2023年 第49卷 第10期
2023, 49(10): 2019-2059.
doi: 10.16383/j.aas.c220810
cstr: 32138.14.j.aas.c220810
摘要:
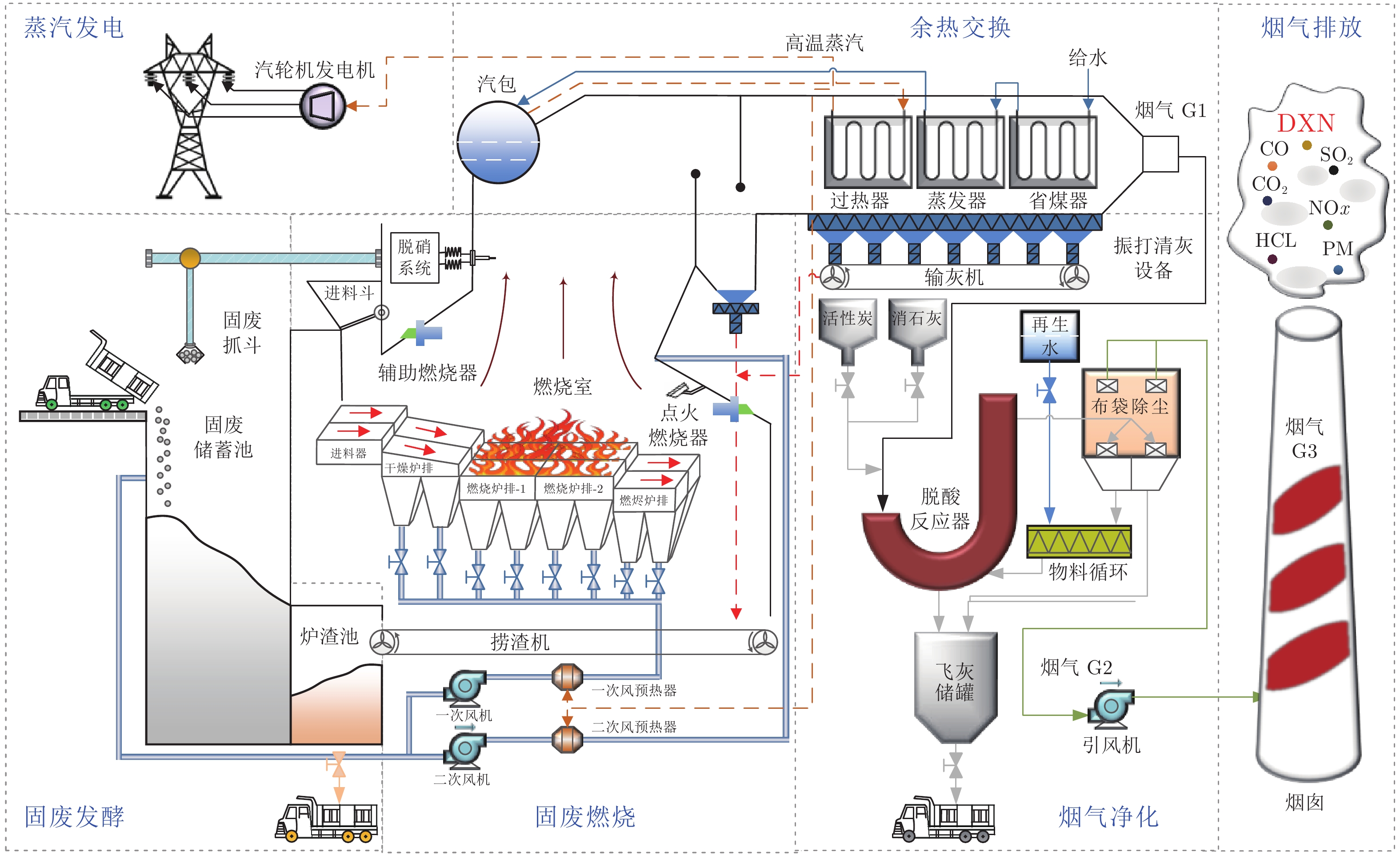
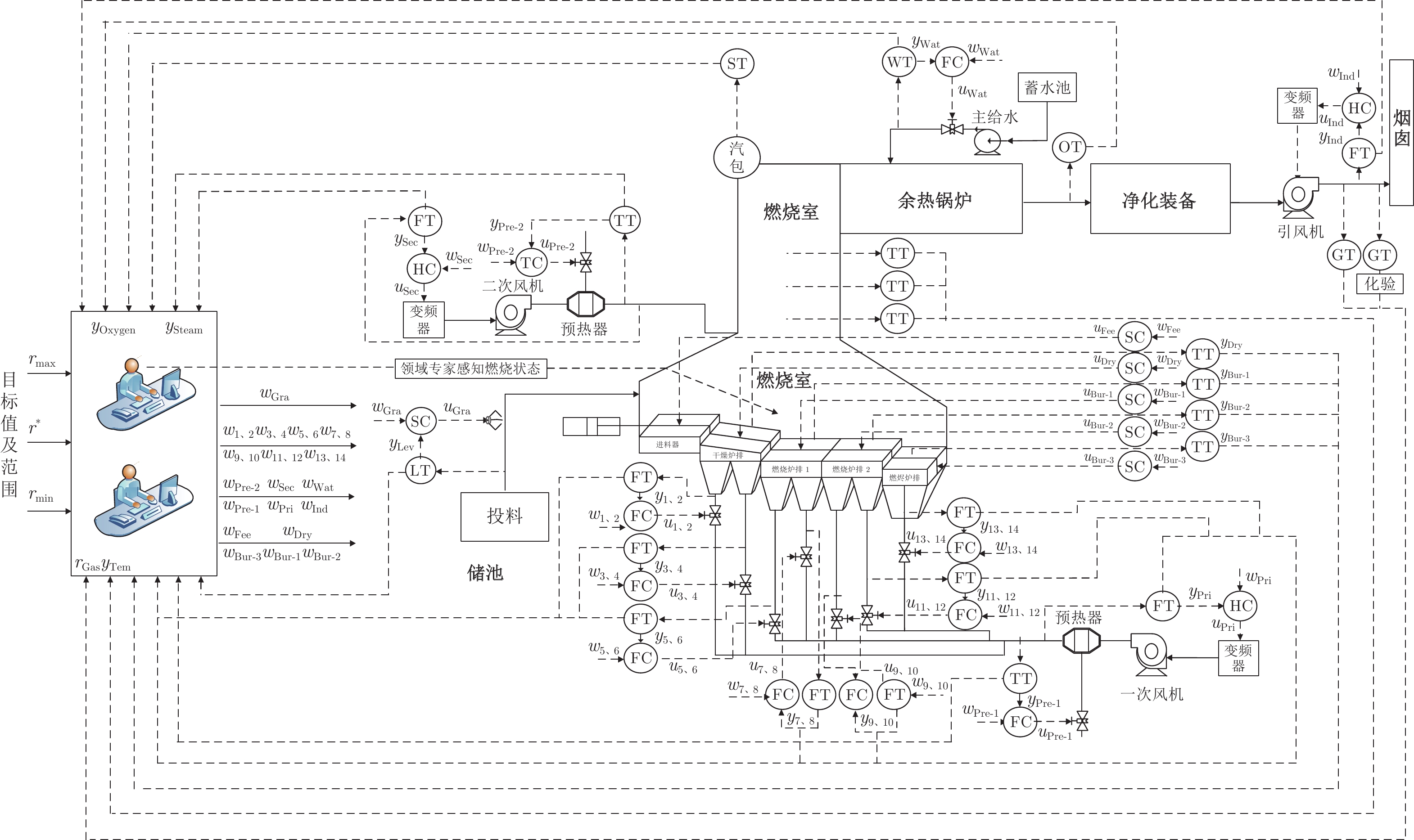
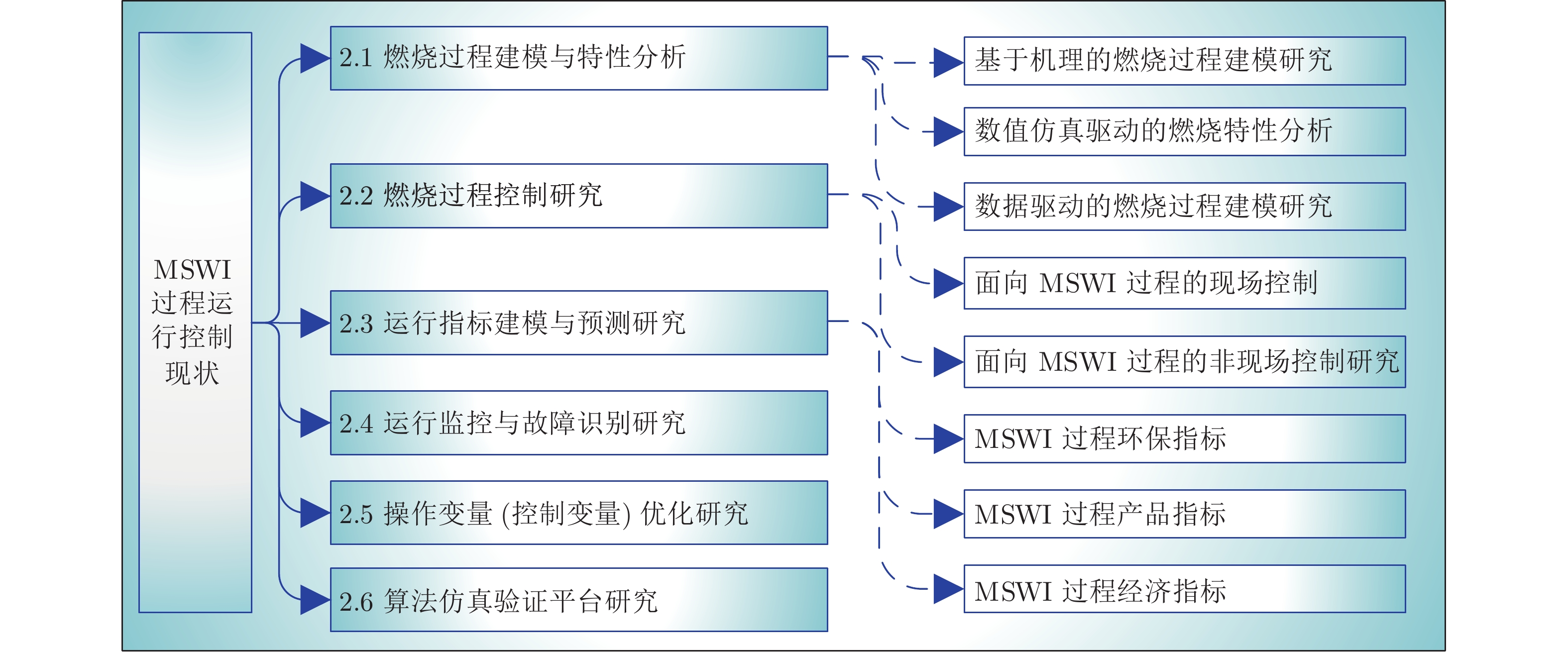
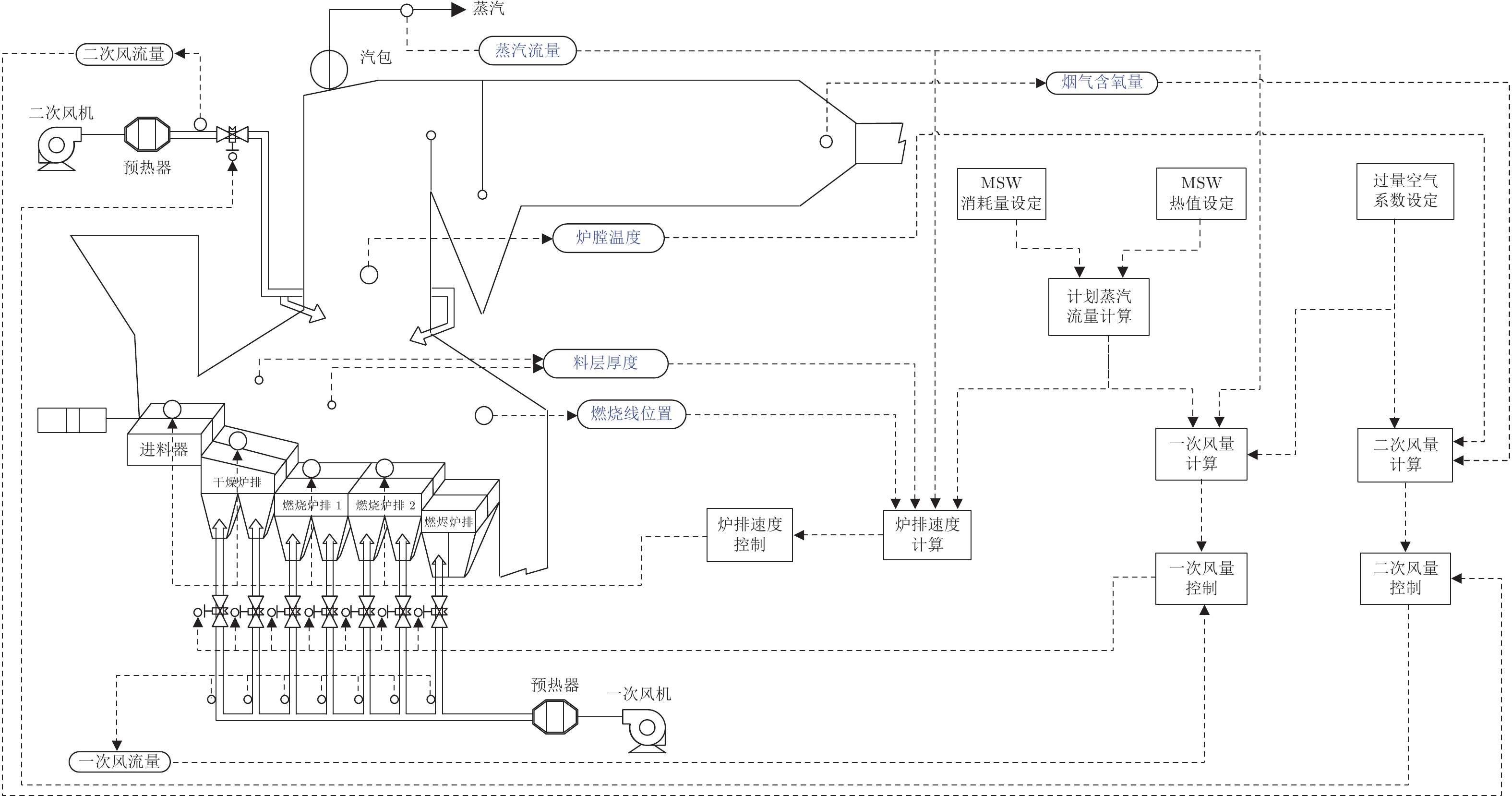
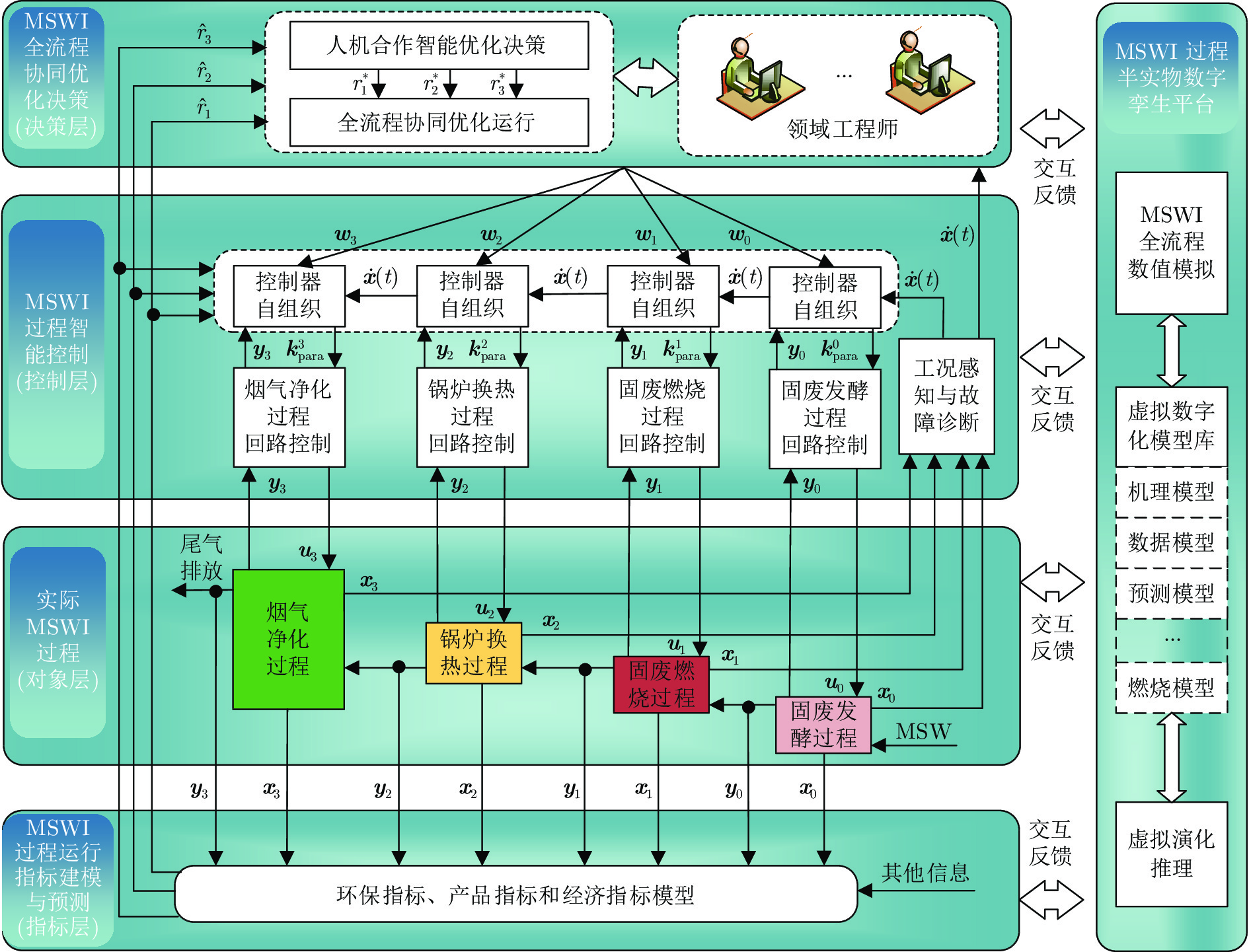
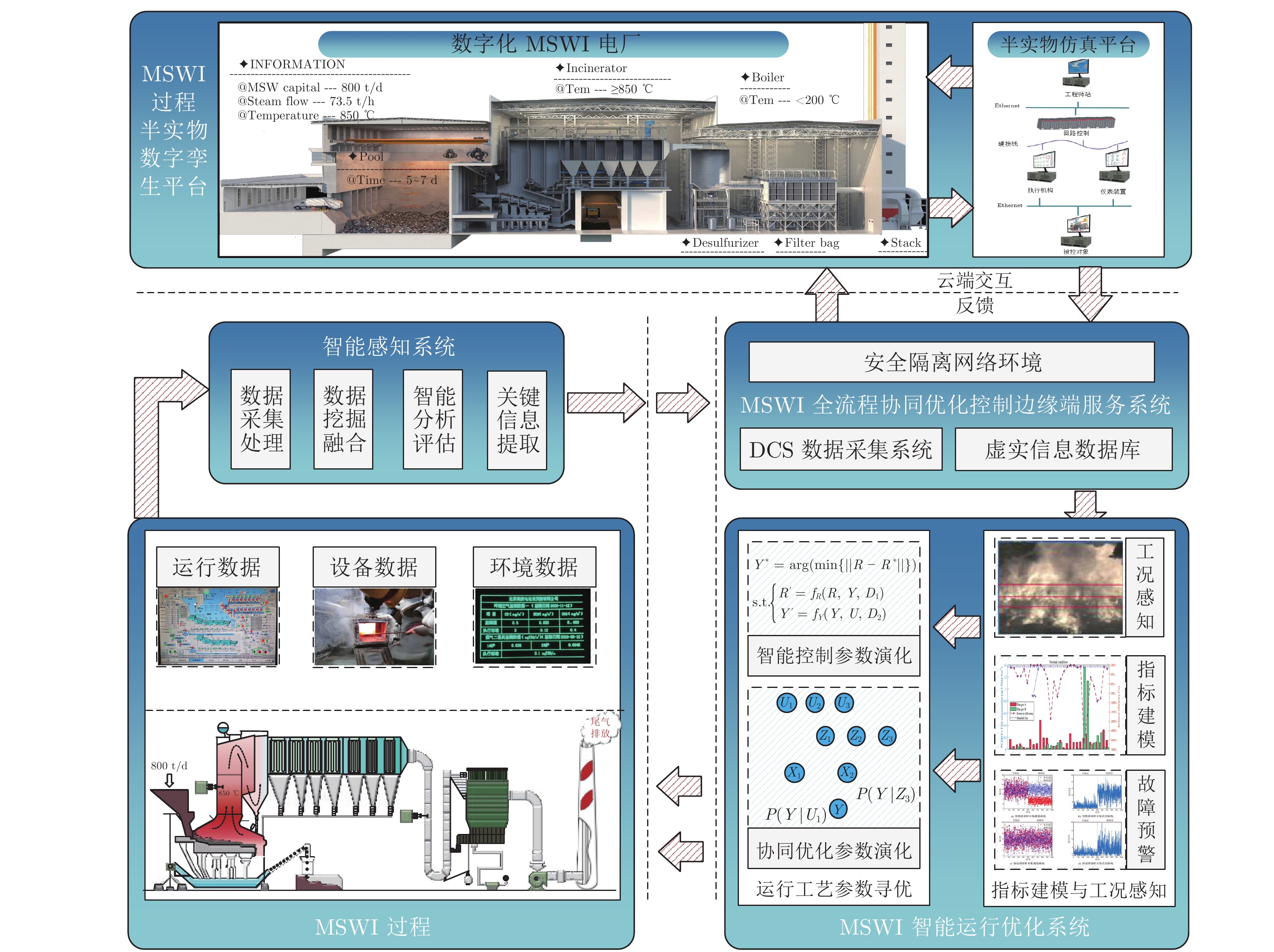
针对全球城市固废(Municipal solid waste, MSW)的高增长率导致城市环境持续恶化以至于“垃圾围城”现象日益增多等问题, MSW焚烧(MSW incineration, MSWI)技术能够通过发酵、燃烧、换热和净化等工艺实现废物变能源(Waste-to-energy, WTE). 在当前“双碳战略”和“蓝天净土”的新环保背景下, 作为未来长时期内MSW处理主流方式和生态文明建设与循环经济体系托底工业的MSWI过程正面临着重大机遇. 如何融合人工智能、大数据、云计算等技术实现MSWI的智慧化、低碳化和绿色化可持续性发展是目前具有挑战性的难题. 对此, 本文首先描述MSWI工艺机理, 分析其运行控制特性和实现其智能优化控制存在的难点; 然后, 从燃烧特性分析与建模、燃烧过程控制、指标建模与预测、运行监控与故障识别、操作(控制)变量优化、算法仿真验证平台等6个方面进行综述; 接着, 分析MSWI过程智能优化控制研究的必要性; 最后, 结合工业人工智能的本质给出未来研究方向. 在此基础上, 展望基于数字孪生平台的MSWI智能优化控制系统的框架和愿景, 并总结未来挑战.
针对全球城市固废(Municipal solid waste, MSW)的高增长率导致城市环境持续恶化以至于“垃圾围城”现象日益增多等问题, MSW焚烧(MSW incineration, MSWI)技术能够通过发酵、燃烧、换热和净化等工艺实现废物变能源(Waste-to-energy, WTE). 在当前“双碳战略”和“蓝天净土”的新环保背景下, 作为未来长时期内MSW处理主流方式和生态文明建设与循环经济体系托底工业的MSWI过程正面临着重大机遇. 如何融合人工智能、大数据、云计算等技术实现MSWI的智慧化、低碳化和绿色化可持续性发展是目前具有挑战性的难题. 对此, 本文首先描述MSWI工艺机理, 分析其运行控制特性和实现其智能优化控制存在的难点; 然后, 从燃烧特性分析与建模、燃烧过程控制、指标建模与预测、运行监控与故障识别、操作(控制)变量优化、算法仿真验证平台等6个方面进行综述; 接着, 分析MSWI过程智能优化控制研究的必要性; 最后, 结合工业人工智能的本质给出未来研究方向. 在此基础上, 展望基于数字孪生平台的MSWI智能优化控制系统的框架和愿景, 并总结未来挑战.
2023, 49(10): 2060-2072.
doi: 10.16383/j.aas.c200878
cstr: 32138.14.j.aas.c200878
摘要:
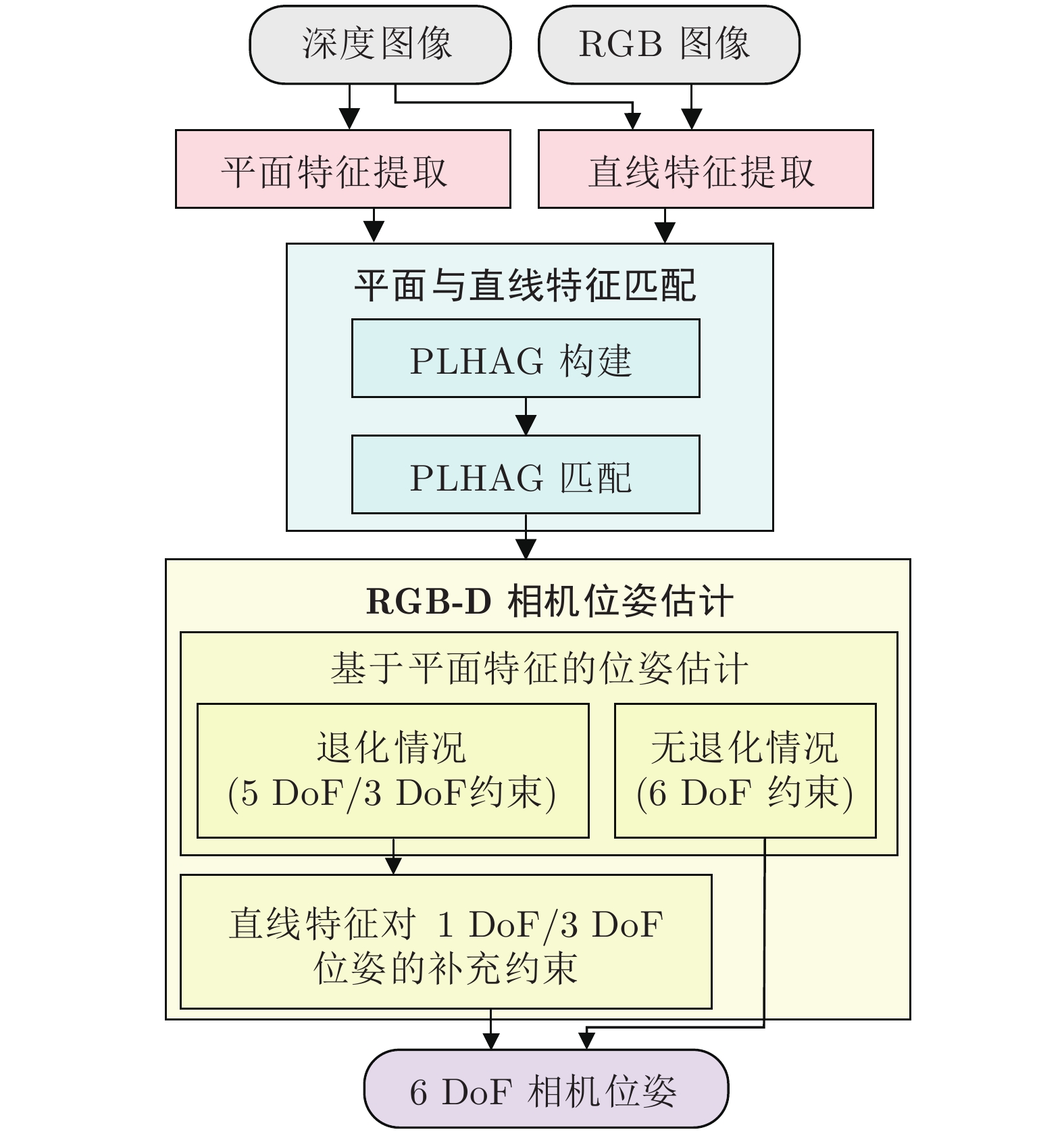
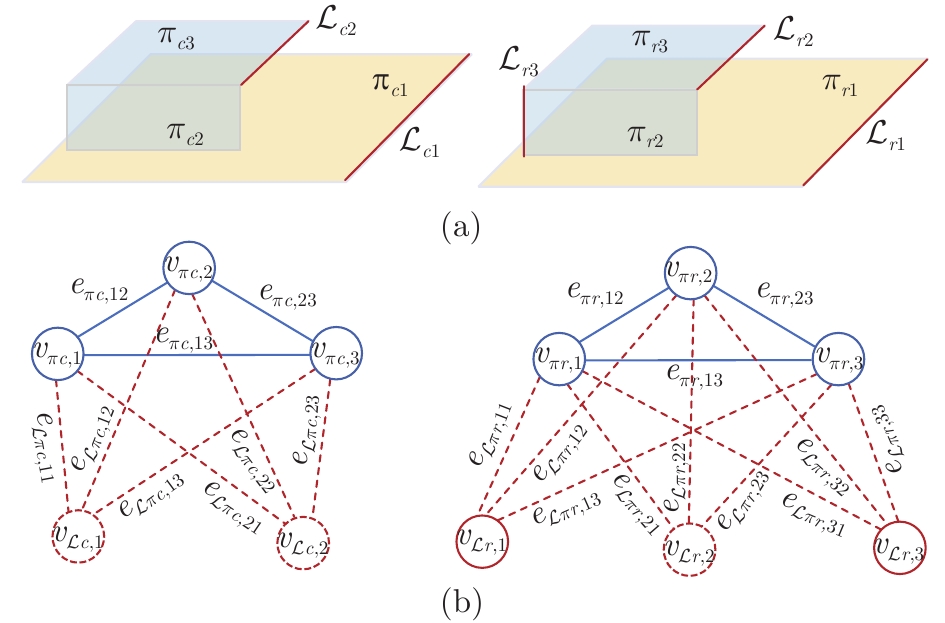
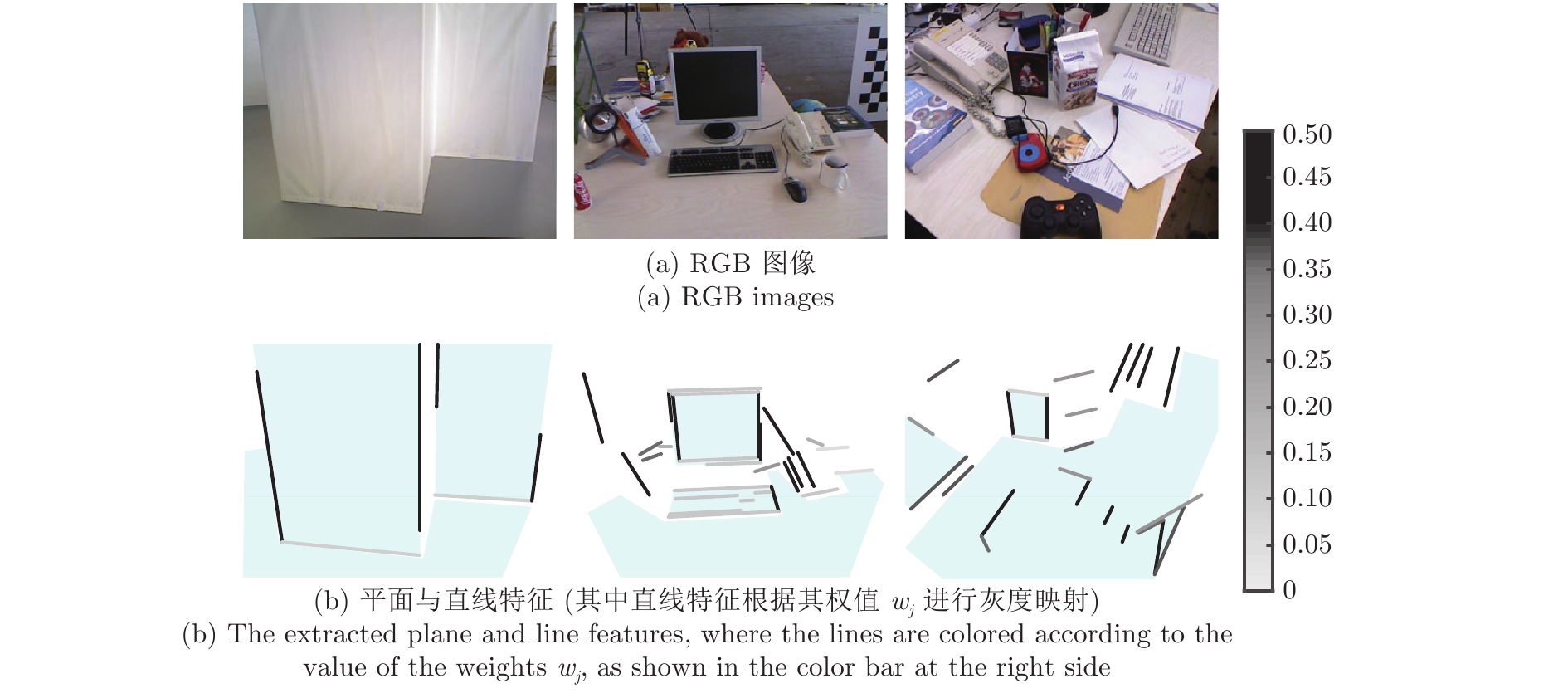
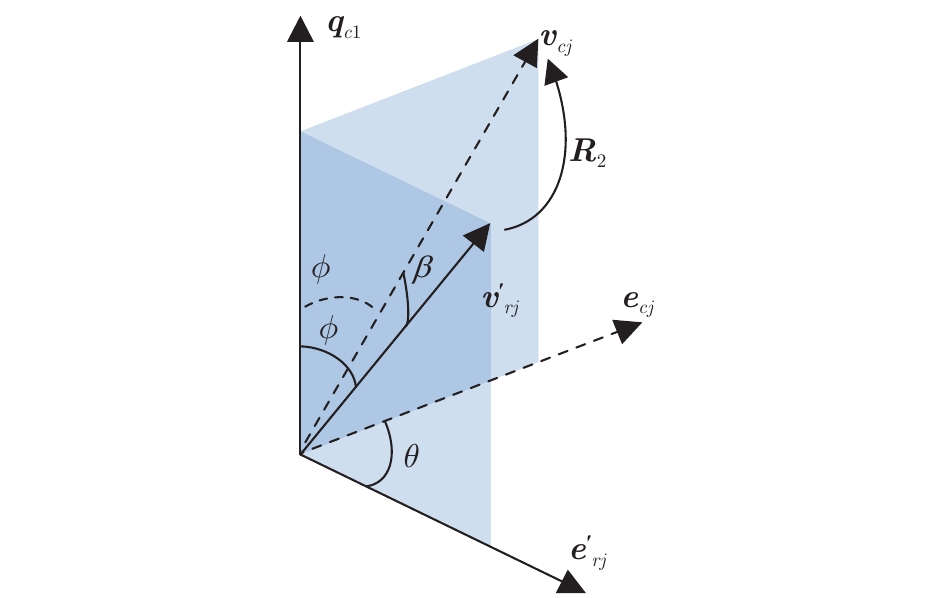
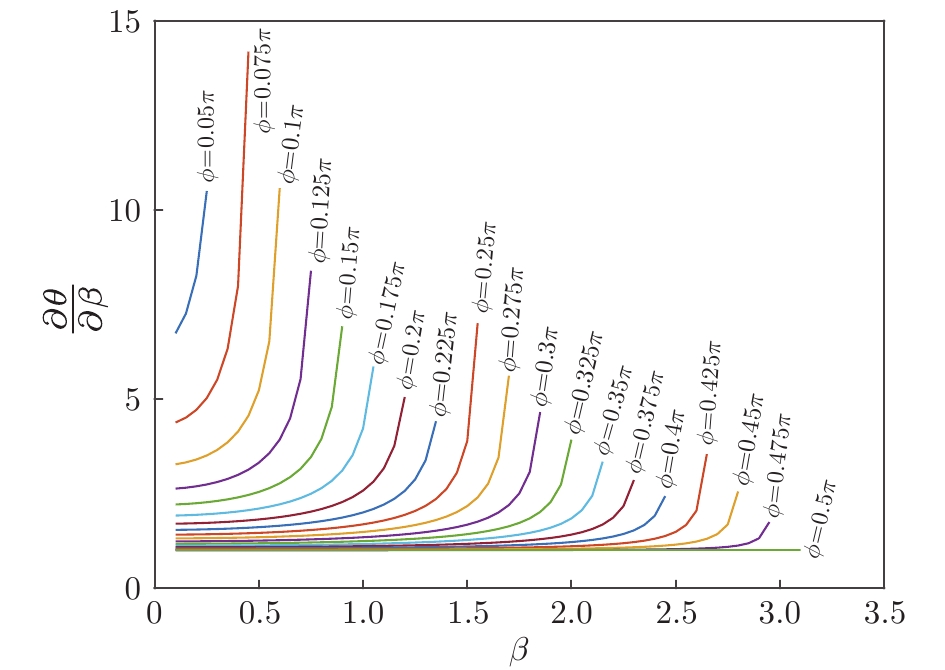
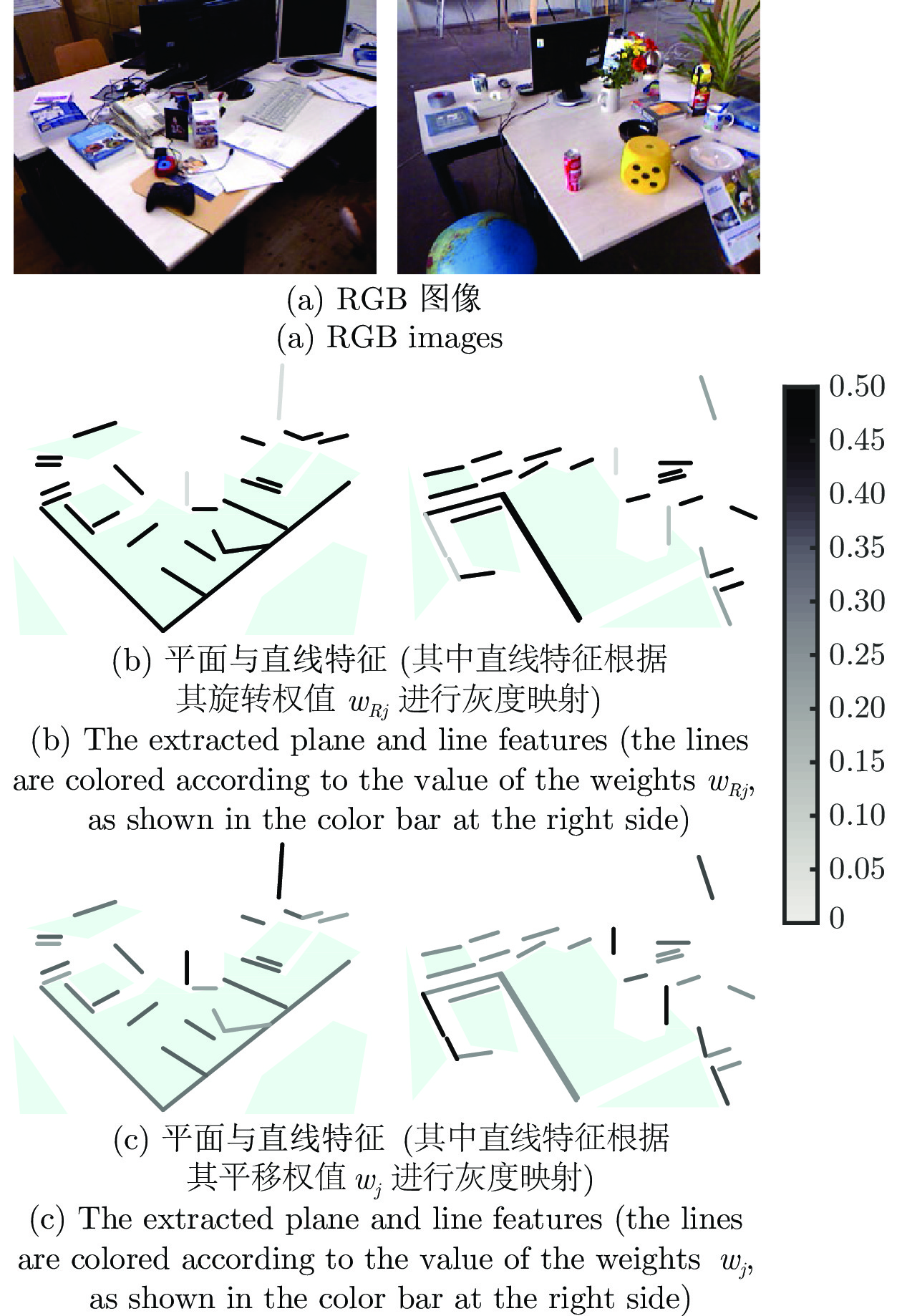
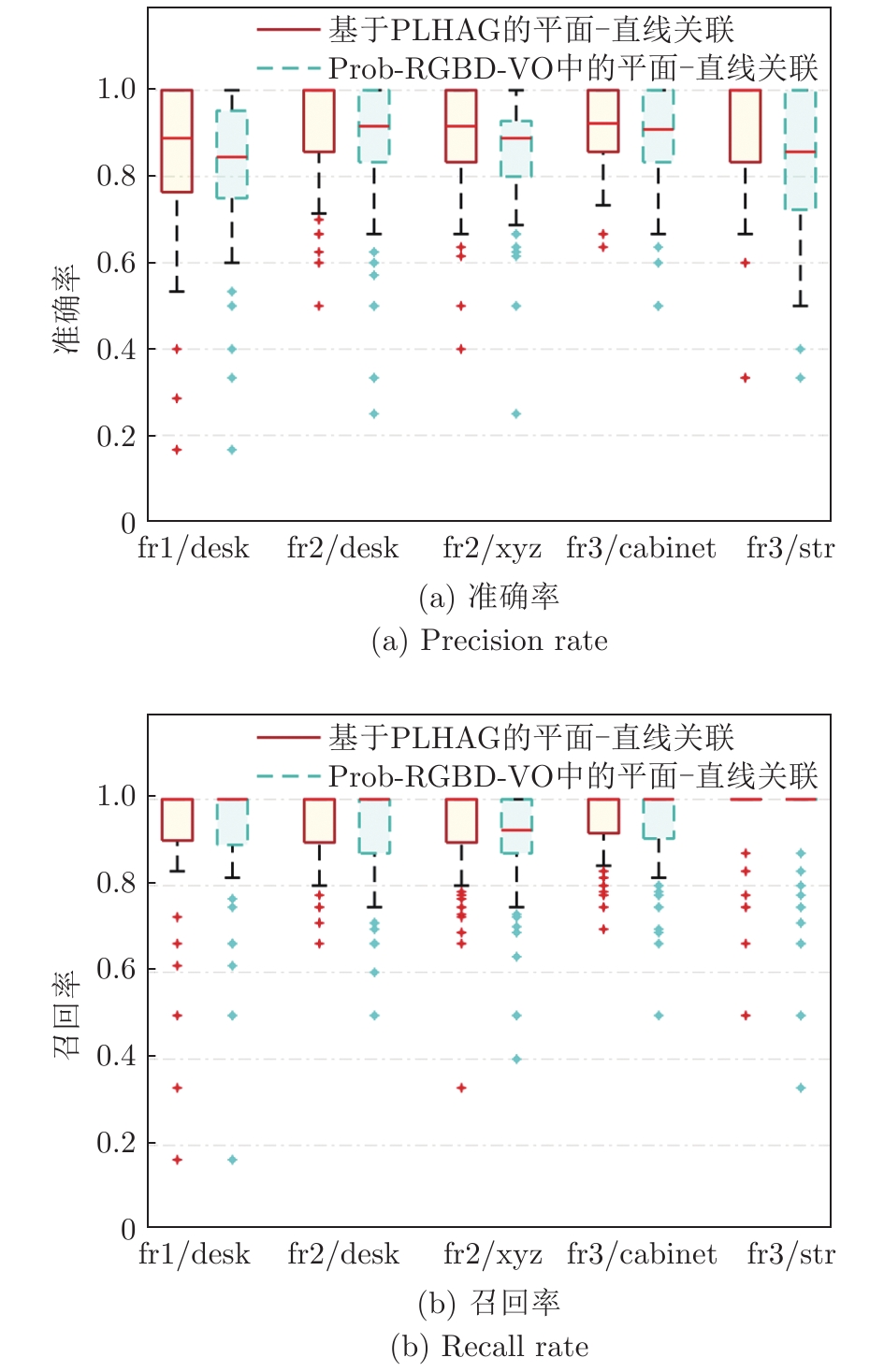
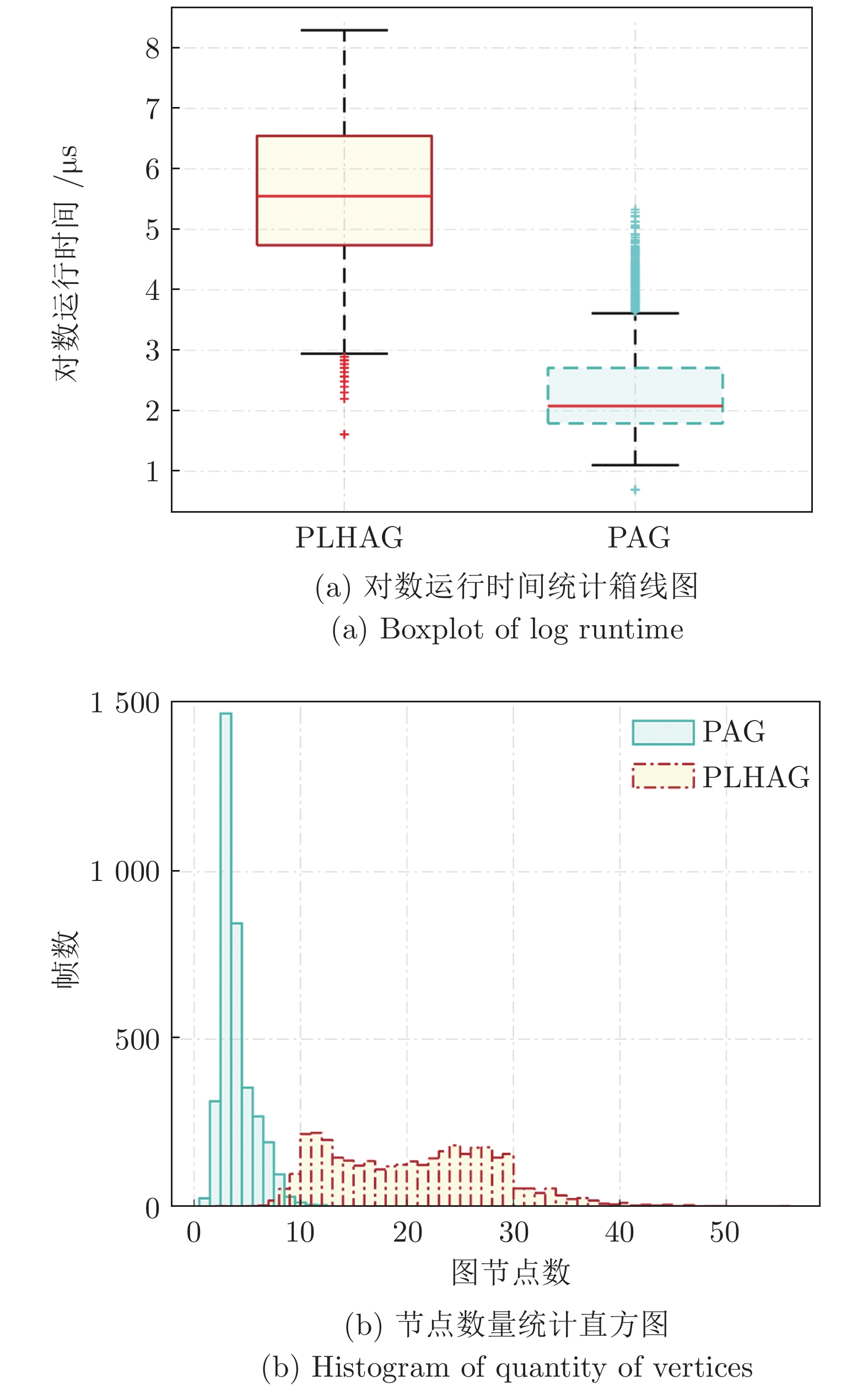
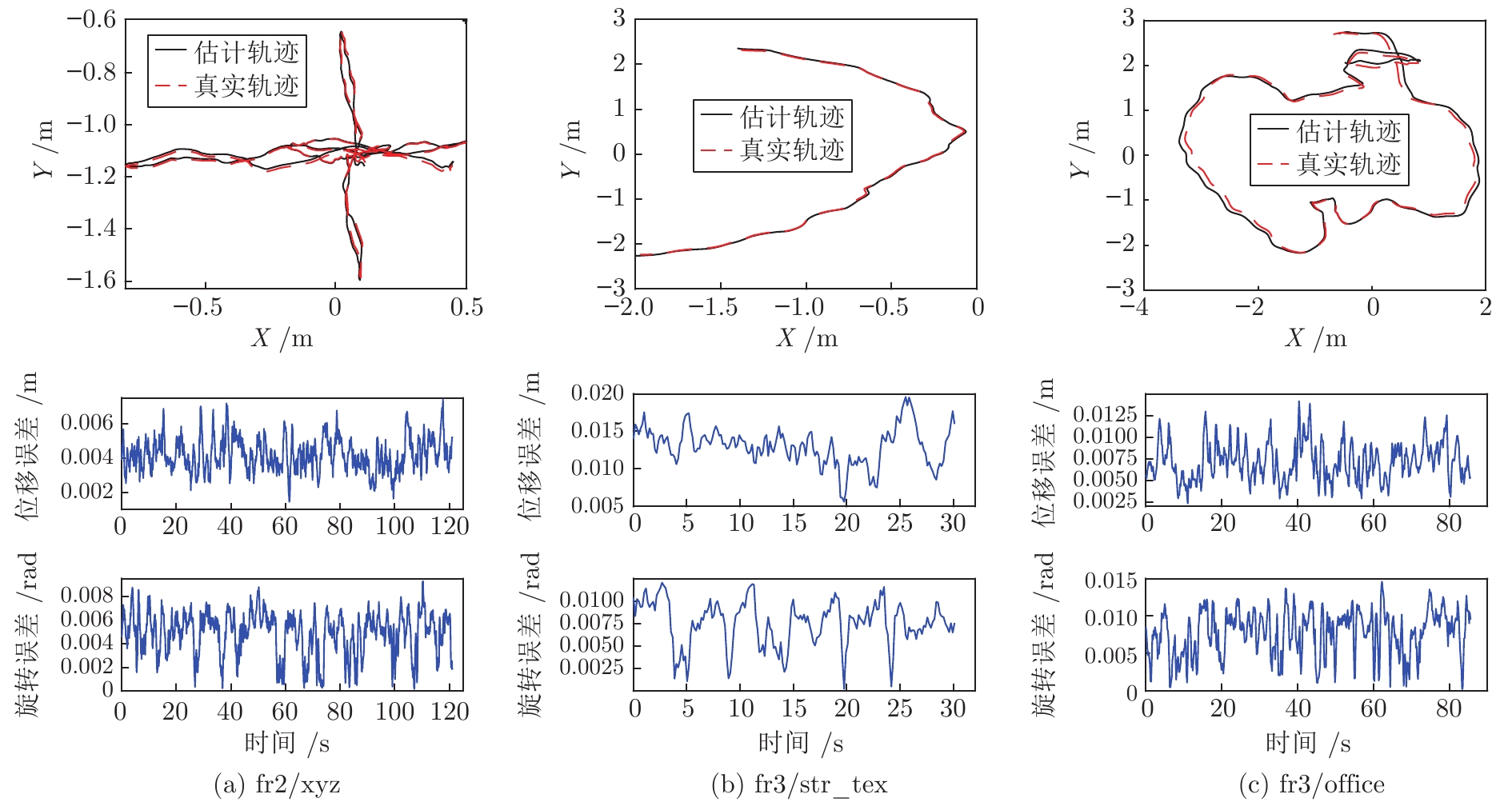
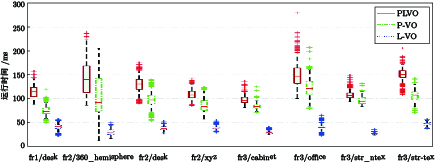
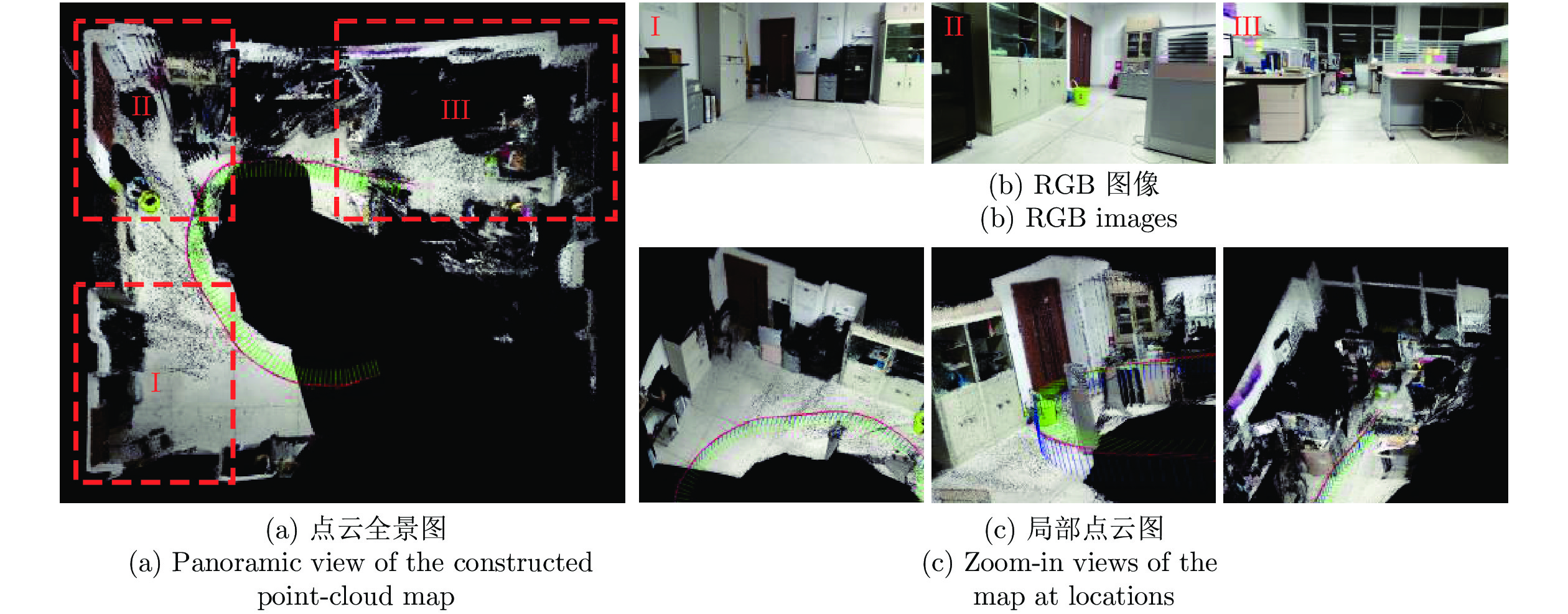
针对利用平面特征计算RGB-D相机位姿时的求解退化问题, 提出平面和直线融合的RGB-D视觉里程计(Plane-line-based RGB-D visual odometry, PLVO). 首先, 提出基于平面−直线混合关联图(Plane-line hybrid association graph, PLHAG)的多特征关联方法, 充分考虑平面和平面、平面和直线之间的几何关系, 对平面和直线两类几何特征进行一体化关联. 然后, 提出基于平面和直线主辅相济、自适应融合的RGB-D相机位姿估计方法. 具体来说, 鉴于平面特征通常比直线特征具有更好的准确性和稳定性, 通过自适应加权的方法, 确保平面特征在位姿计算中的主导作用, 而对平面特征无法约束的位姿自由度(Degree of freedom, DoF), 使用直线特征进行补充, 得到相机的6自由度位姿估计结果, 从而实现两类特征的融合, 解决了单纯使用平面特征求解位姿时的退化问题. 最后, 通过公开数据集上的定量实验以及真实室内环境下的机器人实验, 验证了所提出方法的有效性.
针对利用平面特征计算RGB-D相机位姿时的求解退化问题, 提出平面和直线融合的RGB-D视觉里程计(Plane-line-based RGB-D visual odometry, PLVO). 首先, 提出基于平面−直线混合关联图(Plane-line hybrid association graph, PLHAG)的多特征关联方法, 充分考虑平面和平面、平面和直线之间的几何关系, 对平面和直线两类几何特征进行一体化关联. 然后, 提出基于平面和直线主辅相济、自适应融合的RGB-D相机位姿估计方法. 具体来说, 鉴于平面特征通常比直线特征具有更好的准确性和稳定性, 通过自适应加权的方法, 确保平面特征在位姿计算中的主导作用, 而对平面特征无法约束的位姿自由度(Degree of freedom, DoF), 使用直线特征进行补充, 得到相机的6自由度位姿估计结果, 从而实现两类特征的融合, 解决了单纯使用平面特征求解位姿时的退化问题. 最后, 通过公开数据集上的定量实验以及真实室内环境下的机器人实验, 验证了所提出方法的有效性.
