2024年 第50卷 第5期
2024, 50(5): 873-897.
doi: 10.16383/j.aas.c230149
cstr: 32138.14.j.aas.c230149
摘要:
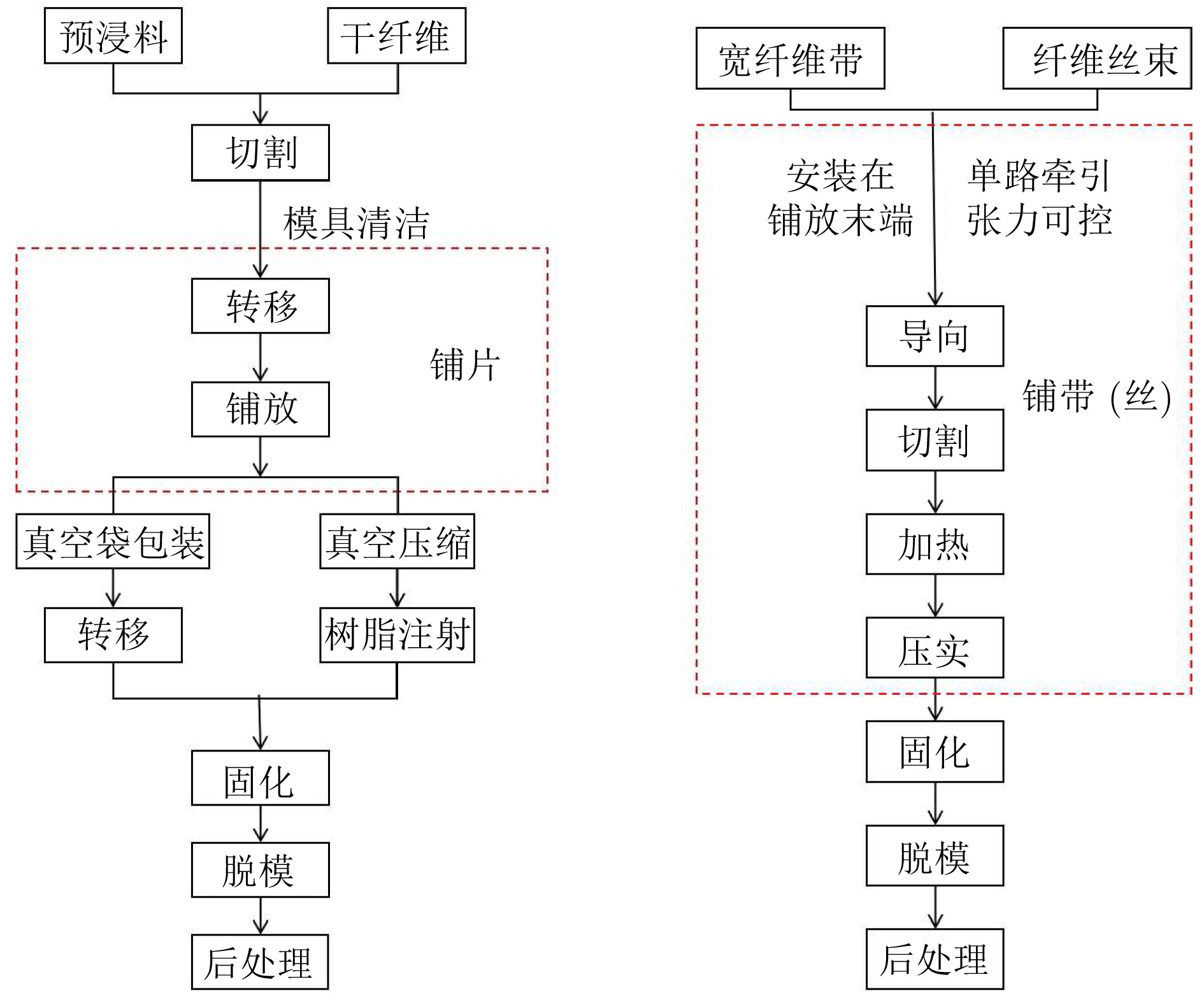
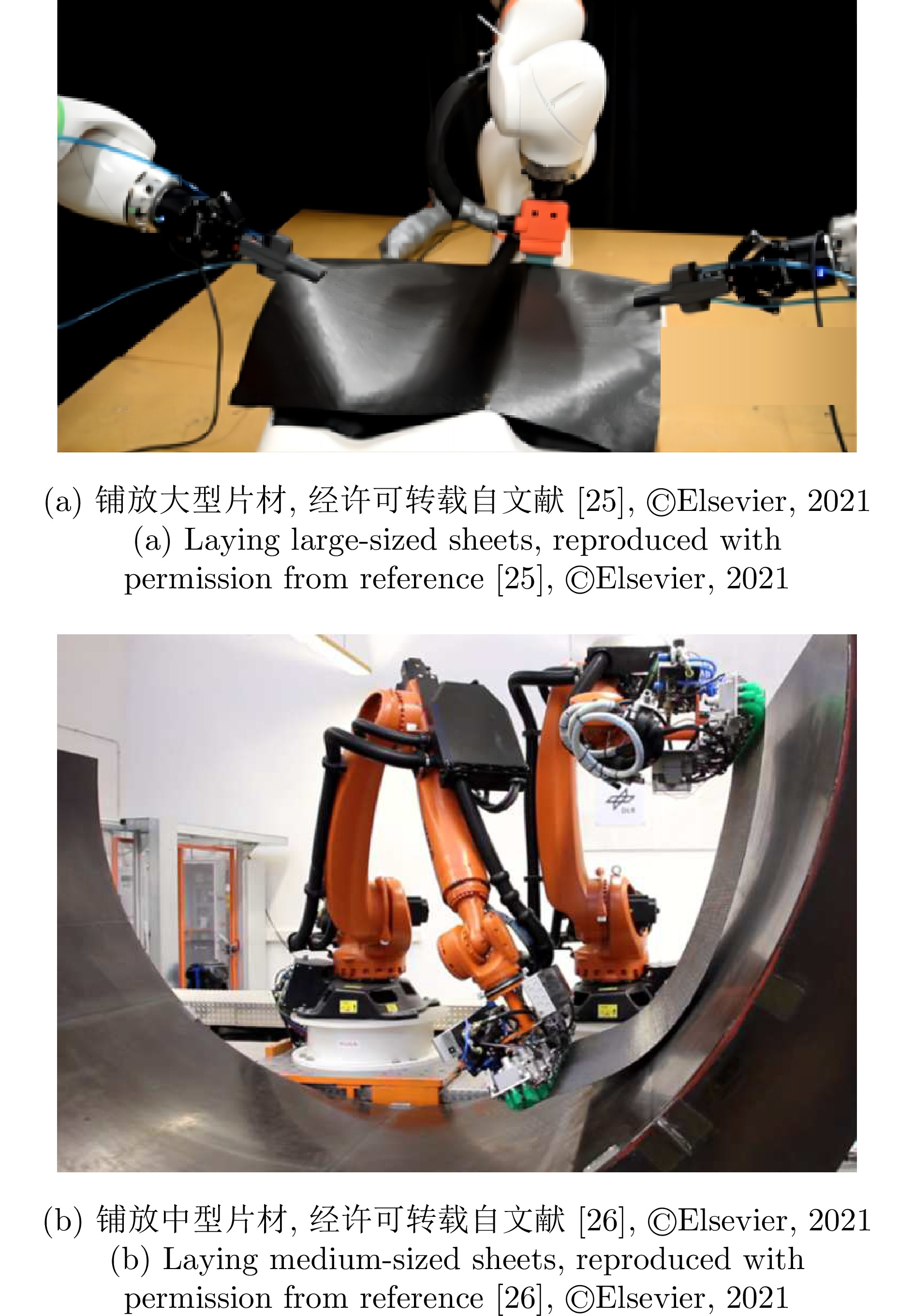
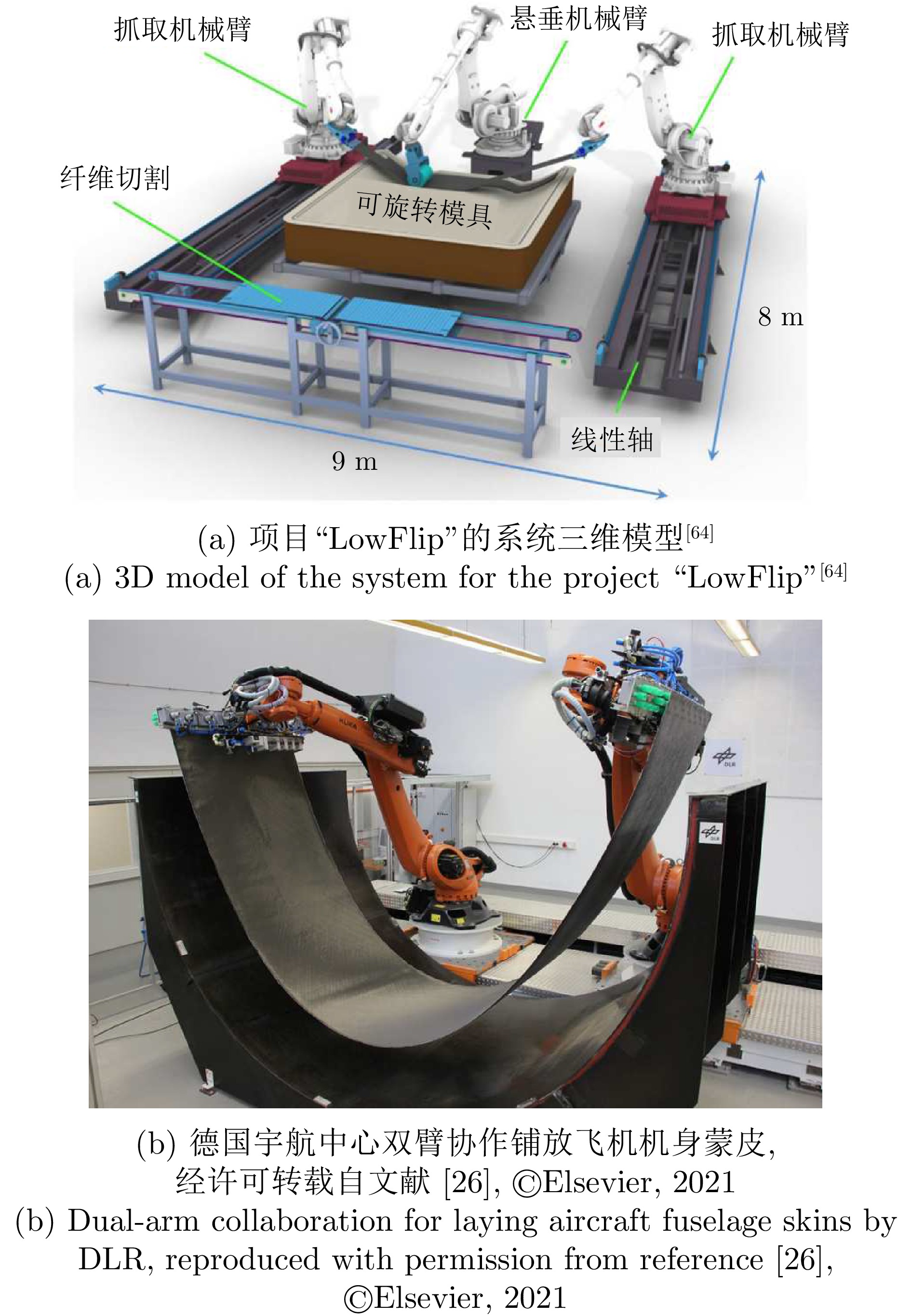
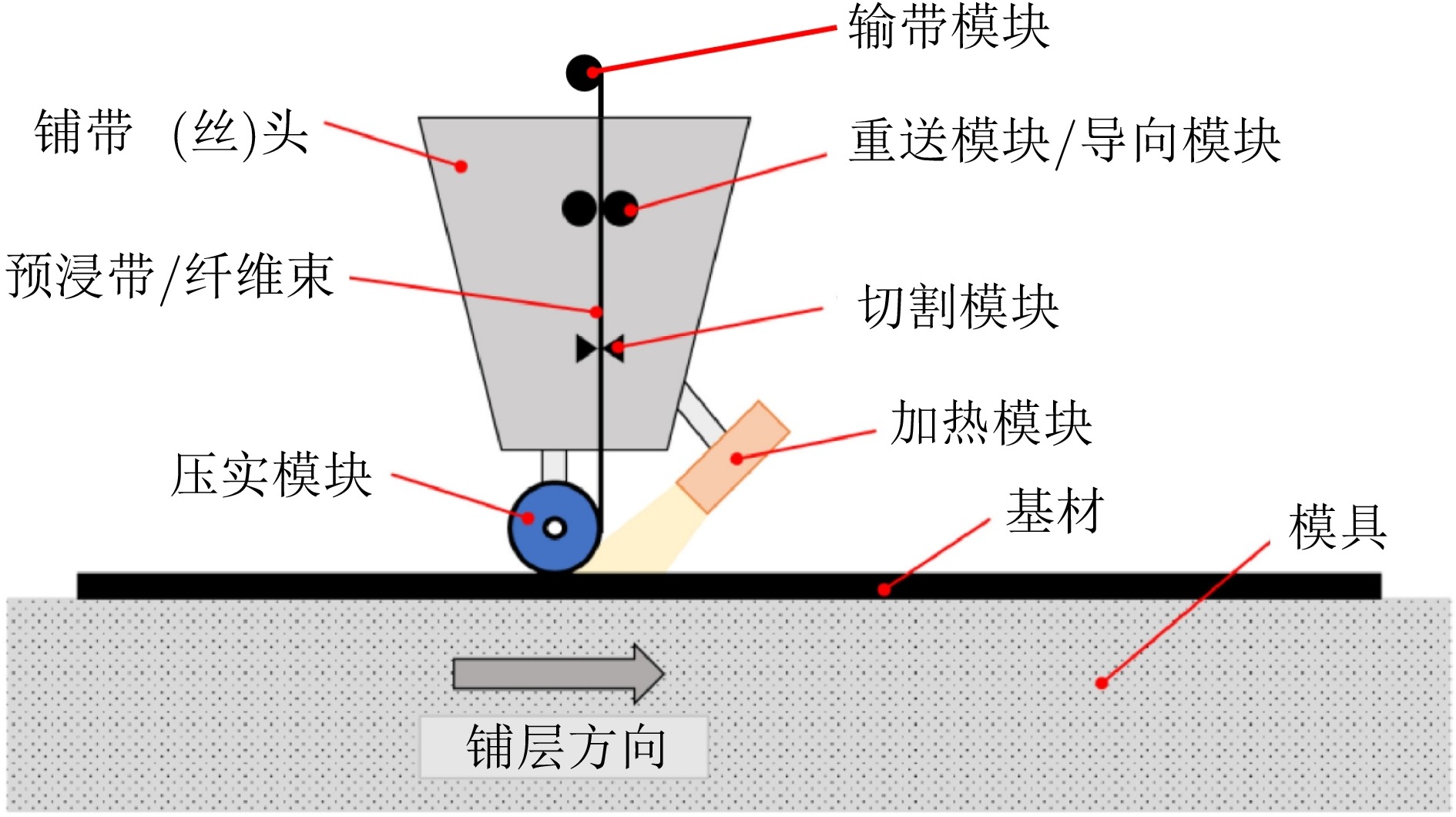
碳纤维增强复合材料(Carbon fiber-reinforced composite, CFRC)因具有轻质高强、耐腐蚀、耐冲击等优越性能, 在生产生活中的应用已越来越广泛, 然而复材产品的生产制造仍是劳动密集性产业, 主要依靠人工. 机械臂自上世纪50年代进入工业生产中以来, 极大提高了生产效率和质量, 然而目前机械臂在复材产品制造中的应用是少见的, 主要集中在机械臂形式的自动铺丝(Automated fiber placement, AFP)中. 复材产品制造工艺繁琐, 将复合材料铺放在模具上是复材产品制造过程中的一个重要环节, 本文称之为“铺层”, 使用机械臂完成复合材料自动铺层将是未来复材产品制造自动化、智能化发展的一个关键方向. 本文将机械臂进行复合材料自动铺层操作分为两种主要形式: 铺片和铺带(丝), 通过案例调研和分析, 归纳总结现有的设计理念和技术方法, 提出未来发展趋势, 以期对机械臂的应用和研究、复材产品的智能化制造和工业4.0的发展形成参考.
碳纤维增强复合材料(Carbon fiber-reinforced composite, CFRC)因具有轻质高强、耐腐蚀、耐冲击等优越性能, 在生产生活中的应用已越来越广泛, 然而复材产品的生产制造仍是劳动密集性产业, 主要依靠人工. 机械臂自上世纪50年代进入工业生产中以来, 极大提高了生产效率和质量, 然而目前机械臂在复材产品制造中的应用是少见的, 主要集中在机械臂形式的自动铺丝(Automated fiber placement, AFP)中. 复材产品制造工艺繁琐, 将复合材料铺放在模具上是复材产品制造过程中的一个重要环节, 本文称之为“铺层”, 使用机械臂完成复合材料自动铺层将是未来复材产品制造自动化、智能化发展的一个关键方向. 本文将机械臂进行复合材料自动铺层操作分为两种主要形式: 铺片和铺带(丝), 通过案例调研和分析, 归纳总结现有的设计理念和技术方法, 提出未来发展趋势, 以期对机械臂的应用和研究、复材产品的智能化制造和工业4.0的发展形成参考.




2024, 50(5): 898-910.
doi: 10.16383/j.aas.c230288
cstr: 32138.14.j.aas.c230288
摘要:
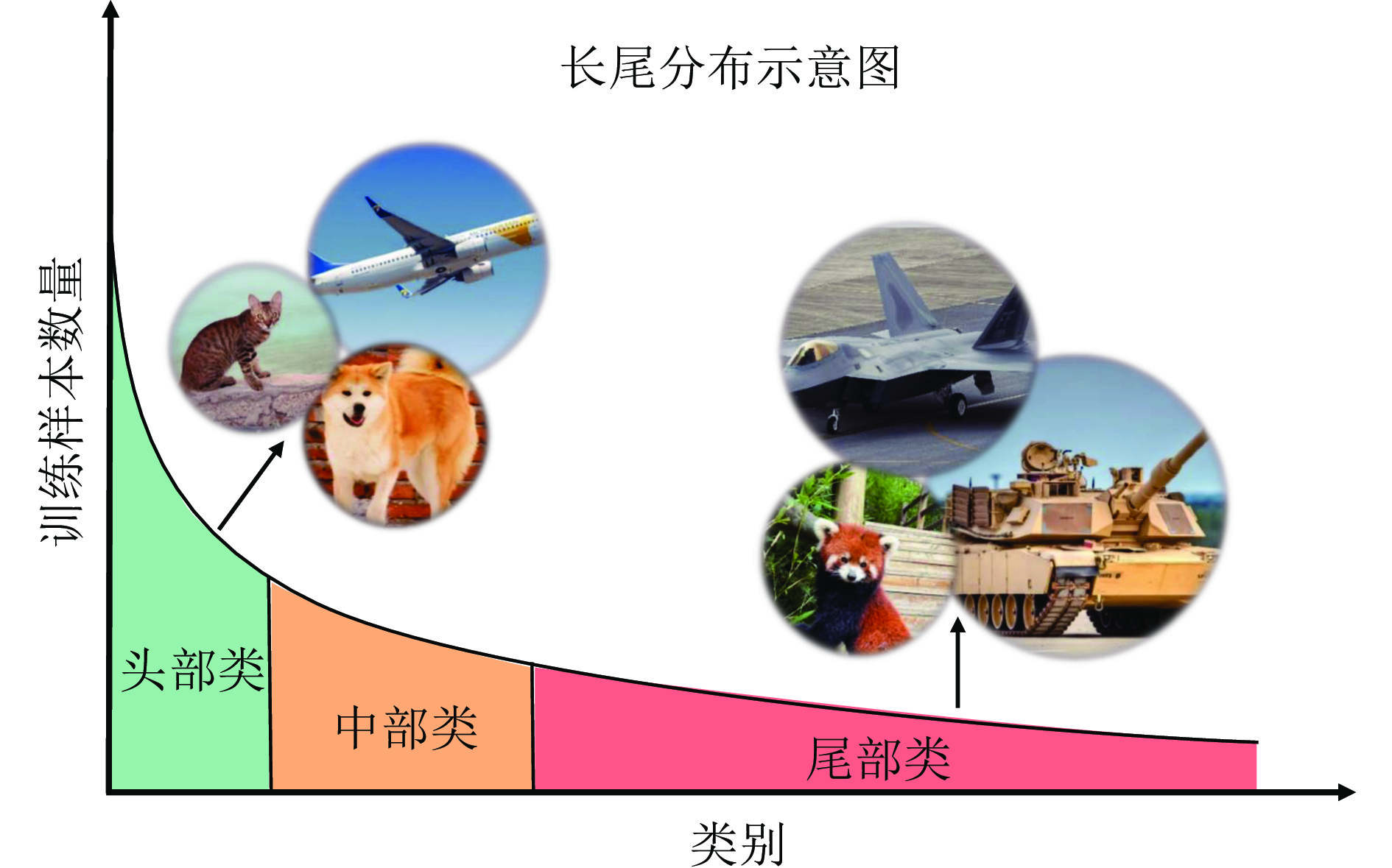
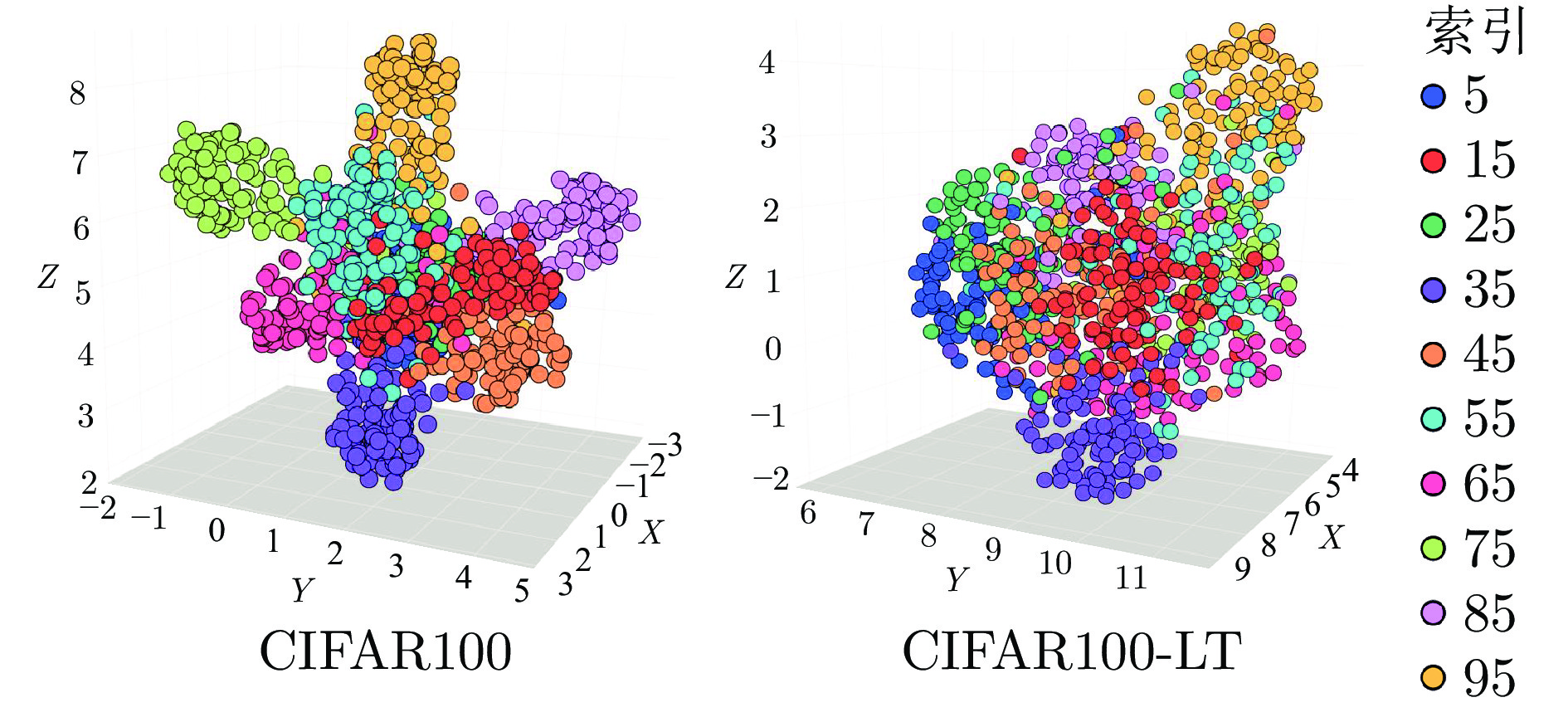
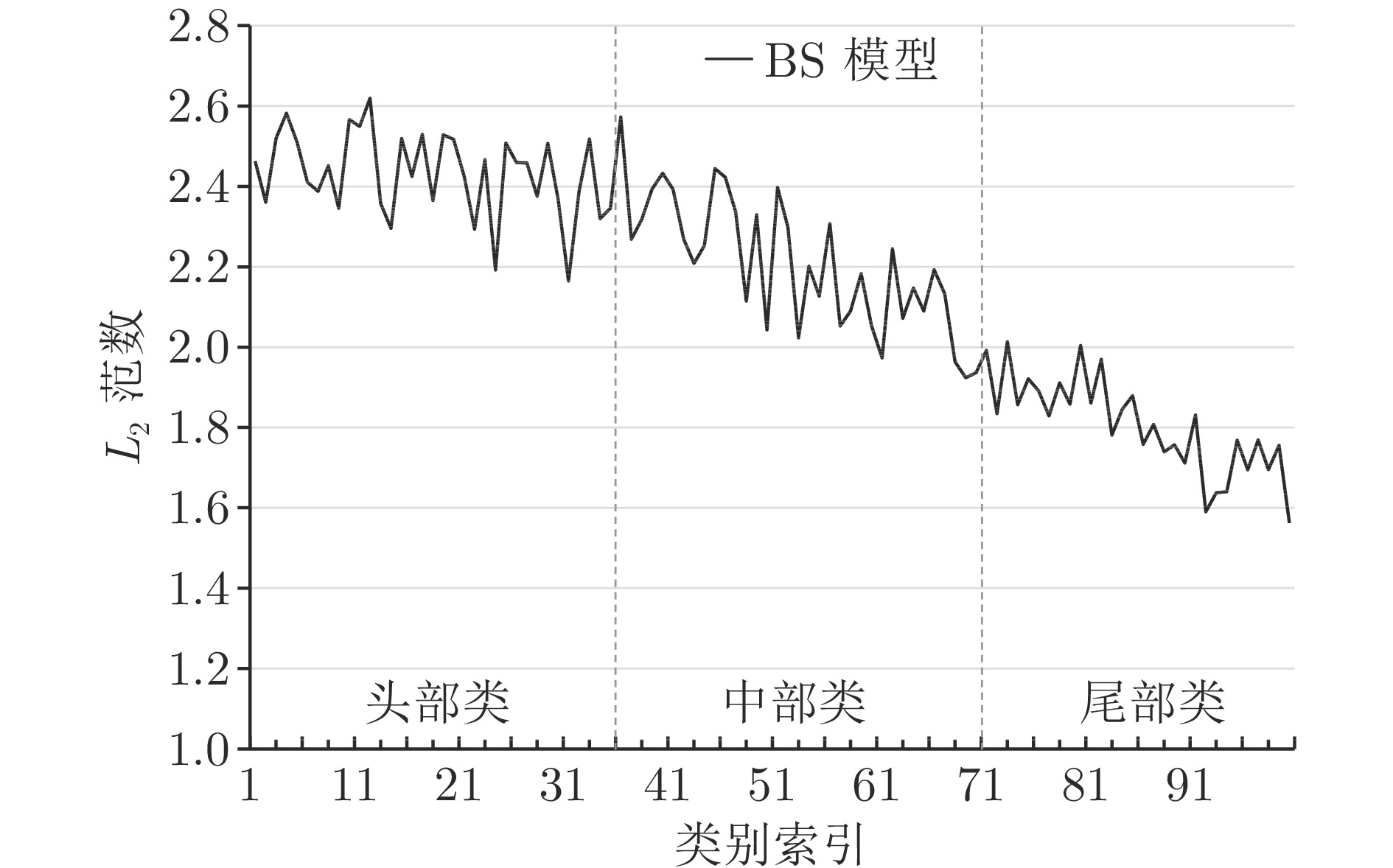
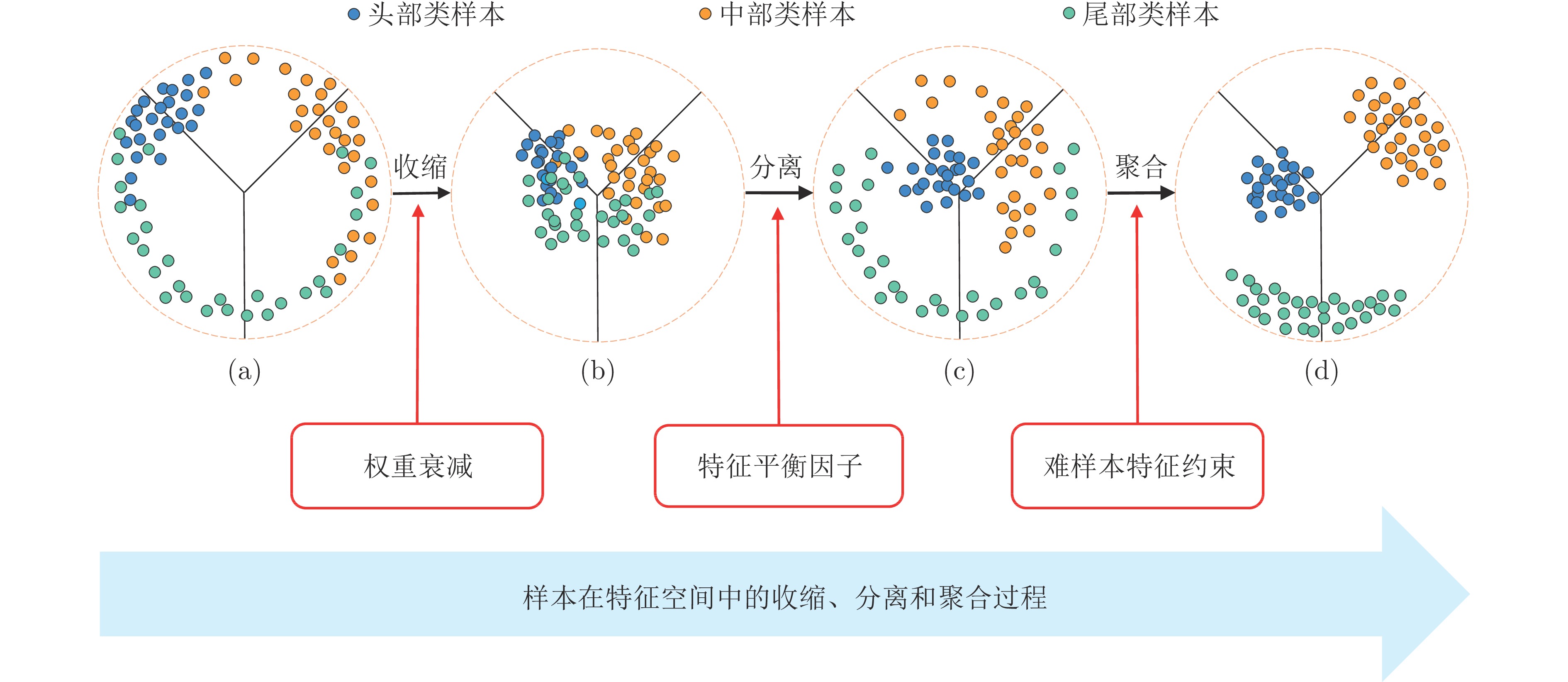
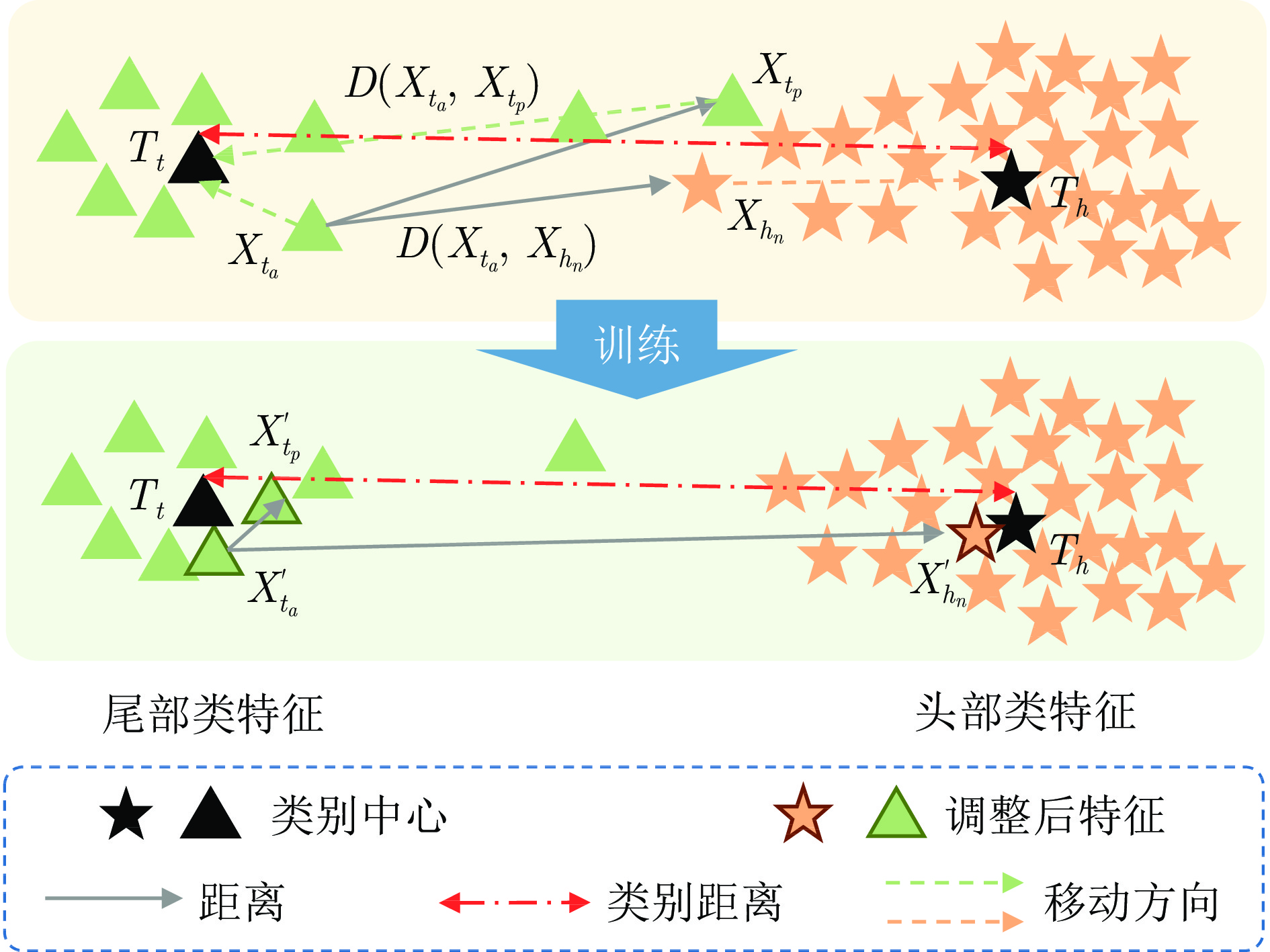
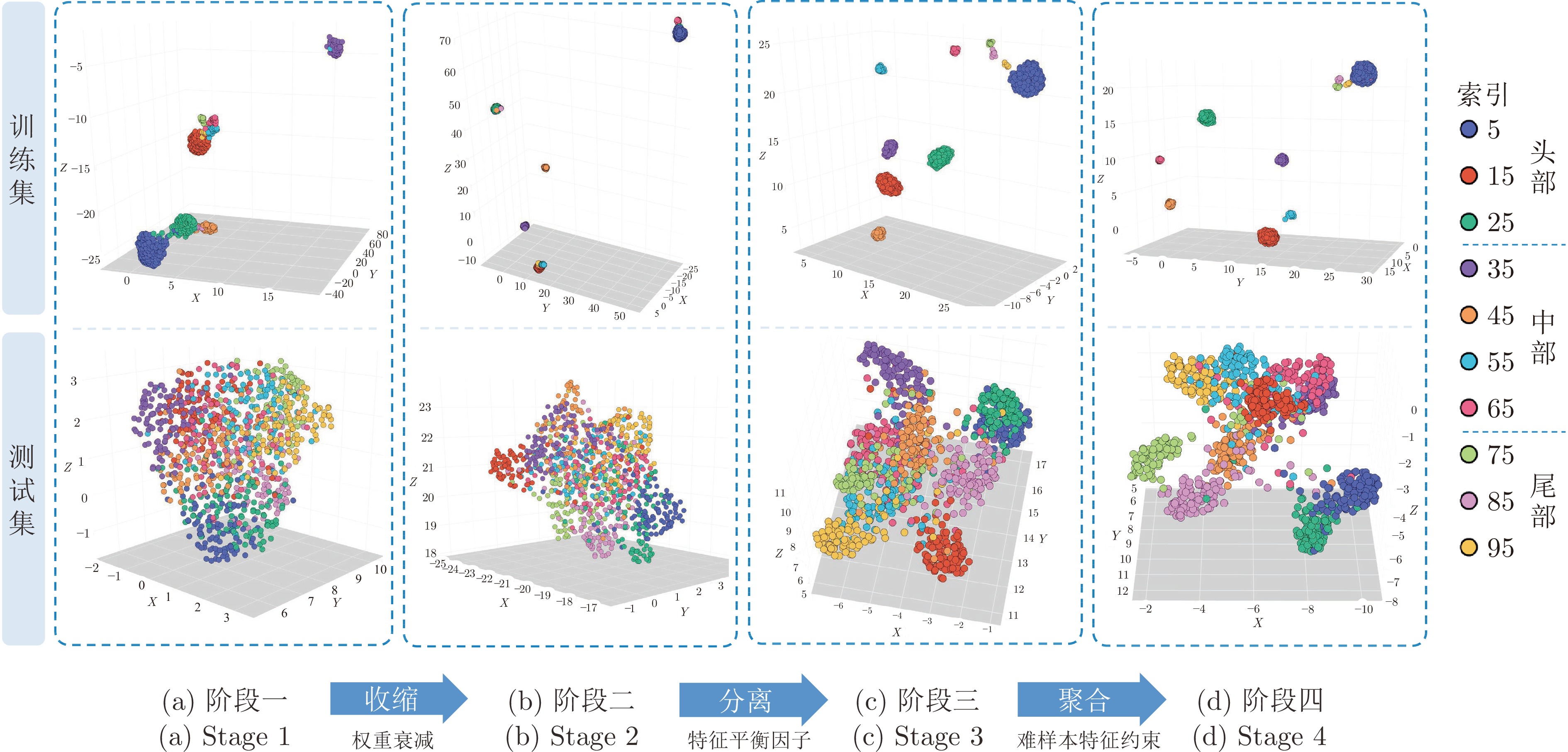
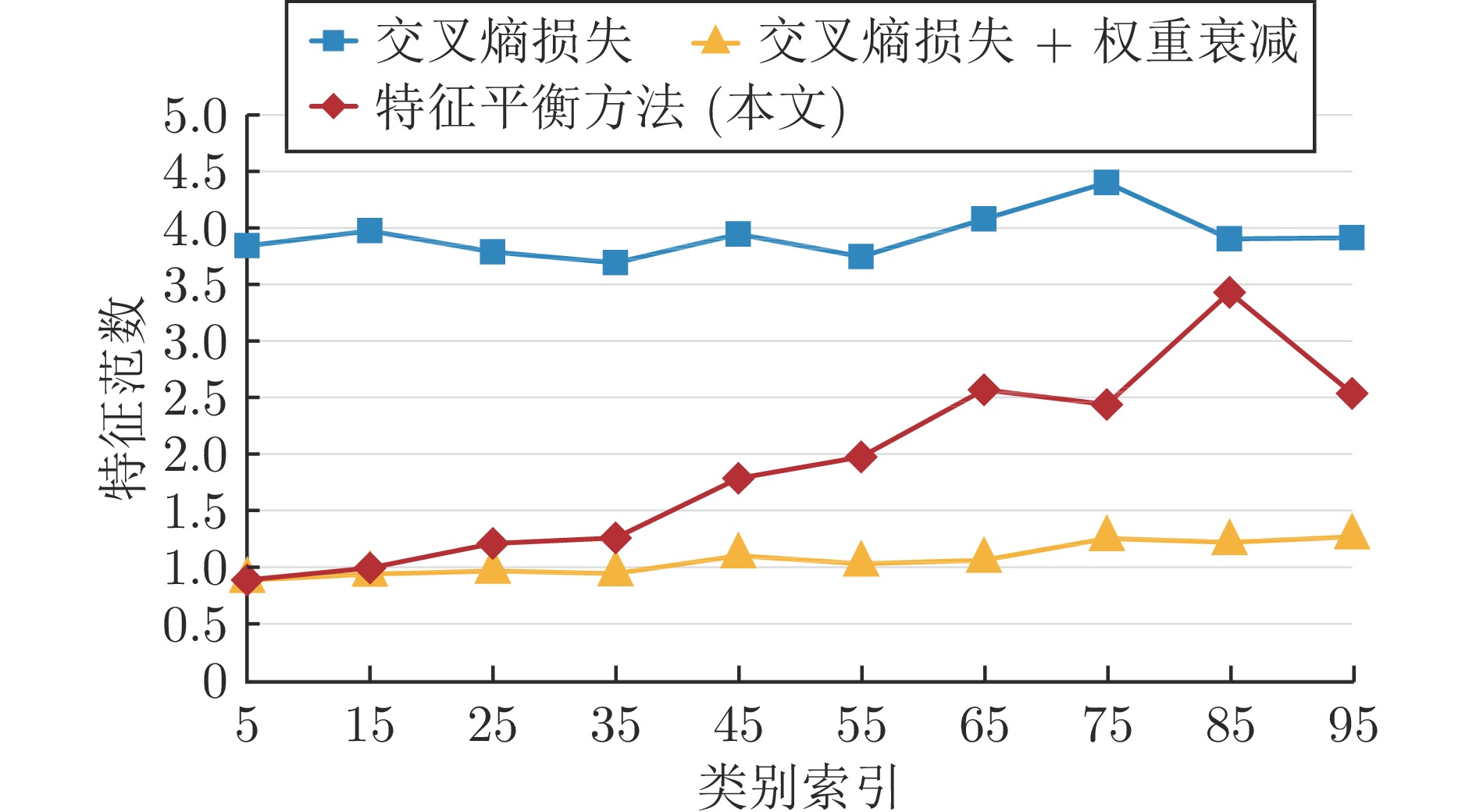
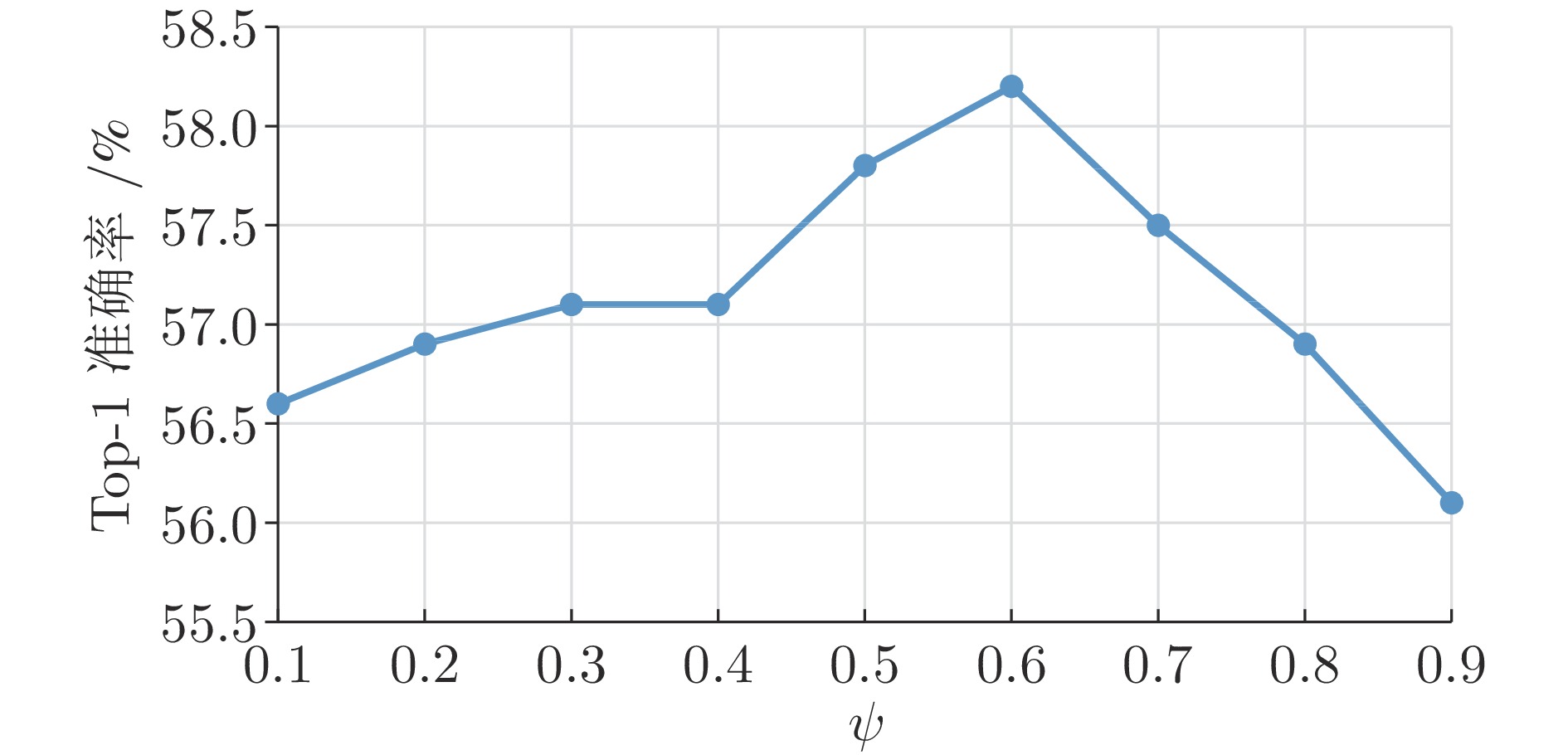
数据在现实世界中通常呈现长尾分布, 即, 少数类别拥有大量样本, 而多数类别仅有少量样本. 这种数据不均衡的情况会导致在该数据集上训练的模型对于样本数量较少的尾部类别产生过拟合. 面对长尾视觉识别这一任务, 提出一种面向长尾视觉识别的特征平衡方法, 通过对样本在特征空间中的收缩、分离和聚合操作, 增强模型对于难样本的识别能力. 该方法主要由特征平衡因子和难样本特征约束两个模块组成. 特征平衡因子利用类样本数量来调整模型的输出概率分布, 使得不同类别之间的特征距离更加均衡, 从而提高模型的分类准确率. 难样本特征约束通过对样本特征进行聚类分析, 增加不同类别之间的边界距离, 使得模型能够找到更合理的决策边界. 该方法在多个常用的长尾基准数据集上进行实验验证, 结果表明不但提高了模型在长尾数据上的整体分类精度, 而且显著提升了尾部类别的识别性能. 与基准方法BS相比较, 该方法在CIFAR100-LT、ImageNet-LT和iNaturalist 2018数据集上的性能分别提升了7.40%、6.60%和2.89%.
数据在现实世界中通常呈现长尾分布, 即, 少数类别拥有大量样本, 而多数类别仅有少量样本. 这种数据不均衡的情况会导致在该数据集上训练的模型对于样本数量较少的尾部类别产生过拟合. 面对长尾视觉识别这一任务, 提出一种面向长尾视觉识别的特征平衡方法, 通过对样本在特征空间中的收缩、分离和聚合操作, 增强模型对于难样本的识别能力. 该方法主要由特征平衡因子和难样本特征约束两个模块组成. 特征平衡因子利用类样本数量来调整模型的输出概率分布, 使得不同类别之间的特征距离更加均衡, 从而提高模型的分类准确率. 难样本特征约束通过对样本特征进行聚类分析, 增加不同类别之间的边界距离, 使得模型能够找到更合理的决策边界. 该方法在多个常用的长尾基准数据集上进行实验验证, 结果表明不但提高了模型在长尾数据上的整体分类精度, 而且显著提升了尾部类别的识别性能. 与基准方法BS相比较, 该方法在CIFAR100-LT、ImageNet-LT和iNaturalist 2018数据集上的性能分别提升了7.40%、6.60%和2.89%.
