

State-attracted Control of Cable-driven Soft Robot With Human-inspired Decision-making Integration
-
摘要: 绳驱动软体机器人通过柔性本体与绳传动相结合, 在结构轻量化、运动柔顺性及人机交互安全性等方面具有显著优势, 在协作操作与安全交互场景中展现出重要应用潜力. 然而, 软体材料固有的强非线性与大变形特性, 以及绳驱动结构引入的多自由度耦合和参数不确定性, 使绳驱动软体机器人在复杂环境下的稳定控制与抗扰性能面临较大挑战. 针对上述问题, 构建一种仿生绳驱动软体机器人原型系统, 建立相应的运动学与动力学模型; 提出一种融合仿人决策的状态吸引控制方法, 该方法引入脉冲神经网络以模拟人类决策行为, 实现对绳驱动软体机器人启停策略与期望轨迹的自适应更新; 设计一种融合状态吸引函数与仿人决策的鲁棒轨迹跟踪控制策略, 用以约束跟踪误差在模型不确定性与外部扰动条件下的收敛方向, 并基于Lyapunov理论证明闭环系统的稳定性. 仿真与实物实验结果表明, 所提方法在鲁棒性、人机交互安全性及动态响应性能等方面具有良好表现, 验证了其在实际人机交互场景中的可行性与有效性.Abstract: The cable-driven soft robot (CDSRA) combines a compliant body with cable transmission, offering notable advantages in lightweight design, motion compliance, and human-robot interaction safety, thus showing great potential in collaborative manipulation and interaction scenarios. However, the strong nonlinearity and large deformation of soft materials, together with the multi-degree-of-freedom coupling and parameter uncertainties introduced by cable-driven structures, pose challenges to stable control and disturbance rejection in complex environments. To address these issues, this paper develops a bionic cable-driven soft robot prototype, establishes its kinematic and dynamic models, and proposes a state-attracted control method for CDSRA incorporating human-inspired decision (HID). In this method, a spiking neural network is introduced to emulate human decision-making, enabling adaptive updates