

Association Tracking Control of UAV Swarms Based on Harris Hawks' Surrounding Behavior
-
摘要: 针对无人机集群在纯方位测量下协同跟踪动态目标集群时面临的强非线性、高维度以及估计−控制耦合等关键难题, 提出一种基于哈里斯鹰群环伺行为的分布式协同估计−控制闭环系统. 基于鹰群在环伺猎物时形成的多视角感知特性, 提出一种方位统计融合估计方法, 将贝叶斯统计与分布式滤波相融合, 引入共视子集的量测结构, 通过伪线性的方位统计降低估计问题中的计算维度, 并保持系统的可观性. 依据鹰群的动态封锁机制, 提出一种环伺关联跟踪控制器, 使观测无人机能够主动维持最优环伺态势, 从而提升估计质量及稳定性. 理论分析证明了该闭环系统的Lyapunov稳定性与估计误差的有界性, 数值仿真验证了所提方法的有效性.Abstract: To address the key challenges of strong nonlinearity, high dimensionality, and estimation-control coupling faced by UAV swarms in bearing-only cooperative tracking of dynamic target swarm, this paper proposes a distributed estimation-control closed-loop system inspired by Harris hawks' surrounding behavior. Based on the multi-view perception characteristic formed when Harris hawks orbit their prey, a bearing-statistics fusion estimator is designed by combining Bayesian statistics with distributed filtering, using co-view subsets and pseudo-linearized bearing statistics to reduce computational dimensionality while preserving observability. Based on the dynamic blockade mechanism of the Harris hawks, a surrounding association tracking controller further enables observer UAVs to maintain an optimal surrounding configuration to enhance estimation quality and stability. Theoretical analysis proves both the Lyapunov stability of the closed-loop system and the boundedness of the estimation error, while numerical simulations validate the effectiveness of the proposed method.
-
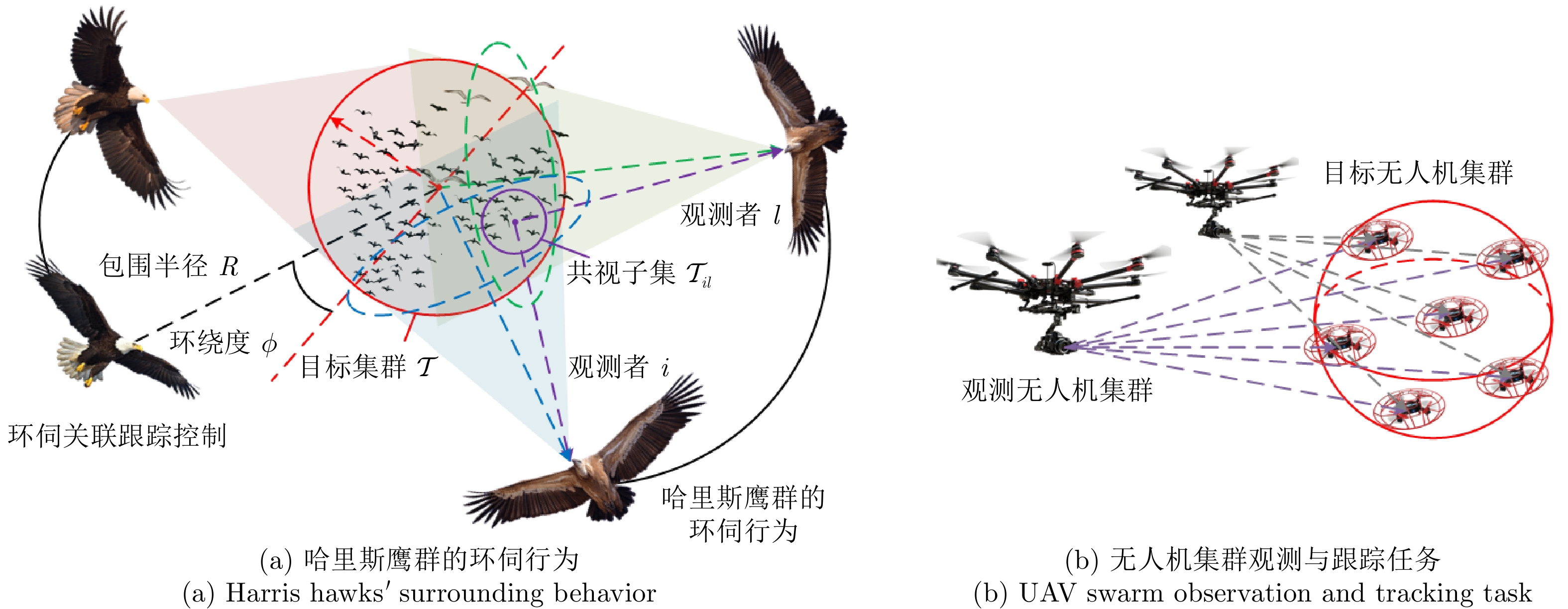
图 1 哈里斯鹰群环伺行为与无人机集群观测系统的映射关系
Fig. 1 Mapping relationship between Harris hawks' surrounding behavior and UAV swarm observation system
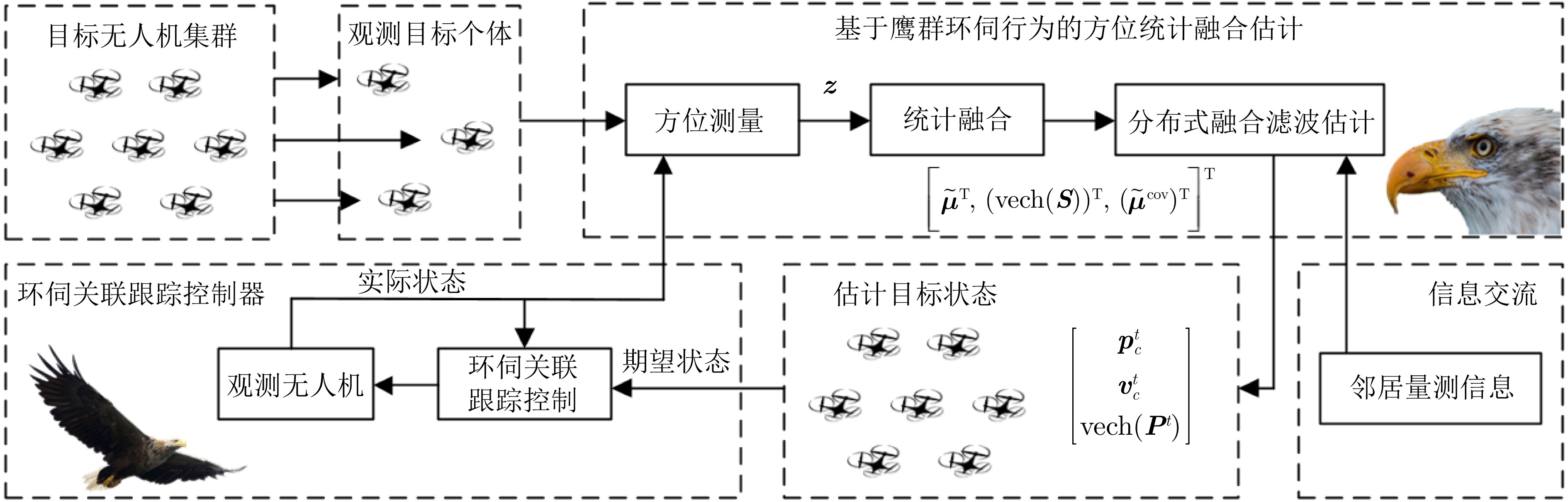
图 2 基于鹰群环伺行为的无人机集群关联跟踪控制系统结构图
Fig. 2 Structural diagram of UAV swarm association tracking control system based on Harris hawks' surrounding behavior
-
