

Generalization Generation of Hazardous Lane-changing Scenarios for Automated Vehicle Testing
-
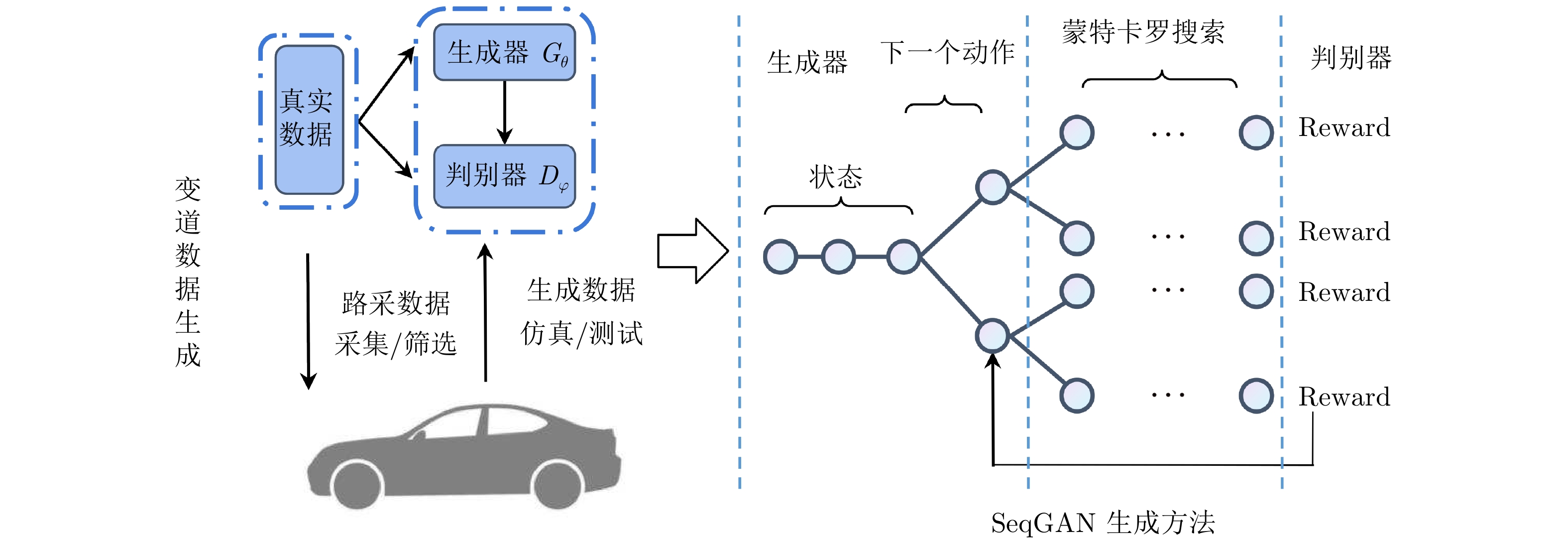
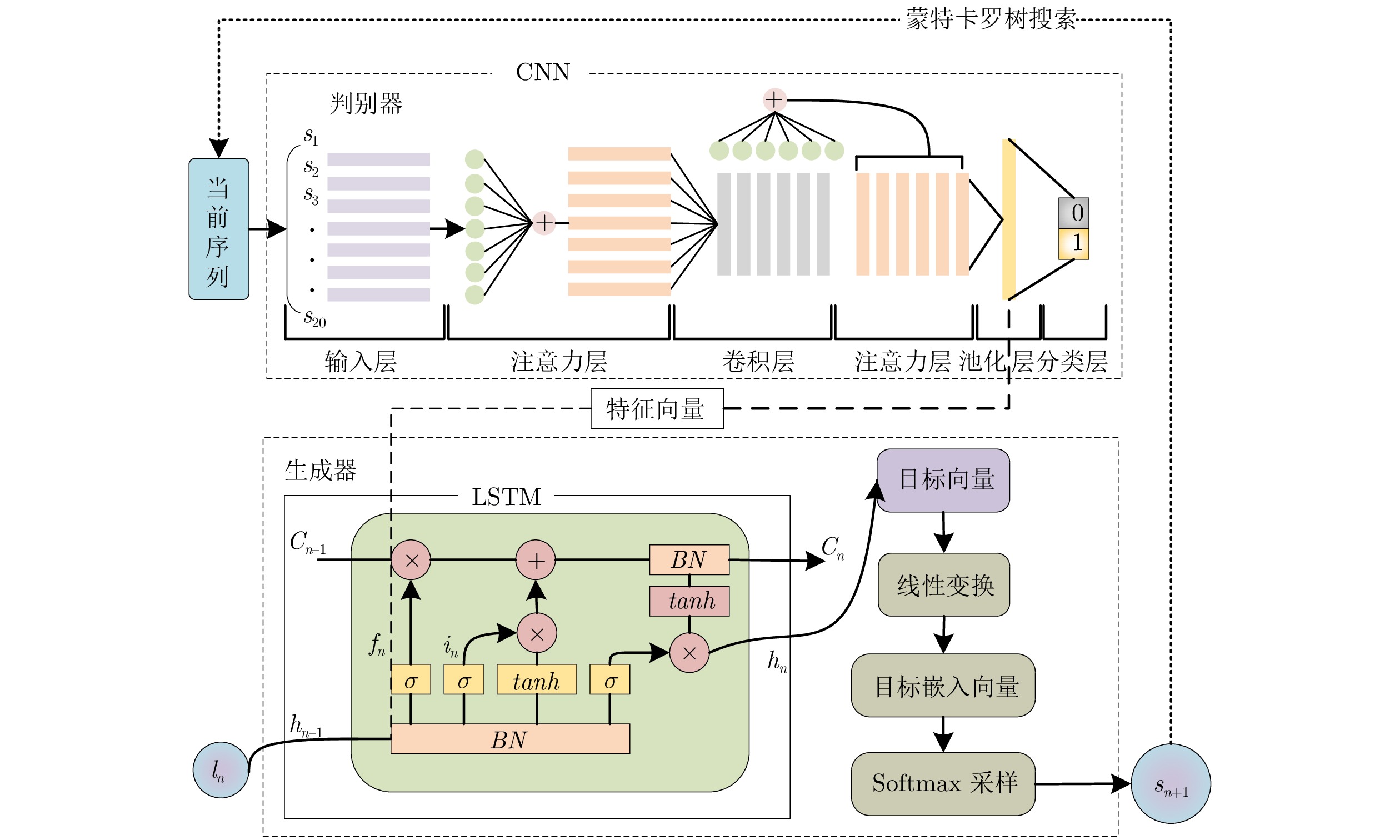
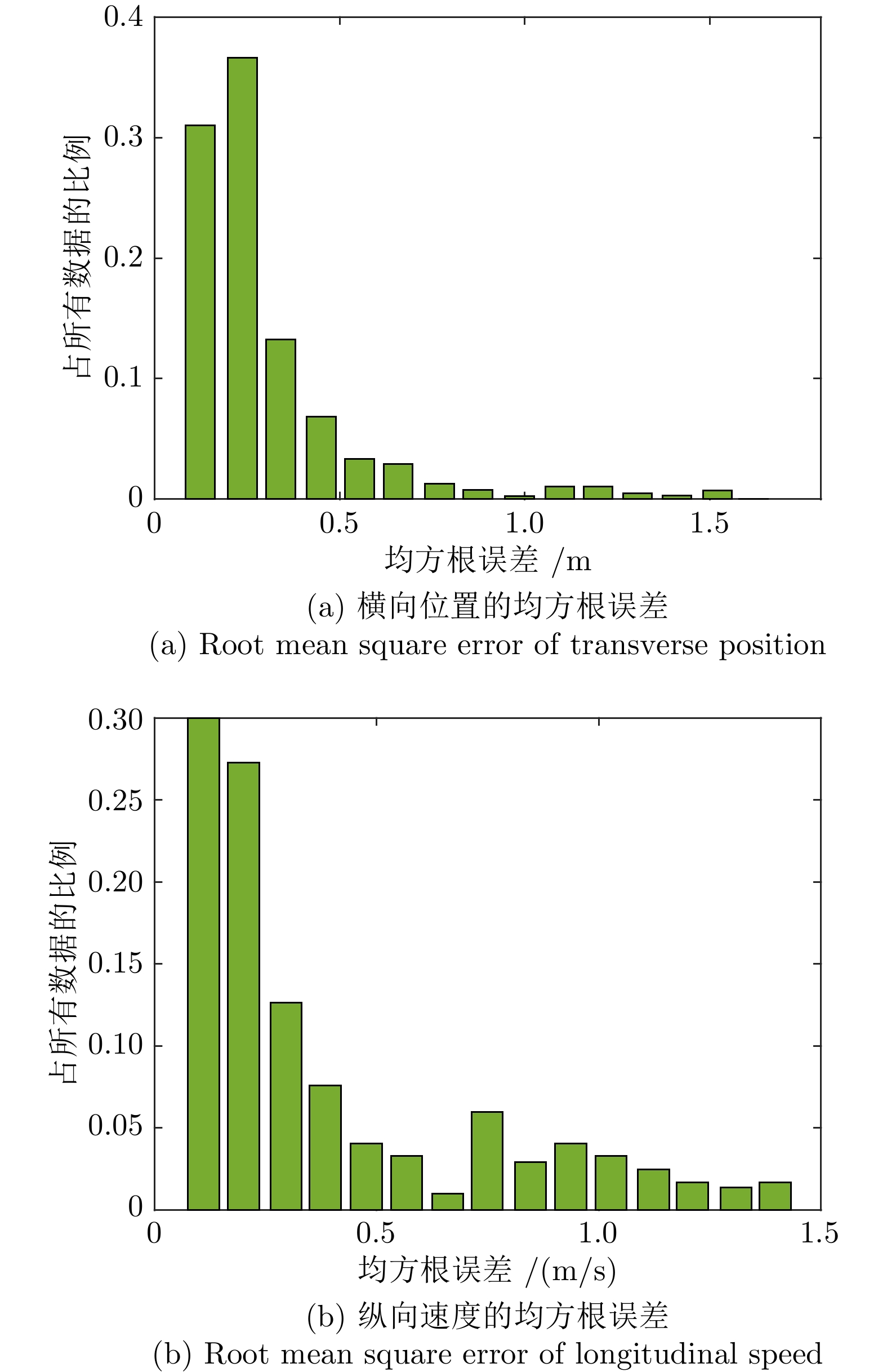
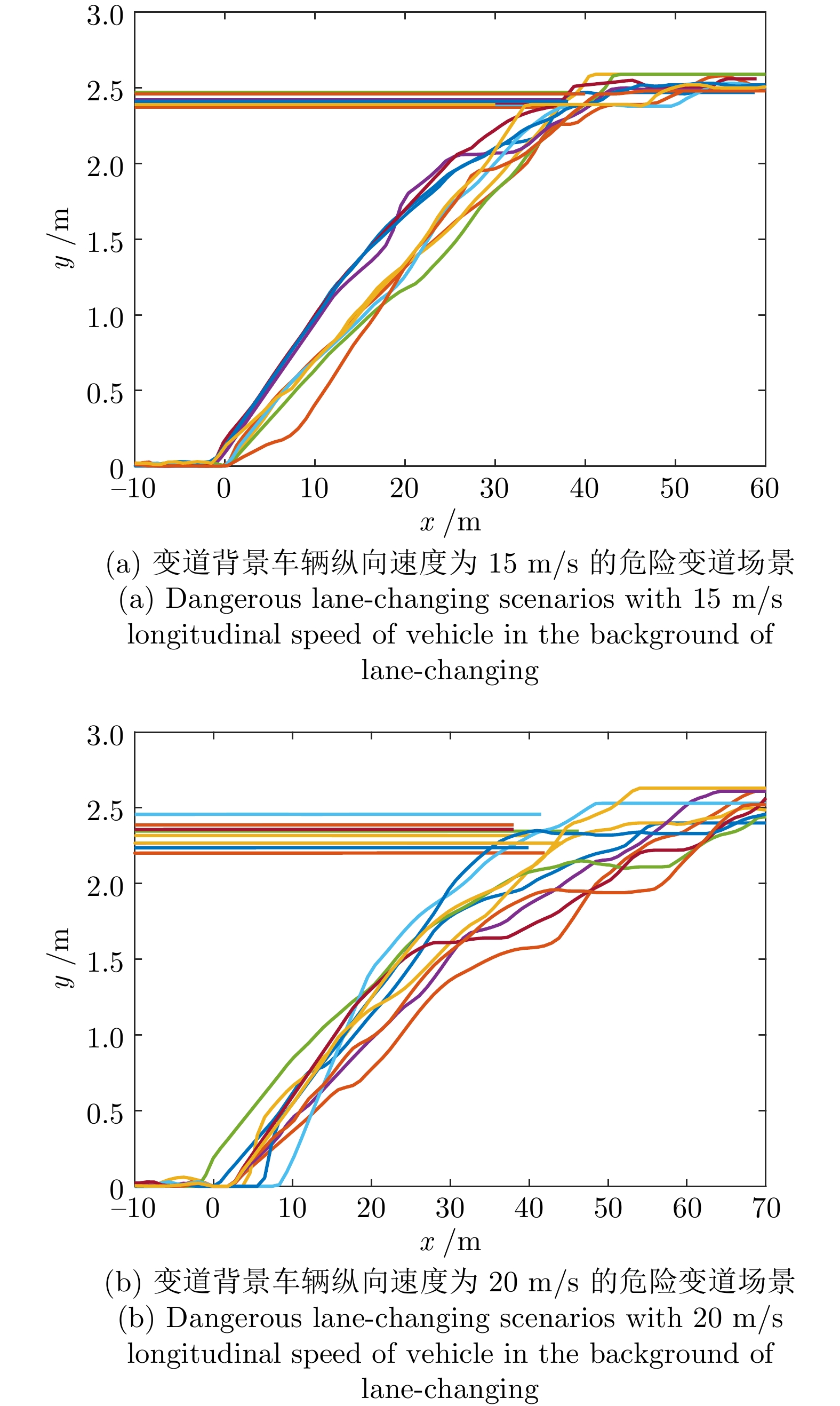
摘要: 针对自动驾驶虚拟测试中危险变道场景构建问题, 提出一种数据−模型驱动的自动驾驶测试危险变道场景泛化生成方法. 基于 NGSIM US101 数据集中的紧急变道数据, 提出一种紧急变道轨迹对抗生成方法(BN-AM-SeqGAN), 构建基于安全距离的两车变道状态约束模型, 设计危险变道测试场景泛化生成方法, 生成危险变道测试场景库. 实验结果显示: 生成的5万条紧急变道轨迹变道完成时间分布的均方根误差为 0.63, 生成的 5 万个危险变道场景中, 99.54% 的场景被测自动驾驶车辆与变道背景车辆的碰撞时间小于 1 s, 表明该方法能够有效生成自动驾驶测试危险变道场景.Abstract: To address the issue of hazardous lane-changing scenario construction in automated vehicle virtual testing, proposed a data-model-driven method for generally producing hazardous lane-changing scenarios. Based on emergency lane-changing data in NGSIM US101 Dataset, an emergency lane-changing trajectories producing method called batch normalization-attention mechanism-sequence generative adversarial nets (BN-AM-SeqGAN) with policy gradient is proposed based on sequence generative adversarial network. The safety distance based constraint model for two vehicle lane-changing statesis built, and the general approach of producing hazardous lane-changing test scenarios is designed. The library of hazardous lane-changing test scenarios is finally achieved. According to the experimental findings, the root mean square error of the lane-changing completion time distribution for produced 50 000 emergency trajectories is 0.63. Among the 50 000 generated hazardous lane-changing scenarios, the collision time between the tested automated vehicle and the lane-changing background vehicle is less than 1 s in 99.54% of the scenarios. Results show that the proposed method can effectively produce hazardous lane-changing scenarios for automated vehicle testing.
