2024年 第50卷 第4期
2024, 50(4): 649-673.
doi: 10.16383/j.aas.c230153
摘要:
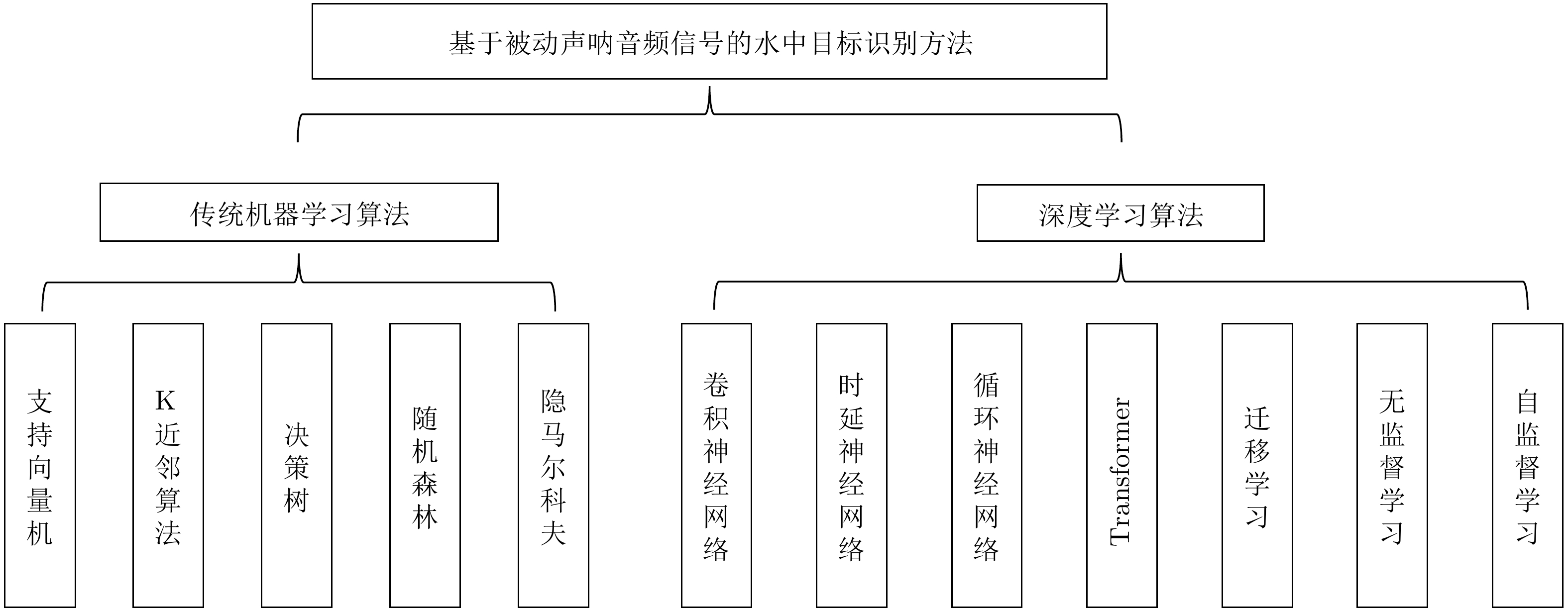
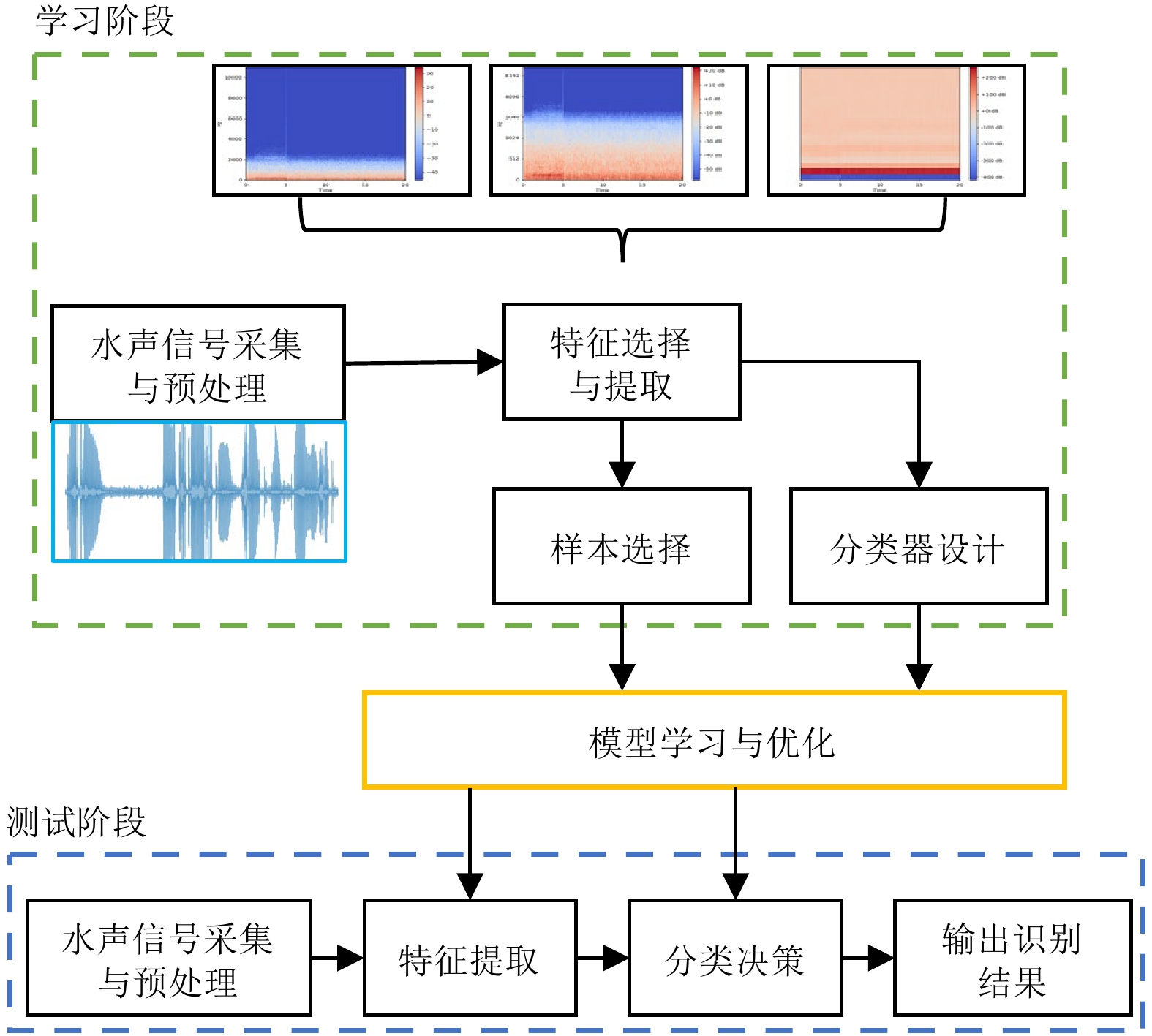
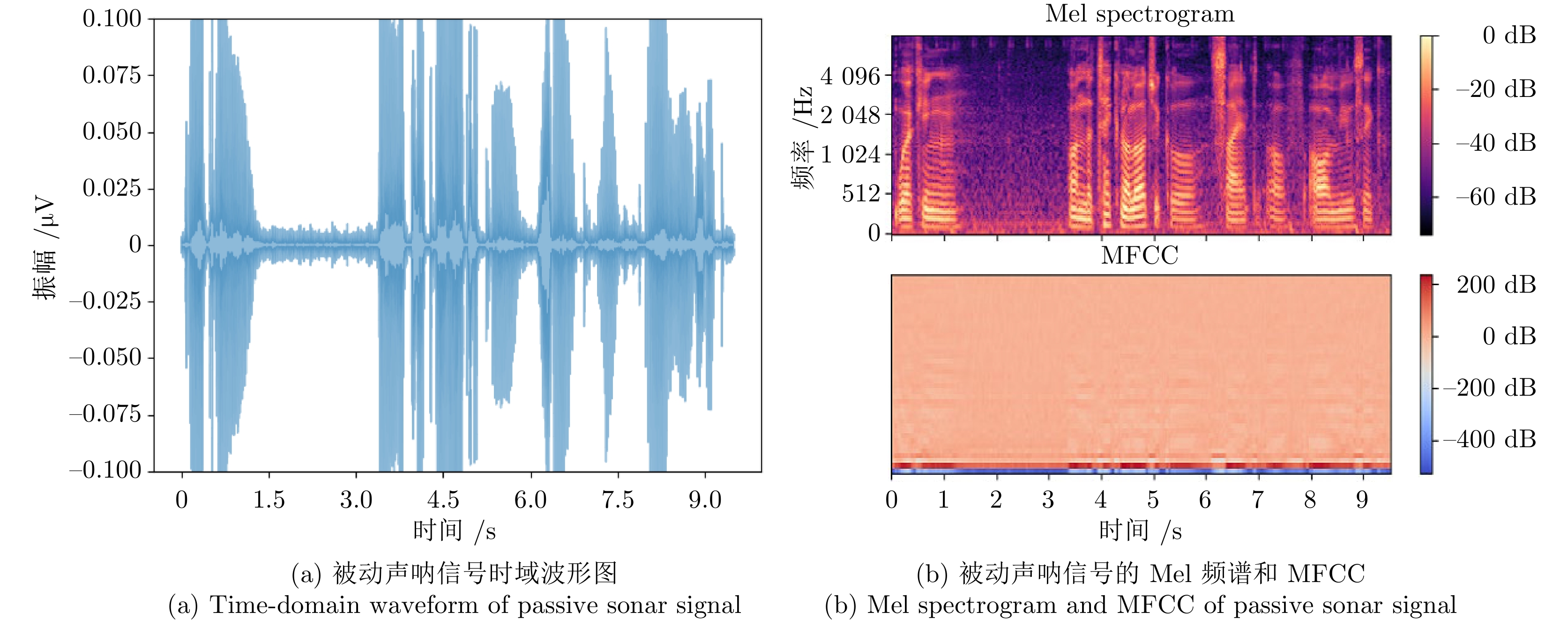
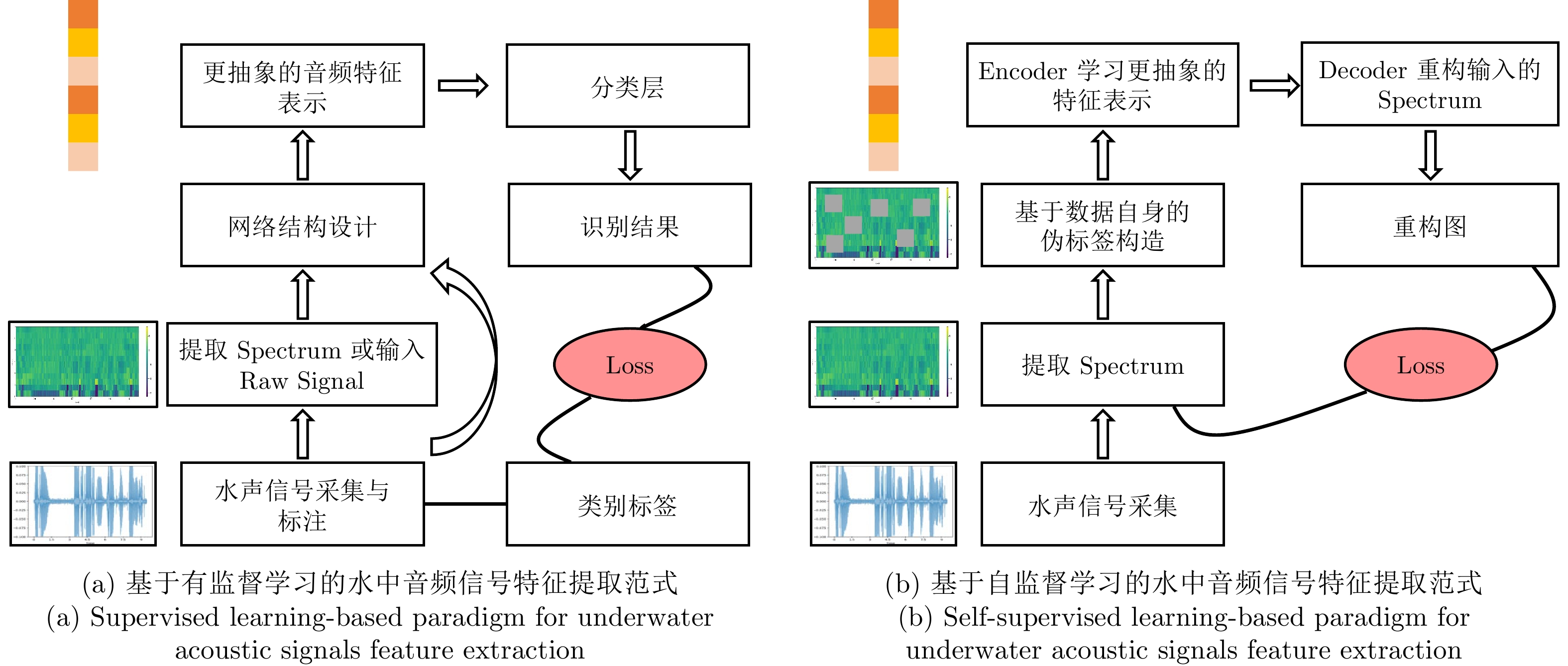
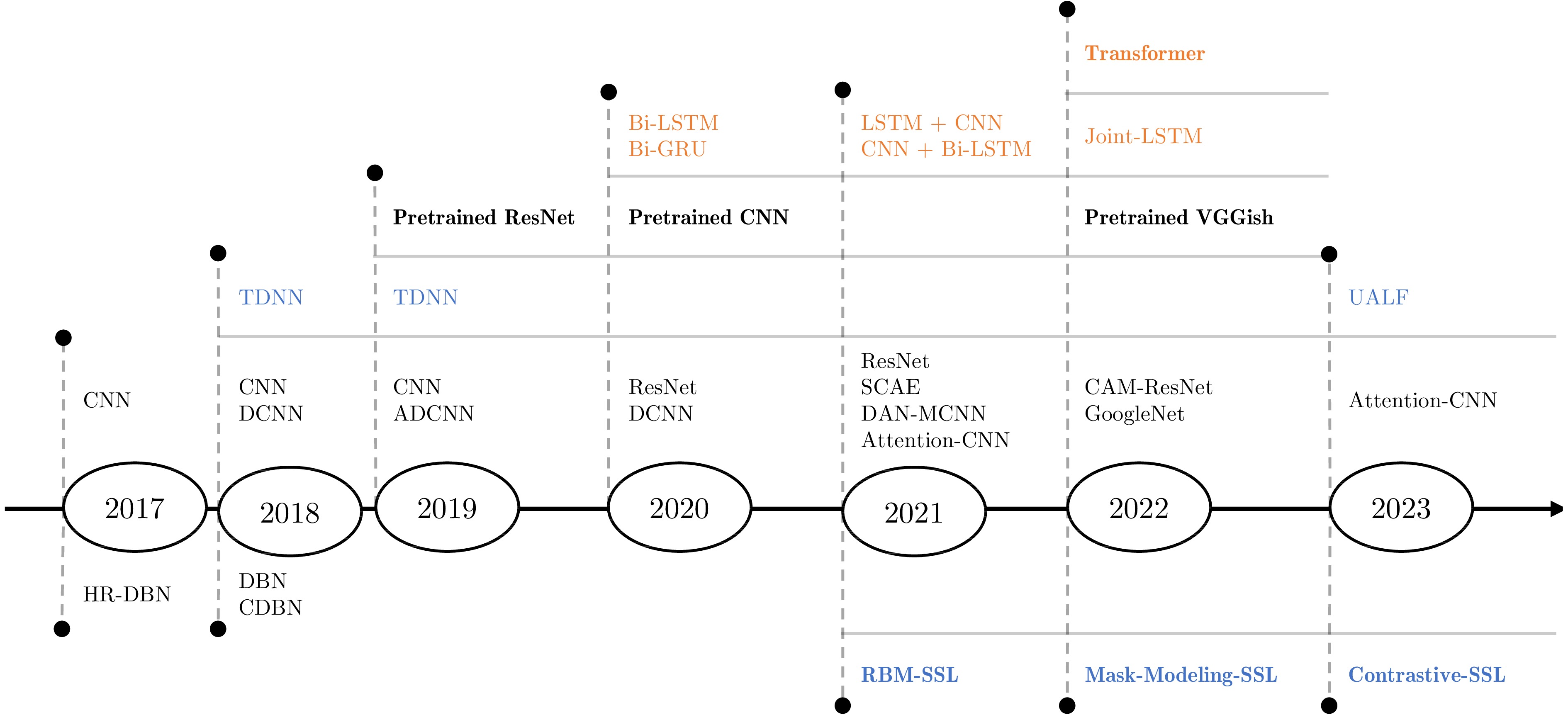
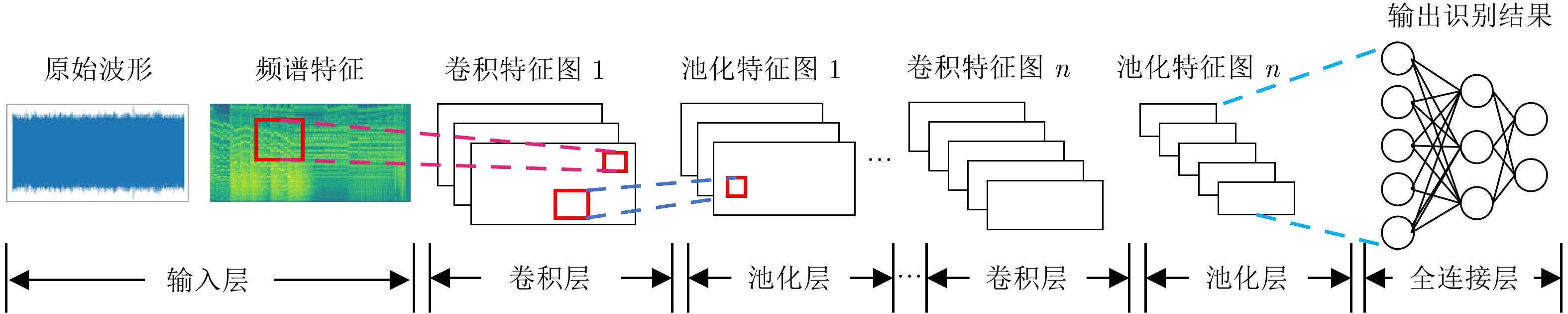
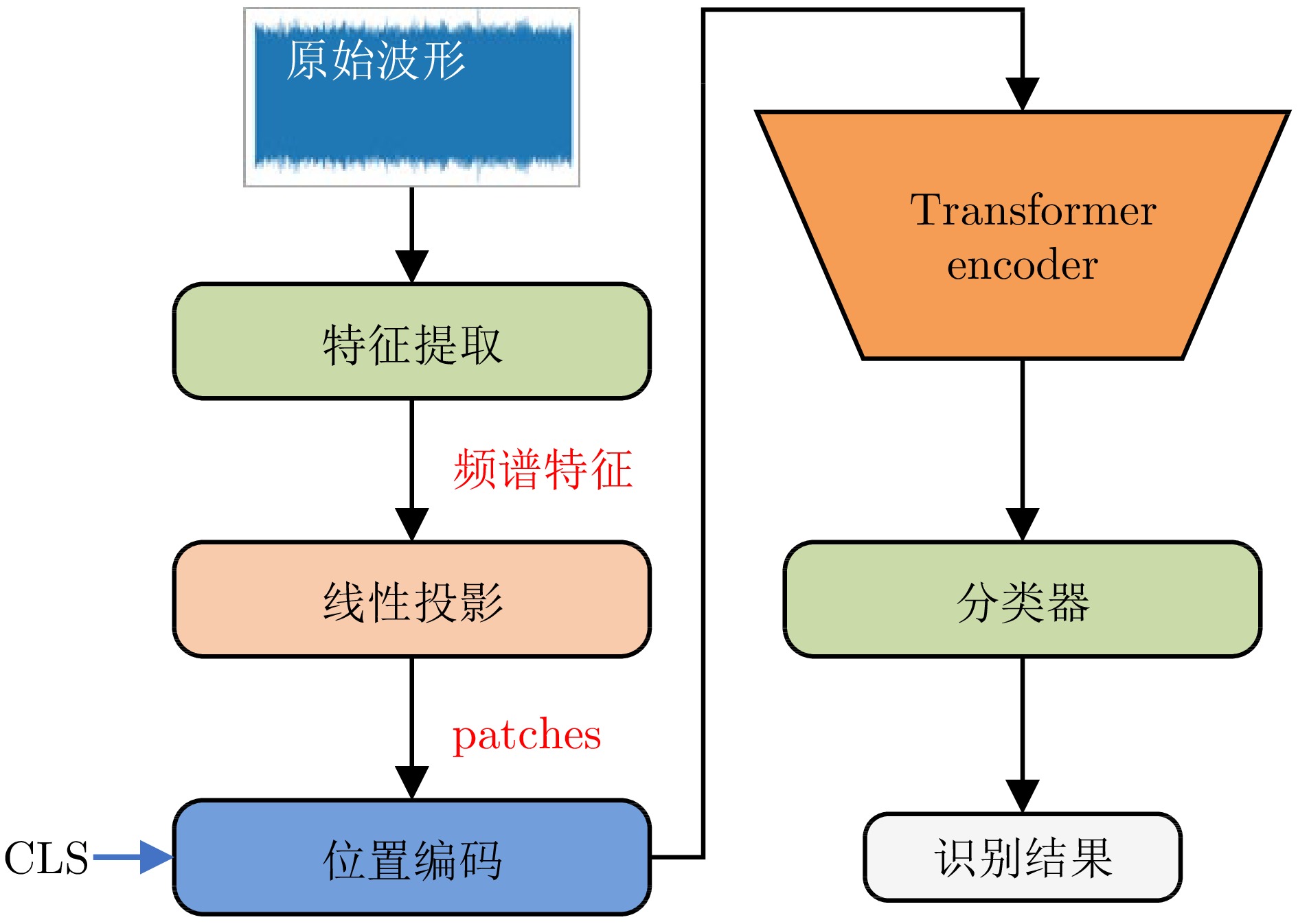
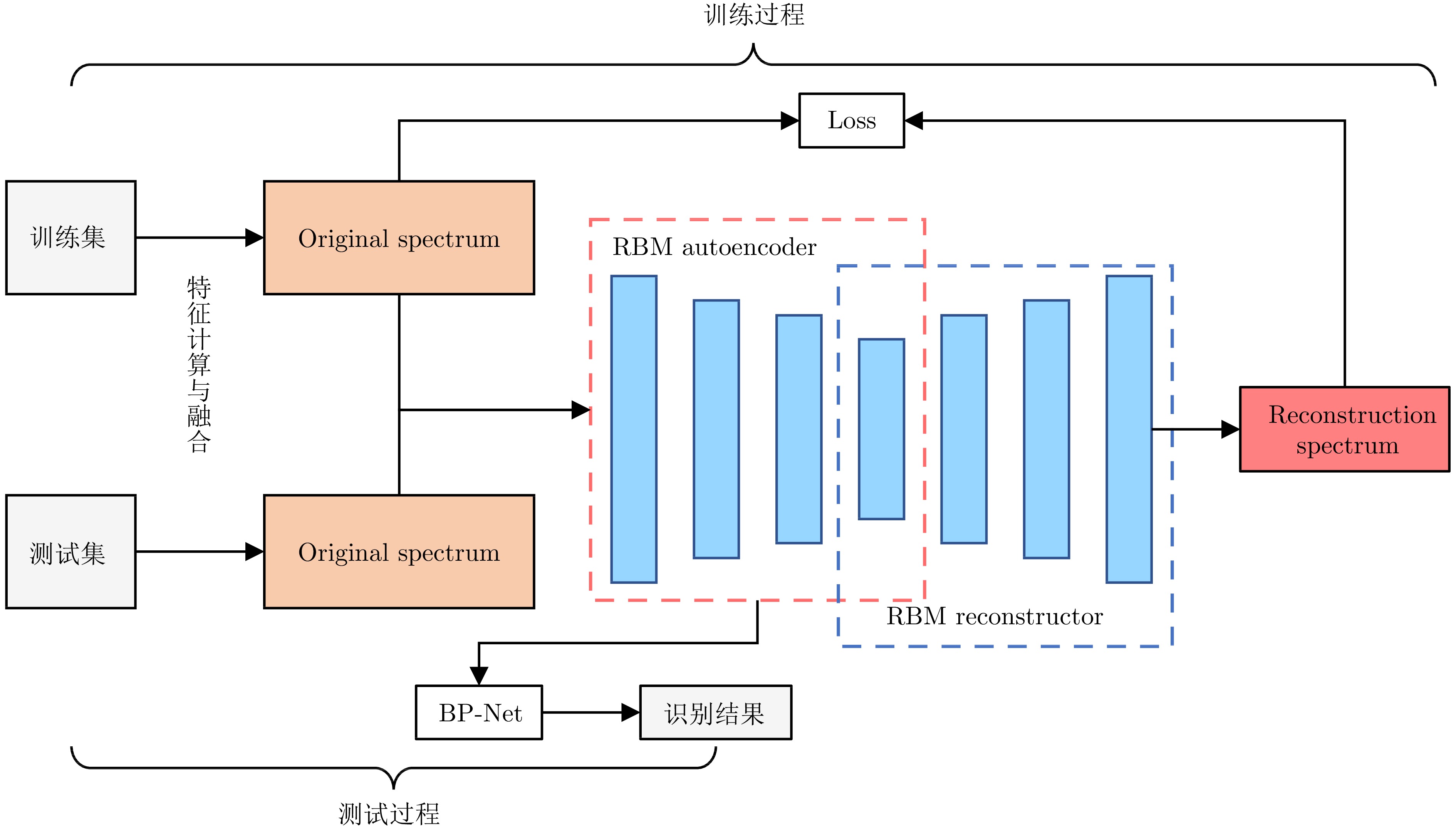
基于被动声呐音频信号的水中目标识别是当前水下无人探测领域的重要技术难题, 在军事和民用领域都应用广泛. 本文从数据处理和识别方法两个层面系统阐述基于被动声呐信号进行水中目标识别的方法和流程. 在数据处理方面, 从基于被动声呐信号的水中目标识别基本流程、被动声呐音频信号分析的数理基础及其特征提取三个方面概述被动声呐信号处理的基本原理. 在识别方法层面, 全面分析基于机器学习算法的水中目标识别方法, 并聚焦以深度学习算法为核心的水中目标识别研究. 本文从有监督学习、无监督学习、自监督学习等多种学习范式对当前研究进展进行系统性的总结分析, 并从算法的标签数据需求、鲁棒性、可扩展性与适应性等多个维度分析这些方法的优缺点. 同时, 还总结该领域中较为广泛使用的公开数据集, 并分析公开数据集应具备的基本要素. 最后, 通过对水中目标识别过程的论述, 总结目前基于被动声呐音频信号的水中目标自动识别算法存在的困难与挑战, 并对该领域未来的发展方向进行展望.
基于被动声呐音频信号的水中目标识别是当前水下无人探测领域的重要技术难题, 在军事和民用领域都应用广泛. 本文从数据处理和识别方法两个层面系统阐述基于被动声呐信号进行水中目标识别的方法和流程. 在数据处理方面, 从基于被动声呐信号的水中目标识别基本流程、被动声呐音频信号分析的数理基础及其特征提取三个方面概述被动声呐信号处理的基本原理. 在识别方法层面, 全面分析基于机器学习算法的水中目标识别方法, 并聚焦以深度学习算法为核心的水中目标识别研究. 本文从有监督学习、无监督学习、自监督学习等多种学习范式对当前研究进展进行系统性的总结分析, 并从算法的标签数据需求、鲁棒性、可扩展性与适应性等多个维度分析这些方法的优缺点. 同时, 还总结该领域中较为广泛使用的公开数据集, 并分析公开数据集应具备的基本要素. 最后, 通过对水中目标识别过程的论述, 总结目前基于被动声呐音频信号的水中目标自动识别算法存在的困难与挑战, 并对该领域未来的发展方向进行展望.





2024, 50(4): 674-687.
doi: 10.16383/j.aas.c240156
摘要:
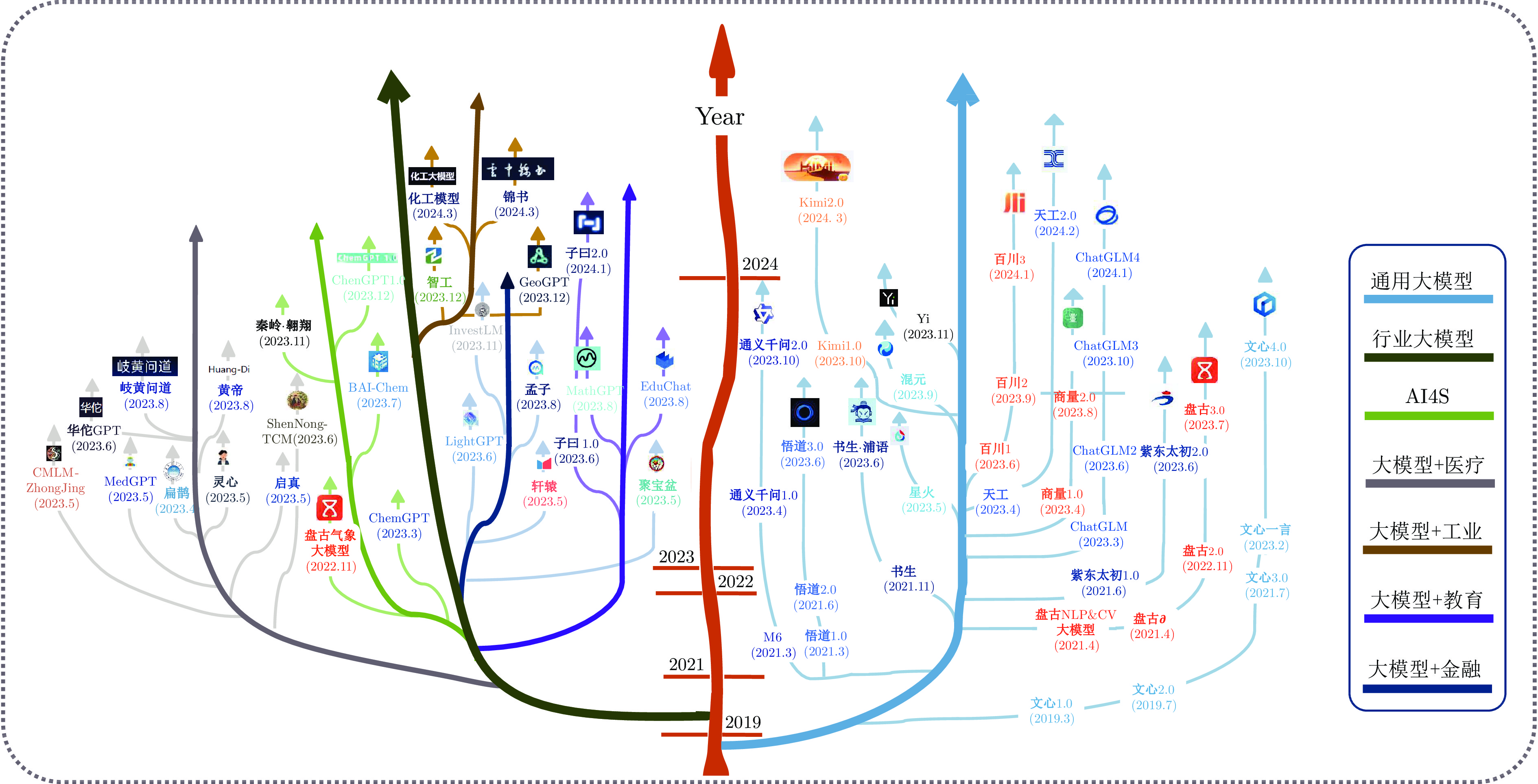
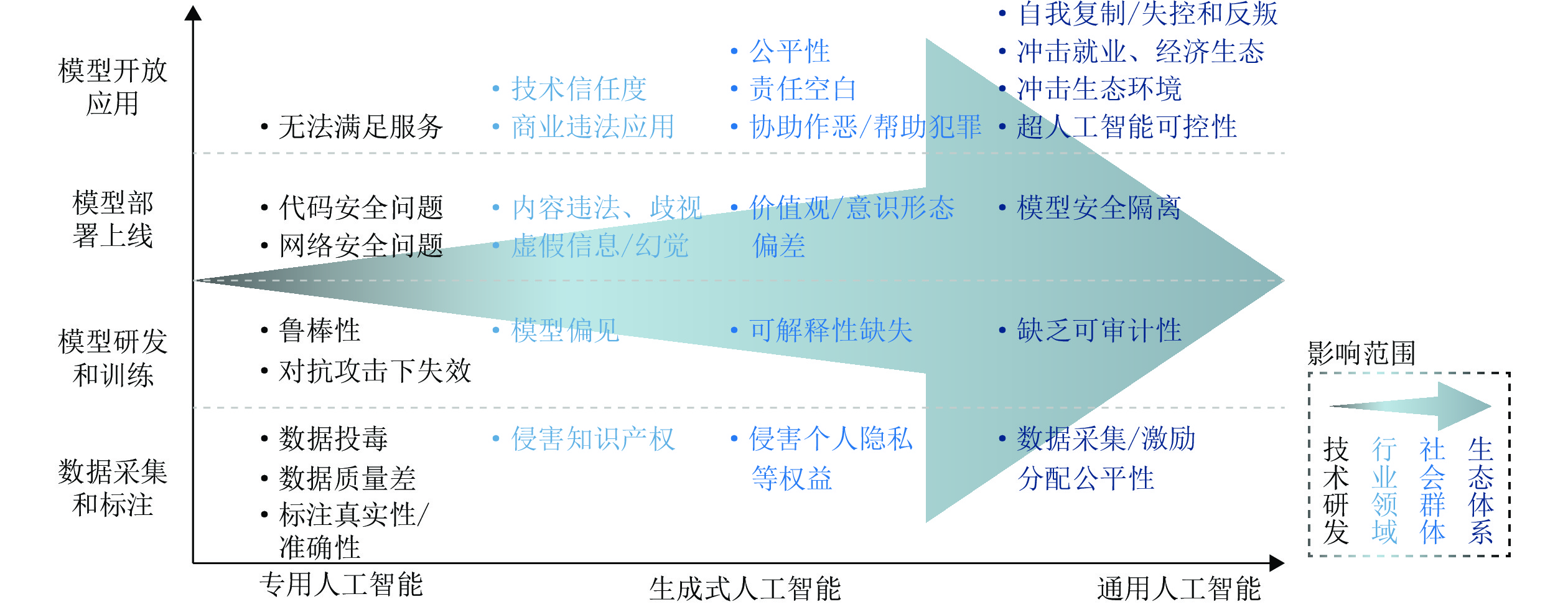
本文对生成式AI (Generative artificial intelligence, GenAI)的国内外发展现状进行了概述, 重点分析了中美之间在算力、数据、算法、生态等方面存在的差距. 为改变我国在生成式AI领域的落后现状, 提出高能效算力建设、联邦数据、专业领域模型、基于TAO的联邦生态等应对策略, 对大模型时代AI安全治理进行了论述, 对通用人工智能(Artificial general intelligence, AGI)的未来发展进行了展望.
本文对生成式AI (Generative artificial intelligence, GenAI)的国内外发展现状进行了概述, 重点分析了中美之间在算力、数据、算法、生态等方面存在的差距. 为改变我国在生成式AI领域的落后现状, 提出高能效算力建设、联邦数据、专业领域模型、基于TAO的联邦生态等应对策略, 对大模型时代AI安全治理进行了论述, 对通用人工智能(Artificial general intelligence, AGI)的未来发展进行了展望.

2024, 50(4): 688-718.