2023, 49(10): 2073-2083.
doi: 10.16383/j.aas.c210783
cstr: 32138.14.j.aas.c210783
摘要:
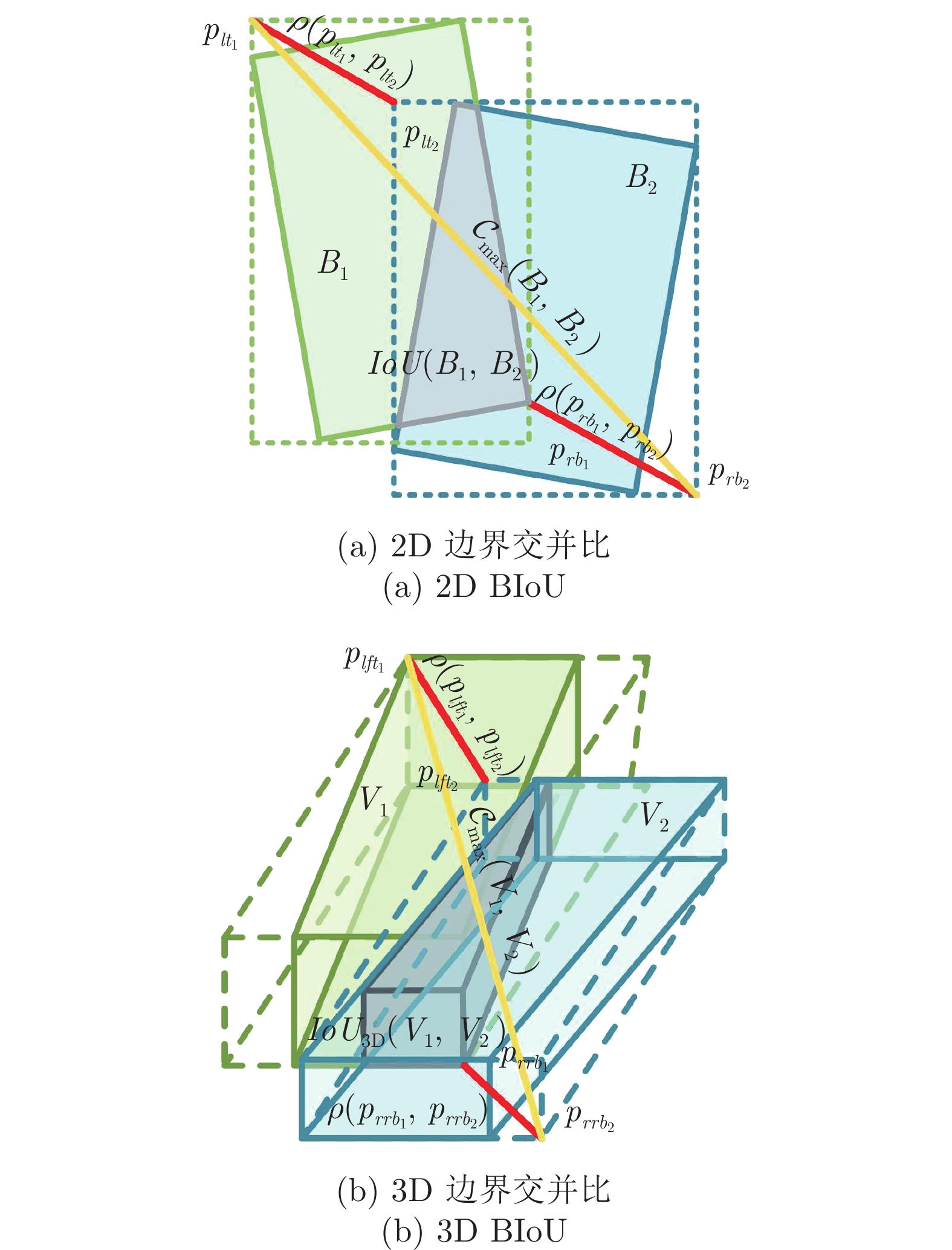
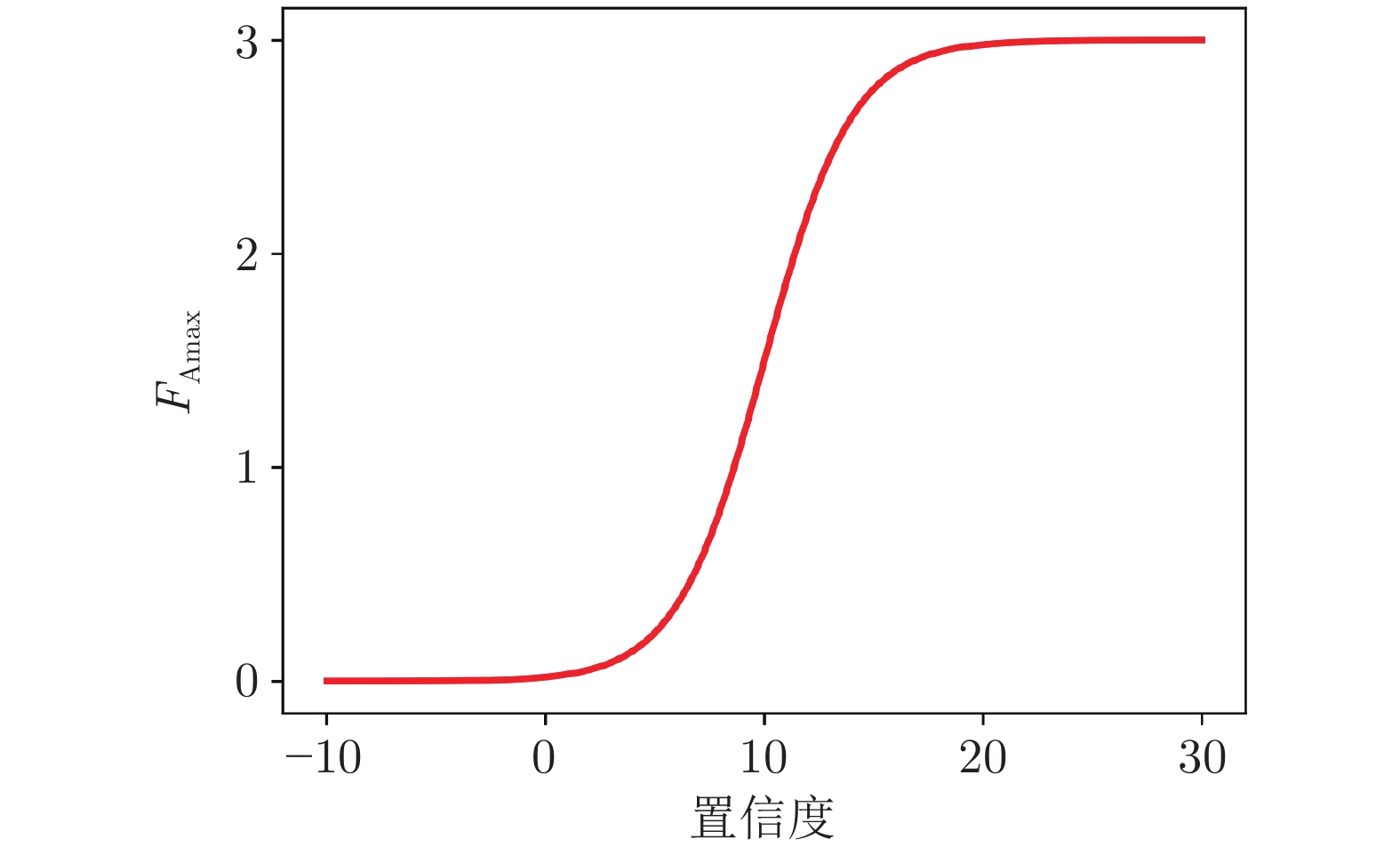
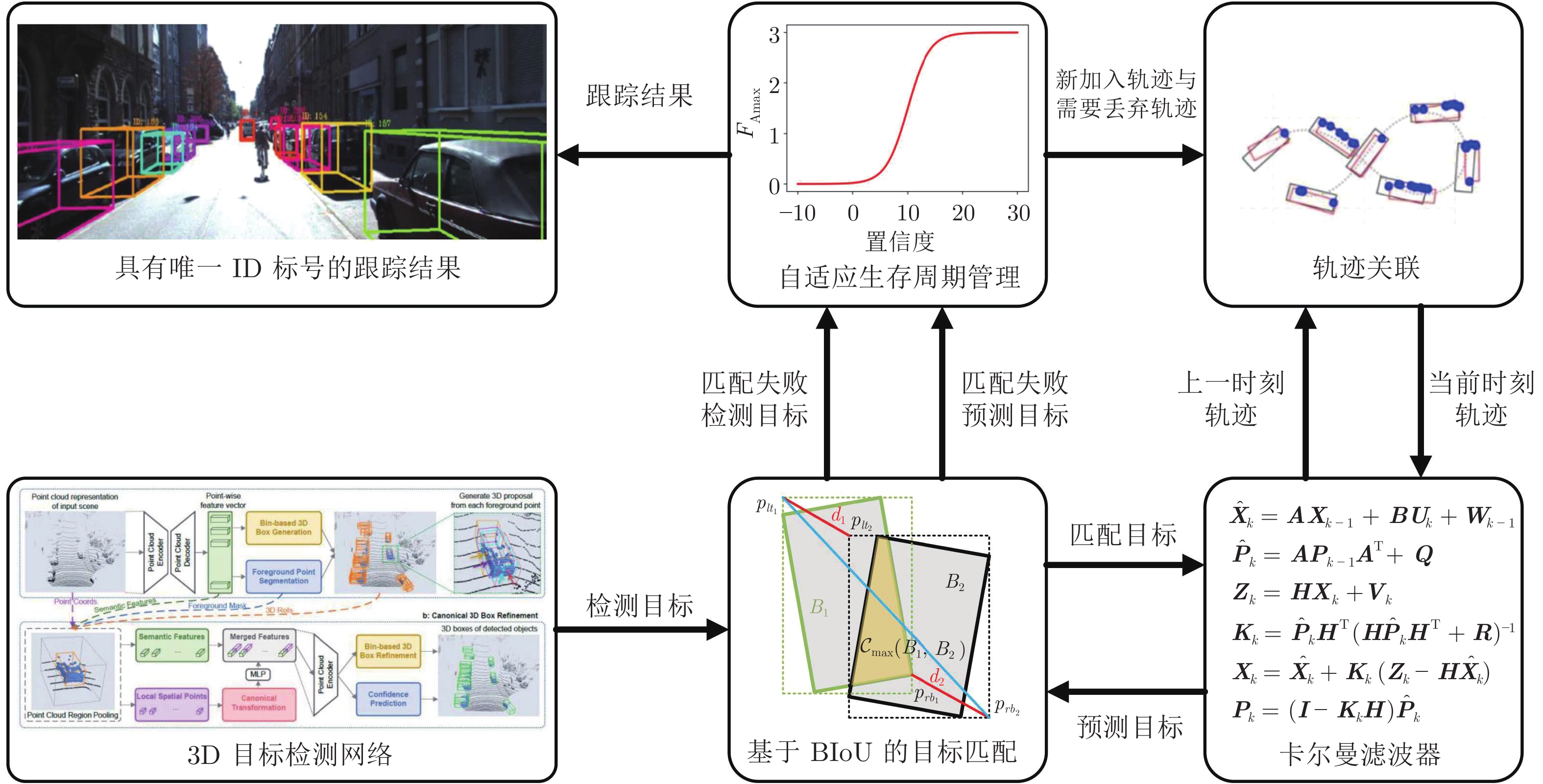
无人驾驶汽车行驶是连续时空的三维运动, 汽车周围的目标不可能突然消失或者出现, 因此, 对于感知层而言, 稳定可靠的多目标跟踪(Multi-object tracking, MOT)意义重大. 针对传统的目标关联和固定生存周期(Birth and death memory, BDM)管理的不足, 提出基于边界交并比(Border intersection over union, BIoU)度量的目标关联和自适应生存周期管理策略. BIoU综合了欧氏距离和交并比(Intersection over union, IoU)的优点, 提高了目标关联的精度. 自适应生存周期管理将目标轨迹置信度与生存周期相联系, 显著减少了目标丢失和误检. 在KITTI多目标跟踪数据集上的实验验证了该方法的有效性.
无人驾驶汽车行驶是连续时空的三维运动, 汽车周围的目标不可能突然消失或者出现, 因此, 对于感知层而言, 稳定可靠的多目标跟踪(Multi-object tracking, MOT)意义重大. 针对传统的目标关联和固定生存周期(Birth and death memory, BDM)管理的不足, 提出基于边界交并比(Border intersection over union, BIoU)度量的目标关联和自适应生存周期管理策略. BIoU综合了欧氏距离和交并比(Intersection over union, IoU)的优点, 提高了目标关联的精度. 自适应生存周期管理将目标轨迹置信度与生存周期相联系, 显著减少了目标丢失和误检. 在KITTI多目标跟踪数据集上的实验验证了该方法的有效性.




2023, 49(10): 2084-2093.
doi: 10.16383/j.aas.c220341
cstr: 32138.14.j.aas.c220341
摘要:
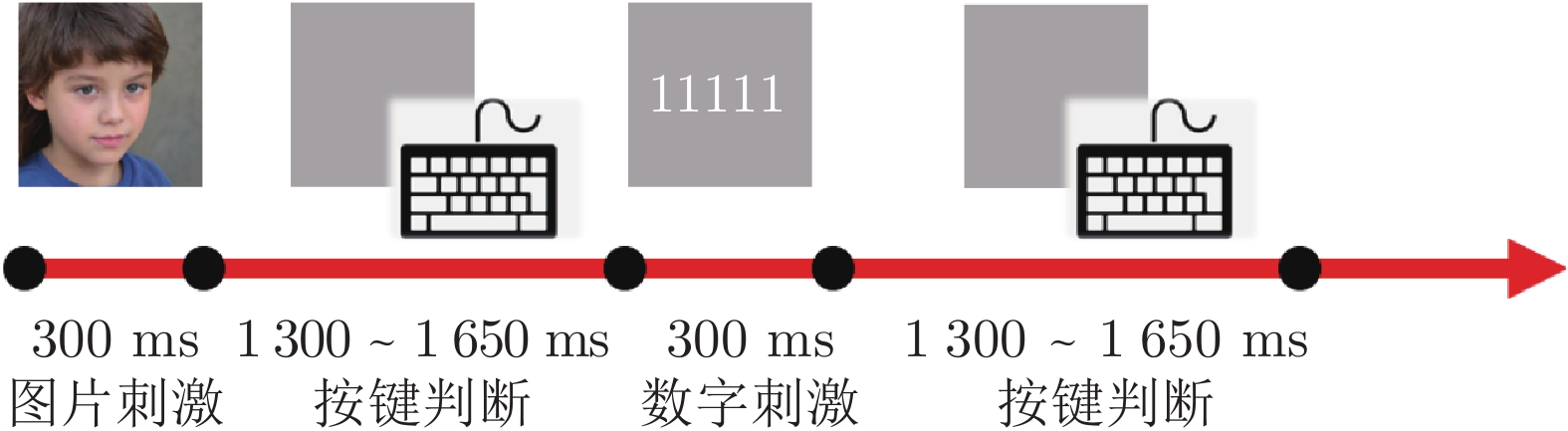
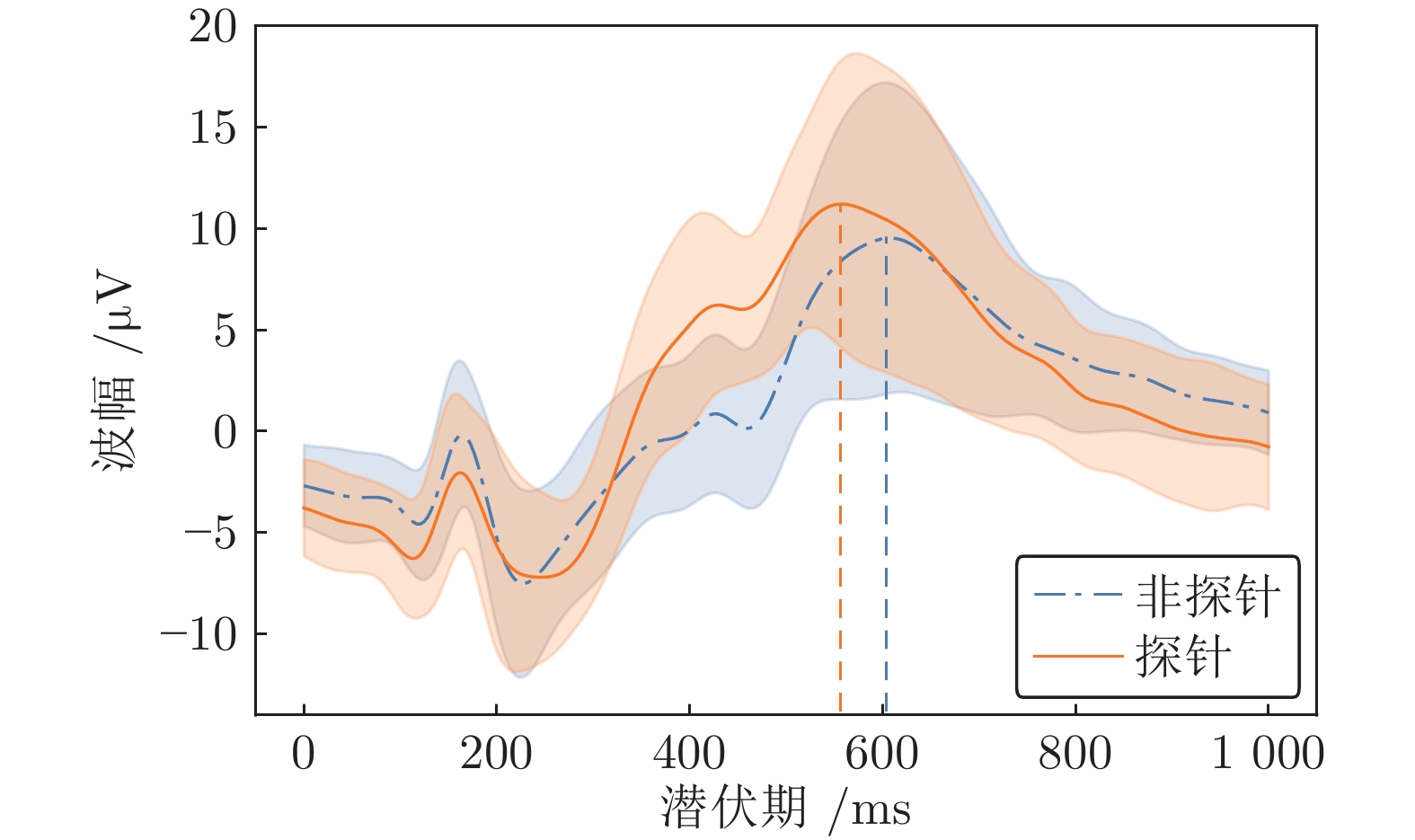
基于脑电(Electroencephalogram, EEG)的谎言检测技术依赖于对事件相关电位(Event-related potential, ERP)的有效解码, 当前主要采用手工设计特征进行脑电分析. 近年来, 单试次脑电分类方法取得了长足进步, 其中端到端的脑电分类方法能够实现对脑电的自动特征提取和分类, 但在谎言检测中缺乏研究和应用, 同时存在无法在测谎场景下直接应用的问题. 本研究设计基于复合反应范式(Complex trial protocol, CTP)进行自我面孔信息识别任务的实验, 采集了18 名被试的脑电数据. 研究了不同端到端的单试次ERP分类方法在谎言检测中的应用, 同时针对单试次脑电解码方法无法直接实际应用的问题, 提出了一种类自举算法. 算法基于数据分布假设, 通过对比各类刺激图像被视为探针刺激时所训练模型的性能, 来推断真正的探针刺激. 实验结果表明, 在基于自我面孔信息的CTP的谎言预测中, 所提出的类自举法性能优于传统探针预测方法, 在仅使用少量脑电数据情况下, 可实现准确的谎言预测.
基于脑电(Electroencephalogram, EEG)的谎言检测技术依赖于对事件相关电位(Event-related potential, ERP)的有效解码, 当前主要采用手工设计特征进行脑电分析. 近年来, 单试次脑电分类方法取得了长足进步, 其中端到端的脑电分类方法能够实现对脑电的自动特征提取和分类, 但在谎言检测中缺乏研究和应用, 同时存在无法在测谎场景下直接应用的问题. 本研究设计基于复合反应范式(Complex trial protocol, CTP)进行自我面孔信息识别任务的实验, 采集了18 名被试的脑电数据. 研究了不同端到端的单试次ERP分类方法在谎言检测中的应用, 同时针对单试次脑电解码方法无法直接实际应用的问题, 提出了一种类自举算法. 算法基于数据分布假设, 通过对比各类刺激图像被视为探针刺激时所训练模型的性能, 来推断真正的探针刺激. 实验结果表明, 在基于自我面孔信息的CTP的谎言预测中, 所提出的类自举法性能优于传统探针预测方法, 在仅使用少量脑电数据情况下, 可实现准确的谎言预测.


2023, 49(10): 2094-2108.
doi: 10.16383/j.aas.c210964
cstr: 32138.14.j.aas.c210964
摘要:
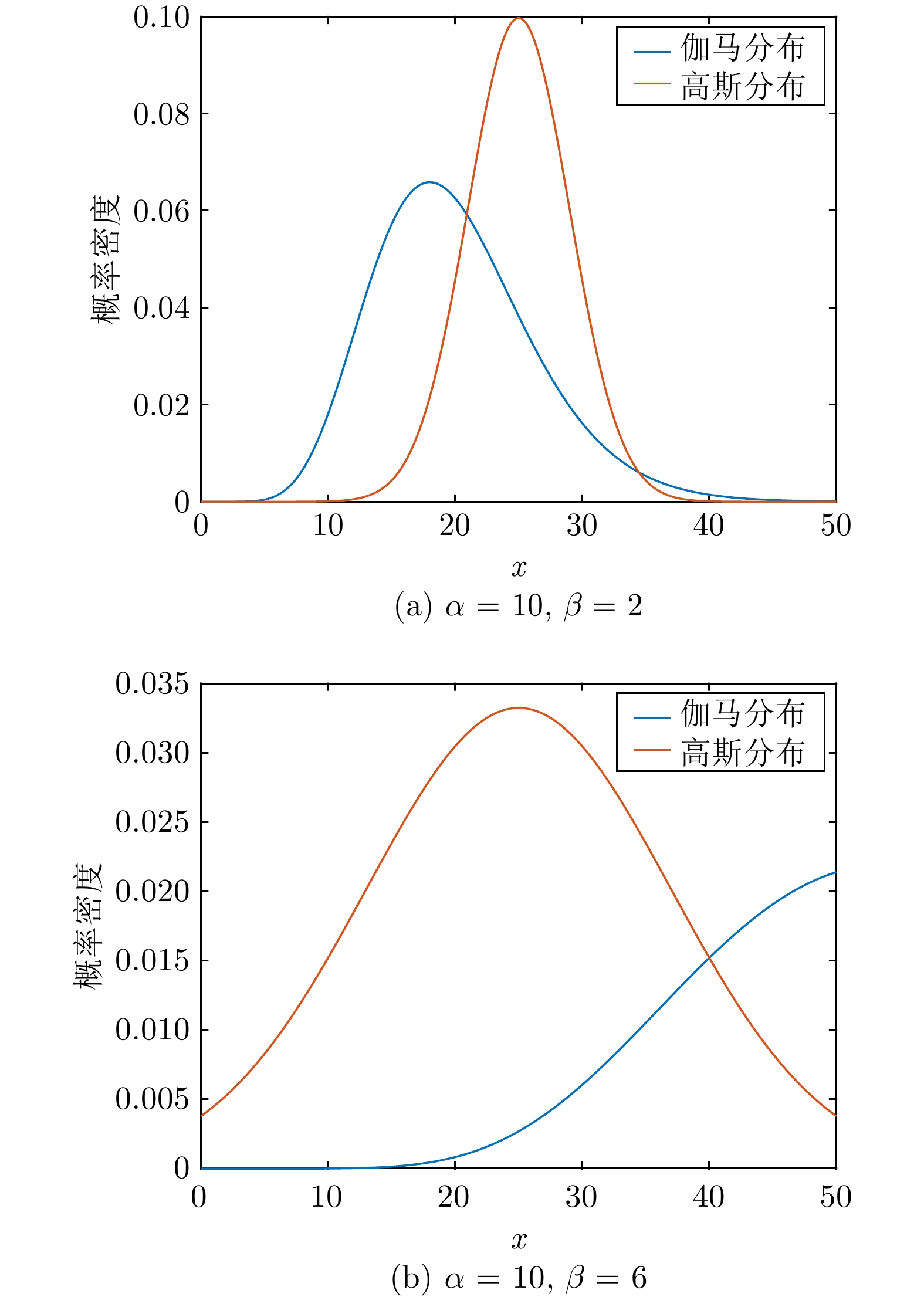
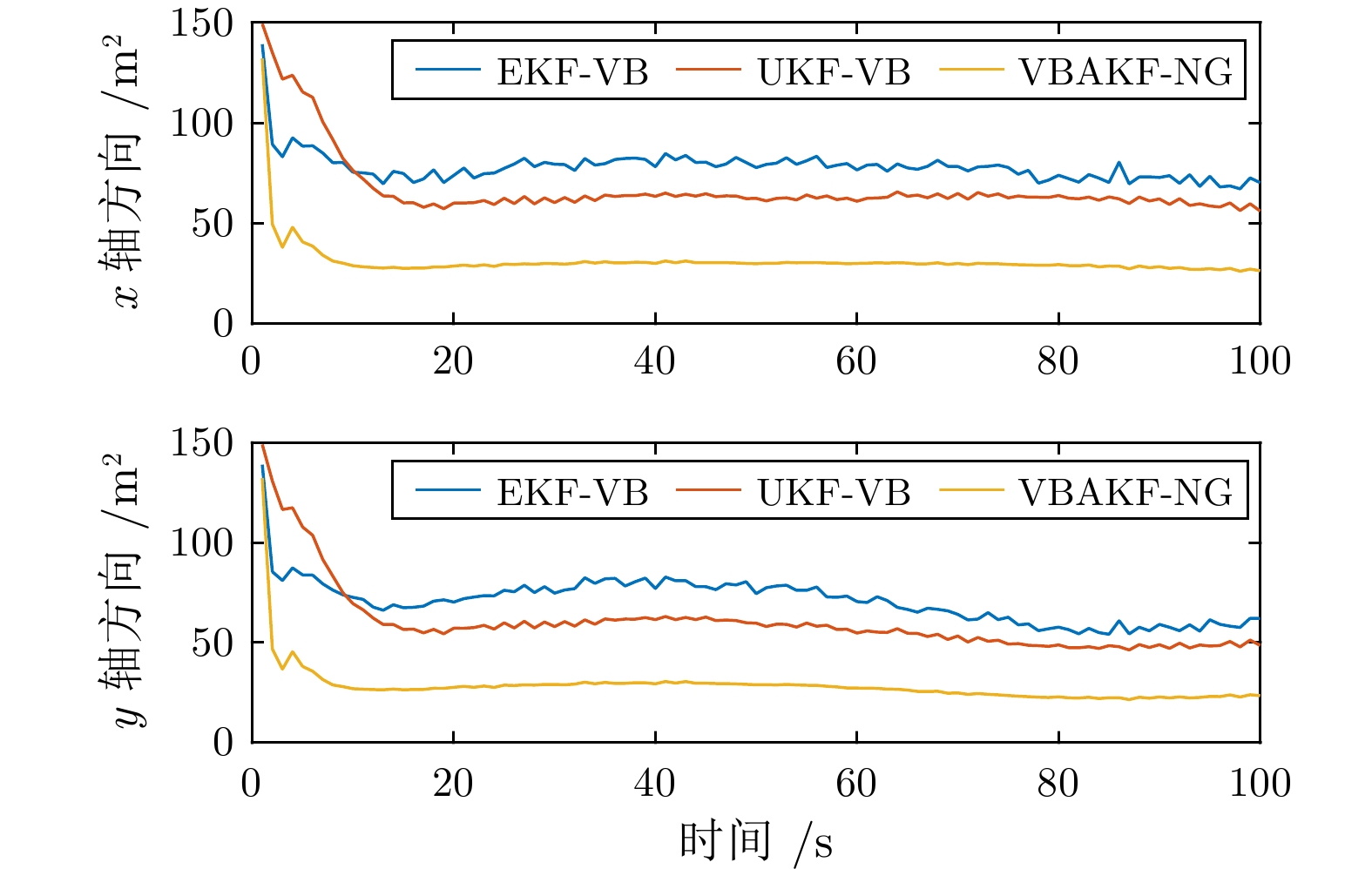
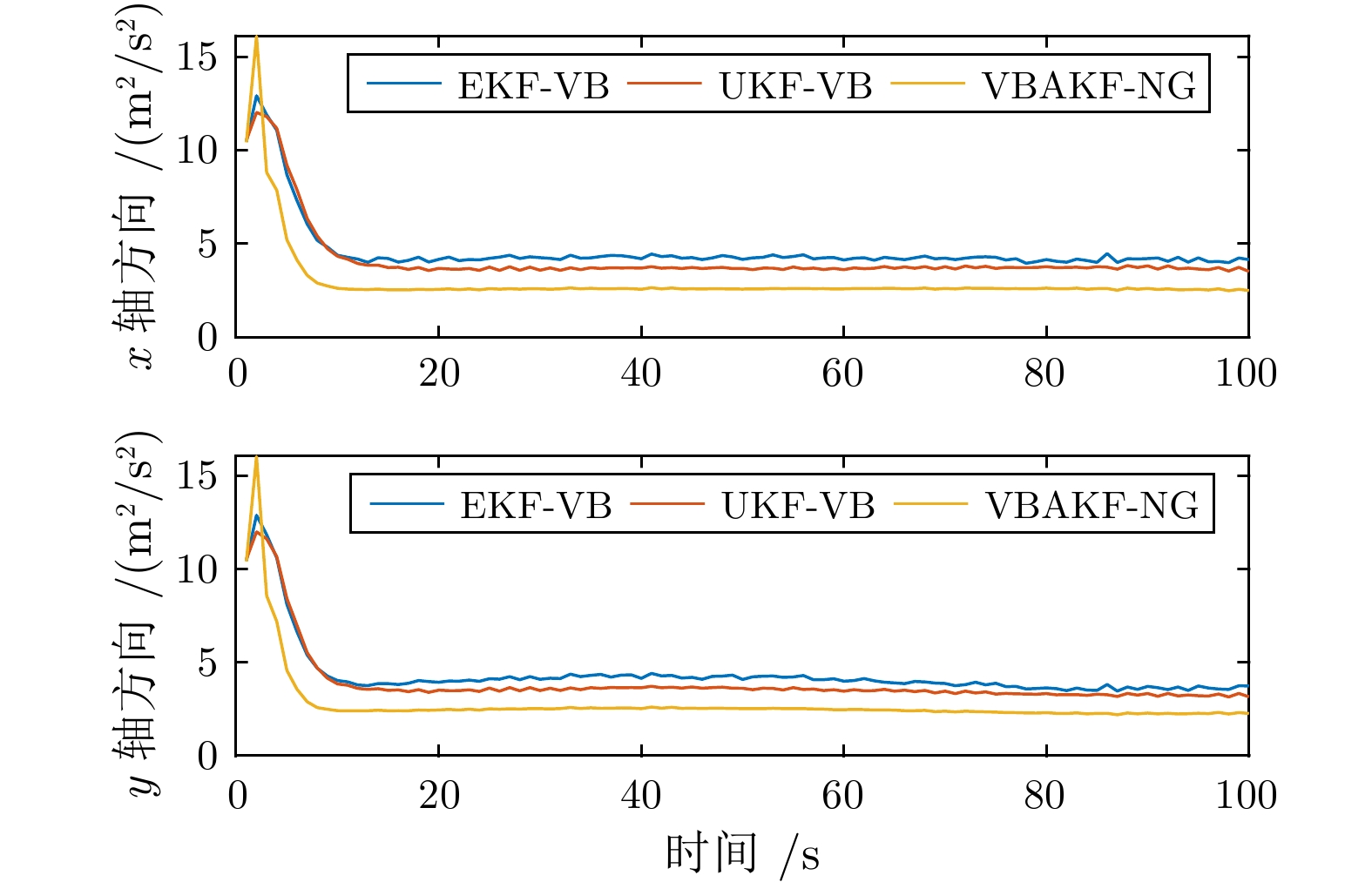
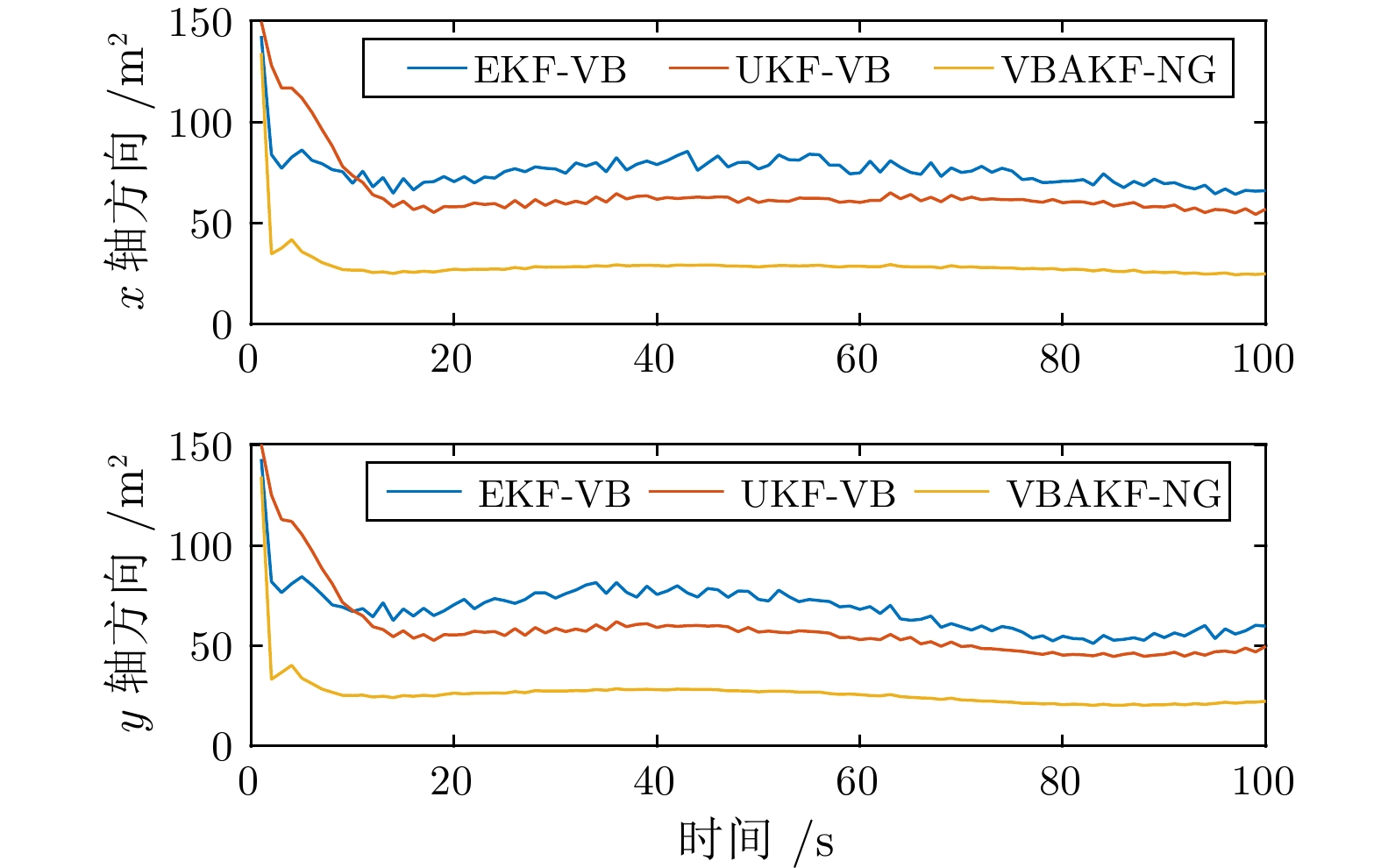
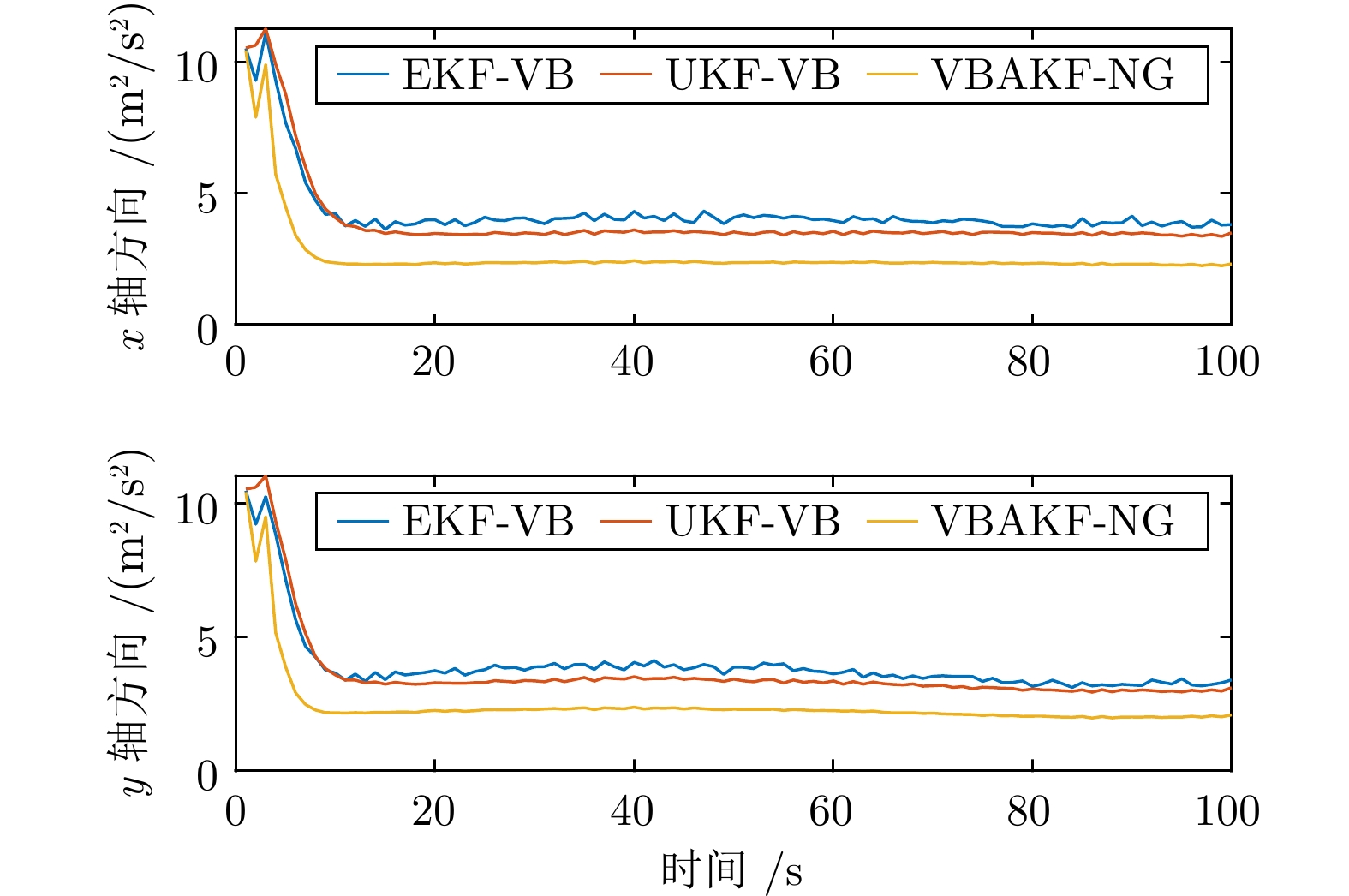
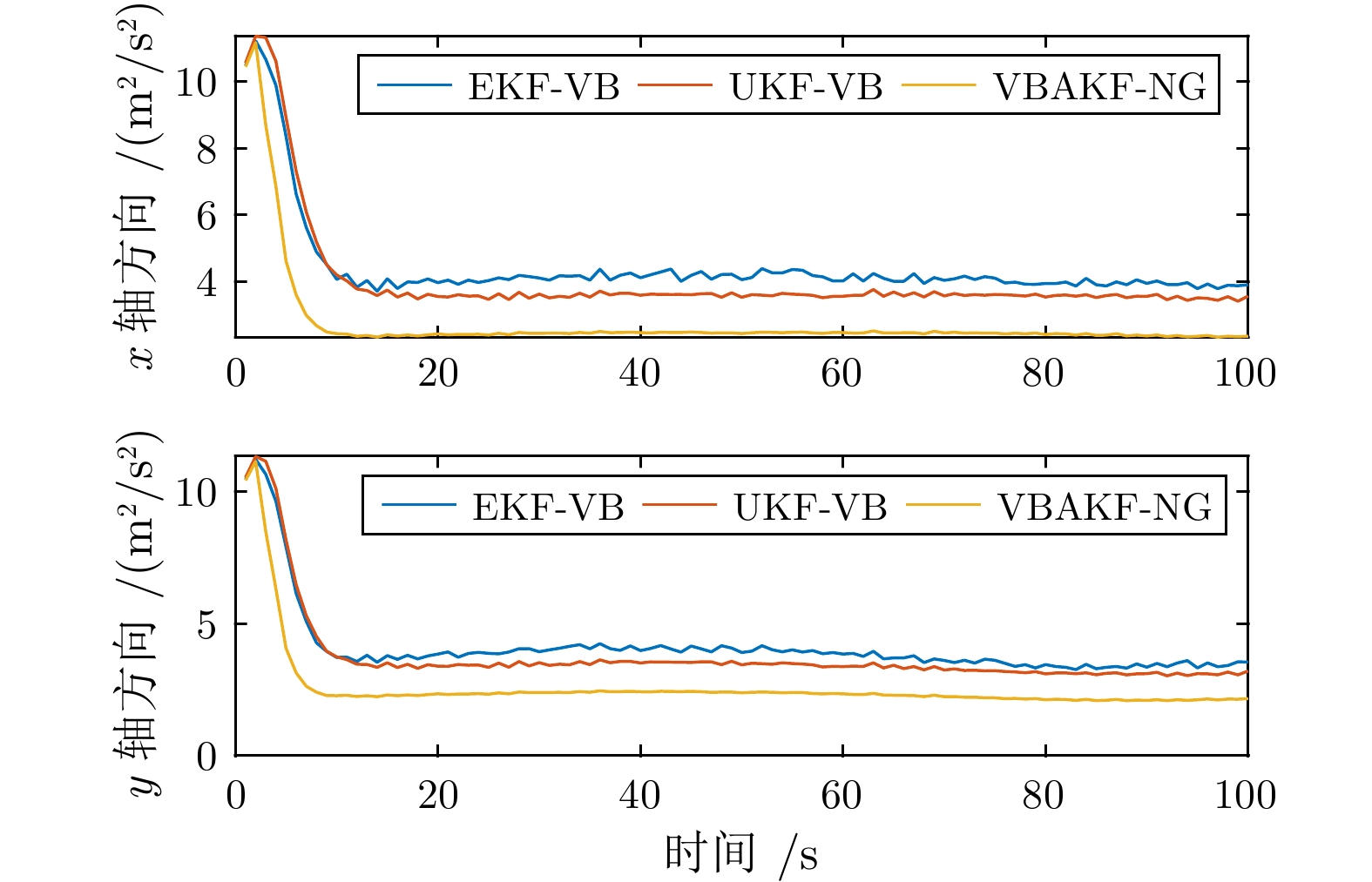
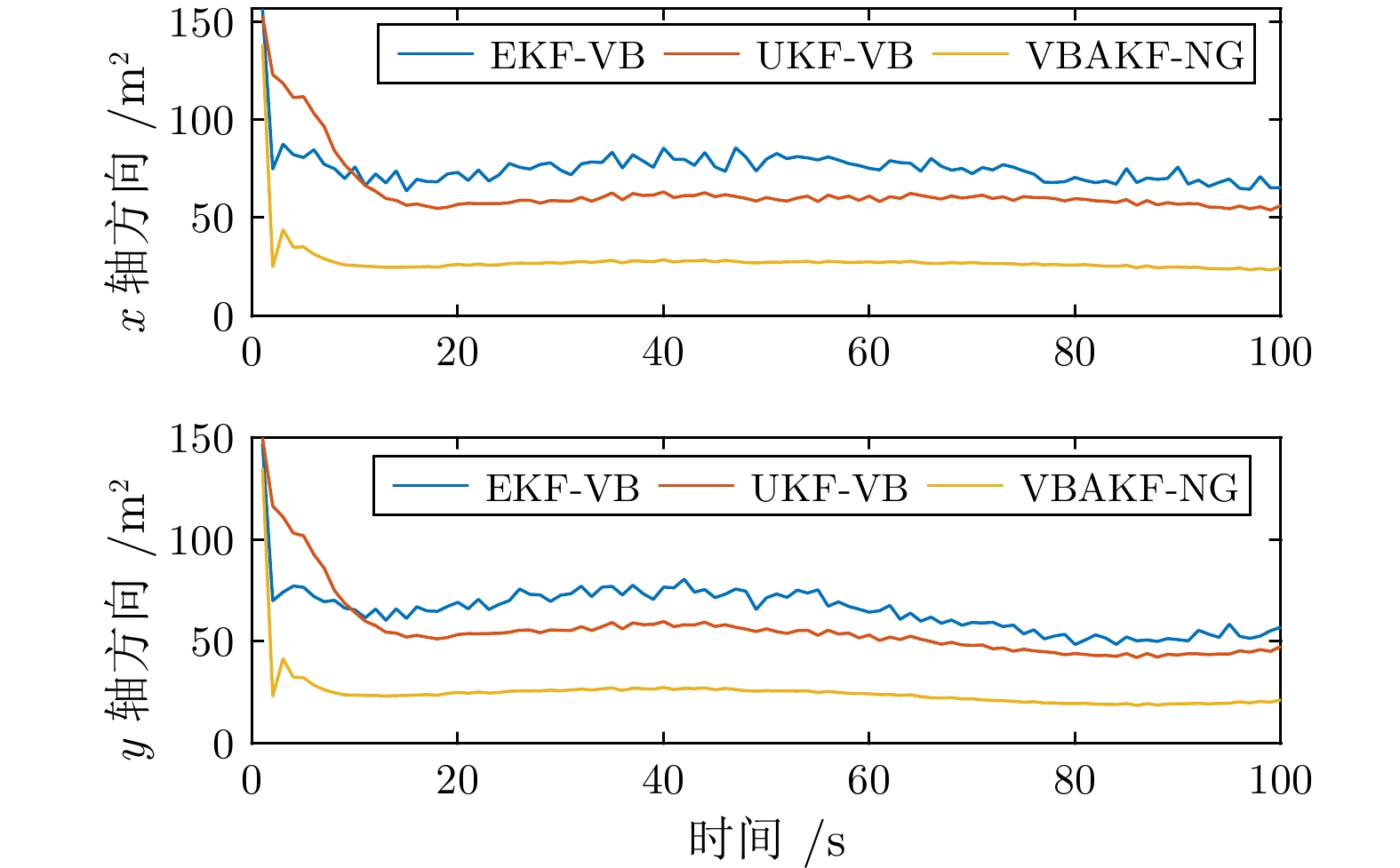
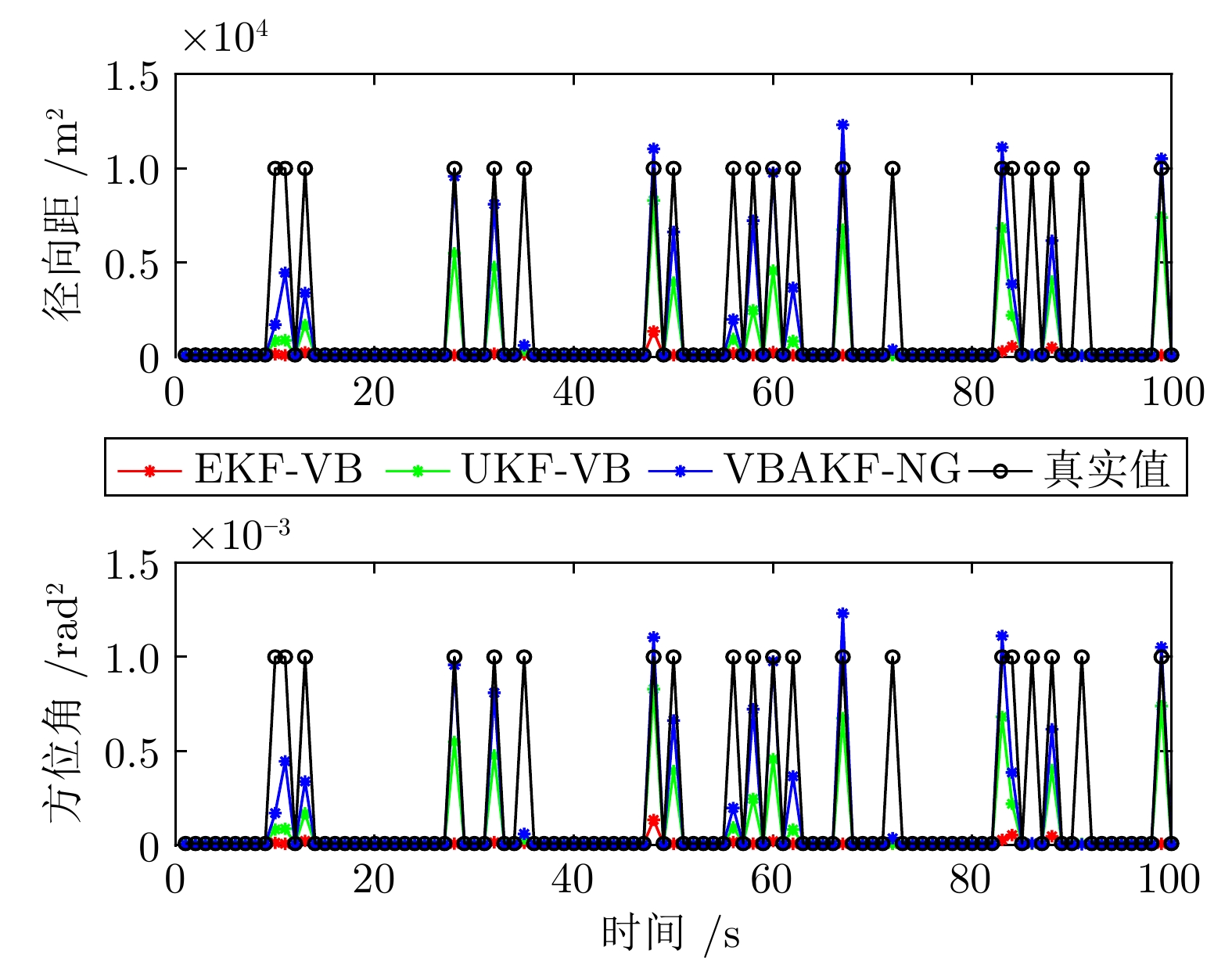
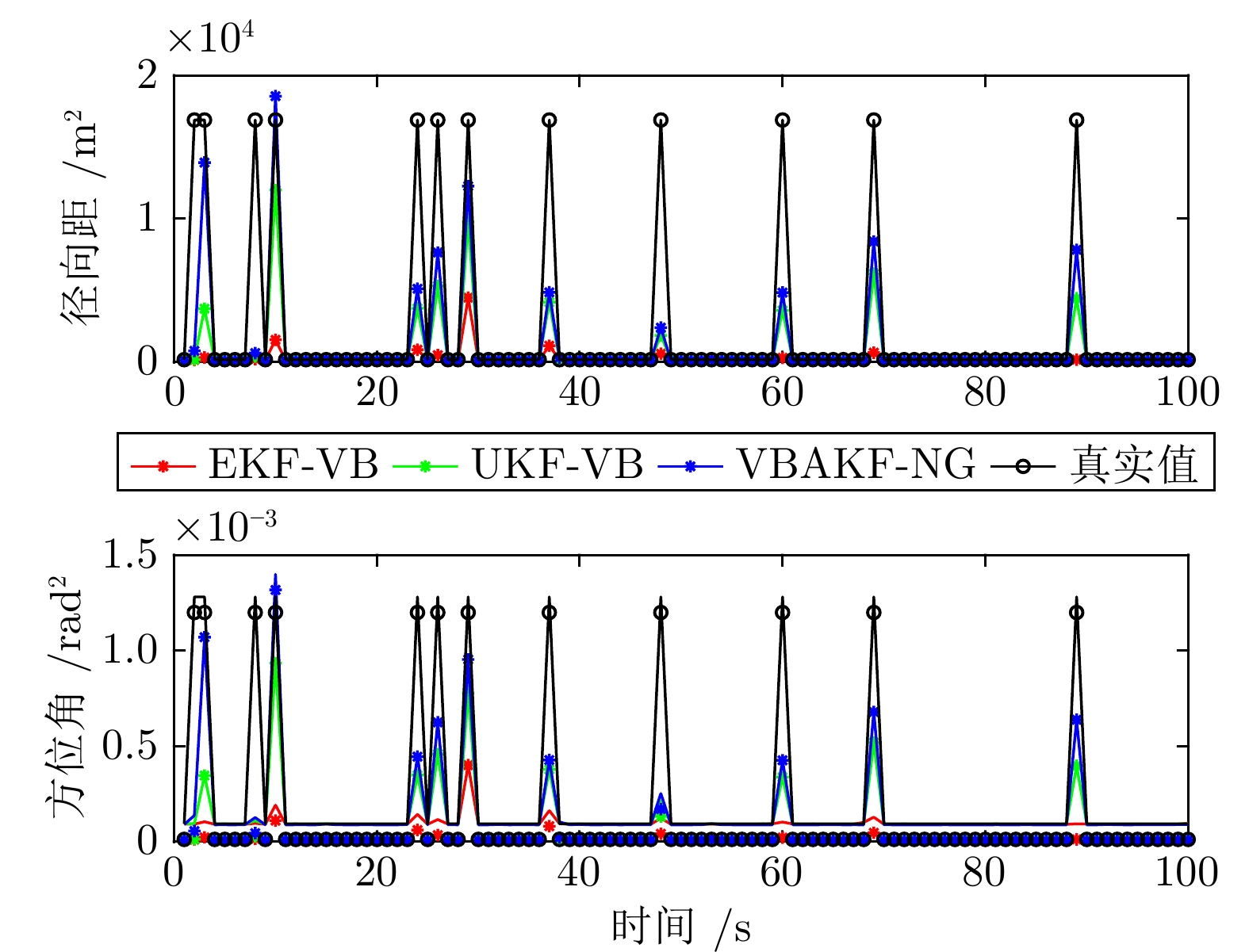
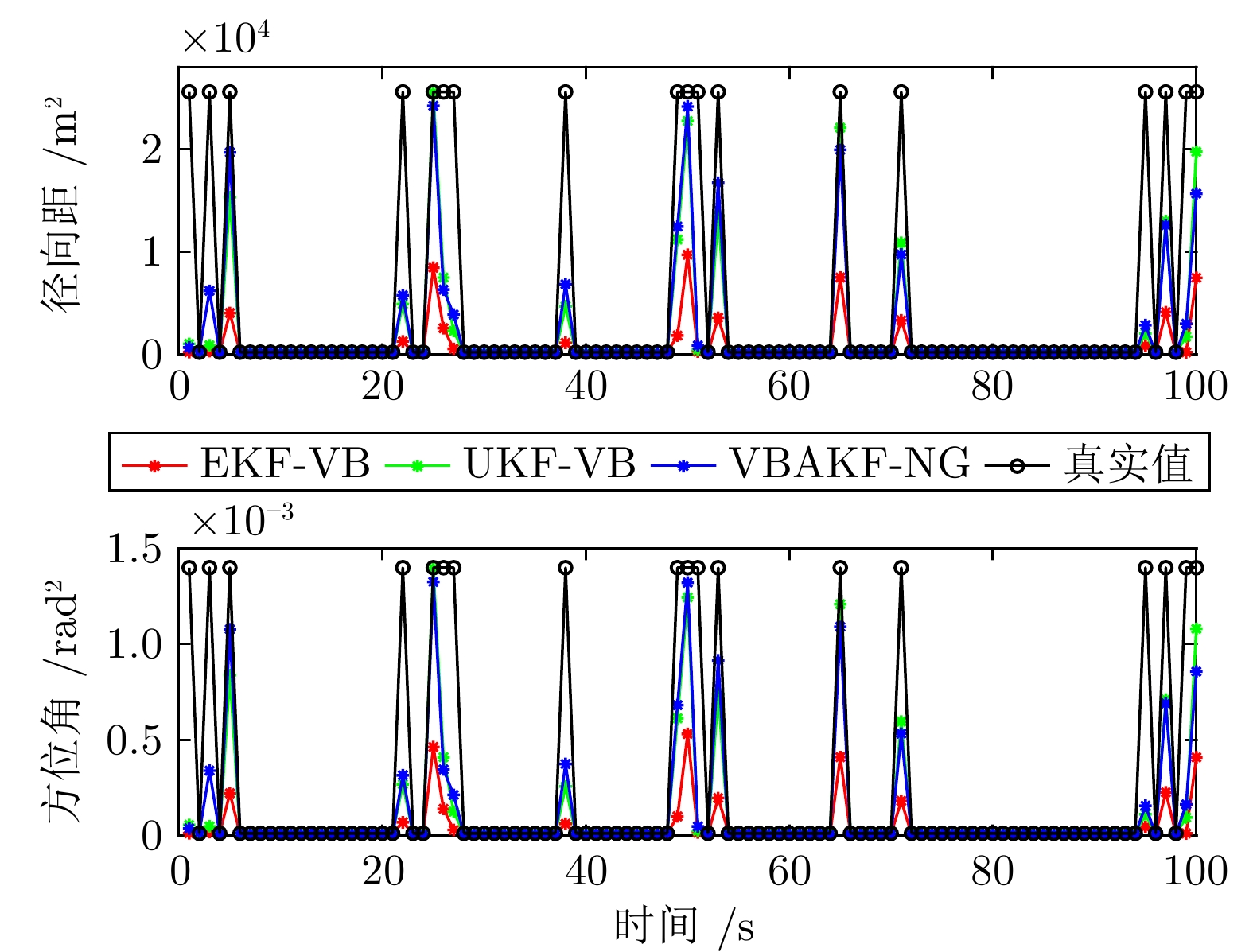
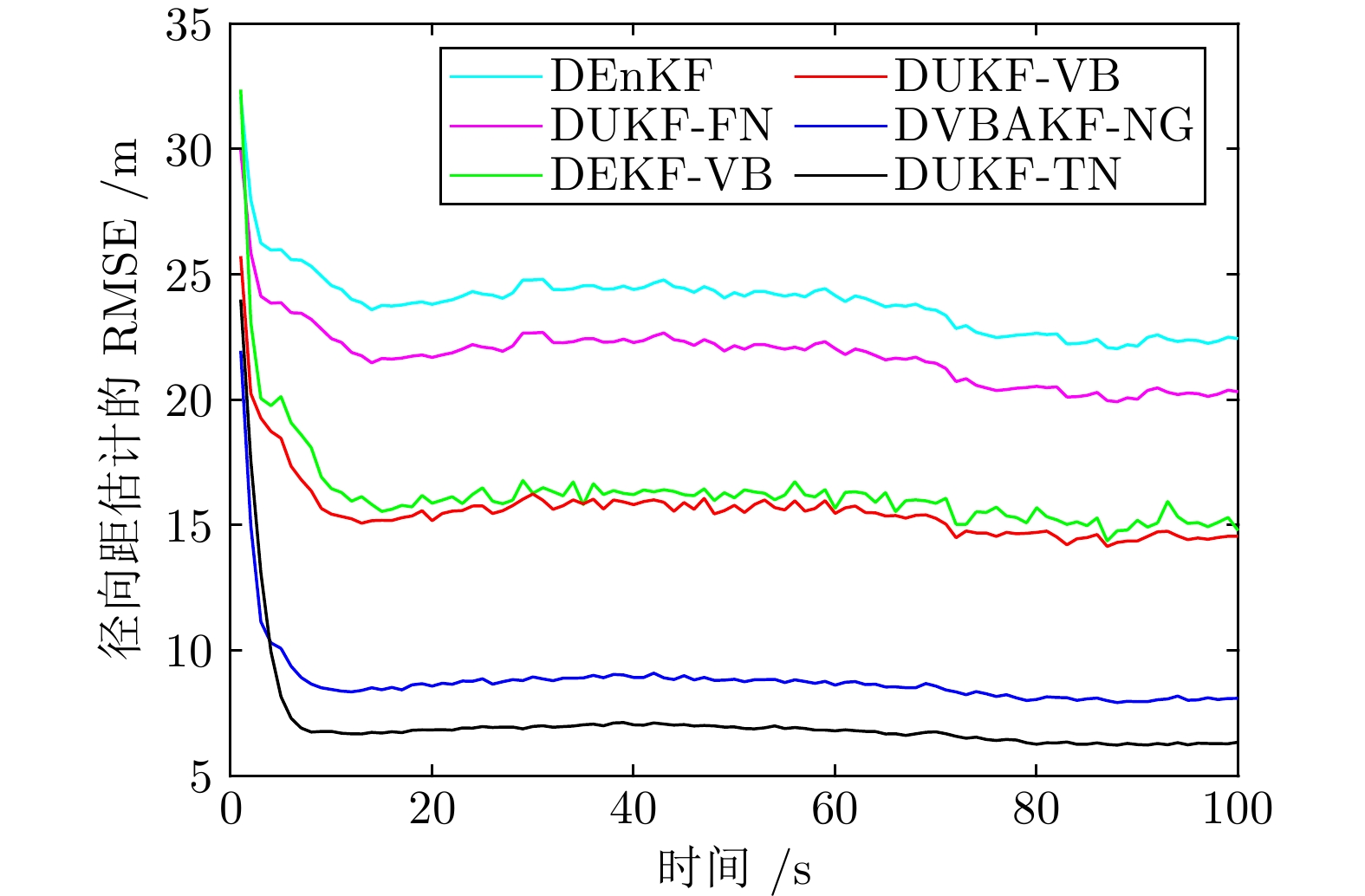
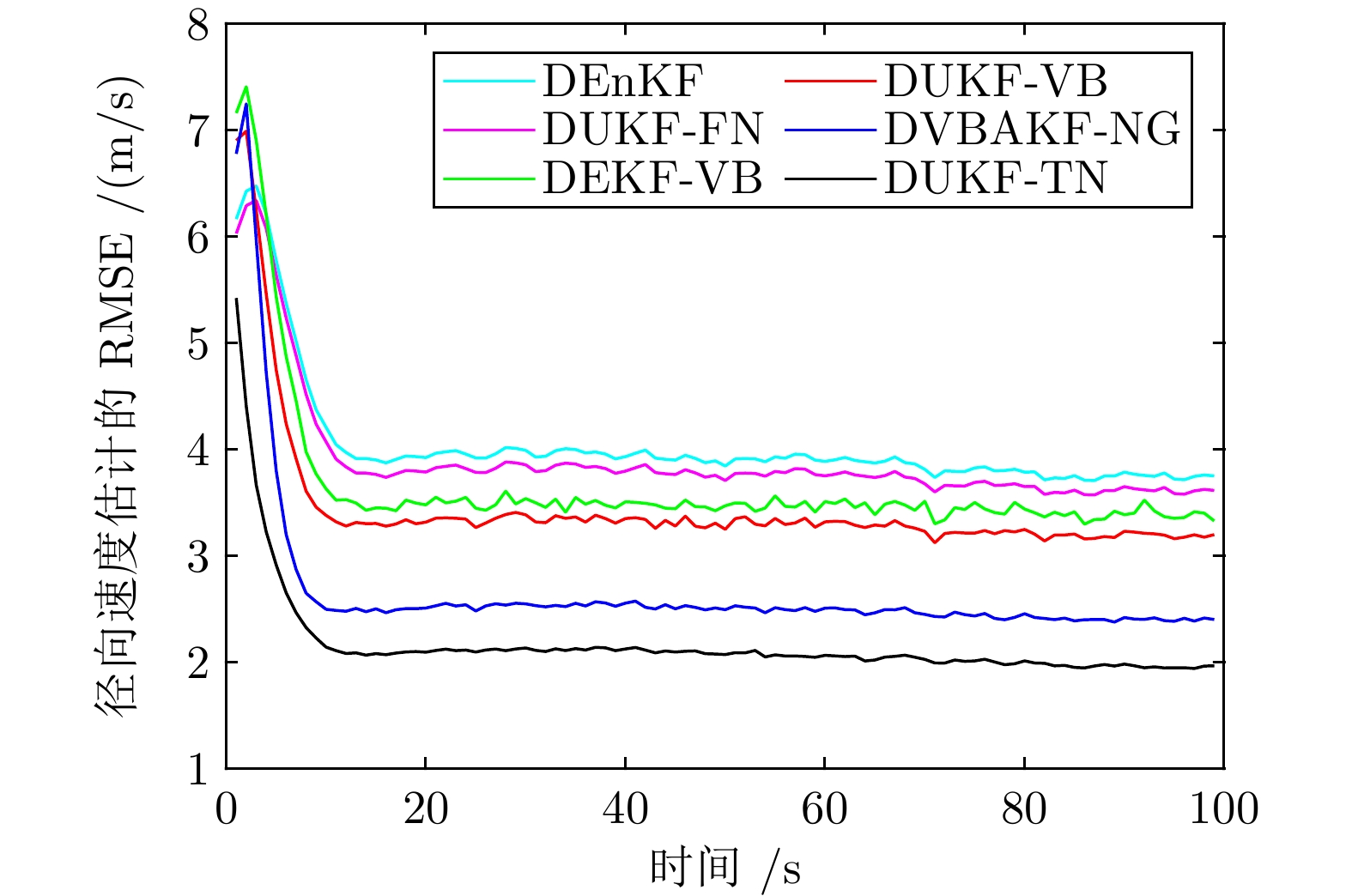
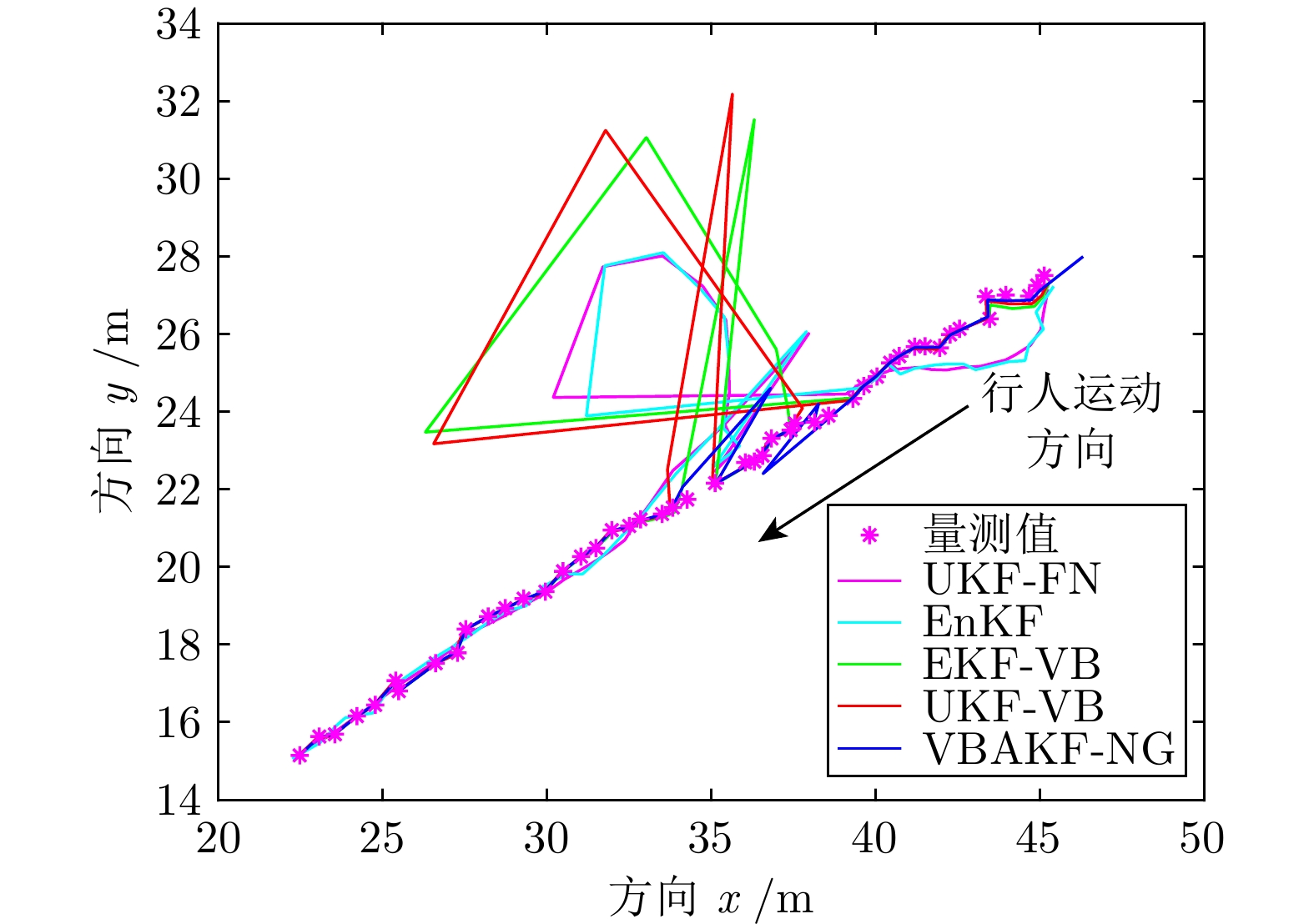
考虑到运动目标跟踪系统机动、隐身等人为对抗特征以及非视距、干扰、遮挡等环境因素, 其系统建模、估计与辨识过程中越来越无法回避非线性、非高斯以及参数未知等复杂系统特征的影响. 针对过程噪声先验信息不准确以及量测噪声非高斯环境下运动目标的非线性状态估计问题, 提出一种基于自然梯度的噪声自适应变分贝叶斯(Variational Bayes, VB)滤波算法. 首先, 利用指数族分布具有统一表达形式的优势, 构建参数化逆威沙特(Inverse-Wishart, IW)分布作为状态一步预测误差协方差的共轭先验分布, 同时选取学生t分布重构因量测随机缺失导致的具有非高斯特点的似然函数; 其次, 在变分贝叶斯优化框架下采用平均场理论将状态变量联合后验分布近似分解为独立的变分分布, 在此基础上, 结合坐标上升方法更新各变量的变分分布参数; 进而, 结合 Fisher 信息矩阵推导置信下界最大化关于状态估计及其估计误差协方差的自然梯度, 使非线性状态后验分布的近似分布沿梯度下降, 以实现对状态后验概率密度函数(Probability density function, PDF)的“紧密”逼近. 理论分析和仿真实验表明: 相对传统的非线性滤波方法, 本文算法对噪声不确定问题具有较好的自适应能力, 并且能够获得较高的状态估计精度.
