

An Anti-saturation Method for a Class of Nonlinear Systems with Actuator Saturation
-
摘要: 针对一类具有执行器饱和的非线性控制系统, 提出了一种双环路的动态抗饱和补偿方案, 为执行器输出受限的非线性系统提供了新思路. 与现有结果相比, 所提方案能更好地改善闭环系统控制性能. 考虑执行器饱和约束, 通过优化执行器饱和发生前后控制器的状态误差的积分性能指标, 综合设计一类同时包含传统抗饱和及延迟抗饱和补偿器两个环路的改进抗饱和补偿器, 这类补偿器有效地抑制了饱和现象对控制器的影响, 从而降低了执行器饱和对控制系统性能的影响. 当系统存在高饱和度现象时, 利用该双环路抗饱和补偿器, 可以最大程度弱化饱和对系统性能的影响. 最后, 利用输入状态稳定 (Input state stability, ISS) 定理分析和证明了该闭环系统全局一致有界稳定. 并通过舵机执行器受约束的舵减横摇系统的仿真试验, 验证了该方案的有效性及优越性.Abstract: For a class of nonlinear control systems with actuator saturation, a dual-loop anti-saturation compensation scheme is proposed in this paper, which provides a new idea for the limited-output actuator of a nonlinear system. Compared with existing solutions, the proposed scheme can improve the performance of the closed-loop system. Considering the actuator saturation constraints, by optimizing the integral performance index of state error of feedback controller which occurs before and after actuator saturation, we design a class of improved anti-saturation compensators that contain both traditional anti-saturation and delayed anti-saturation compensators. Such compensations effectively suppress the effects of saturation on the controller, thus reducing actuator saturation effects on the control system performance. Furthermore, when the system has high saturation with this dual-loop anti-saturation compensators, it can significantly attenuate the influence of saturation upon system performance. We then utilize the input state stability (ISS) to analyze and prove the theorem for the closed-loop system to be globally and uniformly bounded stable. Finally, simulation results demonstrate the effectiveness and superiority of the proposed method.
-
执行器饱和现象普遍存在于控制系统设计中,当系统进入饱和状态时,控制器的输出和被控对象的输入将不再匹配,这是使得控制系统的性能变差,甚至造成严重后果的根源.
抗饱和补偿算法是降低执行器饱和产生不利影响的一种通用方法[1].在抗饱和补偿器设计中,首先并不考虑执行器饱和非线性的发生来设计一个系统的控制器,然后,考虑执行器饱和后添加一个抗饱和补偿器,以保持闭环系统的稳定性,并且降低因执行器饱和而带来的系统性能下降的情况.近几十年,由于该方法在实践中的有效性而被广泛关注.
对于一个传统的抗饱和补偿器的主要特点是当饱和发生时能尽快启动抗饱和补偿器[2],弱化饱和所带来的影响,来保持闭环系统的性能.考虑到进一步提升闭环系统的控制性能,Sajjadi和Jabbari[3-5]研究了推迟启动抗饱和补偿器的影响提出了一种延迟抗饱和补偿器,首先假设线性控制器具有鲁棒稳定性,启动延迟抗饱和补偿器的主要目的是直到闭环系统性能面临大幅降低时启动抗饱和补偿器,延迟补偿器比传统的补偿器具有更好的$L_2$性能[5],但是毕竟延迟开启补偿器,当系统存在未达到延迟饱和器开启指标时,执行器已经存在饱和现象,使得控制效果在一定程度上较传统补偿器差.针对这一问题,在Sajjadi和Jabbari研究的基础上,Wu等[6]考虑到系统的动力学特性,提出了一个新的提前抗饱和补偿方法,提前抗饱和补偿是相对延迟抗饱和补偿,其基本思想是在执行器发生饱和时,提前启用抗饱和补偿器.在文献[6-8],提前抗饱和器具有显著改善闭环控制效果的潜力,但同时由于其使系统的饱和限制更加苛刻,在控制器输出低于执行器饱和限制却高于提前补偿器饱和限制时,对于传统补偿器本可以不工作,但使用提前抗饱和仍需要工作,同样会增加系统负担,在执行器饱和度过高的情况下,呈现的控制性能与控制效果也未有较大改善[8].
针对以上问题,本文提出一种双环路的动态抗饱和补偿方案.通过优化执行器饱和发生前后控制器的状态误差的积分性能指标,综合设计一类同时包含传统抗饱和及延迟抗饱和补偿器两个环路的改进抗饱和补偿器,前者用于立即启用,后者用于延迟启动,其主要思想是分离饱和区,当饱和度过大时两个补偿器同时工作,将得到更有效的抗饱和补偿项来降低执行器的饱和度.该补偿器有效地抑制了饱和现象对控制器的影响,从而降低了执行器饱和对控制系统性能的影响;当系统存在高饱和度现象时,可以最大程度弱化饱和对系统性能的影响;当饱和度降低到一定程度时,延迟启动的补偿器将不再启用,降低了整个闭环系统工作负担.本文在理论上分析和证明了所提出的双环路抗饱和补偿器闭环系统全局一致有界稳定.并将其应用于舵机执行器受约束的船舶舵减横摇系统中,说明了可行性和有效性.具有重要的理论意义和应用价值.