-
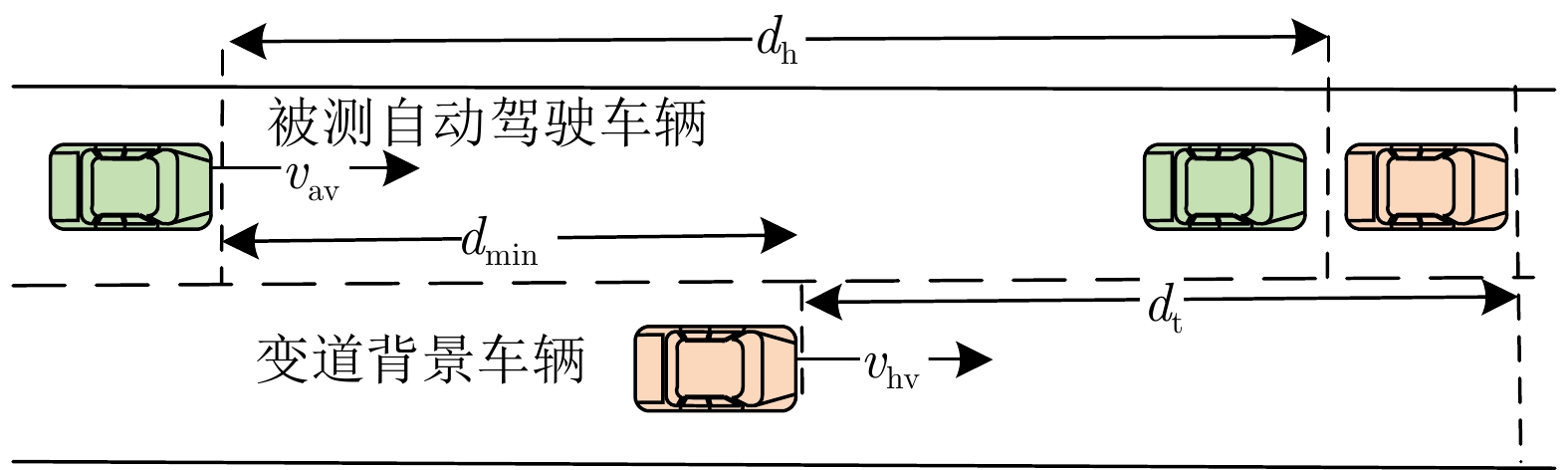
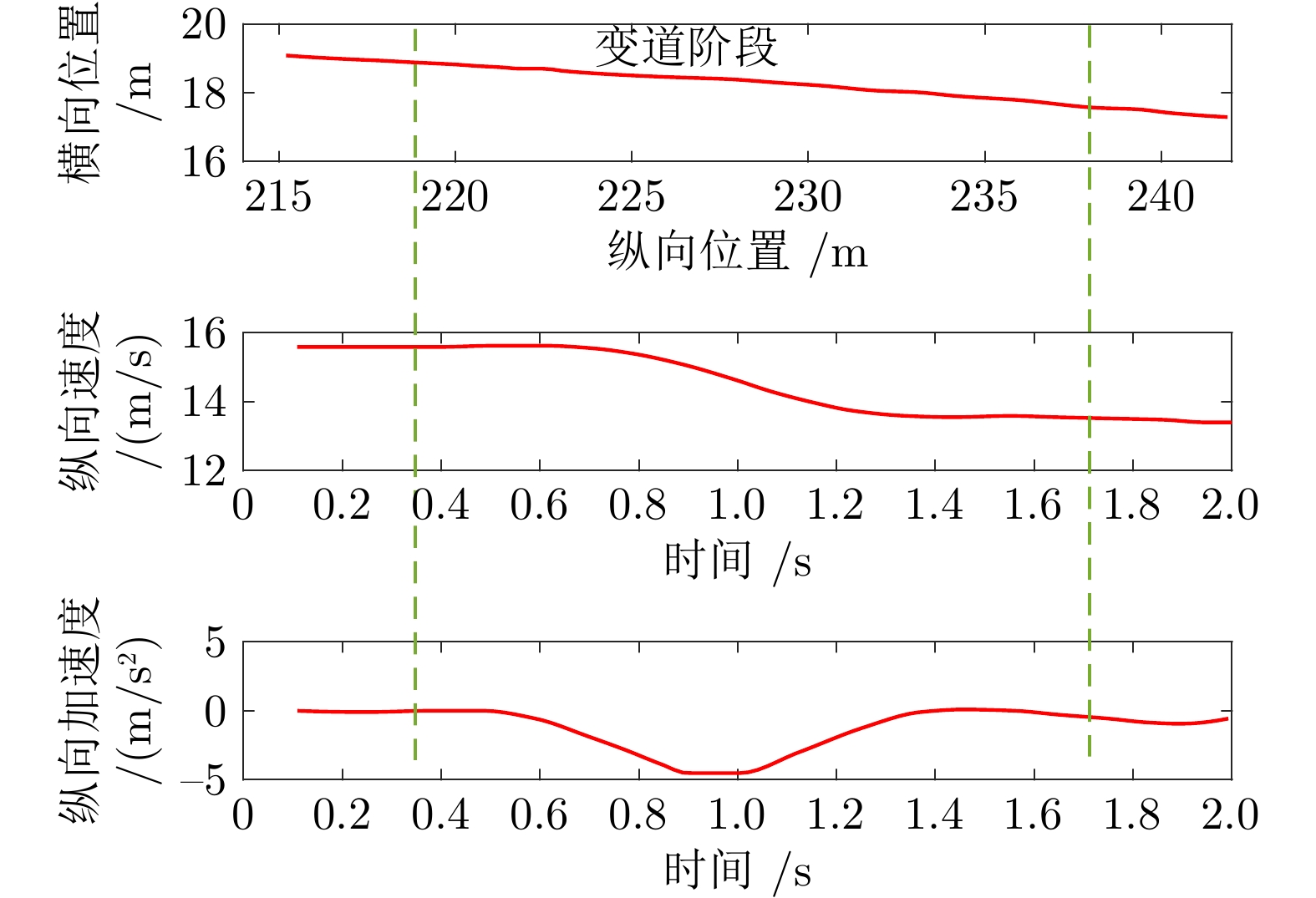
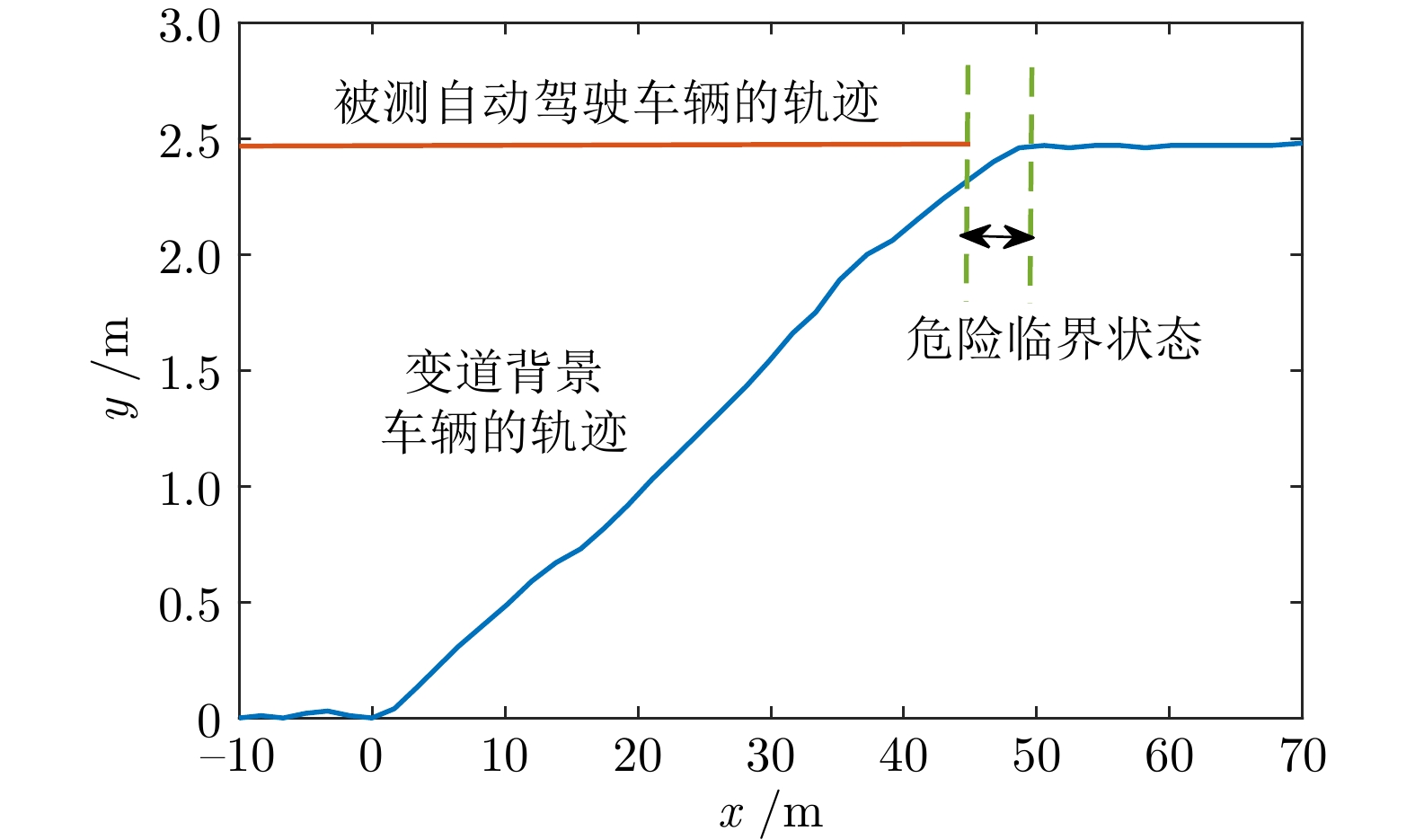
图 7 被测自动驾驶车辆和变道背景车行驶状态
Fig. 7 Driving status of the tested automated vehicle and lane-changing background vehicle

图 8 变道车真实轨迹缓冲区实例
Fig. 8 Example of the real trajectory buffer of the lane-changing vehicle
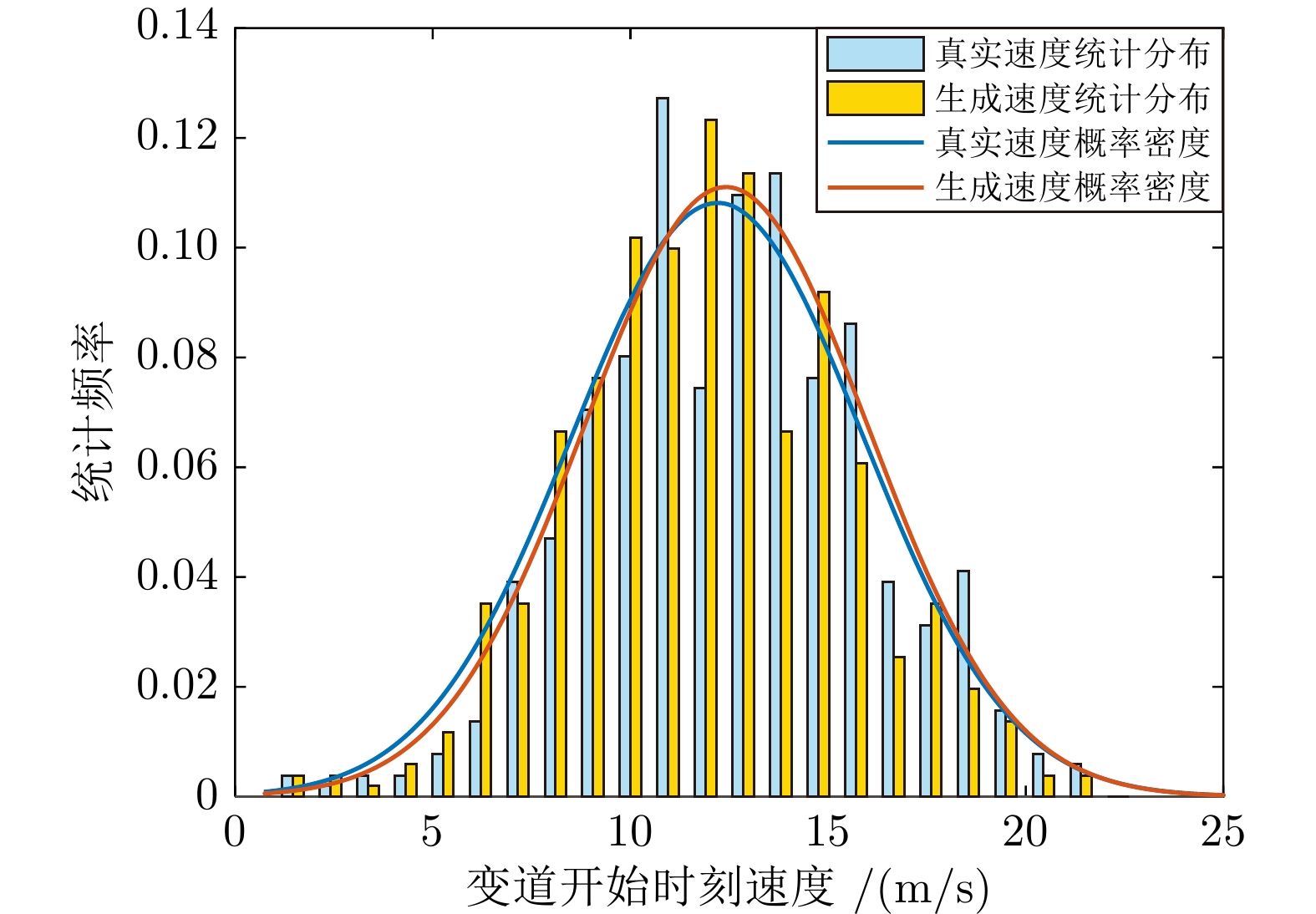
图 9 变道开始时原始速度和生成速度的状态分布
Fig. 9 State distribution of original speed and generated speed at the beginning of lane-changing
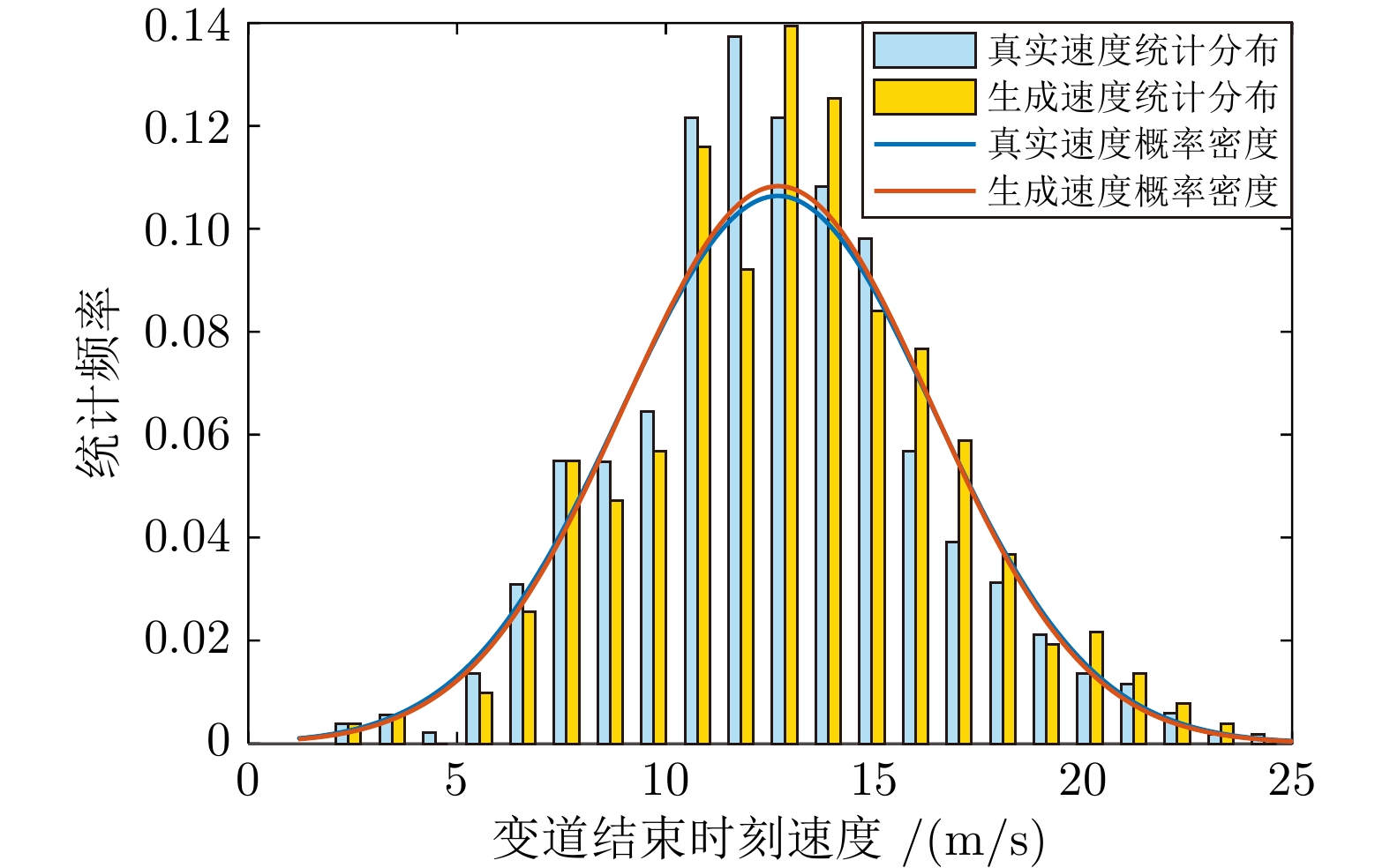
图 10 变道结束时原始速度和生成速度的状态分布
Fig. 10 State distribution of original speed and generated speed at the end of lane-changing
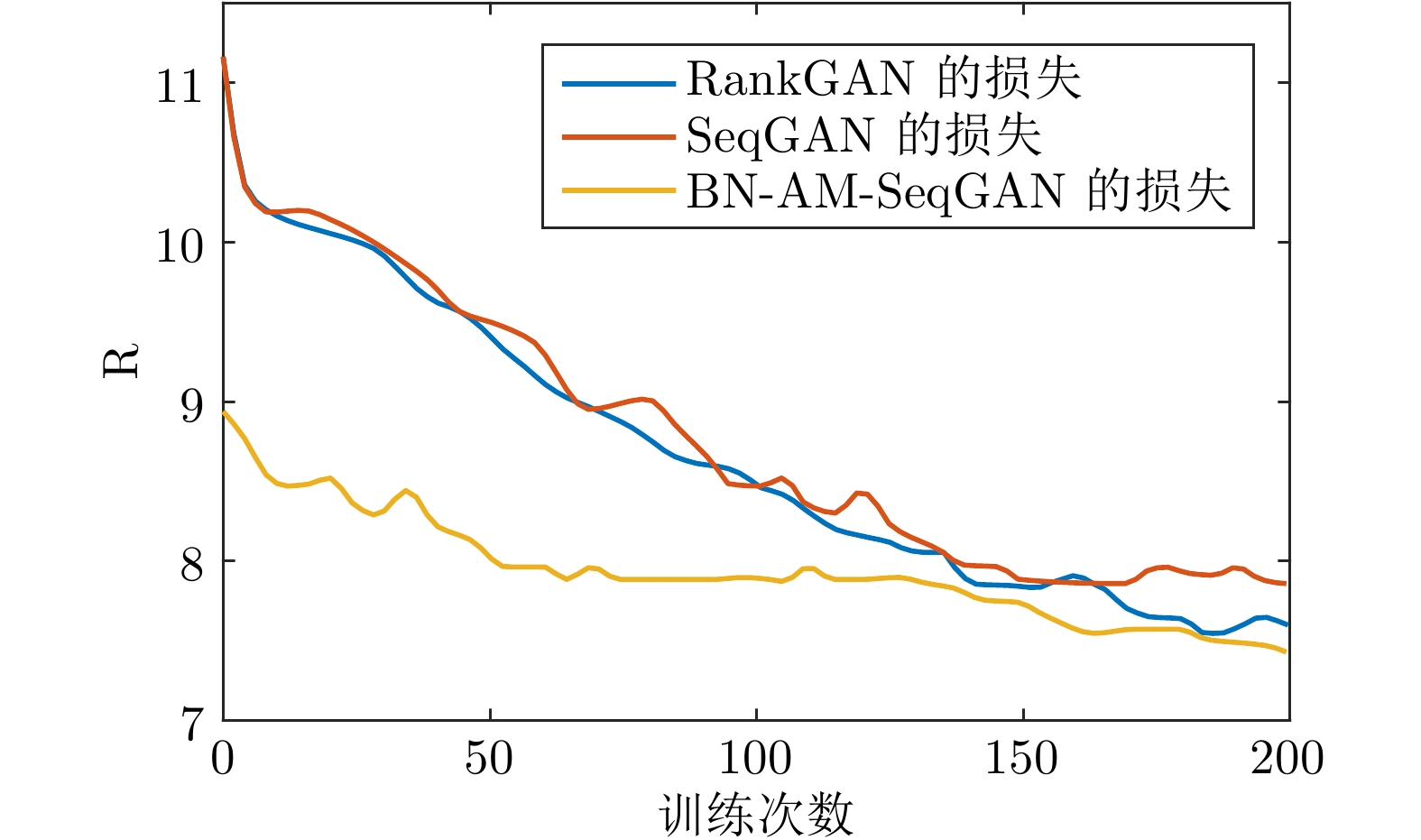
图 12 三种生成对抗网络的损失值对比
Fig. 12 The comparison of loss values of three generative adversarial networks
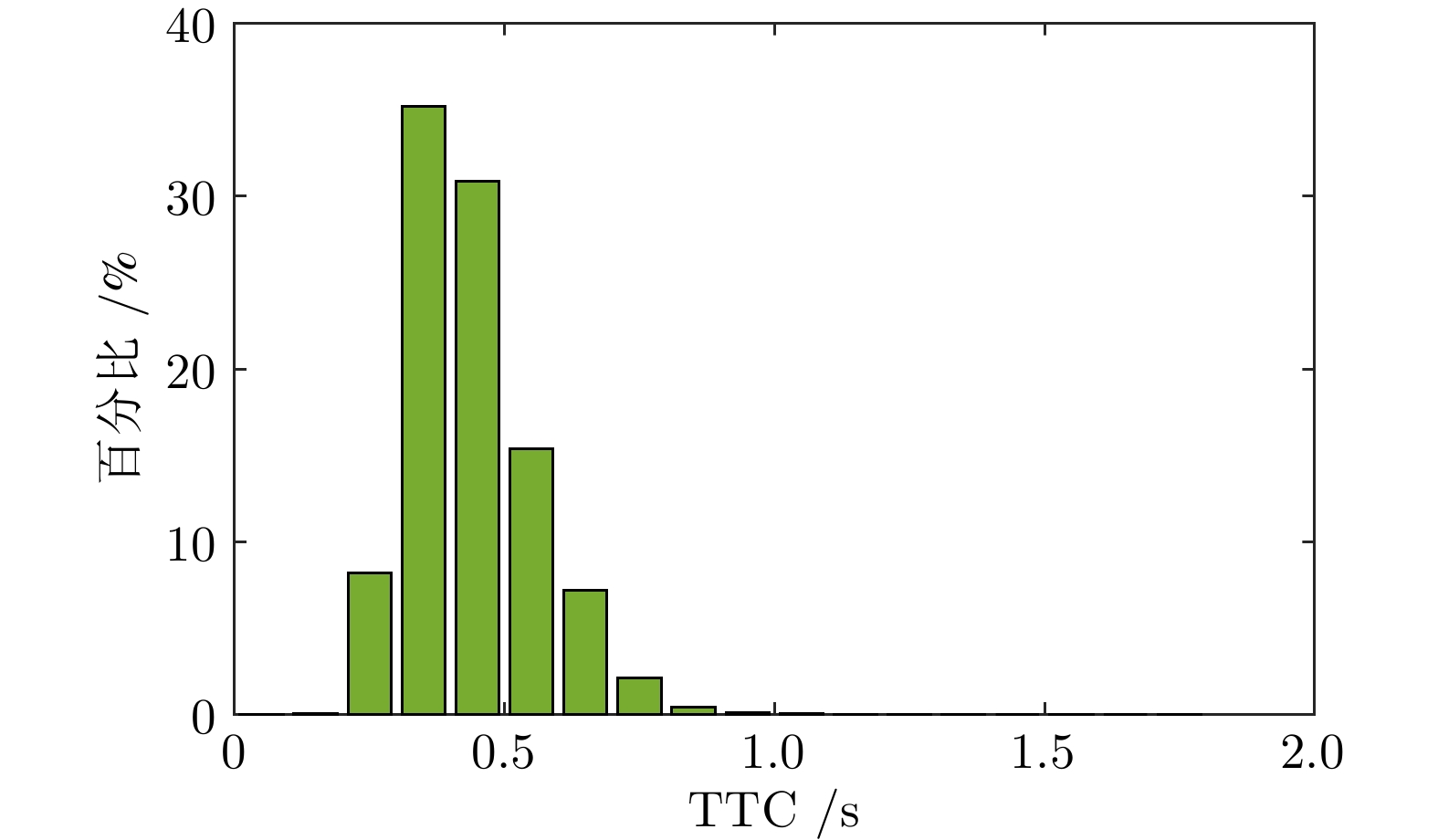
图 15 危险变道测试场景库TTC百分比
Fig. 15 TTC percentage of dangerous lane-changing scenarios library
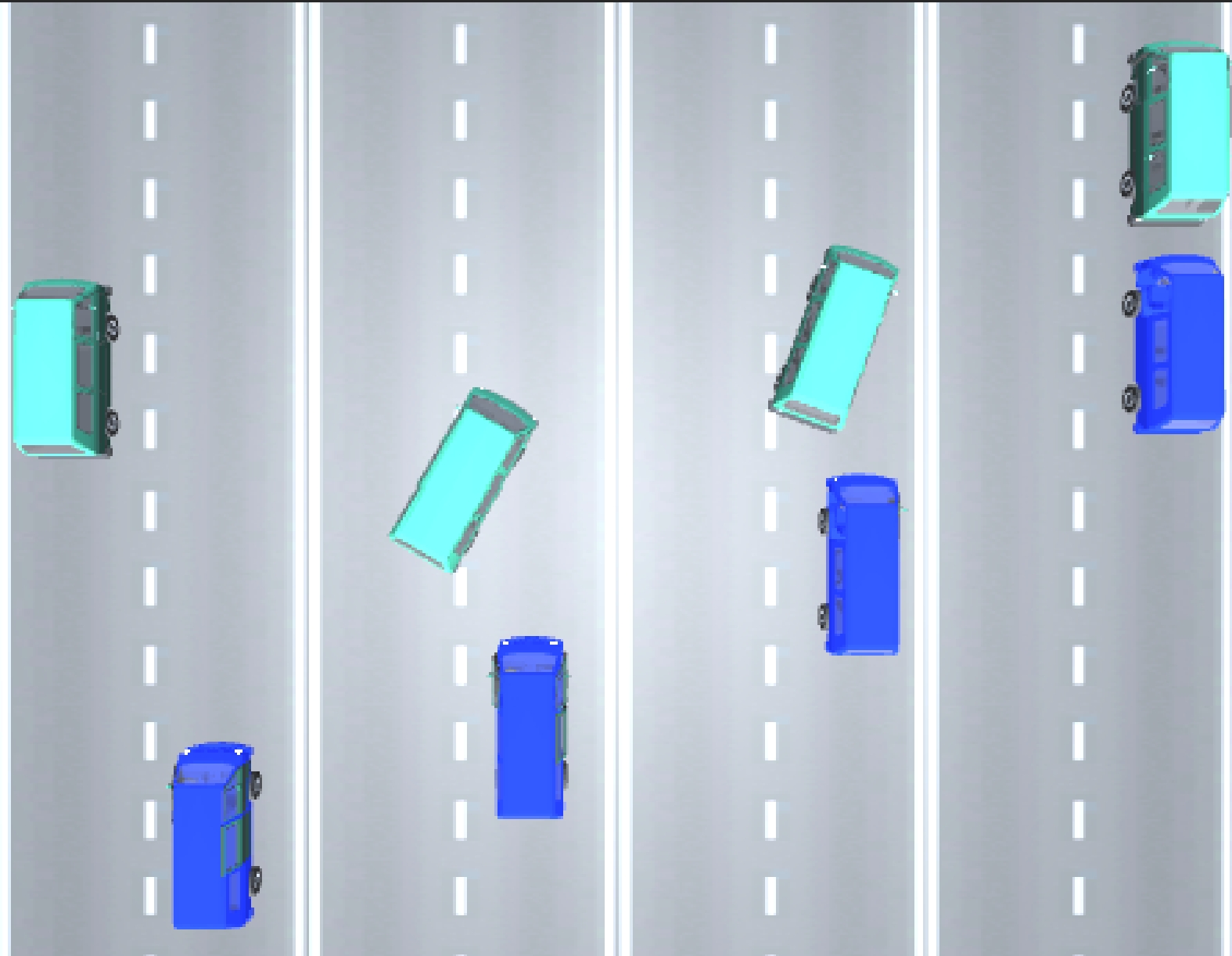
图 16 仿真平台搭建的虚拟变道测试场景
Fig. 16 Virtual lane-changing test scenario built by simulation platform
表 1 真实数据的数据特征
Table 1 Data characteristics of real data
变量 平均值 方差 标准差 最小值 最大值 运动状态 速度 (m/s) 13.60 3.69 1.92 13.60 22.80 纵向加速度(m/s2) 0.21 0.53 0.73 −5.70 5.90 横向加速度(m/s2) 0.06 0.26 0.51 −5.01 5.93 位置分布 变道后纵向位置(m) 352.42 22 300.38 3149.33 45.56 663.51 变道后横向位置(m) 11.32 23.03 4.80 2.49 19.04  下载: 导出CSV
下载: 导出CSV
表 2 实验中的参数设置
Table 2 Parameter settings in the experiment
参数含义 值 制动变减速时间段${t_2}$ 0.2 s 变道背景车速度${v_1}$ 生成变道轨迹的平均速度 真实轨迹序列长度$N$ 20 真实轨迹总数 511 变道经过的纵向距离$d_{\rm{t}}$ 生成变道轨迹的纵向距离 车长$l$ 4 m 变道背景车完成变道的时间$t$ 等于被测自动驾驶汽车制动时间 车辆制动最大加速度$a_{\max}$ ${6 \;{\rm{m/s^2} } }$ 嵌入维数 64 隐藏层数 160 预训练次数 120 生成器的初始学习率 0.04 计算奖赏的参数${\gamma}$ 0.95 生成器预训练次数 150 判别器预训练次数 50
