

Fish-school-behavior-inspired Self-organizing Formation Reconfiguration Control for Underactuated USVs
-
摘要: 受鱼群自组织行为启发, 提出一种面向欠驱动水面机器人(USV)的自组织编队架构, 以解决复杂海洋环境下多USV编队重构控制问题. 该架构采用分布式策略, 支持任意USV按需担任临时领导者并重构树状拓扑, 使编队构型随环境自适应调整. 在此基础上, 首先基于鱼群穿越狭窄通道的疏散行为机制, 提出一种仿鱼群疏散编队重构算法, 将通行优势排序与有限状态机切换结合, 实现受限环境中的高效、平滑重构. 然后, 基于鱼群逃逸行为机制, 设计自组织动态分裂−合并编队重构算法, 将重构问题建模为多智能体路径规划问题, 并结合Dubins路径和改进遗传算法优化满足USV运动学与安全间距约束的重构轨迹. 最后, 结合横截函数法设计编队控制律, 并利用Lyapunov理论证明闭环稳定性. 仿真结果表明, 所提方法在狭窄通道和大型障碍物场景下具有良好的适应性与重构效果.Abstract: Inspired by the self-organizing behaviors of fish schools, this paper proposes a self-organizing formation architecture for underactuated unmanned surface vehicles (USVs) to address the formation reconfiguration control problem in complex marine environments. The architecture adopts a distributed strategy, allowing any USV to act as a temporary leader when needed and reconstructing a tree topology, thereby enabling adaptive formation adjustment in response to environmental changes. Based on the evacuation behavior mechanism of fish schools navigating narrow passages, a formation reconfiguration algorithm is first proposed, which combines sorting of passage advantages with finite-state machine switching to achieve efficient and smooth reconfiguration in constrained