1. 问题描述
一类具有执行器饱和的非线性系统可描述如下:
$ \left\{ {\begin{array}{*{20}{c}} {\mathop {{x_p}}\limits^. = f({x_p}) + g({x_p})sat(u)}\\ {y = h({x_p})} \end{array}} \right. $
(1) 其中,$ x_p\in {\bf R}^n$为系统状态变量,$ f( x_p)$为已知光滑向量函数,$ g( x_p)\in {\bf R}^{n\times m}$为光滑非线性矩阵,$ y=[ h_1( x_p)$ $\cdots$ $ h_m( x_p)]^{\rm T}$为输出,$sat(\cdot)$为饱和函数控制量.其中
$ sat(u) = \left\{ {\begin{array}{*{20}{l}} {{u_{{\rm{lim}}}},}&{u > {u_{{\rm{lim}}}}}&{}\\ {u,}&{ - {u_{{\rm{lim}}}} \le u \le {u_{{\rm{lim}}}}}&{}\\ { - {u_{{\rm{lim}}}},}&{u < - {u_{{\rm{lim}}}}}&{} \end{array}} \right. $
首先,根据Isidori在1995年编著的 《非线性系统》一书中,考虑到期望输出向量时,系统(1)可以变换成下面的标准形式[9]:
$ \begin{cases} \dot{ \eta}= q_p( \eta, \psi)\\ \dot{ \psi}=A_p \psi+B_p( \alpha_p( \eta, \psi) +E_p( \eta, \psi)sat( u)- \beta_p)\\ \end{cases} $
(2) 其中,$ q_p( \eta, \psi)$,$ \alpha_p( \eta, \psi)$为光滑向量函数,$E_p( \eta, \psi)$为非奇异矩阵,$A_p$,$B_p$为适当维数的矩阵. $ \beta_p=[ y_{1d}^{(r_1)}\ \cdots \ y_{md}^{(r_m)}]^{\rm T}$,$ y_d=[ y_{1d}\ \cdots\ y_{md}]^{\rm T}$,$r_i$记为每个输出的相关度,$ y_{id}$为期望输出. $ \eta$,$ \psi$为新定义的状态变量, $ \eta= y_d$,$ \psi =\left[ {array}{c} y- y_d\\ \dot{ y}-\dot{ y_d}\\ \vdots\\ y^{(\gamma_m-1)}- y_d^{(\gamma_m-1)} {array} \right]$为$m\times r_m$维向量,$ \eta$为$(n-m)\times r_m$维向量.
本文将要设计具有两个抗饱和回路的补偿器,其结构框图如图 1所示.
图 1中,$AW$代表传统抗饱和补偿器,它的状态记为$ x_{aw}$,$ v_0$ $=$ $ u$$ - $$sat( u)$为系统饱和度; $AW_1$代表延迟抗饱和补偿器,它的状态记为$ x_{aw1}$,$ v_1$ $=$ $ u$ $-$ $sat_1( u)$为延迟补偿器的饱和度; $ \xi_0$,$ \xi_1$分别作为传统抗饱和及延迟抗饱和的补偿项,为所求项,$ \xi$作为双回路后抗饱和补偿项,$ \xi$ $=$ $ \xi_0$ $+$ $ \xi_1$.图中$sat_1( u)$ 表示为
$ sa{t_1}(u) = \left\{ {\begin{array}{*{20}{l}} {\frac{{{u_{{\rm{lim}}}}}}{g},}&{u > \frac{{{u_{{\rm{lim}}}}}}{g}}&{}&{}\\ {u,}&{ - \frac{{{u_{{\rm{lim}}}}}}{g} \le u \le \frac{{{u_{{\rm{lim}}}}}}{g},\;0 < g < 1}&{}&{}\\ { - \frac{{{u_{{\rm{lim}}}}}}{g},}&{u < - \frac{{{u_{{\rm{lim}}}}}}{g}}&{}&{} \end{array}} \right. $
为方便讨论,把控制器的状态变量记为$x_c$,对于非线性系统,考虑到饱和发生具有抗饱和补偿项$\xi$的动态反馈线性化控制,
$ \begin{cases} \dot{ x_c}=A_c x_c+B_c \psi- \xi\\ \xi= \xi_0+ \xi_1\\ u=E_p^{-1}( \eta, \psi)(- \alpha_p( \eta, \psi)+C_c x_c+D_c \psi+ \beta_p) \end{cases} $
(3) 式中,$ u$是控制器考虑饱和限制时所求得的反馈线性化控制规律; $ A_c$,$ B_c$,$ C_c$,$ D_c$ 为不含饱和补偿器的控制器参数矩阵[10],$ x_c$为控制器的状态变量.
当执行器发生饱和,系统性能降低的主要原因是控制器的输出不能按预期输入到被控对象中,也就是说控制器状态在无饱和约束和饱和约束后产生了差异,这一差异导致了控制信号的扭曲,这最终导致了闭环系统的性能下降[9].因此,给出控制器输出不受约束与受约束后的状态变量的差值 $J$最小作为性能指标:
$ J=\int_0^\infty\|\bar{ x}_c(t)- x_c(t)\|^2{\rm d}t $
(4) 式中,$\|\cdot\|$为欧几里德范数. $\bar{ x}_c(t)$和$ x_c(t)$分别代表执行器饱和发生前后控制器的状态.
