2024年 第50卷 第3期
2024, 50(3): 431-449.
doi: 10.16383/j.aas.c230161
摘要:
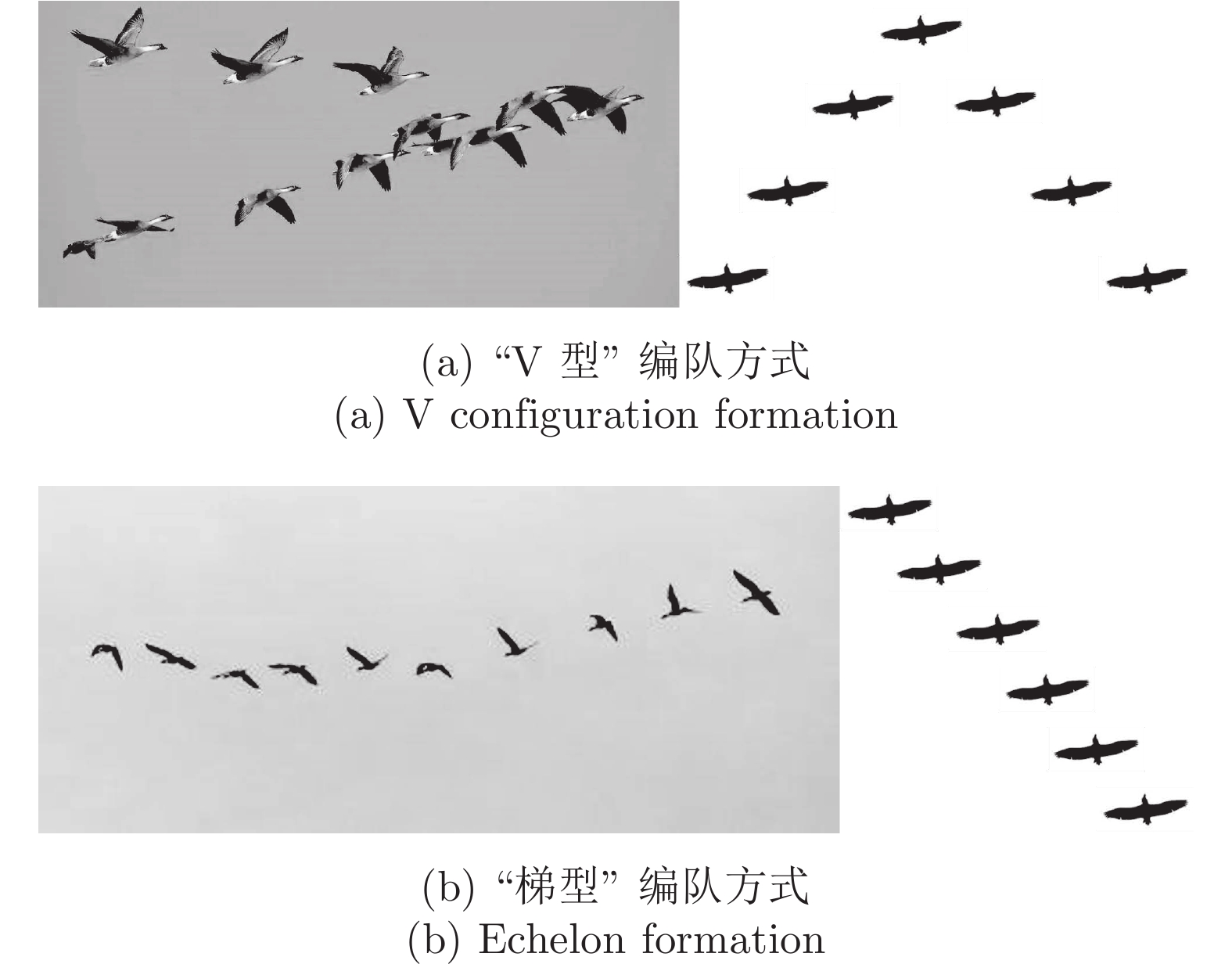
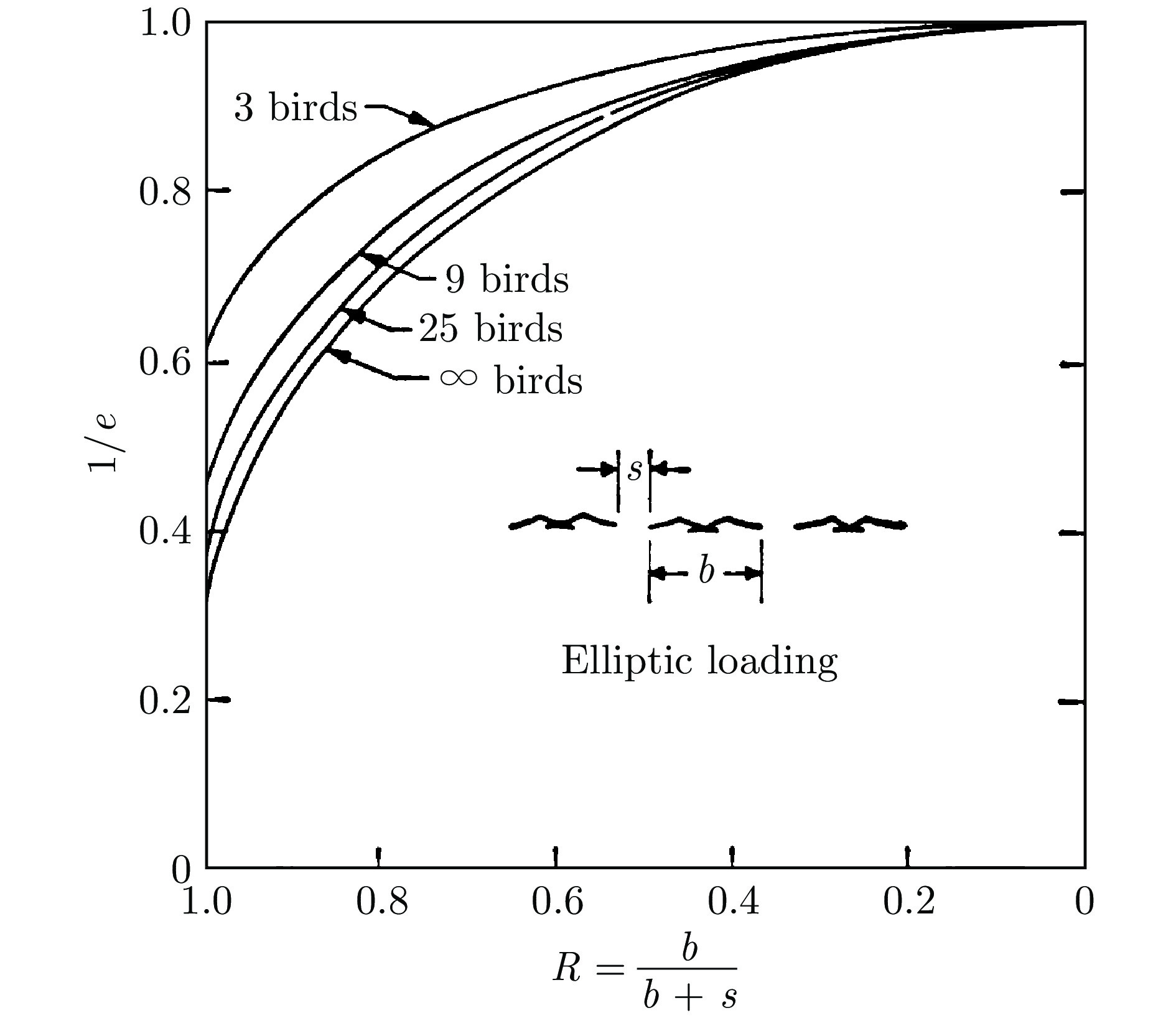
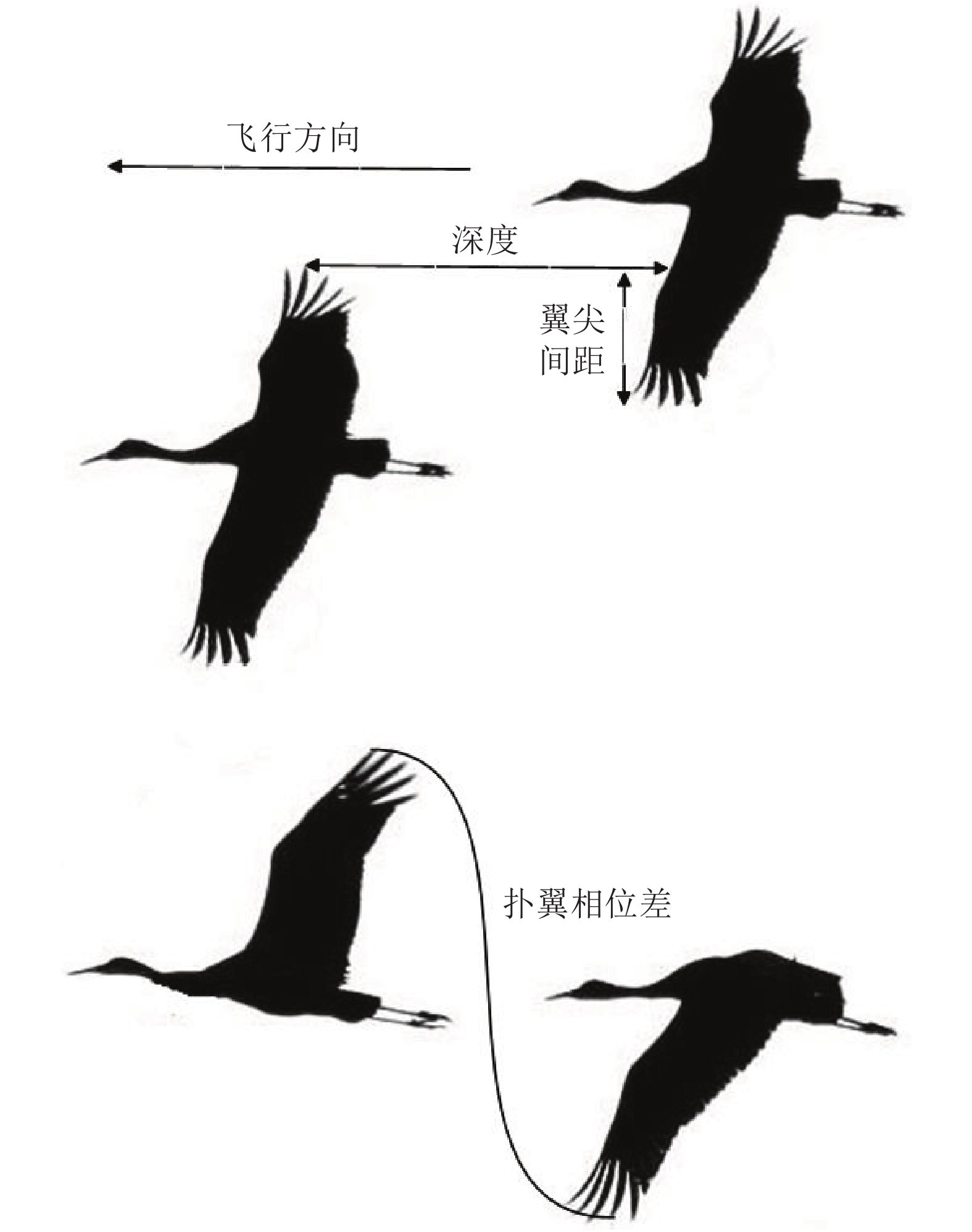
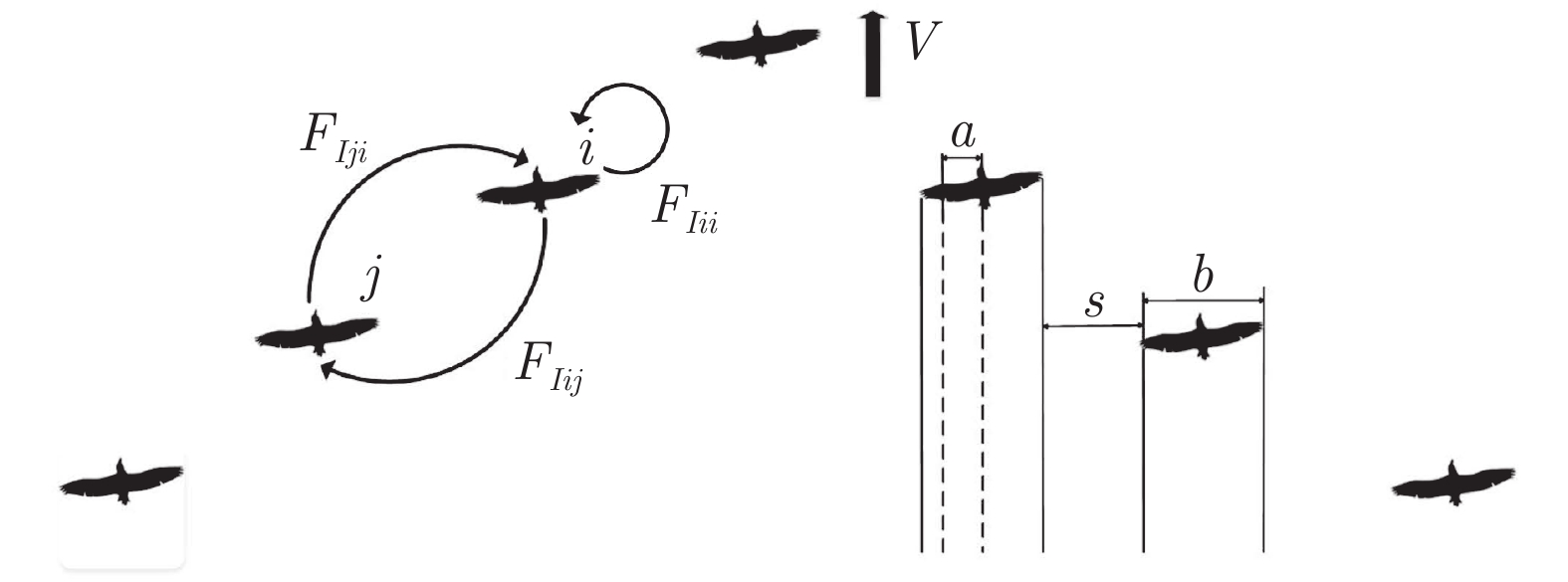
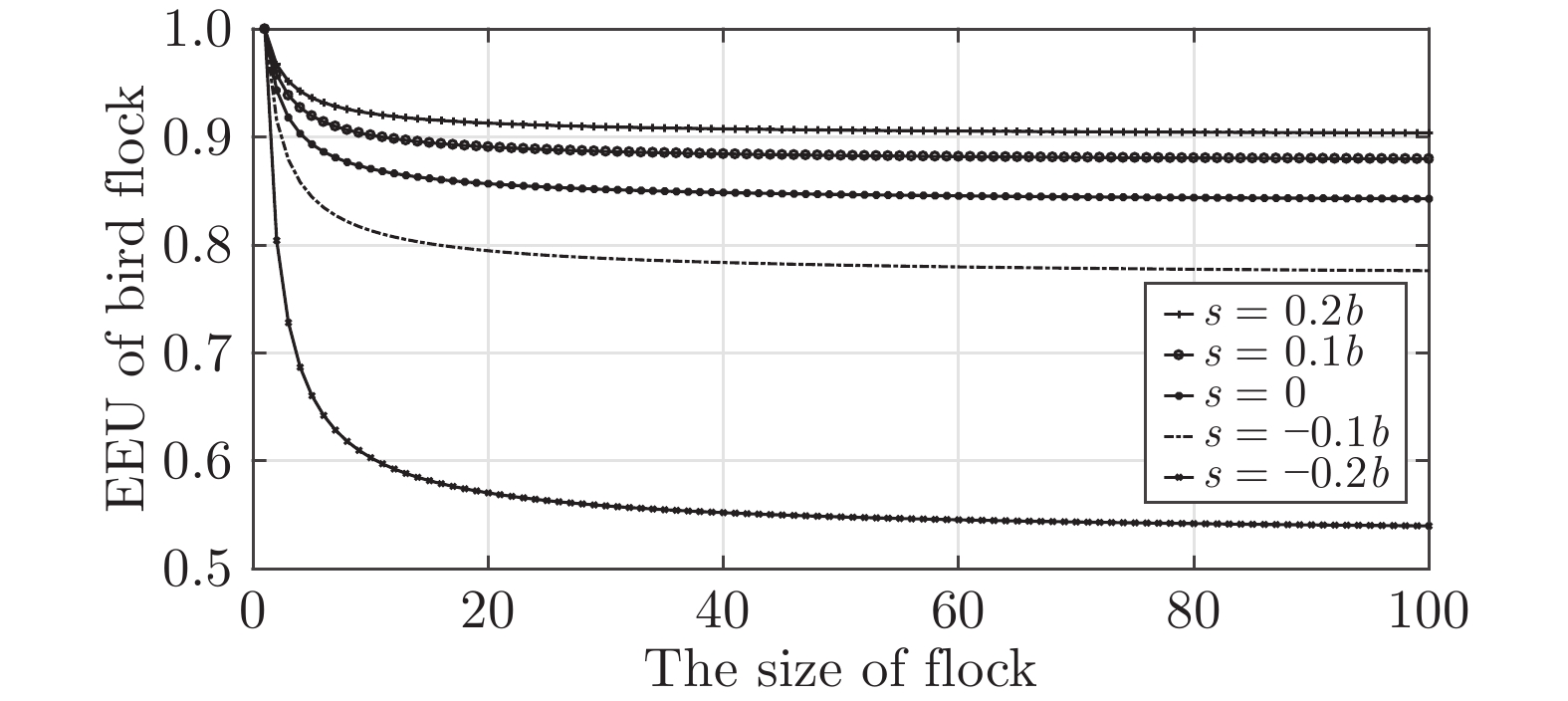
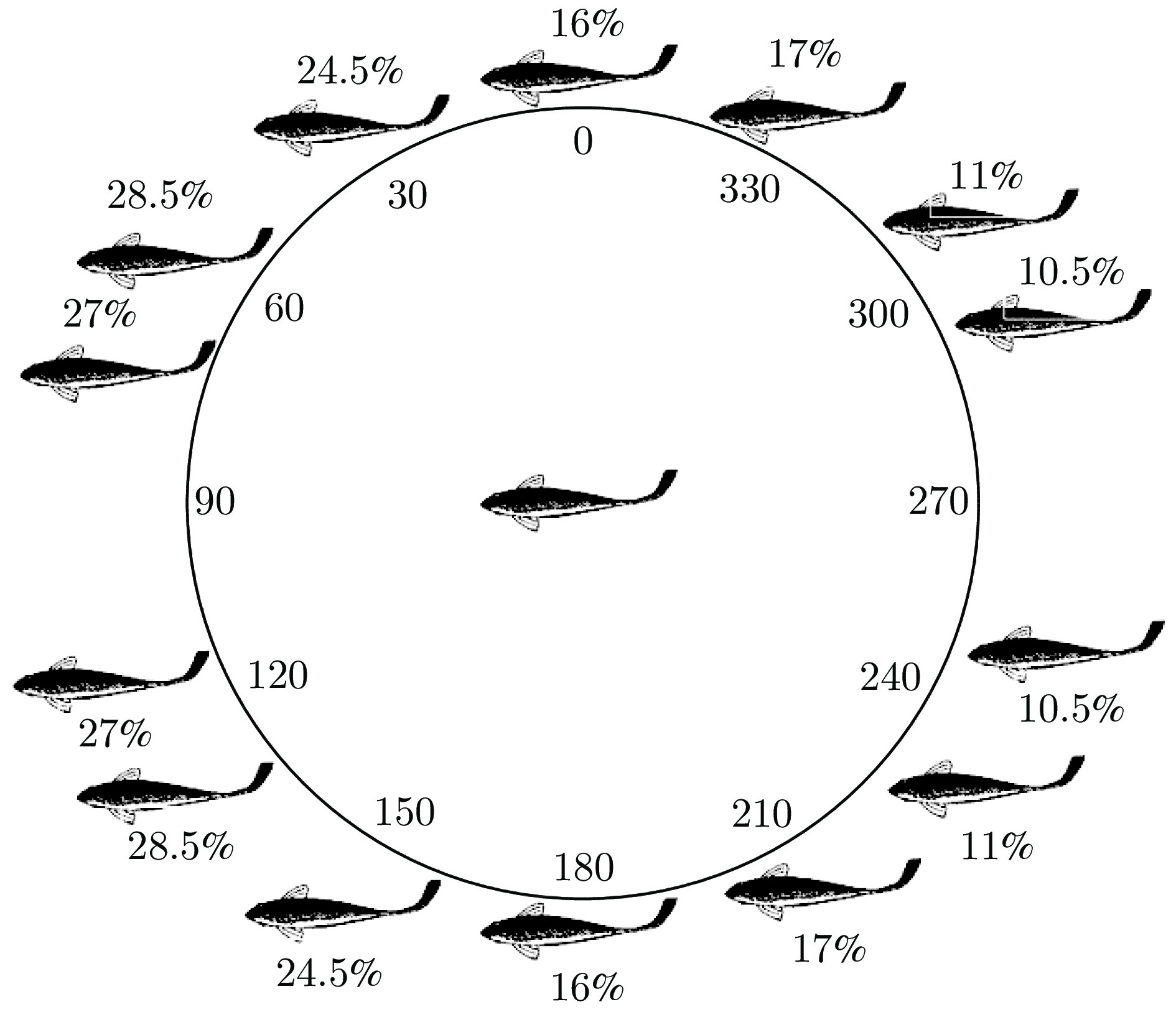
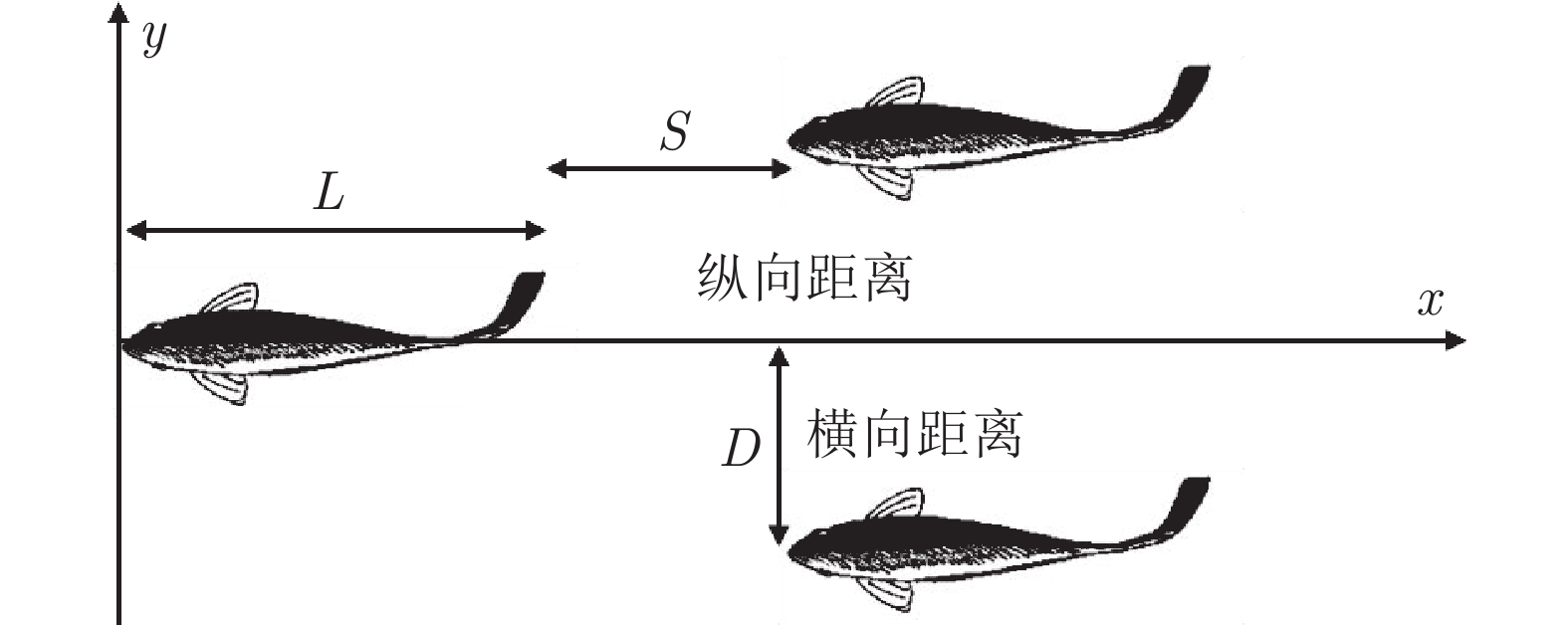
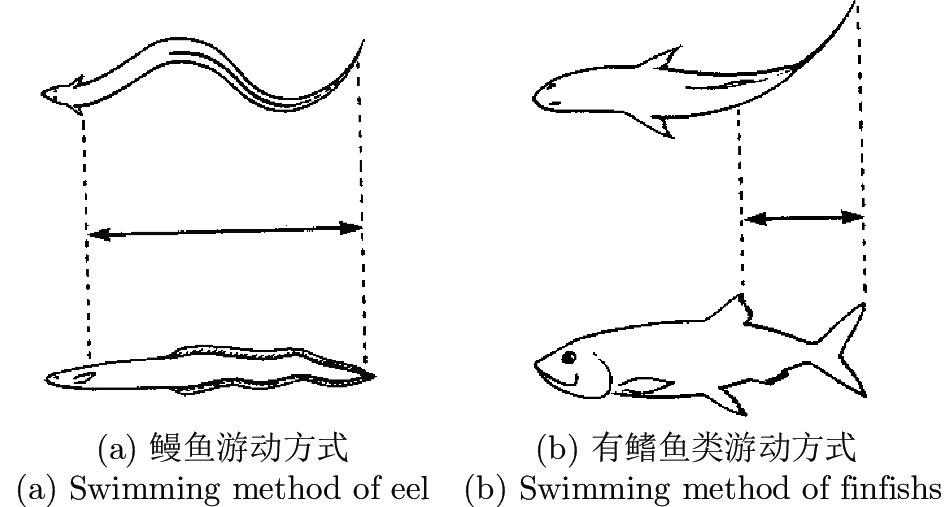
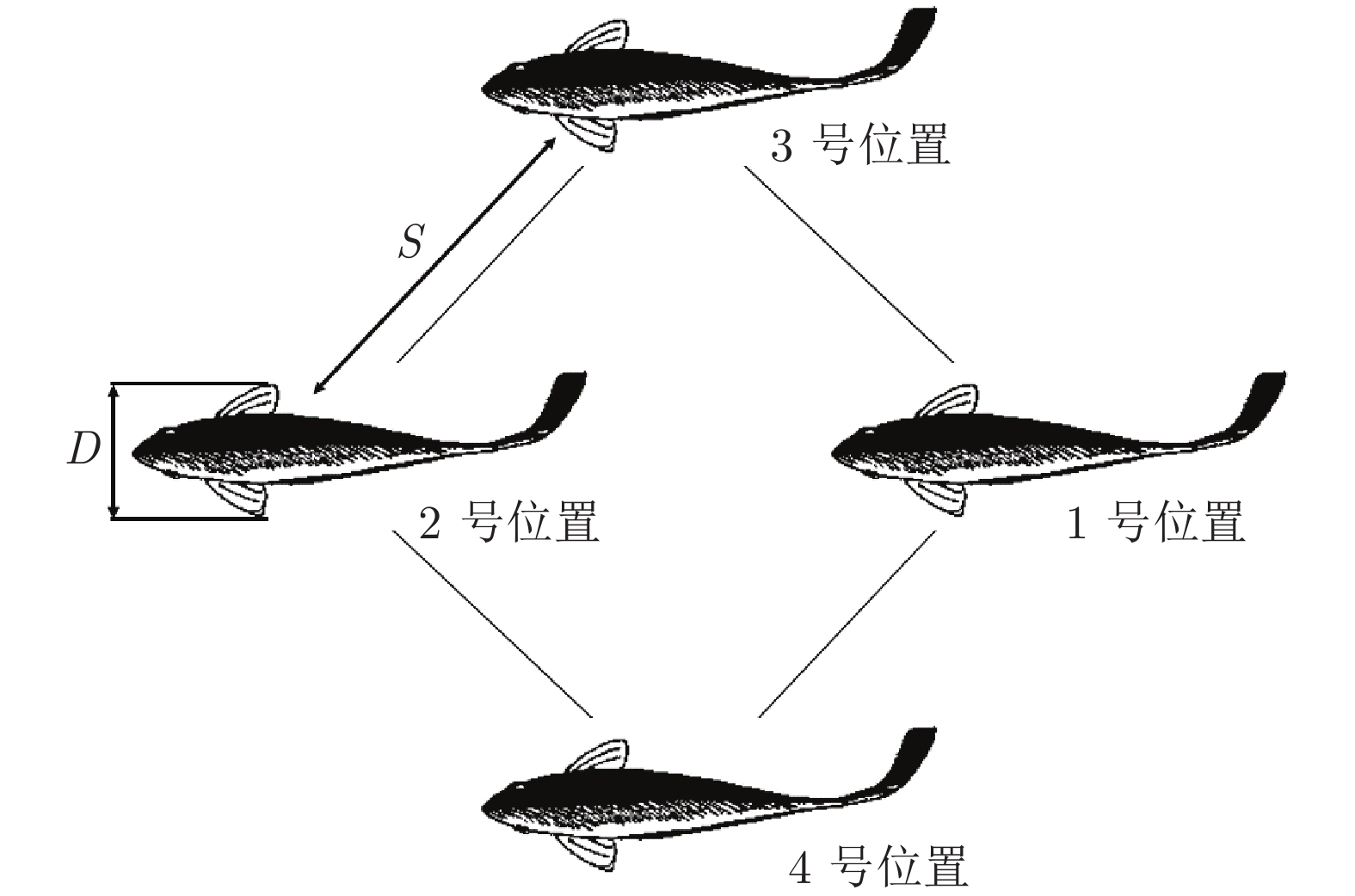
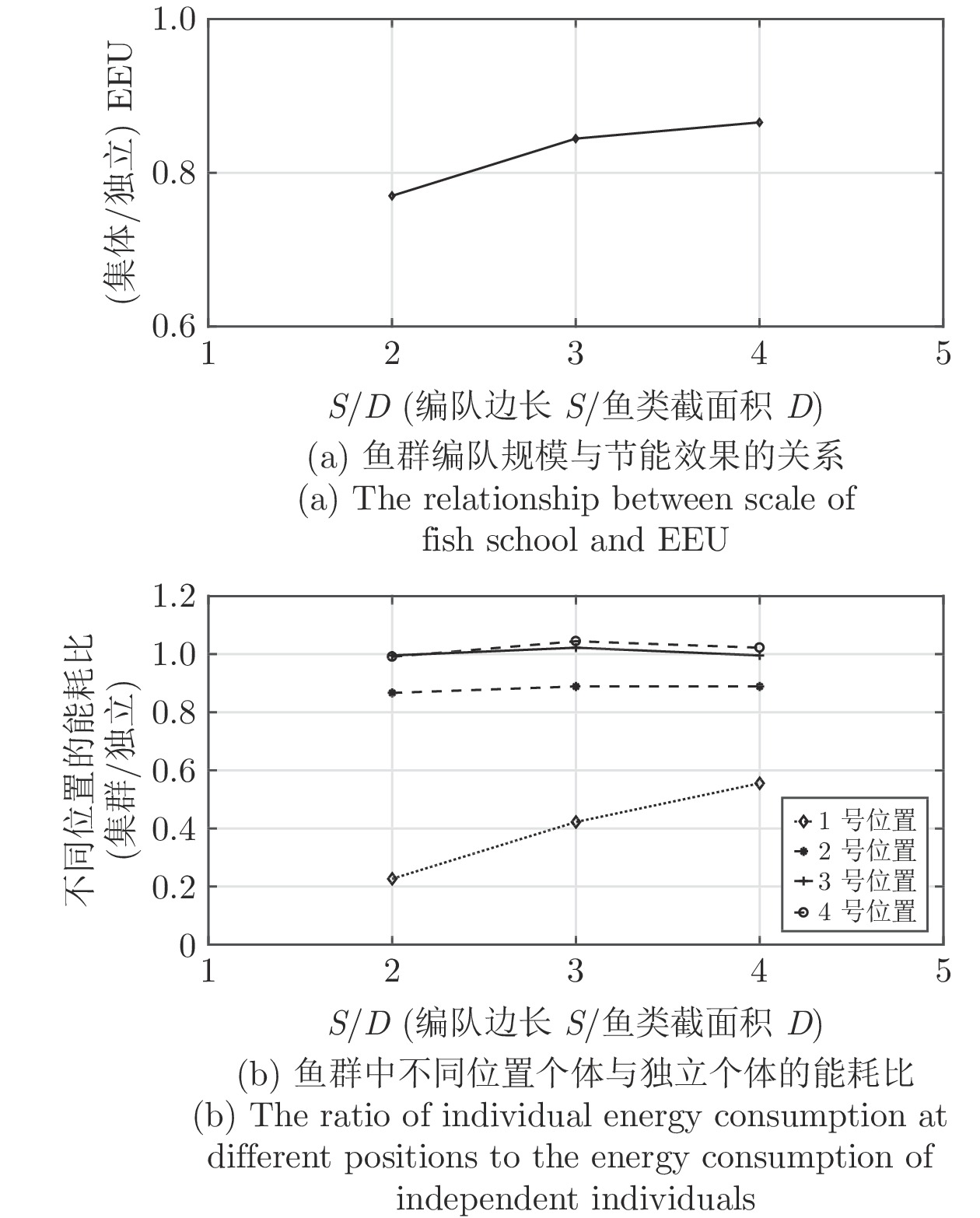
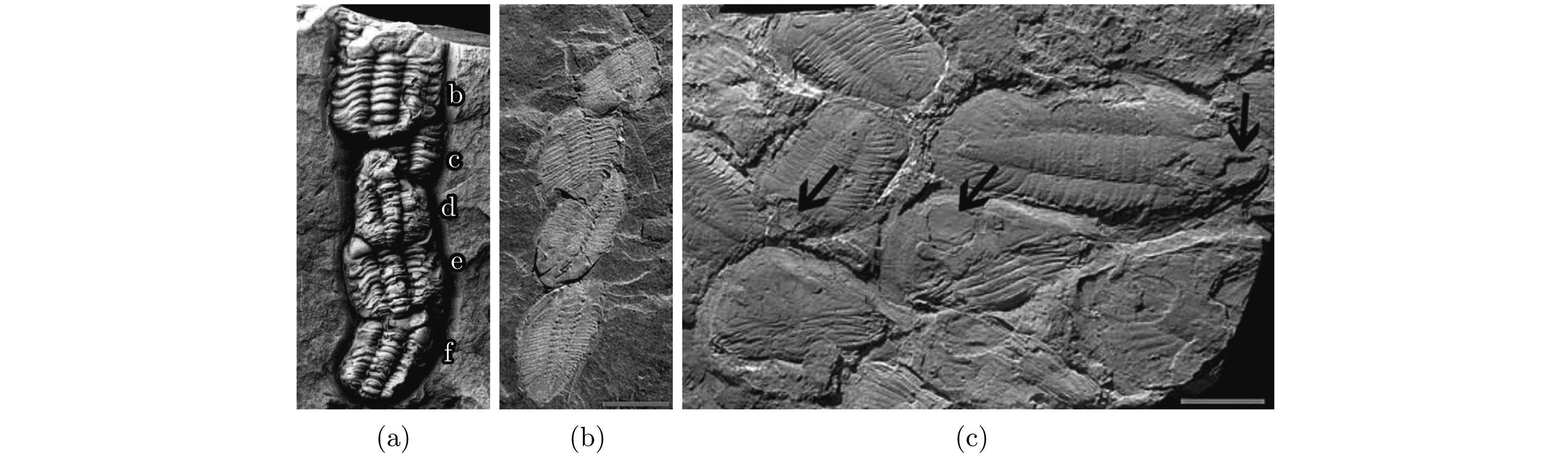
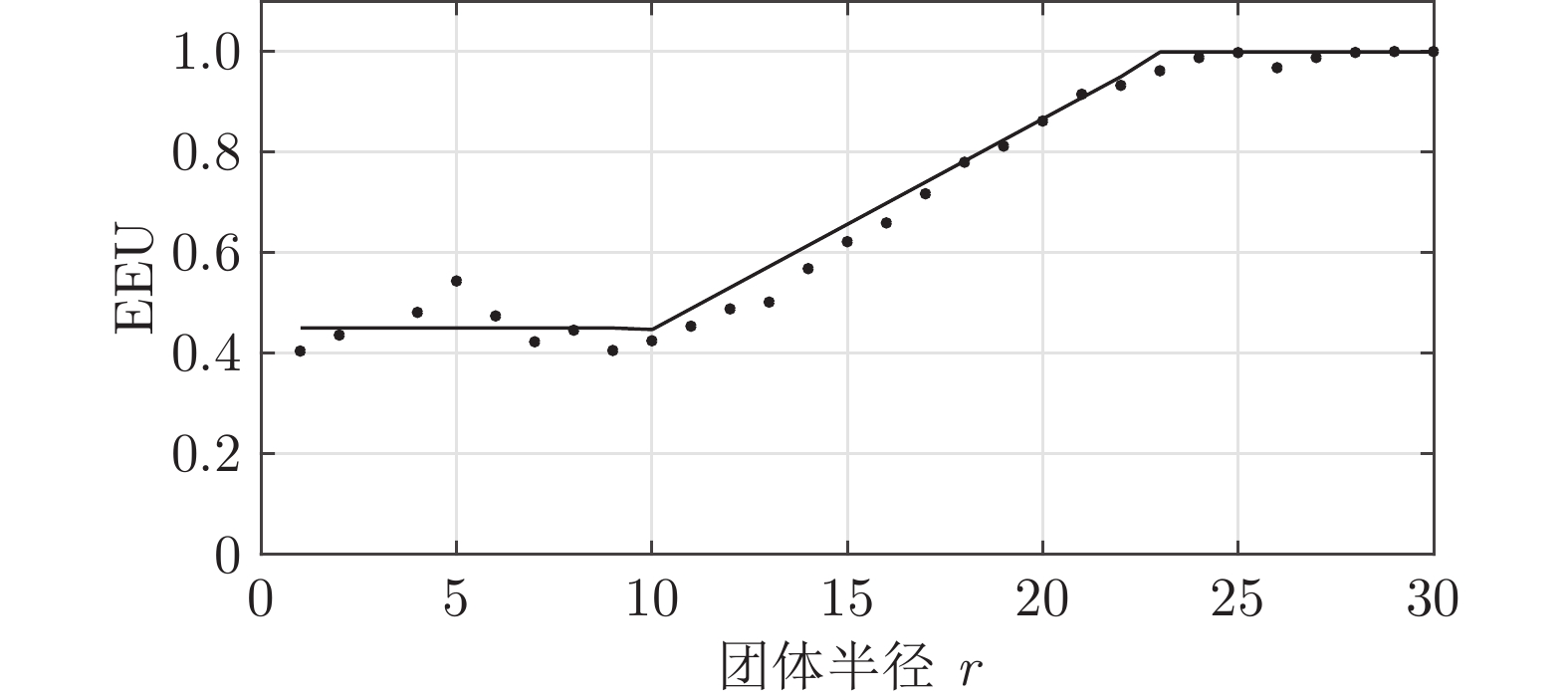
近年来, 智能体集群的能量高效利用(Energy efficient utilization, EEU)机制已经成为多智能体系统领域的热点问题, 如何使用有限的能量资源实现系统性能最优是该问题的核心研究内容. 考虑到智能体集群与生物族群的相似性, 探究生物族群的能量高效利用机制对提升智能体集群节能性能有着重要的研究价值. 为此, 首先介绍不同生物族群中蕴含的能量利用机制, 并根据节能方式的差异分成3类, 流体优势利用机制、流体阻碍克服机制和热量交换与扩散机制; 然后对这些机制进行总结与分析, 并提出一种具有一般性的能量高效利用模型; 最后, 探讨能量高效利用机制在多智能体系统应用中面临的挑战和发展趋势.
近年来, 智能体集群的能量高效利用(Energy efficient utilization, EEU)机制已经成为多智能体系统领域的热点问题, 如何使用有限的能量资源实现系统性能最优是该问题的核心研究内容. 考虑到智能体集群与生物族群的相似性, 探究生物族群的能量高效利用机制对提升智能体集群节能性能有着重要的研究价值. 为此, 首先介绍不同生物族群中蕴含的能量利用机制, 并根据节能方式的差异分成3类, 流体优势利用机制、流体阻碍克服机制和热量交换与扩散机制; 然后对这些机制进行总结与分析, 并提出一种具有一般性的能量高效利用模型; 最后, 探讨能量高效利用机制在多智能体系统应用中面临的挑战和发展趋势.




2024, 50(3): 450-474.
doi: 10.16383/j.aas.c230120
摘要:
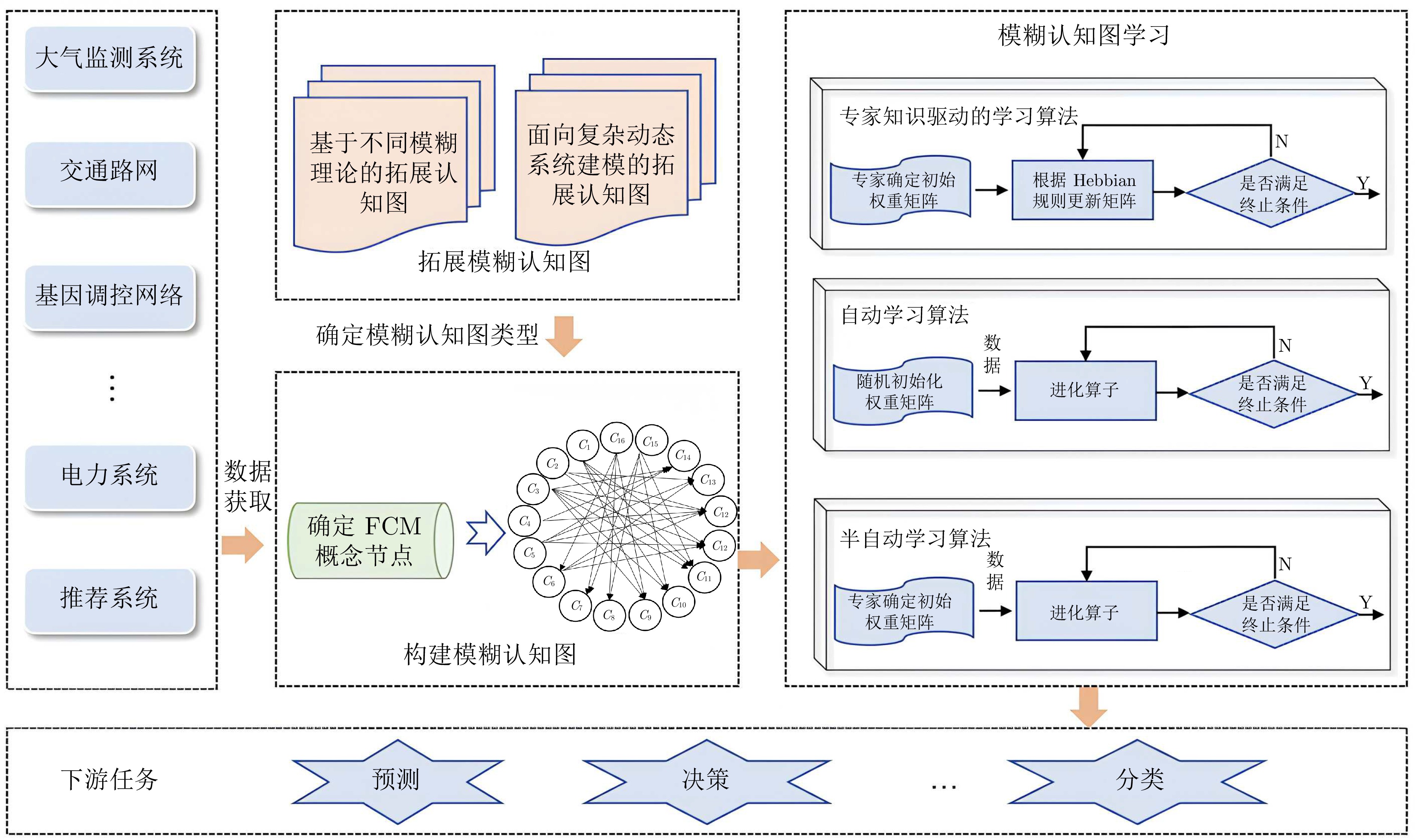
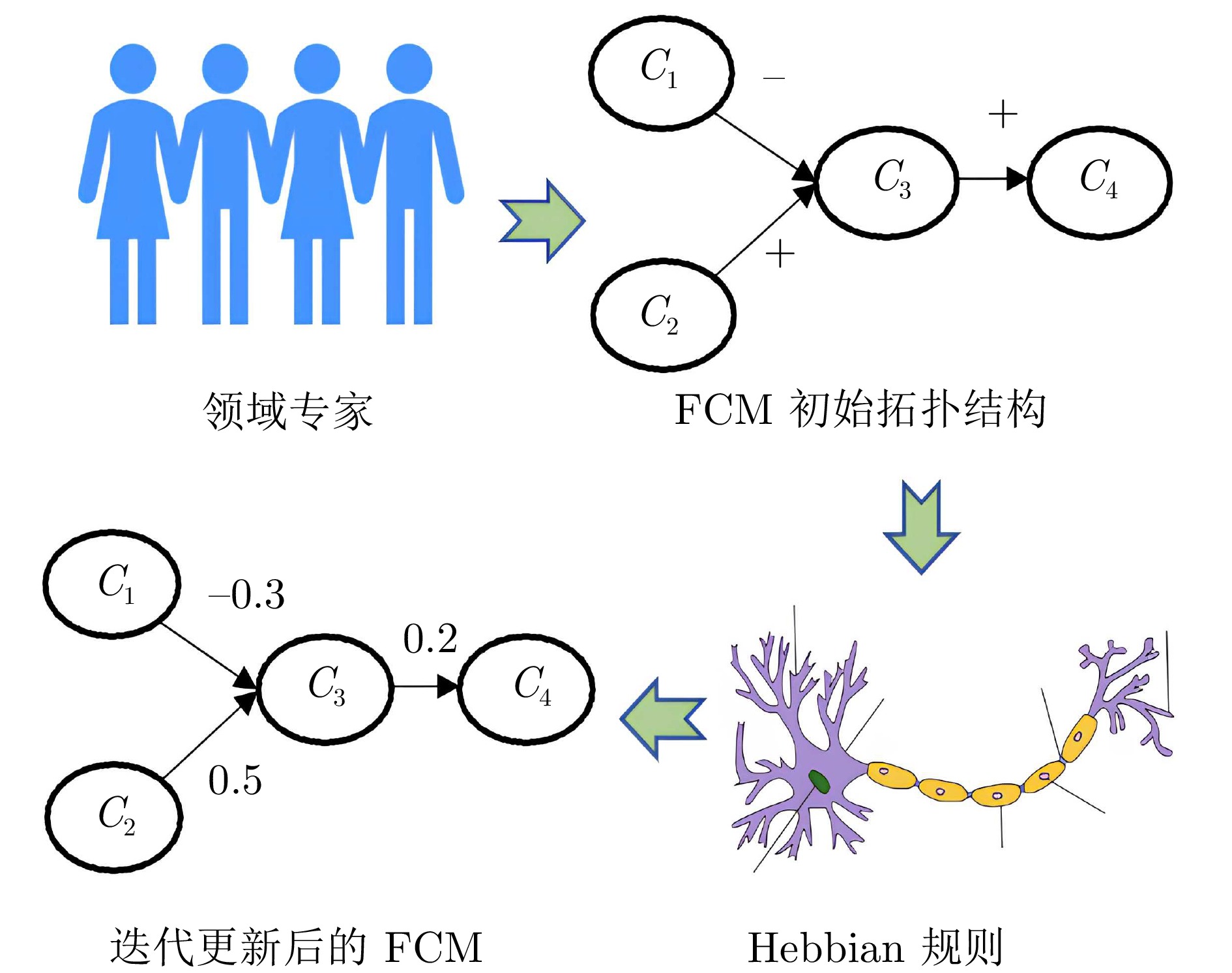
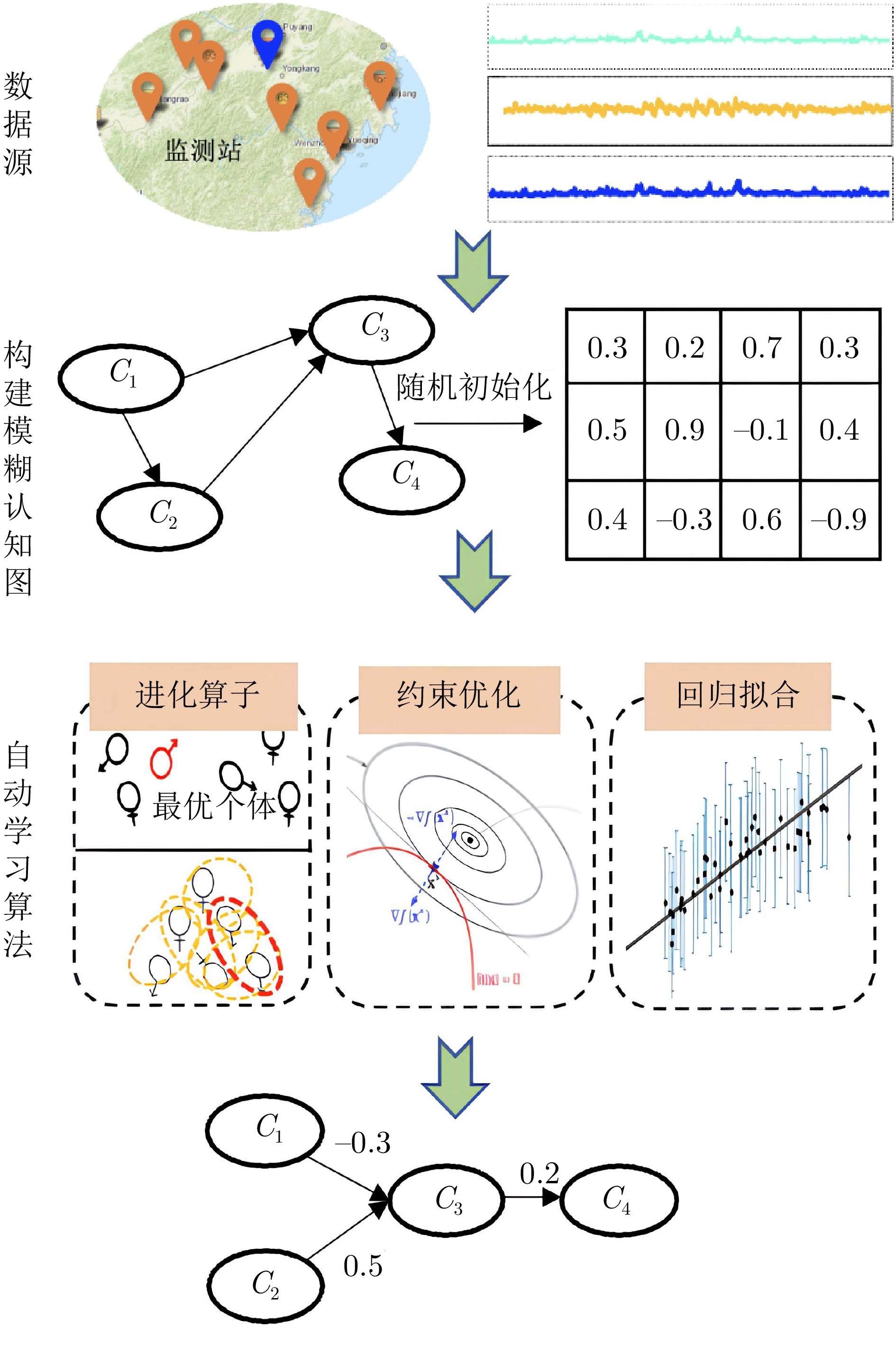
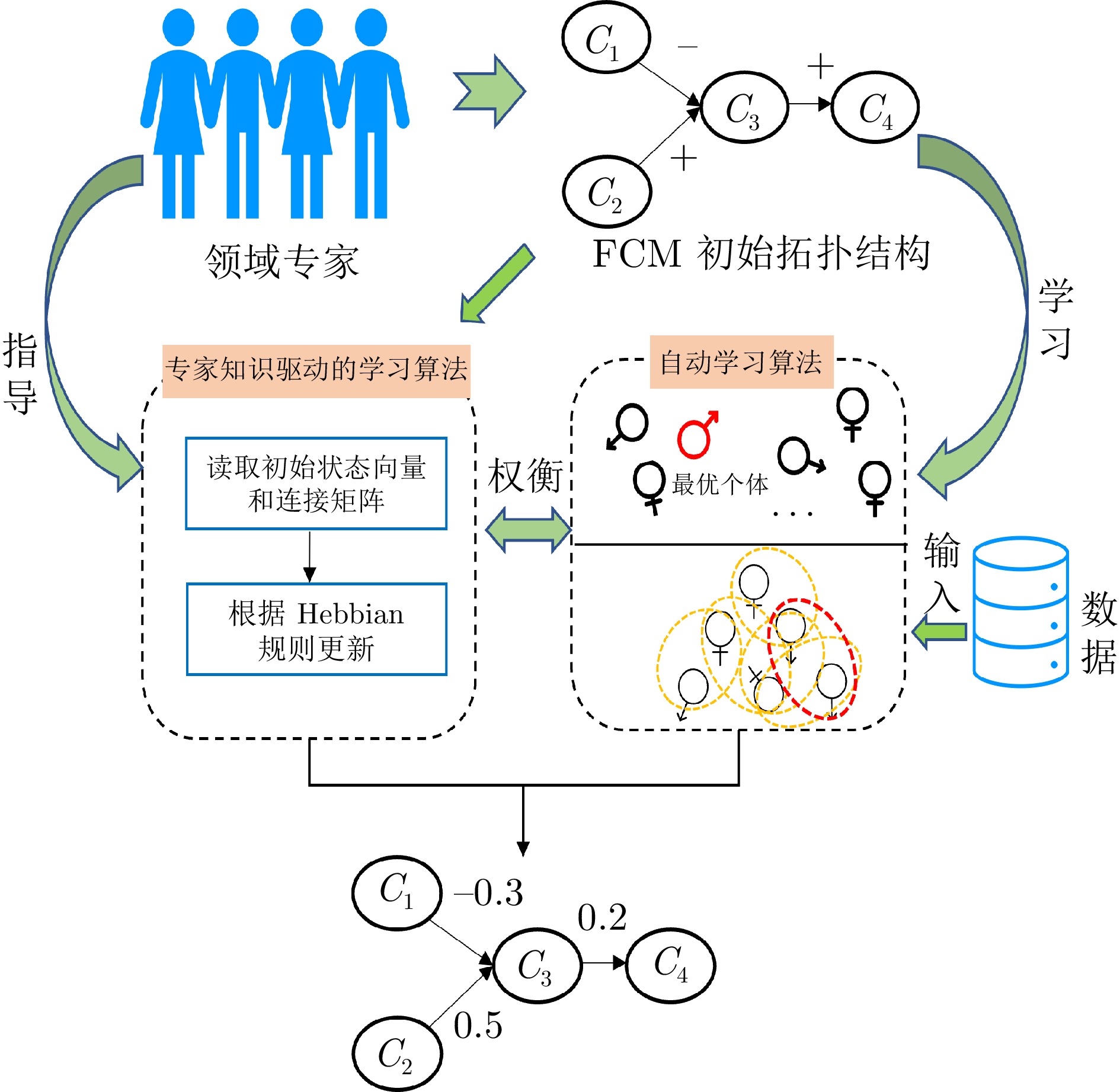
模糊认知图(Fuzzy cognitive map, FCM)是建立在认知图和模糊集理论上的一类代表性的软计算理论, 兼具神经网络和模糊决策两者的优势, 已成功地应用于复杂系统建模和时间序列分析等众多领域. 学习权重矩阵是基于模糊认知图建模的首要任务, 是模糊认知图研究领域的焦点. 针对这一核心问题, 首先, 全面综述模糊认知图的基本理论框架, 系统地总结近年来模糊认知图的拓展模型. 其次, 归纳、总结和分析模糊认知图学习算法的最新研究进展, 对学习算法进行重新定义和划分, 深度阐述各类学习算法的时间复杂度和优缺点. 然后, 对比分析各类学习算法在不同科学领域的应用特点以及现有的模糊认知图建模软件工具. 最后, 讨论学习算法未来潜在的研究方向和发展趋势.
