

Dynamic Marker Tracking Method of Bionic Visual-tactile Sensor Based on Improved CSRT
-
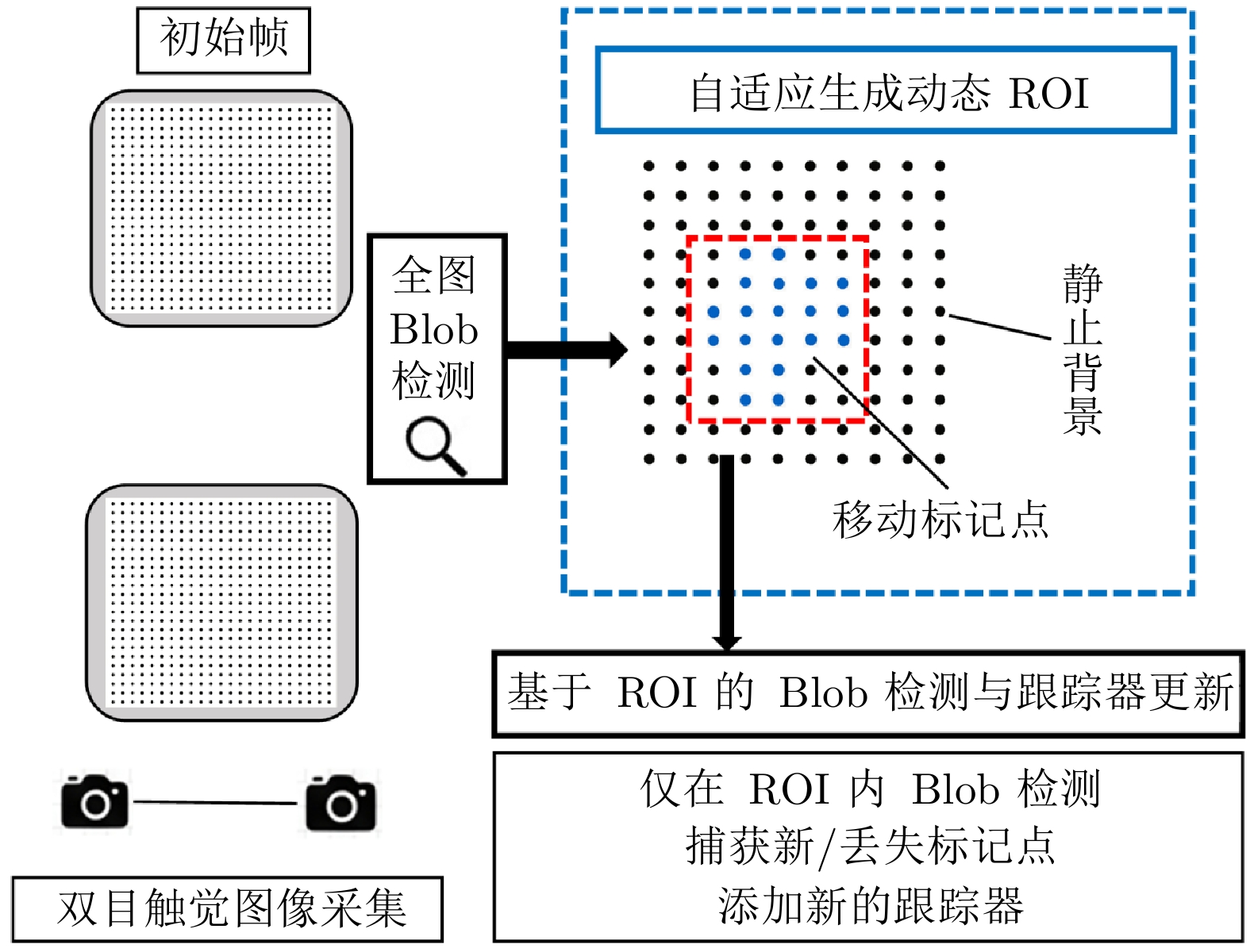
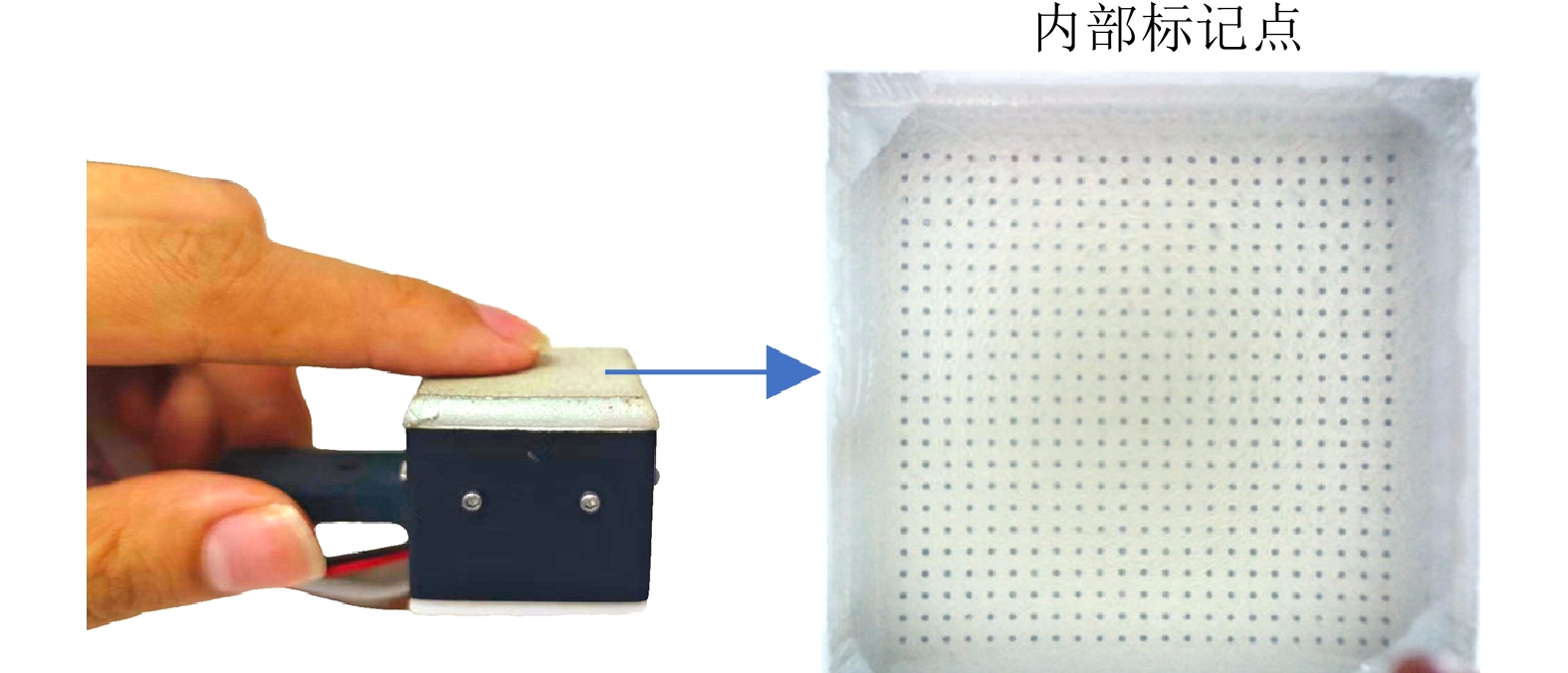
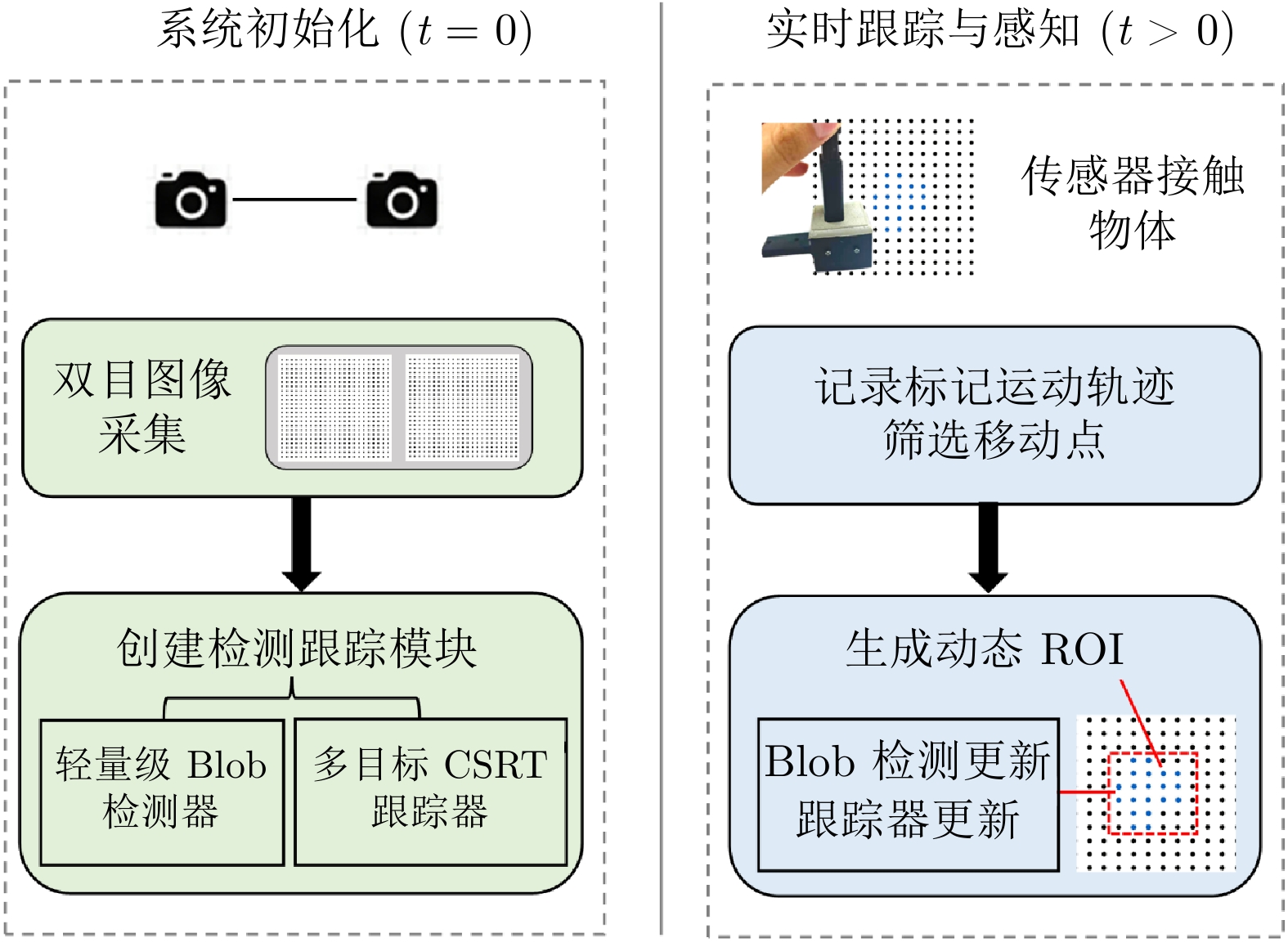
摘要: 针对仿生视触觉传感器中密集标记点目标在动态环境下检测精度与实时性难以兼顾、传统光流算法对光照敏感导致检测精度低的问题, 提出一种融合斑点检测与动态感兴趣区域(ROI)优化机制的改进CSRT算法. 以GelStereo型传感器为硬件平台, 通过轻量级斑点检测实现标记点目标初始定位, 并依据其运动轨迹自适应生成ROI, 显著降低了计算复杂度, 提升系统实时性. 实验结果表明, 所提算法在多种光照条件下均保持优越性能, 检测准确率、召回率与F1分数分别达
0.9991 、0.9953 、0.9972 , 较光流算法F1分数提升17.48%; 跟踪持续率为99.41%, FPS提升至22.17, 是CSRT的2.66倍. 该算法有效平衡了检测鲁棒性、跟踪精度与实时性, 为仿生机器人高精度实时触觉感知提供了可行的技术方案.-
关键词:
- 仿生视触觉 /
- 目标检测 /
- 目标跟踪 /
- GelStereo传感器 /
- CSRT相关滤波器
Abstract: Aiming at the problem that the detection accuracy and real-time performance of the dense marker point target in the bionic visual-tactile sensor are difficult to balance in the dynamic environment, and the traditional optical flow algorithm is sensitive to illumination, resulting in low detection