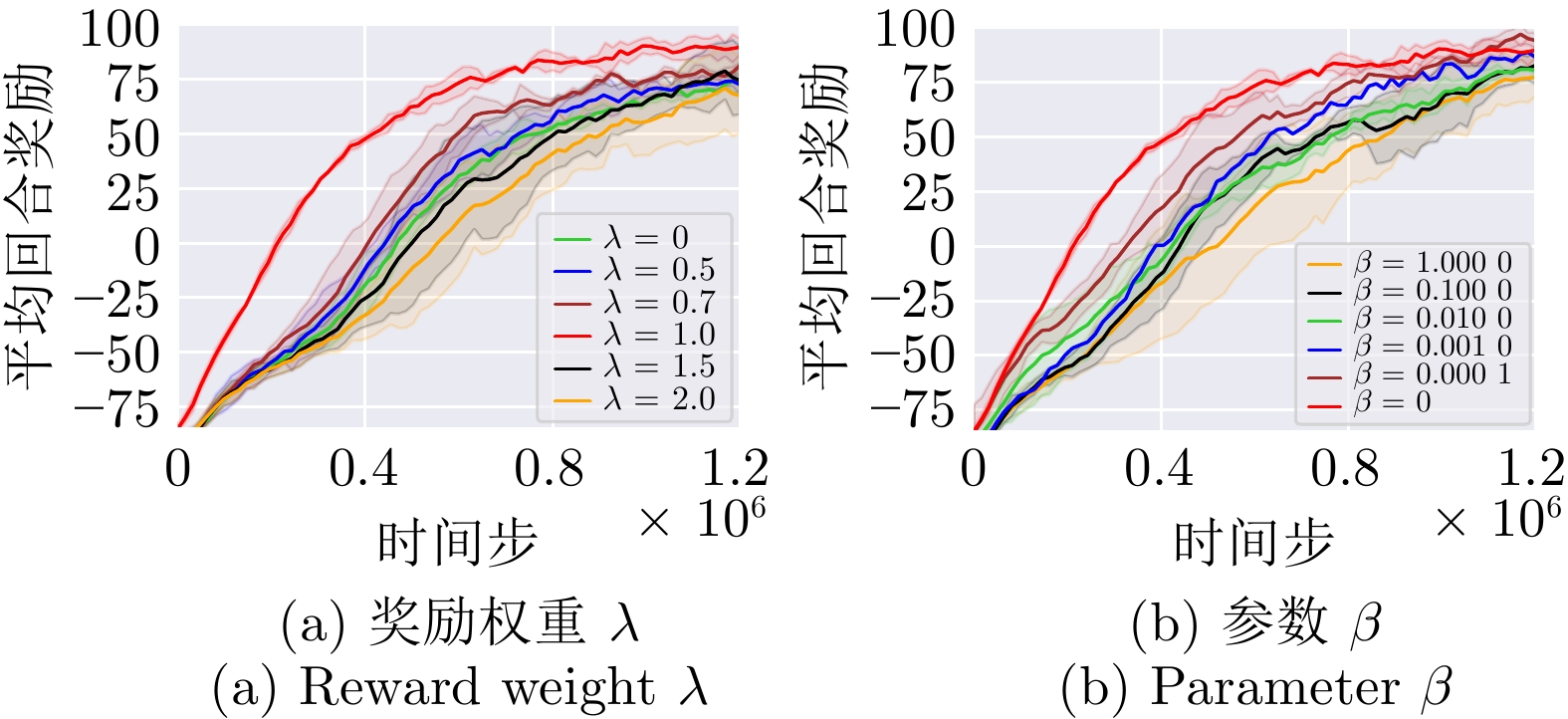
多无人机协同导航是实现高效海上协同作业的重要技术. 然而, 在广阔且动态未知的海域中, 受限的感知能力与自主决策机制使无人机之间的协作关系复杂, 难以获取全局信息. 近年来, 基于集中训练与分散执行范式的多智能体强化学习在协作行为学习方面取得显著进展, 并被广泛应用于海上协同导航任务. 但由于智能体交互往往仅在特定情境下发生, 如何有效提升协作效率与探索能力仍是关键挑战. 为解决上述问题, 提出一种基于因果影响检测的多智能体近端策略优化方法. 该方法以智能体之间的因果影响为衡量准则, 引入基于协作规则设计的内在奖励机制, 利用因果推断与条件互信息来检测智能体之间在行为上的因果影响, 从而引导其优先探索对全局状态具有正向影响的动作, 强化多智能体间的合作. 实验结果表明, 所提方法表现出显著的性能提升, 尤其在海上搜救任务中展现出更高的协同效率, 验证了方法的有效性.
多无人机协同导航是实现高效海上协同作业的重要技术. 然而, 在广阔且动态未知的海域中, 受限的感知能力与自主决策机制使无人机之间的协作关系复杂, 难以获取全局信息. 近年来, 基于集中训练与分散执行范式的多智能体强化学习在协作行为学习方面取得显著进展, 并被广泛应用于海上协同导航任务. 但由于智能体交互往往仅在特定情境下发生, 如何有效提升协作效率与探索能力仍是关键挑战. 为解决上述问题, 提出一种基于因果影响检测的多智能体近端策略优化方法. 该方法以智能体之间的因果影响为衡量准则, 引入基于协作规则设计的内在奖励机制, 利用因果推断与条件互信息来检测智能体之间在行为上的因果影响, 从而引导其优先探索对全局状态具有正向影响的动作, 强化多智能体间的合作. 实验结果表明, 所提方法表现出显著的性能提升, 尤其在海上搜救任务中展现出更高的协同效率, 验证了方法的有效性.
2026, 52(5): 1083-1091.
doi: 10.16383/j.aas.c250510
cstr: 32138.14.j.aas.c250510
摘要:
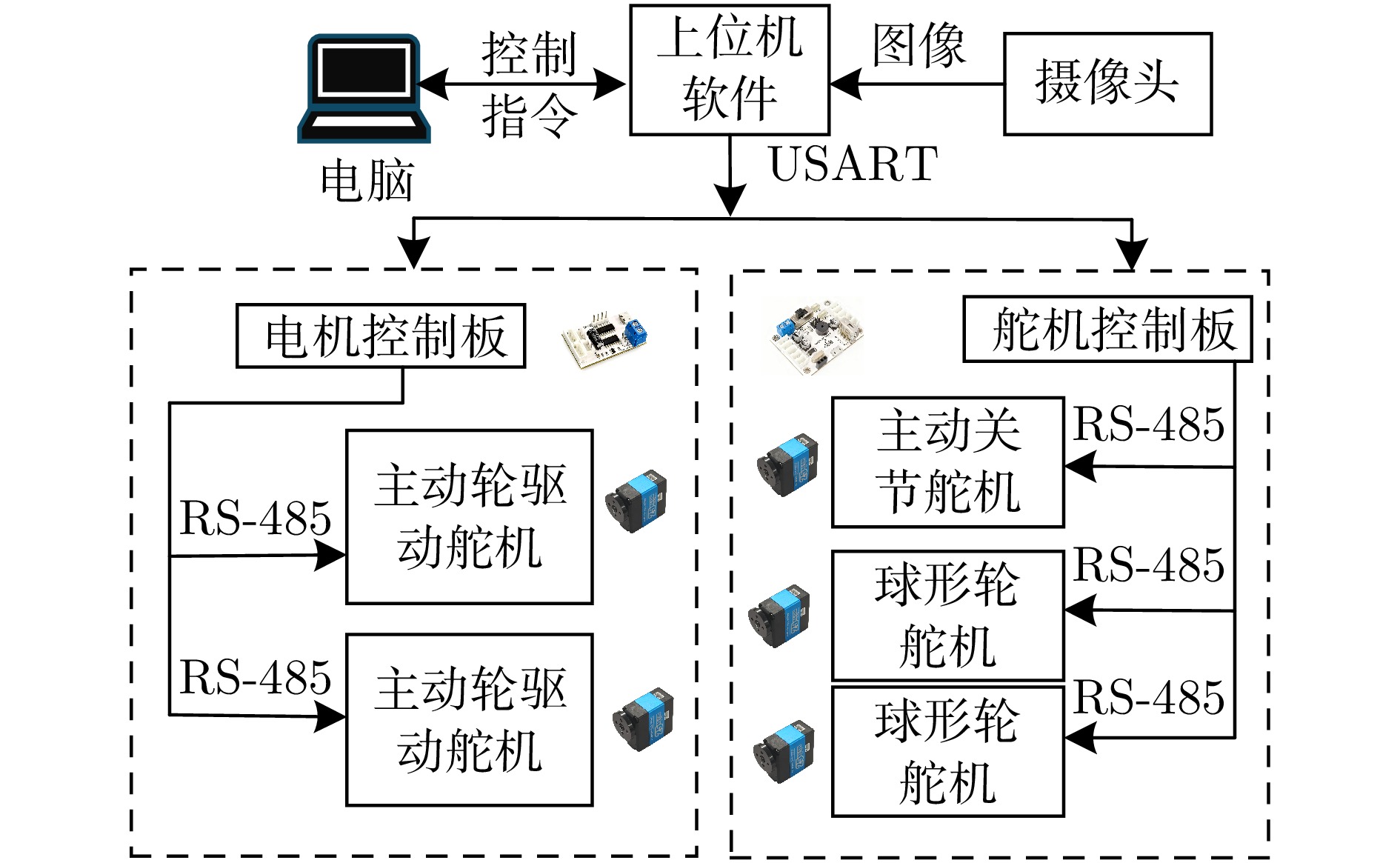
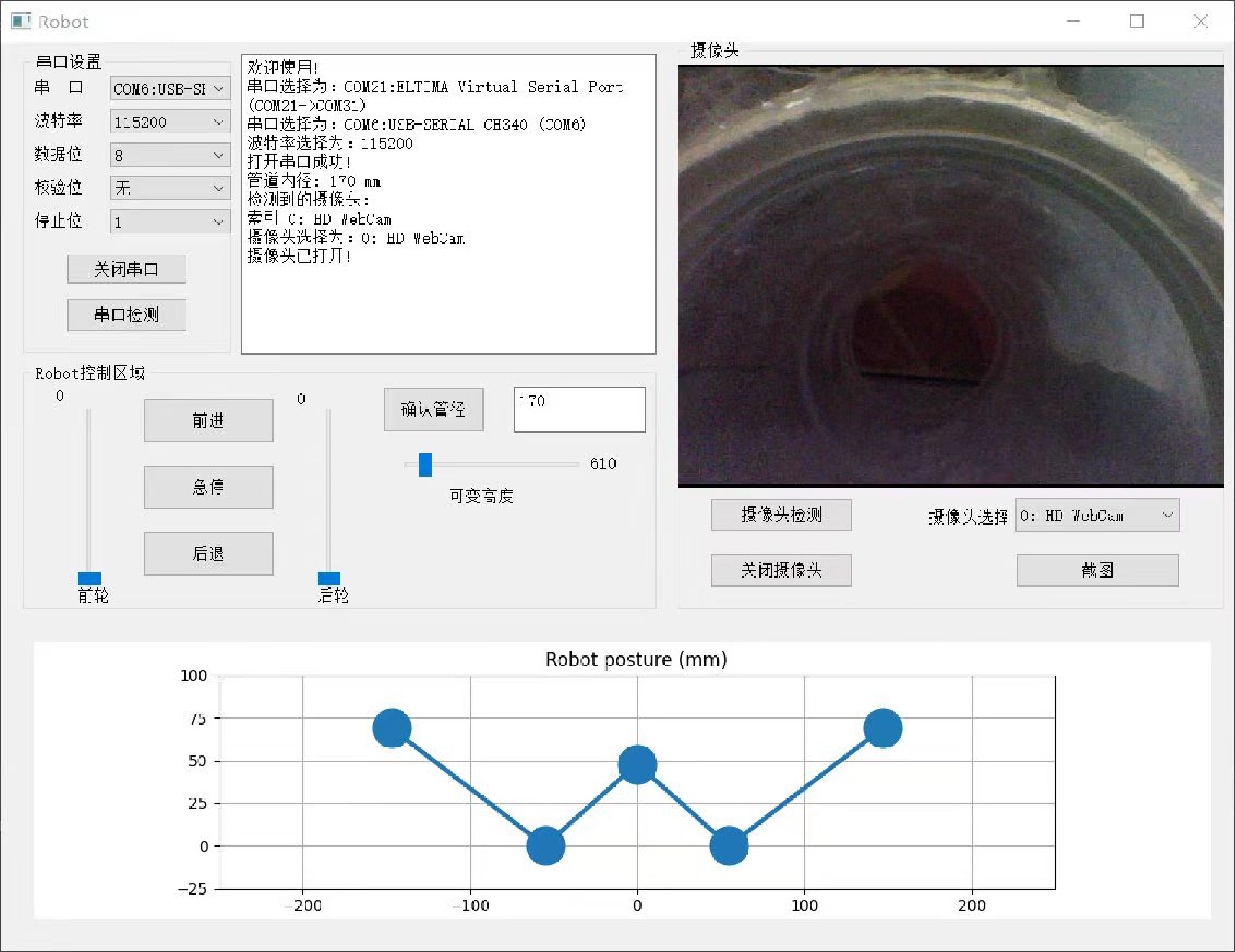
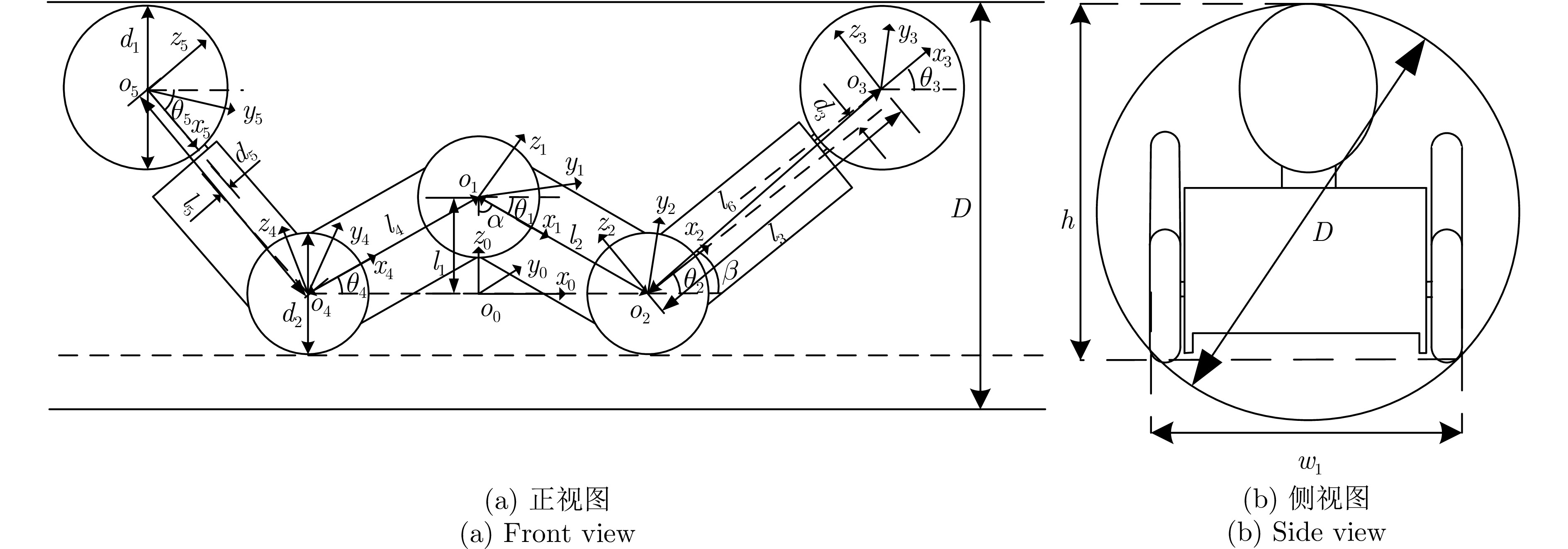
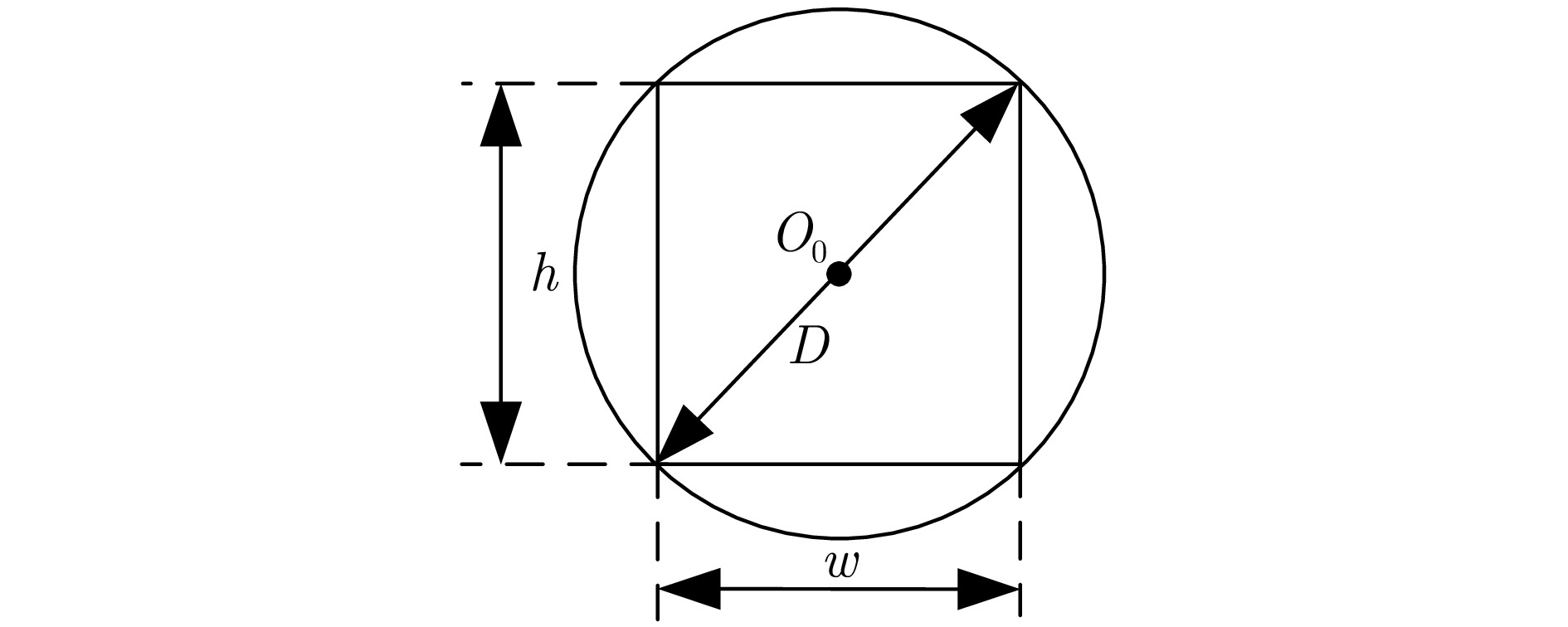
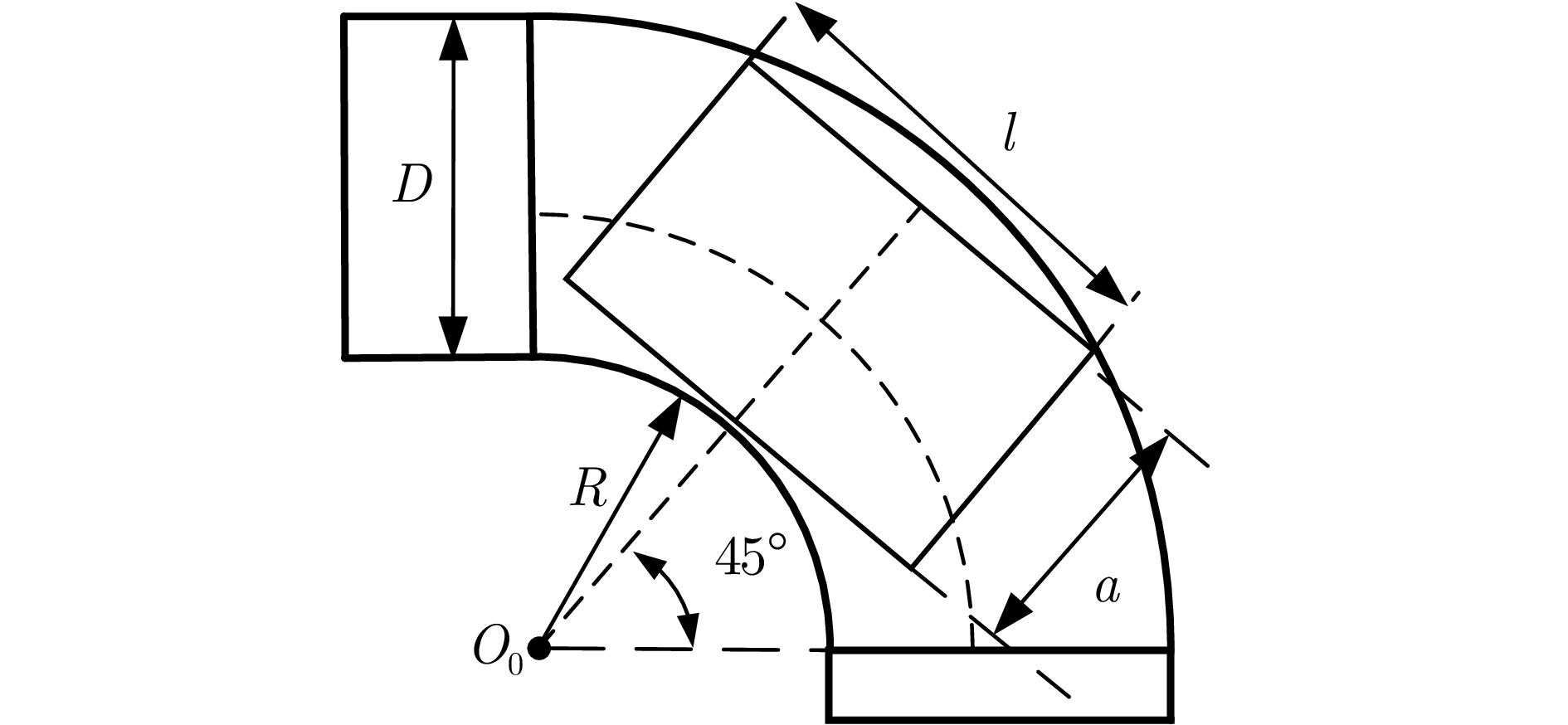
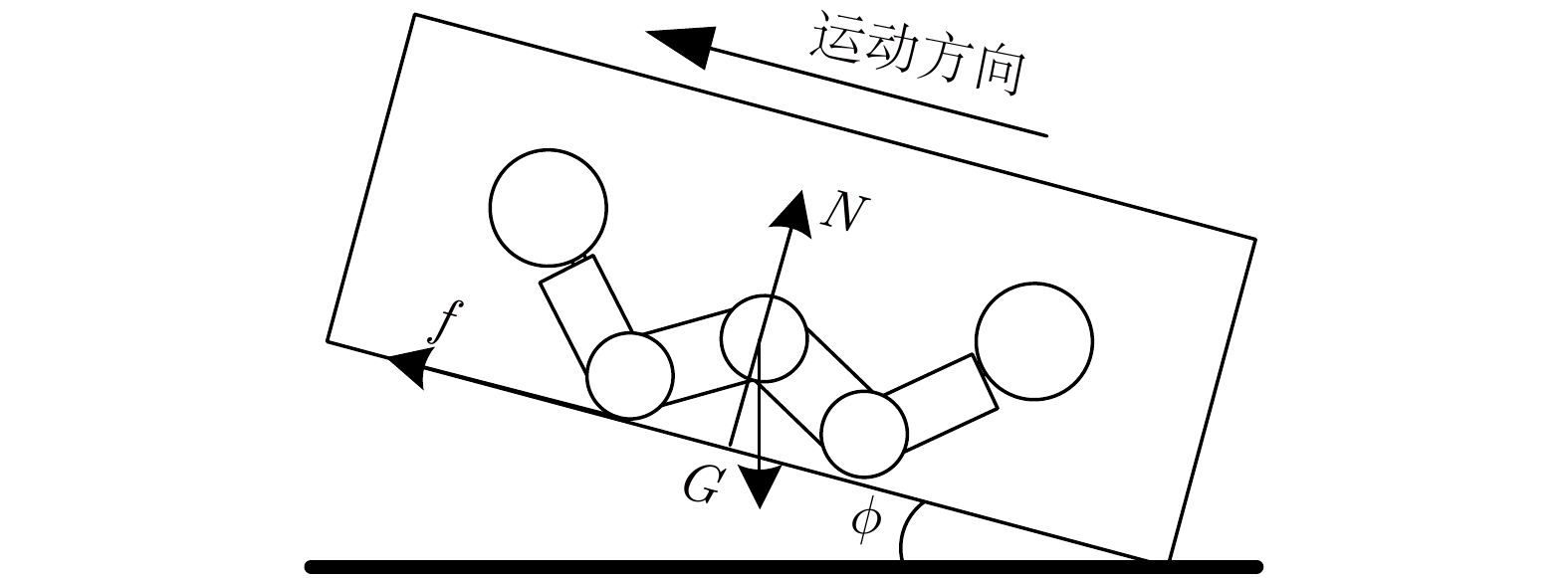
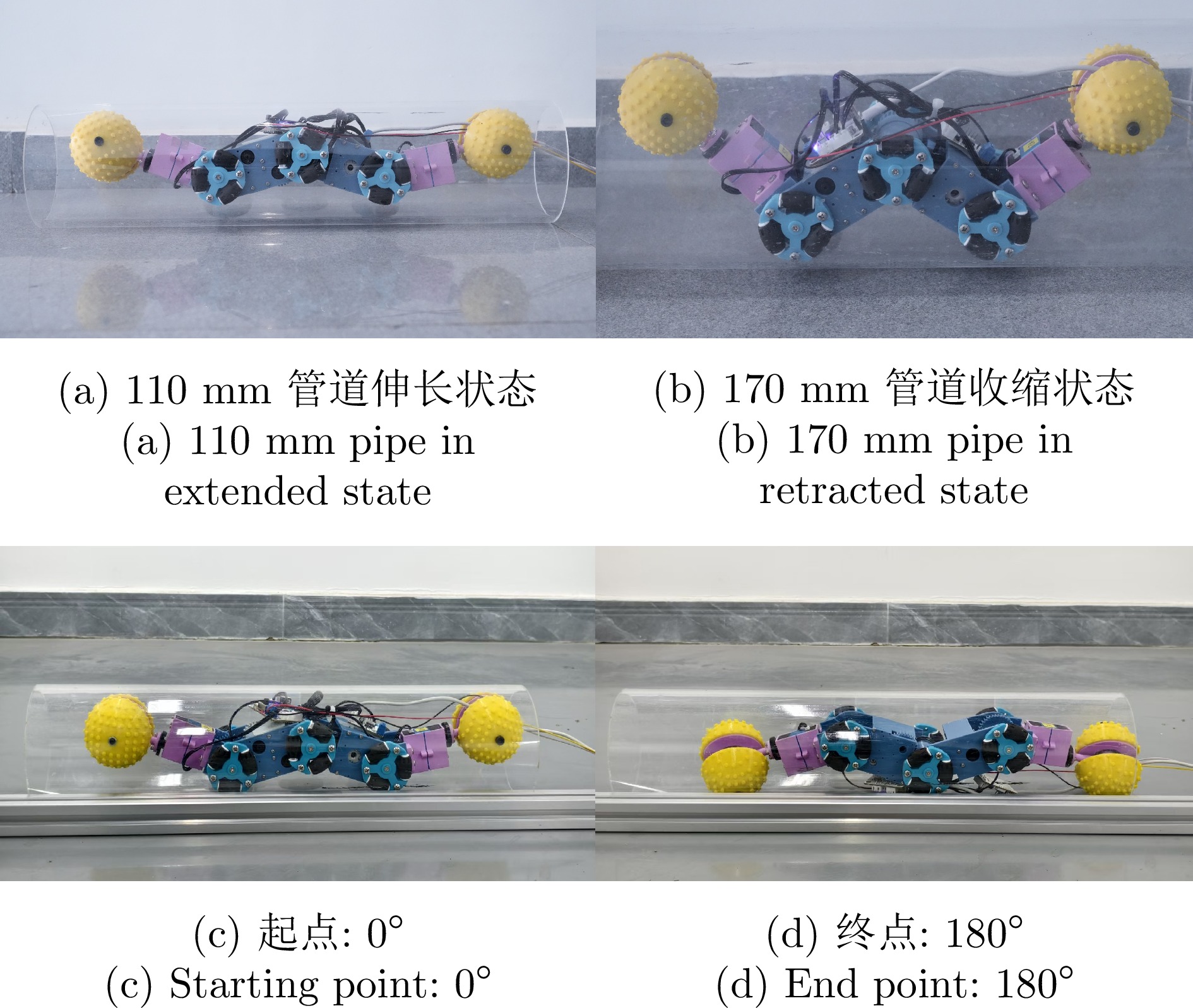
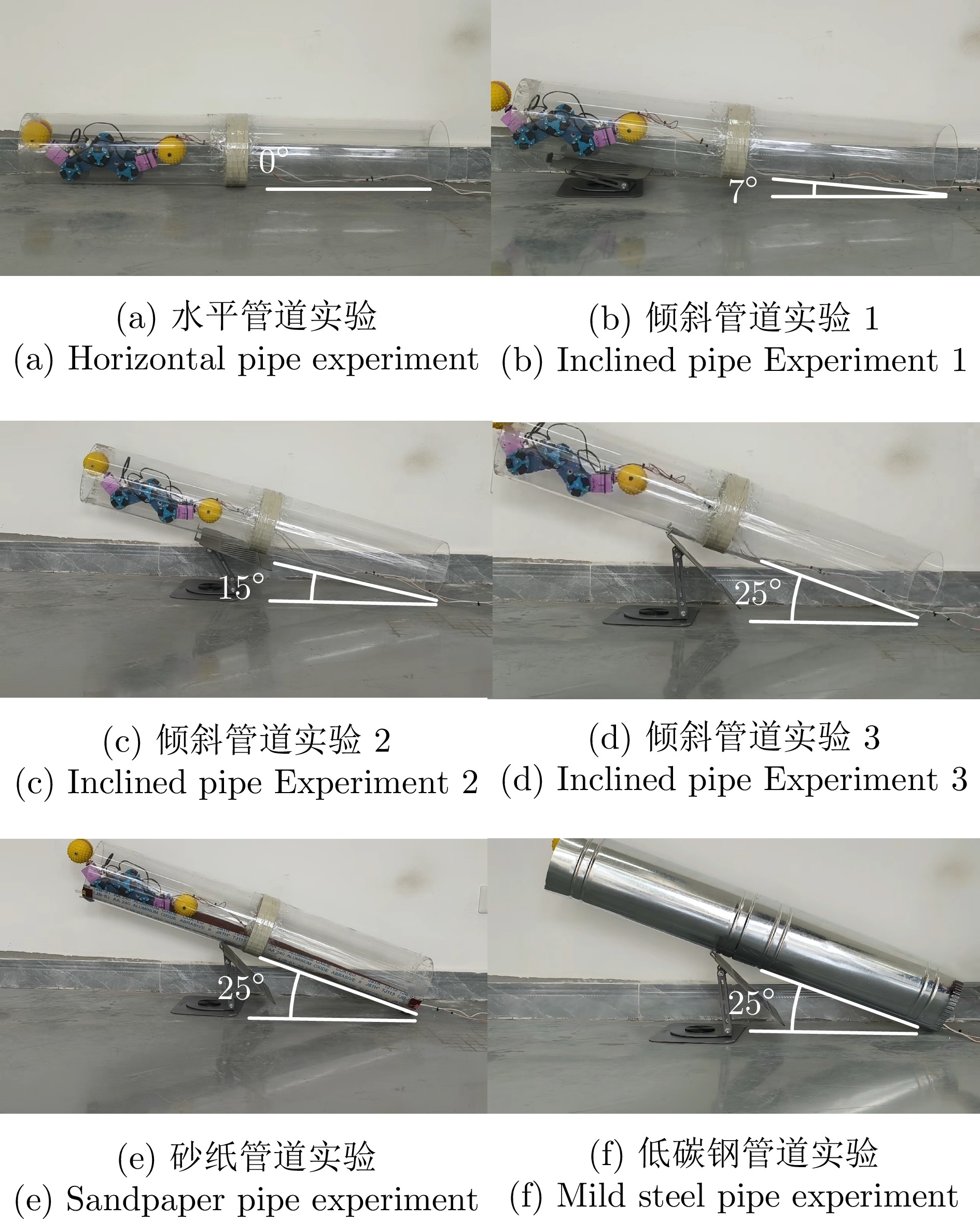
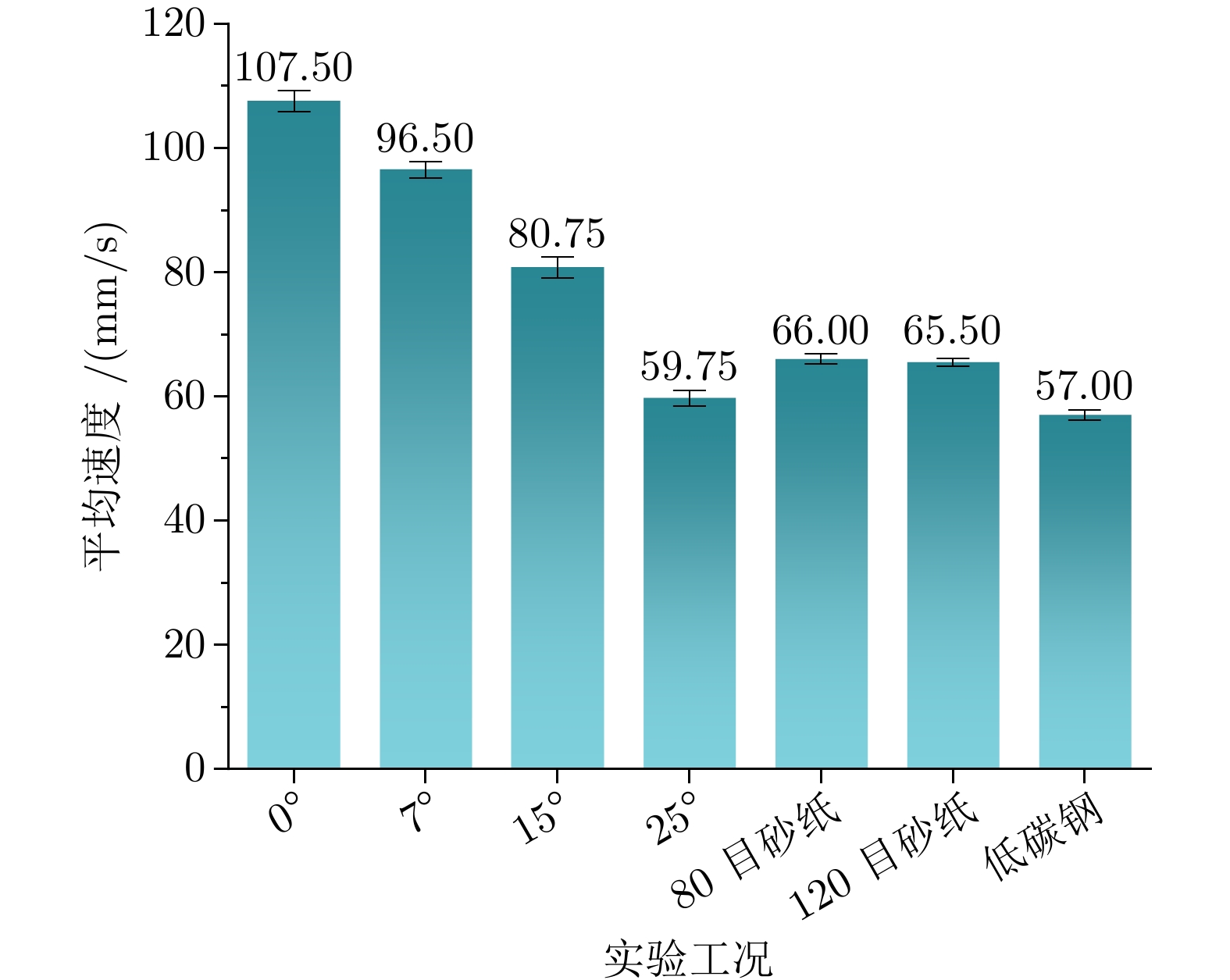
