2016年 第42卷 第5期
2016, 42(5): 643-654.
doi: 10.16383/j.aas.2016.c160019
cstr: 32138.14.j.aas.2016.c160019
摘要:
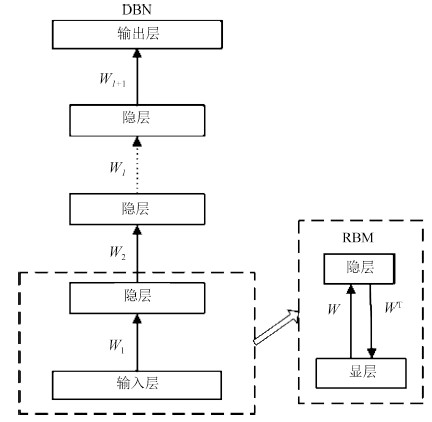
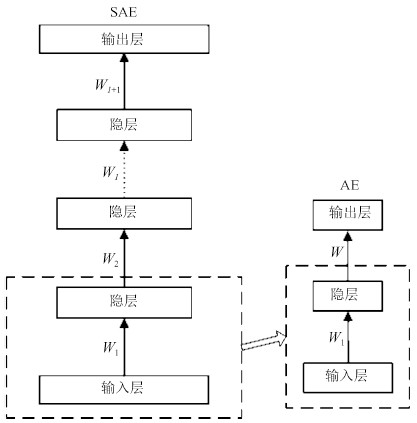
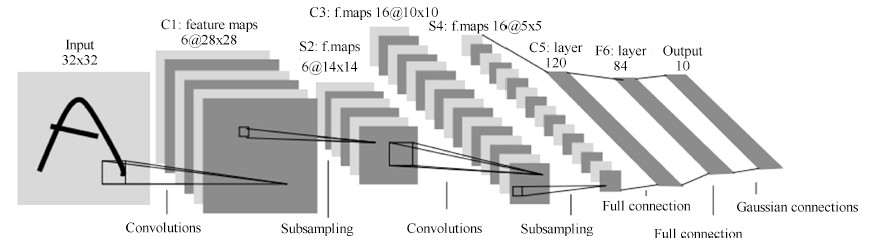
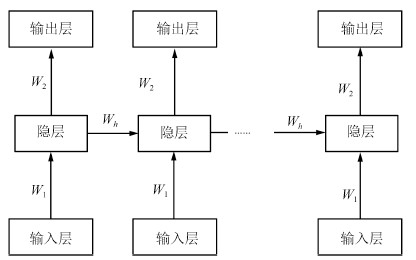
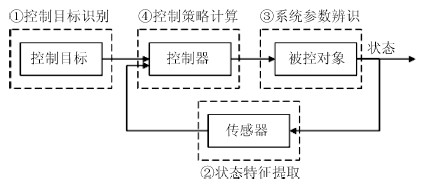
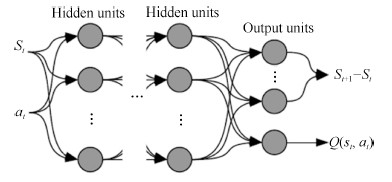
深度学习在特征提取与模型拟合方面显示了其潜力和优势. 对于存在高维数据的控制系统, 引入深度学习具有一定的意义. 近年来, 已有一些研究关注深度学习在控制领域的应用. 本文介绍了深度学习在控制领域的研究方向和现状, 包括控制目标识别、状态特征提取、系统参数辨识和控制策略计算. 并对相关的深度控制以及自适应动态规划与平行控制的方法和思想进行了描述. 总结了深度学习在控制领域研究中的主要作用和存在的问题, 展望了未来值得研究的方向.
深度学习在特征提取与模型拟合方面显示了其潜力和优势. 对于存在高维数据的控制系统, 引入深度学习具有一定的意义. 近年来, 已有一些研究关注深度学习在控制领域的应用. 本文介绍了深度学习在控制领域的研究方向和现状, 包括控制目标识别、状态特征提取、系统参数辨识和控制策略计算. 并对相关的深度控制以及自适应动态规划与平行控制的方法和思想进行了描述. 总结了深度学习在控制领域研究中的主要作用和存在的问题, 展望了未来值得研究的方向.





2016, 42(5): 655-667.
doi: 10.16383/j.aas.2016.c150198
cstr: 32138.14.j.aas.2016.c150198
摘要:
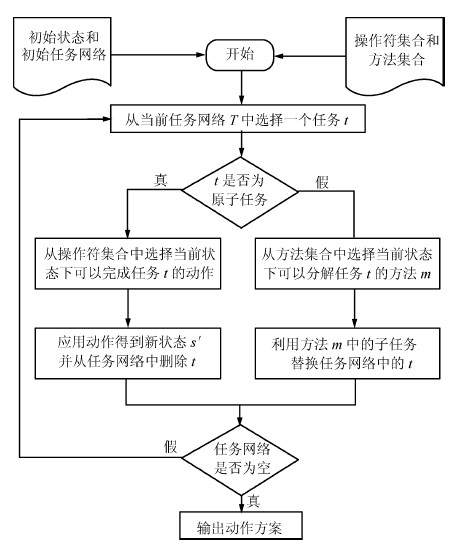
层次任务网络(Hierarchical task network, HTN)规划作为一项重要的智能规划技术被广泛应用于实际规划问题中, 传统的HTN规划无法处理不确定规划问题.然而, 现实世界不可避免地存在无法确定或无法预测的信息, 这使许多学者开始关注不确定规划问题, 不确定HTN规划研究也成为HTN规划研究的前沿.本文从HTN规划过程出发分析了不确定HTN规划问题中涉及的三类不确定, 即状态不确定、动作效果不确定和任务分解不确定; 总结了系统状态、动作效果和任务分解等不确定需要扩展确定性HTN规划模型的工作, 以此对现有不确定HTN规划的研究工作加以梳理和归类; 最后,对不确定HTN规划研究中仍需要解决的问题和未来的研究方向作了进一步展望.
层次任务网络(Hierarchical task network, HTN)规划作为一项重要的智能规划技术被广泛应用于实际规划问题中, 传统的HTN规划无法处理不确定规划问题.然而, 现实世界不可避免地存在无法确定或无法预测的信息, 这使许多学者开始关注不确定规划问题, 不确定HTN规划研究也成为HTN规划研究的前沿.本文从HTN规划过程出发分析了不确定HTN规划问题中涉及的三类不确定, 即状态不确定、动作效果不确定和任务分解不确定; 总结了系统状态、动作效果和任务分解等不确定需要扩展确定性HTN规划模型的工作, 以此对现有不确定HTN规划的研究工作加以梳理和归类; 最后,对不确定HTN规划研究中仍需要解决的问题和未来的研究方向作了进一步展望.
2016, 42(5): 668-669.
doi: 10.16383/j.aas.2016.y000004
cstr: 32138.14.j.aas.2016.y000004
摘要:
讨论了语言的三指功能(指名、指物、指心)与图灵测试的关系,指出早期的人工智能研究一般假设语言三指等价,因此致力于实现其中之一的功能.如果一个功能实现了,其他两个功能也就实现了, 比如图灵测试将智能的表现限定在指名功能里.但是,现代科学已经证明,语言三指不一定等价.这给人工智能的研究带来很大挑战,本文罗列了一些开放性问题,如对话的理论计算机制等.
讨论了语言的三指功能(指名、指物、指心)与图灵测试的关系,指出早期的人工智能研究一般假设语言三指等价,因此致力于实现其中之一的功能.如果一个功能实现了,其他两个功能也就实现了, 比如图灵测试将智能的表现限定在指名功能里.但是,现代科学已经证明,语言三指不一定等价.这给人工智能的研究带来很大挑战,本文罗列了一些开放性问题,如对话的理论计算机制等.
2016, 42(5): 671-675.
doi: 10.16383/j.aas.2016.y000001
cstr: 32138.14.j.aas.2016.y000001
摘要:
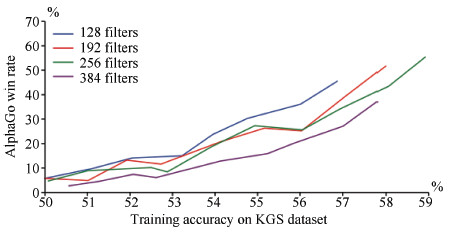
谷歌的围棋系统阿法狗(AlphaGo)在三月的比赛中以4:1的成绩击败了围棋世界冠军李世石, 大大超过了许多人对计算机围棋程序何时能赶上人类职业高手的预期(约10~30年).本文在技术层面分析了阿法狗系统的组成部分, 并基于它过去的公开对局预测了它可能的弱点.
谷歌的围棋系统阿法狗(AlphaGo)在三月的比赛中以4:1的成绩击败了围棋世界冠军李世石, 大大超过了许多人对计算机围棋程序何时能赶上人类职业高手的预期(约10~30年).本文在技术层面分析了阿法狗系统的组成部分, 并基于它过去的公开对局预测了它可能的弱点.

2016, 42(5): 676-684.
doi: 10.16383/j.aas.2016.y000002
cstr: 32138.14.j.aas.2016.y000002
摘要:
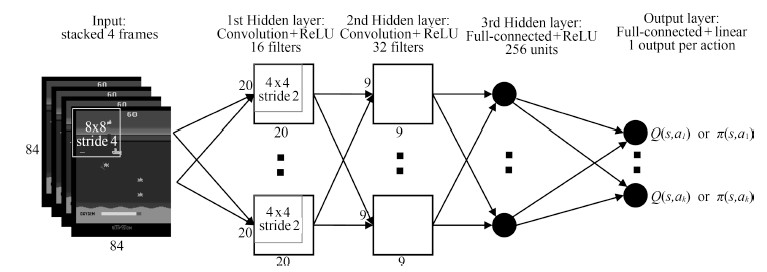
综述了近年来发展迅速的深度学习技术及其在游戏(或博弈)中的应用. 深度学习通过多层神经网络来构建端对端的从输入到输出的非线性映射, 相比传统的机器学习模型有显见的优势. 最近, 深度学习被成功地用于解决强化学习中的策略评估和策略优化的问题, 并于多种游戏的人工智能取得了突破性的提高. 本文详述了深度学习在常见游戏中的应用.
