2025年 第51卷 第2期
2025, 51(2): 233-248.
doi: 10.16383/j.aas.c230575
cstr: 32138.14.j.aas.c230575
摘要:
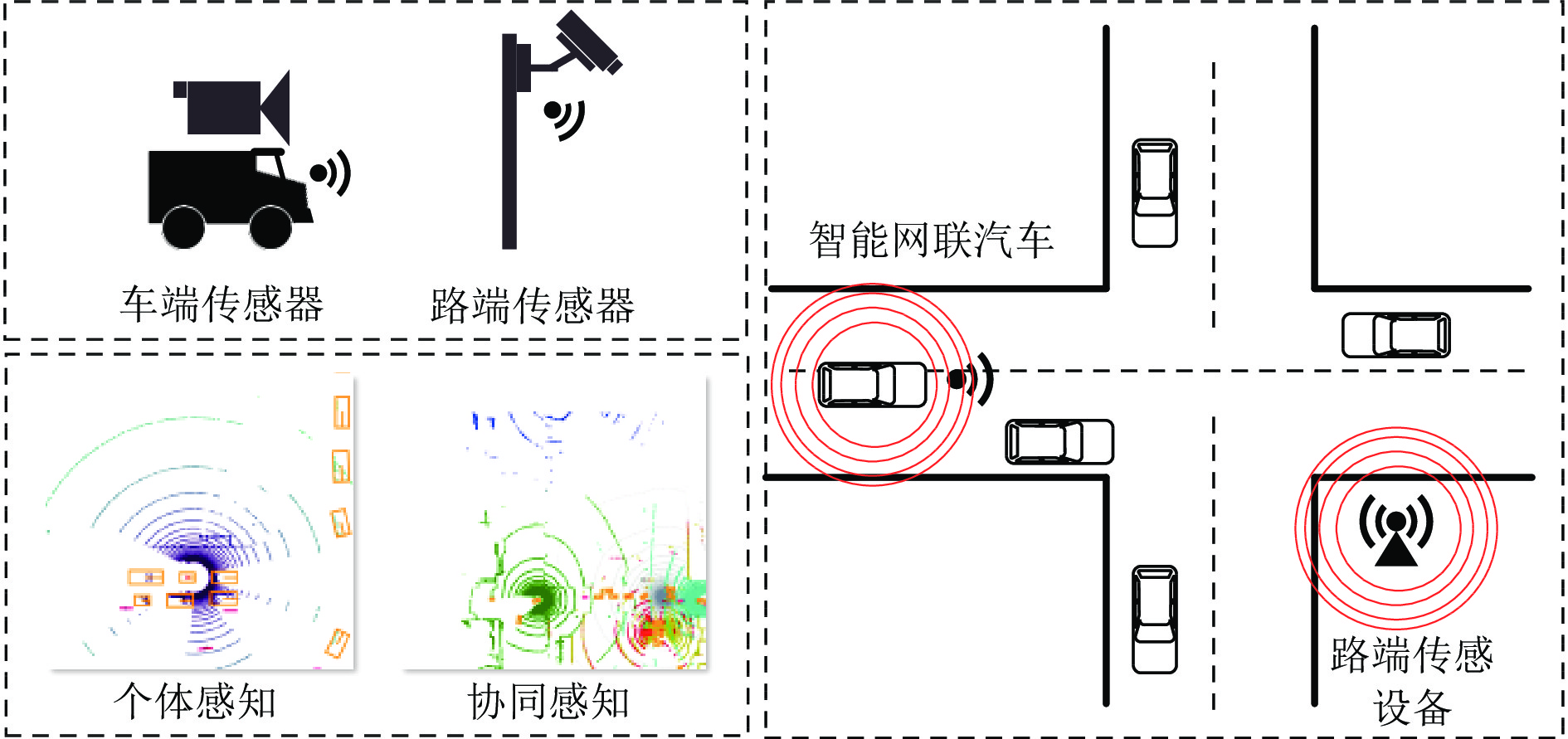
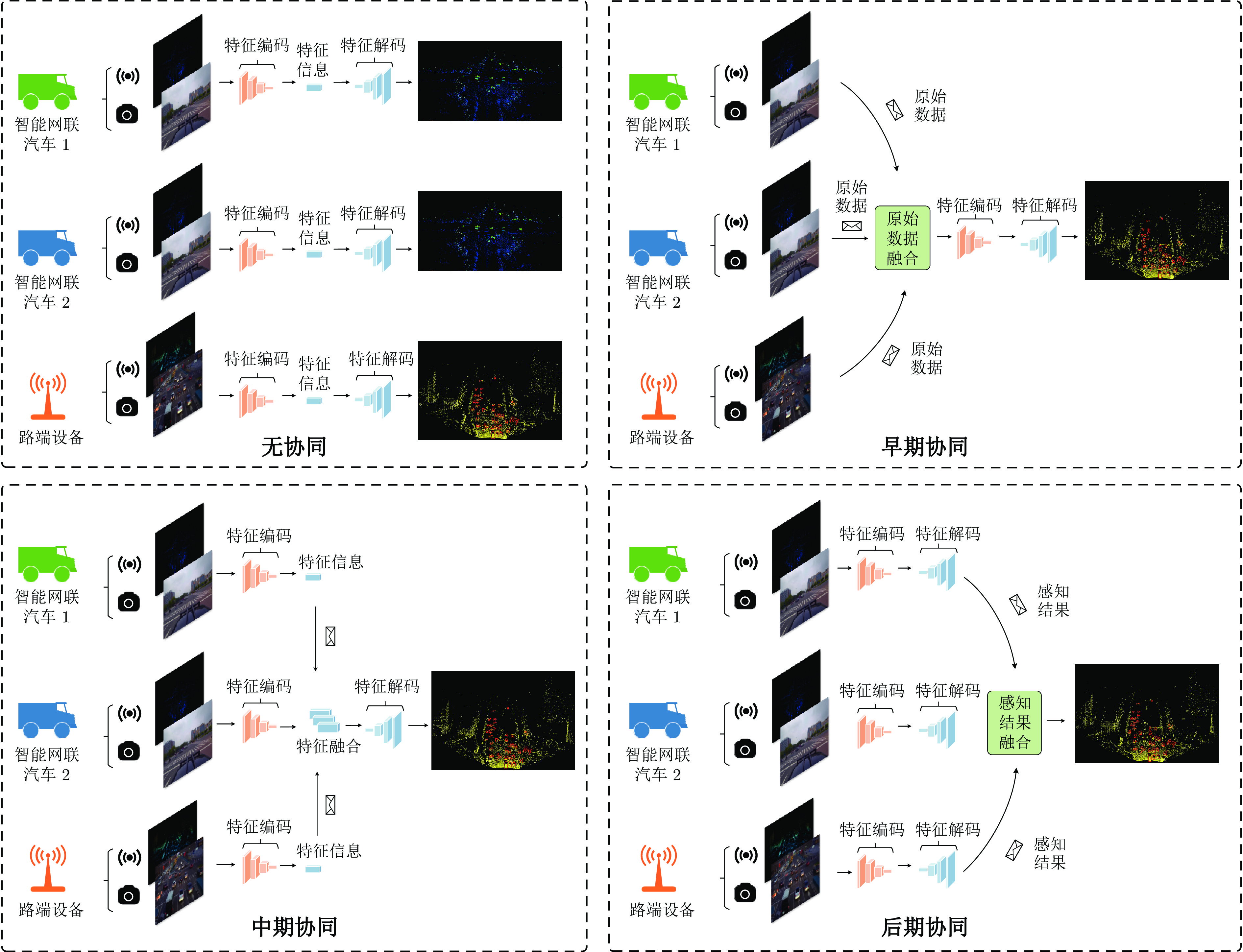
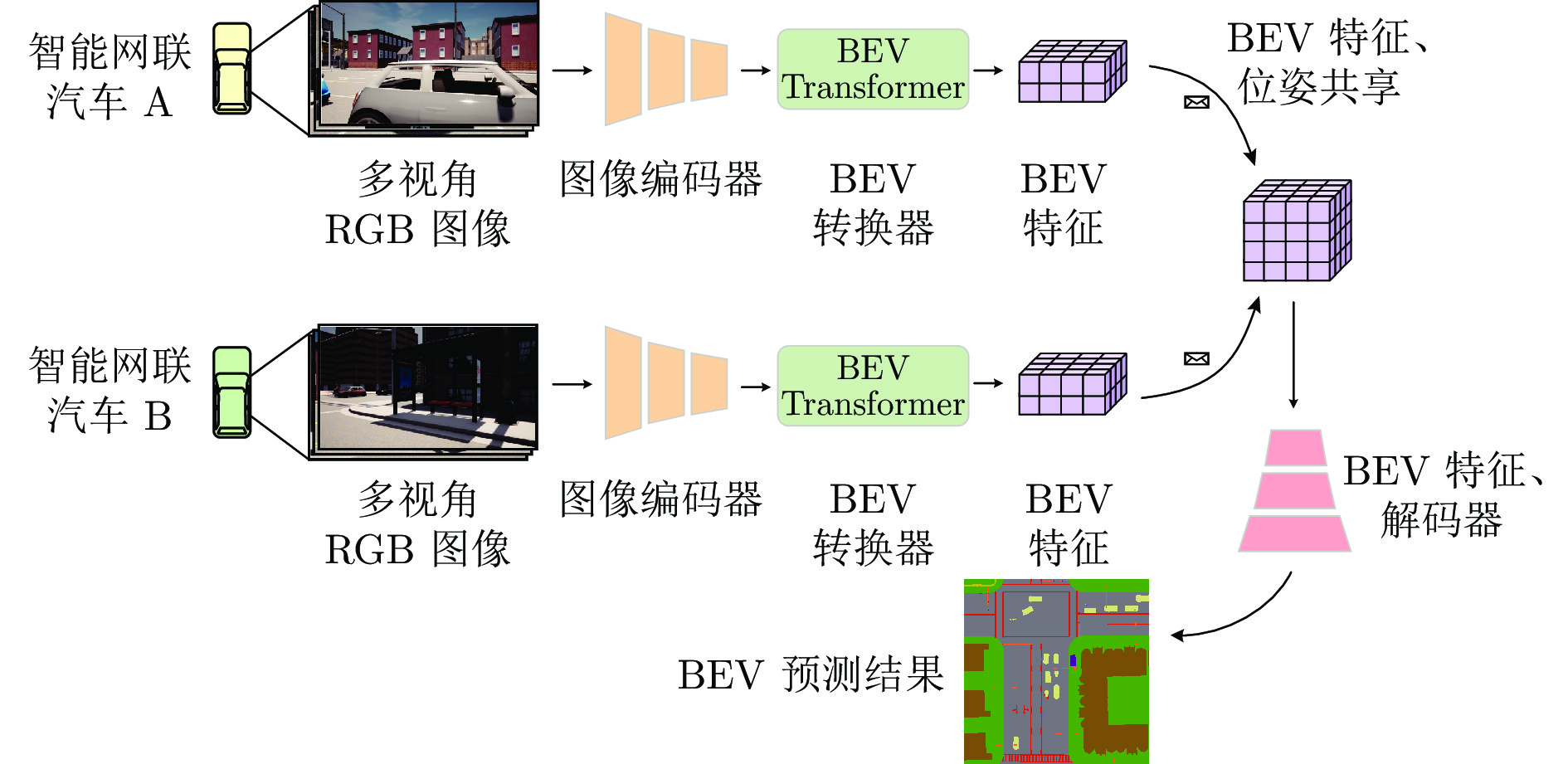
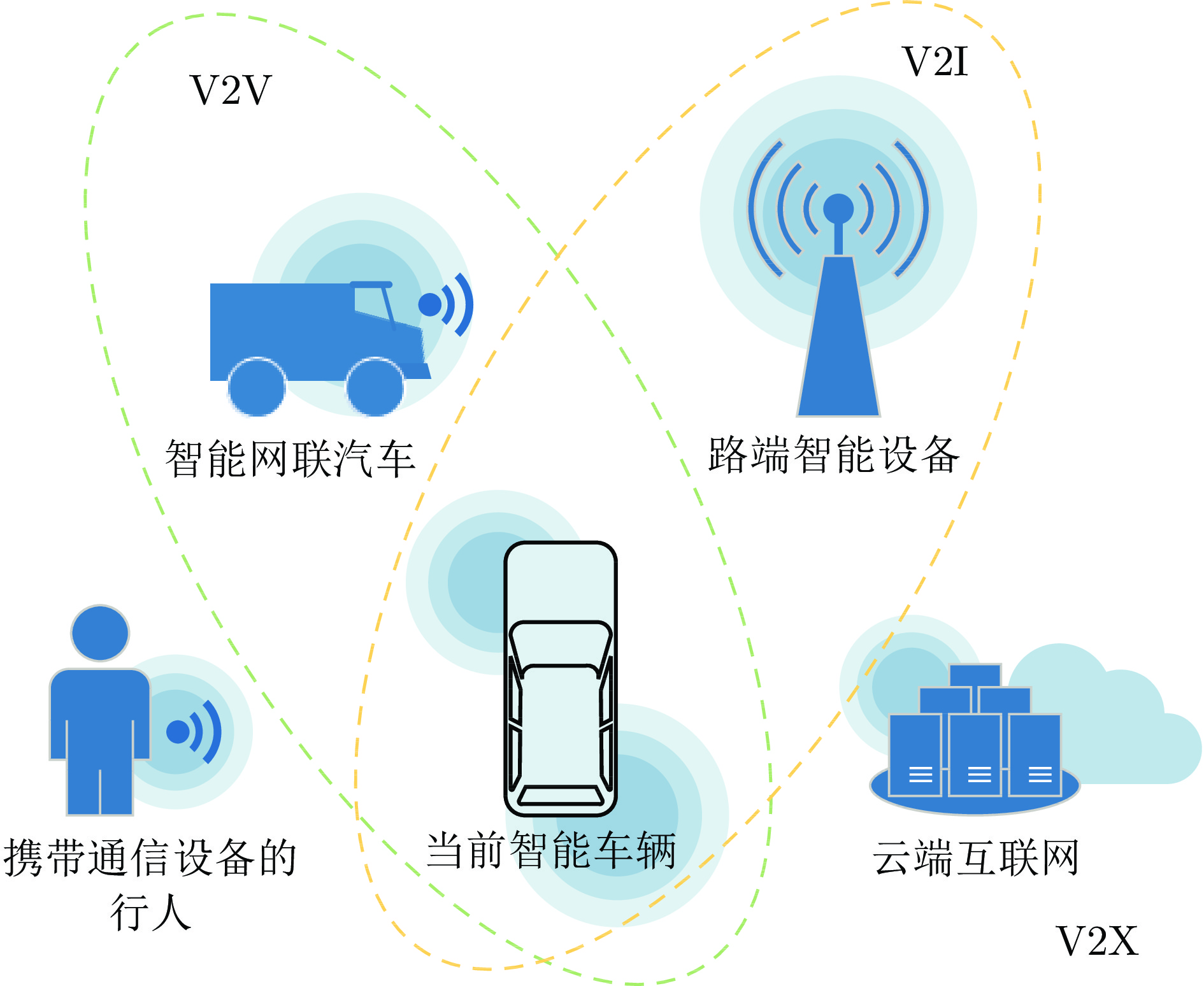
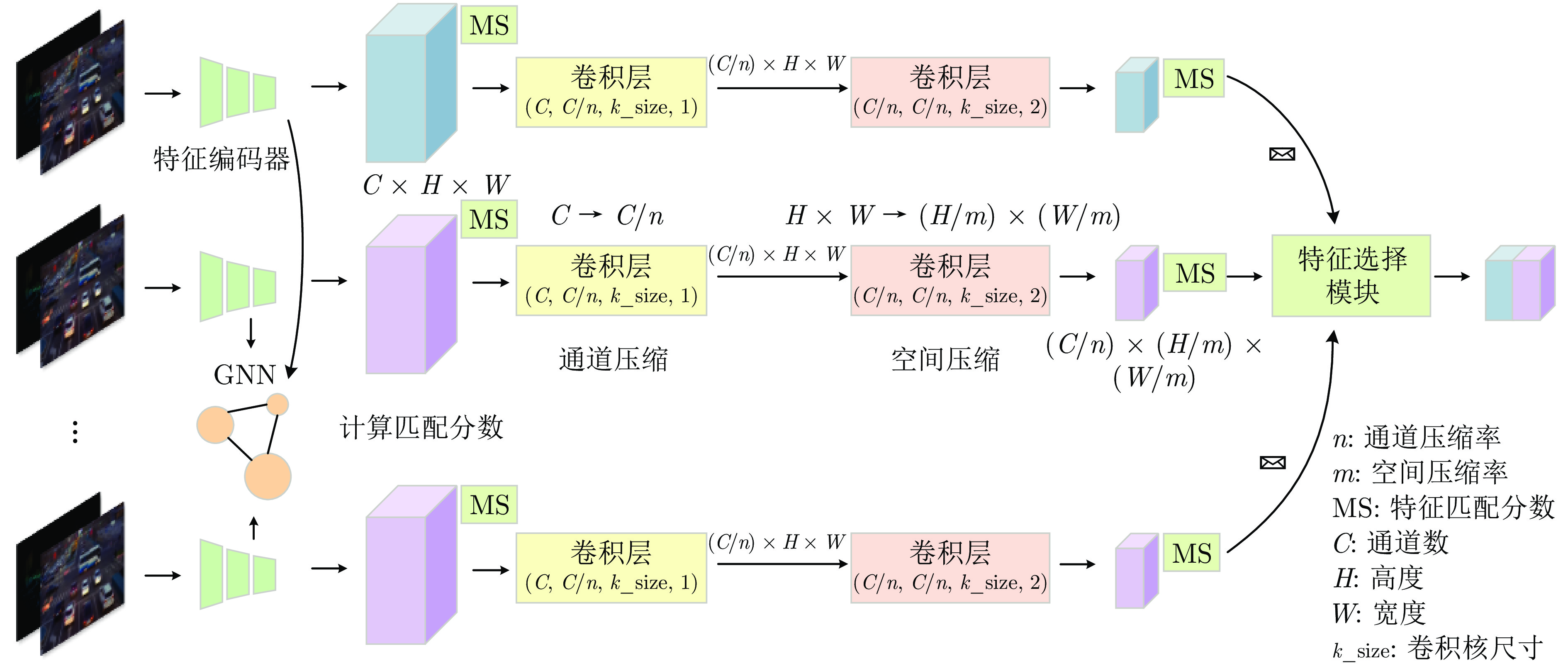
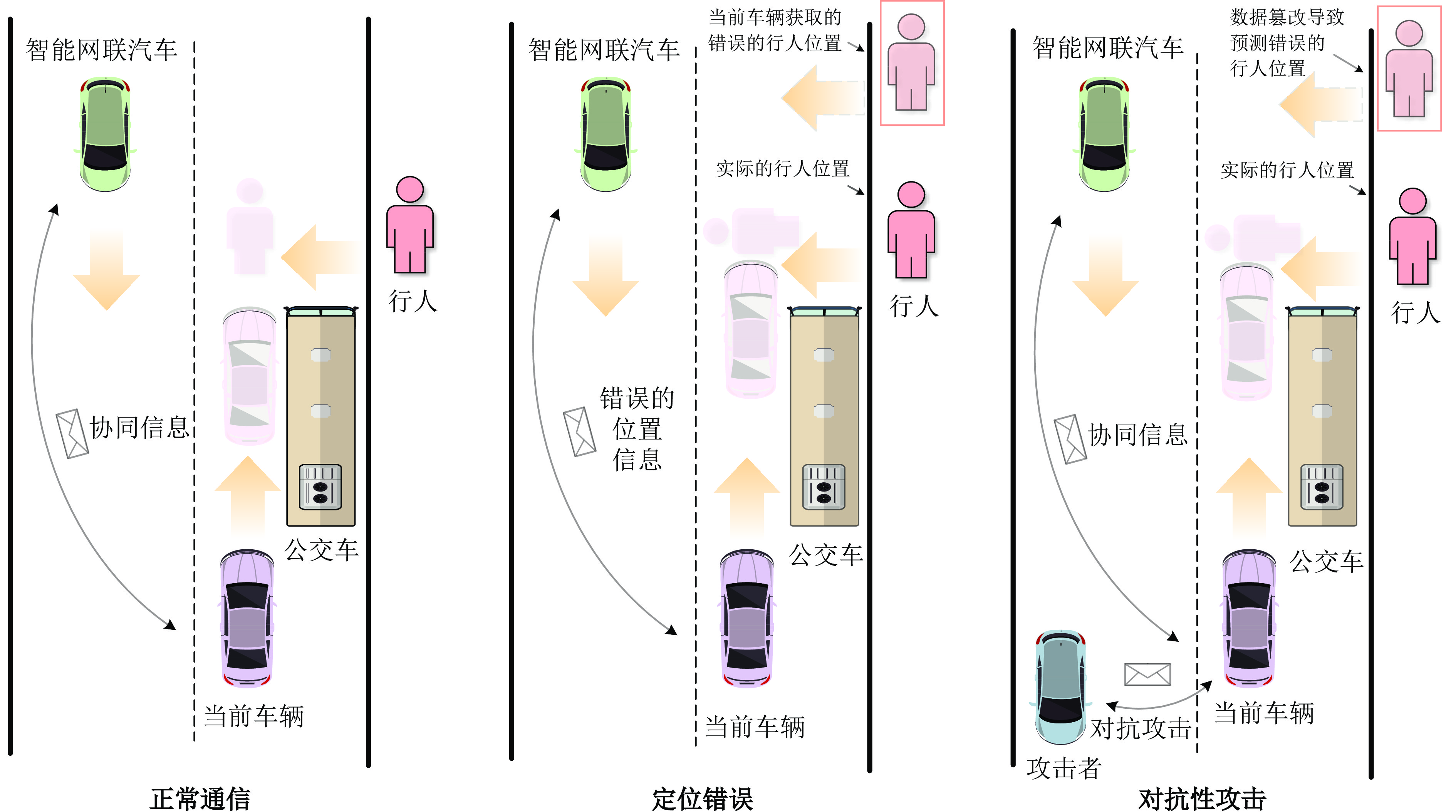
随着感知技术的不断发展以及智能交通基础设施的完善, 智能网联汽车应用在自动驾驶领域的地位逐渐提升. 自动驾驶感知从单车智能向车路协同迈进, 近年来涌现出一批新的协同感知技术与方法. 本文旨在全面阐述面向智能网联汽车的车路协同感知技术, 并总结相关可利用数据及该方向的发展趋势. 首先对智能网联汽车的协同感知策略进行划分, 并总结了不同感知策略具备的优势与不足; 其次, 对智能网联汽车协同感知的关键技术进行阐述, 包括车路协同感知过程中的感知技术与通信技术; 然后对车路协同感知方法进行归纳, 总结了近年来解决协同感知中感知融合(Perception fusion, PF)、感知信息选择与压缩(Perception selection and compression, SC)等问题的相关研究; 最后对车路协同感知的大规模数据集进行整理, 并对智能网联汽车协同感知的发展趋势进行分析.
随着感知技术的不断发展以及智能交通基础设施的完善, 智能网联汽车应用在自动驾驶领域的地位逐渐提升. 自动驾驶感知从单车智能向车路协同迈进, 近年来涌现出一批新的协同感知技术与方法. 本文旨在全面阐述面向智能网联汽车的车路协同感知技术, 并总结相关可利用数据及该方向的发展趋势. 首先对智能网联汽车的协同感知策略进行划分, 并总结了不同感知策略具备的优势与不足; 其次, 对智能网联汽车协同感知的关键技术进行阐述, 包括车路协同感知过程中的感知技术与通信技术; 然后对车路协同感知方法进行归纳, 总结了近年来解决协同感知中感知融合(Perception fusion, PF)、感知信息选择与压缩(Perception selection and compression, SC)等问题的相关研究; 最后对车路协同感知的大规模数据集进行整理, 并对智能网联汽车协同感知的发展趋势进行分析.

2025, 51(2): 249-270.
doi: 10.16383/j.aas.c240096
cstr: 32138.14.j.aas.c240096
摘要:
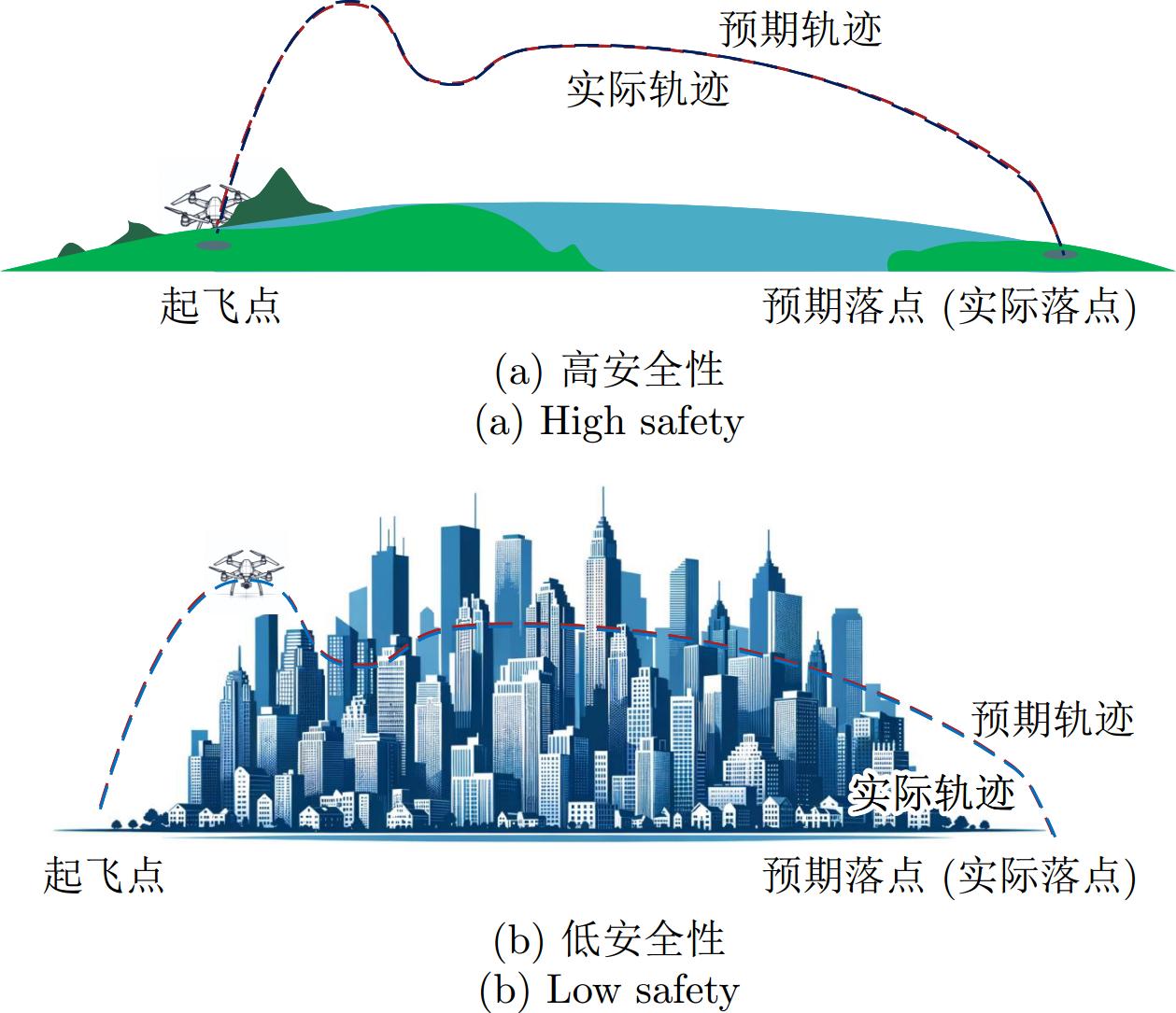
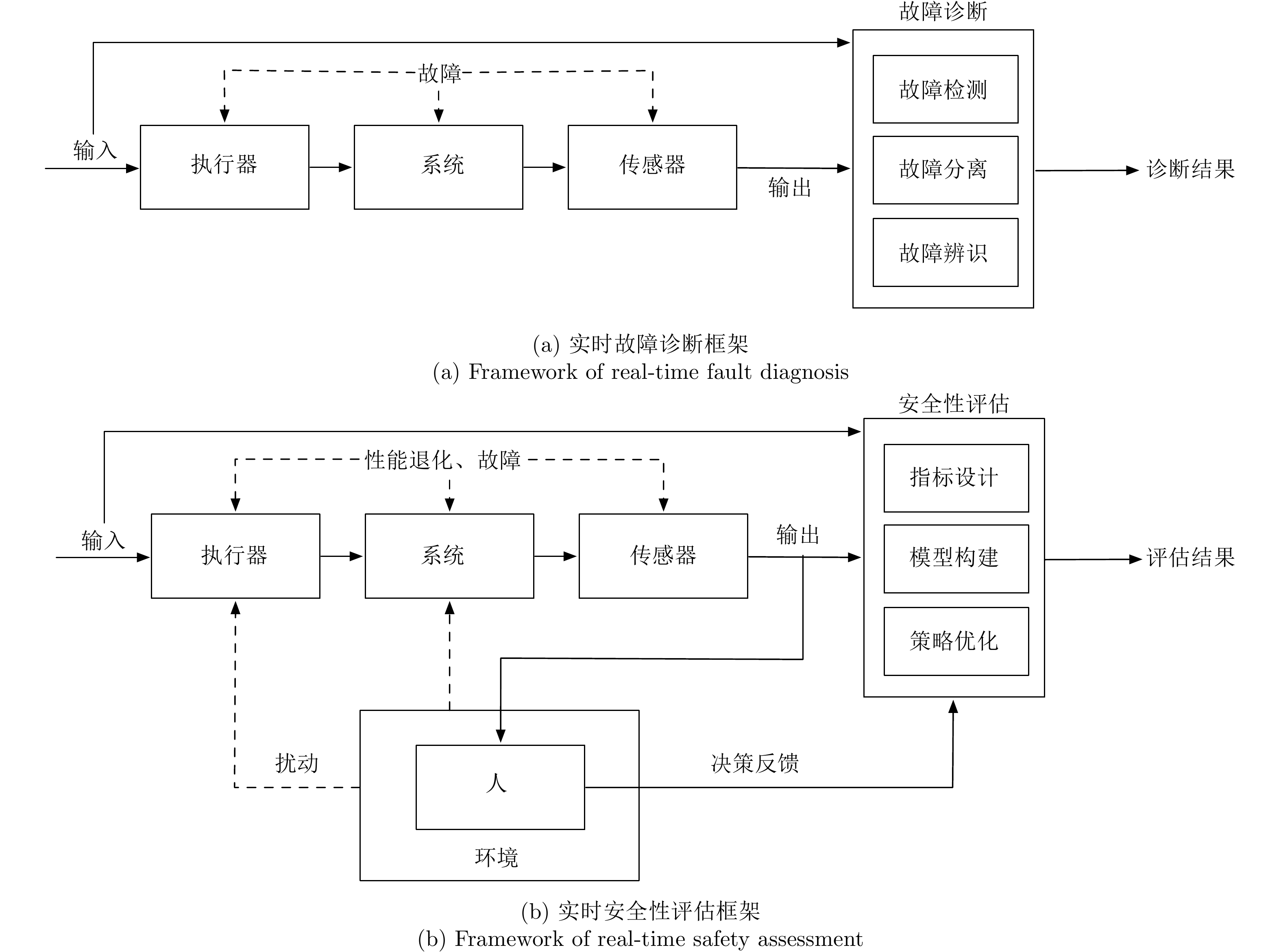
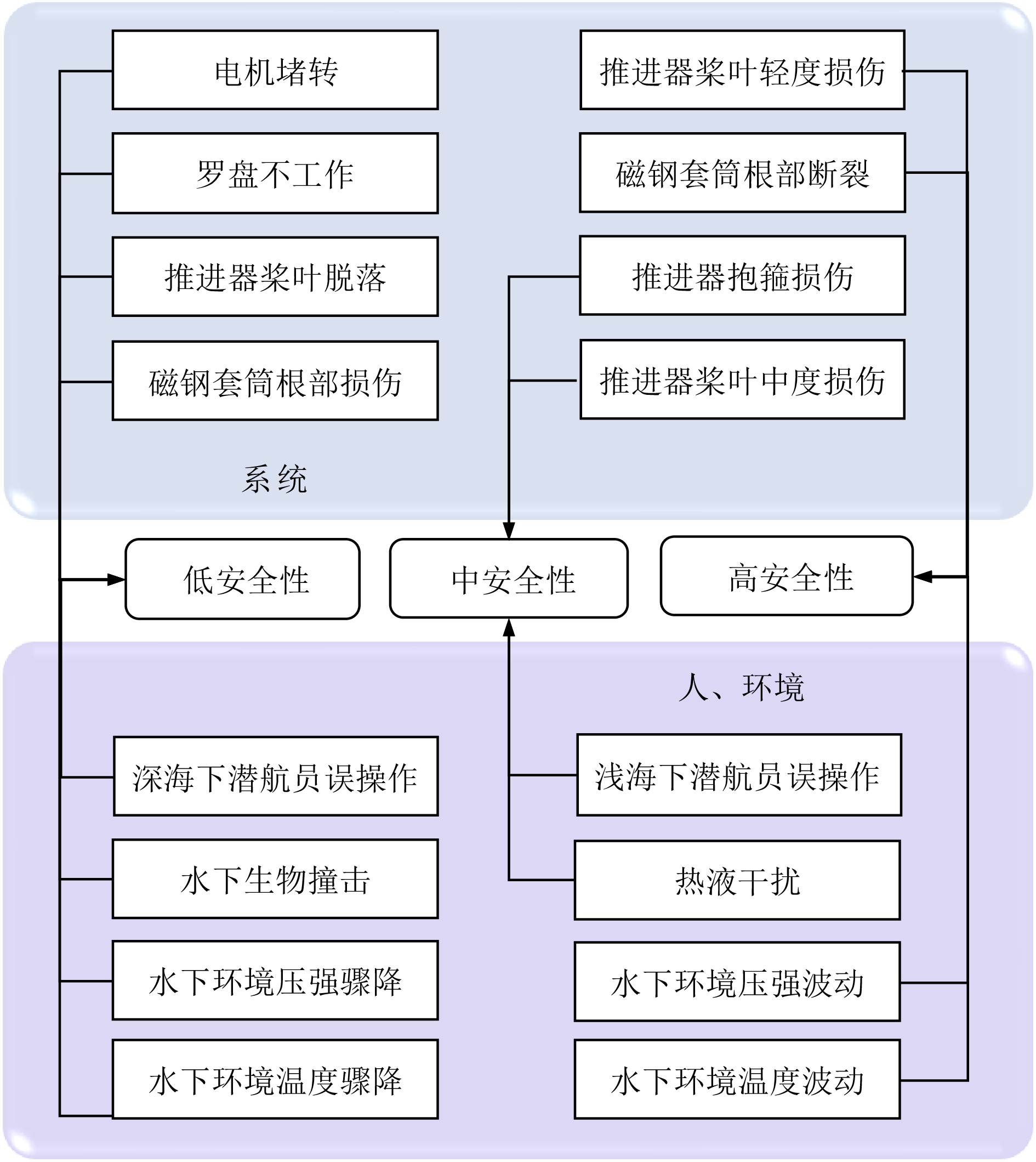
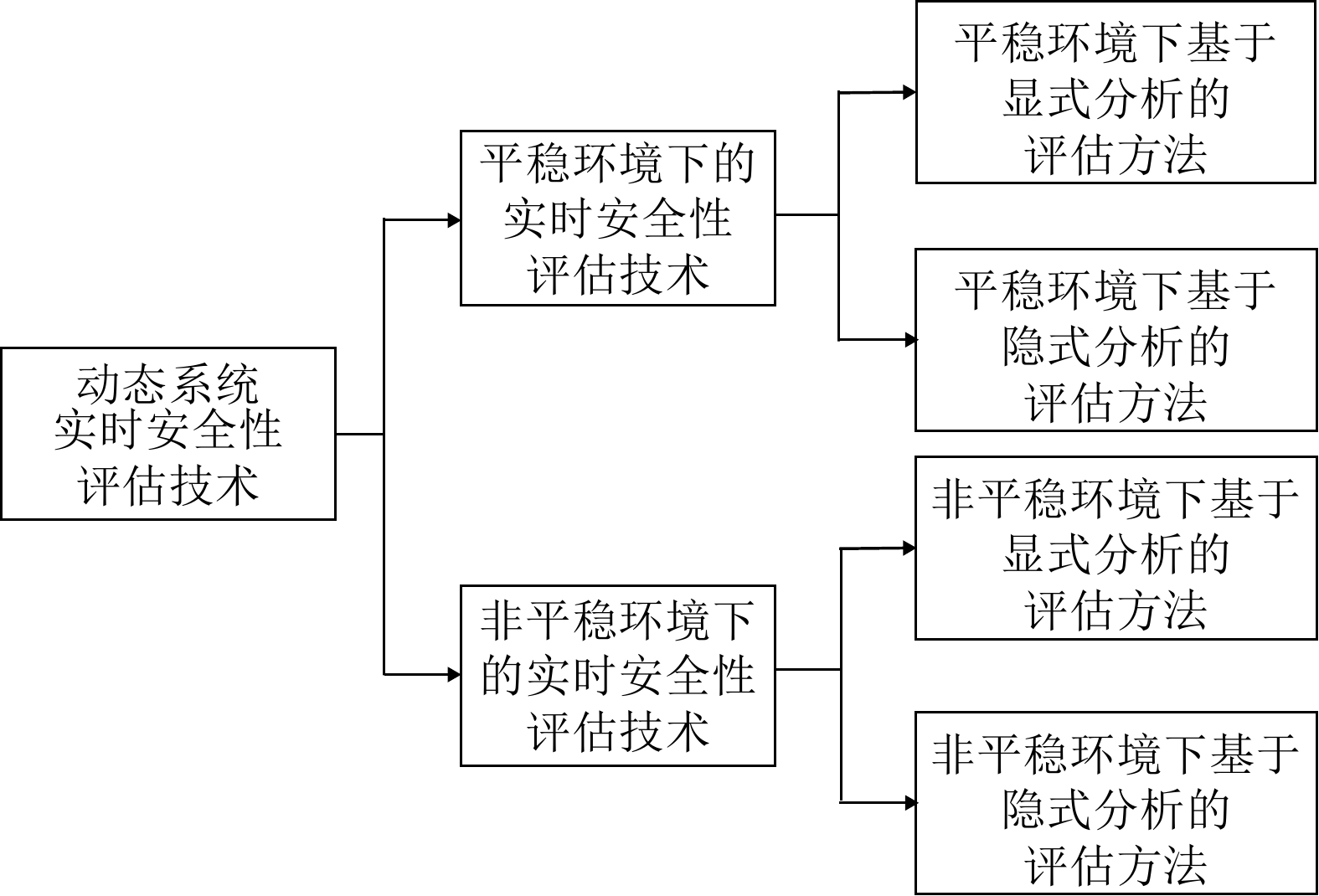
动态系统的实时安全性评估(Real-time safety assessment, RTSA)在防止潜在安全事故导致重大损失方面发挥着关键作用. 随着系统功能和操作环境复杂性的日益增加, 开发有效的实时安全性评估技术面临着更大的挑战. 鉴于此, 阐述动态系统实时安全性评估的概念定义, 从环境的平稳性及评估模型的构建方式两个维度出发提出一种分类框架, 给出相应的问题描述, 较系统地回顾了动态系统实时安全性评估技术的现有进展, 讨论针对不同实际系统的部署策略, 分析现有技术的发展趋势, 探讨实时安全性评估中亟待解决的问题与未来的发展方向.
动态系统的实时安全性评估(Real-time safety assessment, RTSA)在防止潜在安全事故导致重大损失方面发挥着关键作用. 随着系统功能和操作环境复杂性的日益增加, 开发有效的实时安全性评估技术面临着更大的挑战. 鉴于此, 阐述动态系统实时安全性评估的概念定义, 从环境的平稳性及评估模型的构建方式两个维度出发提出一种分类框架, 给出相应的问题描述, 较系统地回顾了动态系统实时安全性评估技术的现有进展, 讨论针对不同实际系统的部署策略, 分析现有技术的发展趋势, 探讨实时安全性评估中亟待解决的问题与未来的发展方向.

2025, 51(2): 271-286.
doi: 10.16383/j.aas.c240221
cstr: 32138.14.j.aas.c240221
摘要:
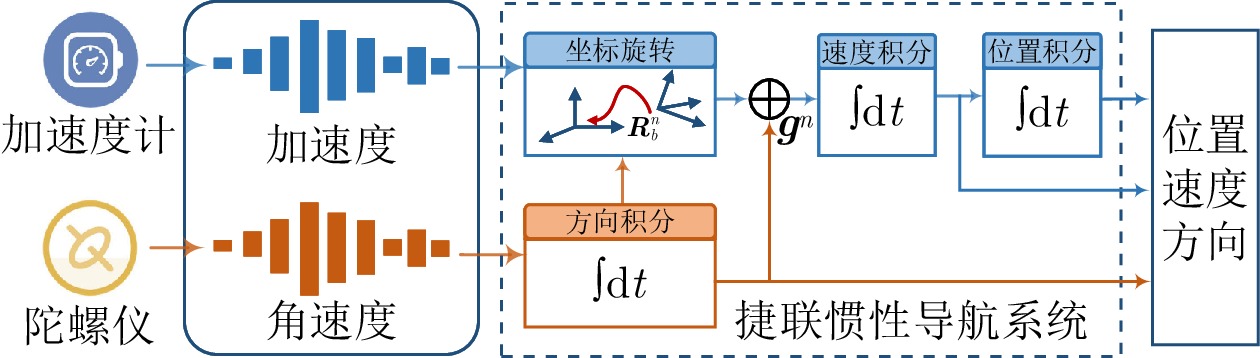
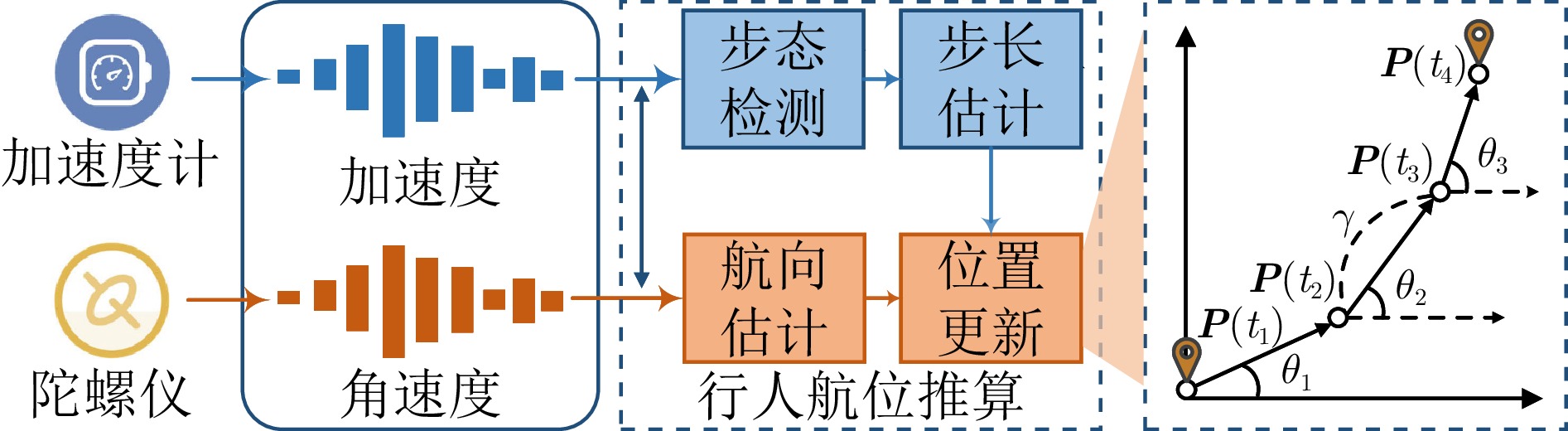
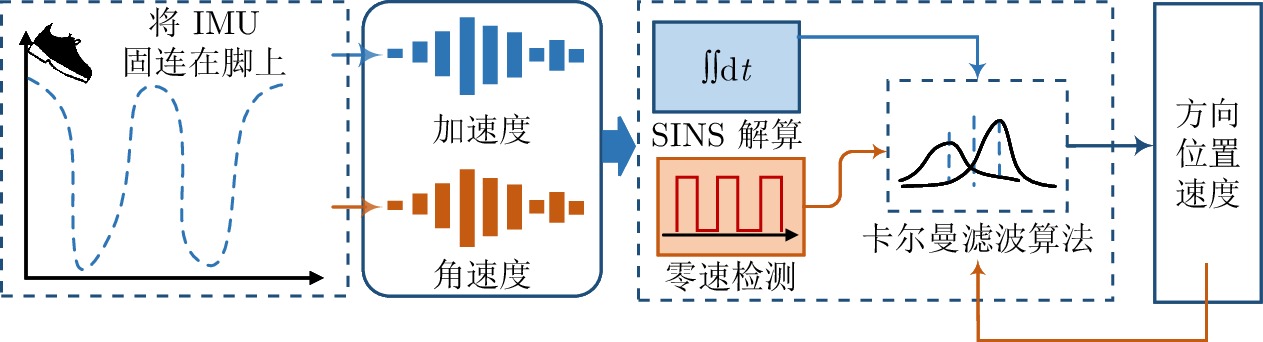
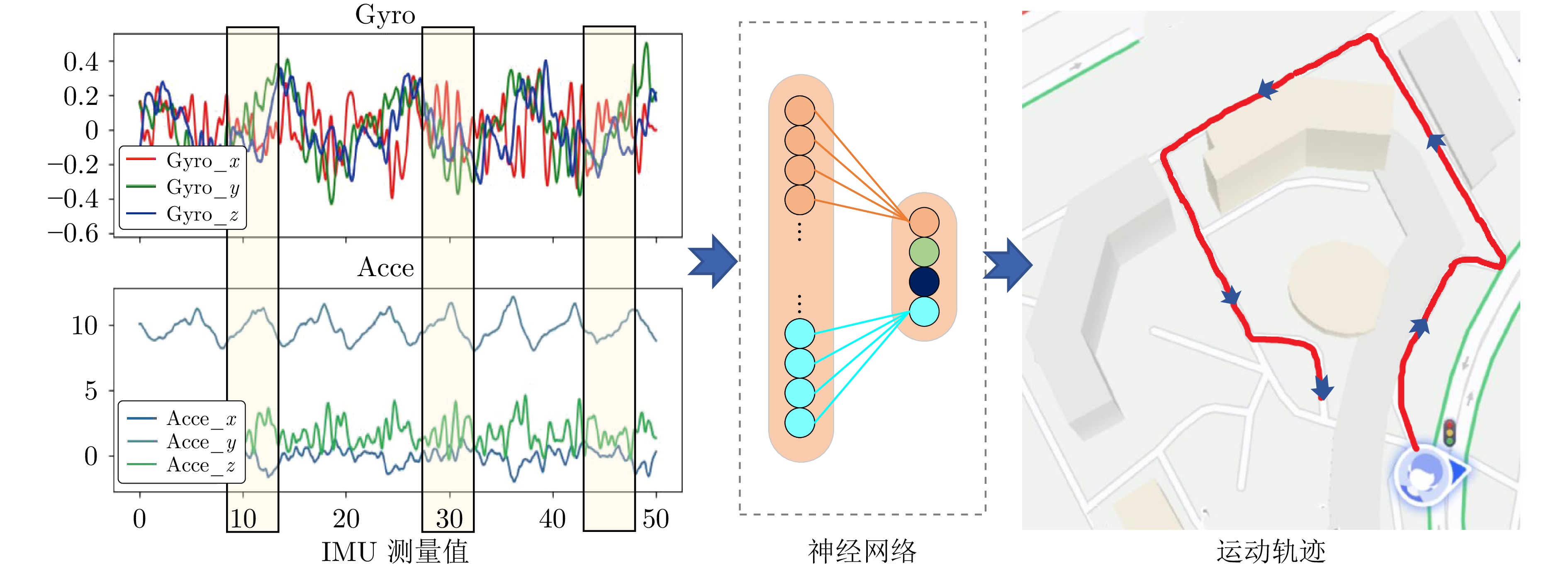
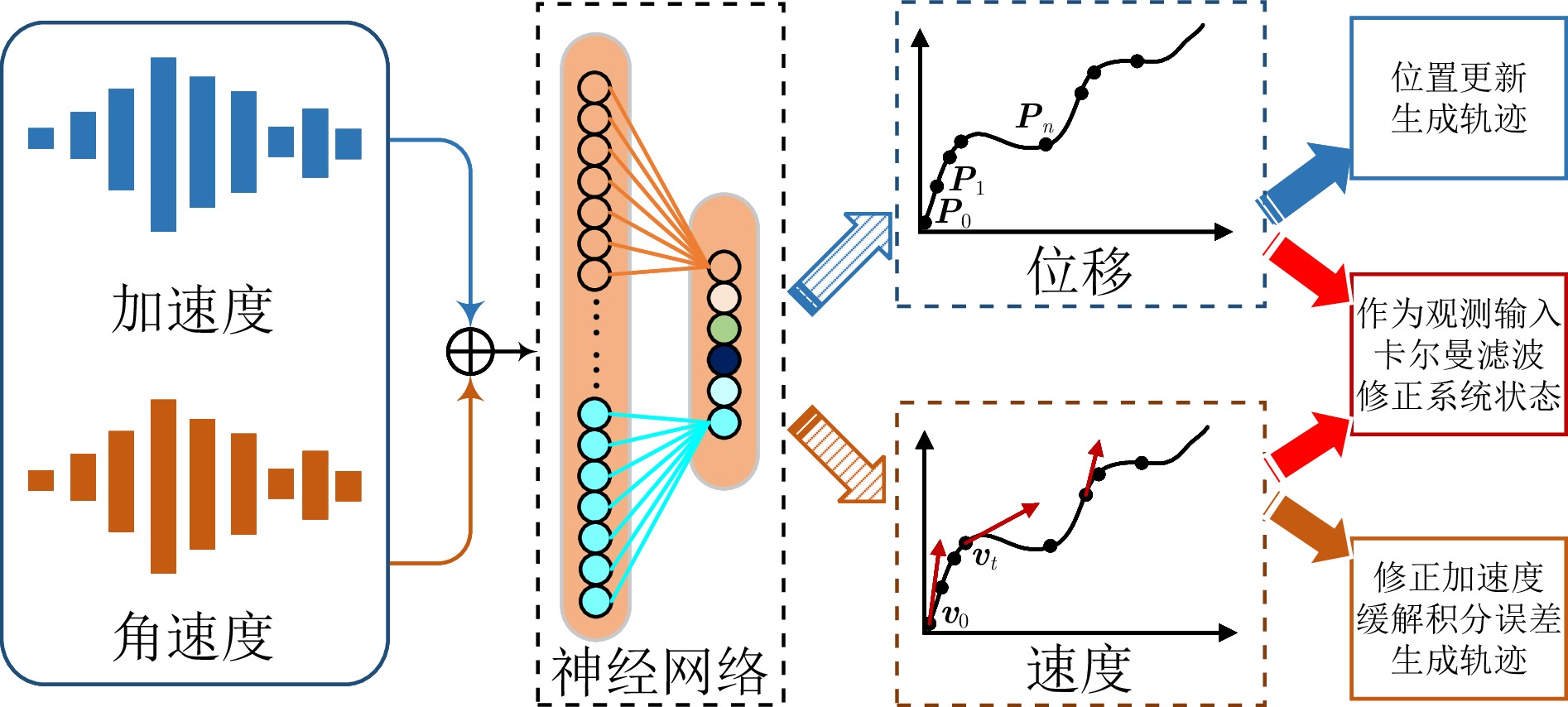
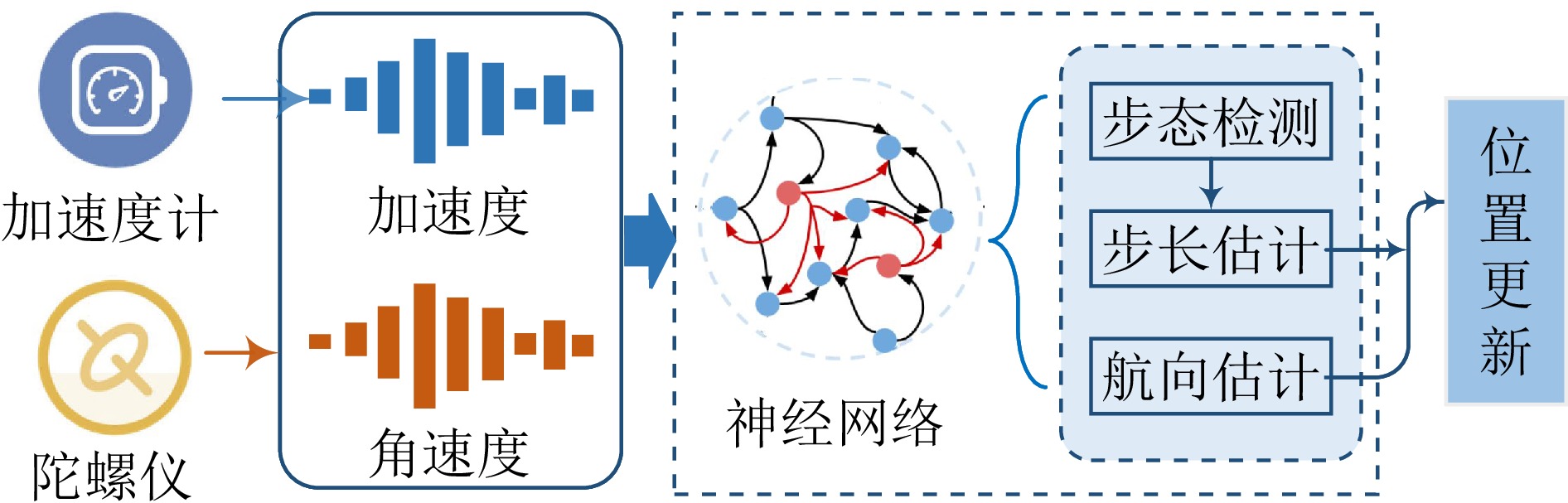
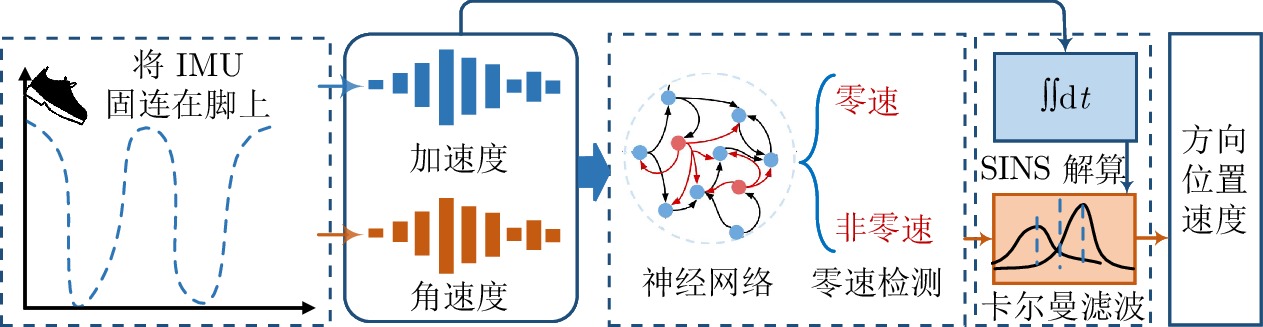
行人惯性定位(Inertial positioning, IP)通过惯性测量单元(Inertial measurement unit, IMU)的测量序列来估计行人的位置, 近年来已成为解决室内或卫星信号遮挡环境下行人自主定位的重要手段. 然而, 传统惯性定位方法在双重积分时易受误差源影响导致漂移问题, 一定程度上限制了行人惯性定位在长时间长距离实际运动中的应用. 幸运的是, 基于神经网络(Neural network, NN)的方法能够仅从IMU历史数据中学习行人的运动模式并修正惯性测量值在积分时引起的漂移. 为此, 本文对近期基于深度神经网络(Deep neural network, DNN)的行人惯性定位进行全面综述. 首先对传统的惯性定位方法进行了简要介绍; 其次, 按照是否融入领域知识分别介绍了端到端(End-to-end, ETE)的神经惯性定位方法和融合领域知识的神经惯性定位方法的研究动态; 然后, 概述了行人惯性定位的基准数据集和评价指标, 并分析比较了其中一些代表性方法的优势和不足; 最后, 对该领域需要解决的关键难点问题进行了总结, 并探讨基于DNN的行人惯性定位未来所面临的关键挑战与发展趋势, 以期为后续的研究提供有益参考.
行人惯性定位(Inertial positioning, IP)通过惯性测量单元(Inertial measurement unit, IMU)的测量序列来估计行人的位置, 近年来已成为解决室内或卫星信号遮挡环境下行人自主定位的重要手段. 然而, 传统惯性定位方法在双重积分时易受误差源影响导致漂移问题, 一定程度上限制了行人惯性定位在长时间长距离实际运动中的应用. 幸运的是, 基于神经网络(Neural network, NN)的方法能够仅从IMU历史数据中学习行人的运动模式并修正惯性测量值在积分时引起的漂移. 为此, 本文对近期基于深度神经网络(Deep neural network, DNN)的行人惯性定位进行全面综述. 首先对传统的惯性定位方法进行了简要介绍; 其次, 按照是否融入领域知识分别介绍了端到端(End-to-end, ETE)的神经惯性定位方法和融合领域知识的神经惯性定位方法的研究动态; 然后, 概述了行人惯性定位的基准数据集和评价指标, 并分析比较了其中一些代表性方法的优势和不足; 最后, 对该领域需要解决的关键难点问题进行了总结, 并探讨基于DNN的行人惯性定位未来所面临的关键挑战与发展趋势, 以期为后续的研究提供有益参考.