模糊认知图(Fuzzy cognitive map, FCM)是建立在认知图和模糊集理论上的一类代表性的软计算理论, 兼具神经网络和模糊决策两者的优势, 已成功地应用于复杂系统建模和时间序列分析等众多领域. 学习权重矩阵是基于模糊认知图建模的首要任务, 是模糊认知图研究领域的焦点. 针对这一核心问题, 首先, 全面综述模糊认知图的基本理论框架, 系统地总结近年来模糊认知图的拓展模型. 其次, 归纳、总结和分析模糊认知图学习算法的最新研究进展, 对学习算法进行重新定义和划分, 深度阐述各类学习算法的时间复杂度和优缺点. 然后, 对比分析各类学习算法在不同科学领域的应用特点以及现有的模糊认知图建模软件工具. 最后, 讨论学习算法未来潜在的研究方向和发展趋势.


2024, 50(3): 475-485.
doi: 10.16383/j.aas.c210585
摘要:
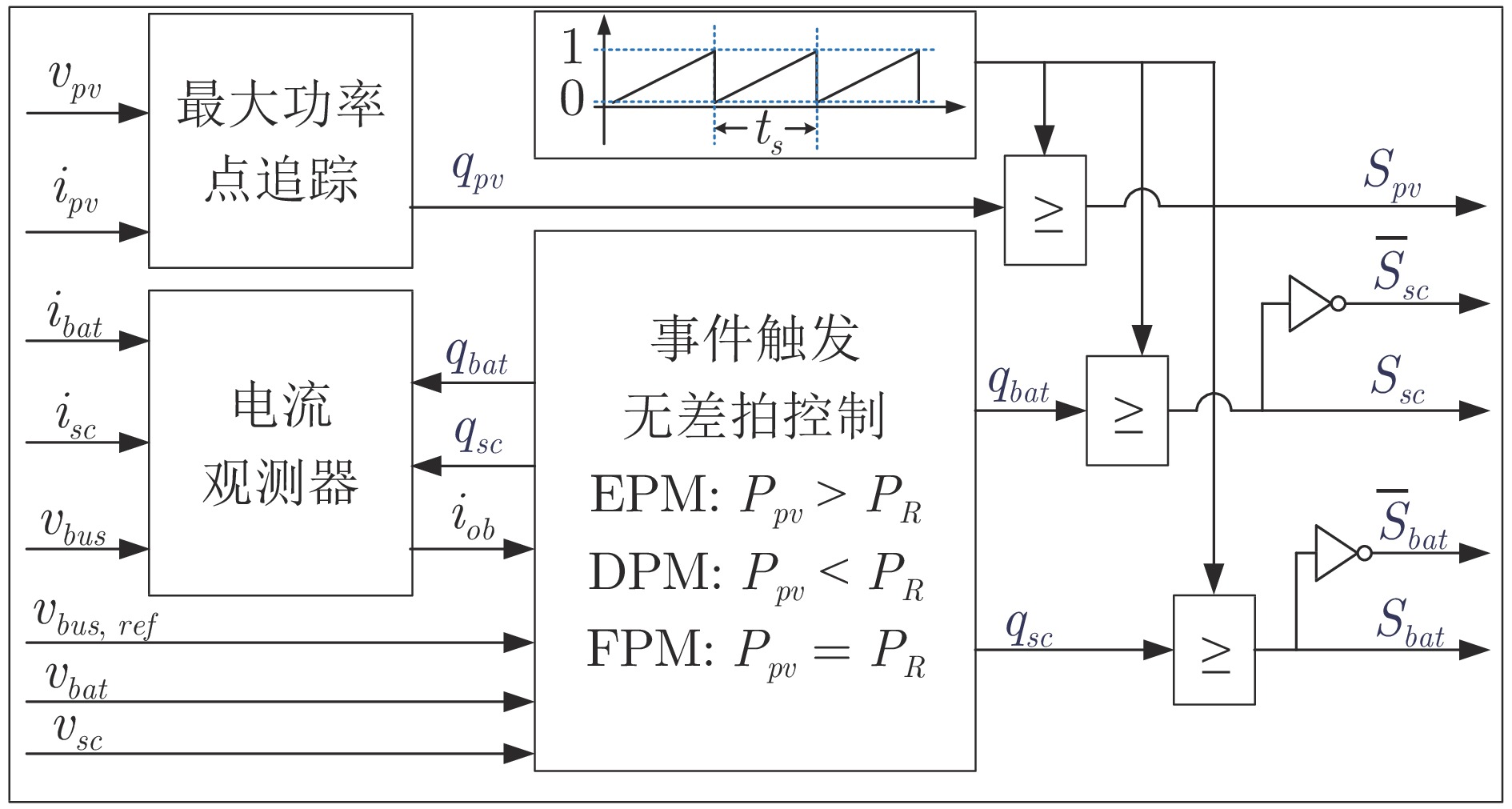
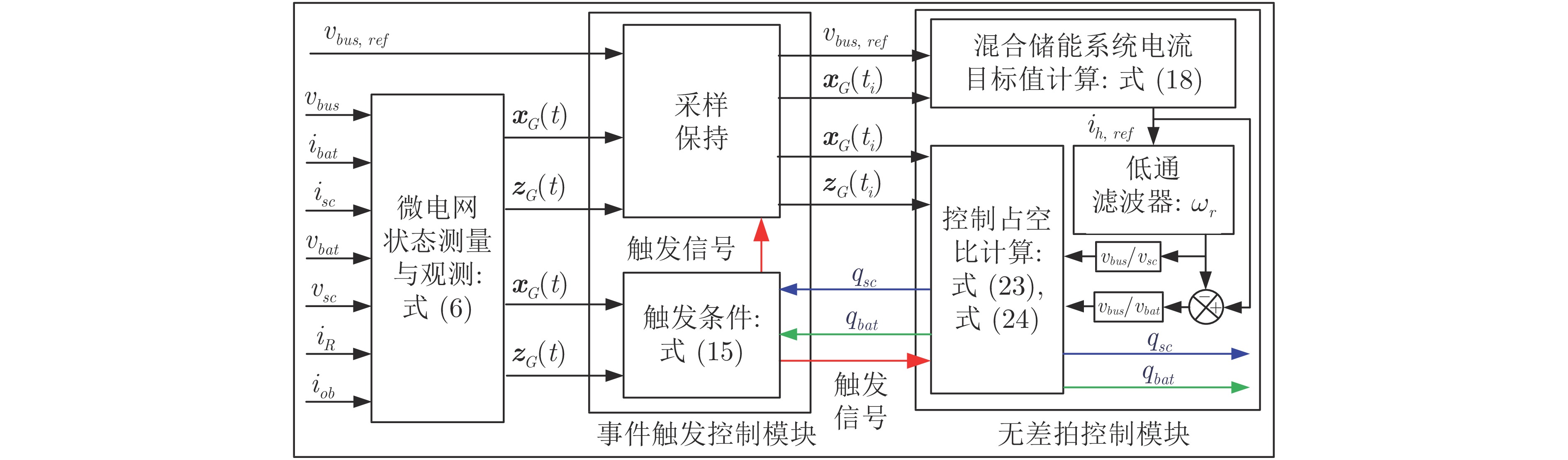
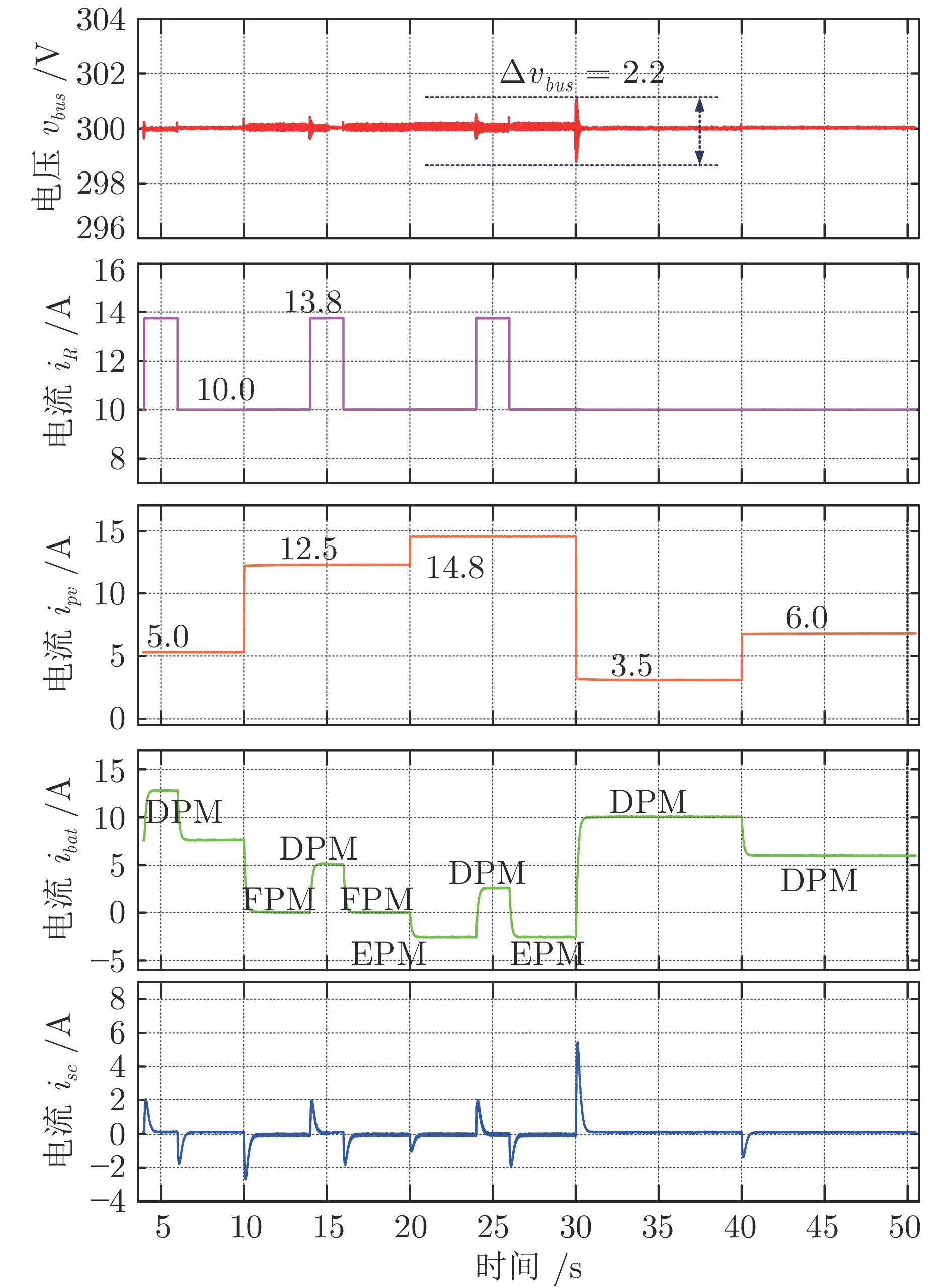
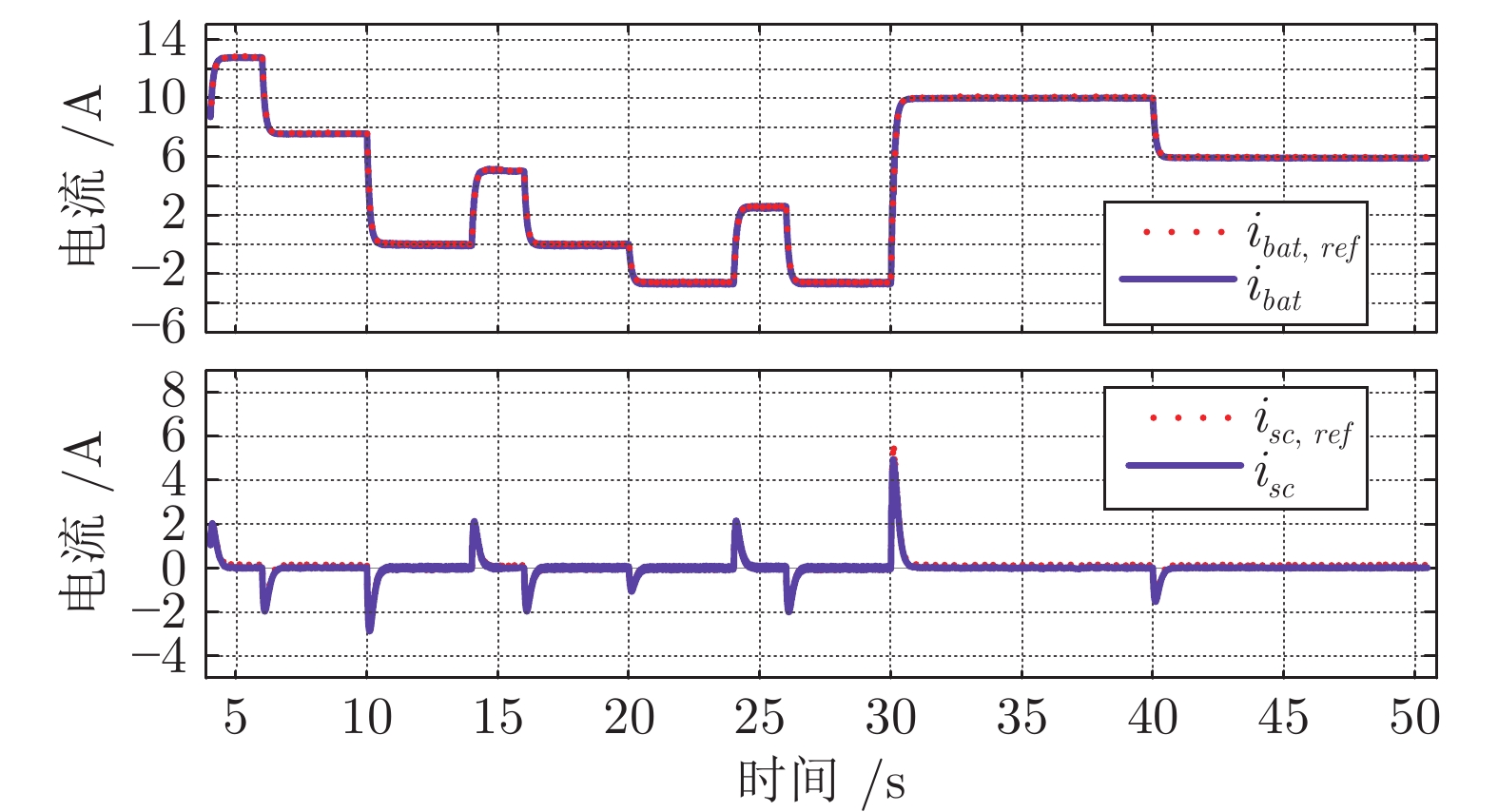
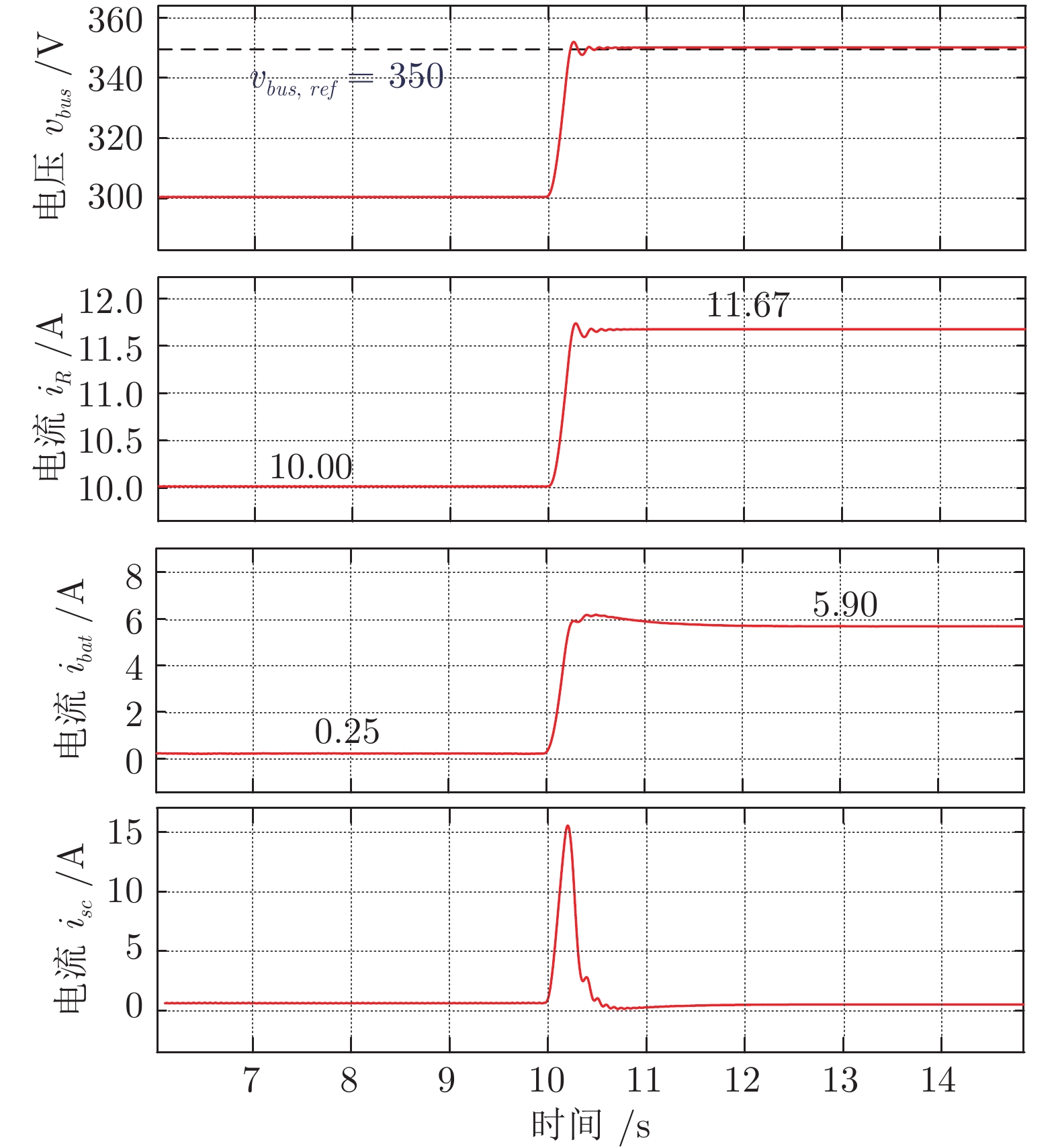
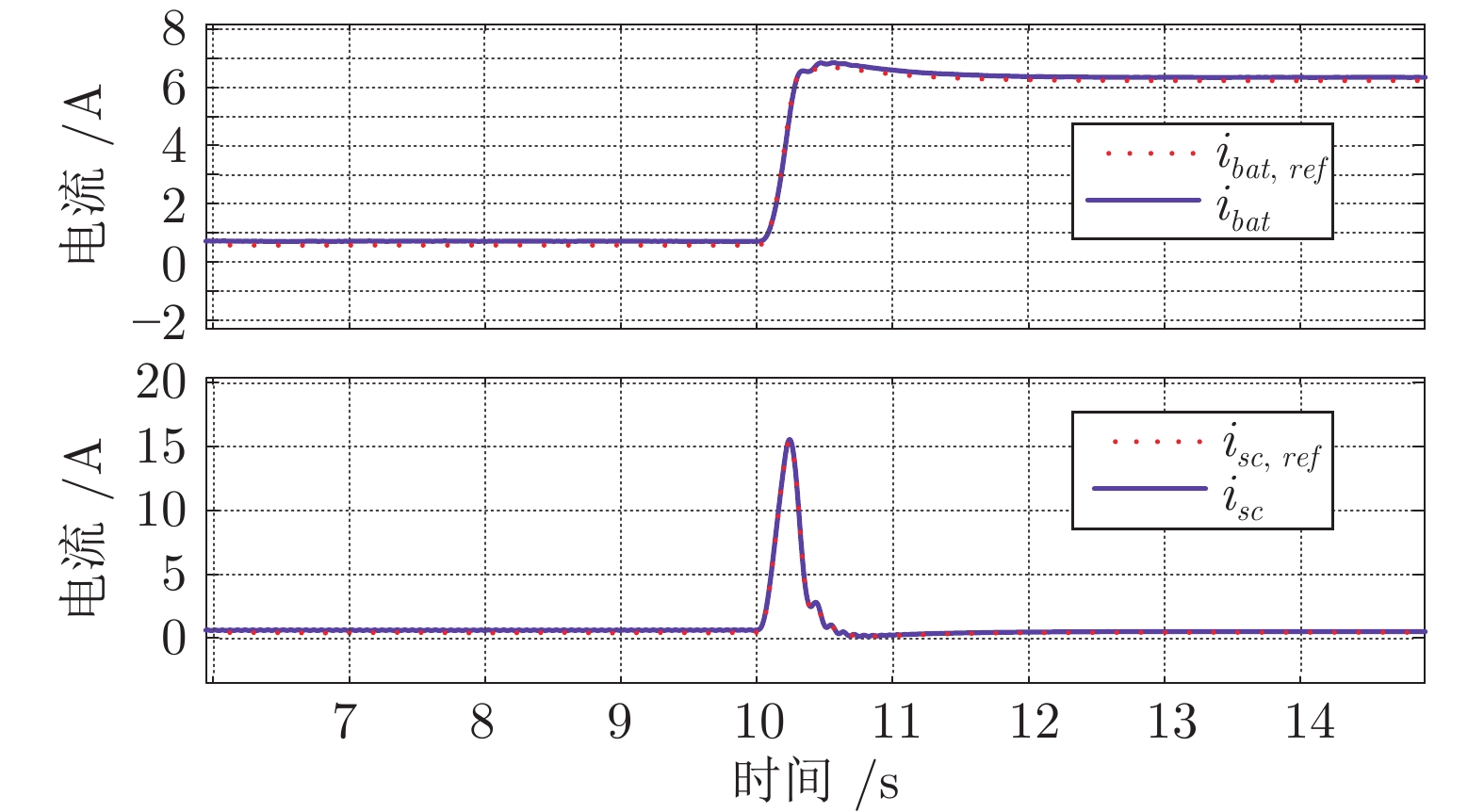
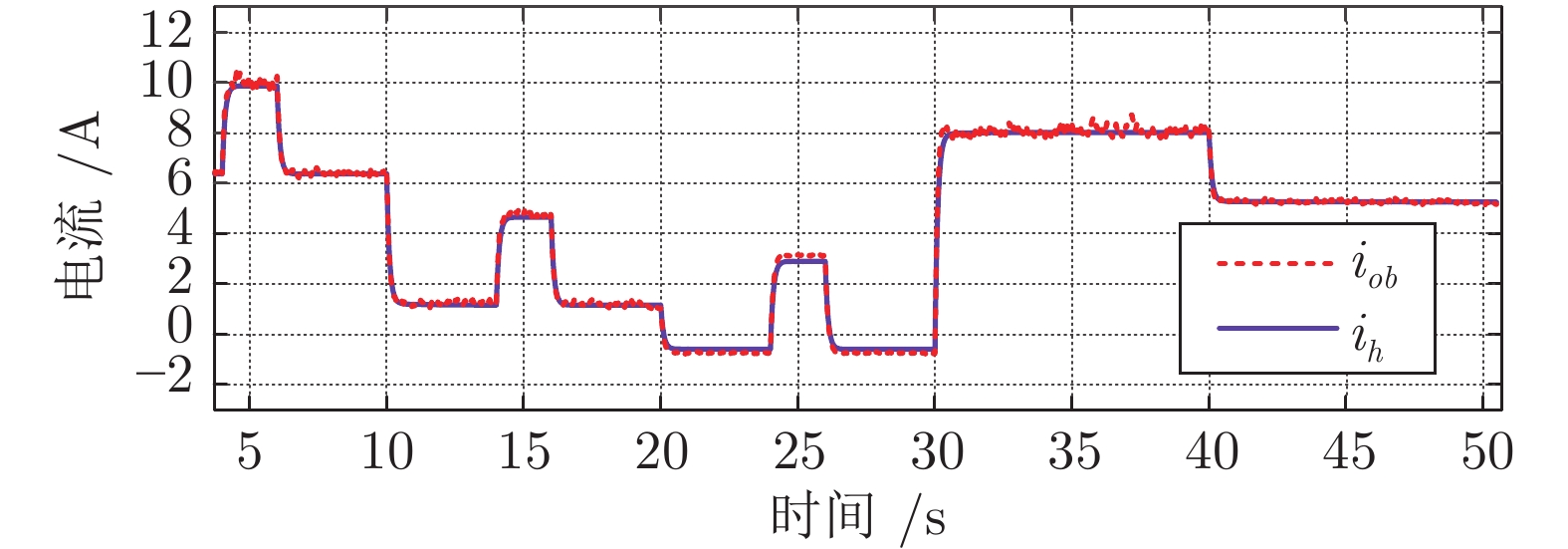
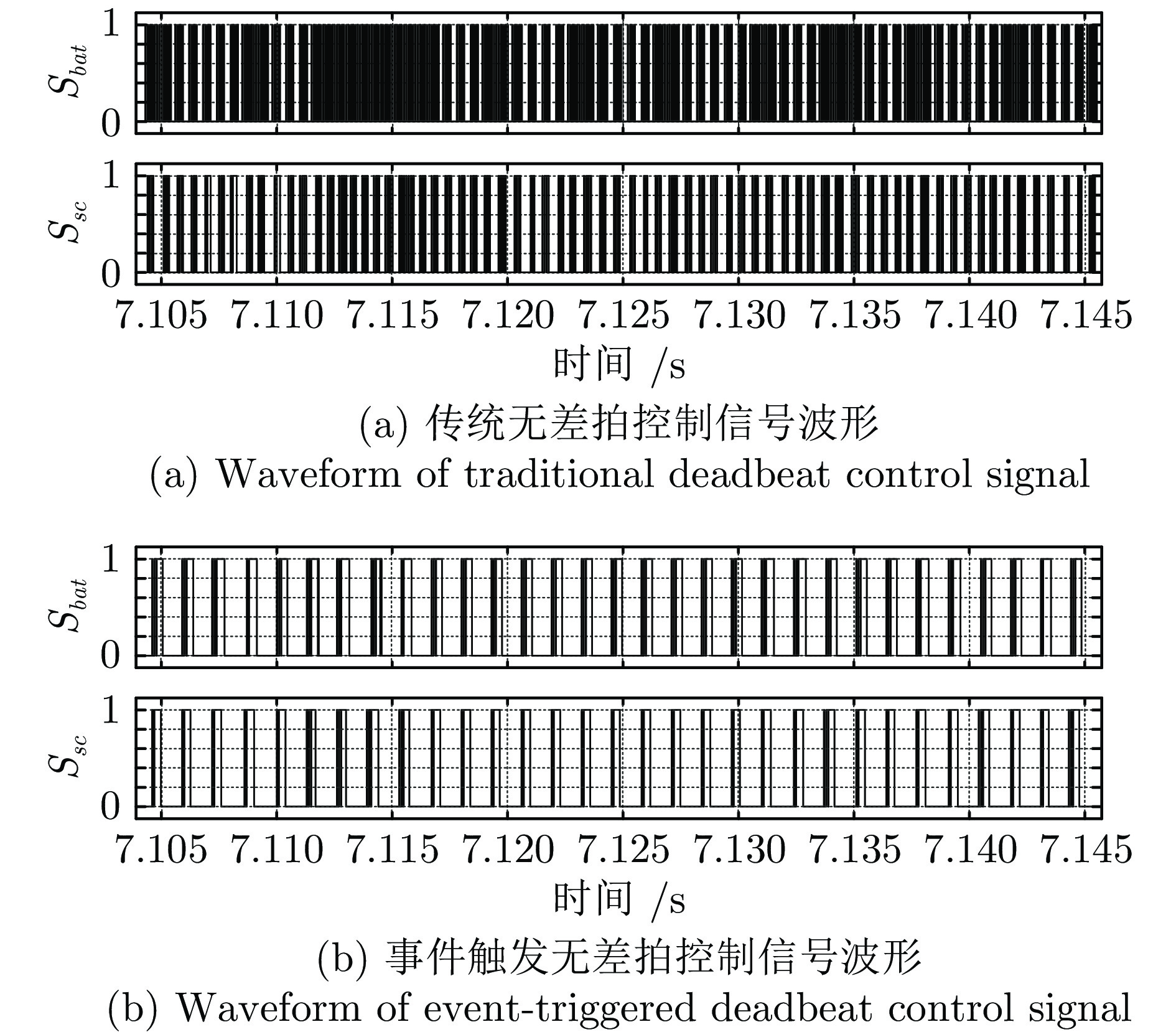
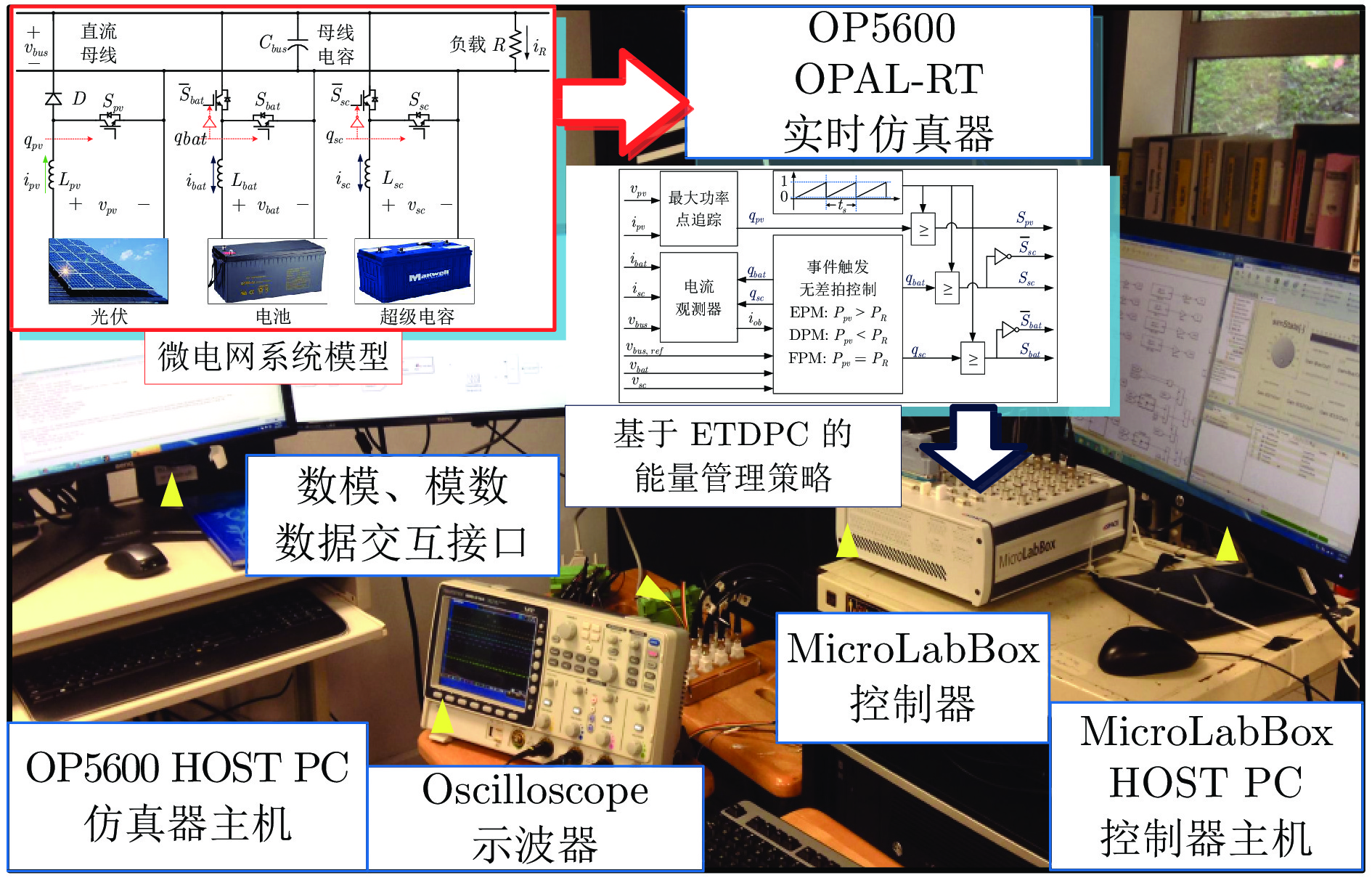
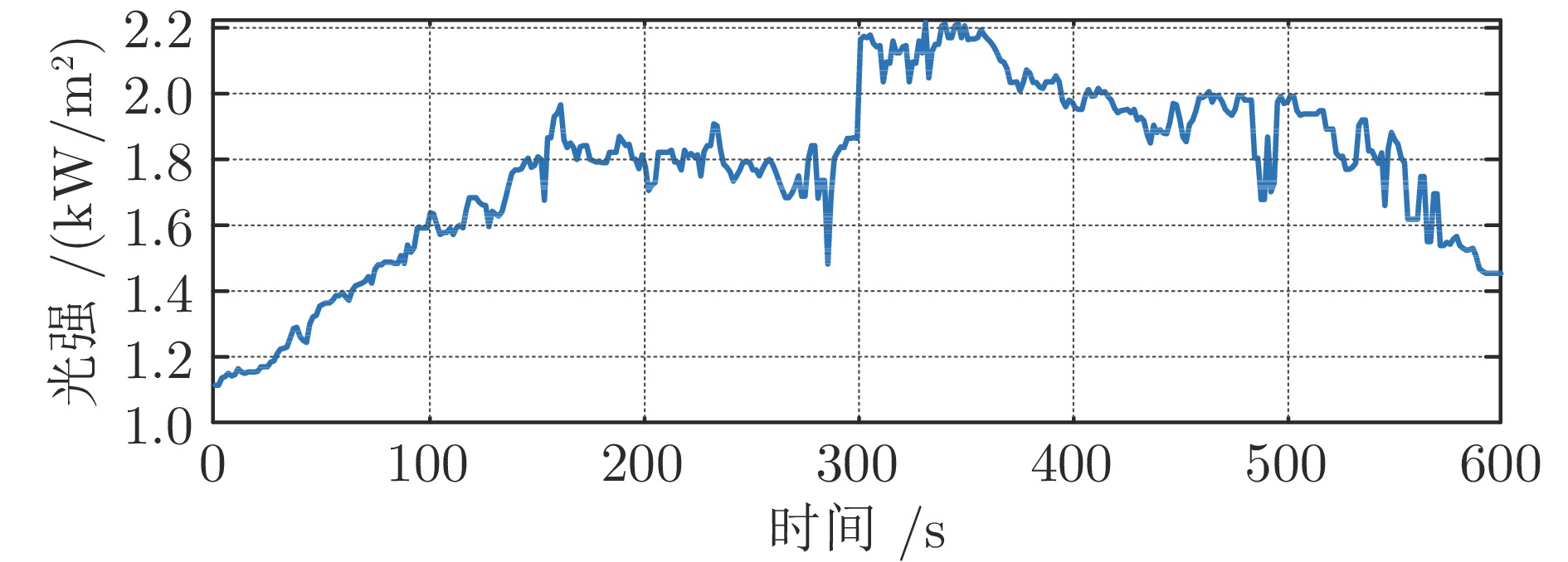
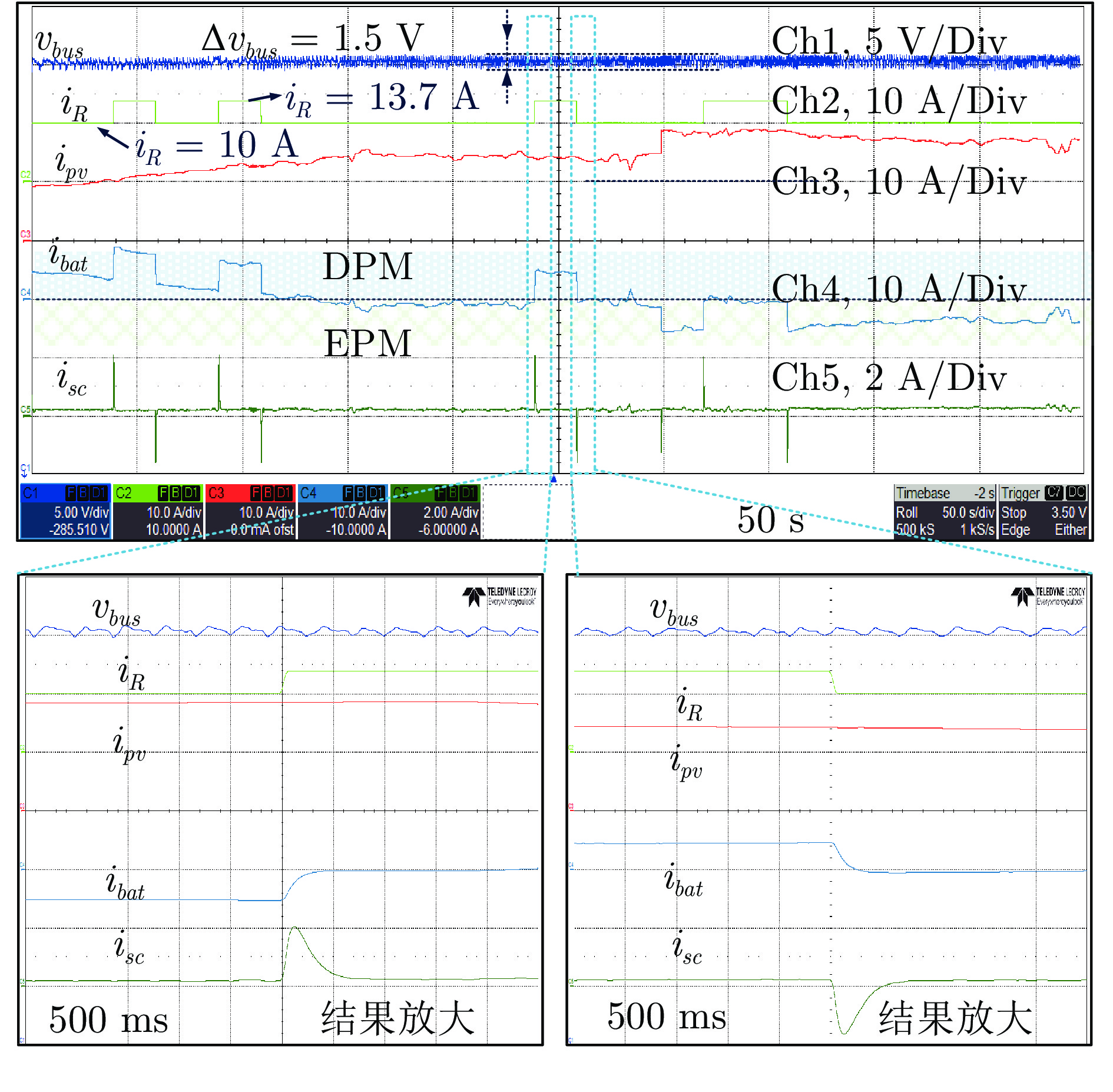
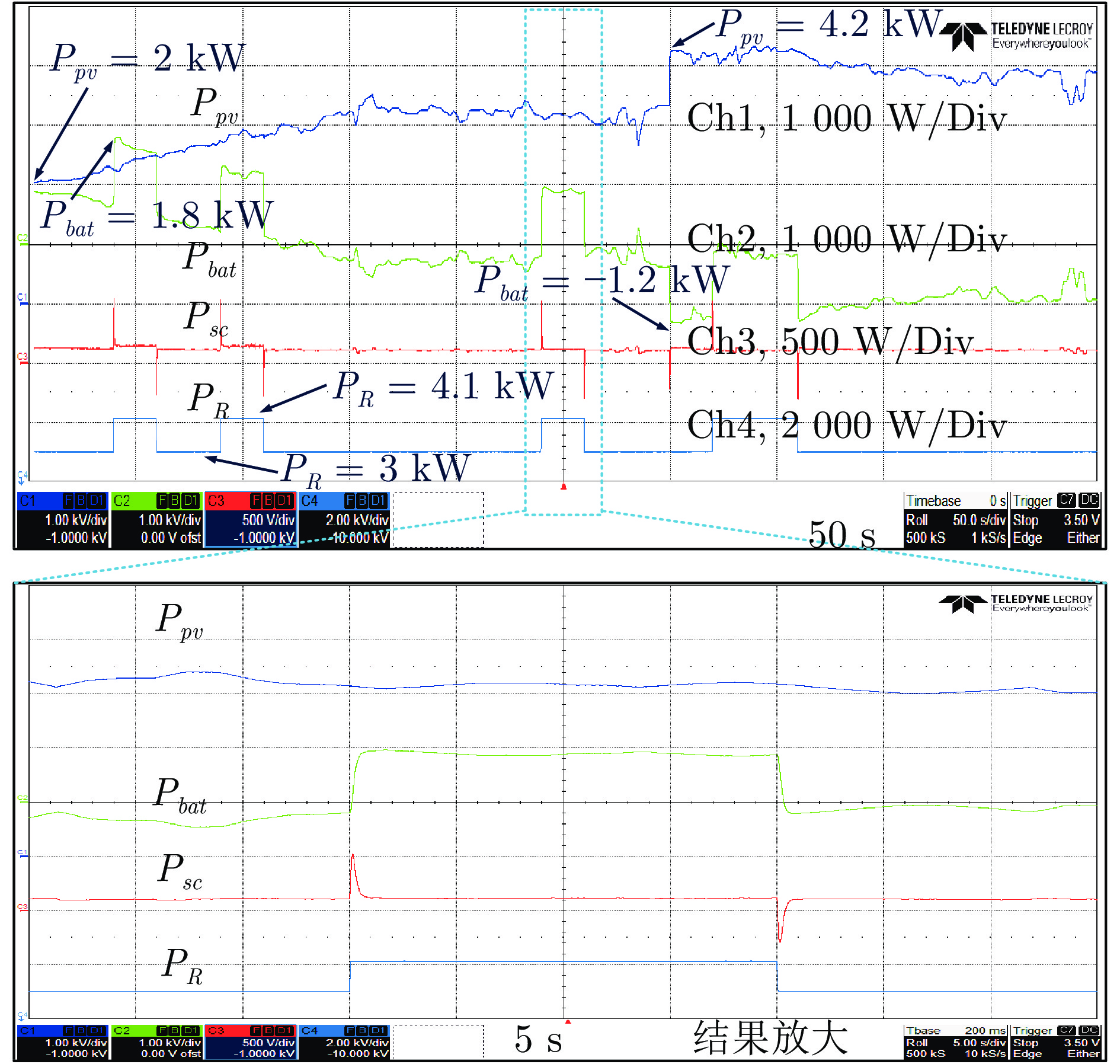
针对光伏(Photovoltaic, PV)−电池−超级电容直流微电网系统中光伏发电间歇性造成的功率失配问题, 提出一种基于事件触发的无差拍预测控制(Event-triggered deadbeat predictive control, ETDPC)方法, 以实现有效的能量管理. ETDPC方法结合事件触发控制策略和无差拍预测控制策略(Deadbeat predictive control, DPC)的优点, 根据微电网的拓扑结构构建状态空间模型, 用于设计适用于微电网能量管理的触发条件: 当ETDPC的触发条件满足时, ETDPC中无差拍预测控制模块被激活, 可以在一个控制周期内产生最优控制信号, 实现对于扰动的快速响应, 减小母线电压纹波; 当系统状态不满足ETDPC中的触发条件时, 无差拍预测控制模块被挂起, 从而消除非必要运算, 以减轻实现能量管理的运算负担. 因此, 对于电池−超级电容器混合储能系统(Hybrid energy storage system, HESS), ETDPC能够缓解间歇性光伏发电与负荷需求之间的功率失衡, 以稳定母线电压. 最后, 数字仿真和硬件在环(Hardware-in-loop, HIL)实验结果表明, 相较于传统无差拍控制方法, 运算负担减小了50.63%, 母线电压纹波小于0.73%, 验证了ETDPC方法的有效性与性能优势, 为直流微电网的能量管理提供了一种参考.