accuracy, an improved CSRT algorithm combining blob detection and dynamic region of interest (ROI) optimization mechanism is proposed. With the GelStereo sensor as the hardware platform, the initial positioning of the marker point target is realized by lightweight blob detection, and the ROI is adaptively generated according to the trajectory of the marker point, which significantly reduces the computational complexity and improves the real-time performance of the system. The experimental results show that the algorithm maintains superior performance under various lighting conditions. The detection accuracy, recall rate and F1 Score are0.9991 ,0.9953 and0.9972 , respectively. Compared with the optical flow algorithm, the F1 Score of the proposed algorithm is increased by 17.48%. The tracking persistence rate is maintained at 99.41%, and the FPS is increased to 22.17, which is 2.66 times higher than that of the CSRT algorithm. The algorithm effectively balances the detection robustness, tracking accuracy and real-time performance, and provides a feasible technical solution for high-precision real-time tactile perception of bionic robots.-
Key words:
- bionic visual-tactile /
- object detection /
- object tracking /
- GelStereo sensor /
- CSRT correlation filters
-
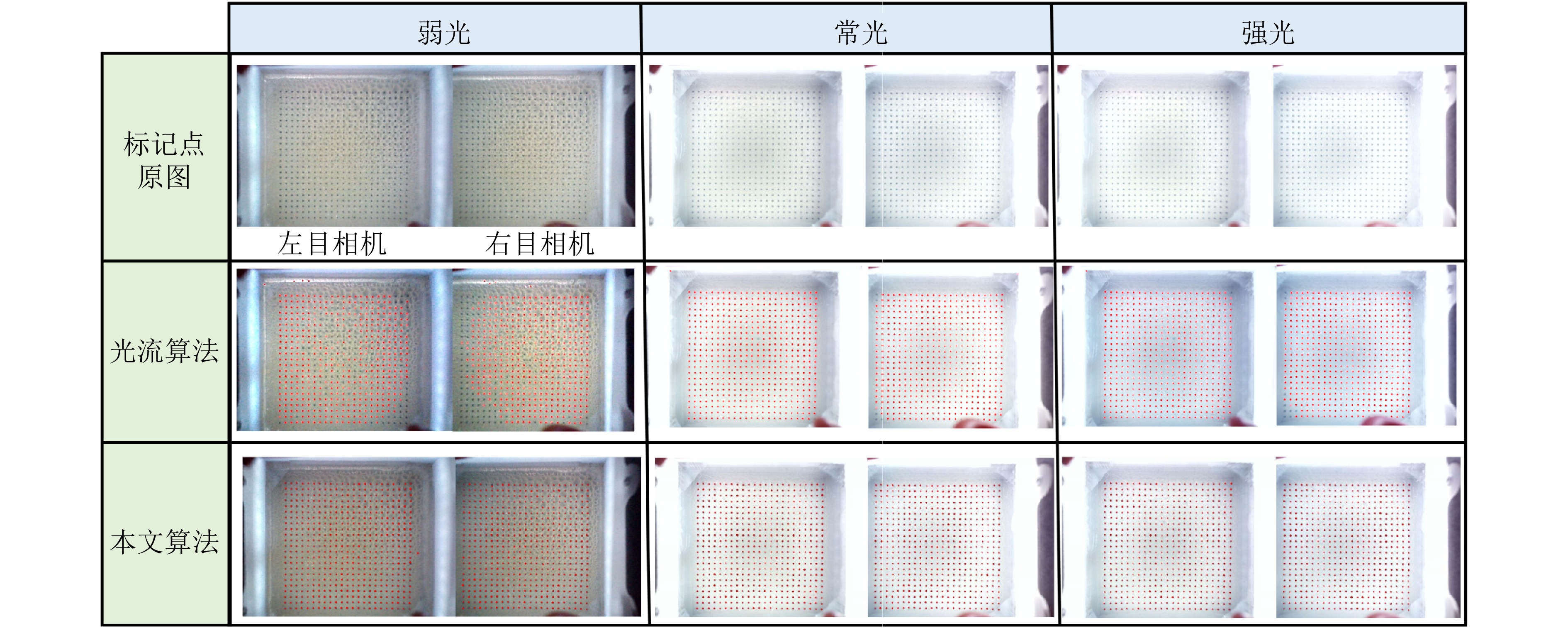
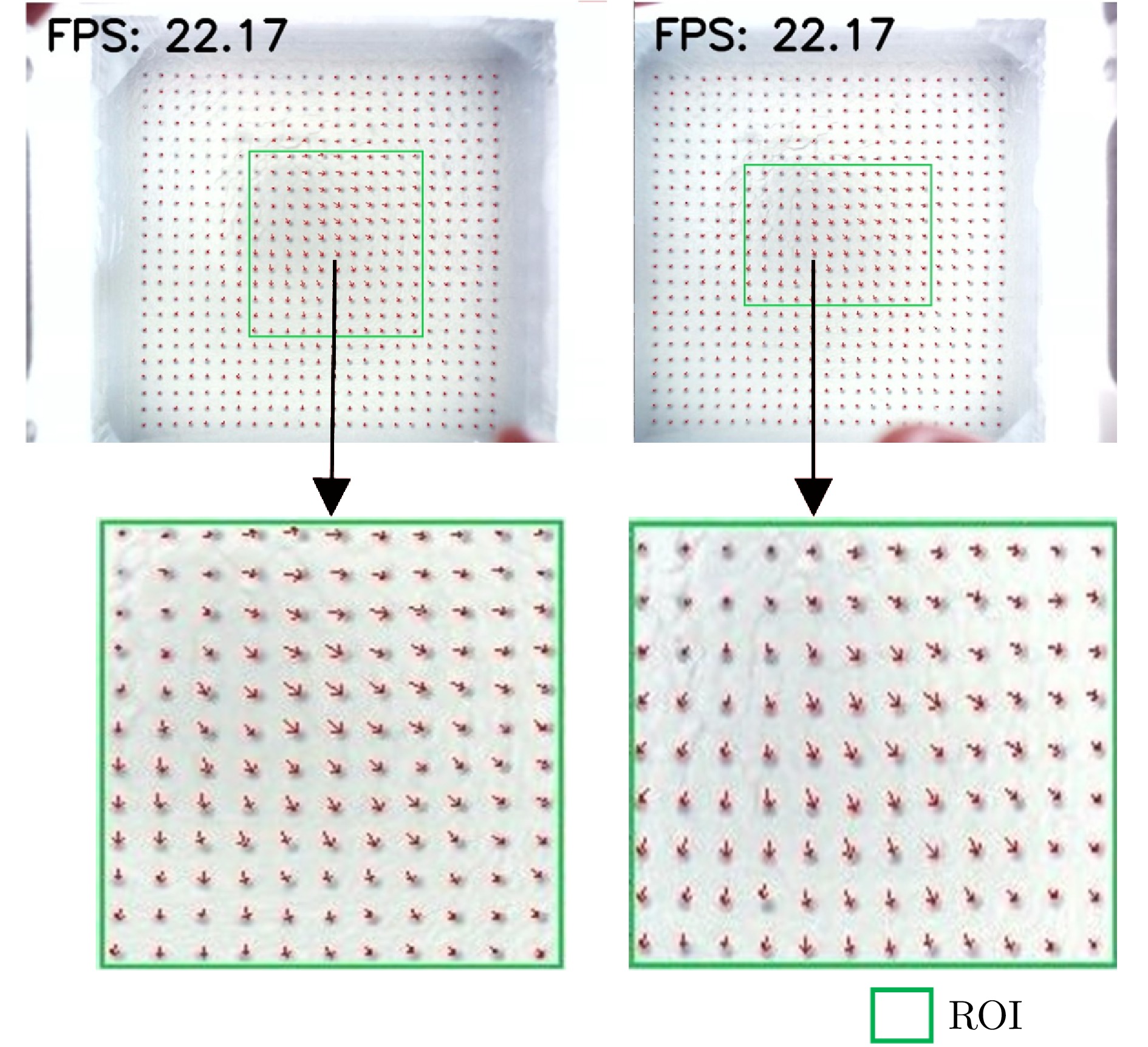
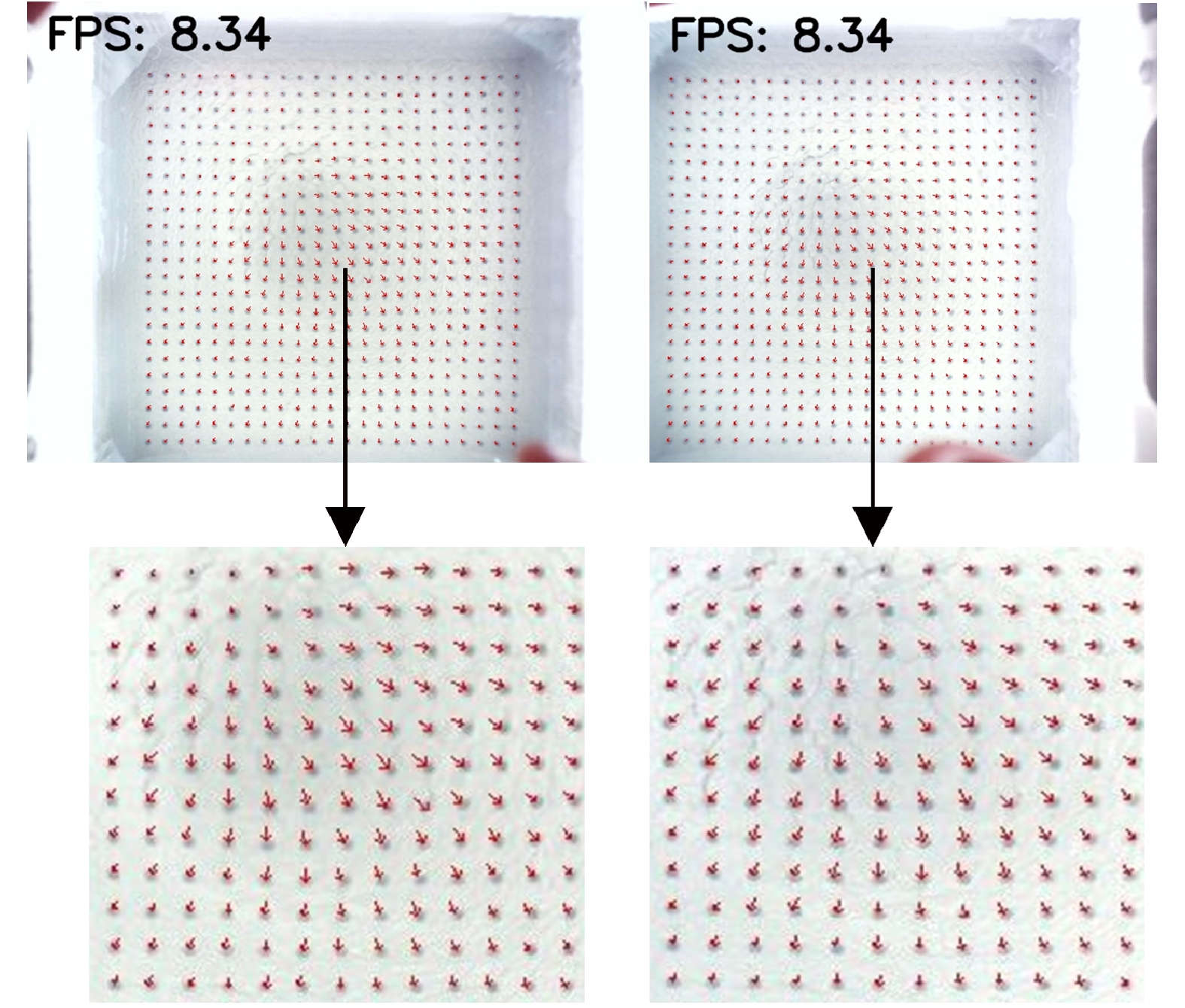
图 4 不同算法标记点检测效果对比
Fig. 4 Comparison of marker detection effects of different algorithms
表 1 不同算法检测结果对比
Table 1 Comparison of detection results of different algorithms
方法 Precision Recall F1 Score 光流算法 0.9603 0.7939 0.8488 本文算法 0.9991 0.9953 0.9972  下载: 导出CSV
下载: 导出CSV
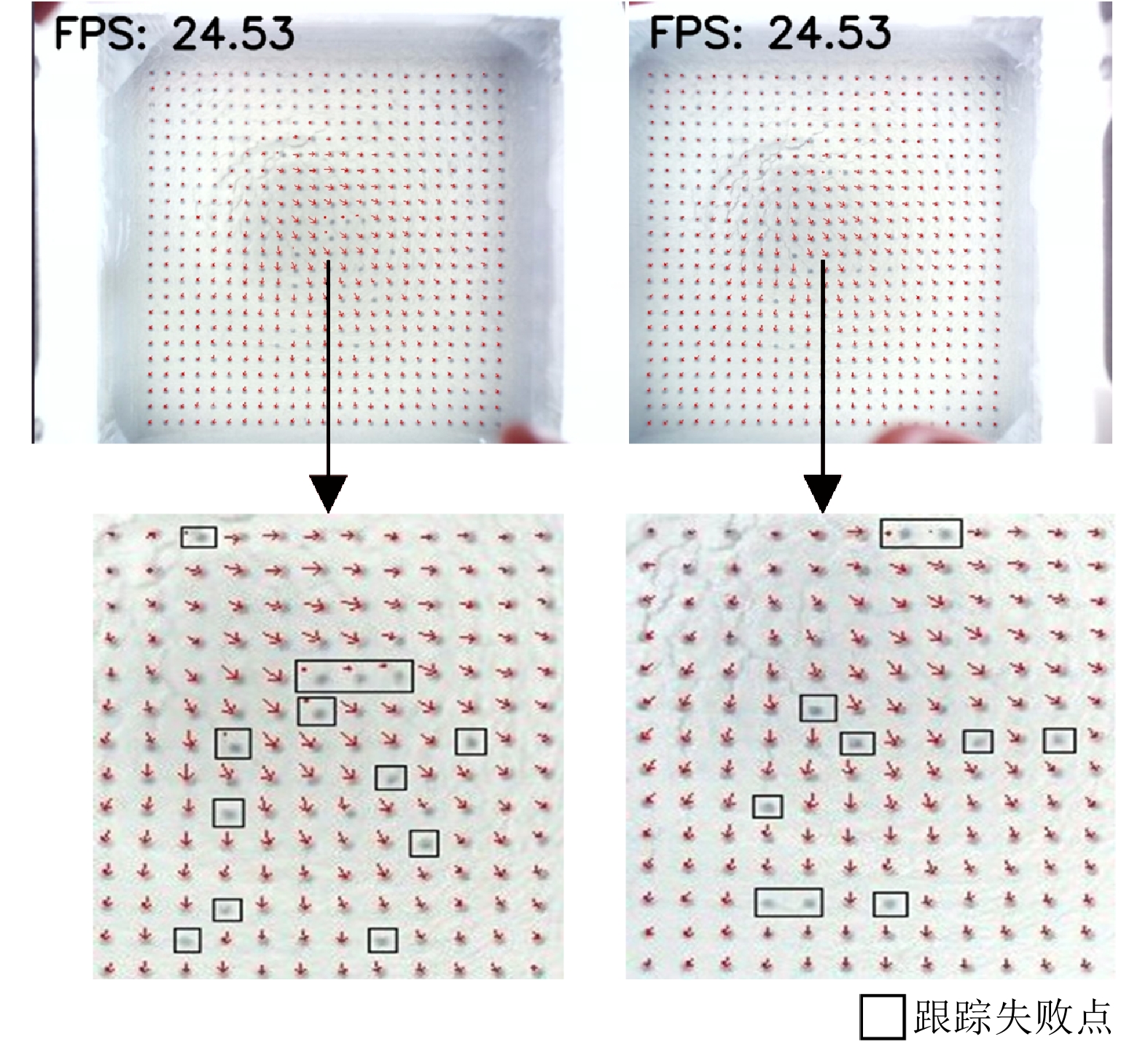
表 2 不同算法标记点跟踪结果对比
Table 2 Comparison of marker tracking results of different algorithms
方法 TPR (%) FPS 光流算法 90.77 24.53 CSRT算法 99.41 8.34 本文算法 99.41 22.17
下载: 导出CSV
-
