

Adaptive Track Stand Control for Unmanned Motorcycles Based on a Human-inspired Control Strategy
-
摘要: 无人摩托车静止时离心力效应失效, 导致其平衡控制具有极大的挑战性, 目前仍缺乏一种鲁棒且高效的控制机制. 受摩托车手定车技巧启发, 提出一种基于仿人操控的无人摩托静止平衡控制方法, 阐明定车原理并基于其实现后驱无人摩托静止平衡控制. 通过建立动力学模型并结合骑手实验, 从模型和数据两个维度分析定车机理, 揭示骑手在定车中保持平衡与地形适应的原理, 在此基础上提出平衡点自适应鲁棒定车控制方法. 该方法利用扰动观测器估计的扰动计算受扰平衡点, 进而使用非线性模型预测控制实现扰动下的平衡控制. 证明了所提方法的无静差跟踪特性, 通过实验验证方法的有效性, 该方法在侧向/纵向斜面定车任务中将可容忍扰动分别提升至普通模型预测控制的约3.1倍和2.4倍, 在后轮位置跟踪任务中将跟踪误差降低一个数量级.Abstract: When an unmanned motorcycle is at zero velocity, the centrifugal effect becomes ineffective, making balance control extremely challenging and lacking a robust and efficient control mechanism. Inspired by track stand skills of human riders, this paper proposes a human-inspired control method for the stationary balance of unmanned motorcycles. The principle of track stand is elucidated and applied to stationary balance of rear-wheel-driven unmanned motorcycles. By deriving the dynamic equations and conducting rider experiments, the mechanism of track stand is analyzed from both model-based and data-driven perspectives, revealing the principles by which riders maintain balance and adapt to varying terrains. Building upon this insight, a robust equilibrium-adaptation track stand control method is proposed. The method estimates the disturbed equilibrium point by using a disturbance observer, and adopts nonlinear model predictive control to achieve balance control under disturbances. The proposed method is shown to ensure zero steady-state tracking error, and its effectiveness is validated through experiments. Experimental results show that the proposed method improves tolerable disturbances to about 3.1 times and 2.4 times those of the conventional model predictive control in track stand tasks on lateral and longitudinal slopes, respectively, and reduces tracking errors by one order of magnitude in rear wheel position tracking tasks.
