

Enhanced Restricted Boltzmann Machine-driven Interactive Estimation of Distribution Algorithms With Attention Mechanism
-
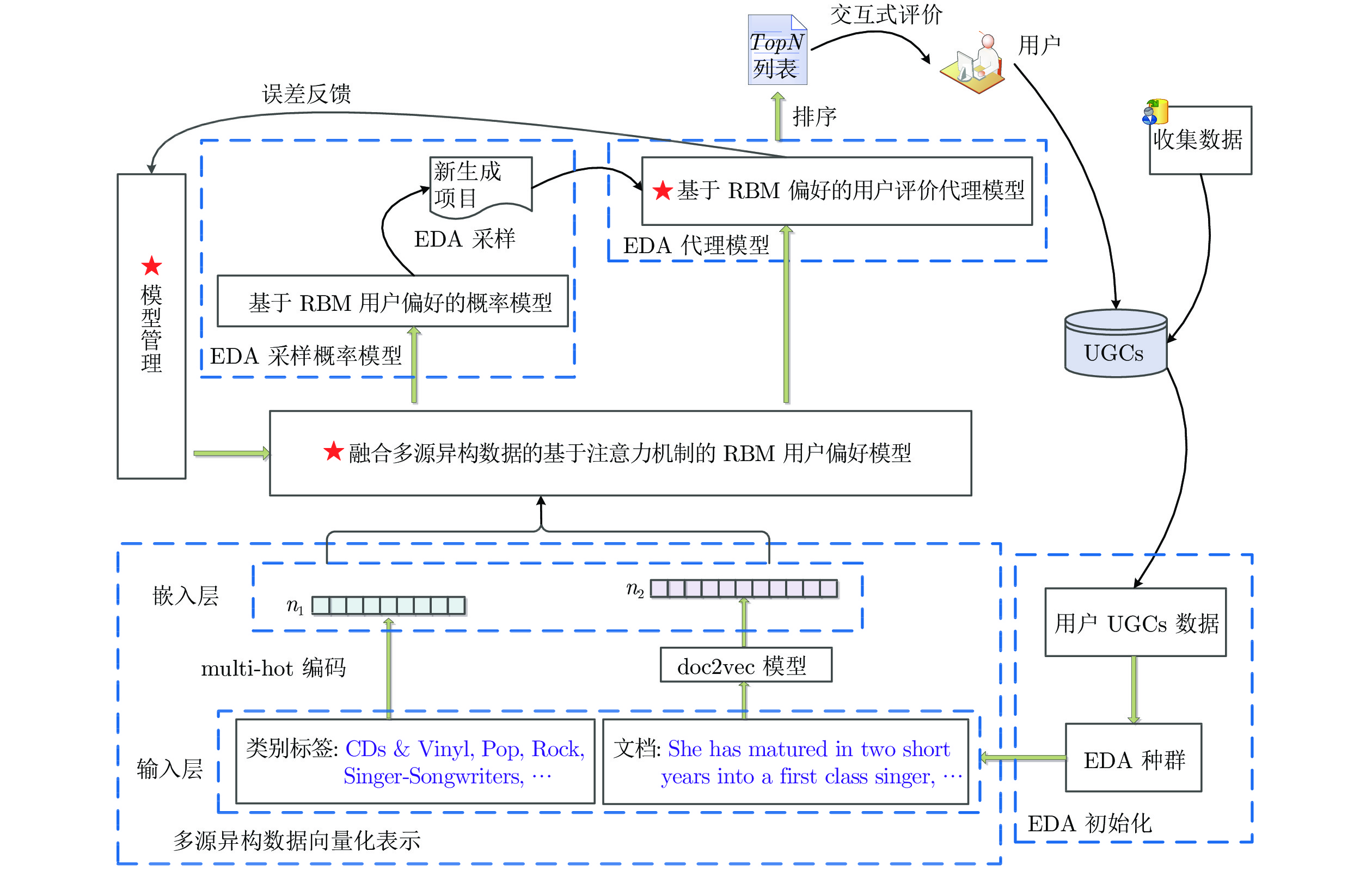
摘要: 面向用户生成内容(User generated content, UGC)的进化搜索在大数据及个性化服务领域已引起广泛关注, 其关键在于基于多源异构用户生成内容构建用户认知偏好模型, 进而设计高效的进化搜索机制. 针对此, 提出融合注意力机制(Attention mechanism, AM)的受限玻尔兹曼机(Restricted Boltzmann machine, RBM)偏好认知代理模型构建机制, 并应用于交互式分布估计算法(Interactive estimation of distribution algorithm, IEDA), 设计含用户生成内容的个性化进化搜索策略. 基于用户群体提供的文本评论, 以及搜索物品的类别文本, 构建无监督受限玻尔兹曼机模型提取广义特征; 设计注意力机制, 融合广义特征, 获取对用户认知偏好高度相关特征的集成; 利用该特征再次训练受限玻尔兹曼机, 实现对用户偏好认知代理模型的构建; 根据用户偏好认知代理模型, 给出交互式分布估计算法概率更新模型以及物品适应度评价函数, 实现物品个性化进化搜索. 算法在亚马逊个性化搜索实例的应用验证了用户认知偏好模型的可靠性, 以及个性化进化搜索的有效性.Abstract: User generated content (UGC)-oriented evolutionary search has attracted widespread attention in the field of big data and personalized services. The key is to construct a user cognitive preference model based on multi-source heterogeneous user generated content, and then design efficient evolutionary search mechanism. To solve this problem, this paper proposed a preference cognitive surrogate model based on restricted Boltzmann machine (RBM) with the attention mechanism (AM) in an interactive estimation of distribution algorithm (IEDA) to design personalized evolutionary search strategies with user generated content. Based on the text comments provided by user groups and the category text of searched items, an unsupervised restricted Boltzmann machine model is built to extract generalized features. The attention mechanism is designed to integrate generalized features to obtain the integration of highly relevant features of user cognitive preferences. These features are used to train a restricted Boltzmann machine to construct the surrogate model of user cognitive preferences. According to this surrogate model, a probability updating model of interactive estimation of distribution algorithm and a fitness evaluation function of searched items are given to realize personalized evolutionary search. The application of the algorithm in Amazon personalized search examples verifies the reliability of the user cognitive preference model and the effectiveness of personalized evolutionary search.
-
无人艇(Unmanned surface vehicle, USV)是执行海洋资源勘测、海事防务等水面作业任务的新兴技术装备, 在军事、民生、科研等领域发挥重要的作用[1-3]. 针对不同场景需求, 精准轨迹跟踪是USV可靠自主作业的关键技术基础, 具有重要的研究价值和现实意义[4-8]. 由于USV处于复杂、多变的海洋环境, 存在强环境干扰和未知动力学等不利因素, 使得高精度跟踪控制系统设计成为挑战性难题[9-13].
滑模控制(Sliding mode control, SMC)技术具备良好的收敛性能, 对外部扰动、系统不确定性有较强鲁棒性, 在USV控制领域得到了广泛应用[14-17]. 文献[18]设计了SMC策略, 解决了全回转舵浆的电力推进船舶航向控制问题. 针对系统不确定性和复杂干扰, 文献[19]结合非线性增益递归SMC与自适应神经网络控制技术, 获得了良好的控制性能. 文献[20]提出了自适应快速非奇异积分终端滑模控制, 使得水下航行器跟踪误差动态系统的收敛速度快于现有的非奇异SMC方法. 文献[21]设计了事件触发SMC策略, 显著减少了控制律更新次数, 有助于节约USV通信资源. 然而, 上述控制方法只能实现系统渐近稳定或指数稳定, 即系统稳定时间无穷大, 难以满足USV执行快速、精确的跟踪控制任务需求.
有限时间控制方法能够确保系统在有限时间内稳定, 具有更快的收敛速度、更高的稳态精度, 近年来成为USV控制领域的研究热点[22-23]. 文献[24]提出了一种基于积分SMC的轨迹跟踪控制策略, 利用扰动观测器补偿未知海洋扰动, 实现了复杂航行环境下的USV精确跟踪控制, 但该方案忽略了USV系统中存在的系统不确定性. 考虑未建模动态和时变干扰, 文献[25]提出基于观测器的SMC设计方法, 获得有限时间收敛跟踪性能. 文献[26]进一步考虑执行器故障, 将自适应控制与SMC相结合, 提出一种新型有限时间容错跟踪控制器, 实现系统模型完全未知的有限时间轨迹跟踪控制. 文献[27]考虑未知系统动力学和复杂扰动, 提出基于有限时间扩张状态观测器的精确跟踪控制方案, 实现了有限时间内对期望轨迹的高精度跟踪. 在文献[28]中, 针对欠驱动USV有限时间跟踪问题, 设计一种超扭曲观测器实现有限时间内对扰动与未知系统动态的精准重构, 同时有效削弱观测抖振, 进而设计了一种新型指令滤波控制方案, 能够保证跟踪误差控制系统全局有限时间稳定.
针对有限时间控制方案的不足, Polyakov发展固定时间控制方法[29]. 文献[30]提出一种基于双极限齐次理论的固定时间SMC方案, 实现USV固定时间跟踪控制, 但需要扰动上界已知. 文献[31]将固定时间状态观测器和非奇异终端SMC结合, 实现了速度未知的复杂扰动下USV固定时间跟踪控制. 文献[32]结合积分SMC和固定时间观测器, 实现模型参数未知的USV固定时间控制. 考虑到USV全状态约束, 文献[33]基于均匀性的Lyapunov方法, 通过设计扩张状态观测器, 使USV的位置和航向严格在预定义的输出约束内. 在上述成果的基础上, 文献[34]提出了基于事件触发的无人船固定时间轨迹跟踪控制方法. 但需要指出的是, 上述研究成果需要系统状态精准已知.
实际上, USV测量装置易受恶劣海洋环境影响, 不可避免地存在状态测量不确定性[35-37]. 不同于系统不确定性、海洋环境扰动和推进系统约束, 测量不确定性不仅带来USV动力学层面的匹配非线性, 而且产生运动学层面的非匹配扰动. 由于没有直接控制输入处理同一通道中的非匹配扰动, 导致测量不确定性USV成为一类非匹配系统, 使其高精度跟踪控制系统设计更为困难. 在现有文献中, 考虑位姿、速度测量不确定性的USV跟踪控制研究鲜有报道. 此外, 推进器是USV运动控制的底层执行机构, 在高负荷工作、润滑不足、老化等因素作用下极易发生故障[38-40]. 而且, 推进系统故障难以预见, 若未能及时识别、有效补偿, 必然导致控制性能下降、甚至引发灾难性事故. 针对上述问题, 目前主要采用自适应控制、观测器设计、神经网络逼近等技术, 提升控制系统的容错能力[41-44]. 文献[45]采用滑模输出反馈技术, 设计USV鲁棒容错控制器, 在推进器故障约束下尽量减小位置、速度跟踪误差. 文献[46]针对包含推进器故障与未知扰动, 建立了考虑偏移、卡死、时变情形的USV推进器故障模型, 对推进器输入矩阵进行满秩分解并构造线形滑模面, 提出一种基于终端滑模的自适应容错跟踪控制策略, 保证闭环系统误差收敛不依赖故障检测与诊断机制. 文献[47]中, 结合固定时间扰动观测器, 解决了含有执行器死区和偏航约束的无人船系统渐近稳定问题, 该方法还可以扩展到偏航约束时变且初始状态超过约束区域的情况. 文献[48]中, 综合考虑系统未知动态、外部扰动、推进器故障约束等问题, 结合齐次积分滑模和自适应控制技术, 提出一种新型有限时间自适应控制方案, 确保推进器故障下位姿和速度跟踪误差有限时间收敛, 并且具有不依赖模型、连续无抖振等优势.
本文率先研究状态测量不确定的USV系统动力学未知、推进器故障约束等容错跟踪控制问题, 结合扰动观测、快速非奇异滑模和自适应控制等技术手段, 提出一种基于双扰动观测器的固定时间容错控制(Double disturbance observer-based fixed-time fault-tolerance control, DDO-FxFC) 策略. 首先, 分别设计固定时间扰动观测器, 实现系统非匹配扰动与匹配集总非线性的精准估计与补偿; 同时, 采用自适应技术实时逼近未知观测误差, 进一步提高系统鲁棒性. 进而, 设计基于实际位姿跟踪误差及其动态的快速非奇异终端滑模面, 保证跟踪误差在固定时间内快速到达平衡点; 结合所设计固定时间扰动观测器与快速非奇异终端滑模面设计, 构建新型固定时间容错控制框架, 保证USV能够在固定时间内精准跟踪期望轨迹, 并且误差收敛时间上界独立于系统初始状态. 最后, 充分利用有限时间收敛带来的控制−观测分离特性, 严格证明闭环控制系统固定时间稳定性. 本文创新性和研究意义如下:
1) 虽然基于终端滑模的有限时间控制方法能够确保跟踪误差在有界时间内收敛至平衡点或其邻域, 但是其收敛时间依赖系统初始状态, 难以应对快速时变扰动和不确定性. 对此, 本文引入固定时间控制方法, 提出不依赖初始状态的USV固定时间控制方案, 使得在任意初始状态下跟踪误差在预设时间内收敛至平衡点或其邻域, 且收敛时间仅由预设的固定时间确定.
2) 考虑实际任务需求, USV轨迹跟踪要求从任意初始位置出发以指定速度跟踪期望轨迹, 保证在指定时间到达指定位置. 但是由于USV具有快时变、强耦合、强非线性和强不确定性等特点, 必须考虑其收敛时间, 否则控制性能难以保证、甚至失稳. 因此, 研究并解决USV跟踪控制的固定时间收敛问题具有重要实际意义.
3) 本文首次研究考虑状态测量不确定性的USV固定时间容错控制问题. 当USV推进器发生故障时, 必然会造成跟踪控制收敛速度慢、控制性能差、鲁棒性弱, 甚至导致系统失稳. 对此, 借鉴容错控制思想, 处理状态测量存在不确定性的推进器故障约束; 结合固定时间控制方法, 提升USV故障系统的稳定性和收敛速度.
