

UAV Autonomous Precise Localization Method Based on Ultra-wideband Intelligent Decision-making
-
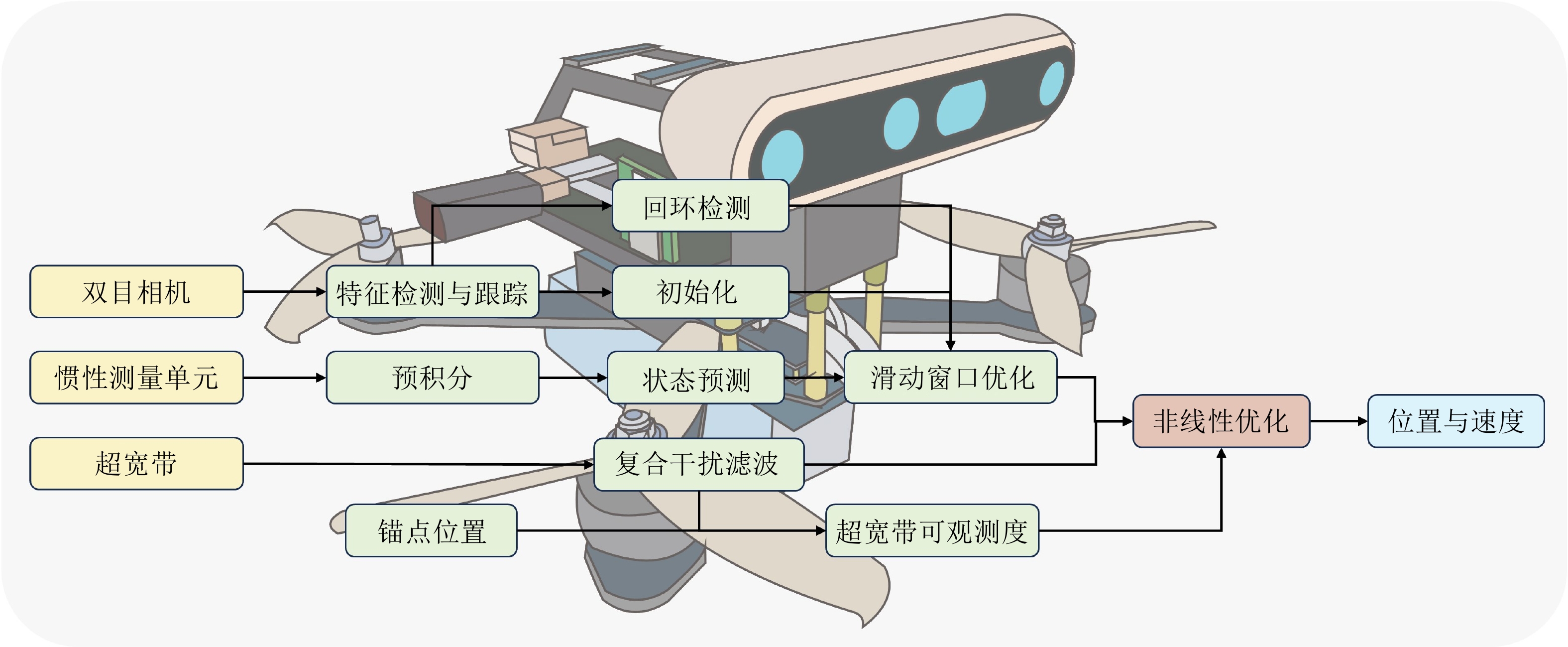
摘要: 在卫星信号拒止环境中实现无人机的高精度定位是一项关键且具有挑战性的任务. 针对这一难题, 提出一种基于超宽带信息智能决策的无人机自主精确定位方法, 通过超宽带的全局测距校正视觉惯性里程计的累积误差, 从而显著提升定位结果的精确性与鲁棒性. 具体来说, 采用复合干扰滤波方法对超宽带定位中存在的多源异质干扰进行处理; 同时构建超宽带信息评估模块, 对定位结果的可靠性进行量化评估. 实验结果表明, 所提基于超宽带信息智能决策的无人机自主精确定位方法可以有效提高无人机的定位精度.Abstract: Achieving high-precision unmanned aerial vehicle (UAV) localization in global navigation satellite system-denied environments remains a critical and challenging task. To address this problem, a UAV autonomous precise localization method based on ultra-wideband (UWB) intelligent decision-making is proposed, which can compensate for the accumulated error of the visual inertial odometry by the global UWB measurements, thereby significantly improving the accuracy and robustness of the localization results. Specifically, a composite disturbance filtering method is introduced to handle multi-source heterogeneous disturbances, and the UWB information evaluation module is developed to quantitatively assess the reliability of the localization results. Experimental results verify that the proposed UAV autonomous precise localization method based on UWB intelligent decision-making effectively enhances the localization accuracy of UAV.