doi: 10.16383/j.aas.c221006
摘要:
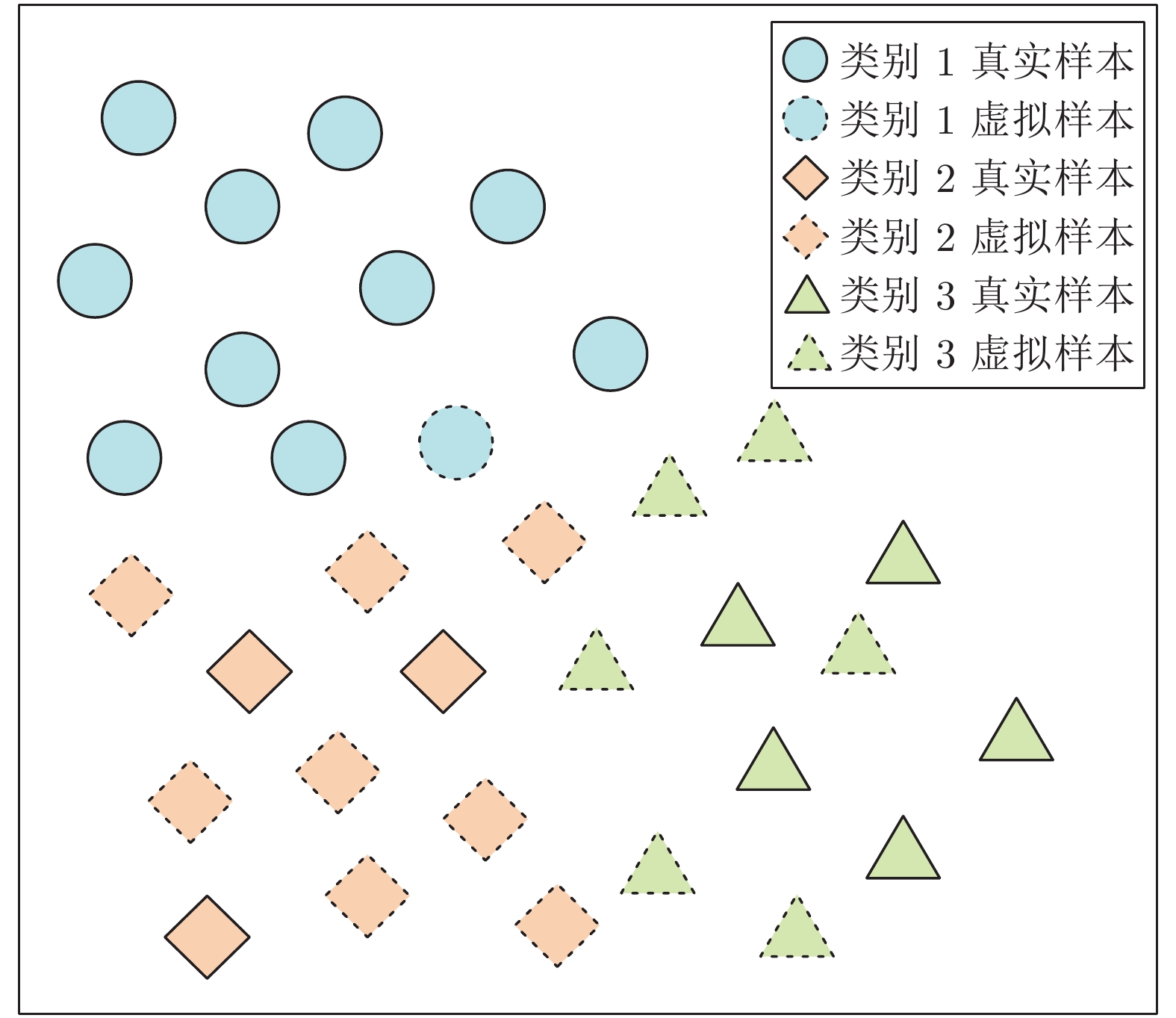
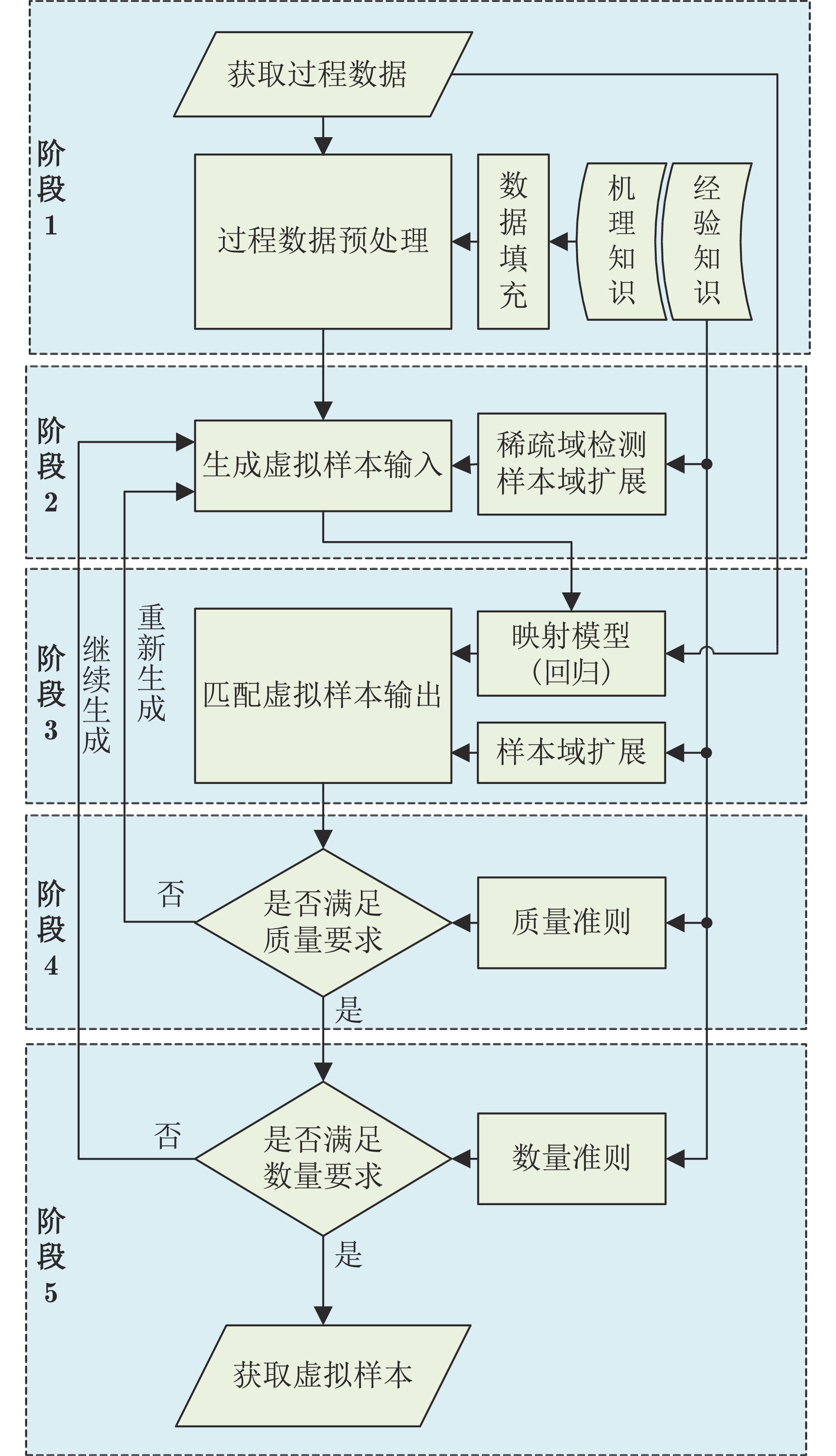
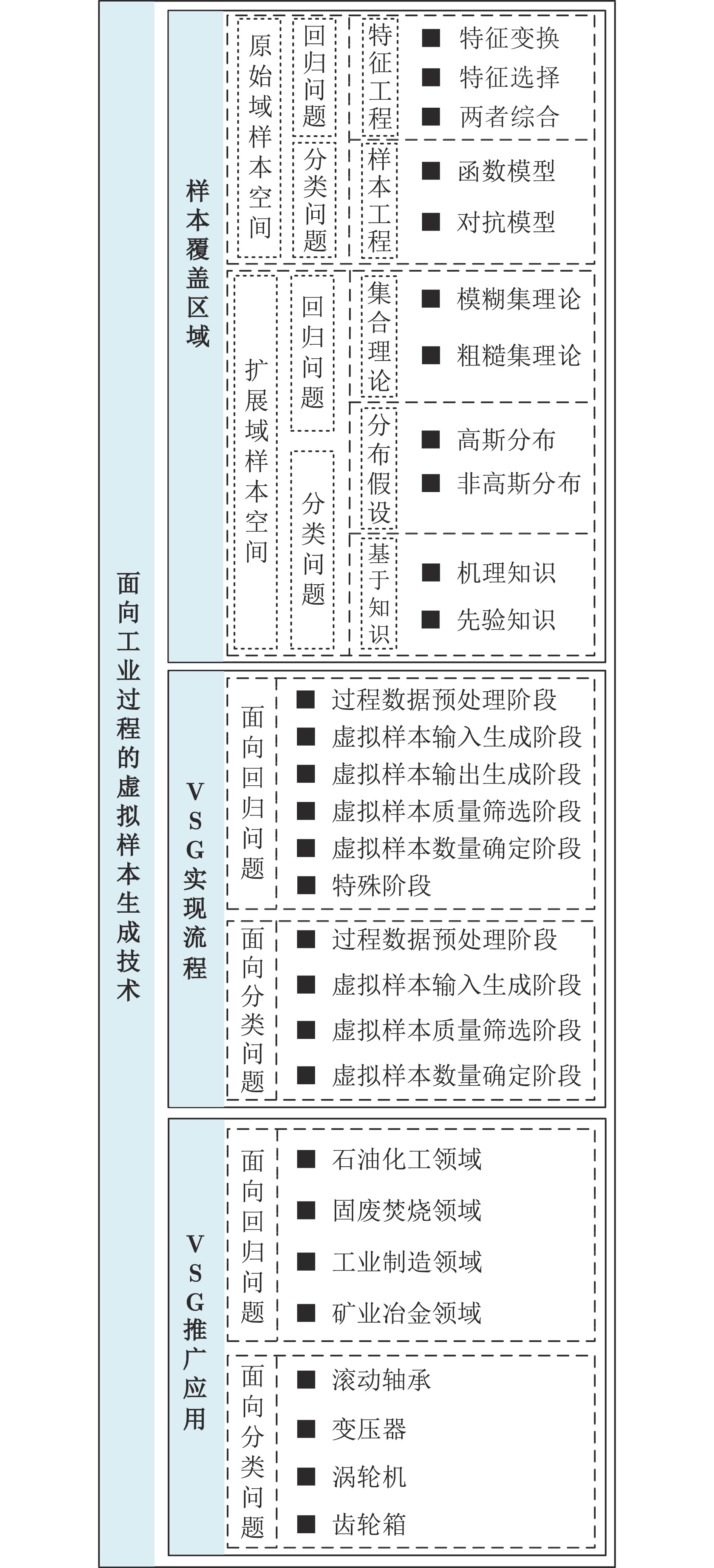
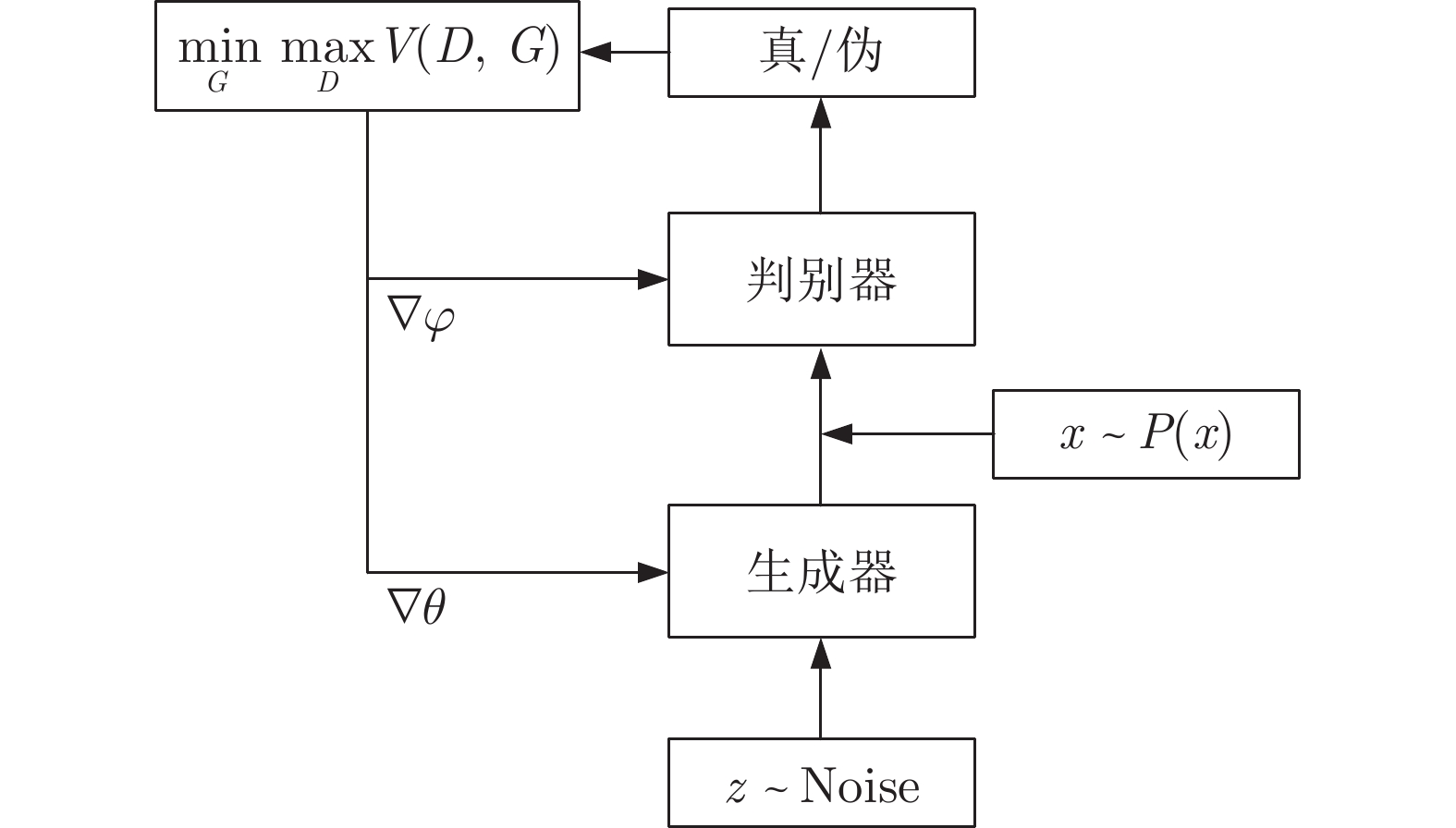
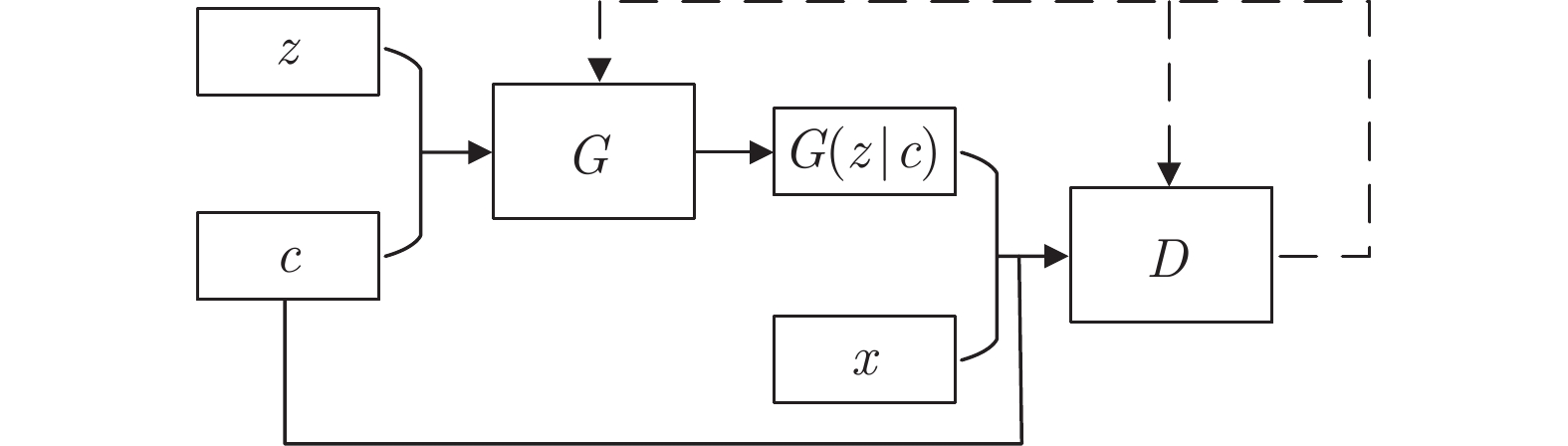
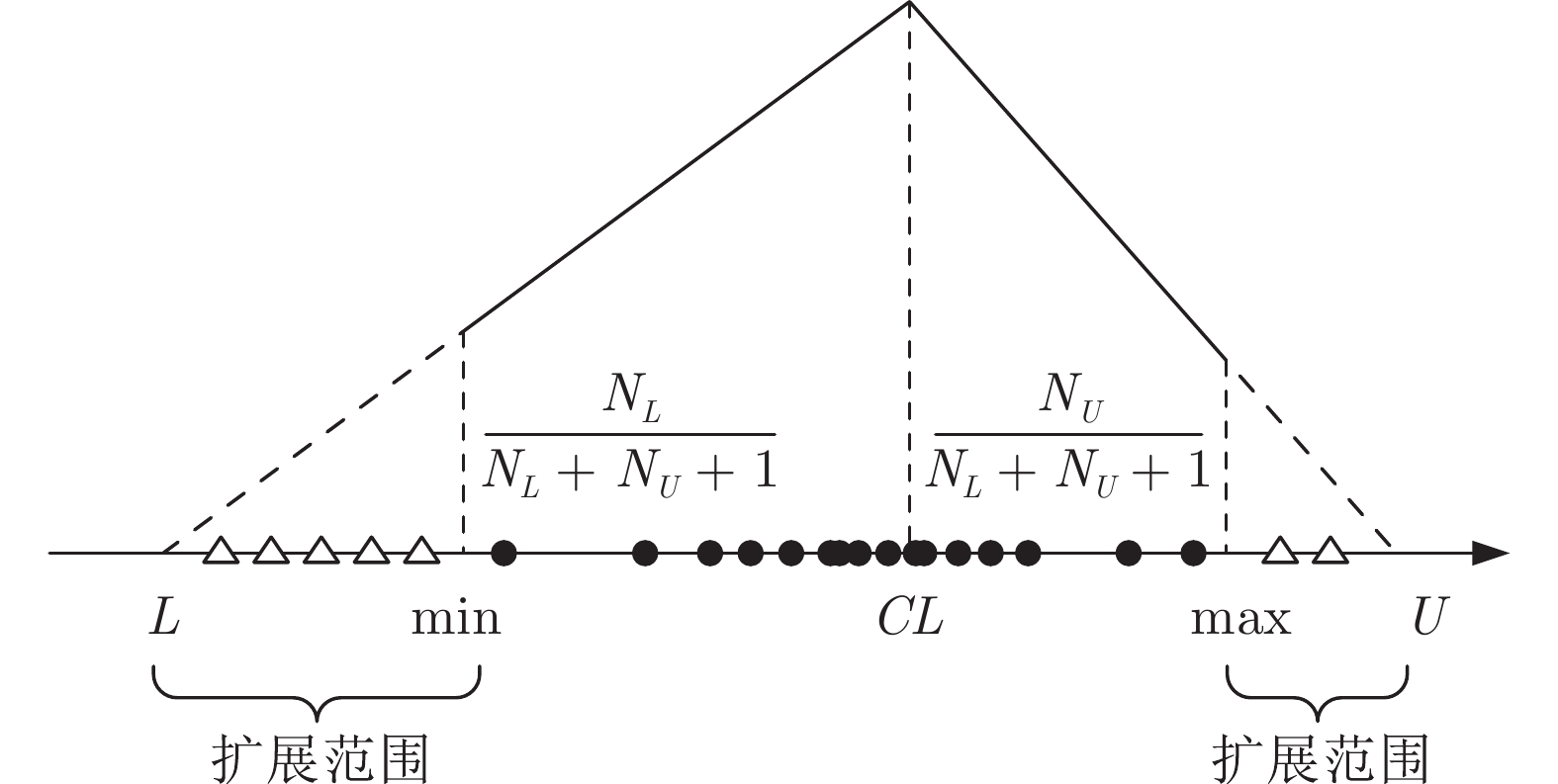
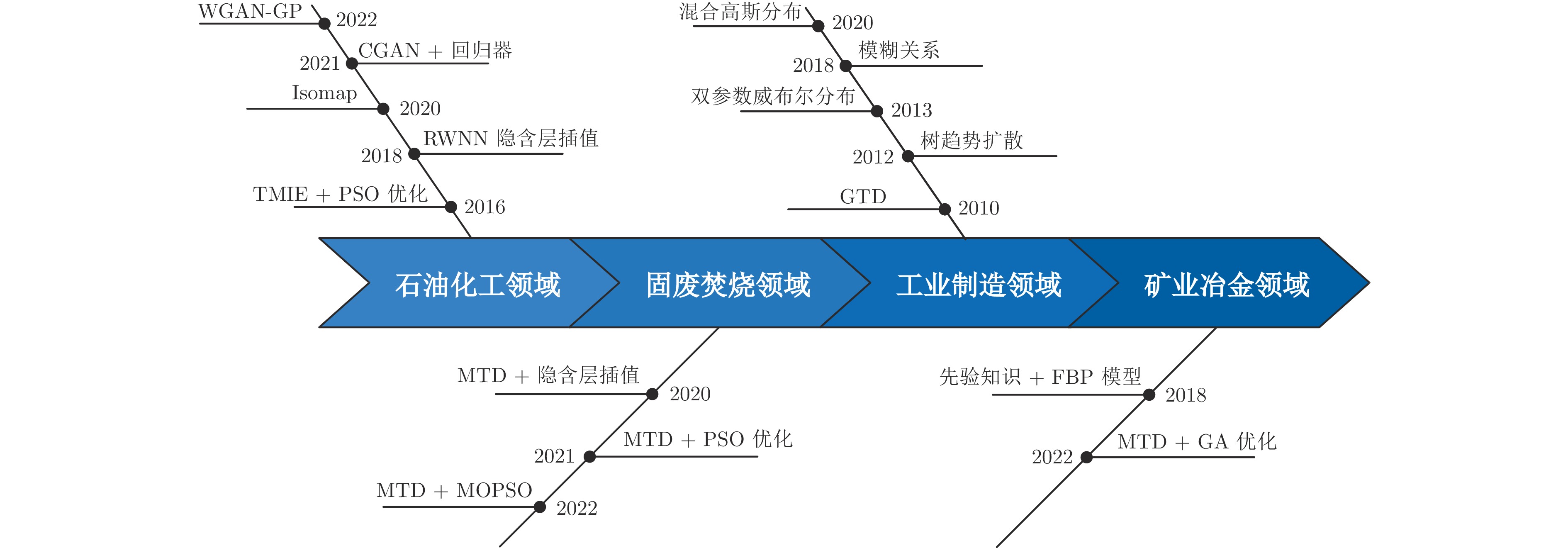
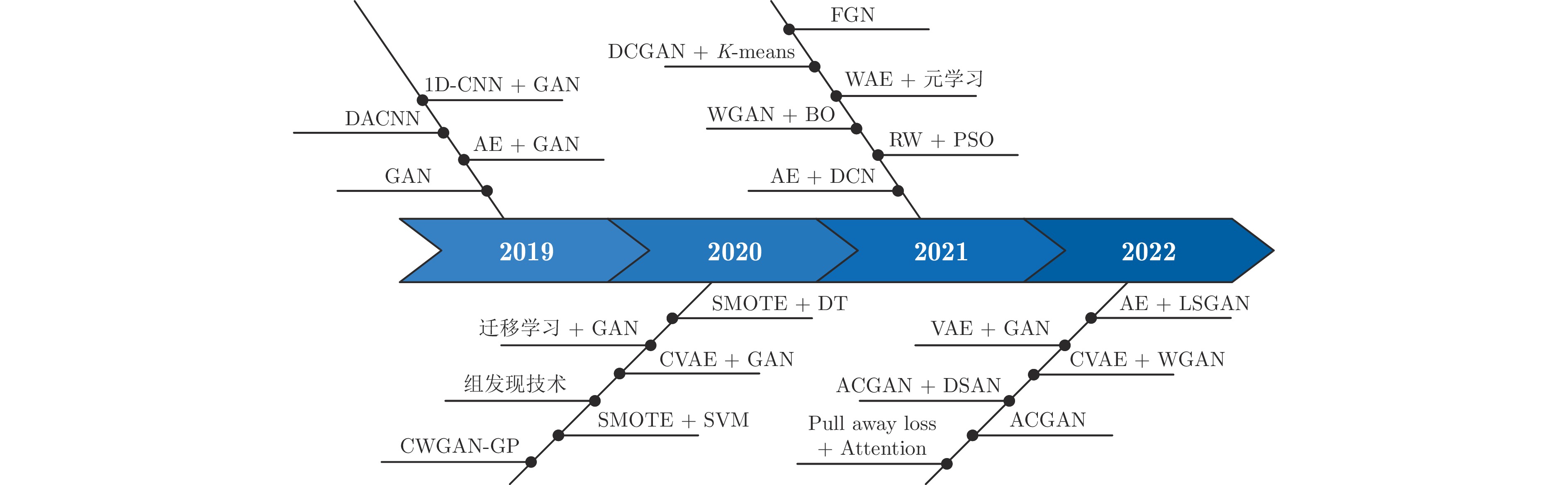
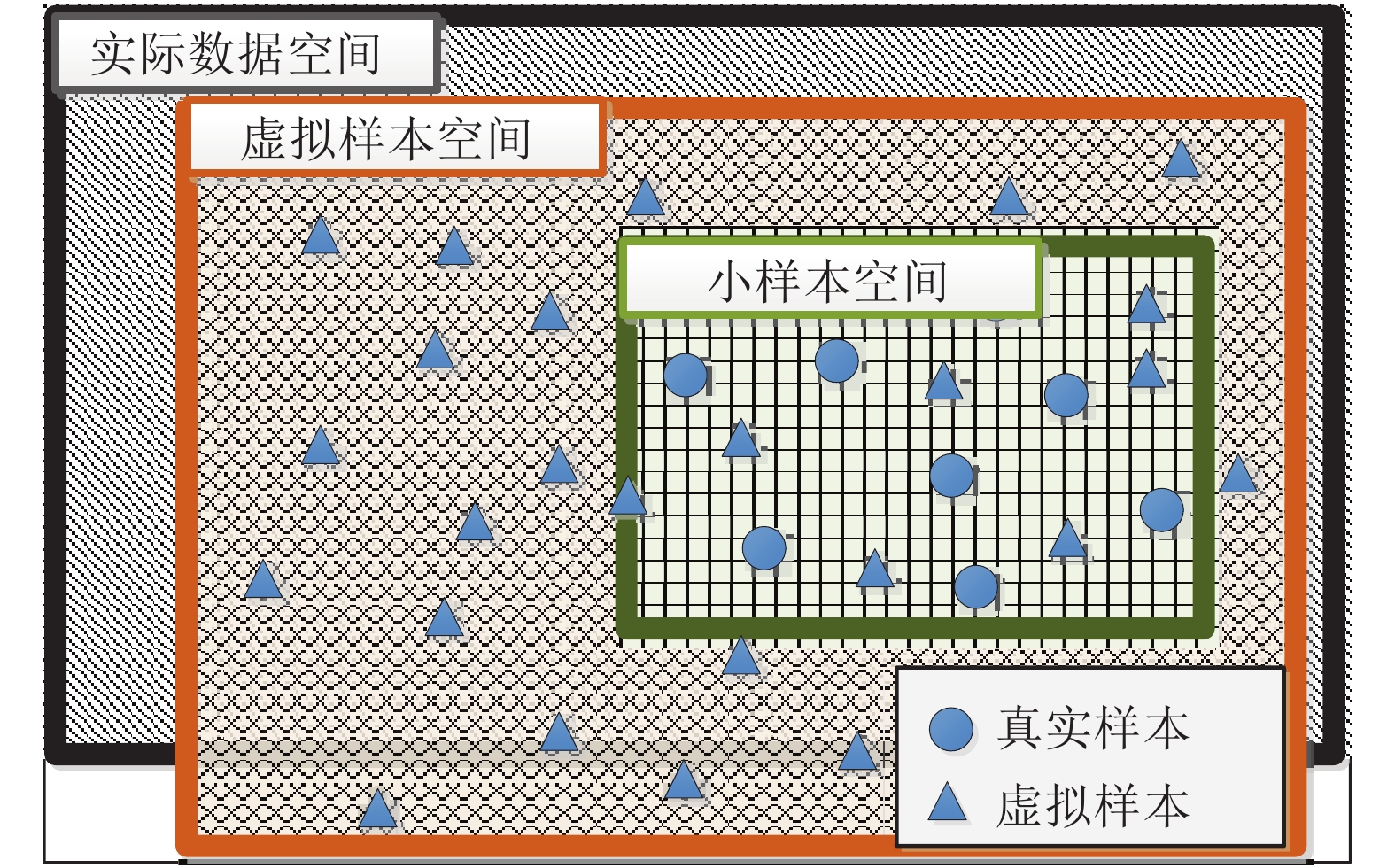
用于复杂工业过程难测运行指标和异常故障建模的样本具有量少稀缺、分布不平衡以及内涵机理知识匮乏等特性. 虚拟样本生成(Virtual sample generation, VSG)作为扩充建模样本数量及其涵盖空间的技术, 已成为解决上述问题的主要手段之一, 但已有研究还存在缺乏理论支撑、分类准则与应用边界模糊等问题. 本文在描述复杂工业过程难测运行指标和异常故障建模所存在问题的基础上, 梳理虚拟样本定义及其内涵, 给出面向工业过程回归与分类问题的VSG实现流程; 接着, 从样本覆盖区域、实现流程与推广应用等方向进行综述; 然后, 分析讨论VSG的下一步研究方向; 最后, 对全文进行总结并给出未来挑战.
用于复杂工业过程难测运行指标和异常故障建模的样本具有量少稀缺、分布不平衡以及内涵机理知识匮乏等特性. 虚拟样本生成(Virtual sample generation, VSG)作为扩充建模样本数量及其涵盖空间的技术, 已成为解决上述问题的主要手段之一, 但已有研究还存在缺乏理论支撑、分类准则与应用边界模糊等问题. 本文在描述复杂工业过程难测运行指标和异常故障建模所存在问题的基础上, 梳理虚拟样本定义及其内涵, 给出面向工业过程回归与分类问题的VSG实现流程; 接着, 从样本覆盖区域、实现流程与推广应用等方向进行综述; 然后, 分析讨论VSG的下一步研究方向; 最后, 对全文进行总结并给出未来挑战.






2024, 50(4): 719-730.
doi: 10.16383/j.aas.c230642
摘要:
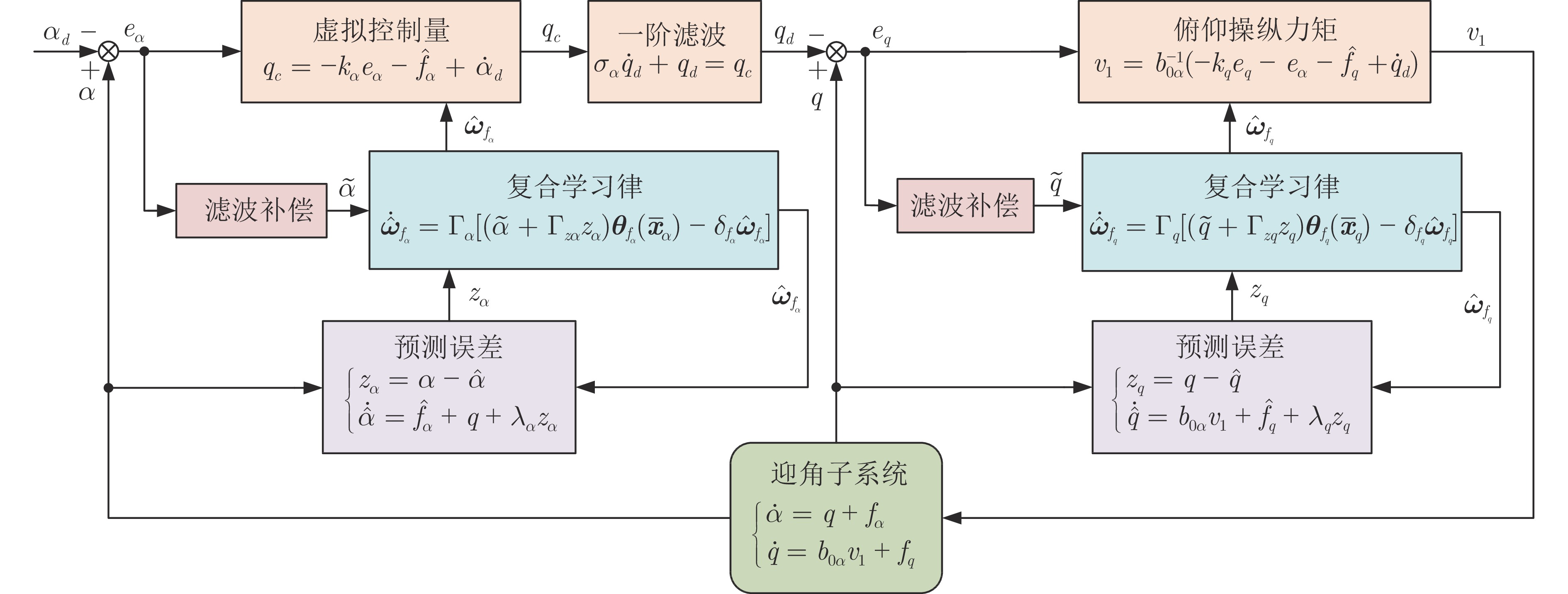
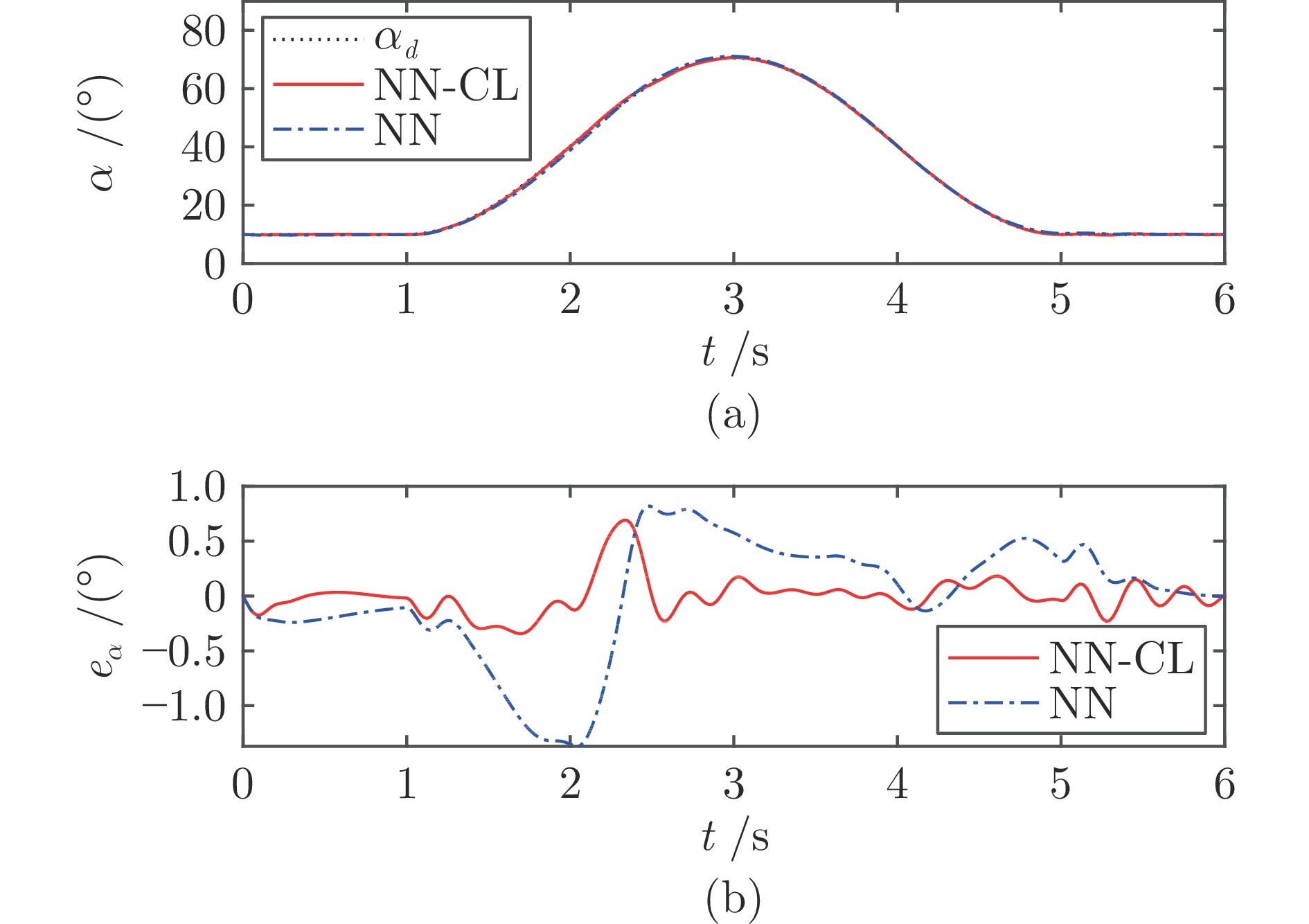
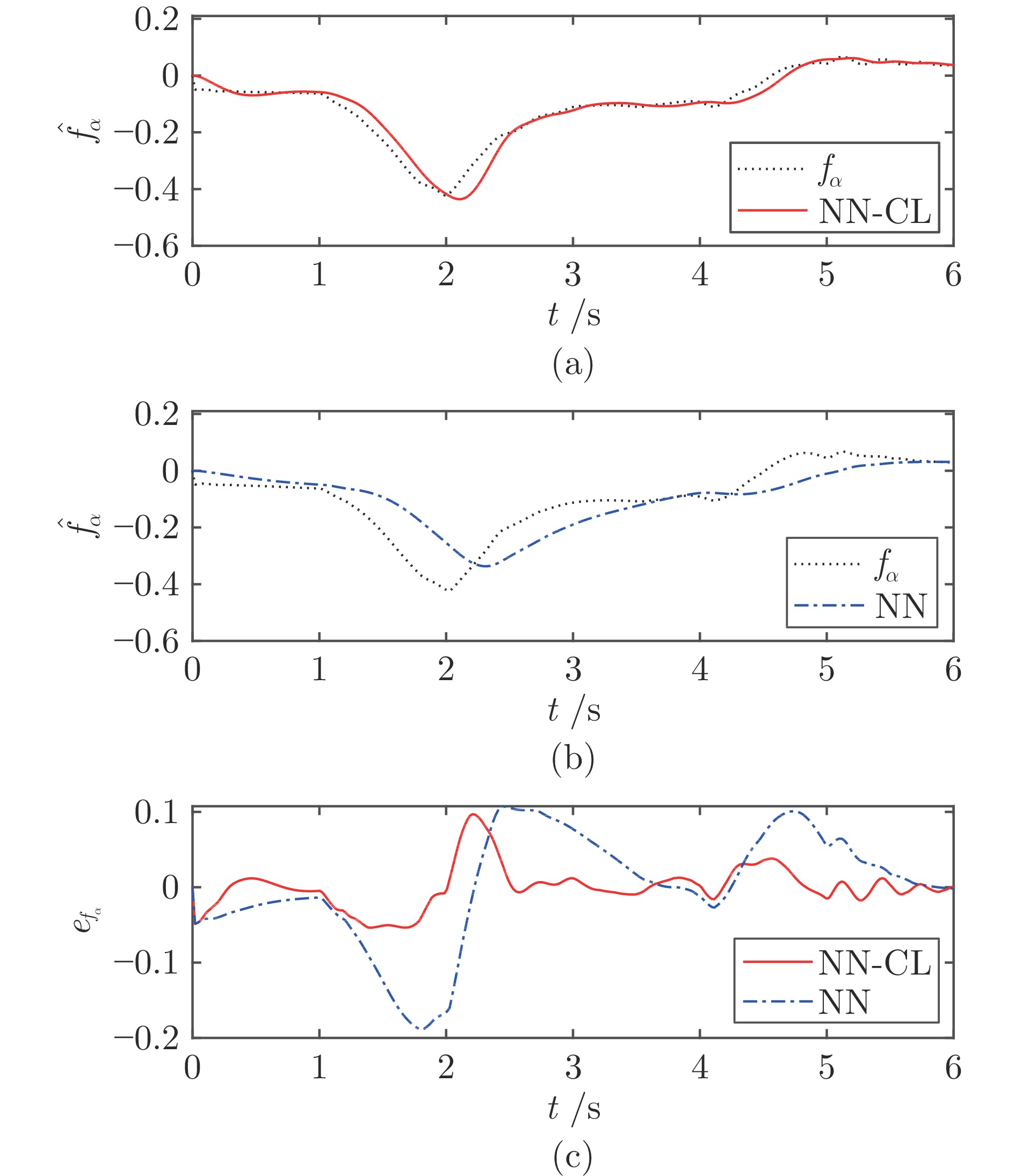
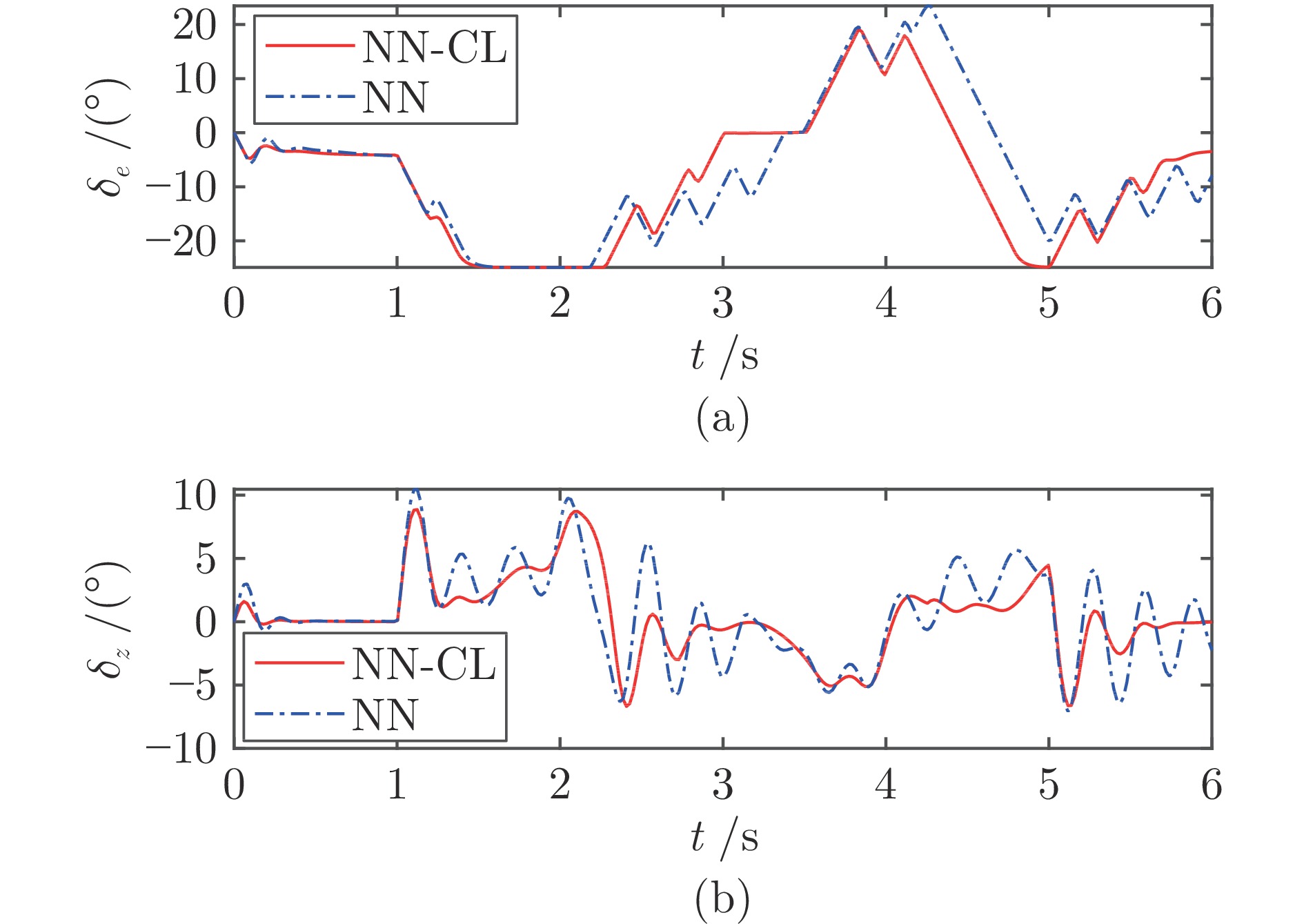
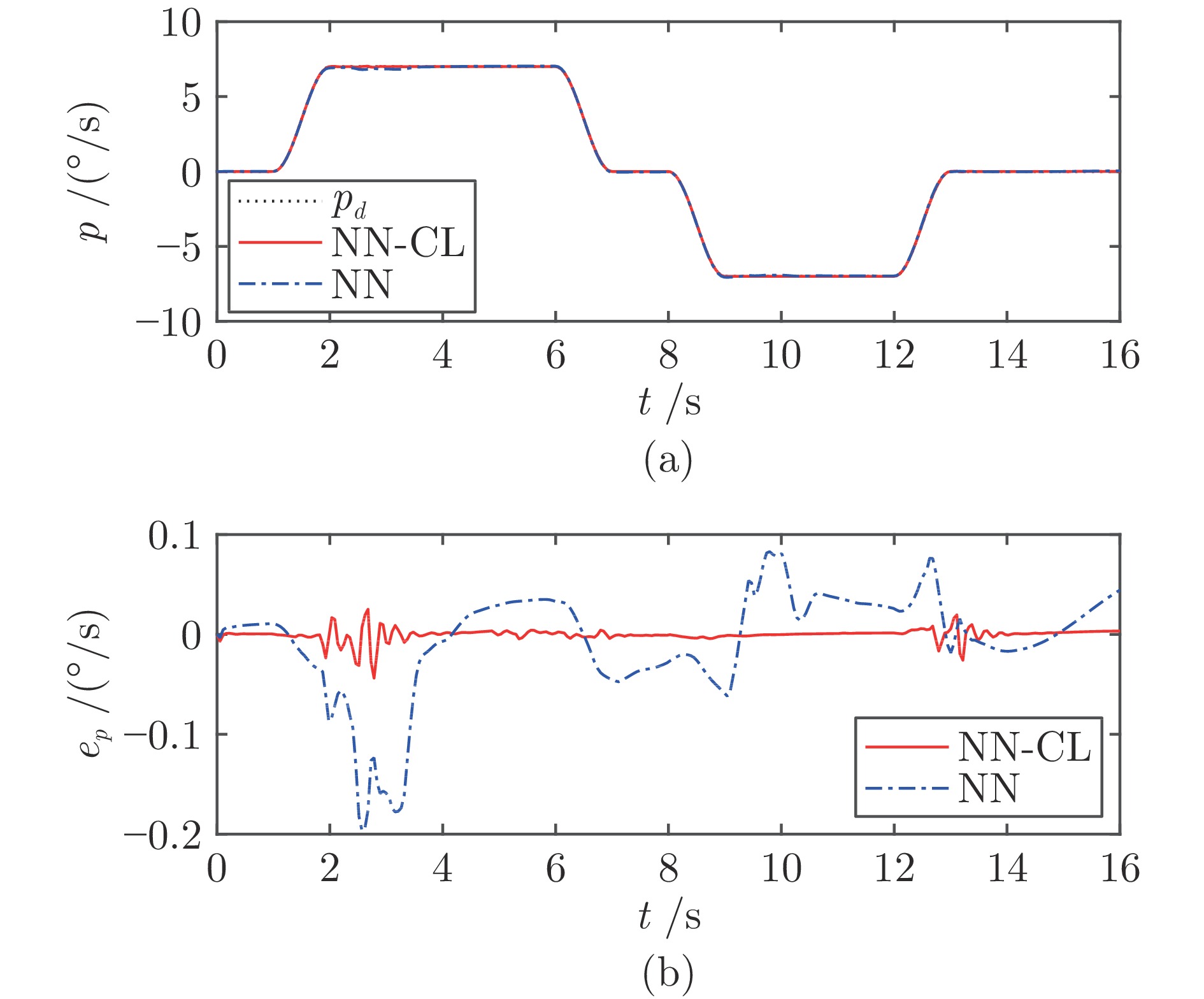
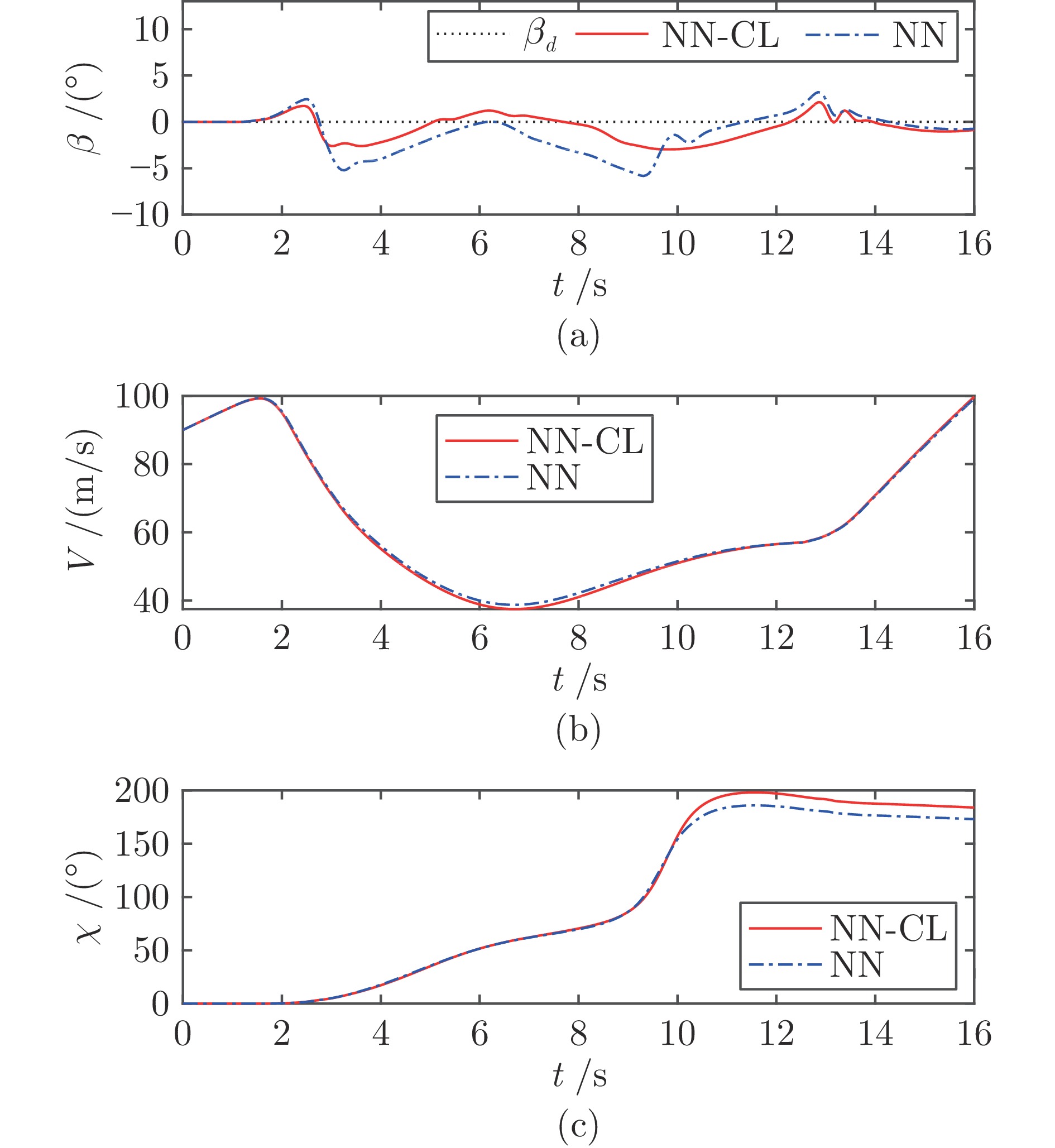
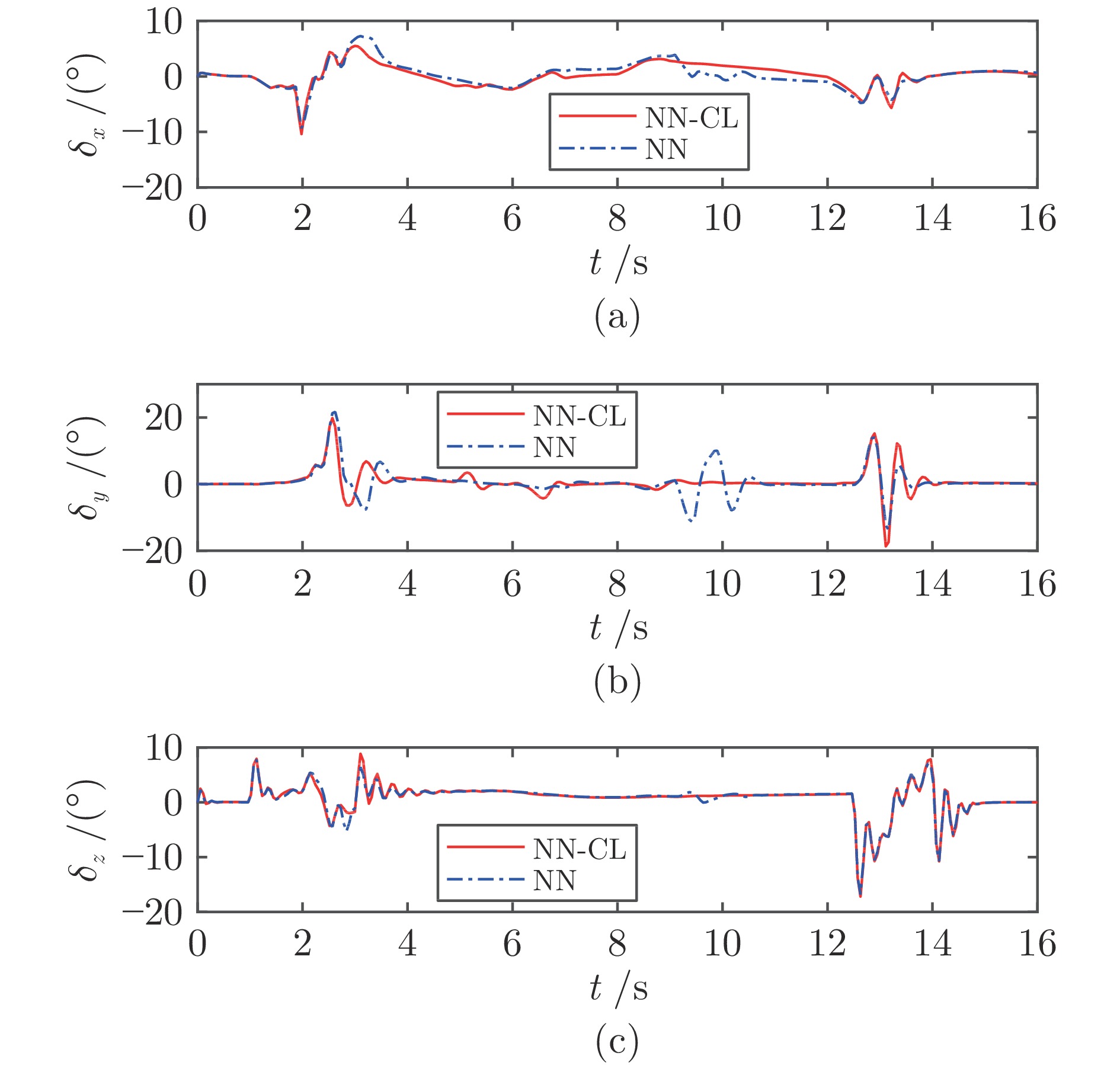
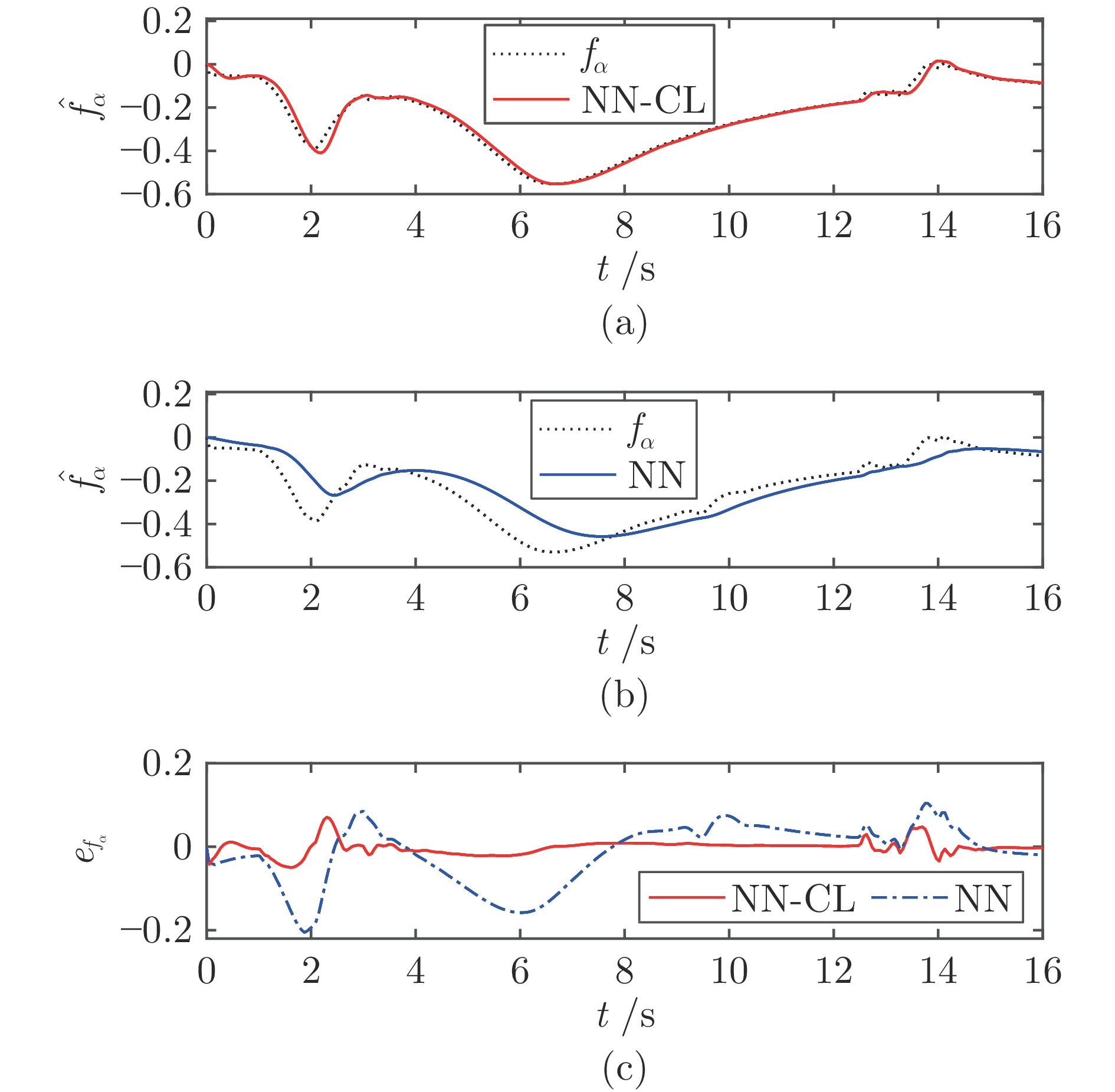
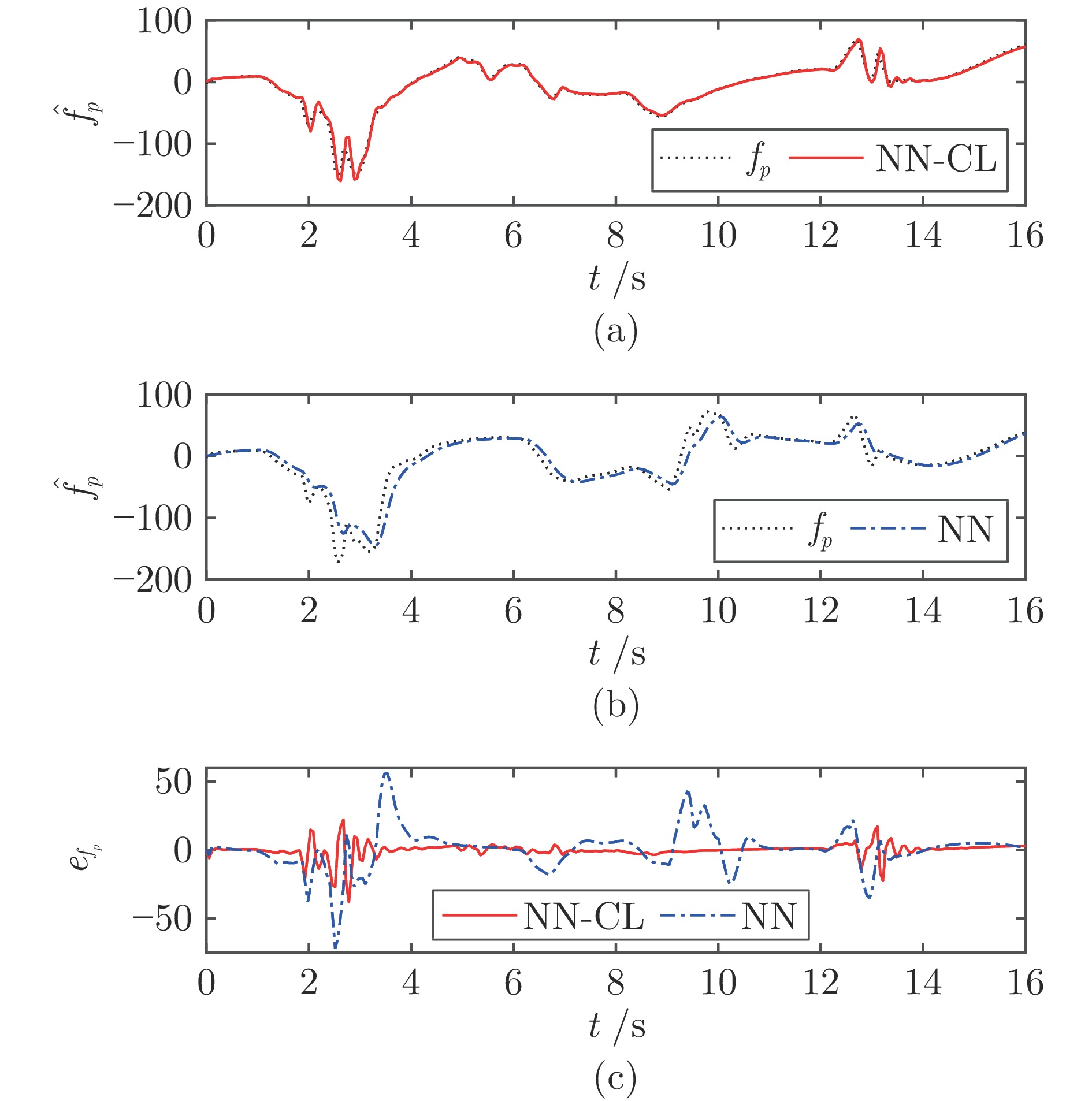
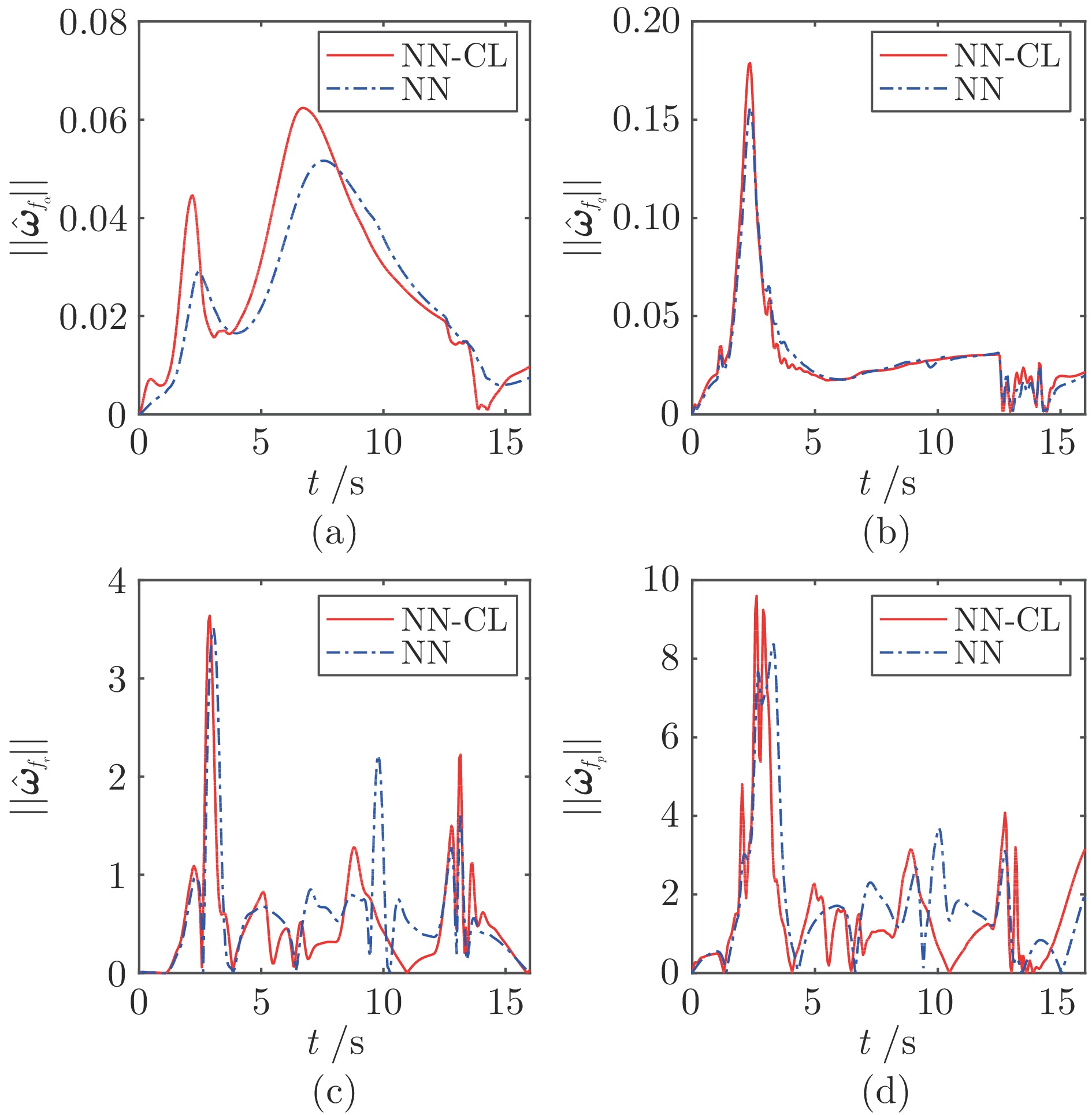
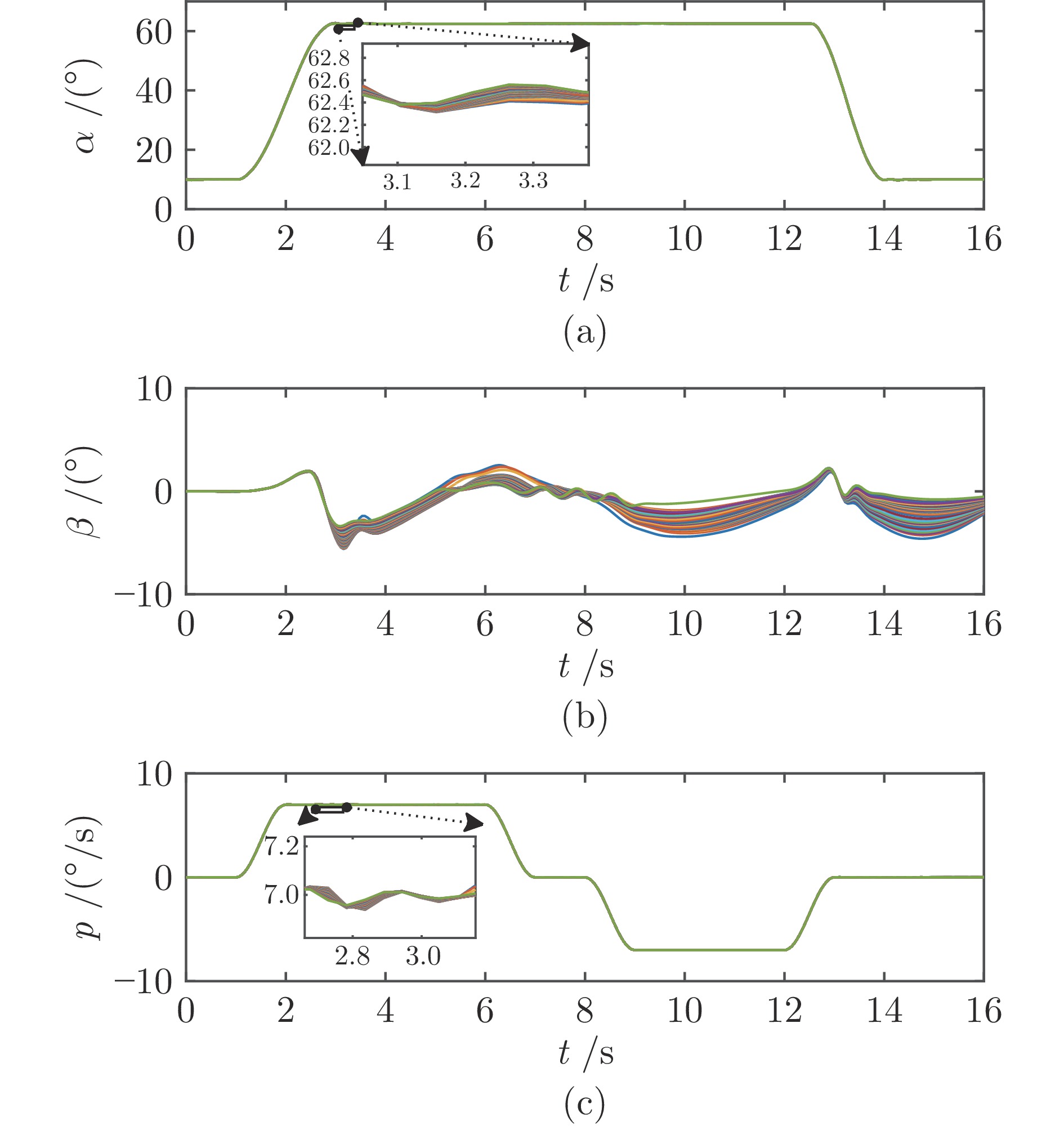