2025, 51(2): 287-311.
doi: 10.16383/j.aas.c230778
cstr: 32138.14.j.aas.c230778
摘要:
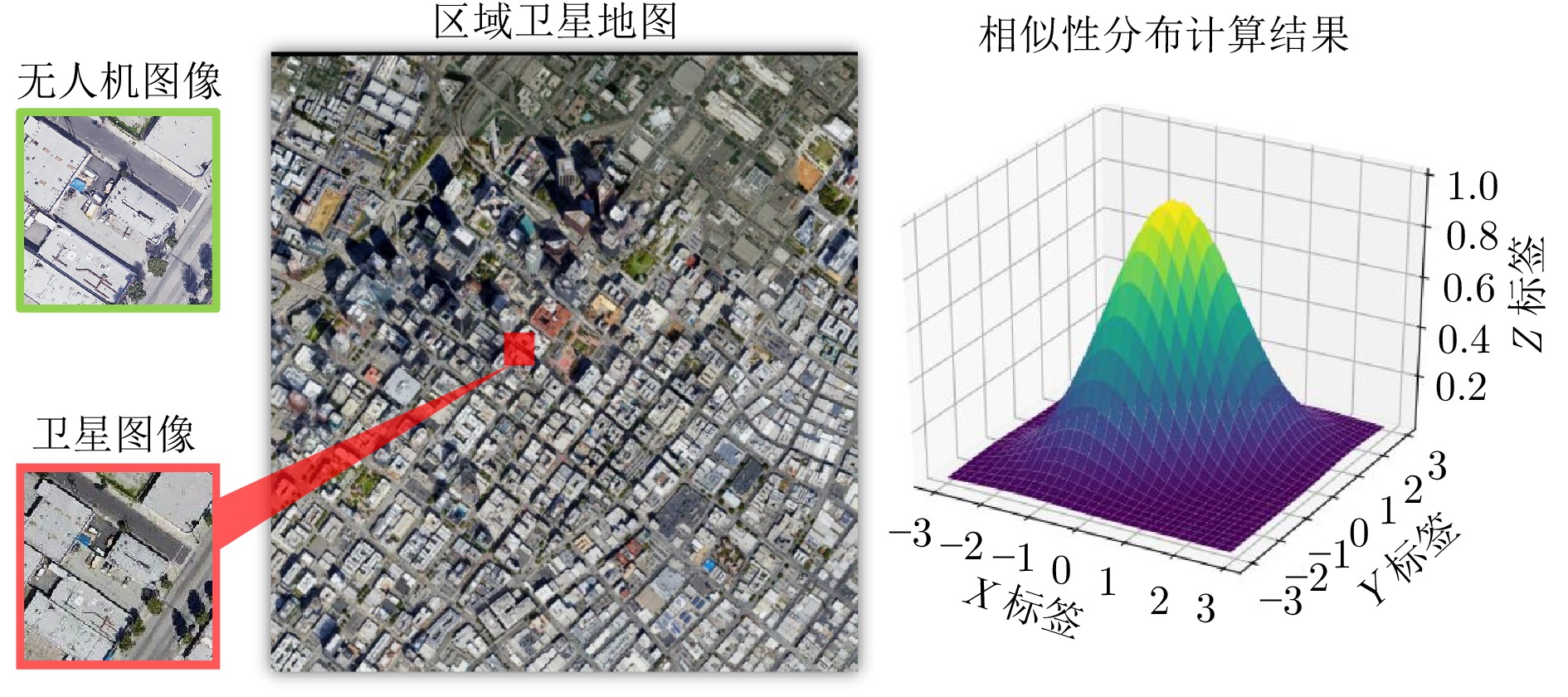
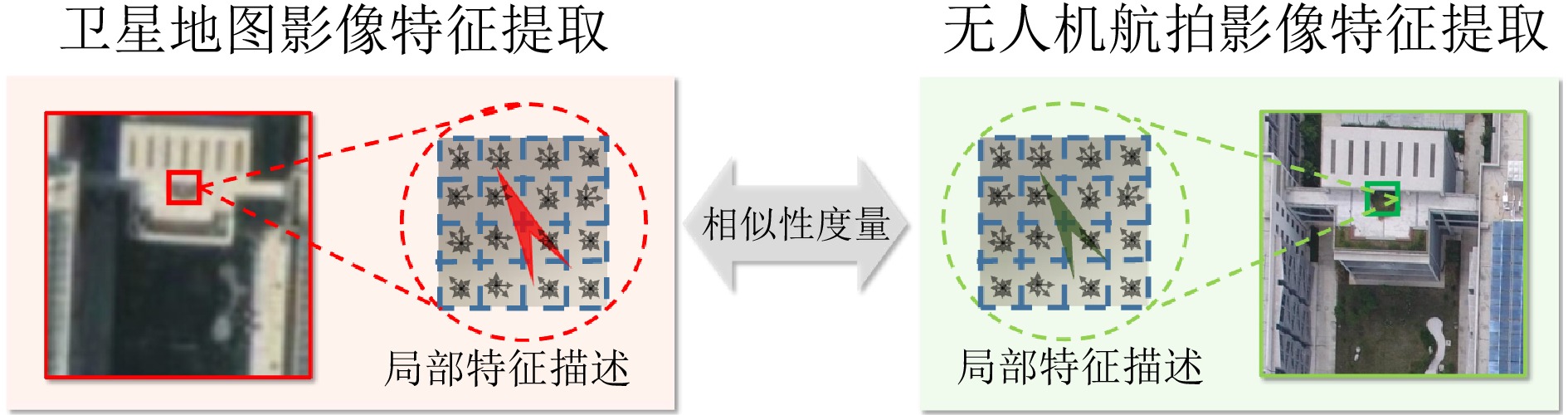
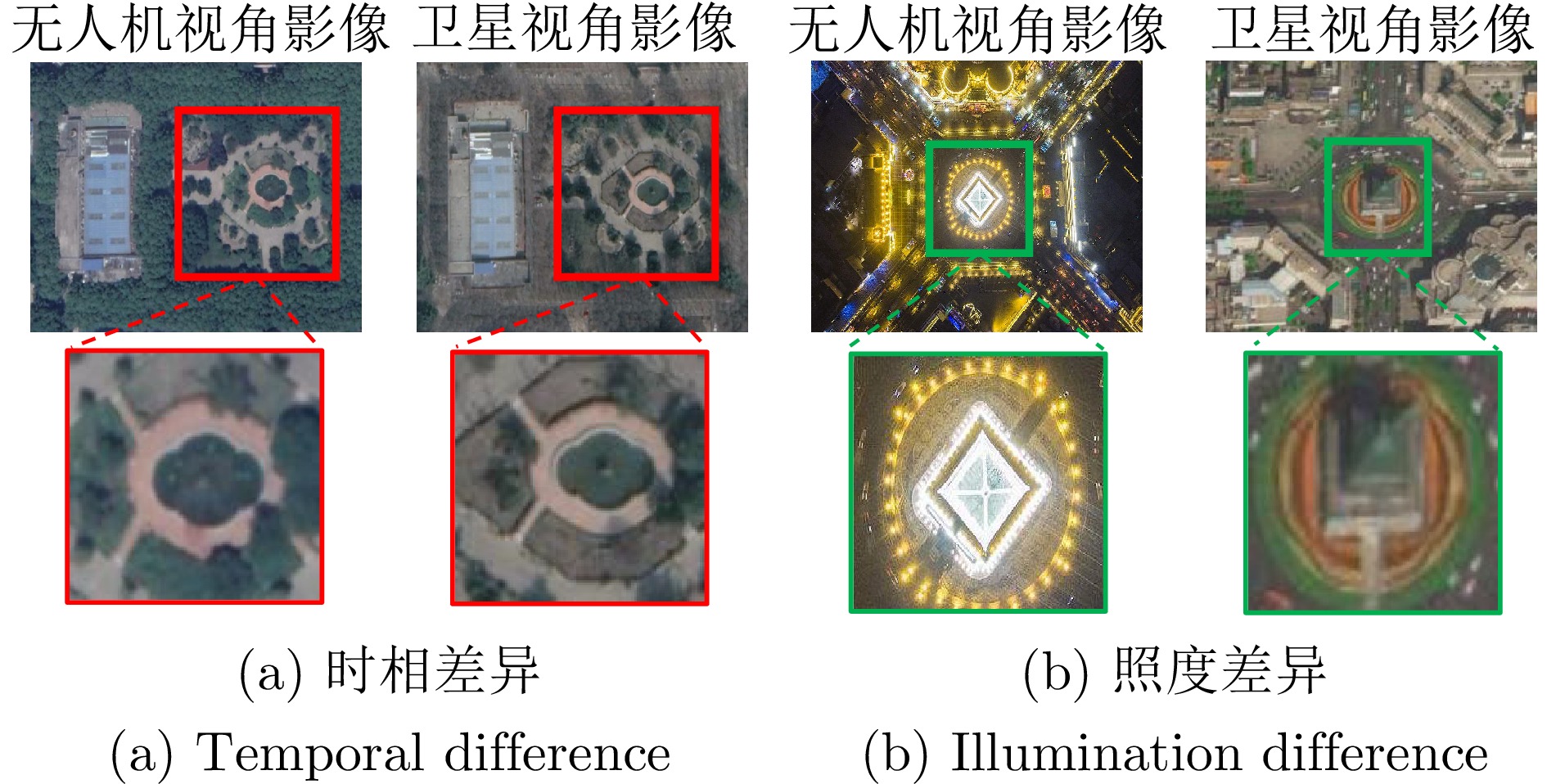
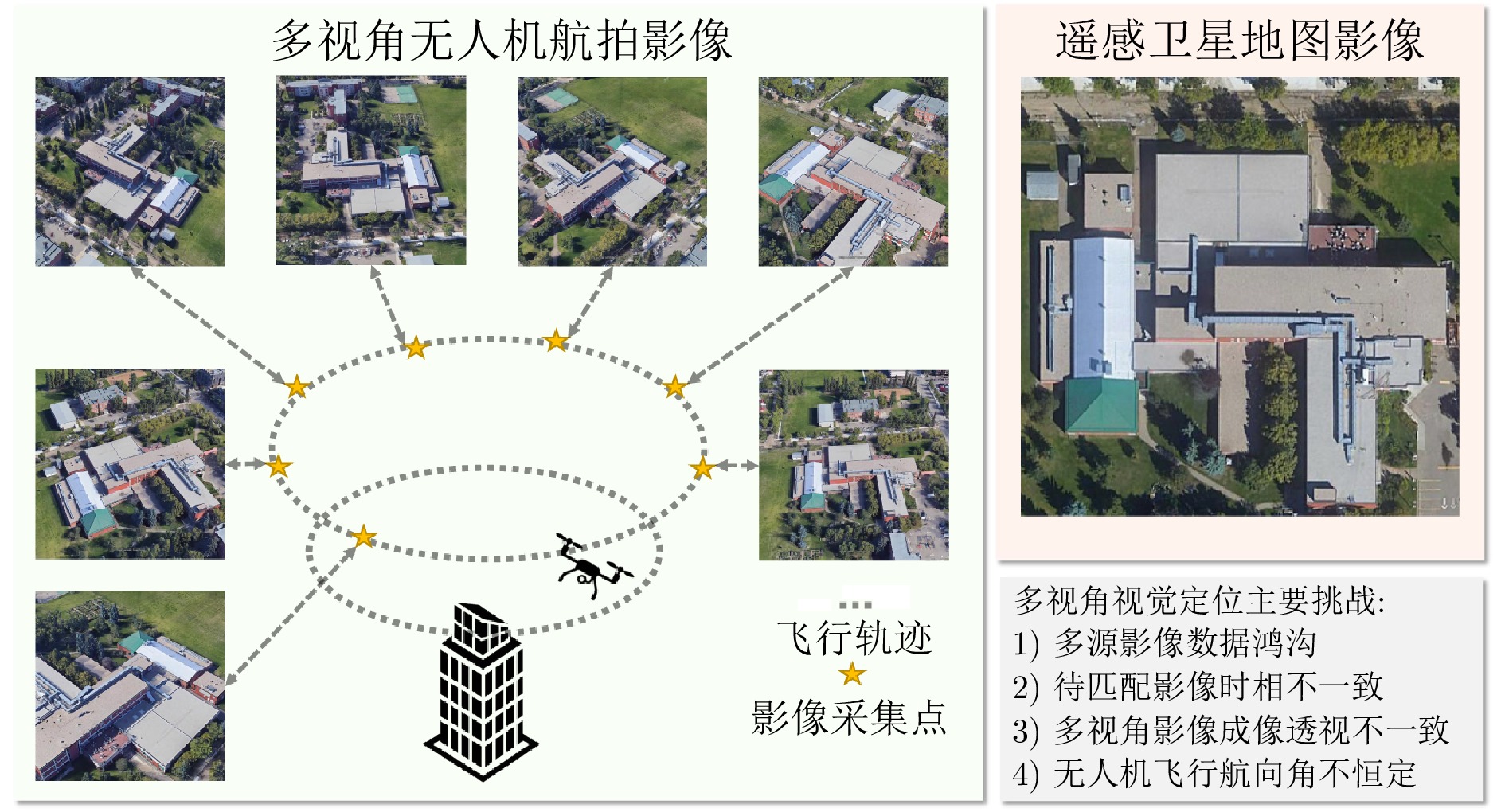
无人机因其高度的灵活性, 在临地安防、灾后救援、地质勘测、农业植保等领域发挥着重要作用, 因此受到越来越多的关注. 定位导航作为无人机中的关键技术, 对于无人机能否顺利执行任务至关重要. 当前主要的定位导航算法包括全球导航卫星系统、惯性定位以及景象匹配定位导航等. 首先, 景象匹配定位导航方法利用计算机视觉技术, 对无人机飞行时采集的航空影像进行数字化特征编码; 随后, 通过构建相似性度量与检索模型, 将航空影像特征与预先获取的遥感地图库特征进行相似性度量, 从而完成景象匹配; 最后, 根据无人机航空影像与遥感卫星地图的匹配结果, 获取相应的地理位置信息, 并将其更新为无人机的定位结果. 景象匹配定位导航方法摆脱了定位系统对定位信号的依赖, 实现了无人机飞行定位的自主化. 鉴于此, 以景象匹配算法中的特征提取方式为线索, 分别针对基于模板匹配、基于手工特征以及基于度量学习的景象匹配, 梳理其发展过程, 并总结景象匹配定位导航方法中的关键问题. 最后, 针对景象匹配算法的发展现状, 总结无人机景象匹配定位方法中亟待解决的问题.
无人机因其高度的灵活性, 在临地安防、灾后救援、地质勘测、农业植保等领域发挥着重要作用, 因此受到越来越多的关注. 定位导航作为无人机中的关键技术, 对于无人机能否顺利执行任务至关重要. 当前主要的定位导航算法包括全球导航卫星系统、惯性定位以及景象匹配定位导航等. 首先, 景象匹配定位导航方法利用计算机视觉技术, 对无人机飞行时采集的航空影像进行数字化特征编码; 随后, 通过构建相似性度量与检索模型, 将航空影像特征与预先获取的遥感地图库特征进行相似性度量, 从而完成景象匹配; 最后, 根据无人机航空影像与遥感卫星地图的匹配结果, 获取相应的地理位置信息, 并将其更新为无人机的定位结果. 景象匹配定位导航方法摆脱了定位系统对定位信号的依赖, 实现了无人机飞行定位的自主化. 鉴于此, 以景象匹配算法中的特征提取方式为线索, 分别针对基于模板匹配、基于手工特征以及基于度量学习的景象匹配, 梳理其发展过程, 并总结景象匹配定位导航方法中的关键问题. 最后, 针对景象匹配算法的发展现状, 总结无人机景象匹配定位方法中亟待解决的问题.

2025, 51(2): 312-326.
doi: 10.16383/j.aas.c240405
cstr: 32138.14.j.aas.c240405
摘要:
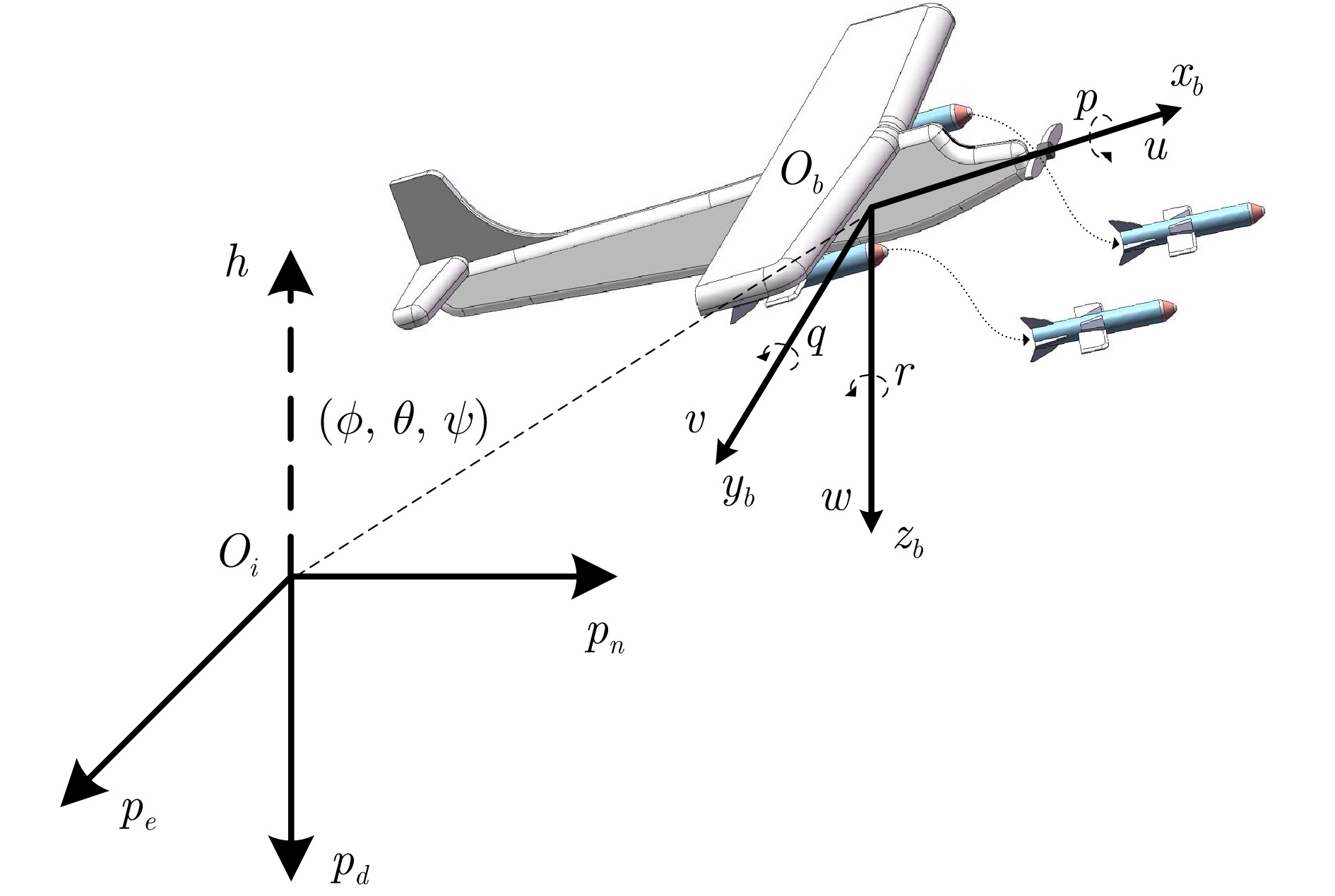
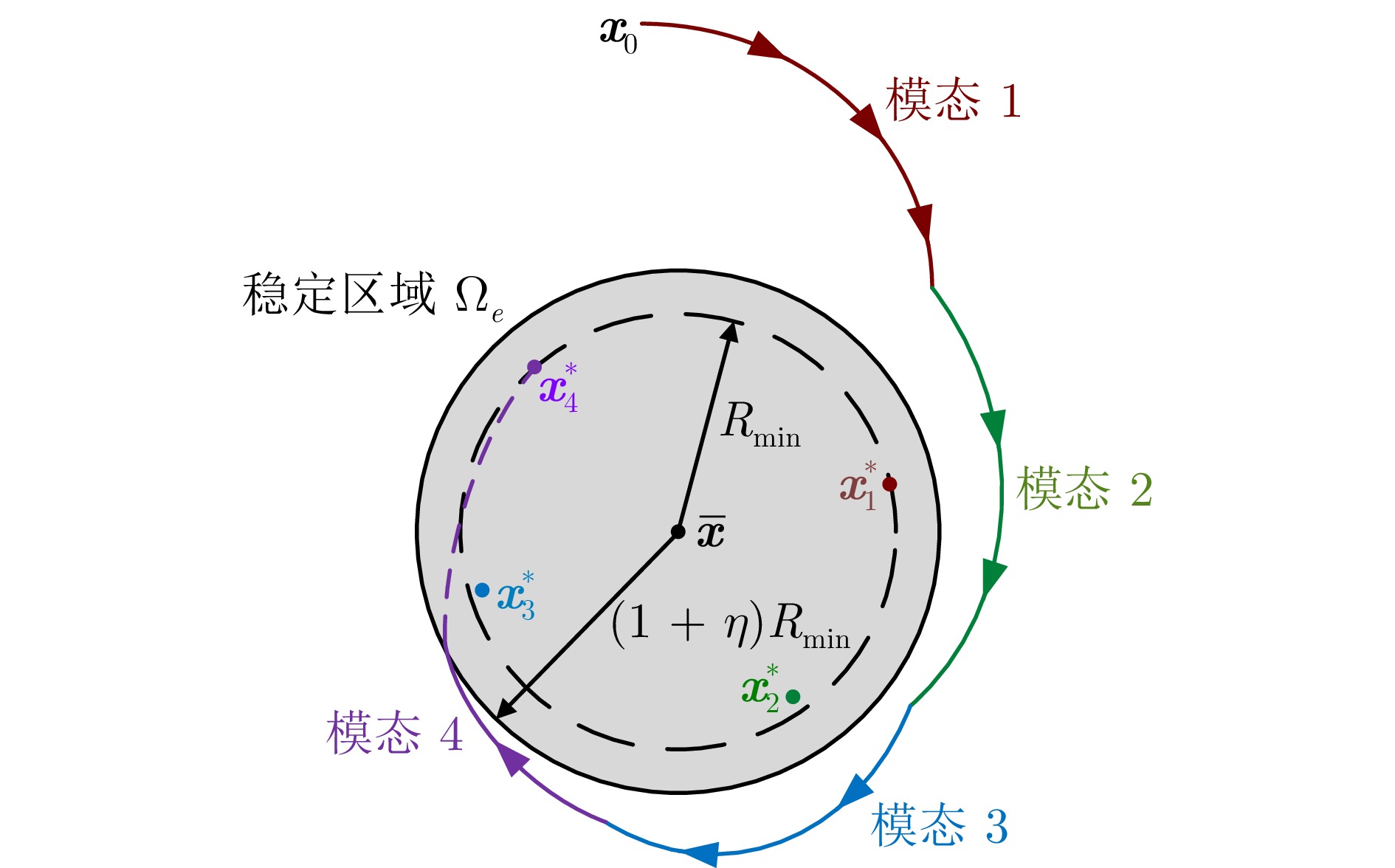
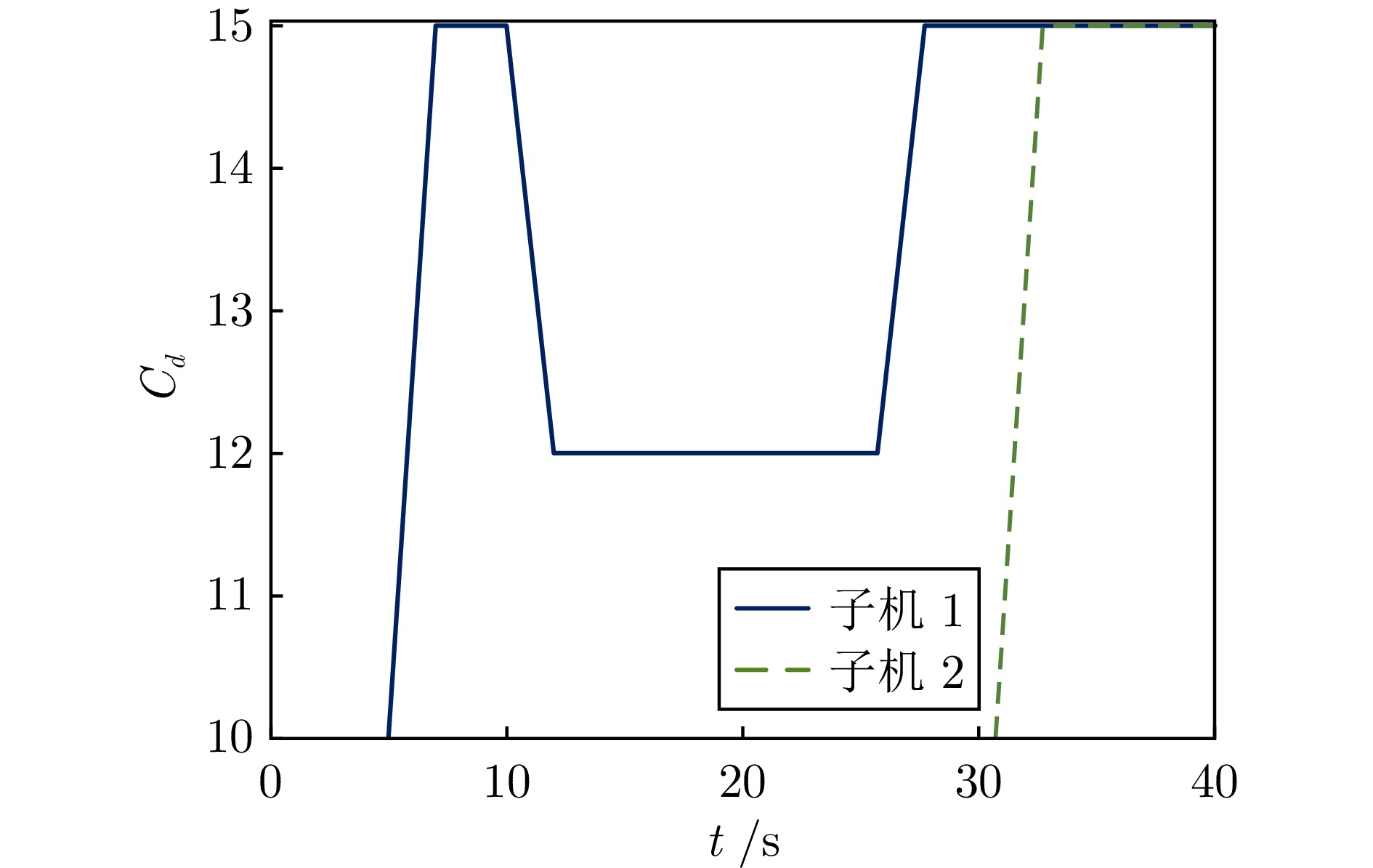
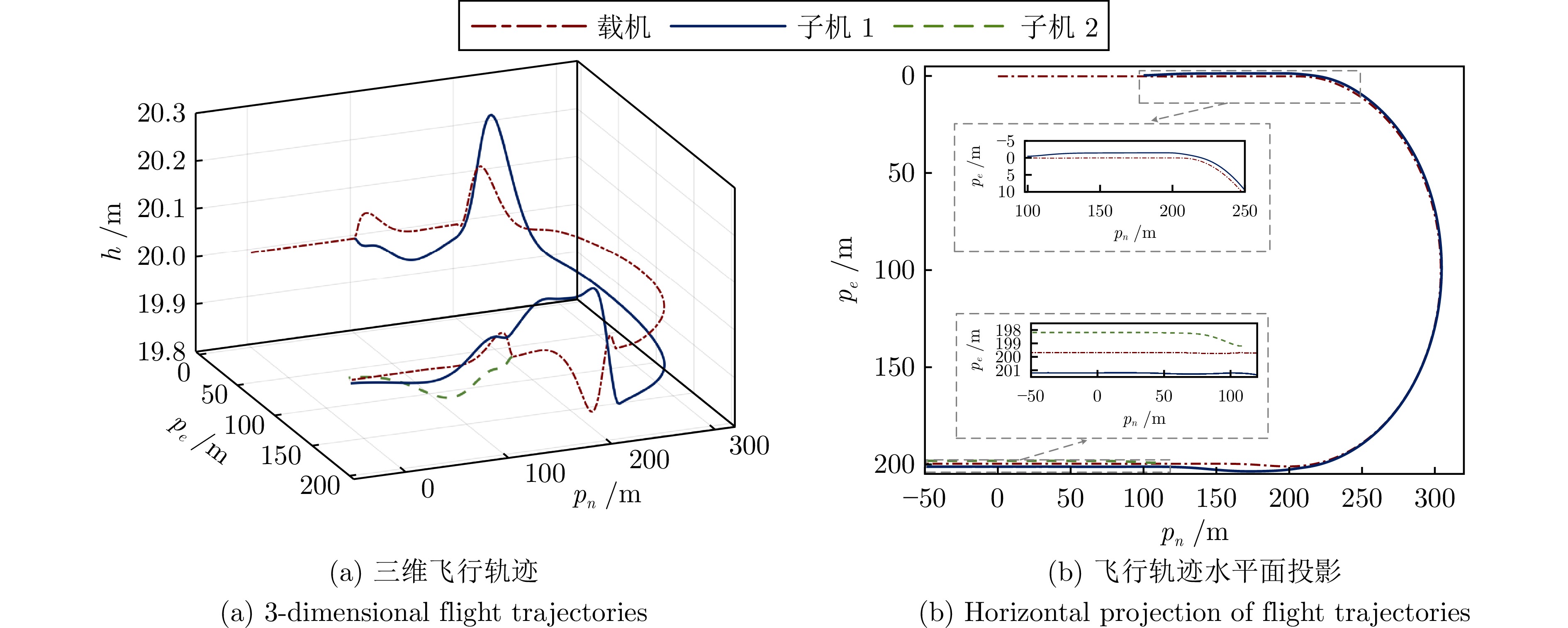
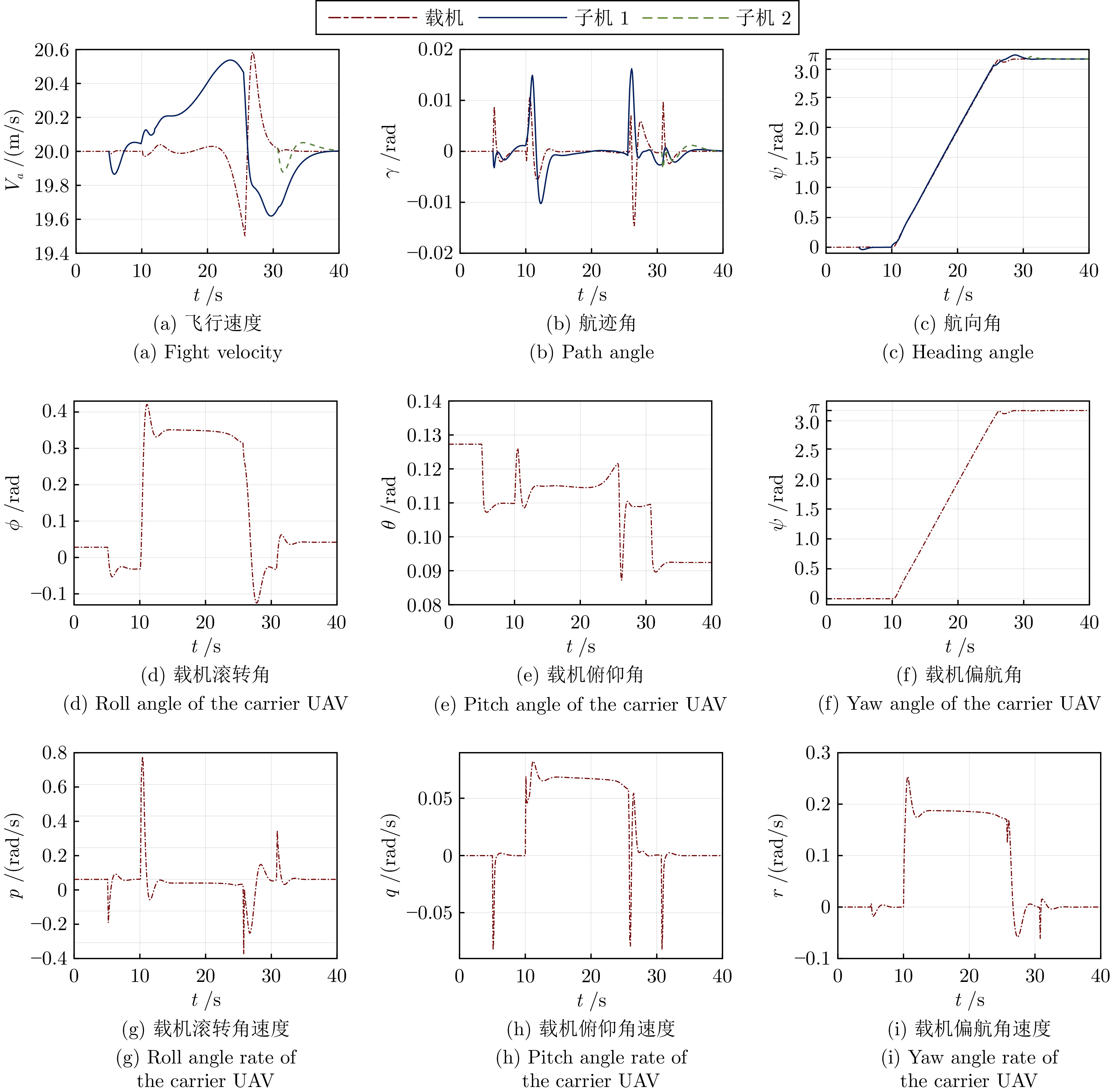
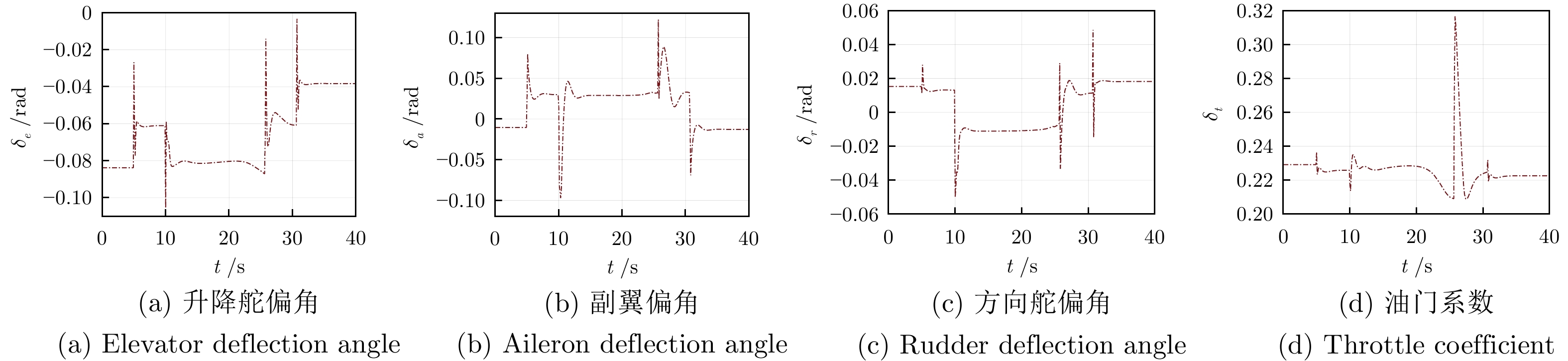
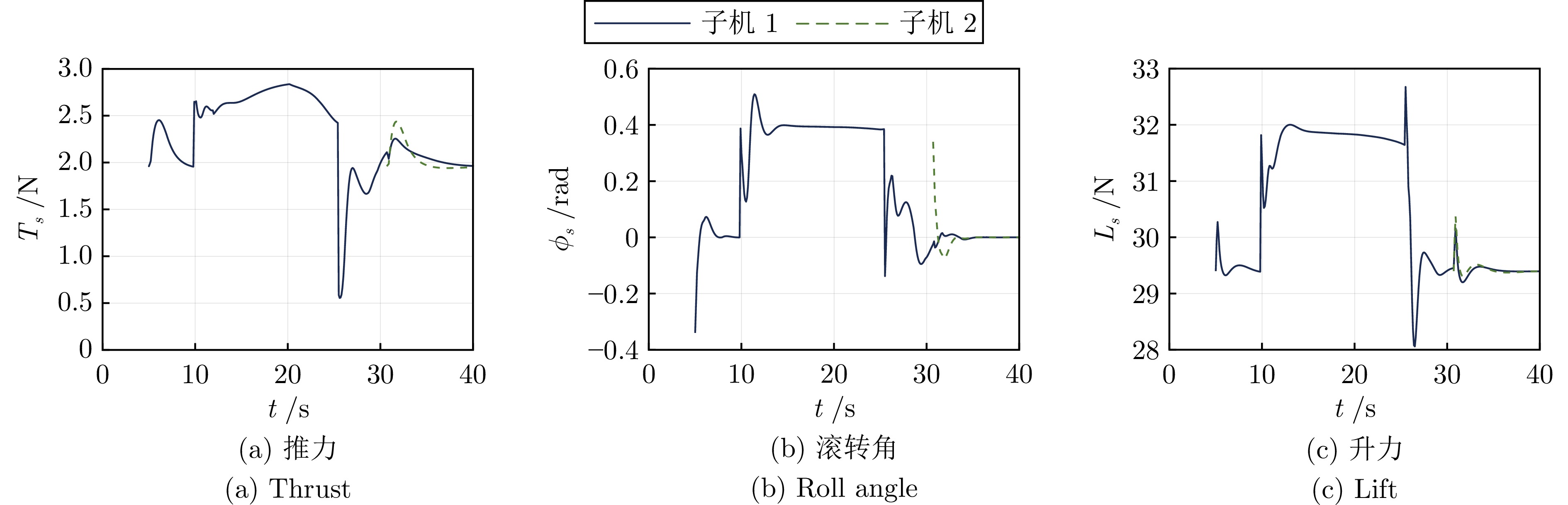
子母式无人机(Unmanned aerial vehicles, UAVs)通常指一类由无人载机搭载和投放多架子机执行协同作业任务的新型飞行器. 相较于传统无人机和无人机集群, 子母式无人机兼具航程长、空间可达性强等优势, 得到了广泛关注. 首先针对子母式无人机在编队飞行任务中的载机姿态稳定控制与子机轨迹跟踪控制问题, 建立子母式无人机动力学模型. 在此基础上, 分别设计基于多平衡点切换模型预测控制的飞行控制方法以及基于多胞不确定性模型预测控制的轨迹跟踪控制方法, 实现了子母式无人机的稳定、安全编队飞行. 仿真结果表明, 所提出的方法能够实现预期的编队飞行目标, 具有良好的稳定性和鲁棒性.
子母式无人机(Unmanned aerial vehicles, UAVs)通常指一类由无人载机搭载和投放多架子机执行协同作业任务的新型飞行器. 相较于传统无人机和无人机集群, 子母式无人机兼具航程长、空间可达性强等优势, 得到了广泛关注. 首先针对子母式无人机在编队飞行任务中的载机姿态稳定控制与子机轨迹跟踪控制问题, 建立子母式无人机动力学模型. 在此基础上, 分别设计基于多平衡点切换模型预测控制的飞行控制方法以及基于多胞不确定性模型预测控制的轨迹跟踪控制方法, 实现了子母式无人机的稳定、安全编队飞行. 仿真结果表明, 所提出的方法能够实现预期的编队飞行目标, 具有良好的稳定性和鲁棒性.

2025, 51(2): 327-342.
doi: 10.16383/j.aas.c240069
cstr: 32138.14.j.aas.c240069
摘要:
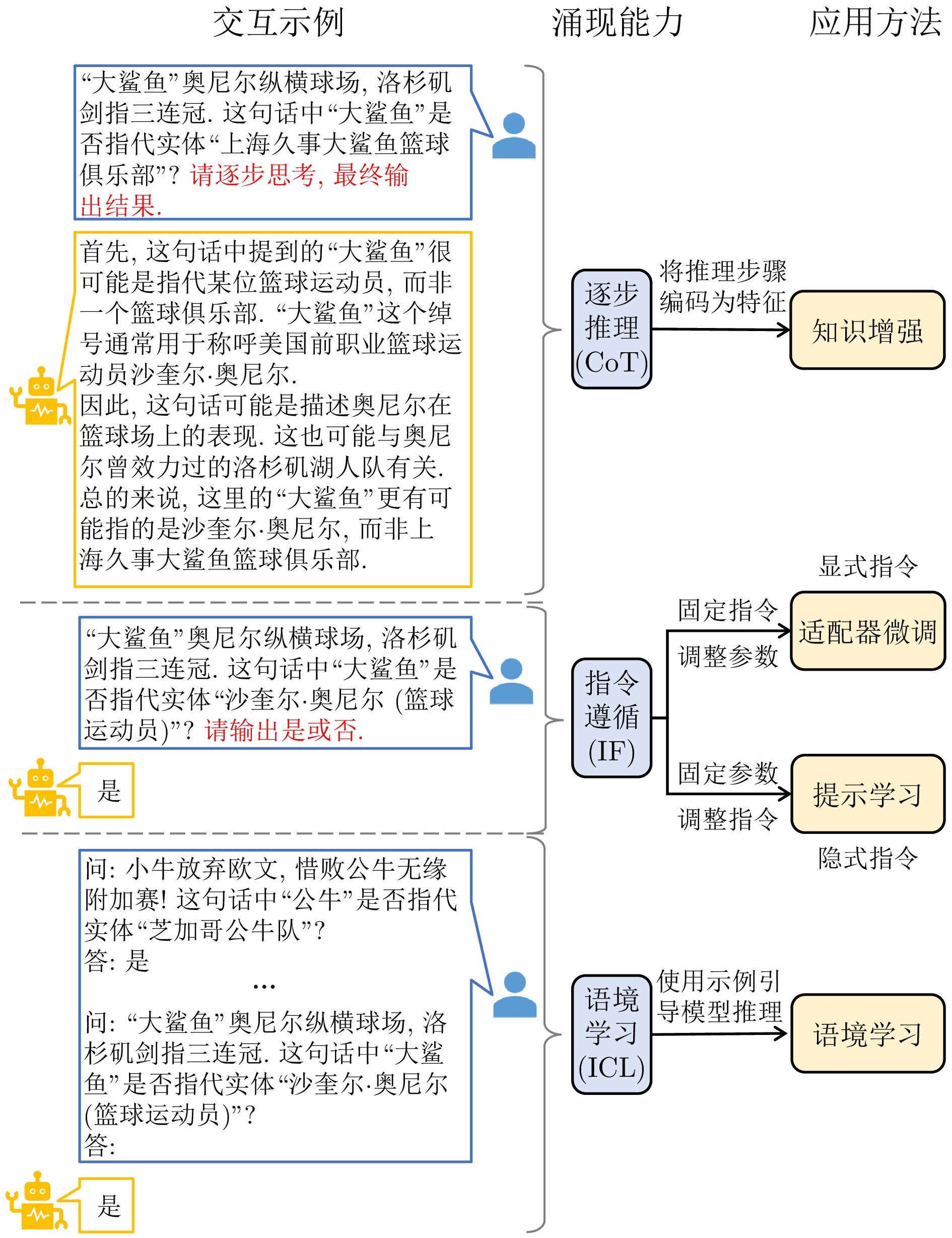
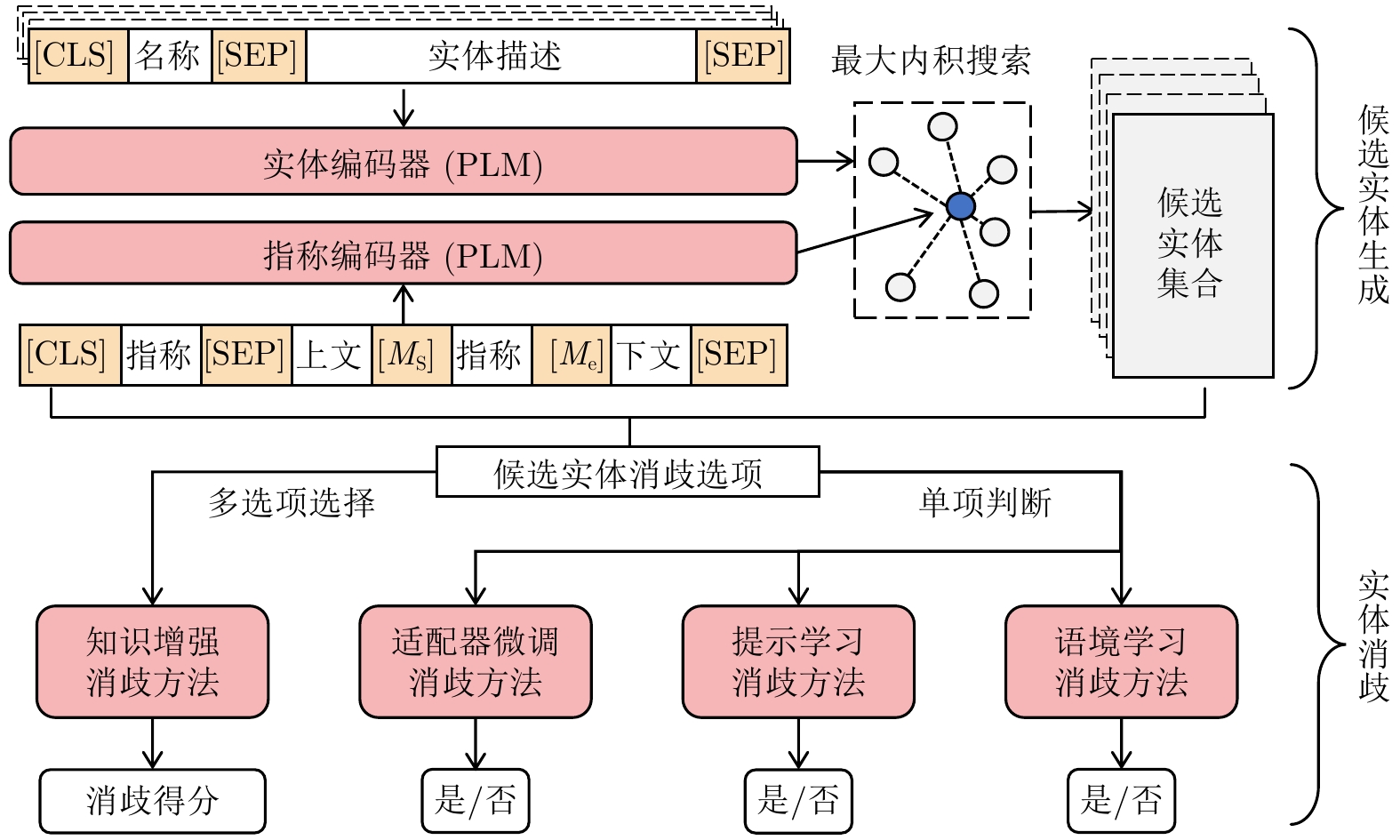
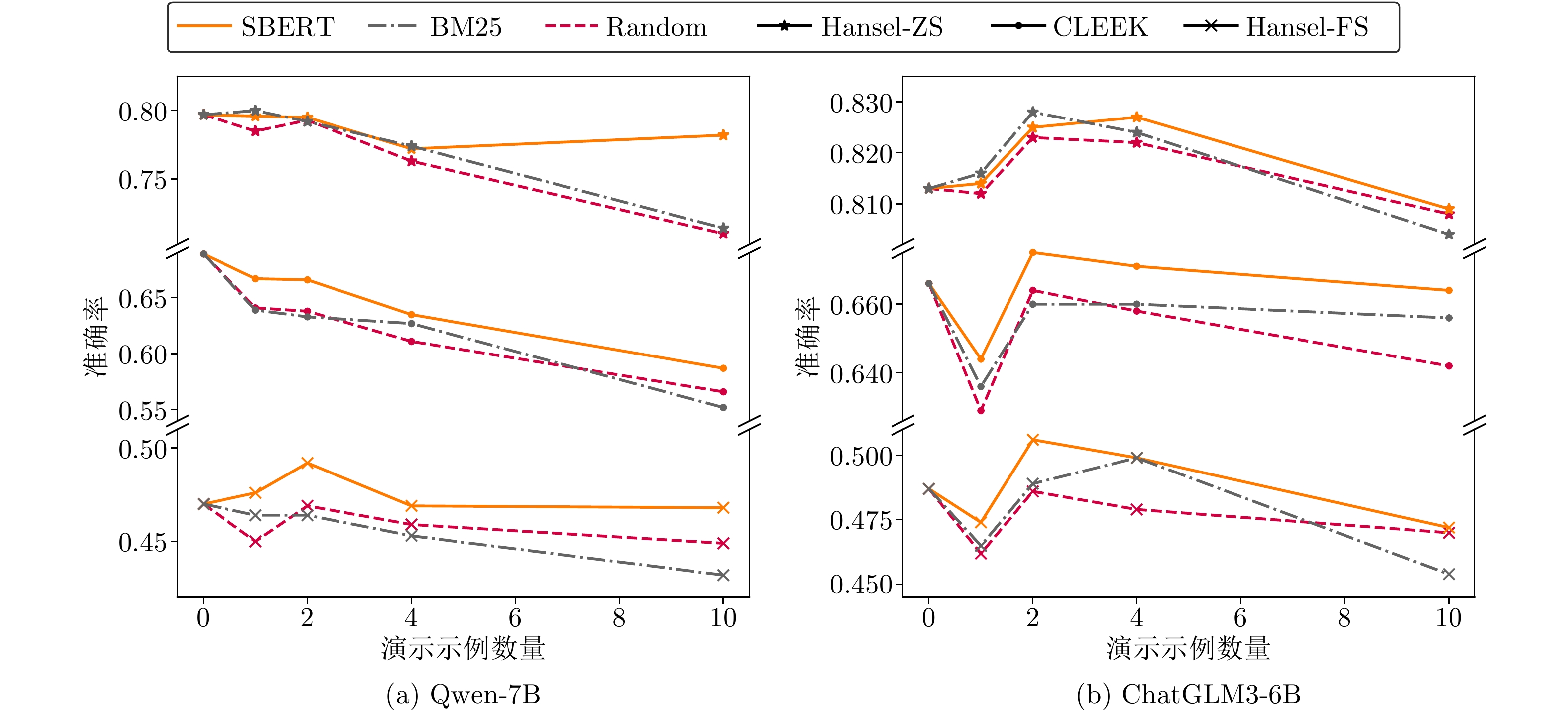
近年来, 大语言模型(Large language model, LLM)在自然语言处理中取得重大进展. 在模型足够大时, 大语言模型涌现出传统的预训练语言模型(Pre-trained language model, PLM)不具备的推理能力. 为了探究如何将大语言模型的涌现能力应用于中文实体链接任务, 适配了以下四种方法: 知识增强、适配器微调、提示学习和语境学习(In-context learning, ICL). 在Hansel和CLEEK数据集上的实证研究表明, 基于Qwen-7B/ChatGLM3-6B的监督学习方法超过基于小模型的方法, 在Hansel-FS数据集上提升3.9% ~ 11.8%, 在Hansel-ZS数据集上提升0.7% ~ 4.1%, 在CLEEK数据集上提升0.6% ~ 3.7%. 而当模型参数量达到720亿时, Qwen-72B的无监督方法实现与监督微调Qwen-7B相近的结果(−2.4% ~ +1.4%). 此外, 大语言模型Qwen在长尾实体场景下有明显的优势(11.8%), 且随着参数量的增加, 优势会更加明显(13.2%). 对错误案例进行分析(以下简称错误分析)发现, 实体粒度和实体类别相关错误占比较高, 分别为36%和25%. 这表明在实体链接任务中, 准确划分实体边界以及正确判断实体类别是提高系统性能的关键.
近年来, 大语言模型(Large language model, LLM)在自然语言处理中取得重大进展. 在模型足够大时, 大语言模型涌现出传统的预训练语言模型(Pre-trained language model, PLM)不具备的推理能力. 为了探究如何将大语言模型的涌现能力应用于中文实体链接任务, 适配了以下四种方法: 知识增强、适配器微调、提示学习和语境学习(In-context learning, ICL). 在Hansel和CLEEK数据集上的实证研究表明, 基于Qwen-7B/ChatGLM3-6B的监督学习方法超过基于小模型的方法, 在Hansel-FS数据集上提升3.9% ~ 11.8%, 在Hansel-ZS数据集上提升0.7% ~ 4.1%, 在CLEEK数据集上提升0.6% ~ 3.7%. 而当模型参数量达到720亿时, Qwen-72B的无监督方法实现与监督微调Qwen-7B相近的结果(−2.4% ~ +1.4%). 此外, 大语言模型Qwen在长尾实体场景下有明显的优势(11.8%), 且随着参数量的增加, 优势会更加明显(13.2%). 对错误案例进行分析(以下简称错误分析)发现, 实体粒度和实体类别相关错误占比较高, 分别为36%和25%. 这表明在实体链接任务中, 准确划分实体边界以及正确判断实体类别是提高系统性能的关键.