environments. Then, based on the escape behavior mechanism of fish schools, a self-organizing dynamic split-merge formation reconfiguration algorithm is designed, where the reconfiguration problem is formulated as a multi-agent path finding problem, and then the Dubins paths and an improved genetic algorithm are combined to optimize reconfiguration trajectories under USV kinematics and safety distance constraints. Finally, a formation control law is designed by using the transverse function method, and closed-loop stability is proved by using the Lyapunov theory. Simulation results show that the proposed method achieves good adaptability and reconfiguration performance in narrow-passage and large obstacle scenarios.
-
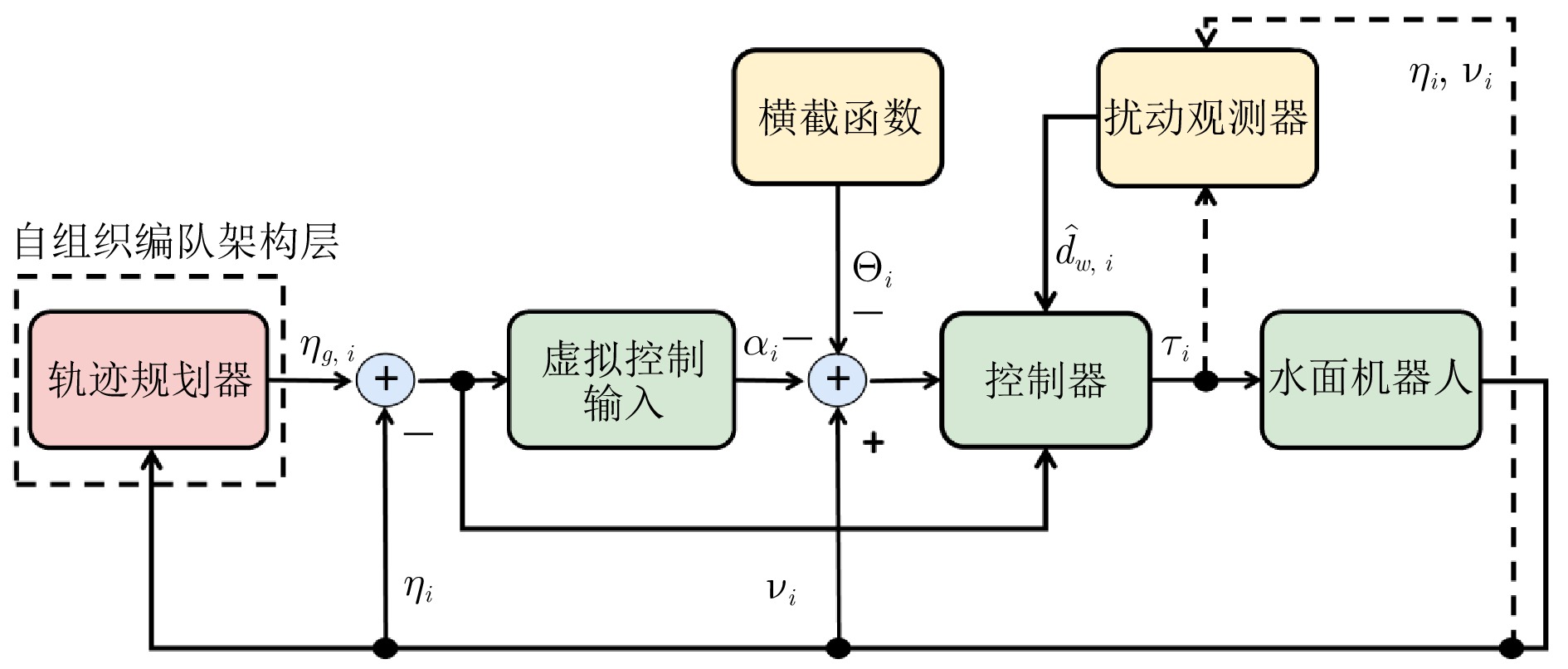
图 1 欠驱动水面机器人编队控制系统框图
Fig. 1 Block diagram of the formation control system for underactuated USVs
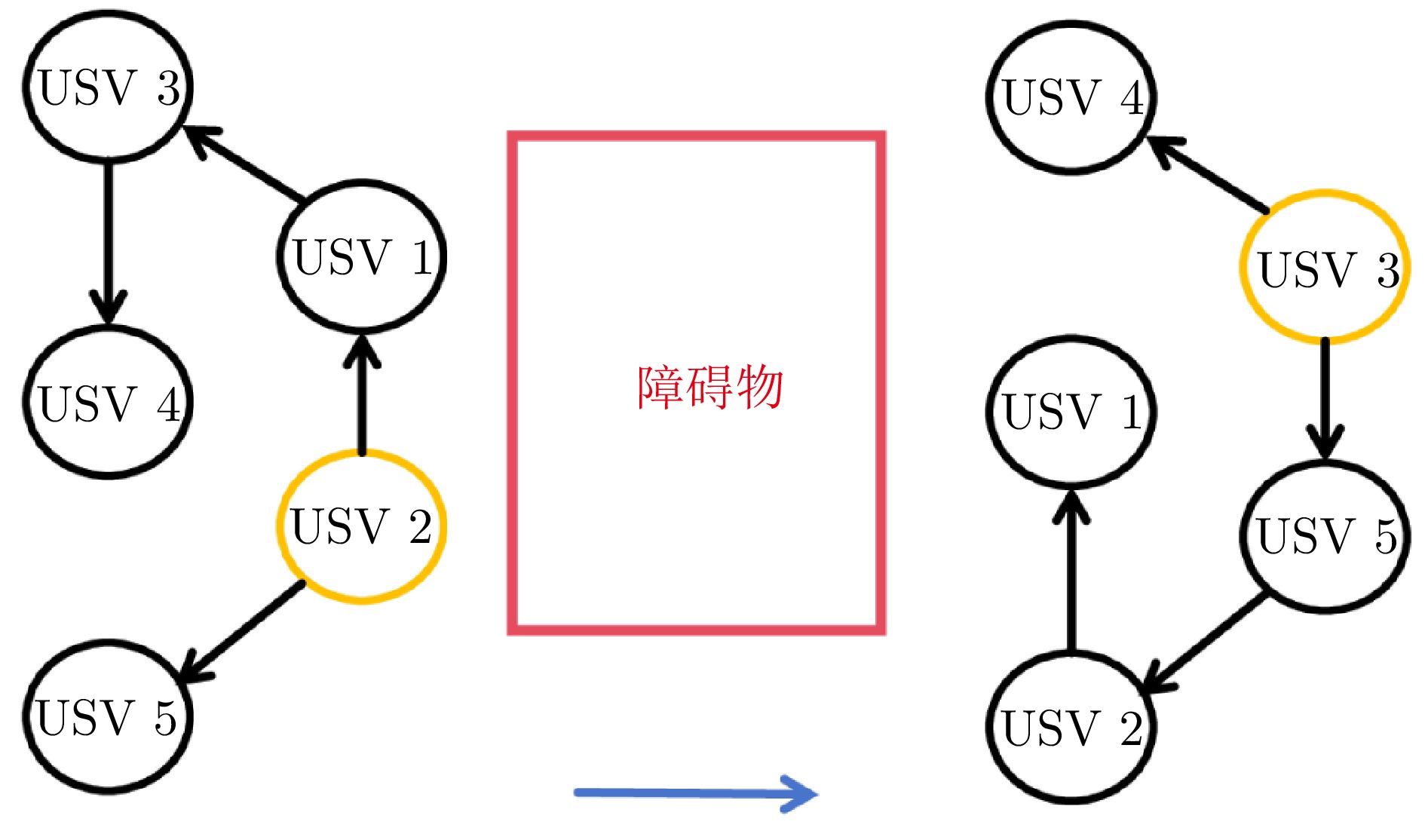
图 2 自组织水面机器人编队架构树结构重构示例
Fig. 2 Example of self-organizing USV formation architecture tree structure reconstruction
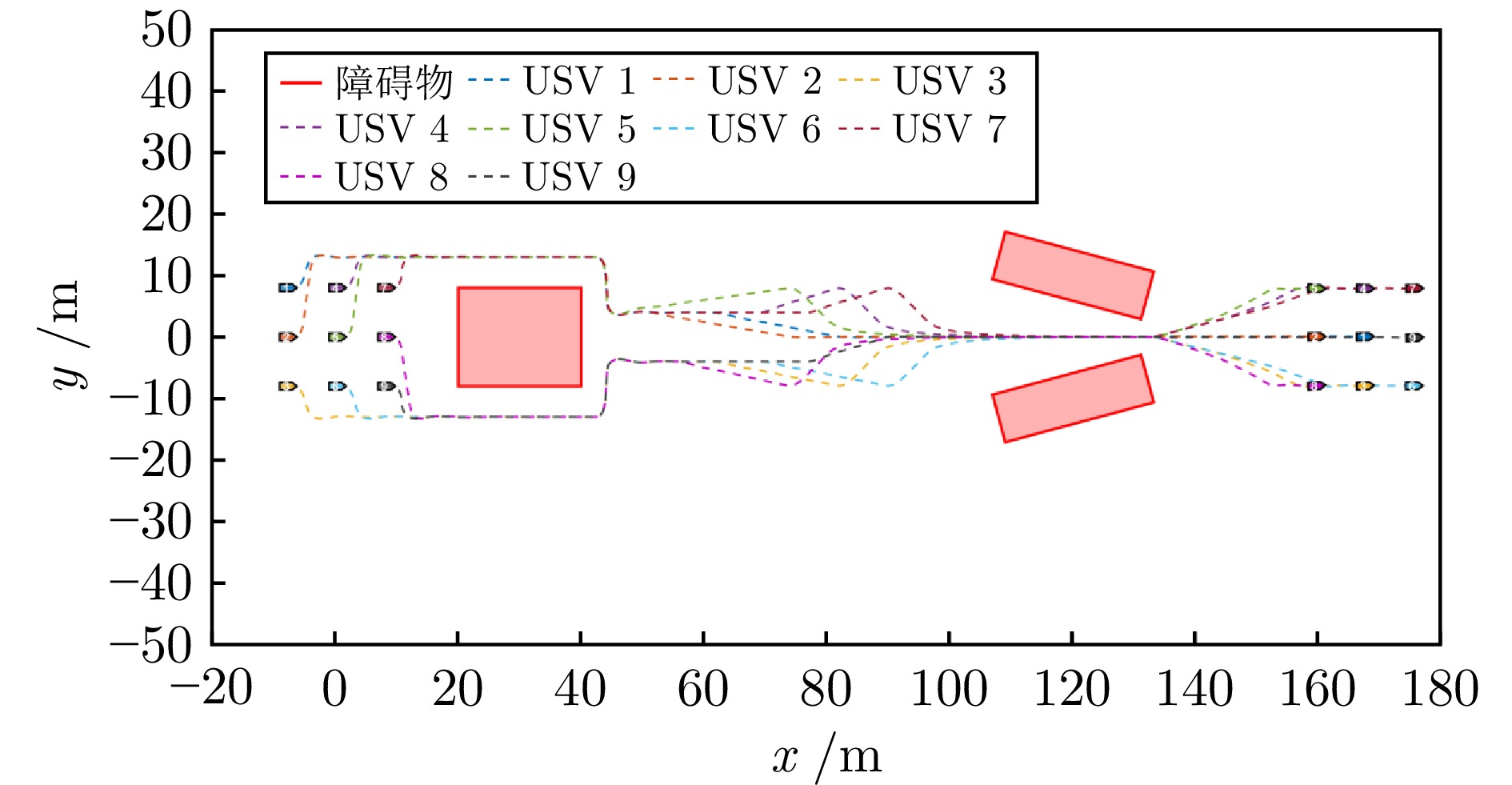
图 3 水面机器人的$x\text- y $相平面轨迹
Fig. 3 Position trajectory of the USVs in the horizontal $x\text- y $ plane
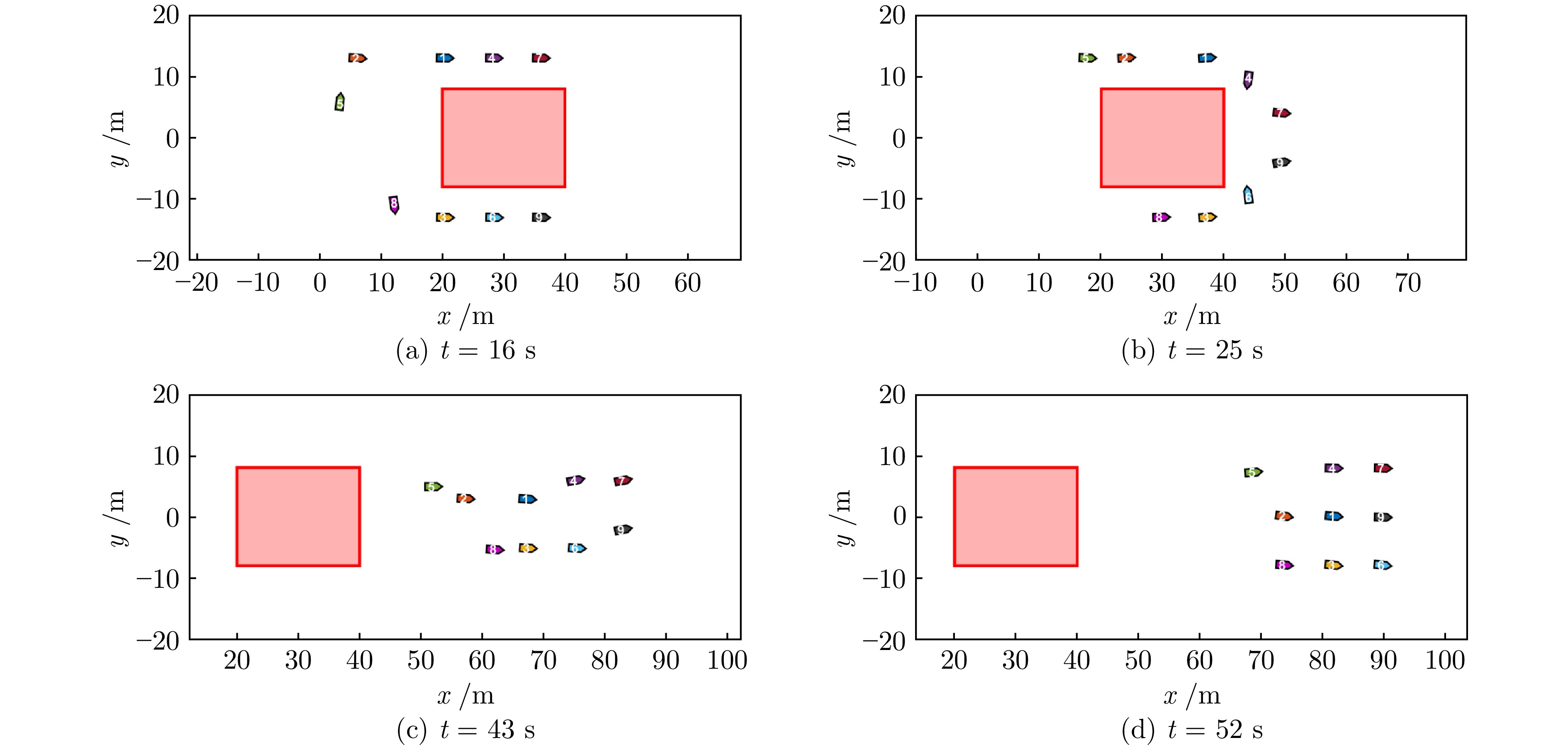
图 4 仿鱼群逃逸行为动态分裂−合并重构中部分时刻水面机器人的位姿