下载: 导出CSV
表 3 变道完成时间分布表
Table 3 Distribution of lane-changing completion time
变道完成
时间 (s)生成数量 BN-AM-SeqGAN
生成数据 (%)SeqGAN
生成数据 (%)真实数据 (%) (1.8, 2.0] 511 53.15 53.65 53.1 50 000 54.06 53.08 (1.6, 1.8] 511 32.79 33.79 31.5 50 000 30.49 33.46 (1.4, 1.6] 511 10.82 9.82 12.3 50 000 12.17 11.25 (1.2, 1.4] 511 2.86 2.36 2.7 50 000 2.82 2.10 [1.0, 1.2] 511 0.49 0.99 0.4 50 000 0.46 0.11
下载: 导出CSV
表 4 网络输出效果对比
Table 4 Comparison of network output effect
网络 符合数量 有效性 SeqGAN 44 647 71.23% RankGAN 46 001 73.39% BN-AM-SeqGAN 50 000 79.54%
下载: 导出CSV
-
[1] 李力, 王飞跃. 地面交通控制的百年回顾和未来展望. 自动化学报, 2018, 44(4): 577--583 doi: 10.16383/j.aas.2018.c170616LI Li, WANG Fei-Yue. Ground traffic control in the past century and its future perspective. ACTA AUTOMATICA SINICA, 2018, 44(4): 577--583 doi: 10.16383/j.aas.2018.c170616 [2] Fryman J, Matthias B. Safety of industrial robots: From conventional to collaborative applications. In: Proceedings of Conference of Robotik, 7th German Conference on Robotics. Munich, Germany: VDE, 2012. [3] Kalra N, Paddock S M. Driving to safety: how many miles of driving would it take to demonstrate autonomous vehicle reliability. Transportation Research Part A Policy & Practice, 2016, 94(12): 182--193 [4] 赵祥模, 承靖钧, 徐志刚, 王文威, 王润民, 王冠群, 等. 基于整车在环仿真的自动驾驶汽车室内快速测试平台. 中国公路学报, 2019, 32(6): 124--136 doi: 10.19721/j.cnki.1001-7372.2019.06.013ZHAO Xiang-Mo, CHENG Jing-Jun, XU Zhi-Gang, WANG Wen-Wei, WANG Run-Min, WANG Guan-Qun, et al. An indoor rapid-testing platform for autonomous vehicle based on vehicle-in-the-loop simulation. China Journal of Highway and Transport, 2019, 32(6): 124--136 doi: 10.19721/j.cnki.1001-7372.2019.06.013 [5] Riedmaier S, Ponn T, Ludwig D, Schick