-
Key words:
- unmanned motorcycle /
- track stand /
- bio-inspired control /
- disturbance rejection control
1)2 1为下文表述简洁, 下文中的状态$ {\boldsymbol{x}} $ 均是此扩展后的状态.2)1 2此处$ |{\boldsymbol{d}}(t)| $表示对向量或矩阵逐元素取绝对值, 符号$ \preceq $表示对向量或矩阵逐元素比较的“小于等于”. -
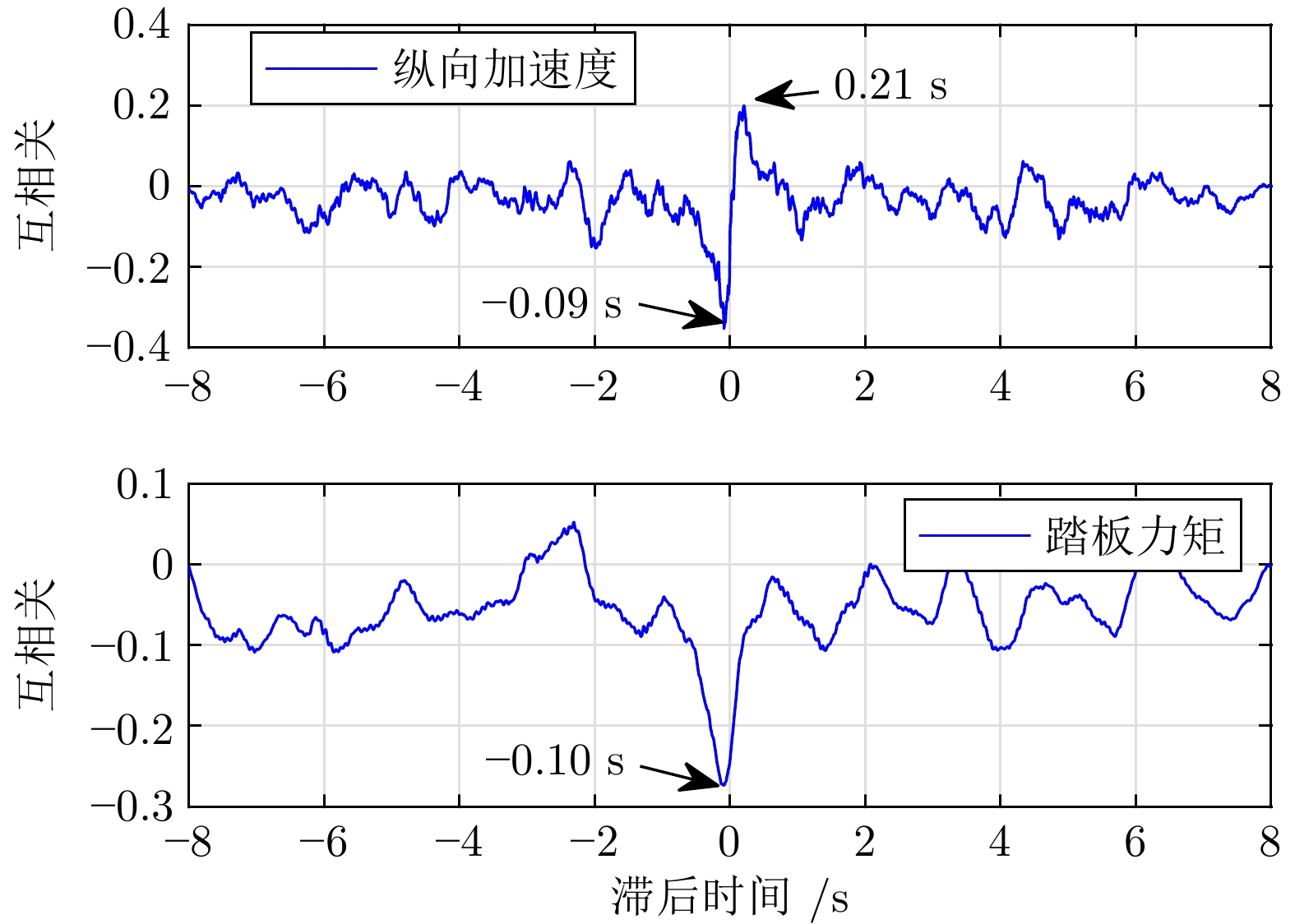
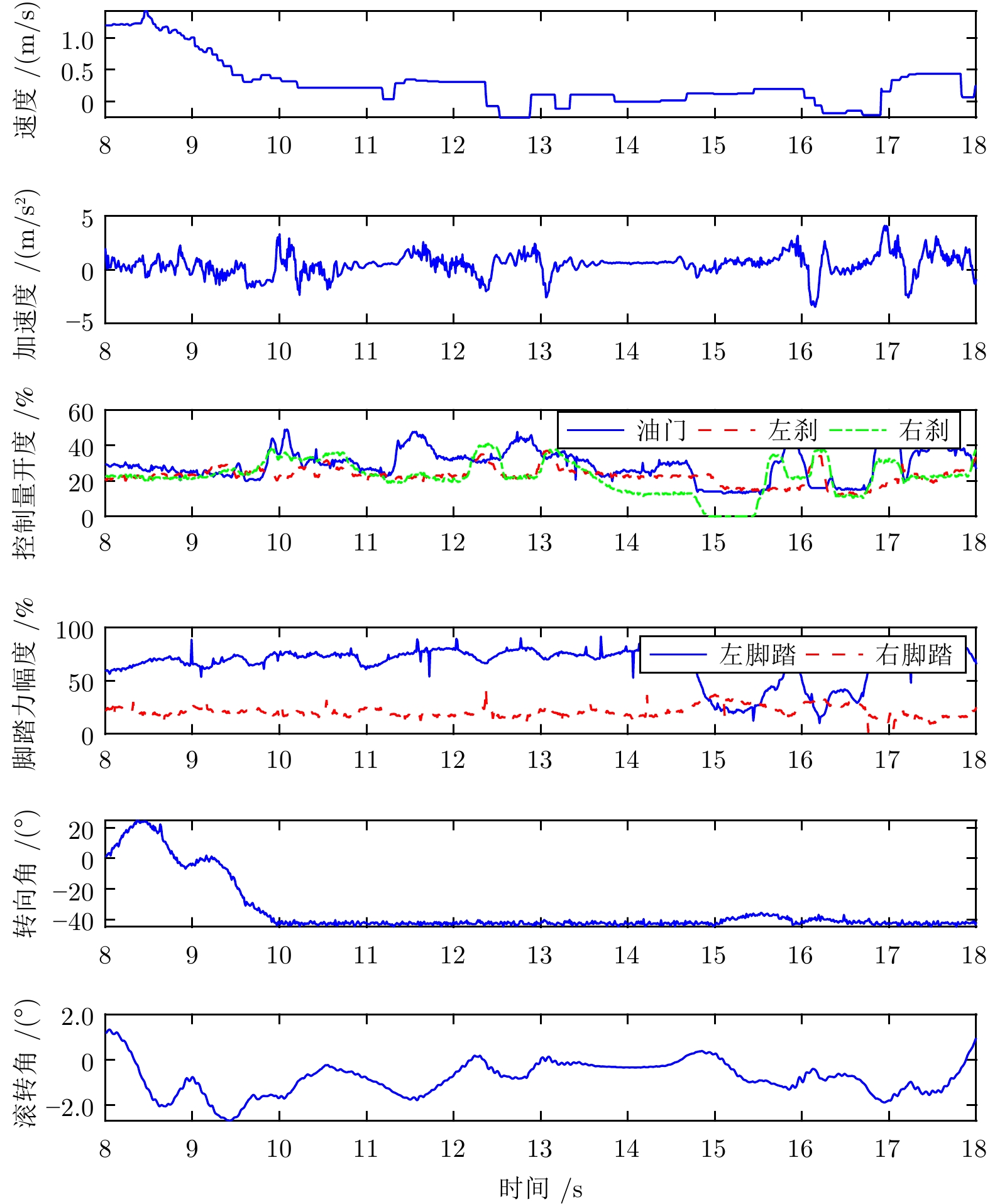
图 7 定车过程中滚转角速度分别与纵向加速度和踏板力矩的互相关
Fig. 7 Cross-correlations of roll angular velocity with longitudinal acceleration and pedal torque during the track stand
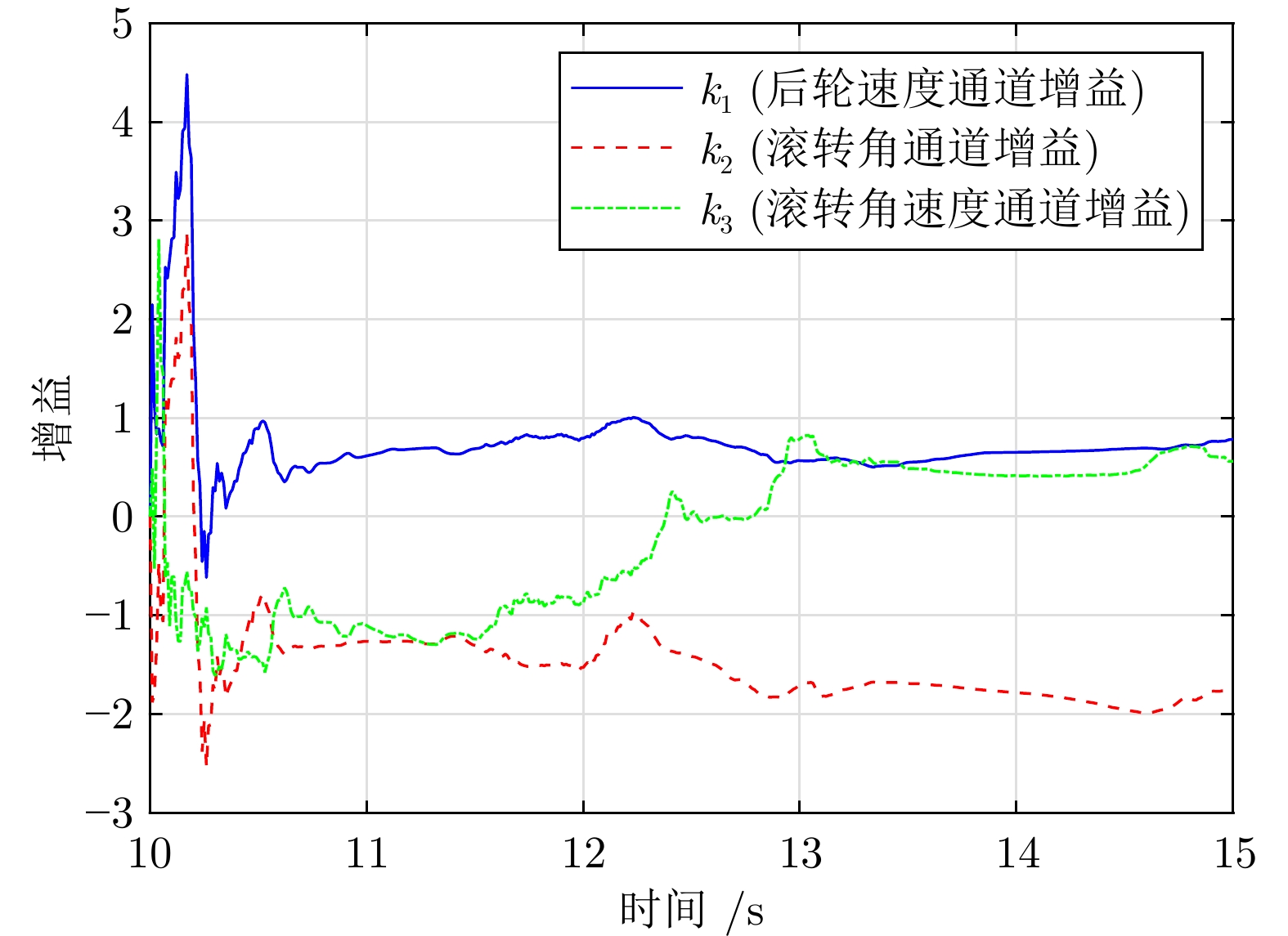
图 8 骑手定车控制增益递归最小二乘估计
Fig. 8 Recursive least square estimation of control gains for track stand control of a human rider
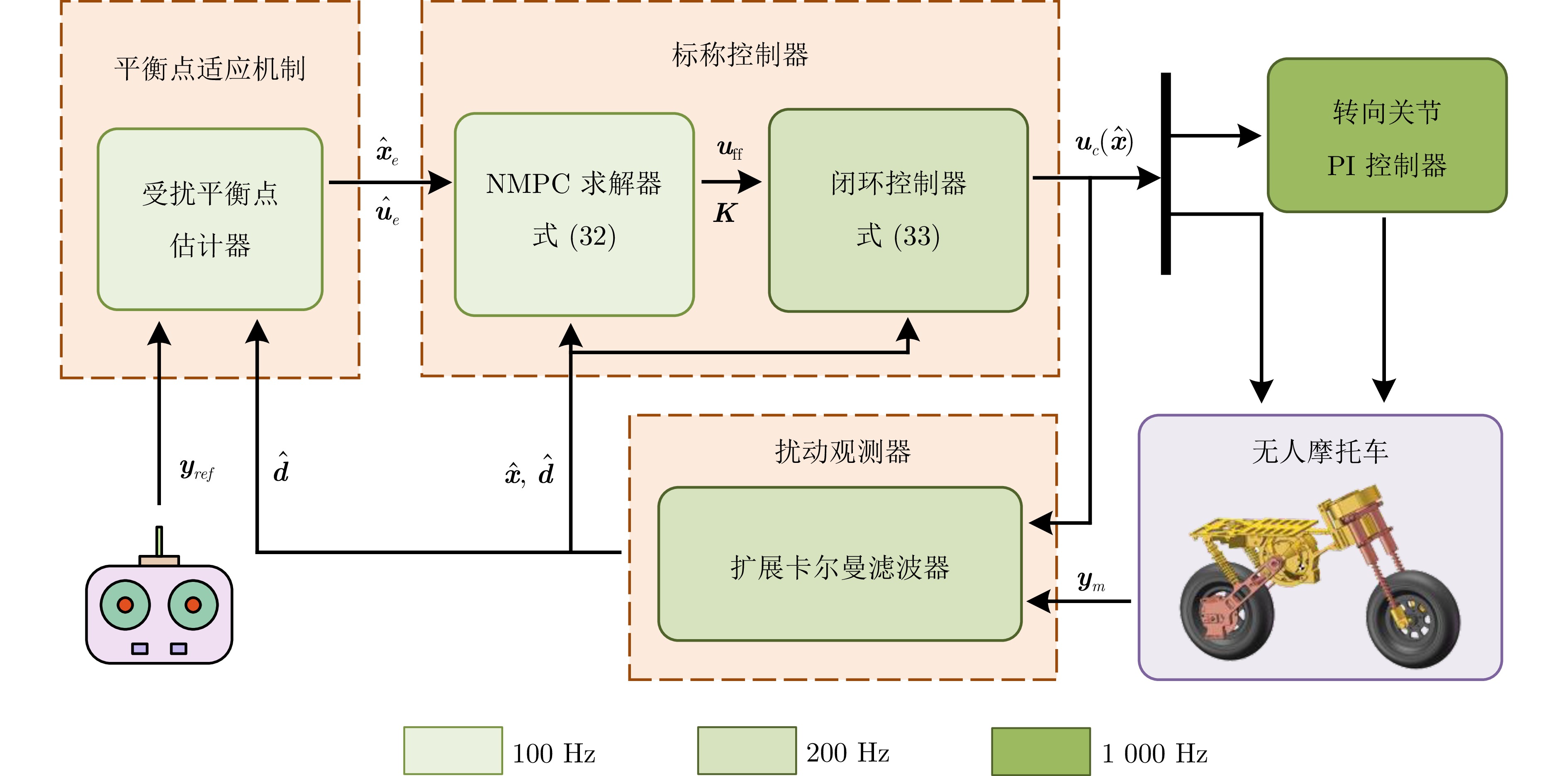
图 10 用于无人摩托车定车控制的EAMPC框图
Fig. 10 EAMPC block diagram for track stand control of unmanned motorcycle
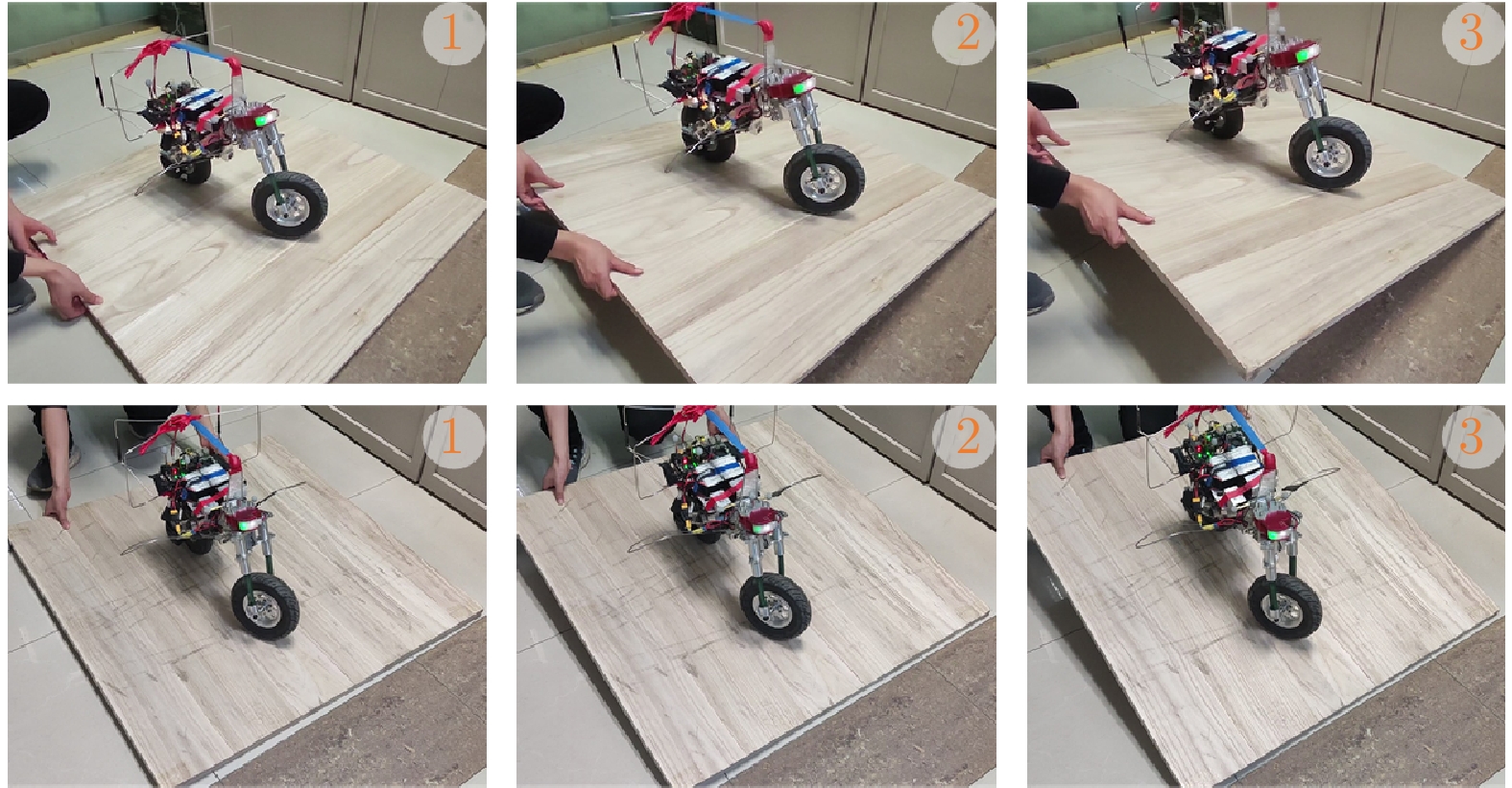
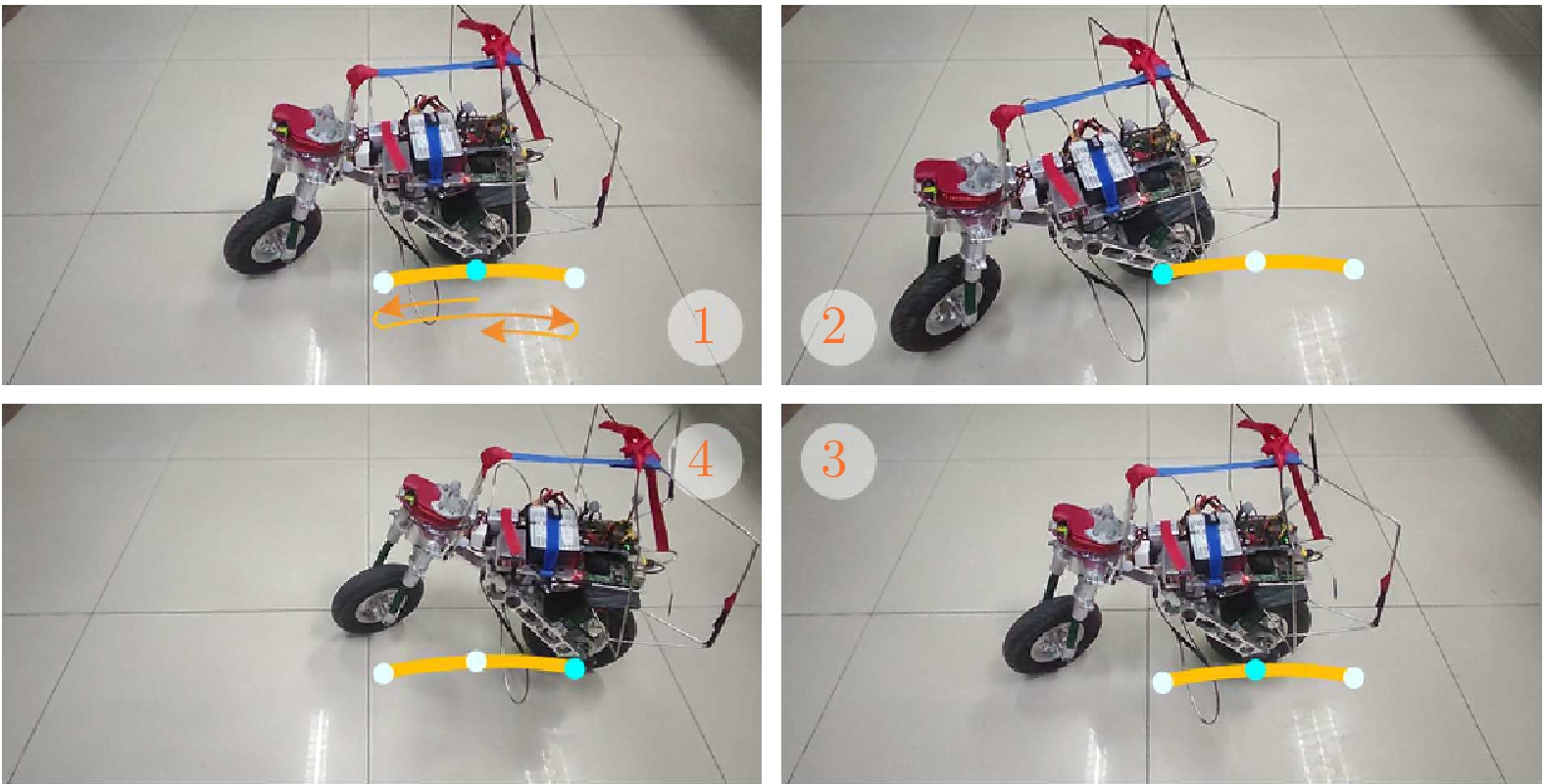
图 12 斜面定车实验(上: 侧向斜面; 下: 纵向斜面)
Fig. 12 Track stand experiments on inclined planes (upper: laterally inclined plane; lower: longitudinally inclined plane)
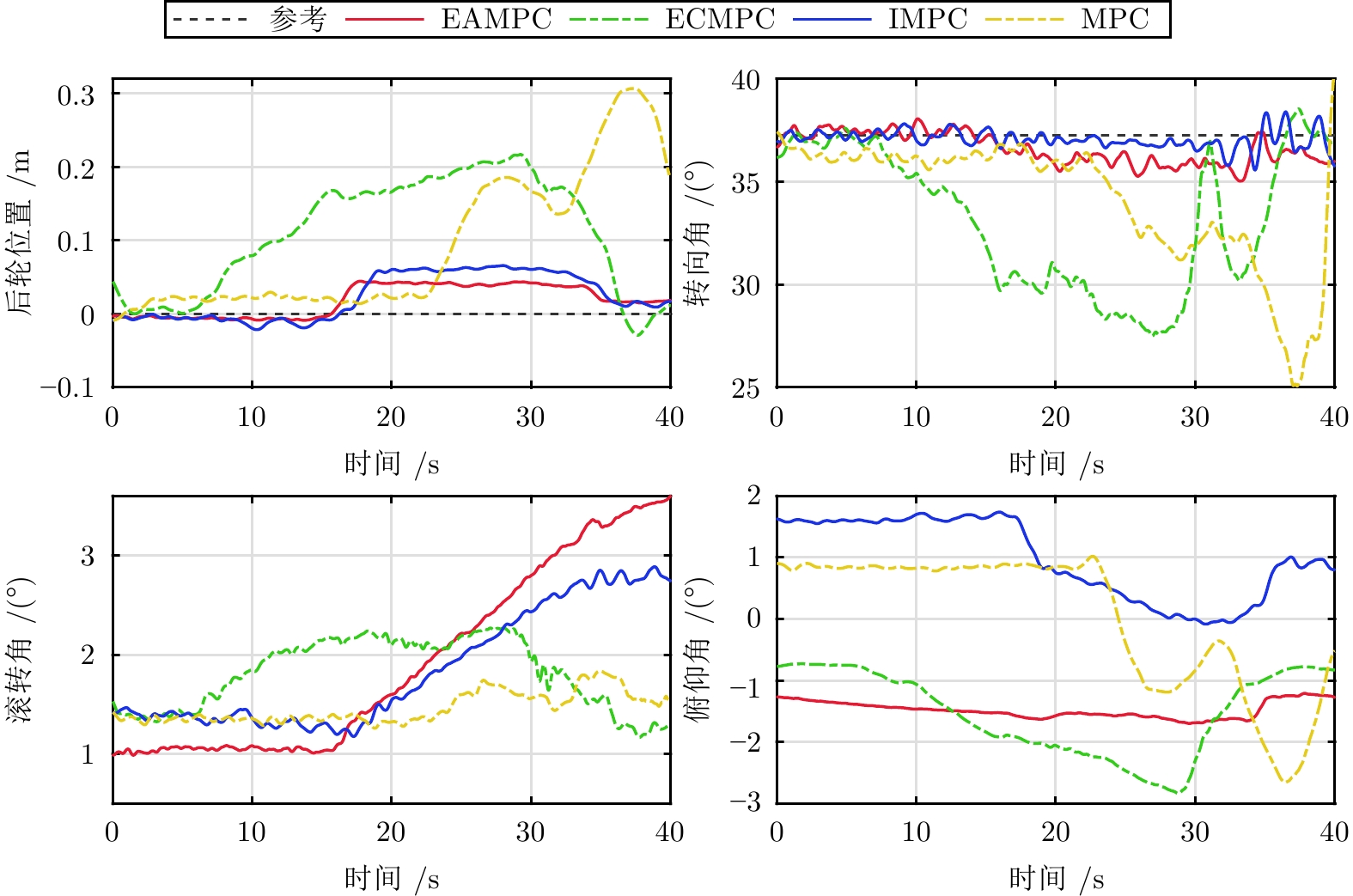
图 13 侧向倾斜平面定车实验结果
Fig. 13 Experimental results of track stand on the laterally inclined plane
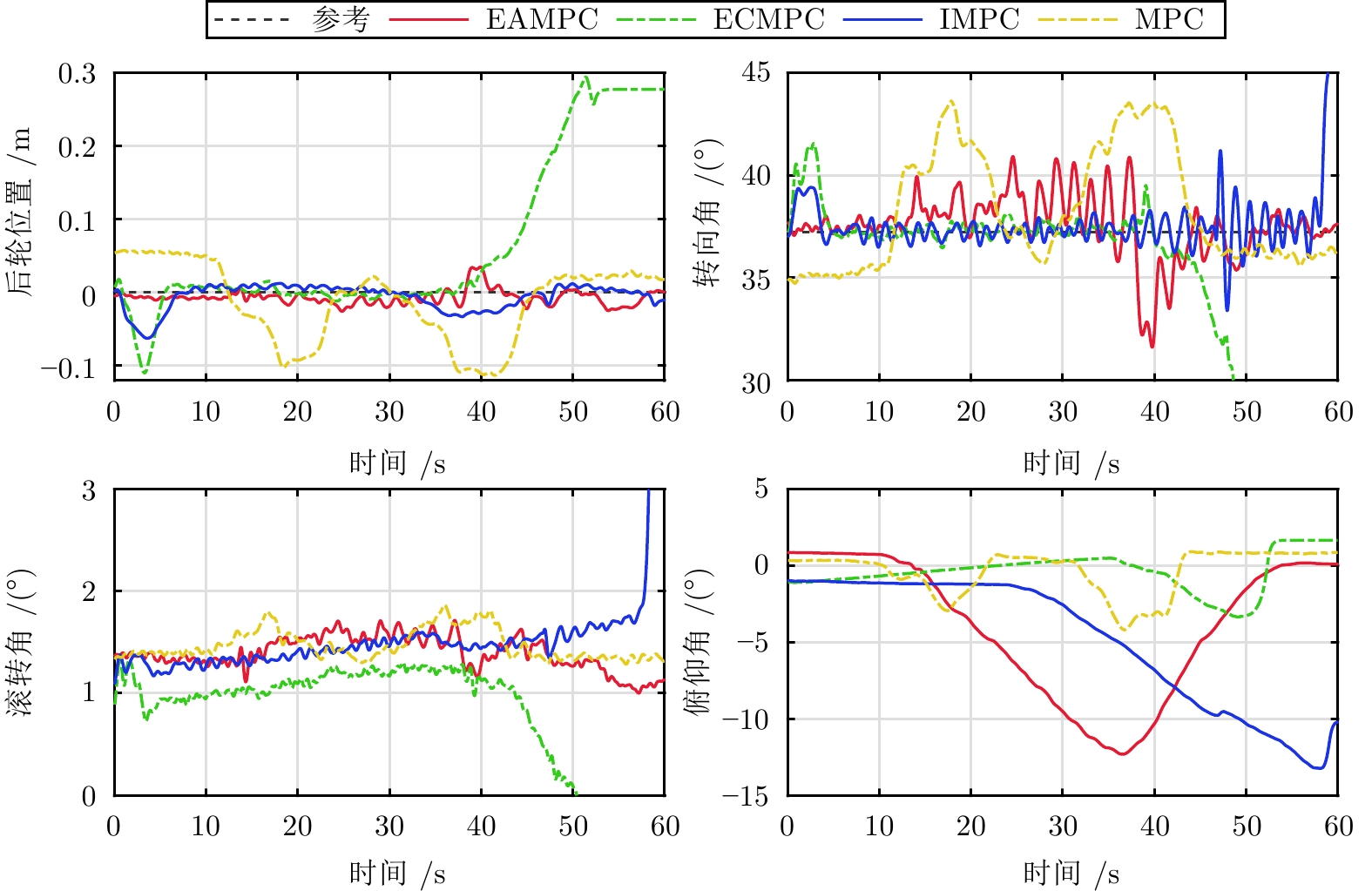
图 14 纵向倾斜平面定车实验结果
Fig. 14 Experimental results of track stand on the longitudinally inclined plane
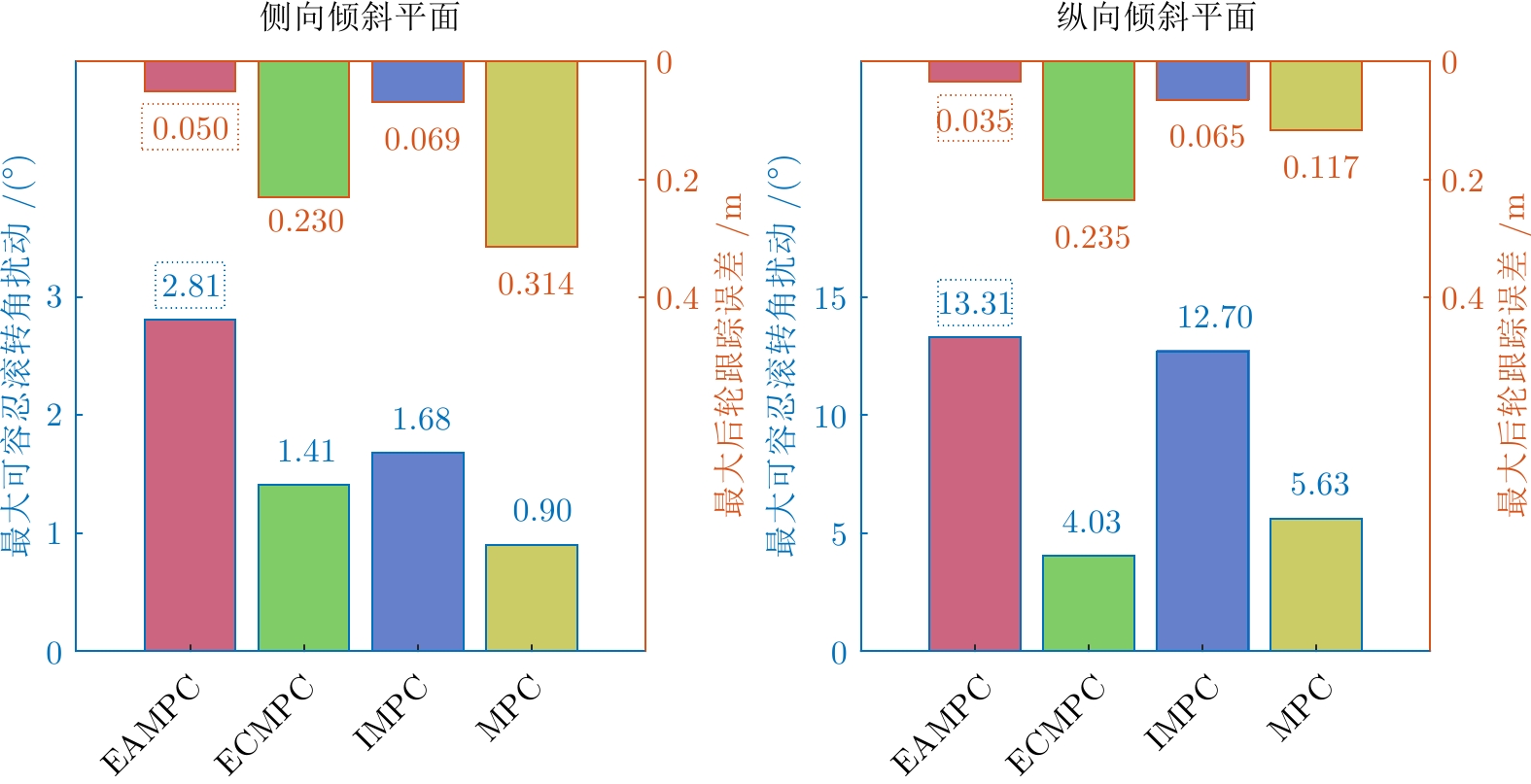
图 15 最大可容许滚转/俯仰扰动及最大后轮位置跟踪误差
Fig. 15 Maximum tolerable roll/pitch disturbances and maximum rear wheel position tracking errors
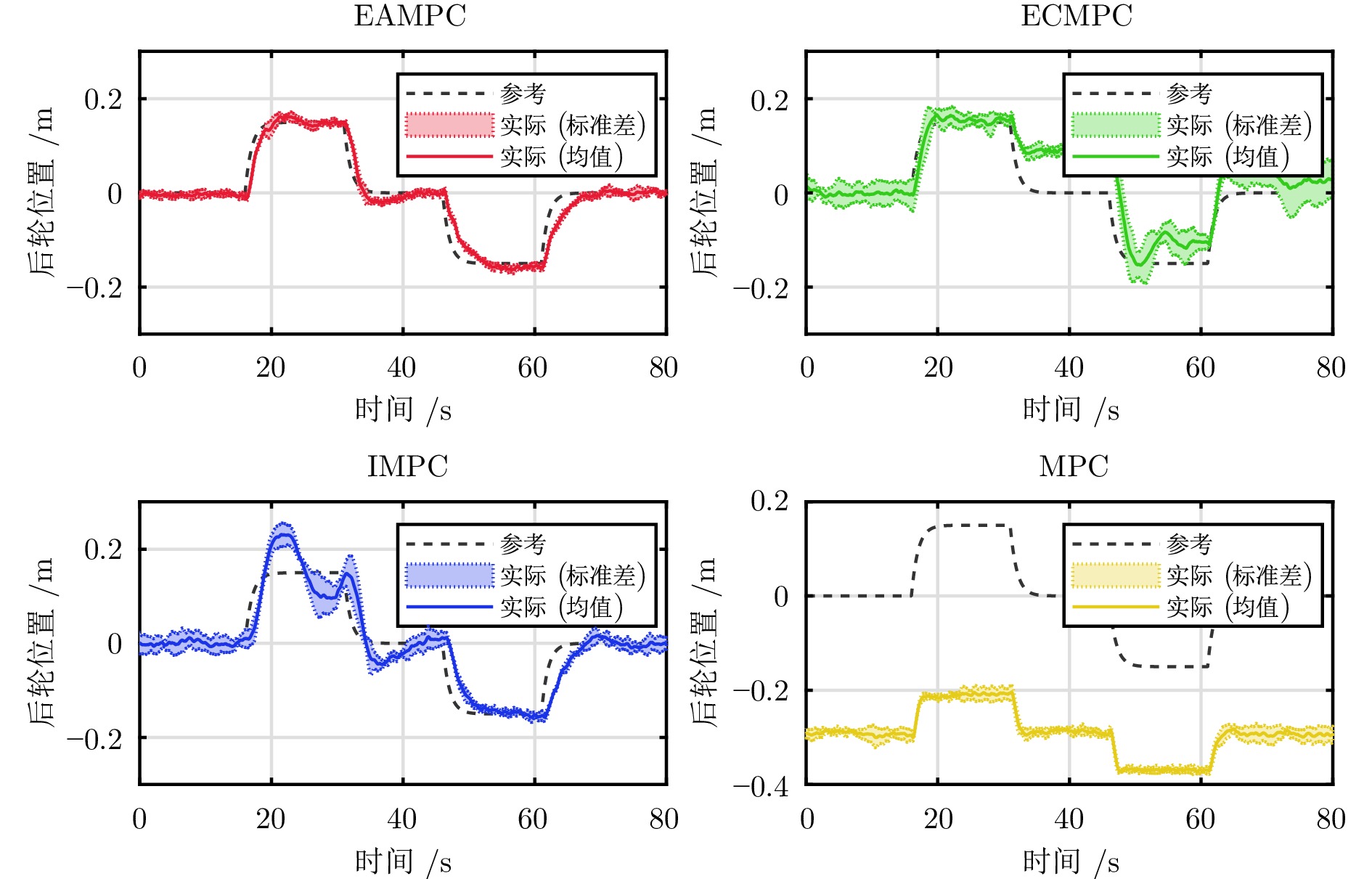
