

Alternating Identification Algorithm and Its Application to a Class of Nonlinear Discrete-time Dynamical Systems
-
摘要: 表征产品在工业过程加工的质量、效率、成本、能耗或物耗等的运行指标与过程控制系统的输出密切相关,它们之间的动态模型往往机理不清,具有强非线性,难以用精确数学模型描述,但运行指标的预报对运行操作具有重要意义.本文利用工业过程在工作点附近工作的特点,将过程控制系统的输出与运行指标之间的动态模型描述成线性模型与高阶非线性项即未建模动态组成,对线性模型以及未建模动态提出了一种由改进的投影算法与未建模动态估计算法组成的交替辨识算法.最后,通过数值仿真实验和电熔镁炉的真实数据进行功率预报实验,实验结果表明了所提方法的有效性.Abstract: The major operational indexes such as quality, efficiency, cost, energy and material consumptions in industrial process of product processing are closely related to the output of the process control system; their dynamic models between the operational indexes and the output of the process control system are often nonlinear and with unclear structure nature generally. Therefore, it is difficult to obtain an accurate model. However, the prediction of operational index is of great significance to the operational operations. In this paper, based upon the characteristic that complex industrial systems often work near an operating point, the dynamic model between the operational indexes and the output of the process control system is represented by a linear model plus a higher order nonlinear term (unmodeled dynamics). With the above development, an alternating identification algorithm which consists of improved projection algorithm for the linear model and an