2025, 51(2): 343-355.
doi: 10.16383/j.aas.c240378
cstr: 32138.14.j.aas.c240378
摘要:
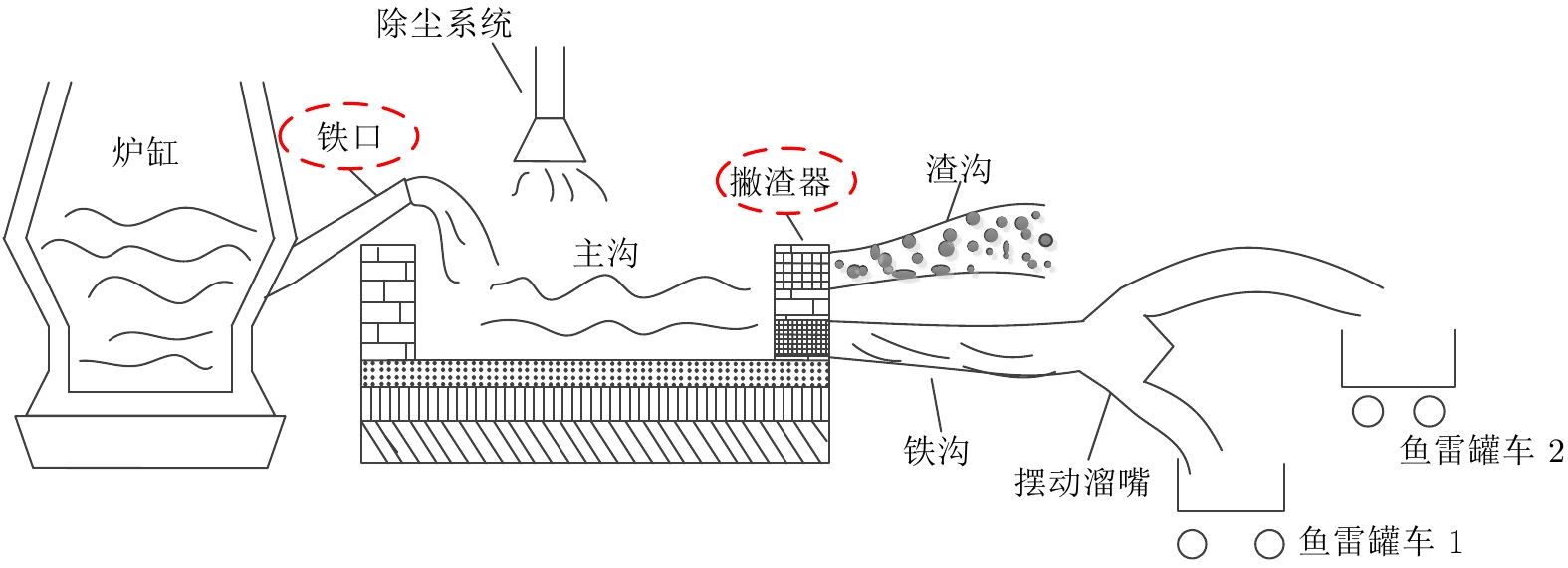
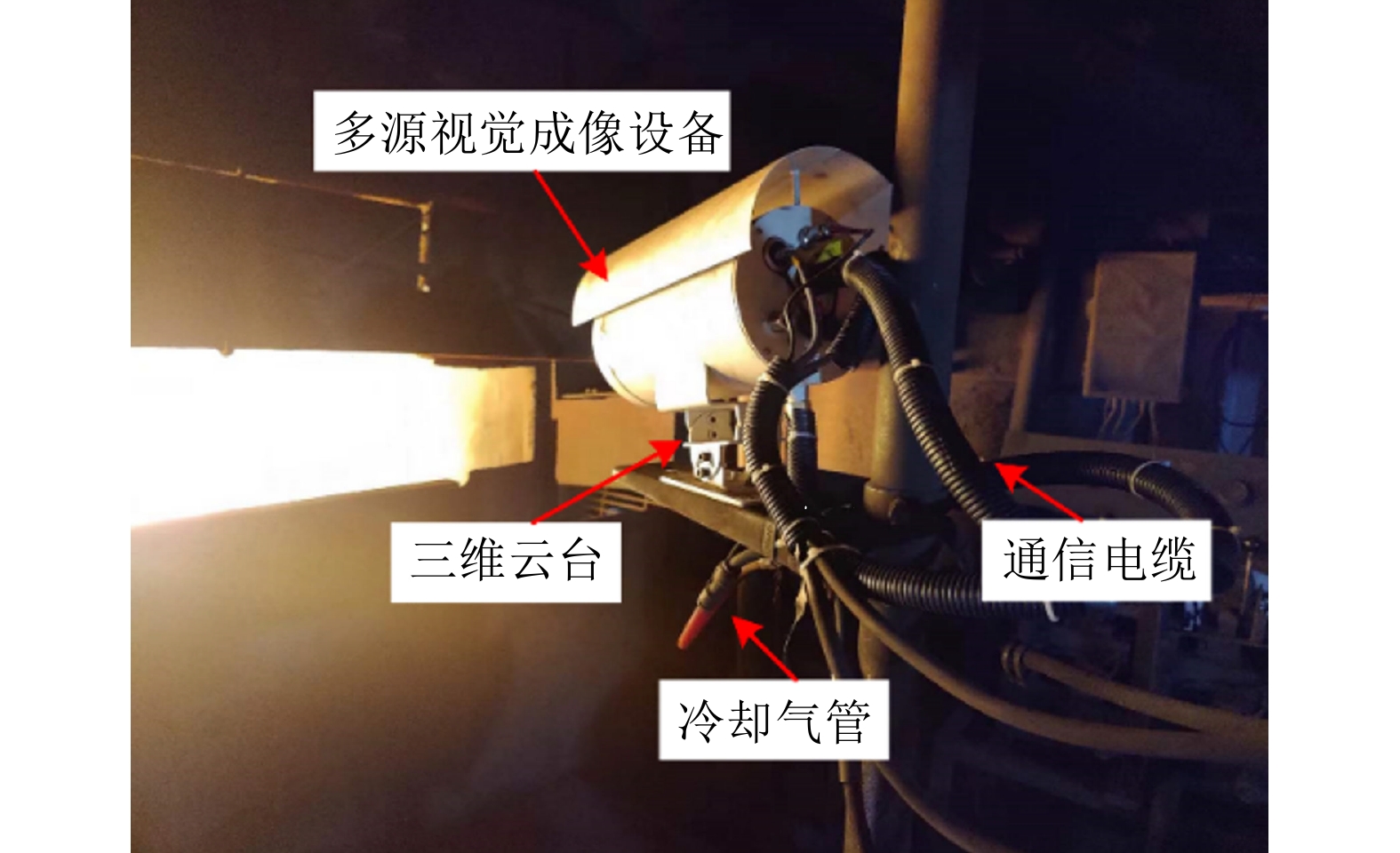
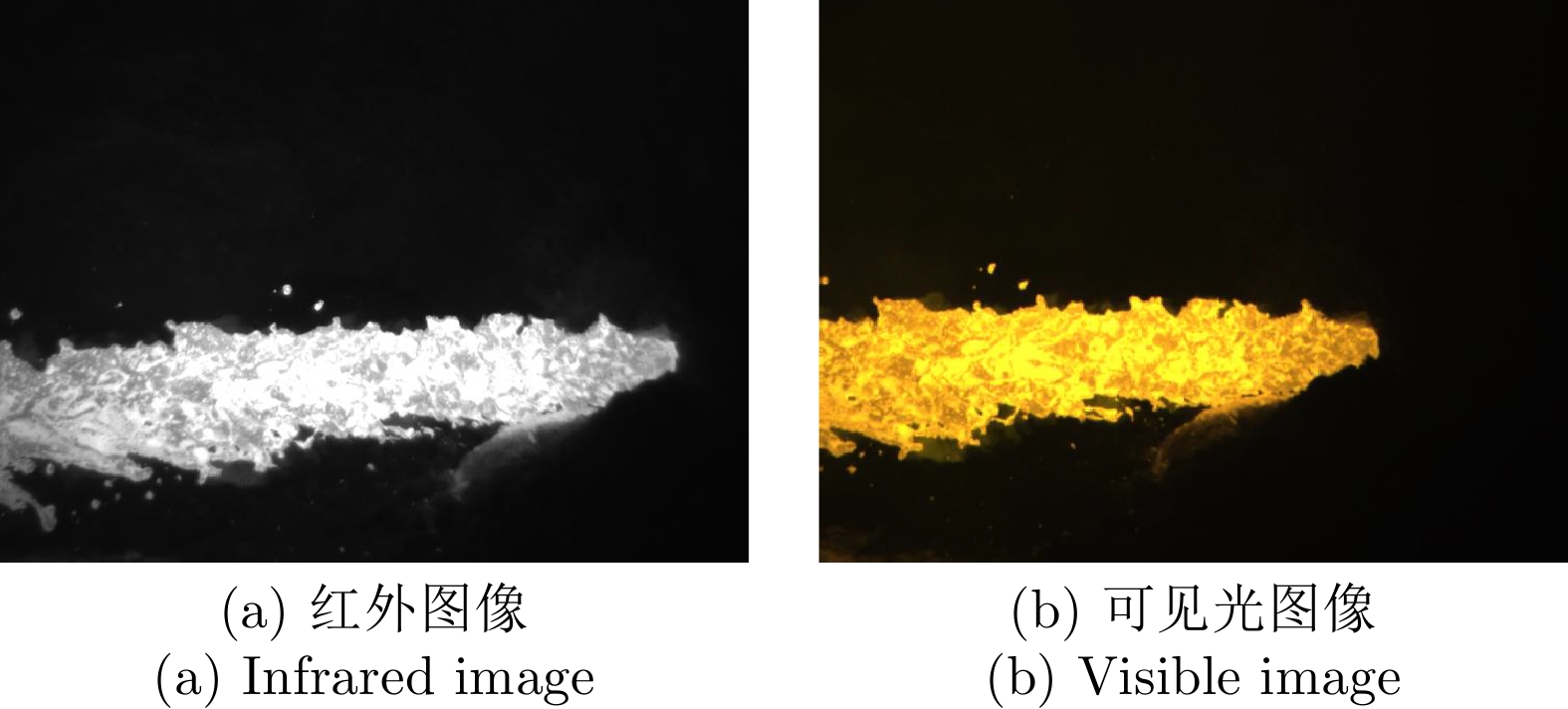
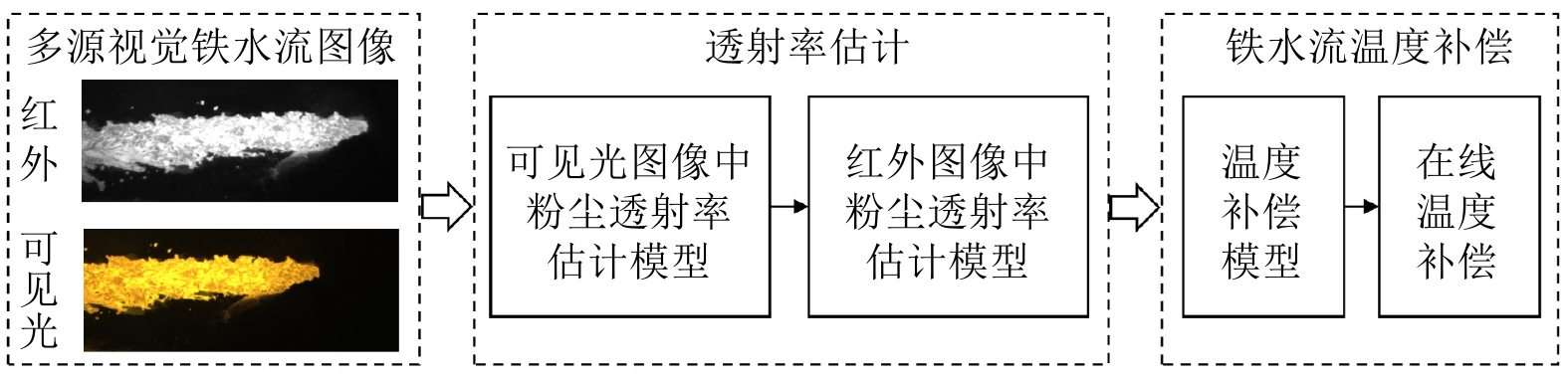
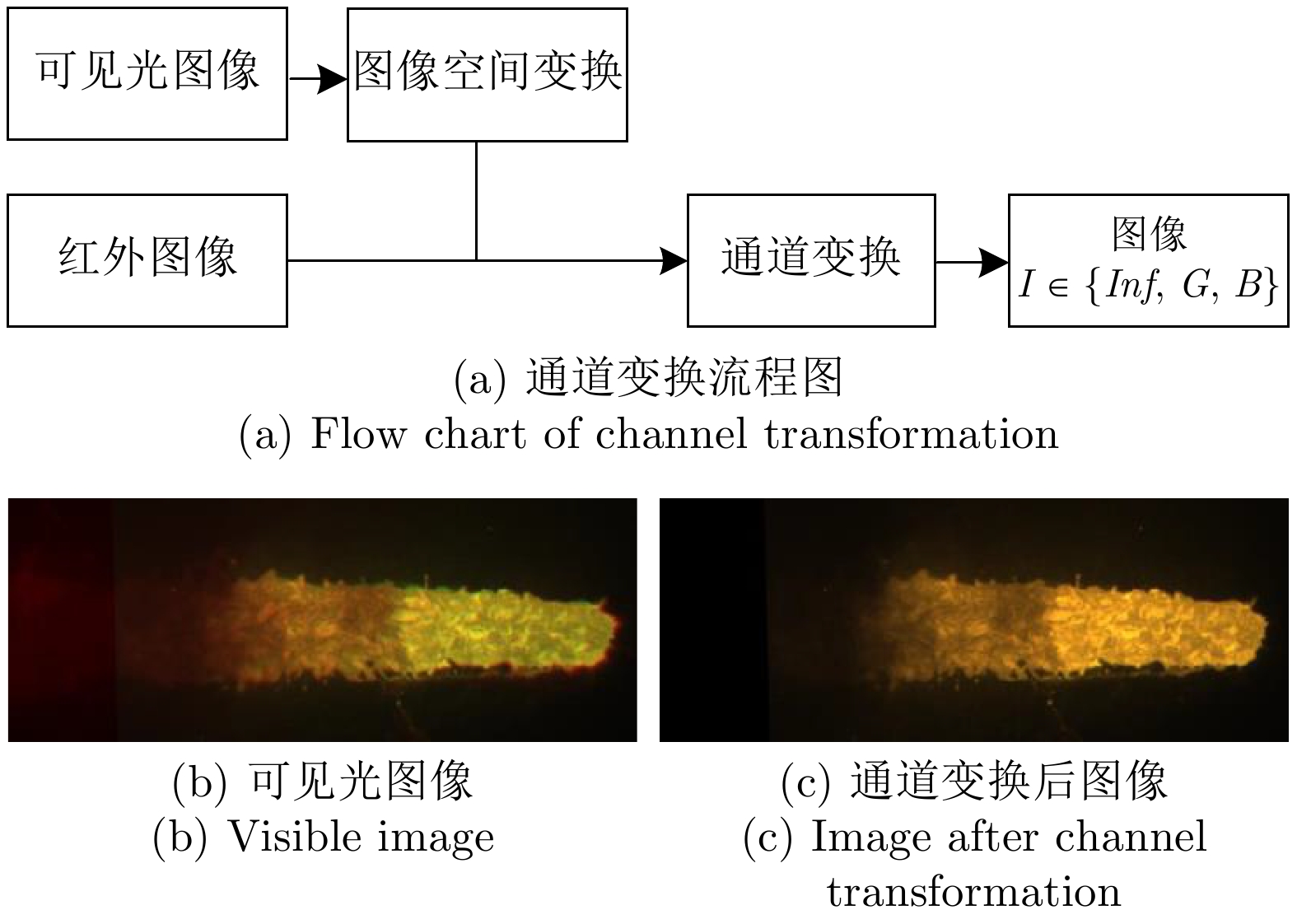
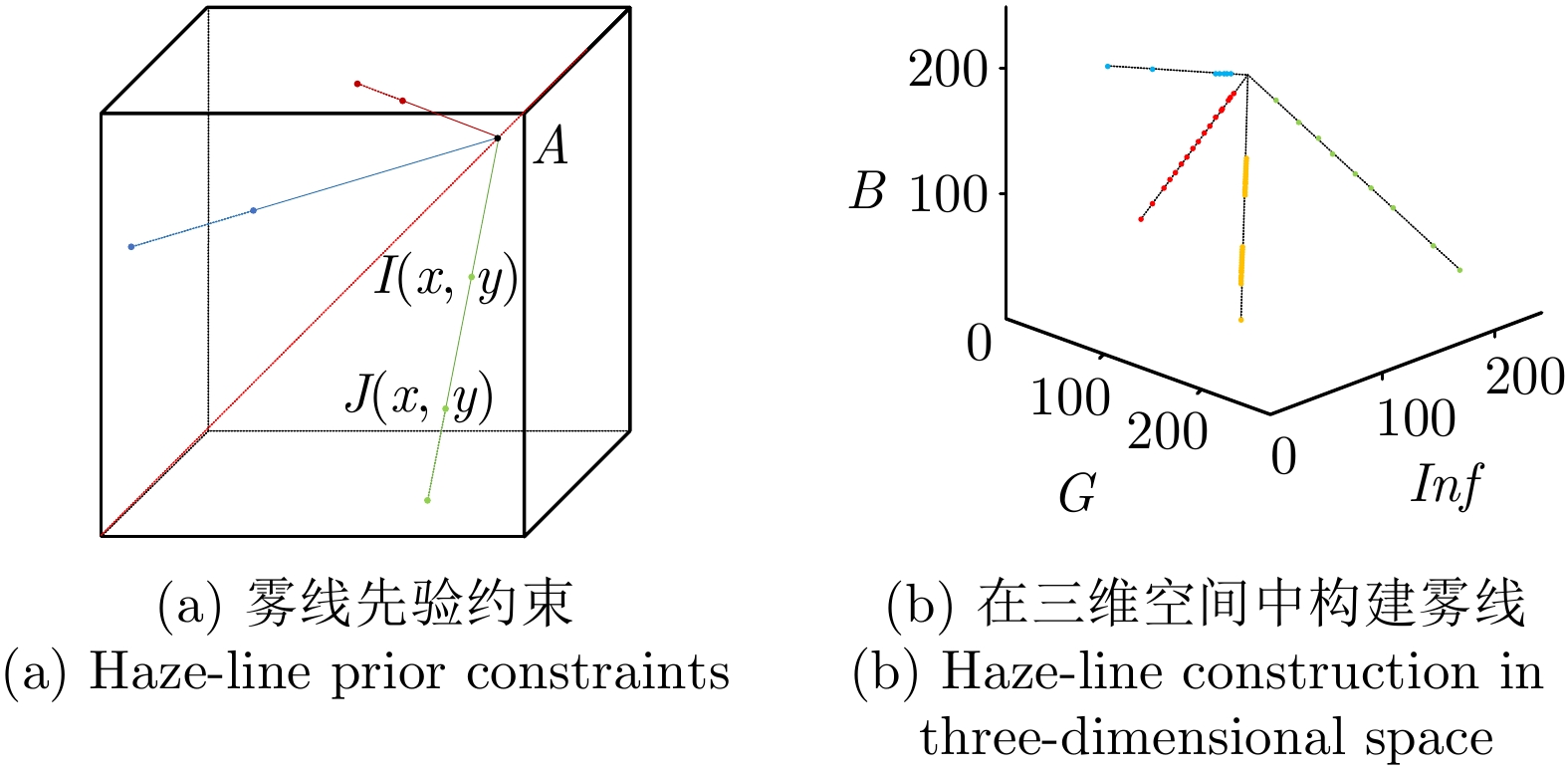
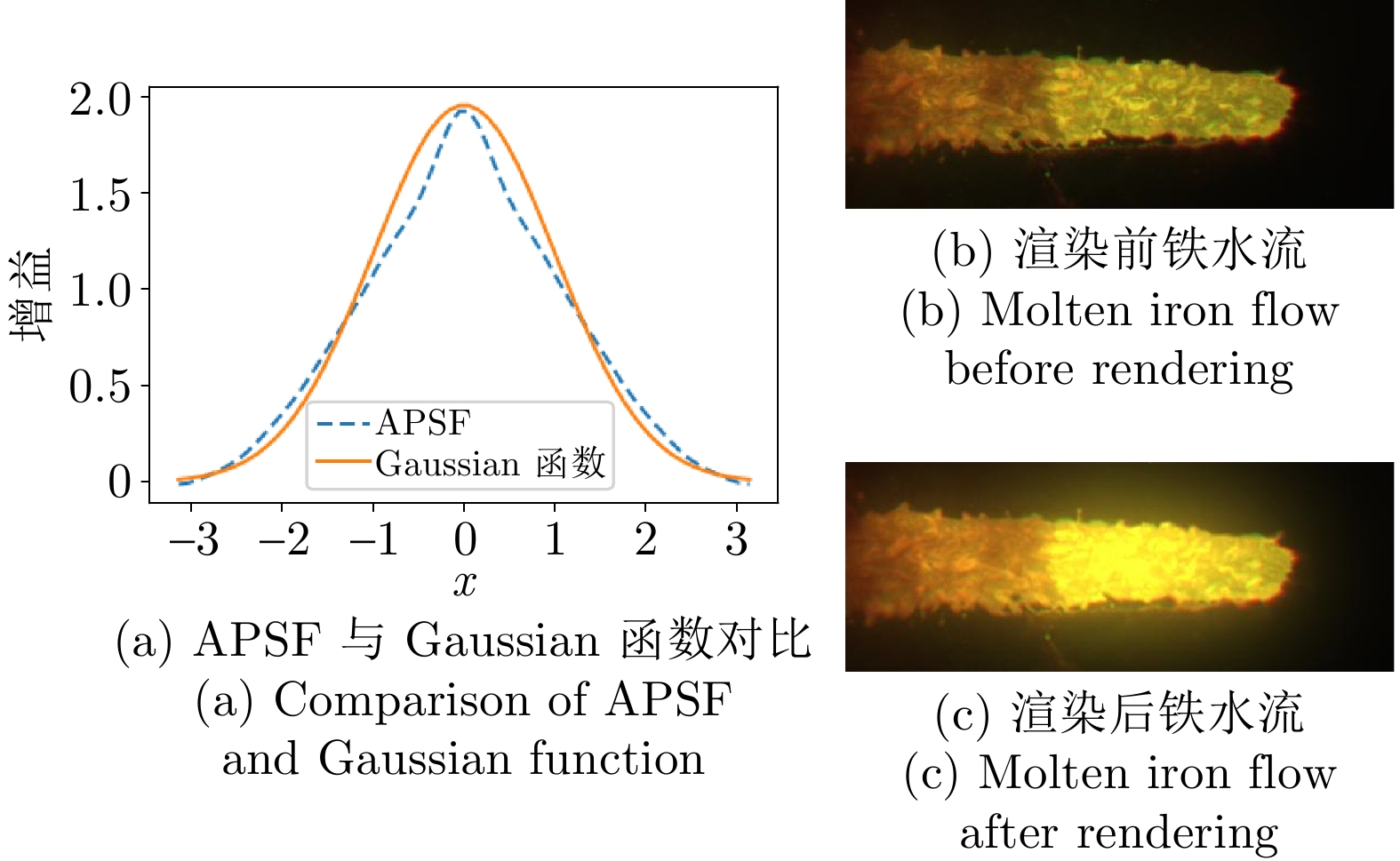
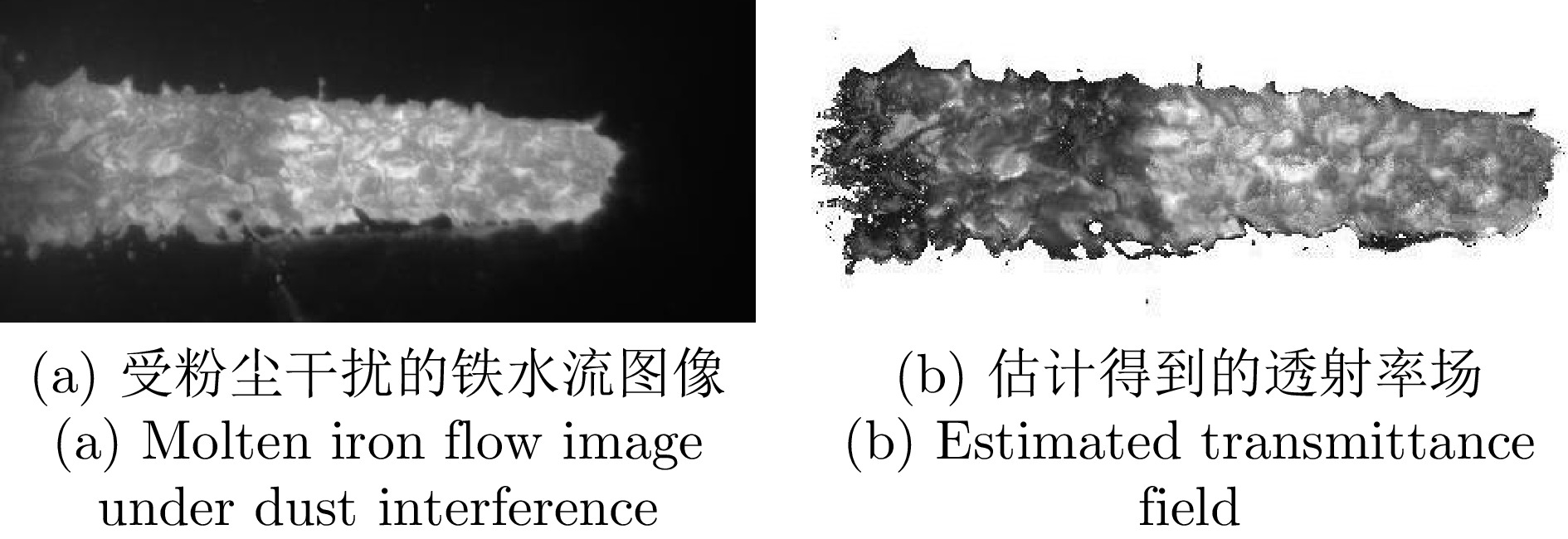
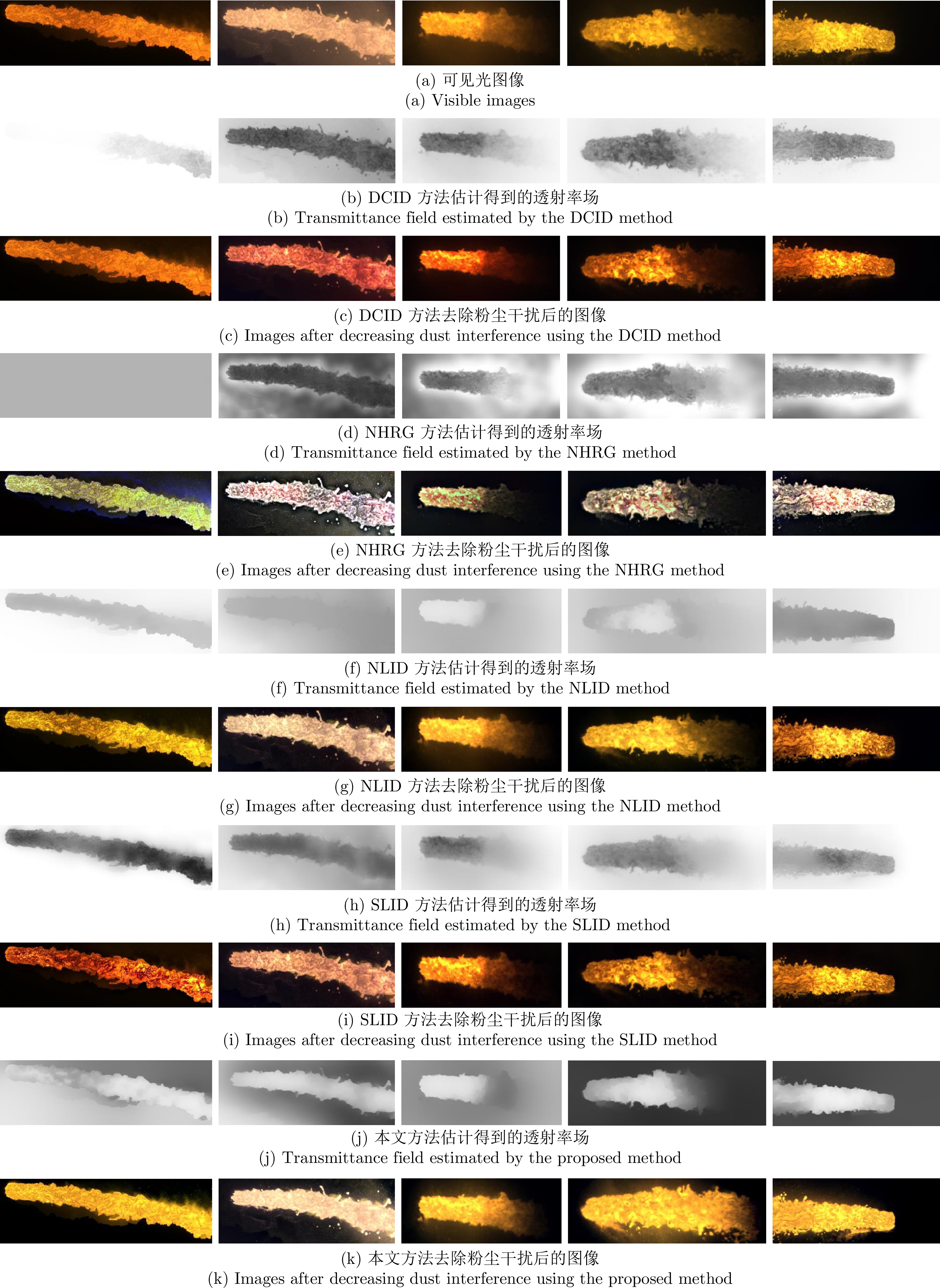
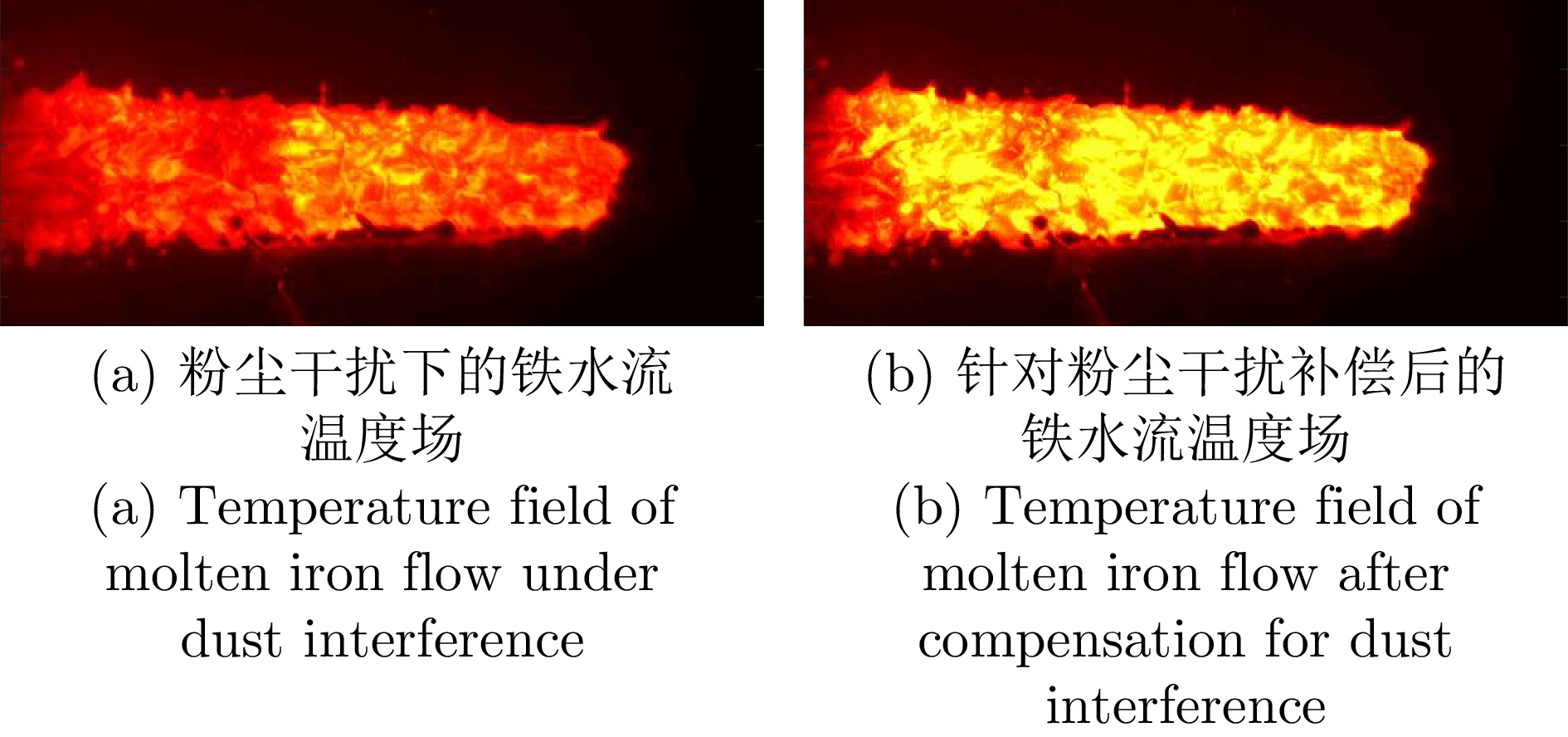
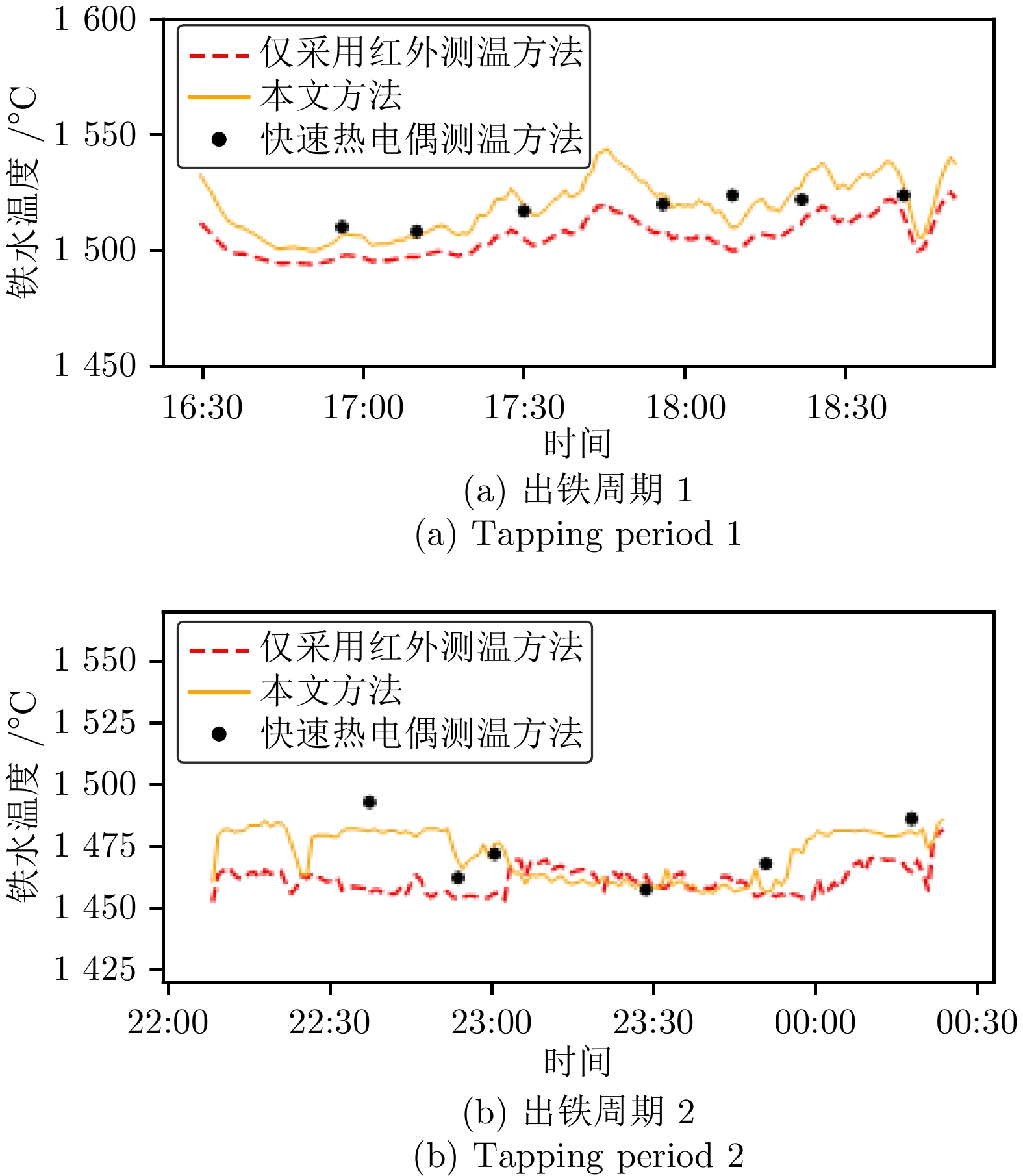
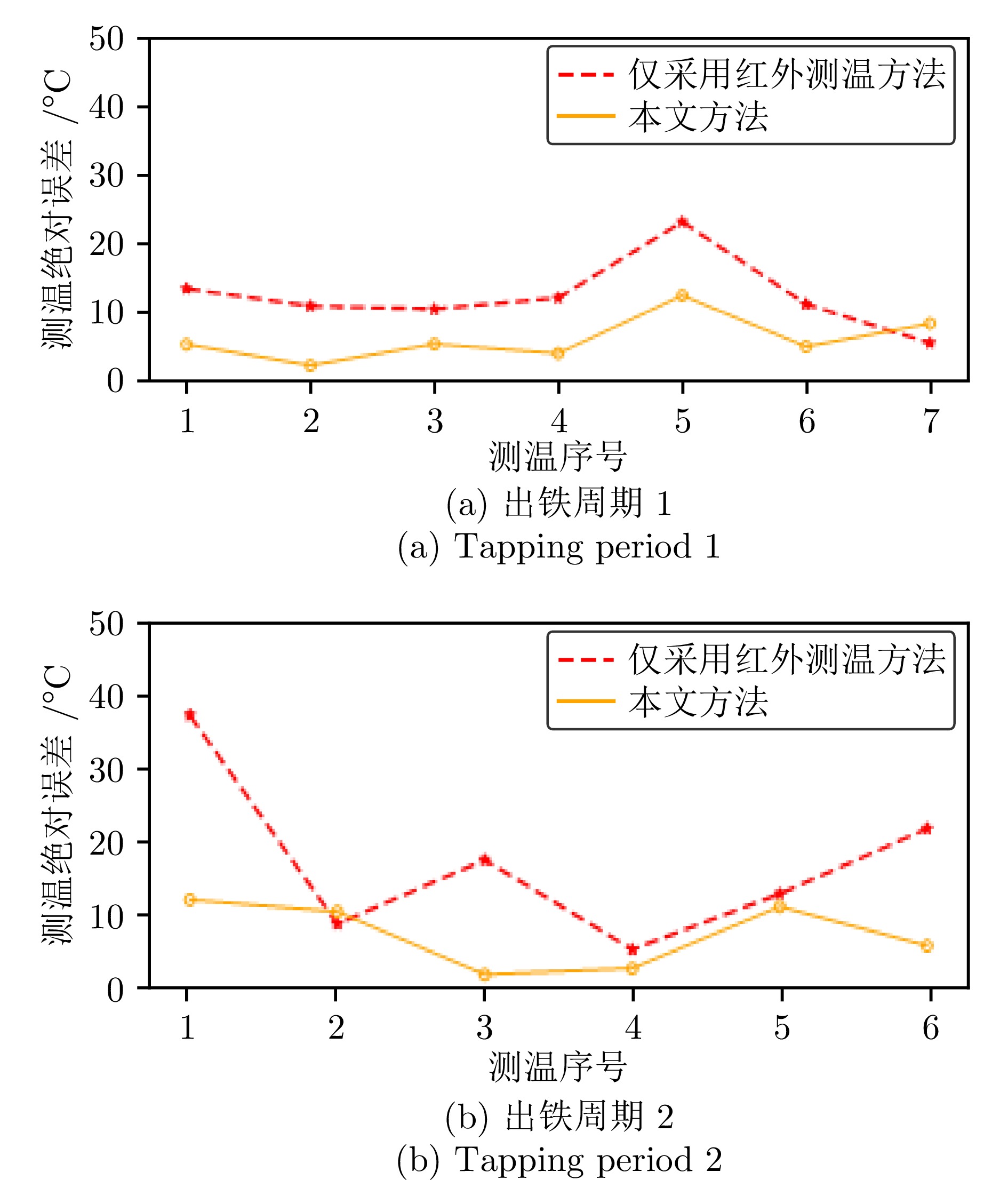
高炉铁口铁水温度场 (Molten iron temperature field, MITF) 是表征铁水质量、判断炉温状况的重要信息. 然而高炉出铁场动态粉尘的干扰使得铁水温度场的在线准确获取充满挑战. 为此, 首次提出基于红外与可见光视觉的高炉铁口铁水温度场检测方法, 利用可见光图像为红外视觉测温提供先验粉尘干扰情况. 首先, 设计红外与可见光视觉协同的测温系统, 同步获取高炉铁口铁水流的红外图像和可见光图像, 铁水流红外图像表征铁水原始温度场信息, 可见光图像为量化粉尘透射率提供数据基础. 其次, 构建基于色彩一致性的可见光图像中粉尘透射率估计模型和基于雾线先验的红外图像中粉尘透射率估计模型, 得到红外波段下粉尘透射率. 最后, 结合红外辐射测温原理, 构建基于粉尘透射率的红外测温近似补偿模型, 实现铁水温度场的针对性补偿, 获取误差较小的铁水温度. 工业实验表明, 相比于仅利用红外视觉测量铁水温度场, 所提方法能够显著降低粉尘造成的测温误差, 为高炉调控提供连续可靠的铁水温度数据.
高炉铁口铁水温度场 (Molten iron temperature field, MITF) 是表征铁水质量、判断炉温状况的重要信息. 然而高炉出铁场动态粉尘的干扰使得铁水温度场的在线准确获取充满挑战. 为此, 首次提出基于红外与可见光视觉的高炉铁口铁水温度场检测方法, 利用可见光图像为红外视觉测温提供先验粉尘干扰情况. 首先, 设计红外与可见光视觉协同的测温系统, 同步获取高炉铁口铁水流的红外图像和可见光图像, 铁水流红外图像表征铁水原始温度场信息, 可见光图像为量化粉尘透射率提供数据基础. 其次, 构建基于色彩一致性的可见光图像中粉尘透射率估计模型和基于雾线先验的红外图像中粉尘透射率估计模型, 得到红外波段下粉尘透射率. 最后, 结合红外辐射测温原理, 构建基于粉尘透射率的红外测温近似补偿模型, 实现铁水温度场的针对性补偿, 获取误差较小的铁水温度. 工业实验表明, 相比于仅利用红外视觉测量铁水温度场, 所提方法能够显著降低粉尘造成的测温误差, 为高炉调控提供连续可靠的铁水温度数据.


2025, 51(2): 356-365.
doi: 10.16383/j.aas.c240527
cstr: 32138.14.j.aas.c240527
摘要:
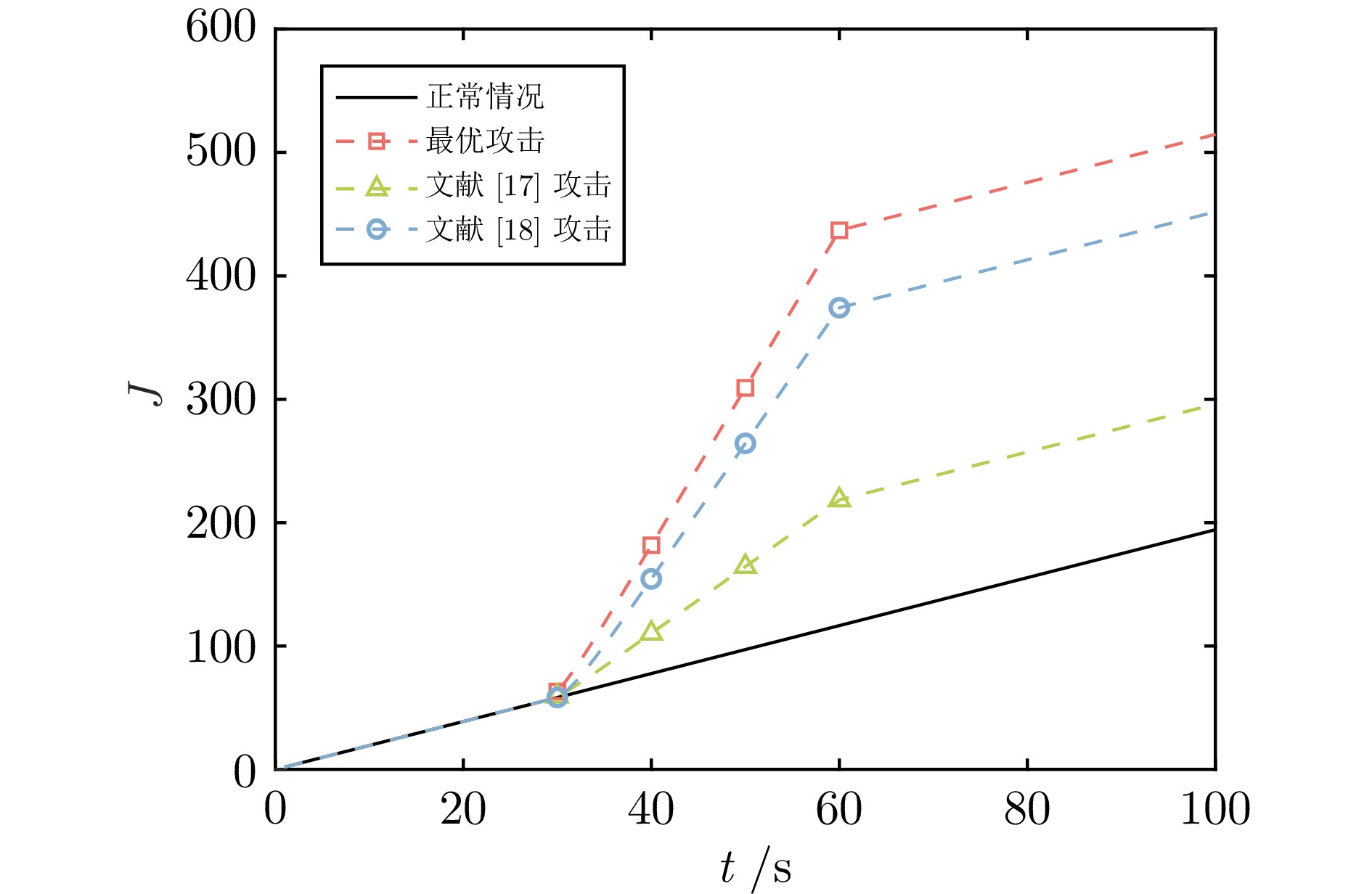
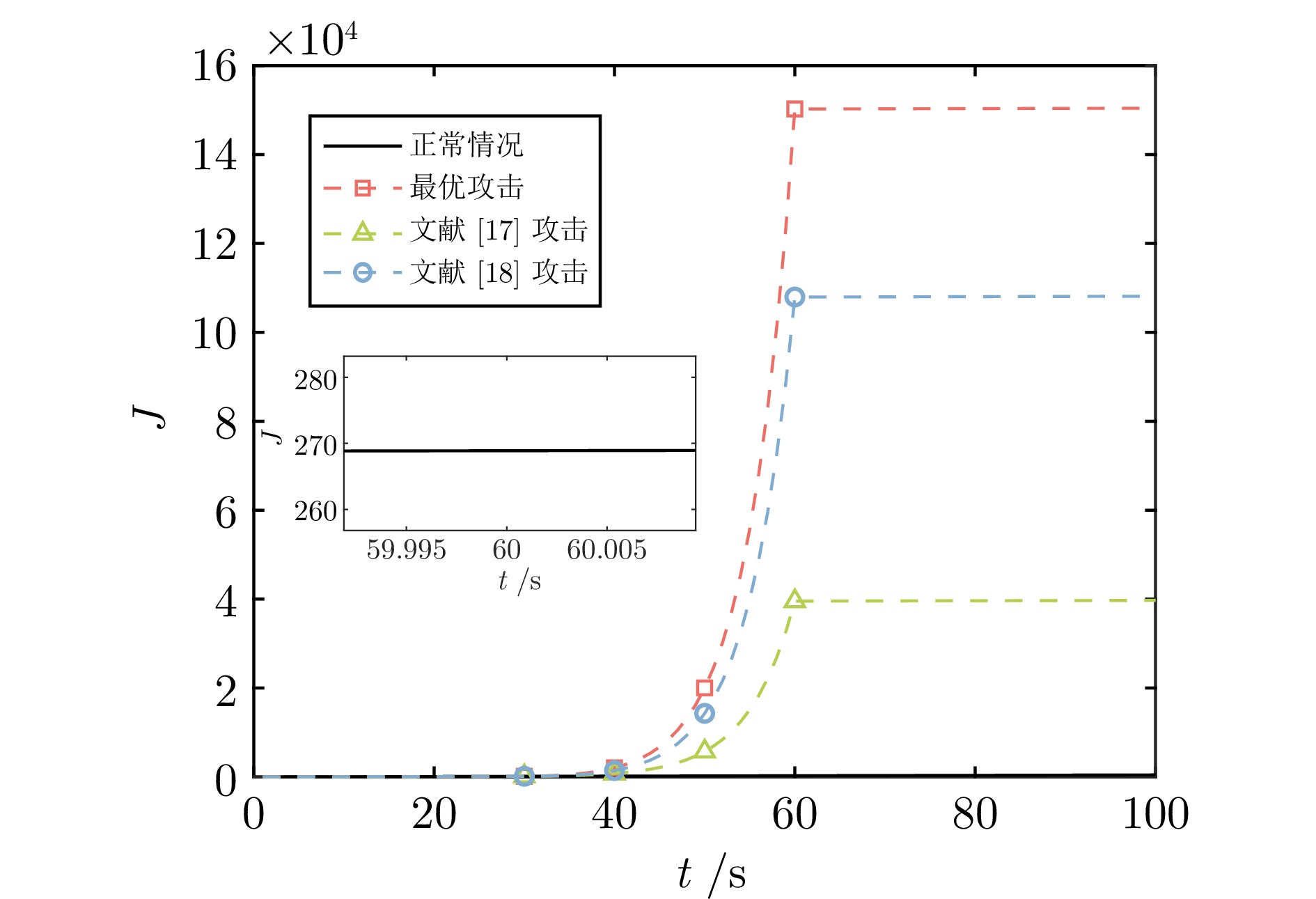
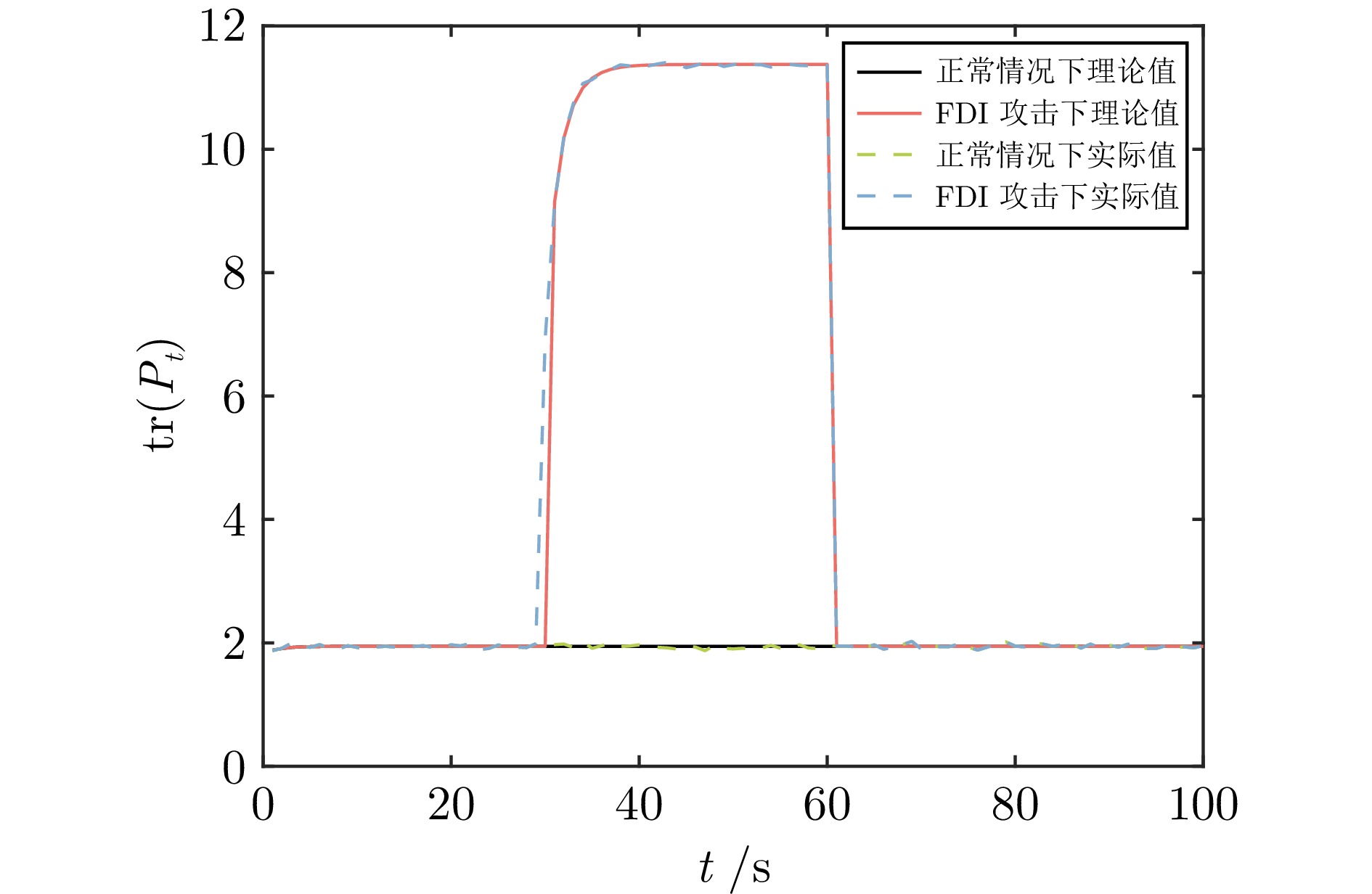
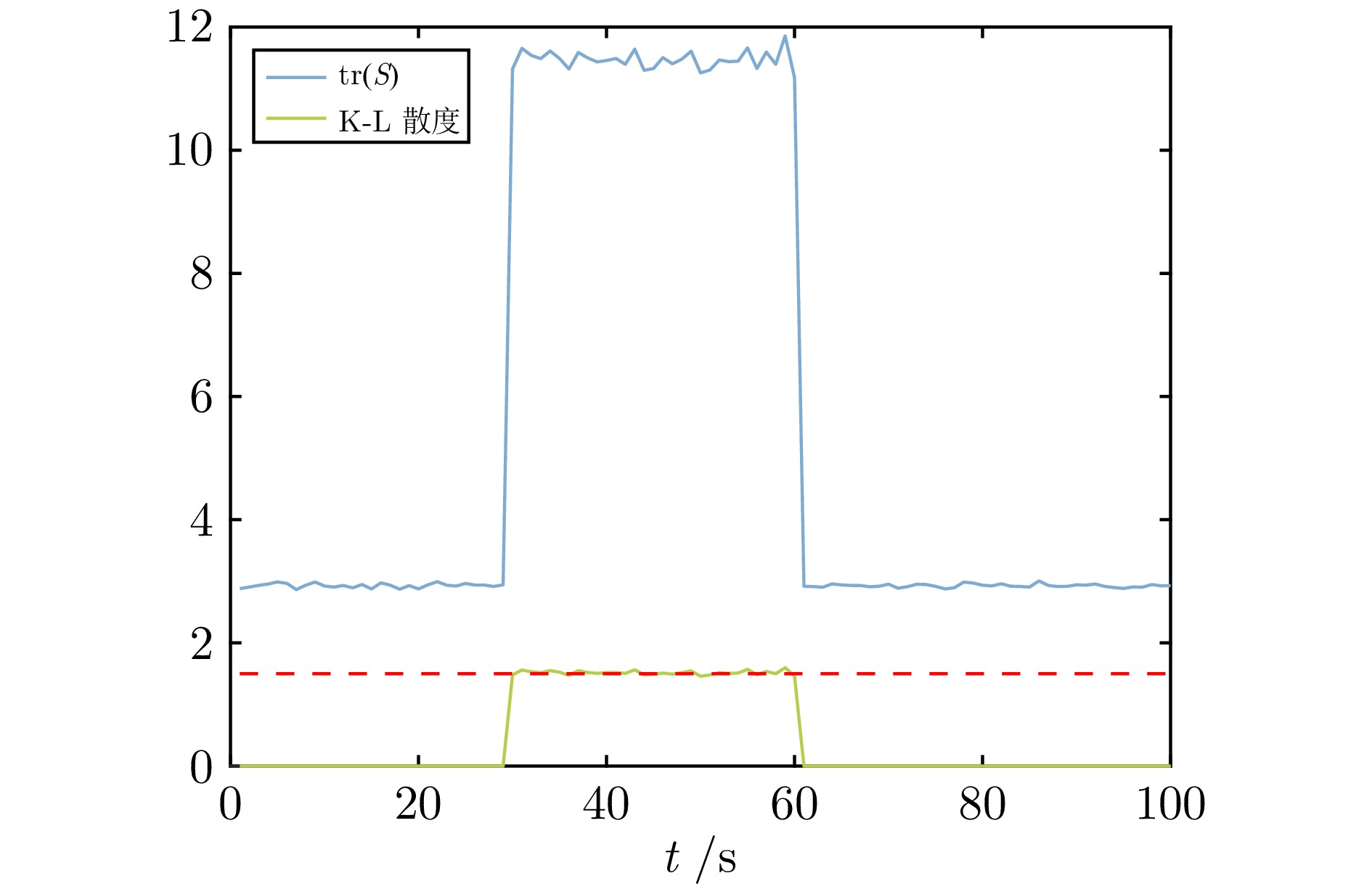
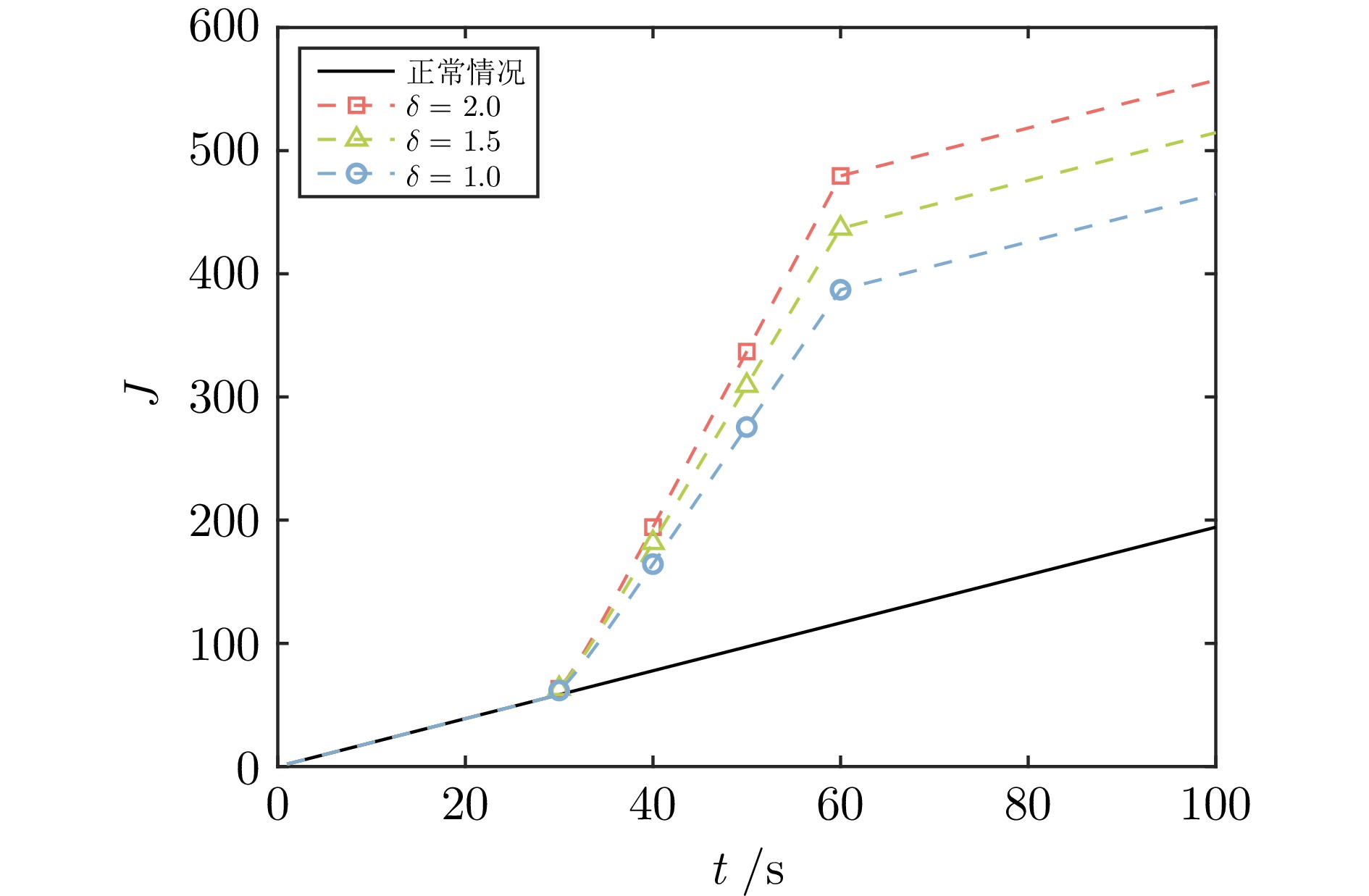
从攻击者的角度探讨信息物理系统(Cyber-physical system, CPS)中隐蔽虚假数据注入(False data injection, FDI)攻击的最优策略. 选取Kullback-Leibler (K-L)散度作为攻击隐蔽性的评价指标, 设计攻击信号使得攻击保持隐蔽且最大程度地降低CPS远程状态估计的性能. 首先, 利用残差的统计特征计算远程状态估计误差协方差, 将FDI最优策略问题转化为二次约束优化问题. 其次, 在攻击隐蔽性的约束下, 运用拉格朗日乘子法及半正定规划推导出最优策略. 最后, 通过仿真实验验证所提方法与现有方法相比在隐蔽性方面具有显著优势.