2024, 50(5): 911-923.
doi: 10.16383/j.aas.c220988
cstr: 32138.14.j.aas.c220988
摘要:
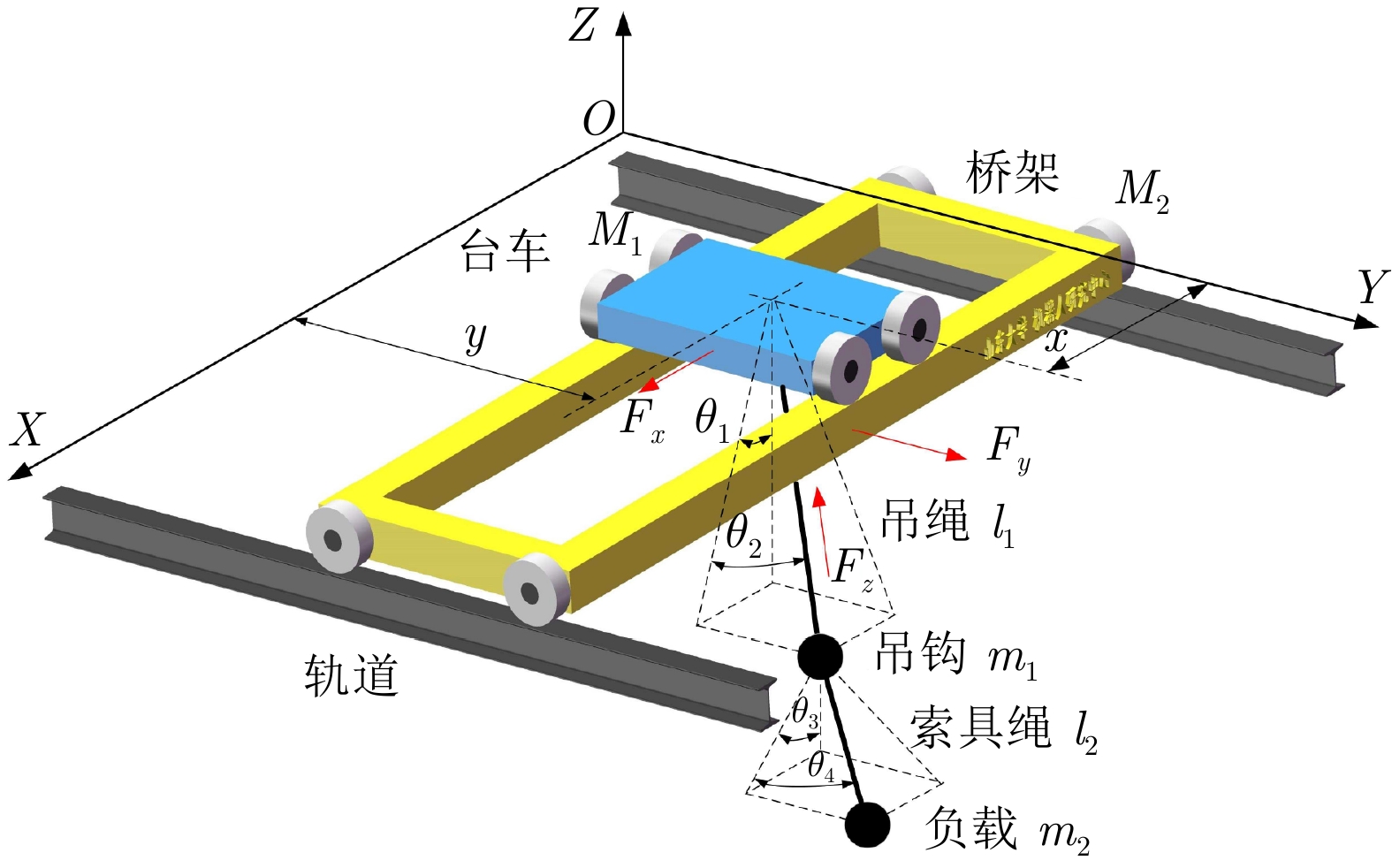
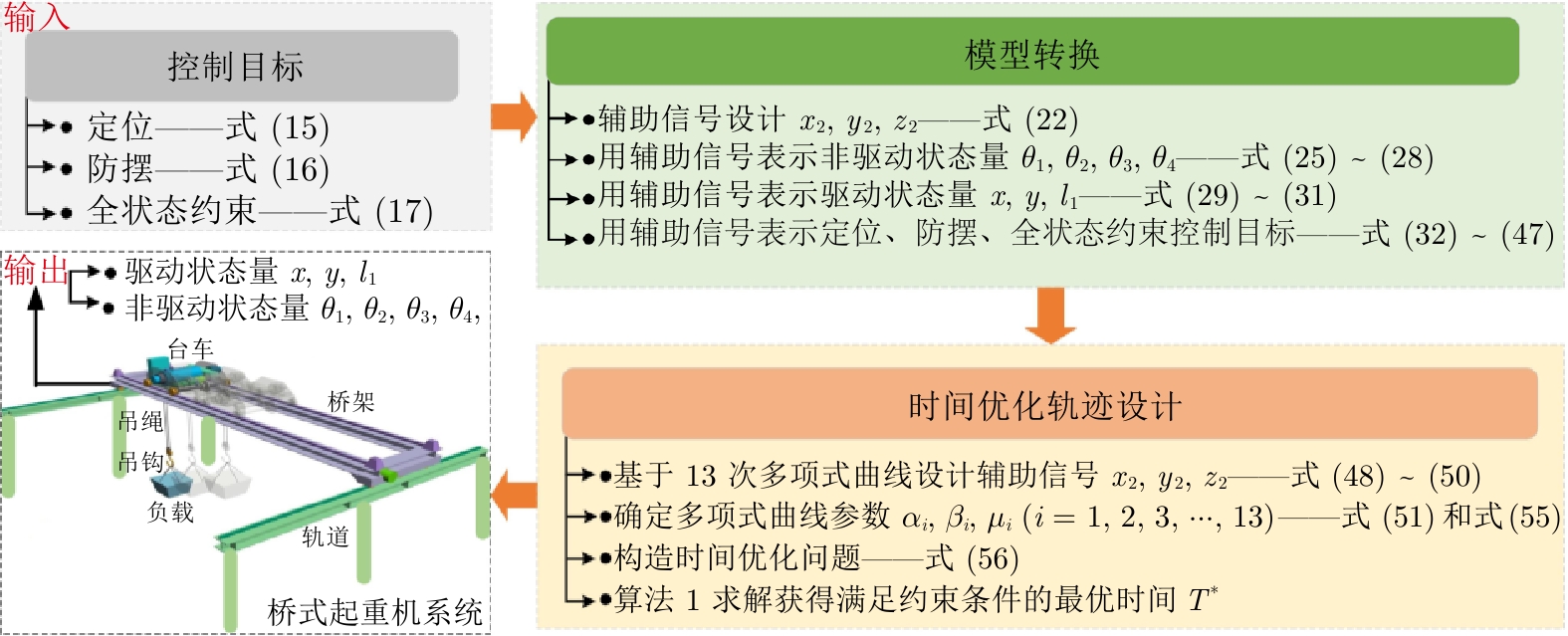
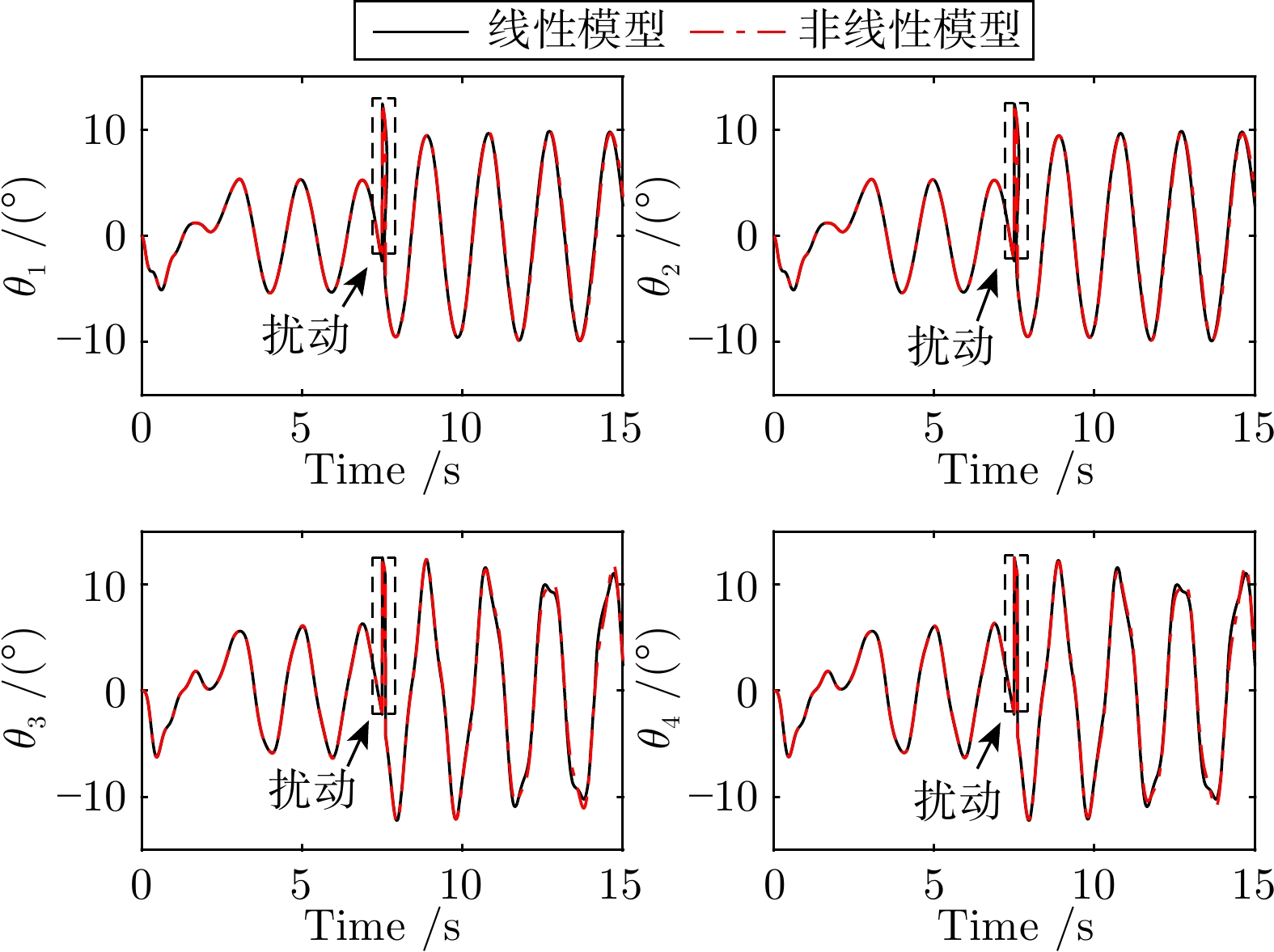
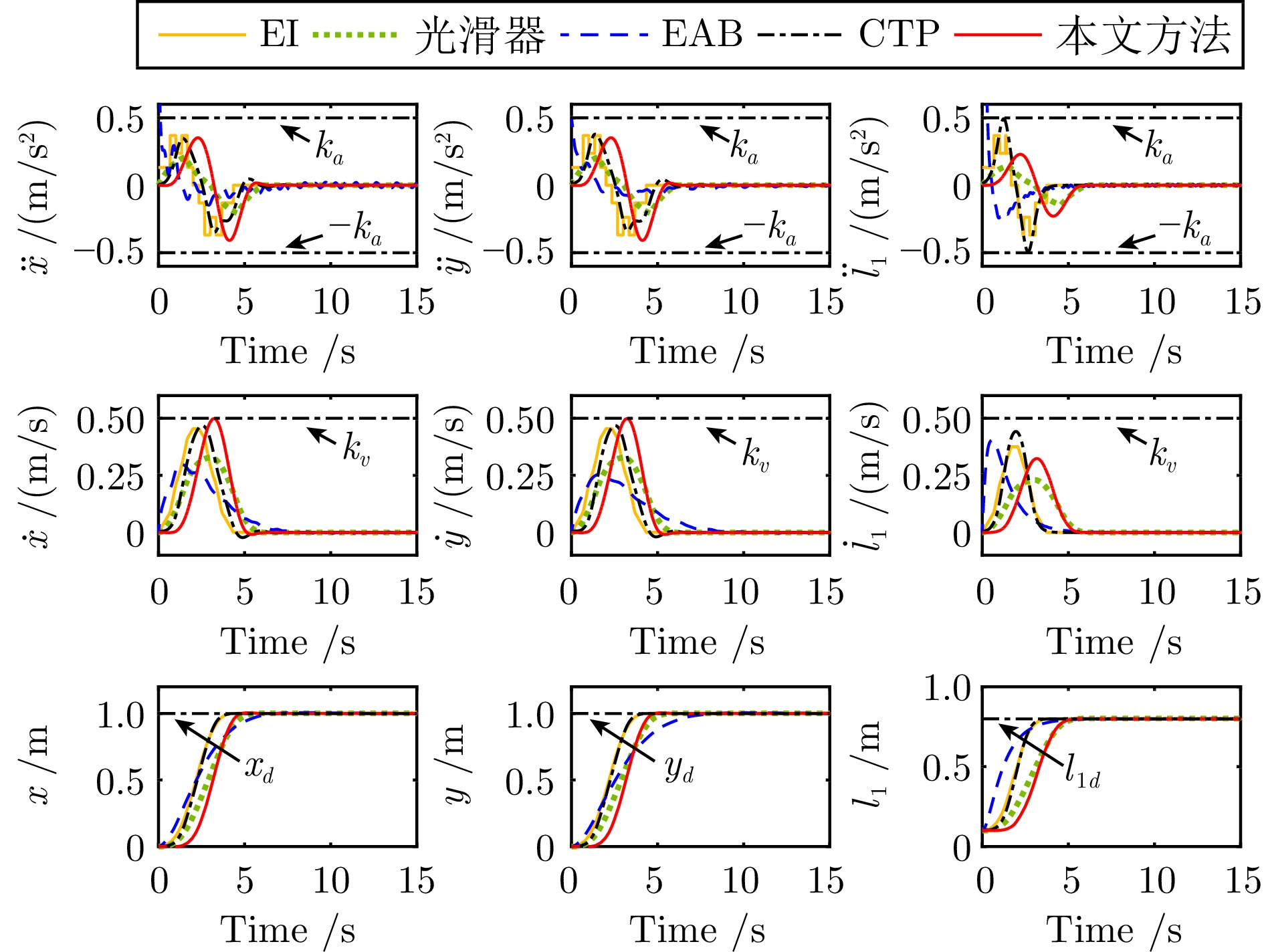
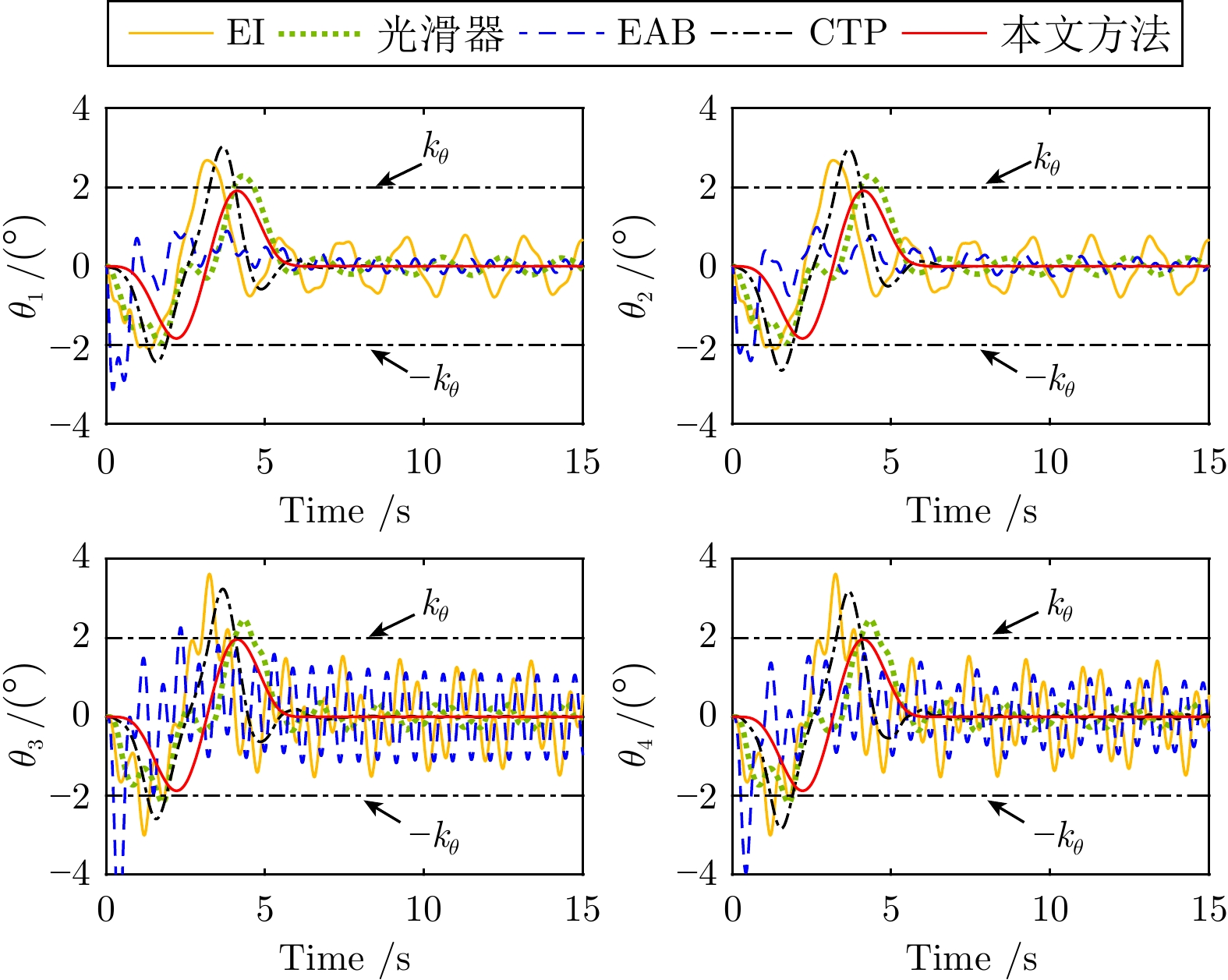
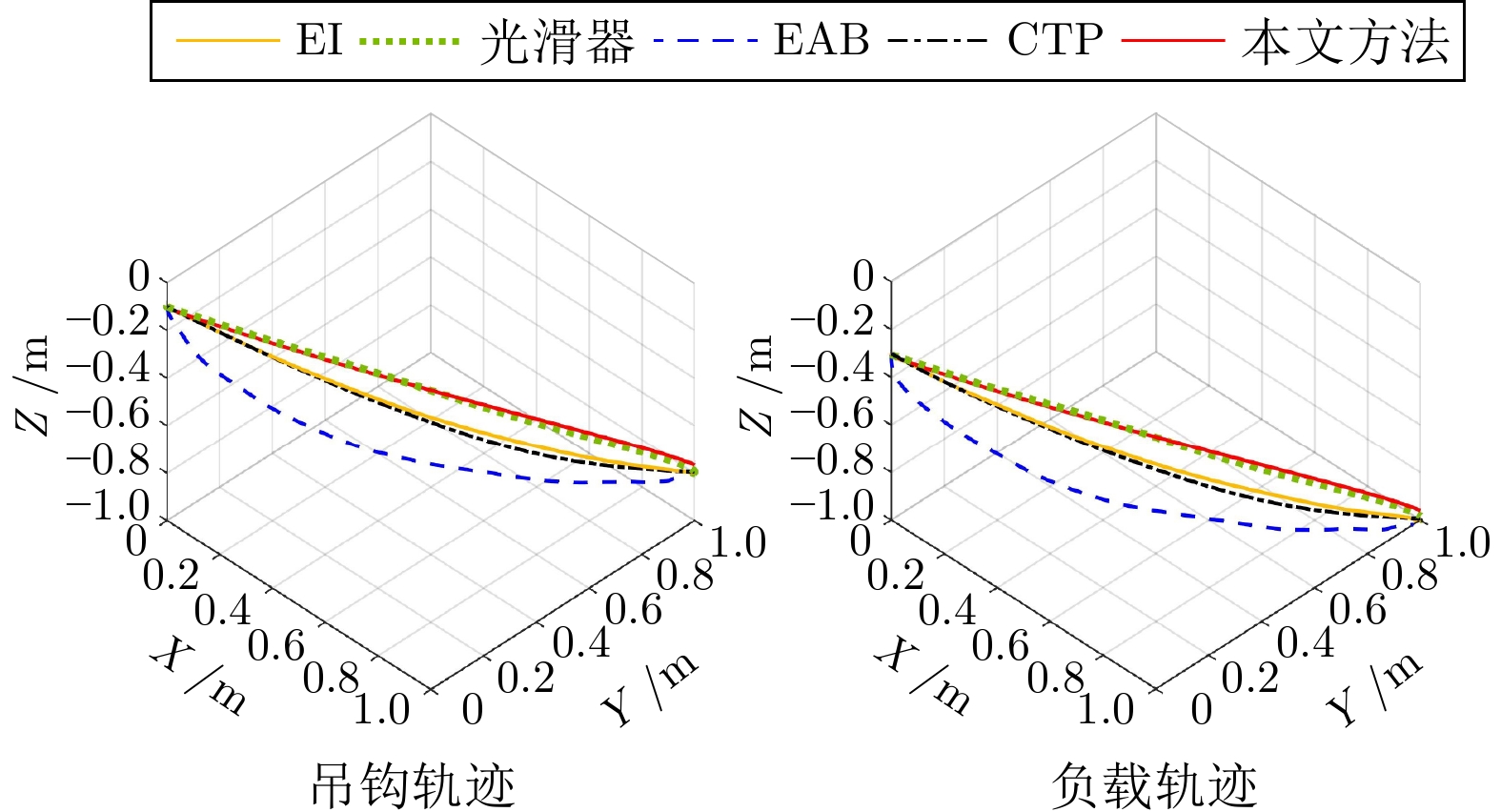
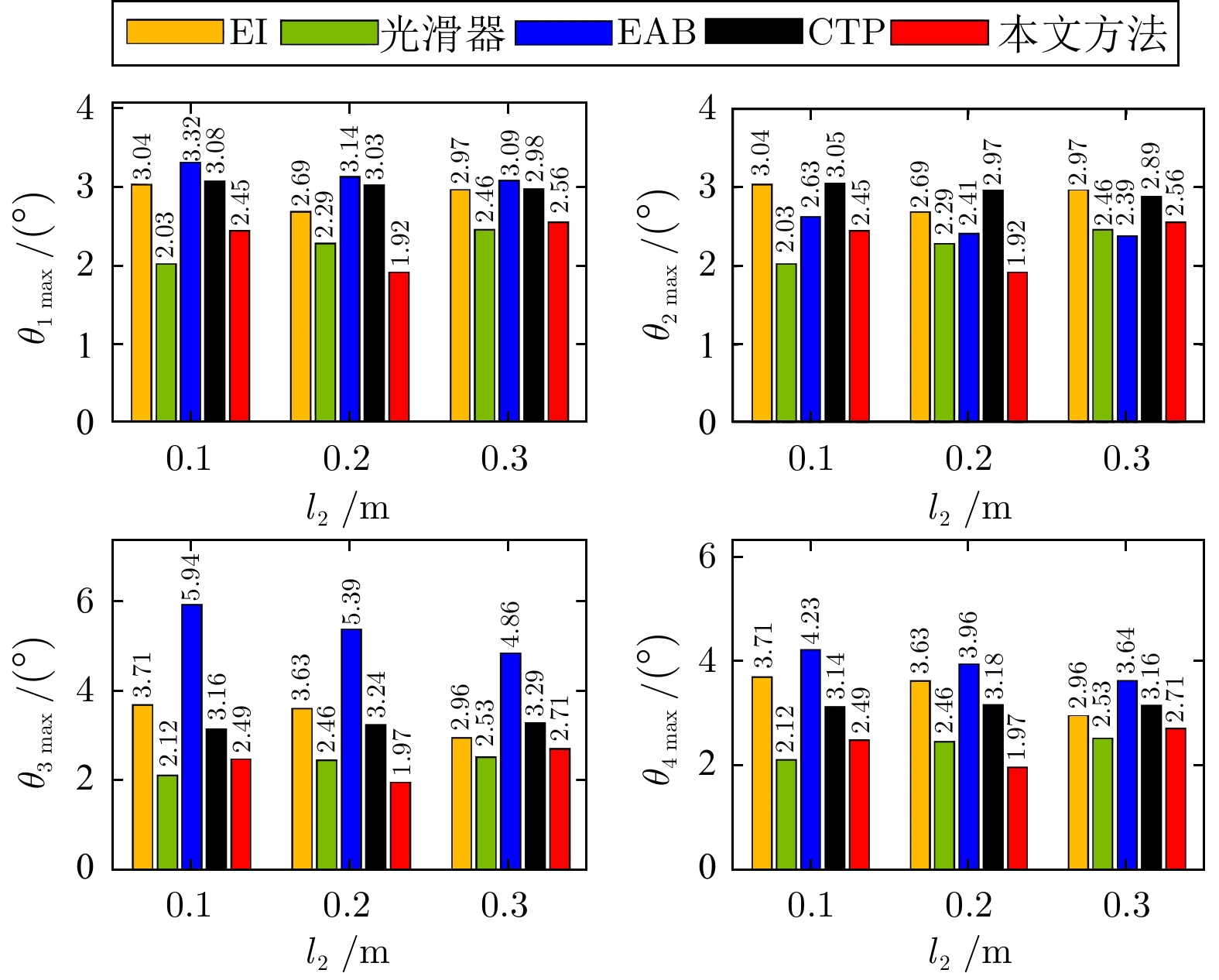
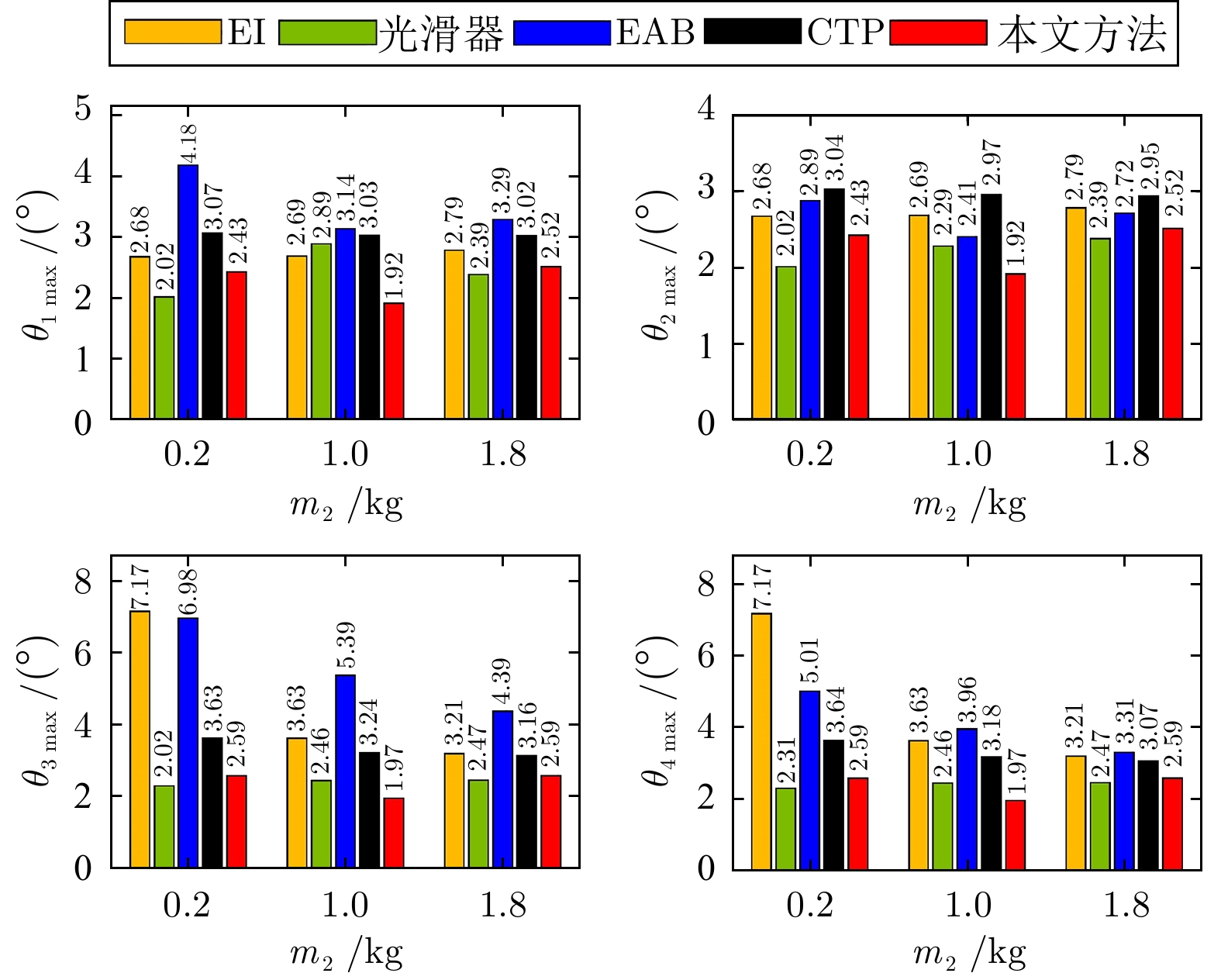
带有双球面摆和变绳长效应的桥式起重机具有多输入多输出以及欠驱动的动力学特性, 目前仍缺乏有效的控制策略. 在台车移动、桥架移动、负载升降同步作业过程中, 吊钩和负载两级球面摆动特性更为复杂, 各状态量之间的非线性耦合关系更强, 桥式起重机的防摆控制更具挑战性. 不仅如此, 现有方法无法保证桥式起重机系统全状态量的暂态控制性能. 为解决上述问题, 提出一种基于多项式的优化轨迹规划方法. 首先, 在未进行近似简化的前提下, 使用拉格朗日方法建立带有双球面摆和变绳长效应的7自由度 (Seven degree-of-freedom, 7-DOF) 桥式起重机的精确动力学模型. 在此基础上, 构造一组包含各状态量的辅助信号, 将施加在台车、桥架、绳长以及吊钩、负载摆动上的约束转化为对辅助信号的约束, 从而将桥式起重机的轨迹规划问题转化为与辅助信号相关的时间优化问题, 并使用二分法求解. 该轨迹规划方法不仅缩短了吊运时间, 而且确保了全状态量满足约束条件. 最后, 仿真结果证明了动力学模型的准确性和轨迹规划方法的有效性.
带有双球面摆和变绳长效应的桥式起重机具有多输入多输出以及欠驱动的动力学特性, 目前仍缺乏有效的控制策略. 在台车移动、桥架移动、负载升降同步作业过程中, 吊钩和负载两级球面摆动特性更为复杂, 各状态量之间的非线性耦合关系更强, 桥式起重机的防摆控制更具挑战性. 不仅如此, 现有方法无法保证桥式起重机系统全状态量的暂态控制性能. 为解决上述问题, 提出一种基于多项式的优化轨迹规划方法. 首先, 在未进行近似简化的前提下, 使用拉格朗日方法建立带有双球面摆和变绳长效应的7自由度 (Seven degree-of-freedom, 7-DOF) 桥式起重机的精确动力学模型. 在此基础上, 构造一组包含各状态量的辅助信号, 将施加在台车、桥架、绳长以及吊钩、负载摆动上的约束转化为对辅助信号的约束, 从而将桥式起重机的轨迹规划问题转化为与辅助信号相关的时间优化问题, 并使用二分法求解. 该轨迹规划方法不仅缩短了吊运时间, 而且确保了全状态量满足约束条件. 最后, 仿真结果证明了动力学模型的准确性和轨迹规划方法的有效性.
2024, 50(5): 924-936.
doi: 10.16383/j.aas.c230766