1. 问题描述
1.1 重要引理
引理 1[24]. 对于非线性系统:
$$ \dot x = - {k_1}{x^\frac{\alpha _1}{\alpha _2}} - {k_2}{x^\frac{\beta _1}{\beta _2}} - {k_3}x - d $$ (1) 其中,
$ {k_1}>0 $ ,$ {k_2}>0 $ ,$ {k_3}>0 $ ,$ {k_3} > |d| $ ,$ {\alpha _1},{\alpha _2}, {\beta _1},{\beta _2} $ 为正奇数, 满足$ {\alpha _1} > {\alpha _2} $ ,$ {\beta _1} < {\beta _2} $ . 该系统全局固定时间稳定且收敛时间独立于系统初始状态, 收敛时间上界满足$$ T \le {T_{{\rm{upper}}}} = \frac{{{\alpha _2}}}{{{k_1}({\alpha _1} - {\alpha _2})}} + \frac{{{\beta _2}}}{{{k_1}({\beta _2} - {\beta _1})}} $$ (2) 引理 2[33]. 考虑非线性系统:
$$ \dot x = - {l_1}{\rm si}{{\rm g}^{{k_1}}}(x) - {l_2}{\rm si}{{\rm g}^{{k_2}}}(x),\quad{\rm{ }}x(0) = {x_0} $$ (3) 其中,
$ {l_1} > 0 $ ,$ {l_2} > 0 $ ,${k_1} \;=\; ({{m_1} \;+\; 1})/{2}\; +\; {\rm{sign}}(x \;- 1)({m_1} - 1)/{2}$ ,${k_2} \;=\; ({{m_2} + 1})/{2} \;-\; {\rm{sign}}(x - 1)({m_2} - 1)/{2}$ ,$ {m_1} > 0 $ ,$ 1/2 < {m_2} < 1 $ .${\rm{si}}{{\rm{g}}^{{k_1}}}(x) = {\rm{sign}}(x)|x{|^{{k_1}}}$ ,${\rm{si}}{{\rm{g}}^{{k_2}}}(x) = {\rm{sign}}(x)|x{|^{{k_2}}}$ ,${\rm{sign}}(x) = \left\{ \begin{aligned} - 1,\;\;\,如果\;x < 0\\0,\quad \,如果\;x = 0\\1,\quad \,\,如果\;x > 0\end{aligned} \right.$ 该系统固定时间稳定, 收敛时间独立于系统初始状态且满足$$ \begin{split} T \le {T_{{\rm{upper}}}} =\;& \frac{1}{{{l_1}({m_1} - 1)}}{\rm{ln}}\left( {\frac{{{l_1} + {l_2}}}{{{l_1}}}} \right)+\\ &\frac{1}{{{l_2}(1 - {m_2})}}{\rm{ln}}\left( {\frac{{{l_1} + {l_2}}}{{{l_2}}}} \right)\end{split} $$ (4) 引理 3[35]. 若存在正定、连续函数
$ V(x{\rm{)}} $ 满足$$ \dot V(x) = - a{V^p}(x) - b{V^q}(x) + \vartheta $$ (5) 其中,
$ a $ ,$ b $ 为正常数且$ 0 < p < 1 $ ,$ q > 1 $ , 则该系统实际固定时间稳定, 系统状态能够在固定时间收敛到残差集:$$ \begin{split} &\bigg\{ \lim_{x \to T}x \bigg| V(x) \le \min \Big\{a^{-\frac{1}{p}}\left(\frac{\vartheta}{1 - \theta}\right)^\frac{1}{p},\\ &\qquad b^{-\frac{1}{p}}\left(\frac{\vartheta }{1 - \theta}\right)^\frac{1}{q} \Big\} \bigg\} \end{split} $$ (6) 其中,
$ 0 < \theta < 1 $ , 收敛时间$ T $ 满足$$ T \le \frac{1}{a(1 - p)} + \frac{1}{b(q - 1)} $$ (7) 1.2 USV数学模型
考虑系统动态未知的USV数学模型如下:
$$ \left\{\begin{aligned} {\dot{\boldsymbol{\eta}}} & = {\boldsymbol{R}}(\psi ){{\boldsymbol{\upsilon}}} \\ {\dot{\boldsymbol{\upsilon}}} & = {{{\boldsymbol{M}}}^{ - 1}}\big({{{\cal{H}}}({{\boldsymbol{\eta}}},{{\boldsymbol{\upsilon}}}) + {{\boldsymbol{\tau}} } + {{\boldsymbol{d}}}}\big) \end{aligned} \right. $$ (8) 其中,
$$ {{\cal{H}}}\left( {{\boldsymbol{\eta}} ,{\boldsymbol{\upsilon}} } \right) = - {{\boldsymbol{C}}}\left( {\boldsymbol{\upsilon}} \right){\boldsymbol{\upsilon}} - {{\boldsymbol{D}}}\left( {\boldsymbol{\upsilon}} \right){\boldsymbol{\upsilon}} $$ (9) $ {\boldsymbol{\eta}} = [x, y, \psi]^{\mathrm{T}} $ 为惯性坐标系下的位置和艏向,$ {\boldsymbol{\upsilon}} = {[u,v,r]^{\rm{T}}} $ 为附体坐标系下纵荡、横漂、艏摇速度;$ {{\boldsymbol{d}}} = {{\boldsymbol{M}}}{{{\boldsymbol{R}}}^{\rm{T}}}{\boldsymbol{\delta}} $ ,$ {\boldsymbol{\delta}} = {[{\delta _u},{\delta _v},{\delta _r}]^{\rm{T}}} $ 表示海洋环境下产生的外部扰动;$ {\boldsymbol{R}}(\psi) $ 为附体坐标系到惯性坐标系的转换矩阵, 具体可表示为:$$ {\boldsymbol{R}}(\psi) = \left[\begin{array}{ccc} \cos \psi & -\sin \psi & 0 \\ \sin \psi & \cos \psi & 0 \\ 0 & 0 & 1 \end{array}\right] $$ (10) 且满足
$$ \begin{align} &{\boldsymbol{R}}^{\rm{T}}(\psi) {\boldsymbol{R}}(\psi) = {\boldsymbol{I}}, || {\boldsymbol{R}}(\psi)|| = 1, \forall \psi \in [0,2 \pi] \end{align} $$ (11) $$ \begin{align} &{ \dot{\boldsymbol{R}}}(\psi) = {\boldsymbol{R}}(\psi) {\boldsymbol{S}}(r) \end{align} $$ (12) $$ \begin{align} &{\boldsymbol{R}}^{\rm{T}}(\psi) {\boldsymbol{S}}(r) {\boldsymbol{R}}(\psi) = {\boldsymbol{R}} (\psi) {\boldsymbol{S}}(r) {\boldsymbol{R}}^{\rm{T}}(\psi) = {\boldsymbol{S}}(r) \end{align} $$ (13) 其中,
${\boldsymbol{I}} $ 是单位矩阵,$$ {\boldsymbol{S}}(r) = \left[\begin{array}{ccc} 0 & -r & 0 \\ r & 0 & 0 \\ 0 & 0 & 0 \end{array}\right] $$ (14) $ {\boldsymbol{M}} $ 为惯性矩阵, 满足$ {\boldsymbol{M}} = {\boldsymbol{M}}^{\mathrm{T}}>0 $ , 表示为:$$ {\boldsymbol{M}} = \left[\begin{array}{ccc} m_{11} & 0 & 0 \\ 0 & m_{22} & m_{23} \\ 0 & m_{32} & m_{33} \end{array}\right] $$ (15) $ {{\boldsymbol{C}}({\boldsymbol{\upsilon}})} $ 为科里奥利向心力矩阵, 满足$ {{\boldsymbol{C}}}({{\boldsymbol{\upsilon}}}) = -{{\boldsymbol{C}}}({{\boldsymbol{\upsilon}}})^{\mathrm{T}} $ ,$ {{\boldsymbol{D}}}({{\boldsymbol{\upsilon}}}) $ 为阻尼矩阵, 分别表示为:$$ {\boldsymbol{C}}({{\boldsymbol{\upsilon}}}) = \left[\begin{array}{ccc} 0 & 0 & c_{13}({{\boldsymbol{\upsilon}}}) \\ 0 & 0 & c_{23}({{\boldsymbol{\upsilon}}}) \\ -c_{13}({{\boldsymbol{\upsilon}}}) & -c_{23}({{\boldsymbol{\upsilon}}}) & 0 \end{array}\right] $$ (16) $$ {\boldsymbol{D}}({{\boldsymbol{\upsilon}}}) = \left[\begin{array}{ccc} d_{11}({{\boldsymbol{\upsilon}}}) & 0 & 0 \\ 0 & d_{22}({{\boldsymbol{\upsilon}}}) & d_{23}({{\boldsymbol{\upsilon}}}) \\ 0 & d_{32}({{\boldsymbol{\upsilon}}}) & d_{33}({{\boldsymbol{\upsilon}}}) \end{array}\right] $$ (17) 式中,
$ m_{11} = m - X_{\dot{u}} $ ,$ m_{22} = m - Y_{\dot{v}} $ ,$m_{23} = mx_g - Y_{\dot{r}}$ ,$m_{32} = m x_g - N_{\dot{v}}$ ,$m_{33} = I_z - N_{\dot{r}}$ ,$c_{13}({{\boldsymbol{\upsilon}}}) = -m_{11}v - m_{23} r$ ,$ c_{23}({{\boldsymbol{\upsilon}}}) = -m_{11}u $ ,$d_{11}({\boldsymbol{\upsilon}}) = - X_u - X_{|u|u}|u|- X_{uuu}|u|^2$ ,$ d_{22}({\boldsymbol{\upsilon}}) = - Y_v - Y_{|v|v}|v| $ ,$d_{23}({\boldsymbol{\upsilon}}) = - Y_r - Y_{|v|r}|v| - Y_{|r|r}|r|$ ,$ d_{32} ({\boldsymbol{\upsilon}}) = -N_v - N_{|v|v}|v|-N_{|r|v|r|} $ ,$ d_{33} ({\boldsymbol{\upsilon}}) = -N_r - N_{|v|r}|v|- N_{|r|r} |r| $ ,$ Y_{\dot{r}} = N_{\dot{v}} $ .$ m $ 表示USV质量;$ I_z $ 为惯量力矩;$ X_{*} $ ,$ Y_{*} $ ,$ N_{*} $ 表示作用于USV上的水动力参数.不考虑USV推进器具体配置, 仅考虑轨迹跟踪所需的力/力矩. 针对存在推进器部分失效、偏差故障问题, 带有推进器故障的USV控制输入可表示为:
$$ \tau_{j} = \tau_{n j}+b_{j}\left(t-t_{0 j}\right)\left(\left(e_{j}-1\right) \tau_{n j}+\bar{\tau}_{j}\right) $$ (18) 其中,
$ {\tau _j}\;(j = u,v,r) $ 表示作用于USV的实际控制输入,$ {\tau _{nj}} $ 表示对应的期望控制力/力矩,$ {\bar \tau _j} $ 表示以叠加形式表现的偏差故障项,$ {e_j} $ 为推进器效率因子,$ b_{j}\left(t-t_{0 j}\right) $ 表示时变故障:$$ {b_j}(t - {t_{0j}}) = \left\{ \begin{aligned}& 0,& t < {t_{0j}}\\ &1 - {{\rm{e}}^{ - {a_j}(t - {t_{0j}})}}{\rm{,}}& t \ge {t_{0j}} \end{aligned} \right. $$ (19) 其中,
$ {a_j} $ 为未知的故障变化率,$ t_{0 j} $ 为各个自由度故障发生时刻.综上, 考虑推进器故障约束的USV推进系统等效控制力/力矩表示为:
$$ {\boldsymbol{\tau}} = {{\boldsymbol{\tau}} _n} + {\boldsymbol{B}}(t - {t_0})\Big( {({\boldsymbol{E}} - {{{\boldsymbol{I}}}_3}){{\boldsymbol{\tau}} _n} + {\bar{\boldsymbol{\tau}}}} \Big) $$ (20) 其中,
$ {\boldsymbol{E}} = {\rm{diag}}{{\{ }}{e_u},{e_v},{e_r}{{\} }} $ 为推进系统的效率矩阵,$ {{\boldsymbol{\tau}} _n} = {[{\tau _{nu}},{\tau _{nv}},{\tau _{nr}}]^{\rm{T}}} $ 、$ {\bar{\boldsymbol{\tau}}} = {[{\bar \tau _u},{\bar \tau _v},{\bar \tau _r}]^{\rm{T}}} $ 分别为期望控制力/力矩和加性故障矢量, 矩阵${{\boldsymbol{B}}}(t - {t_0}) = {\rm{diag}}\{ {b_u}(t - {t_{0u}}),{b_v}(t - {t_{0v}}),{b_r}(t - {t_{0r}})\}$ 为时变故障.此外, 考虑位姿/速度测量不确定性:
$$ \left\{ \begin{aligned} &{{\boldsymbol{\eta}} _c} = {\boldsymbol{\eta}} + {{\boldsymbol{\iota}} _1}\\ &{{\boldsymbol{\upsilon}} _c} = {\boldsymbol{\upsilon}} + {{\boldsymbol{\iota}} _2} \end{aligned} \right. $$ (21) 其中,
$ {{\boldsymbol{\eta}} _c} = {[{x_c},{y_c},{\psi _c}]^{\rm{T}}} $ 表示通过相应的位姿传感设备实时测量所得的USV位置和艏向角,${{\boldsymbol{\upsilon}} _c} = {[{u_c},{v_c},{r_c}]^{\rm{T}}}$ 为测量速度;$ {{\boldsymbol{\iota}} _1} = {[{\iota _{1u}},{\iota _{1v}},{\iota _{1r}}]^{\rm{T}}} $ 、${{\boldsymbol{\iota}} _2} = [{\iota _{2u}}, {\iota _{2v}},{\iota _{2r}}]^{\rm{T}}$ 表示位姿与速度测量不确定性.结合式(8)、式(21), 可得
$$ \left\{ \begin{aligned} {{ {\dot{\boldsymbol{\eta}}} }_c} =\;& {{\boldsymbol{R}}}{\rm{(}}{\psi _c}{\rm{)}}{{\boldsymbol{\upsilon}} _c} + {{\boldsymbol{d}}_{\rm{1}}}\\ {{ {\dot{\boldsymbol{\upsilon}}}}_c} =\;& {{\boldsymbol{M}}^{ - {\rm{1}}}}\Big( {{\boldsymbol{\tau}} _n} + {{\boldsymbol{B}}}\big(t - {t_{\rm{0}}})\big( ({{\boldsymbol{E}}} \;-\\ &\qquad {{\boldsymbol{I}}}_3){{\boldsymbol{\tau}} _n}+{\bar {{\boldsymbol{\tau}}}} \big) + {{\boldsymbol{d}}_{\rm{2}}} \Big) \end{aligned} \right. $$ (22) 其中,
$$ {{{\boldsymbol{d}}}_1} = { {\dot{\boldsymbol{\iota}}} _1} + {{\boldsymbol{R}}}({\psi _c} - {\iota _{1r}})({{\boldsymbol{\upsilon}} _c} - {{\boldsymbol{\iota}} _2}) - {{\boldsymbol{R}}}({\psi _c}){{\boldsymbol{\upsilon}} _c} $$ (23) $$ {{{\boldsymbol{d}}}_2} = {\boldsymbol{d}} + {{\cal{H}}}({{\boldsymbol{\eta}} _c} - {{\boldsymbol{\iota}} _1},{{\boldsymbol{\upsilon}} _c} - {{\boldsymbol{\iota}} _2}) + {\boldsymbol{M}}{ {\dot{\boldsymbol{\iota}}} _2} $$ (24) 其中,
$ {{{\boldsymbol{d}}}_1} $ 表示位姿测量不确定性带来的非匹配扰动,$ {{{\boldsymbol{d}}}_2} $ 表示包含未知系统动态、风浪流扰动和速度测量不确定性的集总未知非线性.期望轨迹动态如下:
$$ \left\{ \begin{aligned} &{{ {\dot{\boldsymbol{\eta}}} }_d} = {{\boldsymbol{R}}}({\psi _d}){{{\boldsymbol{\upsilon}}} _d}\\ &{{ {\dot{\boldsymbol{\upsilon}}} }_d} = {{{\boldsymbol{M}}}^{ - 1}}({{{\cal{H}}}_d}({{{\boldsymbol{\eta}}} _d},{{\boldsymbol{\upsilon}} _d}) + {{\boldsymbol{\tau}} _d}) \end{aligned} \right. $$ (25) 其中,
$$ {{{\cal{H}}}_d}({{\boldsymbol{\eta}} _d},{{\boldsymbol{\upsilon}} _d}) = - {{\boldsymbol{C}}}({{\boldsymbol{\upsilon}} _d}){{\boldsymbol{\upsilon}} _d} - {{\boldsymbol{D}}}({{\boldsymbol{\upsilon}} _d}){{\boldsymbol{\upsilon}} _d} $$ (26) 其中,
$ {{\boldsymbol{\eta}} _d} = {[{x_d},{y_d},{\psi _d}]^{\rm{T}}} $ 表示USV的期望位置和艏向,$ {{\boldsymbol{\upsilon}} _d} = {\left[ {{u_d},{v_d},{r_d}} \right]^{\rm{T}}} $ 表示附体坐标系下期望纵荡、横荡速度与艏摇角速度.本文控制目标. 定义测量位姿和速度跟踪误差分别为
$ {{\boldsymbol{\eta}} _e} = {{\boldsymbol{\eta}} _c} - {{\boldsymbol{\eta}} _d} $ ,$ {{\boldsymbol{\upsilon}} _e} = {{\boldsymbol{\upsilon}} _c} - {{\boldsymbol{\upsilon}} _d} $ , 实际位姿和速度跟踪误差为$ { {\tilde{\boldsymbol{\eta}}} _e} = {\boldsymbol{\eta}} - {{\boldsymbol{\eta}} _d} $ ,$ { {\tilde{\boldsymbol{\upsilon}}} _e} = {\boldsymbol{\upsilon}} - {{\boldsymbol{\upsilon}} _d} $ , 设计轨迹跟踪控制策略$ {{\boldsymbol{\tau}} _n} $ , 使得包含状态测量不确定性、推进器故障、动力学未知的USV实际位姿和速度跟踪误差$ { {\tilde{\boldsymbol{\eta}}} _e},{ {\tilde{\boldsymbol{\upsilon}}} _e} $ 在固定时间内稳定在平衡点附近的小邻域.2. 轨迹跟踪控制系统设计
2.1 模型变换
引入坐标变换
$$ \left\{\begin{aligned} &{{\boldsymbol{\zeta}}}_{c} = {\boldsymbol{R}}\left(\psi_{c}\right) {{\boldsymbol{\upsilon}}}_{c} \\ &{{\boldsymbol{\zeta}}}_{d} = {\boldsymbol{R}}\left(\psi_{d}\right) {{\boldsymbol{\upsilon}}}_{d} \end{aligned}\right. $$ (27) 其中,
$ {{\boldsymbol{\zeta}} _c}{\rm{ = [}}{\zeta _{cu}}{\rm{,}}{\zeta _{cv}}{\rm{,}}{\zeta _{cr}}{{\rm{]}}^{\rm{T}}} $ ,$ {{\boldsymbol{\zeta}}_d}{\rm{ = [}}{\zeta _{du}}{\rm{,}}{\zeta _{dv}}{\rm{,}}{\zeta _{dr}}{{\rm{]}}^{\rm{T}}} $ ,${\boldsymbol{R}}_{c} = {\boldsymbol{R}}\left(\psi_{c}\right)$ ,$ {\boldsymbol{R}}_d = {\boldsymbol{R}}({\psi _d}) $ .结合式(22)、式(27), 可得
$$ \left\{ \begin{aligned} {{ {\dot{\boldsymbol{\eta}}}}_c} = \;& {{\boldsymbol{\zeta}} _c} + {{{\boldsymbol{d}}}_1}\\ {{\dot {{\boldsymbol{\zeta}}}}_c} = \;& {{{\boldsymbol{R}}}_c}{{{\boldsymbol{M}}}^{ - 1}}{{\boldsymbol{\tau}} _n} + {{{\boldsymbol{S}}}_c}{{\boldsymbol{\zeta}} _c} {{{\boldsymbol{R}}}_c}{{{\boldsymbol{M}}}^{ - 1}}\Big({{{\boldsymbol{d}}}_2}\;+ \\ \; & {{\boldsymbol{B}}}(t - {t_{\rm{0}}})\big(({{\boldsymbol{E}}} - {{{\boldsymbol{I}}}_3}){{\boldsymbol{\tau}} _n} + \bar {{\boldsymbol{\tau}}} \big)\Big) \end{aligned} \right. $$ (28) 其中,
$ {\boldsymbol{S}}_{c} = {\boldsymbol{S}}\left({\boldsymbol{\zeta}}_{c r}\right) $ .同理, 由式(25)、式(27), 可得
$$ \left\{ \begin{aligned} {{ {\dot{\boldsymbol{\eta}}} }_d} = \;& {{\boldsymbol{\zeta}} _d}\\ {{\dot {{\boldsymbol{\zeta}}} }_d} = \;& {{{\boldsymbol{R}}}_d}{{{\boldsymbol{M}}}^{ - 1}}{{\boldsymbol{\tau}} _d} - \Big({{{\boldsymbol{R}}}_d}{{{\boldsymbol{M}}}^{ - 1}}\big({{\boldsymbol{C}}}({{\boldsymbol{\upsilon}} _d}) \;+ \\ &{{\boldsymbol{D}}}({{\boldsymbol{\upsilon}} _d})\big){{\boldsymbol{R}}}_d^{\rm{T}}\Big){{\boldsymbol{\zeta}} _d}+ {{\boldsymbol{S}}_d}{{\boldsymbol{\zeta}} _d} \end{aligned} \right. $$ (29) 其中,