estimation algorithm for unmodeled dynamic are proposed. Finally, through simulation study and a power forecast experiment using real data of an electric-melting magnesia furnace, the effectiveness of the proposed algorithm is justified.
-
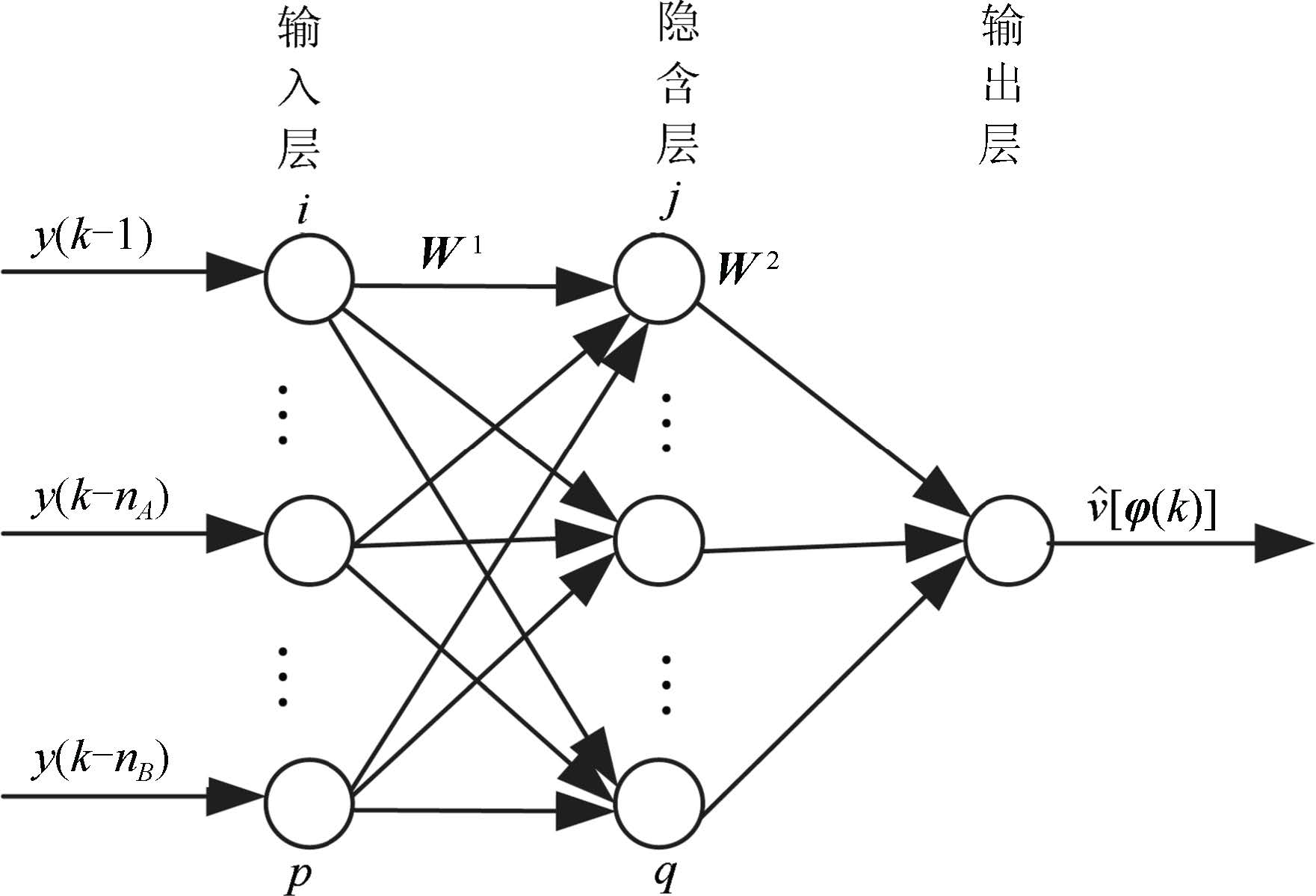
图 1 BP神经网络估计$v[\varphi (k)]$的结构
Fig. 1 The structure of the estimation for $v[\varphi (\text{k})]$ by BP neural networks[
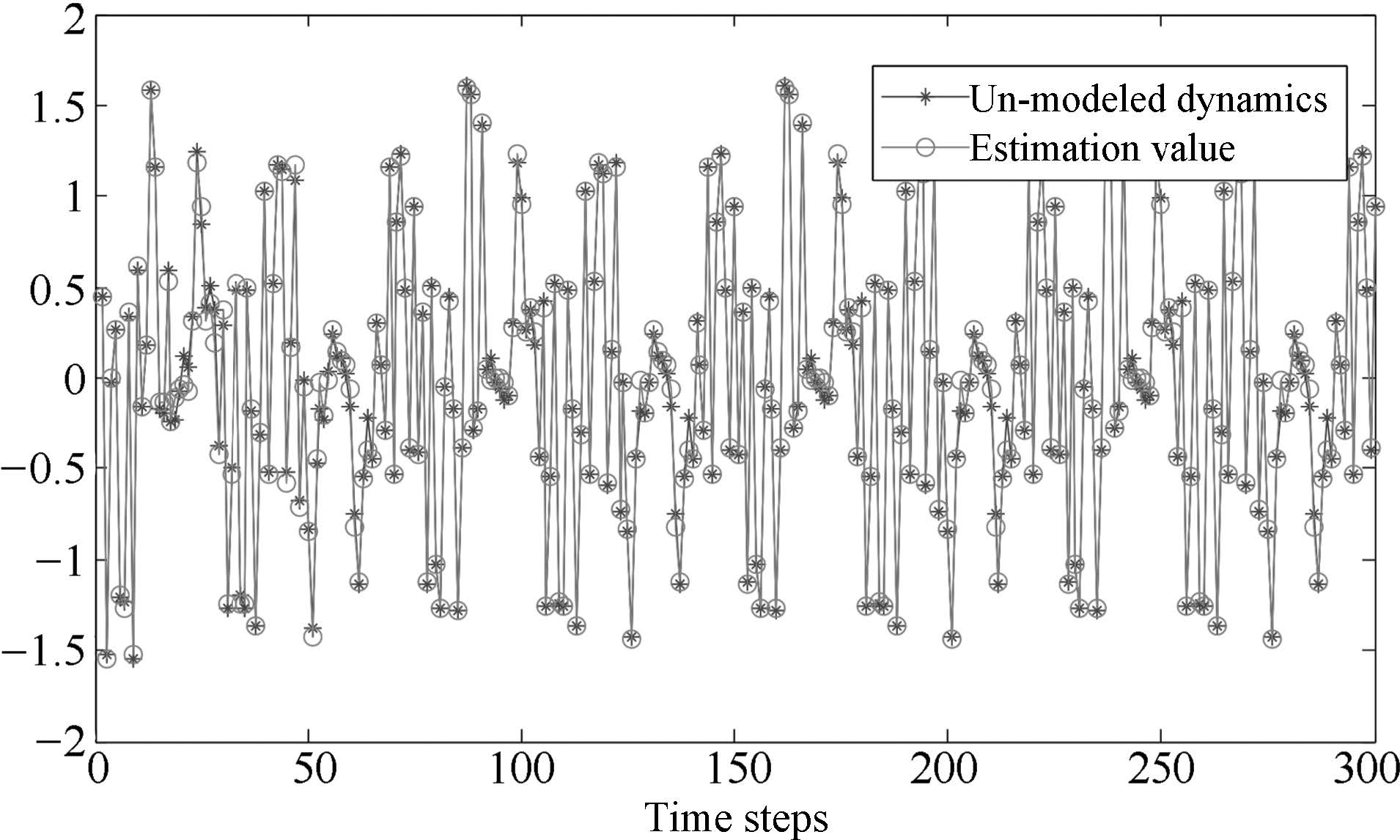
图 3 未建模动态(星线)及其估计值(圈线)
Fig. 3 The un-modeled dynamics (star line) and its estimation value (circle line)

图 4 采用BP神经网络估计未建模动态的误差
Fig. 4 Estimation error for the un-modeled dynamics which produced by BP neural networks
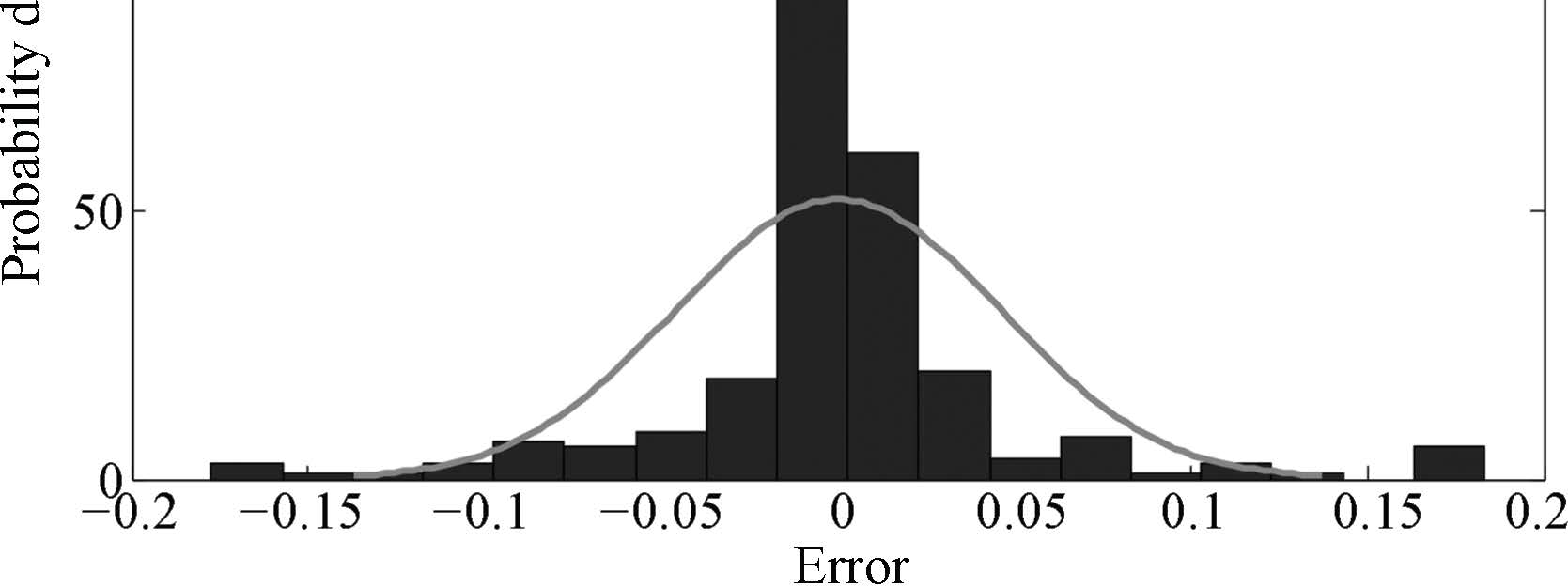
图 5 采用BP神经网络的估计误差(残差)的概率密度函数
Fig. 5 The probability density functions of prediction errors (residuals) by BP neural networks

图 6 BP神经网络的性能、训练状况和相关系数
Fig. 6 The performance,training state,and regression of BP neural networks
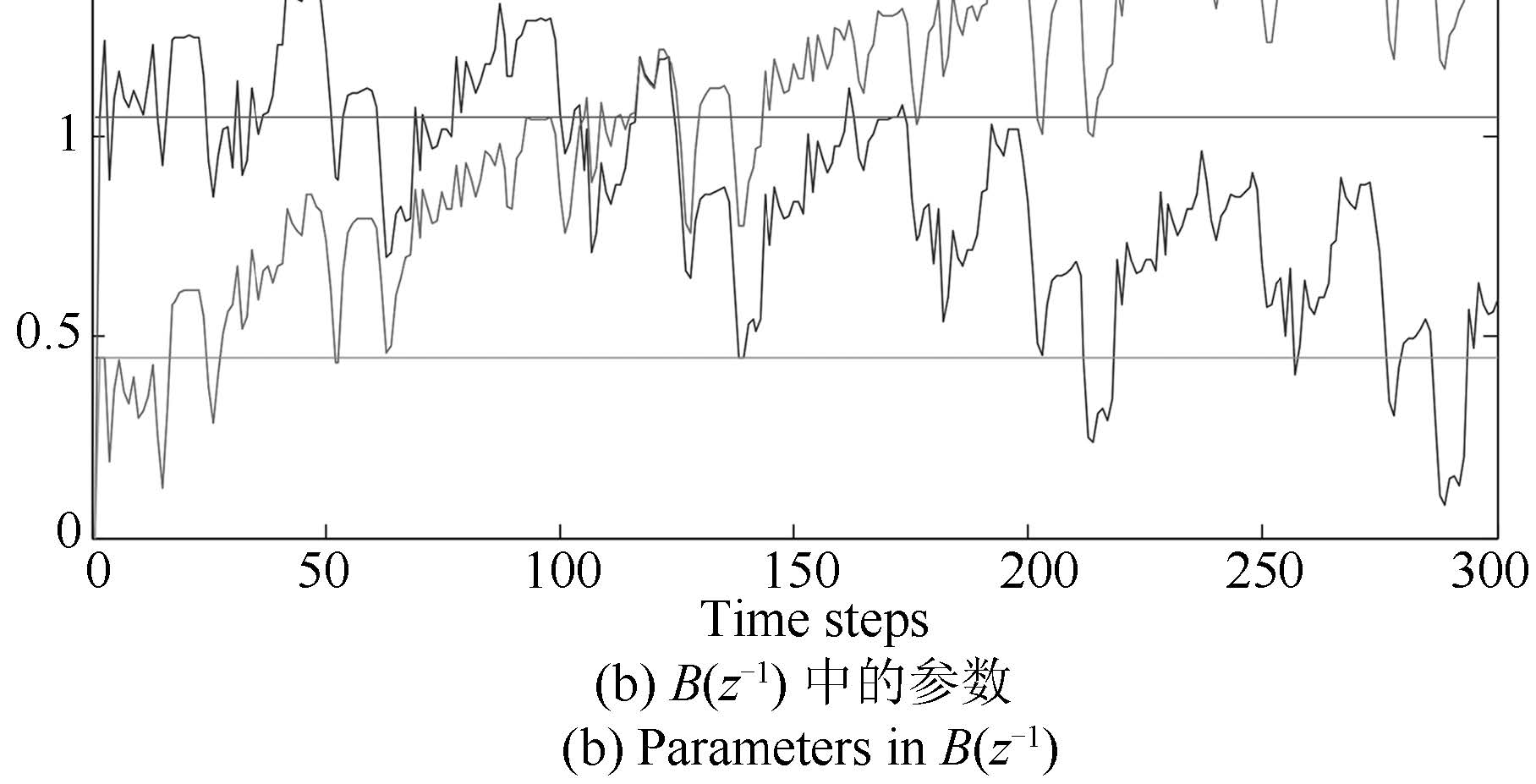
图 7 $A({z^{ - 1}})$ 中的参数和$B({z^{ - 1}})$中的参数
Fig. 7 Parameters in A(z-1) and parameters in B(z-1)

图 8 未建模动态(星线)及其估计值(圈线)
Fig. 8 The un-modeled dynamics (star line) and its estimation value (circle line) by BP neural networks

图 9 采用BP神经网络估计未建模动态的误差
Fig. 9 Estimation error for the un-modeled dynamics which produced by BP neural networks with he proposed method
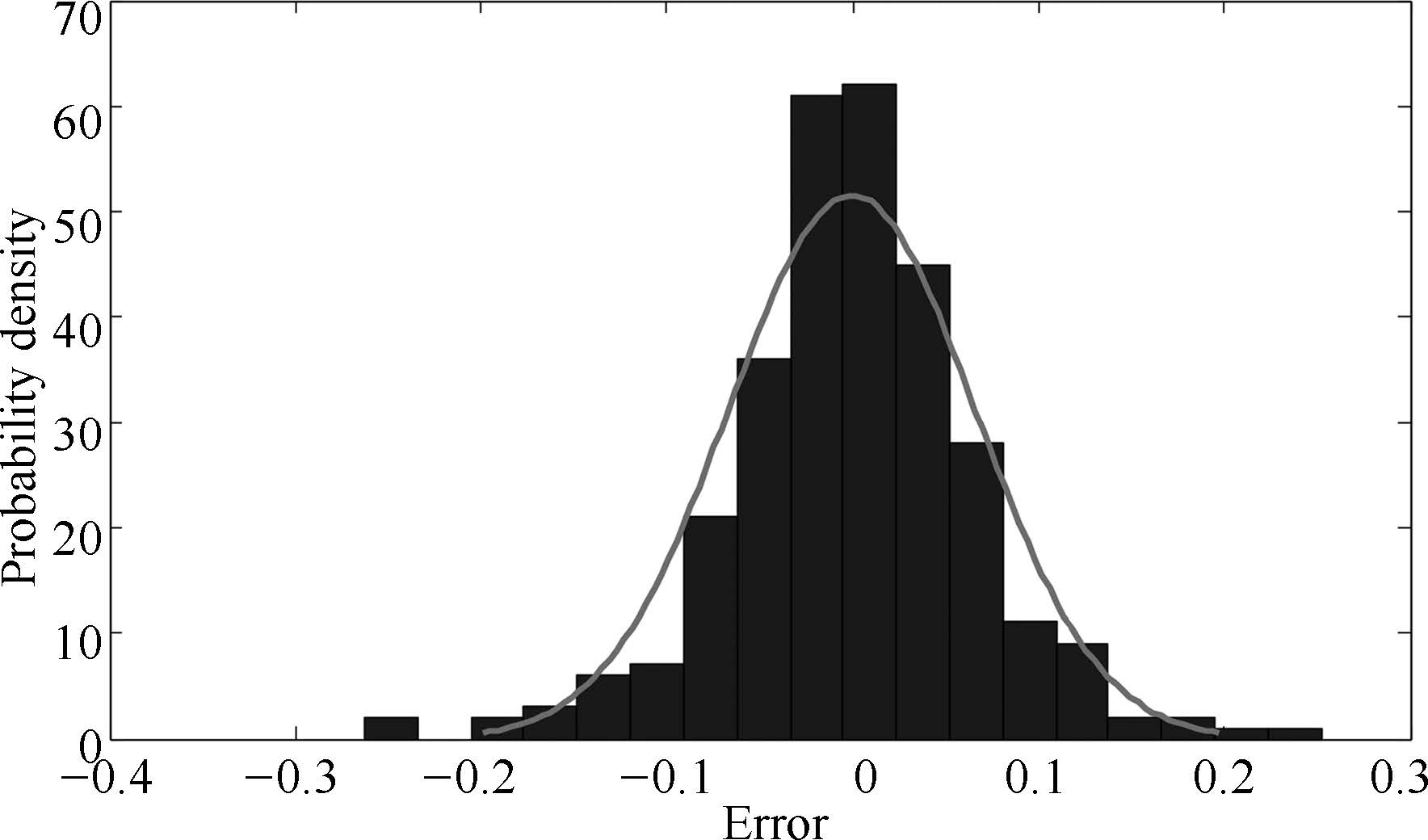
