2023年 第49卷 第9期
2023, 49(9): 1813-1835.
doi: 10.16383/j.aas.c220631
摘要:
强化学习(Reinforcement learning, RL)在围棋、视频游戏、导航、推荐系统等领域均取得了巨大成功. 然而, 许多强化学习算法仍然无法直接移植到真实物理环境中. 这是因为在模拟场景下智能体能以不断试错的方式与环境进行交互, 从而学习最优策略. 但考虑到安全因素, 很多现实世界的应用则要求限制智能体的随机探索行为. 因此, 安全问题成为强化学习从模拟到现实的一个重要挑战. 近年来, 许多研究致力于开发安全强化学习(Safe reinforcement learning, SRL)算法, 在确保系统性能的同时满足安全约束. 本文对现有的安全强化学习算法进行全面综述, 将其归为三类: 修改学习过程、修改学习目标、离线强化学习, 并介绍了5大基准测试平台: Safety Gym、safe-control-gym、SafeRL-Kit、D4RL、NeoRL. 最后总结了安全强化学习在自动驾驶、机器人控制、工业过程控制、电力系统优化和医疗健康领域中的应用, 并给出结论与展望.
强化学习(Reinforcement learning, RL)在围棋、视频游戏、导航、推荐系统等领域均取得了巨大成功. 然而, 许多强化学习算法仍然无法直接移植到真实物理环境中. 这是因为在模拟场景下智能体能以不断试错的方式与环境进行交互, 从而学习最优策略. 但考虑到安全因素, 很多现实世界的应用则要求限制智能体的随机探索行为. 因此, 安全问题成为强化学习从模拟到现实的一个重要挑战. 近年来, 许多研究致力于开发安全强化学习(Safe reinforcement learning, SRL)算法, 在确保系统性能的同时满足安全约束. 本文对现有的安全强化学习算法进行全面综述, 将其归为三类: 修改学习过程、修改学习目标、离线强化学习, 并介绍了5大基准测试平台: Safety Gym、safe-control-gym、SafeRL-Kit、D4RL、NeoRL. 最后总结了安全强化学习在自动驾驶、机器人控制、工业过程控制、电力系统优化和医疗健康领域中的应用, 并给出结论与展望.

2023, 49(9): 1836-1844.
doi: 10.16383/j.aas.c220420
摘要:
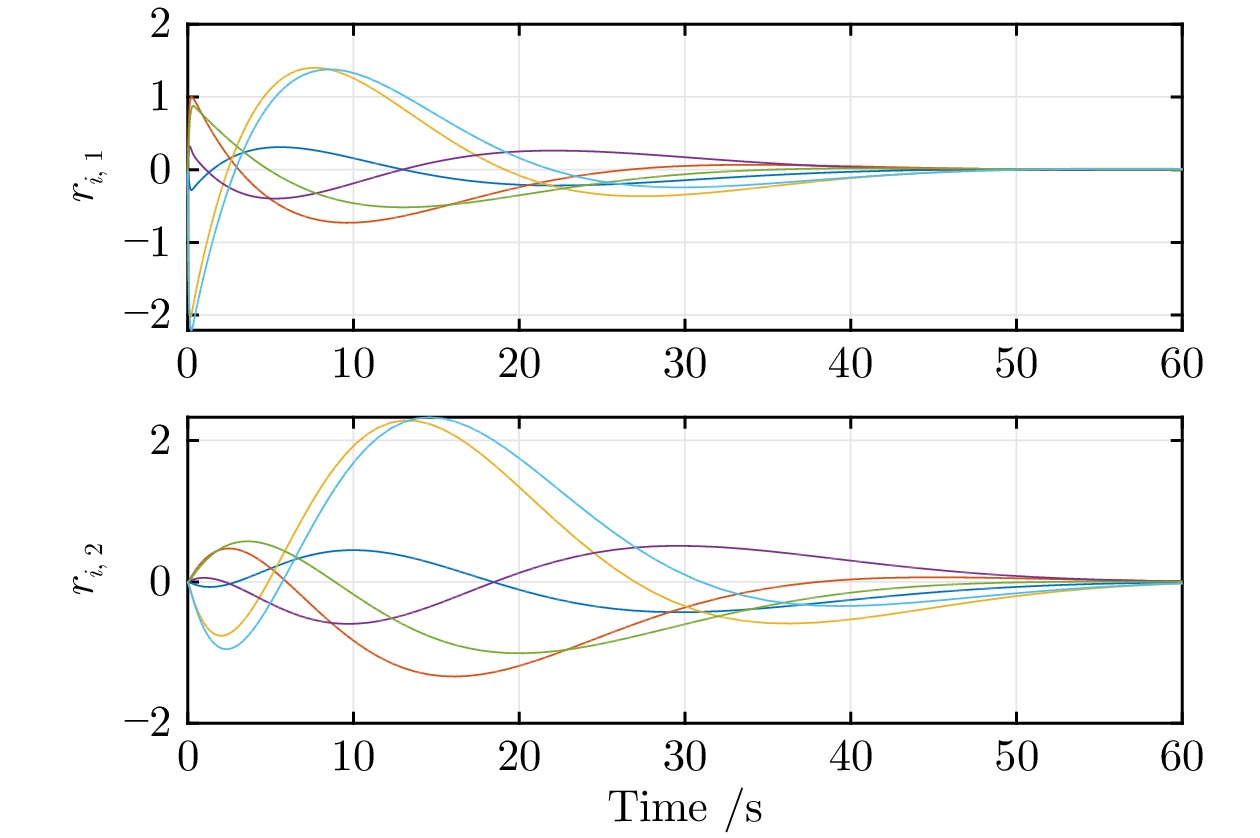
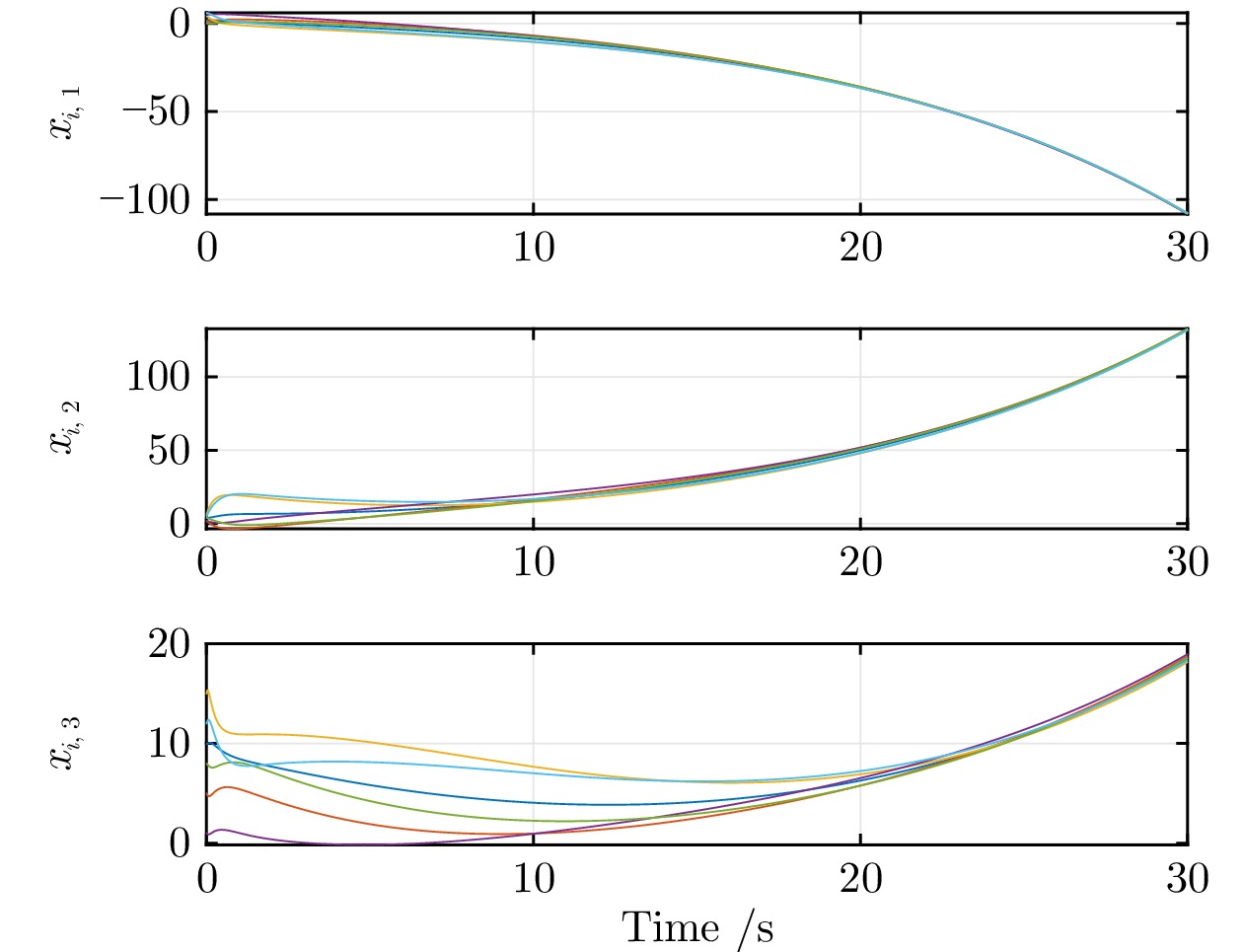
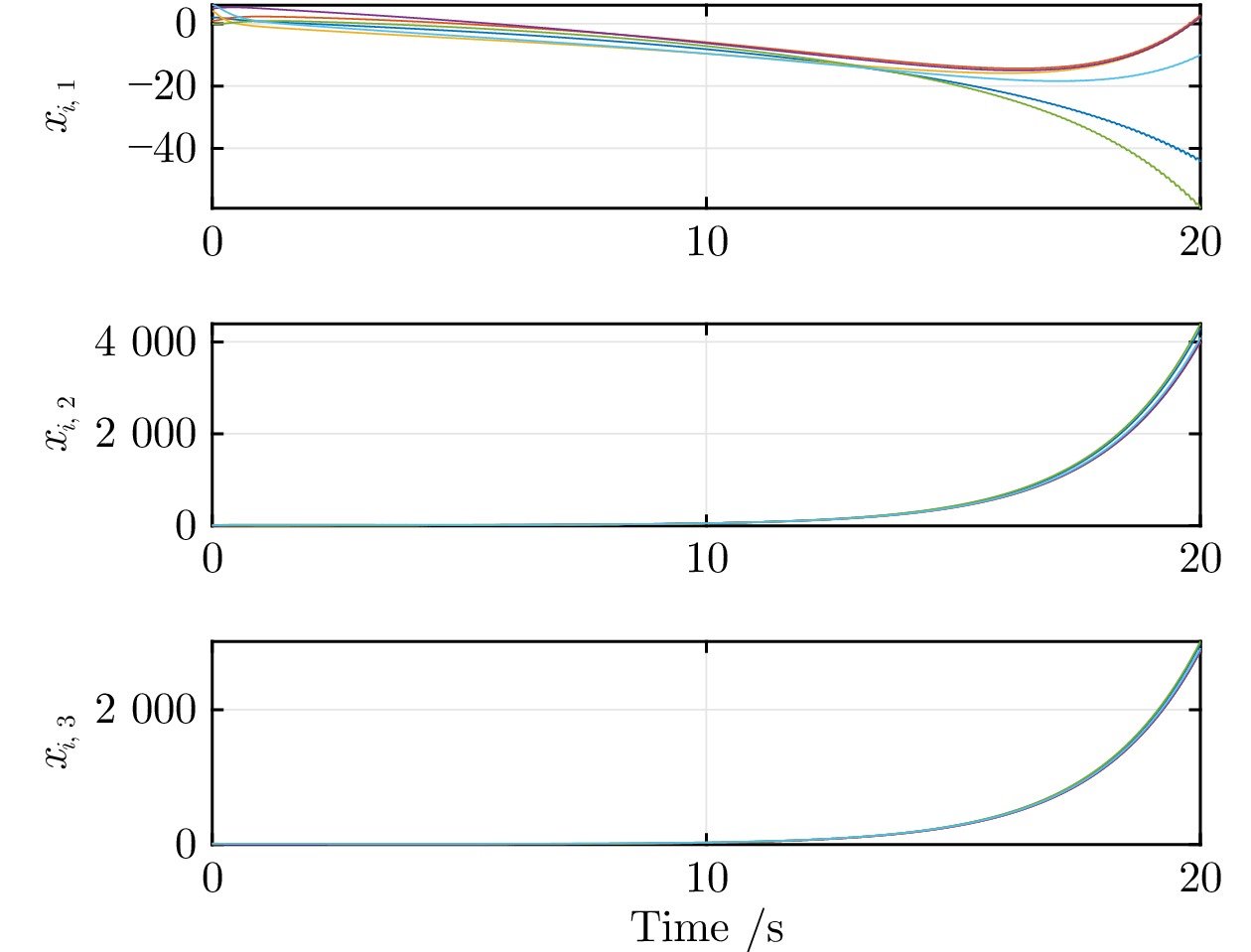
针对线性同质多智能体系统, 提出一种新的降阶输出反馈一致性协议. 该协议仅依赖智能体间相对输出信息, 当相对输出信息可直接测量时, 该协议无需在邻居智能体间共享控制器的状态, 降低系统对通讯媒介的依赖. 本文首先给出该协议存在的充要条件, 然后证明闭环系统的一致性并计算一致性状态. 理论分析表明, 该协议仍然具有类似分离原理的性质, 因此其参数构造过程非常简便. 最后, 通过数值仿真对比实验, 验证了该控制协议的有效性.