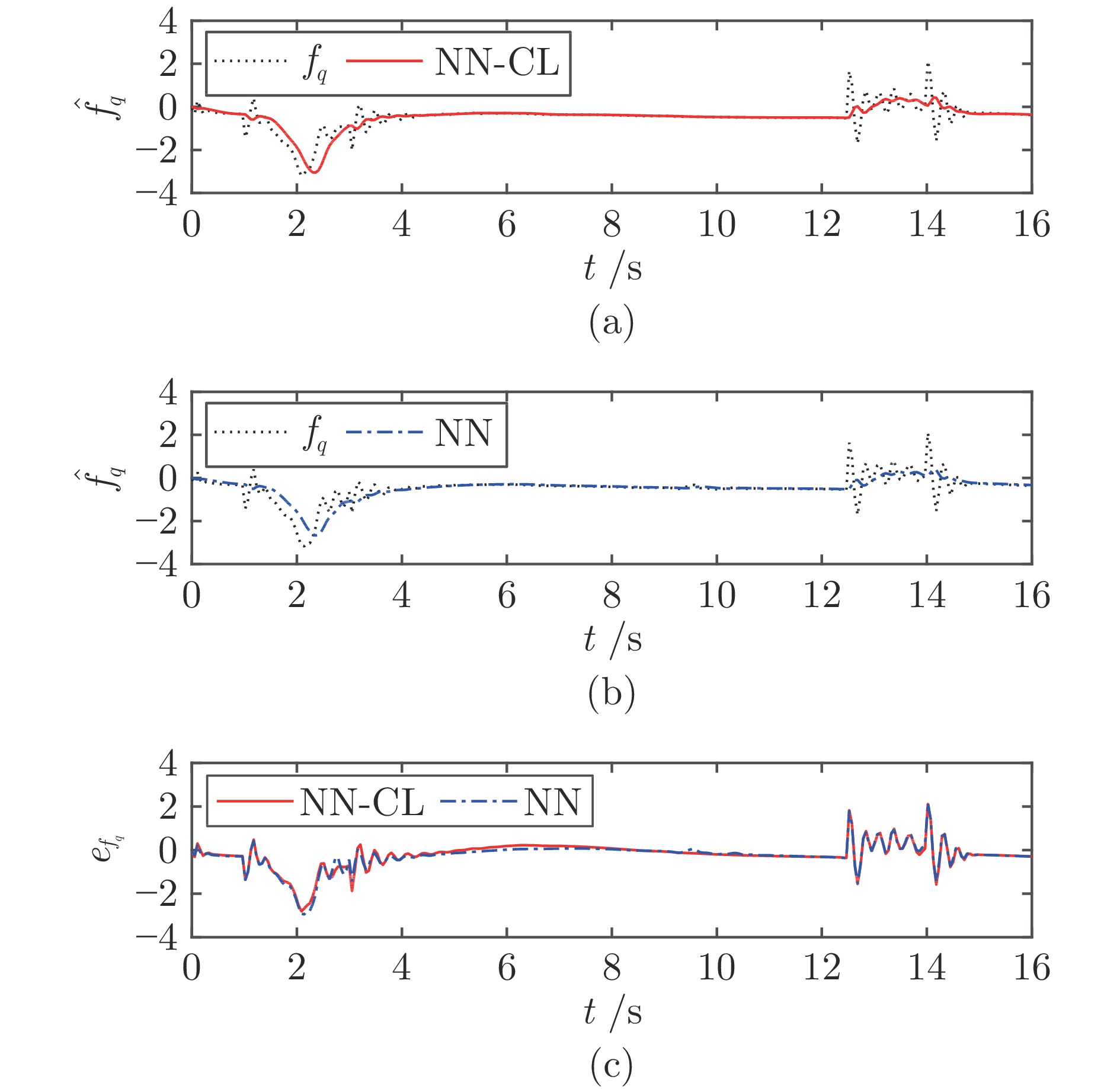
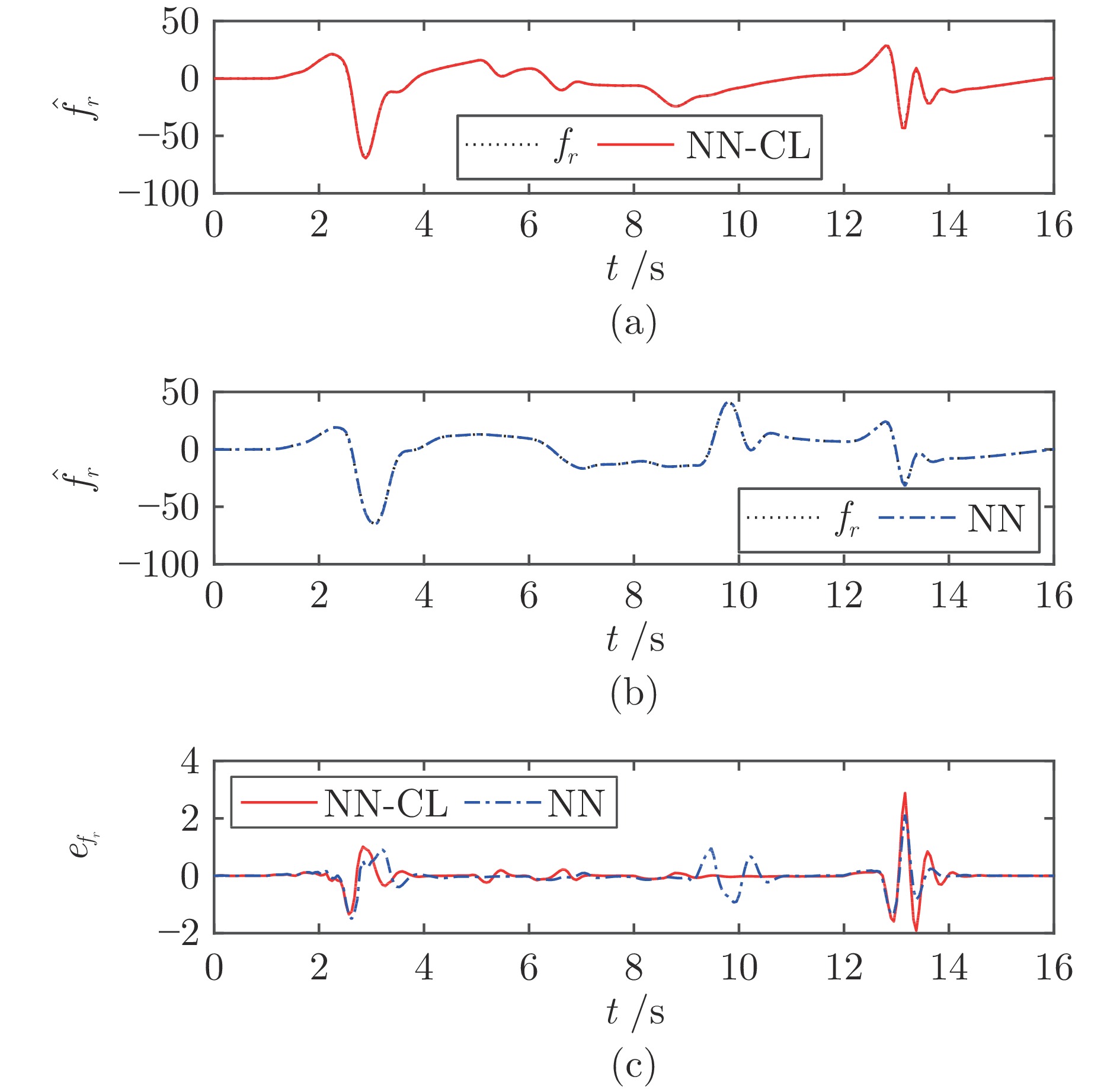
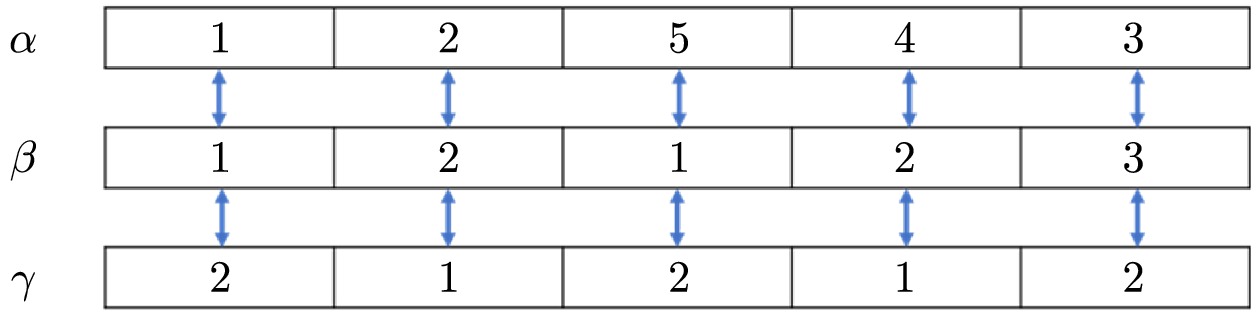
针对战机大迎角动力学呈现的强非线性、气动不确定和通道耦合特性, 提出了一种基于智能学习的自适应机动跟踪控制方法. 通过将通道耦合视为集总扰动的一部分, 把模型分解为迎角子系统、侧滑角子系统和滚转角速率子系统. 采用神经网络估计不确定, 设计跟踪误差反馈与集总干扰估计前馈相结合的控制器获取期望操纵力矩, 并基于串接链分配方法求解气动舵偏角和推力矢量偏角. 对于神经网络权重更新, 构建预测误差表征集总干扰的估计性能, 结合跟踪误差设计复合学习更新律. 基于李雅普诺夫方法证明了闭环系统的一致最终有界稳定性. 针对眼镜蛇机动和赫伯斯特机动指令进行了仿真验证和抗干扰参数拉偏测试, 结果表明所提方法具有较高的机动指令跟踪精度和鲁棒性能.
针对战机大迎角动力学呈现的强非线性、气动不确定和通道耦合特性, 提出了一种基于智能学习的自适应机动跟踪控制方法. 通过将通道耦合视为集总扰动的一部分, 把模型分解为迎角子系统、侧滑角子系统和滚转角速率子系统. 采用神经网络估计不确定, 设计跟踪误差反馈与集总干扰估计前馈相结合的控制器获取期望操纵力矩, 并基于串接链分配方法求解气动舵偏角和推力矢量偏角. 对于神经网络权重更新, 构建预测误差表征集总干扰的估计性能, 结合跟踪误差设计复合学习更新律. 基于李雅普诺夫方法证明了闭环系统的一致最终有界稳定性. 针对眼镜蛇机动和赫伯斯特机动指令进行了仿真验证和抗干扰参数拉偏测试, 结果表明所提方法具有较高的机动指令跟踪精度和鲁棒性能.



2024, 50(4): 731-744.
doi: 10.16383/j.aas.c230446
摘要:
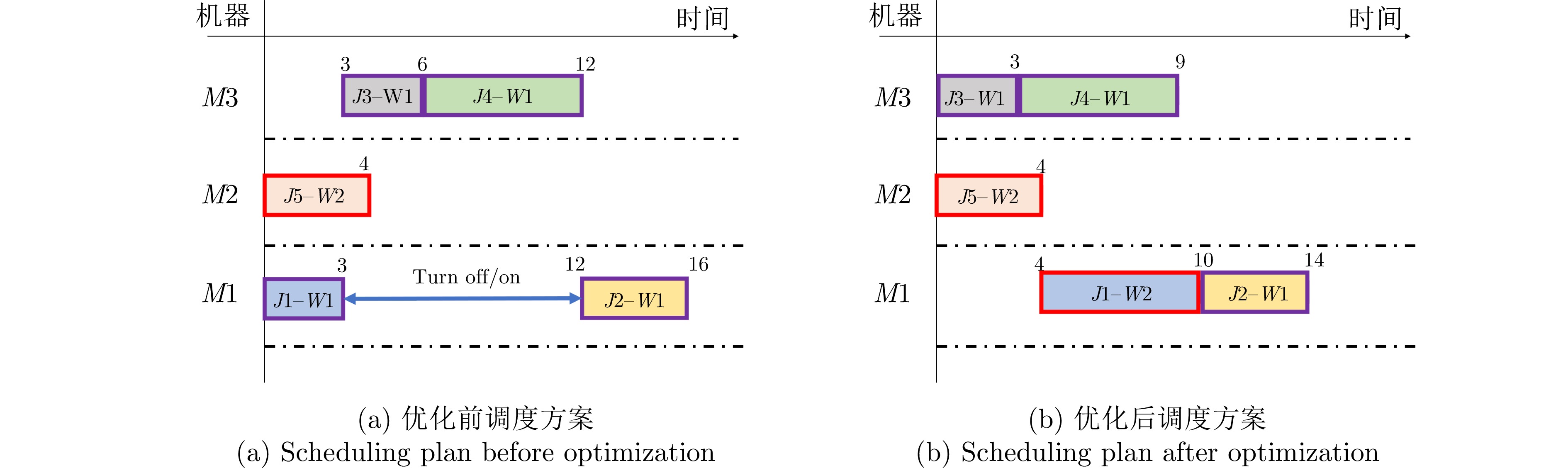
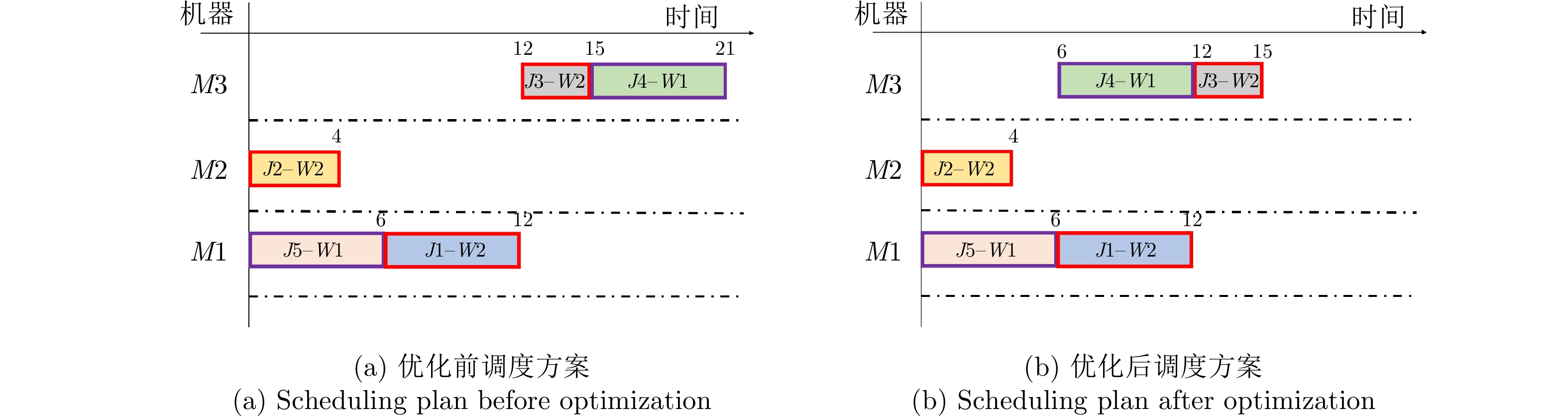
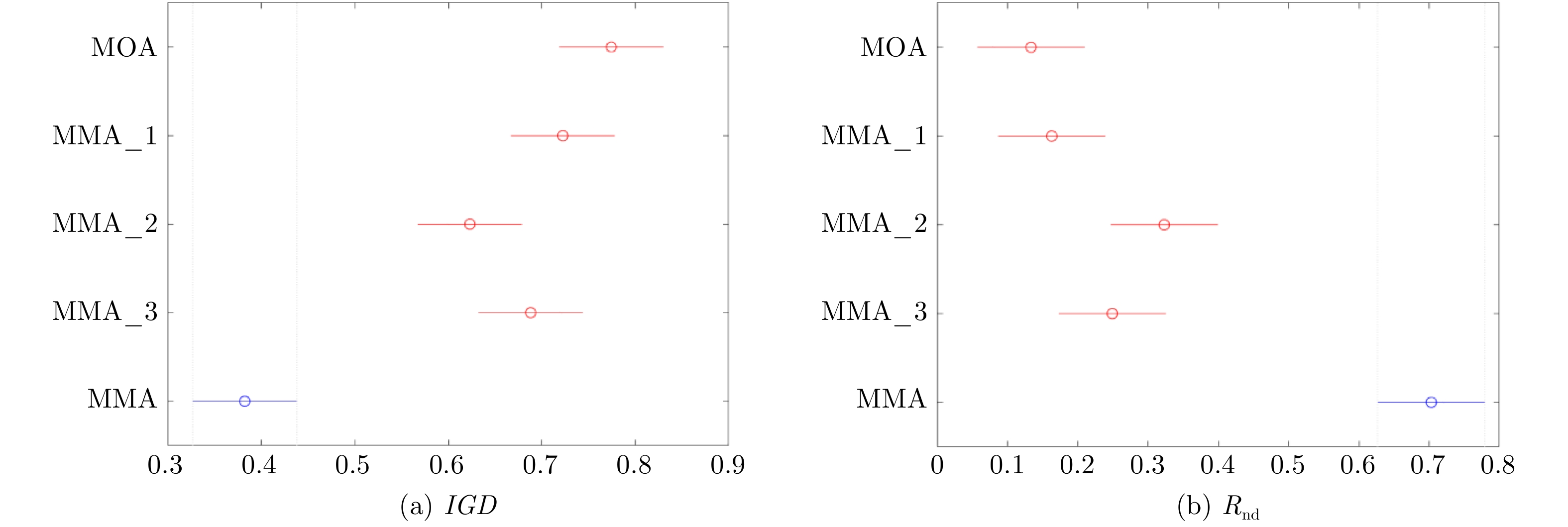
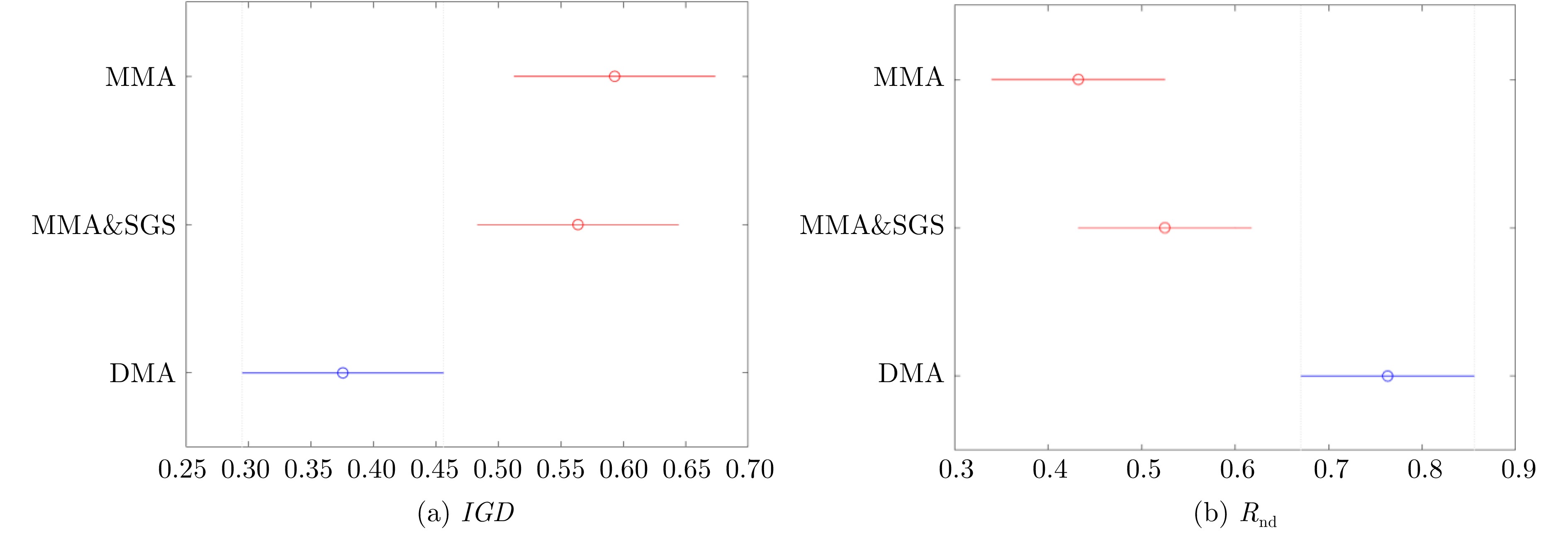
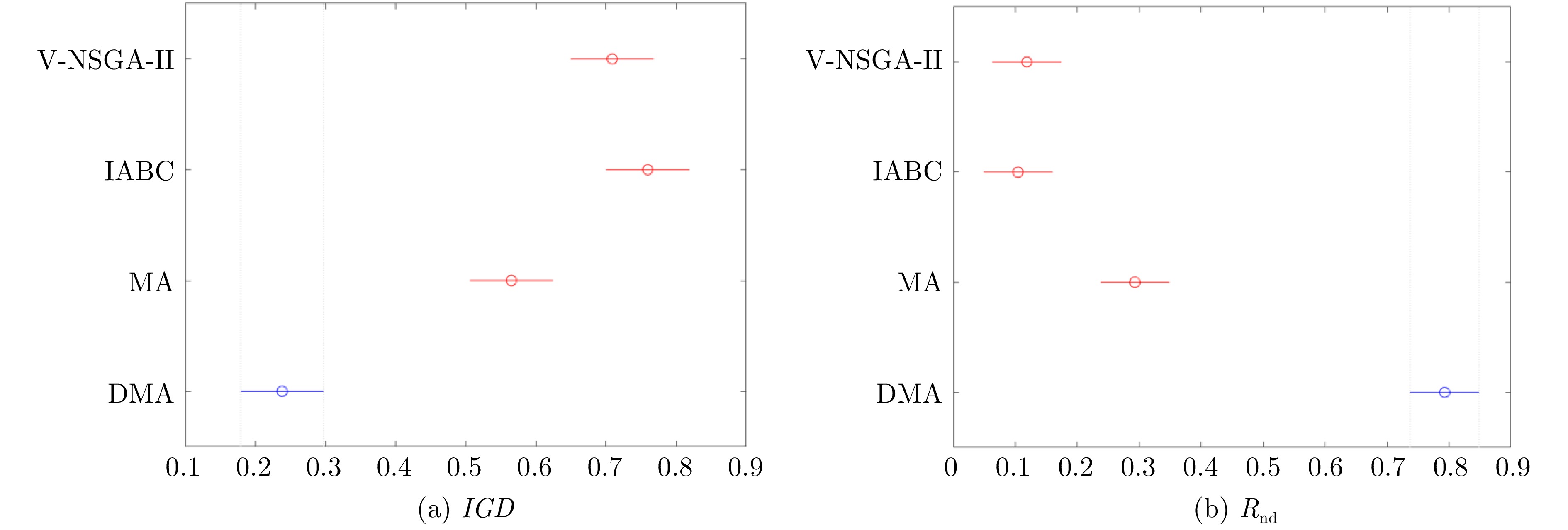
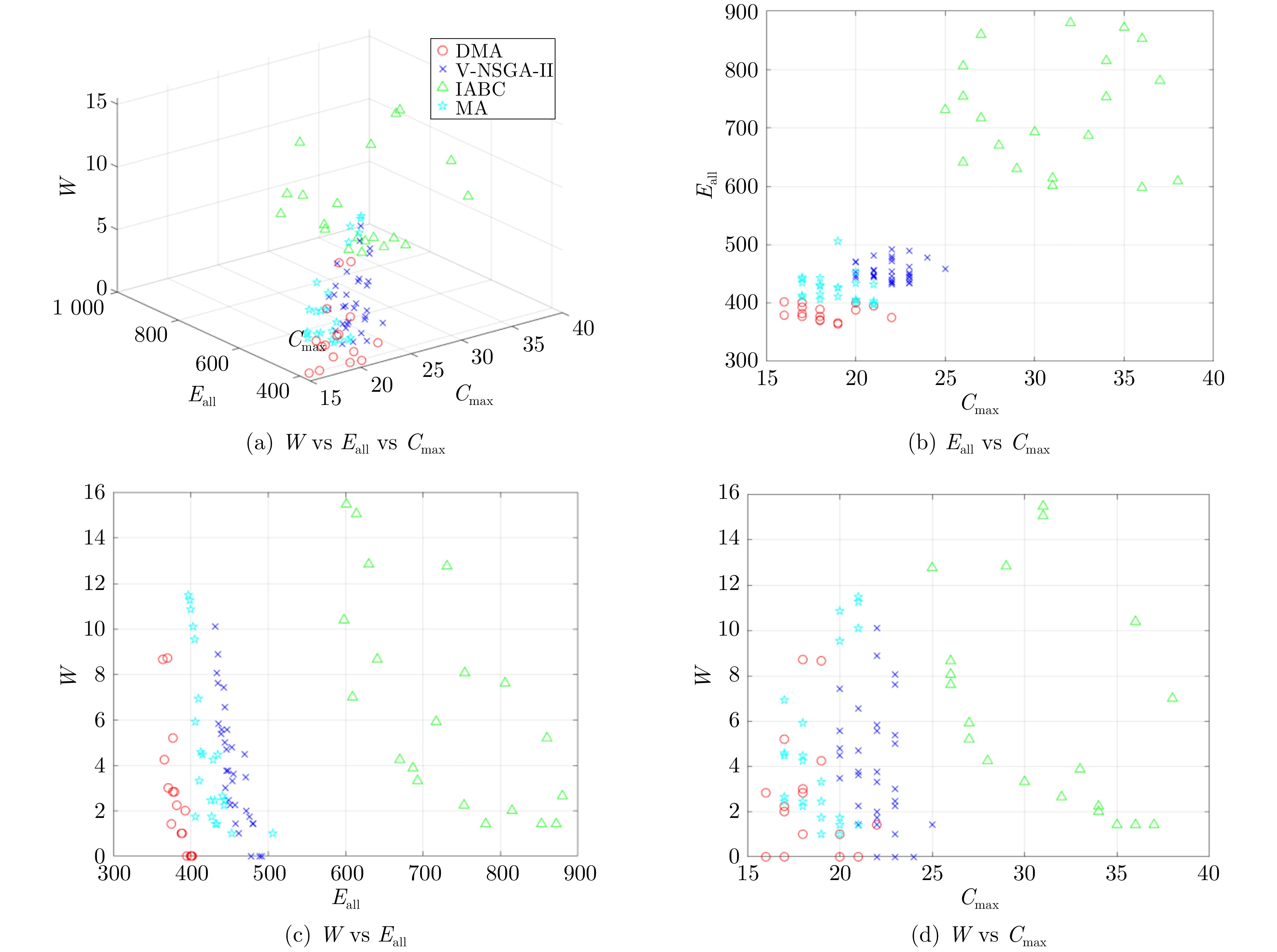
从经济、环境和社会3个维度, 全面提升生产调度方案的可持续性具有重要意义. 针对并行机生产场景, 建立考虑机器指派、加工顺序、人员安排以及开关机控制等4种决策任务的调度模型. 为实现对复杂决策空间的高效寻优, 提出一种融合两种局部优化策略的双重增强模因算法(Dual-enhanced memetic algorithm, DMA)求解模型. 从随机更新角度, 针对不同决策任务, 构造单步变邻域搜索(One-step variable neighborhood search, 1S-VNS)策略. 从定向优化角度, 分析目标和关键任务之间的匹配关系, 提出一种可持续目标导向策略(Sustainable goals-oriented strategy, SGS). 考虑到两种优化策略的不同特点, 单步变邻域搜索策略作用于整个种群, 目标导向策略强化种群中的精英个体, 实现对输出解集的双重优化. 仿真实验结果表明, 双重优化策略能有效地增强算法性能, 并且所提算法在非支配解的多样性和收敛性上具有优越性.