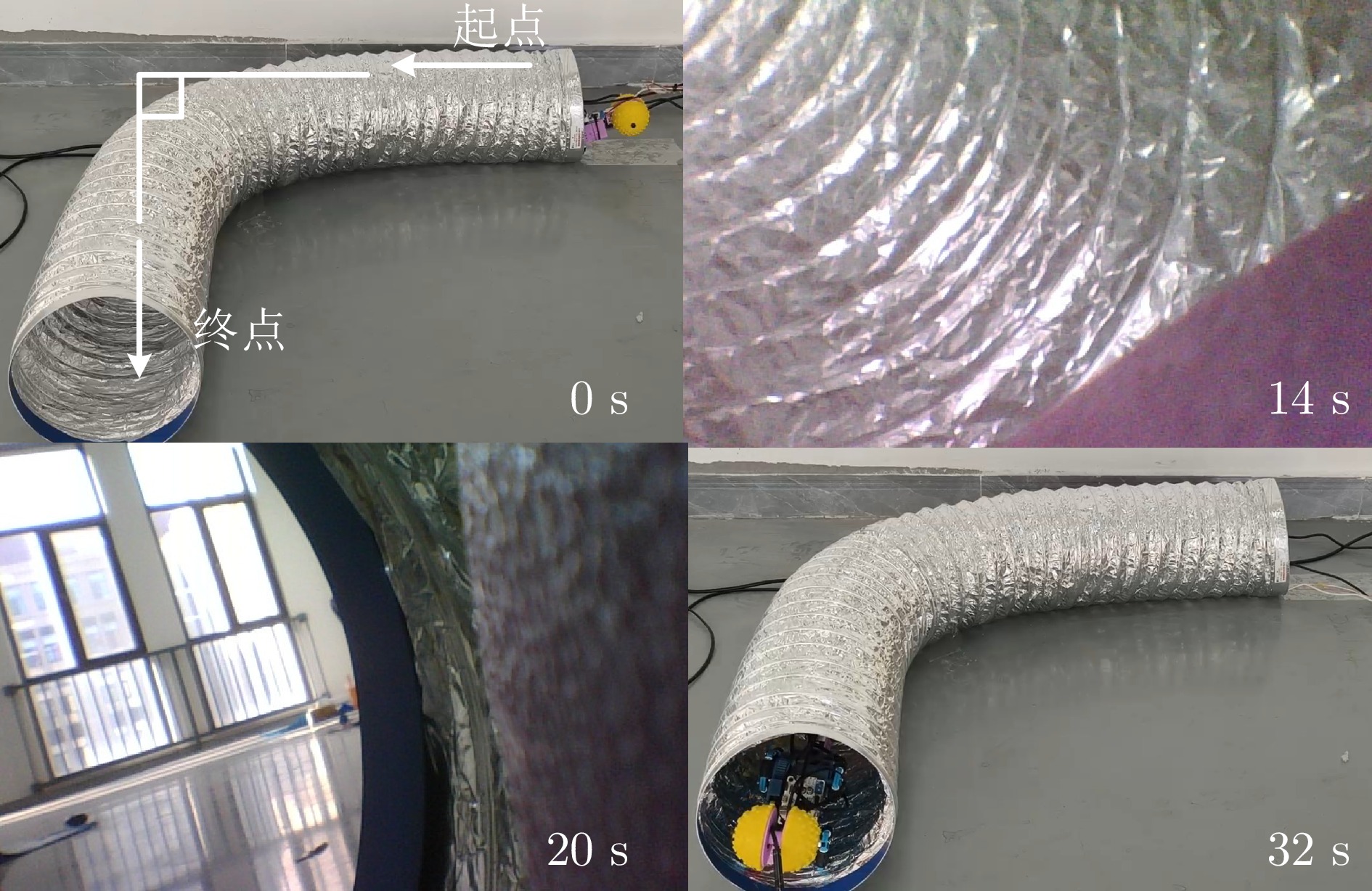
受自然界多关节生物运动机理的启发, 针对当前仿生管道机器人面临的结构紧凑性以及运动速率的问题, 设计一种新型仿生多关节管道检测机器人. 该管道机器人采用多关节串联与可变构型设计, 在保证管道机器人环境适应性的情况下, 提高管道机器人运动速率和结构的紧凑性. 管道机器人在最大伸展状态下的外观尺寸为446 mm×80 mm×71.2 mm (长×宽×高). 通过对管道机器人进行几何通过性分析, 确定其适用的管道范围: 在仅含竖直管的情况下, 适应管径为108 ~ 163 mm; 在仅含水平管且无弯曲段时, 最小适应管径为108 mm; 在含有水平弯曲段时, 最小适应管径增至213 mm, 且对应的最小弯曲半径为26 mm. 开展多种工况下的运动实验, 实验结果表明, 机器人在水平管道中的最大平均运动速度可达 107.5 mm/s, 并能够完成管径适应、翻滚运动、倾斜管道及直角弯管实验, 验证了仿生多关节管道检测机器人方案设计的可行性. 本文所提出的仿生多关节管道机器人为变管径管道检测机器人设计提供了借鉴.
受自然界多关节生物运动机理的启发, 针对当前仿生管道机器人面临的结构紧凑性以及运动速率的问题, 设计一种新型仿生多关节管道检测机器人. 该管道机器人采用多关节串联与可变构型设计, 在保证管道机器人环境适应性的情况下, 提高管道机器人运动速率和结构的紧凑性. 管道机器人在最大伸展状态下的外观尺寸为446 mm×80 mm×71.2 mm (长×宽×高). 通过对管道机器人进行几何通过性分析, 确定其适用的管道范围: 在仅含竖直管的情况下, 适应管径为108 ~ 163 mm; 在仅含水平管且无弯曲段时, 最小适应管径为108 mm; 在含有水平弯曲段时, 最小适应管径增至213 mm, 且对应的最小弯曲半径为26 mm. 开展多种工况下的运动实验, 实验结果表明, 机器人在水平管道中的最大平均运动速度可达 107.5 mm/s, 并能够完成管径适应、翻滚运动、倾斜管道及直角弯管实验, 验证了仿生多关节管道检测机器人方案设计的可行性. 本文所提出的仿生多关节管道机器人为变管径管道检测机器人设计提供了借鉴.
2026, 52(5): 1092-1100.
doi: 10.16383/j.aas.c250664
cstr: 32138.14.j.aas.c250664
摘要:
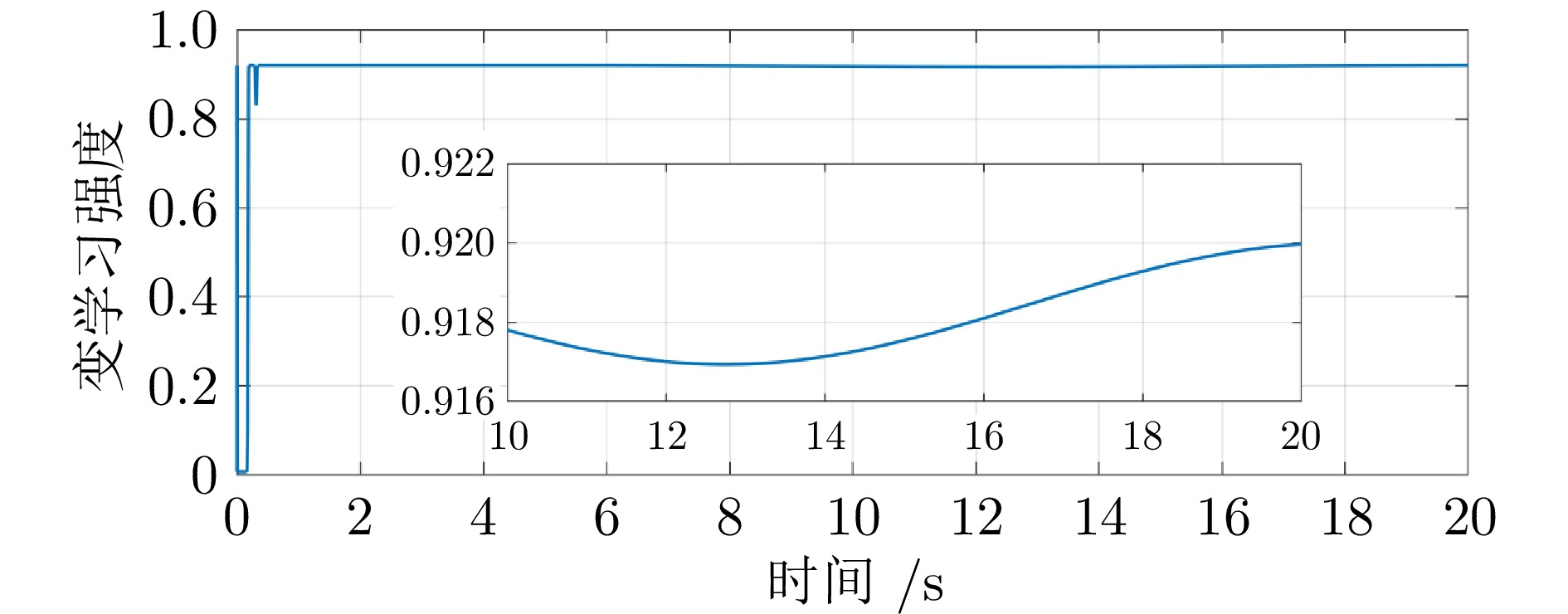
针对扑翼飞行器存在非线性动态、模型不确定性及嵌入式平台算力受限等问题, 提出一种可自定义变学习强度自学习控制方法. 该方法通过学习历史控制信息, 仅基于一个代数方程, 避免复杂控制器设计并有效提升轨迹跟踪精度与系统鲁棒性. 针对扑翼系统, 使用自定义函数对学习强度进行调节, 提高系统动态响应速度与稳态性能. 仿真结果表明, 所提方法在保持低计算复杂度同时, 具有优越控制性能.