[1] Eliker K, Grouni S, Tadjine M, Zhang W D. Practical finite time adaptive robust flight control system for quadcopter UAVs. Aerospace Science and Technology, 2020, 98: Article No. 105708 [2] Xiao X S, Dufek J, Woodbury T, Murphy R. UAV assisted USV visual navigation for marine mass casualty incident response. In: Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Vancouver, Canada: IEEE, 2017. 6105−6110 [3] Huo M Z, Duan H B, Yang Q, Zhang D F, Qiu H X. Live-fly experimentation for pigeon-inspired obstacle avoidance of quadrotor unmanned aerial vehicles. Science China Information Sciences, 2019, 62: Article No. 52201 doi: 10.1007/s11432-018-9576-x [4] Zhou Z Q, Ouyang C, Hu L Q, Xie Y, Chen Y N, Gan Z X. A framework for dynamical distributed flocking control in dense environments. Expert Systems With Applications, 2024, 241: Article No. 122694 doi: 10.1016/j.eswa.2023.122694 [5] Gao Y M, Ji J L, Wang Q H, Jin R, Lin Y, Shang Z M. Adaptive tracking and perching for quadrotor in dynamic scenarios. IEEE Transactions on Robotics, 2024, 40: 499−519 doi: 10.1109/TRO.2023.3335670 [6] Wang M Y, Wang Q H, Wang Z, Gao Y M, Wang J P, Cui C, et al. Unlocking aerobatic potential of quadcopters: Autonomous freestyle flight generation and execution. Science Robotics, 2025, 10(101): Article No. 9905 doi: 10.1126/scirobotics.adp9905 [7] Pawar A, Yadav S, Gupta A, Aamir M, Singh A, Roy A K. Path planning of unmanned aerial vehicle using model predictive control. In: Proceedings of the 2024 OPJU International Technology Conference (OTCON) on Smart Computing for Innovation and Advancement in Industry 4.0. Raigarh, India: IEEE, 2024. 1−5 [8] Peng J T, Viswanath H, Bera A. Graph-based decentralized task allocation for multi-robot target localization. IEEE Robotics and Automation Letters, 2024, 9(11): 10676−10683 doi: 10.1109/LRA.2024.3475013 [9] Lama A, Bernardo M D, Klapp S H L. Nonreciprocal field theory for decision-making in multi-agent control systems. Nature Communications, 2025, 16: Article No. 8450 doi: 10.1038/s41467-025-63071-4 [10] Zhang Z, Wang X H, Zhang Q R, Hu T J. Multi-robot cooperative pursuit via potential field-enhanced reinforcement learning. In: Proceedings of the 2022 International Conference on Robotics and Automation (ICRA). Philadelphia, USA: IEEE, 2022. 8808−8814 [11] 王龙, 黄锋. 