综述了近年来发展迅速的深度学习技术及其在游戏(或博弈)中的应用. 深度学习通过多层神经网络来构建端对端的从输入到输出的非线性映射, 相比传统的机器学习模型有显见的优势. 最近, 深度学习被成功地用于解决强化学习中的策略评估和策略优化的问题, 并于多种游戏的人工智能取得了突破性的提高. 本文详述了深度学习在常见游戏中的应用.
2016, 42(5): 685-695.
doi: 10.16383/j.aas.2016.y000003
cstr: 32138.14.j.aas.2016.y000003
摘要:
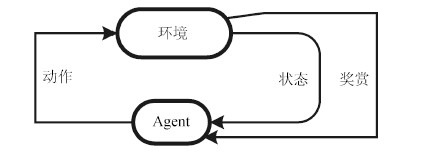
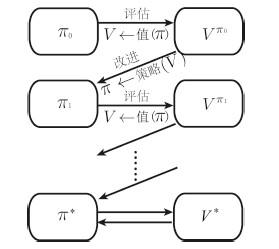
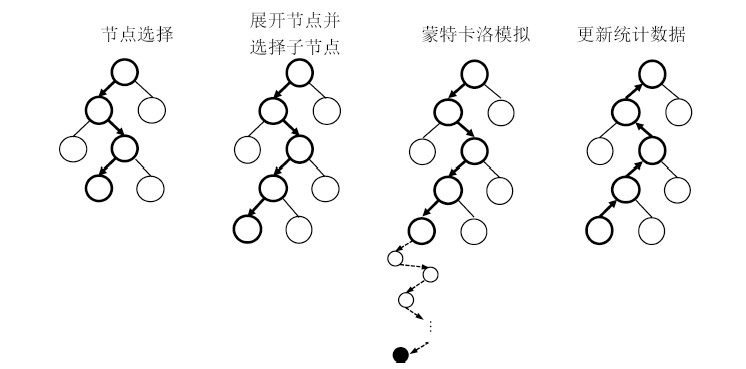
强化学习是一类特殊的机器学习, 通过与所在环境的自主交互来学习决策策略, 使得策略收到的长期累积奖赏最大. 最近, 在围棋和电子游戏等领域, 强化学习被成功用于取得人类水平的操作能力, 受到了广泛关注. 本文将对强化学习进行简要介绍, 重点介绍基于函数近似的强化学习方法, 以及在围棋等领域中的应用.
强化学习是一类特殊的机器学习, 通过与所在环境的自主交互来学习决策策略, 使得策略收到的长期累积奖赏最大. 最近, 在围棋和电子游戏等领域, 强化学习被成功用于取得人类水平的操作能力, 受到了广泛关注. 本文将对强化学习进行简要介绍, 重点介绍基于函数近似的强化学习方法, 以及在围棋等领域中的应用.
2016, 42(5): 696-705.
doi: 10.16383/j.aas.2016.c150577
cstr: 32138.14.j.aas.2016.c150577
摘要:
微创血管介入手术是治疗冠心病的重要治疗手段, 手术中要求对导管、导丝等介入器械高精度递送.得益于机器人技术的高精度、可远程操作等特点, 血管介入手术机器人的研制受到了极大关注.在微创血管介入手术中, 按导管或导丝远端所处血管部位, 将介入器械递送过程分为三个阶段: 1) 主动脉阶段:导丝或导管远端位于主动脉, 需快速前送, 以减少X射线和造影剂的使用; 2) 冠脉入口阶段:导丝或导管远端进入冠脉, 此时需选择相应的病变冠脉分支; 3) 冠脉病变阶段:导丝或导管远端位于狭窄病变部位, 需要高精度操作才能使导丝或导管穿过狭窄病变.针对器械递送的不同阶段, 提出具有运动缩放的主从控制方法, 通过改变血管介入手术机器人主端和从端之间的运动缩放关系, 实现机器人从端对主端操作的放大、缩小或等比例复现.通过在微创血管介入手术机器人平台实验, 验证了机器人从端对主端操作缩放的可行性和有效性.通过操作时间和操作精度对比分析得到:在缩放因子为4时操作时间减少39.9%;在缩放因子为1/4时, 平移和旋转操作精度分别提高72.9%和77.1%.
微创血管介入手术是治疗冠心病的重要治疗手段, 手术中要求对导管、导丝等介入器械高精度递送.得益于机器人技术的高精度、可远程操作等特点, 血管介入手术机器人的研制受到了极大关注.在微创血管介入手术中, 按导管或导丝远端所处血管部位, 将介入器械递送过程分为三个阶段: 1) 主动脉阶段:导丝或导管远端位于主动脉, 需快速前送, 以减少X射线和造影剂的使用; 2) 冠脉入口阶段:导丝或导管远端进入冠脉, 此时需选择相应的病变冠脉分支; 3) 冠脉病变阶段:导丝或导管远端位于狭窄病变部位, 需要高精度操作才能使导丝或导管穿过狭窄病变.针对器械递送的不同阶段, 提出具有运动缩放的主从控制方法, 通过改变血管介入手术机器人主端和从端之间的运动缩放关系, 实现机器人从端对主端操作的放大、缩小或等比例复现.通过在微创血管介入手术机器人平台实验, 验证了机器人从端对主端操作缩放的可行性和有效性.通过操作时间和操作精度对比分析得到:在缩放因子为4时操作时间减少39.9%;在缩放因子为1/4时, 平移和旋转操作精度分别提高72.9%和77.1%.








2016, 42(5): 706-714.
doi: 10.16383/j.aas.2016.c150546
cstr: 32138.14.j.aas.2016.c150546
摘要:
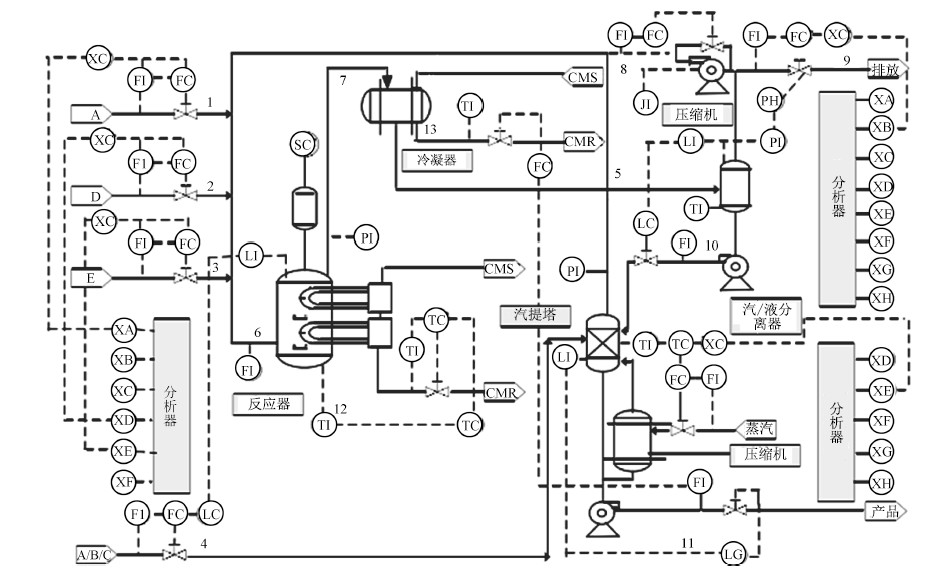
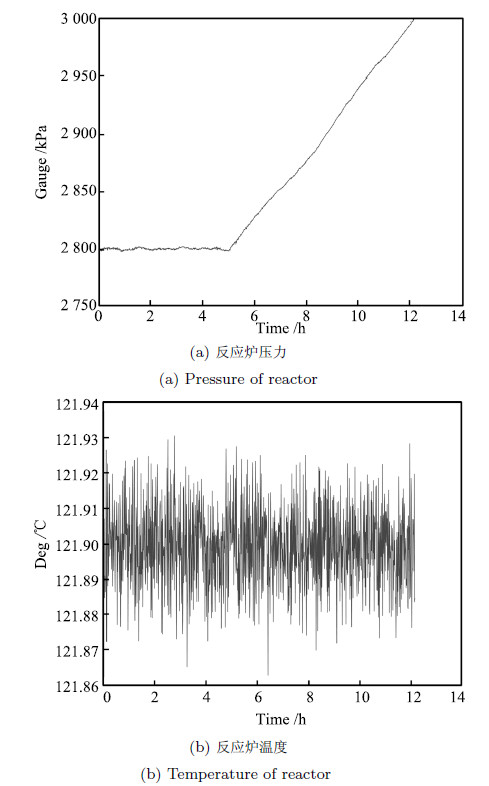
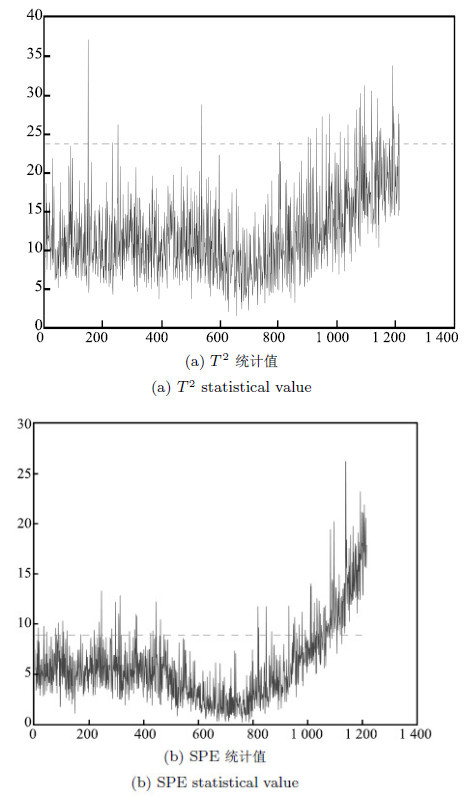
目前的工业控制系统(Industrial control systems, ICS) 安全评估方法中,往往利用专家经验对系统设备受攻击的可能性进行赋值, 主观性较强.针对这个问题,本文提出了一种系统设备受攻击可能性的量化计算方法. 工控系统设备受攻击的可能性与两个因素有关,该设备受攻击后, 造成系统损害的严重程度与异常检测算法发现异常的时间长短.因此, 通过对工控系统中的各个设备发动相同攻击,记录各个设备受攻击后系统敏感指标的变化情况与异常检测算法发现异常的时间, 将敏感指标变化情况与发现异常时间作为量化指标,提出基于多目标决策的量化计算方法, 计算出各个设备受攻击的可能性.本文以田纳西--伊斯曼过程(Tennessee-Eastman process, TEP)为例,验证了计算方法的可行性,得到了设备受攻击可能性的量化计算结果.
