

-
摘要: 子母式无人机(Unmanned aerial vehicles, UAVs)通常指一类由无人载机搭载和投放多架子机执行协同作业任务的新型飞行器. 相较于传统无人机和无人机集群, 子母式无人机兼具航程长、空间可达性强等优势, 得到了广泛关注. 首先针对子母式无人机在编队飞行任务中的载机姿态稳定控制与子机轨迹跟踪控制问题, 建立子母式无人机动力学模型. 在此基础上, 分别设计基于多平衡点切换模型预测控制的飞行控制方法以及基于多胞不确定性模型预测控制的轨迹跟踪控制方法, 实现了子母式无人机的稳定、安全编队飞行. 仿真结果表明, 所提出的方法能够实现预期的编队飞行目标, 具有良好的稳定性和鲁棒性.Abstract: Composite unmanned aerial vehicles (UAVs) typically refer to a class of novel aircraft, each of which involves a carrier UAV deploying and airdropping multiple parasite UAVs for collaborative operations. Compared to traditional UAVs and UAV swarms, composite UAVs offer significant advantages in terms of extended range and enhanced spatial accessibility, garnering widespread attention. First, the dynamic model of the composite UAV is established for the problem of attitude stabilization control for the carrier UAV and trajectory tracking control for the parasite UAVs during formation flight tasks. On this basis, the flight control method based on multi-equilibrium switched model predictive control, as well as the trajectory tracking control method based on model predictive control with the polytopic model uncertainty, are designed to achieve a stable and safe formation flight of the composite UAV. Simulation results indicate that the proposed methods achieve the anticipated formation flight, demonstrating satisfying stability and robustness.
-
图 3 多平衡点切换系统状态轨迹及区域稳定性示意图
Fig. 3 Illustration of state trajectory and region stability for a multi-equilibrium switched system
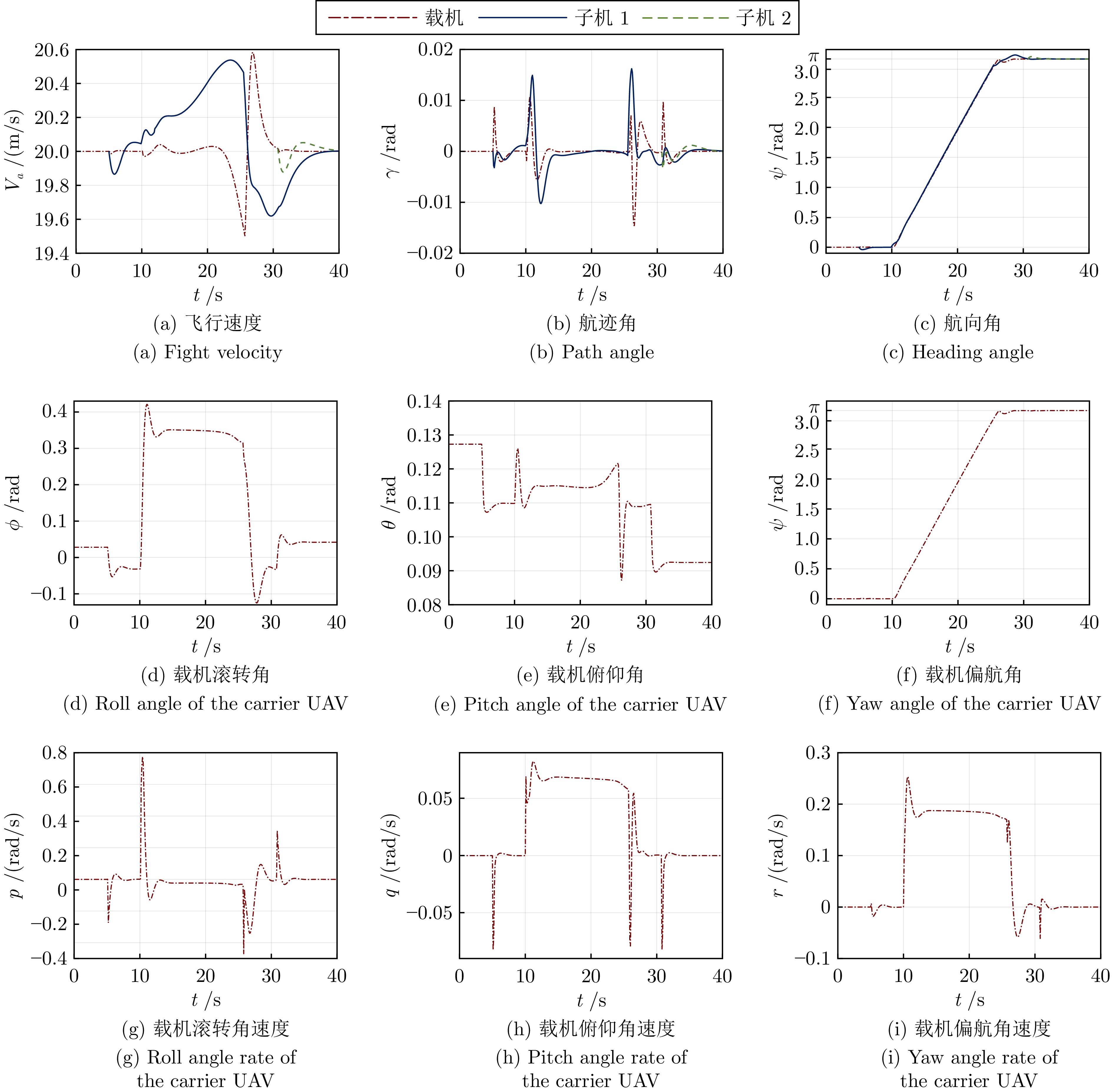
表 1 不同模态下载机飞行状态及平衡点
Table 1 Flight states and equilibria of the carrier UAV in different modes
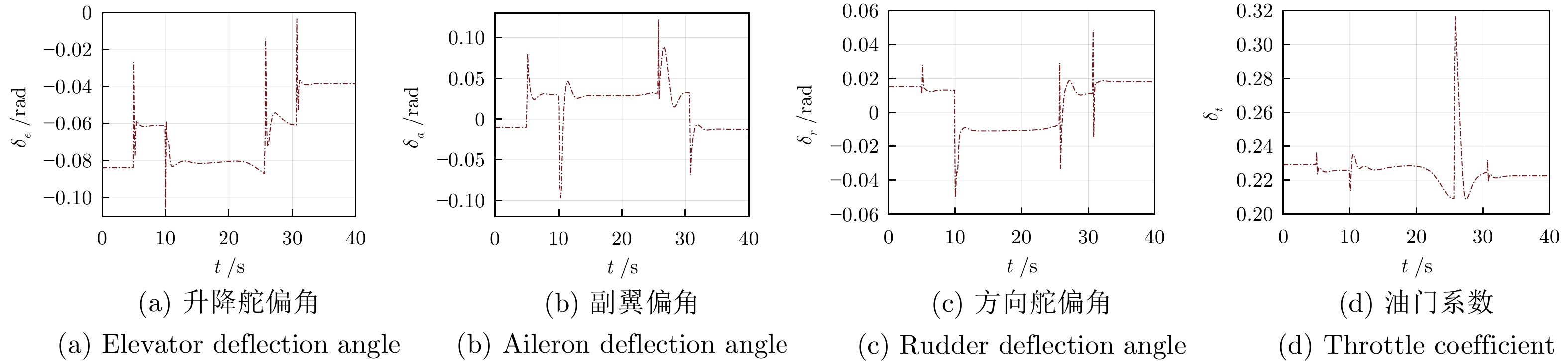
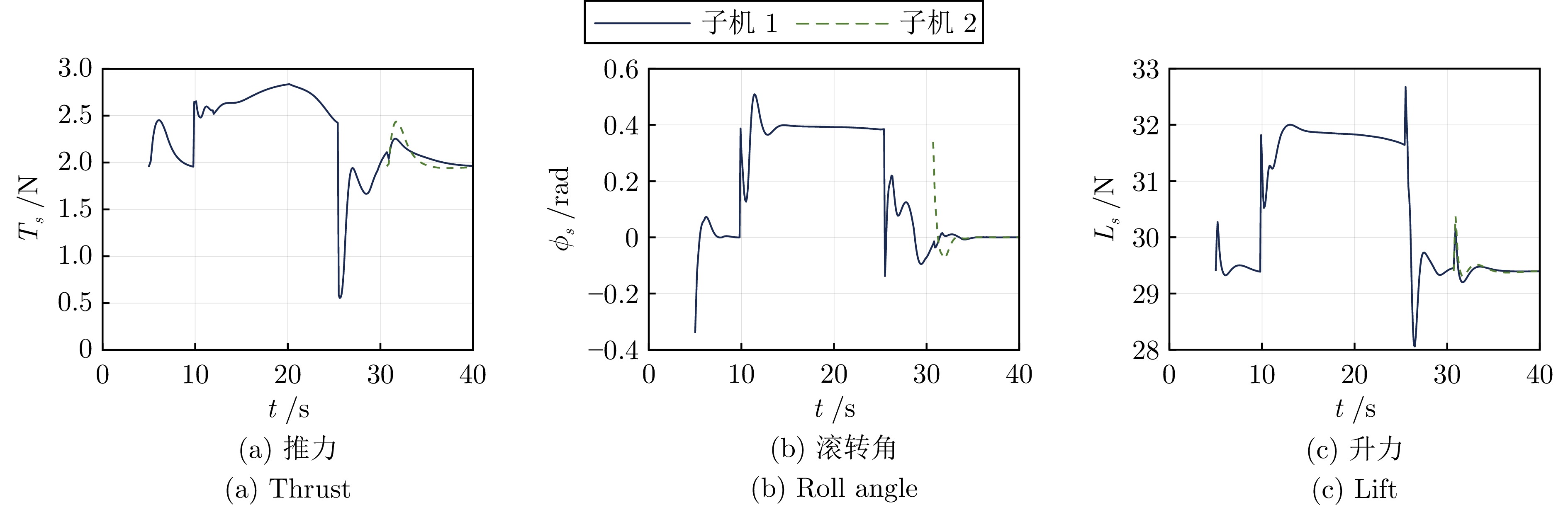