图 10 采用BP神经网络的估计误差(残差)的概率密度函数
Fig. 10 The probability density functions of prediction errors (residuals) by BP neural networks

图 11 BP 神经网络的性能、训练状况和相关系数
Fig. 11 The performance, training state, and regression of BP neural networks
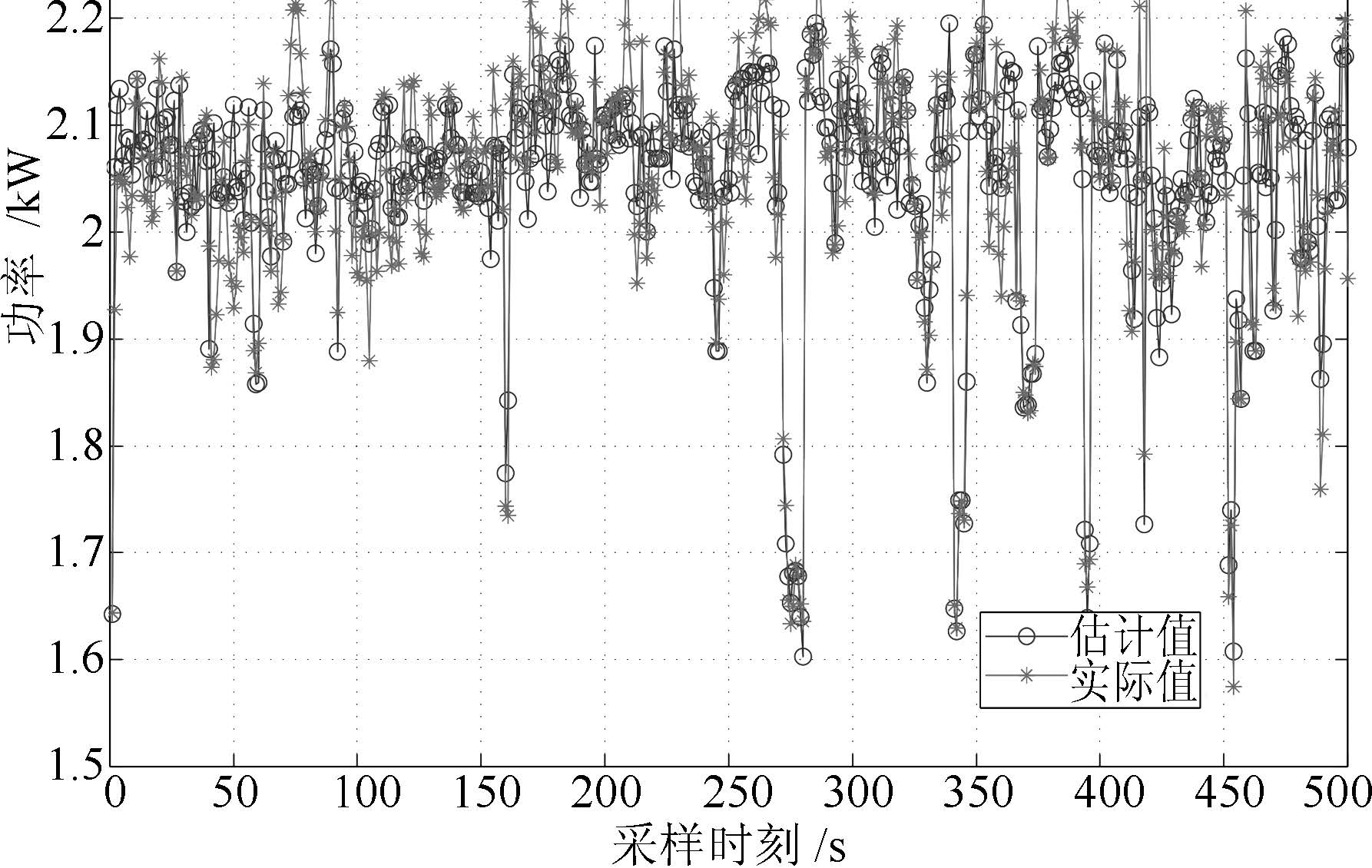
图 14 功率(星线) 及其估计值(圈线)
Fig. 14 The power (star line) and its estimation value (circle line) by the proposed method

图 16 估计误差(残差) 的概率密度函数
Fig. 16 The probability density functions of prediction errors (residuals)
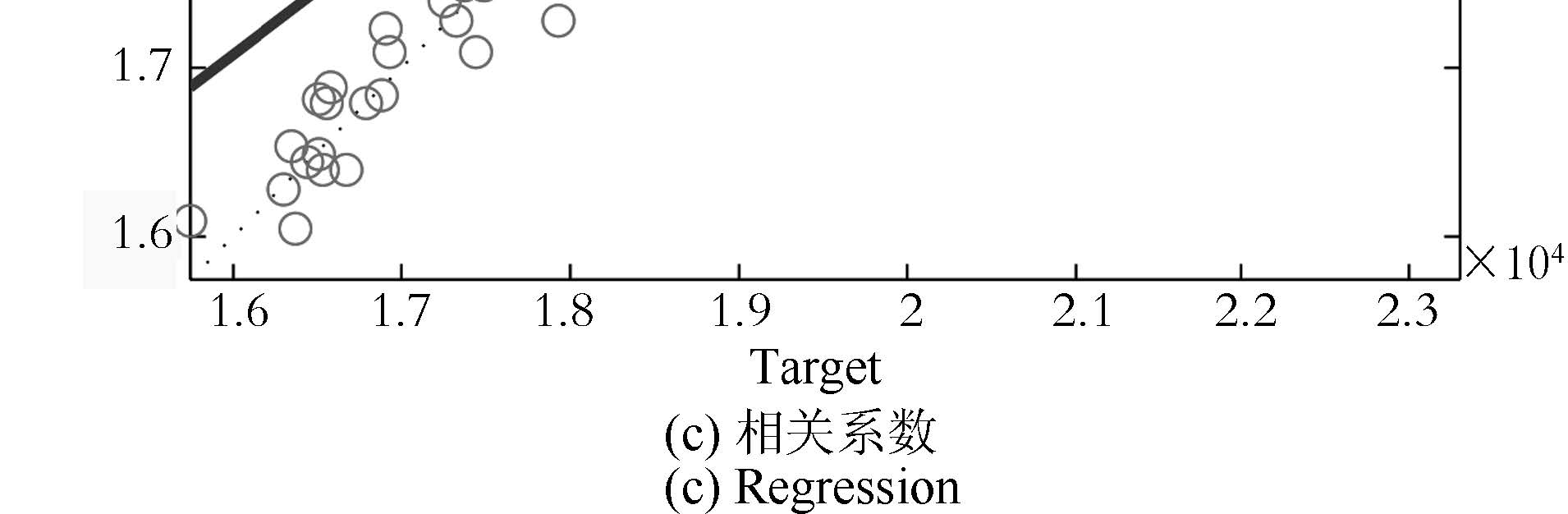
图 17 BP 神经网络的性能、训练状况和相关系数
Fig. 17 The performance, training state, and regression of BP neural networks
表 1 辨识的平均绝对值误差、方差以及标准差
Table 1 The average absolute error,variance and the standard deviation which produced by the proposed method
平均绝对值误差 方差 标准差 432.6477 311320 557.9634  下载: 导出CSV
下载: 导出CSV
-
[1] 柴天佑, 丁进良, 王宏, 苏春翌. 复杂工业过程运行的混合智能优化控制方法. 自动化学报, 2008, 34(5):505-515 http://www.aas.net.cn/CN/abstract/abstract13476.shtmlChai Tian-You, Ding Jin-Liang, Wang Hong, Su Chun-Yi. Hybrid intelligent optimal control method for operation of complex industrial processes. Acta Automatica Sinica, 2008, 34(5):505-515 http://www.aas.net.cn/CN/abstract/abstract13476.shtml [2] 柴天佑. 复杂工业过程运行优化与反馈控制. 