$ {\boldsymbol{S}}_{d} = {\boldsymbol{S}}\left(\zeta_{dr}\right) $ .进一步, 测量跟踪误差动态系统可表示为:
$$ \left\{ \begin{aligned} {\dot{\boldsymbol{\eta}}}_{e} =\; &{\boldsymbol{\zeta}}_{e}+{{{\boldsymbol{d}}}_1} \\ {\dot{\boldsymbol{\zeta}}}_{e} =\; &{\boldsymbol{R}}_{c} {\boldsymbol{M}}^{-1} {\boldsymbol{\tau}}_{n}+{\boldsymbol{S}}_{c} {\boldsymbol{\zeta}}_{c}- {\boldsymbol{S}}_{d} {\boldsymbol{\zeta}}_{d}+{\cal{F}}(\cdot) \end{aligned} \right. $$ (30) 其中,
$ {\boldsymbol{\eta}}_{e} = {\boldsymbol{\eta}}_{c}-{\boldsymbol{\eta}}_{d} = \left[\eta_{e u}, \eta_{e v}, \eta_{e r}\right]^{\mathrm{T}} $ ,${\boldsymbol{\zeta}}_{e} = {\boldsymbol{\zeta}}_{c}- {\boldsymbol{\zeta}}_{d} = \left[\zeta_{e u}, \zeta_{e v}, \zeta_{e r}\right]^{\mathrm{T}}$ ,$ {\cal{F}}(\cdot) $ 如下式所示:$$ \begin{split} {\cal{F}}(\cdot) =\;&{\boldsymbol{R}}_{c} {\boldsymbol{M}}^{-1} \big({\boldsymbol{d}}_{2}+{\boldsymbol{B}}\left(t-t_{0}\right)\left({\boldsymbol{E}} -{\boldsymbol{I}}_{3}\right) \times \\ &{\boldsymbol{\tau}}_{n}+{\bar{\boldsymbol{\tau}}}\big)- {\boldsymbol{R}}_{d} {\boldsymbol{M}}^{-1} {\boldsymbol{\tau}}_{d}+\Big({\boldsymbol{R}}_{d} {\boldsymbol{M}}^{-1} \;\times \\ & \big({\boldsymbol{C}}\left({\boldsymbol{\upsilon}}_{d}\right)+{\boldsymbol{D}}\left({\boldsymbol{\upsilon}} _{d}\right)\big) {\boldsymbol{R}}_{d}^{\rm{T}} \Big){\boldsymbol{\zeta}}_{d} \end{split} $$ (31) 假设 1. 位姿测量不确定性
$ {\boldsymbol{\iota}}_{1} $ 与速度测量不确定性$ {\boldsymbol{\iota}}_{2} $ 均有界.假设 2. USV非匹配扰动
$ {\boldsymbol{d}}_{1} $ 可导且有界, 满足$ \left\|{\boldsymbol{d}}_{1}\right\| \leq L_{1} $ .假设 3. 包含推进器故障、未知系统动态的集总非线性
$ {\cal{F}}(\cdot) $ 可导且导数有界, 满足$ {\rm{||}}\dot {{{\cal{F}}}}( \cdot ){\rm{||}} \le {L_2} $ .结合式(30)与假设2, 设计固定时间非匹配扰动观测器:
$$ \left\{\begin{aligned} {\dot{\boldsymbol{z}}}_{0} = \;&{\boldsymbol{z}}_{1}+ {{\boldsymbol{\zeta}}}_{e} -\lambda_{1} \text{sig}^{\frac{\mu_{1}}{\mu_{2}}}\left({\boldsymbol{z}}_{0}-{\boldsymbol{\eta}}_{e}\right)-\\ &\lambda_{2} \text{sig}^{\frac{\mu_{3}}{\mu_{4}}}\left({\boldsymbol{z}}_{0}-{\boldsymbol{\eta}}_{e}\right) \\ {\dot{\boldsymbol{z}}}_{1} = \;&-\lambda_{3} \text{sign}\left({\boldsymbol{z}}_{0}-{\boldsymbol{\eta}}_{e}\right) \end{aligned}\right. $$ (32) 其中,
$ \lambda_{1} > 0 $ ,$ \lambda_{2} > 0 $ ,$ \lambda_{3}\geq L_{1} $ ;$ \mu_{1}, \mu_{2}, \mu_{3}, \mu_{4} $ 均为正奇数, 满足$ \mu_{1}>\mu_{2} $ ,$ \mu_{3}<\mu_{4} $ .定理 1. 满足假设2, 设计固定时间扰动观测器(32), 实现固定时间
$ T_{0} $ 内对非匹配扰动精准估计.证明. 定义观测误差:
$$ \left\{\begin{aligned} &{\boldsymbol{x}}_{0} = {\boldsymbol{z}}_{0}-{\boldsymbol{\eta}}_{e} \\ &{\boldsymbol{x}}_{1} = {\boldsymbol{z}}_{1}-{\boldsymbol{d}}_{1} \end{aligned}\right. $$ (33) 结合式(33), 扰动观测器(32)可表示为:
$$ \left\{\begin{aligned} {\dot{\boldsymbol{z}}}_{0} =\; &-\lambda_{1} \text{sig}^{{\frac{\mu_{1}}{\mu_{2}}}}\left({\boldsymbol{x}}_{0}\right)-\lambda_{2} \text{sig}^{{\frac{\mu_{3}}{\mu_{4}}}}\left({\boldsymbol{x}}_{0}\right) + {\boldsymbol{z}}_{1}+{\boldsymbol{\zeta}}_{e} \\ {\dot{\boldsymbol{z}}}_{1} =\; &-\lambda_{3} \text{sign}\left({\boldsymbol{x}}_{0}\right) \end{aligned}\right. $$ (34) 利用假设2, 则有
$$ \left\{\begin{aligned}& {\dot{\boldsymbol{x}}}_{0} = {\dot{\boldsymbol{z}}}_{0}-{\dot{\boldsymbol{\eta}}}_{e} = \\ &\;\;\qquad f-\lambda_{1} \text{sig}^{{\frac{\mu_{1}}{\mu_{2}}}}\left({\boldsymbol{x}}_{0}\right)- \lambda_{2} \text{sig}^{{\frac{\mu_{3}}{\mu_{4}}}}\left({\boldsymbol{x}}_{0}\right)+{\boldsymbol{x}}_{1} \\ &{\dot{\boldsymbol{x}}}_{1} = {\dot{\boldsymbol{z}}}_{1}-{{\dot{\boldsymbol{d}}}}_{1} = -\lambda_{3} \text{sign}\left({\boldsymbol{x}}_{0}\right)-{{\dot{\boldsymbol{d}}}}_{1} \end{aligned}\right. $$ (35) 结合式(30)和式(35), 可得
$$ \begin{split} {\dot{\boldsymbol{x}}}_{0} =\; &{\dot{\boldsymbol{z}}}_{0}-{\dot{\boldsymbol{\eta}}}_{e} =-\lambda_{1} \text{sig}^{{\frac{\mu_{1}}{\mu_{2}}}}\left({\boldsymbol{x}}_{0}\right)-\lambda_{2} \text{sig}^{{\frac{\mu_{3}}{\mu_{4}}}}\left({\boldsymbol{x}}_{0}\right)-\\ &\lambda_{3} { \int_{0}^{t}} \text{sign}\left({\boldsymbol{x}}_{0}\right) \mathrm{d} t-{\boldsymbol{d}}_{1}\\[-15pt] \end{split} $$ (36) 由引理1可知, 系统(36)固定时间稳定, 观测误差在固定时间
$ T_{0} $ 内收敛至平衡点, 即$$ {\boldsymbol{z}}_{0}(t) \equiv {\boldsymbol{\eta}}_{e}(t), {\boldsymbol{z}}_{1}(t) \equiv {\boldsymbol{d}}_{1}(t),\ \forall t>T_{0} $$ (37) 收敛时间
$ T_{0} $ 满足$$ T_{0} \leq \frac{\mu_{2}}{\lambda_{1}\left(\mu_{1}-\mu_{2}\right)}+\frac{\mu_{4}}{\lambda_{2}\left(\mu_{4}-\mu_{3}\right)} $$ (38) 进一步, 设计固定时间集总扰动观测器对集总未知非线性进行观测补偿. 结合假设3与式(30), 设计观测器如下:
$$ \left\{\begin{aligned} {\dot{\boldsymbol{z}}}_{2} =\;& \gamma_{1} {\boldsymbol{\vartheta}}_{1}\Big(\dfrac{{\boldsymbol{\zeta}}_{e}-{\boldsymbol{z}}_{2}}{\hbar}\Big)+{\boldsymbol{z}}_{3}+{\boldsymbol{R}}_{c} {\boldsymbol{M}}^{-1} {\boldsymbol{\tau}}_{n} \;+ \\ &{\boldsymbol{S}}_{c} {\boldsymbol{\zeta}}_{c}-{\boldsymbol{S}}_{d} {\boldsymbol{\zeta}}_{d} \\ {\dot{\boldsymbol{z}}}_{3} =\;& \dfrac{\gamma_{2}}{\hbar} {\boldsymbol{\vartheta}}_{2}\Big(\dfrac{{\boldsymbol{\zeta}}_{e}-{\boldsymbol{z}}_{2}}{\hbar}\Big) \end{aligned}\right. $$ (39) 其中,
$ {\gamma_{1}},{\gamma_{2}}>0 $ ,$ \gamma_{1}>2 \sqrt{\gamma_{2}} $ ,$ \hbar $ 为待设计的放大因子, 满足$ 0<\hbar<1 $ ;$ {\boldsymbol{\vartheta}}_{1} $ ,$ {\boldsymbol{\vartheta}}_{2} $ 表示如下:$$ \left\{\begin{aligned} &{\boldsymbol{\vartheta}}_{1} = {\text{sig}^{b_{1}}}\Big(\dfrac{{\boldsymbol{\zeta}}_{e}-{\boldsymbol{z}}_{2}}{\hbar}\Big)+\text{sig}^{b_{2}}\Big(\dfrac{{\boldsymbol{\zeta}}_{e}-{\boldsymbol{z}}_{2}}{\hbar}\Big) \\ &{\boldsymbol{\vartheta}}_{2} = \text{sig}^{ b'_{1}}\Big(\dfrac{{\boldsymbol{\zeta}}_{e}-{\boldsymbol{z}}_{2}}{\hbar}\Big)+ \text{sig}^{b'_{2}}\Big(\dfrac{{\boldsymbol{\zeta}}_{e}-{\boldsymbol{z}}_{2}}{\hbar}\Big) \end{aligned}\right. $$ (40) 其中,
$ 0<{b}_{1}<1 $ ,$ 0<{b}_{2}<1.5 $ ,$ b'_1 = 2b_1 -1 $ ,$b'_2 = 2b_2 -1$ .□ 定理 2. 满足假设3, 设计固定时间集总观测器(39), 观测误差
$ {\left\| {{{\boldsymbol{\zeta}} _e} - {\boldsymbol{z}}_2} \right\|} $ ,$ \left\| {{\cal{F}}( \cdot ) - {\boldsymbol{z}}_3} \right\| $ 能够在固定时间收敛至有界区域内, 收敛时间$ T _{1} $ 满足$$ T_{1} \leq \frac{1}{b_{0}}\left(\frac{2 b_{1}}{1-b_{1}}+\frac{2 b_{2}}{b_{2}-1}\right) $$ (41) 其中,
$ {b}_{0} $ 是与$ {b}_{1} $ ,$ {b}_{2} $ 相关的常数.证明. 引入误差辅助变量:
$$ \left\{ \begin{aligned} &{{{\boldsymbol{y}}}_1} = {{\boldsymbol{\zeta}} _e} - {{{\boldsymbol{z}}}_2} \\ &{{\boldsymbol{y}}_2} = {{\cal{F}}}(\cdot) - {{{\boldsymbol{z}}}_3} \end{aligned} \right. $$ (42) 进一步, 定义如下变量:
$$ {\boldsymbol{\partial}}_i = \frac{{{{\boldsymbol{y}}_{{i}}}(\hbar t)}}{{{\hbar ^{2 - i}}}}, \quad i = 1,2 $$ (43) 结合式(39)、式(43), 可得
$$ \left\{ \begin{aligned} &{{\dot {\boldsymbol{\partial}}}_1}= - {\gamma _1}\big( {{\rm{si}}{{\rm{g}}^{{b_1}}}({\boldsymbol{\partial}}_1) + {\rm{si}}{{\rm{g}}^{{b_2}}}({\boldsymbol{\partial}}_1)} \big) + {{\boldsymbol{\partial}}_2}\\ &{{\dot {\boldsymbol{\partial}} }_2}= - {\gamma _2}\big( {{\rm{si}}{{\rm{g}}^{{b'_1}}}({\boldsymbol{\partial}}_1) } +{ {\rm{si}}{{\rm{g}}^{{b'_2} }}({\boldsymbol{\partial}}_1)}\big) + \hbar \cdot {\dot {{\cal{F}}}} \end{aligned} \right. $$ (44) 经过变换, 式(44)所示的集总扰动观测器与文献[20]观测器类似, 后续证明步骤略去.
□ 2.2 固定时间快速非奇异终端滑模设计
令
$ {\boldsymbol{\omega }}_e = {\boldsymbol{\zeta}} _e + {{{\boldsymbol{z}}}_1} $ , 式(28)可表示为$$ \left\{ \begin{aligned} {\dot{\boldsymbol{\eta }}}_e =\; & {\boldsymbol{\omega}} _e\\ {{\dot{\boldsymbol{\omega }}}_e} = \;& {{\boldsymbol{R}}}{{{\boldsymbol{M}}}^{ - 1}}{\boldsymbol{\tau}}_n + {\boldsymbol{S}}_c{{\boldsymbol{\zeta}} }_c - {\boldsymbol{S}}_d{{\boldsymbol{\zeta}}} _d\;+\\ & {{{\dot{\boldsymbol{z}}}}_1} + {\cal{F}}( \cdot ) \end{aligned} \right. $$ (45) 进而, 构造快速非奇异终端滑动模态:
$$ {\boldsymbol{s}} = {\boldsymbol{\omega }}_e + {\alpha _1}{\rm{sig}}^{{k_1}}({\boldsymbol{\eta }}_e) + {\beta _1}{\boldsymbol{\varphi}} ({\boldsymbol{\eta }}_e) $$ (46) 其中,
${\boldsymbol{\varphi}} ({{\boldsymbol{\eta}} _{{e}}})$ 可表示为:$$ \left\{ {\begin{aligned} &{h_1}{{\boldsymbol{\eta}} _{{e}}} + {h_2}{\rm{sig}}^2({{\boldsymbol{\eta}} _{{e}}}), & ||{{\boldsymbol{\eta}} _{{e}}}|| < \varepsilon \\ &{\rm{sig}}^{{k_2}}({{\boldsymbol{\eta}} _{{e}}}), & ||{{\boldsymbol{\eta}} _{{e}}}|| \ge \varepsilon \end{aligned}} \right. $$ (47) 其中,
${k_1} = ({{m_1} + 1})/{2} + {\rm{sign}}(||{{\boldsymbol{\eta}} _{{e}}}|| - 1)({{m_1} - 1})/{2}$ ,$ {m_1}>1 $ ;${k_2} = ({{m_2} + 1})/{2} - {\rm{sign}}(||{{\boldsymbol{\eta}} _e}|| - 1) ({{m_2} - 1})/{2}$ , 且满足$ {1}/{2} < {m_2} < 1 $ . 此外,$ {\alpha _1} > 0 $ ,$ {\beta _1} > 0 $ ,$ \varepsilon $ 表示一个极小的正常数,$ {h_1} = (2 - {k_2}){\varepsilon ^{{k_2} - 1}} $ ,${h_2} = ({k_2} - 1){\varepsilon ^{{k_2} - 2}}$ .对所设计滑动模态求导, 可得
$$ {\dot{\boldsymbol{s}}} = {\dot{\boldsymbol{\omega }}}_e + {\alpha _1}{k_1}{\mathop{\rm diag}\nolimits} \{ ||{{\boldsymbol{\eta}} _{{e}}}|{|^{{k_1} - 1}}\} {{\boldsymbol{\omega}} _{{e}}} + {\beta _1}{\dot {\boldsymbol{\varphi}}}({{\boldsymbol{\eta}} _{{e}}}) $$ (48) 其中,
${\rm{diag}}{\rm{\{ }}||{{\boldsymbol{\eta}} _e}|{|^{{k_1} - 1}}{\rm{\} }} \;= \;{\rm{diag}}{\rm{\{ }}|{\eta _{eu}}{|^{{k_1} - 1}}, \;|{\eta _{ev}}{|^{{k_1} - 1}},$ $ |{\eta _{er}}{|^{{k_1} - 1}}{\rm{\} }} $ ,$ \dot {\boldsymbol{\varphi}} ({{\boldsymbol{\eta}} _e}) $ 可表示为:$$ \dot {\boldsymbol{\varphi}} ({{\boldsymbol{\eta}} _e}) = \left\{ {\begin{aligned} &{{h_1}{{{\boldsymbol{\omega }}}_e} + 2{h_2}{\mathop{\rm diag}\nolimits} \{ ||{\boldsymbol{\eta}} _e||\} {\boldsymbol{\omega}}_e,} &{||{{\boldsymbol{\eta}} _{{e}}}|| < \varepsilon }\\ &{{k_2}{\mathop{\rm diag}\nolimits} \{ ||{\boldsymbol{\eta}}_e|{|^{{k_2} - 1}}\} {\boldsymbol{\omega}}_e,} & {||{\boldsymbol{\eta}}_e|| \ge \varepsilon } \end{aligned}} \right. $$ (49) 其中,
${\rm{diag}}{\rm{\{ }}||{\boldsymbol{\eta}}_e||{\rm{\} }}\;\; =\;\; {\rm{diag}}{\rm{\{ }}|{\eta _{eu}}{\rm{|}},\;\; |{\eta _{ev}}|,\;\;|{\eta _{er}}{\rm{|\} }}$ ,${\rm{diag}} {\rm{\{}}||{\boldsymbol{\eta}}_e|{|^{{k_2} - 1}}{\rm{\} }} = {\rm{diag}}{\rm{\{ }}|{\eta _{eu}}{|^{{k_2} - 1}}, |{\eta _{ev}}{|^{{k_2} - 1}}, |{\eta _{er}}{|^{{k_2} - 1}}{\rm{\} }}$ .2.3 固定时间容错控制律设计
进一步, 为加快滑模趋近速度, 同时减小控制抖振, 设计基于反正切型函数的幂次趋近律:
$$ \left\{ \begin{aligned} \dot {\boldsymbol{s}} & = - \frac{{{r_1}}}{\Re}{\rm{si}}{{\rm{g}}^{{p_1}}}({\boldsymbol{s}}) - \frac{{{r_2}}}{\Re}{\rm{si}}{{\rm{g}}^{{q_1}}}({\boldsymbol{s}})\\ \Re & = \Big(\frac{\pi }{2} - \arctan \ell ||{\boldsymbol{s}}|{|^\rho }\Big)\beta \end{aligned} \right. $$ (50) 其中,
$ {r_1}>0 $ ,$ {r_2}>0 $ ,$ {p_1}>0 $ ,$ 0<{q_1}<1 $ ,$ \beta >{2}/{\pi } $ ,$ 0 < \rho < 1 $ ,$ \ell > 0 $ .综合式(30)、式(32)、式(39)、式(46)、式(50), 设计基于双扰动观测器的固定时间容错控制(DDO-FxFC)策略如下:
$$ \begin{split} {\boldsymbol{\tau}}_{n} =\; &-{\boldsymbol{M}} {\boldsymbol{R}}_{c}^{-1}\Big(\alpha_{1} k_{1} \text{diag}{\{\left\|{\boldsymbol{\eta}}_{e}\right\|^{k_{1}-1}}\} {\boldsymbol{\omega}}_{e}+\beta_{1} \dot{\boldsymbol{\varphi}}\left({\boldsymbol{\eta}}_{e}\right) \;+ \\ &{\boldsymbol{S}}_{c} {\boldsymbol{R}}_{c} {\boldsymbol{v}}_{c}-{\boldsymbol{S}}_{d} {\boldsymbol{R}}_{d} {\boldsymbol{v}}_{d} +\frac{r_{1}}{\Re} \text{sig}^{p_{1}}({\boldsymbol{s}}) \;+ \\ &\frac{r_{2}}{\Re} \text{sig}^{q_{1}}({\boldsymbol{s}})+ {\dot{\boldsymbol{z}}}_{1}+{\boldsymbol{z}}_{3}+\hat{f} \text{sign}({\boldsymbol{s}})\Big)\\[-15pt] \end{split} $$ (51) 其中,
$ \hat f $ 表示集总扰动观测误差上界$ f $ 的自适应估计, 设计为:$$ \dot {\hat f } = \frac{1}{{\theta c}}\big(||{\boldsymbol{s}}|| - q\hat f\big) $$ (52) 其中,
$ \theta>0 $ ,$ c>0 $ ,$ q>0 $ .定理 3. 满足假设1 ~ 3, 设计DDO-FxFC策略(51) 和自适应律(52), 使得USV快速精准跟踪期望轨迹
$ {{\boldsymbol{\eta}}_d} $ ,$ {{\boldsymbol{\upsilon}}_d} $ , 保证其实际位姿、速度跟踪误差在固定时间稳定到平衡点附近的小邻域内, 且收敛时间独立于系统初始状态, 收敛时间$T \le {T_0}+{T_1}\;+ {T_2}+{T_3}$ ,$ {T_2} $ 、$ {T_3} $ 将在后文中给出.3. 稳定性分析
定理3的证明过程可分为两个步骤, 即滑动模态到达阶段与滑动阶段.