模态 I II III IV V 时间 0 ~ 5 s 5 ~ 10 s 10 ~ 25.7 s 25.7 ~ 30.7 s 30.7 ~ 40 s 子机1 $ \surd $ 子机2 $ \surd $ $ \surd $ $ \surd $ $ \surd $ 直线 $ \surd $ $ \surd $ $ \surd $ $ \surd $ 转弯 $ \surd $ $ h^*_i $ 20 20 20 20 20 $ u^*_i $ 19.8381 19.8794 19.8517 19.8794 19.9146 $ v^*_i $ 0 0 0.0197 0 0.0771 $ w^*_i $ 2.5399 2.1933 2.4312 2.1933 1.8449 $ \phi^*_i $ 0 $ - $ 0.0313 0.3495 $ - $ 0.0313 0 $ \theta^*_i $ 0.1273 0.1099 0.1149 0.1099 0.0925 $ \psi^*_i $ 0 0 不适用 $ \pi $ $ \pi $ $ p^*_i $ 0 0 $ - $ 0.0229 0 0 $ q^*_i $ 0 0 0.0680 0 0 $ r^*_i $ 0 0 0.1867 0 0 $ \delta^*_{e,\;i} $ $ - $ 0.0838 $ - $ 0.0611 $ - $ 0.0811 $ - $ 0.0611 $ - $ 0.0383 $ \delta^*_{a,\;i} $ 0 0.0301 0.0289 0.0301 $ - $ 0.0127 $ \delta^*_{r,\;i} $ 0 0.0132 $ - $ 0.0110 0.0132 0.0182 $ \delta^*_{t,\;i} $ 0.2292 0.2259 0.2276 0.2259 0.2226  下载: 导出CSV
下载: 导出CSV
-
[1] Li Y P, Zhang L X, Cai B, Liang Y. Unified path planning for composite UAVs via Fermat point-based grouping particle swarm optimization. Aerospace Science and Technology, 2024, 148: Article No. 109088 doi: 10.1016/j.ast.2024.109088 [2] 褚跃. 复杂条件下子母式无人机子机系统路径规划研究 [硕士学位论文], 沈阳建筑大学, 中国, 2021.Chu Yue. Research on Path Planning of Sub-machine System of Child-mother UAV Under Complex Conditions [Master thesis], Shenyang Jianzhu University, China, 2021. [3] Zhao X D, Wang X Y, Zong G D, Zheng X L. Adaptive neural tracking control for switched high-order stochastic nonlinear systems. IEEE Transactions on Cybernetics, 2017, 47(10): 3088−3099 doi: 10.1109/TCYB.2017.2684218 [4] Liang Y, Zhu Y M, Yang J N, Zhang L X, Liu M. Tracking control of quadrotor with intermittent target measurements: A stochastic switched systems approach. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(5): 5302−5313 [5] Wang Z L, Wang Q, Dong C Y. Asynchronous H∞ control for unmanned aerial vehicles: Switched polytopic system approach. IEEE/CAA Journal of Automatica Sinica, 2015, 2(2): 207−216 doi: 10.1109/JAS.2015.7081660 [6] Wang Q, Gong L G, Dong C Y, Zhong K W. Morphing aircraft control based on switched nonlinear systems and adaptive dynamic programming. Aerospace Science and Technology, 2019, 93: Article No. 105325 doi: 10.1016/j.ast.2019.105325 [7] Chen J, Shi Z K. Flight controller design of transport airdrop. Chinese Journal of Aeronautics, 2011, 24(5): 600−606 doi: 10.1016/S1000-9361(11)60070-8 [8] Zhang L X, Liang Y, Li Y P, Lu S A, Yang J N. Switched control of fixed-wing aircraft for continuous airdrop of heavy payloads. Journal of Guidance, Control, and Dynamics, 2023, 46(9): 1826−1833 doi: 10.2514/1.G007398 [9] Han Y J, Liang Y, Zhang L X, Cai B, Li Y P, Li B. Bumpless transfer switched control of aircraft for heavy payload dropping missions. Aerospace Science and Technology, 2024, 148: Article No. 109067 doi: 10.1016/j.ast.2024.109067 [10] 李繁飙, 杨皓月, 王鸿鑫, 阳春华, 廖力清. 基于干扰估计的非对称运动下飞机刹车系统模型预测控制. 自动化学报, 2022, 48(7): 1690−1703Li Fan-Biao, Yang Hao-Yue, Wang Hong-Xin, Yang Chun-Hua, Liao Li-Qing. Model predictive control of aircraft braking system under asymmetric motion based on disturbance estimation. Acta Automatica Sinica, 2022, 48(7): 1690−1703 [11] Wu T, Zhu Y M, Zhang L X, Shi P. Bumpless transfer model predictive control for Markov jump linear systems. IEEE Transactions on Automatic Control, 2023, 69(2): 1348−1355 [12] 曹承钰, 李繁飙, 廖宇新, 殷泽阳, 桂卫华. 高超声速变外形飞行器建模与固定时间预设性能控制. 自动化学报, 2024, 50(3): 486−504Cao Cheng-Yu, Li Fan-Biao, Liao Yu-Xin, Yin Ze-Yang, Gui Wei-Hua. Modeling and fixed-time prescribed performance control for hypersonic morphing vehicle. Acta Automatica Sinica, 2024, 50(3): 486−504 [13] Drew H, Philipp F, Sun S, Elia K, Davide S. Performance, precision, and payloads: Adaptive nonlinear MPC for quadrotors. IEEE Robotics and Automation