考虑到运动目标跟踪系统机动、隐身等人为对抗特征以及非视距、干扰、遮挡等环境因素, 其系统建模、估计与辨识过程中越来越无法回避非线性、非高斯以及参数未知等复杂系统特征的影响. 针对过程噪声先验信息不准确以及量测噪声非高斯环境下运动目标的非线性状态估计问题, 提出一种基于自然梯度的噪声自适应变分贝叶斯(Variational Bayes, VB)滤波算法. 首先, 利用指数族分布具有统一表达形式的优势, 构建参数化逆威沙特(Inverse-Wishart, IW)分布作为状态一步预测误差协方差的共轭先验分布, 同时选取学生t分布重构因量测随机缺失导致的具有非高斯特点的似然函数; 其次, 在变分贝叶斯优化框架下采用平均场理论将状态变量联合后验分布近似分解为独立的变分分布, 在此基础上, 结合坐标上升方法更新各变量的变分分布参数; 进而, 结合 Fisher 信息矩阵推导置信下界最大化关于状态估计及其估计误差协方差的自然梯度, 使非线性状态后验分布的近似分布沿梯度下降, 以实现对状态后验概率密度函数(Probability density function, PDF)的“紧密”逼近. 理论分析和仿真实验表明: 相对传统的非线性滤波方法, 本文算法对噪声不确定问题具有较好的自适应能力, 并且能够获得较高的状态估计精度.
2023, 49(10): 2109-2121.
doi: 10.16383/j.aas.c200987
cstr: 32138.14.j.aas.c200987
摘要:
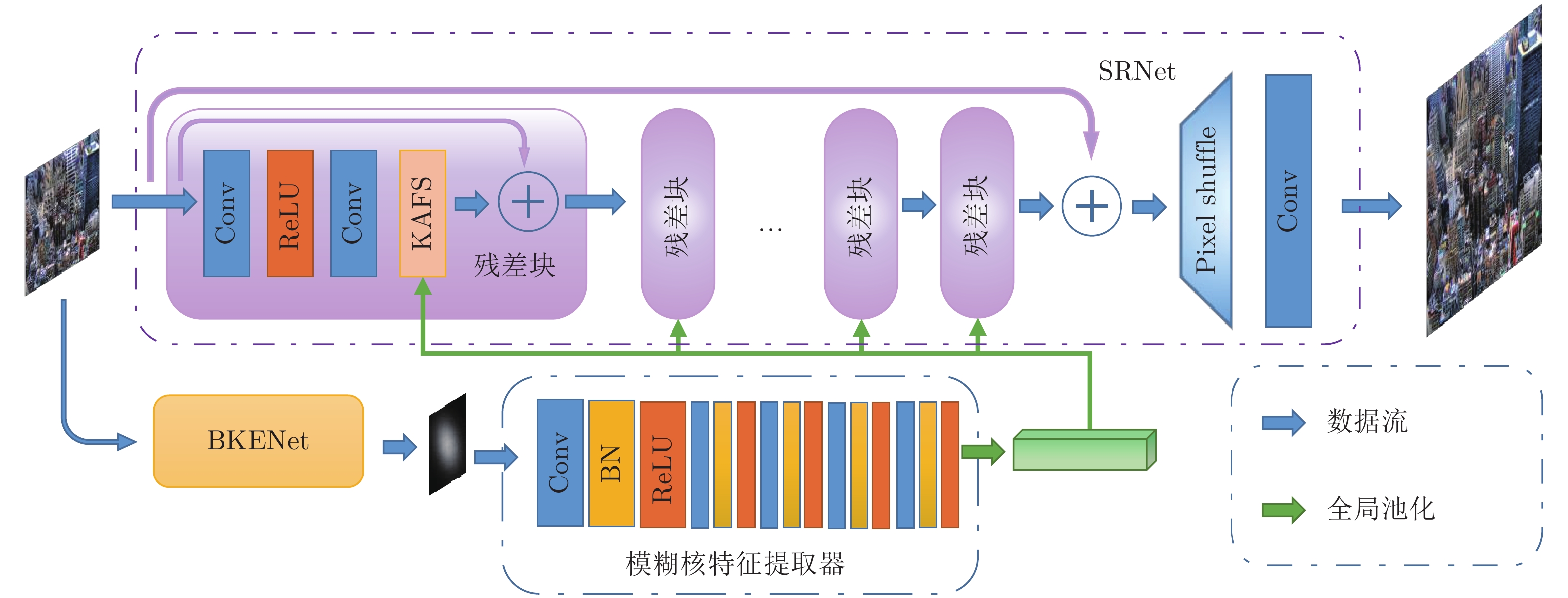
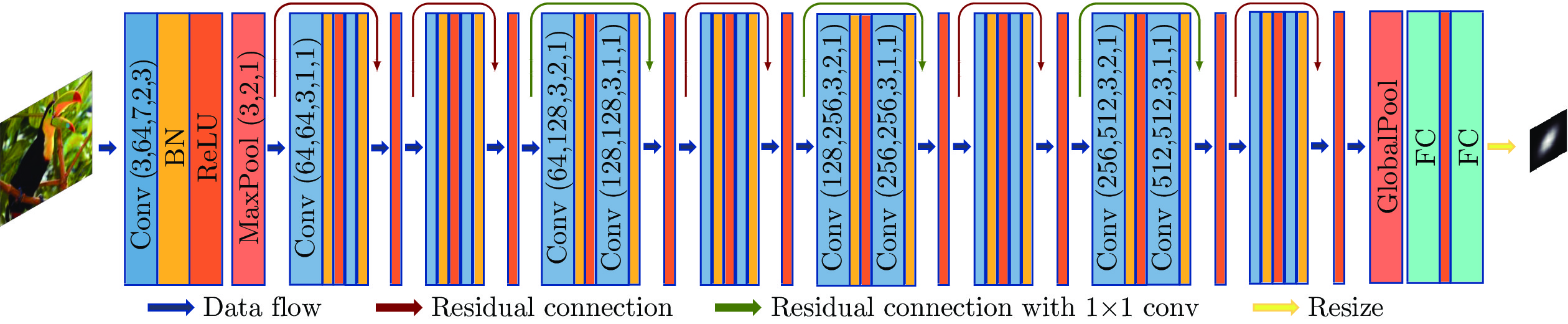
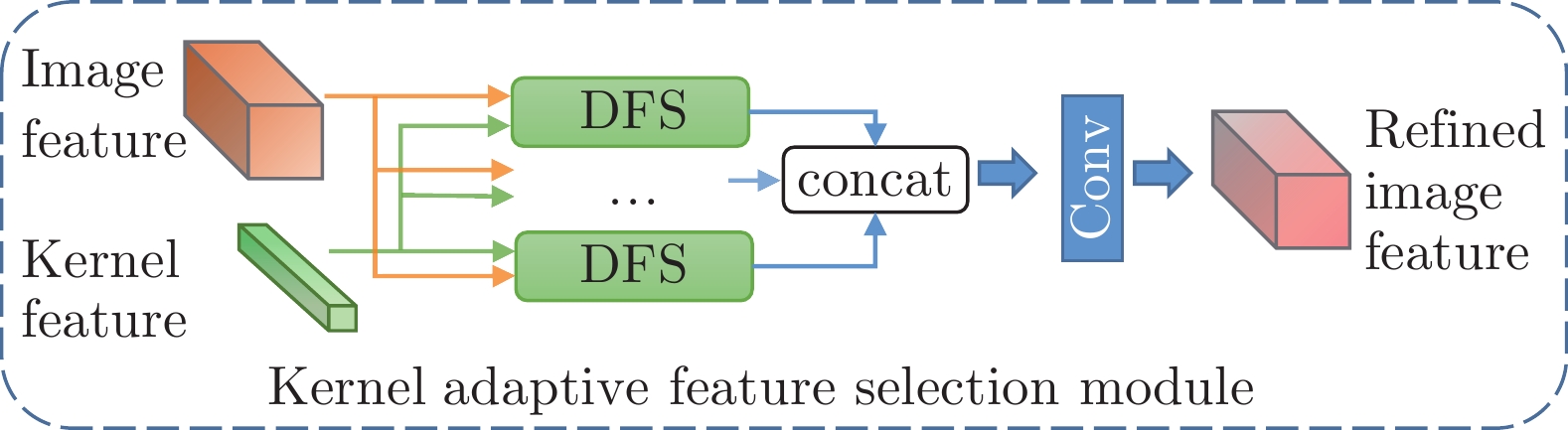
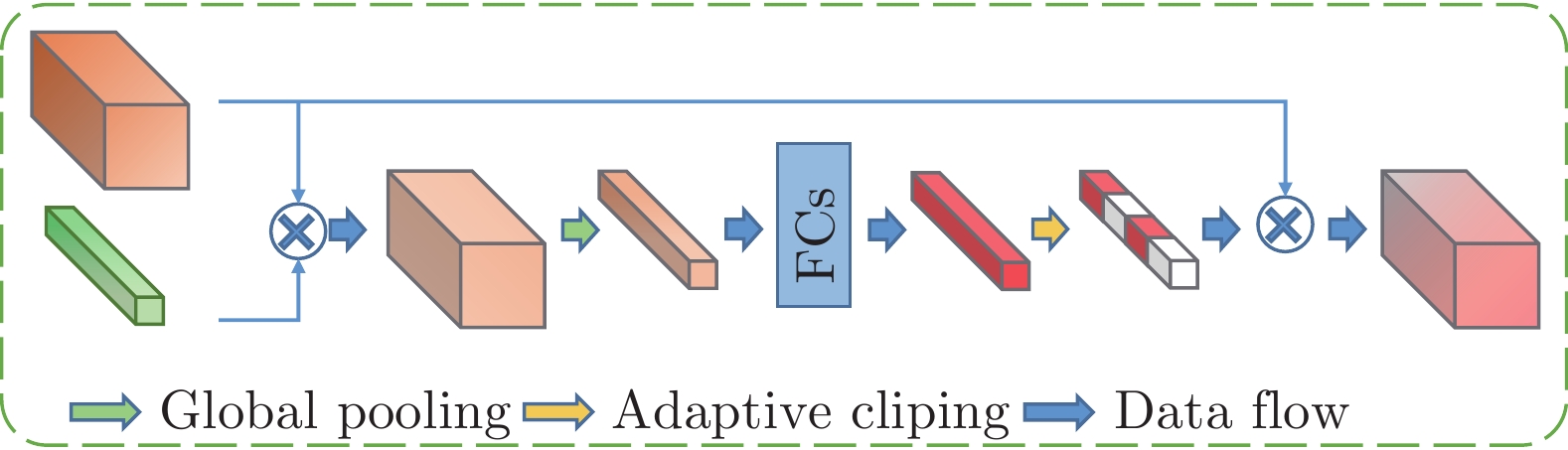
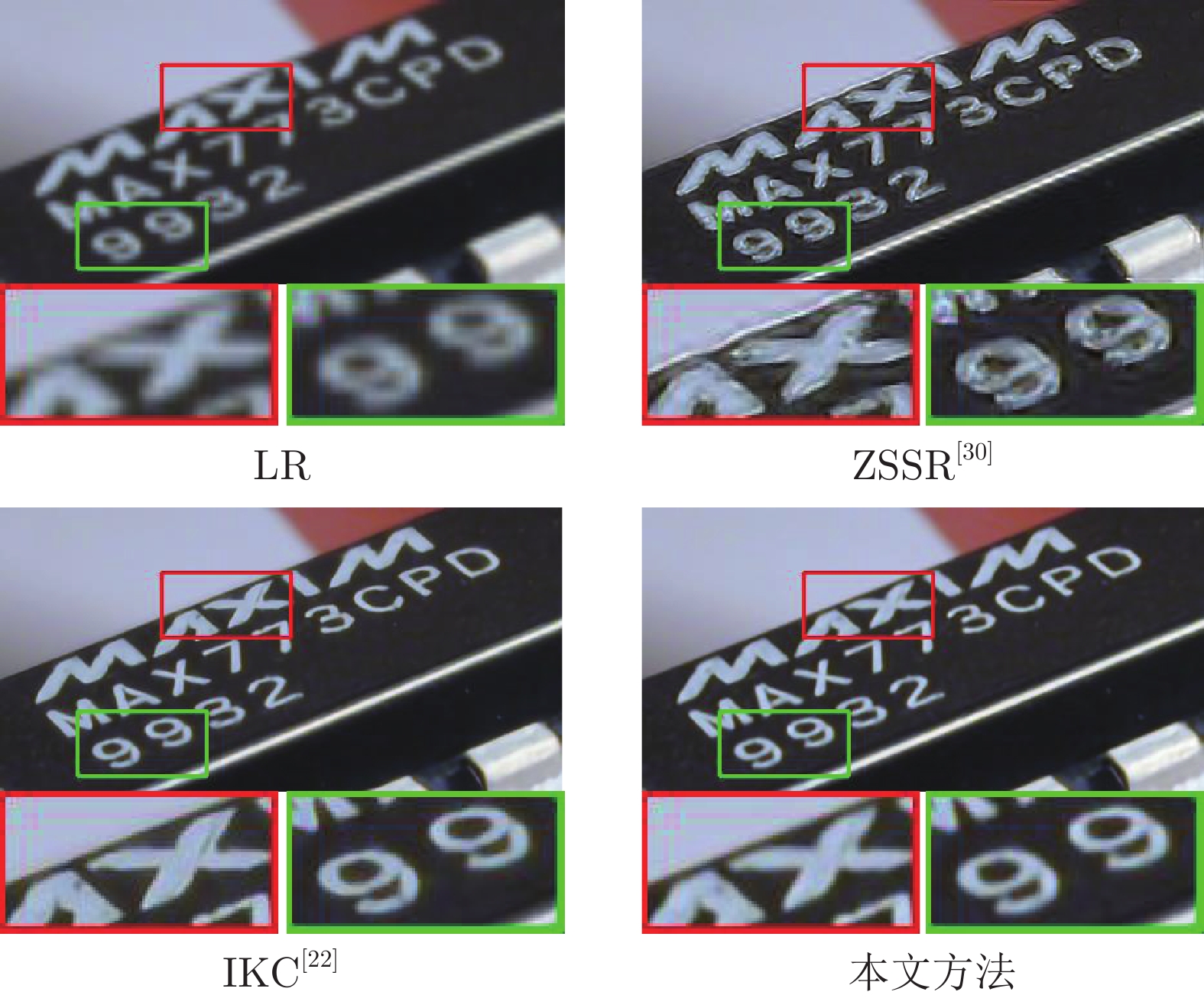
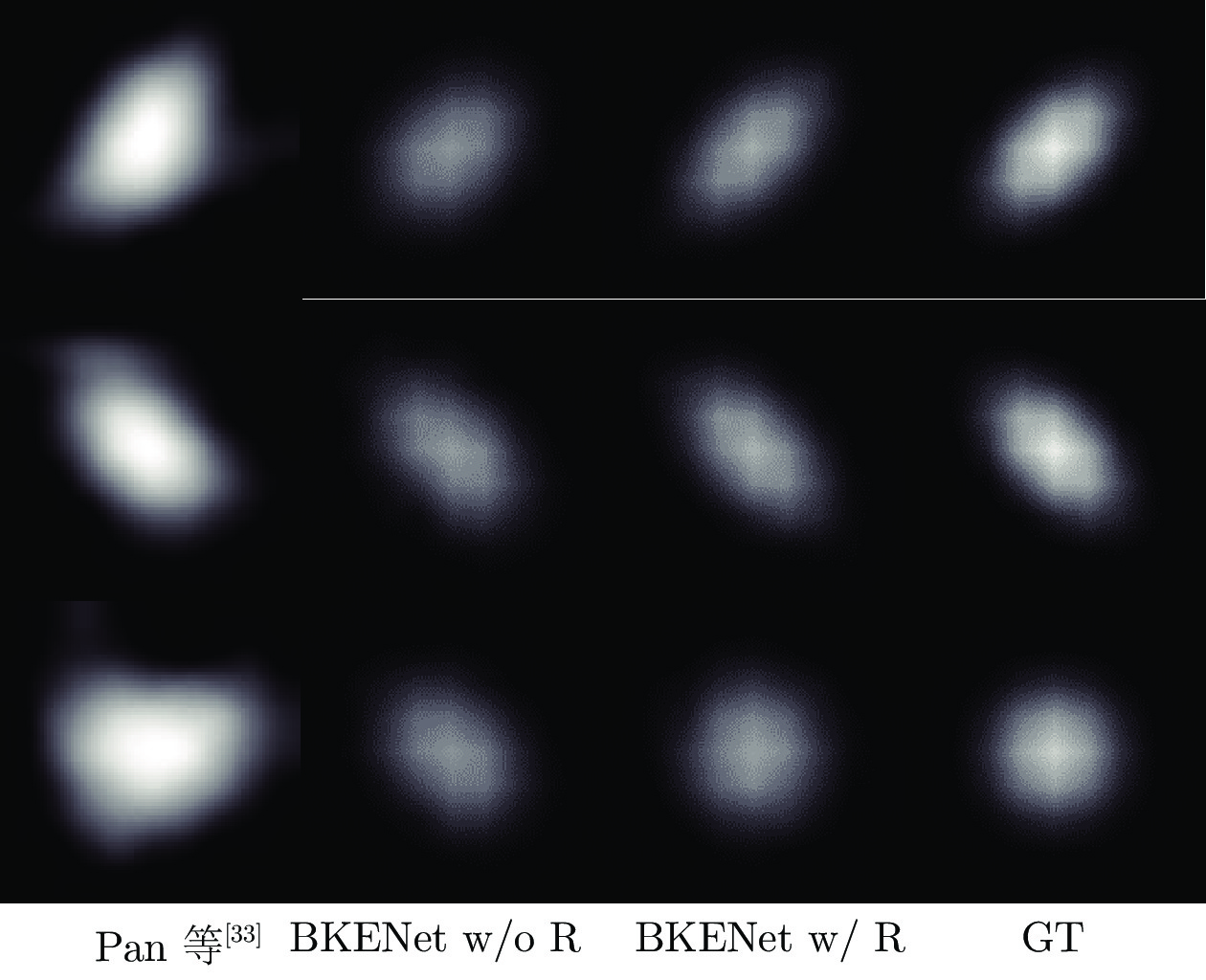
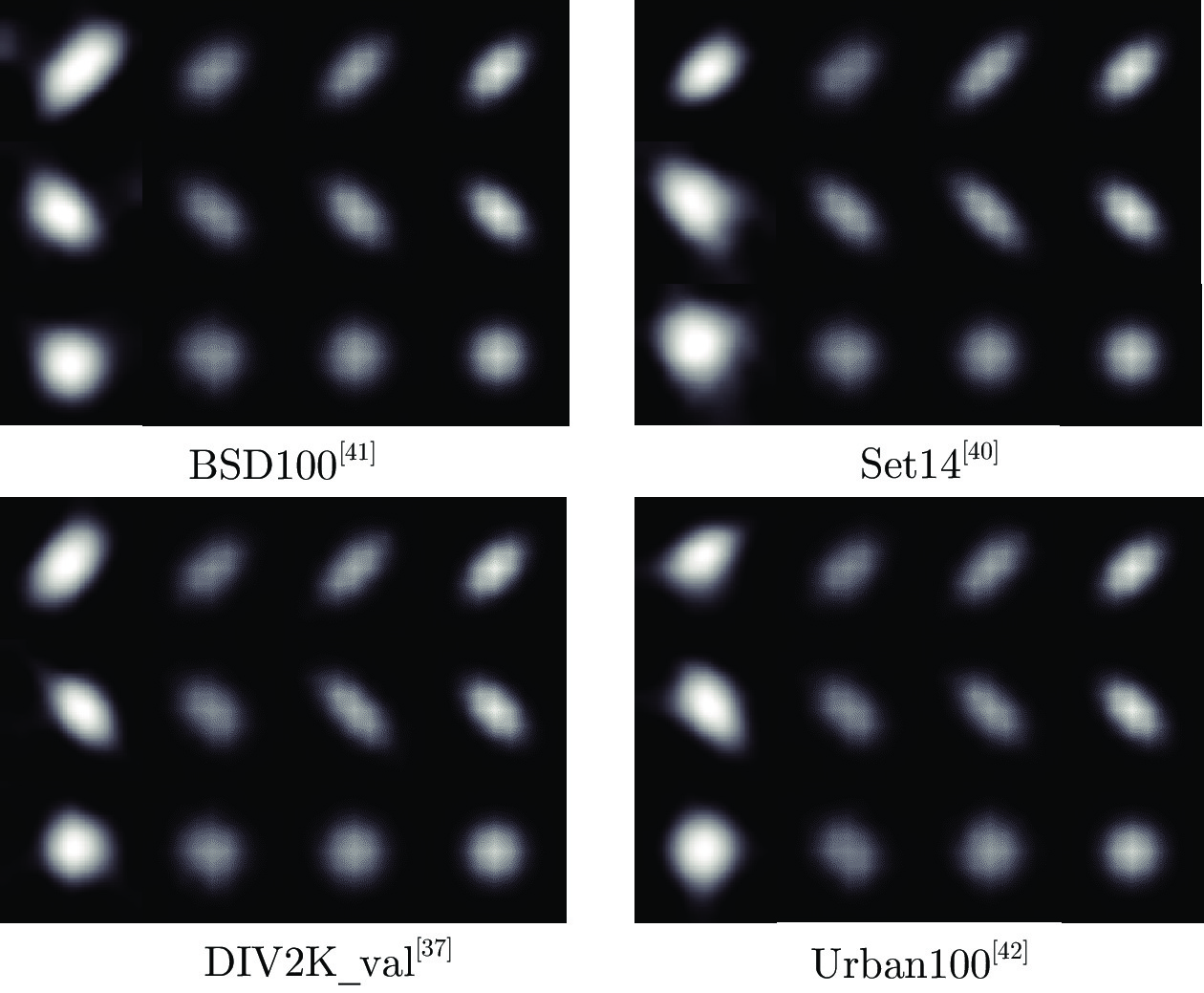
模糊图像的超分辨率重建具有挑战性并且有重要的实用价值. 为此, 提出一种基于模糊核估计的图像盲超分辨率神经网络(Blurred image blind super-resolution network via kernel estimation, BESRNet). 该网络主要包括两个部分: 模糊核估计网络 (Blur kernel estimation network, BKENet)和模糊核自适应的图像重建网络(Kernel adaptive super-resolution network, SRNet). 给定任意低分辨率图像(Low-resolution image, LR), 首先利用模糊核估计子网络从输入图像估计出实际的模糊核, 然后根据估计到的模糊核, 利用模糊核自适应的图像重建子网络完成输入图像的超分辨率重建. 与其他图像盲超分辨率方法不同, 所提出的模糊核估计网络能够显式地从输入低分辨率图像中估计出完整的模糊核, 然后模糊核自适应的图像重建网络根据估计到的模糊核, 动态地调整网络各层的图像特征, 从而适应不同输入图像的模糊. 在多个基准数据集上进行了有效性实验, 定性和定量的结果都表明该网络优于同类的图像盲超分辨率神经网络.