步骤 1. 考虑候选Lyapunov函数:
$$ {V_1} = \frac{1}{2}{{{\boldsymbol{s}}}}^{{\rm{T}}}{\boldsymbol{s}}+\frac{1}{2}{c_0}{\tilde f^2} $$ (53) 其中,
$ {c_0} = \theta c $ ,$ \tilde f = f - \hat f $ .求式(53)关于时间的导数
$$ \begin{split} \dot{V}_{1} =\; &{\boldsymbol{s}}^{\mathrm{T}}\dot{\boldsymbol{s}}+{c_0}{\tilde f}\dot{{\tilde f}} = \\ &{\boldsymbol{s}}^{\mathrm{T}}\Big({{\boldsymbol{R}}}{{{\boldsymbol{M}}}^{ - 1}}{\boldsymbol{\tau}}_n + {\boldsymbol{S}}_c{{\boldsymbol{\zeta}} }_c - {\boldsymbol{S}}_d{{\boldsymbol{\zeta}}} _d+ {{{{\dot{\boldsymbol{z}}}}}_1} \;+ \\ &{\cal{F}}(\cdot)+\alpha_{1} k_{1} \text{diag}\{{\left\|{\boldsymbol{\eta}}_{e}\right\|^{k_{1}-1}}\} {\boldsymbol{\omega}}_{e}\; + \\ &\beta_{1} {\dot{\boldsymbol{\varphi}}}\left({{{\boldsymbol{\eta}}}_e}\right)\Big)+c_{0} \tilde{f} \dot{\tilde{f}} \end{split} $$ (54) 将DDO-FxFC策略代入式(54), 可得
$$ \begin{split} {\dot V_1} =\; & - {{\boldsymbol{s}}^{\rm{T}}}\Big( \frac{{{r_1}}}{\Re}{{\rm{sig}}^{{p_1}}}({\boldsymbol{s}}) + \frac{{{r_2}}}{\Re}{{\rm sig}}^{{q_1}}({\boldsymbol{s}})\; + \\ & {{{\boldsymbol{z}}}_3}- {\cal{F}}( \cdot ) + \hat f {\rm{sign}}{{({\boldsymbol{s}})}}\Big) + {c_0}\; \tilde f \dot{\tilde{f}} \end{split} $$ (55) 结合定理2, 式(55)可表示为
$$ \begin{split} \dot{V}_{1} \leq\; &-{\boldsymbol{s}}^{\mathrm{T}}\Big(\frac{r_{1}}{\Re} \text{sig}^{p_{1}}({\boldsymbol{s}})+\frac{{{r_2}}}{\Re}{{\rm sig}}^{{q_1}}({\boldsymbol{s}})+\hat{f} \text{sign}({\boldsymbol{s}})\Big) \;+ \\ &f|{\boldsymbol{s}}|+c_{0} \tilde{f} \dot{\tilde{f}} \leq \\ &-{\boldsymbol{s}}^{\mathrm{T}}\Big(\frac{r_{1}}{\Re} \text{sig}^{p_{1}}({\boldsymbol{s}})+\frac{{{r_2}}}{\Re}{{\rm sig}}^{{q_1}}({\boldsymbol{s}})+\hat{f} \text{sign}({\boldsymbol{s}}) \;- \\ &f \text{sign}({\boldsymbol{s}})\Big)+c_{0} {\tilde{f}} \dot{\tilde{f}} \leq\\ &-\frac{r_{1}}{\Re} {\boldsymbol{s}}^{p_{1}+1}-\frac{r_{2}}{\Re} {\boldsymbol{s}}^{q_{1}+1} +\tilde{f}|{\boldsymbol{s}}|+c_{0} {\tilde{f}} \dot{\tilde{f}} \\[-15pt]\end{split} $$ (56) 此外, 由式(50)易知
$$ \frac{{{r_1}}}{\Re} \ge \frac{{2{r_1}}}{{\beta {\rm{\pi }}}},\quad \frac{{{r_2}}}{\Re} \ge \frac{{2{r_2}}}{{\beta {\rm{\pi }}}} $$ (57) 令
$r_{1}^{\prime} = {2 r_{1}}/{\pi \beta}$ ,$\quad r_{2}^{\prime} = {2 r_{2}}/{\pi \beta}$ , 则式(57)可表示为:$$ \dot{V_{1}} \leq-r_{1}^{\prime} {\boldsymbol{s}}^{p+1}-r_{2}^{\prime} {\boldsymbol{s}}^{q+1}+\tilde{f}|{\boldsymbol{s}}|+c_{0} \tilde{f} \dot{\tilde{f}} $$ (58) 进一步, 可得
$$ \begin{split} \dot{V}_{1} \leq\;&-l_{1}\left[\left(\frac{1}{2} {{\boldsymbol{s}}}^{2}\right)^{\frac{p_{2}+1}{2}}+\left(\frac{1}{2} c_{0} \tilde{f}^{2}\right)^{\frac{p_{1}+1}{2}}\right] - \\ &l_{2}\left[\left(\frac{1}{2} {{\boldsymbol{s}}}^{2}\right)^{\frac{q_{1}+1}{2}}+\left(\frac{1}{2} c_{0} \tilde{f}^{2}\right)^{\frac{q_1+1}{2}}\right] + \\ &\left(\frac{1}{2} c_{0} \tilde{f}^{2}\right)^{\frac{p_{1}+1}{2}}+\left(\frac{1}{2} c_{0} \tilde{f}^{2}\right)^{\frac{q_{1}+1}{2}}+ q \tilde{f} \hat{f} \end{split} $$ (59) 其中,
$ l_{1} = \min \left\{2^{{p_1}+1} r_{1}^{\prime}, 1\right\} $ ,$ l_{2} = \min \left\{2^{{q_1}+1} r_{2}^{\prime}, 1\right\} $ .根据引理3, 可得
$$ \begin{split} {\dot V_1} \le\;& - \Big({2^{\frac{{1 - {p_1}}}{2}}}{l_1}{V_1}^{\frac{{{p_1} + 1}}{2}} + {l_2}{V_1}^{\frac{{{q_1} + 1}}{2}}\Big)+ {c_0}\tilde f\; \hat f \;+ \\ &{\Big(\frac{1}{2}{c_0}{\tilde f^2}\Big)^{\frac{{{p_1} + 1}}{2}}} + {\Big(\frac{1}{2}{c_0}{\tilde f^2}\Big)^{\frac{{{q_1} + 1}}{2}}}\\[-10pt] \end{split} $$ (60) 由杨氏不等式易知,
$ q \tilde{f} \hat{f} $ 满足$$ \begin{split} {q} \tilde{f} \hat{f} =\; &{q}\tilde{f}(f-\tilde{f}) \leq q\left(\frac{\tilde{f}^{2}}{2 \theta_{1}}+\frac{\theta_{1} f^{2}}{2}-\tilde{f}^{2}\right) \leq \\ & \frac{q \theta_{1} f^{2}}{2}-c_{1} \tilde{f}^{2} \end{split} $$ (61) 其中,
$ {\theta_1} $ 为正常数, 且满足$ \theta_{1}>{1}/{2} $ ,$c_{1} = q(2 \theta_{1}- 1)/{2 \theta_{1}}$ .结合式(60)、式(61), 可得
$$ \begin{align} {\dot V_1} \le& - \Big({2^{\frac{{1 - {p_1}}}{2}}}{l_1}{V_1}^{\frac{{{p_1} + 1}}{2}} + {l_2}{V_1}^{\frac{{q_1+1}}{2}}\Big) + {\Big(\frac{1}{2}{c_0}{\tilde f^2}\Big)^{\frac{{{p_1} + 1}}{2}}} + \\ &{\Big(\frac{1}{2}{c_0}{\tilde f^2}\Big)^{\frac{{{q_1} + 1}}{2}}}+\frac{{q{\theta _1}{f^2}}}{2} - {c_1}{\tilde f^2}\\[-15pt] \end{align} $$ (62) 由于
$ {c_0} = \theta c $ , 并取$ {\theta} $ 满足$1-\left(\theta/{2}\right)^{({q_{1}+1})/{2}}- \theta/{2} = 0$ , 式(62)可表示为:$$ \begin{split} \dot{V}_{1} \leq\;&-\left(3^{\frac{1-p}{2}} l_{1} V_{1}^{\frac{p+1}{2}}+l_{2} V_{1}^{\frac{q+1}{2}}\right) + \\ &\left(\frac{1}{2} c \theta \tilde{f}^{2}\right)^{\frac{p+1}{2}}+\left(\frac{1}{2} c \theta \tilde{f}^{2}\right)^{\frac{q+1}{2}} + \\ &\frac{q \theta_{1} f^{2}}{2}-\frac{1}{2} \theta c \dot{f}^{2}-\left(\frac{1}{2} \theta\right)^{\frac{q+1}{2}} c \dot{f}^{2} \end{split} $$ (63) 式(63)中, 若