Letters, 2021, 7(2): 690−697 [14] Slegers N, Kyle J, Costello M. Nonlinear model predictive control technique for unmanned-air-vehicles. Journal of Guidance, Control, and Dynamics, 2006, 29(5): 1179−1188 doi: 10.2514/1.21531 [15] Eren U, Prach A, Koçer B B, Raković S V, Kayacan E, Açkmeşe B. Model predictive control in aerospace systems: Current state and opportunities. Journal of Guidance, Control, and Dynamics, 2017, 40(7): 1541−1566 doi: 10.2514/1.G002507 [16] Mathur A, Atkins E. Experimental aerodynamic analysis of a quadplane unmanned aircraft system. Journal of Aircraft, 2023, 60(4): 1323−1328 doi: 10.2514/1.C036916 [17] Hui Z, Kong Y N, Yao W G, Chen G. Aircraft parameter estimation using a stacked long short-term memory network and Levenberg-Marquardt method. Chinese Journal of Aeronautics, 2024, 37(2): 123−136 doi: 10.1016/j.cja.2023.09.002 [18] Halefom M H, Hopwood J W, Woolsey C A. Unsteady aerodynamics in model-based wind estimation from fixed-wing aircraft motion. Journal of Guidance, Control, and Dynamics, 2024, 47(8): 1556−1568 [19] Kang Y, Hedrick J K. Linear tracking for a fixed-wing UAV using nonlinear model predictive control. IEEE Transactions on Control Systems Technology, 2009, 17(5): 1202−1210 doi: 10.1109/TCST.2008.2004878 [20] Mammarella M, Capello E, Dabbene F. Sample-based SMPC for tracking control of fixed-wing UAV. IEEE Control Systems Letters, 2018, 2(4): 611−616 doi: 10.1109/LCSYS.2018.2845546 [21] Cao R, Liu Y B, Lu Y P. Robust multiple model predictive control for ascent trajectory tracking of aerospace vehicles. IEEE Transactions on Aerospace and Electronic Systems, 2021, 58(2): 1333−1351 [22] 曹煜琪, 付皓然, 高飞, 吕熙敏. 基于MPCC的鸭翼尾座式垂直起降无人机轨迹跟踪控制算法. 