B, and Diermeyer F. Survey on scenario-based safety assessment of automated vehicles, IEEE access, 2020, 8: 87456–-87477 doi: 10.1109/ACCESS.2020.2993730 [6] Sun J, Zhang H, Zhou H, Yu R, Tian Y. Scenario-Based test automation for highly automated vehicles: a review and paving the way for systematic safety assurance, IEEE Transactions on Transportation Systems, 2022, 9(23): 14088-–14103 [7] 张浩杰, 苏治宝, 杨甜甜. 基于USARSim和ROS的无人平台编队仿真系统. 自动化学报, 2021, 47(6): 1390−1400Intelligent Zhang H, Su Z, Yang T. Design of team formation simulation system for unmanned ground vehicles based on USARSim and ROS. Acta Automatica Sinica, 2021, 47(6): 1390--1400 [8] Wyatt S, Haering J, Feilhauer M. Current approaches in HiL-Based ADAS testing. SAE International Journal of Commercial Vehicles, 2016, 9(2): 63--69 doi: 10.4271/2016-01-8013 [9] ISO/BS PAS 21448, Road Vehicles. Safety of the Intended Functionality, 2019. [10] 翟强, 程洪, 黄瑞, 詹慧琴, 赵洋, 李骏. 智能汽车中人工智能算法应用及其安全综述. 电子科技大学学报, 2020, 49(04): 490--498, 510ZHAI Qiang, CHENG Hong, HUANG Rui, ZHAN Hui-Qin, ZHAO Yang, LI Jun. Review on the application and safety of artificial intelligence algorithms in intelligent vehicles.Journal of University of Electronic Science and Technology of China, 2020, 49(04):490--498, 510 [11] 邓伟文, 李江坤, 任秉韬, 王文奇, 丁娟. 面向自动驾驶的仿真场景自动生成方法综述. 中国公路学报, 2022, 35(1): 316--333 doi: 10.3969/j.issn.1001-7372.2022.01.027DENG Wei-Wen, LI Jiang-Kun, REN Bing-Tao, WANG Wen-Qi, DING Juan. A survey on automatic simulation scenario generation methods for autonomous driving. China Journal of Highway and Transport, 2022, 35(1): 316--333 doi: 10.3969/j.issn.1001-7372.2022.01.027 [12] 陈吉清, 舒孝雄, 兰凤崇, 王俊峰. 典型危险事故特征的自动驾驶测试场景构建. 