如图 1,在未饱和情况下$\bar{ x}_c(t)$所对应的控制器输出为$\bar{ u}$,在有饱和约束下$ x_c(t)$所对应的控制器输出为$ u$,当式(4)中的$J$最小,要想闭环系统将得到与无饱和下相同的控制性能,则需要$ u$跟踪上$\bar{ u}$.其推导形式可由下面推导过程给出:
当系统未饱和时,
$ \begin{cases} \dot{\bar{ x}}_c=A_c\bar{ x}_c+B_c\bar{ \psi}\\ \bar{ u}=E_p^{-1}(\bar{ \eta},\bar{ \psi})(- \alpha_p(\bar{ \eta},\bar{ \psi})+C_c\bar{ x}_c+ D_c\bar{ \psi}+ \beta_p) \end{cases} $
(5) 对上式进行拉氏变换得:
$ \begin{cases} \bar{ X}_c(s)=( s I-A_c)B_c\bar{ \Psi}(s)\\ \bar{ U}(s)=E_p^{-1}(\bar{ \eta},\bar{ \psi})(s)\times(- \alpha_p(\bar{ \eta},\bar{ \psi})(s)\,+\\ \qquad\quad\ \,C_c( s I-A_c)B_c\bar{ \Psi}(s)+D_c\bar{ \Psi}(s)+ \beta_p) \end{cases} $
(6) 当系统具有饱和约束时,
$ \begin{cases} \dot{ x_c}=A_c x_c+B_c \psi- \xi\\ \xi= \xi_0+ \xi_1\\ u=E_p^{-1}( \eta, \psi)(- \alpha_p( \eta, \psi)+C_c x_c+D_c \psi+ \beta_p)\\ \end{cases} $
(7) 对上式进行拉氏变换得:
$ \begin{cases} X_c(s)=( s I-A_c)[B_c \Psi(s)- \xi(s)]\\ U(s)=E_p^{-1}( \eta, \psi)(s)\times(- \alpha_p( \eta, \psi)(s) \,+\\ \qquad\quad\ \,C_c( s I-A_c)[B_c \Psi(s)- \xi(s)]+D_c \Psi(s)+ \beta_p(s))\\ \end{cases} $
(8) 对比$\bar{ U}(s)$与$ U(s)$,通过$ \xi(s)$补偿,使[$B_c \Psi(s)- \xi(s)$] $\rightarrow$ $B_c\bar{ \Psi}(s)$,则$ X_c(s)$ $\rightarrow$ $\bar{ X}_c(s)$,可知$ U(s)$ $\rightarrow$ $\bar{ U}(s)$,$ U(s)$跟踪上$\bar{ U}(s)$,闭环系统保持性能.
2. 抗饱和补偿器设计
当不考虑闭环系统执行器饱和约束,即饱和未发生时,那么$sta( u)$ $=$ $ u$,故$\bar{ \psi}$也可以表示为
$ \dot{\bar{ \psi}}=A_p\bar{ \psi}+B_p( \alpha_p( \bar{ \eta},\bar{ \psi})+E_p(\bar{ \eta},\bar{ \psi}) u- \beta_p) $
(9) 结合式(2)、式(3)和式(9)可得
$ \left[ \begin{array}{c} \dot{\bar{ x}}_c \\ \dot{\bar{ \psi}}\\ \end{array} \right]=\left[ \begin{array}{cc} A_c& B_c\\ B_pC_c &A_p+B_pD_c \\ \end{array} \right]\left[ \begin{array}{c} \bar{ x}_c \\ \bar{ \psi}\\ \end{array} \right] $
(10) 当发生饱和时,$sta( u)\neq u$,结合式(10)状态量$ \psi$可表示为
$ \begin{matrix} \dot{\psi }=\dot{\bar{\psi }}-(\dot{\bar{\psi }}-\dot{\psi })= \\ ({{A}_{p}}+{{B}_{p}}{{D}_{c}})\psi +{{B}_{p}}{{C}_{c}}{{x}_{c}}-{{B}_{p}}{{E}_{p}}(u-sat(u)) \\ \end{matrix} $
(11) 假设 1.
(A1) 矩阵$(A_p+B_pD_c)$是Hurwitz;
(A2) 矩阵
$ \begin{array}{c} A_{cl} \end{array} =\left[ \begin{array}{cc} A_c& B_c\\ B_p C_c & A_p+B_pD_c \\ \end{array} \right] $
(12) 是Hurwitz;
(A3) 非线性模型(1)中的控制规律是按照无执行器饱和情况下的反馈线性化控制所求得的;
(A4) 对于一个有界的状态变量$ \psi$,则有状态变量$ \eta$有界.
在下面的定理中,将给出满足性能指标(4)的最优解.并给出闭环系统的稳定性分析.
定理 1. 当系统(1)~(3)满足假设1,设计如下动态抗饱和补偿器(13)将使性能指标(4)为零:
$ \begin{cases} \dot{ x}_{aw}=(A_p+B_pD_c) x_{aw}+ B_pE_p( u-sat( u))\\ \dot{ x}_{aw1}=(A_p+B_pD_c) x_{aw1}+B_pE_p( u-sat_1( u))\\ \xi=-B_c( x_{aw}+ x_{aw1}) \end{cases} $
(13) 证明. 由Parseval定理可以把性能指标(4)改写为
$ J=\frac{1}{2\pi {\rm j}}\times \int_{-{\rm j}\infty}^{{\rm j}\infty}\|\bar{ X}_c(s)- X_c(s)\|^2{\rm d}s $
(14) 当执行器无饱和约束情况时,由式(9)可知
$ \begin{cases} \dot{\bar{ x_c}}=A_c\bar{ x_c}+B_c\bar{ \psi}\\ \dot{\bar{ \psi}}=B_pC_c\bar{ x_c}+(A_p+B_pD_c)\bar{ \psi} \end{cases} $
(15) 将上式进行拉氏变换可得
$ \begin{cases} s\bar{ X}_c(s)-\bar{ x}_c(0)=A_c\bar{ X_c}(s)+ B_c\bar{ \Psi}(s)\\ s\bar{ \Psi}(s)-\bar{ \psi}(0)=B_pC_c\bar{ X_c}(s)+(A_p+B_pD_c)\bar{ \Psi}(s)\\ \end{cases} $
(16) $ \bar{ X_c}(s)= \Theta_1^{-1}(s)\bar{ x_c}(0)+ \Theta_1^{-1}(s)B_c \Theta_2^{-1}(s)\bar{ \psi}(0) $
(17) 其中
$ \begin{array}{*{20}{c}} {{\Theta _1}(s) = \{ (sI - {A_c}) - {B_c}{{[sI - ({A_p} + {B_p}{D_c})]}^{ - 1}}{B_p}{C_c}}\\ {{\Theta _2}(s) = [sI - ({A_p} + {B_p}{D_c})]} \end{array} $
由假设1中的(A1)可知,$ \Theta_2(s)$是非奇异的,对于任意${\rm Re}(s)$ $\geq$ $0$,由假设1中的(A2)和$ \Theta_2(s)$是非奇异的可知$ \Theta_1(s)$是非奇异的[11].