从经济、环境和社会3个维度, 全面提升生产调度方案的可持续性具有重要意义. 针对并行机生产场景, 建立考虑机器指派、加工顺序、人员安排以及开关机控制等4种决策任务的调度模型. 为实现对复杂决策空间的高效寻优, 提出一种融合两种局部优化策略的双重增强模因算法(Dual-enhanced memetic algorithm, DMA)求解模型. 从随机更新角度, 针对不同决策任务, 构造单步变邻域搜索(One-step variable neighborhood search, 1S-VNS)策略. 从定向优化角度, 分析目标和关键任务之间的匹配关系, 提出一种可持续目标导向策略(Sustainable goals-oriented strategy, SGS). 考虑到两种优化策略的不同特点, 单步变邻域搜索策略作用于整个种群, 目标导向策略强化种群中的精英个体, 实现对输出解集的双重优化. 仿真实验结果表明, 双重优化策略能有效地增强算法性能, 并且所提算法在非支配解的多样性和收敛性上具有优越性.
2024, 50(4): 745-757.
doi: 10.16383/j.aas.c230154
摘要:
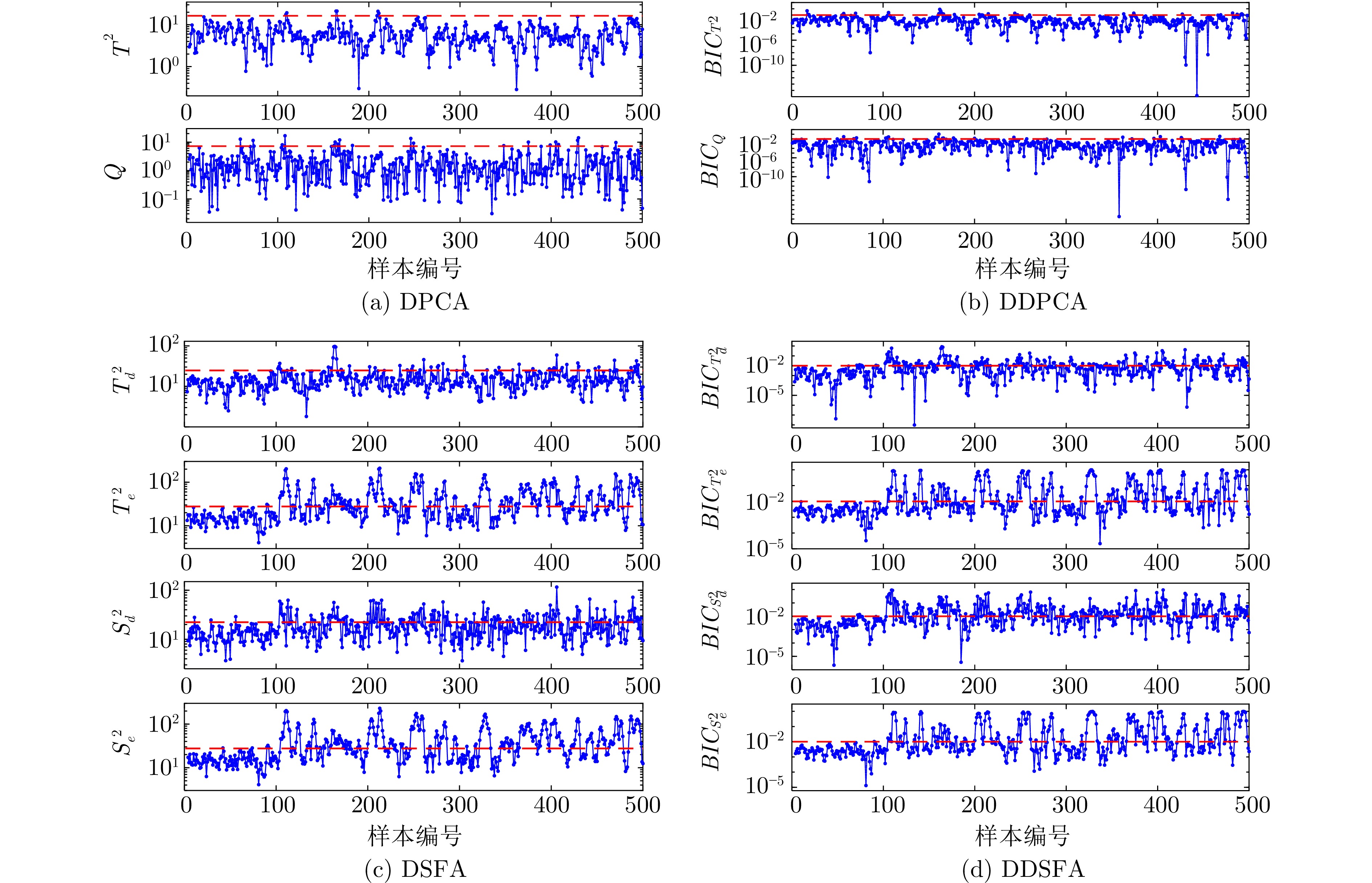
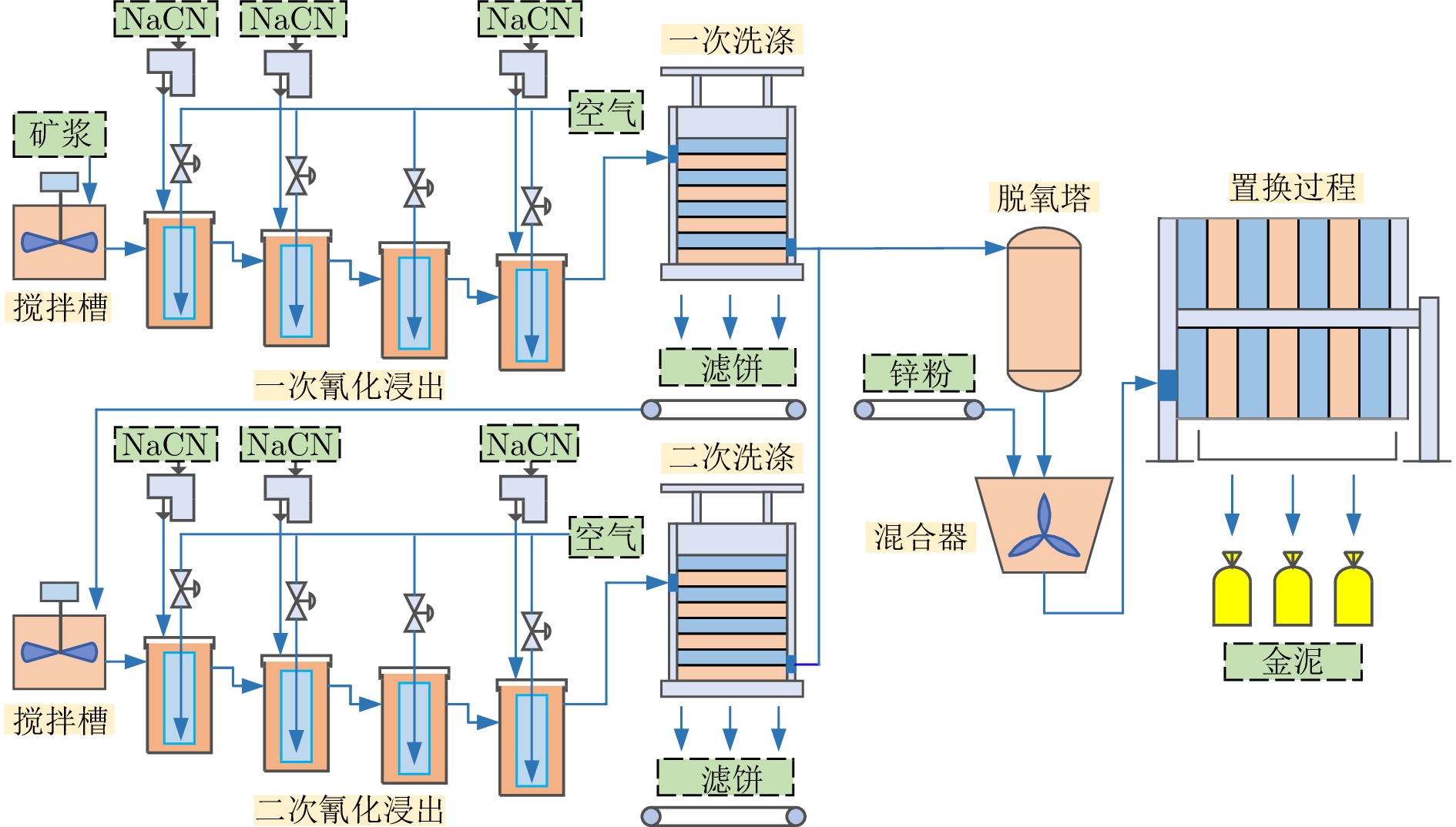
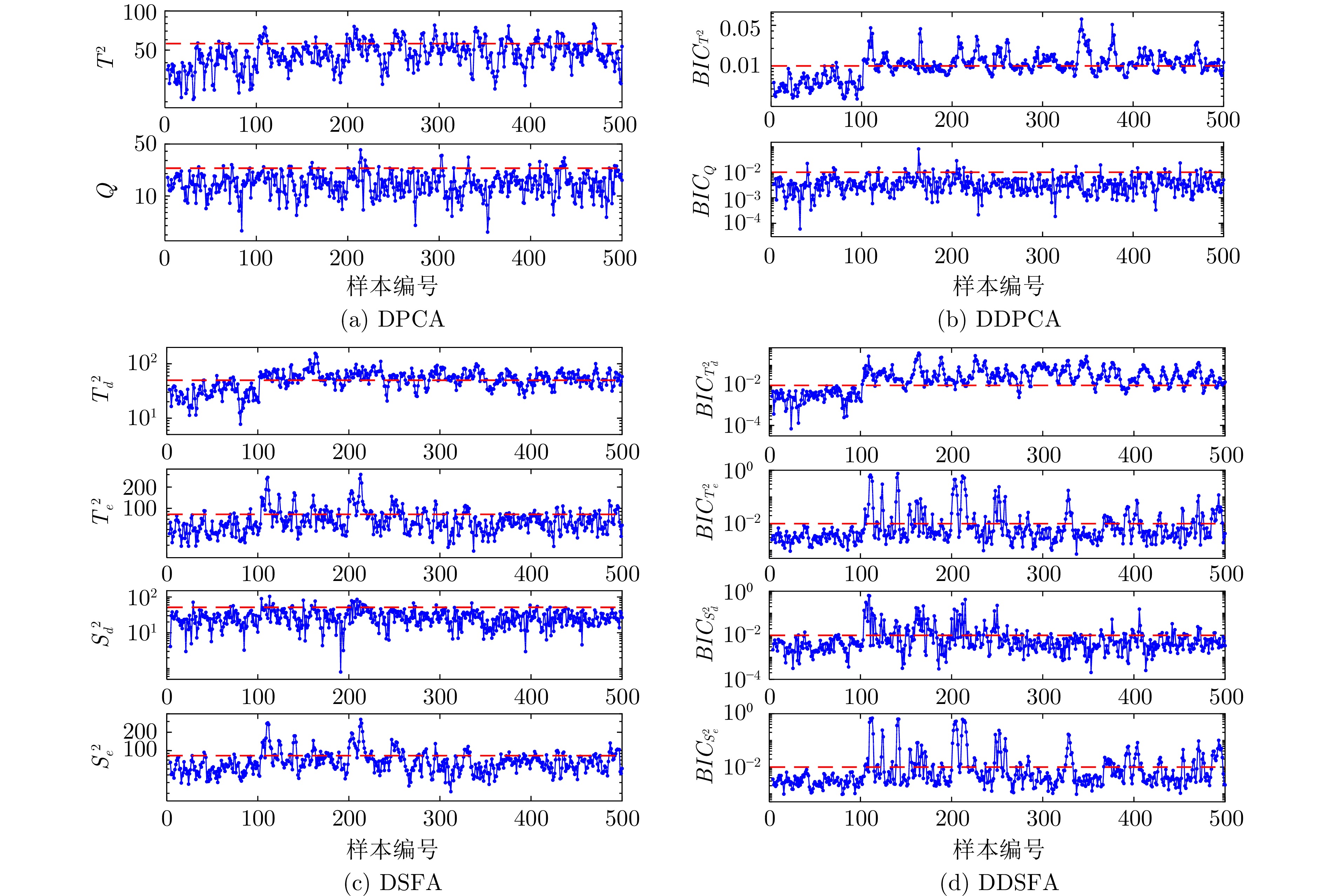
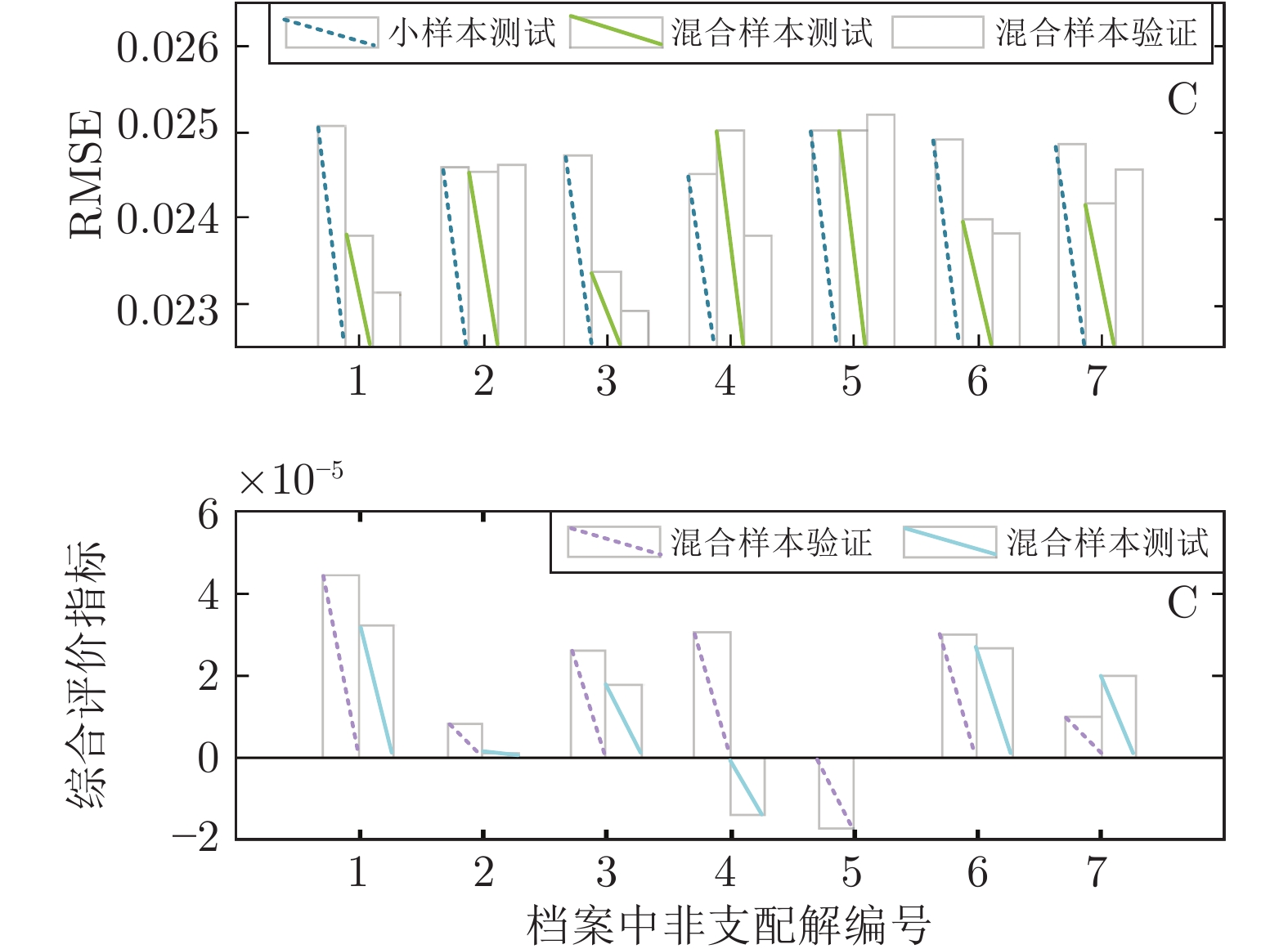
现代工业过程通常具有规模大、流程长和工序多的特点, 导致传统的集中式建模方法会淹没过程的局部变化信息, 从而无法及时识别早期的非优运行状态. 此外, 闭环控制的广泛应用使得过程变量普遍存在时序相关性. 针对以上问题, 提出一种基于慢特征分析(Slow feature analysis, SFA)的分布式动态工业过程运行状态评价方法. 首先, 结合动态时间规整(Dynamic time warping, DTW)和K-medoids聚类算法对过程进行分解; 然后, 对每一变量子块建立相应的动态慢特征分析(Dynamic slow feature analysis, DSFA)模型; 最后, 利用贝叶斯推理获得全局的综合评价指标. 通过在数值案例和金湿法冶金过程的仿真应用, 验证了该方法的有效性.
现代工业过程通常具有规模大、流程长和工序多的特点, 导致传统的集中式建模方法会淹没过程的局部变化信息, 从而无法及时识别早期的非优运行状态. 此外, 闭环控制的广泛应用使得过程变量普遍存在时序相关性. 针对以上问题, 提出一种基于慢特征分析(Slow feature analysis, SFA)的分布式动态工业过程运行状态评价方法. 首先, 结合动态时间规整(Dynamic time warping, DTW)和K-medoids聚类算法对过程进行分解; 然后, 对每一变量子块建立相应的动态慢特征分析(Dynamic slow feature analysis, DSFA)模型; 最后, 利用贝叶斯推理获得全局的综合评价指标. 通过在数值案例和金湿法冶金过程的仿真应用, 验证了该方法的有效性.



2024, 50(4): 758-770.
doi: 10.16383/j.aas.c210518
摘要:
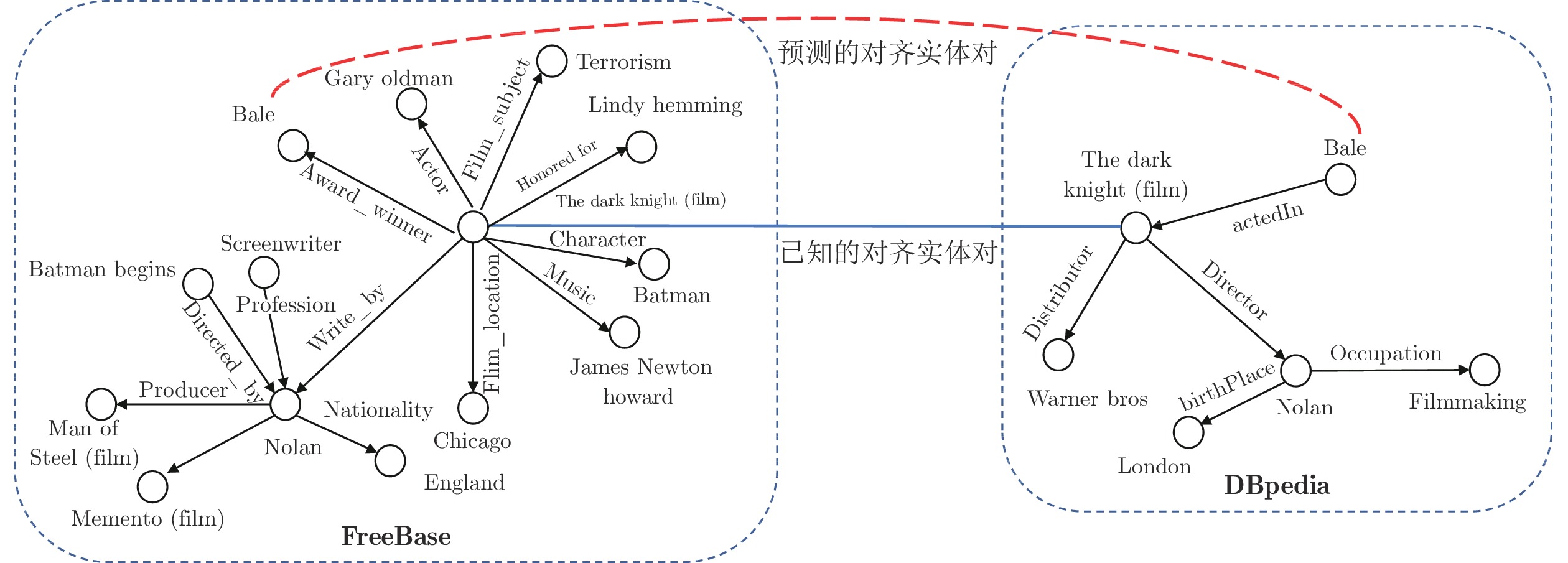
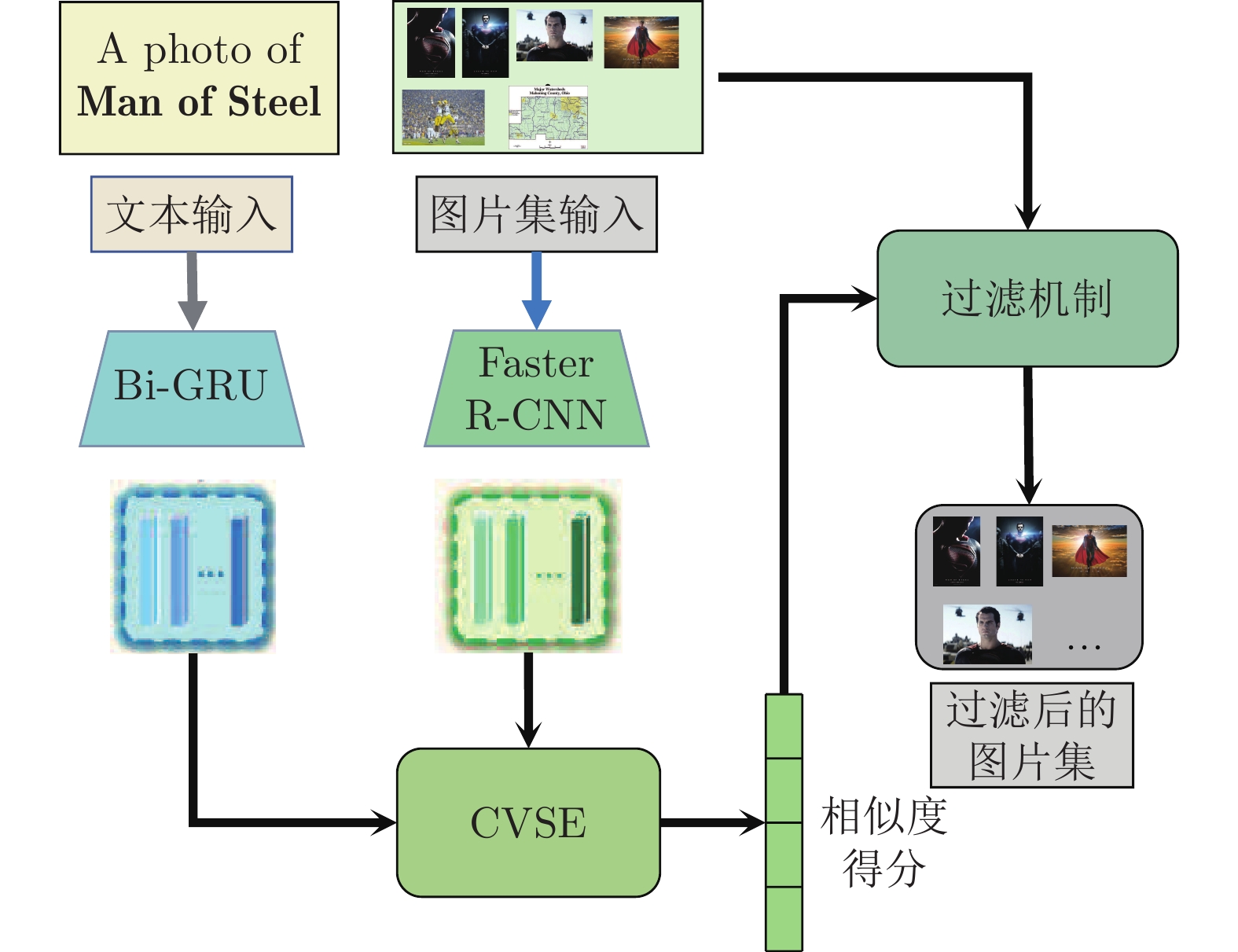
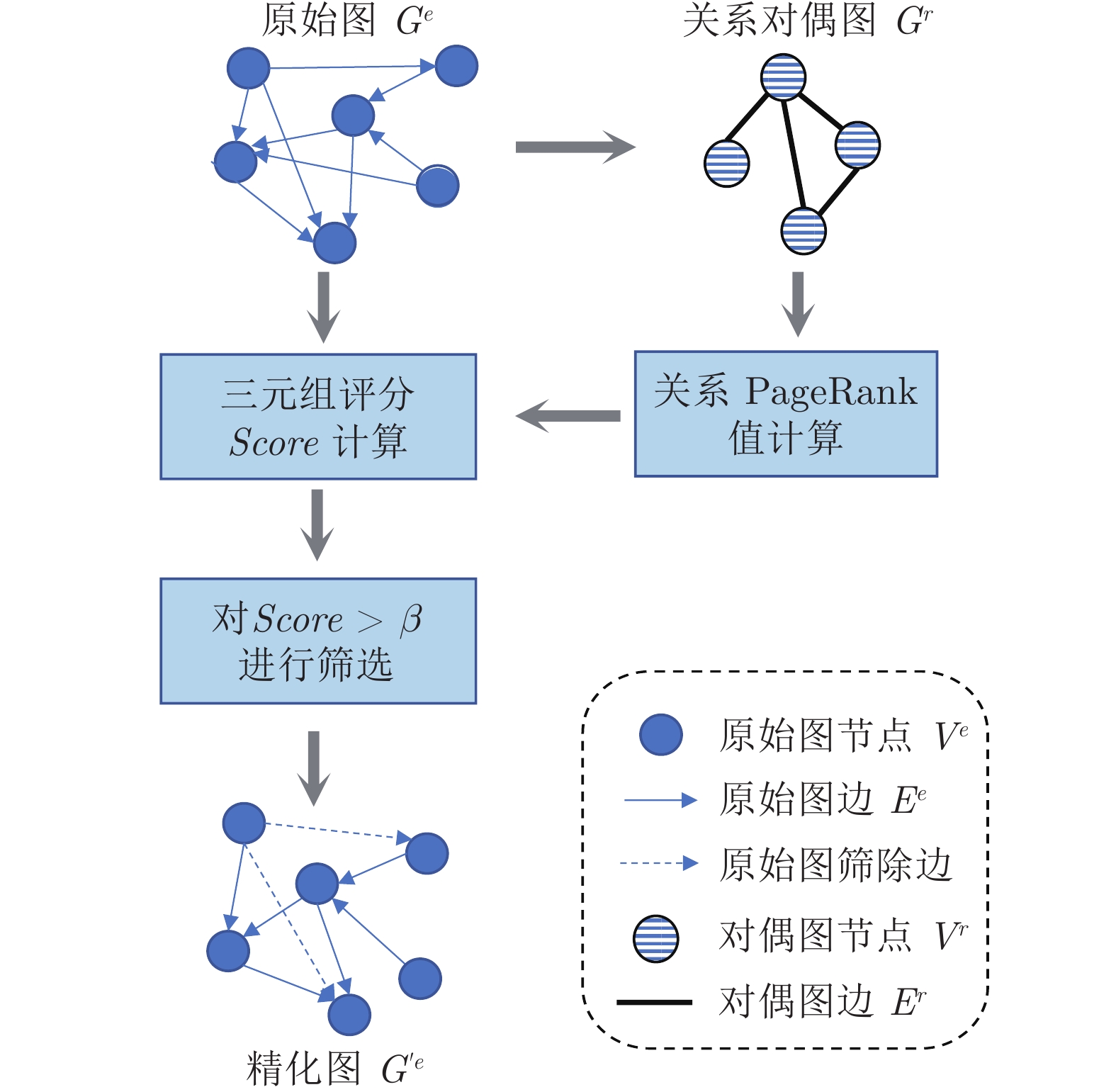
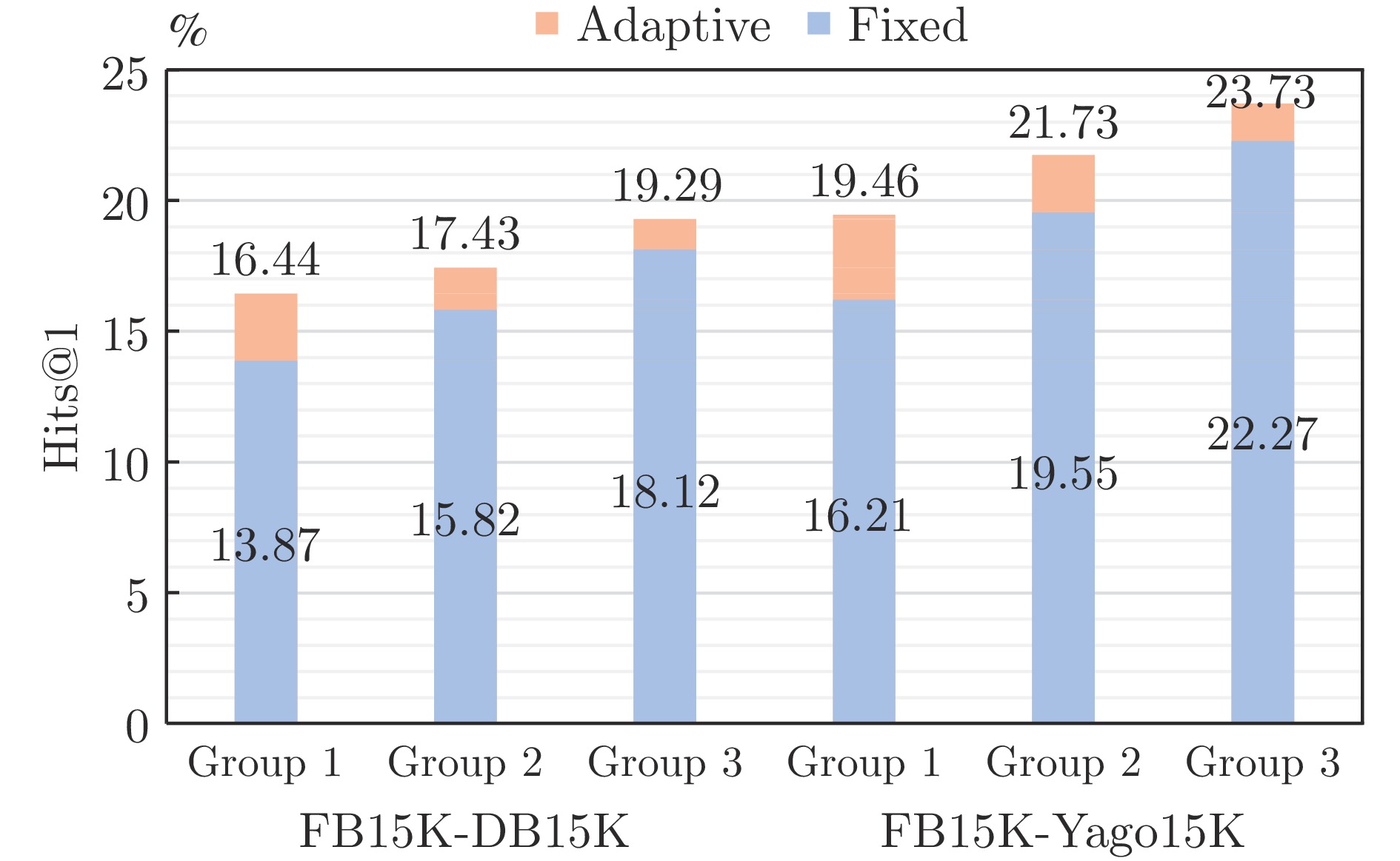
多模态数据间交互式任务的兴起对于综合利用不同模态的知识提出了更高的要求, 因此融合不同模态知识的多模态知识图谱应运而生. 然而, 现有多模态知识图谱存在图谱知识不完整的问题, 严重阻碍对信息的有效利用. 缓解此问题的有效方法是通过实体对齐进行知识图谱补全. 当前多模态实体对齐方法以固定权重融合多种模态信息, 在融合过程中忽略不同模态信息贡献的差异性. 为解决上述问题, 设计一套自适应特征融合机制, 根据不同模态数据质量动态融合实体结构信息和视觉信息. 此外, 考虑到视觉信息质量不高、知识图谱之间的结构差异也影响实体对齐的效果, 本文分别设计提升视觉信息有效利用率的视觉特征处理模块以及缓和结构差异性的三元组筛选模块. 在多模态实体对齐任务上的实验结果表明, 提出的多模态实体对齐方法的性能优于当前最好的方法.
多模态数据间交互式任务的兴起对于综合利用不同模态的知识提出了更高的要求, 因此融合不同模态知识的多模态知识图谱应运而生. 然而, 现有多模态知识图谱存在图谱知识不完整的问题, 严重阻碍对信息的有效利用. 缓解此问题的有效方法是通过实体对齐进行知识图谱补全. 当前多模态实体对齐方法以固定权重融合多种模态信息, 在融合过程中忽略不同模态信息贡献的差异性. 为解决上述问题, 设计一套自适应特征融合机制, 根据不同模态数据质量动态融合实体结构信息和视觉信息. 此外, 考虑到视觉信息质量不高、知识图谱之间的结构差异也影响实体对齐的效果, 本文分别设计提升视觉信息有效利用率的视觉特征处理模块以及缓和结构差异性的三元组筛选模块. 在多模态实体对齐任务上的实验结果表明, 提出的多模态实体对齐方法的性能优于当前最好的方法.