针对扑翼飞行器存在非线性动态、模型不确定性及嵌入式平台算力受限等问题, 提出一种可自定义变学习强度自学习控制方法. 该方法通过学习历史控制信息, 仅基于一个代数方程, 避免复杂控制器设计并有效提升轨迹跟踪精度与系统鲁棒性. 针对扑翼系统, 使用自定义函数对学习强度进行调节, 提高系统动态响应速度与稳态性能. 仿真结果表明, 所提方法在保持低计算复杂度同时, 具有优越控制性能.
2026, 52(5): 1101-1115.
doi: 10.16383/j.aas.c250686
cstr: 32138.14.j.aas.c250686
摘要:
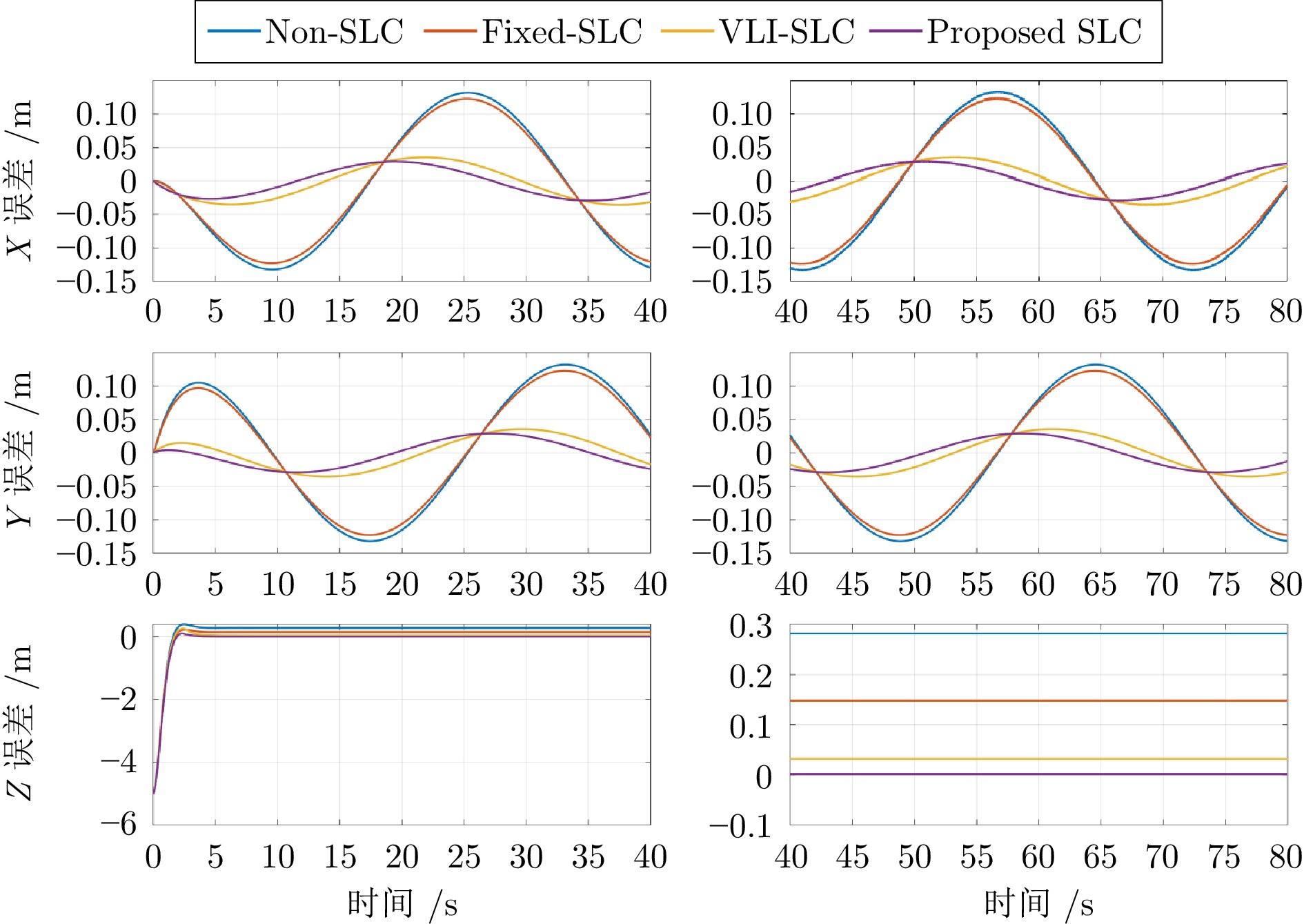
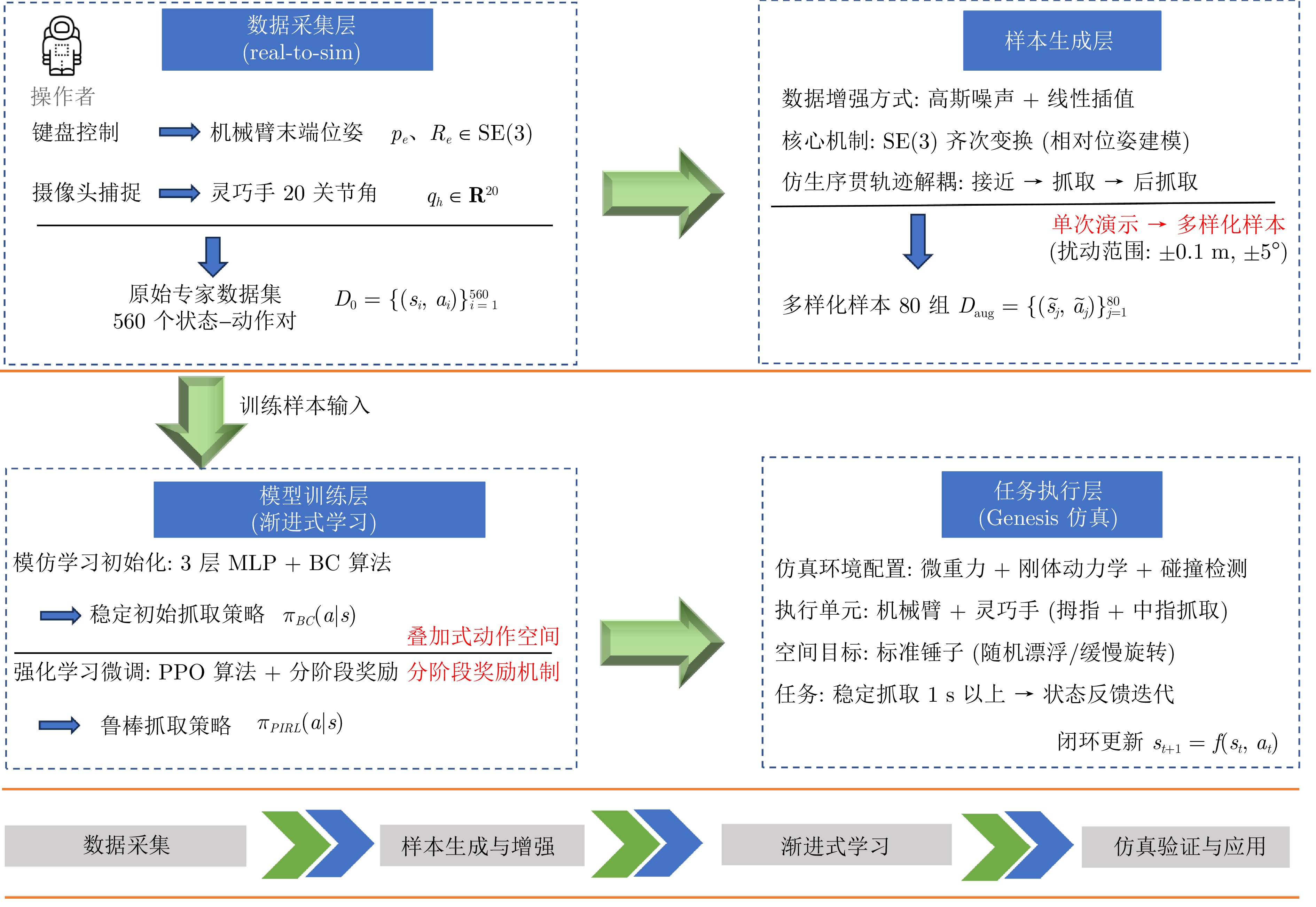
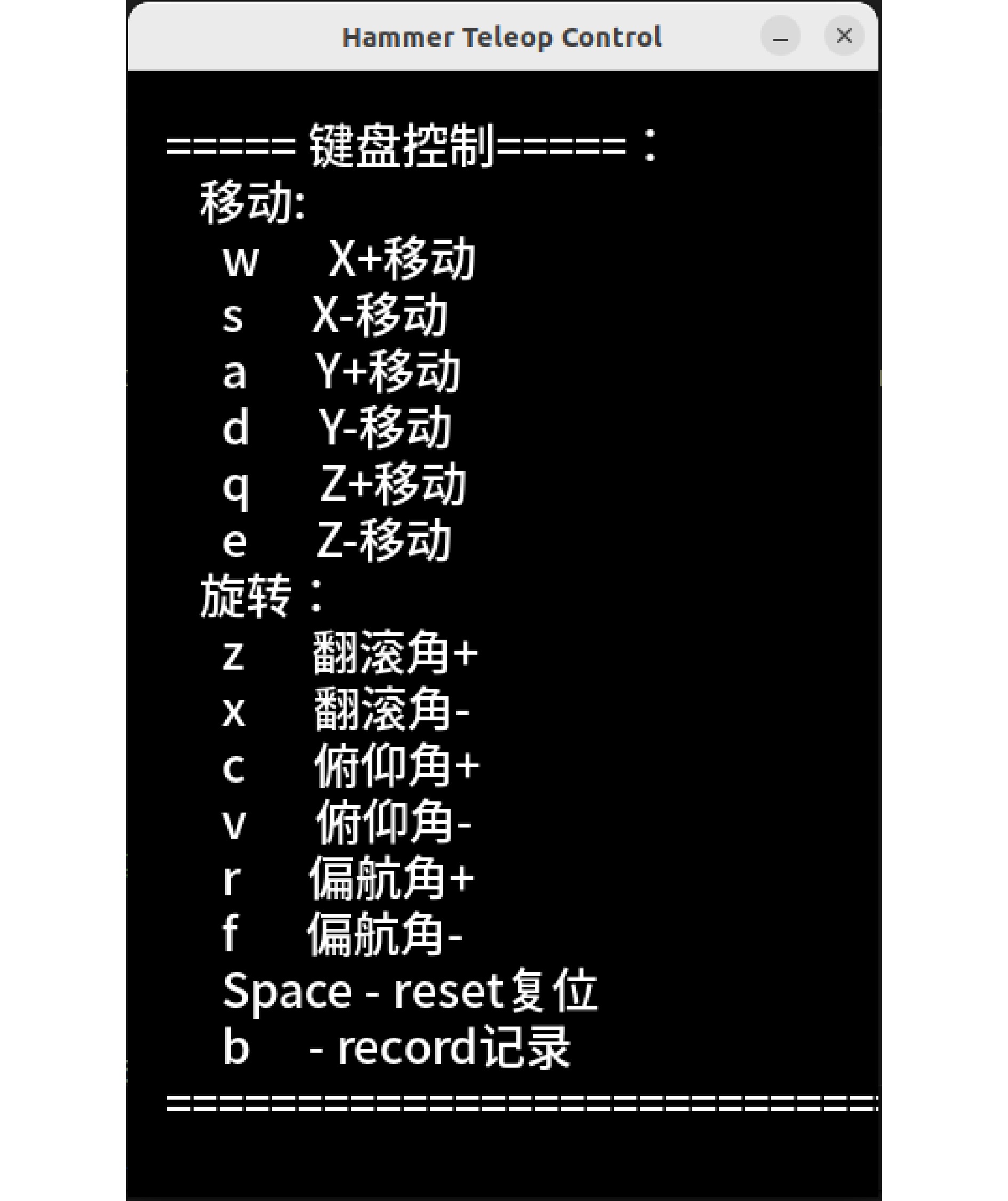
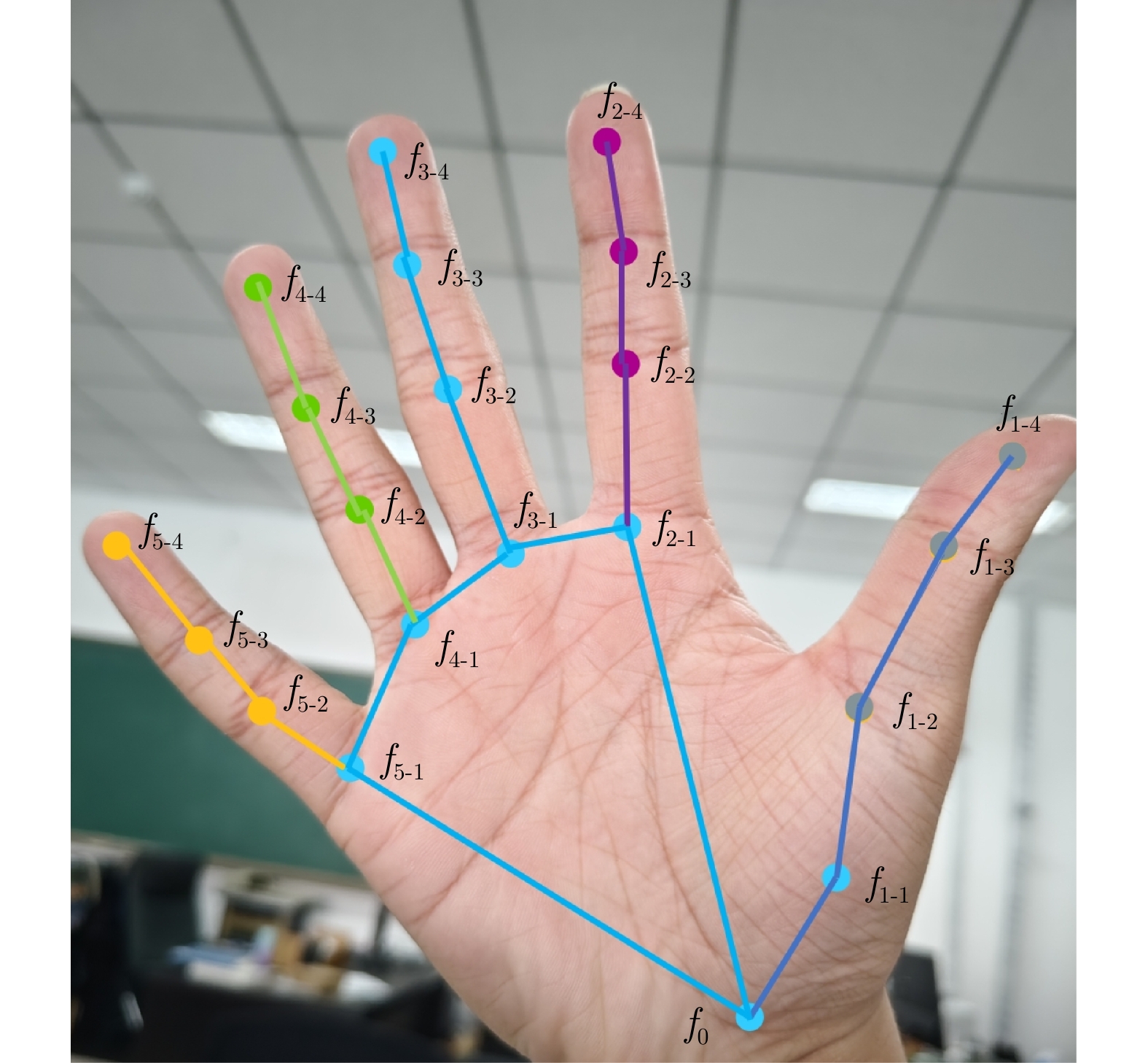
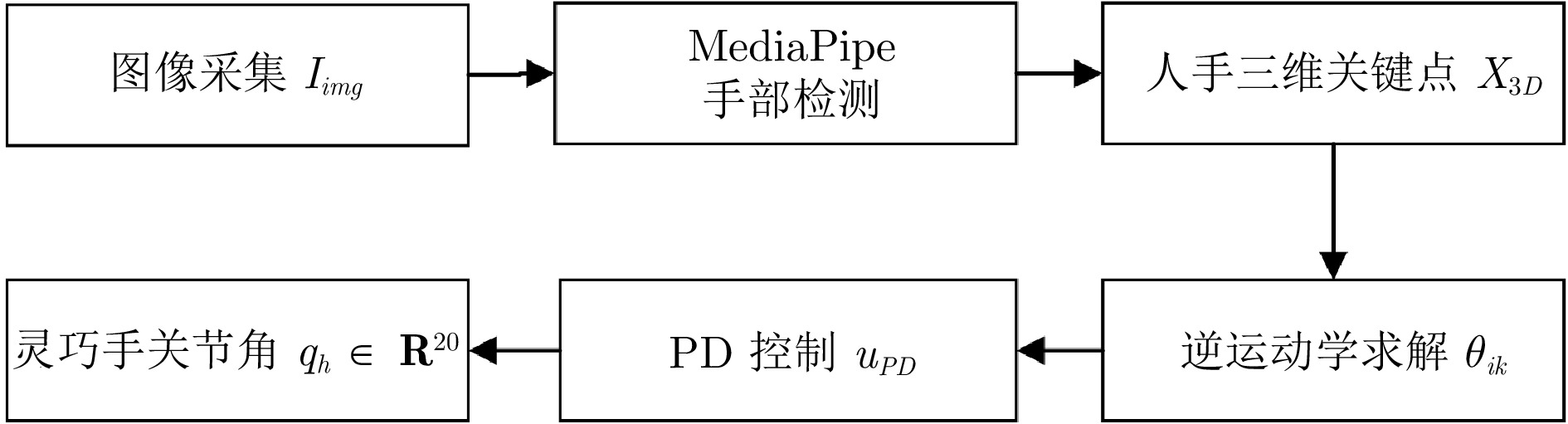
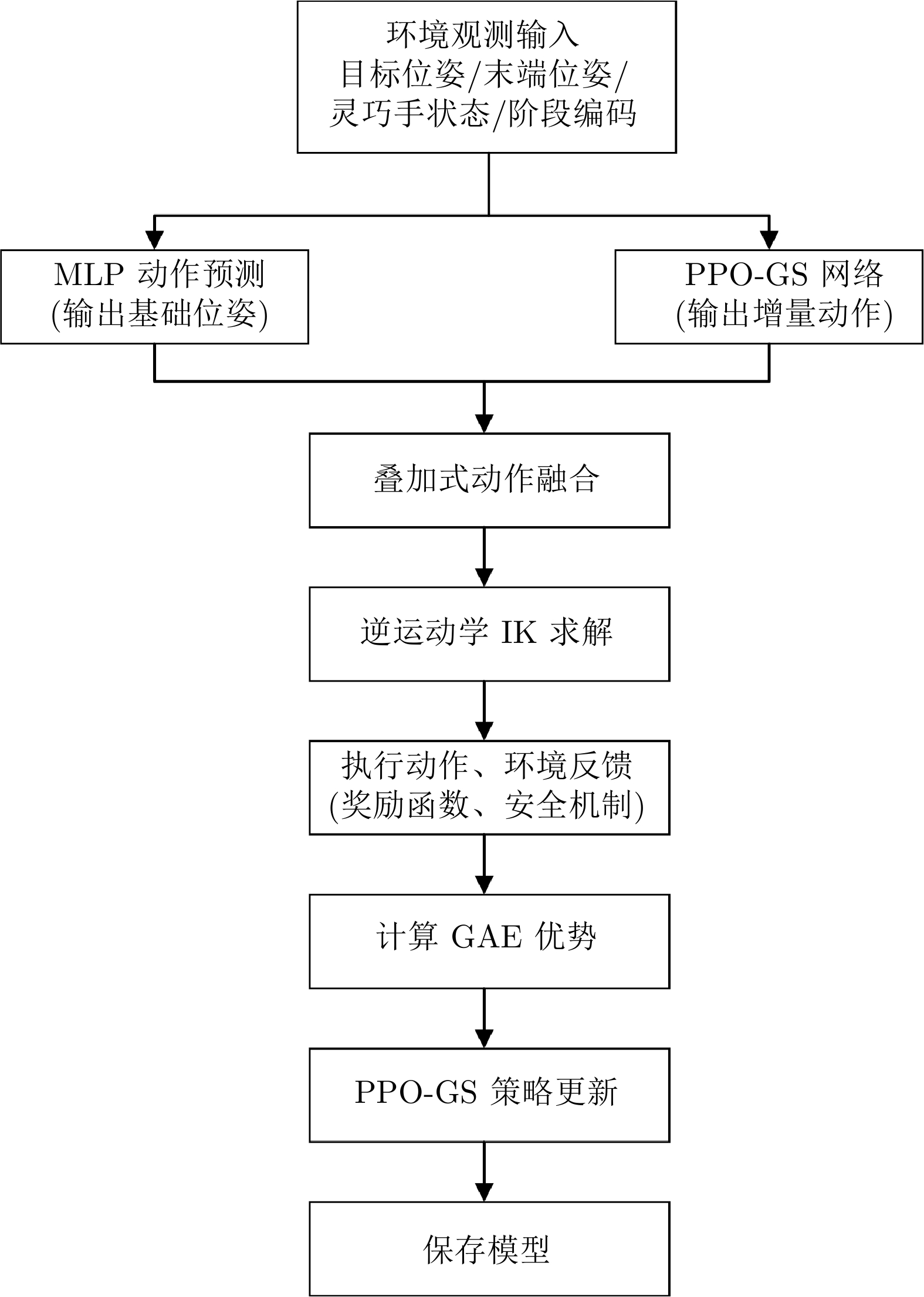
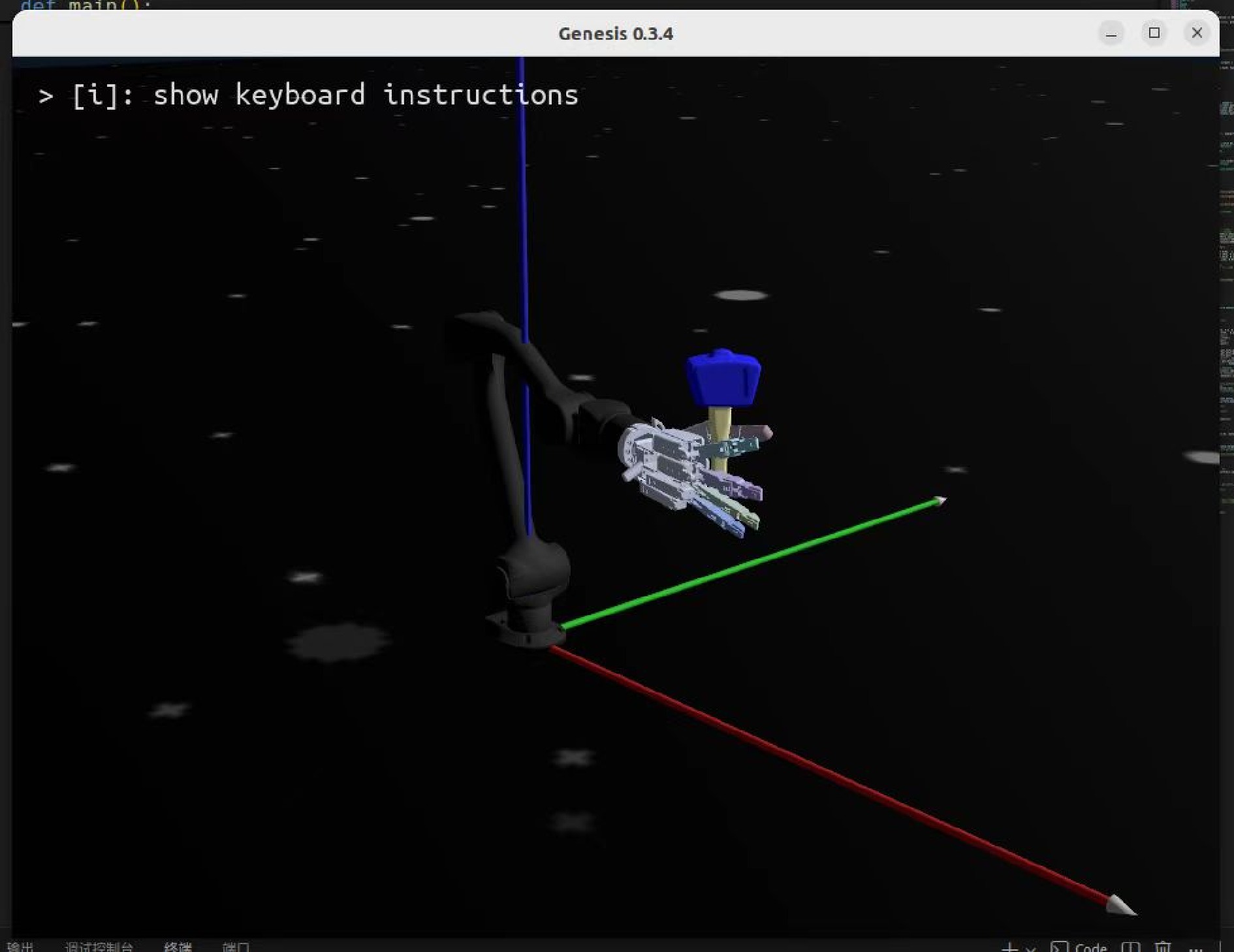
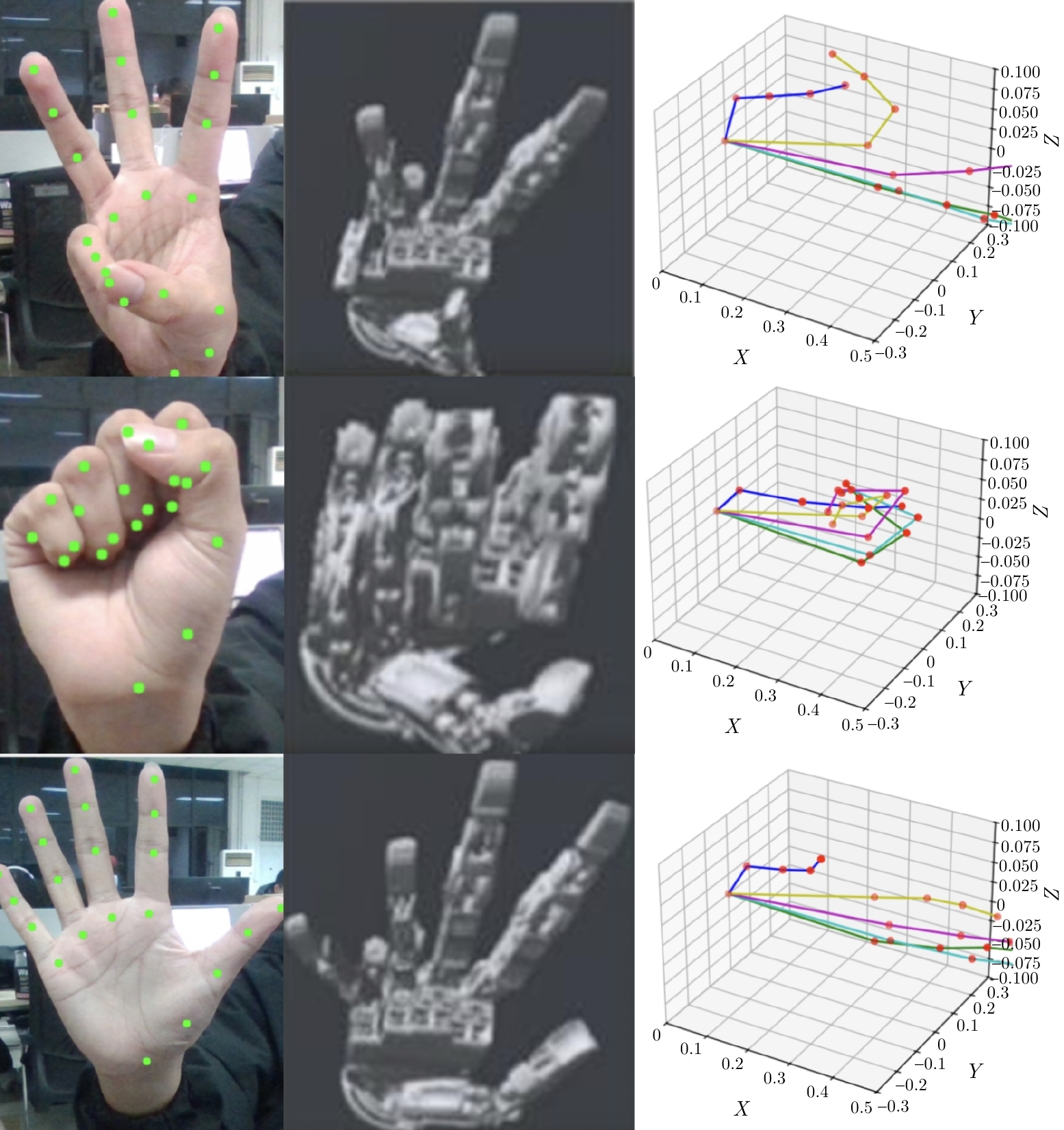
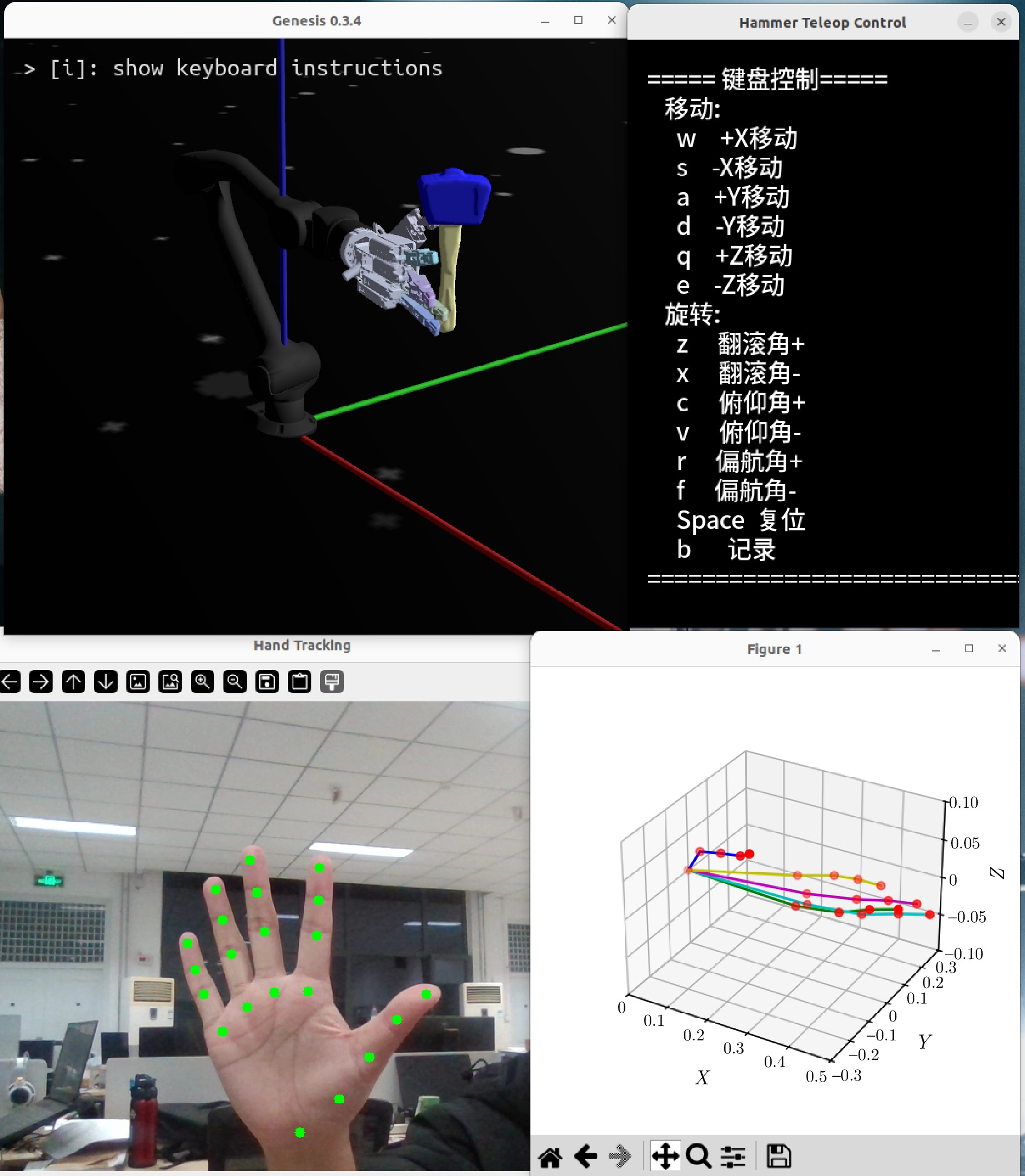