cstr: 32138.14.j.aas.c230766
摘要:
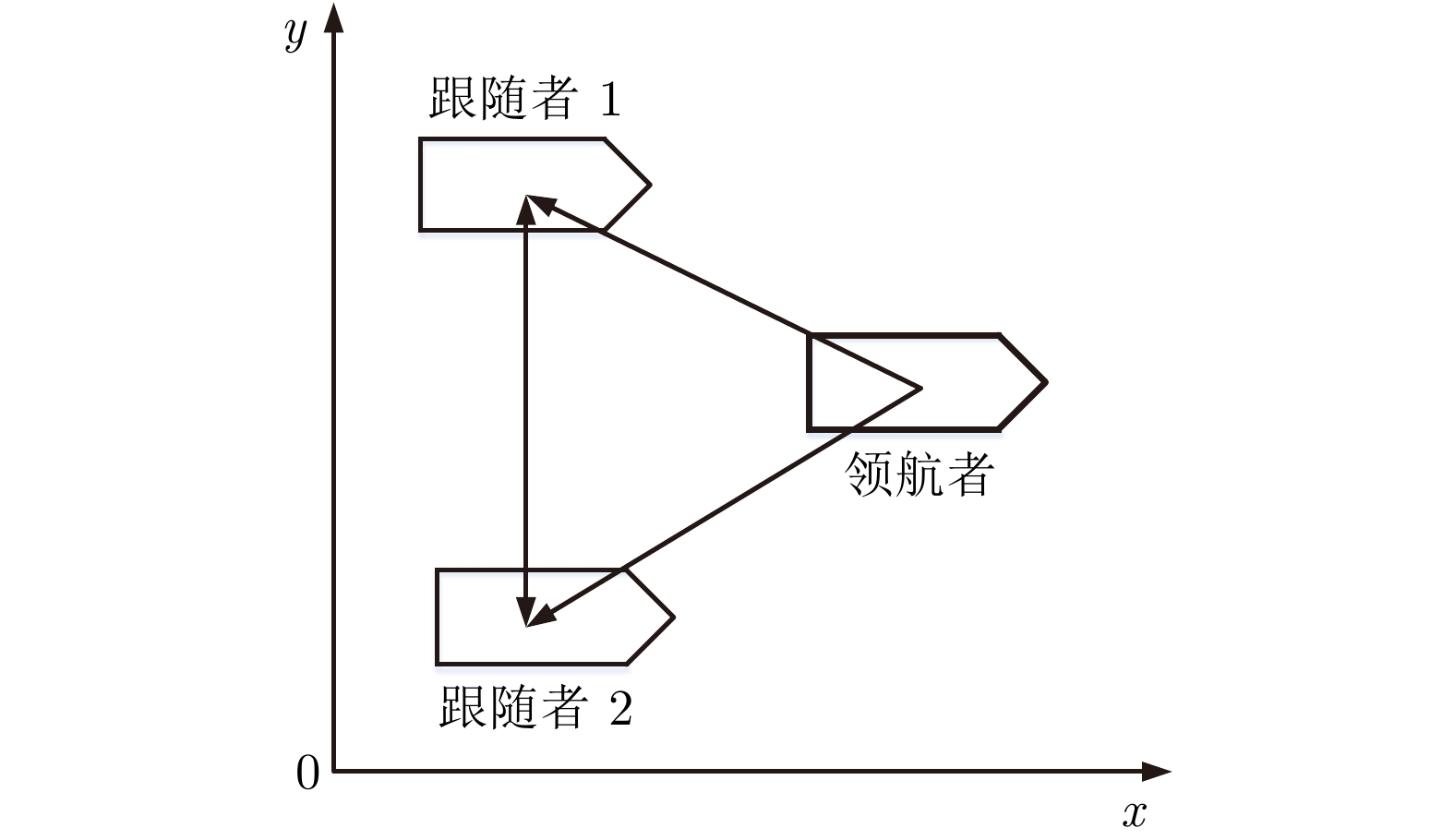
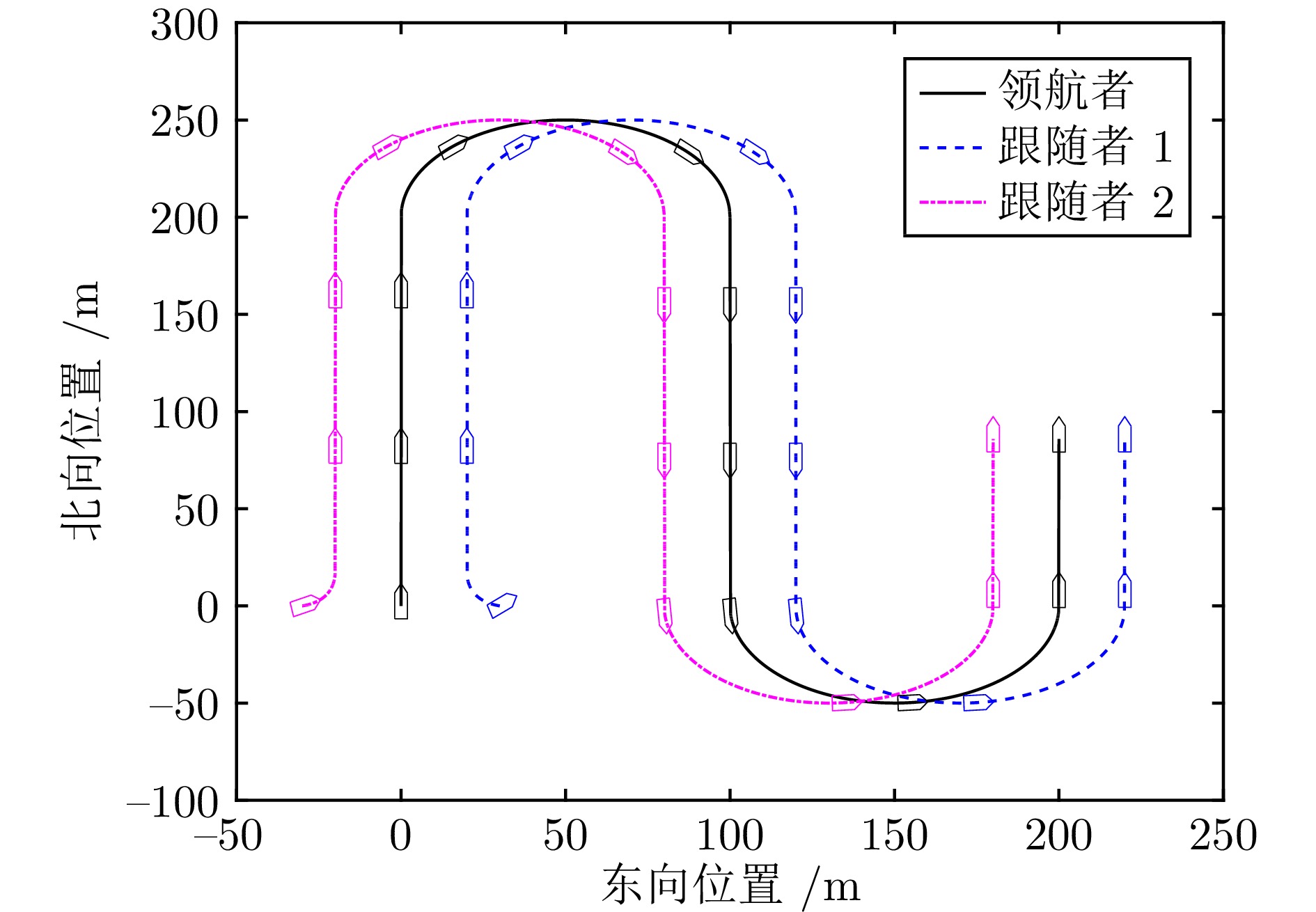
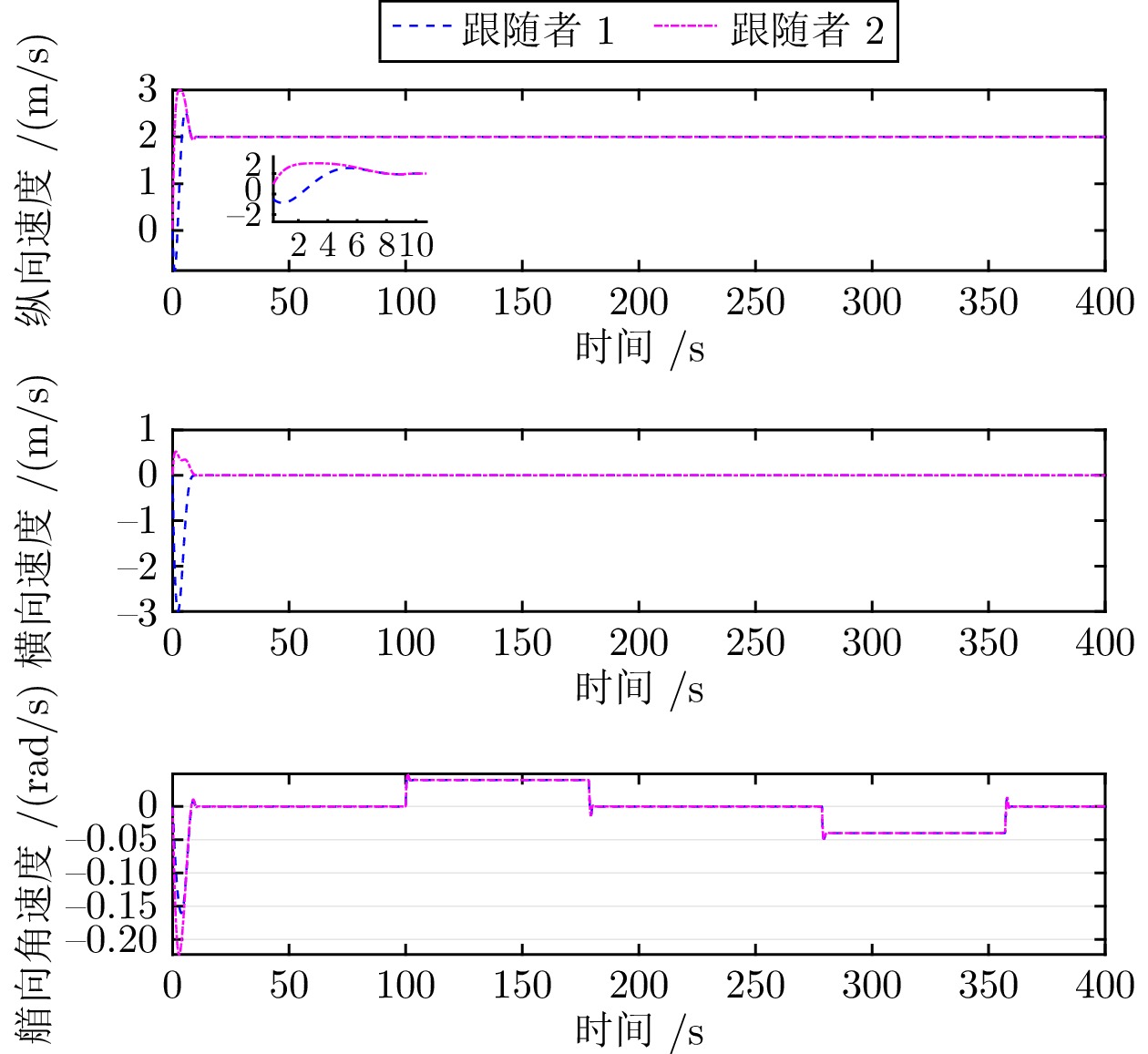
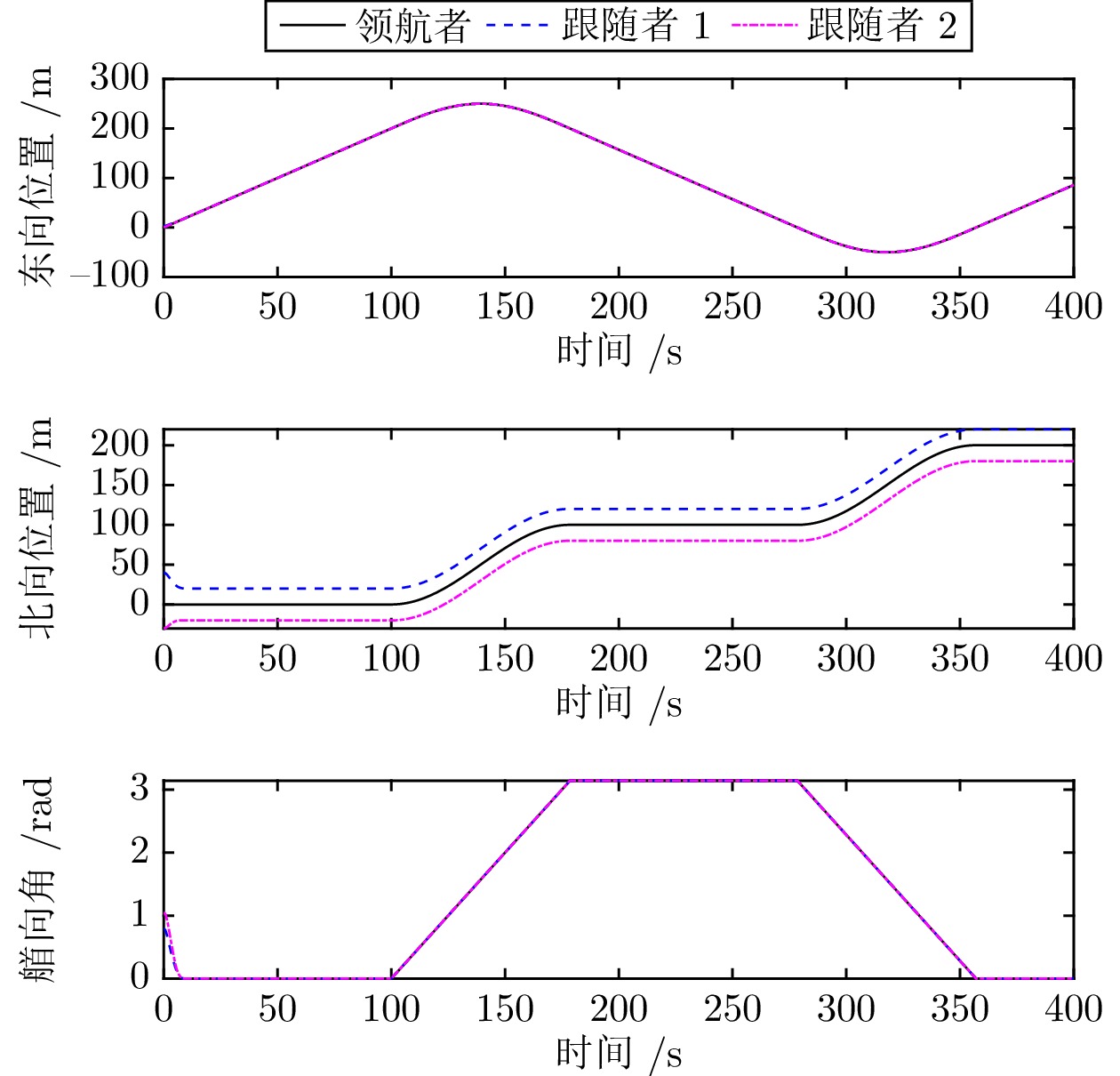
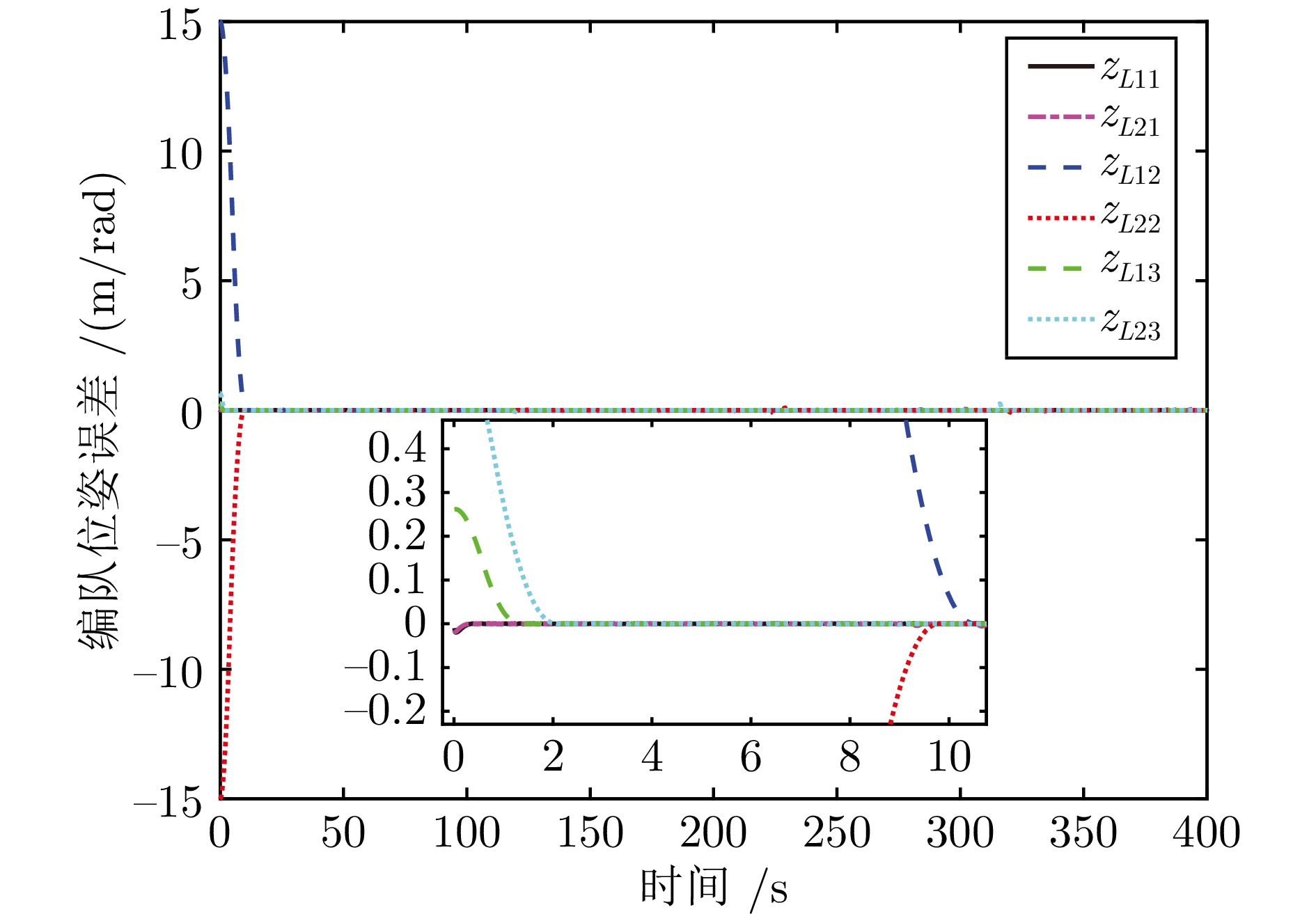
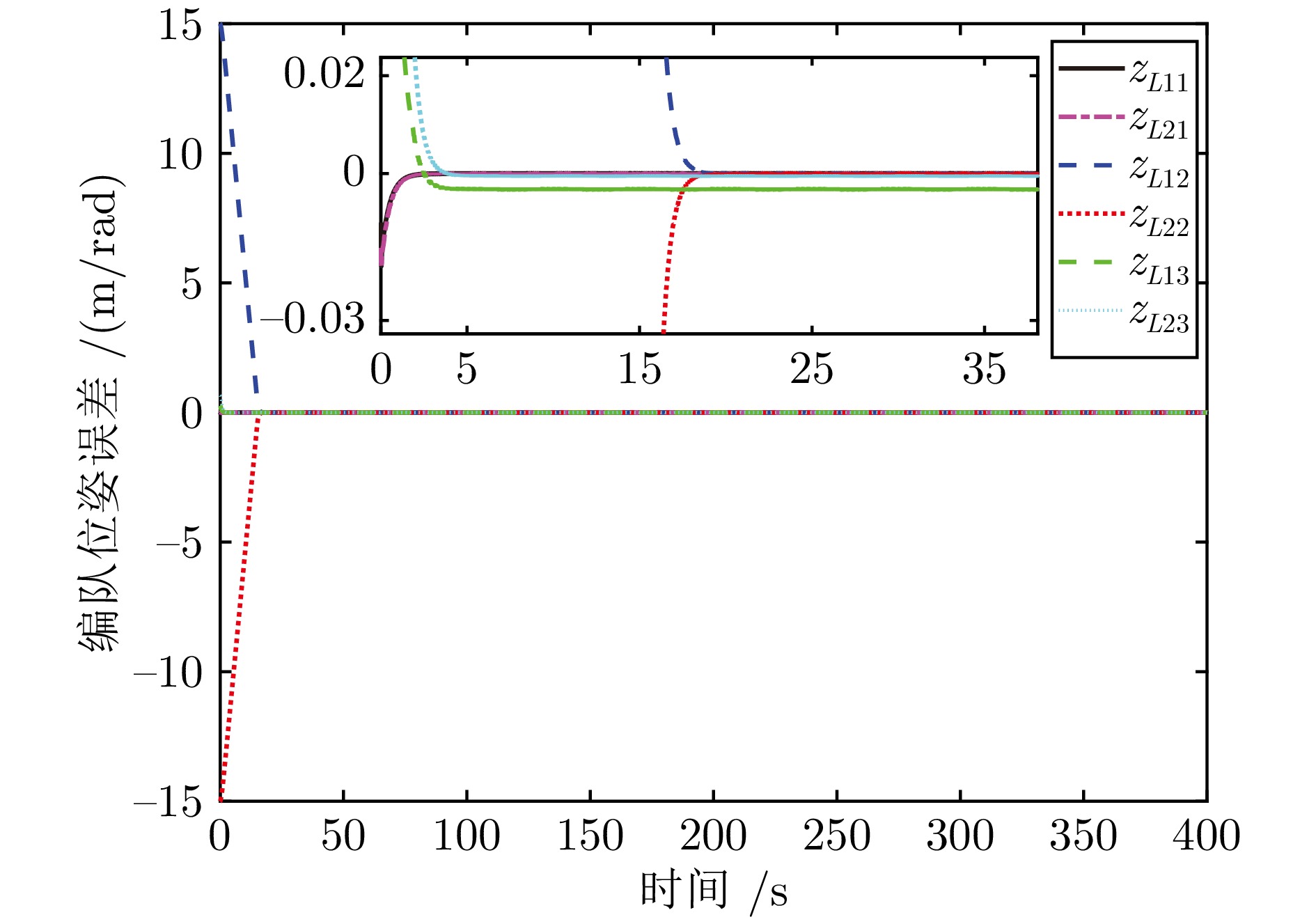
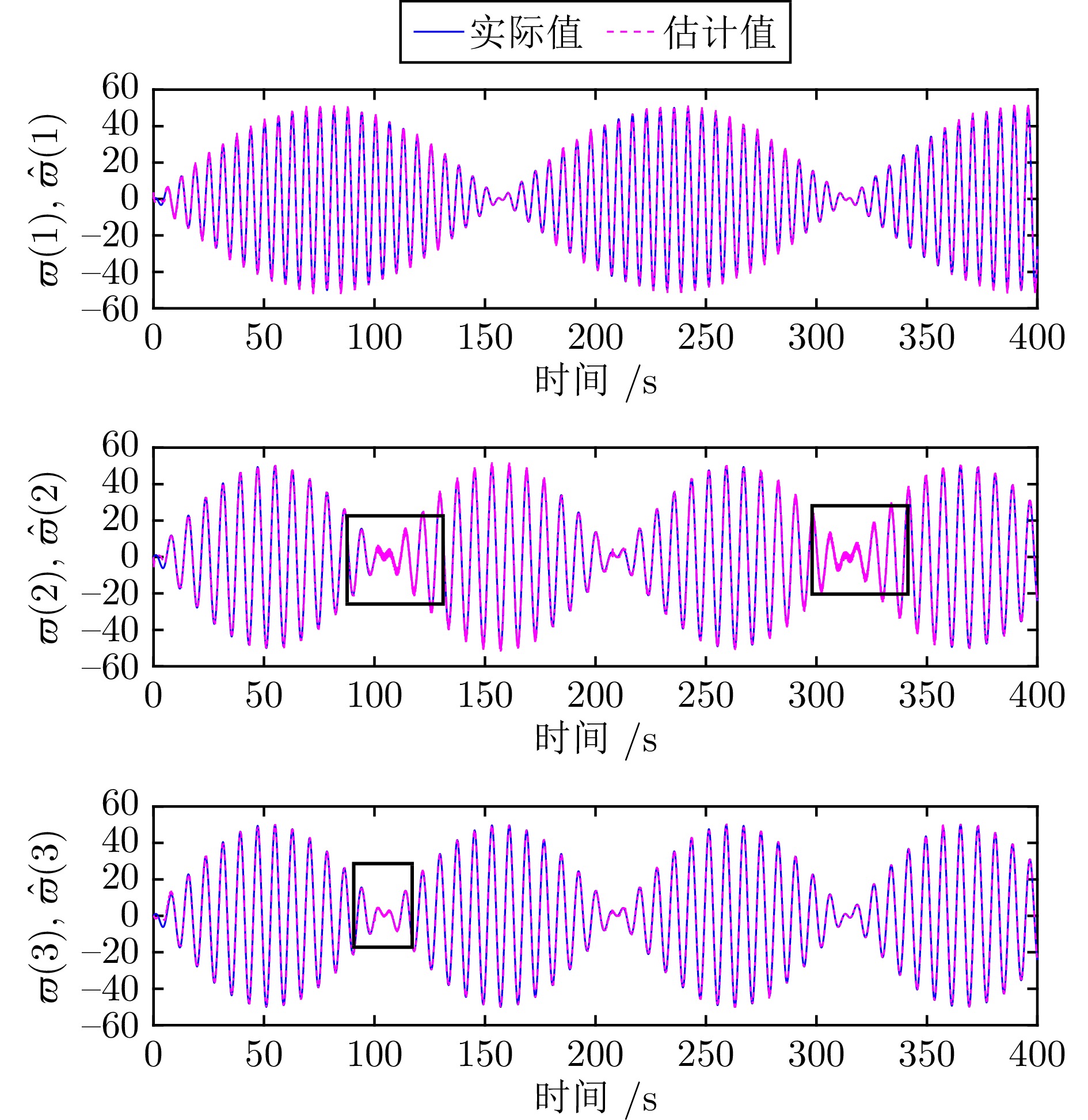
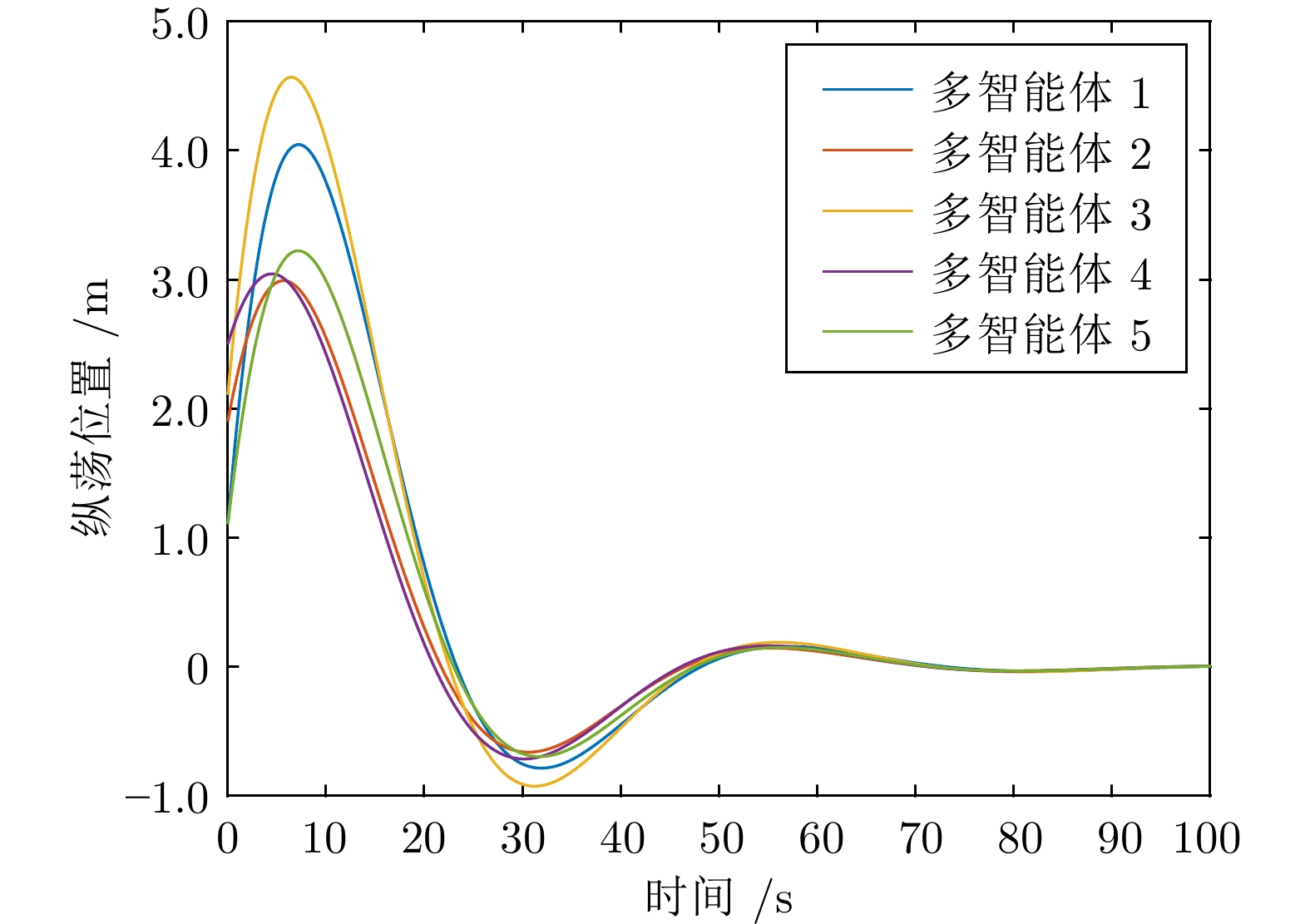
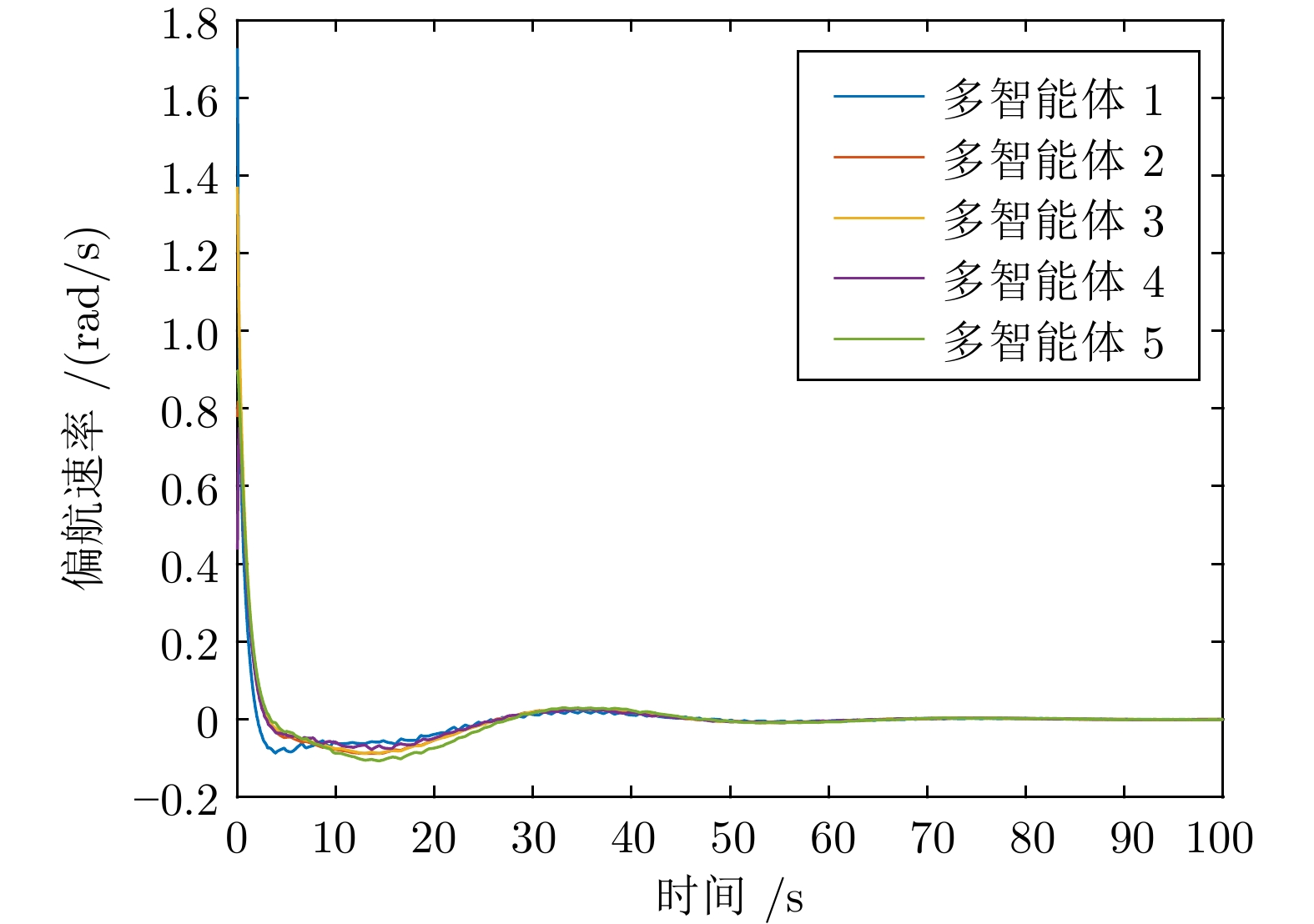
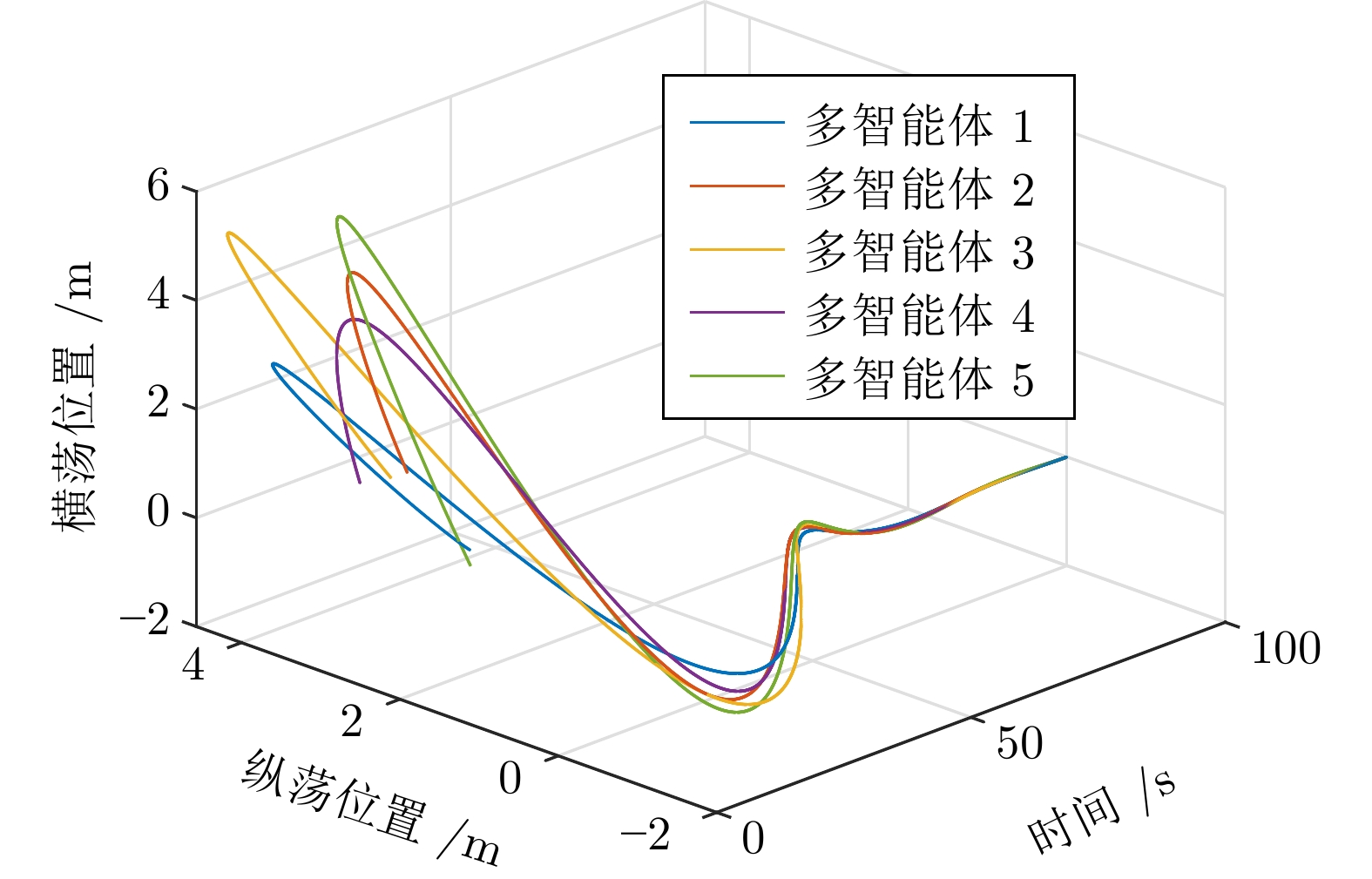
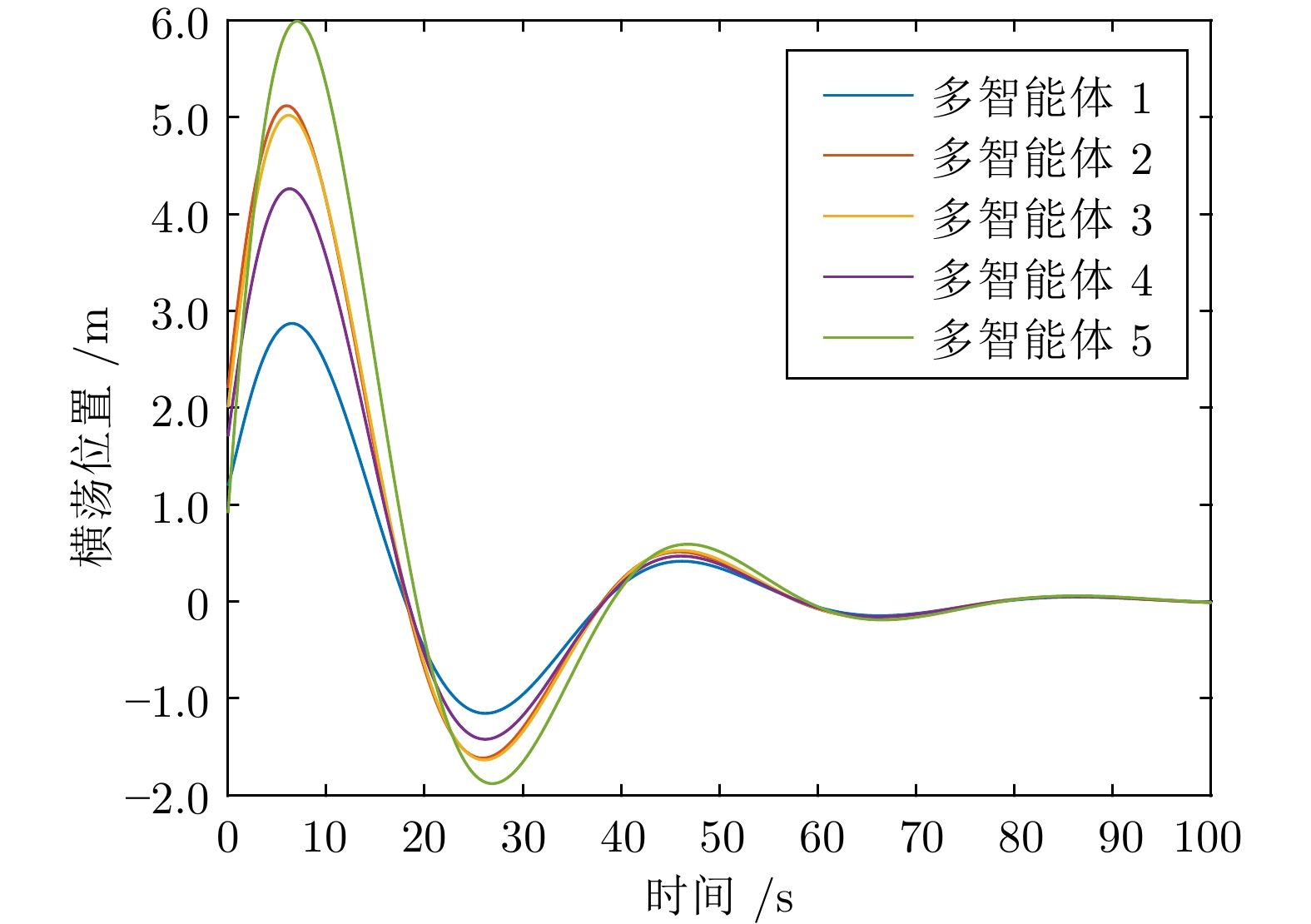
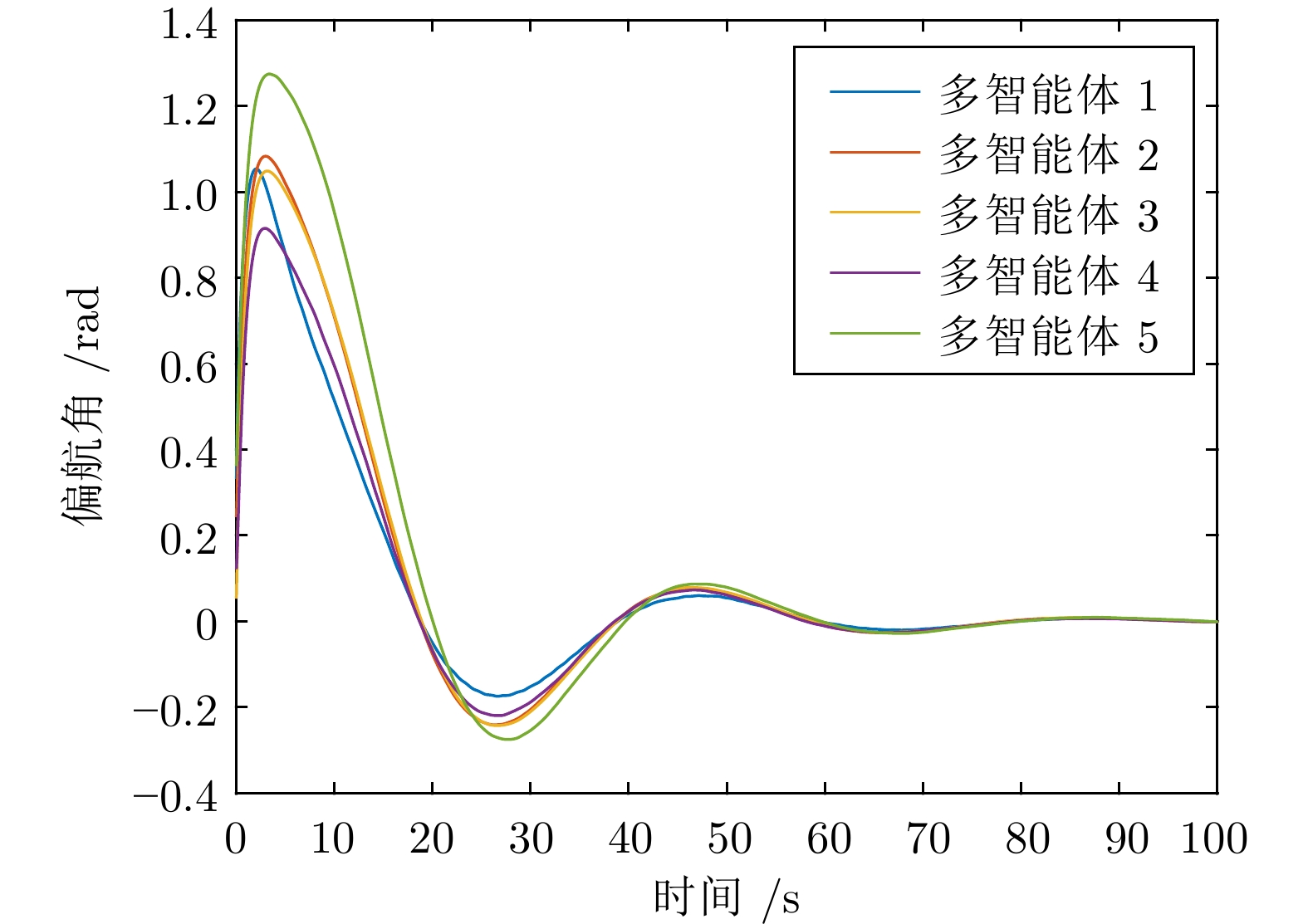
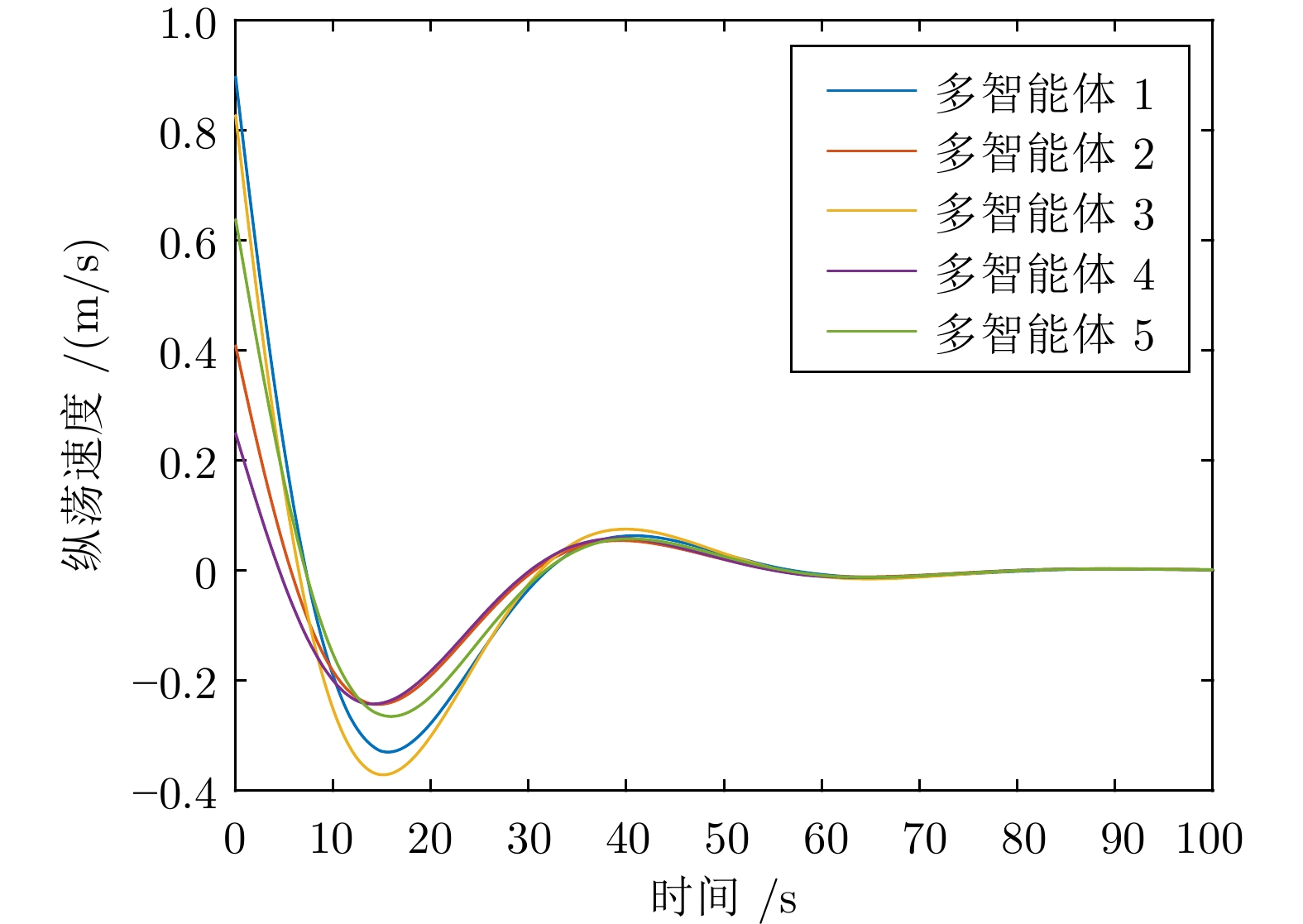
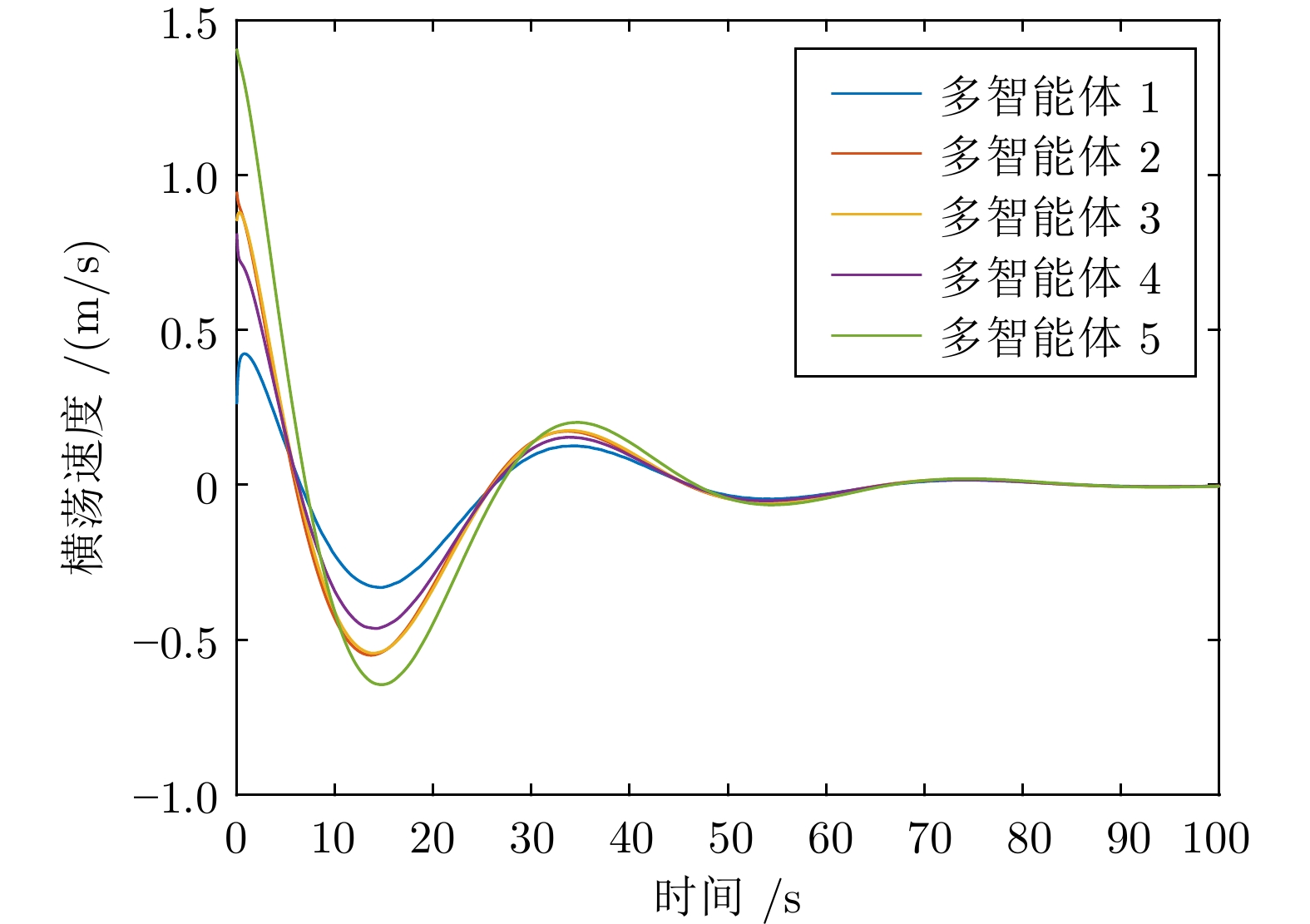
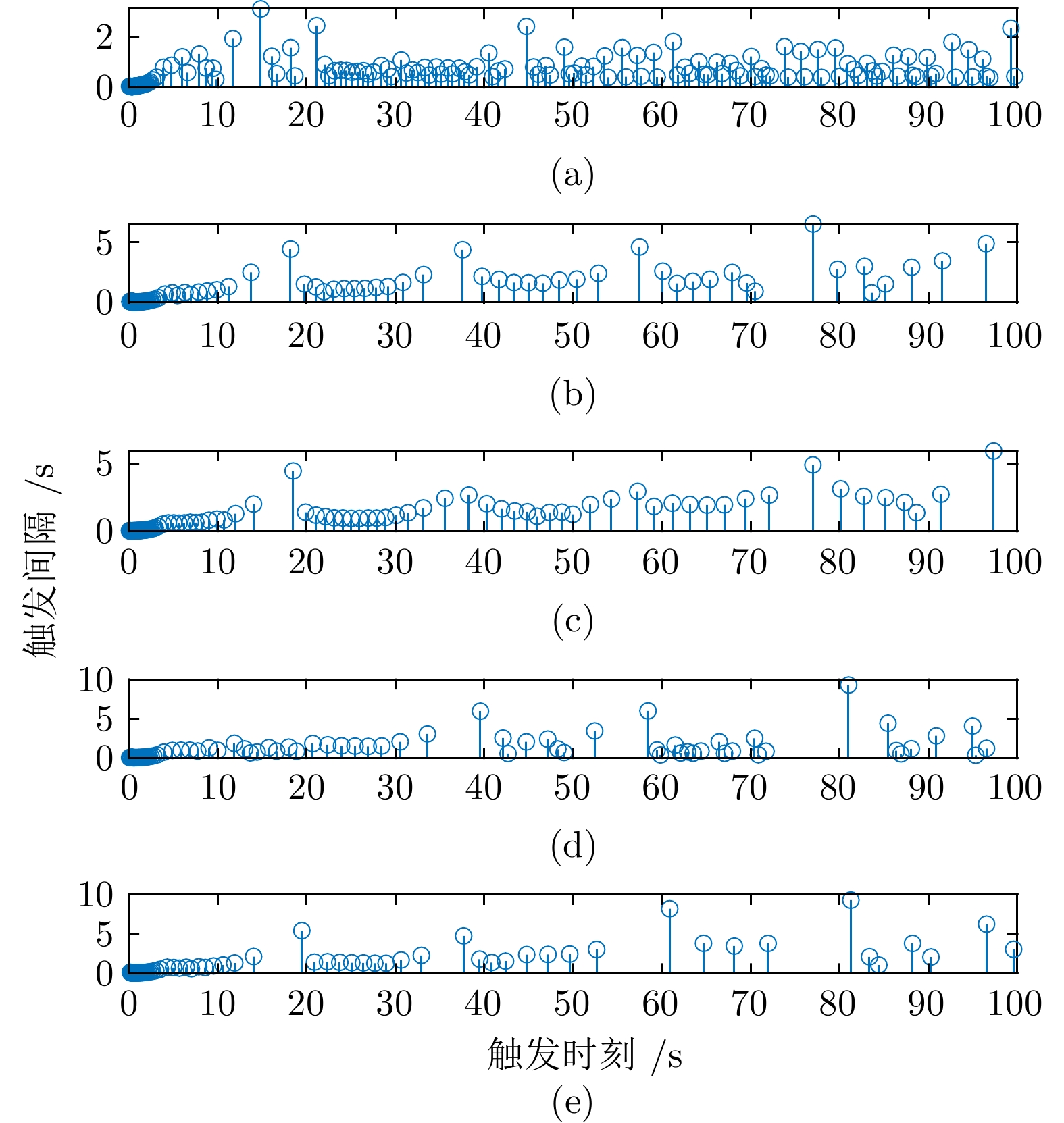
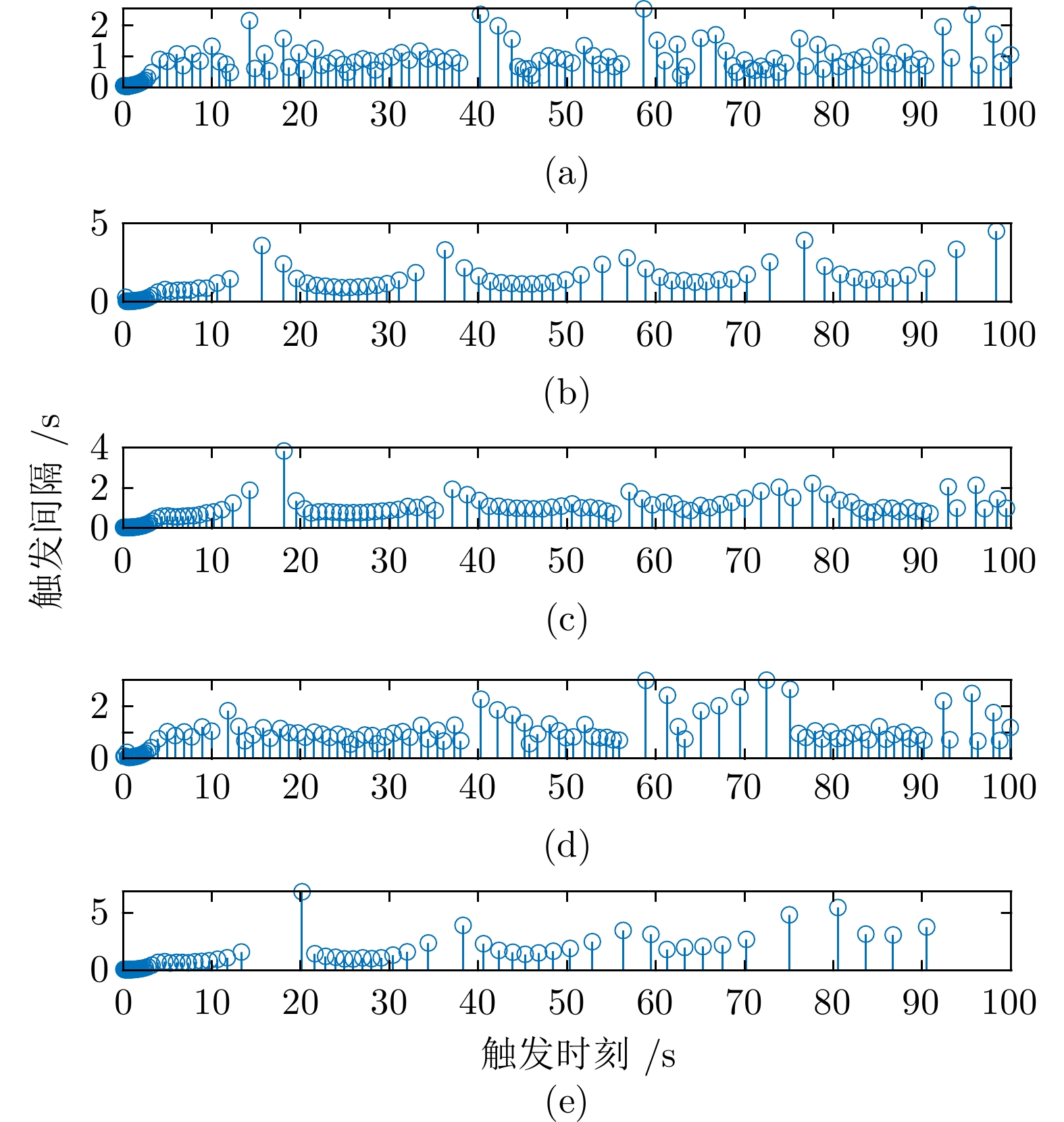
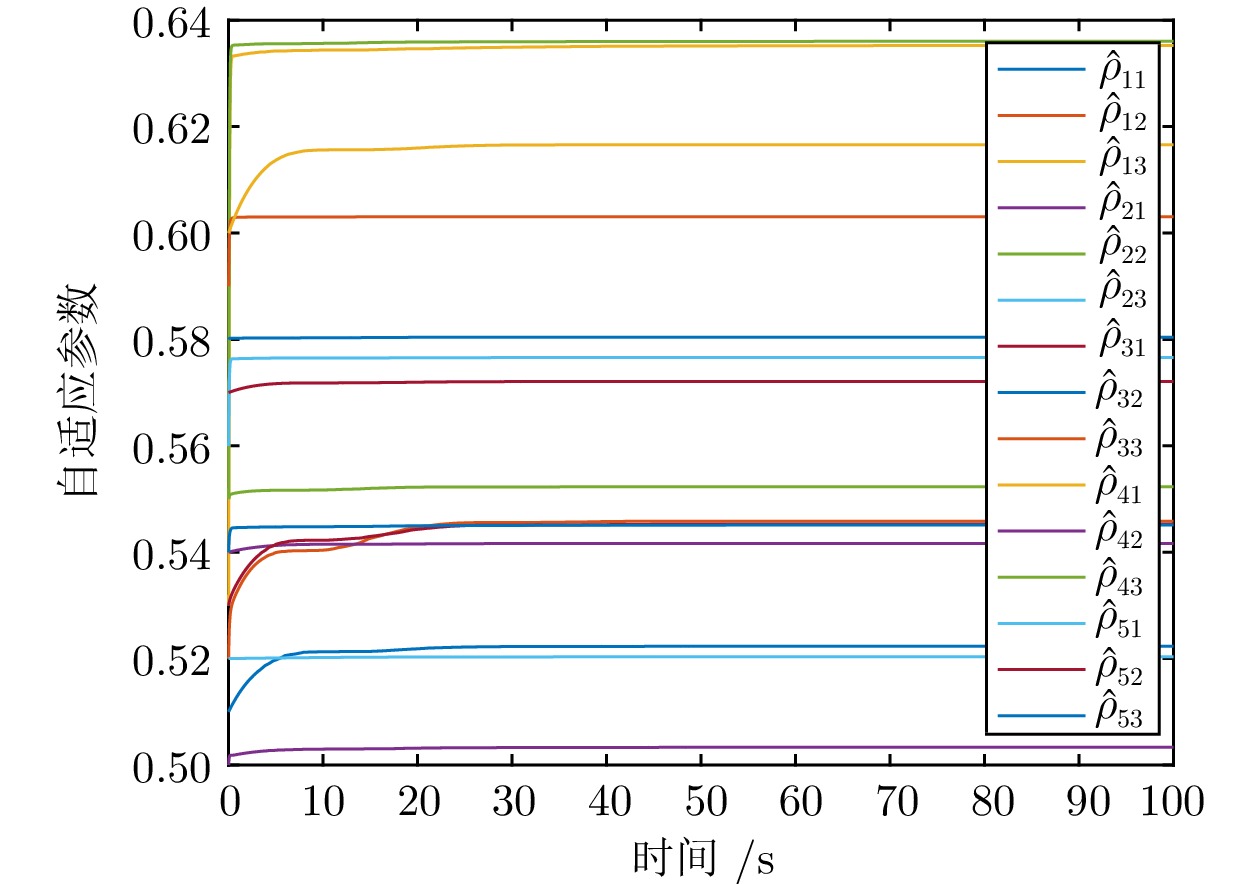
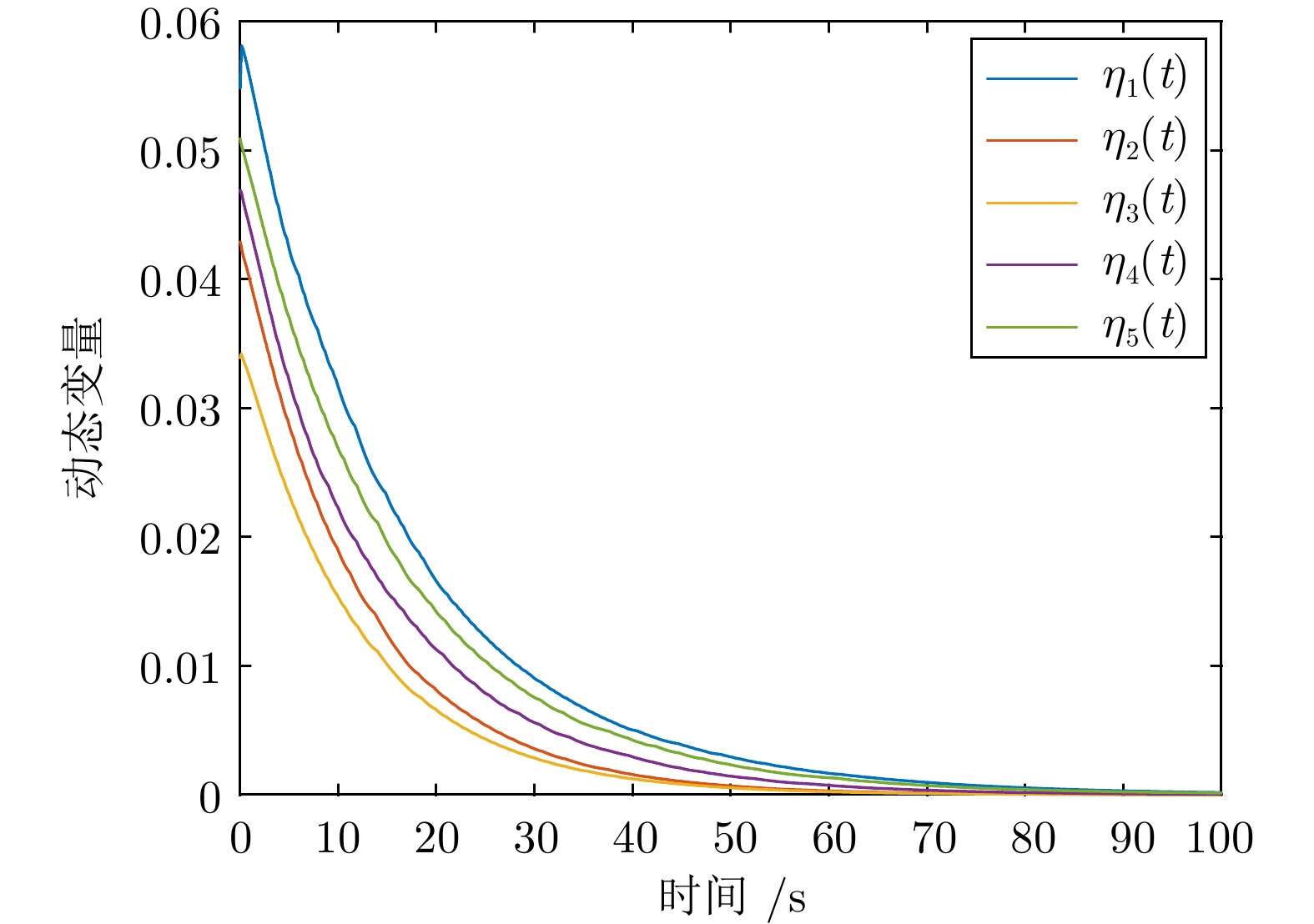
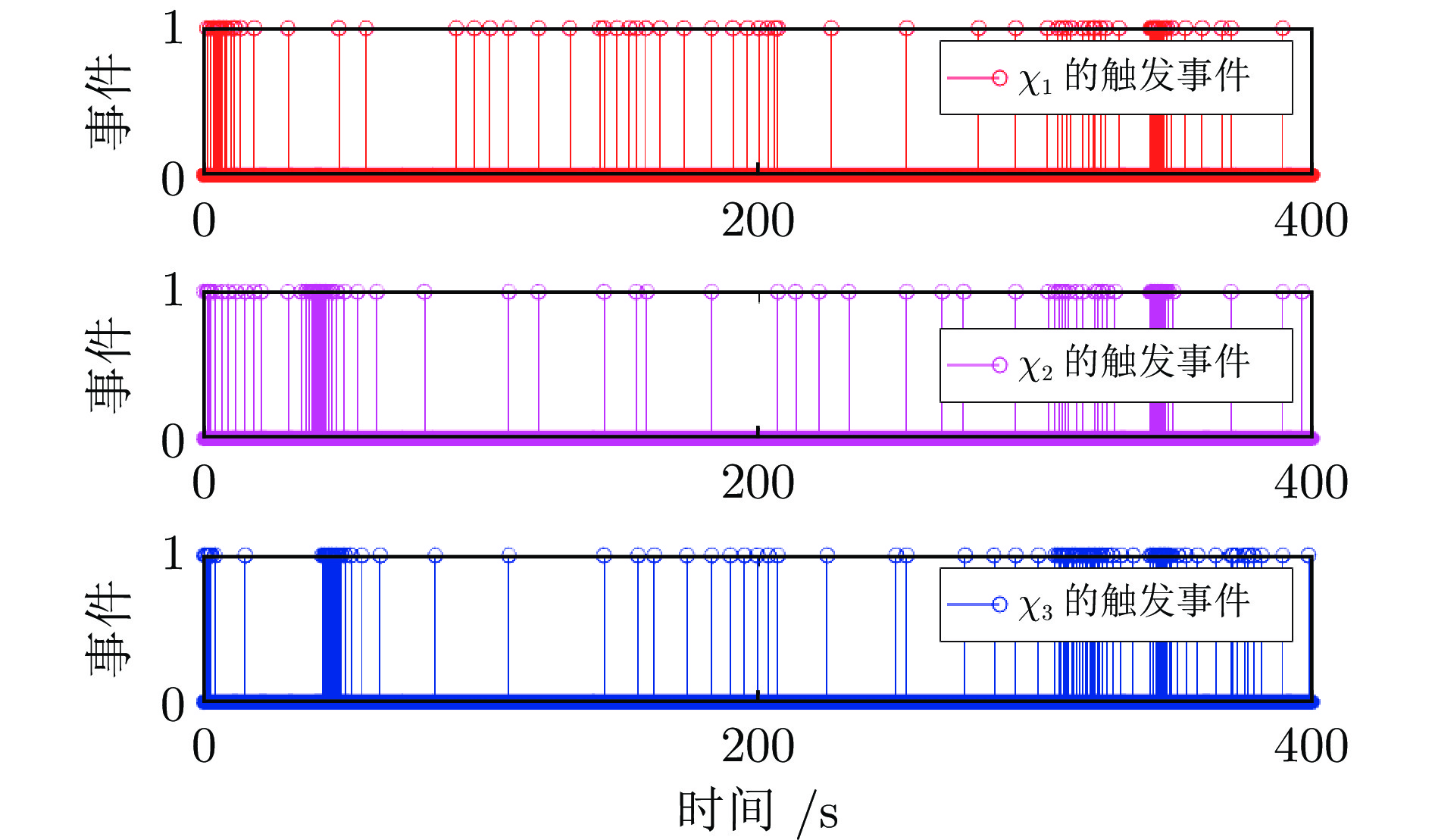
针对多智能体系统中邻居节点间通信资源受限的情况, 研究基于动态事件触发通信协议的多智能体系统自适应可靠一致性控制问题. 首先, 设计一种基于自适应参数估计技术的容错控制策略, 来应对未知执行器故障. 其次, 提出一种新型动态事件触发函数, 通过增加具有自适应调节能力的动态变量来延长事件触发间隔. 在此基础上, 证明在智能体之间非连续通信的情况下, 所提方法仅依靠智能体与邻居在触发时刻的交互信息就可以确保一致性误差的收敛. 此外, 从理论上说明智能体间的事件触发通信不存在芝诺现象. 最后, 针对无人船编队系统开展仿真, 结果能够说明所提自适应事件触发可靠控制方法的有效性.
针对多智能体系统中邻居节点间通信资源受限的情况, 研究基于动态事件触发通信协议的多智能体系统自适应可靠一致性控制问题. 首先, 设计一种基于自适应参数估计技术的容错控制策略, 来应对未知执行器故障. 其次, 提出一种新型动态事件触发函数, 通过增加具有自适应调节能力的动态变量来延长事件触发间隔. 在此基础上, 证明在智能体之间非连续通信的情况下, 所提方法仅依靠智能体与邻居在触发时刻的交互信息就可以确保一致性误差的收敛. 此外, 从理论上说明智能体间的事件触发通信不存在芝诺现象. 最后, 针对无人船编队系统开展仿真, 结果能够说明所提自适应事件触发可靠控制方法的有效性.