模糊图像的超分辨率重建具有挑战性并且有重要的实用价值. 为此, 提出一种基于模糊核估计的图像盲超分辨率神经网络(Blurred image blind super-resolution network via kernel estimation, BESRNet). 该网络主要包括两个部分: 模糊核估计网络 (Blur kernel estimation network, BKENet)和模糊核自适应的图像重建网络(Kernel adaptive super-resolution network, SRNet). 给定任意低分辨率图像(Low-resolution image, LR), 首先利用模糊核估计子网络从输入图像估计出实际的模糊核, 然后根据估计到的模糊核, 利用模糊核自适应的图像重建子网络完成输入图像的超分辨率重建. 与其他图像盲超分辨率方法不同, 所提出的模糊核估计网络能够显式地从输入低分辨率图像中估计出完整的模糊核, 然后模糊核自适应的图像重建网络根据估计到的模糊核, 动态地调整网络各层的图像特征, 从而适应不同输入图像的模糊. 在多个基准数据集上进行了有效性实验, 定性和定量的结果都表明该网络优于同类的图像盲超分辨率神经网络.


2023, 49(10): 2122-2135.
doi: 10.16383/j.aas.c220180
cstr: 32138.14.j.aas.c220180
摘要:
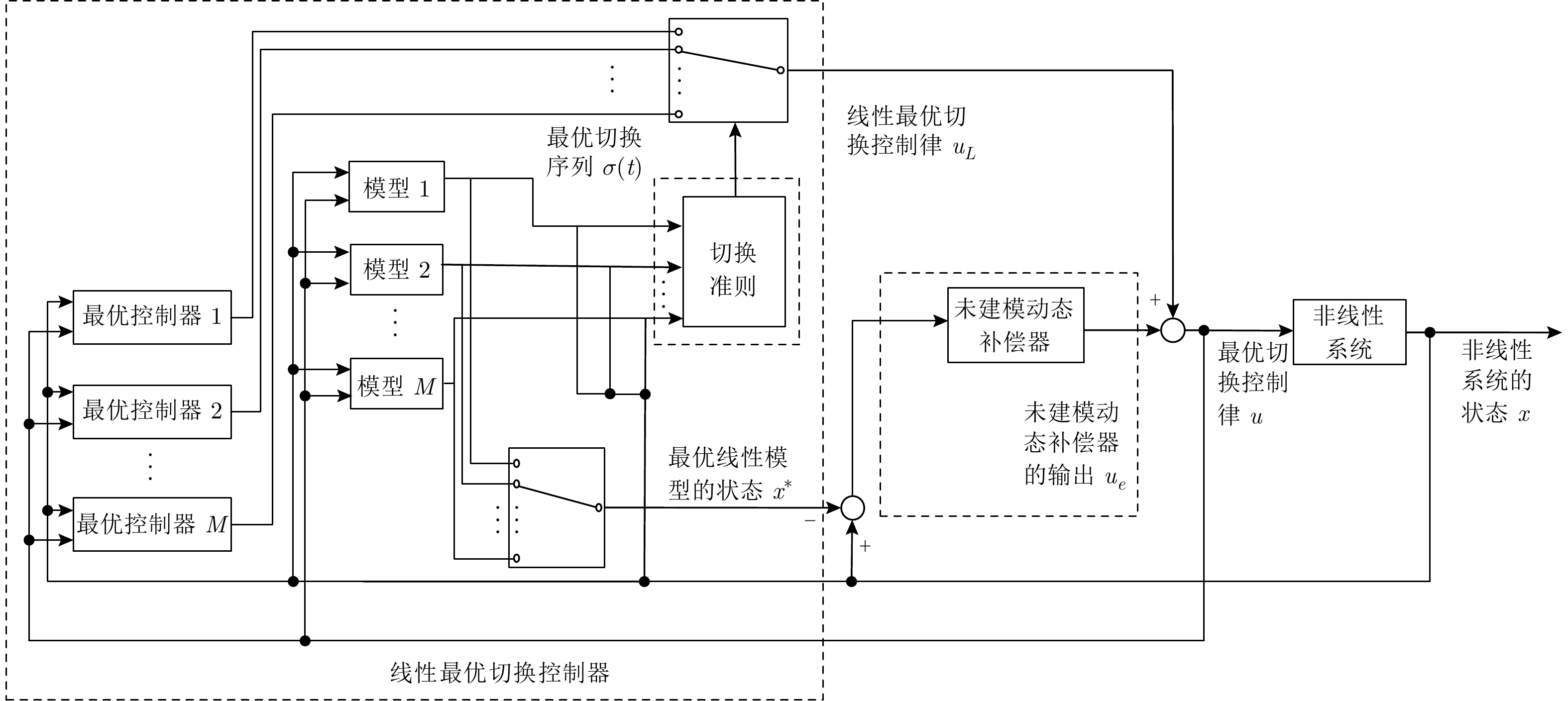
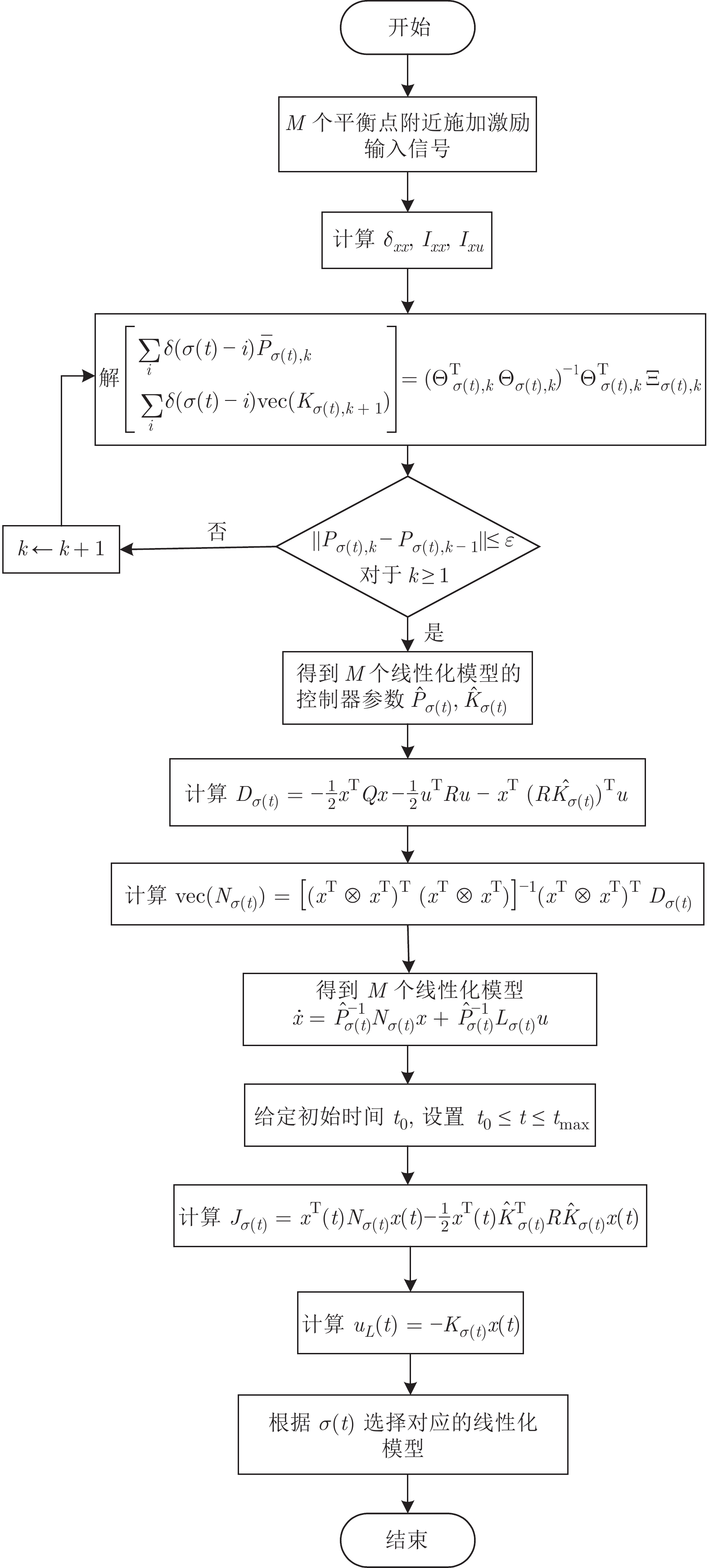
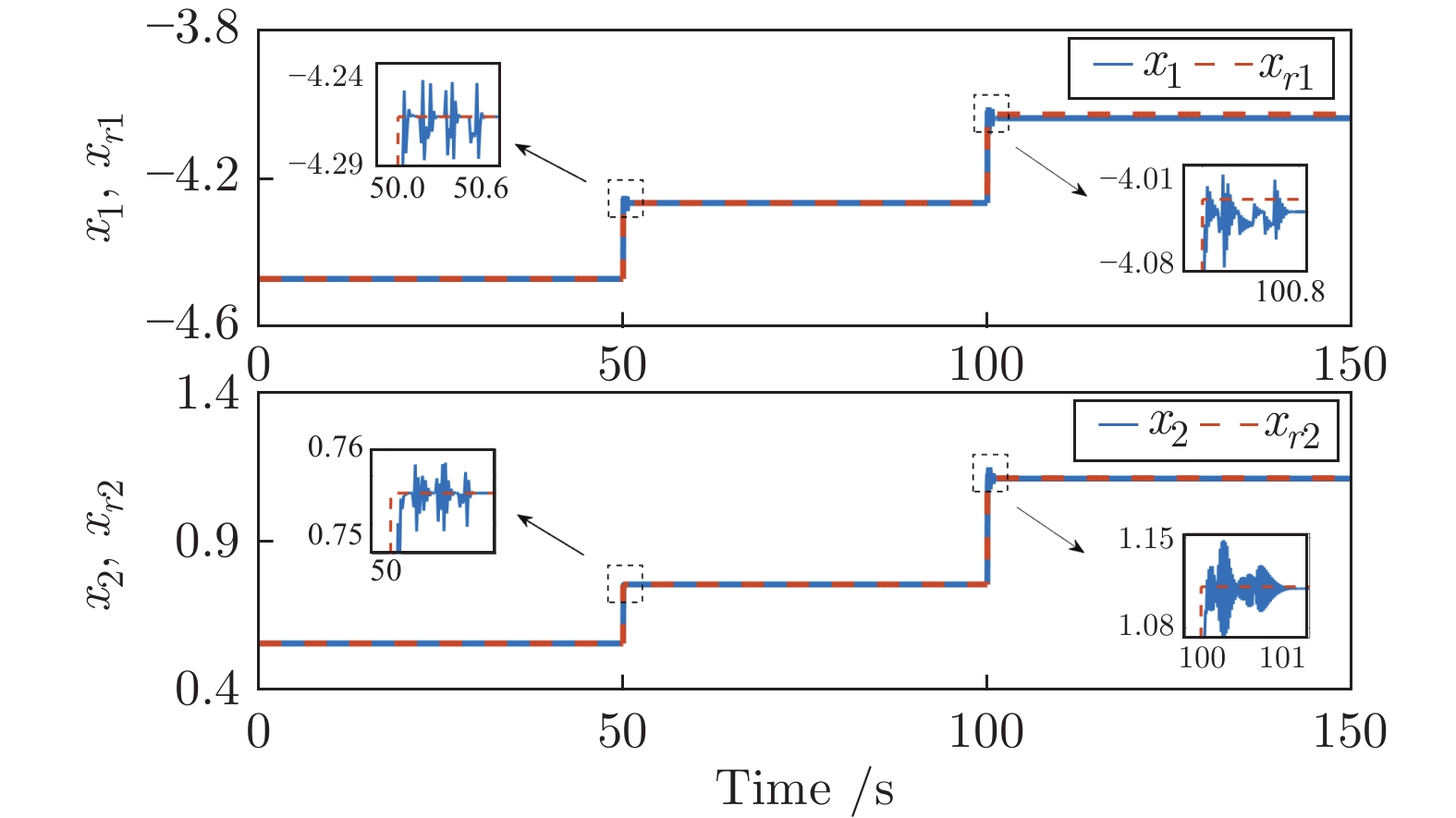
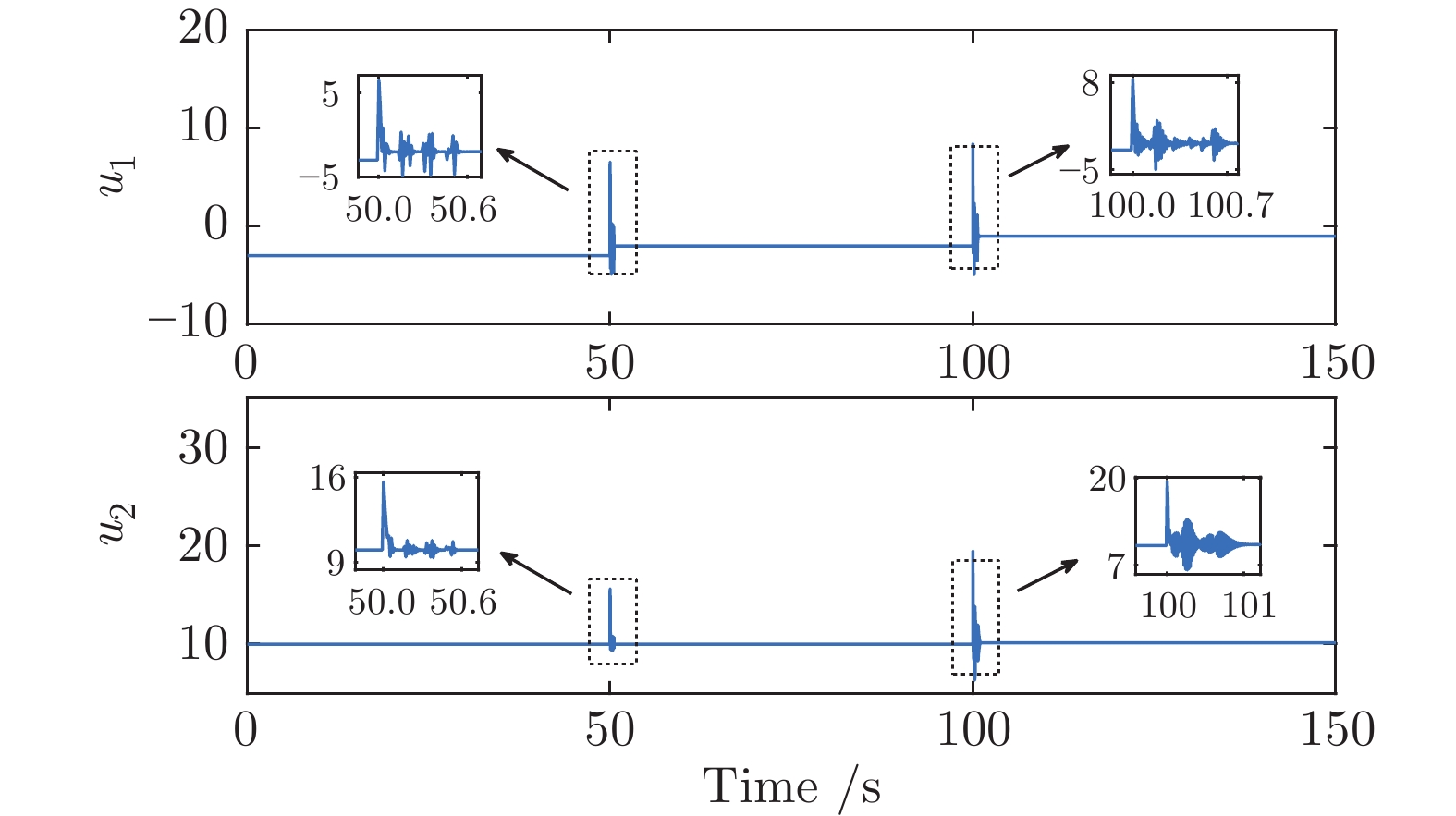
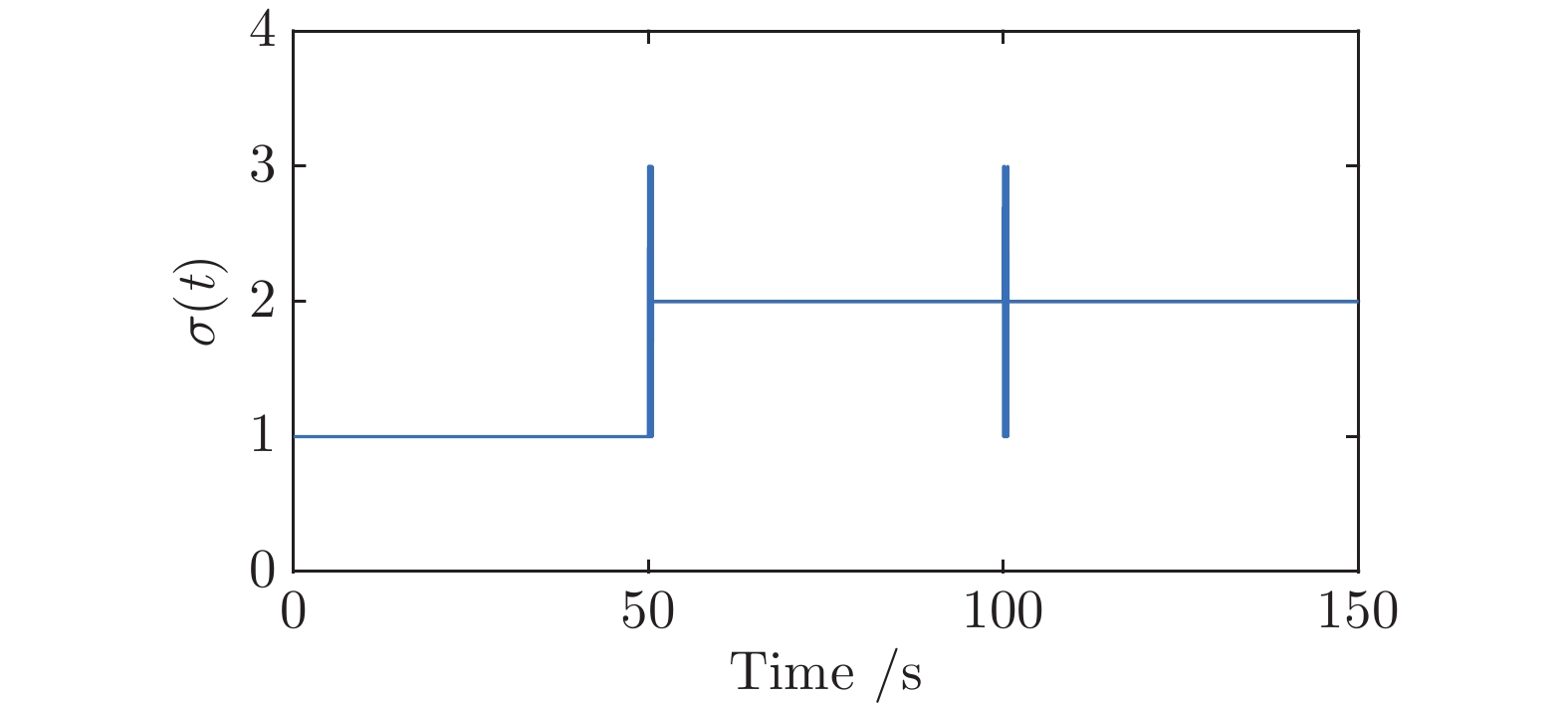
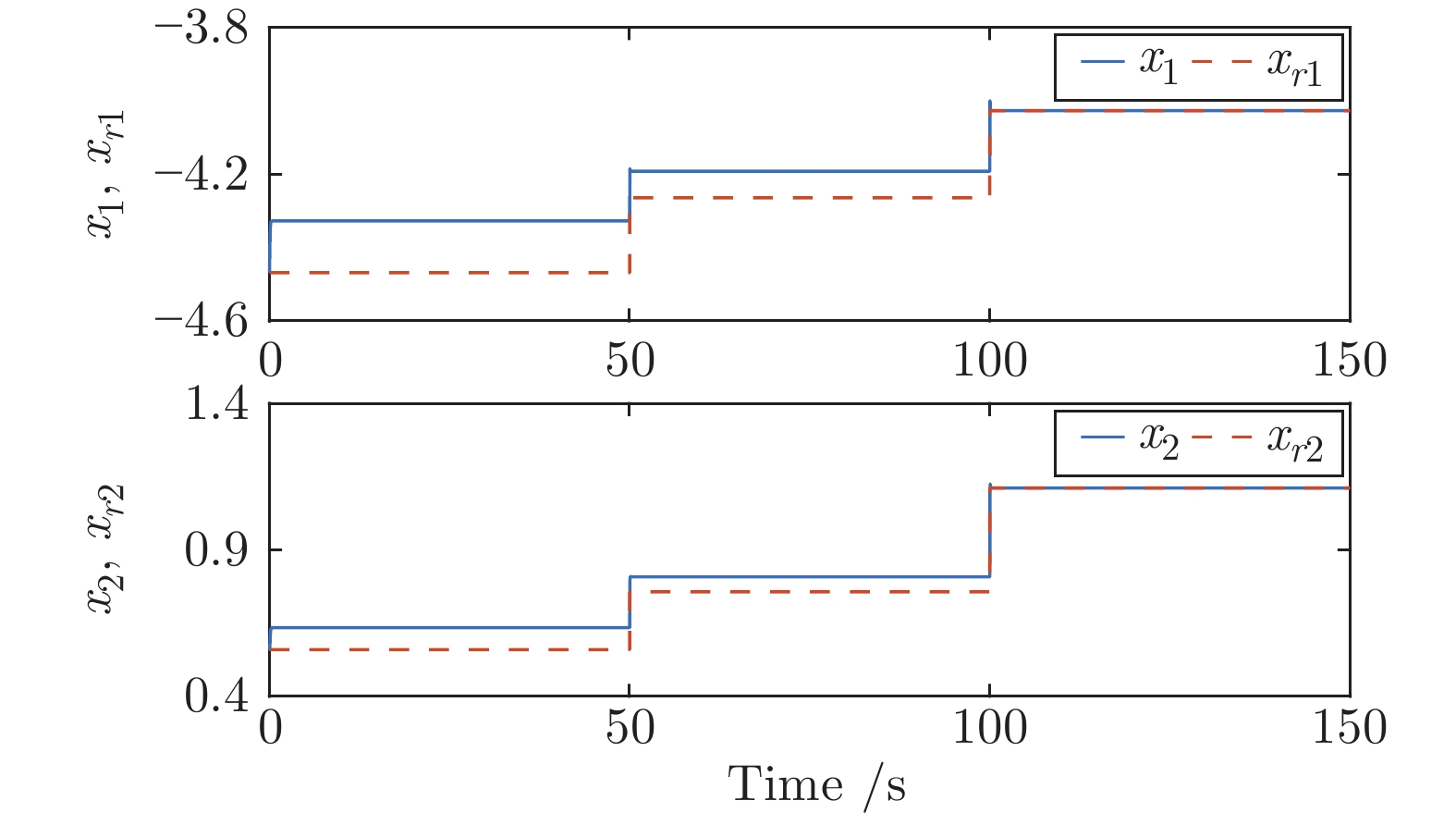
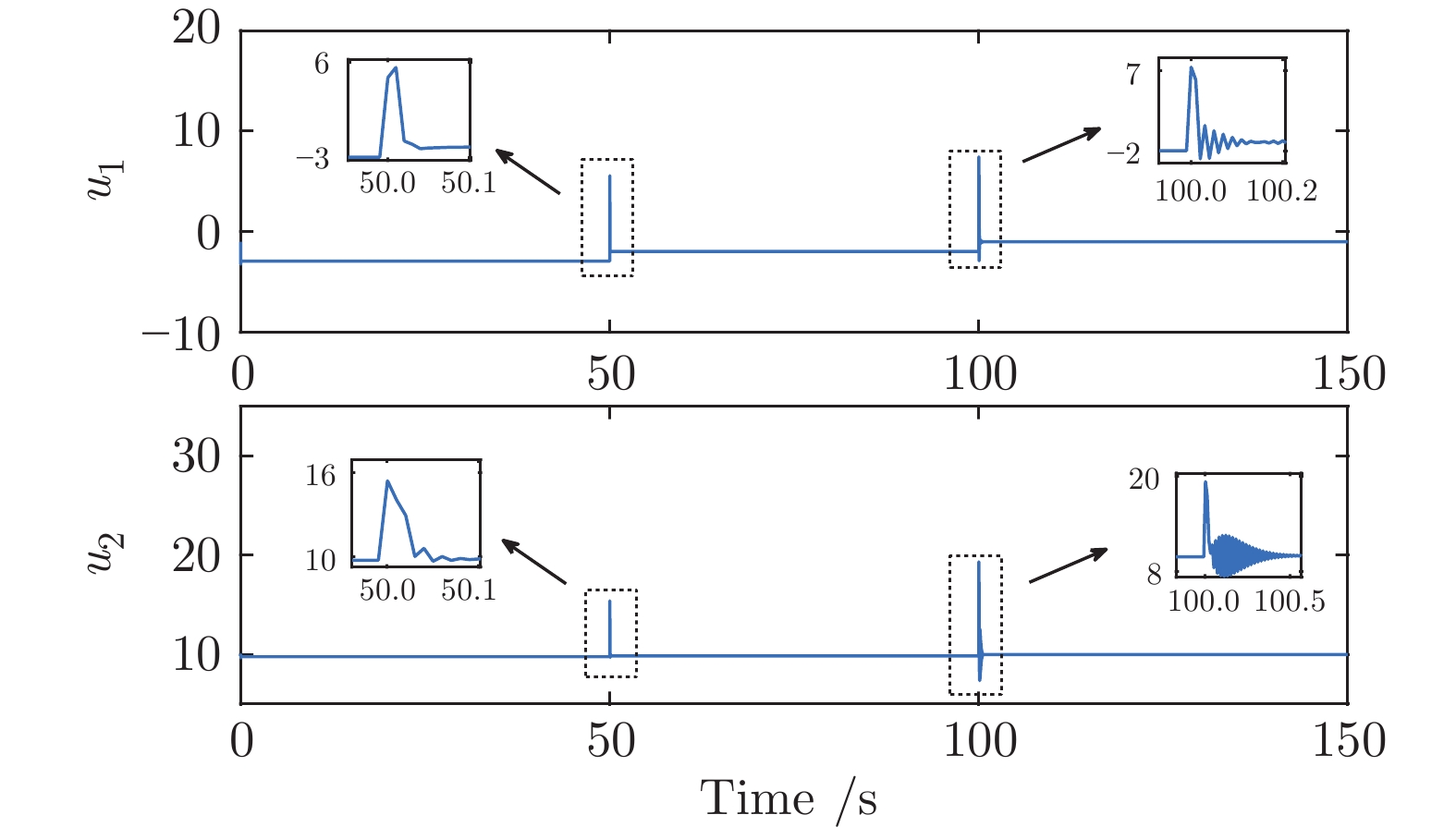
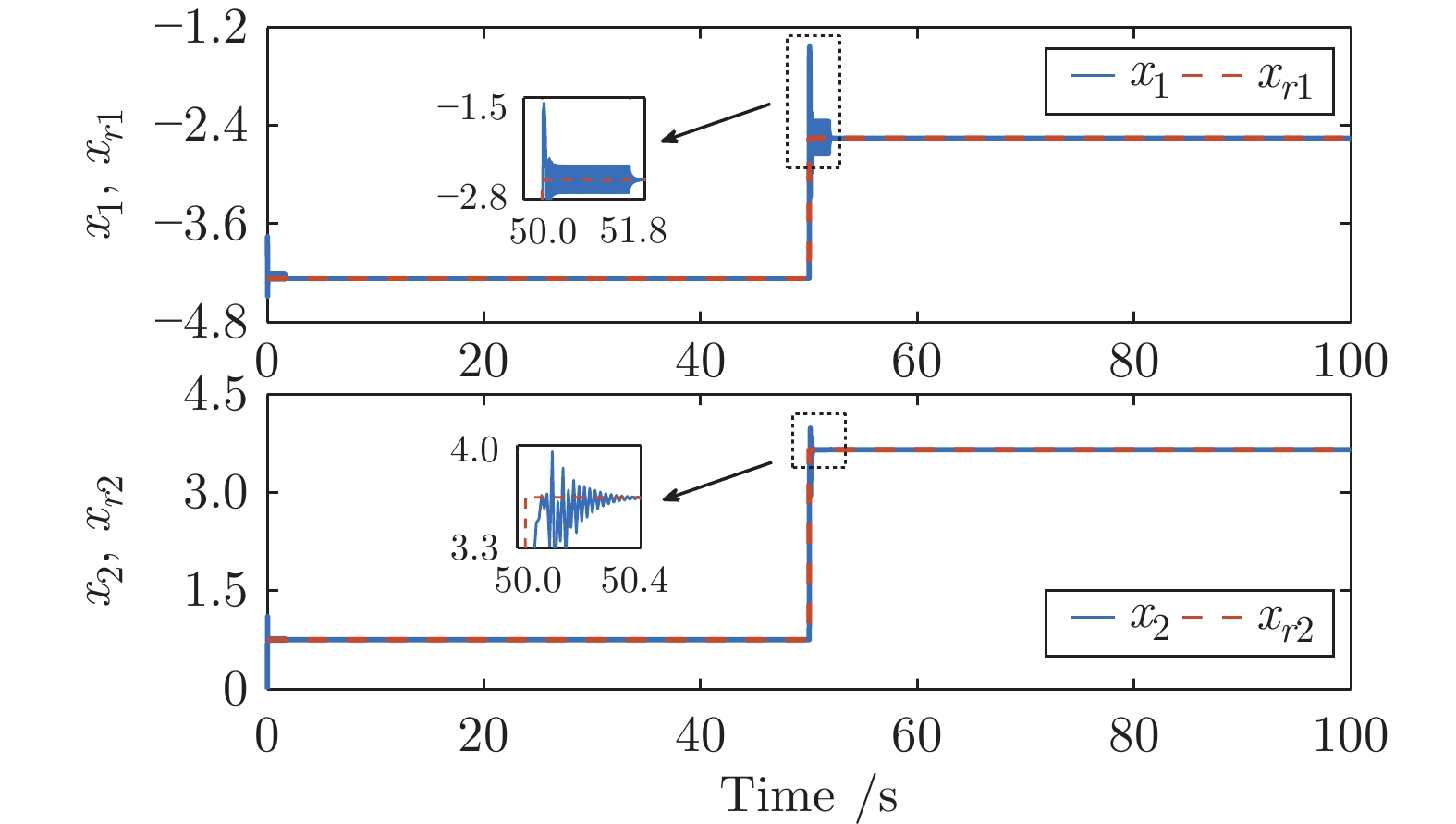
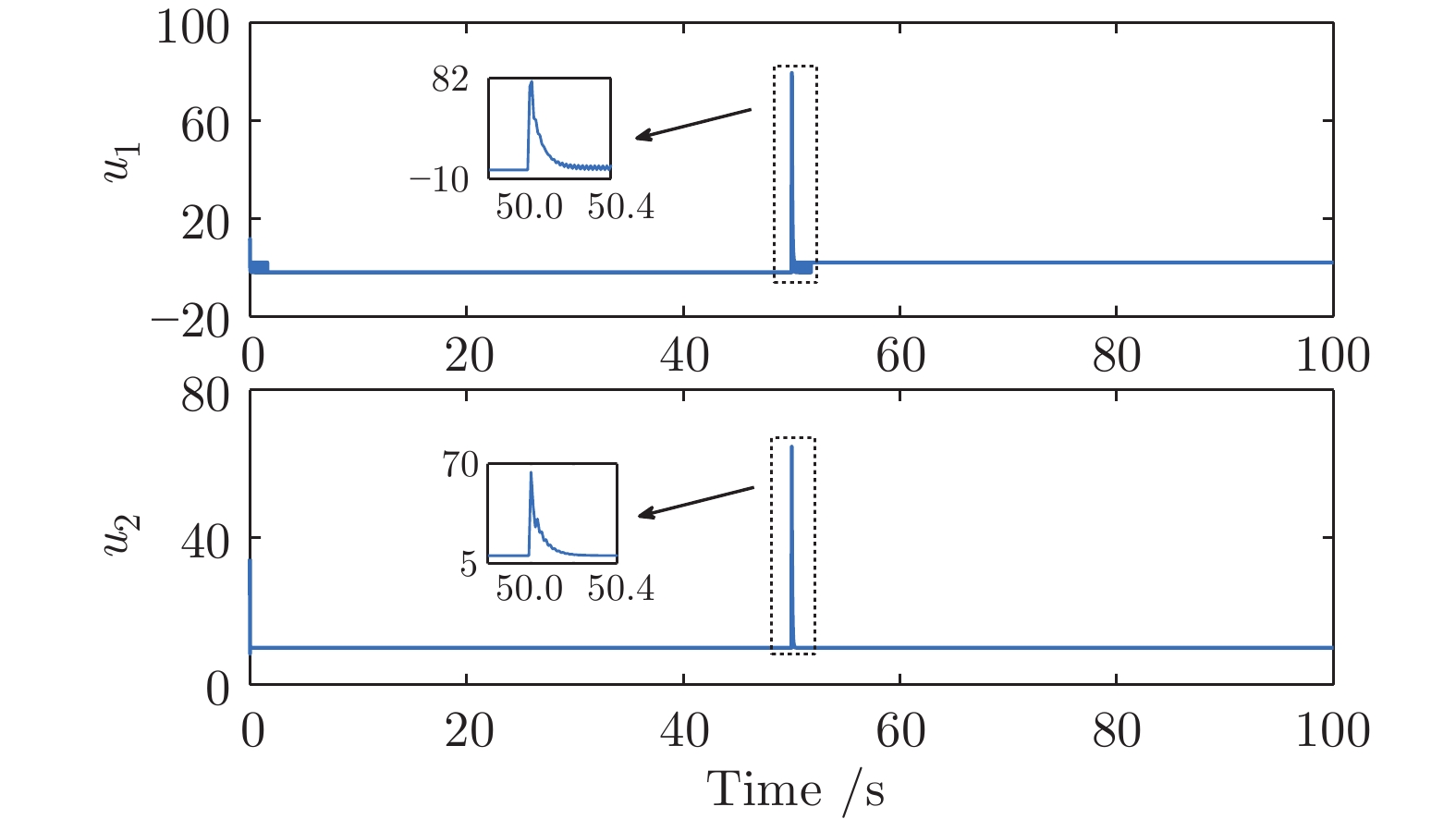
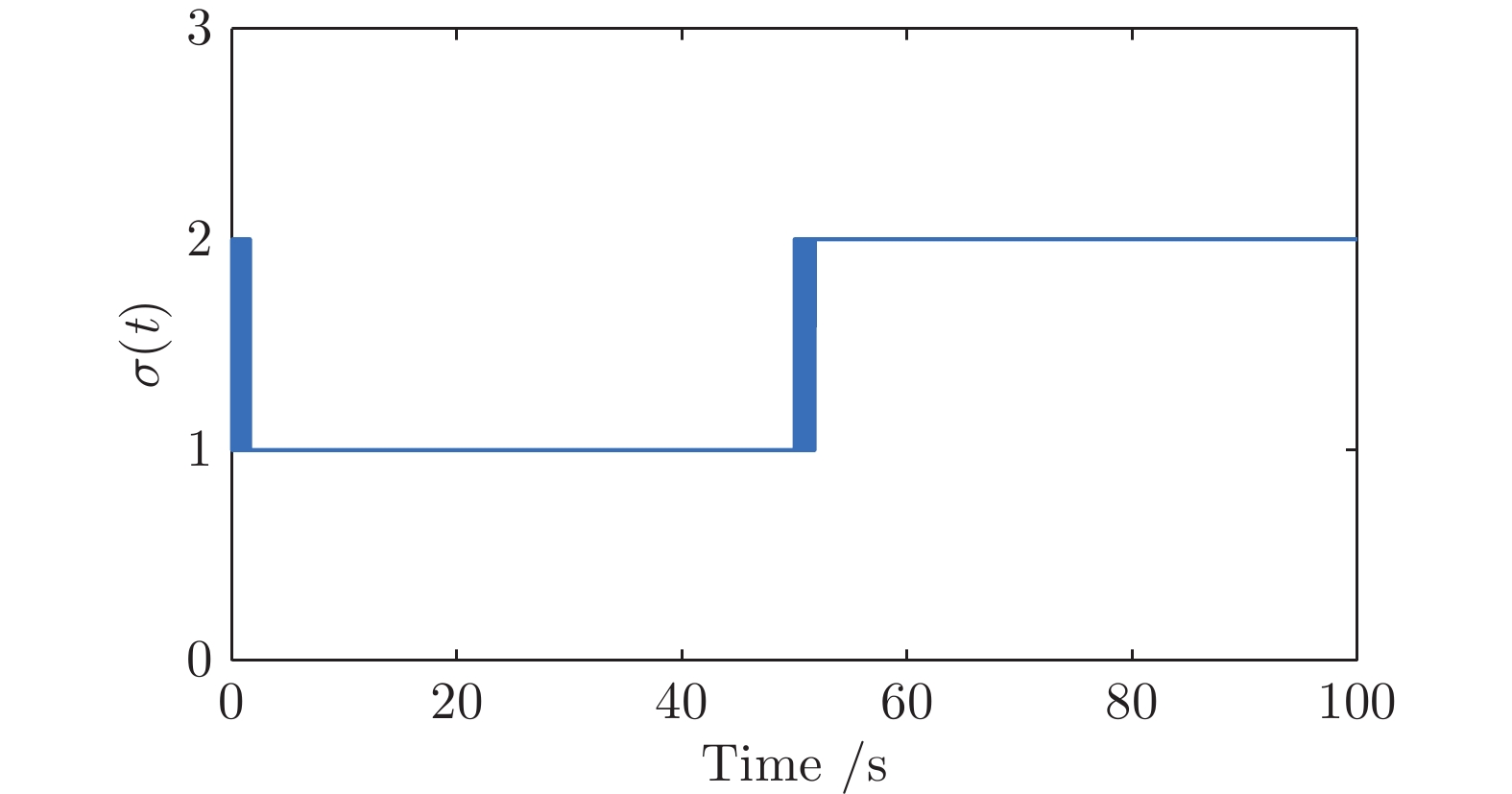
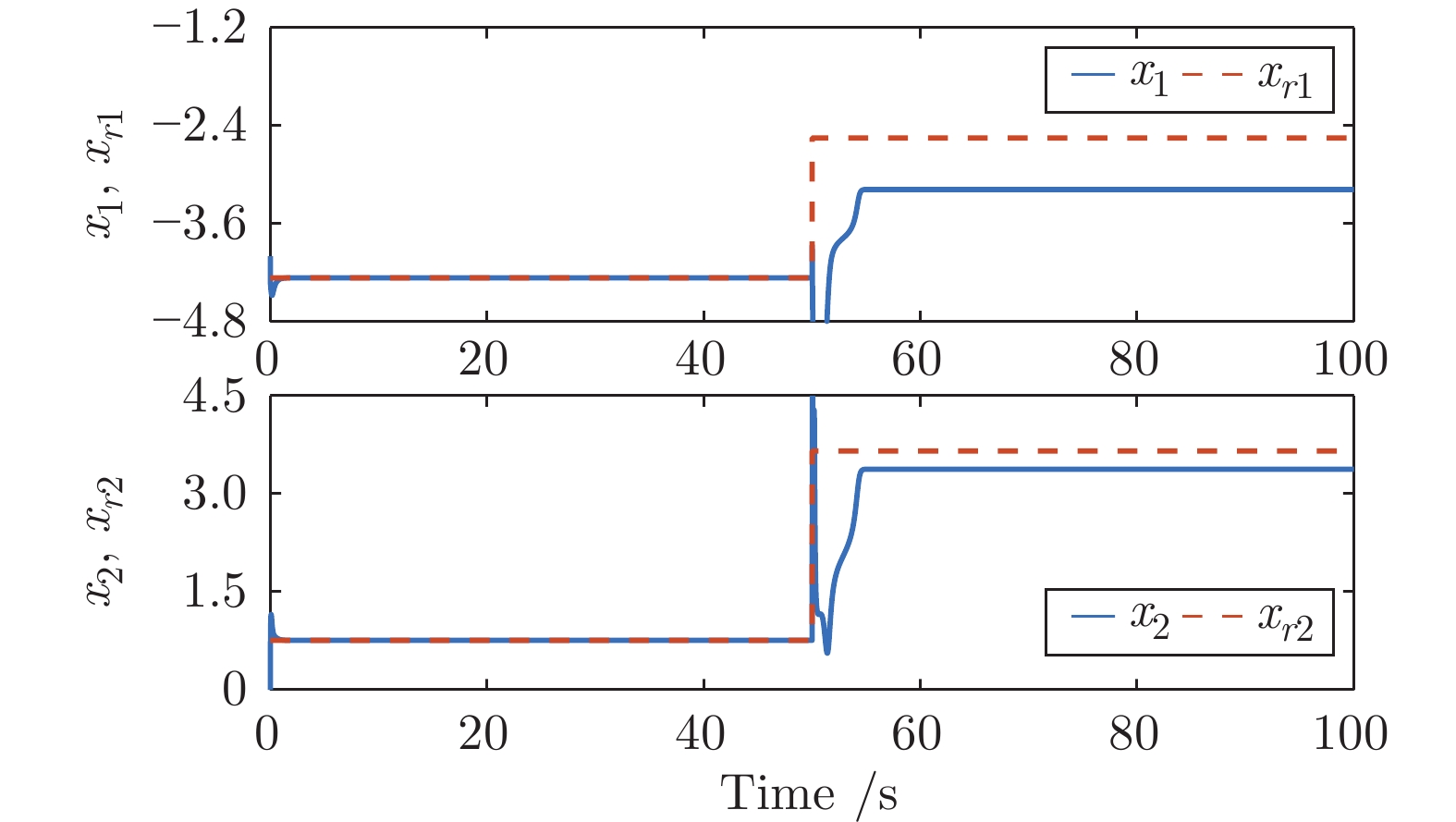
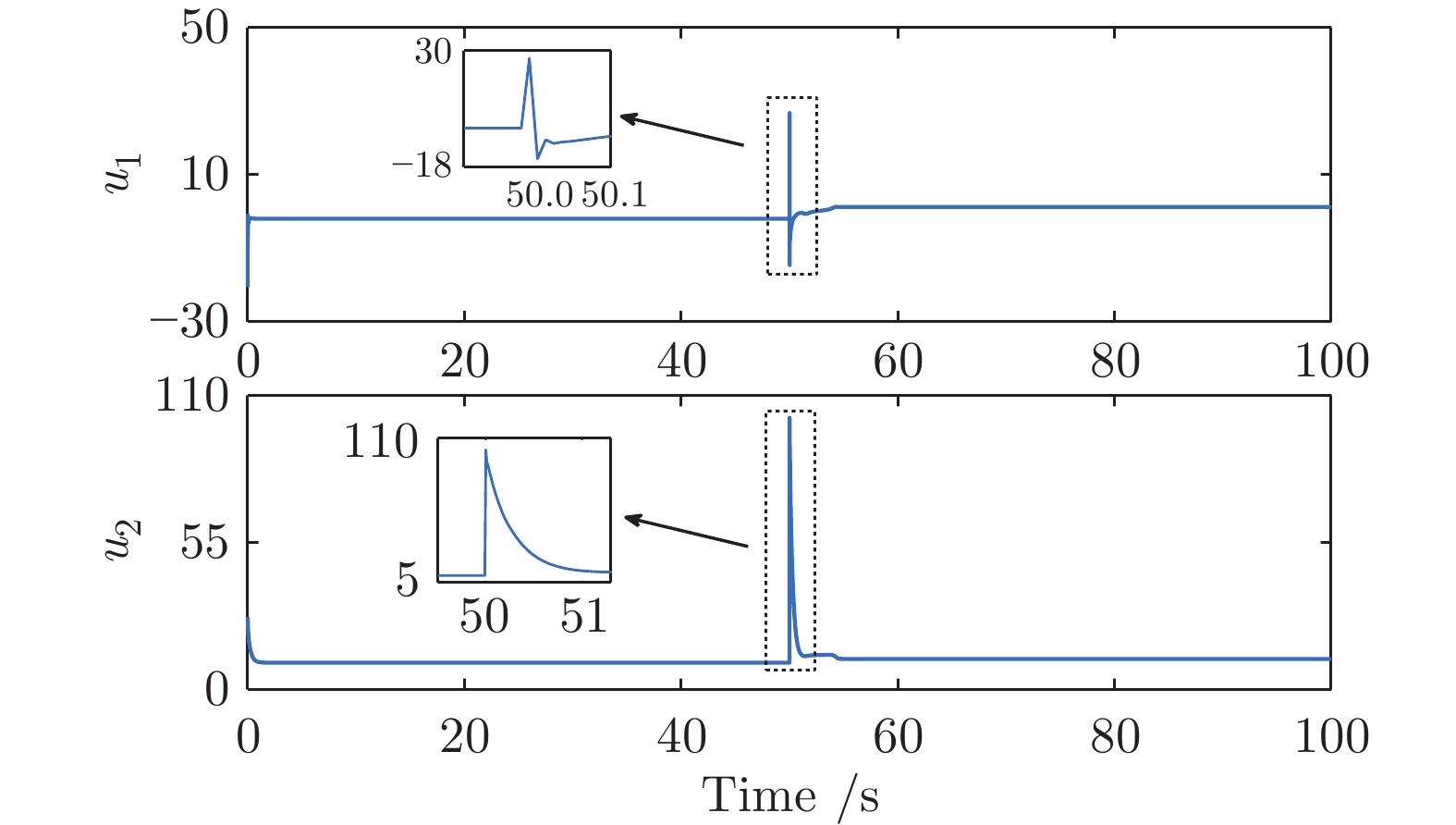
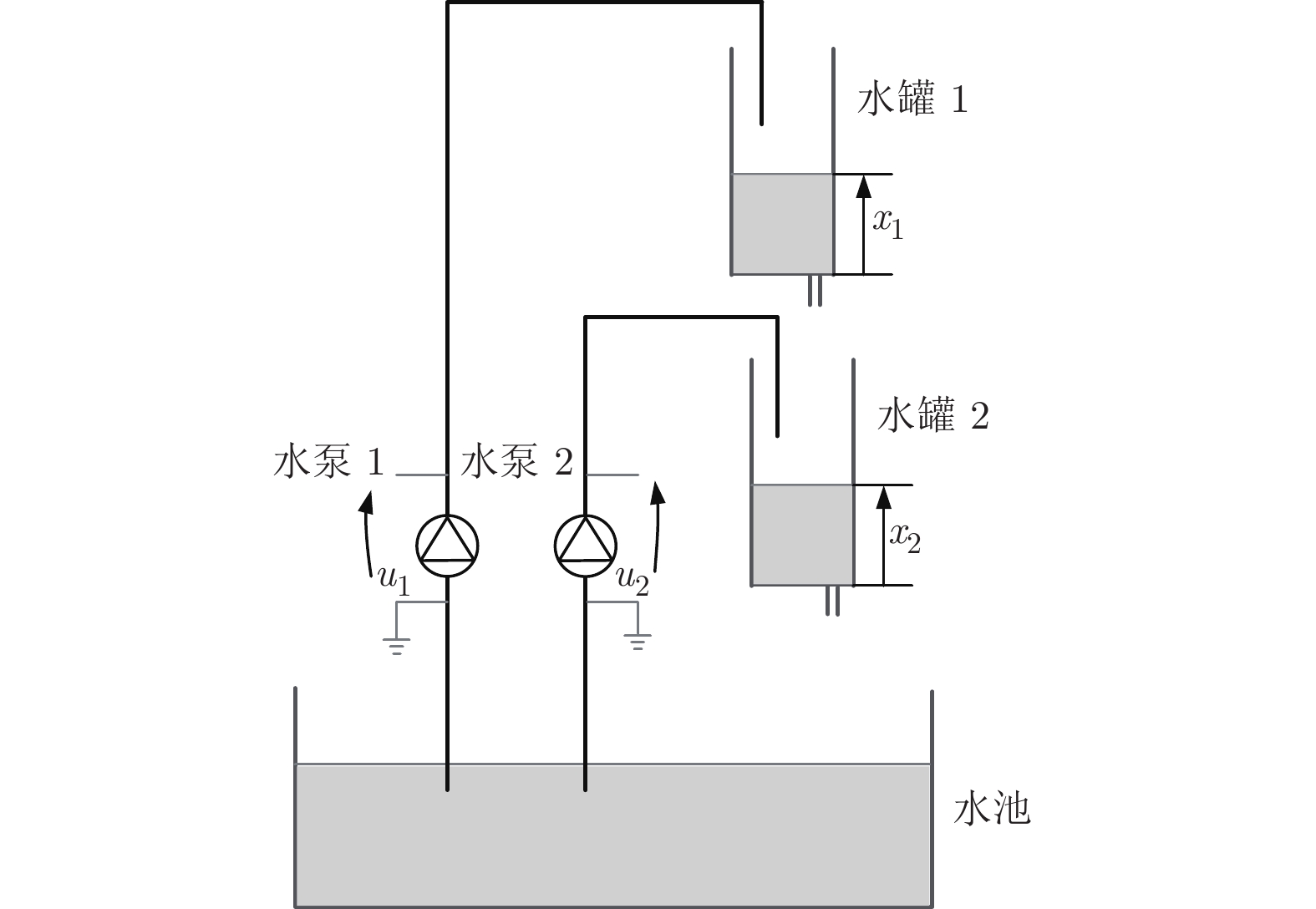
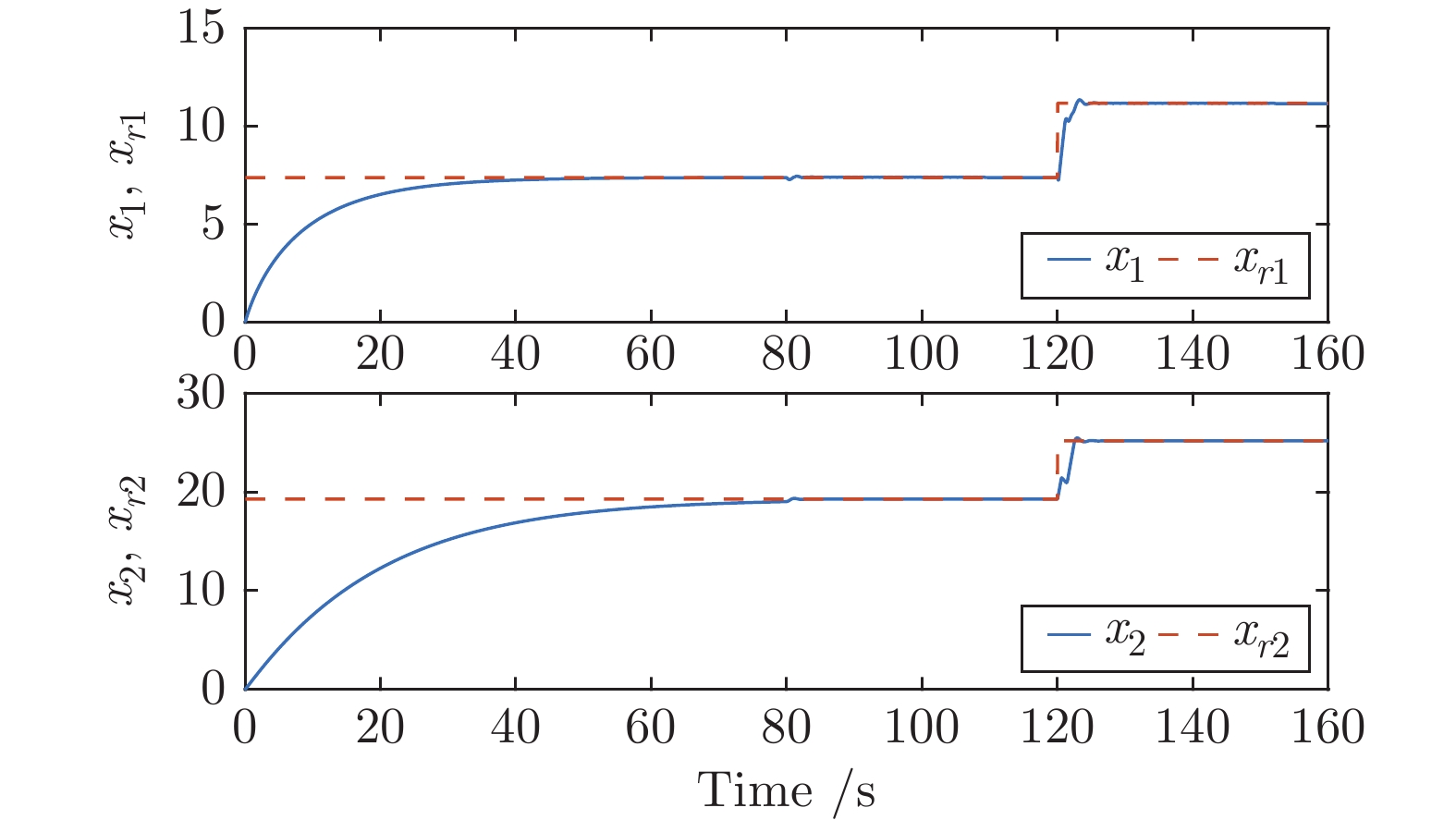
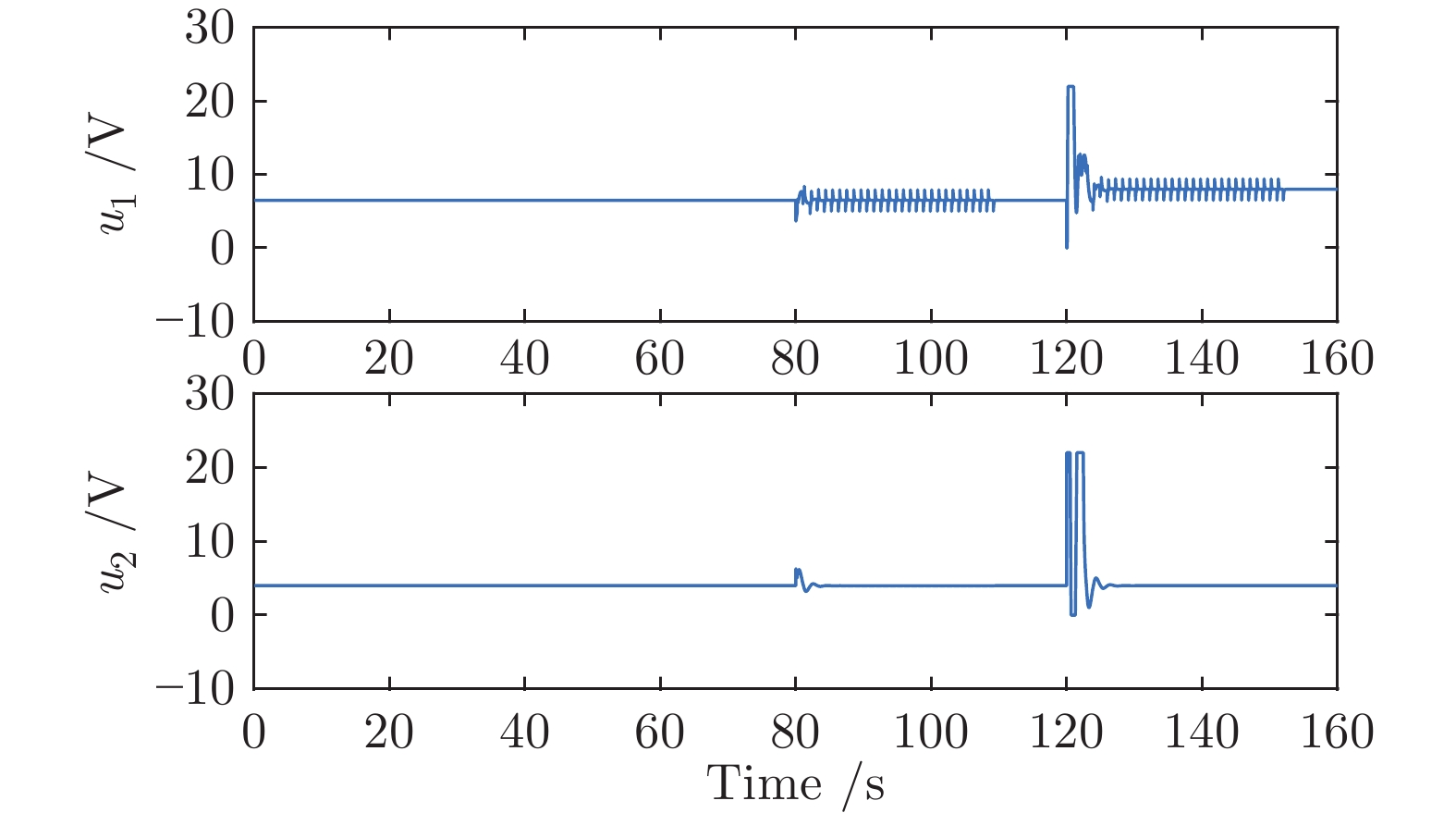
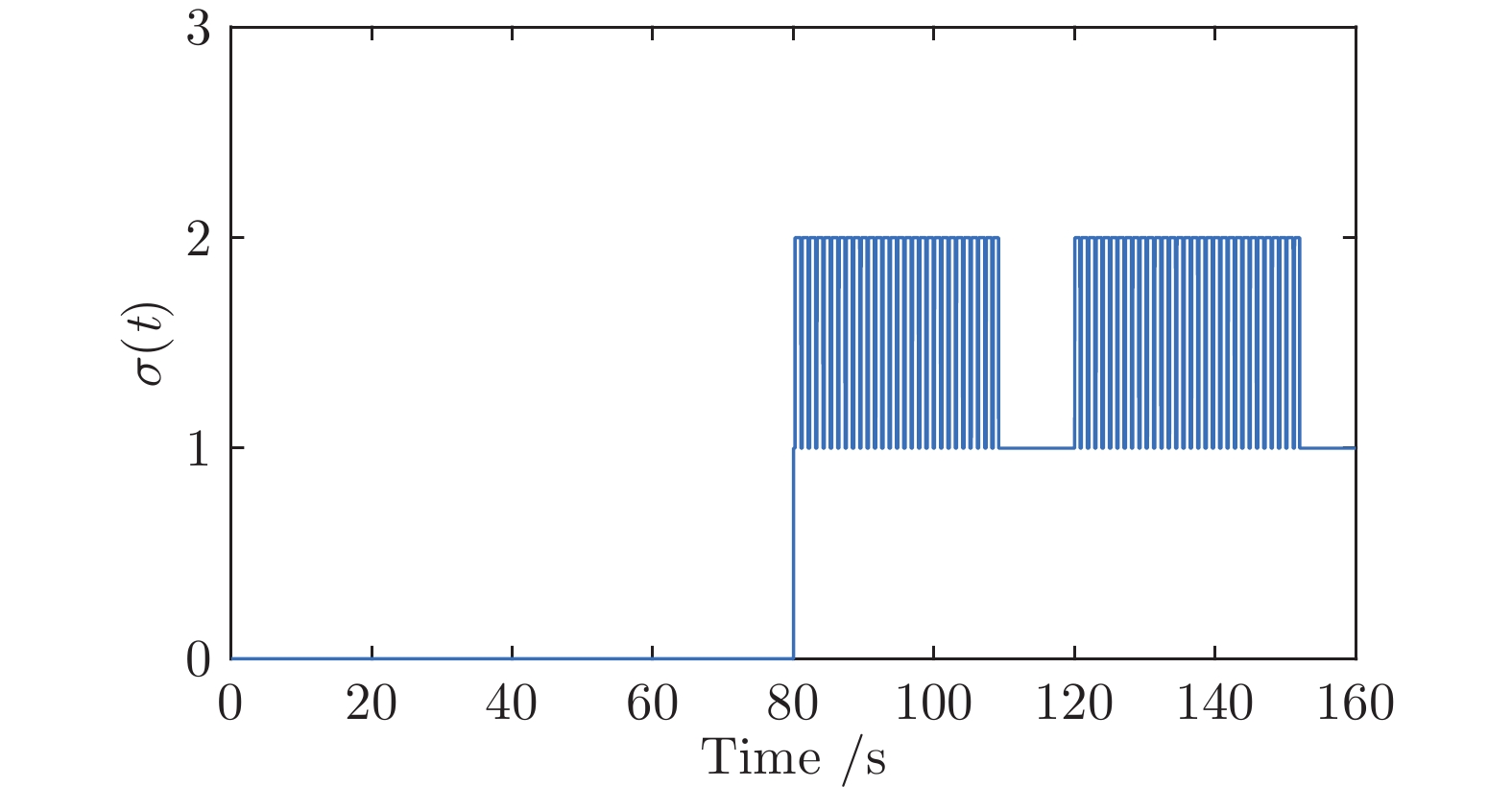
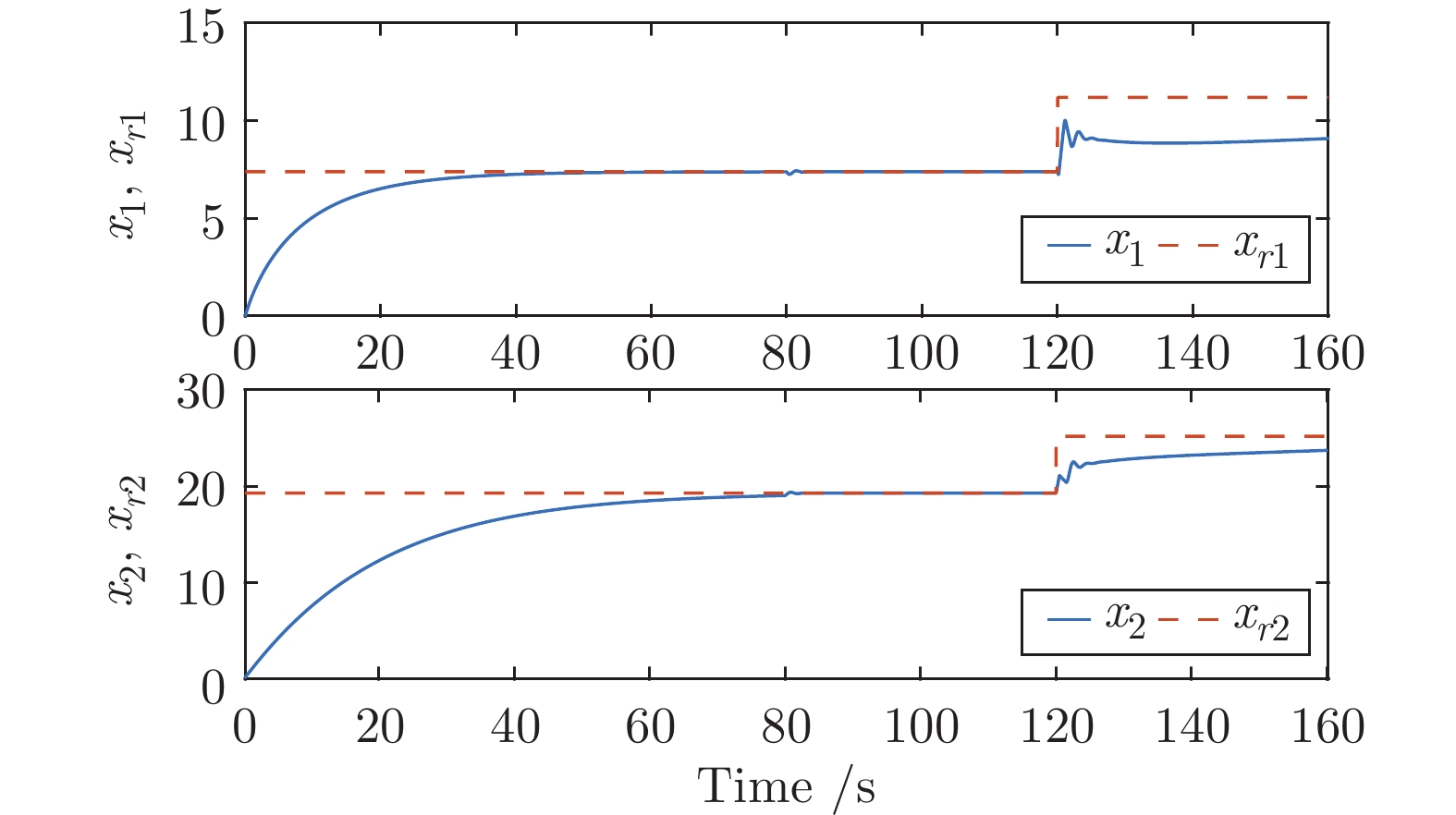
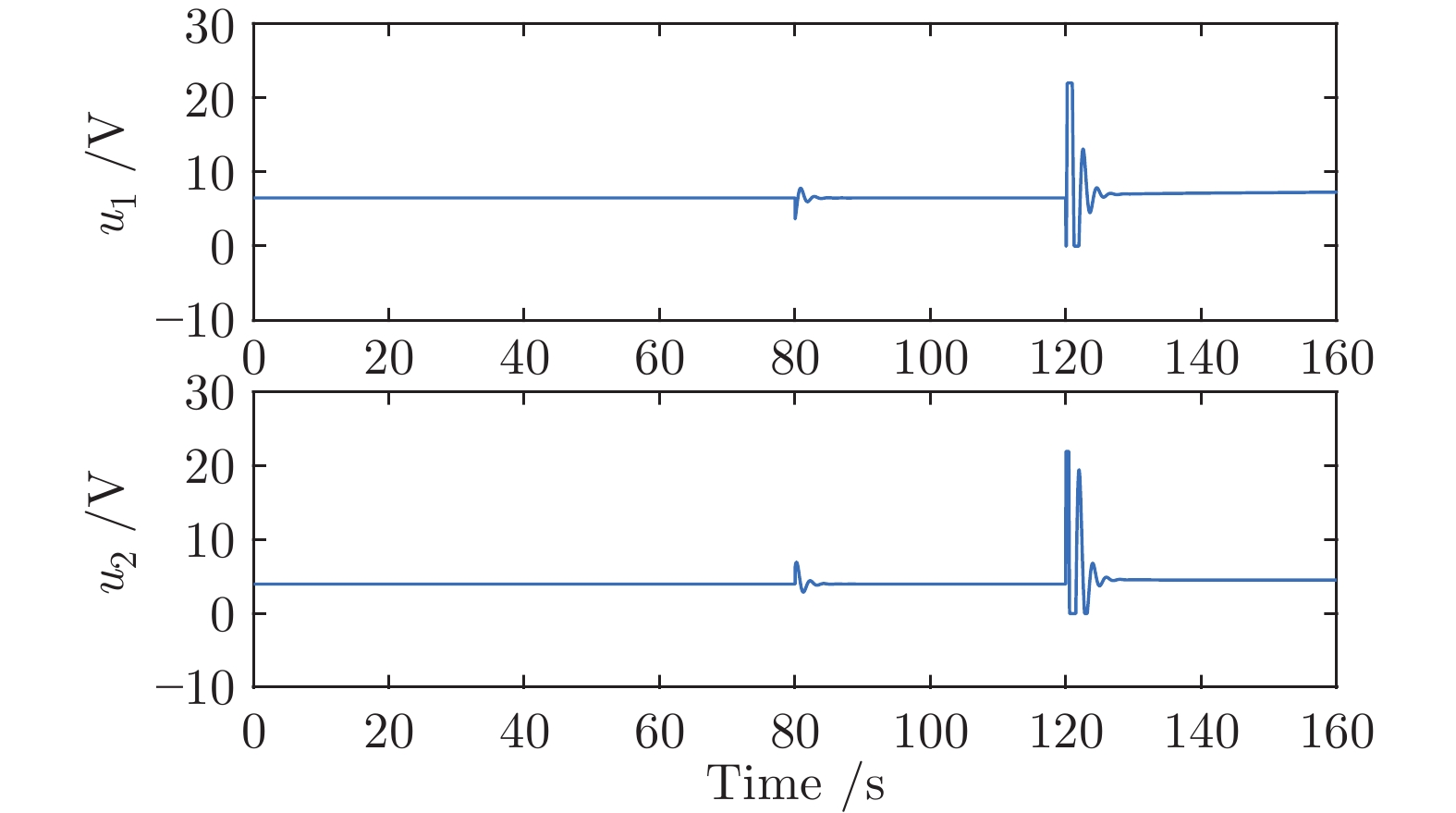
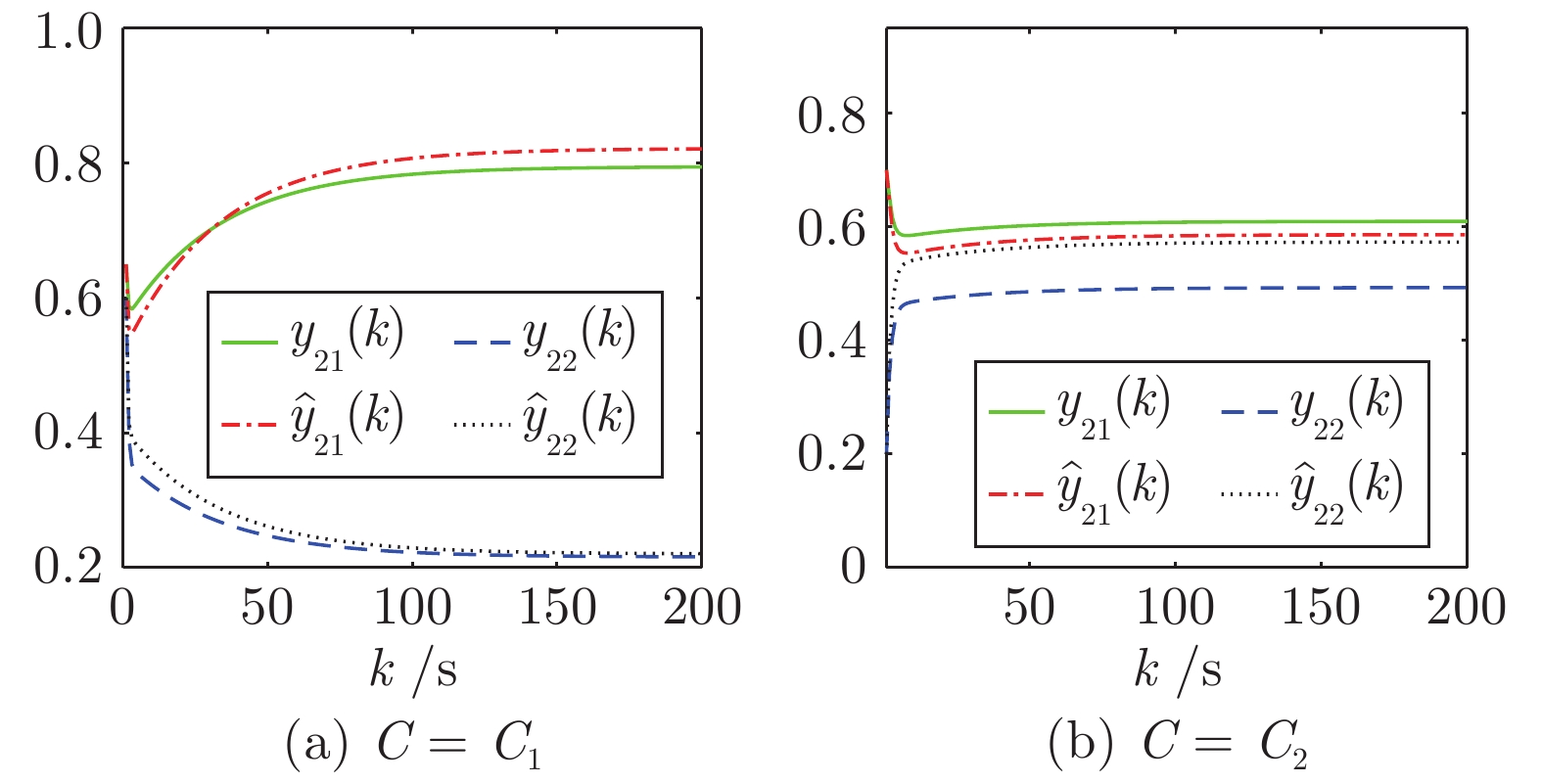
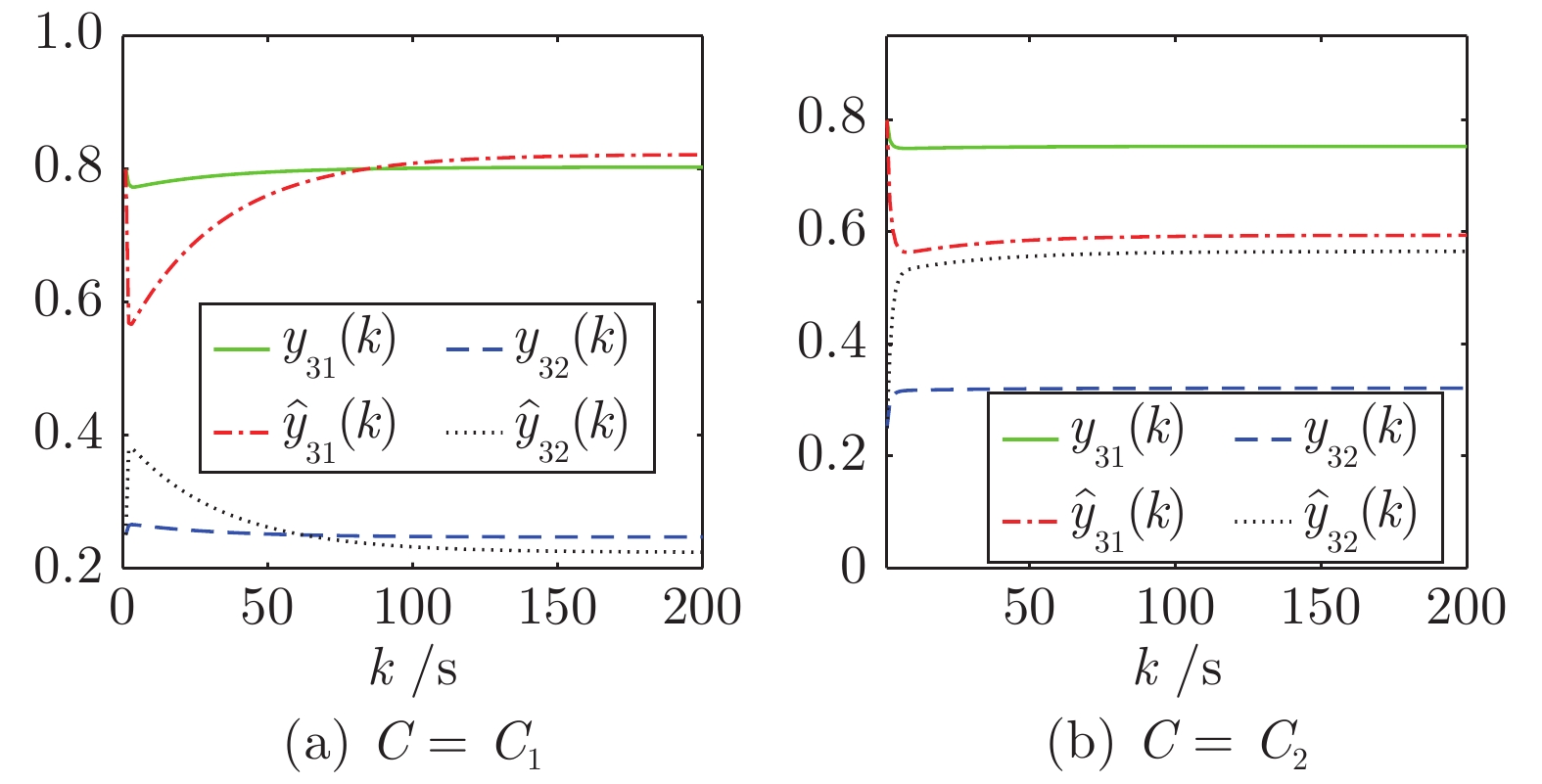
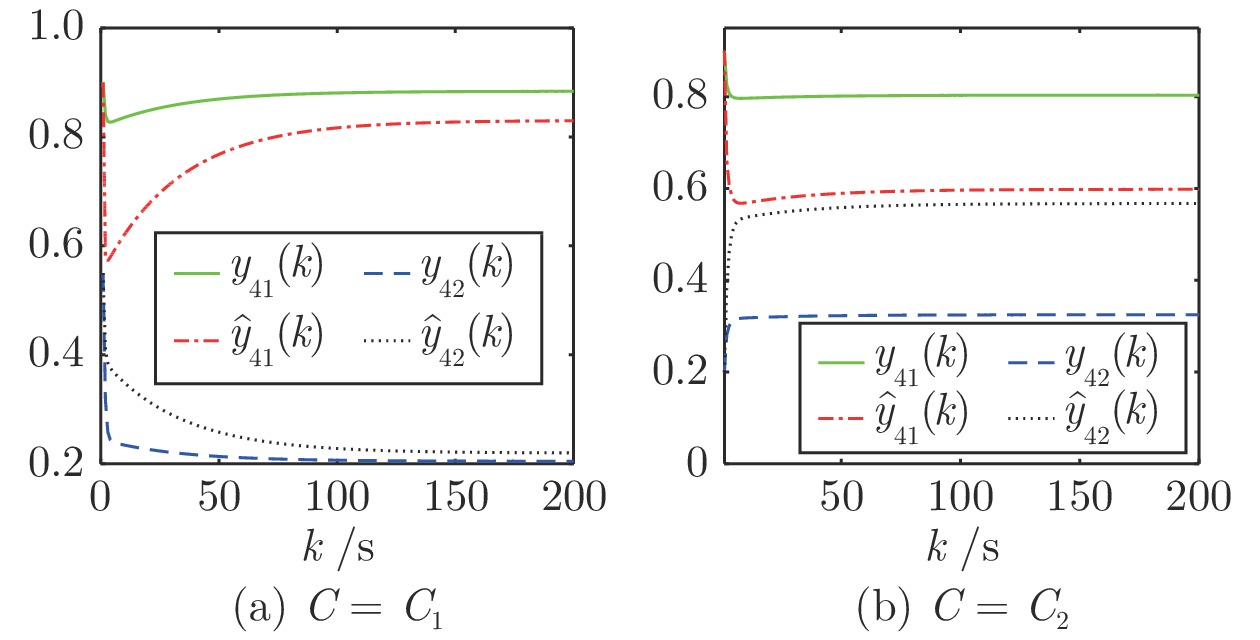
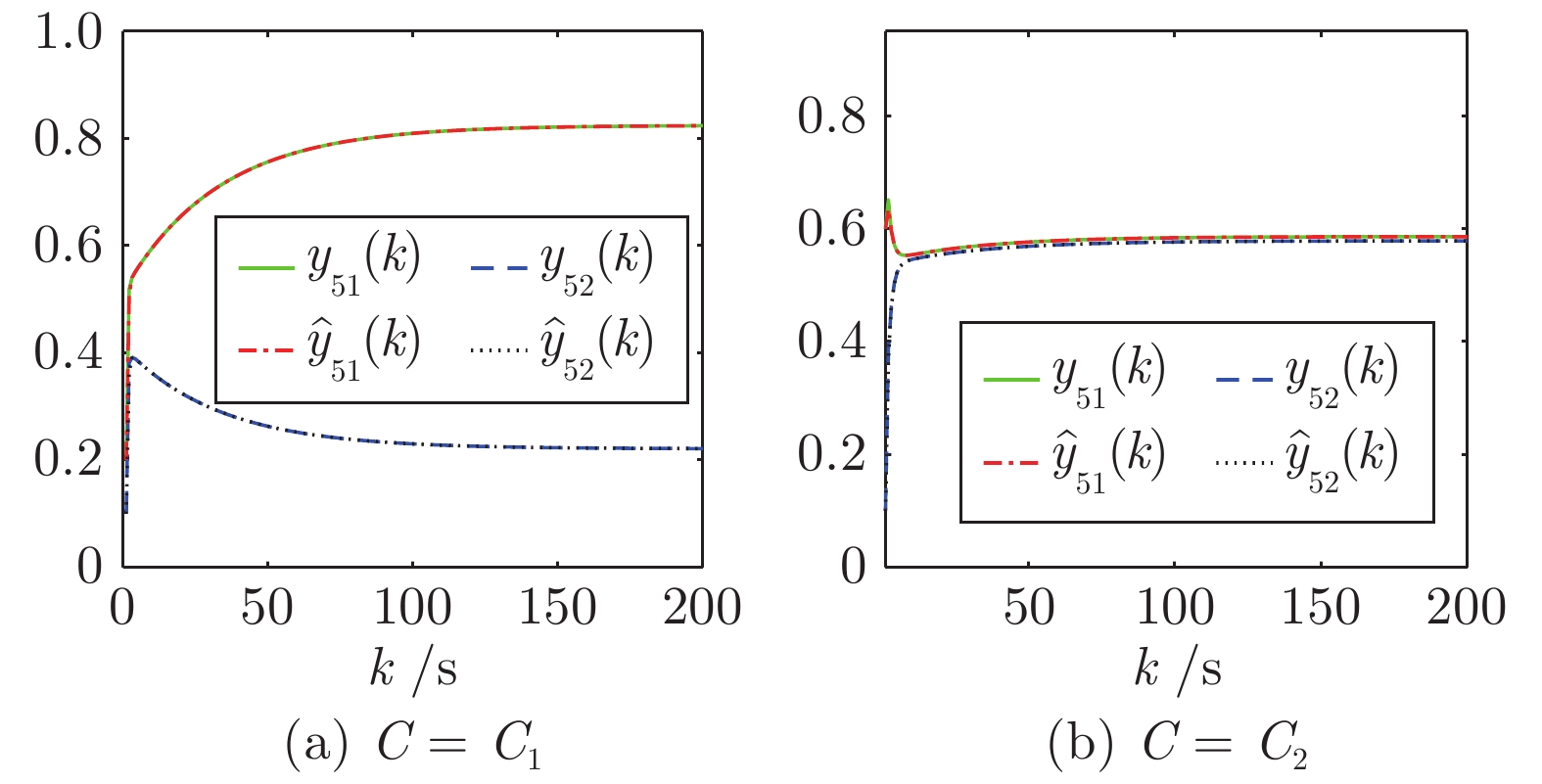
针对具有未知动态和M个平衡点的连续时间非线性系统, 将线性自适应最优切换控制器和未建模动态补偿器相结合, 基于嵌入转换技术和近似动态规划思想, 提出一种自适应最优切换控制方法. 首先在非线性系统的M个平衡点建立M个线性化模型, 当模型参数已知时, 提出由线性最优切换控制器、切换准则、未建模动态补偿器以及非线性系统组成的控制系统结构; 当模型参数未知时, 在每个平衡点附近采集输入和状态数据, 利用黎卡提方程的迭代求解公式、最小二乘方法、极小值原理以及二次规划技术得到非线性系统的自适应最优切换控制器和最优切换序列; 最后进行仿真实验, 实验结果验证了所提方法的有效性、优越性和实际可应用性.