$ c{\tilde f^2} \ge 1 $ , 则有$$ {(c{\tilde f^2})^{\frac{{{q_1} + 1}}{2}}} - c{\tilde f^2} \le 0 $$ (64) 若
$ c{\tilde f^2}<1 $ , 则有$$ {(c{\tilde f^2})^{\frac{{{q_1} + 1}}{2}}} - c{\tilde f^2} \le {\kappa _0} $$ (65) 其中,
${\kappa _0}{\rm{ = \big(}}{2}/({{{q_1} + 1}}){{\rm{\big)}}^{1 + 2/({q_1} - 1)}} - {{\rm{\big(}}{2}/({{{q_1} + 1}}){\rm{\big)}}^{2/({q_1} - 1)}}$ .根据式(64)、式(65)讨论, 可得
$$ {(c{\tilde f^2})^{\frac{{{q_1} + 1}}{2}}} - c{\tilde f^2} \le {\kappa _0} $$ (66) 式(63)可继续化简为:
$$ \begin{split} \dot{V}_{1} \leq\; &-\Big(2^{\frac{1-p_{1}}{2}} l_{1} V_{1}^{\frac{p_{1}+1}{2}}+l_{2} V_{1}^{\frac{q_{1}+1}{2}}\Big) + \\ &\Big(\frac{1}{2} c \theta \tilde{f}^{2}\Big)^{\frac{p_{1}+1}{2}}-\frac{1}{2} \theta c \tilde{f}^{2}+\kappa_{1} \end{split} $$ (67) 其中,
$ {\kappa _1} = ({\theta}/{2})^{({{q_1} + 1})/ 2}{\kappa _0}+{{q{\theta _1}{f^2}}}/{2} $ .进一步, 将式(67)中变量
$ \tilde{f} $ 的上界表示为$ {\lambda} $ , 分两种情形进行讨论.情形 1. 当
$ \lambda \le {{\sqrt 2 }}/{{\sqrt {c\theta } }} $ 时,$$ {\Big(\frac{1}{2}c\theta {\tilde f^2}\Big)^{\frac{{{p_1} + 1}}{2}}} - \frac{1}{2}\theta c{\tilde f^2} \le 0 $$ (68) 将式(68)代入式(67), 可得
$$ {\dot V_1} \le - {2^{\frac{{1 - {p_1}}}{2}}}{l_1}{V_1}^{\frac{{{p_1} + 1}}{2}} - {l_2}{V_1}^{\frac{{{q_1} + 1}}{2}}{\rm{ + }}{\kappa _1} $$ (69) 情形 2. 当
$ \lambda > {{\sqrt 2 }}/{{\sqrt {c\theta } }} $ 时, 存在不等式$$ \begin{split} &{\Big(\frac{1}{2}c\theta {\tilde f^2}\Big)^{\frac{{{p_1} + 1}}{2}}}-\frac{1}{2} c\theta {\tilde f^2} \le\\ &\qquad{\Big(\frac{1}{2}c\theta {\lambda ^2}\Big)^{\frac{{{p_1} + 1}}{2}}} - \frac{1}{2}c\theta {\lambda ^2} \end{split} $$ (70) 则式(67)可表示为:
$$ {\dot V_1} \le - {2^{\frac{{1 - {p_1}}}{2}}}{l_1}{V_1}^{\frac{{{p_1} + 1}}{2}} - {l_2}{V_1}^{\frac{{{q_1} + 1}}{2}}+{\kappa _2} $$ (71) 其中,
${\kappa _2}={\kappa _1}+{(c\theta {\lambda ^2}/{2})^{({{p_1} + 1})/{2}}} -c\theta {\lambda ^2}/{2}$ .根据式(69)、式(71)讨论, 可得
$$ {\dot V_1} \le - {2^{\frac{{1 - {p_1}}}{2}}}{l_1}{V_1}^{\frac{{{p_1} + 1}}{2}} - {l_2}{V_1}^{\frac{{{q_1} + 1}}{2}}{\rm{ + }}\kappa $$ (72) 其中,
$$ \kappa =\left\{ \begin{aligned} &{\kappa _1},&\lambda \le \frac{{\sqrt 2 }}{{\sqrt {c\theta } }} \\ &{\kappa _2},&\lambda > \frac{{\sqrt 2 }}{{\sqrt {c\theta } }}\end{aligned} \right. $$ (73) 由引理3可知, 测量跟踪误差动态系统状态
$ {\boldsymbol{\eta}} _e $ ,$ {{\boldsymbol{\omega}} _e} $ 在固定时间内收敛至平衡点附近的邻域内, 收敛时间满足$$ \begin{align} {T_2} \le \frac{{{2^{\frac{{{p_1}{\rm{ - }}1}}{2}}}}}{{{l_1}}}\frac{2}{{J(1 - {q_1})}} + \frac{1}{{{l_2}}}\frac{2}{{J({p_1} - 1)}} \end{align} $$ (74) 其中,
$ 0< J<1 $ .步骤 2. 当滑动模态到达滑动面, 式(46)可写为:
$$ {{{\dot{\boldsymbol{\eta}} }}_e} = - {\alpha _1}{{\mathop{\rm sig}\nolimits} ^{{k_1}}}({{\boldsymbol{\eta }}_e}) - {\beta _1}{\boldsymbol{\varphi}}( {{\boldsymbol{\eta}} }_e) $$ (75) 选取Lyapunov函数:
$$ {V_2} = \frac{1}{2}{\boldsymbol{\eta}} _e^{\rm{T}}{\boldsymbol{\eta}} _e $$ (76) 当
$ {\rm{||}}{{\boldsymbol{\eta}}} _e{\rm{||}} \ge \varepsilon $ 时, 由式(46)可得滑模变量为:$$ {\boldsymbol{\omega}} _e = {\alpha _1}{\rm{sig}}^{{k_1}}({\boldsymbol{\eta}}_e) - {\beta _1}{\rm{sig}}^{{k_2}}({\boldsymbol{\eta}} _e) $$ (77) 对式(76)求导, 并代入式(77), 可得
$$ \begin{split} \dot{V}_{2} =\; &{\boldsymbol{\eta}}_{e}^{\mathrm{T}}\Big(-\alpha_{1} \text{sig}^{k_{1}}({\boldsymbol{\eta}}_{e})-\beta_{1} \text{sig}^{k_{2}}({\boldsymbol{\eta}}_{e})\Big)\leq \\ & -2^{\frac{k_{1}+1}{2}} \alpha_{1} V_{2}^{\frac{k_{1}+1}{2}} -2^{\frac{k_{2}+1}{2}} \beta_{1} V_{2}^{\frac{k_{2}+1}{2}} \end{split} $$ (78) 易知
$ 0 < ({{k_1} + 1})/{2} < 1 $ ,$ ({{k_2} + 1})/{2} > 1 $ . 则由引理2可知, 系统状态固定时间收敛, 收敛时间$ {T_3} $ 满足$$ \begin{split} T_3 \leq\;& \frac{1}{\beta_1 (m_1 -1)}{\rm ln} \left(1+\frac{\beta_1}{2^{\frac{m_1 -1}{2}}\alpha_1} \right)+ \\ & \frac{1}{\alpha_1 (1 -m_2)}{\rm ln} \left(1+\frac{\beta_1}{2^{\frac{m_2 -1}{2}}\beta_1} \right) \end{split} $$ (79) 则系统状态可在预定时间内进入
$ {\rm{||}}{\boldsymbol{\eta}}_e{\rm{||}} < {\varepsilon } $ , 并且满足$$ \begin{split} {\rm{||}}{\boldsymbol{\omega}}_e{\rm{||}}\le\;& {\alpha _1}{\rm{||}}{\boldsymbol{\eta}}_e{\rm{|}}{{\rm{|}}^{{k_1}}} + {\beta _1}{\rm{||}}{\boldsymbol{\eta}}_e{\rm{|}}{{\rm{|}}^{{k_2}}}\le \\ & {\alpha _1}{\varepsilon ^{{k_1}}} + {\beta _1}{\varepsilon ^{{k_2}}} \end{split} $$ (80) 因此, 测量跟踪误差动态系统状态收敛时间
$ {T} $ 满足$ T \leq {T_0} +{T_1} + {T_2} +{T_3} $ .当
$ {\rm{||}}{{\boldsymbol{\eta}} _e}{\rm{||}} < \varepsilon $ 时, 滑动模态式(46)可表示为:$$ {\boldsymbol{\omega}}_{e} = -\alpha_{1} \text{sig}^{k_{1}}\left({\boldsymbol{\eta}}_{e}\right)-\beta_{1}\left(h_{1} {\boldsymbol{\eta}}_{e}+h_{2} \text{sig}^{2}\left({\boldsymbol{\eta}}_{e}\right)\right) $$ (81) 进一步, 可得
$$ \begin{align} \left\|{\boldsymbol{\omega}}_{e}\right\| & \leq \alpha_{1} \varepsilon^{k_{1}}+\beta_{1} \varepsilon^{k_{2}} \end{align} $$ (82) 同理, 测量跟踪误差控制系统(45)状态可在预定时间