Fig. 4 Poses of the USVs at selected time instants during dynamic splitting-merging reconfiguration driven by a fish-school-escape-behavior-inspired algorithm
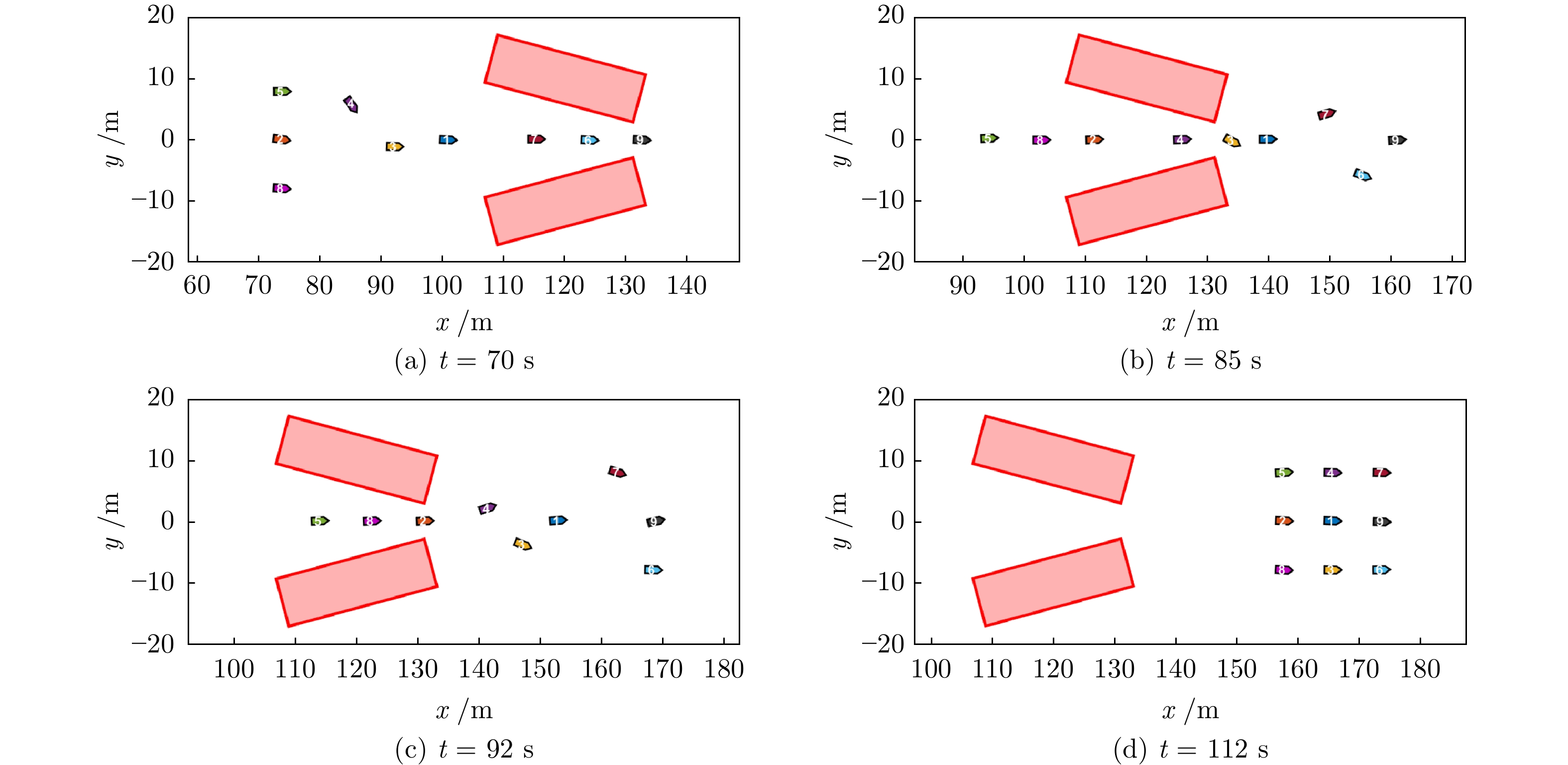
图 5 仿鱼群疏散行为动态重构中部分时刻水面机器人的位姿
Fig. 5 Poses of the USVs at selected time instants during dynamic reconfiguration driven by a bio-inspired algorithm emulating fish-school evacuation behavior
表 1 改进遗传算法优化迭代过程中的性能指标
Table 1 Performance metrics of the improved genetic algorithm during the optimization iteration process
代数 函数评估次数 最佳罚值 平均罚值 停滞代数 1 300 257.9 265.4 0 10 1650 257.9 282.5 9 20 3150 257.9 258.2 19 30 4650 257.9 258.2 29 40 6150 257.9 258.2 39 50 7650 257.9 258.2 49 60 9150 257.9 258.2 59 70 10650 257.9 258.2 69 81 12300 257.9 258.9 80  下载: 导出CSV
下载: 导出CSV
表 2 标准遗传算法优化迭代过程中的性能指标
Table 2 Performance metrics of the standard genetic algorithm during the optimization iteration process
代数 函数评估次数 最佳罚值 平均罚值 停滞代数 1 300 0.9564 5.130 0 2 450 0.8701 4.845 0 3 600 1.4260 4.517 1 4 750 1.0800 4.332 0 5 900 0.9937 4.329 0 6 1050 1.2190 4.431 1 7 1200 0.8871 4.146 0 8 1350 0.9384 4.085 1 9 1500 1.3450 3.984 2 10 1650 0.7427 3.712 0 11 1800 0.6511 4.119 0 12 1950 0.8492 4.148 1 13 2100 0.6066 4.229 0 14 2250 0.5653 4.149 0 15 2400 0.5653 3.815 1 16 2550 0.7285 3.997 2 $ \vdots $ 191 28800 0.8211 3.280 1 192 28950 0.7955 3.426 0 193 29100 0.5670 3.618 0 194 29250 0.5110 3.902 0 195 29400 0.6757 3.553 1 196 29550 0.8724 3.636 2 197 29700 0.8178 3.365 0 198 29850 0.8169 3.253 0 199 30000 0.7084 3.437 0 200 30150 0.8232 3.568 1
