

Self-learning Control for Flapping-wing Air Vehicles With Variable Learning Intensity
-
摘要: 针对扑翼飞行器存在非线性动态、模型不确定性及嵌入式平台算力受限等问题, 提出一种可自定义变学习强度自学习控制方法. 该方法通过学习历史控制信息, 仅基于一个代数方程, 避免复杂控制器设计并有效提升轨迹跟踪精度与系统鲁棒性. 针对扑翼系统, 使用自定义函数对学习强度进行调节, 提高系统动态响应速度与稳态性能. 仿真结果表明, 所提方法在保持低计算复杂度同时, 具有优越控制性能.Abstract: To address the issues of nonlinear dynamics, model uncertainties, and limited computational resources on embedded platforms in flapping-wing air vehicles, this paper proposes a customizable variable learning intensity self-learning control method. The proposed method learns from historical control information and is based on a single algebraic equation, avoiding complex controller designs while effectively improving trajectory tracking accuracy and system robustness. For the flapping-wing system, a custom function is used to adjust the learning intensity, enhancing the system's dynamic response speed and steady-state performance. Simulation results demonstrate that the proposed method maintains low computational complexity while achieving superior control performance.
-
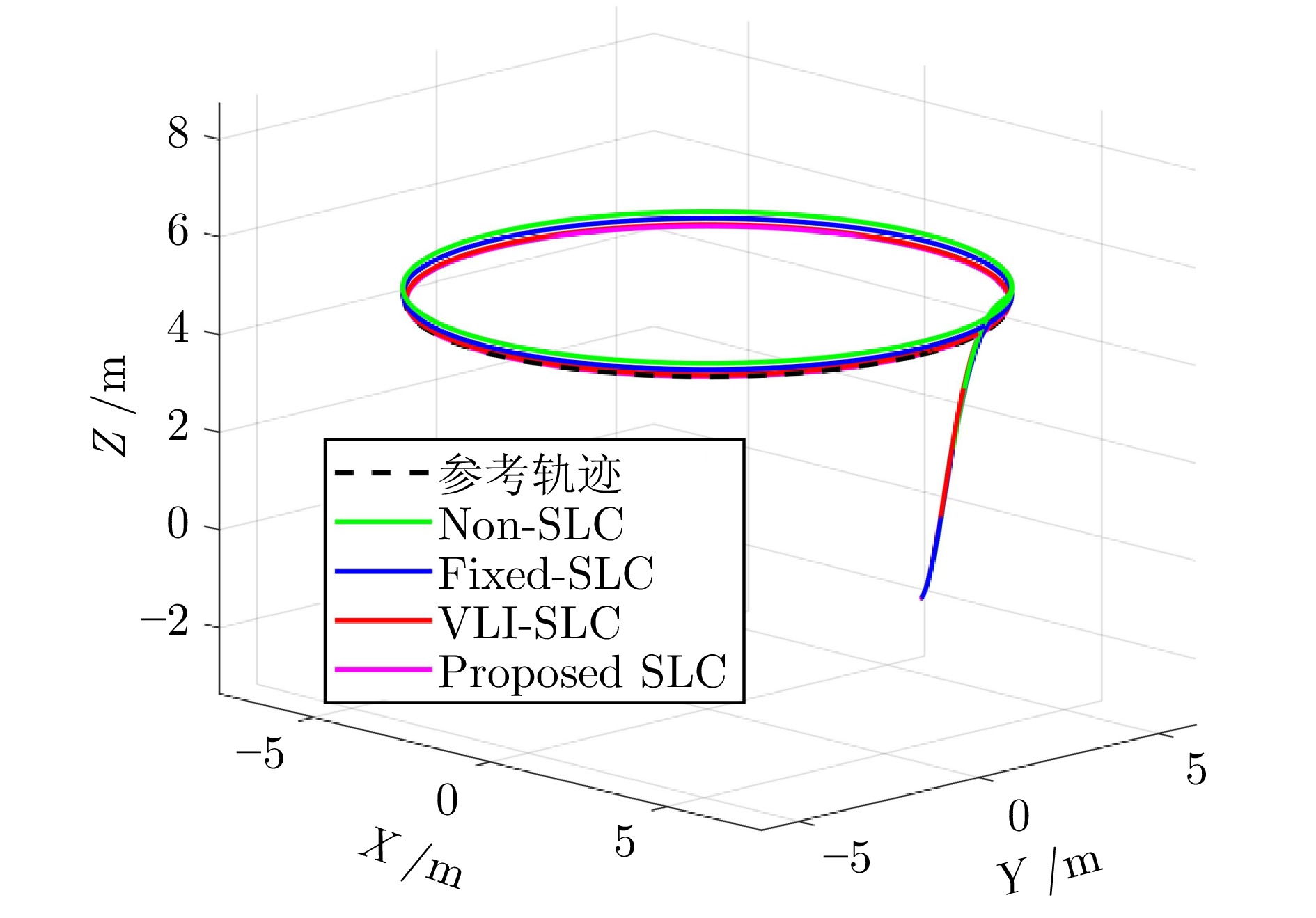
图 1 扑翼飞行器在三维空间中飞行轨迹对比
Fig. 1 Comparison of the flight trajectories of flapping-wing air vehicles in 3D space
表 1 仿真参数设置
Table 1 Simulation parameter settings
参数 数值 参数 数值 $m$ 0.5 kg $k_{p,\; \text{pos}}$ 1.2 $g$ 9.81 m/s2 $k_{d,\; \text{pos}}$ 1.3 $c_D $ 0.10 s−1 $k_{v}$ 3.2 $c$ 26 $R$ 6.0 m $n_p$ 17 $\omega$ 0.20 rad/s $L_p$ 0.04 H $z_{\text{ref}}$ 5.0 m $R_p$ 0.08 $\Omega$ $k_{p,\; z}$ 4.0 $\beta$ $0.001$ N $k_{d,\; z}$ 3.0 $k_e$ 0.06 V·s/rad $k_{i,\; \Theta}$ 40 $k_L$ 2.2 N/rad $k_{p,\; \Theta}$ 2.5 $k_T$ 0.65 N/rad $\alpha_{{\mathrm{ff}}}$ 0.592  下载: 导出CSV
下载: 导出CSV
表 2 控制算法计算性能指标对比
Table 2 Computational performance comparison of control algorithms
算法 存储空间(Bytes) 浮点运算(FLOPs) 单次计算耗时($ \mu {\rm{s}} $) 本文 SLC 40 9 0.2512 增广状态观测器 1152 162 1.3917 自适应控制 1120 240 11.3533
下载: 导出CSV
-
[1] 贺威, 丁施强, 孙长银. 扑翼飞行器的建模与控制研究进展. 自动化学报, 2017, 43(5): 685−696 doi: 10.16383/j.aas.2017.c160581He Wei, Ding Shi-Qiang, Sun Chang-Yin. Research progress on modeling and control of flapping-wing air vehicles. Acta Automatica Sinica, 2017, 43(5): 685−696 doi: 10.16383/j.aas.2017.c160581 [2] Zhou C, Zhang Y, Wu J H. Effect of flexibility on unsteady aerodynamic forces of a purely plunging airfoil. Chinese Journal of Aeronautics, 2020, 33(1): 88−101 doi: 10.1016/j.cja.2019.08.002 [3] 付强, 陈向阳, 郑子亮, 李擎, 贺威. 仿生扑翼飞行器的视觉感知系统研究进展. 