2023年 第49卷 第11期
2023, 49(11): 2237-2256.
doi: 10.16383/j.aas.c220648
摘要:
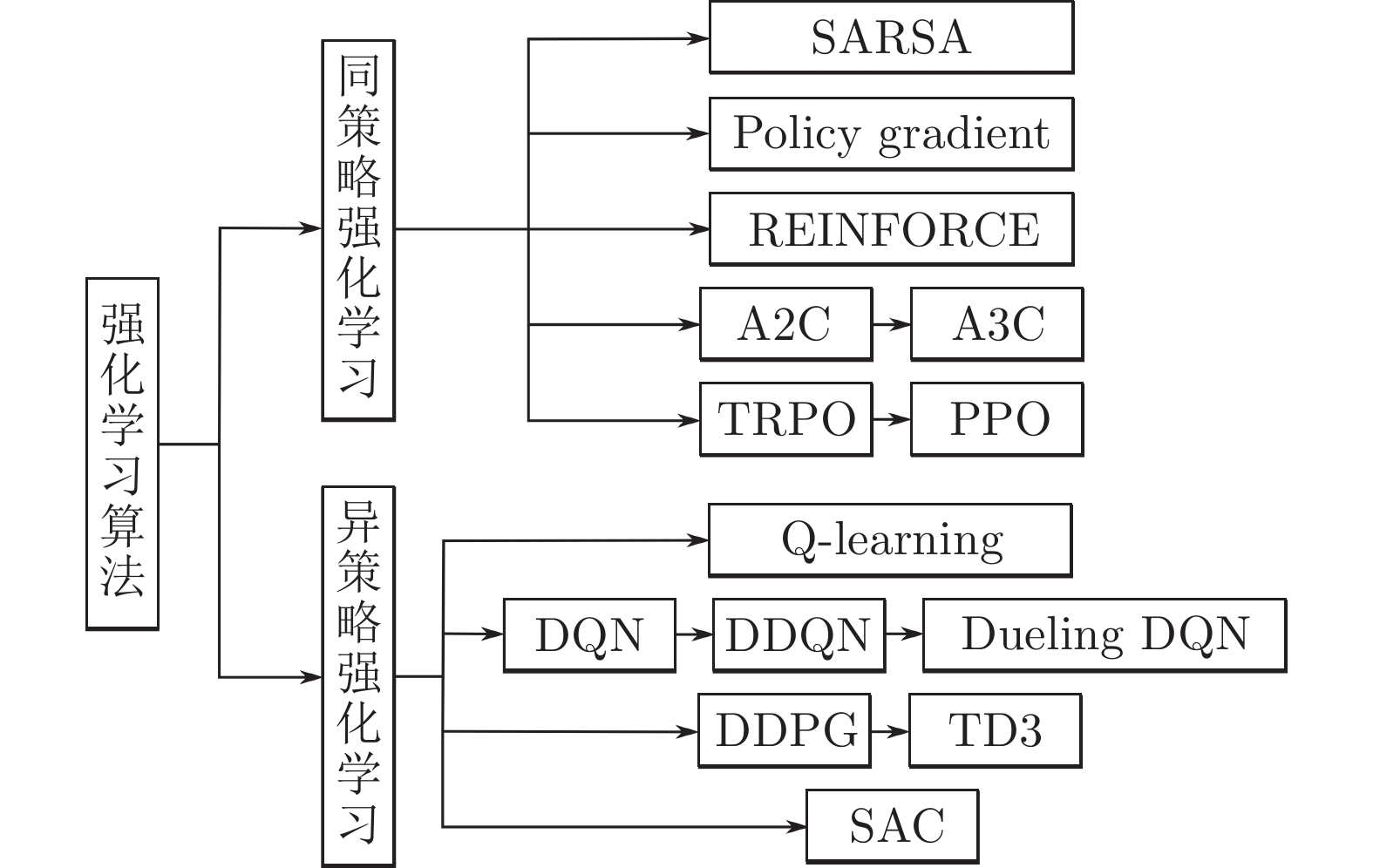
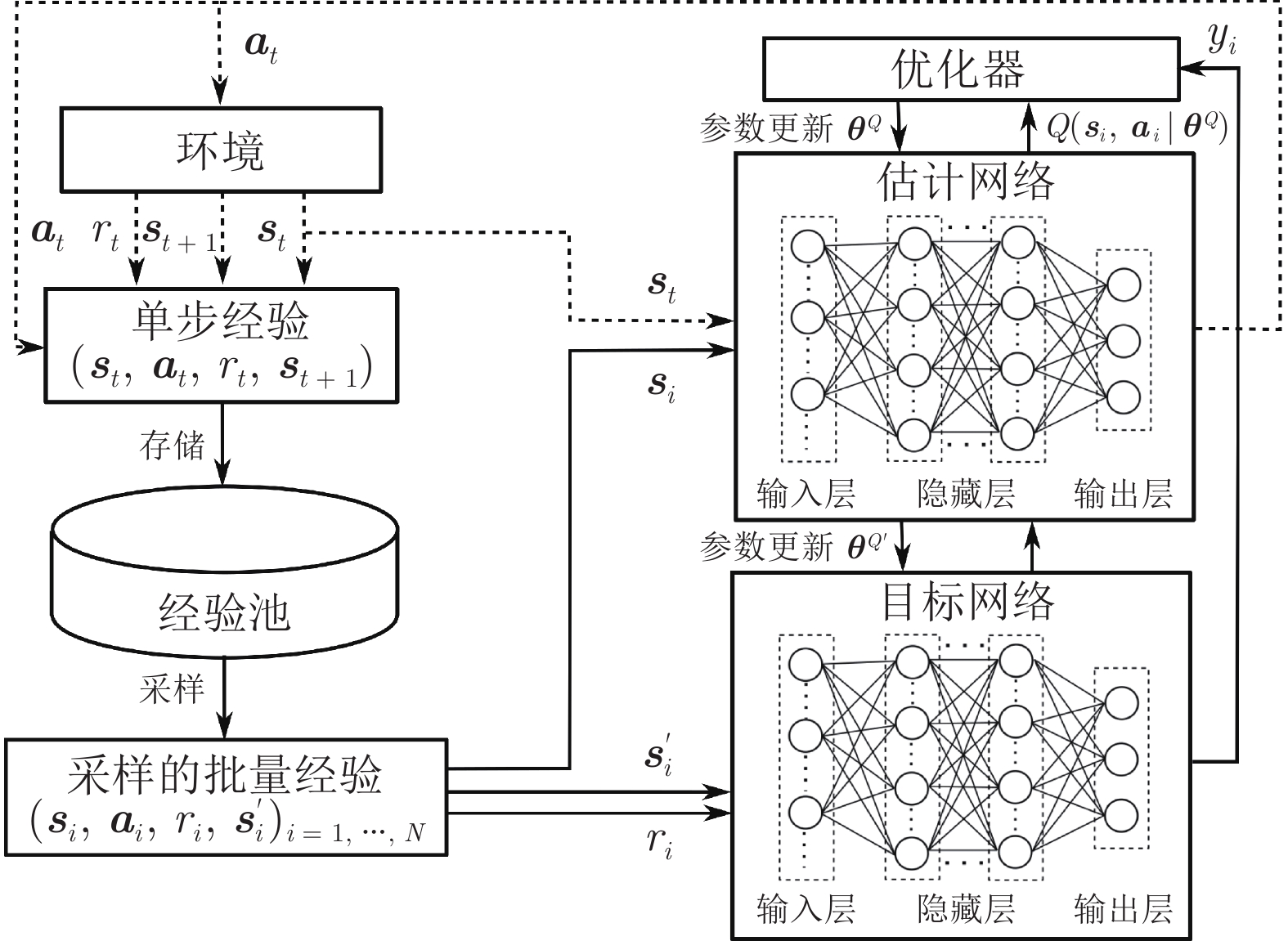
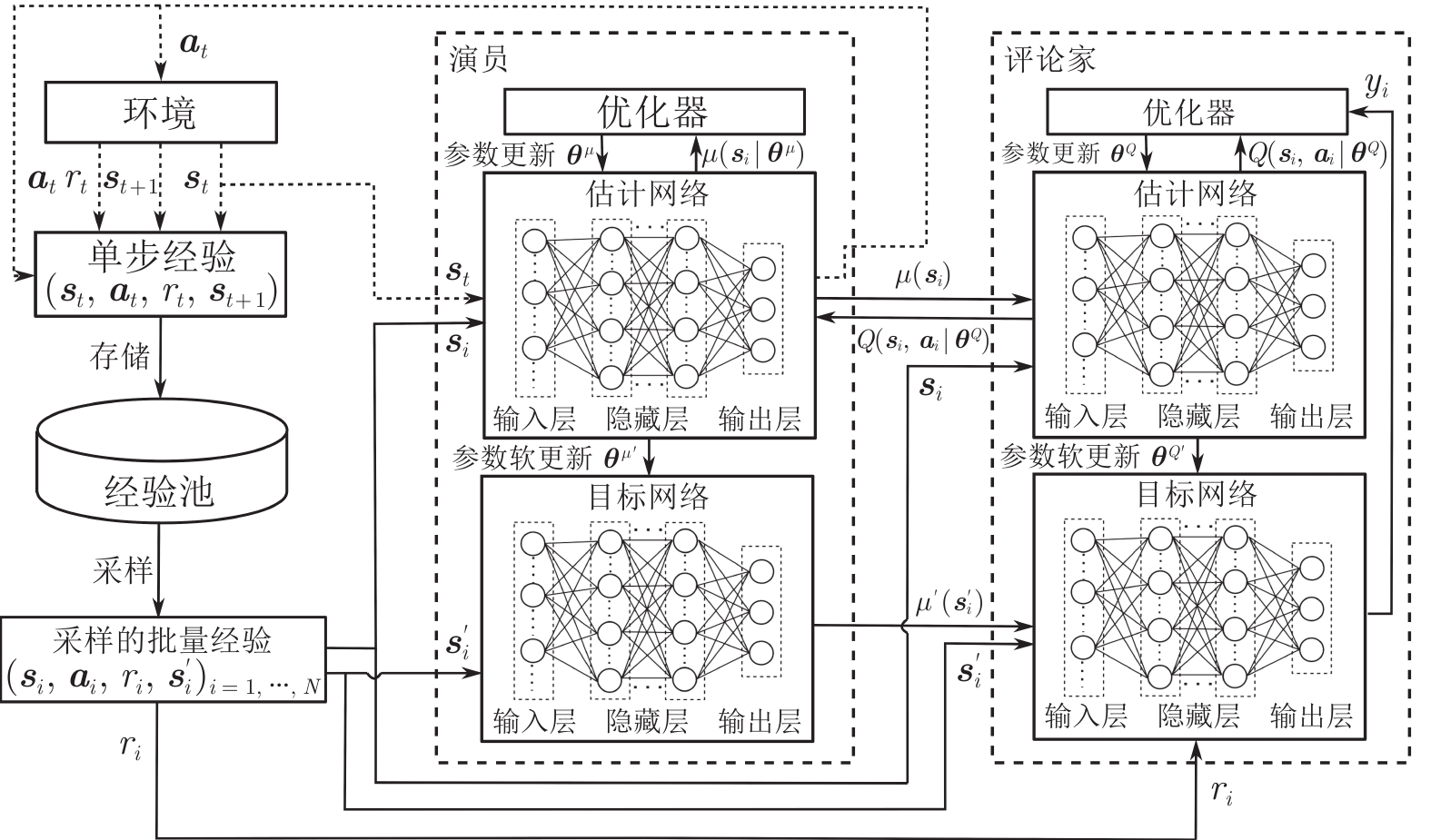
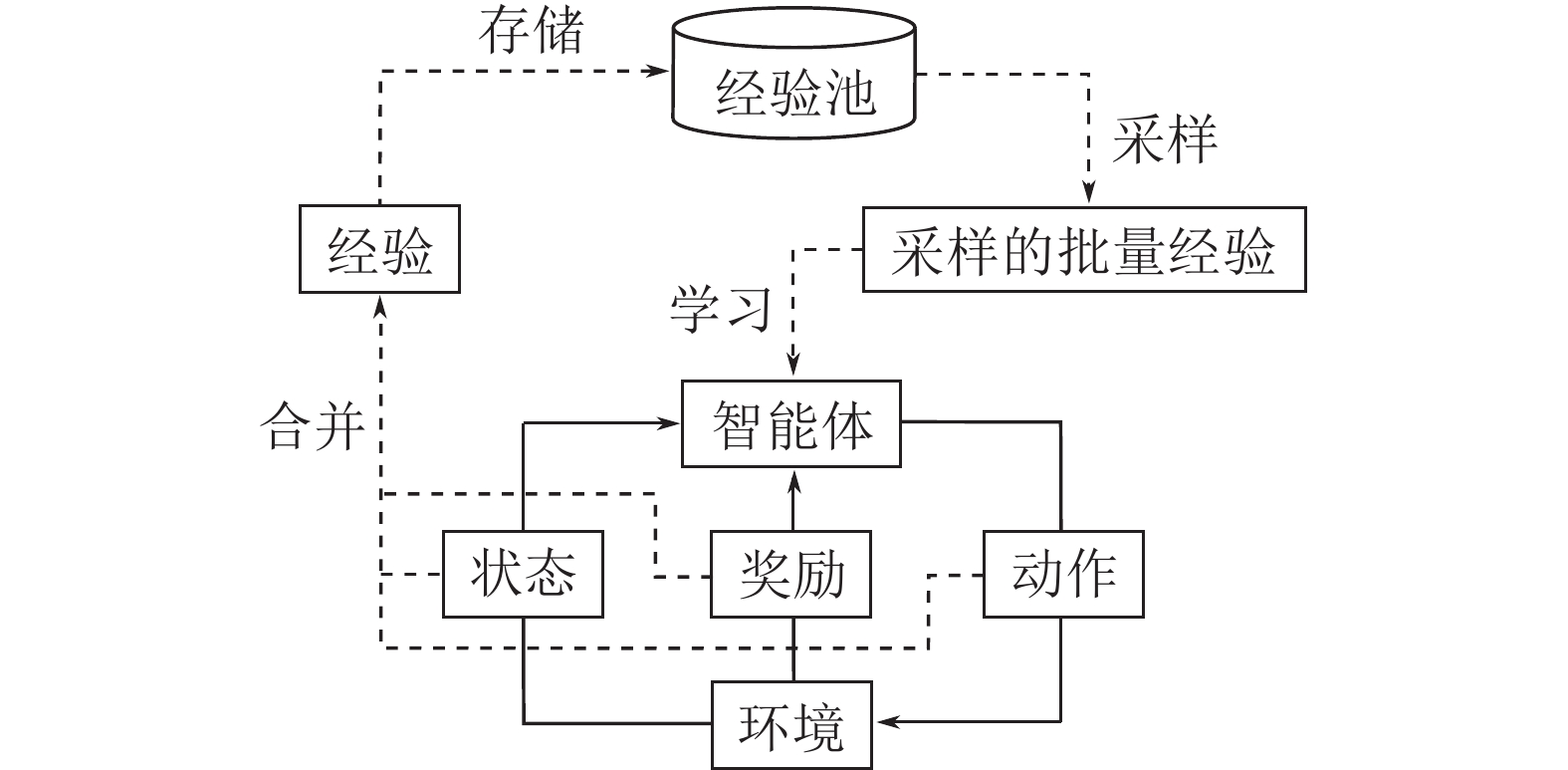
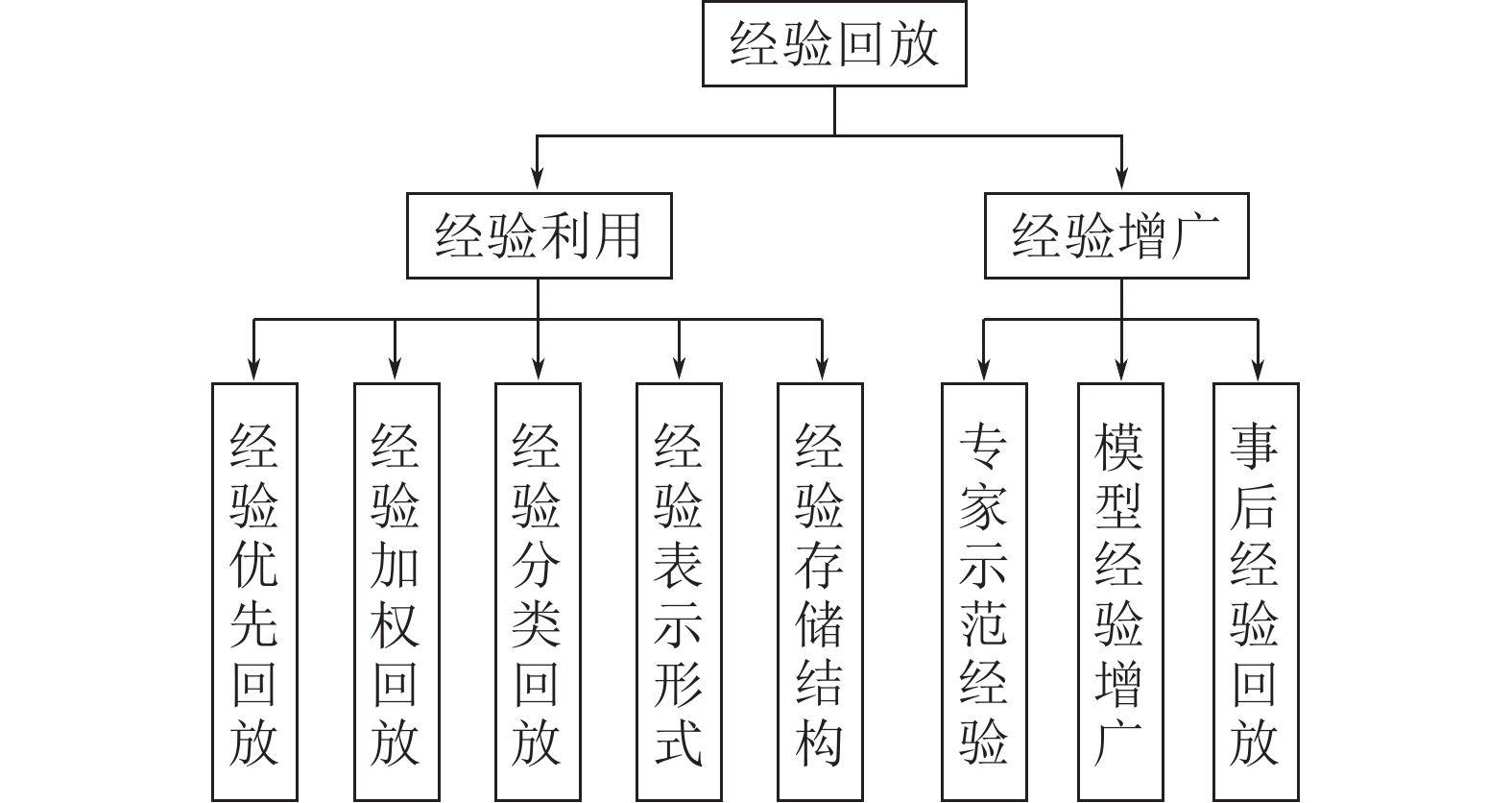
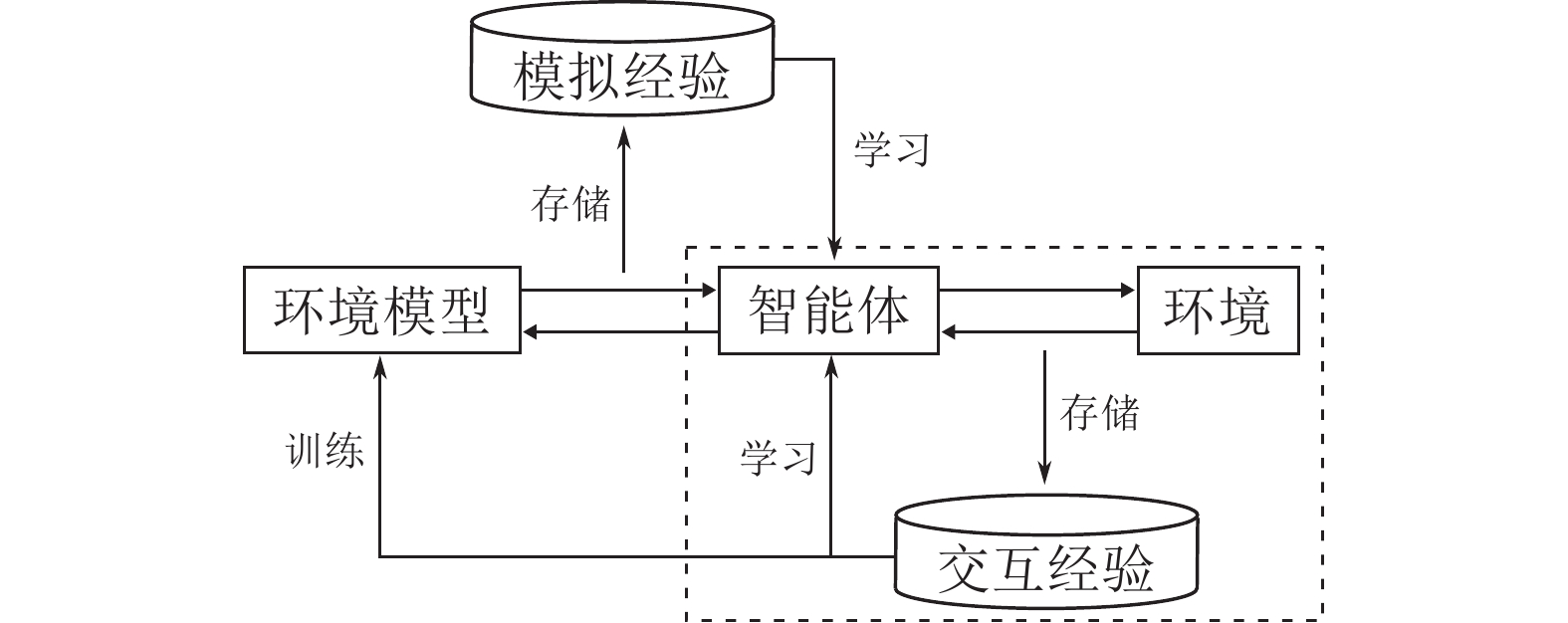
作为一种不需要事先获得训练数据的机器学习方法, 强化学习(Reinforcement learning, RL)在智能体与环境的不断交互过程中寻找最优策略, 是解决序贯决策问题的一种重要方法. 通过与深度学习(Deep learning, DL)结合, 深度强化学习(Deep reinforcement learning, DRL)同时具备了强大的感知和决策能力, 被广泛应用于多个领域来解决复杂的决策问题. 异策略强化学习通过将交互经验进行存储和回放, 将探索和利用分离开来, 更易寻找到全局最优解. 如何对经验进行合理高效的利用是提升异策略强化学习方法效率的关键. 首先对强化学习的基本理论进行介绍; 随后对同策略和异策略强化学习算法进行简要介绍; 接着介绍经验回放(Experience replay, ER)问题的两种主流解决方案, 包括经验利用和经验增广; 最后对相关的研究工作进行总结和展望.
作为一种不需要事先获得训练数据的机器学习方法, 强化学习(Reinforcement learning, RL)在智能体与环境的不断交互过程中寻找最优策略, 是解决序贯决策问题的一种重要方法. 通过与深度学习(Deep learning, DL)结合, 深度强化学习(Deep reinforcement learning, DRL)同时具备了强大的感知和决策能力, 被广泛应用于多个领域来解决复杂的决策问题. 异策略强化学习通过将交互经验进行存储和回放, 将探索和利用分离开来, 更易寻找到全局最优解. 如何对经验进行合理高效的利用是提升异策略强化学习方法效率的关键. 首先对强化学习的基本理论进行介绍; 随后对同策略和异策略强化学习算法进行简要介绍; 接着介绍经验回放(Experience replay, ER)问题的两种主流解决方案, 包括经验利用和经验增广; 最后对相关的研究工作进行总结和展望.

2023, 49(11): 2257-2271.
doi: 10.16383/j.aas.c220969
摘要:
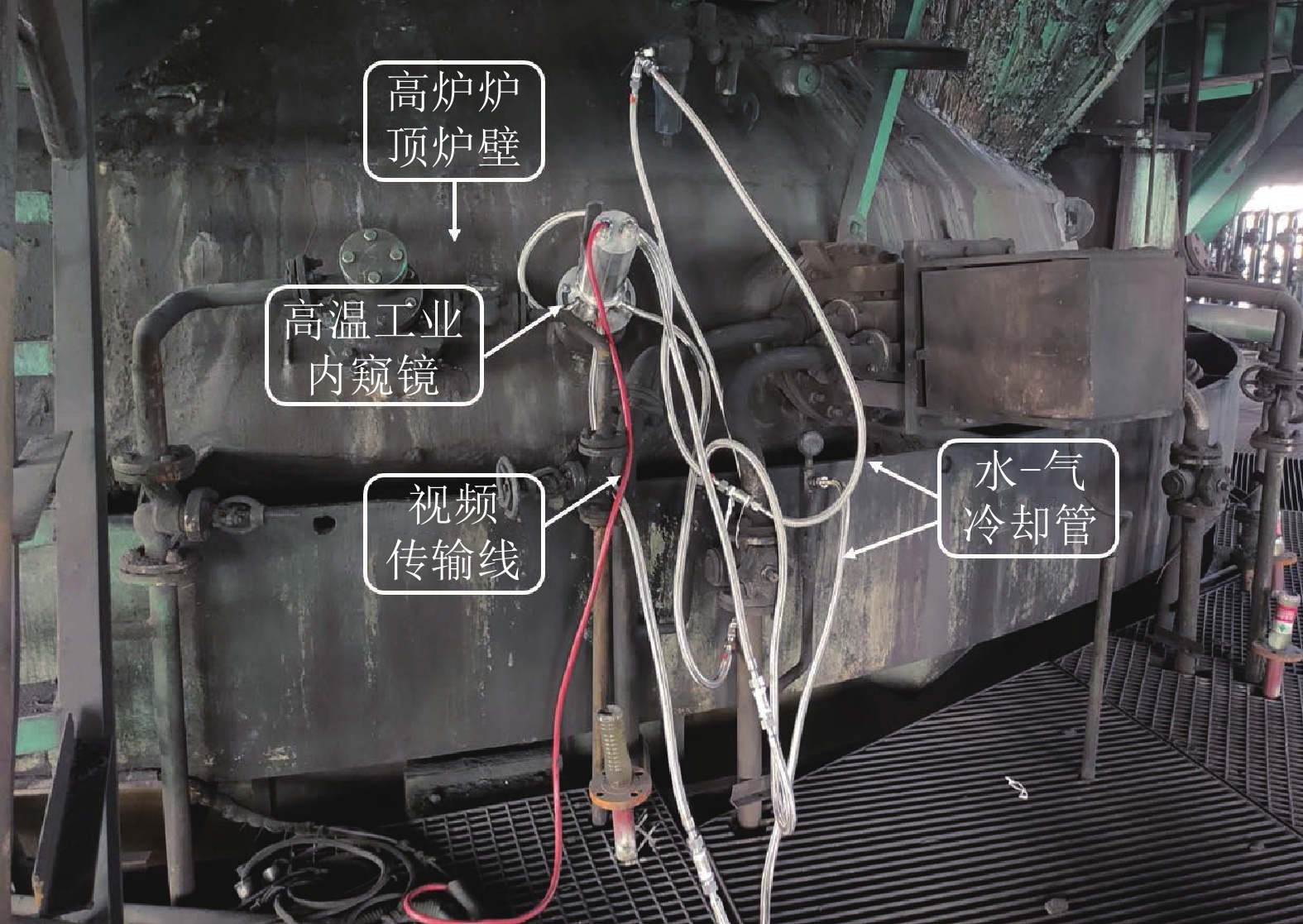
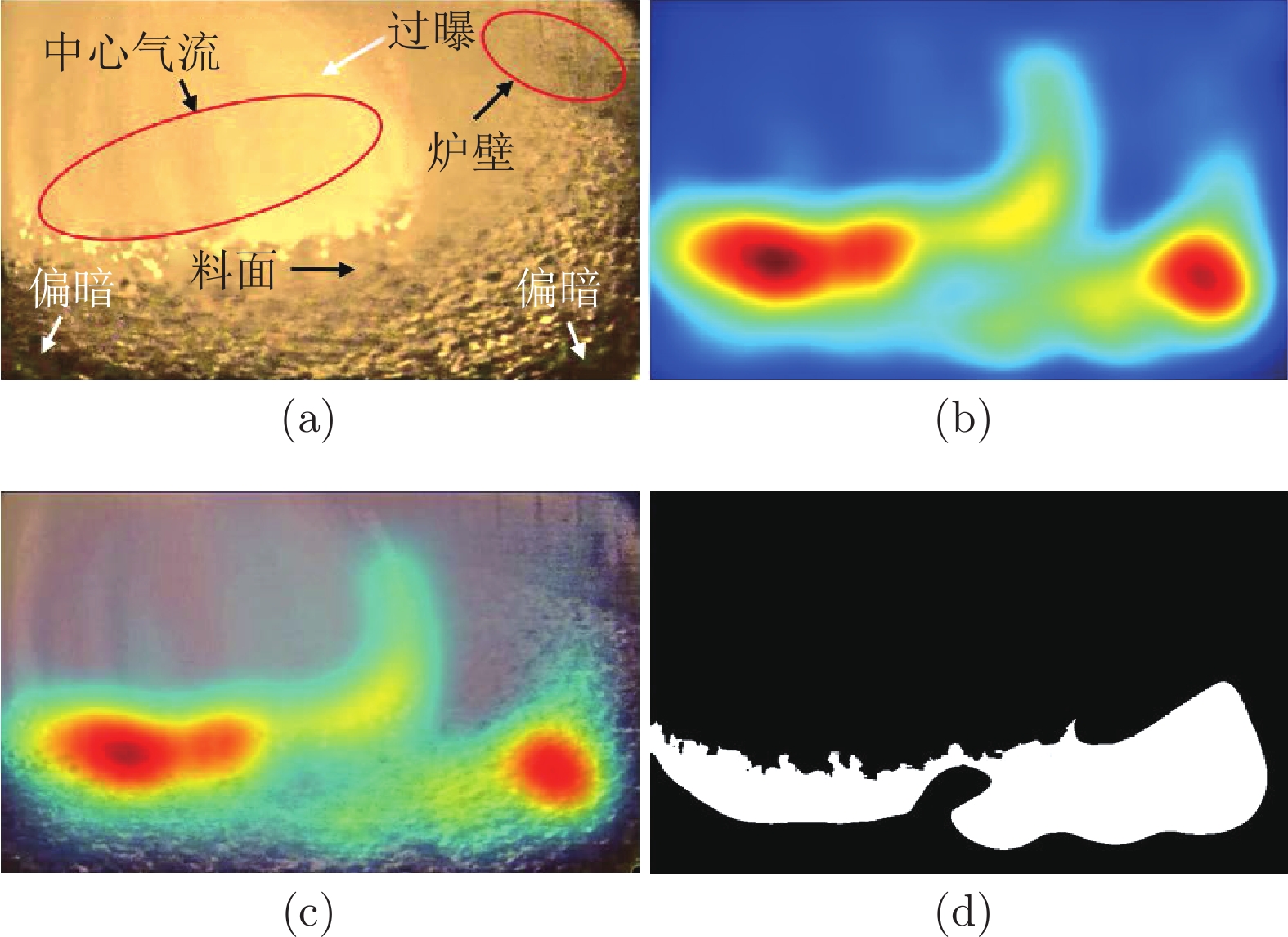
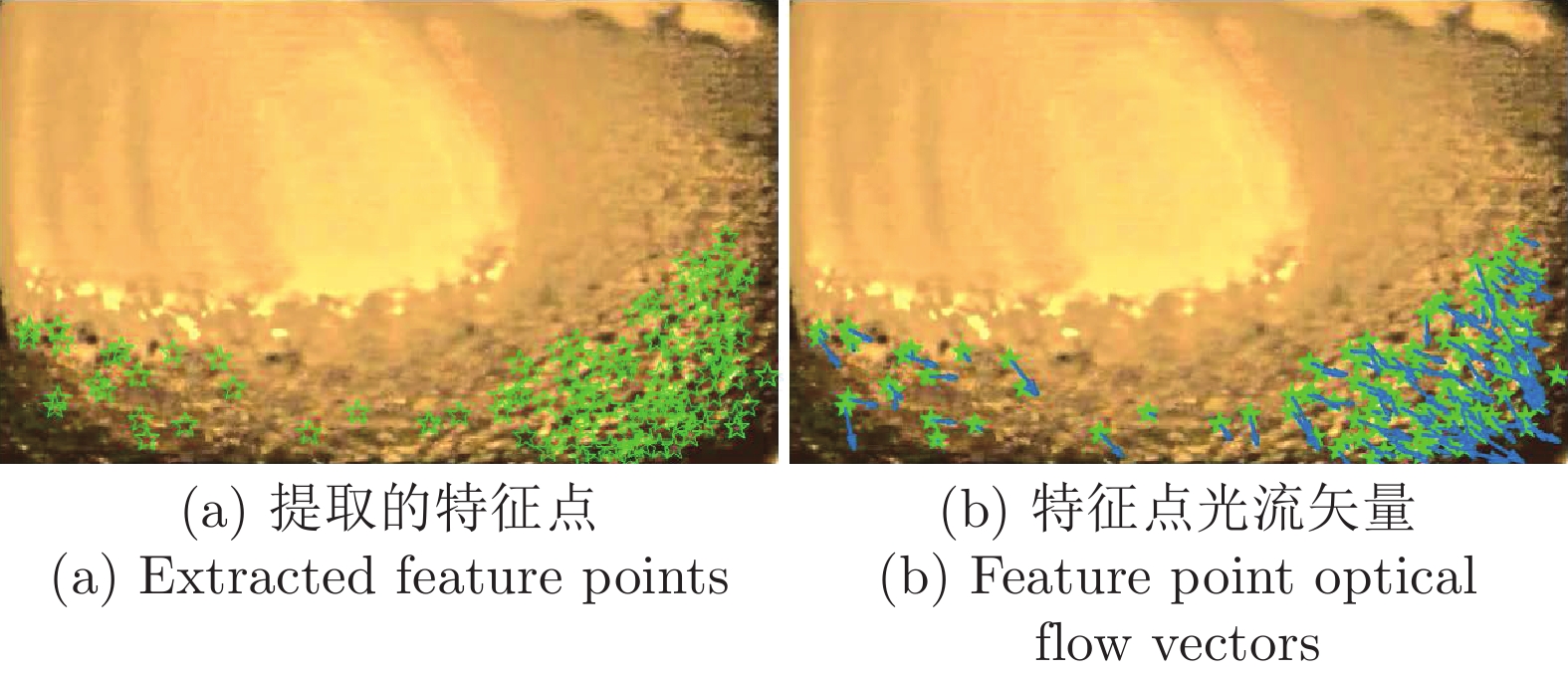
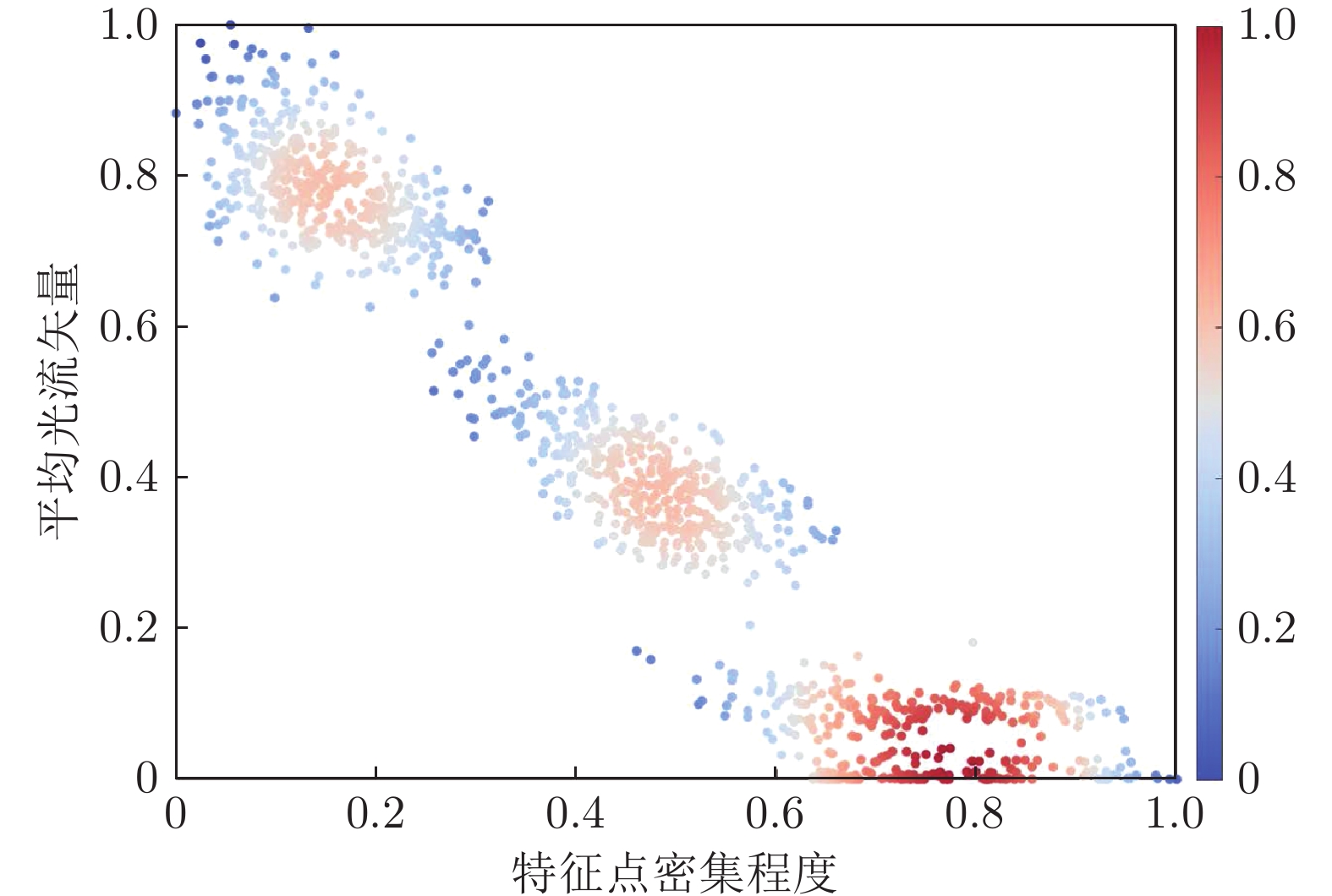
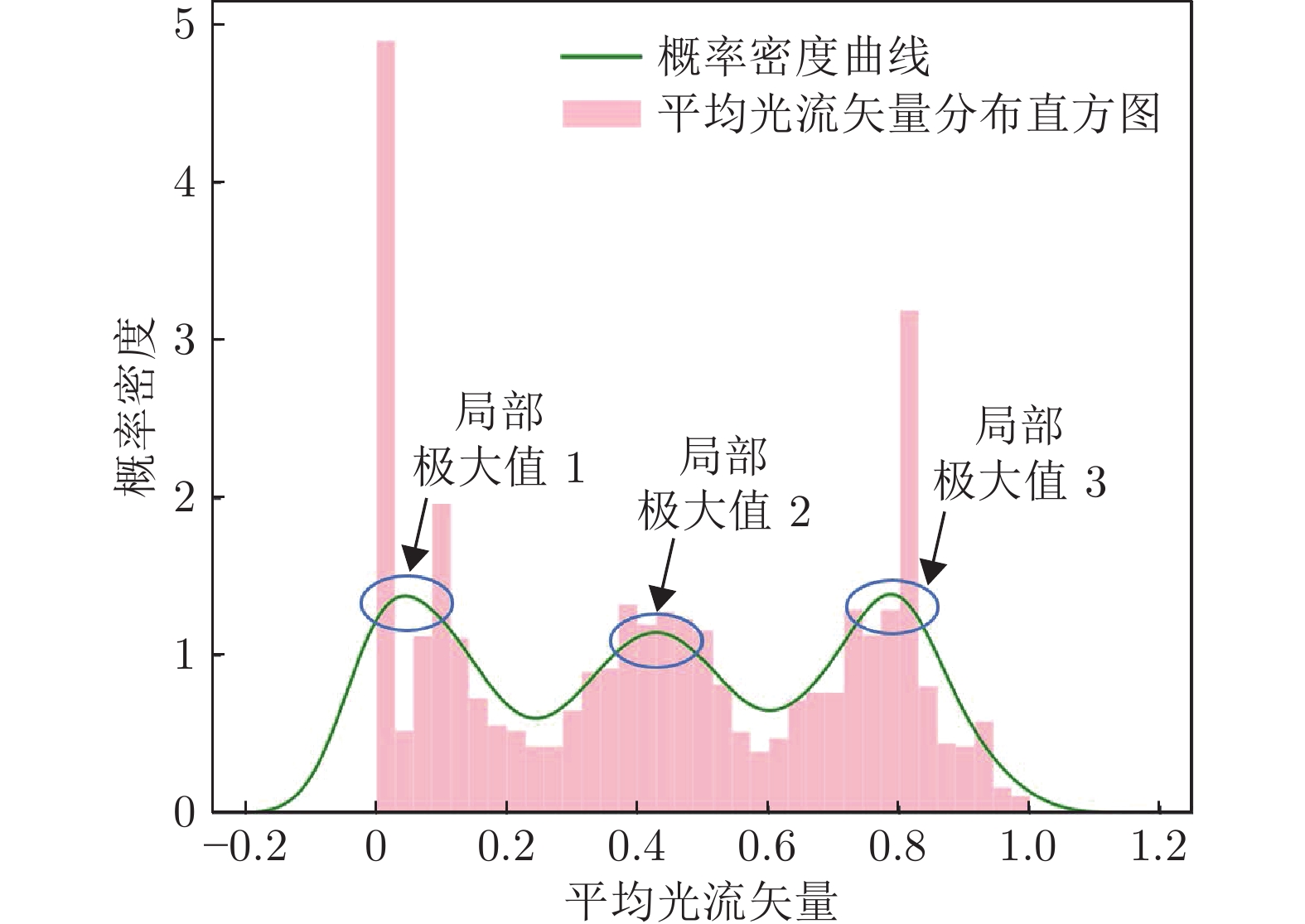
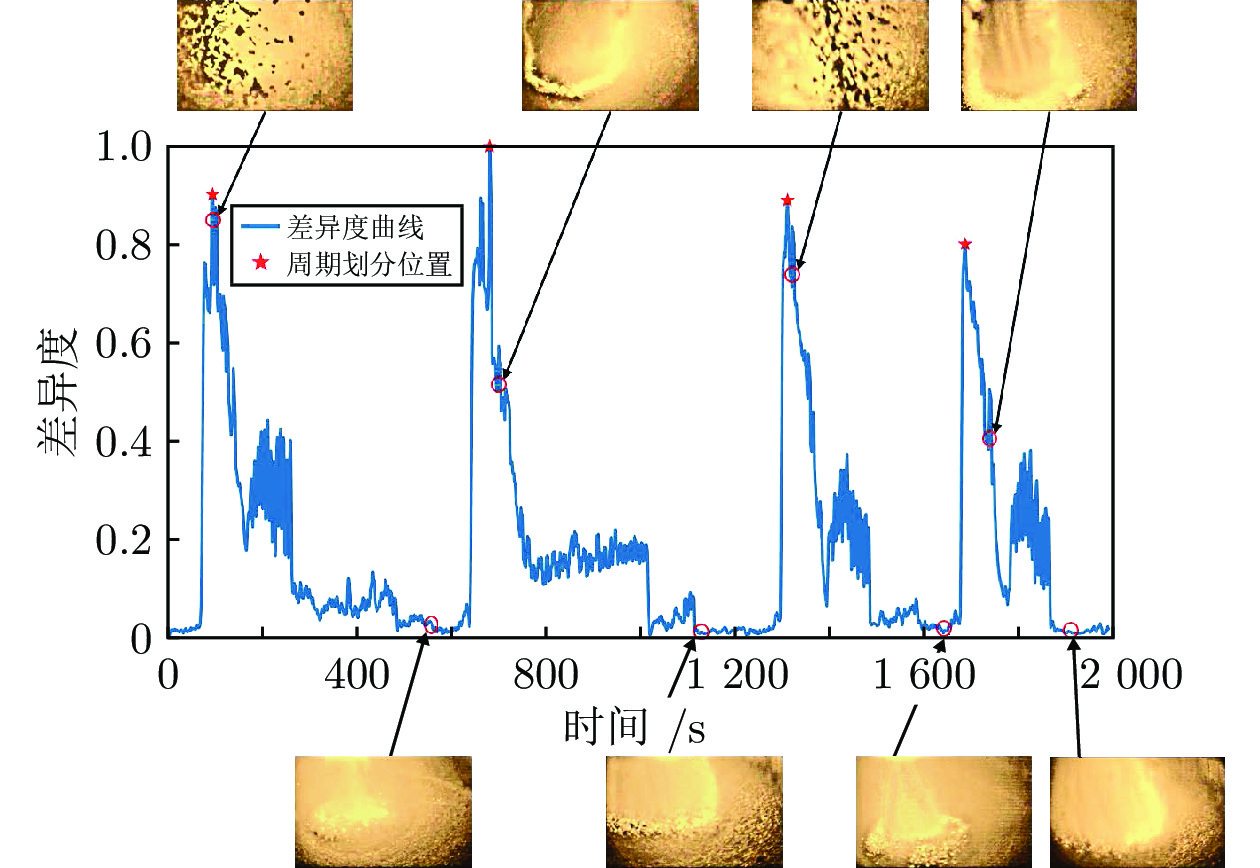
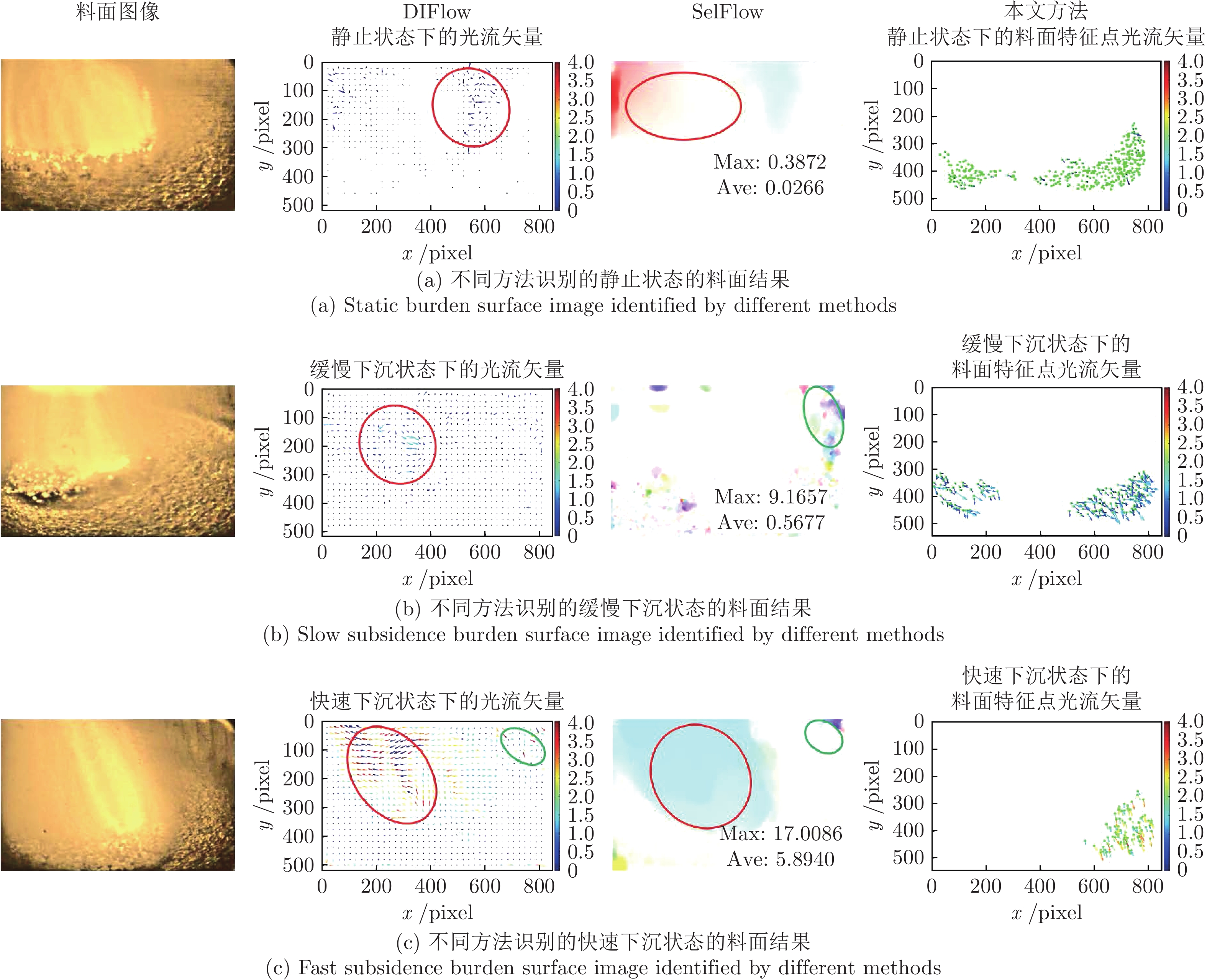
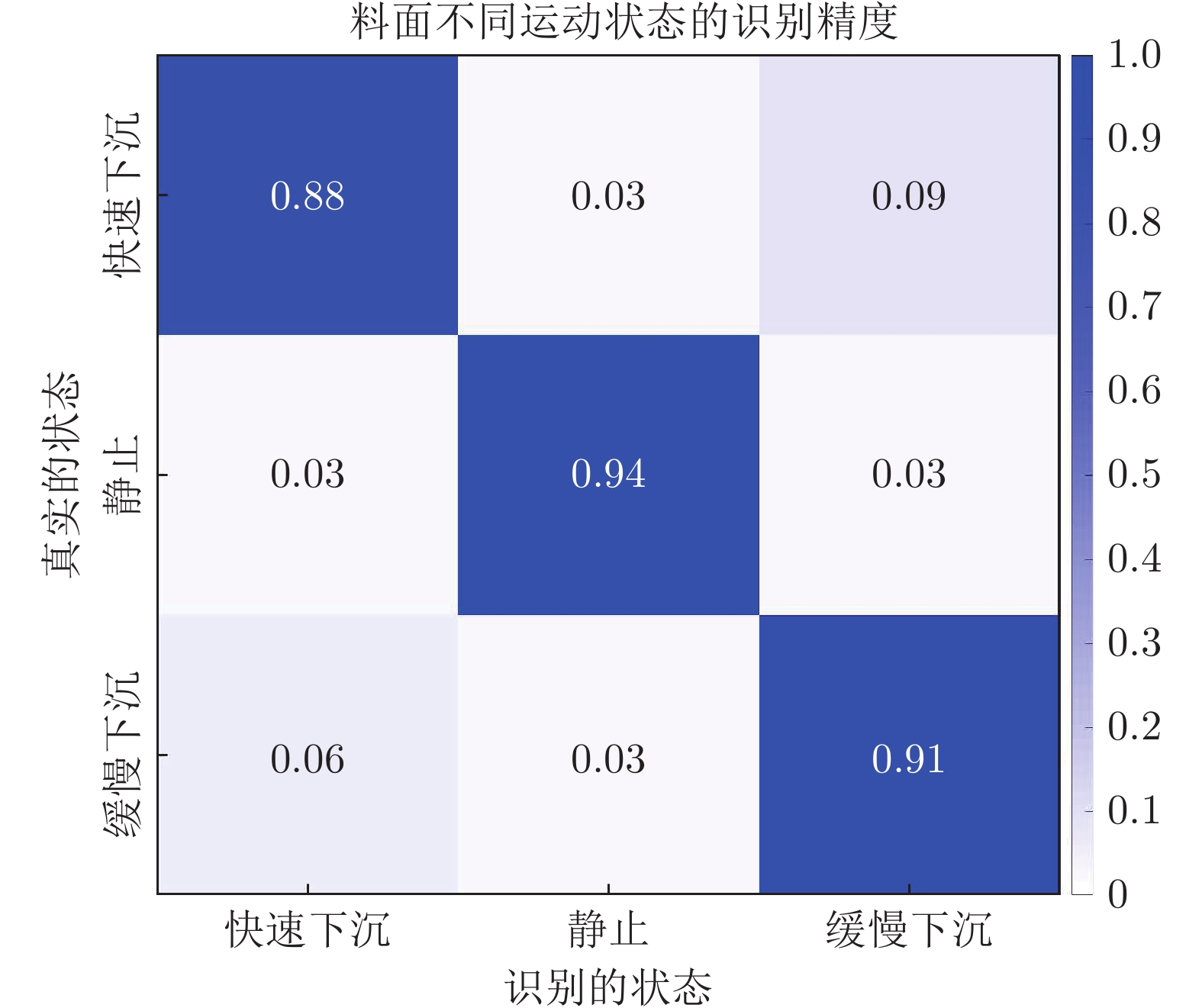
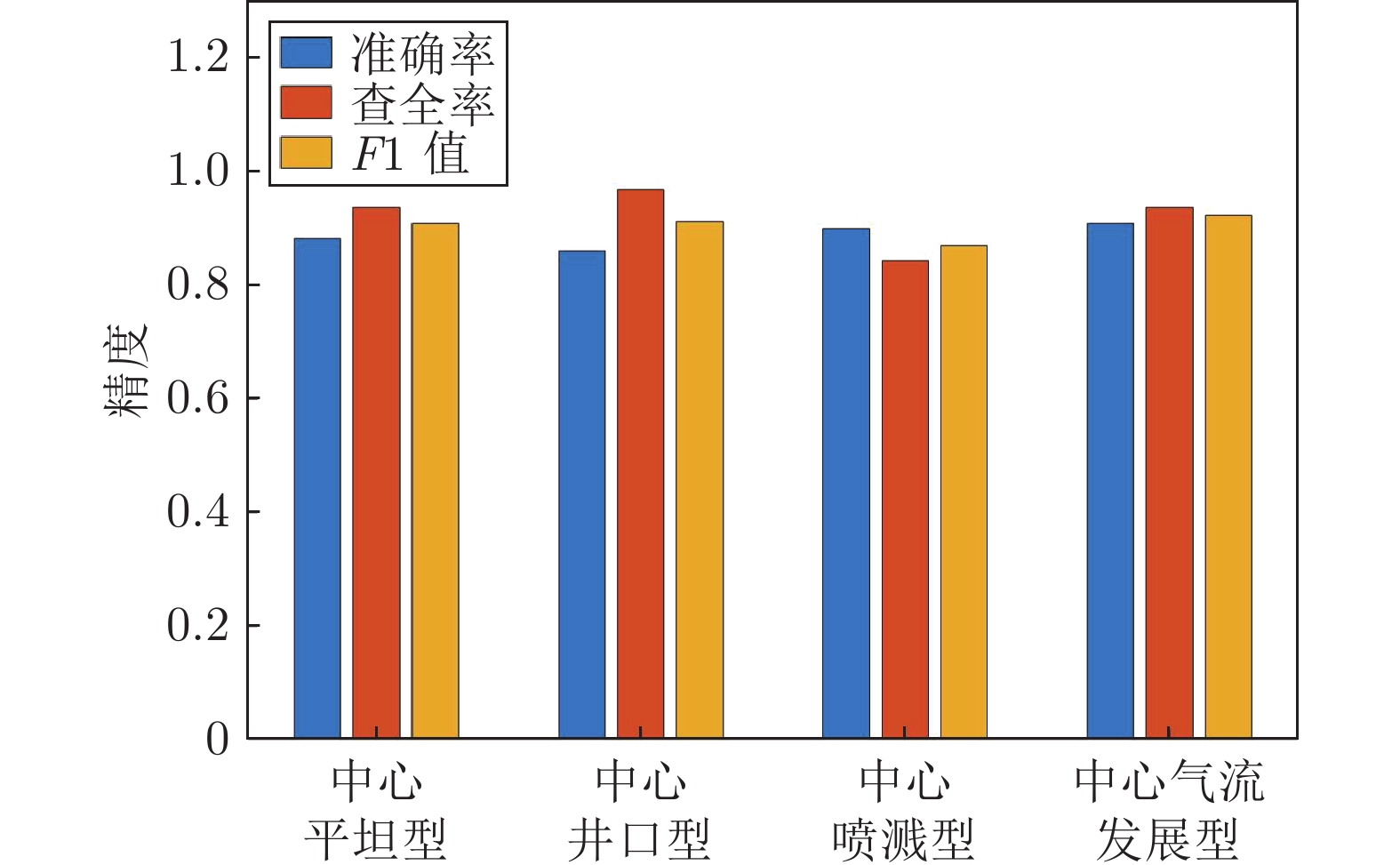
高炉料面视频关键帧是视频中的中心气流稳定、清晰、无炉料及粉尘遮挡且特征明显的图像序列, 对于及时获取炉内运行状态、指导炉顶布料操作具有重要的意义. 然而, 由于高炉内部恶劣的冶炼环境及布料的周期性和间歇性等特征, 料面视频存在信息冗余、图像质量参差不齐、状态多变等问题, 无法直接用于分析处理. 为了从大量高炉冶炼过程料面视频中自动准确筛选清晰稳定的料面图像, 提出基于状态识别的高炉料面视频关键帧提取方法. 首先, 基于高温工业内窥镜采集高炉冶炼过程中的料面视频, 并清晰完整给出料面反应新现象和形貌变化情况; 然后, 提取能够表征料面运动状态的显著性区域的特征点密集程度和像素位移特征, 并提出基于局部密度极大值高斯混合模型(Local density maxima-based Gaussian mixture model, LDGMM)聚类的方法识别料面状态; 最后, 基于料面状态识别结果提取每个布料周期不同状态下的关键帧. 实验结果表明, 该方法能够准确识别料面状态并剔除料面视频冗余信息, 能提取出不同状态下的料面视频关键帧, 为优化炉顶布料操作提供指导.