of the start-stop strategy and desired trajectories. Moreover, a robust trajectory-tracking control strategy integrating a state-attracted function with HID is designed to constrain the direction of tracking-error convergence under model uncertainties and external disturbances, while closed-loop stability is proved via Lyapunov theory. Simulation and experimental results demonstrate that the proposed method achieves favorable performance in robustness, human-robot interaction safety, and dynamic response, validating its feasibility and effectiveness in practical human-robot interaction scenarios.
-
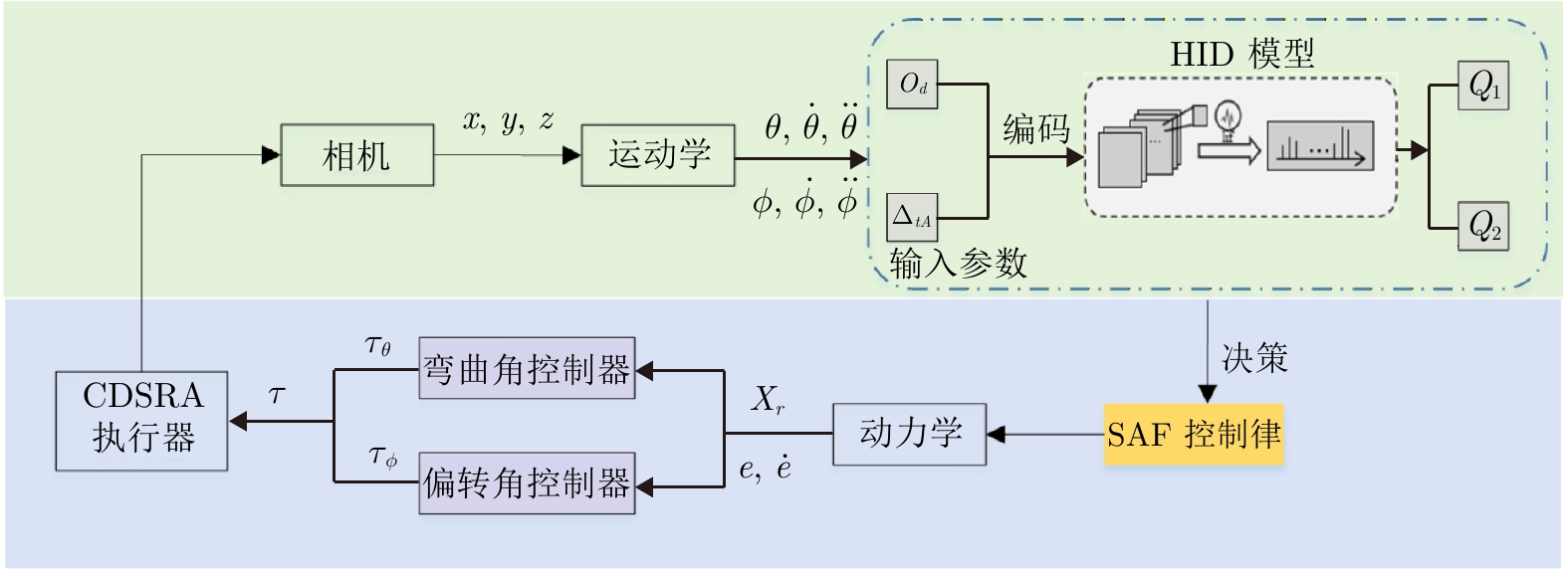
图 6 融合SAF-HID控制策略的总体框架
Fig. 6 General framework of the integrated SAF-HID control strategy

图 7 SAF-HID控制在交互与扰动条件下的性能对比
Fig. 7 Performance comparison of SAF-HID control under interaction and disturbance conditions
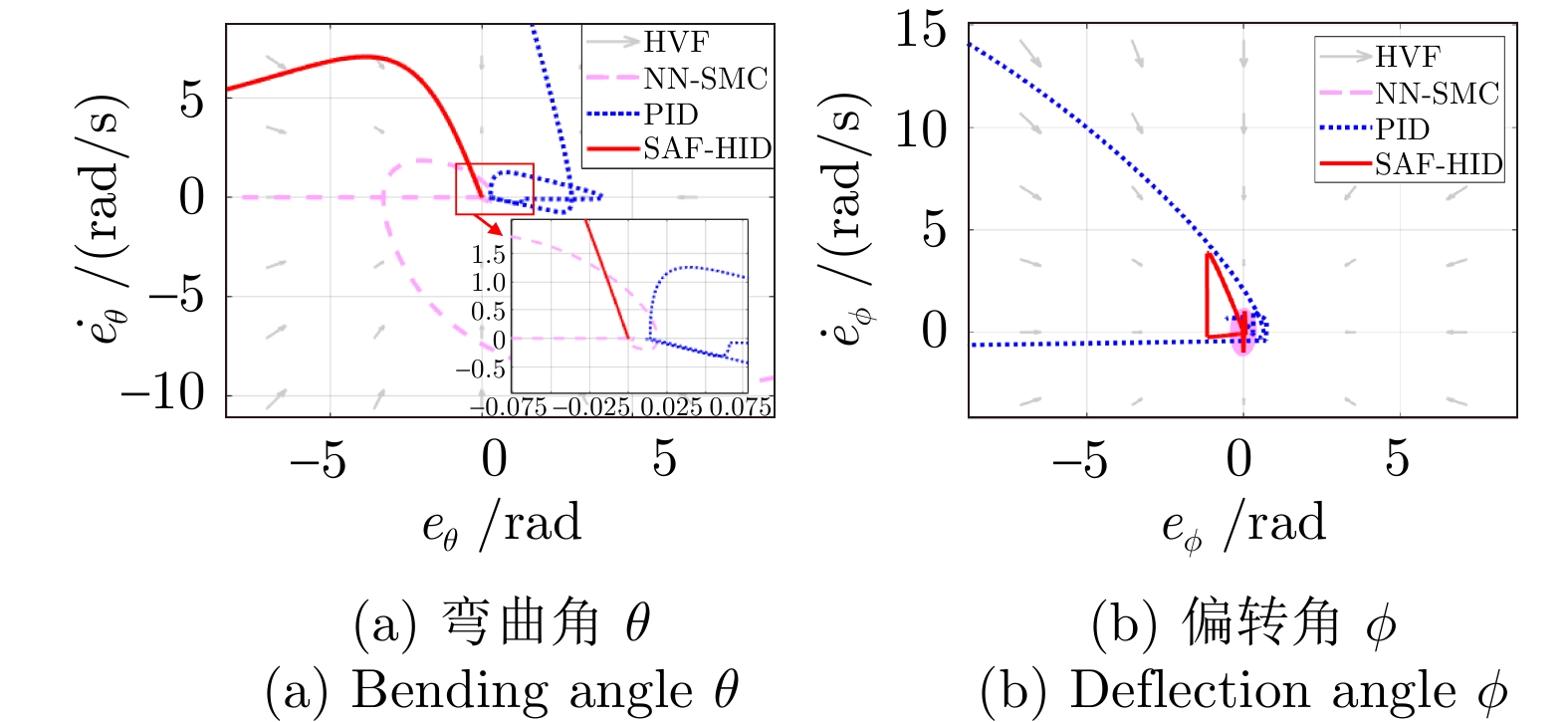
图 9 外部扰动作用下不同控制方法的跟踪误差速度
Fig. 9 Tracking error rates under different control methods with external disturbances
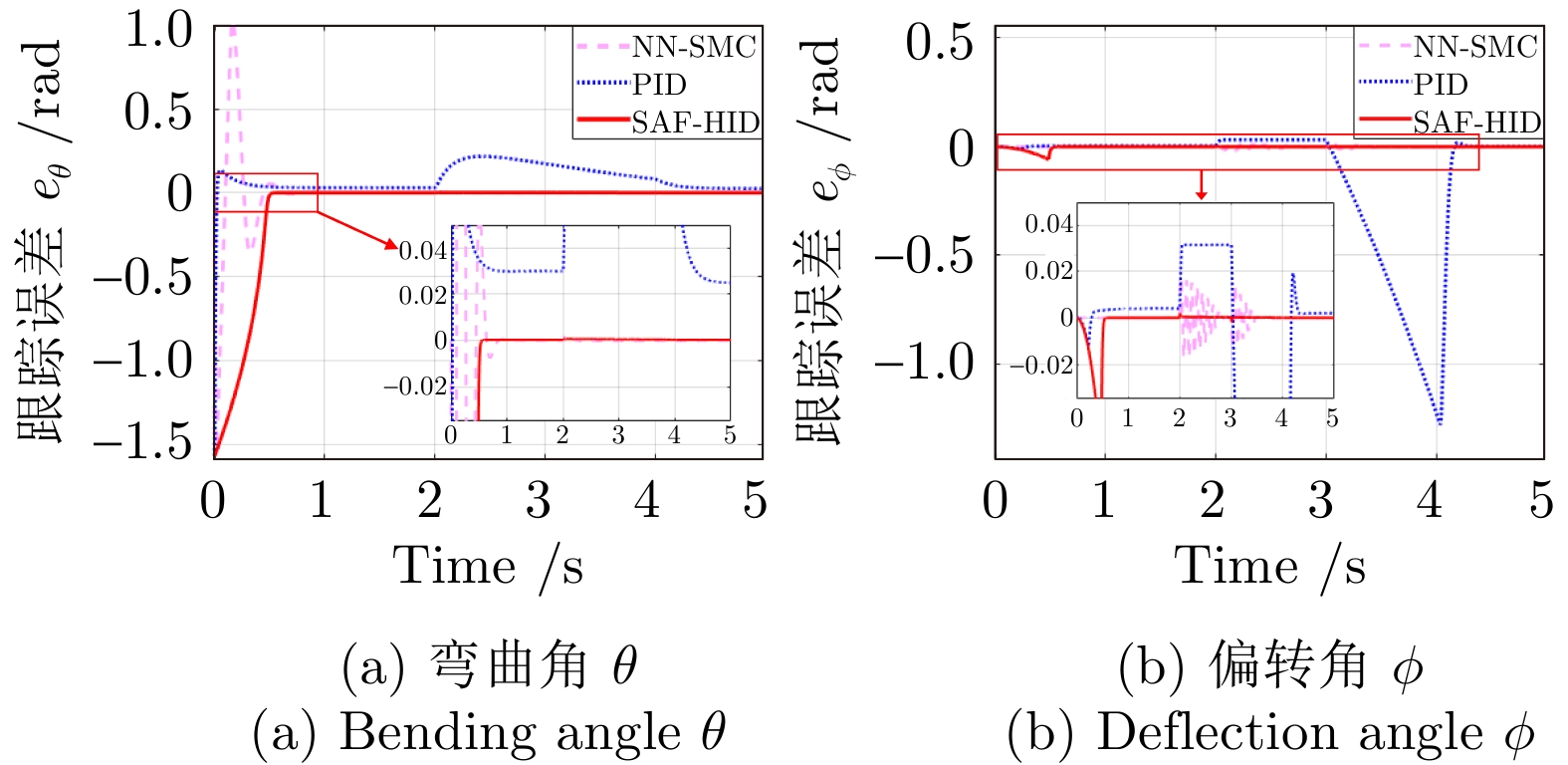
图 8 外部扰动条件下不同控制方法的跟踪误差
Fig. 8 Tracking errors under different control methods with external disturbances
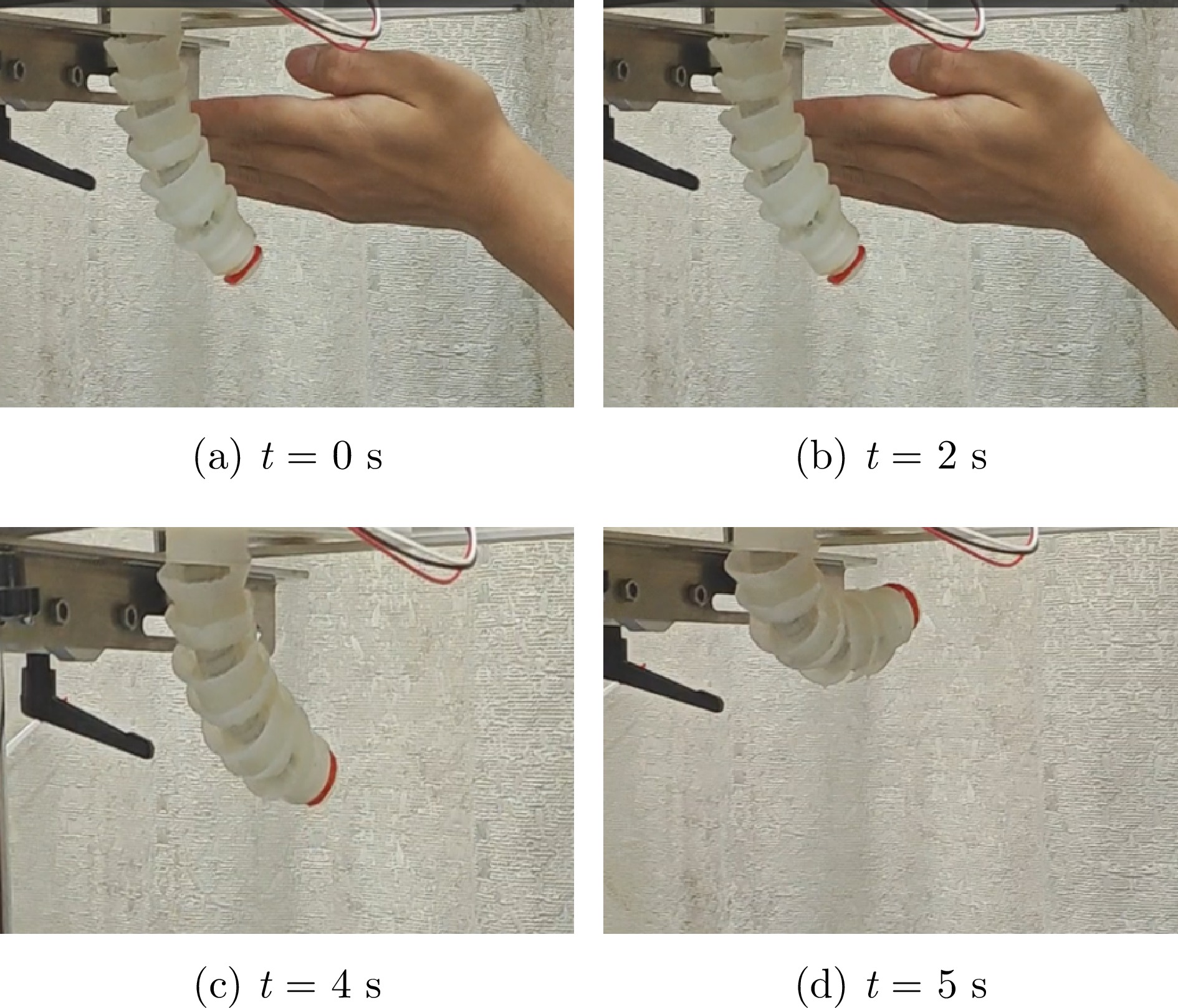
图 10 基于SAF-HID控制的CDSRA的动态安全避障实验
Fig. 10 Dynamic safe obstacle avoidance of CDSRA under SAF-HID control
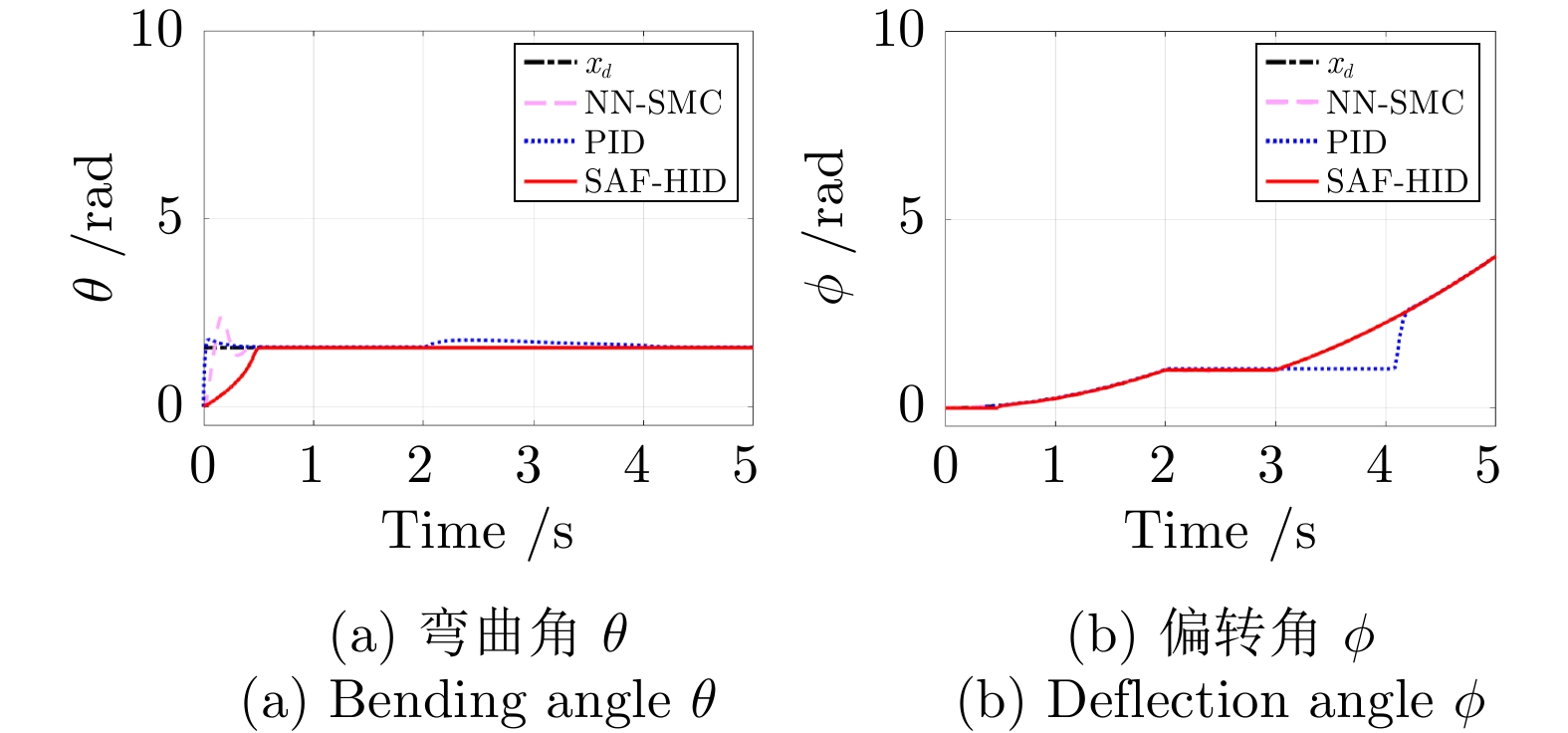
图 11 不同控制方法在关节空间中的避障轨迹
Fig. 11 Joint-space obstacle avoidance trajectories under different control methods