华南理工大学学报: 自然科学版, 2021, 49(5): 1--8CHEN Ji-Qing, SHU Xiao-Xiong, LAN Feng-Chong, WANG Jun-Feng. Construction of autonomous vehicles test scenarios with typical dangerous accident characteristics. Journal of South China University of Technology: Natural Science Edition, 2021, 49(5): 1--8 [13] 王润民, 朱宇, 赵祥模, 徐志刚, 周文帅, 刘童. 自动驾驶测试场景研究进展. 交通运输工程学报, 2021, 21(02): 21--37 doi: 10.19818/j.cnki.1671-1637.2021.02.003WANG Run-min, ZHU Yu, ZHAO Xiang-Mo, XU Zhi-Gang, ZHOU Wen-Shuai, LIU Tong. Research progress of automatic driving test scenario. Journal of Transportation Engineering, 2021, 21(02): 21--37 doi: 10.19818/j.cnki.1671-1637.2021.02.003 [14] 朱冰, 张培兴, 赵健. 面向多维度逻辑场景的自动驾驶安全性聚类评价方法. 汽车工程, 2020, 42(11): 1458--1463, 1505 doi: 10.19562/j.chinasae.qcgc.2020.11.002ZHU Bing, ZHANG Pei-Xing, ZHAO Jian. Autonomous driving safety cluster evaluation method for multi-dimensional logic scenarios. Automotive Engineering, 2020, 42(11): 1458--1463, 1505 doi: 10.19562/j.chinasae.qcgc.2020.11.002 [15] Menzel T, Bagschik G, Maurer M. Scenarios for develop-ment, test and validation of automated vehicles. In: Proceedings of IEEE Intelligent Vehicles Symposium (IV). Changshu, China: IEEE, 2018. 1821−1827 [16] Jesenski S, Stellet J E, Schiegg F, Zollner J M. Generation of scenes in intersections for the validation of highly automated driving functions. In: Proceedings of IEEE Intelligent Vehicles Symposium. Paris, France: IEEE, 2019. 502−509 [17] Ding W, Xu M, Zhao D. Learning to collide: An adaptive safety-critical scenarios generating method. arXiv preprint arXiv: 1707.04792, 2020. [18] Feng S, Feng Y, Yu C, Zhang Y, Liu H X. Testing scenario library generation for connected and automated vehicles, part I: methodology. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(3): 1573--1582 doi: 10.1109/TITS.2020.2972211 [19] Feng S, Feng Y, Yu C., Zhang Y, Liu H X. (2021). Testing scenario library generation for connected and automated vehicles, part Ⅱ: case studies. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(9): 5635--5647 doi: 10.1109/TITS.2020.2988309 [20] Feng S, Feng Y, Yu C, Zhang Y, Liu H X. Intelligent driving intelligence test for autonomous vehicles with naturalistic and adversarial environment. Nature Communications, 2021, 12(1):1--14 doi: 10.1038/s41467-020-20314-w [21] 周文帅, 朱宇, 赵祥模, 王润民, 徐志刚. 面向高速公路车辆切入场景的自动驾驶测试用例生成方法. 汽车技术, 2021, (1): 11--18 doi: 10.19620/j.cnki.1000-3703.20191450ZHOU Wen-Shuai, ZHU Yu, ZHAO Xiang-Mo, WANG Run-Min, XU Zhi-Gang. Vehicle cut-in test case generation methods for testing of autonomous driving on highway. Automobile Technology, 2021(1): 11--18 doi: 10.19620/j.cnki.1000-3703.20191450 [22] Sun J, Zhou H, Xi H, Zhang H, and Tian Y. Adaptive design of experiments for safety evaluation of automated vehicles. IEEE Transactions on Intelligent Transportation Systems, 2022, 9(22):14497--14508 [23] 朱宇, 赵祥模, 徐志刚, 王润民. 基于蒙特卡罗模拟的无人车高速公路变道虚拟测试场景自动生成算法. 中国公路学报, 2022, 35(3): 89--100 doi: 10.3969/j.issn.1001-7372.2022.03.009ZHU Yu, ZHAO Xiang-Mo, XU Zhi-Gang, WANG Run-Min. Automatic generation algorithm of lane-change virtual test scenario on highways for automated vehicles using monte carlo simulation. China Journal of Highway and Transport, 2022, 35(3): 89--100 doi: 10.3969/j.issn.1001-7372.2022.03.009 [24] Jia S, Hui F, Li S, Zhao X. LSTM-CNN for abnormal driving behavior recognition. IET Intelligent Transport Systems, 2019, 14(7): 306--312 [25] 吴斌, 朱西产, 沈剑平, 李霖. 