图 17 后轮位置跟踪实验结果对比
Fig. 17 Comparison of the rear wheel position tracking experimental results
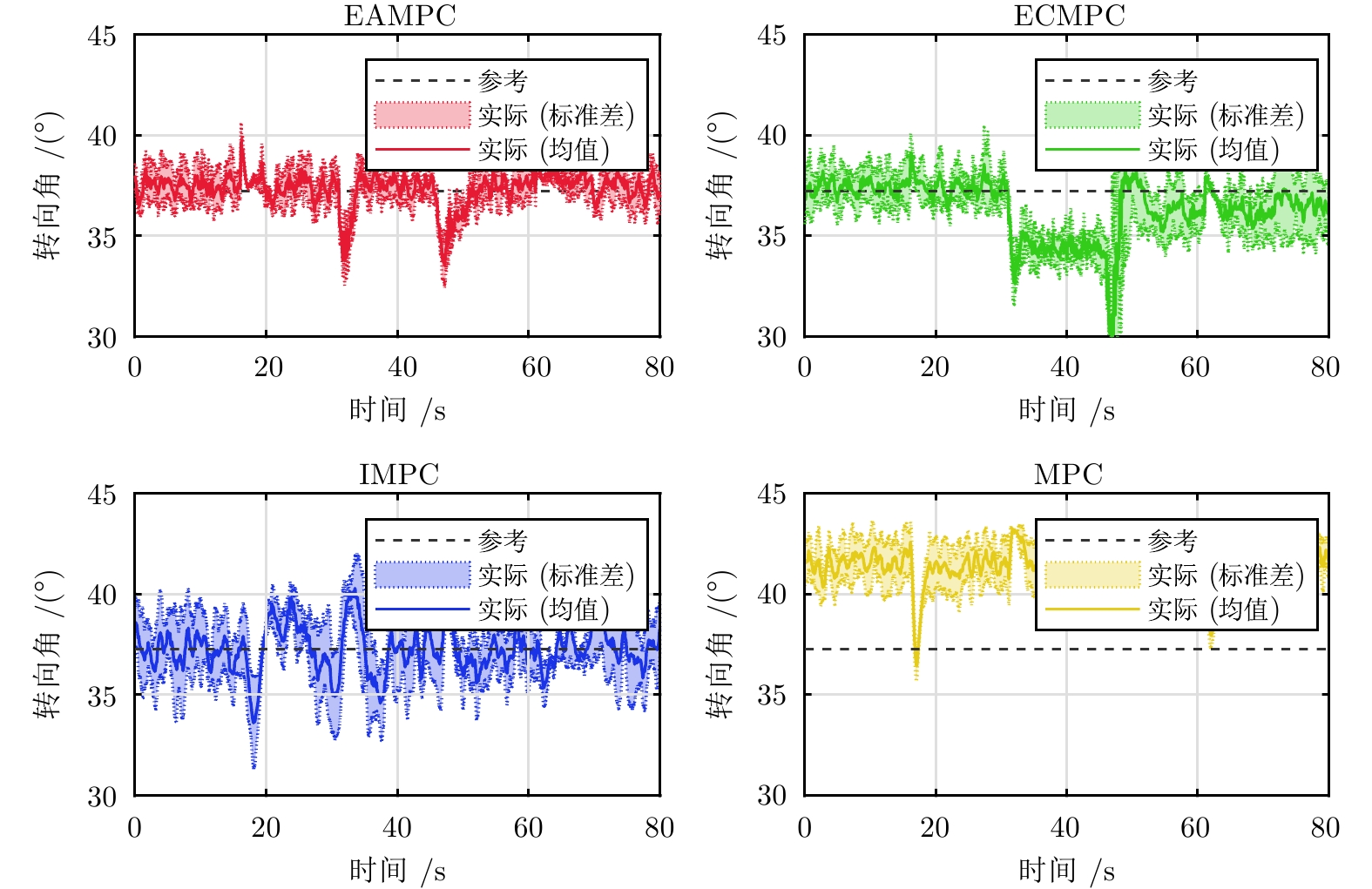
图 18 转向角跟踪实验结果对比
Fig. 18 Comparison of the steering angle tracking experimental results
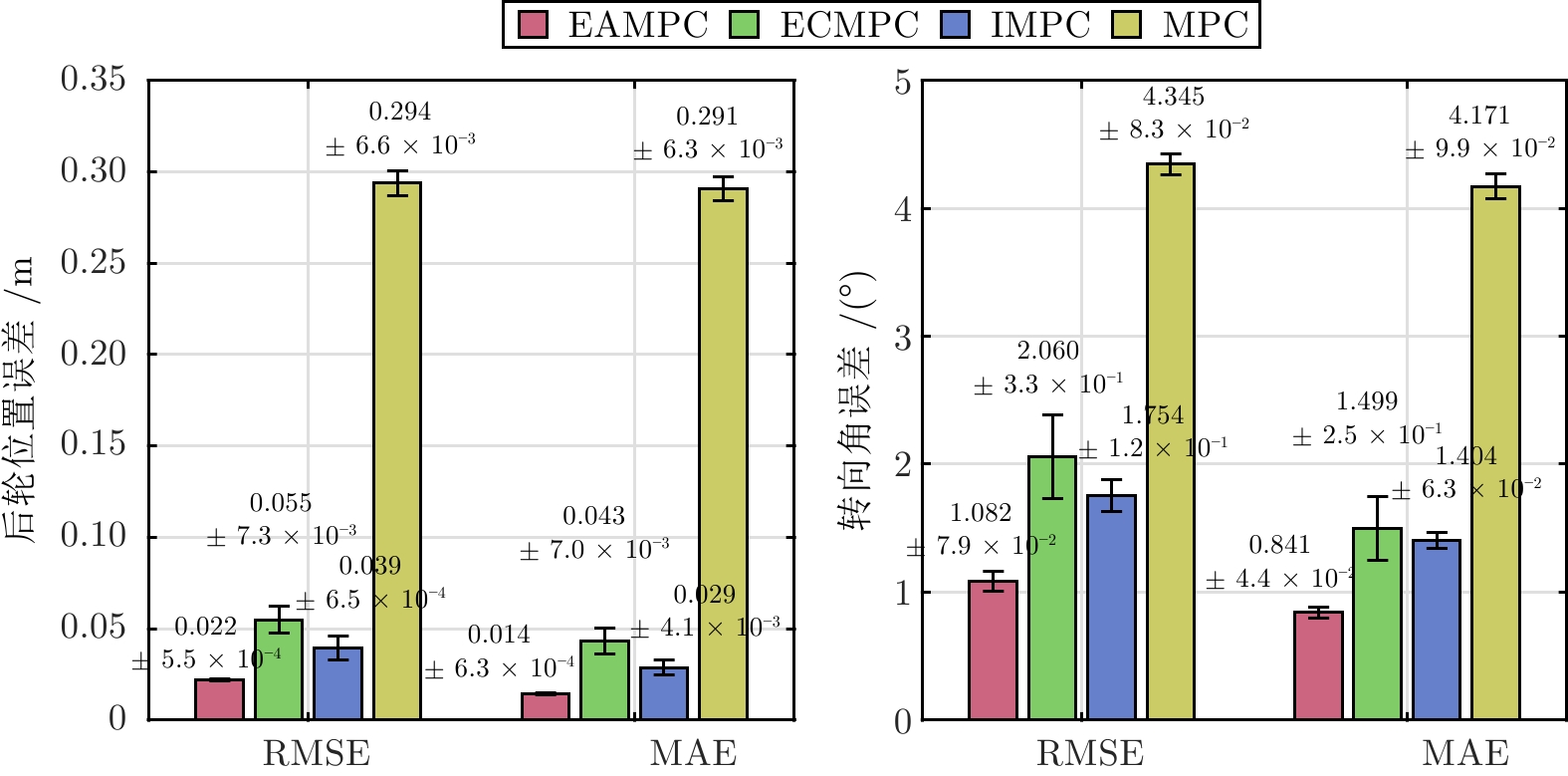
图 19 后轮位置和转向角跟踪误差的RMSE和MAE
Fig. 19 RMSE and MAE of the rear wheel position and the steering angle tracking errors
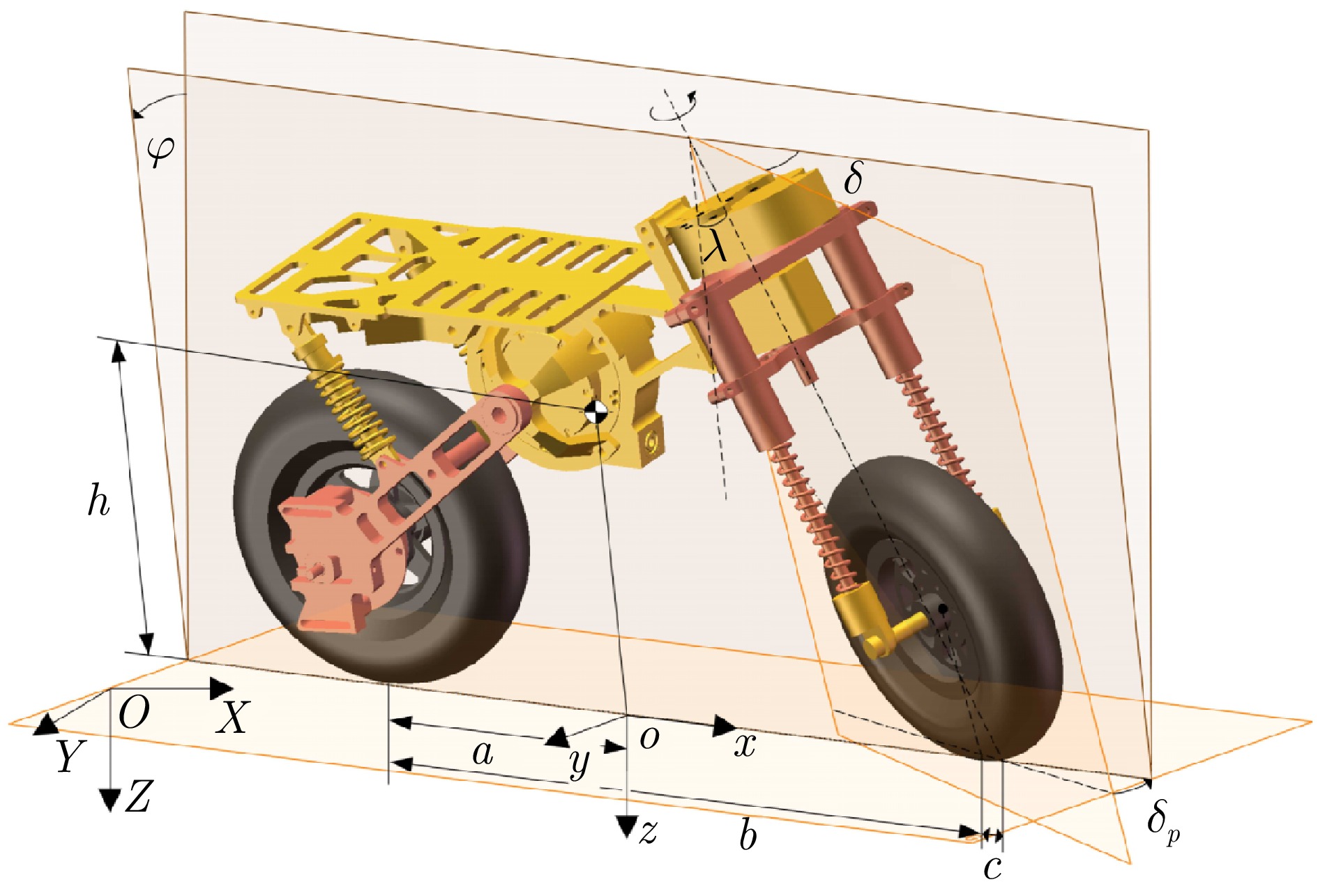
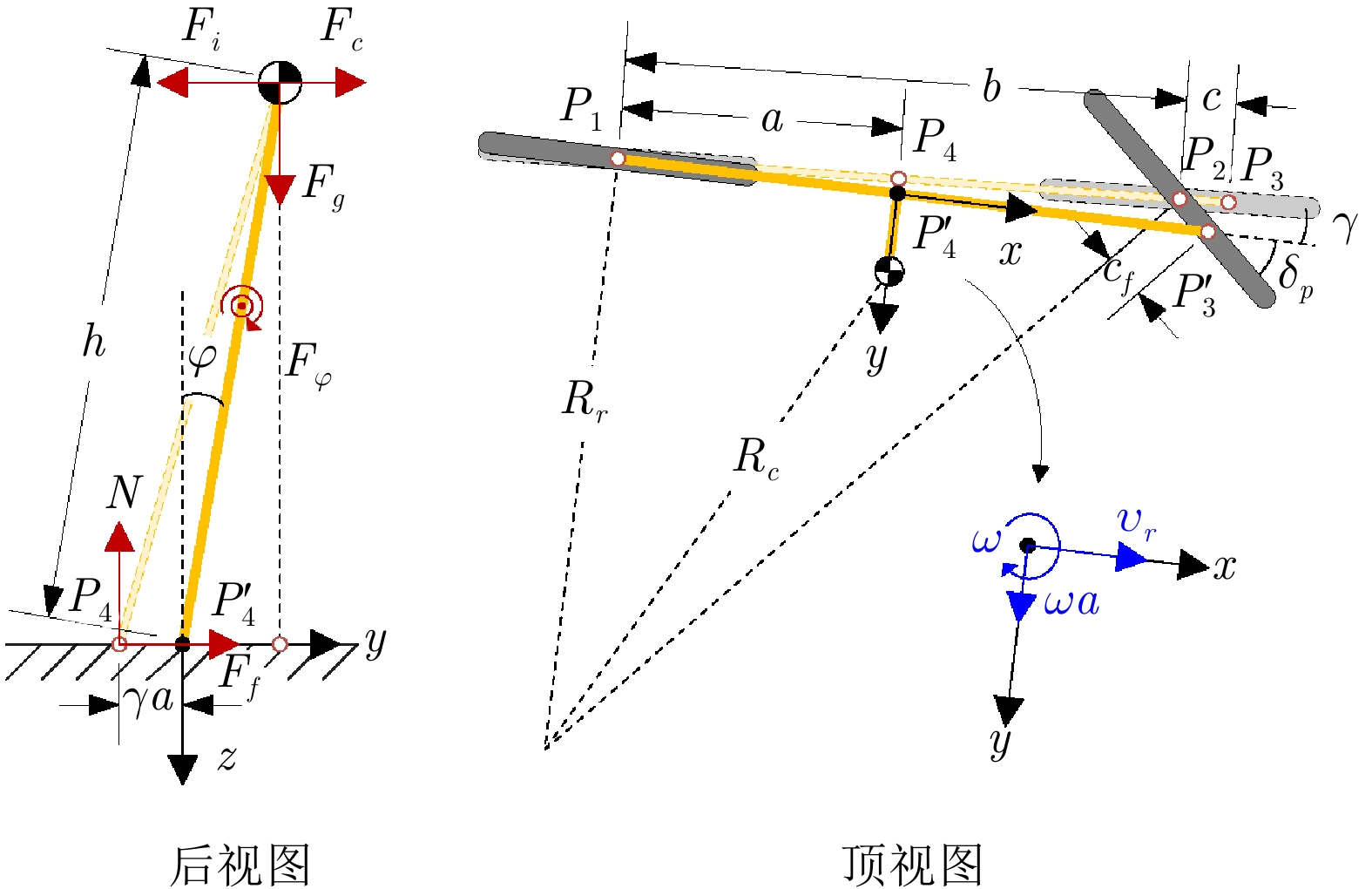
表 1 无人摩托车参数的含义及取值
Table 1 Parameter definitions and values of the unmanned motorcycle
符号 含义 取值 $ a $ 质心后轮距离 0.14 $ {\rm{m}} $ $ b $ 轮轴距 0.408 $ {\rm{m}} $ $ c $ 拖曳距 0.024 $ {\rm{m}} $ $ h $ 质心高度 0.2 $ {\rm{m}} $ $ r $ 轮径 0.1 $ {\rm{m}} $ $ \lambda $ 前叉角 25° $ m $ 整体质量 7.4 $ {\rm{kg}} $ $ I_t $ 整体滚转惯量 0.356 kg·m2 $ I_r $ 车轮自转惯量 0.0039 kg·m2$ \varphi $ 滚转角 — $ \delta $ 转向角 — $ \delta_p $ 在水平面上的转向角投影 — $ P_1/P_2 $ 后轮/前轮触地点 — $ P_3 $ 转向轴和地面的交点 — $ P_4 $ 质心在轮轴线上的投影点 — $ \tau_r $ 后轮力矩 — $ \gamma $ 转向导致的偏航角 — $ \omega $ 偏航角速度 — $ c_f $ 转向角非零时的拖曳距 — $ R_r $ 后轮转弯半径 — $ R_c $ 质心转弯半径 — $ v_r $ 后轮速度 — $ {\boldsymbol{a}}_{o} $ 坐标系$ o{\text{-}}xyz $的平动加速度 —  下载: 导出CSV
下载: 导出CSV
表 2 在不同地形上定车的平均滚转角
Table 2 Average roll angles of track stand on different terrains
实验组别 平均滚转角(°) 斜坡1 −0.6884 斜坡2 −2.1804 平地 −0.30297
下载: 导出CSV
-
[1] Chen K, Yi J G, Song D Z. Gaussian-process-based control of underactuated balance robots with guaranteed performance. IEEE Transactions on Robotics, 2022, 39(1): 572−589 doi: 10.1109/tro.2022.3203625 [2] Yeh T J, Lin T C, Chen A C B. Robust balancing and trajectory control of a self-driving bicycle. IEEE Transactions on Control Systems Technology, 2024, 32(6): 2410−2417 doi: 10.1109/TCST.2024.3395575 [3] Wang B Y, Jing F L, Deng Y, Chen Z, Liang B. Bayesian optimization-based ideal landing planning for ramp jump of single-track two-wheeled robots. In: Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO). Bangkok, Thailand: IEEE, 2024. 