-
[1] 王田苗, 郝雨飞, 杨兴帮, 文力. 软体机器人: 结构, 驱动, 传感与控制. 机械工程学报, 2017, 53(13): 1−13 doi: 10.3901/JME.2017.13.001Wang Tian-Miao, Hao Yu-Fei, Yang Xing-Bang, Wen Li. Soft robotics: Structure, actuation, sensing and control. Journal of Mechanical Engineering, 2017, 53(13): 1−13 doi: 10.3901/JME.2017.13.001 [2] 刘华平, 郭迪, 孙富春, 张新钰. 基于形态的具身智能研究: 历史回顾与前沿进展. 自动化学报, 2023, 49(6): 1131−1154 doi: 10.16383/j.aas.c220564Liu Hua-Ping, Guo Di, Sun Fu-Chun, Zhang Xin-Yu. Morphology-based embodied intelligence: Historical retrospect and research progress. Acta Automatica Sinica, 2023, 49(6): 1131−1154 doi: 10.16383/j.aas.c220564 [3] Rus D, Tolley M T. Design, fabrication and control of soft robots. Nature, 2015, 521(7553): 467−475 doi: 10.1038/nature14543 [4] Armanini C, Boyer F, Mathew A T, Duriez C, Renda F. Soft robots modeling: A structured overview. IEEE Transactions on Robotics, 2023, 39(3): 1728−1748 doi: 10.1109/TRO.2022.3231360 [5] 韦慧玲, 梁成斌, 王金海, 陈明献, 罗陆锋. 绳驱柔性机械手研究进展及其在农业机器人中的应用. 智能化农业装备学报, 2024, 5(4): 95−106 doi: 10.12398/j.issn.2096-7217.2024.04.007Wei Hui-Ling, Liang Cheng-Bin, Wang Jin-Hai, Chen Ming-Xian, Luo Lu-Feng. Research progress of cable-driven flexible manipulator and its application in agricultural robots. Journal of Intelligent Agricultural Mechanization, 2024, 5(4): 95−106 doi: 10.12398/j.issn.2096-7217.2024.04.007 [6] 谭晨羽, 许朋, 李平, 喻洪流. 绳驱柔性机械臂建模与控制方法研究现状. 