

A Multi-target Track-before-detect Algorithm Based on Cost-reference Particle Filter Bank
-
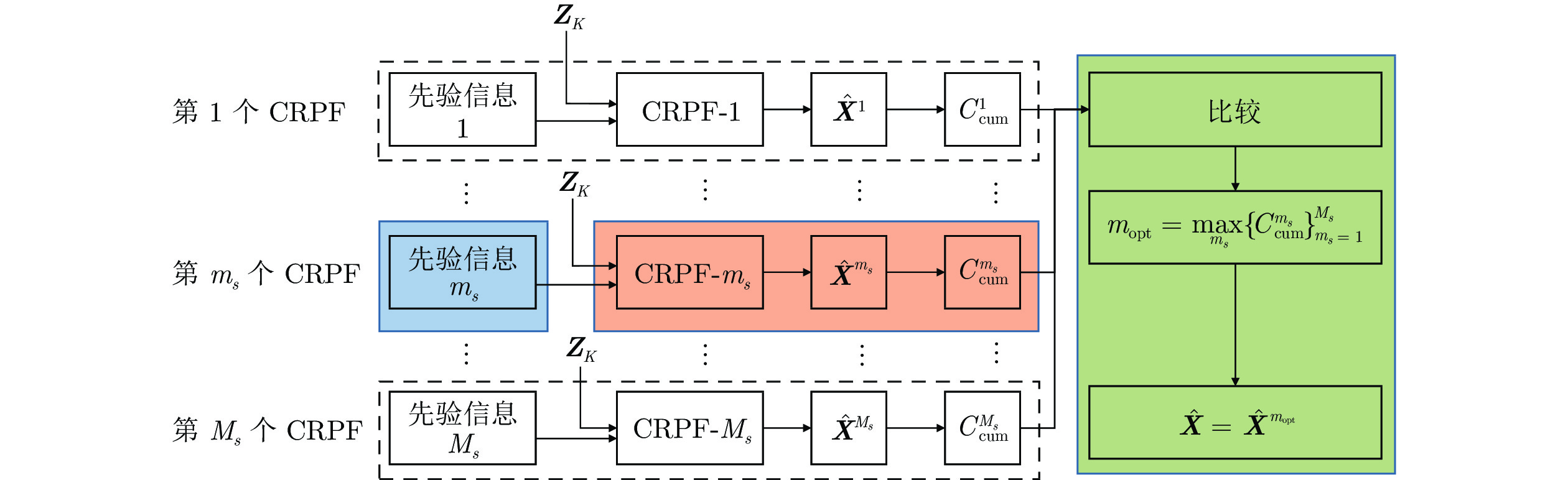
摘要: 针对图像序列中多目标检测和跟踪算法结构复杂、计算量大、性能降低等问题, 提出一种基于代价参考粒子滤波器组的多目标检测前跟踪(Cost-reference particle filter bank based multi-target track-before-detect, CRPFB-MTBD)算法, 将多目标跟踪问题转换为序贯地检测和跟踪多个单目标的问题. 首先, 采用代价参考粒子滤波器组序贯地估计所有可能单目标状态序列; 其次, 基于所有可能单目标状态序列的欧氏距离和累积代价确定目标数量; 最后, 根据累积代价判断每个目标出现和消失的具体时刻. 仿真实验验证了CRPFB-MTBD的优良性能, 与基于传统粒子滤波的多目标检测前跟踪算法(Particle filter based multi-target track-before-detect, PF-MTBD)、基于概率假设密度的检测前跟踪算法(Probability hypothesis density based track-before-detect, PHD-TBD)和基于伯努利滤波的检测前跟踪算法(Bernoulli based track-before-detect, Bernoulli-TBD) 相比, CRPFB-MTBD的目标状态序列和数量估计结果最佳, 且平均单次运行时间极短.
-
关键词:
- 多目标跟踪 /
- 检测前跟踪 /
- 粒子滤波 /
- 代价参考粒子滤波器组 /
- 滤波器组
Abstract: Aiming at the problems of complex structure, increasing computation and decreasing performance of multiple targets detection and tracking algorithms in image sequences, a cost-reference particle filter bank based multi-target track-before-detect (CRPFB-MTBD) algorithm is proposed. In this work, the target tracking problem is converted into a problem of sequentially detecting and tracking multiple single targets. First, a cost reference particle filter bank is used to sequentially estimate all possible single targets’ state sequences; secondly, the number of targets is determined based on the Euclidean distances and cumulative costs of all possible single targets’ state sequences; finally, the specific moment when each target appears and disappears is determined based on the cumulative cost. The simulation experiment verified the excellent performance of CRPFB-MTBD. Compared with the traditional particle filter based multitarget track-before-detect (PF-MTBD) algorithm, probability hypothesis density based track-before-detect (PHD-TBD), and Bernoulli filter based track-before-detect (Bernoulli-TBD), CRPFB-MTBD has the best target state sequence and quantity estimation results, and the average single running time is extremely short. -
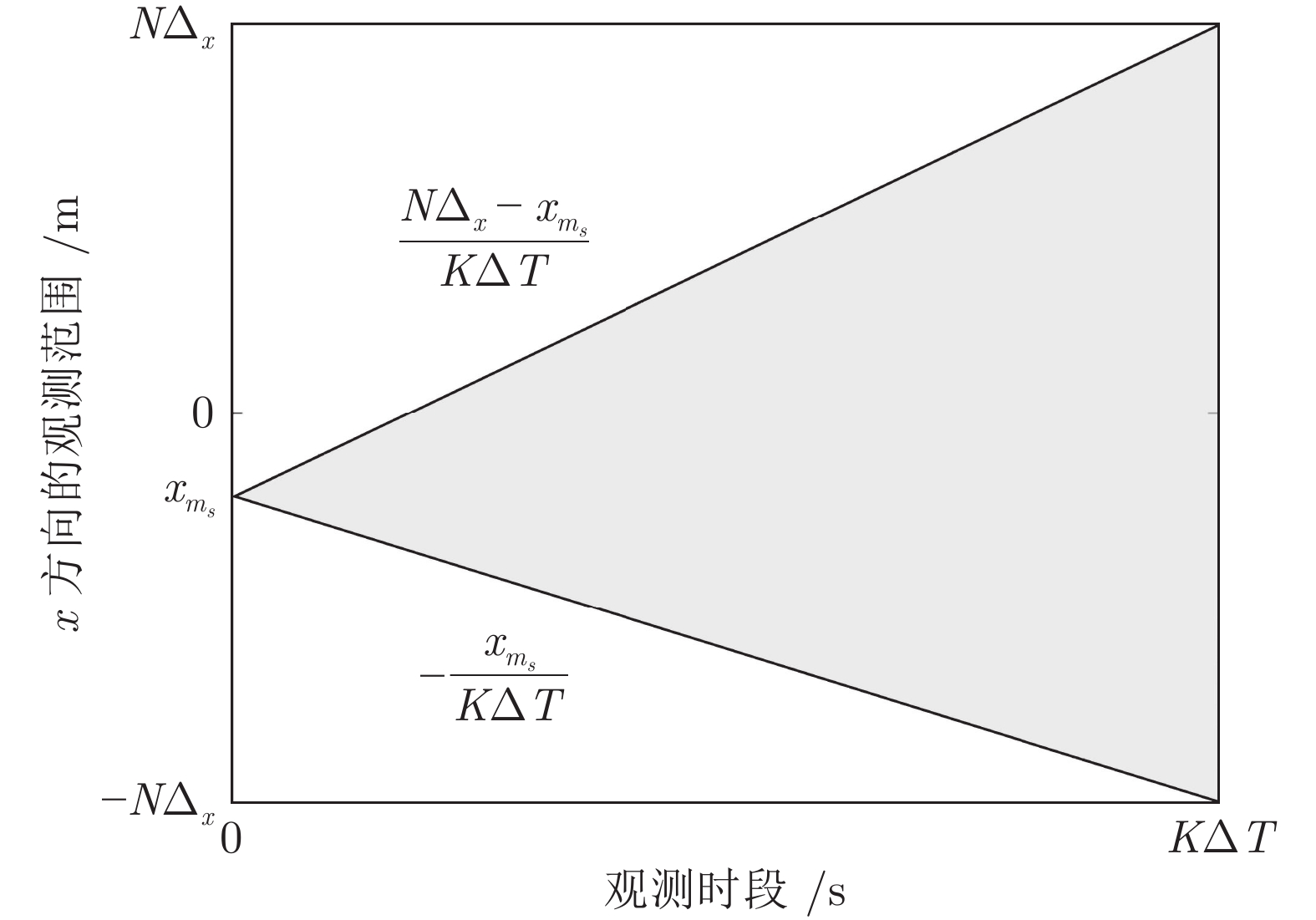

图 6 判断各个目标存在的具体时刻
Fig. 6 Determination of the specific moments when each target existing
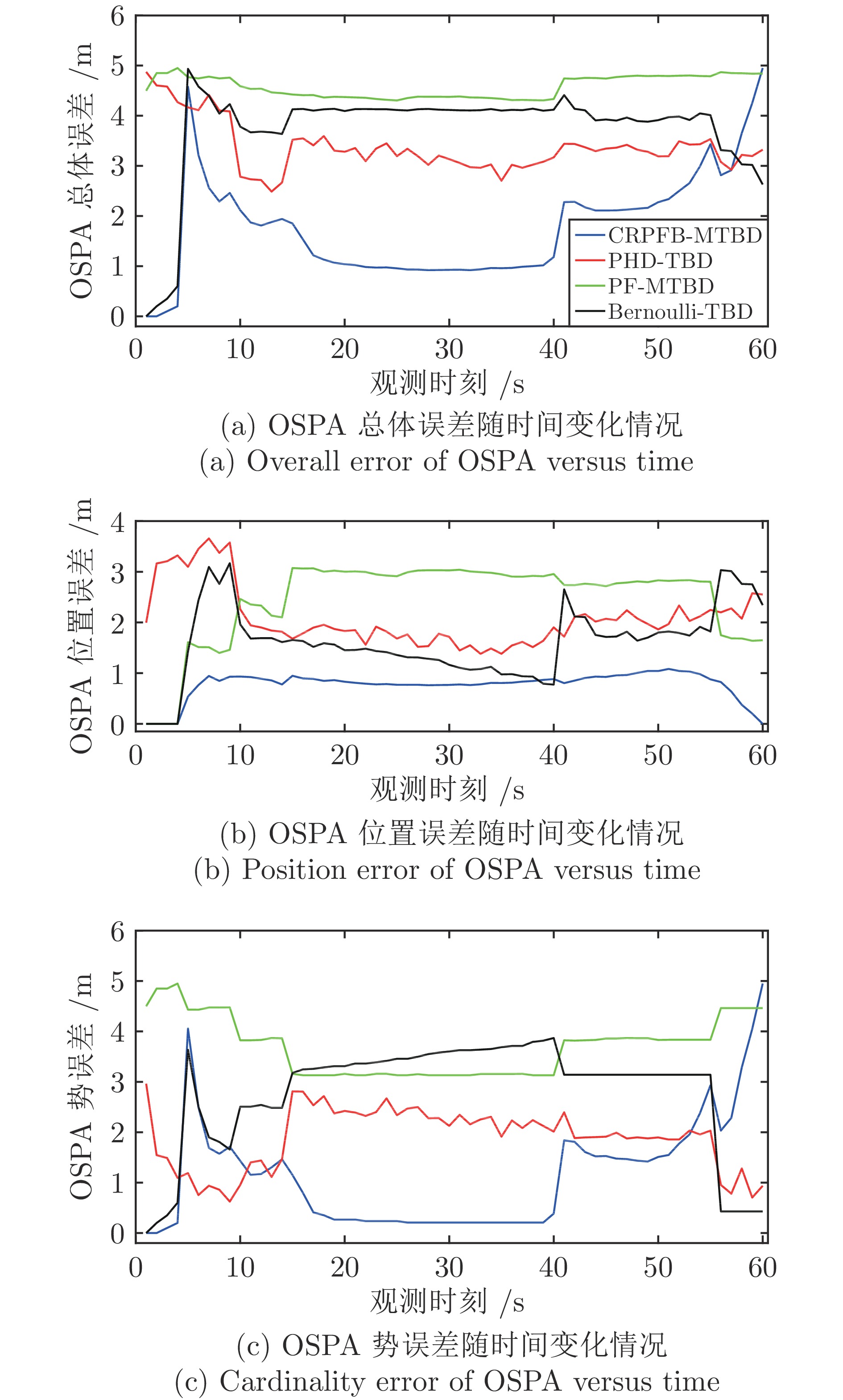
图 8 当SNR = 6 dB, 3个目标时, 4种方法的OSPA
Fig. 8 Comparison of OSPAs resulted from 4 algorithms when SNR = 6 dB and 3 targets
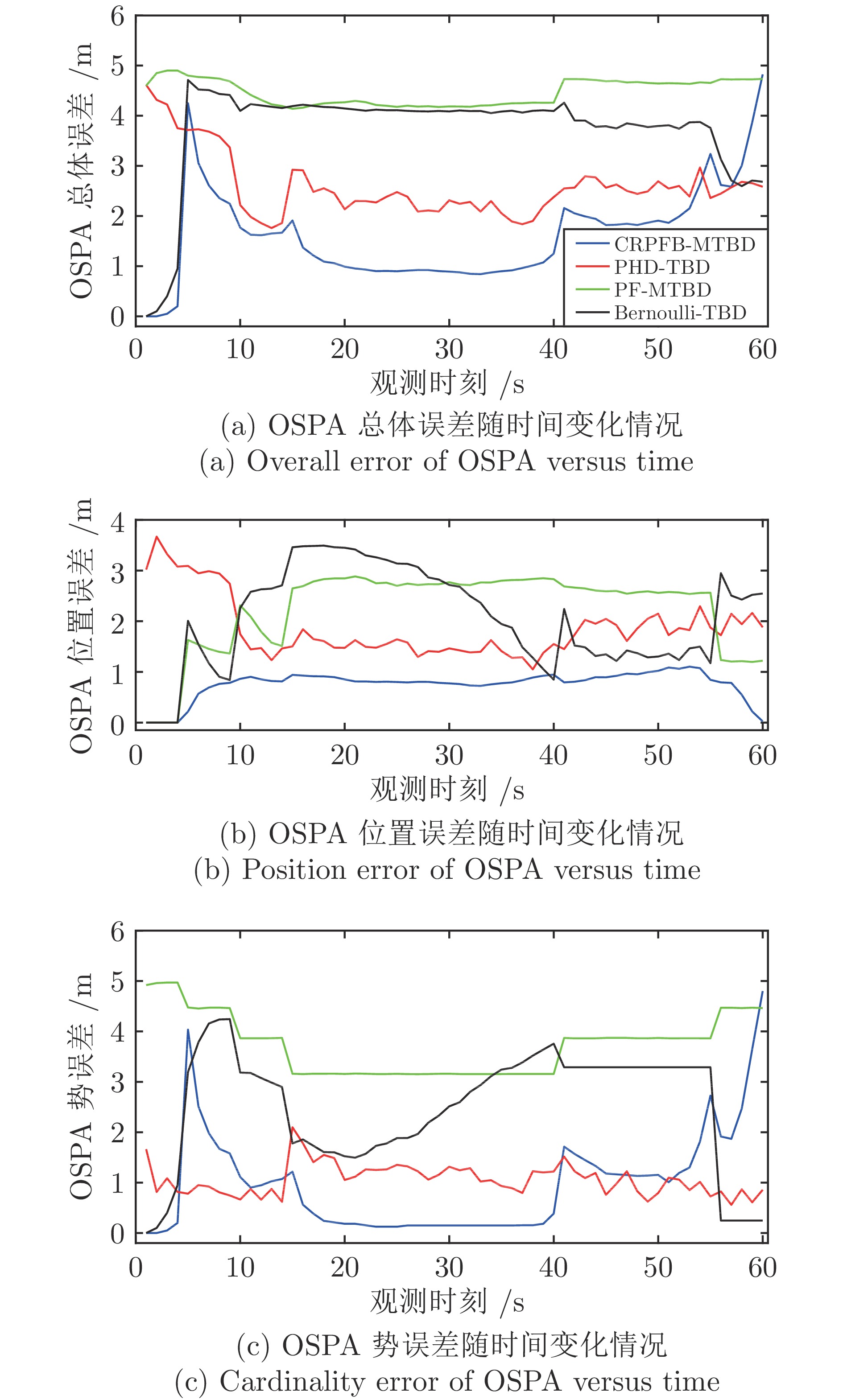
图 9 当SNR = 8 dB, 3个目标时, 4种方法的OSPA
Fig. 9 Comparison of OSPAs resulted from 4 algorithms when SNR = 8 dB and 3 targets
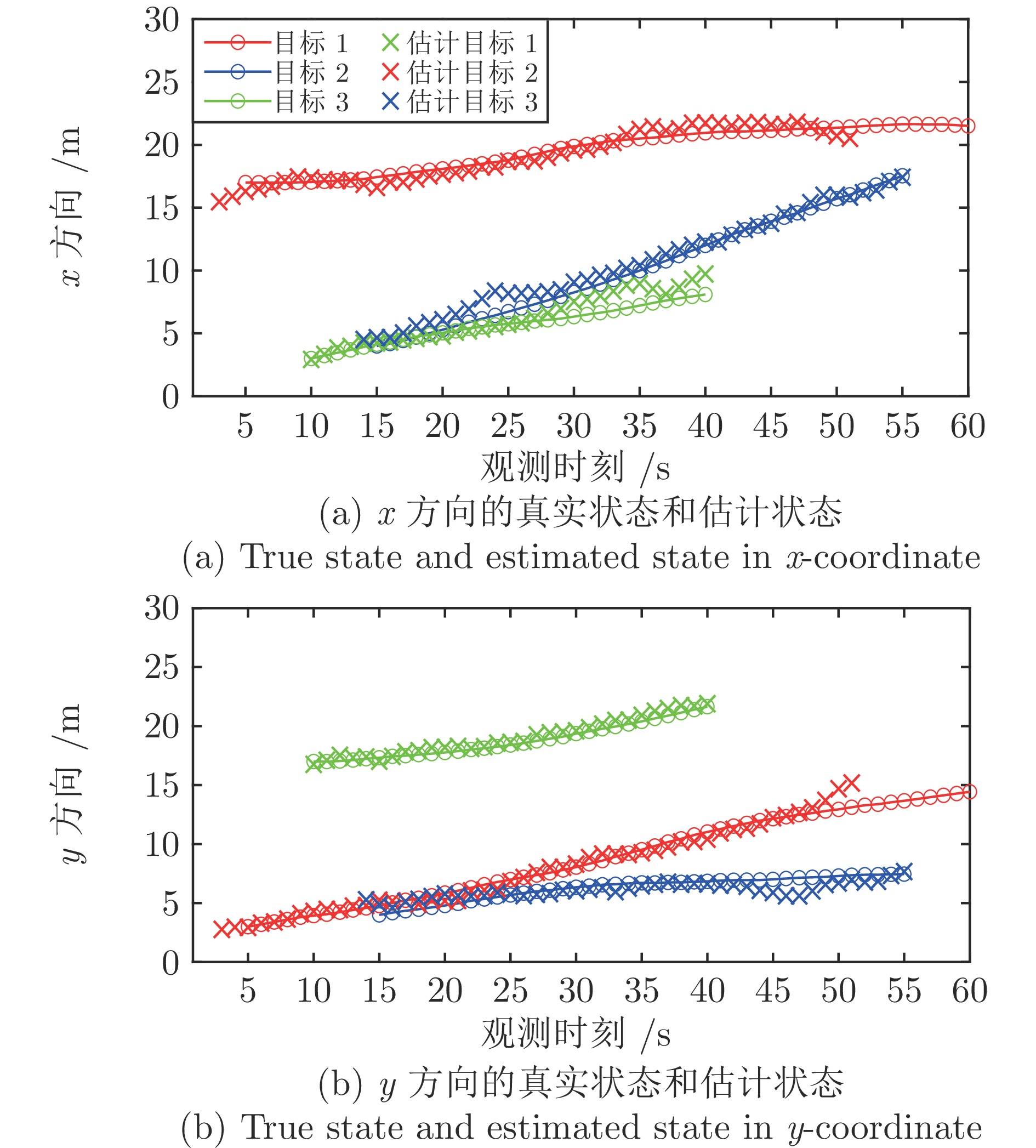
图 10 当SNR = 8 dB, 3个目标时, CRPFB-MTBD的目标状态估计结果
Fig. 10 State estimation of CRPFB-MTBD when SNR = 8 dB and 3 targets
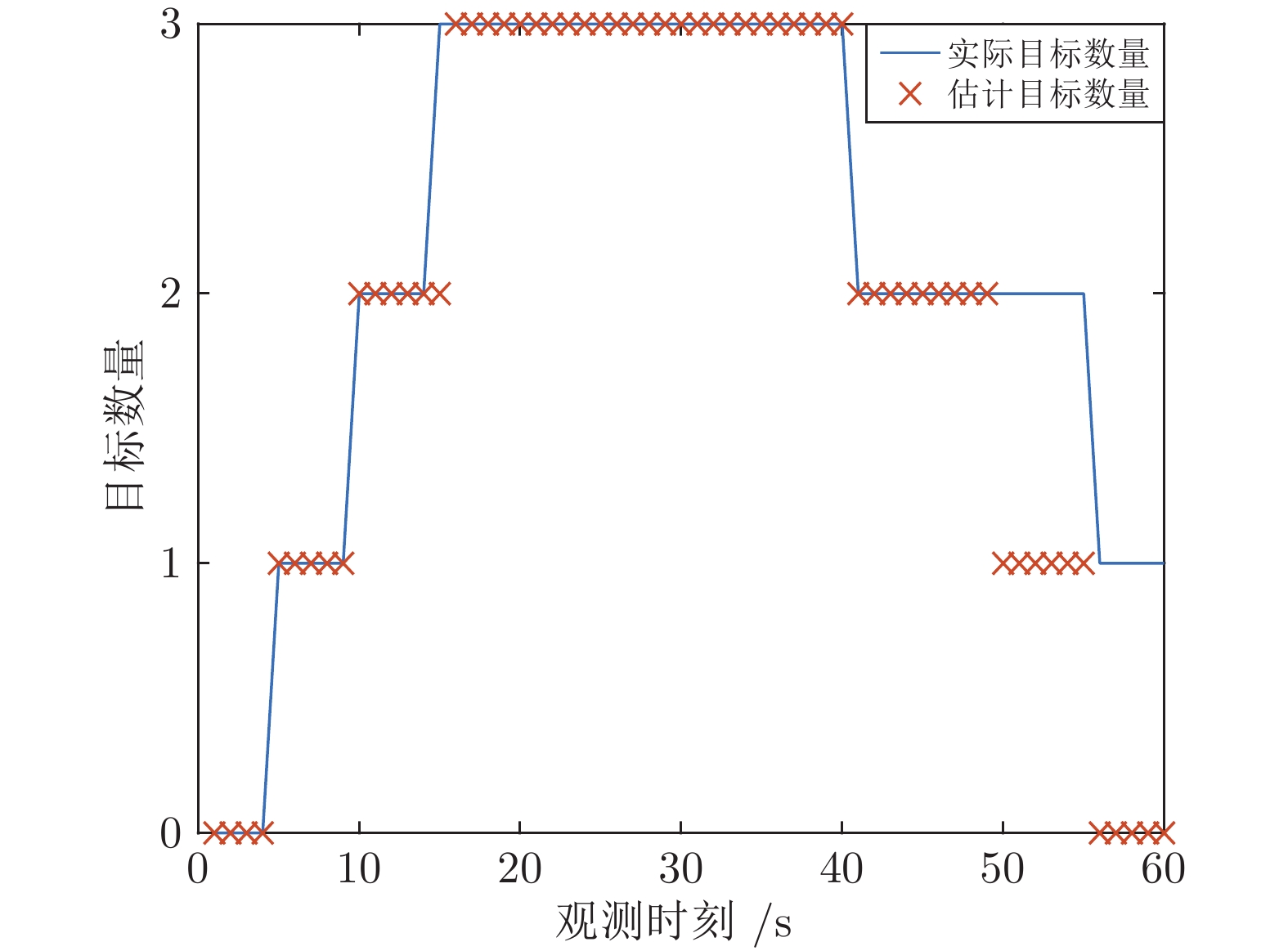
图 11 当SNR = 8 dB, 3个目标时, CRPFB-MTBD的目标数量估计结果
Fig. 11 Estimation of target number provided by CRPFB-MTBD when SNR = 8 dB and 3 targets

图 12 当SNR = 6 dB时, 目标数量对CRPFB-MTBD性能的影响
Fig. 12 Impact of target number on the performance of CRPFB-MTBD when SNR = 6 dB
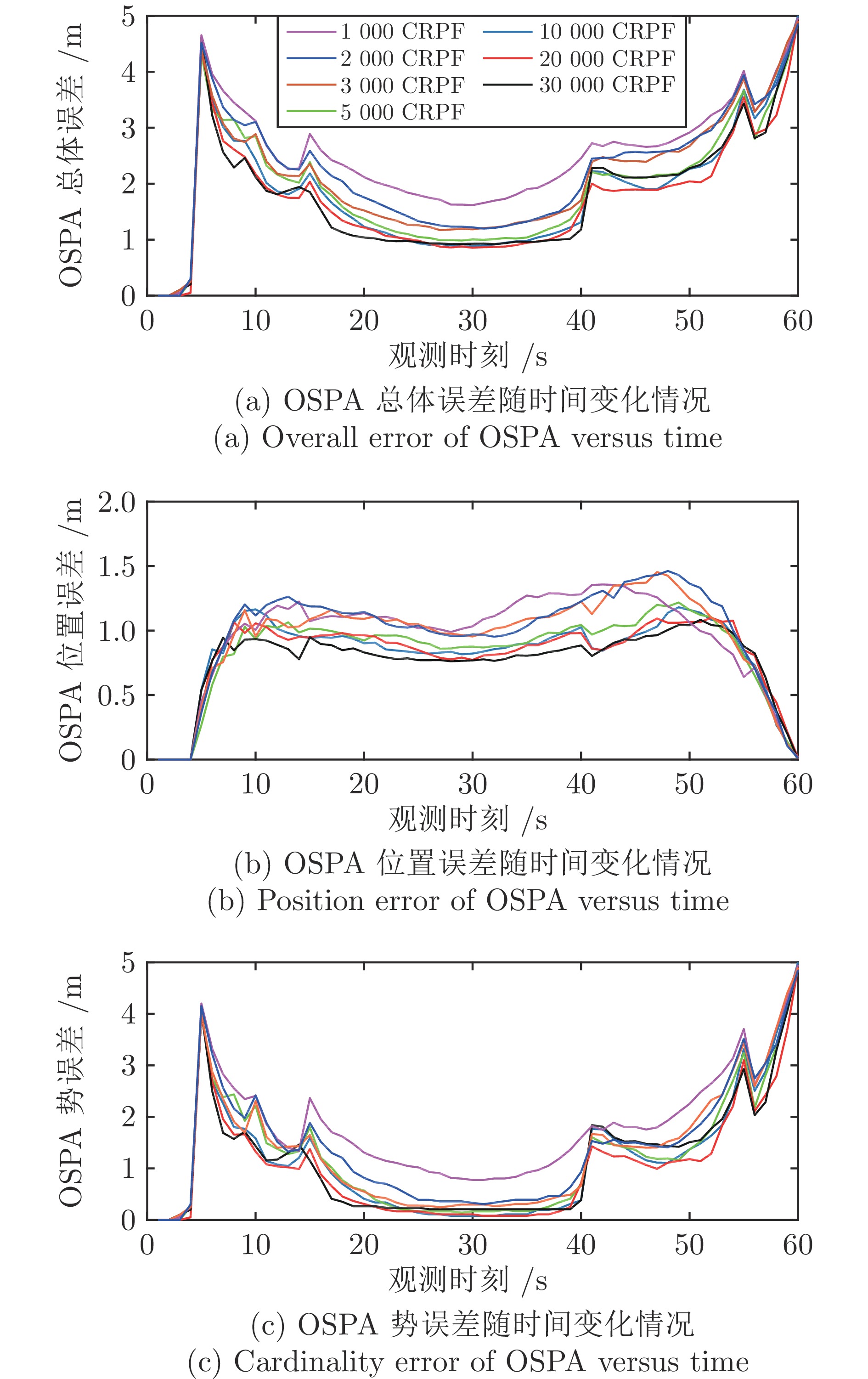
图 13 当SNR = 6 dB, 3个目标时, CRPF数量对CRPFB-MTBD性能的影响
Fig. 13 Impact of the number of CRPFs on the performance of CRPFB-MTBD when SNR = 6 dB and 3 targets
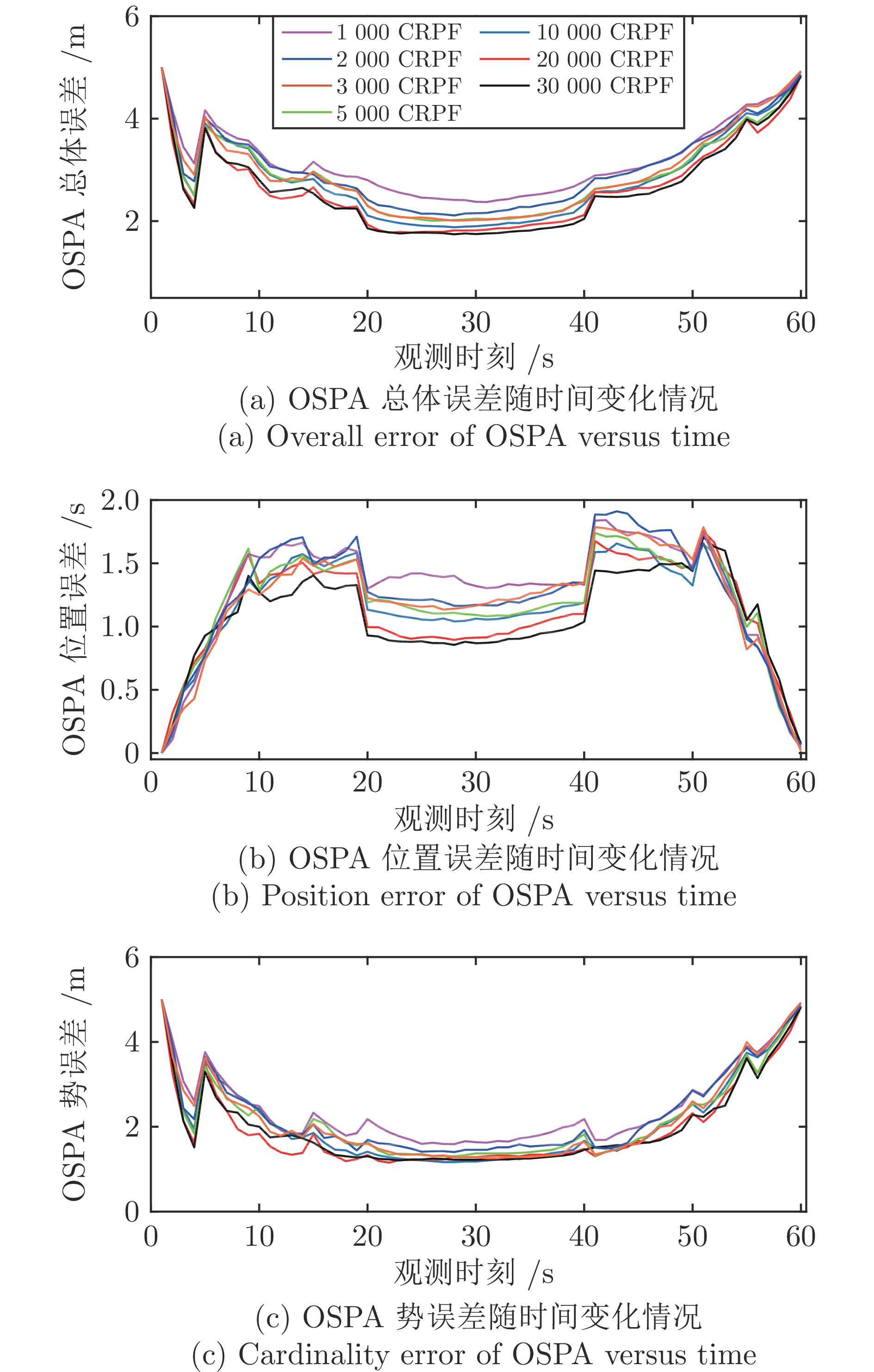
图 14 当SNR = 6 dB, 5个目标时, CRPF数量对CRPFB-MTBD性能的影响
Fig. 14 Impact of the number of CRPFs on the performance of CRPFB-MTBD when SNR = 6 dB and 5 targets
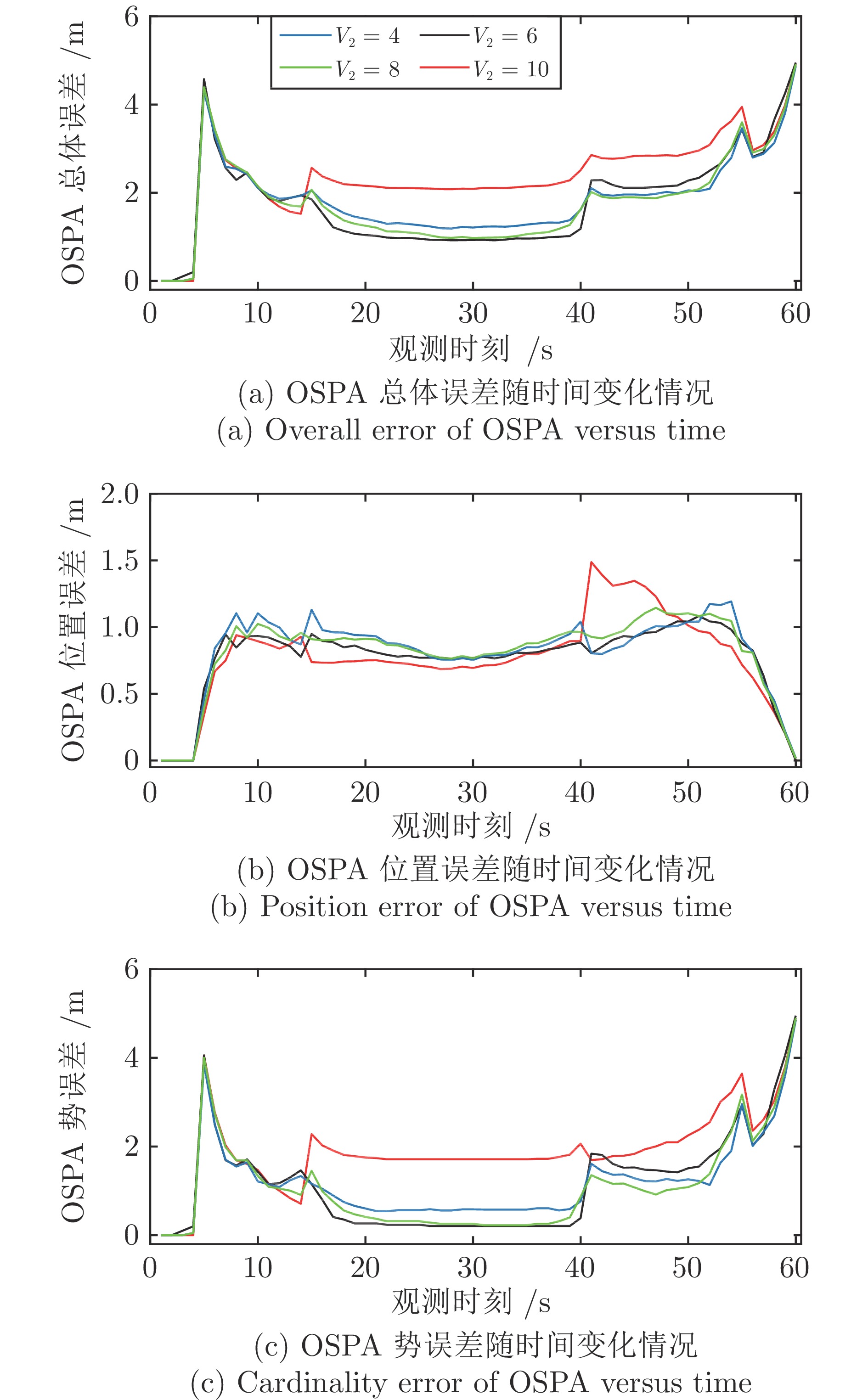
图 15 当SNR = 6 dB, 3个目标时, 门限$ V_{2}$对CRPFB-MTBD性能的影响
Fig. 15 Impact of threshold $ V_{2}$ on the performance of CRPFB-MTBD when SNR = 6 dB and 3 targets
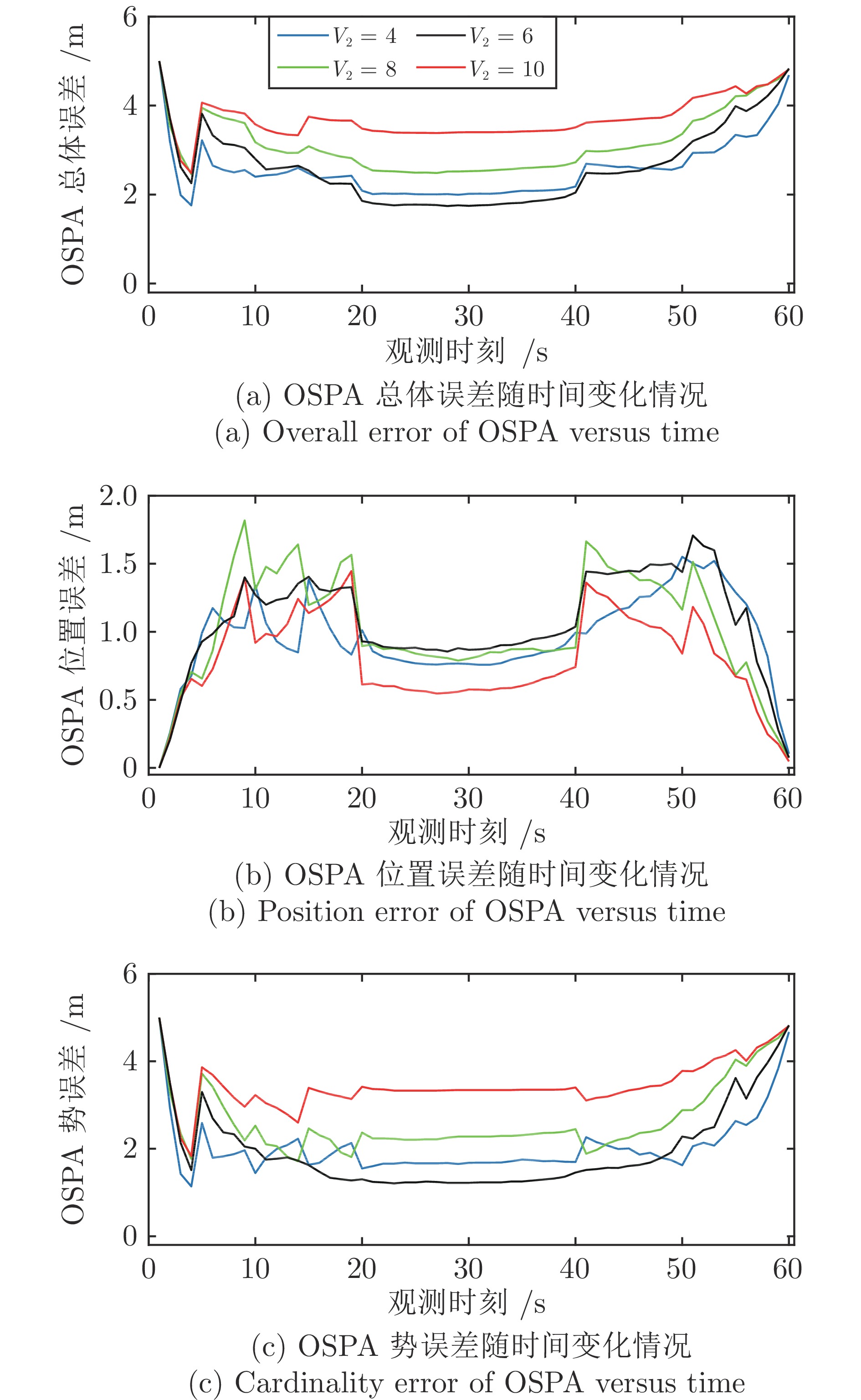
图 16 当SNR = 6 dB, 5个目标时, 门限$ V_{2}$对CRPFB-MTBD性能的影响
Fig. 16 Impact of threshold $ V_{2}$ on the performance of CRPFB-MTBD when SNR = 6 dB and 5 targets
表 1 第$l$个目标的先验信息
Table 1 Apriori information for the $l\text{-} {\rm th}$ target
先验信息 $x $方向 $y $方向 初始位置 $x_{l,1}=x_{m_{s}}$ $y_{l,1}=y_{m_{s}}$ 速度范围 $-\dfrac{x_{m_{s} } }{K\triangle T}\leq \dot{x}_{l}\leq \dfrac{N\triangle_{x}-x_{m_{s} } }{K\triangle T}$ $-\dfrac{y_{m_{s} } }{K\triangle T}\leq \dot{y}_{l}\leq \dfrac{M\triangle_{y}-y_{m_{s} } }{K\triangle{T} }$ $k$时刻位置范围 $x_{m_{s}}-(k-1)\dfrac{-x_{m_{s}}}{K\triangle T} \leq x_{m_{s}}+(k-1)\dfrac{N\triangle_{x}-x_{m_{s}}}{K\triangle T}$ $y_{m_{s}}-(k-1)\dfrac{-y_{m_{s}}}{K\triangle T} \leq y_{m_{s}}+(k-1)\dfrac{M\triangle_{y}-y_{m_{s}}}{K\triangle T}$  下载: 导出CSV
下载: 导出CSV
表 2 4种算法的平均单次运行时间 (s)
Table 2 Average single running time of 4 algorithms (s)
算法名称 运行时间 PHD-TBD 506.8180 PF-MTBD 131.0574 Bernoulli-TBD 6.6079 CRPFB-MTBD 0.0116
下载: 导出CSV
-
[1] Zhao M J, Li W, Li L, Hu J. Single-frame infrared small-target detection: A survey. IEEE Geoscience and Remote Sensing Magazine, 2022, 10(2): 87−119 doi: 10.1109/MGRS.2022.3145502 [2] Zhang W C, Sun C, Gao Y. Image intensity variation information for interest point detection. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(4): 4694−4712 [3] Bao Z H, Lu J B, Tian Y H, Tian S S. A novel radar TBD detection approach for weak marine targets in dense clutter based on modified Hough transform. Acta Electronica Sinica, 2022, 50(7): 1735−1743 [4] Tonissen S M, Bar-Shalom Y. Maximum likelihood track-before-detect with fluctuating target amplitude. IEEE Transactions on Aerospace and Electronic Systems, 1998, 34(3): 796−809 doi: 10.1109/7.705887 [5] Zhou Y, Su H, Tian S, Liu X M, Suo J D. Multiple-kernelized-correlation-filter-based track-before-detect algorithm for tracking weak and extended target in marine radar systems. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(4): 3411−3426 doi: 10.1109/TAES.2022.3150262 [6] Salmond D J, Birch H. A particle filter for track-before-detect. In: Proceedings of the American Control Conference. Arlington, USA: IEEE, 2001. 3755−3760 [7] Ristic B, Guan R, Kim D Y, Rosenberg L. Bernoulli track-before-detect smoothing for maritime radar. IET Radar, Sonar & Navigation, 2022, 16(6): 953−960 [8] Zhu Y R, Li Y, Zhang N. Candidate-plots-based dynamic programming algorithm for track-before-detect. Digital Signal Processing, 2022, 123(4): Article No. 103458 doi: 10.1016/j.dsp.2022.103458 [9] Boers Y, Driessen J N. Multi-target particle filter track before detect application. IEE Proceedings-Radar, Sonar and Navigation, 2004, 151(6): 351−357 doi: 10.1049/ip-rsn:20040841 [10] Ebenezer S P, Papandreou-Suppappola A. Generalized recursive track-before-detect with proposal partitioning for tracking varying number of multiple targets in low SNR. IEEE Transactions on Signal Processing, 2016, 64(11): 2819−2834 doi: 10.1109/TSP.2016.2523455 [11] Ito N, Godsill S J. A multi-target track-before-detect particle filter using super-positional data in non-Gaussian noise. IEEE Signal Processing Letters, 2020, 27: 1075−1079 doi: 10.1109/LSP.2020.3002704 [12] Punithakumar K, Kirubarajan T, Sinha A. A sequential Monte Carlo probability hypothesis density algorithm for multi-target track-before-detect. In: Proceedings of the International Society for Optical Engineering. San Diego, USA: 2005. 587−594 [13] Li T C, Hlawatsch F, Djuri P M. Cardinality-consensus-based PHD filtering for distributed multi-target tracking. IEEE Signal Processing Letters, 2018, 26(1): 49−53 [14] Vo B N, Vo B T, Pham N T, Suter D. Joint detection and estimation of multiple objects from image observations. IEEE Transactions on Signal Processing, 2010, 58(10): 5129−5141 doi: 10.1109/TSP.2010.2050482 [15] 卢锦, 王鑫. 基于代价参考粒子滤波器组的检测前跟踪算法. 电子与信息学报, 2021, 48(10): 2815−2823 doi: 10.11999/JEIT210234Lu Jin, Wang Xin. Cost-reference particle filter bank based track-before-detecting algorithm. Journal of Electronics Information Technology, 2021, 48(10): 2815−2823 doi: 10.11999/JEIT210234 [16] Schuhmacher D, Vo B T, Vo B N. A consistent metric for performance evaluation of multi-object filters. IEEE Transactions on Signal Processing, 2008, 56(8): 3447−3457 doi: 10.1109/TSP.2008.920469 [17] Beard M, Vo B T, Vo B N. OSPA (2): Using the OSPA metric to evaluate multi-target tracking performance. In: Proceedings of the International Conference on Control, Automation and Information Sciences. Chiang Mai, Thailand: IEEE, 2017. 86−91 -

 下载:
下载:


计量
- 文章访问数: 1141
- HTML全文浏览量: 233
- PDF下载量: 234
- 被引次数: 0