2024, 50(4): 771-789.
doi: 10.16383/j.aas.c220775
摘要:
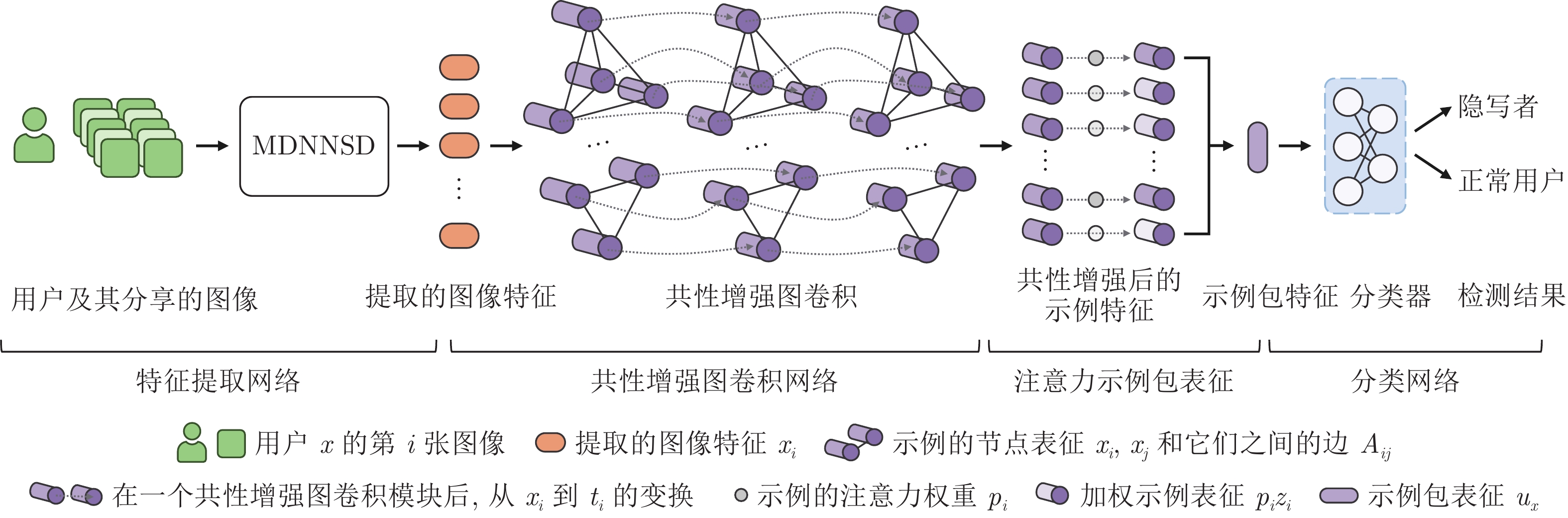
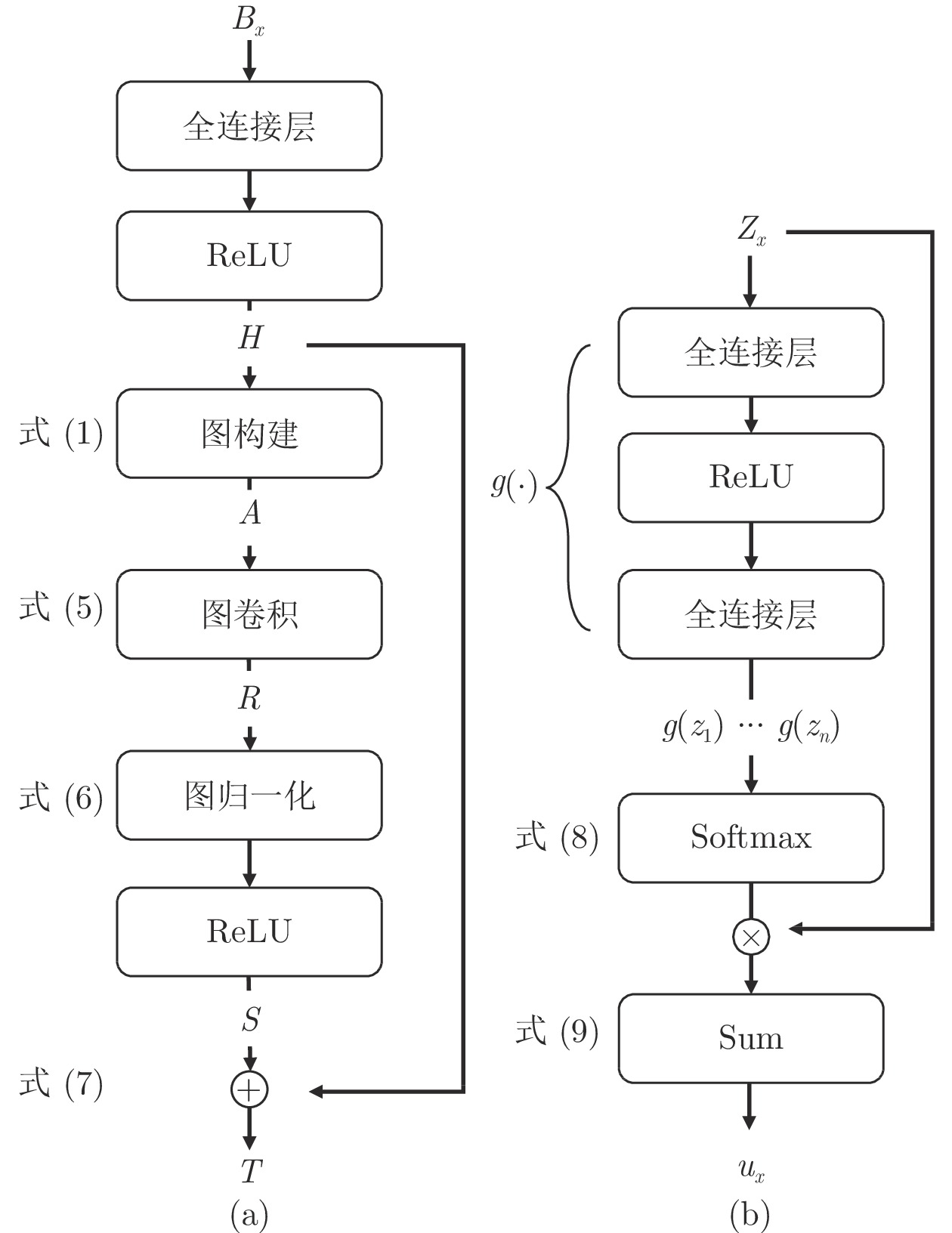
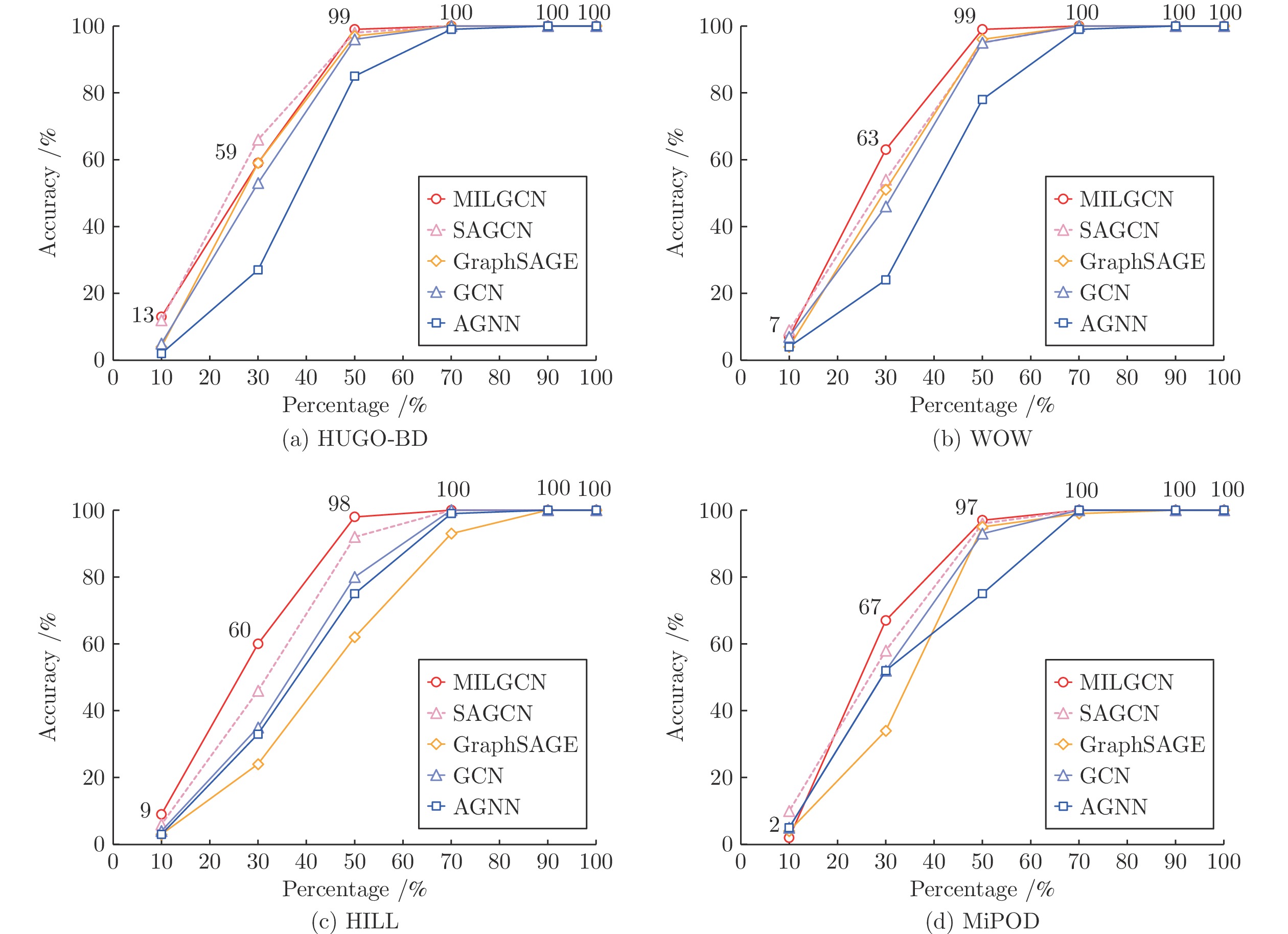
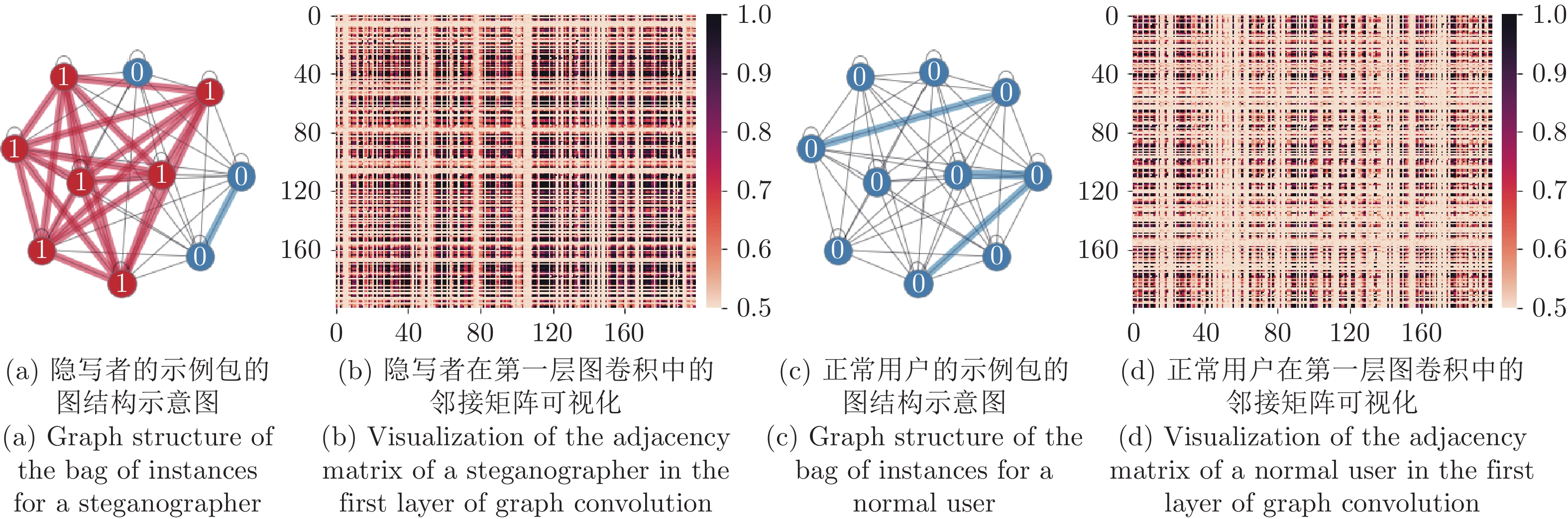
隐写者检测通过设计模型检测在批量图像中嵌入秘密信息进行隐蔽通信的隐写者, 对解决非法使用隐写术的问题具有重要意义. 本文提出一种基于多示例学习图卷积网络 (Multiple-instance learning graph convolutional network, MILGCN) 的隐写者检测算法, 将隐写者检测形式化为多示例学习(Multiple-instance learning, MIL) 任务. 本文中设计的共性增强图卷积网络(Graph convolutional network, GCN) 和注意力图读出模块能够自适应地突出示例包中正示例的模式特征, 构建有区分度的示例包表征并进行隐写者检测. 实验表明, 本文设计的模型能够对抗多种批量隐写术和与之对应的策略.
隐写者检测通过设计模型检测在批量图像中嵌入秘密信息进行隐蔽通信的隐写者, 对解决非法使用隐写术的问题具有重要意义. 本文提出一种基于多示例学习图卷积网络 (Multiple-instance learning graph convolutional network, MILGCN) 的隐写者检测算法, 将隐写者检测形式化为多示例学习(Multiple-instance learning, MIL) 任务. 本文中设计的共性增强图卷积网络(Graph convolutional network, GCN) 和注意力图读出模块能够自适应地突出示例包中正示例的模式特征, 构建有区分度的示例包表征并进行隐写者检测. 实验表明, 本文设计的模型能够对抗多种批量隐写术和与之对应的策略.
2024, 50(4): 790-811.
doi: 10.16383/j.aas.c211091
摘要:
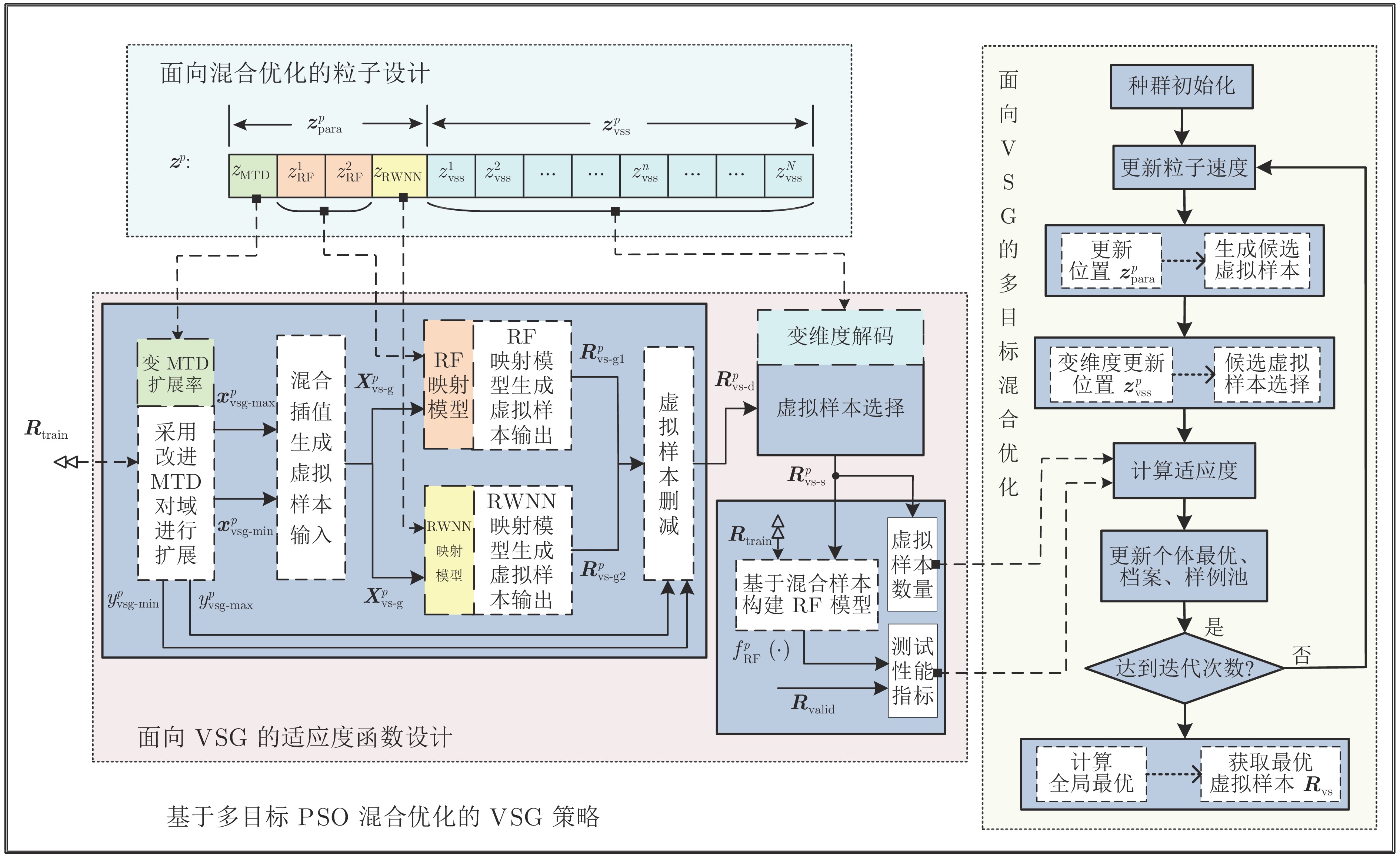
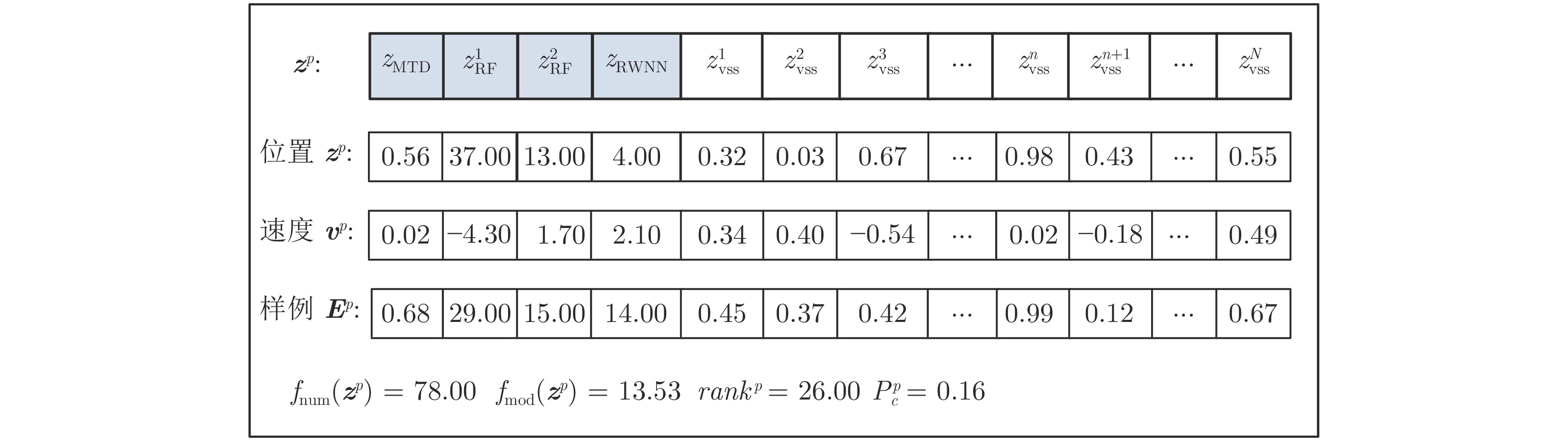
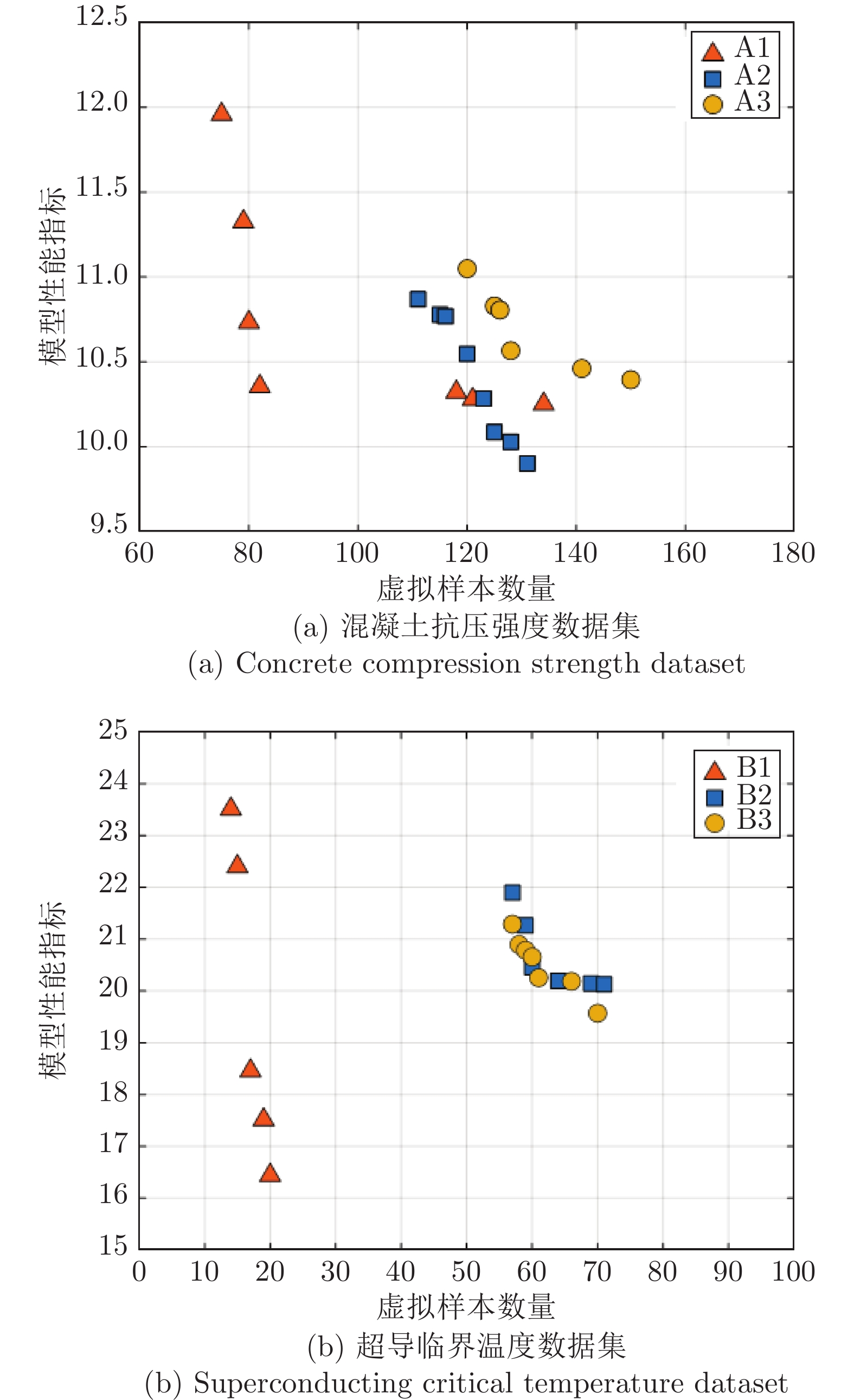
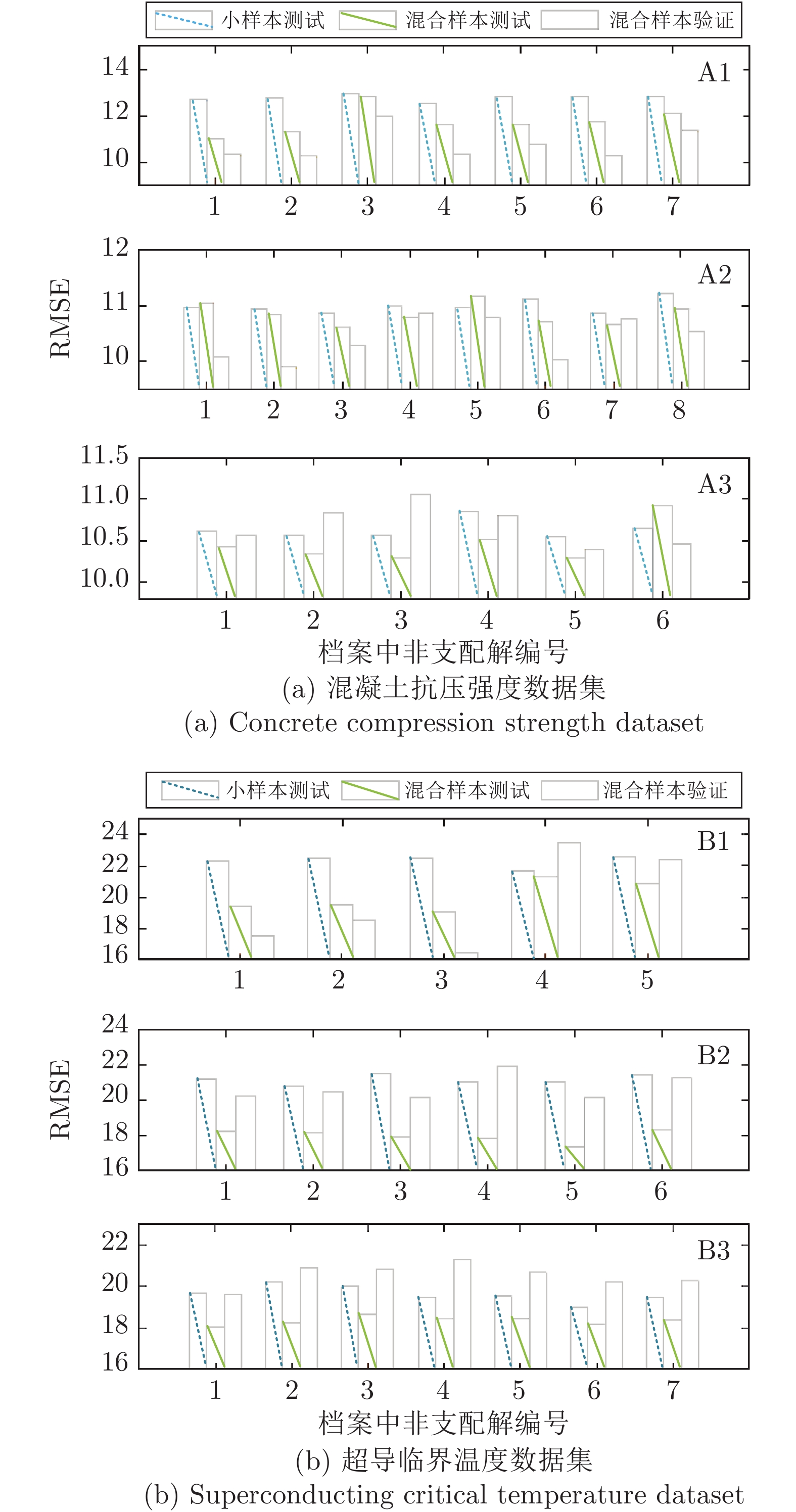
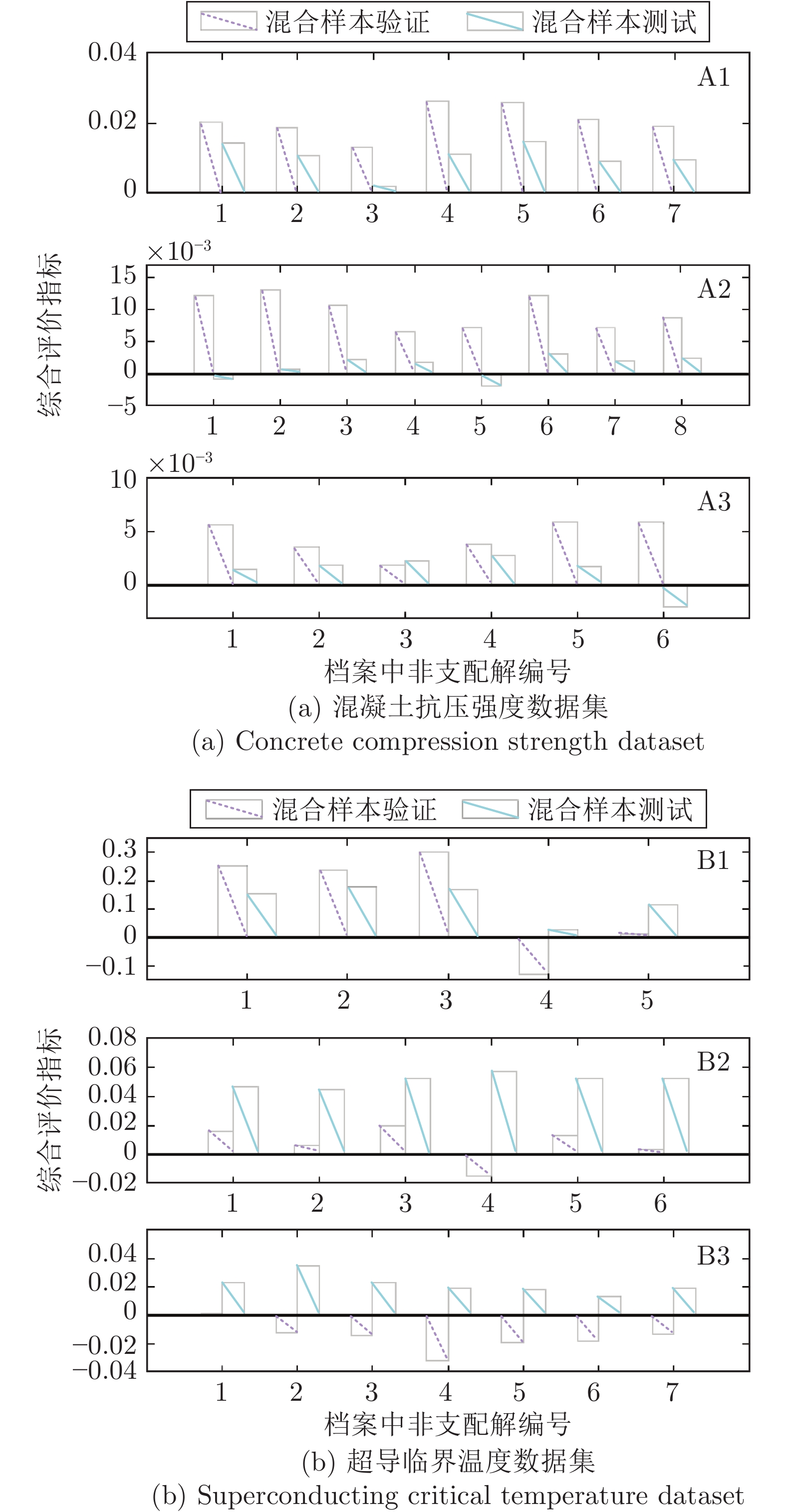
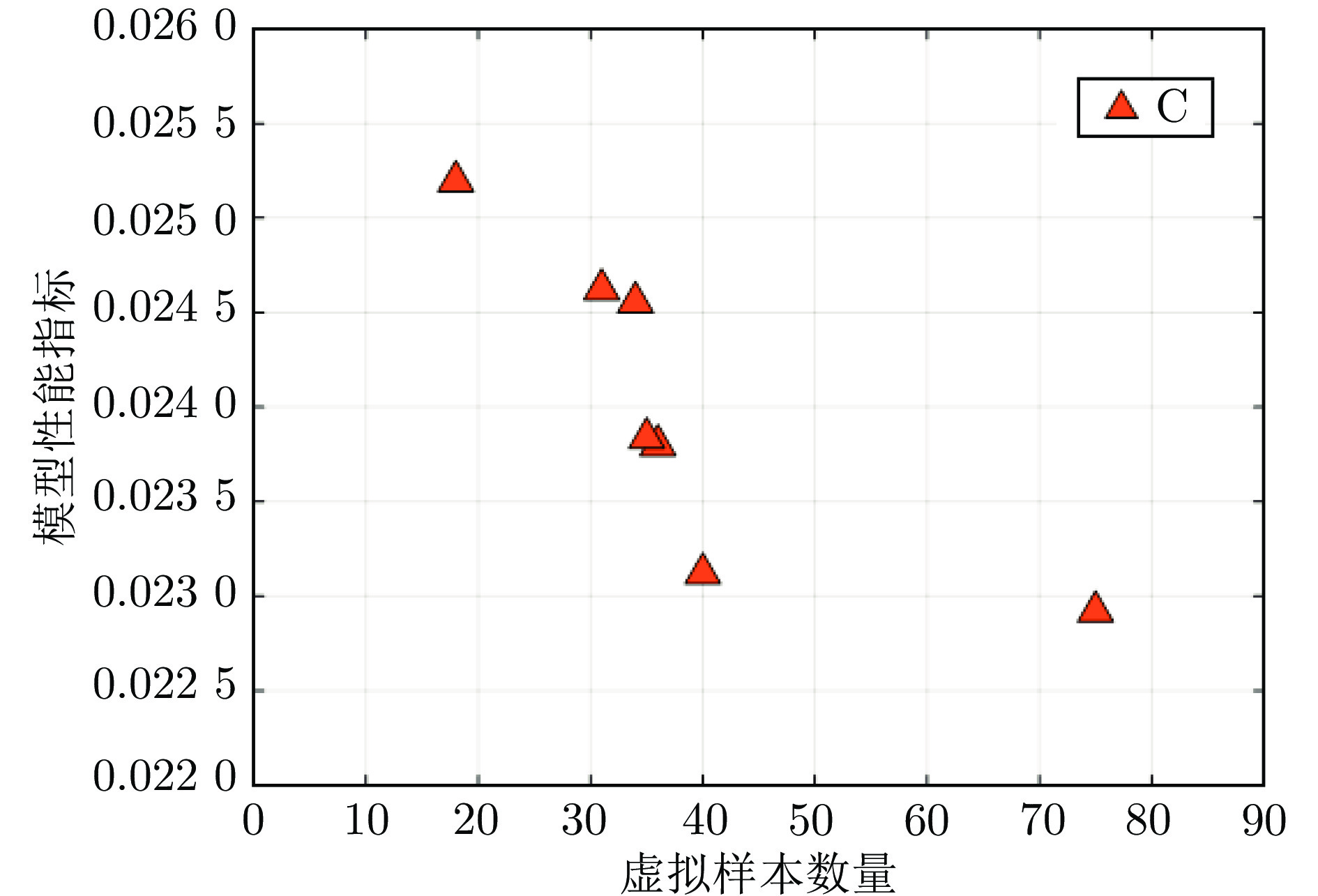
受限于检测技术难度、高时间与经济成本等原因, 难测参数的软测量模型建模样本存在数量少、分布稀疏与不平衡等问题, 严重制约了数据驱动模型的泛化性能. 针对以上问题, 提出一种基于多目标粒子群优化(Multi-objective particle swarm optimization, MOPSO)混合优化的虚拟样本生成(Virtual sample generation, VSG)方法. 首先, 设计综合学习粒子群优化算法的种群表征机制, 使其能够同时编码用于连续变量和离散变量; 然后, 定义具有多阶段多目标特性的综合学习粒子群优化算法适应度函数, 使其能够在确保模型泛化性能的同时最小化虚拟样本数量; 最后, 提出面向虚拟样本生成的多目标混合优化任务以改进综合学习粒子群优化算法, 使其能够适应虚拟样本优选过程的变维特性并提高收敛速度. 同时, 首次借鉴度量学习提出用于评价虚拟样本质量的综合评价指标和分布相似指标. 利用基准数据集和真实工业数据集验证了所提方法的有效性和优越性.
受限于检测技术难度、高时间与经济成本等原因, 难测参数的软测量模型建模样本存在数量少、分布稀疏与不平衡等问题, 严重制约了数据驱动模型的泛化性能. 针对以上问题, 提出一种基于多目标粒子群优化(Multi-objective particle swarm optimization, MOPSO)混合优化的虚拟样本生成(Virtual sample generation, VSG)方法. 首先, 设计综合学习粒子群优化算法的种群表征机制, 使其能够同时编码用于连续变量和离散变量; 然后, 定义具有多阶段多目标特性的综合学习粒子群优化算法适应度函数, 使其能够在确保模型泛化性能的同时最小化虚拟样本数量; 最后, 提出面向虚拟样本生成的多目标混合优化任务以改进综合学习粒子群优化算法, 使其能够适应虚拟样本优选过程的变维特性并提高收敛速度. 同时, 首次借鉴度量学习提出用于评价虚拟样本质量的综合评价指标和分布相似指标. 利用基准数据集和真实工业数据集验证了所提方法的有效性和优越性.