信息与控制, 2023, 52(3): 277−291 doi: 10.13976/j.cnki.xk.2023.2033Tan Chen-Yu, Xu Peng, Li Ping, Yu Hong-Liu. Current research on modeling and control methods for cable-driven flexible manipulator. Information and Control, 2023, 52(3): 277−291 doi: 10.13976/j.cnki.xk.2023.2033 [7] Tang Z Q, Tian L Y, Xin W C, Wang Q Q, Rus D, Laschi C. A general soft robotic controller inspired by neuronal structural and plastic synapses that adapts to diverse arms, tasks, and perturbations. Science Advances, 2026, 12(2): Article No. eaea3712 doi: 10.1126/sciadv.aea3712 [8] Lai J W, Lu B, Zhao Q X, Chu H K. Constrained motion planning of a cable-driven soft robot with compressible curvature modeling. IEEE Robotics and Automation Letters, 2022, 7(2): 4813−4820 doi: 10.1109/LRA.2022.3152318 [9] 王世强, 谢哲新, 袁菲阳, 李磊, 刘昱辰, 王田苗, 等. 软体机器人的仿生物理智能. 科学通报, 2022, 67: 959−975 doi: 10.1360/TB-2021-1217Wang Shi-Qiang, Xie Zhe-Xin, Yuan Fei-Yang, Li Lei, Liu Yu-Chen, Wang Tian-Miao, et al. Bio-inspired physical intelligence for soft robotics. Science Bulletin, 2022, 67: 959−975 doi: 10.1360/TB-2021-1217 [10] Huang X J, Zou J, Gu G Y. Kinematic modeling and control of variable curvature soft continuum robots. IEEE/ASME Transactions on Mechatronics, 2021, 26(6): 3175−3185 doi: 10.1109/TMECH.2021.3055339 [11] 耿鹏, 何彦霖, 杨溢, 历文宇. 软体机械臂控制方法研究现状及展望. 