高炉料面视频关键帧是视频中的中心气流稳定、清晰、无炉料及粉尘遮挡且特征明显的图像序列, 对于及时获取炉内运行状态、指导炉顶布料操作具有重要的意义. 然而, 由于高炉内部恶劣的冶炼环境及布料的周期性和间歇性等特征, 料面视频存在信息冗余、图像质量参差不齐、状态多变等问题, 无法直接用于分析处理. 为了从大量高炉冶炼过程料面视频中自动准确筛选清晰稳定的料面图像, 提出基于状态识别的高炉料面视频关键帧提取方法. 首先, 基于高温工业内窥镜采集高炉冶炼过程中的料面视频, 并清晰完整给出料面反应新现象和形貌变化情况; 然后, 提取能够表征料面运动状态的显著性区域的特征点密集程度和像素位移特征, 并提出基于局部密度极大值高斯混合模型(Local density maxima-based Gaussian mixture model, LDGMM)聚类的方法识别料面状态; 最后, 基于料面状态识别结果提取每个布料周期不同状态下的关键帧. 实验结果表明, 该方法能够准确识别料面状态并剔除料面视频冗余信息, 能提取出不同状态下的料面视频关键帧, 为优化炉顶布料操作提供指导.









2023, 49(11): 2272-2285.
doi: 10.16383/j.aas.c220795
摘要:
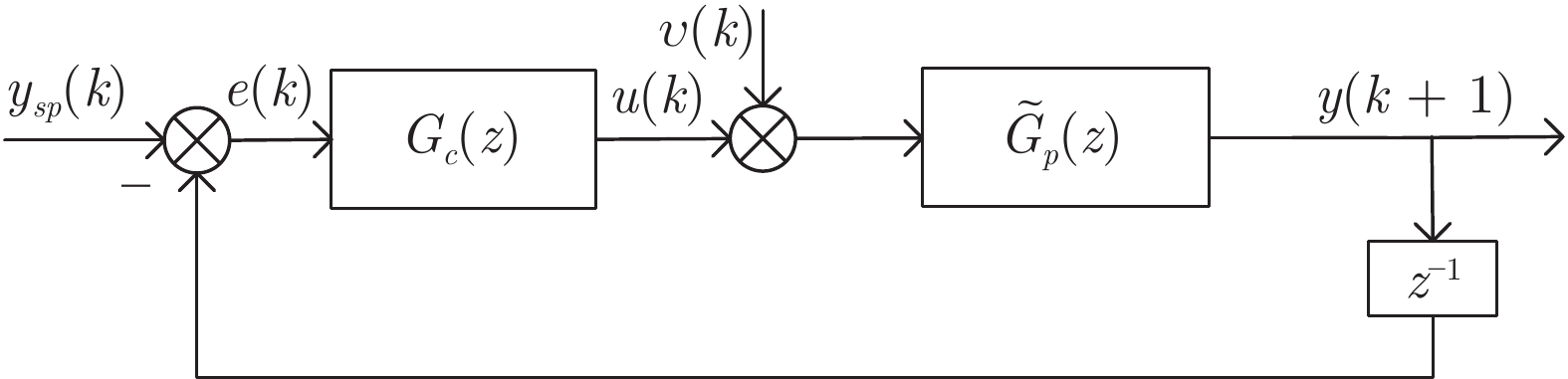
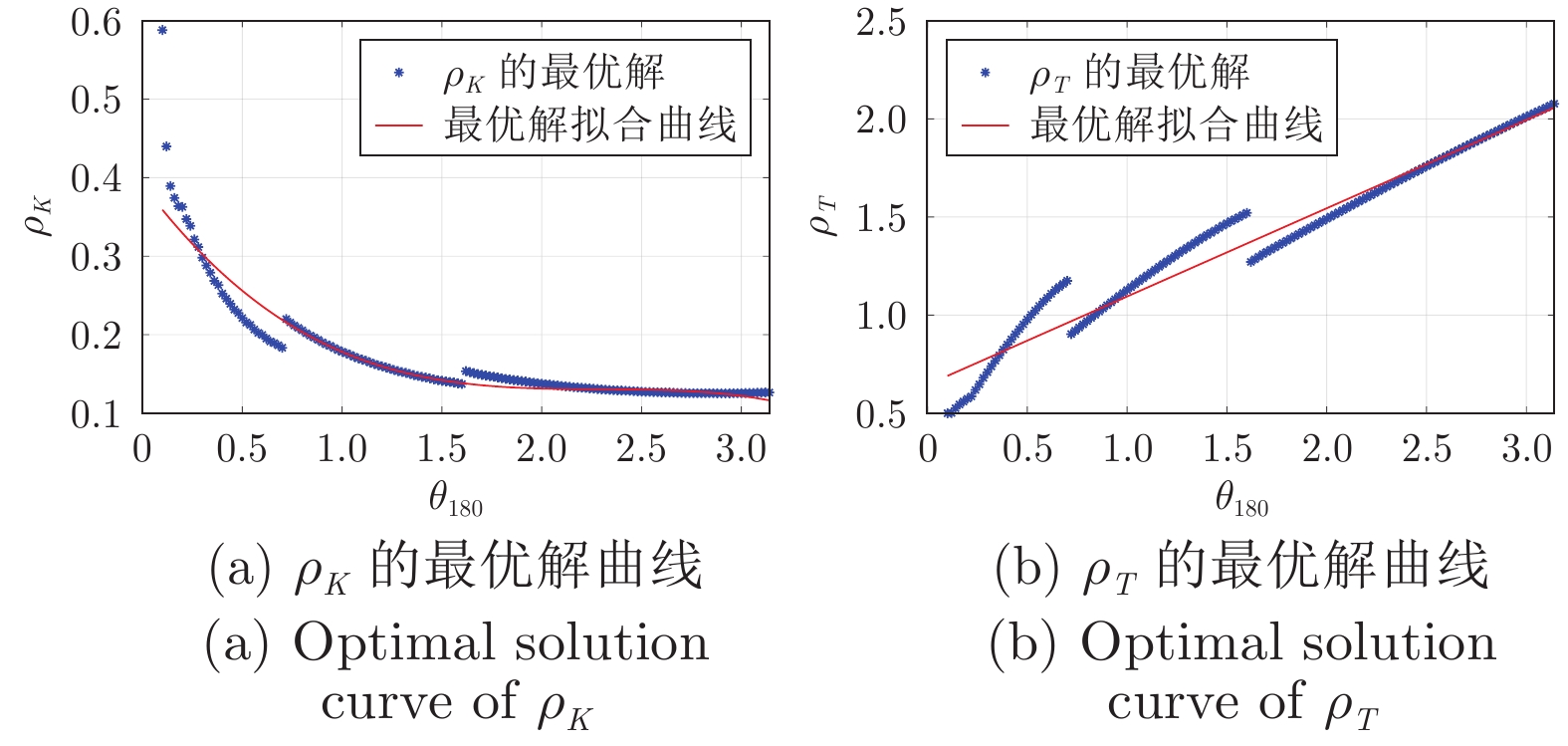
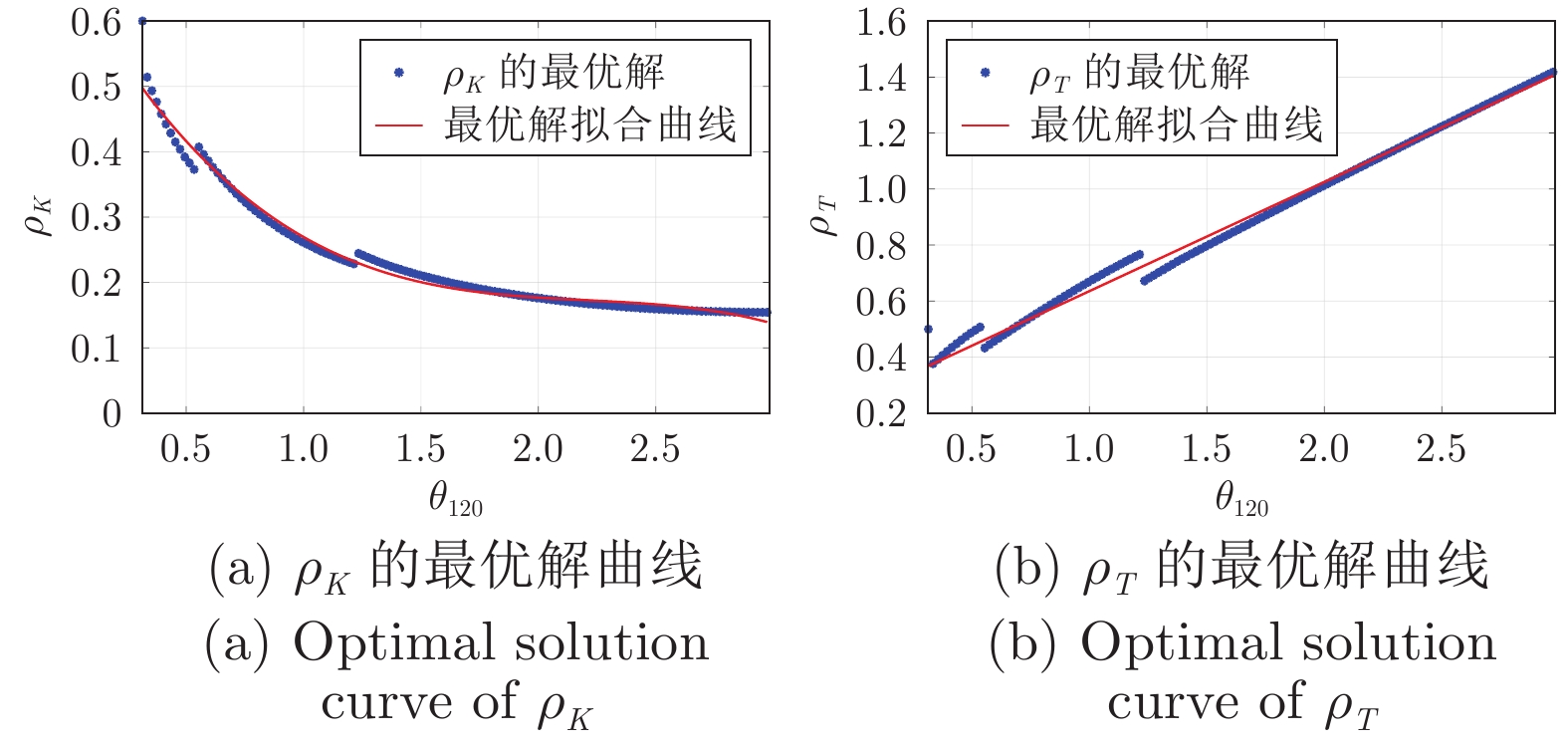
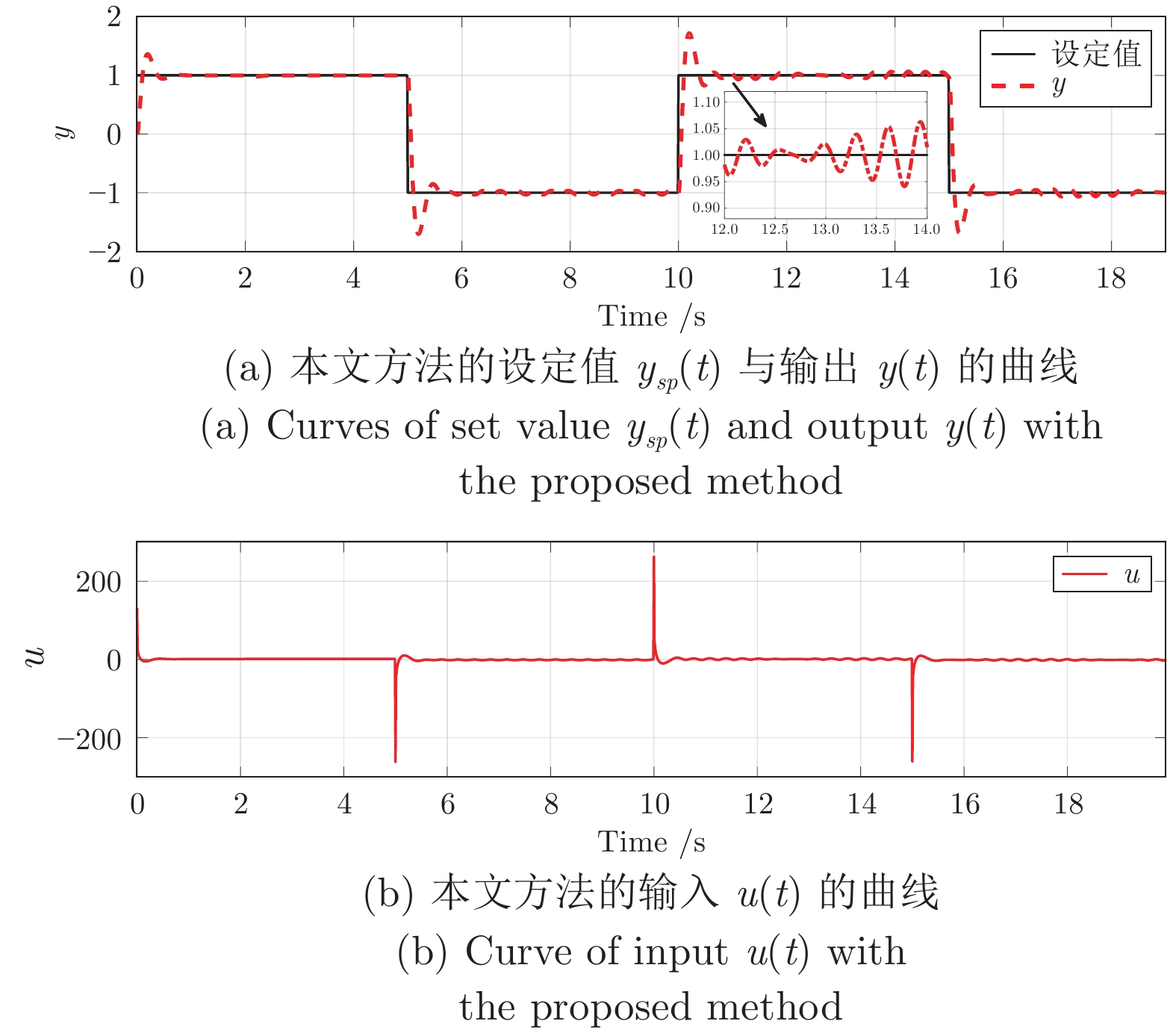
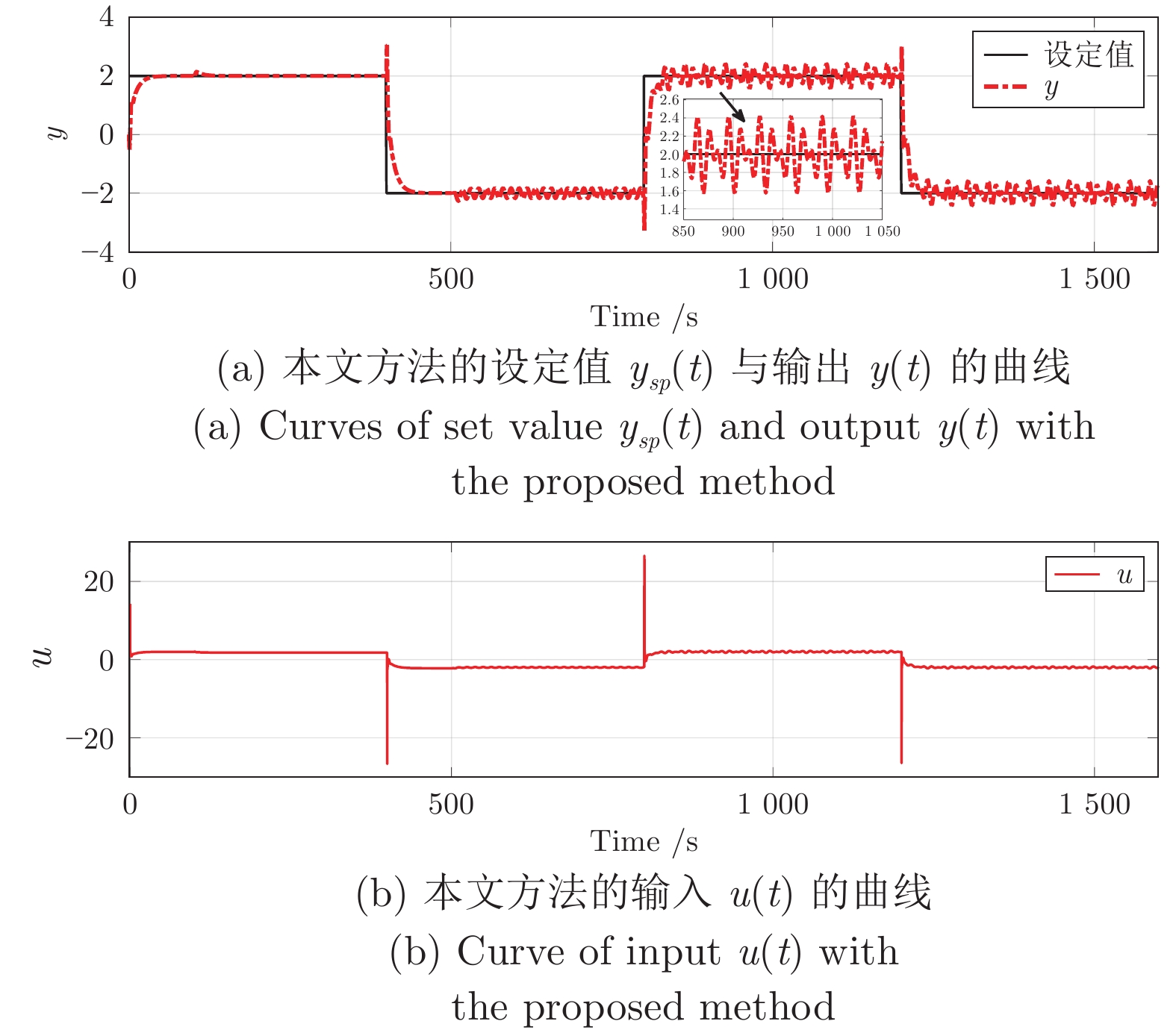
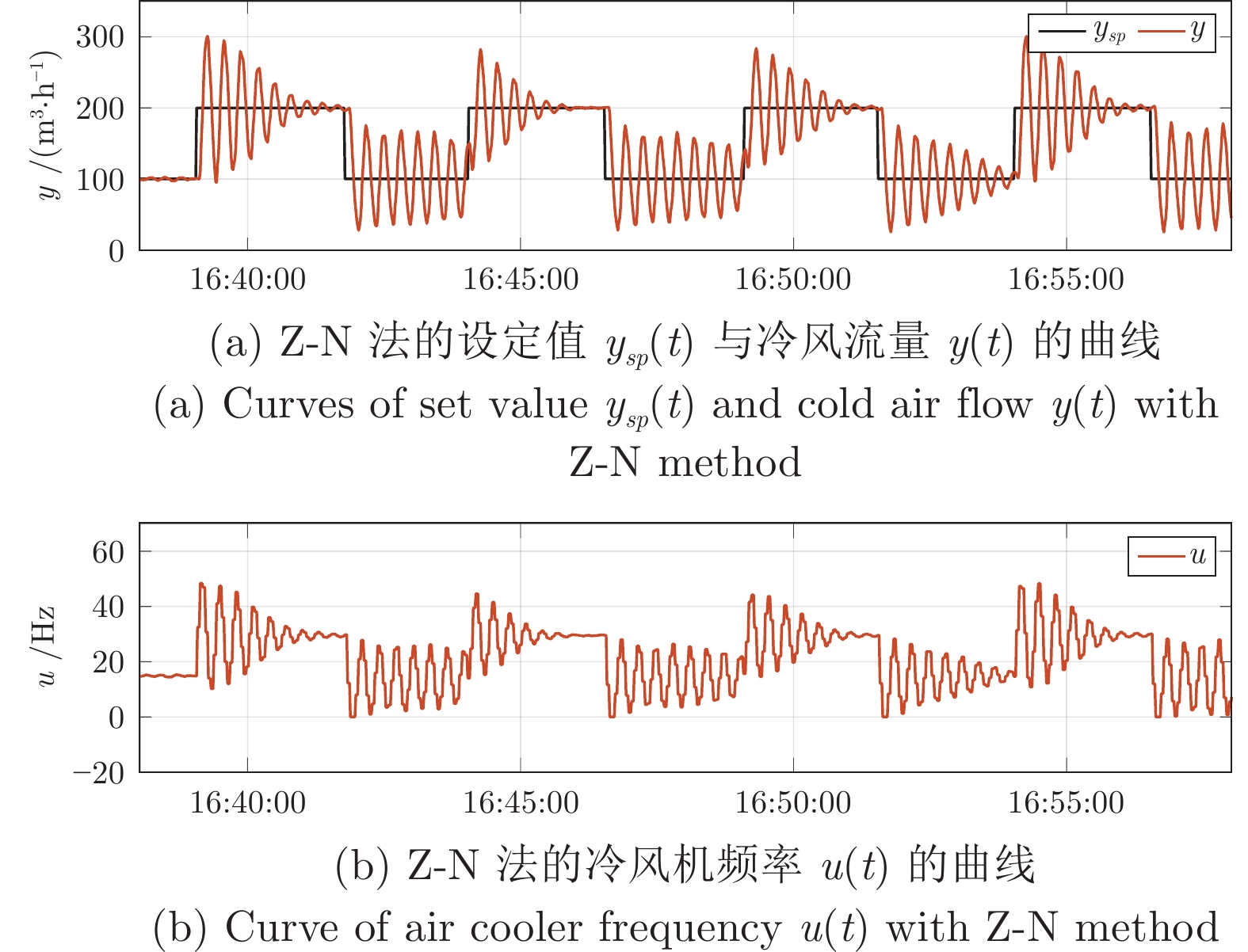
针对存在临界点的A类被控对象及不存在临界点的B类被控对象, 分别采用其\begin{document}$-180^\circ$\end{document} \begin{document}$-120^\circ$\end{document} \begin{document}$-180^\circ$\end{document} \begin{document}$-120^\circ$\end{document} \begin{document}$-180^\circ$\end{document} \begin{document}$-120^\circ$\end{document}
针对存在临界点的A类被控对象及不存在临界点的B类被控对象, 分别采用其





2023, 49(11): 2286-2296.
doi: 10.16383/j.aas.c211230
摘要:
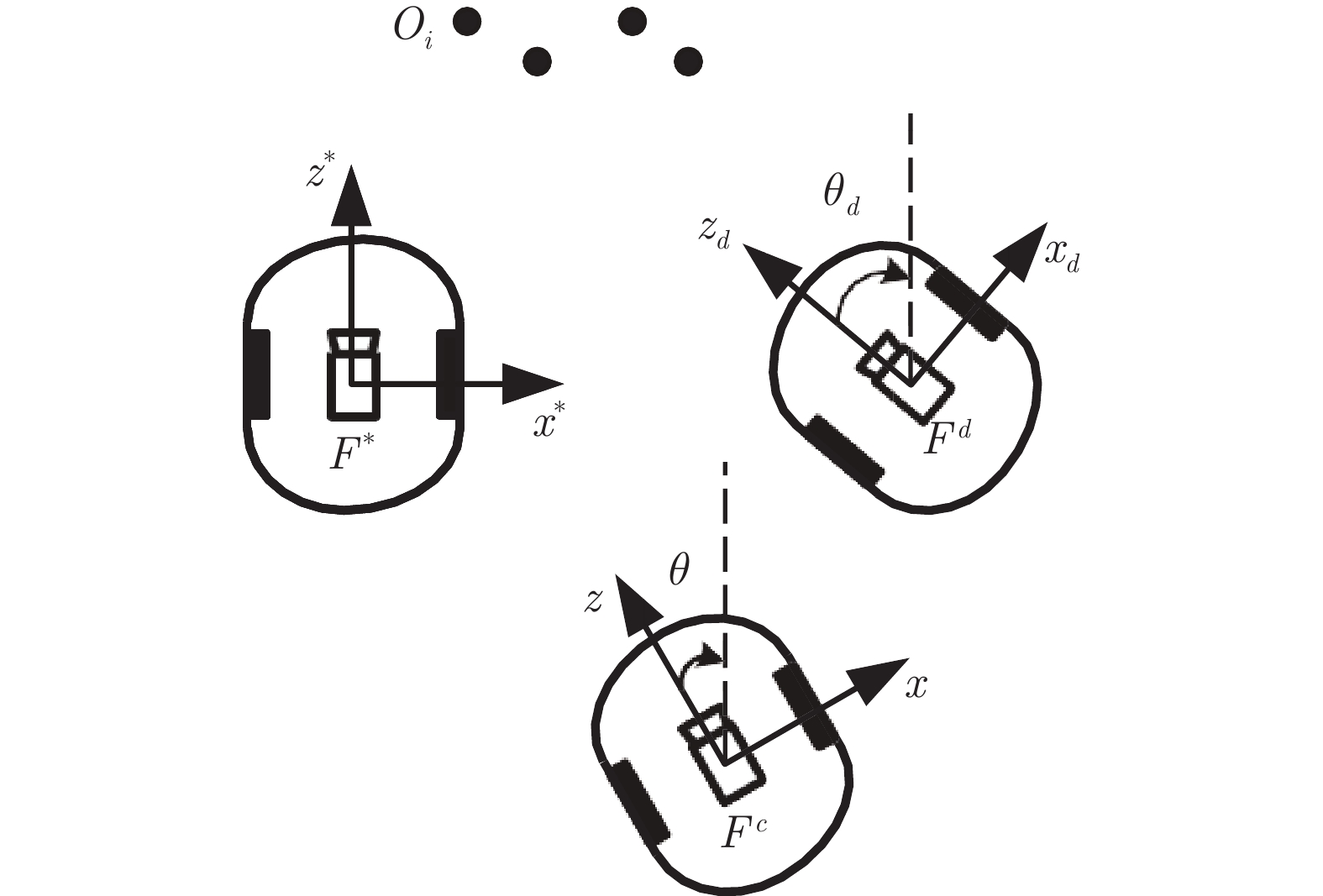
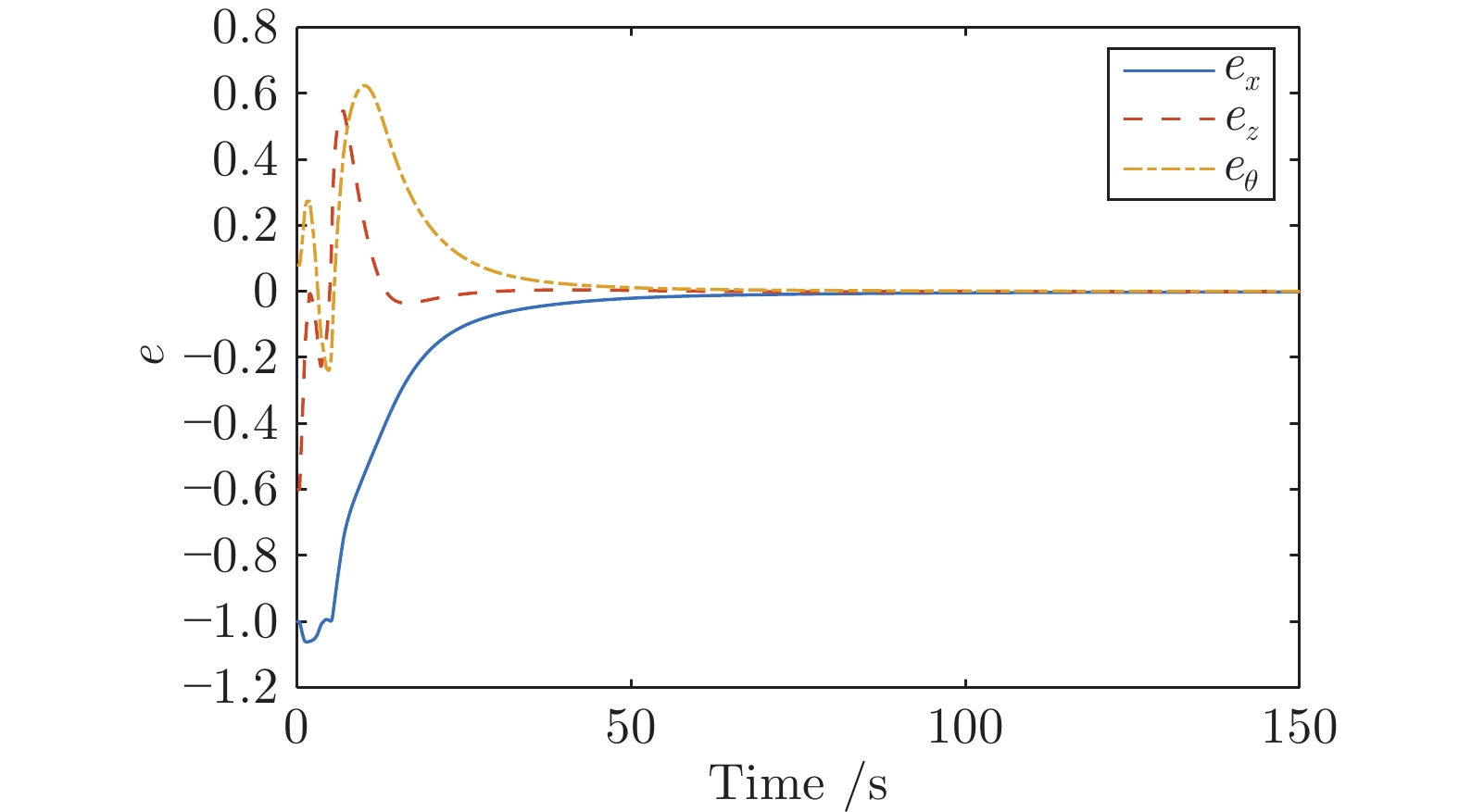
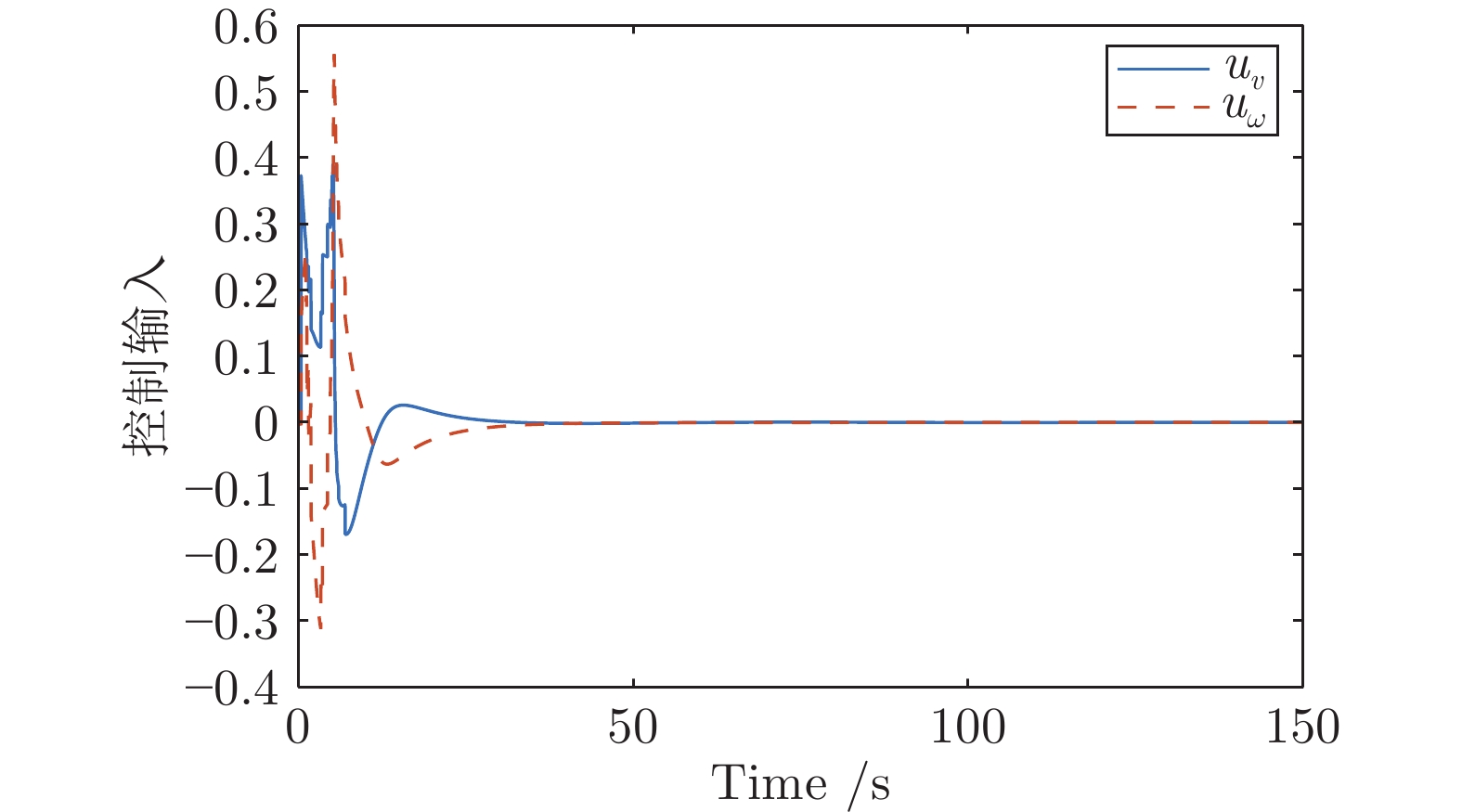
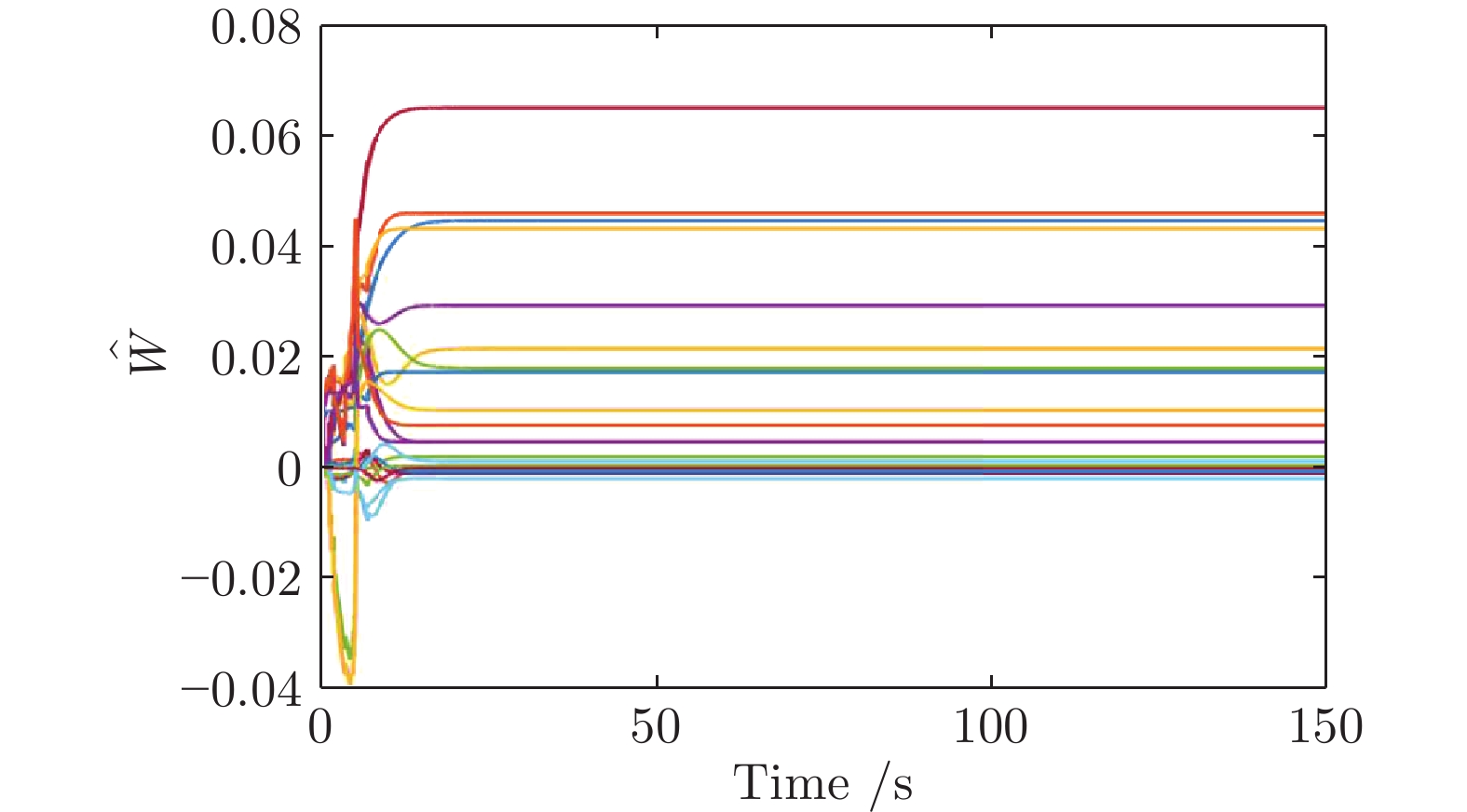
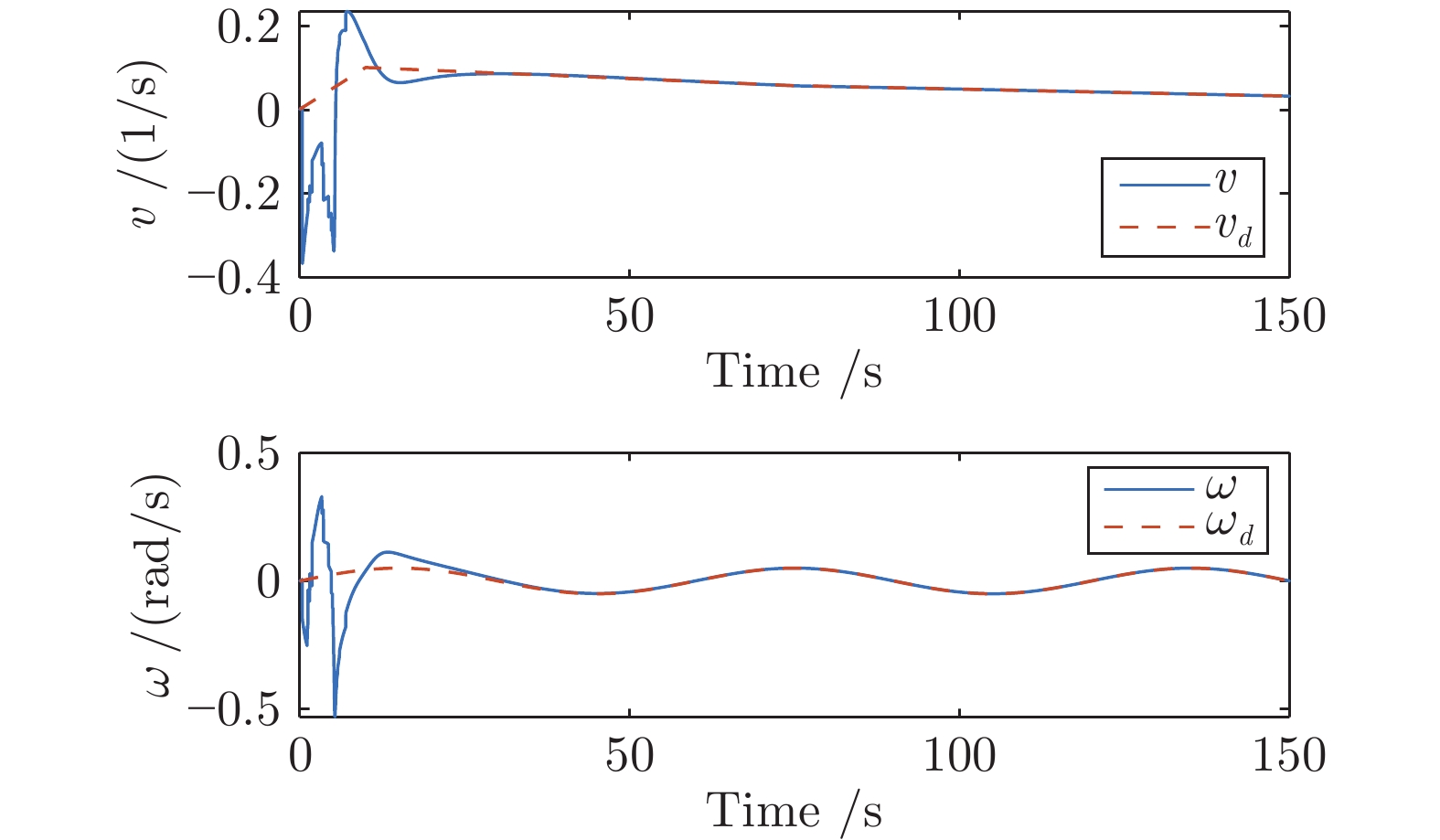
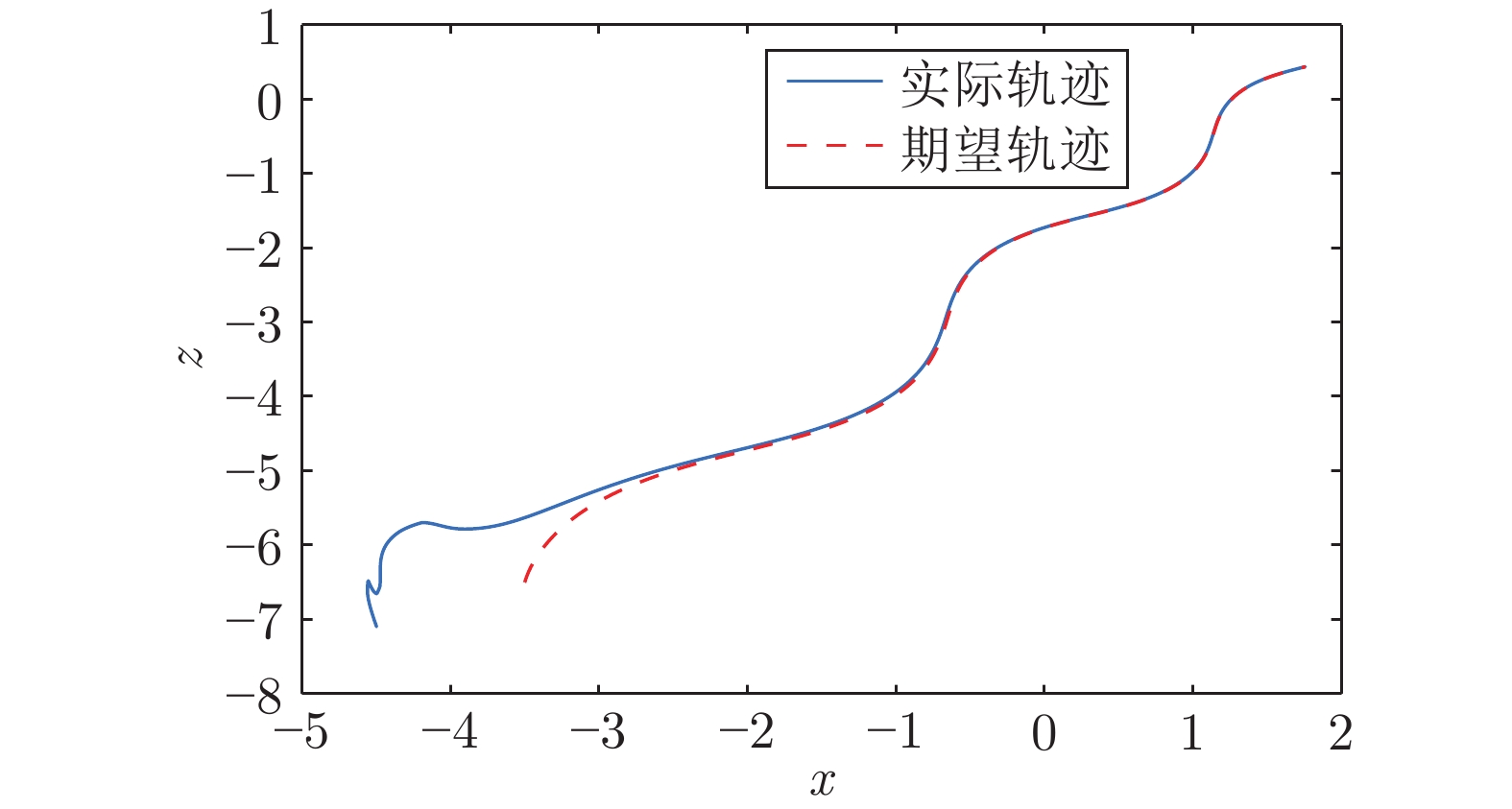
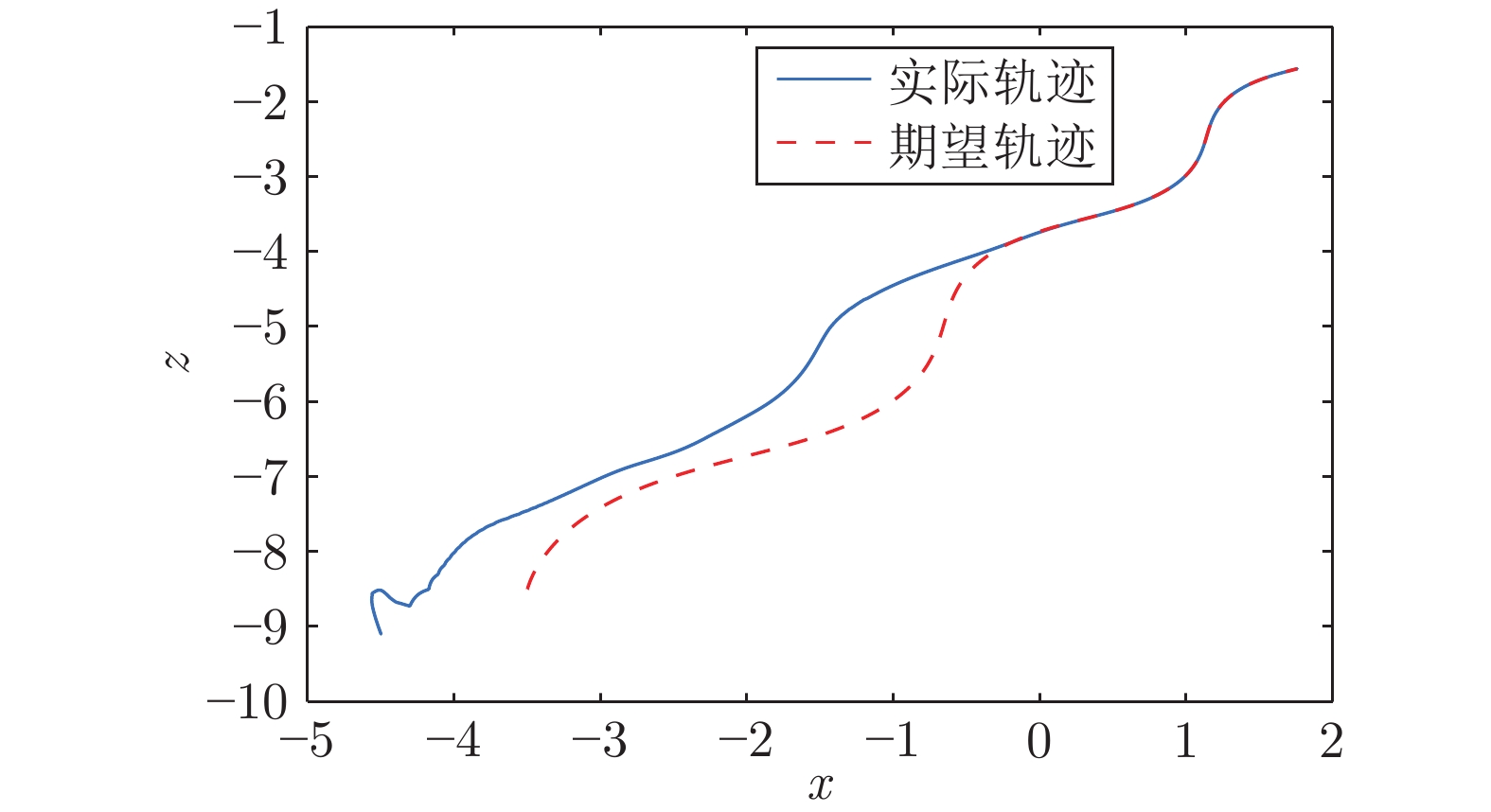
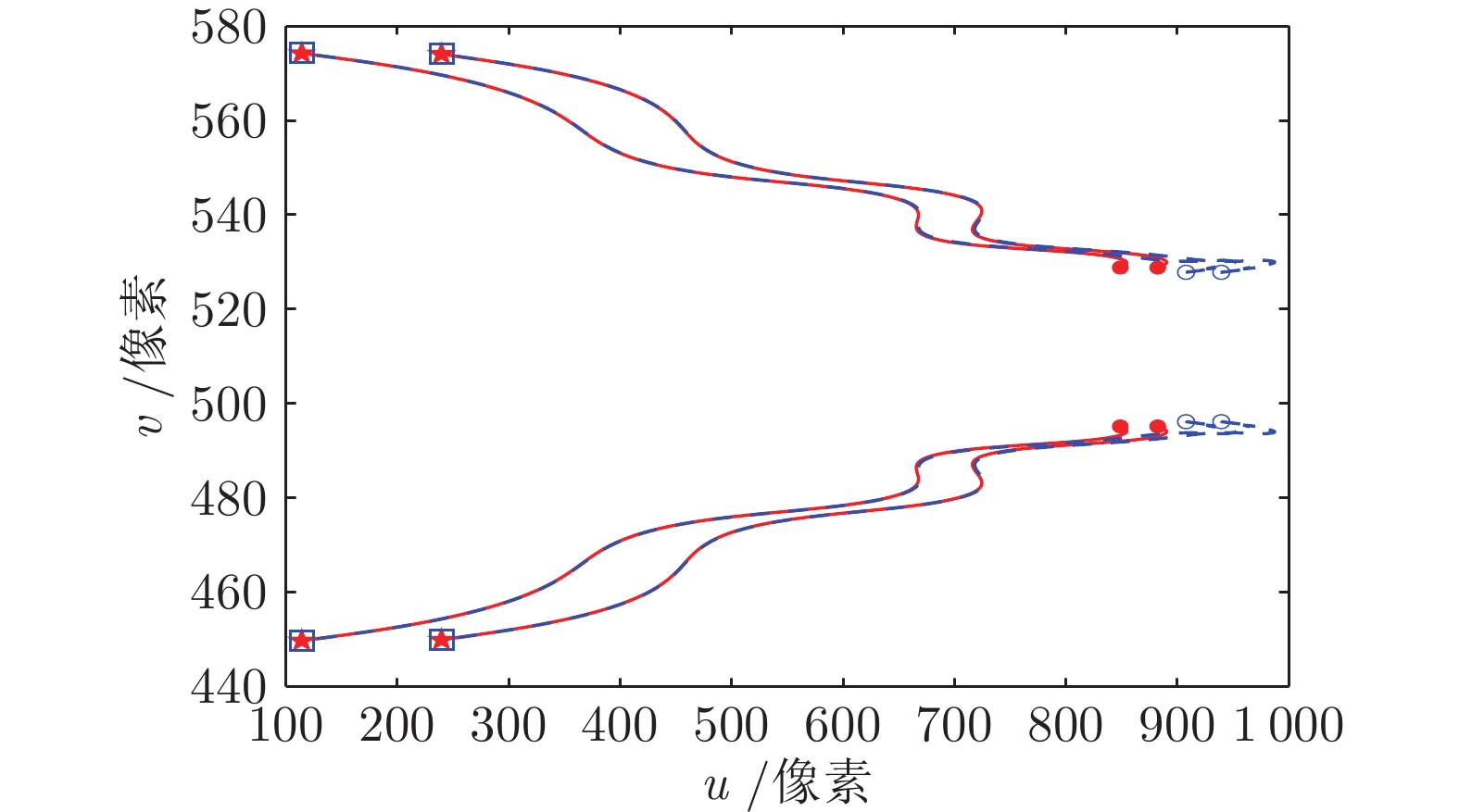
针对移动机器人视觉伺服跟踪控制问题, 提出一种基于自适应动态规划(Adaptive dynamic programming, ADP) 的控制方法. 通过移动机器人上的相机拍摄共面特征点的当前图像、期望图像以及参考图像, 利用单应性技术得到移动机器人当前的位姿信息与期望的位姿信息(即平移量与旋转角度), 从而通过当前与期望的平移旋转之间差值得到系统的开环误差模型. 进而, 针对此系统设计最优控制器, 同时做合适的控制输入变换. 在此基础上设计一个基于ADP的视觉伺服控制方法以保证移动机器人完成轨迹跟踪任务. 为求出最优控制输入, 采用一个评价神经网络近似值函数, 通过不断学习逼近哈密顿−雅可比−贝尔曼(Hamilton-Jacobi-Bellman, HJB)方程的解. 与以往不同的是, 由于系统存在时变项, 导致HJB方程也含有时变项, 因此需要设计具有时变权值结构的神经网络近似值函数. 最终证明在所设计的控制方法作用下, 闭环系统是一致最终有界的.
