

A Morphological-intelligence Approach to Folding Control of a Structurally Bioinspired Six-bar Tensegrity Robot
-
摘要: 形态智能通常指机器人利用“身体”的物理特性、几何结构以及动力学特征等简化复杂的计算(如控制器设计), 具备良好的环境适应性特点, 是实现具身智能的核心机制. 本文针对六杆张拉整体完全折叠问题, 提出一种利用形态智能机理简化控制方法, 实现部分绳驱下机器人整体的等效折叠. 首先基于“端点聚拢”形态构造折叠目标, 通过结构对称性分析得到四种折叠模式及对应的绳长变化量. 再通过图论回路空间分析, 识别由几何构型产生的冗余绳长变化量, 基于此确定折叠过程中的被控绳. 然后在静力学框架下建立电机输入与绳长变化映射关系并给出可达性判据, 以此得到每种模式下简化控制策略. 最后通过MATLAB准静态仿真及实物实验, 验证所提方法的有效性. 四种折叠模式下的简化控制策略均能实现机器人完全折叠, 驱动绳的数量可由传统方法的24降低至9, 展现了形态智能在简化机器人控制器设计方面的潜力.Abstract: Morphological intelligence refers to leveraging a robot's physical body——Its physical properties, geometric structure, and dynamic characteristics——To offload computation (e.g., controller design) and enhance environmental adaptability; It is a core mechanism of embodied intelligence. This paper targets complete folding of a six-bar tensegrity robot and develops a morphology-driven simplified control method that achieves whole-body equivalent folding under partial cable actuation. A folding objective based on endpoint aggregation is first formulated; symmetry analysis then enumerates four folding patterns together with their associated cable-length variations. A graph-theoretic cycle-space analysis is employed to identify redundancy in length changes induced by geometric