针对光伏(Photovoltaic, PV)−电池−超级电容直流微电网系统中光伏发电间歇性造成的功率失配问题, 提出一种基于事件触发的无差拍预测控制(Event-triggered deadbeat predictive control, ETDPC)方法, 以实现有效的能量管理. ETDPC方法结合事件触发控制策略和无差拍预测控制策略(Deadbeat predictive control, DPC)的优点, 根据微电网的拓扑结构构建状态空间模型, 用于设计适用于微电网能量管理的触发条件: 当ETDPC的触发条件满足时, ETDPC中无差拍预测控制模块被激活, 可以在一个控制周期内产生最优控制信号, 实现对于扰动的快速响应, 减小母线电压纹波; 当系统状态不满足ETDPC中的触发条件时, 无差拍预测控制模块被挂起, 从而消除非必要运算, 以减轻实现能量管理的运算负担. 因此, 对于电池−超级电容器混合储能系统(Hybrid energy storage system, HESS), ETDPC能够缓解间歇性光伏发电与负荷需求之间的功率失衡, 以稳定母线电压. 最后, 数字仿真和硬件在环(Hardware-in-loop, HIL)实验结果表明, 相较于传统无差拍控制方法, 运算负担减小了50.63%, 母线电压纹波小于0.73%, 验证了ETDPC方法的有效性与性能优势, 为直流微电网的能量管理提供了一种参考.



2024, 50(3): 486-504.
doi: 10.16383/j.aas.c230240
摘要:
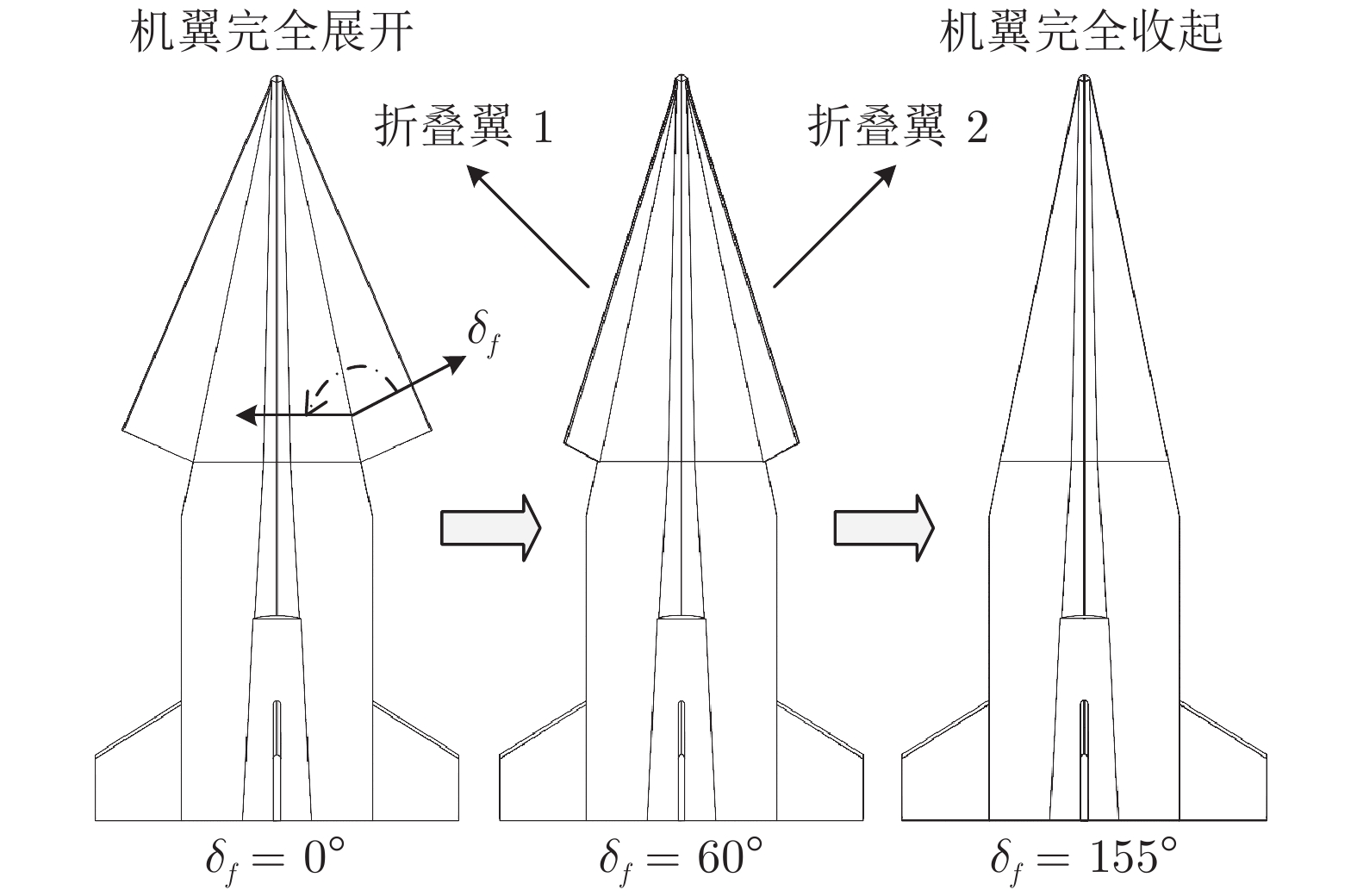
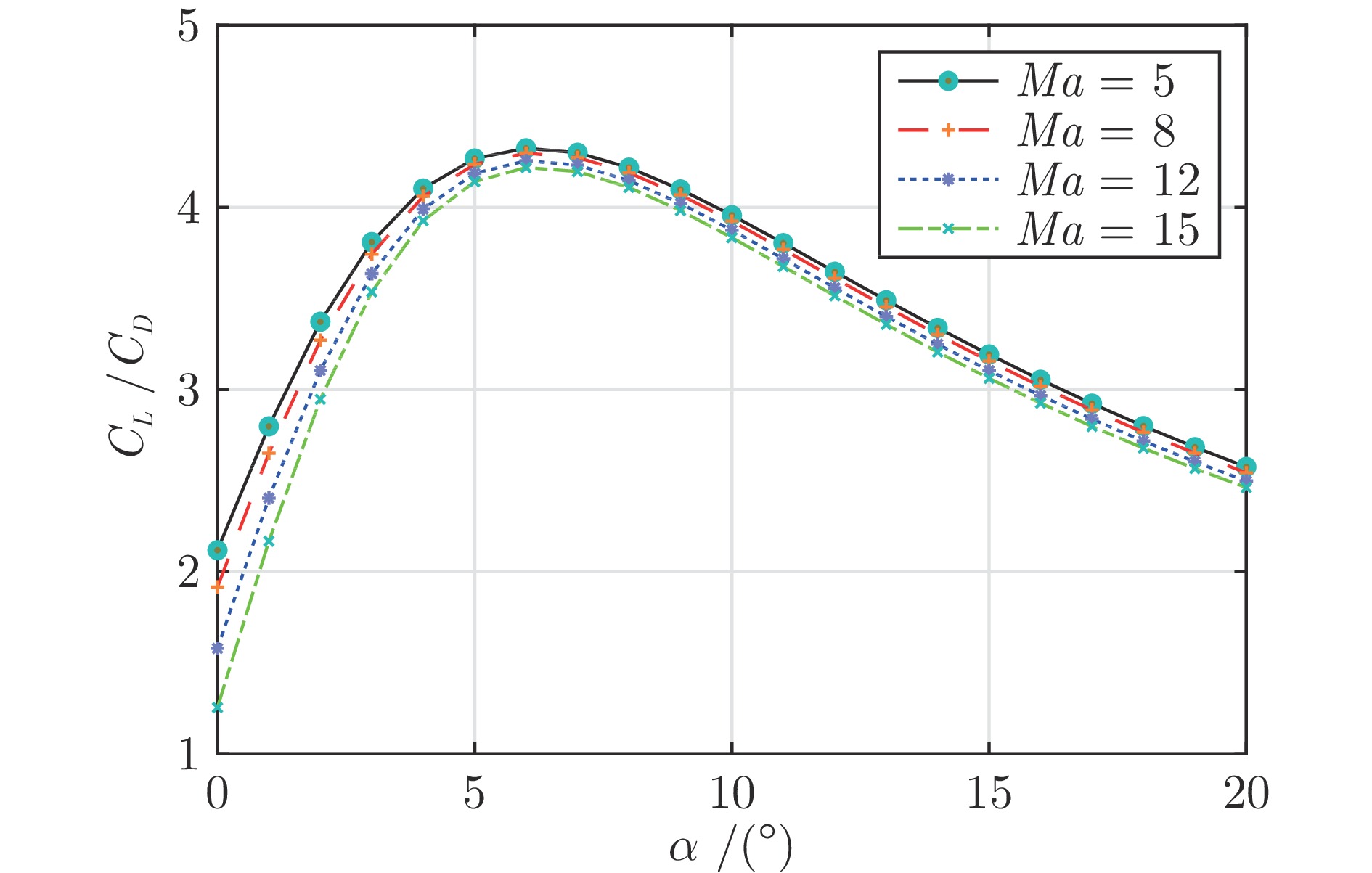
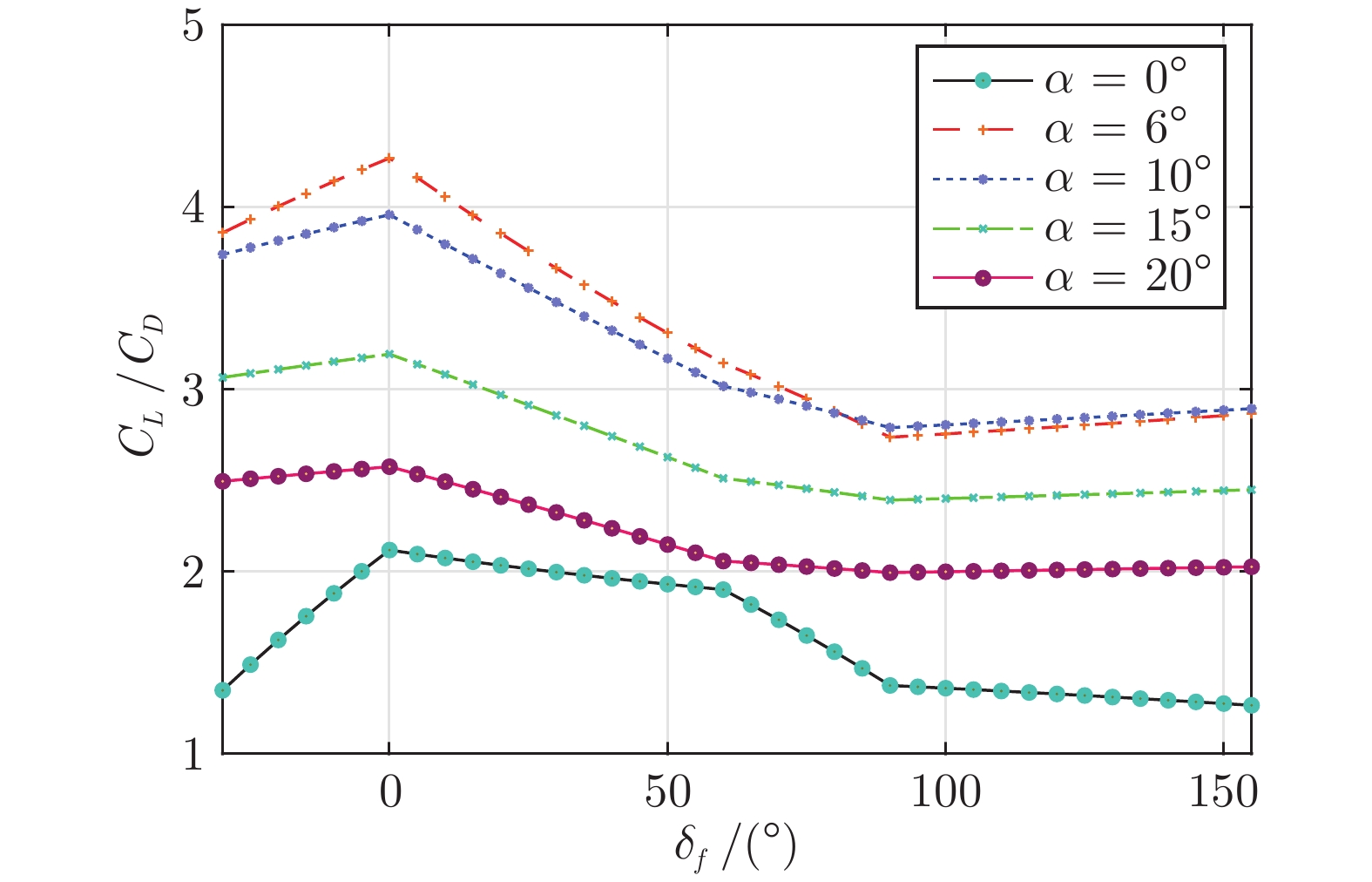
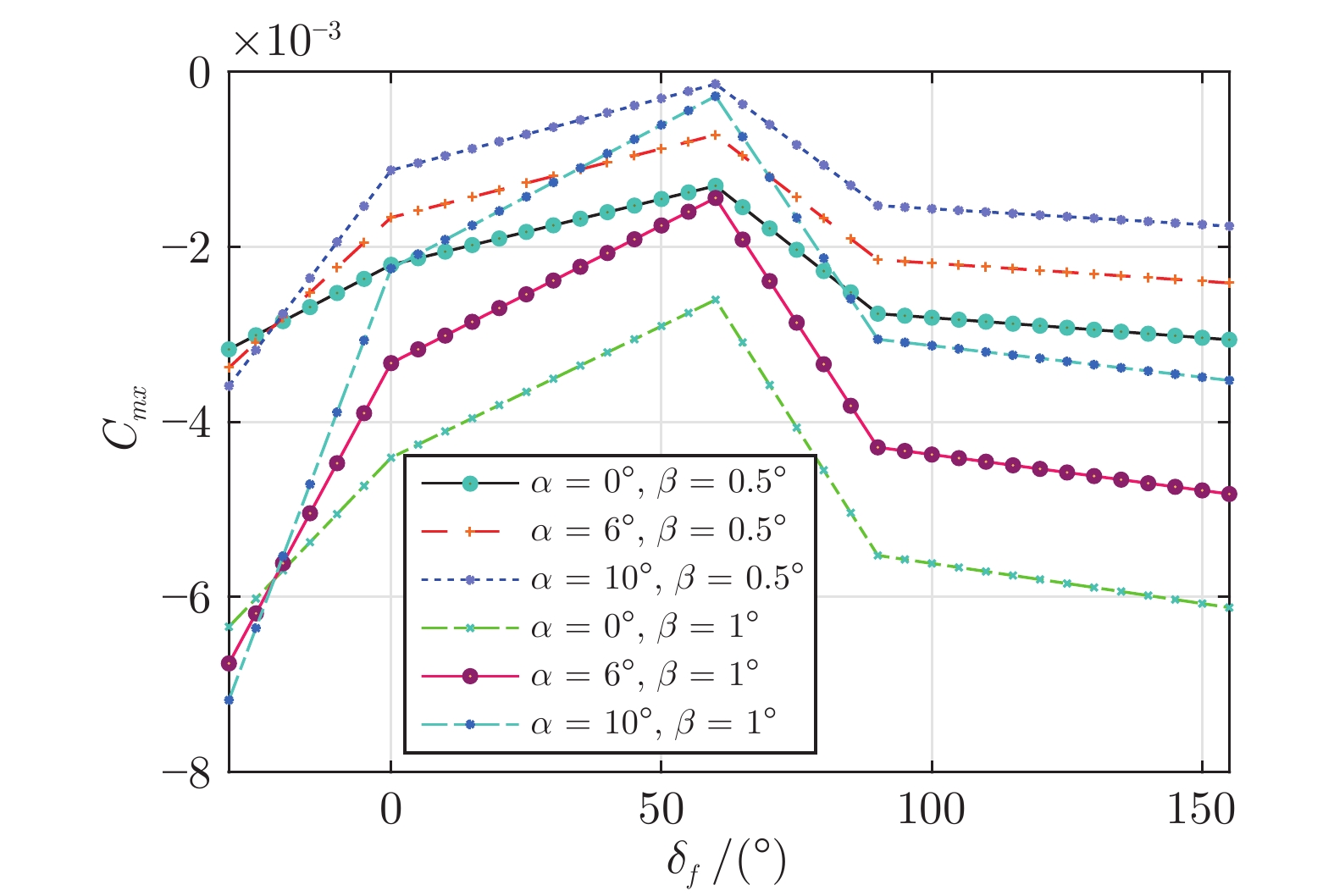
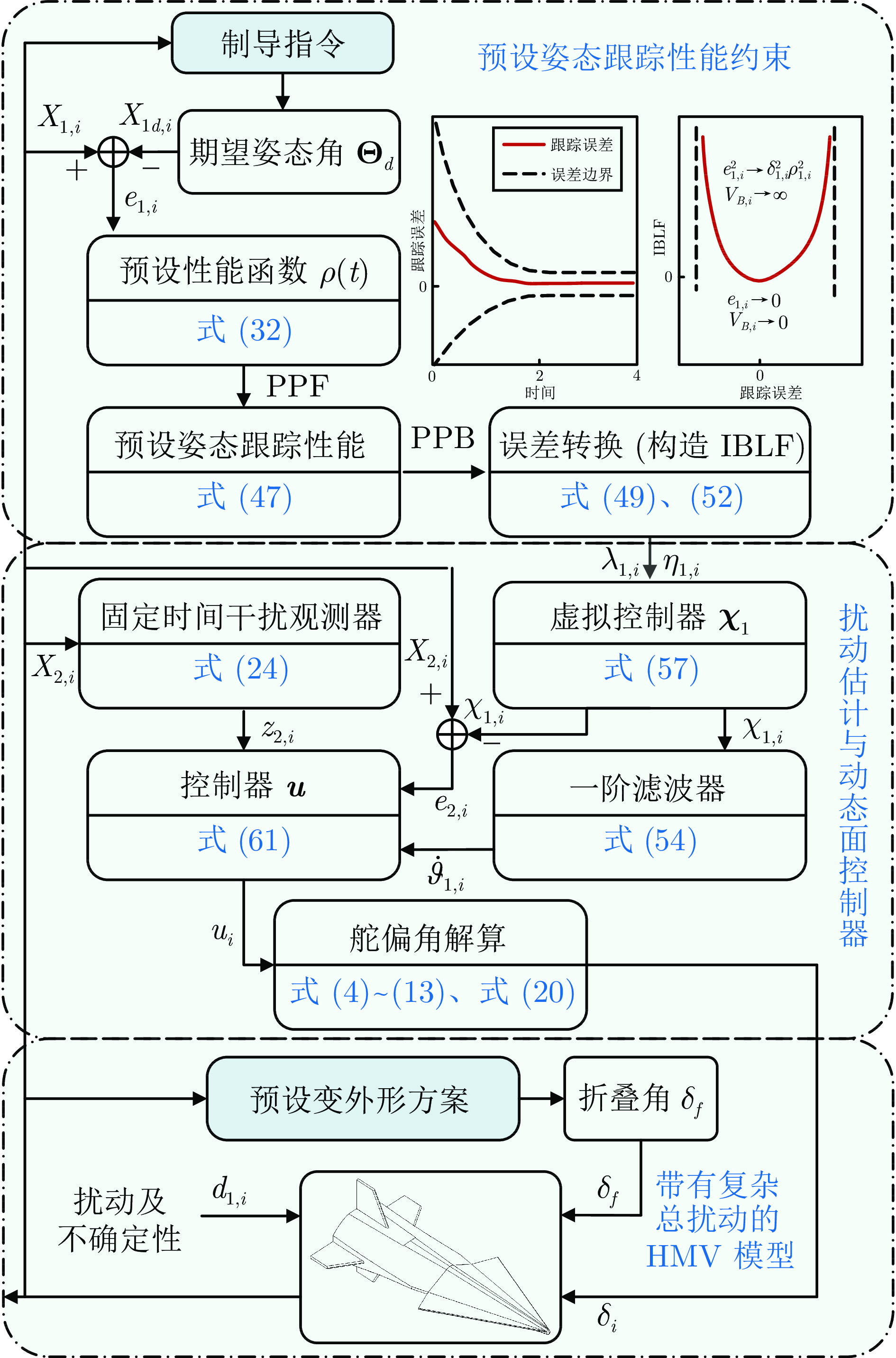
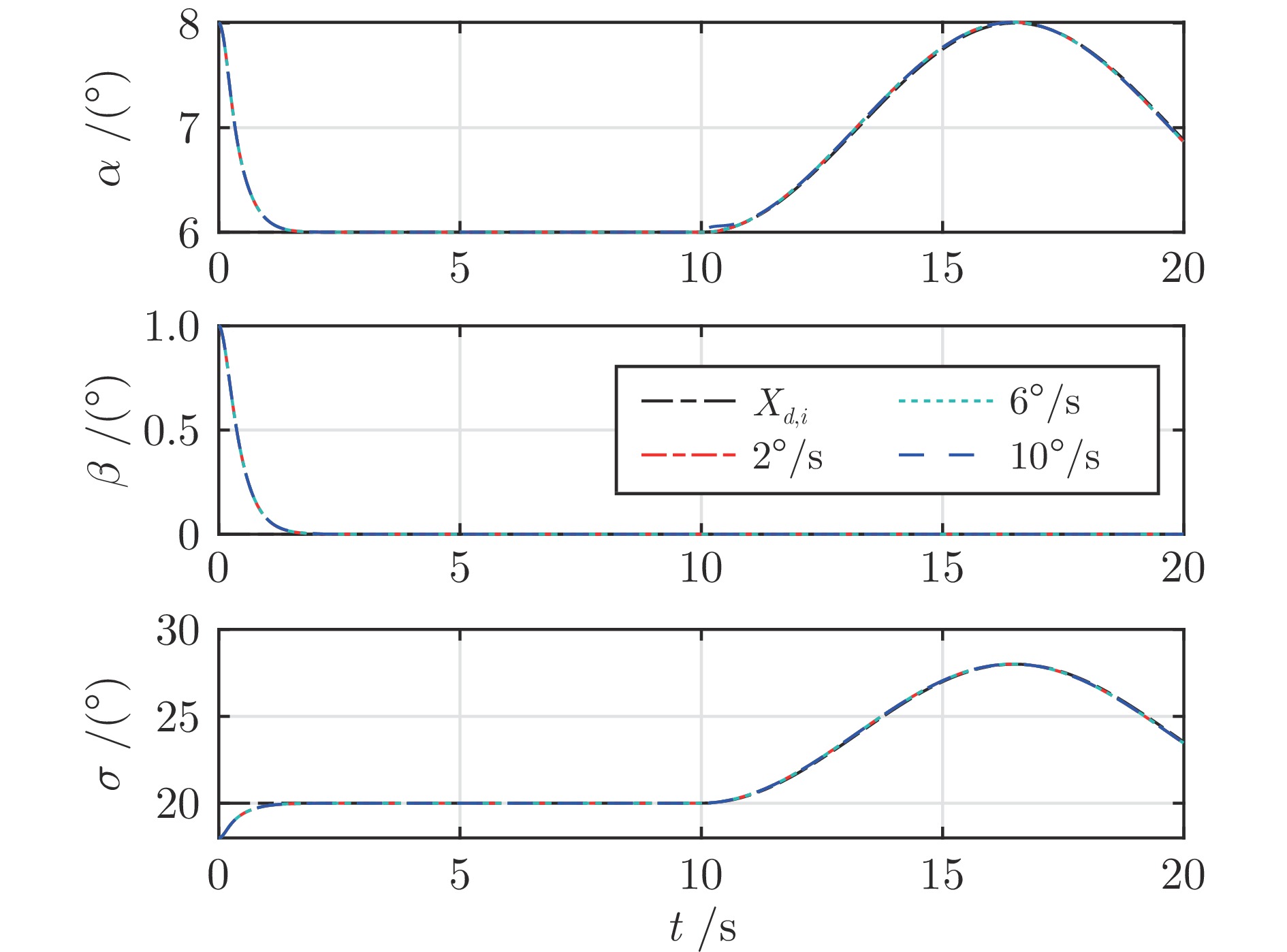
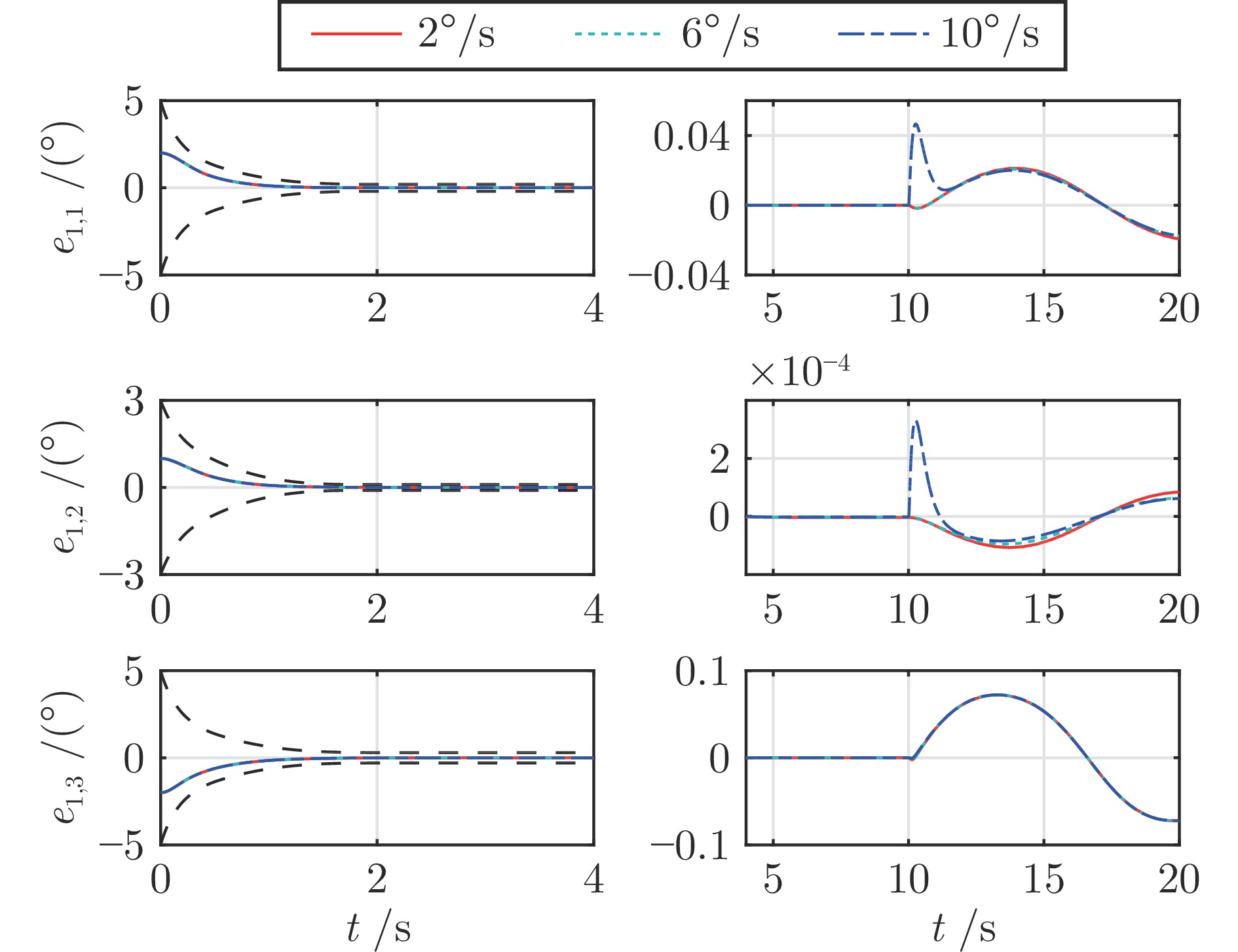
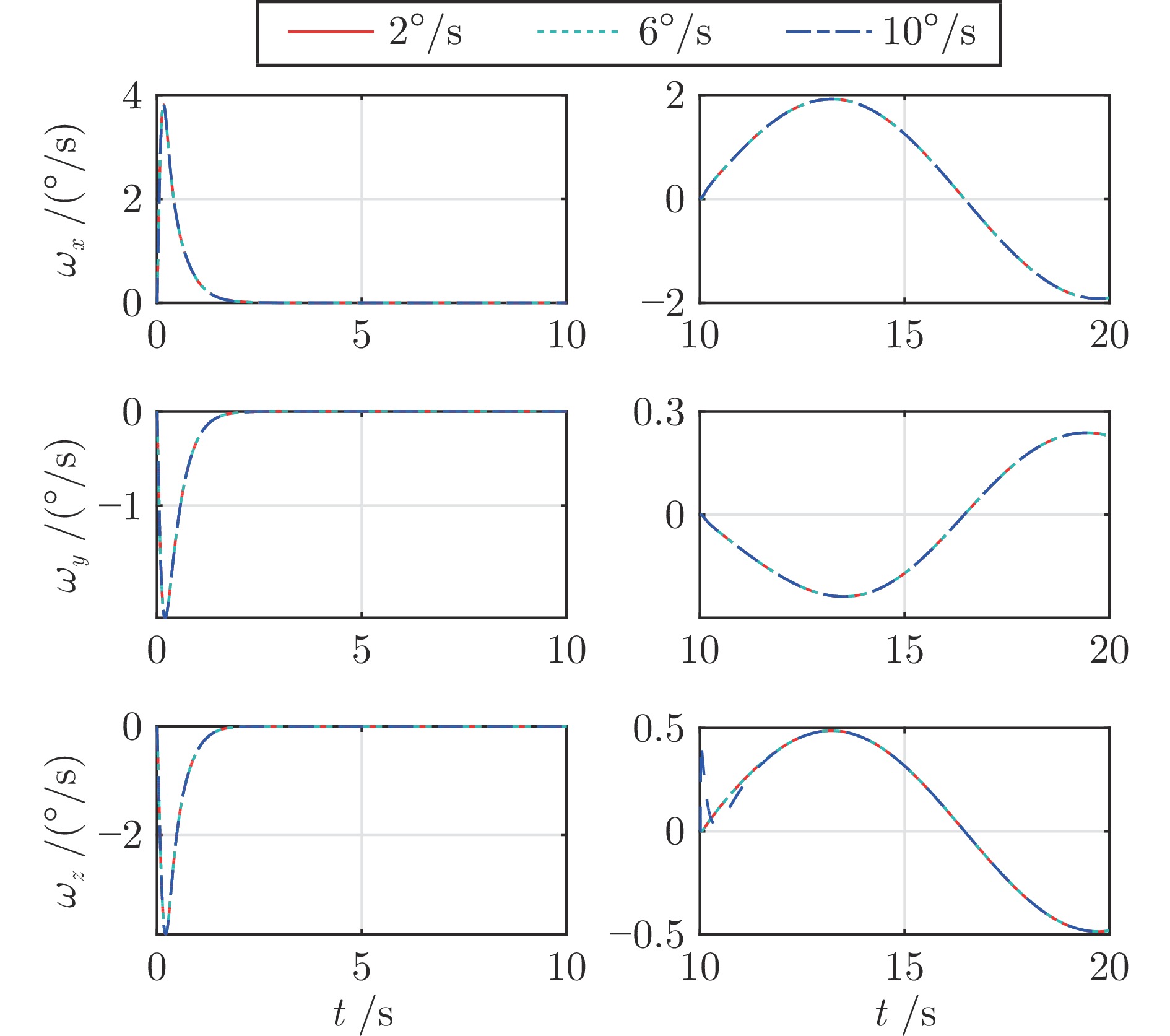
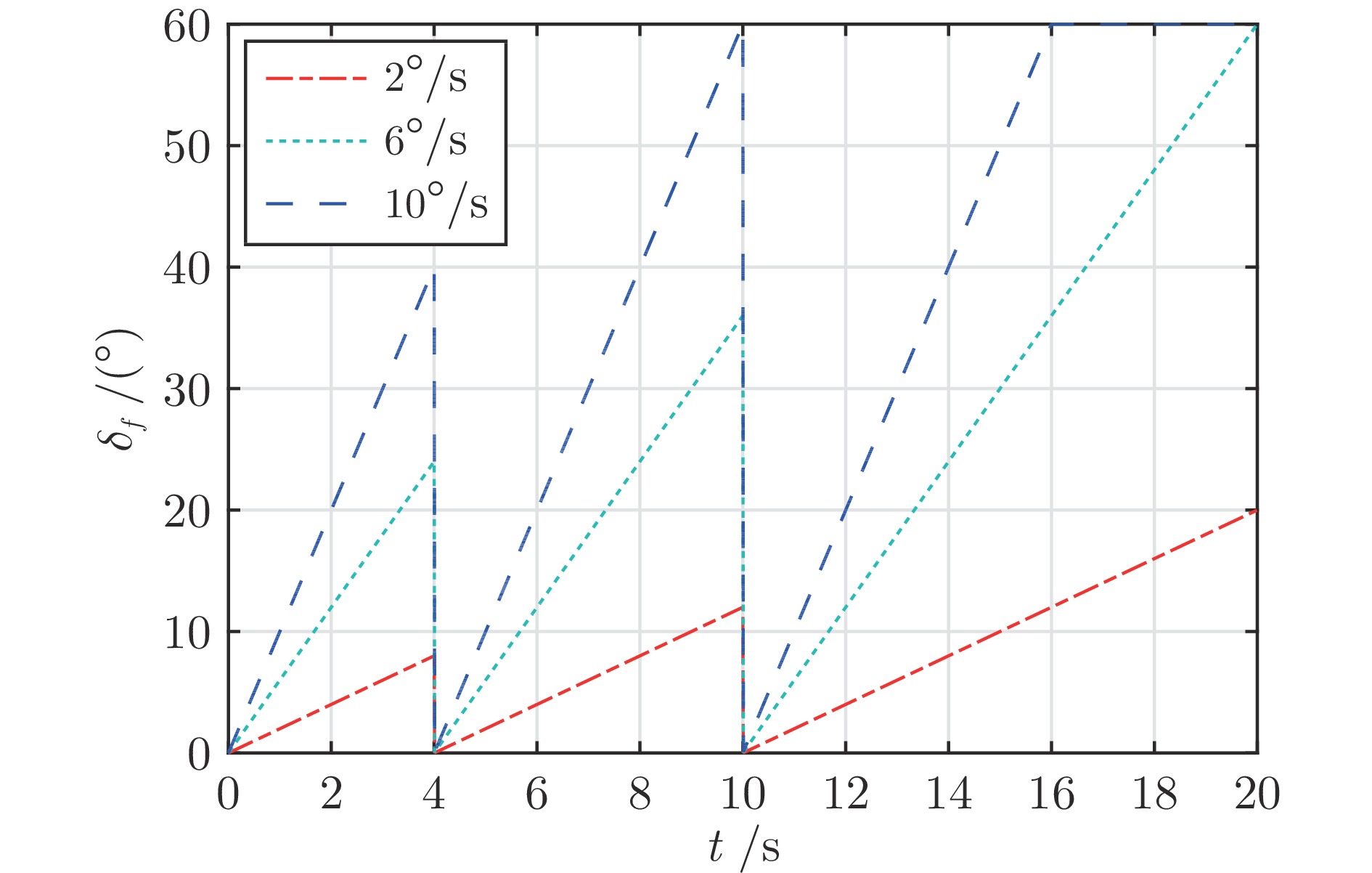
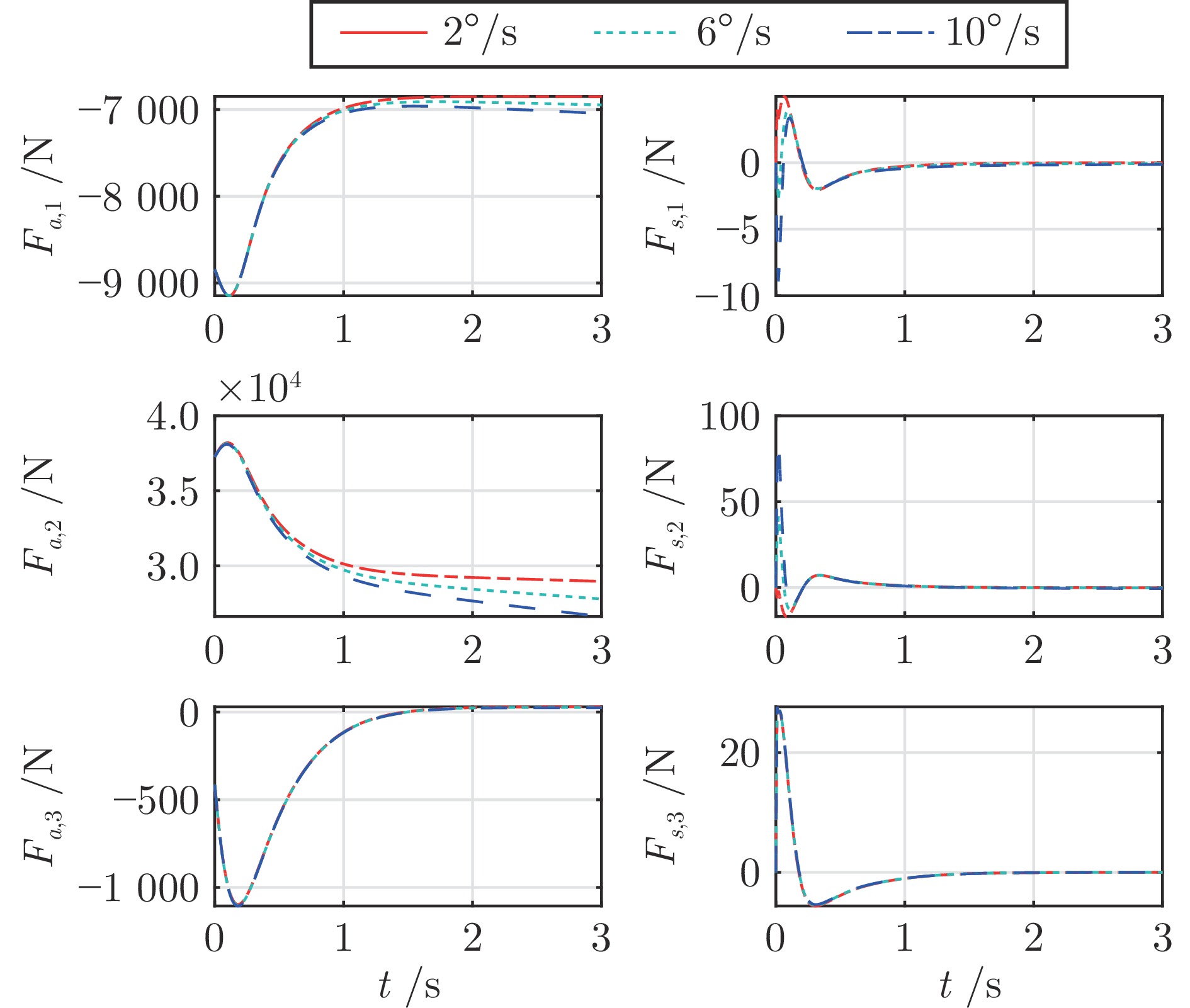
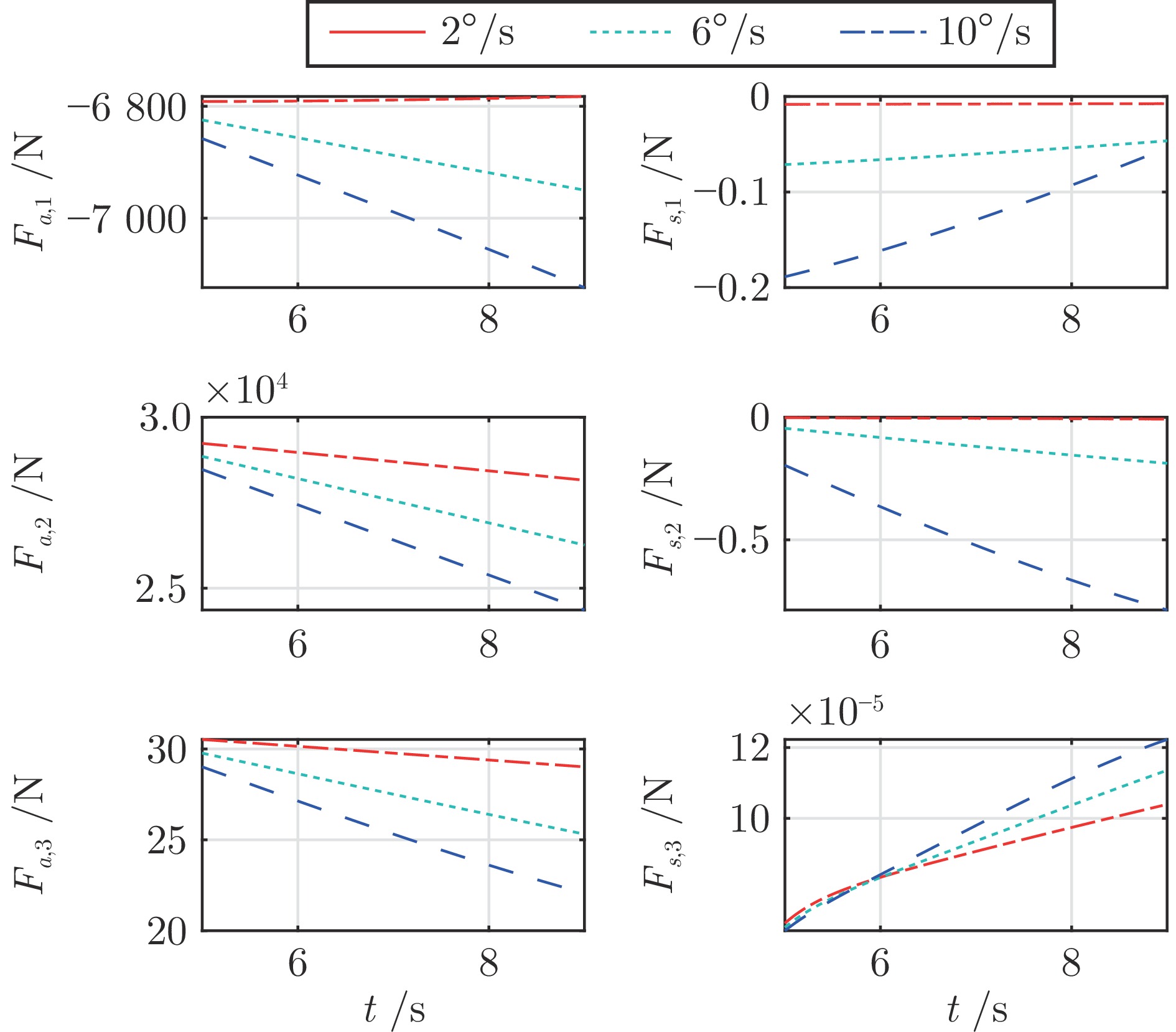
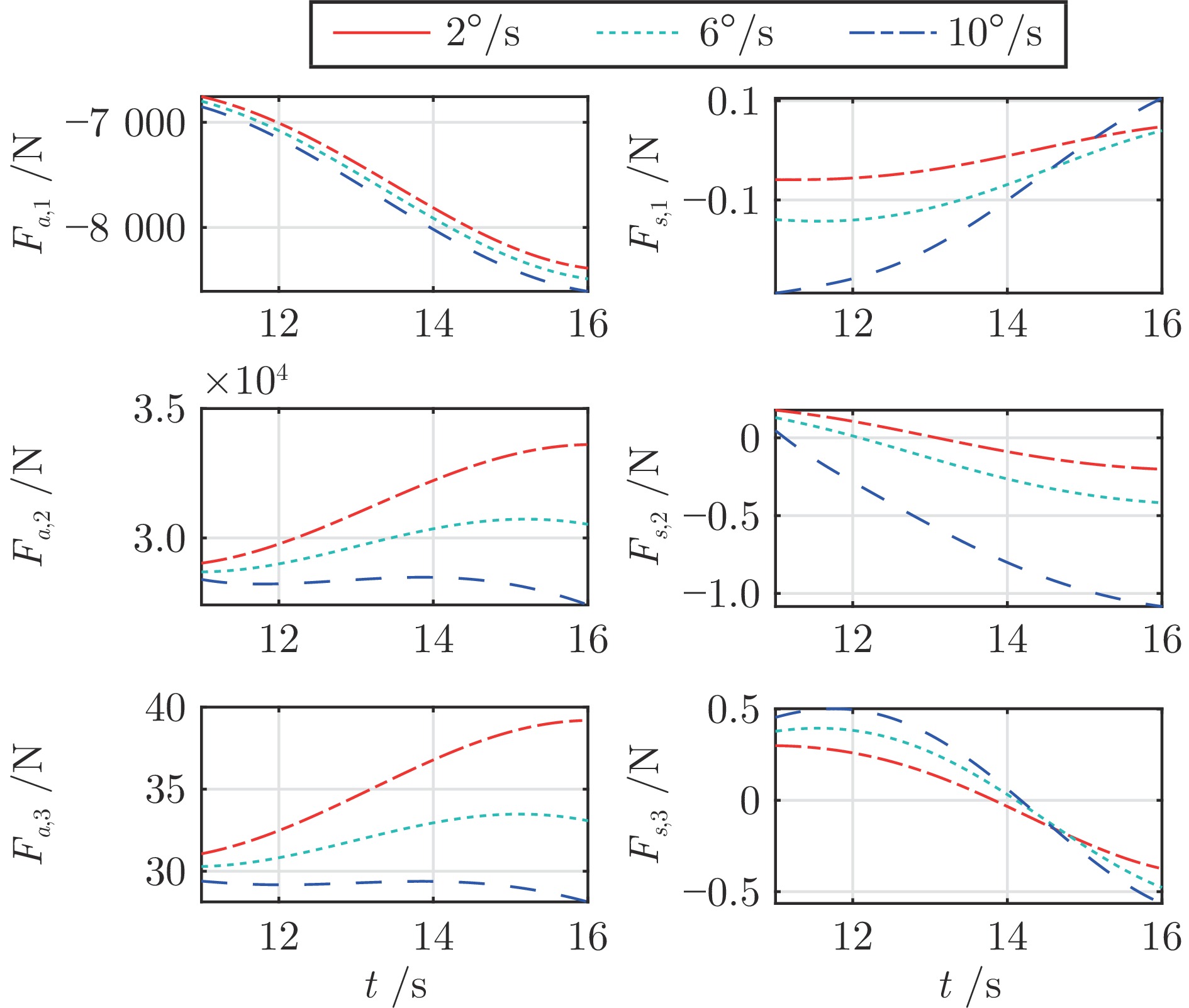
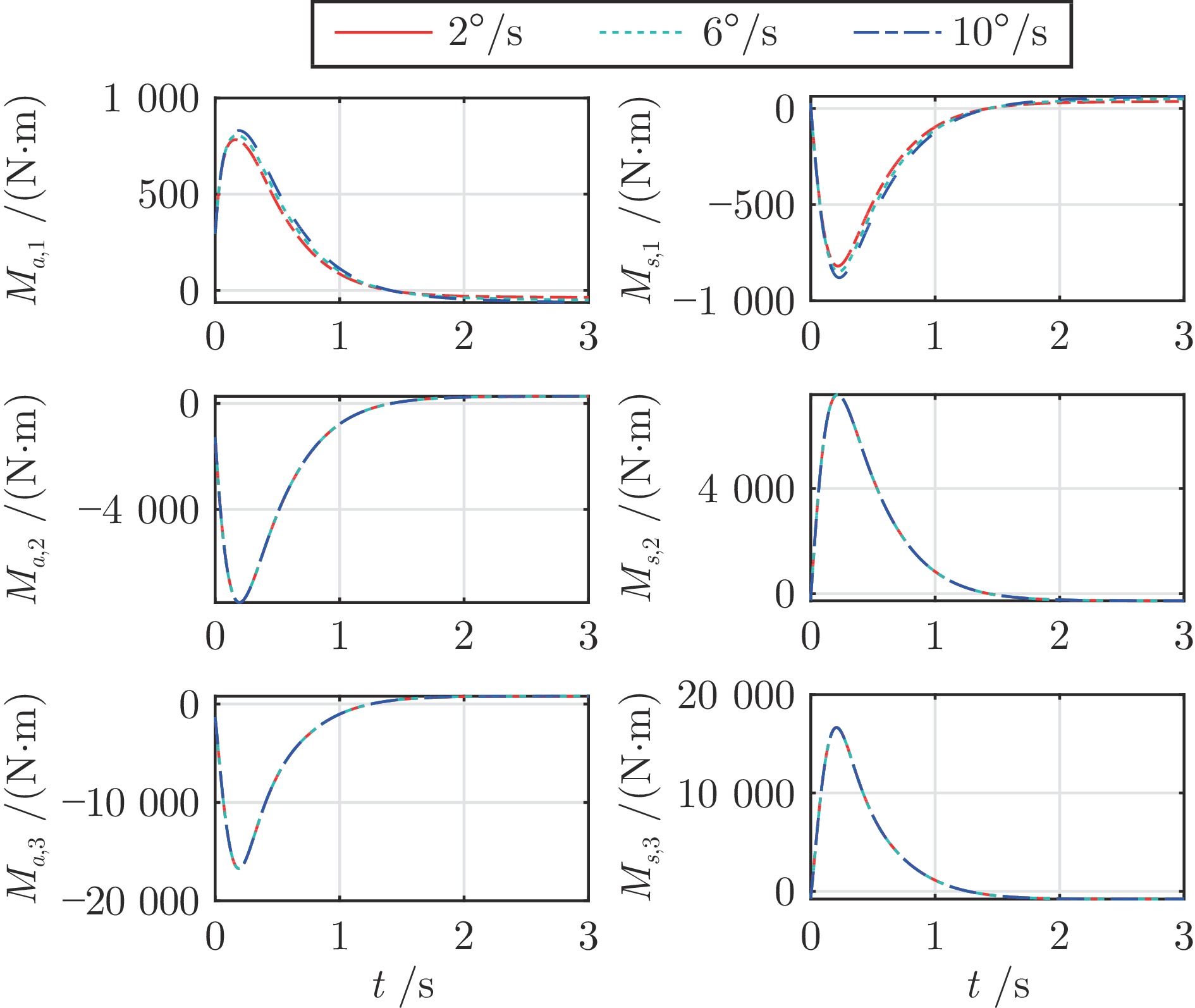
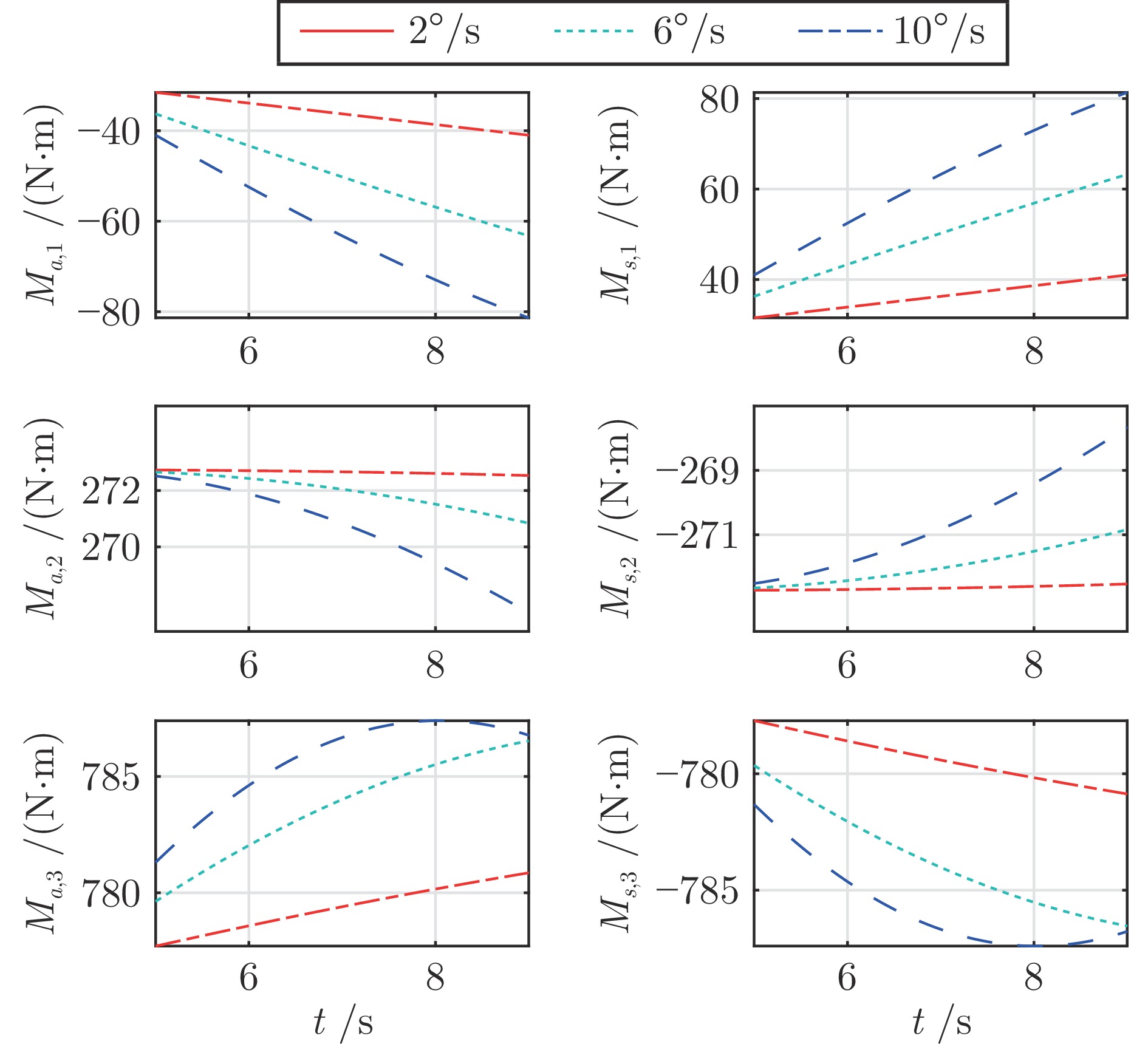
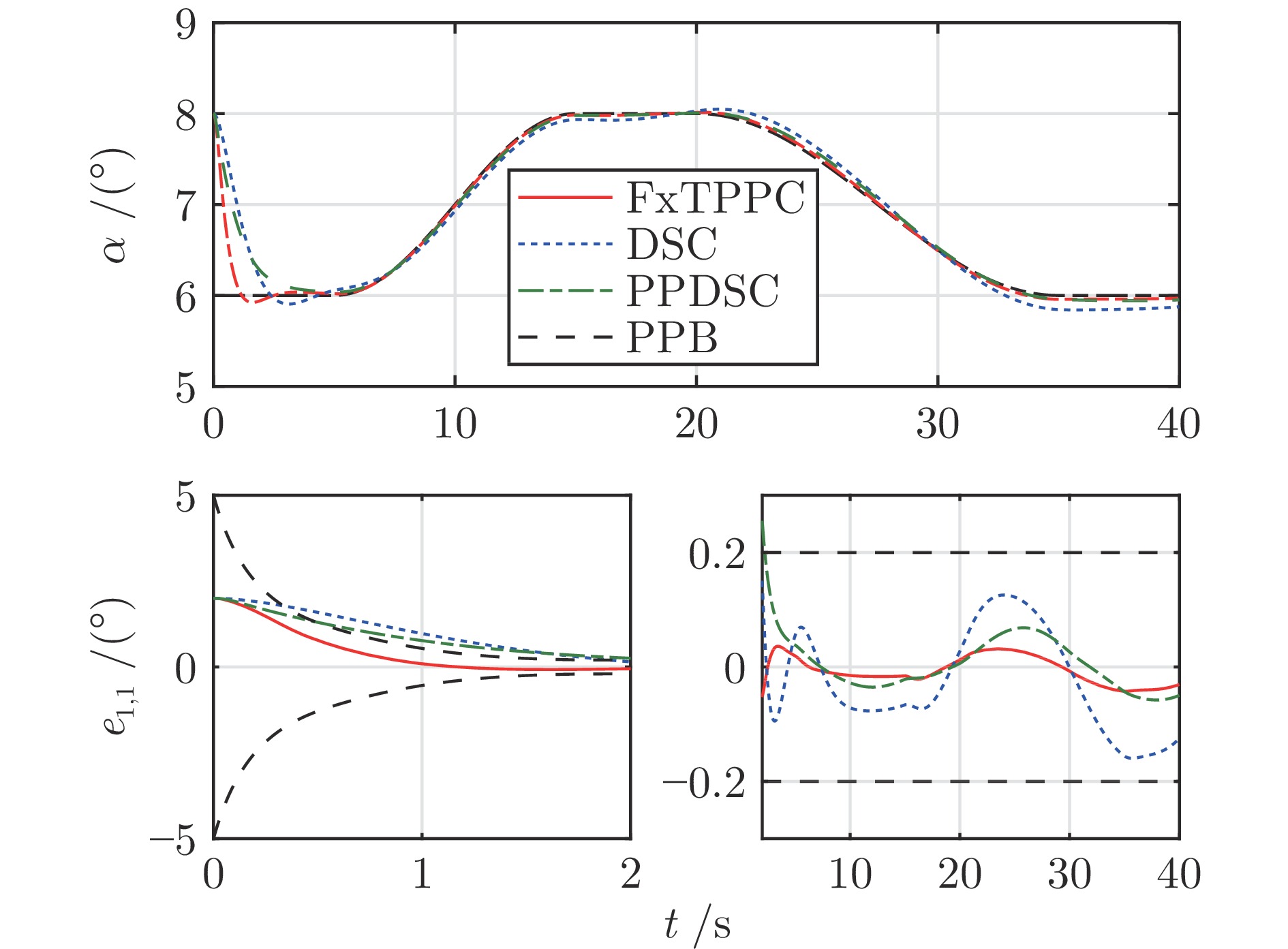
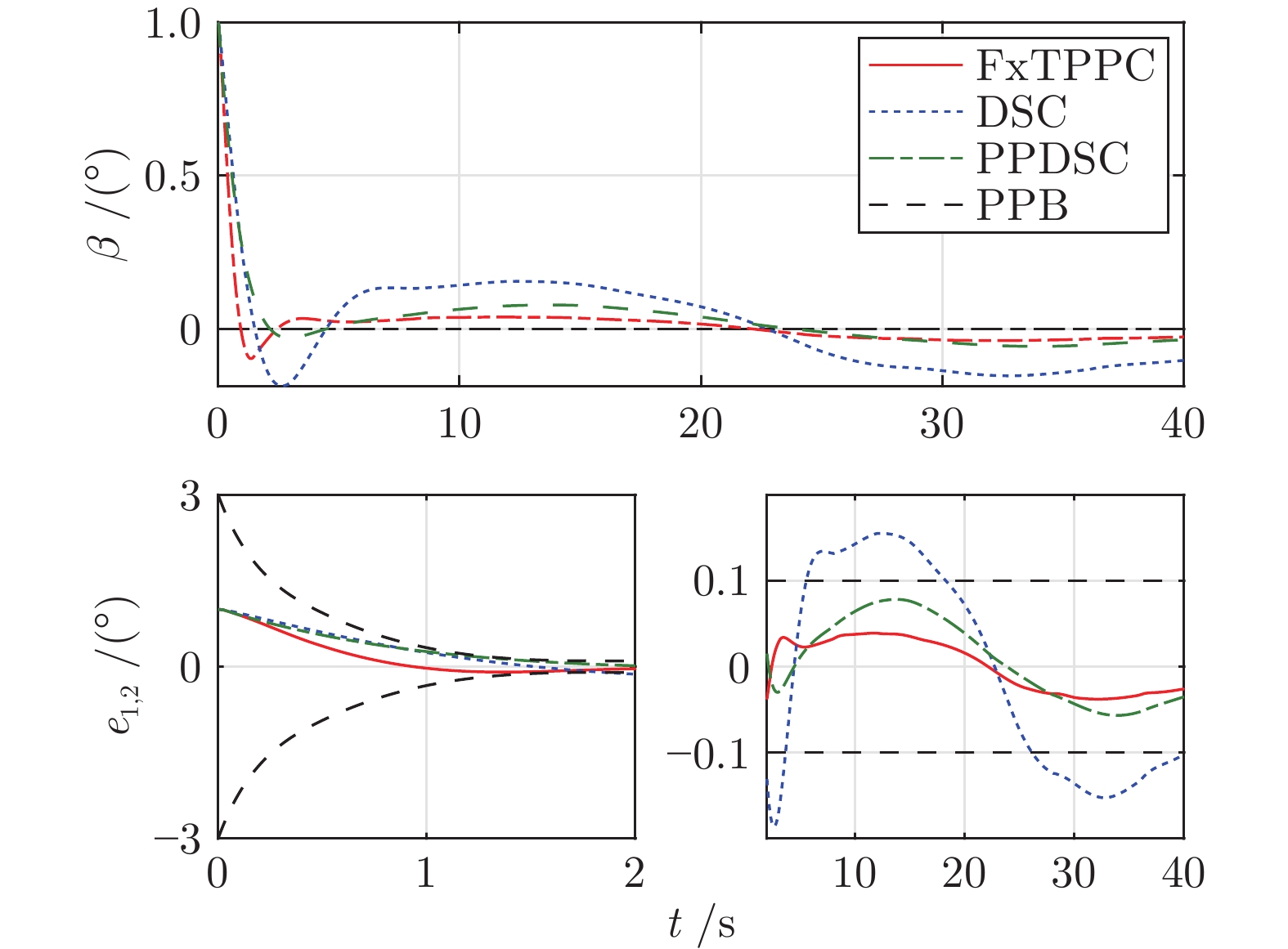
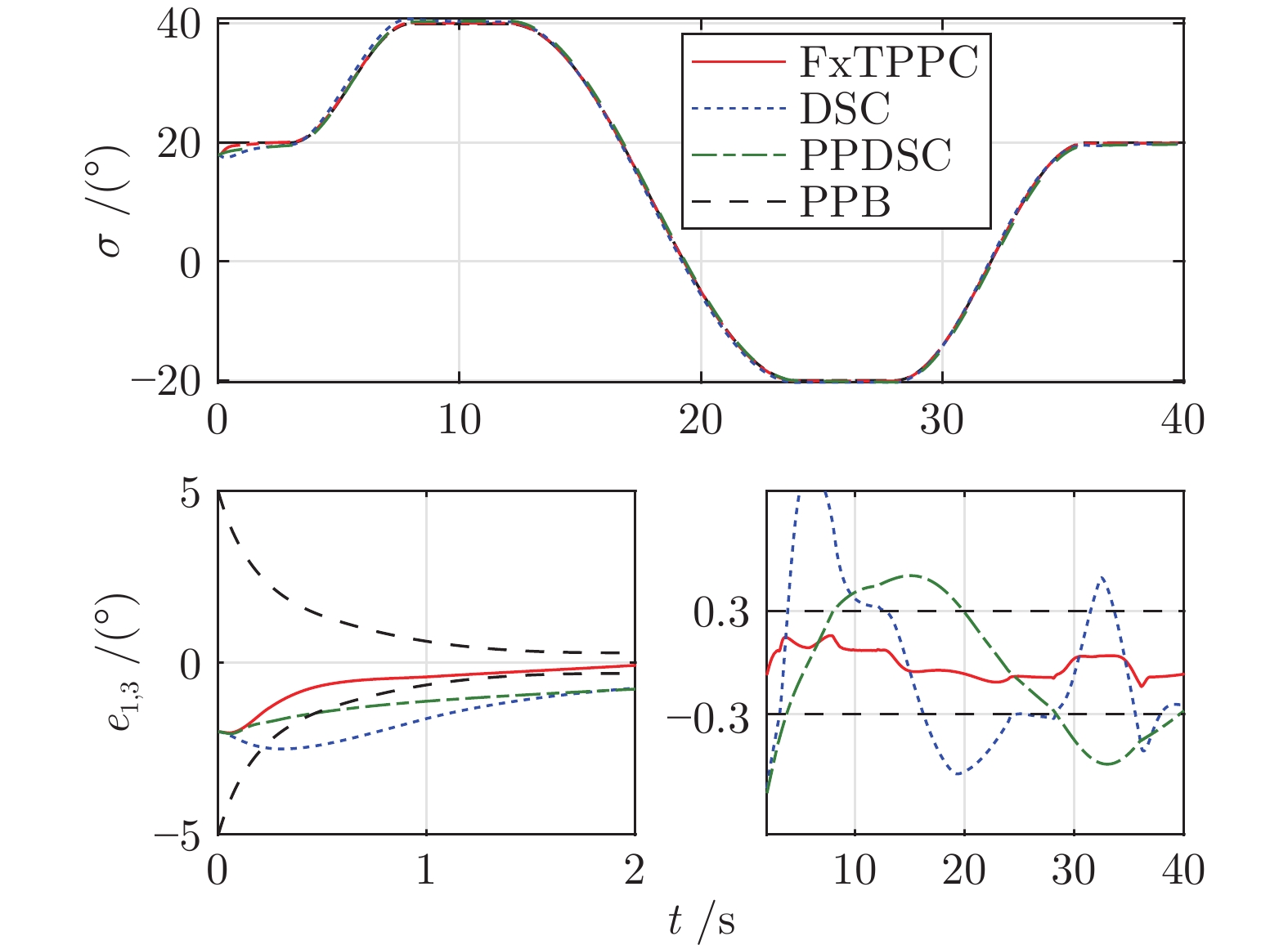
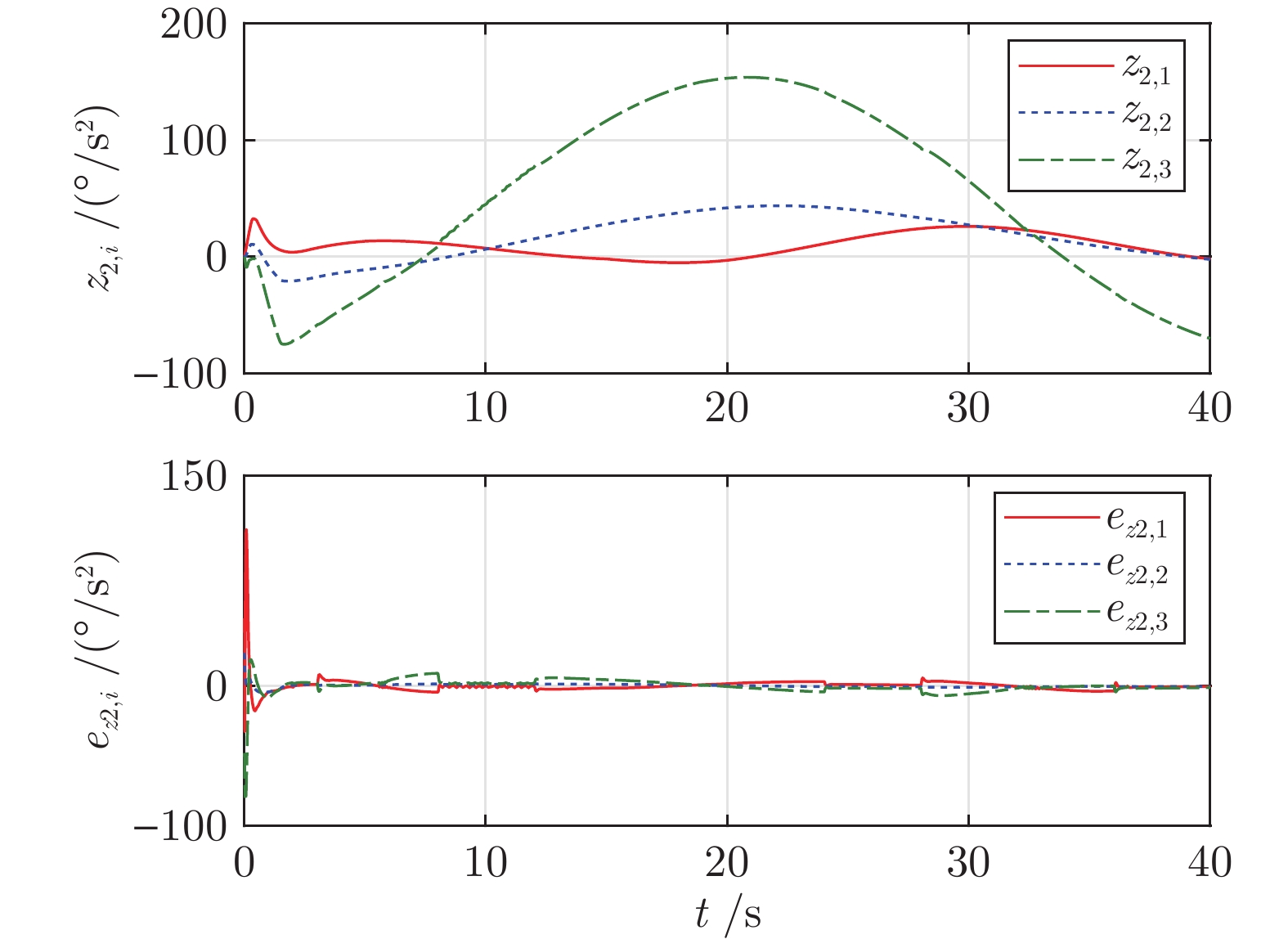
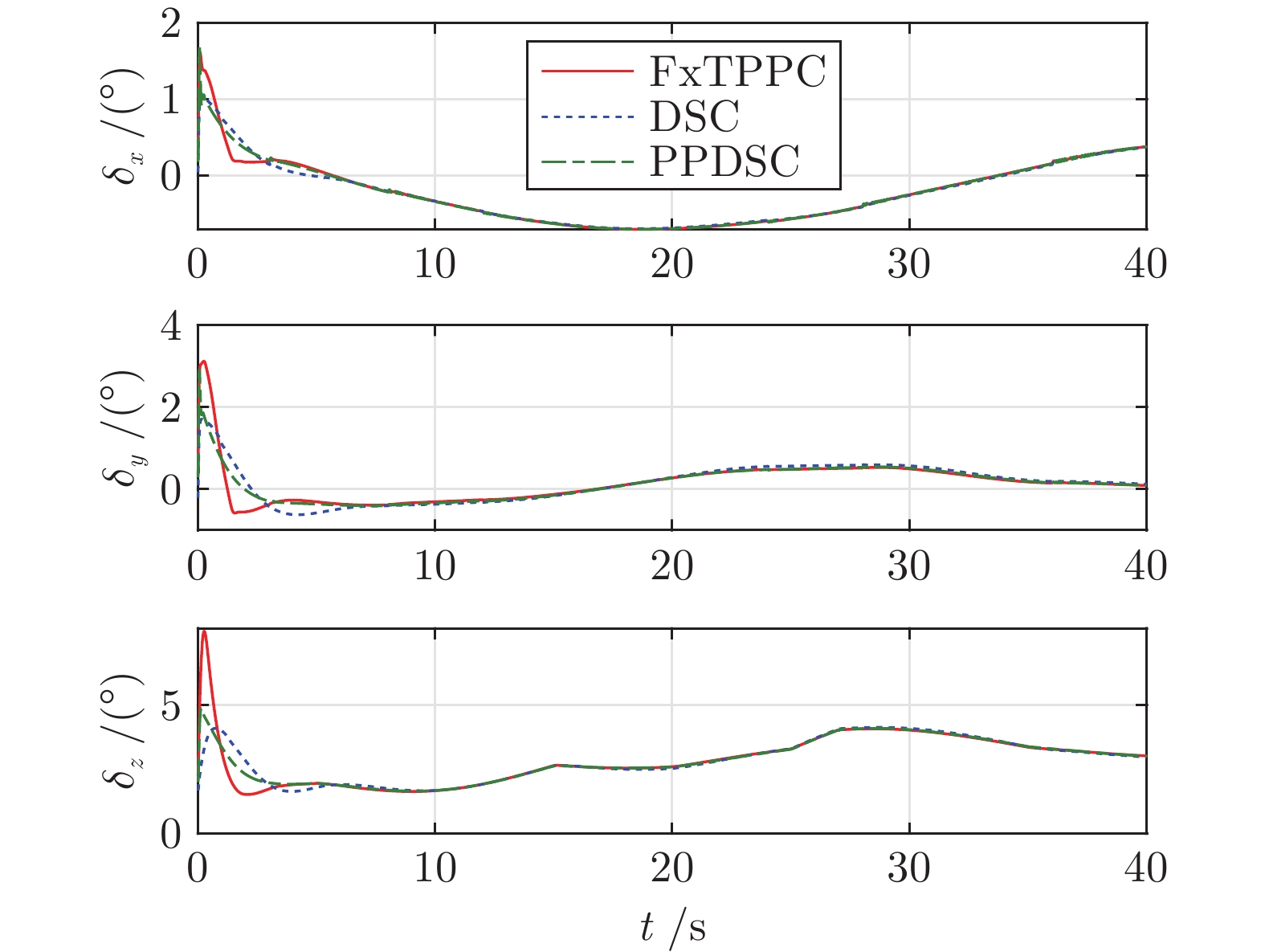
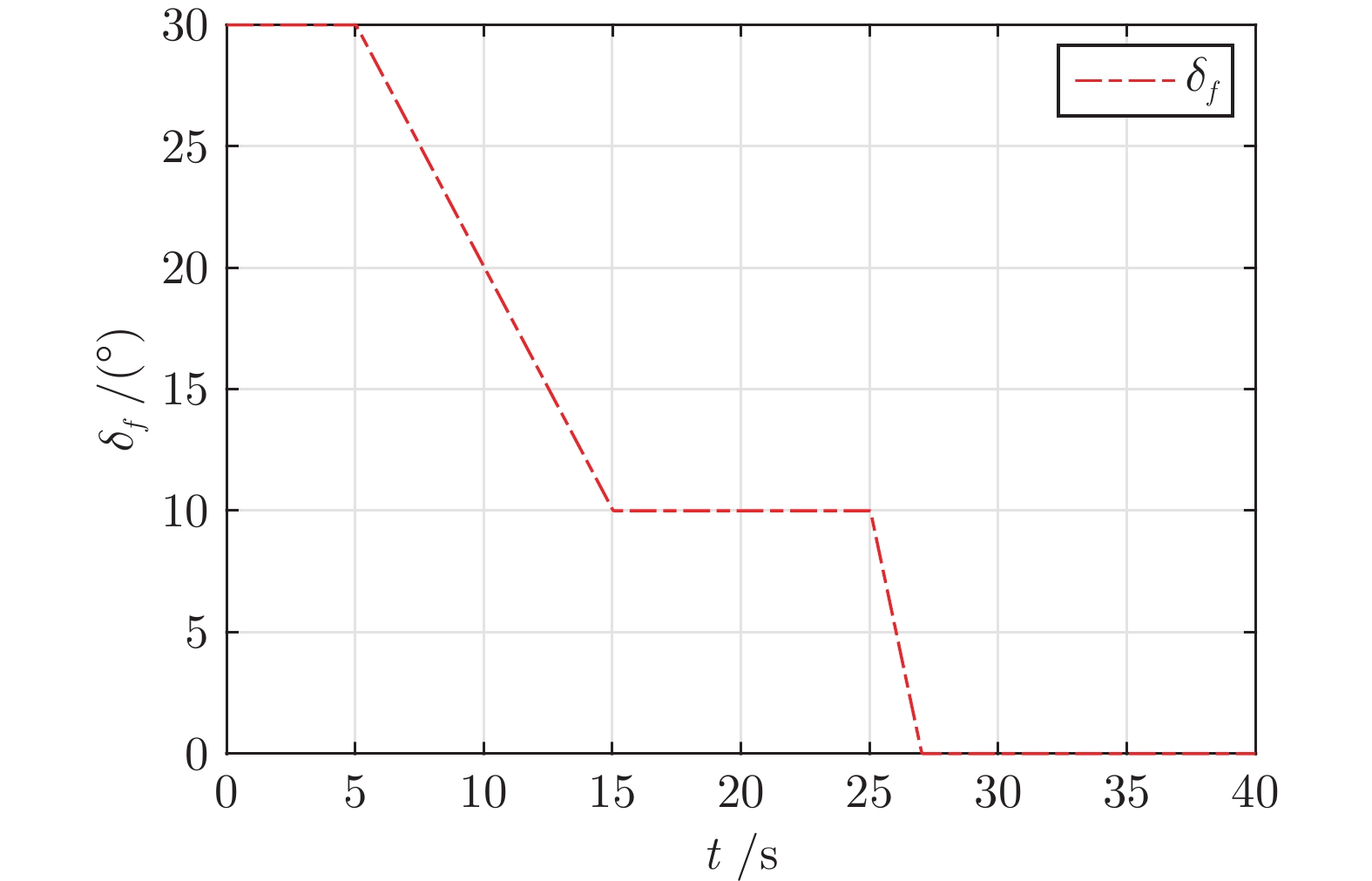
以一种折叠式高超声速变外形飞行器(Hypersonic morphing vehicle, HMV)为研究对象, 综合考虑变形引起的气动特性、动力学特性的动态变化和模型不确定性、外部干扰的影响, 开展飞行器建模与固定时间预设性能控制方法研究. 首先, 建立高超声速变外形飞行器的运动模型和姿态控制模型; 然后, 采用固定时间干扰观测器实现对模型不确定性和外部干扰构成的复合总扰动的精确估计, 并设计一种新型固定时间预设性能函数以定量描述期望性能约束, 在此基础上, 基于预设性能控制架构并结合动态面控制技术设计预设性能姿态控制器, 利用Lyapunov稳定性理论证明闭环系统的固定时间稳定性; 最后, 通过数值仿真验证所提出方法的有效性和鲁棒性.
以一种折叠式高超声速变外形飞行器(Hypersonic morphing vehicle, HMV)为研究对象, 综合考虑变形引起的气动特性、动力学特性的动态变化和模型不确定性、外部干扰的影响, 开展飞行器建模与固定时间预设性能控制方法研究. 首先, 建立高超声速变外形飞行器的运动模型和姿态控制模型; 然后, 采用固定时间干扰观测器实现对模型不确定性和外部干扰构成的复合总扰动的精确估计, 并设计一种新型固定时间预设性能函数以定量描述期望性能约束, 在此基础上, 基于预设性能控制架构并结合动态面控制技术设计预设性能姿态控制器, 利用Lyapunov稳定性理论证明闭环系统的固定时间稳定性; 最后, 通过数值仿真验证所提出方法的有效性和鲁棒性.





2024, 50(3): 505-517.
doi: 10.16383/j.aas.c230552
摘要:
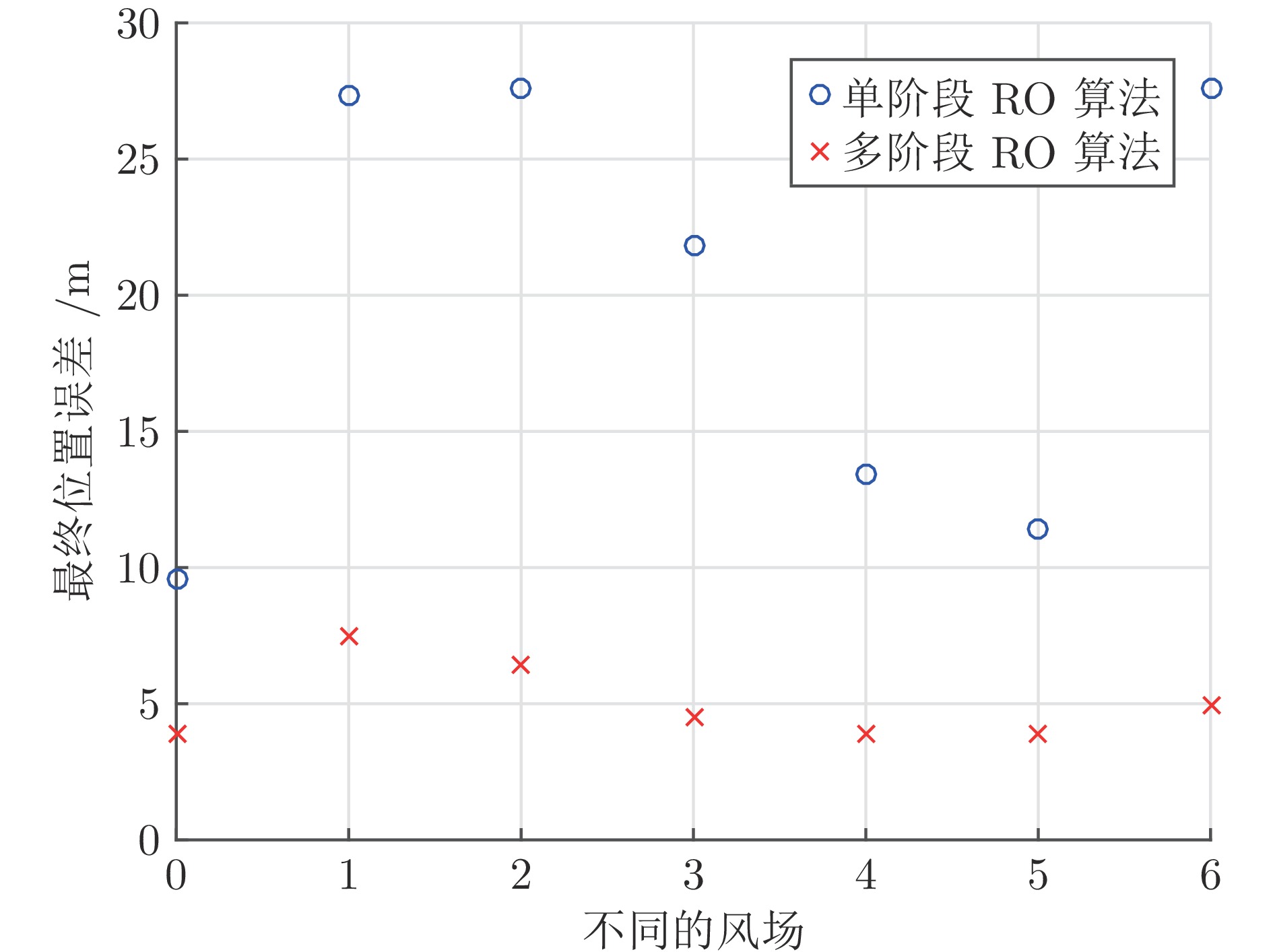
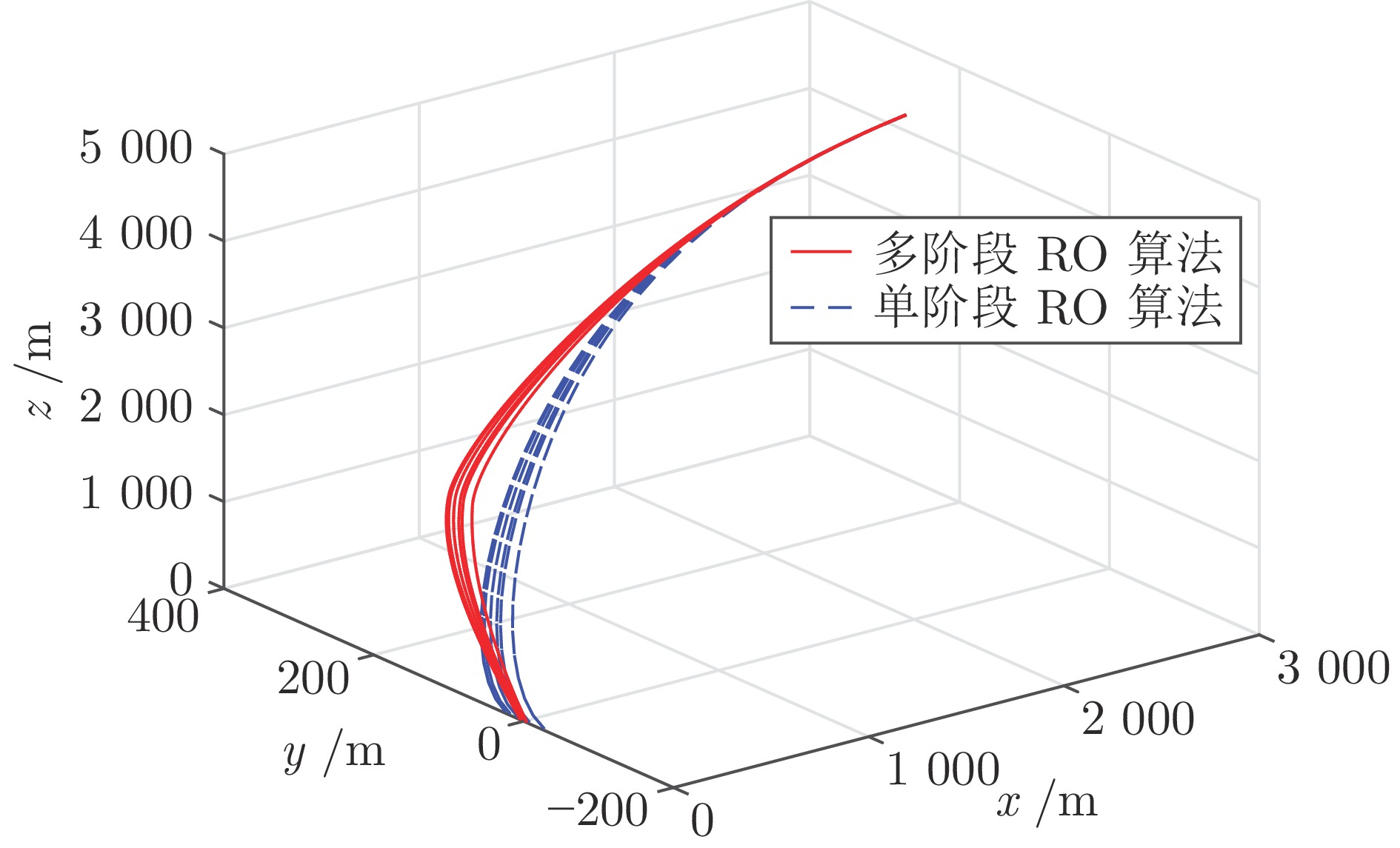
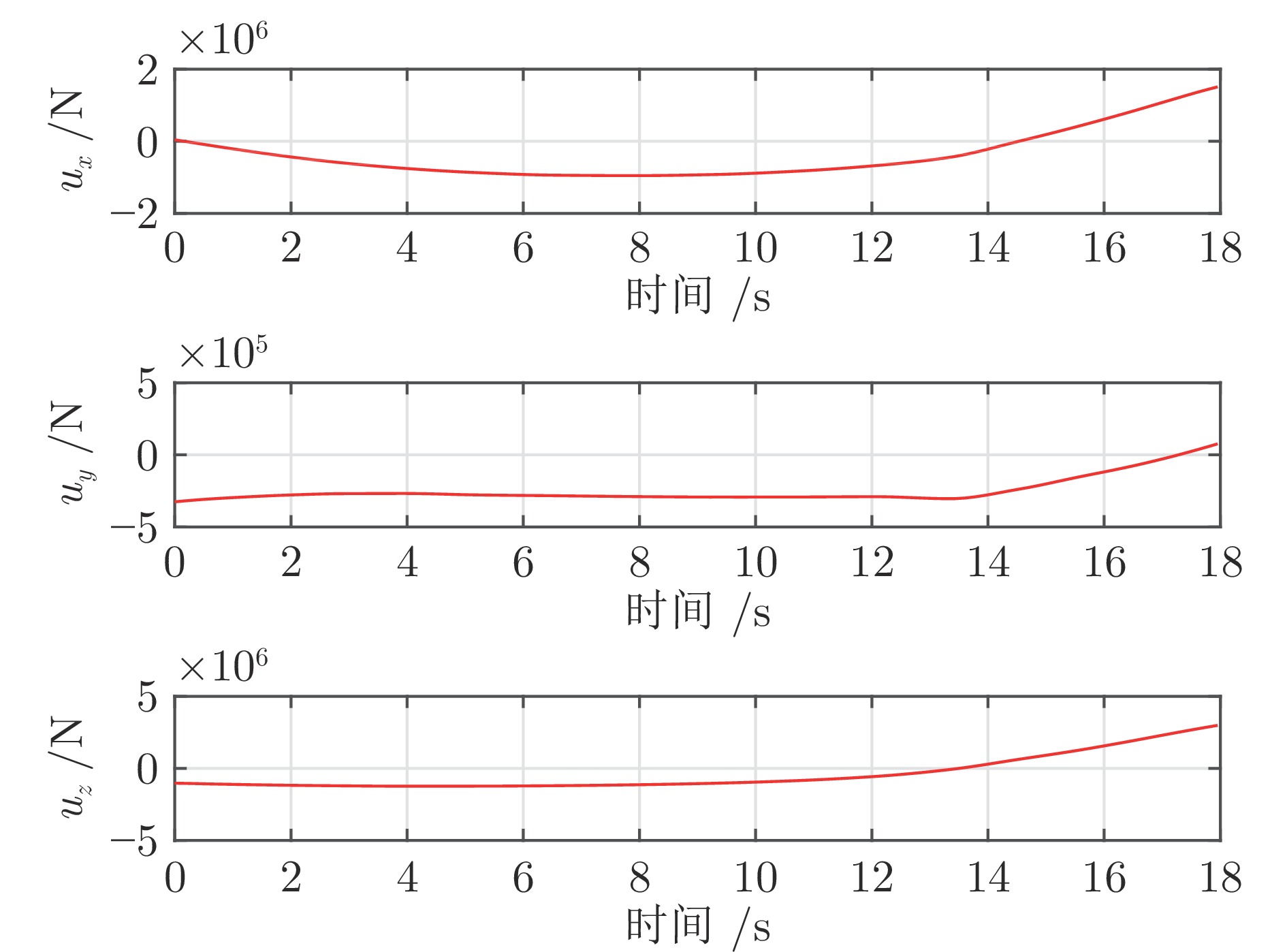
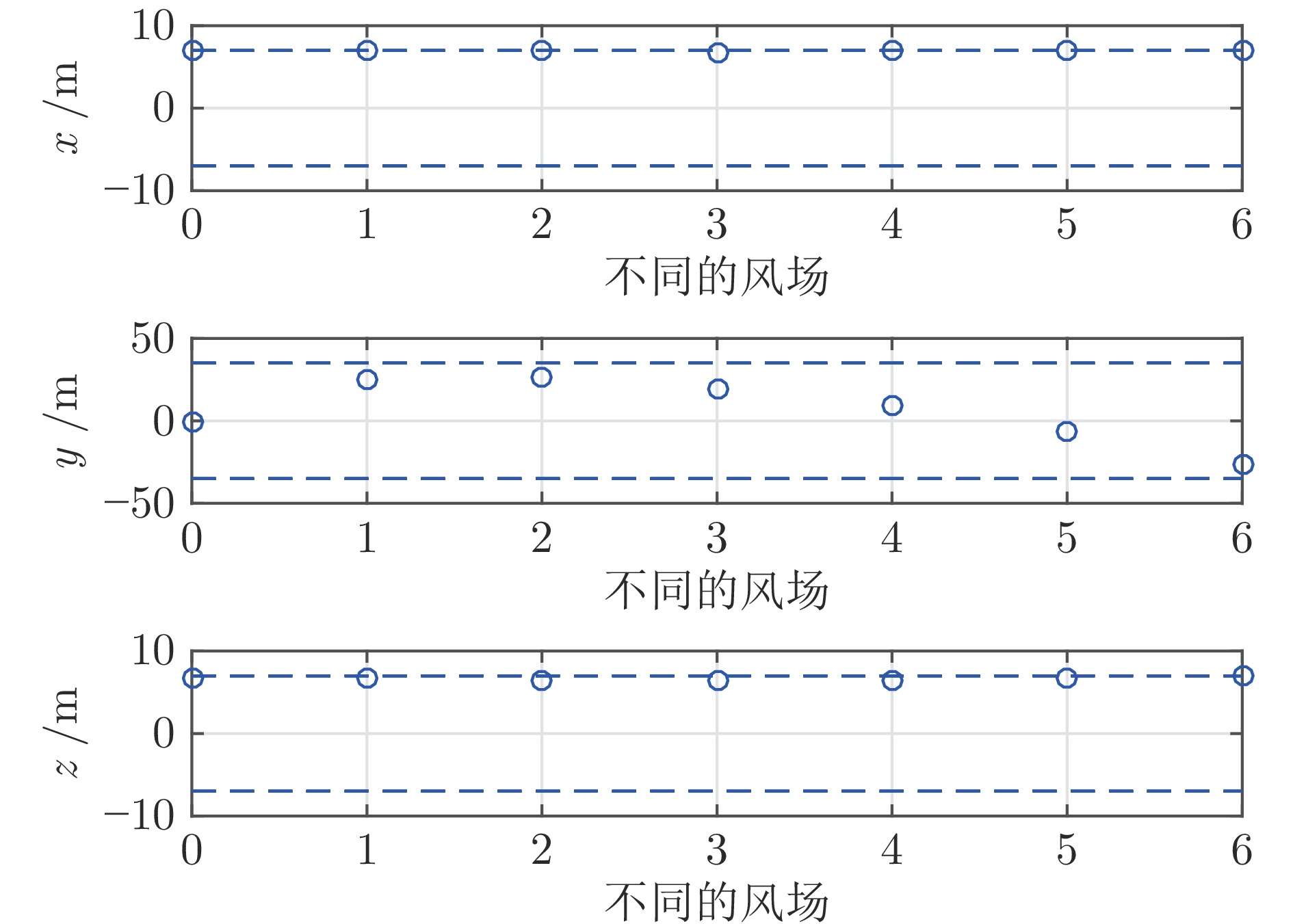
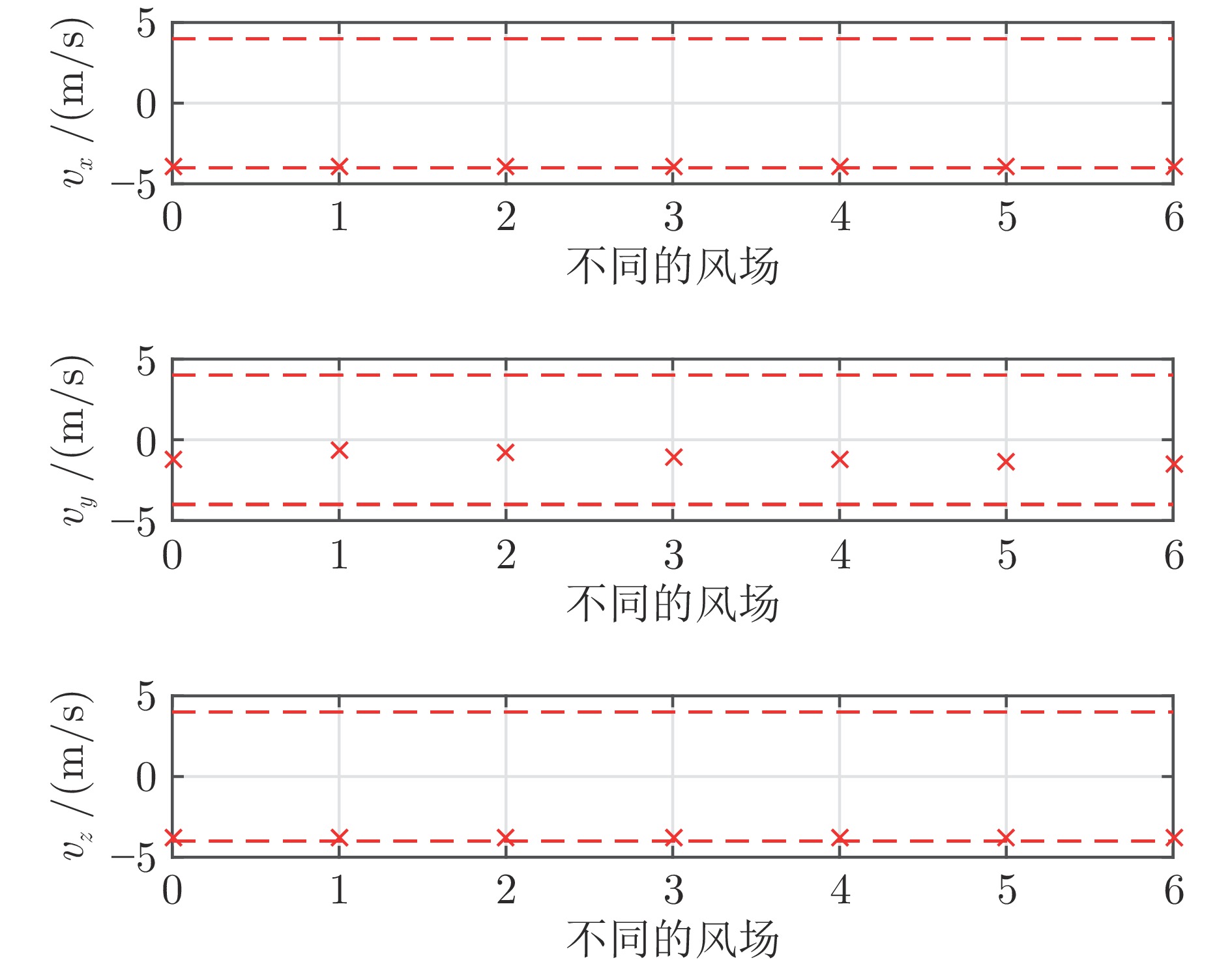
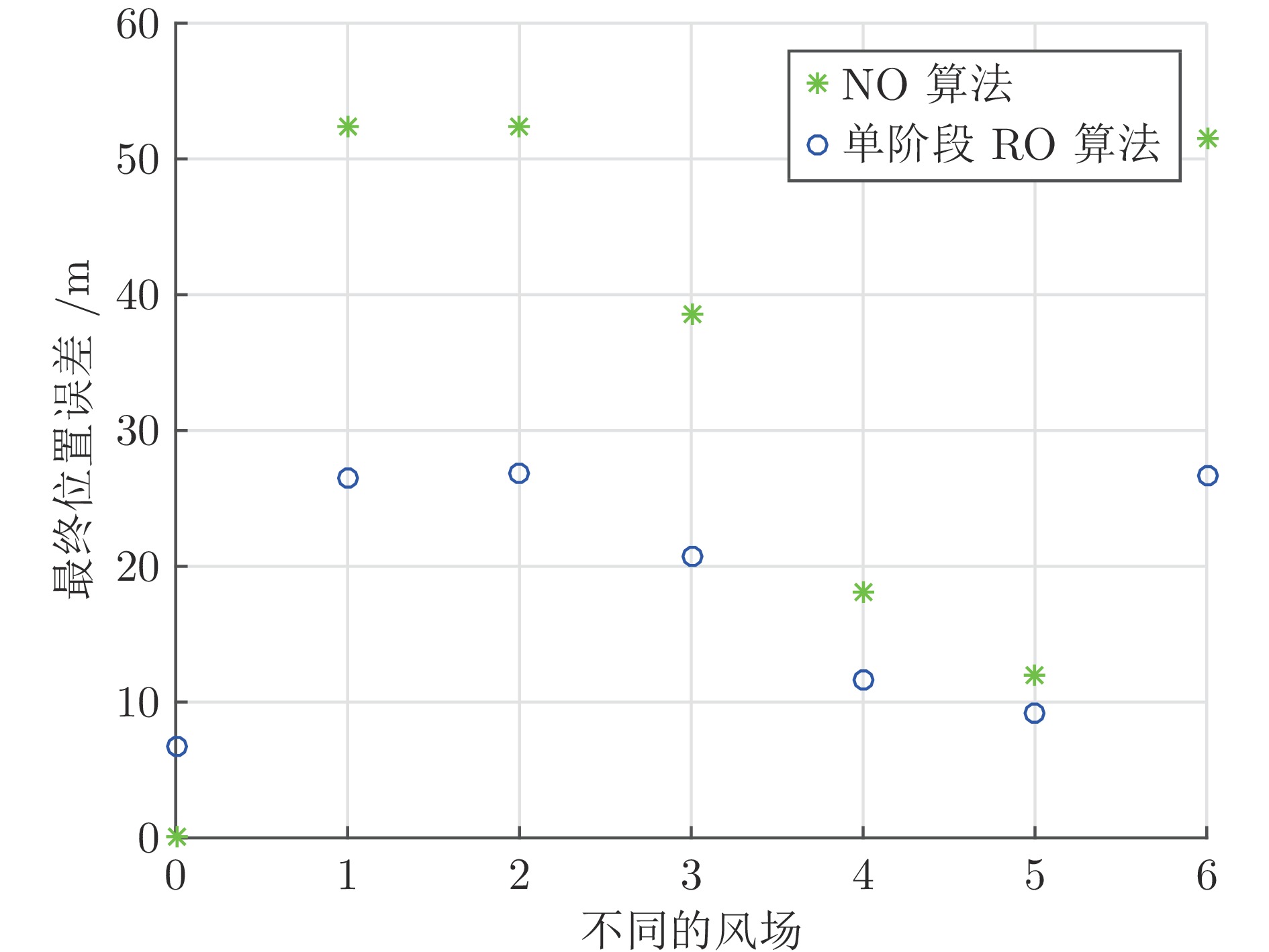
针对大气层内可回收火箭的动力下降问题, 提出一种多阶段的鲁棒优化(Robust optimization, RO)方法. 由于大气层内存在未知风场, 如何在火箭下降段考虑这种不确定性具有十分重要的意义. 首先, 建立一个关于高度的不确定风场模型, 在该风场下给出火箭动力下降的鲁棒最优控制问题. 为了求解该问题, 使用一种对不等式约束采取一阶近似并将一阶项作为安全裕量加入约束的鲁棒优化方法, 得到一个可以求解的单阶段鲁棒优化算法. 其次, 定量给出安全裕量的上界, 基于该上界提出一种多阶段鲁棒优化算法, 避免单阶段鲁棒优化算法中安全裕量可能过大导致无法求解的问题. 最后, 通过仿真对比各个算法在多个实际风场下的性能, 结果表明所提出的多阶段鲁棒优化方法同时具有较高的落点精度和对于不同风场的鲁棒性.