针对具有未知动态和M个平衡点的连续时间非线性系统, 将线性自适应最优切换控制器和未建模动态补偿器相结合, 基于嵌入转换技术和近似动态规划思想, 提出一种自适应最优切换控制方法. 首先在非线性系统的M个平衡点建立M个线性化模型, 当模型参数已知时, 提出由线性最优切换控制器、切换准则、未建模动态补偿器以及非线性系统组成的控制系统结构; 当模型参数未知时, 在每个平衡点附近采集输入和状态数据, 利用黎卡提方程的迭代求解公式、最小二乘方法、极小值原理以及二次规划技术得到非线性系统的自适应最优切换控制器和最优切换序列; 最后进行仿真实验, 实验结果验证了所提方法的有效性、优越性和实际可应用性.
2023, 49(10): 2136-2144.
doi: 10.16383/j.aas.c201016
cstr: 32138.14.j.aas.c201016
摘要:
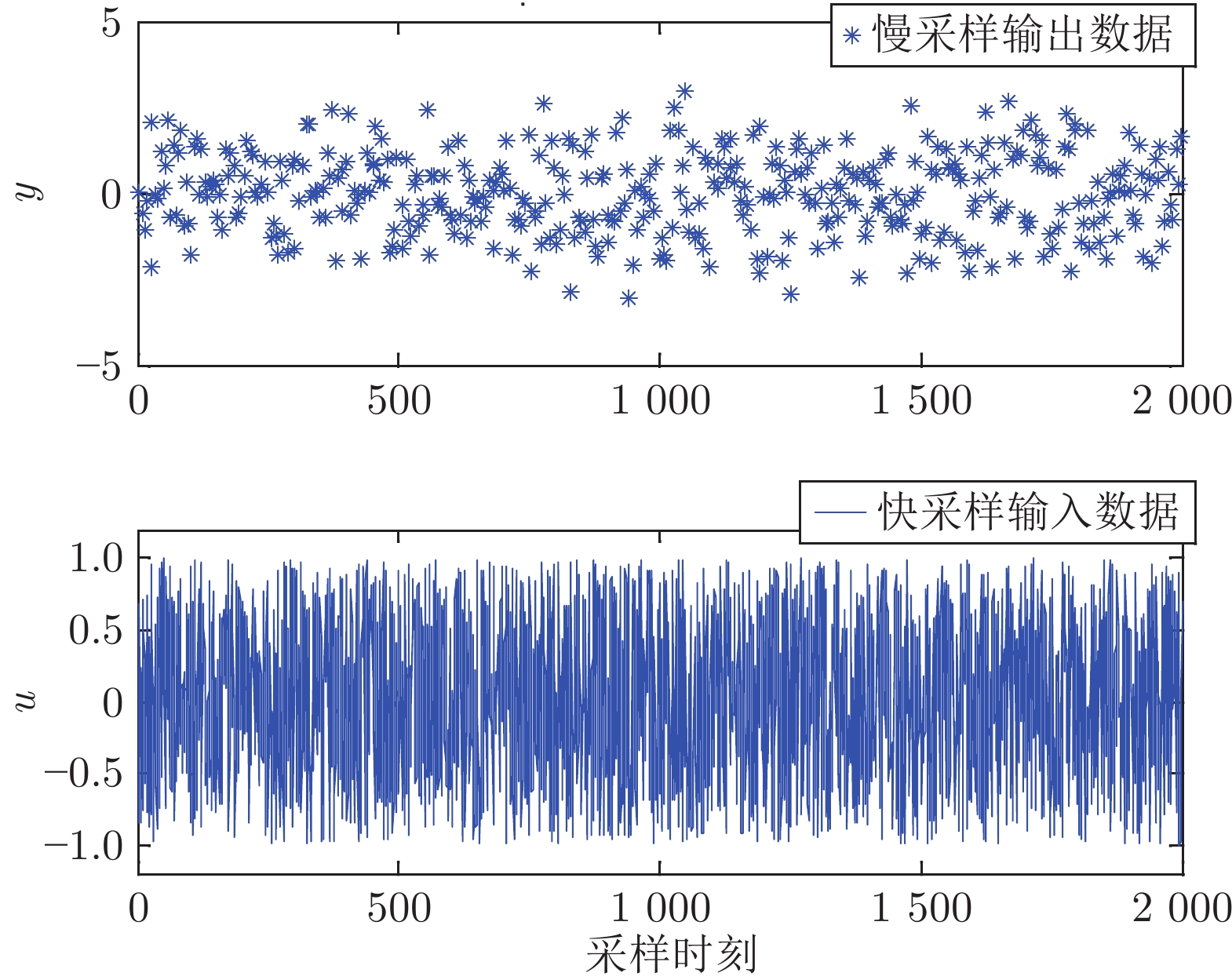
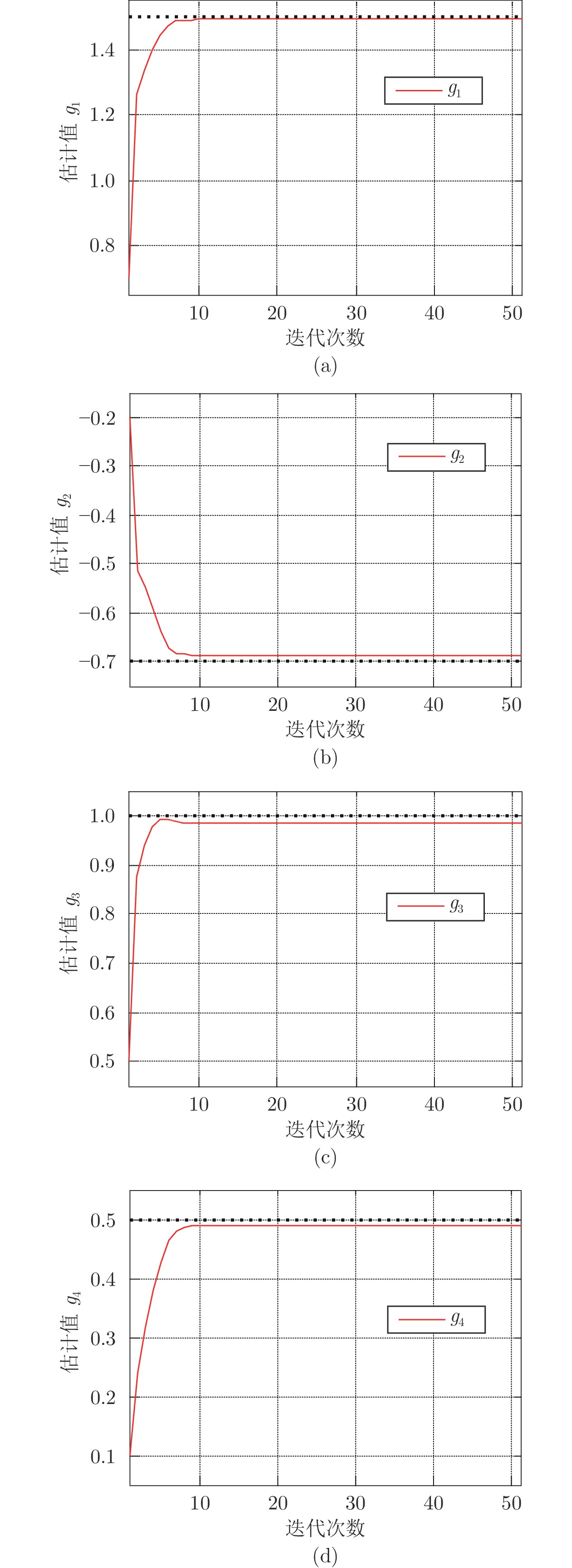
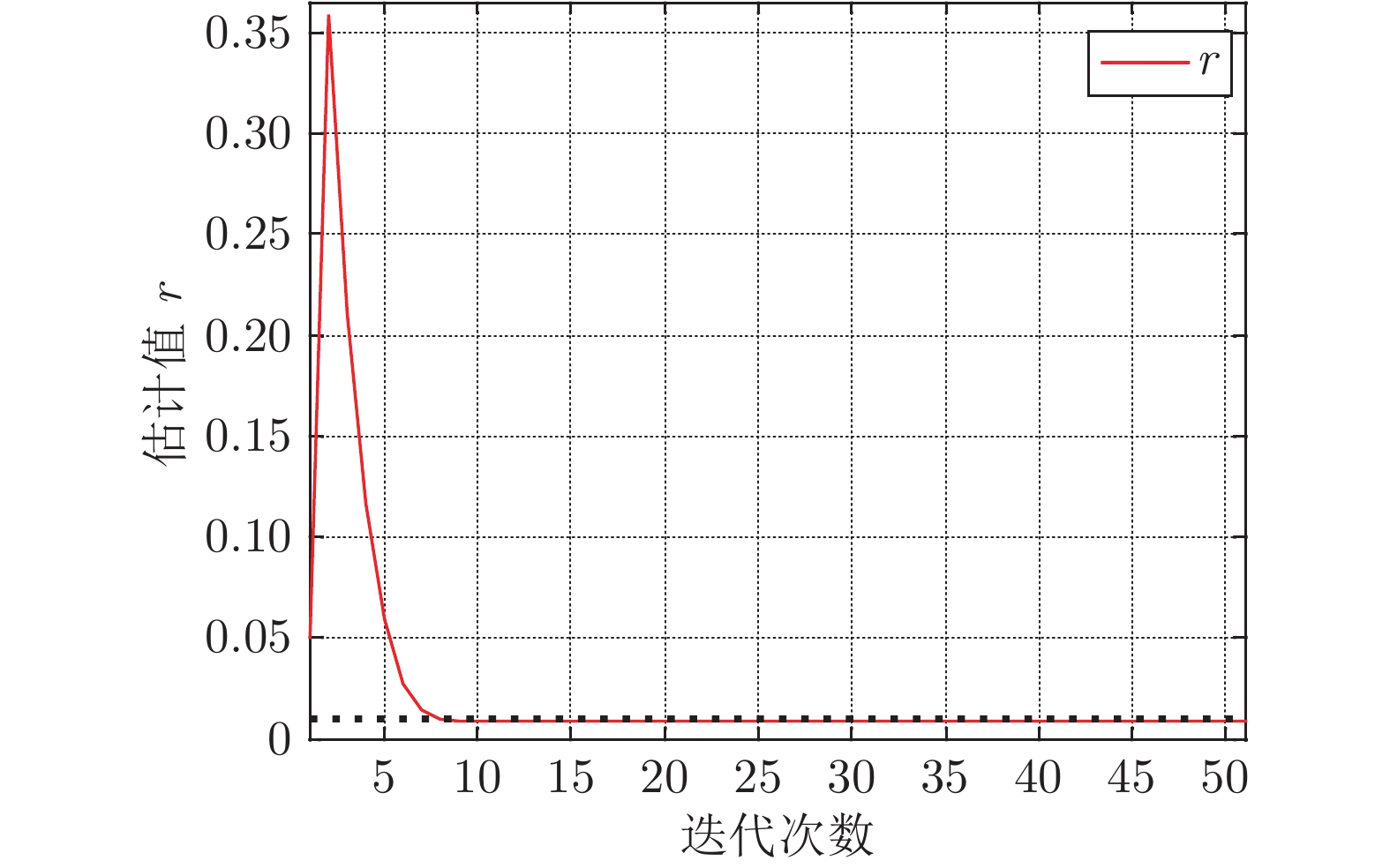
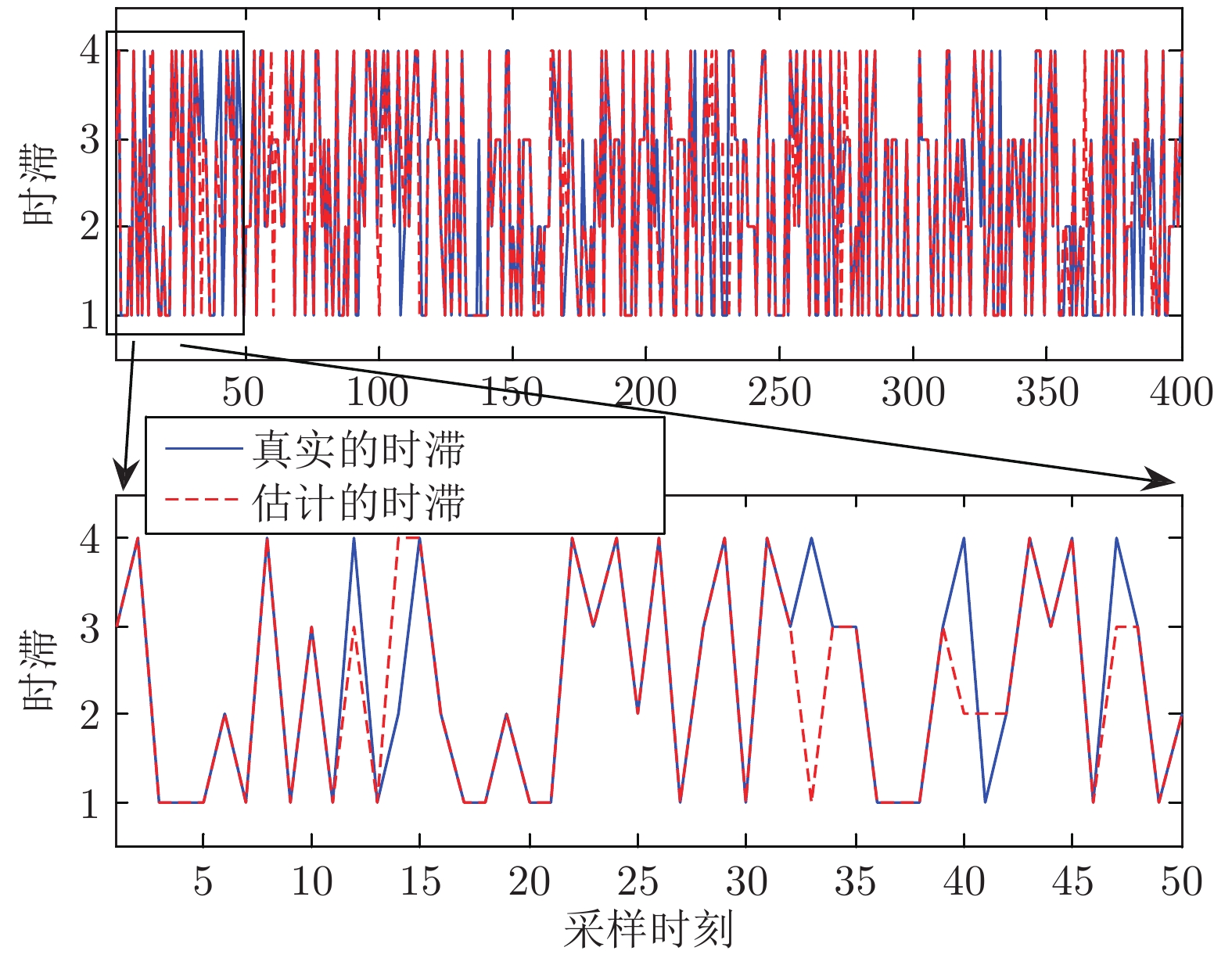
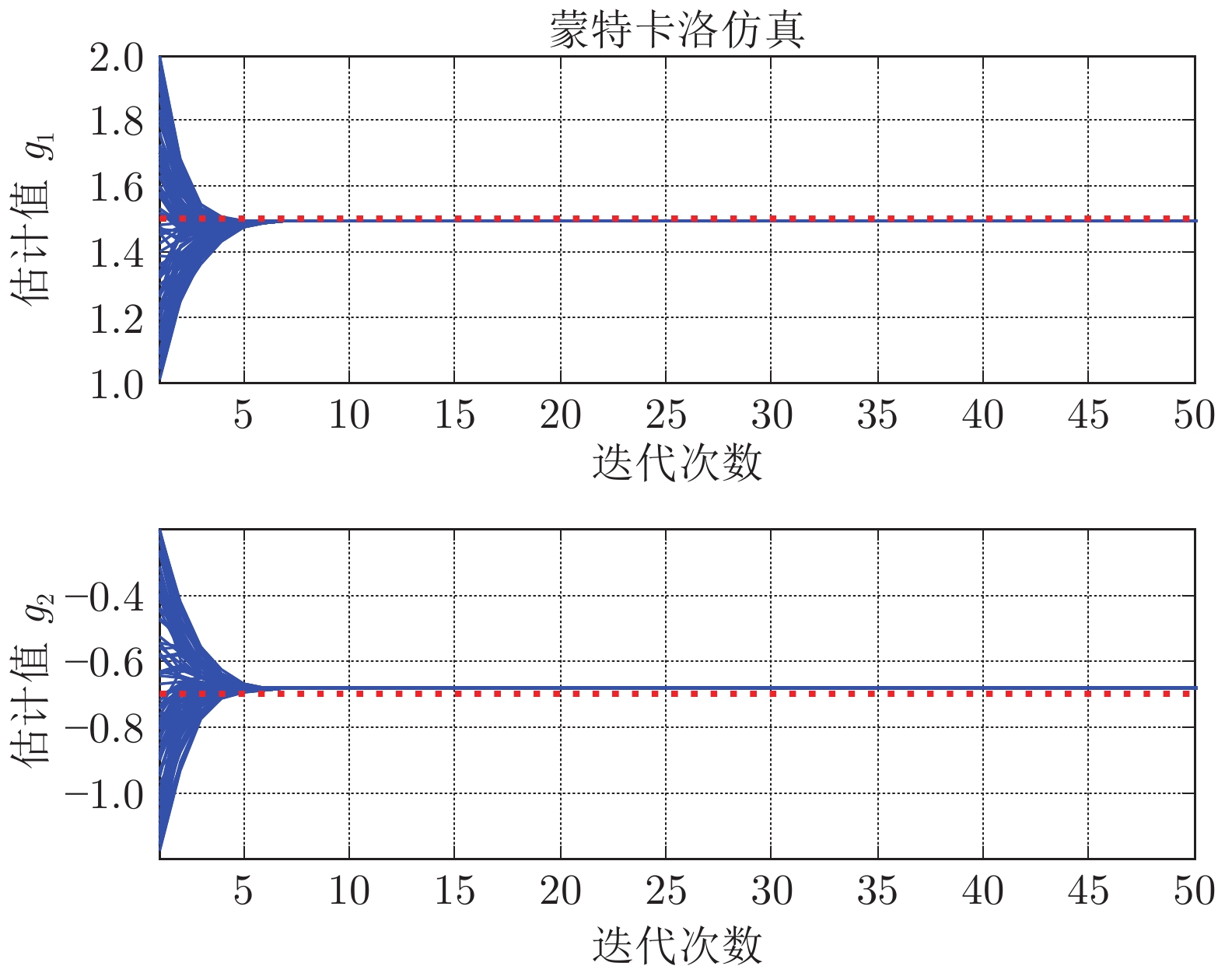
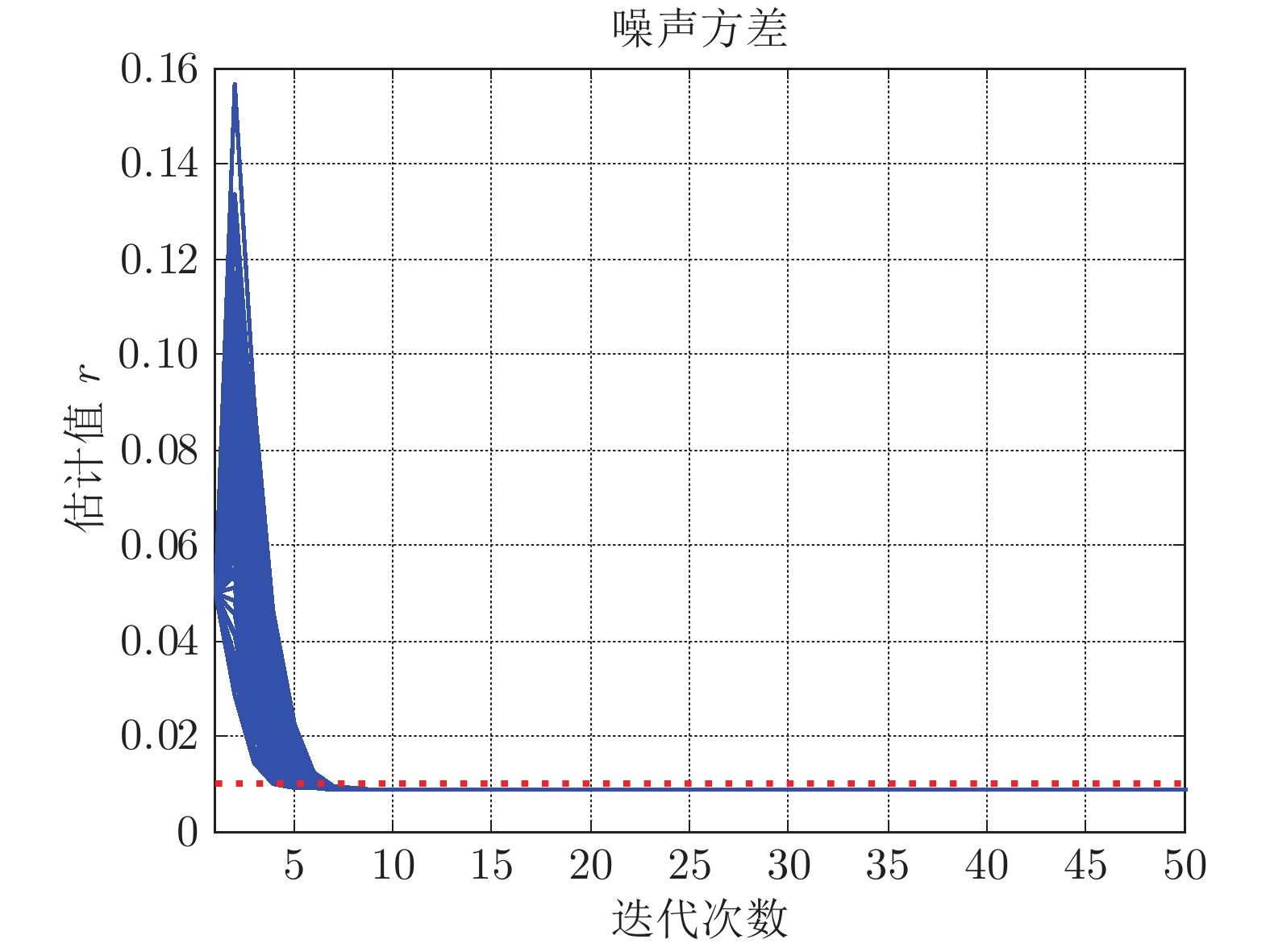
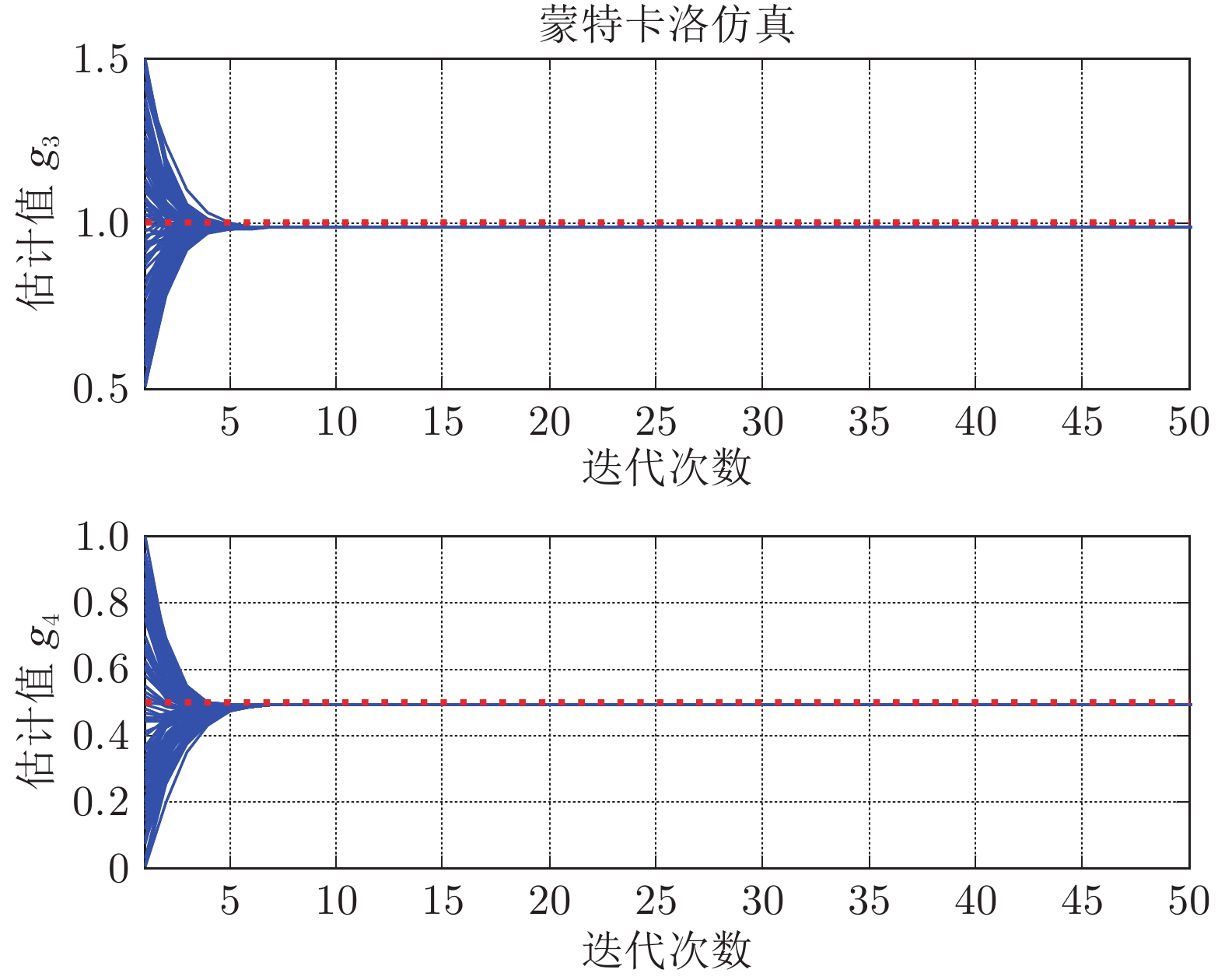
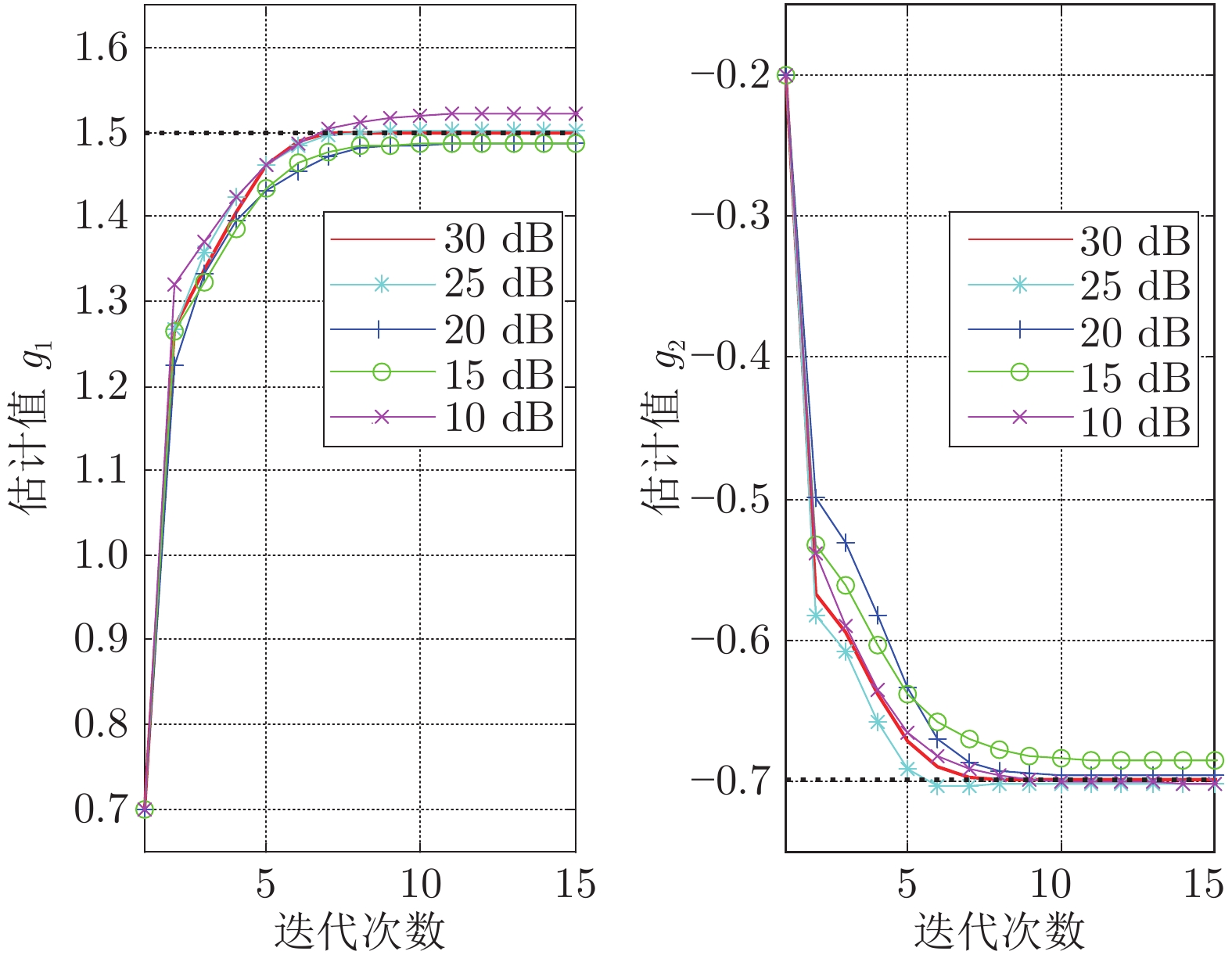
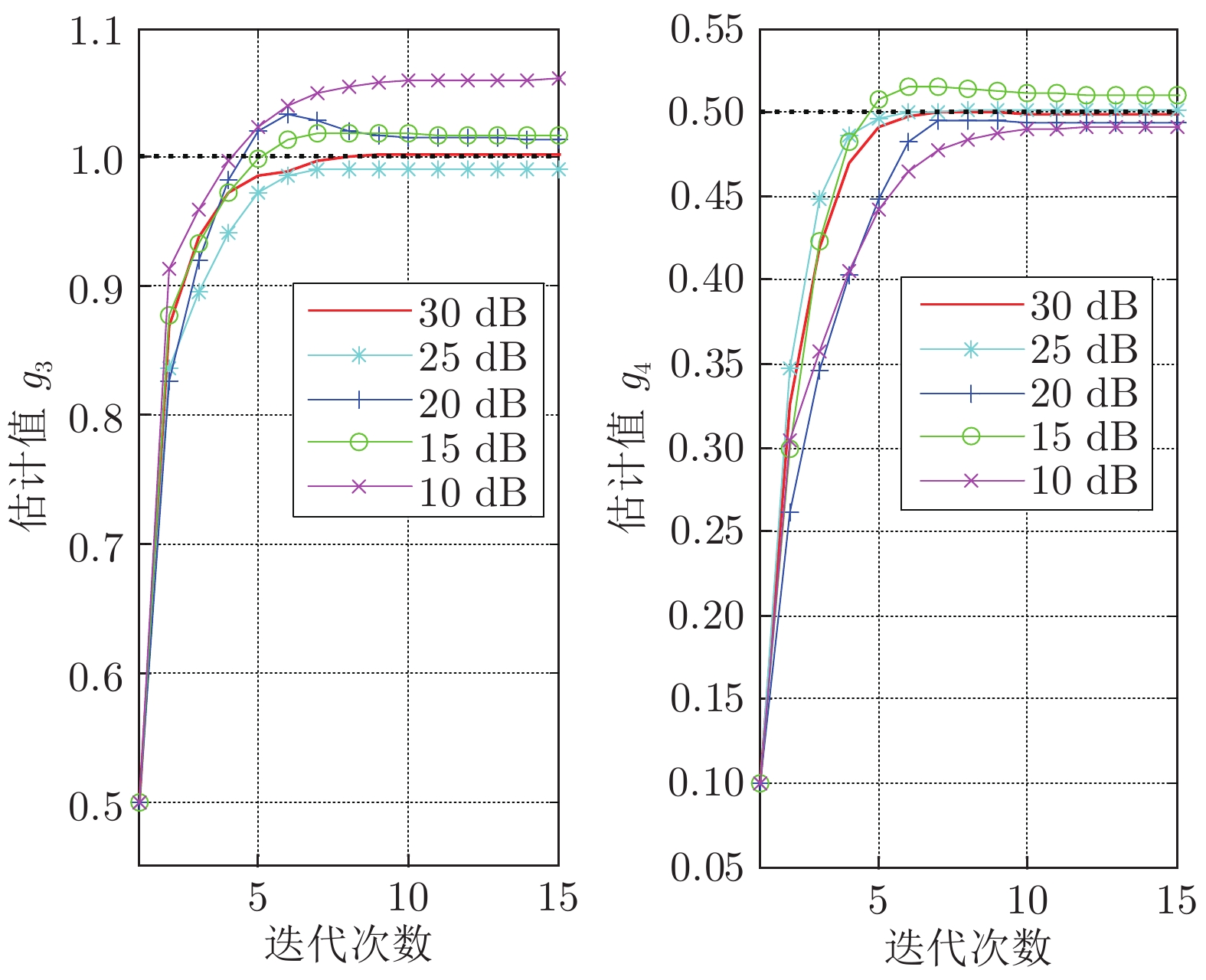
在大多数系统辨识方法中, 通常假设时变时滞在其可能的取值范围内服从均匀分布. 但是这种假设是非常受限的且在实际过程中常常无法得到满足. 因此在时滞取值概率条件未知的情况下, 针对一类线性时变时滞系统提出有效的辨识方法. 利用期望最大化(Expectation maximization, EM)算法将拟研究的辨识问题公式化, 期望最大化算法通过不断地迭代执行期望步骤和最大化步骤得到优化的参数估计. 在期望步骤中, 将未知的时变时滞当作隐含变量来处理并且假设可能的取值范围已知. 在每一个采样时刻, 时滞的变换由一个概率向量控制, 并且该向量中的每一个元素是未知的, 将其当作待估计的未知参数处理. 在算法的每次迭代过程中, 计算时滞的后验概率密度函数(Probability density function, PDF), 并在此基础上构造代价函数(Q-函数). 在最大化步骤中, 通过不断优化(Q-函数)来估计想要的参数, 包括模型参数、噪声参数、控制概率向量中的每一个元素和未知的时滞. 最后通过一个数值例子验证提出算法的有效性.
在大多数系统辨识方法中, 通常假设时变时滞在其可能的取值范围内服从均匀分布. 但是这种假设是非常受限的且在实际过程中常常无法得到满足. 因此在时滞取值概率条件未知的情况下, 针对一类线性时变时滞系统提出有效的辨识方法. 利用期望最大化(Expectation maximization, EM)算法将拟研究的辨识问题公式化, 期望最大化算法通过不断地迭代执行期望步骤和最大化步骤得到优化的参数估计. 在期望步骤中, 将未知的时变时滞当作隐含变量来处理并且假设可能的取值范围已知. 在每一个采样时刻, 时滞的变换由一个概率向量控制, 并且该向量中的每一个元素是未知的, 将其当作待估计的未知参数处理. 在算法的每次迭代过程中, 计算时滞的后验概率密度函数(Probability density function, PDF), 并在此基础上构造代价函数(Q-函数). 在最大化步骤中, 通过不断优化(Q-函数)来估计想要的参数, 包括模型参数、噪声参数、控制概率向量中的每一个元素和未知的时滞. 最后通过一个数值例子验证提出算法的有效性.
2023, 49(10): 2145-2158.
doi: 10.16383/j.aas.c220638
cstr: 32138.14.j.aas.c220638
摘要:
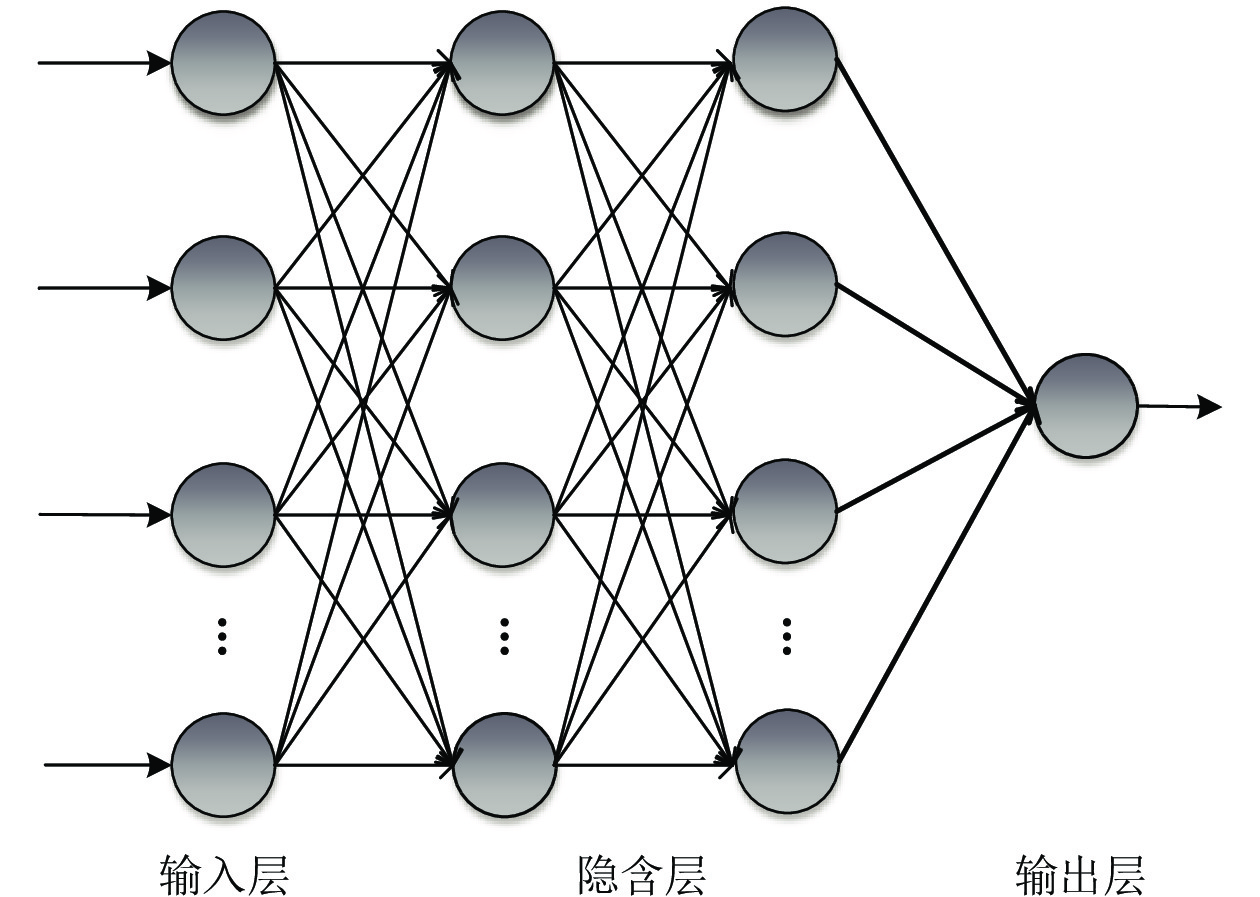
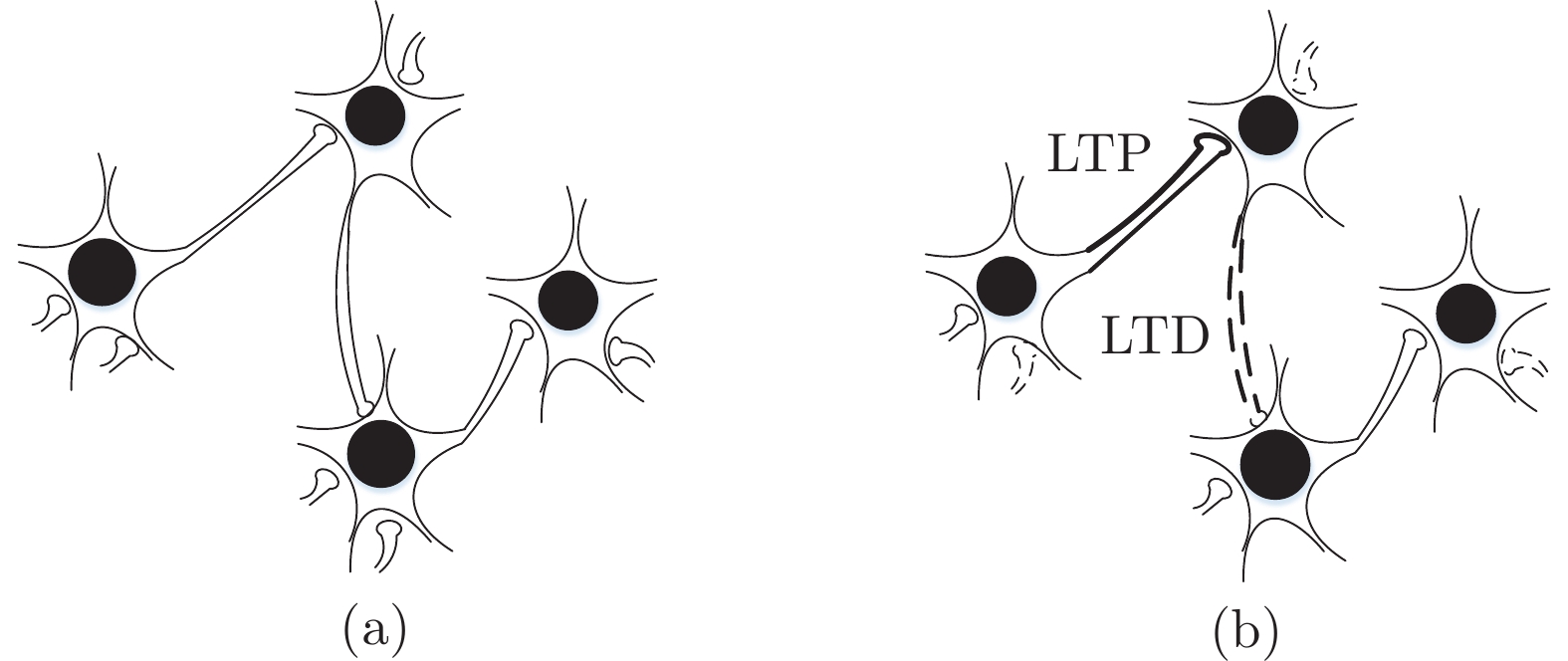
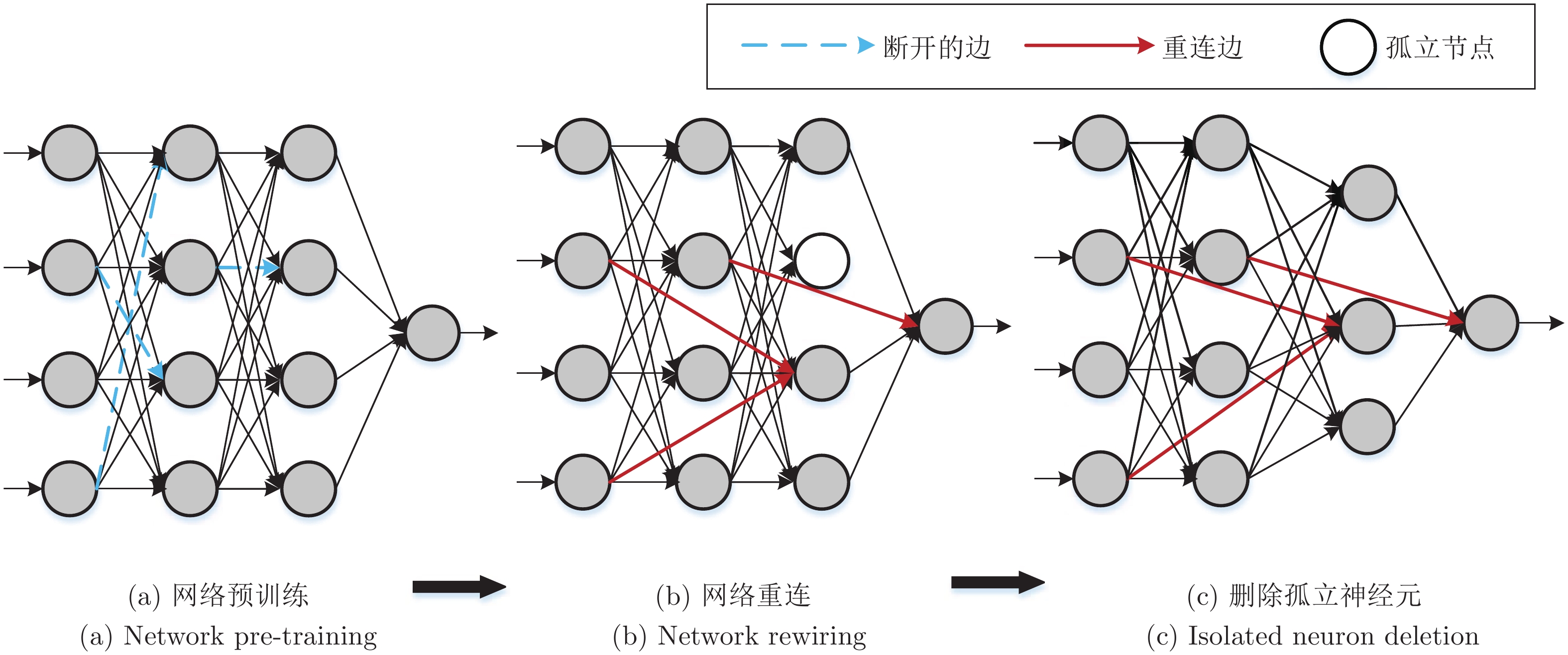
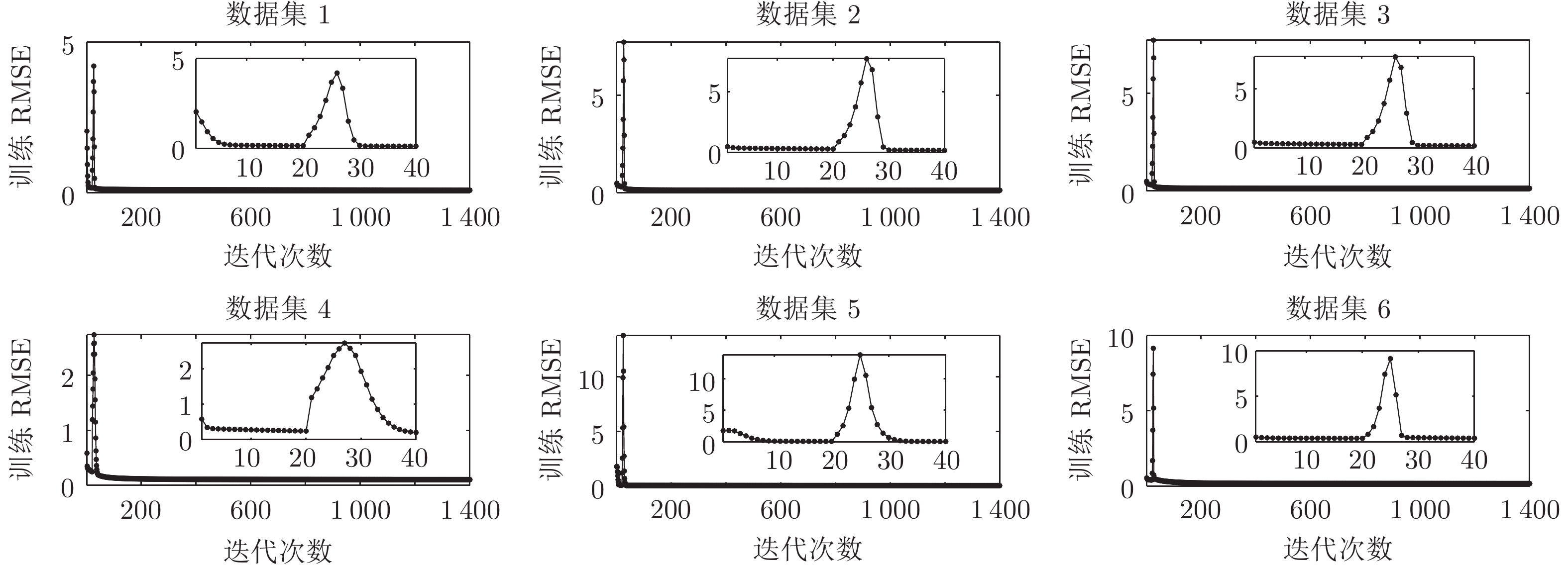
小世界神经网络具有较快的收敛速度和优越的容错性, 近年来得到广泛关注. 然而, 在网络构造过程中, 随机重连可能造成重要信息丢失, 进而导致网络精度下降. 针对该问题, 基于Watts-Strogatz (WS) 型小世界神经网络, 提出了一种基于突触巩固机制的前馈小世界神经网络(Feedforward small-world neural network based on synaptic consolidation, FSWNN-SC). 首先, 使用网络正则化方法对规则前馈神经网络进行预训练, 基于突触巩固机制, 断开网络不重要的权值连接, 保留重要的连接权值; 其次, 设计重连规则构造小世界神经网络, 在保证网络小世界属性的同时实现网络稀疏化, 并使用梯度下降算法训练网络; 最后, 通过4个UCI基准数据集和2个真实数据集进行模型性能测试, 并使用Wilcoxon符号秩检验对对比模型进行显著性差异检验. 实验结果表明: 所提出的FSWNN-SC模型在获得紧凑的网络结构的同时, 其精度显著优于规则前馈神经网络及其他WS型小世界神经网络.
小世界神经网络具有较快的收敛速度和优越的容错性, 近年来得到广泛关注. 然而, 在网络构造过程中, 随机重连可能造成重要信息丢失, 进而导致网络精度下降. 针对该问题, 基于Watts-Strogatz (WS) 型小世界神经网络, 提出了一种基于突触巩固机制的前馈小世界神经网络(Feedforward small-world neural network based on synaptic consolidation, FSWNN-SC). 首先, 使用网络正则化方法对规则前馈神经网络进行预训练, 基于突触巩固机制, 断开网络不重要的权值连接, 保留重要的连接权值; 其次, 设计重连规则构造小世界神经网络, 在保证网络小世界属性的同时实现网络稀疏化, 并使用梯度下降算法训练网络; 最后, 通过4个UCI基准数据集和2个真实数据集进行模型性能测试, 并使用Wilcoxon符号秩检验对对比模型进行显著性差异检验. 实验结果表明: 所提出的FSWNN-SC模型在获得紧凑的网络结构的同时, 其精度显著优于规则前馈神经网络及其他WS型小世界神经网络.



