

An Anti-saturation Method for a Class of Nonlinear Systems with Actuator Saturation
-
摘要: 针对一类具有执行器饱和的非线性控制系统, 提出了一种双环路的动态抗饱和补偿方案, 为执行器输出受限的非线性系统提供了新思路. 与现有结果相比, 所提方案能更好地改善闭环系统控制性能. 考虑执行器饱和约束, 通过优化执行器饱和发生前后控制器的状态误差的积分性能指标, 综合设计一类同时包含传统抗饱和及延迟抗饱和补偿器两个环路的改进抗饱和补偿器, 这类补偿器有效地抑制了饱和现象对控制器的影响, 从而降低了执行器饱和对控制系统性能的影响. 当系统存在高饱和度现象时, 利用该双环路抗饱和补偿器, 可以最大程度弱化饱和对系统性能的影响. 最后, 利用输入状态稳定 (Input state stability, ISS) 定理分析和证明了该闭环系统全局一致有界稳定. 并通过舵机执行器受约束的舵减横摇系统的仿真试验, 验证了该方案的有效性及优越性.Abstract: For a class of nonlinear control systems with actuator saturation, a dual-loop anti-saturation compensation scheme is proposed in this paper, which provides a new idea for the limited-output actuator of a nonlinear system. Compared with existing solutions, the proposed scheme can improve the performance of the closed-loop system. Considering the actuator saturation constraints, by optimizing the integral performance index of state error of feedback controller which occurs before and after actuator saturation, we design a class of improved anti-saturation compensators that contain both traditional anti-saturation and delayed anti-saturation compensators. Such compensations effectively suppress the effects of saturation on the controller, thus reducing actuator saturation effects on the control system performance. Furthermore, when the system has high saturation with this dual-loop anti-saturation compensators, it can significantly attenuate the influence of saturation upon system performance. We then utilize the input state stability (ISS) to analyze and prove the theorem for the closed-loop system to be globally and uniformly bounded stable. Finally, simulation results demonstrate the effectiveness and superiority of the proposed method.
-
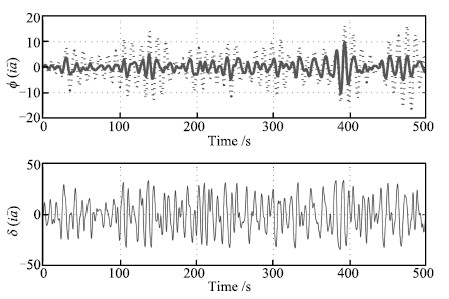
图 4 有饱和限制只有传统补偿器时横摇角及舵角输出
Fig. 4 Output of roll and rudder when there is only a traditional anti-saturation compensator
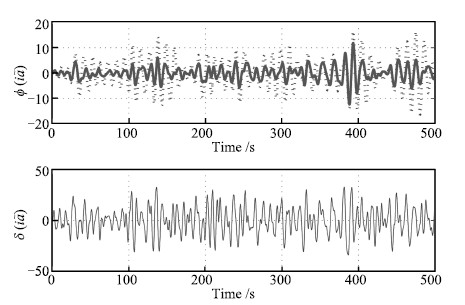
图 5 有饱和限制只有延迟补偿器时横摇角及舵角输出
Fig. 5 Output of roll and rudder when there is only a delay anti-saturation compensator

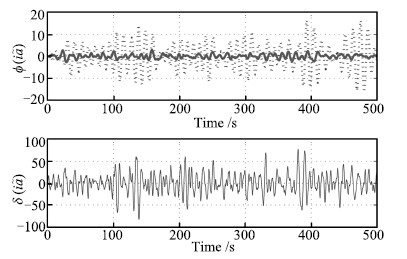
图 6 有饱和限制具有改进补偿器时横摇角及舵角输出
Fig. 6 Output of roll and rudder when there is an improved anti-saturation compensator
表 1 减摇率与舵角标准偏差
Table 1 The standard deviation of damping rate and rudder
参数 $AP$ $RCS$ $DP$ $RRR\,(\%)$ 无饱和限制 6.2116 1.0160 22.8524 83.64 有限制无补偿器 6.2116 3.0813 19.3945 50.39 只有传统补偿器 6.2116 2.4010 12.3876 61.35 只有延迟补偿器 6.2116 2.6002 11.5471 58.14 具有改进补偿器 6.2116 2.1529 10.6496 65.34  下载: 导出CSV
下载: 导出CSV
-
[1] Tarbouriech S, Turner M. Anti-windup design: an overview of some recent advances and open problems. IET Control Theory and Applications, 2009, 3(1): 1-19 [2] Galeani S, Tarbouriech S, Turner M, Zaccarian M. A tutorial on modern anti-windup design. European Journal of Control, 2009, 15(3-4): 418-440 [3] Sajjadi-Kia S, Jabbari F. Modified anti-windup compensators for stable plants. IEEE Transactions on Automatic Control, 2009, 54(8): 1934-1939 [4] Sajjadi-Kia S, Jabbari F. Modified anti-windup compensators for stable plants: dynamic anti-windup case. In: Proceedings of the 48th IEEE Conference on Decision and Control, 2009 Held Jointly with the 28th Chinese Control Conference. Shanghai, China: IEEE, 2009. 2795-2800 [5] Sajjadi-Kia S, Jabbari F. Modified dynamic anti-windup through deferral of activation. International Journal of Robust and Nonlinear Control, 2012, 22(15): 1661-1673 [6] Wu X J, Lin Z L. Anti-windup in anticipation of actuator saturation. In: Proceedings of the 49th IEEE Conference on Decision and Control. Atlanta, GA, USA: IEEE, 2010. 5245 -5250 [7] Wu X J, Lin Z L. On immediate, delayed and anticipatory activation of anti-windup mechanism: static anti-windup case. IEEE Transactions on Automatic Control, 2012, 57(3): 771 -777 [8] Wu X J, Lin Z L. Dynamic anti-windup design in anticipation of actuator saturation. International Journal of Robust and Nonlinear Control, 2014, 24(2): 295-312 [9] Isidori A. Nonlinear Control Systems. Berlin: Springer-Verlag, 1995. 58-99 [10] 郑云峰, 杨盐生, 李铁山. 带有执行器的船舶航向控制反馈线性化设计. 大连海事大学学报, 2004, 30(3): 14-17Zheng Yun-Feng, Yang Yan-Sheng, Li Tie-Shan. Input-state linearization based ship's course-keeping controller designs. Journal of Dalian Maritime University, 2004, 30(3): 14-17 [11] Mulder E F, Tiwari P Y, Kothare M V. Simultaneous linear and anti-windup controller synthesis using multiobjective convex optimization. Automatica, 2009, 45(3): 805-811 [12] 王新屏. 舵鳍联合系统的简捷非线性鲁棒控制[博士学位论文]. 大连海事大学, 中国, 2009. 105-113Wang Xin-Ping. Simple and Direct Nonlinear Robust Control of Rudder/Fin Joint System [Ph.D. dissertation], Dalian Maritime University, China, 2009. 105-113 [13] Liu S, Zhou L M. Static anti-windup synthesis for a class of linear systems subject to actuator amplitude and rate saturation. Acta Automatica Sinica, 2009, 35(7): 1003-1006 [14] Huang C Q, Peng X F, Wang J P. Robust nonlinear PID controllers for anti-windup design of robot manipulators with an uncertain Jacobian matrix. Acta Automatica Sinica, 2008, 34(9): 1113-1120 -

 下载:
下载:


计量
- 文章访问数: 2508
- HTML全文浏览量: 549
- PDF下载量: 1410
- 被引次数: 0