针对移动机器人视觉伺服跟踪控制问题, 提出一种基于自适应动态规划(Adaptive dynamic programming, ADP) 的控制方法. 通过移动机器人上的相机拍摄共面特征点的当前图像、期望图像以及参考图像, 利用单应性技术得到移动机器人当前的位姿信息与期望的位姿信息(即平移量与旋转角度), 从而通过当前与期望的平移旋转之间差值得到系统的开环误差模型. 进而, 针对此系统设计最优控制器, 同时做合适的控制输入变换. 在此基础上设计一个基于ADP的视觉伺服控制方法以保证移动机器人完成轨迹跟踪任务. 为求出最优控制输入, 采用一个评价神经网络近似值函数, 通过不断学习逼近哈密顿−雅可比−贝尔曼(Hamilton-Jacobi-Bellman, HJB)方程的解. 与以往不同的是, 由于系统存在时变项, 导致HJB方程也含有时变项, 因此需要设计具有时变权值结构的神经网络近似值函数. 最终证明在所设计的控制方法作用下, 闭环系统是一致最终有界的.

2023, 49(11): 2297-2310.
doi: 10.16383/j.aas.c220577
摘要:
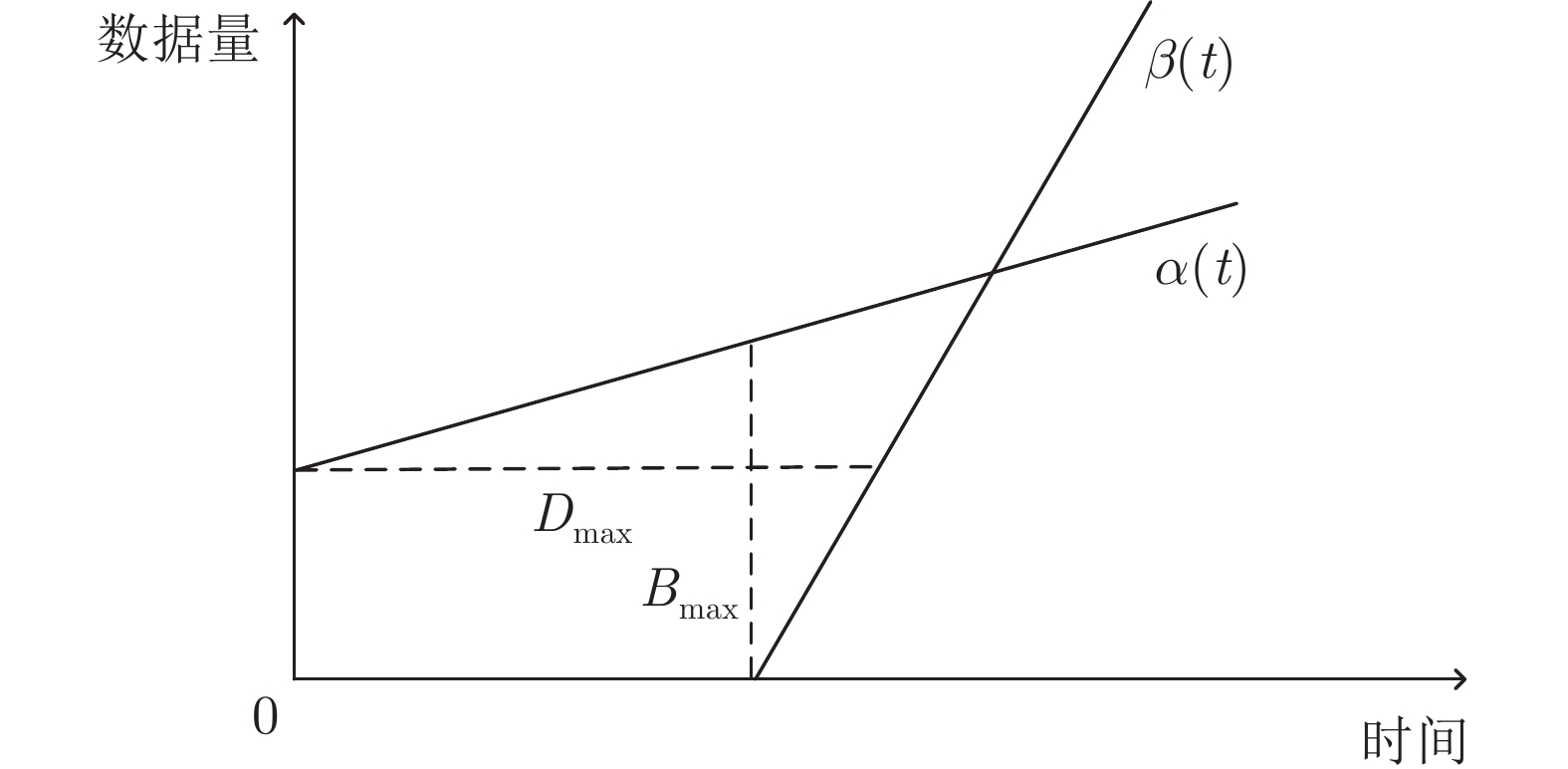
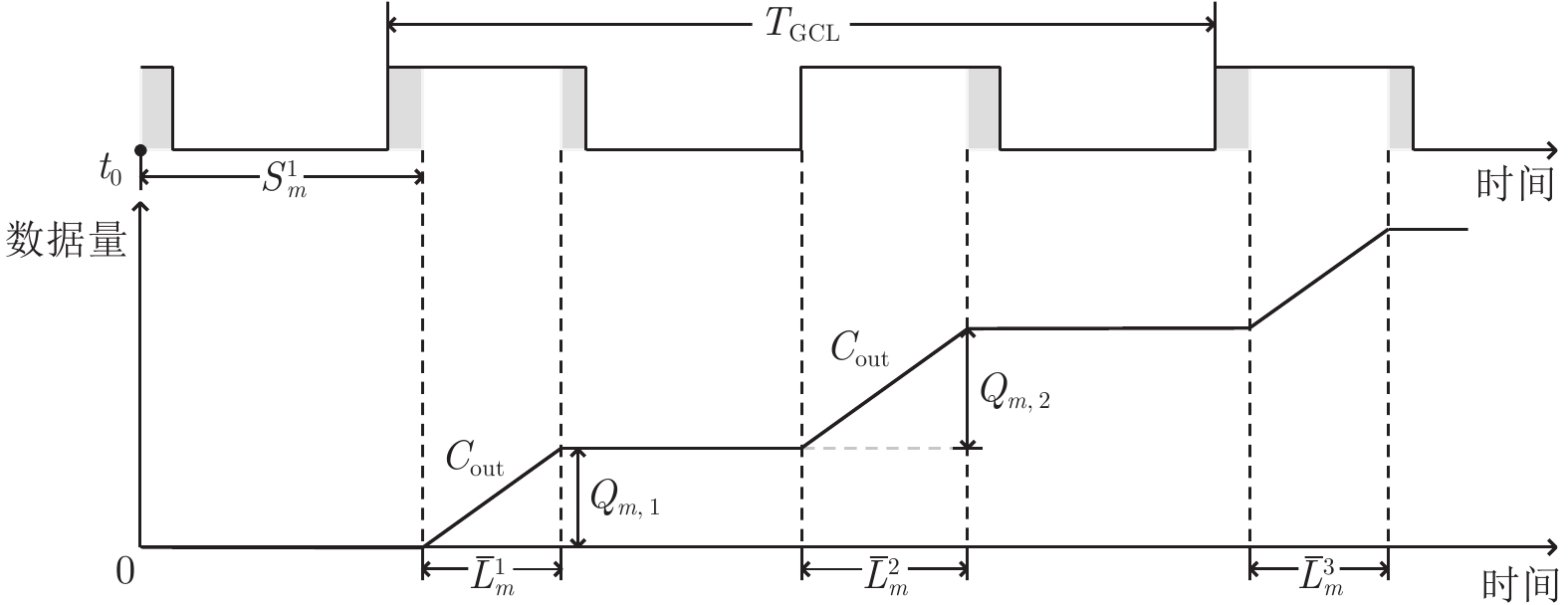
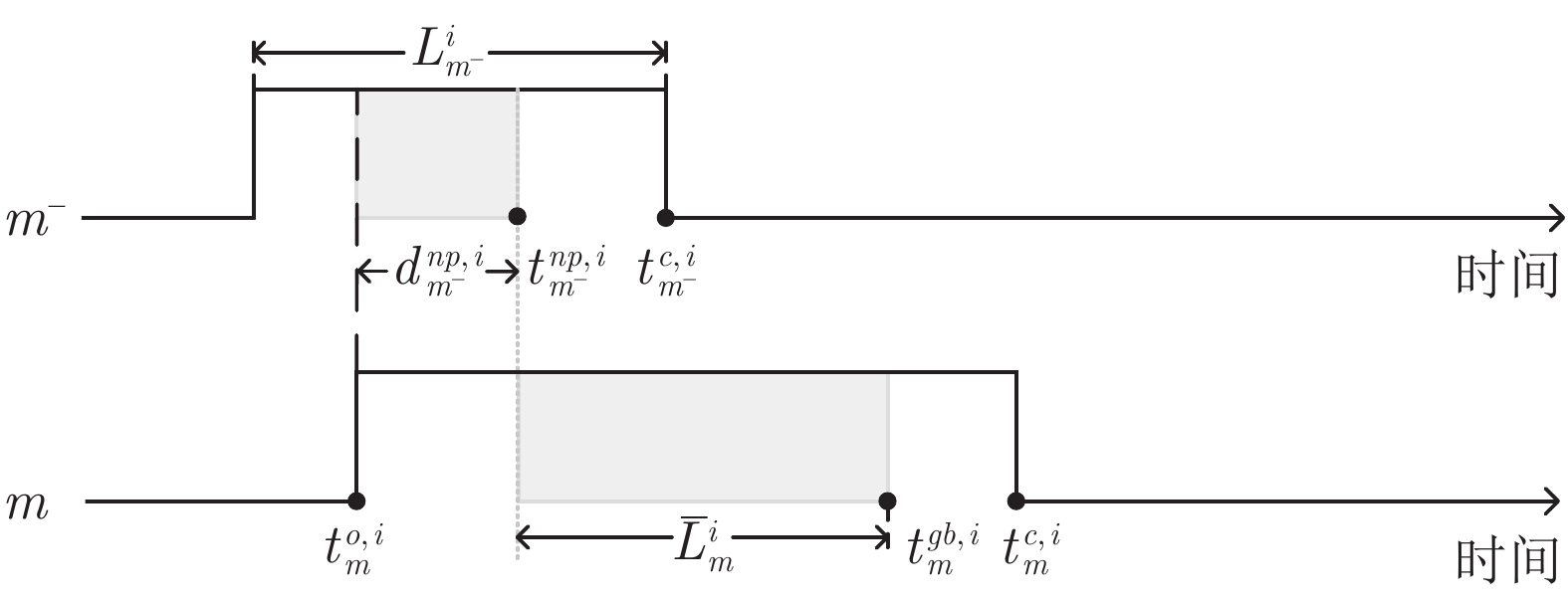
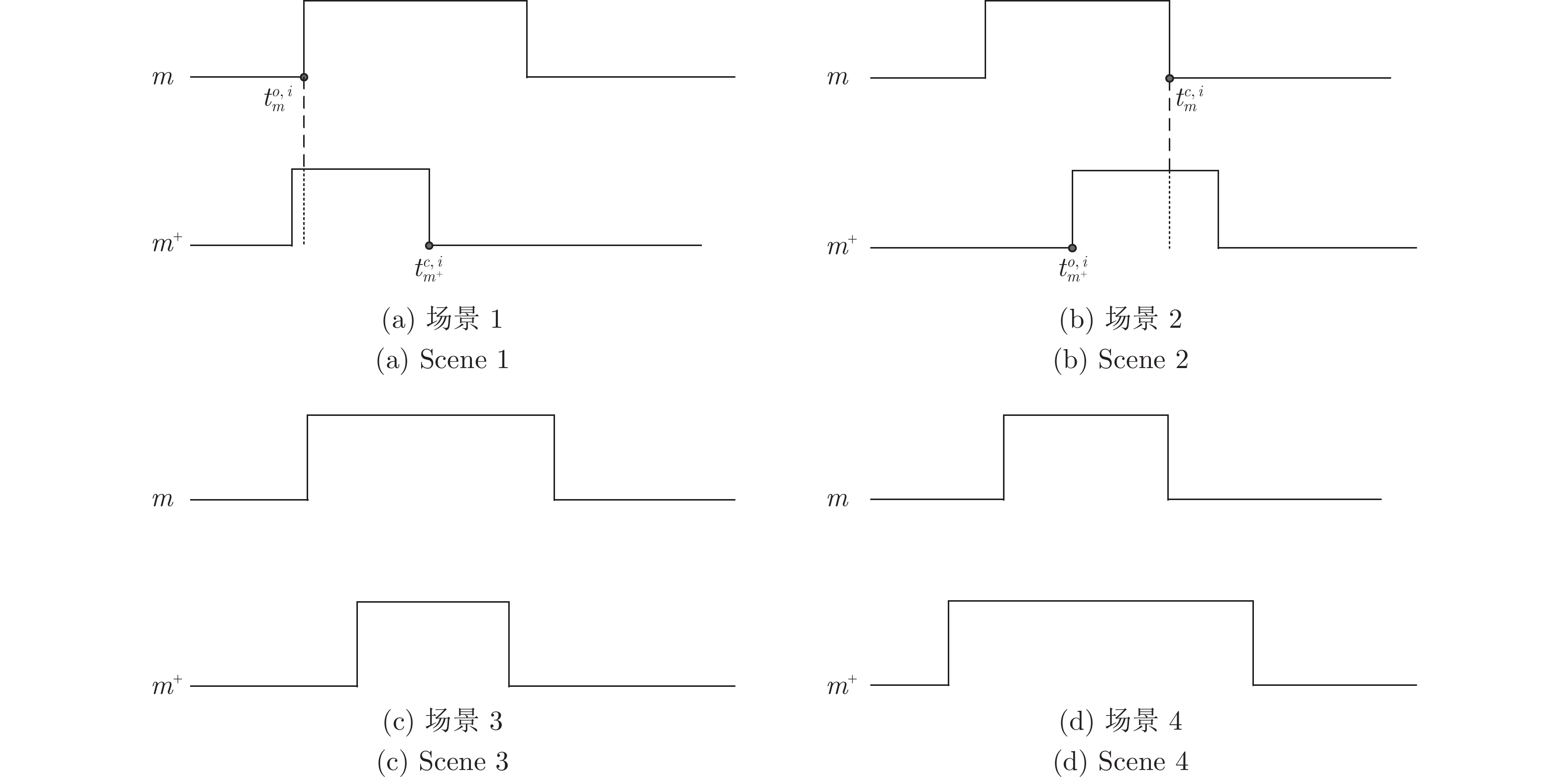
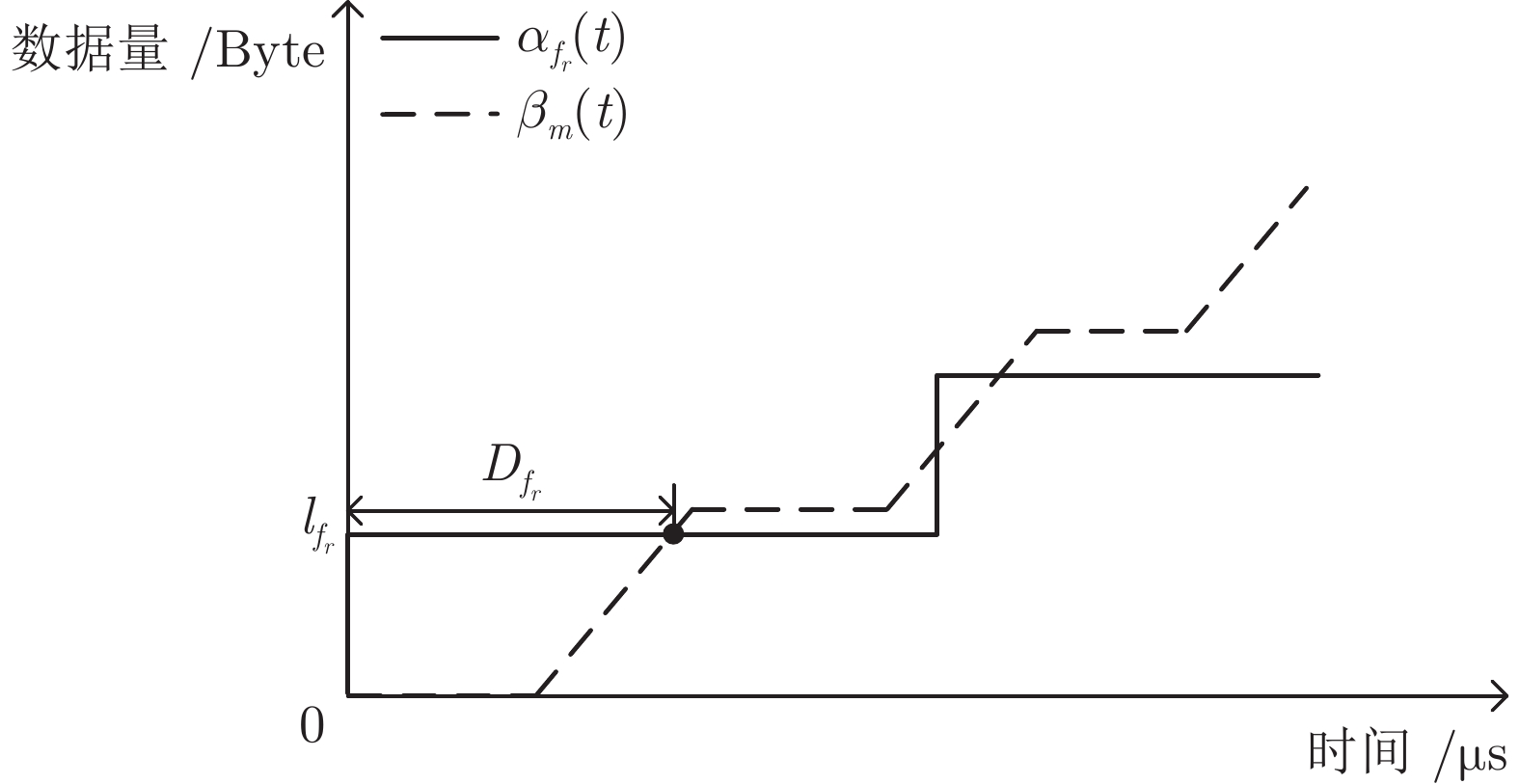
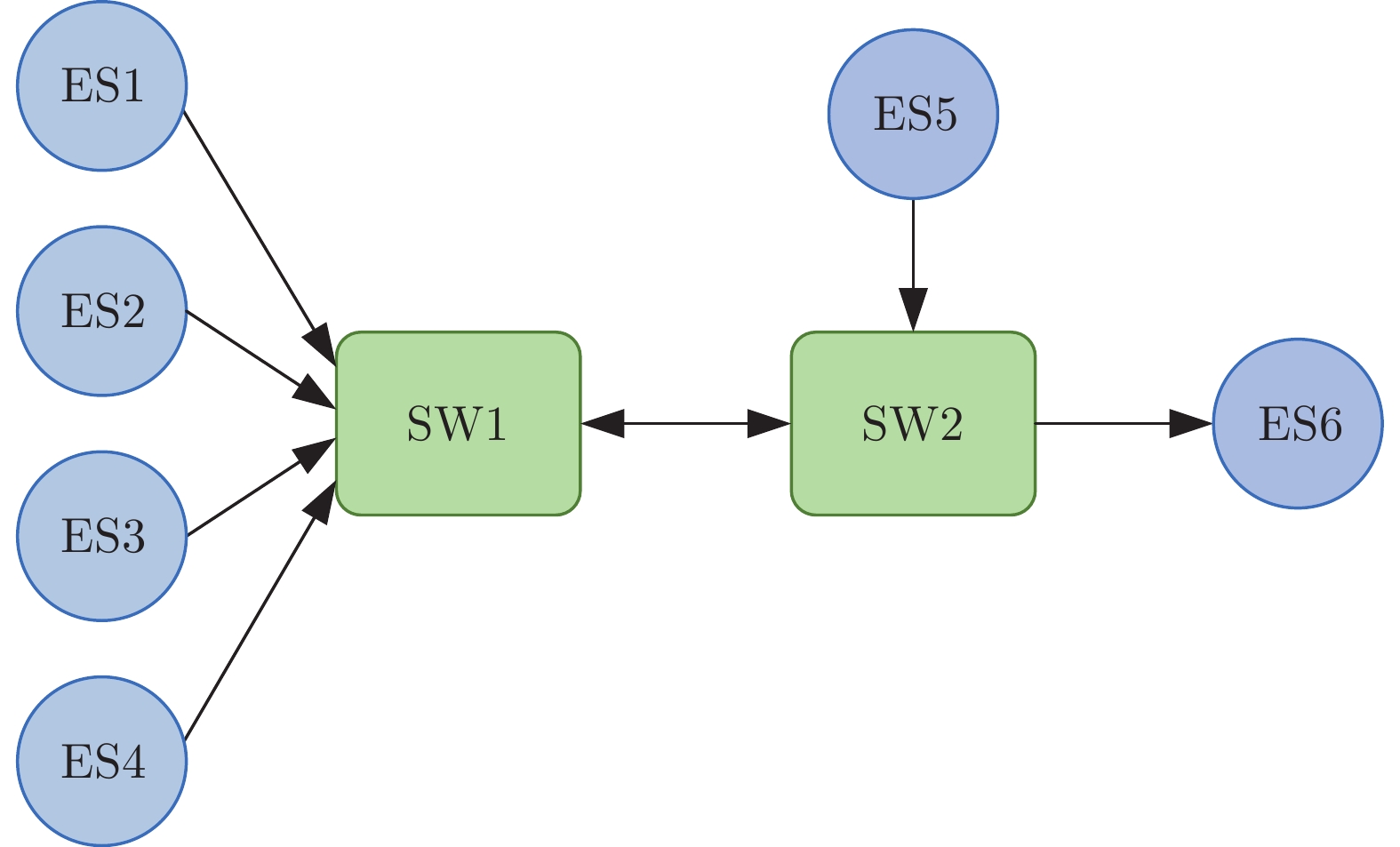
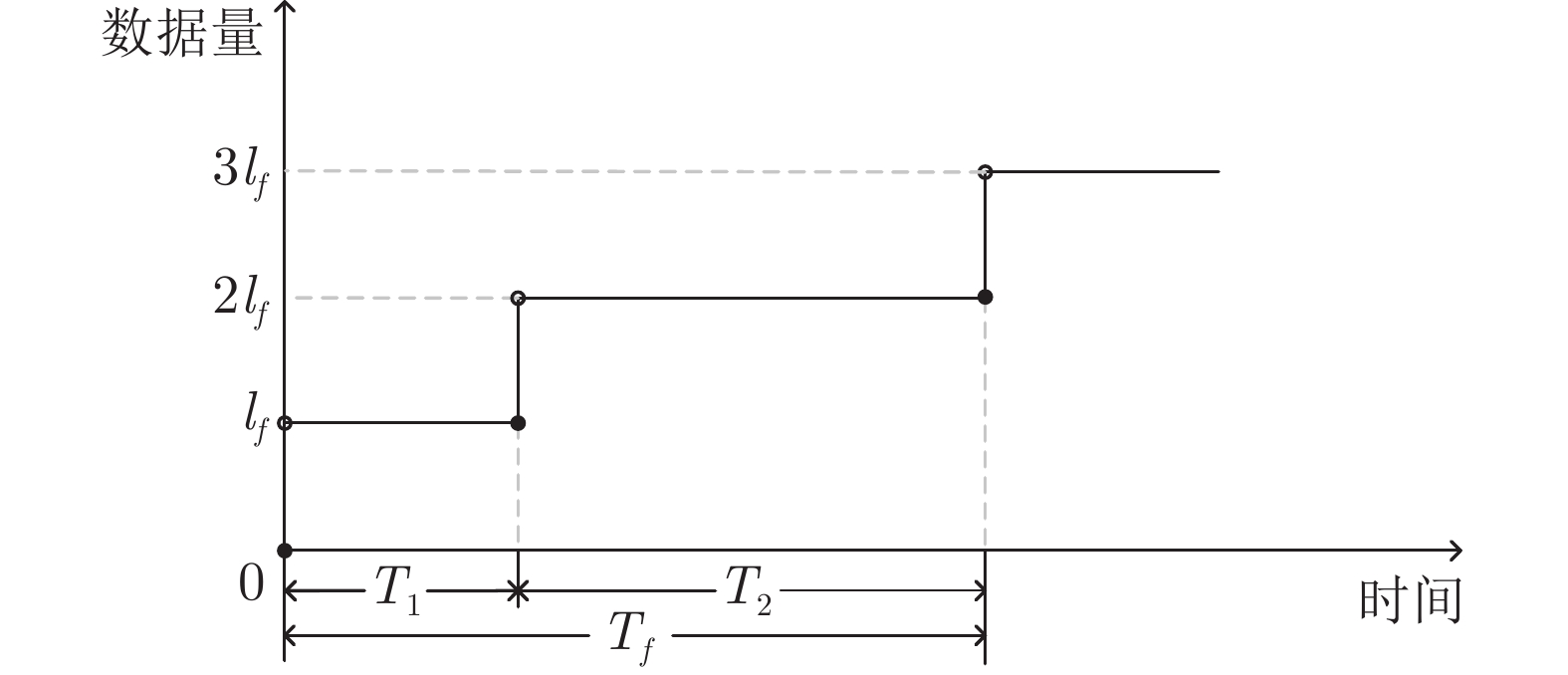
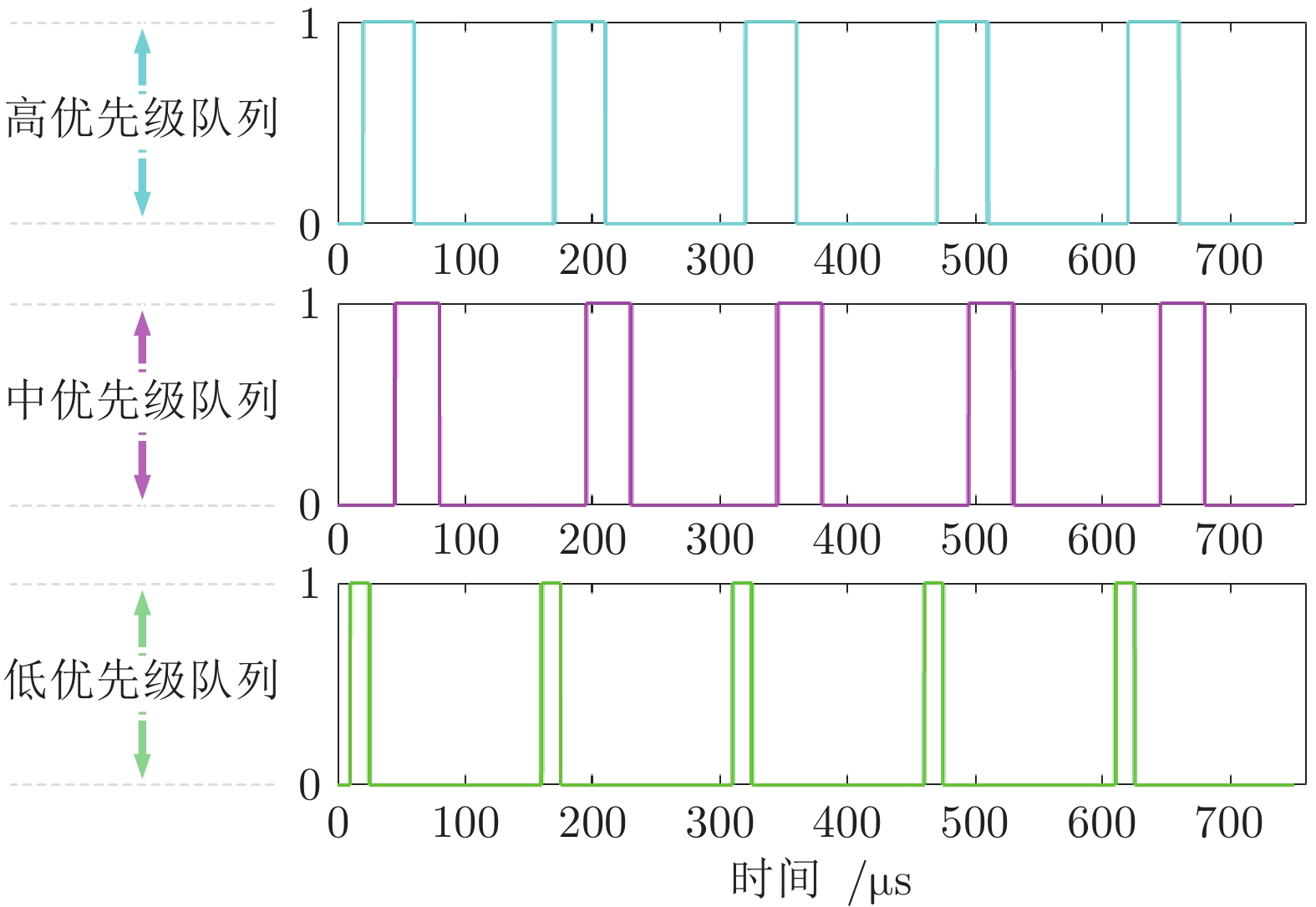
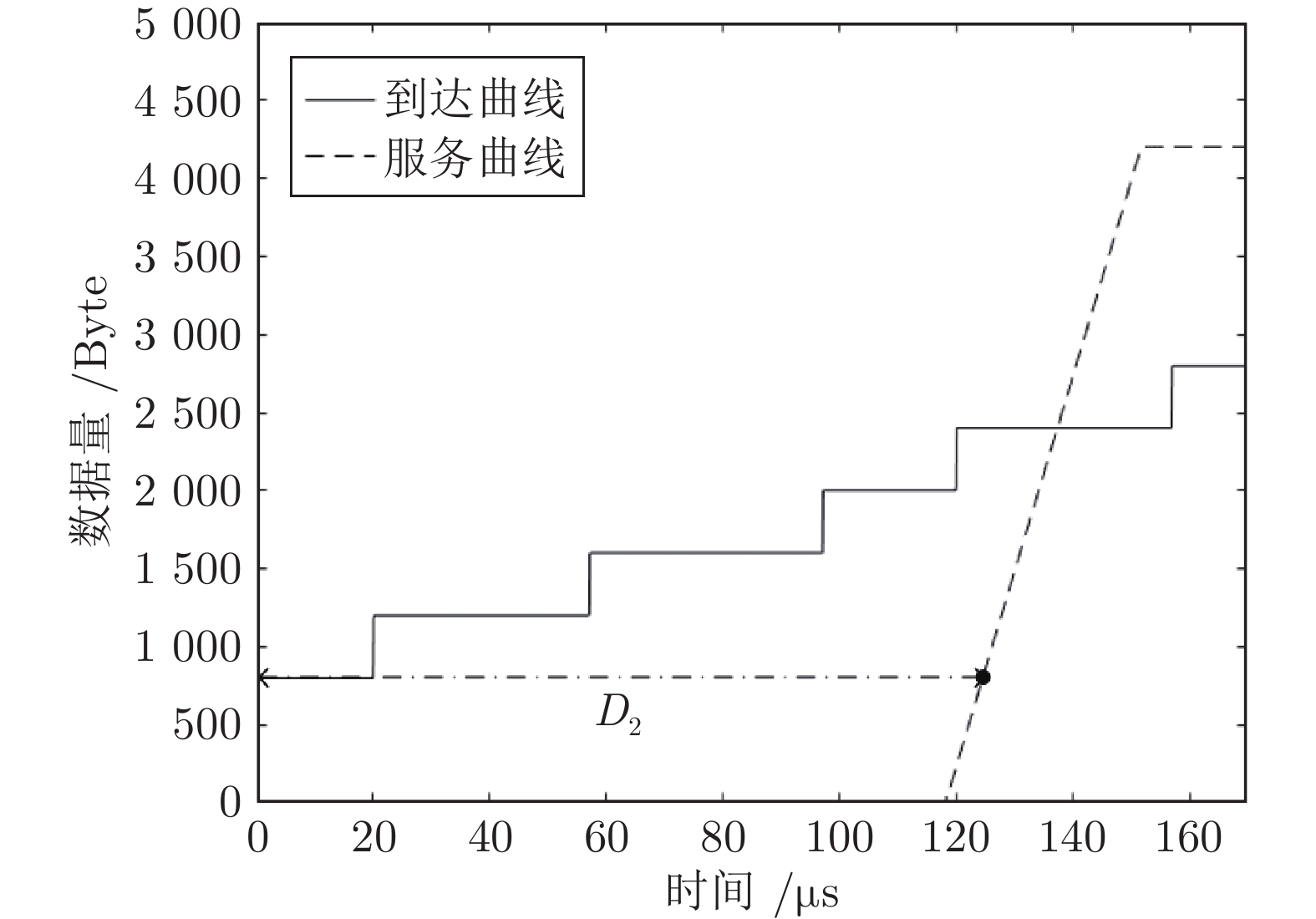
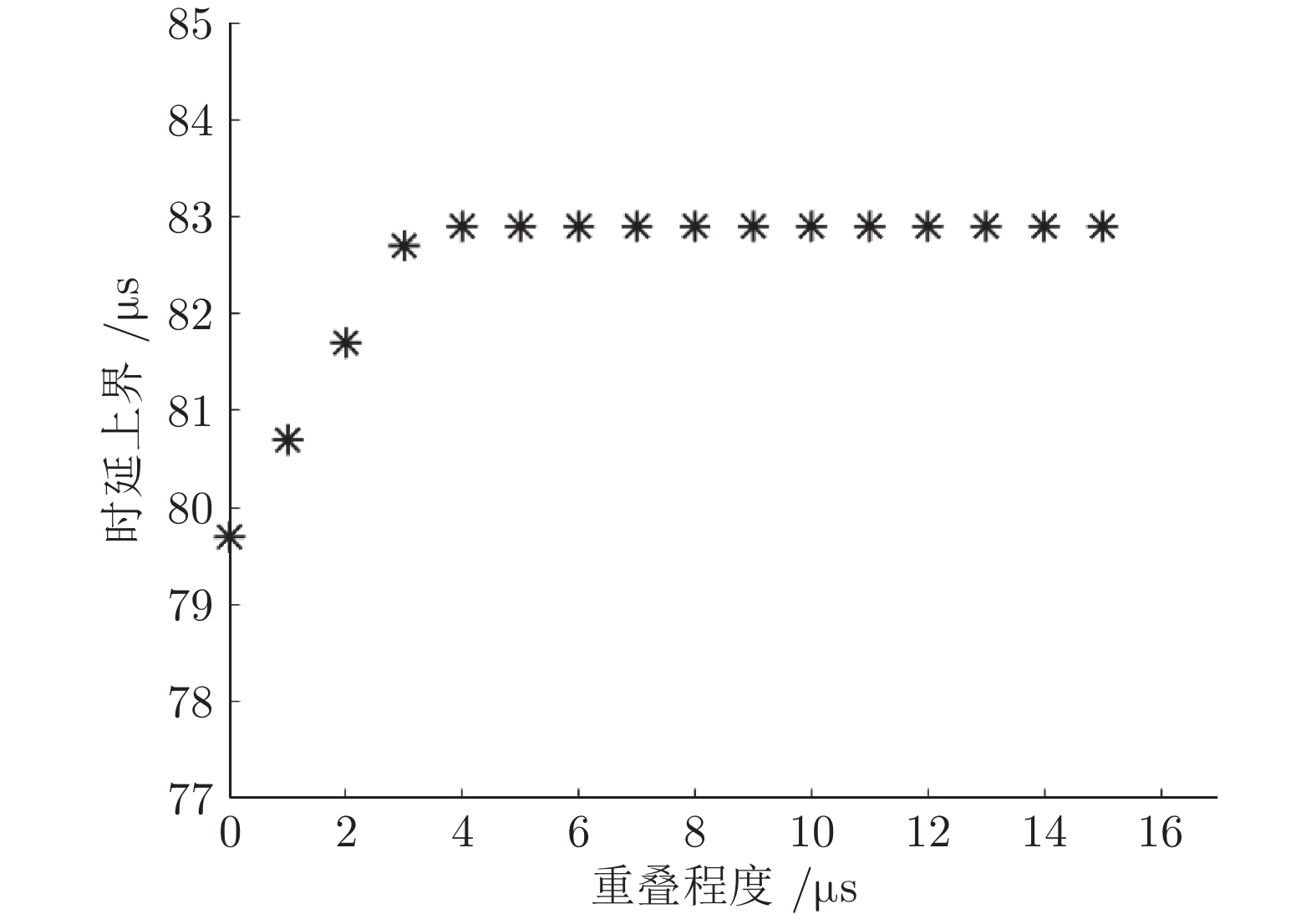
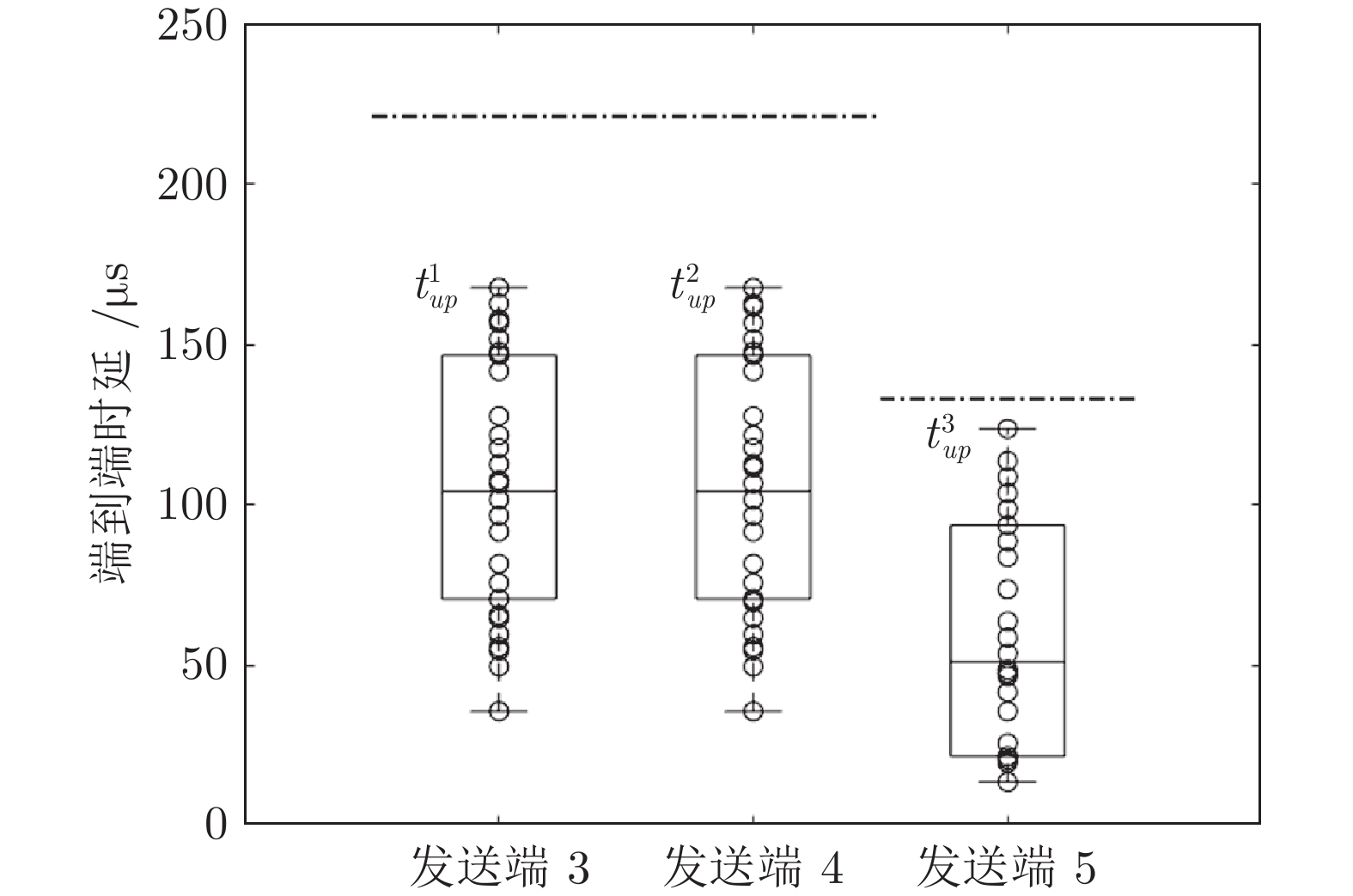
时间敏感网络(Time-sensitive networking, TSN)作为一种新兴工业通信技术, 能够为工业控制业务提供高可靠及确定性时延保障. 针对时间敏感网络在工业场景中广泛采用的时间感知整形(Time-aware shaper, TAS)机制, 提出一种基于网络演算的时延上界分析模型, 对多节点组网下端到端时延上界进行定量分析, 用以评估门控 (Gate control list, GCL)设置是否满足业务服务质量(Quality of service, QoS)需求, 有助于简化多节点组网场景下门控设置复杂度. 模型仿真部分对影响端到端时延的主要因素进行了对比分析, 并通过OMNeT++ 实时仿真验证了所提出时延上界分析模型的有效性.