仪器仪表学报, 2024, 44(11): 85−98 doi: 10.19650/j.cnki.cjsi.J2311572Geng Peng, He Yan-Lin, Yang Yi, Li Wen-Yu. Research status and prospects of control methods for soft robotic arms. Chinese Journal of Scientific Instrument, 2024, 44(11): 85−98 doi: 10.19650/j.cnki.cjsi.J2311572 [12] Caasenbrood B, Pogromsky A, Nijmeijer H. Control-oriented models for hyperelastic soft robots through differential geometry of curves. Soft Robotics, 2023, 10(1): 129−148 doi: 10.1089/soro.2021.0035 [13] Alkayas A Y, Mathew A T, Feliu-Talegon D, Deng P, Thuruthel T G, Renda F. Soft synergies: Model order reduction of hybrid soft-rigid robots via optimal strain parameterization. IEEE Transactions on Robotics, 2024, 41: 1118−1137 doi: 10.1109/tro.2024.3522182 [14] Kazemipour A, Fischer O, Toshimitsu Y, Wong K W, Katzschmann R K. Adaptive dynamic sliding mode control of soft continuum manipulators. In: Proceedings of the 2022 International Conference on Robotics and Automation. Philadelphia, USA: IEEE, 2022. 3259–3265 [15] Wang D, Zhao B W, Li X L, Dong L, Zhang M J, Zou J, et al. Dexterous electrical-driven soft robots with reconfigurable chiral-lattice foot design. Nature Communications, 2023, 14(1): Article No. 5067 doi: 10.1038/s41467-023-40626-x [16] Truby R L, Chin L, Rus D. A recipe for electrically-driven soft robots via 3D printed handed shearing auxetics. IEEE Robotics and Automation Letters, 2021, 6(2): 795−802 doi: 10.1109/LRA.2021.3052422 [17] Nguyen C C, Teh T, Thai M T, Phan P T, Hoang T T, Davies J, et al. A handheld hydraulic soft robotic device with bidirectional bending end-effector for minimally invasive surgery. IEEE Transactions on Medical