针对线性同质多智能体系统, 提出一种新的降阶输出反馈一致性协议. 该协议仅依赖智能体间相对输出信息, 当相对输出信息可直接测量时, 该协议无需在邻居智能体间共享控制器的状态, 降低系统对通讯媒介的依赖. 本文首先给出该协议存在的充要条件, 然后证明闭环系统的一致性并计算一致性状态. 理论分析表明, 该协议仍然具有类似分离原理的性质, 因此其参数构造过程非常简便. 最后, 通过数值仿真对比实验, 验证了该控制协议的有效性.

2023, 49(9): 1845-1856.
doi: 10.16383/j.aas.c210242
摘要:
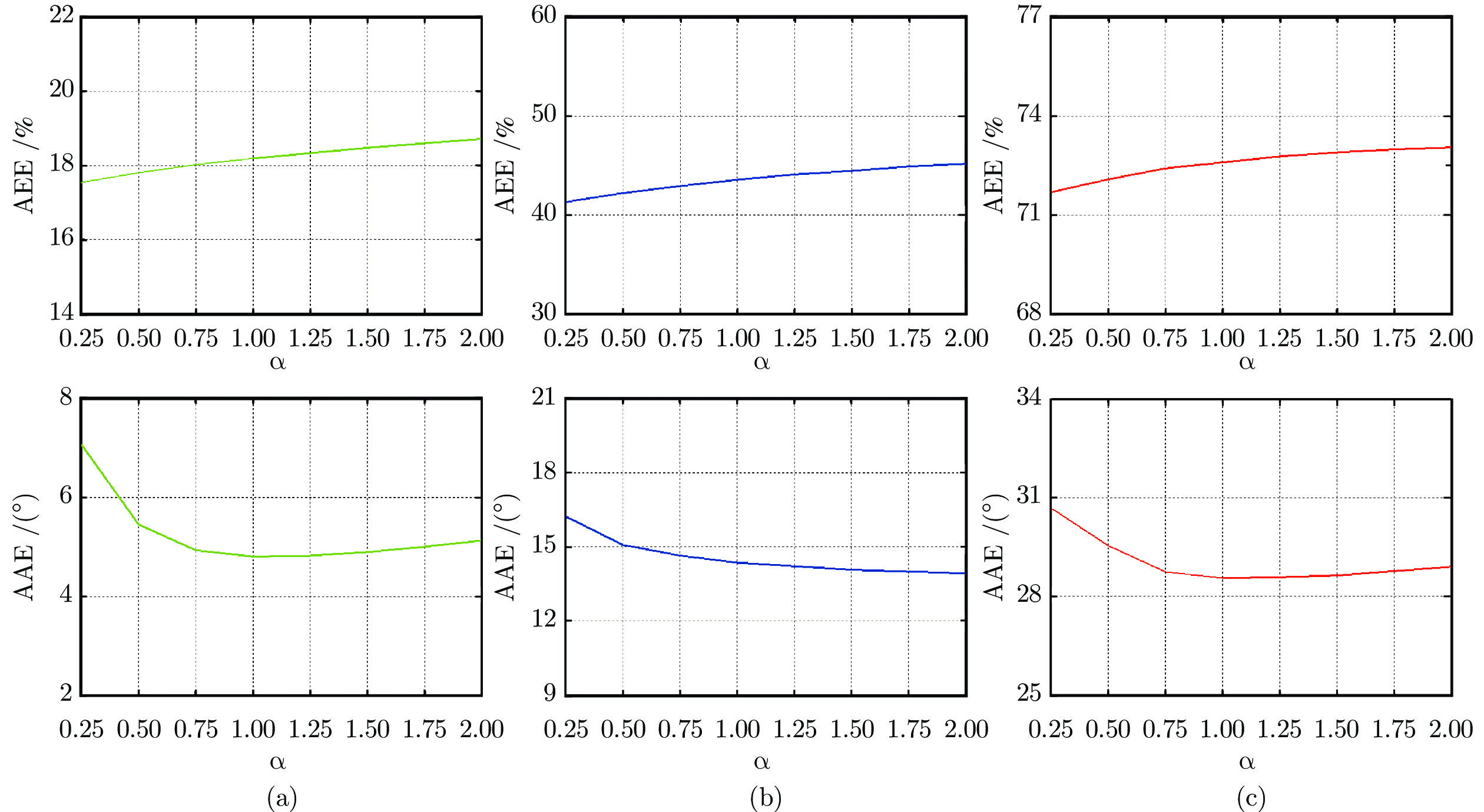
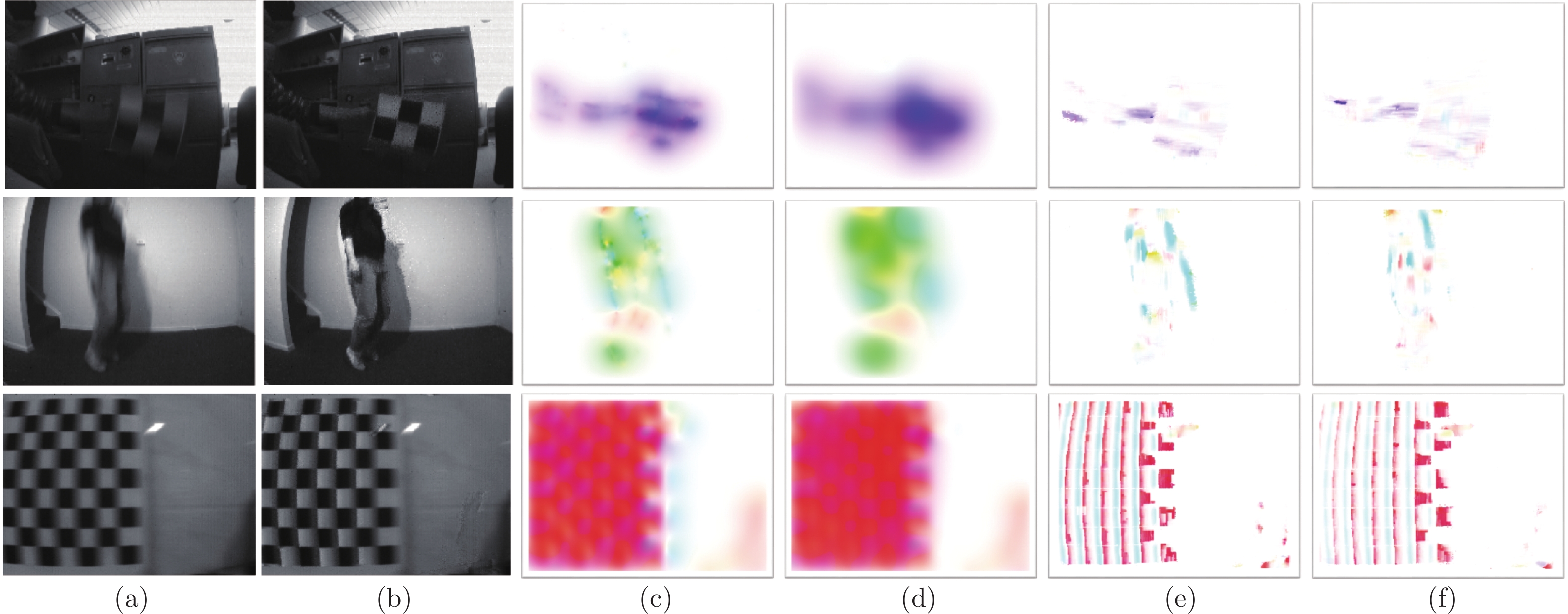
事件相机对场景的亮度变化进行成像, 输出异步事件流, 具有极低的延时, 受运动模糊问题影响较少. 因此, 可以利用事件相机解决高速运动场景下的光流(Optical flow, OF)估计问题. 基于亮度恒定假设和事件产生模型, 利用事件相机输出事件流的低延时性质, 融合存在运动模糊的亮度图像帧, 提出基于事件相机的连续光流估计算法, 提升了高速运动场景下的光流估计精度. 实验结果表明, 相比于现有的基于事件相机的光流估计算法, 该算法在平均端点误差、平均角度误差和均方误差3个指标上, 分别提升11%、45% 和8%. 在高速运动场景下, 该算法能够准确重建出高速运动目标的连续光流, 保证了存在运动模糊情况时, 光流估计的精度.
事件相机对场景的亮度变化进行成像, 输出异步事件流, 具有极低的延时, 受运动模糊问题影响较少. 因此, 可以利用事件相机解决高速运动场景下的光流(Optical flow, OF)估计问题. 基于亮度恒定假设和事件产生模型, 利用事件相机输出事件流的低延时性质, 融合存在运动模糊的亮度图像帧, 提出基于事件相机的连续光流估计算法, 提升了高速运动场景下的光流估计精度. 实验结果表明, 相比于现有的基于事件相机的光流估计算法, 该算法在平均端点误差、平均角度误差和均方误差3个指标上, 分别提升11%、45% 和8%. 在高速运动场景下, 该算法能够准确重建出高速运动目标的连续光流, 保证了存在运动模糊情况时, 光流估计的精度.