从攻击者的角度探讨信息物理系统(Cyber-physical system, CPS)中隐蔽虚假数据注入(False data injection, FDI)攻击的最优策略. 选取Kullback-Leibler (K-L)散度作为攻击隐蔽性的评价指标, 设计攻击信号使得攻击保持隐蔽且最大程度地降低CPS远程状态估计的性能. 首先, 利用残差的统计特征计算远程状态估计误差协方差, 将FDI最优策略问题转化为二次约束优化问题. 其次, 在攻击隐蔽性的约束下, 运用拉格朗日乘子法及半正定规划推导出最优策略. 最后, 通过仿真实验验证所提方法与现有方法相比在隐蔽性方面具有显著优势.

2025, 51(2): 366-375.
doi: 10.16383/j.aas.c240384
cstr: 32138.14.j.aas.c240384
摘要:
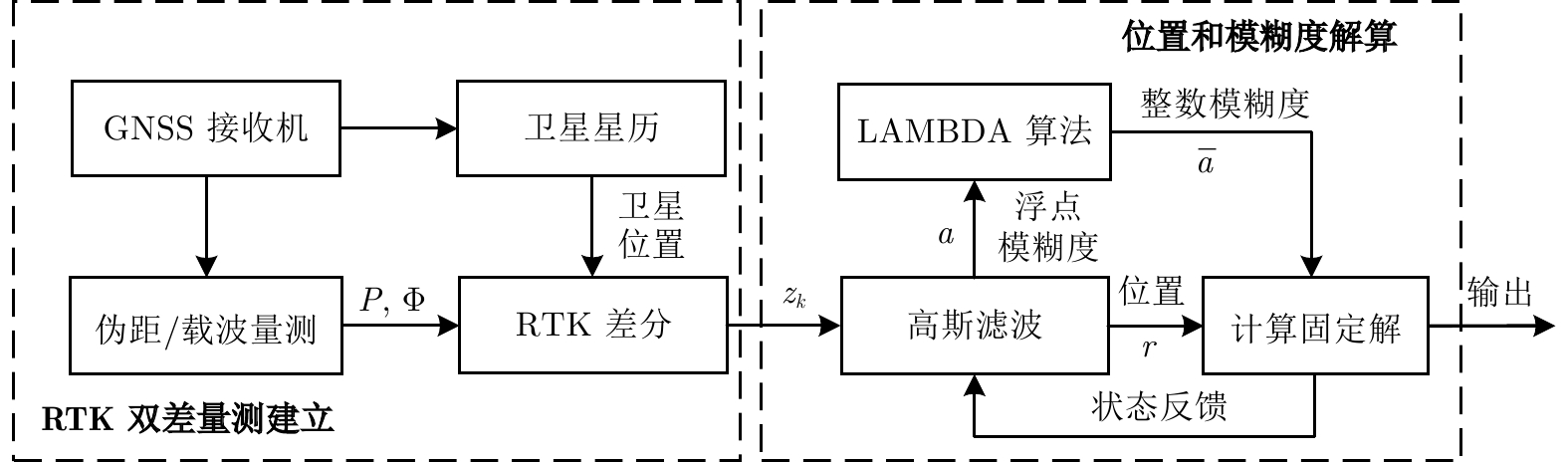
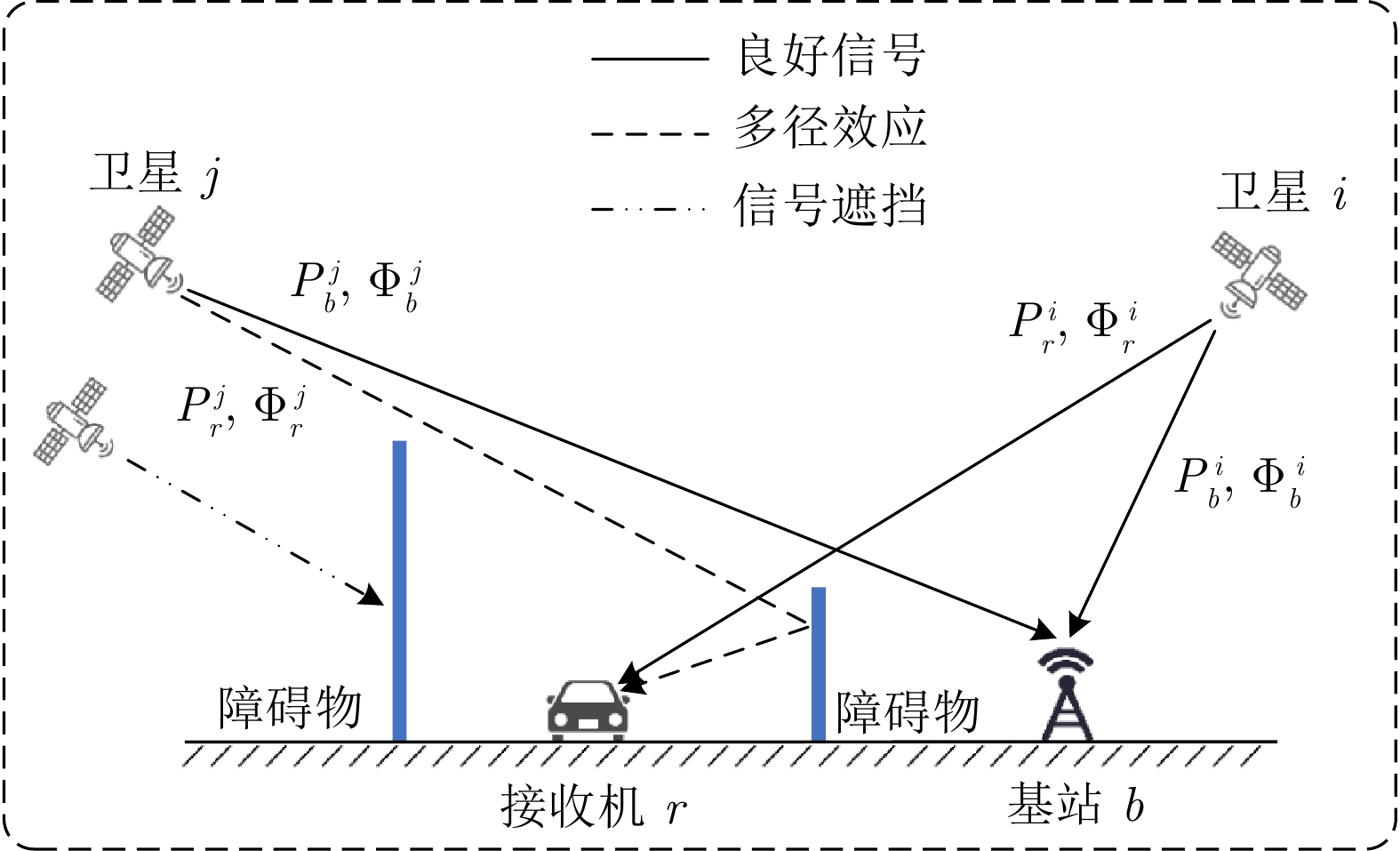
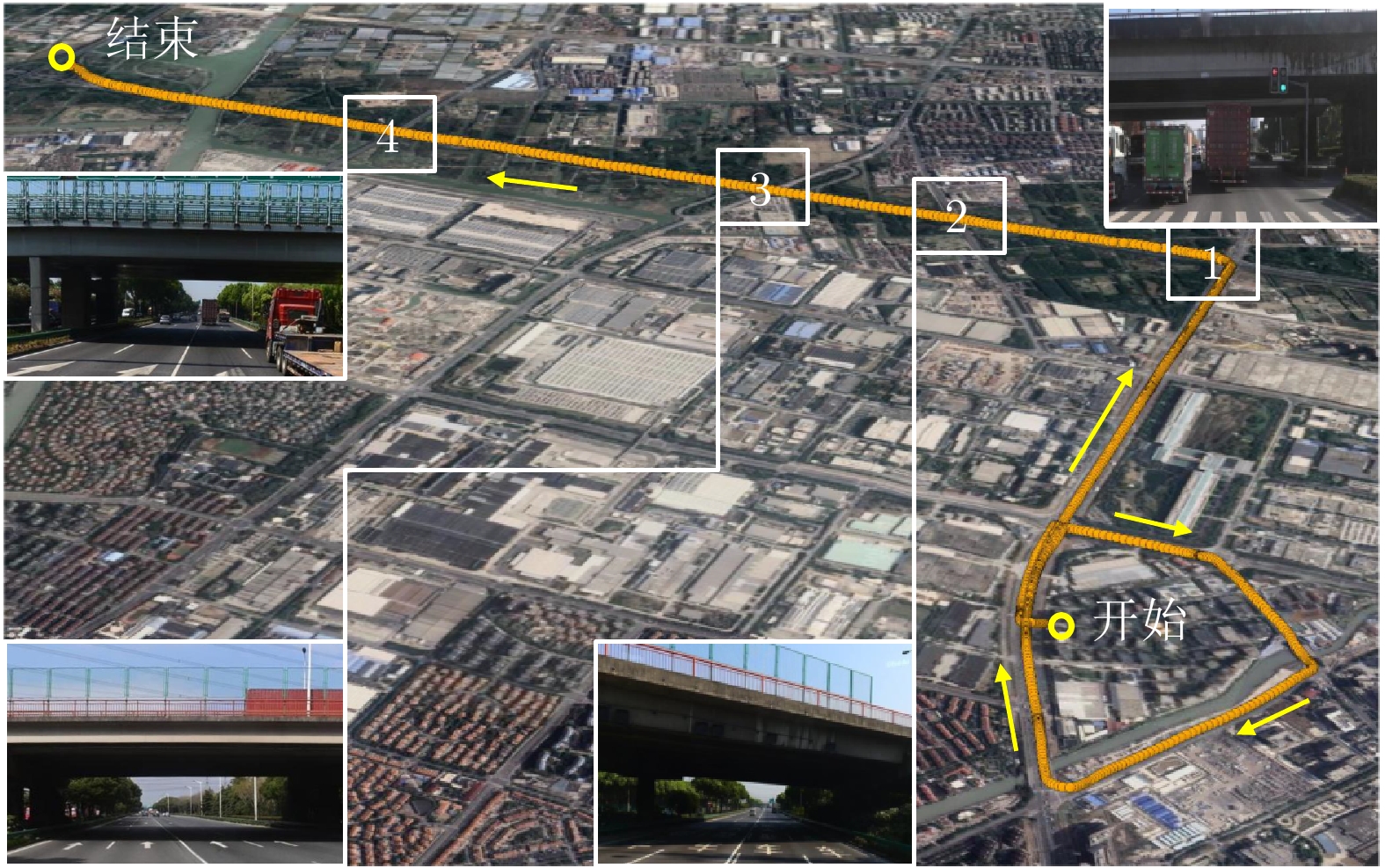
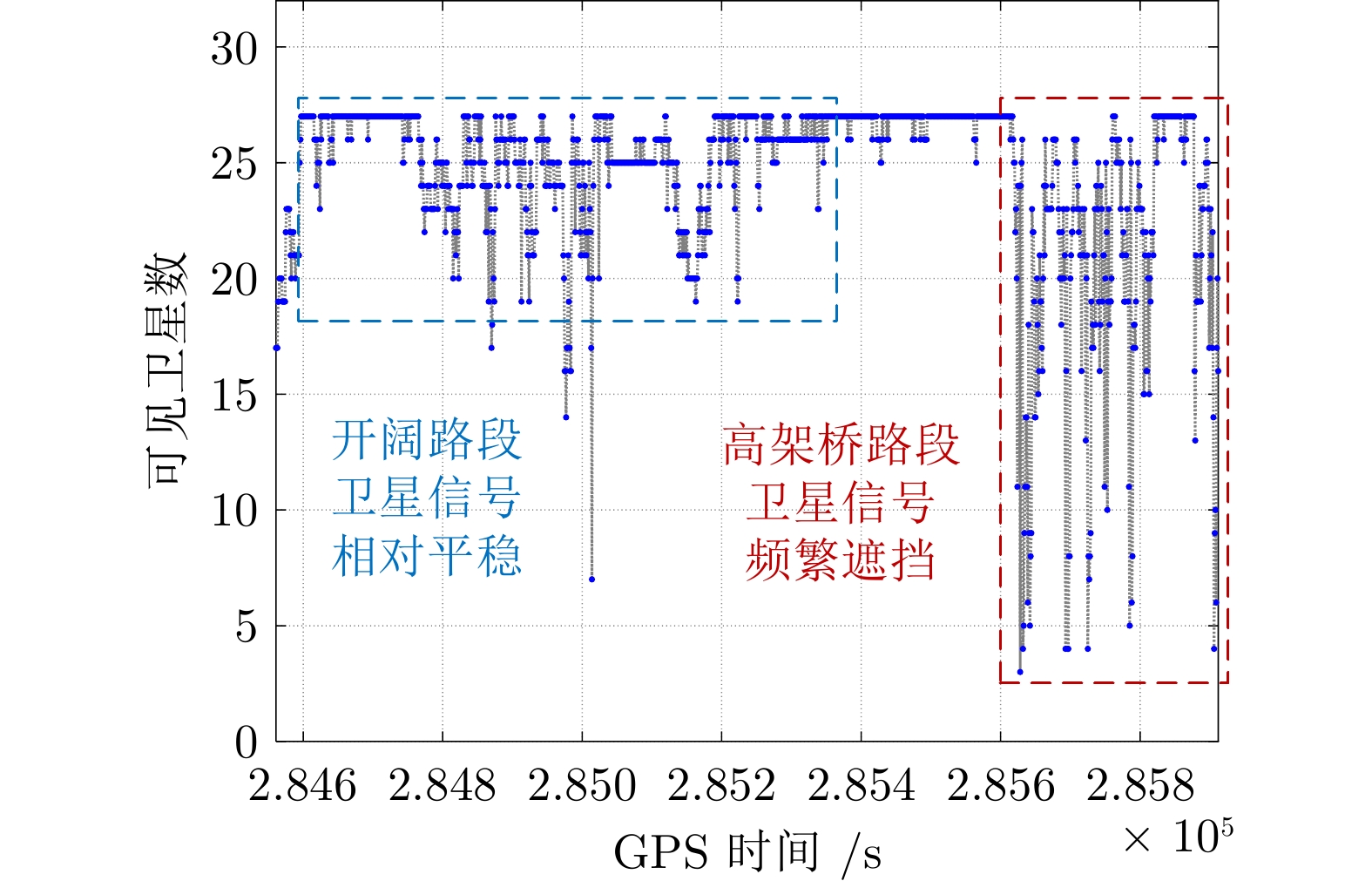
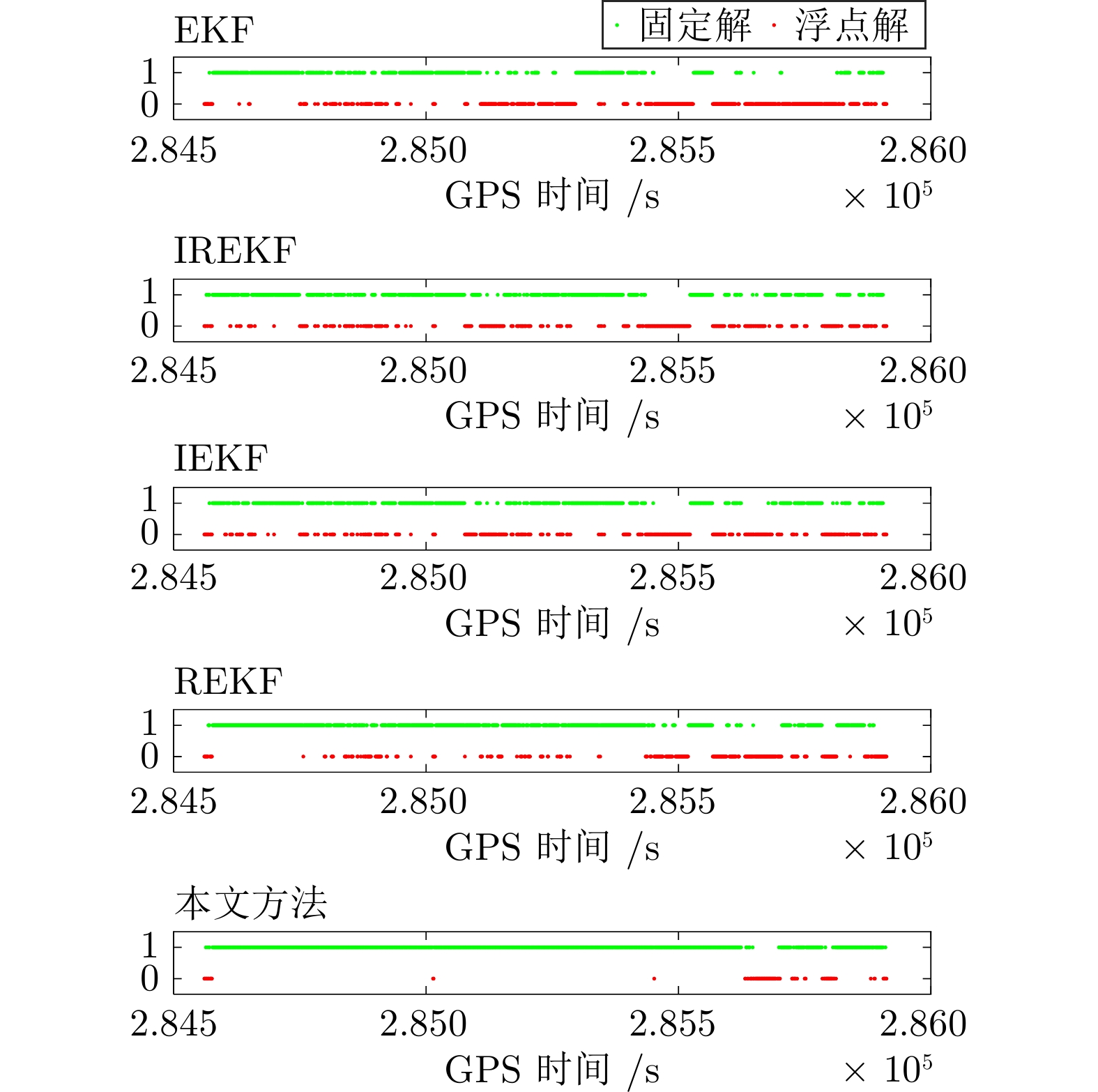
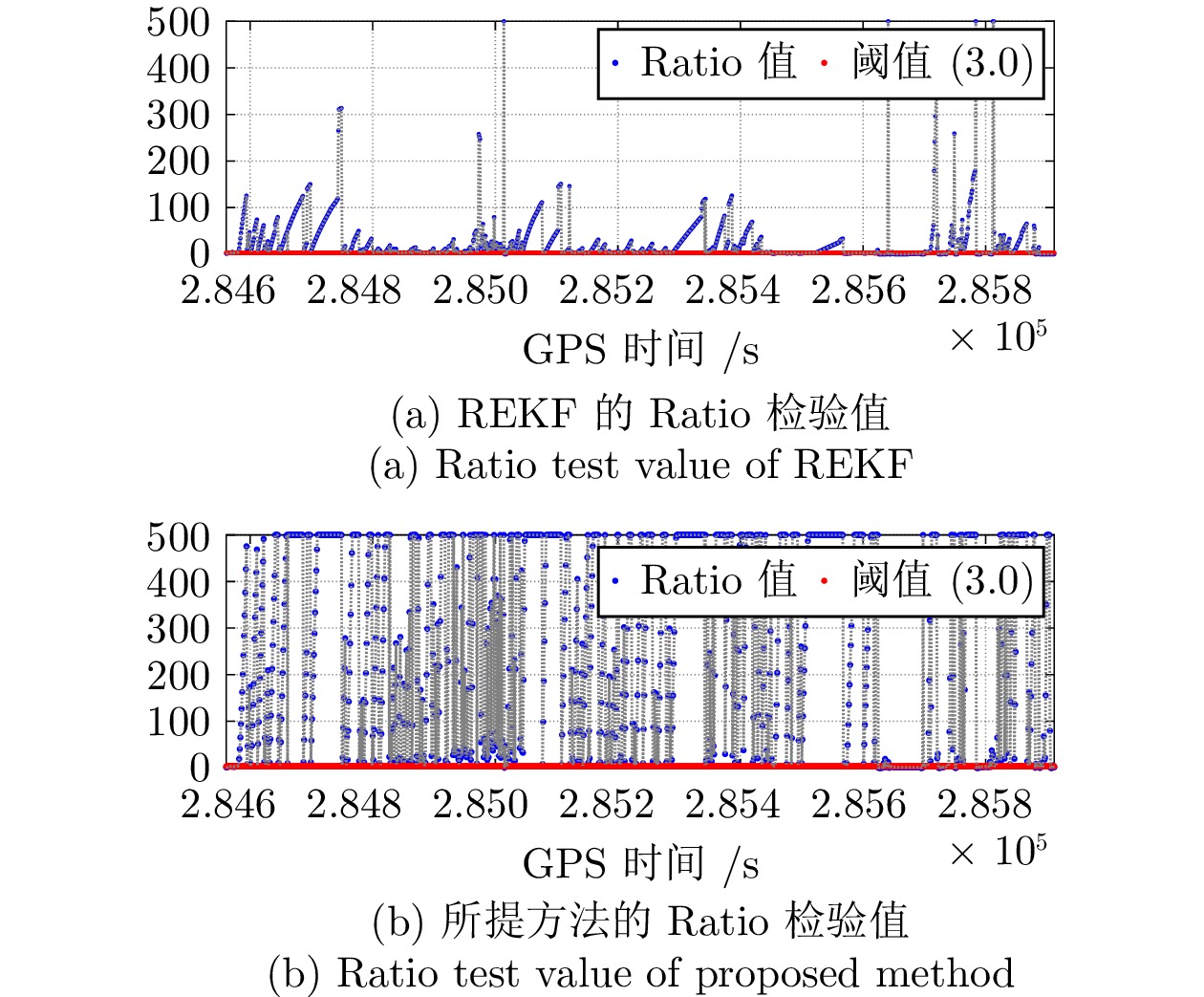
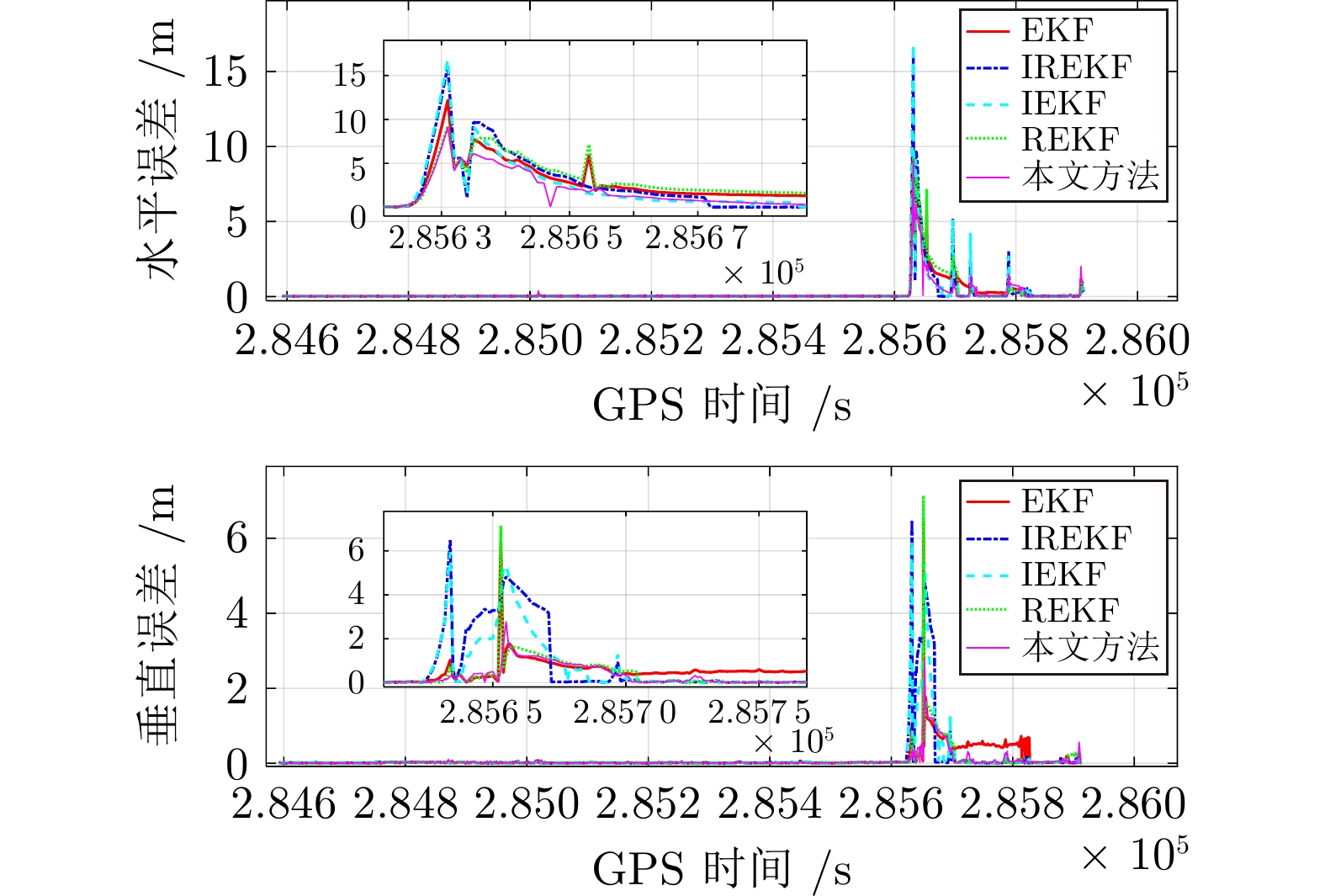
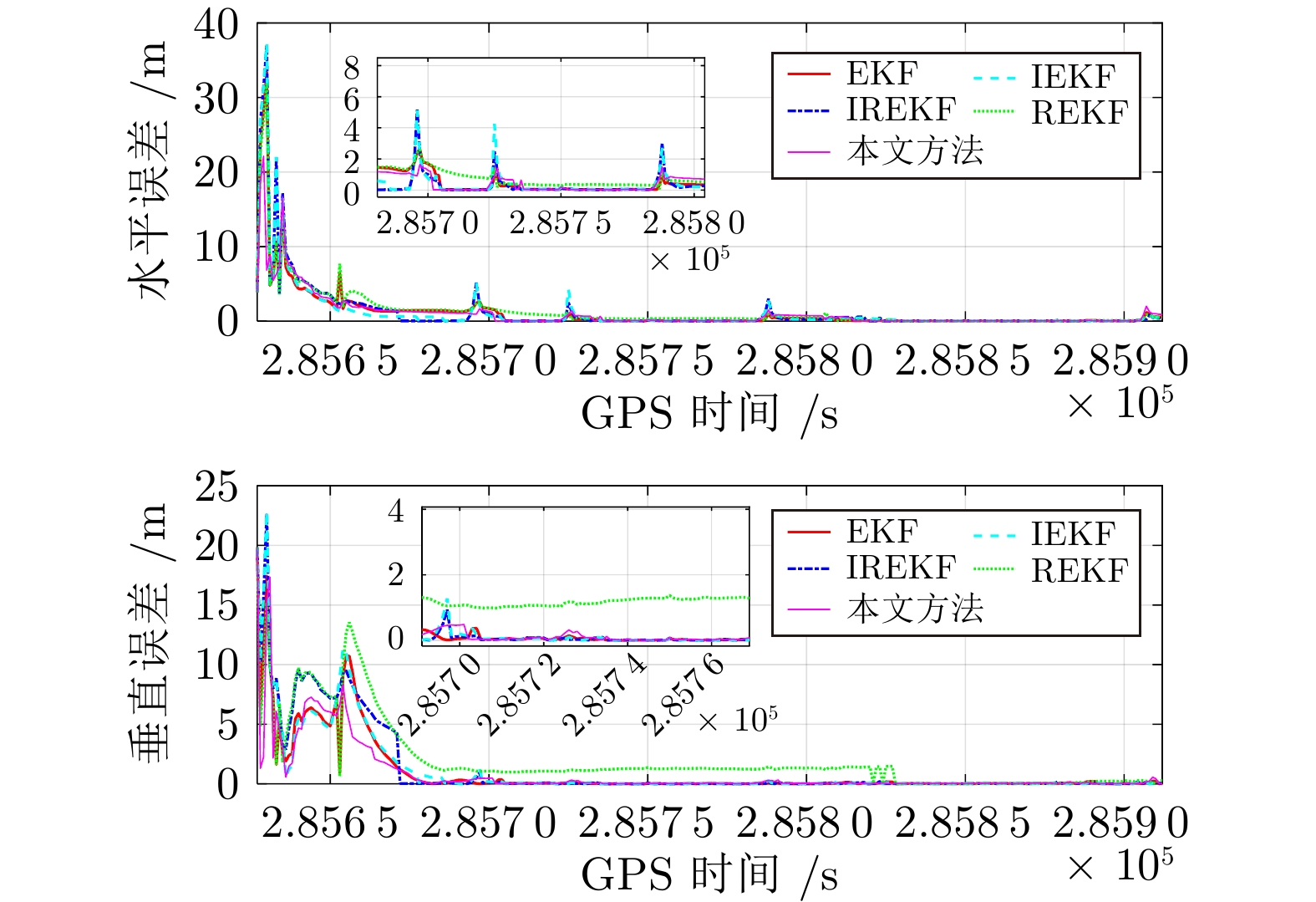
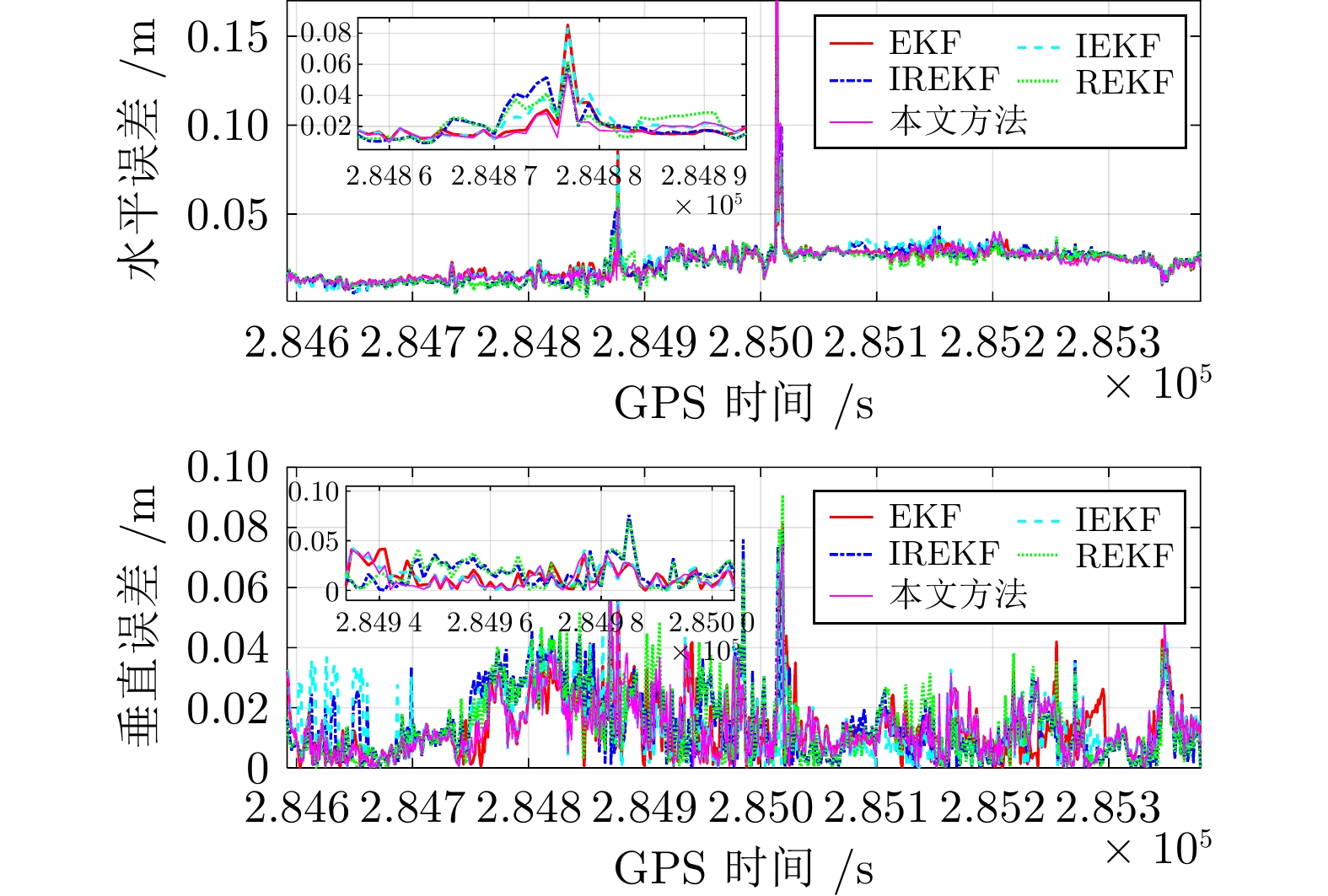
本文研究了卫星信号干扰下 RTK (Real-time kinematic)整周模糊度固定问题, 提出一种基于整数约束型渐进高斯滤波的 RTK 定位方法. 首先, 结合贝叶斯推理与同伦方法优势, 导出一种兼容整数、浮点状态的渐进高斯滤波框架. 其次, 构造从先验分布到后验分布的同伦路径, 以目标浮点状态与模糊度固定的迭代求解来提高信号干扰情形下的整周模糊度固定率. 特别地, 通过渐进地融合卫星双差信息来降低线性化误差, 进而提升对目标状态后验分布的逼近精度. 最后, 通过车载 RTK 实验及后处理分析, 验证了所提方法的有效性和优越性.
本文研究了卫星信号干扰下 RTK (Real-time kinematic)整周模糊度固定问题, 提出一种基于整数约束型渐进高斯滤波的 RTK 定位方法. 首先, 结合贝叶斯推理与同伦方法优势, 导出一种兼容整数、浮点状态的渐进高斯滤波框架. 其次, 构造从先验分布到后验分布的同伦路径, 以目标浮点状态与模糊度固定的迭代求解来提高信号干扰情形下的整周模糊度固定率. 特别地, 通过渐进地融合卫星双差信息来降低线性化误差, 进而提升对目标状态后验分布的逼近精度. 最后, 通过车载 RTK 实验及后处理分析, 验证了所提方法的有效性和优越性.

2025, 51(2): 376-390.
doi: 10.16383/j.aas.c240491
cstr: 32138.14.j.aas.c240491
摘要:
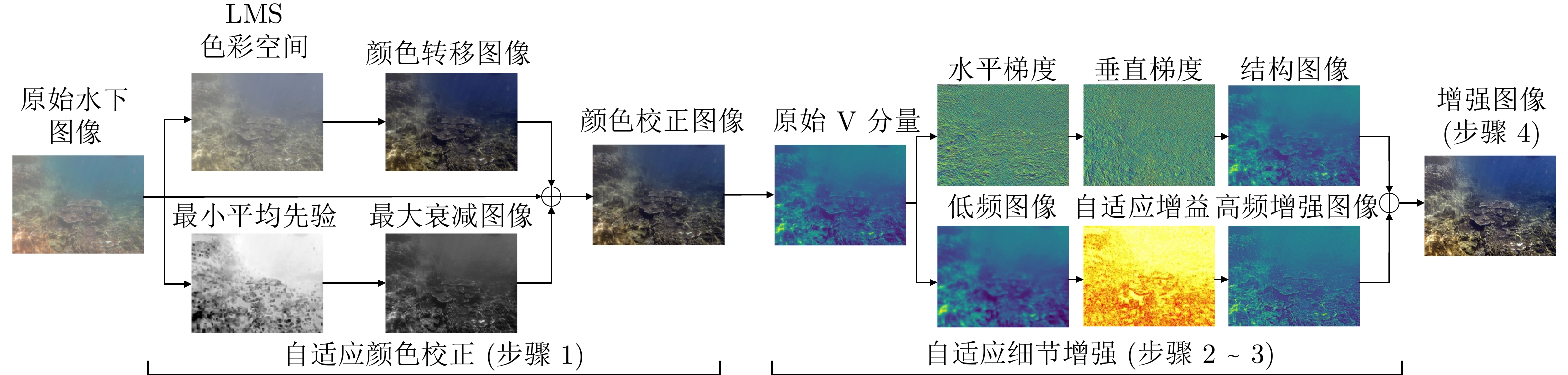
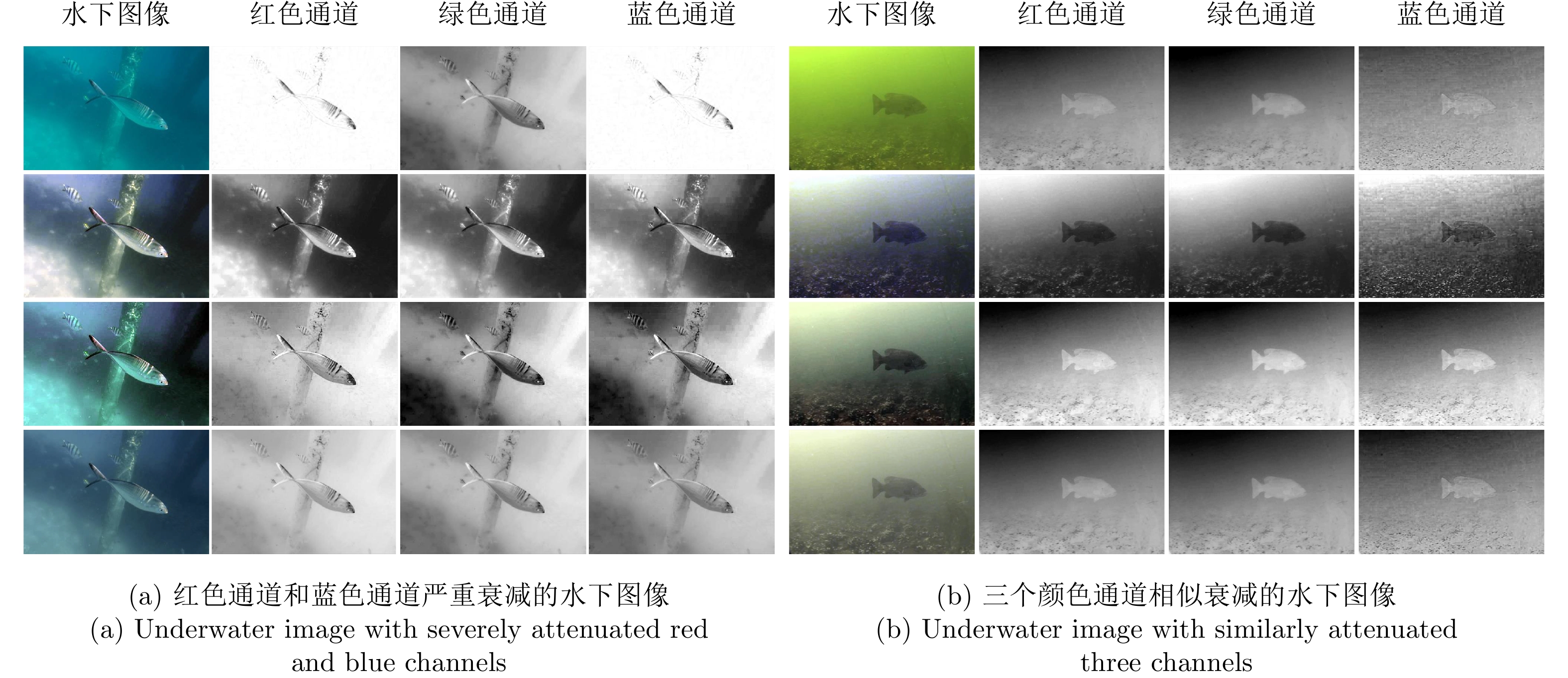
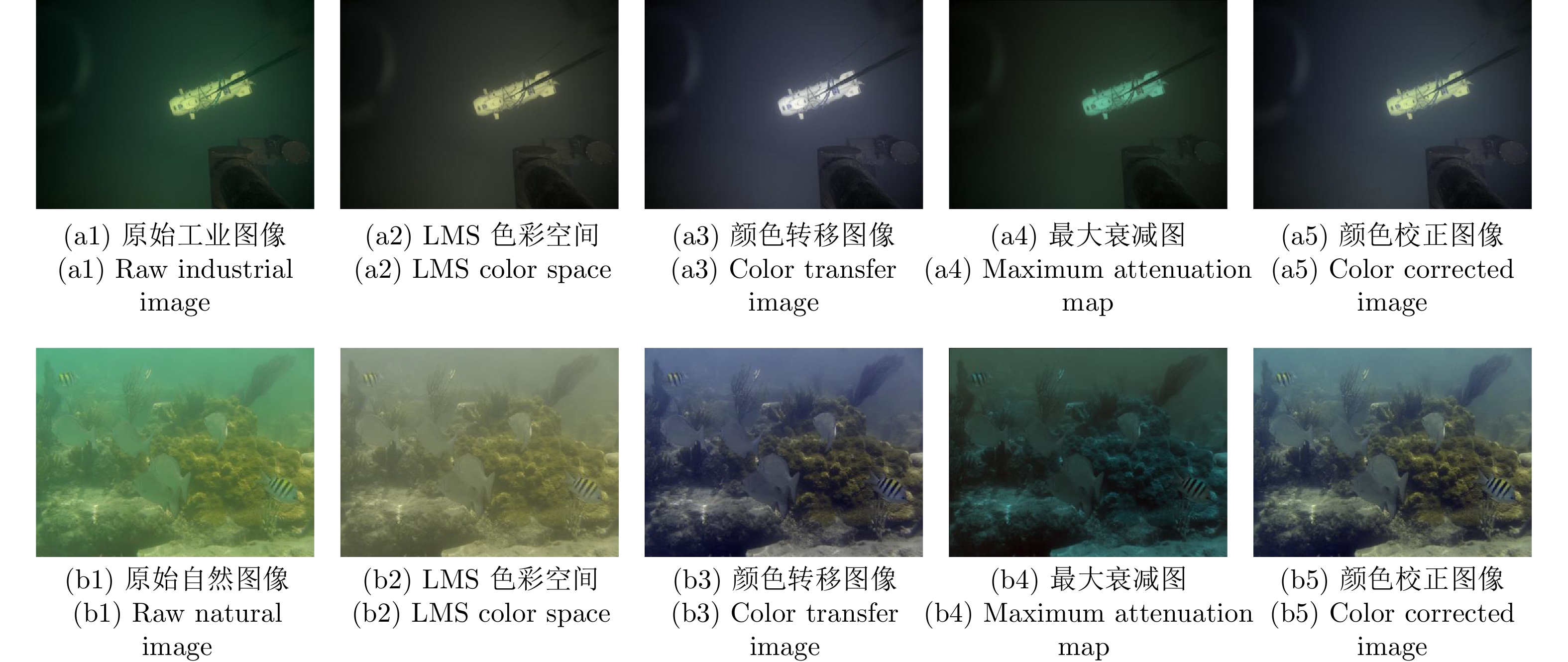
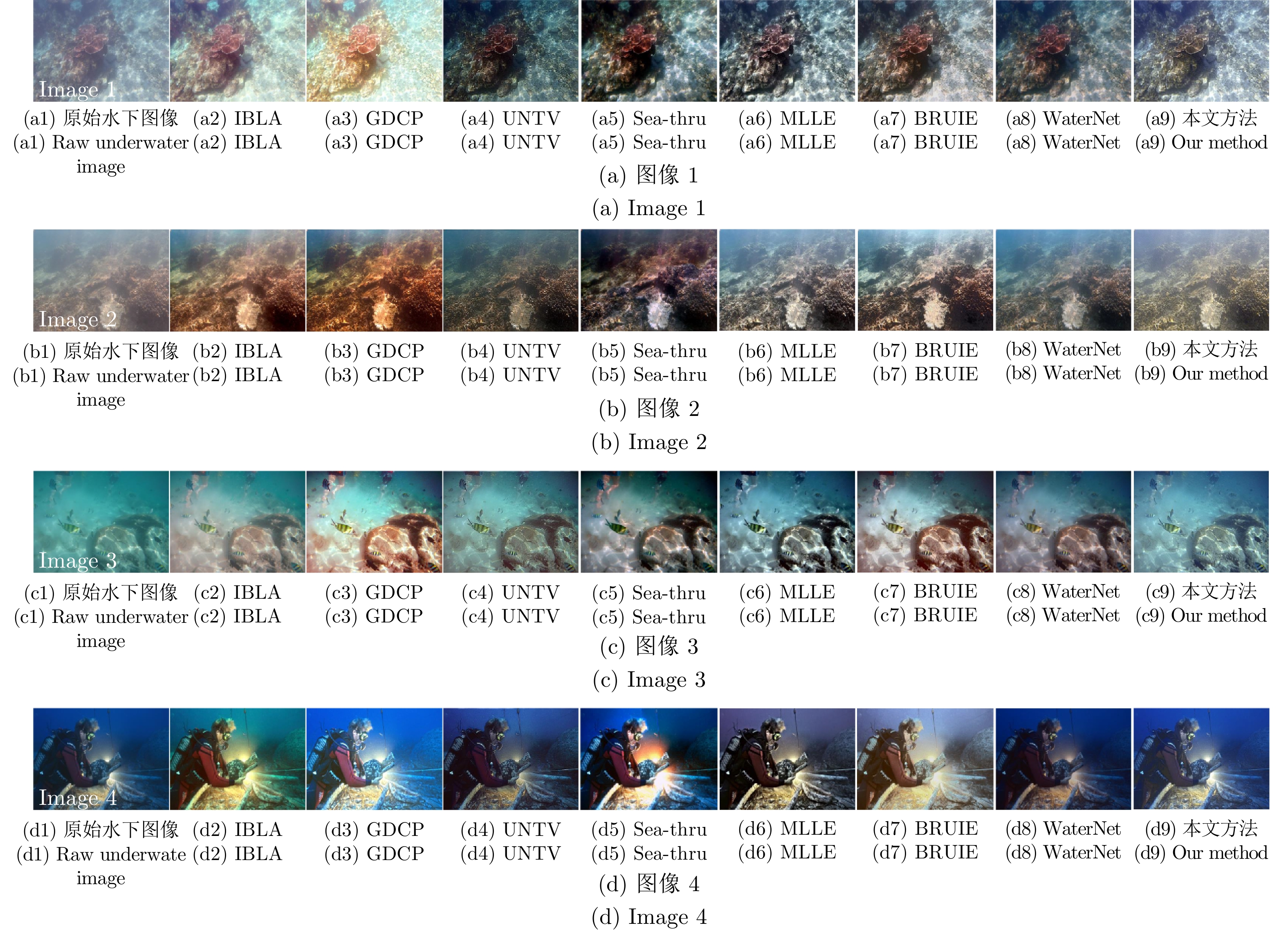
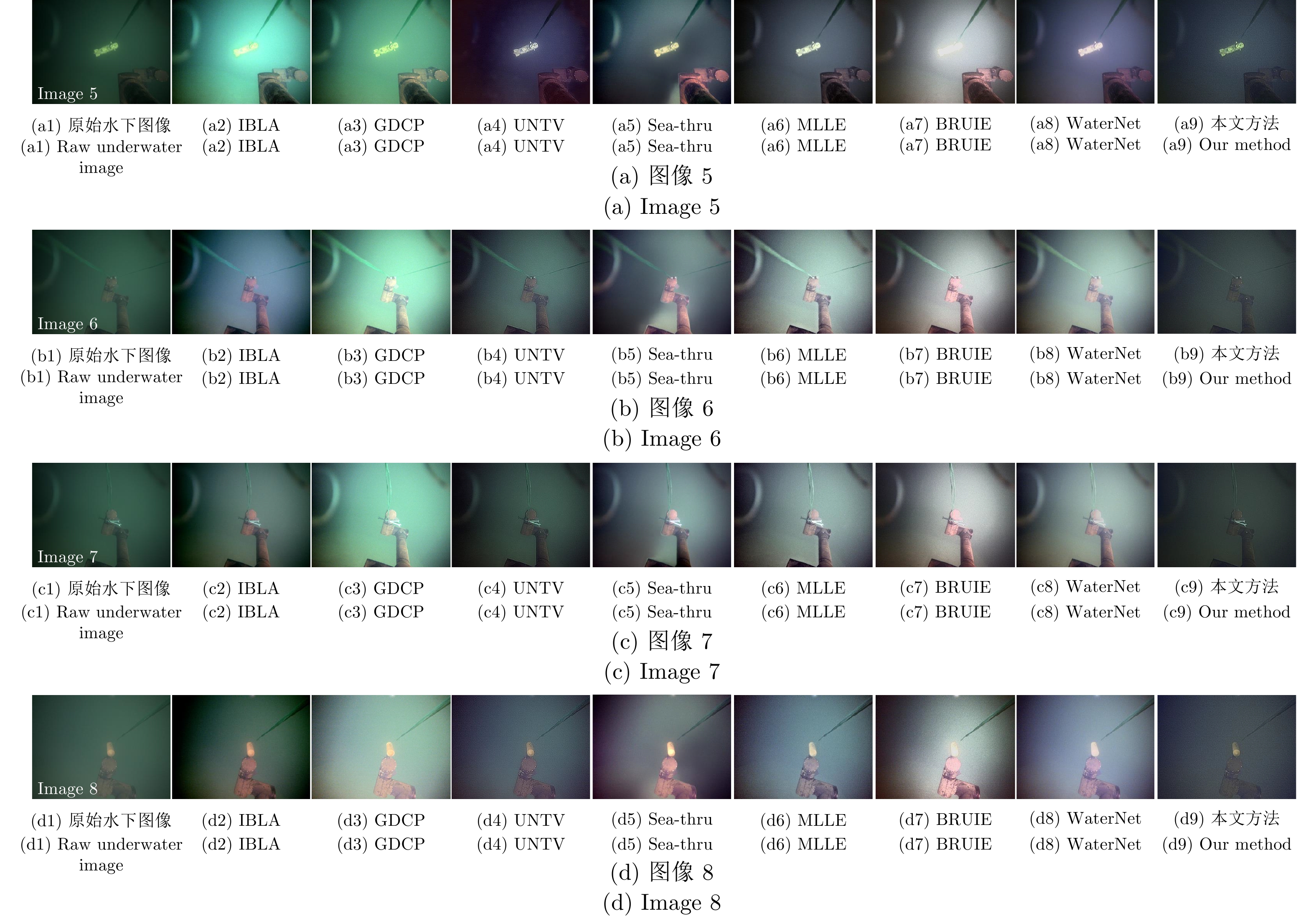
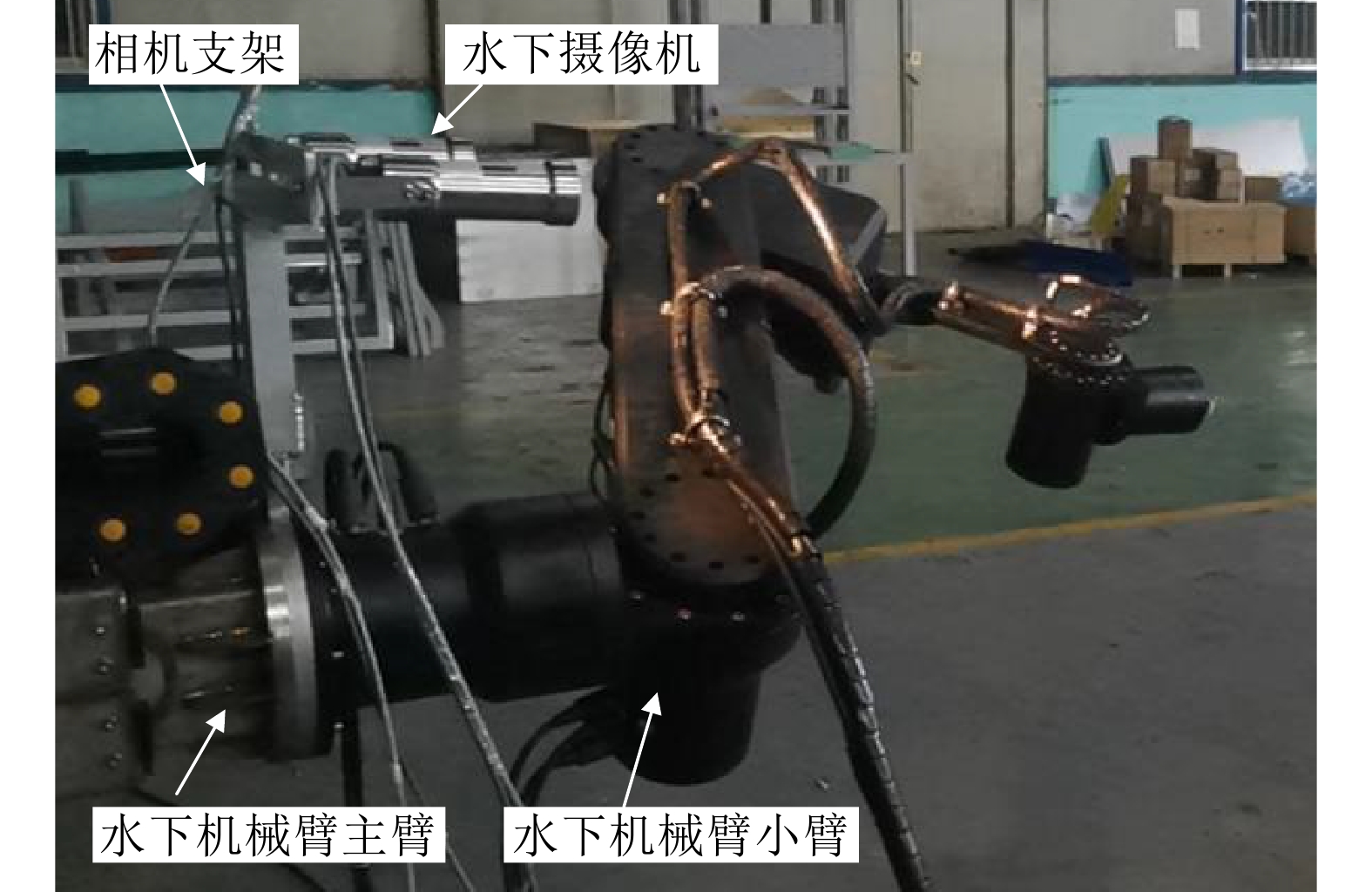
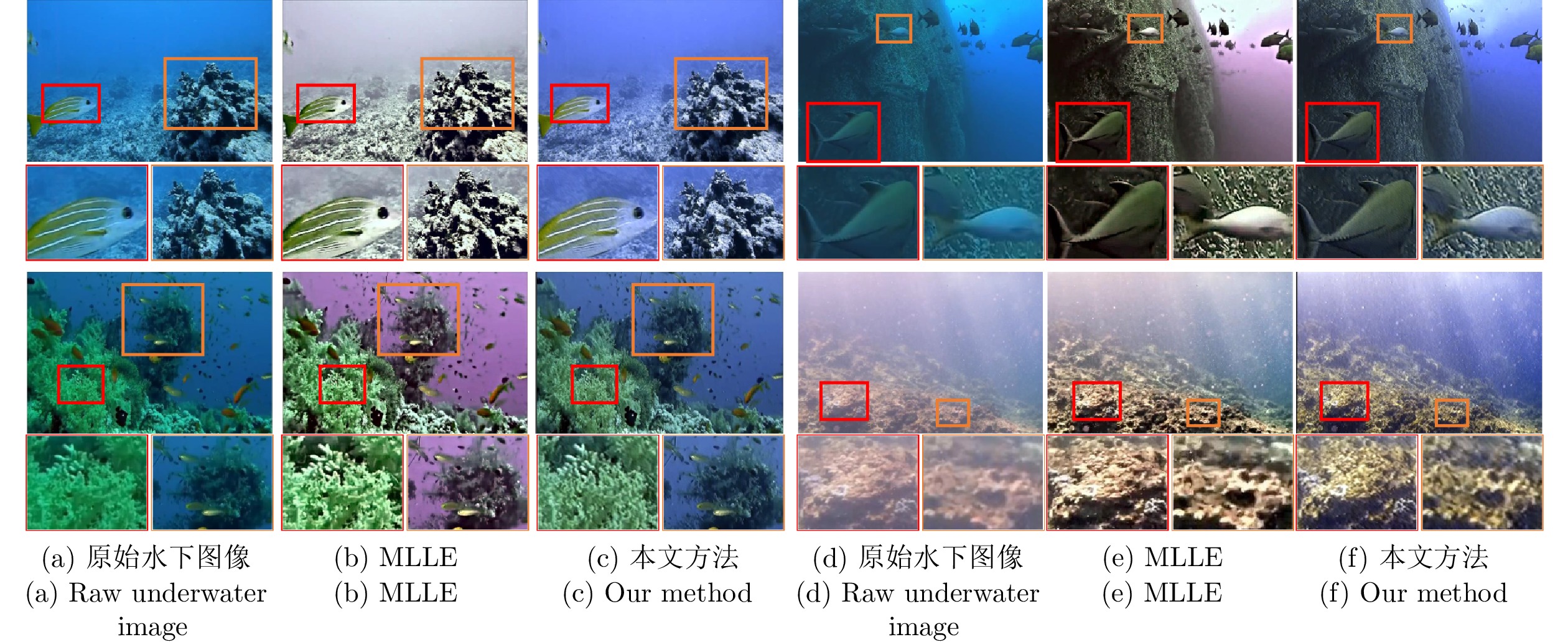
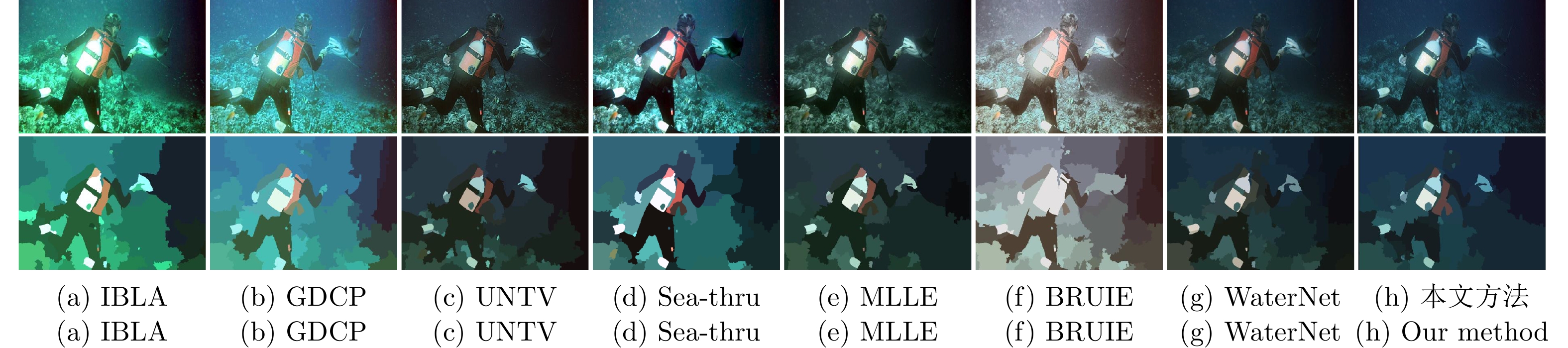
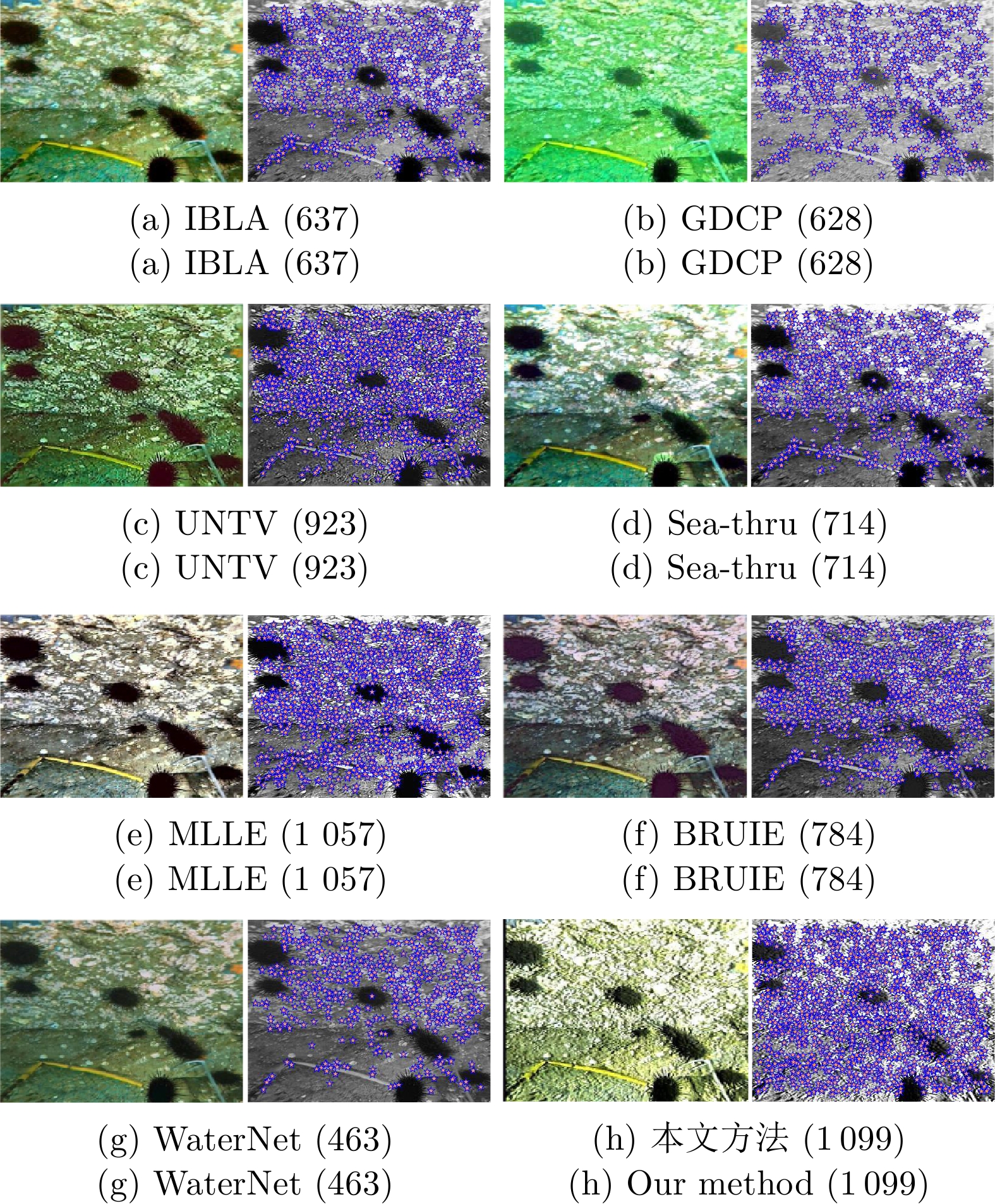
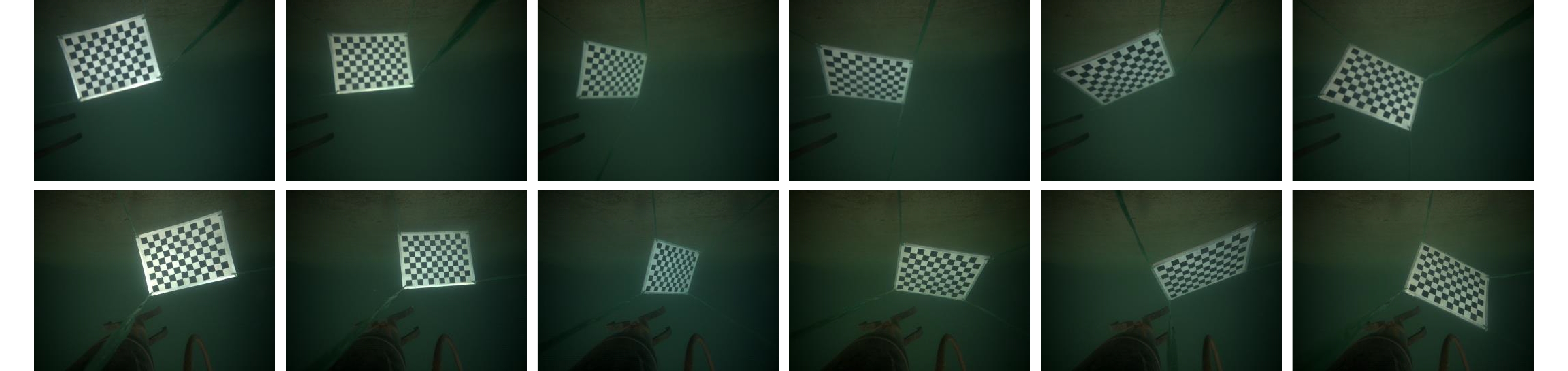
针对水下图像的颜色偏差和低对比度等退化问题, 提出一种基于颜色转移和自适应增益控制的混合水下图像增强方法. 首先, 根据颜色转移图像和最大衰减图引导的融合策略校正水下图像的颜色偏差. 其次, 利用一阶原始对偶方法对V通道进行滤波以有效地抑制噪声的干扰, 获得结构图像; 并且提出自适应增益控制, 根据图像的高频信息自适应调整增益, 以获得细节图像. 最后, 通过加权融合结构图像与细节图像, 得到高质量的水下图像. 实验结果表明, 针对不同自然和工业环境下的水下图像: 1) 所提方法可以有效地校正颜色失真现象; 2) 显著提高水下图像的对比度并且抑制噪声干扰; 3) 在定量评价指标和高级视觉任务(目标检测、图像分割、关键点检测和水下双目测距)中优于其他主流水下图像增强方法, 为水下目标抓取等工程应用提供了有益的参考.