时间敏感网络(Time-sensitive networking, TSN)作为一种新兴工业通信技术, 能够为工业控制业务提供高可靠及确定性时延保障. 针对时间敏感网络在工业场景中广泛采用的时间感知整形(Time-aware shaper, TAS)机制, 提出一种基于网络演算的时延上界分析模型, 对多节点组网下端到端时延上界进行定量分析, 用以评估门控 (Gate control list, GCL)设置是否满足业务服务质量(Quality of service, QoS)需求, 有助于简化多节点组网场景下门控设置复杂度. 模型仿真部分对影响端到端时延的主要因素进行了对比分析, 并通过OMNeT++ 实时仿真验证了所提出时延上界分析模型的有效性.





2023, 49(11): 2311-2325.
doi: 10.16383/j.aas.c210430
摘要:
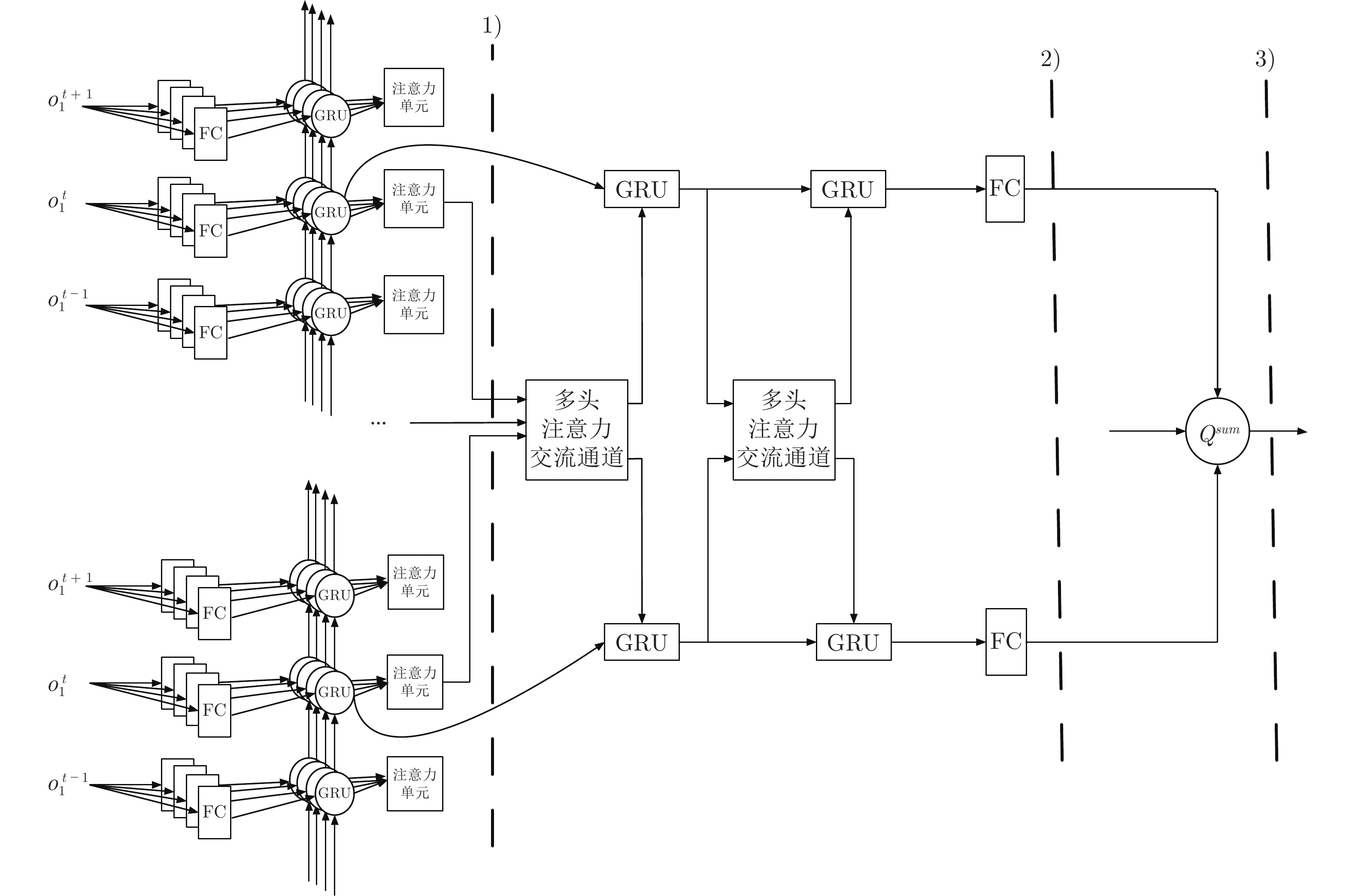
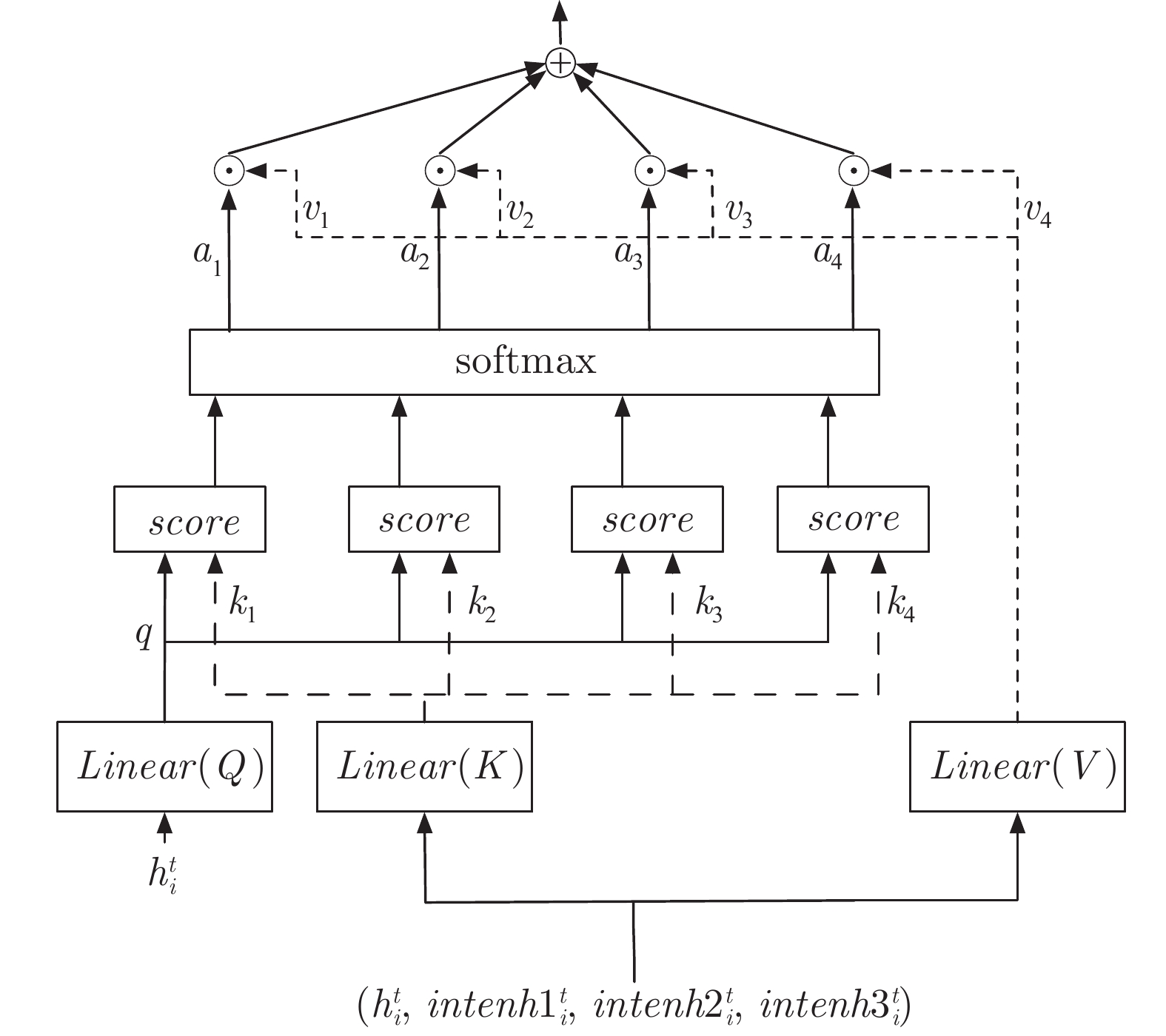
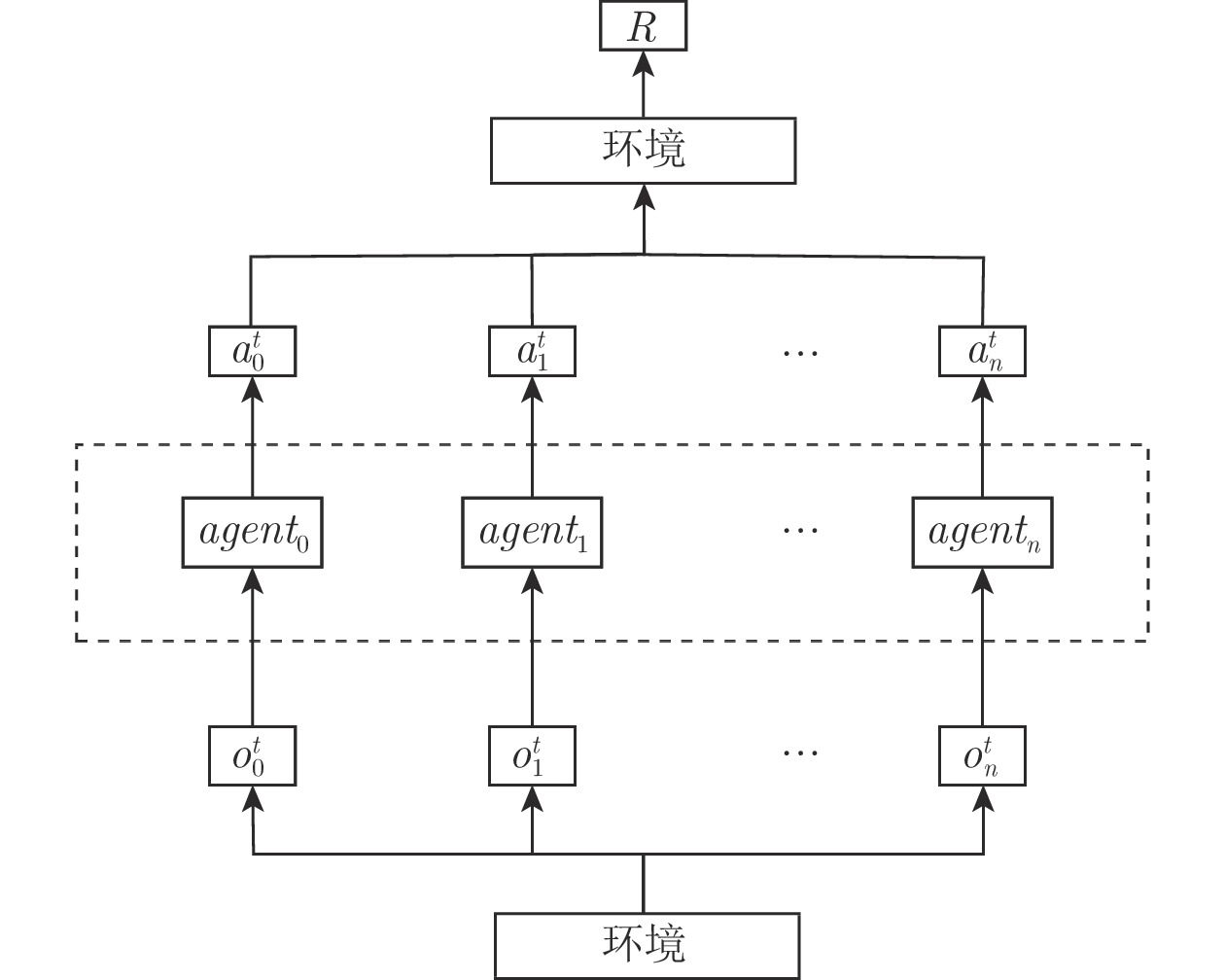
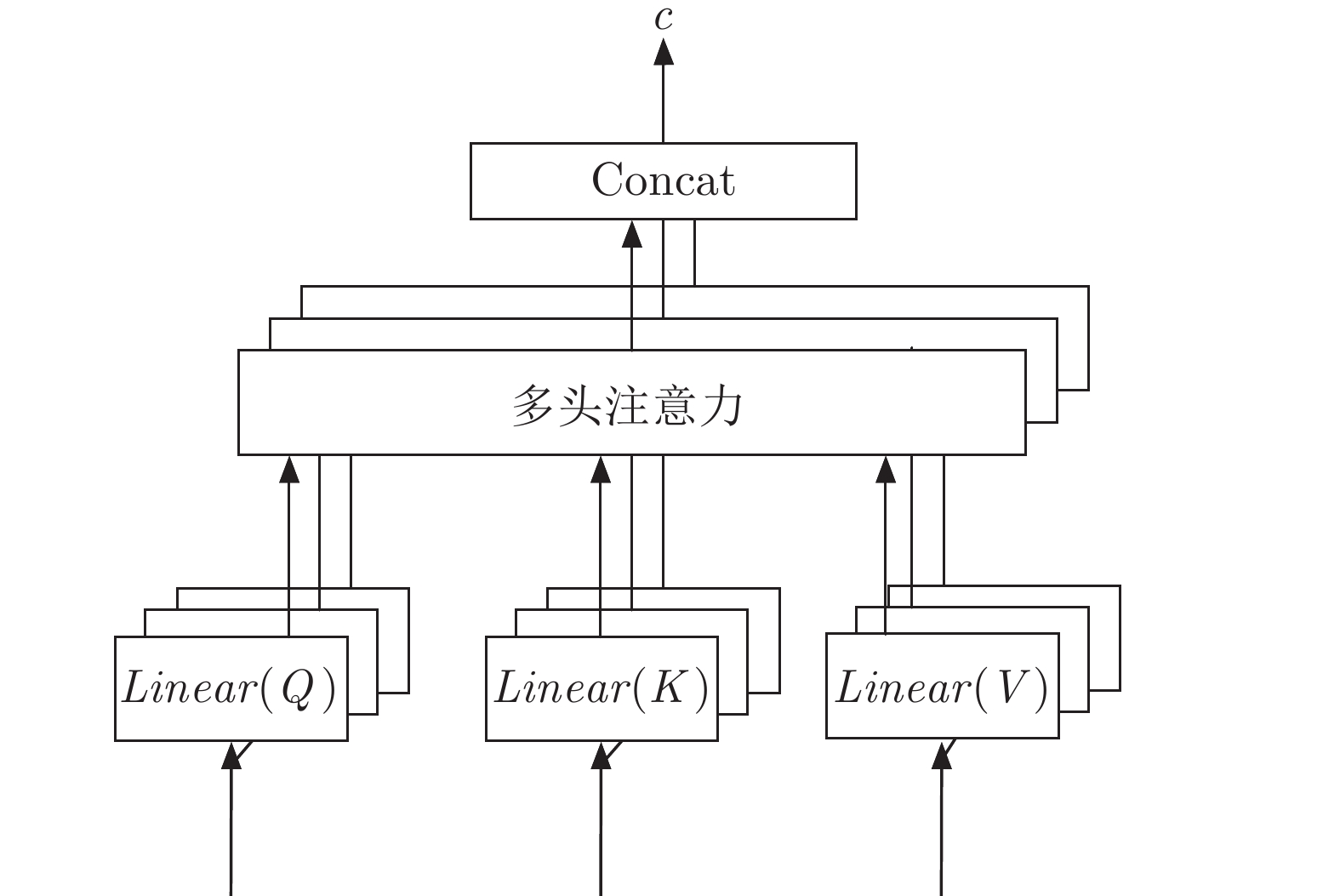
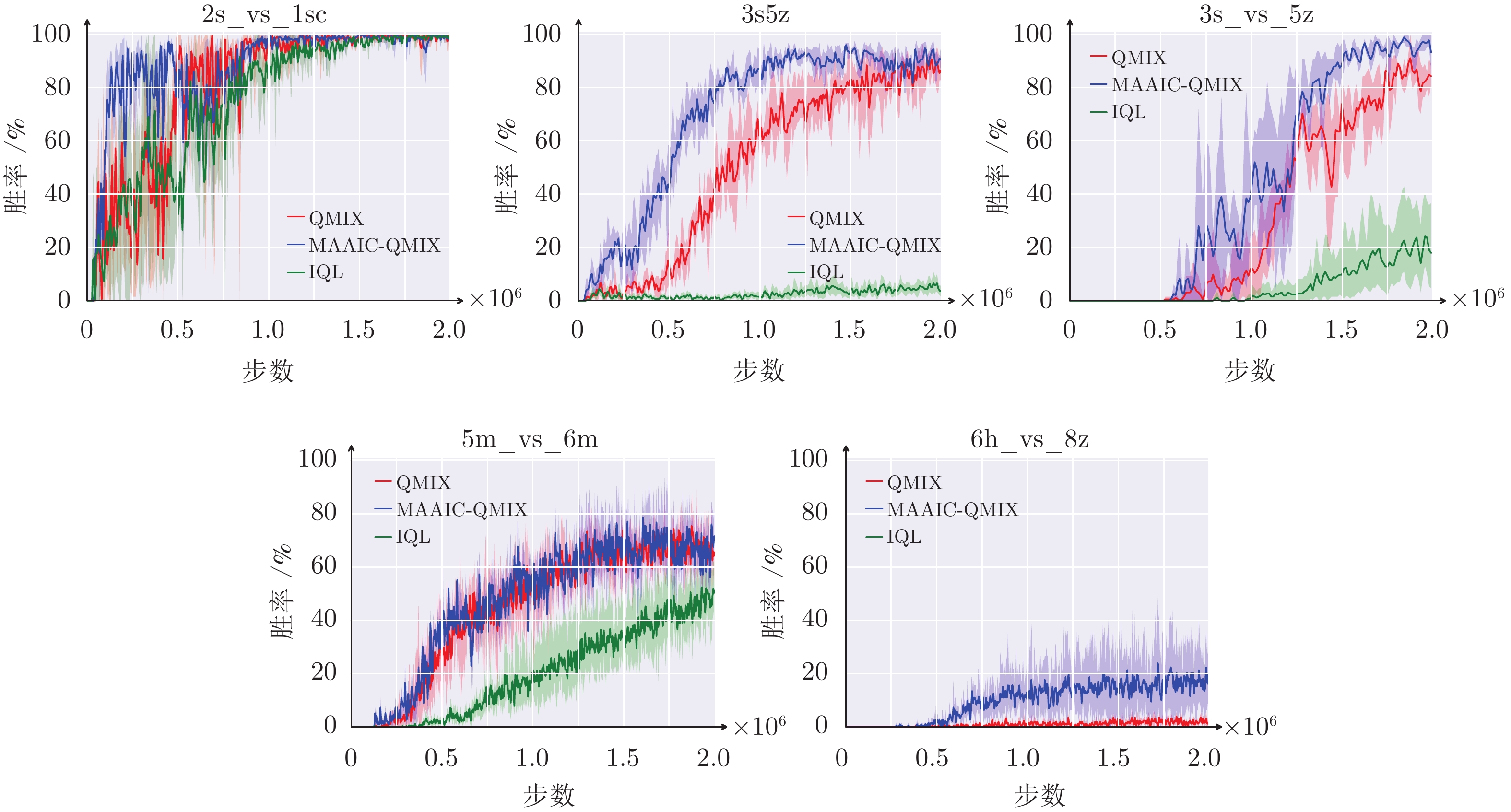
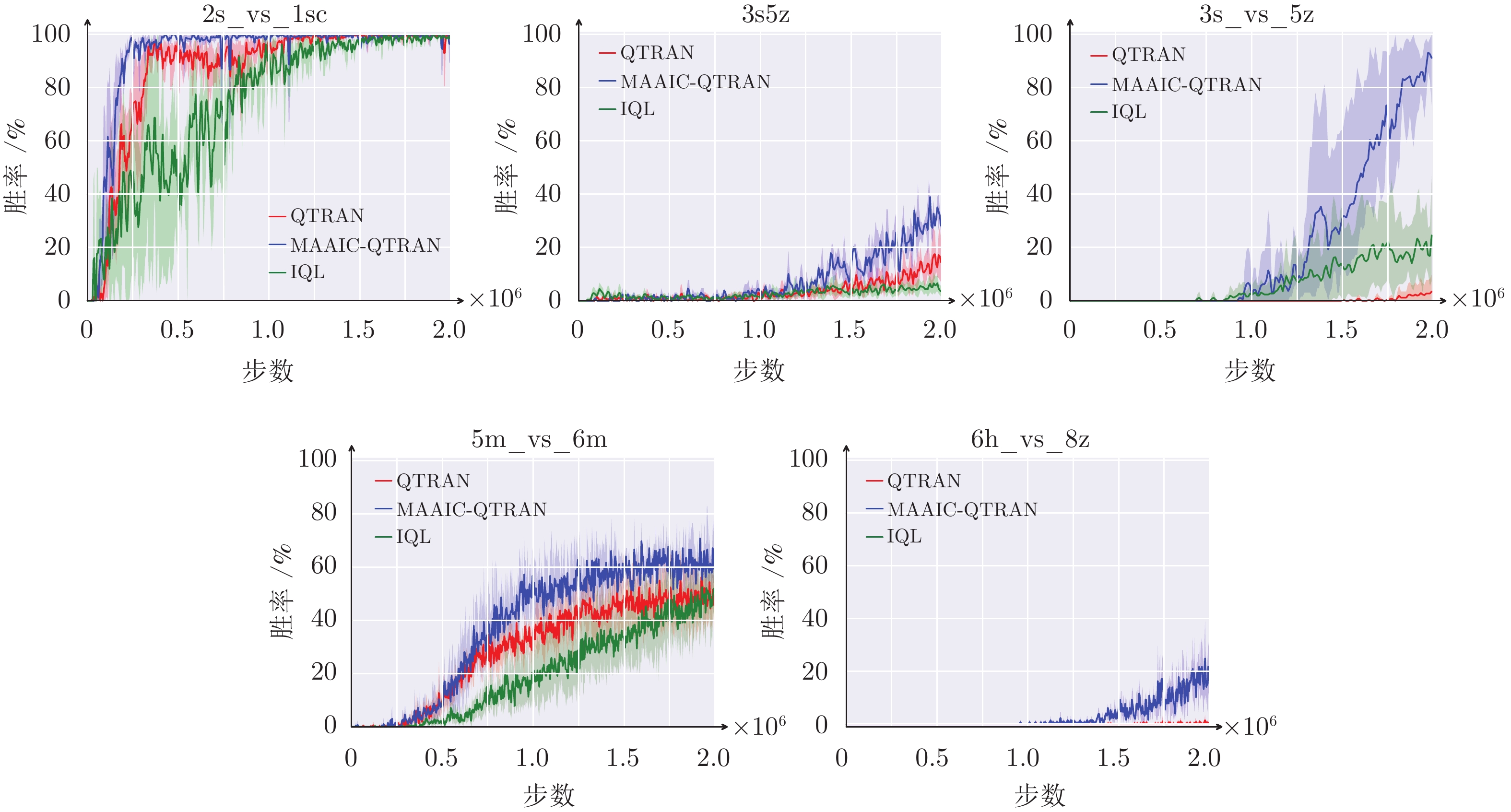
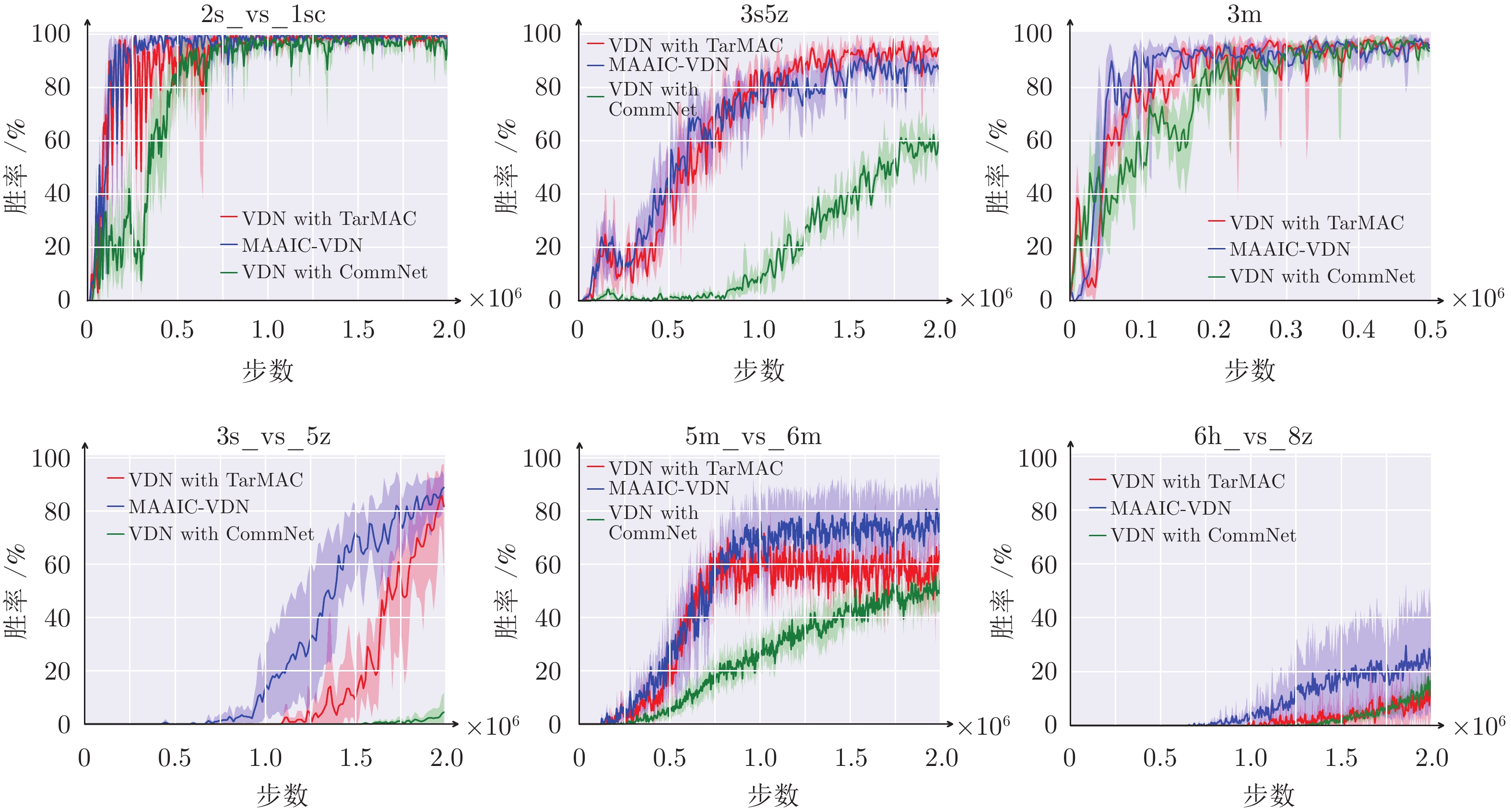
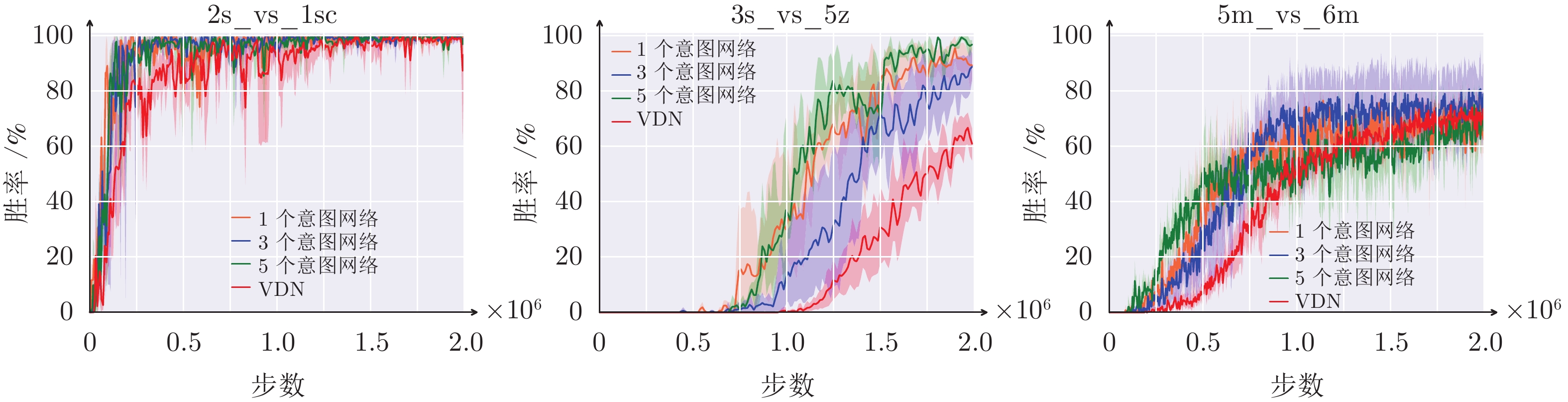
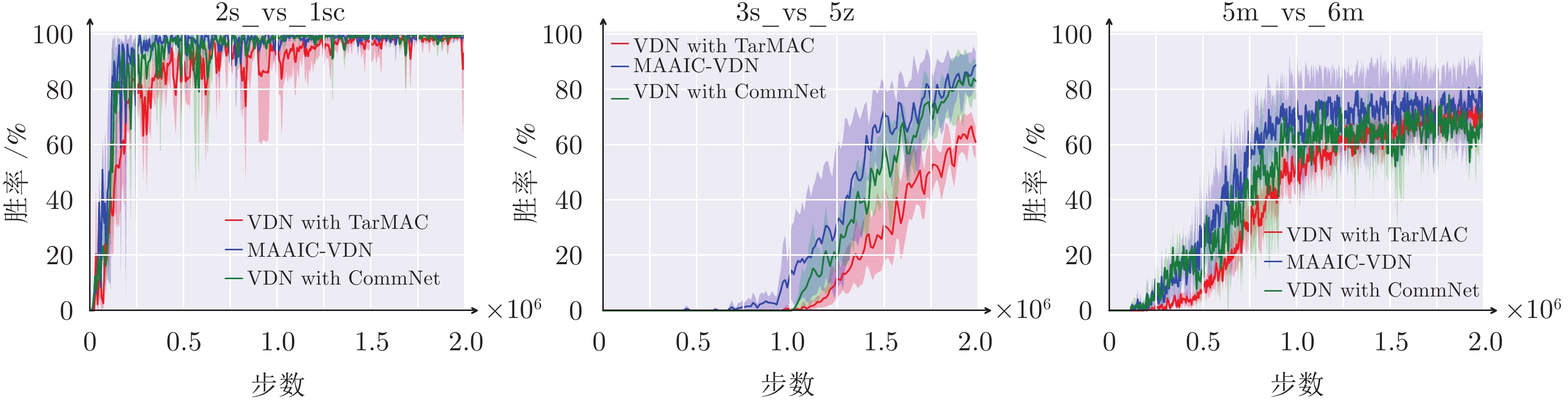
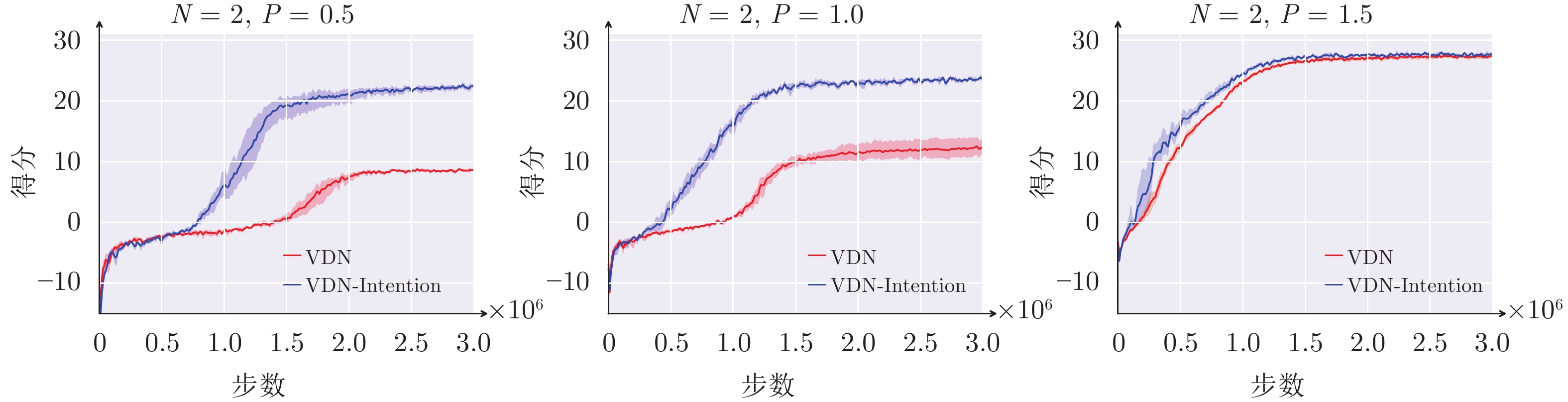
对于部分可观测环境下的多智能体交流协作任务, 现有研究大多只利用了当前时刻的网络隐藏层信息, 限制了信息的来源. 研究如何使用团队奖励训练一组独立的策略以及如何提升独立策略的协同表现, 提出多智能体注意力意图交流算法(Multi-agent attentional intention and communication, MAAIC), 增加了意图信息模块来扩大交流信息的来源, 并且改善了交流模式. 将智能体历史上表现最优的网络作为意图网络, 且从中提取策略意图信息, 按时间顺序保留成一个向量, 最后结合注意力机制推断出更为有效的交流信息. 在星际争霸环境中, 通过实验对比分析, 验证了该算法的有效性.
对于部分可观测环境下的多智能体交流协作任务, 现有研究大多只利用了当前时刻的网络隐藏层信息, 限制了信息的来源. 研究如何使用团队奖励训练一组独立的策略以及如何提升独立策略的协同表现, 提出多智能体注意力意图交流算法(Multi-agent attentional intention and communication, MAAIC), 增加了意图信息模块来扩大交流信息的来源, 并且改善了交流模式. 将智能体历史上表现最优的网络作为意图网络, 且从中提取策略意图信息, 按时间顺序保留成一个向量, 最后结合注意力机制推断出更为有效的交流信息. 在星际争霸环境中, 通过实验对比分析, 验证了该算法的有效性.


2023, 49(11): 2326-2337.
doi: 10.16383/j.aas.c200255
摘要:
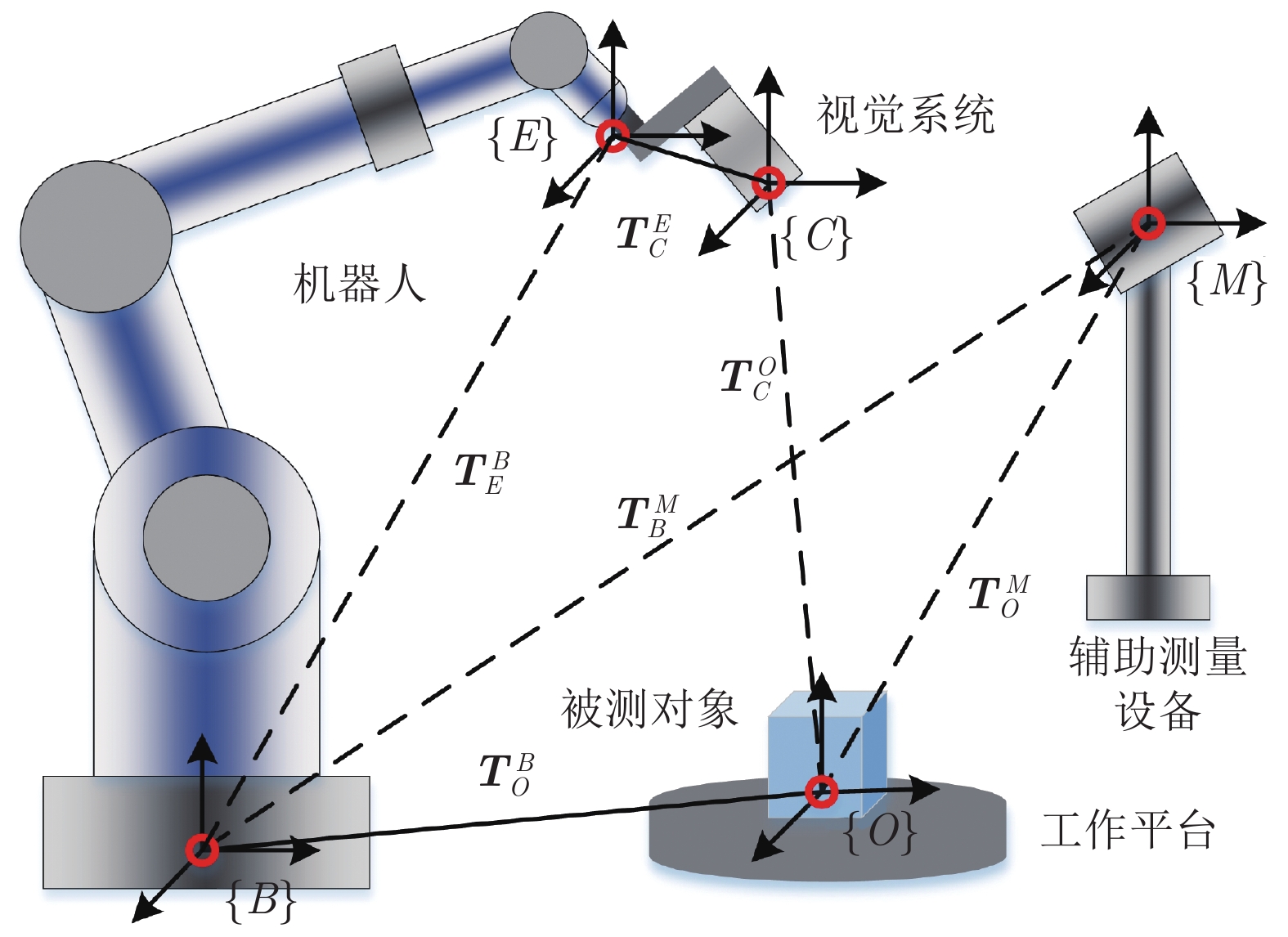
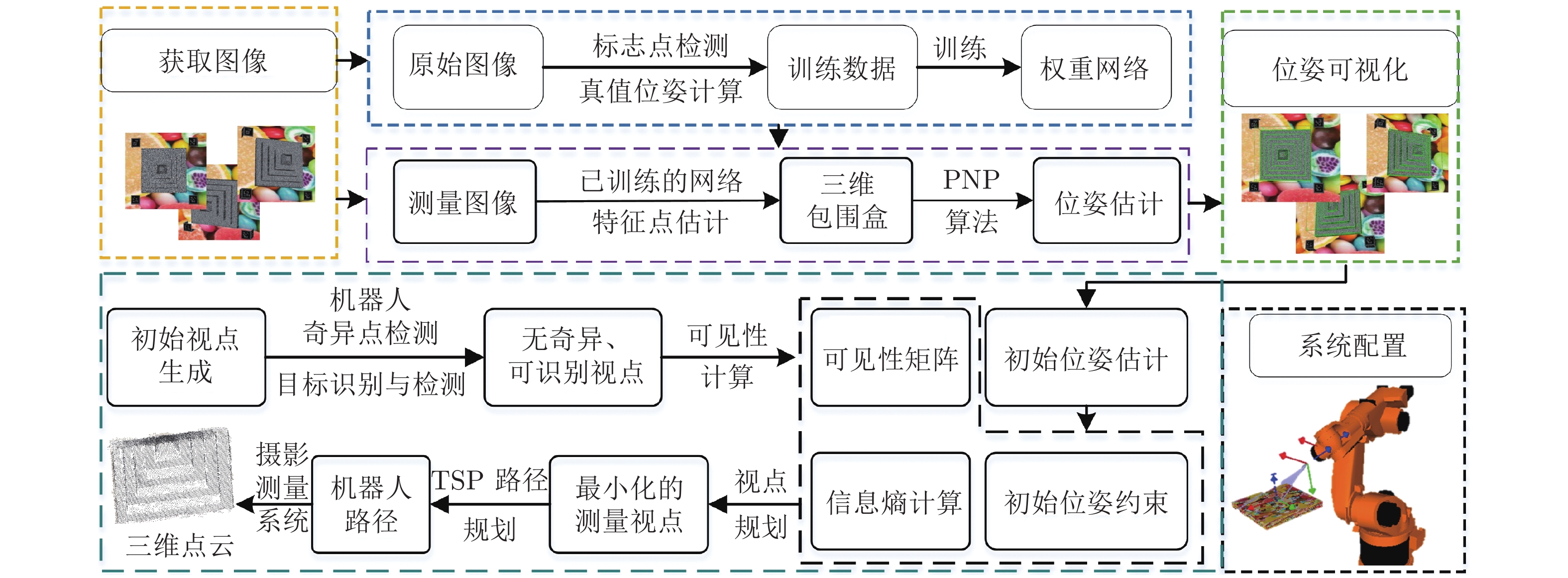
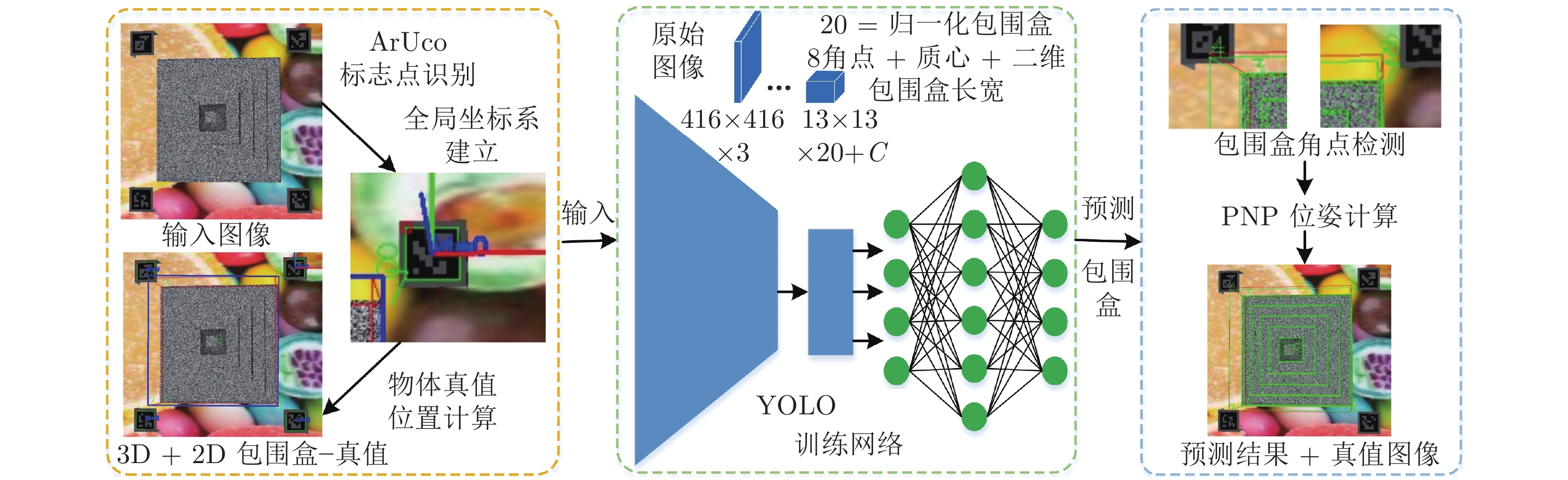
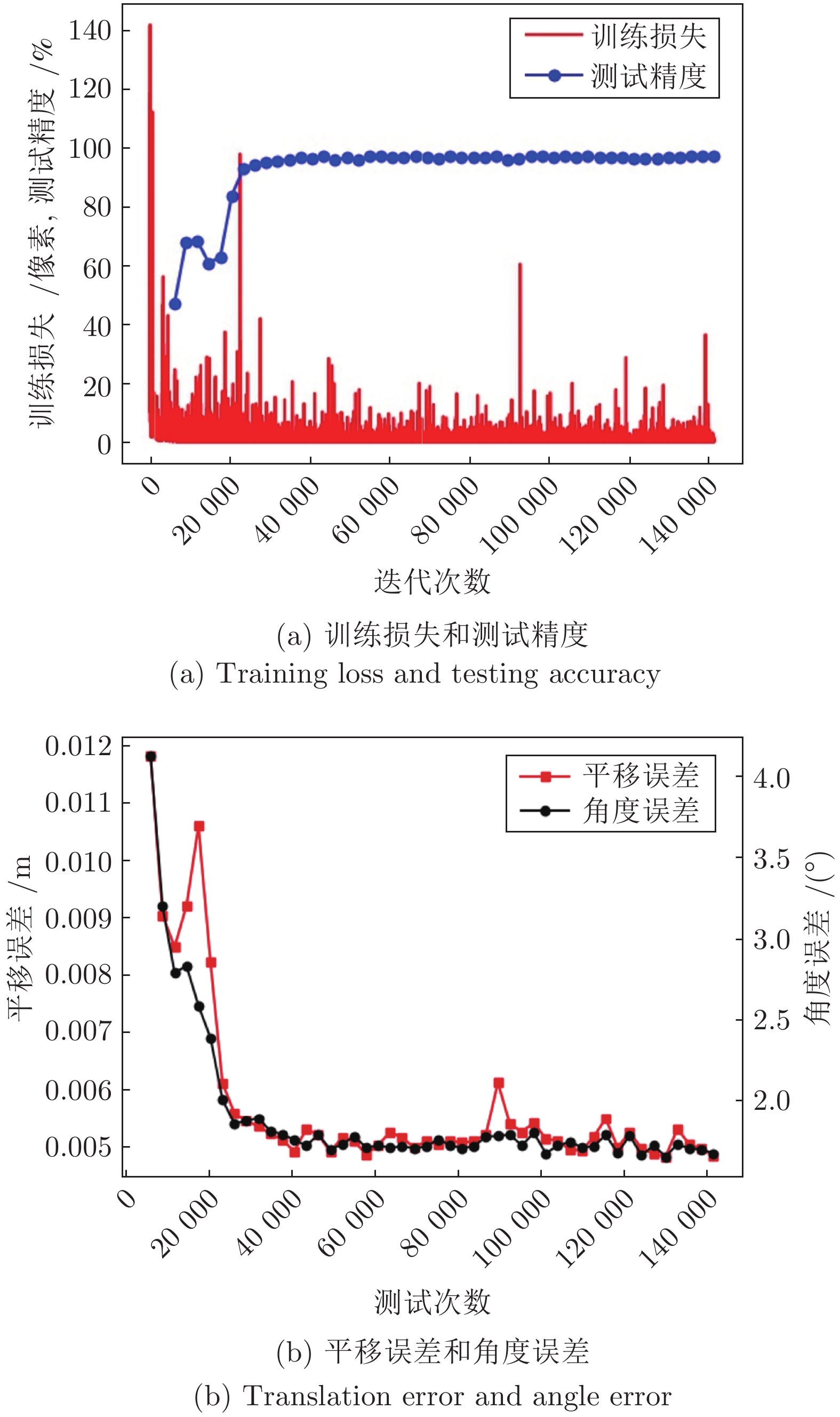
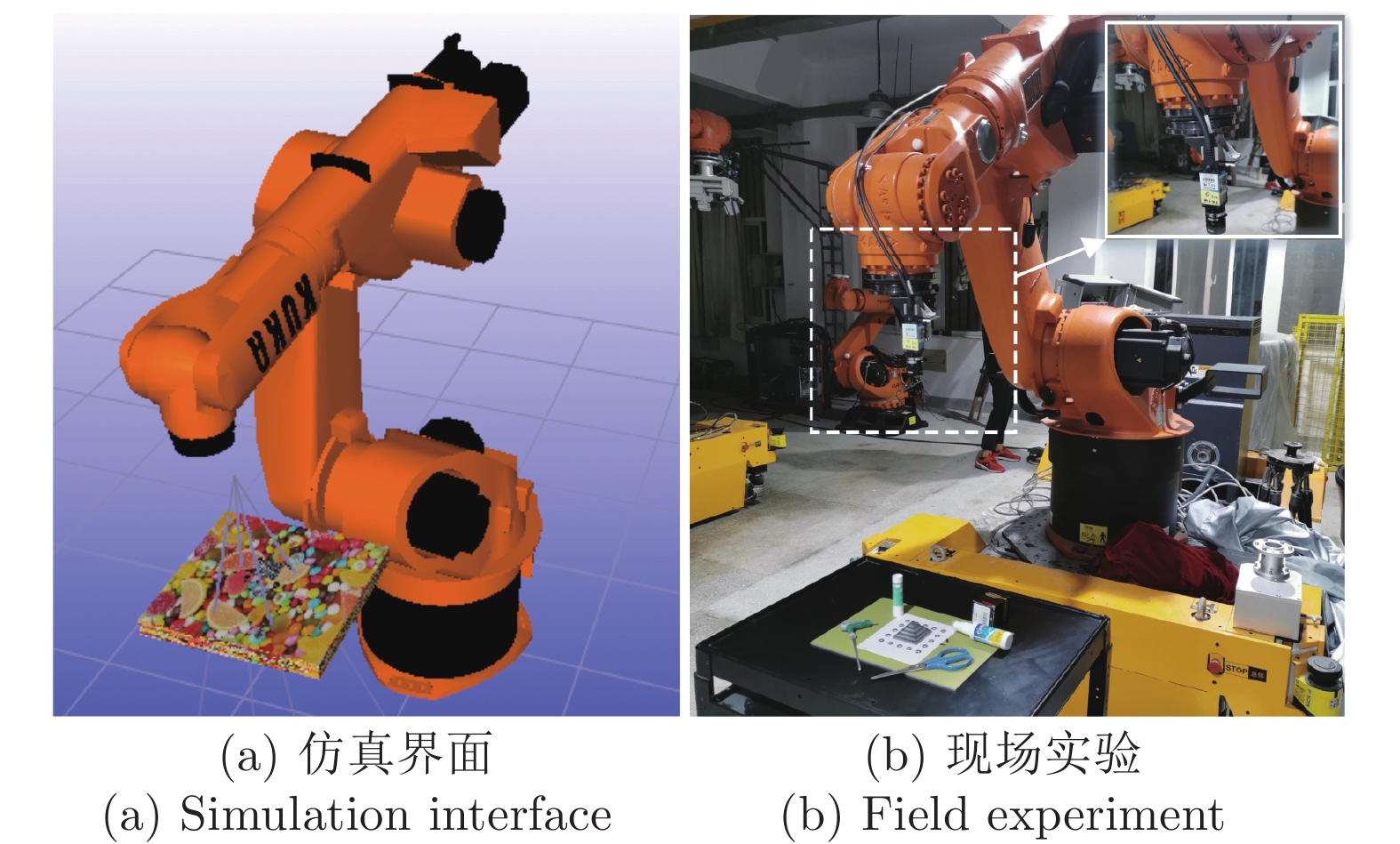
针对机器人摄影测量中离线规划受初始位姿标定影响的问题, 提出融合初始位姿估计的机器人摄影测量系统视点规划方法. 首先构建基于YOLO (You only look once) 的深度学习网络估计被测对象3D包围盒, 利用PNP (Perspective-N-point)算法快速求解对象姿态; 然后随机生成机器人无奇异无碰撞的视点, 基于相机成像的2D-3D正逆性映射, 根据深度原则计算每个视角下目标可见性矩阵; 最后, 引入熵权法, 以最小化重建信息熵为目标建立优化模型, 并基于旅行商问题(Travelling saleman problem, TSP)模型规划机器人路径. 结果表明, 利用深度学习估计的平移误差低于5 mm, 角度误差低于2°. 考虑熵权的视点规划方法提高了摄影测量质量, 融合深度学习初始姿态的摄影测量系统提高了重建效率. 利用本算法对典型零件进行摄影测量质量和效率的验证, 均获得优异的位姿估计和重建效果. 提出的算法适用于实际工程应用, 尤其是快速稀疏摄影重建, 促进了工业摄影测量速度与自动化程度提升.