目前的工业控制系统(Industrial control systems, ICS) 安全评估方法中,往往利用专家经验对系统设备受攻击的可能性进行赋值, 主观性较强.针对这个问题,本文提出了一种系统设备受攻击可能性的量化计算方法. 工控系统设备受攻击的可能性与两个因素有关,该设备受攻击后, 造成系统损害的严重程度与异常检测算法发现异常的时间长短.因此, 通过对工控系统中的各个设备发动相同攻击,记录各个设备受攻击后系统敏感指标的变化情况与异常检测算法发现异常的时间, 将敏感指标变化情况与发现异常时间作为量化指标,提出基于多目标决策的量化计算方法, 计算出各个设备受攻击的可能性.本文以田纳西--伊斯曼过程(Tennessee-Eastman process, TEP)为例,验证了计算方法的可行性,得到了设备受攻击可能性的量化计算结果.
2016, 42(5): 715-723.
doi: 10.16383/j.aas.2016.c150574
cstr: 32138.14.j.aas.2016.c150574
摘要:
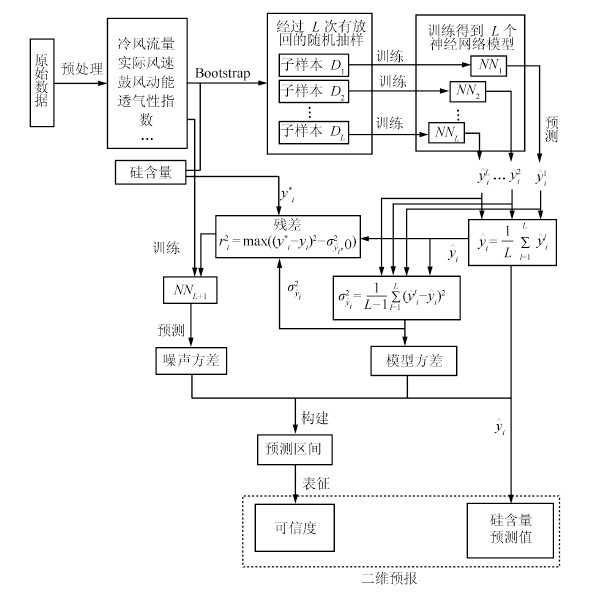
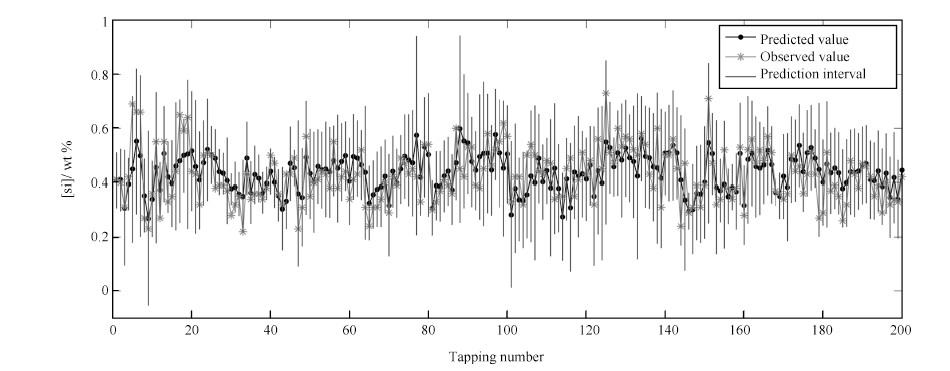
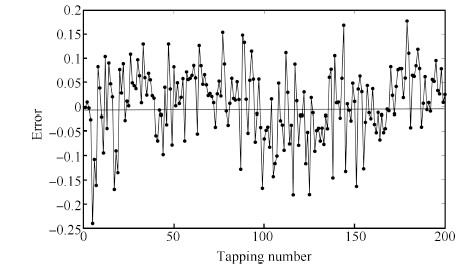
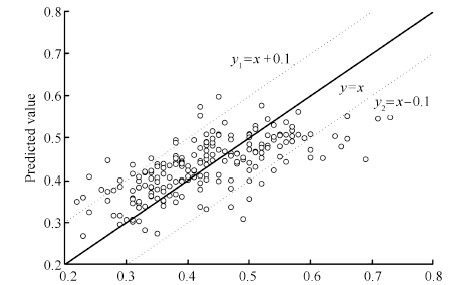
高炉铁水硅含量的实时准确预报对调控高炉炉温和稳定炉况具有重要作用, 但其预报结果一直存在准确度不高和缺乏可信度表征等问题, 特别是在炉况不稳、运行数据波动较大时, 预报结果的准确度和可信度急速下降, 不利于现场操作人员根据预报结果进行生产操作. 为此本文融合神经网络和Bootstrap预报区间方法, 构建高炉铁水硅含量的二维预报模型, 实现在预报硅含量值的同时给出了该预测值的可信度.应用实例表明, 本文提出的方法提高了硅含量点预测结果的准确度, 且预测区间宽度能正确地表征点预测结果的可信度, 对实际生产操作具有较好的指导意义.
高炉铁水硅含量的实时准确预报对调控高炉炉温和稳定炉况具有重要作用, 但其预报结果一直存在准确度不高和缺乏可信度表征等问题, 特别是在炉况不稳、运行数据波动较大时, 预报结果的准确度和可信度急速下降, 不利于现场操作人员根据预报结果进行生产操作. 为此本文融合神经网络和Bootstrap预报区间方法, 构建高炉铁水硅含量的二维预报模型, 实现在预报硅含量值的同时给出了该预测值的可信度.应用实例表明, 本文提出的方法提高了硅含量点预测结果的准确度, 且预测区间宽度能正确地表征点预测结果的可信度, 对实际生产操作具有较好的指导意义.
2016, 42(5): 724-734.
doi: 10.16383/j.aas.2016.c150554
cstr: 32138.14.j.aas.2016.c150554
摘要:
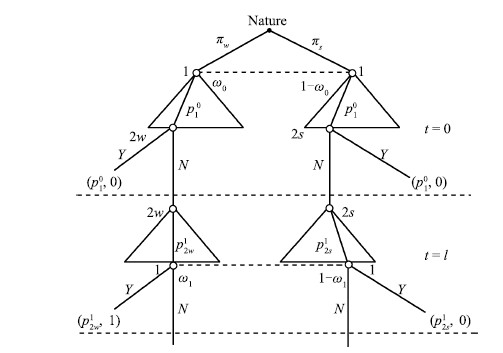
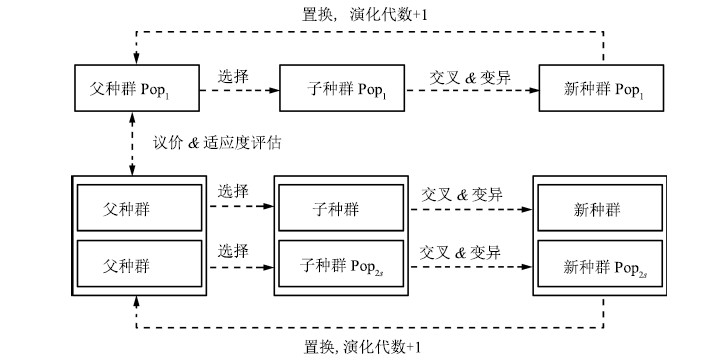
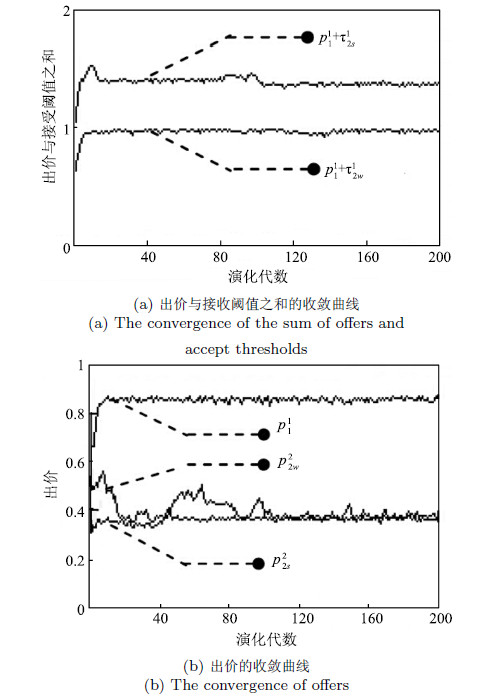
本文从理论研究和计算实验两个层次分析和验证了一类带有时间 偏好的单边双类型不完全信息议价博弈模型及其序贯均衡, 运用单阶段偏离法则分别推导和证明了该议价博弈的合并均衡与分离均衡, 并通过策略比较和构造静态出价博弈证明了合并均衡是议价博弈的唯一理性解. 在此基础上, 本文设计不完全信息议价博弈计算实验场景, 基于协同演化计算实验方法验证了议价博弈的序贯均衡解. 最后, 本文探讨了该序贯均衡对于议价双方相应管理策略的实践指导意义.
本文从理论研究和计算实验两个层次分析和验证了一类带有时间 偏好的单边双类型不完全信息议价博弈模型及其序贯均衡, 运用单阶段偏离法则分别推导和证明了该议价博弈的合并均衡与分离均衡, 并通过策略比较和构造静态出价博弈证明了合并均衡是议价博弈的唯一理性解. 在此基础上, 本文设计不完全信息议价博弈计算实验场景, 基于协同演化计算实验方法验证了议价博弈的序贯均衡解. 最后, 本文探讨了该序贯均衡对于议价双方相应管理策略的实践指导意义.