自动化学报, 2013, 39(11):1744-1757 doi: 10.3724/SP.J.1004.2013.01744Chai Tian-You. Operational optimization and feedback control for complex industrial. Acta Automatica Sinica, 2013, 39(11):1744-1757 doi: 10.3724/SP.J.1004.2013.01744 [3] Fu Jun, Chai Tian-You, Su Chun-Yi, Xie Wen-Fang. Adaptive output tracking control of a class of nonlinear systems. Control Engineering of China, 2015, 22(4):731-736 [4] 王爱平, 王宏. 复杂工业系统运行优化品质分析——平方影响度原理. 控制工程, 2013, 20(6):991-995 http://www.cnki.com.cn/Article/CJFDTOTAL-JZDF201306001.htmWang Ai-ping, Wang Hong. Performance analysis for operational optimal control for complex industrial processesthe square impact principle. Control Engineering of China, 2013, 20(6):991-995 http://www.cnki.com.cn/Article/CJFDTOTAL-JZDF201306001.htm [5] Li H X, Guan S P. Hybrid intelligent control strategy. Supervising a DCS-controlled batch process. IEEE Control Systems, 2001, 21(3):36-48 doi: 10.1109/37.924796 [6] Diaz S, Luque J, Romero M C, Escudero J I. Power systems monitoring and control using telecom network management standards. IEEE Transactions on Power Delivery, 2005, 20(2):1349-1356 doi: 10.1109/TPWRD.2004.833918 [7] Nima A, Farshid K, Hamidreza Z. Wind power prediction by a new forecast engine composed of modified hybrid neural network and enhanced particle swarm optimization. IEEE Transactions on Sustainable Energy, 2011, 2(3):265-276 doi: 10.1109/TSTE.2011.2114680 [8] Gyan R B, Maheshwari R P, Dewal M L. Modeling, control, and monitoring of S3RS-based