396−401 [4] Jing F L, Deng Y, Wang B Y, Zheng X D, Sun Y F, Chen Z, et al. Steady-state drifting equilibrium analysis of single-track two-wheeled robots for controller design. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Hangzhou, China: IEEE, 2025. 16515−16522 [5] Meijaard J P, Papadopoulos J M, Ruina A, Schwab A L. Linearized dynamics equations for the balance and steer of a bicycle: A benchmark and review. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 2007, 463(2084): 1955−1982 [6] Yu Y C, Zhao M G. Steering control for autonomously balancing bicycle at low speed. In: Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO). Kuala Lumpur, Malaysia: IEEE, 2018. 33−38 [7] Zhang Y Z, Li J L, Yi J G, Song D Z. Balance control and analysis of stationary riderless motorcycles. In: Proceedings of the IEEE International Conference on Robotics and Automation. Shanghai, China: IEEE, 2011. 3018−3023 [8] He K H, Deng Y, Wang G H, Sun X Y, Sun Y Y, Chen Z. Learning-based trajectory tracking and balance control for bicycle robots with a pendulum: A Gaussian process approach. IEEE/ASME Transactions on Mechatronics, 2022, 27(2): 634−644 doi: 10.1109/TMECH.2022.3140885 [9] Zhu X J, Xu W F, Chen Z, Deng Y, Zheng Q Y, Liang B, et al. Online robust self-learning terminal sliding mode control for balancing control of reaction wheel bicycle robots. Robotica, 2024, 42(10): 3416−3430 doi: 10.1017/S0263574724001437 [10] Huang W H, Nguyen P T, Nguyen