2024, 50(4): 812-827.
doi: 10.16383/j.aas.c220689
摘要:
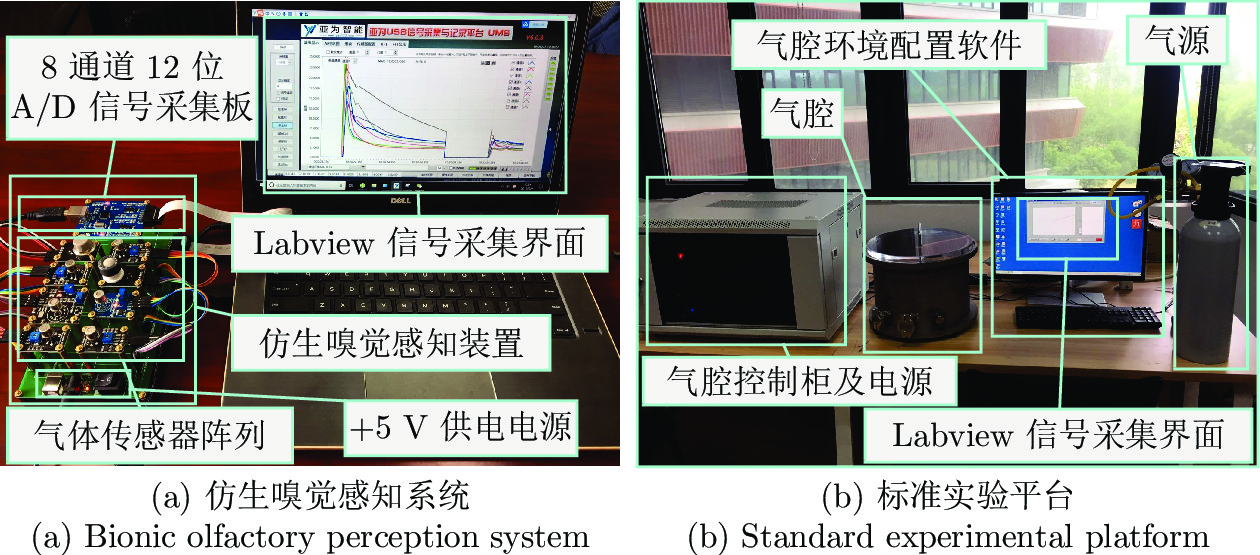
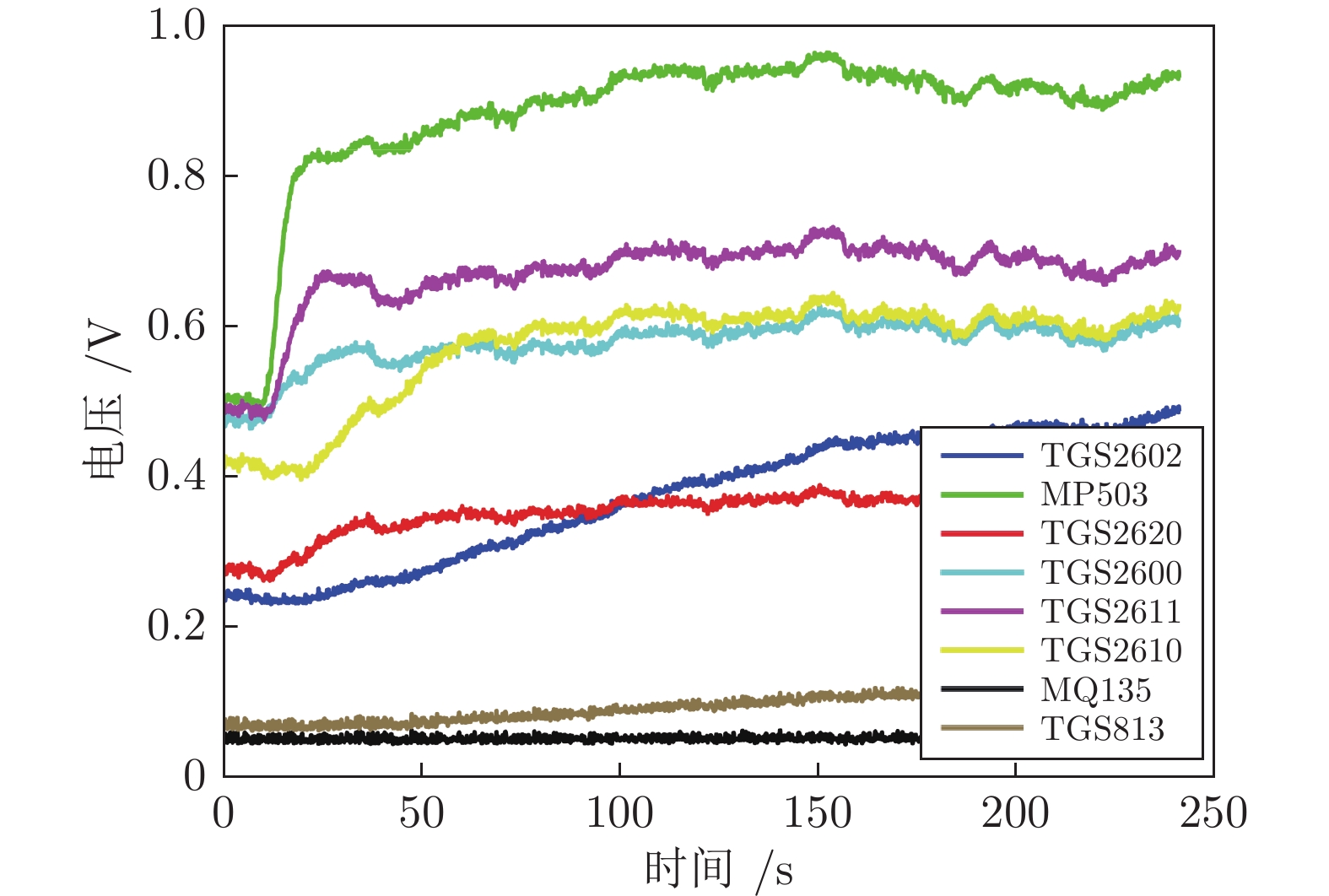
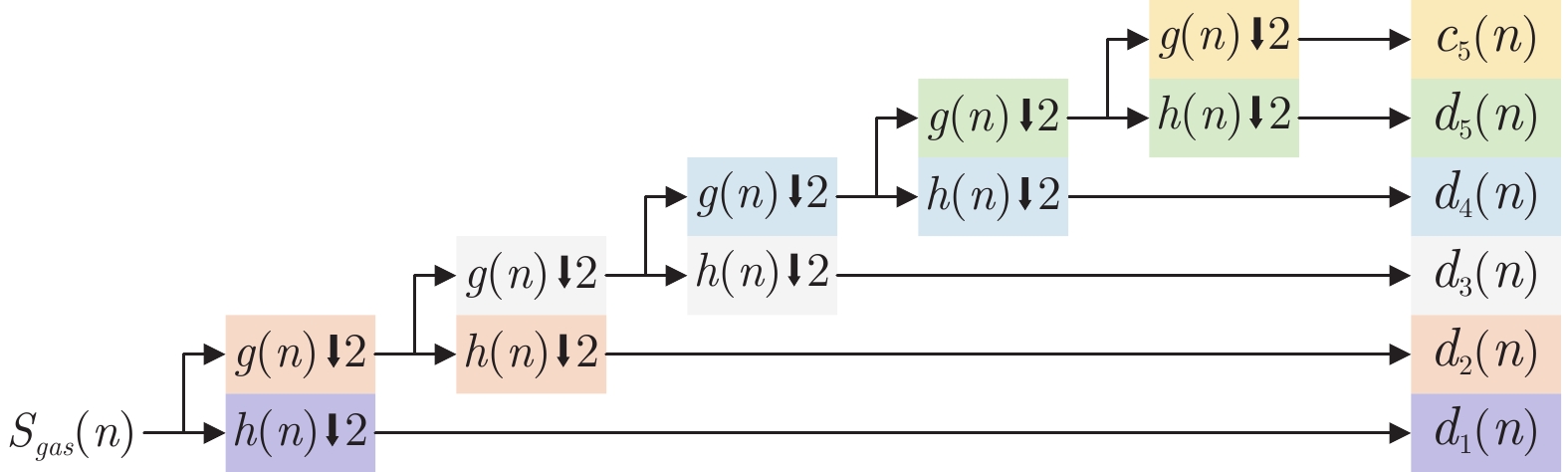
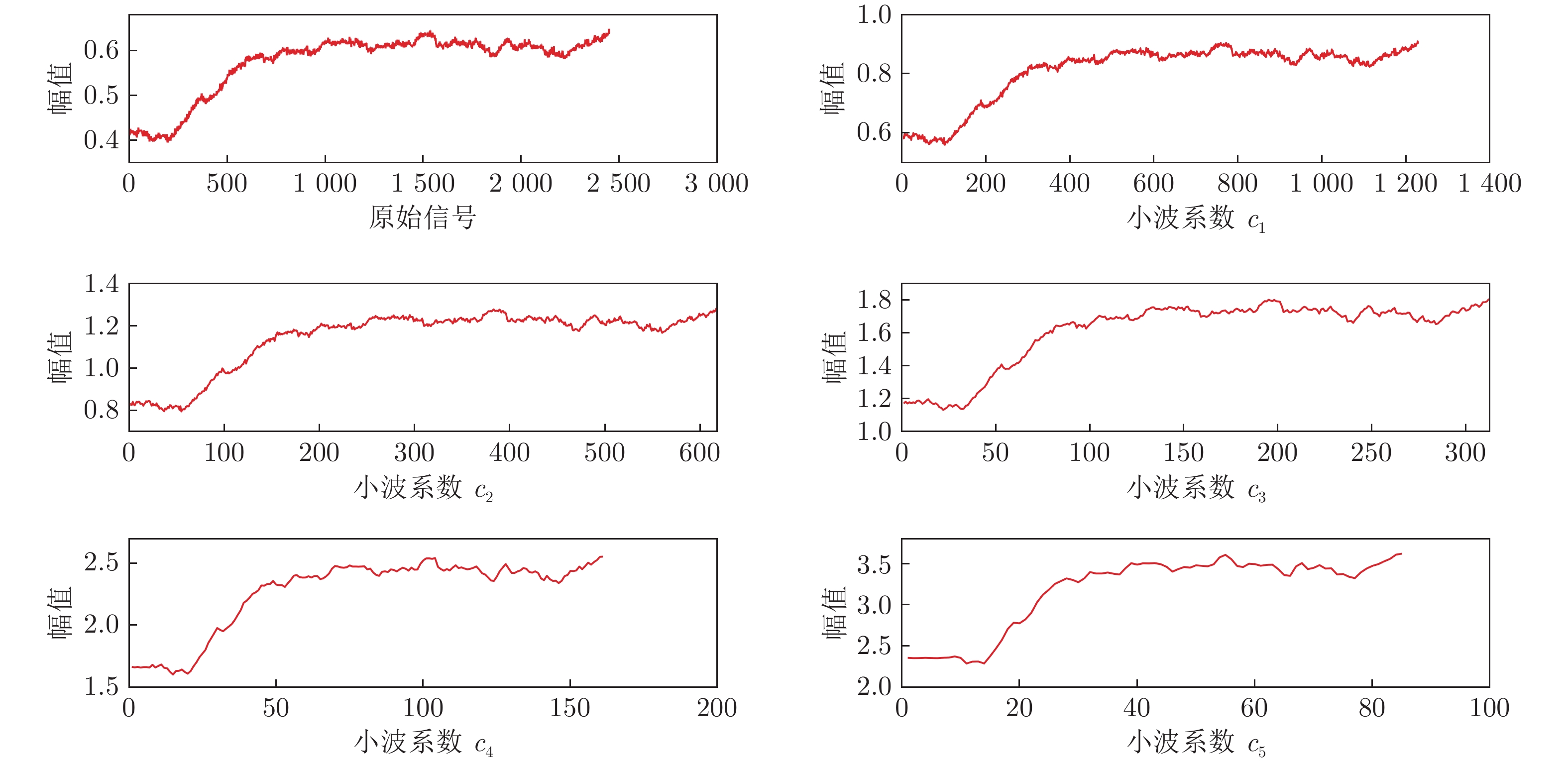
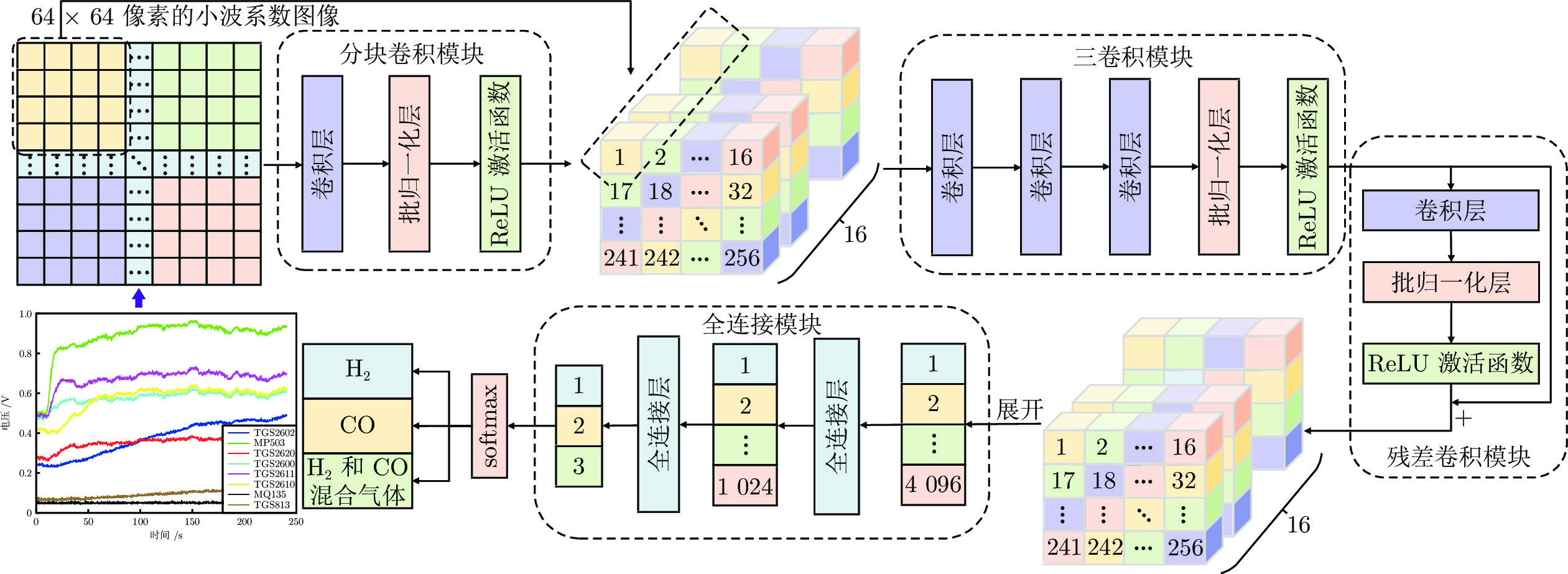
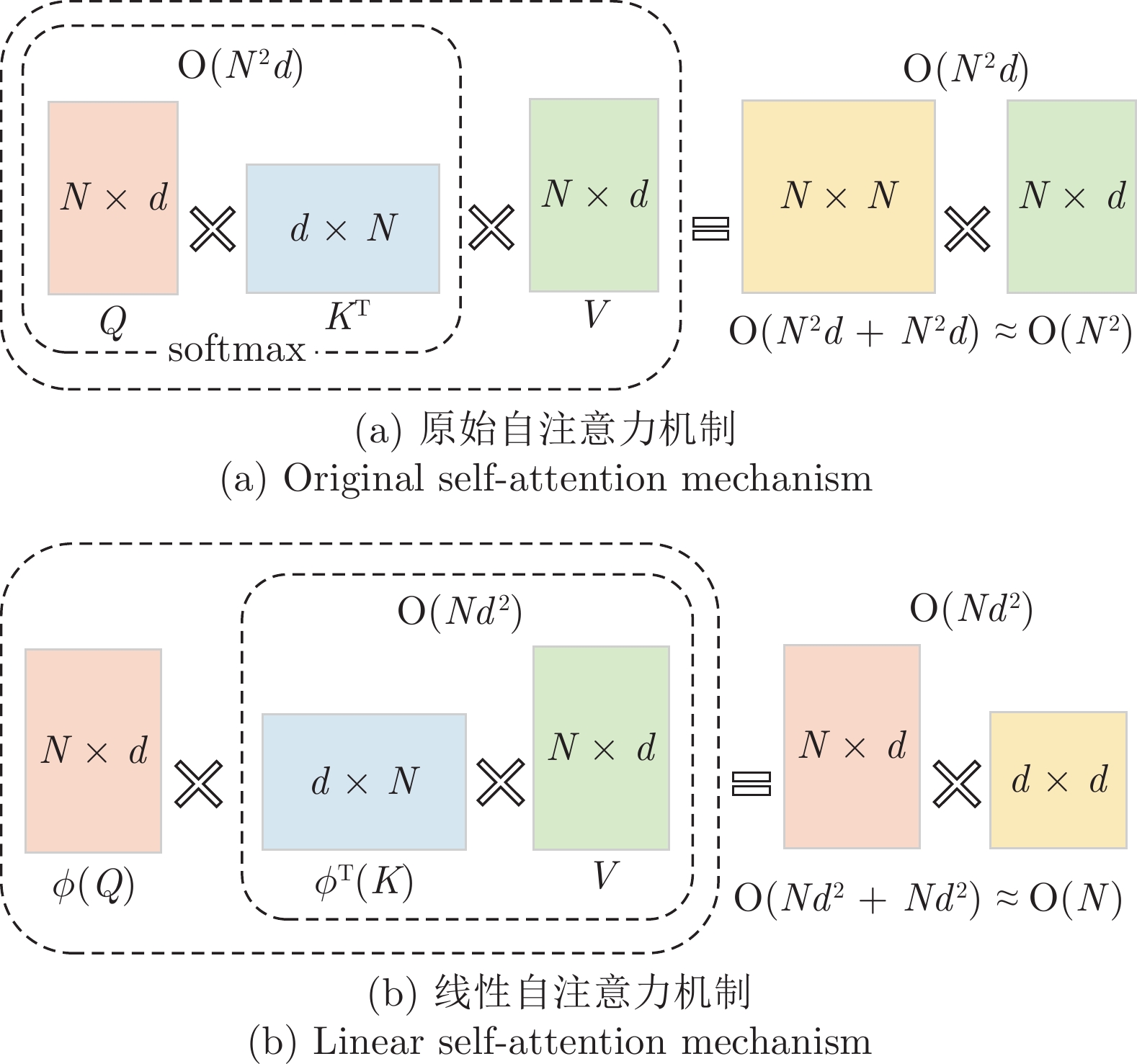
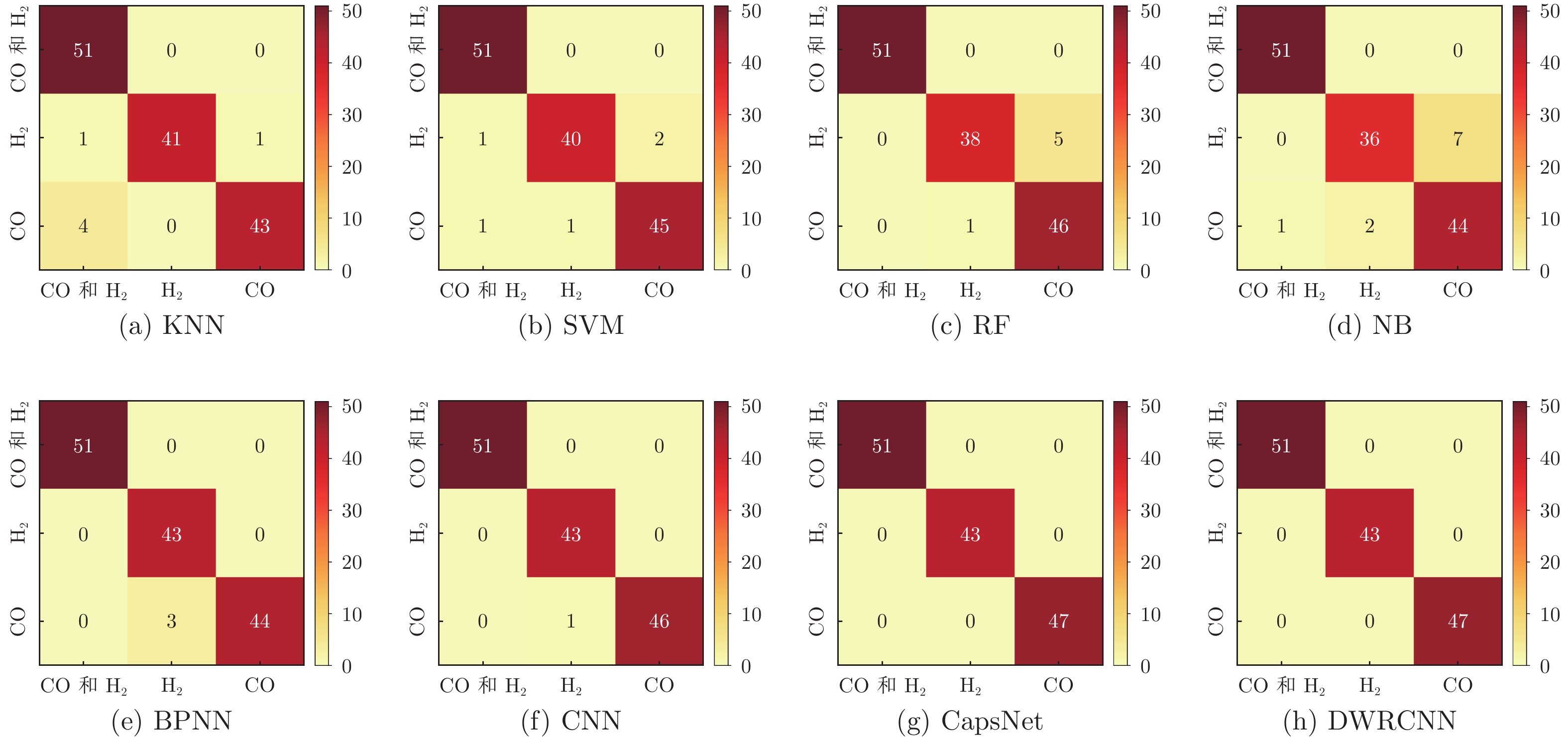
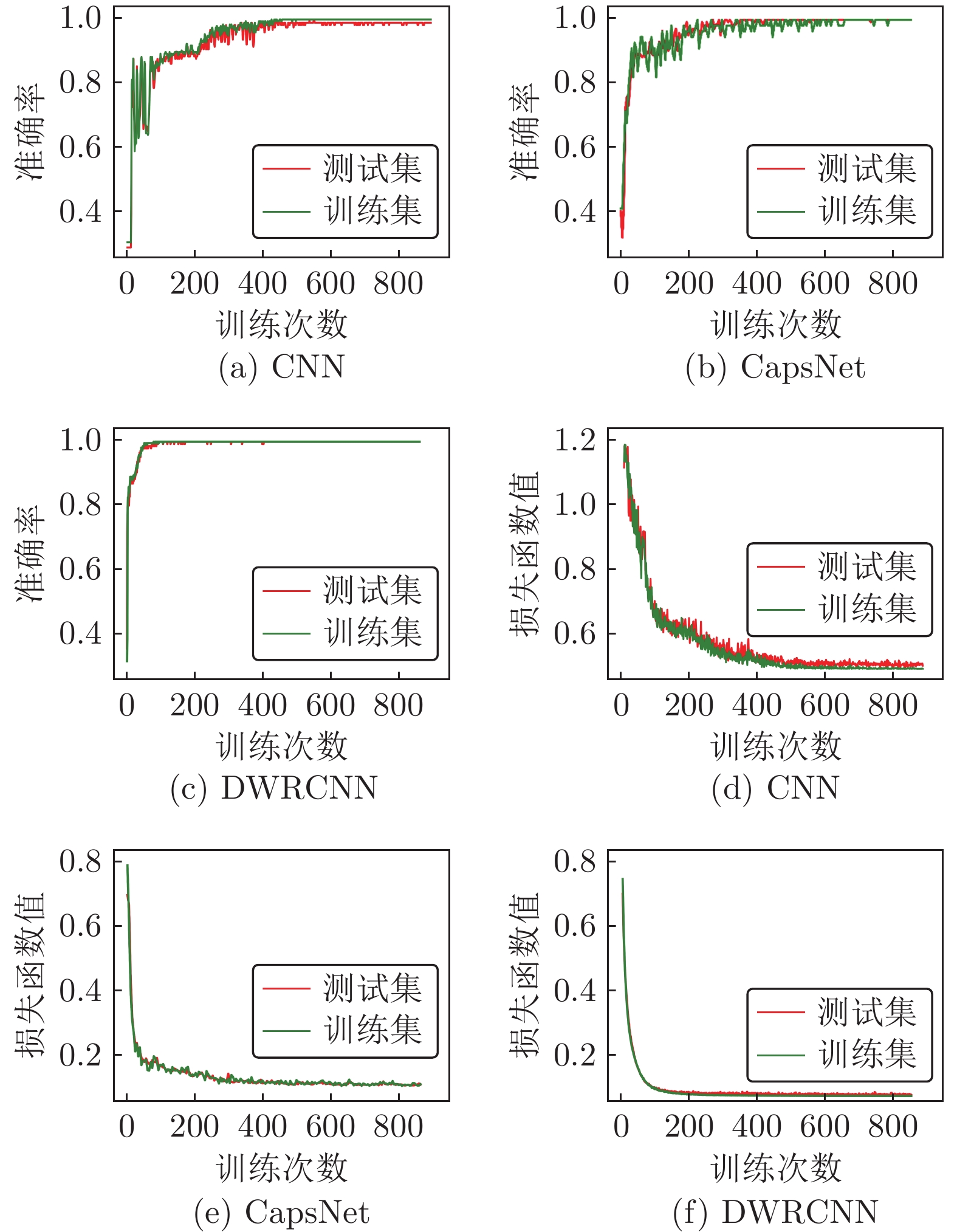
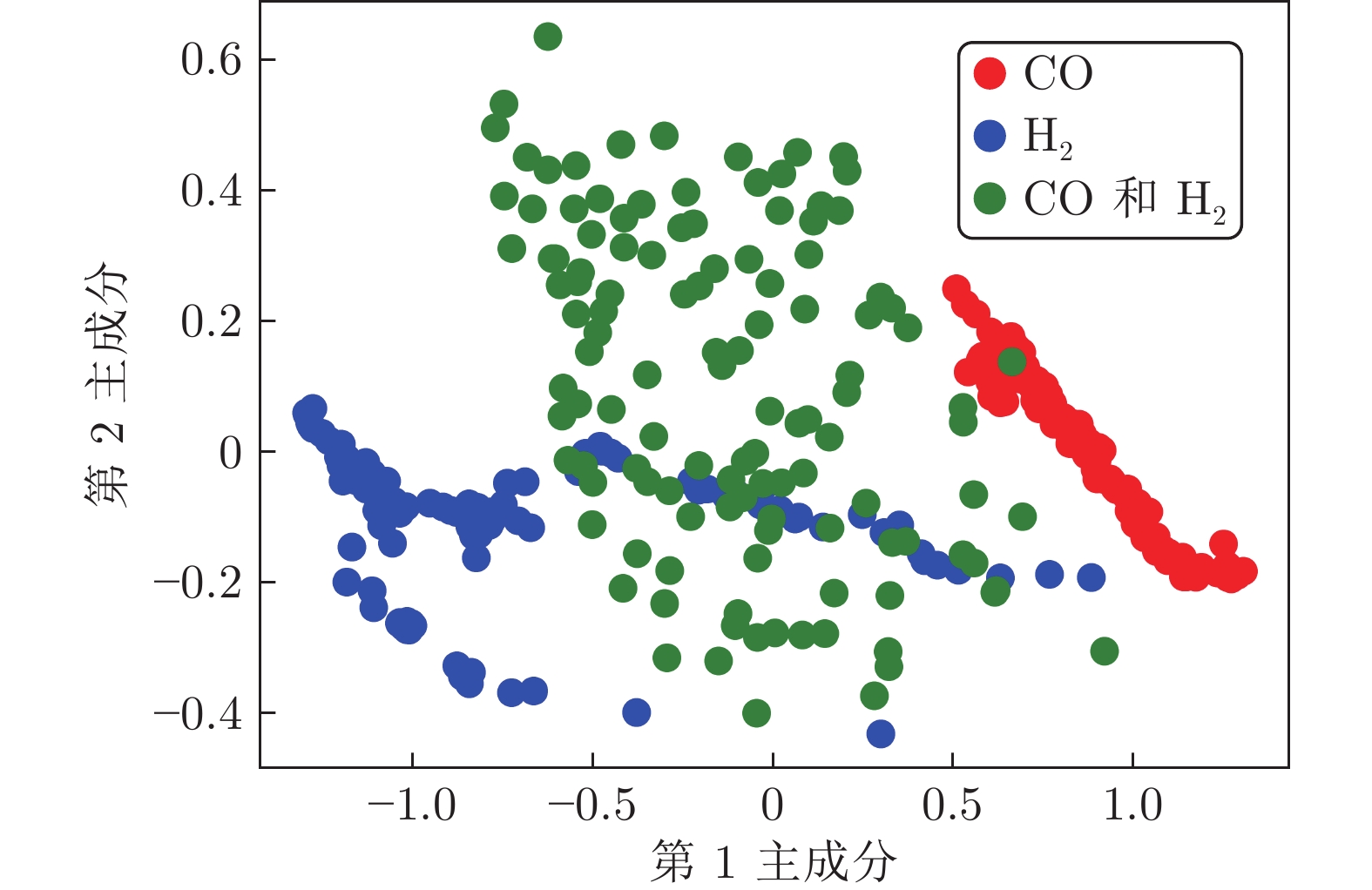
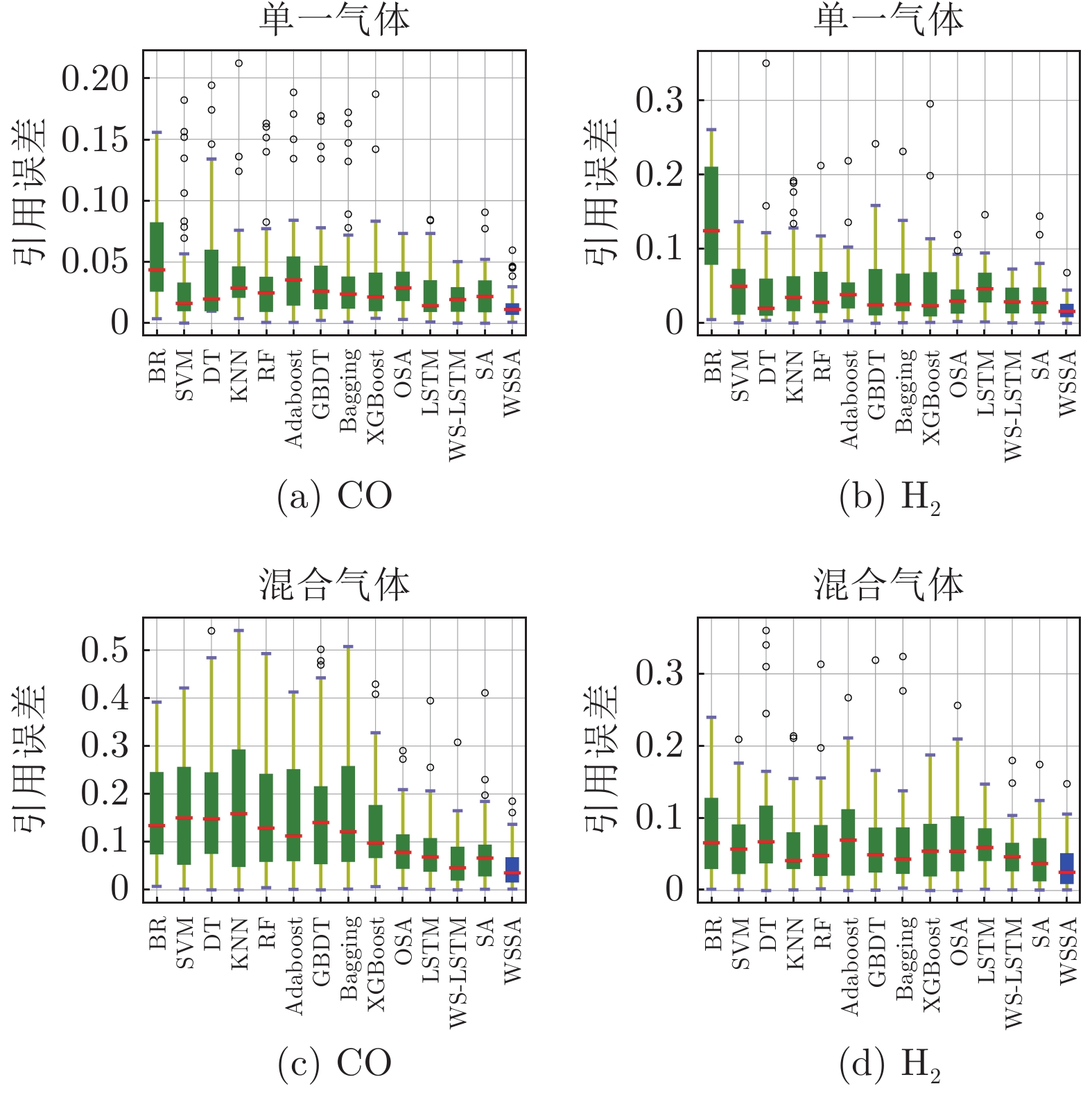
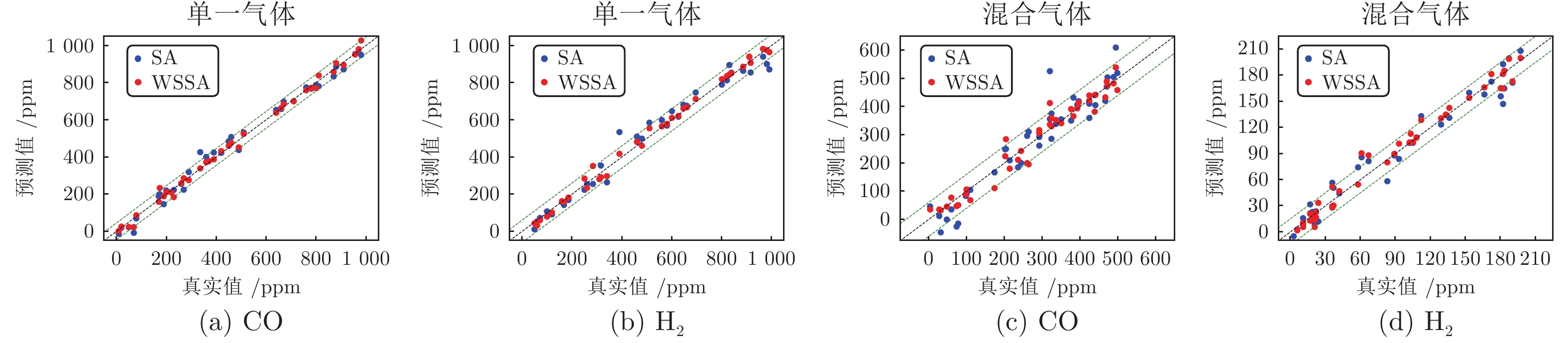
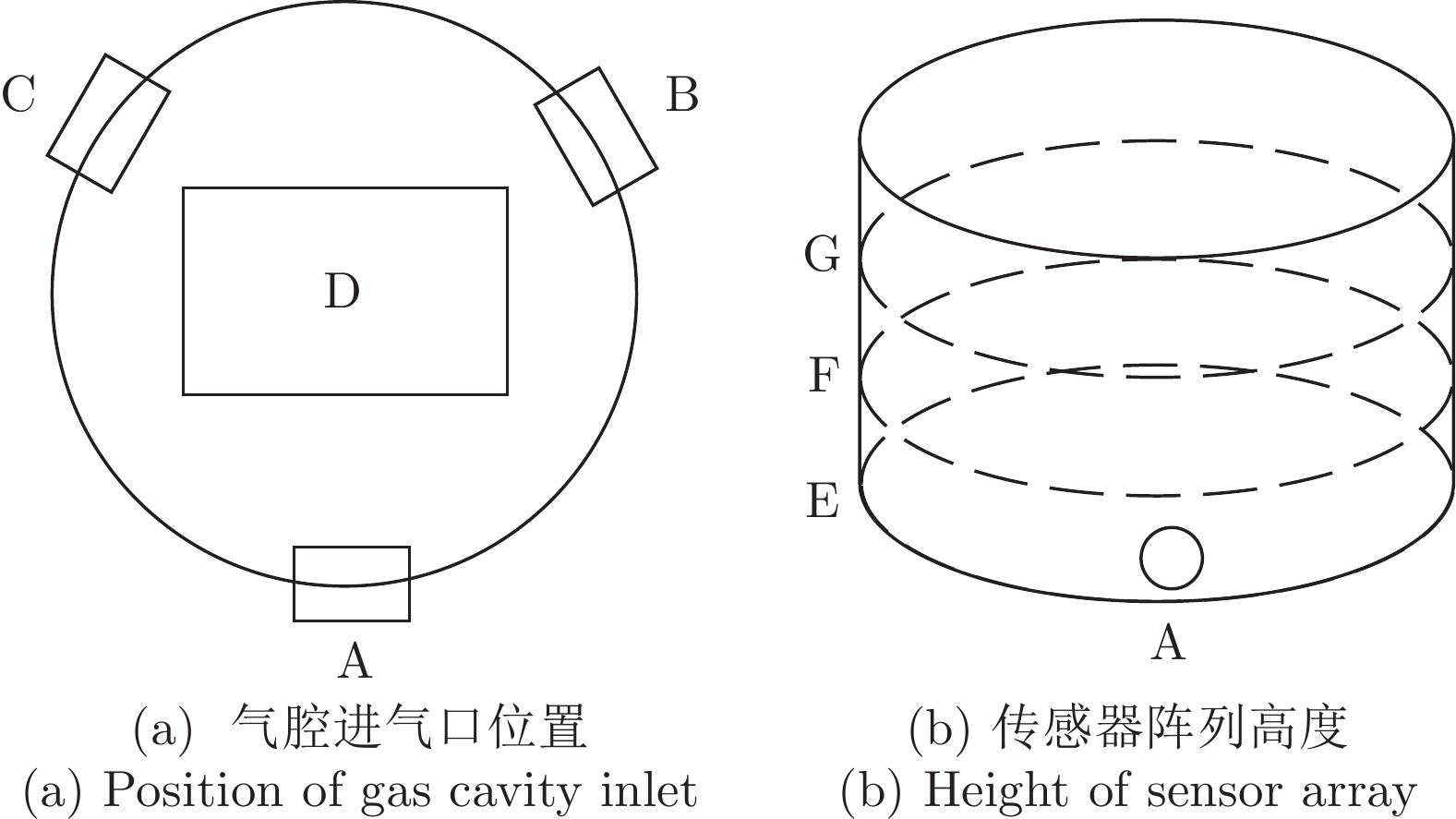
常用气体检测模型需要使用气体传感器阵列响应信号的稳态值对气体进行种类识别和浓度估计, 而在实际环境 中, 气体一般处于动态变化的状态, 气体传感器阵列响应信号难以达到稳态值或长时间维持稳定状态. 针对上述问题, 提出 一种由动态小波残差卷积神经网络(Dynamic wavelet residual convolutional neural network, DWRCNN)子模型和权重 信号自注意力(Weighted signal self-attention, WSSA)子模型组成的气体检测模型. 该模型可以直接使用气体传感器阵列 的原始动态响应信号对动态变化的气体进行成分识别, 并进一步对每种成分气体的浓度在线估计. 通过搭建的仿生嗅觉感 知系统对模型的性能进行评估, 实验结果表明, 与常用气体识别模型相比, DWRCNN能获得接近 100%气体识别准确率, 且在线训练时间短, 收敛速度快; 与常用气体浓度估计模型相比, WSSA浓度估计模型能够大幅提高气体浓度估计精度, 并 能同时对不同气体都保持较高气体浓度估计精度, 解决了动态环境中仿生嗅觉感知系统需要针对不同气体选择不同最优气 体浓度估计模型问题.
常用气体检测模型需要使用气体传感器阵列响应信号的稳态值对气体进行种类识别和浓度估计, 而在实际环境 中, 气体一般处于动态变化的状态, 气体传感器阵列响应信号难以达到稳态值或长时间维持稳定状态. 针对上述问题, 提出 一种由动态小波残差卷积神经网络(Dynamic wavelet residual convolutional neural network, DWRCNN)子模型和权重 信号自注意力(Weighted signal self-attention, WSSA)子模型组成的气体检测模型. 该模型可以直接使用气体传感器阵列 的原始动态响应信号对动态变化的气体进行成分识别, 并进一步对每种成分气体的浓度在线估计. 通过搭建的仿生嗅觉感 知系统对模型的性能进行评估, 实验结果表明, 与常用气体识别模型相比, DWRCNN能获得接近 100%气体识别准确率, 且在线训练时间短, 收敛速度快; 与常用气体浓度估计模型相比, WSSA浓度估计模型能够大幅提高气体浓度估计精度, 并 能同时对不同气体都保持较高气体浓度估计精度, 解决了动态环境中仿生嗅觉感知系统需要针对不同气体选择不同最优气 体浓度估计模型问题.



2024, 50(4): 828-840.