工程科学学报, 2019, 41(12): 1512−1519Fu Qiang, Chen Xiang-Yang, Zheng Zi-Liang, Li Qing, He Wei. Research progress on visual perception system of bionic flapping-wing aerial vehicles. Chinese Journal of Engineering, 2019, 41(12): 1512−1519 [4] Gerdes J, Holness A, Perez-Rosado A, Roberts L, Greisinger A, Barnett E, et al. Robo Raven: A flapping-wing air vehicle with highly compliant and independently controlled wings. Soft Robotics, 2014, 1(4): 275−288 doi: 10.1089/soro.2014.0019 [5] Keennon M, Klingebiel K, Won H. Development of the Nano hummingbird: A tailless flapping wing micro air vehicle. In: Proceedings of the 50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Nashrille Tennessee, USA: AIAA, 2012. Article No. 2012-0588 [6] Chen Y F, Wang H Q, Helbling E F, Jafferis N T, Zufferey R, Ong A, et al. A biologically inspired flapping-wing hybrid aerial-aquatic microrobot. Science Robotics, 2017, 2(11): Article No. aao5619 doi: 10.1126/scirobotics.aao5619 [7] Fu Q, Wang J, Gong L, Wang J Y, He W. Obstacle avoidance of flapping-wing air vehicle based on optical flow and fuzzy control. Transactions of Nanjing University of Aeronautics and Astronautics, 2021, 38(2): 206−215 [8] Banazadeh A, Taymourtash N. Adaptive attitude and position control of an insect-like flapping-wing air vehicle. Nonlinear Dynamics, 2016, 85(1): 47−66 doi: 10.1007/s11071-016-2666-8 [9] Qian C, Fang Y C, Li Y P. Neural network-based hybrid three-dimensional position control for a flapping wing aerial vehicle. IEEE Transactions on Cybernetics, 2022, 53(10): 6095−6108 doi: 10.1109/tcyb.2022.3166566 [10] Huang H F, Liu Y T, Niu T, Wang C, Zou Y, He W. Vector field path following for a micro flapping-wing robot. Science China Information Sciences, 2024, 67(6): Article No. 164201 doi: 10.1007/s11432-023-4027-x [11] 贺威, 刘上平, 黄海丰, 付强, 孙长银. 独立驱动的仿鸟扑翼飞行机器人的系统设计与实验. 控制理论与应用, 2022, 39(1): 12−22 doi: 10.7641/CTA.2021.00394He Wei, Liu Shang-Ping, Huang Hai-Feng, Fu Qiang, Sun Chang-Yin. System design and experiment of an independently driven bird-like flapping-wing robot. Control Theory and Applications, 2022, 39(1): 12−22 doi: 10.7641/CTA.2021.00394 [12] Wen G X, Yu D X, Zhao Y L. Optimized fuzzy attitude control of quadrotor unmanned aerial vehicle using adaptive reinforcement learning strategy. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(5): 6075−6083 doi: 10.1109/TAES.2024.3401668 [13] Liu M, Ma D X, Li S. Neural dynamics for adaptive attitude tracking control of a flapping wing micro aerial vehicle. Neurocomputing, 2021, 456: 364−372 doi: 10.1016/j.neucom.2021.05.088 [14] Wang L, Jiang W Y, Zhao L F, Jiao Z X. Modeling and hover flight control of a micromechanical flapping-wing aircraft inspired by wing-tail interaction. IEEE/ASME Transactions on Mechatronics, 2023, 28(6): 3132−3142 doi: 10.1109/TMECH.2023.3254921 [15] Tijmons S, de Croon G C H E, Remes B D W, de Wagter C, Mulder M. Obstacle avoidance strategy using onboard stereo vision on a flapping wing MAV. IEEE Transactions on Robotics, 2017, 33(4): 858−874 doi: 10.1109/TRO.2017.2683530 [16] 付强, 张树禹, 王久斌, 冯富森. 