2016, 42(5): 735-745.
doi: 10.16383/j.aas.2016.c150526
cstr: 32138.14.j.aas.2016.c150526
摘要:
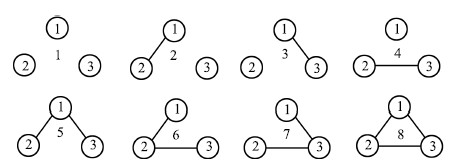
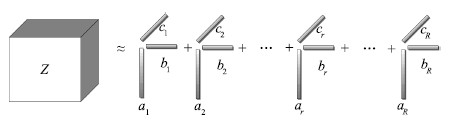
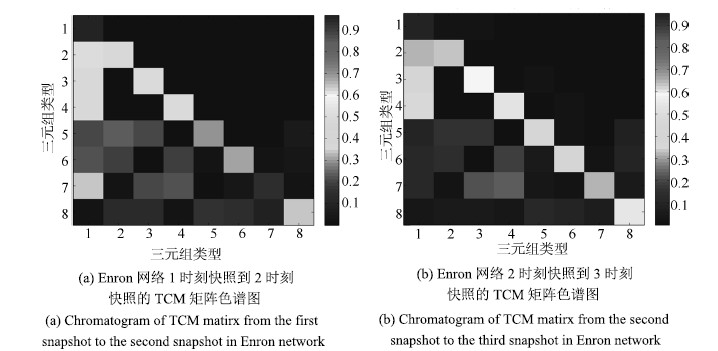
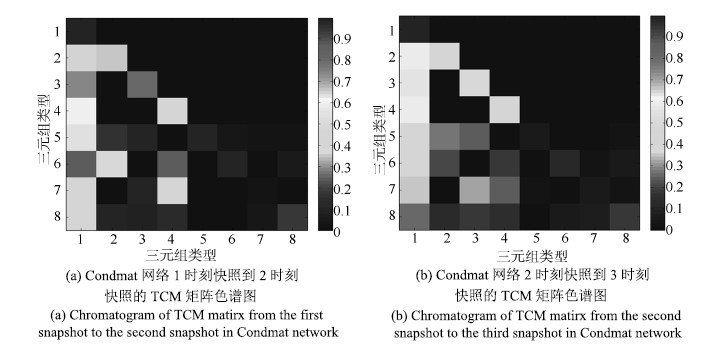
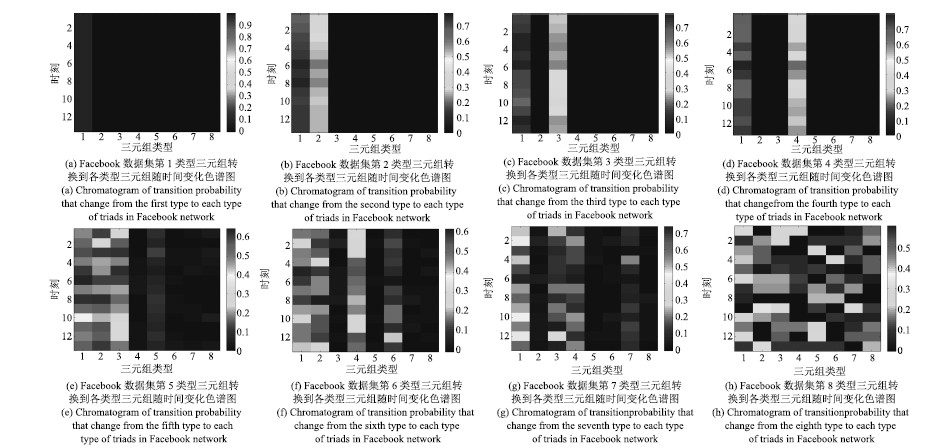
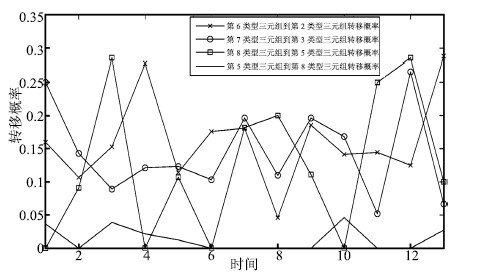
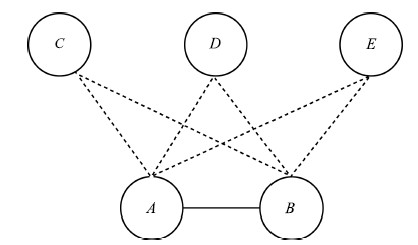
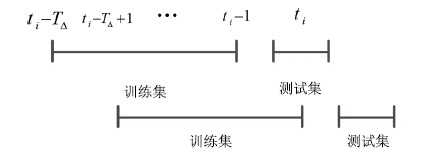
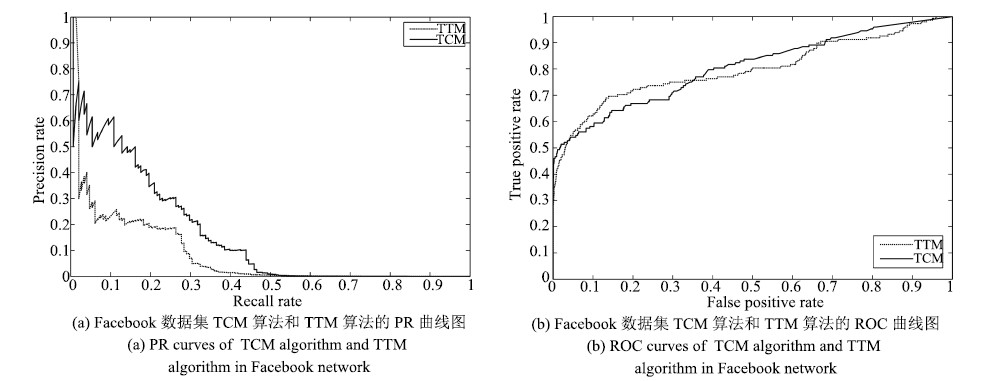
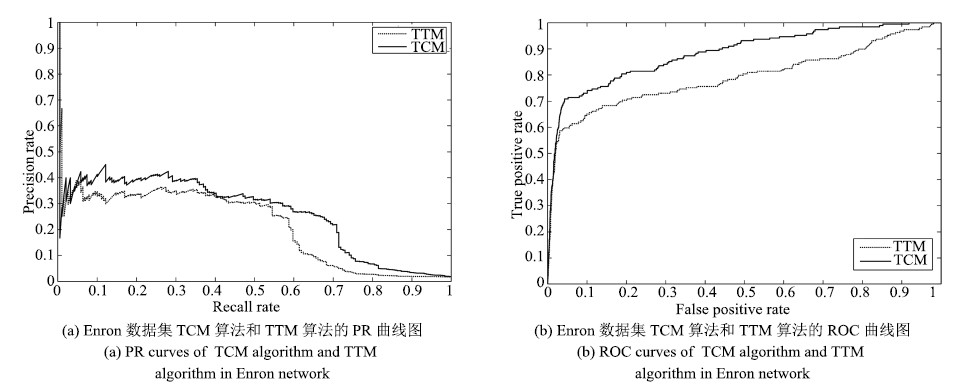
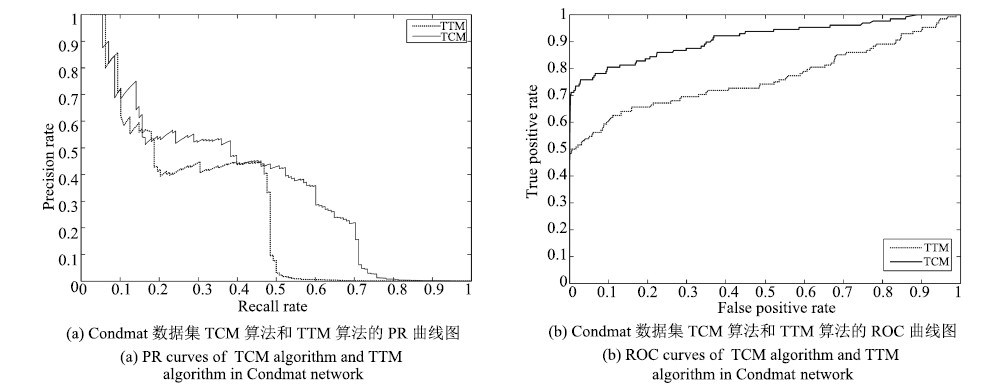
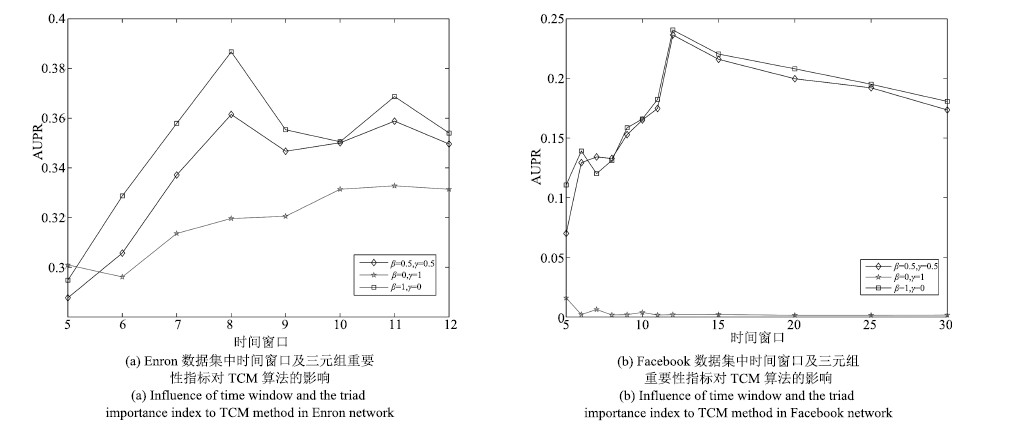
时序链路预测是动态网络分析的重要组成部分,具有极大的理论和应用价值. 传统的时序链路预测方法往往直接对边的演化规律进行分析,忽略了网络中其他微观结构的演化对链路形成的影响. 基于此分析,本文引入非负张量分解和时间序列分析对网络模体的演化规律进行研究,进而提出一种基于模体演化的链路预测方法. 在三个真实数据集上的实验结果表明,该方法能有效提高链路预测精度.
时序链路预测是动态网络分析的重要组成部分,具有极大的理论和应用价值. 传统的时序链路预测方法往往直接对边的演化规律进行分析,忽略了网络中其他微观结构的演化对链路形成的影响. 基于此分析,本文引入非负张量分解和时间序列分析对网络模体的演化规律进行研究,进而提出一种基于模体演化的链路预测方法. 在三个真实数据集上的实验结果表明,该方法能有效提高链路预测精度.