[1] 彭欢, 熊鹏文, 张宇, 洪金华, 徐健宁, 宋爱国. 面向机器人交互识别的抗干扰多模态柔性电子皮肤. 机器人, 2025, 47(1): 55−63Peng Huan, Xiong Peng-Wen, Zhang Yu, Hong Jin-Hua, Xu Jian-Ning, Song Ai-Guo. Interference-resistant multimodal flexible electronic skin for robotic interactive recognition. Robot, 2025, 47(1): 55−63 [2] Sormoli M A, Dianati M, Mozaffari S, Woodman R. Optical flow based detection and tracking of moving objects for autonomous vehicles. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(9): 12578−12590 doi: 10.1109/TITS.2024.3382495 [3] Subudhi D, Routray P K, Muniyandi M. Subblescope: Novel thin-film haptic sensing using a single-bubble approach. IEEE Sensors Journal, 2024, 24(18): 28652−28661 doi: 10.1109/jsen.2024.3433488 [4] 高芳芳, 武振超, 索睿, 周忠贤, 李瑞, 傅隆生, 等. 基于深度学习与目标跟踪的苹果检测与视频计数方法. 农业工程学报, 2021, 37(21): 217−224Gao Fang-Fang, Wu Zhen-Chao, Suo Rui, Zhou Zhong-Xian, Li Rui, Fu Long-Sheng, et al. Apple detection and counting using real-time video based on deep learning and object tracking. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(21): 217−224 [5] Du Y H, Zhao Z C, Yang S, Zhao Y Y, Su F, Tao G. StrongSORT: Make DeepSORT great again. IEEE Transactions on Multimedia, 2023, 25: 8725−8737 doi: 10.1109/TMM.2023.3240881 [6] Liu S, Liu D Y, Gautam S, Dawid P, Marcin W. Overview and methods of correlation filter algorithms in object tracking. Complex Intelligent Systems, 2021, 7: 1895−1917 doi: 10.1007/s40747-020-00161-4 [7] Zhao F, Hui K D, Wang T T, Zhang Z Z, Chen Y J. A KCF-based incremental target tracking method with constant update speed. IEEE Access, 2021, 9: 73544−73560 doi: 10.1109/ACCESS.2021.3080308 [8] Maharani D A, Machbub C, Yulianti L, Rusmin P H. Deep features fusion for KCF-based moving object tracking. Journal of Big Data, 2023, 10: Article No. 136 doi: 10.1186/s40537-023-00813-5 [9] Kakani V, Cui X N, Ma M J, Kim H. Vision-based tactile sensor mechanism for the estimation of contact position and force distribution using deep learning. Sensors, 2021, 21(5): Article No. 1920 doi: 10.3390/s21051920 [10] Aucone E, Sferrazza C, Gregor M, D'Andrea R, Mintchev S. Optical tactile sensing for aerial multicontact interaction: Design, integration, and evaluation. IEEE Transactions on Robotics, 2025, 41: 364−377 doi: 10.1109/TRO.2024.3508140 [11] Yin D, Lu S L, Yang J, Zhang Y, Dai Z W, Nan D, et al. GelEvent——A novel high-speed tactile sensor with event camera. IEEE Transactions on Instrumentation and Measurement, 2025, 74: 1−13 [12] Shepherd D R, Husbands P, Philippides A, Johnson C. Texture and friction classification: Optical tactip vs. vibrational piezoeletric and accelerometer tactile sensors. Sensors, 2025, 25(16): Article No. 4971 doi: 10.3390/s25164971 [13] Xin Y H, Hu K M, Xiang R J, Gao Y L, Zhou J F, Meng G, et al. Vision-based tactile sensing: From performance parameters to device design. Applied Physics Reviews, 2025, 12(2): Article