Robotics and Bionics, 2023, 5(3): 590−601 doi: 10.1109/TMRB.2023.3291014 [18] Liu S J, Liu C B, Wei G W, Ren L Q, Ren L. Design, modeling, and optimization of hydraulically powered double-joint soft robotic fish. IEEE Transactions on Robotics, 2025, 41: 1211−1223 doi: 10.1109/TRO.2025.3526087 [19] 乔增, 王神龙, 李凯, 林俊杰, 胡锦杰, 黎卓羿, 等. 气动双稳态装置驱动的仿喷水推进乌贼结构软体机器人. 机器人, 2023, 45(3): 287−301 doi: 10.13973/j.cnki.robot.220062Qiao Zeng, Wang Shen-Long, Li Kai, Lin Jun-Jie, Hu Jin-Jie, Li Zhuo-Yi, et al. Water-jet propelled squid-inspired soft robot driven by pneumatic bistable device. Robot, 2023, 45(3): 287−301 doi: 10.13973/j.cnki.robot.220062 [20] Wang D, Jiang C R, Gu G Y. Modeling design of lattice-reinforced pneumatic soft robots. IEEE Transactions on Robotics, 2023, 40: 606−623 [21] 华德正, 申玉瑞, 彭来, 王其雨, 刘新华. 磁流变软体机器人滚动−变形运动特性. 机械工程学报, 2024, 60(21): 56−65 doi: 10.3901/JME.2024.21.056Hua De-Zheng, Shen Yu-Rui, Peng Lai, Wang Qi-Yu, Liu Xin-Hua. Rolling-deformation motion characteristics of magnetorheological soft robot. Journal of Mechanical Engineering, 2024, 60(21): 56−65 doi: 10.3901/JME.2024.21.056 [22] Dong Y, Wang L, Xia N, Yang Z X, Zhang C, Pan C F, et al. Untethered small-scale magnetic soft robot with programmable magnetization and integrated multifunctional modules. Science Advances, 2022, 8(25): Article No. eabn8932 doi: 10.1126/sciadv.abn8932 [23] Qi X D, Mei Y, Chen D, Li Z J, Tan X B. Design and nonlinear modeling of a