2024, 50(5): 937-946.
doi: 10.16383/j.aas.c230701
cstr: 32138.14.j.aas.c230701
摘要:
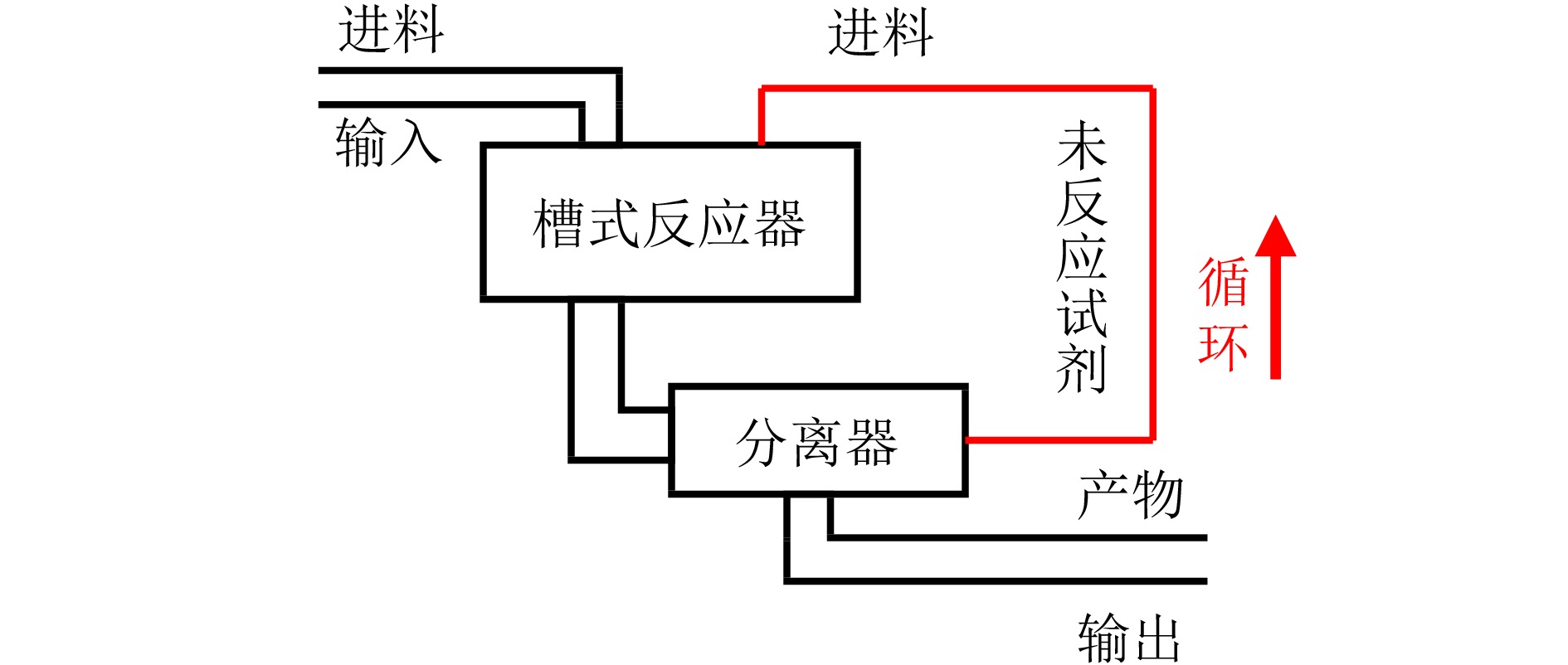
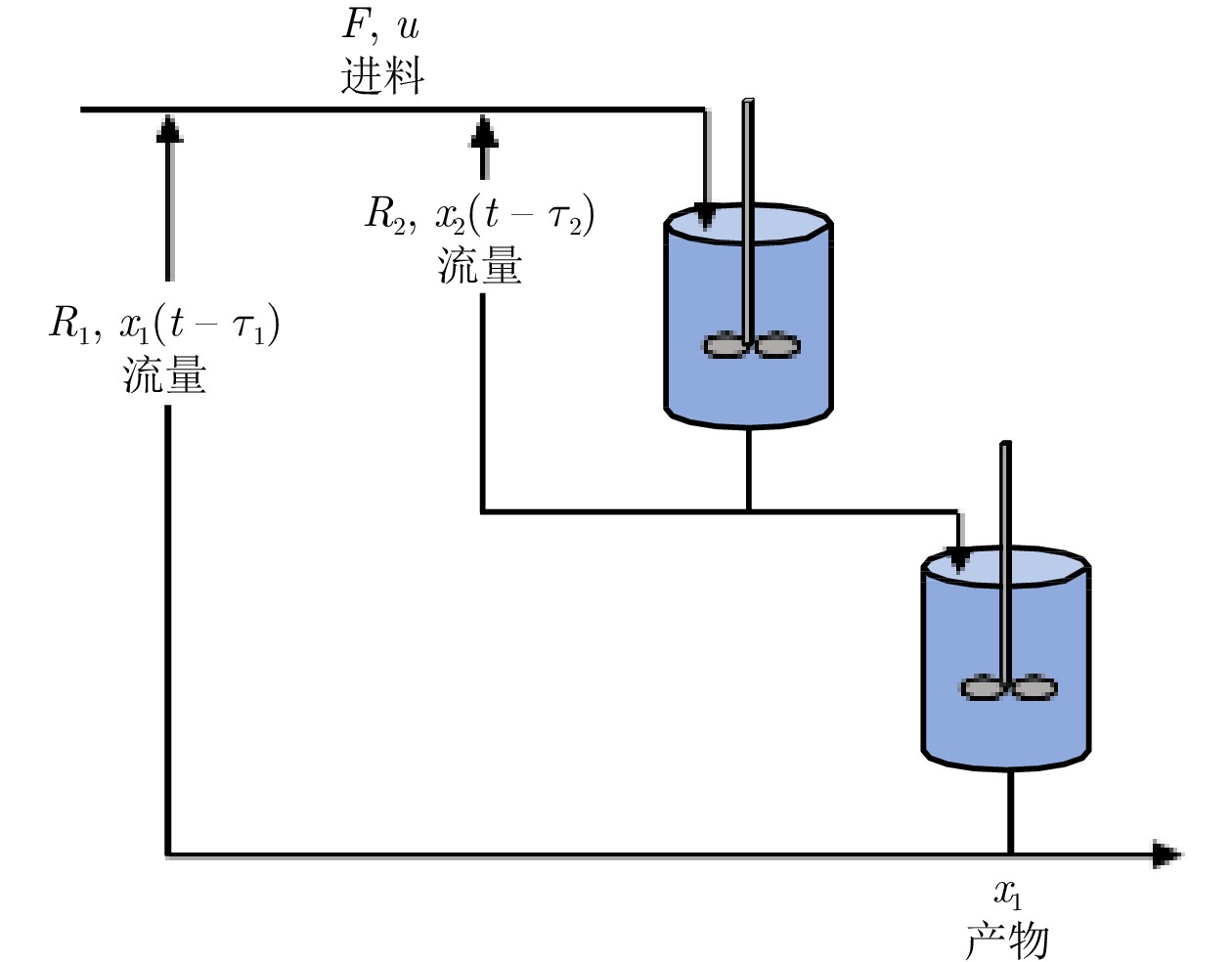
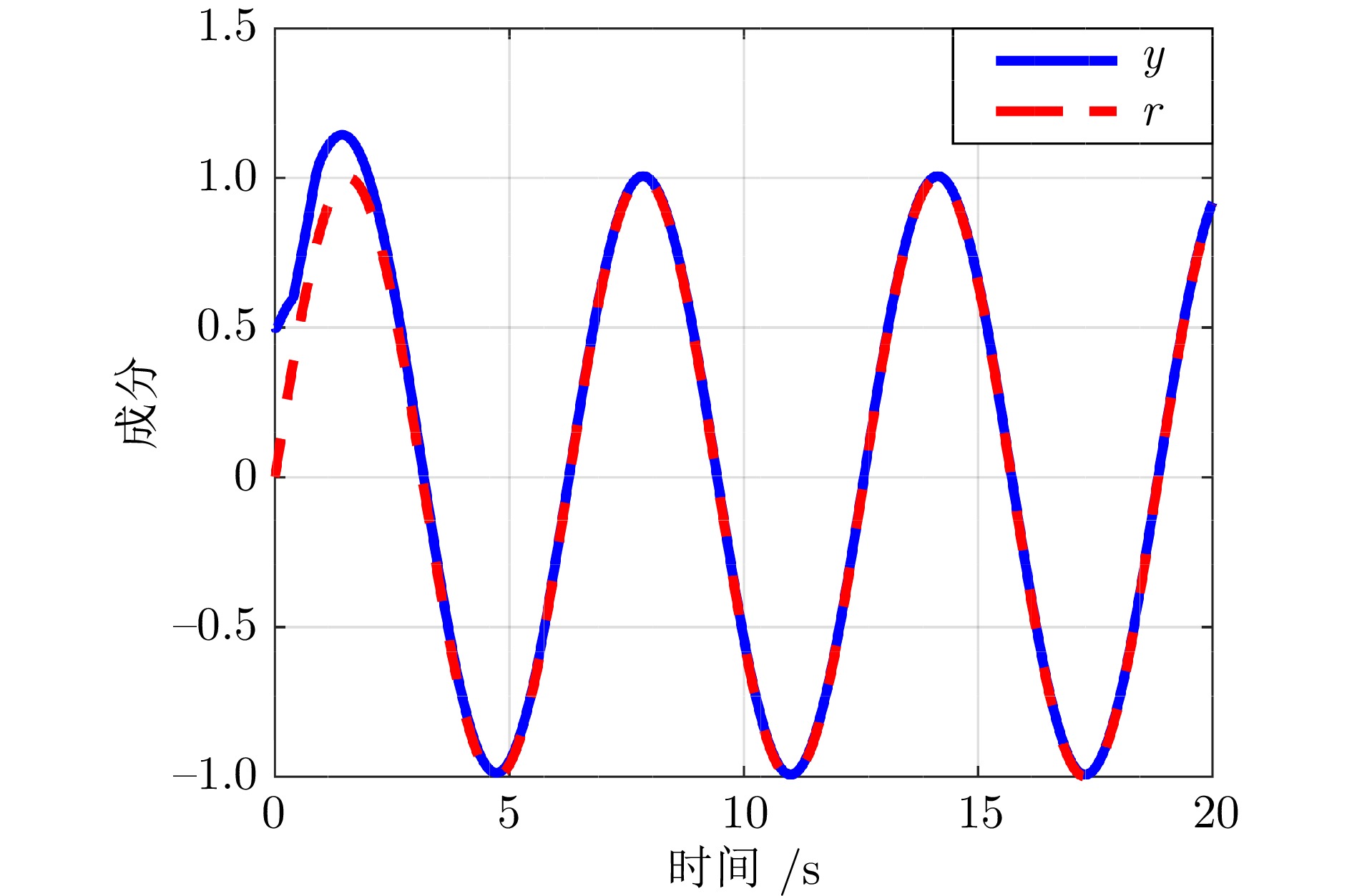
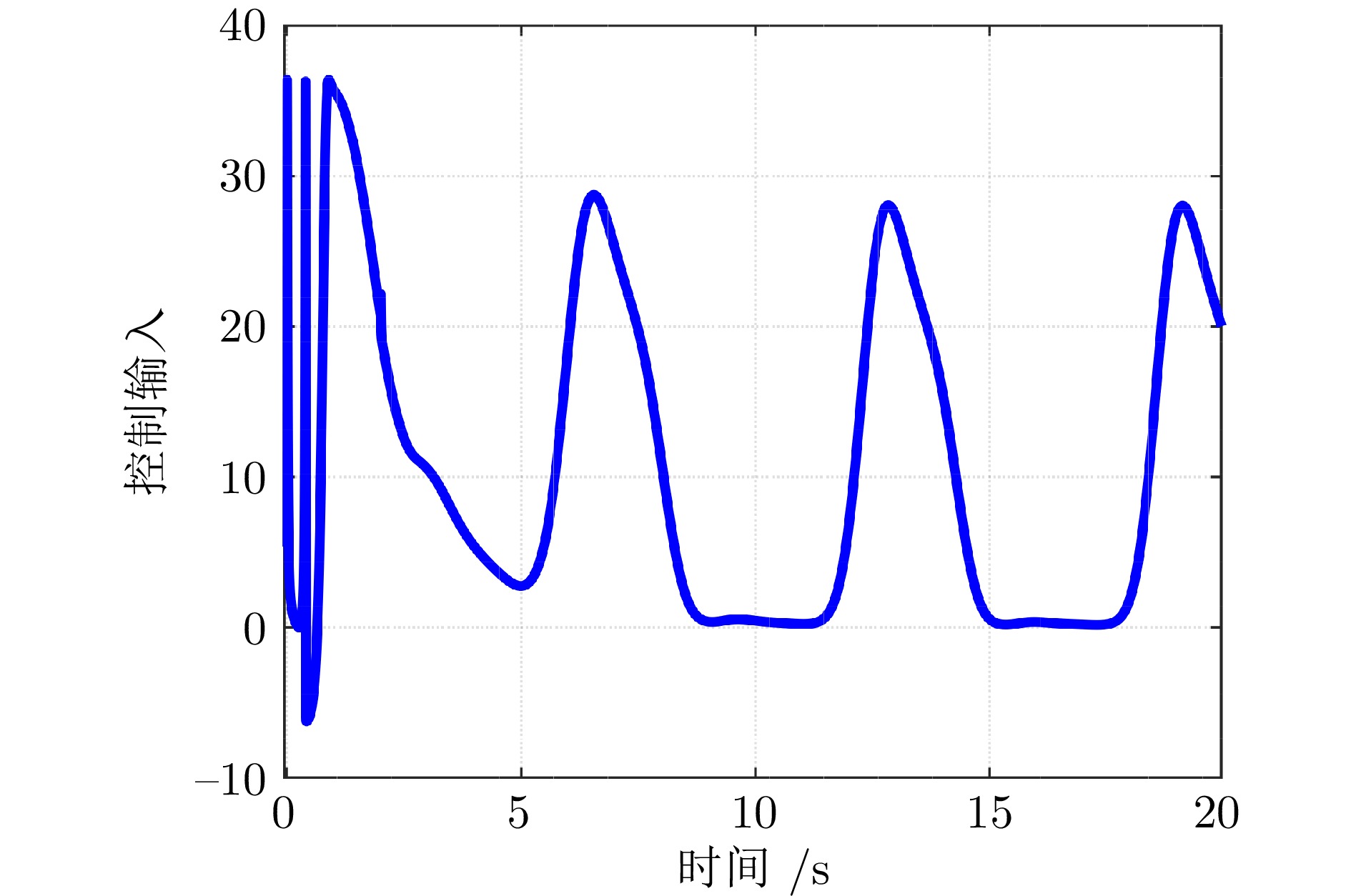
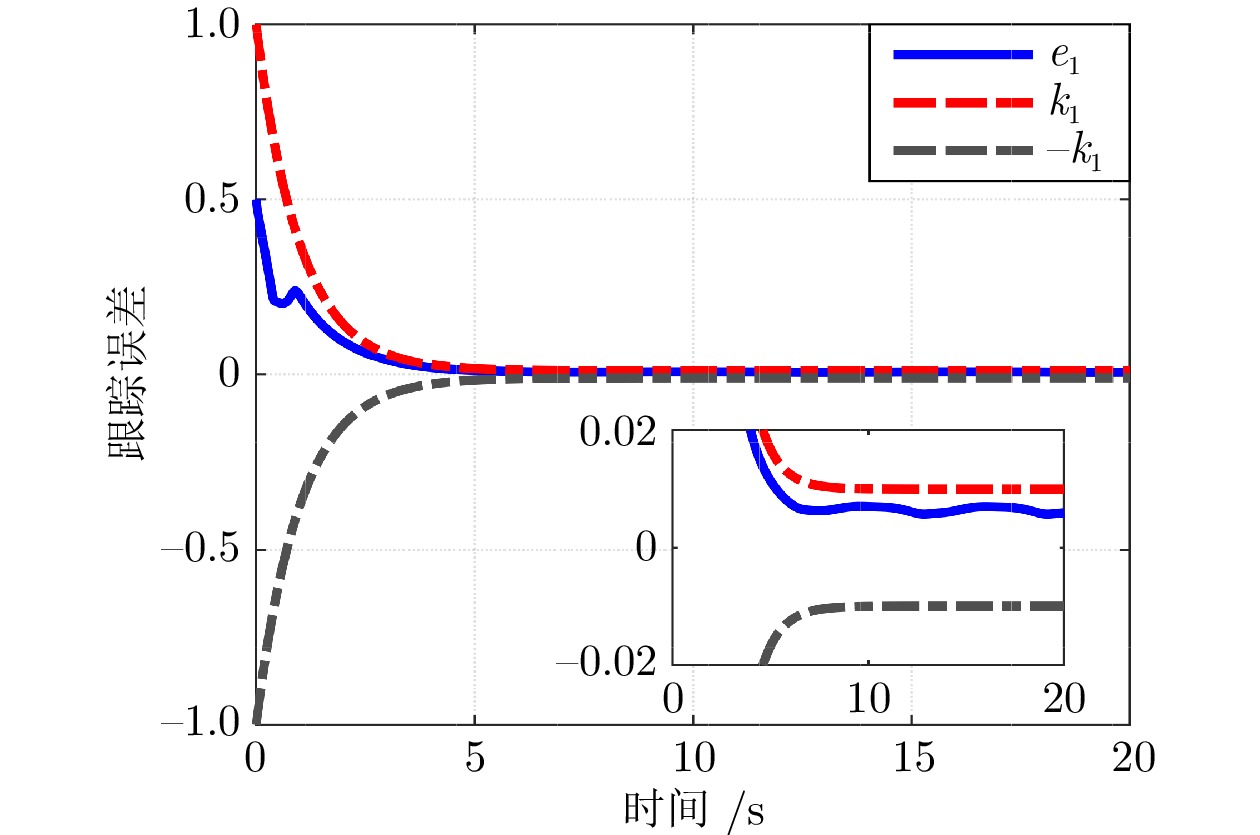
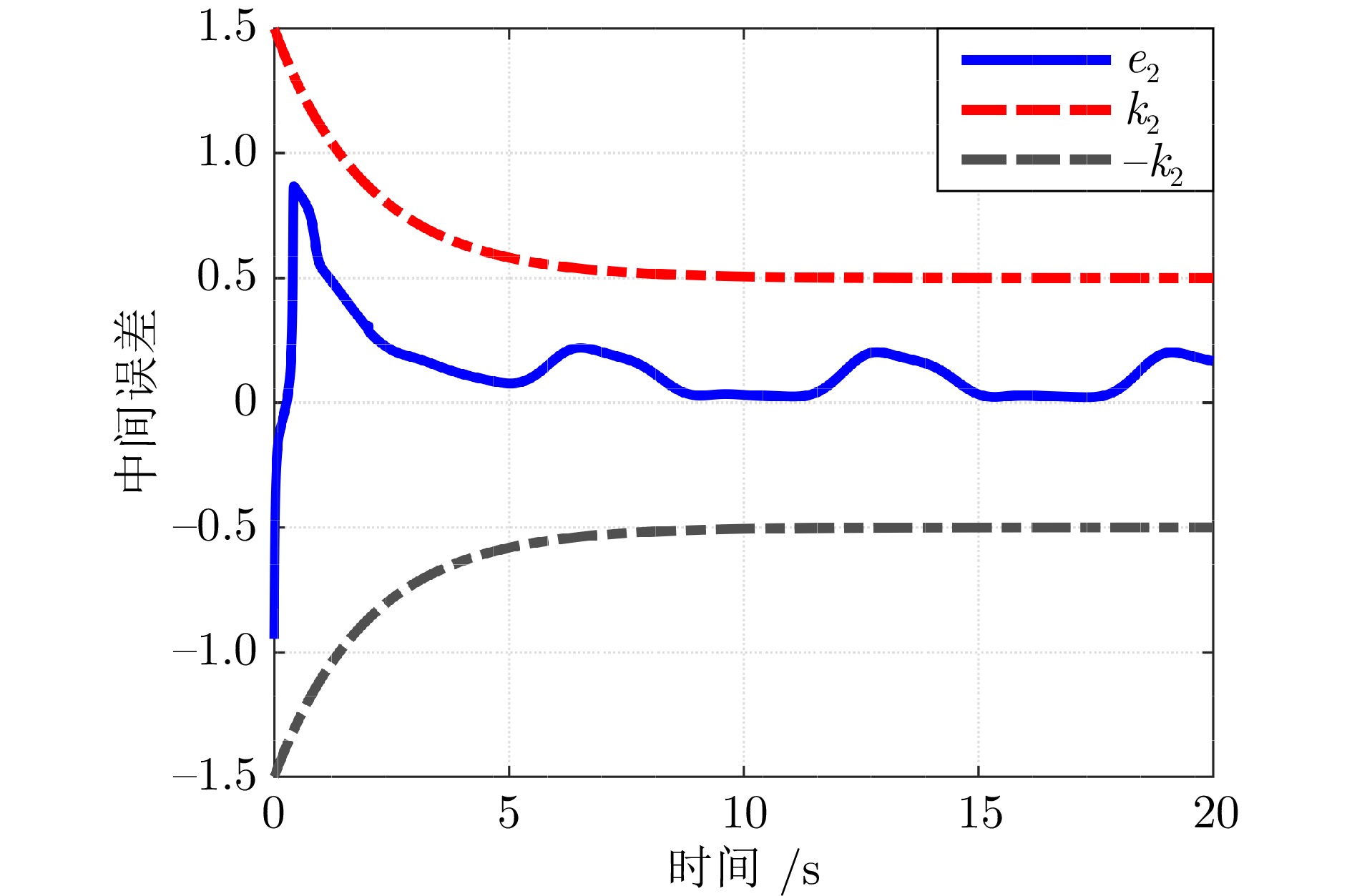
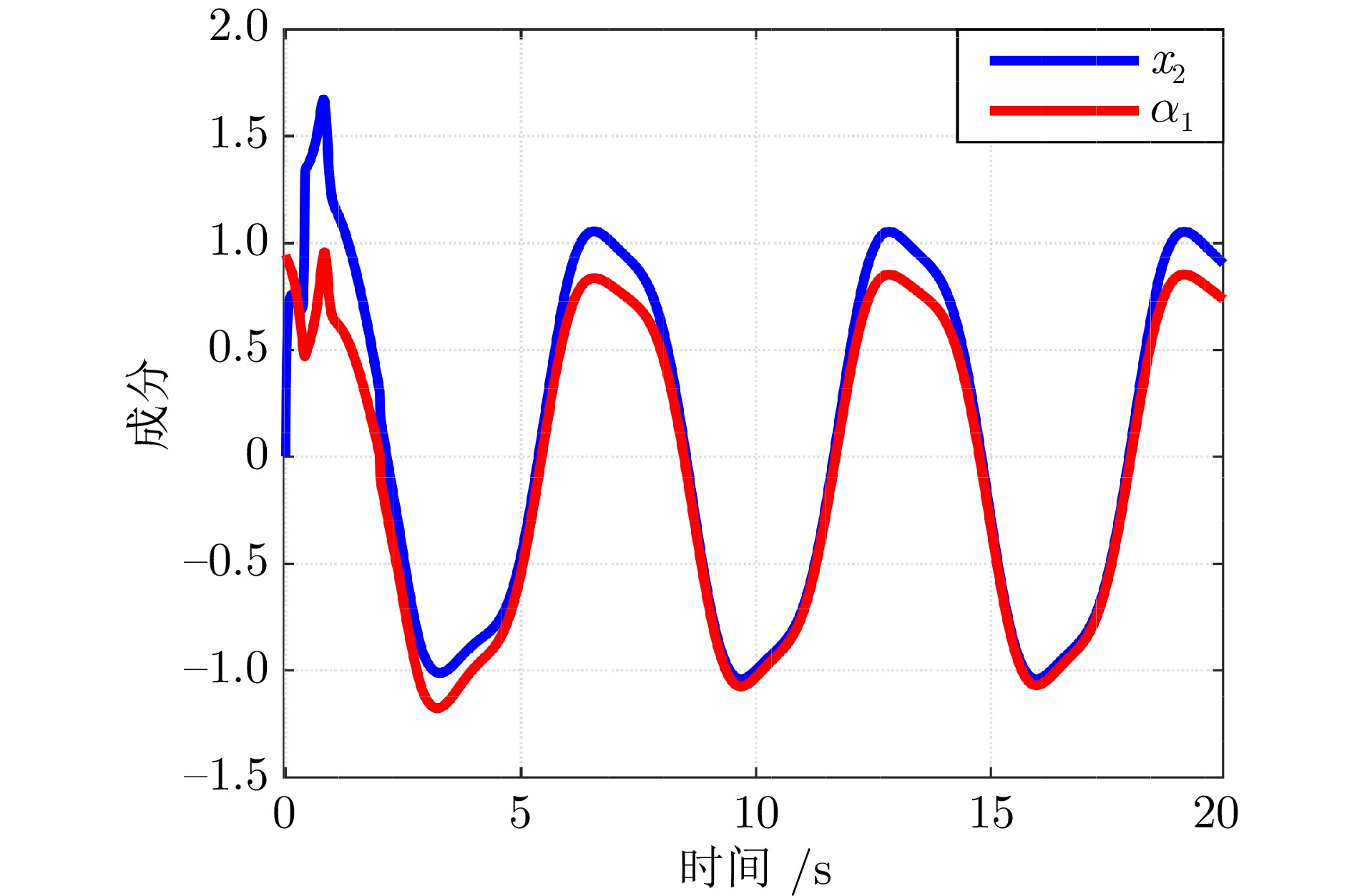
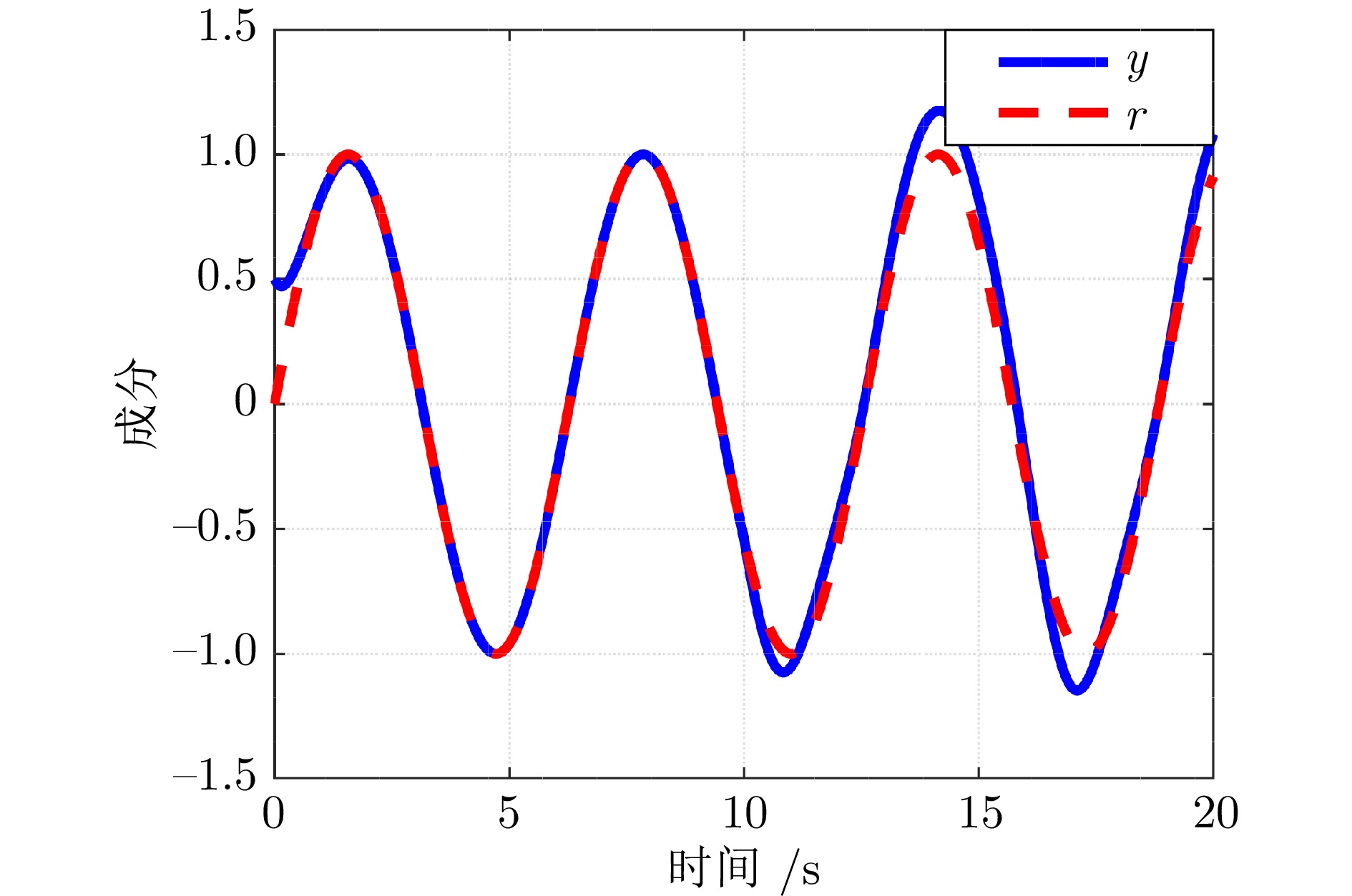
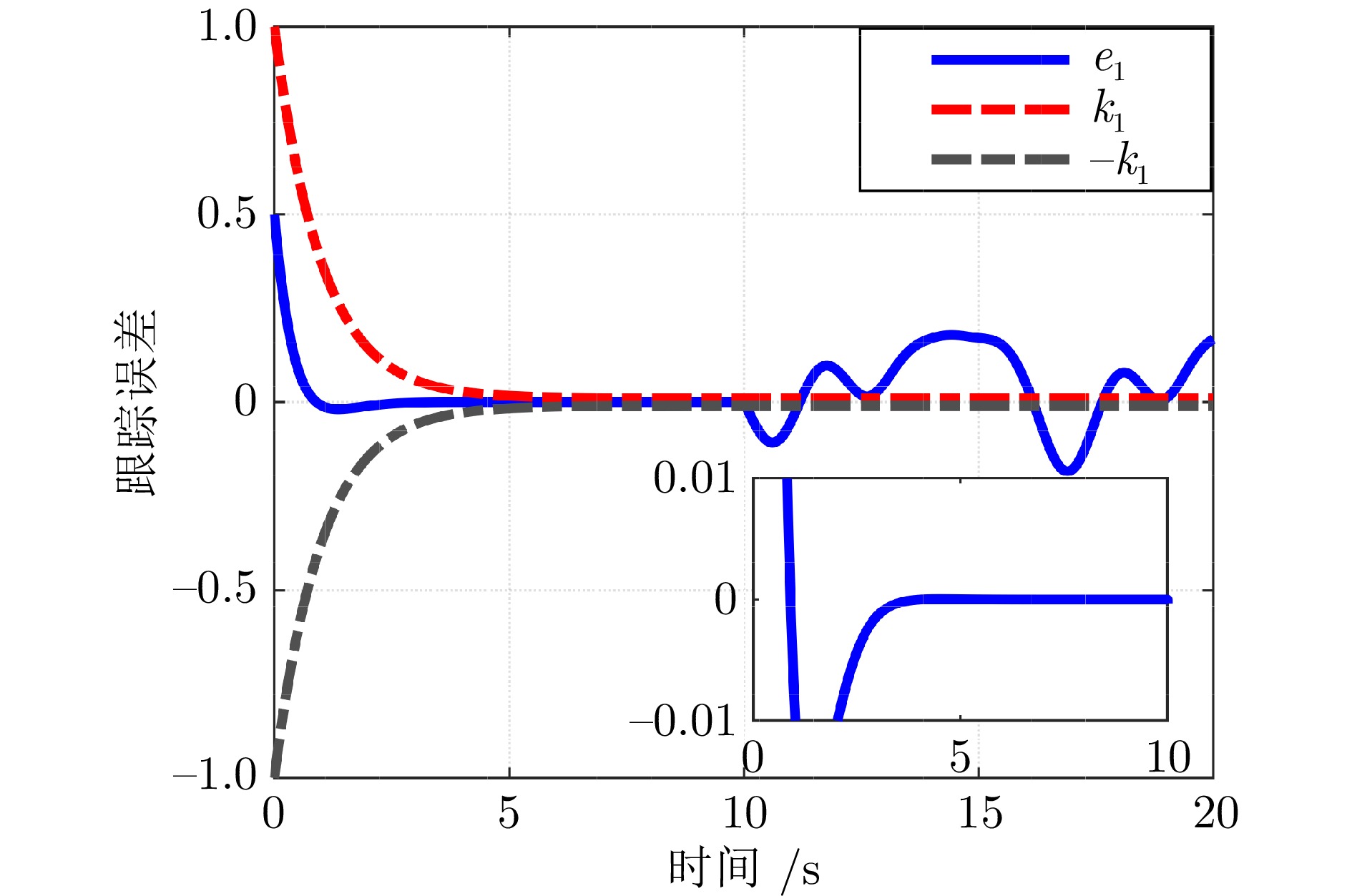
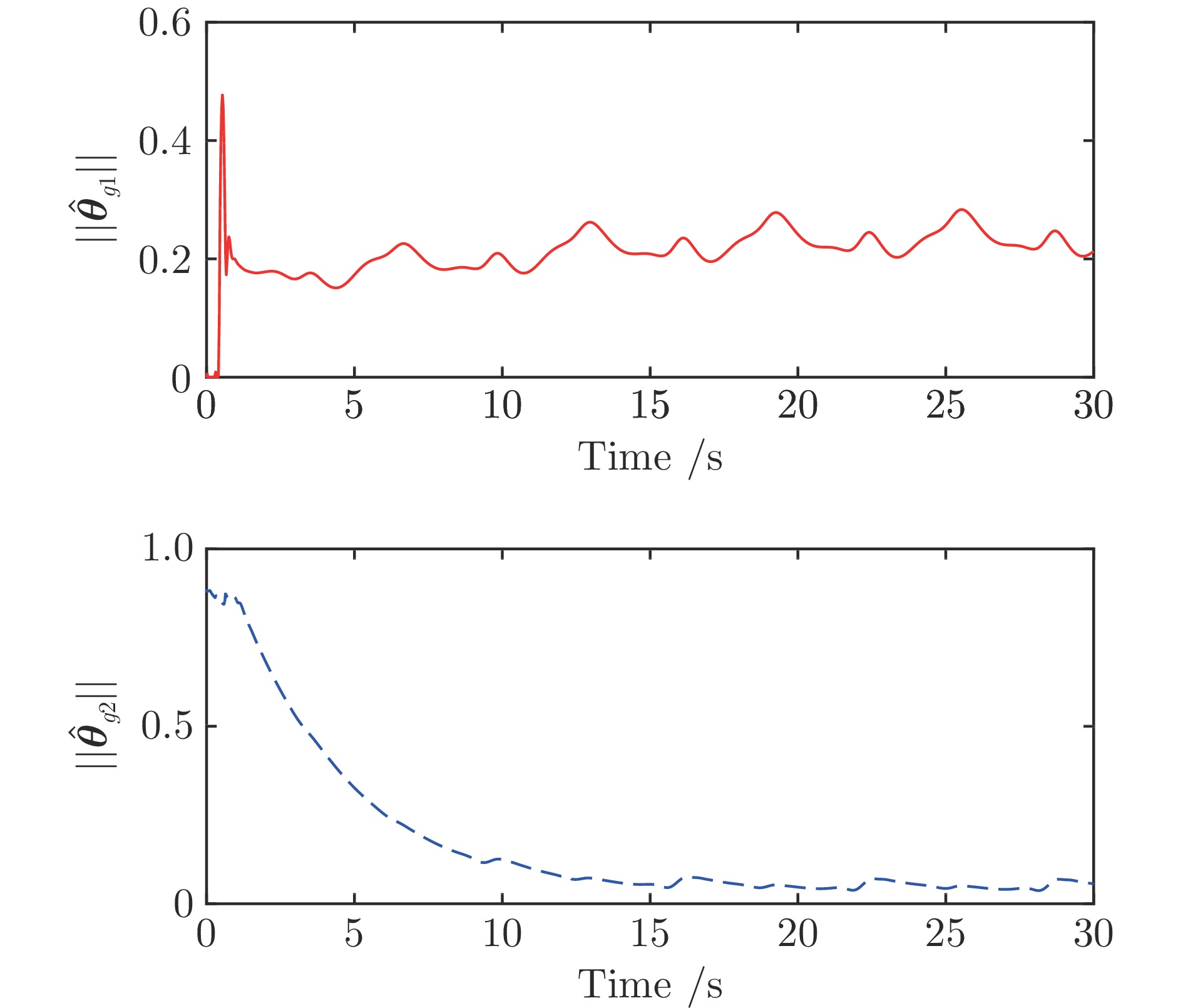
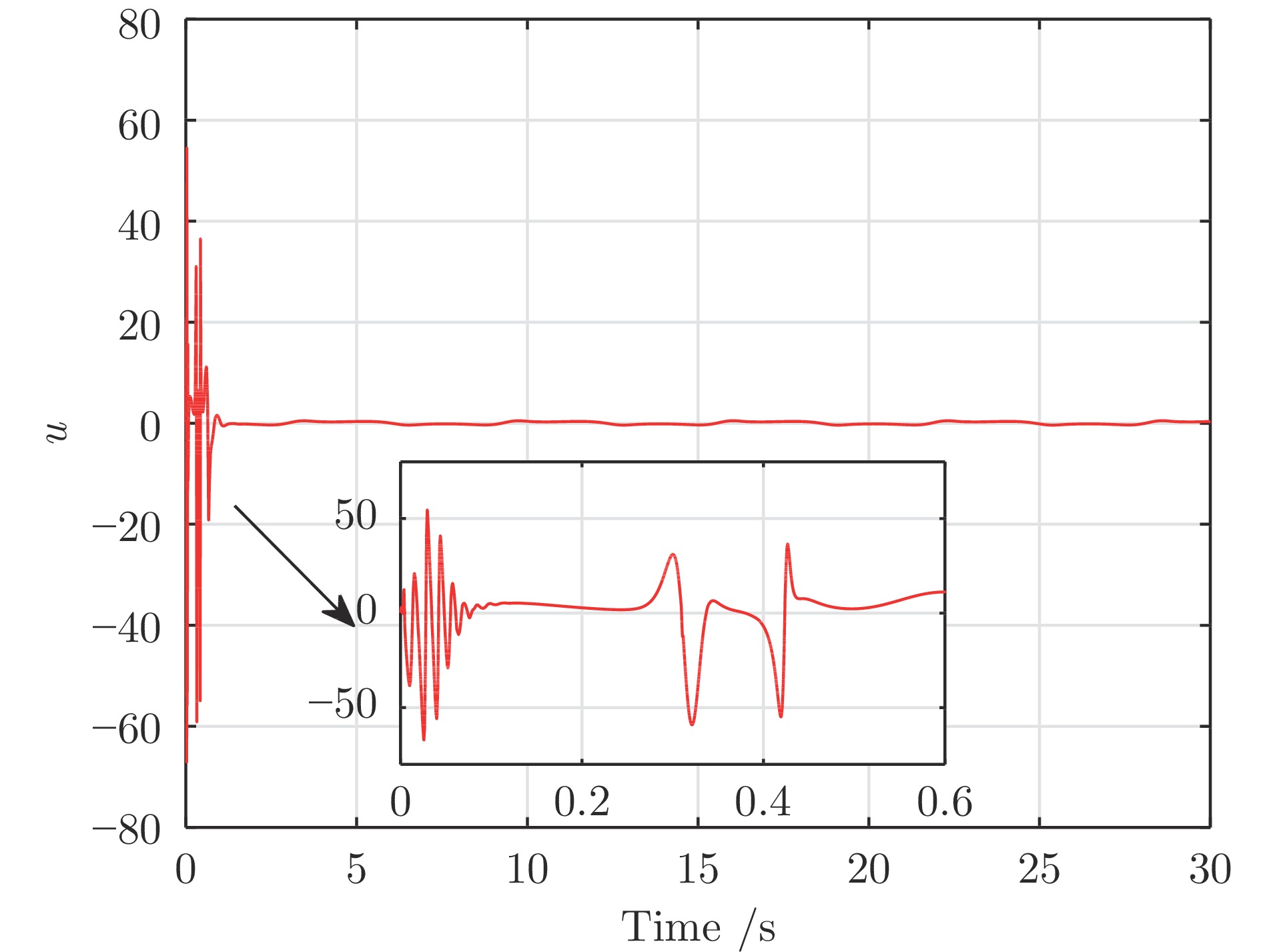
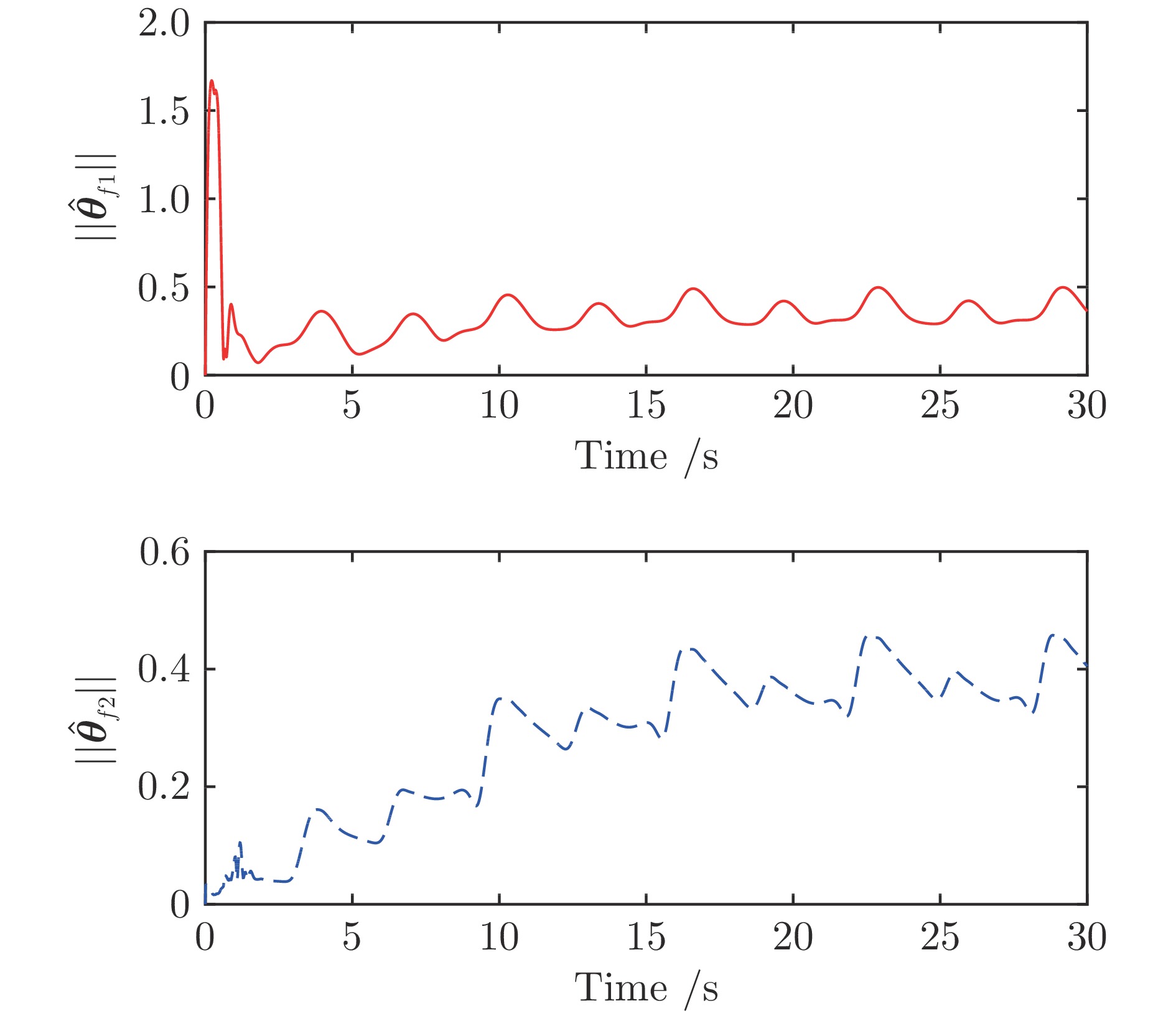
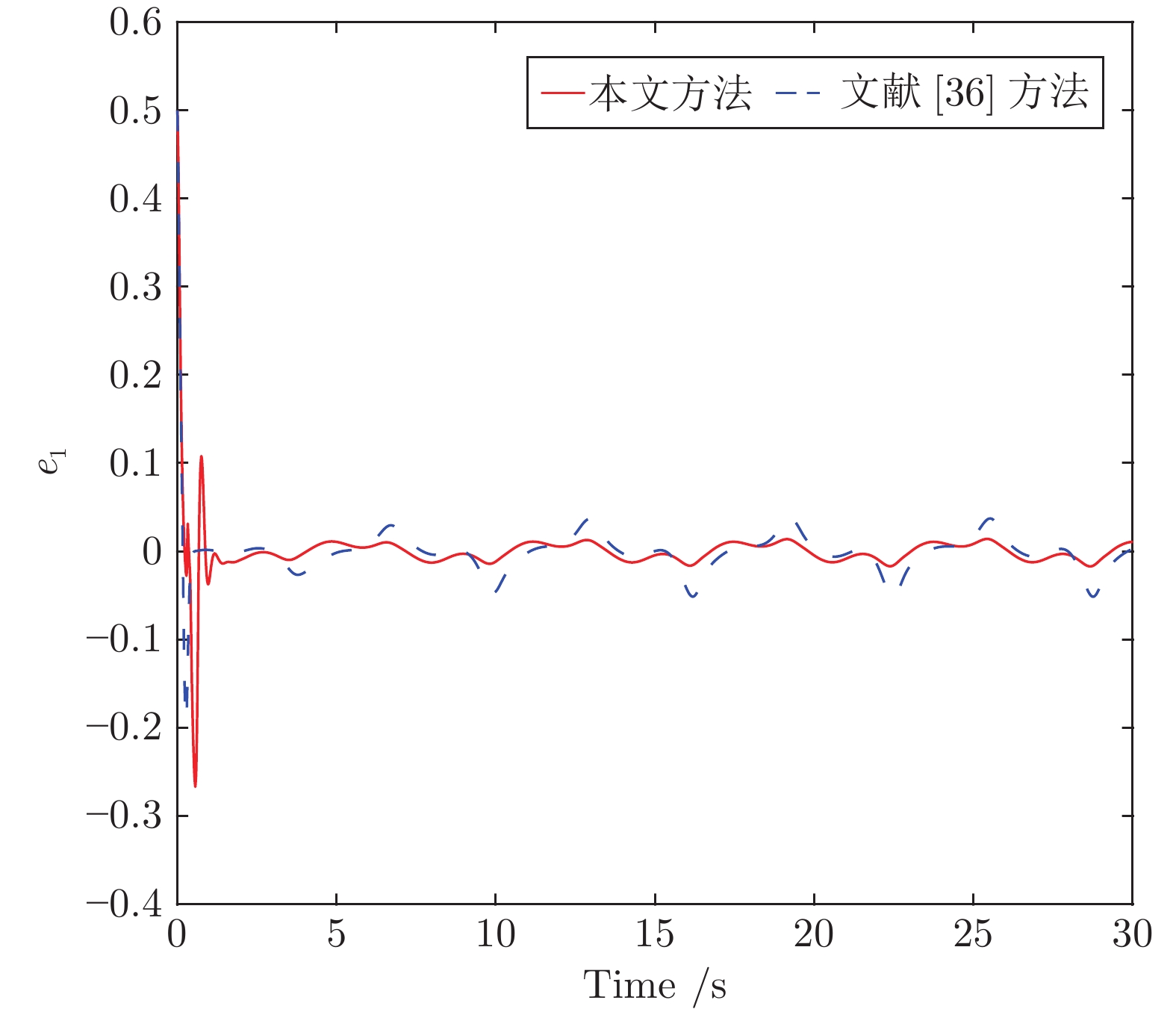
研究含有状态时延的严反馈非线性系统的跟踪控制问题, 充分考虑时延的时变性和任意性以及系统的未知动力学特性. 为解决该问题, 取代参数辨识、函数逼近、增益调节、指令滤波等常规技术, 提出基于导向函数的预设性能控制方法, 移除了控制器设计对于系统非线性、控制方向和虚拟控制信号导数等信息的依赖. 并且, 摆脱基于李雅普诺夫−克拉索夫斯基泛函或拉祖米欣函数的稳定性分析框架, 采用基于反证法的受限分析理论, 移除性能分析对于已知的时延上界、部分已知的时延非线性函数和时延导数小于1等常见约束. 因此, 形成无模型、低复杂度、高性能控制方法, 将跟踪误差限制于设计者预先选取的性能包络线内, 确保系统输出以预先设定的速度和精度跟踪上时变的设定值. 最后, 以具有延迟回收流的两级化学反应器为对象开展对比仿真, 实验结果验证了所提方法的有效性和优越性.
研究含有状态时延的严反馈非线性系统的跟踪控制问题, 充分考虑时延的时变性和任意性以及系统的未知动力学特性. 为解决该问题, 取代参数辨识、函数逼近、增益调节、指令滤波等常规技术, 提出基于导向函数的预设性能控制方法, 移除了控制器设计对于系统非线性、控制方向和虚拟控制信号导数等信息的依赖. 并且, 摆脱基于李雅普诺夫−克拉索夫斯基泛函或拉祖米欣函数的稳定性分析框架, 采用基于反证法的受限分析理论, 移除性能分析对于已知的时延上界、部分已知的时延非线性函数和时延导数小于1等常见约束. 因此, 形成无模型、低复杂度、高性能控制方法, 将跟踪误差限制于设计者预先选取的性能包络线内, 确保系统输出以预先设定的速度和精度跟踪上时变的设定值. 最后, 以具有延迟回收流的两级化学反应器为对象开展对比仿真, 实验结果验证了所提方法的有效性和优越性.