D D, Doan H P, Chuang M Y, Kuo C H. Stability control and path tracking of a self-balancing bicycle with a reaction wheel. IEEE/ASME Transactions on Mechatronics, 2025, 30(4): 2928−2936 doi: 10.1109/TMECH.2025.3572225 [11] Wang P C, Yi J G, Liu T, Zhang Y Z. Trajectory tracking and balance control of an autonomous bikebot. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Singapore: IEEE, 2017. 2414−2419 [12] Wang B Y, Chen Z, Zheng Q Y, Liu X A, Zhao M G, Liang B. Observer-based disturbance estimation and optimal allocation for the roll control of an unmanned motorcycle with control moment gyros. In: Proceedings of the 49th Annual Conference of the IEEE Industrial Electronics Society. Singapore: IEEE, 2023. 1−6 [13] Huang Y H, Liao Q Z, Guo L, Wei S M. Balanced motions realization for a mechanical regulators free and front-wheel drive bicycle robot under zero forward speed. International Journal of Advanced Robotic Systems, 2013, 10(8): Article No. 317 doi: 10.5772/56701 [14] 黄用华, 廖启征, 魏世民, 郭磊. 前轮驱动自行车机器人定车运动的鲁棒控制实现. 计算机测量与控制, 2012, 20(6): 1535−1539 doi: 10.16526/j.cnki.11-4762/tp.2012.06.066Huang Yong-Hua, Liao Qi-Zheng, Wei Shi-Min, Guo Lei. Robust controlling strategy for track-stand motion of a front-wheel drive bicycle robot. Computer Measurement & Control, 2012, 20(6): 1535−1539 doi: 10.16526/j.cnki.11-4762/tp.2012.06.066 [15] 黄用华, 廖启征, 魏世民, 郭磊. 45° 车把转角下前轮驱动自行车机器人的定车运动. 机械工程学报, 2012, 48(7): 16−22Huang Yong-Hua, Liao Qi-Zheng, Wei Shi-Min, Guo Lei. Track-stand motion of a front-wheel drive bicycle robot under 45° front-bar turning angle. Journal of Mechanical Engineering, 2012, 48(7): 16−22 [16] Getz N H, Marsden J E. Control for an autonomous bicycle. In: Proceedings of the IEEE International Conference on Robotics and Automation. New Jersey, USA: IEEE, 1995. 