多智能体博弈、学习与控制. 自动化学报, 2023, 49(3): 580−613Wang Long, Huang Feng. An interdisciplinary survey of multi-agent games, learning, and control. Acta Automatica Sinica, 2023, 49(3): 580−613 [12] Ning Z A, Zhang Y, Li J N, Zhang C, Zhao S Y. A bearing-angle approach for unknown target motion analysis based on visual measurements. The International Journal of Robotics Research, 2024, 43(8): 1228−1249 doi: 10.1177/02783649241229172 [13] Zheng Y, Zheng C L, Shen J H, Liu P D, Zhao S Y. Keypoint-guided efficient pose estimation and domain adaptation for micro aerial vehicles. IEEE Transactions on Robotics, 2024, 40: 2967−2983 doi: 10.1109/TRO.2024.3400938 [14] Yuan Y, Xu X B, Duan H B, Zeng Z G, Xu D K, Chen R J, et al. Eagle vision-based coordinate landing control framework of unmanned aerial vehicles on an unmanned surface vehicle. Guidance, Navigation and Control, 2022, 2(4): Article No. 2250023 doi: 10.1142/S2737480722500236 [15] Zheng C L, Mi Y Z, Guo H Q, Chen H B, Lin Z Y, Zhao S Y. Optimal spatial-temporal triangulation for bearing-only cooperative motion estimation. Automatica, 2025, 175: Article No. 112216 doi: 10.1016/j.automatica.2025.112216 [16] 段志生, 吕跃祖, 段培虎, 杨莹, 王金枝, 温广辉. 多智能体系统协同互估计与控制一体化框架. 自动化学报, 2025, 51(10): 2359−2370 doi: 10.16383/j.aas.c250290Duan Zhi-Sheng, Lv Yue-Zu, Duan Pei-Hu, Yang Ying, Wang Jin-Zhi, Wen Guang-Hui. Integrated framework for cooperative mutual estimation and control in multi-agent systems. Acta Automatica Sinica, 2025, 51(10): 2359−2370 doi: 10.16383/j.aas.c250290 [17] Li J N, Wang Z K, Ding S S, Guo S L, Zhao S Y. Cooperative bearing-only target pursuit via multiagent reinforcement learning: Design and experiment. arXiv preprint arXiv: 2503.08740, 2025. [18] Zheng C L, Mi Y Z, Guo H Q, Chen H B, Zhao S Y. Vision-based cooperative MAV-capturing-MAV. In: Proceedings of the 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Hangzhou, China: IEEE, 2025. 21227−21234 [19] 袁洋, 段海滨, 魏晨. 无人机/无人艇异构协同固定时间预设性能演化控制. 