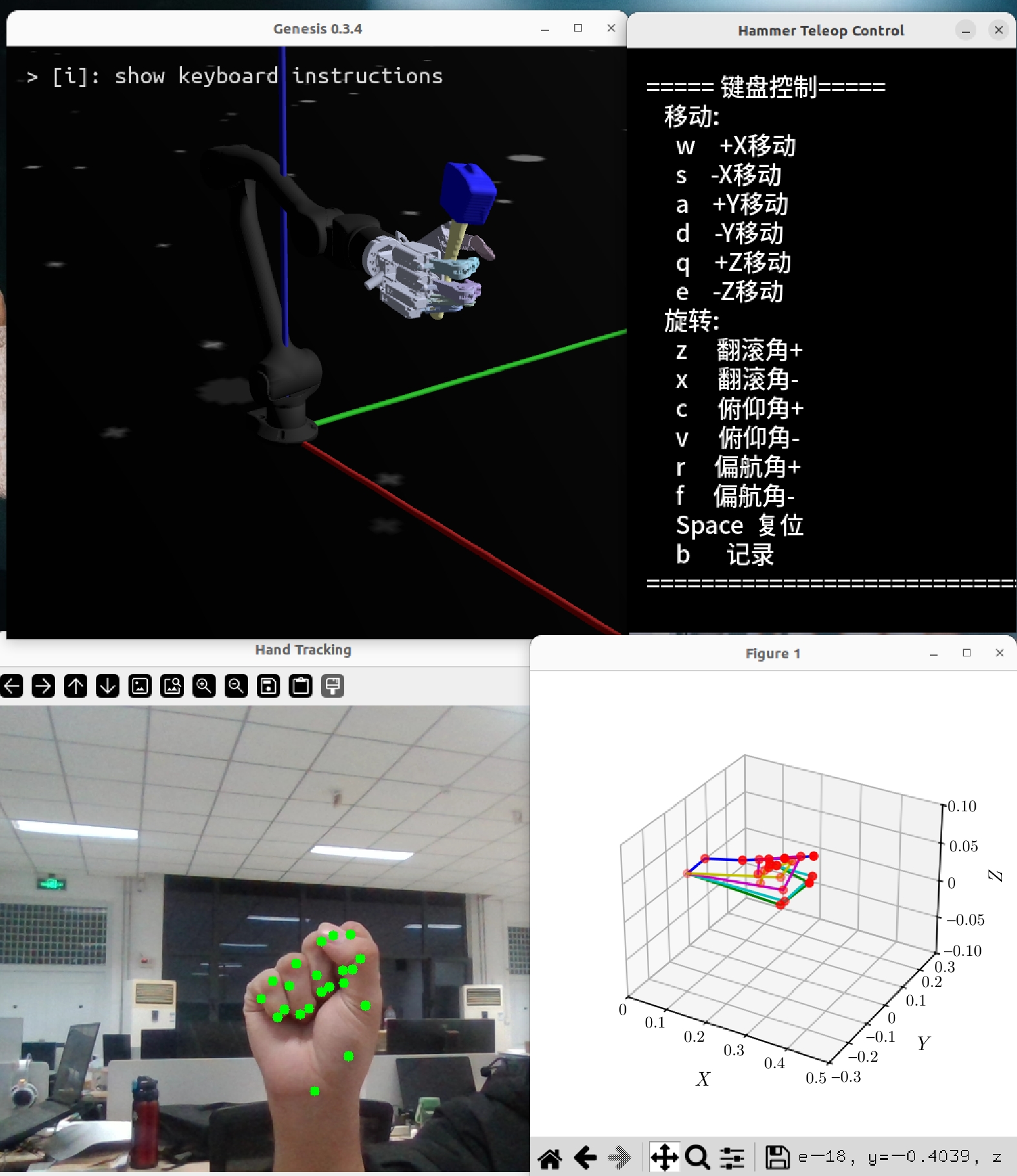
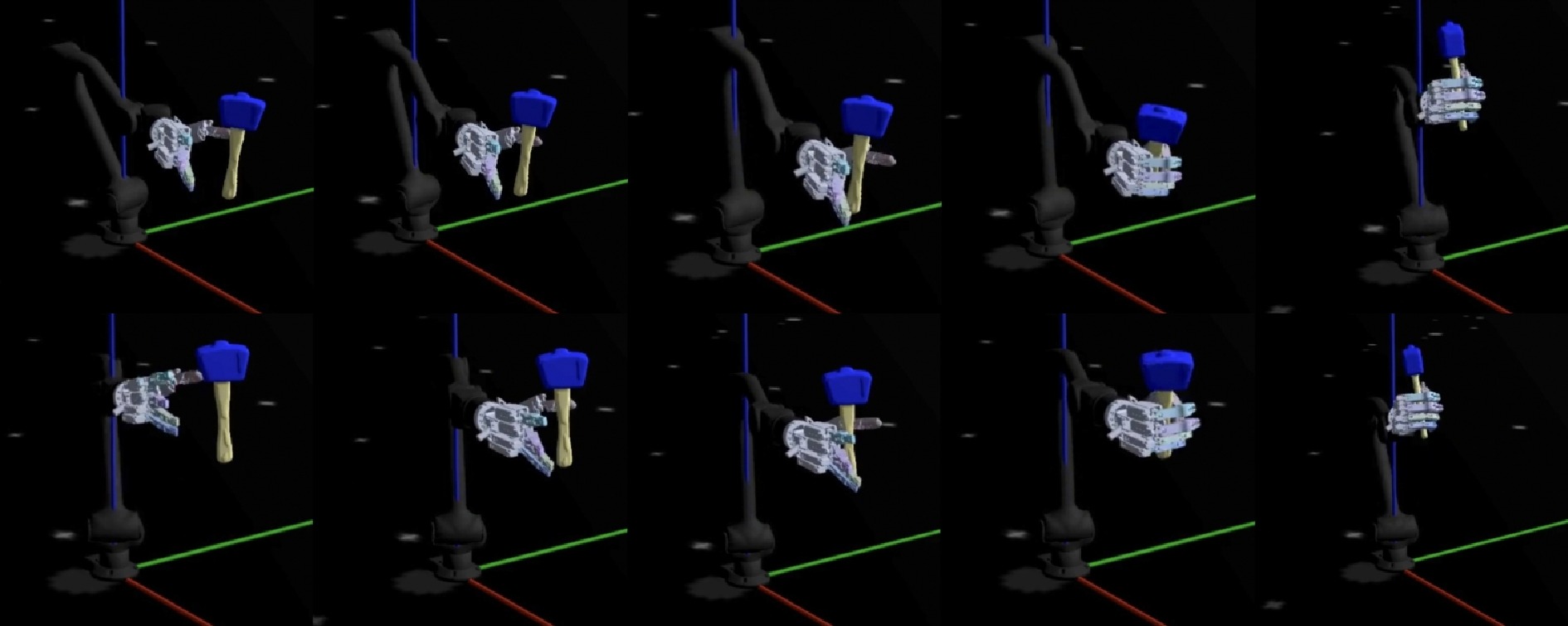
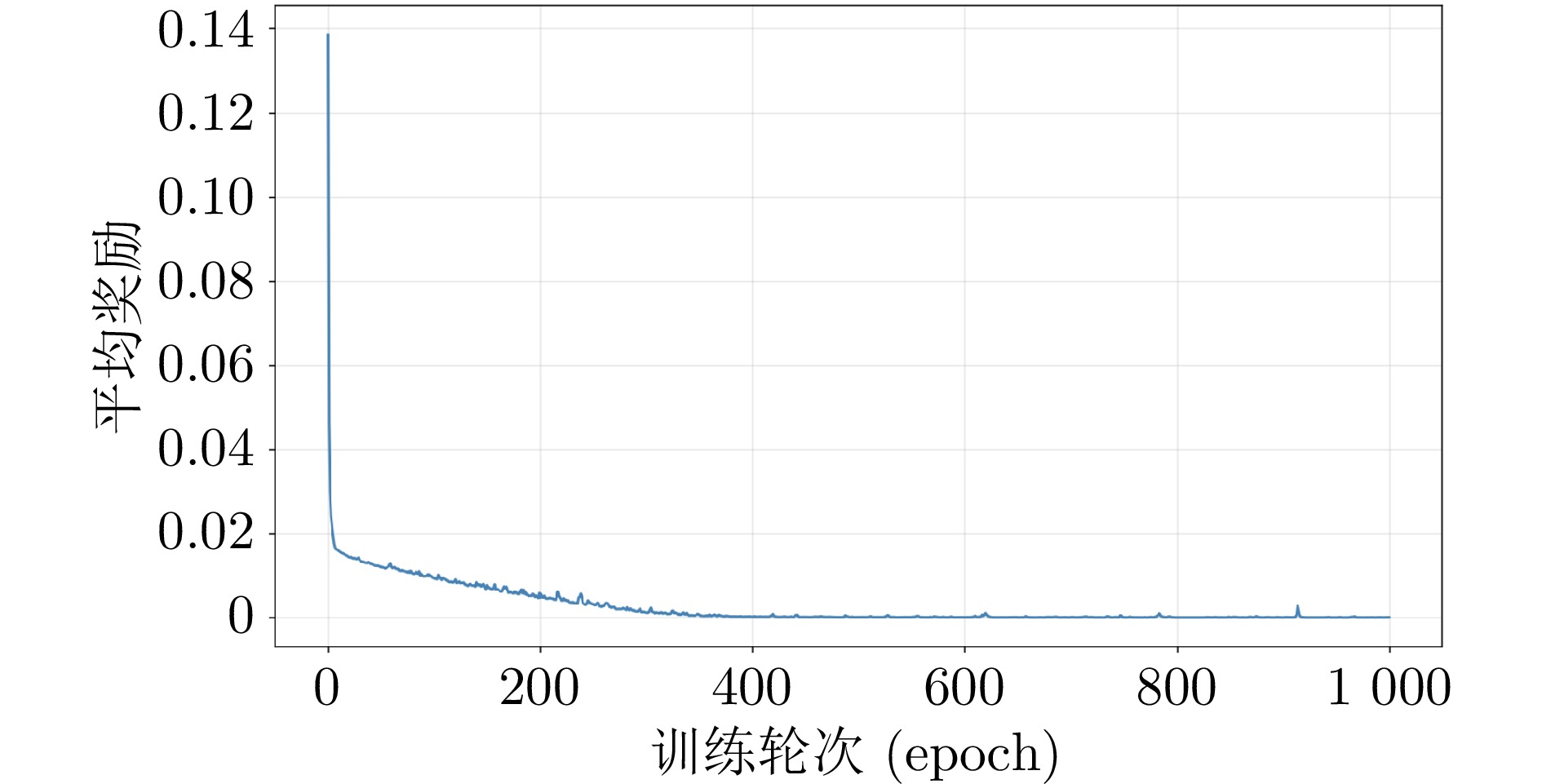
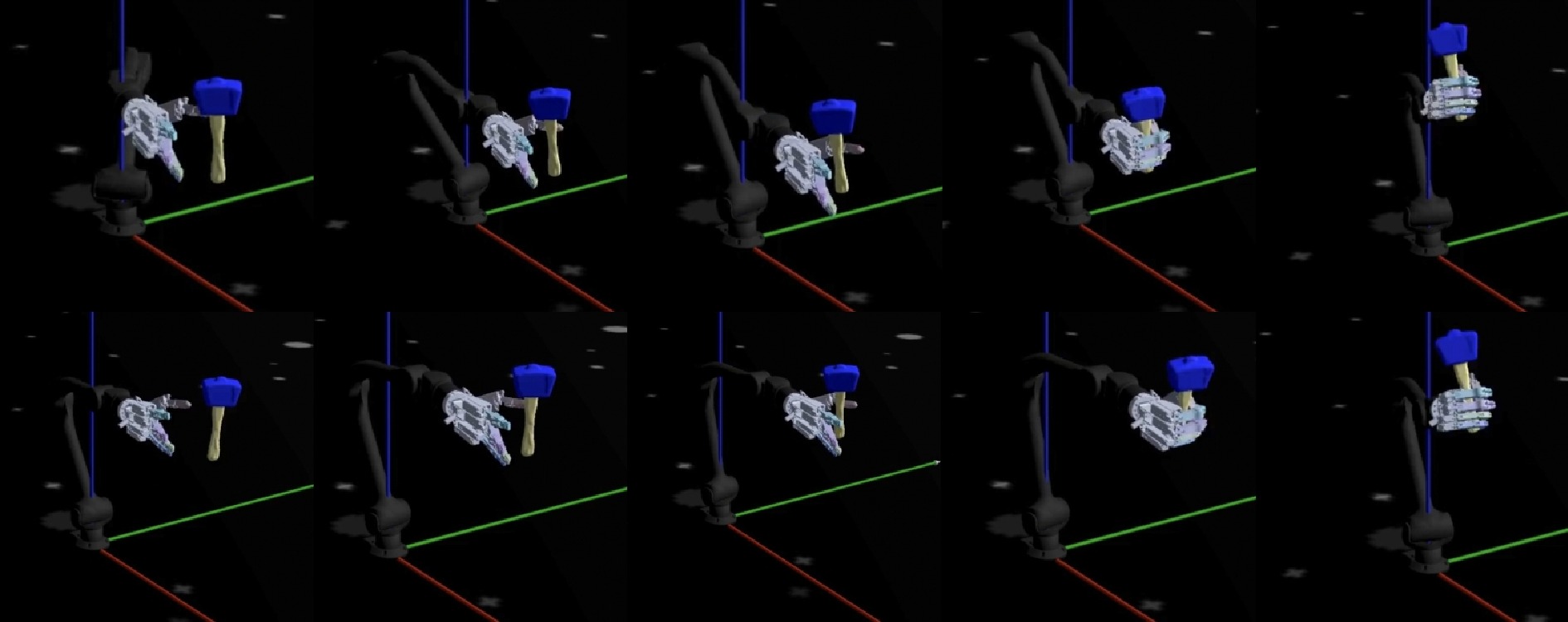
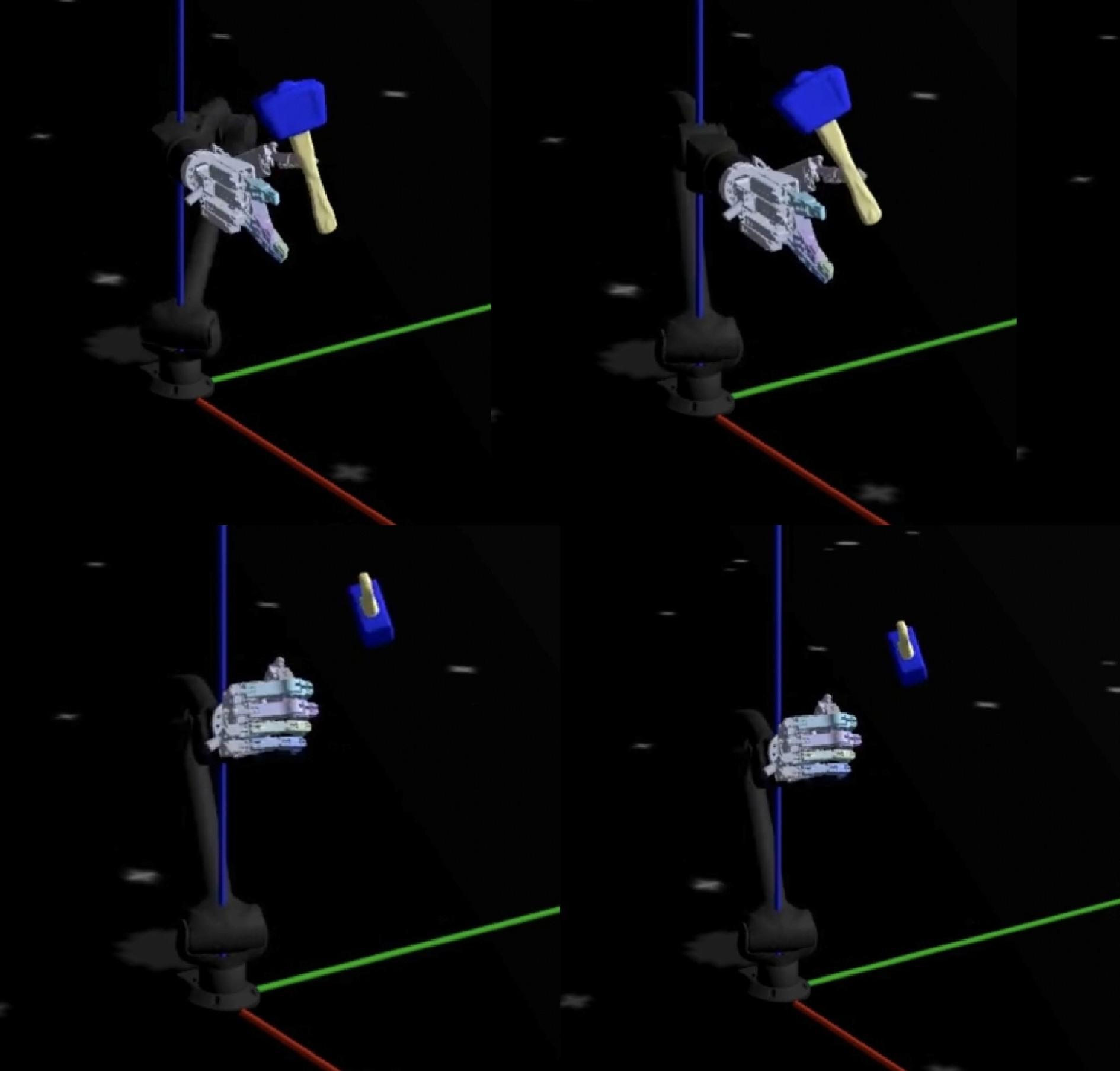
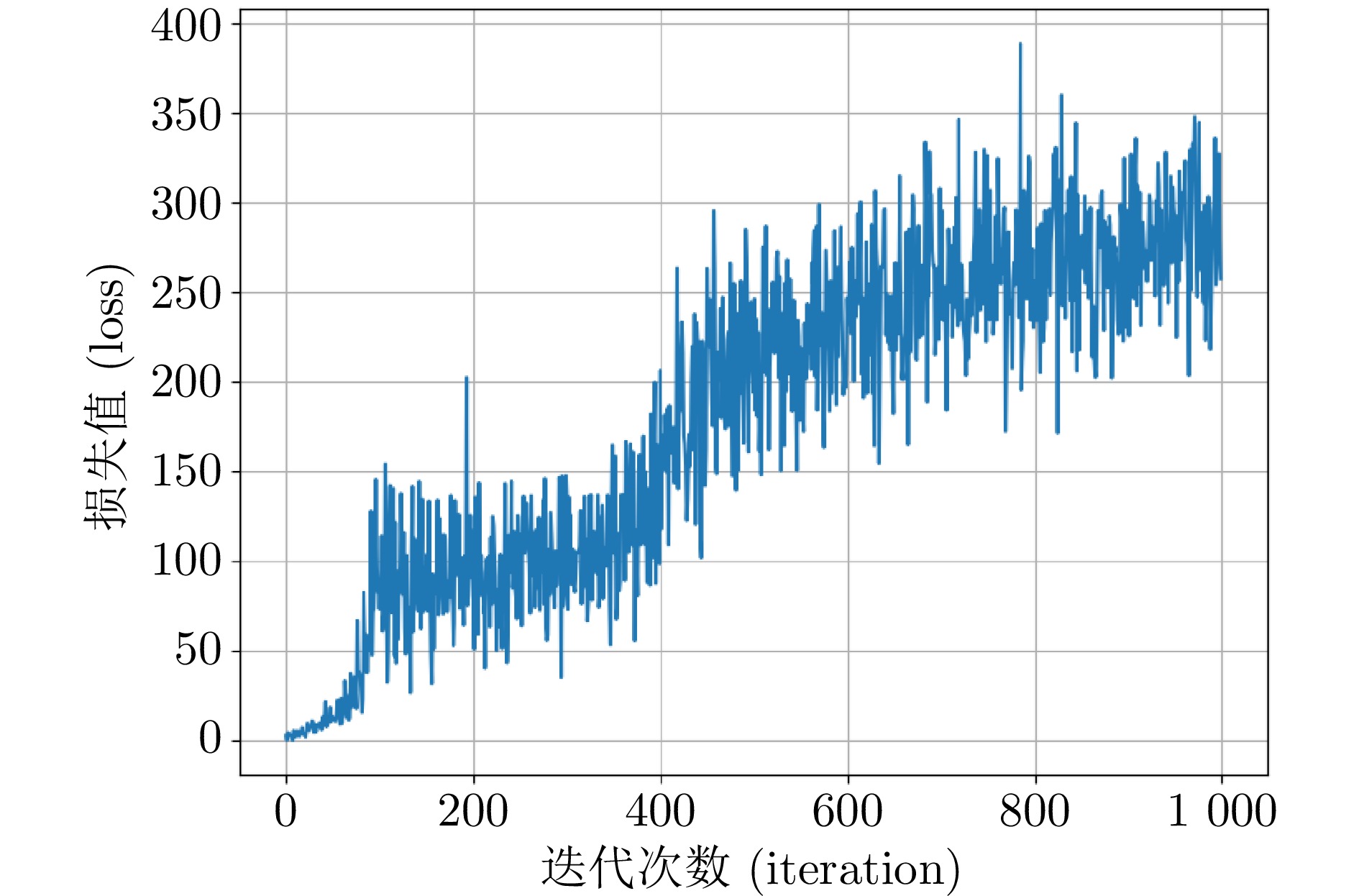
针对空间机械臂在微重力环境下执行漂浮目标自主抓取任务时存在的样本获取难、泛化能力弱、动态扰动适应差的问题, 提出一种融合仿生智能的渐进式模仿强化学习方法. 首先, 基于遥操作采集的人类臂手协同操作专家示范数据, 构建多层感知机(MLP)初始抓取策略模型, 并通过行为克隆完成仿生抓取训练; 然后, 将该初始模型嵌入Genesis高保真空间操作仿真环境, 采用近端策略优化空间抓取算法开展抓取策略在线微调, 依托叠加式动作空间与分阶段奖励机制实现专家先验知识与环境自主探索的协同优化, 有效解决模仿学习的分布偏移缺陷与强化学习样本效率瓶颈. 实验结果表明, 所提方法在目标随机位姿扰动下抓取成功率达89.5%, 较MLP模仿学习提升14.5%, 显著增强了策略在目标位姿偏差下复杂空间场景中的鲁棒性与环境适应能力, 为微重力环境下空间机械臂漂浮目标自主抓取提供新的技术方案.