2023, 49(10): 2159-2171.
doi: 10.16383/j.aas.c200493
cstr: 32138.14.j.aas.c200493
摘要:
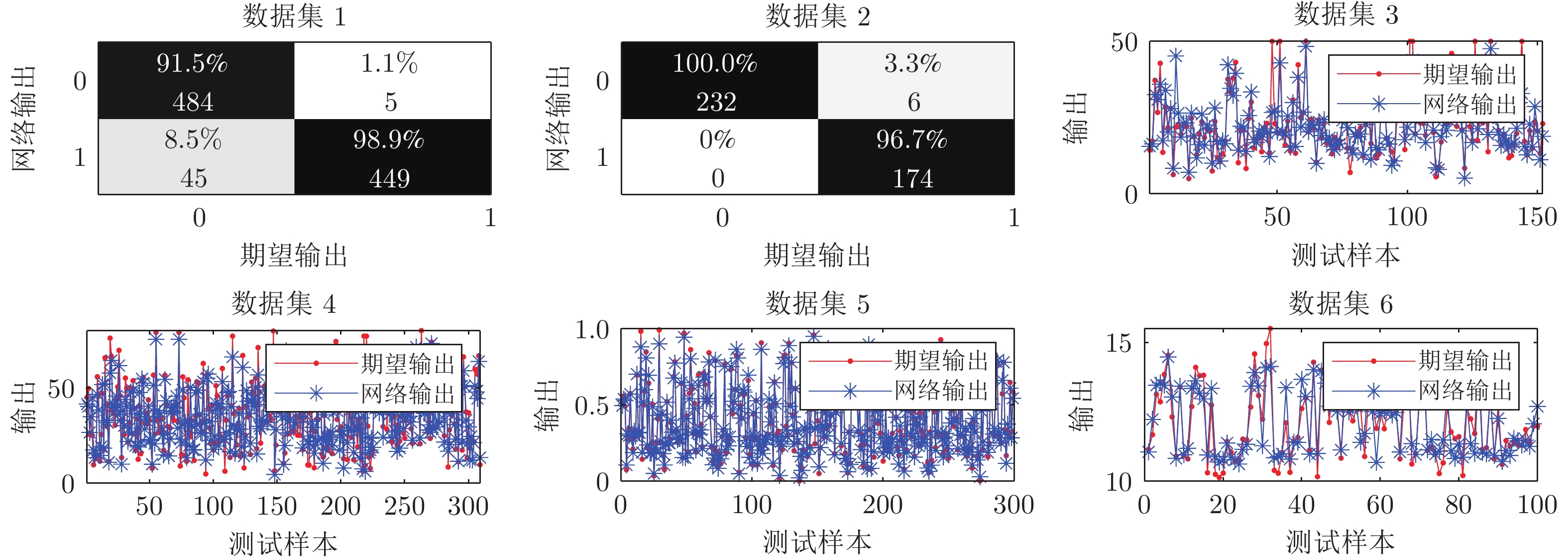
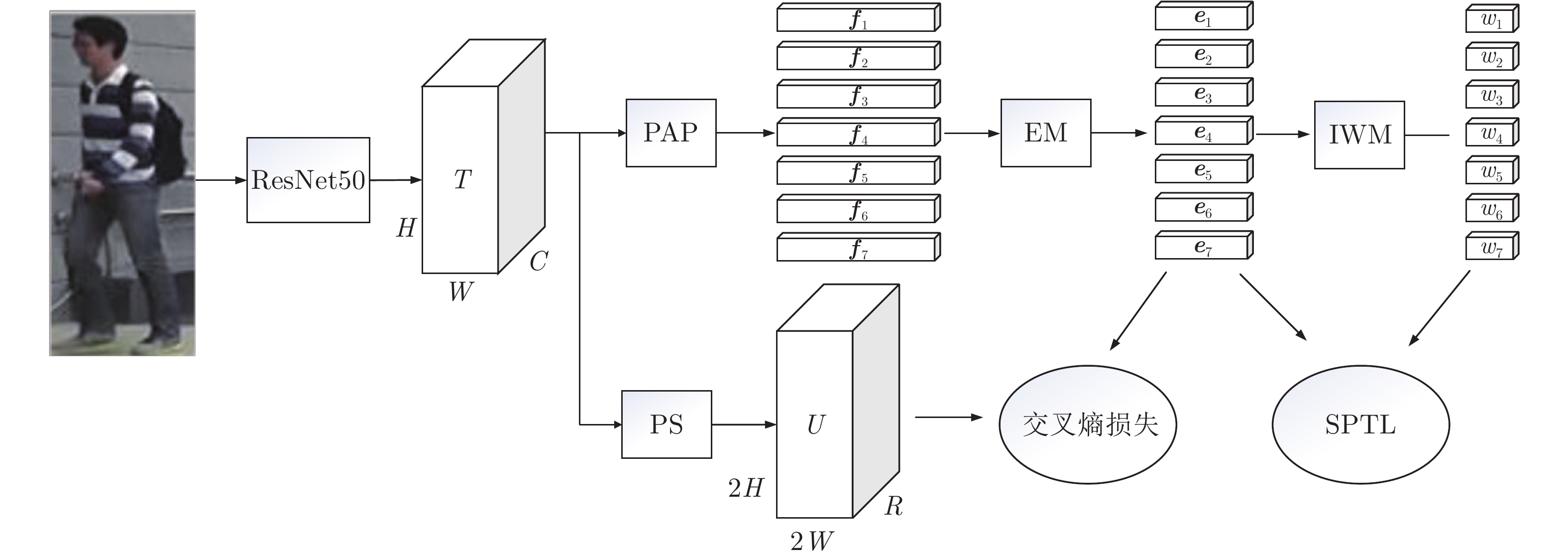
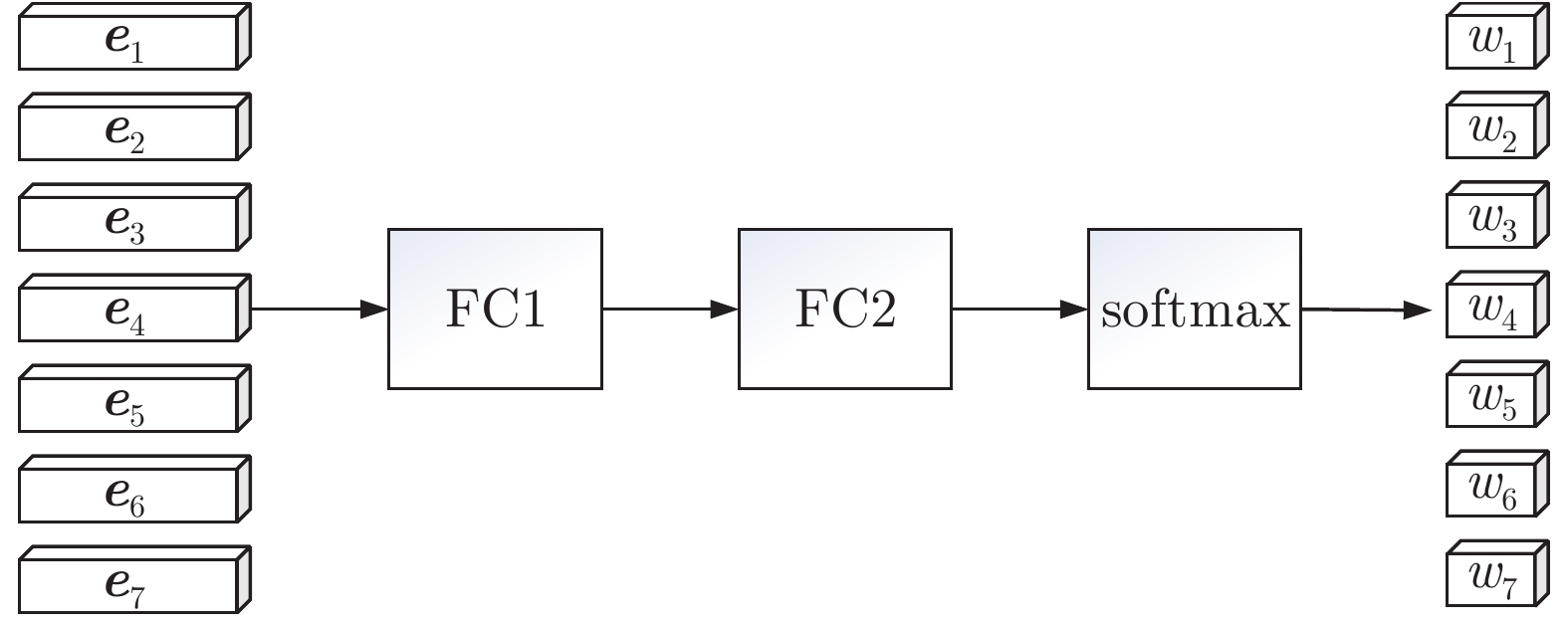
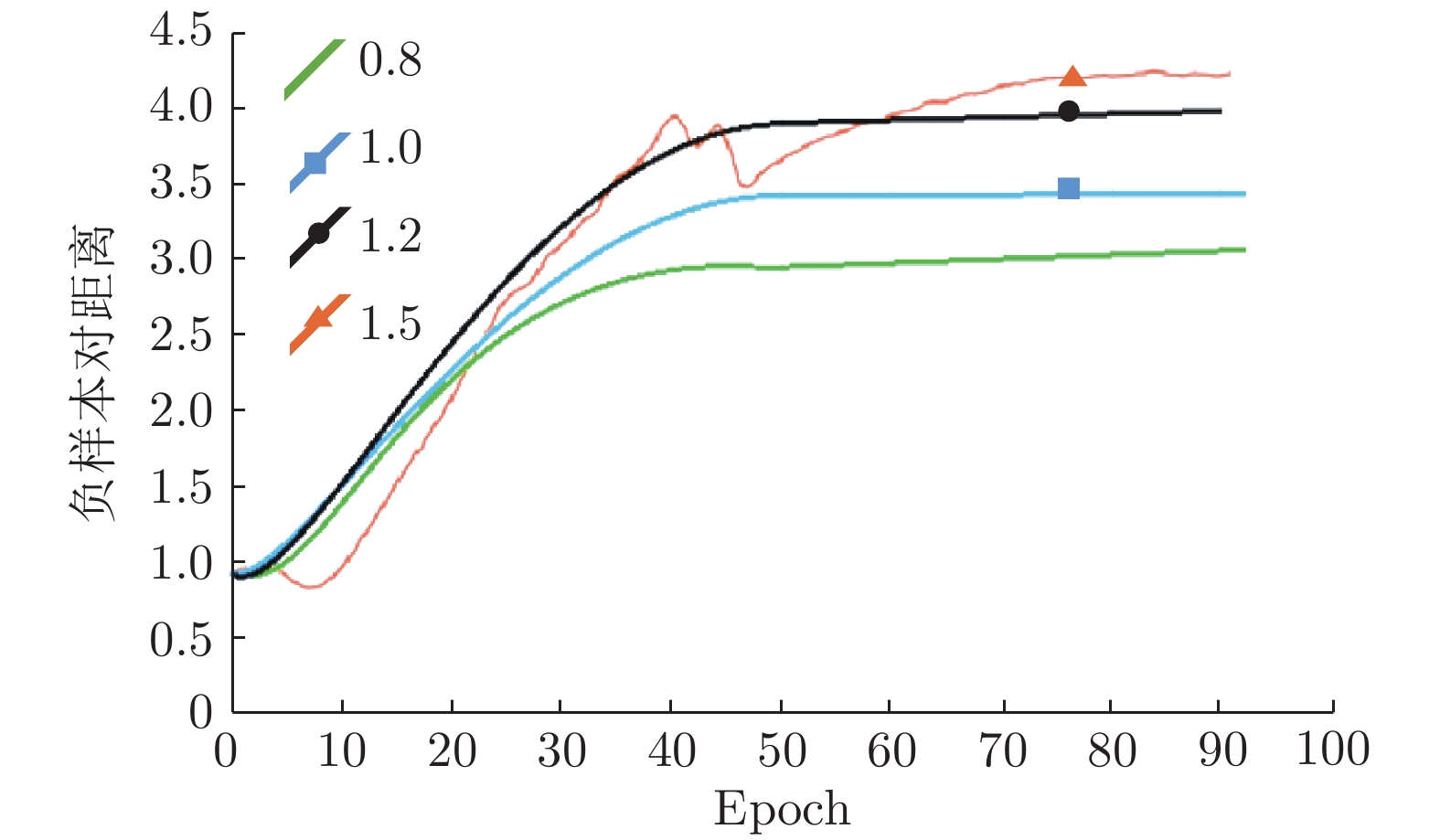
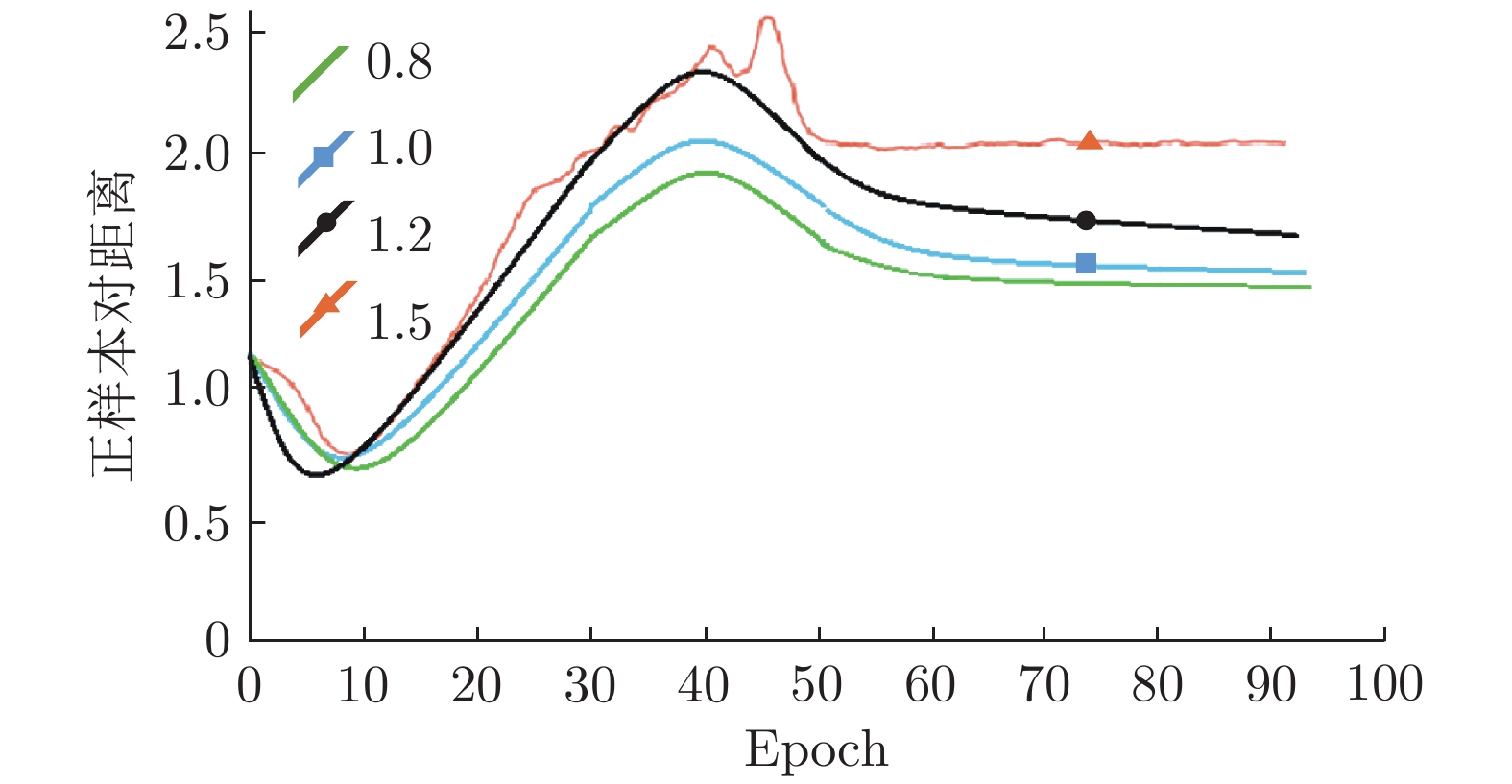
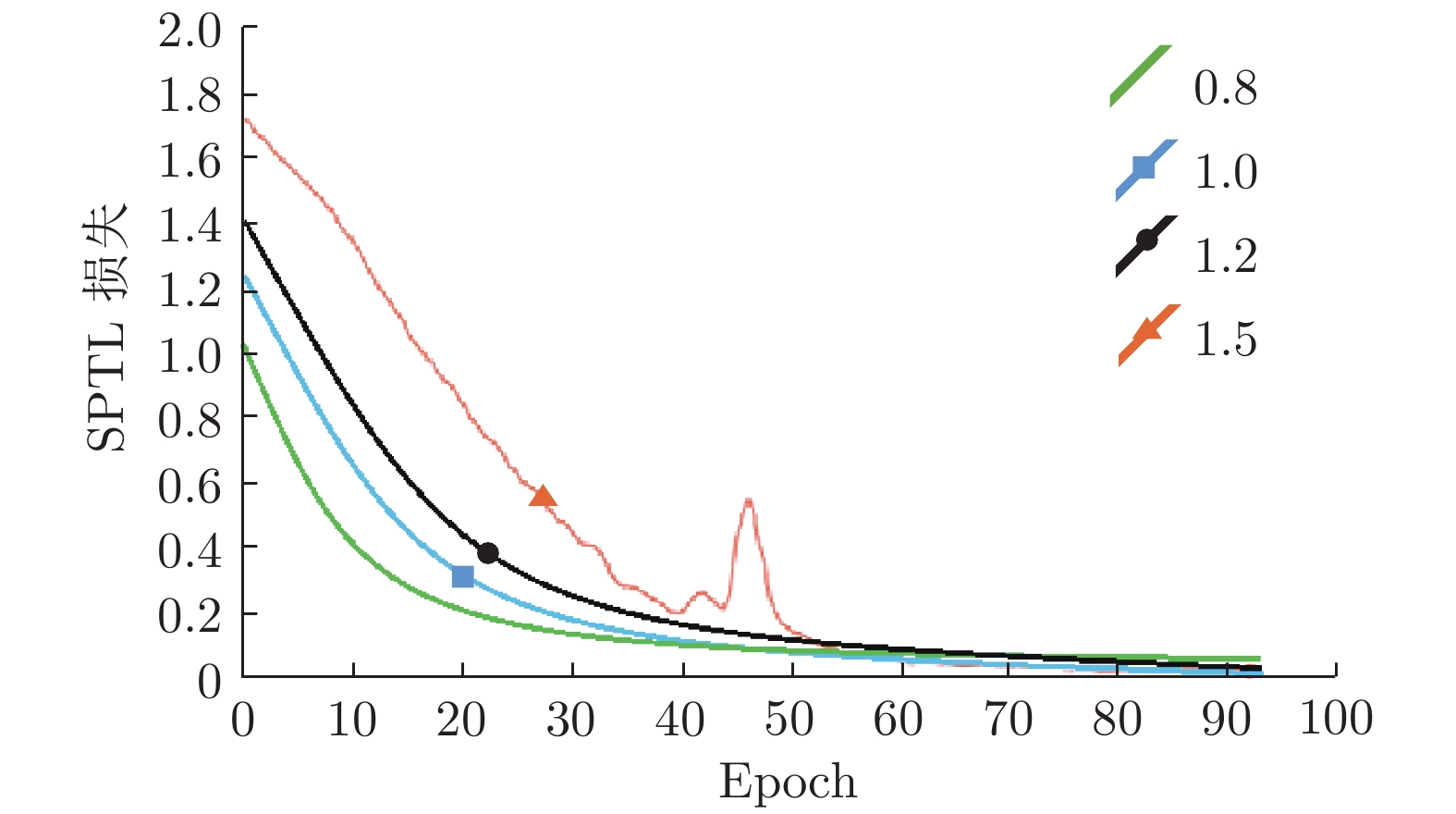
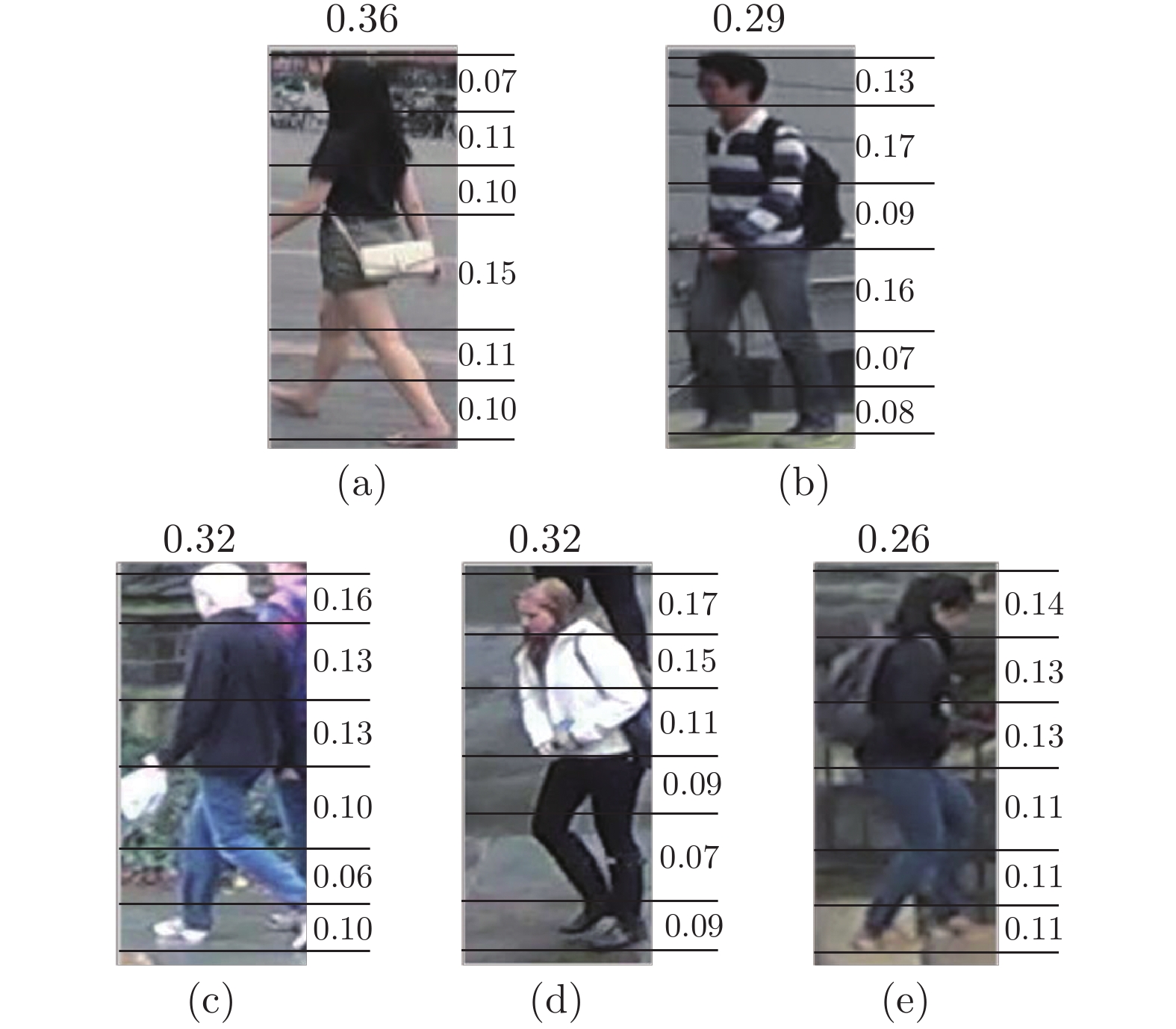
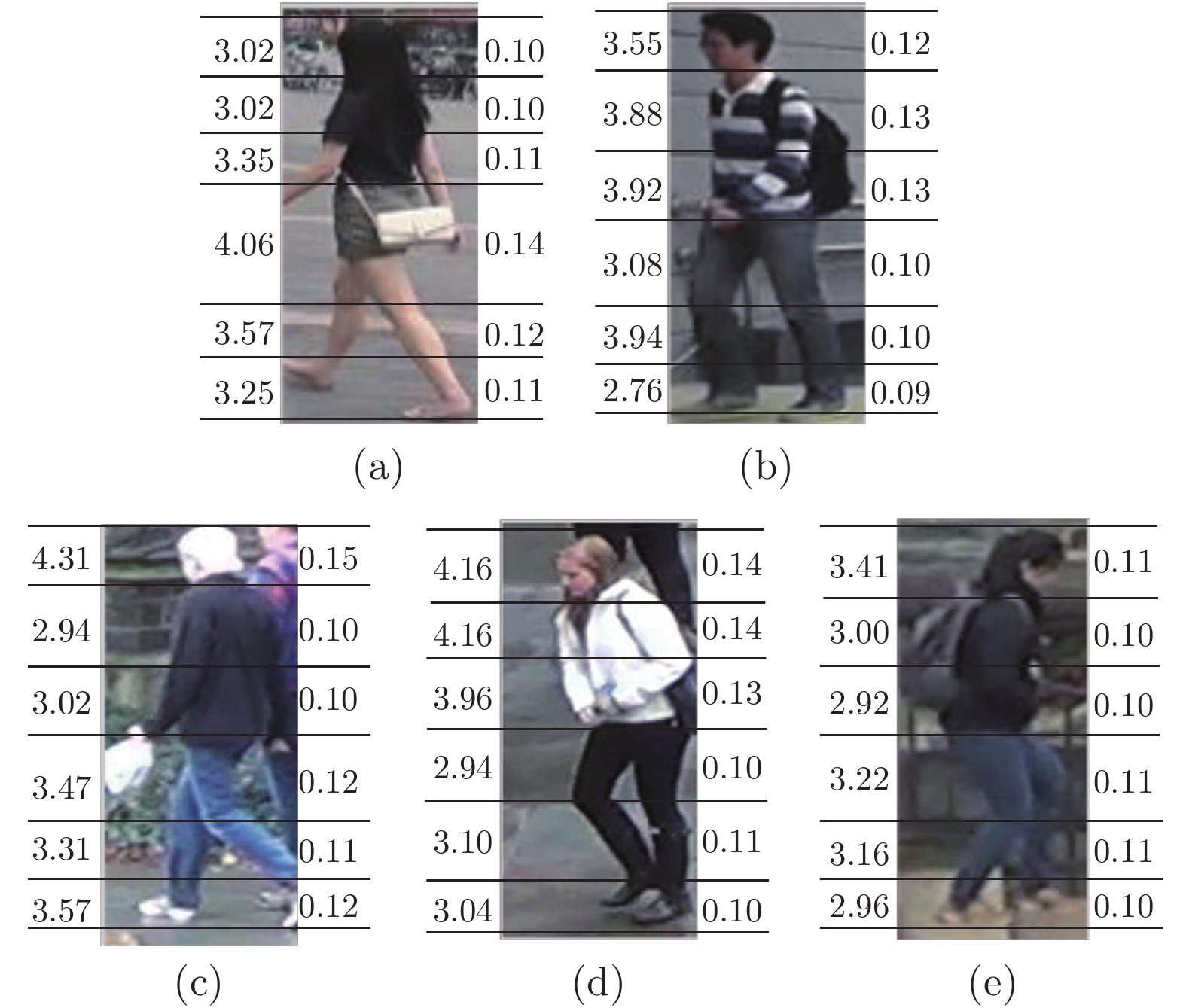
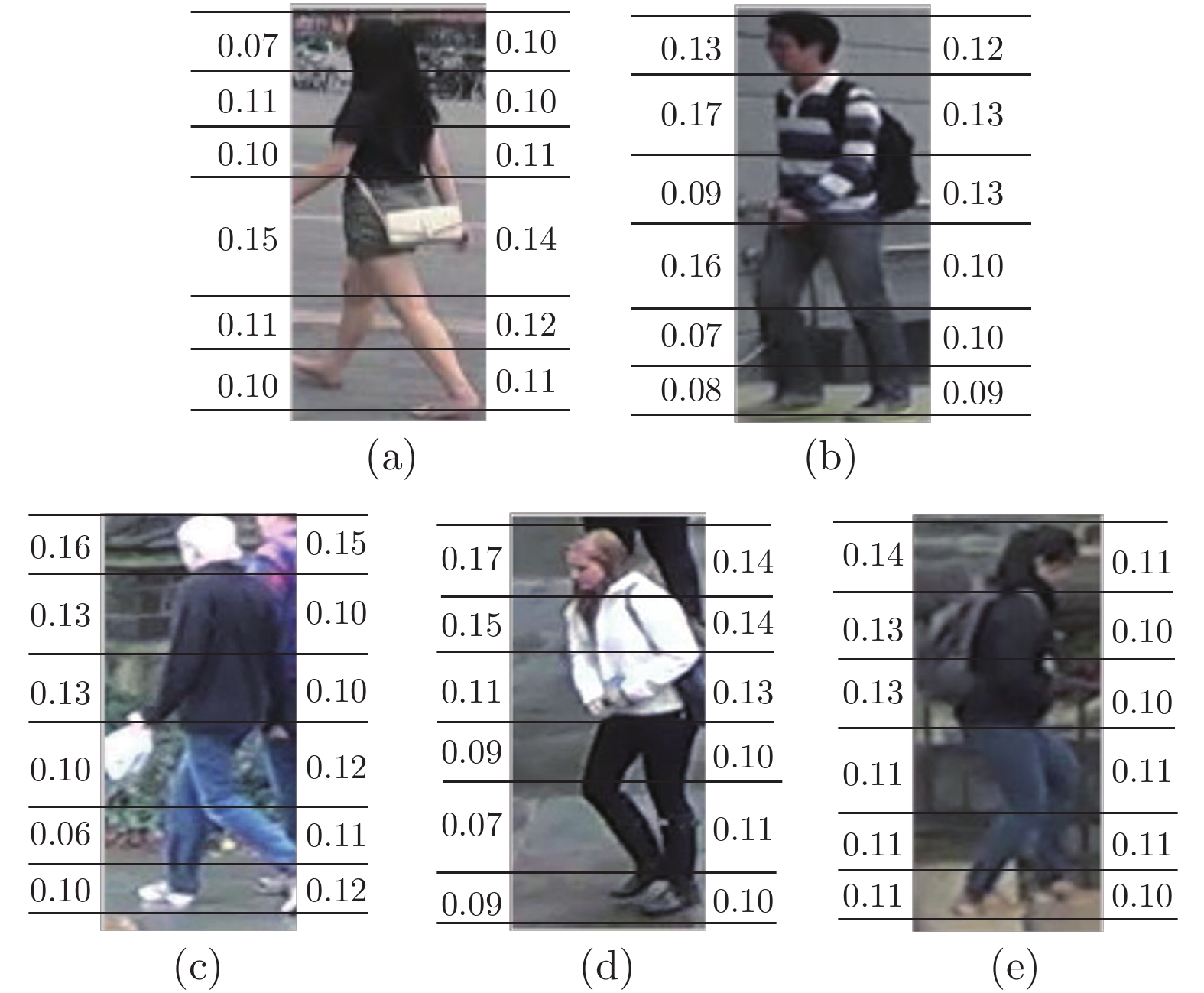
大多数行人重识别(Person re-identification, ReID)方法仅将注意力机制作为提取显著特征的辅助手段, 缺少网络对行人图像关注程度的量化研究. 基于此, 提出一种可解释注意力部件模型(Interpretable attention part model, IAPM). 该模型有3 个优点: 1)利用注意力掩码提取部件特征, 解决部件不对齐问题; 2)为了根据部件的显著性程度生成可解释权重, 设计可解释权重生成模块(Interpretable weight generation module, IWM); 3)提出显著部件三元损失(Salient part triplet loss, SPTL)用于IWM的训练, 提高识别精度和可解释性. 在3 个主流数据集上进行实验, 验证所提出的方法优于现有行人重识别方法. 最后通过一项人群主观测评比较IWM生成可解释权重的相对大小与人类直观判断得分, 证明本方法具有良好的可解释性.
大多数行人重识别(Person re-identification, ReID)方法仅将注意力机制作为提取显著特征的辅助手段, 缺少网络对行人图像关注程度的量化研究. 基于此, 提出一种可解释注意力部件模型(Interpretable attention part model, IAPM). 该模型有3 个优点: 1)利用注意力掩码提取部件特征, 解决部件不对齐问题; 2)为了根据部件的显著性程度生成可解释权重, 设计可解释权重生成模块(Interpretable weight generation module, IWM); 3)提出显著部件三元损失(Salient part triplet loss, SPTL)用于IWM的训练, 提高识别精度和可解释性. 在3 个主流数据集上进行实验, 验证所提出的方法优于现有行人重识别方法. 最后通过一项人群主观测评比较IWM生成可解释权重的相对大小与人类直观判断得分, 证明本方法具有良好的可解释性.


2023, 49(10): 2172-2187.
doi: 10.16383/j.aas.c201077
cstr: 32138.14.j.aas.c201077
摘要:
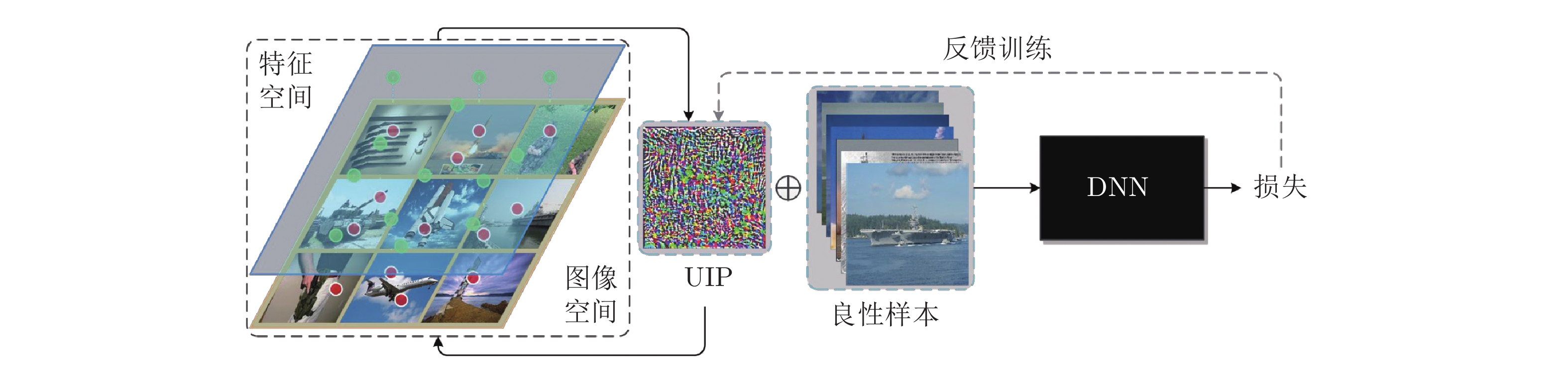
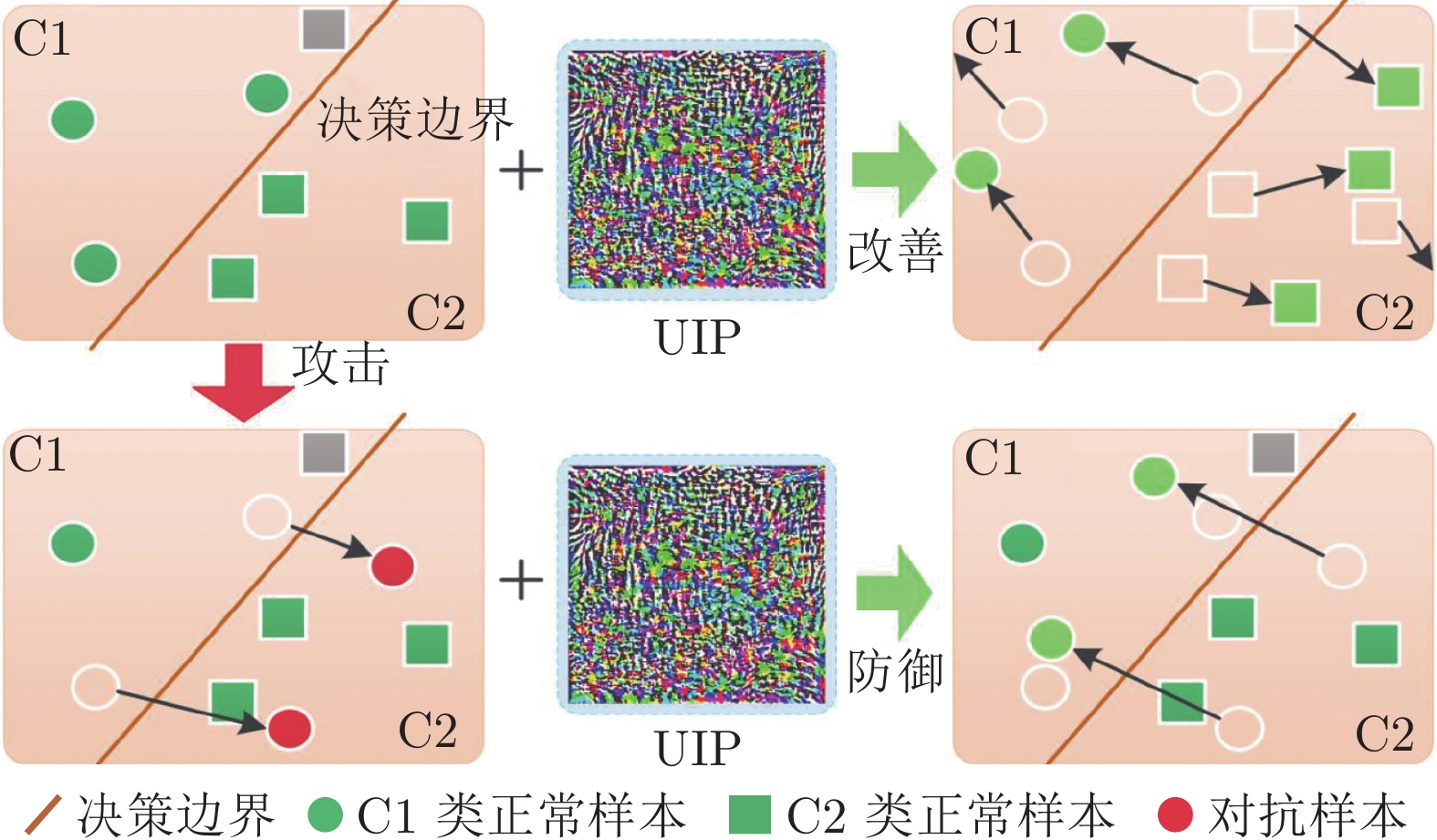
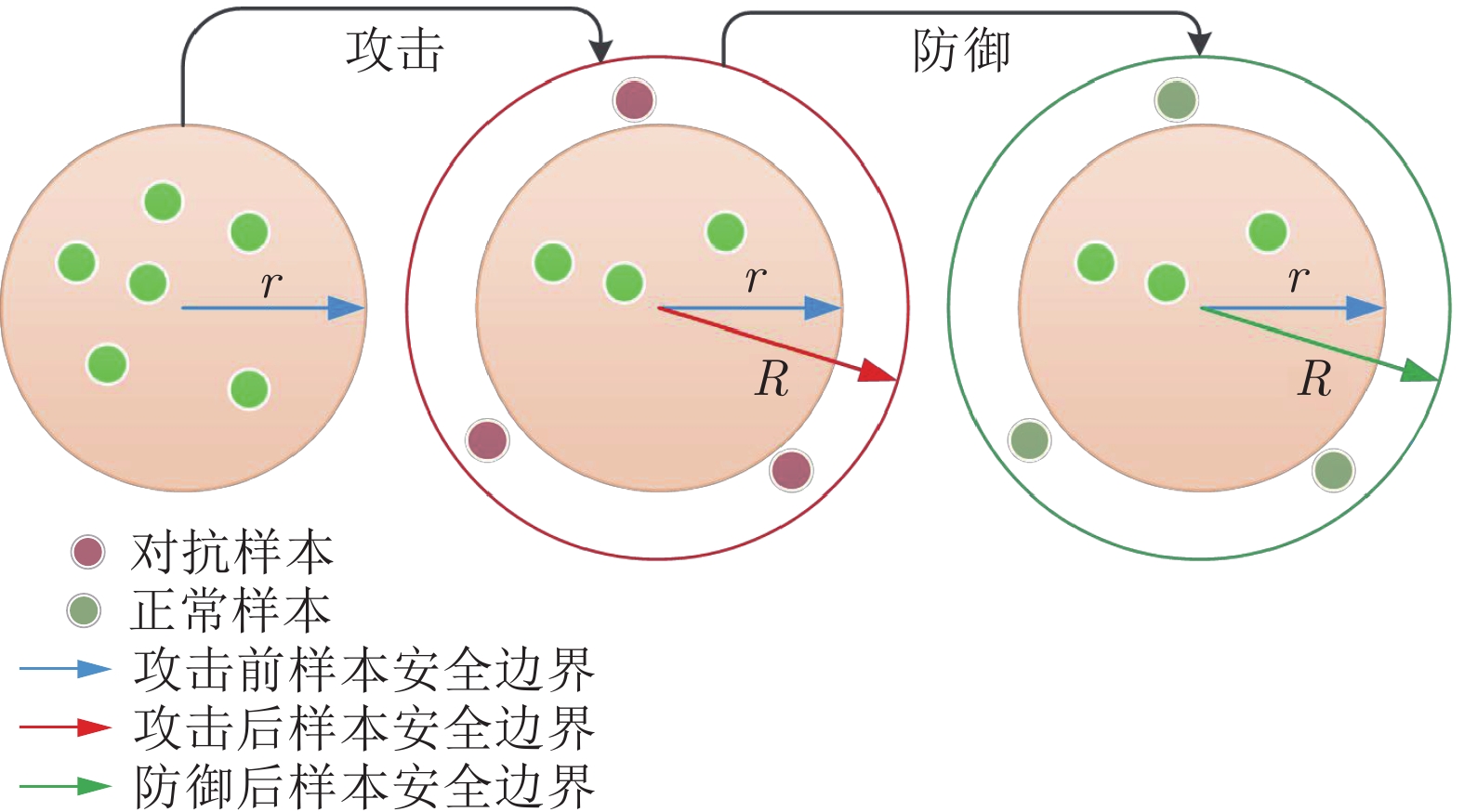
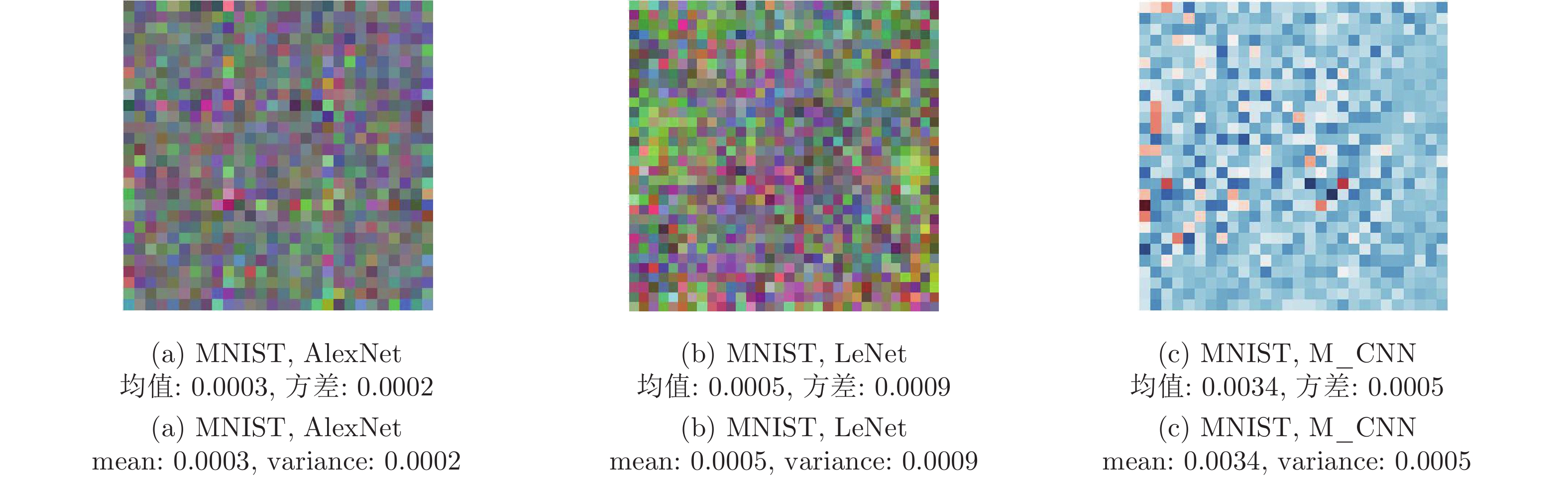
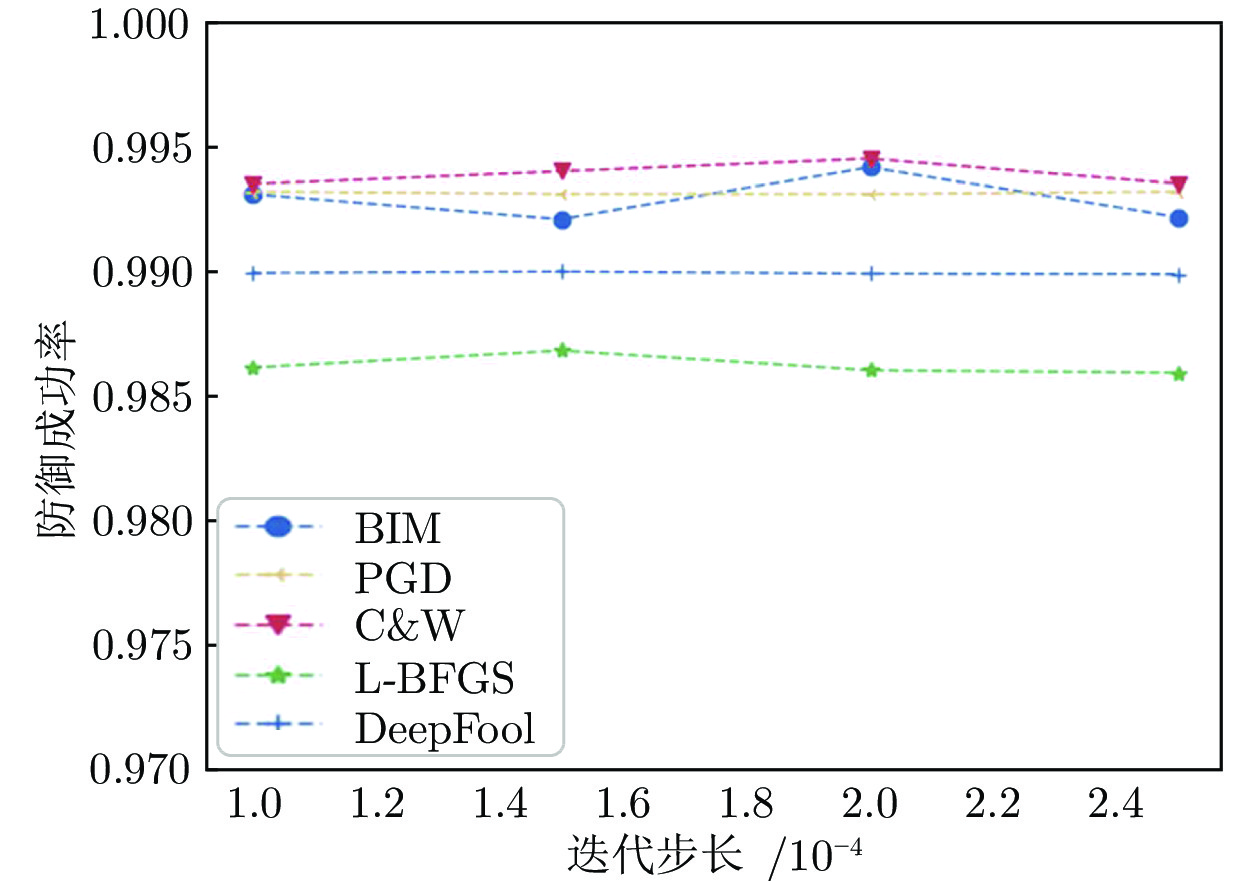
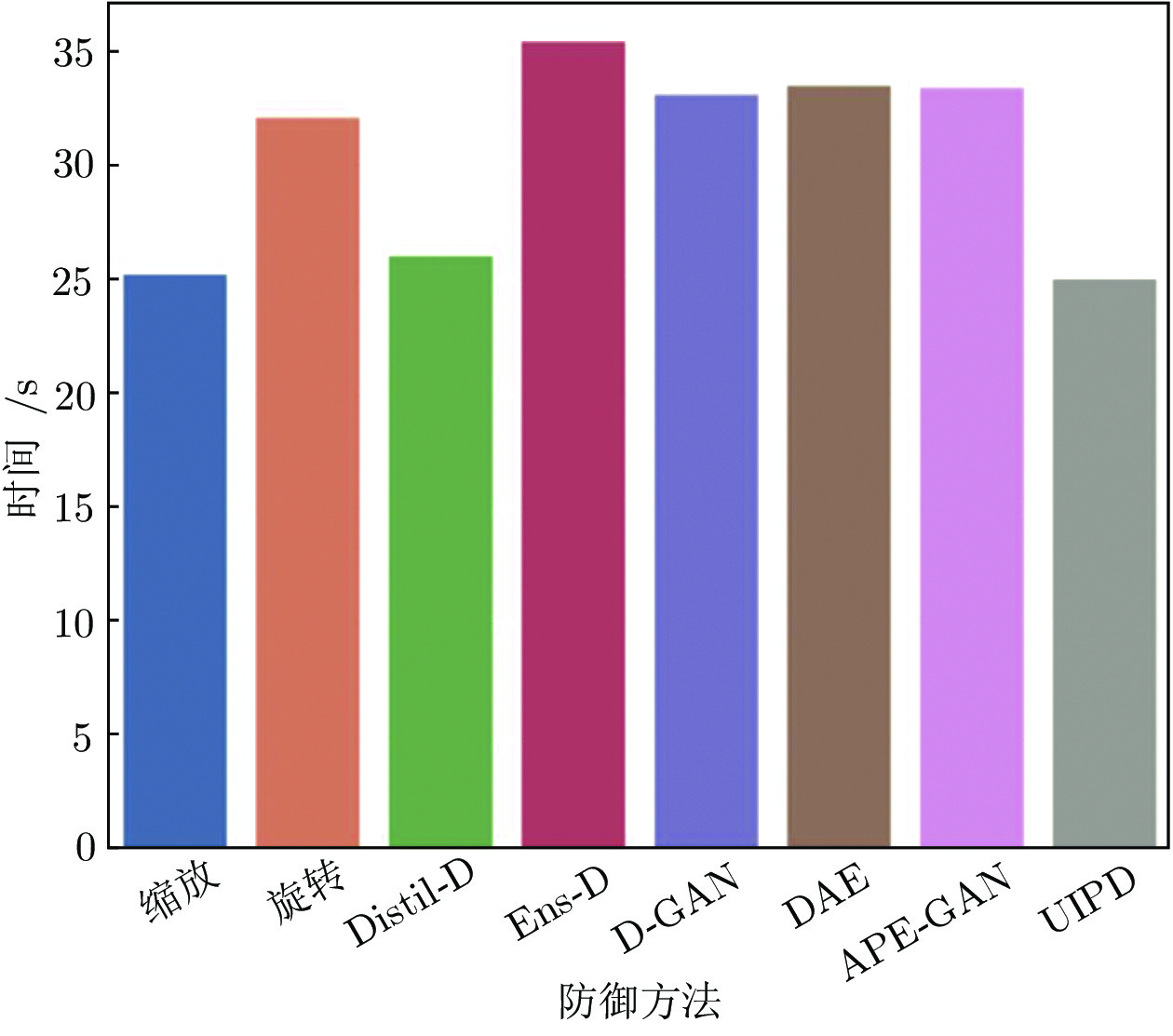
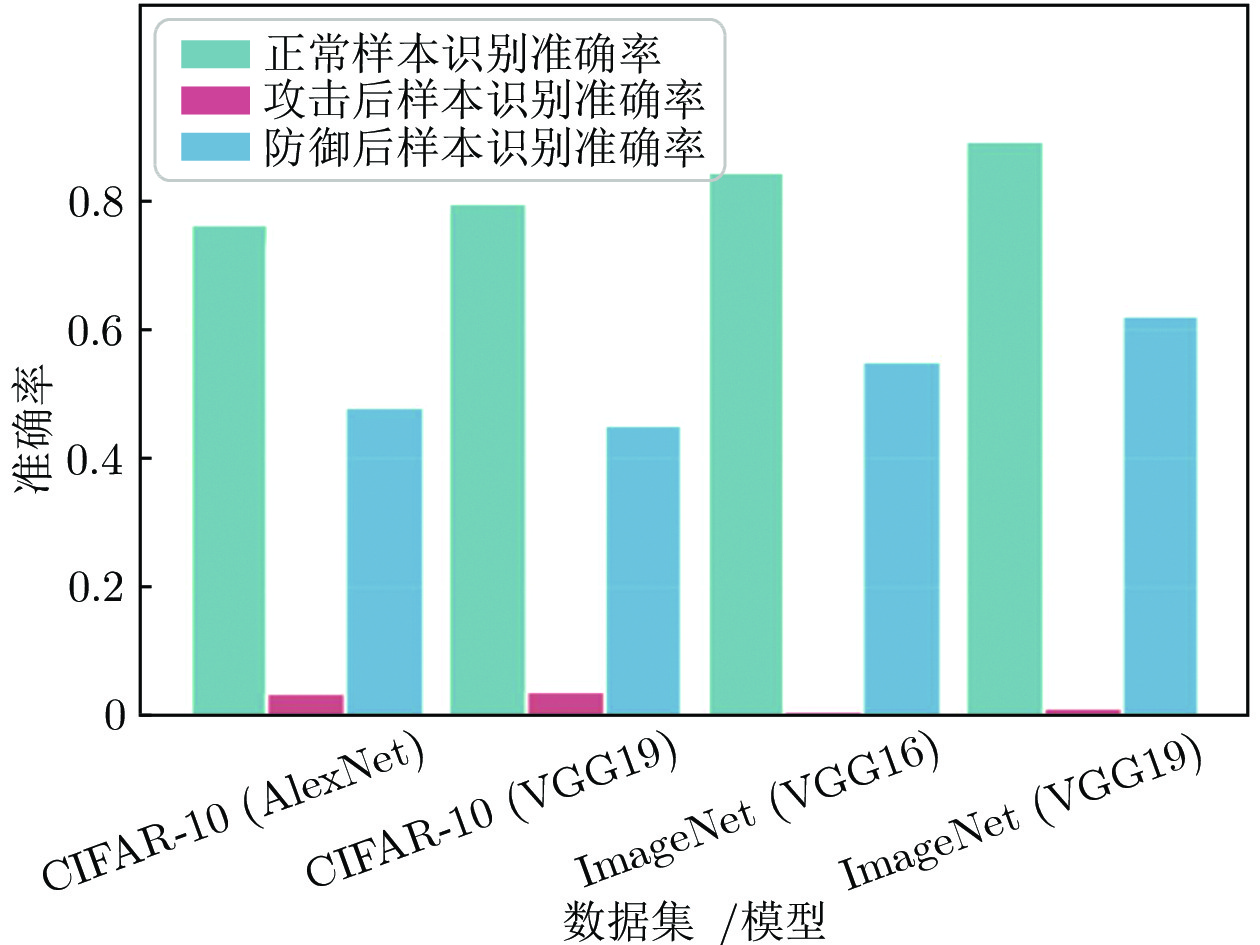
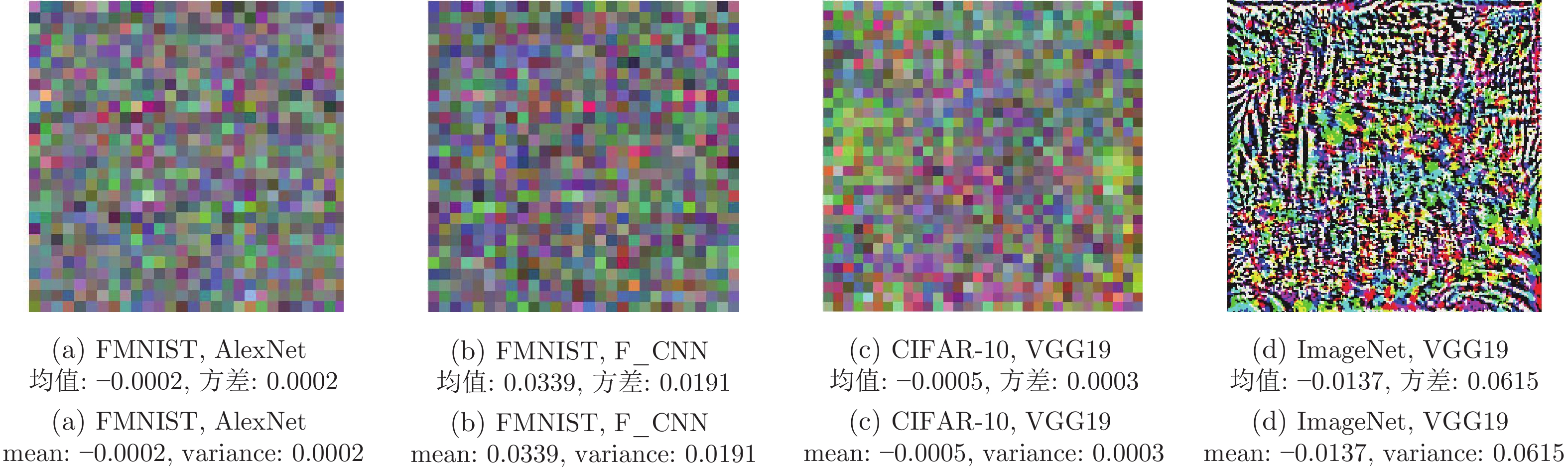
现有研究表明深度学习模型容易受到精心设计的对抗样本攻击, 从而导致模型给出错误的推理结果, 引发潜在的安全威胁. 已有较多有效的防御方法, 其中大多数针对特定攻击方法具有较好防御效果, 但由于实际应用中无法预知攻击者可能采用的攻击策略, 因此提出不依赖攻击方法的通用防御方法是一个挑战. 为此, 提出一种基于通用逆扰动(Universal inverse perturbation, UIP)的对抗样本防御方法, 通过学习原始数据集中的类相关主要特征, 生成通用逆扰动, 且UIP对数据样本和攻击方法都具有通用性, 即一个UIP可以实现对不同攻击方法作用于整个数据集得到的所有对抗样本进行防御. 此外, UIP通过强化良性样本的类相关重要特征实现对良性样本精度的无影响, 且生成UIP无需对抗样本的先验知识. 通过大量实验验证, 表明UIP在不同数据集、不同模型中对各类攻击方法都具备显著的防御效果, 且提升了模型对正常样本的分类性能.
现有研究表明深度学习模型容易受到精心设计的对抗样本攻击, 从而导致模型给出错误的推理结果, 引发潜在的安全威胁. 已有较多有效的防御方法, 其中大多数针对特定攻击方法具有较好防御效果, 但由于实际应用中无法预知攻击者可能采用的攻击策略, 因此提出不依赖攻击方法的通用防御方法是一个挑战. 为此, 提出一种基于通用逆扰动(Universal inverse perturbation, UIP)的对抗样本防御方法, 通过学习原始数据集中的类相关主要特征, 生成通用逆扰动, 且UIP对数据样本和攻击方法都具有通用性, 即一个UIP可以实现对不同攻击方法作用于整个数据集得到的所有对抗样本进行防御. 此外, UIP通过强化良性样本的类相关重要特征实现对良性样本精度的无影响, 且生成UIP无需对抗样本的先验知识. 通过大量实验验证, 表明UIP在不同数据集、不同模型中对各类攻击方法都具备显著的防御效果, 且提升了模型对正常样本的分类性能.