2023, 49(9): 1857-1867.
doi: 10.16383/j.aas.c210264
摘要:
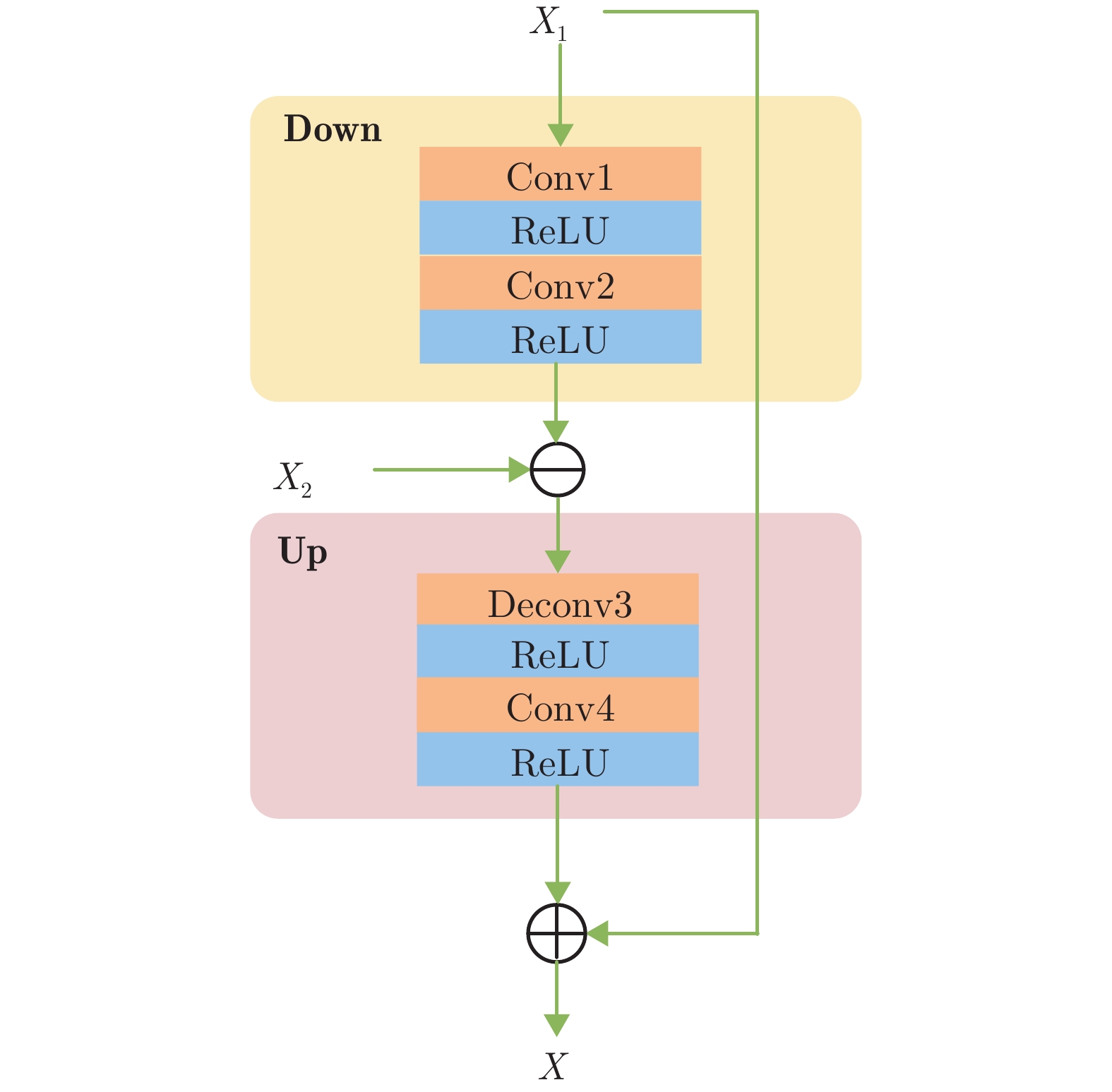
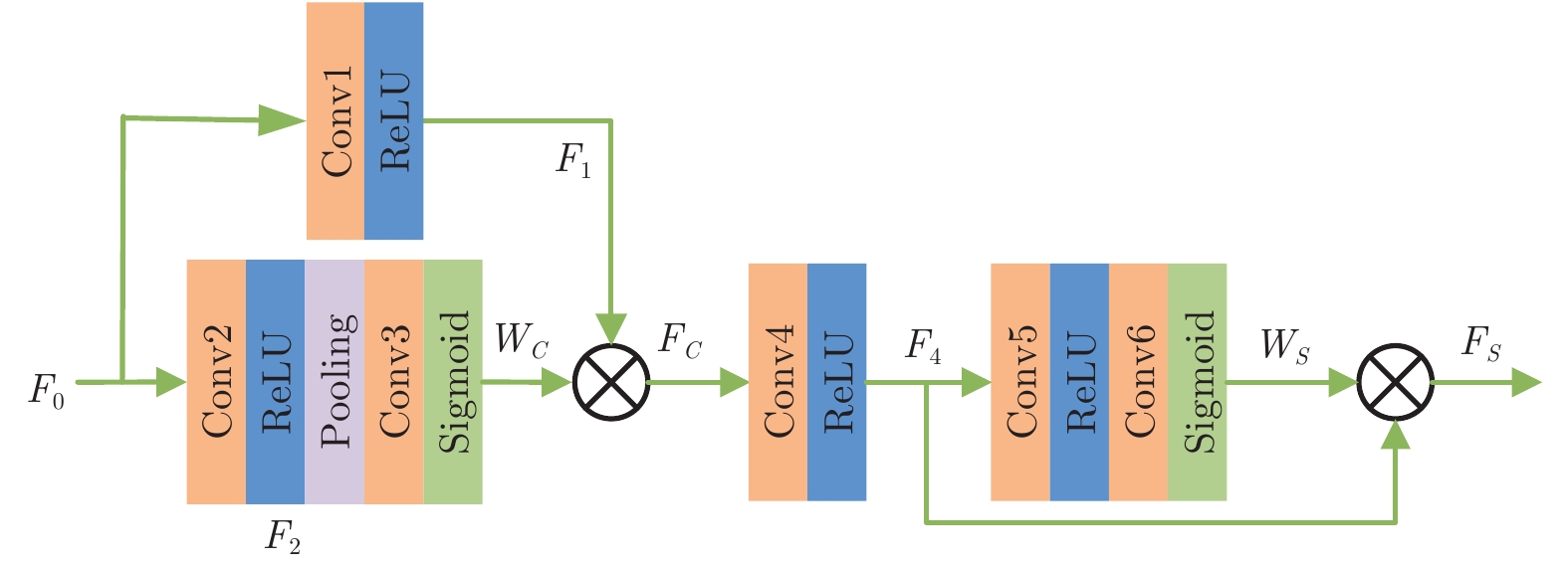
针对现有图像去雾方法因空间上/下文信息丢失而无法准确估计大尺度目标特征, 导致图像结构被破坏或去雾不彻底等问题, 提出一种基于误差回传机制的多尺度去雾网络. 网络由误差回传多尺度去雾组(Error-backward multi-scale dehazing group, EMDG)、门控融合模块(Gated fusion module, GFM)和优化模块组成. 其中误差回传多尺度去雾组包括误差回传模块(Error-backward block, EB)和雾霾感知单元(Haze aware unit, HAU). 误差回传模块度量相邻尺度网络特征图之间的差异, 并将生成的差值图回传至上一尺度, 实现对结构信息和上/下文信息的有效复用; 雾霾感知单元是各尺度子网络的核心, 其由残差密集块(Residual dense block, RDB)和雾浓度自适应检测块(Haze density adaptive detection block, HDADB)组成, 可充分提取局部信息并能够根据雾浓度实现自适应去雾. 不同于已有融合方法直接堆叠各尺度特征, 提出的门控融合模块逐像素学习每个子网络特征图对应的最优权重, 有效避免了干扰信息对图像结构和细节信息的破坏. 再经优化模块, 可得到最终的无雾图像. 在合成数据集和真实数据集上的大量实验表明, 该方法优于目前的主流去雾方法, 尤其是对远景雾气去除效果更佳.
针对现有图像去雾方法因空间上/下文信息丢失而无法准确估计大尺度目标特征, 导致图像结构被破坏或去雾不彻底等问题, 提出一种基于误差回传机制的多尺度去雾网络. 网络由误差回传多尺度去雾组(Error-backward multi-scale dehazing group, EMDG)、门控融合模块(Gated fusion module, GFM)和优化模块组成. 其中误差回传多尺度去雾组包括误差回传模块(Error-backward block, EB)和雾霾感知单元(Haze aware unit, HAU). 误差回传模块度量相邻尺度网络特征图之间的差异, 并将生成的差值图回传至上一尺度, 实现对结构信息和上/下文信息的有效复用; 雾霾感知单元是各尺度子网络的核心, 其由残差密集块(Residual dense block, RDB)和雾浓度自适应检测块(Haze density adaptive detection block, HDADB)组成, 可充分提取局部信息并能够根据雾浓度实现自适应去雾. 不同于已有融合方法直接堆叠各尺度特征, 提出的门控融合模块逐像素学习每个子网络特征图对应的最优权重, 有效避免了干扰信息对图像结构和细节信息的破坏. 再经优化模块, 可得到最终的无雾图像. 在合成数据集和真实数据集上的大量实验表明, 该方法优于目前的主流去雾方法, 尤其是对远景雾气去除效果更佳.








2023, 49(9): 1868-1877.