针对空间机械臂在微重力环境下执行漂浮目标自主抓取任务时存在的样本获取难、泛化能力弱、动态扰动适应差的问题, 提出一种融合仿生智能的渐进式模仿强化学习方法. 首先, 基于遥操作采集的人类臂手协同操作专家示范数据, 构建多层感知机(MLP)初始抓取策略模型, 并通过行为克隆完成仿生抓取训练; 然后, 将该初始模型嵌入Genesis高保真空间操作仿真环境, 采用近端策略优化空间抓取算法开展抓取策略在线微调, 依托叠加式动作空间与分阶段奖励机制实现专家先验知识与环境自主探索的协同优化, 有效解决模仿学习的分布偏移缺陷与强化学习样本效率瓶颈. 实验结果表明, 所提方法在目标随机位姿扰动下抓取成功率达89.5%, 较MLP模仿学习提升14.5%, 显著增强了策略在目标位姿偏差下复杂空间场景中的鲁棒性与环境适应能力, 为微重力环境下空间机械臂漂浮目标自主抓取提供新的技术方案.
2026, 52(5): 1116-1127.
doi: 10.16383/j.aas.c250453
cstr: 32138.14.j.aas.c250453
摘要:
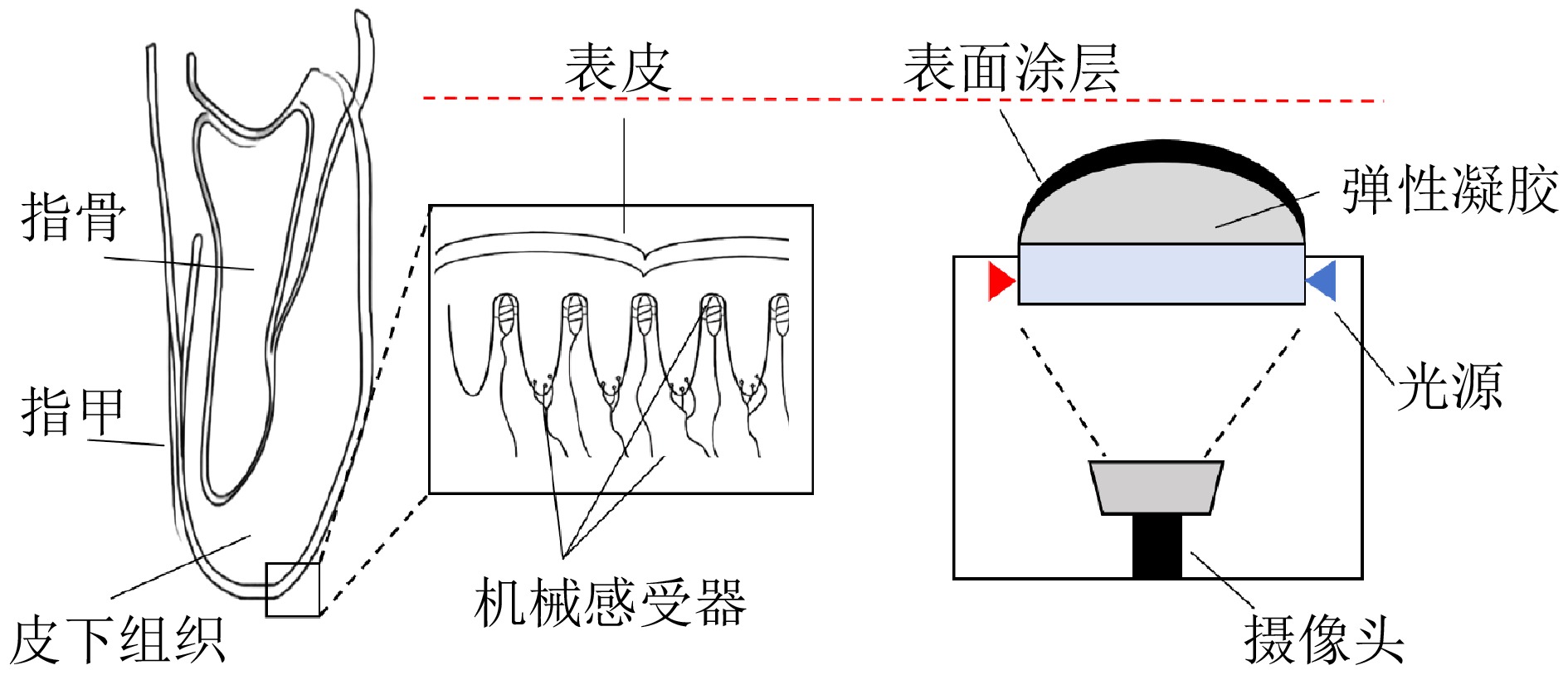
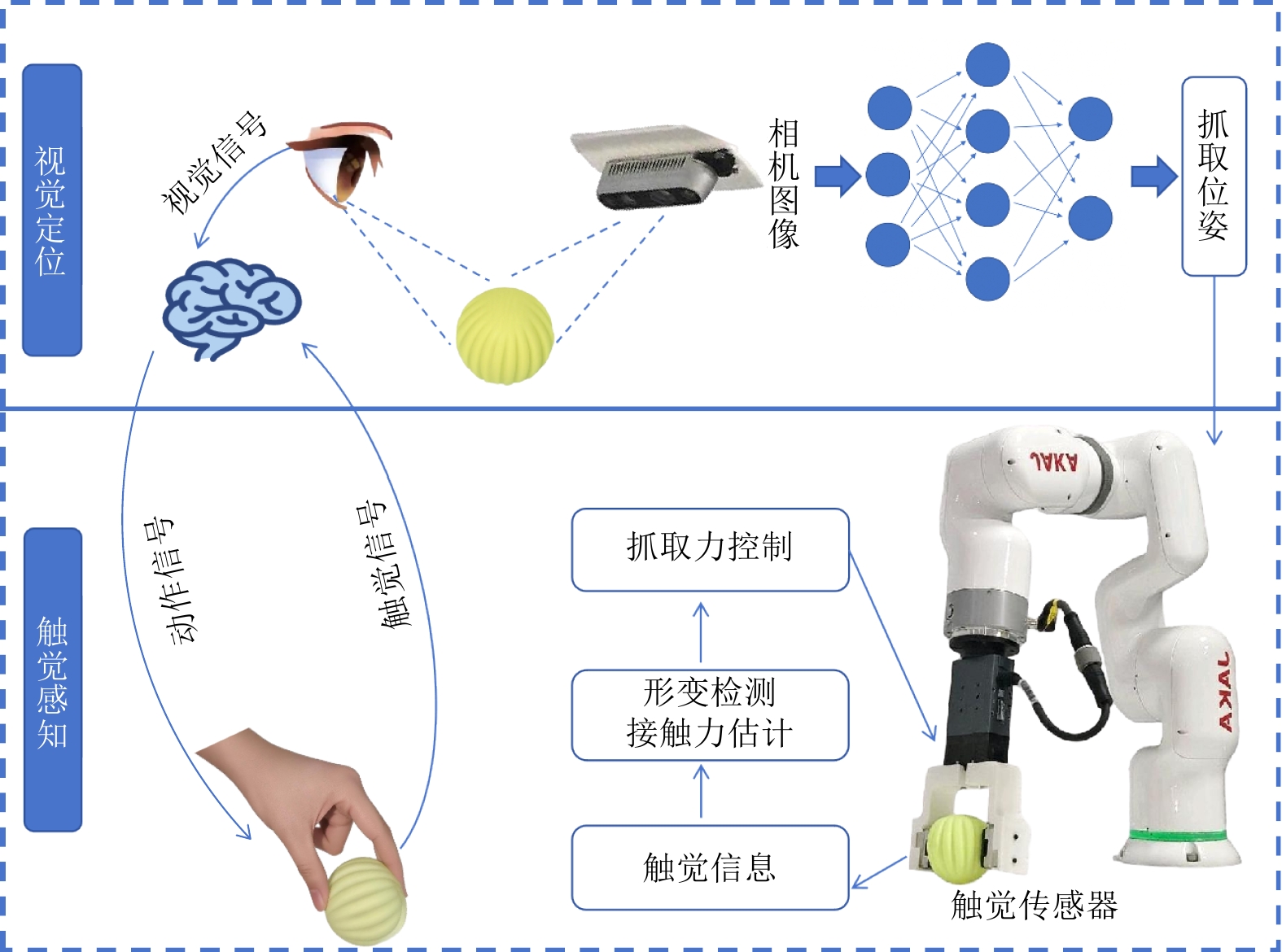
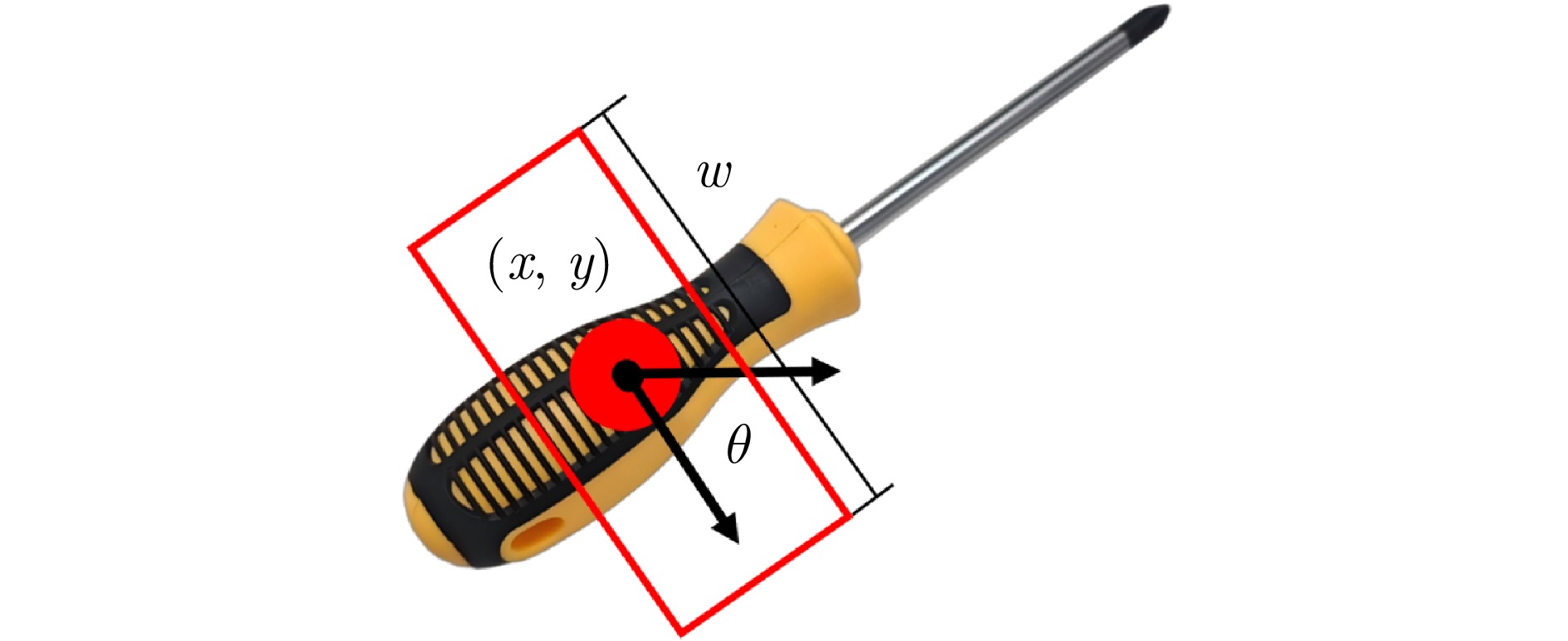
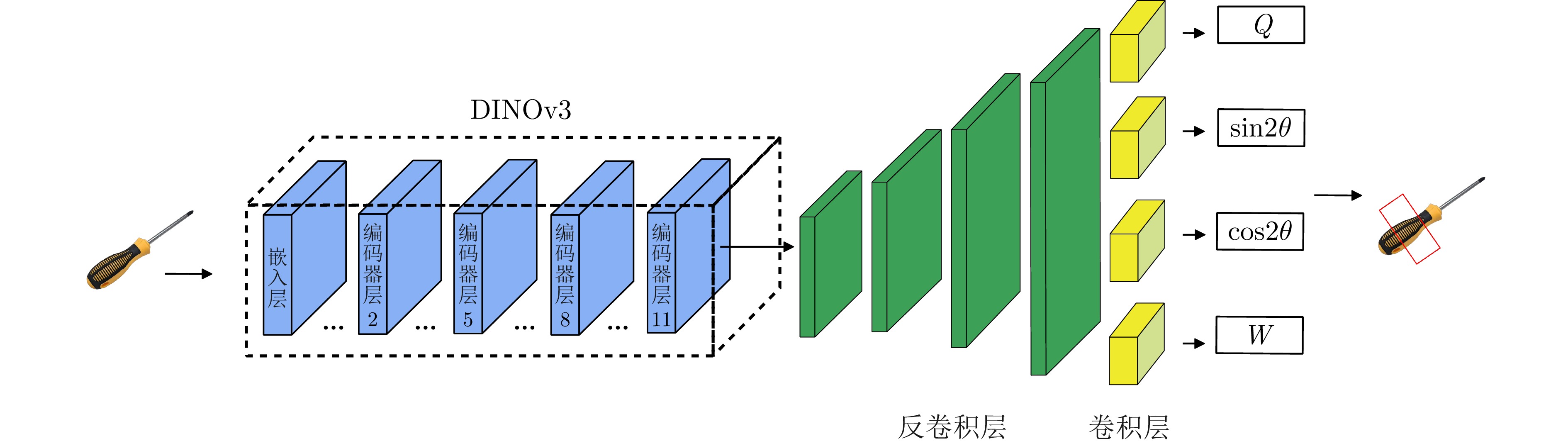
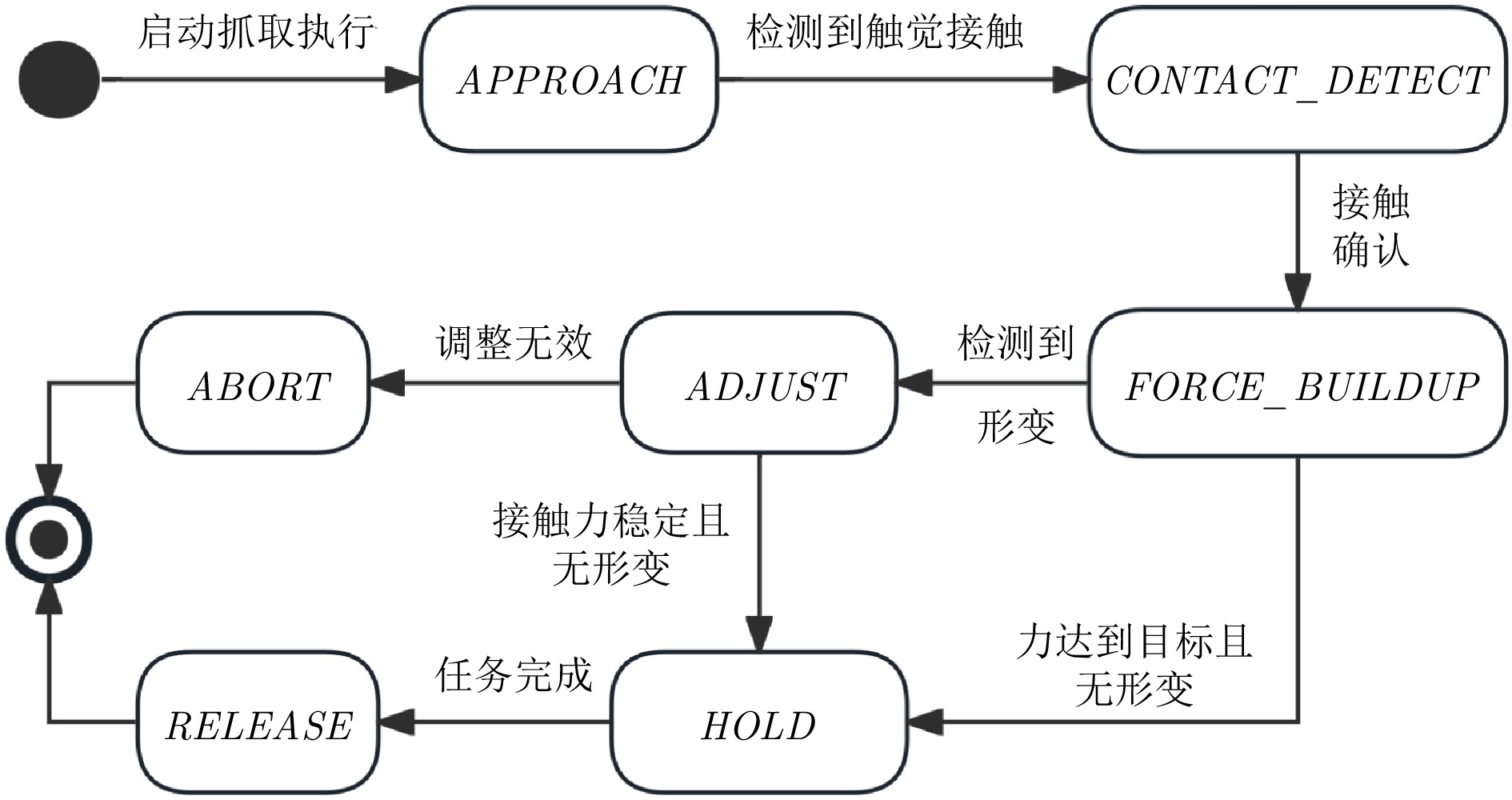