下载: 导出CSV
-
[1] Peng Z H, Wang J, Wang D, Han Q L. An overview of recent advances in coordinated control of multiple autonomous surface vehicles. IEEE Transactions on Industrial Informatics, 2021, 17(2): 732−745 doi: 10.1109/TII.2020.3004343 [2] Cao L, Qin Y, Pan Y N, Liang H J. Prescribed performance-based optimal formation control for USVs with position constraints and yaw angle time-varying partial constraints. IEEE Transactions on Intelligent Transportation Systems, 2025, 26(3): 4109−4121 doi: 10.1109/TITS.2024.3520328 [3] Li L L, Yu Z L, Li T S, Jiang B, Guo Q J. Rate-based output regulation for switched IT2 fuzzy systems with application to ship formation. IEEE Transactions on Fuzzy Systems, 2024, 32(8): 4570−4582 doi: 10.1109/TFUZZ.2024.3404931 [4] 王端松, 李东禹, 梁晓玲. 干扰条件下无人艇编队有限时间同步控制. 自动化学报, 2024, 50(5): 1047−1058 doi: 10.16383/j.aas.c230550Wang Duan-Song, Li Dong-Yu, Liang Xiao-Ling. Finite-time synchronized formation control of unmanned surface vehicles with external disturbances. Acta Automatica Sinica, 2024, 50(5): 1047−1058 doi: 10.16383/j.aas.c230550 [5] 张卫东, 刘笑成, 韩鹏. 