doi: 10.16383/j.aas.c220659
摘要:
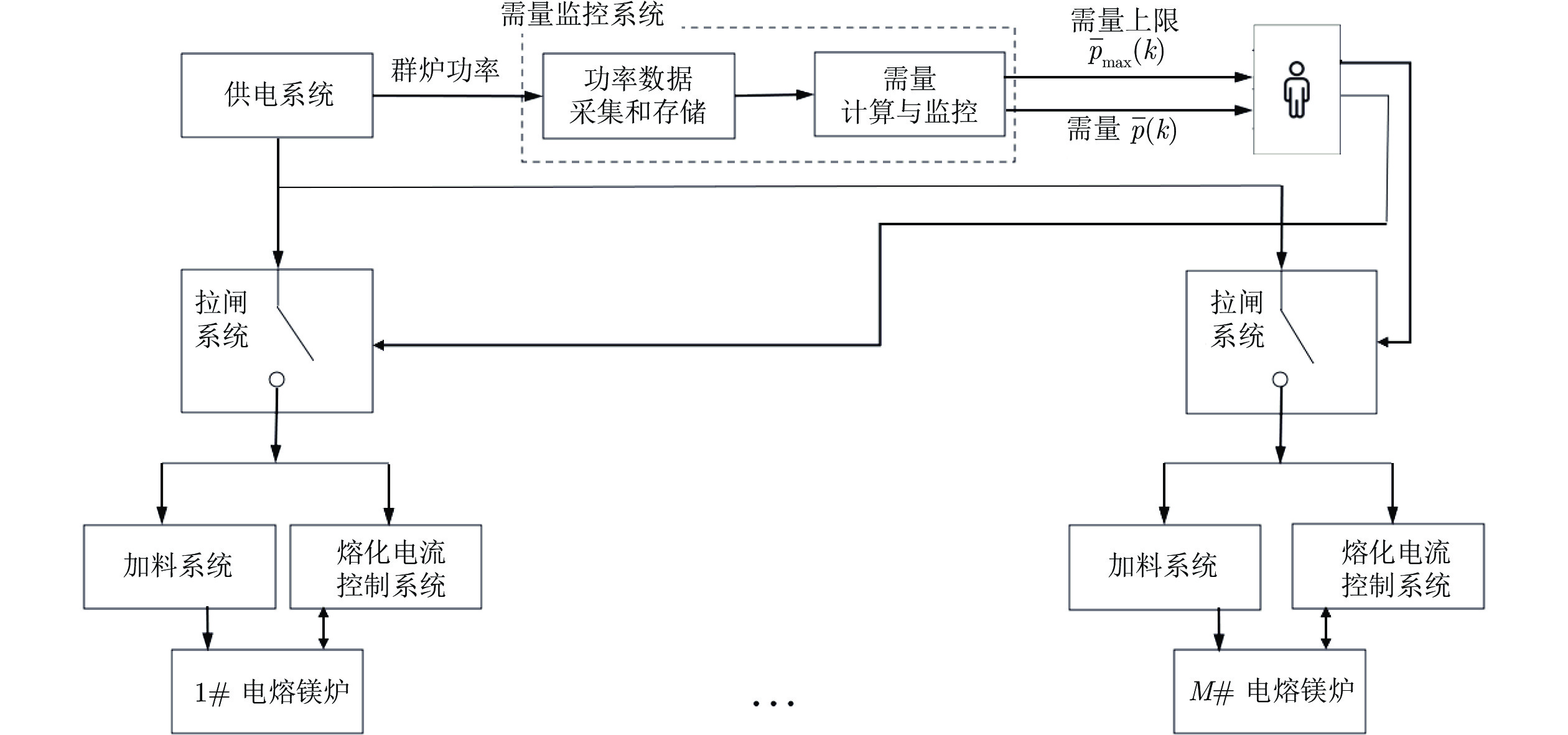
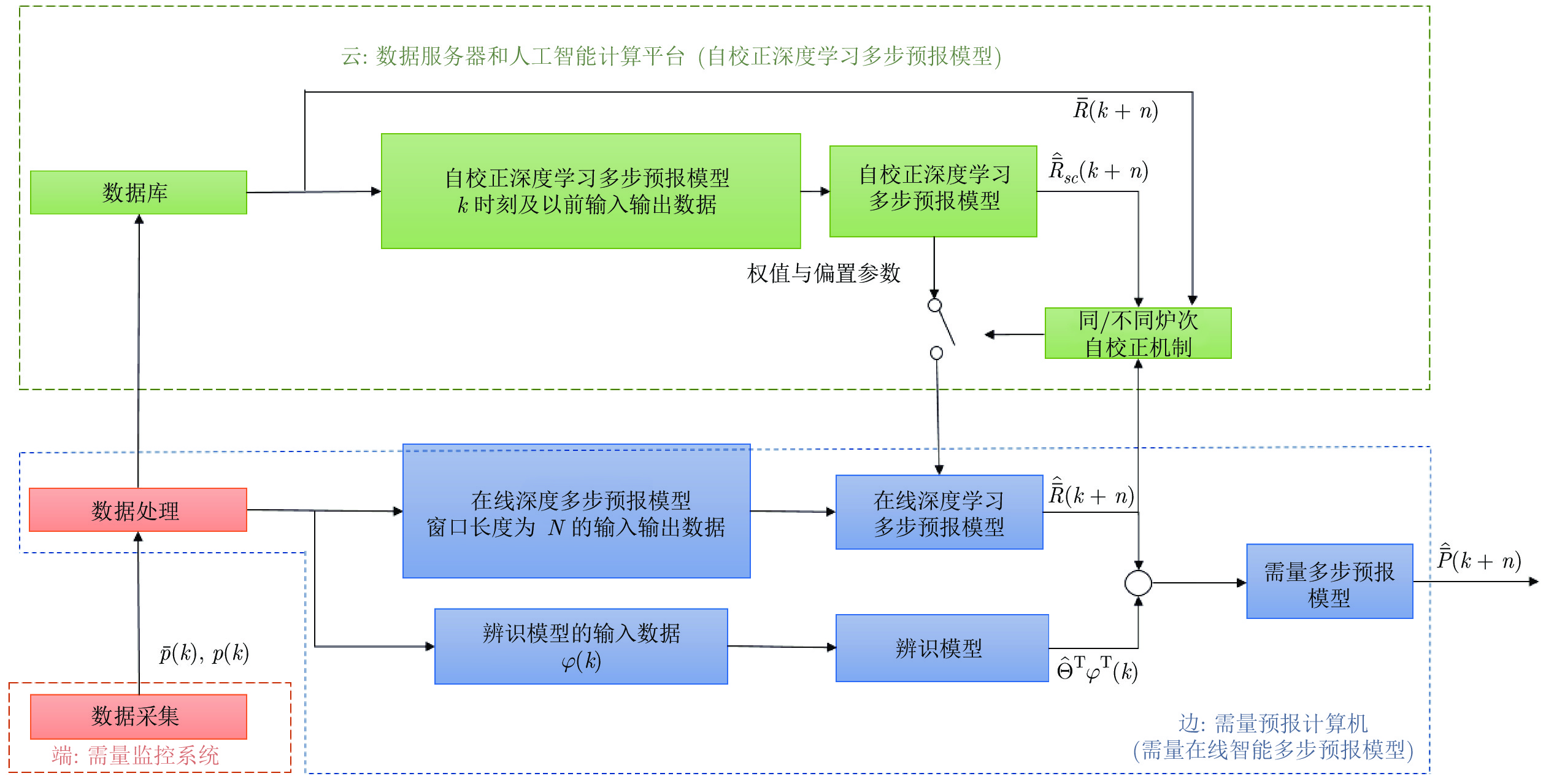
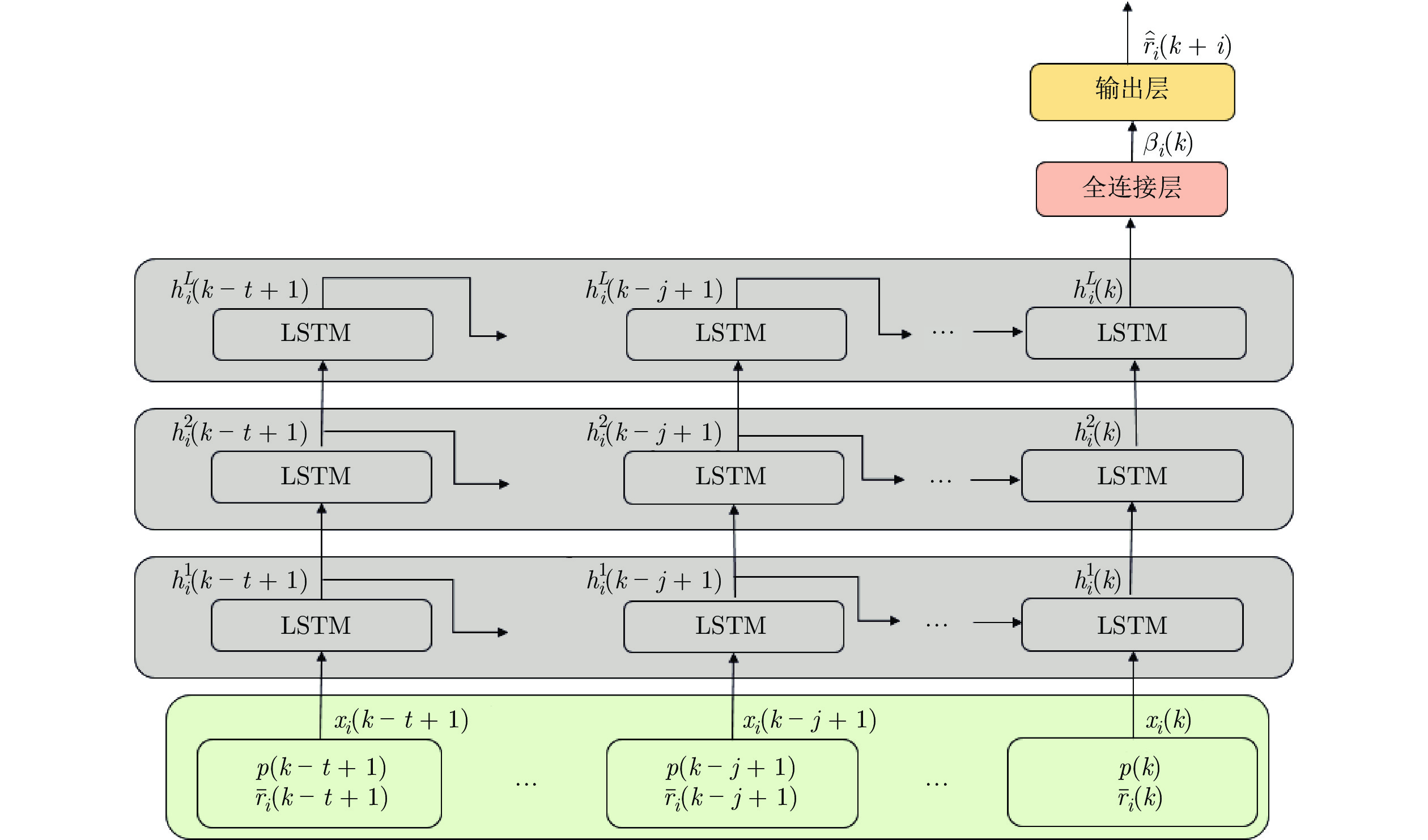
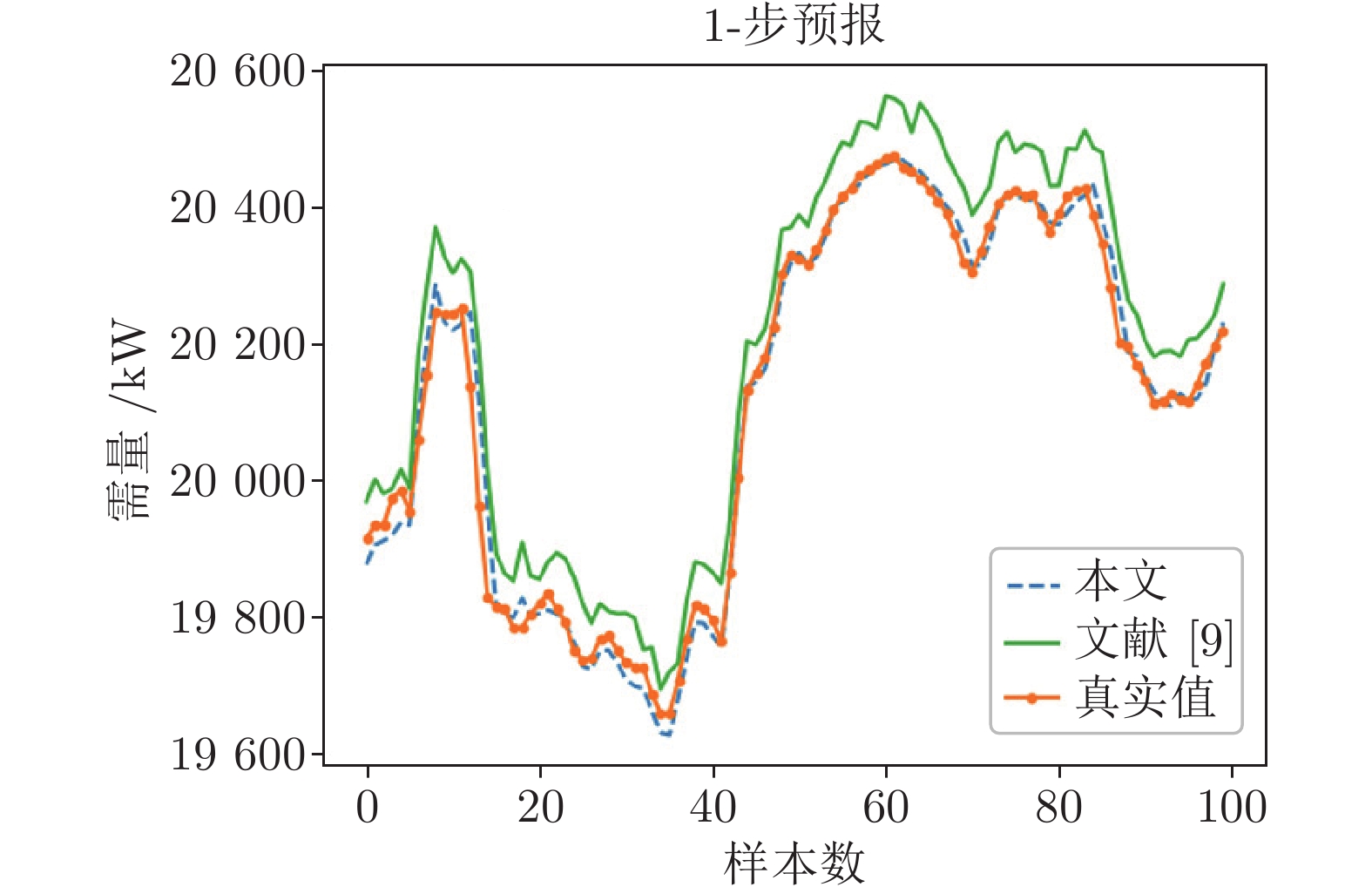
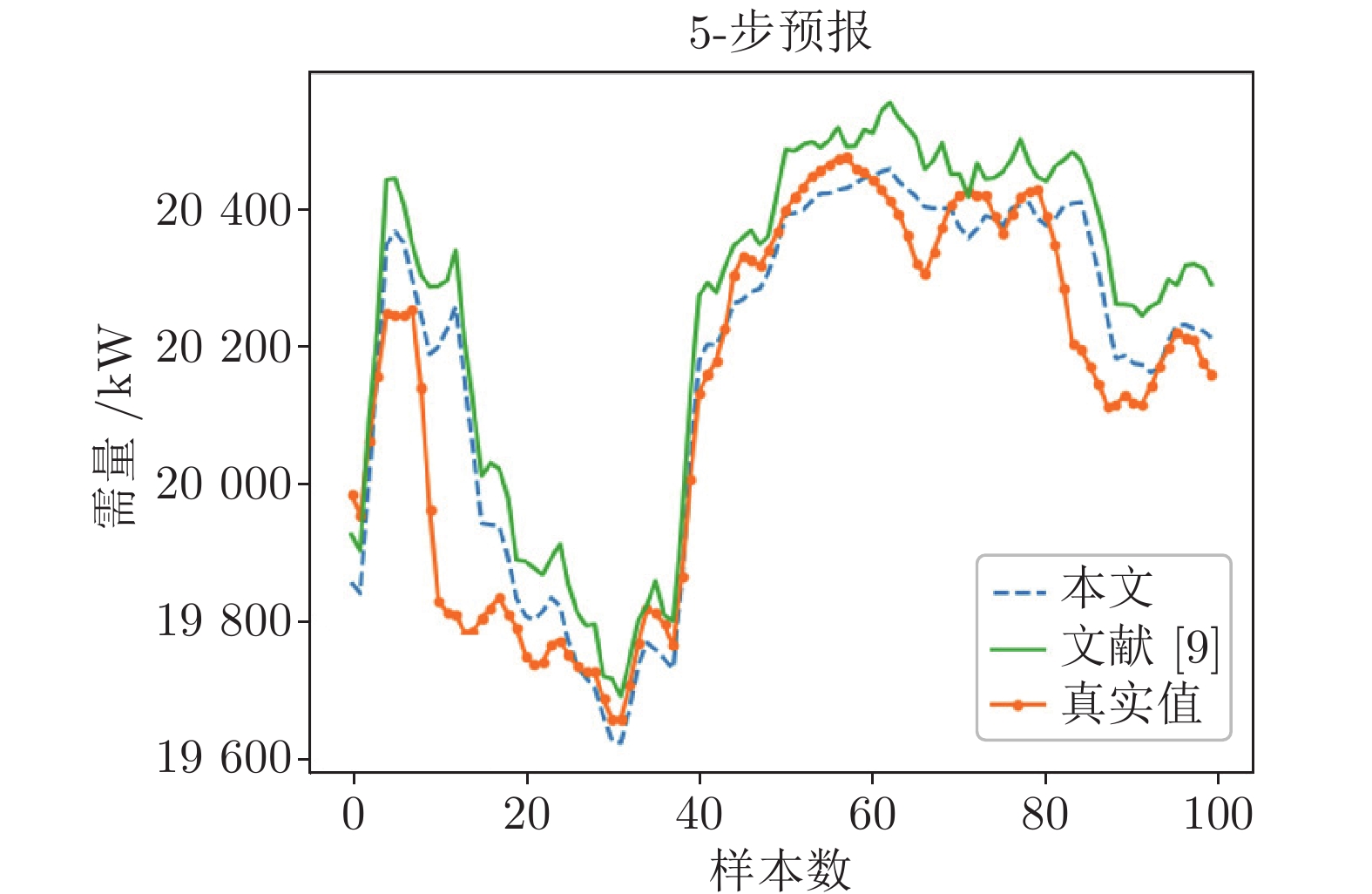
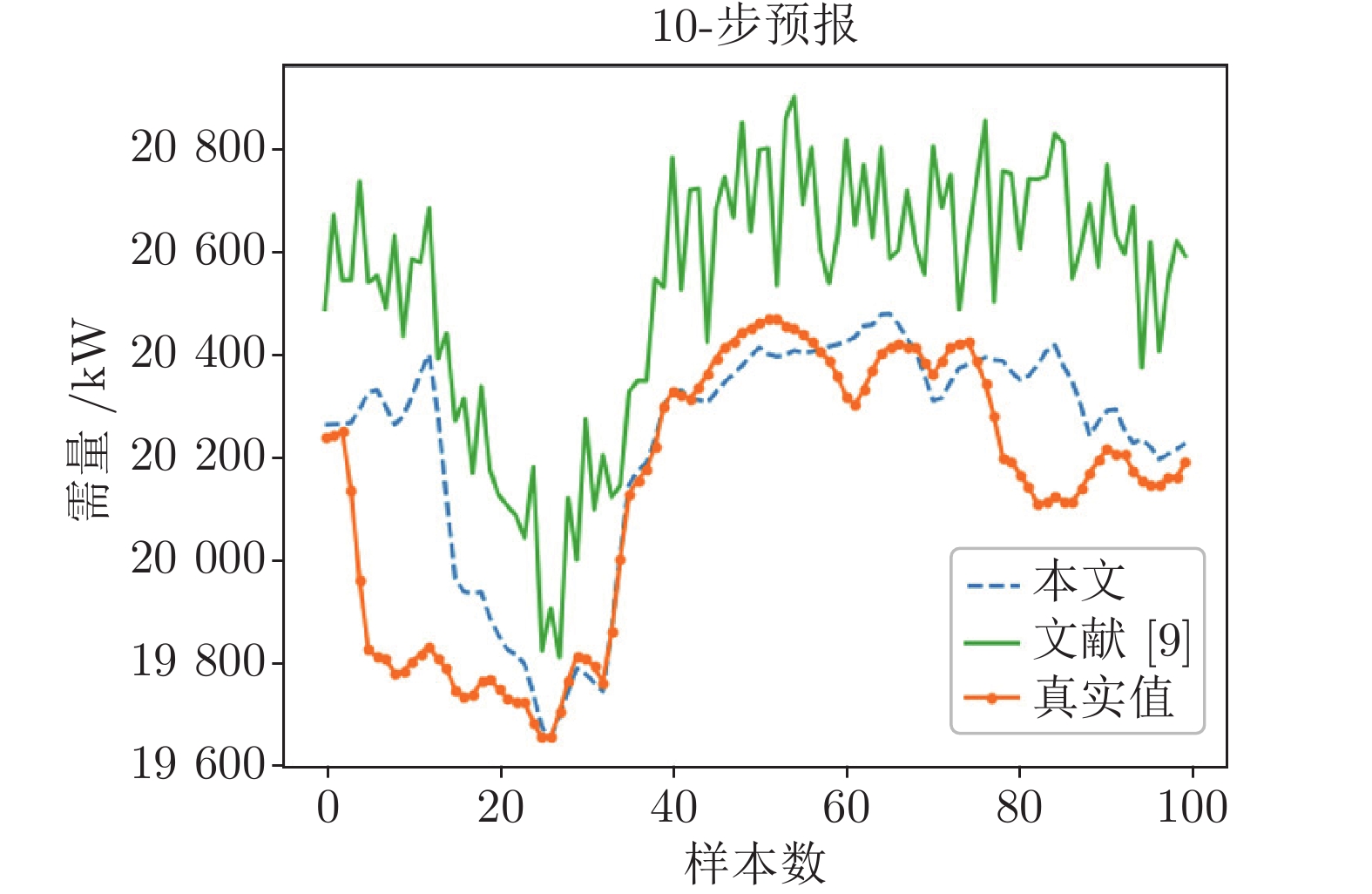
电熔镁砂生产 (Fused magnesia smelting process, FMSP)用电需量会出现先升后降的尖峰现象, 当峰值达到用电需量限幅值, 会将电熔镁炉(Fused magnesia furnace, FMF)拉闸断电. 为避免尖峰时刻的不必要拉闸需要对需量尖峰进行识别, 因此需要进行需量多步预报. 利用电熔镁砂生产过程熔化电流闭环控制系统方程建立了由线性模型和未知非线性动态系统组成的需量多步预报模型, 将系统辨识与深度学习相结合提出了端边云协同的电熔镁砂生产用电需量多步智能预报方法. 采用电熔镁砂生产过程的工业大数据的实验结果验证了所提的预报方法可以准确预报需量的变化趋势.
电熔镁砂生产 (Fused magnesia smelting process, FMSP)用电需量会出现先升后降的尖峰现象, 当峰值达到用电需量限幅值, 会将电熔镁炉(Fused magnesia furnace, FMF)拉闸断电. 为避免尖峰时刻的不必要拉闸需要对需量尖峰进行识别, 因此需要进行需量多步预报. 利用电熔镁砂生产过程熔化电流闭环控制系统方程建立了由线性模型和未知非线性动态系统组成的需量多步预报模型, 将系统辨识与深度学习相结合提出了端边云协同的电熔镁砂生产用电需量多步智能预报方法. 采用电熔镁砂生产过程的工业大数据的实验结果验证了所提的预报方法可以准确预报需量的变化趋势.