-
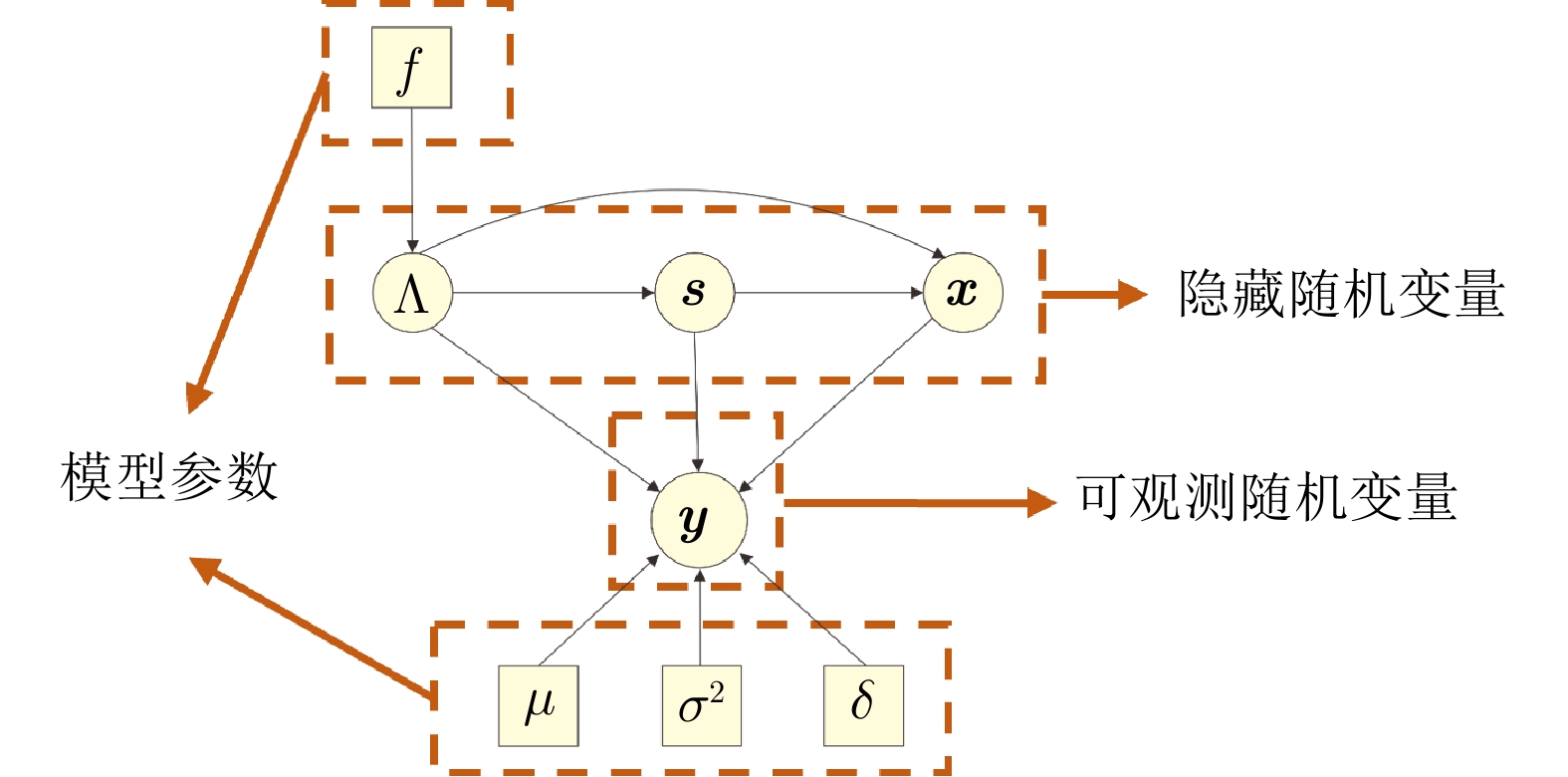
图 2 UWB偏斜$ t $测量噪声的概率图模型
Fig. 2 Probabilistic graphical model of UWB $ {\rm skew}\text-t $ measurement noise
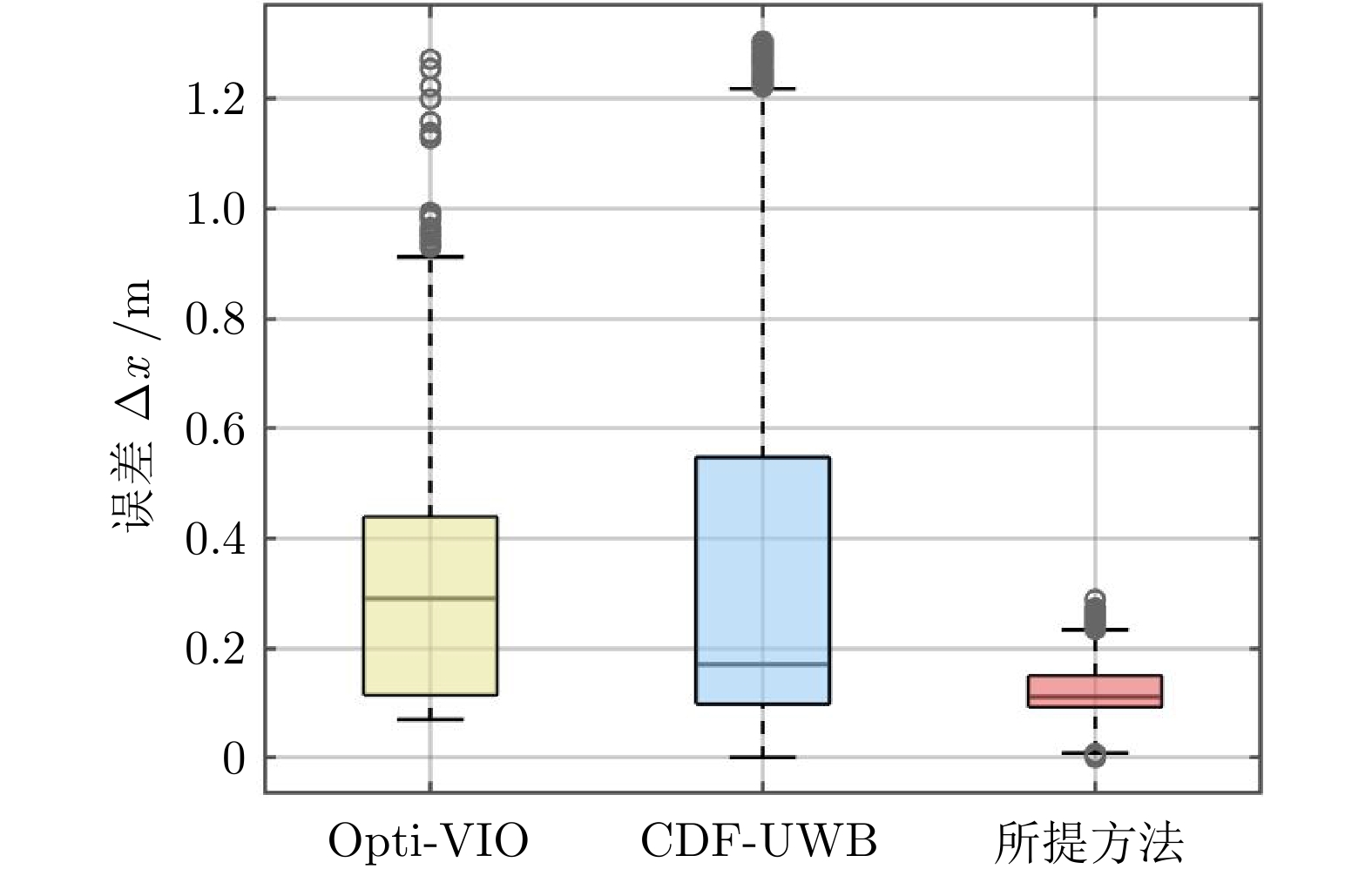
图 8 实验1中$x $轴位置误差箱型图
Fig. 8 Box plot of the $x\text-\rm axis $ position error in experiment 1
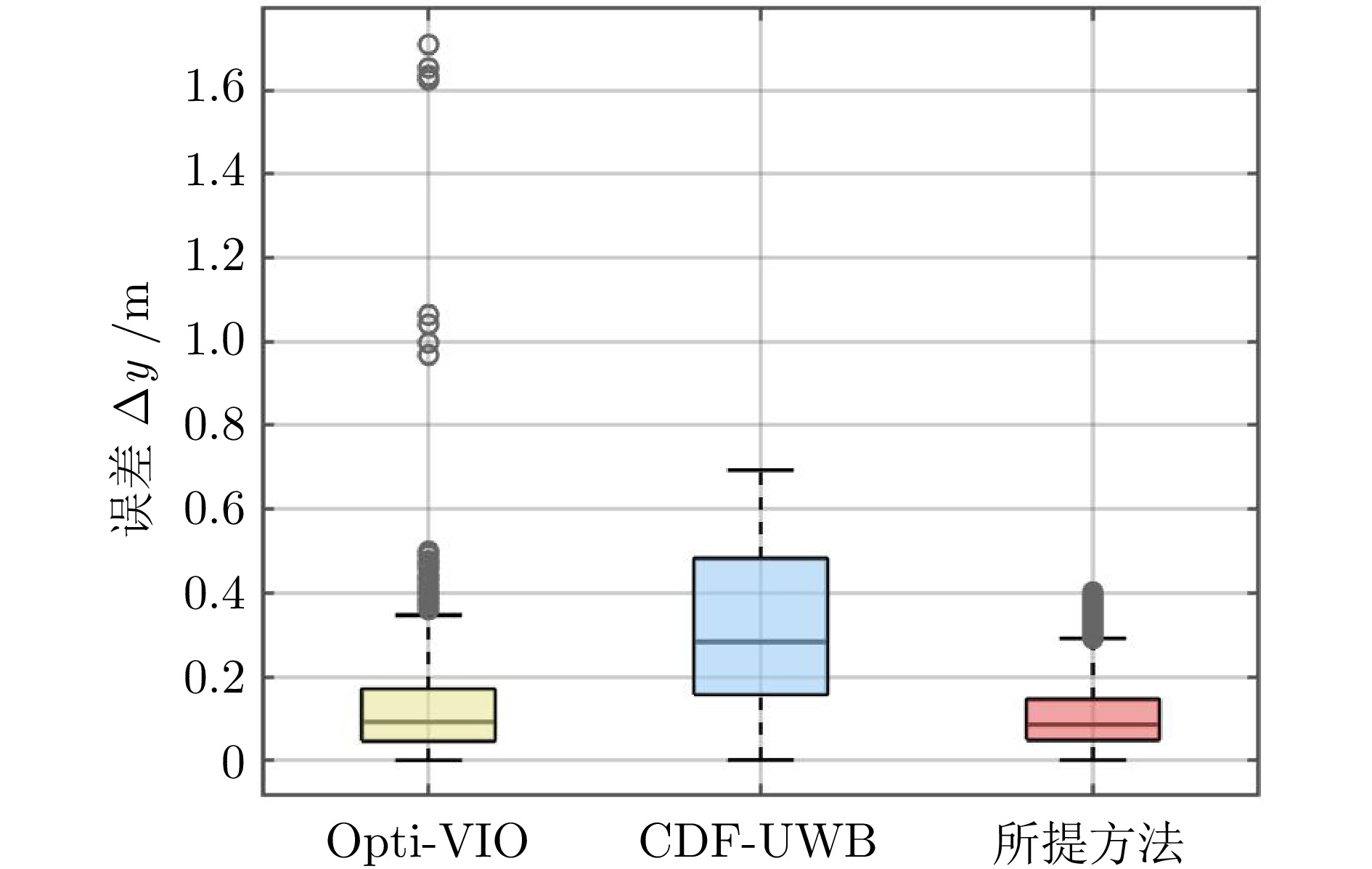
图 9 实验1中$y $轴位置误差箱型图
Fig. 9 Box plot of the $y\text-\rm axis $ position error in experiment 1
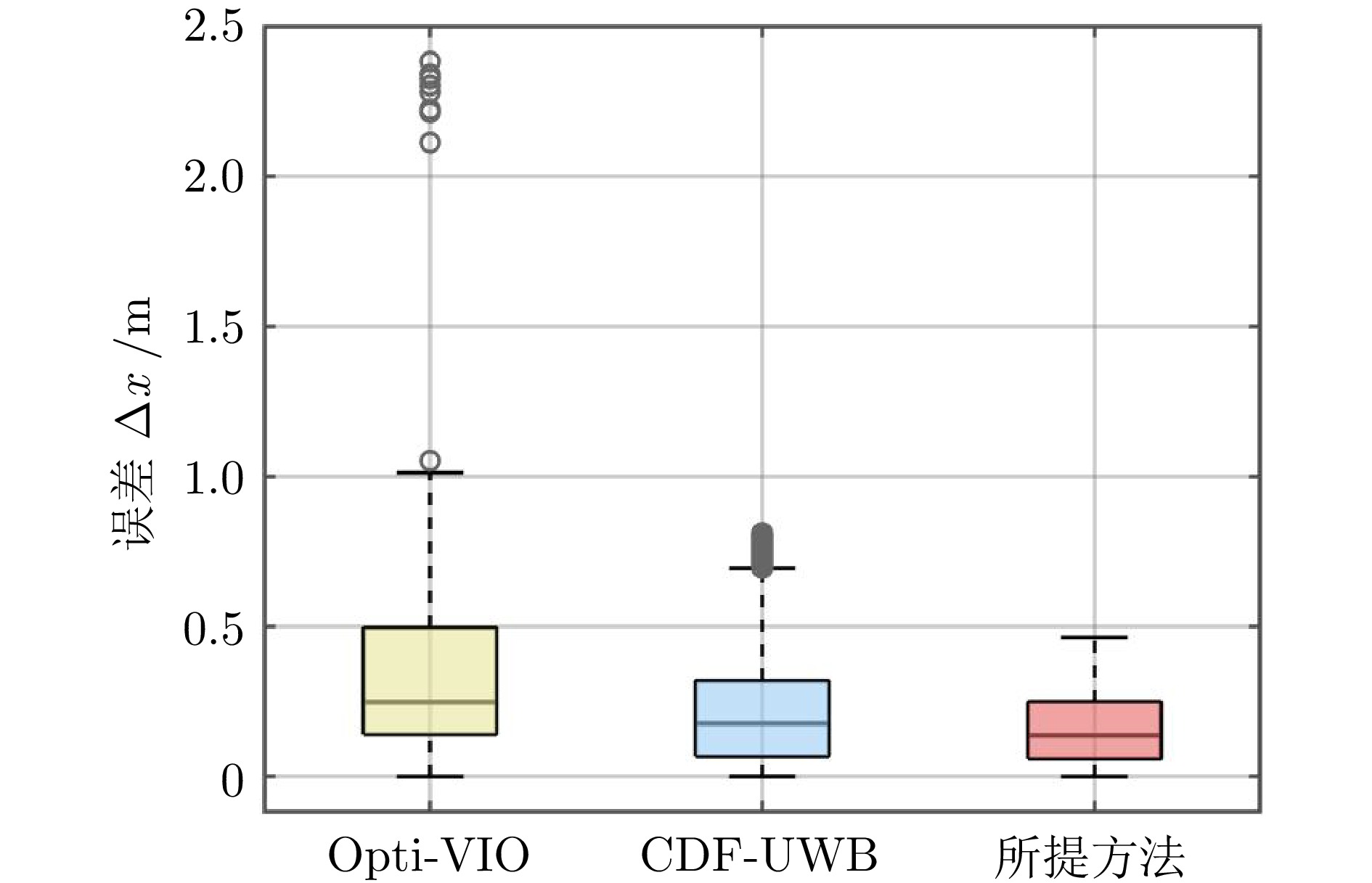
图 12 实验2中$x $轴位置误差箱型图
Fig. 12 Box plot of the$x\text-\rm axis $ position error in experiment 2
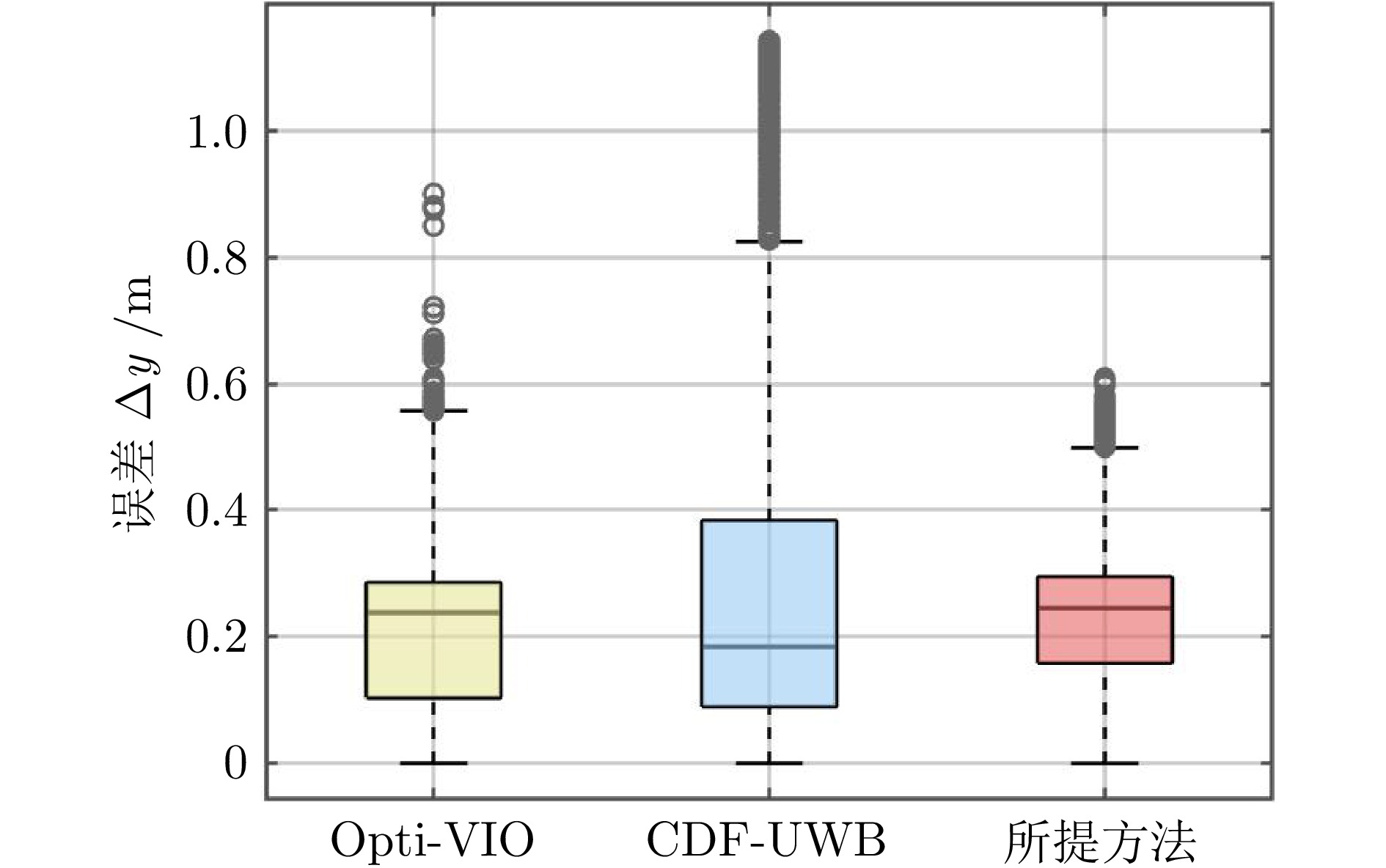
图 13 实验2中$y $轴位置误差箱型图
Fig. 13 Box plot of the $y\text-\rm axis $ position error in experiment 2
表 1 实验1中误差指标对比(m)
Table 1 Comparison of error indices in experiment 1 (m)
指标 Opti-VIO CDF-UWB 所提方法 $ MAE_{\rm{x}} $ 0.3344 0.3697 0.1203 $ MAE_{\rm{y}} $ 0.1214 0.3125 0.1318 $ MAE $ 0.3558 0.4841 0.1784 $ STD_{\rm{x}} $ 0.2350 0.4179 0.0560 $ STD_{\rm{y}} $ 0.1368 0.1908 