航空学报, 2023, 44(S2): 501−511Cao Yu-Qi, Fu Hao-Ran, Gao Fei, Lv Xi-Min. Trajectory tracking control algorithm for canardequipped tailsitting vertical takeoff and landing UAV based on MPCC. Acta Aeronautica et Astronautica Sinica, 2023, 44(S2): 501−511 [23] Beard R W, McLain T W. Small Unmanned Aircraft: Theory and Practice. Princeton: Princeton University Press, 2012. 165−173 [24] Liberzon D. Switching in Systems and Control. Boston: Birkhäuser, 2003. 17−72 [25] 史爽, 费中阳, 赵旭东. 基于时间依赖切换信号的切换系统稳定性分析研究进展. 信息与控制, 2021, 50(1): 34−42Shi Shuang, Fei Zhong-Yang, Zhao Xu-Dong. Advances on stability analysis for switched systems with time-dependent switching signals. Information and Control, 2021, 50(1): 34−42 [26] Veer S, Poulakakis I. Switched systems with multiple equilibria under disturbances: Boundedness and practical stability. IEEE Transactions on Automatic Control, 2019, 65(2): 2371−2386 [27] Nielsen F, Nock R. On the smallest enclosing information disk. Information Processing Letters, 2008, 105(3): 93−97 doi: 10.1016/j.ipl.2007.08.007 [28] Megiddo N. Linear-time algorithms for linear programming in R3 and related problems. SIAM Journal on Computing, 1983, 12(4): 759−776 doi: 10.1137/0212052 [29] Phillips K, Campa G, Gururajan S, Seanor B, Napolitano M, Gu Y, et al. Parameter identification for application within a fault-tolerant flight control system. In: Proceedings of the AIAA Atmospheric Flight Mechanics Conference. Chicago, USA: AIAA, 2009. 5723−5743 [30] Qi P Y, Li Q X, Wang Y N. Trim analysis and structured H-infinity control of wing-docked multibody aircraft. Journal of Guidance, Control, and Dynamics, 2024, 47(5): 964−978 doi: 10.2514/1.G007835 [31] Erturk S A, Dogan A. Trim analyses of mass-actuated airplane in cruise and steady-state turn. Journal of Aircraft, 2017, 54(4): 1587−1594 doi: 10.2514/1.C034200 -

 下载:
下载:


图(8) / 表(1)
计量
- 文章访问数: 5281
- HTML全文浏览量: 577
- PDF下载量: 291
- 被引次数: 0