自然驾驶工况的驾驶员紧急转向变道行为. 同济大学学报: 自然科学版, 2017(4):554--561WU Bin, ZHU Xi-Chan, SHEN Jian-Ping, LI Lin. Analysis of driver emergency steering lane changing behavior based on naturalistic driving data. Journal of Tongji University :Natural Science, 2017(4):554--561 [26] Yu L, Zhang W, Wang J, Yong Y. SeqGAN: Sequence generative adversarial nets with policy gradient. In: Proceedings of AAAI-17: Thirty-first AAAI Conference on Artificial Intelligence. San Francisco, California, USA: AAAI, 2017. 2852−2858 [27] 林懿伦, 戴星原, 李力, 王晓, 王飞跃. 人工智能研究的新前线: 生成式对抗网络. 自动化学报, 2018, 44(5): 775--792LIN Yi-Lun, DAI Xing-Yuan, LI Li, WANG Xiao, WANG Fei-Yue. The new frontier of AI research: generative adversarial networks. ACTA AUTOMATICA SINICA, 2018, 44(5): 775--792 [28] 王坤峰, 左旺孟, 谭营, 秦涛, 李力, 王飞跃.生成式对抗网络:从生成数据到创造智能. 自动化学报, 2018, 44(5): 769--774 doi: 10.16383/j.aas.2018.y000001WANG Kun-Feng, ZUO Wang-Meng, TAN Ying, QIN Tao, LI Li, WANG Fei-Yue. Generative adversarial networks: from generating data to creating intelligence. ACTA AUTOMATICA SINICA, 2018, 44(5): 769--774 doi: 10.16383/j.aas.2018.y000001 [29] Zhao X, Jing S, Hu F, Liu R, Khattak J A. DSRC-based rear-end collision warning system - an error- component safety distance model and field test. Transportation research part C: Emerging Technologies, 2019, 107: 92--104 doi: 10.1016/j.trc.2019.08.002 [30] 交通部公路司中国工程建设标准化协会公路工程委员会. 公路工程技术标准. 人民交通出版社, 2004.Highway Department of Ministry of Communications, Highway Engineering Committee of China Engineering Construction Standardization Association. Technical Standard of Highway Engineering. People's Communications Press, 2004. -

 下载:
下载:


计量
- 文章访问数: 1370
- HTML全文浏览量: 1493
- PDF下载量: 376
- 被引次数: 0