coupling, from which the actuated-cable set during folding is determined. Within a static framework, the mapping from motor inputs to cable-length variations is established and a reachability criterion is provided, yielding a simplified control strategy for each pattern. Quasi-static MATLAB simulations and hardware experiments validate the approach: Across all four patterns, complete folding is achieved while the number of actively actuated cables is reduced from 24 to 9. The results highlight the potential of morphological intelligence to simplify controller design for tensegrity robots.
-
Key words:
- tensegrity robot /
- folding control /
- equilibrium manifold /
- morphological intelligence
-

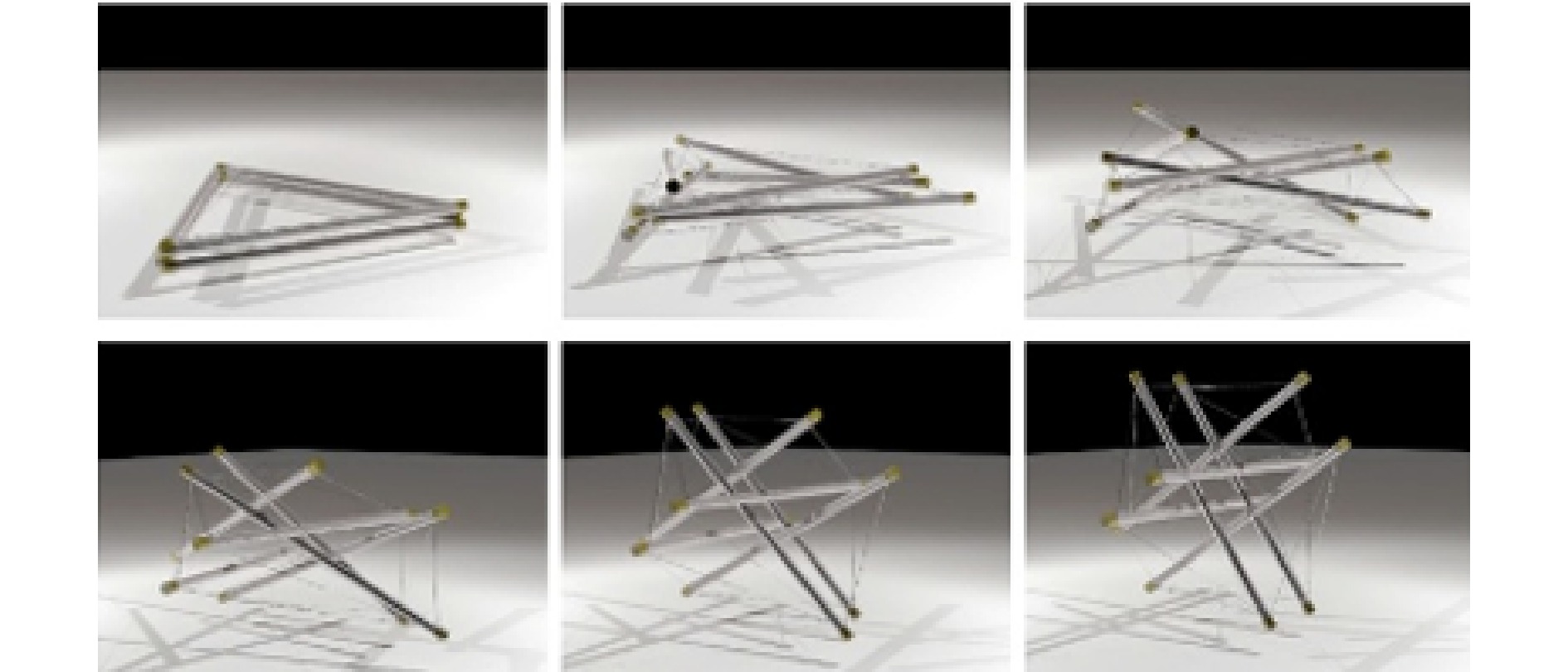
图 4 六杆张拉整体机器人一维构型折叠
Fig. 4 One-dimensional configuration folding of six-bar tensegrity robot
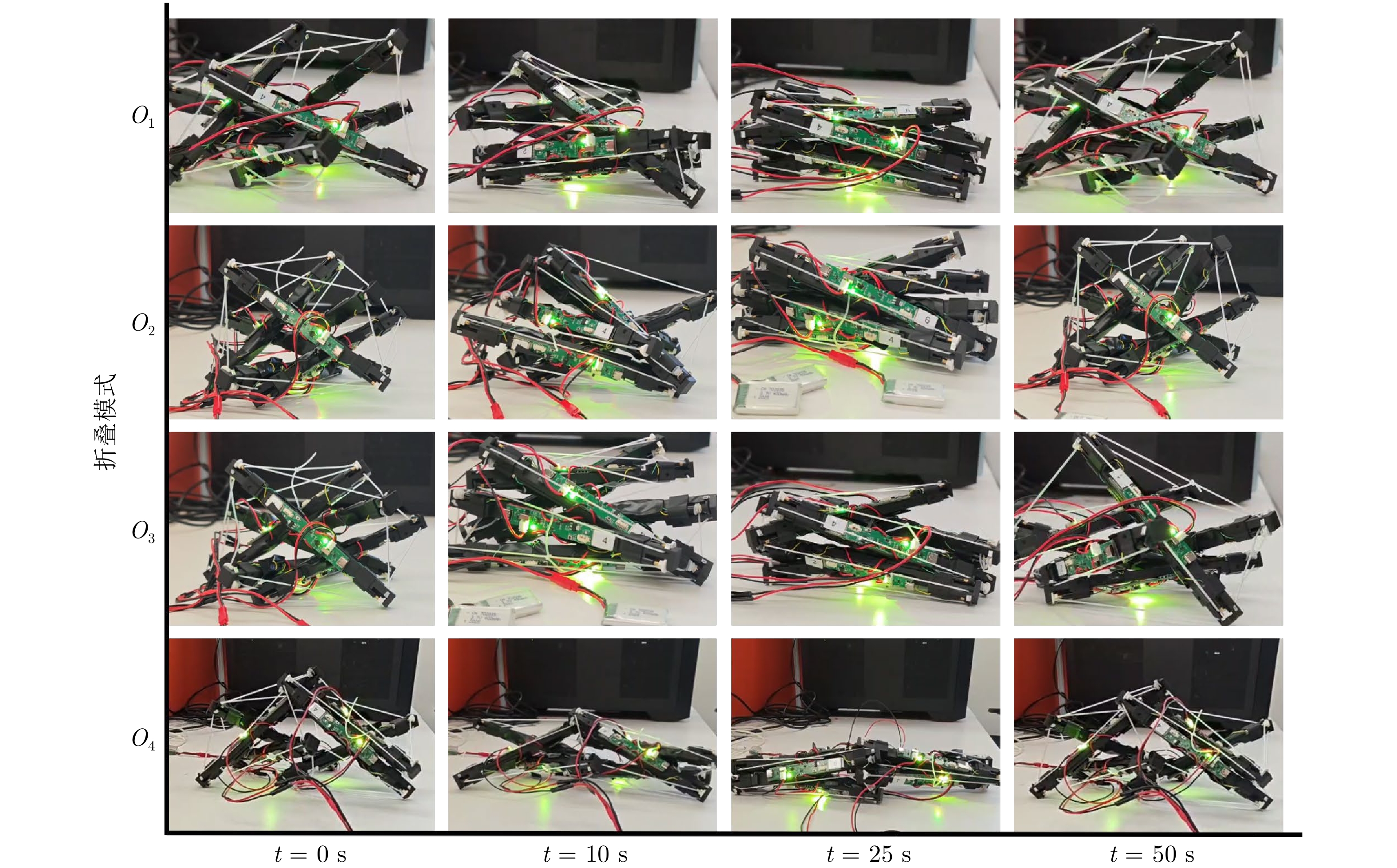
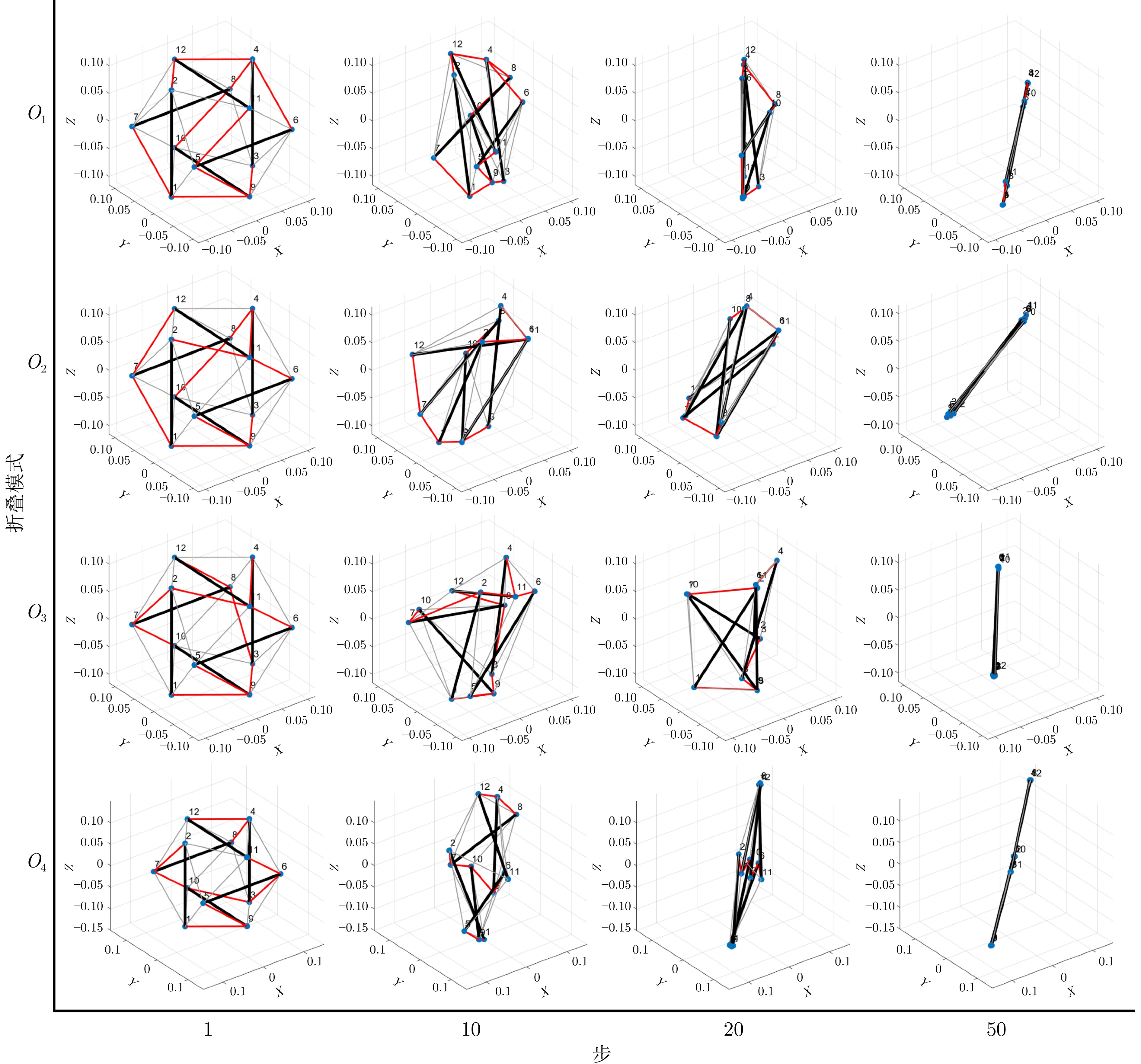
图 10 六杆张拉整体机器人折叠与展开过程
Fig. 10 Folding and deployment process of six-bar tensegrity robot
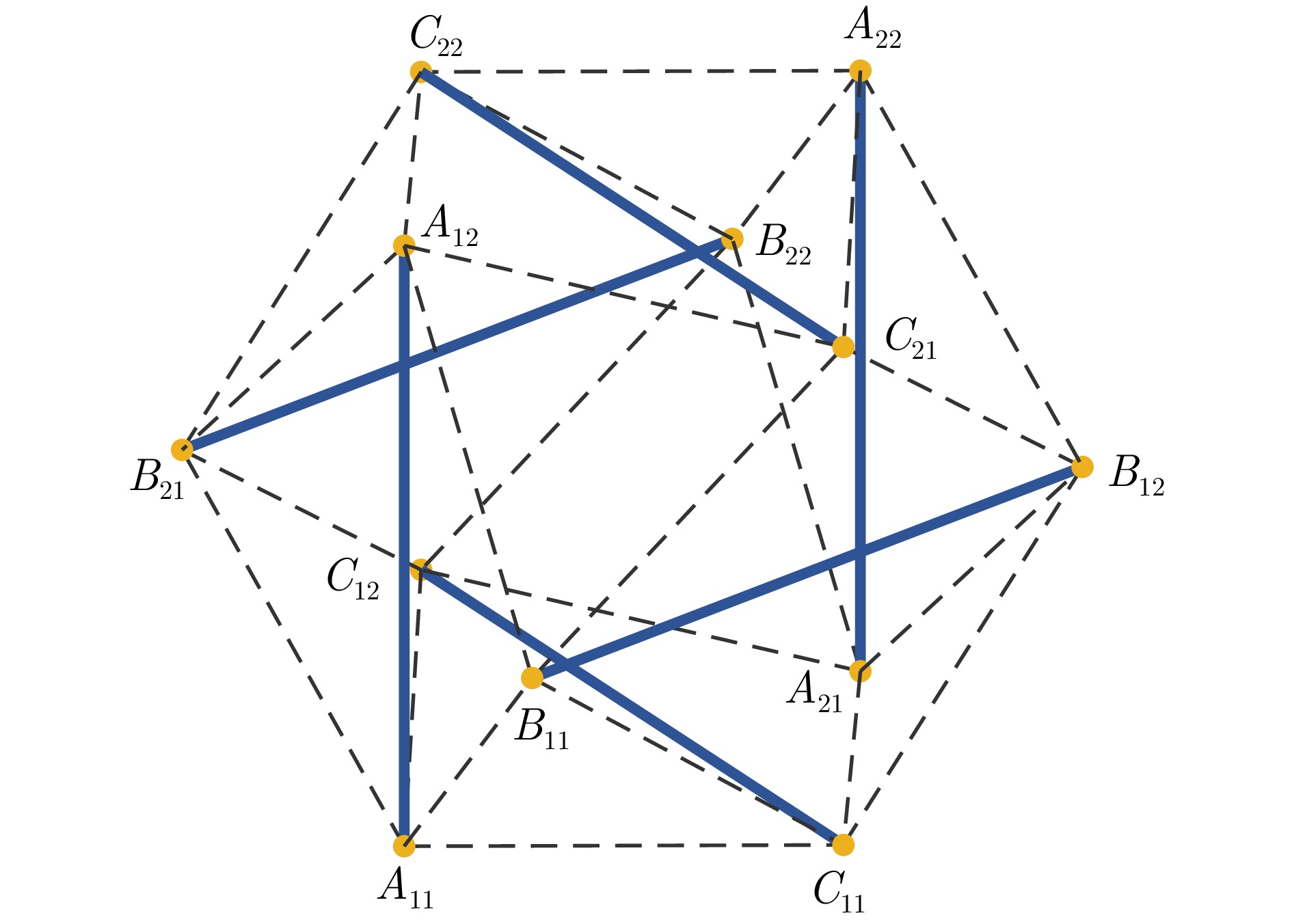
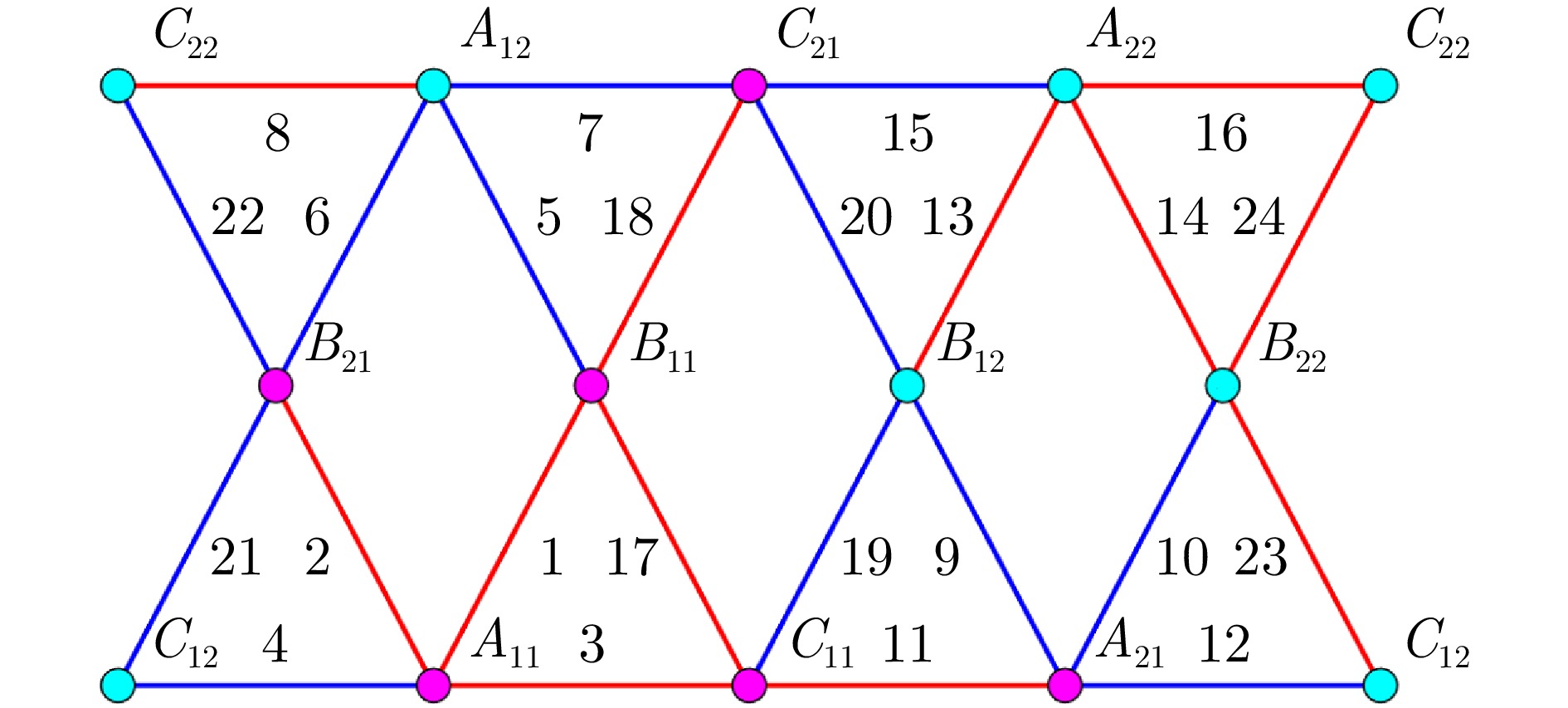
表 1 绳索编号
Table 1 Cable number