自动化学报, 2025, 51(5): 1052−1066 doi: 10.16383/j.aas.c240141Yuan Yang, Duan Hai-Bin, Wei Chen. Heterogeneous cooperative fixed-time prescribed performance evolution control for unmanned aerial/surface vehicle. Acta Automatica Sinica, 2025, 51(5): 1052−1066 doi: 10.16383/j.aas.c240141 [20] 段海滨, 尤灵辰, 范彦铭, 李明. 仿鸟群自推进机制的无人机集群相变控制. 自动化学报, 2025, 51(5): 960−971Duan Hai-Bin, You Ling-Chen, Fan Yan-Ming, Li Ming. Phase transition control of UAV swarm based on bird-inspired self-propelled mechanism. Acta Automatica Sinica, 2025, 51(5): 960−971 [21] Huo M Z, Duan H B. Three-dimension cluster space formation control of manned/unmanned aerial team subject to input constraint. IEEE Transactions on Industrial Informatics, 2024, 20(6): 8596−8604 doi: 10.1109/TII.2024.3367039 [22] Brighton C H, Kloepper L N, Harding C D, Larkman L, McGowan K, Zusi L, et al. Raptors avoid the confusion effect by targeting fixed points in dense aerial prey aggregations. Nature Communications, 2022, 13: Article No. 4778 doi: 10.1038/s41467-022-32354-5 [23] Caraco T, Martindale S, Pulliam H. Avian flocking in the presence of a predator. Nature, 1980, 285: 400−401 doi: 10.1038/285400a0 [24] Brighton C H, Taylor G K. Hawks steer attacks using a guidance system tuned for close pursuit of erratically manoeuvring targets. Nature Communications, 2019, 10(1): Article No. 2462 doi: 10.1038/s41467-019-10454-z [25] Farine D R, Aplin L M, Garroway C J, Mann R P, Sheldon B C. Collective decision making and social interaction rules in mixed-species flocks of songbirds. Animal Behaviour, 2014, 95: 173−182 doi: 10.1016/j.anbehav.2014.07.008 [26] Schilling F, Soria E, Floreano D. On the scalability of vision-based drone swarms in the presence of occlusions. IEEE Access, 2022, 10: 28133−28146 doi: 10.1109/ACCESS.2022.3158758 [27] KleinHeerenbrink M, France L A, Brighton C H, Taylor G K. Optimization of avian perching manoeuvres. Nature, 2022, 607: 91−96 [28] Wüest V, Jeger S, Feroskhan M, Ajanic E, Bergonti F, Floreano D. Agile perching maneuvers in birds and morphing-wing drones. Nature Communications, 2024, 15: Article No. 8330 doi: 10.1038/s41467-024-52369-4 -

 下载:
下载:

图(10)
计量
- 文章访问数: 313
- HTML全文浏览量: 89
- PDF下载量: 94
- 被引次数: 0