2024, 50(5): 947-957.
doi: 10.16383/j.aas.c230460
cstr: 32138.14.j.aas.c230460
摘要:
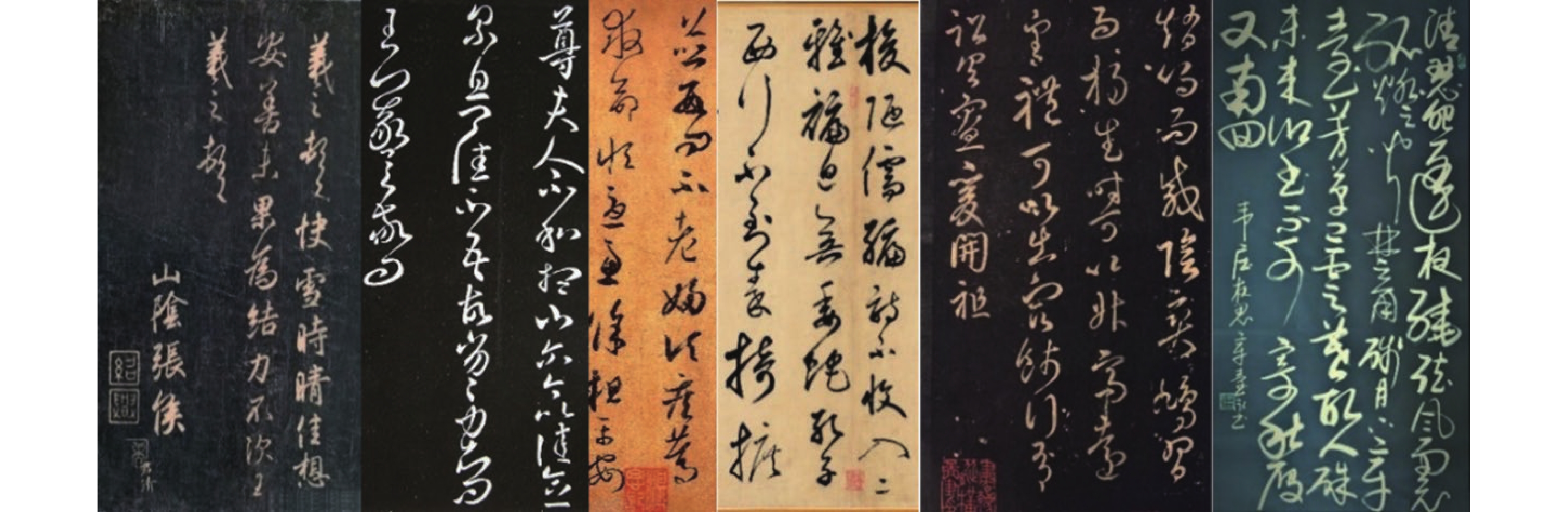
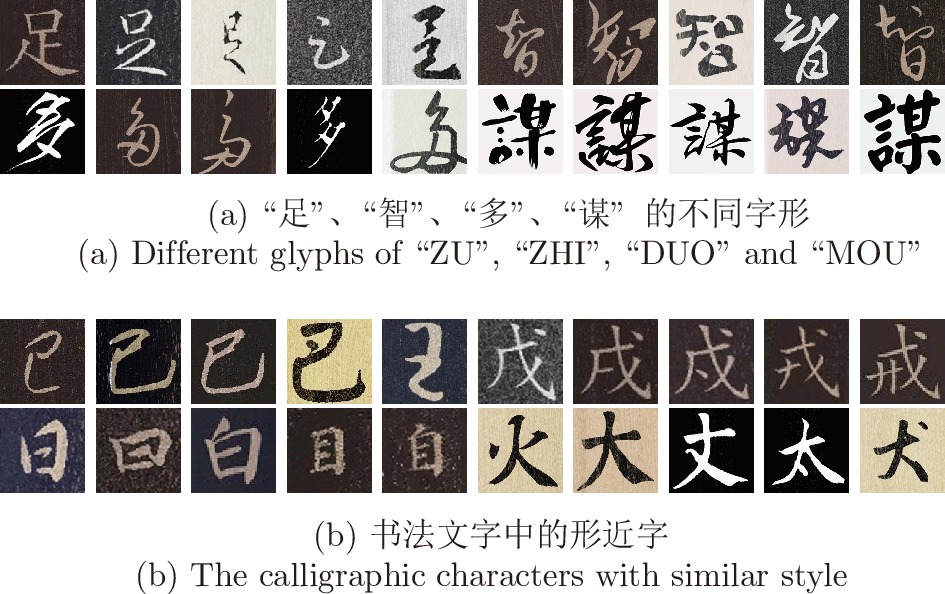
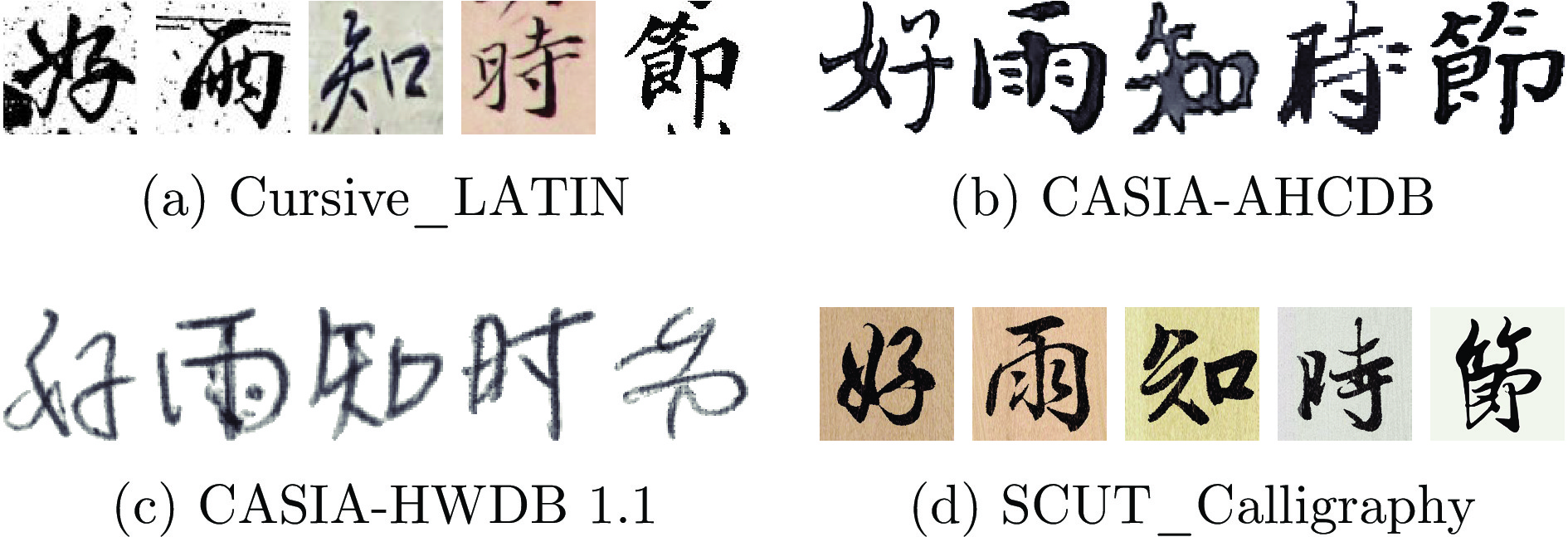
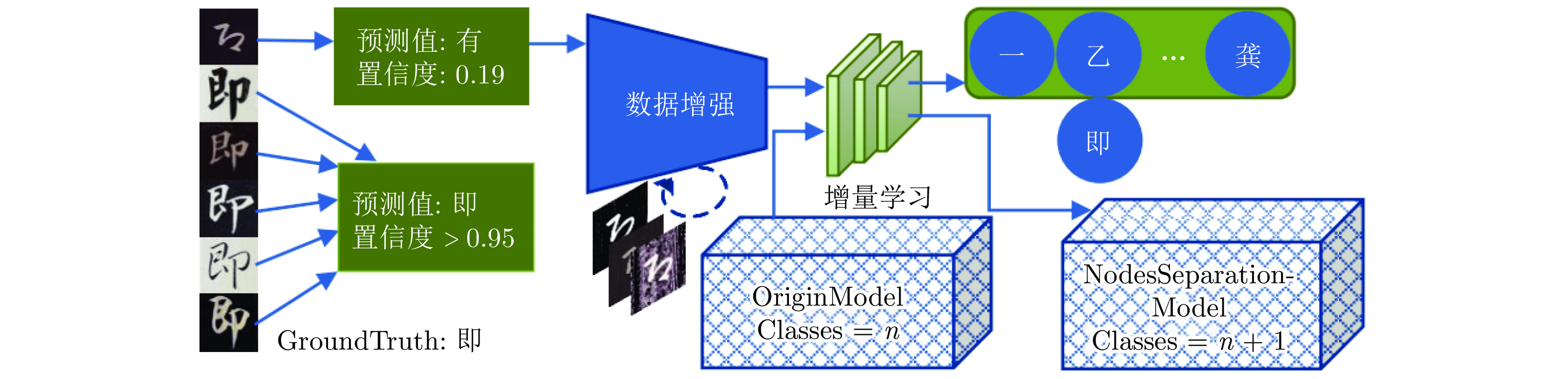
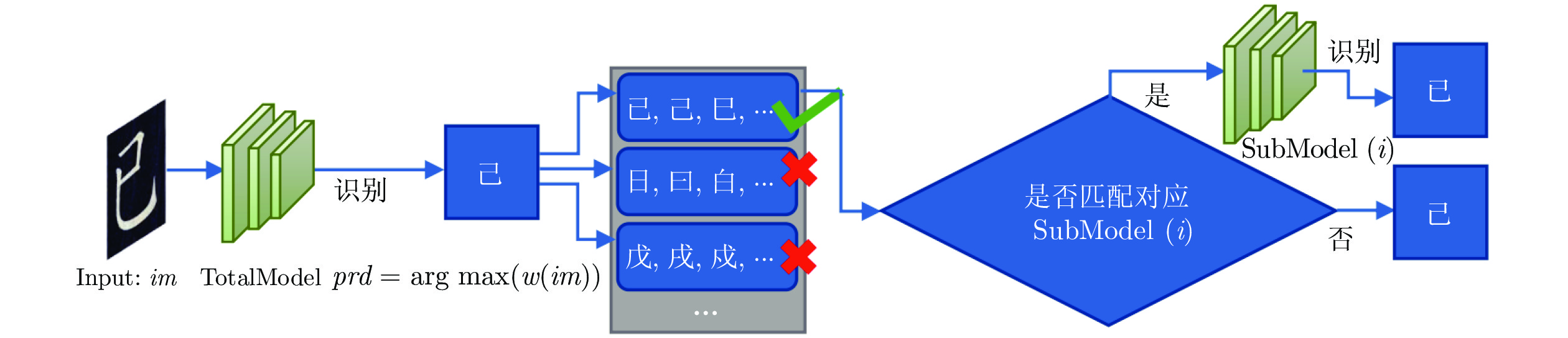
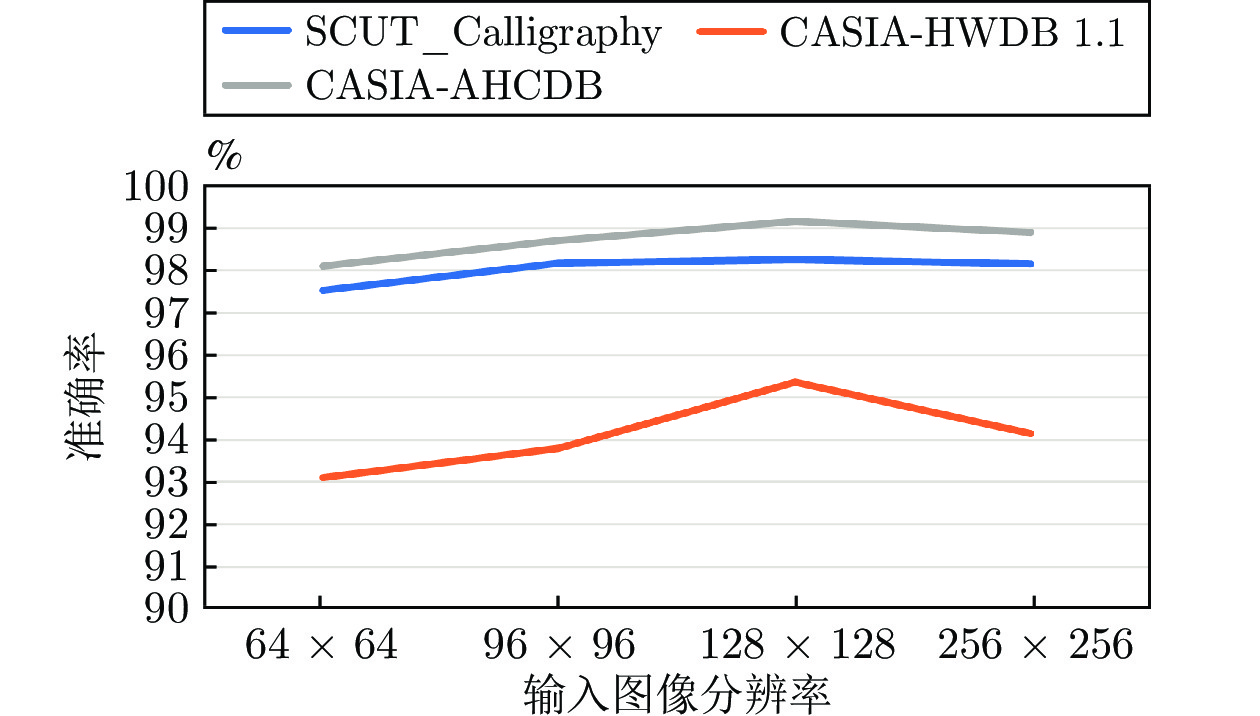
基于二维图像的书法文字识别是指利用计算机视觉技术对书法文字单字图像进行识别, 在古籍研究和文化传播中具有重要应用. 目前书法文字识别技术已经取得了相当不错的进展, 但依旧面临很多挑战, 比如复杂多变的字形可能导致的识别误差, 汉字本身又存在较多形近字, 且汉字字符类别数与其他语言文字相比更多, 书法文字图像普遍存在类内差距大、类间差距小的问题. 为解决这些问题, 提出叠层模型驱动的书法文字识别方法(Stacked-model driven character recognition, SDCR), 通过使用数据预处理、节点分离策略和叠层模型对现有单一分类模型进行改进, 按照字体类别对同一类别不同字体风格的文字进行二次划分; 针对类间差距小的问题, 根据书法文字训练集图像识别置信度对形近字进行子集划分, 针对子集进行嵌套模型增强训练, 在测试阶段利用叠层模型对形近字进行二次识别, 提升形近字的识别准确率. 为了验证该方法的鲁棒性, 在自主生成的SCUT_Calligraphy数据集和CASIA-HWDB 1.1, CASIA-AHCDB公开数据集上进行训练和测试, 实验结果表明该方法在上述数据集的识别准确率均有较大幅度提升, 在CASIA-HWDB 1.1、CASIA-AHCDB和自建数据集SCUT_Calligraphy上测试准确率分别达到96.33%、99.51%和99.90%, 证明了该方法的有效性.
基于二维图像的书法文字识别是指利用计算机视觉技术对书法文字单字图像进行识别, 在古籍研究和文化传播中具有重要应用. 目前书法文字识别技术已经取得了相当不错的进展, 但依旧面临很多挑战, 比如复杂多变的字形可能导致的识别误差, 汉字本身又存在较多形近字, 且汉字字符类别数与其他语言文字相比更多, 书法文字图像普遍存在类内差距大、类间差距小的问题. 为解决这些问题, 提出叠层模型驱动的书法文字识别方法(Stacked-model driven character recognition, SDCR), 通过使用数据预处理、节点分离策略和叠层模型对现有单一分类模型进行改进, 按照字体类别对同一类别不同字体风格的文字进行二次划分; 针对类间差距小的问题, 根据书法文字训练集图像识别置信度对形近字进行子集划分, 针对子集进行嵌套模型增强训练, 在测试阶段利用叠层模型对形近字进行二次识别, 提升形近字的识别准确率. 为了验证该方法的鲁棒性, 在自主生成的SCUT_Calligraphy数据集和CASIA-HWDB 1.1, CASIA-AHCDB公开数据集上进行训练和测试, 实验结果表明该方法在上述数据集的识别准确率均有较大幅度提升, 在CASIA-HWDB 1.1、CASIA-AHCDB和自建数据集SCUT_Calligraphy上测试准确率分别达到96.33%、99.51%和99.90%, 证明了该方法的有效性.

2024, 50(5): 958-969.
doi: 10.16383/j.aas.c220983
cstr: 32138.14.j.aas.c220983
摘要:
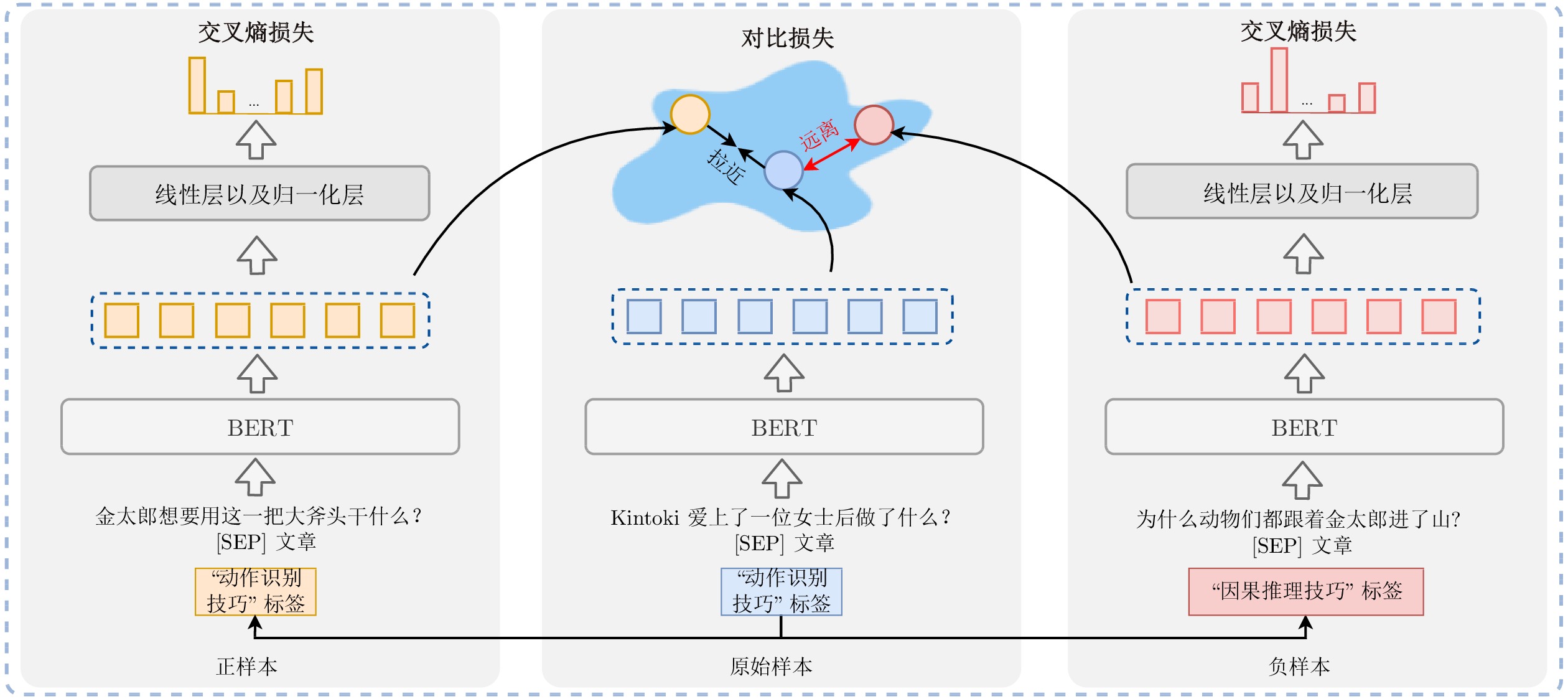
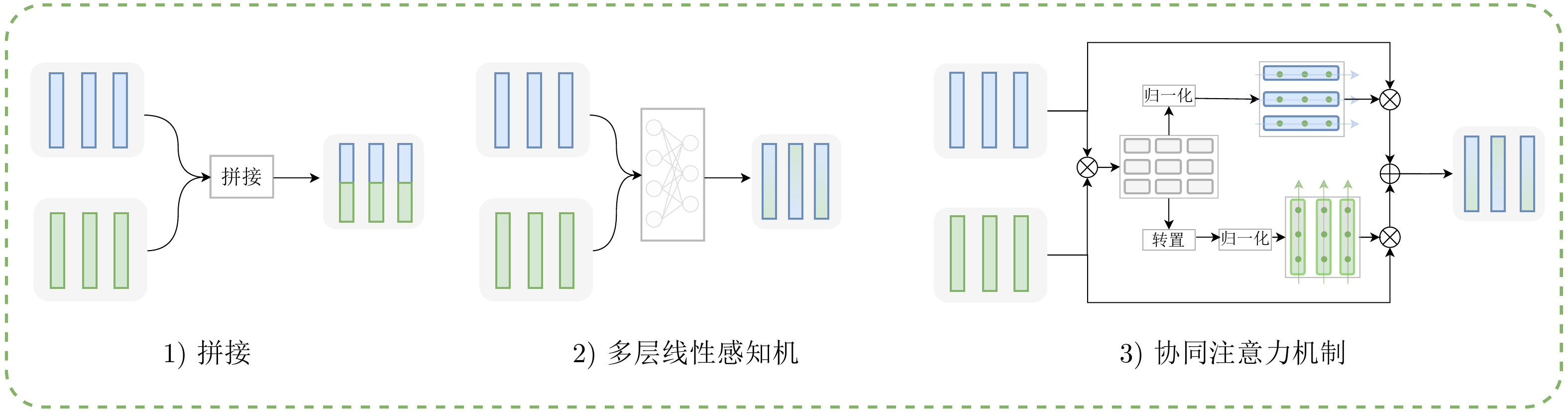
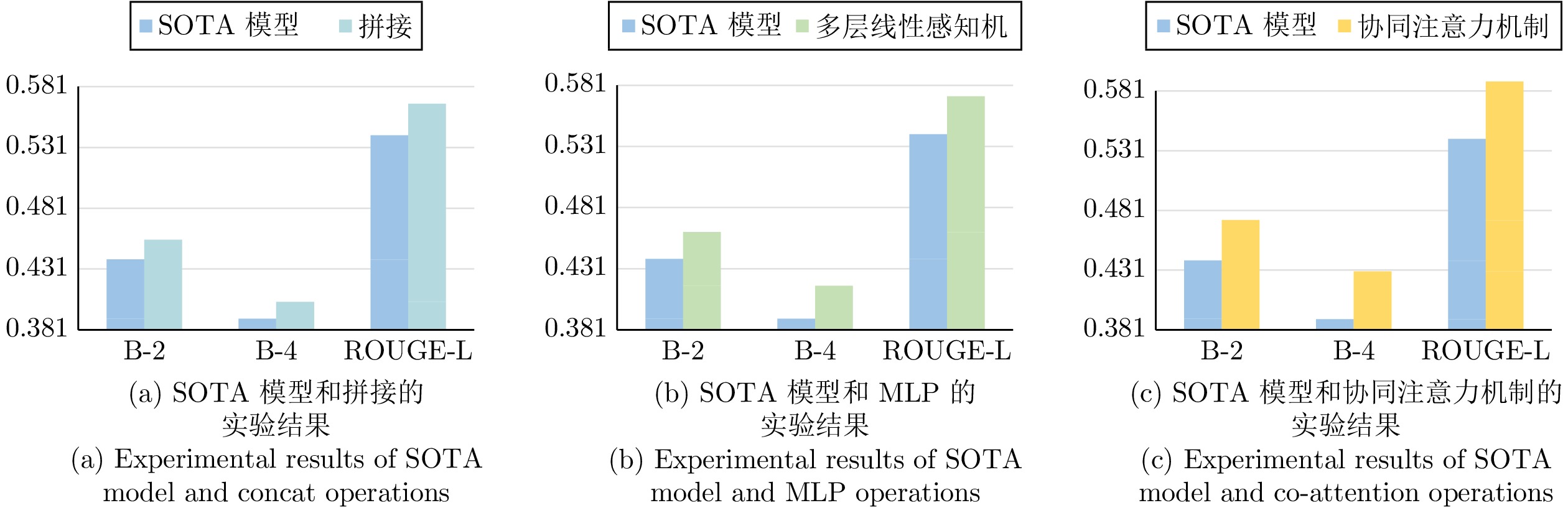
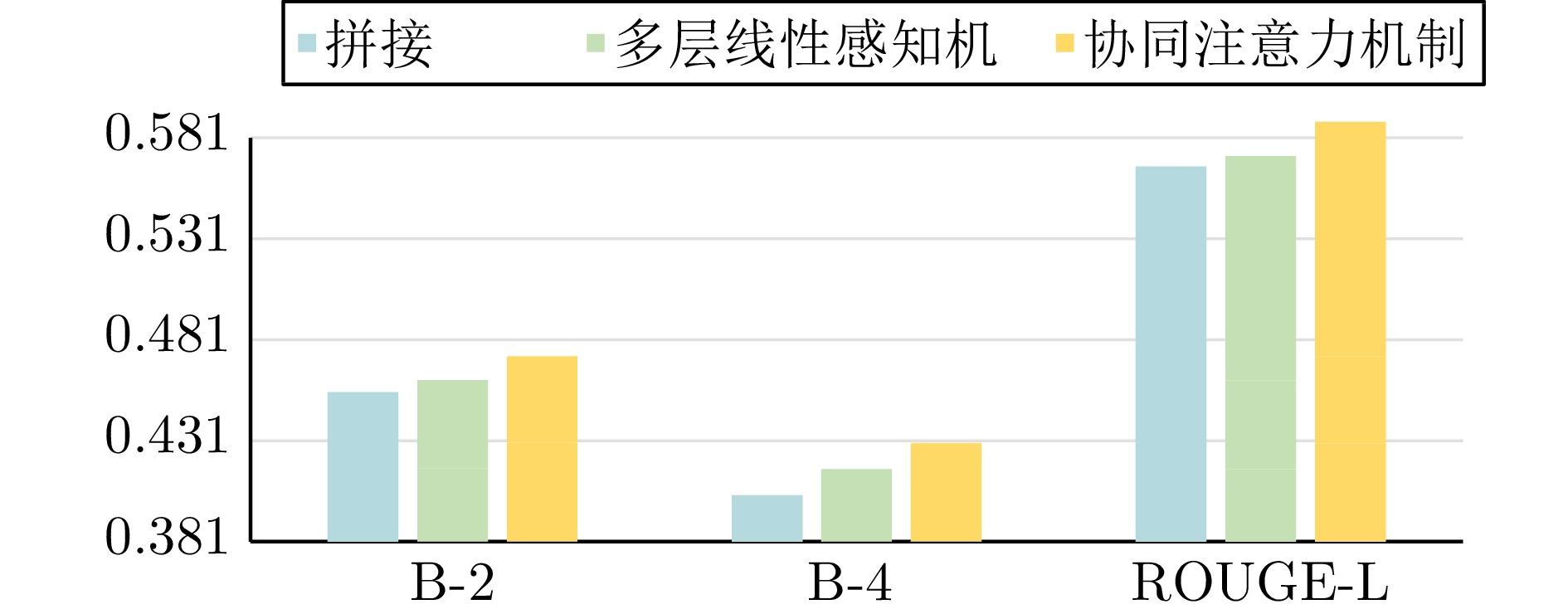
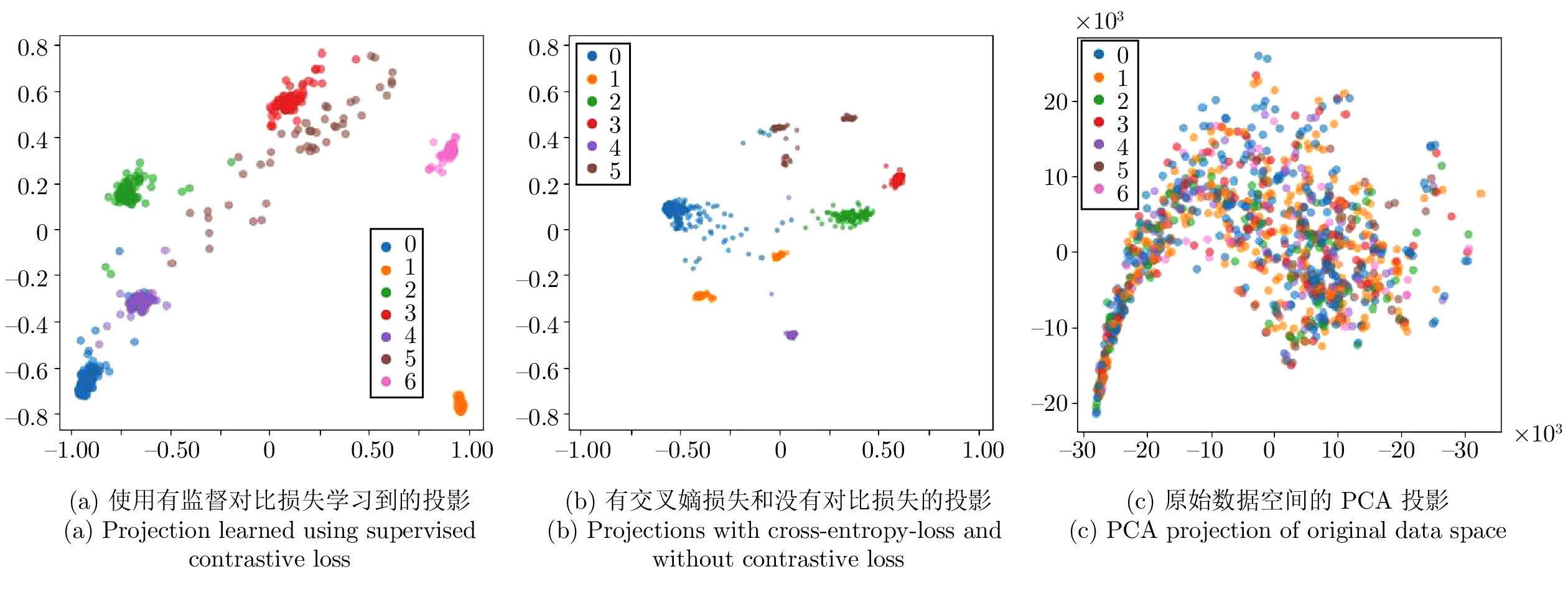
机器阅读理解任务旨在要求系统对给定文章进行理解, 然后对给定问题进行回答. 先前的工作重点聚焦在问题和文章间的交互信息, 忽略了对问题进行更加细粒度的分析(如问题所考察的阅读技巧是什么?). 受先前研究的启发, 人类对于问题的理解是一个多维度的过程. 首先, 人类需要理解问题的上下文信息; 然后, 针对不同类型问题, 识别其需要使用的阅读技巧; 最后, 通过与文章交互回答出问题答案. 针对这些问题, 提出一种基于阅读技巧识别和双通道融合的机器阅读理解方法, 对问题进行更加细致的分析, 从而提高模型回答问题的准确性. 阅读技巧识别器通过对比学习的方法, 能够显式地捕获阅读技巧的语义信息. 双通道融合机制将问题与文章的交互信息和阅读技巧的语义信息进行深层次的融合, 从而达到辅助系统理解问题和文章的目的. 为了验证该模型的效果, 在FairytaleQA数据集上进行实验, 实验结果表明, 该方法实现了在机器阅读理解任务和阅读技巧识别任务上的最好效果.
机器阅读理解任务旨在要求系统对给定文章进行理解, 然后对给定问题进行回答. 先前的工作重点聚焦在问题和文章间的交互信息, 忽略了对问题进行更加细粒度的分析(如问题所考察的阅读技巧是什么?). 受先前研究的启发, 人类对于问题的理解是一个多维度的过程. 首先, 人类需要理解问题的上下文信息; 然后, 针对不同类型问题, 识别其需要使用的阅读技巧; 最后, 通过与文章交互回答出问题答案. 针对这些问题, 提出一种基于阅读技巧识别和双通道融合的机器阅读理解方法, 对问题进行更加细致的分析, 从而提高模型回答问题的准确性. 阅读技巧识别器通过对比学习的方法, 能够显式地捕获阅读技巧的语义信息. 双通道融合机制将问题与文章的交互信息和阅读技巧的语义信息进行深层次的融合, 从而达到辅助系统理解问题和文章的目的. 为了验证该模型的效果, 在FairytaleQA数据集上进行实验, 实验结果表明, 该方法实现了在机器阅读理解任务和阅读技巧识别任务上的最好效果.


2024, 50(5): 970-979.
doi: 10.16383/j.aas.c210298
cstr: 32138.14.j.aas.c210298
摘要:
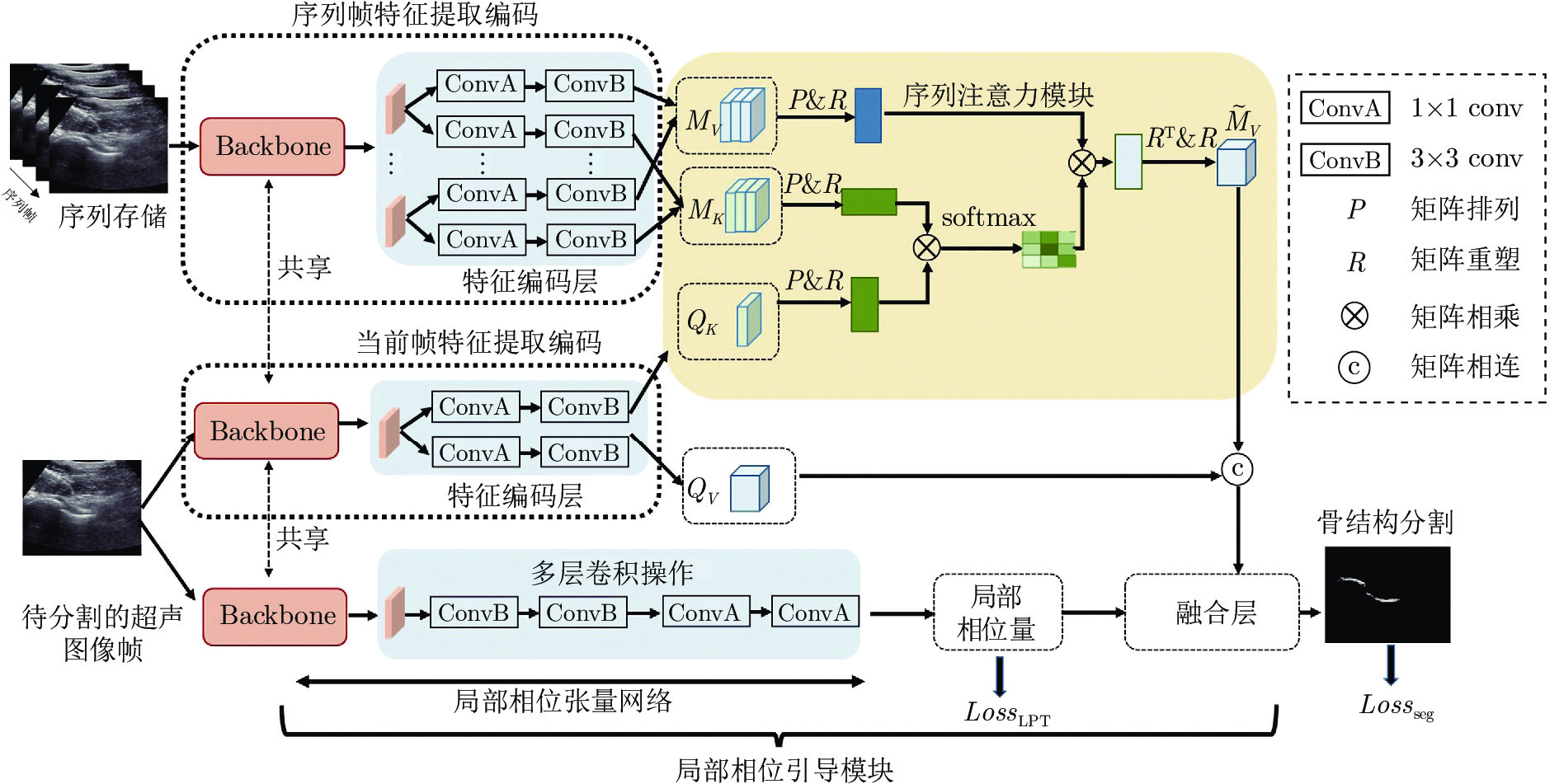
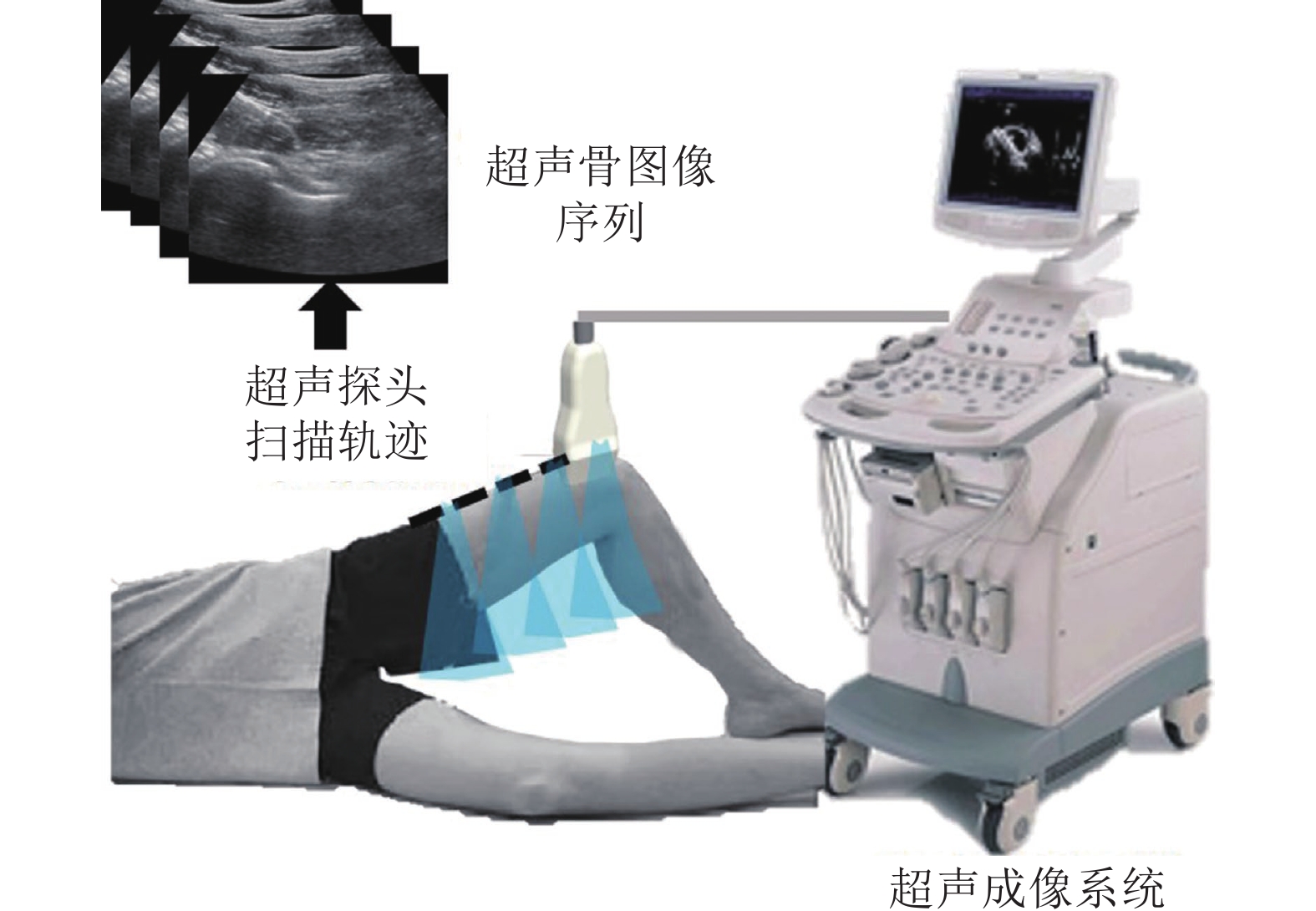
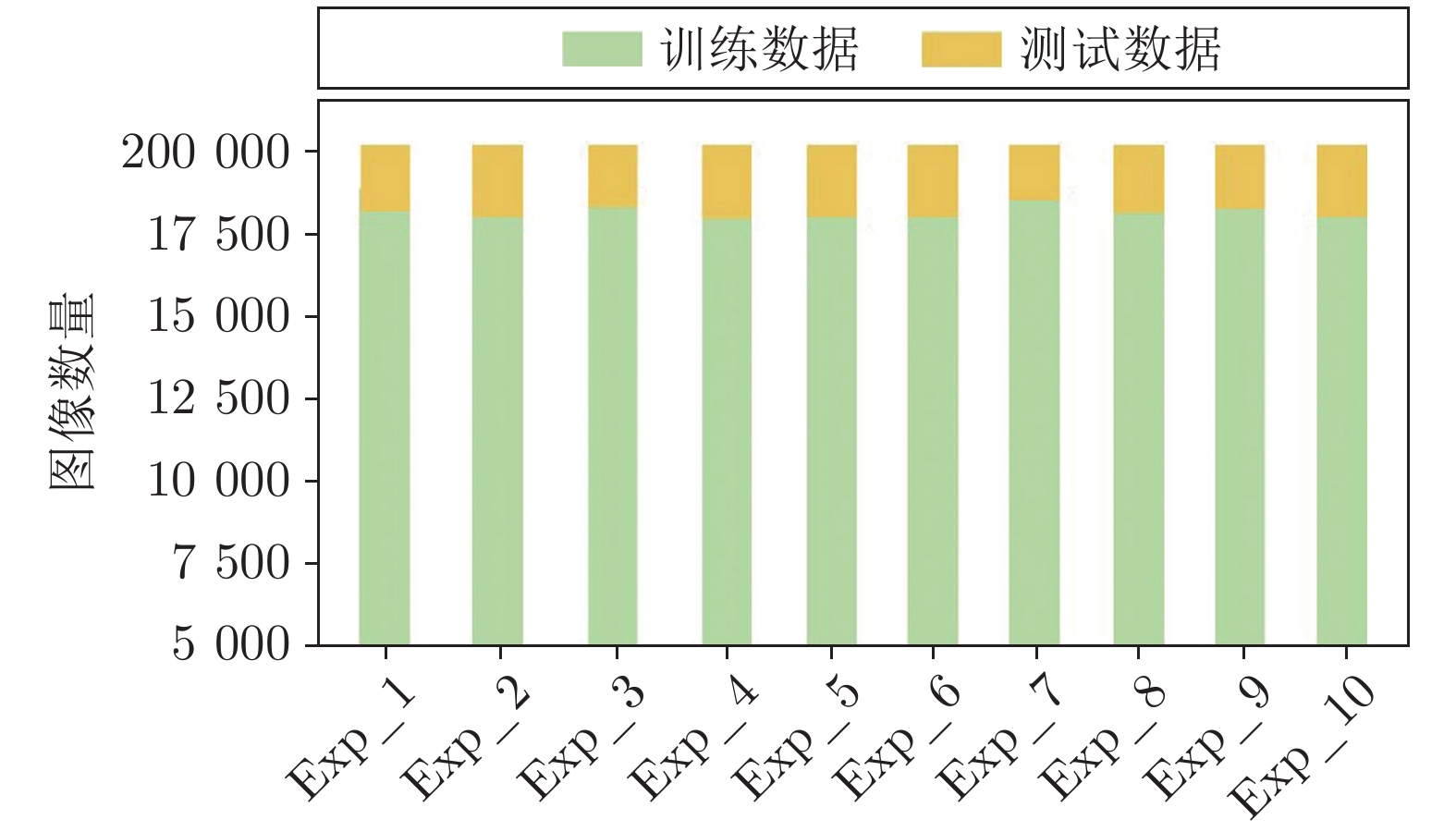
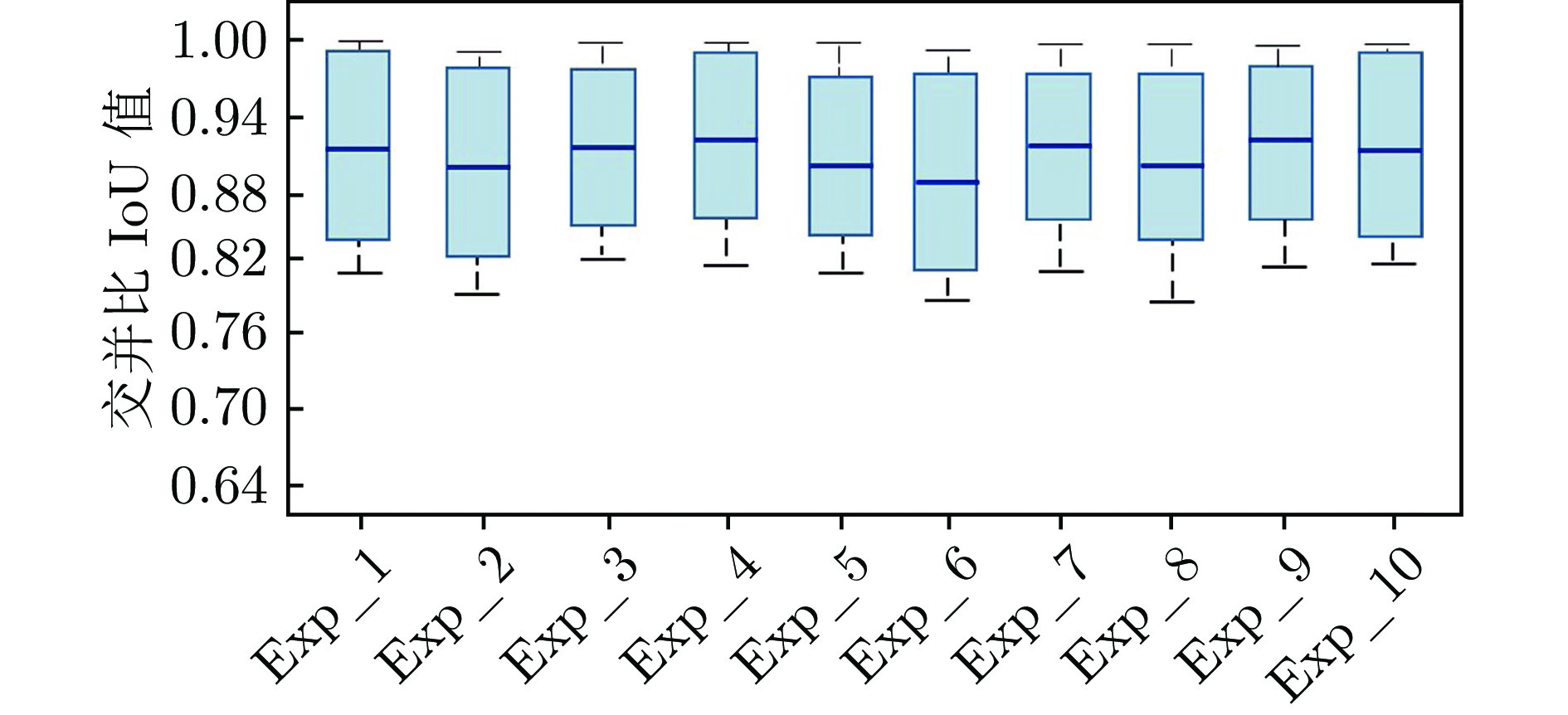
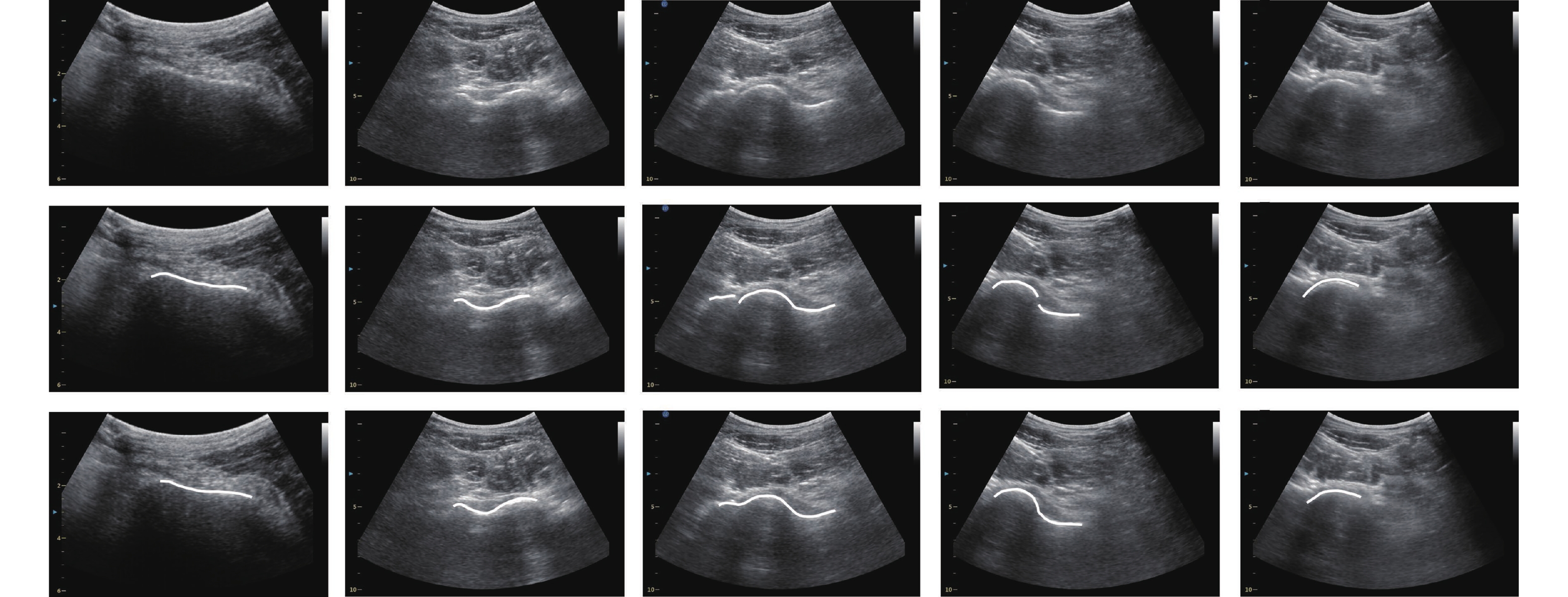
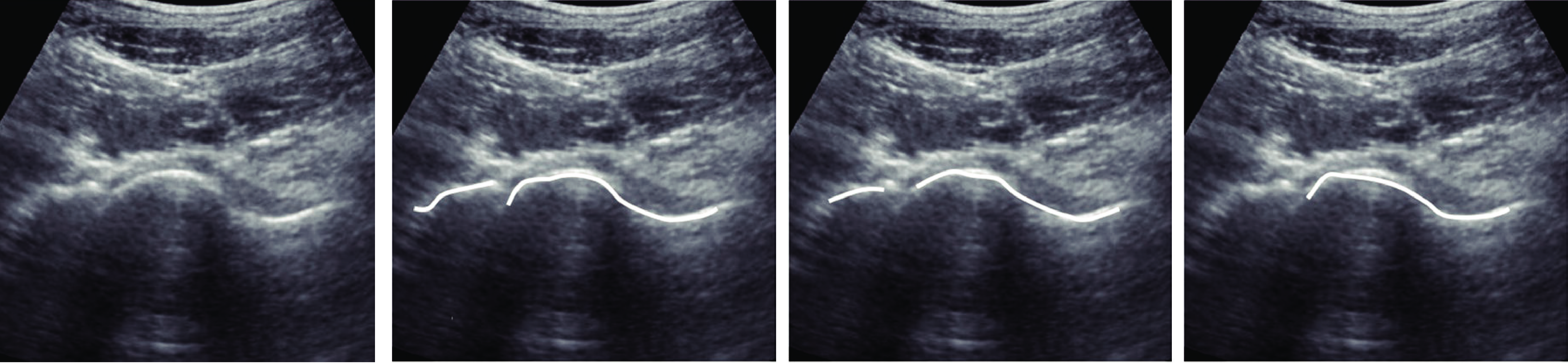
在超声辅助的骨科手术导航中, 需要从采集的超声图像序列中精确分割出骨结构, 并展示给医生, 来辅助医生进行术中决策. 但是, 图像噪声、成像伪影以及模糊的骨边界导致从超声图像序列中精确分割提取骨结构十分困难. 为解决该问题, 提出一种新的基于序列注意力与局部相位引导的骨超声图像分割网络. 该网络一方面自适应地利用超声序列帧之间的关系即序列注意力来辅助骨结构的语义分割. 另一方面, 该网络通过引入局部相位引导模块, 突出骨边缘信息, 进一步提高分割精度. 利用包含19 050幅图像的骨超声数据集, 进行交叉实验、消融实验并与最新的超声骨分割方法进行比较. 实验结果表明所提方法对骨结构分割精度高, 优于现有的超声骨分割方法.
在超声辅助的骨科手术导航中, 需要从采集的超声图像序列中精确分割出骨结构, 并展示给医生, 来辅助医生进行术中决策. 但是, 图像噪声、成像伪影以及模糊的骨边界导致从超声图像序列中精确分割提取骨结构十分困难. 为解决该问题, 提出一种新的基于序列注意力与局部相位引导的骨超声图像分割网络. 该网络一方面自适应地利用超声序列帧之间的关系即序列注意力来辅助骨结构的语义分割. 另一方面, 该网络通过引入局部相位引导模块, 突出骨边缘信息, 进一步提高分割精度. 利用包含19 050幅图像的骨超声数据集, 进行交叉实验、消融实验并与最新的超声骨分割方法进行比较. 实验结果表明所提方法对骨结构分割精度高, 优于现有的超声骨分割方法.