2016, 42(5): 746-759.
doi: 10.16383/j.aas.2016.c150364
cstr: 32138.14.j.aas.2016.c150364
摘要:
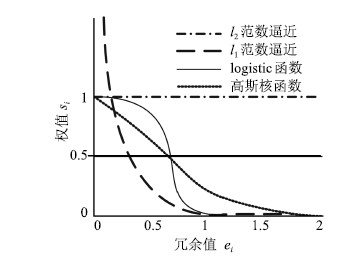
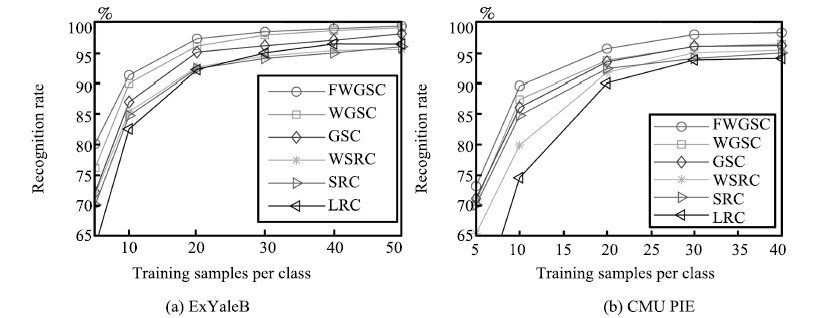
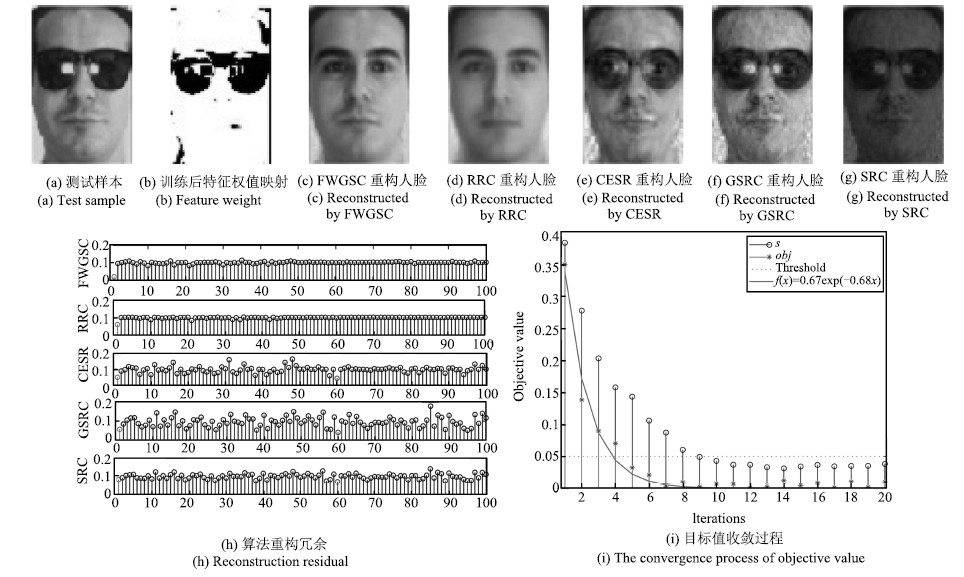
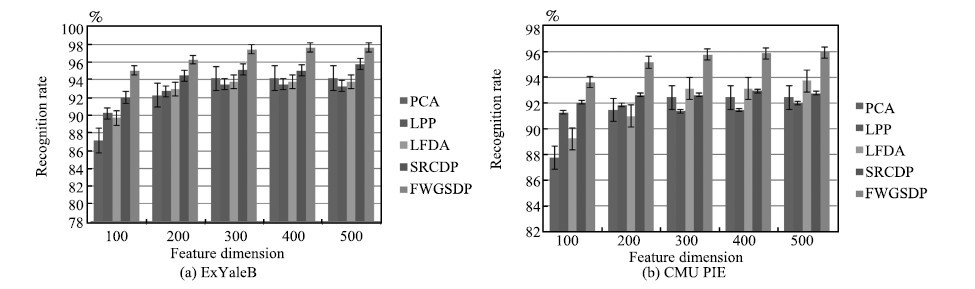
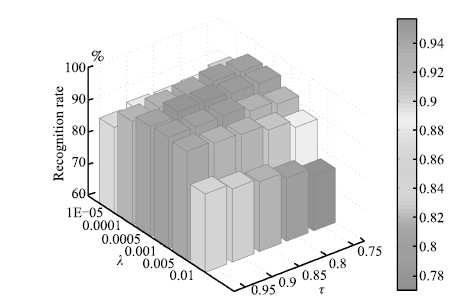
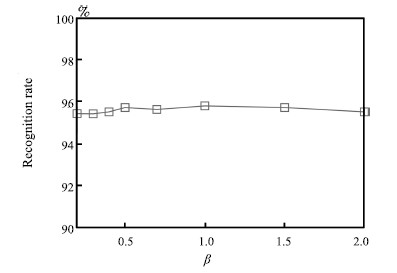
近来, 稀疏表示分类算法已经在模式识别和特征提取领域获得了广泛的关注. 受最近提出的稀疏表示判别投影算法启发, 本文提出了一种新的特征加权组稀疏判别投影算法(Feature weighted group sparse classification steered discriminative projection, FWGSDP). 首先, 提出特征加权组稀疏分类算法(Feature weighted group sparsebased classification, FWGSC)进行稀疏系数编码, 该算法采用带特征加权约束的保局性信息, 能够鲁棒地重构给定的输入数据; 其次, 通过类内重构散度最小、类间重构散度最大为目标计算最优投影判别矩阵, 使得输入数据具有最佳的模式分类效果; 最后, 提出迭代重约束稀疏编码方法并结合特征分解操作进行FWGSDP模型高效求解. 在ExYaleB, PIE和AR三个人脸数据库的实验验证了所提算法在普通数据和带噪数据中的分类效果都优于现存的算法.
近来, 稀疏表示分类算法已经在模式识别和特征提取领域获得了广泛的关注. 受最近提出的稀疏表示判别投影算法启发, 本文提出了一种新的特征加权组稀疏判别投影算法(Feature weighted group sparse classification steered discriminative projection, FWGSDP). 首先, 提出特征加权组稀疏分类算法(Feature weighted group sparsebased classification, FWGSC)进行稀疏系数编码, 该算法采用带特征加权约束的保局性信息, 能够鲁棒地重构给定的输入数据; 其次, 通过类内重构散度最小、类间重构散度最大为目标计算最优投影判别矩阵, 使得输入数据具有最佳的模式分类效果; 最后, 提出迭代重约束稀疏编码方法并结合特征分解操作进行FWGSDP模型高效求解. 在ExYaleB, PIE和AR三个人脸数据库的实验验证了所提算法在普通数据和带噪数据中的分类效果都优于现存的算法.
2016, 42(5): 760-770.
doi: 10.16383/j.aas.2016.c150207
cstr: 32138.14.j.aas.2016.c150207
摘要:
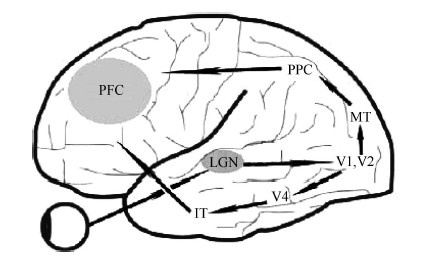
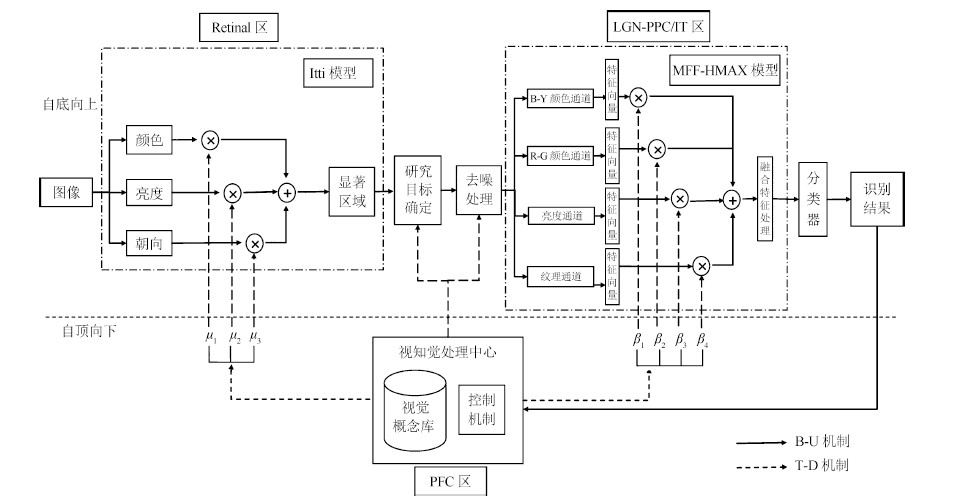
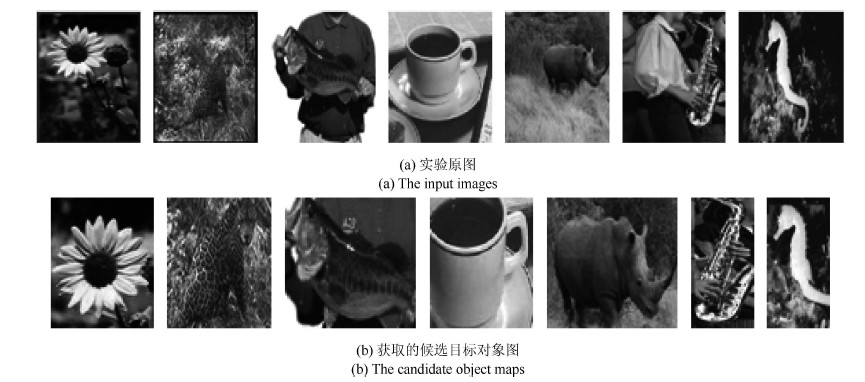
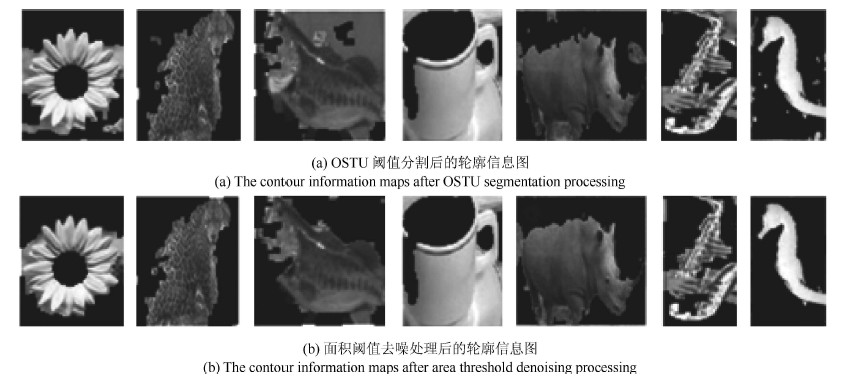
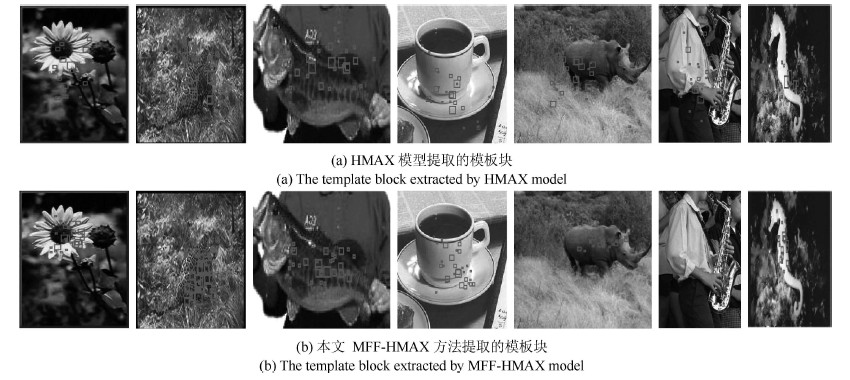
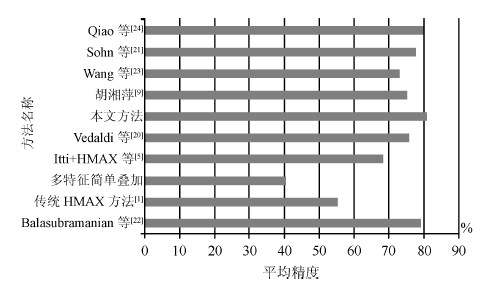