hydrogen cooling system in thermal power plant. IEEE Transactions on Industrial Electronics, 2012, 59(1):562-570 doi: 10.1109/TIE.2011.2134059 [9] Khosravi A, Nahavandi S, Creighton D. Prediction intervals for short-term wind farm power generation forecasts. IEEE Transactions on Sustainable Energy, 2013, 4(3):602-610 doi: 10.1109/TSTE.2012.2232944 [10] Paparoditis E, Sapatinas T. Short-term load forecasting:the similar shape functional time-series predictor. IEEE Transactions on Power Systems, 2013, 28(4):3818-3825 doi: 10.1109/TPWRS.2013.2272326 [11] Quan H, Srinivasan D, Khosravi A. Short-term load and wind power forecasting using neural network-based prediction intervals. IEEE Transactions on Neural Networks and Learning Systems, 2014, 25(2):303-315 doi: 10.1109/TNNLS.2013.2276053 [12] Ceperic E, Ceperic V, Baric A. A strategy for short-term load forecasting by support vector regression machines. IEEE Transactions on Power Systems, 2013, 28(4):4356-4364 doi: 10.1109/TPWRS.2013.2269803 [13] Atalik T, Cadirci I, Demirci T, Ermis M, Inan T, Kalaycioglu A S, Salor O. Multipurpose platform for power system monitoring and analysis with sample grid applications. IEEE Transactions on Instrumentation and Measurement, 2014, 63(3):566-582 doi: 10.1109/TIM.19 [14] Huang T C, Du M J, Kang Y C, Peng R H, Chen K H, Lin Y H, Tsai T Y, Lee C C, Chen L D, Chen