水上无人系统研究进展及其面临的挑战. 自动化学报, 2020, 46(5): 847−857 doi: 10.16383/j.aas.c190363Zhang Wei-Dong, Liu Xiao-Cheng, Han Peng. Progress and challenges of overwater unmanned systems. Acta Automatica Sinica, 2020, 46(5): 847−857 doi: 10.16383/j.aas.c190363 [6] Jin X. Fault tolerant finite-time leader-follower formation control for autonomous surface vessels with LOS range and angle constraints. Automatica, 2016, 68: 228−236 doi: 10.1016/j.automatica.2016.01.064 [7] Gu N, Wang D, Peng Z H, Liu L. Observer-based finite-time control for distributed path maneuvering of underactuated unmanned surface vehicles with collision avoidance and connectivity preservation. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(8): 5105−5115 doi: 10.1109/TSMC.2019.2944521 [8] Dai S L, He S D, Cai H, Yang C G. Adaptive leader-follower formation control of underactuated surface vehicles with guaranteed performance. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(3): 1997−2008 doi: 10.1109/TSMC.2020.3036120 [9] Lu Y, Wen C Y, Shen T L, Zhang W D. Bearing-based adaptive neural formation scaling control for autonomous surface vehicles with uncertainties and input saturation. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(10): 4653−4664 doi: 10.1109/TNNLS.2020.3025807 [10] Zhang X Z, Yang Q K, Zeng X L, Fang H, Chen J. Cooperative shape-translation estimation and control for time-varying linear formation. IEEE Transactions on Automatic Control, 2025, 70(8): 5206−5221 doi: 10.1109/TAC.2025.3540570 [11] Zhang X Z, Yang Q K, Xiao F, Fang H, Chen J. Linear formation control of multi-agent systems. Automatica, 2025, 171: Article No. 111935 doi: 10.1016/j.automatica.2024.111935 [12] Do H T, Hua H T, Nguyen M T, Nguyen C V, Nguyen H T T, Nguyen H T, et al. Formation control algorithms for multiple-UAVs: A comprehensive survey. EAI Endorsed Transactions on Industrial Networks and Intelligent Systems, 2021, 8(27): Article No. e3 doi: 10.4108/eai.10-6-2021.170230 [13] Li J F, Xu Z, Zhu D J, Dong K, Yan T, Zeng Z, et al. Bio-inspired intelligence with applications to robotics: A survey. Intelligence & Robotics, 2021, 1(1): 58−83 doi: 10.20517/ir.2021.08 [14] Ma J, Han Z J, Li M G, Liu Z J, He W, Ge S S. Conductive hydrogels-based self-sensing soft robot state perception and trajectory tracking. Journal of Field Robotics, 2025, 42(2): 510−524 [15] Duan H B, Huo M Z, Fan Y M. From animal collective behaviors to swarm robotic cooperation. National Science Review, 2023, 10(5): Article No. nwad040 doi: 10.1093/nsr/nwad040 [16] 班晓娟, 宁淑荣, 涂序彦. 人工鱼群高级自组织行为研究. 