2024, 50(5): 980-990.
doi: 10.16383/j.aas.c230678
cstr: 32138.14.j.aas.c230678
摘要:
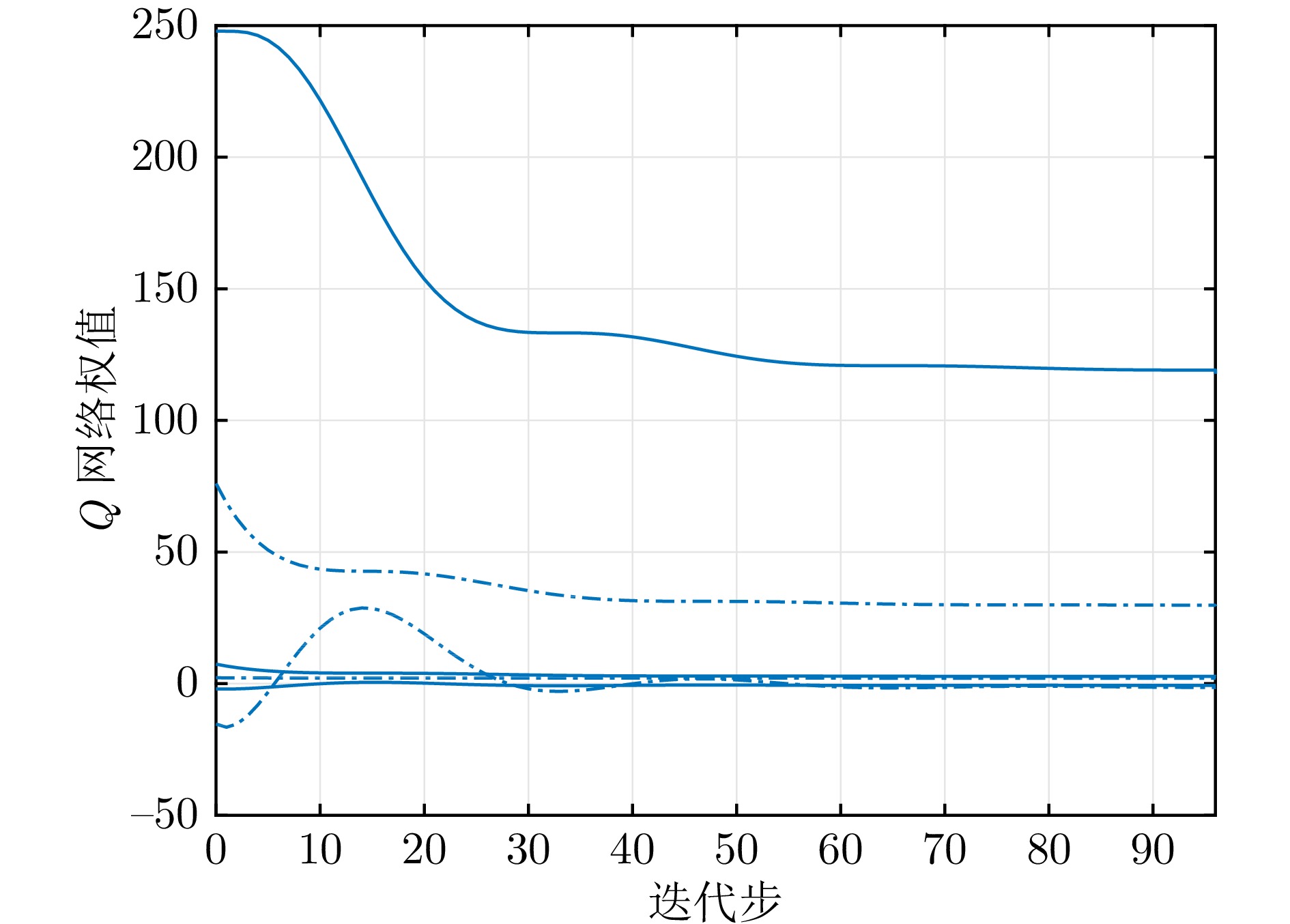
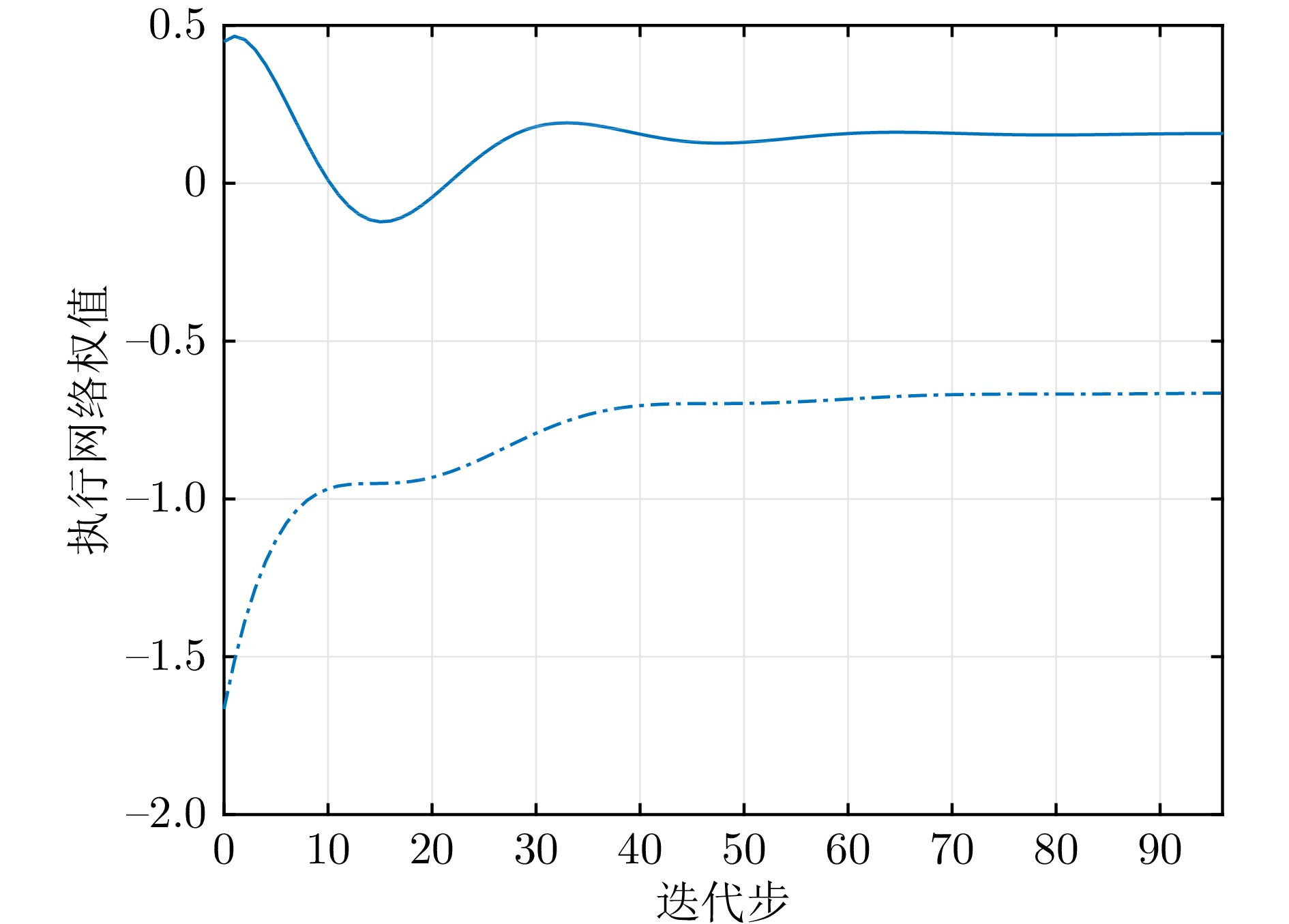
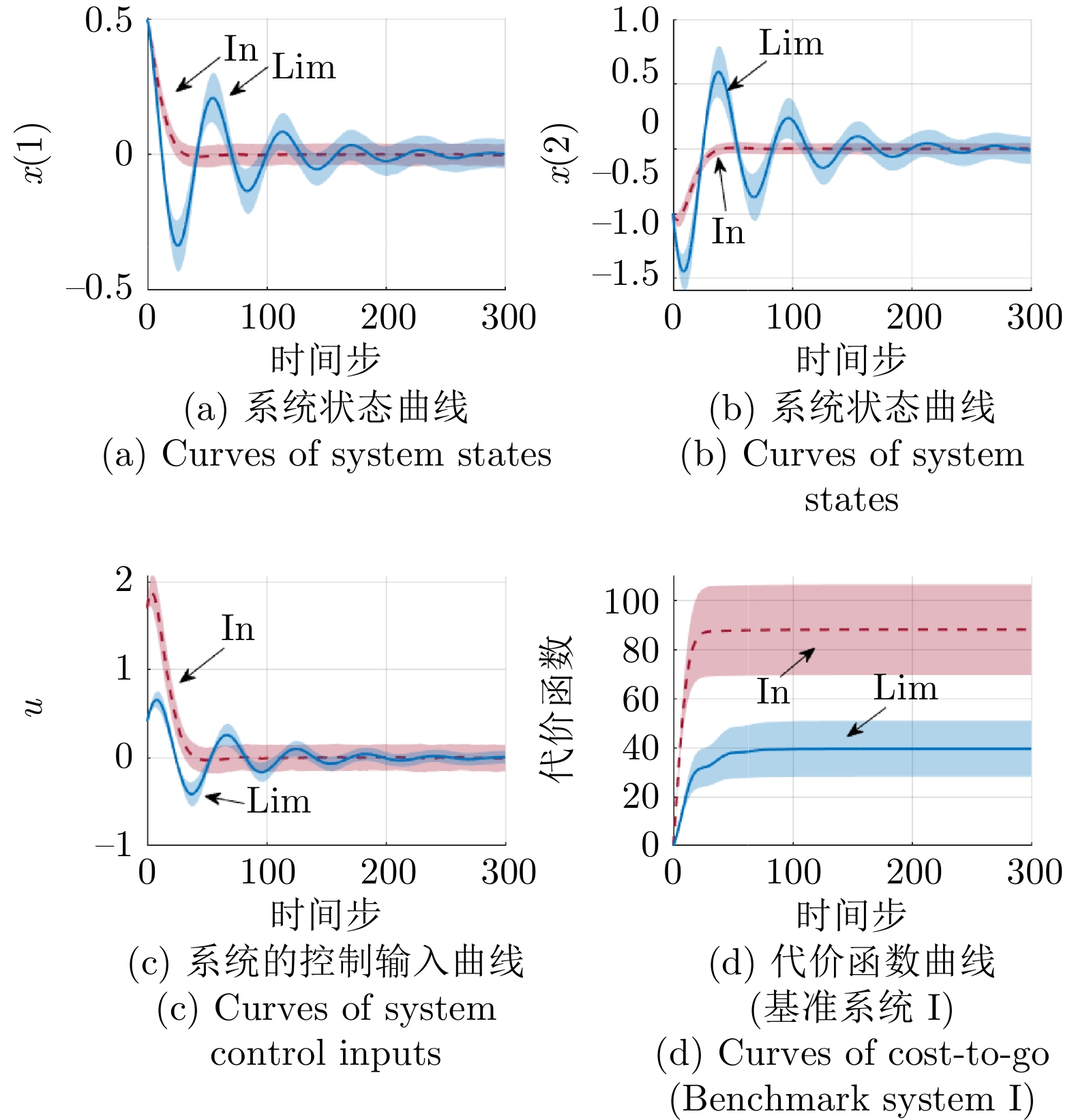
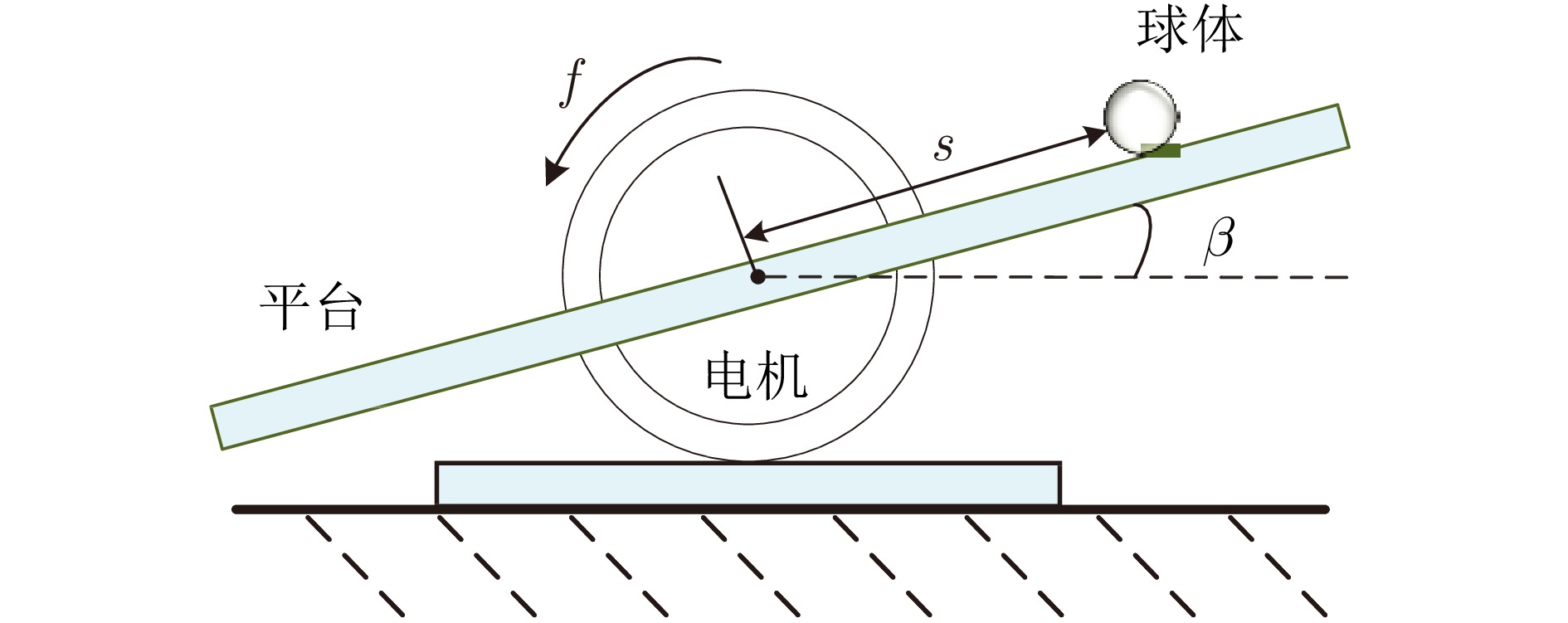
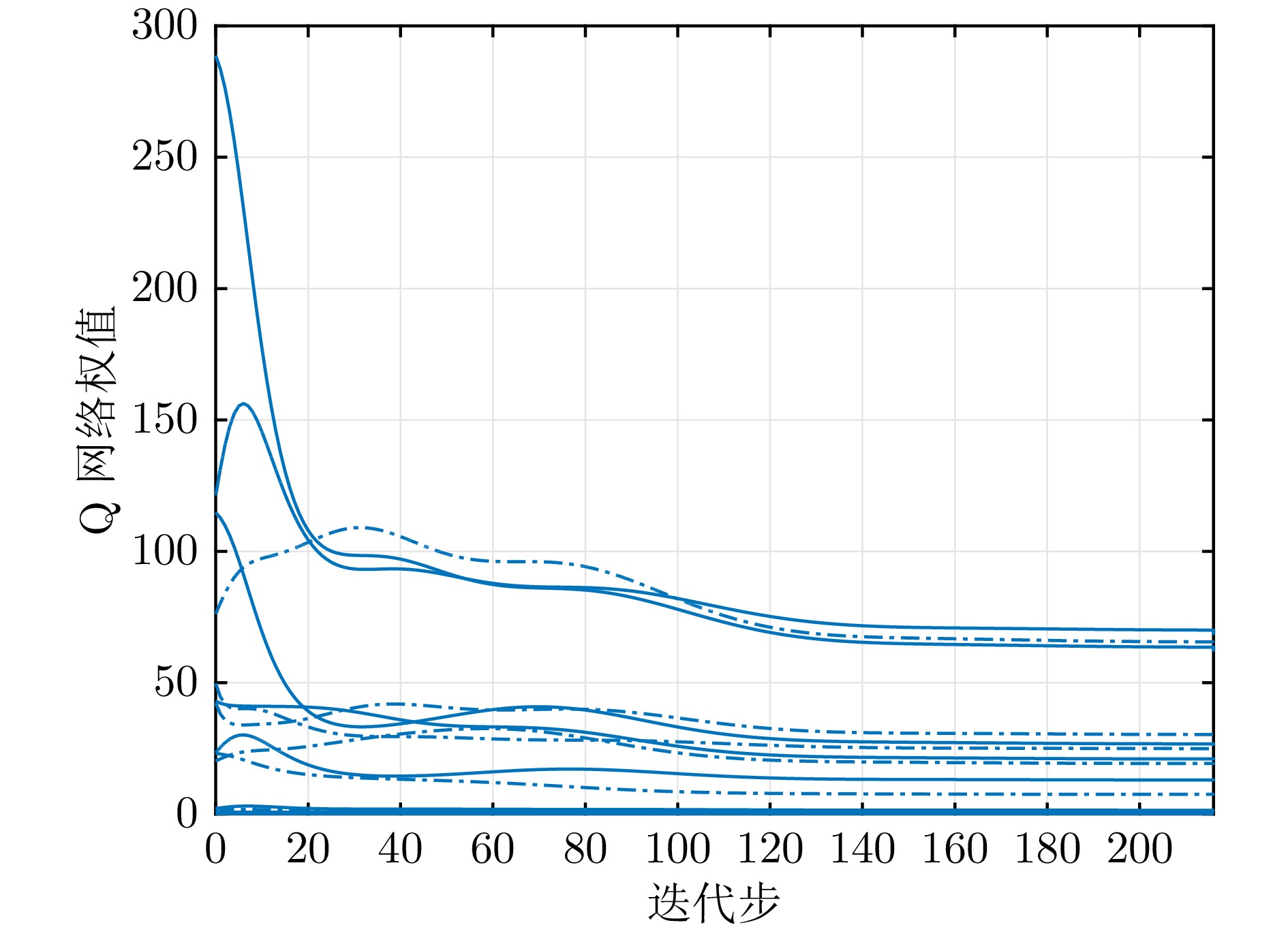
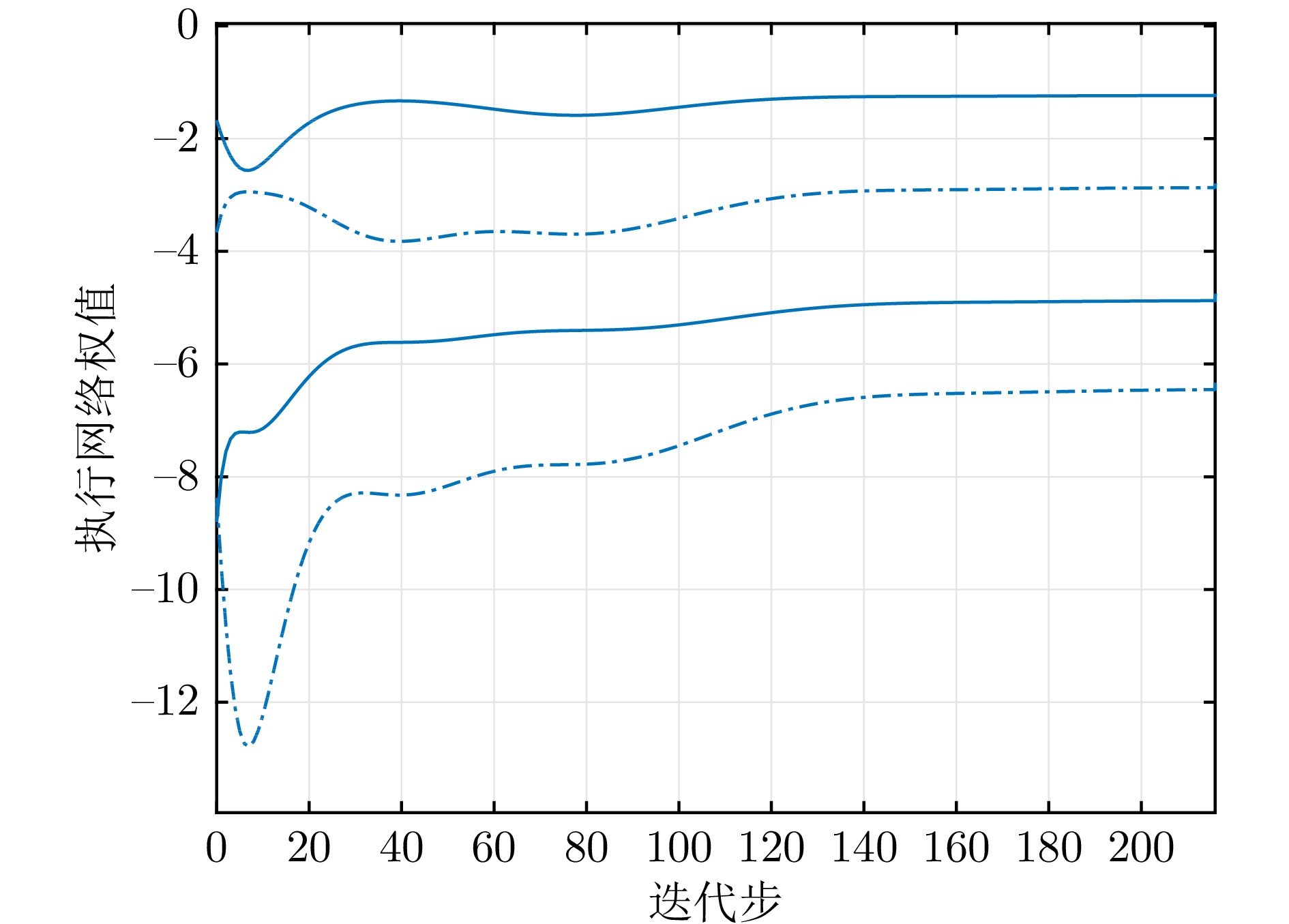
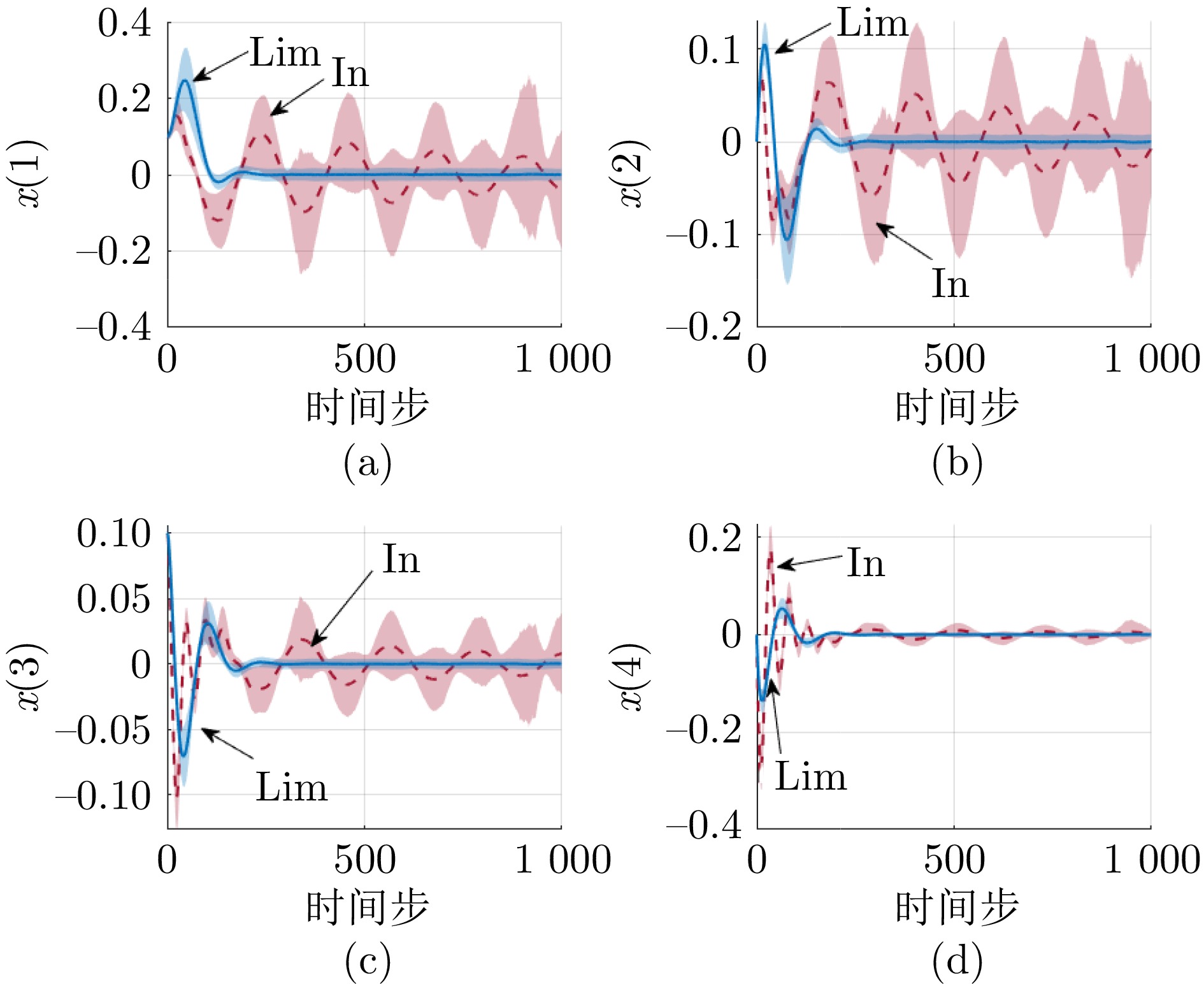
自适应评判技术已经广泛应用于求解复杂非线性系统的最优控制问题, 但利用其求解离散时间非线性随机系统的无限时域最优控制问题还存在一定局限性. 本文融合自适应评判技术, 建立一种数据驱动的离散随机系统折扣最优调节方法. 首先, 针对宽松假设下的非线性随机系统, 研究带有折扣因子的无限时域最优控制问题. 所提的随机系统 Q-learning 算法能够将初始的容许策略单调不增地优化至最优策略. 基于数据驱动思想, 随机系统 Q-learning 算法在不建立模型的情况下直接利用数据进行策略优化. 其次, 利用执行−评判神经网络方案, 实现了随机系统 Q-learning 算法. 最后, 通过两个基准系统, 验证本文提出的随机系统 Q-learning 算法的有效性.
自适应评判技术已经广泛应用于求解复杂非线性系统的最优控制问题, 但利用其求解离散时间非线性随机系统的无限时域最优控制问题还存在一定局限性. 本文融合自适应评判技术, 建立一种数据驱动的离散随机系统折扣最优调节方法. 首先, 针对宽松假设下的非线性随机系统, 研究带有折扣因子的无限时域最优控制问题. 所提的随机系统 Q-learning 算法能够将初始的容许策略单调不增地优化至最优策略. 基于数据驱动思想, 随机系统 Q-learning 算法在不建立模型的情况下直接利用数据进行策略优化. 其次, 利用执行−评判神经网络方案, 实现了随机系统 Q-learning 算法. 最后, 通过两个基准系统, 验证本文提出的随机系统 Q-learning 算法的有效性.

2024, 50(5): 991-1000.
doi: 10.16383/j.aas.c230581
cstr: 32138.14.j.aas.c230581
摘要:
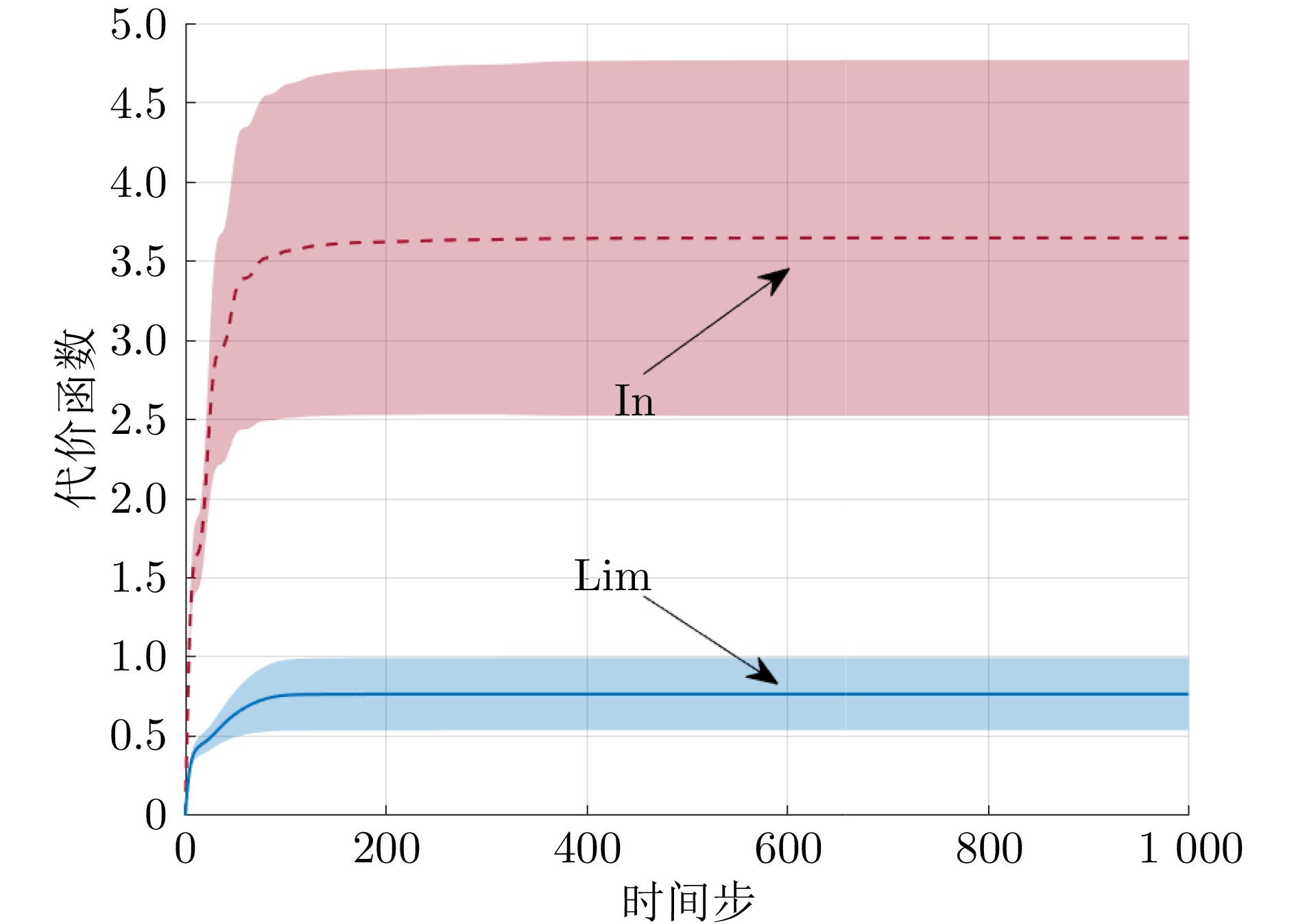
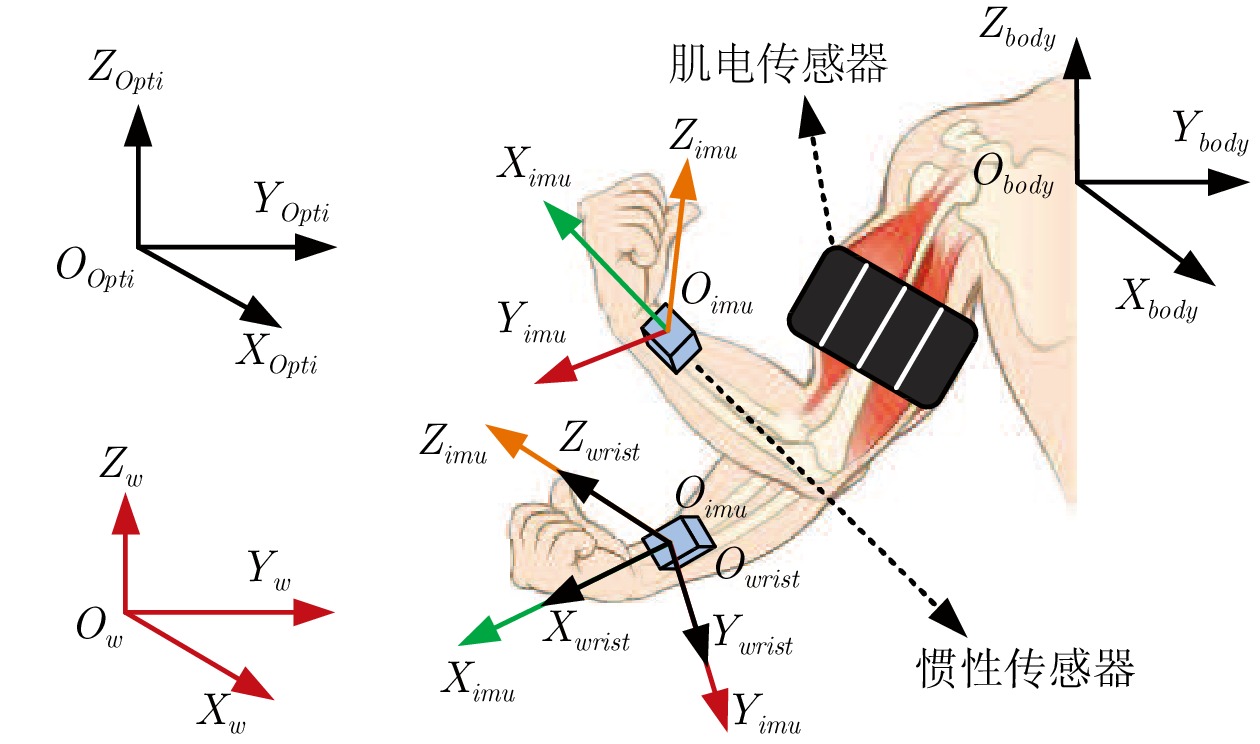
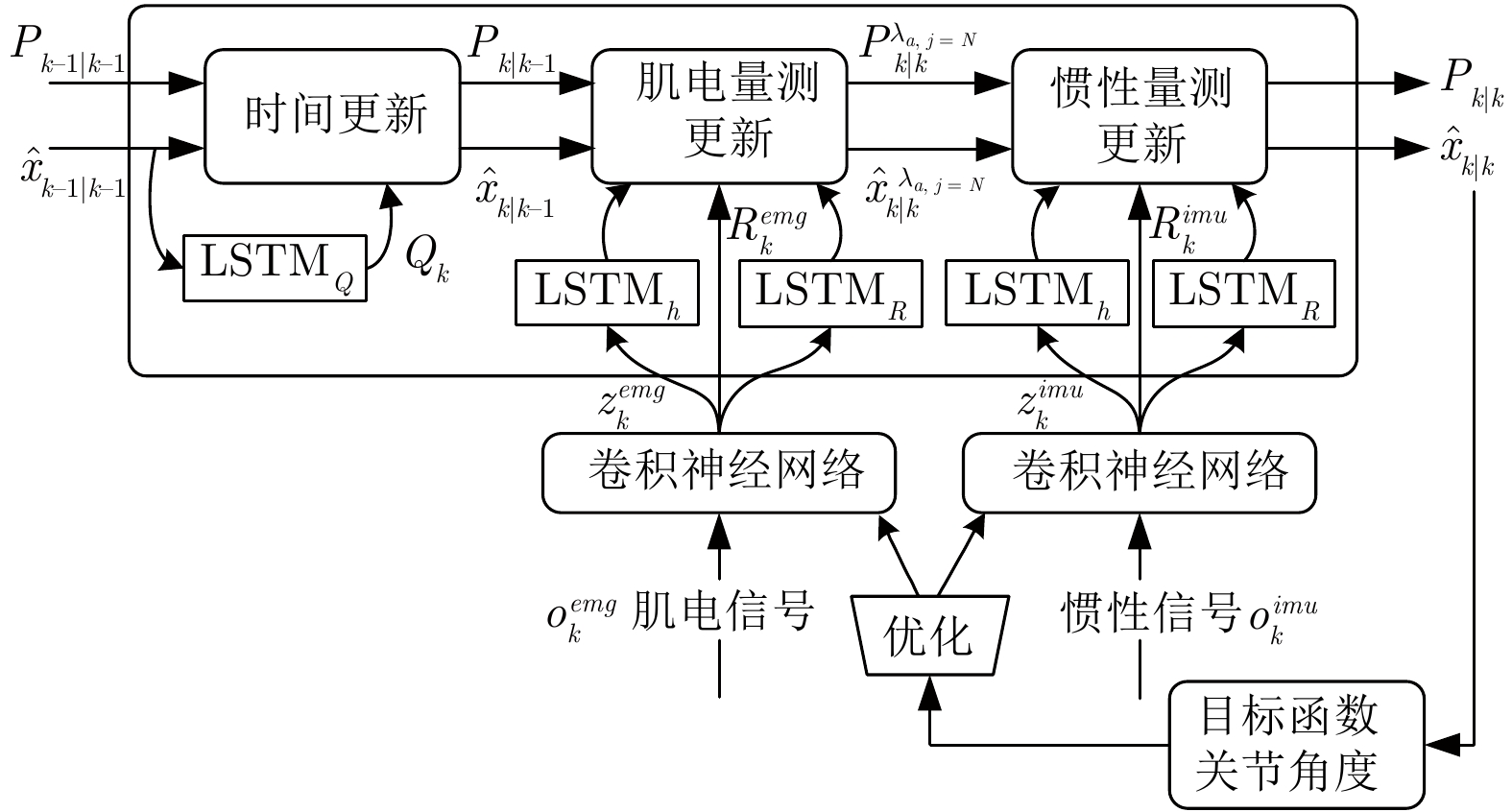
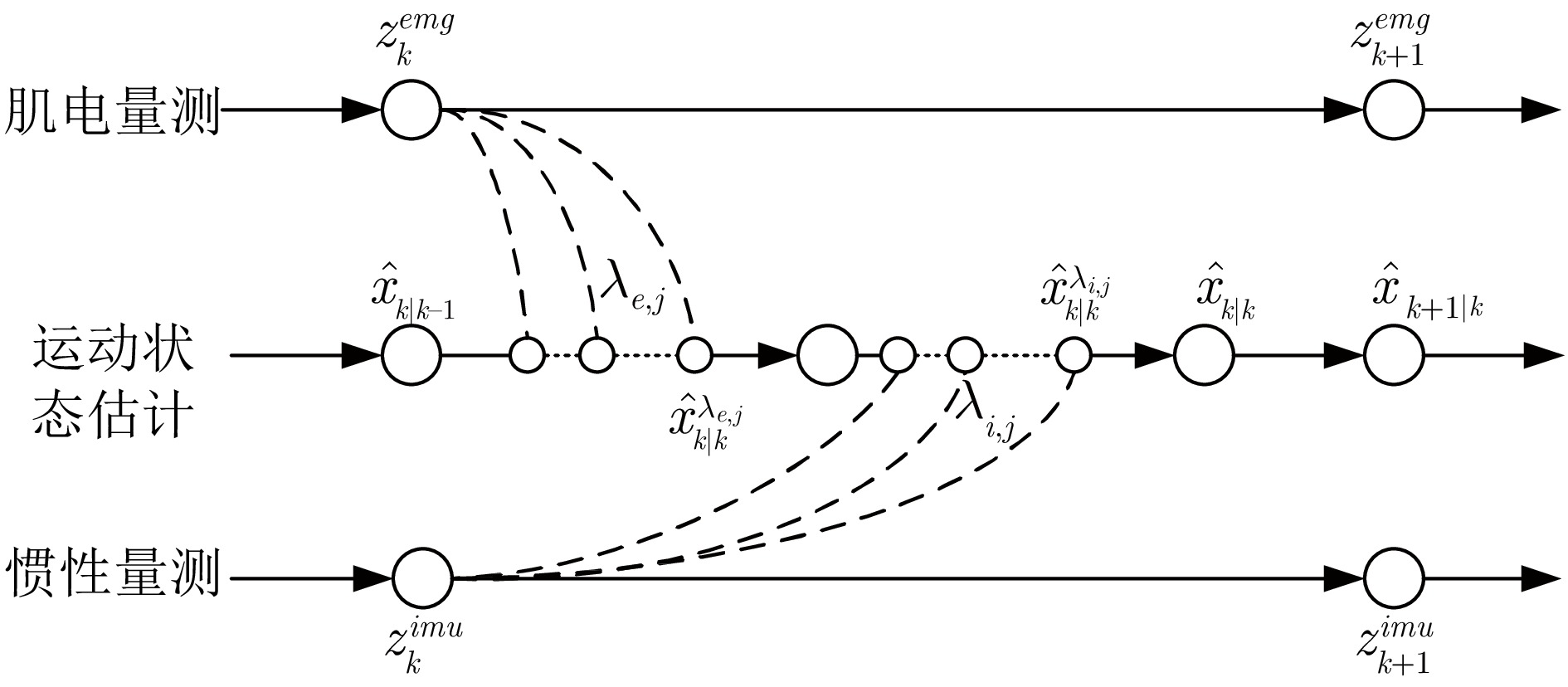
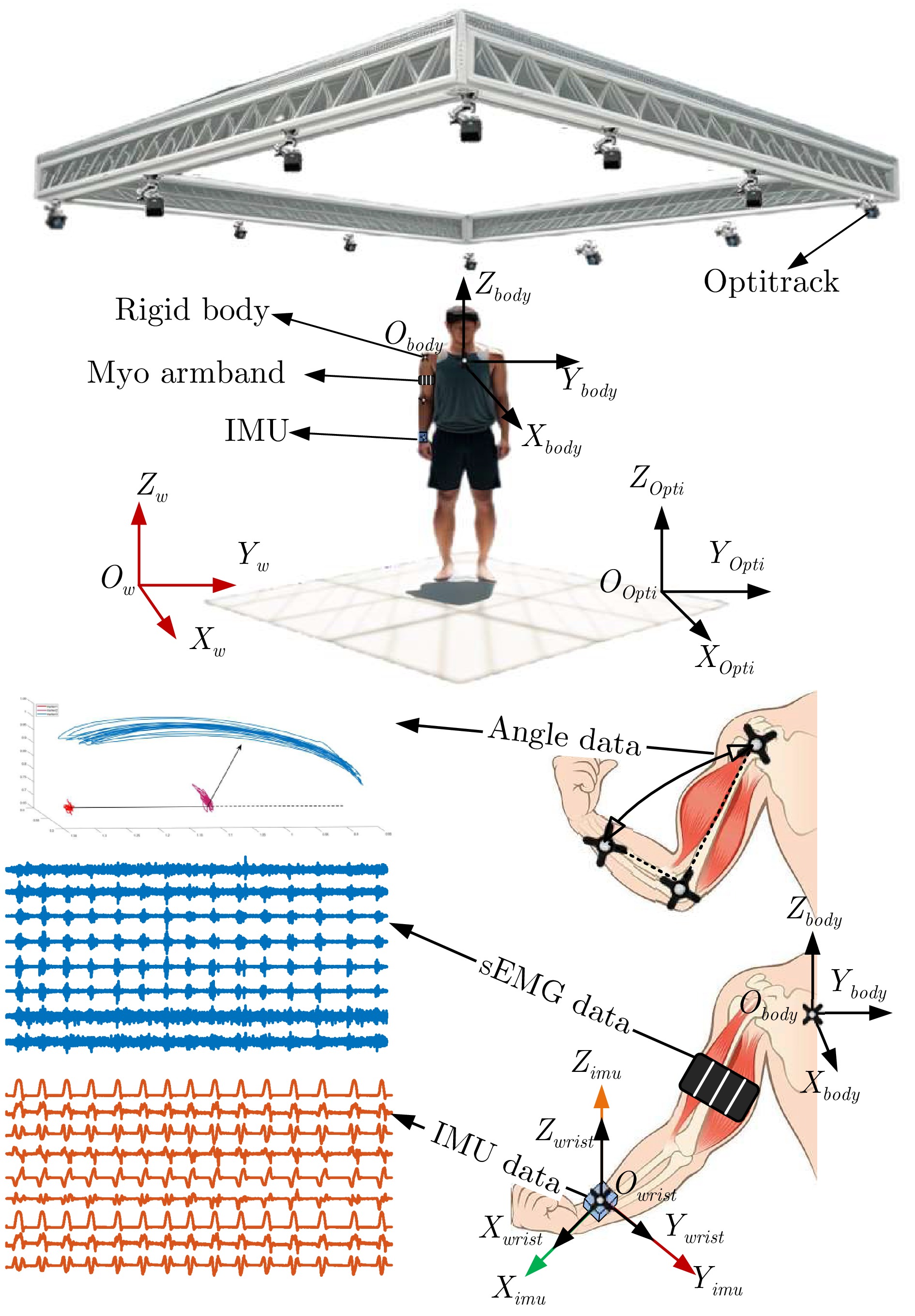
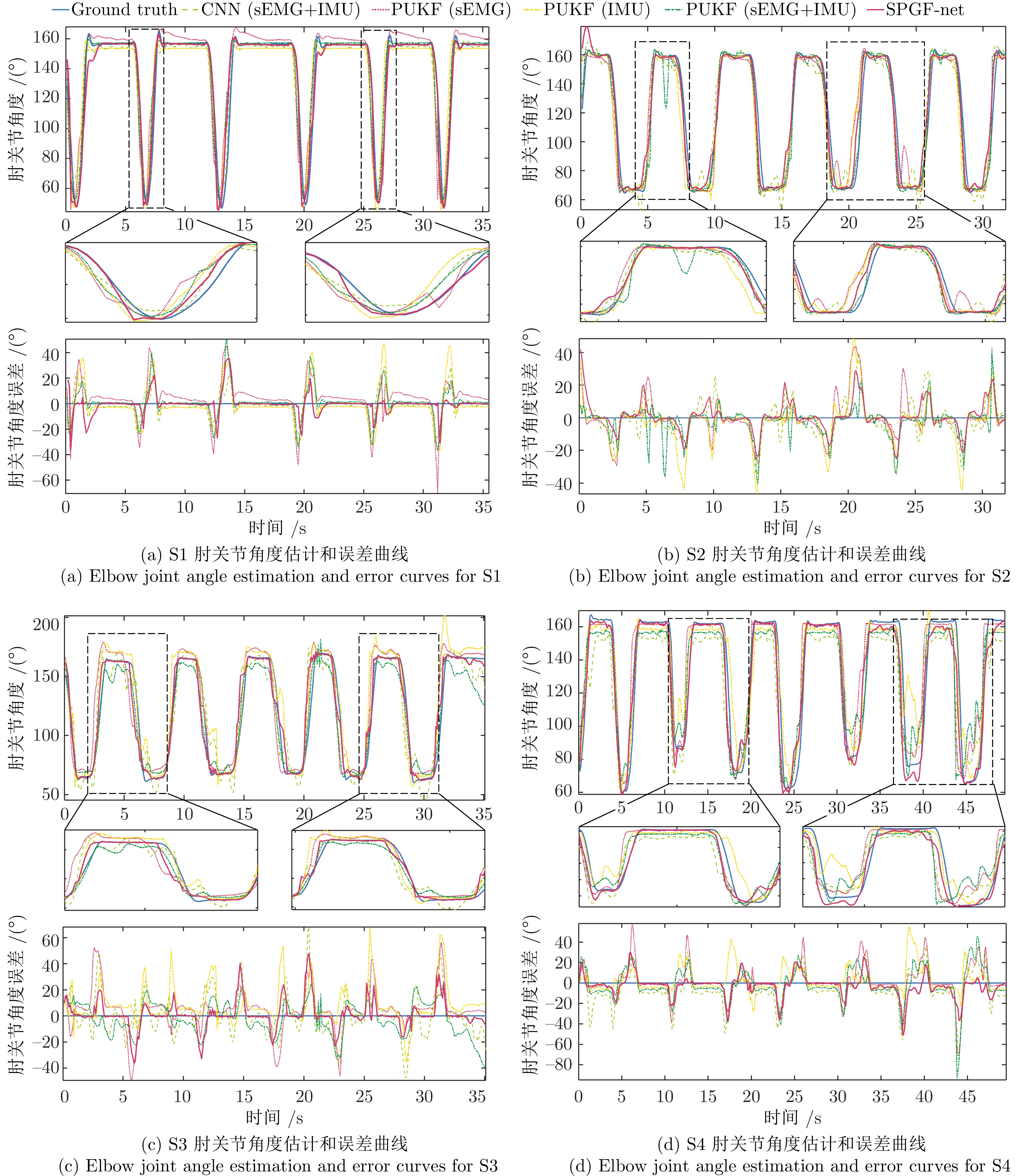
本文研究了基于肌电(Electromyography, EMG)−惯性融合的人体运动估计问题, 提出了一种序贯渐进高斯滤波网络(Sequential progressive Gaussian filtering network, SPGF-net)估计方法来形成肌电和惯性的互补性优势, 以提高人体运动估计精度和稳定性. 首先, 利用卷积神经网络对观测数据进行特征提取, 以及利用长短期记忆(Long short-term memory, LSTM)网络模型来学习噪声统计特性和量测模型. 其次, 采用序贯融合的方式融合异构传感器量测特征, 以建立高斯滤波与深度学习相结合的网络模型来实现人体运动估计. 特别地, 引入渐进量测更新对网络量测特征的不确定性进行补偿. 最后, 通过实验结果表明, 相比于现有的卡尔曼滤波网络, 该融合方法在上肢关节角度估计中的均方根误差(Root mean square error, RMSE)下降了13.8%, 相关系数(R2)提高了4.36%.
本文研究了基于肌电(Electromyography, EMG)−惯性融合的人体运动估计问题, 提出了一种序贯渐进高斯滤波网络(Sequential progressive Gaussian filtering network, SPGF-net)估计方法来形成肌电和惯性的互补性优势, 以提高人体运动估计精度和稳定性. 首先, 利用卷积神经网络对观测数据进行特征提取, 以及利用长短期记忆(Long short-term memory, LSTM)网络模型来学习噪声统计特性和量测模型. 其次, 采用序贯融合的方式融合异构传感器量测特征, 以建立高斯滤波与深度学习相结合的网络模型来实现人体运动估计. 特别地, 引入渐进量测更新对网络量测特征的不确定性进行补偿. 最后, 通过实验结果表明, 相比于现有的卡尔曼滤波网络, 该融合方法在上肢关节角度估计中的均方根误差(Root mean square error, RMSE)下降了13.8%, 相关系数(R2)提高了4.36%.