针对机器人摄影测量中离线规划受初始位姿标定影响的问题, 提出融合初始位姿估计的机器人摄影测量系统视点规划方法. 首先构建基于YOLO (You only look once) 的深度学习网络估计被测对象3D包围盒, 利用PNP (Perspective-N-point)算法快速求解对象姿态; 然后随机生成机器人无奇异无碰撞的视点, 基于相机成像的2D-3D正逆性映射, 根据深度原则计算每个视角下目标可见性矩阵; 最后, 引入熵权法, 以最小化重建信息熵为目标建立优化模型, 并基于旅行商问题(Travelling saleman problem, TSP)模型规划机器人路径. 结果表明, 利用深度学习估计的平移误差低于5 mm, 角度误差低于2°. 考虑熵权的视点规划方法提高了摄影测量质量, 融合深度学习初始姿态的摄影测量系统提高了重建效率. 利用本算法对典型零件进行摄影测量质量和效率的验证, 均获得优异的位姿估计和重建效果. 提出的算法适用于实际工程应用, 尤其是快速稀疏摄影重建, 促进了工业摄影测量速度与自动化程度提升.




2023, 49(11): 2338-2349.
doi: 10.16383/j.aas.c210935
摘要:
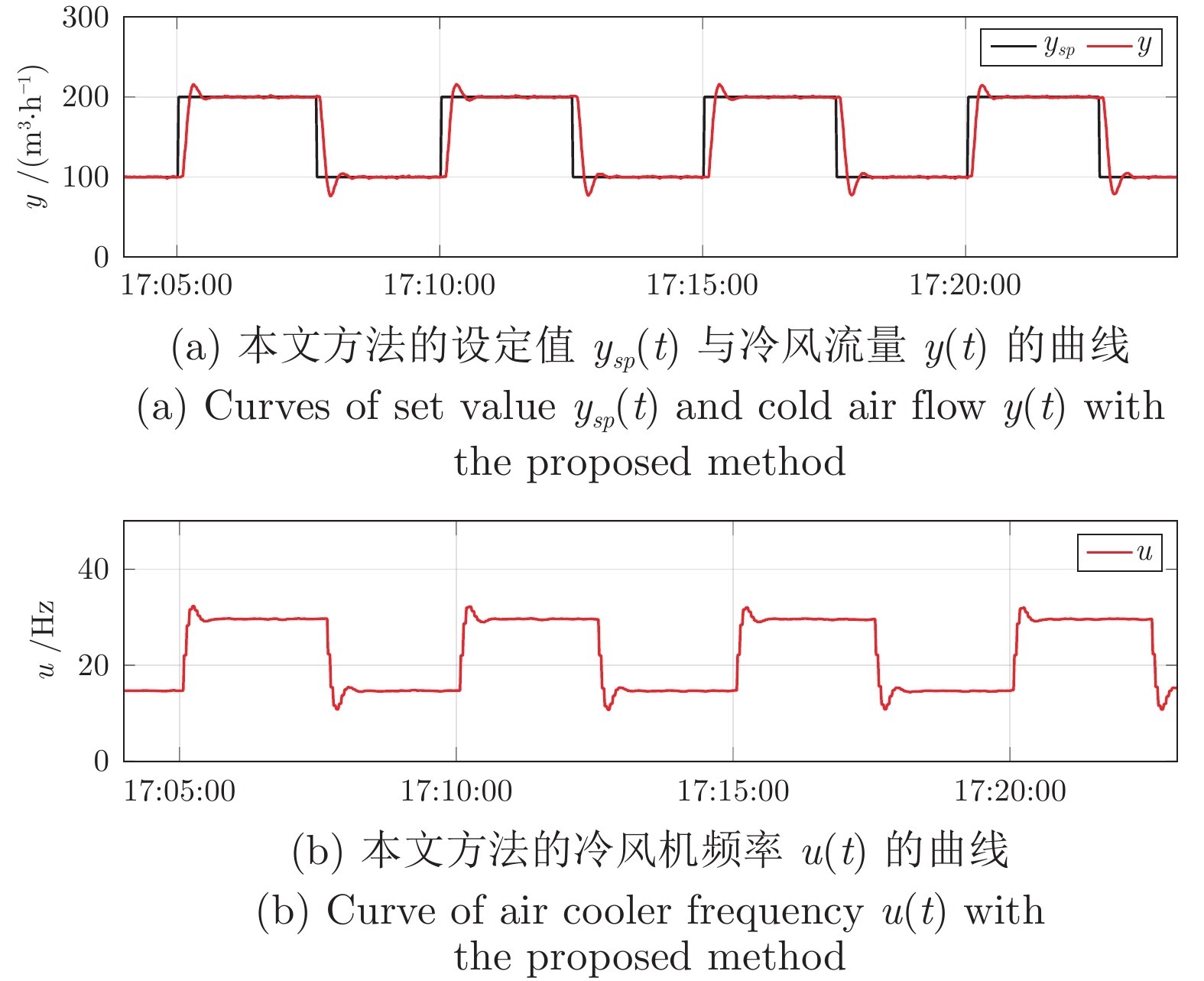
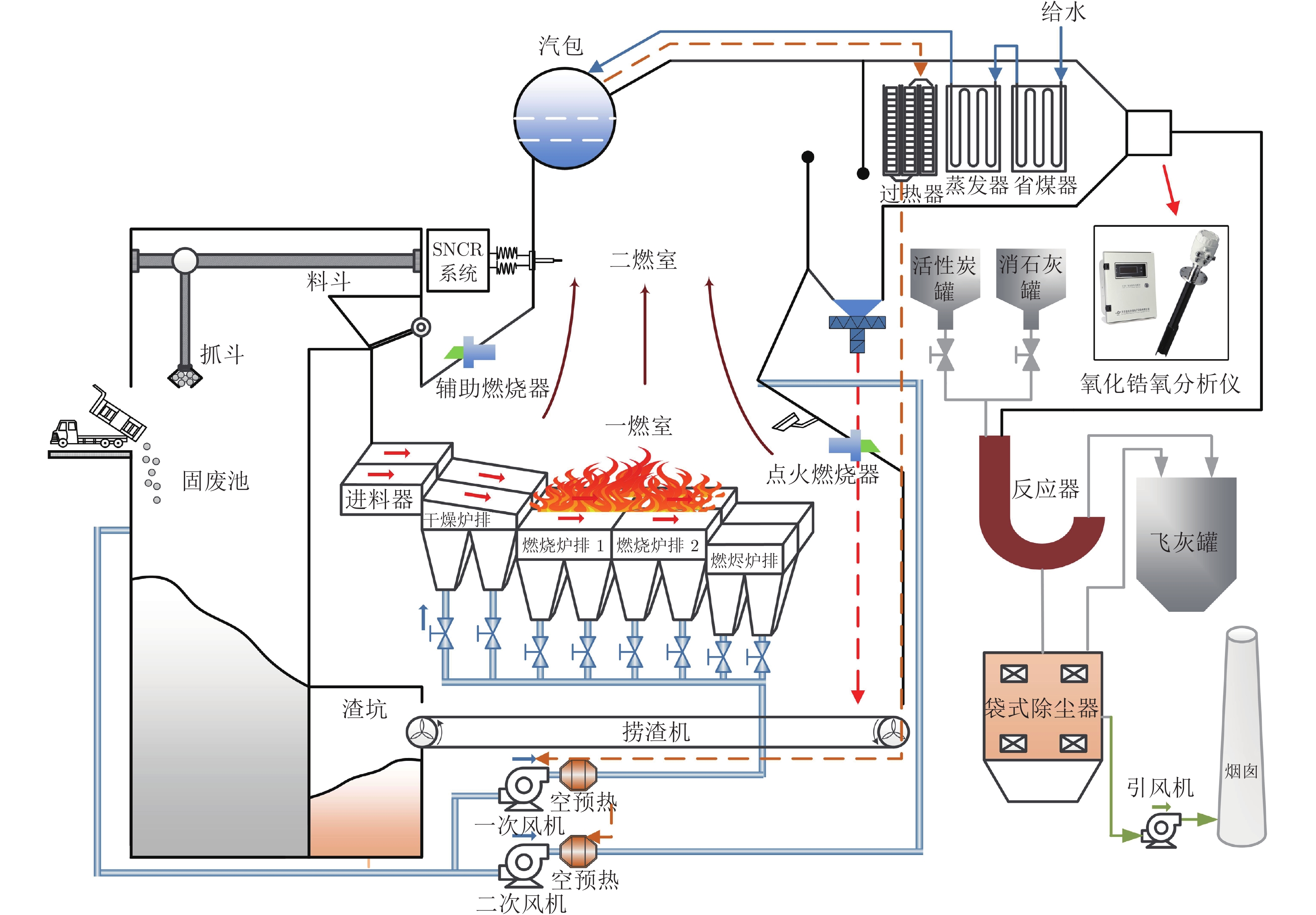
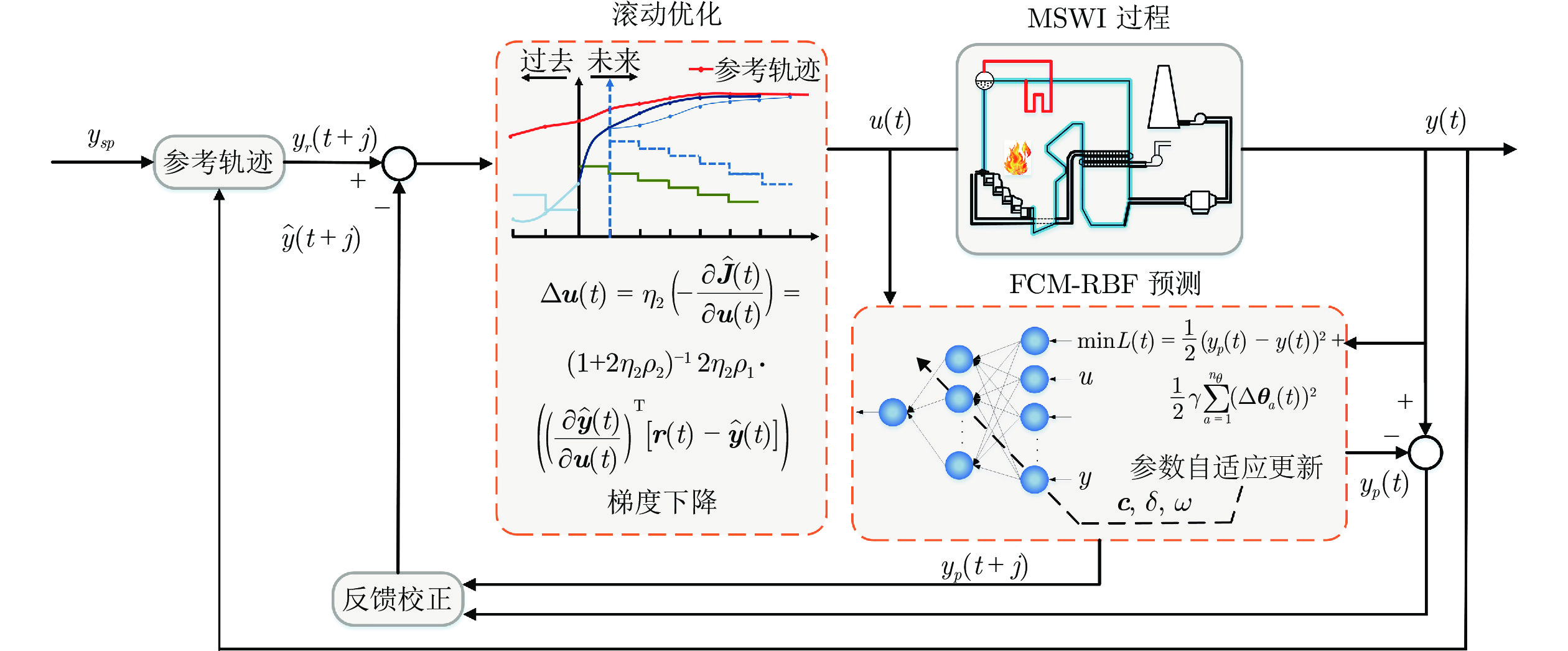
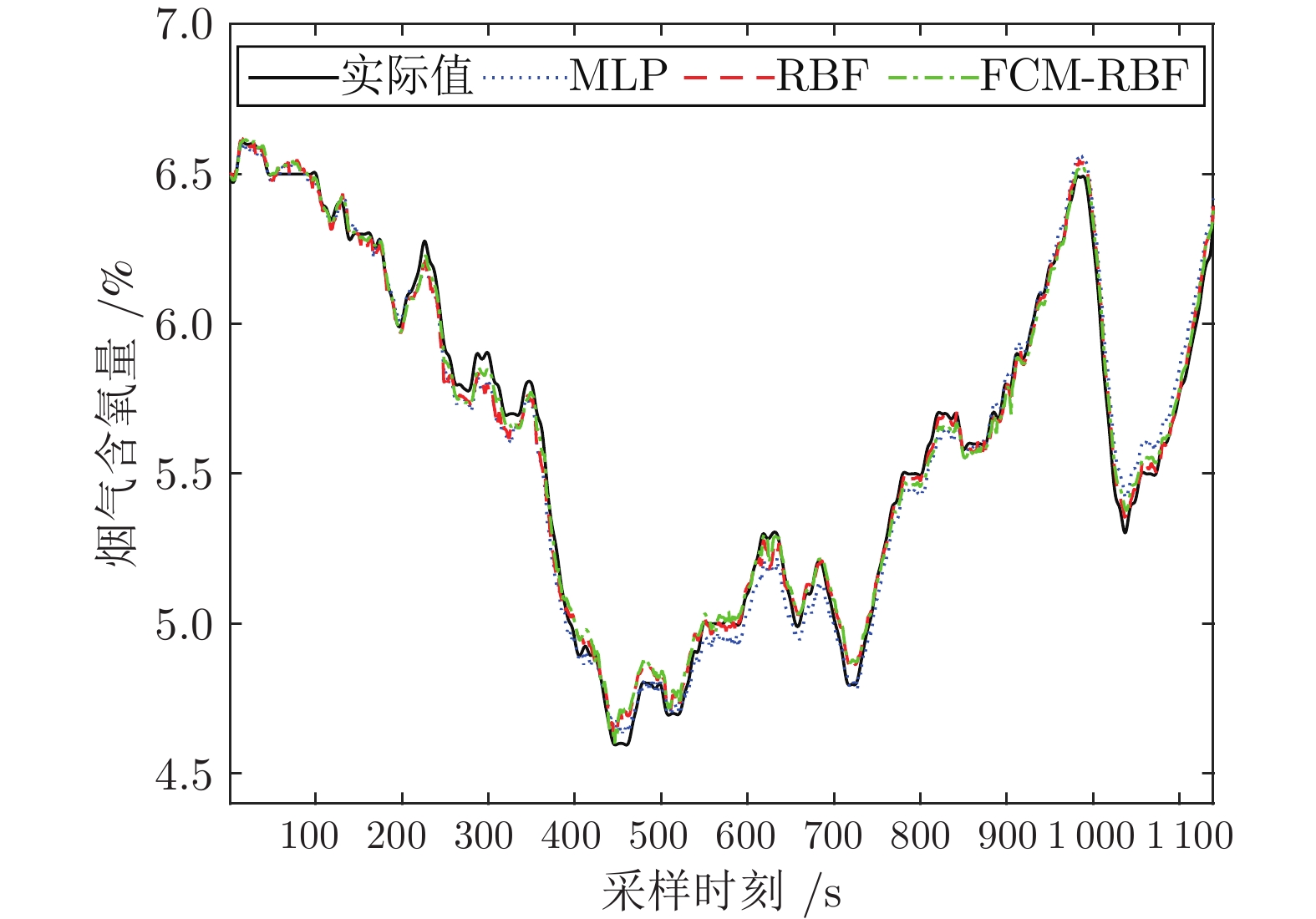
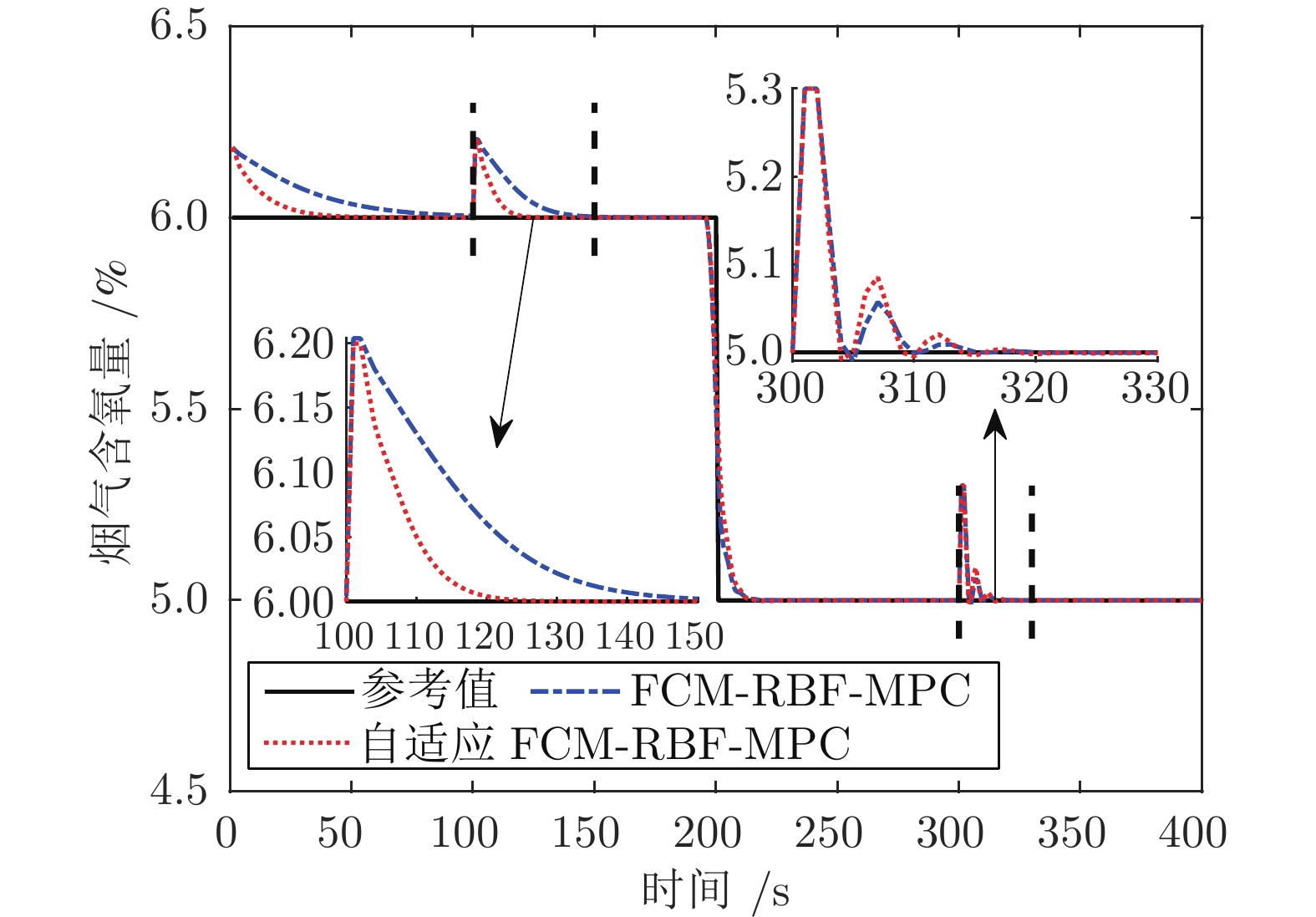
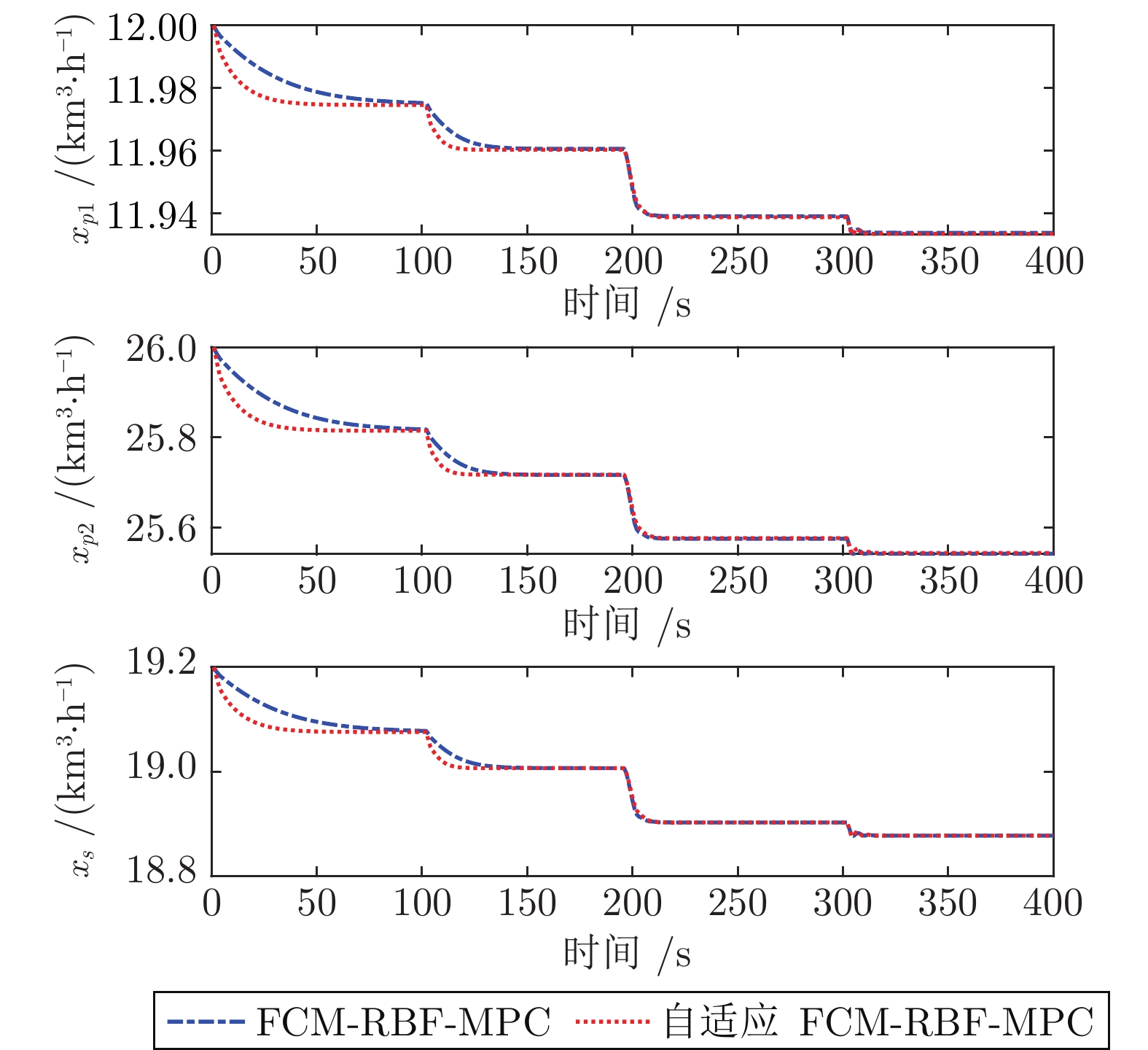
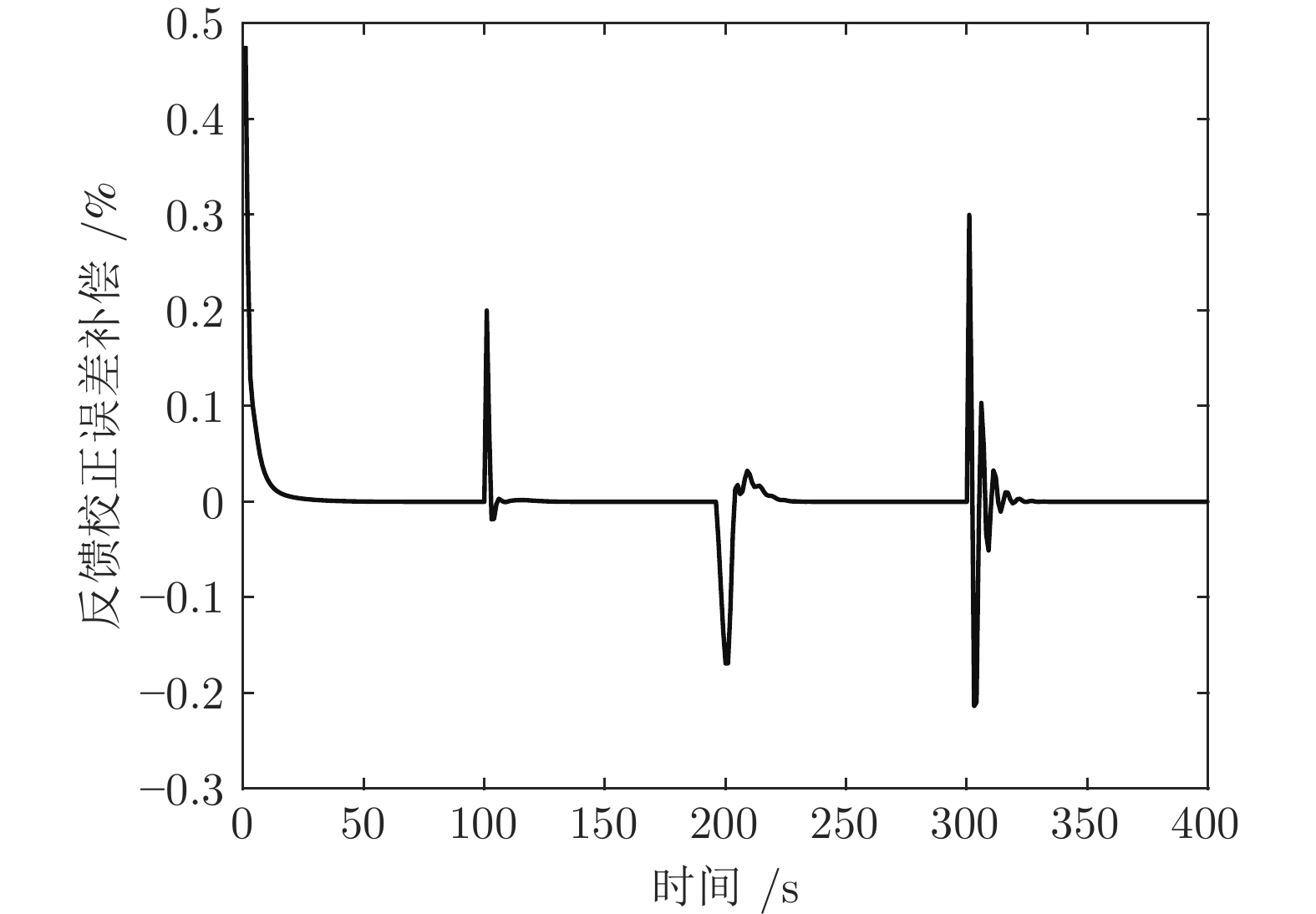
在城市固体废弃物焚烧(Municipal solid waste incineration, MSWI)过程中, 烟气含氧量是影响焚烧效果的重要工艺参数. 由于固废焚烧过程的复杂性, 在实际应用过程中, 难以实现烟气含氧量的有效控制. 面向城市固废焚烧过程烟气含氧量控制的实际需求, 提出一种基于数据驱动的烟气含氧量自适应预测控制方法. 首先, 采用自适应模糊C均值(Fuzzy C-means, FCM)算法辅助确定径向基函数(Radial basis function, RBF)神经网络隐含层神经元个数及初始中心, 建立基于FCM算法的径向基函数神经网络预测模型, 并在控制过程中通过自适应更新策略在线调节预测模型参数; 然后, 利用梯度下降算法求解控制律, 并基于李雅普诺夫理论分析了所提控制方法的稳定性; 最后, 基于城市固废焚烧厂实际数据, 验证了所提控制方法的有效性.
在城市固体废弃物焚烧(Municipal solid waste incineration, MSWI)过程中, 烟气含氧量是影响焚烧效果的重要工艺参数. 由于固废焚烧过程的复杂性, 在实际应用过程中, 难以实现烟气含氧量的有效控制. 面向城市固废焚烧过程烟气含氧量控制的实际需求, 提出一种基于数据驱动的烟气含氧量自适应预测控制方法. 首先, 采用自适应模糊C均值(Fuzzy C-means, FCM)算法辅助确定径向基函数(Radial basis function, RBF)神经网络隐含层神经元个数及初始中心, 建立基于FCM算法的径向基函数神经网络预测模型, 并在控制过程中通过自适应更新策略在线调节预测模型参数; 然后, 利用梯度下降算法求解控制律, 并基于李雅普诺夫理论分析了所提控制方法的稳定性; 最后, 基于城市固废焚烧厂实际数据, 验证了所提控制方法的有效性.

2023, 49(11): 2350-2359.
doi: 10.16383/j.aas.c210532
摘要:
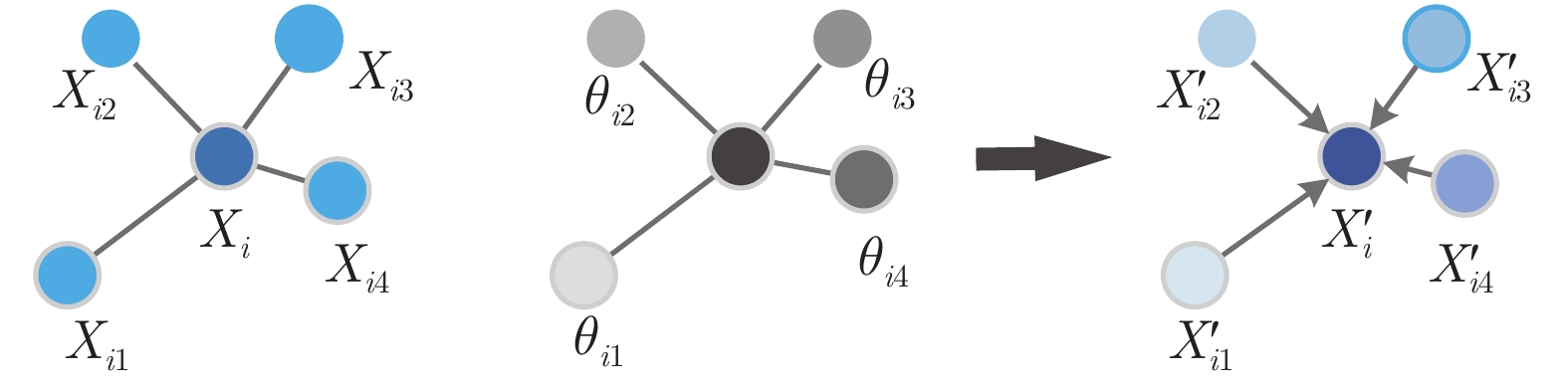
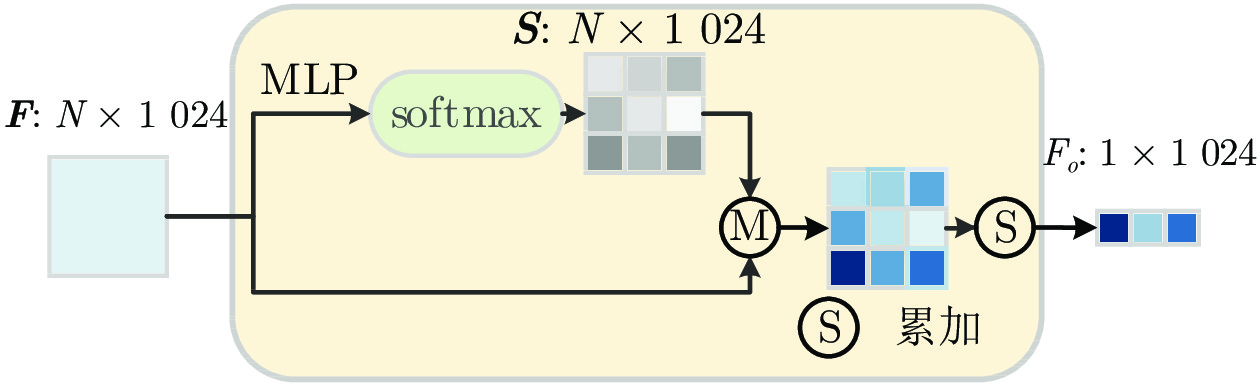
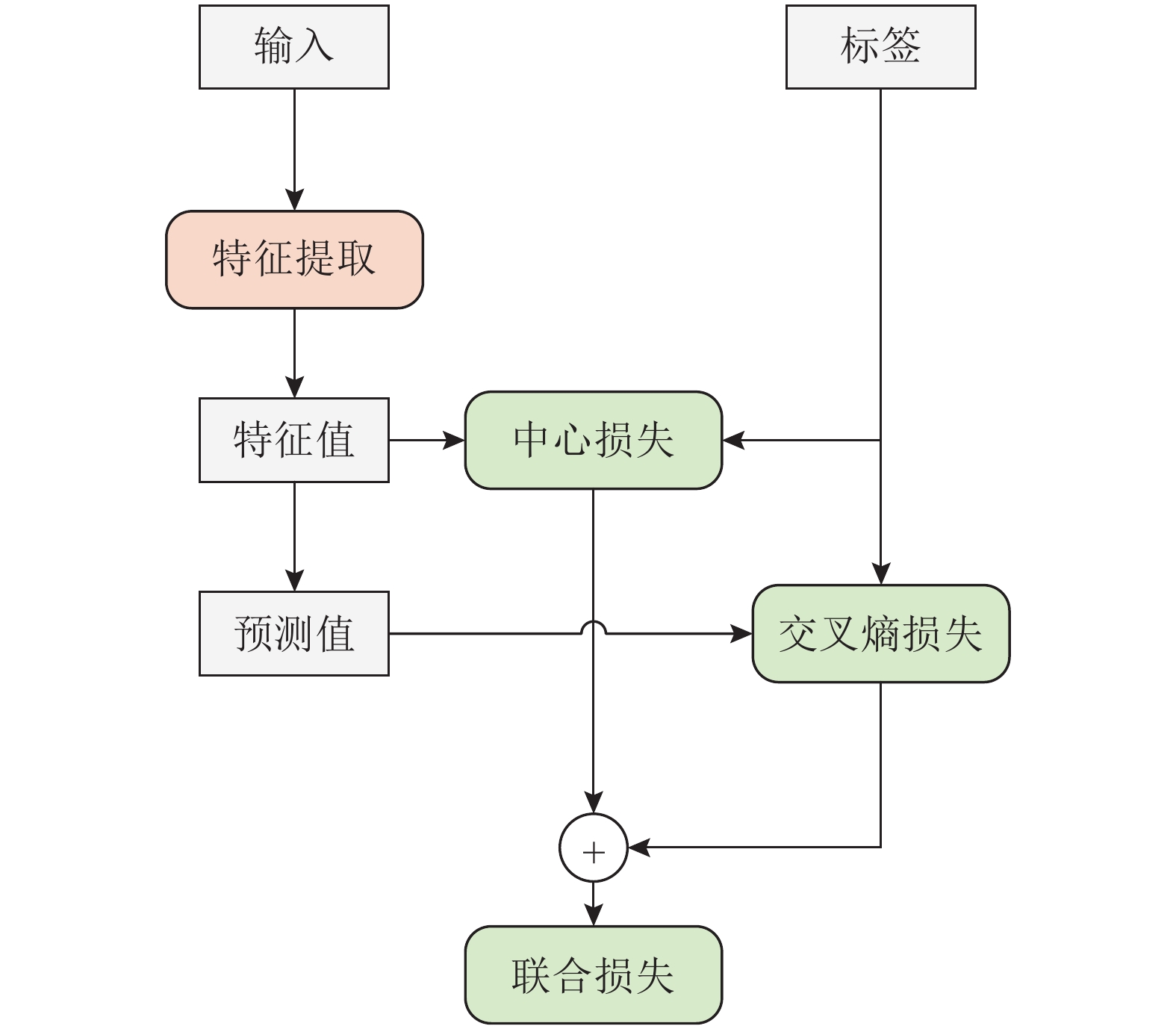
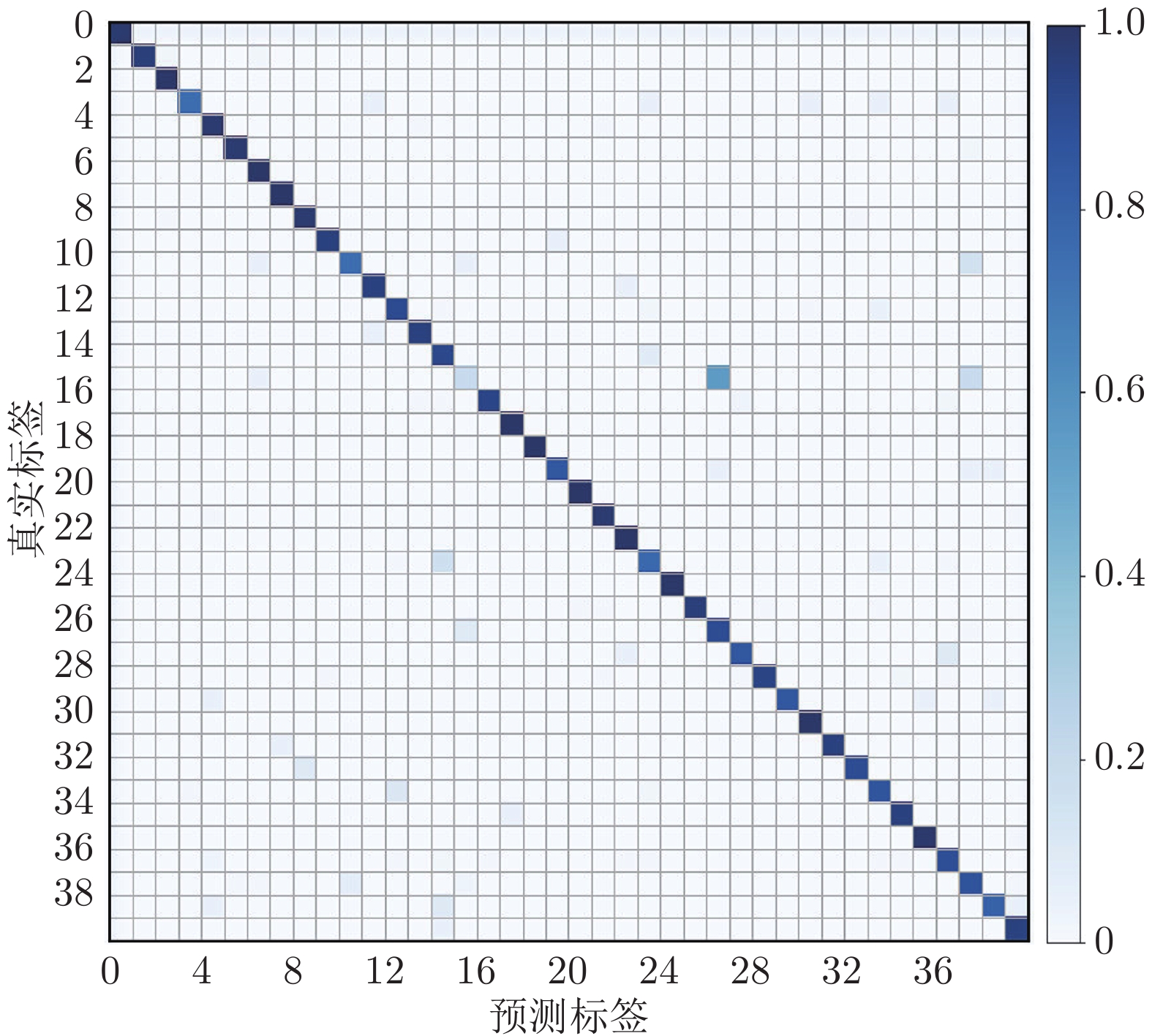
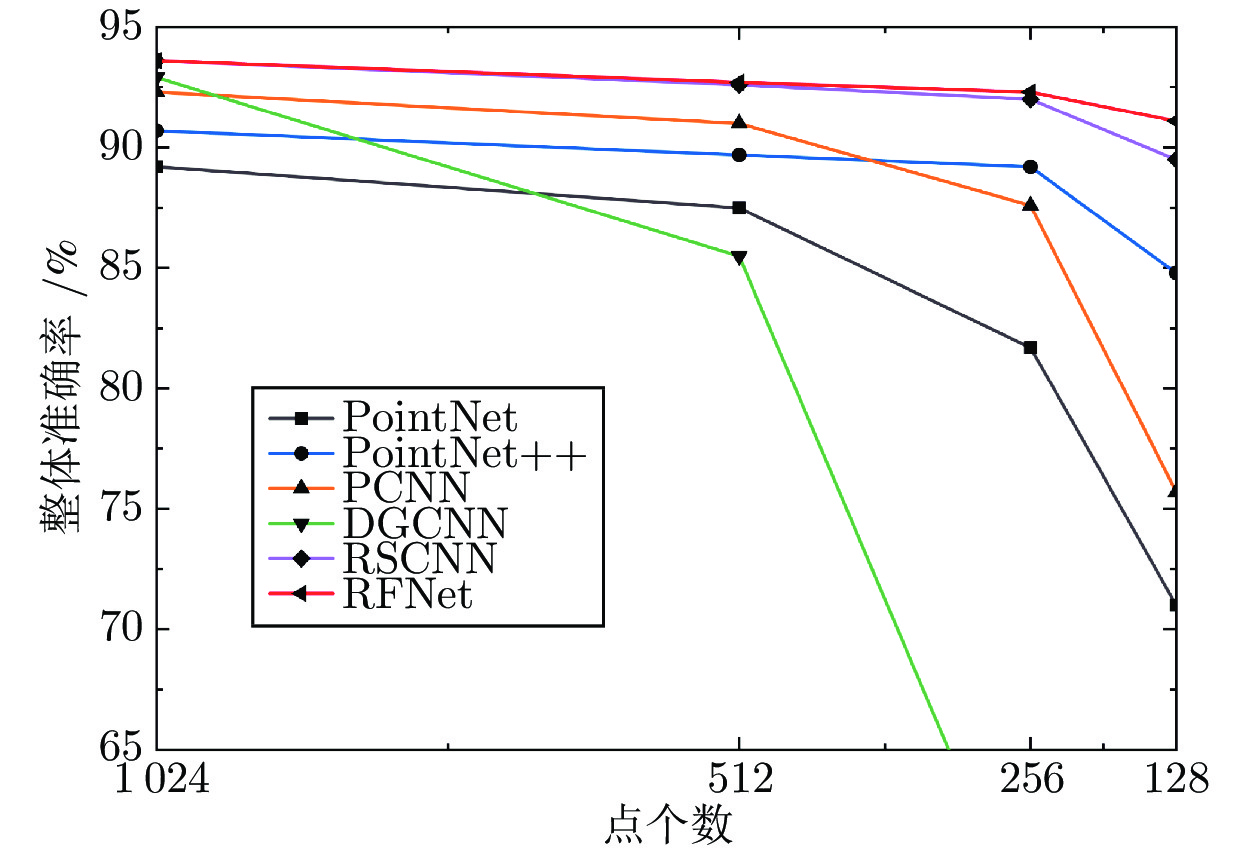
由于点云的非结构性和无序性, 目前已有的点云分类网络在精度上仍然需要进一步提高. 通过考虑局部结构的构建、全局特征聚合和损失函数改进三个方面, 构造一个有效的点云分类网络. 首先, 针对点云的非结构性, 通过学习中心点特征与近邻点特征之间的关系, 为不规则的近邻点分配不同的权重, 以此构建局部结构; 然后, 使用注意力思想, 提出加权平均池化(Weighted average pooling, WAP), 通过自注意力方式, 学习每个高维特征的注意力分数, 在应对点云无序性的同时, 可以有效地聚合冗余的高维特征; 最后, 利用交叉熵损失与中心损失之间的互补关系, 提出联合损失函数(Joint loss function, JL), 在增大类间距离的同时, 减小类内距离, 进一步提高了网络的分类能力. 在合成数据集ModelNet40、ShapeNetCore和真实世界数据集ScanObjectNN上进行实验, 与目前性能最好的多个网络相比较, 验证了该整体网络结构的优越性.
由于点云的非结构性和无序性, 目前已有的点云分类网络在精度上仍然需要进一步提高. 通过考虑局部结构的构建、全局特征聚合和损失函数改进三个方面, 构造一个有效的点云分类网络. 首先, 针对点云的非结构性, 通过学习中心点特征与近邻点特征之间的关系, 为不规则的近邻点分配不同的权重, 以此构建局部结构; 然后, 使用注意力思想, 提出加权平均池化(Weighted average pooling, WAP), 通过自注意力方式, 学习每个高维特征的注意力分数, 在应对点云无序性的同时, 可以有效地聚合冗余的高维特征; 最后, 利用交叉熵损失与中心损失之间的互补关系, 提出联合损失函数(Joint loss function, JL), 在增大类间距离的同时, 减小类内距离, 进一步提高了网络的分类能力. 在合成数据集ModelNet40、ShapeNetCore和真实世界数据集ScanObjectNN上进行实验, 与目前性能最好的多个网络相比较, 验证了该整体网络结构的优越性.