doi: 10.16383/j.aas.c230018
摘要:
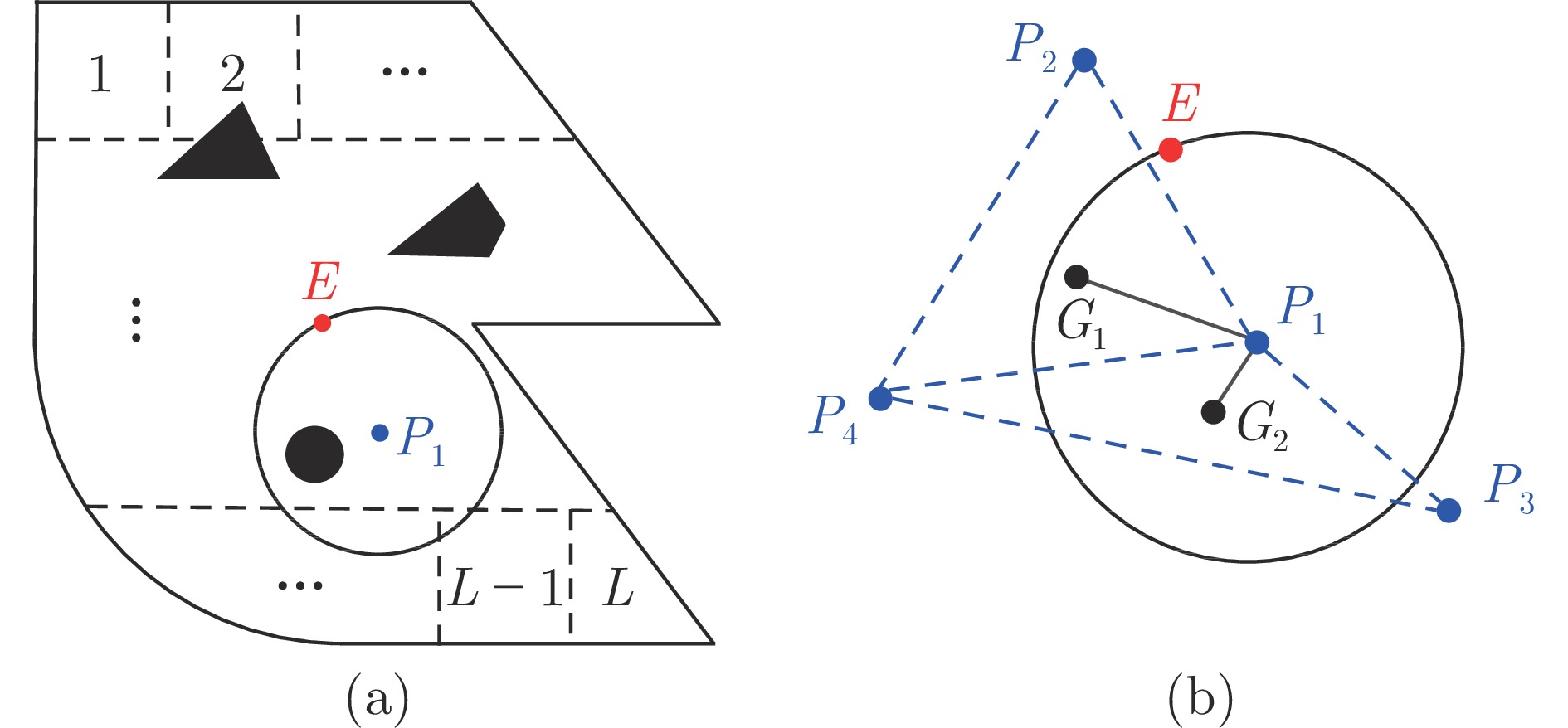
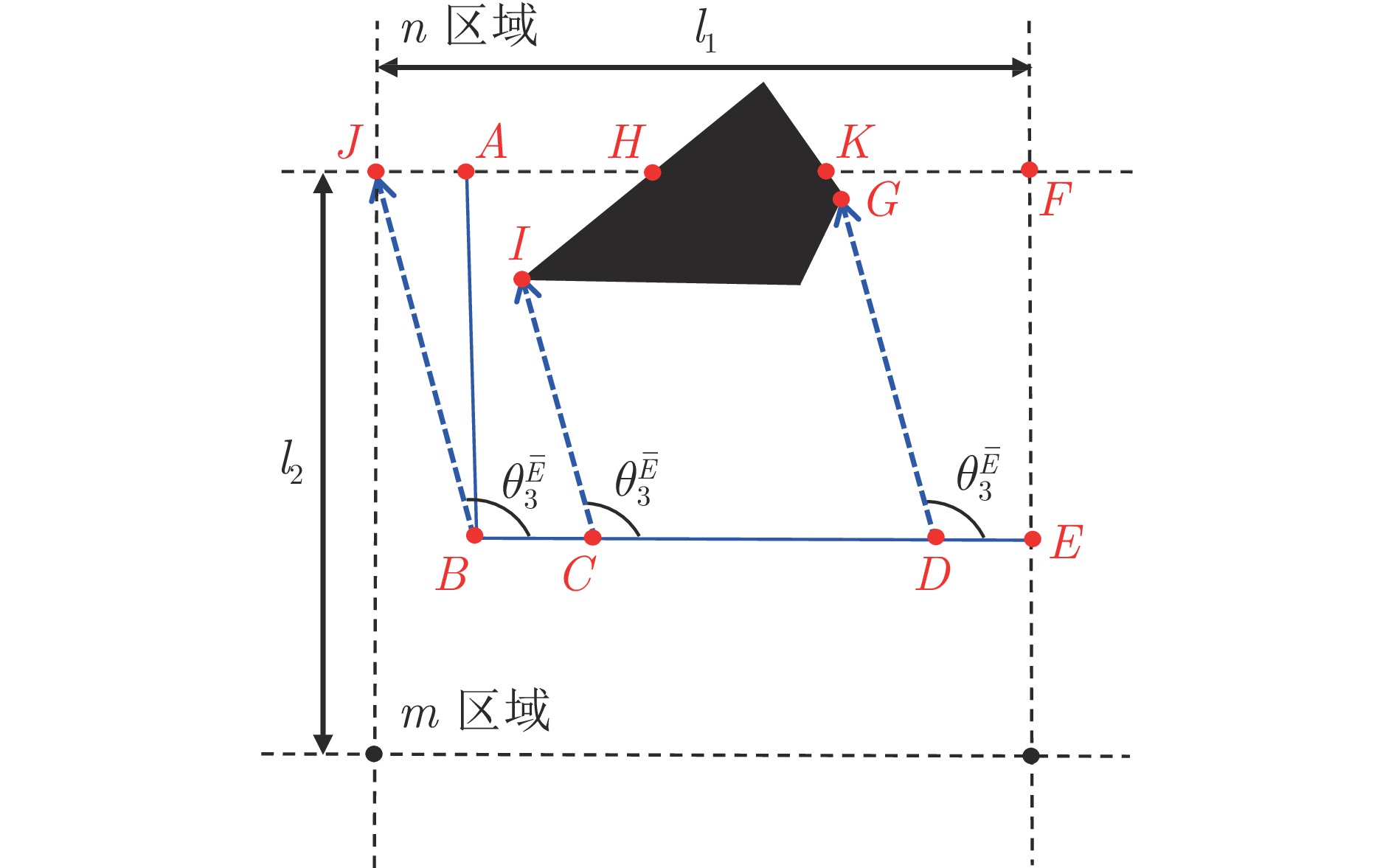
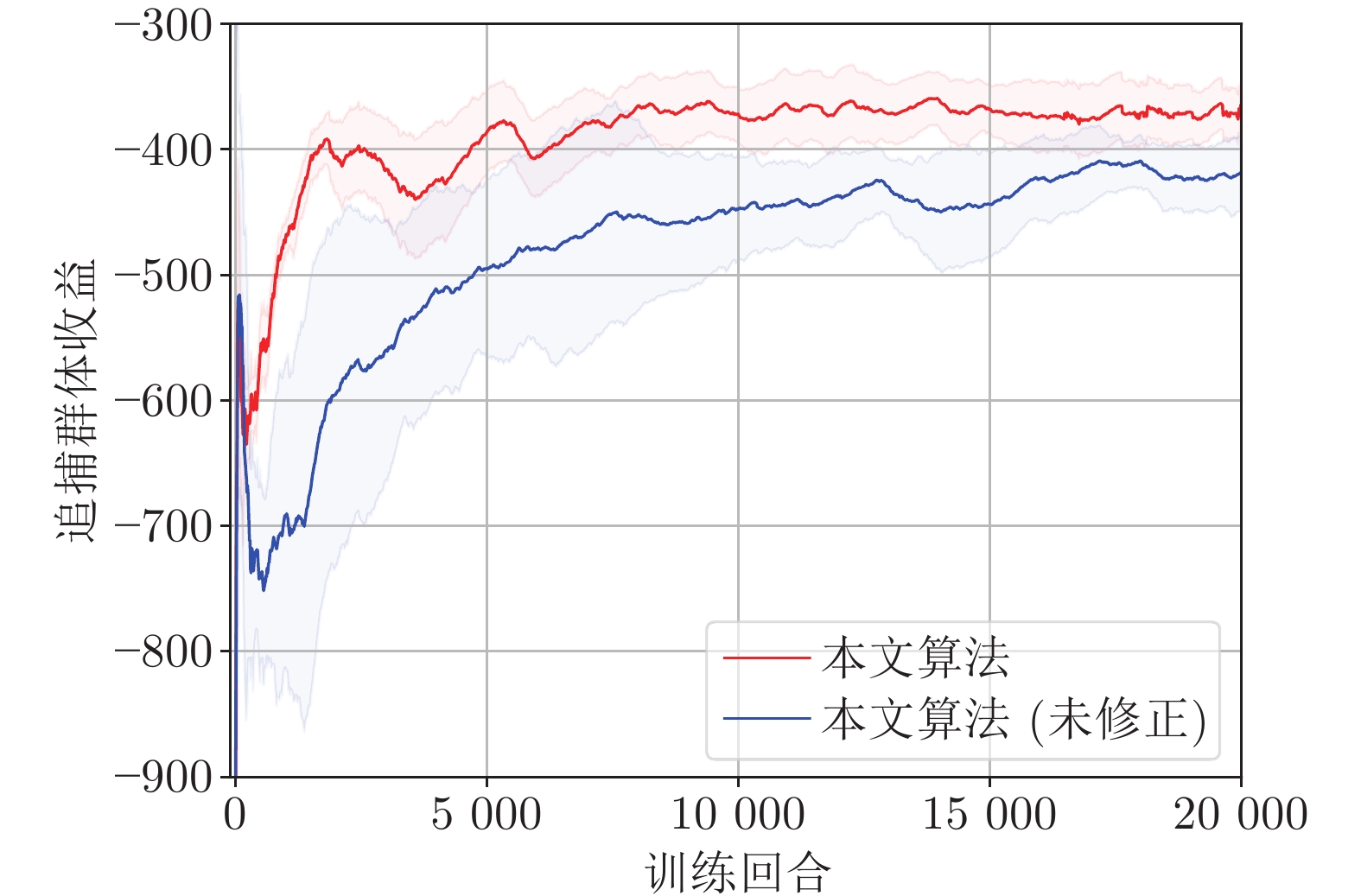
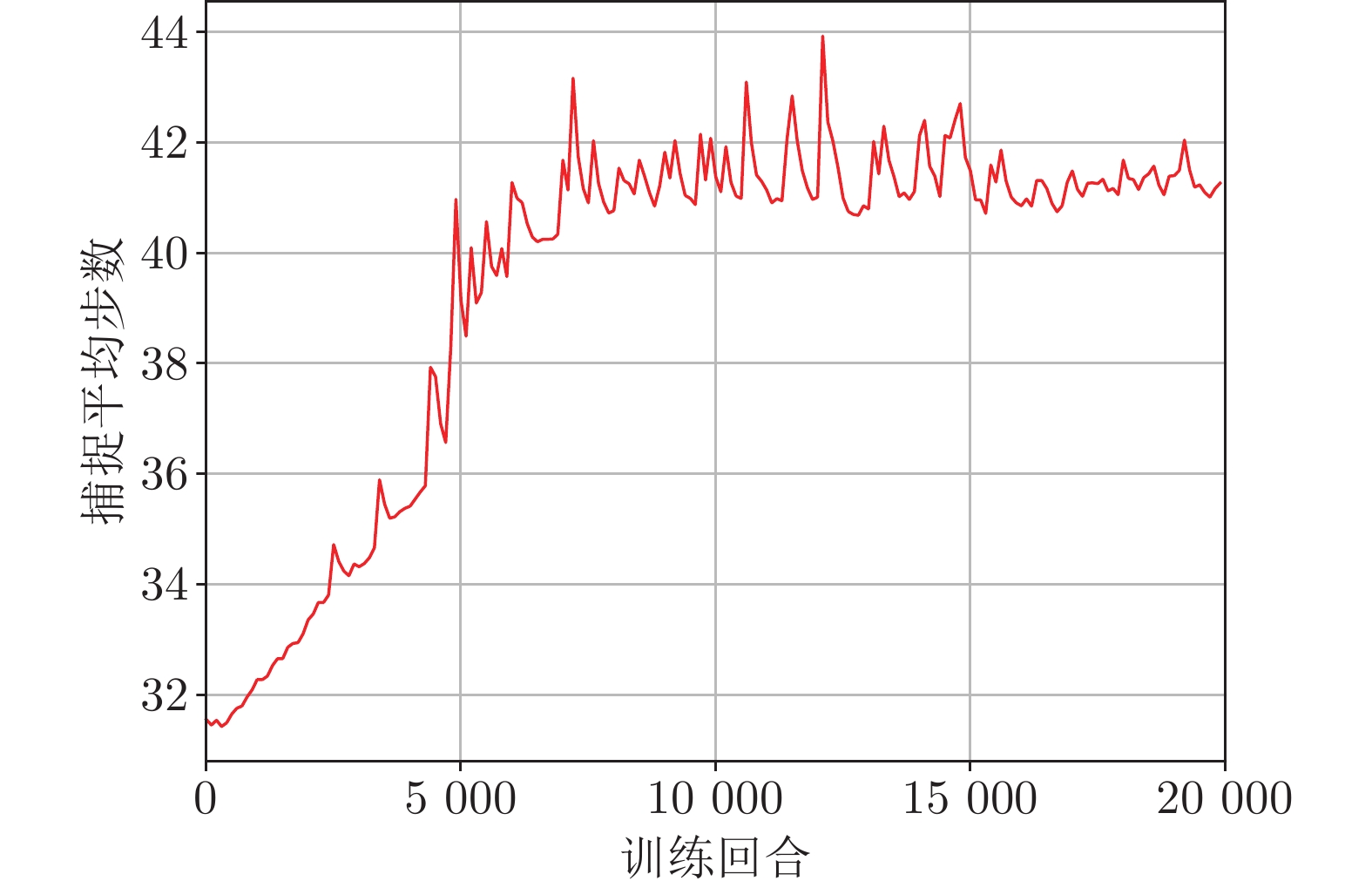
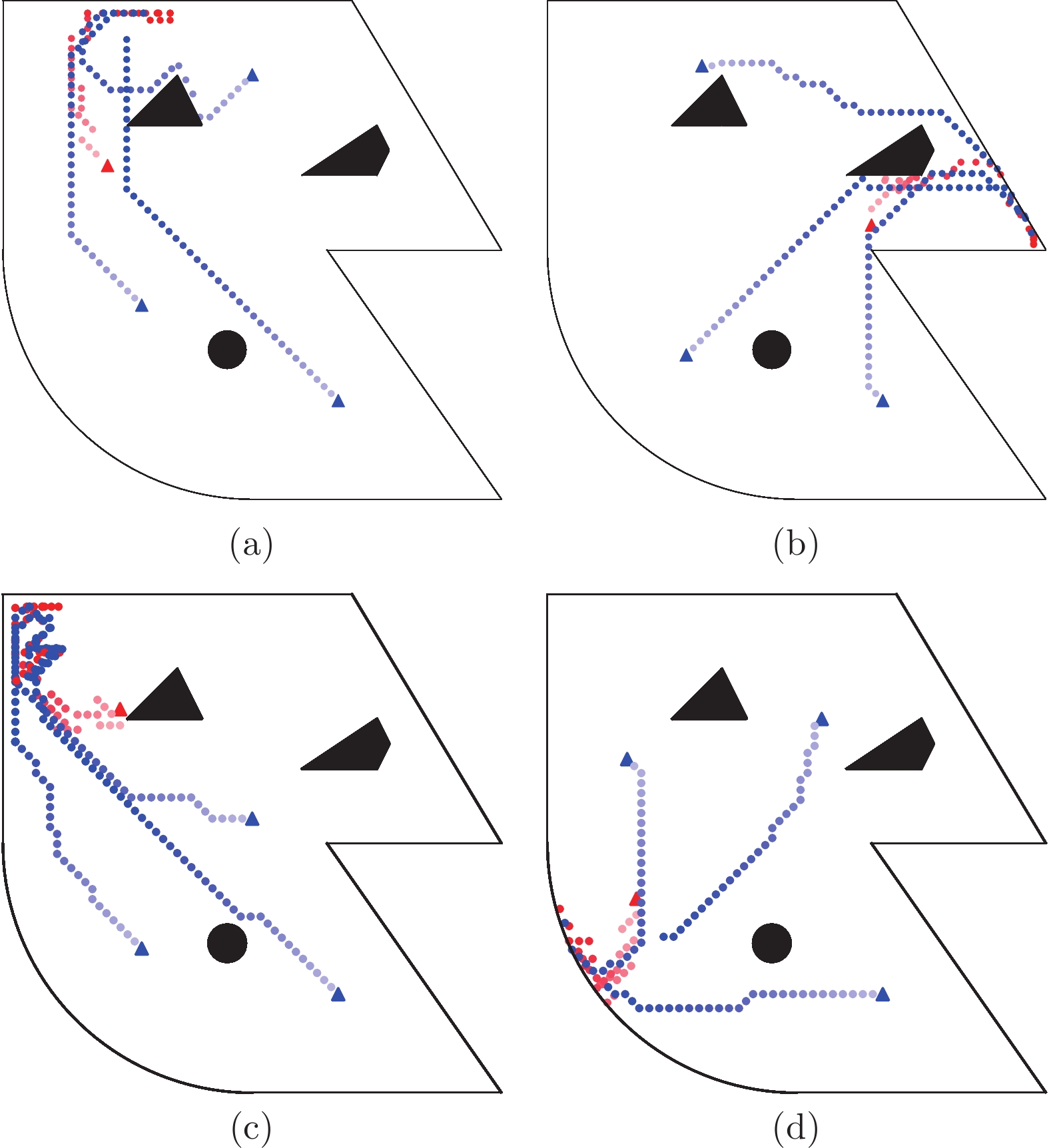
追逃问题的研究在对抗、追踪以及搜查等领域极具现实意义. 借助连续随机博弈与马尔科夫决策过程(Markov decision process, MDP), 研究使用测量距离求解多对一追逃问题的最优策略. 在此追逃问题中, 追捕群体仅领导者可测量与逃逸者间的相对距离, 而逃逸者具有全局视野. 追逃策略求解被分为追博弈与马尔科夫决策两个过程. 在求解追捕策略时, 通过分割环境引入信念区域状态以估计逃逸者位置, 同时使用测量距离对信念区域状态进行修正, 构建起基于信念区域状态的连续随机追博弈, 并借助不动点定理证明了博弈平稳纳什均衡策略的存在性. 在求解逃逸策略时, 逃逸者根据全局信息建立混合状态下的马尔科夫决策过程及相应的最优贝尔曼方程. 同时给出了基于强化学习的平稳追逃策略求解算法, 并通过案例验证了该算法的有效性.
追逃问题的研究在对抗、追踪以及搜查等领域极具现实意义. 借助连续随机博弈与马尔科夫决策过程(Markov decision process, MDP), 研究使用测量距离求解多对一追逃问题的最优策略. 在此追逃问题中, 追捕群体仅领导者可测量与逃逸者间的相对距离, 而逃逸者具有全局视野. 追逃策略求解被分为追博弈与马尔科夫决策两个过程. 在求解追捕策略时, 通过分割环境引入信念区域状态以估计逃逸者位置, 同时使用测量距离对信念区域状态进行修正, 构建起基于信念区域状态的连续随机追博弈, 并借助不动点定理证明了博弈平稳纳什均衡策略的存在性. 在求解逃逸策略时, 逃逸者根据全局信息建立混合状态下的马尔科夫决策过程及相应的最优贝尔曼方程. 同时给出了基于强化学习的平稳追逃策略求解算法, 并通过案例验证了该算法的有效性.





2024, 50(4): 841-850.
doi: 10.16383/j.aas.c210921
摘要:
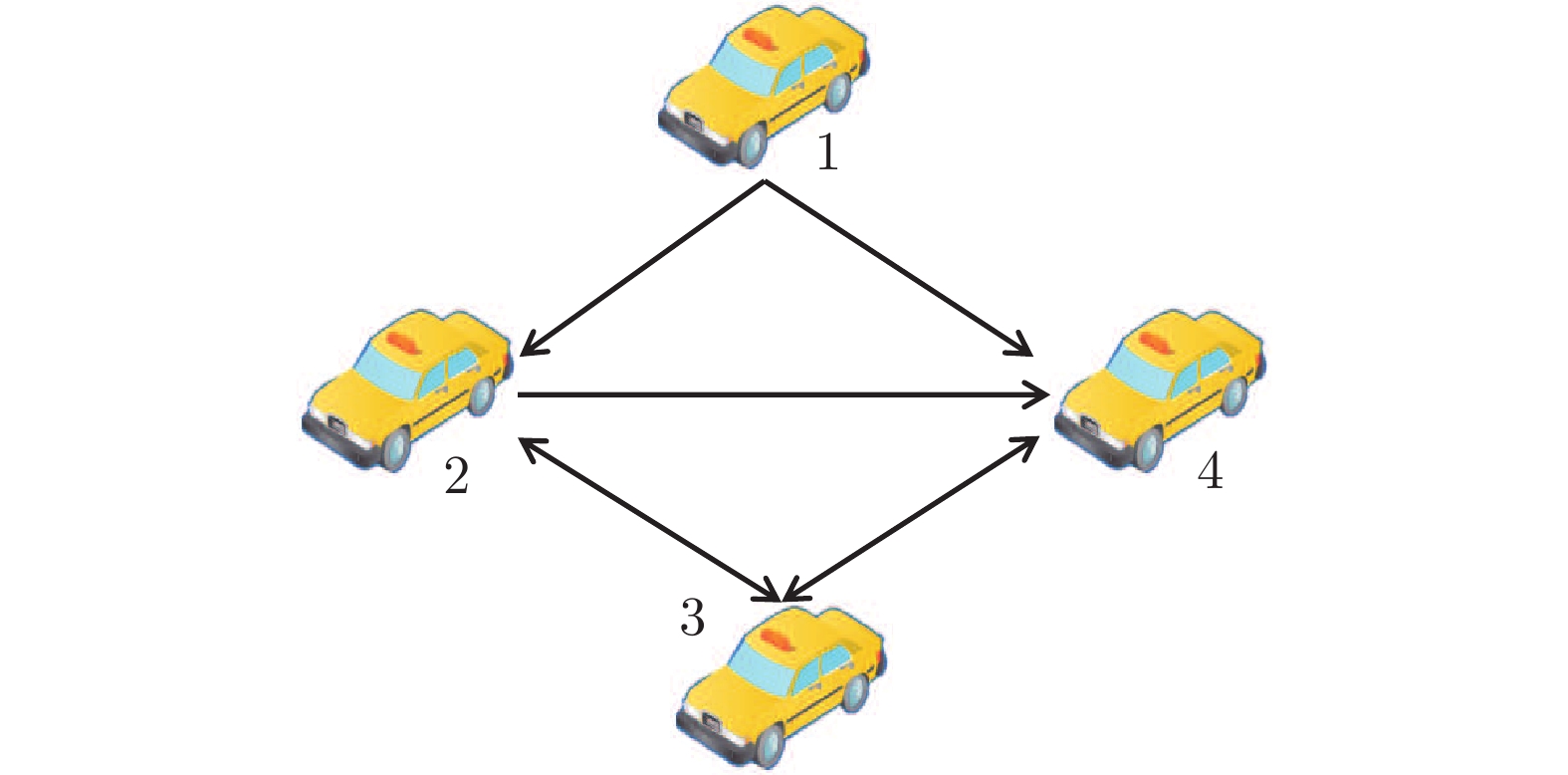
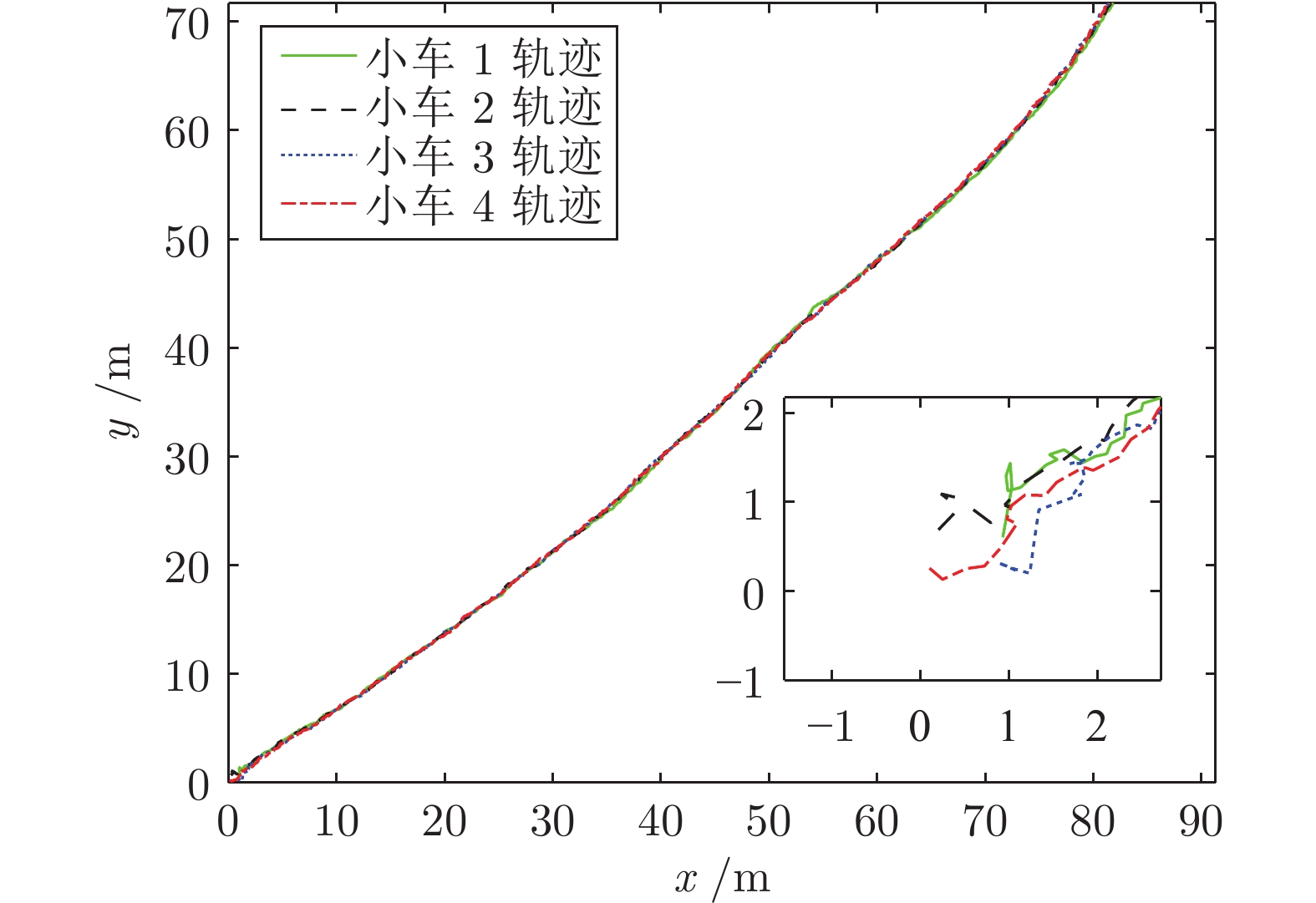
研究一类存在一步随机时滞的复杂网络分布式状态估计问题, 采用伯努利随机变量刻画测量值的随机时滞情况. 基于复杂网络模型和不可靠测量值, 分别设计复杂网络的状态预测器和分布式状态估计器, 基于杨氏不等式消除节点之间的耦合项, 通过优化杨氏不等式引进的参数, 优化状态预测协方差. 通过设计估计器增益, 获得状态估计误差协方差, 同时结合预测误差协方差, 获得状态估计误差协方差的迭代公式, 并给出估计误差协方差稳定的充分条件. 最后, 对由小车组成的耦合系统进行数值仿真, 验证所设计估计器的有效性.
研究一类存在一步随机时滞的复杂网络分布式状态估计问题, 采用伯努利随机变量刻画测量值的随机时滞情况. 基于复杂网络模型和不可靠测量值, 分别设计复杂网络的状态预测器和分布式状态估计器, 基于杨氏不等式消除节点之间的耦合项, 通过优化杨氏不等式引进的参数, 优化状态预测协方差. 通过设计估计器增益, 获得状态估计误差协方差, 同时结合预测误差协方差, 获得状态估计误差协方差的迭代公式, 并给出估计误差协方差稳定的充分条件. 最后, 对由小车组成的耦合系统进行数值仿真, 验证所设计估计器的有效性.



2024, 50(4): 851-861.
doi: 10.16383/j.aas.c220635
摘要:
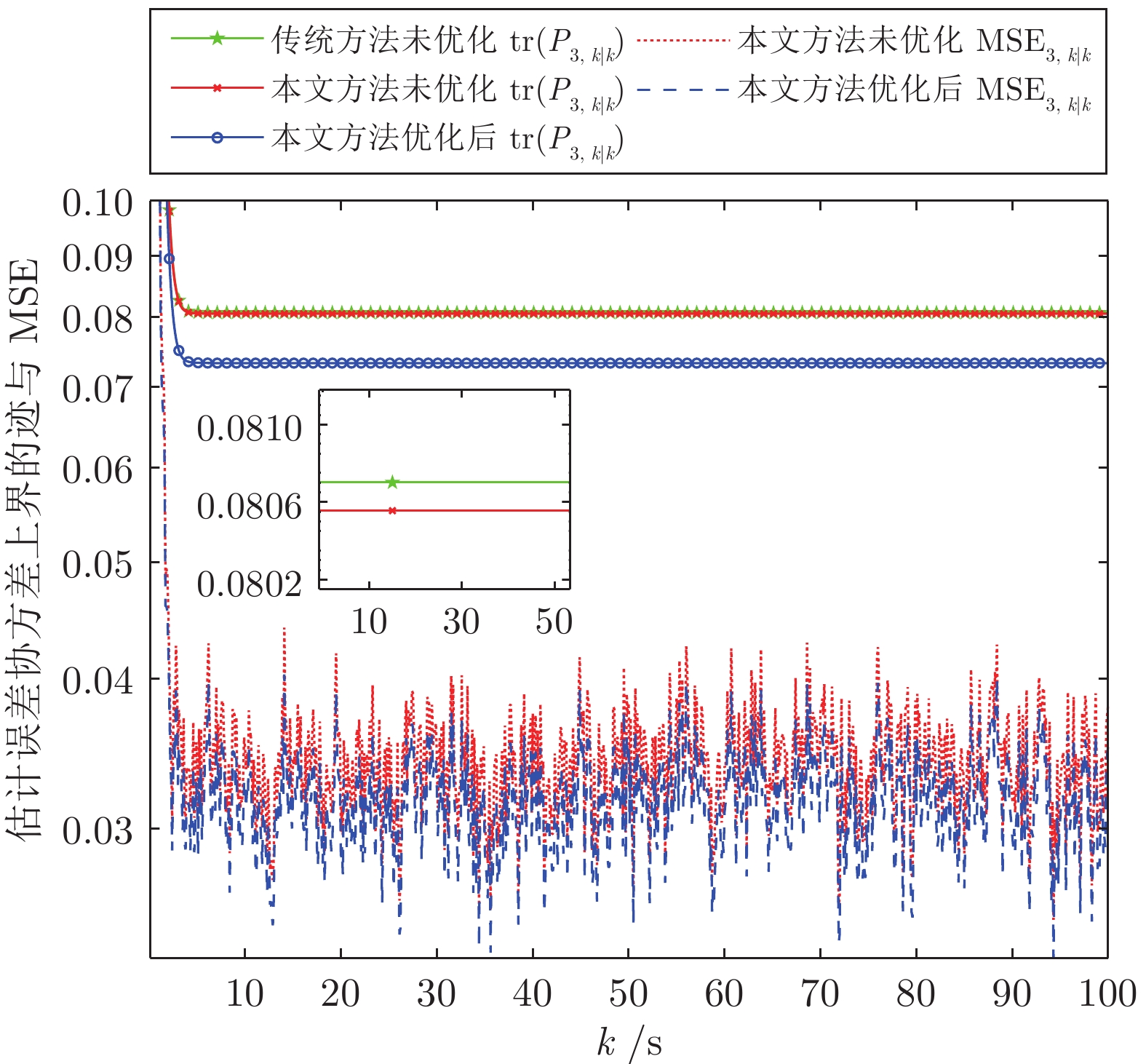
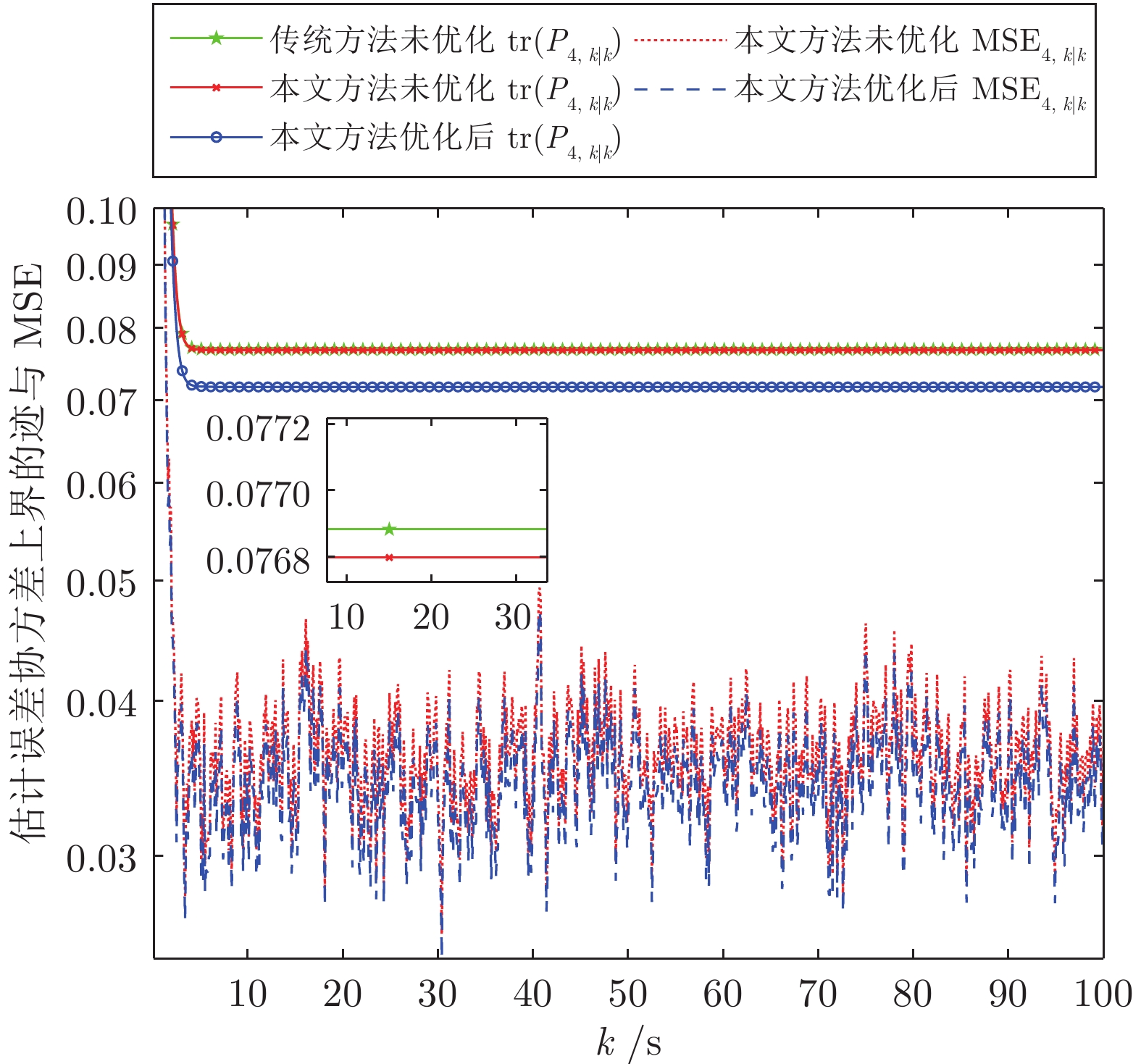
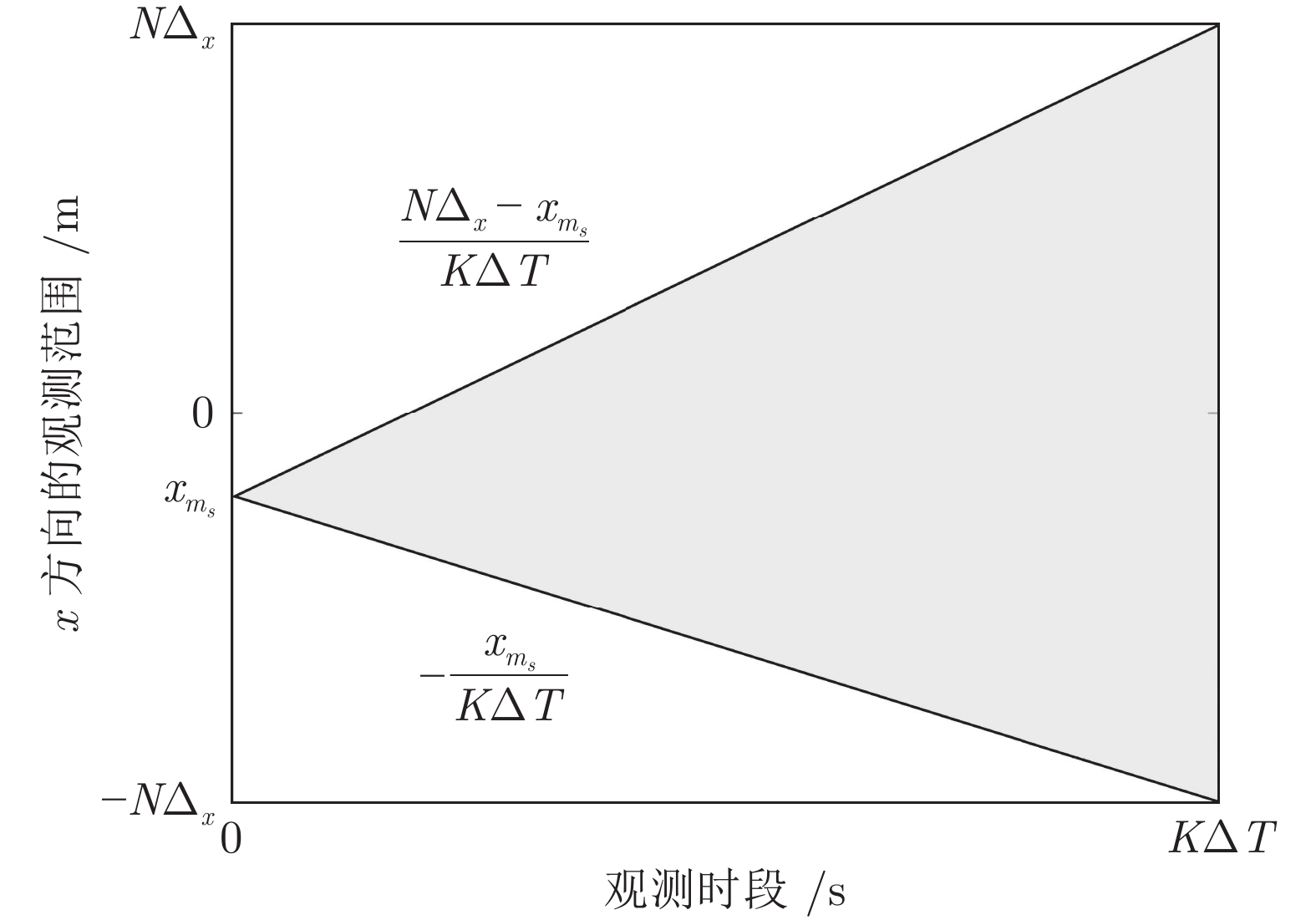
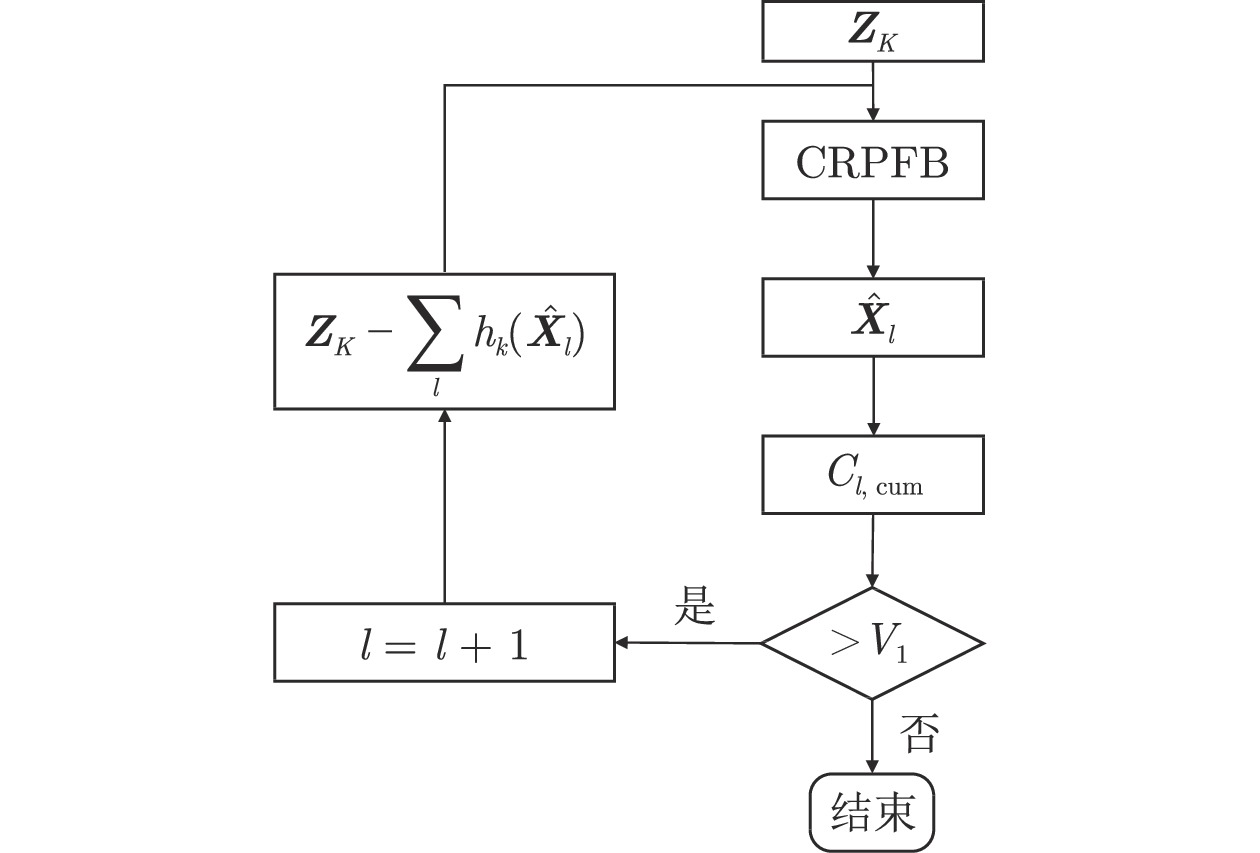
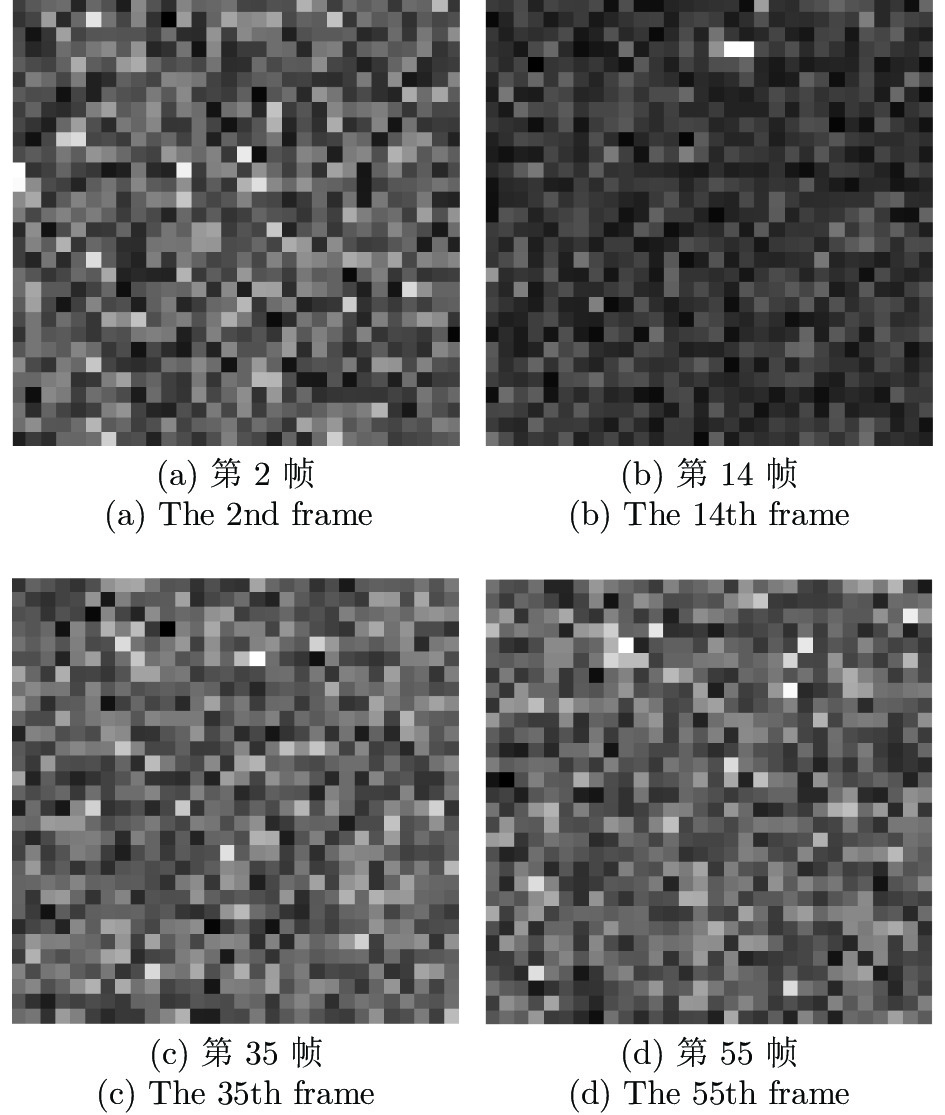
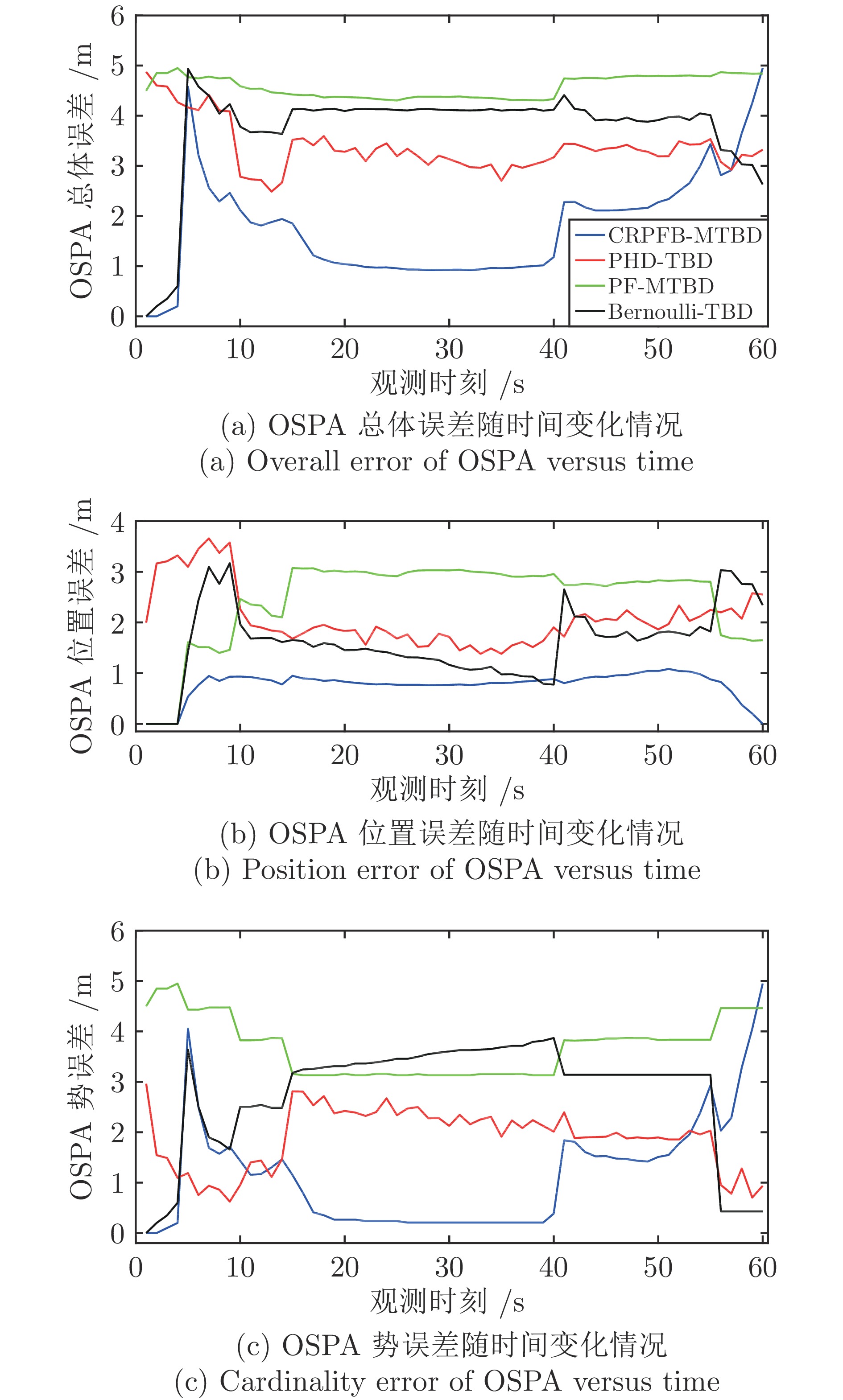
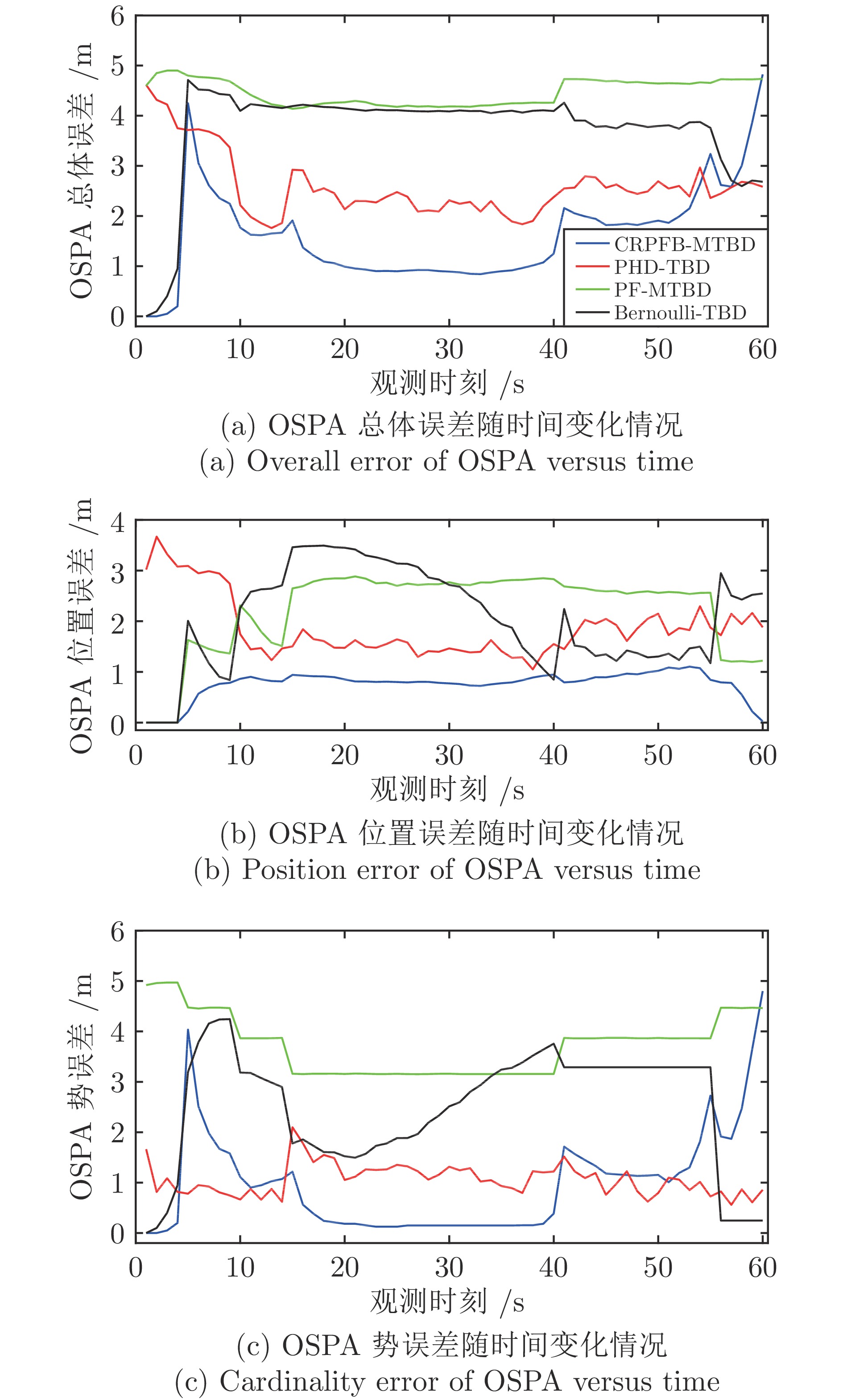
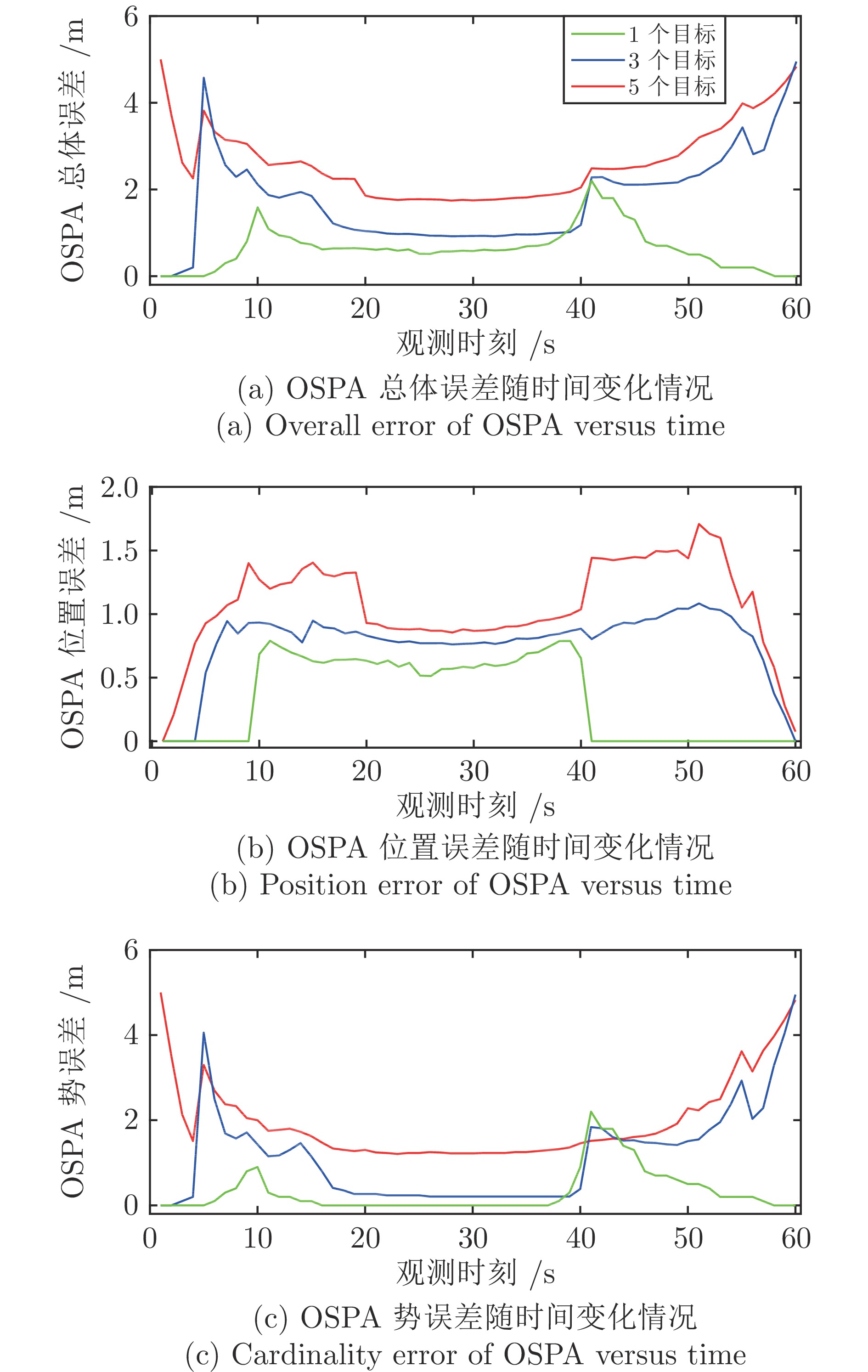
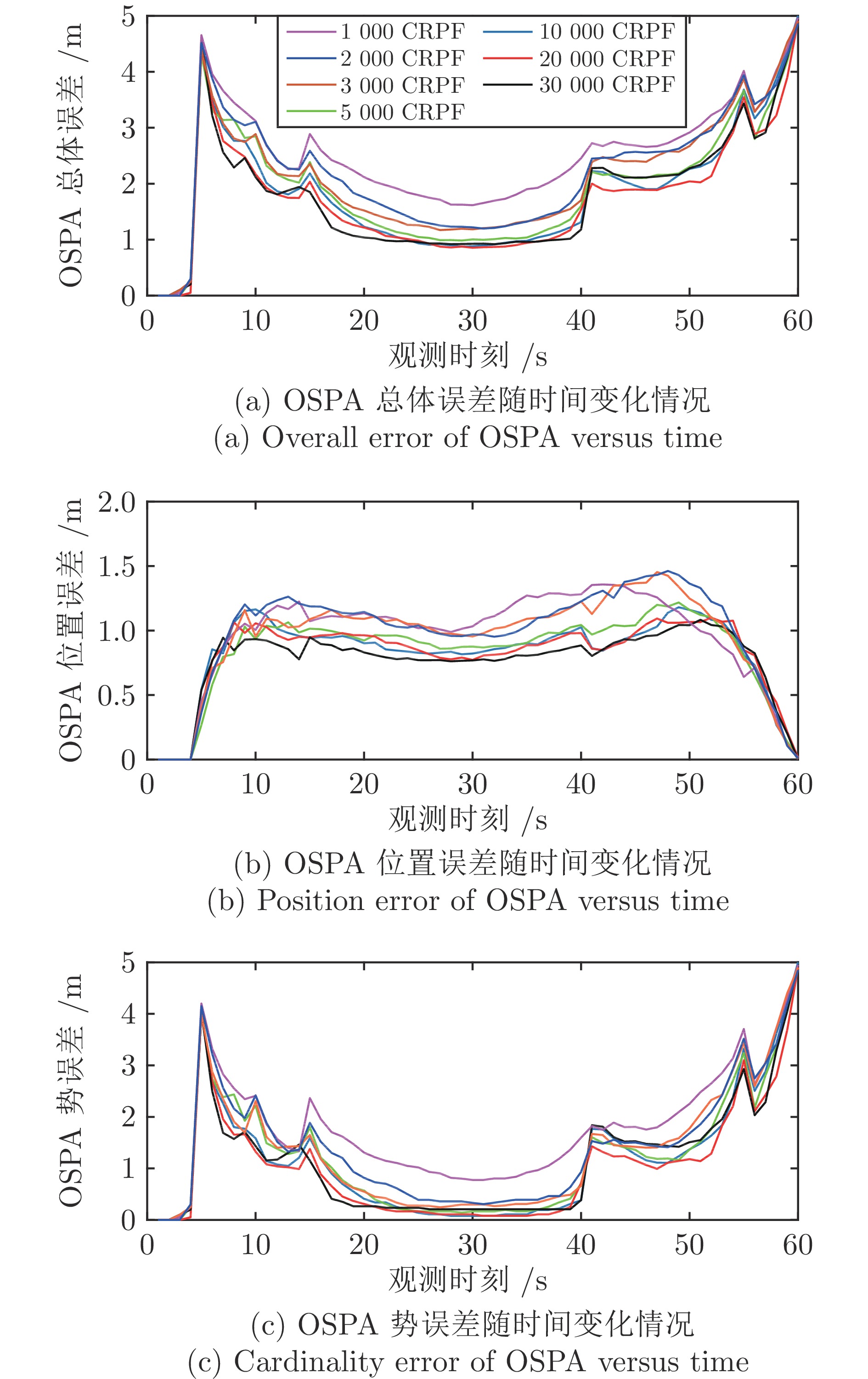
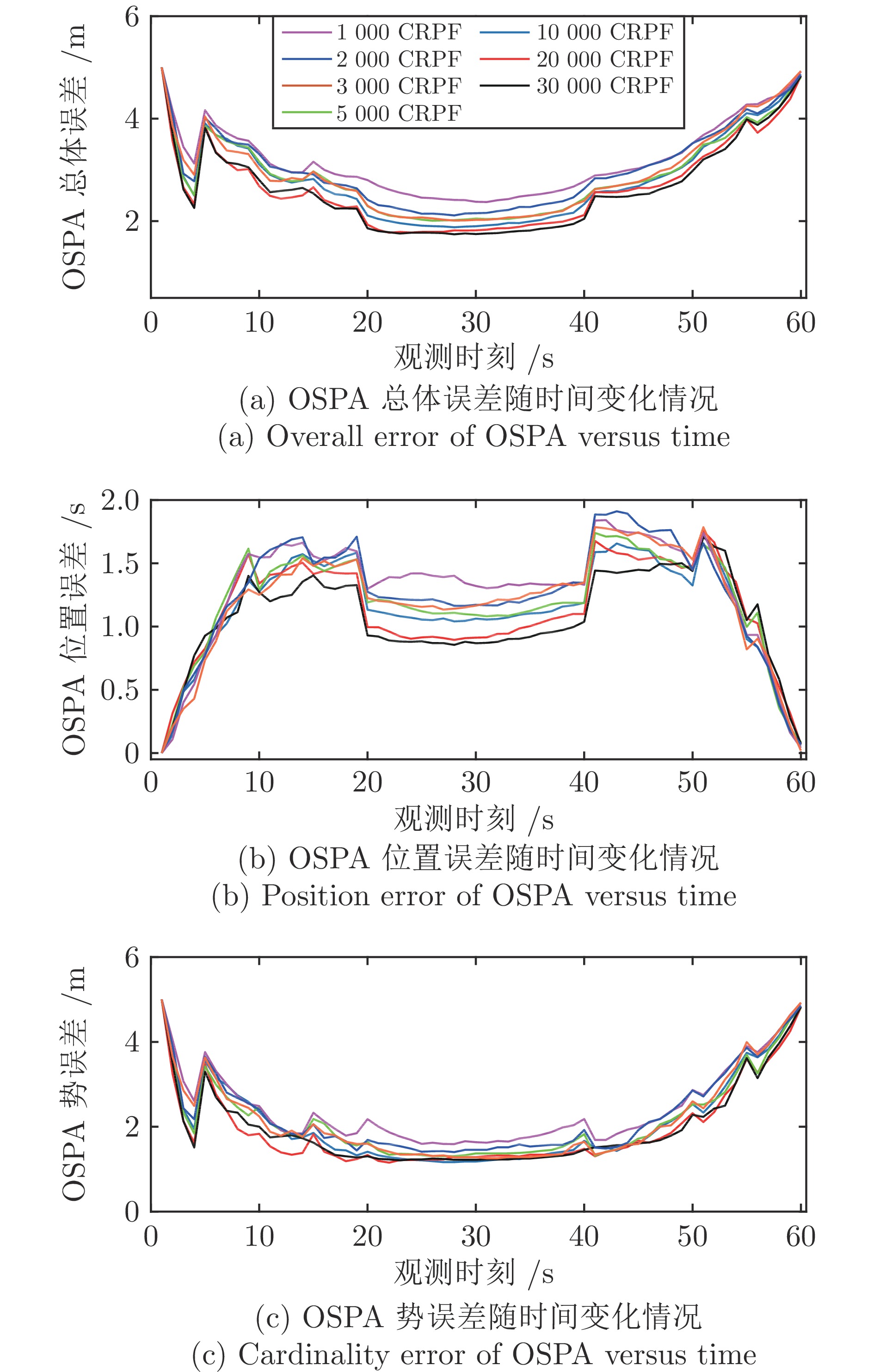
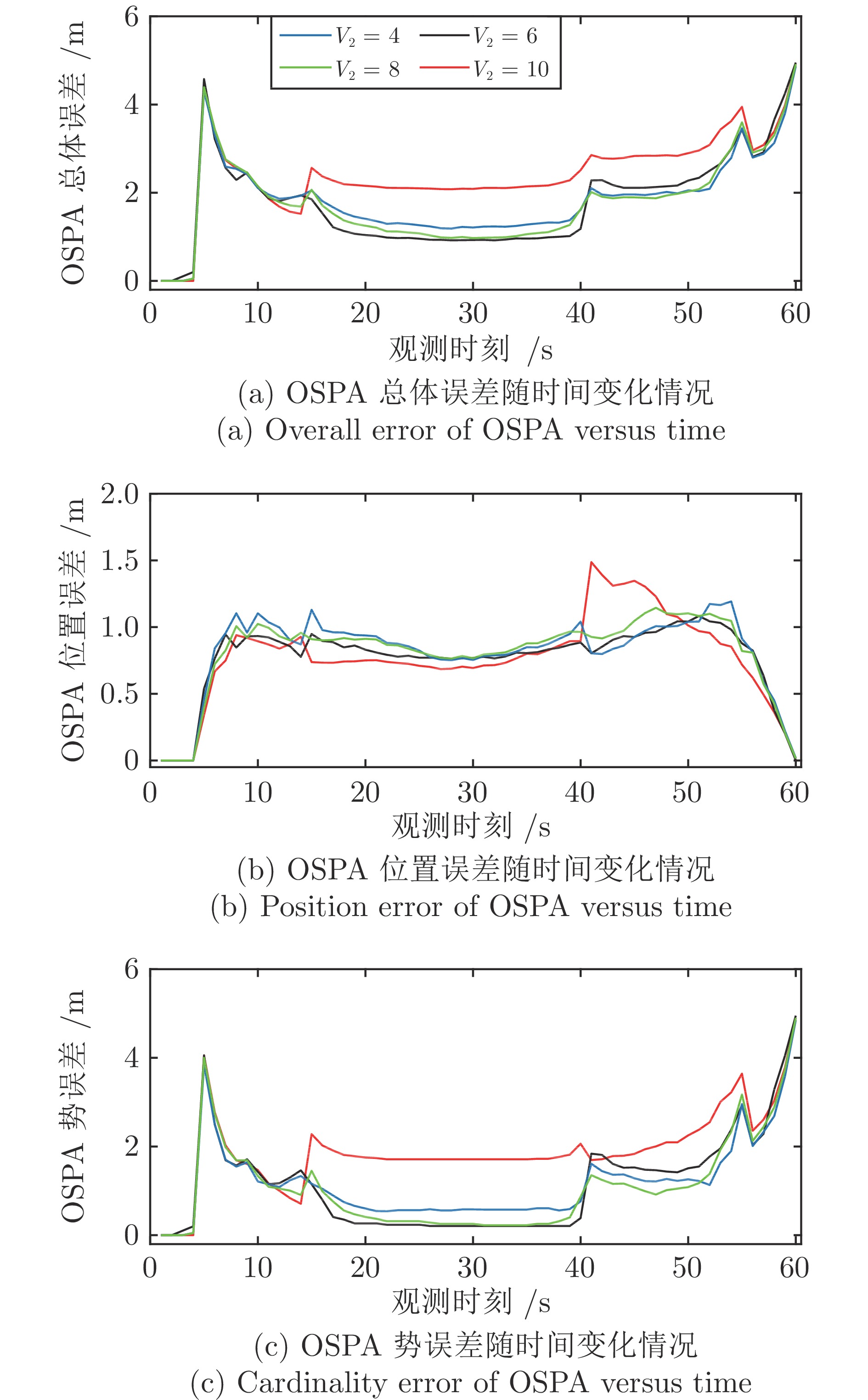
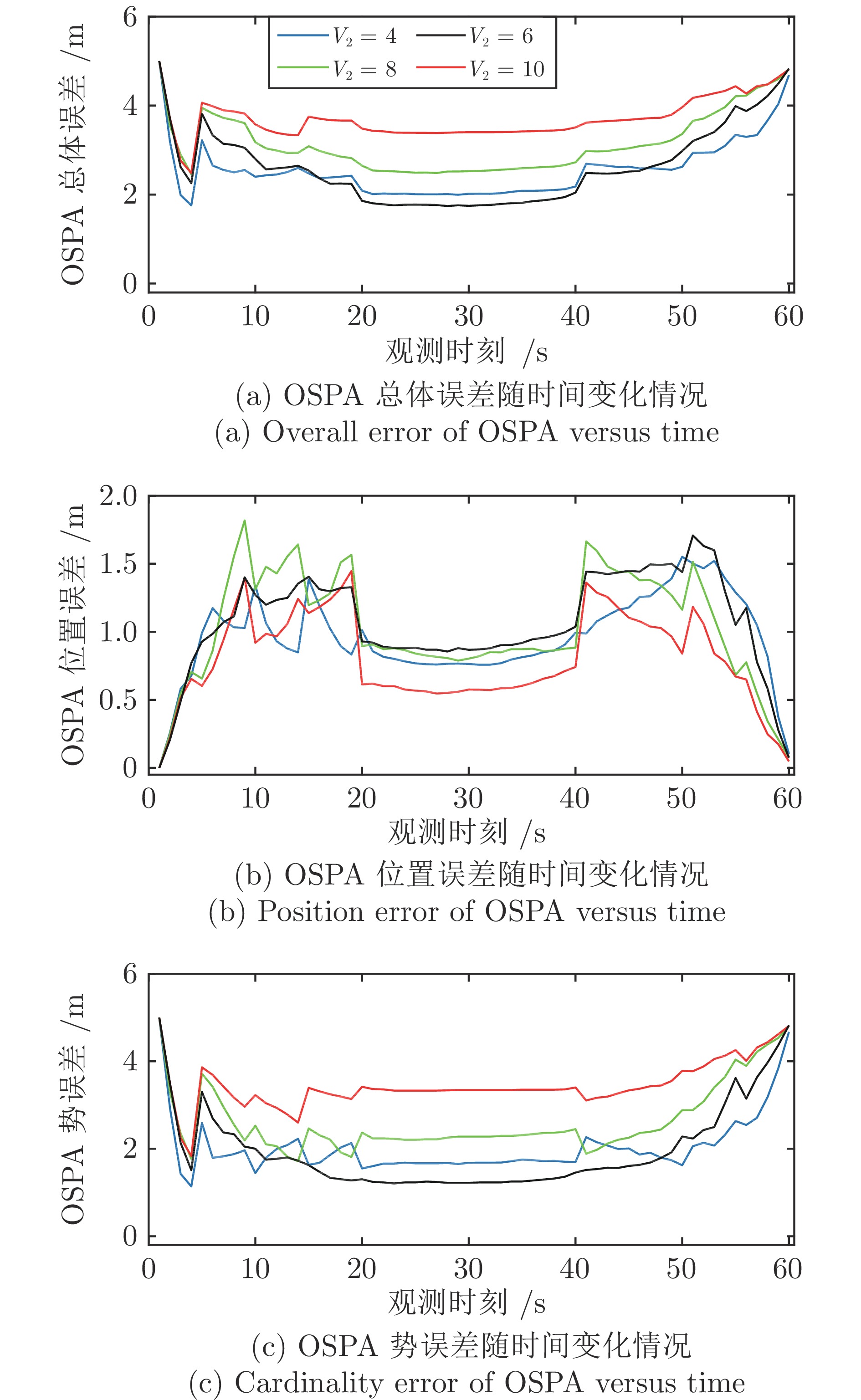