当考虑到执行器饱和,使用如图 1所示抗饱和补偿器时,结合式(7)由拉普拉斯变换可得到
$ \begin{cases} s X_c(s)- x_c(0)=A_c X_c(s)+B_c \Psi(s)- \xi(s)\\ s \Psi(s)- \psi(0)=B_pC_c X_c(s)~+\\ \qquad\quad\ \,( A_p+B_pD_c) \Psi(s)-B_p \xi_a(s)\\ \end{cases} $
(18) 那么可得
$ \begin{matrix} {{X}_{c}}(s)=\text{ }\ \Theta _{1}^{-1}(s){{x}_{c}}(0)+\Theta _{1}^{-1}(s){{B}_{c}}\Theta _{2}^{-1}(s)\Psi (0)~- \\ \Theta _{1}^{-1}(s)\left[ \xi (s)+{{B}_{c}}\Theta _{2}^{-1}(s){{B}_{p}}{{\xi }_{a}}(s) \right] \\ \end{matrix} $
(19) 其中,$ \xi_a=E_p( u-sat( u))$,根据假设1中(A4)可以证明$ \xi_a$有界.将式(13)与式(15)做差可得
$ \begin{matrix} {{{\bar{X}}}_{c}}(s)-{{X}_{c}}(s)=\Theta _{1}^{-1}(s)[\bar{x}(0)-{{x}_{c}}(0)]+ \\ \Theta _{1}^{-1}(s){{B}_{c}}\Theta _{2}^{-1}(s)[\bar{\Psi }(0)-\Psi (0)]+ \\ \Theta _{1}^{-1}(s)[\xi (s)+{{B}_{c}}\Theta _{2}^{-1}(s){{B}_{p}}{{\xi }_{a}}(s)] \\ \end{matrix} $
(20) 其中,初始值可设置为
$ \bar{ x_c}(0)= x_c(0),\ \ \bar{ \psi}(0)= \psi(0) $
(21) 由于$ \Theta_1(s)$是非奇异的,为了使式(16)为零,则
$ \xi(s)=\ \xi_0(s)+ \xi_1(s)= -B_c[ s I-(A_p+B_pD_c)]^{-1}B_p \xi_a $
(22) 如果控制器的输出$| u|< u_{\rm lim}/g$ ($0<g<1$),那么$ \xi_1(s)$ $=$ $0$,由式(18)推得饱和补偿器的状态空间表达式为
$ \begin{cases} \dot{ x}_{aw}=( A_p+B_pD_c) x_{aw}+B_pE_p( u-sat( u))\\ \xi=-B_c x_{aw} \end{cases} $
(23) 即为传统的抗饱和补偿器.
但当存在$| u|\geq u_{\rm lim}/g$情况时,延迟抗饱和补偿器开启,由式(18)推得抗饱和补偿器的状态空间表达式为
$ \begin{cases} \dot{ x}_{aw}=(A_p+B_pD_c) x_{aw}+B_pE_p( u-sat( u))\\ \dot{ x}_{aw1}=(_p+B_pD_c) x_{aw1}+B_pE_p( u-sat_1( u))\\ \xi=-B_c( x_{aw}+ x_{aw1}) \end{cases} $
(24) 对比式(24)与式(23)可知,双环抗饱和补偿器可在$| u|$ $\geq$ $ u_{\rm lim}/g$情况下,进一步加强了补偿,补偿项由原来的传统抗饱和补偿器的补偿项加上延迟抗饱和器的补偿项.
由式(3)可以看出,饱和发生后控制器状态$ x_c$被补偿项$ \xi$不断更新,那么控制规律$ u$也将不断更新,使得$ x_c$$\rightarrow$$\bar{ x}_c$.
3. 稳定性分析及证明
定义 1. 设原点${ x} = {\bf 0}$是非线性系统$\dot{ x}= f( x)$的渐近平衡点,其中,$ f: D\rightarrow{\bf R}^n$是局部Lipschitz的,且$ D\in {\bf R}^n$是包含原点的定义域.又设$ \phi(t; x)$是系统在时刻$t=0$初始状态的解.原点的吸引域记为${ R}_A$,定义为
$ { R}_A=\{ x\in D| \phi(t; x),\ \forall\,t\geq 0,\ t\rightarrow \infty,\ \phi(t; x)\rightarrow 0\} $
(25) 接下来将根据该反馈线性化控制器使得有条件约束的非线性系统是具有吸引域局部稳定,以及输入状态有界定理,来证明闭环系统的稳定性.
定理 2. 假设系统满足假设1条件中的子条件(A1)~ (A3),如果系统在$( \eta, \psi)$ $=$ $(0,0)$是局部渐近稳定的,对于下面静态控制系统
$ \begin{cases} \dot{ \eta}= q_p( \eta, \psi)\\ \dot{ \psi}=\,_p \psi+B_p( \alpha_p( \eta, \psi) \,+\\ \qquad E_p( \eta, \psi)sat( \varphi_1( \eta, \psi, \beta_p))- \beta_p) \end{cases} $
(26) 其中,
$ \varphi_1( \eta, \psi, \beta_p)=E_p^{-1}( \eta, \psi)(- \alpha_p( \eta, \psi)+D_c \psi+ \beta_p) $
那么,当吸引域$ X_2\in {\bf R}^n$时,给定${ Z}_2$为$ X_2$的任意紧子集,动态控制系统(2)、(3)和(9)在初始值为 $( x_c, \psi+ x_{aw}, \eta, \psi)$ $=$ $(0,0,0,0)$时,在吸引域$ S_1\times S_2$是局部渐近稳定的.其中,$ S_1\subseteq{\bf R}^{n_c+n_{aw}}$,$ S_2$包含${ Z}_2$的$ X_2$的紧子集,$n_c$,$n_{aw}$分别表示控制器和补偿器的维数.