绳索 编号 绳索 编号 绳索 编号 $ A_{11}B_{11} $ 1 $ A_{21}B_{12} $ 9 $ B_{11}C_{11} $ 17 $ A_{11}B_{21} $ 2 $ A_{21}B_{22} $ 10 $ B_{11}C_{21} $ 18 $ A_{11}C_{11} $ 3 $ A_{21}C_{11} $ 11 $ B_{12}C_{11} $ 19 $ A_{11}C_{12} $ 4 $ A_{21}C_{12} $ 12 $ B_{12}C_{21} $ 20 $ A_{12}B_{11} $ 5 $ A_{22}B_{12} $ 13 $ B_{21}C_{12} $ 21 $ A_{12}B_{21} $ 6 $ A_{22}B_{22} $ 14 $ B_{21}C_{22} $ 22 $ A_{12}C_{21} $ 7 $ A_{22}C_{21} $ 15 $ B_{22}C_{12} $ 23 $ A_{12}C_{22} $ 8 $ A_{22}C_{22} $ 16 $ B_{22}C_{22} $ 24  下载: 导出CSV
下载: 导出CSV
表 2 四种折叠模式簇划分
Table 2 Cluster partitioning under four folding patterns
模式 $ C_L $ $ C_R $ $ C_M $ $ O_1 $ $A_{11},\; A_{21},\; B_{11},\; $$ B_{21},\; C_{11},\; C_{21}$ $A_{12},\;A_{22},\;B_{12},\; $$ B_{22},\;C_{12},\;C_{22}$ — $ O_2 $ $A_{11},\; A_{21},\; B_{11},\; $$ B_{21},\; C_{11},\; C_{22}$ $A_{12},\; A_{22},\; B_{12},\; $$ B_{22},\; C_{12},\; C_{21}$ — $ O_3 $ $A_{11},\; A_{21},\; B_{11},\; $$ B_{22},\; C_{11},\; C_{22}$ $A_{12},\; A_{22},\; B_{12},\; $$ B_{21},\; C_{12},\; C_{21}$ — $ O_4 $ $ {A_{11},\;B_{11},\;C_{11}} $ $ {A_{22},\;B_{22},\;C_{22}} $ $A_{12},\; A_{21},\; B_{12},\; $$ B_{21},\; C_{12},\; C_{21}$
下载: 导出CSV
-
[1] Ingber D E, Tensegrity I. Cell structure and hierarchical systems biology. Journal of Cell Science, 2003, 116(7): 1157−1173 doi: 10.1242/jcs.00359 [2] Wang N, Naruse K, Stamenović D, Fredberg J J, Mijailovich S M, Tolić-Nørrelykke I M, et al. Mechanical behavior in living cells consistent with the tensegrity model. Proceedings