modular cable-driven soft robotic arm. IEEE/ASME Transactions on Mechatronics, 2024, 29(4): 3083−3091 doi: 10.1109/TMECH.2024.3402609 [24] Zhou Z F, Zuo R Z, Du M, Wang S J, Levy S, Sun Y, et al. A cable-driven soft robotic hand with an in-hand RGB-D camera for dexterous grasping and manipulation. IEEE Transactions on Robotics, 2025, 42: 600−618 doi: 10.1109/tro.2025.3641751/mm8 [25] Yang J L, Zhou Z X, Runciman M, Avery J, Sun Z J, Mylonas G. A soft inflatable cable-driven parallel robot with a variable stiffness end-effector for advanced interventional endoscopy. IEEE Transactions on Biomedical Engineering, 2025, 72(9): 2794−2803 doi: 10.1109/TBME.2025.3552551 [26] Garriga-Casanovas A, Rodriguez y Baena F. Kinematics of continuum robots with constant curvature bending and extension capabilities. Journal of Mechanisms and Robotics, 2019, 11(1): Article No. 011010 doi: 10.1115/1.4041739 [27] Thuruthel T G, Falotico E, Renda F, Laschi C. Model-based reinforcement learning for closed-loop dynamic control of soft robotic manipulators. IEEE Transactions on Robotics, 2019, 35(1): 124−134 doi: 10.1109/TRO.2018.2878318 [28] Yang Y Y, Peng J Z, Liu Y Q, He W. State-attracted functions-based trajectory planning and tracking control for uncertain robotic systems based on a human-inspired vector field. IEEE Transactions on Industrial Electronics, 2026, 73(4): 5782−5793 doi: 10.1109/TIE.2025.3626587 [29] Yang Y Y, Ma R L, Peng J Z, Liu Y Q, He