1397−1402 [17] Yi J G, Song D Z, Levandowski A, Jayasuriya S. Trajectory tracking and balance stabilization control of autonomous motorcycles. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Florida, USA: IEEE, 2006. 2583−2589 [18] Sun Y Y, Zhao M G, Wang B Y, Zheng X D, Liang B. Polynomial controller for bicycle robot based on nonlinear descriptor system. In: Proceedings of the 46th Annual Conference of the IEEE Industrial Electronics Society. Singapore: IEEE, 2020. 2792−2797 [19] Tian Y, Chen Z, Deng Y, Wang B Y, Liang B. Steady-state manifold of riderless motorcycles. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Kyoto, Japan: IEEE, 2022. 3491−3496 [20] He J R, Zhao M G, Stasinopoulos S. Constant-velocity steering control design for unmanned bicycles. In: Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO). Zhuhai, China: IEEE, 2015. 428−433 [21] Sha S Y, Liu Y H, Huo B Y, Chen Z, Zhao X G. Hierarchical adaptive control framework for autonomous bicycles: Integrating residual decisions and dynamic optimization. IEEE Transactions on Automation Science and Engineering, 2025, 22: 21057−21069 doi: 10.1109/TASE.2025.3608870 [22] Neunert M, de Crousaz C, Furrer F, Kamel M, Farshidian F, Siegwart R, et al. Fast nonlinear model predictive control for unified trajectory optimization and tracking. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Stockholm, Sweden: IEEE, 2016. 