针对水下图像的颜色偏差和低对比度等退化问题, 提出一种基于颜色转移和自适应增益控制的混合水下图像增强方法. 首先, 根据颜色转移图像和最大衰减图引导的融合策略校正水下图像的颜色偏差. 其次, 利用一阶原始对偶方法对V通道进行滤波以有效地抑制噪声的干扰, 获得结构图像; 并且提出自适应增益控制, 根据图像的高频信息自适应调整增益, 以获得细节图像. 最后, 通过加权融合结构图像与细节图像, 得到高质量的水下图像. 实验结果表明, 针对不同自然和工业环境下的水下图像: 1) 所提方法可以有效地校正颜色失真现象; 2) 显著提高水下图像的对比度并且抑制噪声干扰; 3) 在定量评价指标和高级视觉任务(目标检测、图像分割、关键点检测和水下双目测距)中优于其他主流水下图像增强方法, 为水下目标抓取等工程应用提供了有益的参考.






2025, 51(2): 391-403.
doi: 10.16383/j.aas.c240382
cstr: 32138.14.j.aas.c240382
摘要:
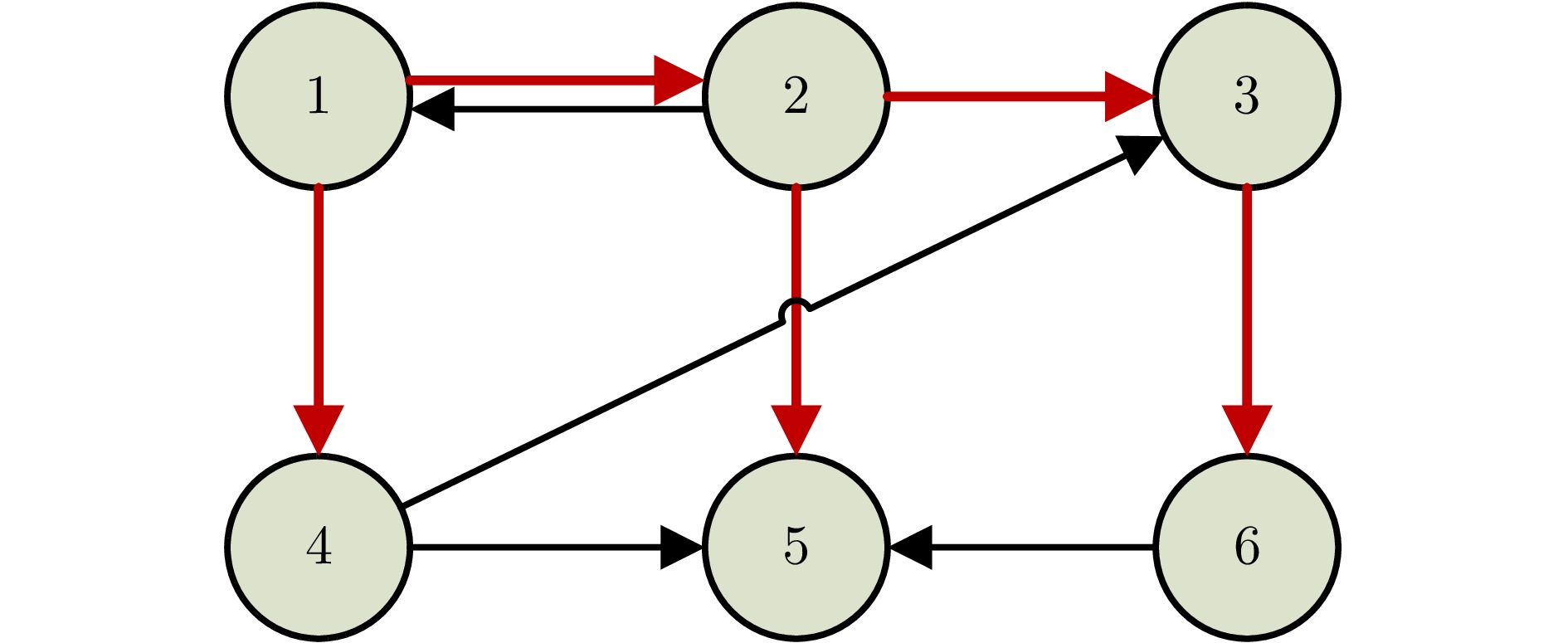
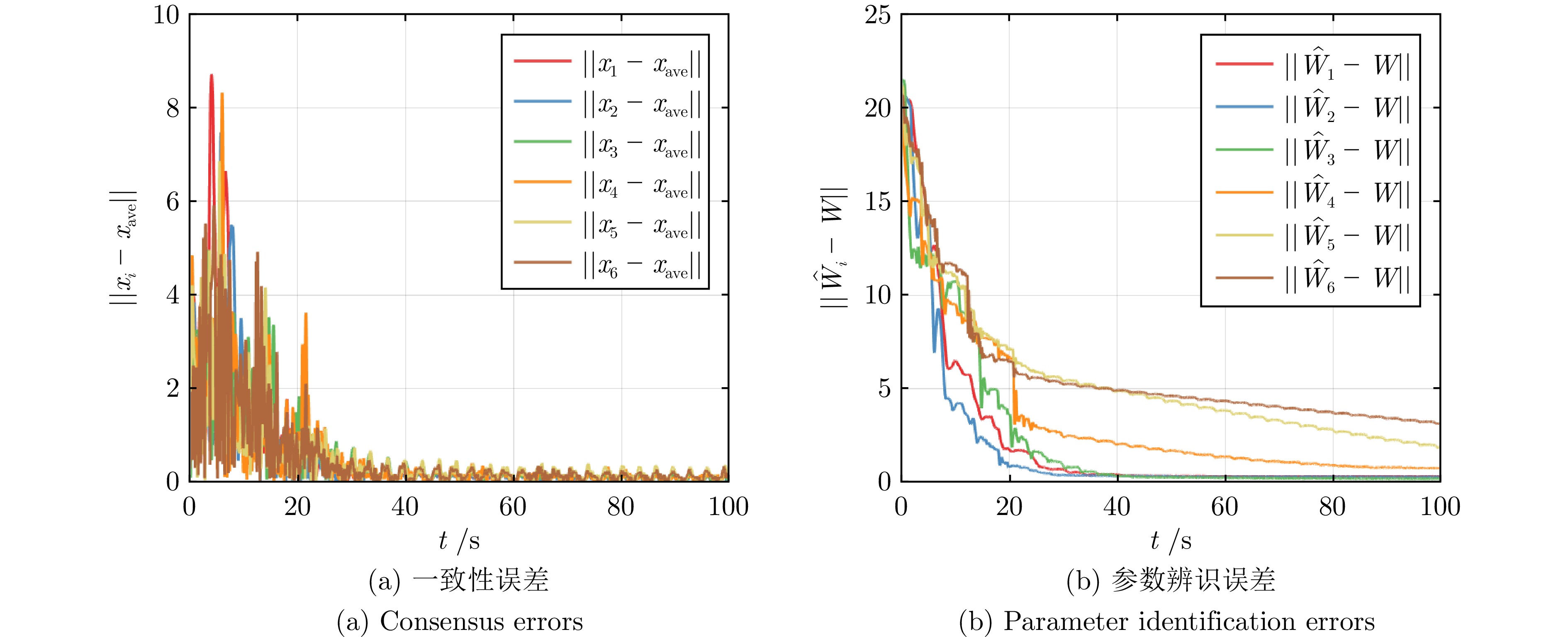
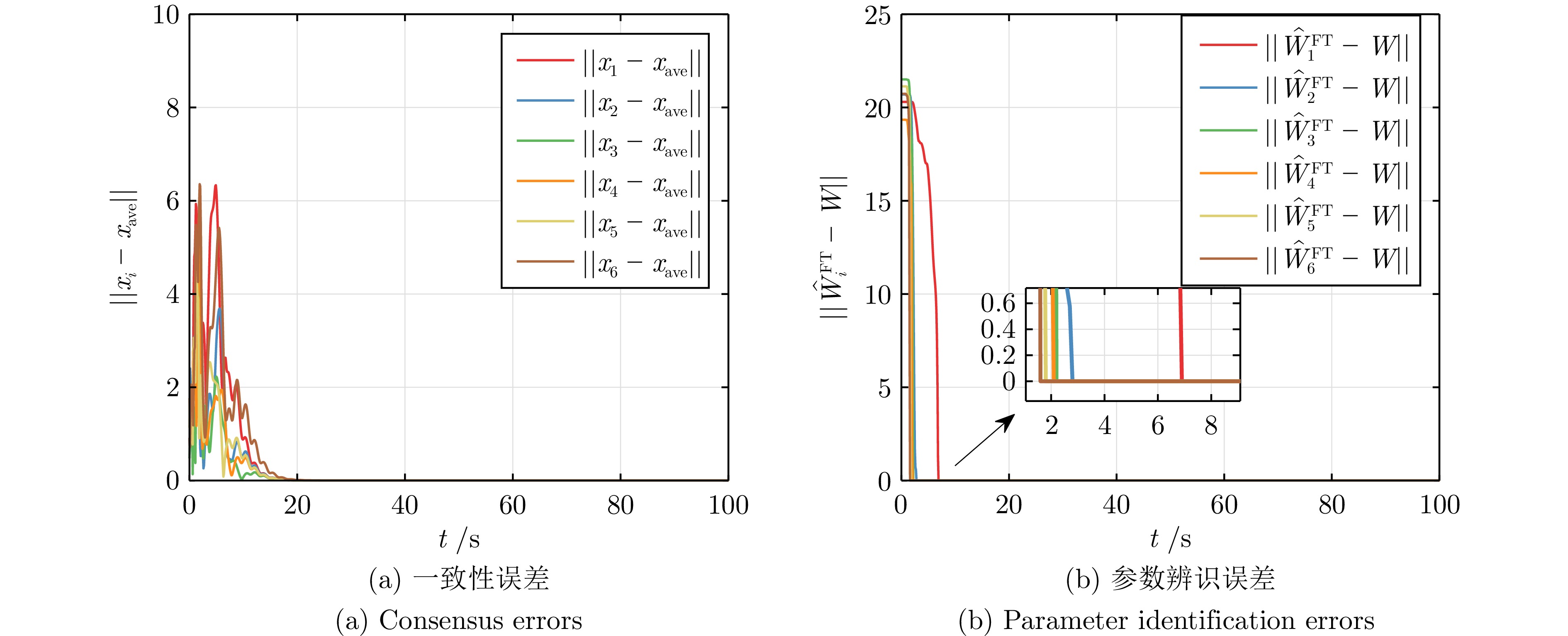
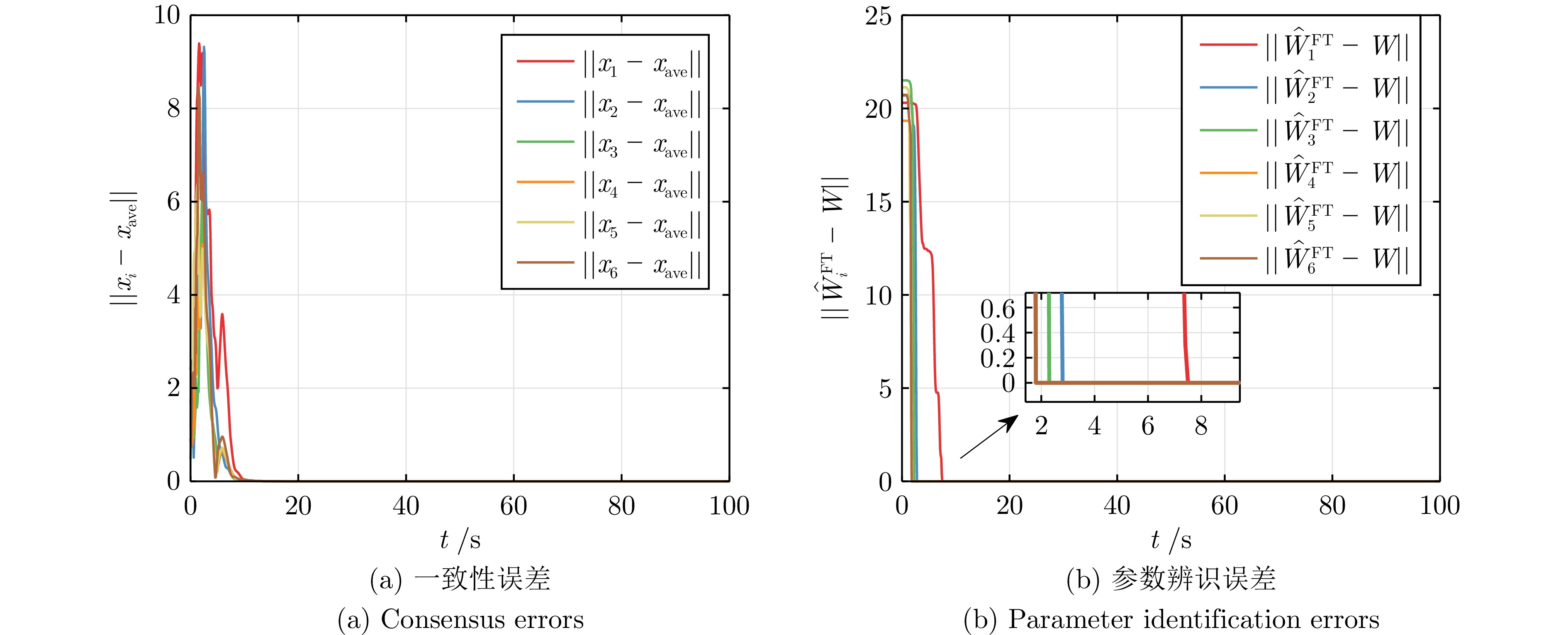
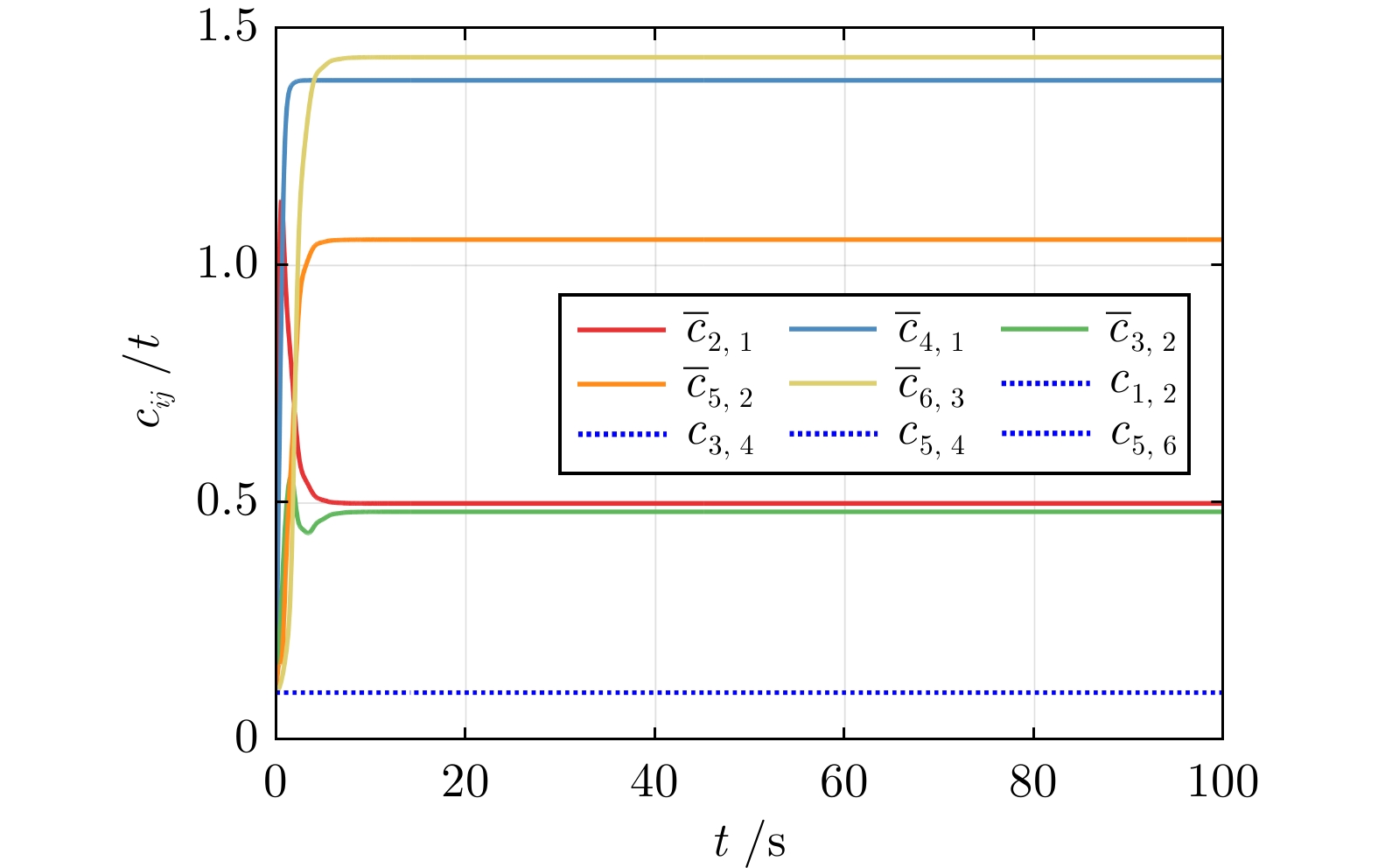
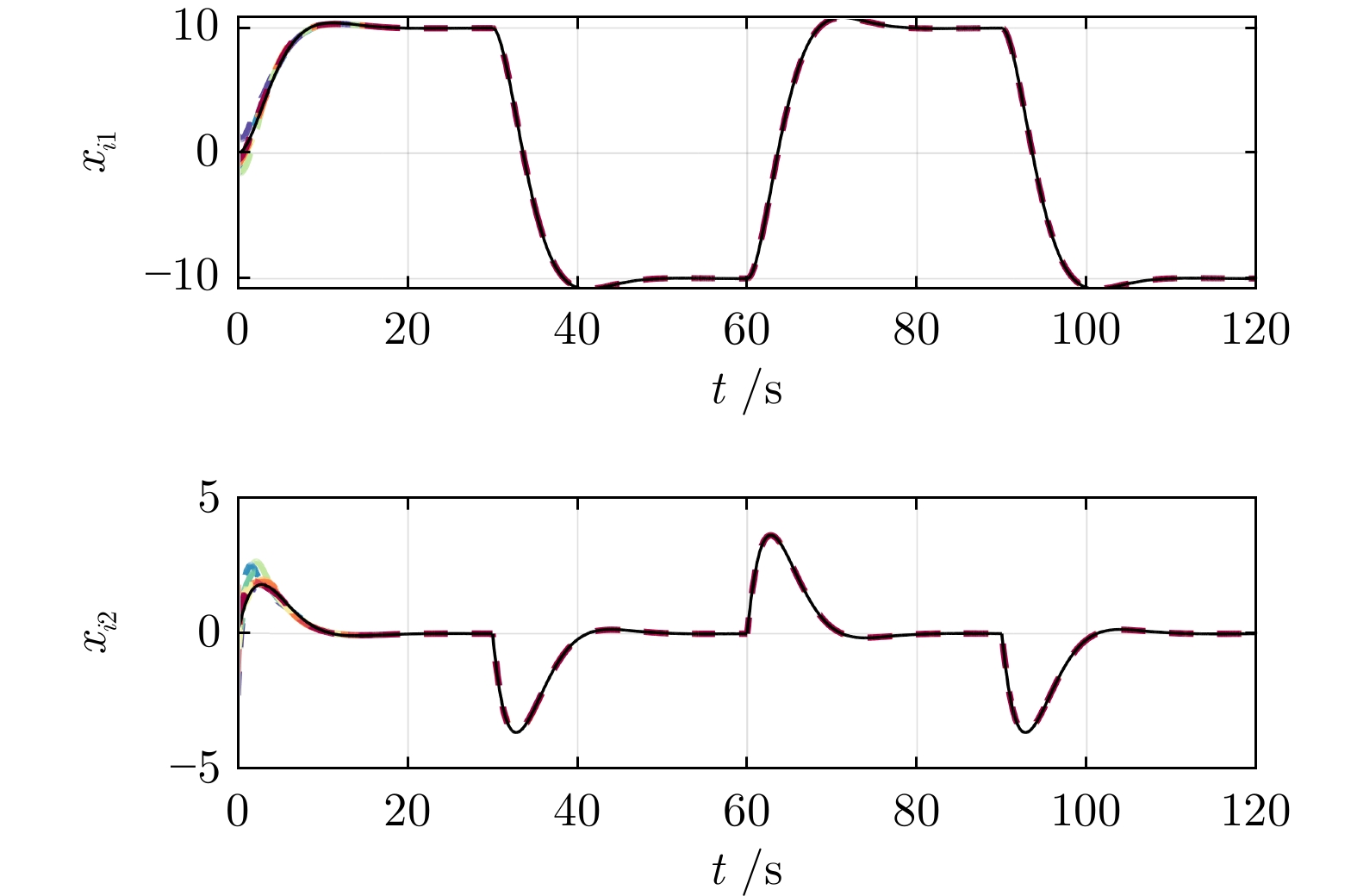
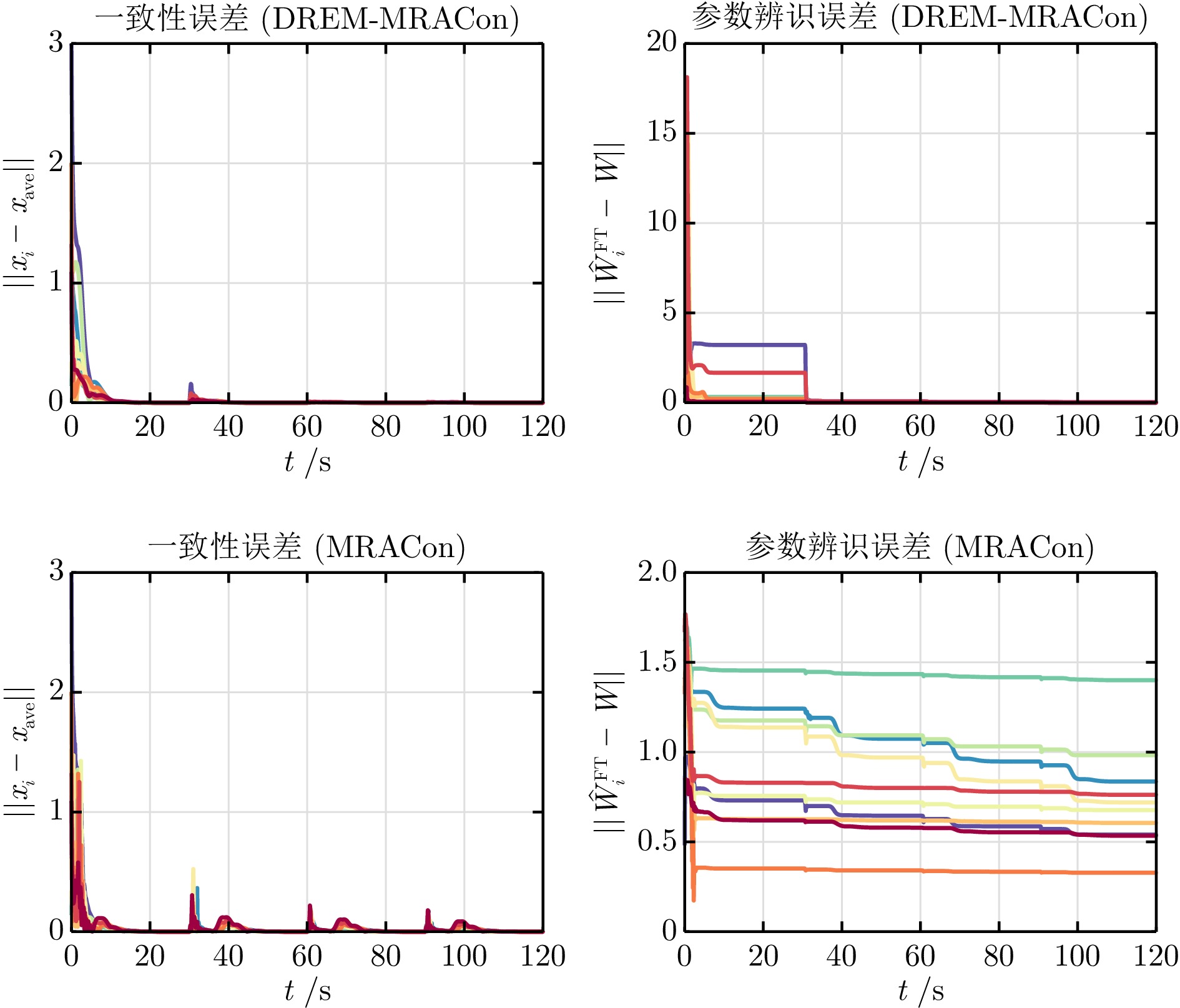
针对有向图上一类不确定性多智能体系统, 研究一体化参数辨识与一致性控制策略. 在现有模型参考自适应一致性(Model reference adaptive consensus, MRACon)框架基础上, 结合动态回归因子扩张与融合(Dynamic regressor extension and mixing, DREM)技术, 提出两类改进的MRACon控制协议, 即固定耦合DREM-MRACon和自适应耦合DREM-MRACon. 其中, 自适应耦合DREM-MRACon在有向支撑树结构上具有时变的耦合增益. 与MRACon相比, 此两类改进算法均能保证系统未知参数的有限时间辨识. 此外, 固定耦合DREM-MRACon保证了多智能体系统的指数时间一致性, 而自适应耦合DREM-MRACon则克服了对于全局网络拓扑特征信息的依赖性. 最后, 通过数值仿真验证了理论成果的有效性.
针对有向图上一类不确定性多智能体系统, 研究一体化参数辨识与一致性控制策略. 在现有模型参考自适应一致性(Model reference adaptive consensus, MRACon)框架基础上, 结合动态回归因子扩张与融合(Dynamic regressor extension and mixing, DREM)技术, 提出两类改进的MRACon控制协议, 即固定耦合DREM-MRACon和自适应耦合DREM-MRACon. 其中, 自适应耦合DREM-MRACon在有向支撑树结构上具有时变的耦合增益. 与MRACon相比, 此两类改进算法均能保证系统未知参数的有限时间辨识. 此外, 固定耦合DREM-MRACon保证了多智能体系统的指数时间一致性, 而自适应耦合DREM-MRACon则克服了对于全局网络拓扑特征信息的依赖性. 最后, 通过数值仿真验证了理论成果的有效性.

2025, 51(2): 404-426.
doi: 10.16383/j.aas.c230551
cstr: 32138.14.j.aas.c230551
摘要:
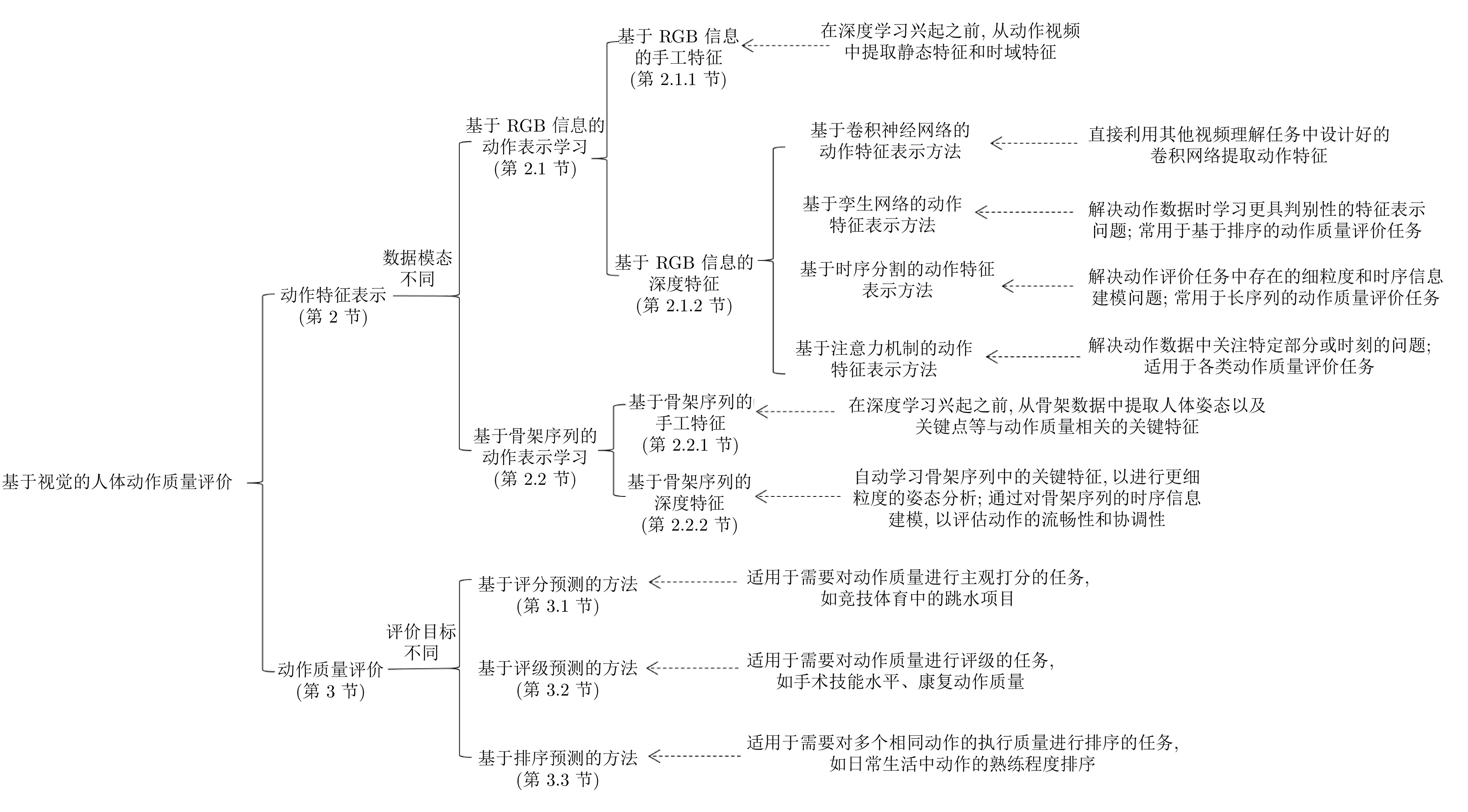
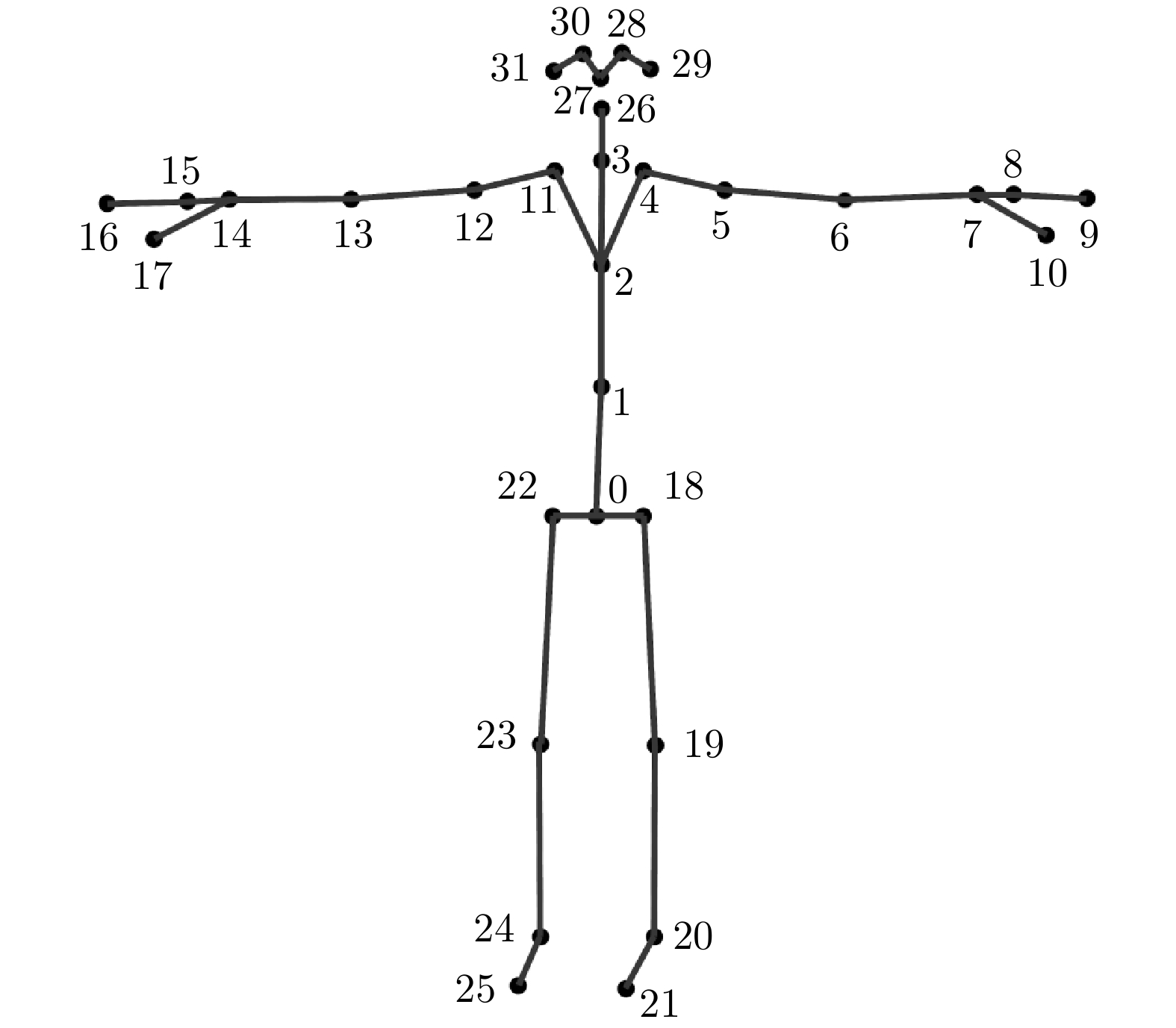
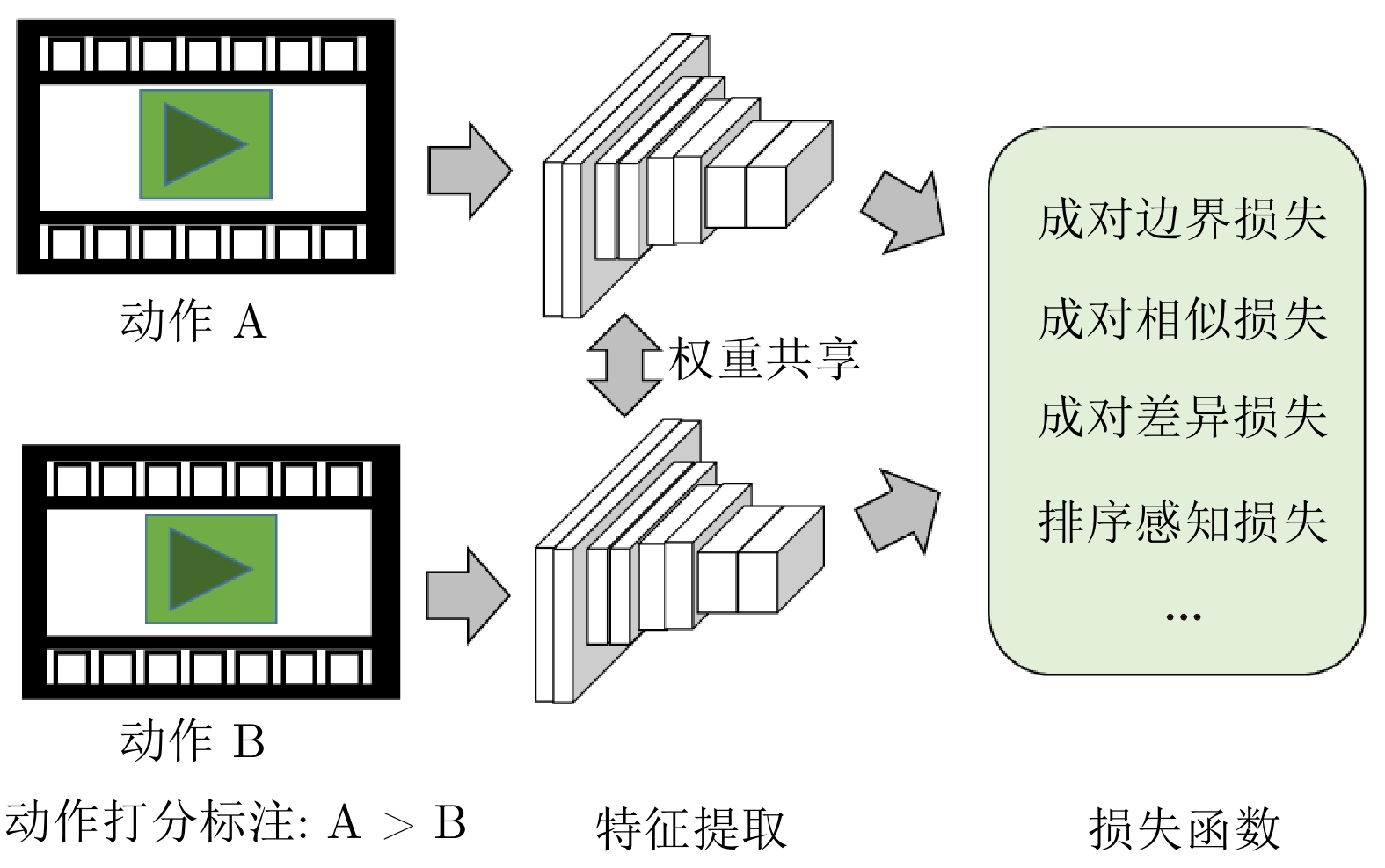
基于视觉的人体动作质量评价利用计算机视觉相关技术自动分析个体运动完成情况, 并为其提供相应的动作质量评价结果. 这已成为运动科学和人工智能交叉领域的一个热点研究问题, 在竞技体育、运动员选材、健身锻炼、运动康复等领域具有深远的理论研究意义和很强的实用价值. 本文将从数据获取及标注、动作特征表示、动作质量评价3个方面对涉及到的技术进行回顾分析, 对相关方法进行分类, 并比较分析不同方法在AQA-7、JIGSAWS、EPIC-Skills 2018三个数据集上的性能. 最后讨论未来可能的研究方向.
基于视觉的人体动作质量评价利用计算机视觉相关技术自动分析个体运动完成情况, 并为其提供相应的动作质量评价结果. 这已成为运动科学和人工智能交叉领域的一个热点研究问题, 在竞技体育、运动员选材、健身锻炼、运动康复等领域具有深远的理论研究意义和很强的实用价值. 本文将从数据获取及标注、动作特征表示、动作质量评价3个方面对涉及到的技术进行回顾分析, 对相关方法进行分类, 并比较分析不同方法在AQA-7、JIGSAWS、EPIC-Skills 2018三个数据集上的性能. 最后讨论未来可能的研究方向.

2025, 51(2): 427-444.