$ {T} $ 内收敛.□ 注 1. 由定理3可知, 测量位姿/速度误差
$ {{\boldsymbol{\eta}}_e},{{{\boldsymbol{\upsilon}}}_e} $ 能够在固定时间稳定在平衡点附近的任意小邻域内. 根据$ { {\tilde{\boldsymbol{\eta}}}_e} = {{{\boldsymbol{\eta}}}_e} - {{\boldsymbol{\iota}}_1} $ ,$ { {\tilde{\boldsymbol{\upsilon}}}_e} = {{{\boldsymbol{\upsilon}}} _e} - {{\boldsymbol{\iota}}_2} $ , 并结合假设1, 可得实际位姿/速度跟踪误差能够在固定时间稳定在平衡点附近的邻域内, 即其实际位姿/速度跟踪误差固定时间一致有界.注 2. 被动容错控制设计需要预知系统可能发生的各种故障情况, 可能导致控制器设计过程复杂, 采用固定控制器应对多种故障也在一定程度上增加了控制系统的保守性. 但是, 本文的控制目标是实际位姿和速度误差在固定时间内收敛到平衡点附近的小邻域内. 借鉴被动容错思想, 结合滑模控制和固定时间收敛技术, 将可能会发生的推进器故障作为先验知识, 设计由期望控制力矩和故障补偿项组成的控制输入, 使得USV系统在正常工作状态下能够达到预期的控制性能指标. 同时在系统部件发生故障时, 依然能够保证USV在固定时间内跟踪并保持期望轨迹, 且跟踪误差收敛时间的上界独立于系统初始状态, 解决推进器部分失效、偏差故障下的固定时间跟踪控制问题.
注 3. 虽然有限时间控制方法解决了渐近或指数稳定导致的系统收敛时间无穷大问题, 但是有限时间控制系统收敛时间依赖系统初始状态, 当系统远离平衡点时, 有限时间控制收敛速度甚至不及渐近、指数稳定控制. 对此, 突破有限时间控制的局限性, 本文引入固定时间控制方法, 使得在任意初始状态下USV闭环控制系统能够在预设时间内收敛至平衡点或其邻域, 且收敛时间独立于系统初始状态. 从实用性角度, 具有固定时间稳定性的USV系统能够预设系统误差收敛时间, 大幅减少繁琐的控制参数调节. 从控制性能角度, 固定时间稳定系统能够获得比有限时间稳定系统更高的跟踪精度、更快的收敛速度、更强的鲁棒性, 本文所提出的固定时间控制方法优于文献[18]的有限时间控制方法.
4. 仿真研究
为了验证本文所提出DDO-FxFC方案在状态测量不确定和动力学未知情形下实现对期望轨迹的高精度跟踪, 结合实际任务场景, 针对部署3台浮式风机的海上风电场进行近距离巡检作业, 采用Cybership II USV开展仿真验证, 模型的相关参数见表1.
表 1 Cybership II水动力参数Table 1 Hydrodynamic parameters of the Cybership II参数 取值 参数 取值 参数 取值 $ m $ 23.800 $ Y_v $ −0.8612 $ X_{\dot{u}} $ −2.0 $ I_z $ 1.760 $ Y_{|v|v} $ −36.2823 $ Y_{\dot{v}} $ −10.0 $ x_g $ 0.046 $ Y_r $ 0.1079 $ Y_{\dot{r}} $ 0 $ X_u $ −0.7225 $ N_v $ 0.1052 $ N_{\dot{v}} $ 0 $ X_{|u|u} $ −1.3274 $ N_{|v|v} $ 5.0437 $ N_{\dot{r}} $ −1.0 $ X_{uuu} $ 1.255 考虑海洋环境干扰:
$$ {\boldsymbol{\delta}} = \left[\begin{array}{c} 2\sin \left(0.25\pi t + \dfrac{\pi} {6}\right)\\ 2\cos \left(0.35\pi t + \dfrac{\pi} {3}\right)\\ 1.5\sin \left(0.6\pi t + \dfrac{\pi} {5}\right)\nonumber \end{array} \right] $$ 期望轨迹控制输入:
$$ {{\boldsymbol{\tau}}_d} = {[12,2\cos {(0.05\pi t)^2},\sin {(0.05\pi t)^2}]^{\rm{T}}} \nonumber $$ 对应的初始位姿和速度分别取为
${{\boldsymbol{\eta}}_d}(0) = [0, 0, 0]^{\rm{T}}$ ,$ {{\boldsymbol{\upsilon}}_d}(0) = {[0,0,0]^{\rm{T}}} $ . USV初始状态取为${\boldsymbol{\eta}} (0) = {[ - 0.5, - 2, \pi /3]^{\rm{T}}}$ ,$ {\boldsymbol{\upsilon}} (0) = {[ - 0.5, 0, 0]^{\rm{T}}} $ .推进器故障参数取
$ {\boldsymbol{E}} = {\rm{diag}}\{ 0.7,0.7,0.7\} $ ,$\bar {{\boldsymbol{\tau}}} = {[40,40,20]^{\rm{T}}}$ ,$ {a_u} = {a_v} = {a_r} = 20 $ ,${t_{0u}} = {t_{0v}} = {t_{0r}} = 10$ . 位姿、速度测量不确定性取为${{\boldsymbol{\iota}}_1} = {{\boldsymbol{\iota}}_2} = [0.01\sin (0.6t), 0.01\sin (0.8t),0.01\sin (0.4t)]^ {\rm{T}}$ . 非匹配扰动观测器参数取为$ {\lambda _1} = 3 $ ,$ {\lambda _2} = 3 $ ,$ {\lambda _3} = 10 $ ,$ {\mu _{1}} = 7 $ ,$ {\mu _2} = 9 $ ,$ {\mu _3} = 9 $ ,$ {\mu _4} = 7 $ . 所设计的集总扰动观测器参数取为$ {\gamma _1} = 3 $ ,$ {\gamma _2} = 1.5 $ ,$ \hbar = 0.05 $ . 固定时间快速非奇异终端滑动模态式(46)、式(47)中参数取为$ {\alpha _1} = 0.5 $ ,$ {\beta _1} = 0.5 $ ,$ {m_1} = 9/5 $ ,$ {m_2} = 5/9 $ ,$ \varepsilon = 0.001 $ . 快速幂次趋近律式(50)参数取为$ {r_1} = 2 $ ,$ {r_2} = 2 $ ,$ \rho = 0.8 $ ,$ \ell = 1\,200 $ ,$ \beta = 8 $ . 式(52)中自适应律参数取为$ \hat f = 1.4 $ ,$ \theta = 0.629 $ ,$ c = 0.5 $ ,$ q = 0.45 $ .此外, 选取文献[26]中有限时间被动容错控制(Finite-time passive fault-tolerance control, FPFC)策略、有限时间主动容错控制(Finite-time active fault-tolerance control, FAFC)策略和鲁棒自适应容错控制(Robust adaptive fault-tolerance tracking control, RFTC)[39]开展对比研究, 相关参数选取与原文献中保持一致, 此处不再给出.
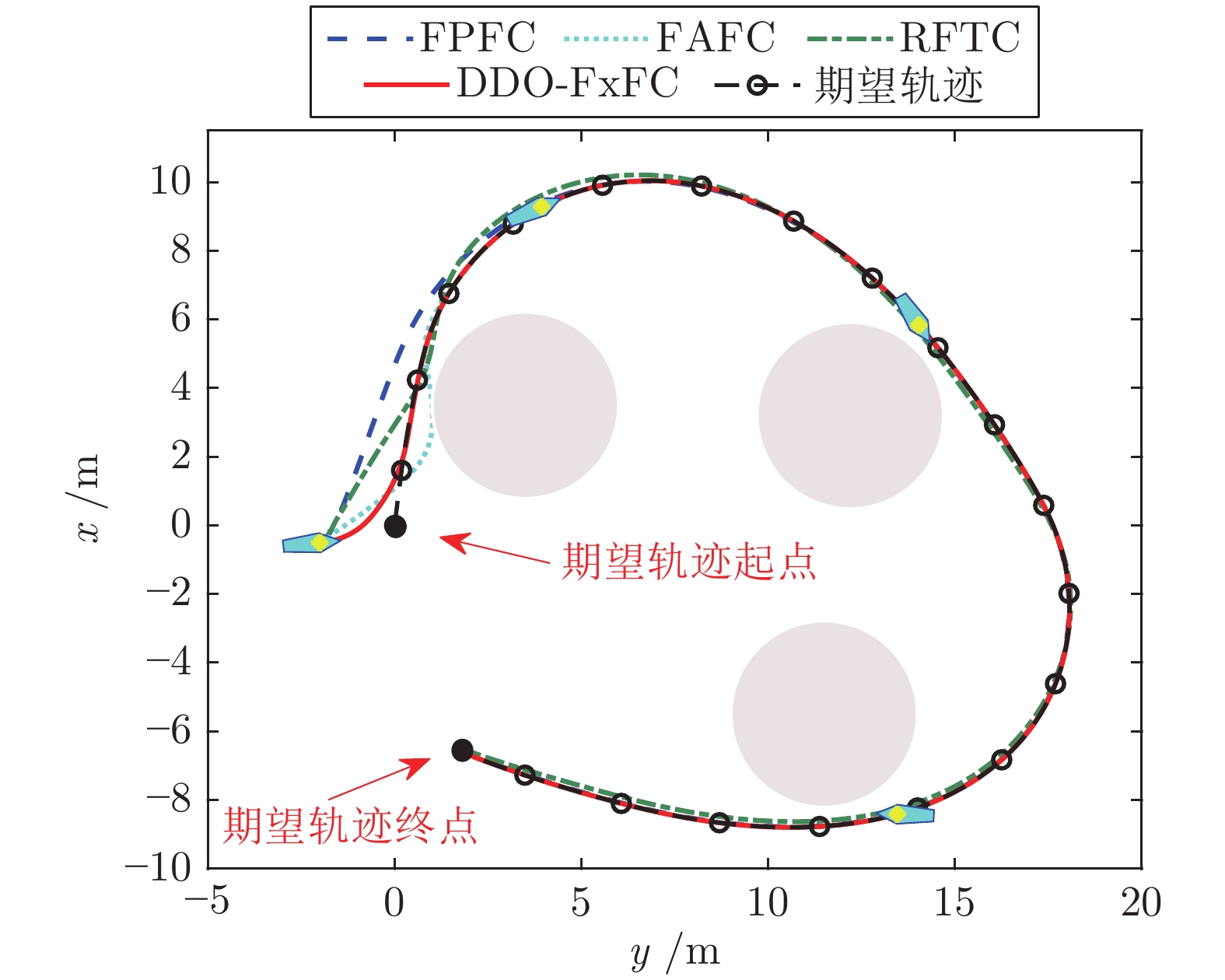
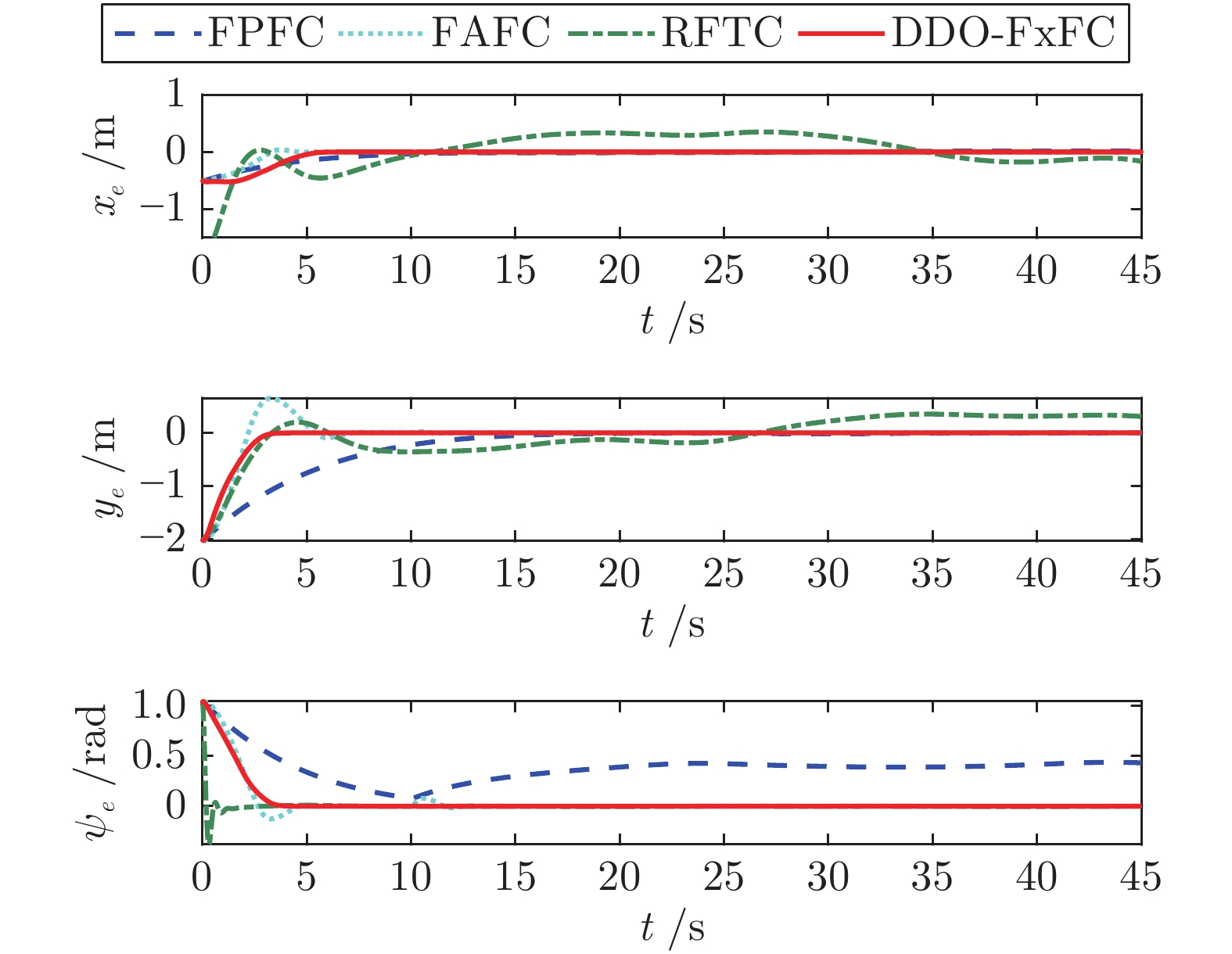
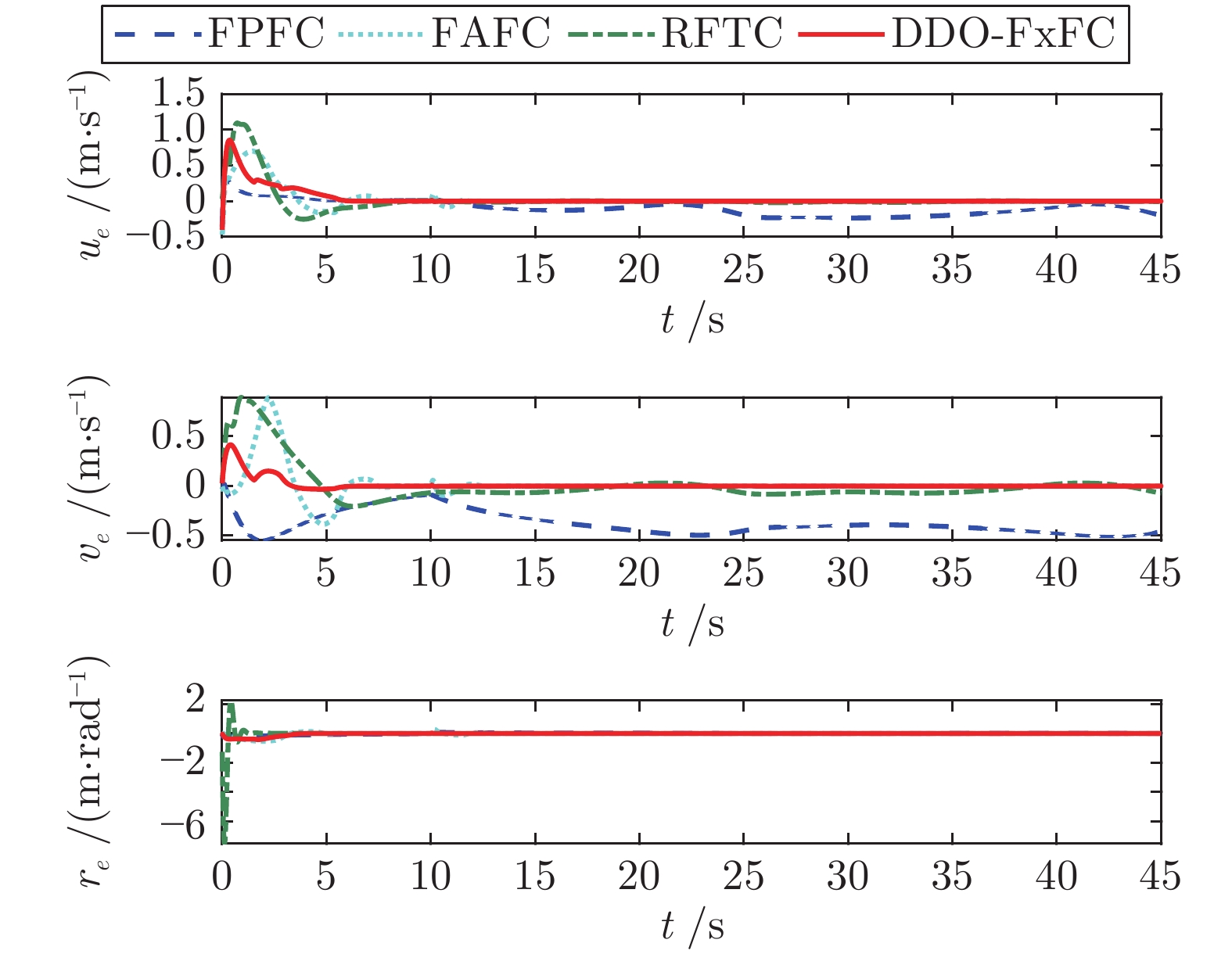
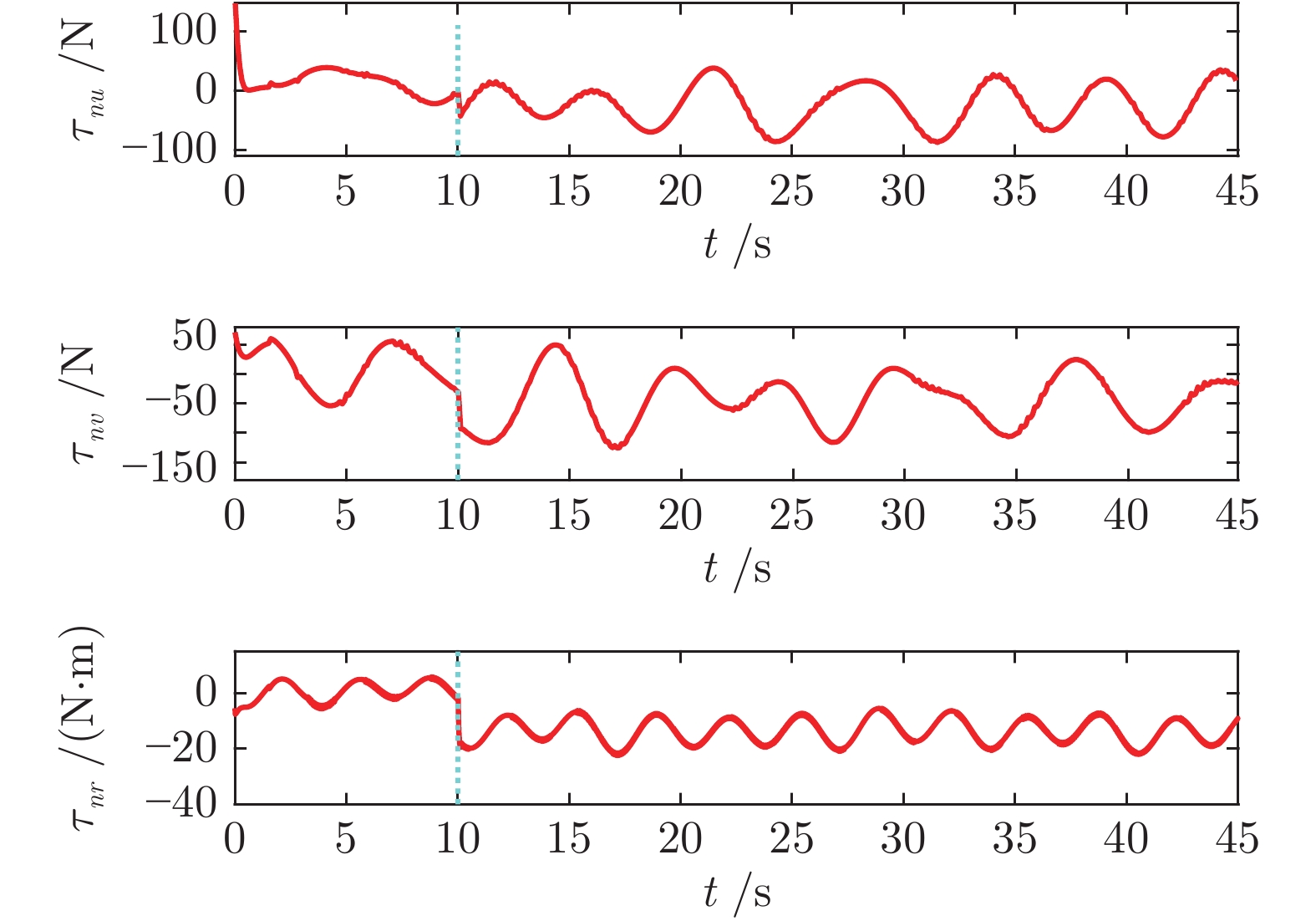
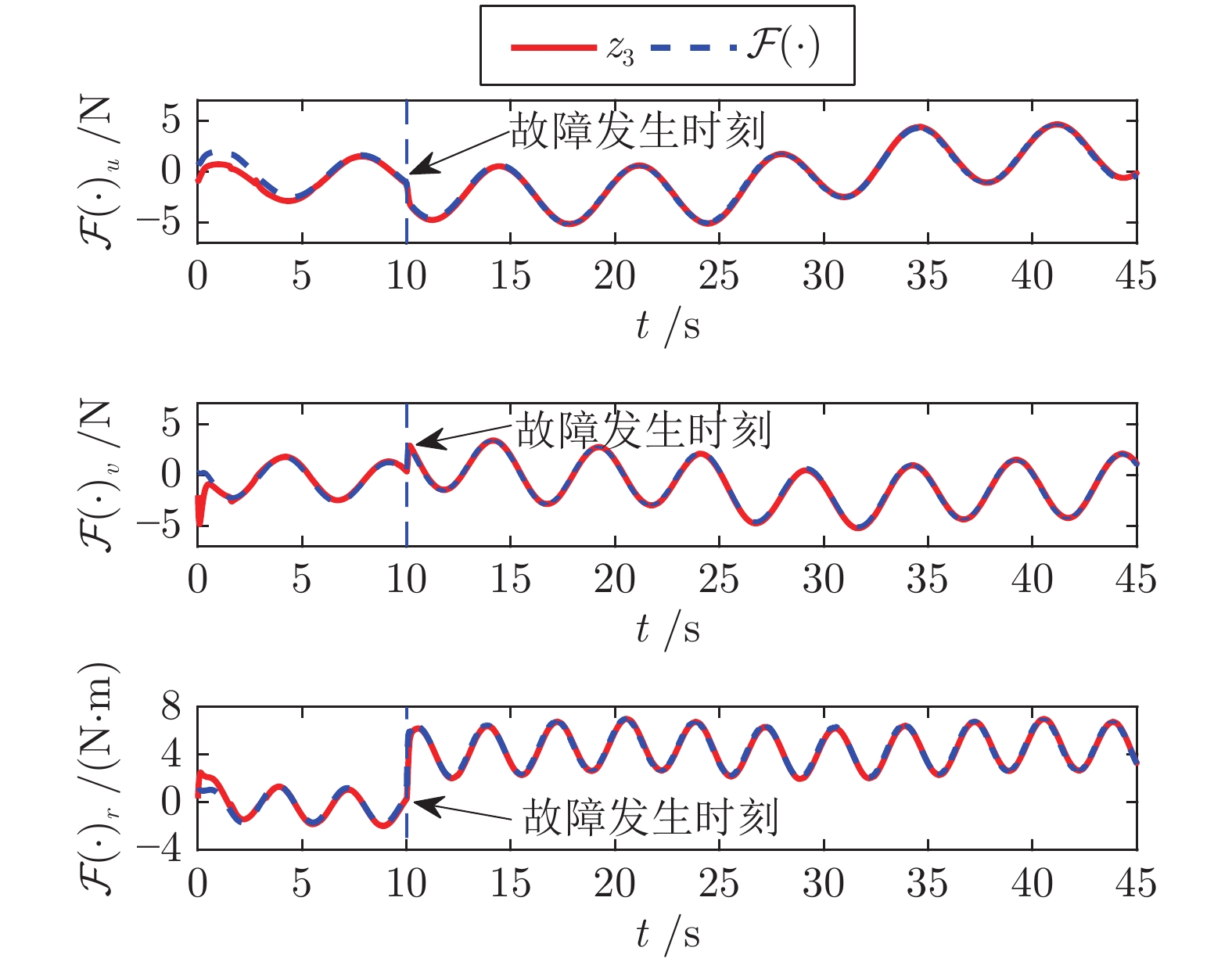
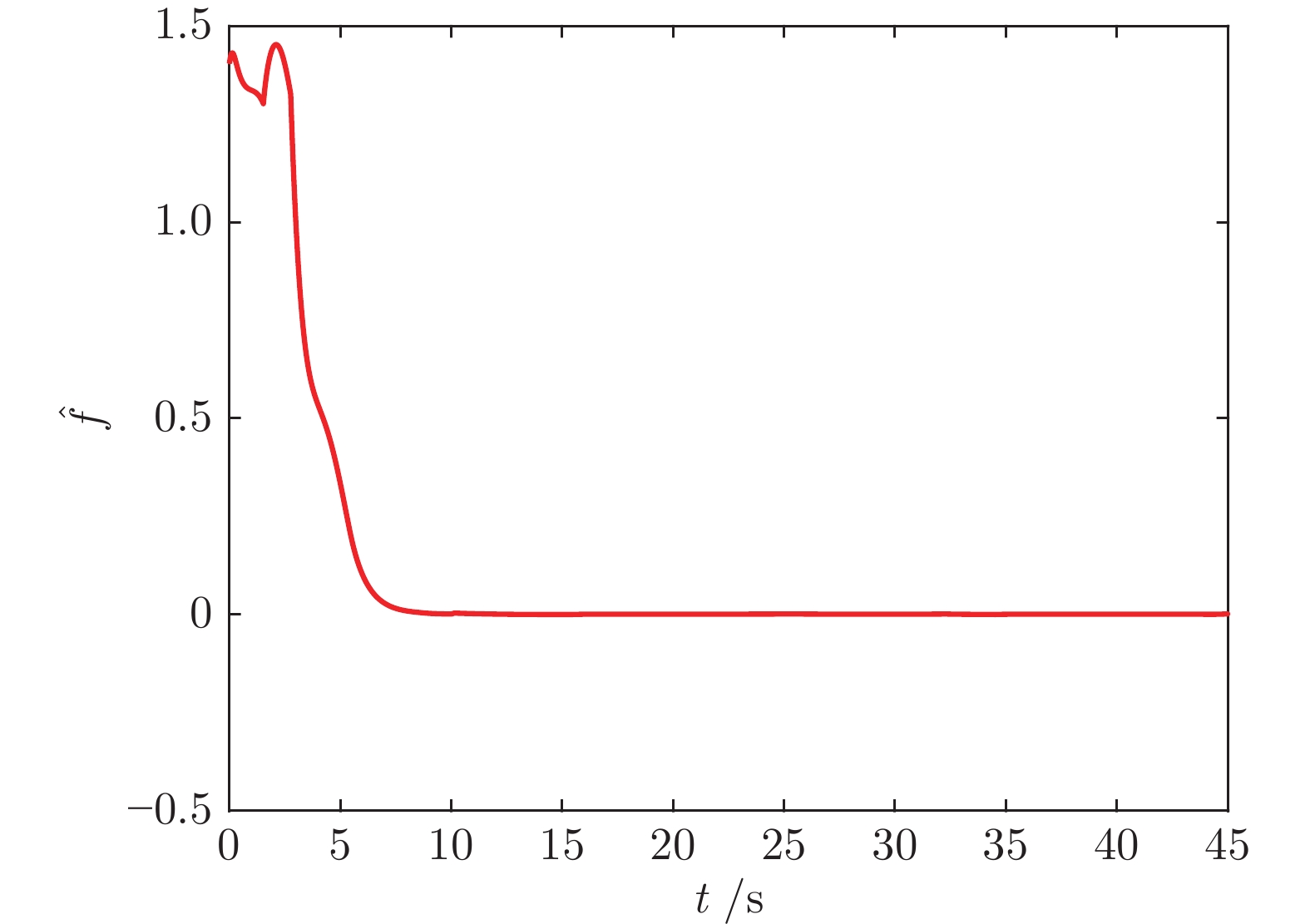
仿真结果如图1 ~ 6所示. 图1为本文所提的DDO-FxFC策略与三种对比控制策略作用下的USV的轨迹跟踪曲线. 不难发现, 在本文所提出DDO-FxFC策略作用下, USV能够快速精准地跟踪期望轨迹, 保证安全和高效地完成指定海上风场近距离巡检作业. FPFC和FAFC方法在推进器故障和测量不确定性影响下存在较大的瞬态与稳态跟踪误差, 明显增加碰撞风险. 而RFTC方法面对状态不确定约束和外界扰动时, 在初始阶段需要较长的自适应调整时间, 且横荡受到外界扰动导致系统可靠性降低. 图2和图3分别表示USV对期望位姿和速度的跟踪误差曲线. 结果表明, 即使包含复杂海洋扰动、系统动力学未知、推进系统故障和测量不确定性等限制, 在DDO-FxFC策略下, 跟踪误差仍然能够快速、精确地收敛到平衡点. 然而, FPFC方法的收敛性能依赖系统初始状态, 当系统远离平衡点时跟踪误差较大, 且处于反复校正状态; RFTC方法的
$ xy $ 坐标误差在平衡点附近振荡, 存在较大的稳态跟踪误差, 无法满足高精度跟踪任务的需求. 如图4所示为合适控制增益下控制输入曲线, 当推进系统故障发生时, DDO-FxFC策略会立即响应, 以便克服故障对控制性能的影响. 图5为集总扰动观测器的估计曲线, 在DDO-FxFC策略作用下, 所设计的观测器可以实现对未知非线性的精准重构与补偿. 如图6所示为自适应增益变化曲线, 当系统状态接近平衡点时, 自适应增益能够快速稳定到零附近的邻域内, 有助于提升系统鲁棒性, 而且可以有效降低常值滑模增益导致的控制抖振.此外, 采用绝对误差积分(Integrated absolute errors, IAE)与时间乘以绝对误差积分(Integrated time absolute errors, ITAE) 两种性能指标, 对本文控制方案与对比方案进行量化比较分析. 对应性能指标分别表示为:
$$ \begin{split} &{\rm IAE}_i = \int_{0}^{t} |e_i(t)|{\rm d}t \\ &{\rm ITAE}_i = \int_{0}^{t} t|e_i(t)|{\rm d}t \end{split} $$ 如表2和表3所示, 在状态测量不确定性和复杂未知非线性影响下, 本文所设计的DDO-FxFC策略取得最佳指标值, 得到最高的暂态精度与稳态精度. 综上可知, 本文所设计的DDO-FxFC策略可确保USV完成对期望轨迹的高精度跟踪, 显著提高USV跟踪控制系统的收敛速度与稳态精度.