0.1135 $ STD $ 0.2719 0.4594 0.1266 $ RMSE_{\rm{x}} $ 0.4086 0.5579 0.1327 $ RMSE_{\rm{y}} $ 0.1829 0.3661 0.1739 $ RMSE $ 0.4477 0.6673 0.2187  下载: 导出CSV
下载: 导出CSV
表 2 实验2中误差指标对比(m)
Table 2 Comparison of error indices in experiment 2 (m)
指标 Opti-VIO CDF-UWB 所提方法 $ MAE_{\rm{x}} $ 0.3234 0.2267 0.1681 $ MAE_{\rm{y}} $ 0.2283 0.2911 0.2504 $ MAE $ 0.3959 0.3690 0.3016 $ STD_{\rm{x}} $ 0.2653 0.1956 0.1245 $ STD_{\rm{y}} $ 0.1555 0.2938 0.1362 $ STD $ 0.3075 0.3530 0.1845 $ RMSE_{\rm{x}} $ 0.4183 0.2994 0.2092 $ RMSE_{\rm{y}} $ 0.2762 0.4135 0.2851 $ RMSE $ 0.5013 0.5105 0.3536
下载: 导出CSV
-
[1] 郭雷, 余翔, 张霄, 张友民. 无人机安全控制系统技术: 进展与展望. 中国科学: 信息科学, 2020, 50(2): 184−194Guo Lei, Yu Xiang, Zhang Xiao, Zhang You-Min. Safety control system technologies for UAVs: Review and prospect. Scientia Sinica Informationis, 2020, 50(2): 184−194 [2] 郭雷, 李文硕, 崔洋洋, 朱玉凯, 章健淳, 余翔, 等. 动态闭环不确定性量化理论与智能无人系统应用. 