of the National Academy of Sciences of the United States of America, 2001, 98(14): 7765−7770 [3] Bruce J, Sabelhaus A P, Chen Y X, Liu D Z, Morse K, Milam S, et al. SUPERball: Exploring tensegrities for planetary probes. In: Proceedings of the 12th International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS). Montreal, Canada: Canadian Space Agency, 2014. [4] Paul C, Valero-Cuevas F J, Lipson H. Design and control of tensegrity robots for locomotion. IEEE Transactions on Robotics, 2006, 22(5): 944−957 doi: 10.1109/TRO.2006.878980 [5] Tibert G. Deployable Tensegrity Structures for Space Applications [Ph.D. dissertation], KTH Royal Institute of Technology, Sweden, 2002. [6] Chen B X, He Z Y, Ye F, Yang Y, Chen W H, Ding F H, et al. Untethered miniature tensegrity robot with tunable stiffness for high-speed and adaptive locomotion. Soft Robotics, 2025, 12(5): 676−686 doi: 10.1089/soro.2024.0178 [7] Caluwaerts K, Despraz J, Işçen A, Sabelhaus A P, Bruce J, Schrauwen B, et al. Design and control of compliant tensegrity robots through simulation and hardware validation. Journal of the Royal Society Interface, 2014, 11(98): Article No. 20140520 doi: 10.1098/rsif.2014.0520 [8] Bruce J, Caluwaerts K, Iscen A, Sabelhaus A P, SunSpiral V. Design and evolution of a modular tensegrity robot platform. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Hong Kong, China: IEEE, 2014. 3483−3489 [9] Kim K, Agogino A K, Agogino A M. Rolling locomotion of cable-driven soft spherical tensegrity robots. Soft Robotics, 2020, 7(3): 346−361 doi: 10.1089/soro.2019.0056 [10] Liu Q, Li P, Yin Y H, Yang Q K, Zhao X Y, Fang H. Rolling strategy and motion controller design for an aerial vehicle surrounded by a six-bar tensegrity structure. In: Proceedings of the 42nd Chinese Control Conference (CCC). Tianjin, China: IEEE, 2023. 4131−4136 [11] Mo J X, Fang H, Yang Q K. Design and locomotion characteristic analysis of two kinds of tensegrity hopping robots. iScience, 2024, 27(3): Article No. 109226 doi: 10.1016/j.isci.2024.109226 [12] Liu S Y, Jing Z, Hao S Y, Lyu J S, Tao Z C, Gui Y, et al. Joint terrestrial-aerial path planning for tensegrone robot. Unmanned Systems, DOI: 10.1142/S2301385026500287 [13] Lyu J S, Yang Q K, Liu S Y, Yin Y H, Fang H. Joint terrestrial-aerial geometric path planning for tensegrity-aerial robot. In: Proceedings of the 43rd Chinese Control Conference (CCC). Kunming, China: IEEE, 2024. 4658−4662 [14] Yang Q K, Hao S Y, Liu Q, Liu S Y, Fang H. Dynamic modeling and control for a collision-resilient tensegrity aerial vehicle. IEEE/ASME Transactions on Mechatronics, 2025, 30(6): 7184−7195 doi: 10.1109/TMECH.2024.3523177 [15] 陶子辰, 刘松源, 桂昀, 郝思远, 方浩, 杨庆凯. 