doi: 10.16383/j.aas.c230359
cstr: 32138.14.j.aas.c230359
摘要:
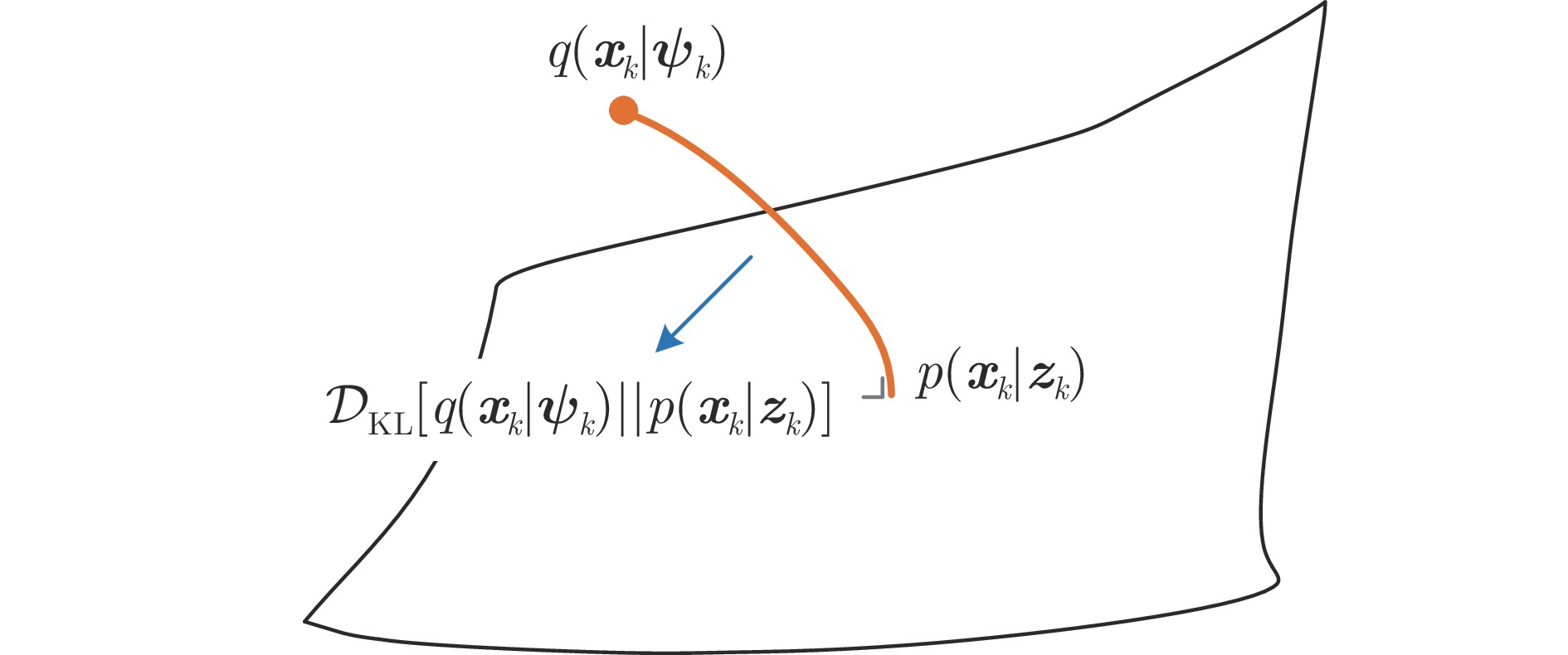
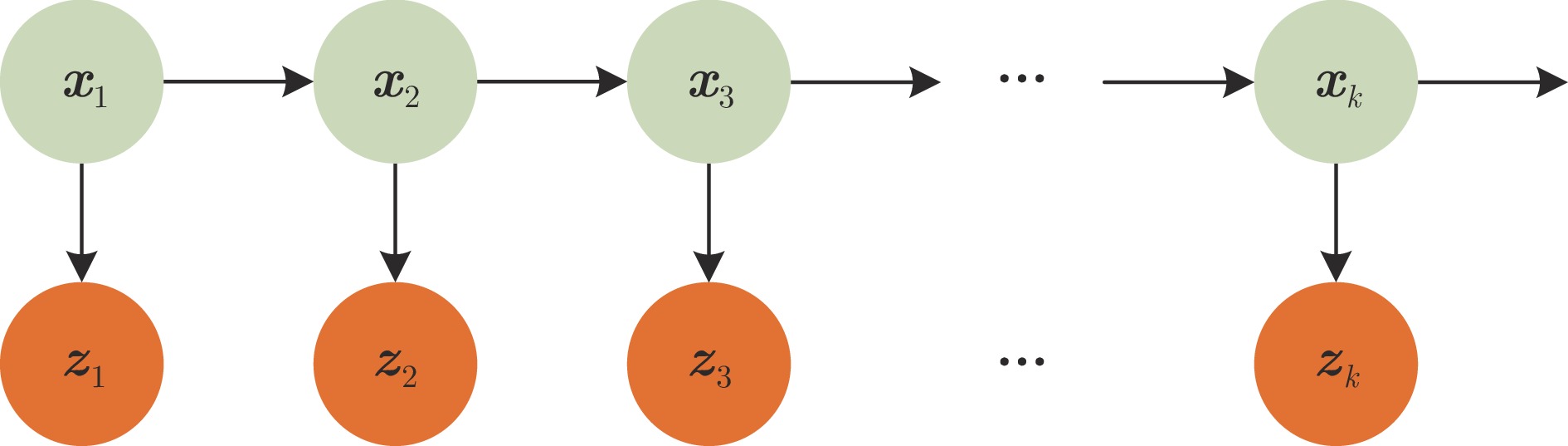
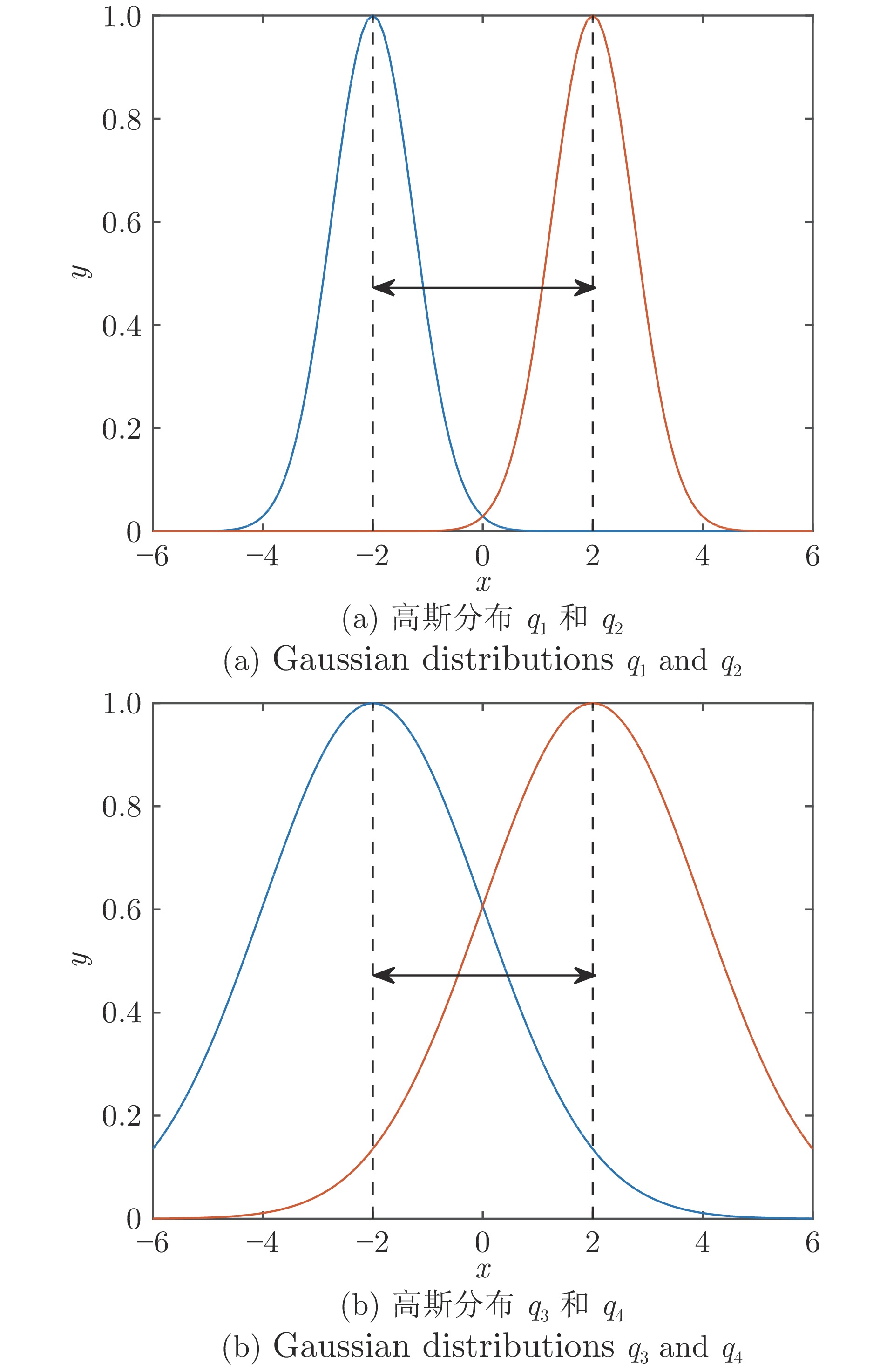
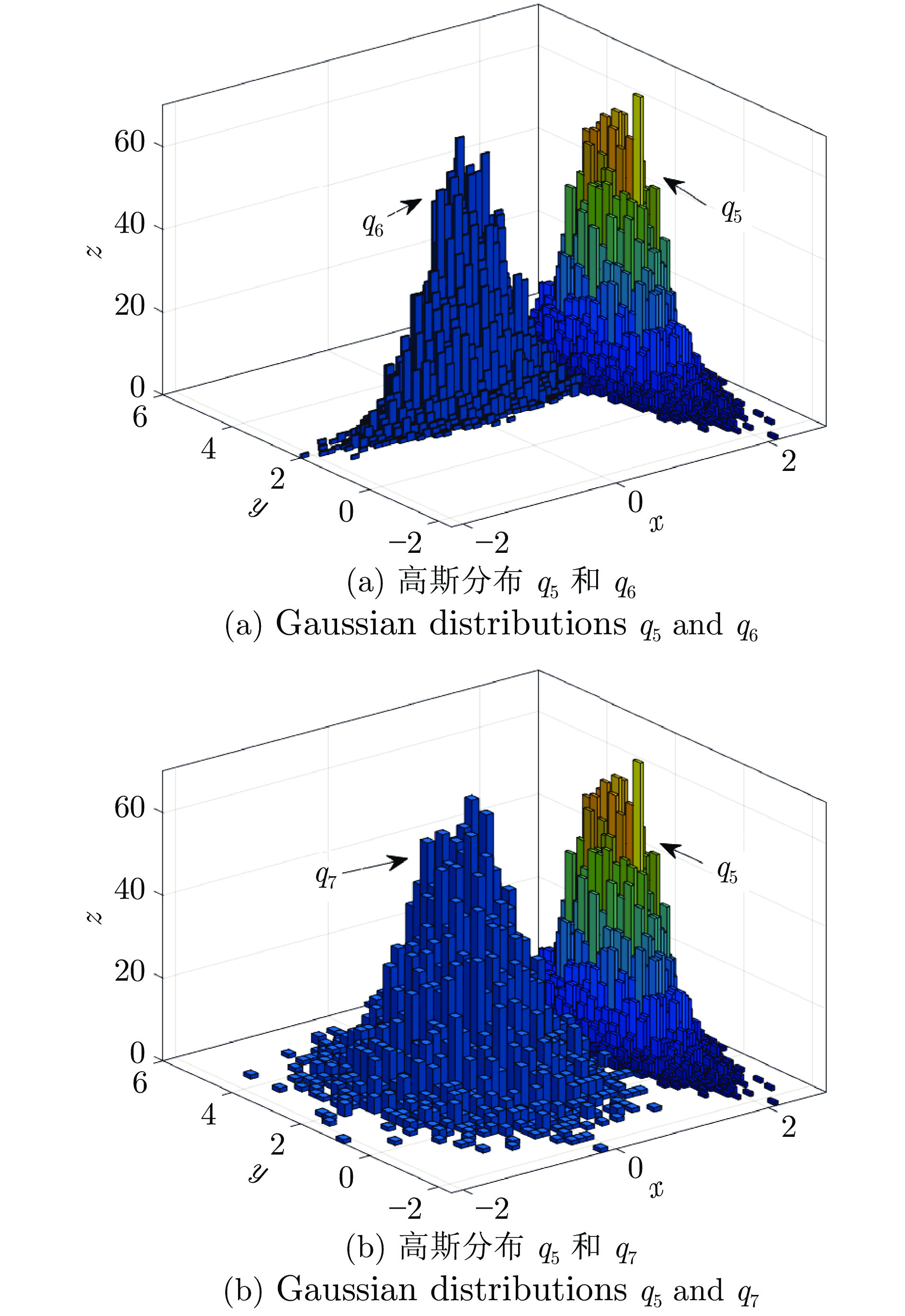
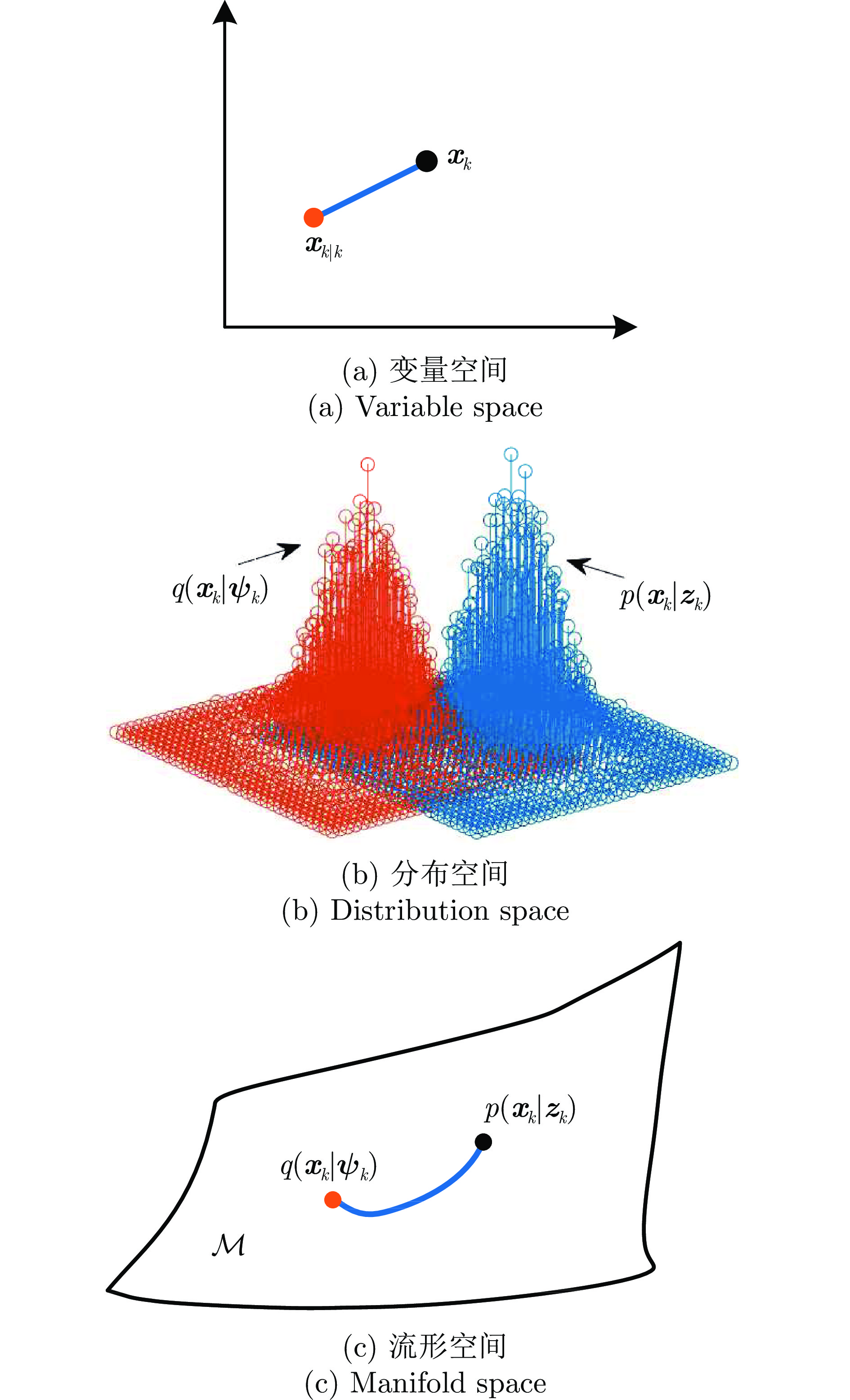
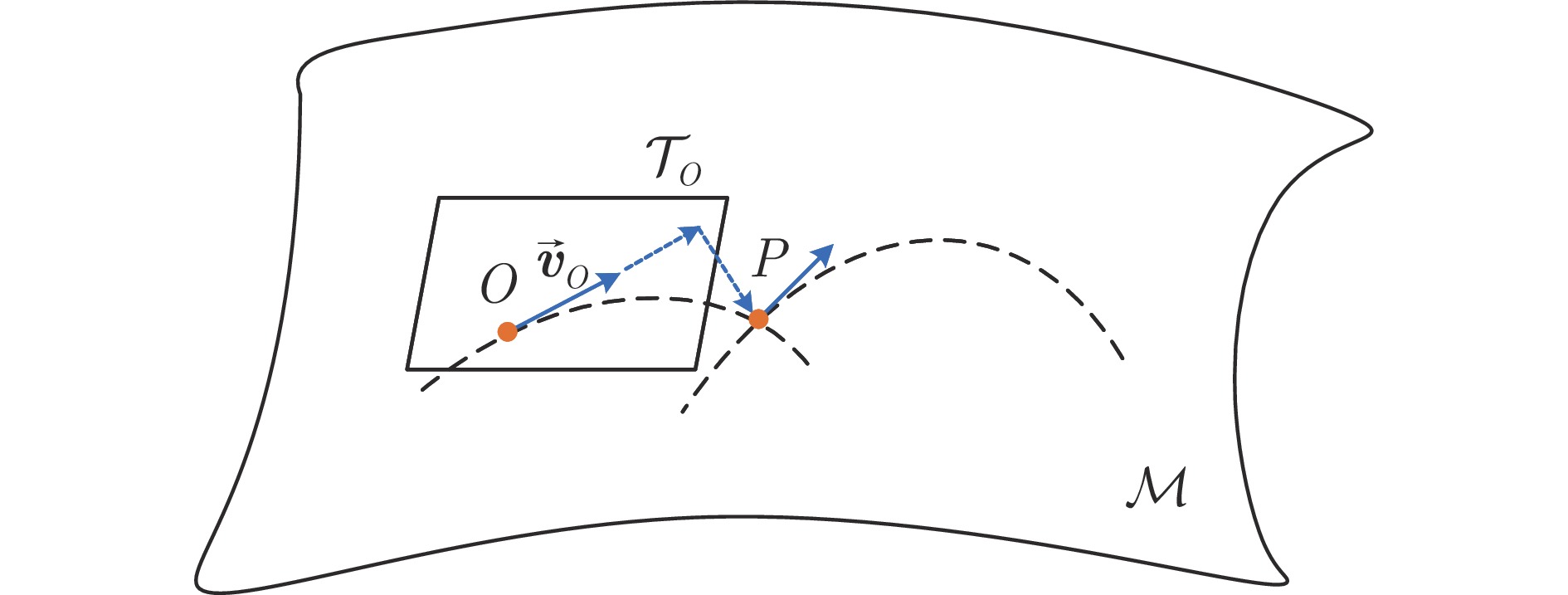
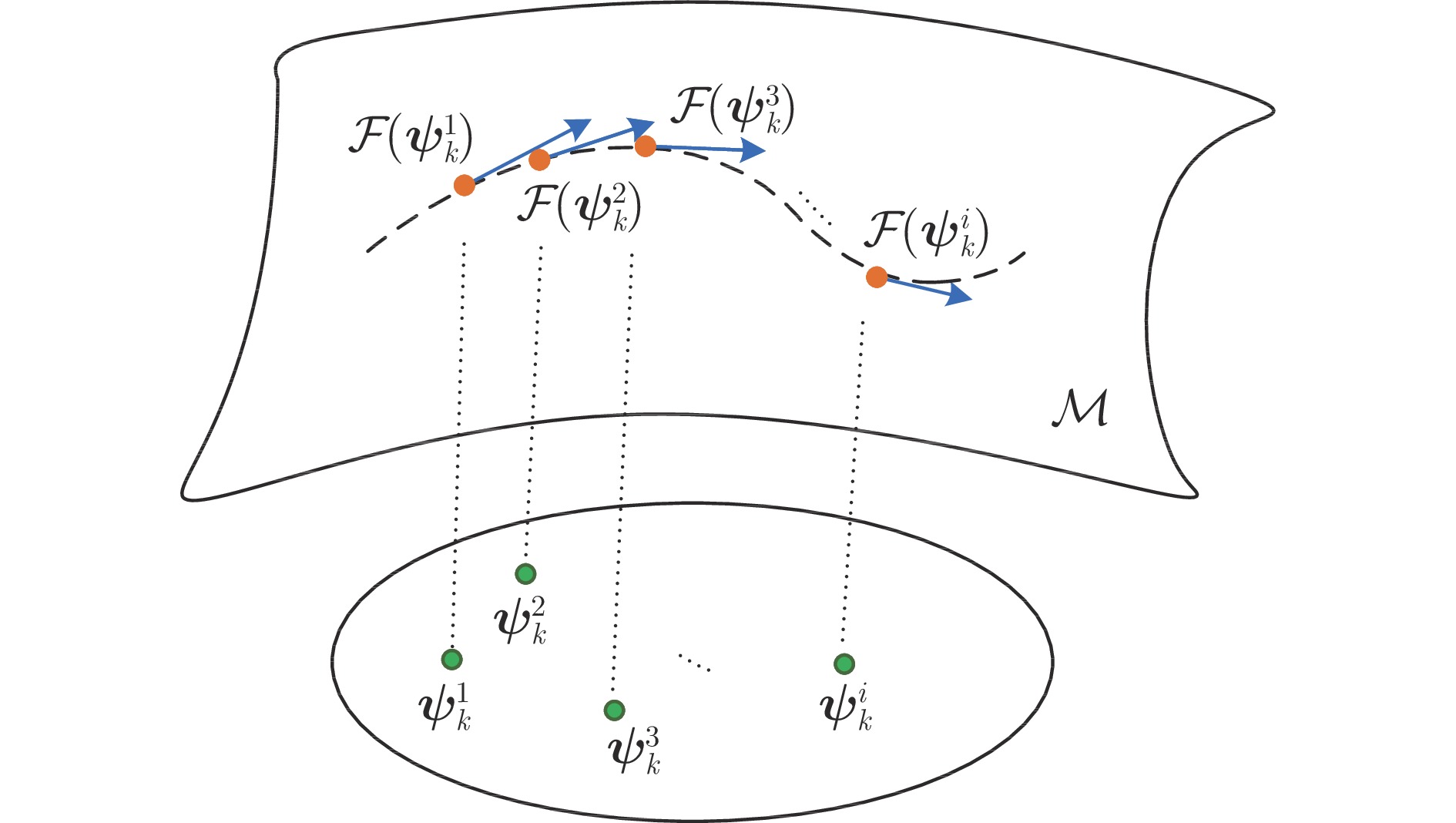
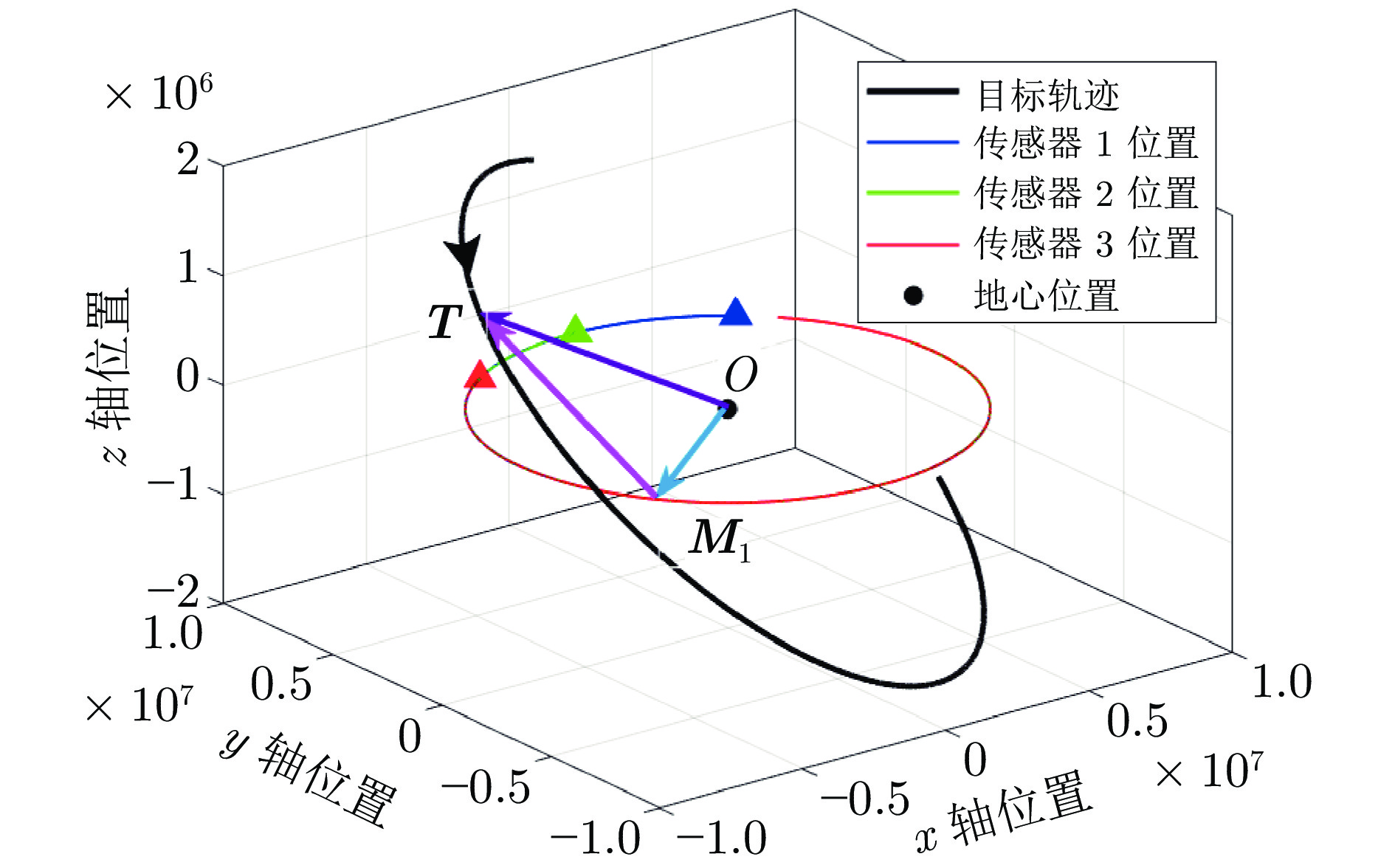
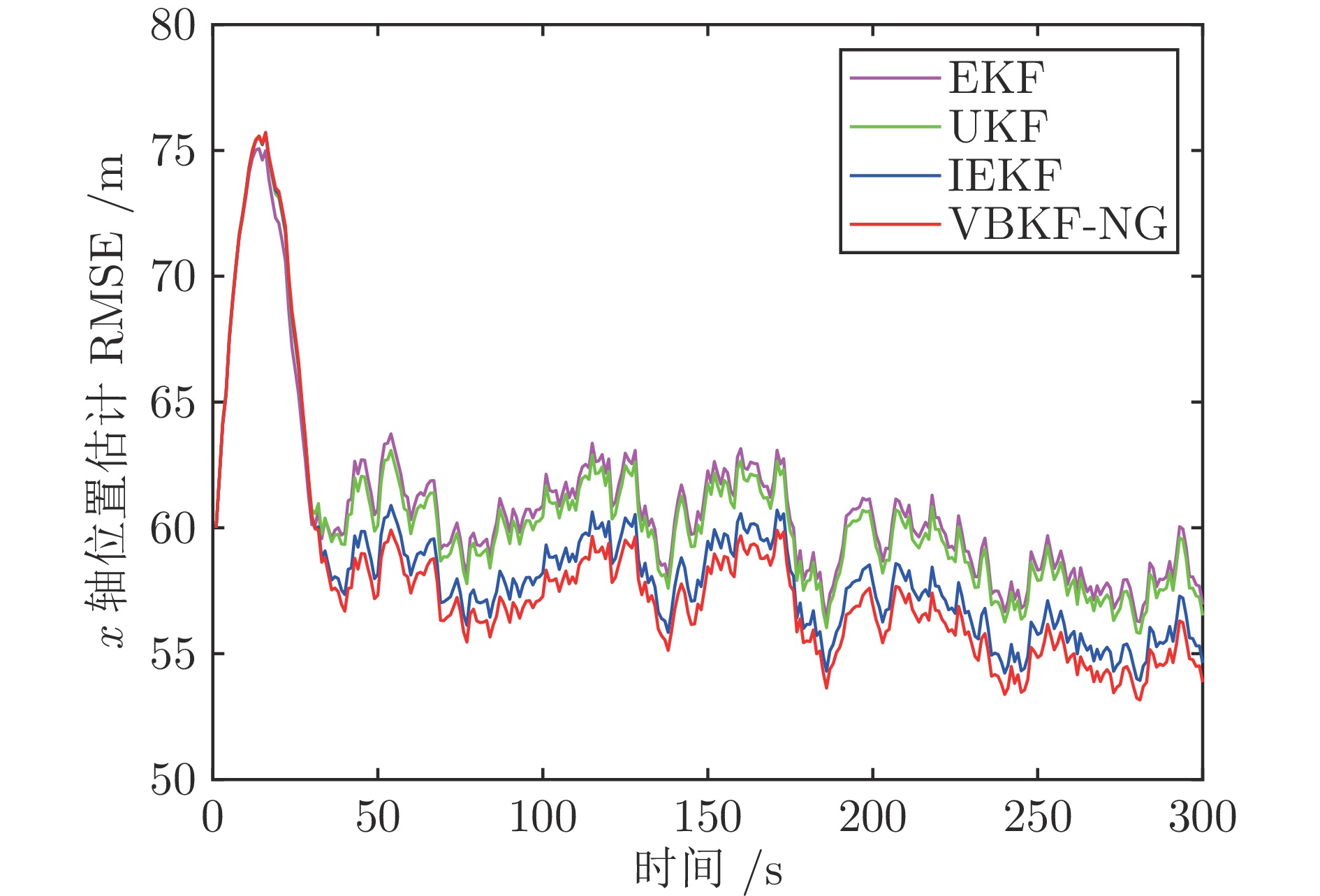
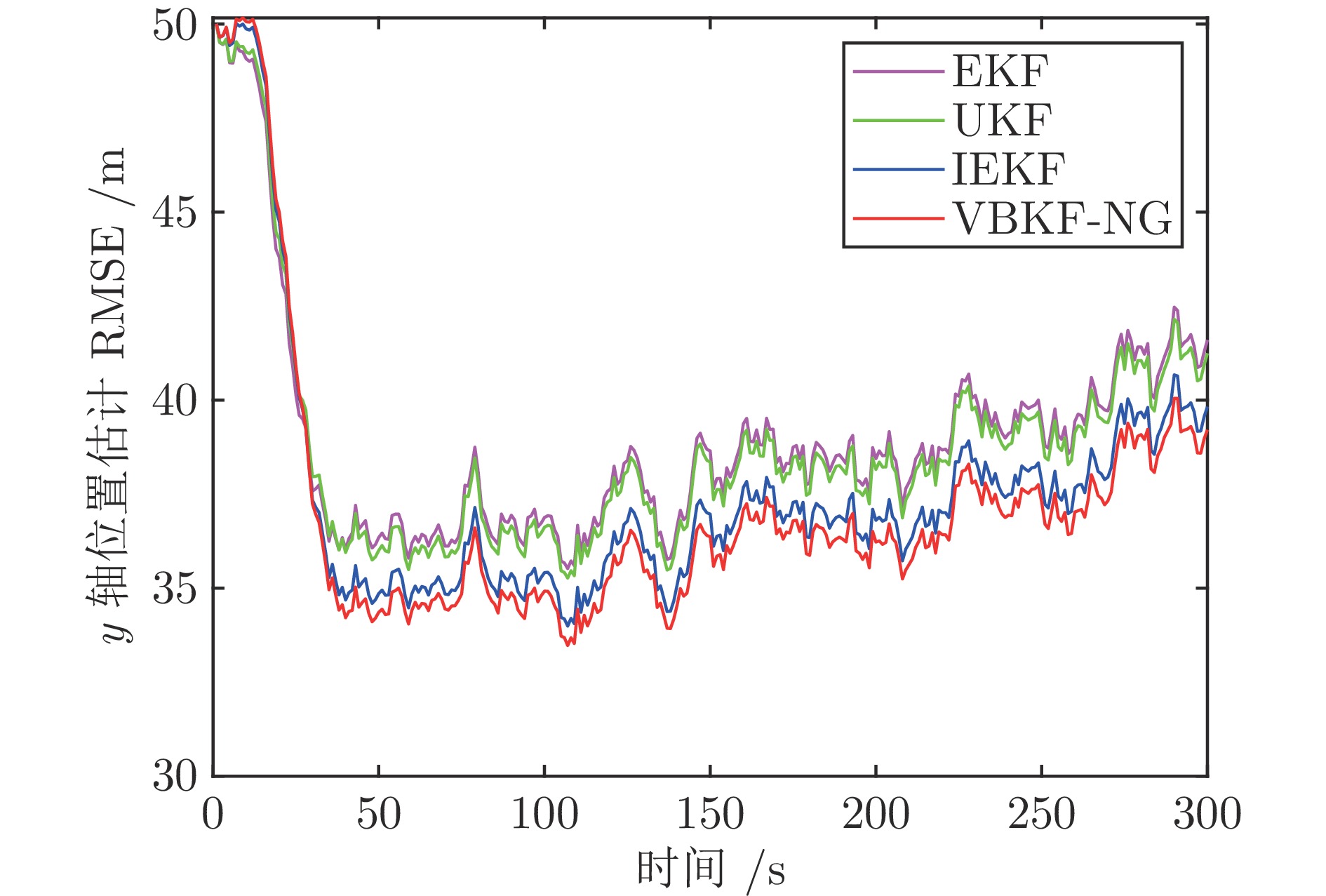
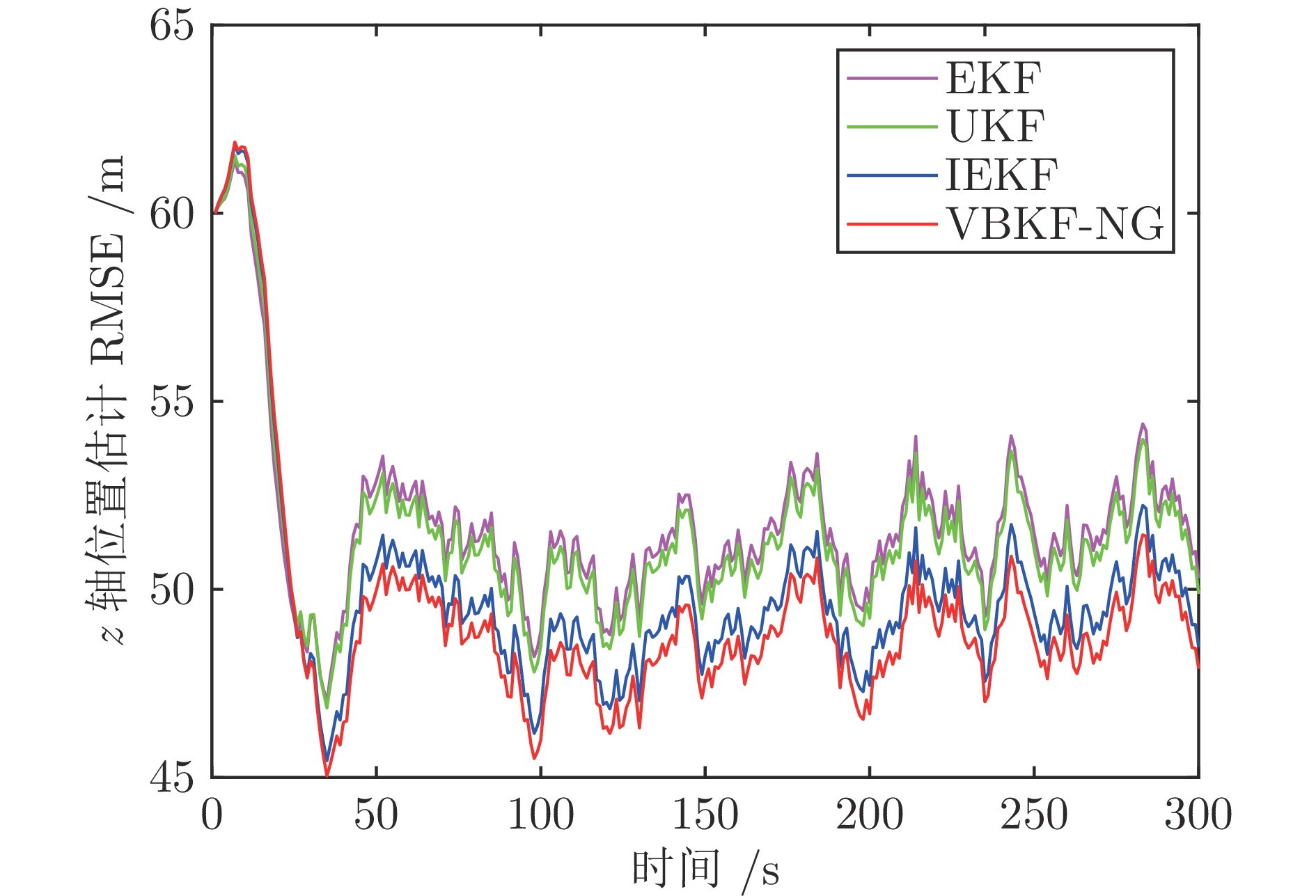
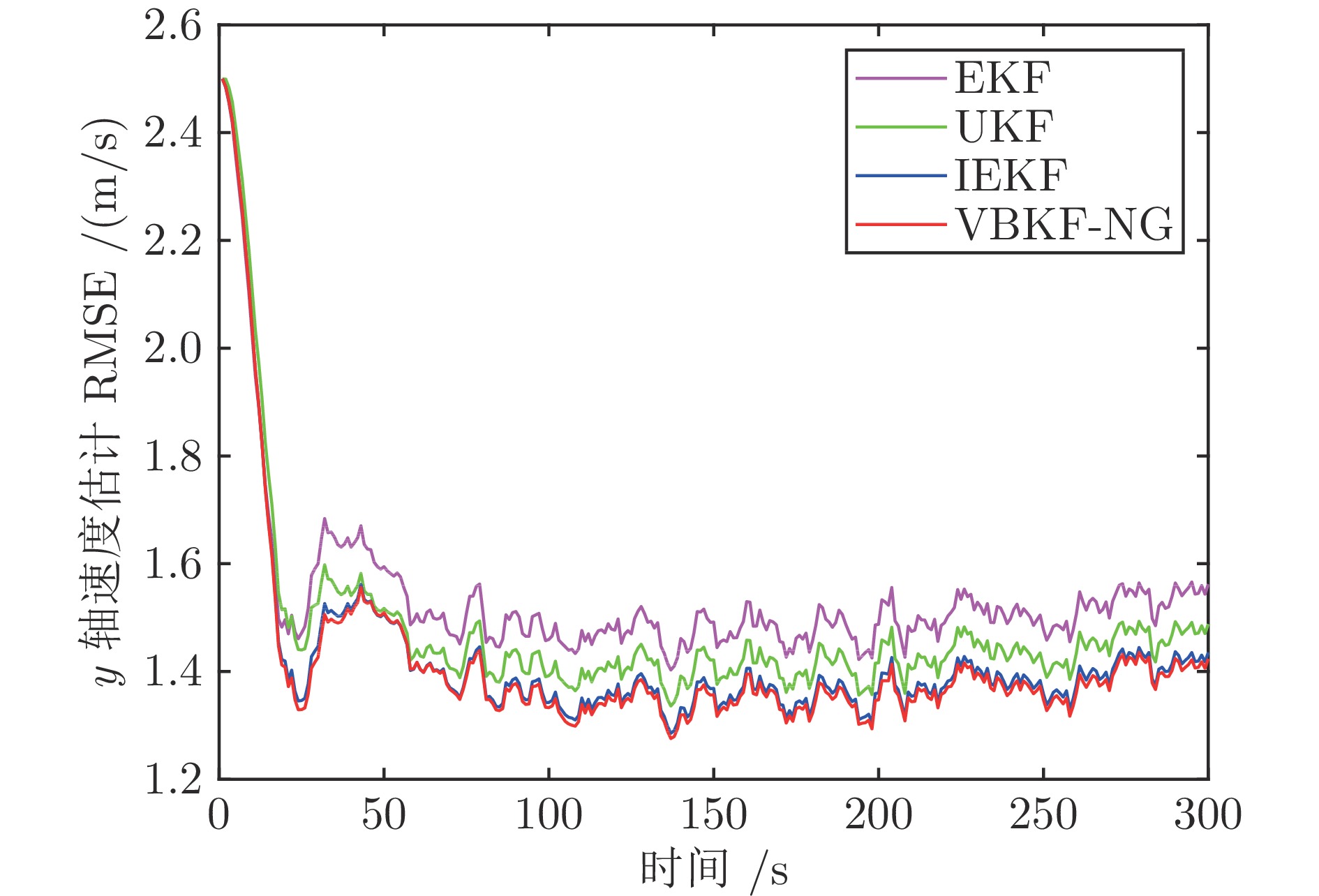
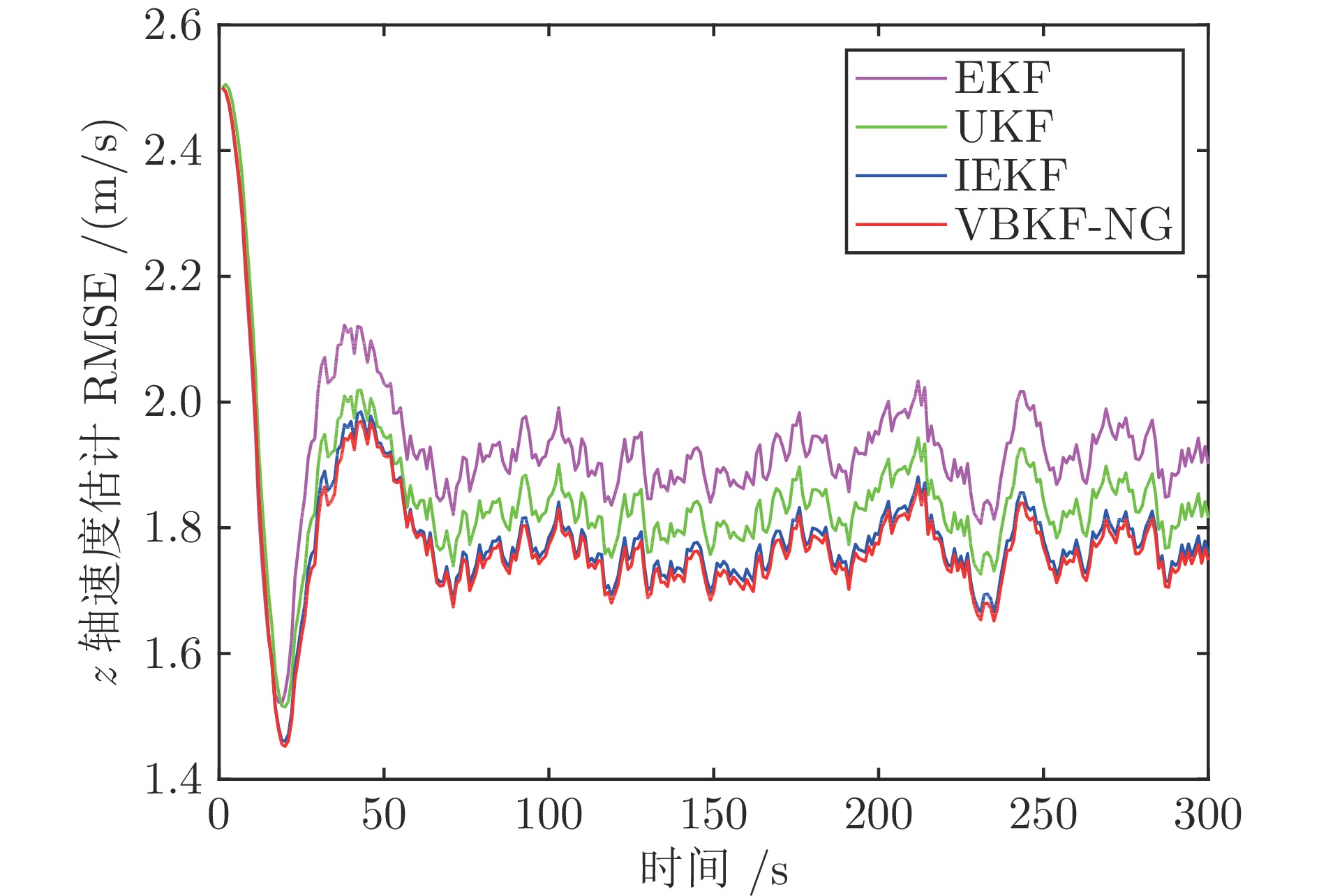
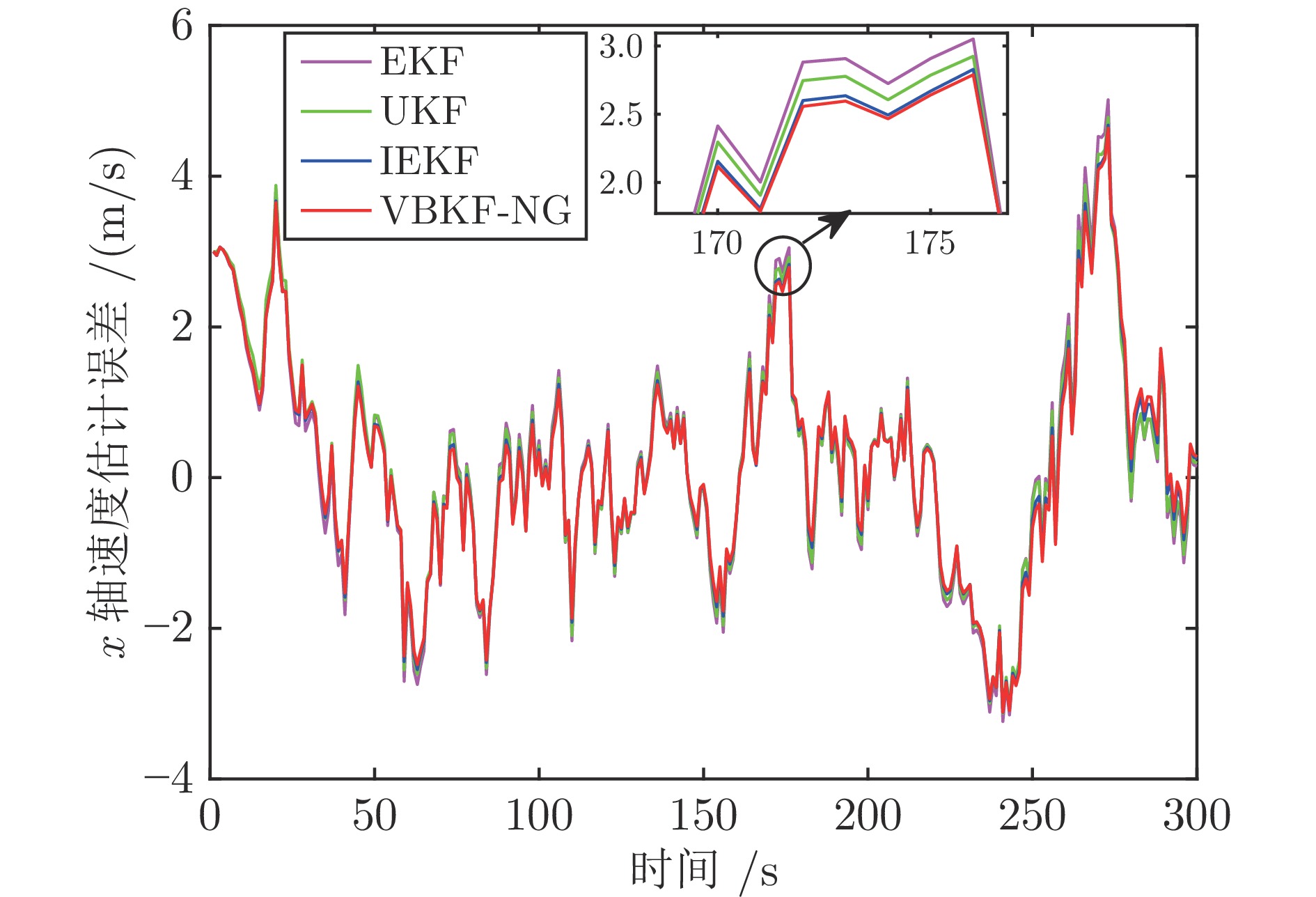
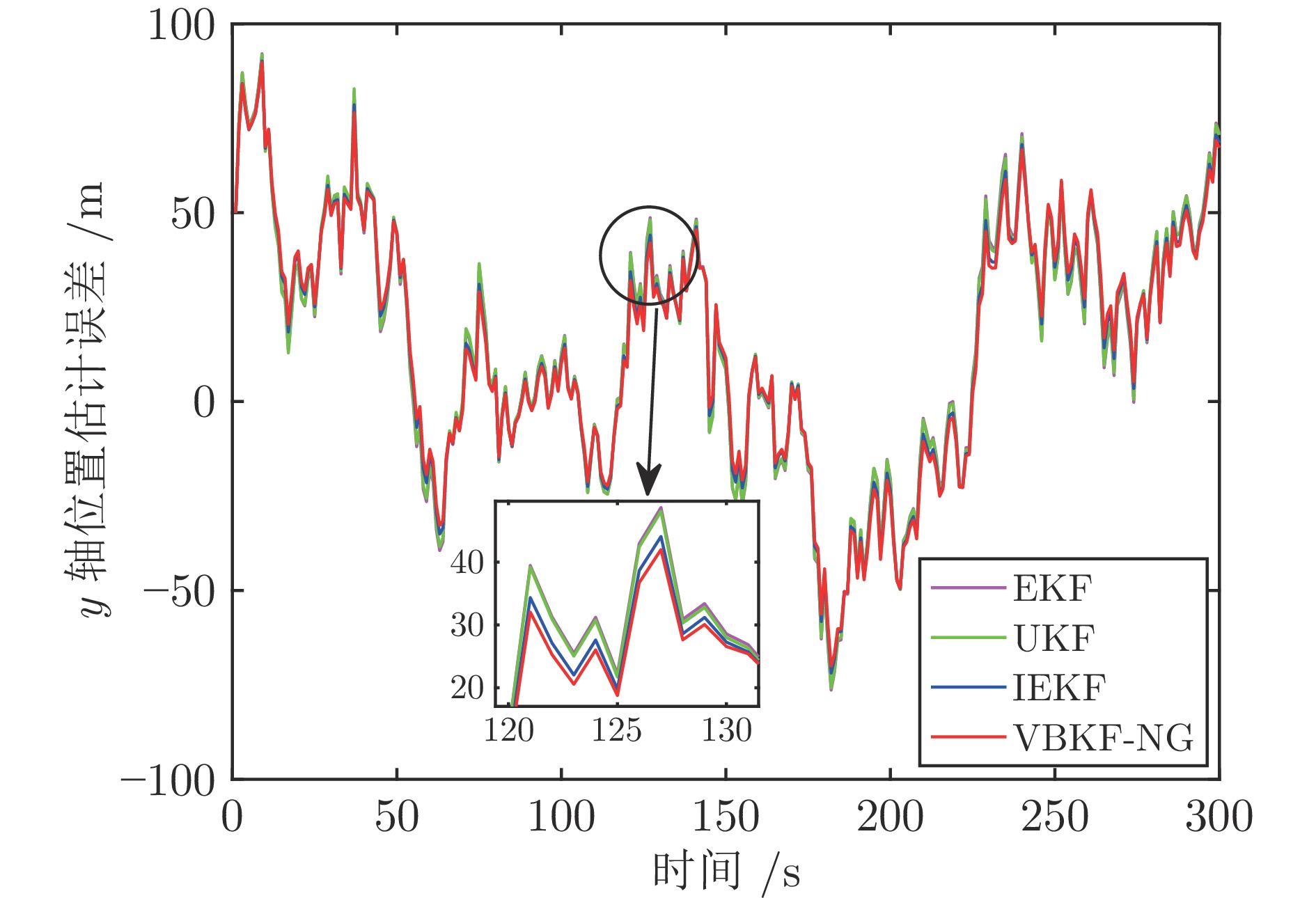
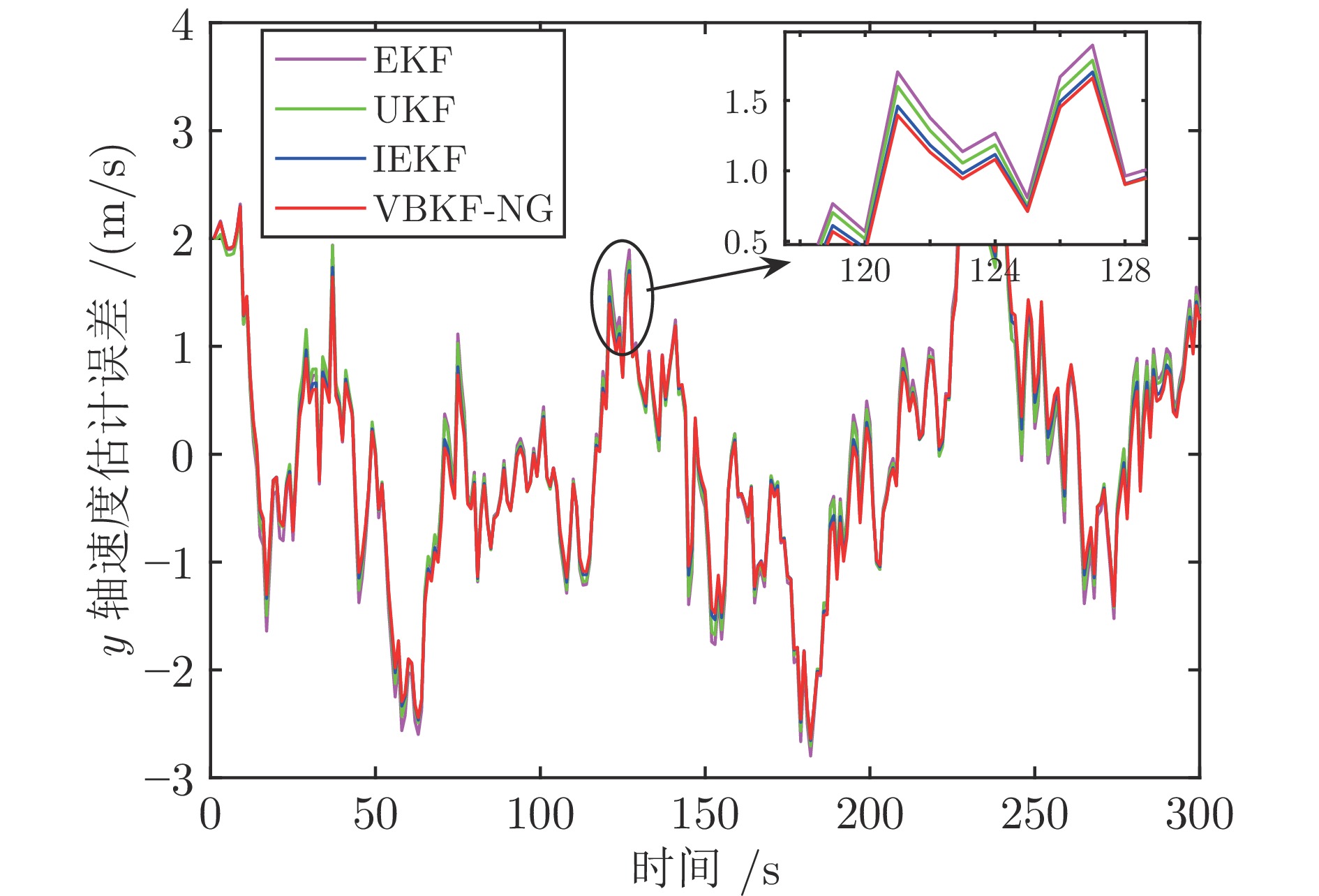
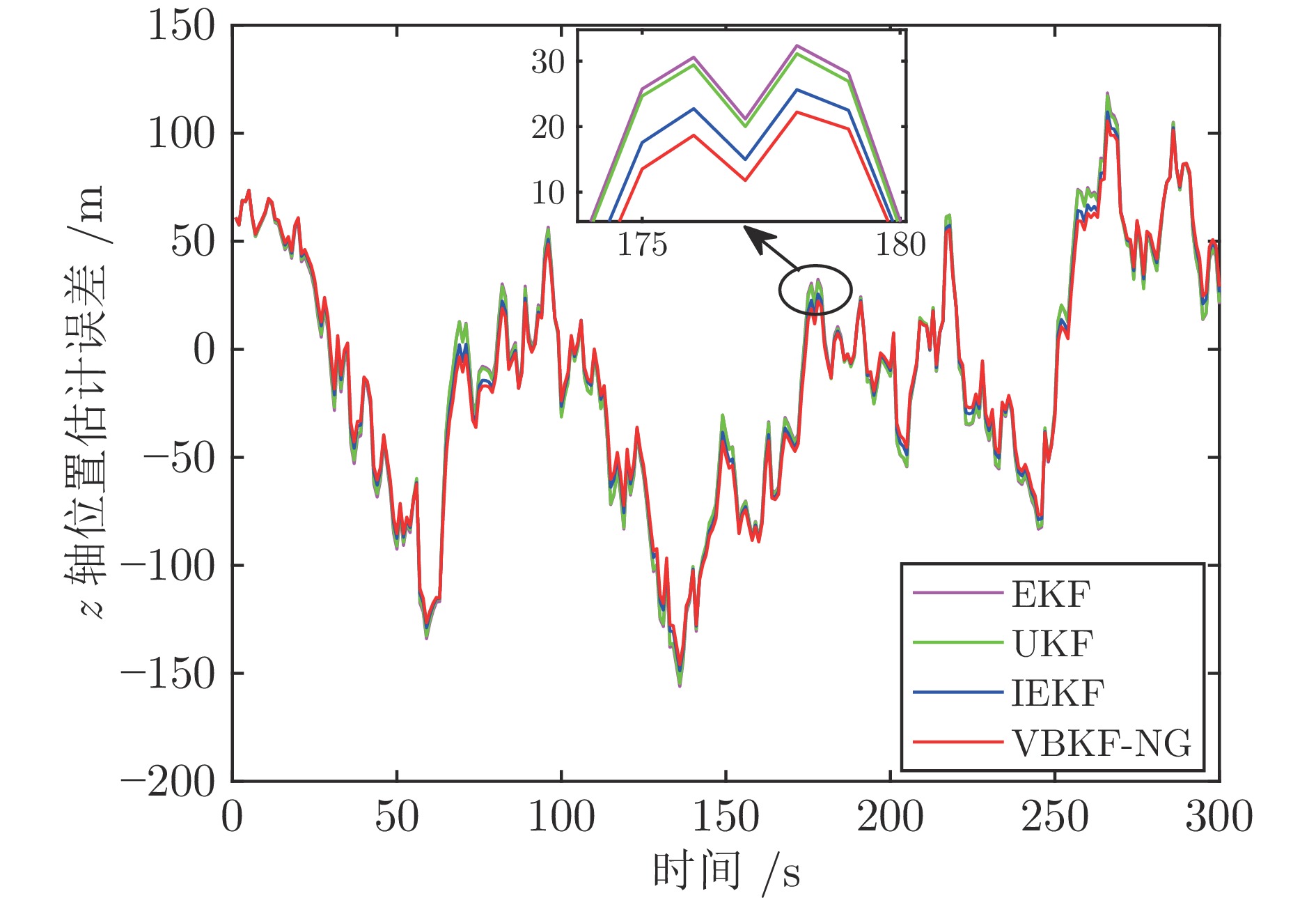
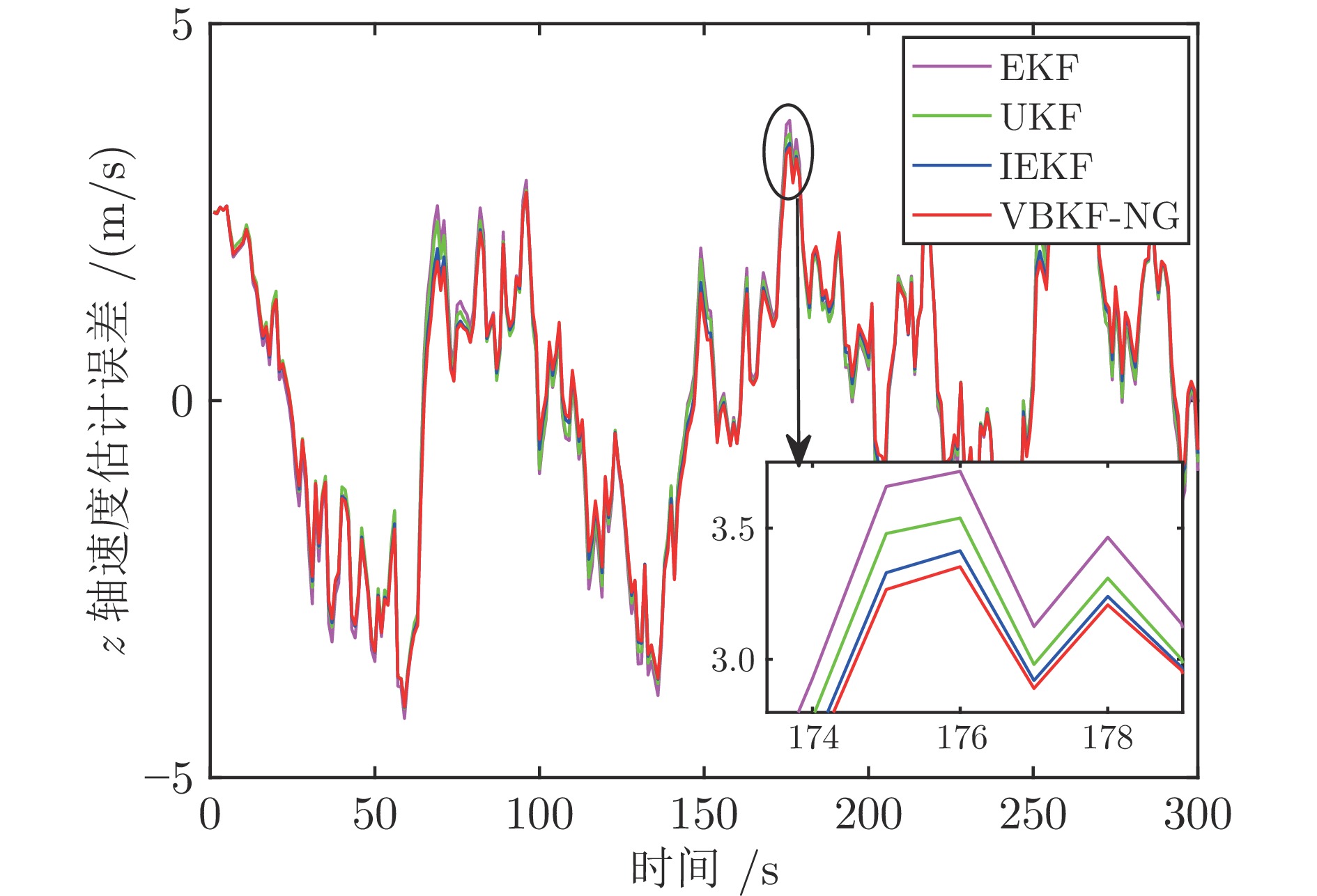
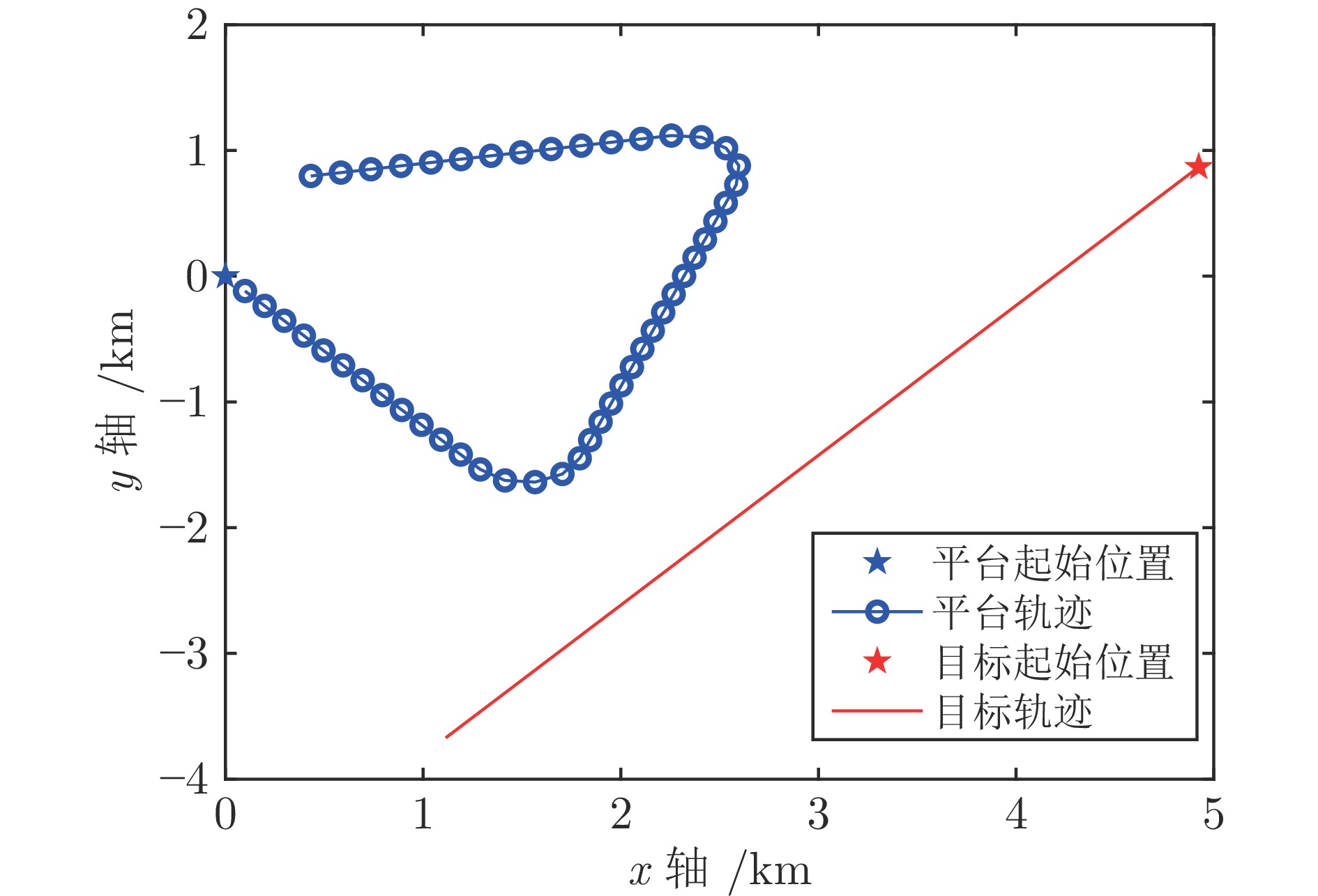
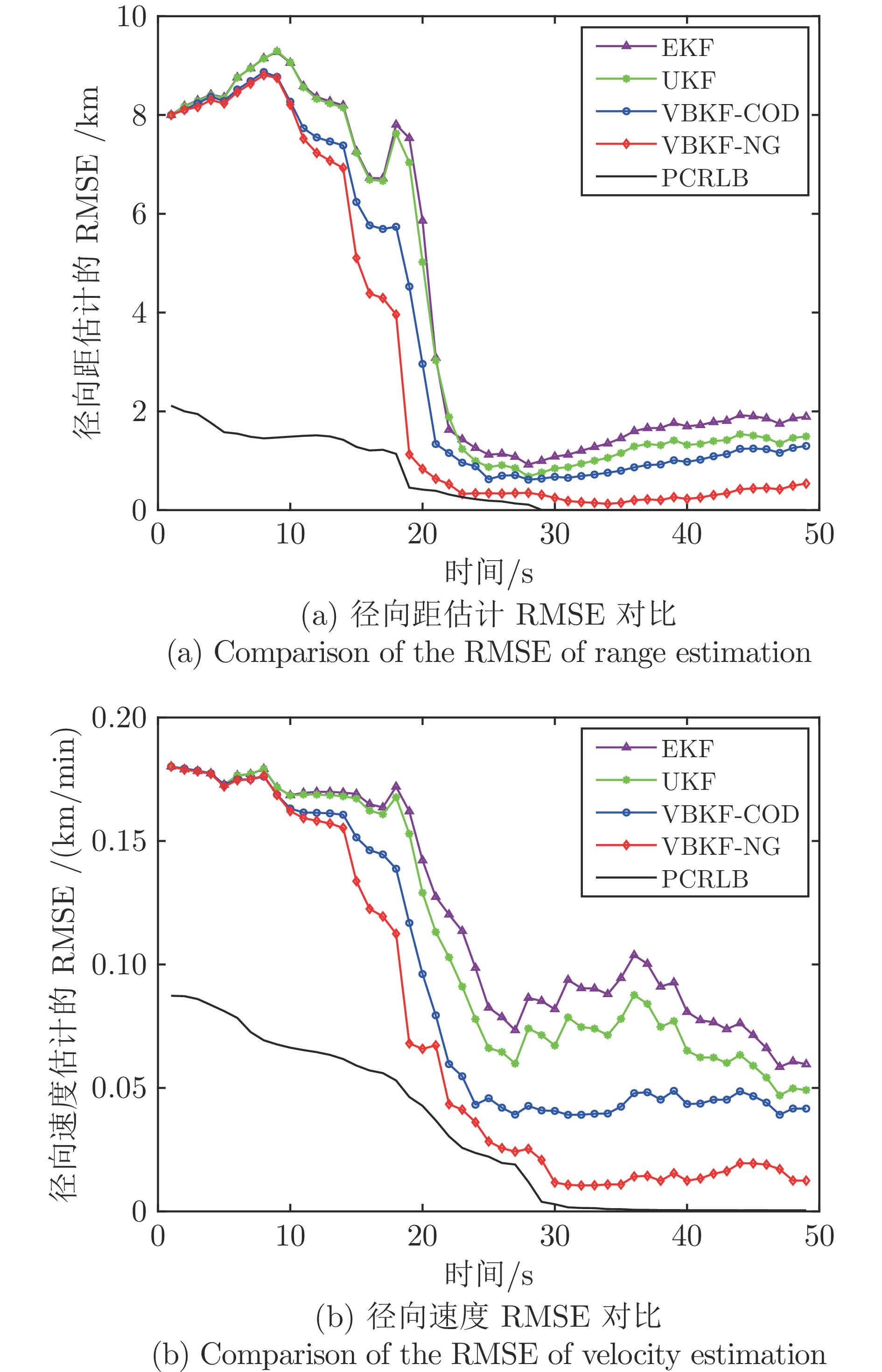
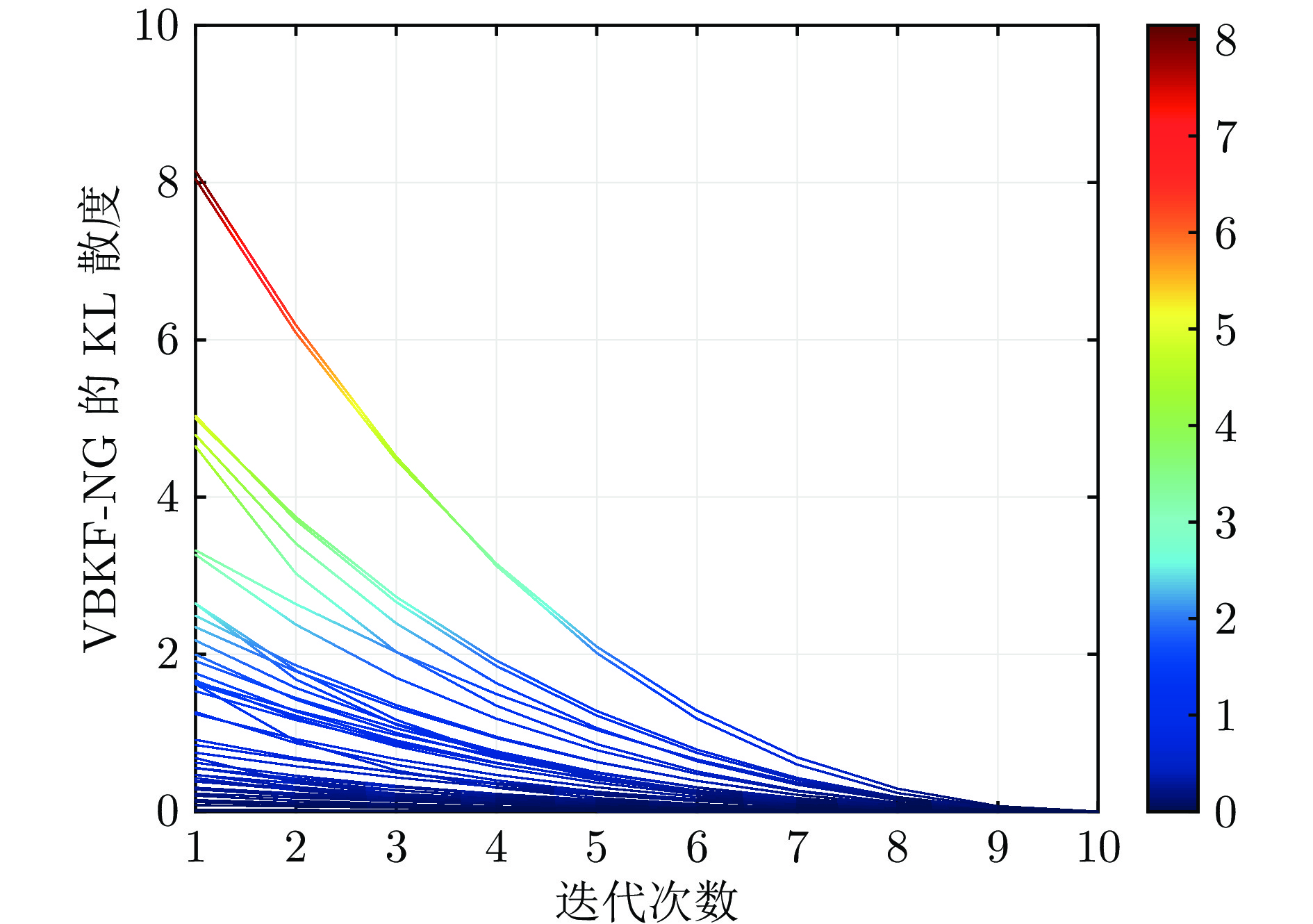
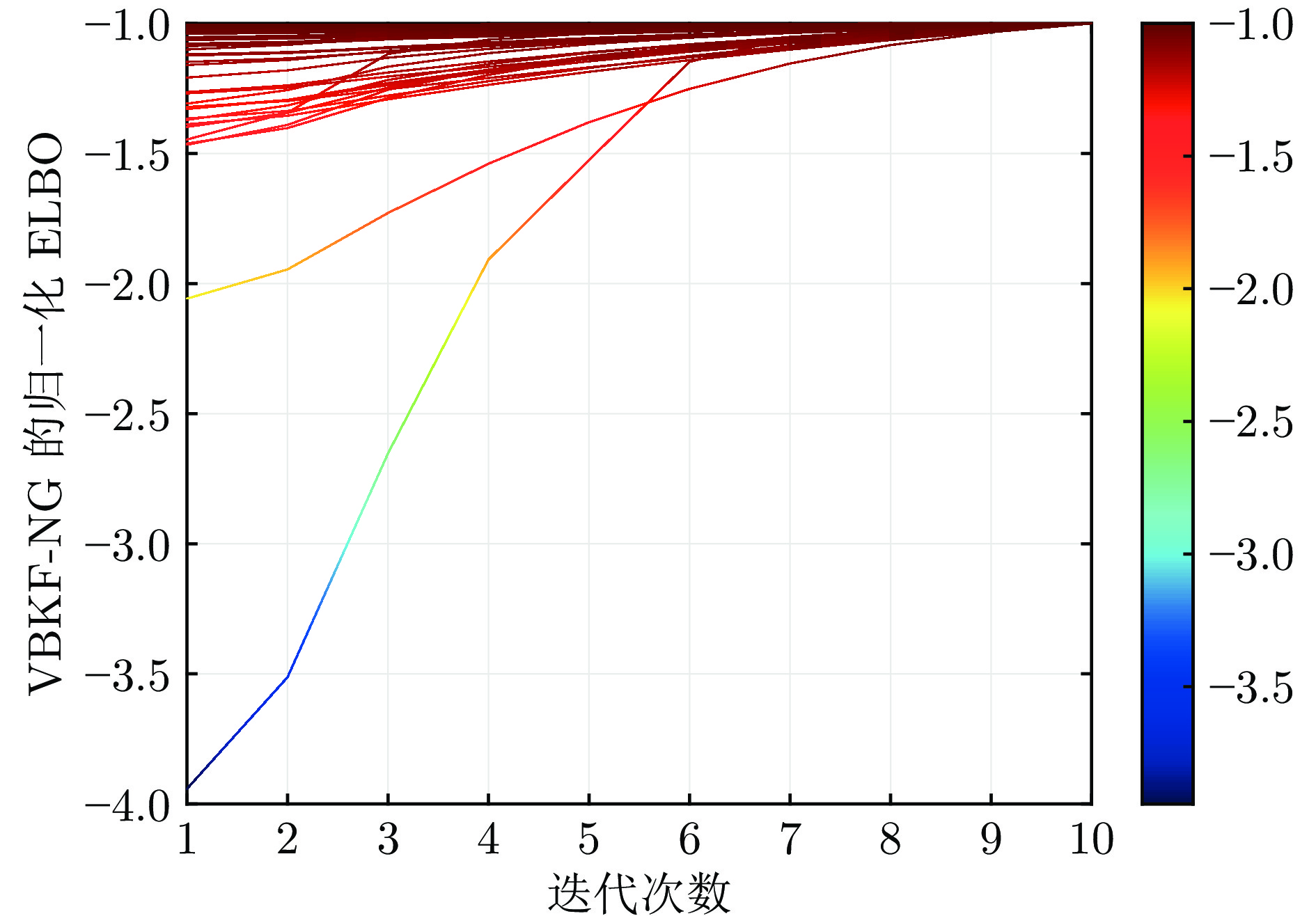
在统计流形空间中, 从信息几何角度考虑非线性状态后验分布近似的实质是后验分布与相应参数化变分分布之间的Kullback-Leibler (KL)散度最小化问题, 同时也可以转化为变分置信下界的最大化问题. 为了提升非线性系统状态估计的精度, 在高斯系统假设条件下结合变分贝叶斯(Variational Bayes, VB)推断和Fisher信息矩阵推导出置信下界的自然梯度, 并通过分析其信息几何意义, 阐述在统计流形空间中置信下界沿其方向不断迭代增大, 实现变分分布与后验分布的“紧密”近似; 在此基础上, 以状态估计及其误差协方差作为变分超参数, 结合最优估计理论给出一种基于自然梯度的非线性变分贝叶斯滤波算法; 最后, 通过天基光学传感器量测条件下近地轨道卫星跟踪定轨和纯角度被动传感器量测条件下运动目标跟踪仿真实验验证, 与对比算法相比, 所提算法具有更高的精度.