针对大气层内可回收火箭的动力下降问题, 提出一种多阶段的鲁棒优化(Robust optimization, RO)方法. 由于大气层内存在未知风场, 如何在火箭下降段考虑这种不确定性具有十分重要的意义. 首先, 建立一个关于高度的不确定风场模型, 在该风场下给出火箭动力下降的鲁棒最优控制问题. 为了求解该问题, 使用一种对不等式约束采取一阶近似并将一阶项作为安全裕量加入约束的鲁棒优化方法, 得到一个可以求解的单阶段鲁棒优化算法. 其次, 定量给出安全裕量的上界, 基于该上界提出一种多阶段鲁棒优化算法, 避免单阶段鲁棒优化算法中安全裕量可能过大导致无法求解的问题. 最后, 通过仿真对比各个算法在多个实际风场下的性能, 结果表明所提出的多阶段鲁棒优化方法同时具有较高的落点精度和对于不同风场的鲁棒性.





2024, 50(3): 518-526.
doi: 10.16383/j.aas.c230273
摘要:
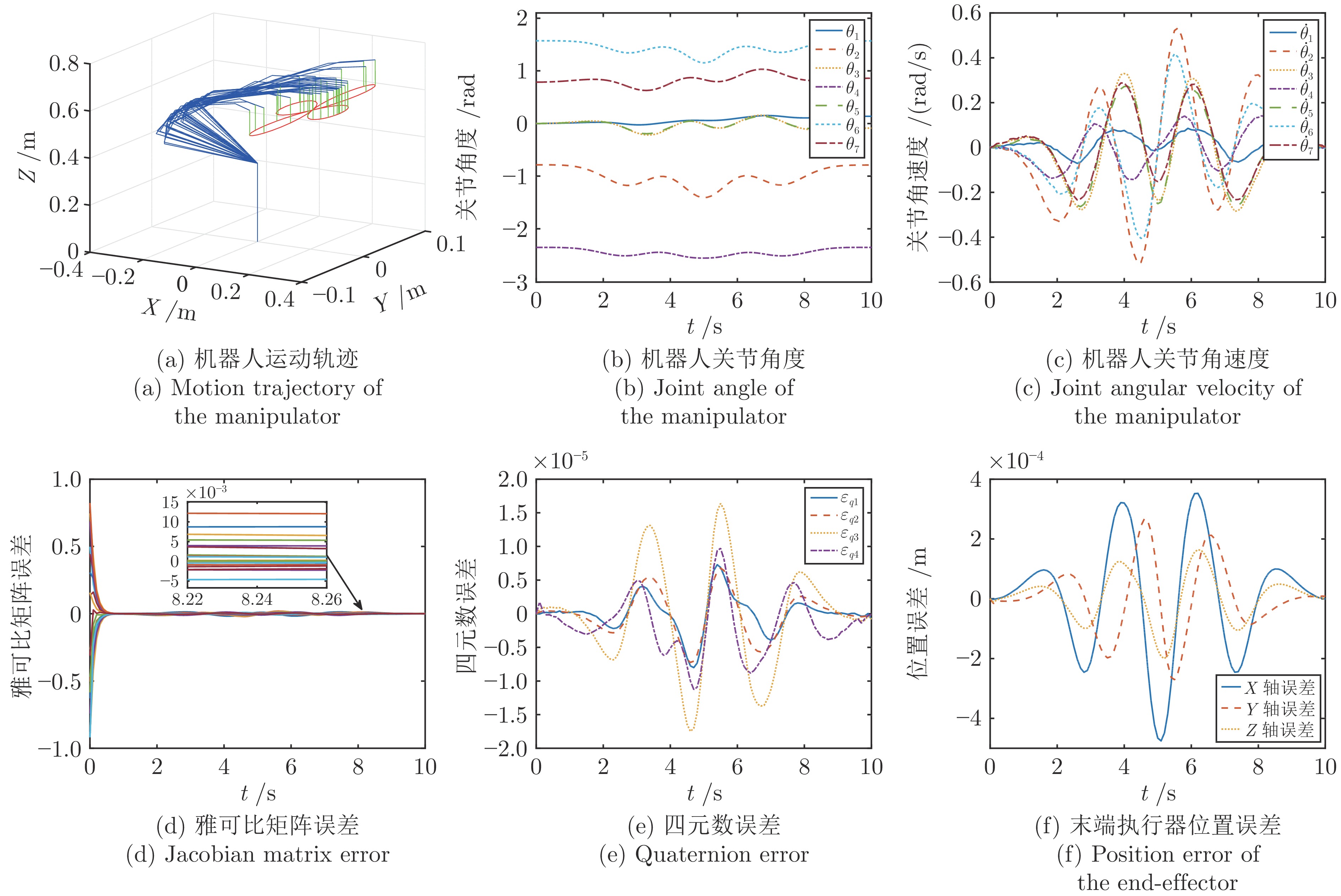
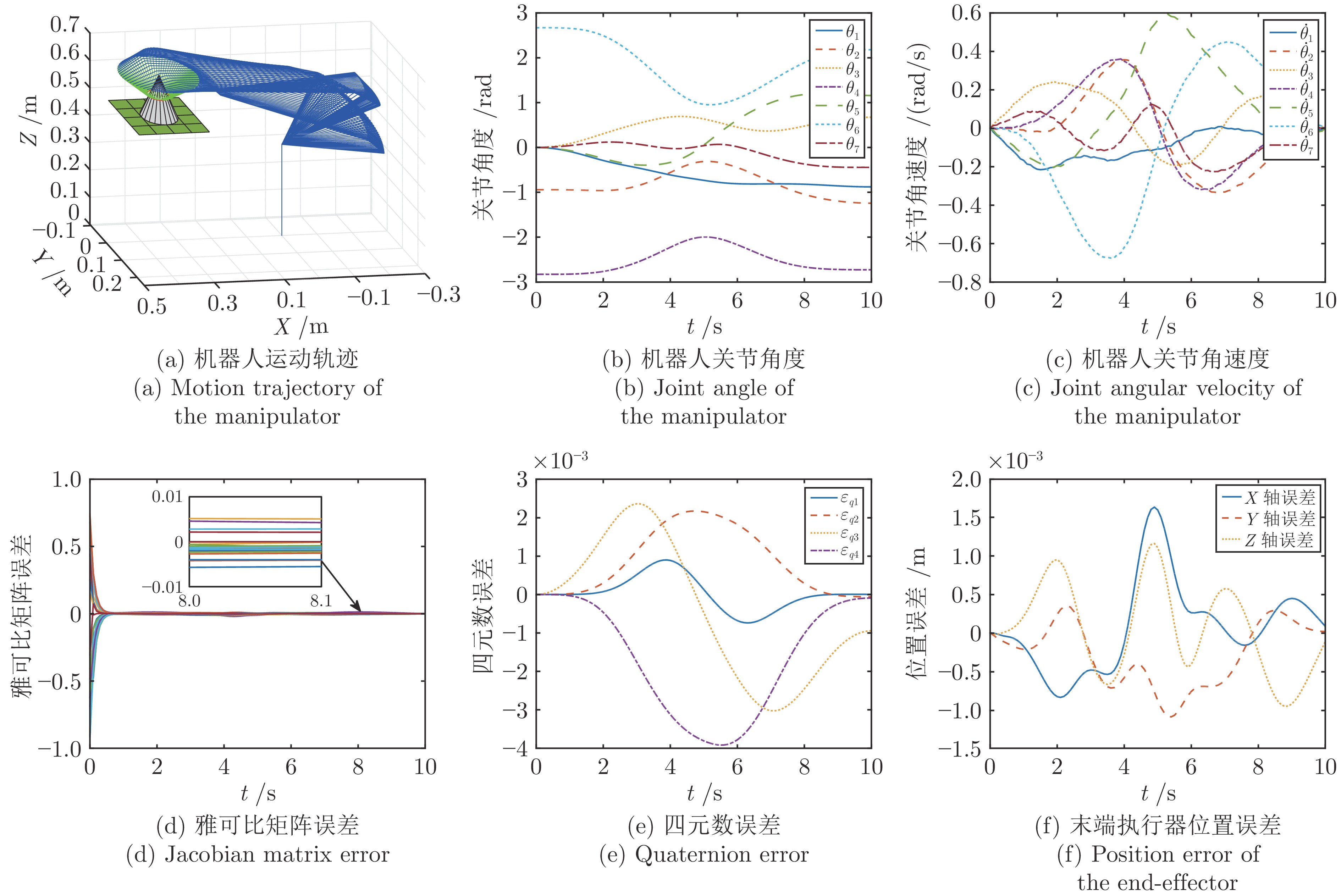
模型未知的冗余机器人执行任务的过程中会产生较大的控制误差, 其末端执行器的位置与姿态也需要针对不同任务进行修正. 为解决该问题, 提出一种基于数据驱动的冗余机器人末端执行器位置与姿态控制方案. 该方案使用在线学习技术, 能够应用于模型未知的冗余机器人控制. 同时引入四元数表示法将控制机器人末端执行器姿态问题转化为基于四元数表示的控制方法. 随后, 设计一种神经动力学求解器对所提方案进行求解. 相关的理论分析、仿真及对比体现了所提方案的可行性、有效性与新颖性.
模型未知的冗余机器人执行任务的过程中会产生较大的控制误差, 其末端执行器的位置与姿态也需要针对不同任务进行修正. 为解决该问题, 提出一种基于数据驱动的冗余机器人末端执行器位置与姿态控制方案. 该方案使用在线学习技术, 能够应用于模型未知的冗余机器人控制. 同时引入四元数表示法将控制机器人末端执行器姿态问题转化为基于四元数表示的控制方法. 随后, 设计一种神经动力学求解器对所提方案进行求解. 相关的理论分析、仿真及对比体现了所提方案的可行性、有效性与新颖性.

2024, 50(3): 527-543.
doi: 10.16383/j.aas.c230272
摘要:
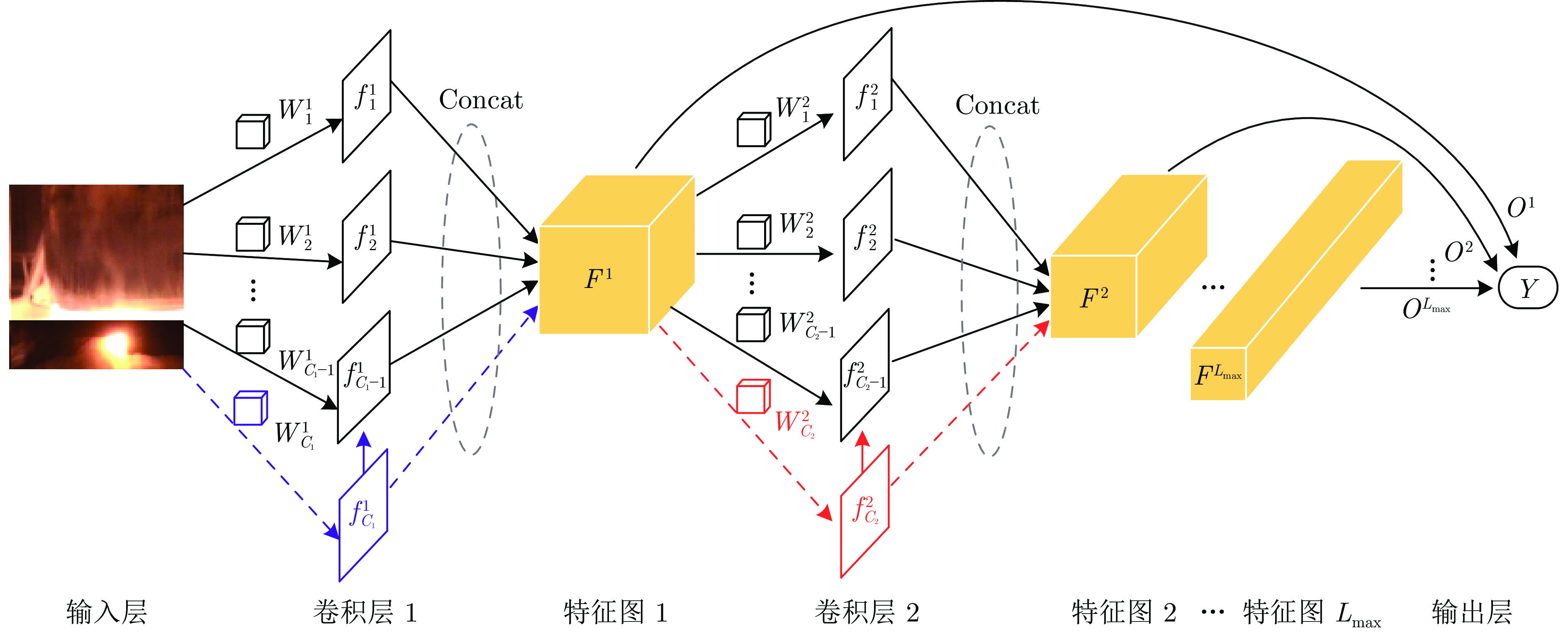
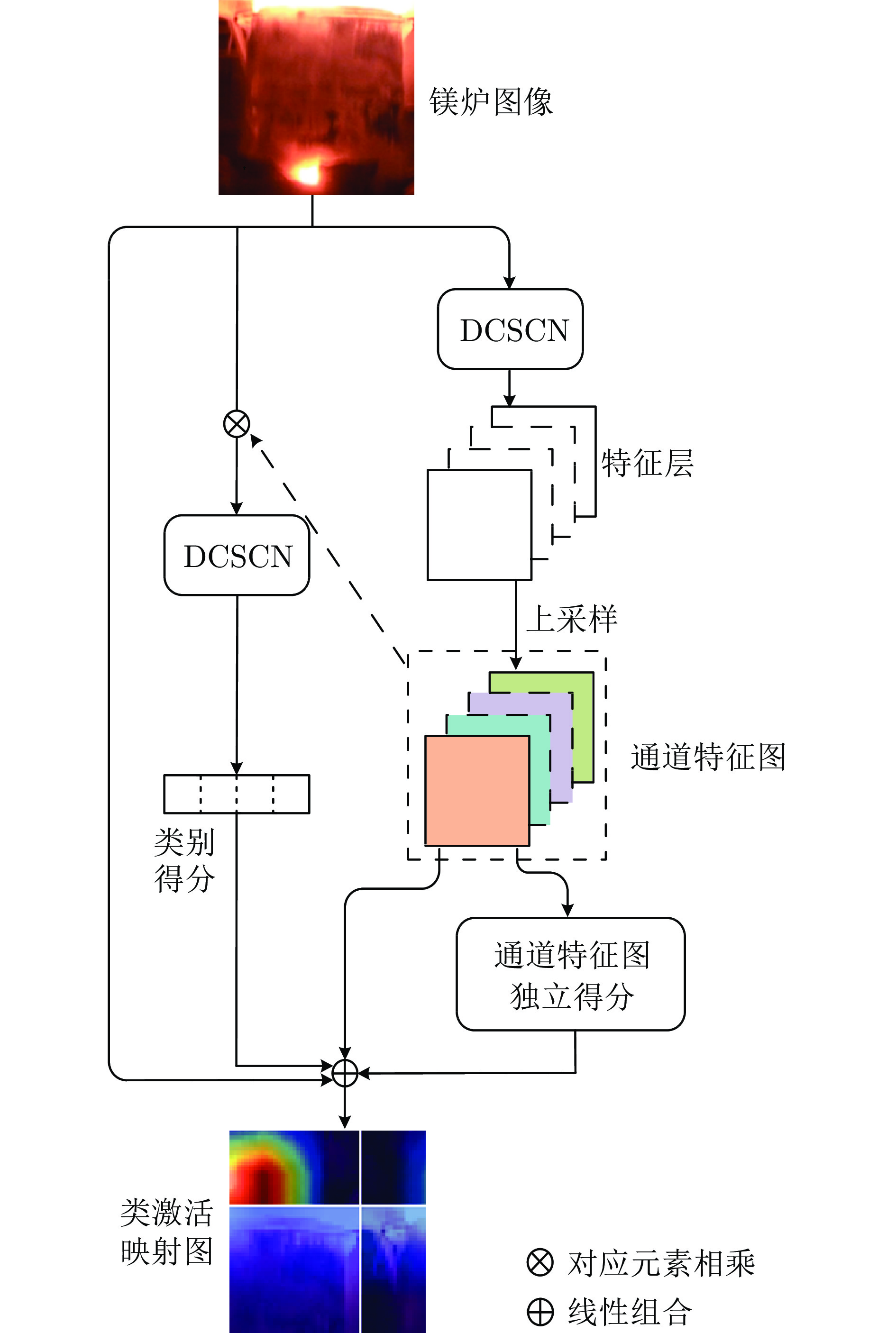
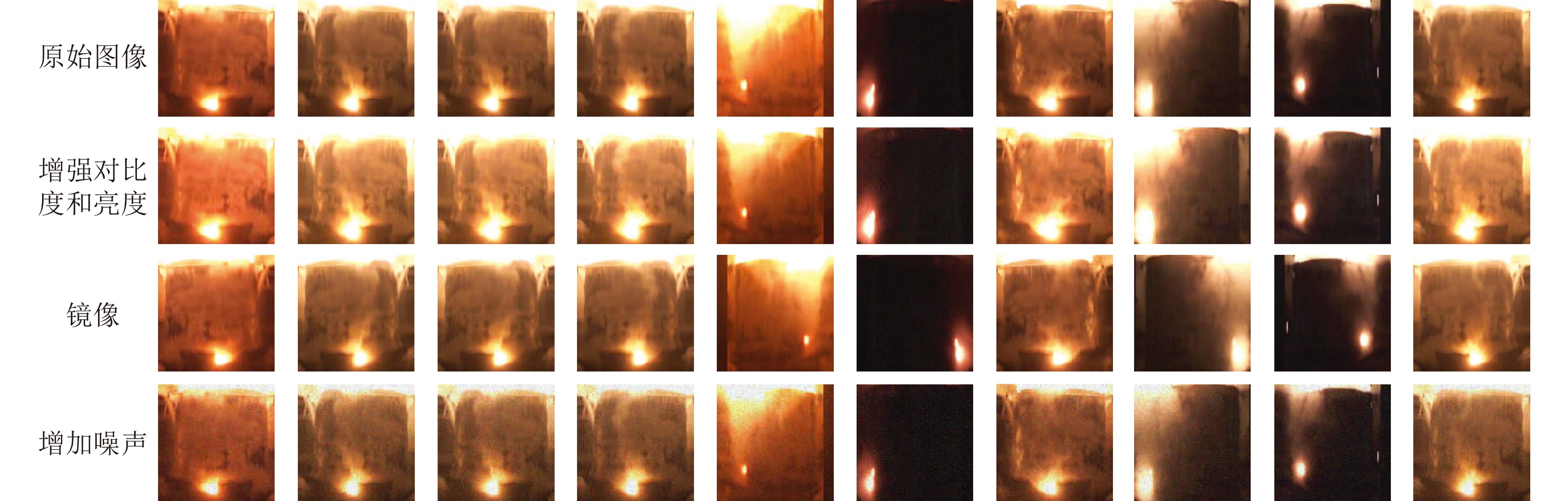
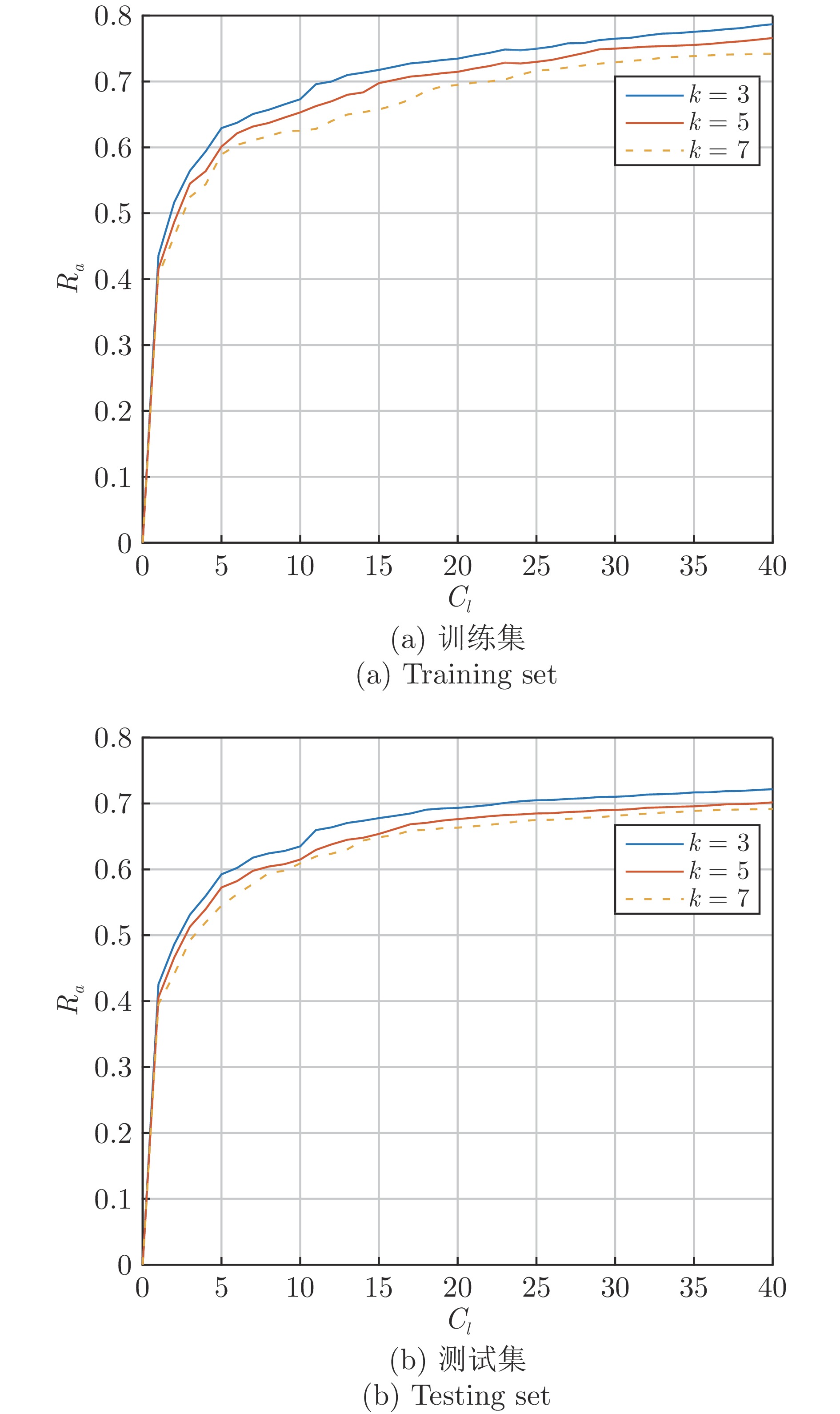
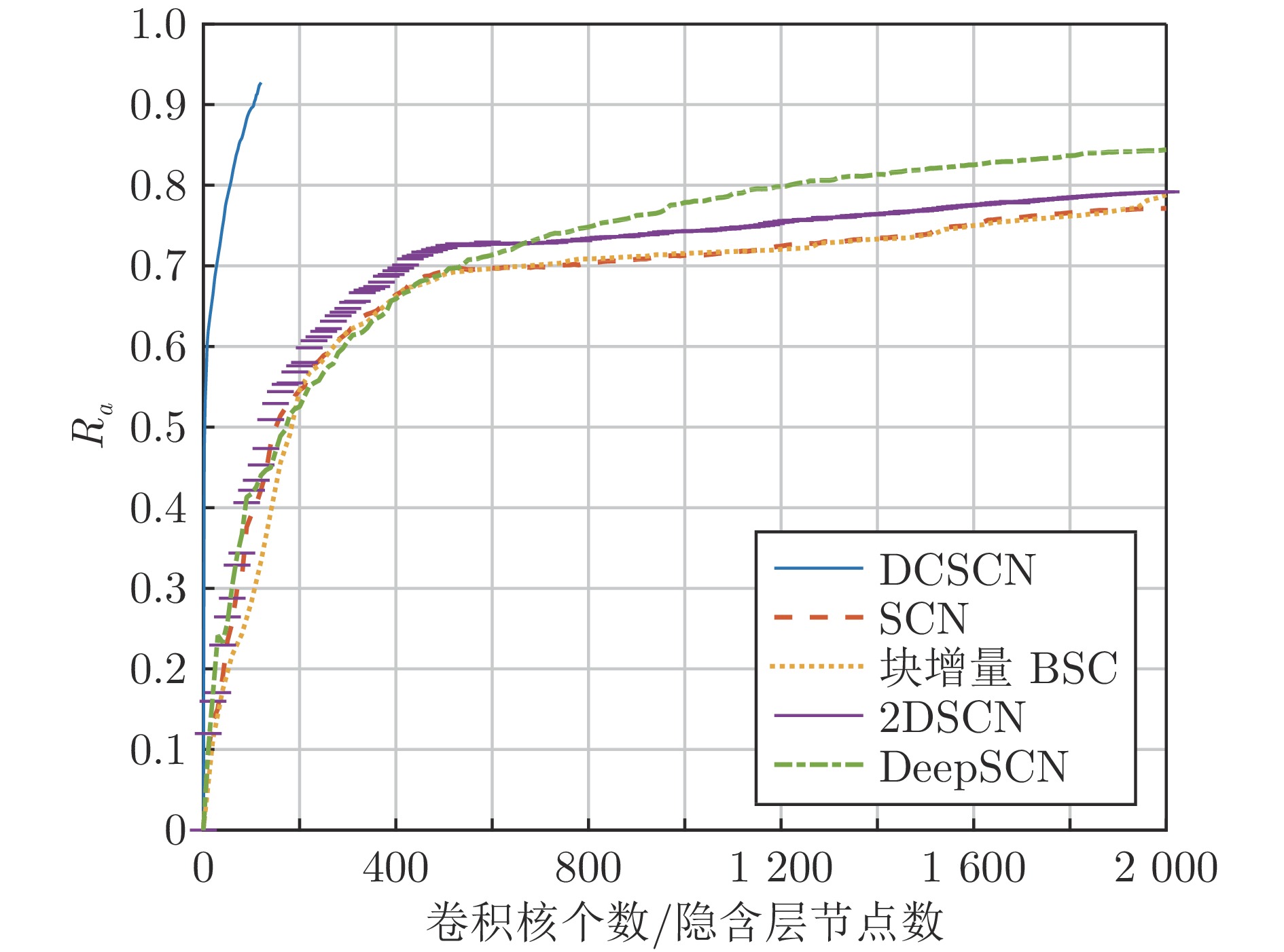
为解决电熔镁炉工况识别模型泛化能力和可解释性弱的缺陷, 提出一种基于深层卷积随机配置网络(Deep convolutional stochastic configuration networks, DCSCN)的可解释性电熔镁炉异常工况识别方法. 首先, 基于监督学习机制生成具有物理含义的高斯差分卷积核, 采用增量式方法构建深层卷积神经网络(Deep convolutional neural network, DCNN), 确保识别误差逐级收敛, 避免反向传播算法迭代寻优卷积核参数的过程. 定义通道特征图独立系数获取电熔镁炉特征类激活映射图的可视化结果, 定义可解释性可信度评测指标, 自适应调节深层卷积随机配置网络层级, 对不可信样本进行再认知以获取最优工况识别结果. 实验结果表明, 所提方法较其他方法具有更优的识别精度和可解释性.
为解决电熔镁炉工况识别模型泛化能力和可解释性弱的缺陷, 提出一种基于深层卷积随机配置网络(Deep convolutional stochastic configuration networks, DCSCN)的可解释性电熔镁炉异常工况识别方法. 首先, 基于监督学习机制生成具有物理含义的高斯差分卷积核, 采用增量式方法构建深层卷积神经网络(Deep convolutional neural network, DCNN), 确保识别误差逐级收敛, 避免反向传播算法迭代寻优卷积核参数的过程. 定义通道特征图独立系数获取电熔镁炉特征类激活映射图的可视化结果, 定义可解释性可信度评测指标, 自适应调节深层卷积随机配置网络层级, 对不可信样本进行再认知以获取最优工况识别结果. 实验结果表明, 所提方法较其他方法具有更优的识别精度和可解释性.








2024, 50(3): 544-559.
doi: 10.16383/j.aas.c230043
摘要:
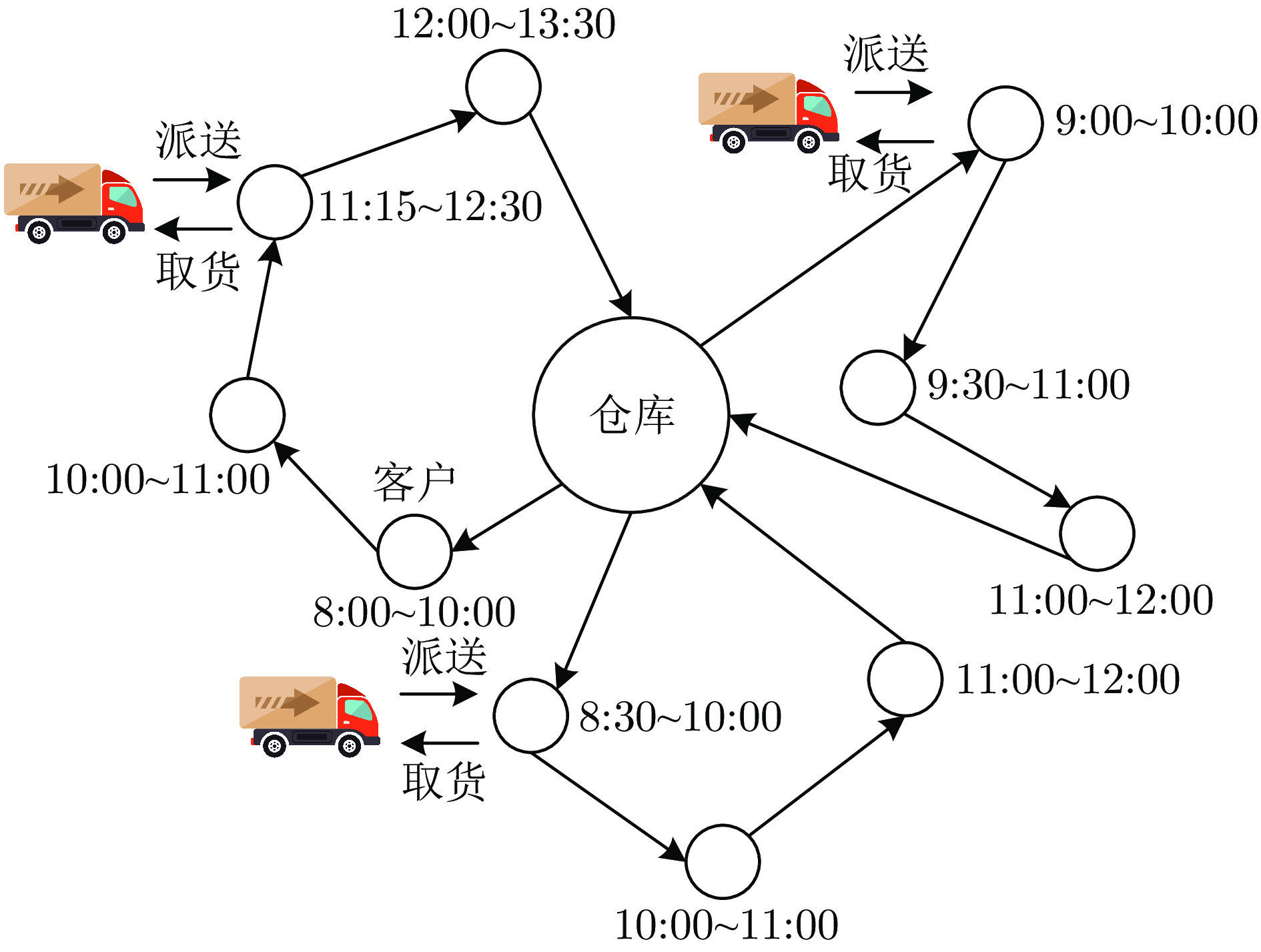
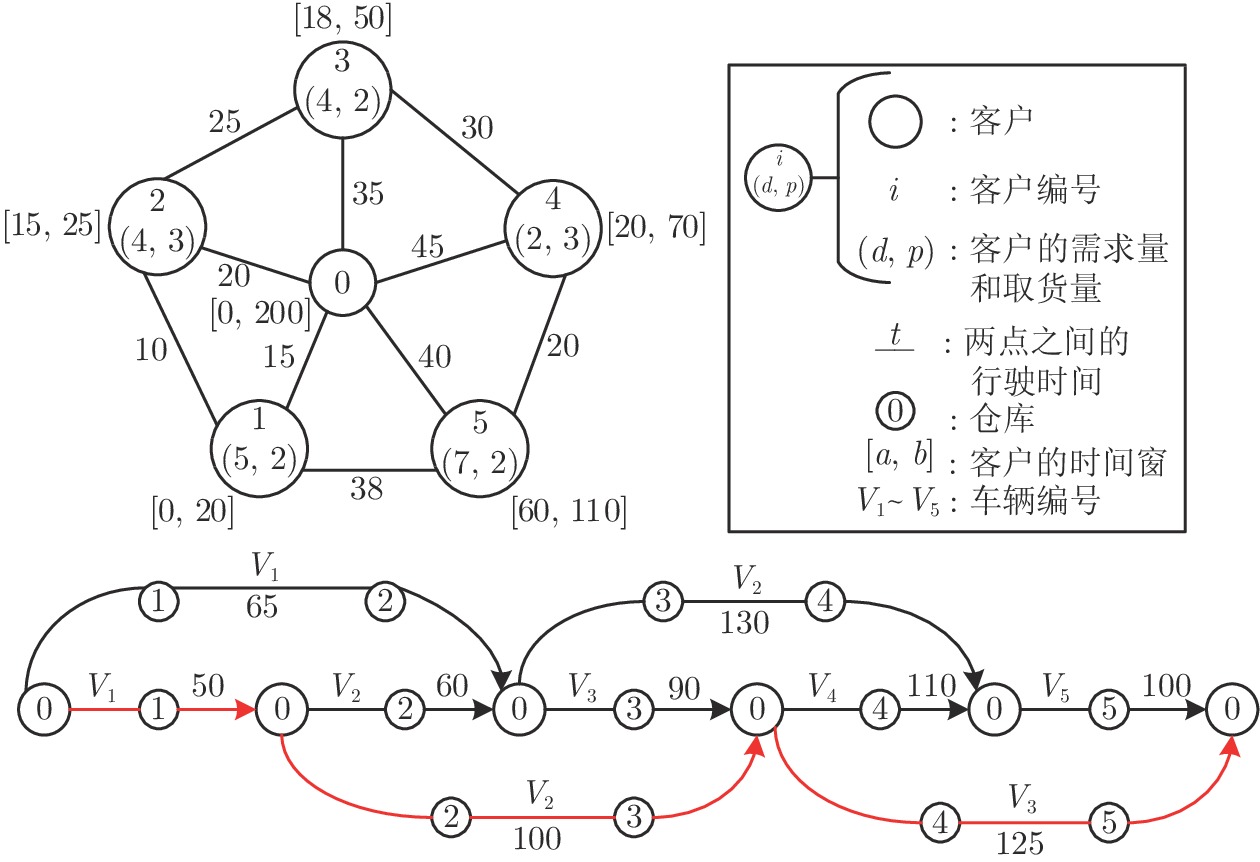
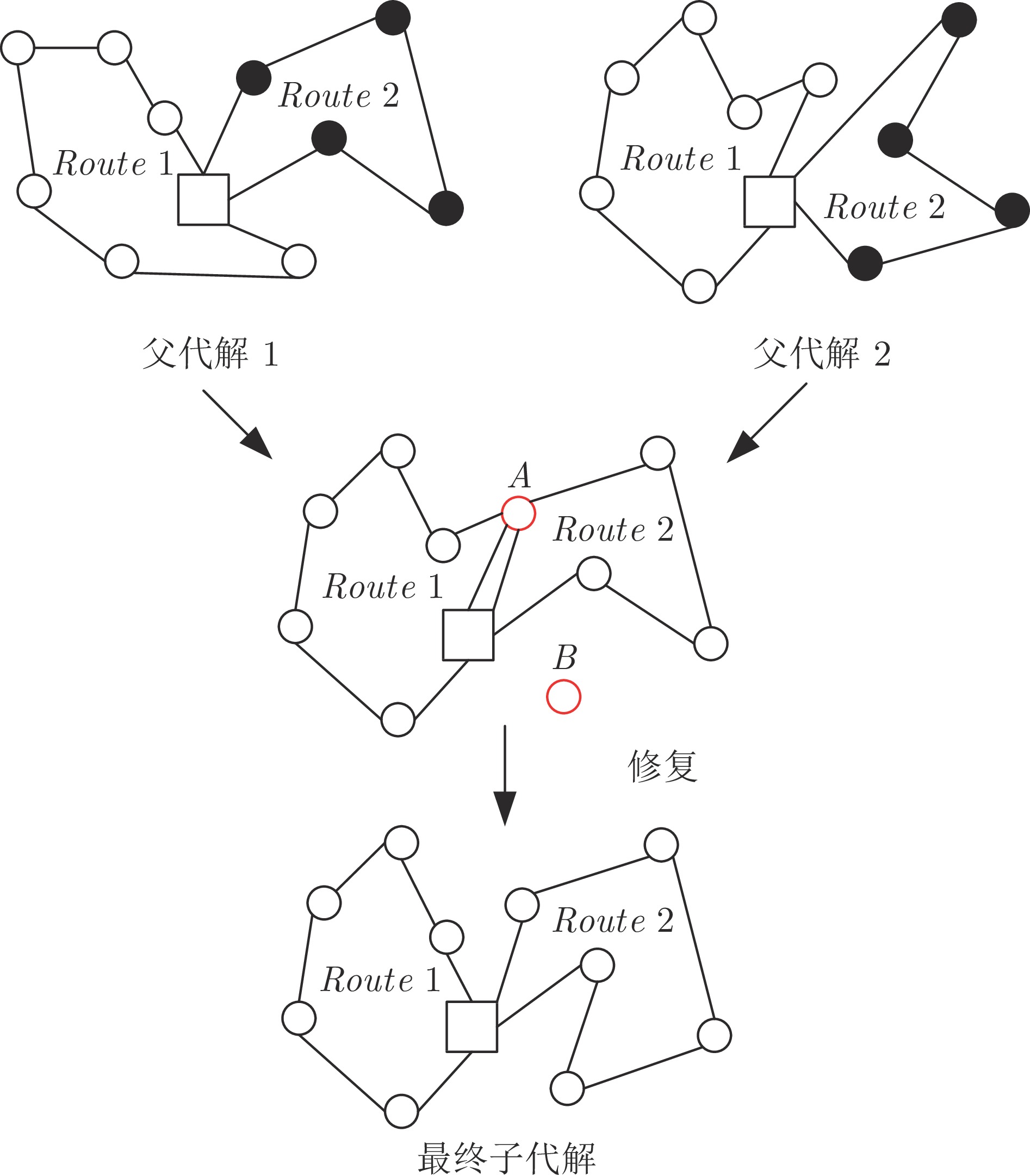
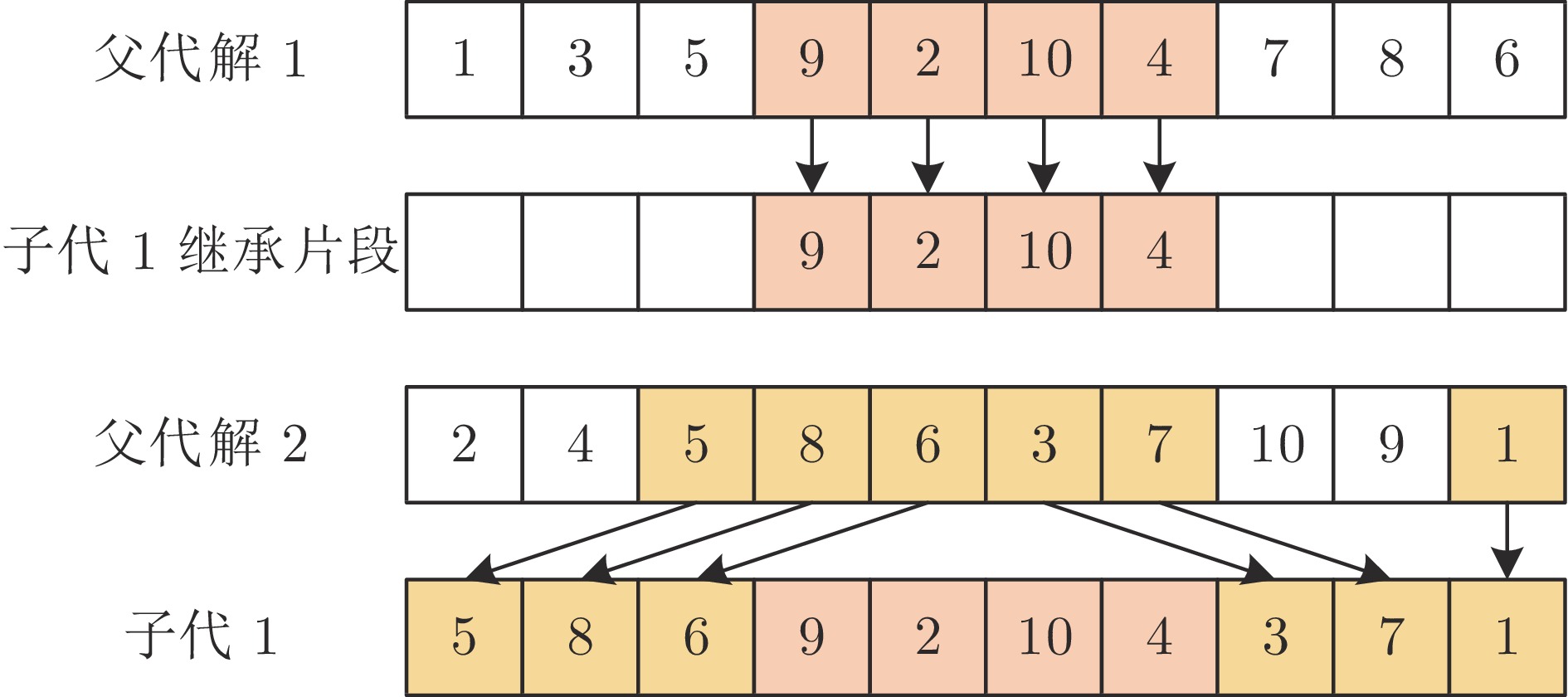
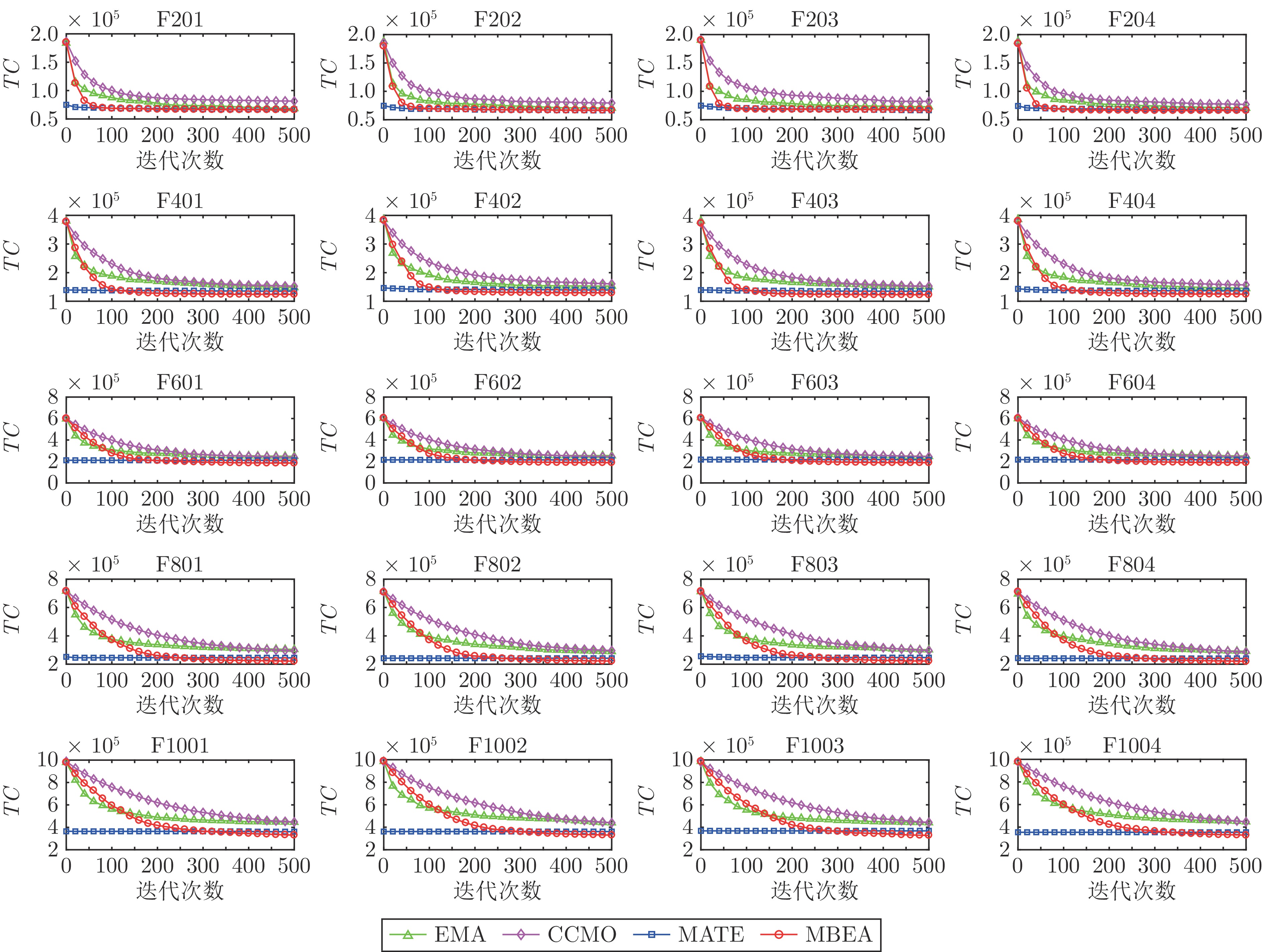
在现代社会中, 复杂物流配送场景的车辆路径规划问题(Vehicle routing problem, VRP)一般带有时间窗约束且需要提供同时取送货的服务. 这种复杂物流配送场景的车辆路径规划问题是NP-难问题. 当其规模逐渐增大时, 一般的数学规划方法难以求解, 通常使用启发式方法在限定时间内求得较优解. 然而, 传统的启发式方法从原大规模问题直接开始搜索, 无法利用先前相关的优化知识, 导致收敛速度较慢. 因此, 提出面向复杂物流配送场景的车辆路径规划多任务辅助进化算法(Multitask-based assisted evolutionary algorithm, MBEA), 通过使用迁移优化方法加快算法收敛速度, 其主要思想是通过构造多个简单且相似的子任务用于辅助优化原大规模问题. 首先从原大规模问题中随机选择一部分客户订单用于构建多个不同的相似优化子任务, 然后使用进化多任务(Evolutional multitasking, EMT)方法用于生成原大规模问题和优化子任务的候选解. 由于优化子任务相对简单且与原大规模问题相似, 其搜索得到的路径特征可以通过任务之间的知识迁移辅助优化原大规模问题, 从而加快其求解速度. 最后, 提出的算法在京东物流公司快递取送货数据集上进行验证, 其路径规划效果优于当前最新提出的路径规划算法.