No. 1312 [14] Du Y P, Zhang G L, Zhang Y Z, Wang Y. High-resolution 3-dimensional contact deformation tracking for FingerVision sensor with dense random color pattern. IEEE Robotics and Automation Letters, 2021, 6(2): 2147−2154 doi: 10.1109/LRA.2021.3061306 [15] Kim W, Kim W D, Kim J J, Kim C H, Kim J. UVtac: Switchable UV marker-based tactile sensing finger for effective force estimation and object localization. IEEE Robotics and Automation Letters, 2022, 7(3): 6036−6043 doi: 10.1109/LRA.2022.3163450 [16] 熊珍凯, 程晓强, 吴幼冬, 左志强, 刘家胜. 基于激光雷达的无人驾驶3D多目标跟踪. 自动化学报, 2023, 49(10): 2073−2083Xiong Zhen-Kai, Cheng Xiao-Qiang, Wu You-Dong, Zuo Zhi-Qiang, Liu Jia-Sheng. LiDAR-based 3D multi-object tracking for unmanned vehicles. Acta Automatica Sinica, 2023, 49(10): 2073−2083 [17] Lukežič A, Vojíř T, Zajc Č L, Matas J, Kristan M. Discriminative correlation filter tracker with channel and spatial reliability. International Journal of Computer Vision, 2018, 