抗饱和补偿器维数$n_{aw}=n_{aw1}$,下文都将用$n_{aw}$表示补偿器的维数.
证明. 首先,做一个等价式(26)的映射,重构上述系统
$ \begin{cases} \dot{ z}_1=A_z z_1\\ \dot{ z}_2= f_z( z_2)+ g_z( z_2)sat[ \varphi_1( z_2)]+ v( z_1, z_2) \end{cases} $
(27) 式中,$ v( z_1, z_2)= g_z( z_2)\{sat[ \varphi_1( z_2)+ \varphi_2( z_1)]-sat[ \varphi_1( z_2)]\}$,$ z_1\in {\bf R}^{n_1}$,$ z_2\in {\bf R}^{n_2}$,$ A_z$是Hurwitz,$ f_2$,$ g_z$,$ \varphi_1$,$ \varphi_2$满足局部李普希兹条件,并且当$ X_2\in {\bf R}^{n_2}$,$ z_2=0$是$\dot{ z}_1= f_z( z_2)$ $+$ $ g_z( z_2)sat[ \varphi_1( z_2)]$的一个局部渐近稳定状态.
其次,通过定理1确定的抗饱和补偿器(13),为了匹配式(26)和式(27),可以重构式(2)、式(3)和式(13),且 $n_1$ $=$ $n_c+n_{aw}$,$n_2=n$,式(27)中各变量可表示为
$ z_1= \left[ \begin{array}{c} x_c\\ \psi+ x_{aw} \\ \end{array} \right],\quad A_z=A_{cl},\quad z_2 =\left[ \begin{array}{c} \eta\\ \psi\\ \end{array} \right] $
$ f_z( z_2, \beta_p)=\left[ \begin{array}{c} q_p( z_2)\\ A_p \psi+B_p( \alpha_p( z_2)- \beta_p)\\ \end{array} \right] $
$ {g_z}({z_2}) = \left[ {\begin{array}{*{20}{c}} 0\\ {{B_p}{E_p}({z_2})} \end{array}} \right],\;\;{\varphi _2}({z_2}) = [E_p^{ - 1}({z_2}){C_c}\;0] $
对式(27)中$ v({ z}_1,{ z}_2)$,可推导出下列不等式:
$ \begin{array}{*{20}{c}} {\mathop {sup}\limits_{t > {\tau _z}} v({z_1},{z_2},{\beta _p})(t)\ <{\varepsilon _z},}\\ {\forall {\mkern 1mu} ({z_1}(0),{z_2}(0)) \in {S_1} \times {Z_2}{\rm{ }}} \end{array} $
(28) 其中,${ Z}_2$是$ X_2$的任意紧子集,构造其他两个$ X_2$的紧子集$ S(c)$ $=$ $\{ z_2: V( z_2)\leq c\}$,$ S(c+1)=\{ z_2: V( z_2)\leq c+1\}$,使得${ Z}_2\subset S(c)\subset S(c+1)\subset X_2$,$c\geq 0$,$ \varepsilon_z$为$\| v(t)\|$的边界值,且满足$\dot{ V}( z_2)$对所有$ z_2\in X_2$为负定的,那么
$ \begin{align} & \|\frac{\partial V({{z}_{2}})}{\partial {{z}_{2}}}\{{{f}_{z}}({{z}_{2}},{{\beta }_{p}})~+ \\ & \ \ \ \ \ \ \ \ \ \ {{g}_{z}}({{z}_{2}})sat[{{\varphi }_{1}}({{z}_{2}},{{\beta }_{p}})+v({{z}_{1}},{{z}_{2}},{{\beta }_{p}})]\}\|\le {{h}_{2}} \\ \end{align} $
(29) $\forall {z_1} \in {{\bf{R}}^{{n_c} + {n_{aw}}}}$和$\forall {\mkern 1mu} {z_2} \in S(c + 1)$,当$\tau_z=1/h+z$,$h_z$为给定常数.
为了获得$\| v(t)\|$的边界值,可知 $\exists M_{z1}>0$,$ M_{z2}>0$,$ M_{z3}$ $>$ $0$,$ \gamma_z>0$,使得$\forall\,( z_1+ z_2)\in {\bf R}^{n_c+n_{aw}}\times X_2$,则
$ \begin{matrix} \|v({{z}_{1}},{{z}_{2}},{{\beta }_{p}})\|\le \min \{{{M}_{z1}},{{M}_{z2}}\|{{z}_{1}}(t)\|\}\le \\ \{{{M}_{z1}},{{M}_{z2}},{{M}_{z3}}\|{{z}_{1}}(0)\|{{\text{e}}^{-\gamma zt}}\},\ \ \forall t\ge 0 \\ \end{matrix} $
(30) 由假设条件(12)中常数矩阵$A_{cl}$的稳定性及饱和函数是全局的李普希兹和有界的,因此 $\forall\,t> \tau_z$,
$ \|{ z}_1(0)\|\leq \frac{\varepsilon_z{\rm e}^{ \gamma_z \tau_z}}{{ M}_{z2}{ M}_{z3}} $
(31) 或者满足$ M_{z1}\leq \varepsilon_z$,故有$\forall\,t> \tau_z$,$\dot{ V}( z_2)<0$,那么,当$t$ $\rightarrow$ $\infty$时,$ z_2(t)$ $\rightarrow$ $0$,状态量趋于稳定,记$ S(c+1)$为$ S_2$.由于状态变量$ z_1(0)$满足式(31),所以可由所有满足式(27)的$ S_1$构成,或者当 $ M_{z1}$ $<$ $ \varepsilon_z$,所有$ z_1(0)$ $\in$ ${\bf R}^{n_c+n_{aw}}$记为$ S_1$.综上,本定理成立.