中国科学: 技术科学, 2025, 55(1): 1−13Guo Lei, Li Wen-Shuo, Cui Yang-Yang, Zhu Yu-Kai, Zhang Jian-Chun, Yu Xiang, et al. Dynamic closed-loop uncertainty quantification theory with intelligent unmanned systems applications. Scientia Sinica Technologica, 2025, 55(1): 1−13 [3] Li K, Bao L, Kim W. Geo-LSTM: A geometry and temporal feature fusion algorithm for multi-sensor 3D localization. IEEE Robotics and Automation Letters, 2025, 10(9): 9128−9135 doi: 10.1109/LRA.2025.3592087 [4] Liu T X, Li B F, Chen G, Yang L, Qiao J, Chen W. Tightly coupled integration of GNSS/UWB/VIO for reliable and seamless positioning. IEEE Transactions on Intelligent Transportation Systems, 2023, 25(2): 2116−2128 [5] Song Y, Guan M, Tay W P, Law C L, Wen C. UWB/LiDAR fusion for cooperative range-only SLAM. In: Proceedings of the International Conference on Robotics and Automation (ICRA). Montreal, Canada: IEEE, 2019. 6568−6574 [6] Zhen W, Scherer S. Estimating the localizability in tunnel-like environments using LiDAR and UWB. In: Proceedings of the International Conference on Robotics and Automation (ICRA). Montreal, Canada: IEEE, 2019. 