1398−1404 [23] Wang S F, Wang Y N, Miao Z Q, Wang X K, He W. Dual model predictive control of multiple quadrotors with formation maintenance and collision avoidance. IEEE Transactions on Industrial Electronics, 2024, 71(12): 16037−16046 doi: 10.1109/TIE.2024.3379663 [24] Neunert M, Stäuble M, Giftthaler M, Bellicoso C D, Carius J, Gehring C, et al. Whole-body nonlinear model predictive control through contacts for quadrupeds. IEEE Robotics and Automation Letters, 2018, 3(3): 1458−1465 doi: 10.1109/LRA.2018.2800124 [25] Le C S, Howell T A, Yang S, Lee C Y, Zhang J, Bishop A, et al. Fast contact-implicit model predictive control. IEEE Transactions on Robotics, 2024, 40: 1617−1629 doi: 10.1109/TRO.2024.3351554 [26] Kim G, Kang D, Kim J H, Hong S, Park H W. Contact-implicit model predictive control: Controlling diverse quadruped motions without pre-planned contact modes or trajectories. The International Journal of Robotics Research, 2025, 44(3): 486−510 doi: 10.1177/02783649241273645 [27] Cossalter V. Motorcycle Dynamics. Raleigh: Lulu.com, 2006. [28] Chen W H. Disturbance observer based control for nonlinear systems. IEEE/ASME Transactions on Mechatronics, 2004, 9(4): 706−710 doi: 10.1109/TMECH.2004.839034 [29] Yang J, Chen W H, Li S H. Non-linear disturbance observer-based robust control for systems with mismatched disturbances/uncertainties. IET Control Theory & Applications, 2011, 5(18): 2053−2062 doi: 10.1049/iet-cta.2010.0616 [30] Li S H, Yang J, Chen W H, Chen X S. Generalized extended state observer based control for systems with mismatched uncertainties. IEEE Transactions on Industrial Electronics, 2012, 59(12): 4792−4802 doi: 10.1109/TIE.2011.2182011 [31] Wang B Y, Deng Y, Chen Z, Liang B. Equilibrium compensation based control: A universal control scheme for systems with mismatched disturbances and sensor errors. IEEE Transactions on Industrial Electronics, 