2023, 49(9): 1878-1888.
doi: 10.16383/j.aas.c230025
摘要:
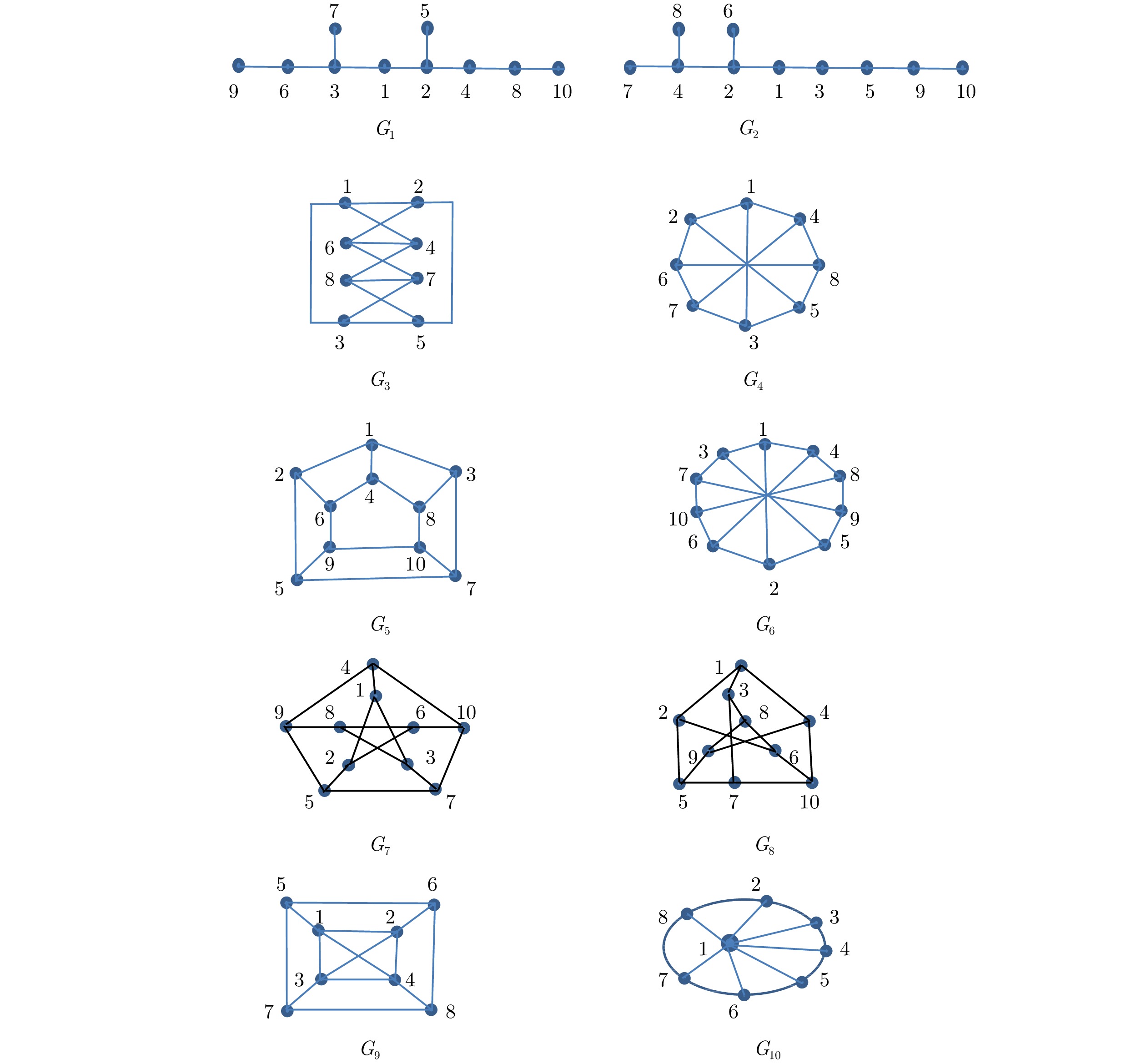
给出了矩阵同构变换、简单无向图距离矩阵、距离矩阵列和向量以及图的距离谱的定义, 将基于邻接矩阵的同构判定条件推广到简单无向图距离矩阵. 针对简单无向连通图的同构判定问题: 给出了基于距离矩阵特征多项式的同构判定条件; 进一步, 为避免计算误差对判定结果的影响, 给出了基于距离矩阵的秩与列和向量的同构判定条件. 上述两个判定条件均是充要条件且均具有多项式时间复杂度.
给出了矩阵同构变换、简单无向图距离矩阵、距离矩阵列和向量以及图的距离谱的定义, 将基于邻接矩阵的同构判定条件推广到简单无向图距离矩阵. 针对简单无向连通图的同构判定问题: 给出了基于距离矩阵特征多项式的同构判定条件; 进一步, 为避免计算误差对判定结果的影响, 给出了基于距离矩阵的秩与列和向量的同构判定条件. 上述两个判定条件均是充要条件且均具有多项式时间复杂度.
2023, 49(9): 1889-1903.
doi: 10.16383/j.aas.c220767
摘要:
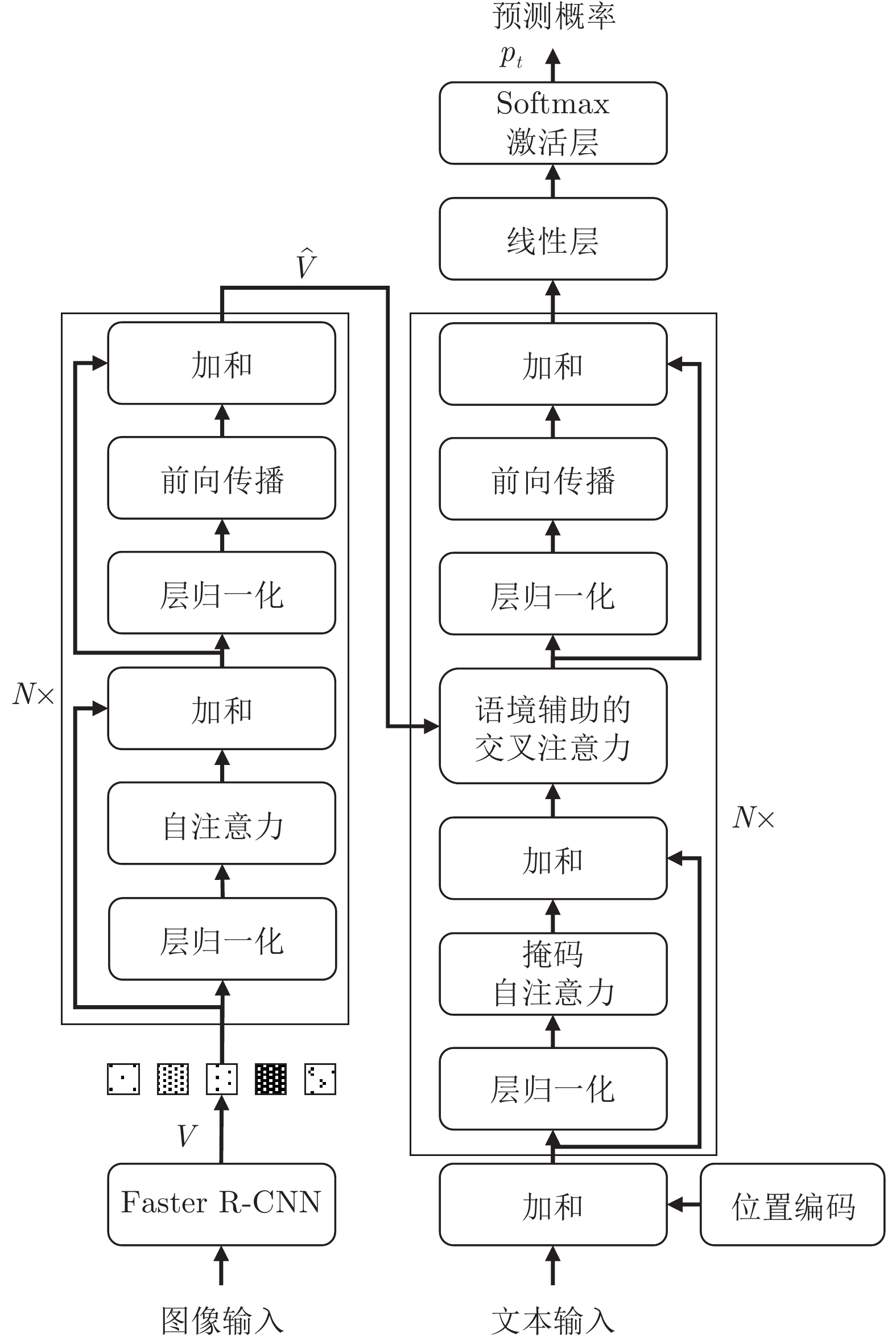
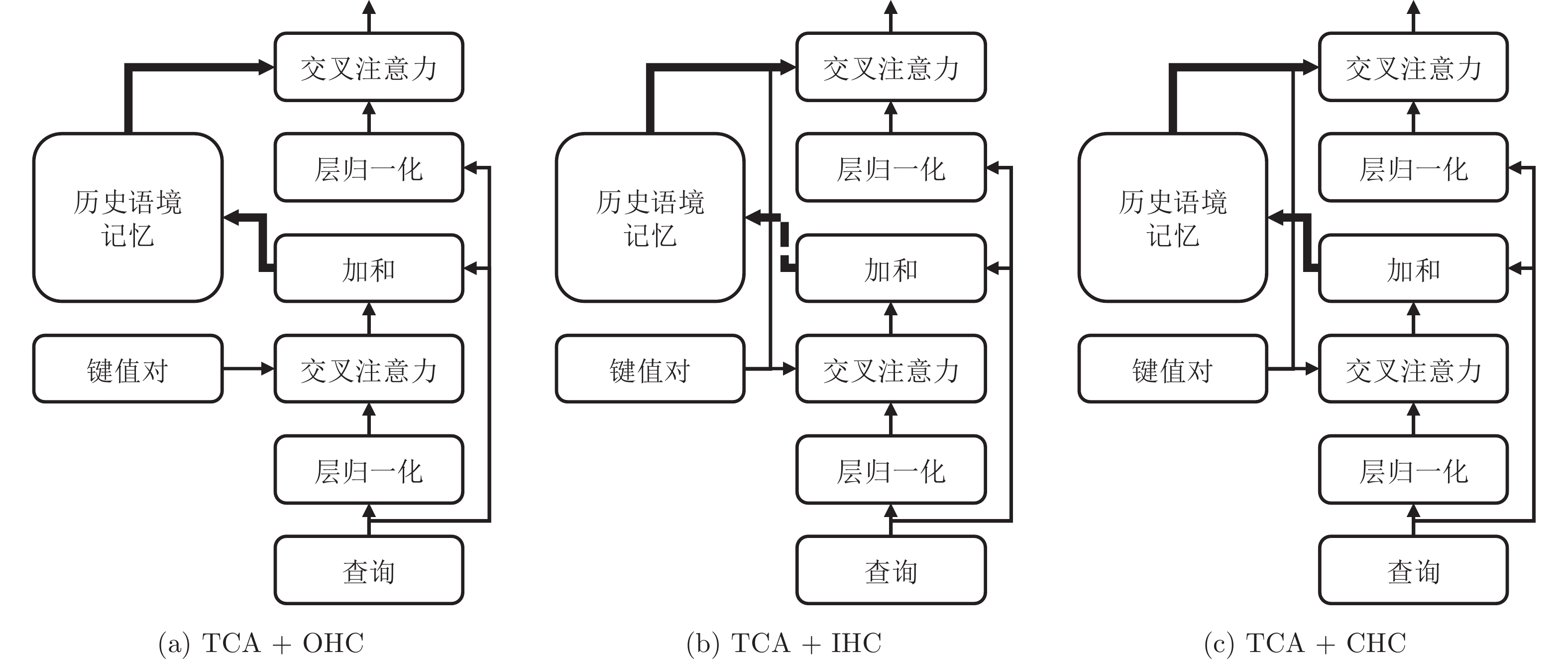
在图像标题生成领域, 交叉注意力机制在建模语义查询与图像区域的关系方面, 已经取得了重要的进展. 然而, 其视觉连贯性仍有待探索. 为填补这项空白, 提出一种新颖的语境辅助的交叉注意力(Context-assisted cross attention, CACA)机制, 利用历史语境记忆(Historical context memory, HCM), 来充分考虑先前关注过的视觉线索对当前注意力语境生成的潜在影响. 同时, 提出一种名为“自适应权重约束(Adaptive weight constraint, AWC)” 的正则化方法, 来限制每个CACA模块分配给历史语境的权重总和. 本文将CACA模块与AWC方法同时应用于转换器(Transformer)模型, 构建一种语境辅助的转换器(Context-assisted transformer, CAT)模型, 用于解决图像标题生成问题. 基于MS COCO (Microsoft common objects in context)数据集的实验结果证明, 与当前先进的方法相比, 该方法均实现了稳定的提升.