4903−4908 [7] He S Z, Yang B, Liu T, Li J. Graph network-based UWB localization via learning spatial-temporal and geometric features. IEEE Communications Letters, 2025, 29(4): 784−788 doi: 10.1109/LCOMM.2025.3543434 [8] Xu H, Zhang Y C, Zhou B Y, Wang L Q, Yao X J, Meng G T. Omni-swarm: A decentralized omnidirectional visual-inertial-UWB state estimation system for aerial swarms. IEEE Transactions on Robotics, 2022, 38(6): 3374−3394 doi: 10.1109/TRO.2022.3182503 [9] Nguyen T H, Nguyen T M, Xie L. Range focused fusion of camera-IMU-UWB for accurate and drift-reduced localization. IEEE Robotics and Automation Letters, 2021, 6(2): 1678−1685 doi: 10.1109/LRA.2021.3057838 [10] Cao Y, Beltrame G. Vir-SLAM: Visual, inertial, and ranging SLAM for single and multi-robot systems. Autonomous Robots, 2021, 45(6): 905−917 doi: 10.1007/s10514-021-09992-7 [11] Perez-Grau F J, Caballero F, Merino L, Viguria A. Multi-modal mapping and localization of unmanned aerial robots based on ultra-wideband and RGB-D sensing. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Vancouver, Canada: IEEE, 2017. 3495−3502 [12] Fang X, Wang C, Nguyen T M, Xie L. Graph optimization approach to range-based localization. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 51(11): 6830−6841 [13] Agha A, Otsu K, Morrell B, Fan D, Thakker R, Santamaria-Navarro A, et al. Nebula: Quest for robotic autonomy in challenging environments; Team costar at the DARPA subterranean challenge. arXiv: 2103.11470, 2021. [14] Eudes A, Lhuillier M. Error propagations for local bundle adjustment. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Miami, USA: IEEE, 2009. 2411−2418 [15] Censi A. On achievable accuracy for pose tracking. In: Proceedings of the International Conference on Robotics and Automation (ICRA). Kobe, Japan: IEEE, 2009. 