在统计流形空间中, 从信息几何角度考虑非线性状态后验分布近似的实质是后验分布与相应参数化变分分布之间的Kullback-Leibler (KL)散度最小化问题, 同时也可以转化为变分置信下界的最大化问题. 为了提升非线性系统状态估计的精度, 在高斯系统假设条件下结合变分贝叶斯(Variational Bayes, VB)推断和Fisher信息矩阵推导出置信下界的自然梯度, 并通过分析其信息几何意义, 阐述在统计流形空间中置信下界沿其方向不断迭代增大, 实现变分分布与后验分布的“紧密”近似; 在此基础上, 以状态估计及其误差协方差作为变分超参数, 结合最优估计理论给出一种基于自然梯度的非线性变分贝叶斯滤波算法; 最后, 通过天基光学传感器量测条件下近地轨道卫星跟踪定轨和纯角度被动传感器量测条件下运动目标跟踪仿真实验验证, 与对比算法相比, 所提算法具有更高的精度.


2025, 51(2): 445-456.
doi: 10.16383/j.aas.c240218
cstr: 32138.14.j.aas.c240218
摘要:
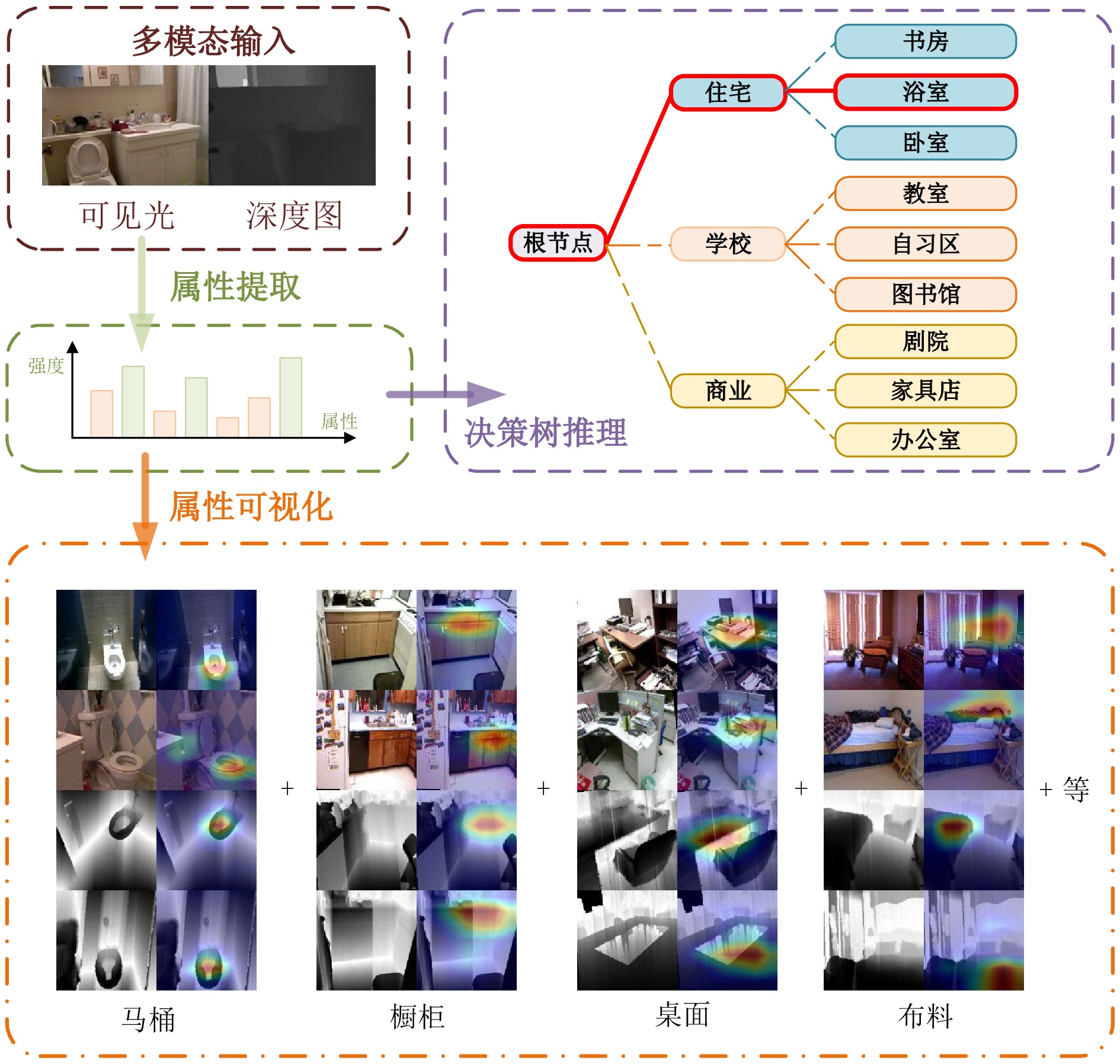
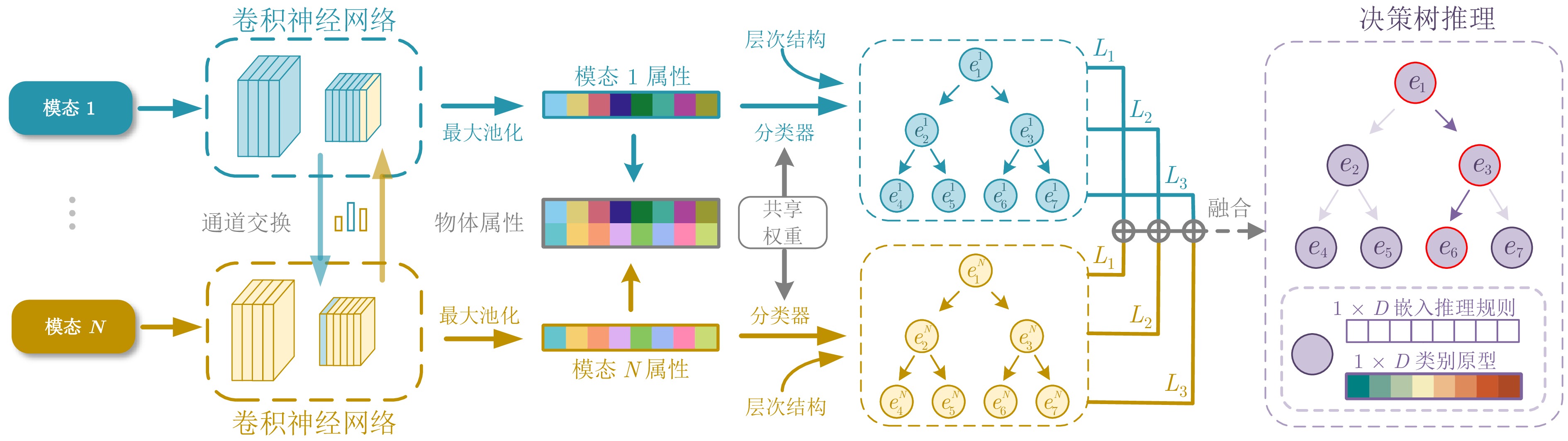
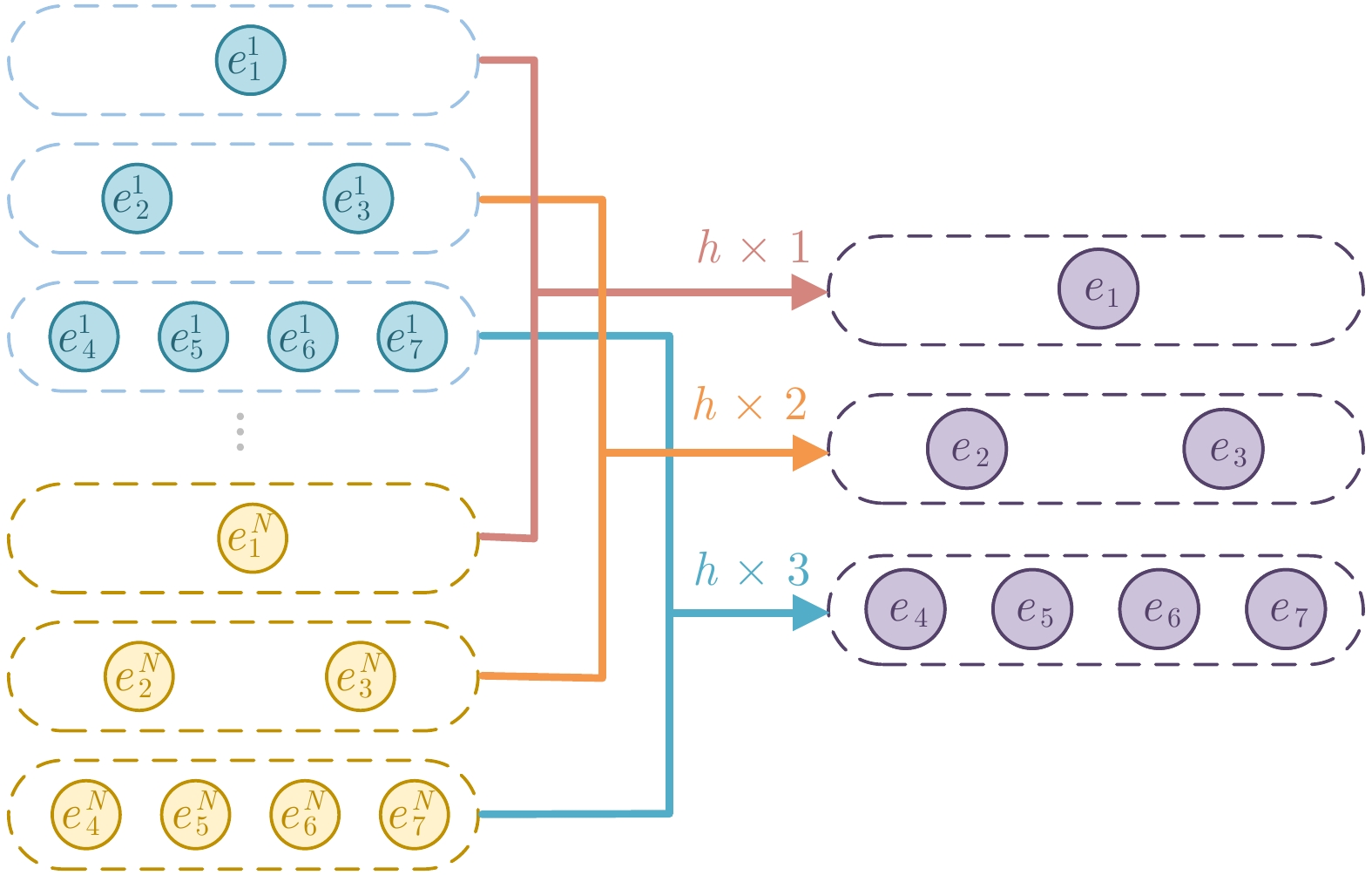
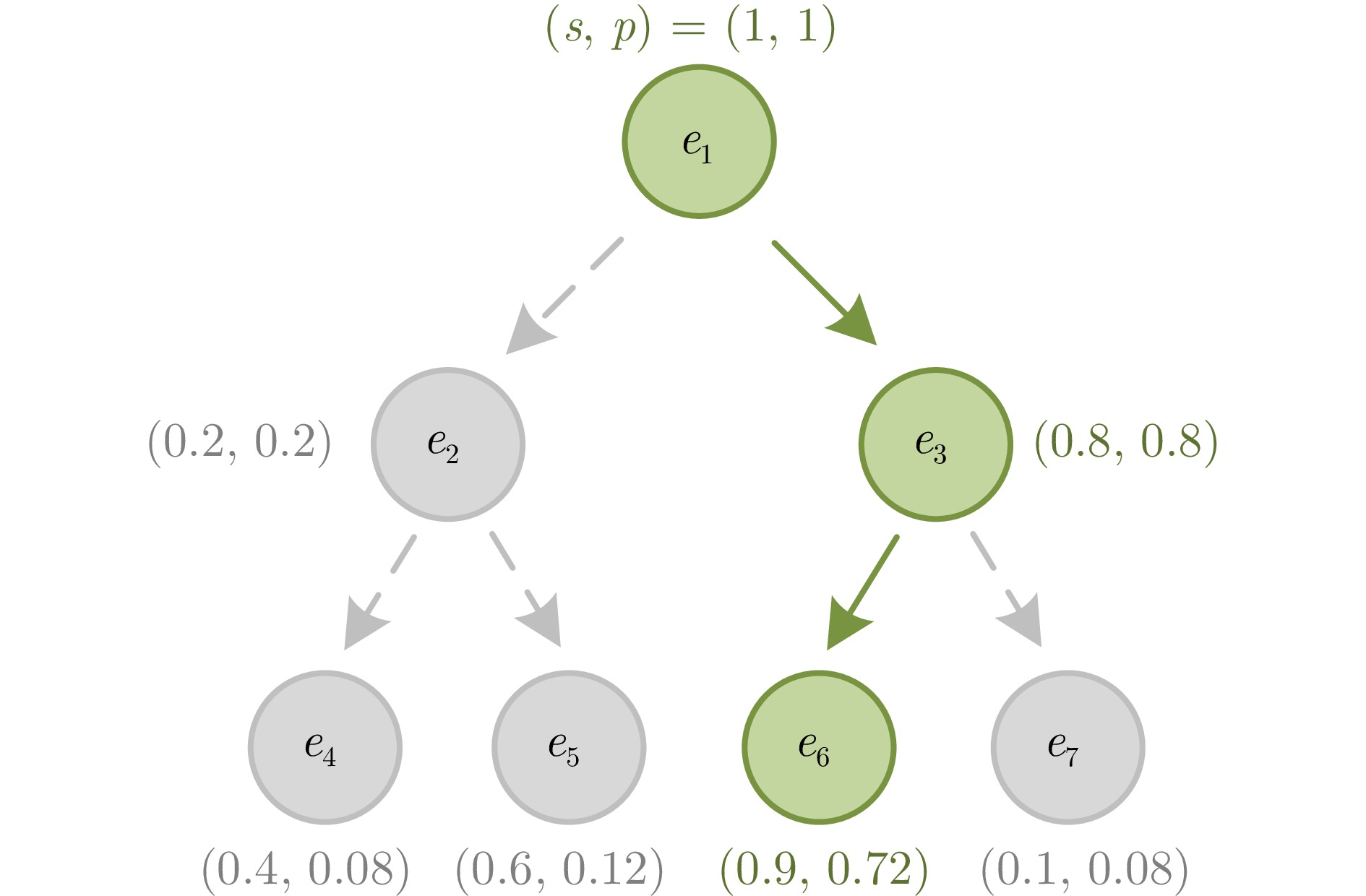
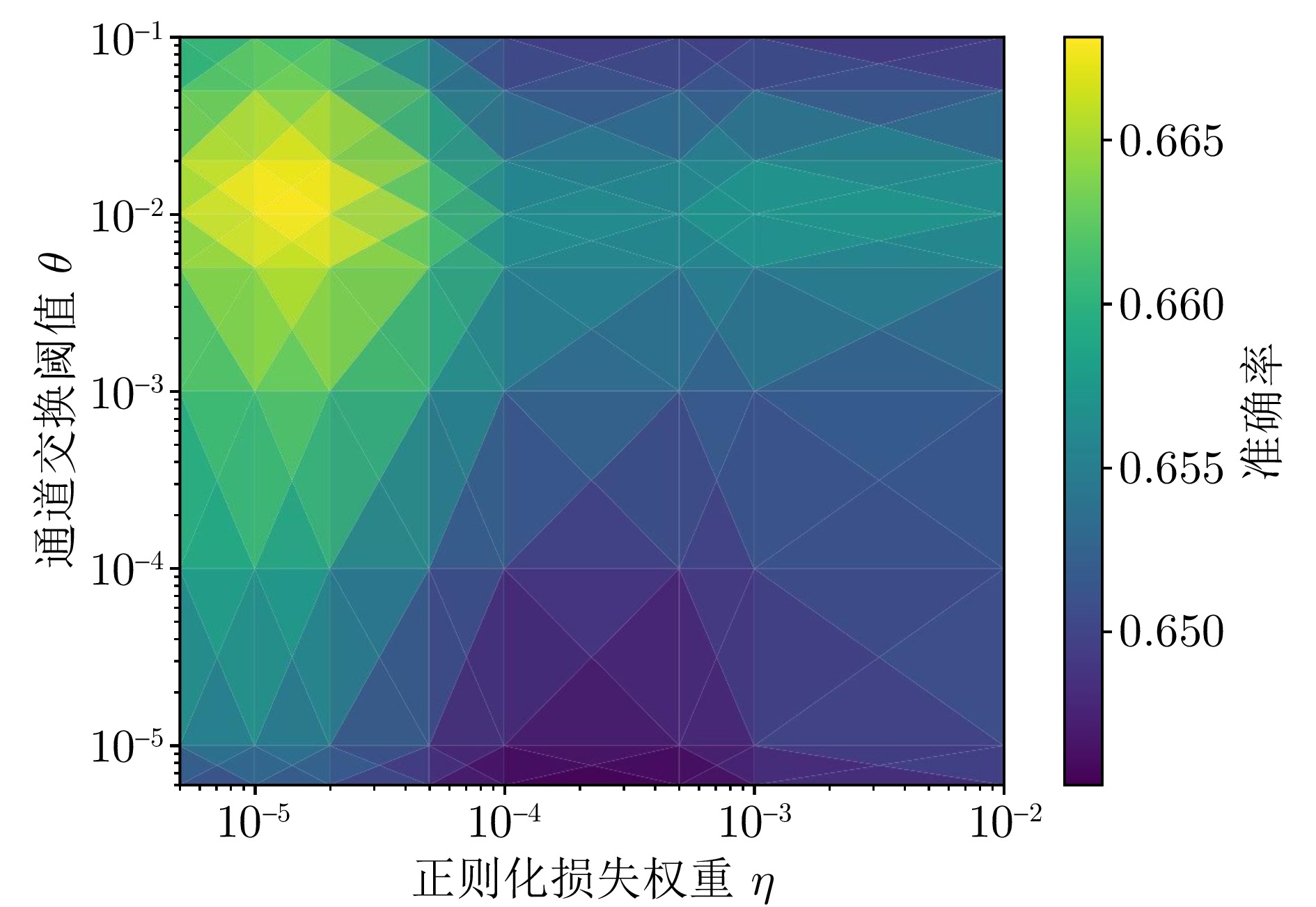
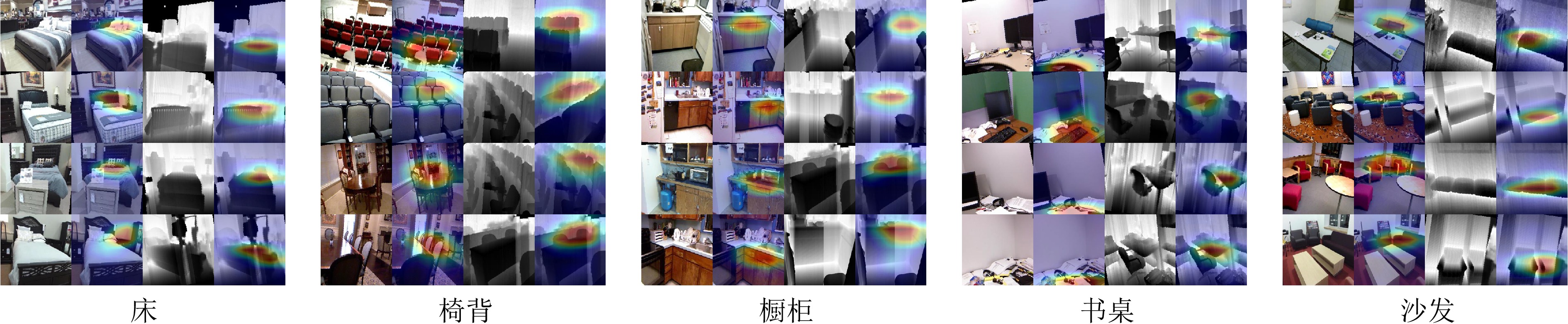
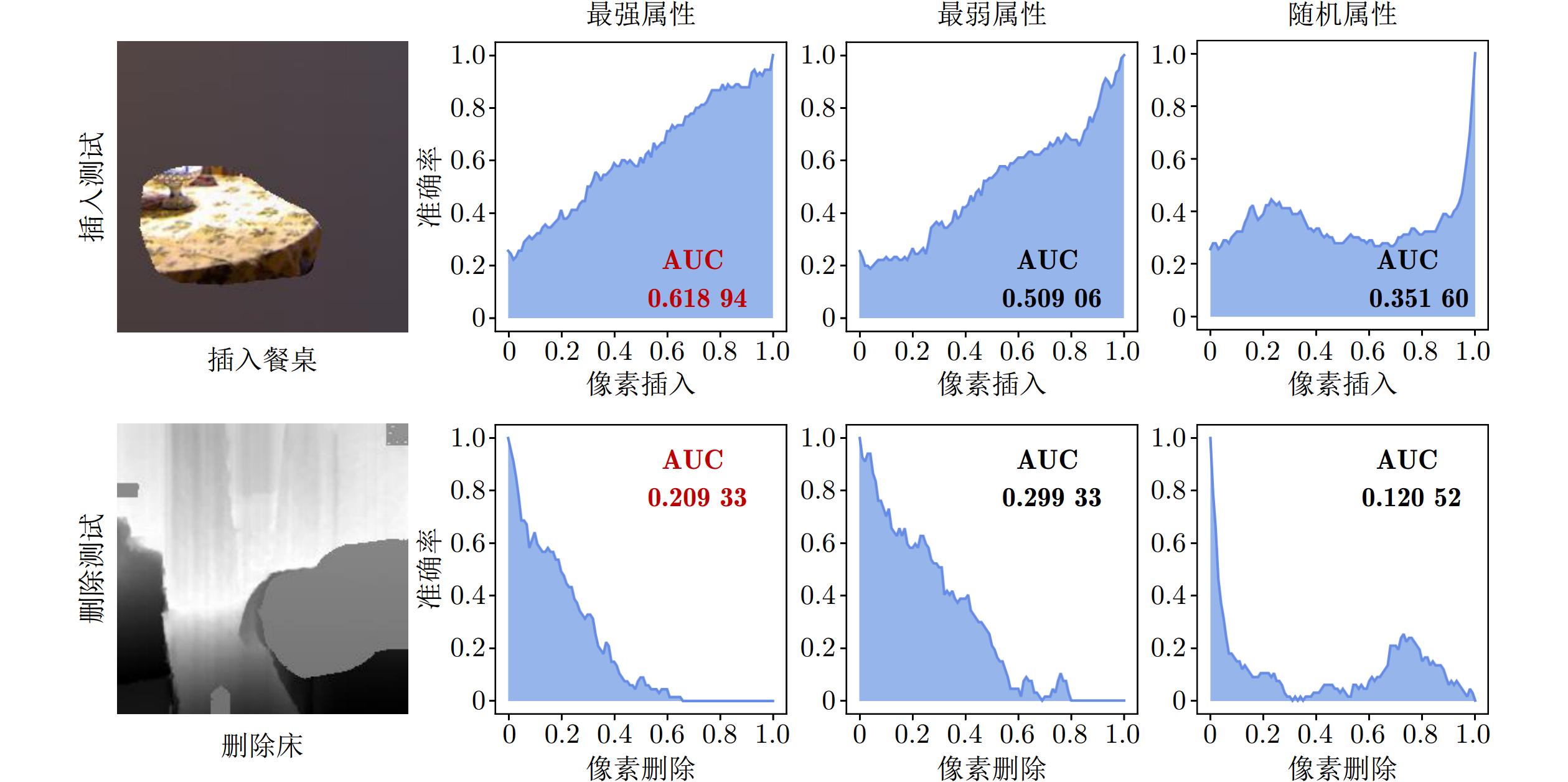
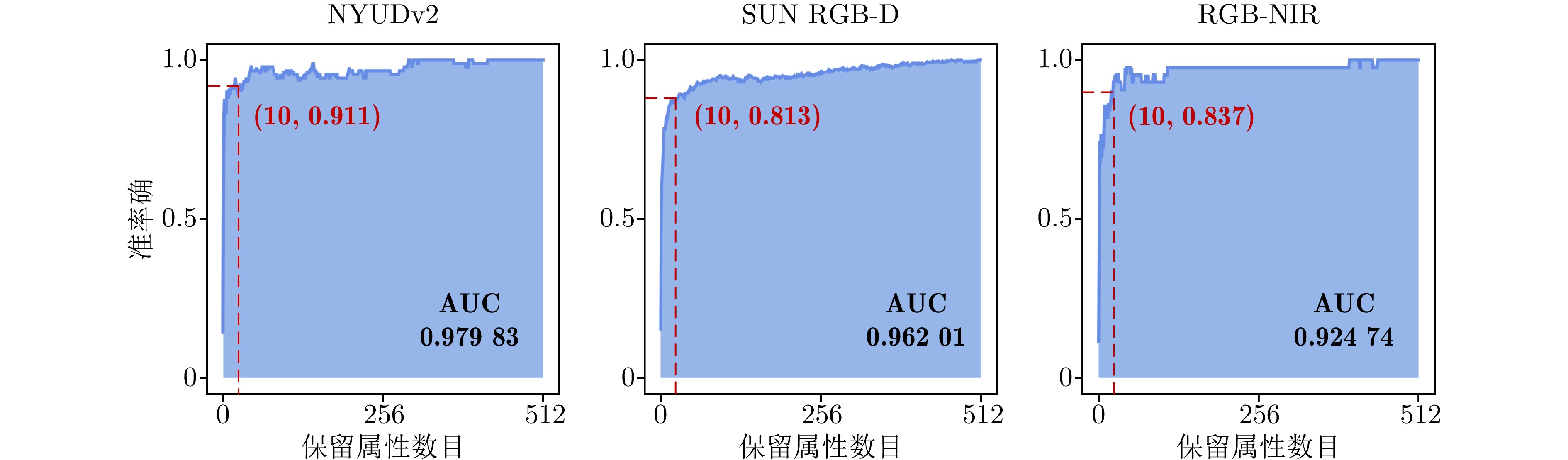
基于深度神经网络(Deep neutral networks, DNN)的分类方法因缺乏可解释性, 导致在金融、医疗、法律等关键领域难以获得完全信任, 极大限制了其应用. 现有多数研究主要关注单模态数据的可解释性, 多模态数据的可解释性方面仍存在挑战. 为解决这一问题, 提出一种基于视觉属性的多模态可解释图像分类方法, 该方法将可见光和深度图等不同视觉模态提取的属性融入模型的训练过程, 不仅能通过视觉属性和决策树对已有的神经网络黑盒模型进行解释, 而且能在训练过程中进一步提升模型解释信息的能力. 引入可解释性通常会造成模型精度的降低, 该方法在保持模型具有良好可解释性的同时, 仍具有较高的分类精度, 在NYUDv2、SUN RGB-D和RGB-NIR三个数据集上, 相比于单模态可解释方法, 该模型准确率明显提升, 并达到与多模态不可解释模型相媲美的性能.
基于深度神经网络(Deep neutral networks, DNN)的分类方法因缺乏可解释性, 导致在金融、医疗、法律等关键领域难以获得完全信任, 极大限制了其应用. 现有多数研究主要关注单模态数据的可解释性, 多模态数据的可解释性方面仍存在挑战. 为解决这一问题, 提出一种基于视觉属性的多模态可解释图像分类方法, 该方法将可见光和深度图等不同视觉模态提取的属性融入模型的训练过程, 不仅能通过视觉属性和决策树对已有的神经网络黑盒模型进行解释, 而且能在训练过程中进一步提升模型解释信息的能力. 引入可解释性通常会造成模型精度的降低, 该方法在保持模型具有良好可解释性的同时, 仍具有较高的分类精度, 在NYUDv2、SUN RGB-D和RGB-NIR三个数据集上, 相比于单模态可解释方法, 该模型准确率明显提升, 并达到与多模态不可解释模型相媲美的性能.


2025, 51(2): 457-474.