126(7): 671−688 doi: 10.1007/s11263-017-1061-3 [18] Li C J, Zhong Q, Wang S Y, Liu L. A method of cross-layer fusion multi-object detection and recognition based on improved faster R-CNN model in complex traffic environment. Pattern Recognition Letters, 2021, 145: 127−134 doi: 10.1016/j.patrec.2021.02.003 [19] 强伟, 贺昱曜, 郭玉锦, 李宝奇, 何灵蛟. 基于改进SSD的水下目标检测算法研究. 西北工业大学学报, 2020, 38(4): 747−754Qiang Wei, He Yu-Yao, Guo Yu-Jin, Li Bao-Qi, He Ling-Jiao. Exploring underwater target detection algorithm based on improved SSD. Journal of Northwestern Polytechnical University, 2020, 38(4): 747−754 [20] 曾长紊, 杨支羽, 代作晓, 顾明剑. 基于红外双目视觉的同步目标检测与匹配网络. 红外与毫米波学报, 2025, 44(1): 118−128Zeng Chang-Wen, Yang Zhi-Yu, Dai Zuo-Xiao, Gu Ming-Jian. Synchronous object detection and matching network based on infrared binocular vision. Journal of Infrared and Millimeter Waves, 2025, 44(1): 118−128 -

 下载:
下载:

图(8) / 表(2)
计量
- 文章访问数: 258
- HTML全文浏览量: 101
- PDF下载量: 60
- 被引次数: 0