2024, 50(5): 1001-1014.
doi: 10.16383/j.aas.c230430
cstr: 32138.14.j.aas.c230430
摘要:
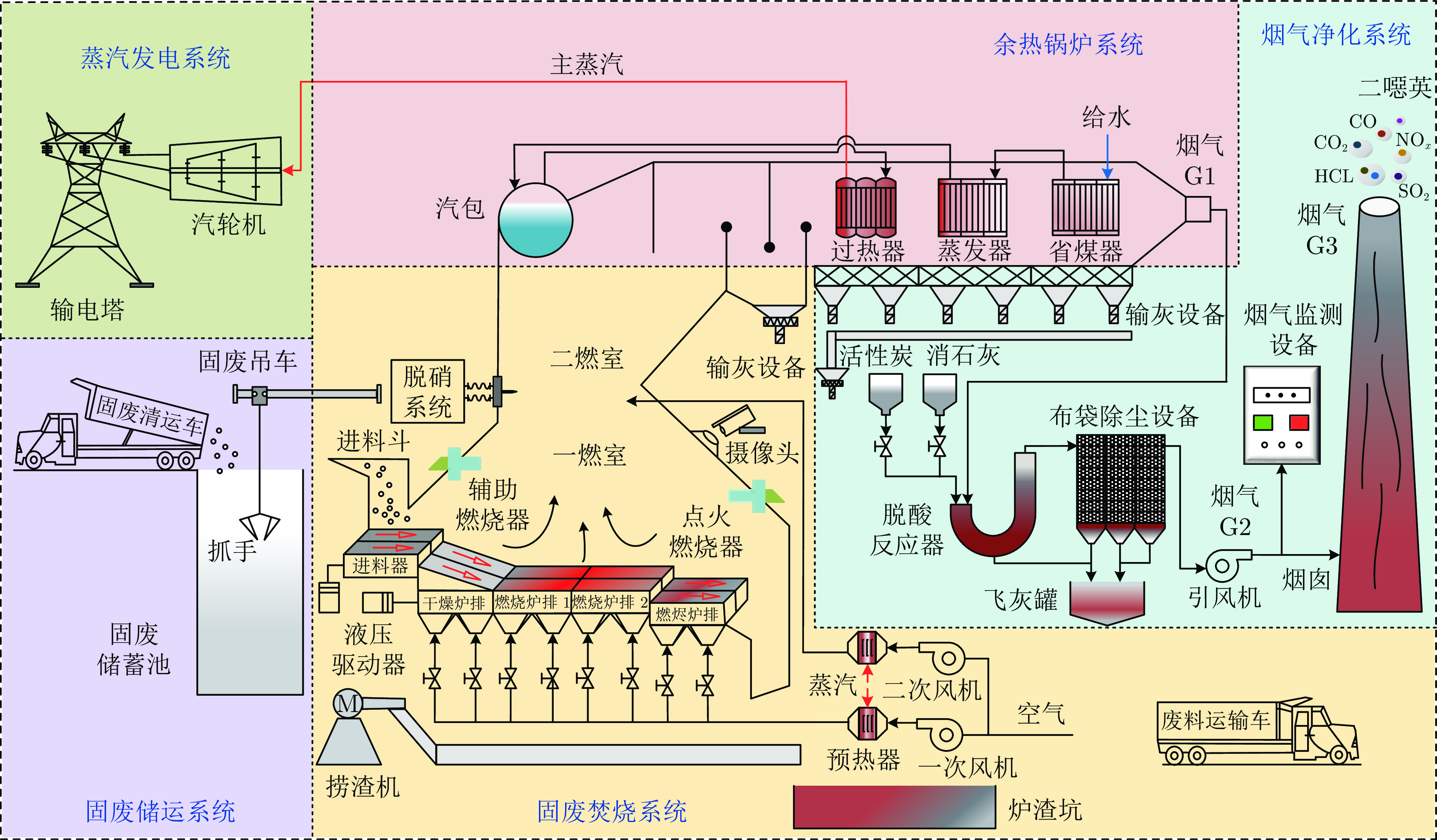
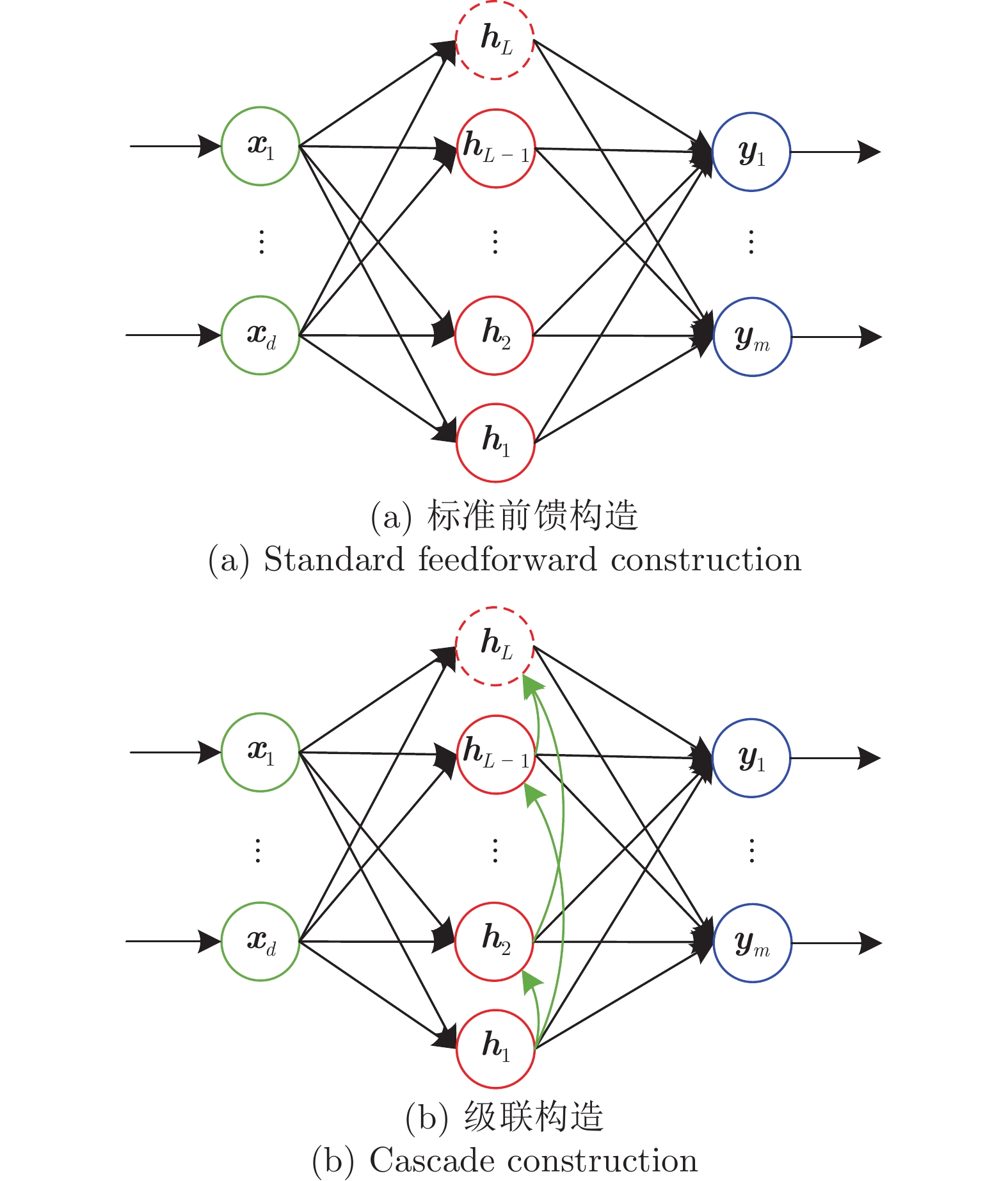
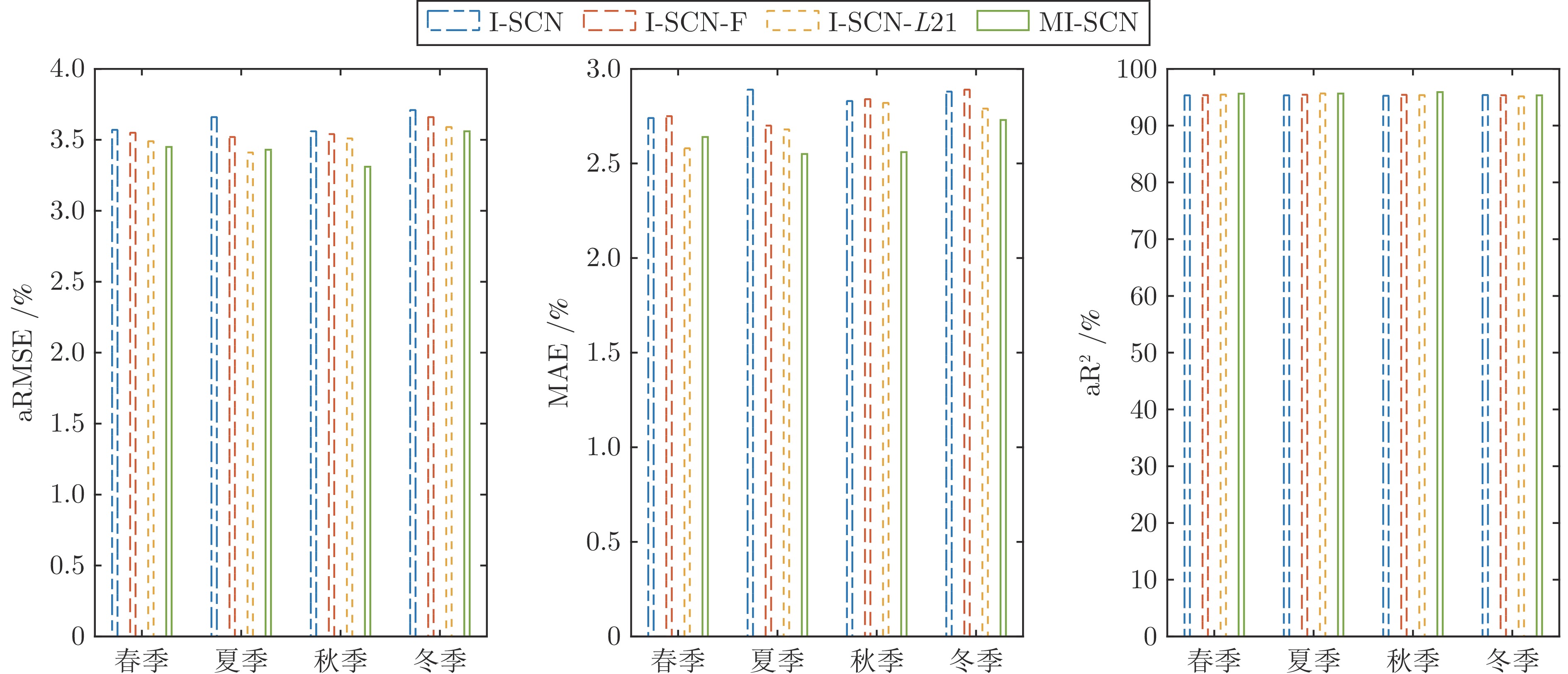
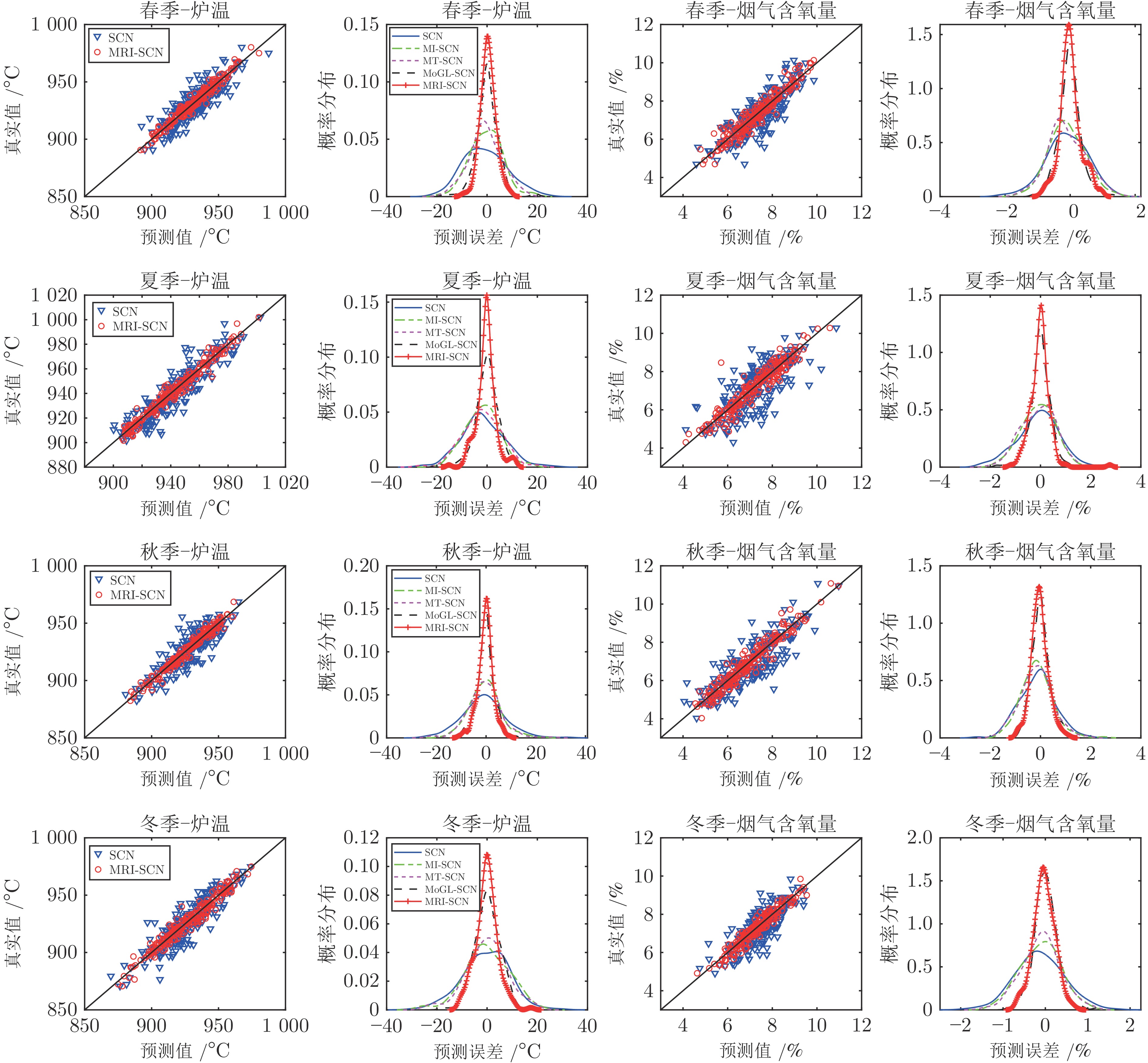
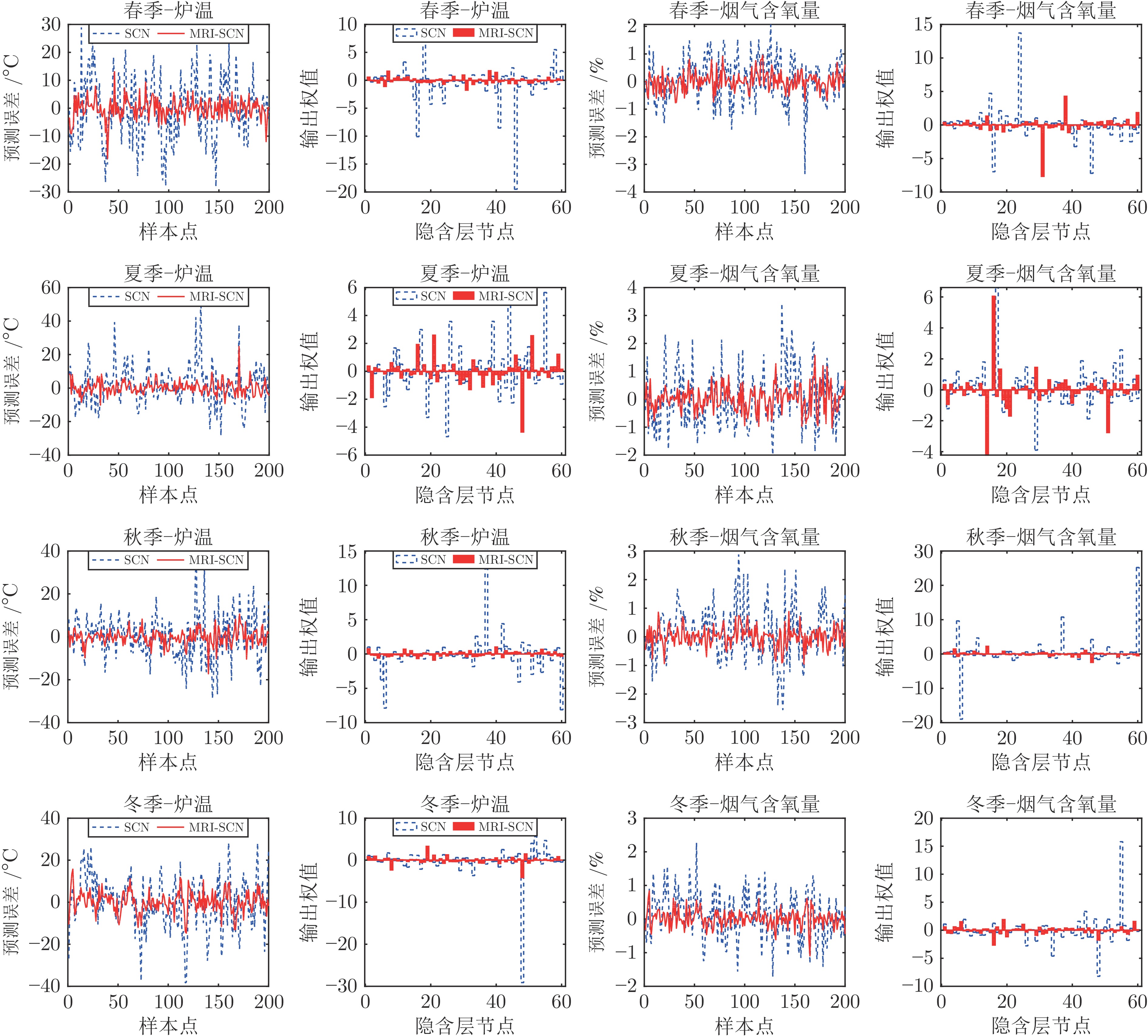
为实现城市固废焚烧(Municipal solid waste incineration, MSWI)过程炉温与烟气含氧量的准确预测, 提出一种基于改进随机配置网络的多目标鲁棒建模方法(Multi-target robust modeling method based on improved stochastic configuration network, MRI-SCN). 首先, 设计了一种并行方式增量构建 SCN 隐含层, 通过信息叠加与跨越连接来增强隐含层映射多样性, 并利用参数自适应变化的监督不等式分配隐含层参数; 其次, 使用\begin{document}$ \text{F} $\end{document} \begin{document}$ L_{2,1} $\end{document}
为实现城市固废焚烧(Municipal solid waste incineration, MSWI)过程炉温与烟气含氧量的准确预测, 提出一种基于改进随机配置网络的多目标鲁棒建模方法(Multi-target robust modeling method based on improved stochastic configuration network, MRI-SCN). 首先, 设计了一种并行方式增量构建 SCN 隐含层, 通过信息叠加与跨越连接来增强隐含层映射多样性, 并利用参数自适应变化的监督不等式分配隐含层参数; 其次, 使用

2024, 50(5): 1015-1023.
doi: 10.16383/j.aas.c210553
cstr: 32138.14.j.aas.c210553
摘要:
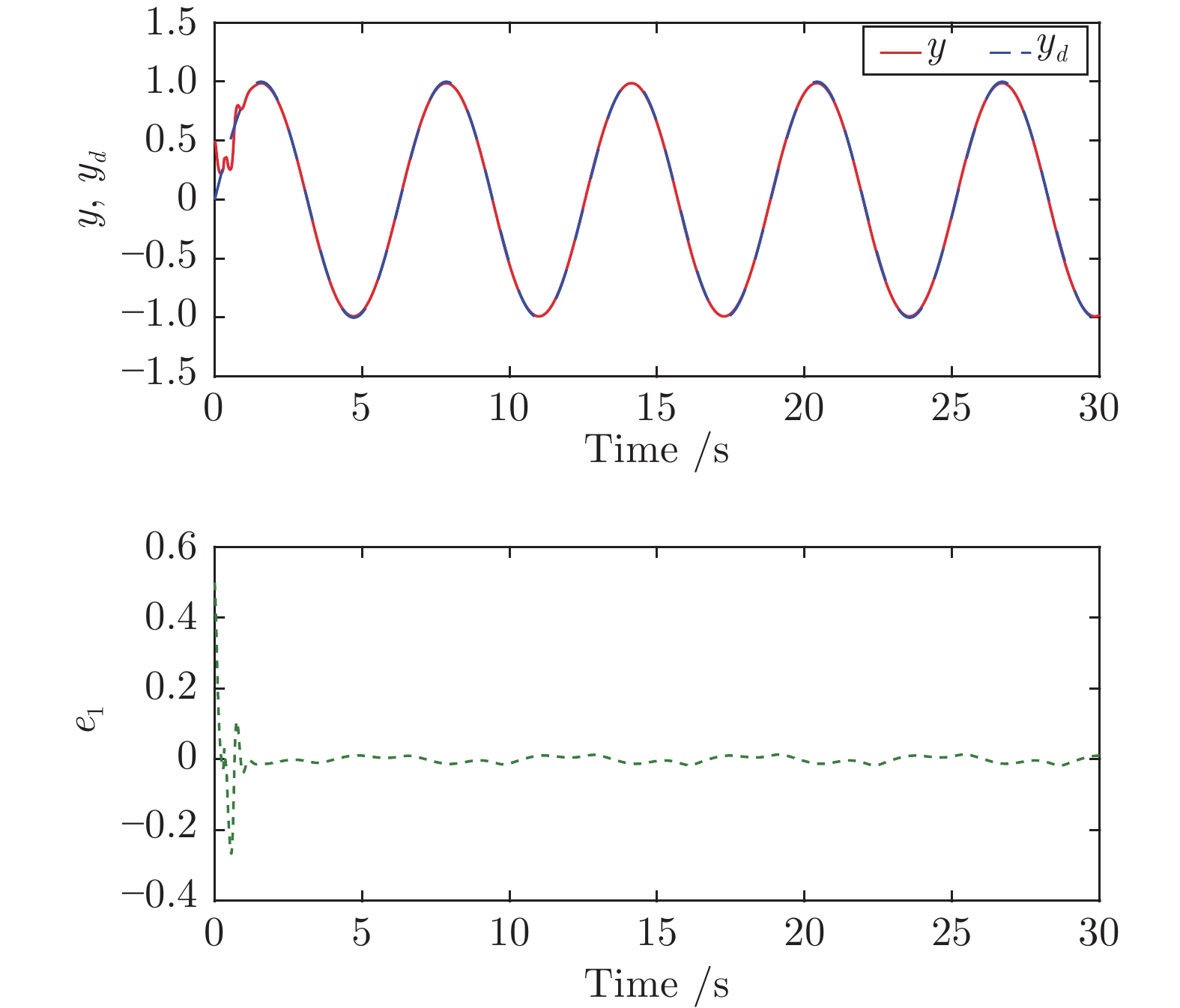
针对一类具有不确定控制增益的严格反馈系统, 提出一种基于命令滤波反推技术的自适应神经网络控制方法. 该方法采用神经网络对系统中的未知非线性函数进行逼近, 并引入命令滤波反推技术克服“计算膨胀”的问题. 与现有的命令滤波反推控制文献相比, 本文通过构造自适应误差补偿系统, 同时消除滤波器产生的边界层误差和不确定控制增益对系统性能造成的影响. 仿真结果验证了所提控制方法的有效性.
针对一类具有不确定控制增益的严格反馈系统, 提出一种基于命令滤波反推技术的自适应神经网络控制方法. 该方法采用神经网络对系统中的未知非线性函数进行逼近, 并引入命令滤波反推技术克服“计算膨胀”的问题. 与现有的命令滤波反推控制文献相比, 本文通过构造自适应误差补偿系统, 同时消除滤波器产生的边界层误差和不确定控制增益对系统性能造成的影响. 仿真结果验证了所提控制方法的有效性.
2024, 50(5): 1024-1034.
doi: 10.16383/j.aas.c211163
cstr: 32138.14.j.aas.c211163
摘要:
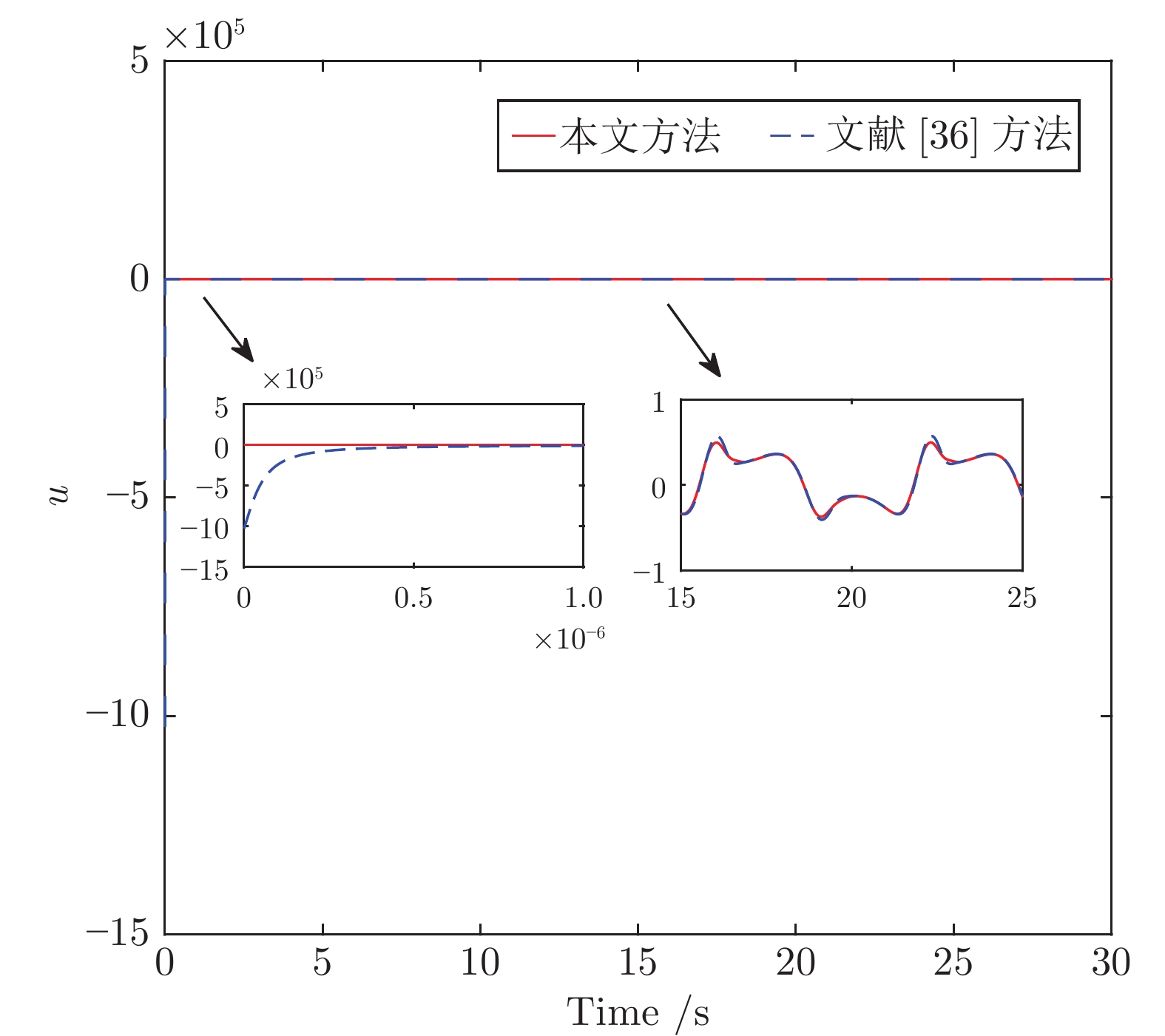
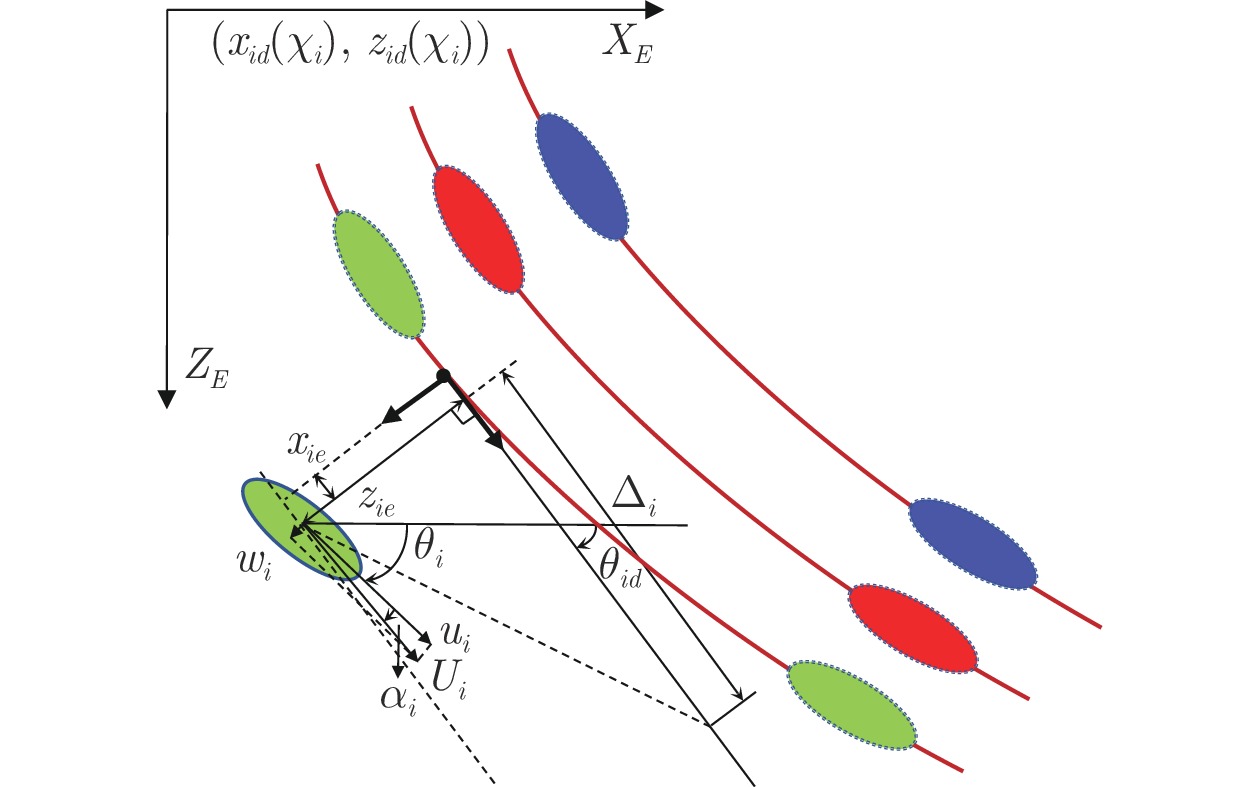
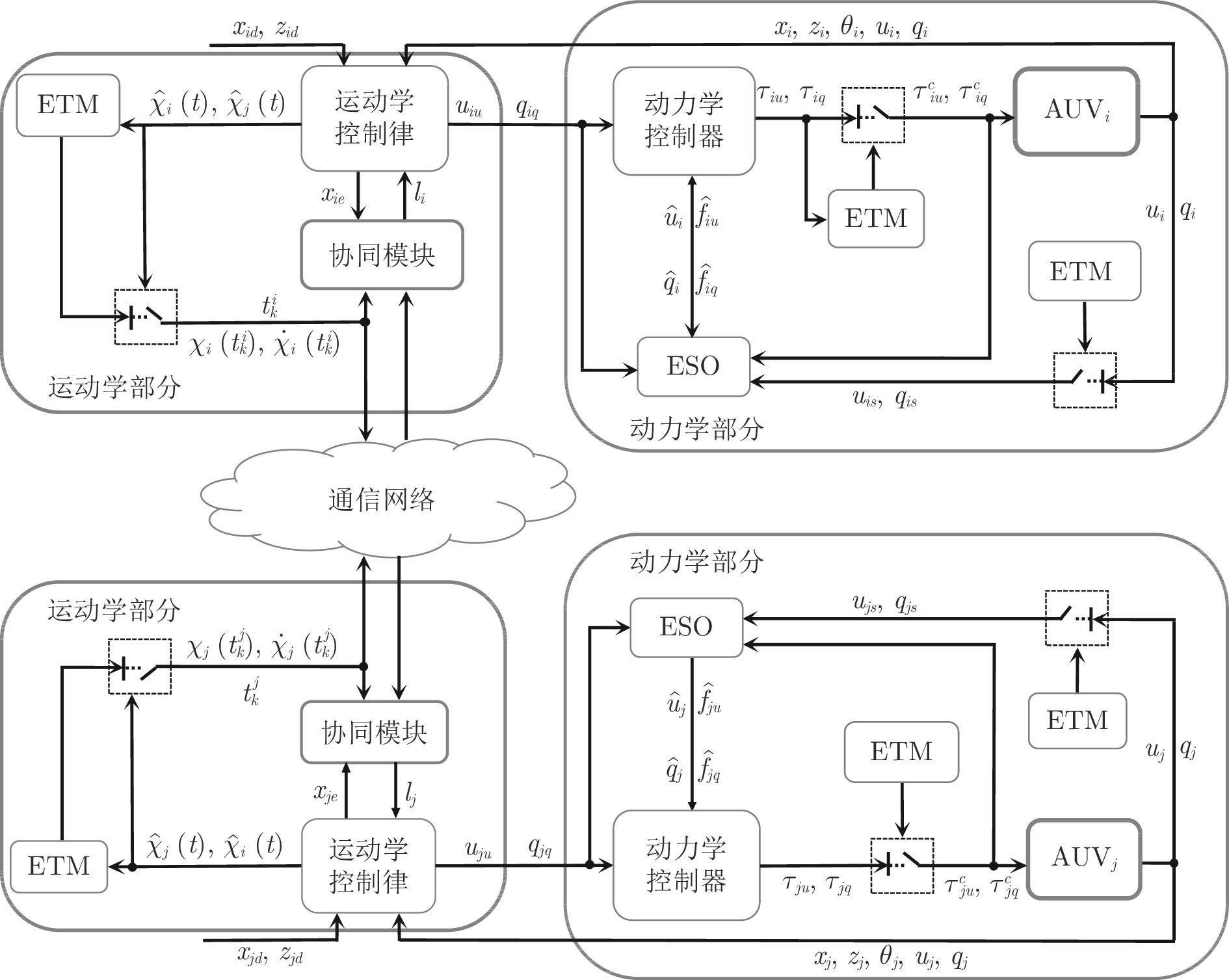
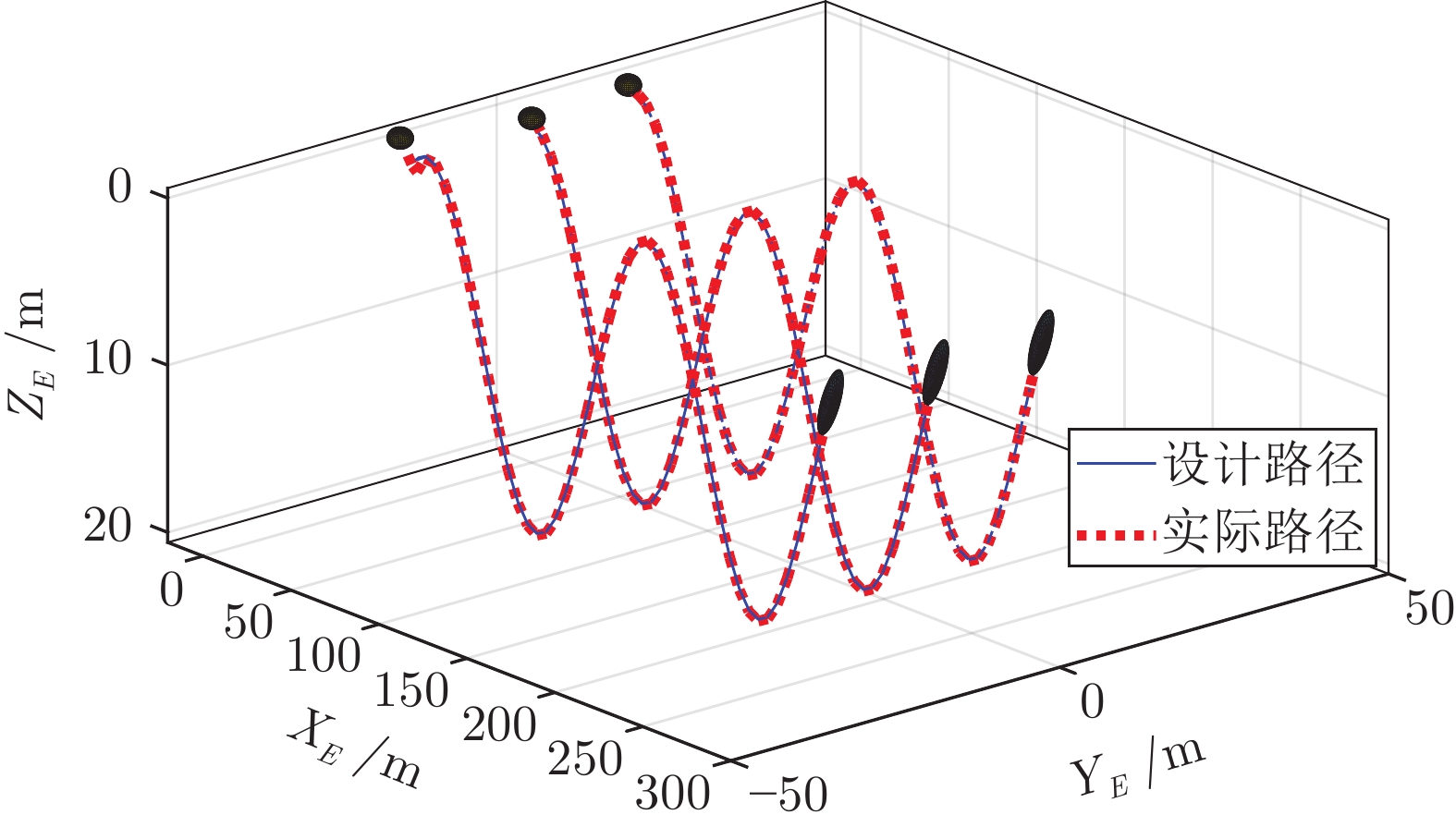
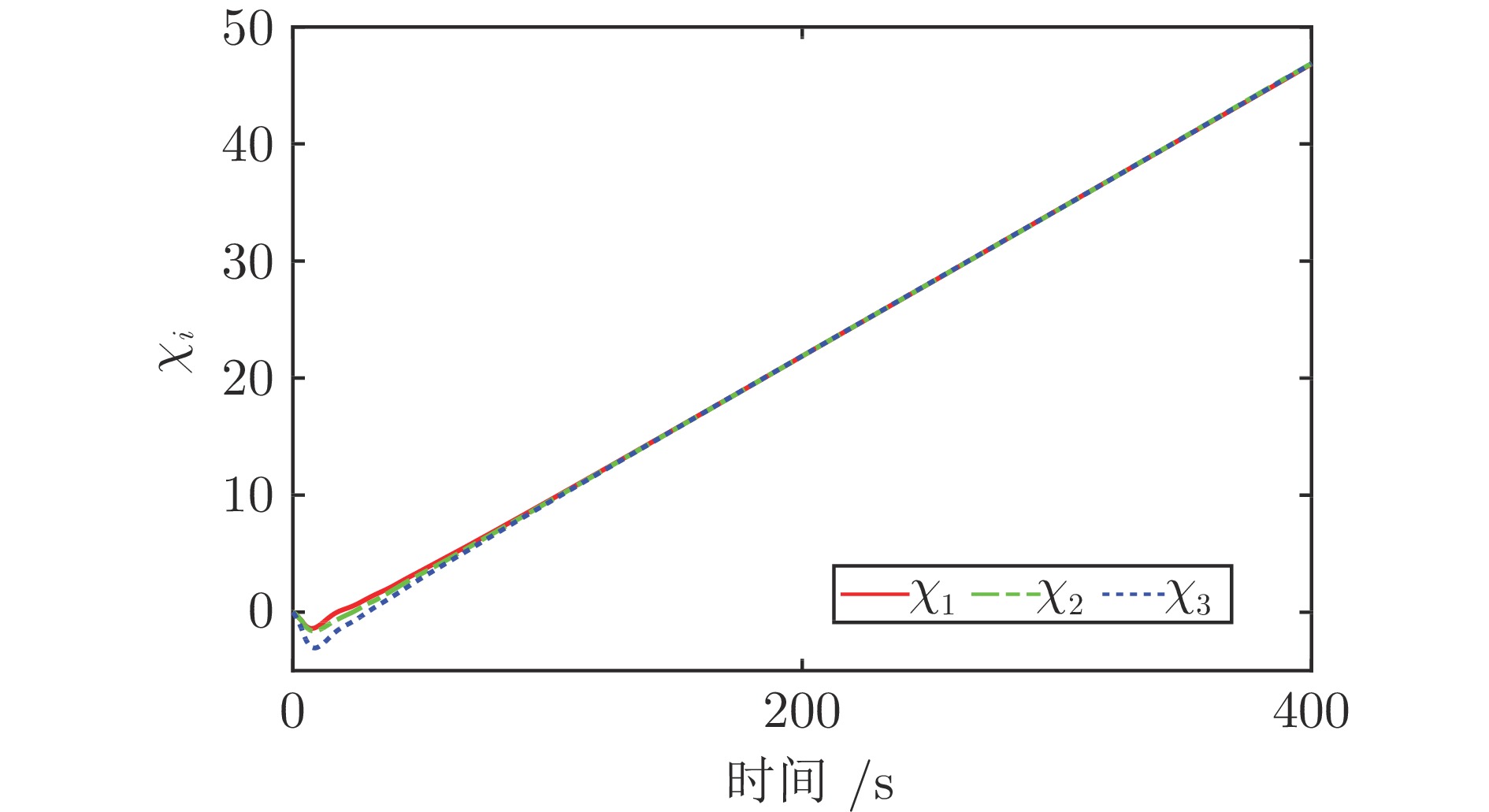
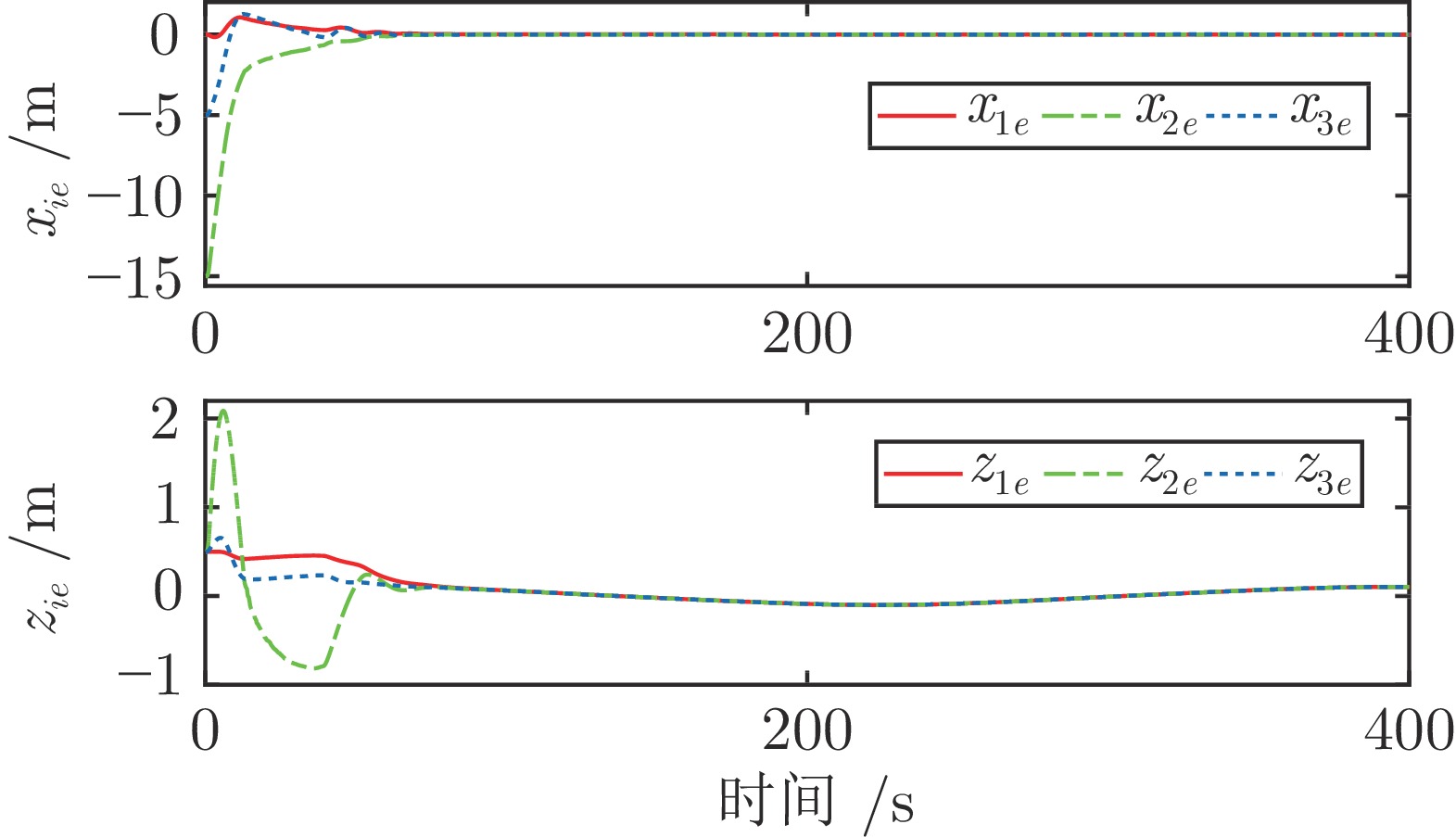
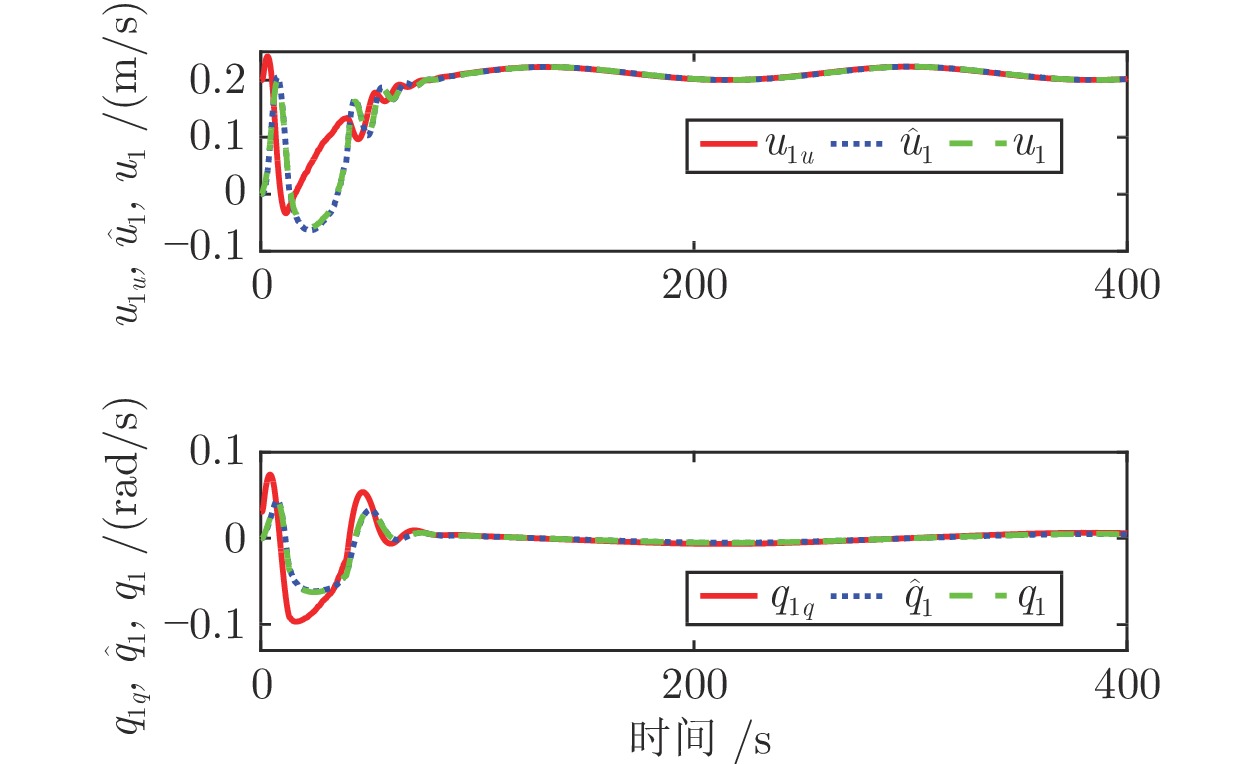
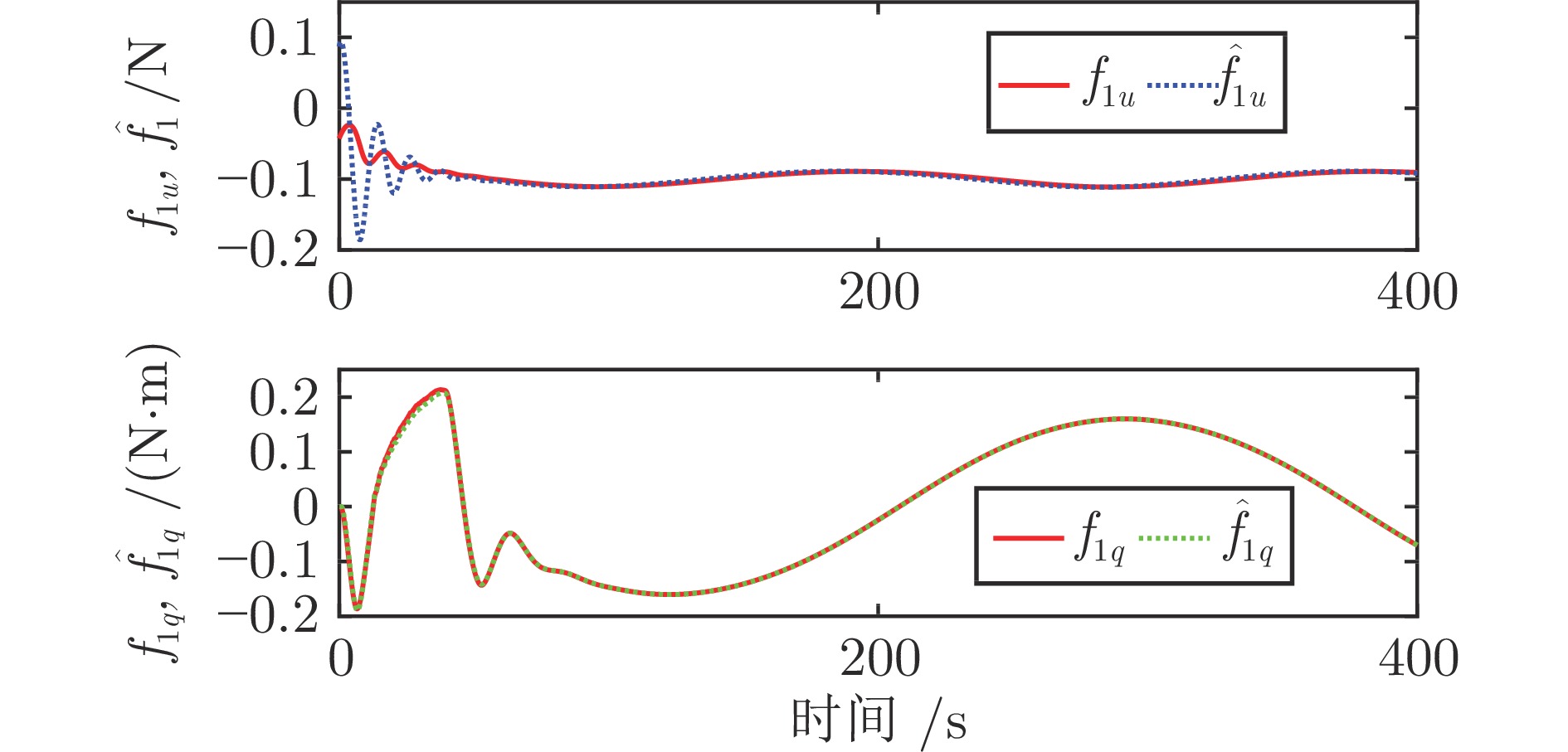
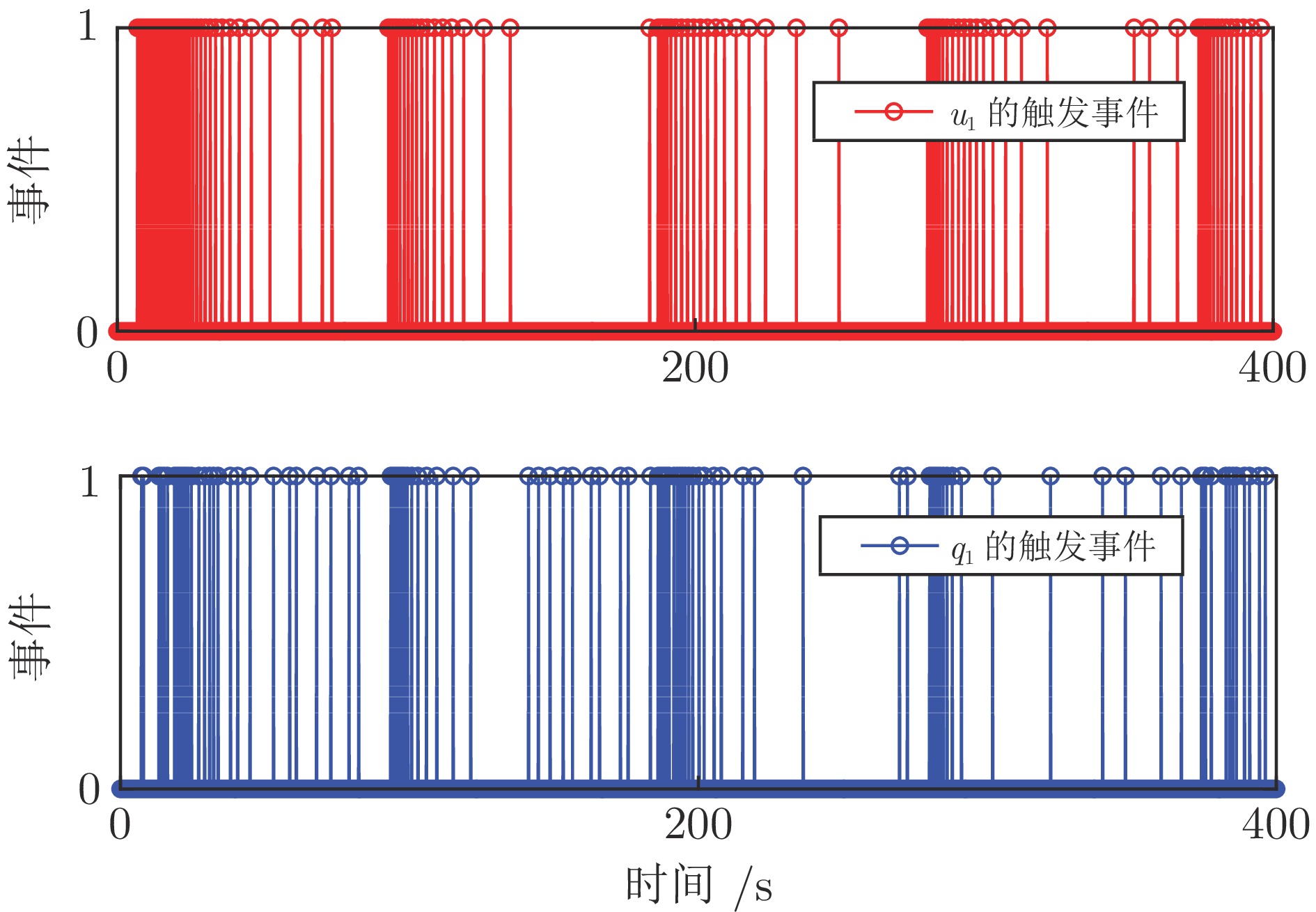
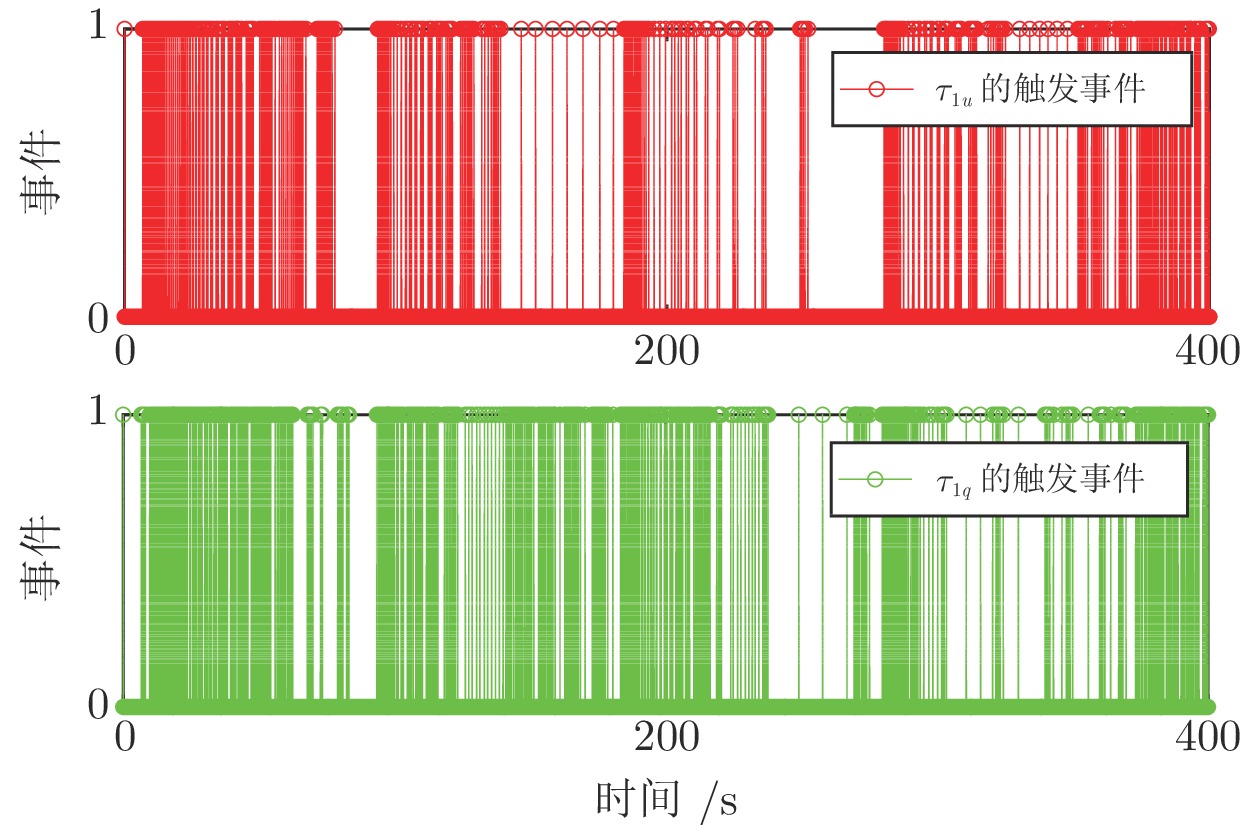
针对考虑外部海洋环境扰动和内部模型不确定性的多自主水下航行器(Autonomous underwater vehicle, AUV), 研究其在通信资源受限和机载能量受限下的协同路径跟踪控制问题. 首先, 针对水声通信信道窄造成的通信资源受限问题, 设计一种基于事件触发机制(Event-triggered mechanism, ETM)的协同通信策略; 然后, 针对模型不确定性和海洋环境扰动问题, 设计一种基于事件触发机制的线性扩张状态观测器(Extended state observer, ESO)来逼近水下航行器的未知动力学, 并降低了系统采样次数; 最后, 针对机载能量受限问题, 设计一种基于事件触发机制的动力学控制律, 在保证控制精度的前提下, 降低了执行机构的动作频次, 从而节省了能量消耗. 应用级联系统稳定性分析方法, 分别验证了闭环系统是输入状态稳定的且系统不存在Zeno行为. 仿真结果验证了所提基于事件触发机制的多自主水下航行器协同路径跟踪控制方法的有效性.