J L. 120% percent harvesting energy improvement by maximum power extracting control for high sustainability magnetic power monitoring and harvesting system. IEEE Transactions on Power Electronics, 2015, 30(4):2262-2274 doi: 10.1109/TPEL.2014.2330868 [15] Zhang Y, Beaudin M, Taheri R, Zareipour H, Wood D. Day-ahead power output forecasting for small-scale solar photovoltaic electricity generators. IEEE Transactions on Smart Grid, 2015, 6(5):2253-2262 doi: 10.1109/TSG.2015.2397003 [16] Rumelhart D E, Hinton G E, Williams R J. Learning internal representations by error propagation. Parallel Distributed Processing. Cambridge:MIT Press, 1986. 318-362 [17] Chen L J, Narendra K S. Nonlinear adaptive control using neural networks and multiple models. Automatica, 2001, 37(8):1245-1255 doi: 10.1016/S0005-1098(01)00072-3 [18] Chen S, Cowan C F N, Grant P M. Orthogonal least squares learning algorithm for radial basis function networks. IEEE Transactions On Neural Networks, 1991, 2(2):302-309 doi: 10.1109/72.80341 [19] 李士哲, 王印松, 张涛, 田靖雨. 基于时域指标的负荷控制系统性能评价. 控制工程, 2016, 23(3):864-869 http://www.baidu.com/link?url=siUxUka4d122u9vkAQu1WqwNSlgUoSbX0O3fGnxlxcbMQB0CZ1TTbXNI1U0s3VfPJNfPxbPHOf4_nkb4EKPmt18gXeicp5XB5zDPrWse1TSgcrLdbL6TrHEljDD5jabE2Bg3yo9DlNg585jURkZ00CNDKIu51w8n8PNUvMQAtyfLQ9ywfhQ9rXxqLegshWUhfFtOkcYUizTCTgVJaiZ9M1pYGguJ5cLJZaaBGzn7jXIzchBnKexrMt4Q0UTGxIzUwnHwU0lKRnxiVtrxbOLz7yVIPJPn83XJ608LjWJv6ipuAcRMOTY4sfxlWdJ31MZaMizHkKAIg1kYFcZMfUfoWYmIVa0zLBjuoi_u2kZafOb5FYvU6qkPv4S2pPCKo2MiC6_SbXBtzCjKLXbZ4PfVP5Q2pQcVV17jmeL58ZmJM6S7fQCo857MSe0RcKhU3olf&wd=&eqid=ba4eba1600043a1d000000055882b2bcLi Shi-Zhe, Wang Yin-Song, Zhang Tao, Tian Jing-Yu. Performance assessment of load control system based on time domain index. Control Engineering of China, 2016, 23(3):864-869 http://www.baidu.com/link?url=siUxUka4d122u9vkAQu1WqwNSlgUoSbX0O3fGnxlxcbMQB0CZ1TTbXNI1U0s3VfPJNfPxbPHOf4_nkb4EKPmt18gXeicp5XB5zDPrWse1TSgcrLdbL6TrHEljDD5jabE2Bg3yo9DlNg585jURkZ00CNDKIu51w8n8PNUvMQAtyfLQ9ywfhQ9rXxqLegshWUhfFtOkcYUizTCTgVJaiZ9M1pYGguJ5cLJZaaBGzn7jXIzchBnKexrMt4Q0UTGxIzUwnHwU0lKRnxiVtrxbOLz7yVIPJPn83XJ608LjWJv6ipuAcRMOTY4sfxlWdJ31MZaMizHkKAIg1kYFcZMfUfoWYmIVa0zLBjuoi_u2kZafOb5FYvU6qkPv4S2pPCKo2MiC6_SbXBtzCjKLXbZ4PfVP5Q2pQcVV17jmeL58ZmJM6S7fQCo857MSe0RcKhU3olf&wd=&eqid=ba4eba1600043a1d000000055882b2bc [20] Du K L, Swamy M N S. Radial basis function networks. Neural Networks and Statistical Learning. London:Springer-Verlag, 2014. [21] 吴志伟, 柴天佑, 吴永建. 电熔镁砂产品单吨能耗混合预报模型. 自动化学报, 2013, 39(12):2002-2011 http://www.aas.net.cn/CN/abstract/abstract18239.shtmlWu Zhi-Wei, Chai Tian-You, Wu Yong-Jian. A Hybrid prediction model of energy consumption per ton for fused magnesia. Acta Automatica Sinica, 2013, 39(12):2002-2011 http://www.aas.net.cn/CN/abstract/abstract18239.shtml [22] 郭茂先. 