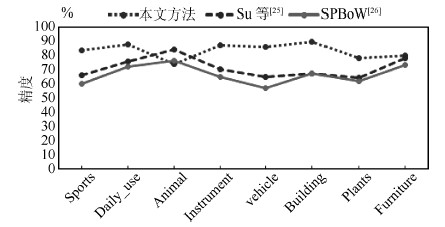
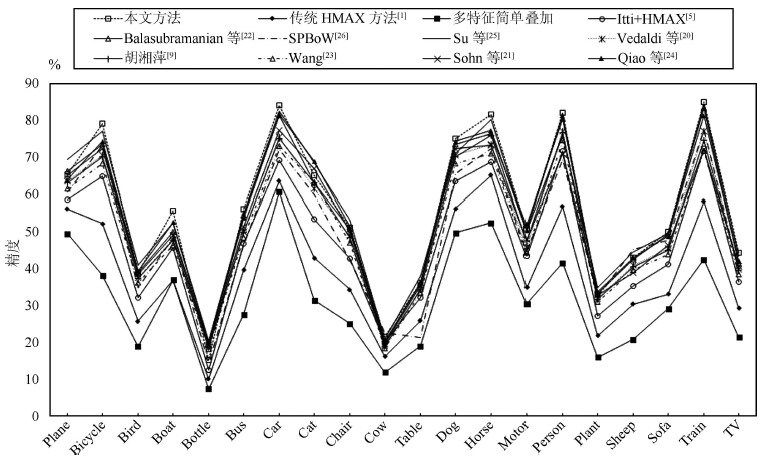
提出了一种基于视觉知识加工模型的目标识别方法. 该加工模型结合目标定位、模板筛选和MFF-HMAX (Hierarchical model and X based on multi-feature fusion)方法对图像进行学习, 形成相应的视觉知识库, 并用于指导目标的识别. 首先, 利用Itti模型获取图像的显著区, 结合视觉通路中What和Where通道的位置、大小等特征以及视觉知识库中的定位知识确定初期候选目标区域; 然后, 采用二步去噪处理获取候选目标区域, 利用MFF-HMAX模型提取目标区域的颜色、亮度、纹理、轮廓、大小等知识特征, 并采用特征融合思想将各项特征融合供目标识别; 最后, 与单一特征以及目前的流行方法进行对比实验, 结果表明本文方法不仅具备较高的识别效果, 同时能够模仿人脑学习视觉知识的过程形成视觉知识库.
提出了一种基于视觉知识加工模型的目标识别方法. 该加工模型结合目标定位、模板筛选和MFF-HMAX (Hierarchical model and X based on multi-feature fusion)方法对图像进行学习, 形成相应的视觉知识库, 并用于指导目标的识别. 首先, 利用Itti模型获取图像的显著区, 结合视觉通路中What和Where通道的位置、大小等特征以及视觉知识库中的定位知识确定初期候选目标区域; 然后, 采用二步去噪处理获取候选目标区域, 利用MFF-HMAX模型提取目标区域的颜色、亮度、纹理、轮廓、大小等知识特征, 并采用特征融合思想将各项特征融合供目标识别; 最后, 与单一特征以及目前的流行方法进行对比实验, 结果表明本文方法不仅具备较高的识别效果, 同时能够模仿人脑学习视觉知识的过程形成视觉知识库.

2016, 42(5): 771-781.
doi: 10.16383/j.aas.2016.c150545
cstr: 32138.14.j.aas.2016.c150545
摘要:
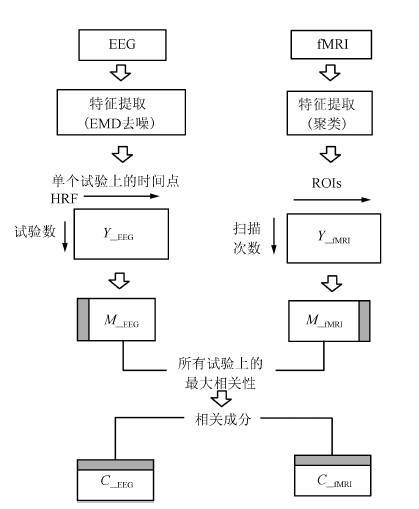
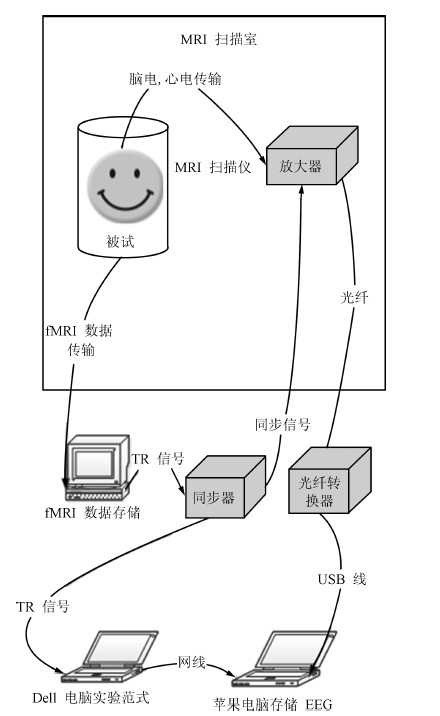
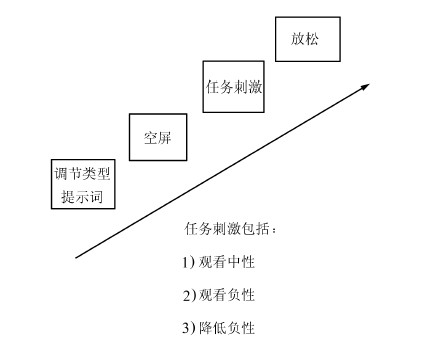
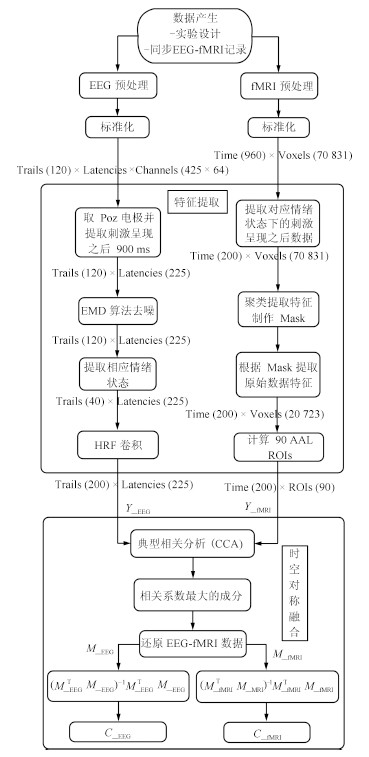
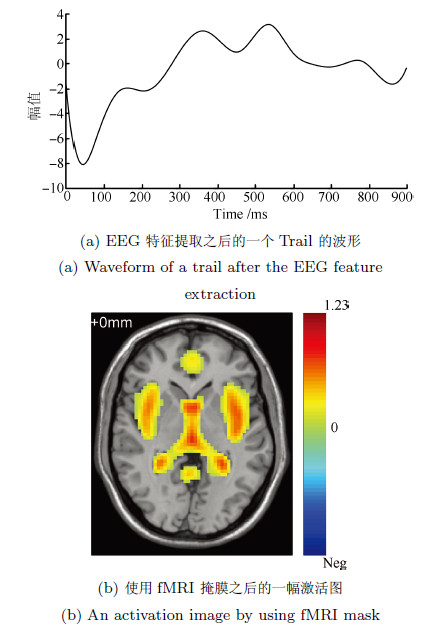
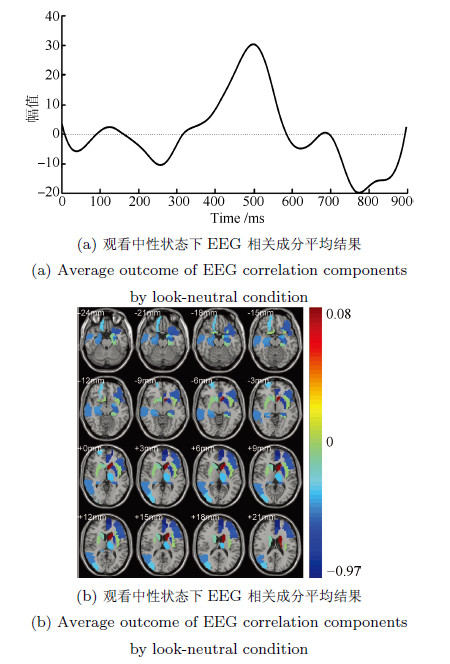
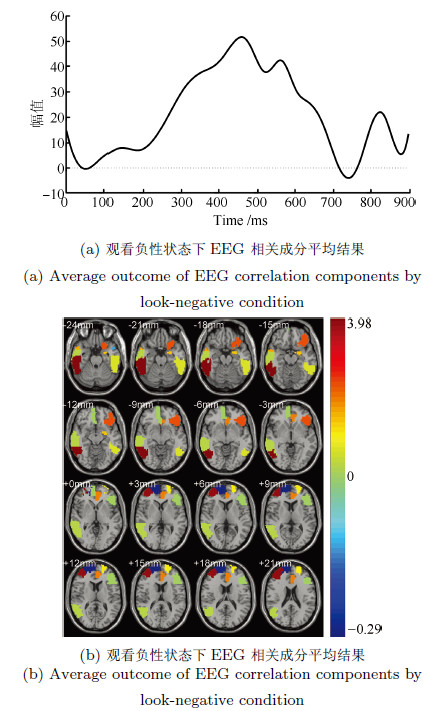
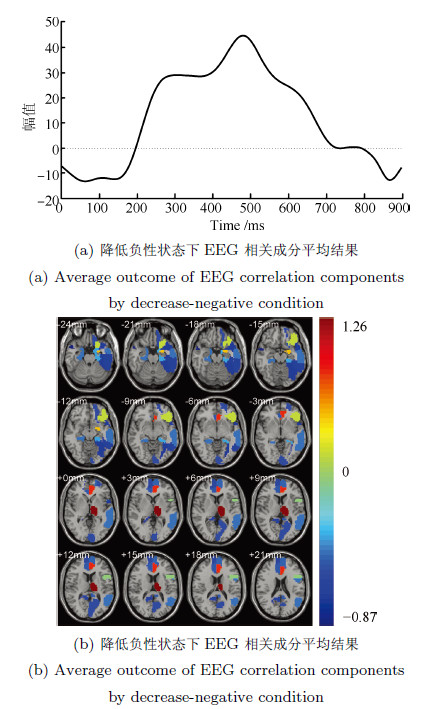
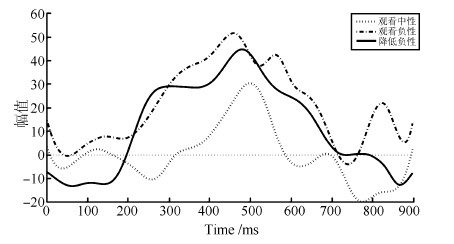
脑电(Electroencephalography, EEG)与功能磁共振成像(Functional magnetic resonance imaging, fMRI)为脑科学研究提供了互补的时空信息. 为研究大脑在对情绪图片采取认知重评策略时的神经活动, 基于同步采集的EEG-fMRI数据, 应用典型相关分析、经验模态分解及k-均值聚类等算法对融合情绪数据进行交叉关联和盲源分离, 得到空间上的fMRI图像和与之对应的EEG时间演变信号. 