定理 3. 当满足假设1的(A1)~(A4)时,如果系统受到输入饱和限制,闭环控制系统(2)、系统(3)和系统(9)满足以下性能:
1) $ x_c(t)$指数收敛到0;
2) $\forall\,t$,满足$\| \eta(t)\|<\infty$,$\| \psi(t)\|<\infty$,$\| x_{aw}(t)\|<\infty$, $\| x_{aw1}(t)\|$ $<$ $\infty$.
证明. 由假设1的(A3)和(A4)可知,$\forall\,t$满足$\| \eta(t)\|$ $<$ $\infty$,$\| \psi(t)\|< \infty$,加入抗饱和补偿器后,由定理1和假设1的(A1)~(A4),式(23)中$ z_1$动态稳定,有假设1的(A2)可确保$ x_c(t)$指数收敛到0,令$ x'_{aw}(t)$为改进补偿器的状态,因此
$ \lim\limits_{t\rightarrow\infty}[ \Psi(t)+ x'_{\alpha w}]=0,\quad \| \Psi(t)+ x'_{\alpha w}(t)\|<\infty $
(32) 由于$ \varphi(t)$有界,则$ x_{aw}'(t)$有界,由于$ x_{aw}'(t)$为$ x_{aw}(t)$与$ x_{aw1}(t)$共同组成,且$ x_{aw}(t)$与$ x_{aw1}(t)$互为倍数关系,则$ x_{aw}(t)$与$ x_{aw1}(t)$有界.
4. 仿真实例与分析
为验证本文所提抗饱和补偿器的性能及工程实用性,本节将该方法对某船[12]的舵减横摇系统进行仿真实验和分析.其中系统模型为
$ \begin{cases} \dot{ x}_p= f( x_p)+ g( x_p)sat( u)+ w\\ y= h( x_p)\\ \end{cases} $
(33) 式中,$ x_p=[ x_1\ x_2]^{\rm T}=[ \varphi \ \ \dot{ \varphi}]^{\rm T}$,$ \varphi$为横摇角,$\dot{ \varphi}$为横摇角速度. $ f( x_p)$ $ =\left[{array}{c} x_2\\ a_1 x_1+a_2 x_1^3+a_3 x_2 \\ {array}\right]$,$ g( x_p) =\left[{array}{c} 0\\ b \\ {array} \right]$,$ y= x_1$,$ w$ $=$ $\left[{array}{c} 0\\ f_w \\ {array} \right]$为海浪干扰,干扰计算根据文献[12]给出. $a_1$ $=$ $-0.3588$,$a_2=0.7363$,$a_3=-0.0763$,$b=0.0182$.舵机饱和受限情况为
$ {sat(u)}= \begin{cases} 35^0, u>35^0\\ u,-35^0\leq u\leq 35^0\\ -35^0, u<-35^0 \end{cases} $
(34) 延迟抗饱和补偿器受限情况为(取$g=35/45$)
$ {sat(u)}= \begin{cases} 45^0, u>45^0\\ u,-45^0\leq u\leq 45^0\\ -45^0, u <-45^0 \end{cases} $
(35) 下面的变量单位为弧度.
将式(29)变化成式(2)的形式,其参数为
$ A_p =\left[ \begin{array}{cc} 0& 1\\ 0 & 0 \\ \end{array} \right],\ B_p =\left[ \begin{array}{cc} 0\\ 1 \\ \end{array} \right],\ \ E_p=\frac{1}{b} $
给出系统的控制器
$ \begin{cases} \dot{ x}_c=0\times x_c+( x_1- y_d)- \xi \\ \xi= \xi_0+ \xi_1\\ u=\dfrac{-a_1 x_1-a_2 x_1^3-a_3 x_2}{b}~ +\\ \quad\ \ \,\dfrac{-5( x_1- y_d)-30(\dot{ x}_1- y_d)-10 x_c-\ddot{ y}_d}{b}\end{cases} $
(36) 期望$ y_d=0$. $C_c=-10$,$D_c=[-5\ -30]$,$B_c=[1\ 0]$.
根据式(9)可以计算出补偿器
$ \begin{cases} \dot{ x}_{aw}=\left[\begin{array}{cc} 0& 1\\ -5 & -30 \\ \end{array}\right] x_{aw}\left[\begin{array}{c} 0\\1\end{array}\right]\dfrac{1}{b}( u-sat( u))\\ \dot{ x}_{aw1}=\left[\begin{array}{cc} 0& 1\\ -5 & -30 \\ \end{array}\right] x_{aw}\left[\begin{array}{c} 0\\1\end{array}\right]\dfrac{1}{b}( u-sat_1( u))\\ \xi=-[1\ 0]( x_{aw}+ x_{aw1}) \end{cases} $
(37) 根据以上计算结果,给出具有海浪干扰下(海浪干扰的计算由文献[13-14]给出)横摇运动及舵角输出的仿真图.
首先,假设舵机无饱和限制(舵角和舵速可以不受限制,可以无限大),实现设计好的反馈线性化控制器的减横摇情况及舵角输出如图 2所示.
但实际情况是舵机存在饱和限制(舵角和舵速都有极限值,如式(5)~(30)所示),给出执行器受限后,但无抗饱和补偿器时,系统的减横摇情况及舵角输出如图 3所示.