2023, 49(11): 2360-2373.
doi: 10.16383/j.aas.c210313
摘要:
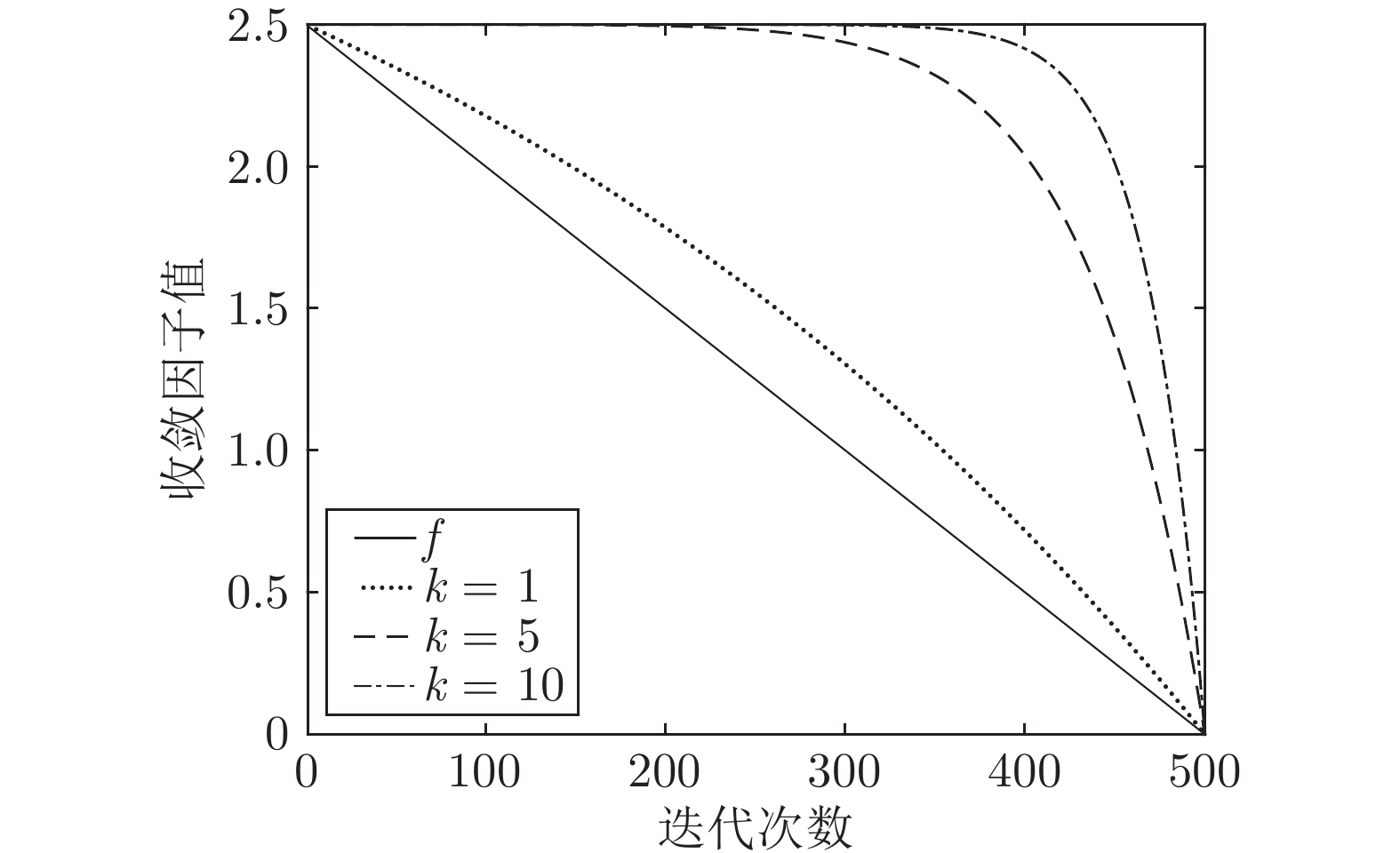
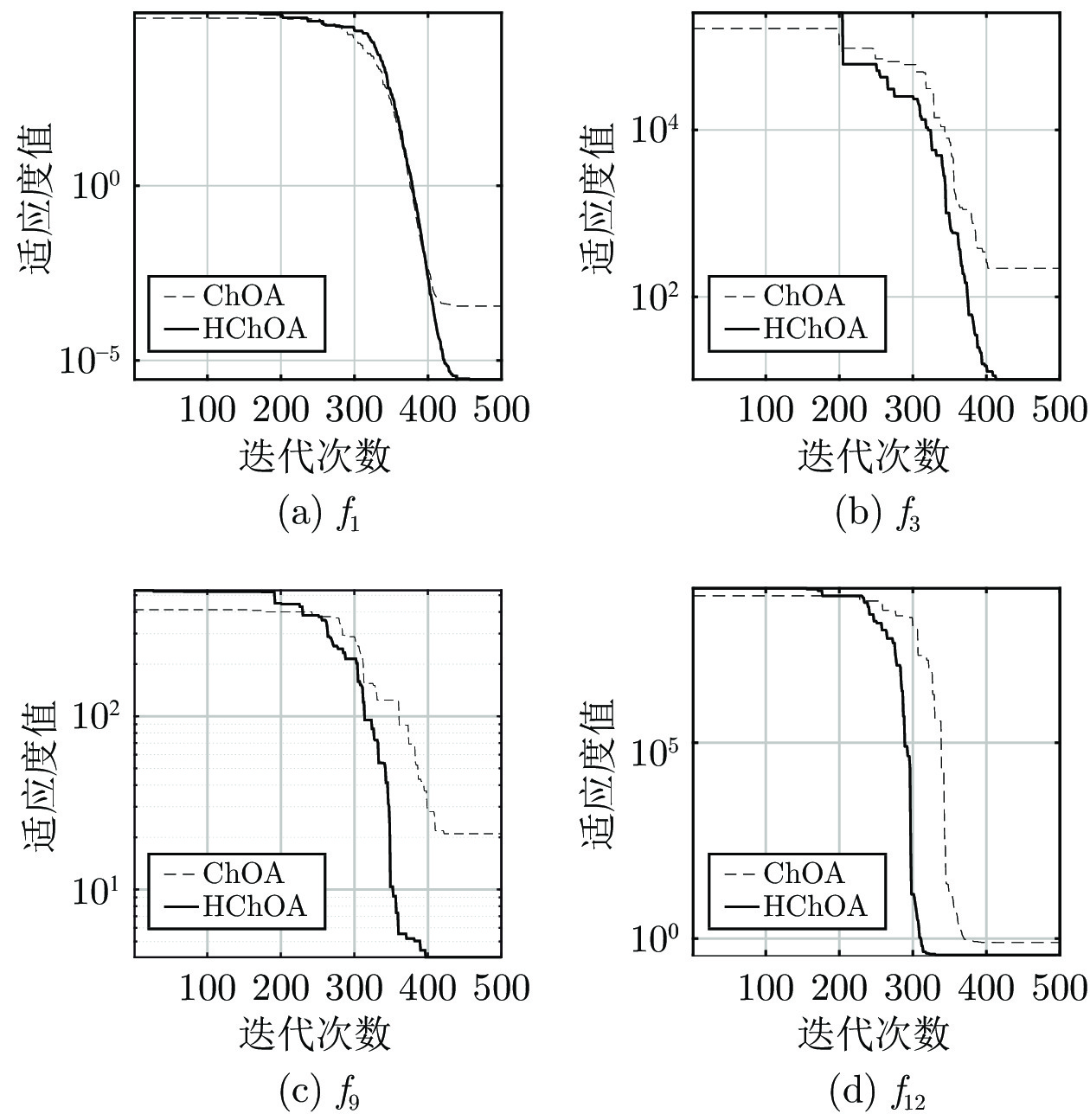
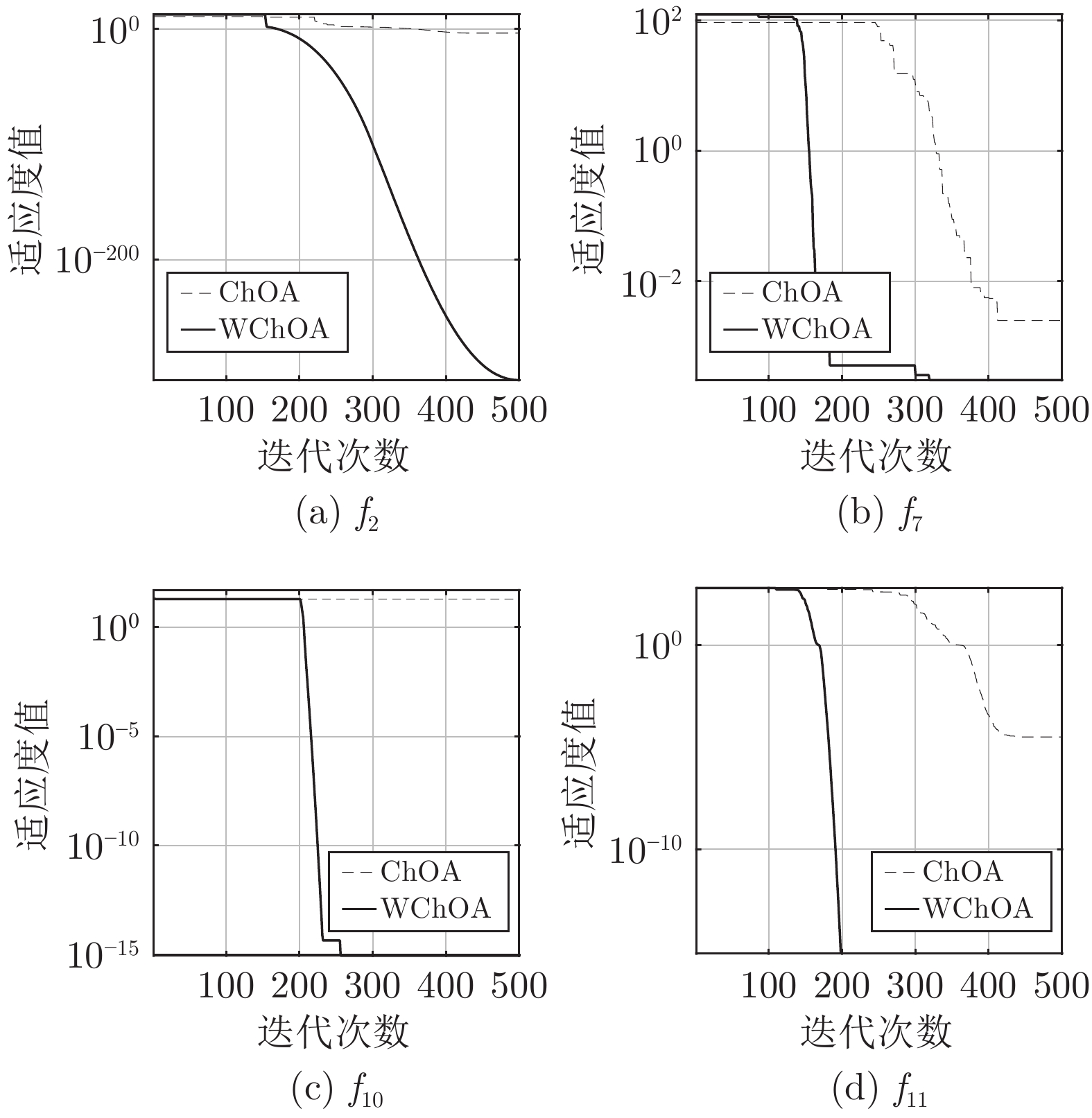
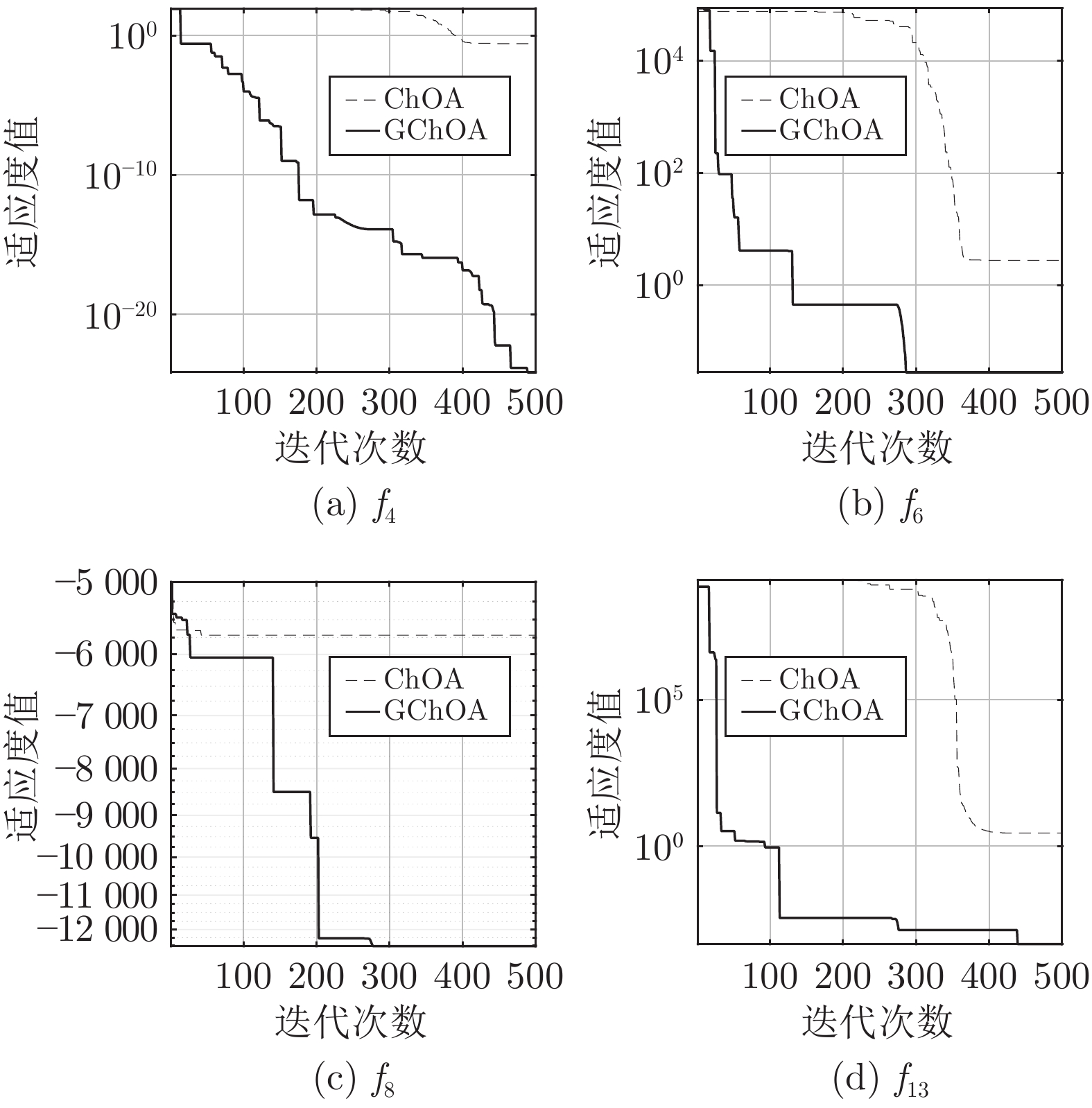
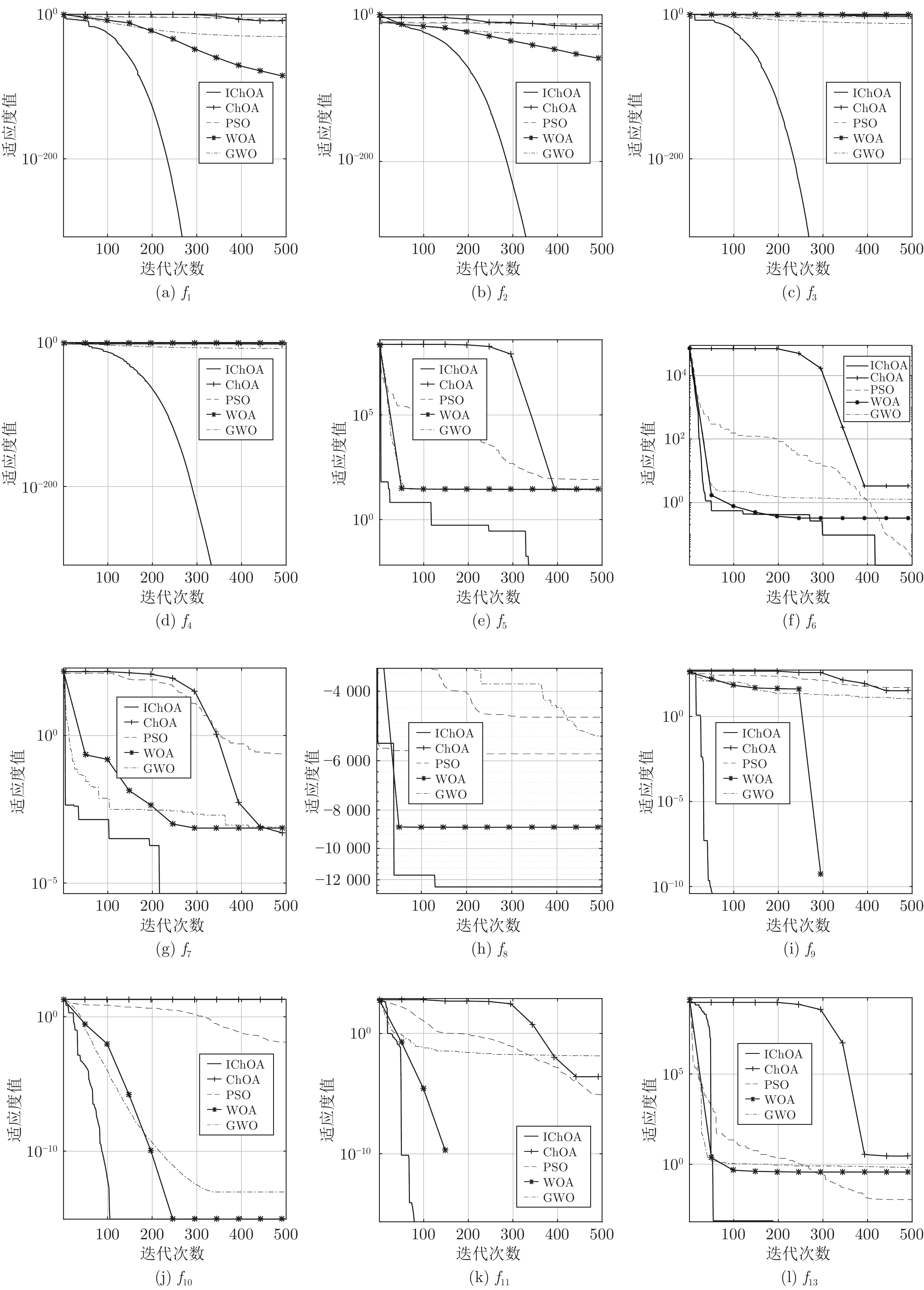
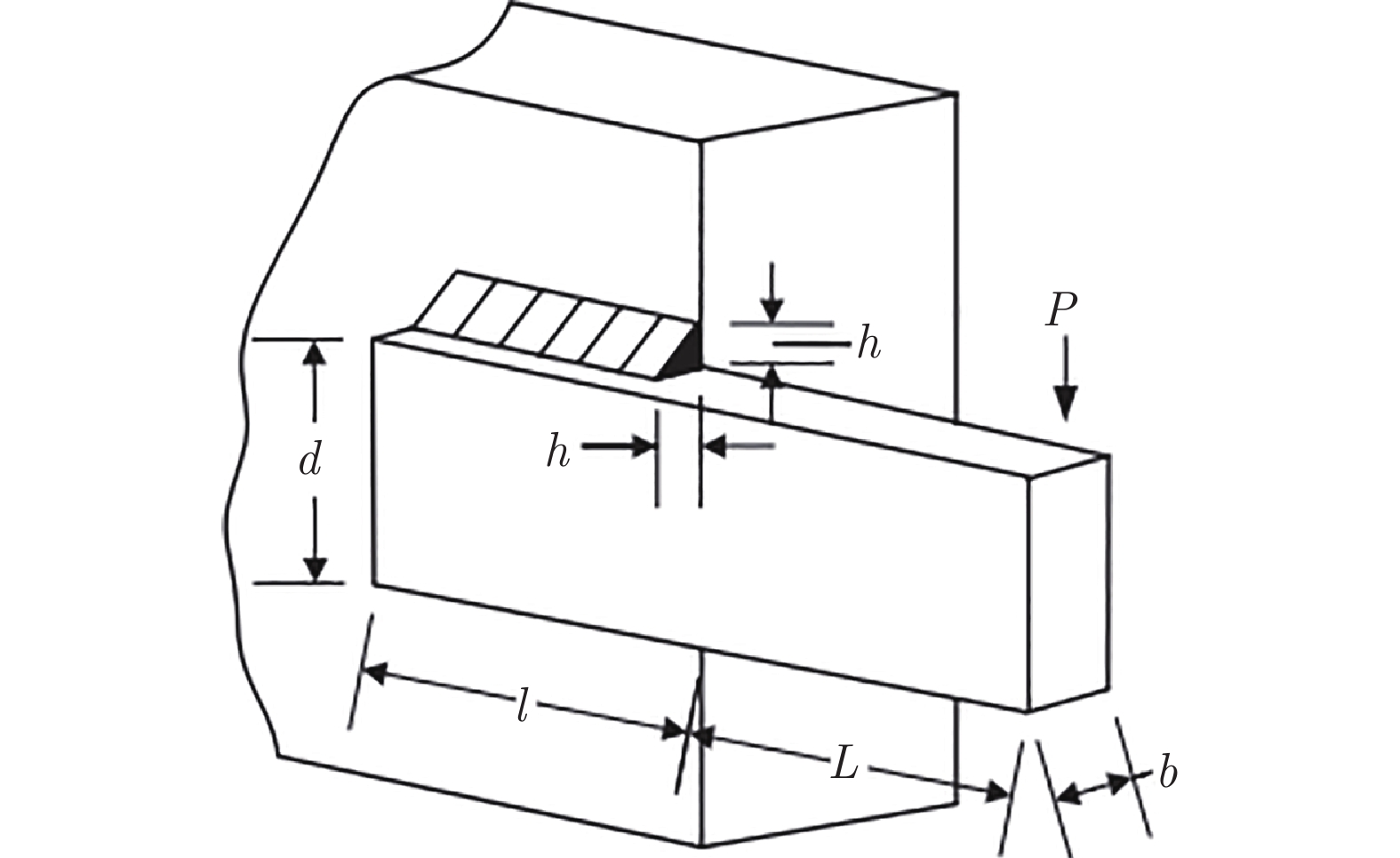
针对黑猩猩优化算法(Chimp optimization algorithm, ChOA)存在收敛速度慢、精度低和易陷入局部最优值问题, 提出一种融合多策略的黄金正弦黑猩猩优化算法(Multi-strategy golden sine chimp optimization algorithm, IChOA). 引入Halton序列初始化种群, 提高初始化种群的多样性, 加快算法收敛, 提高收敛精度; 考虑到收敛因子和权重因子对于平衡算法勘探和开发能力的重要作用, 引入改进的非线性收敛因子和自适应权重因子, 平衡算法的搜索能力; 结合黄金正弦算法相关思想, 更新个体位置, 提高算法对局部极值的处理能力. 通过对23个基准测试函数的寻优对比分析和Wilcoxon秩和统计检验以及部分CEC2014测试函数寻优结果对比可知, 改进的算法具有更好的鲁棒性; 最后, 通过2个实际工程优化问题的实验对比分析, 进一步验证了IChOA在处理现实优化问题上的优越性.
针对黑猩猩优化算法(Chimp optimization algorithm, ChOA)存在收敛速度慢、精度低和易陷入局部最优值问题, 提出一种融合多策略的黄金正弦黑猩猩优化算法(Multi-strategy golden sine chimp optimization algorithm, IChOA). 引入Halton序列初始化种群, 提高初始化种群的多样性, 加快算法收敛, 提高收敛精度; 考虑到收敛因子和权重因子对于平衡算法勘探和开发能力的重要作用, 引入改进的非线性收敛因子和自适应权重因子, 平衡算法的搜索能力; 结合黄金正弦算法相关思想, 更新个体位置, 提高算法对局部极值的处理能力. 通过对23个基准测试函数的寻优对比分析和Wilcoxon秩和统计检验以及部分CEC2014测试函数寻优结果对比可知, 改进的算法具有更好的鲁棒性; 最后, 通过2个实际工程优化问题的实验对比分析, 进一步验证了IChOA在处理现实优化问题上的优越性.



2023, 49(11): 2374-2385.
doi: 10.16383/j.aas.c200361
摘要:
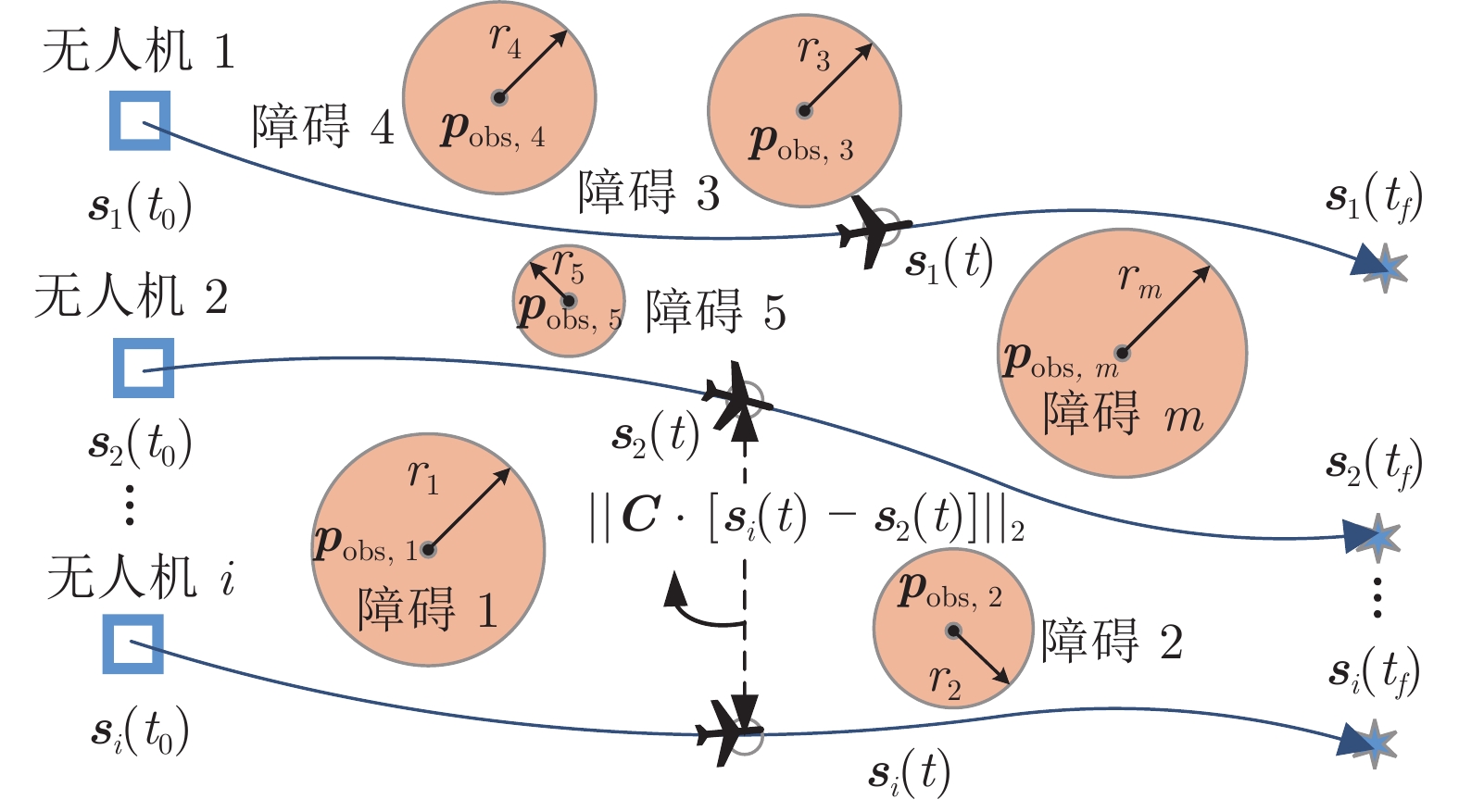
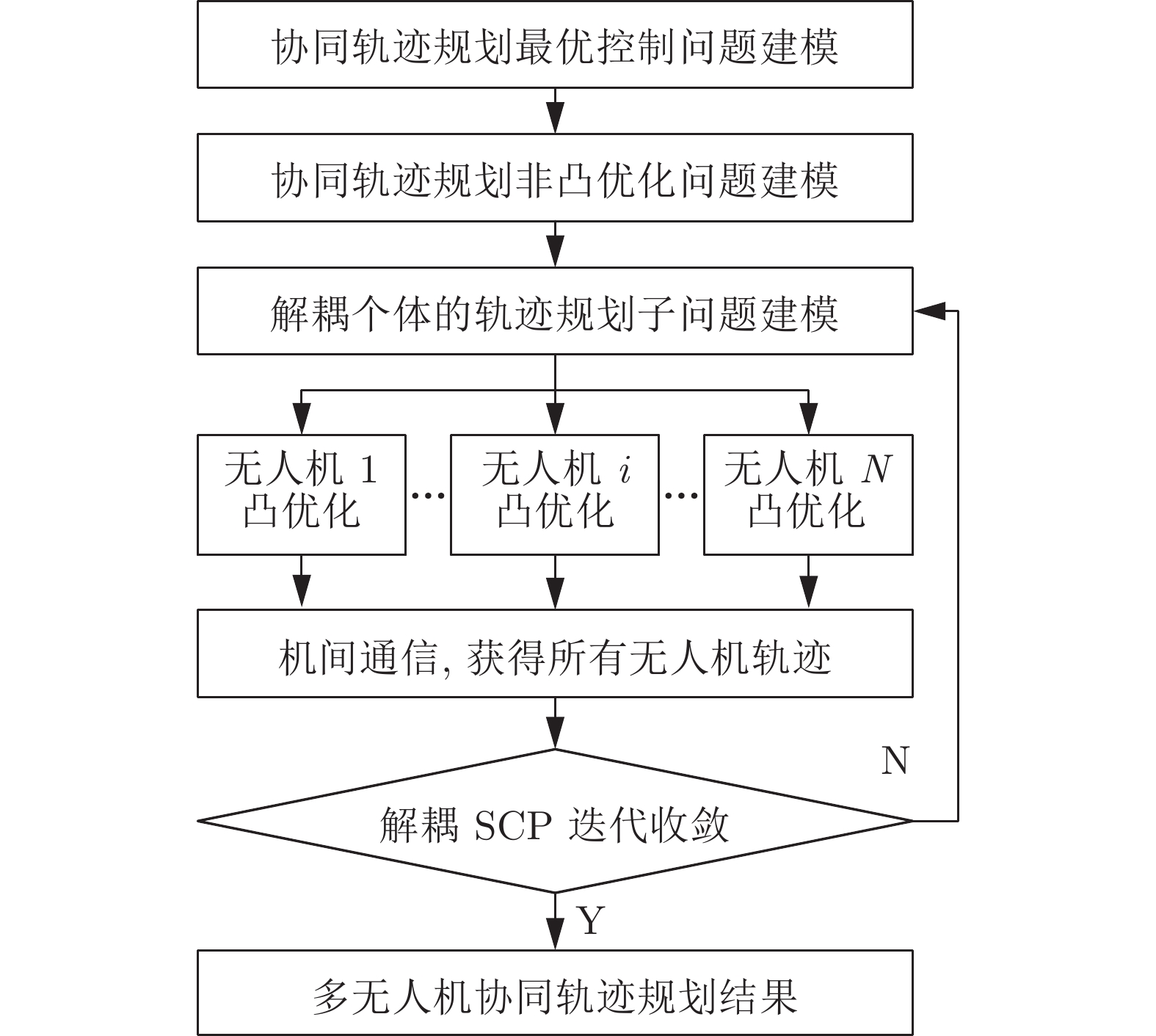
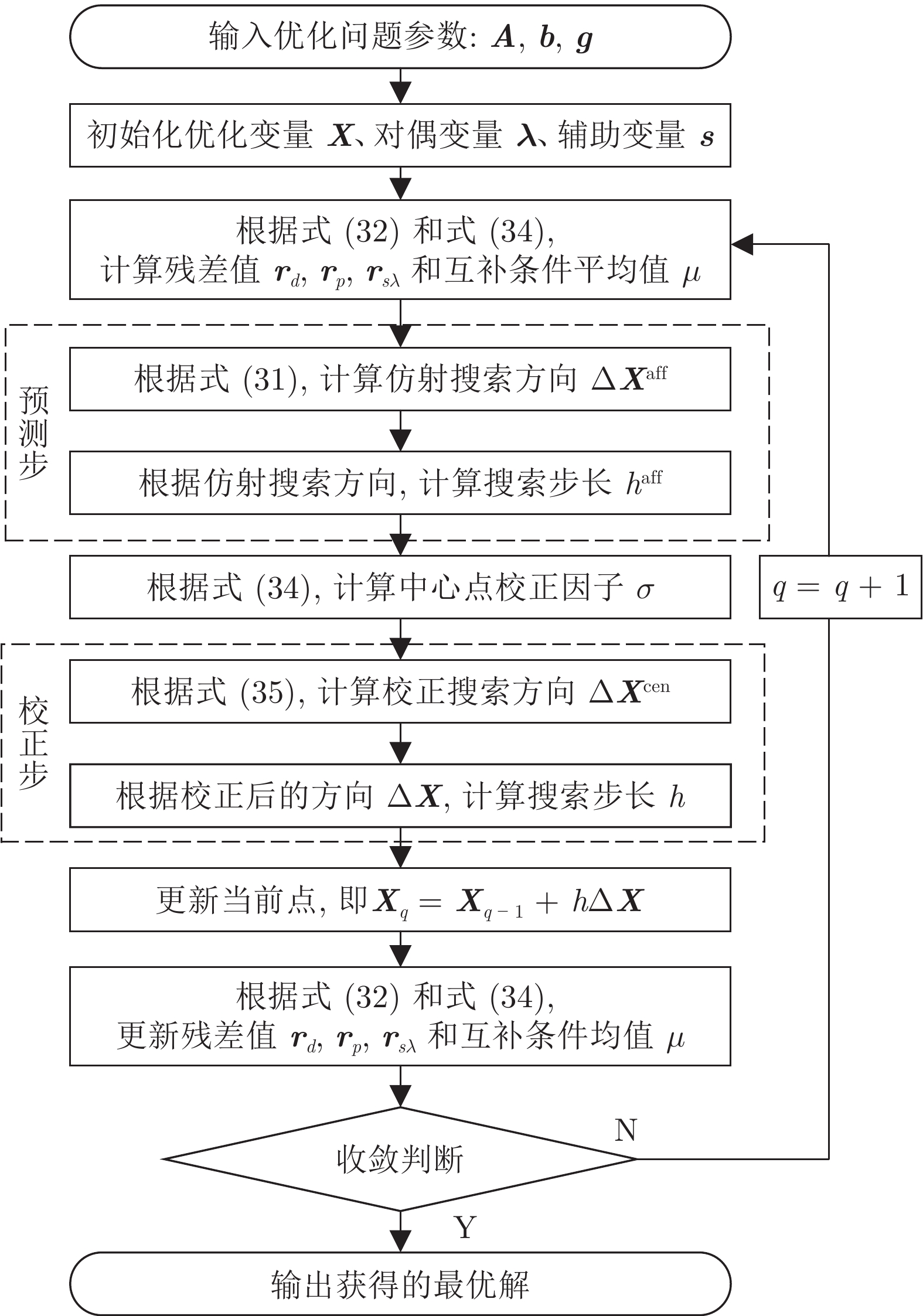
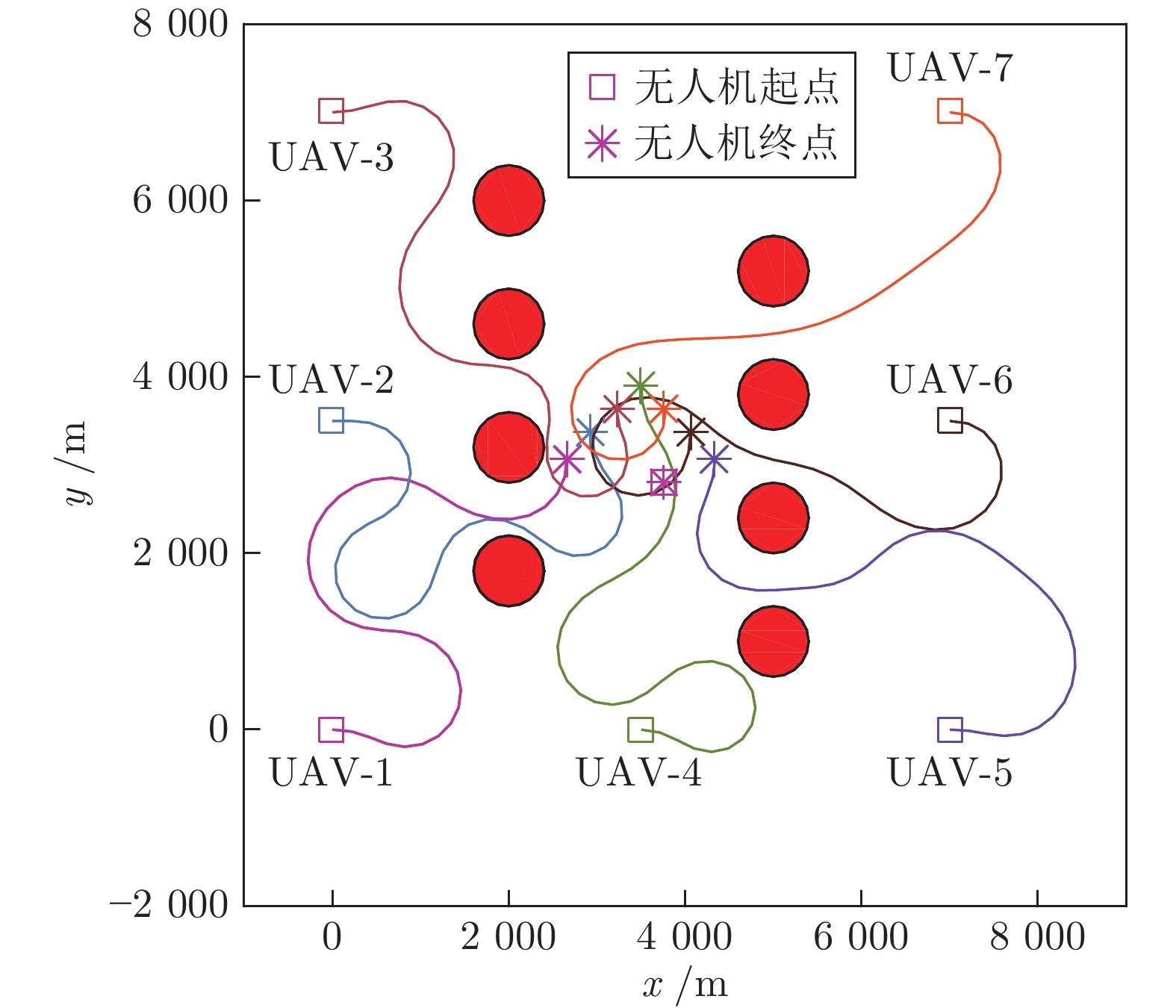
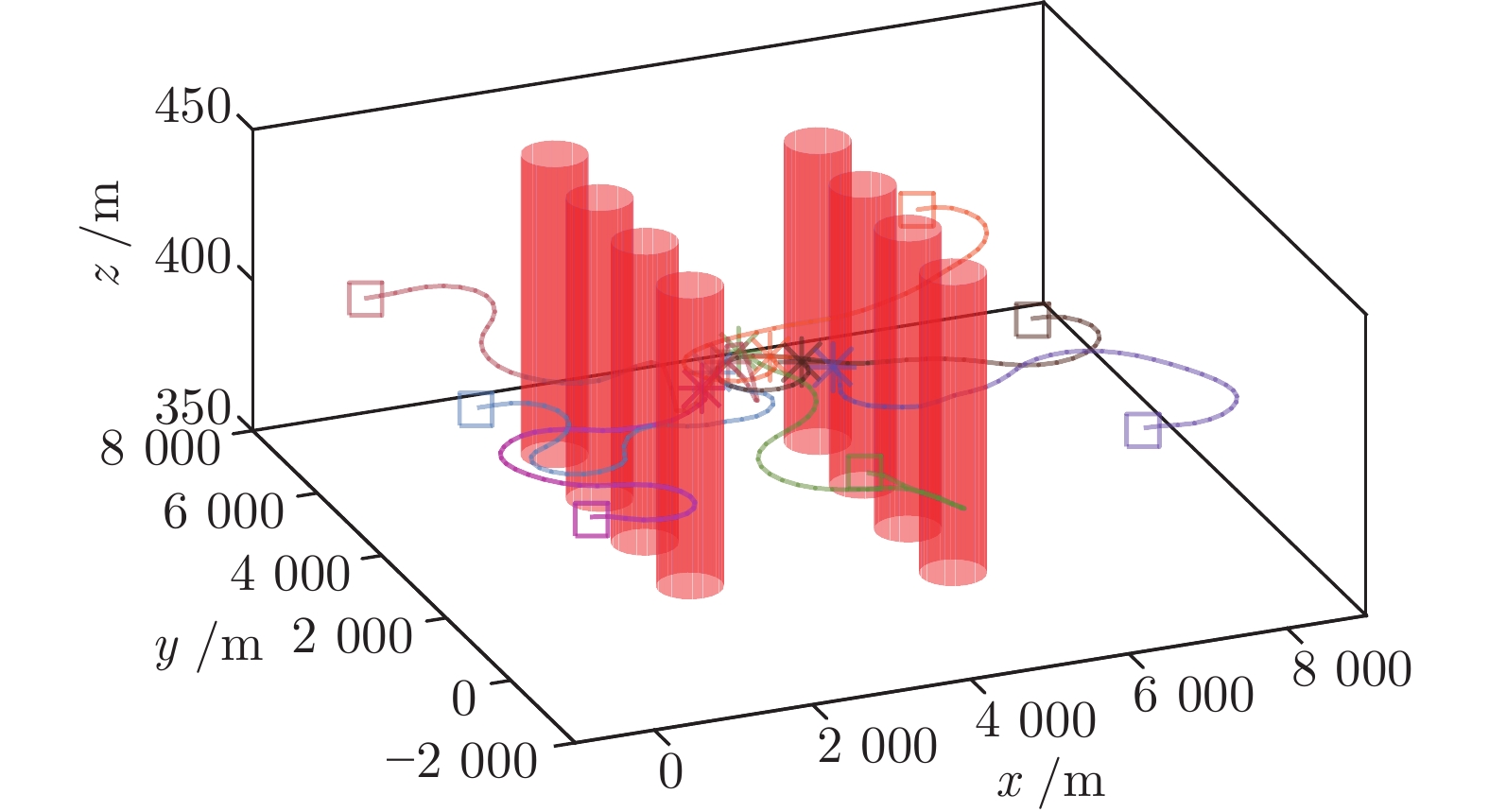
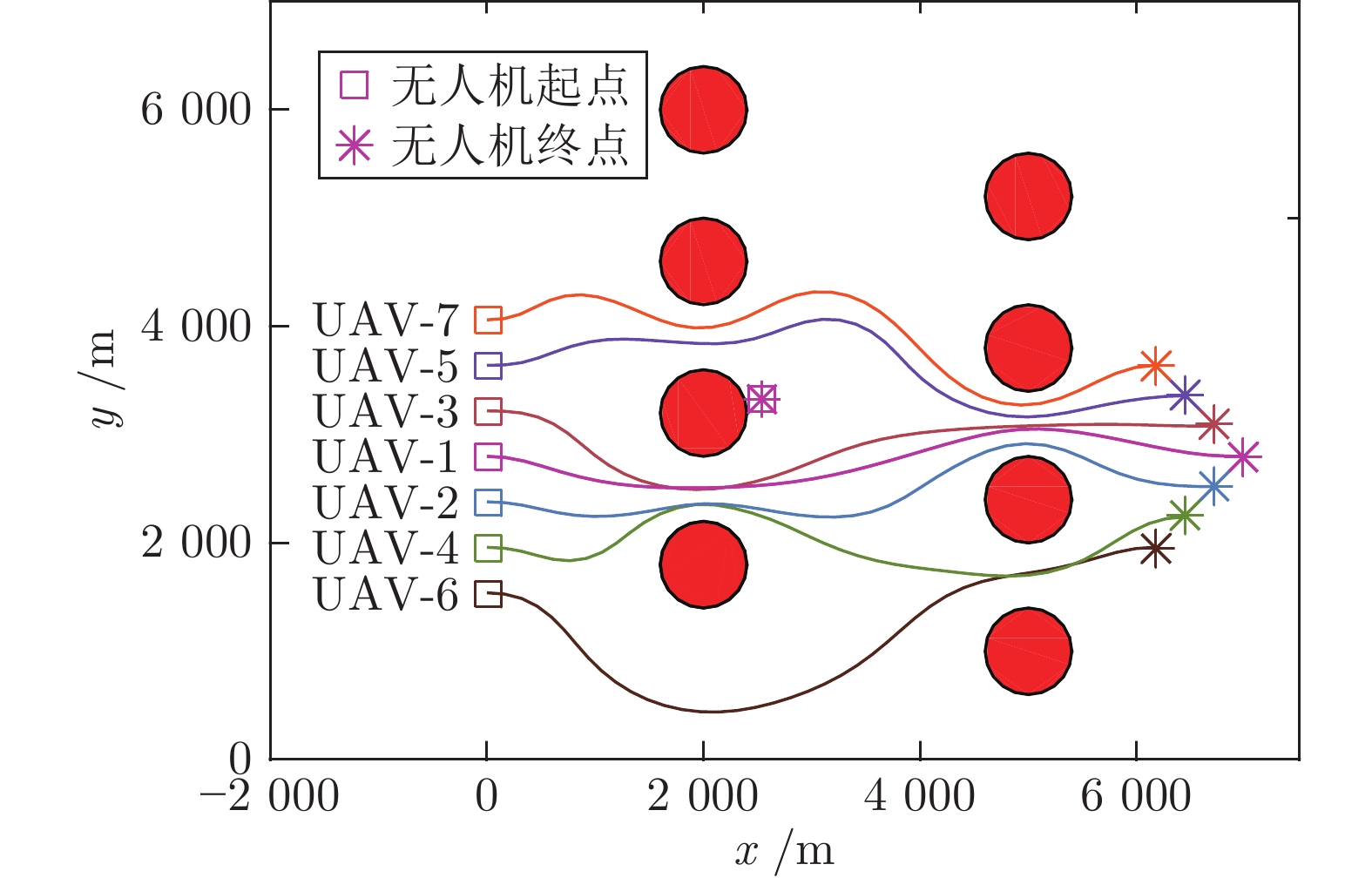
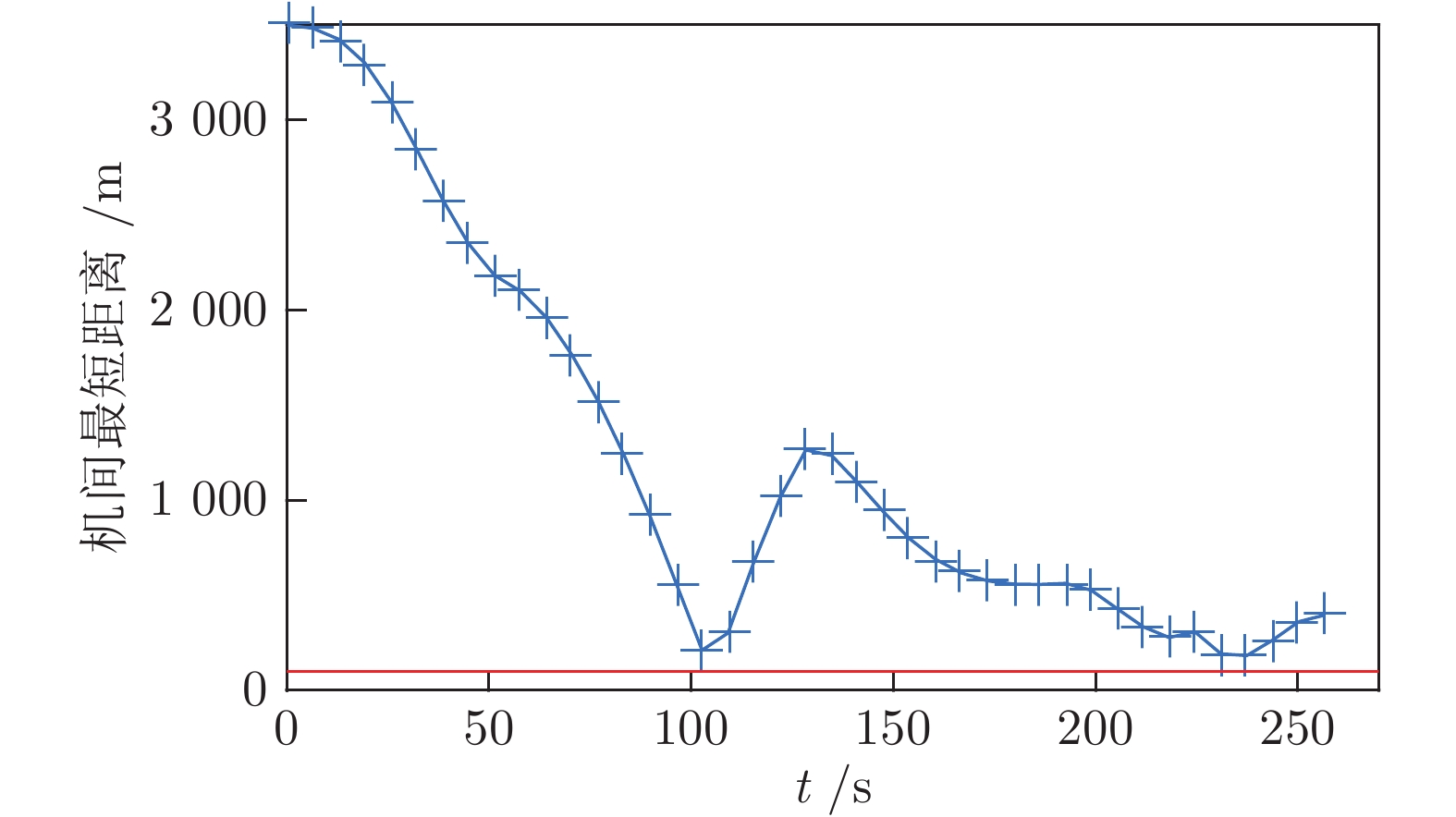
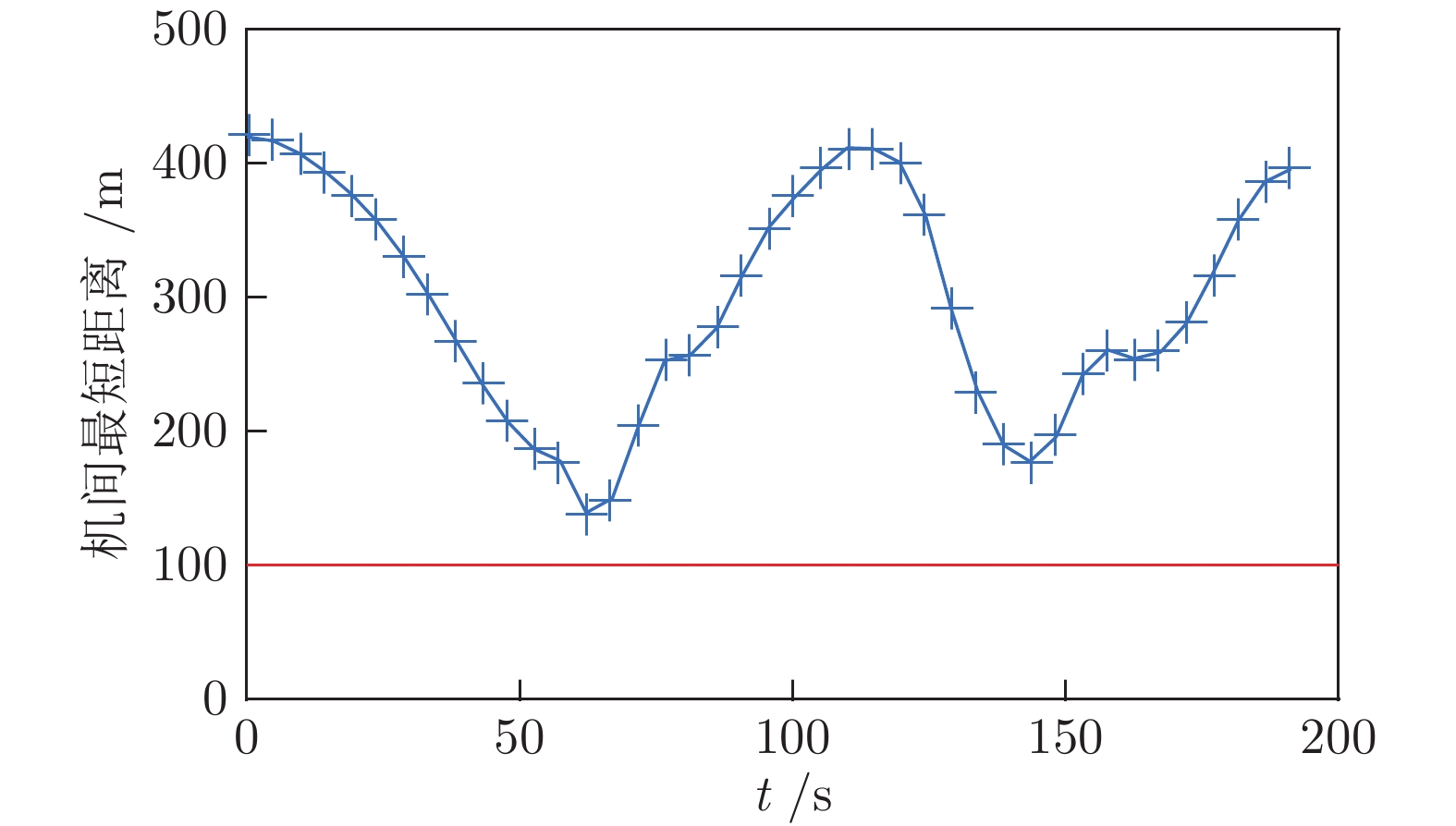
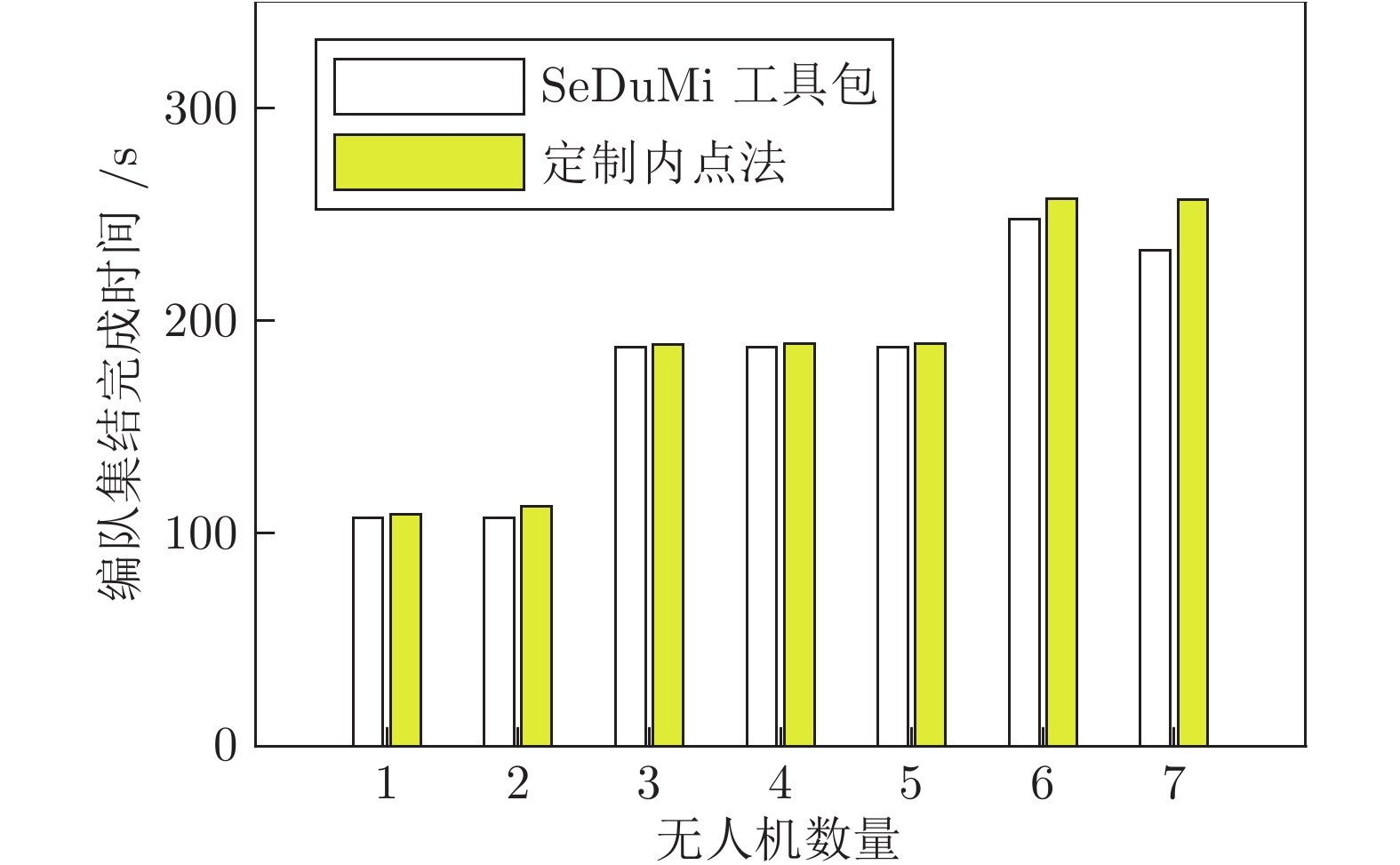
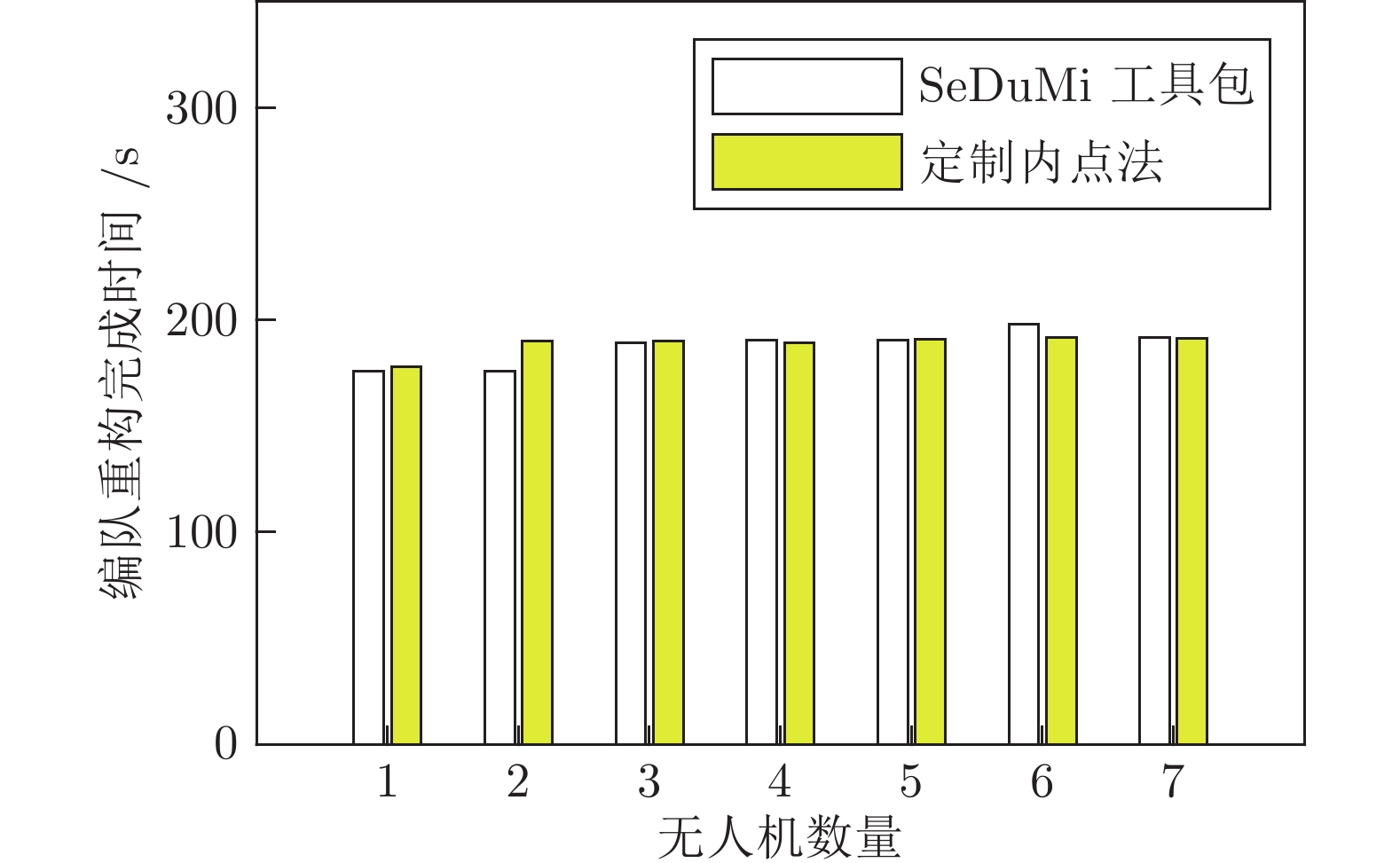
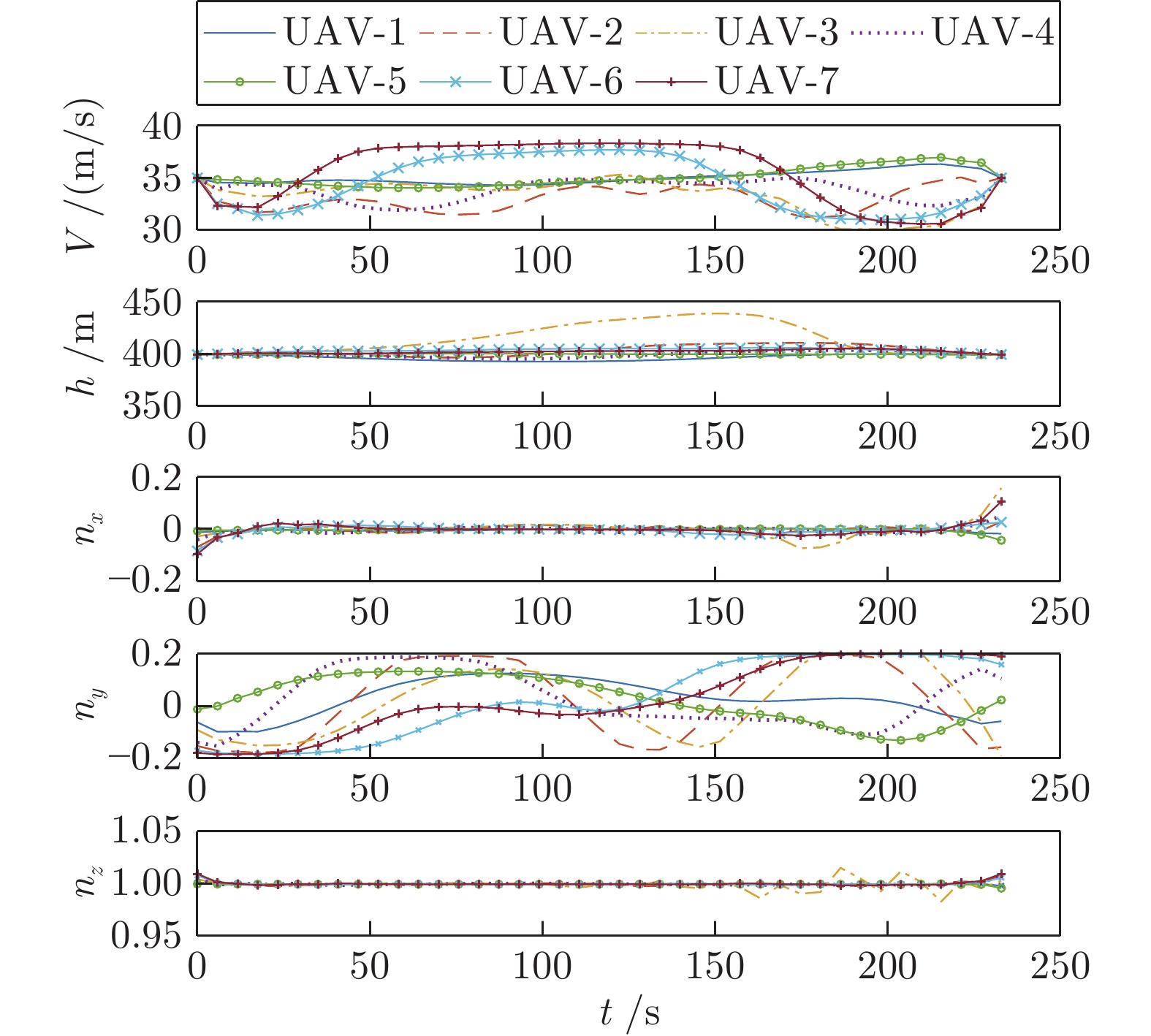
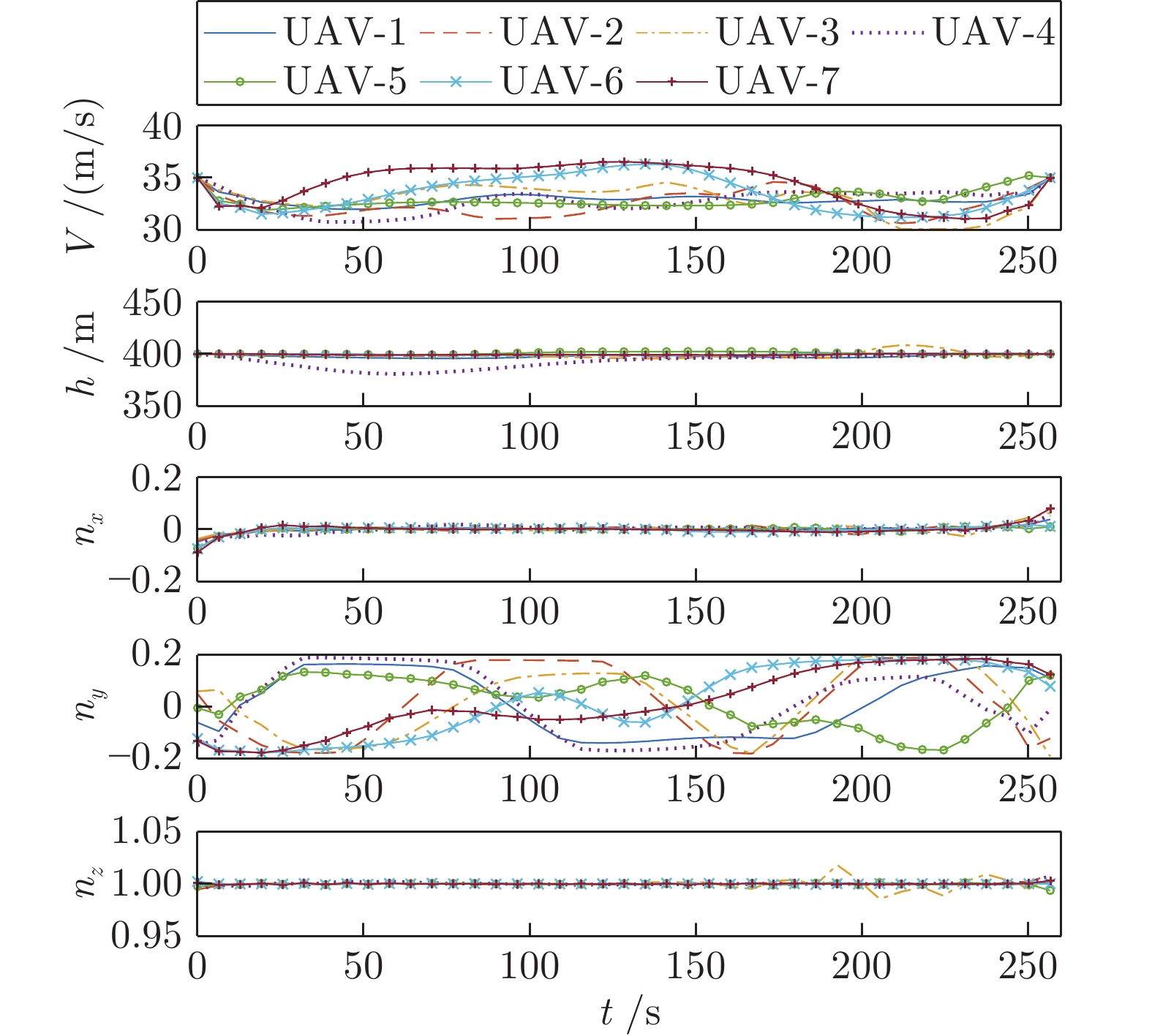
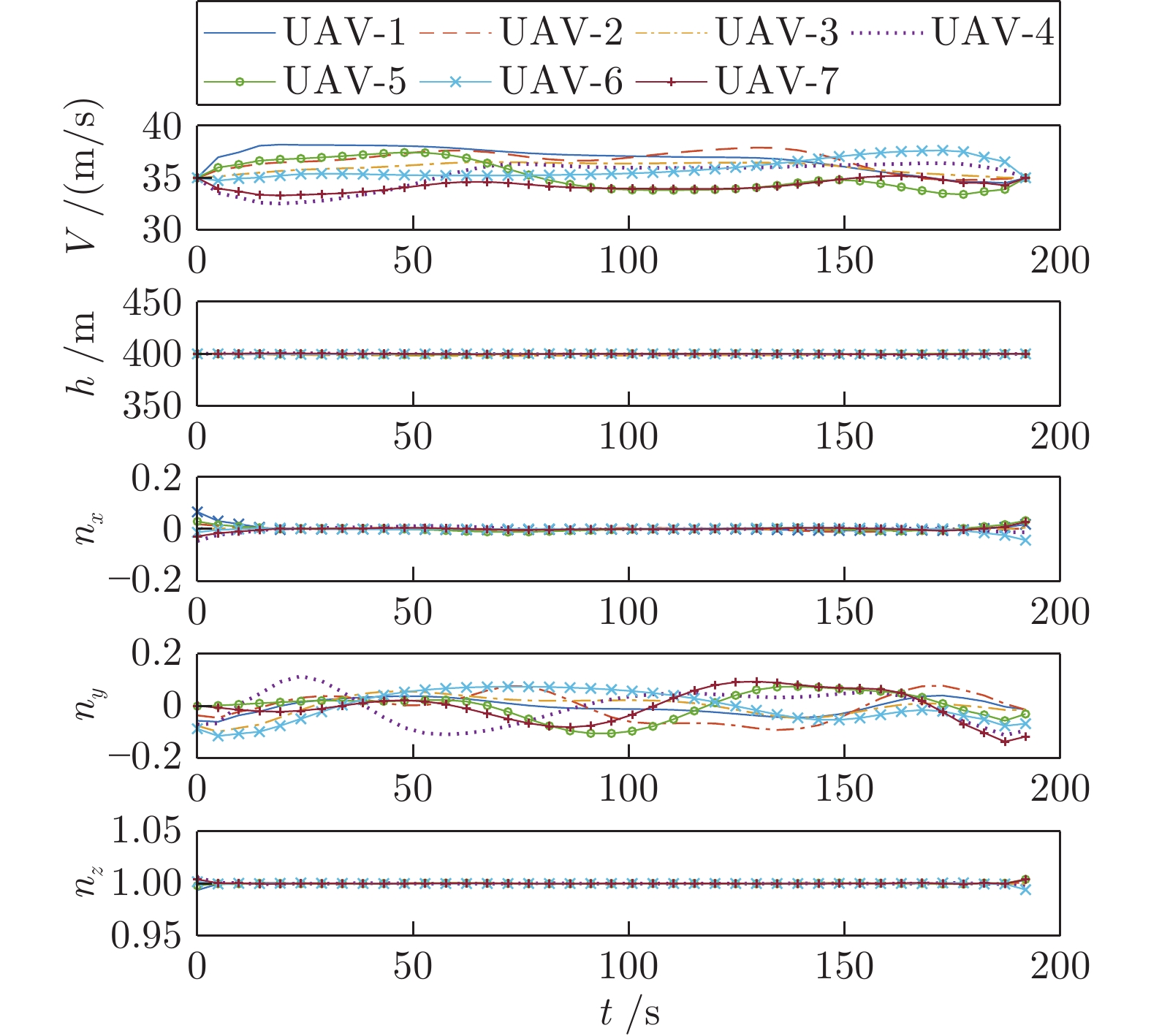
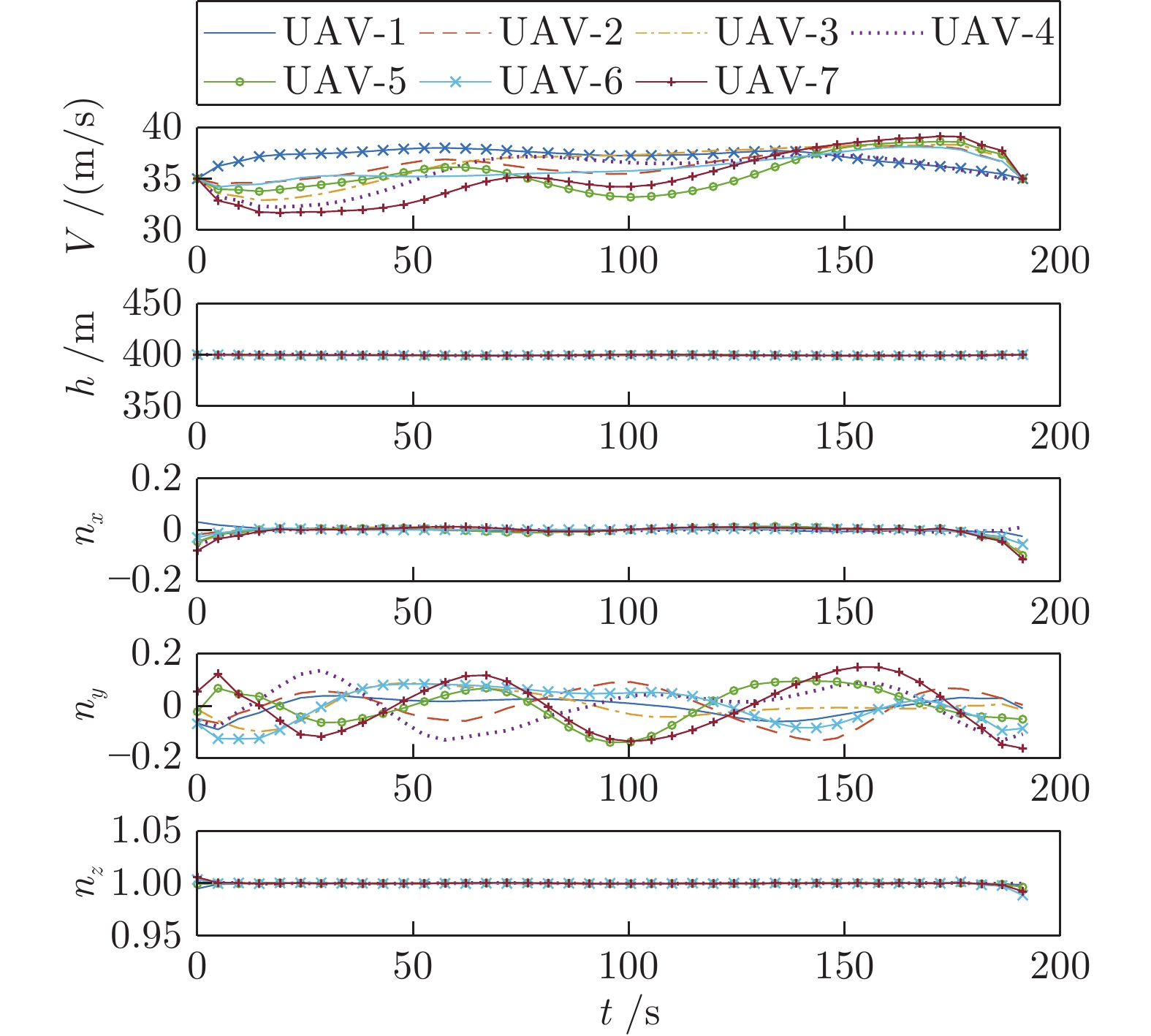
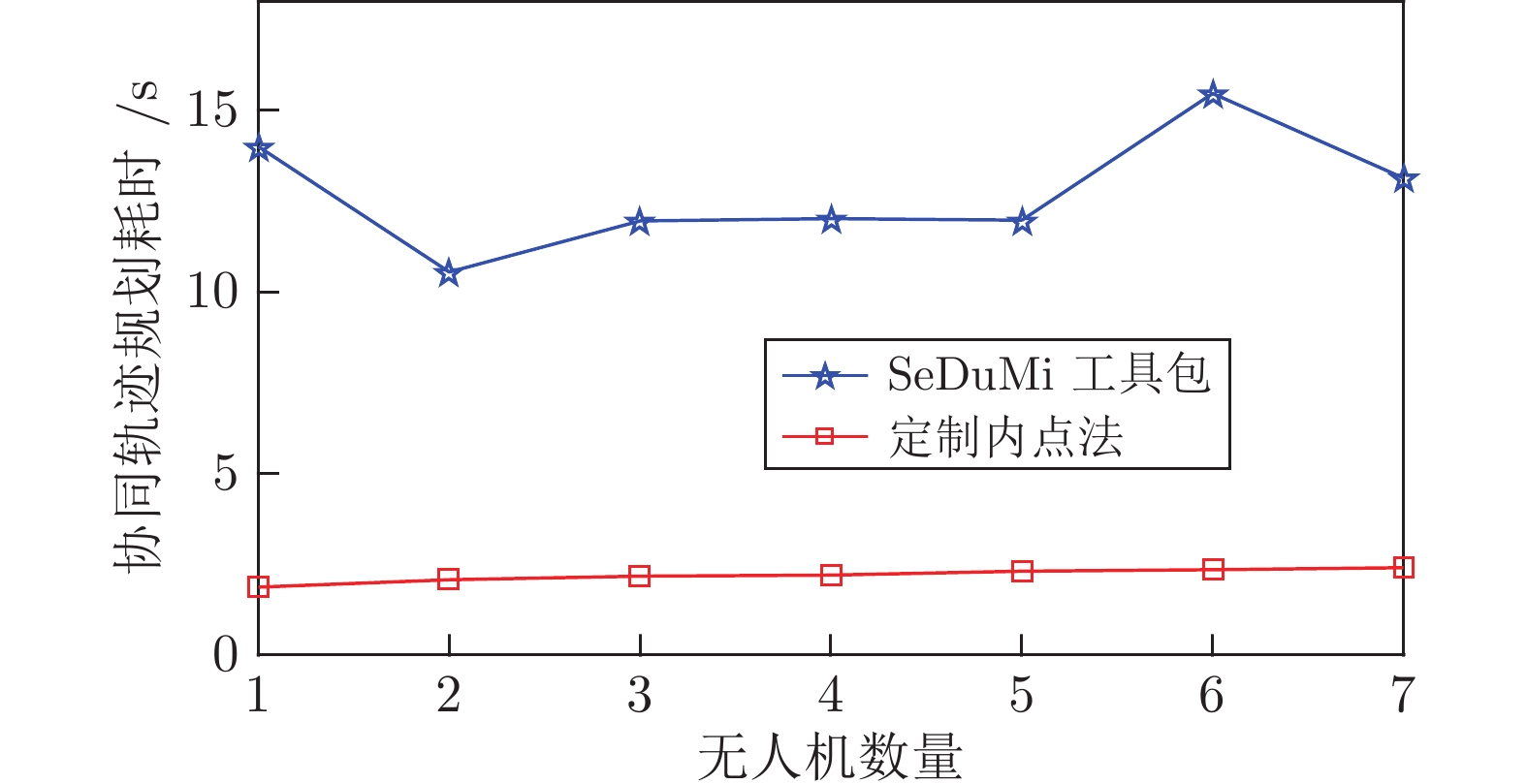
为提高多无人机(Unmanned aerial vehicles, UAV)协同轨迹规划(Cooperative trajectory planning, CTP)效率, 在解耦序列凸优化(Sequential convex programming, SCP)方法基础上, 提出一种高效求解凸优化子问题的定制内点法. 首先引入松弛变量, 构建子问题的等价描述形式, 并推导该形式下的子问题最优性条件. 然后在预测−校正原对偶内点法的框架下, 构建一套高效求解最优性条件方程组的计算流程以降低子问题计算复杂度, 并利用约束矩阵特征提出一种快速计算原对偶搜索方向的方法以提高规划效率. 仿真结果表明, 在解耦序列凸优化框架下, 定制内点法可将协同轨迹规划耗时降低一个数量级, 达到秒级.