结果表明: 时域上, CCA分离出的脑电成分在认知重评状态下有明显的晚期正电位(Late positive potential, LPP) (潜伏期200ms~900ms)出现, 而且认知重评策略诱发下的LPP 波幅明显小于观看负性诱发的LPP波幅(F(1, 224)= 28.72, P<0.01), 而大于观看中性诱发的LPP波幅(F(1, 224)= 63.32, P<0.01); 与之对应的空域上, 可以明显地看出和情绪调节相关的扣带回, 额叶、颞叶等区域有明显激活区, 采用情绪认知重评策略时的脑区激活强度明显小于观看负性状态, 而大于观看中性, 且观看中性状态下被激活的与情绪相关的区域相对较少. 研究表明, 这种融合数据分析技术通过计算两种模态数据之间潜在的线性相关性, 可以有效地分离出大脑在时空上神经活动情况, 达到了同时描绘出大脑神经活动的时间信息与空间信息的效果.
脑电(Electroencephalography, EEG)与功能磁共振成像(Functional magnetic resonance imaging, fMRI)为脑科学研究提供了互补的时空信息. 为研究大脑在对情绪图片采取认知重评策略时的神经活动, 基于同步采集的EEG-fMRI数据, 应用典型相关分析、经验模态分解及k-均值聚类等算法对融合情绪数据进行交叉关联和盲源分离, 得到空间上的fMRI图像和与之对应的EEG时间演变信号. 结果表明: 时域上, CCA分离出的脑电成分在认知重评状态下有明显的晚期正电位(Late positive potential, LPP) (潜伏期200ms~900ms)出现, 而且认知重评策略诱发下的LPP 波幅明显小于观看负性诱发的LPP波幅(F(1, 224)= 28.72, P<0.01), 而大于观看中性诱发的LPP波幅(F(1, 224)= 63.32, P<0.01); 与之对应的空域上, 可以明显地看出和情绪调节相关的扣带回, 额叶、颞叶等区域有明显激活区, 采用情绪认知重评策略时的脑区激活强度明显小于观看负性状态, 而大于观看中性, 且观看中性状态下被激活的与情绪相关的区域相对较少. 研究表明, 这种融合数据分析技术通过计算两种模态数据之间潜在的线性相关性, 可以有效地分离出大脑在时空上神经活动情况, 达到了同时描绘出大脑神经活动的时间信息与空间信息的效果.
2016, 42(5): 782-791.
doi: 10.16383/j.ass.2016.c150488
cstr: 32138.14.j.ass.2016.c150488
摘要:
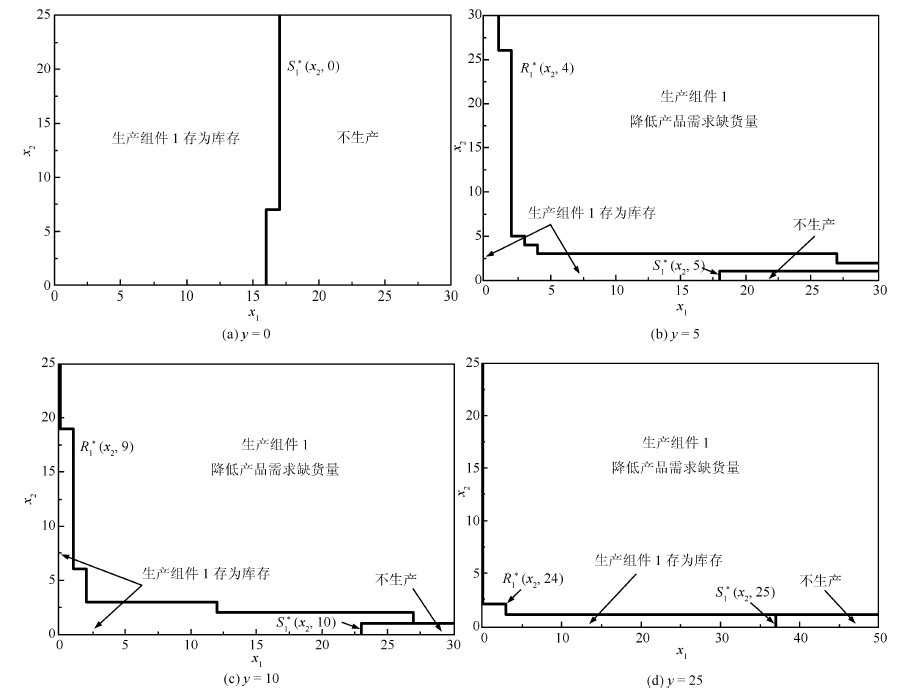
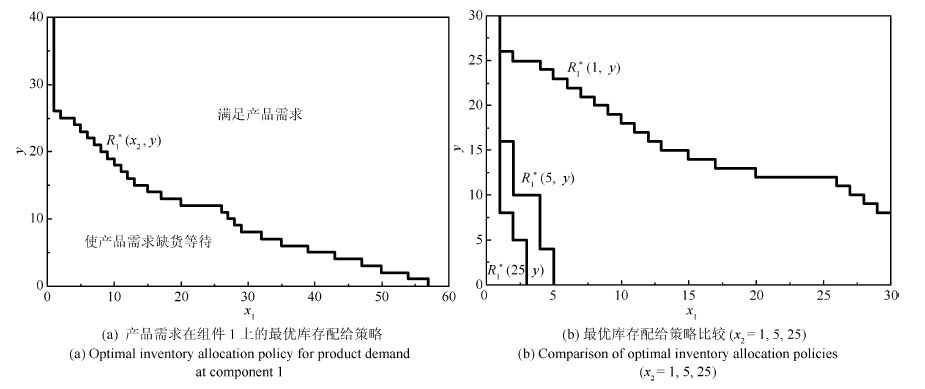
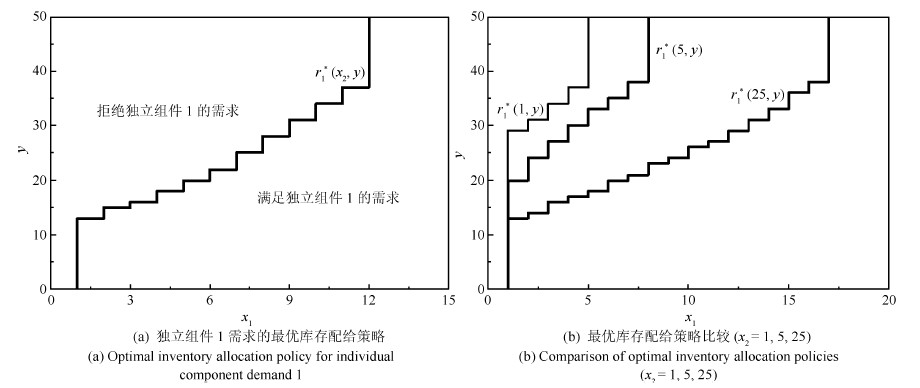
研究多维组件, 单一产品的双需求型面向订单装配(Assemble-to-order, ATO)系统. 产品需求为延期交货型, 当其不被满足时将产生缺货等待成本; 而独立组件需求为销售损失型, 其不被满足时将产生缺货损失成本. 该问题可以抽象成一个动态马尔科夫决策过程(Markov decision process, MDP), 通过对双需求模型求解得到状态依赖型最优策略, 即任一组件的最优生产--库存策略由系统内其他组件的库存水平决定. 研究解决了多需求复杂ATO系统的生产和库存优化控制问题. 提出在一定条件下, 组件的基础库存值可以等价于最终产品需求的库存配给值. 组件的基础库存值与库存配给值随系统内其他组件库存的增加而增加, 而产品需求的库存配给值随系统组件库存和产品缺货量的增加而减少. 最后通过数值实验分析缺货量及组件库存对最优策略结构的影响, 并得到了相应的企业生产实践的管理启示.