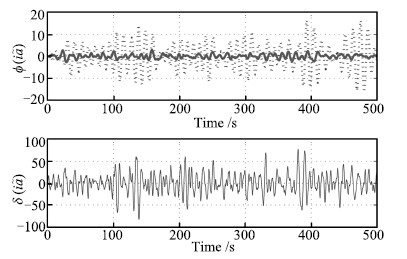
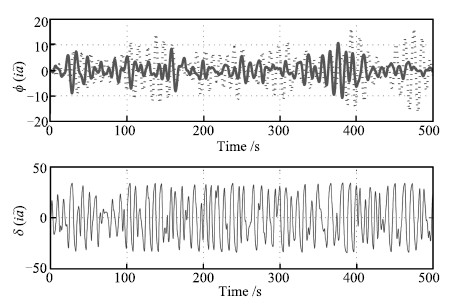
当舵机存在饱和限制时,可以使用抗饱和补偿器,降低执行器饱和对舵减横摇系统的影响.当系统中只有一个传统补偿器时,系统的减横摇情况及舵角输出如图 4所示;当系统中只有一个延迟补偿器时,系统的减横摇情况及舵角输出如图 5所示;当系统中具有两个补偿器的双环路的改进抗饱和补偿器时,系统的减横摇情况及舵角输出如图 6所示.
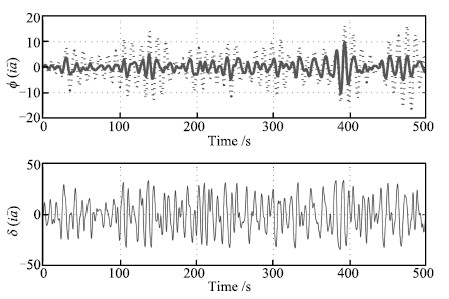 图 4 有饱和限制只有传统补偿器时横摇角及舵角输出Fig. 4 Output of roll and rudder when there is only a traditional anti-saturation compensator
图 4 有饱和限制只有传统补偿器时横摇角及舵角输出Fig. 4 Output of roll and rudder when there is only a traditional anti-saturation compensator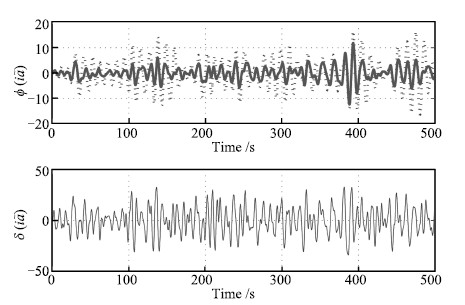 图 5 有饱和限制只有延迟补偿器时横摇角及舵角输出Fig. 5 Output of roll and rudder when there is only a delay anti-saturation compensator
图 5 有饱和限制只有延迟补偿器时横摇角及舵角输出Fig. 5 Output of roll and rudder when there is only a delay anti-saturation compensator 图 6 有饱和限制具有改进补偿器时横摇角及舵角输出Fig. 6 Output of roll and rudder when there is an improved anti-saturation compensator
图 6 有饱和限制具有改进补偿器时横摇角及舵角输出Fig. 6 Output of roll and rudder when there is an improved anti-saturation compensator为比较几种情况的减摇效果情况,减摇率定义由文献[12]给出:
$ RRR\,(\%)=\frac{AP-RCS}{AP}\times100% $
(38) 其中,$AP$为无减摇控制器时横摇标准偏差,$RCS$为加入减摇控制器后横摇标准偏差.设$DP$为舵角输出的标准偏差.由表 1给出每种情况下的减摇数据和舵角输出标准偏差情况.
表 1 减摇率与舵角标准偏差Table 1 The standard deviation of damping rate and rudder参数 $AP$ $RCS$ $DP$ $RRR\,(\%)$ 无饱和限制 6.2116 1.0160 22.8524 83.64 有限制无补偿器 6.2116 3.0813 19.3945 50.39 只有传统补偿器 6.2116 2.4010 12.3876 61.35 只有延迟补偿器 6.2116 2.6002 11.5471 58.14 具有改进补偿器 6.2116 2.1529 10.6496 65.34 图 2~6中每幅图的第1幅图中虚线代表不加控制时横摇运动情况,实线为加入控制器时的横摇运动情况,在执行器饱和约束情况下,从这五幅图对比及表 1数据可明显看出,加入补偿器后的减摇率和舵机工作性能都得到改善,如图 3~6.
当只有一个补偿器的时候,传统补偿器较延迟补偿器取得了较好的减摇率61.35%,但对于执行器饱和的处理却较之差些;改进后的抗饱和补偿器减摇率提高到65.34%,极大地改善了减摇效果,同时舵机打舵幅度和次数都减小了,是所有补偿器中舵角输出的标准偏差,最小的为10.6496,相比其他补偿器减少了舵机磨损,提高了舵机工作性能.这将在舵减横摇应用方面具有重要意义.
5. 结论
本文提出一种具有双环路的抗饱和补偿器设计方案,来解决一类具有执行器饱和的非线性系统.该方案在传统的补偿器上,引入一延迟补偿器,用以分离饱和区,与单环路的补偿器相比,在系统具有高饱和度情况时,能以最大程度降低饱和对系统带来的影响.同时当控制器输出低于延迟补偿器的极限值时,延迟补偿器并不启动,在一定程度上减轻了系统的工作负担.本文不仅在理论上分析和证明了所提出的双环路抗饱和补偿器闭环系统全局一致有界稳定,具有一定理论意义.并将其应用于舵机执行器受约束的船舶舵减横摇系统中,仿真结果说明减摇率和舵机工作性能都得到改善,这将在舵减横摇应用方面具有重要意义.