2023, 49(10): 2188-2200.
doi: 10.16383/j.aas.c200604
cstr: 32138.14.j.aas.c200604
摘要:
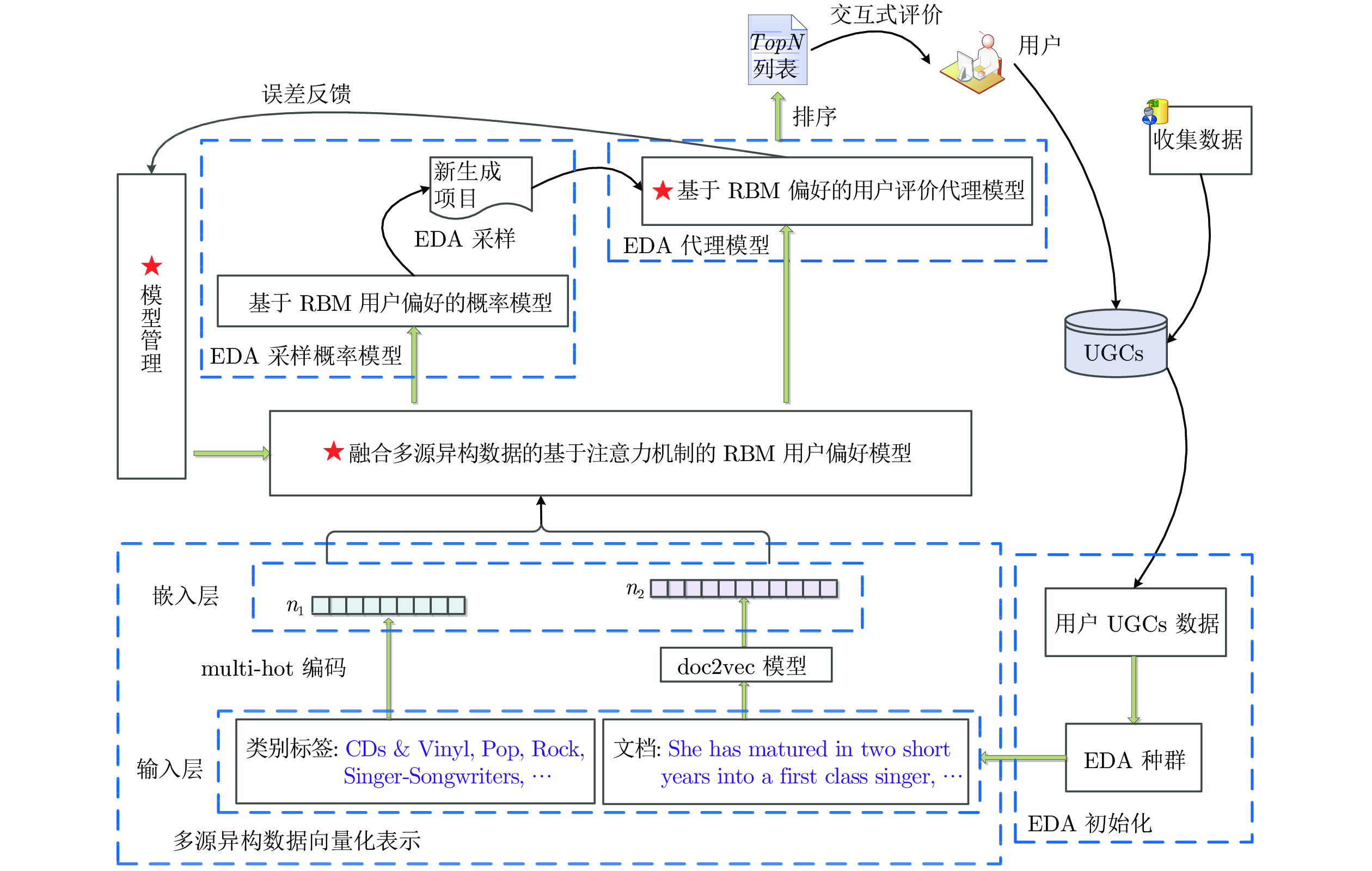
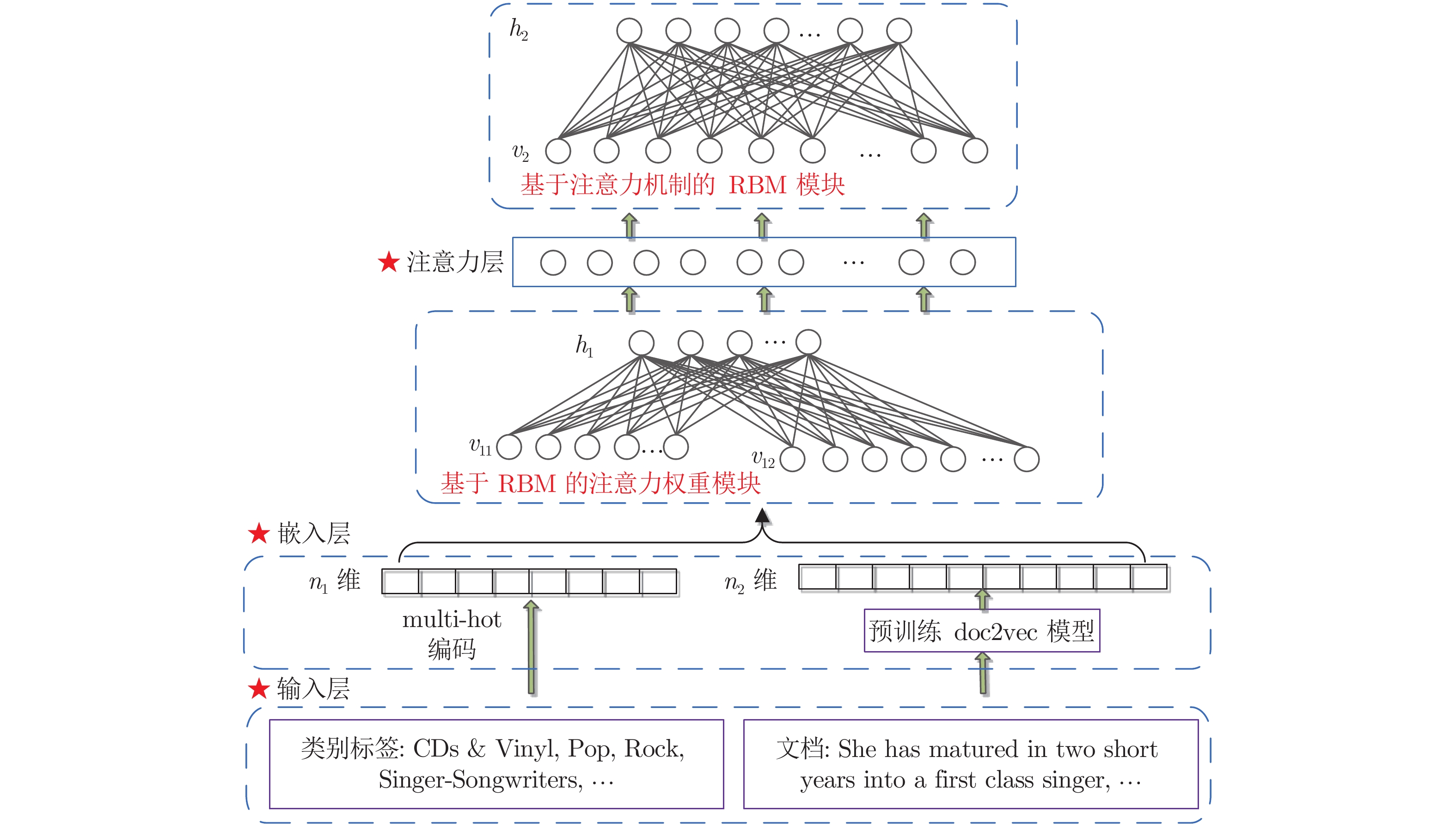
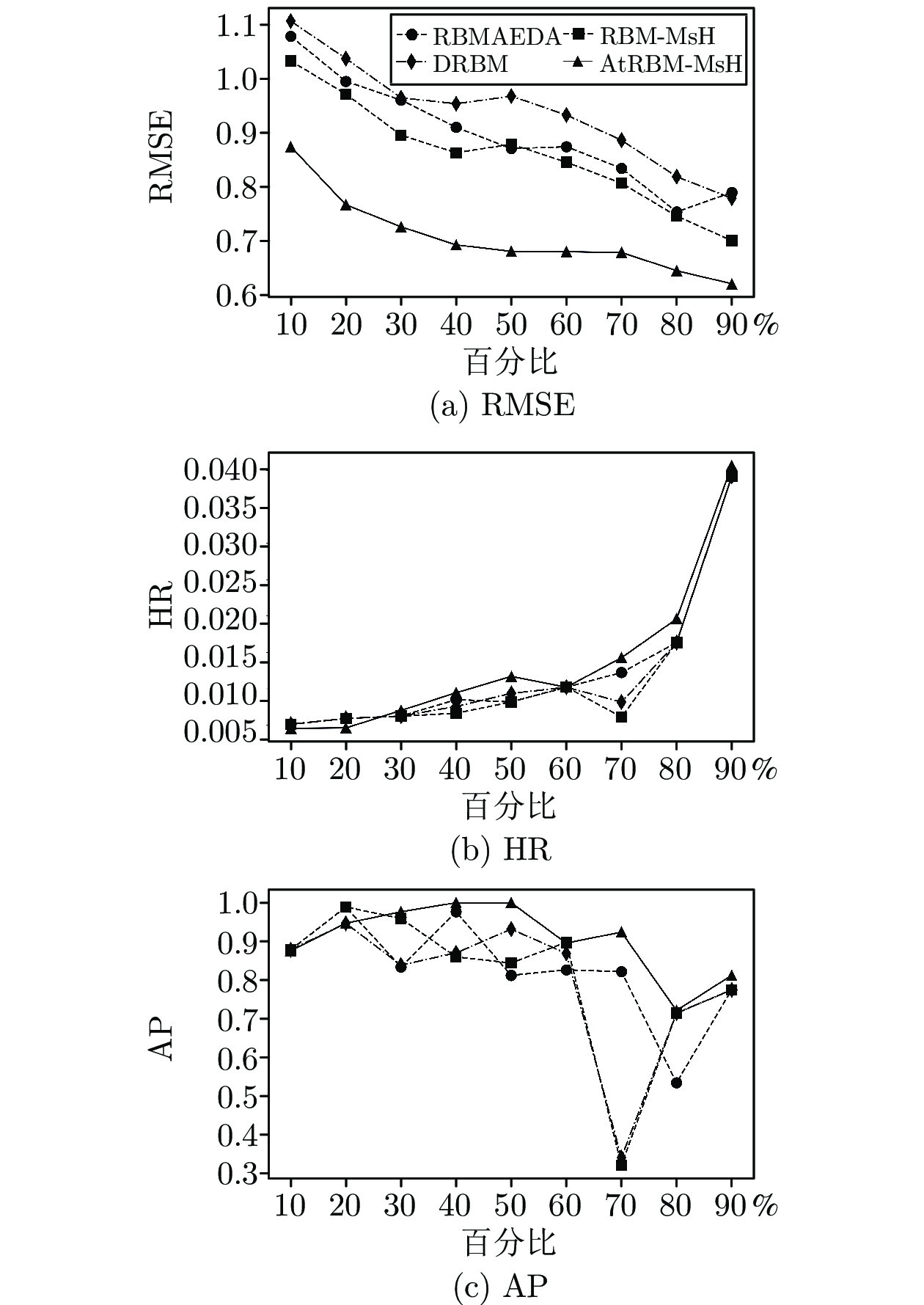
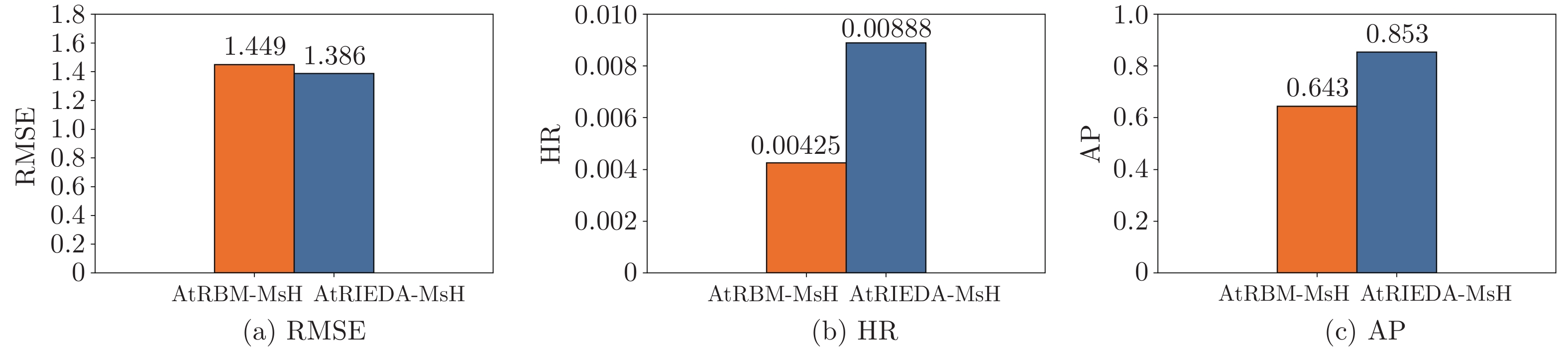
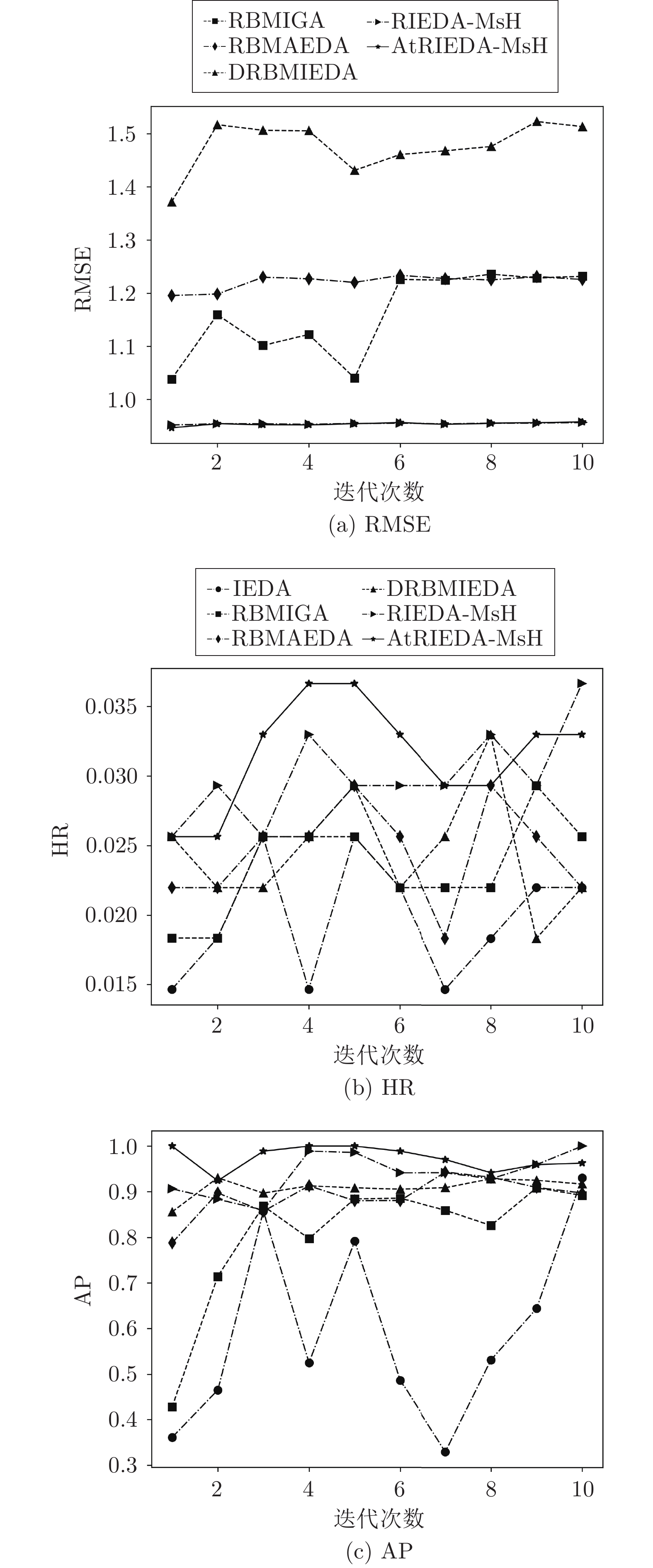
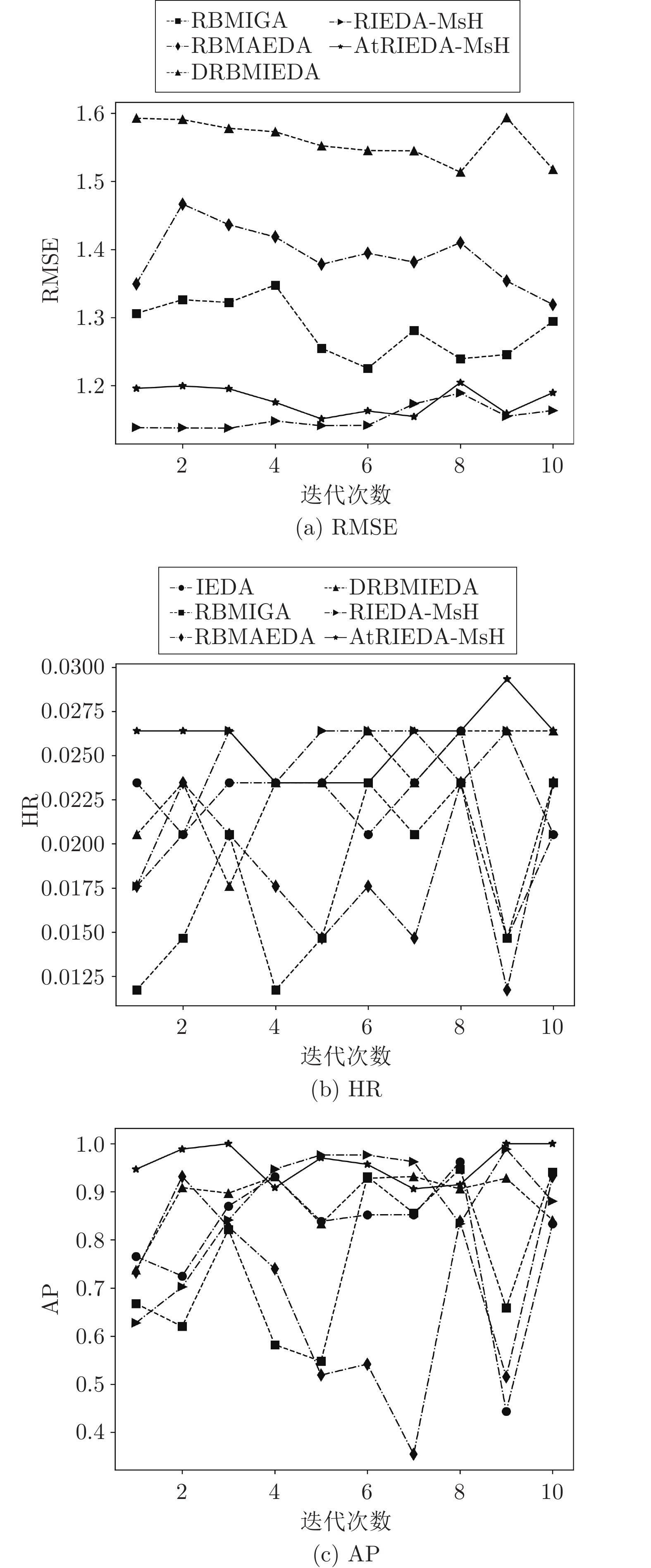
面向用户生成内容(User generated content, UGC)的进化搜索在大数据及个性化服务领域已引起广泛关注, 其关键在于基于多源异构用户生成内容构建用户认知偏好模型, 进而设计高效的进化搜索机制. 针对此, 提出融合注意力机制(Attention mechanism, AM)的受限玻尔兹曼机(Restricted Boltzmann machine, RBM)偏好认知代理模型构建机制, 并应用于交互式分布估计算法(Interactive estimation of distribution algorithm, IEDA), 设计含用户生成内容的个性化进化搜索策略. 基于用户群体提供的文本评论, 以及搜索物品的类别文本, 构建无监督受限玻尔兹曼机模型提取广义特征; 设计注意力机制, 融合广义特征, 获取对用户认知偏好高度相关特征的集成; 利用该特征再次训练受限玻尔兹曼机, 实现对用户偏好认知代理模型的构建; 根据用户偏好认知代理模型, 给出交互式分布估计算法概率更新模型以及物品适应度评价函数, 实现物品个性化进化搜索. 算法在亚马逊个性化搜索实例的应用验证了用户认知偏好模型的可靠性, 以及个性化进化搜索的有效性.
面向用户生成内容(User generated content, UGC)的进化搜索在大数据及个性化服务领域已引起广泛关注, 其关键在于基于多源异构用户生成内容构建用户认知偏好模型, 进而设计高效的进化搜索机制. 针对此, 提出融合注意力机制(Attention mechanism, AM)的受限玻尔兹曼机(Restricted Boltzmann machine, RBM)偏好认知代理模型构建机制, 并应用于交互式分布估计算法(Interactive estimation of distribution algorithm, IEDA), 设计含用户生成内容的个性化进化搜索策略. 基于用户群体提供的文本评论, 以及搜索物品的类别文本, 构建无监督受限玻尔兹曼机模型提取广义特征; 设计注意力机制, 融合广义特征, 获取对用户认知偏好高度相关特征的集成; 利用该特征再次训练受限玻尔兹曼机, 实现对用户偏好认知代理模型的构建; 根据用户偏好认知代理模型, 给出交互式分布估计算法概率更新模型以及物品适应度评价函数, 实现物品个性化进化搜索. 算法在亚马逊个性化搜索实例的应用验证了用户认知偏好模型的可靠性, 以及个性化进化搜索的有效性.
2023, 49(10): 2201-2210.
doi: 10.16383/j.aas.c210091
cstr: 32138.14.j.aas.c210091
摘要:
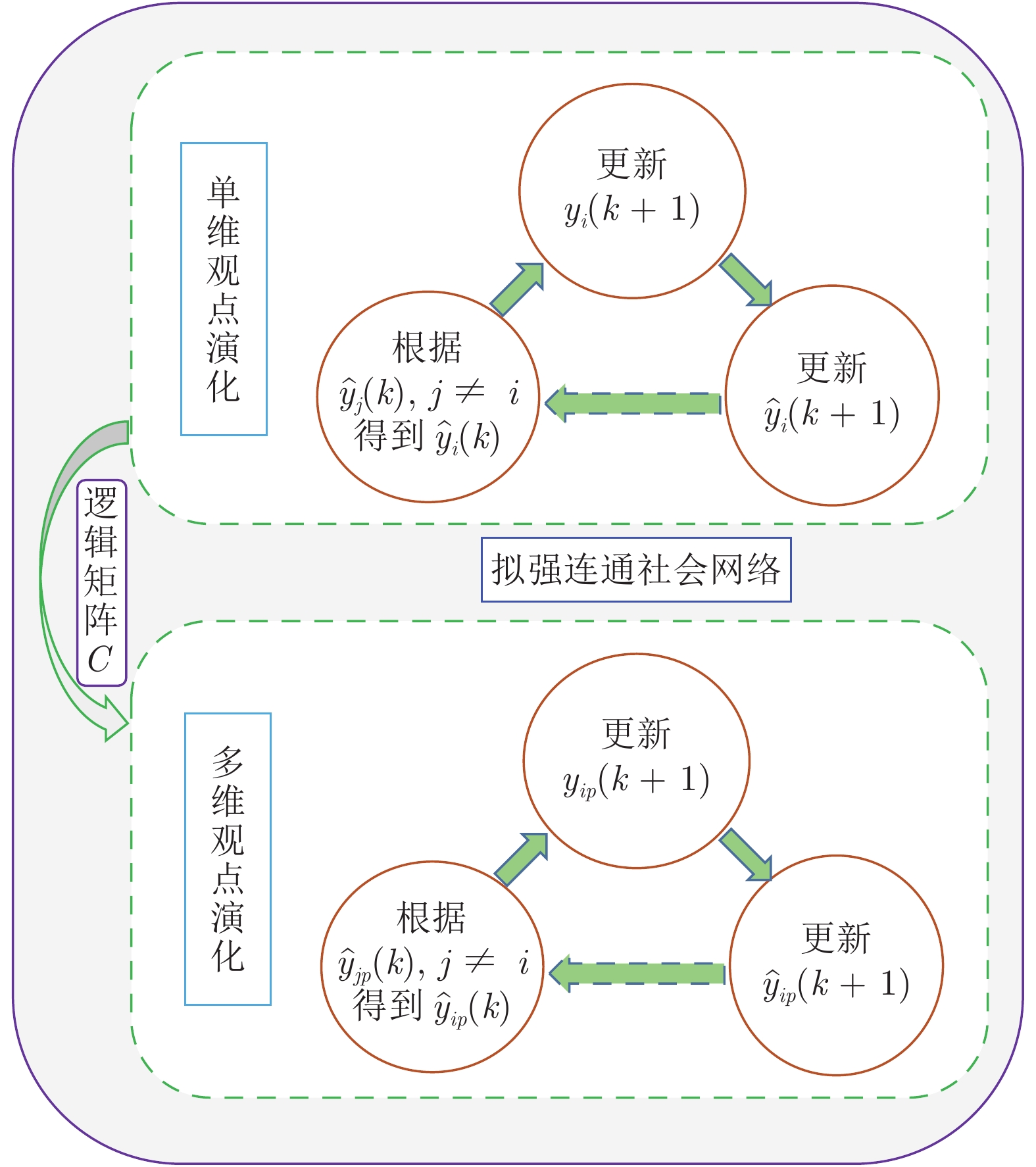
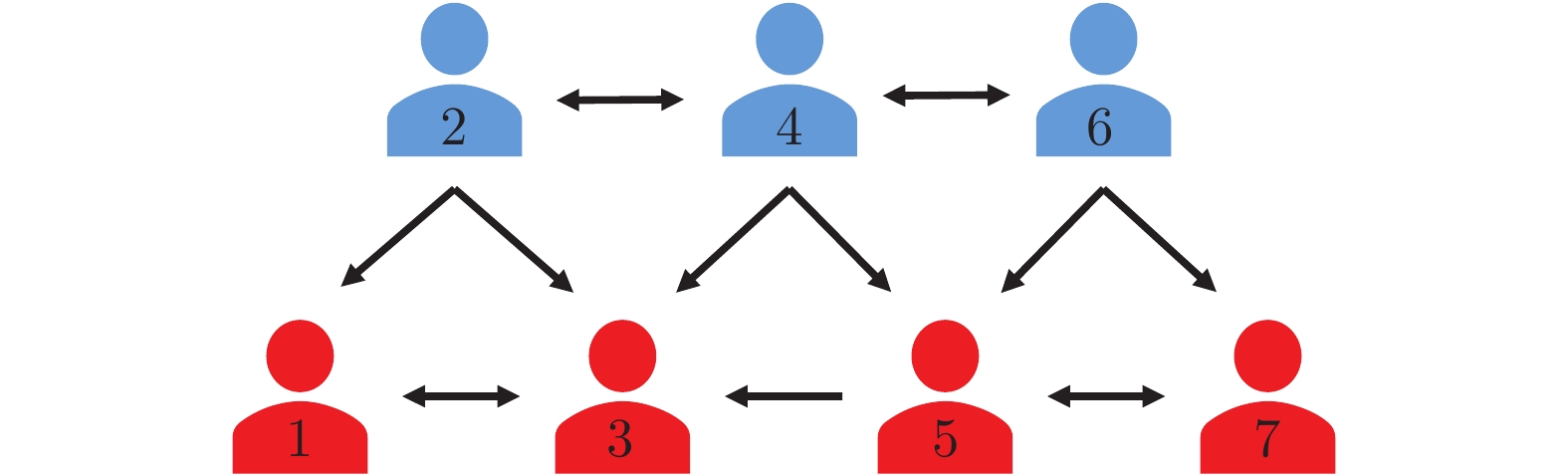
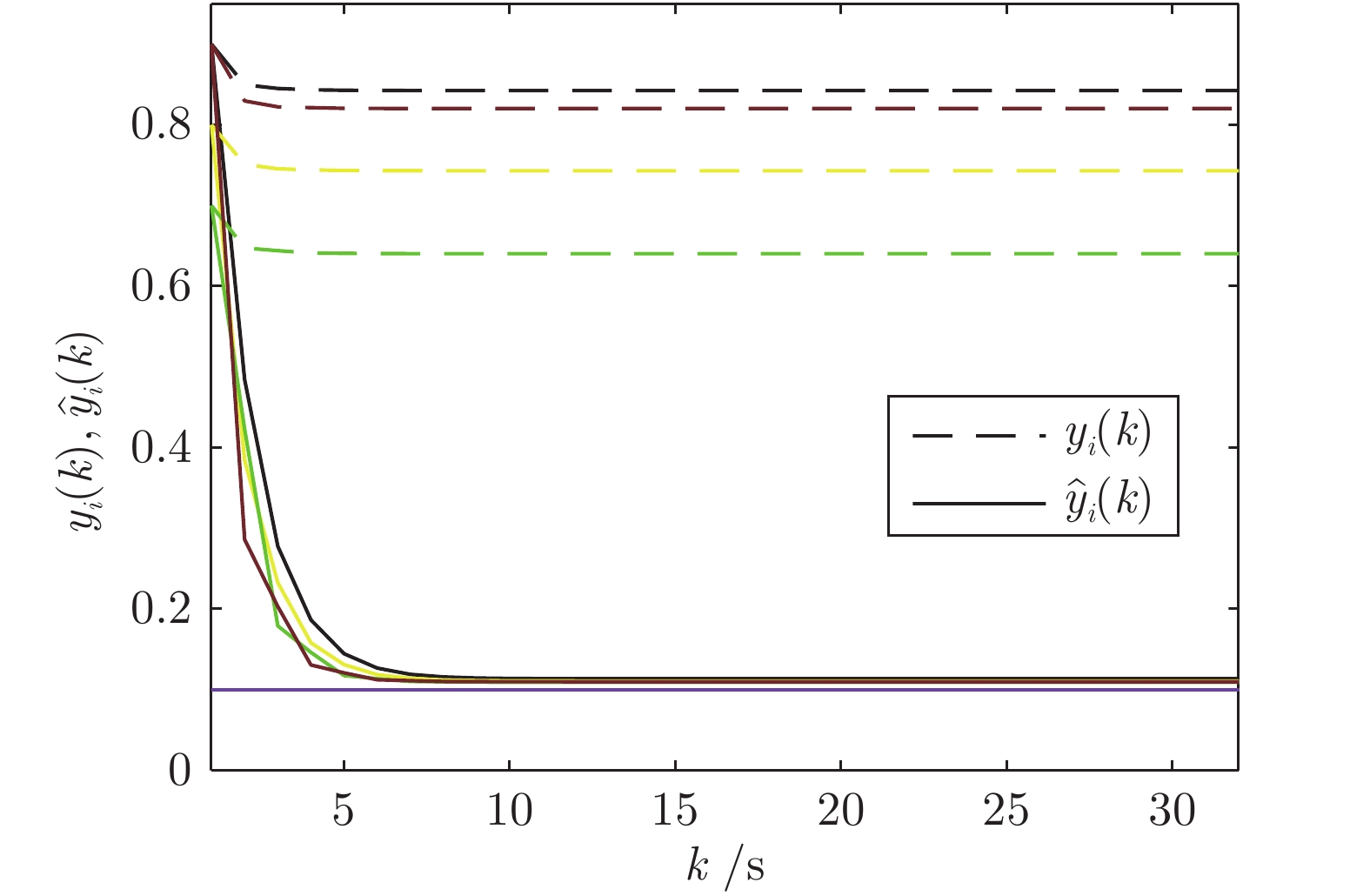
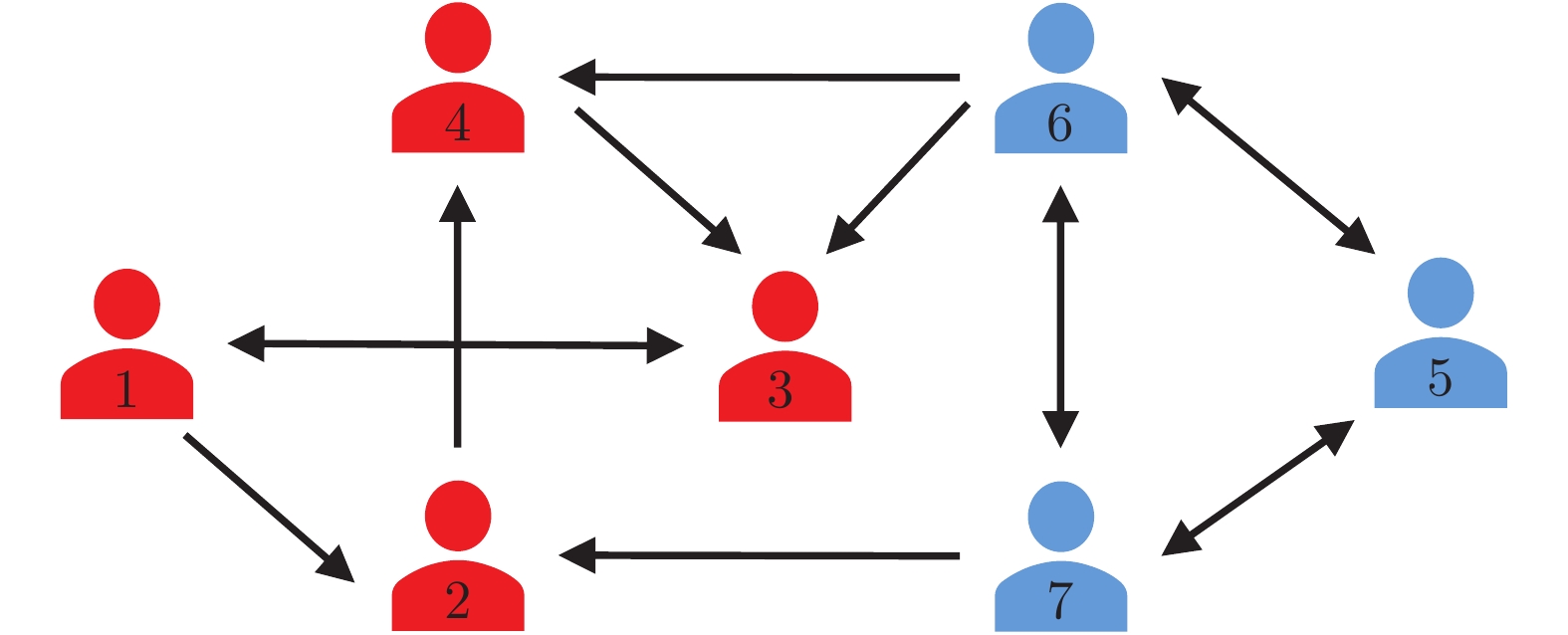
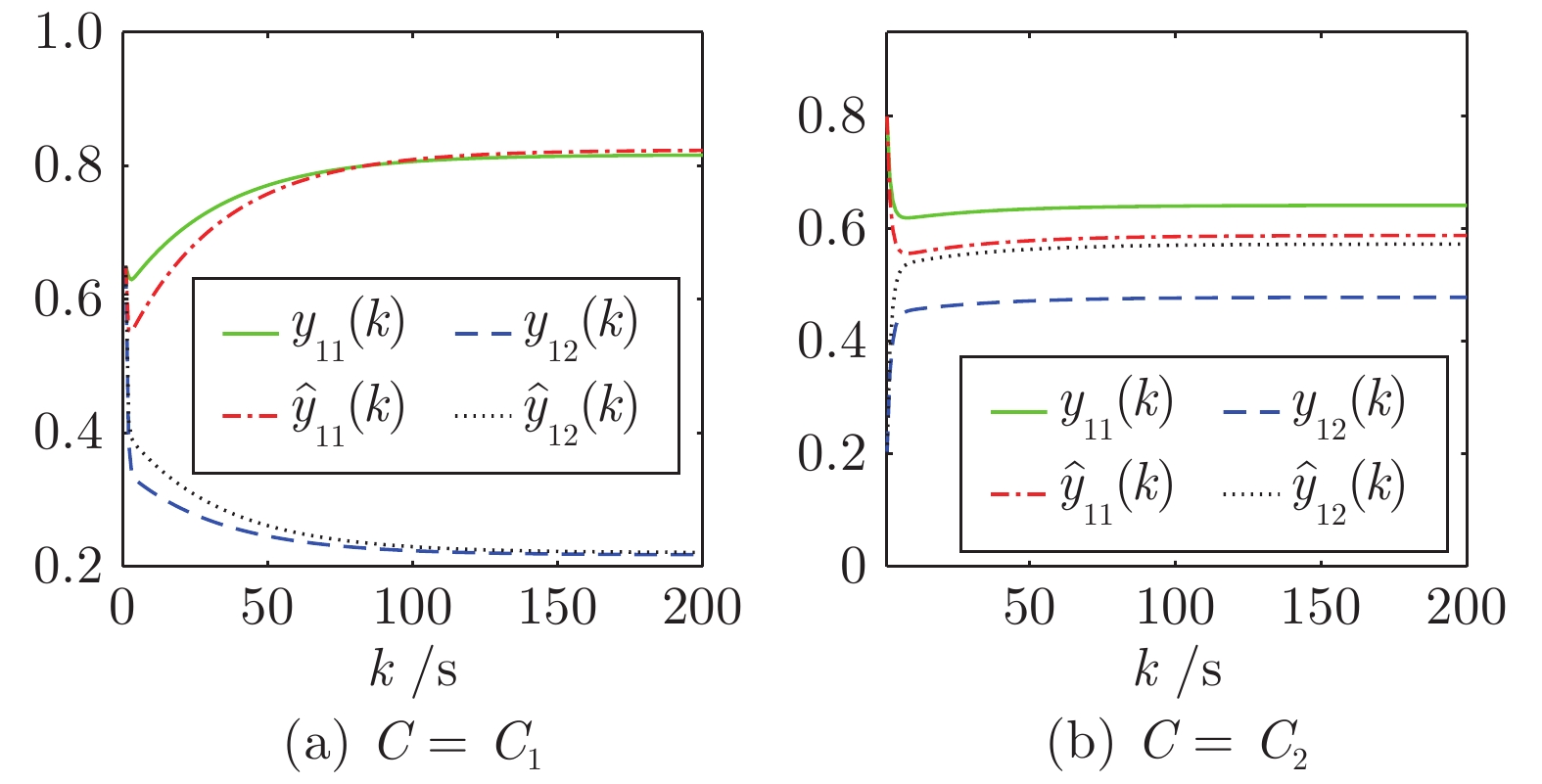
在个体观点演化过程中, 由于通讯技术和实际环境的限制, 个体之间往往不能进行充分的交流. 另一方面, 由于社会群体的从众压力影响, 个体会改变已形成的观点. 为此, 研究了具有遗忘个体和从众压力的拟强连通社会网络中表达/私人观点演化问题. 为刻画不同话题之间表达/私人观点的相互影响, 提出一个新的多维观点动力学模型. 根据逻辑矩阵和网络影响子矩阵的正则性, 给出表达观点和私人观点收敛的充分条件. 应用本文所提出的观点动力学模型, 复现了“多元无知”的社会现象. 仿真分析表明, 从众压力的恢复力越小, 表达观点与私人观点的差异越大.
在个体观点演化过程中, 由于通讯技术和实际环境的限制, 个体之间往往不能进行充分的交流. 另一方面, 由于社会群体的从众压力影响, 个体会改变已形成的观点. 为此, 研究了具有遗忘个体和从众压力的拟强连通社会网络中表达/私人观点演化问题. 为刻画不同话题之间表达/私人观点的相互影响, 提出一个新的多维观点动力学模型. 根据逻辑矩阵和网络影响子矩阵的正则性, 给出表达观点和私人观点收敛的充分条件. 应用本文所提出的观点动力学模型, 复现了“多元无知”的社会现象. 仿真分析表明, 从众压力的恢复力越小, 表达观点与私人观点的差异越大.
2023, 49(10): 2211-2223.