自动化学报, 2008, 534(10): 1327−1332Ban Xiao-Juan, Ning Shu-Rong, Tu Xu-Yan. Research on advanced self-organization behavior for artificial fish school. Acta Automatica Sinica, 2008, 534(10): 1327−1332 [17] 段海滨, 尤灵辰, 范彦铭, 李明. 仿鸟群自推进机制的无人机集群相变控制. 自动化学报, 2025, 51(5): 960−971 doi: 10.16383/j.aas.c240598Duan Hai-Bin, You Ling-Chen, Fan Yan-Ming, Li Ming. Phase transition control of UAV swarm based on bird-inspired self-propelled mechanism. Acta Automatica Sinica, 2025, 51(5): 960−971 doi: 10.16383/j.aas.c240598 [18] Zhu W X, Oguz S, Heinrich M K, Allwright M, Wahby M, Christensen A L, et al. Self-organizing nervous systems for robot swarms. Science Robotics, 2024, 9(96): Article No. eadl5161 doi: 10.1126/scirobotics.adl5161 [19] Larrieu R, Moreau P, Graff C, Peyla P, Dupont A. Fish evacuate smoothly respecting a social bubble. Scientific Reports, 2023, 13(1): Article No. 10414 doi: 10.1038/s41598-023-36869-9 [20] Sankey D W E, Storms R F, Musters R J, Russell T W, Hemelrijk C K, Portugal S J. Absence of “selfish herd” dynamics in bird flocks under threat. Current Biology, 2021, 31(14): 3192−3198 doi: 10.1016/j.cub.2021.05.009 [21] Poel W, Daniels B C, Sosna M M G, Twomey C R, Leblanc S P, Couzin I D, et al. Subcritical escape waves in schooling fish. Science Advances, 2022, 