4170−4175 [16] Rojas C R, Welsh J S, Goodwin G C, Feuer A. Robust optimal experiment design for system identification. Automatica, 2007, 43(6): 993−1008 doi: 10.1016/j.automatica.2006.12.013 [17] Xu S, Willners J S, Hong Z, Zhang K, Petillot Y R, Wang S. Observability-aware active extrinsic calibration of multiple sensors. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). London, United Kingdom: IEEE, 2023. 2091−2097 [18] Emenonye D R, Dhillon H S, Buehrer R M. Fundamentals of LEO based localization. IEEE Transactions on Information Theory, 2025, 71(7): 5277−5311 doi: 10.1109/TIT.2025.3567037 [19] Minervini A, Carrio A, Guglieri G. Enhancing visual-inertial odometry robustness and accuracy in challenging environments. Robotics, 2025, 14(6): Article No. 71 doi: 10.3390/robotics14060071 [20] Zhang J, Zhang C, Liu Q C, Ma Q C, Qin J H. Tightly-coupled visual-inertial odometry with robust feature association in dynamic illumination environments. Robotica, 2025, 43(6): 2304−2319 doi: 10.1017/S0263574725000608 [21] Jiang X, Li H, Chen C, Chen Y, Huang J, Zhou Z, et al. Ddio-mapping: A fast and robust visual-inertial odometry for low-texture environment challenge. IEEE Transactions on Industrial Informatics, 2023, 20(3): 4418−4428 [22] Nurminen H, Ardeshiri T, Piché R, Gustafsson F. Skew-t filter and smoother with improved covariance matrix approximation. IEEE Transactions on Signal Processing, 2018, 66(21): 5618−5633 doi: 10.1109/TSP.2018.2865434 [23] Jia J T, Guo K X, Li W S, Yu X, Guo L. Composite filtering for UWB-based localization of quadrotor UAV with skewed measurements and uncertain dynamics. IEEE Transactions on Instrumentation and Measurement, 2022, 71: Article No. 1002313 doi: 10.1109/tim.2022.3151934 [24] Qin T, Cao S, Pan J, Shen S. A general optimization-based framework for global pose estimation with multiple sensors. arXiv: 1901.03642, 2019. -

 下载:
下载:

计量
- 文章访问数: 490
- HTML全文浏览量: 397
- PDF下载量: 101
- 被引次数: 0