为提高多无人机(Unmanned aerial vehicles, UAV)协同轨迹规划(Cooperative trajectory planning, CTP)效率, 在解耦序列凸优化(Sequential convex programming, SCP)方法基础上, 提出一种高效求解凸优化子问题的定制内点法. 首先引入松弛变量, 构建子问题的等价描述形式, 并推导该形式下的子问题最优性条件. 然后在预测−校正原对偶内点法的框架下, 构建一套高效求解最优性条件方程组的计算流程以降低子问题计算复杂度, 并利用约束矩阵特征提出一种快速计算原对偶搜索方向的方法以提高规划效率. 仿真结果表明, 在解耦序列凸优化框架下, 定制内点法可将协同轨迹规划耗时降低一个数量级, 达到秒级.



2023, 49(11): 2386-2395.
doi: 10.16383/j.aas.c210425
摘要:
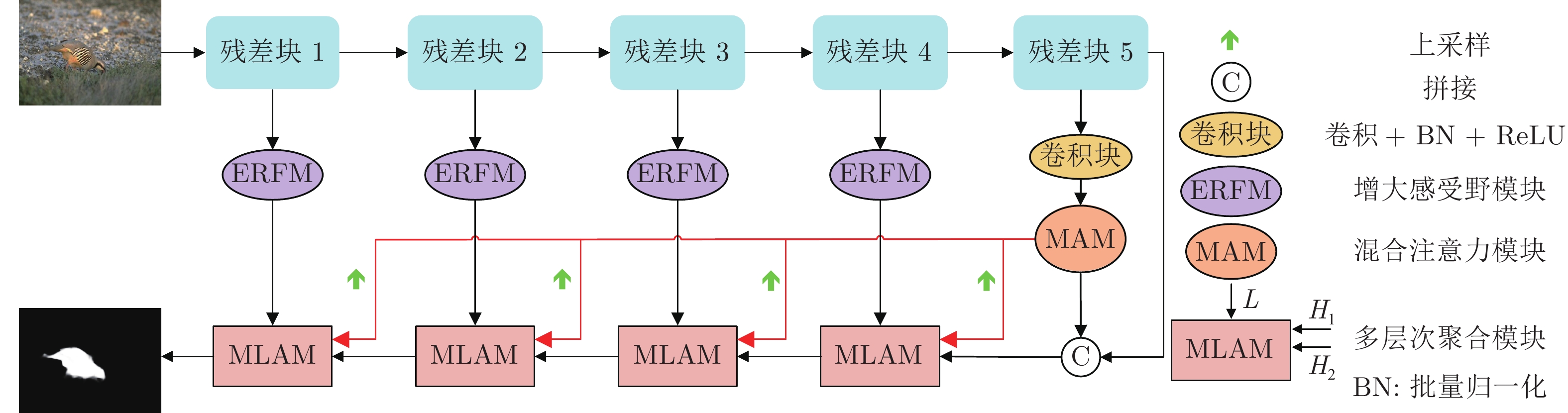
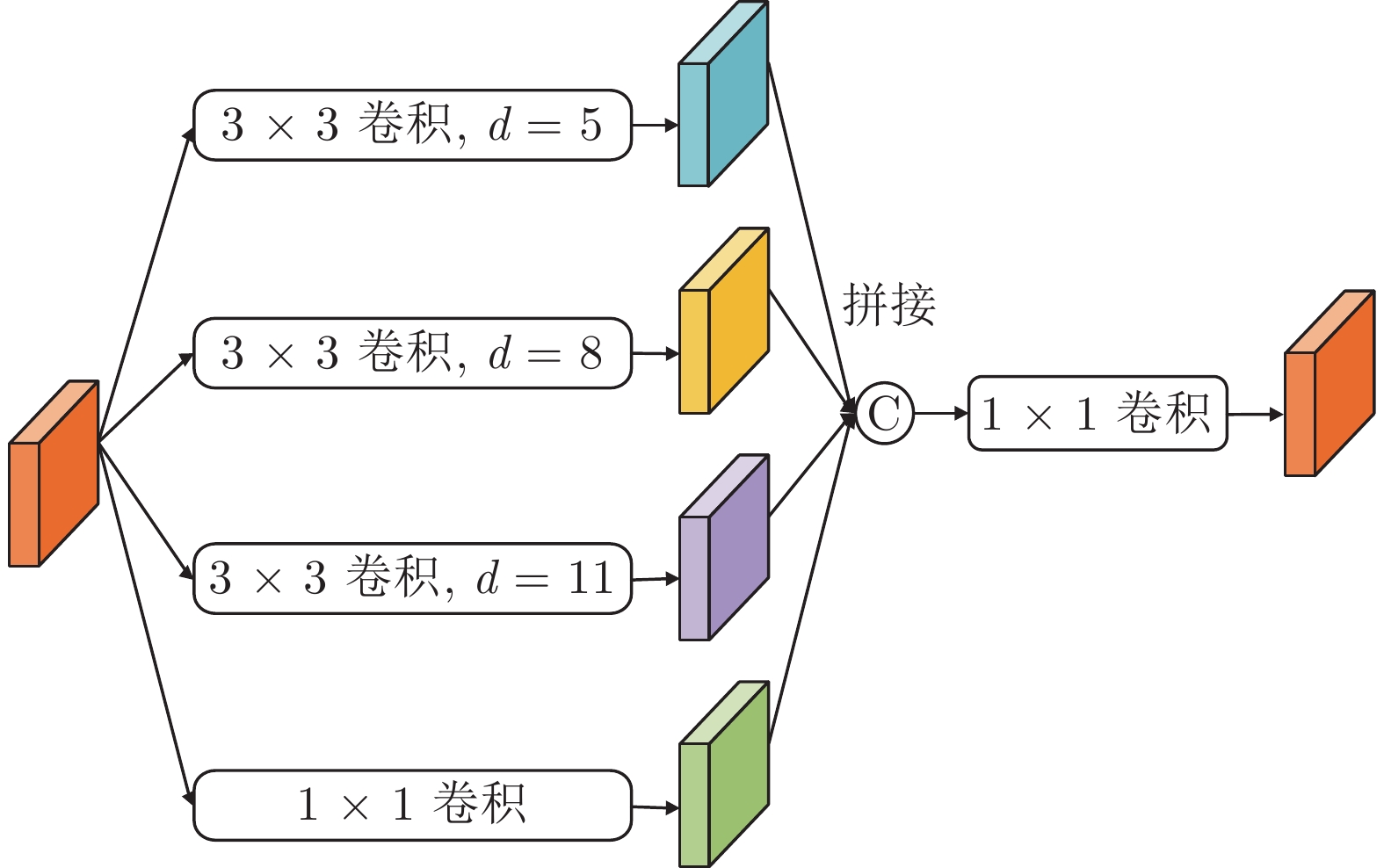
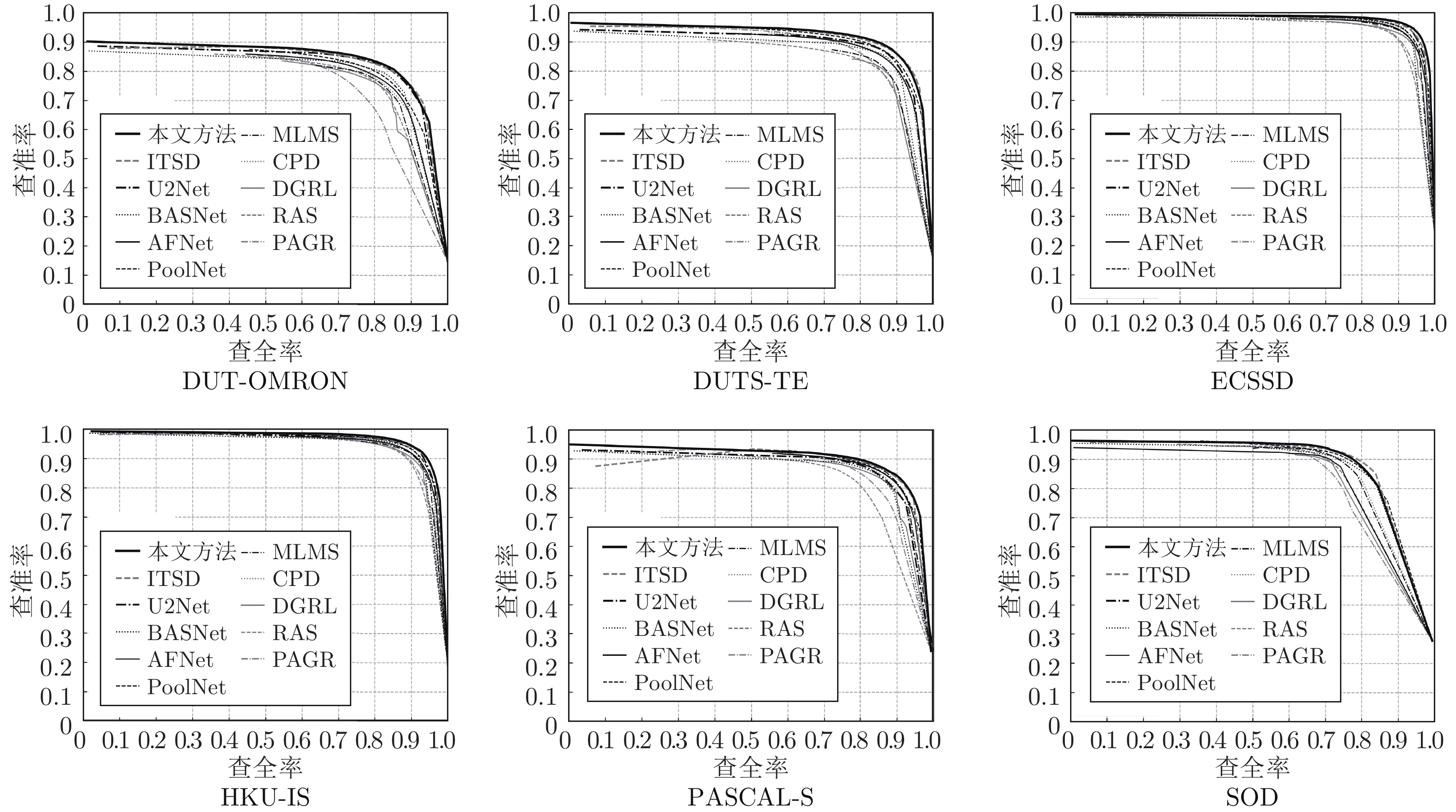
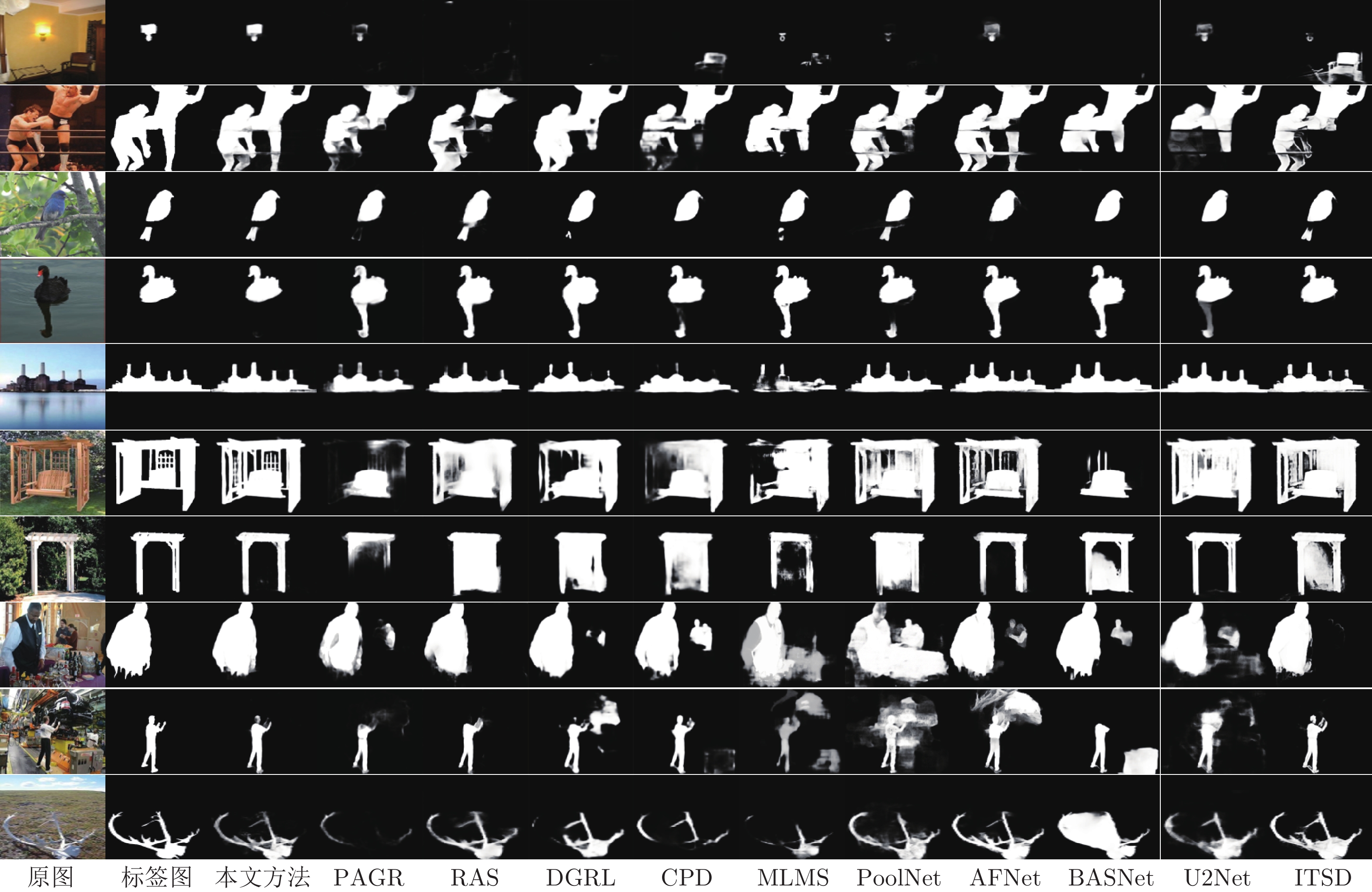
在显著性目标检测网络的设计中, U型结构使用广泛. 但是在U型结构显著性检测方法中, 普遍存在空间位置细节丢失和边缘难以细化的问题, 针对这些问题, 提出一种基于语义信息引导特征聚合的显著性目标检测网络, 通过高效的特征聚合来获得精细的显著性图. 该网络由混合注意力模块(Mixing attention module, MAM)、增大感受野模块(Enlarged receptive field module, ERFM)和多层次聚合模块(Multi-level aggregation module, MLAM)三个部分组成. 首先, 利用增大感受野模块处理特征提取网络提取出的低层特征, 使其在保留原有边缘细节的同时增大感受野, 以获得更加丰富的空间上/下文信息; 然后, 利用混合注意力模块处理特征提取网络的最后一层特征, 以增强其表征力, 并作为解码过程中的语义指导, 不断指导特征聚合; 最后, 多层次聚合模块对来自不同层次的特征进行有效聚合, 得到最终精细的显著性图. 在6个基准数据集上进行了实验, 结果验证了该方法能够有效地定位显著特征, 并且对边缘细节的细化也很有效.
在显著性目标检测网络的设计中, U型结构使用广泛. 但是在U型结构显著性检测方法中, 普遍存在空间位置细节丢失和边缘难以细化的问题, 针对这些问题, 提出一种基于语义信息引导特征聚合的显著性目标检测网络, 通过高效的特征聚合来获得精细的显著性图. 该网络由混合注意力模块(Mixing attention module, MAM)、增大感受野模块(Enlarged receptive field module, ERFM)和多层次聚合模块(Multi-level aggregation module, MLAM)三个部分组成. 首先, 利用增大感受野模块处理特征提取网络提取出的低层特征, 使其在保留原有边缘细节的同时增大感受野, 以获得更加丰富的空间上/下文信息; 然后, 利用混合注意力模块处理特征提取网络的最后一层特征, 以增强其表征力, 并作为解码过程中的语义指导, 不断指导特征聚合; 最后, 多层次聚合模块对来自不同层次的特征进行有效聚合, 得到最终精细的显著性图. 在6个基准数据集上进行了实验, 结果验证了该方法能够有效地定位显著特征, 并且对边缘细节的细化也很有效.


2023, 49(11): 2396-2408.
doi: 10.16383/j.aas.c190761
摘要:
针对一些智能优化算法缺乏完备数学物理理论基础的现状, 利用优化问题和量子物理在概率意义上的相似性, 建立优化问题的薛定谔方程, 将优化问题转化为以目标函数为约束条件的基态波函数问题, 同时利用波函数定义了算法的能量、隧道效应和熵, 实现了以波函数为中心的优化问题量子模型. 这一纲要利用了量子物理完备的理论框架, 建立起了优化问题与量子理论广泛的内在联系. 从量子物理的角度回答了优化问题解的概率描述, 邻域采样函数的选择, 算法演化的过程设计, 多尺度过程的必要性等问题. 智能优化算法的量子理论纲要可以作为研究与构造算法的理论工具, 其有效性已得到初步验证.
针对一些智能优化算法缺乏完备数学物理理论基础的现状, 利用优化问题和量子物理在概率意义上的相似性, 建立优化问题的薛定谔方程, 将优化问题转化为以目标函数为约束条件的基态波函数问题, 同时利用波函数定义了算法的能量、隧道效应和熵, 实现了以波函数为中心的优化问题量子模型. 这一纲要利用了量子物理完备的理论框架, 建立起了优化问题与量子理论广泛的内在联系. 从量子物理的角度回答了优化问题解的概率描述, 邻域采样函数的选择, 算法演化的过程设计, 多尺度过程的必要性等问题. 智能优化算法的量子理论纲要可以作为研究与构造算法的理论工具, 其有效性已得到初步验证.