W. Modeling and trajectory tracking control for a rope-driven soft robotic arm based on state-attracted functions. IEEE Robotics and Automation Letters, 2025, 10(10): 9750−9757 doi: 10.1109/LRA.2025.3597862 [30] 王瑞东, 王睿, 张天栋, 王硕. 机器人类脑智能研究综述. 自动化学报, 2024, 50(8): 1485−1501 doi: 10.16383/j.aas.c230705Wang Rui-Dong, Wang Rui, Zhang Tian-Dong, Wang Shuo. A survey of research on robotic brain-inspired intelligence. Acta Automatica Sinica, 2024, 50(8): 1485−1501 doi: 10.16383/j.aas.c230705 [31] Zhang T Y K, Zhan J X, Shi J M, Xin J M, Zheng N N. Human-like decision-making of autonomous vehicles in dynamic traffic scenarios. IEEE/CAA Journal of Automatica Sinica, 2023, 10(10): 1905−1917 doi: 10.1109/JAS.2023.123696 [32] Huang H J, Rau P-L P, Ma L. Will you listen to a robot? Effects of robot ability, task complexity, and risk on human decision-making. Advanced Robotics, 2021, 35(19): 1156−1166 doi: 10.1080/01691864.2021.1974940 [33] Tabb A, Yousef K M A. Solving the robot-world hand-eye(s) calibration problem with iterative methods. Machine Vision and Applications, 2017, 28(5–6): 569−590 doi: 10.1007/s00138-017-0841-7 [34] Yang Y Y, Peng J Z, Fan P H. A non-destructive dropped fruit impact signal imaging-based deep learning approach for smart sorting of kiwifruit. Computers and Electronics in Agriculture, 2022, 202: Article No. 107380 doi: 10.1016/j.compag.2022.107380 -

 下载:
下载:

计量
- 文章访问数: 331
- HTML全文浏览量: 156
- PDF下载量: 79
- 被引次数: 0