针对考虑外部海洋环境扰动和内部模型不确定性的多自主水下航行器(Autonomous underwater vehicle, AUV), 研究其在通信资源受限和机载能量受限下的协同路径跟踪控制问题. 首先, 针对水声通信信道窄造成的通信资源受限问题, 设计一种基于事件触发机制(Event-triggered mechanism, ETM)的协同通信策略; 然后, 针对模型不确定性和海洋环境扰动问题, 设计一种基于事件触发机制的线性扩张状态观测器(Extended state observer, ESO)来逼近水下航行器的未知动力学, 并降低了系统采样次数; 最后, 针对机载能量受限问题, 设计一种基于事件触发机制的动力学控制律, 在保证控制精度的前提下, 降低了执行机构的动作频次, 从而节省了能量消耗. 应用级联系统稳定性分析方法, 分别验证了闭环系统是输入状态稳定的且系统不存在Zeno行为. 仿真结果验证了所提基于事件触发机制的多自主水下航行器协同路径跟踪控制方法的有效性.
2024, 50(5): 1035-1046.
doi: 10.16383/j.aas.c230585
cstr: 32138.14.j.aas.c230585
摘要:
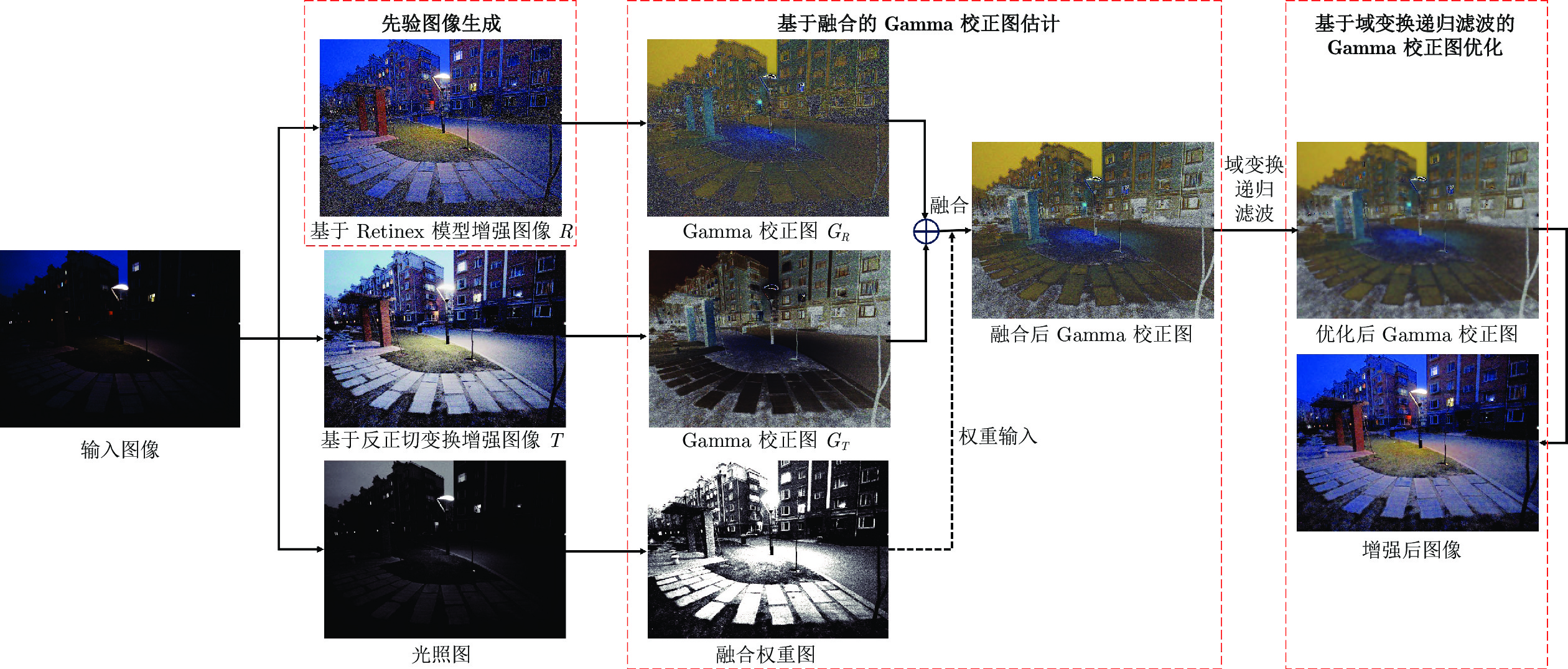
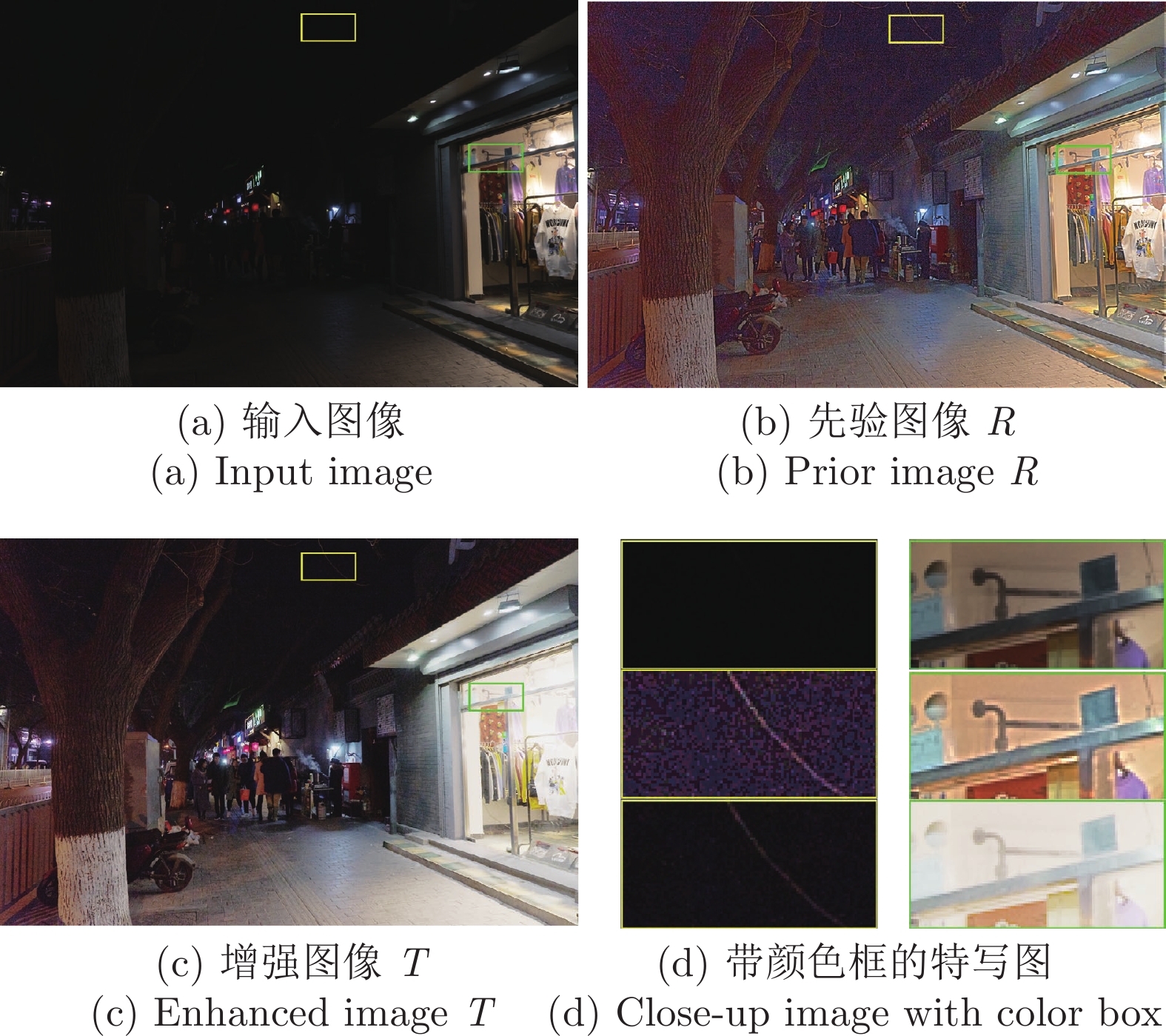
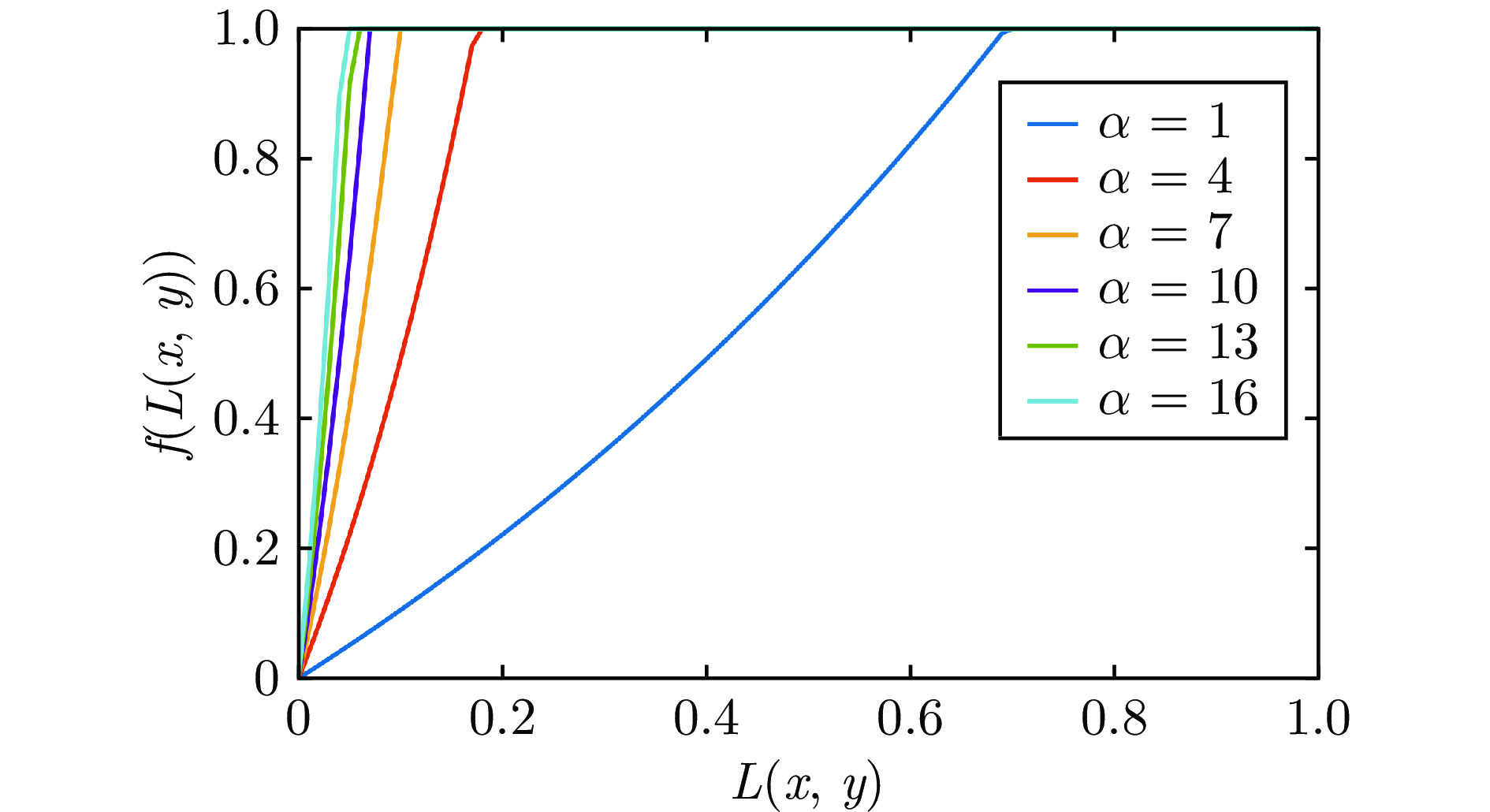
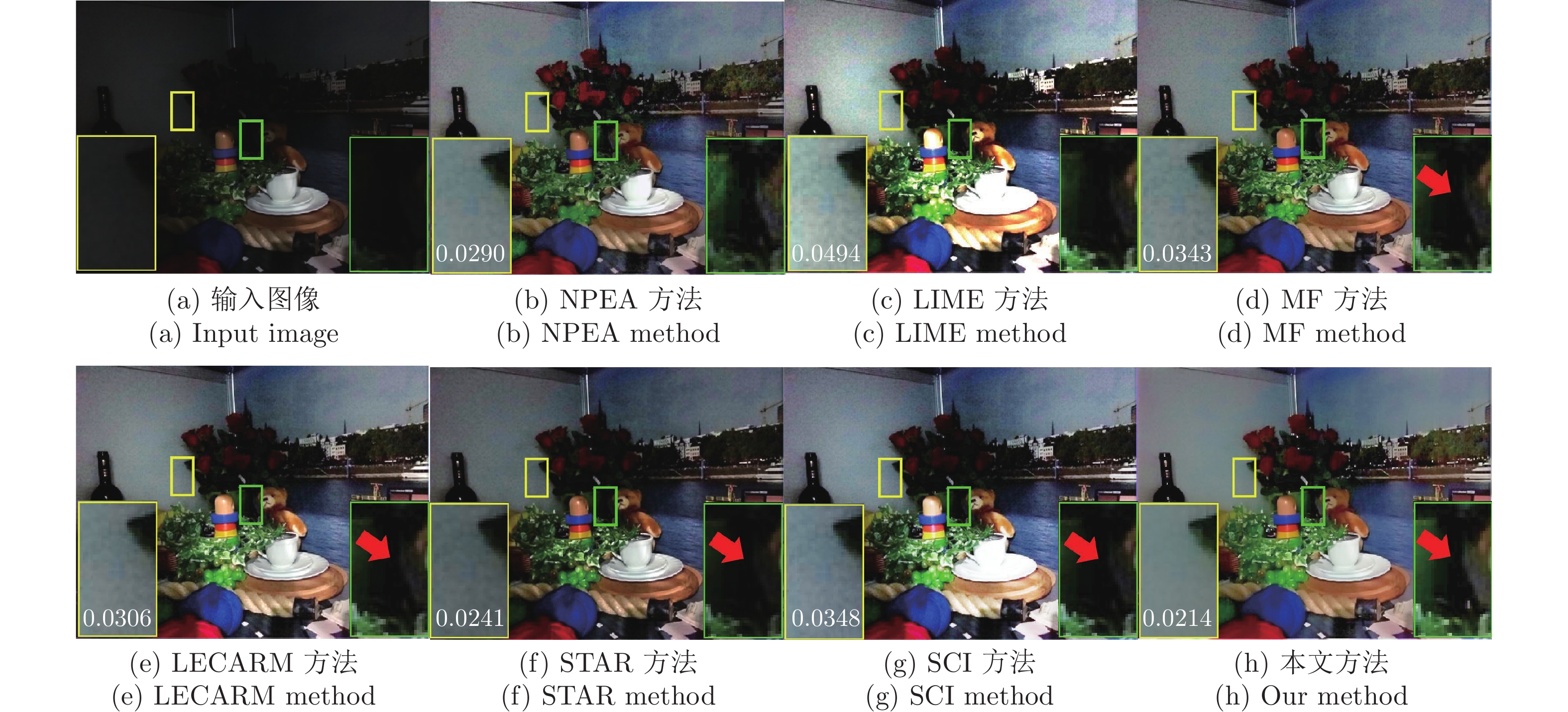
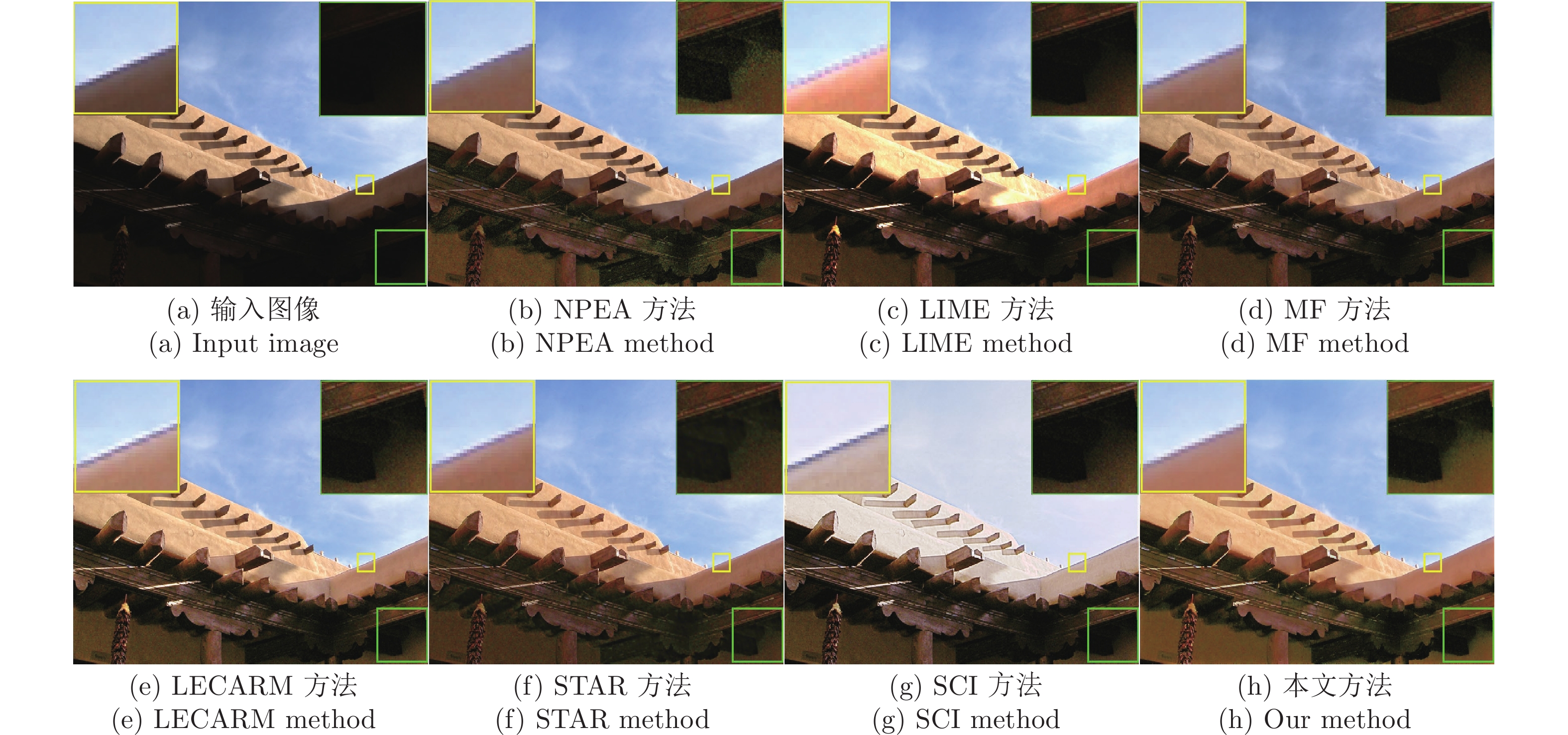
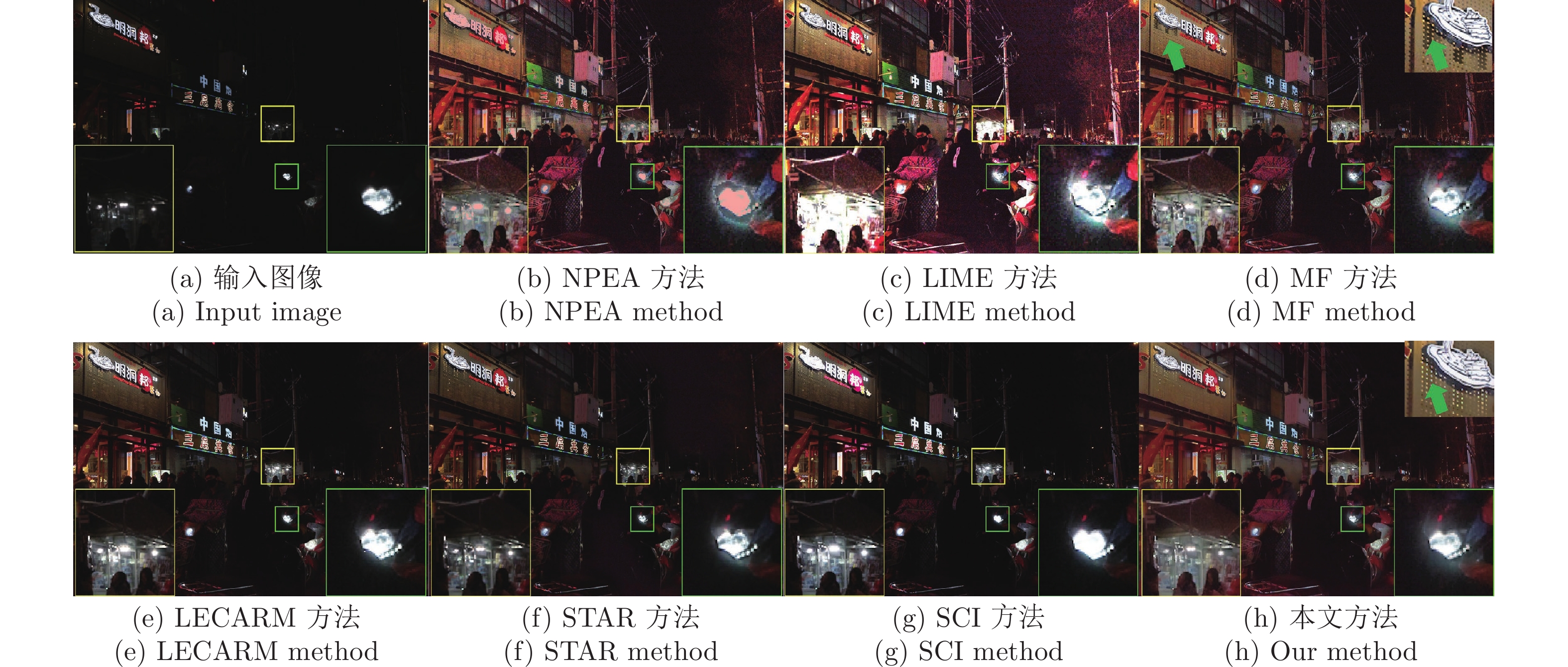
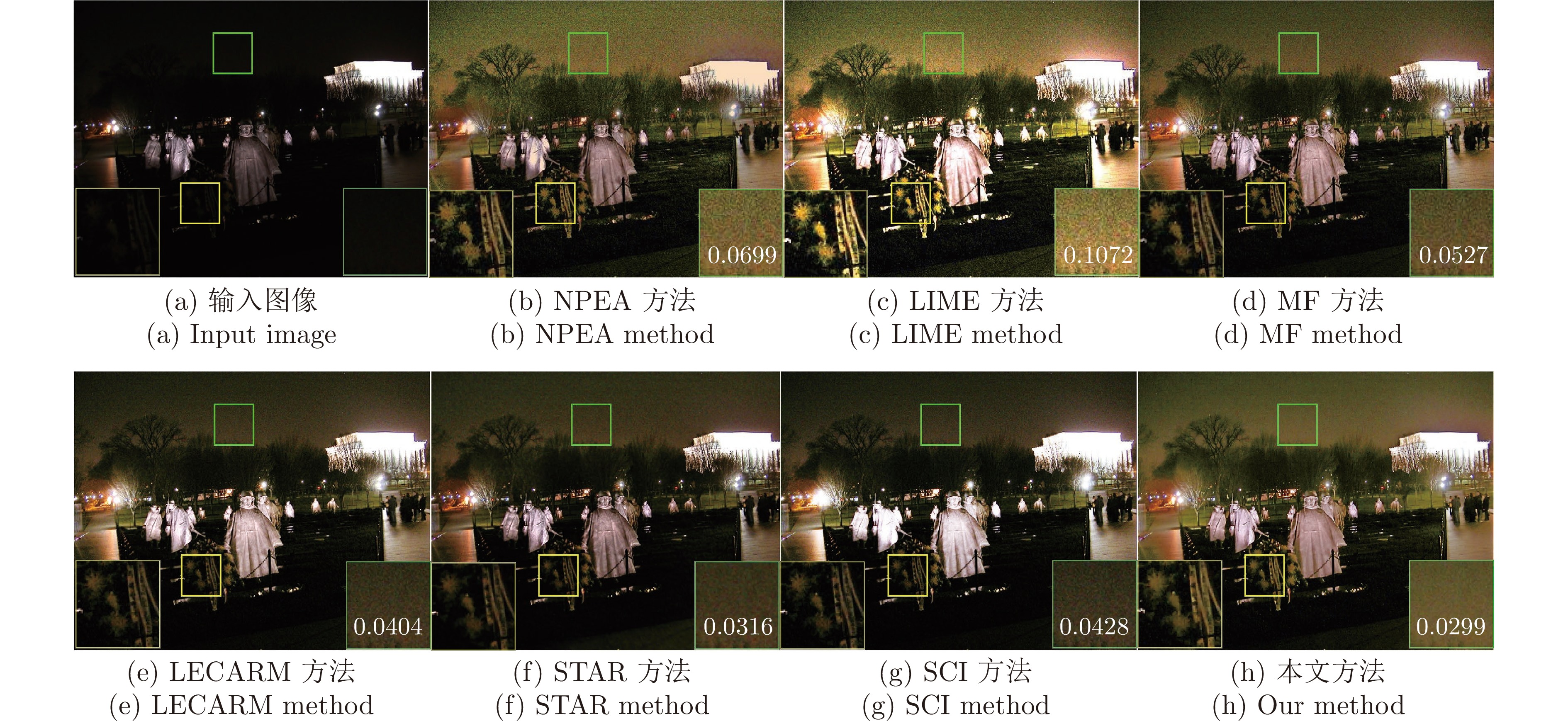
低光照图像增强旨在提高在低光照环境下所采集图像的视觉质量. 然而, 现有的低光照图像增强方法难以在计算效率与增强性能之间达到很好的平衡, 为此, 提出一种基于Retinex先验引导的低光照图像快速增强方法, 将Retinex模型与Gamma校正相结合, 快速输出具有对比度高、视觉效果好和低噪声的图像. 为获取具有良好光照的图像以引导确定与输入图像尺寸大小一致的Gamma校正图, 提出基于Retinex模型的先验图像生成方法. 针对所提先验图像生成方法在极低光照区域中存在颜色失真的问题, 提出一种基于融合的Gamma校正图估计方法, 采用反正切变换恢复极低光照区域的颜色和对比度, 以提升Gamma校正图在极低光照区域的增强性能. 为抑制输出图像的噪声, 考虑到完全平滑的Gamma校正图不会平滑细节纹理的特点, 提出基于域变换递归滤波的Gamma校正图优化方法, 降低输出图像噪声的同时保持颜色和对比度. 实验结果表明, 所提方法不仅在主客观图像质量评价上优于现有大多数主流算法, 而且在计算效率上具有十分显著的优势.
低光照图像增强旨在提高在低光照环境下所采集图像的视觉质量. 然而, 现有的低光照图像增强方法难以在计算效率与增强性能之间达到很好的平衡, 为此, 提出一种基于Retinex先验引导的低光照图像快速增强方法, 将Retinex模型与Gamma校正相结合, 快速输出具有对比度高、视觉效果好和低噪声的图像. 为获取具有良好光照的图像以引导确定与输入图像尺寸大小一致的Gamma校正图, 提出基于Retinex模型的先验图像生成方法. 针对所提先验图像生成方法在极低光照区域中存在颜色失真的问题, 提出一种基于融合的Gamma校正图估计方法, 采用反正切变换恢复极低光照区域的颜色和对比度, 以提升Gamma校正图在极低光照区域的增强性能. 为抑制输出图像的噪声, 考虑到完全平滑的Gamma校正图不会平滑细节纹理的特点, 提出基于域变换递归滤波的Gamma校正图优化方法, 降低输出图像噪声的同时保持颜色和对比度. 实验结果表明, 所提方法不仅在主客观图像质量评价上优于现有大多数主流算法, 而且在计算效率上具有十分显著的优势.



2024, 50(5): 1047-1058.
doi: 10.16383/j.aas.c230550
cstr: 32138.14.j.aas.c230550
摘要:
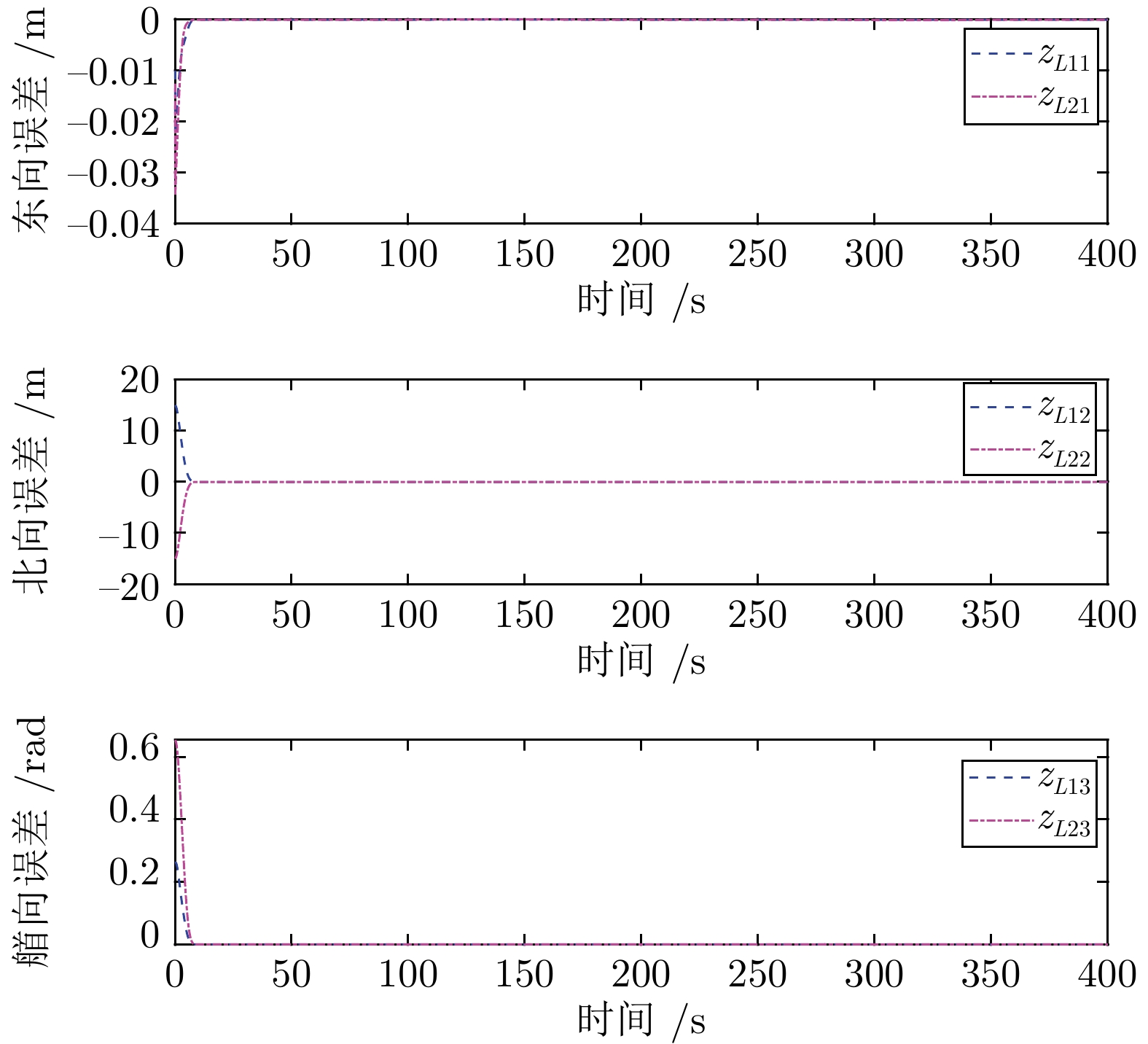
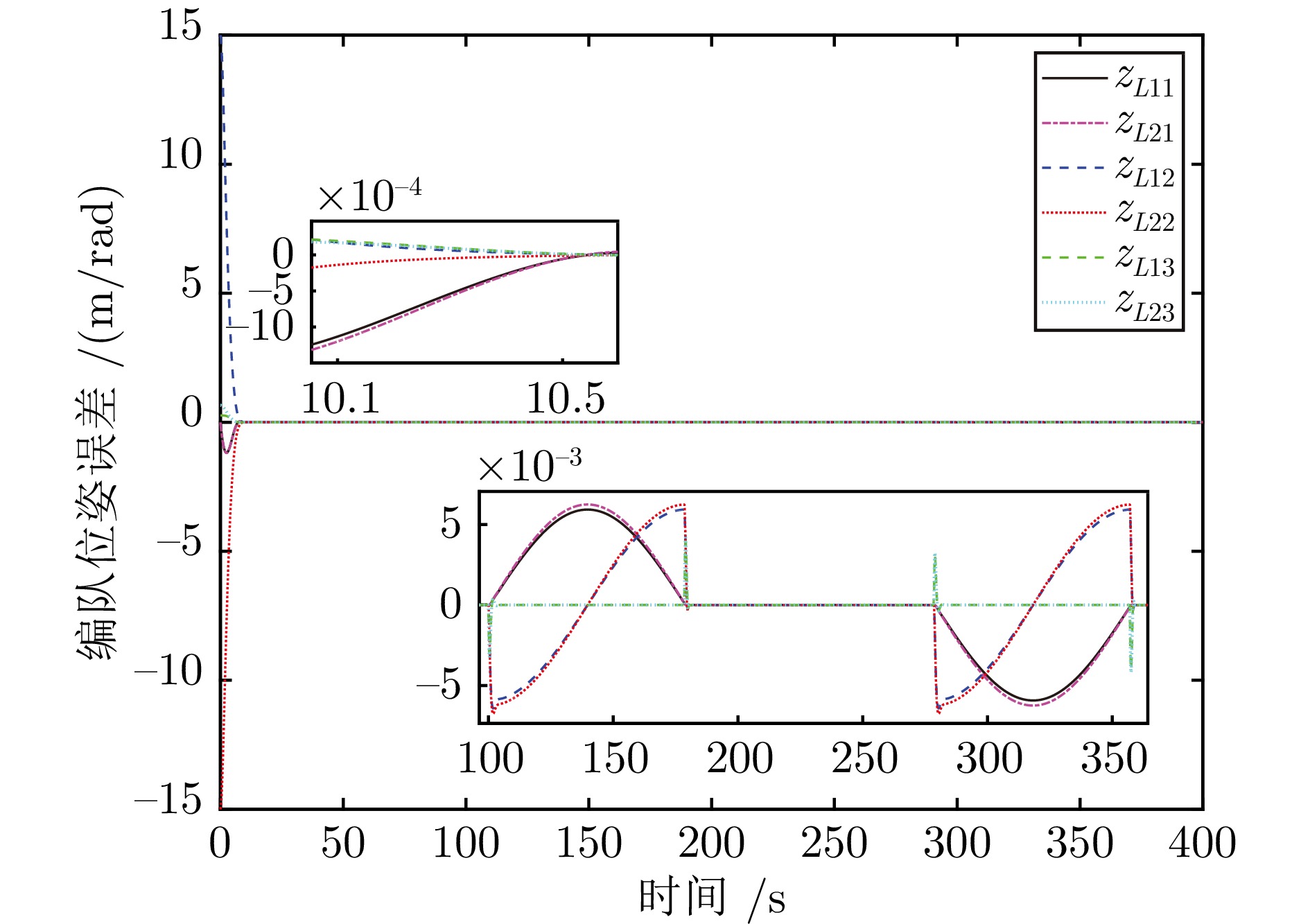
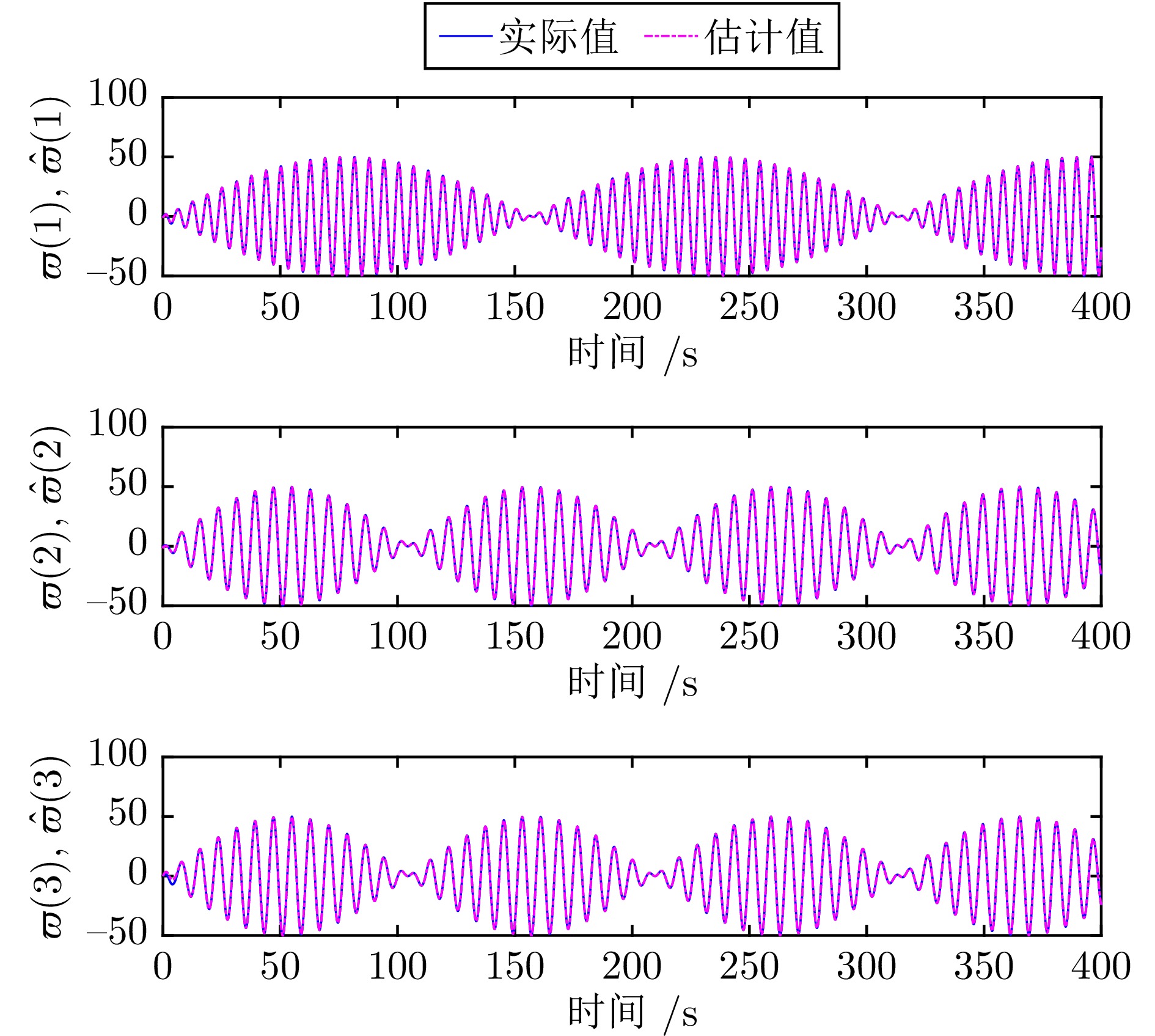
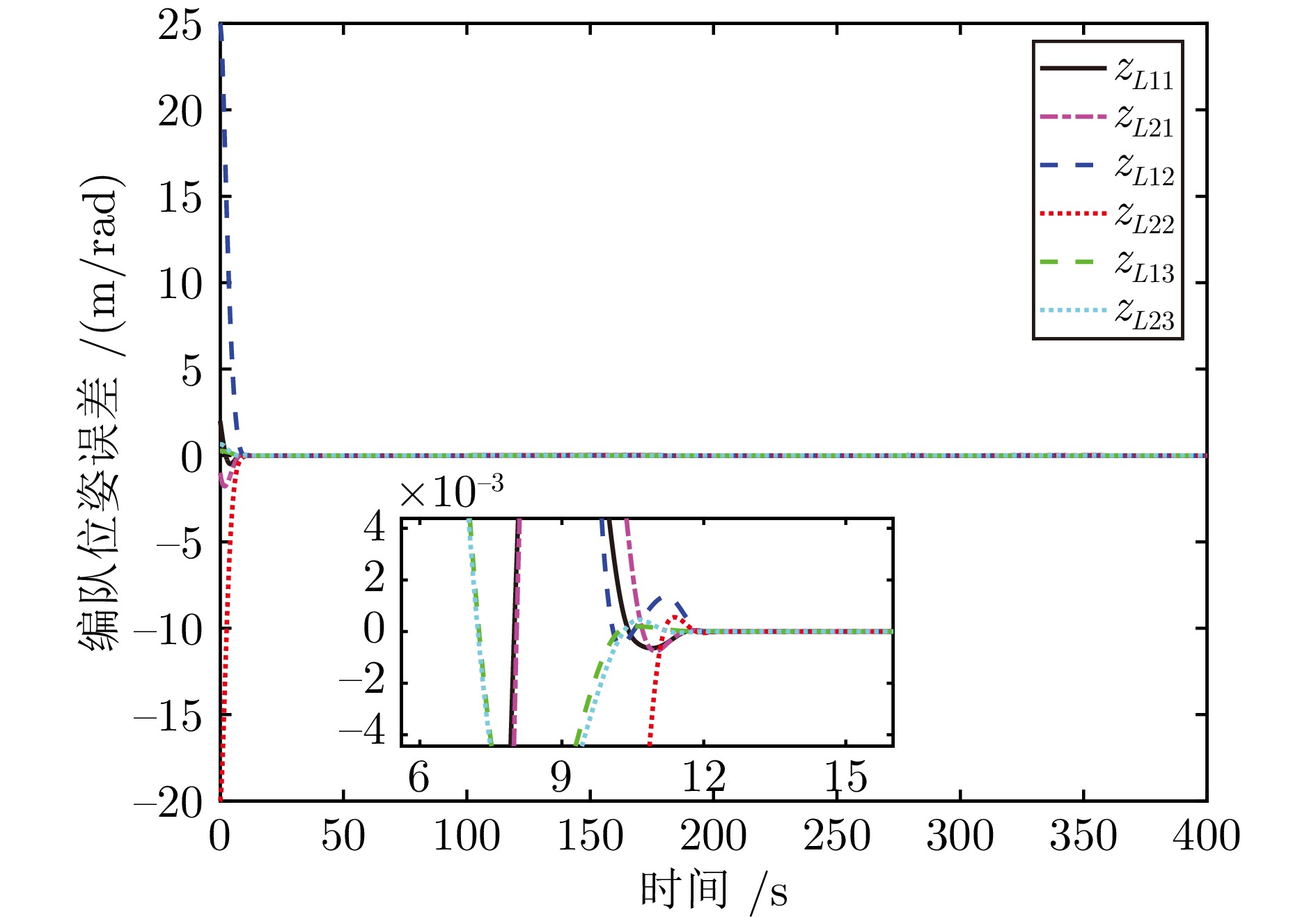
针对有限时间控制中各状态分量收敛时间不同问题, 提出一种无人艇编队有限时间同步控制框架, 在此框架下设计的有限时间同步编队控制方法可巧妙地达到无人艇所有自由度编队误差在同一时刻收敛到平衡点. 首先, 针对现有干扰观测器与时间同步稳定框架不兼容问题, 设计有限时间同步干扰观测器; 然后, 利用比例保持特性设计有限时间同步编队控制器, 并验证了所提控制方法的稳定性; 最后, 通过3艘无人艇编队进行仿真实验, 实验结果验证了所提控制方法的有效性和优越性. 所提控制方法对有限时间同步控制需求的航海、航空航天和工业领域具有现实意义.
针对有限时间控制中各状态分量收敛时间不同问题, 提出一种无人艇编队有限时间同步控制框架, 在此框架下设计的有限时间同步编队控制方法可巧妙地达到无人艇所有自由度编队误差在同一时刻收敛到平衡点. 首先, 针对现有干扰观测器与时间同步稳定框架不兼容问题, 设计有限时间同步干扰观测器; 然后, 利用比例保持特性设计有限时间同步编队控制器, 并验证了所提控制方法的稳定性; 最后, 通过3艘无人艇编队进行仿真实验, 实验结果验证了所提控制方法的有效性和优越性. 所提控制方法对有限时间同步控制需求的航海、航空航天和工业领域具有现实意义.