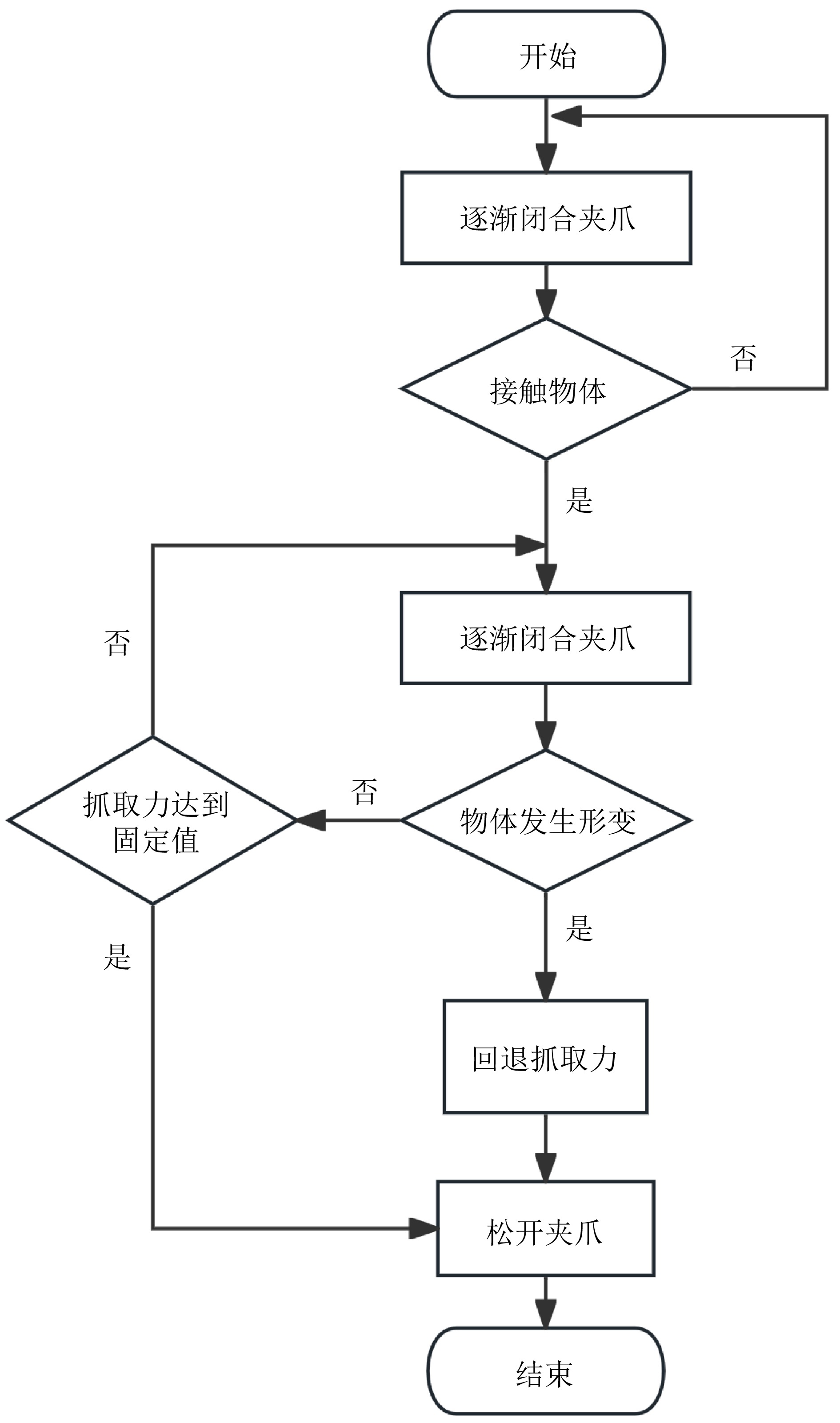
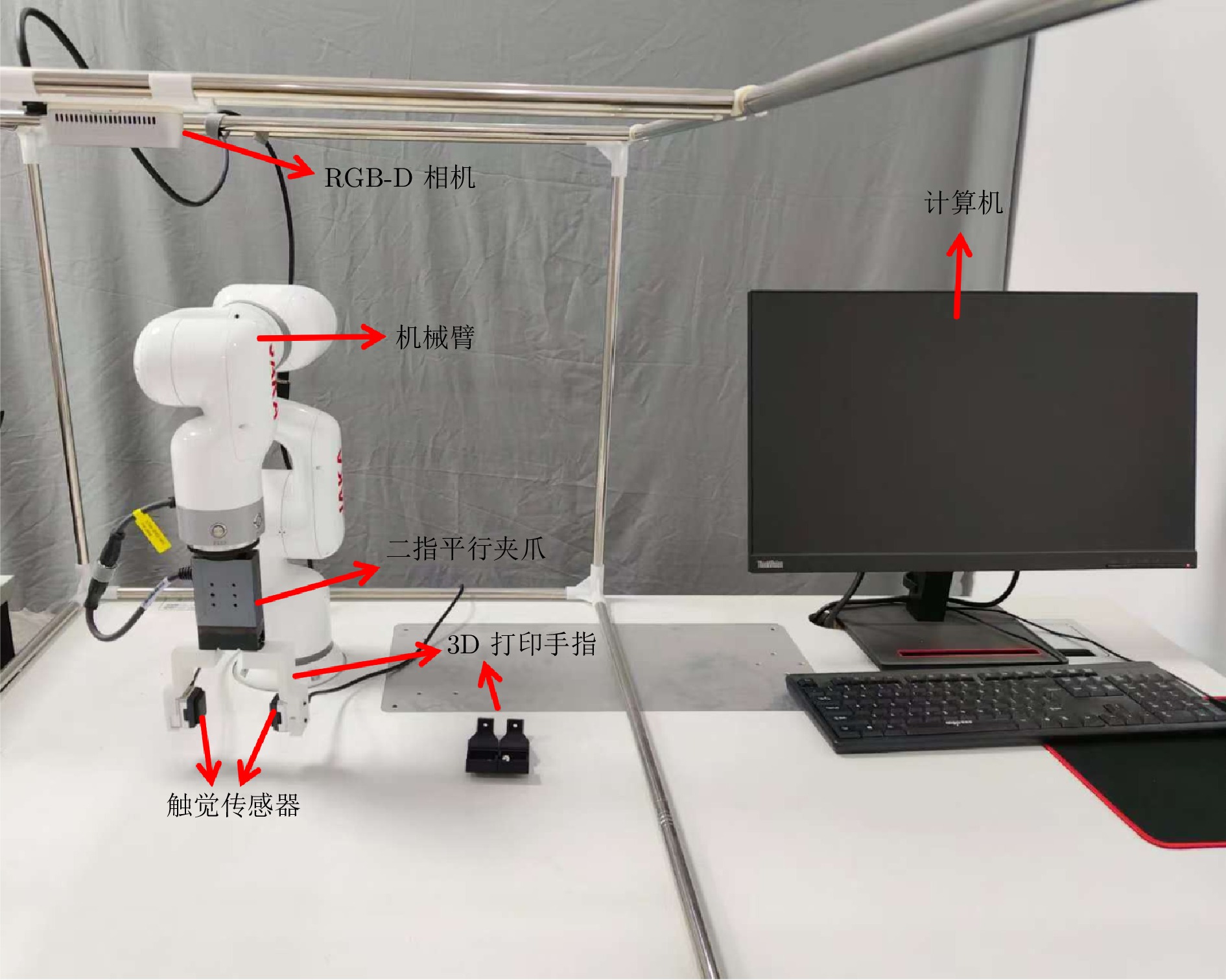
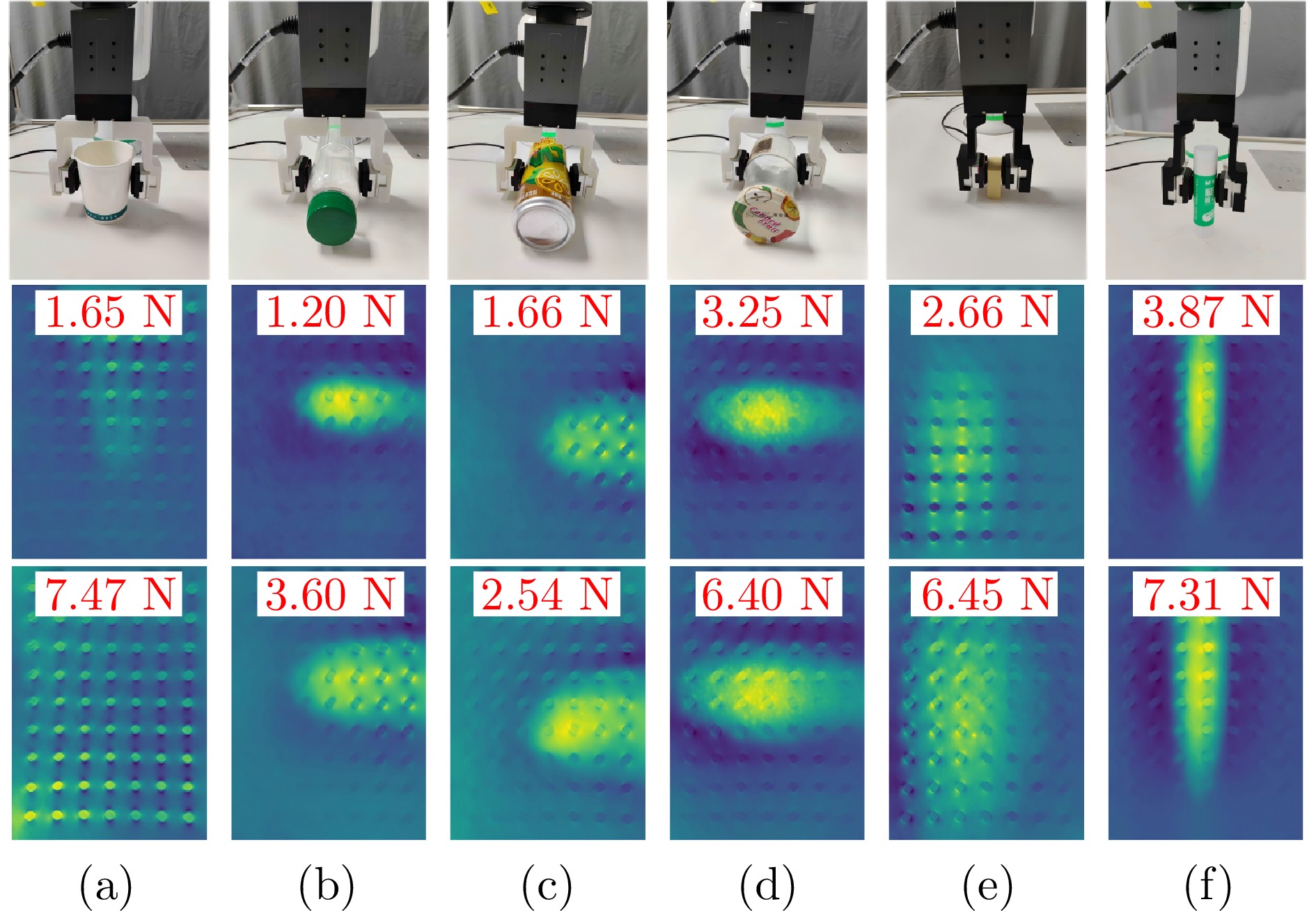
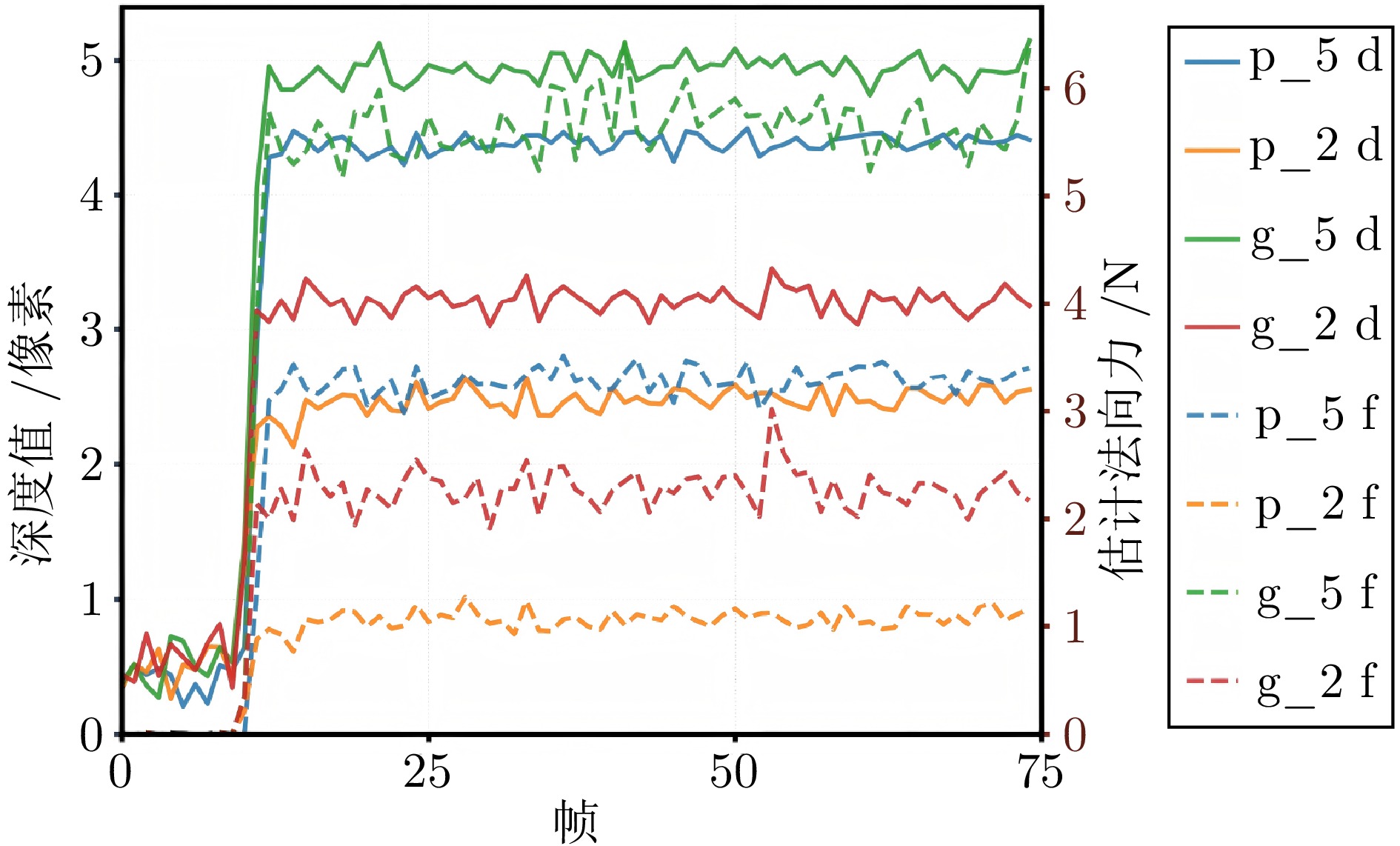
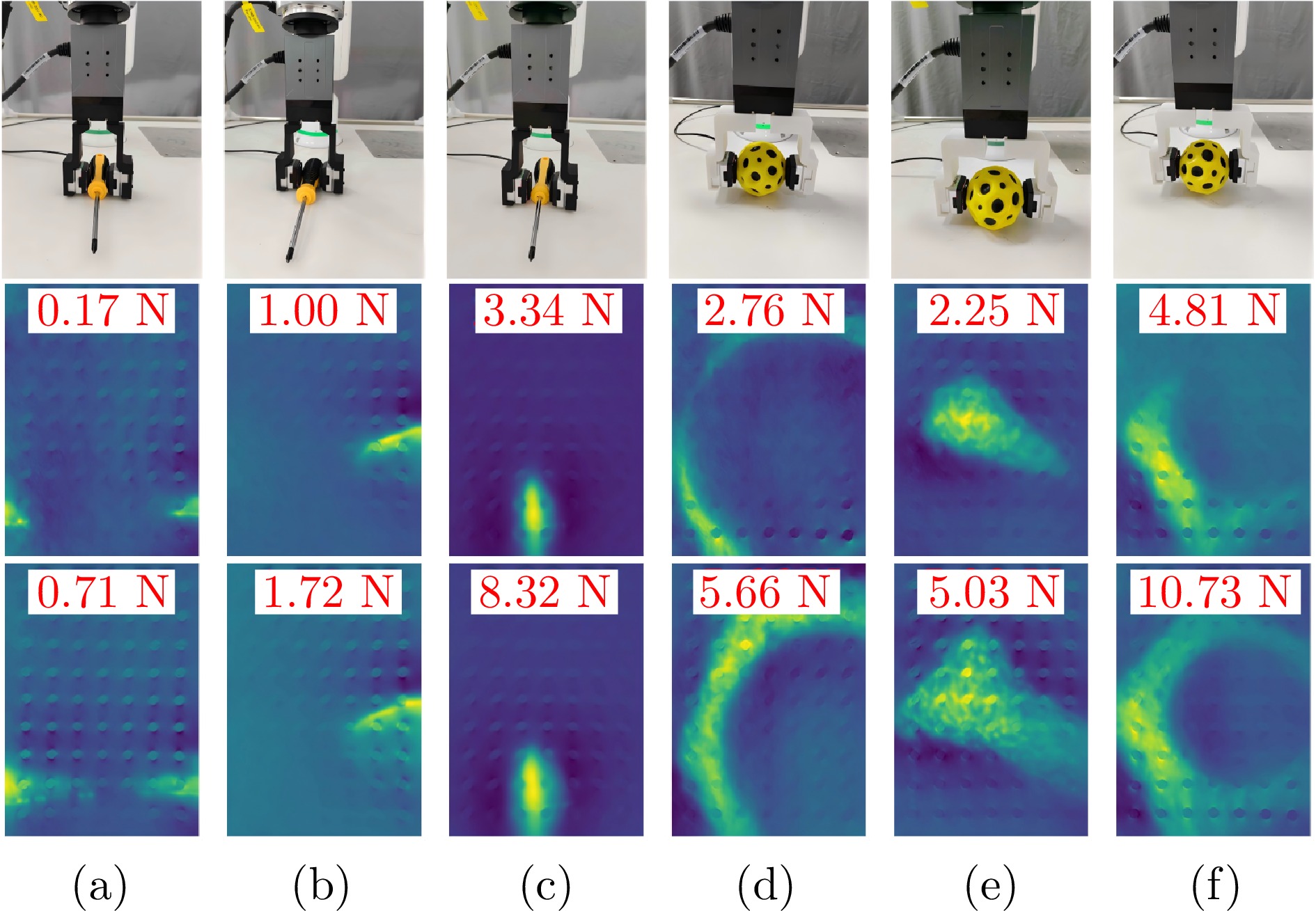
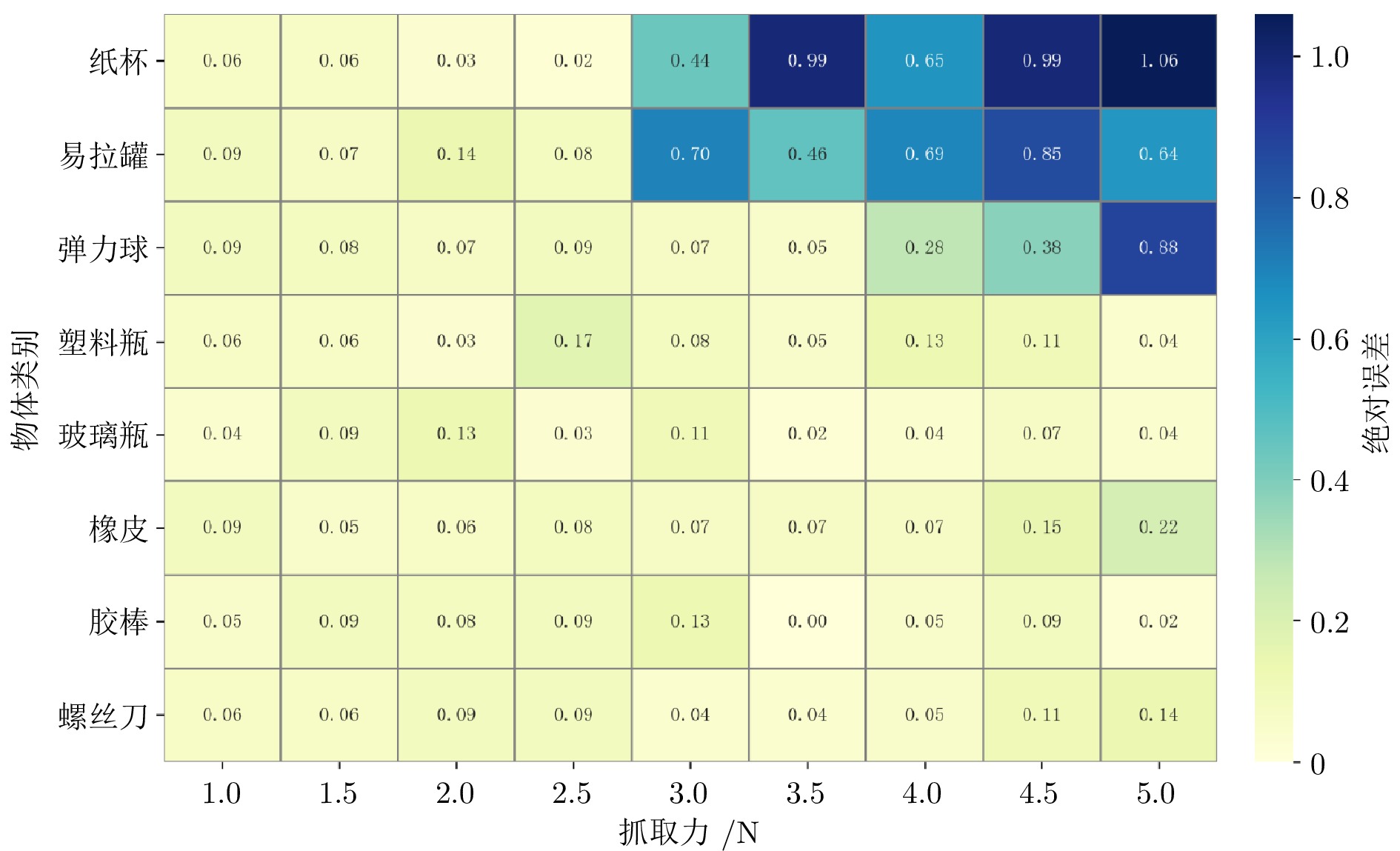
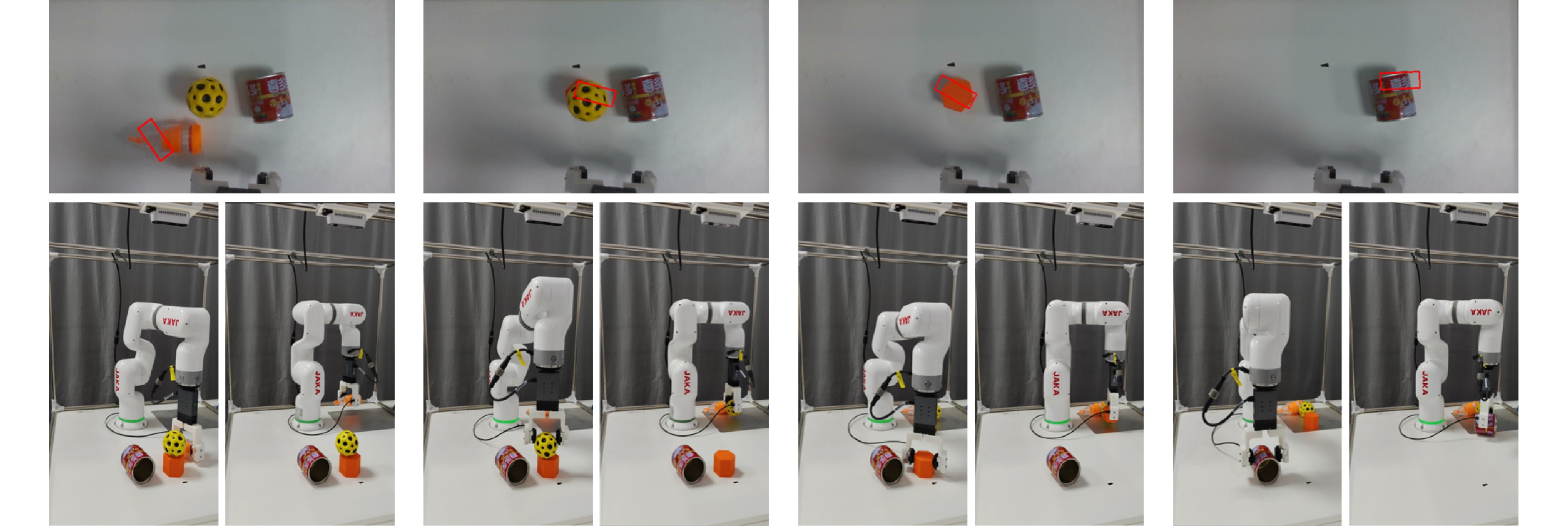
随着机器人技术快速发展, 其对精细感知能力需求日益增长. 然而, 现有机器人仍难以具备如人类般灵活的操作能力. 在精细抓取任务中, 机器人恒力抓取策略存在局限性: 抓取力过大易损伤物体, 抓取力过小则导致抓取不稳. 为应对上述问题, 提出一种基于视觉与触觉融合的机器人自适应力控抓取方法. 该方法由视觉模块、触觉模块和抓取策略组成: 视觉模块用于预测目标抓取位置; 在接触阶段, 触觉模块借助视触觉传感器恢复触觉深度并估算接触面积与法向力; 随后, 通过最大深度变化率和帧间均方差进行形变判定, 并触发抓取力调整策略, 从而实现“渐进增力–形变检测–力回退”的仿生反馈抓取机制. 实验结果表明, 该方法将多种日常物体的整体抓取成功率由87.50% 提升至98.75%, 在易碎物体抓取中实现零损坏.