基于外部单目视觉的仿生扑翼飞行器室内定高控制. 工程科学学报, 2020, 42(2): 249−256Fu Qiang, Zhang Shu-Yu, Wang Jiu-Bin, Feng Fu-Sen. Indoor fixed-height control for bio-inspired flapping-wing aerial vehicles based on off-board monocular vision. Chinese Journal of Engineering, 2020, 42(2): 249−256 [17] 付强, 张祥, 赵民, 张春华, 贺威. 仿生扑翼飞行器风洞实验研究进展. 工程科学学报, 2022, 44(4): 767−779Fu Qiang, Zhang Xiang, Zhao Min, Zhang Chun-Hua, He Wei. Research progress on the wind tunnel experiment of a bionic flapping-wing aerial vehicle. Chinese Journal of Engineering, 2022, 44(4): 767−779 [18] Lv Z F, Xiao L, Du Y S, Niu G H, Xing C W, Xu W Y. Multi-agent reinforcement learning based UAV swarm communications against jamming. IEEE Transactions on Wireless Communications, 2023, 22(12): 9063−9075 doi: 10.1109/TWC.2023.3268082 [19] Kong L H, He W, Chen W S, Zhang H, Wang Y N. Dynamic movement primitives based robot skills learning. Machine Intelligence Research, 2023, 20(3): 396−407 doi: 10.1007/s11633-022-1346-z [20] Zhang C X, Lu W J, Zhao S Y, Wu J, Zhu X Y, Liu Z J, et al. Enhancing Attitude tracking with self-learning control using tanh-type learning intensity. IEEE Transactions on Automation Science and Engineering, 2025, 22: 16976−16986 doi: 10.1109/TASE.2025.3581953 [21] 胡海天. 基于强化学习的微型扑翼飞行器机动动作控制研究 [硕士学位论文], 哈尔滨工业大学, 中国, 2025.Hu Hai-Tian. Research on Maneuver Control of Flapping Wing Micro Aerial Vehicle Based on Reinforcement Learning [Master thesis], Harbin Institute of Technology, China, 2025. [22] Sun M, Tang J. Unsteady aerodynamic force generation by a model fruit fly wing. Journal of Experimental Biology, 2002, 205(1): 55−70 doi: 10.1242/jeb.205.1.55 [23] Zhang C X, Ahn C K, Wu J, He W. Online-learning control with weakened saturation response to attitude tracking: A variable learning intensity approach. Aerospace Science and Technology, 2021, 117: Article No. 106981 doi: 10.1016/j.ast.2021.106981 [24] Zhang C X, Xiao B, Wu J, Li B. On low-complexity control design to spacecraft attitude stabilization: An online-learning approach. Aerospace Science and Technology, 2021, 110: Article No. 106441 doi: 10.1016/j.ast.2020.106441 [25] 张良, 何修宇, 王者奇, 贺威. 扑翼飞行器的变幅飞行策略的设计与实现. 机器人, 2025, 47(1): 76−84Zhang Liang, He Xiu-Yu, Wang Zhe-Qi, He Wei. Design and implementation of a variable-amplitude flight strategy for flapping-wing aircraft. Robot, 2025, 47(1): 76−84 -

 下载:
下载:

图(4) / 表(2)
计量
- 文章访问数: 223
- HTML全文浏览量: 120
- PDF下载量: 56
- 被引次数: 0