张拉整体跨域机器人的设计与控制. 机器人, 2025, 47(3): 338−347 doi: 10.13973/j.cnki.robot.240303Tao Zi-Chen, Liu Song-Yuan, Gui Yun, Hao Si-Yuan, Fang Hao, Yang Qing-Kai. Design and control of tensegrity based cross-domain robot. Robot, 2025, 47(3): 338−347 doi: 10.13973/j.cnki.robot.240303 [16] Kobayashi R, Nabae H, Suzumori K. Large torsion thin artificial muscles tensegrity structure for twist manipulation. IEEE Robotics and Automation Letters, 2023, 8(3): 1207−1214 doi: 10.1109/LRA.2023.3236889 [17] Liu Y X, Bi Q, Dai X L, Song R, Zang X Z, Li Y B. An in-pipe crawling robot based on tensegrity structures. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Kyoto, Japan: IEEE, 2022. 13248−13253 [18] Calangi J J. Model-based Control System for Packing a 6-bar Tensegrity Structure, Fung Technical Report No. 2014. 05. 02, University of California, USA, 2014. [19] SunSpiral V, Gorospe G, Bruce J, Iscen A, Korbel G, Milam S, et al. Tensegrity based probes for planetary exploration: Entry, descent and landing (EDL) and surface mobility analysis. International Journal of Planetary Probes, 2013, 7: Article No. 13 [20] Sultan C, Skelton R. Deployment of tensegrity structures. International Journal of Solids and