-
图 4 有饱和限制只有传统补偿器时横摇角及舵角输出
Fig. 4 Output of roll and rudder when there is only a traditional anti-saturation compensator
图 5 有饱和限制只有延迟补偿器时横摇角及舵角输出
Fig. 5 Output of roll and rudder when there is only a delay anti-saturation compensator
图 6 有饱和限制具有改进补偿器时横摇角及舵角输出
Fig. 6 Output of roll and rudder when there is an improved anti-saturation compensator
表 1 减摇率与舵角标准偏差
Table 1 The standard deviation of damping rate and rudder
参数 $AP$ $RCS$ $DP$ $RRR\,(\%)$ 无饱和限制 6.2116 1.0160 22.8524 83.64 有限制无补偿器 6.2116 3.0813 19.3945 50.39 只有传统补偿器 6.2116 2.4010 12.3876 61.35 只有延迟补偿器 6.2116 2.6002 11.5471 58.14 具有改进补偿器 6.2116 2.1529 10.6496 65.34  下载: 导出CSV
下载: 导出CSV
-
[1] Tarbouriech S, Turner M. Anti-windup design: an overview of some recent advances and open problems. IET Control Theory and Applications, 2009, 3(1): 1-19 [2] Galeani S, Tarbouriech S, Turner M, Zaccarian M. A tutorial on modern anti-windup design. European Journal of Control, 2009, 15(3-4): 418-440 [3] Sajjadi-Kia S, Jabbari F. Modified anti-windup compensators for stable plants. IEEE Transactions on Automatic Control, 2009, 54(8): 1934-1939 [4] Sajjadi-Kia S, Jabbari F. Modified anti-windup compensators for stable plants: dynamic anti-windup case. In: Proceedings of the 48th IEEE Conference on Decision and Control, 2009 Held Jointly with the 28th Chinese Control Conference. Shanghai, China: IEEE, 2009. 2795-2800 [5] Sajjadi-Kia S, Jabbari F. Modified dynamic anti-windup through deferral of activation. International Journal of Robust and Nonlinear Control, 2012, 22(15): 1661-1673 [6] Wu X J, Lin Z L. Anti-windup in anticipation of actuator saturation. In: Proceedings of the 49th IEEE Conference on Decision and Control. Atlanta, GA, USA: IEEE, 2010. 5245 -5250 [7] Wu X J, Lin Z L. On immediate, delayed and anticipatory activation of anti-windup mechanism: static anti-windup case. IEEE Transactions on Automatic Control, 2012, 57(3): 771 -777 [8] Wu X J, Lin Z L. Dynamic anti-windup design in anticipation of actuator saturation. International Journal of Robust and Nonlinear Control, 2014, 24(2): 295-312 [9] Isidori A. Nonlinear Control Systems. Berlin: Springer-Verlag, 1995. 58-99 [10] 郑云峰, 杨盐生, 李铁山. 带有执行器的船舶航向控制反馈线性化设计. 大连海事大学学报, 2004, 30(3): 14-17Zheng Yun-Feng, Yang Yan-Sheng, Li Tie-Shan. Input-state linearization based ship's course-keeping controller designs. Journal of Dalian Maritime University, 2004, 30(3): 14-17 [11] Mulder E F, Tiwari P Y, Kothare M V. Simultaneous linear and anti-windup controller synthesis using multiobjective convex optimization. Automatica, 2009, 45(3): 805-811 [12] 王新屏. 舵鳍联合系统的简捷非线性鲁棒控制[博士学位论文]. 大连海事大学, 中国, 2009. 105-113Wang Xin-Ping. Simple and Direct Nonlinear Robust Control of Rudder/Fin Joint System [Ph.D. dissertation], Dalian Maritime University, China, 2009. 105-113 [13] Liu S, Zhou L M. Static anti-windup synthesis for a class of linear systems subject to actuator amplitude and rate saturation. Acta Automatica Sinica, 2009, 35(7): 1003-1006 [14] Huang C Q, Peng X F, Wang J P. Robust nonlinear PID controllers for anti-windup design of robot manipulators with an uncertain Jacobian matrix. Acta Automatica Sinica, 2008, 34(9): 1113-1120 期刊类型引用(9)
1. 王典,吴云华,岳程斐,马松靖. 输入受限的挠性航天器全驱姿态饱和控制. 自动化学报. 2024(11): 2177-2187 .  本站查看
本站查看2. 周思羽,杨文奇,卢建华,宋立廷. 基于LESO的舰载机纵向着舰动态面抗饱和控制技术. 测控技术. 2023(03): 124-133 . 百度学术3. 赖文馨,李元龙,林宗利. 基于系统输出的嵌套饱和系统抗饱和补偿器设计. 控制理论与应用. 2023(02): 187-195 . 百度学术4. 高阳,吴文海,王子健. 具有输入约束和输出噪声的不确定系统级联线性自抗扰控制. 自动化学报. 2022(03): 843-852 . 本站查看5. 赖文馨,李元龙,林宗利. 抗饱和控制系统研究综述. 厦门大学学报(自然科学版). 2022(06): 916-926 . 百度学术6. 高阳,吴文海,张杨. 非对称输入饱和下的非仿射不确定系统自抗扰反演控制. 控制与决策. 2020(04): 885-892 . 百度学术7. 聂永辉,李兵兵,高磊,金国彬,张鹏宇. 考虑饱和影响的电力系统广域阻尼控制器设计. 电力自动化设备. 2020(09): 95-102 . 百度学术8. 钟佳岐,梁山,熊庆宇. 德拜媒质微波加热过程的H_∞保性能温度跟踪控制. 自动化学报. 2018(08): 1518-1527 . 本站查看9. 刘晨,董朝阳,王青,冉茂鹏. 基于扩张状态观测器的动态抗饱和补偿器设计方法. 控制与决策. 2018(11): 2087-2093 . 百度学术其他类型引用(26)
-

 下载:
下载:

计量
- 文章访问数: 2347
- HTML全文浏览量: 439
- PDF下载量: 1395
- 被引次数: 35