针对图像序列中多目标检测和跟踪算法结构复杂、计算量大、性能降低等问题, 提出一种基于代价参考粒子滤波器组的多目标检测前跟踪(Cost-reference particle filter bank based multi-target track-before-detect, CRPFB-MTBD)算法, 将多目标跟踪问题转换为序贯地检测和跟踪多个单目标的问题. 首先, 采用代价参考粒子滤波器组序贯地估计所有可能单目标状态序列; 其次, 基于所有可能单目标状态序列的欧氏距离和累积代价确定目标数量; 最后, 根据累积代价判断每个目标出现和消失的具体时刻. 仿真实验验证了CRPFB-MTBD的优良性能, 与基于传统粒子滤波的多目标检测前跟踪算法(Particle filter based multi-target track-before-detect, PF-MTBD)、基于概率假设密度的检测前跟踪算法(Probability hypothesis density based track-before-detect, PHD-TBD)和基于伯努利滤波的检测前跟踪算法(Bernoulli based track-before-detect, Bernoulli-TBD) 相比, CRPFB-MTBD的目标状态序列和数量估计结果最佳, 且平均单次运行时间极短.
针对图像序列中多目标检测和跟踪算法结构复杂、计算量大、性能降低等问题, 提出一种基于代价参考粒子滤波器组的多目标检测前跟踪(Cost-reference particle filter bank based multi-target track-before-detect, CRPFB-MTBD)算法, 将多目标跟踪问题转换为序贯地检测和跟踪多个单目标的问题. 首先, 采用代价参考粒子滤波器组序贯地估计所有可能单目标状态序列; 其次, 基于所有可能单目标状态序列的欧氏距离和累积代价确定目标数量; 最后, 根据累积代价判断每个目标出现和消失的具体时刻. 仿真实验验证了CRPFB-MTBD的优良性能, 与基于传统粒子滤波的多目标检测前跟踪算法(Particle filter based multi-target track-before-detect, PF-MTBD)、基于概率假设密度的检测前跟踪算法(Probability hypothesis density based track-before-detect, PHD-TBD)和基于伯努利滤波的检测前跟踪算法(Bernoulli based track-before-detect, Bernoulli-TBD) 相比, CRPFB-MTBD的目标状态序列和数量估计结果最佳, 且平均单次运行时间极短.






2024, 50(4): 862-872.
doi: 10.16383/j.aas.c240088
摘要:
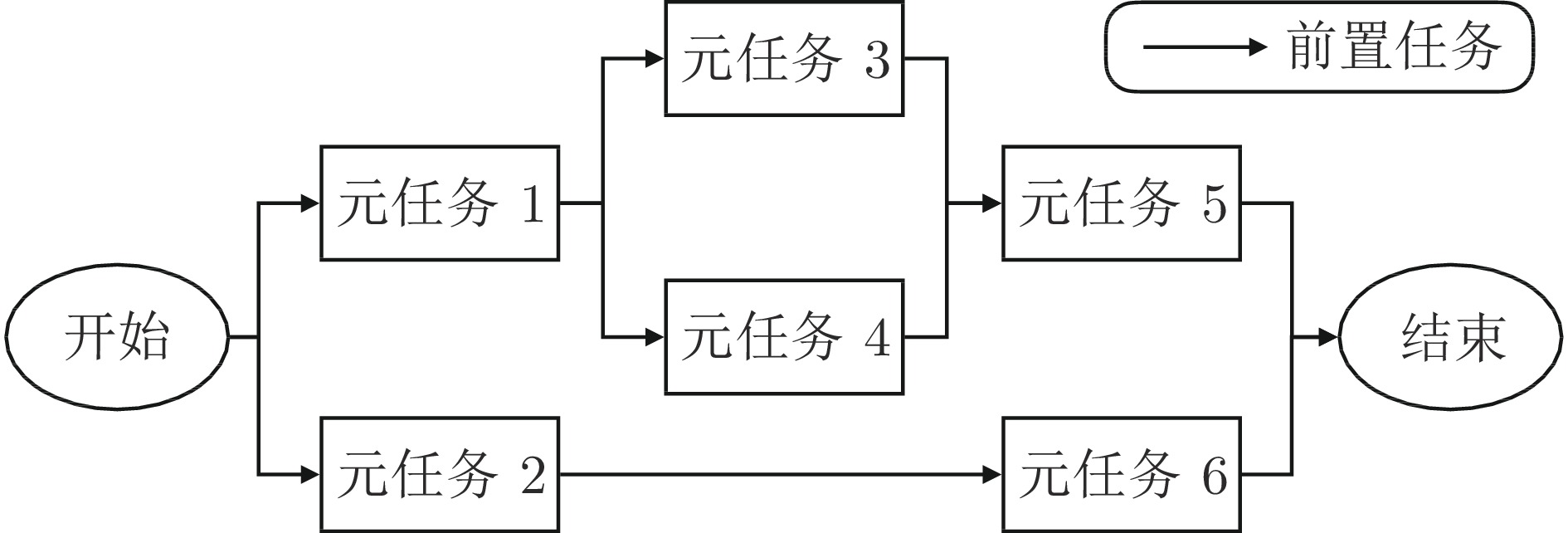
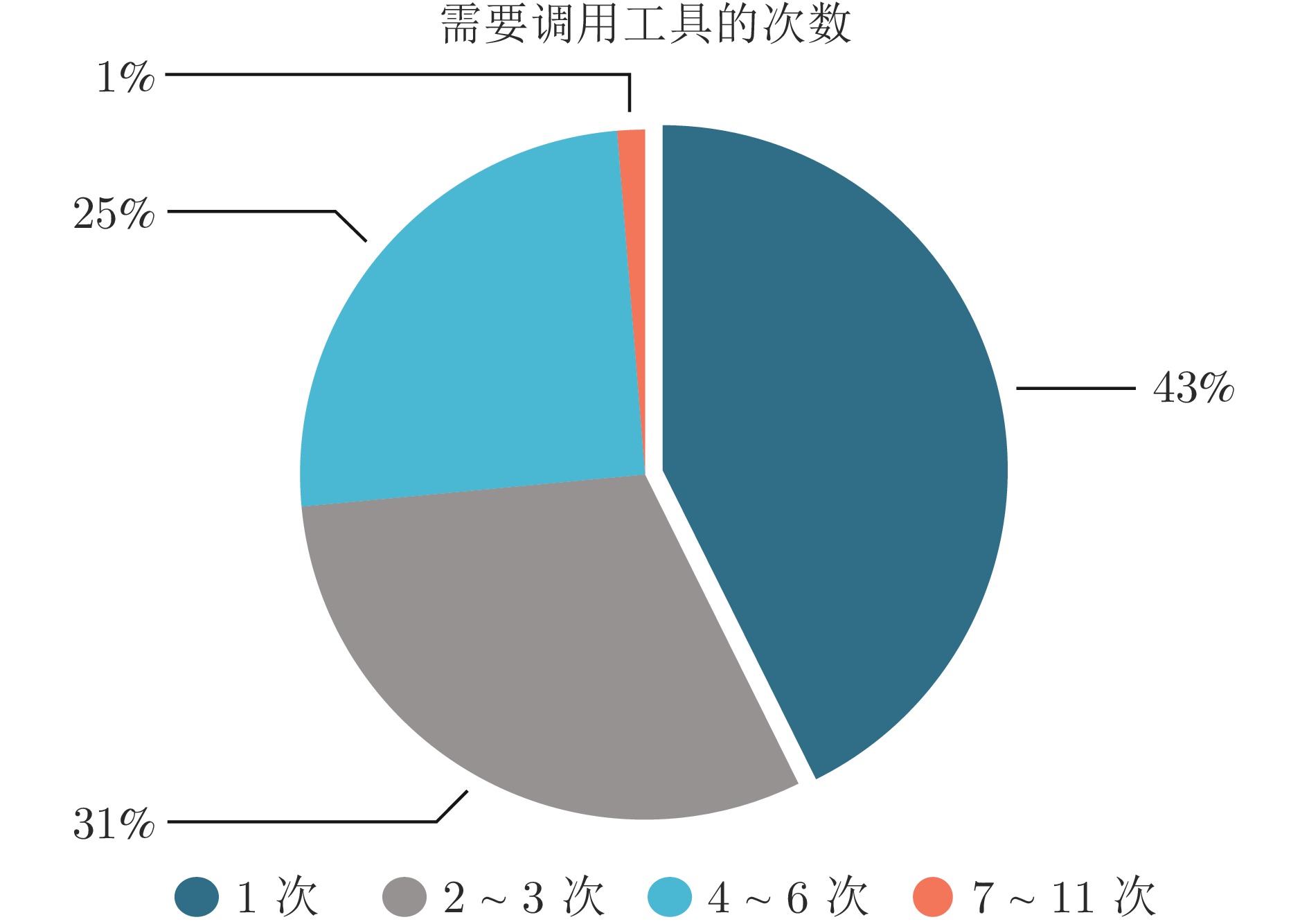
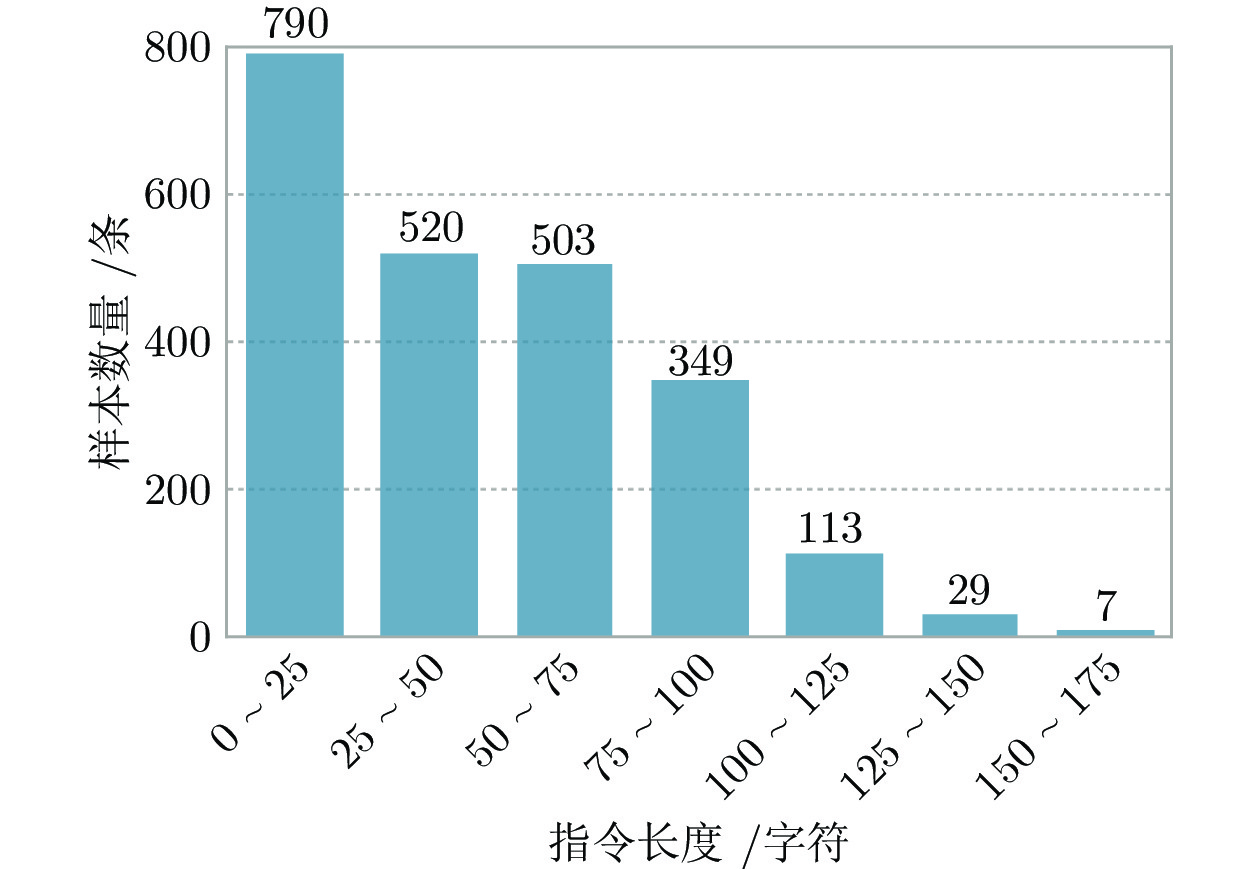
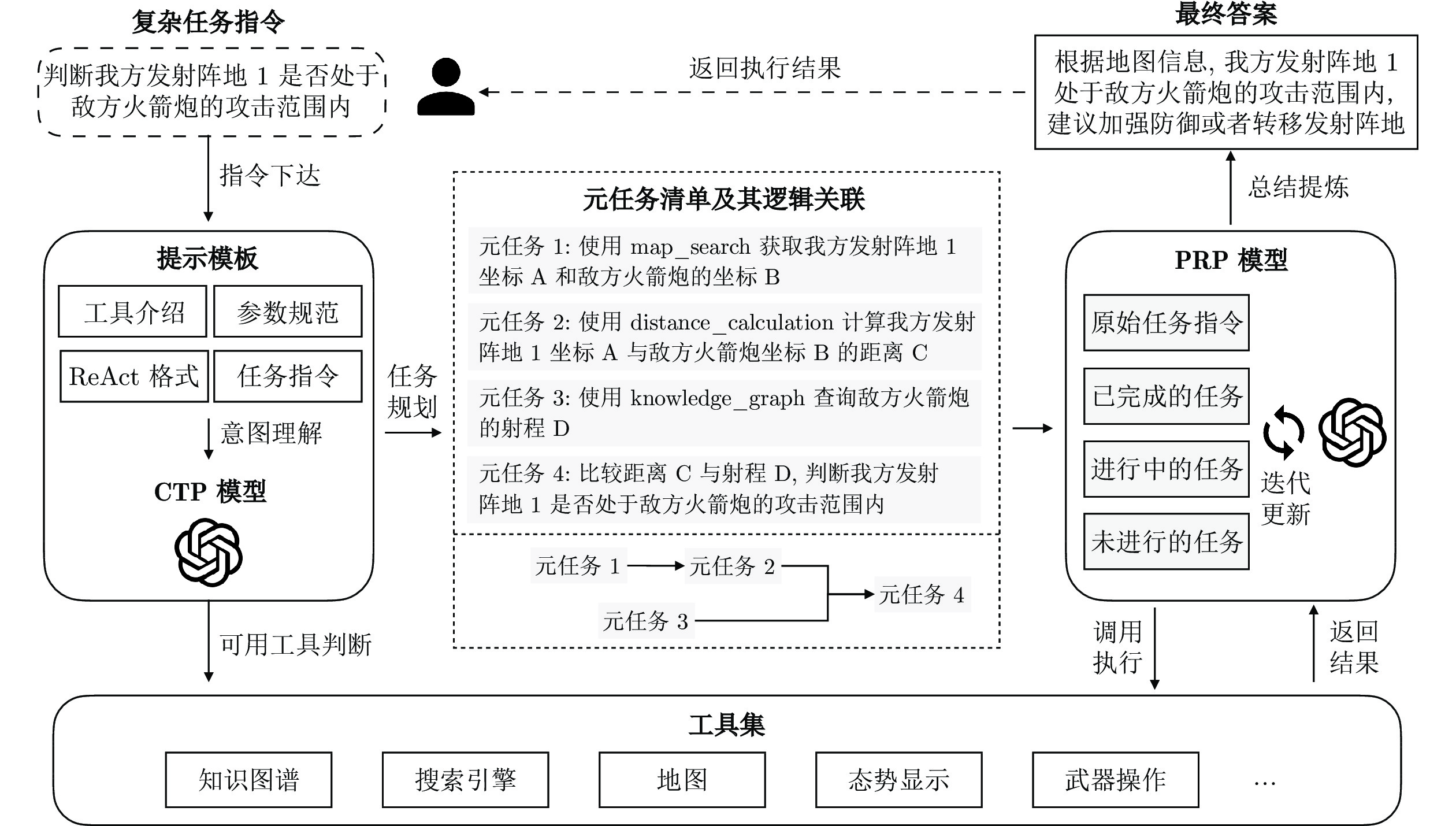
随着深度学习和自然语言处理技术的进步, 大语言模型(Large language models, LLMs)展现出巨大潜力. 尽管如此, 它们在处理复杂任务时仍存在局限性, 特别是在任务需要结合规划及外部工具调用的场合. 面向这一挑战, 提出国内首个以军事游戏为背景的中文的复杂任务规划与执行数据集(Complex task planning and execution dataset, CTPaE), 以及一个基于LLMs的自主复杂任务规划 (Complex task planning, CTP) 处理框架AutoPlan. 该框架可以对复杂任务进行自主规划得到元任务序列, 并使用递进式ReAct提示 (Progressive ReAct prompting,PRP) 方法对已规划的元任务逐步执行. 该框架的有效性通过在CTPaE上的实验及与其他经典算法的比较分析得到了验证. 项目地址:https://github.com/LDLINGLINGLING/AutoPlan .
随着深度学习和自然语言处理技术的进步, 大语言模型(Large language models, LLMs)展现出巨大潜力. 尽管如此, 它们在处理复杂任务时仍存在局限性, 特别是在任务需要结合规划及外部工具调用的场合. 面向这一挑战, 提出国内首个以军事游戏为背景的中文的复杂任务规划与执行数据集(Complex task planning and execution dataset, CTPaE), 以及一个基于LLMs的自主复杂任务规划 (Complex task planning, CTP) 处理框架AutoPlan. 该框架可以对复杂任务进行自主规划得到元任务序列, 并使用递进式ReAct提示 (Progressive ReAct prompting,PRP) 方法对已规划的元任务逐步执行. 该框架的有效性通过在CTPaE上的实验及与其他经典算法的比较分析得到了验证. 项目地址: