2017年 第43卷 第1期
2017, 43(1): 1-8.
doi: 10.16383/j.aas.2017.y000001
cstr: 32138.14.j.aas.2017.y000001
摘要:
本文提出了一种新的机器学习理论框架.该框架结合了现有多种机器学习理论框架的优点,并针对如何使用软件定义的人工系统从大数据提取有效数据,如何结合预测学习和集成学习,以及如何利用默顿定律进行指示学习等目前机器学习领域面临的重要问题进行了特别设计.
本文提出了一种新的机器学习理论框架.该框架结合了现有多种机器学习理论框架的优点,并针对如何使用软件定义的人工系统从大数据提取有效数据,如何结合预测学习和集成学习,以及如何利用默顿定律进行指示学习等目前机器学习领域面临的重要问题进行了特别设计.


2017, 43(1): 9-19.
doi: 10.16383/j.aas.2017.c160193
cstr: 32138.14.j.aas.2017.c160193
摘要:
互联系统的容错控制是近年来控制领域的研究热点,具有重要的理论价值和实际意义.本文阐述了互联系统容错控制的基本结构和主要思想,总结了带有机械互联、网络互联和模型虚拟互联的三类互联系统的容错控制最新研究成果,并对该研究方向进行了展望.
互联系统的容错控制是近年来控制领域的研究热点,具有重要的理论价值和实际意义.本文阐述了互联系统容错控制的基本结构和主要思想,总结了带有机械互联、网络互联和模型虚拟互联的三类互联系统的容错控制最新研究成果,并对该研究方向进行了展望.

2017, 43(1): 20-39.
doi: 10.16383/j.aas.2017.c160149
cstr: 32138.14.j.aas.2017.c160149
摘要:
假设空间复杂性是统计学习理论中用于分析学习模型泛化能力的关键因素.与数据无关的复杂度不同,Rademacher复杂度是与数据分布相关的,因而通常能得到比传统复杂度更紧致的泛化界表达.近年来,Rademacher复杂度在统计学习理论泛化能力分析的应用发展中起到了重要的作用.鉴于其重要性,本文梳理了各种形式的Rademacher复杂度及其与传统复杂度之间的关联性,并探讨了基于Rademacher复杂度进行学习模型泛化能力分析的基本技巧.考虑样本数据的独立同分布和非独立同分布两种产生环境,总结并分析了Rademacher复杂度在泛化能力分析方面的研究现状.展望了当前Rademacher复杂度在非监督框架与非序列环境等方面研究的不足,及其进一步应用与发展.
假设空间复杂性是统计学习理论中用于分析学习模型泛化能力的关键因素.与数据无关的复杂度不同,Rademacher复杂度是与数据分布相关的,因而通常能得到比传统复杂度更紧致的泛化界表达.近年来,Rademacher复杂度在统计学习理论泛化能力分析的应用发展中起到了重要的作用.鉴于其重要性,本文梳理了各种形式的Rademacher复杂度及其与传统复杂度之间的关联性,并探讨了基于Rademacher复杂度进行学习模型泛化能力分析的基本技巧.考虑样本数据的独立同分布和非独立同分布两种产生环境,总结并分析了Rademacher复杂度在泛化能力分析方面的研究现状.展望了当前Rademacher复杂度在非监督框架与非序列环境等方面研究的不足,及其进一步应用与发展.

2017, 43(1): 40-59.
doi: 10.16383/j.aas.2017.c150537
cstr: 32138.14.j.aas.2017.c150537
摘要:
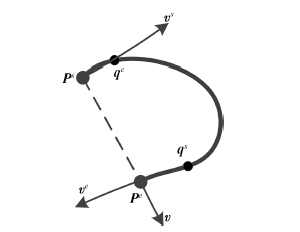
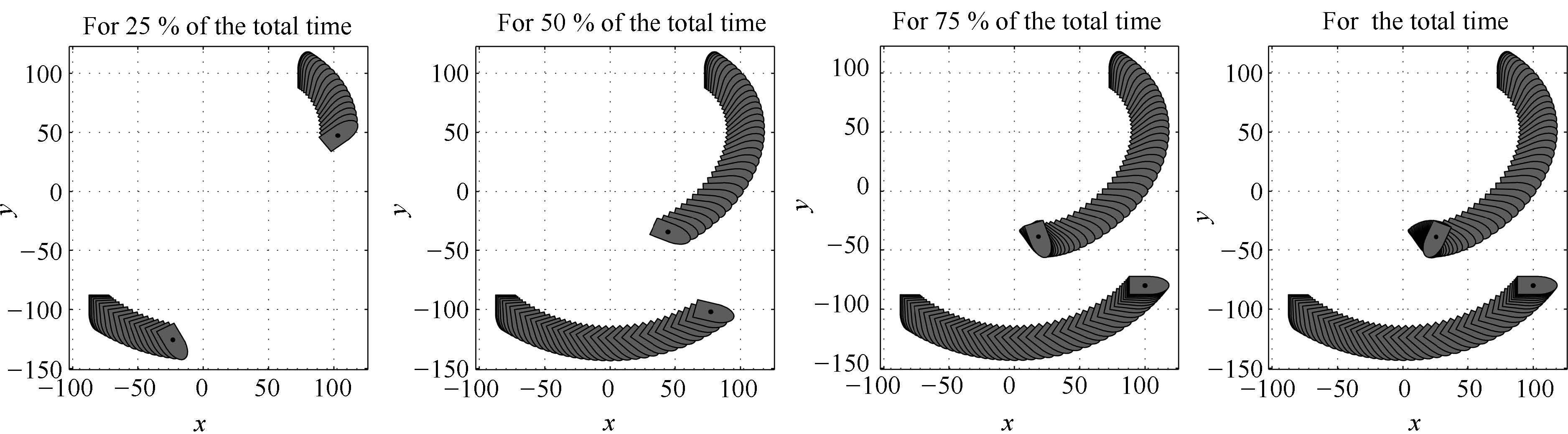
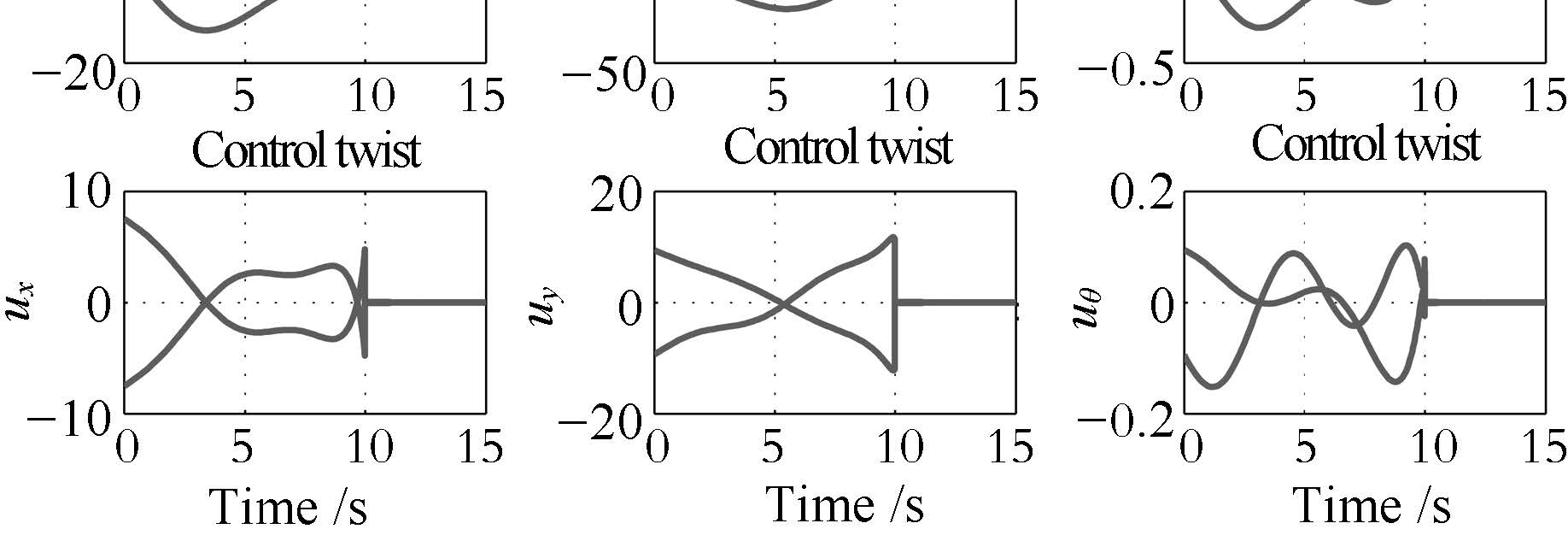
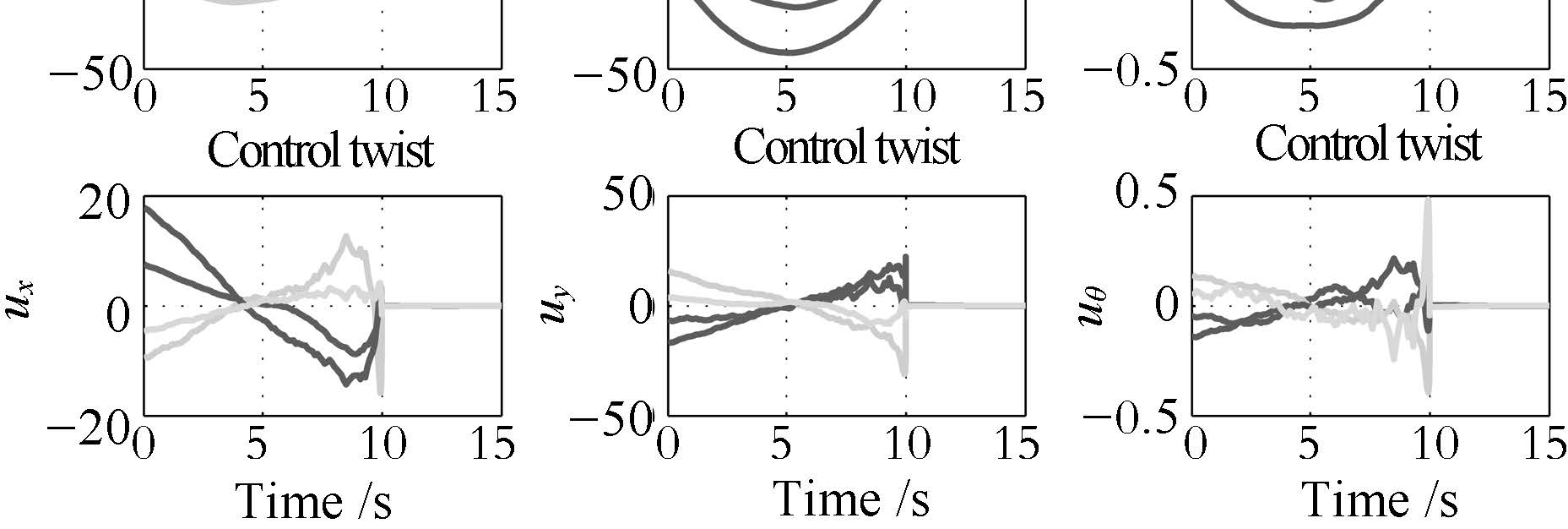
研究基于庞特里亚金极小值原理的多运载体有限时间编队问题.运载体刻画为欧氏群切丛上演化的全驱动刚体动力学模型.编队机动时间以及队形的几何结构是由编队任务指定的.对于期望的队形,首先利用庞特里亚金最小值原理给出了开环最优控制.为了克服开环控制对扰动的敏感性并增加针对初始条件不确定性摄动的鲁棒性,在假定运载体间通讯为全联通的模式下,通过反馈将系统当前状态作为初始状态,当前时刻作为初始时刻,进一步将开环控制律转化为闭环形式.为了验证所得结果,给出了平面及空间运载体编队的仿真算例.
研究基于庞特里亚金极小值原理的多运载体有限时间编队问题.运载体刻画为欧氏群切丛上演化的全驱动刚体动力学模型.编队机动时间以及队形的几何结构是由编队任务指定的.对于期望的队形,首先利用庞特里亚金最小值原理给出了开环最优控制.为了克服开环控制对扰动的敏感性并增加针对初始条件不确定性摄动的鲁棒性,在假定运载体间通讯为全联通的模式下,通过反馈将系统当前状态作为初始状态,当前时刻作为初始时刻,进一步将开环控制律转化为闭环形式.为了验证所得结果,给出了平面及空间运载体编队的仿真算例.









2017, 43(1): 60-71.
doi: 10.16383/j.aas.2017.c150723
cstr: 32138.14.j.aas.2017.c150723
摘要:
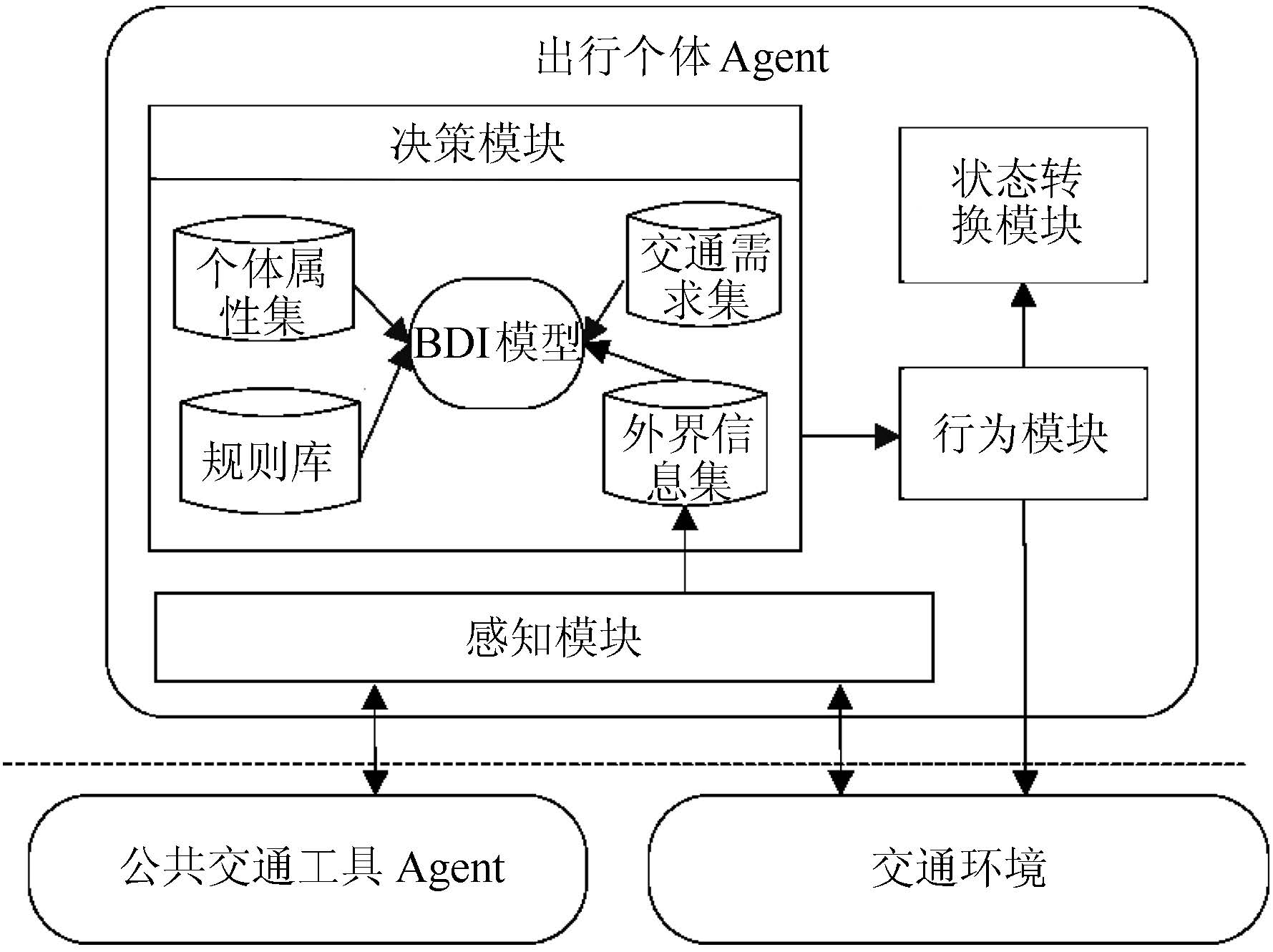
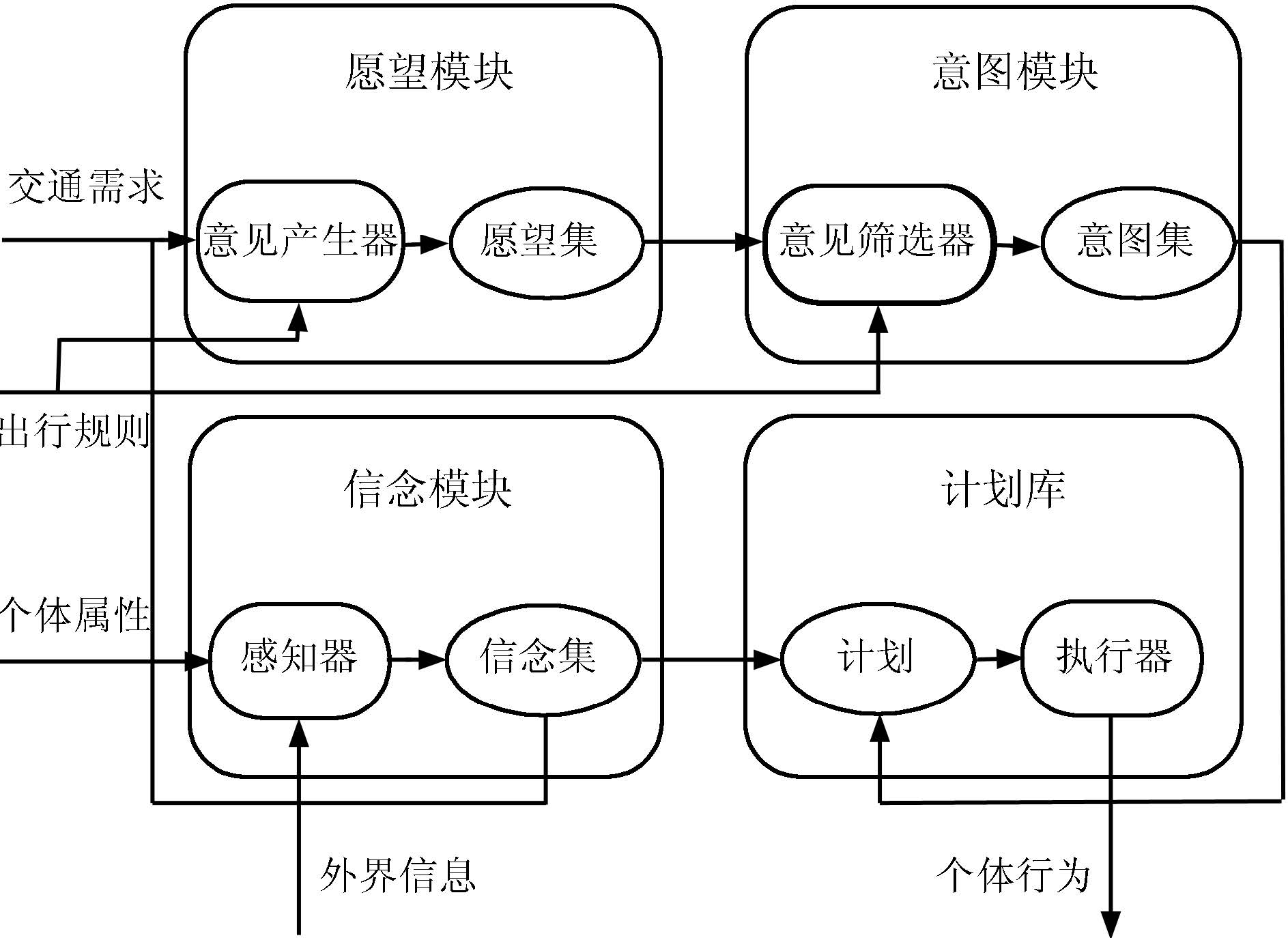
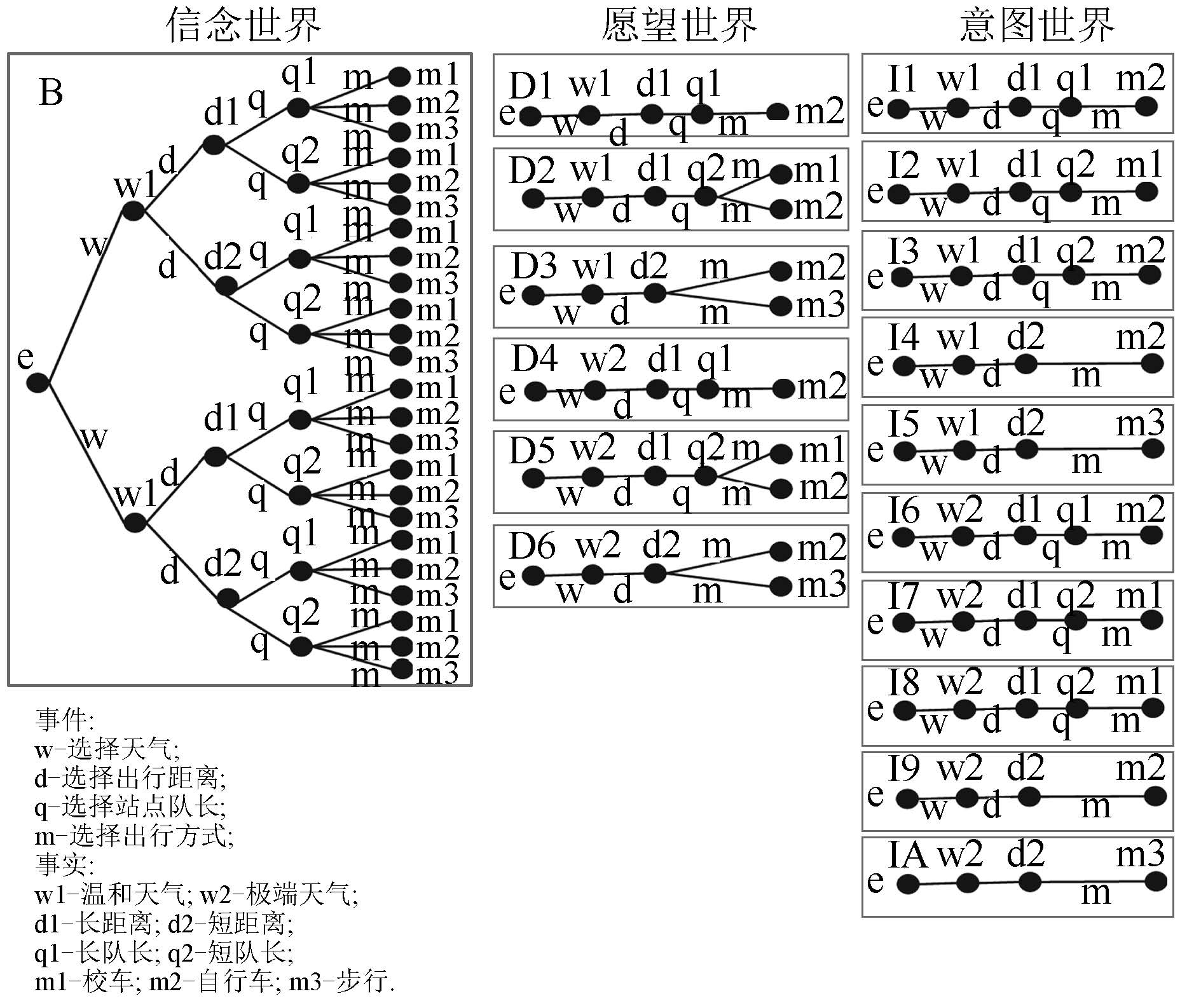
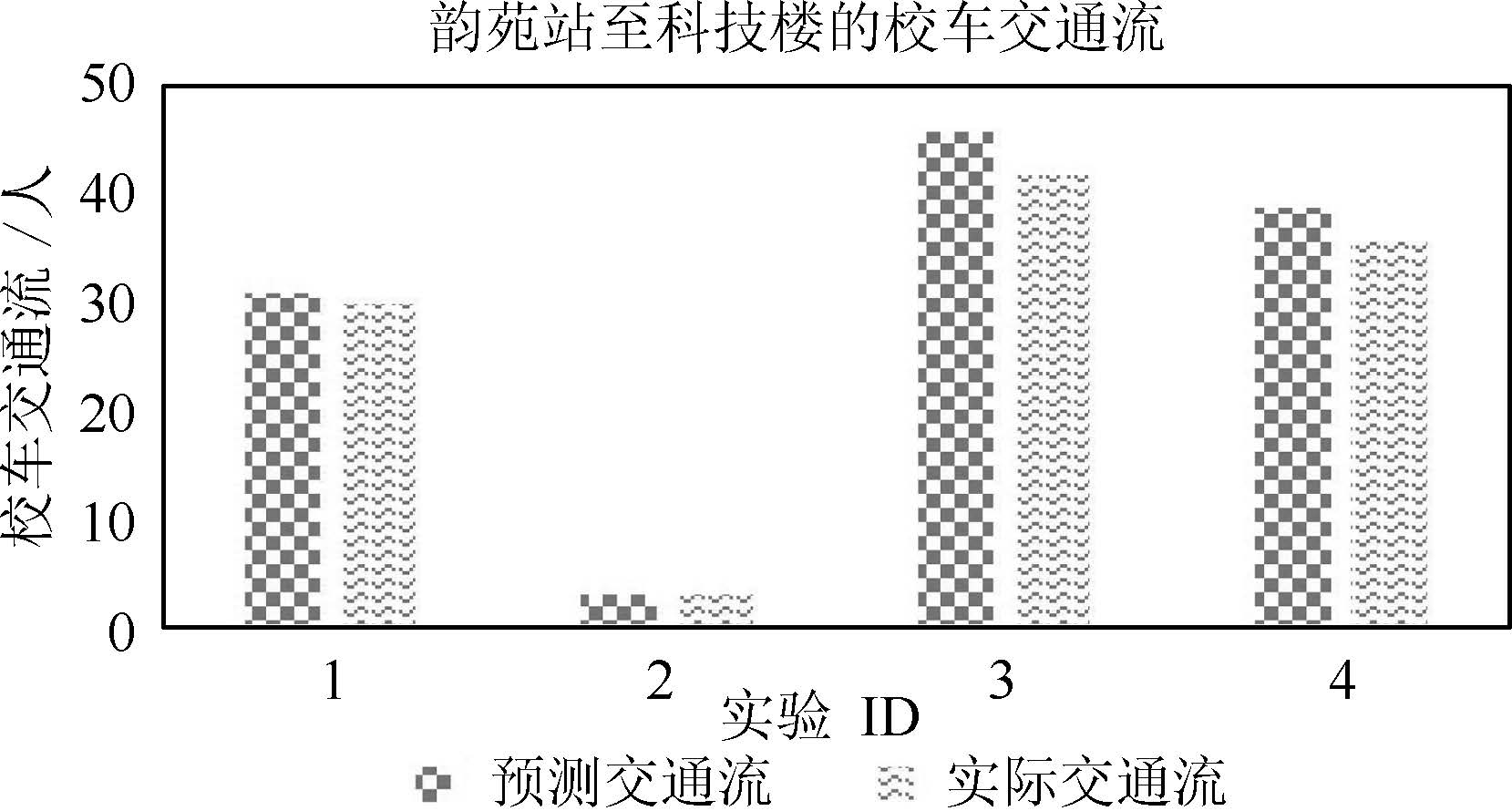
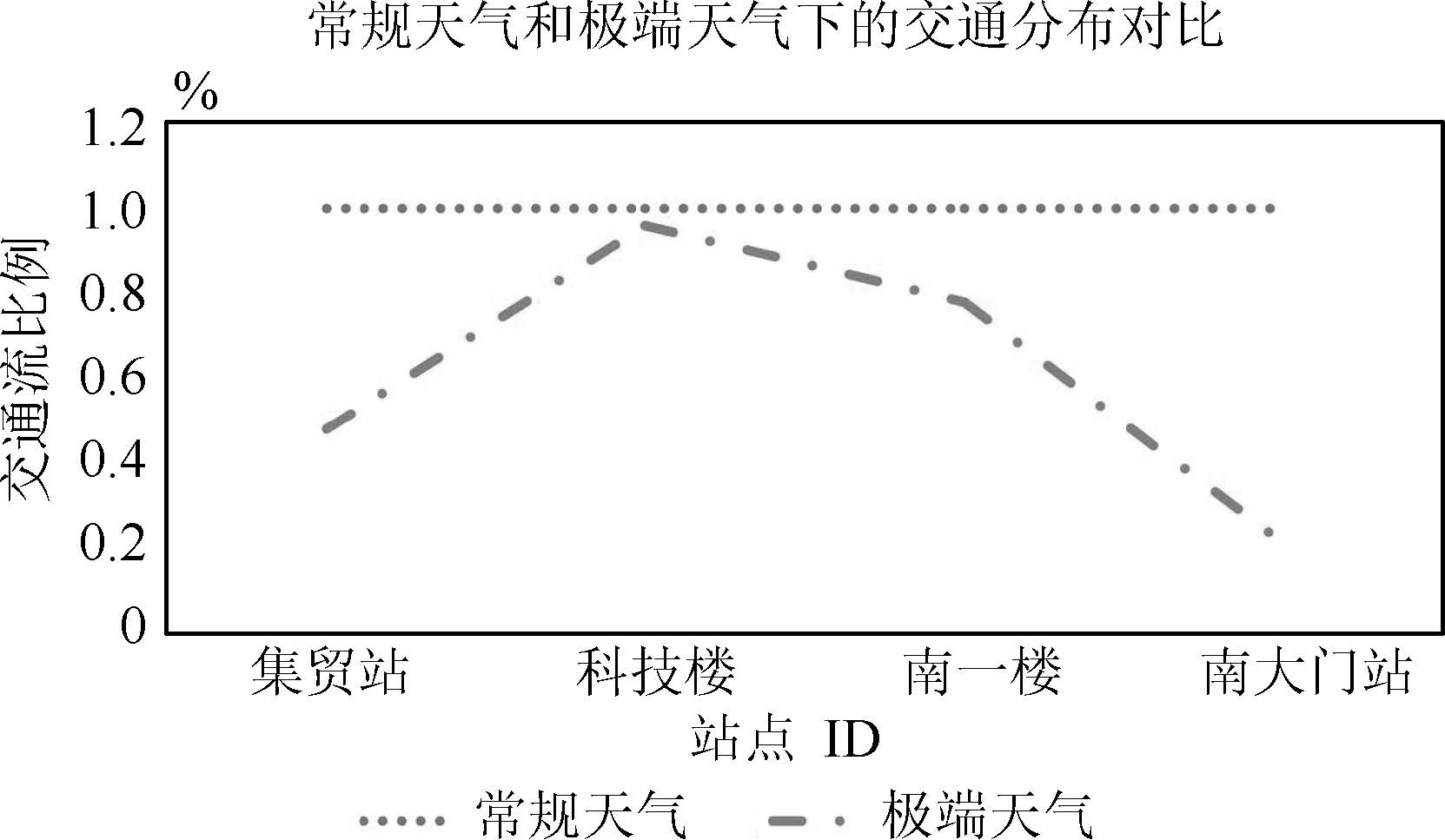
一般来说,用于交通需求预测的数学模型往往缺少对出行个体微观水平上的异质性和可变交通情景的考虑.针对这些问题,本文提出了一种基于计算实验的公共交通需求预测方法.该方法主要由交通调查、基于Agent的人工交通系统(Artificial transportation system,ATS)和计算实验3部分组成.在出行个体Agent建模中引入BDI(Belief-desire-intention)模型,来推演各出行个体在出行过程中对各交通选择的决策制定过程.在人工交通系统的基础上,可以设计并执行大量的计算实验来进行交通需求预测.本文通过基于校车系统的一系列交通调查和计算实验验证了该方法的可行性和优越性,并针对各种不同交通情景进行了交通分布预测和交通方式划分预测.
一般来说,用于交通需求预测的数学模型往往缺少对出行个体微观水平上的异质性和可变交通情景的考虑.针对这些问题,本文提出了一种基于计算实验的公共交通需求预测方法.该方法主要由交通调查、基于Agent的人工交通系统(Artificial transportation system,ATS)和计算实验3部分组成.在出行个体Agent建模中引入BDI(Belief-desire-intention)模型,来推演各出行个体在出行过程中对各交通选择的决策制定过程.在人工交通系统的基础上,可以设计并执行大量的计算实验来进行交通需求预测.本文通过基于校车系统的一系列交通调查和计算实验验证了该方法的可行性和优越性,并针对各种不同交通情景进行了交通分布预测和交通方式划分预测.








2017, 43(1): 72-82.
doi: 10.16383/j.aas.2017.c150389
cstr: 32138.14.j.aas.2017.c150389
摘要:
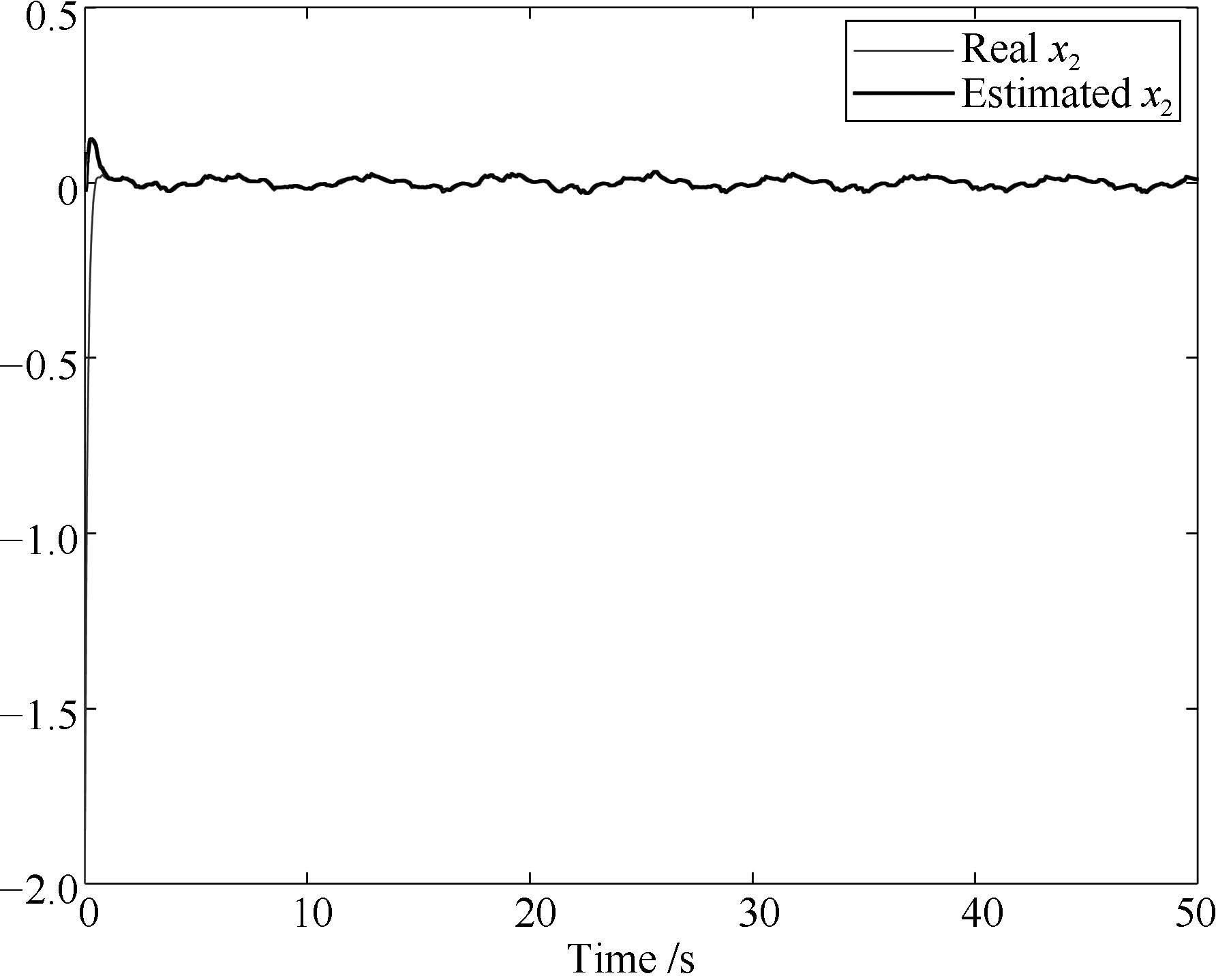
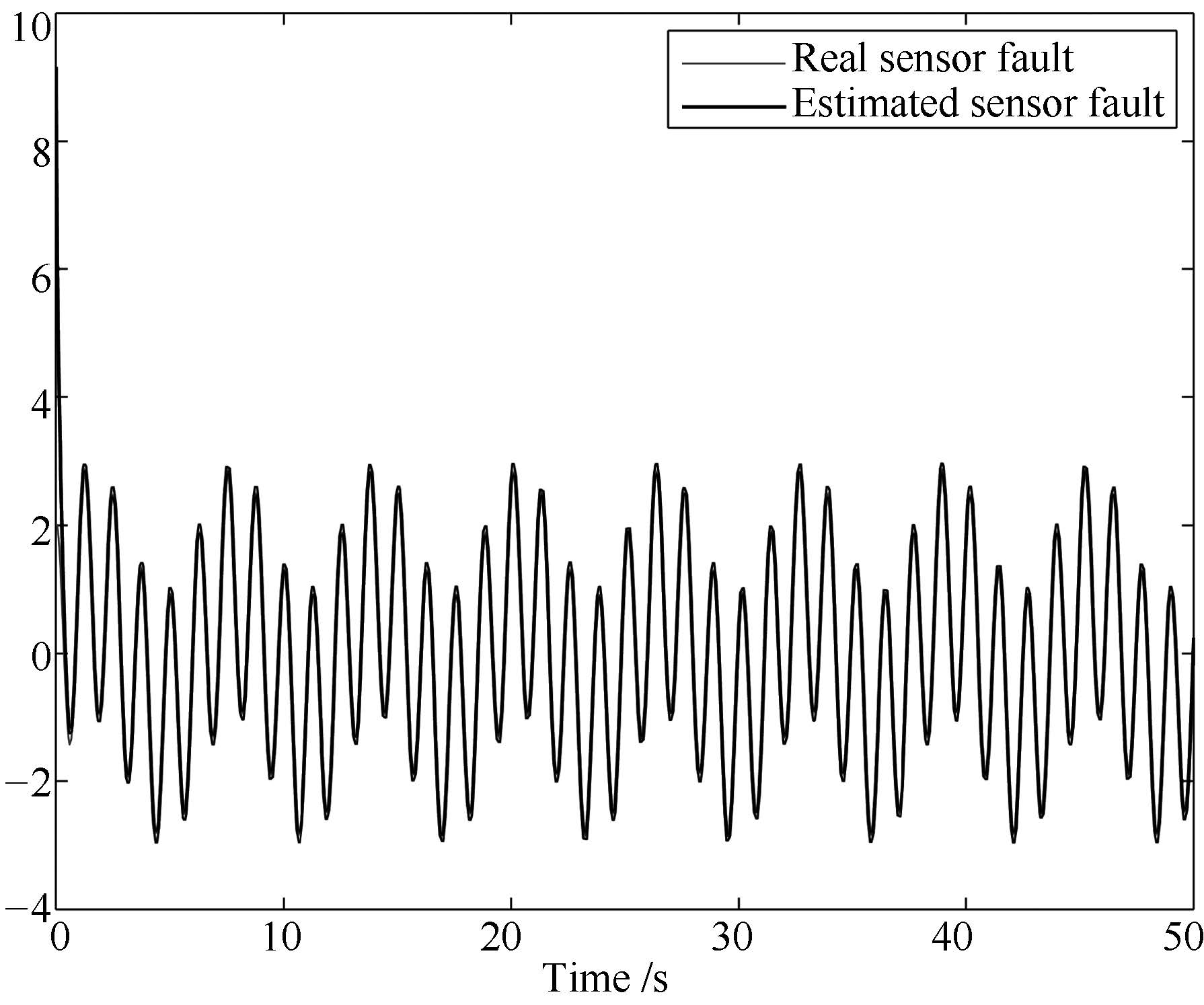
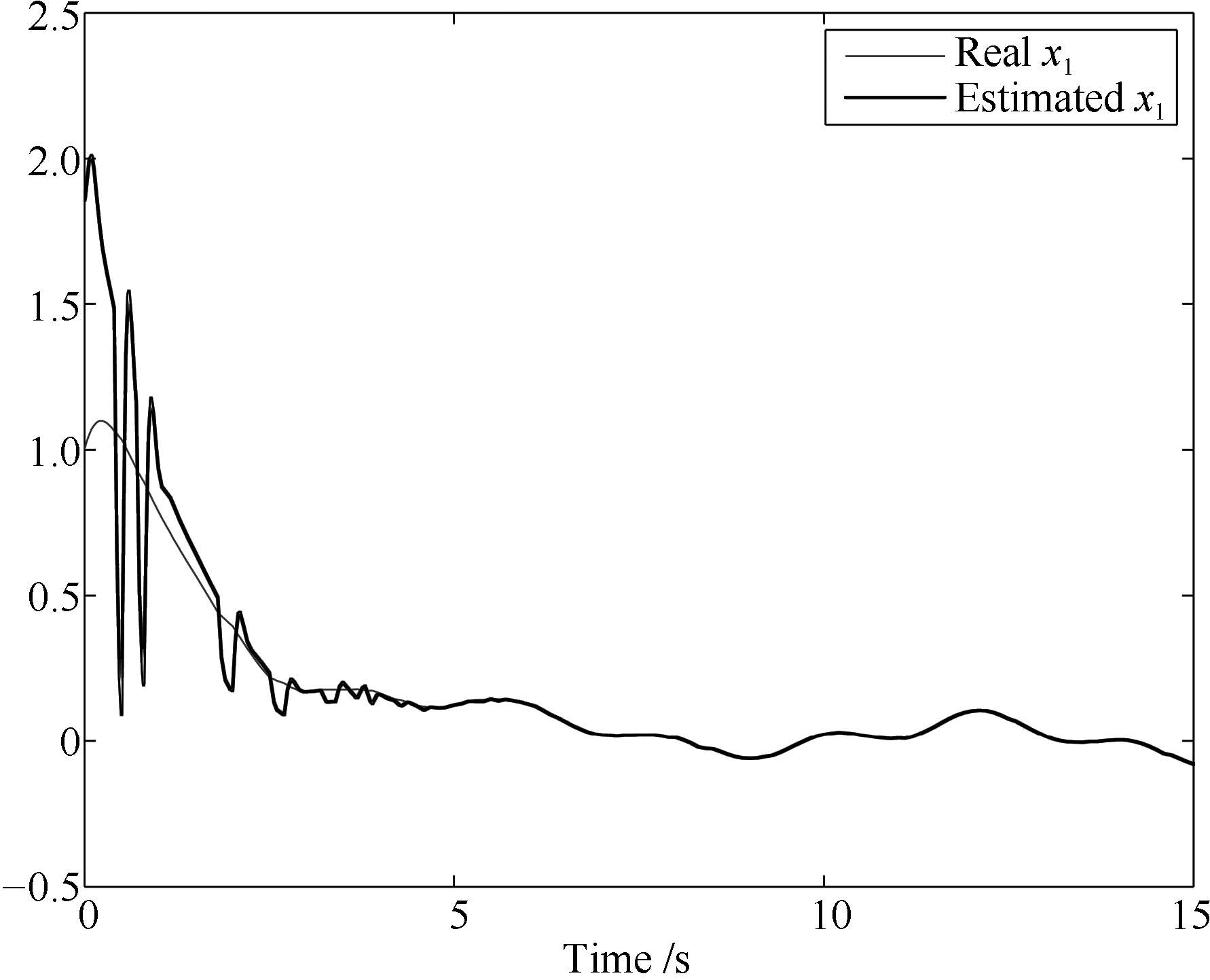
针对具有参数不确定和延迟环节的马尔科夫跳变系统,在状态转移概率矩阵(Transition probability matrix,TPM)不确定的情形下,讨论了其执行器和传感器故障同时估计的方法.通过扩展系统状态,将系统转换为一个具有马尔科夫跳变参数的广义描述系统,基于此广义描述系统设计马尔科夫跳变观测器实现对其状态和传感器故障的估计.与此同时,还设计了一组自适应律对执行器故障进行在线调节.通过求解一组线性矩阵不等式最优化问题,得到观测器存在的充分条件.最后,针对两个数值实例,验证了所设计方法的有效性.
针对具有参数不确定和延迟环节的马尔科夫跳变系统,在状态转移概率矩阵(Transition probability matrix,TPM)不确定的情形下,讨论了其执行器和传感器故障同时估计的方法.通过扩展系统状态,将系统转换为一个具有马尔科夫跳变参数的广义描述系统,基于此广义描述系统设计马尔科夫跳变观测器实现对其状态和传感器故障的估计.与此同时,还设计了一组自适应律对执行器故障进行在线调节.通过求解一组线性矩阵不等式最优化问题,得到观测器存在的充分条件.最后,针对两个数值实例,验证了所设计方法的有效性.









2017, 43(1): 83-93.
doi: 10.16383/j.aas.2017.c150791
cstr: 32138.14.j.aas.2017.c150791
摘要:
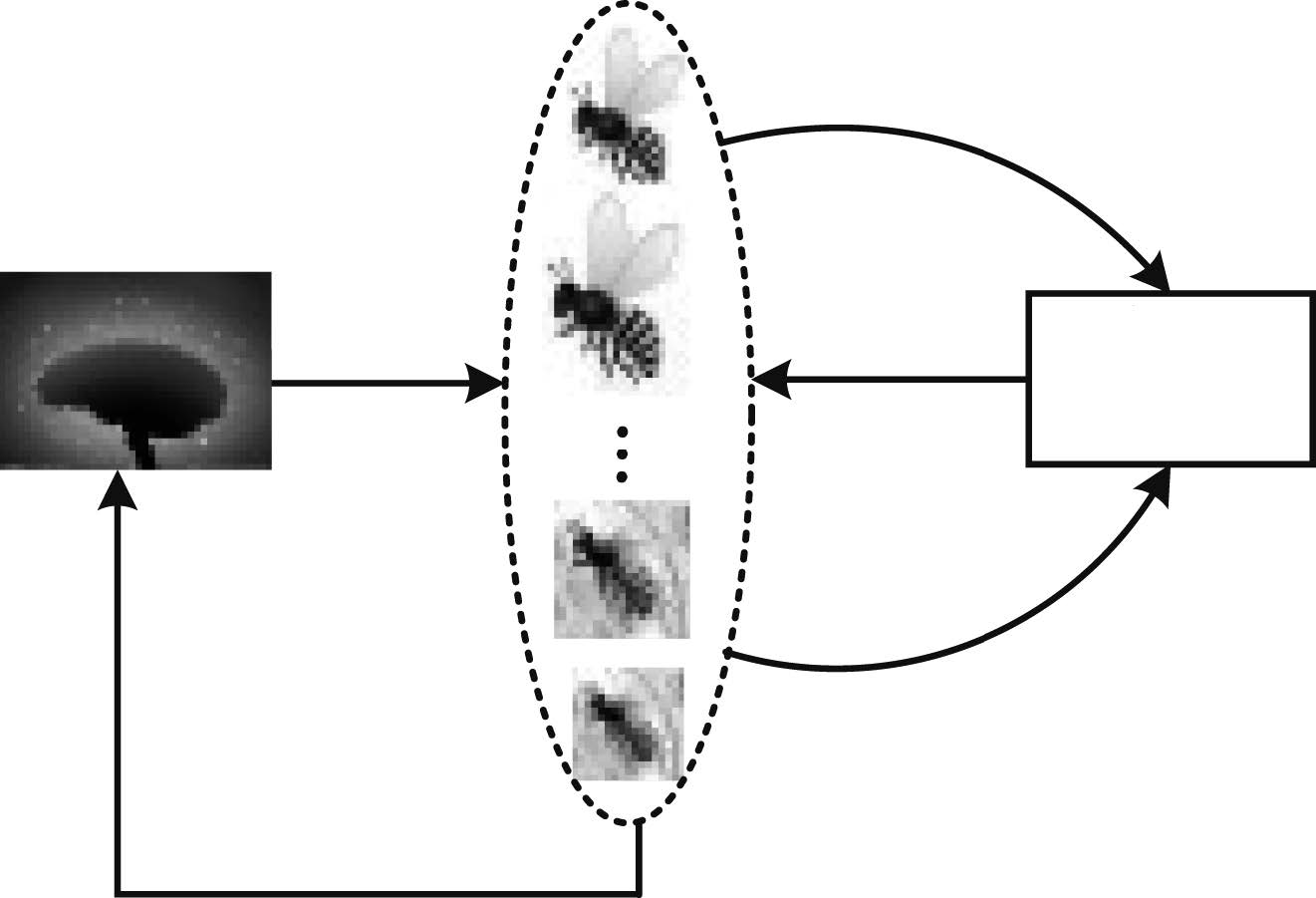
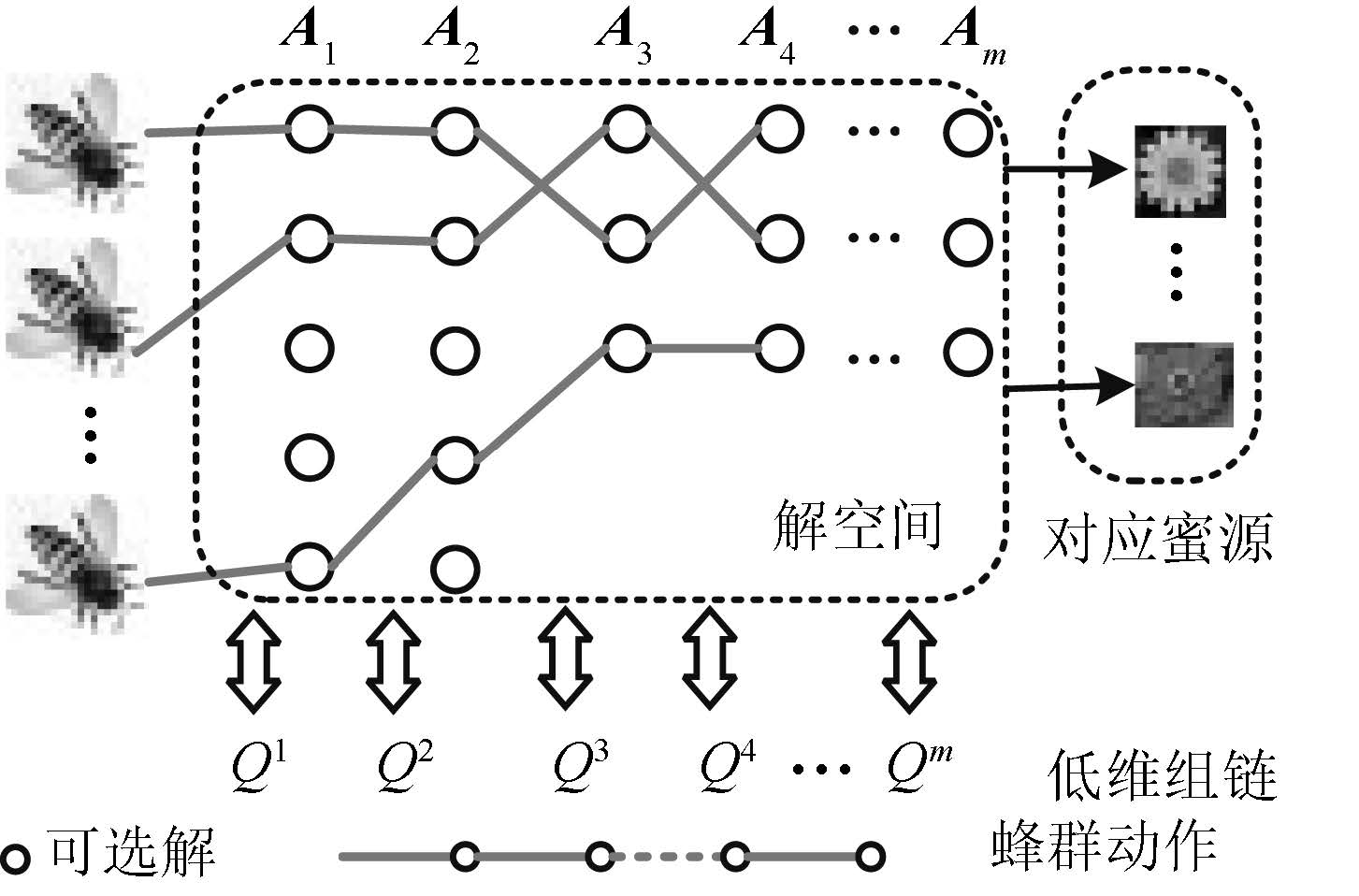
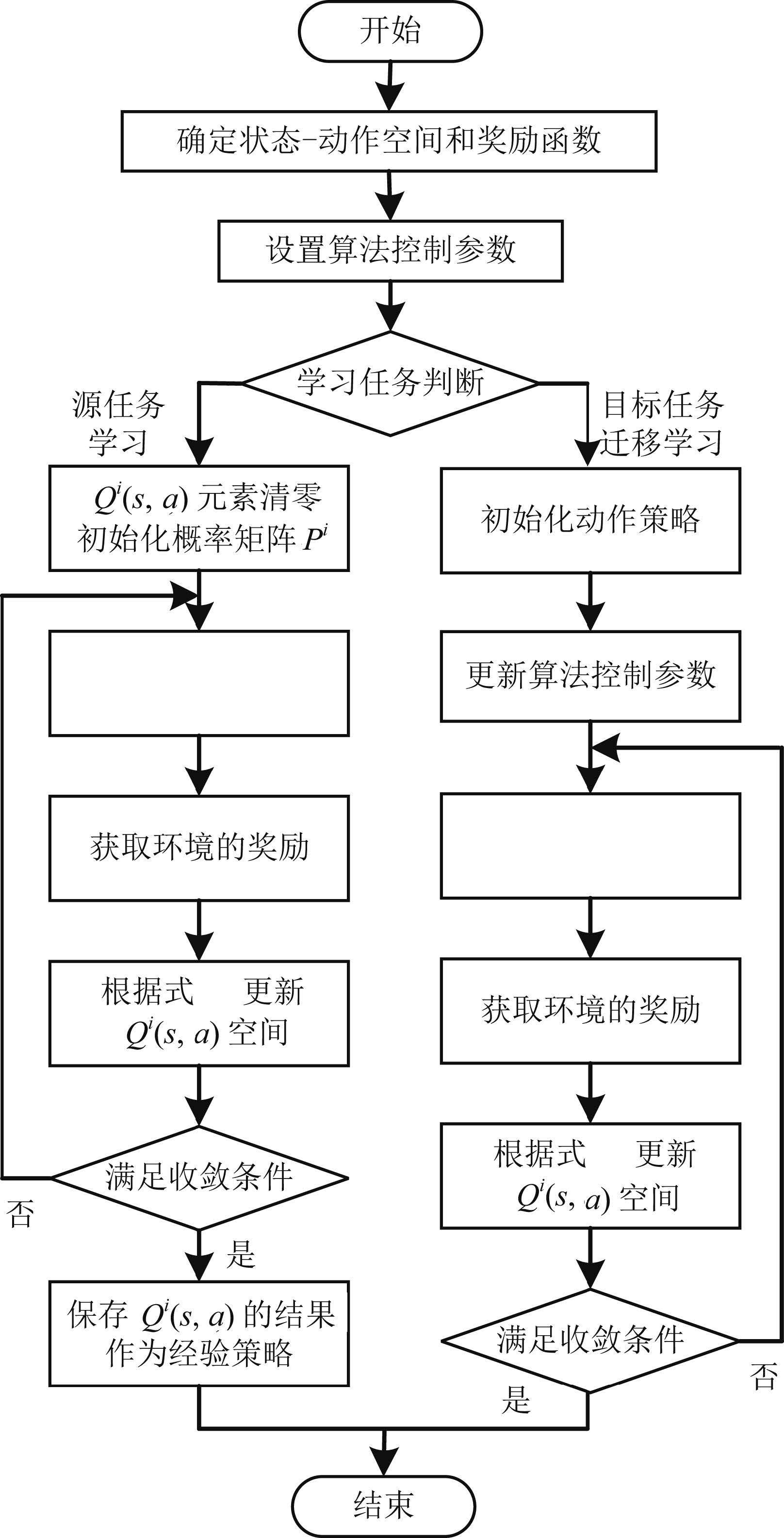
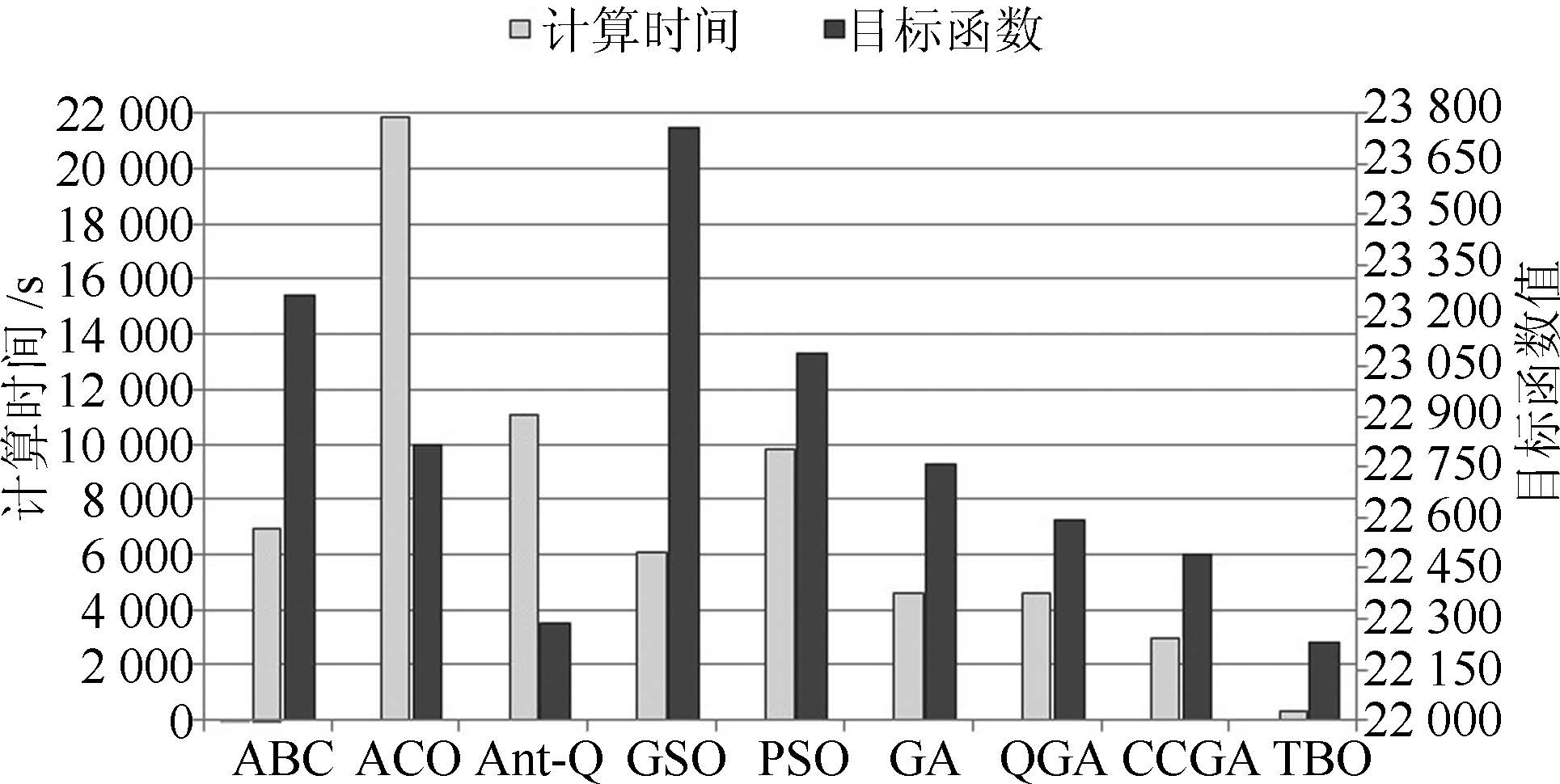
提出了一种全新的迁移蜂群优化算法,并应用到电力系统无功优化问题.利用Q学习的试错与奖励机制构造蜂群的学习模式,并采用强化学习的行为迁移技术实现蜂群的迁移学习.为解决算法求解多变量优化问题遇到的维数灾难,提出了状态-组合动作链的方式将状态-动作空间分解成若干低维空间,明显降低算法的计算难度.仿真结果表明:本文所提算法可以保证最优解质量的同时,寻优速度能提高到传统启发式智能算法的4~67倍左右,非常适用于大规模复杂系统非线性规划问题的快速求解.
提出了一种全新的迁移蜂群优化算法,并应用到电力系统无功优化问题.利用Q学习的试错与奖励机制构造蜂群的学习模式,并采用强化学习的行为迁移技术实现蜂群的迁移学习.为解决算法求解多变量优化问题遇到的维数灾难,提出了状态-组合动作链的方式将状态-动作空间分解成若干低维空间,明显降低算法的计算难度.仿真结果表明:本文所提算法可以保证最优解质量的同时,寻优速度能提高到传统启发式智能算法的4~67倍左右,非常适用于大规模复杂系统非线性规划问题的快速求解.







2017, 43(1): 94-100.
doi: 10.16383/j.aas.2017.c150698
cstr: 32138.14.j.aas.2017.c150698
摘要:
针对多模型自适应混合控制的性能依赖系统参数估计误差大小的缺点,本文提出了基于切换机制的多模型自适应混合控制.首先对被控系统进行辨识,然后根据参数估计值进行判断.当参数估计值不在最优参数集内时,实行切换策略,重置参数估计值到最优参数集内,用以减小暂态误差,提高暂态性能;当参数估计值在最优参数集内时,实行混合控制,用以平滑过渡过程.文中给出了系统的稳定性和收敛性的证明,最后的仿真实验结果验证了所提出方法的可行性.
针对多模型自适应混合控制的性能依赖系统参数估计误差大小的缺点,本文提出了基于切换机制的多模型自适应混合控制.首先对被控系统进行辨识,然后根据参数估计值进行判断.当参数估计值不在最优参数集内时,实行切换策略,重置参数估计值到最优参数集内,用以减小暂态误差,提高暂态性能;当参数估计值在最优参数集内时,实行混合控制,用以平滑过渡过程.文中给出了系统的稳定性和收敛性的证明,最后的仿真实验结果验证了所提出方法的可行性.





2017, 43(1): 101-113.
doi: 10.16383/j.aas.2017.c150759
cstr: 32138.14.j.aas.2017.c150759
摘要:
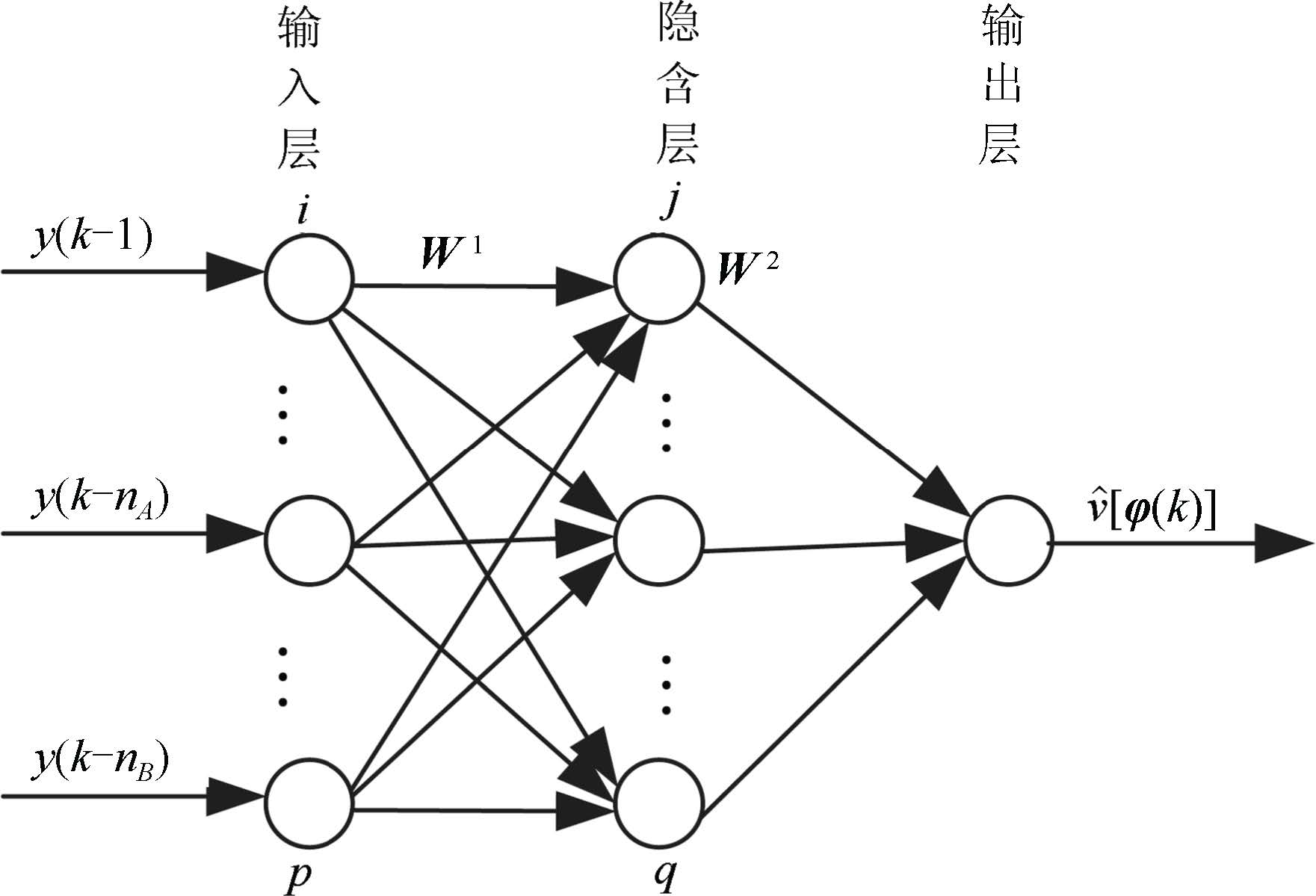
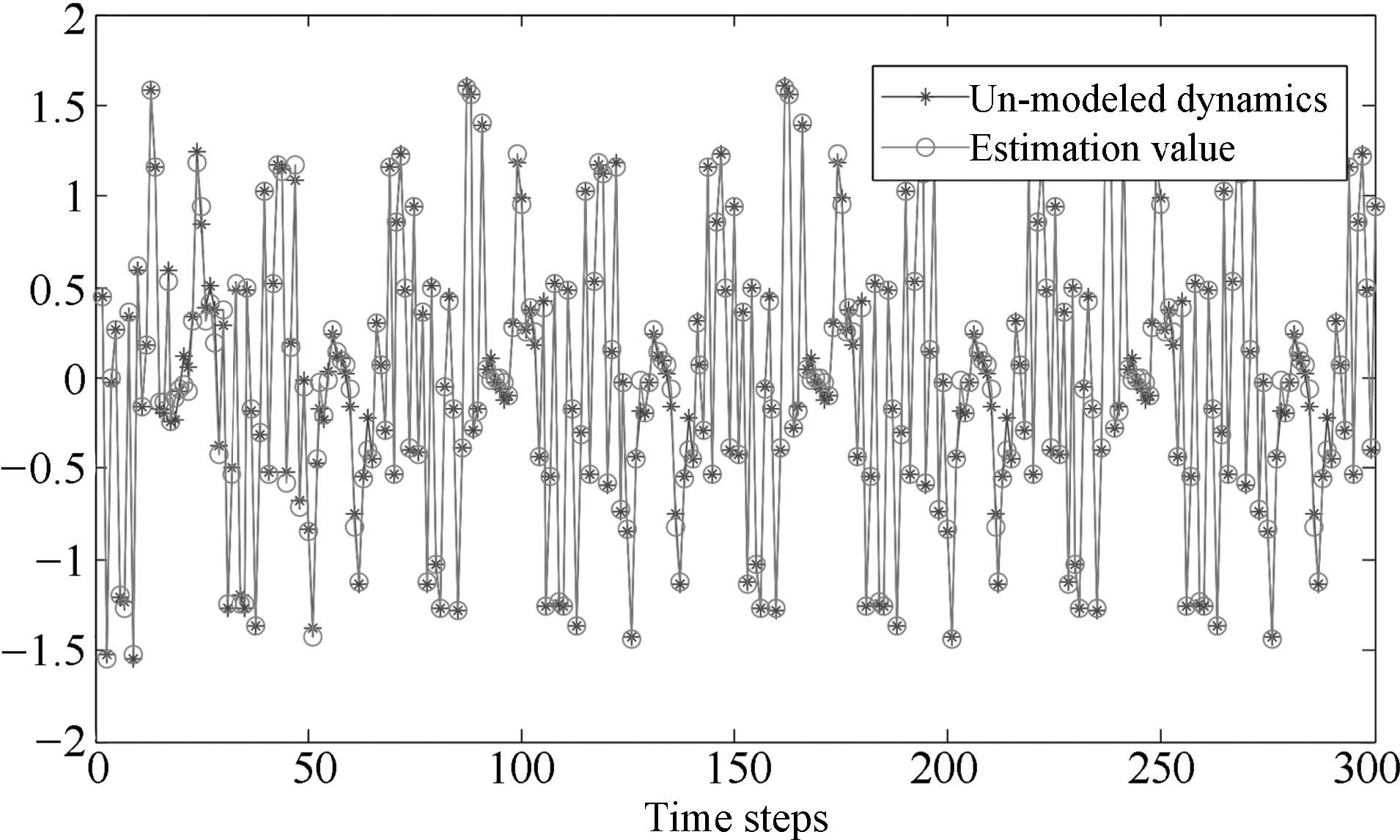
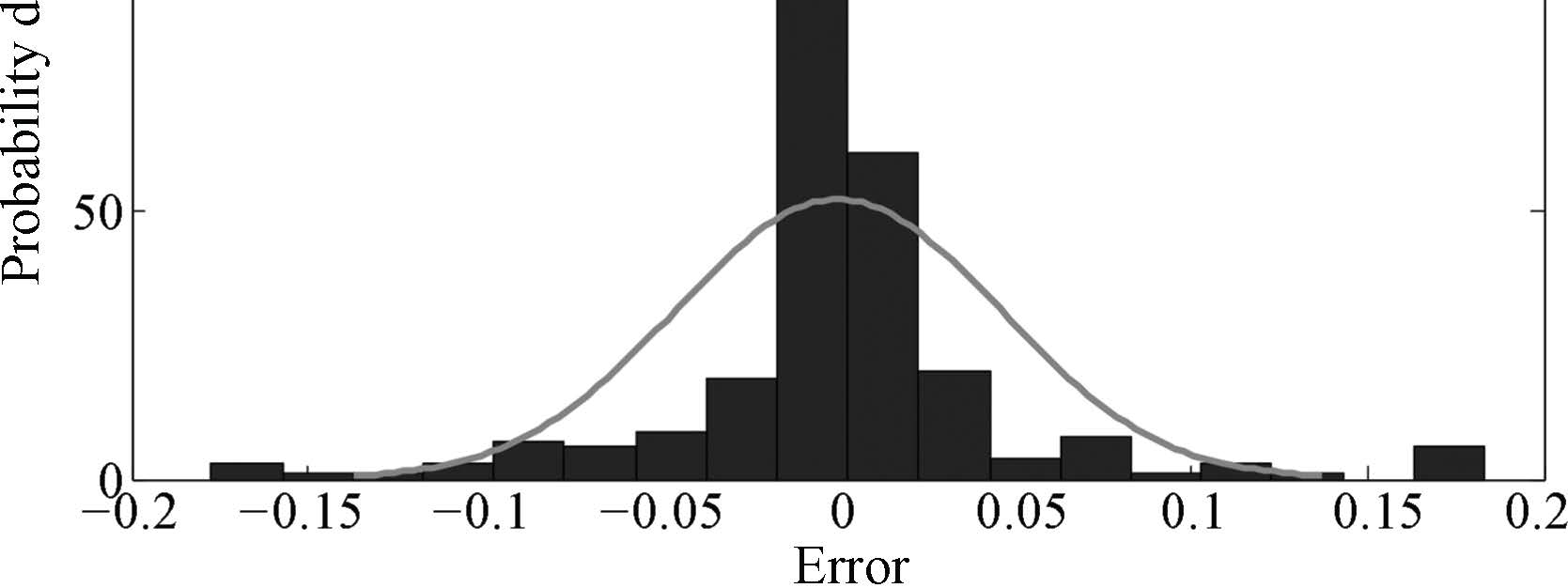
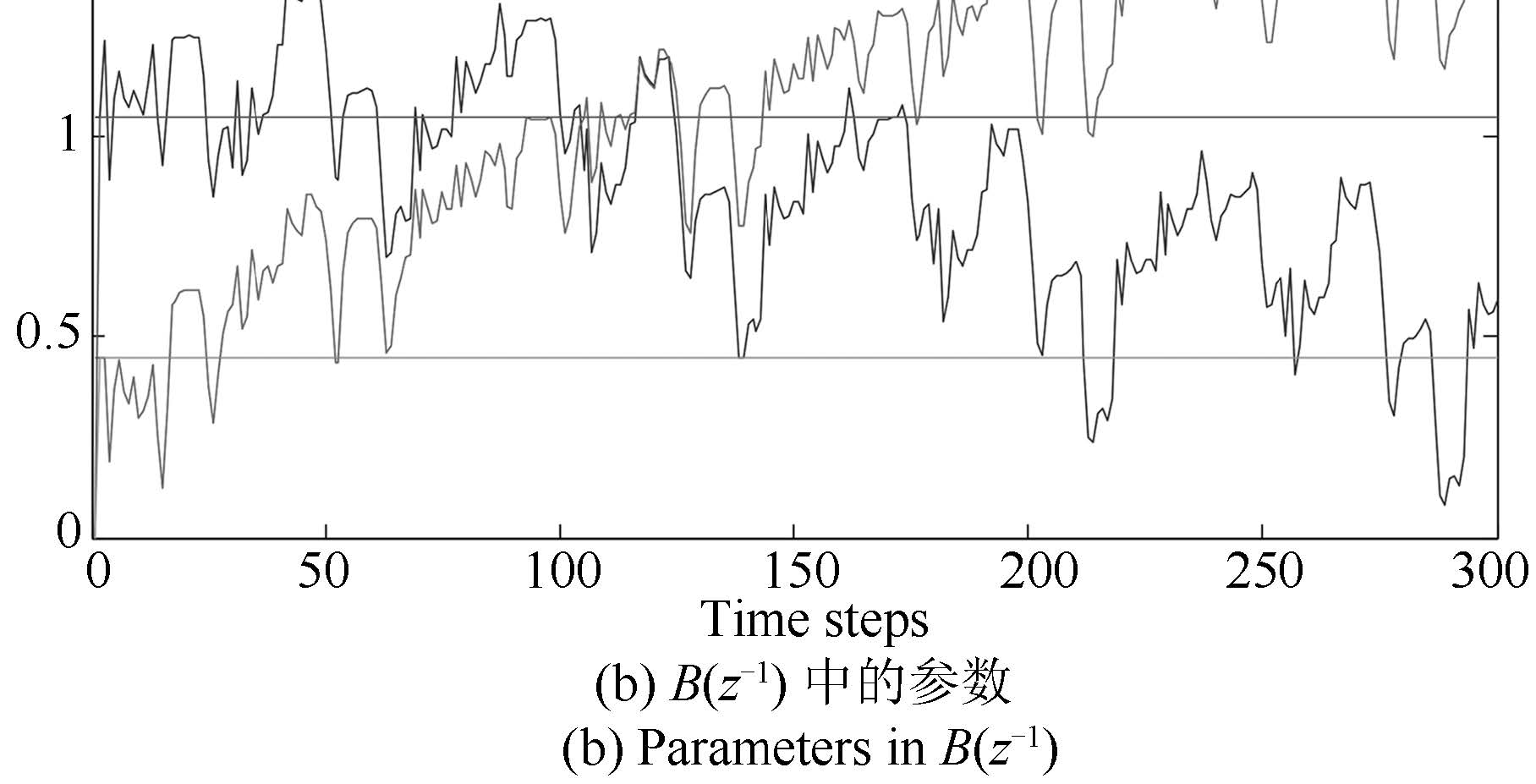
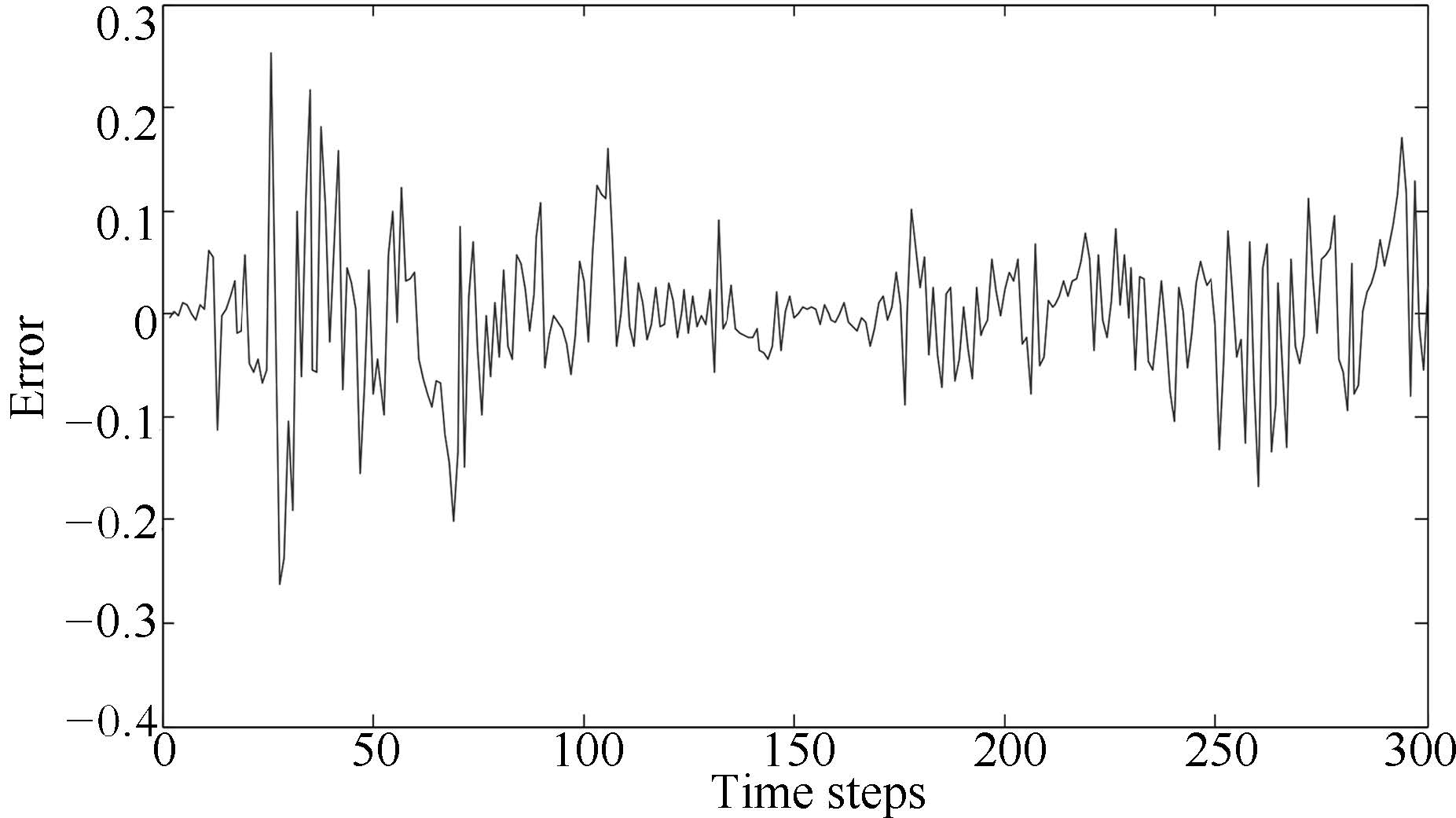
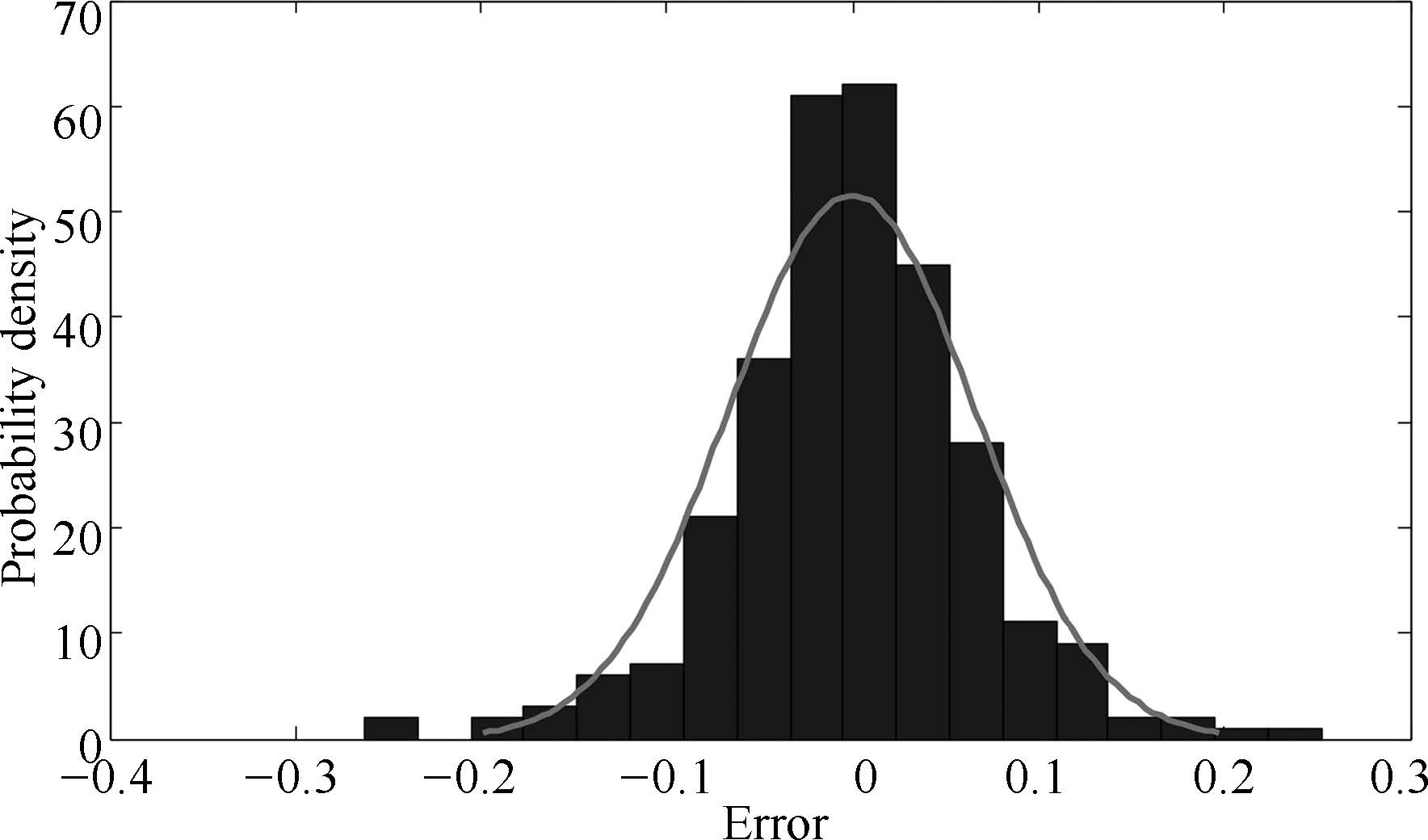
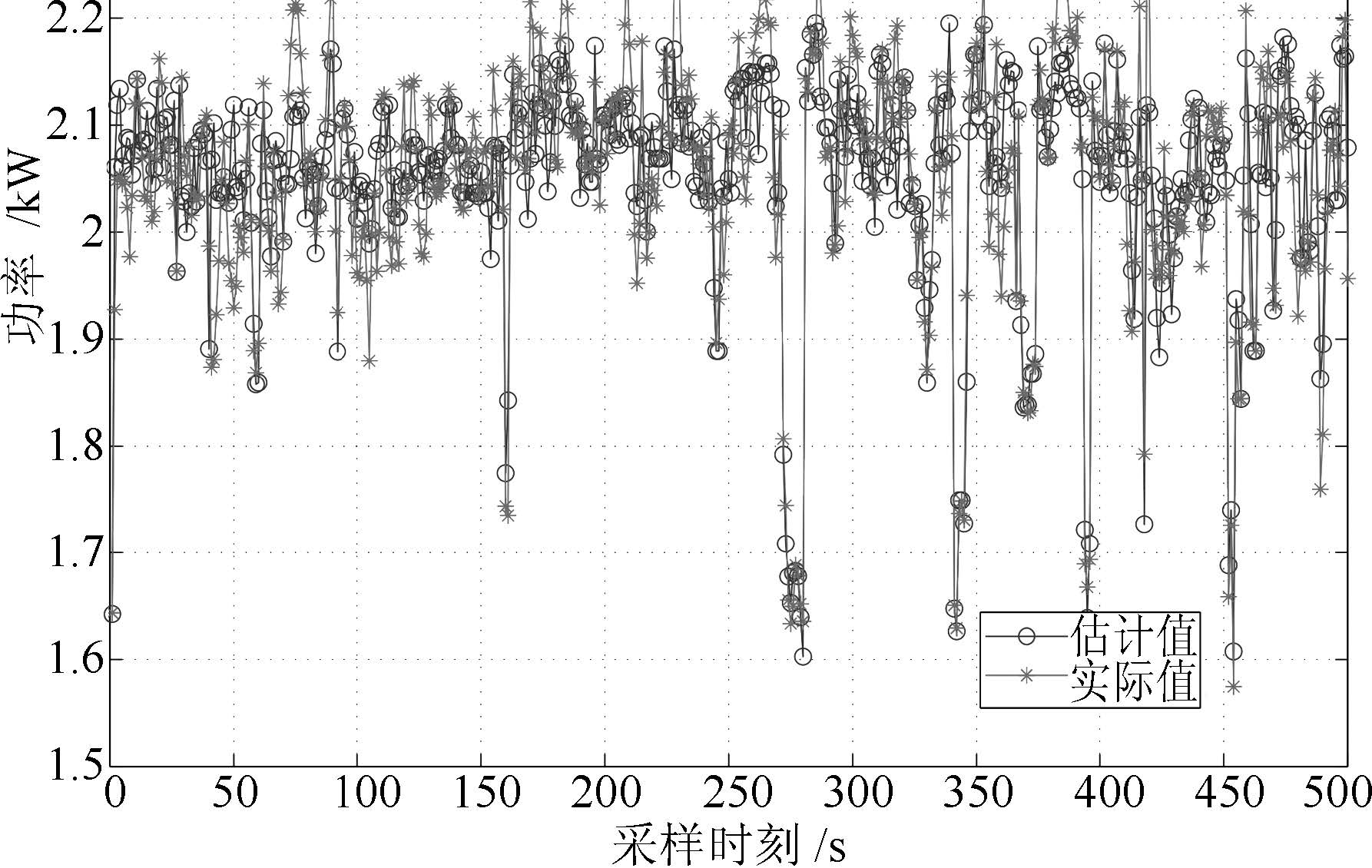
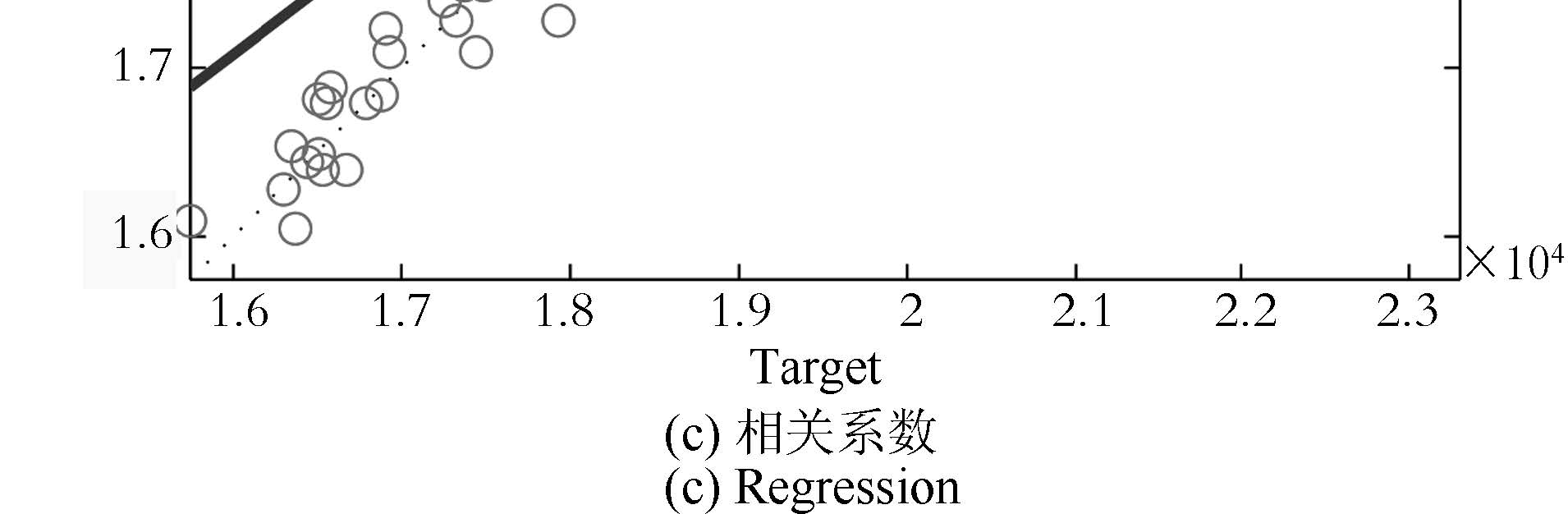
表征产品在工业过程加工的质量、效率、成本、能耗或物耗等的运行指标与过程控制系统的输出密切相关,它们之间的动态模型往往机理不清,具有强非线性,难以用精确数学模型描述,但运行指标的预报对运行操作具有重要意义.本文利用工业过程在工作点附近工作的特点,将过程控制系统的输出与运行指标之间的动态模型描述成线性模型与高阶非线性项即未建模动态组成,对线性模型以及未建模动态提出了一种由改进的投影算法与未建模动态估计算法组成的交替辨识算法.最后,通过数值仿真实验和电熔镁炉的真实数据进行功率预报实验,实验结果表明了所提方法的有效性.
表征产品在工业过程加工的质量、效率、成本、能耗或物耗等的运行指标与过程控制系统的输出密切相关,它们之间的动态模型往往机理不清,具有强非线性,难以用精确数学模型描述,但运行指标的预报对运行操作具有重要意义.本文利用工业过程在工作点附近工作的特点,将过程控制系统的输出与运行指标之间的动态模型描述成线性模型与高阶非线性项即未建模动态组成,对线性模型以及未建模动态提出了一种由改进的投影算法与未建模动态估计算法组成的交替辨识算法.最后,通过数值仿真实验和电熔镁炉的真实数据进行功率预报实验,实验结果表明了所提方法的有效性.








2017, 43(1): 114-131.
doi: 10.16383/j.aas.2017.c150810
cstr: 32138.14.j.aas.2017.c150810
摘要:
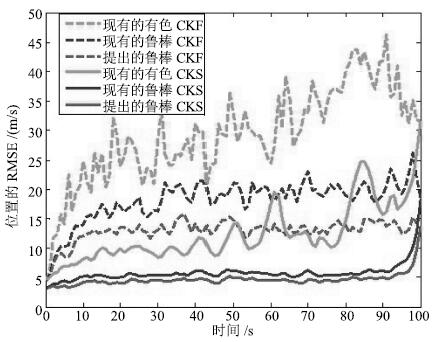
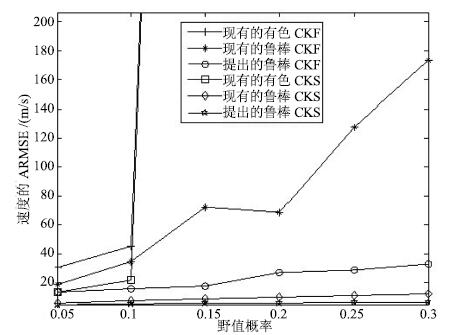
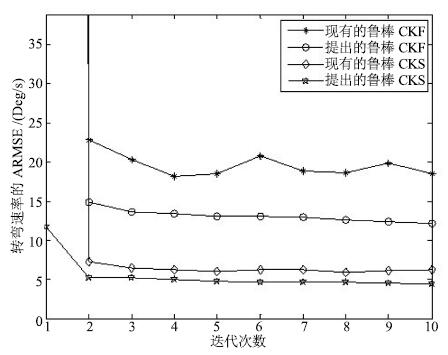
为了解决带有色厚尾量测噪声的非线性状态估计问题,本文提出了新的鲁棒高斯近似(Gaussian approximate,GA)滤波器和平滑器.首先,基于状态扩展方法将量测差分后带一步延迟状态和白色厚尾量测噪声的非线性状态估计问题,转化成带厚尾量测噪声的标准非线性状态估计问题.其次,针对量测差分后模型中的噪声尺度矩阵和自由度(Degrees of freedom,DOF)参数未知问题,设计了新的高斯近似滤波器和平滑器,通过建立未知参数和待估计状态的共轭先验分布,并利用变分贝叶斯方法同时估计未知的状态、尺度矩阵、自由度参数.最后,利用目标跟踪仿真验证了本文提出的带有色厚尾量测噪声的鲁棒高斯近似滤波器和平滑器的有效性以及与现有方法相比的优越性.
为了解决带有色厚尾量测噪声的非线性状态估计问题,本文提出了新的鲁棒高斯近似(Gaussian approximate,GA)滤波器和平滑器.首先,基于状态扩展方法将量测差分后带一步延迟状态和白色厚尾量测噪声的非线性状态估计问题,转化成带厚尾量测噪声的标准非线性状态估计问题.其次,针对量测差分后模型中的噪声尺度矩阵和自由度(Degrees of freedom,DOF)参数未知问题,设计了新的高斯近似滤波器和平滑器,通过建立未知参数和待估计状态的共轭先验分布,并利用变分贝叶斯方法同时估计未知的状态、尺度矩阵、自由度参数.最后,利用目标跟踪仿真验证了本文提出的带有色厚尾量测噪声的鲁棒高斯近似滤波器和平滑器的有效性以及与现有方法相比的优越性.












2017, 43(1): 132-141.
doi: 10.16383/j.aas.2017.c150720
cstr: 32138.14.j.aas.2017.c150720
摘要:
非稀疏性是最小二乘支持向量机(Least squares support vector machine,LS-SVM)的主要不足,因此稀疏化是LS-SVM研究的重要内容.在目前LS-SVM稀疏化研究中,多数算法采用的是基于迭代选择的稀疏化策略,但是时间复杂度和稀疏化效果还不够理想.为了进一步改进LS-SVM稀疏化方法的性能,文中提出了一种基于全局代表点选择的快速LS-SVM稀疏化算法(Global-representation-based sparse least squares support vector machine,GRS-LSSVM).在综合考虑数据局部密度和全局离散度的基础上,给出了数据全局代表性指标来评估每个数据的全局代表性.利用该指标,在全部数据中,一次性地选择出其中最具有全局代表性的数据并构成稀疏化后的支持向量集,然后在此基础上求解决策超平面,是该算法的基本思路.该算法对LS-SVM的非迭代稀疏化研究进行了有益的探索.通过与传统的迭代稀疏化方法进行比较,实验表明GRS-LSSVM具有稀疏度高、稳定性好、计算复杂度低的优点.
非稀疏性是最小二乘支持向量机(Least squares support vector machine,LS-SVM)的主要不足,因此稀疏化是LS-SVM研究的重要内容.在目前LS-SVM稀疏化研究中,多数算法采用的是基于迭代选择的稀疏化策略,但是时间复杂度和稀疏化效果还不够理想.为了进一步改进LS-SVM稀疏化方法的性能,文中提出了一种基于全局代表点选择的快速LS-SVM稀疏化算法(Global-representation-based sparse least squares support vector machine,GRS-LSSVM).在综合考虑数据局部密度和全局离散度的基础上,给出了数据全局代表性指标来评估每个数据的全局代表性.利用该指标,在全部数据中,一次性地选择出其中最具有全局代表性的数据并构成稀疏化后的支持向量集,然后在此基础上求解决策超平面,是该算法的基本思路.该算法对LS-SVM的非迭代稀疏化研究进行了有益的探索.通过与传统的迭代稀疏化方法进行比较,实验表明GRS-LSSVM具有稀疏度高、稳定性好、计算复杂度低的优点.






2017, 43(1): 142-151.
doi: 10.16383/j.aas.2017.c150512
cstr: 32138.14.j.aas.2017.c150512
摘要:
主成分分析(Principle component analysis,PCA)是一种被广泛应用的降维方法.然而经典PCA的构造基于L2-模导致了其对离群点和噪声点敏感,同时经典PCA也不具备稀疏性的特点.针对此问题,本文提出基于Lp-模的稀疏主成分分析降维方法(LpSPCA).LpSPCA通过极大化带有稀疏正则项的Lp-模样本方差,使得其在降维的同时保证了稀疏性和鲁棒性.LpSPCA可用简单的迭代算法求解,并且当p≥1时该算法的收敛性可在理论上保证.此外通过选择不同的p值,LpSPCA可应用于更广泛的数据类型.人工数据及人脸数据上的实验结果表明,本文所提出的LpSPCA不仅具有较好的降维效果,并且具有较强的抗噪能力.
主成分分析(Principle component analysis,PCA)是一种被广泛应用的降维方法.然而经典PCA的构造基于L2-模导致了其对离群点和噪声点敏感,同时经典PCA也不具备稀疏性的特点.针对此问题,本文提出基于Lp-模的稀疏主成分分析降维方法(LpSPCA).LpSPCA通过极大化带有稀疏正则项的Lp-模样本方差,使得其在降维的同时保证了稀疏性和鲁棒性.LpSPCA可用简单的迭代算法求解,并且当p≥1时该算法的收敛性可在理论上保证.此外通过选择不同的p值,LpSPCA可应用于更广泛的数据类型.人工数据及人脸数据上的实验结果表明,本文所提出的LpSPCA不仅具有较好的降维效果,并且具有较强的抗噪能力.




2017, 43(1): 152-160.
doi: 10.16383/j.aas.2017.c150519
cstr: 32138.14.j.aas.2017.c150519
摘要:
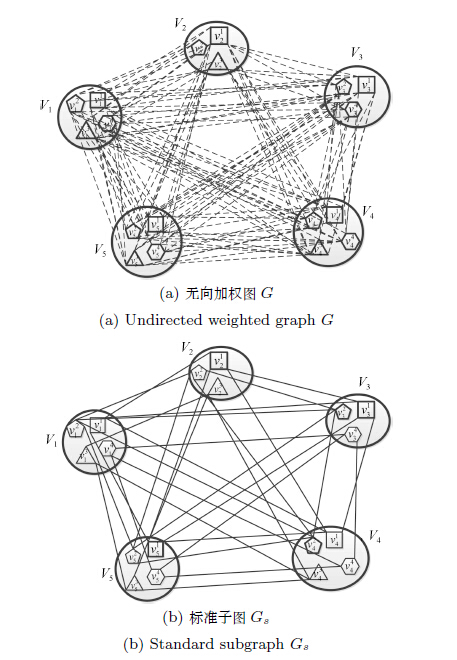
检测跟踪是近期多目标跟踪研究的热点方向之一.目前大部分方法都是基于相邻帧之间的双向匹配,对检测点进行数据融合.本文提出的方法是,给定一个滑动时间窗口,在窗口内对某个目标每帧出现的检测点进行一次性数据融合.我们把多目标跟踪看作图的分割问题,利用广义关联聚类(Generalized correlation clustering problem,GCCP)图优化文中提出的数据融合.吸取分层数据关联的思想,把多目标跟踪分成两个阶段.首先,在时间窗口内遵循检测点,利用广义关联聚类,得到自适应长度的轨迹片段,轨迹片段长度不受窗口宽度的限制.然后,基于轨迹片段进一步数据关联,得到目标的长轨迹.在公共数据集上的实验测试表明,本文方法能够有效地实现多目标跟踪,对于遮挡处理、身份转换处理以及轨迹的生成具有很好的鲁棒性,多目标跟踪准确率(Multiple object tracking accuracy,MOTA)超过当前水平.
检测跟踪是近期多目标跟踪研究的热点方向之一.目前大部分方法都是基于相邻帧之间的双向匹配,对检测点进行数据融合.本文提出的方法是,给定一个滑动时间窗口,在窗口内对某个目标每帧出现的检测点进行一次性数据融合.我们把多目标跟踪看作图的分割问题,利用广义关联聚类(Generalized correlation clustering problem,GCCP)图优化文中提出的数据融合.吸取分层数据关联的思想,把多目标跟踪分成两个阶段.首先,在时间窗口内遵循检测点,利用广义关联聚类,得到自适应长度的轨迹片段,轨迹片段长度不受窗口宽度的限制.然后,基于轨迹片段进一步数据关联,得到目标的长轨迹.在公共数据集上的实验测试表明,本文方法能够有效地实现多目标跟踪,对于遮挡处理、身份转换处理以及轨迹的生成具有很好的鲁棒性,多目标跟踪准确率(Multiple object tracking accuracy,MOTA)超过当前水平.