doi: 10.16383/j.aas.c220772
cstr: 32138.14.j.aas.c220772
摘要:
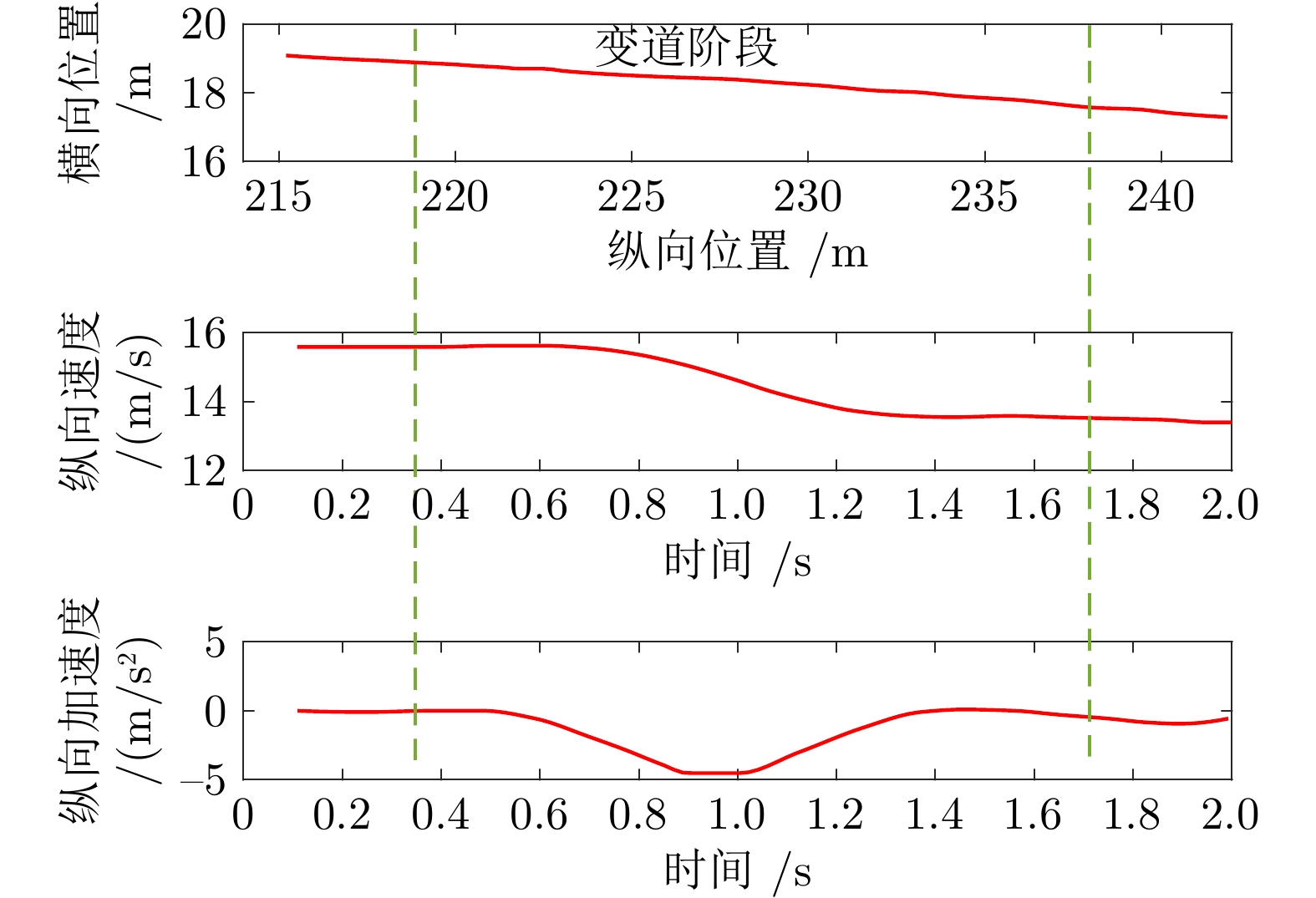
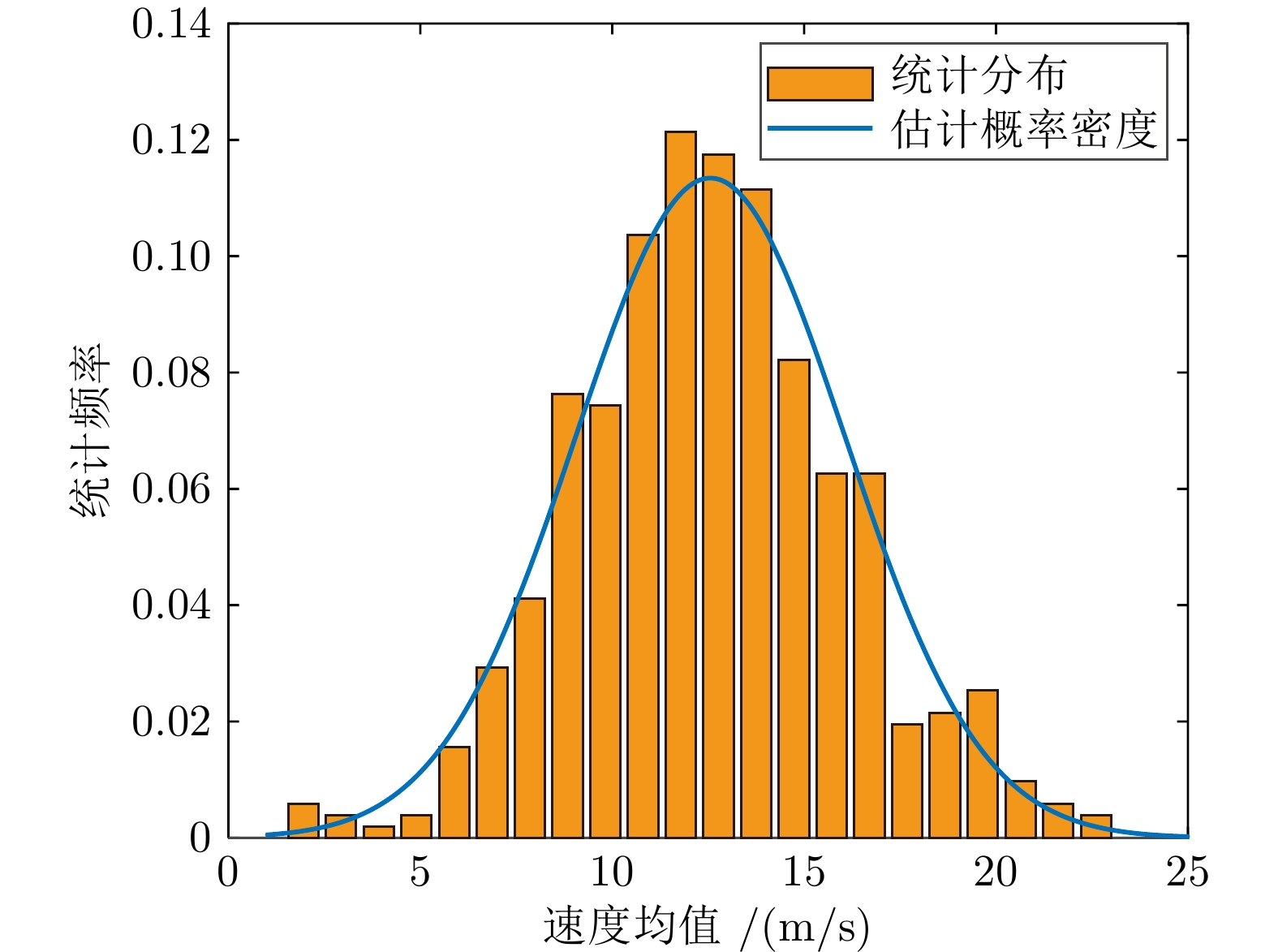
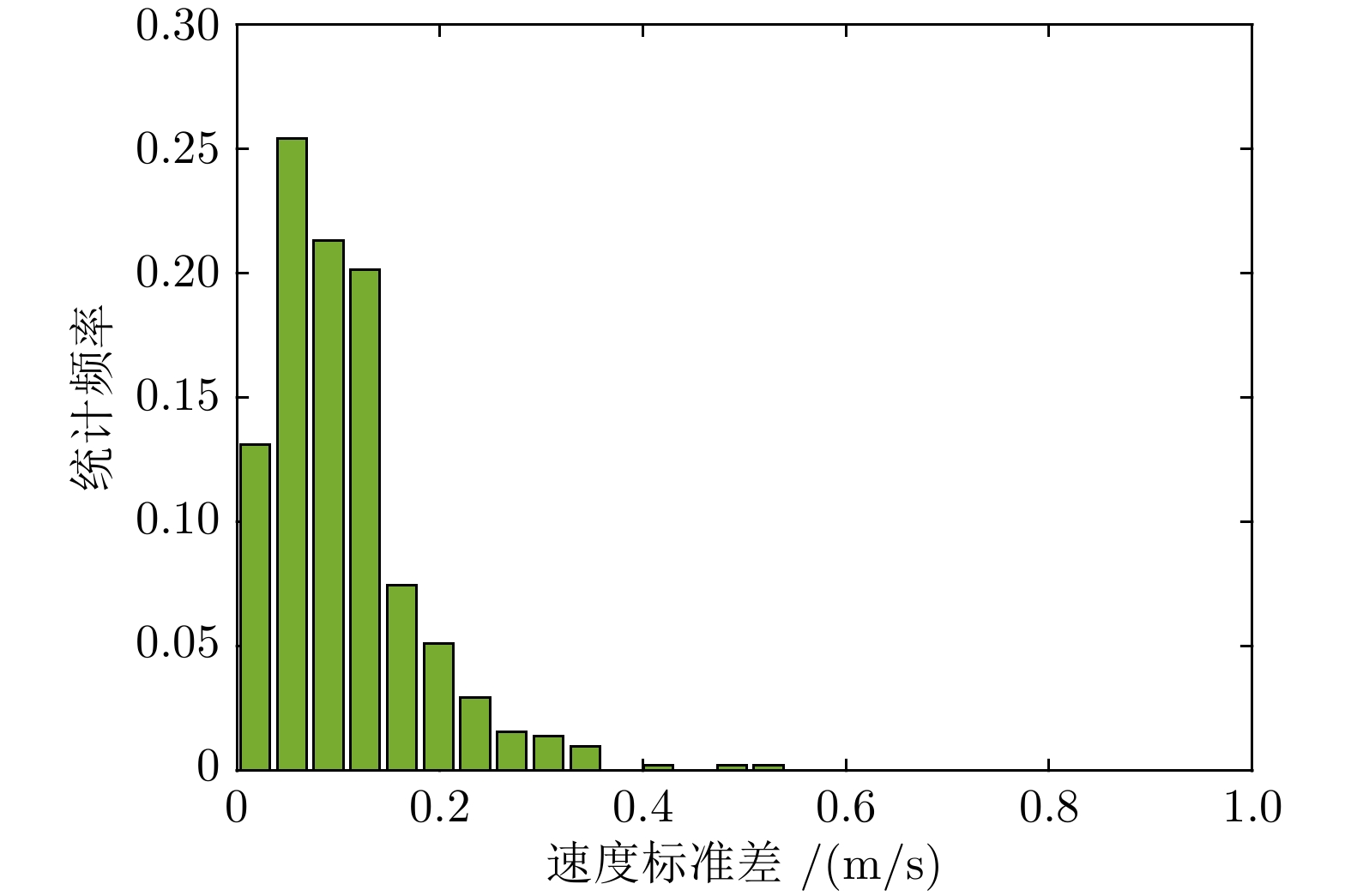
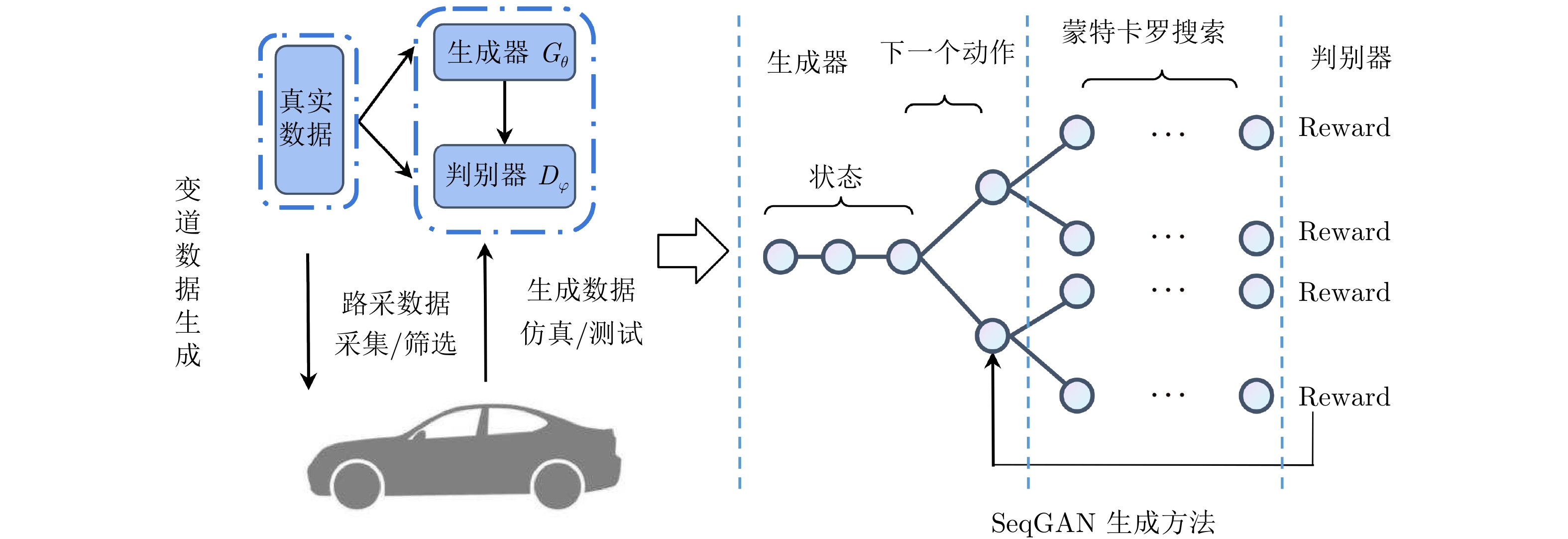
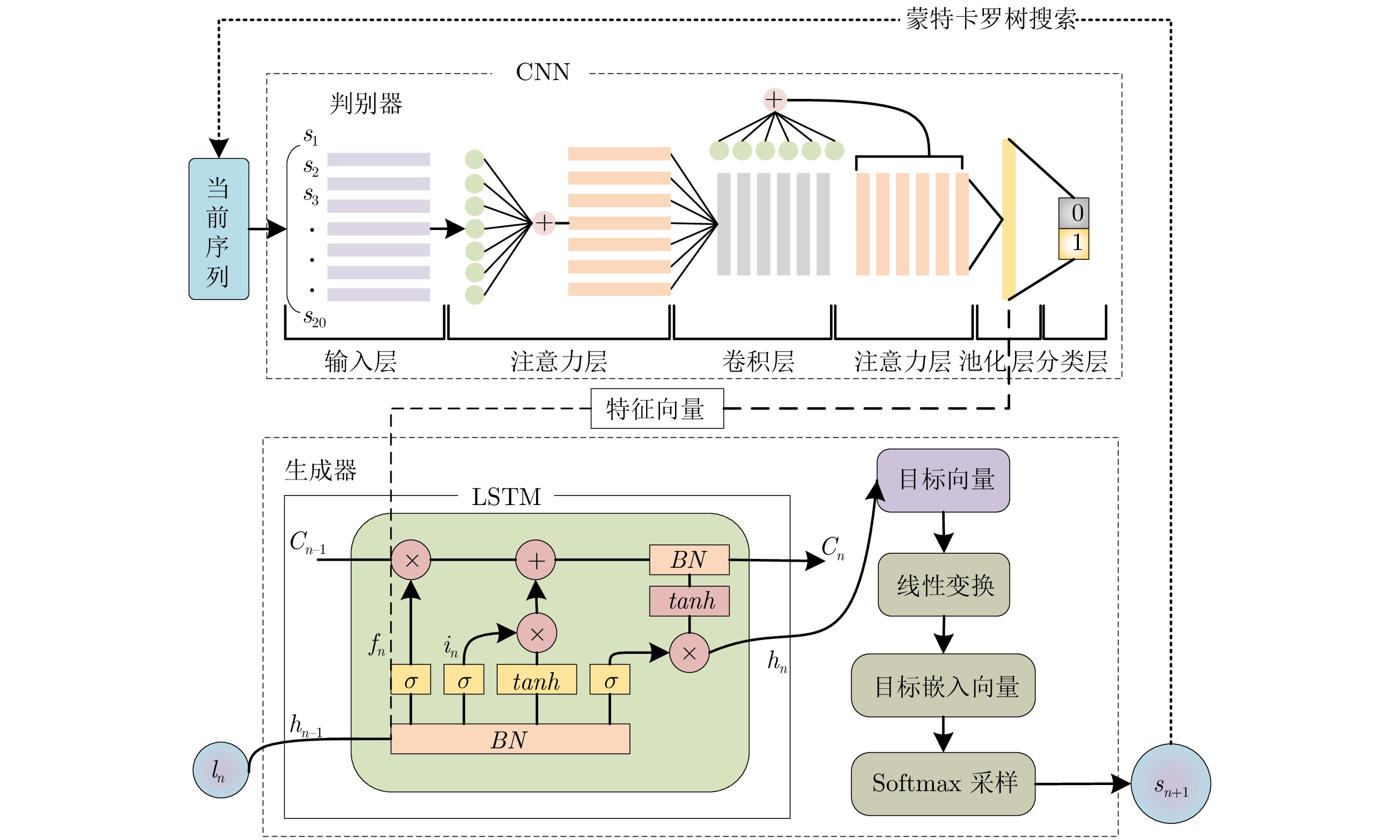
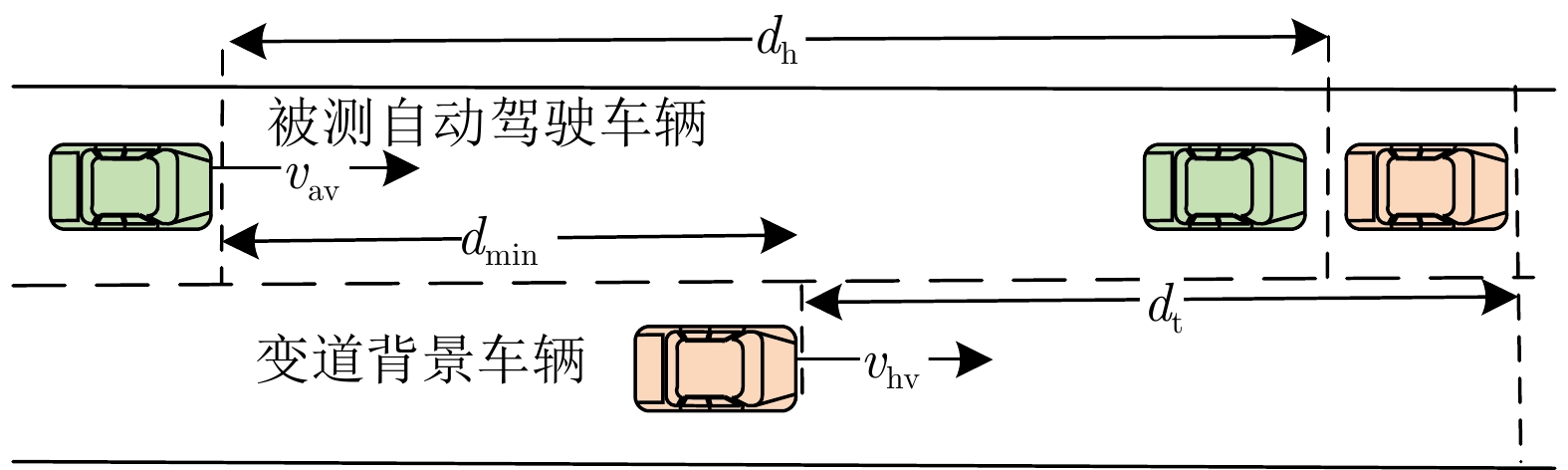
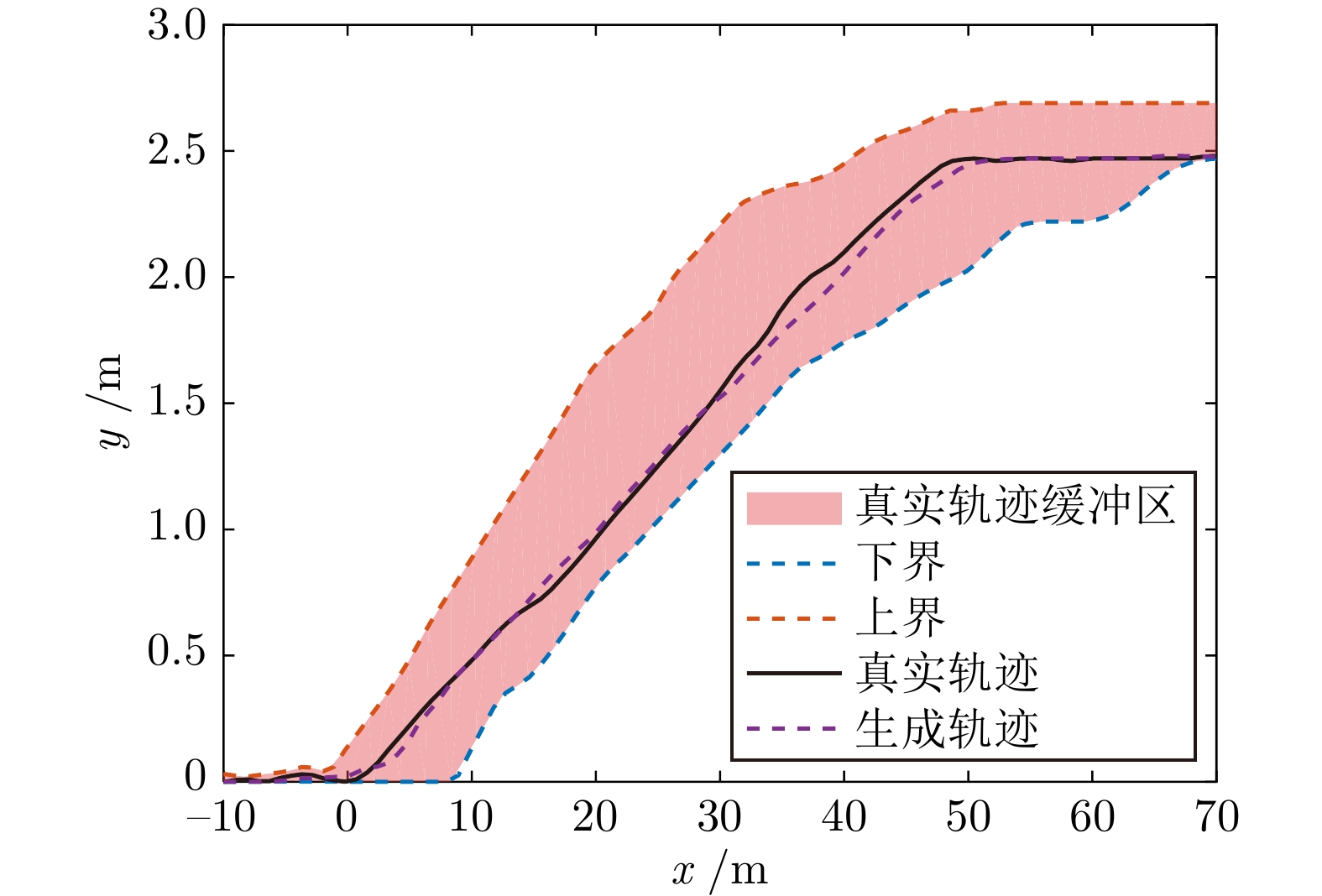
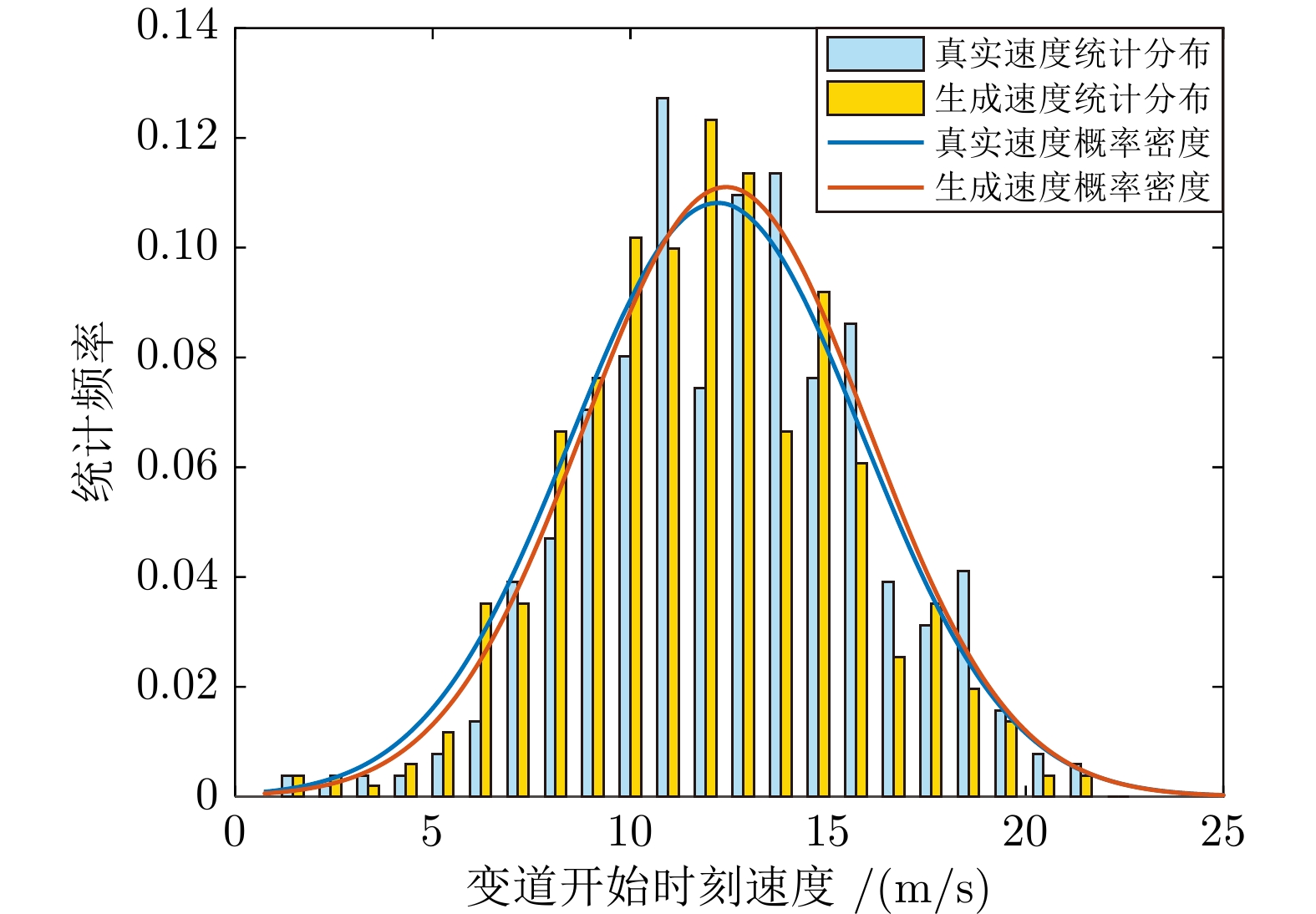
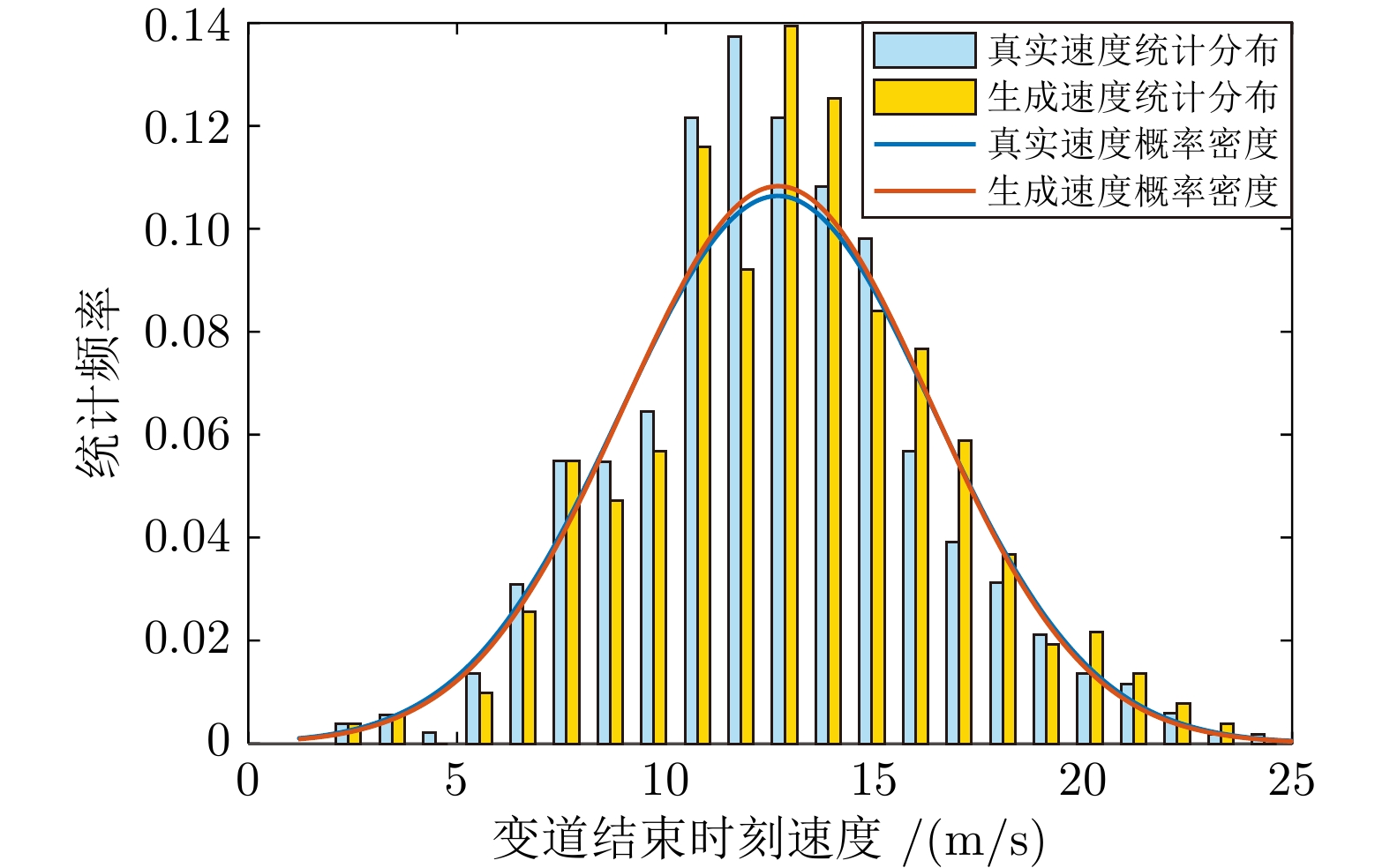
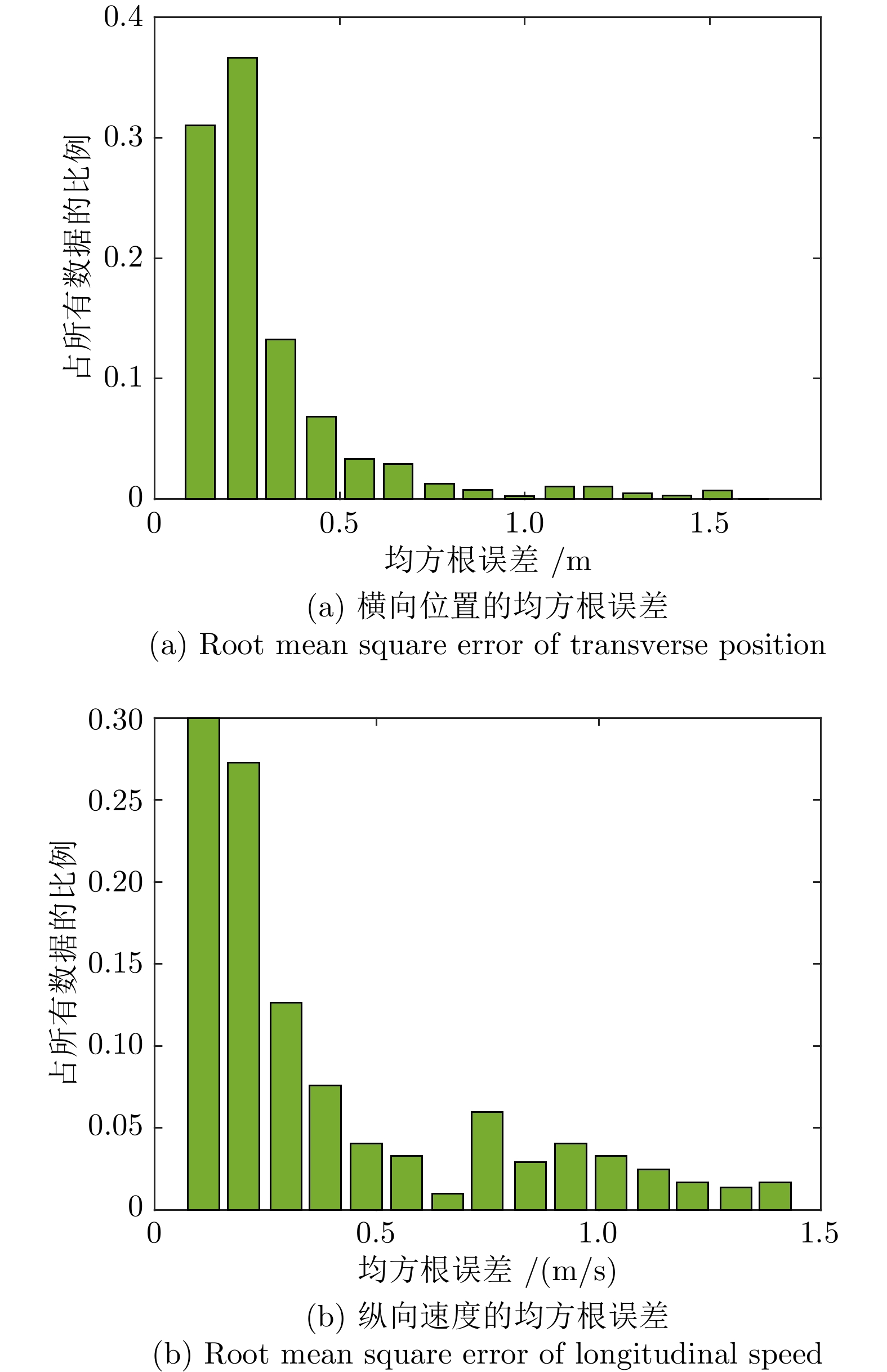
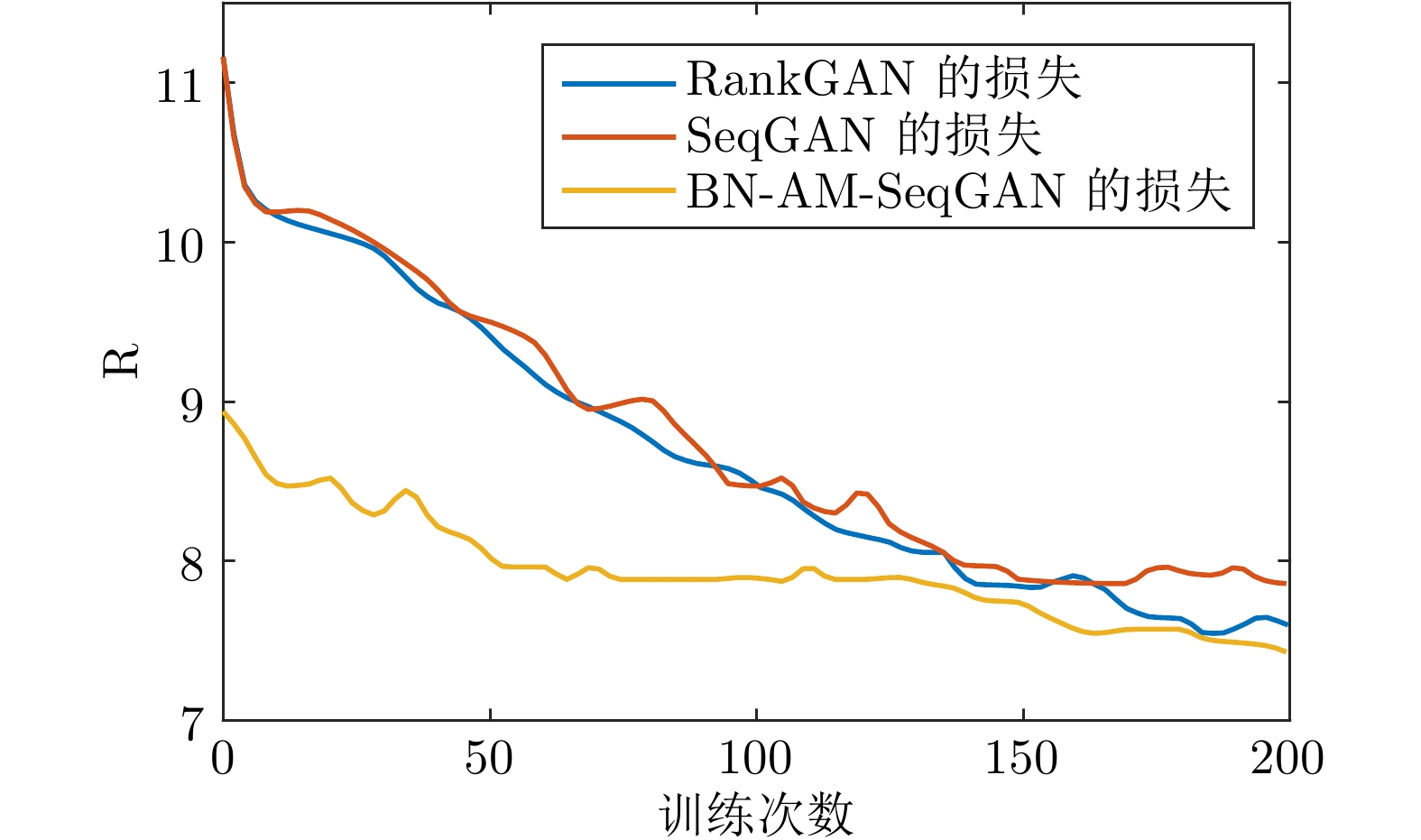
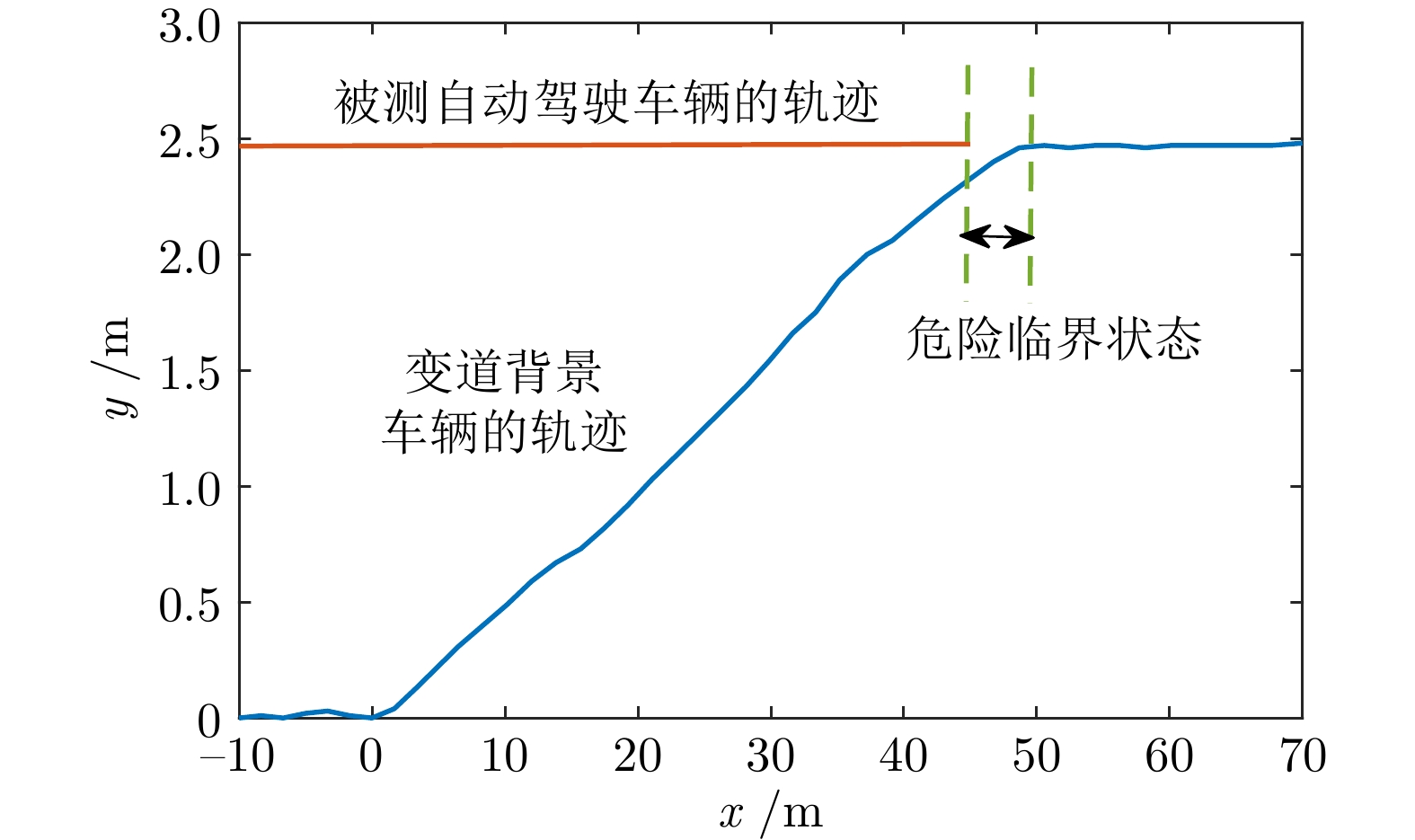
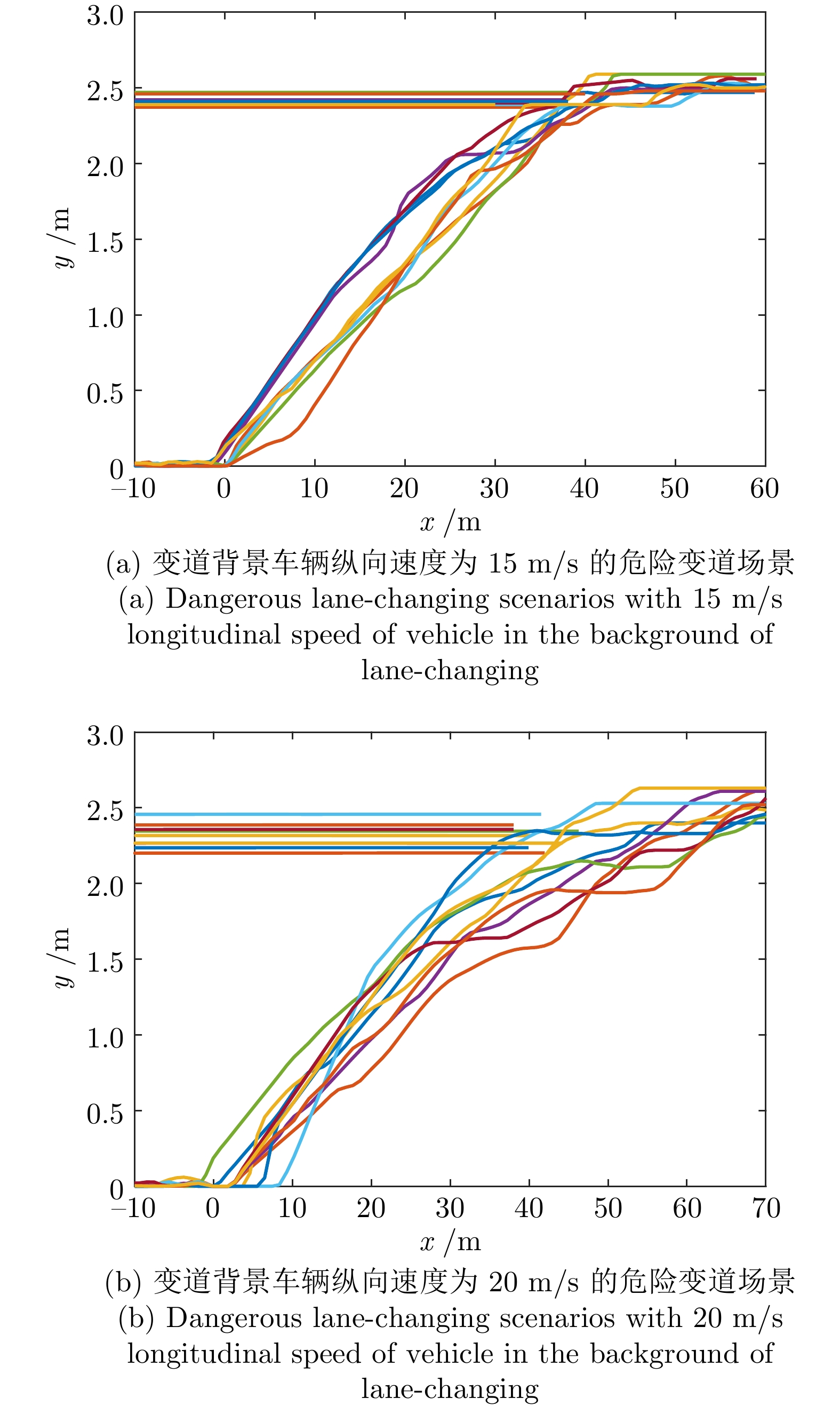
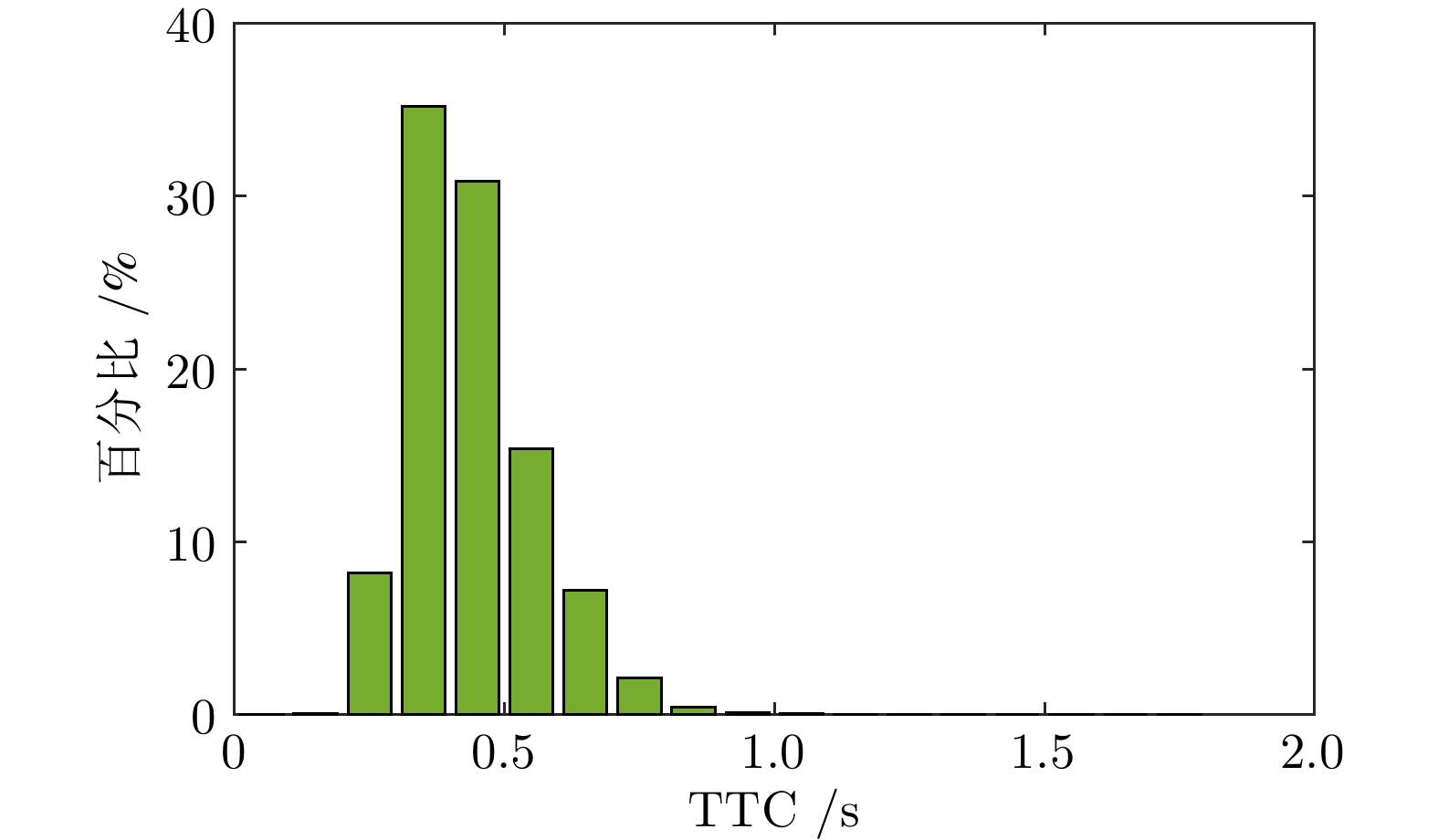
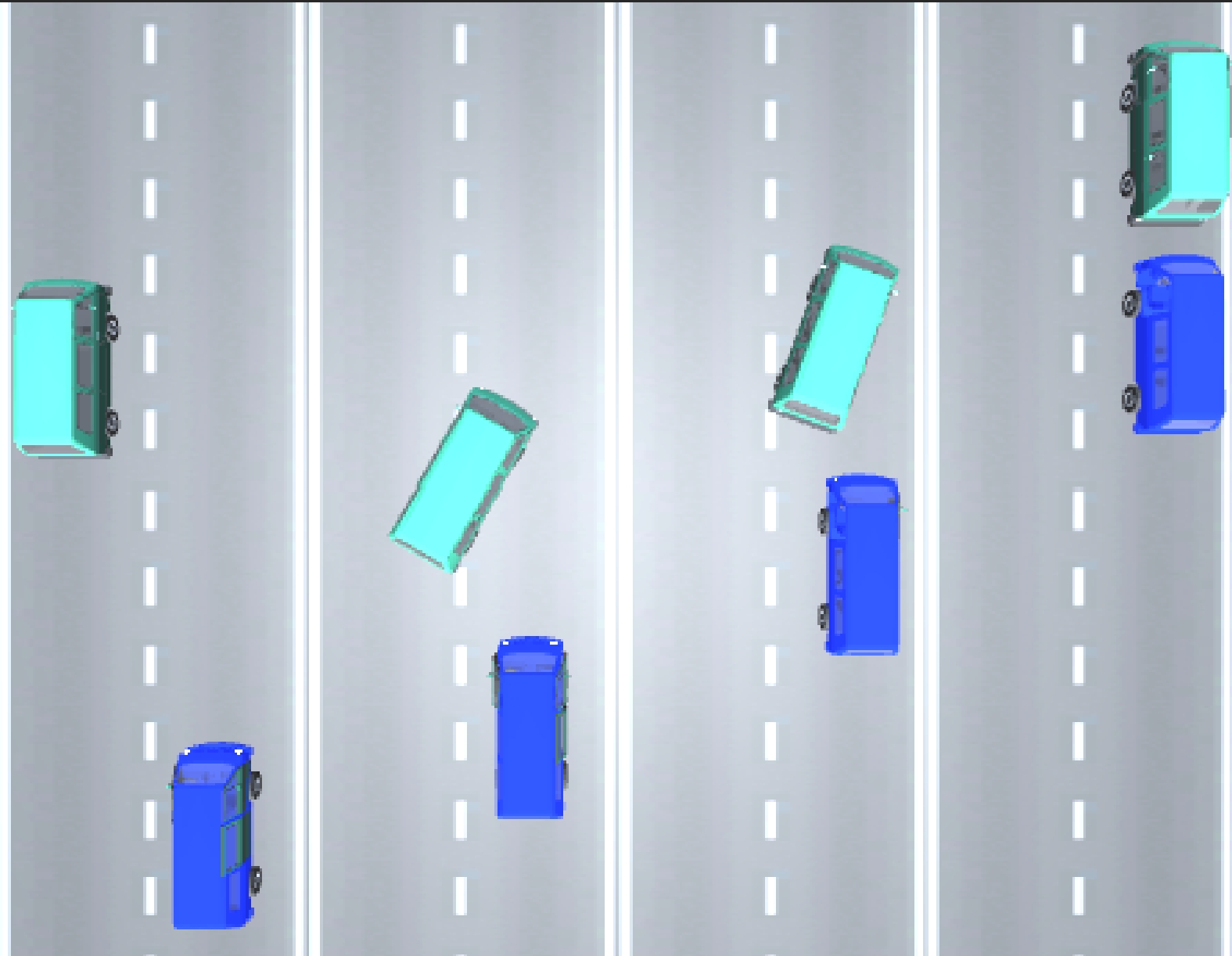
针对自动驾驶虚拟测试中危险变道场景构建问题, 提出一种数据−模型驱动的自动驾驶测试危险变道场景泛化生成方法. 基于 NGSIM US101 数据集中的紧急变道数据, 提出一种紧急变道轨迹对抗生成方法(BN-AM-SeqGAN), 构建基于安全距离的两车变道状态约束模型, 设计危险变道测试场景泛化生成方法, 生成危险变道测试场景库. 实验结果显示: 生成的5万条紧急变道轨迹变道完成时间分布的均方根误差为 0.63, 生成的 5 万个危险变道场景中, 99.54% 的场景被测自动驾驶车辆与变道背景车辆的碰撞时间小于 1 s, 表明该方法能够有效生成自动驾驶测试危险变道场景.
针对自动驾驶虚拟测试中危险变道场景构建问题, 提出一种数据−模型驱动的自动驾驶测试危险变道场景泛化生成方法. 基于 NGSIM US101 数据集中的紧急变道数据, 提出一种紧急变道轨迹对抗生成方法(BN-AM-SeqGAN), 构建基于安全距离的两车变道状态约束模型, 设计危险变道测试场景泛化生成方法, 生成危险变道测试场景库. 实验结果显示: 生成的5万条紧急变道轨迹变道完成时间分布的均方根误差为 0.63, 生成的 5 万个危险变道场景中, 99.54% 的场景被测自动驾驶车辆与变道背景车辆的碰撞时间小于 1 s, 表明该方法能够有效生成自动驾驶测试危险变道场景.
2023, 49(10): 2224-2236.
doi: 10.16383/j.aas.c220875
cstr: 32138.14.j.aas.c220875
摘要:
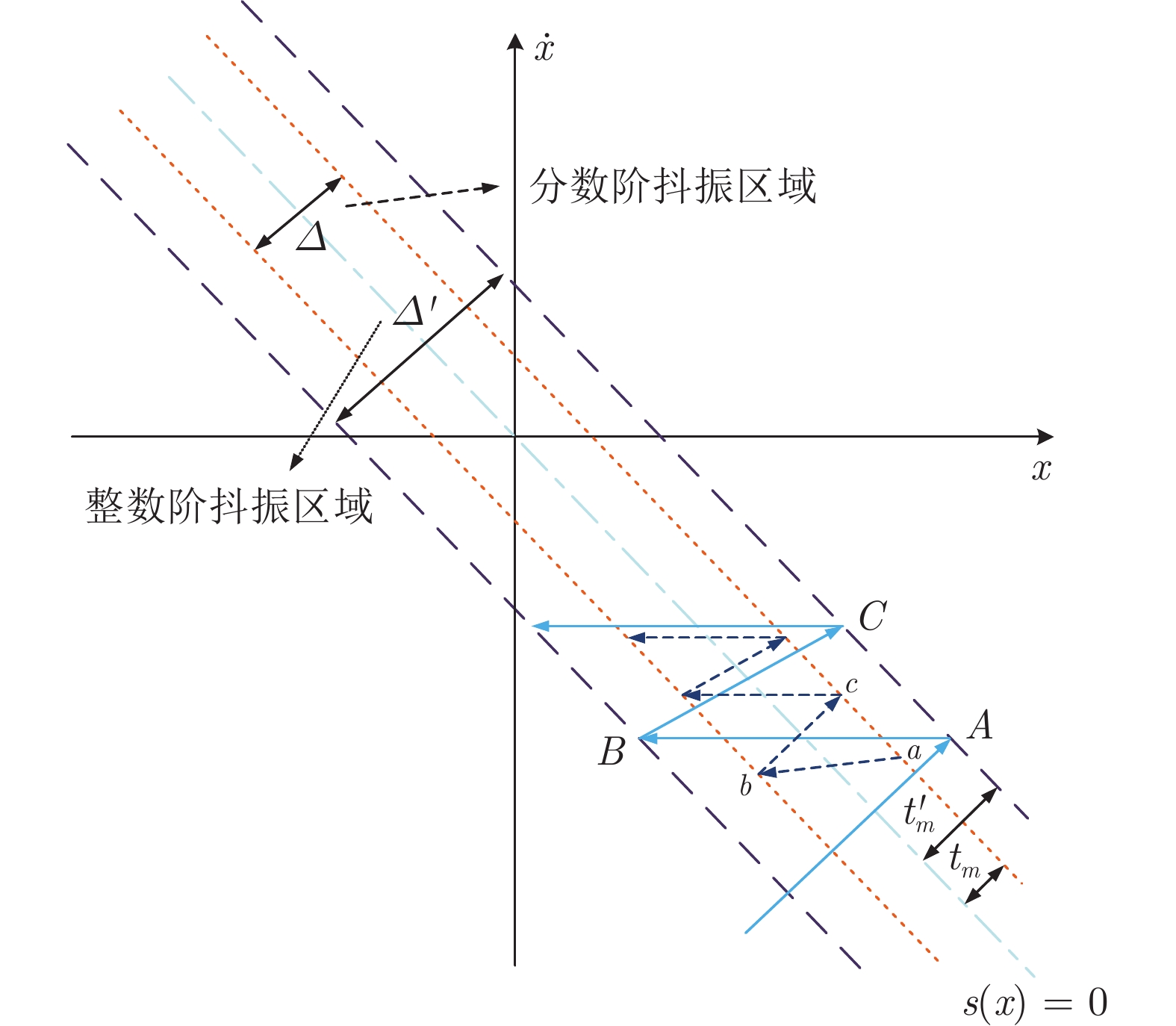
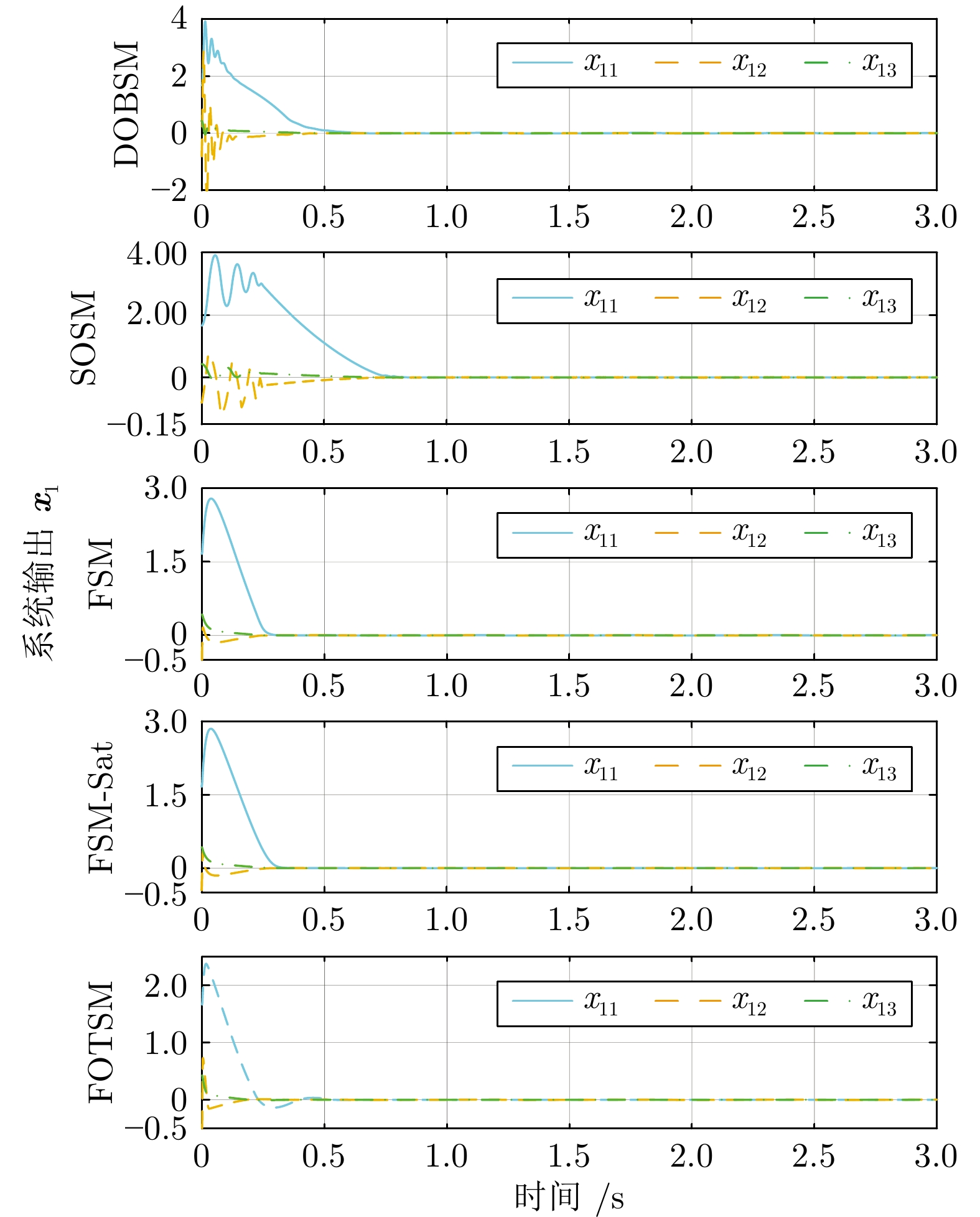
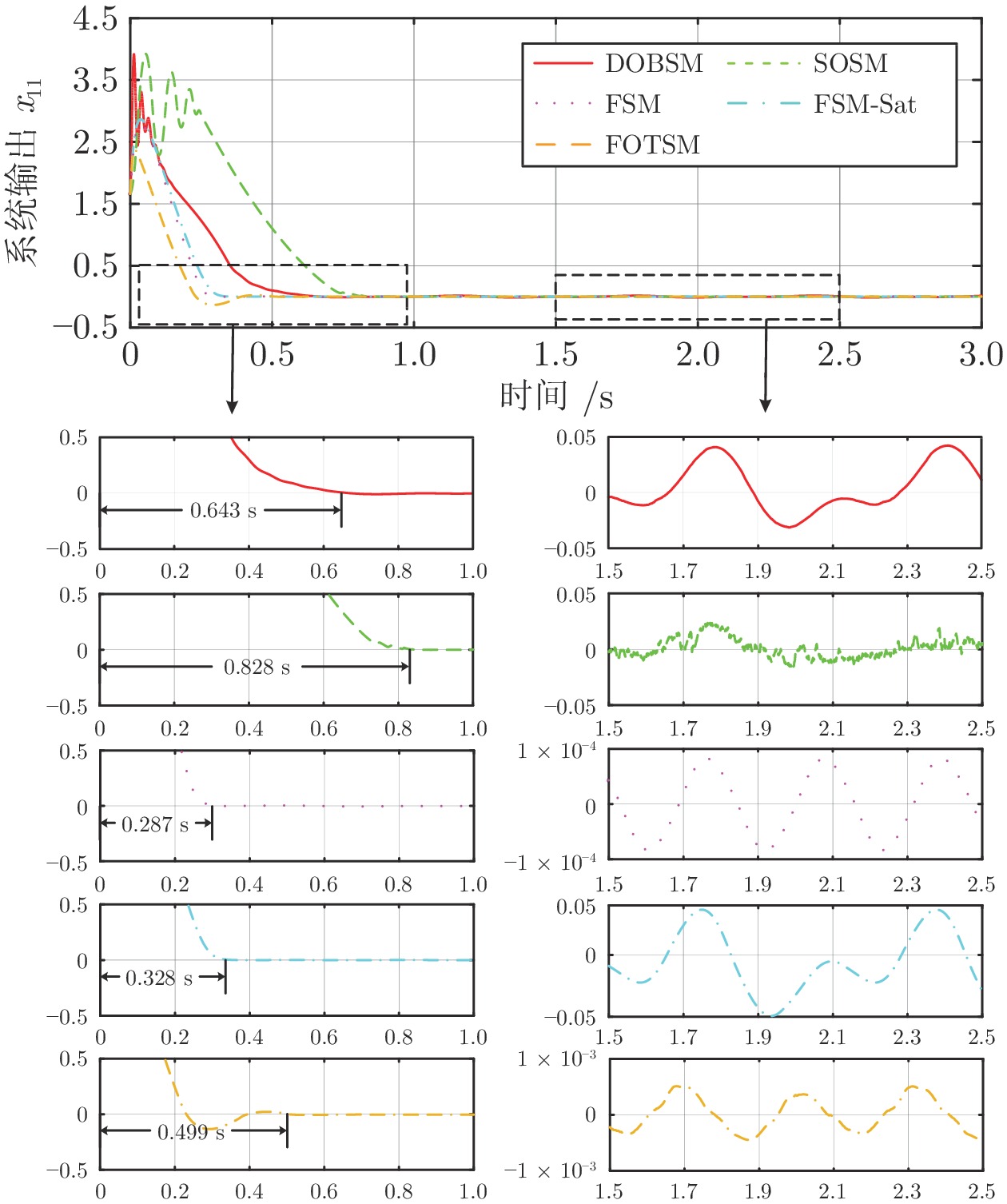
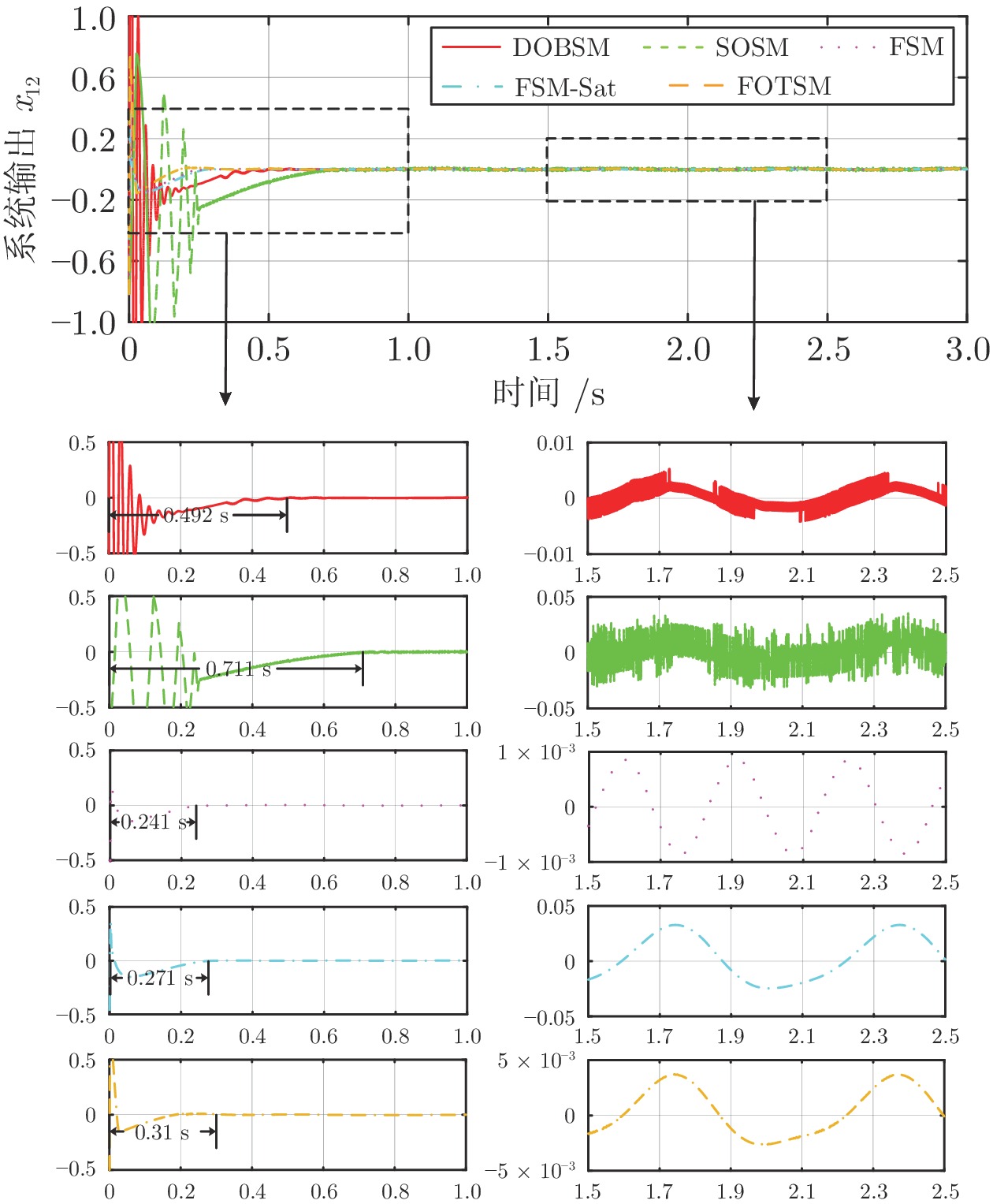
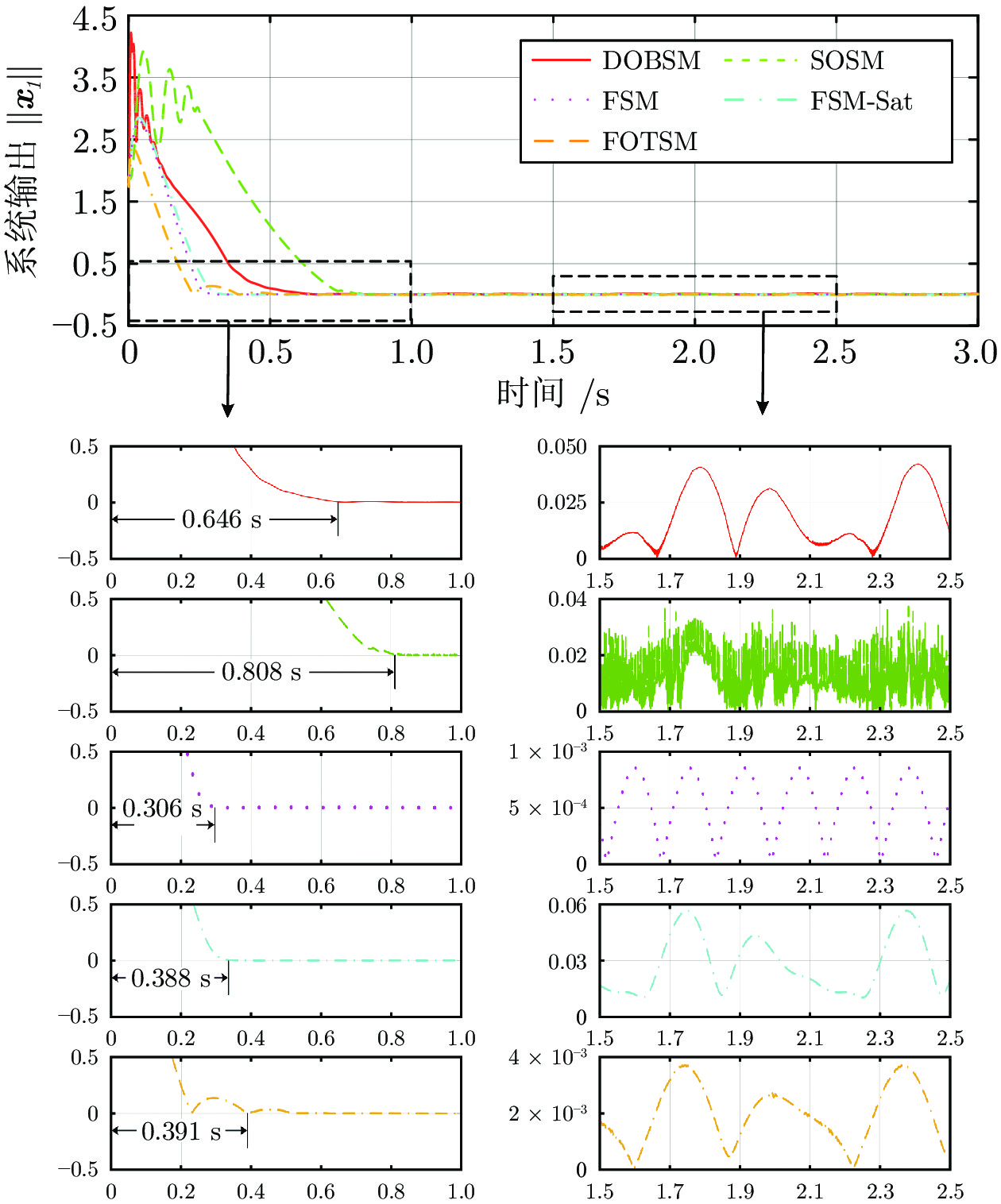
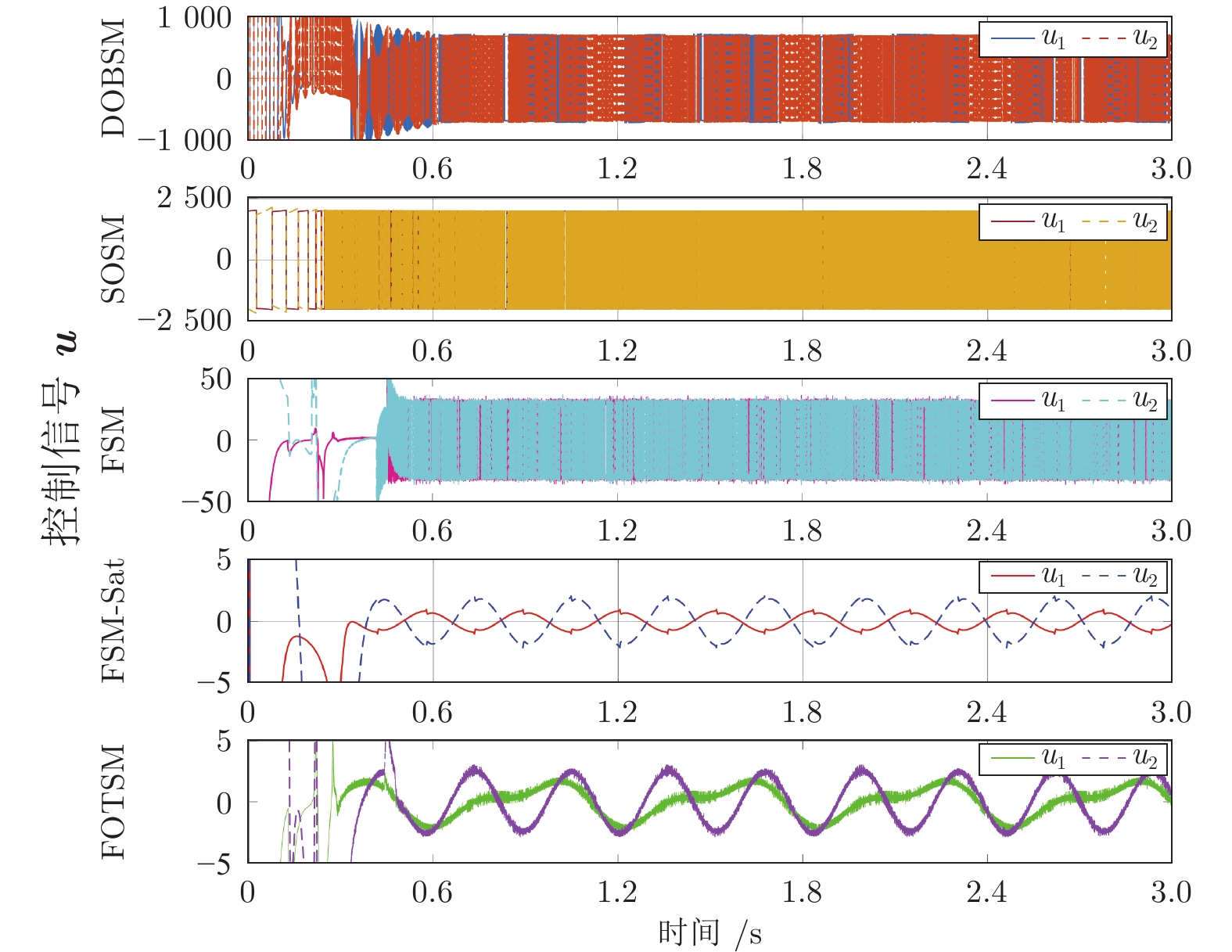
针对一类非匹配不确定多输入多输出(Multi-input multi-output, MIMO)系统提出一种分数阶终端滑模控制(Fractional-order terminal sliding-mode, FOTSM)策略, 使系统输出收敛到零而非其邻域. 该方法解除传统反步法控制律设计中, 虚拟控制增益右伪逆矩阵必须存在的严苛限制; 对系统不确定性的假设不局限于慢时变和H2范数有界型扰动, 分析控制增益存在摄动情况下系统的控制问题. 分数阶终端滑模面及其控制律的设计使得虚拟和实际控制信号连续, 削弱抖振现象, 利用自适应滑模切换增益技术解决由控制增益矩阵摄动引起的代数环问题. 最后, 仿真分析验证所提方法的正确性和优越性.
针对一类非匹配不确定多输入多输出(Multi-input multi-output, MIMO)系统提出一种分数阶终端滑模控制(Fractional-order terminal sliding-mode, FOTSM)策略, 使系统输出收敛到零而非其邻域. 该方法解除传统反步法控制律设计中, 虚拟控制增益右伪逆矩阵必须存在的严苛限制; 对系统不确定性的假设不局限于慢时变和H2范数有界型扰动, 分析控制增益存在摄动情况下系统的控制问题. 分数阶终端滑模面及其控制律的设计使得虚拟和实际控制信号连续, 削弱抖振现象, 利用自适应滑模切换增益技术解决由控制增益矩阵摄动引起的代数环问题. 最后, 仿真分析验证所提方法的正确性和优越性.