在现代社会中, 复杂物流配送场景的车辆路径规划问题(Vehicle routing problem, VRP)一般带有时间窗约束且需要提供同时取送货的服务. 这种复杂物流配送场景的车辆路径规划问题是NP-难问题. 当其规模逐渐增大时, 一般的数学规划方法难以求解, 通常使用启发式方法在限定时间内求得较优解. 然而, 传统的启发式方法从原大规模问题直接开始搜索, 无法利用先前相关的优化知识, 导致收敛速度较慢. 因此, 提出面向复杂物流配送场景的车辆路径规划多任务辅助进化算法(Multitask-based assisted evolutionary algorithm, MBEA), 通过使用迁移优化方法加快算法收敛速度, 其主要思想是通过构造多个简单且相似的子任务用于辅助优化原大规模问题. 首先从原大规模问题中随机选择一部分客户订单用于构建多个不同的相似优化子任务, 然后使用进化多任务(Evolutional multitasking, EMT)方法用于生成原大规模问题和优化子任务的候选解. 由于优化子任务相对简单且与原大规模问题相似, 其搜索得到的路径特征可以通过任务之间的知识迁移辅助优化原大规模问题, 从而加快其求解速度. 最后, 提出的算法在京东物流公司快递取送货数据集上进行验证, 其路径规划效果优于当前最新提出的路径规划算法.



2024, 50(3): 560-575.
doi: 10.16383/j.aas.c210843
摘要:
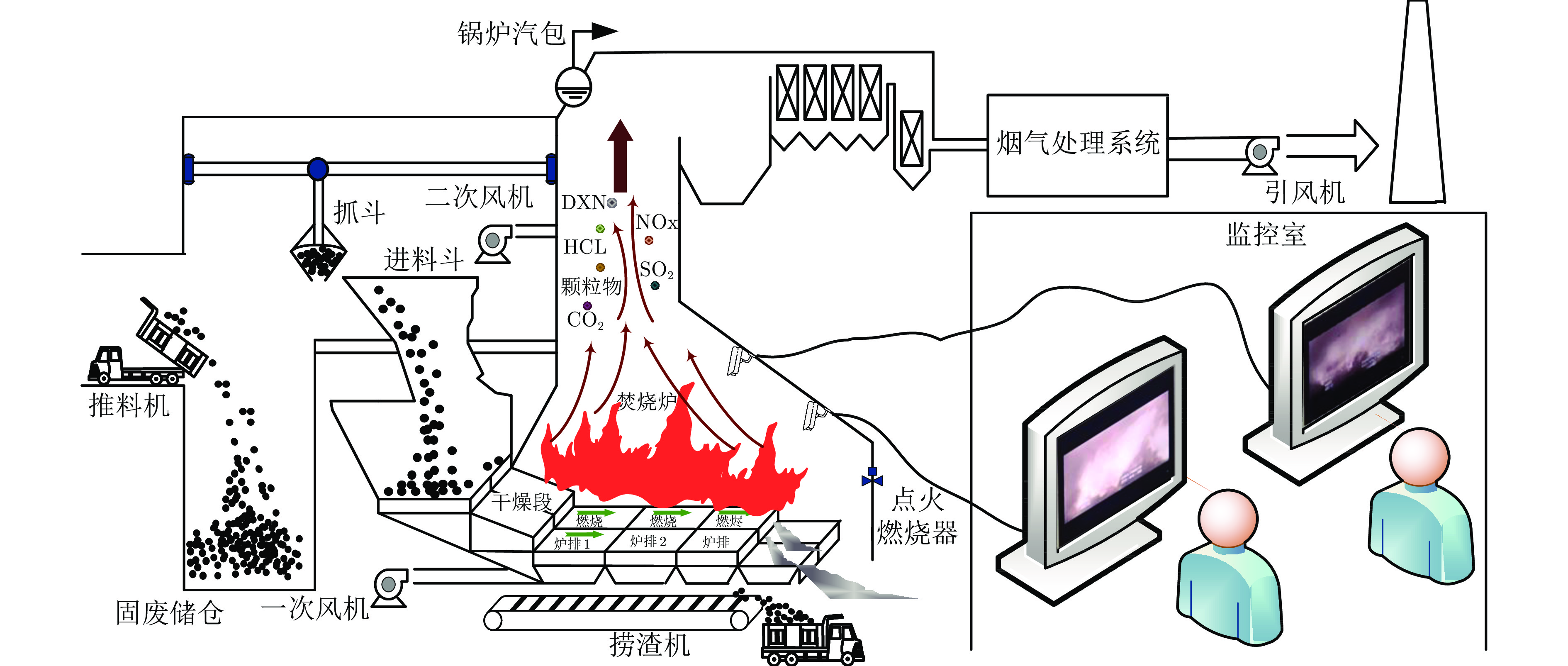
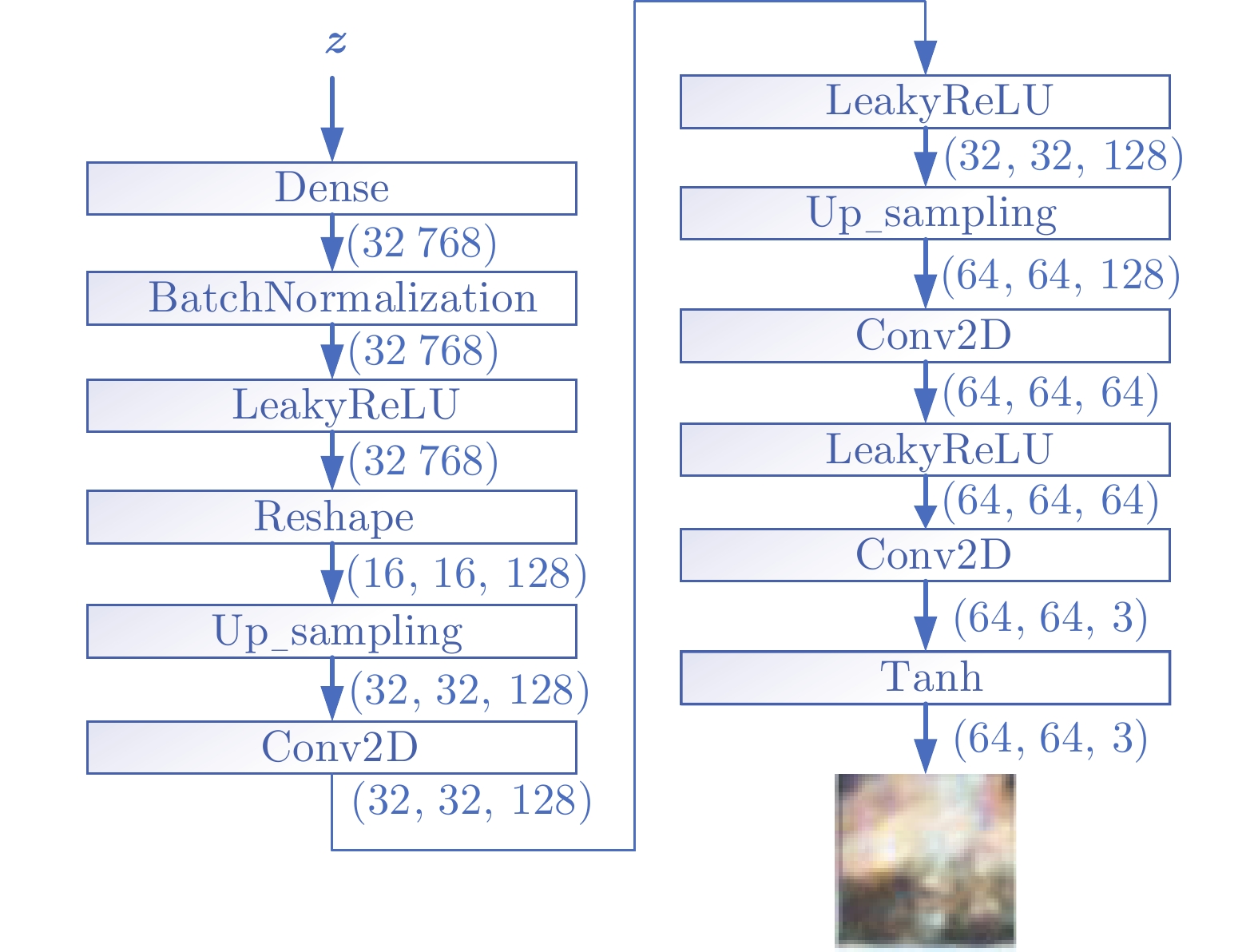
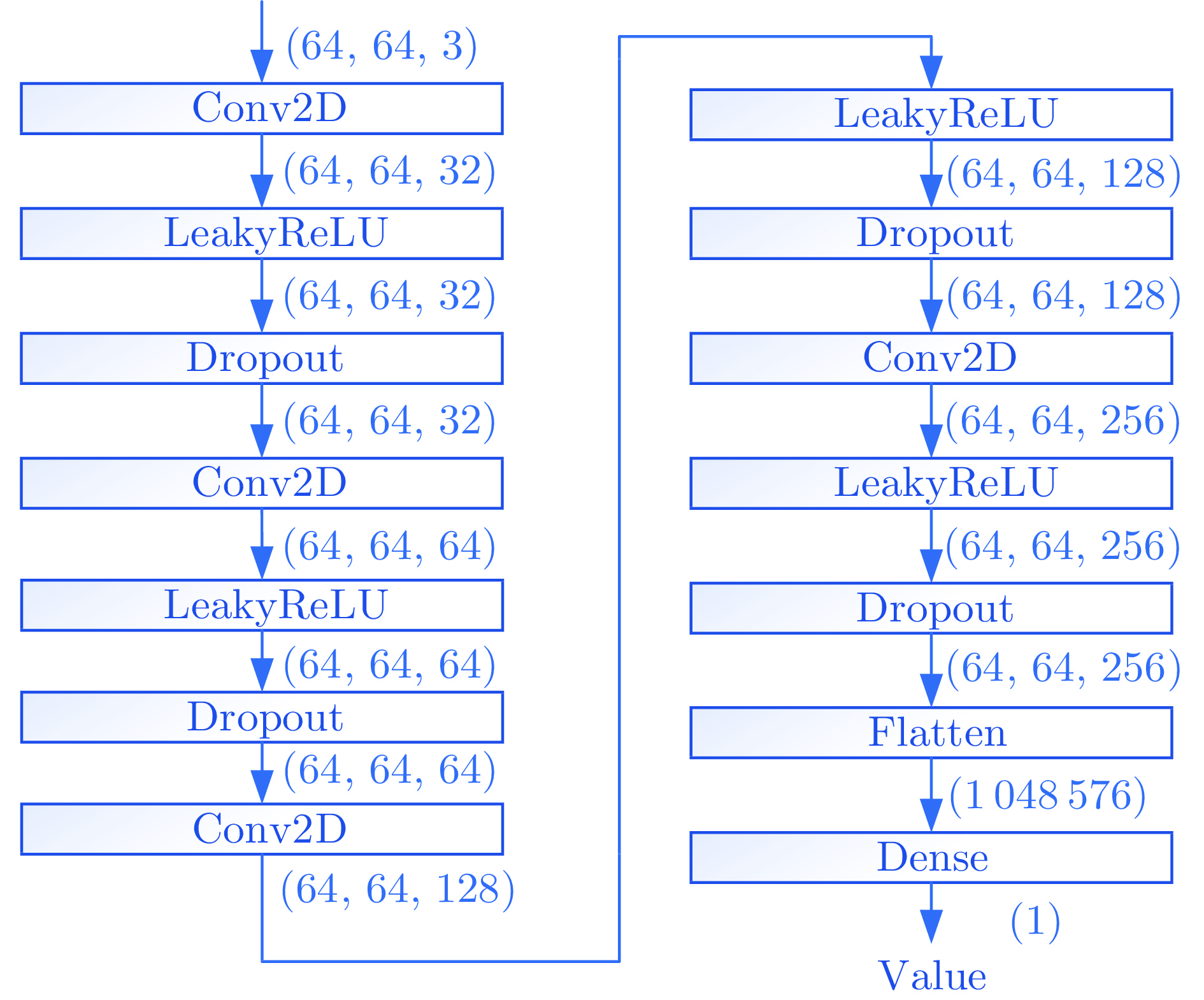
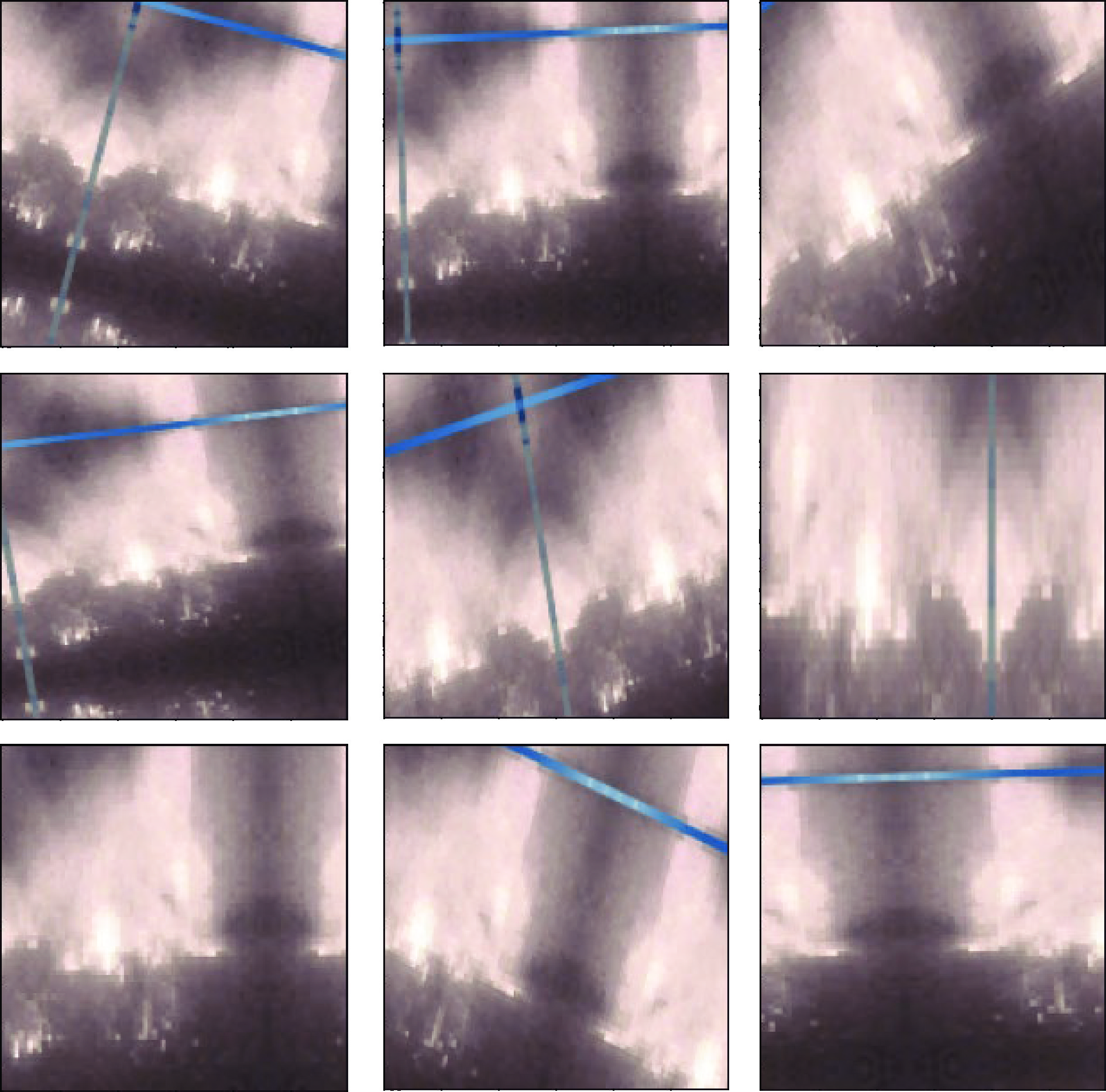
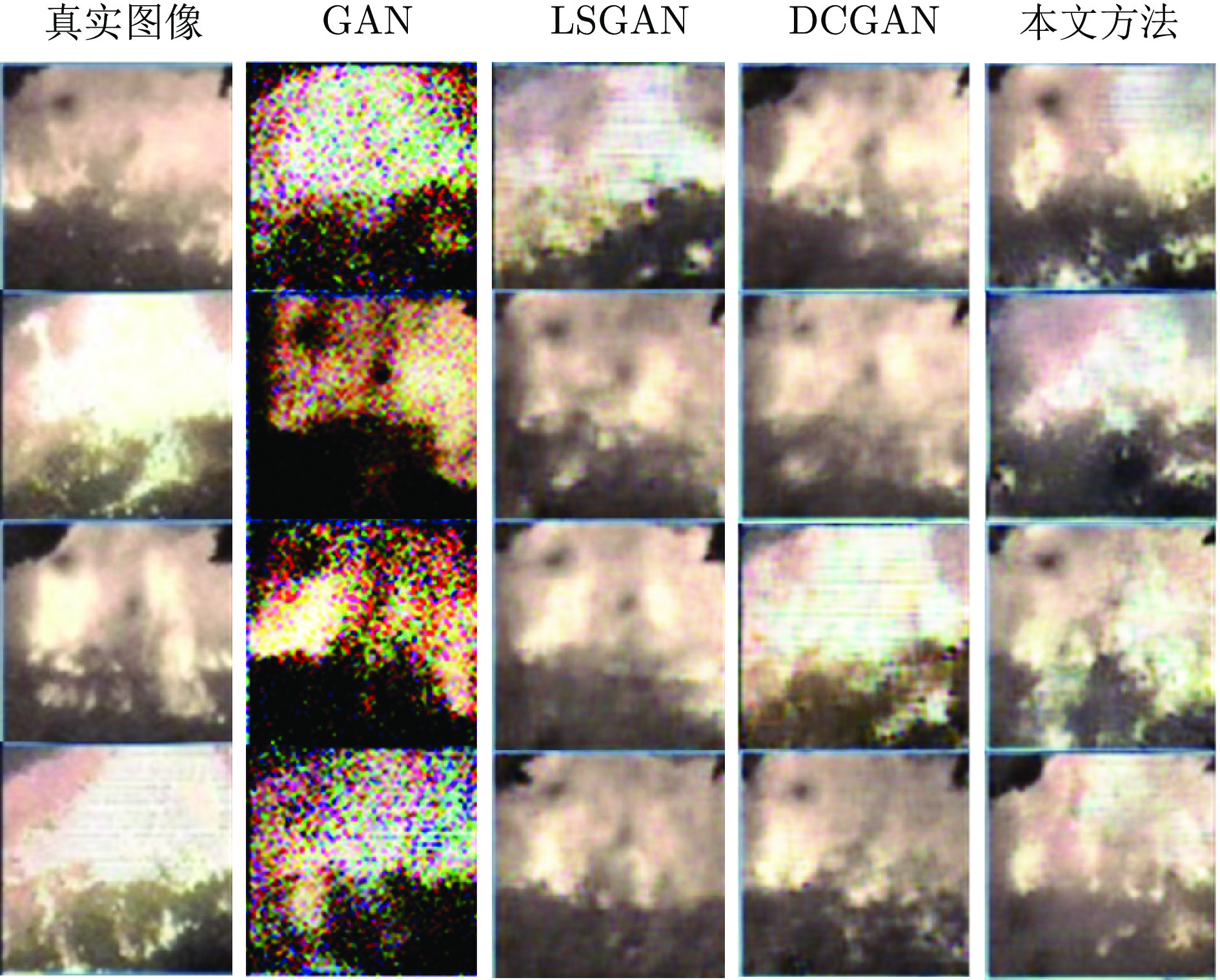
国内城市固废焚烧(Municipal solid waste incineration, MSWI)过程通常依靠运行专家观察炉内火焰识别燃烧状态后再结合自身经验修正控制策略以维持稳定燃烧, 存在智能化水平低、识别结果具有主观性与随意性等问题. 由于MSWI过程的火焰图像具有强污染、多噪声等特性, 并且存在异常工况数据较为稀缺等问题, 导致传统目标识别方法难以适用. 对此, 提出一种基于混合数据增强的MSWI过程燃烧状态识别方法. 首先, 结合领域专家经验与焚烧炉排结构对燃烧状态进行标定; 接着, 设计由粗调和精调两级组成的深度卷积生成对抗网络(Deep convolutional generative adversarial network, DCGAN)以获取多工况火焰图像; 然后, 采用弗雷歇距离(Fréchet inception distance, FID)对生成式样本进行自适应选择; 最后, 通过非生成式数据增强对样本进行再次扩充, 获得混合增强数据构建卷积神经网络以识别燃烧状态. 基于某MSWI电厂实际运行数据实验, 表明该方法有效地提高了识别网络的泛化性与鲁棒性, 具有良好的识别精度.
国内城市固废焚烧(Municipal solid waste incineration, MSWI)过程通常依靠运行专家观察炉内火焰识别燃烧状态后再结合自身经验修正控制策略以维持稳定燃烧, 存在智能化水平低、识别结果具有主观性与随意性等问题. 由于MSWI过程的火焰图像具有强污染、多噪声等特性, 并且存在异常工况数据较为稀缺等问题, 导致传统目标识别方法难以适用. 对此, 提出一种基于混合数据增强的MSWI过程燃烧状态识别方法. 首先, 结合领域专家经验与焚烧炉排结构对燃烧状态进行标定; 接着, 设计由粗调和精调两级组成的深度卷积生成对抗网络(Deep convolutional generative adversarial network, DCGAN)以获取多工况火焰图像; 然后, 采用弗雷歇距离(Fréchet inception distance, FID)对生成式样本进行自适应选择; 最后, 通过非生成式数据增强对样本进行再次扩充, 获得混合增强数据构建卷积神经网络以识别燃烧状态. 基于某MSWI电厂实际运行数据实验, 表明该方法有效地提高了识别网络的泛化性与鲁棒性, 具有良好的识别精度.











2024, 50(3): 576-588.
doi: 10.16383/j.aas.c211146
摘要:
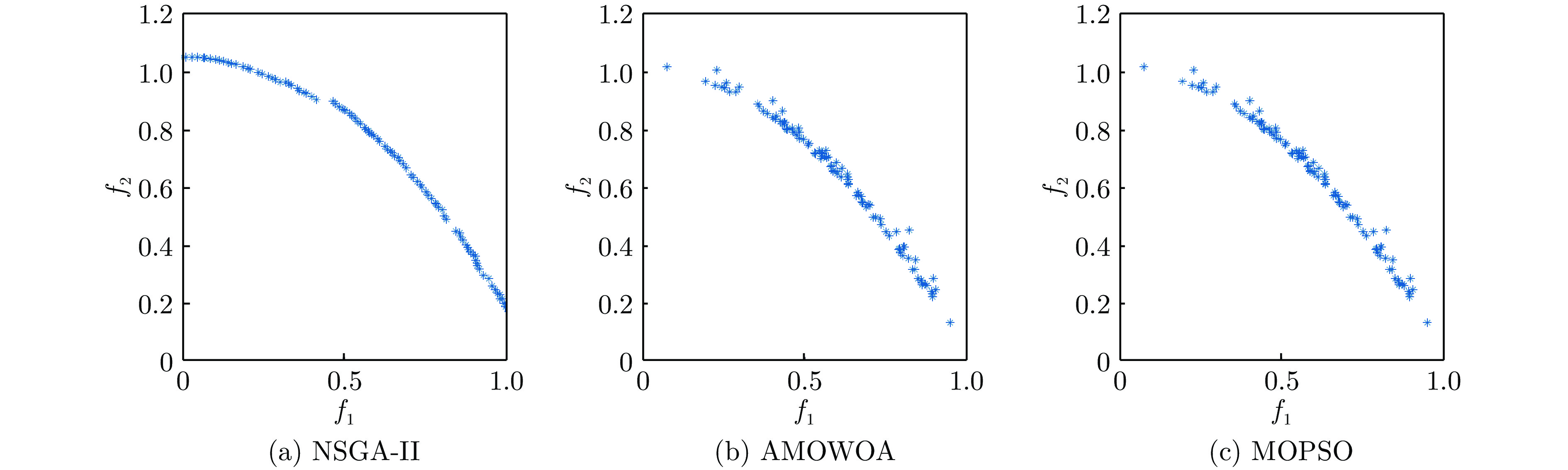
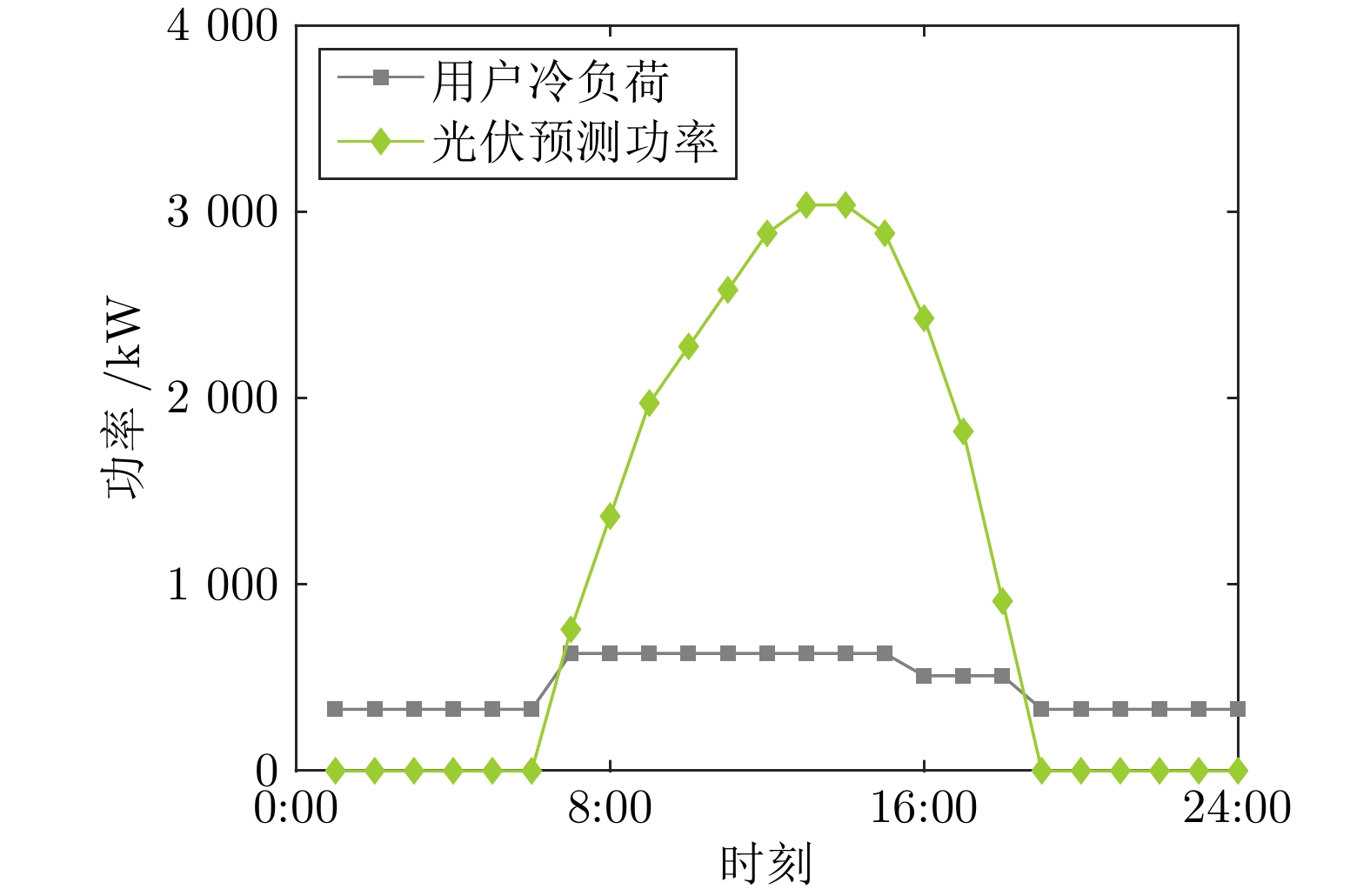
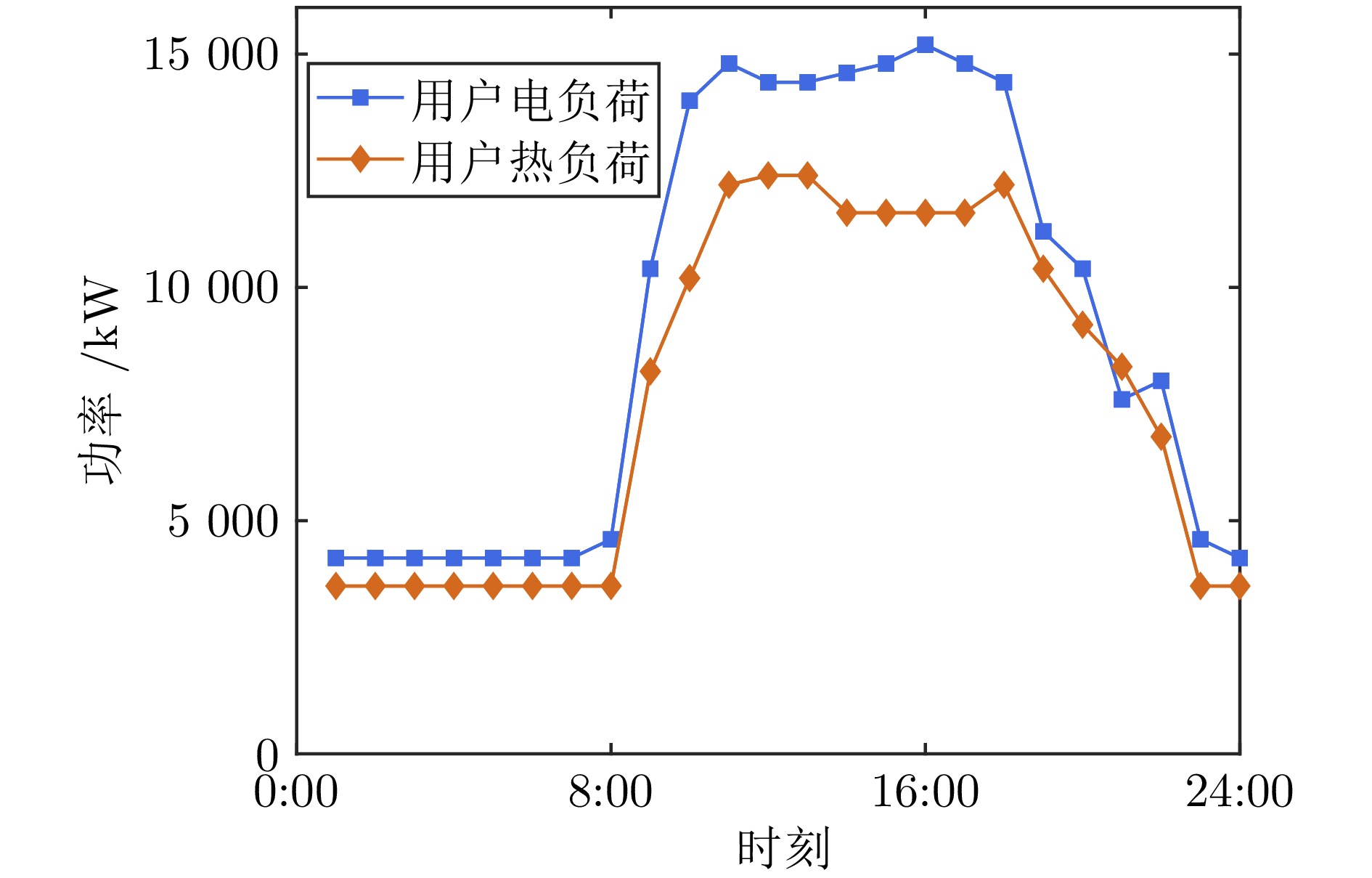
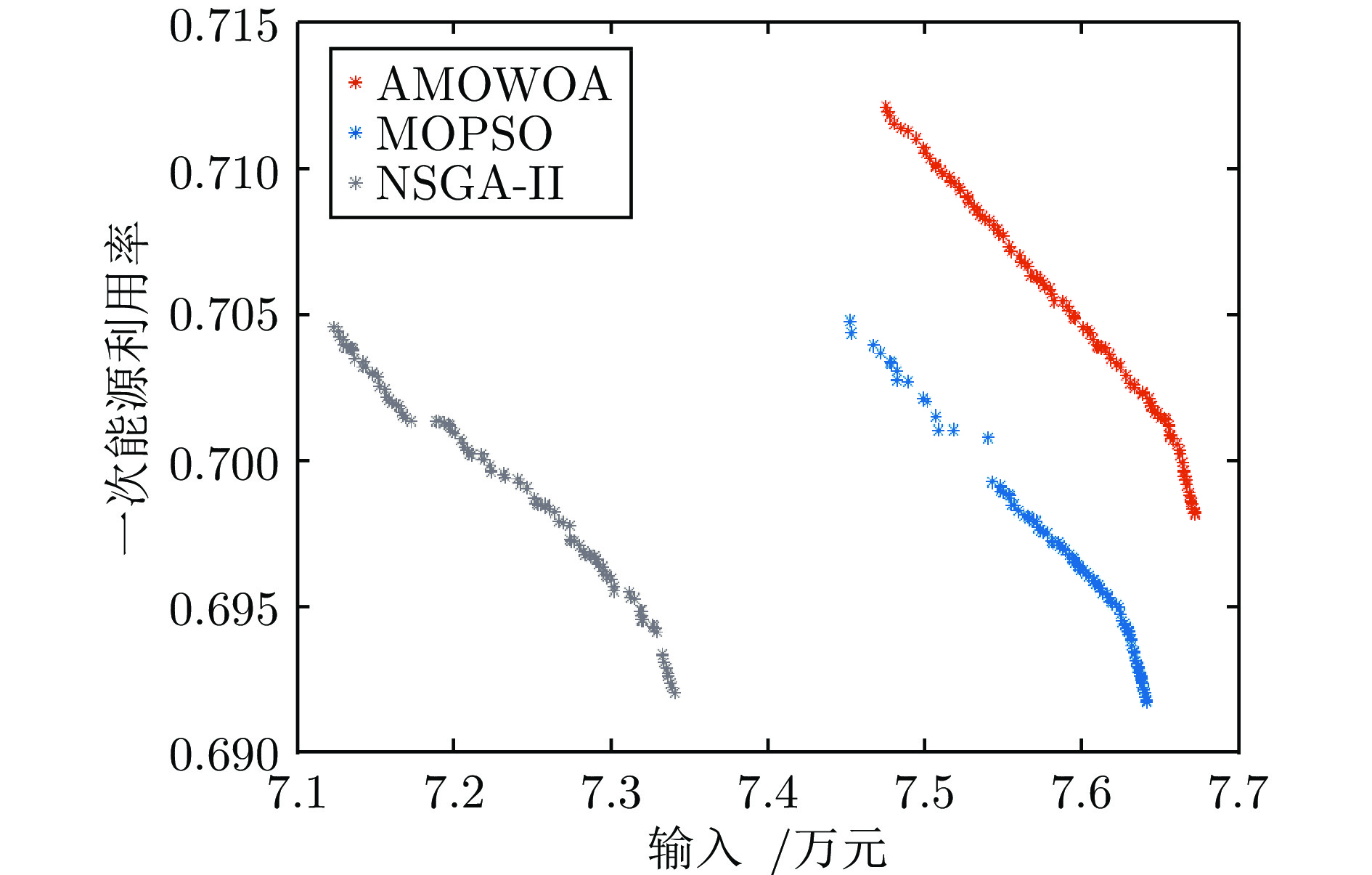
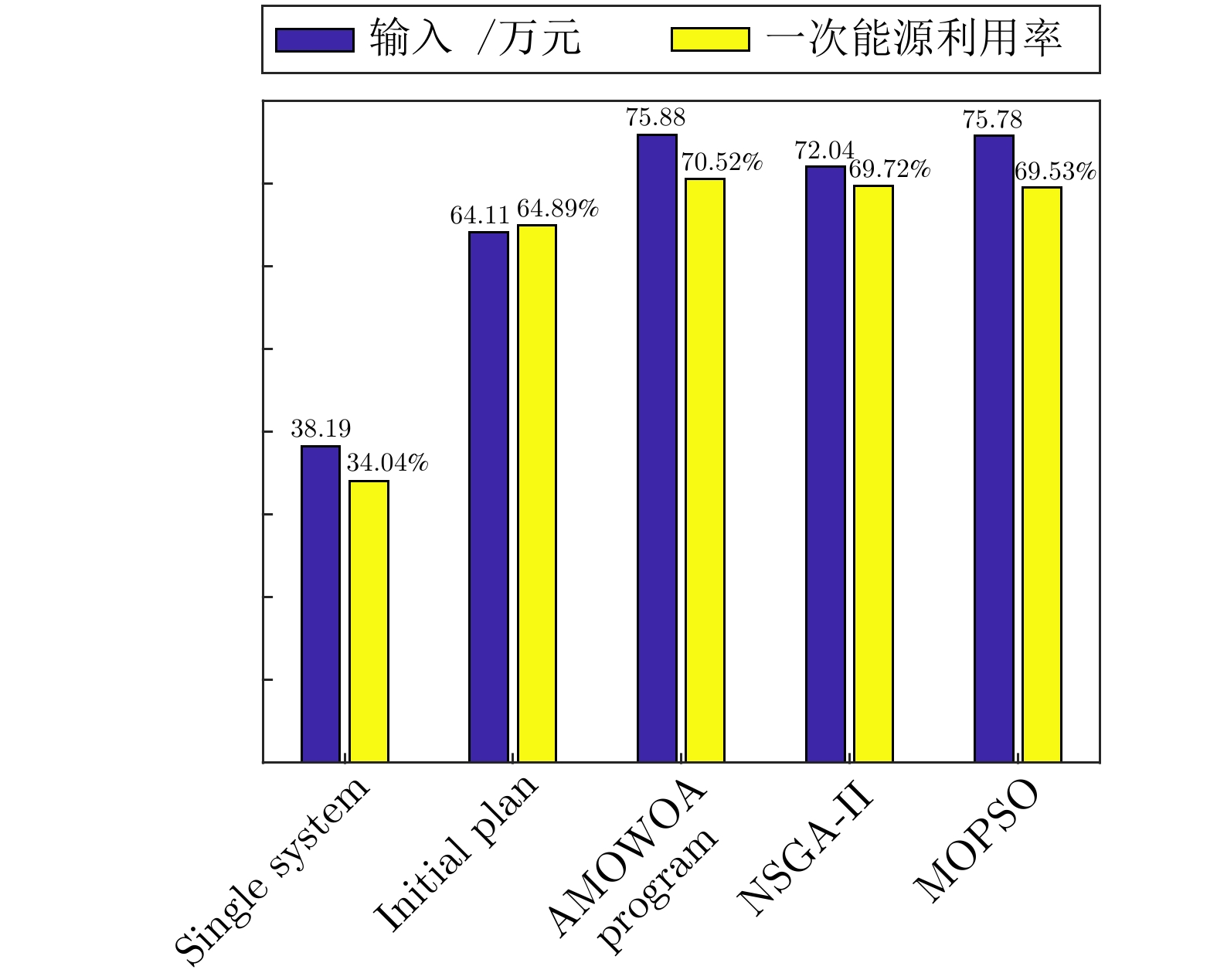
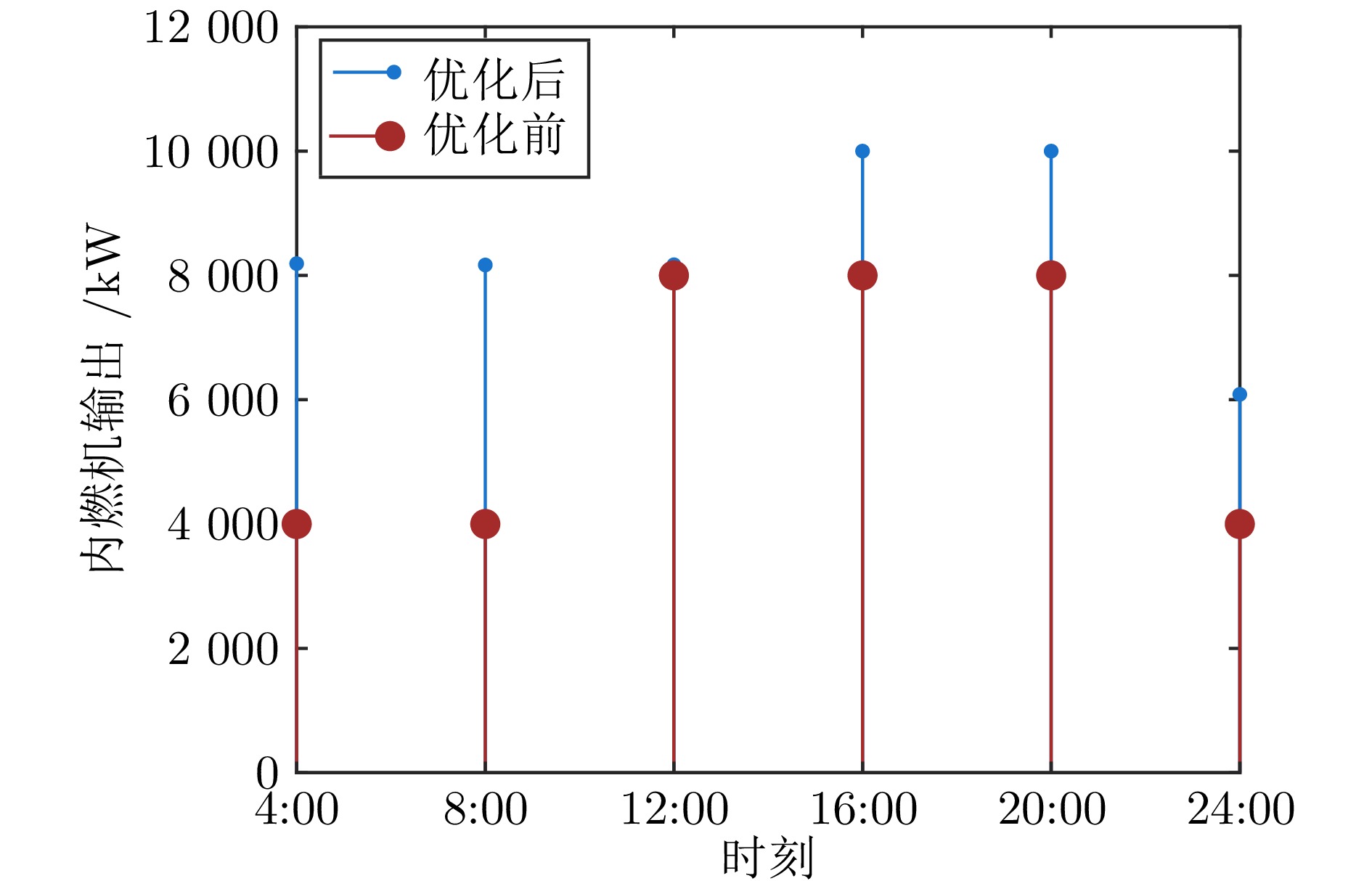
目前, 智能优化算法已广泛应用于工程优化中, 在当前多能耦合与互补的能源发展趋势下, 仅考虑系统经济指标的单目标优化模式已经不再适用于目前区域综合能源系统(Integrated energy system, IES)的运行优化调度, 需要研究一种多目标运行策略来解决区域综合能源系统的运行优化调度问题. 首先综合考虑经济与能源利用两个指标并结合商业住宅区域的特性, 以系统日运行收益和一次能源利用率为优化目标构建商业住宅区域综合能源系统多目标运行优化调度模型. 其次由于传统多目标智能优化算法缺乏一种最优解综合评价方法, 基于非支配排序以及拥挤度计算的多目标算法框架, 提出一种利用模糊一致矩阵选取全局最优解的多目标鲸鱼优化算法(A multi-objective whale optimization algorithm, AMOWOA), 并将提出算法对商住区域综合能源系统多目标运行优化调度模型进行求解. 最后以华东某商业住宅区域综合能源系统为例进行仿真, 验证了该方法的有效性和可行性.
目前, 智能优化算法已广泛应用于工程优化中, 在当前多能耦合与互补的能源发展趋势下, 仅考虑系统经济指标的单目标优化模式已经不再适用于目前区域综合能源系统(Integrated energy system, IES)的运行优化调度, 需要研究一种多目标运行策略来解决区域综合能源系统的运行优化调度问题. 首先综合考虑经济与能源利用两个指标并结合商业住宅区域的特性, 以系统日运行收益和一次能源利用率为优化目标构建商业住宅区域综合能源系统多目标运行优化调度模型. 其次由于传统多目标智能优化算法缺乏一种最优解综合评价方法, 基于非支配排序以及拥挤度计算的多目标算法框架, 提出一种利用模糊一致矩阵选取全局最优解的多目标鲸鱼优化算法(A multi-objective whale optimization algorithm, AMOWOA), 并将提出算法对商住区域综合能源系统多目标运行优化调度模型进行求解. 最后以华东某商业住宅区域综合能源系统为例进行仿真, 验证了该方法的有效性和可行性.