表 2 4种控制方案下积分绝对误差Table 2 Integrated absolute errors of the four controllers$ {\rm IAE}_x $ $ {{\rm IAE}}_y $ $ {{\rm IAE}}_{\psi} $ $ {{\rm IAE}}_u $ $ {{\rm IAE}}_v $ $ {{\rm IAE}}_r $ FPFC 2.32 9.69 17.23 5.27 17.07 1.41 FAFC 1.07 4.13 1.92 1.96 2.09 1.54 RFTC 11.52 13.64 0.34 2.67 4.69 1.54 DDO-FxFC 1.79 2.53 1.61 1.50 0.64 2.08 表 3 4种控制方案下积分时间绝对误差Table 3 Integrated time absolute errors ofthe four controllers$ {\rm ITAE}_x $ $ {\rm ITAE}_y $ $ {\rm ITAE}_{\psi} $ $ {\rm ITAE}_u $ $ {\rm ITAE}_v $ $ {\rm ITAE}_r $ FPFC 17.12 44.49 39.26 23.20 42.91 11.64 FAFC 1.51 7.65 3.16 5.32 7.61 5.25 RFTC 10.97 26.48 1.95 11.79 5.62 1.11 DDO-FxFC 3.42 2.35 1.72 3.05 1.28 2.01 5. 结论
本文研究了状态测量不确定和动力学未知情形下的USV固定时间容错控制问题. 基于双扰动观测器结构, 提出了一种新型鲁棒固定时间容错跟踪控制策略, 有效提升了系统的收敛速度与跟踪精度. 采用两个固定时间扰动观测器, 分别实现对非匹配扰动与系统匹配集总非线性的精确估计与补偿. 进而, 结合快速非奇异终端滑模与固定时间扰动观测器, 构建了基于双扰动观测器的固定时间容错控制策略, 确保实际位姿与速度跟踪误差在固定时间内达到期望精度. 最后, 仿真实验表明本文所提出控制策略能够明显提升USV的轨迹跟踪暂态和稳态性能.
-
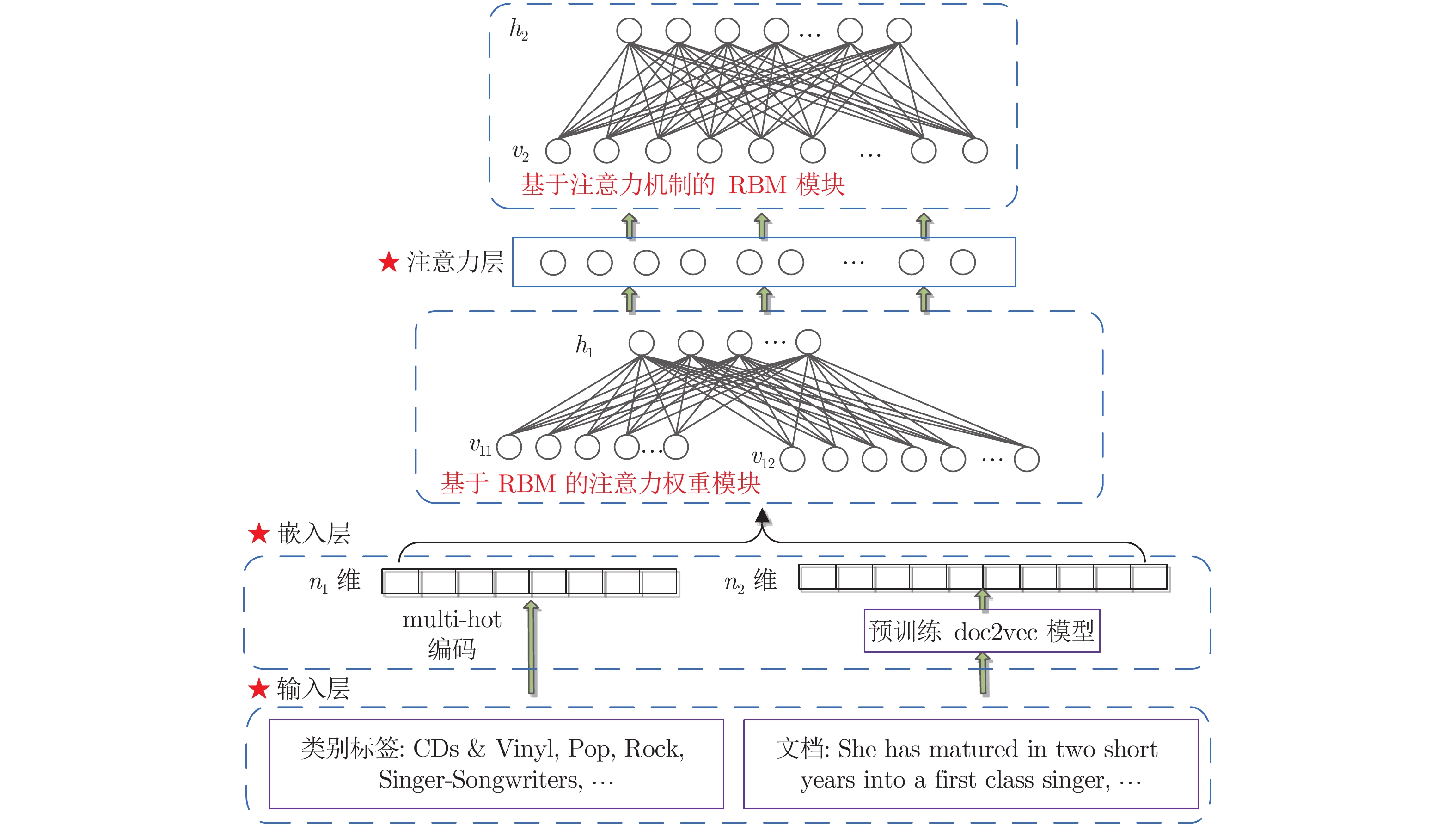
图 2 基于注意力机制和RBM的用户认知偏好模型
Fig. 2 User cognitive preference model based on attention mechanism and RBM
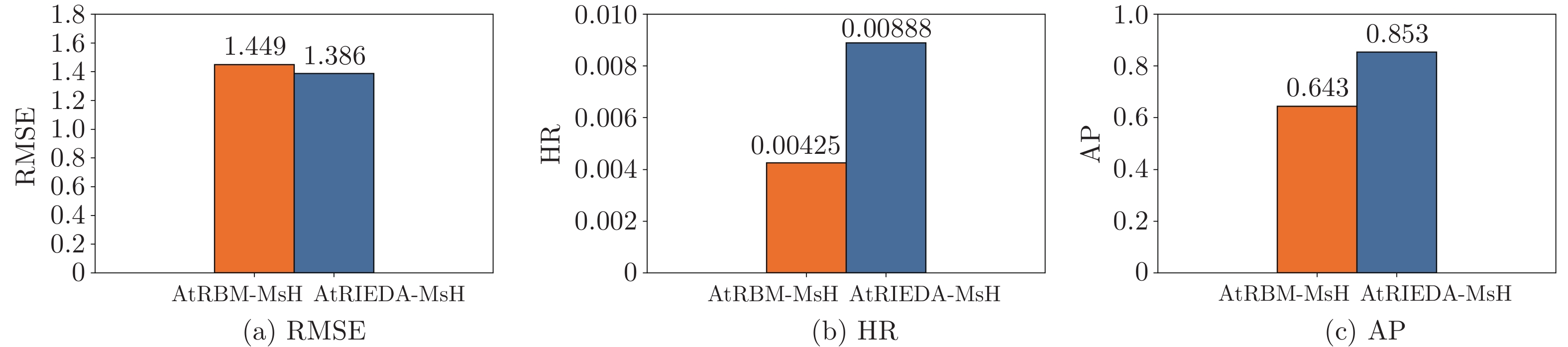
图 4 CDs_and_Vinyl数据集测试用户个性化搜索实验
Fig. 4 Experimental results of a test user on CDs_and_Vinyl
表 1 数据集统计信息
Table 1 Statistical information of datasets
数据集 # 用户 # 项目 # 评分 Digital_Music (Music) 478235 266414 836006 Video_Games (Games) 826767 50210 1324753 Apps_for_Android (Apps) 1323884 61275 2638173 Kindle_Store (Kindle) 1406890 430530 3205467 CDs_and_Vinyl (CDs) 1578597 486360 3749004 Movies_and_TV (Movies) 2088620 200941 4607047 Yelp 1912494 180347 7778794  下载: 导出CSV
下载: 导出CSV
表 2 算法的实验参数
Table 2 Experimental parameters of our algorithm
参数 数值 ${n_1}$ 类别标签数量 ${n_2}$ 200 $m$ 0.8 ~ 1.2倍类别标签数量 学习率 0.1 动量 0.5 ~ 0.9 训练次数 20 $Pop$ 0.3倍测试数据集规模 $k$ 10 $\alpha $ 0.3 $\beta $ 0.2 $N$ 10
下载: 导出CSV
表 3 对比实验结果
Table 3 Experiments compared with popular recommendation algorithms
算法 评价指标 Random Popularity BPRMF ConvMF ATRank RBMAEDA DRBM RBM-MsH AtRBM-MsH Music RMSE — 3.144 1.898 3.130 2.198 1.298 1.264 1.297 1.221* HR 0.0765 0.0793 0.0764 0.0742 0.0778 0.0784 0.0924 0.0906 0.0951* mAP 0.761 0.723 0.811 0.728 0.778 0.811 0.887 0.880 0.879* 运行时间(s) 0.020 0.182 0.494 276.716 2.900 0.221 1.599 0.672 1.766* Games RMSE — 3.516 1.973 3.497 2.482 1.285 1.332 1.271 1.242* HR 0.0810 0.0930 0.0753 0.0945 0.0869 0.0804 0.0815 0.0809 0.0985* mAP 0.747 0.873 0.707 0.915 0.785 0.736 0.760 0.777 0.827* 运行时间(s) 0.014 0.196 0.402 131.716 3.095 0.151 2.346 0.719 2.785* Apps RMSE — 3.164 2.146 3.119 2.699 1.523 1.543 1.507 1.486* HR 0.0799 0.0795 0.0852 0.0701 0.0887 0.0759 0.0746 0.0760 0.0818* mAP 0.736 0.714 0.736 0.688 0.759 0.718 0.712 0.748 0.771* 运行时间(s) 0.014 0.170 0.344 90.489 2.573 0.103 0.646 0.388 1.476* Kindle RMSE — 4.319 2.284 4.317 2.213 1.437 1.549 1.445 1.168* HR 0.0298 0.0222 0.0278 0.0221 0.0301 0.0286 0.0295 0.0297 0.0308* mAP 0.914 0.920 0.857 0.833 0.900 0.894 0.867 0.875 0.926* 运行时间(s) 0.014 0.761 1.205 416.532 8.745 10.060 26.223 7.224 23.478* CDs RMSE — 4.218 2.182 4.217 2.694 1.482 1.534 1.432 1.241* HR 0.0119 0.0136 0.0101 0.0107 0.0108 0.0110 0.0110 0.0105 0.0147* mAP 0.847 0.825 0.826 0.817 0.844 0.845 0.852 0.838 0.921* 运行时间(s) 0.016 3.833 5.406 884.519 32.307 5.345 31.382 28.111 35.836* Movies RMSE — 3.068 1.960 3.029 2.271 1.191 1.185 1.167 1.176* HR 0.0134 0.0153 0.0144 0.0183 0.0166 0.0138 0.0154 0.0171 0.0173* mAP 0.668 0.769 0.702 0.838 0.682 0.672 0.766 0.800 0.770* 运行时间(s) 0.014 2.186 3.261 506.125 18.341 0.465 9.468 1.815 10.978* Yelp RMSE — 3.132 1.709 3.194 2.195 0.998 1.025 0.989 0.967* HR 0.0185 0.0228 0.0196 0.0259 0.0210 0.0208 0.0232 0.0233 0.0268* mAP 0.671 0.775 0.735 0.871 0.783 0.735 0.812 0.886 0.912* 运行时间(s) 0.017 65.504 27.729 4824.915 159.446 23.325 26.669 11.326 20.551
下载: 导出CSV
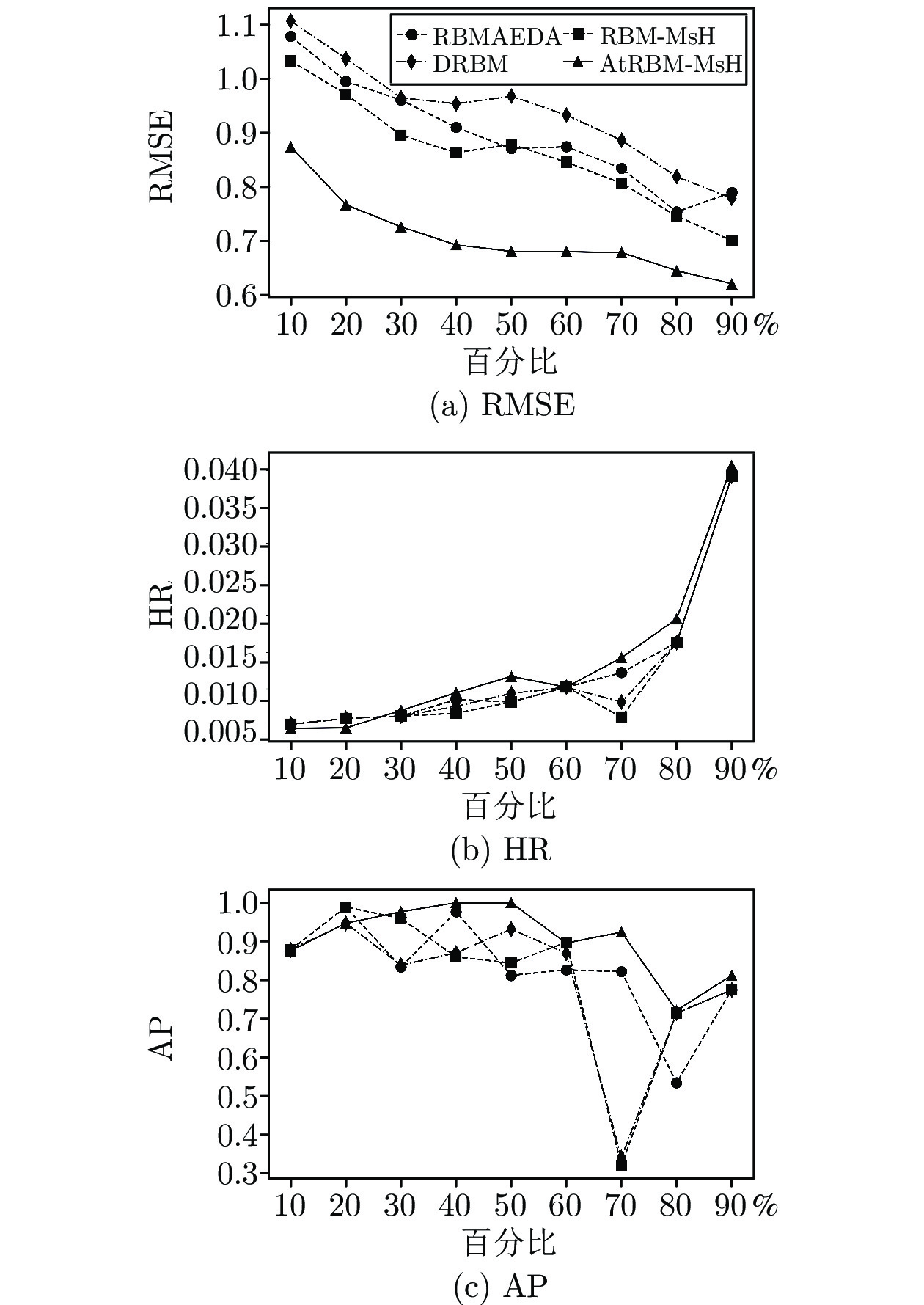
表 4 测试用户个性化搜索实验结果
Table 4 Experimental results of a test user
百分比 (%) 测试用户 RMSE HR AP 10 0.874 0.00455 0.876 20 0.766 0.00459 0.947 30 0.725 0.00700 0.977 40 0.692 0.00944 1.000 50 0.680 0.01168 1.000 60 0.679 0.01020 0.895 70 0.678 0.01426 0.924 80 0.644 0.01961 0.721 90 0.620 0.04068 0.812
下载: 导出CSV
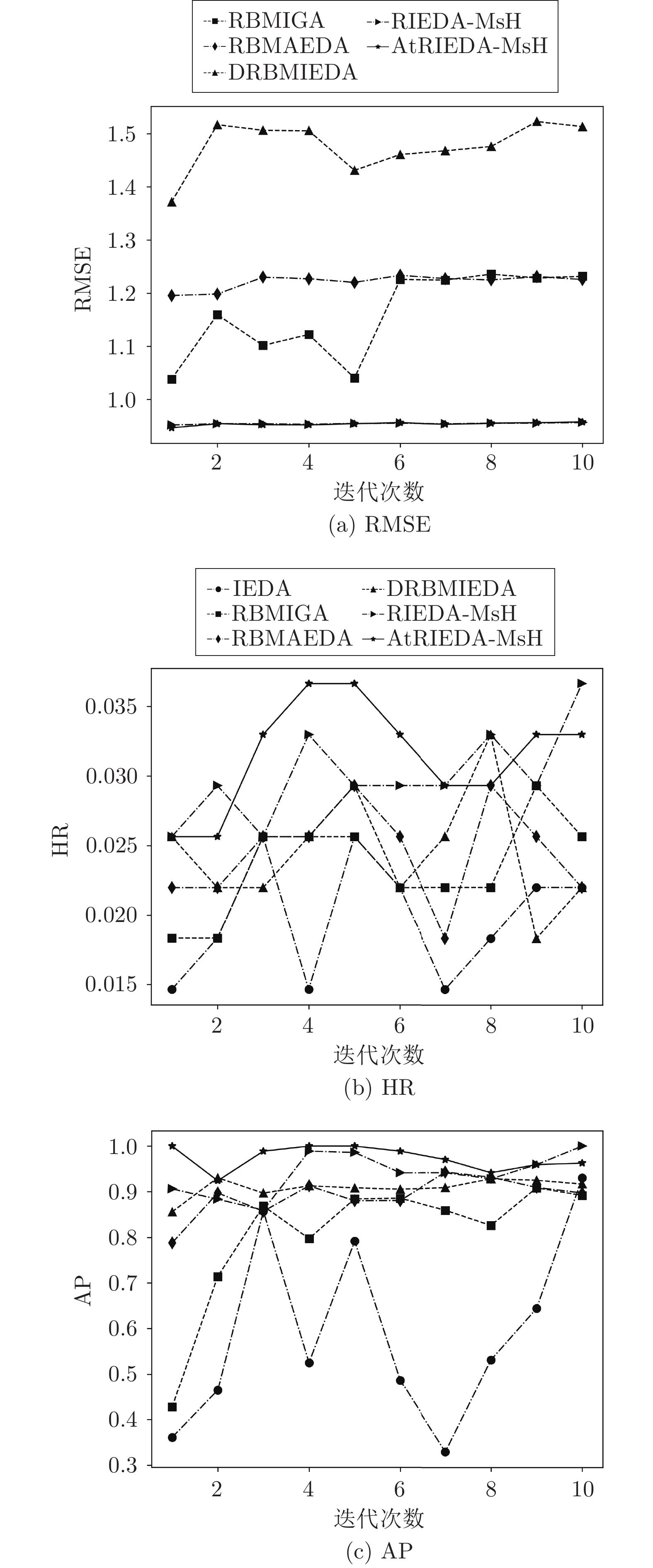
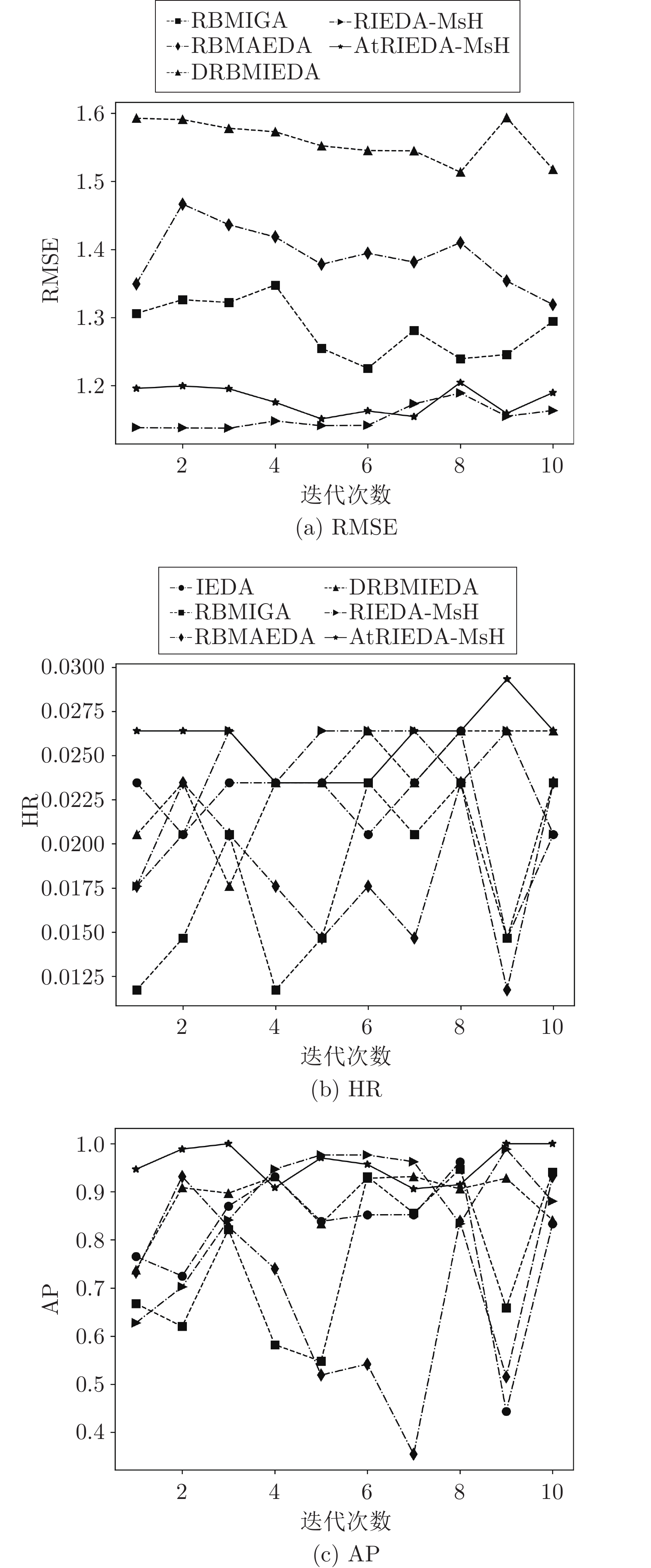
表 5 对比实验结果
Table 5 Comparison of experimental results
算法 评价指标 IEDA RBMIGA RBMAEDA DRBMIEDA RIEDA-MsH AtRIEDA-MsH Music RMSE — 1.160 1.204 1.480 0.955 0.955 HR 0.0184 0.0222 0.0236 0.0230 0.0286 0.0305* AP 0.601 0.815 0.897 0.914 0.931 0.956* Games RMSE — 1.331 1.351 1.560 1.187 1.176* HR 0.0231 0.0205 0.0201 0.0238 0.0245 0.0246 AP 0.710 0.764 0.787 0.870 0.879 0.928* Apps RMSE — 1.537 1.534 1.630 1.574 1.572* HR 0.0330 0.0325 0.0324 0.0350 0.0351 0.0354* AP 0.639 0.657 0.638 0.751 0.736 0.779* Kindle RMSE — 0.908 0.900 1.064 0.700 0.711* HR 0.00756 0.00758 0.00770 0.00760 0.00874 0.00888* AP 0.752 0.783 0.740 0.733 0.834 0.853* CDs RMSE — 1.406 1.405 1.589 1.388 1.386 HR 0.00396 0.00426 0.00452 0.00480 0.00480 0.00486* AP 0.818 0.849 0.890 0.931 0.929 0.923* Movies RMSE — 1.275 1.276 1.210 1.188 1.132* HR 0.00690 0.00738 0.00696 0.00742 0.00840 0.00851* AP 0.485 0.539 0.499 0.526 0.630 0.642* Yelp RMSE — 0.752 0.749 0.896 0.723 0.746* HR 0.00469 0.00469 0.00590 0.00646 0.00698 0.00970* AP 0.516 0.582 0.637 0.702 0.754 0.924*
下载: 导出CSV
-
[1] 李金忠, 刘关俊, 闫春钢, 蒋昌俊. 排序学习研究进展与展望. 自动化学报, 2018, 44(8): 1345-1369Li Jin-Zhong, Liu Guan-Jun, Yan Chun-Gang, Jiang Chang-Jun. Research advances and prospects of learning to rank. Acta Automatica Sinica, 2018, 44(8): 1345-1369 [2] Batmaz Z, Yurekli A, Bilge A, Kaleli C. A review on deep learning for recommender systems: Challenges and remedies. Artificial Intelligence Review, 2019, 52(1): 1-37 doi: 10.1007/s10462-018-9654-y [3] Wang Z K, Liu H Z, Du Y P, Wu Z H, Zhang X. Unified embedding model over heterogeneous information network for personalized recommendation. In: Proceedings of the 28th International Joint Conference on Artificial Intelligence. Macao, China: AAAI Press, 2019. 3813−3819 [4] 饶子昀, 张毅, 刘俊涛, 曹万华. 应用知识图谱的推荐方法与系统[J]. 自动化学报, 2021, 47(9): 2061-2077Rao Zi-Yun, Zhang Yi, Liu Jun-Tao, Cao Wan-Hua. Recommendation methods and systems using knowledge graph. Acta Automatica Sinica, 2021, 47(9): 2061-2077 [5] Rendle S, Freudenthaler C, Gantner Z, Schmidt-Thieme L. BPR: Bayesian personalized ranking from implicit feedback. In: Proceedings of the 25th Conference on Uncertainty in Artificial Intelligence. Montreal, Canada: AUAI Press, 2009. 