8(25): Article No. eabm6385 doi: 10.1126/sciadv.abm6385 [22] Yuan C Z, He H B, Wang C. Cooperative deterministic learning-based formation control for a group of nonlinear uncertain mechanical systems. IEEE Transactions on Industrial Informatics, 2019, 15(1): 319−333 doi: 10.1109/TII.2018.2792455 [23] Marshall J A R, Reina A. On aims and methods of collective animal behaviour. Animal Behaviour, 2024, 210: 189−197 doi: 10.1016/j.anbehav.2024.01.024 [24] Standley T S. Finding optimal solutions to cooperative pathfinding problems. In: Proceedings of the AAAI Conference on Artificial Intelligence. Atlanta, USA: AAAI, 2010. 173−178 [25] Dubins L E. On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents. American Journal of Mathematics, 1957, 79(3): 497−516 doi: 10.2307/2372560 [26] Bac F Q, Perov V L. New evolutionary genetic algorithms for NP-complete combinatorial optimization problems. Biological Cybernetics, 1993, 69(3): 229−234 doi: 10.1007/BF00198963 [27] Ab Wahab M N, Nazir A, Khalil A, Ho W J, Akbar M F, Noor M H M, et al. Improved genetic algorithm for mobile robot path planning in static environments. Expert Systems With Applications, 2024, 249: Article No. 123762 doi: 10.1016/j.eswa.2024.123762 -

 下载:
下载:

计量
- 文章访问数: 266
- HTML全文浏览量: 87
- PDF下载量: 83
- 被引次数: 0