工业电炉. 北京:冶金工业出版社, 2002.Guo Mao-Xian. Industry Furnace. Beijing:Metallurgical Industry Press, 2002. [23] Zhao W X, Chen H F, Zheng W X. Recursive identification for nonlinear ARX systems based on stochastic approximation algorithm. IEEE Transactions on Automatic Control, 2010, 55(6):1287-1299 doi: 10.1109/TAC.2010.2042236 [24] Novak A, Simon L, Kadlec F, Lotton P. Nonlinear system identification using exponential swept-sine signal. IEEE Transactions on Instrumentation and Measurement, 2010, 59(8):2220-2229 doi: 10.1109/TIM.2009.2031836 期刊类型引用(9)
1. 刘鑫屏,陈艺文,董子健. 基于混合算法下RBF神经网络的执行机构非线性特性在线辨识与补偿. 动力工程学报. 2024(05): 792-801 .  百度学术
百度学术2. 刘切,李俊豪,王浩,曾建学,柴毅. 不确定性环境下维纳模型的随机变分贝叶斯学习. 自动化学报. 2024(06): 1185-1198 . 本站查看3. 谌卓玲,卢绍文,张亚军,潘庆玉. 工业过程指标的平滑交替辨识预报算法. 控制理论与应用. 2024(09): 1539-1547 . 百度学术4. 陶金梅,牛宏,张亚军,李旭生. 基于随机配置网络的非线性系统智能建模方法. 控制与决策. 2022(10): 2559-2564 . 百度学术5. 李荟,王福利,李鸿儒. 电熔镁炉熔炼过程异常工况识别及自愈控制方法. 自动化学报. 2020(07): 1411-1419 . 本站查看6. 牛宏,陶金梅,张亚军. 一种新的数据驱动的非线性自适应切换控制方法. 自动化学报. 2020(11): 2359-2366 . 本站查看7. 徐宝昌,张华,王金山. 基于径向基函数的非线性系统近似偏最小一乘准则辨识算法. 化工学报. 2019(02): 653-660 . 百度学术8. 魏萃,柴天佑,贾瑶,王良勇. 补偿信号法驱动的Pendubot自适应平衡控制. 自动化学报. 2019(06): 1146-1156 . 本站查看9. 董斌,刘艳梅,宋进良,韩洪刚,任川. 基于非线性时变参数的红外校验评估技术研究. 自动化仪表. 2017(10): 99-102 . 百度学术其他类型引用(12)
-



计量
- 文章访问数: 2372
- HTML全文浏览量: 323
- PDF下载量: 1299
- 被引次数: 21