2023, 49(11): 2409-2425.
doi: 10.16383/j.aas.c220424
摘要:
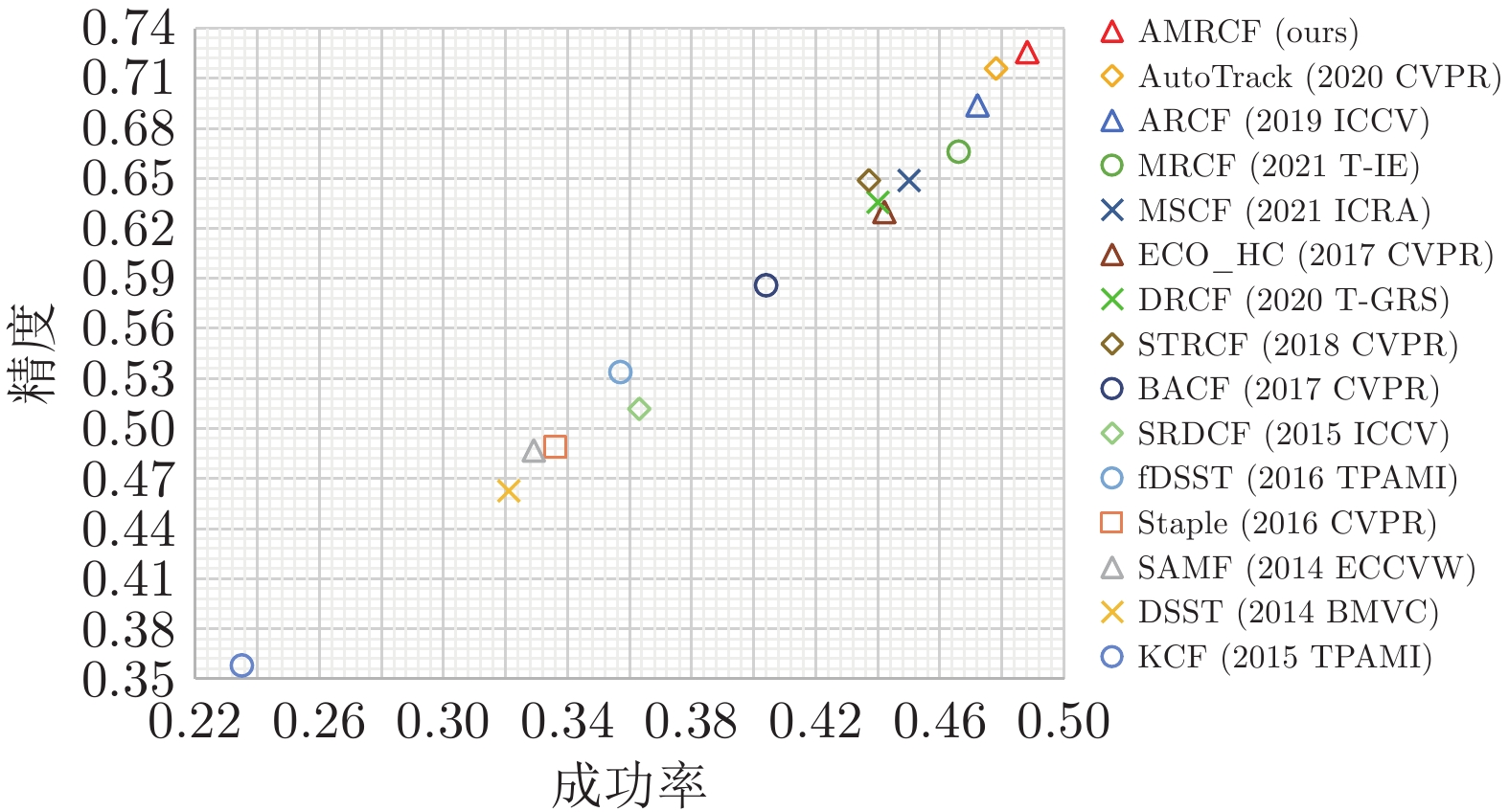
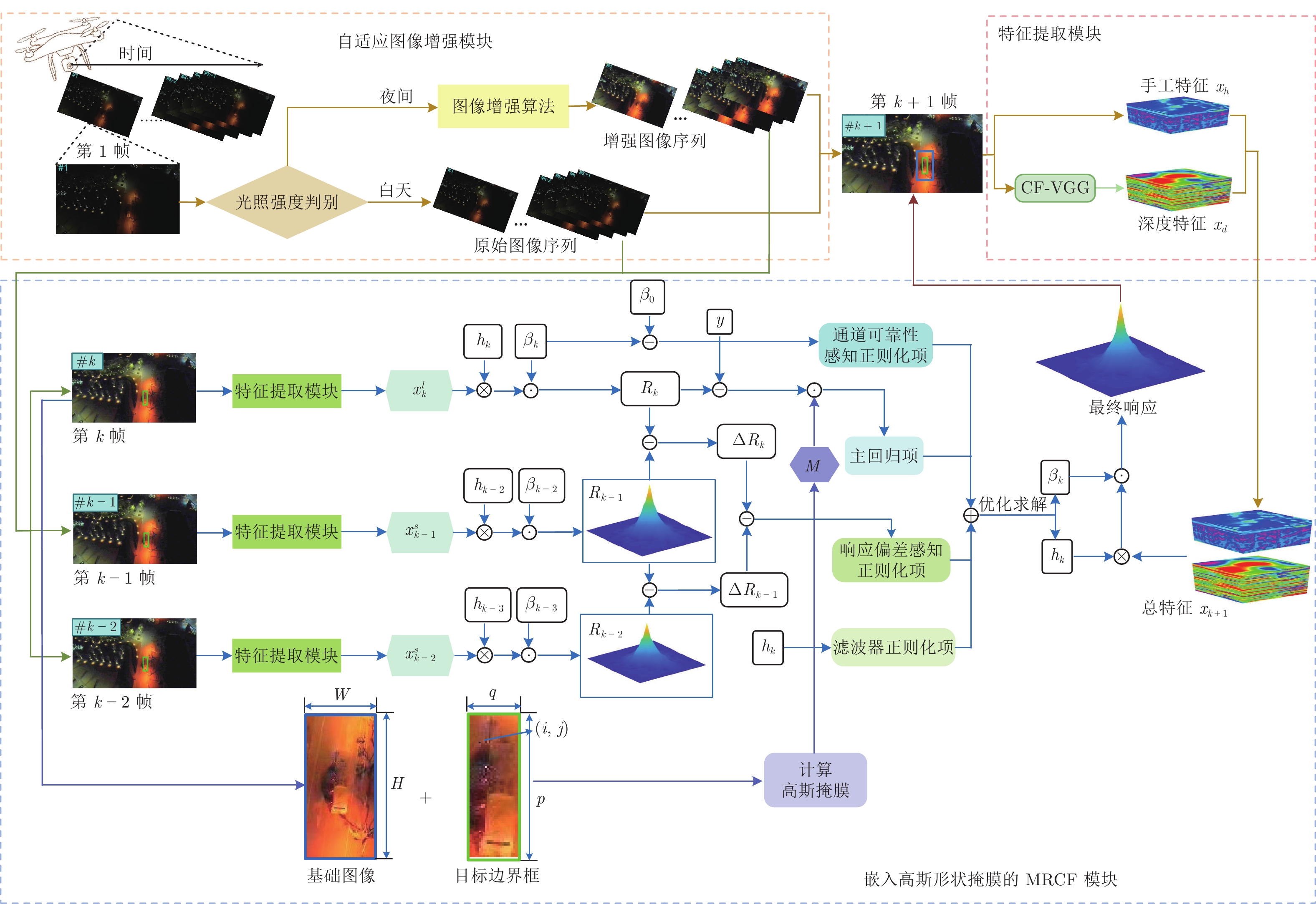
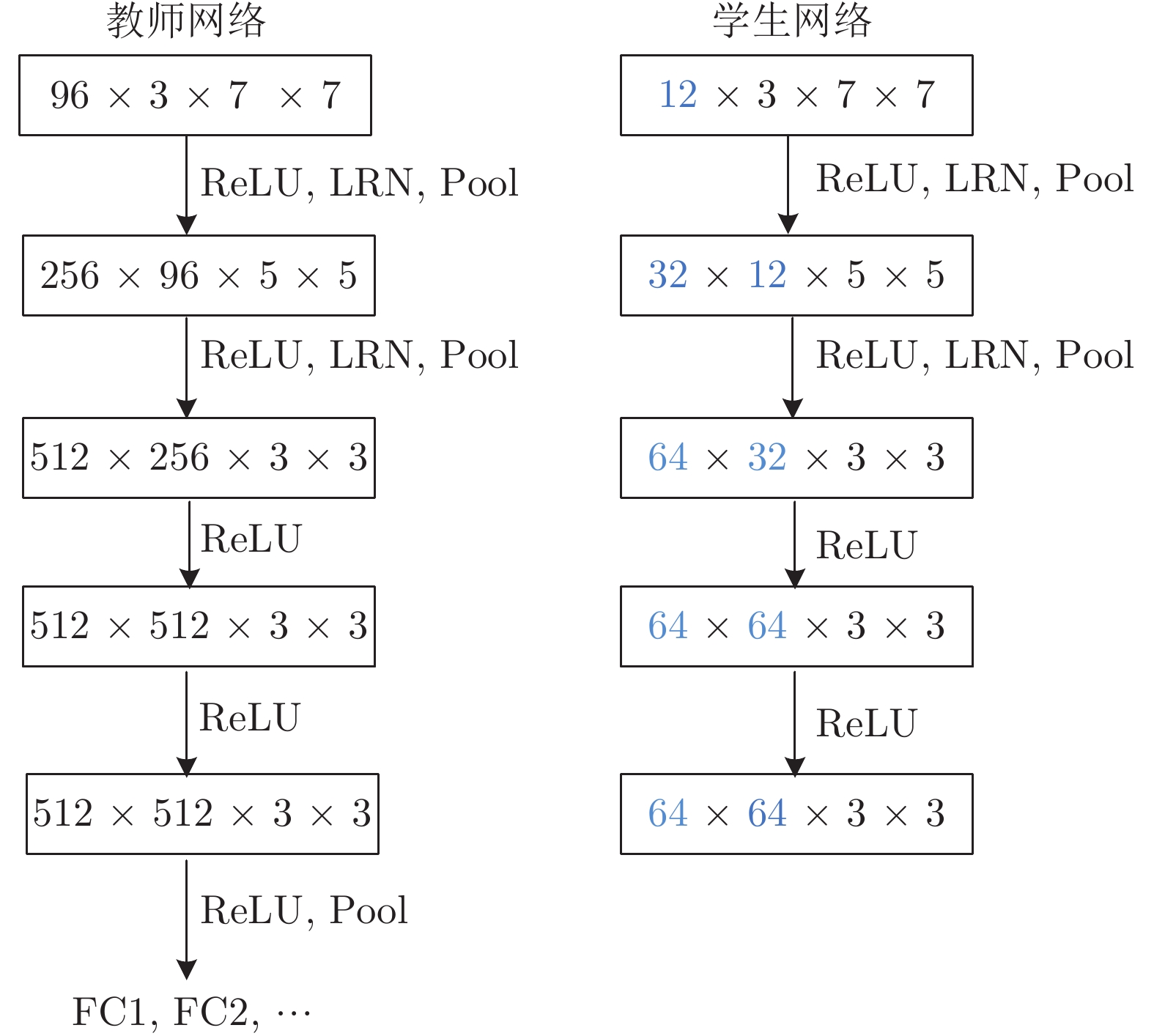
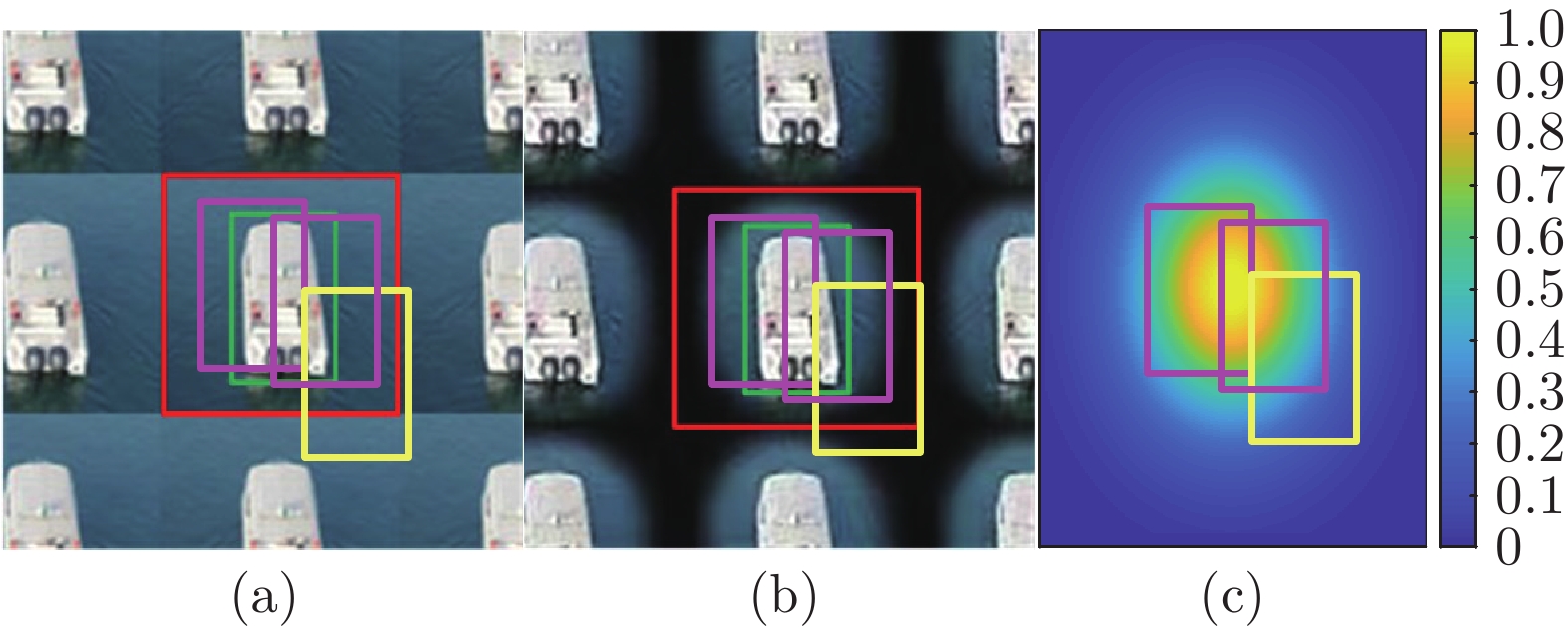
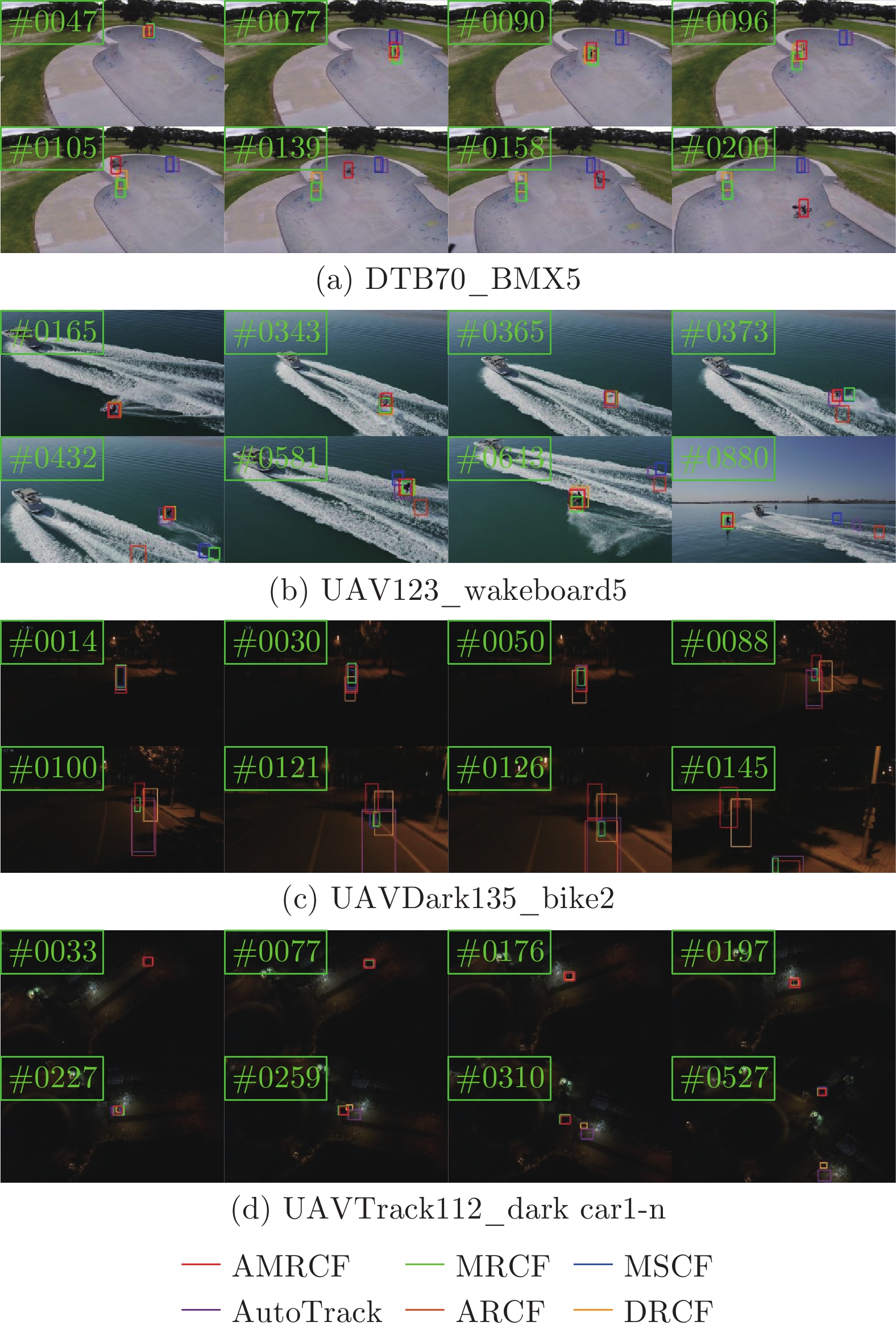
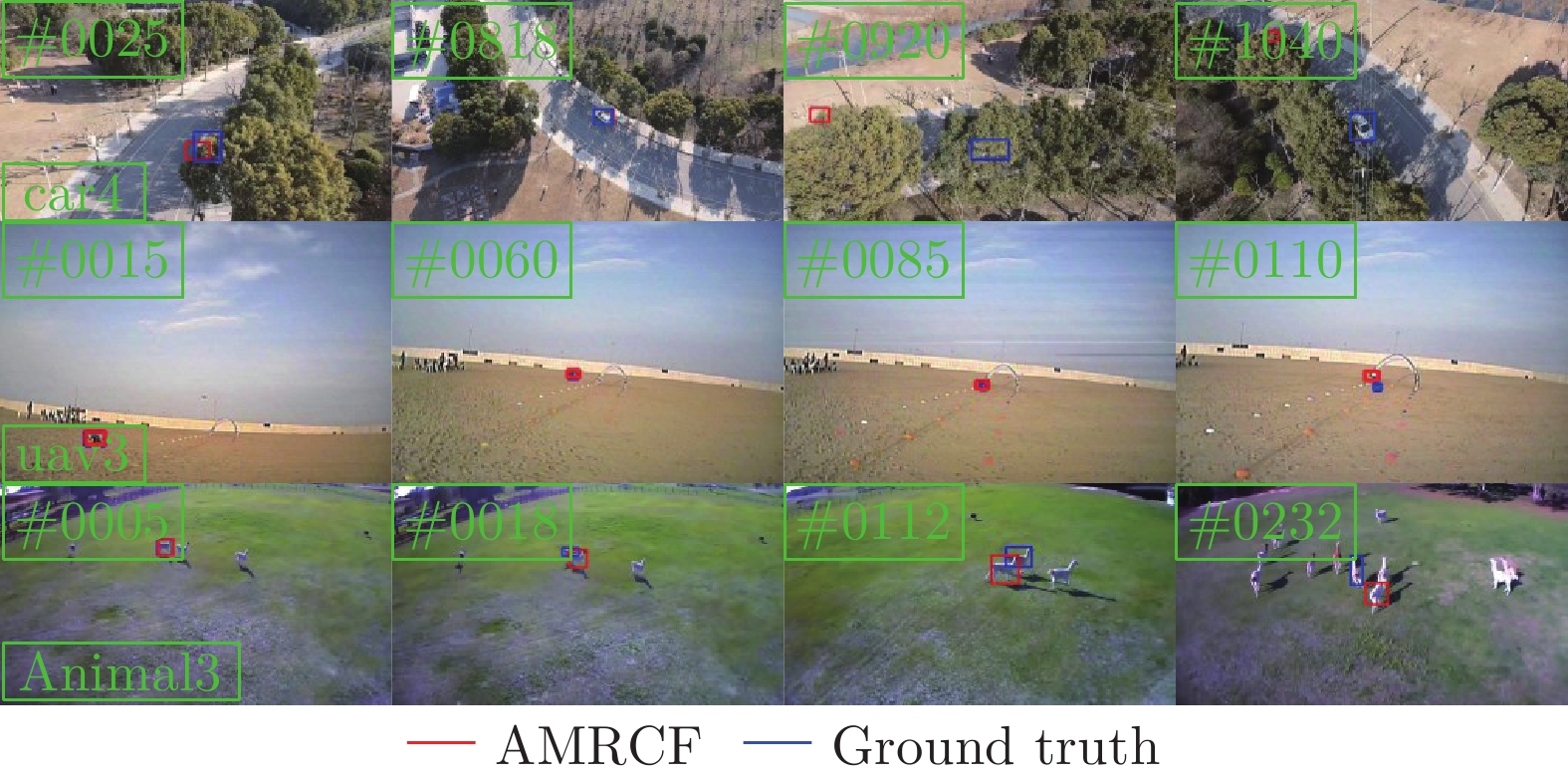
相关滤波算法(Correlation filter, CF)已广泛应用于无人机目标跟踪. 然而, 受无人机 (Unmanned aerial vehicle, UAV) 平台本身计算性能的制约, 现有的无人机相关滤波跟踪算法大都仅采用手工特征来描述目标的外观, 难以获得目标的全面语义信息. 并且这些跟踪算法仅能较好地进行光照条件良好场景下的跟踪, 而在跟踪夜间场景下的目标时性能严重下降. 此外, 相关滤波跟踪器采用余弦窗口来抑制循环移位产生的边界效应, 缩小了样本提取区域, 产生了训练样本污染的问题, 这不可避免地降低了跟踪器的性能. 针对以上问题, 提出全天实时多正则化相关滤波算法(All-day and real-time multi-regularized correlation filter, AMRCF)跟踪无人机目标. 首先, 引入一个自适应图像增强模块, 在不影响图像各通道颜色比例的前提下, 对获得的图像进行增强, 以提高夜间目标跟踪性能. 其次, 引入一个轻量型的深度网络来提取目标的深度特征, 并与手工特征一起来表示目标的语义信息. 此外, 在算法框架中嵌入高斯形状掩膜, 在抑制边界效应的同时, 有效避免训练样本污染. 最后, 在5个公开的无人机基准数据集上进行充分的实验. 实验结果表明, 所提出的算法与多个先进的相关滤波跟踪器相比, 取得了有竞争力的结果, 且算法的实时速度约为25 fps, 能够胜任无人机的目标跟踪任务.
相关滤波算法(Correlation filter, CF)已广泛应用于无人机目标跟踪. 然而, 受无人机 (Unmanned aerial vehicle, UAV) 平台本身计算性能的制约, 现有的无人机相关滤波跟踪算法大都仅采用手工特征来描述目标的外观, 难以获得目标的全面语义信息. 并且这些跟踪算法仅能较好地进行光照条件良好场景下的跟踪, 而在跟踪夜间场景下的目标时性能严重下降. 此外, 相关滤波跟踪器采用余弦窗口来抑制循环移位产生的边界效应, 缩小了样本提取区域, 产生了训练样本污染的问题, 这不可避免地降低了跟踪器的性能. 针对以上问题, 提出全天实时多正则化相关滤波算法(All-day and real-time multi-regularized correlation filter, AMRCF)跟踪无人机目标. 首先, 引入一个自适应图像增强模块, 在不影响图像各通道颜色比例的前提下, 对获得的图像进行增强, 以提高夜间目标跟踪性能. 其次, 引入一个轻量型的深度网络来提取目标的深度特征, 并与手工特征一起来表示目标的语义信息. 此外, 在算法框架中嵌入高斯形状掩膜, 在抑制边界效应的同时, 有效避免训练样本污染. 最后, 在5个公开的无人机基准数据集上进行充分的实验. 实验结果表明, 所提出的算法与多个先进的相关滤波跟踪器相比, 取得了有竞争力的结果, 且算法的实时速度约为25 fps, 能够胜任无人机的目标跟踪任务.


2023, 49(11): 2426-2436.
doi: 10.16383/j.aas.c180777
摘要:
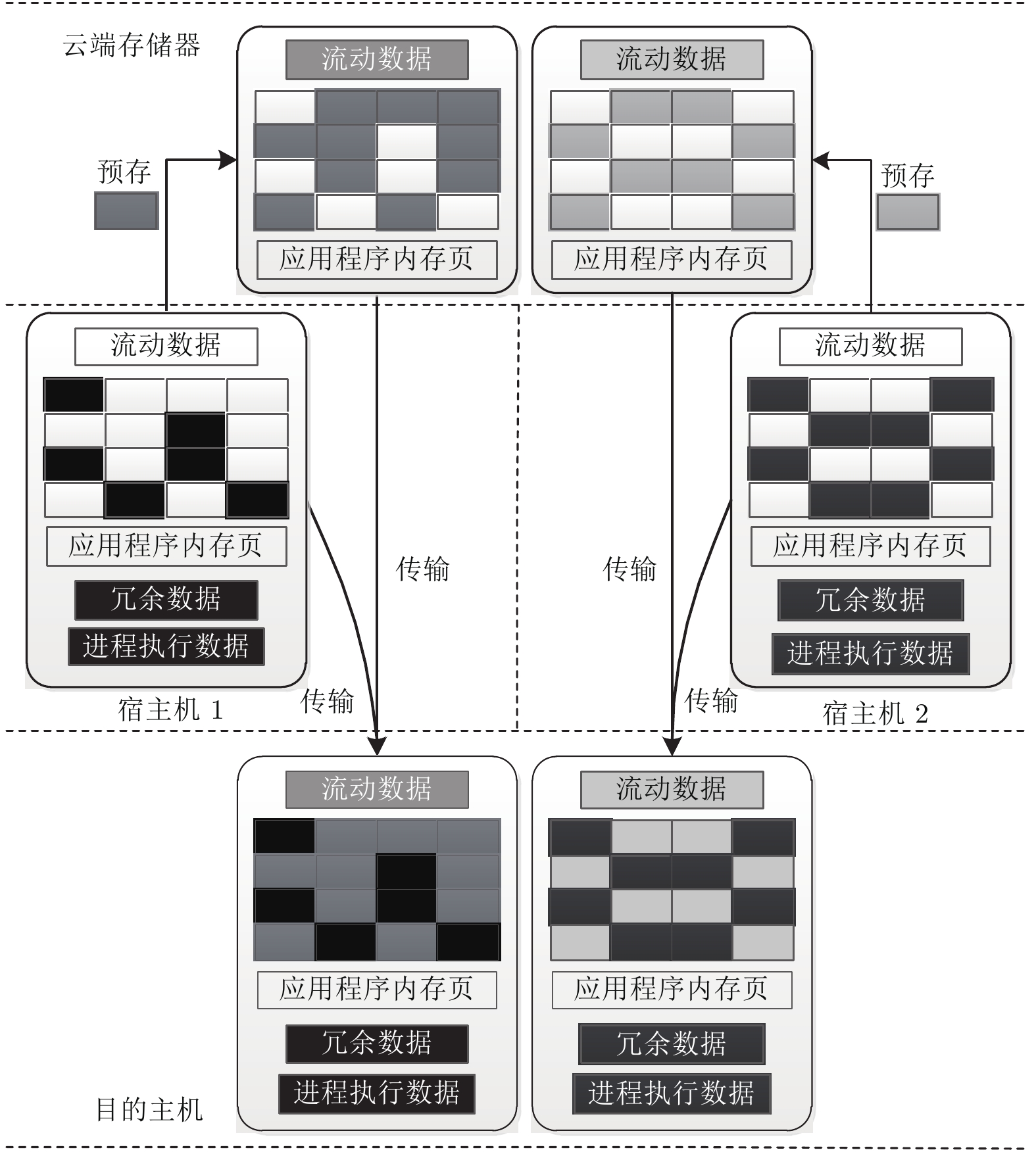
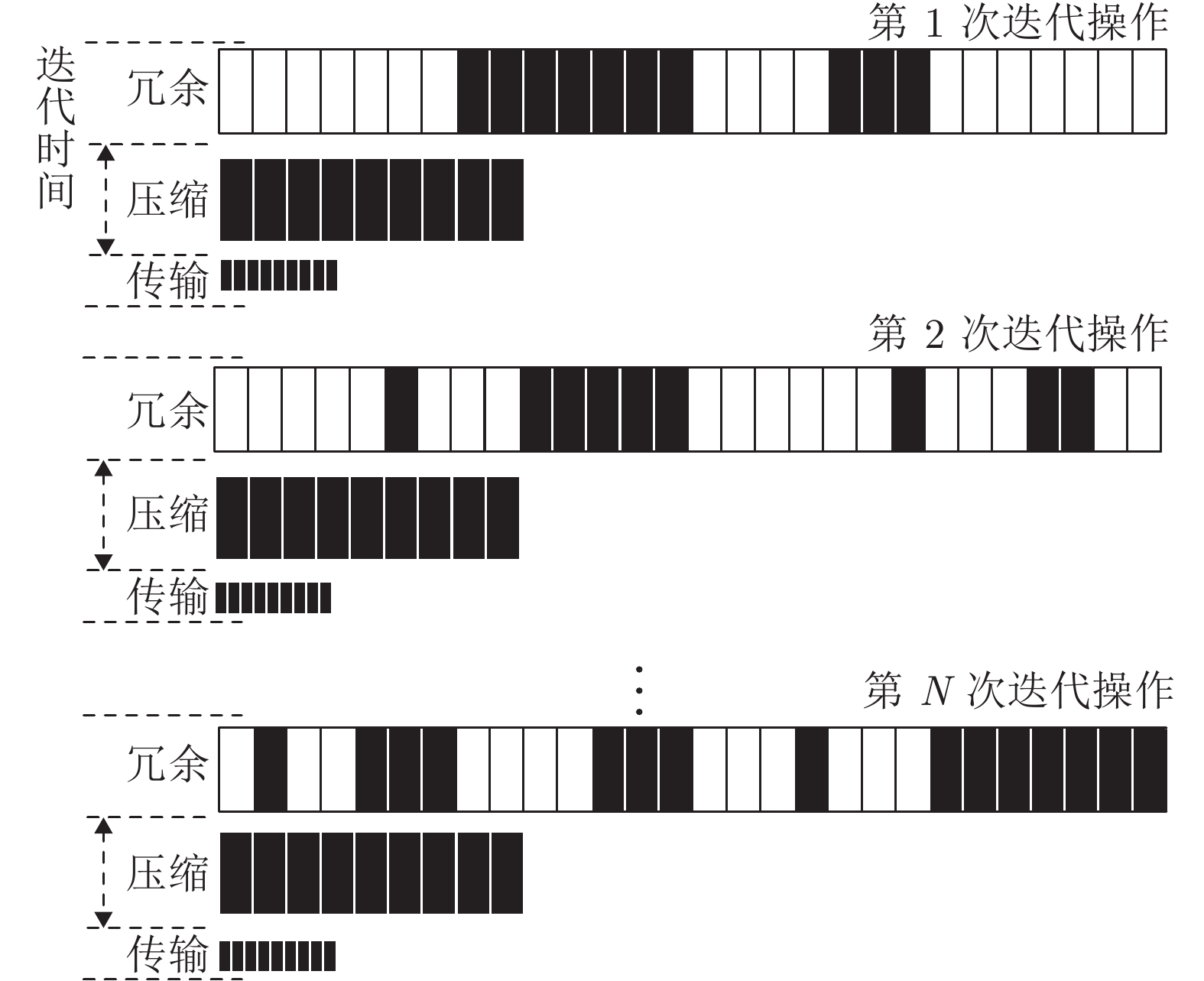
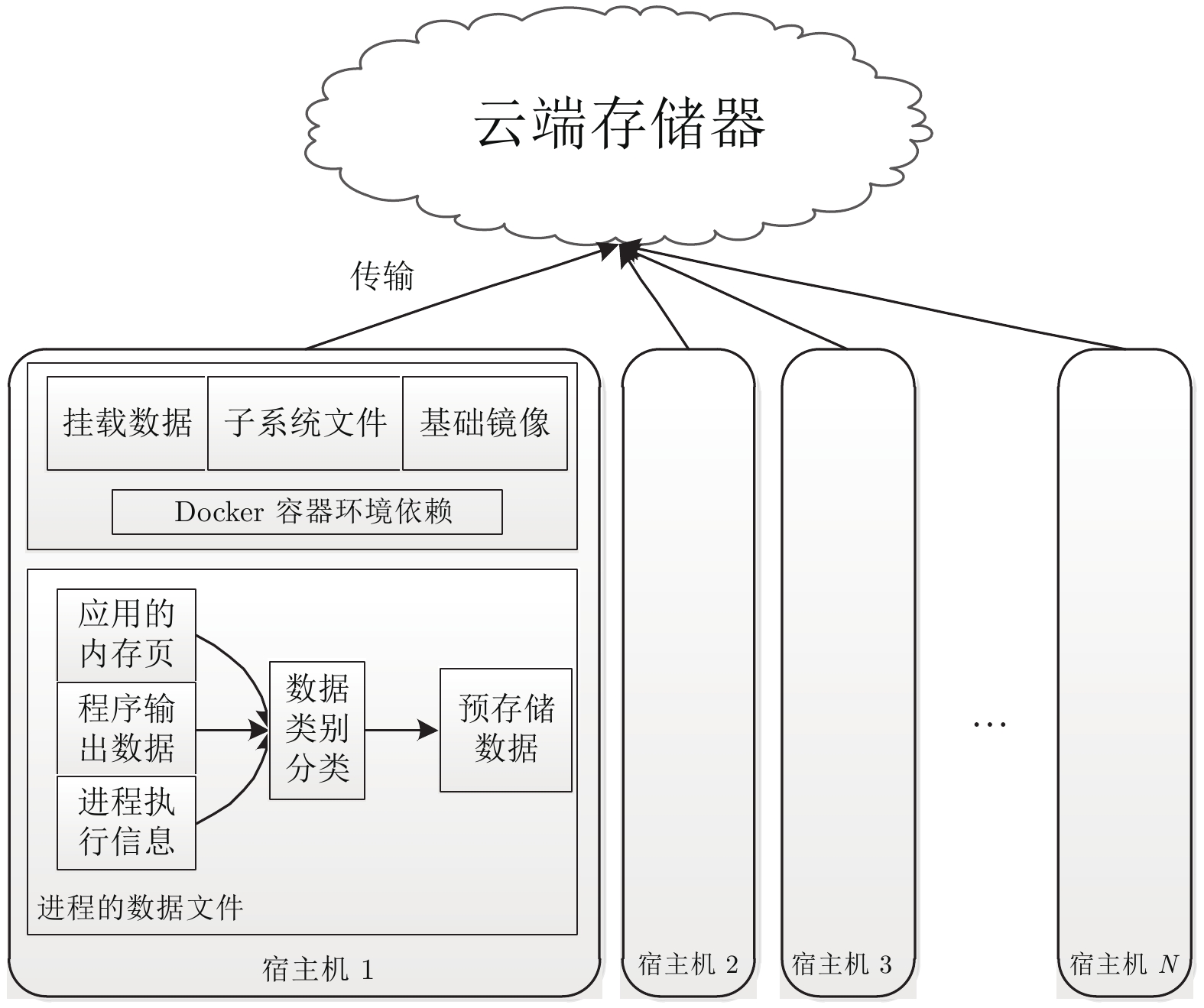
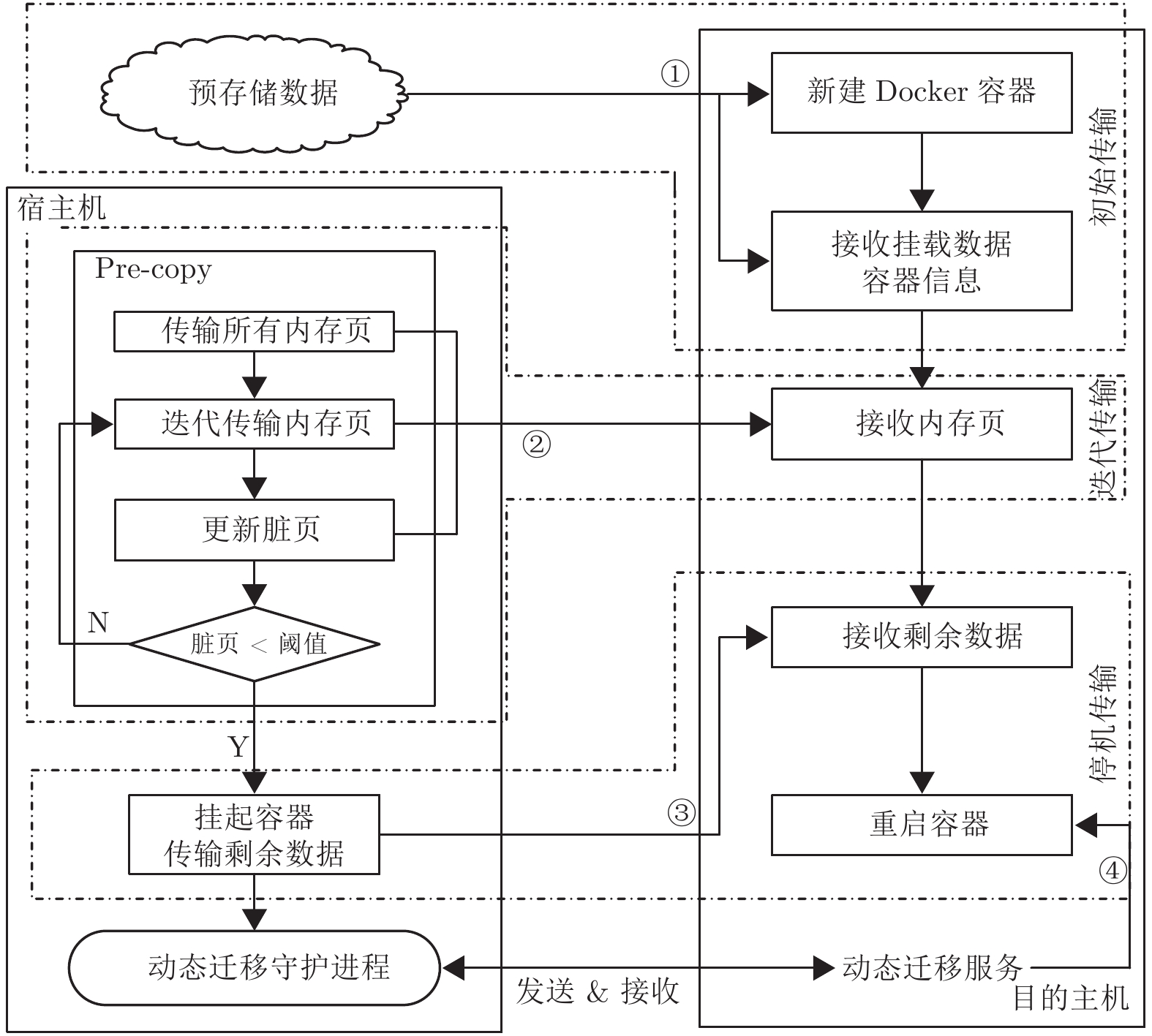
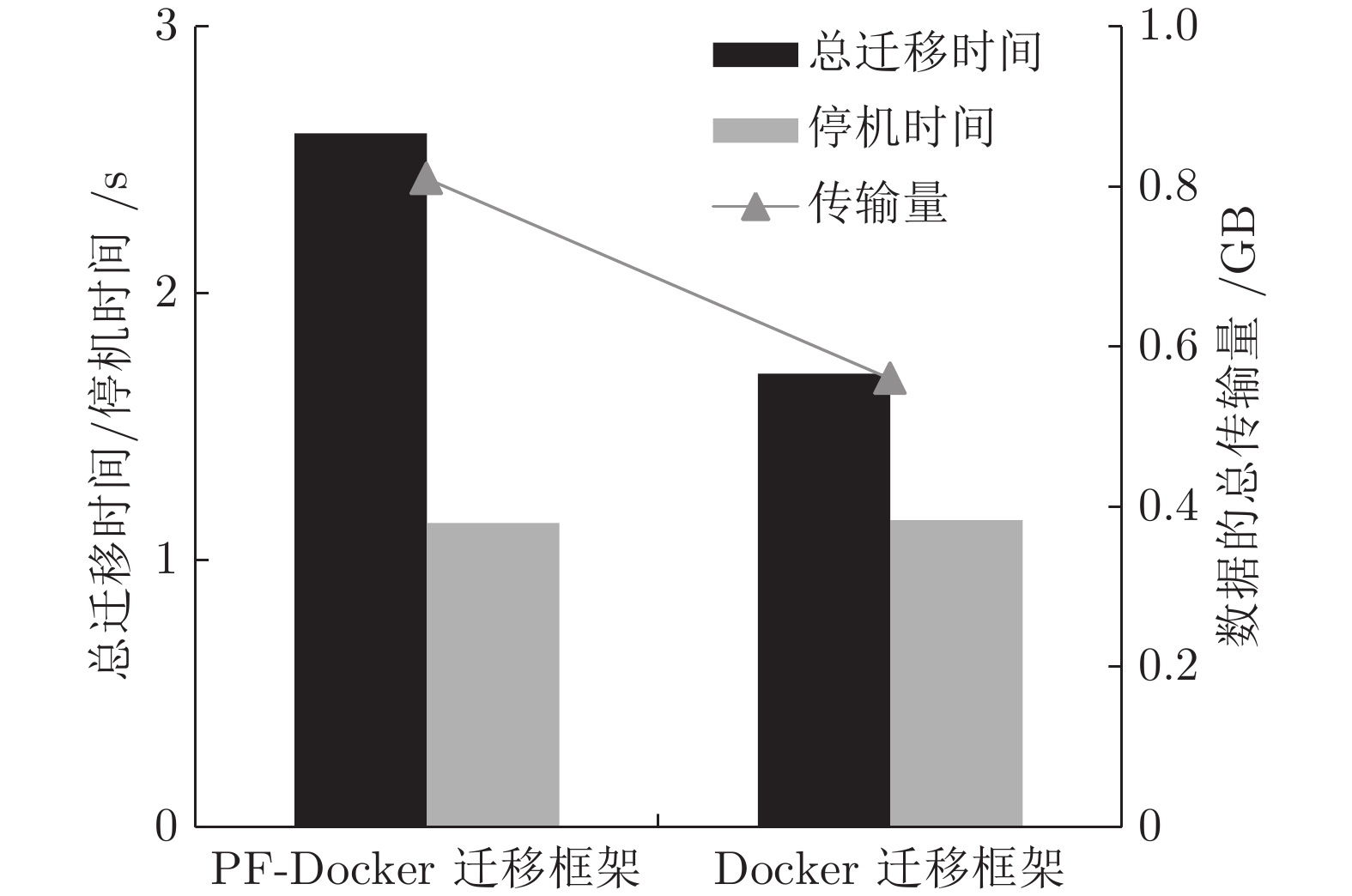
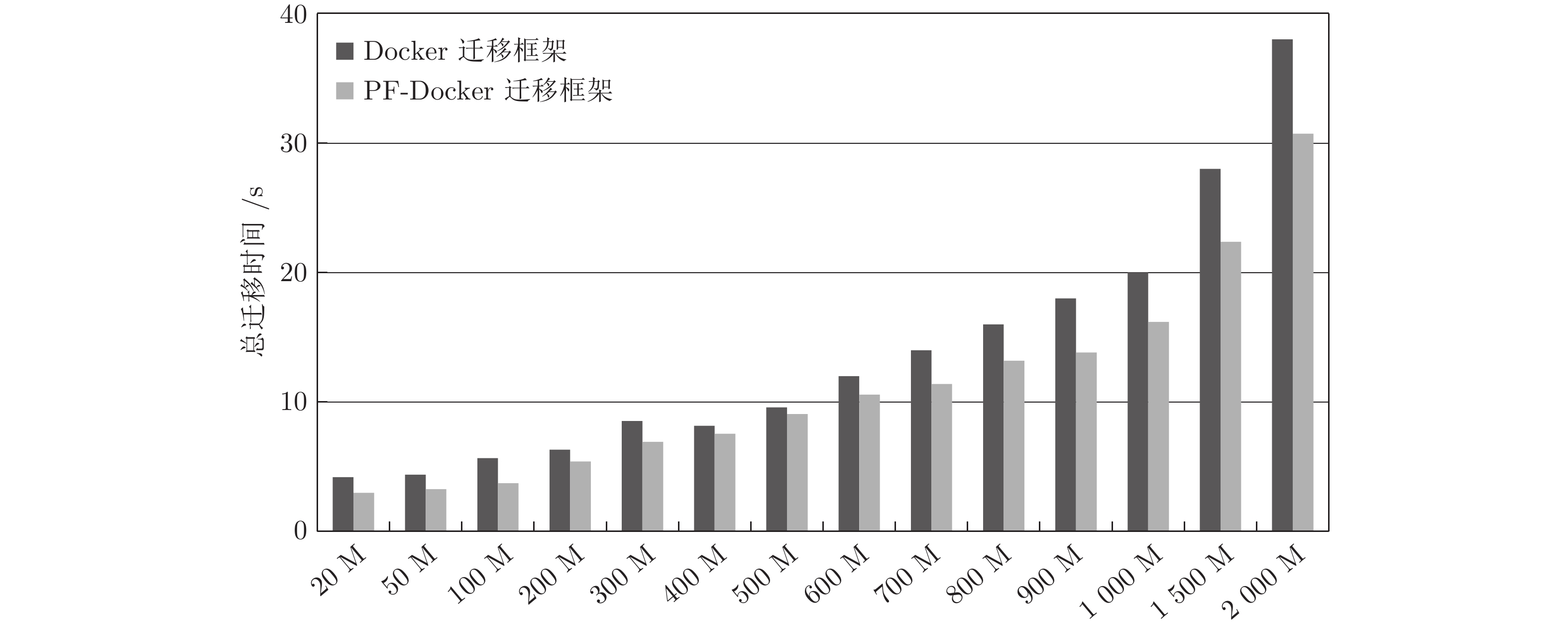
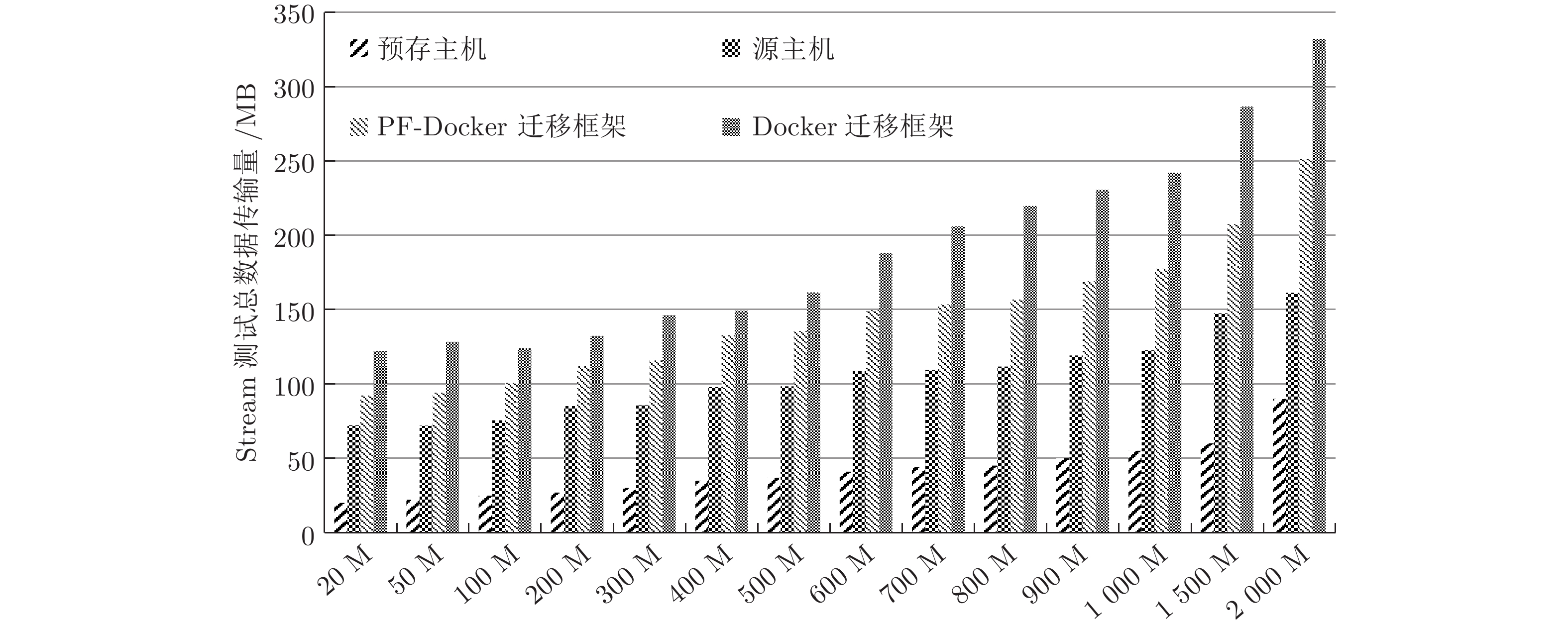
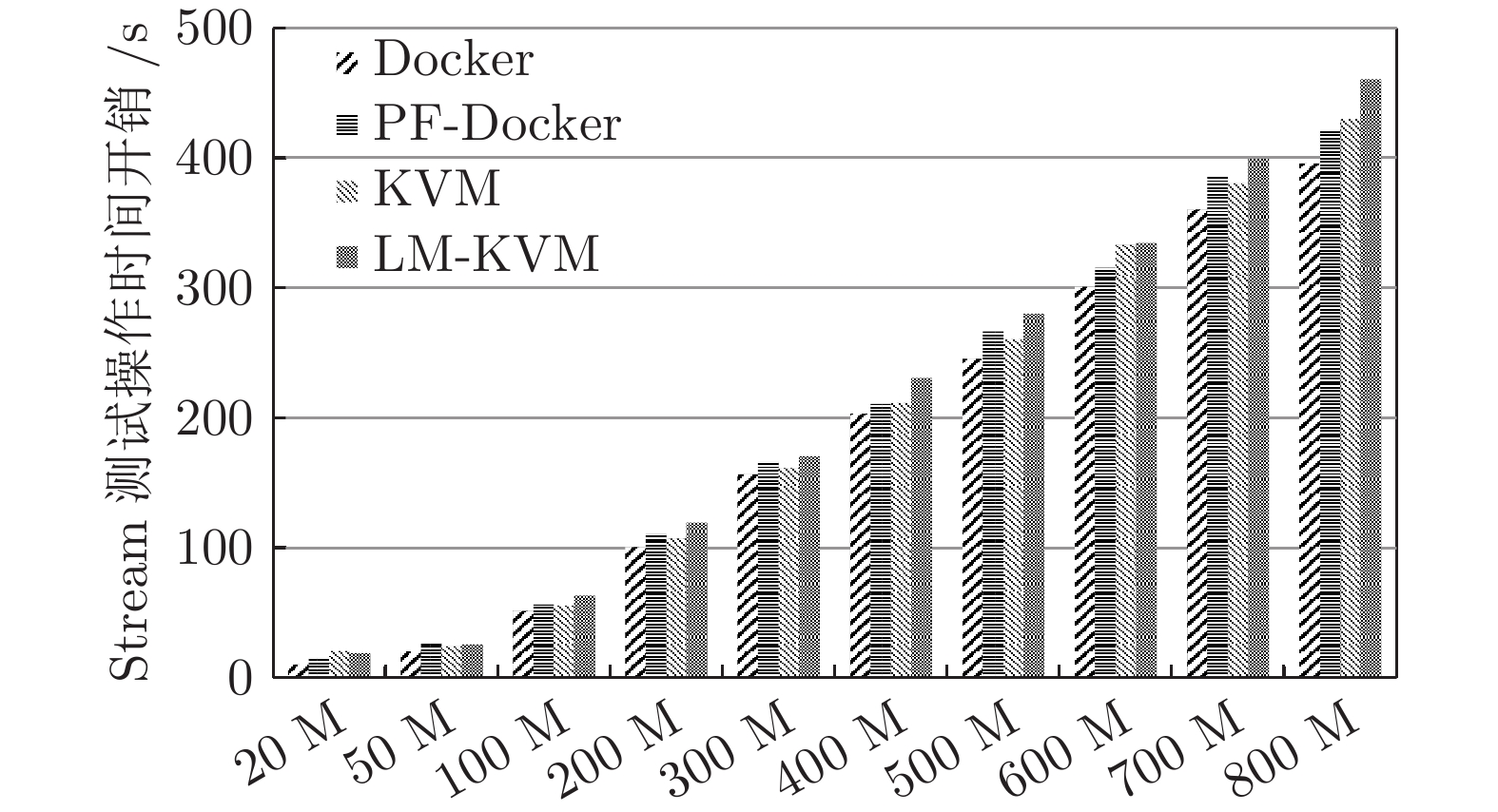
针对基于Docker容器的分布式云计算下出现负载不均衡问题, 有必要将较高负载服务器中的Docker容器进程迁移到其他相对空闲的服务器上. 而传统的容器迁移算法忽视了容器本身的特征, 从而导致在迁移过程中传输效率低下. 基于此, 利用第三方管理平台和数据预存储阈值机制, 提出一种Docker容器动态迁移预存储算法PF-Docker. 首先将Docker容器内部进程运行相关文件和流动数据预存至云端存储器, 然后通过预存储阈值机制减少流动数据的无效传输, 最后在停机传输阶段将流动数据和冗余数据传输给目的服务器. 实验表明, 该方法在Docker容器迁移中能有效地降低迁移时间, 减少数据传输量, 提高容器的容错率.
针对基于Docker容器的分布式云计算下出现负载不均衡问题, 有必要将较高负载服务器中的Docker容器进程迁移到其他相对空闲的服务器上. 而传统的容器迁移算法忽视了容器本身的特征, 从而导致在迁移过程中传输效率低下. 基于此, 利用第三方管理平台和数据预存储阈值机制, 提出一种Docker容器动态迁移预存储算法PF-Docker. 首先将Docker容器内部进程运行相关文件和流动数据预存至云端存储器, 然后通过预存储阈值机制减少流动数据的无效传输, 最后在停机传输阶段将流动数据和冗余数据传输给目的服务器. 实验表明, 该方法在Docker容器迁移中能有效地降低迁移时间, 减少数据传输量, 提高容器的容错率.