2024, 50(3): 589-606.
doi: 10.16383/j.aas.c230233
摘要:
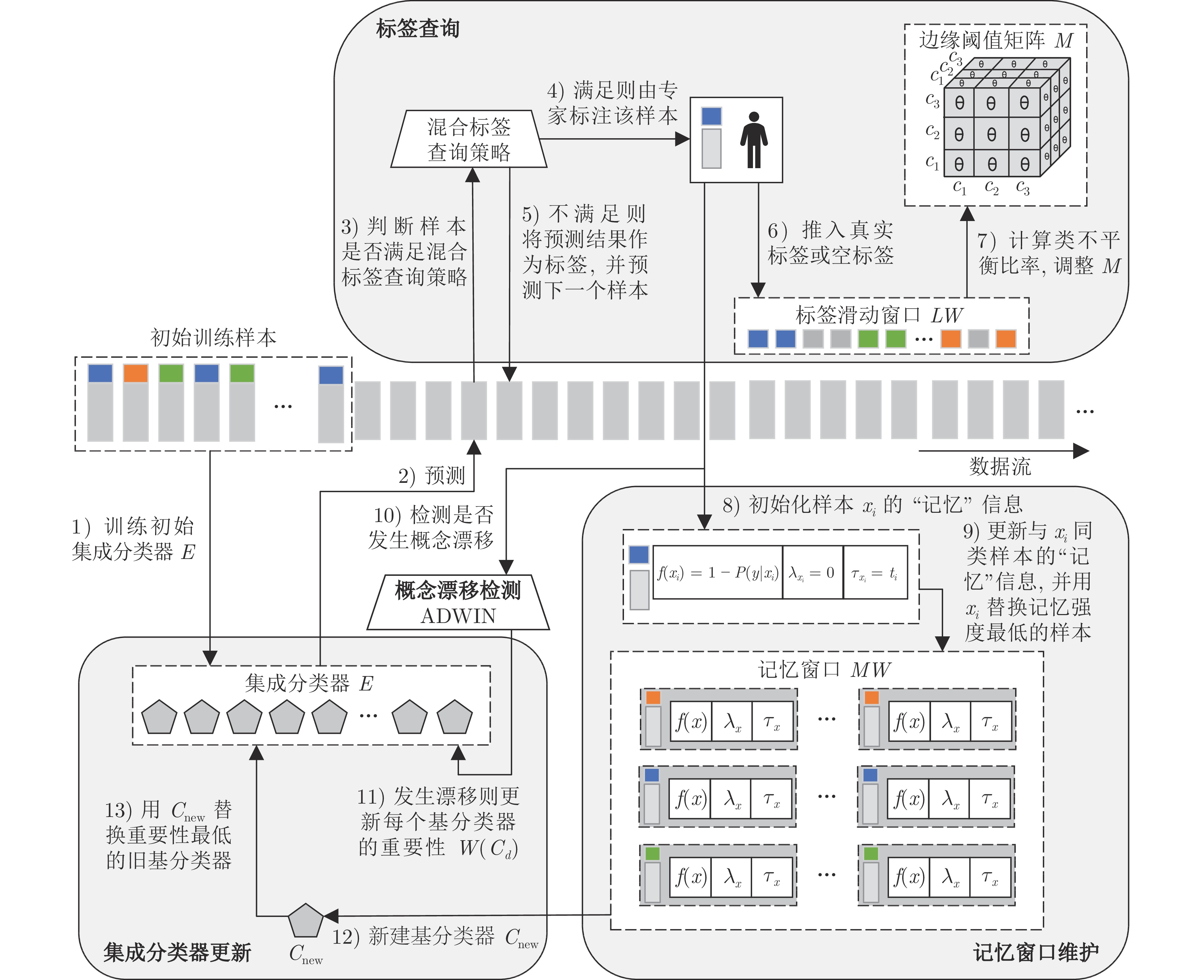
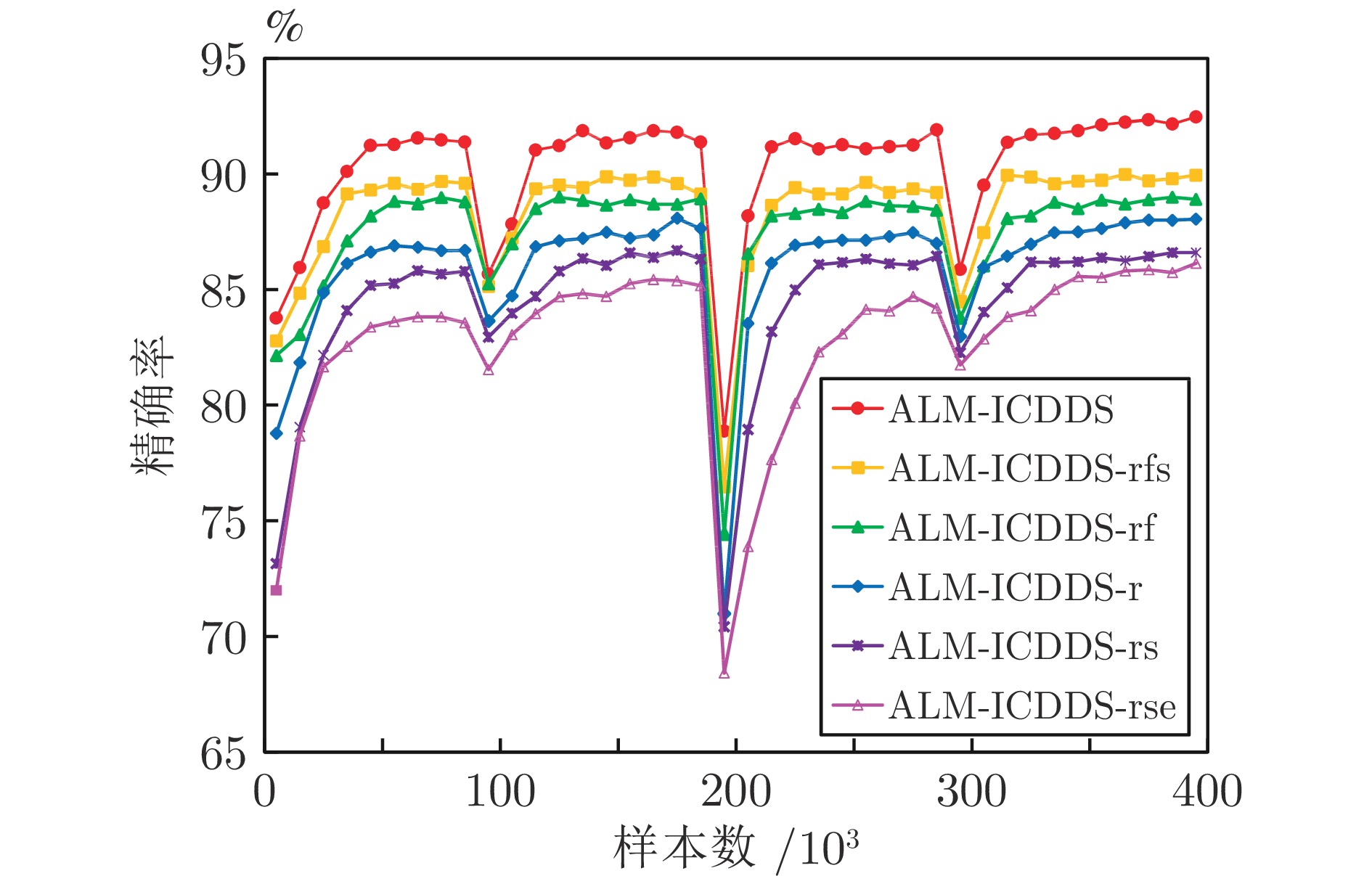
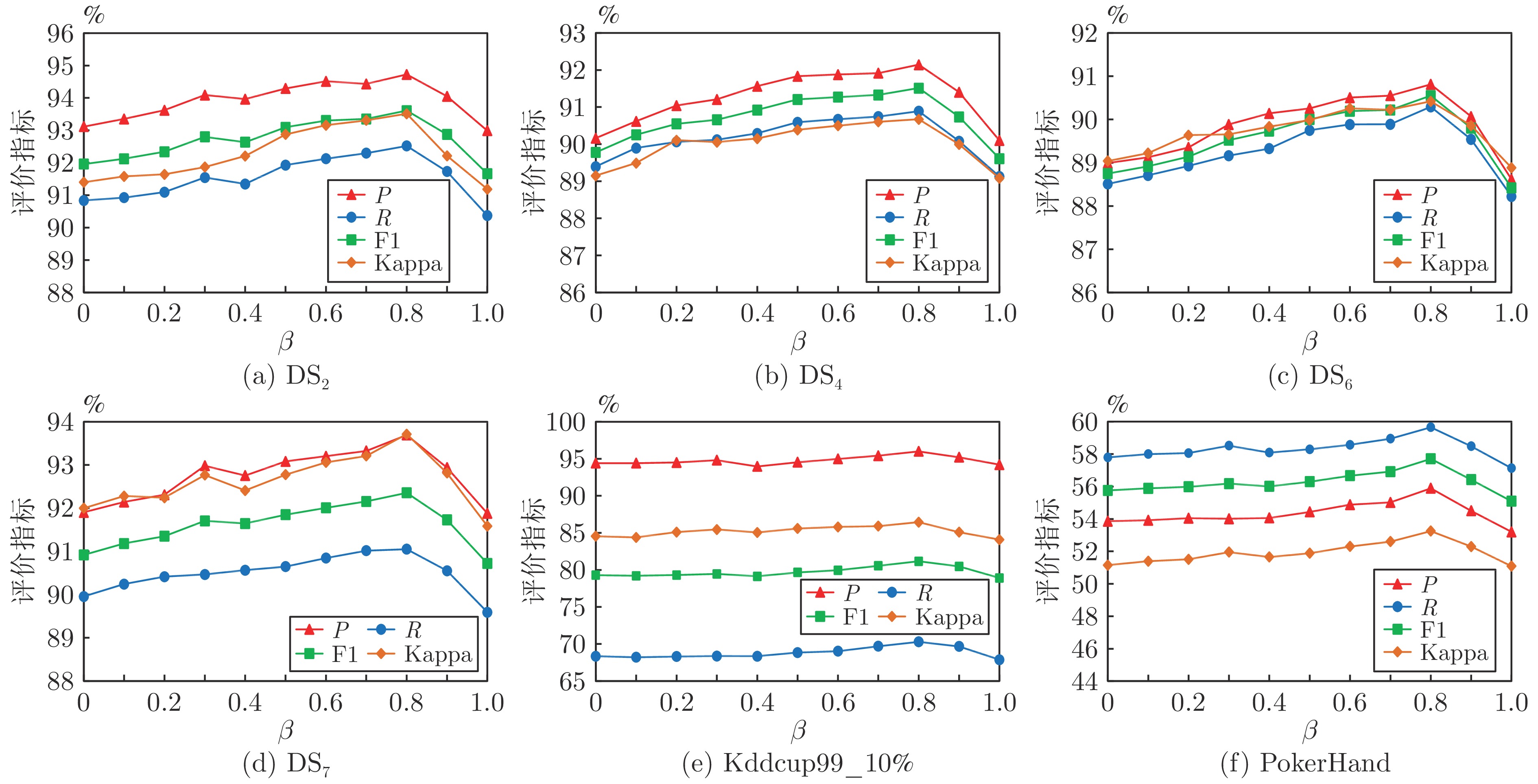
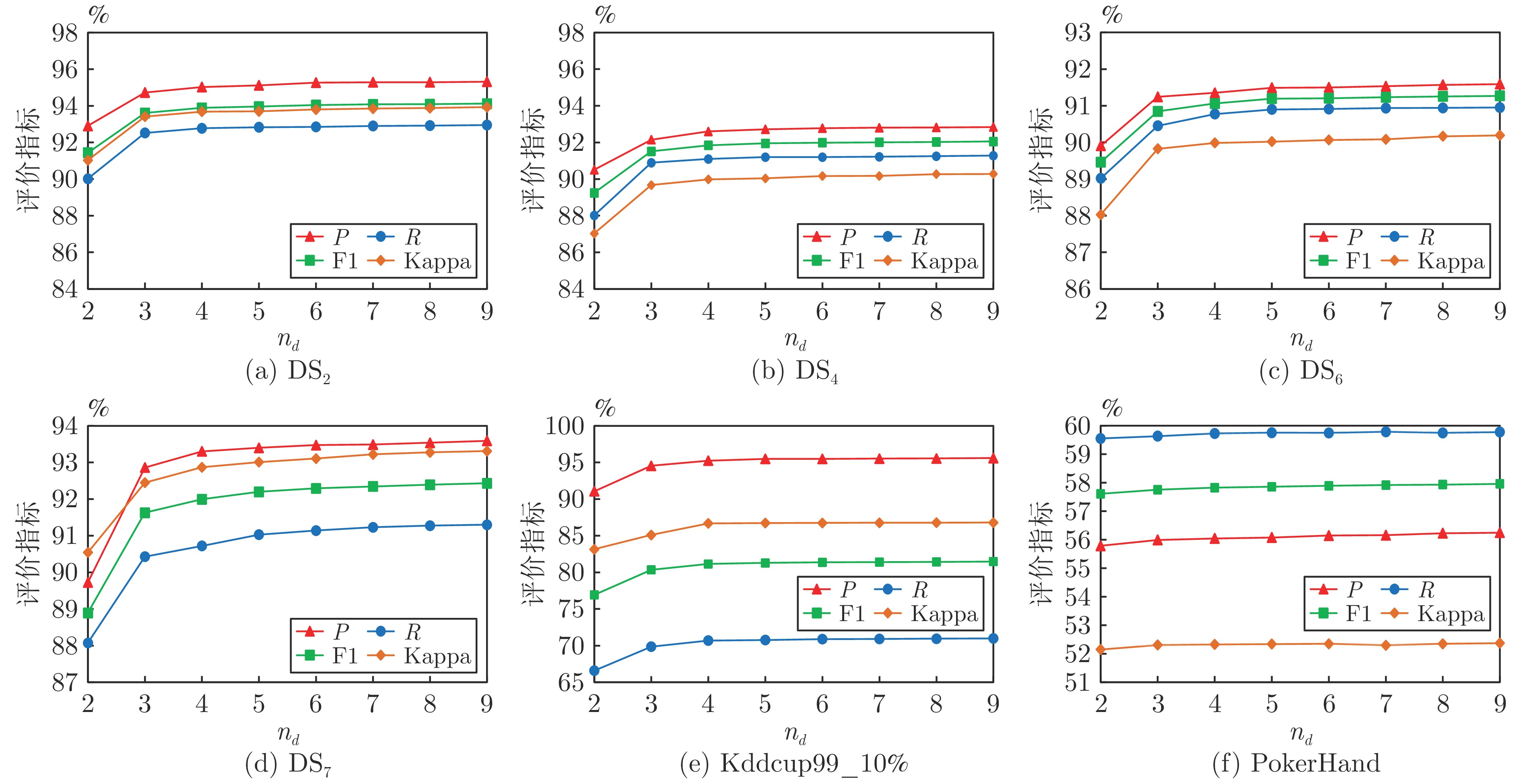
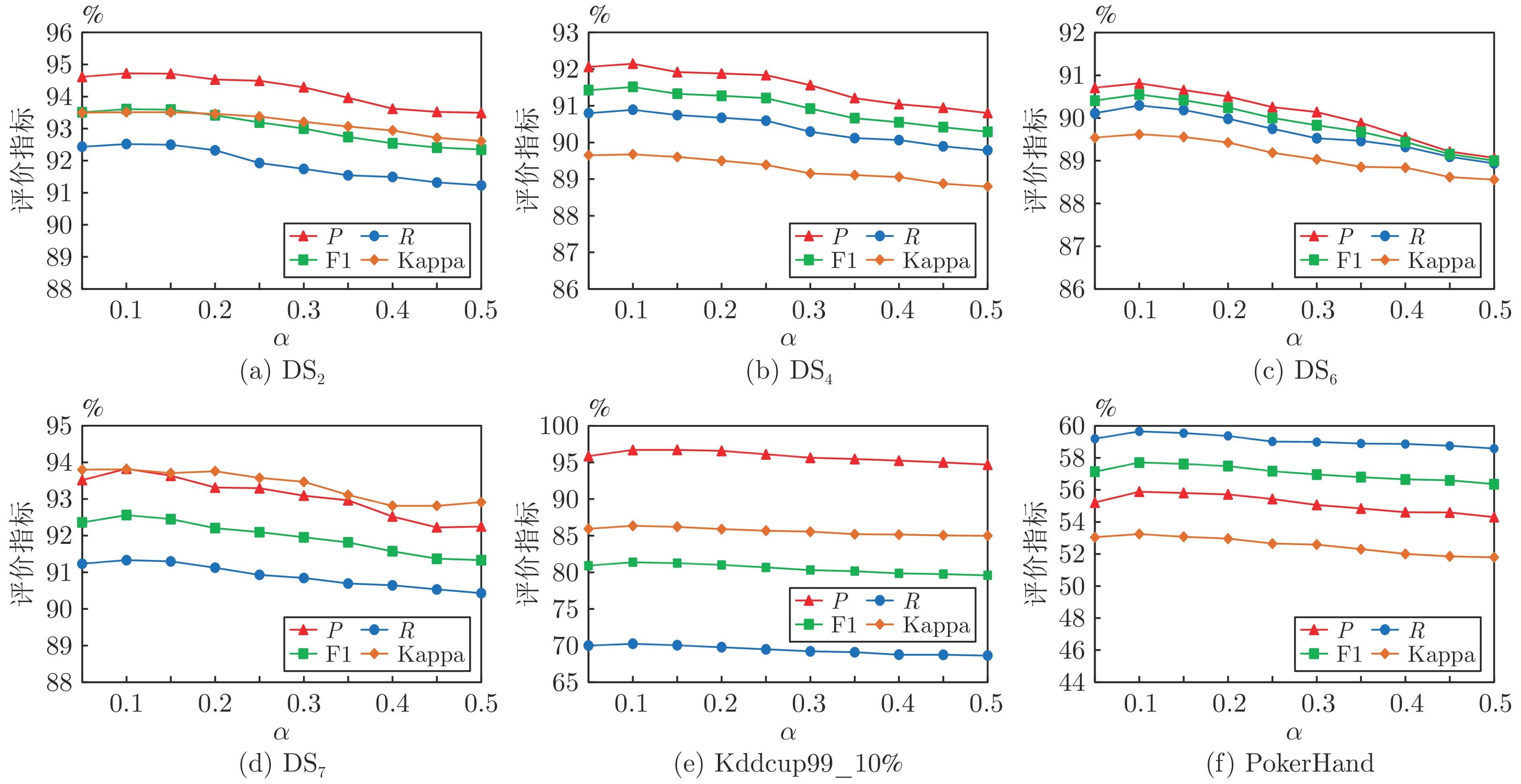
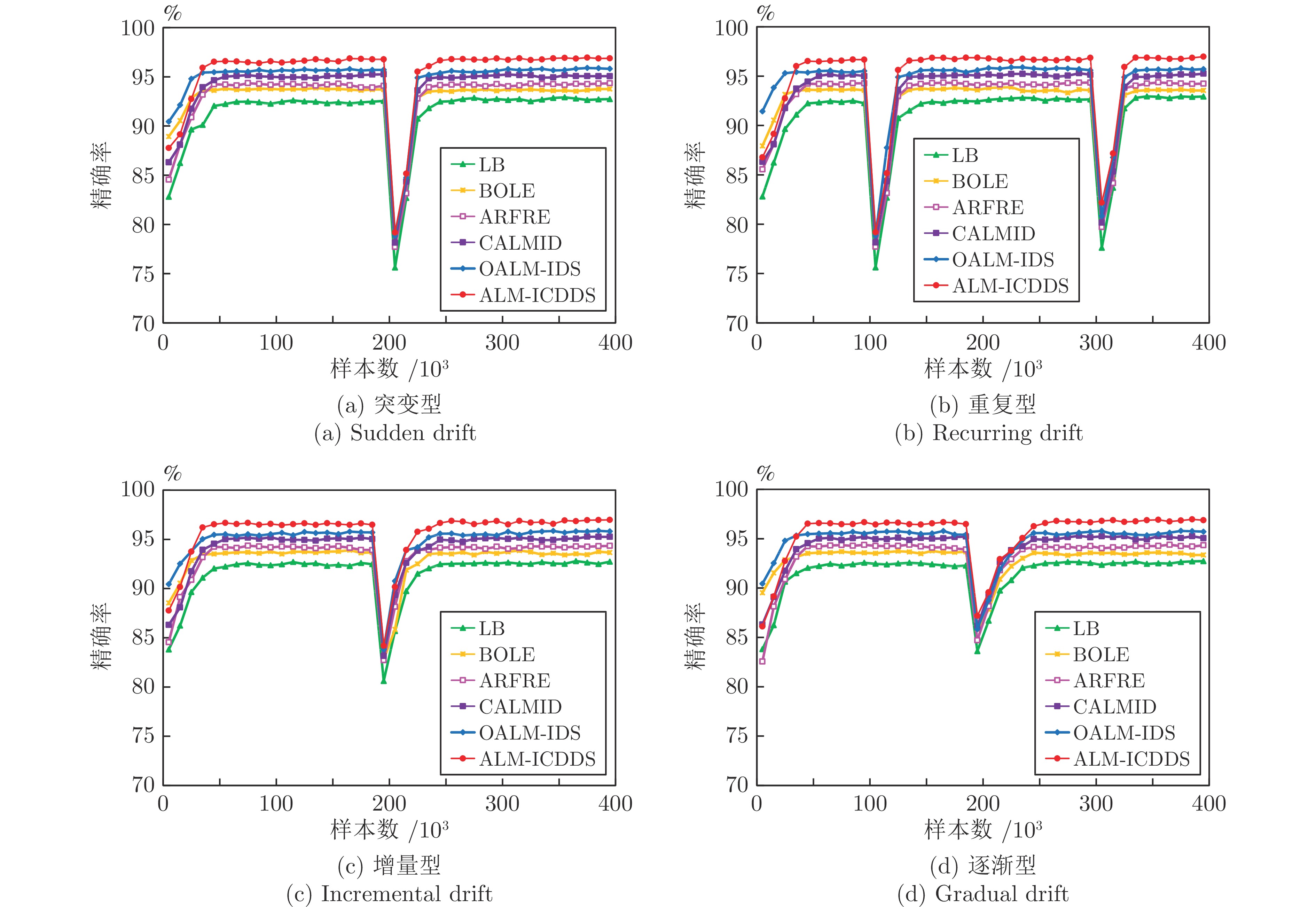
数据流分类研究在开放、动态环境中如何提供更可靠的数据驱动预测模型, 关键在于从实时到达且不断变化的数据流中检测并适应概念漂移. 目前, 为检测概念漂移和更新分类模型, 数据流分类方法通常假设所有样本的标签都是已知的, 这一假设在真实场景下是不现实的. 此外, 真实数据流可能表现出较高且不断变化的类不平衡比率, 会进一步增加数据流分类任务的复杂性. 为此, 提出一种非平衡概念漂移数据流主动学习方法(Active learning method for imbalanced concept drift data stream, ALM-ICDDS). 定义基于多预测概率的样本预测确定性度量, 提出边缘阈值矩阵的自适应调整方法, 使得标签查询策略适用于类别数较多的非平衡数据流; 提出基于记忆强度的样本替换策略, 将难区分、少数类样本和代表当前数据分布的样本保存在记忆窗口中, 提升新基分类器的分类性能; 定义基于分类精度的基分类器重要性评价及更新方法, 实现漂移后的集成分类器更新. 在7个合成数据流和3个真实数据流上的对比实验表明, 提出的非平衡概念漂移数据流主动学习方法的分类性能优于6种概念漂移数据流学习方法.
数据流分类研究在开放、动态环境中如何提供更可靠的数据驱动预测模型, 关键在于从实时到达且不断变化的数据流中检测并适应概念漂移. 目前, 为检测概念漂移和更新分类模型, 数据流分类方法通常假设所有样本的标签都是已知的, 这一假设在真实场景下是不现实的. 此外, 真实数据流可能表现出较高且不断变化的类不平衡比率, 会进一步增加数据流分类任务的复杂性. 为此, 提出一种非平衡概念漂移数据流主动学习方法(Active learning method for imbalanced concept drift data stream, ALM-ICDDS). 定义基于多预测概率的样本预测确定性度量, 提出边缘阈值矩阵的自适应调整方法, 使得标签查询策略适用于类别数较多的非平衡数据流; 提出基于记忆强度的样本替换策略, 将难区分、少数类样本和代表当前数据分布的样本保存在记忆窗口中, 提升新基分类器的分类性能; 定义基于分类精度的基分类器重要性评价及更新方法, 实现漂移后的集成分类器更新. 在7个合成数据流和3个真实数据流上的对比实验表明, 提出的非平衡概念漂移数据流主动学习方法的分类性能优于6种概念漂移数据流学习方法.




2024, 50(3): 607-616.
doi: 10.16383/j.aas.c230316
摘要:
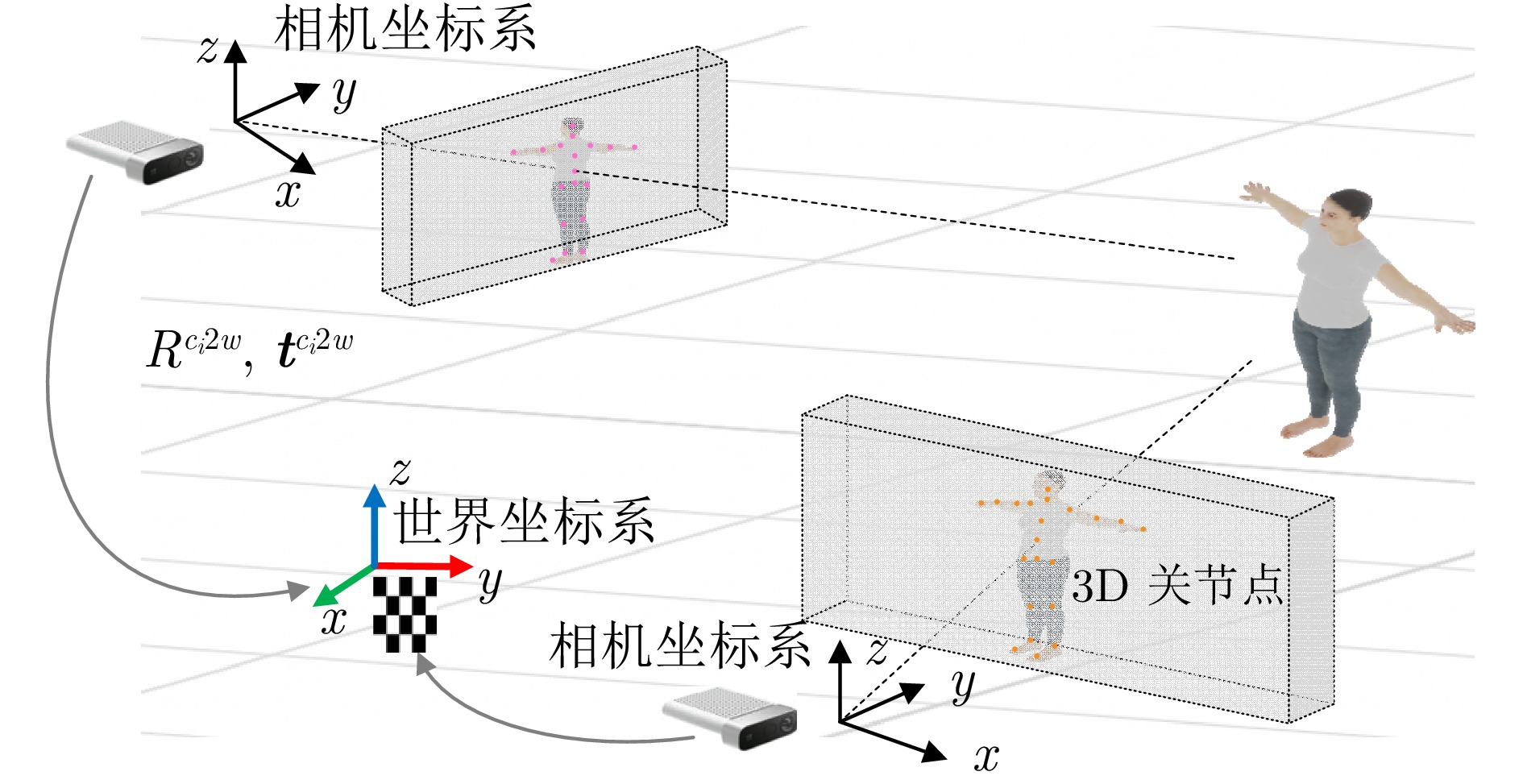
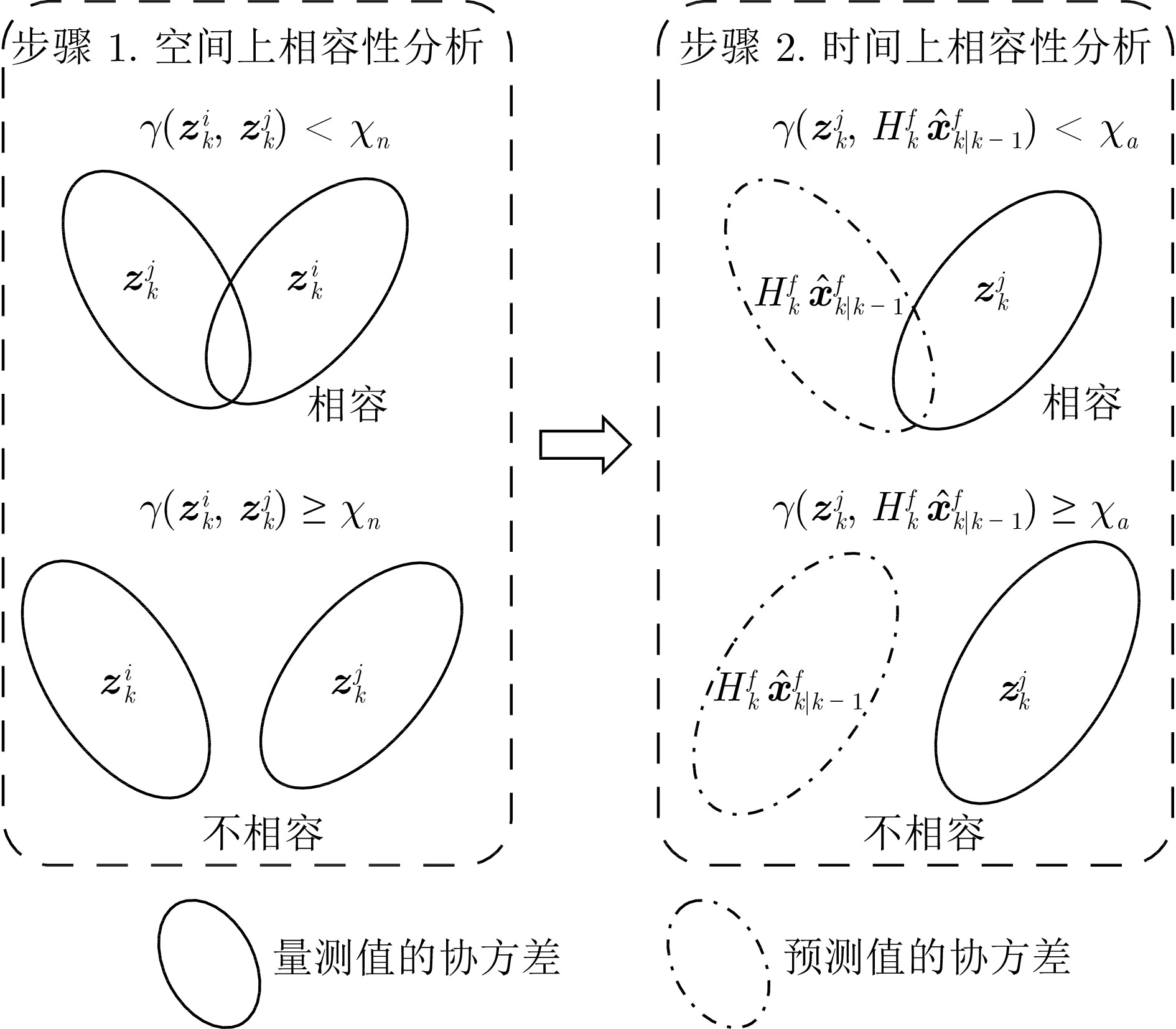
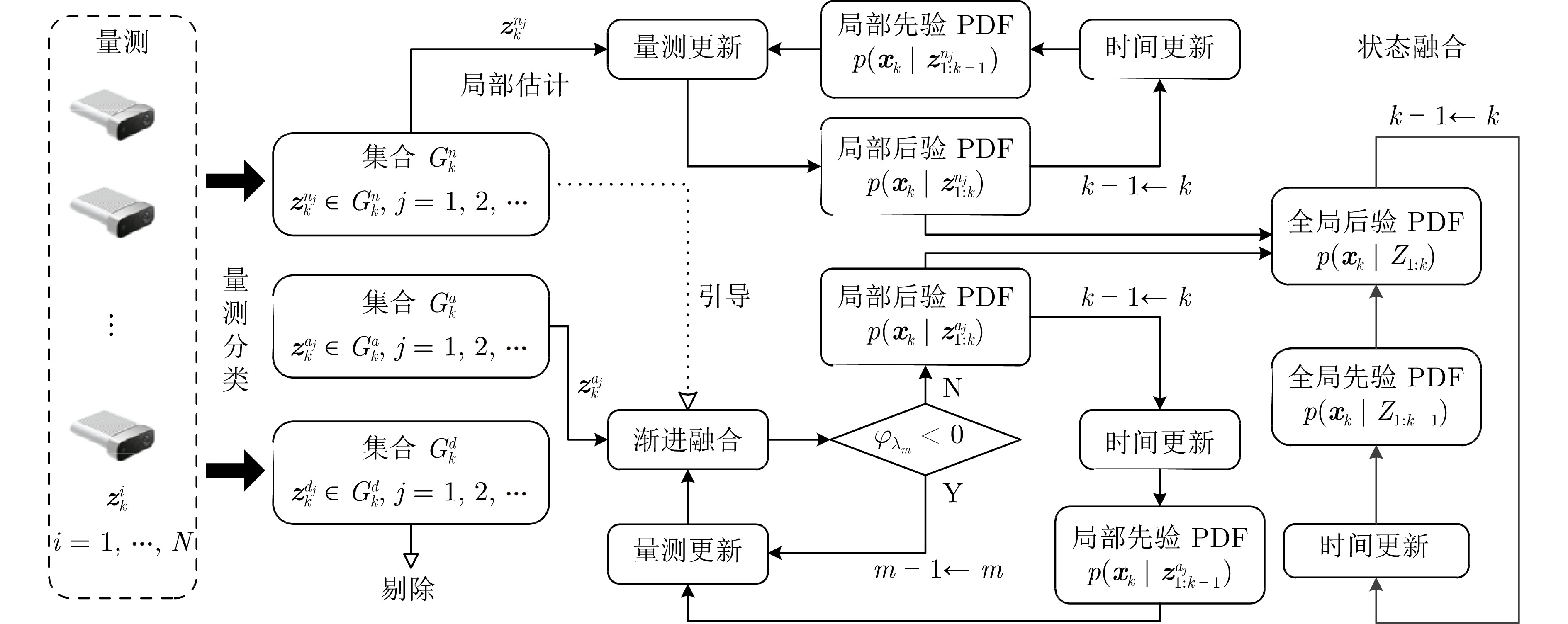
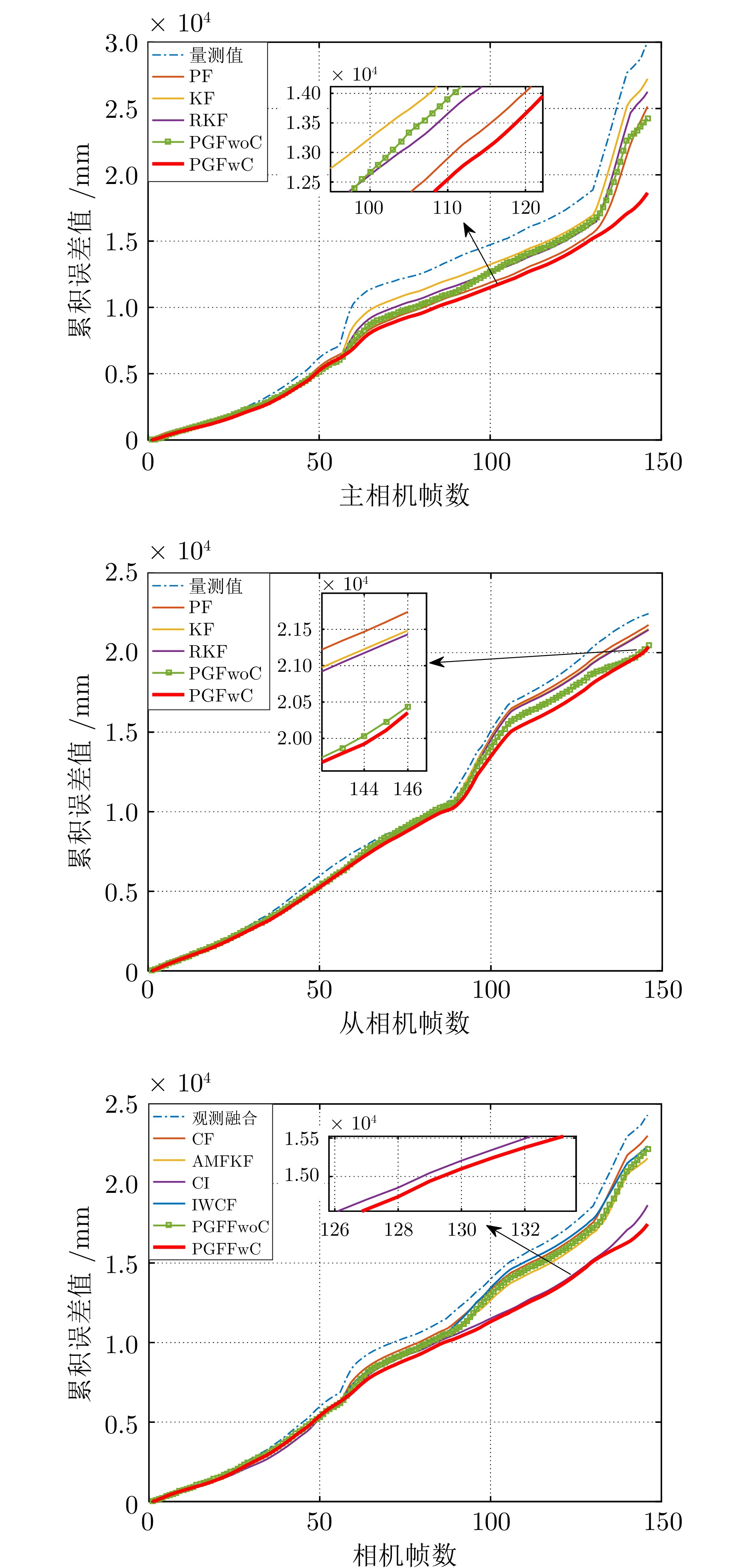
针对视觉遮挡引起的人体姿态估计(Human pose estimation, HPE)性能下降问题, 提出基于渐进高斯滤波(Progressive Gaussian filtering, PGF)融合的人体姿态估计方法. 首先, 设计分层性能评估方法对多视觉量测进行分类处理, 以适应视觉遮挡引起的量测不确定性问题. 其次, 构建分布式渐进贝叶斯滤波融合框架, 以及设计一种分层分类融合估计方法来提升复杂量测融合的鲁棒性和准确性. 特别地, 针对量测统计特性变化问题, 利用局部估计间的交互信息来引导渐进量测更新, 从而隐式地补偿量测不确定性. 最后, 仿真与实验结果表明, 相比于现有的方法, 所提的人体姿态估计方法具有更高的准确性和鲁棒性.
针对视觉遮挡引起的人体姿态估计(Human pose estimation, HPE)性能下降问题, 提出基于渐进高斯滤波(Progressive Gaussian filtering, PGF)融合的人体姿态估计方法. 首先, 设计分层性能评估方法对多视觉量测进行分类处理, 以适应视觉遮挡引起的量测不确定性问题. 其次, 构建分布式渐进贝叶斯滤波融合框架, 以及设计一种分层分类融合估计方法来提升复杂量测融合的鲁棒性和准确性. 特别地, 针对量测统计特性变化问题, 利用局部估计间的交互信息来引导渐进量测更新, 从而隐式地补偿量测不确定性. 最后, 仿真与实验结果表明, 相比于现有的方法, 所提的人体姿态估计方法具有更高的准确性和鲁棒性.


2024, 50(3): 617-639.