Structures, 2003, 40(18): 4637−4657 doi: 10.1016/S0020-7683(03)00267-1 [21] Vespignani M, Friesen J M, SunSpiral V, Bruce J. Design of SUPERball v2, a compliant tensegrity robot for absorbing large impacts. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid, Spain: IEEE, 2018. 2865−2871 [22] 刘华平, 郭迪, 孙富春, 张新钰. 基于形态的具身智能研究: 历史回顾与前沿进展. 自动化学报, 2023, 49(6): 1131−1154 doi: 10.16383/j.aas.c220564Liu Hua-Ping, Guo Di, Sun Fu-Chun, Zhang Xin-Yu. Morphology-based embodied intelligence: Historical retrospect and research progress. Acta Automatica Sinica, 2023, 49(6): 1131−1154 doi: 10.16383/j.aas.c220564 [23] Collins S, Ruina A, Tedrake R, Wisse M. Efficient bipedal robots based on passive-dynamic walkers. Science, 2005, 307(5712): 1082−1085 doi: 10.1126/science.1107799 [24] Mertan A, Cheney N. No-brainer: Morphological computation driven adaptive behavior in soft robots. In: Proceedings of the 17th International Conference on Simulation of Adaptive Behavior (SAB 2024). Irvinen, USA: Springer, 2024. 81−92 [25] Wang Z J, Li K, He Q G, Cai S Q. A light-powered ultralight tensegrity robot with high deformability and load capacity. Advanced Materials, 2019, 31(7): Article No. 1806849 doi: 10.1002/adma.201806849 -

 下载:
下载:



图(10) / 表(2)
计量
- 文章访问数: 511
- HTML全文浏览量: 260
- PDF下载量: 125
- 被引次数: 0