随着机器人技术快速发展, 其对精细感知能力需求日益增长. 然而, 现有机器人仍难以具备如人类般灵活的操作能力. 在精细抓取任务中, 机器人恒力抓取策略存在局限性: 抓取力过大易损伤物体, 抓取力过小则导致抓取不稳. 为应对上述问题, 提出一种基于视觉与触觉融合的机器人自适应力控抓取方法. 该方法由视觉模块、触觉模块和抓取策略组成: 视觉模块用于预测目标抓取位置; 在接触阶段, 触觉模块借助视触觉传感器恢复触觉深度并估算接触面积与法向力; 随后, 通过最大深度变化率和帧间均方差进行形变判定, 并触发抓取力调整策略, 从而实现“渐进增力–形变检测–力回退”的仿生反馈抓取机制. 实验结果表明, 该方法将多种日常物体的整体抓取成功率由87.50% 提升至98.75%, 在易碎物体抓取中实现零损坏.

2026, 52(5): 1128-1140.
doi: 10.16383/j.aas.c250683
cstr: 32138.14.j.aas.c250683
摘要:
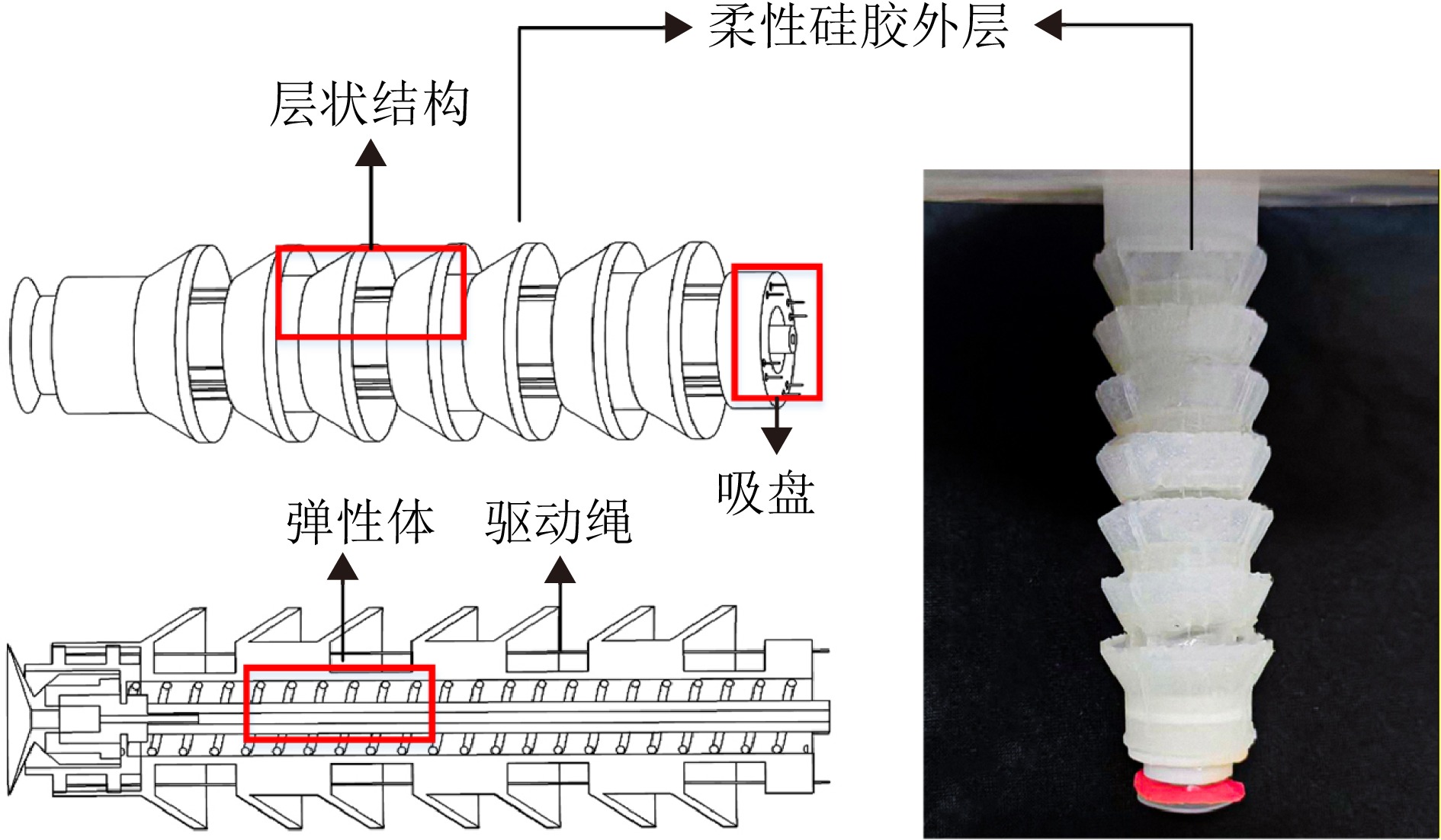
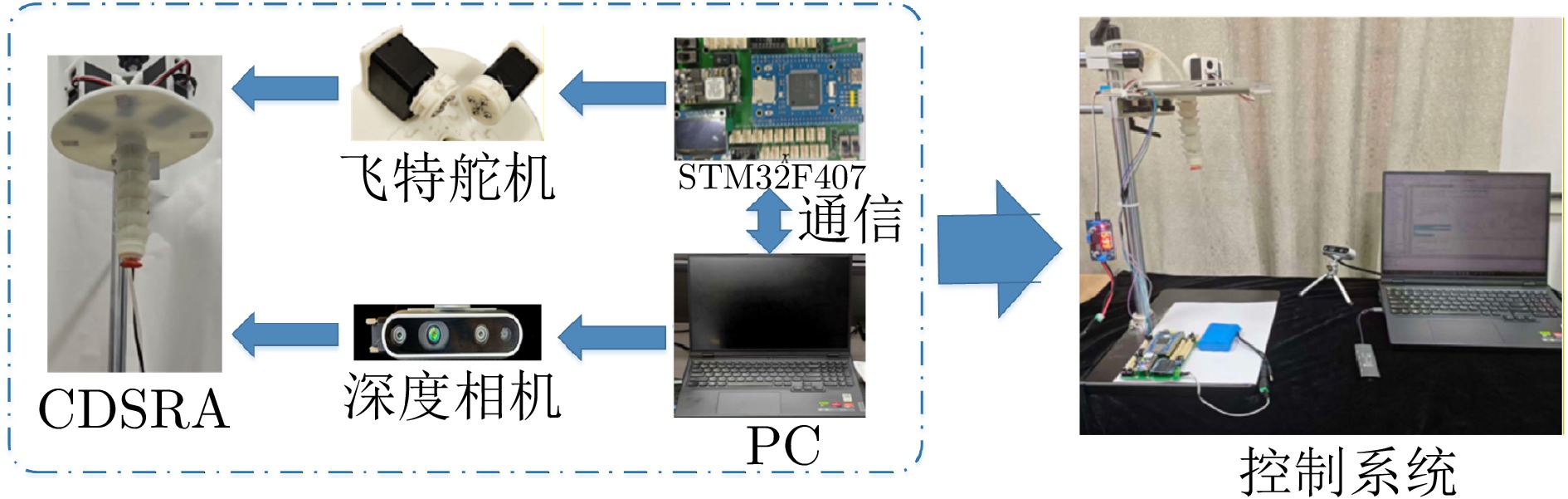
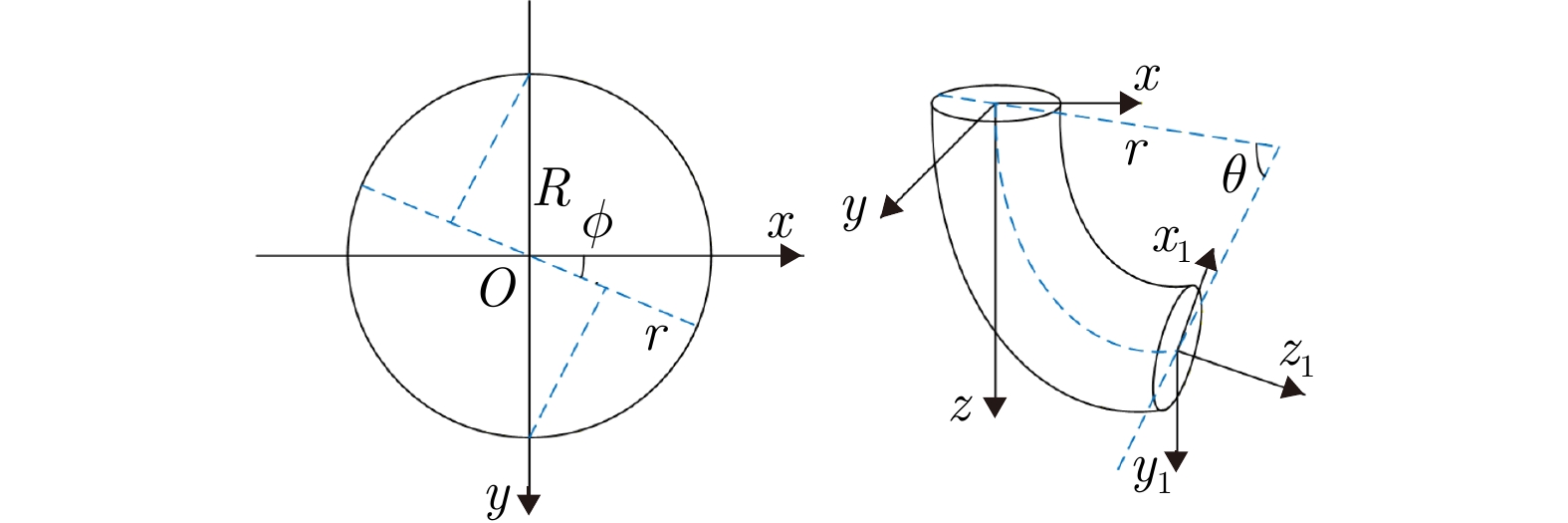
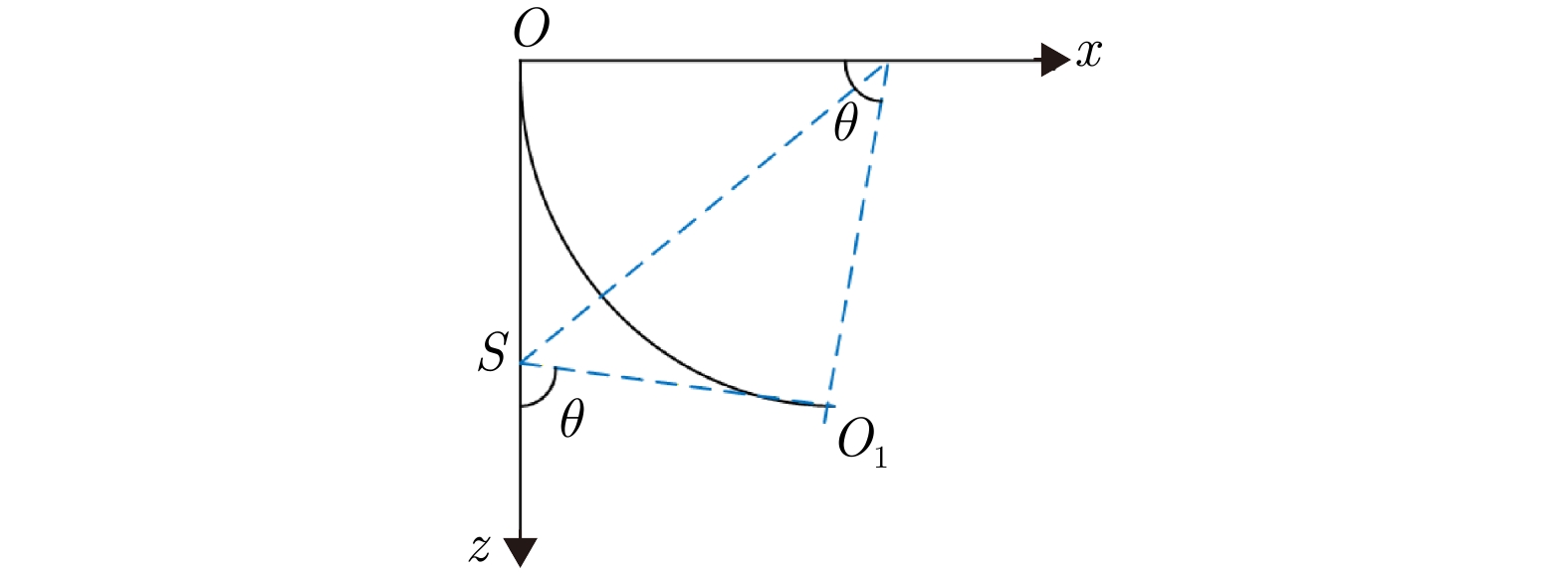
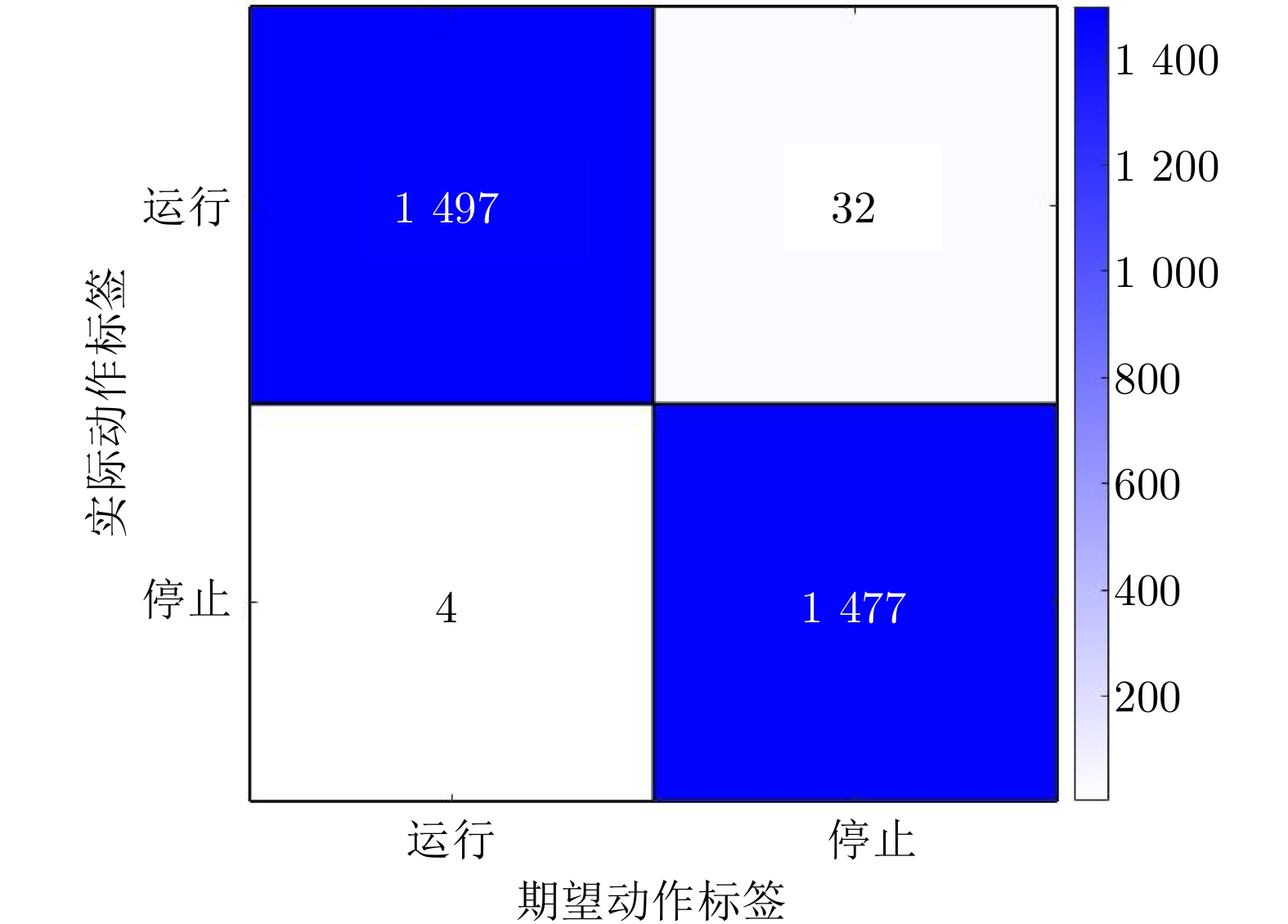
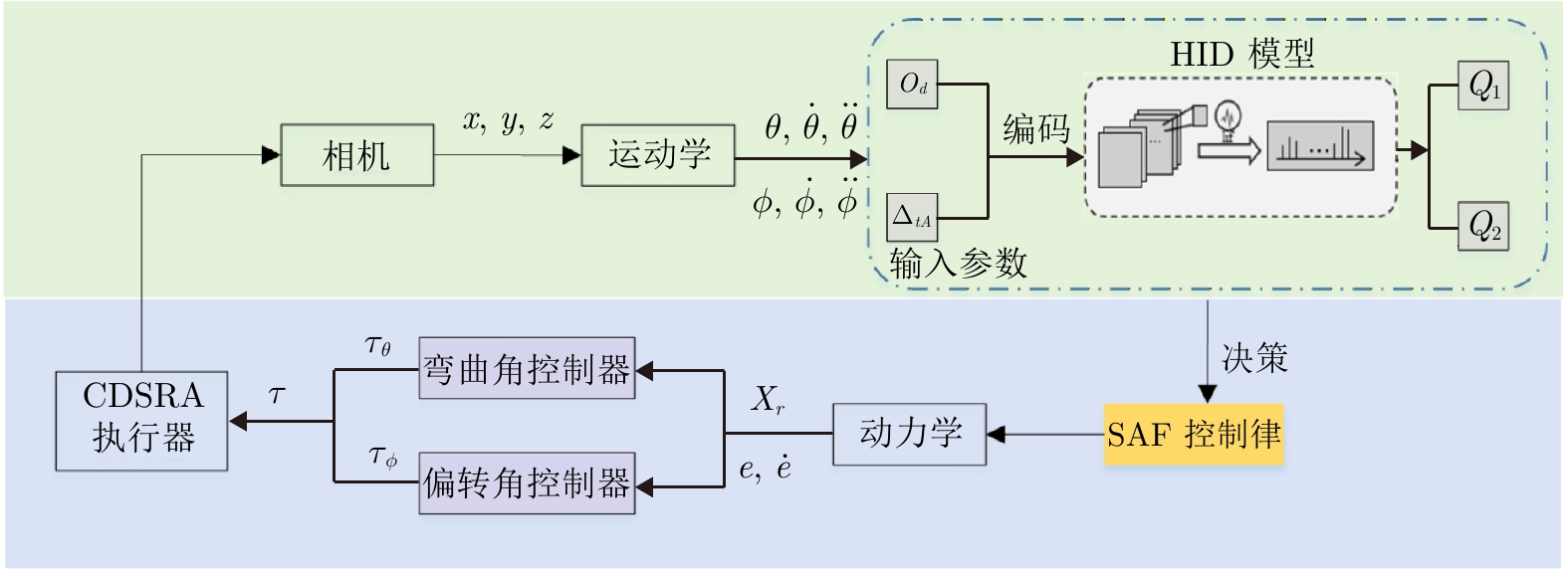
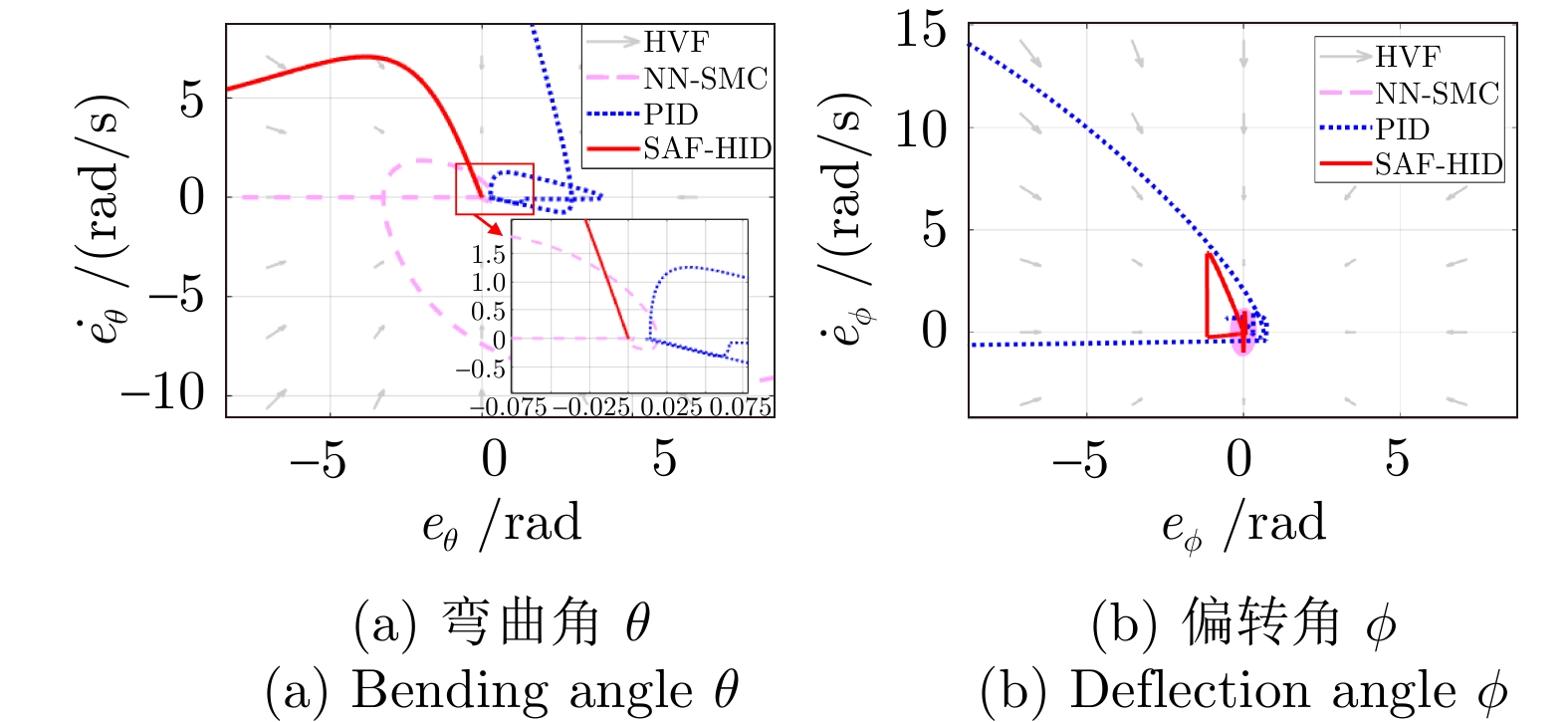
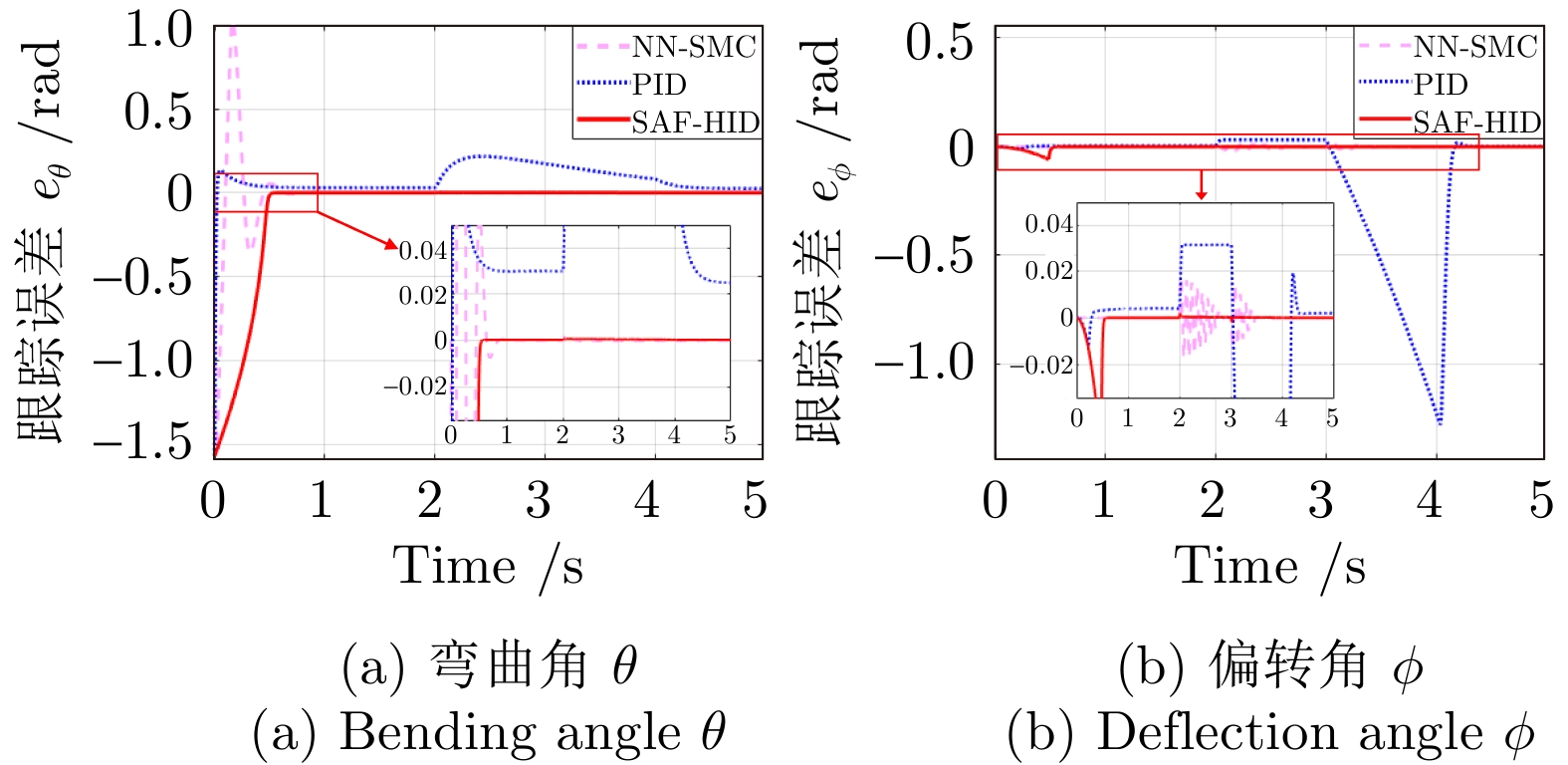
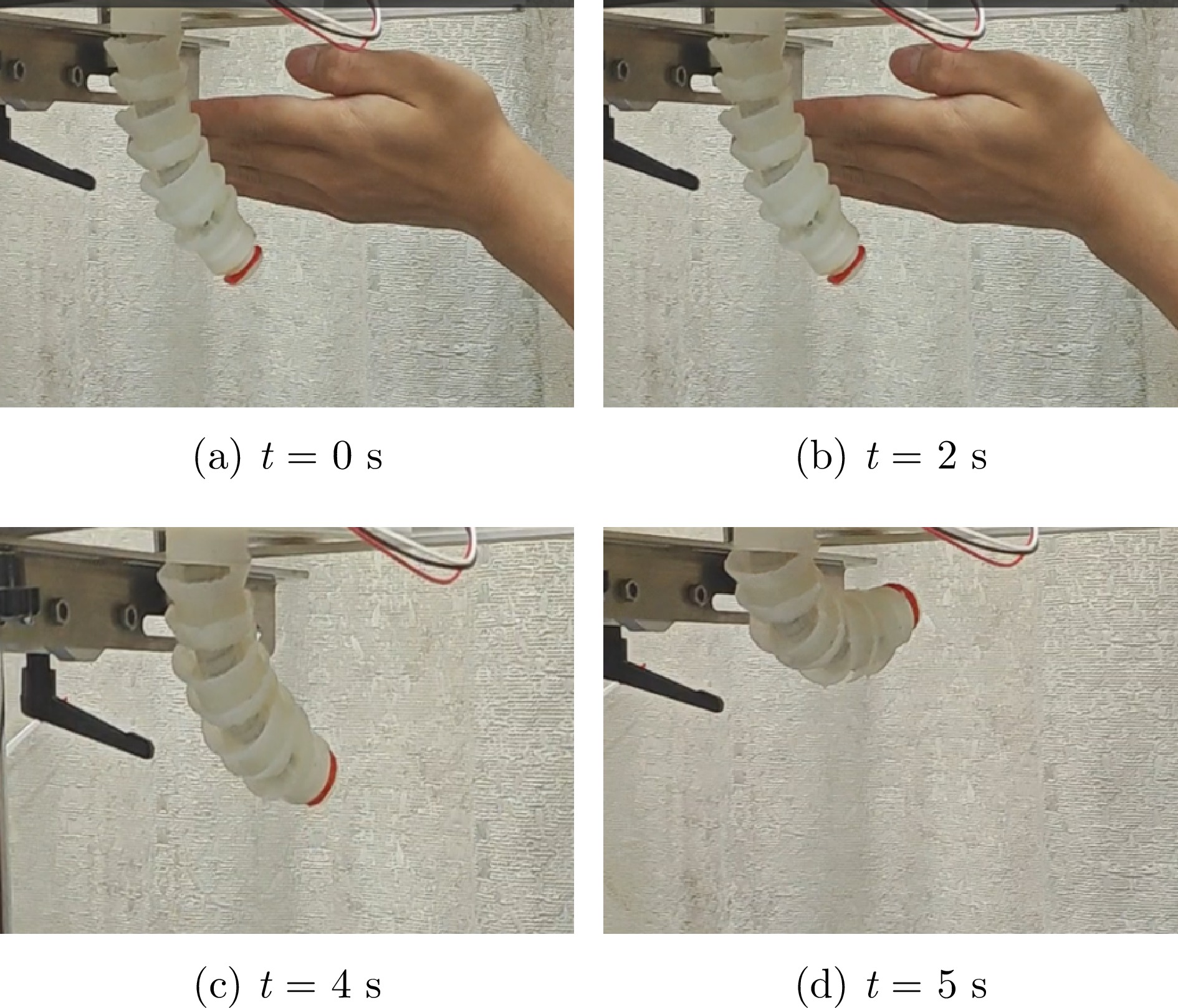
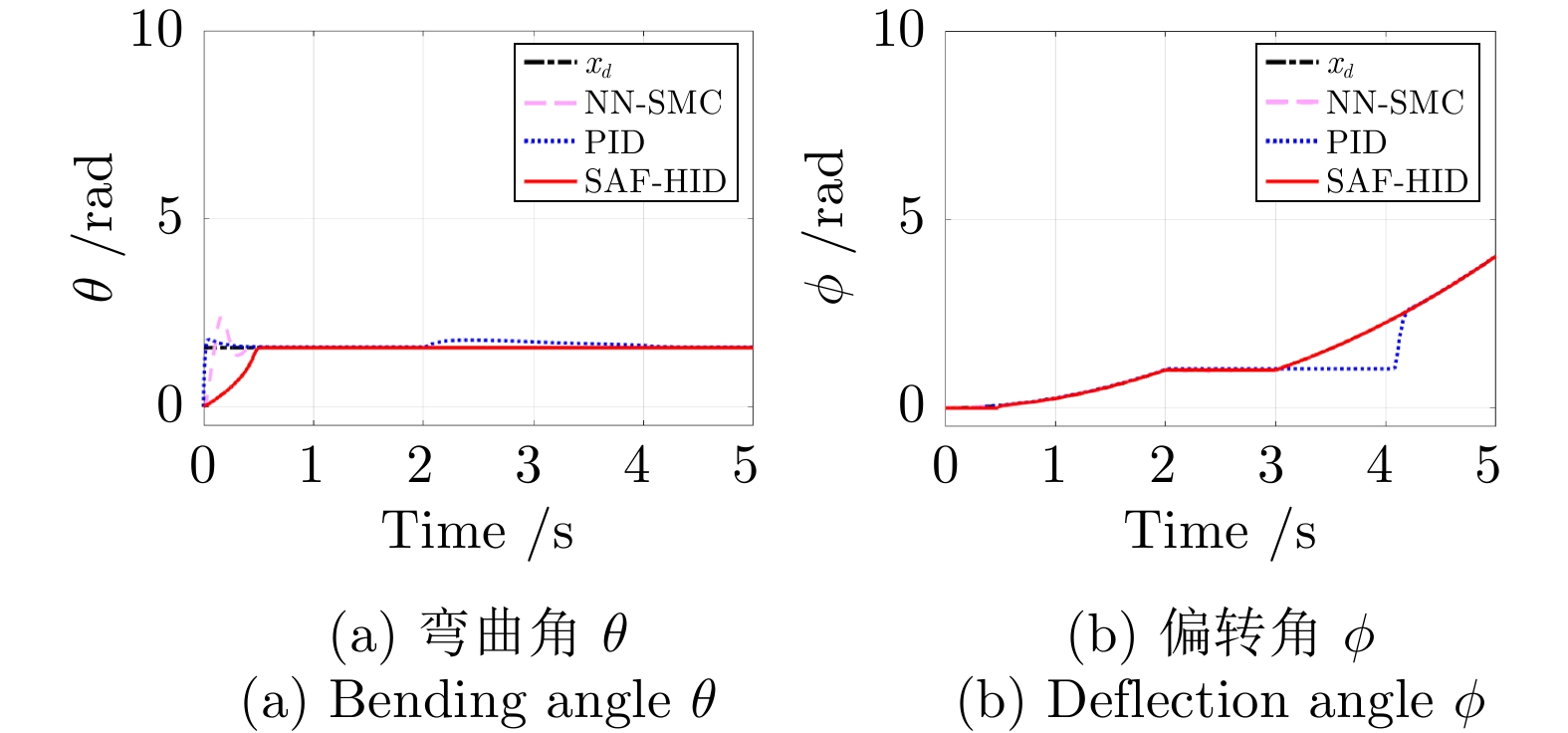
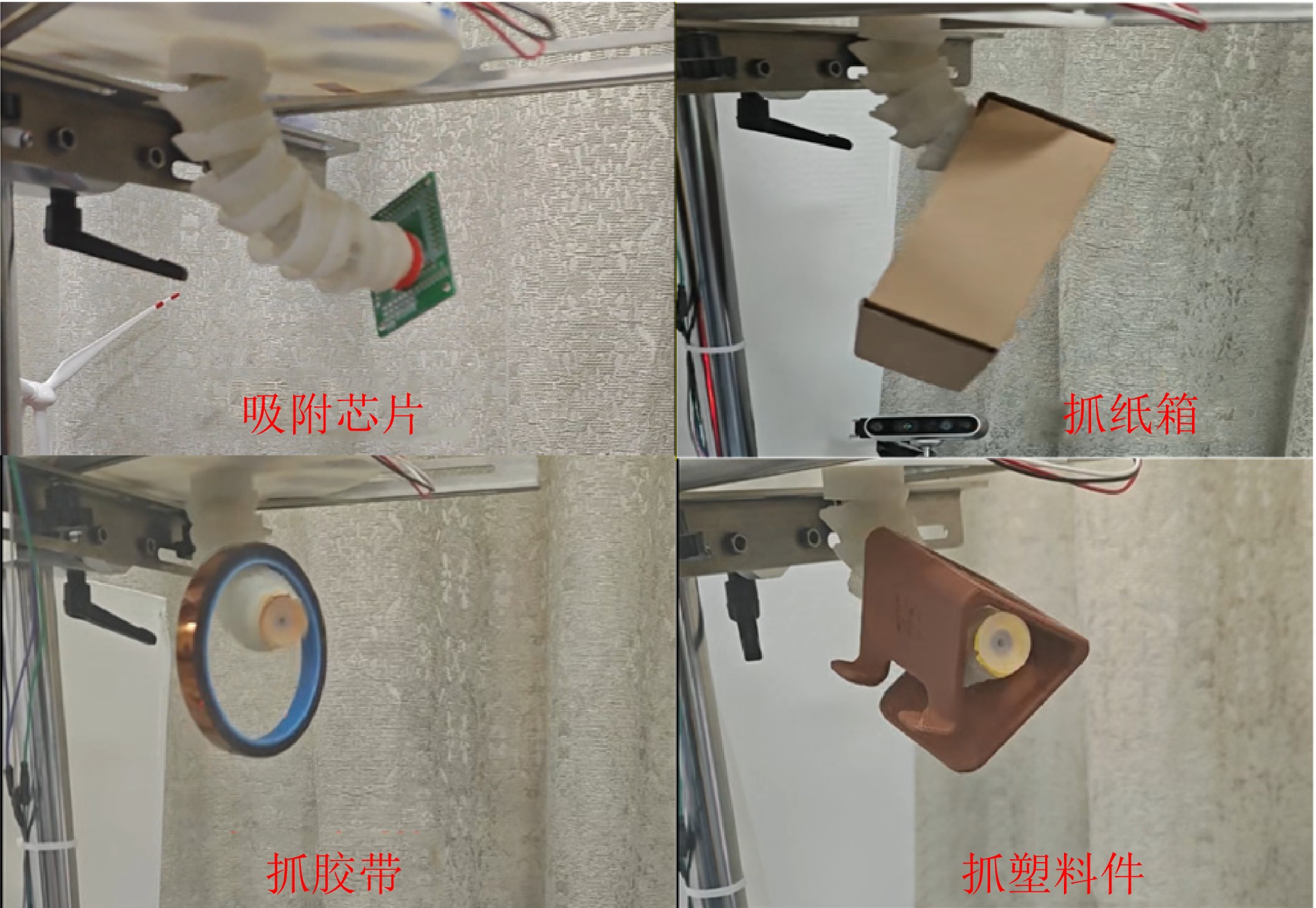