452−461 [6] He X N, Liao L Z, Zhang H W, Nie L Q, Hu X, Chua T S. Neural collaborative filtering. In: Proceedings of the 26th International Conference on World Wide Web. Perth, Australia: ACM, 2017. 173−182 [7] Truong Q T, Salah A, Lauw H W. Bilateral variational autoencoder for collaborative filtering. In: Proceedings of the 14th ACM International Conference on Web Search and Data Mining. New York, USA: Association for Computing Machinery, 2021. 292–300 [8] Bao L, Sun X Y, Chen Y, Gong D W, Zhang Y W. Restricted Boltzmann machine-driven interactive estimation of distribution algorithm for personalized search. Knowledge-Based Systems, 2020, 43: Article No. 106030 [9] Kim D, Park C, Oh J, Lee S, Yu H. Convolutional matrix factorization for document context-aware recommendation. In: Proceedings of the 10th ACM Conference on Recommender Systems. Boston, USA: ACM, 2016. 233−240 [10] Jin J R, Qin J R, Fang Y C, Du K, Zhang W N, Yu Y, et al. An efficient neighborhood-based interaction model for recommendation on heterogeneous graph. In: Proceedings of the 26th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining. Virtual Event, USA: Association for Computing Machinery, 2020. 75−84 [11] Mnih V, Heess N, Graves A, Kavukcuoglu K. Recurrent models of visual attention. In: Proceedings of the 27th International Conference on Neural Information Processing Systems. Montreal, Canada: ACM, 2014. 2204−2212 [12] Zhou C, Bai J Z, Song J S, Liu X F, Zhao Z C, Chen X S, et al. ATRank: An attention-based user behavior modeling framework for recommendation. In: Proceedings of the 32nd AAAI Conference on Artificial Intelligence and 30th Innovative Applications of Artificial Intelligence Conference and 8th AAAI Symposium on Educational Advances in Artificial Intelligence. New Orleans, USA: AAAI, 2018. Article No. 559 [13] 汤文兵, 任正云, 韩芳. 基于注意力机制的协同卷积动态推荐网络. 自动化学报, 2021, 47(10): 2438-2448 doi: 10.16383/j.aas.c190820Tang Wen-Bing, Ren Zheng-Yun, Han Fang. Attention-based collaborative convolutional dynamic network for recommendation. Acta Automatica Sinica, 2021, 47(10): 2438-2448 doi: 10.16383/j.aas.c190820 [14] Li J C, Wang Y J, McAuley J. Time interval aware self-attention for sequential recommendation. In: Proceedings of the 13th International Conference on Web Search and Data Mining. Houston, USA: ACM, 2020. 322−330 [15] Sun X Y, Gong D W, Jin Y C, Chen S S. A new surrogate-assisted interactive genetic algorithm with weighted semisupervised learning. IEEE Transactions on Cybernetics, 2013, 43(2): 685-698 doi: 10.1109/TSMCB.2012.2214382 [16] Zhou G R, Mou N, Fan Y, Pi Q, Bian W J, Zhou C, et al. Deep interest evolution network for click-through rate prediction. In: Proceedings of the 33rd AAAI Conference on Artificial Intelligence and 31st Innovative Applications of Artificial Intelligence Conference and 9th AAAI Symposium on Educational Advances in Artificial Intelligence. Honolulu, USA: AAAI, 2019. Article No. 729 [17] Chen Y, Jin Y C, Sun X Y. Language model based interactive estimation of distribution algorithm. Knowledge-Based Systems, 2020, 200: Article No. 105980 doi: 10.1016/j.knosys.2020.105980 [18] Salameh M, Singh S, Li S W, Krishnamurthy M. Surrogate vibration modeling approach for design optimization of electric machines. IEEE Transactions on Transportation Electrification, 2020, 6(3): 1126-1133 doi: 10.1109/TTE.2020.3017232 [19] Gao Y, Yang T, Bozhko S, Wheeler P, Dragičević T. Filter design and optimization of electromechanical actuation systems using search and surrogate algorithms for more-electric aircraft applications. IEEE Transactions on Transportation Electrification, 2020, 6(4): 1434-1447 doi: 10.1109/TTE.2020.3019729 [20] Bao L, Sun X Y, Chen Y, Man G Y, Shao H. Restricted Boltzmann machine-assisted estimation of distribution algorithm for complex problems. Complexity, 2018, 2018: 2609014 [21] Zhao F, Zeng Z, Liu H Q, Lan R, Fan J L. Semisupervised approach to surrogate-assisted multiobjective kernel intuitionistic fuzzy clustering algorithm for color image segmentation. IEEE Transactions on Fuzzy Systems, 2020, 28(6): 1023-1034 doi: 10.1109/TFUZZ.2020.2973121 [22] Min A T W, Ong Y S, Gupta A, Goh C K. Multiproblem surrogates: Transfer evolutionary multiobjective optimization of computationally expensive problems. IEEE Transactions on Evolutionary Computation, 2019, 23(1): 15-28 doi: 10.1109/TEVC.2017.2783441 [23] Wang S, Liu J, Jin Y C. Surrogate-assisted robust optimization of large-scale networks based on graph embedding. IEEE Transactions on Evolutionary Computation, 2020, 24(4): 735-749 doi: 10.1109/TEVC.2019.2950935 [24] Cai X W, Gao L, Li X Y. Efficient generalized surrogate-assisted evolutionary algorithm for high-dimensional expensive problems. IEEE Transactions on Evolutionary Computation, 2020, 24(2): 365-379 doi: 10.1109/TEVC.2019.2919762 [25] Le Q, Mikolov T. Distributed representations of sentences and documents. In: Proceedings of the 31st International Conference on Machine Learning. Beijing, China: ACM, 2014. 1188−1196 [26] Hinton G E. Training products of experts by minimizing contrastive divergence. Neural Computation, 2002, 14(8): 1771-1800 doi: 10.1162/089976602760128018 [27] Feng S, Chen C L P. A fuzzy restricted Boltzmann machine: Novel learning algorithms based on the crisp possibilistic mean value of fuzzy numbers. IEEE Transactions on Fuzzy Systems, 2018, 26(1): 117-130 doi: 10.1109/TFUZZ.2016.2639064 期刊类型引用(7)
1. 曲星儒,江雨泽,龙飞飞,张汝波,高颖. 基于阶段诱导学习的多无人艇协同目标围捕策略. 中国舰船研究. 2025(01): 162-171 .  百度学术
百度学术2. 温广辉,余星火,黄廷文,周艳. 模型参数不确定下多无人艇系统固定时间二分编队跟踪控制. 自动化学报. 2025(03): 669-677 . 本站查看3. 曹承钰,李繁飙,廖宇新,殷泽阳,桂卫华. 高超声速变外形飞行器建模与固定时间预设性能控制. 自动化学报. 2024(03): 486-504 . 本站查看4. 曲星儒,江雨泽,李初,龙飞飞,张汝波. 基于改进TD3的欠驱动无人水面艇路径跟踪控制. 上海海事大学学报. 2024(03): 1-9 . 百度学术5. 王宁,吴伟,王元元,孙赫男,冯远. 多特征融合的无人艇视觉小目标鲁棒跟踪. 中国舰船研究. 2024(05): 65-78 . 百度学术6. 艾雄雄,张博,邓斌,王杰. 基于扰动估计补偿的PMLSM固定时间积分滑模控制. 电机与控制应用. 2023(09): 28-34 . 百度学术7. 陈宏宇,谭飞,董早鹏. 基于虚拟艇引导的无人艇轨迹跟踪模型预测控制. 大连海事大学学报. 2023(04): 46-56 . 百度学术其他类型引用(2)
-














































































































































































































































































 下载:
下载:





































计量
- 文章访问数: 1572
- HTML全文浏览量: 341
- PDF下载量: 219
- 被引次数: 9