doi: 10.16383/j.aas.c240196
cstr: 32138.14.j.aas.c240196
摘要:
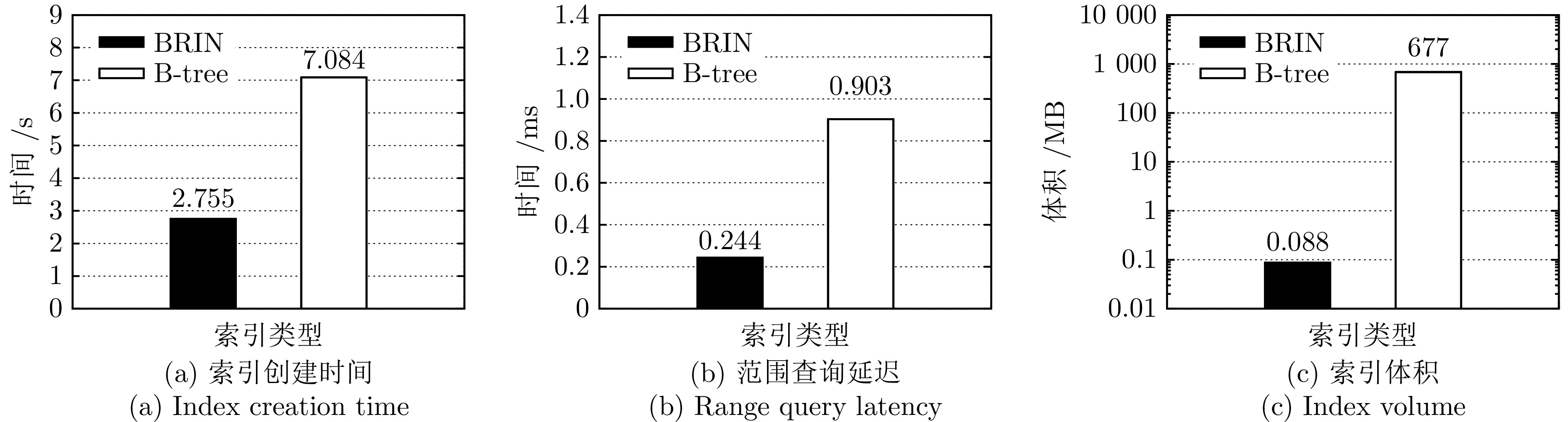
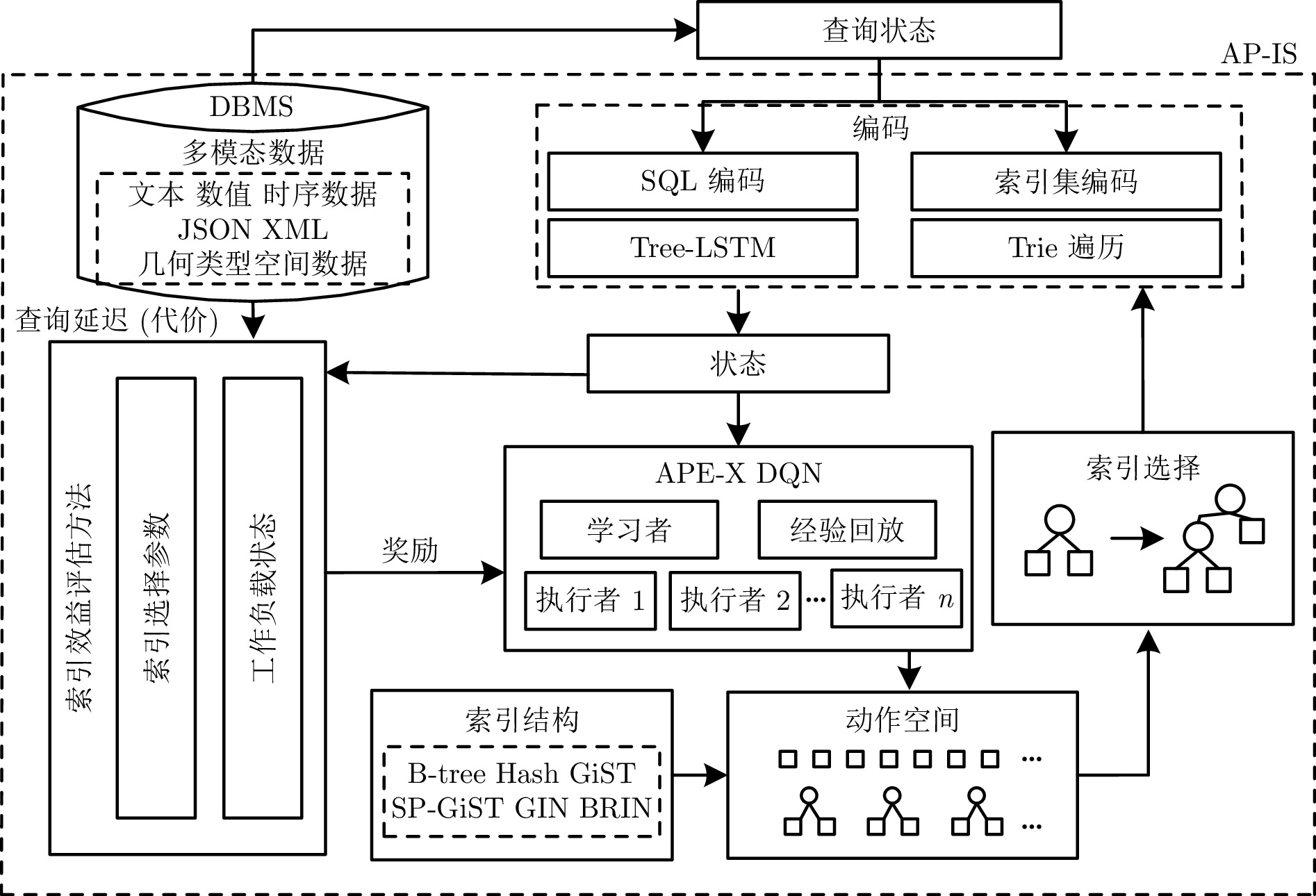
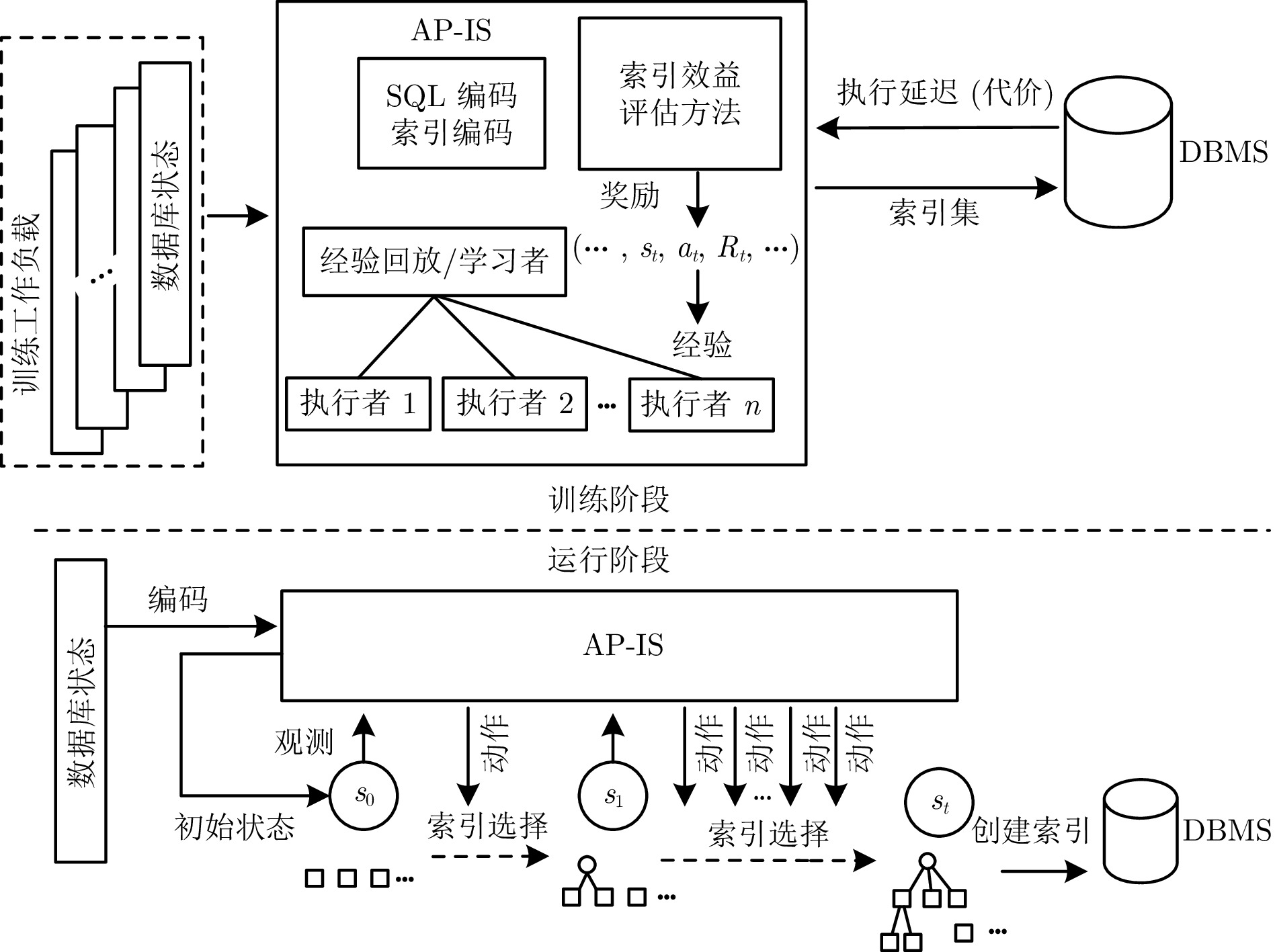
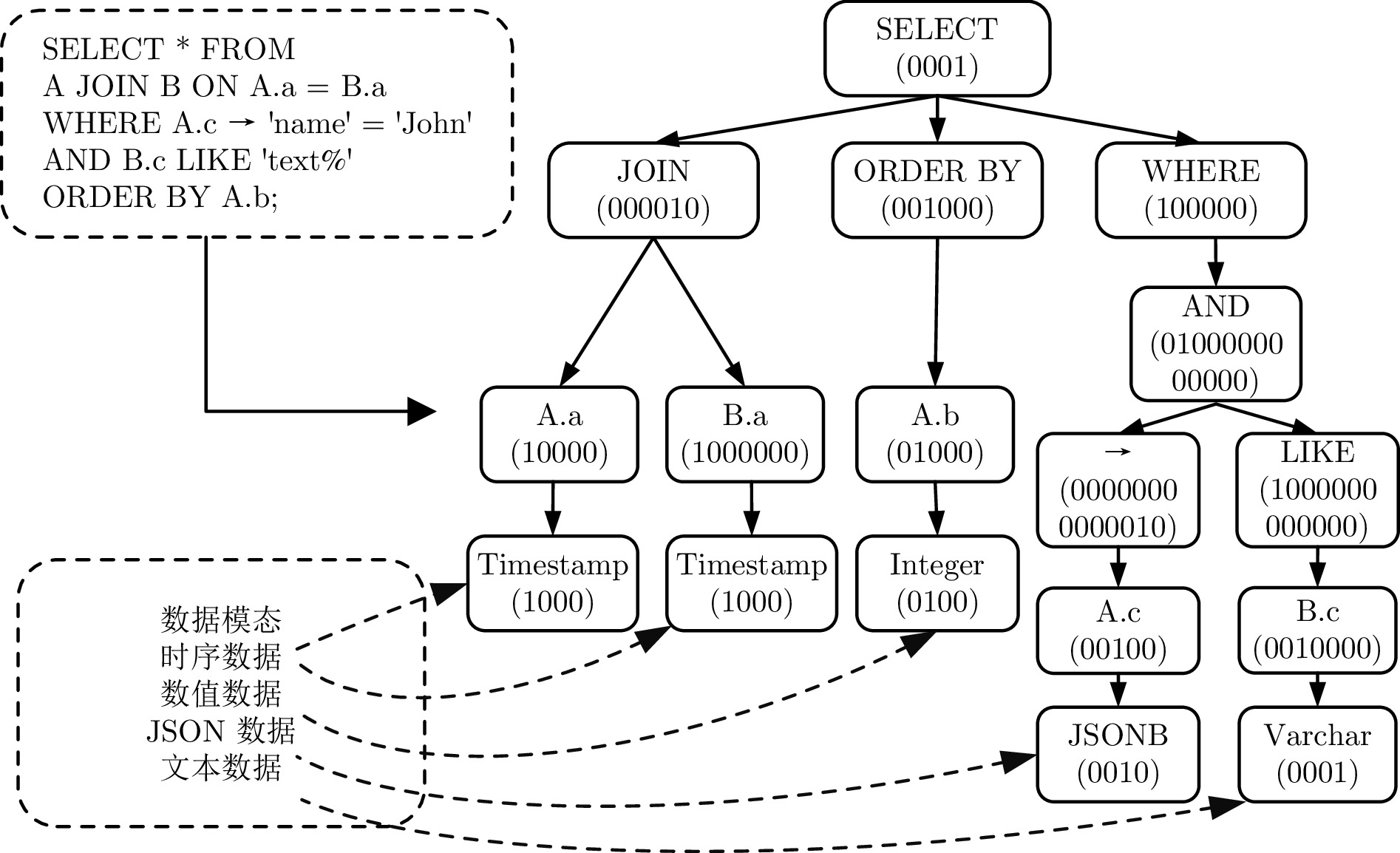
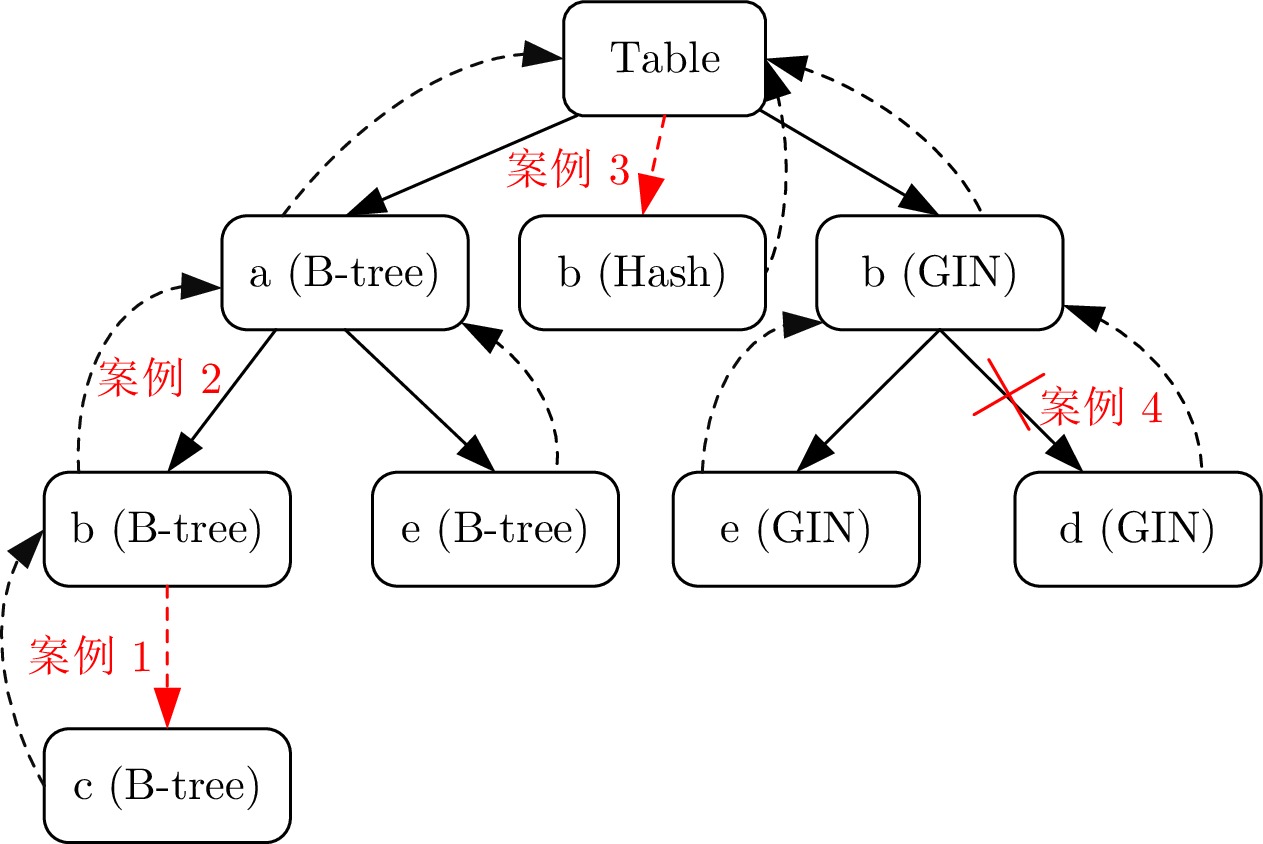
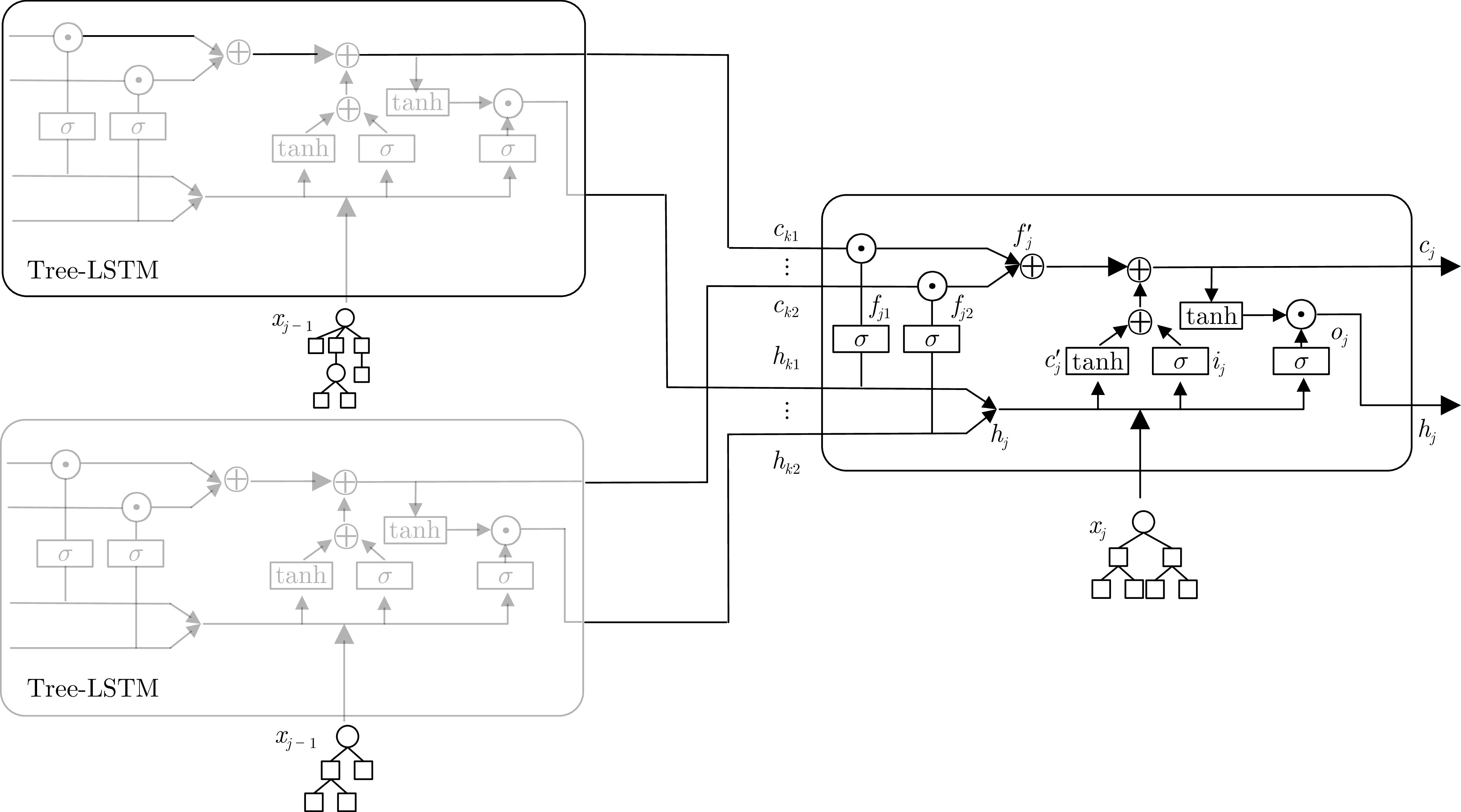
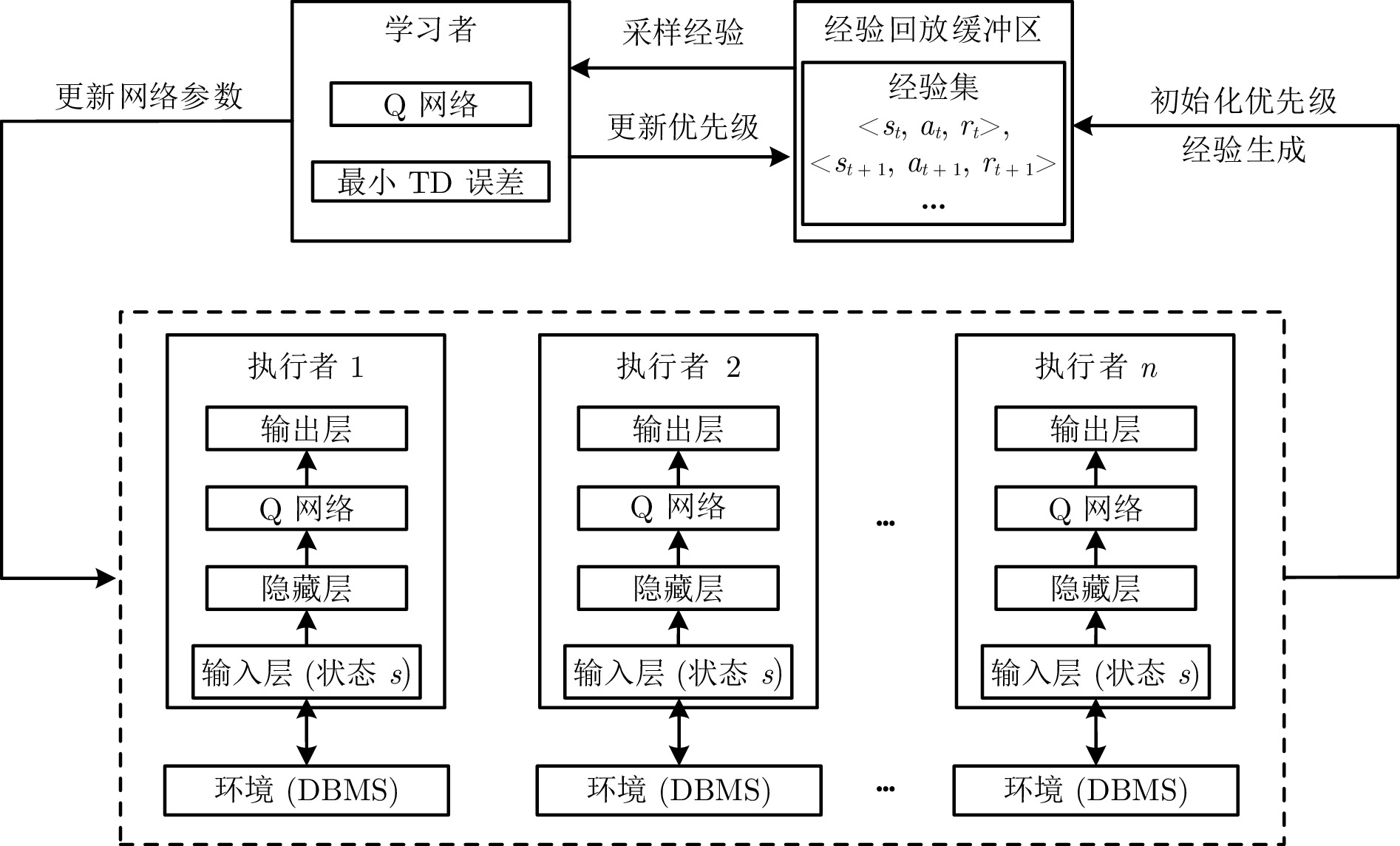
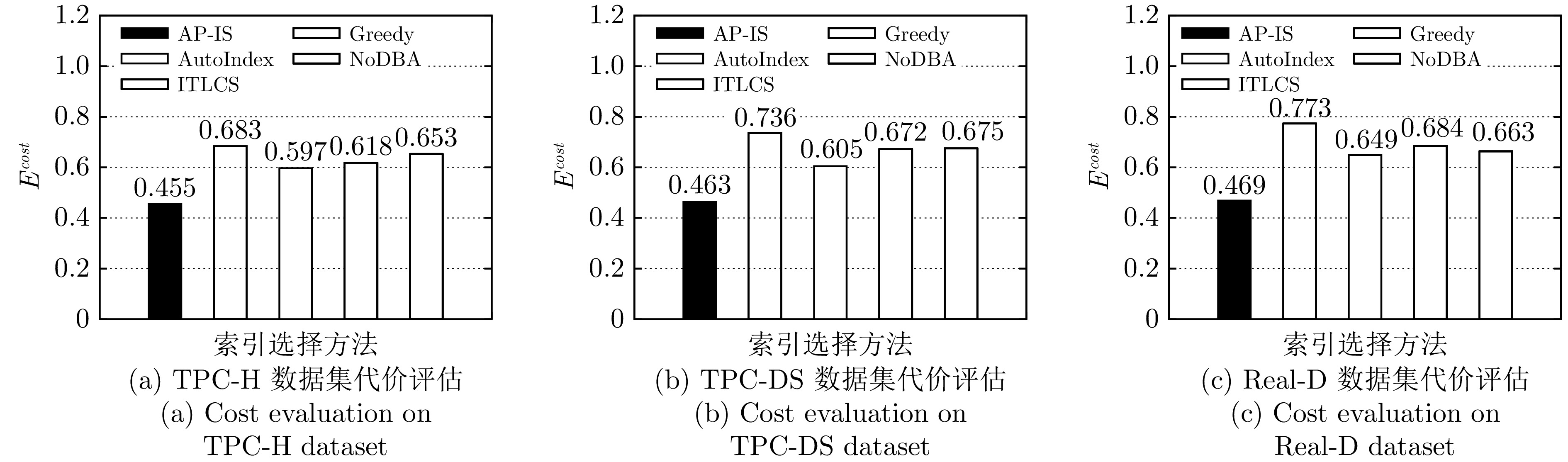
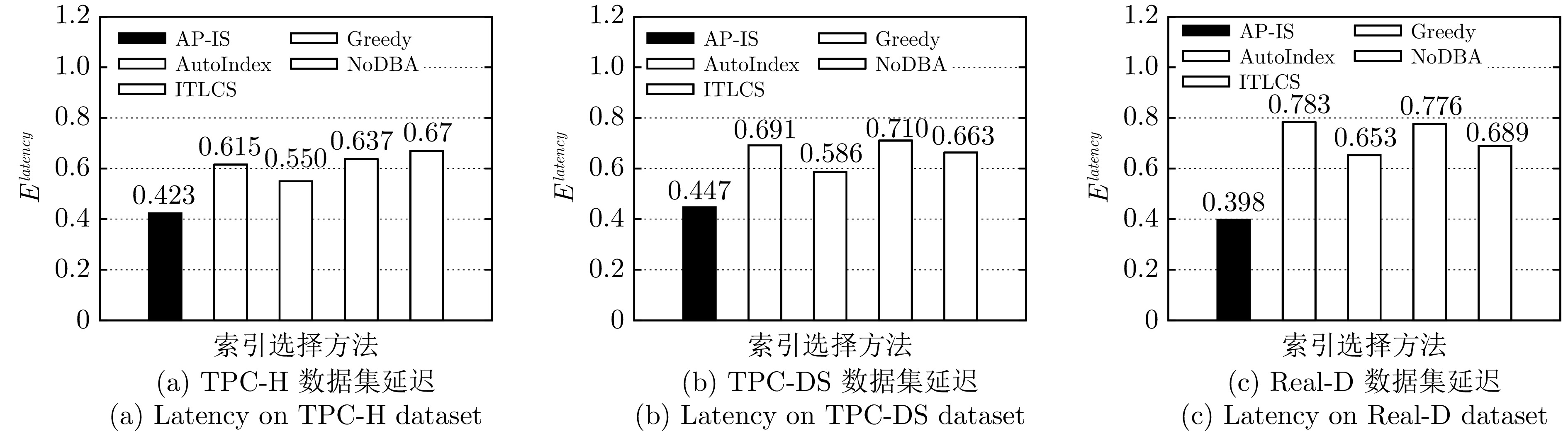
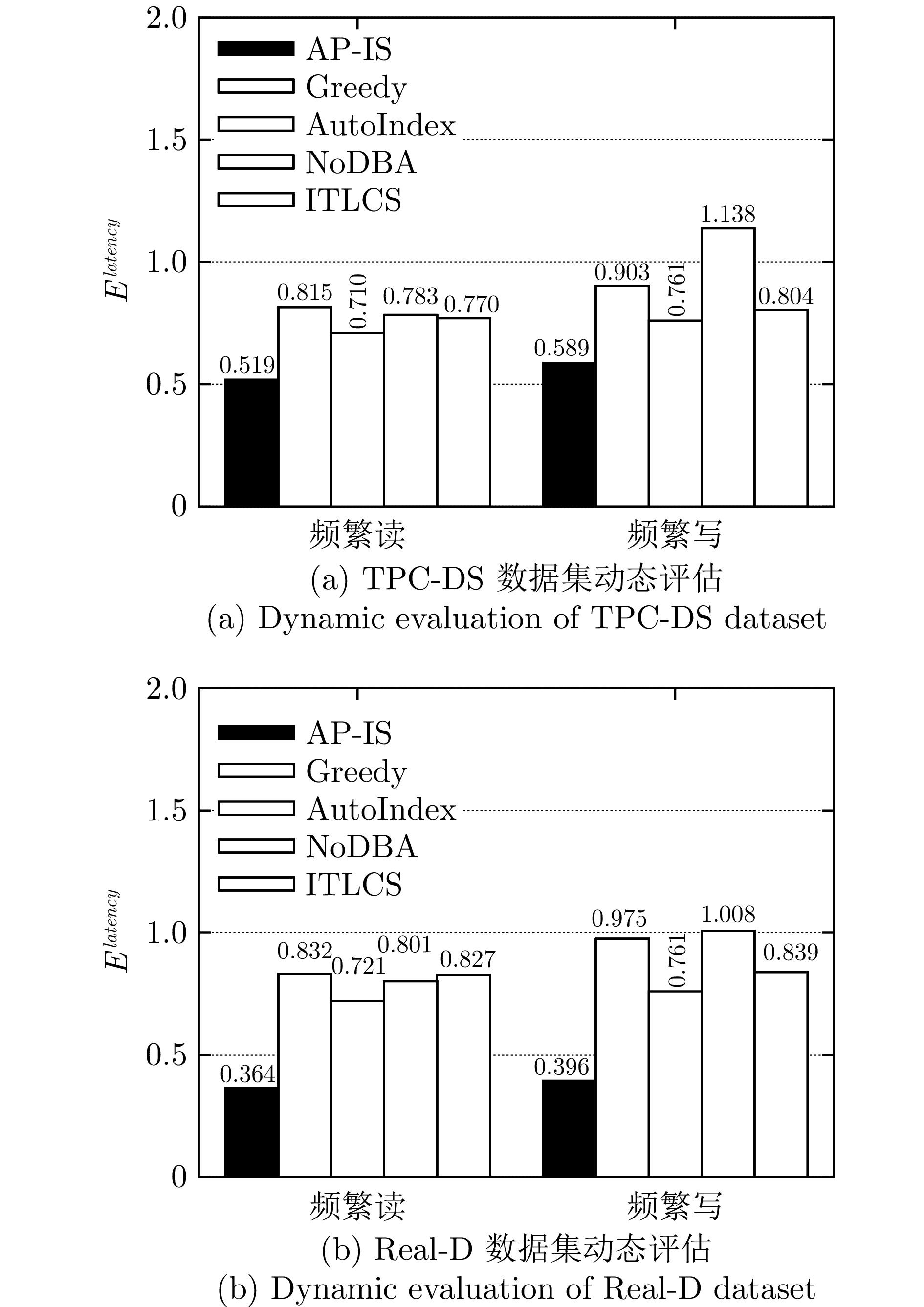
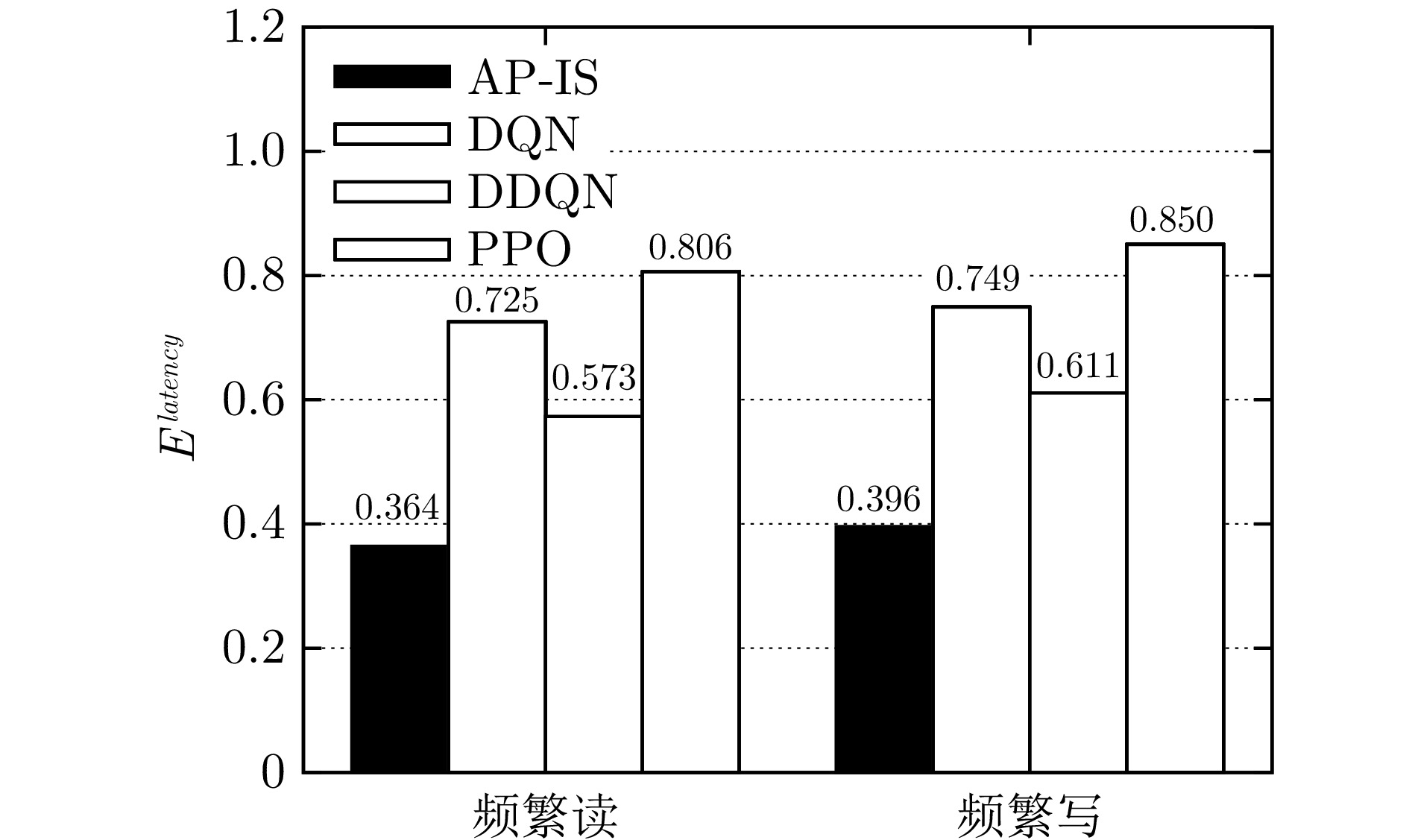
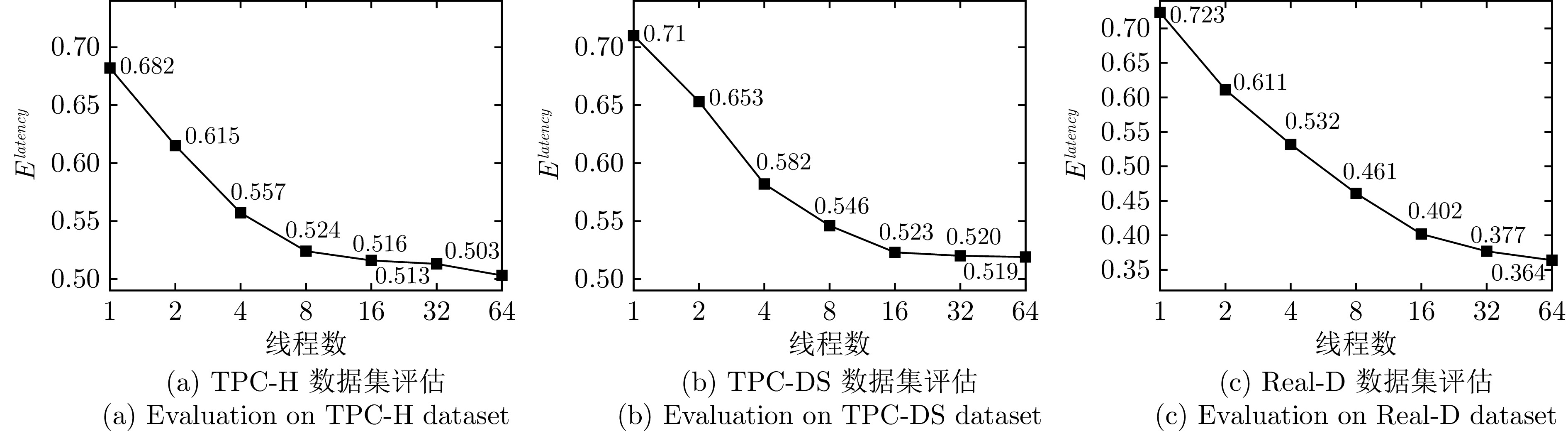
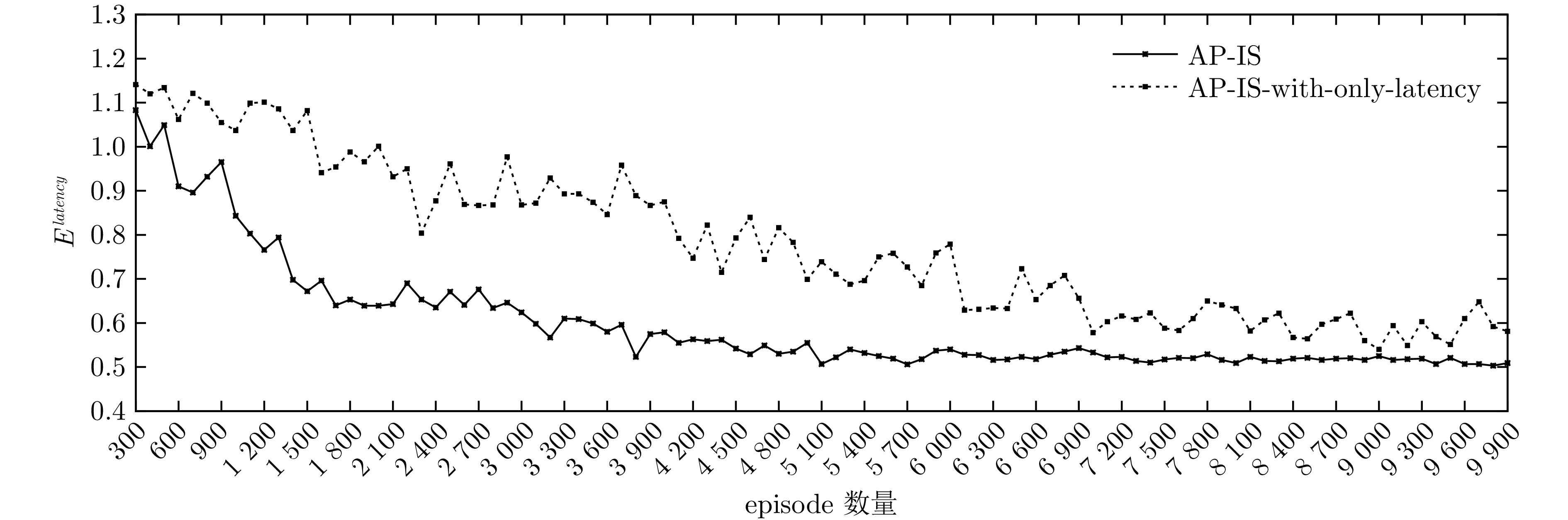
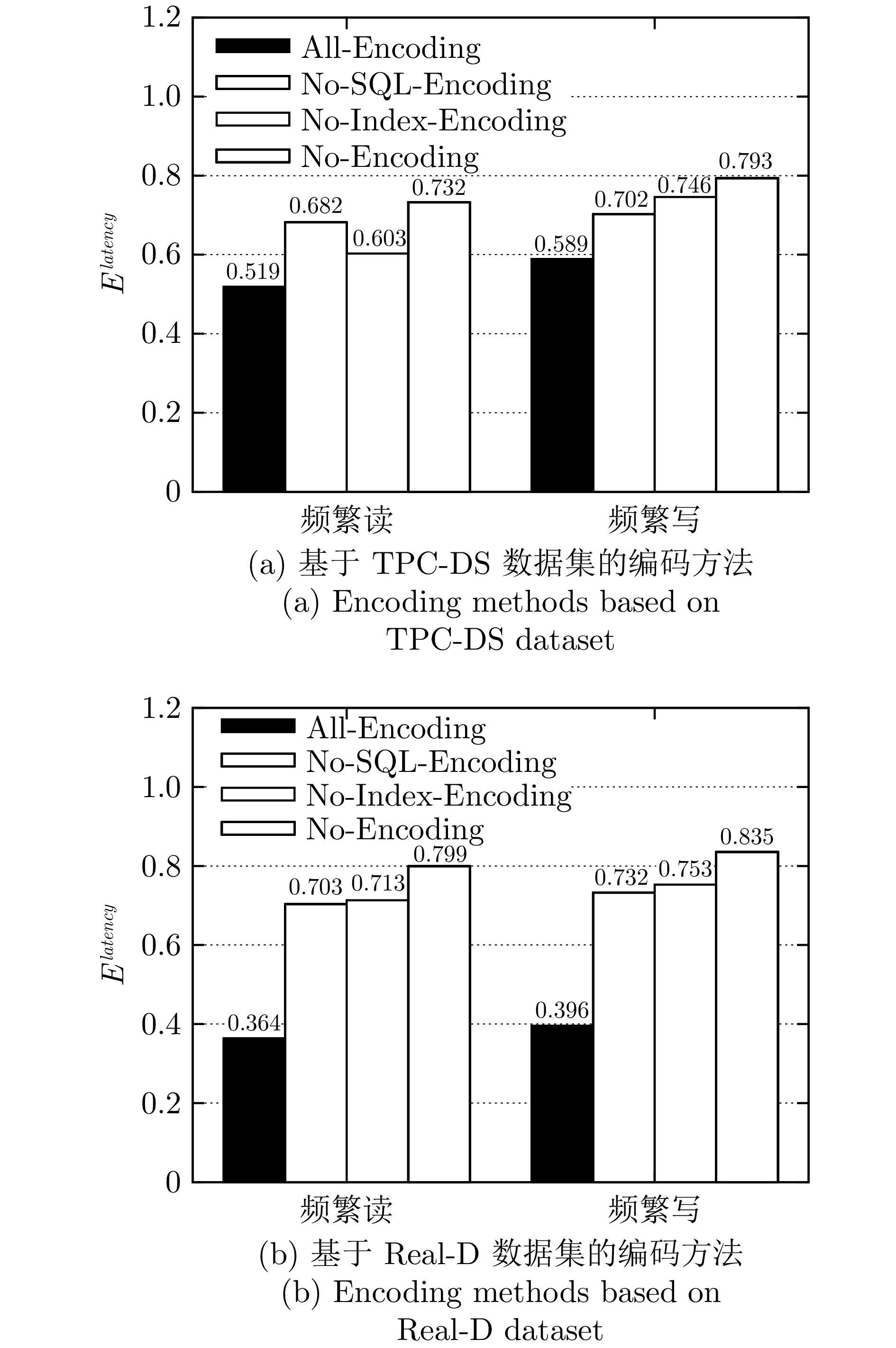
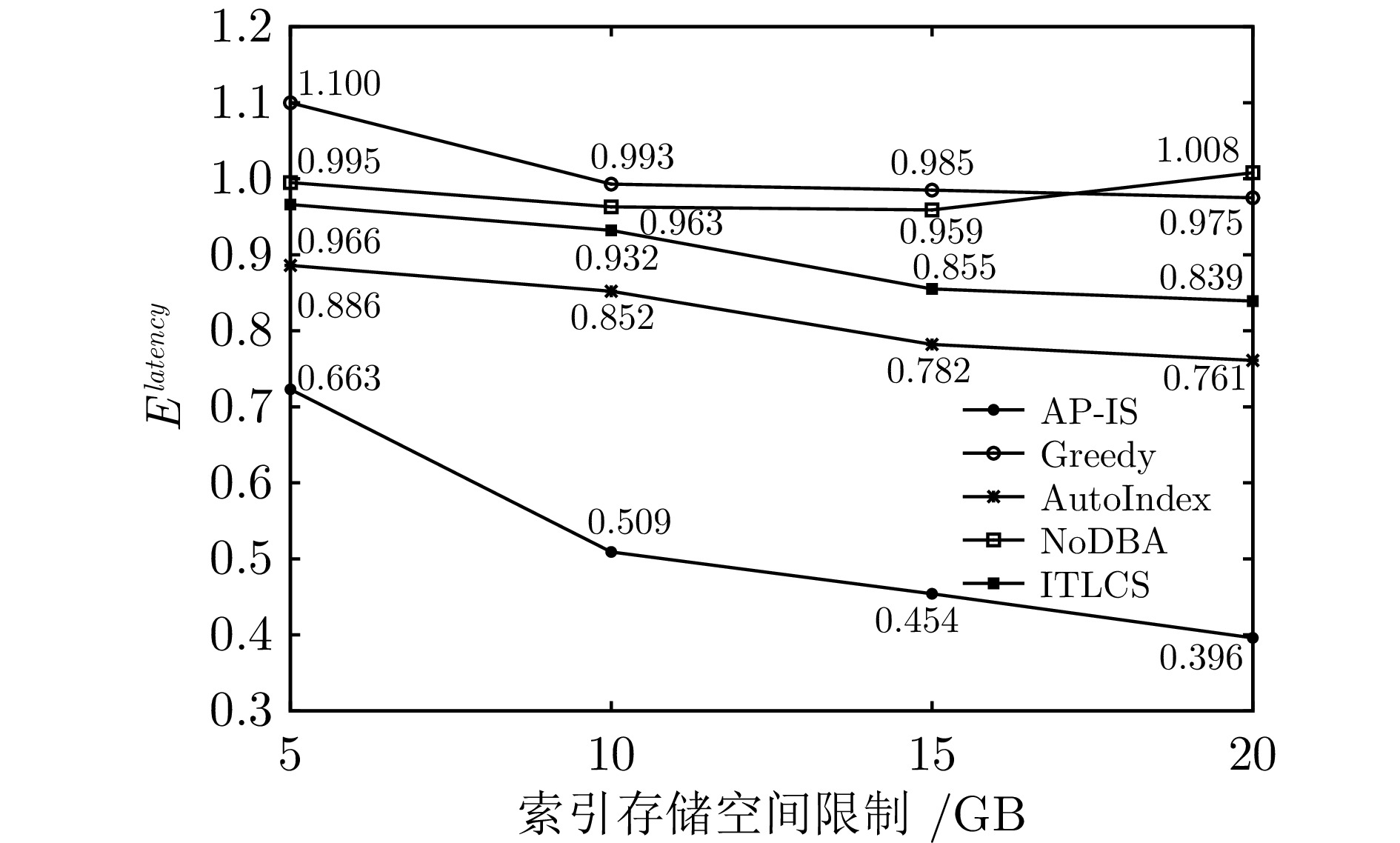
现有的索引选择方法存在诸多局限性. 首先, 大多数方法考虑场景较为单一, 不能针对特定数据模态选择合适的索引结构, 进而无法有效应对海量多模态数据; 其次, 现有方法未考虑索引选择时索引构建的代价, 无法有效应对动态的工作负载. 针对上述问题, 提出一种面向多模态数据的智能高效索引选择模型 APE-X DQN (Distributed prioritized experience replay in deep Q-network), 称为 AP-IS (APE-X DQN for index selection). AP-IS 设计了新型索引集编码和 SQL 语句编码方法, 该方法使 AP-IS 在感知多模态数据的同时兼顾索引结构本身的特性, 极大地降低了索引的存储代价. AP-IS 集成新型索引效益评估方法, 在优化强化学习奖励机制的同时, 监控数据库工作负载的执行状态, 保证动态工作负载下 AP-IS 在时间和空间上的优化效果. 在真实多模态数据集上进行大量实验, 验证了 AP-IS 在工作负载的延迟、存储代价和训练效率等方面的性能, 结果均明显优于最新索引选择方法.
现有的索引选择方法存在诸多局限性. 首先, 大多数方法考虑场景较为单一, 不能针对特定数据模态选择合适的索引结构, 进而无法有效应对海量多模态数据; 其次, 现有方法未考虑索引选择时索引构建的代价, 无法有效应对动态的工作负载. 针对上述问题, 提出一种面向多模态数据的智能高效索引选择模型 APE-X DQN (Distributed prioritized experience replay in deep Q-network), 称为 AP-IS (APE-X DQN for index selection). AP-IS 设计了新型索引集编码和 SQL 语句编码方法, 该方法使 AP-IS 在感知多模态数据的同时兼顾索引结构本身的特性, 极大地降低了索引的存储代价. AP-IS 集成新型索引效益评估方法, 在优化强化学习奖励机制的同时, 监控数据库工作负载的执行状态, 保证动态工作负载下 AP-IS 在时间和空间上的优化效果. 在真实多模态数据集上进行大量实验, 验证了 AP-IS 在工作负载的延迟、存储代价和训练效率等方面的性能, 结果均明显优于最新索引选择方法.
2025, 51(2): 475-484.
doi: 10.16383/j.aas.c240312
cstr: 32138.14.j.aas.c240312
摘要:
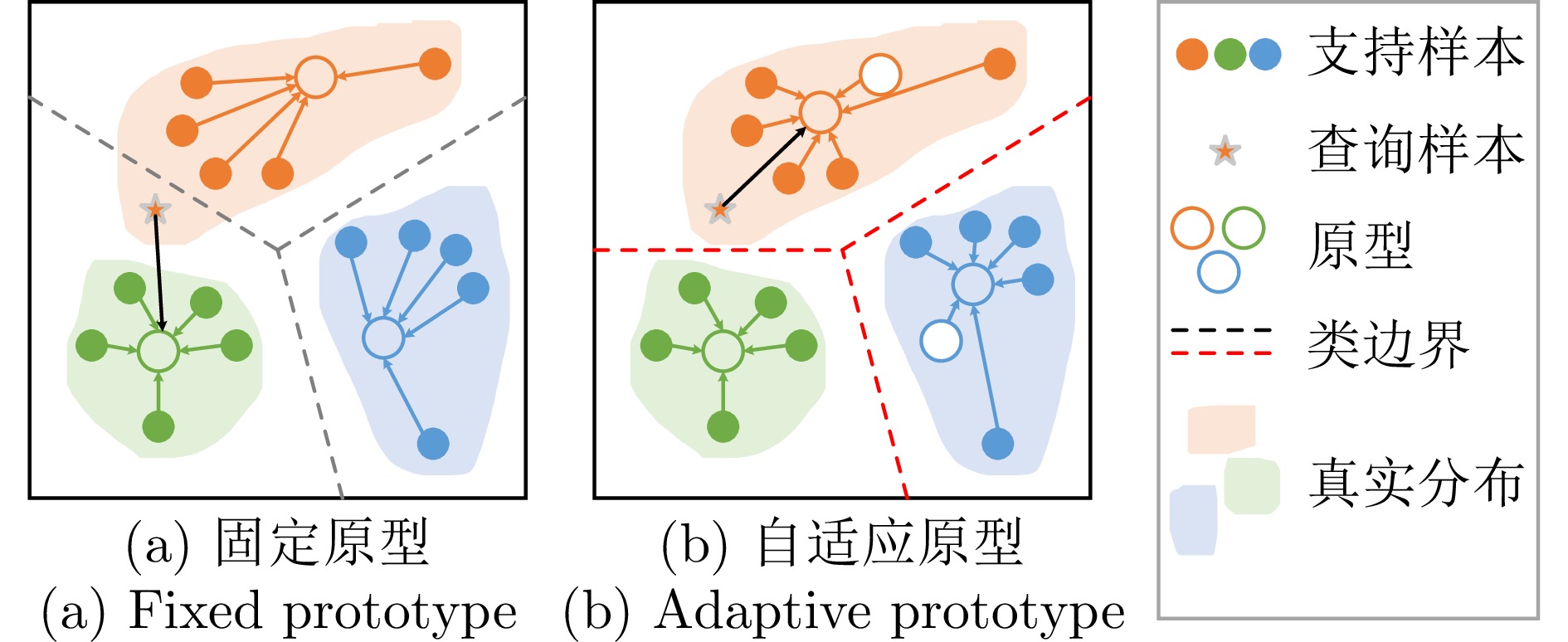
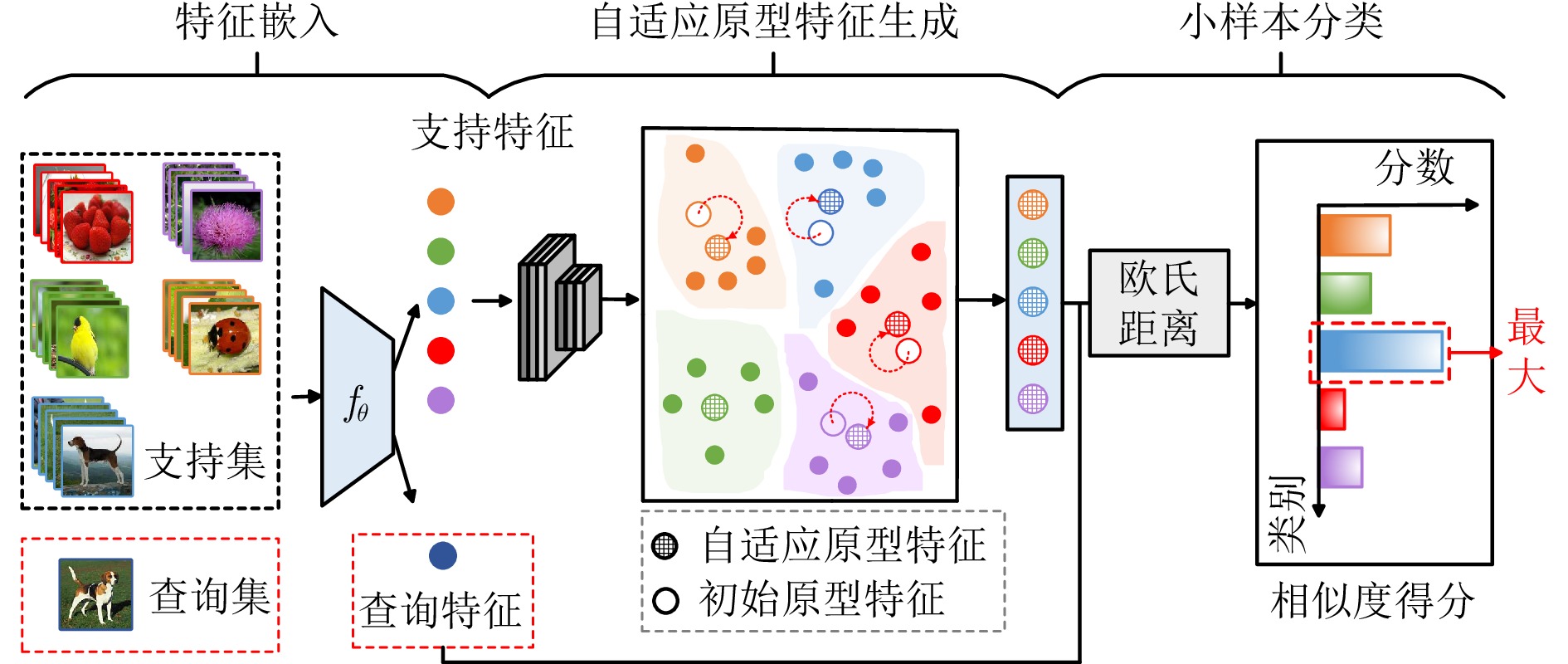
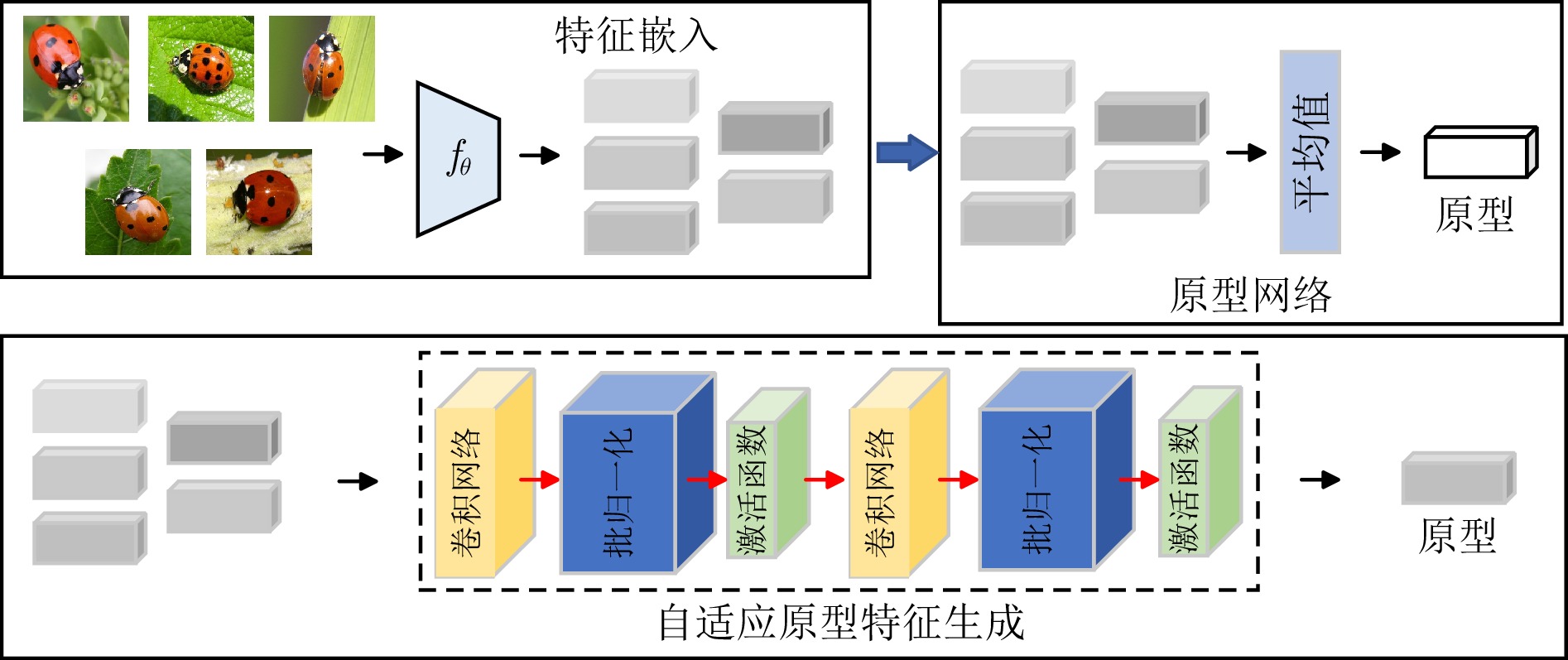
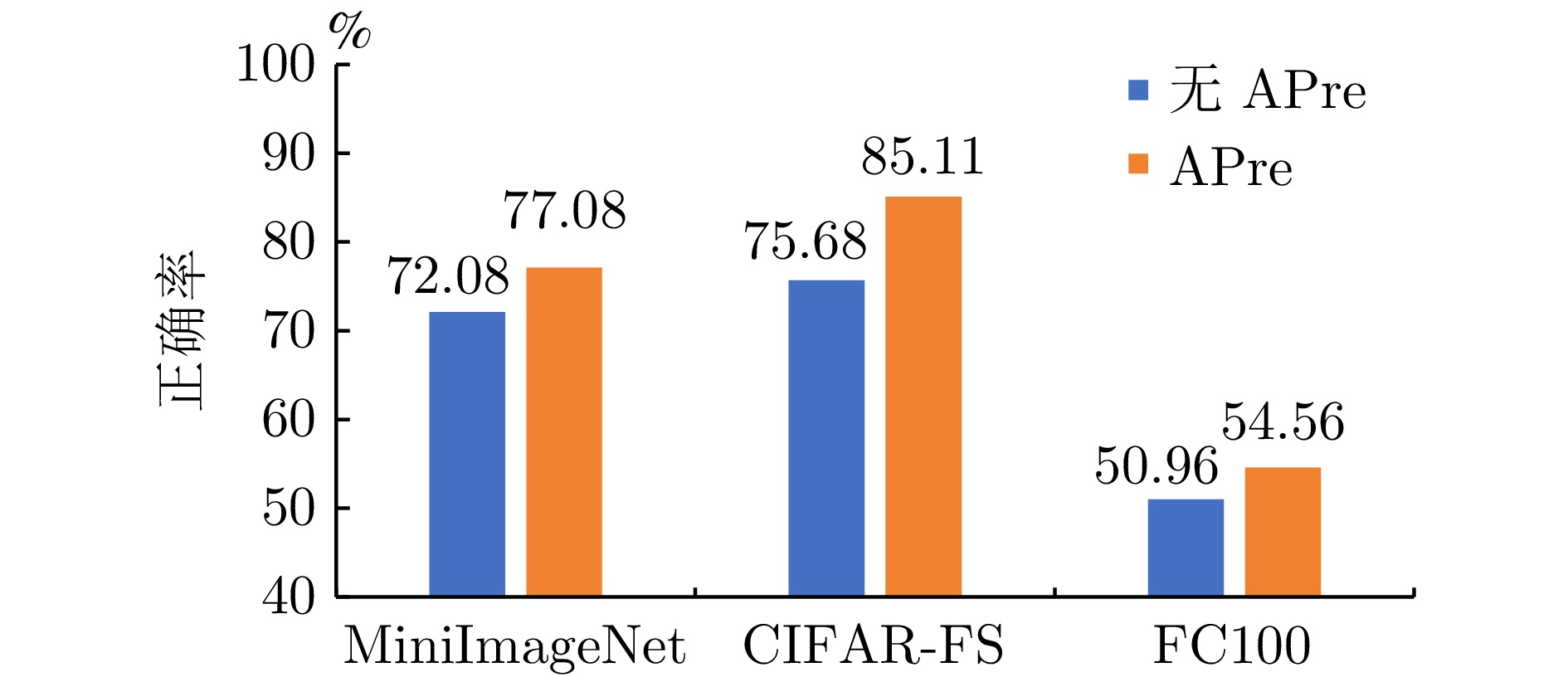
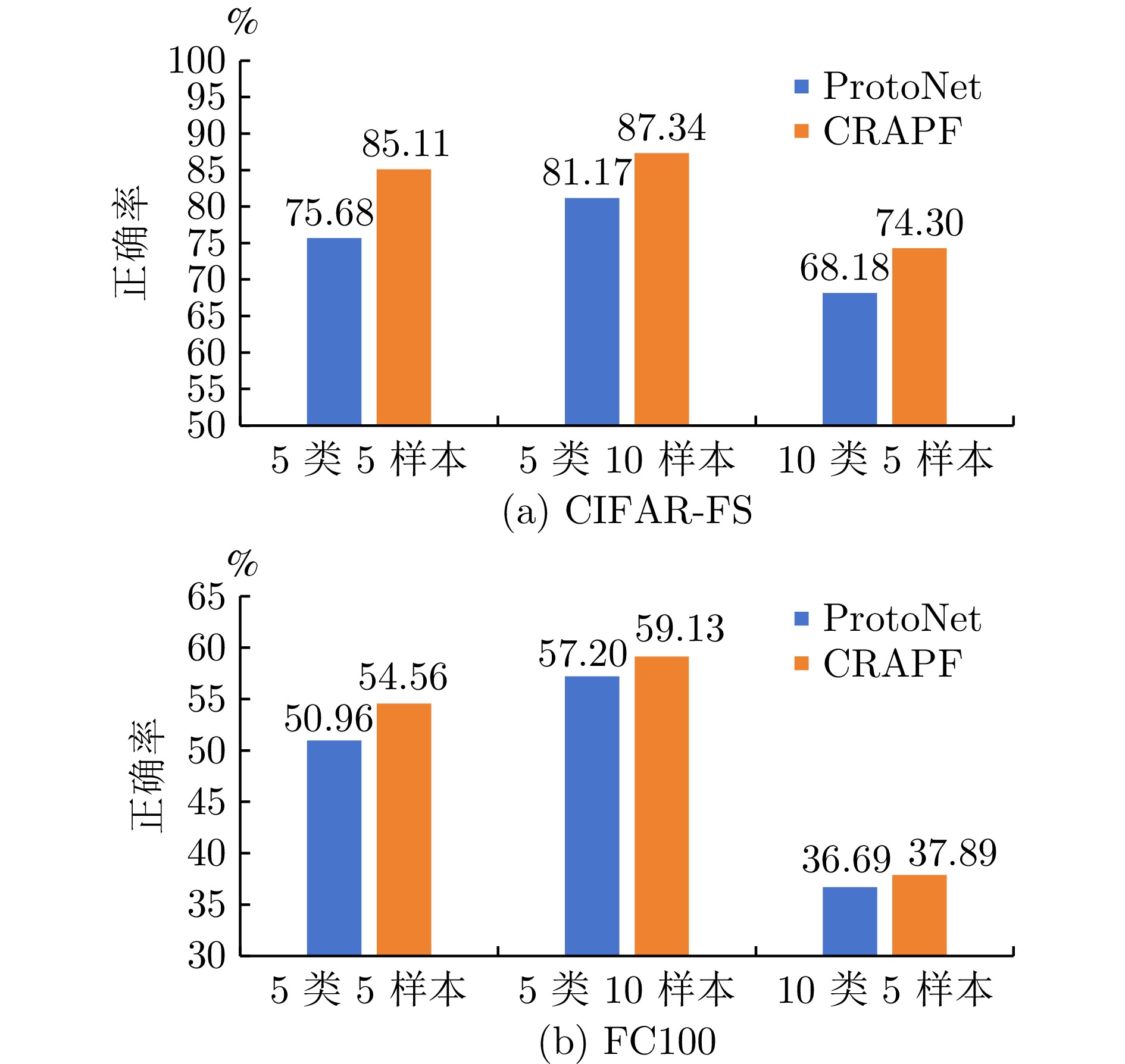
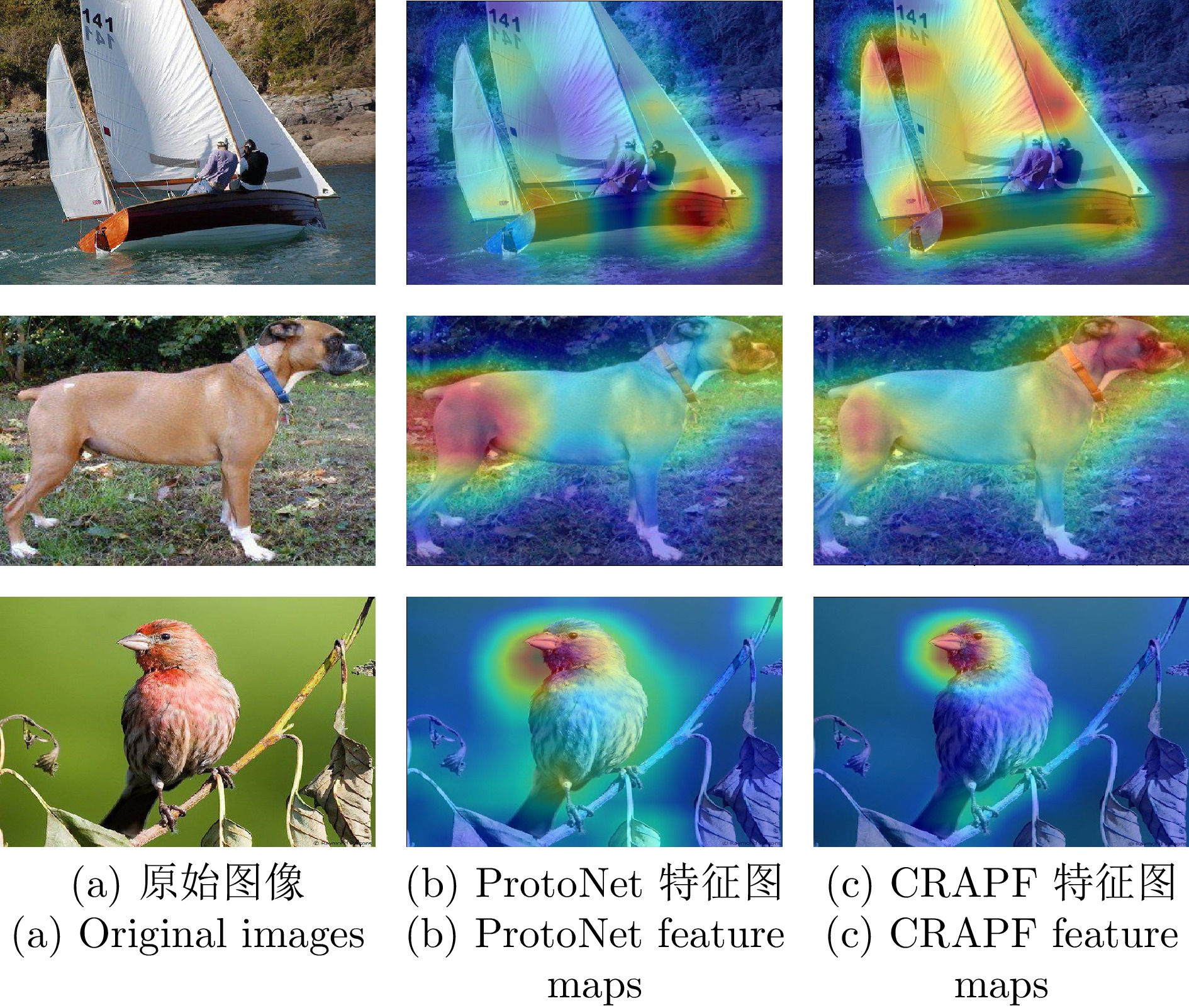
针对小样本学习过程中样本数量不足导致的性能下降问题, 基于原型网络(Prototype network, ProtoNet)的小样本学习方法通过实现查询样本与支持样本原型特征间的距离度量, 从而达到很好的分类性能. 然而, 这种方法直接将支持集样本均值视为类原型, 在一定程度上加剧了对样本数量稀少情况下的敏感性. 针对此问题, 提出了基于自适应原型特征类矫正的小样本学习方法(Few-shot learning based on class rectification via adaptive prototype features, CRAPF), 通过自适应生成原型特征来缓解方法对数据细微变化的过度响应, 并同步实现类边界的精细化调整. 首先, 使用卷积神经网络构建自适应原型特征生成模块, 该模块采用非线性映射获取更为稳健的原型特征, 有助于减弱异常值对原型构建的影响; 然后, 通过对原型生成过程的优化, 提升不同类间原型表示的区分度, 进而强化原型特征对类别表征的整体效能; 最后, 在3个广泛使用的基准数据集上的实验结果显示, 该方法提升了小样本学习任务的表现.
针对小样本学习过程中样本数量不足导致的性能下降问题, 基于原型网络(Prototype network, ProtoNet)的小样本学习方法通过实现查询样本与支持样本原型特征间的距离度量, 从而达到很好的分类性能. 然而, 这种方法直接将支持集样本均值视为类原型, 在一定程度上加剧了对样本数量稀少情况下的敏感性. 针对此问题, 提出了基于自适应原型特征类矫正的小样本学习方法(Few-shot learning based on class rectification via adaptive prototype features, CRAPF), 通过自适应生成原型特征来缓解方法对数据细微变化的过度响应, 并同步实现类边界的精细化调整. 首先, 使用卷积神经网络构建自适应原型特征生成模块, 该模块采用非线性映射获取更为稳健的原型特征, 有助于减弱异常值对原型构建的影响; 然后, 通过对原型生成过程的优化, 提升不同类间原型表示的区分度, 进而强化原型特征对类别表征的整体效能; 最后, 在3个广泛使用的基准数据集上的实验结果显示, 该方法提升了小样本学习任务的表现.