绳驱动软体机器人通过柔性本体与绳传动相结合, 在结构轻量化、运动柔顺性及人机交互安全性等方面具有显著优势, 在协作操作与安全交互场景中展现出重要应用潜力. 然而, 软体材料固有的强非线性与大变形特性, 以及绳驱动结构引入的多自由度耦合和参数不确定性, 使绳驱动软体机器人在复杂环境下的稳定控制与抗扰性能面临较大挑战. 针对上述问题, 构建一种仿生绳驱动软体机器人原型系统, 建立相应的运动学与动力学模型; 提出一种融合仿人决策的状态吸引控制方法, 该方法引入脉冲神经网络以模拟人类决策行为, 实现对绳驱动软体机器人启停策略与期望轨迹的自适应更新; 设计一种融合状态吸引函数与仿人决策的鲁棒轨迹跟踪控制策略, 用以约束跟踪误差在模型不确定性与外部扰动条件下的收敛方向, 并基于Lyapunov理论证明闭环系统的稳定性. 仿真与实物实验结果表明, 所提方法在鲁棒性、人机交互安全性及动态响应性能等方面具有良好表现, 验证了其在实际人机交互场景中的可行性与有效性.
绳驱动软体机器人通过柔性本体与绳传动相结合, 在结构轻量化、运动柔顺性及人机交互安全性等方面具有显著优势, 在协作操作与安全交互场景中展现出重要应用潜力. 然而, 软体材料固有的强非线性与大变形特性, 以及绳驱动结构引入的多自由度耦合和参数不确定性, 使绳驱动软体机器人在复杂环境下的稳定控制与抗扰性能面临较大挑战. 针对上述问题, 构建一种仿生绳驱动软体机器人原型系统, 建立相应的运动学与动力学模型; 提出一种融合仿人决策的状态吸引控制方法, 该方法引入脉冲神经网络以模拟人类决策行为, 实现对绳驱动软体机器人启停策略与期望轨迹的自适应更新; 设计一种融合状态吸引函数与仿人决策的鲁棒轨迹跟踪控制策略, 用以约束跟踪误差在模型不确定性与外部扰动条件下的收敛方向, 并基于Lyapunov理论证明闭环系统的稳定性. 仿真与实物实验结果表明, 所提方法在鲁棒性、人机交互安全性及动态响应性能等方面具有良好表现, 验证了其在实际人机交互场景中的可行性与有效性.