2024, 71(8): 9590−9600 doi: 10.1109/TIE.2023.3321983 [32] Wang B Y, Deng Y, Jing F L, Tian Y, Chen Z, Liang B. Equilibrium compensation-based sliding mode control for accurate steering tracking of a single-track two-wheeled robot. In: Proceedings of the International Conference on Intelligent Robotics and Applications. Hangzhou, China: Springer, 2023. 188−201 [33] Khalil H K. Nonlinear Control. Boston: Pearson, 2015. [34] Giftthaler M, Neunert M, Stäuble M, Buchli J, Diehl M. A family of iterative Gauss-Newton shooting methods for nonlinear optimal control. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid, Spain: IEEE, 2018. 1−9 [35] Marruedo D L, Alamo T, Camacho E F. Input-to-state stable mpc for constrained discrete-time nonlinear systems with bounded additive uncertainties. In: Proceedings of the 41st IEEE Conference on Decision and Control. Las Vegas, USA: IEEE, 2002. 4619−4624 [36] Limon D, Alamo T, Raimondo D M, de la Peña D M, Bravo J M, Ferramosca A, et al. Input-to-state stability: A unifying framework for robust model predictive control. Nonlinear Model Predictive Control. Berlin: Springer, 2009. 1−26 [37] Giftthaler M, Neunert M, Stäuble M, Buchli J. The control toolbox——An open-source C++ library for robotics, optimal and model predictive control. In: Proceedings of the IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR). Brisbane, Australia: IEEE, 2018. 123−129 [38] Incremona G P, Messori M, Toffanin C, Cobelli C, Magni L. Model predictive control with integral action for artificial pancreas. Control Engineering Practice, 2018, 77: 86−94 doi: 10.1016/j.conengprac.2018.05.006 -

 下载:
下载:





计量
- 文章访问数: 323
- HTML全文浏览量: 99
- PDF下载量: 75
- 被引次数: 0