研究多维组件, 单一产品的双需求型面向订单装配(Assemble-to-order, ATO)系统. 产品需求为延期交货型, 当其不被满足时将产生缺货等待成本; 而独立组件需求为销售损失型, 其不被满足时将产生缺货损失成本. 该问题可以抽象成一个动态马尔科夫决策过程(Markov decision process, MDP), 通过对双需求模型求解得到状态依赖型最优策略, 即任一组件的最优生产--库存策略由系统内其他组件的库存水平决定. 研究解决了多需求复杂ATO系统的生产和库存优化控制问题. 提出在一定条件下, 组件的基础库存值可以等价于最终产品需求的库存配给值. 组件的基础库存值与库存配给值随系统内其他组件库存的增加而增加, 而产品需求的库存配给值随系统组件库存和产品缺货量的增加而减少. 最后通过数值实验分析缺货量及组件库存对最优策略结构的影响, 并得到了相应的企业生产实践的管理启示.
2016, 42(5): 792-798.
doi: 10.16383/j.aas.2016.c150517
cstr: 32138.14.j.aas.2016.c150517
摘要:
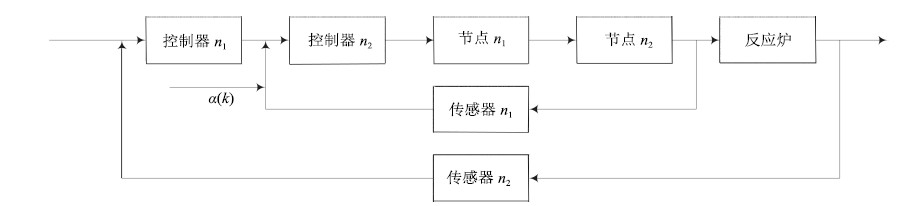
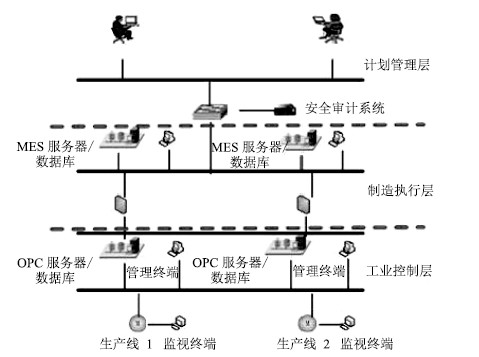
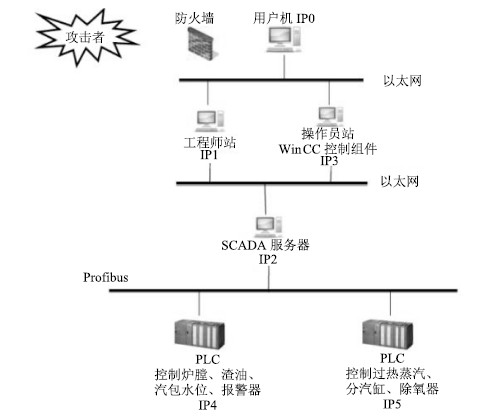
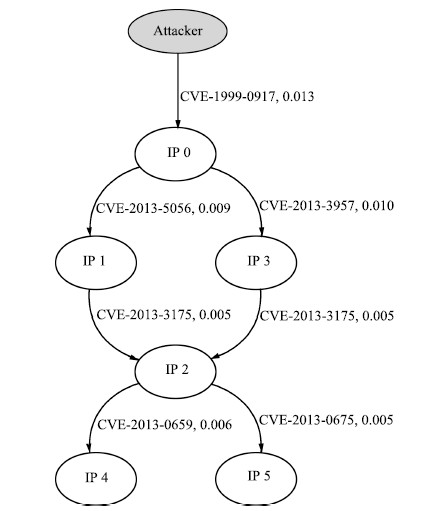
提出了一种基于攻击图的工控系统脆弱性量化研究方法. 从工控系统中存在的漏洞利用难度和漏洞危害性两个维度出发, 同时结合具体的工业系统中有关防御强度、攻击强度、物理损失、信息损失等方面, 提出了一系列的脆弱性量化指标, 制定了比较全面的等级划分标准. 之后将量化指标与攻击图相结合, 利用攻击过程中每一步的原子攻击期望来对可能存在的所有攻击路径进行脆弱性分析. 最后以典型的锅炉控制系统作为实验背景进行了案例分析. 实验结果表明, 该方法能够较全面地分析工控系统中潜在的隐患威胁, 科学合理地评估各条攻击路径的脆弱性, 由此得到总攻击期望最大的攻击路径.
提出了一种基于攻击图的工控系统脆弱性量化研究方法. 从工控系统中存在的漏洞利用难度和漏洞危害性两个维度出发, 同时结合具体的工业系统中有关防御强度、攻击强度、物理损失、信息损失等方面, 提出了一系列的脆弱性量化指标, 制定了比较全面的等级划分标准. 之后将量化指标与攻击图相结合, 利用攻击过程中每一步的原子攻击期望来对可能存在的所有攻击路径进行脆弱性分析. 最后以典型的锅炉控制系统作为实验背景进行了案例分析. 实验结果表明, 该方法能够较全面地分析工控系统中潜在的隐患威胁, 科学合理地评估各条攻击路径的脆弱性, 由此得到总攻击期望最大的攻击路径.
2016, 42(5): 798-804.
doi: 10.16383/j.aas.2016.c150104
cstr: 32138.14.j.aas.2016.c150104
摘要:
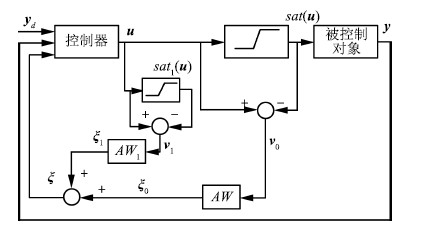
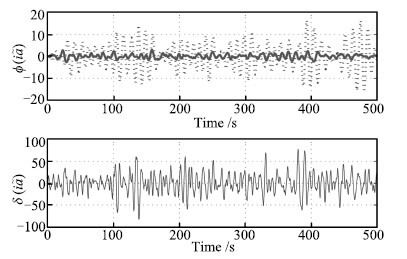
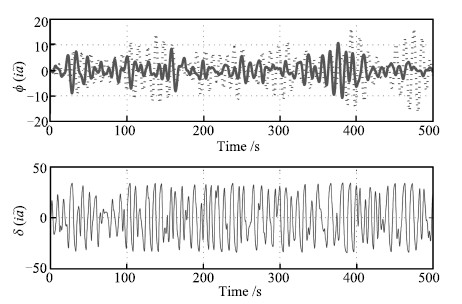
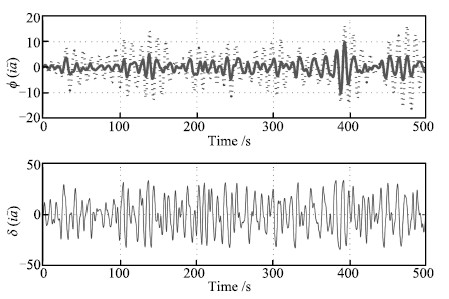
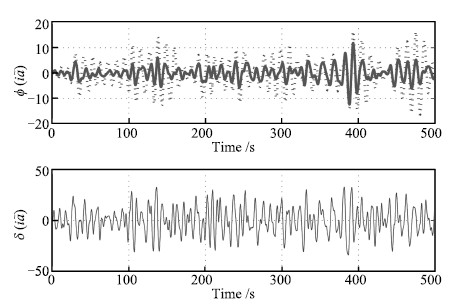
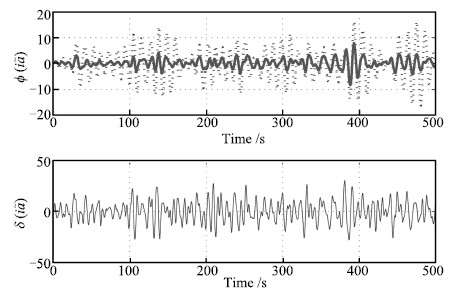
针对一类具有执行器饱和的非线性控制系统, 提出了一种双环路的动态抗饱和补偿方案, 为执行器输出受限的非线性系统提供了新思路. 与现有结果相比, 所提方案能更好地改善闭环系统控制性能. 考虑执行器饱和约束, 通过优化执行器饱和发生前后控制器的状态误差的积分性能指标, 综合设计一类同时包含传统抗饱和及延迟抗饱和补偿器两个环路的改进抗饱和补偿器, 这类补偿器有效地抑制了饱和现象对控制器的影响, 从而降低了执行器饱和对控制系统性能的影响. 当系统存在高饱和度现象时, 利用该双环路抗饱和补偿器, 可以最大程度弱化饱和对系统性能的影响. 最后, 利用输入状态稳定 (Input state stability, ISS) 定理分析和证明了该闭环系统全局一致有界稳定. 并通过舵机执行器受约束的舵减横摇系统的仿真试验, 验证了该方案的有效性及优越性.
针对一类具有执行器饱和的非线性控制系统, 提出了一种双环路的动态抗饱和补偿方案, 为执行器输出受限的非线性系统提供了新思路. 与现有结果相比, 所提方案能更好地改善闭环系统控制性能. 考虑执行器饱和约束, 通过优化执行器饱和发生前后控制器的状态误差的积分性能指标, 综合设计一类同时包含传统抗饱和及延迟抗饱和补偿器两个环路的改进抗饱和补偿器, 这类补偿器有效地抑制了饱和现象对控制器的影响, 从而降低了执行器饱和对控制系统性能的影响. 当系统存在高饱和度现象时, 利用该双环路抗饱和补偿器, 可以最大程度弱化饱和对系统性能的影响. 最后, 利用输入状态稳定 (Input state stability, ISS) 定理分析和证明了该闭环系统全局一致有界稳定. 并通过舵机执行器受约束的舵减横摇系统的仿真试验, 验证了该方案的有效性及优越性.