doi: 10.16383/j.aas.c220815
摘要:
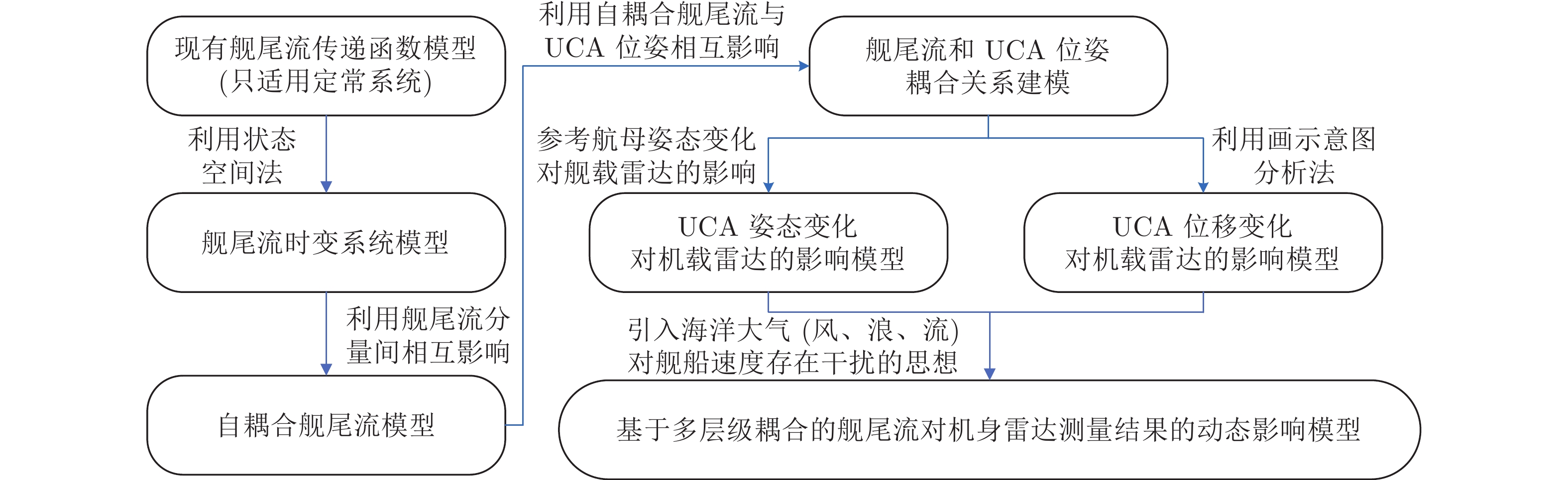
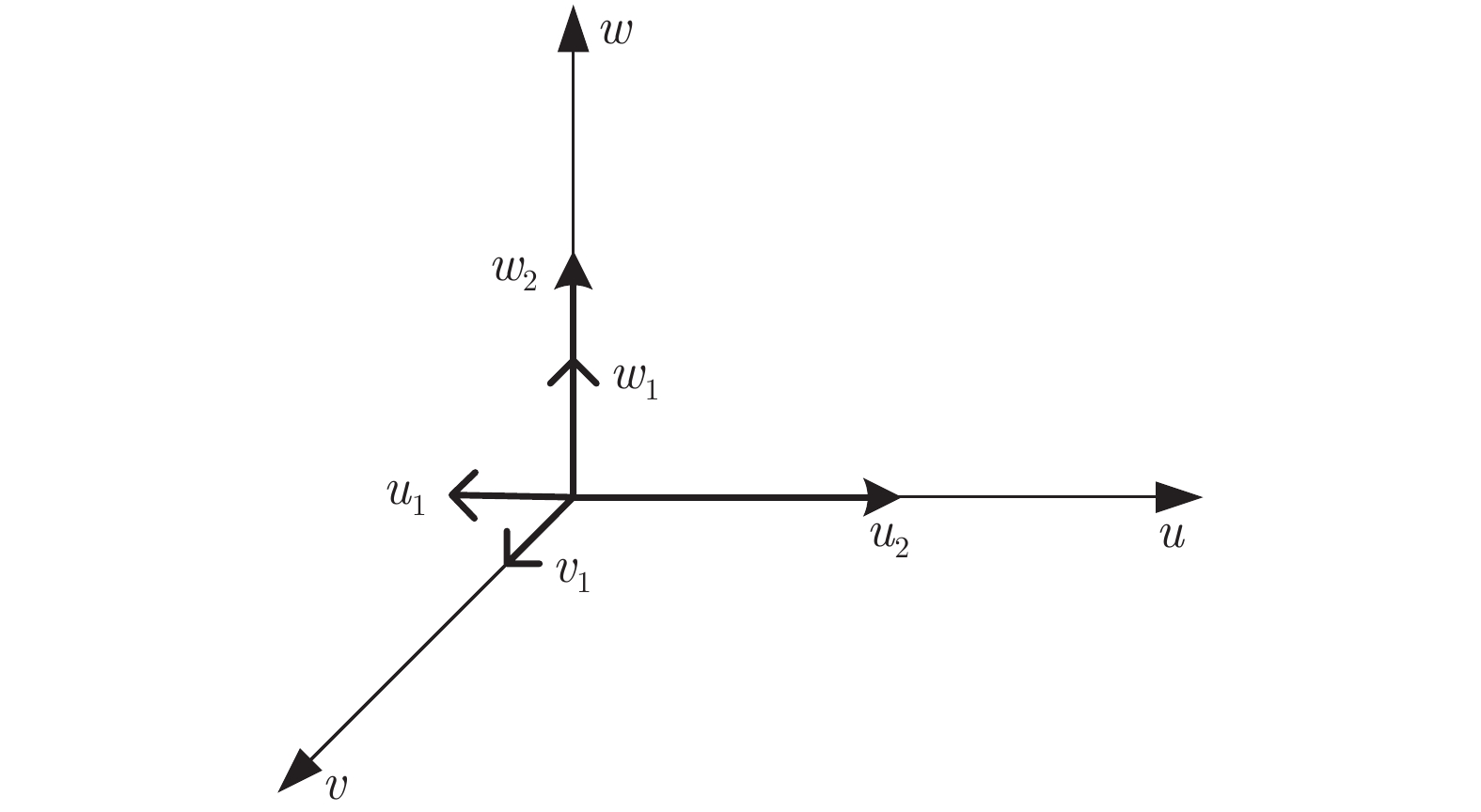
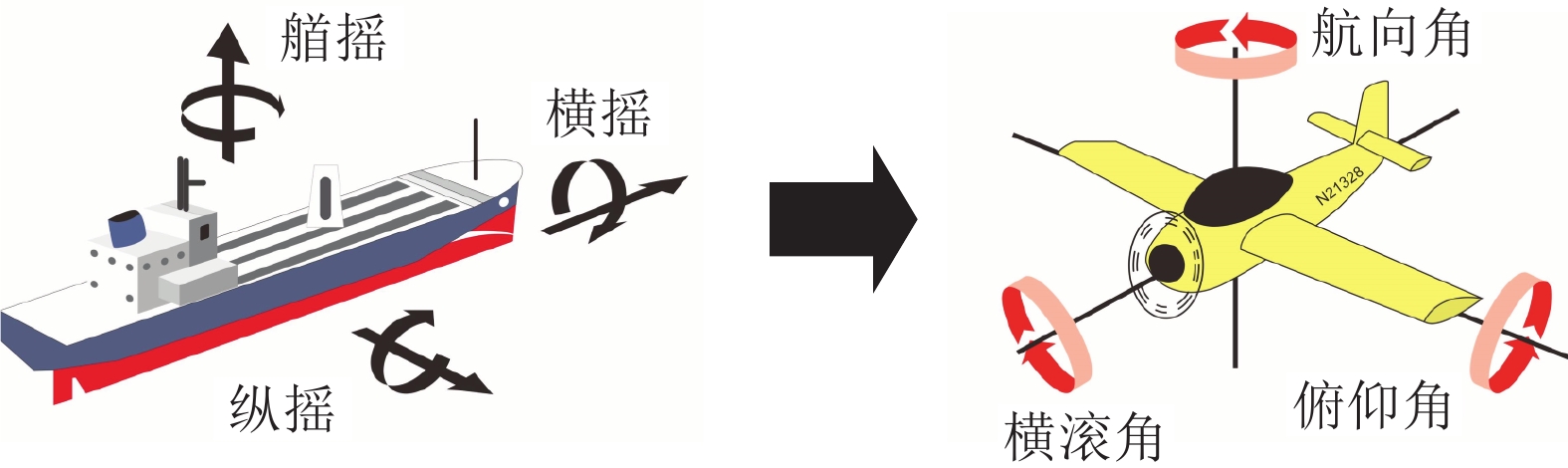
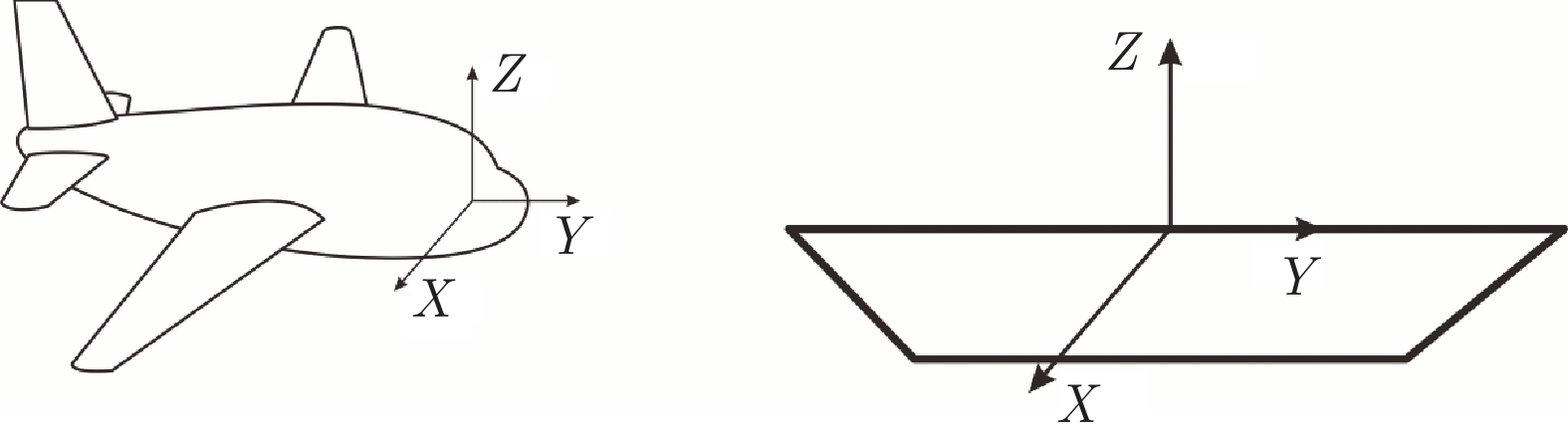
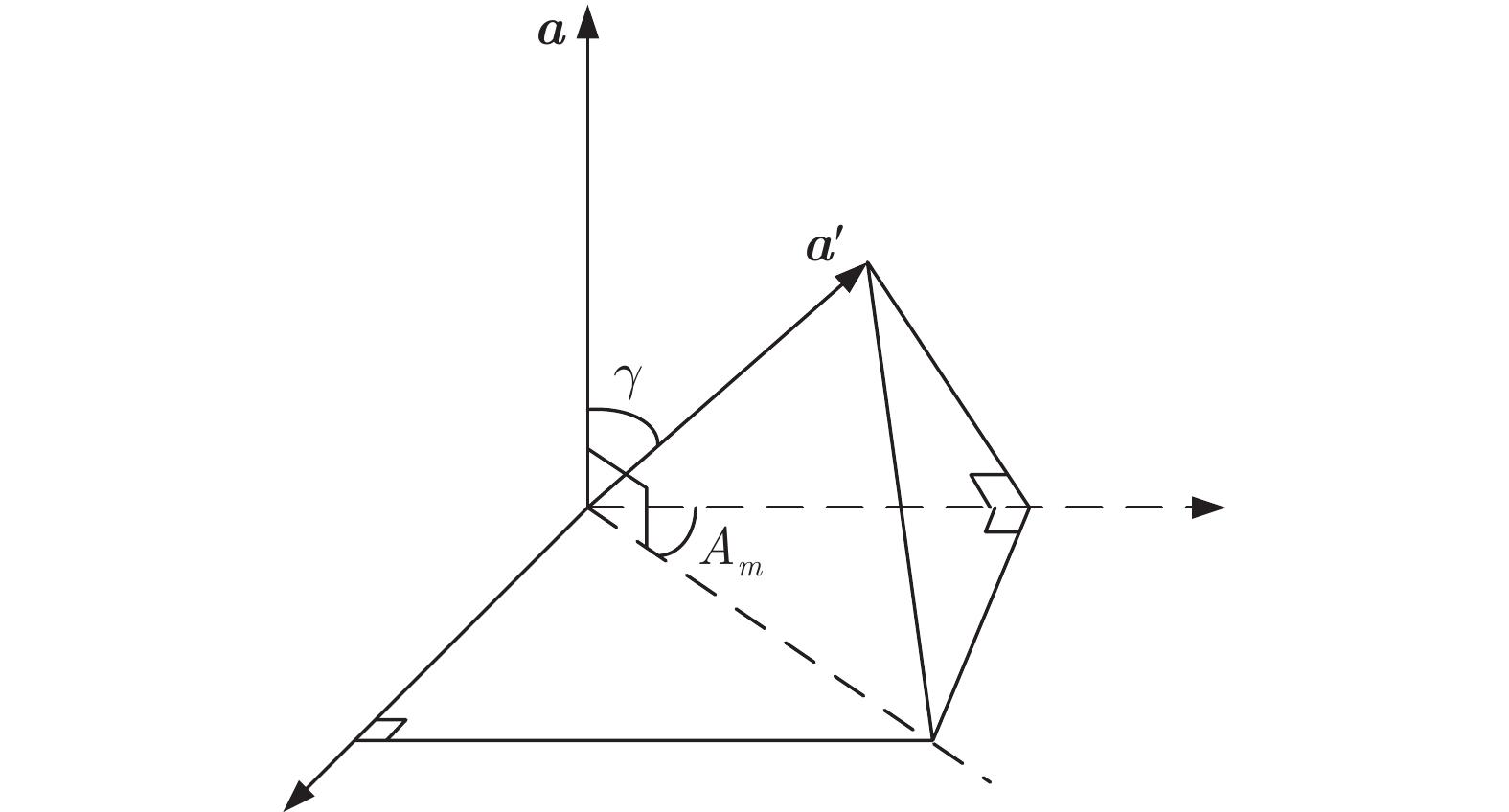
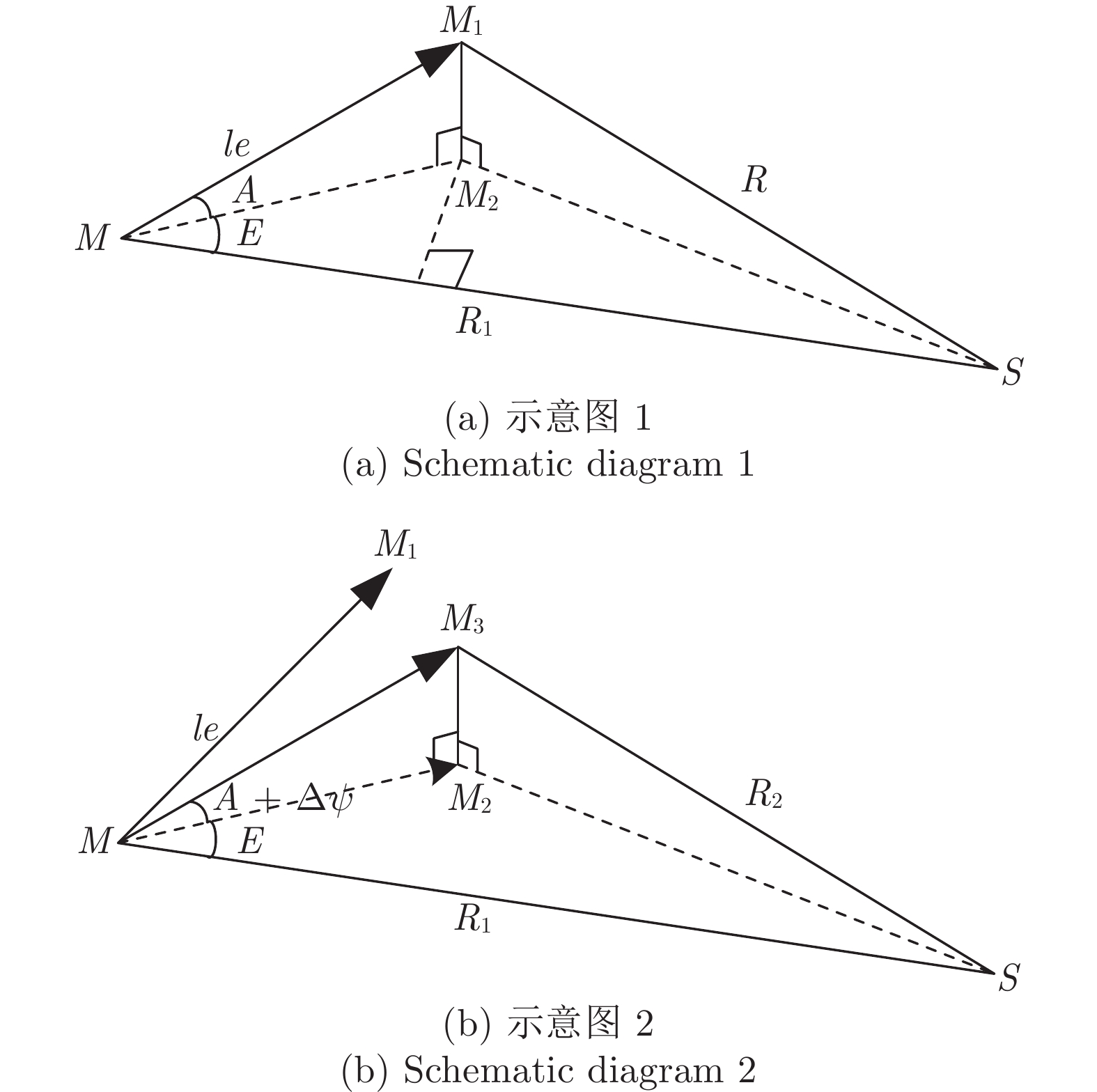
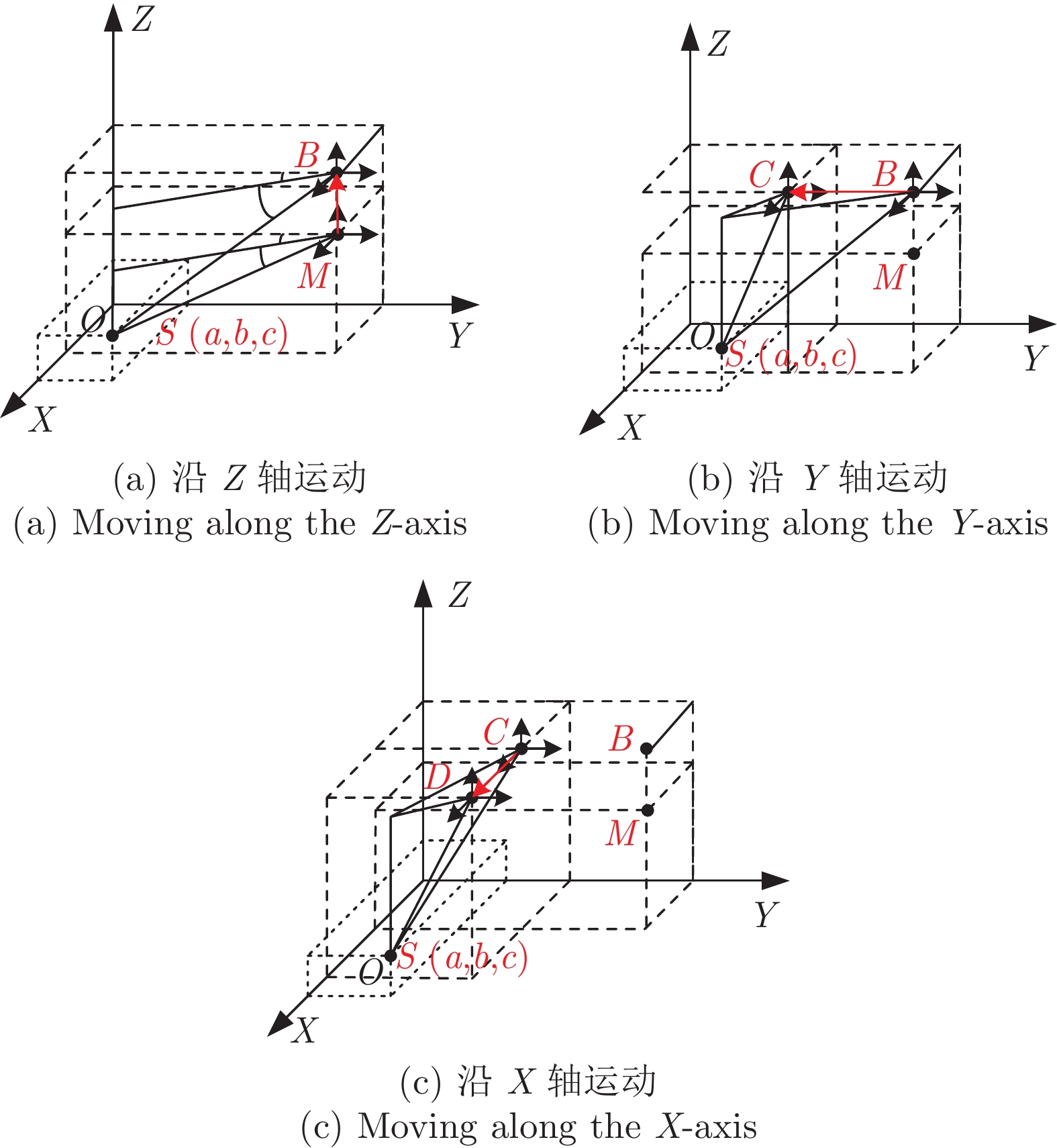
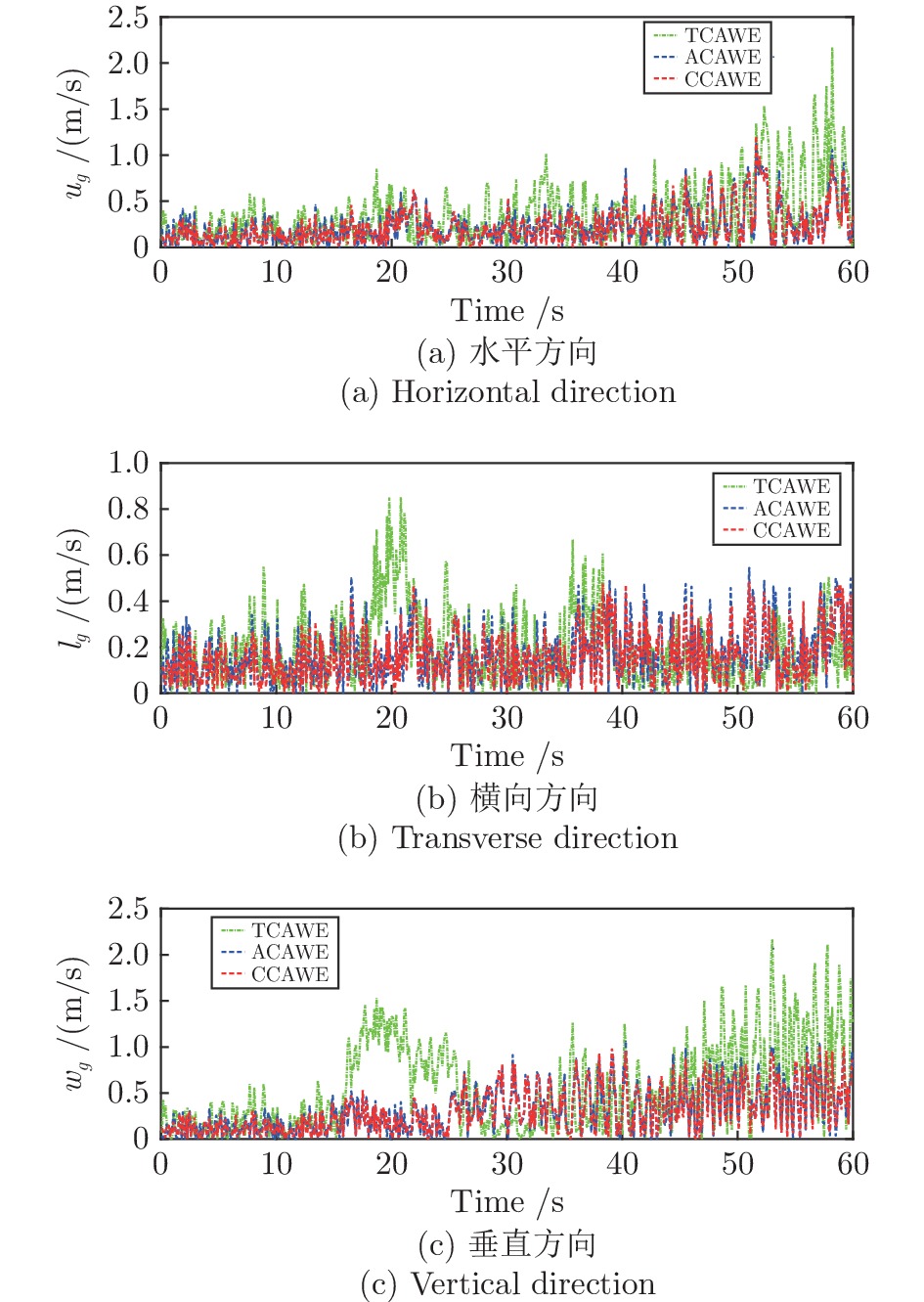
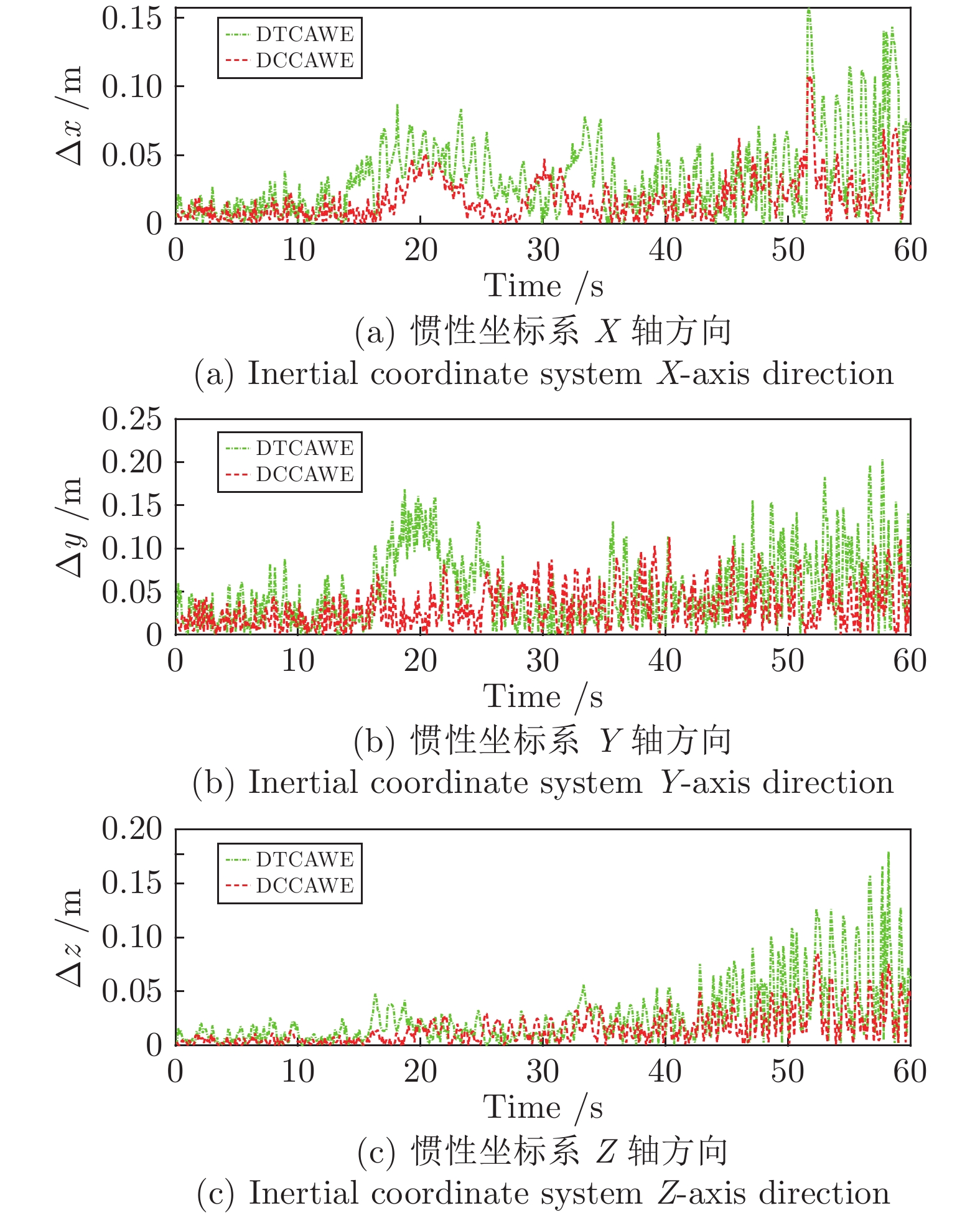
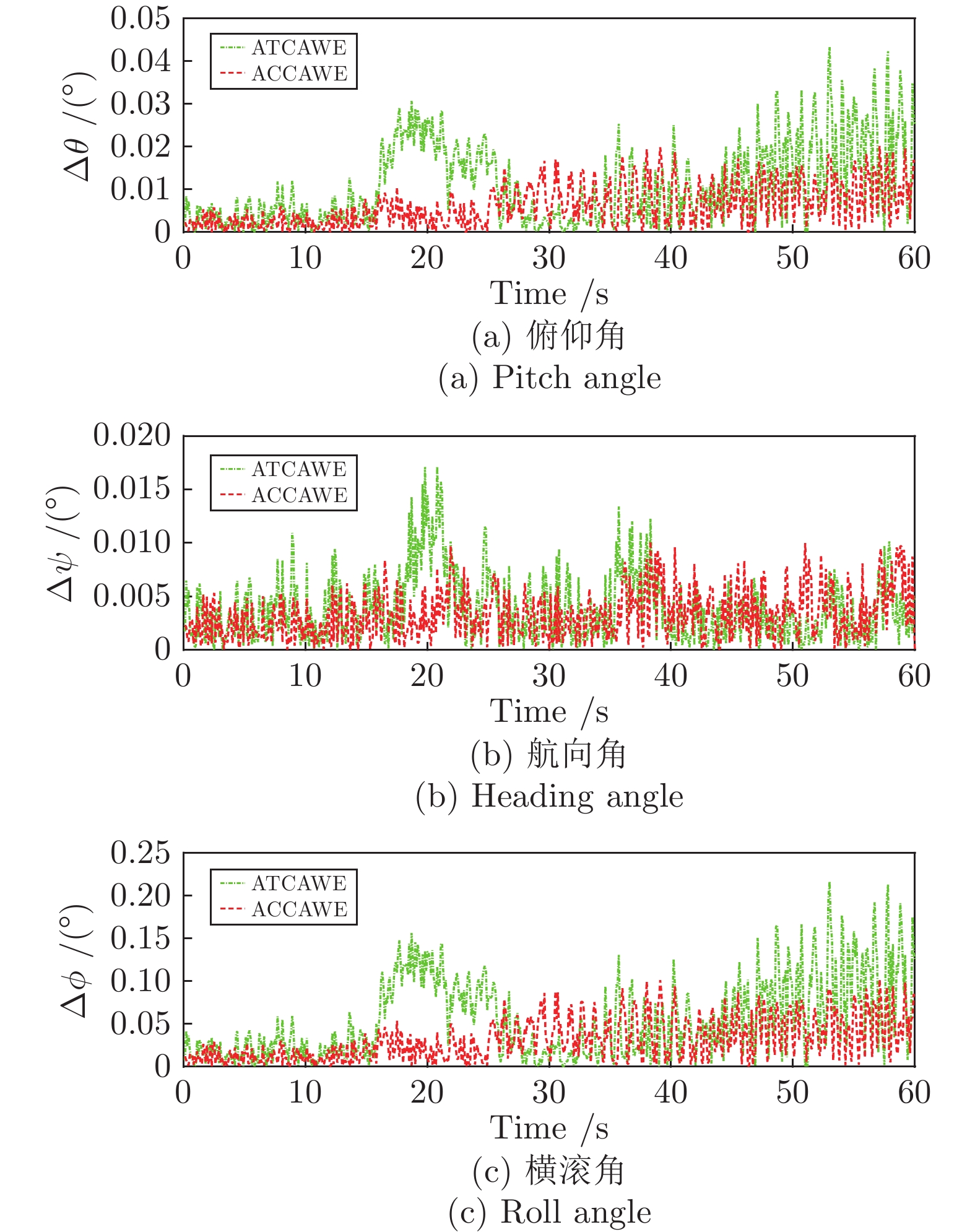
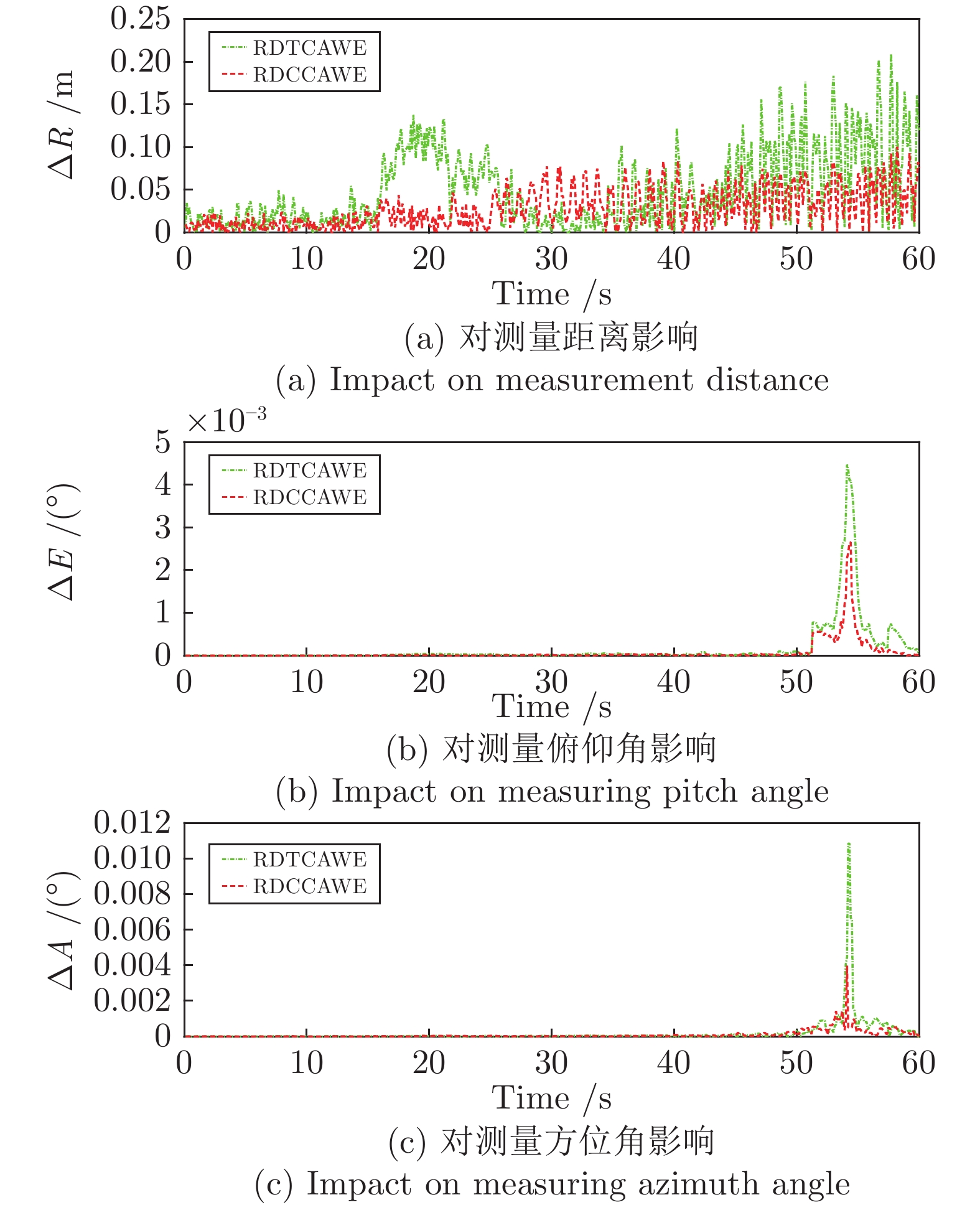
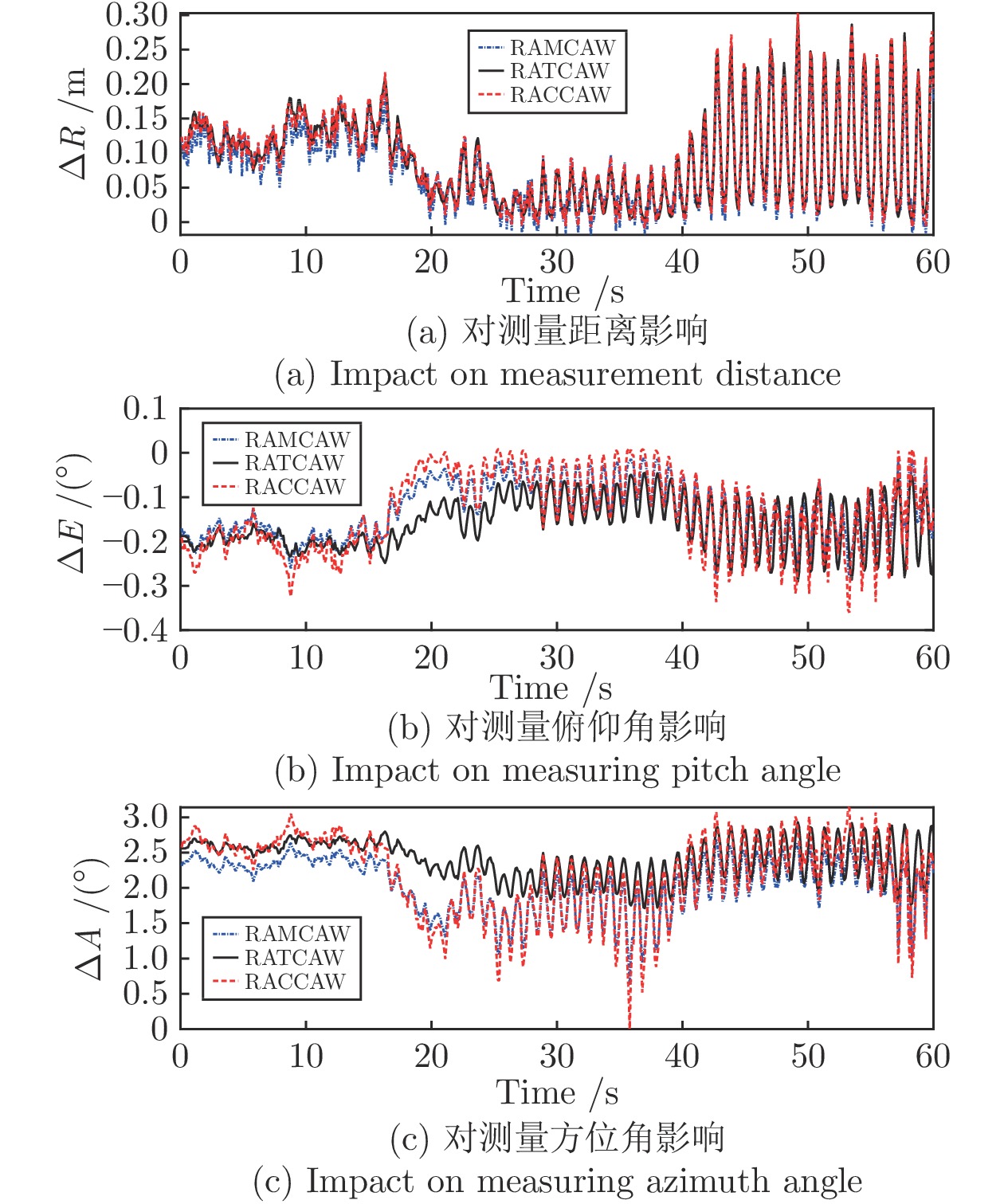
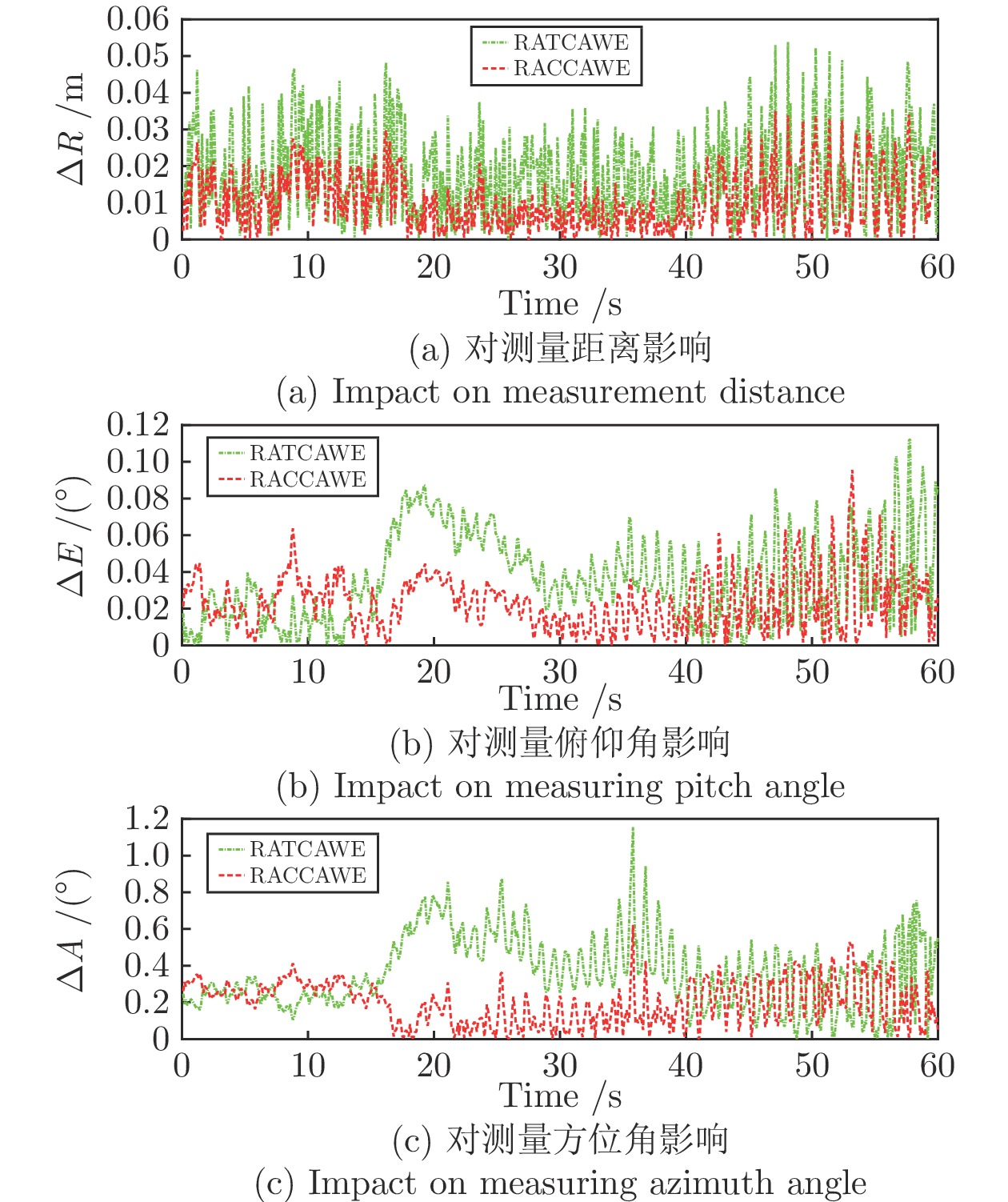
为提高复杂海洋环境中无人舰载机(Unmanned carrier-based aircraft, UCA)自动着舰时导航定位的准确性, 研究舰尾流对机载雷达测量过程的动态影响问题, 建立一种基于多层级耦合性分析的测量影响动态建模分析方法. 首先, 利用直接分解法和前向差分法建立一种基于离散化状态空间的时变舰尾流模型, 以克服传统传递函数方法存在的局限性; 其次, 基于舰尾流各分量均与飞机飞行速度相关的客观事实, 通过在时变系统中考虑舰尾流分量间的相互作用关系来构建一种更符合实际系统特征的分量自耦合舰尾流模型; 紧接着, 采用UCA姿态角变化能够改变坐标转换矩阵的思想, 研究舰尾流与UCA位姿变化间的耦合联系, 提出一种准确性更高的舰尾流对UCA位姿的深度影响模型; 然后, 以航母姿态变化对舰载雷达测量结果的影响模型为基础, 通过考虑本研究场景的内在特性, 建立UCA姿态变化对雷达测量结果的影响模型分析方法; 紧接着, 采用示意图方式获得位移变化对机载雷达测量结果的影响模型; 最后, 针对舰船受海洋大气(风、浪、流)干扰而出现失速这一现象, 建立实际海洋环境中舰尾流对机载雷达测量结果的非线性非高斯影响分析模型. 仿真实验研究验证了上述模型分析方法的有效性和优越性.
为提高复杂海洋环境中无人舰载机(Unmanned carrier-based aircraft, UCA)自动着舰时导航定位的准确性, 研究舰尾流对机载雷达测量过程的动态影响问题, 建立一种基于多层级耦合性分析的测量影响动态建模分析方法. 首先, 利用直接分解法和前向差分法建立一种基于离散化状态空间的时变舰尾流模型, 以克服传统传递函数方法存在的局限性; 其次, 基于舰尾流各分量均与飞机飞行速度相关的客观事实, 通过在时变系统中考虑舰尾流分量间的相互作用关系来构建一种更符合实际系统特征的分量自耦合舰尾流模型; 紧接着, 采用UCA姿态角变化能够改变坐标转换矩阵的思想, 研究舰尾流与UCA位姿变化间的耦合联系, 提出一种准确性更高的舰尾流对UCA位姿的深度影响模型; 然后, 以航母姿态变化对舰载雷达测量结果的影响模型为基础, 通过考虑本研究场景的内在特性, 建立UCA姿态变化对雷达测量结果的影响模型分析方法; 紧接着, 采用示意图方式获得位移变化对机载雷达测量结果的影响模型; 最后, 针对舰船受海洋大气(风、浪、流)干扰而出现失速这一现象, 建立实际海洋环境中舰尾流对机载雷达测量结果的非线性非高斯影响分析模型. 仿真实验研究验证了上述模型分析方法的有效性和优越性.









2024, 50(3): 640-648.
doi: 10.16383/j.aas.c230476
摘要:
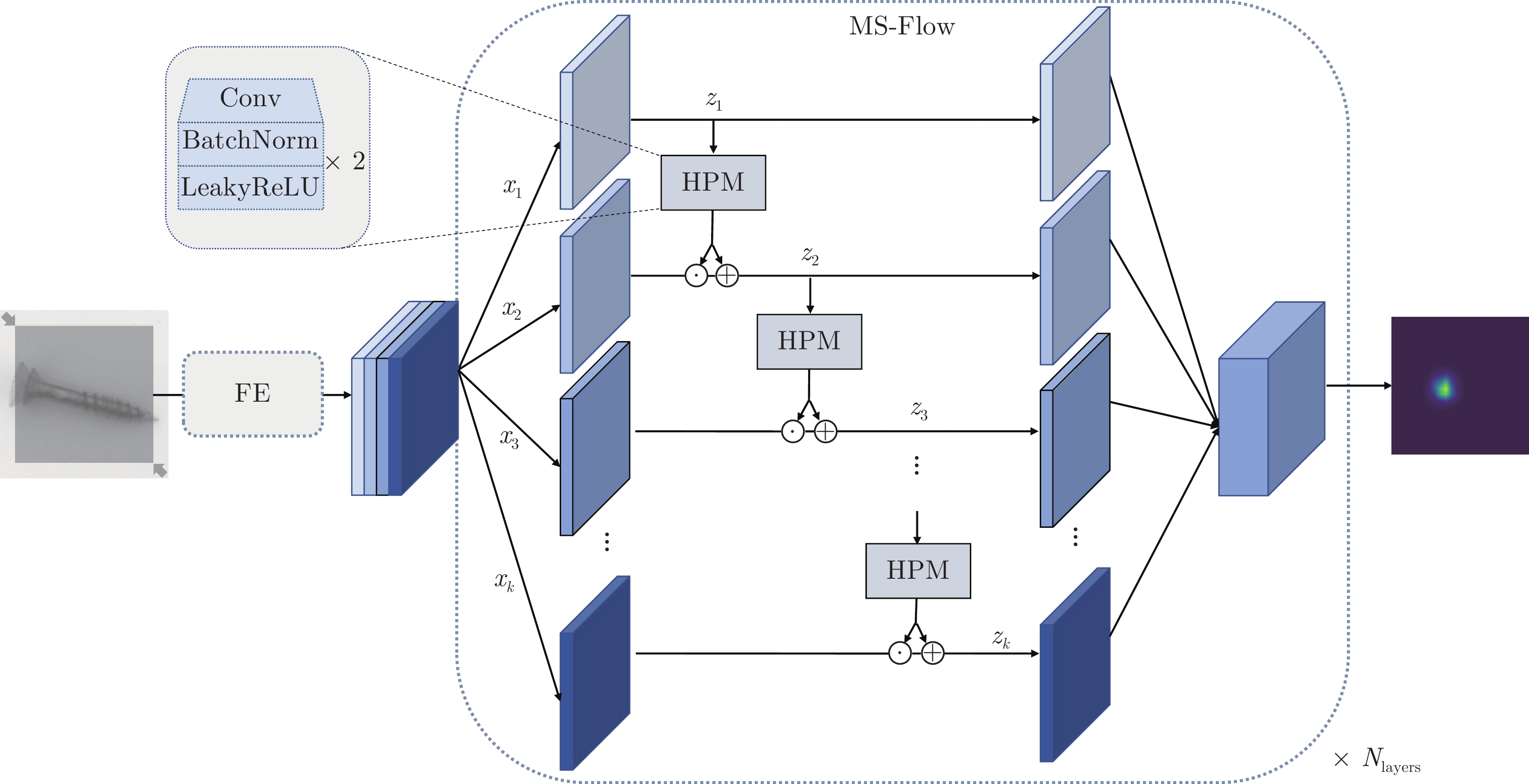
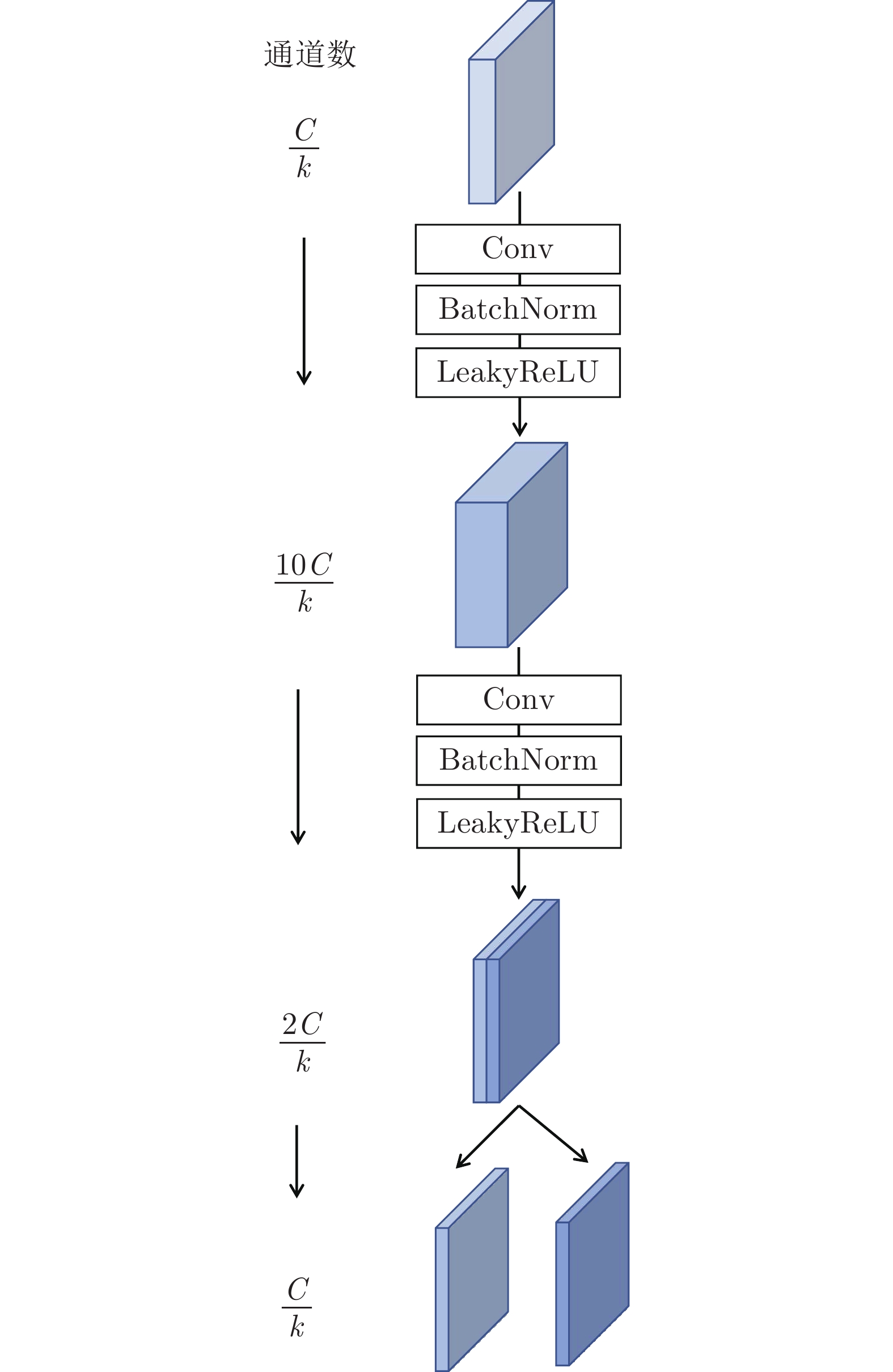
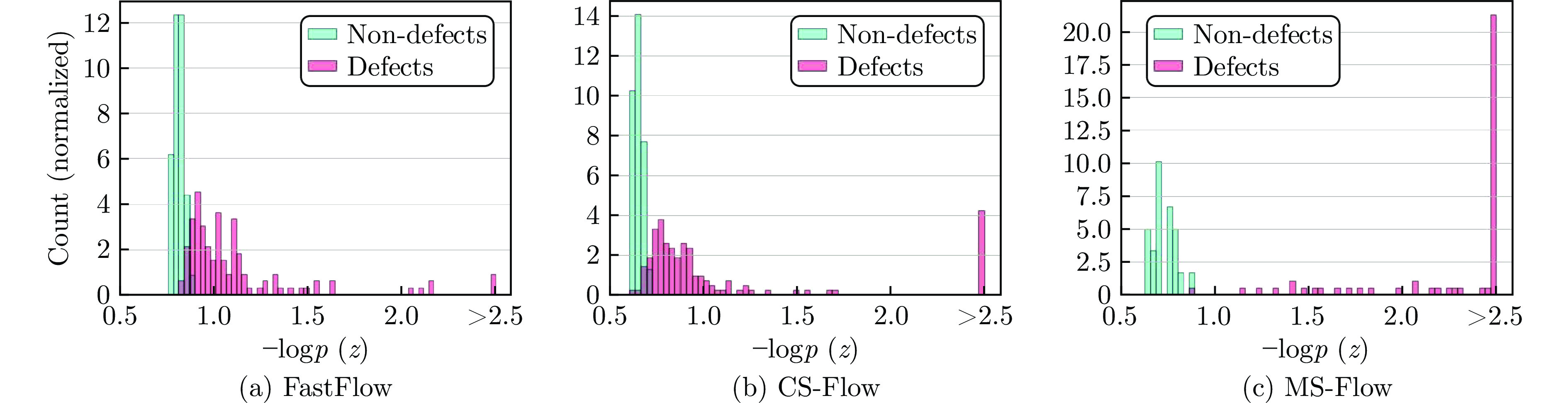
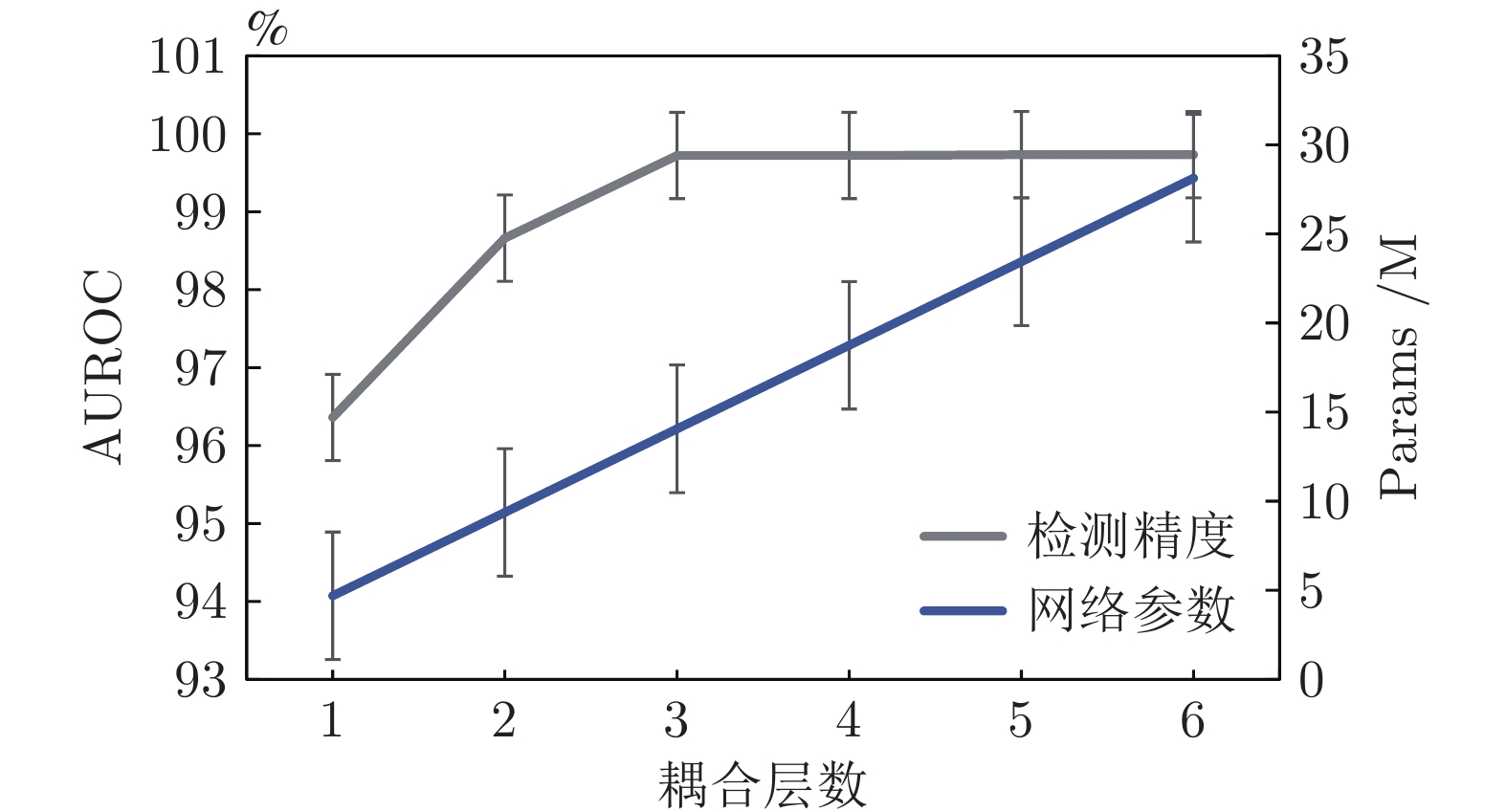
针对现有异常检测(Anomaly detection, AD)模型计算效率低和检测性能差等问题, 提出一种多尺度流模型(Multi-scale normalizing flow, MS-Flow), 通过多尺度交叉融合实现高效的视觉图像异常识别. 具体地, 在流模型(Normalizing flow, NF)内部构建层级式的多尺度架构来避免多通道数据的冗余交叉计算, 同时保证网络的多尺度表达能力. 此外, 设计的层级感知模块通过逐层级的多粒度特征融合, 在细粒度级别表达多尺度特征, 有效地提高分布估计的精确性. 该方法是一个平衡检测精度与计算效率的解决方案. 在两个公开数据集上的实验表明, 所提方法相较于以往的检测模型能够获得更高的检测精度(在MVTec AD和BTAD数据集上的平均AUROC (Area under the receiver operating characteristics)分别为99.7%和96.0%), 同时具有更高的计算效率, 浮点运算次数(Floating point operations, FLOPs)约为CS-Flow的1/8.
针对现有异常检测(Anomaly detection, AD)模型计算效率低和检测性能差等问题, 提出一种多尺度流模型(Multi-scale normalizing flow, MS-Flow), 通过多尺度交叉融合实现高效的视觉图像异常识别. 具体地, 在流模型(Normalizing flow, NF)内部构建层级式的多尺度架构来避免多通道数据的冗余交叉计算, 同时保证网络的多尺度表达能力. 此外, 设计的层级感知模块通过逐层级的多粒度特征融合, 在细粒度级别表达多尺度特征, 有效地提高分布估计的精确性. 该方法是一个平衡检测精度与计算效率的解决方案. 在两个公开数据集上的实验表明, 所提方法相较于以往的检测模型能够获得更高的检测精度(在MVTec AD和BTAD数据集上的平均AUROC (Area under the receiver operating characteristics)分别为99.7%和96.0%), 同时具有更高的计算效率, 浮点运算次数(Floating point operations, FLOPs)约为CS-Flow的1/8.