在图像标题生成领域, 交叉注意力机制在建模语义查询与图像区域的关系方面, 已经取得了重要的进展. 然而, 其视觉连贯性仍有待探索. 为填补这项空白, 提出一种新颖的语境辅助的交叉注意力(Context-assisted cross attention, CACA)机制, 利用历史语境记忆(Historical context memory, HCM), 来充分考虑先前关注过的视觉线索对当前注意力语境生成的潜在影响. 同时, 提出一种名为“自适应权重约束(Adaptive weight constraint, AWC)” 的正则化方法, 来限制每个CACA模块分配给历史语境的权重总和. 本文将CACA模块与AWC方法同时应用于转换器(Transformer)模型, 构建一种语境辅助的转换器(Context-assisted transformer, CAT)模型, 用于解决图像标题生成问题. 基于MS COCO (Microsoft common objects in context)数据集的实验结果证明, 与当前先进的方法相比, 该方法均实现了稳定的提升.




2023, 49(9): 1904-1914.
doi: 10.16383/j.aas.c220575
摘要:
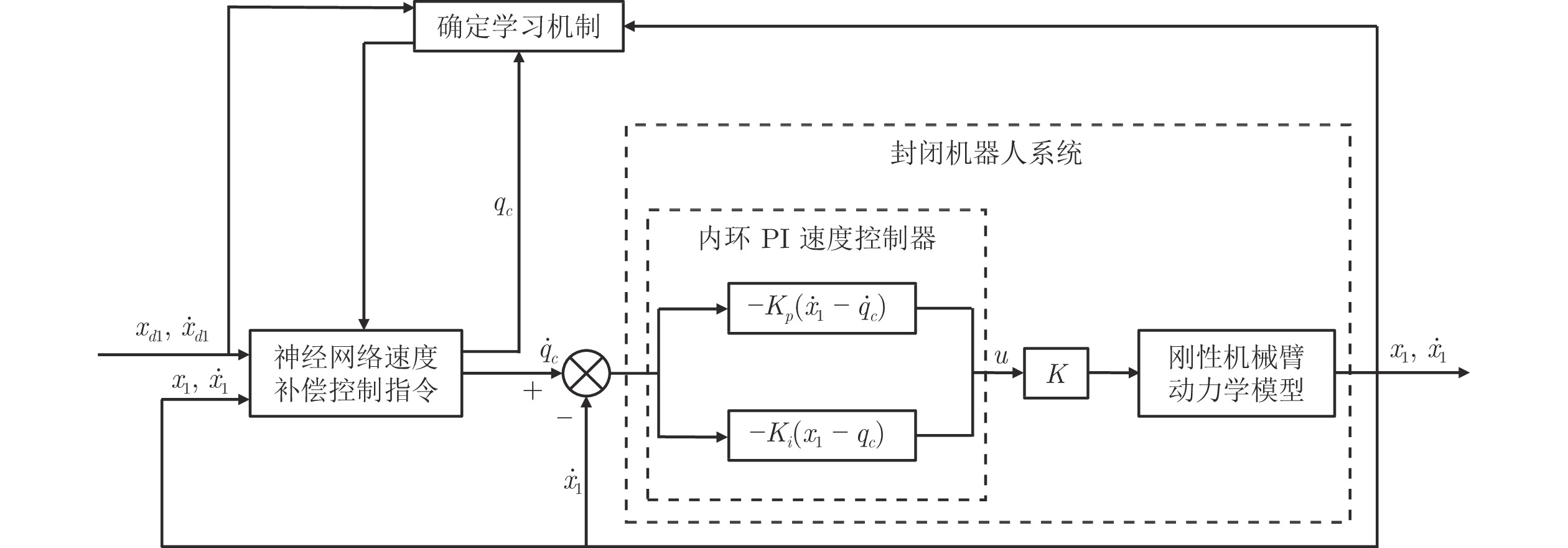
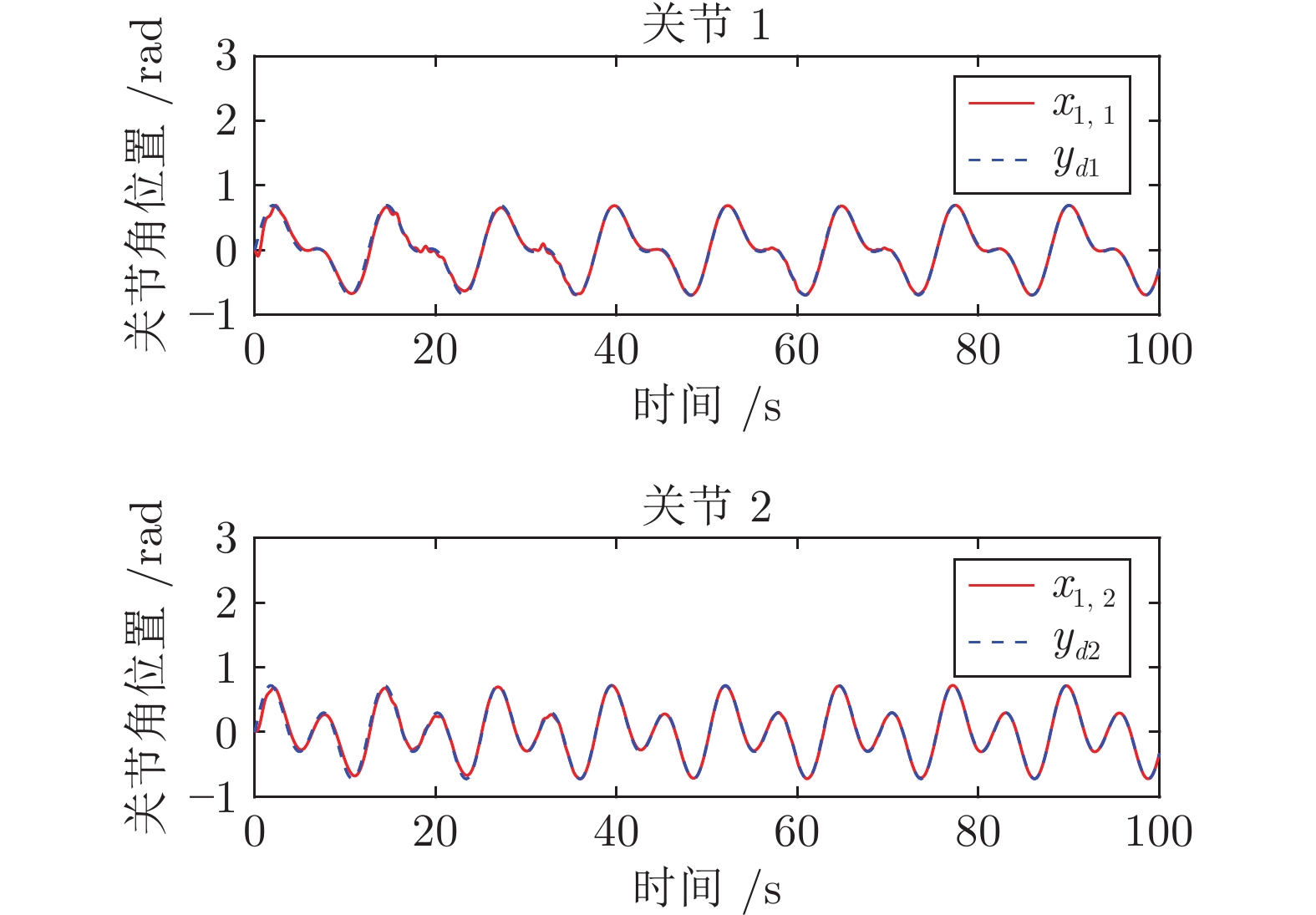
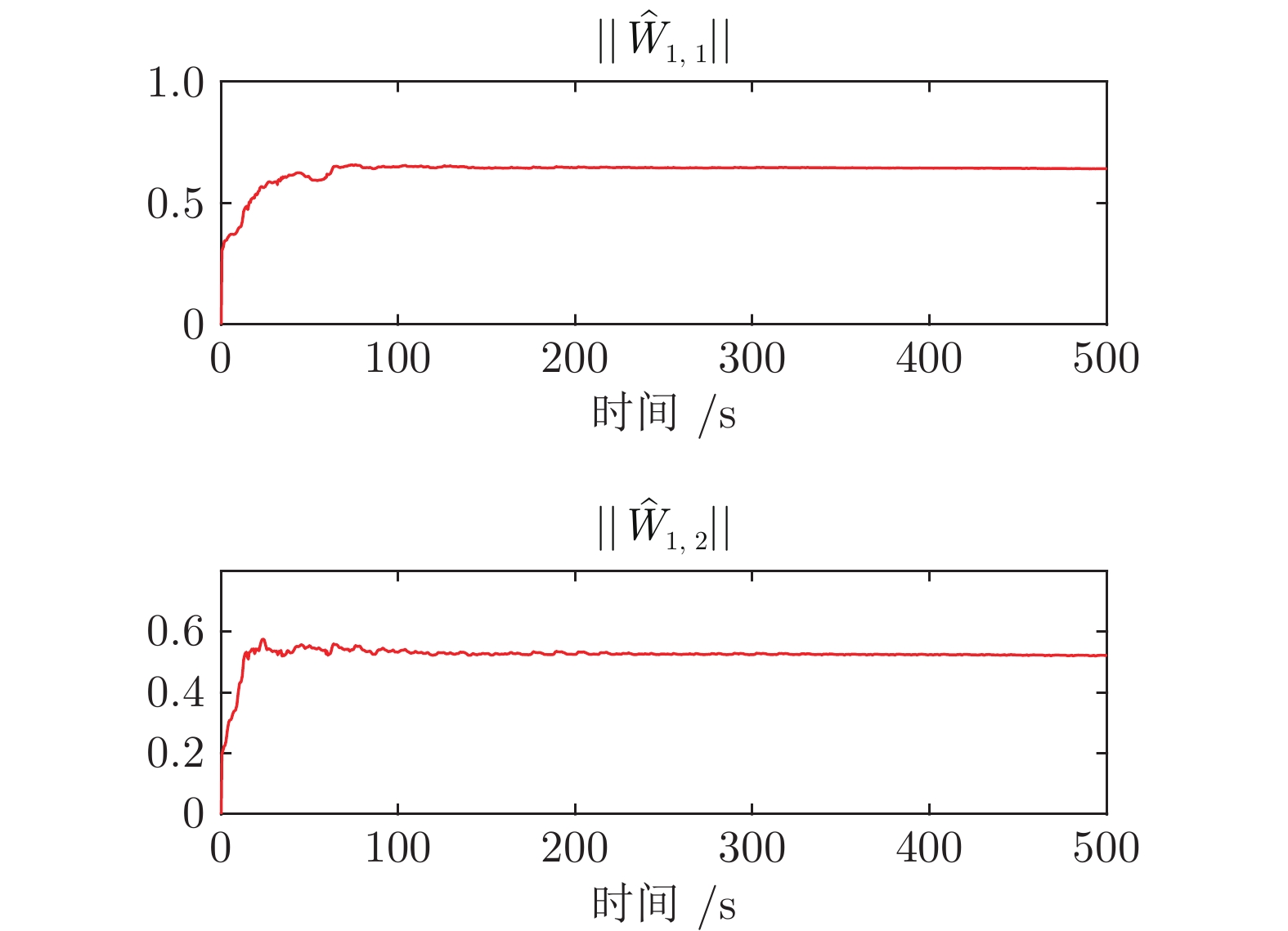
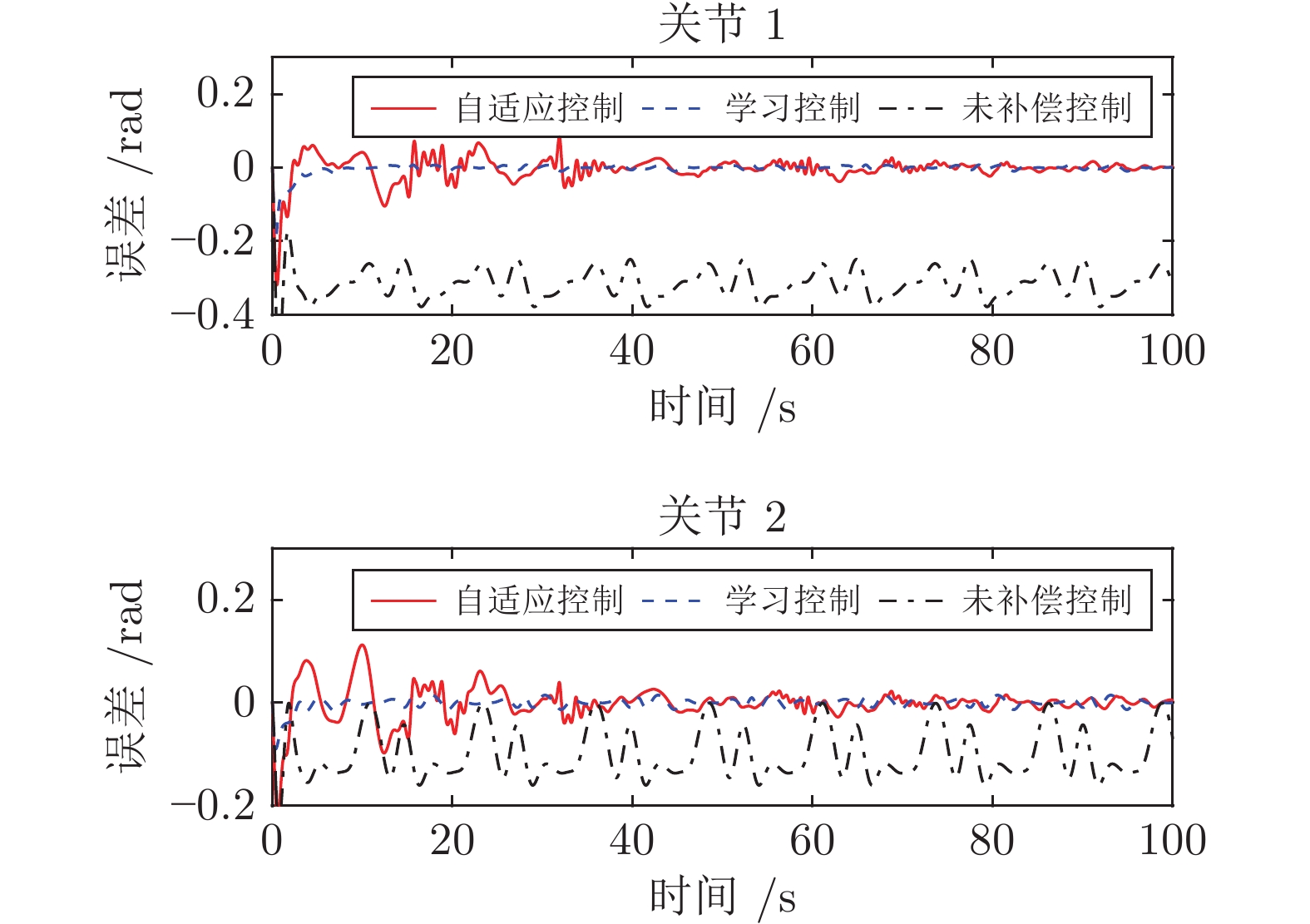
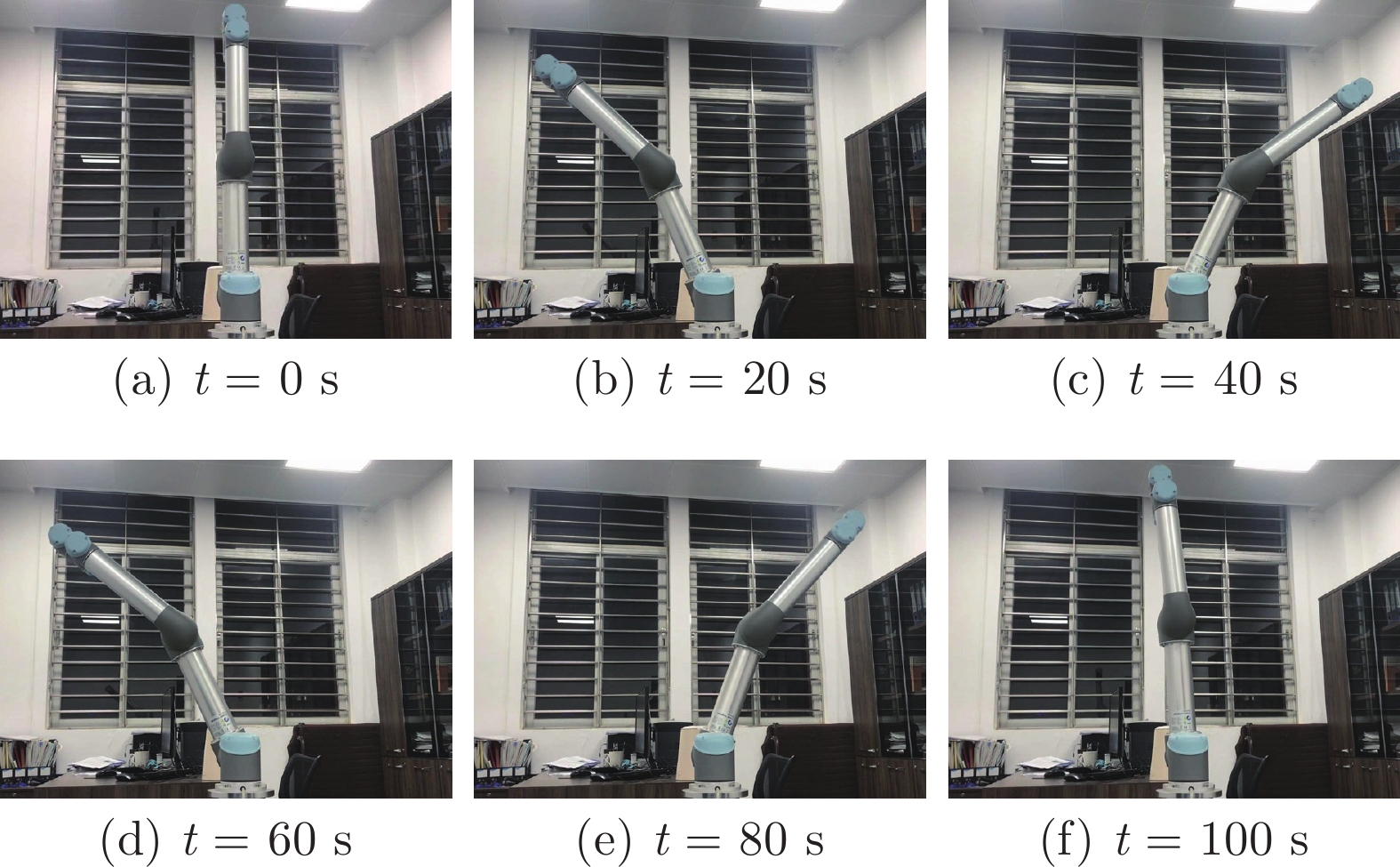
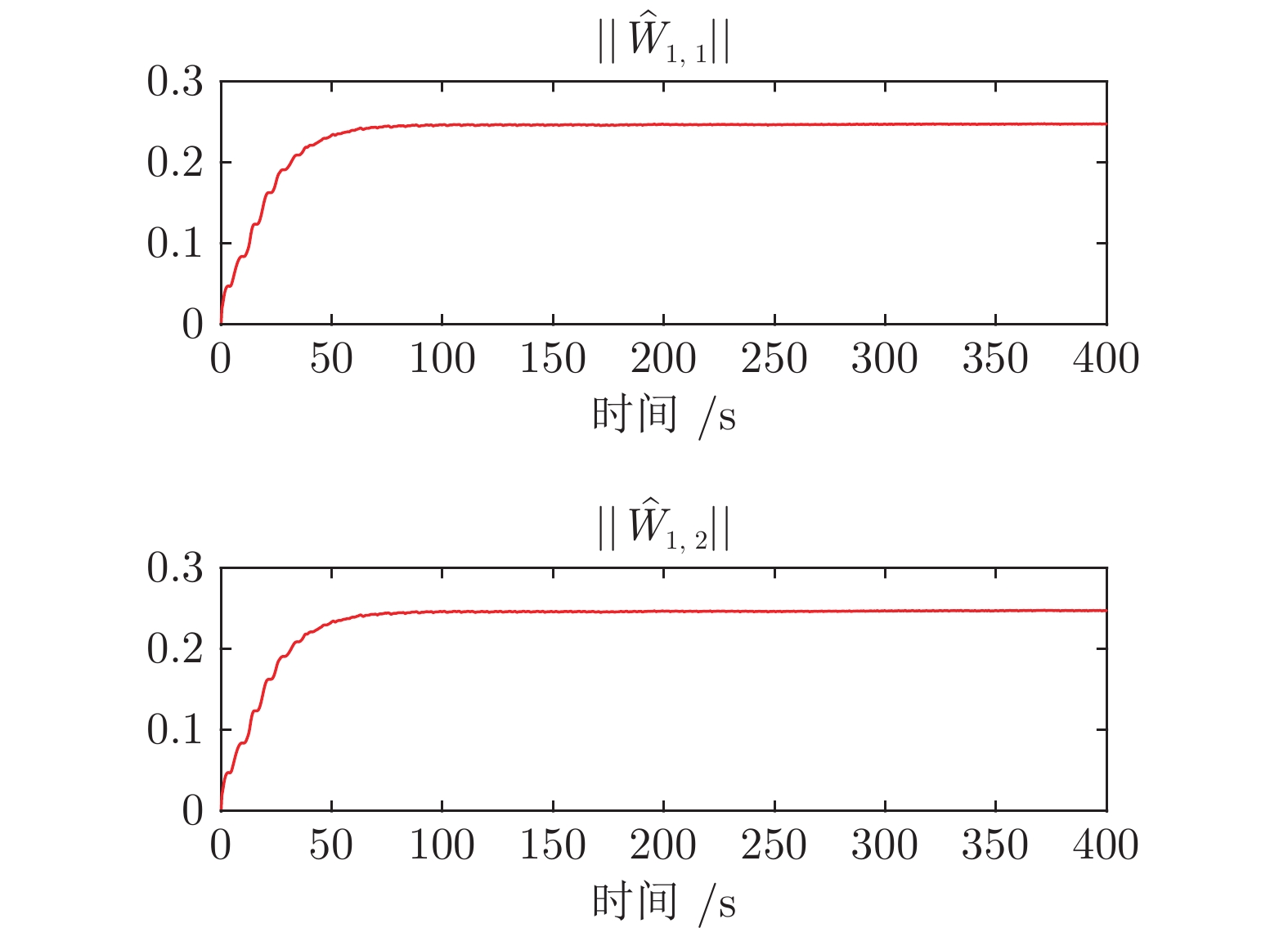
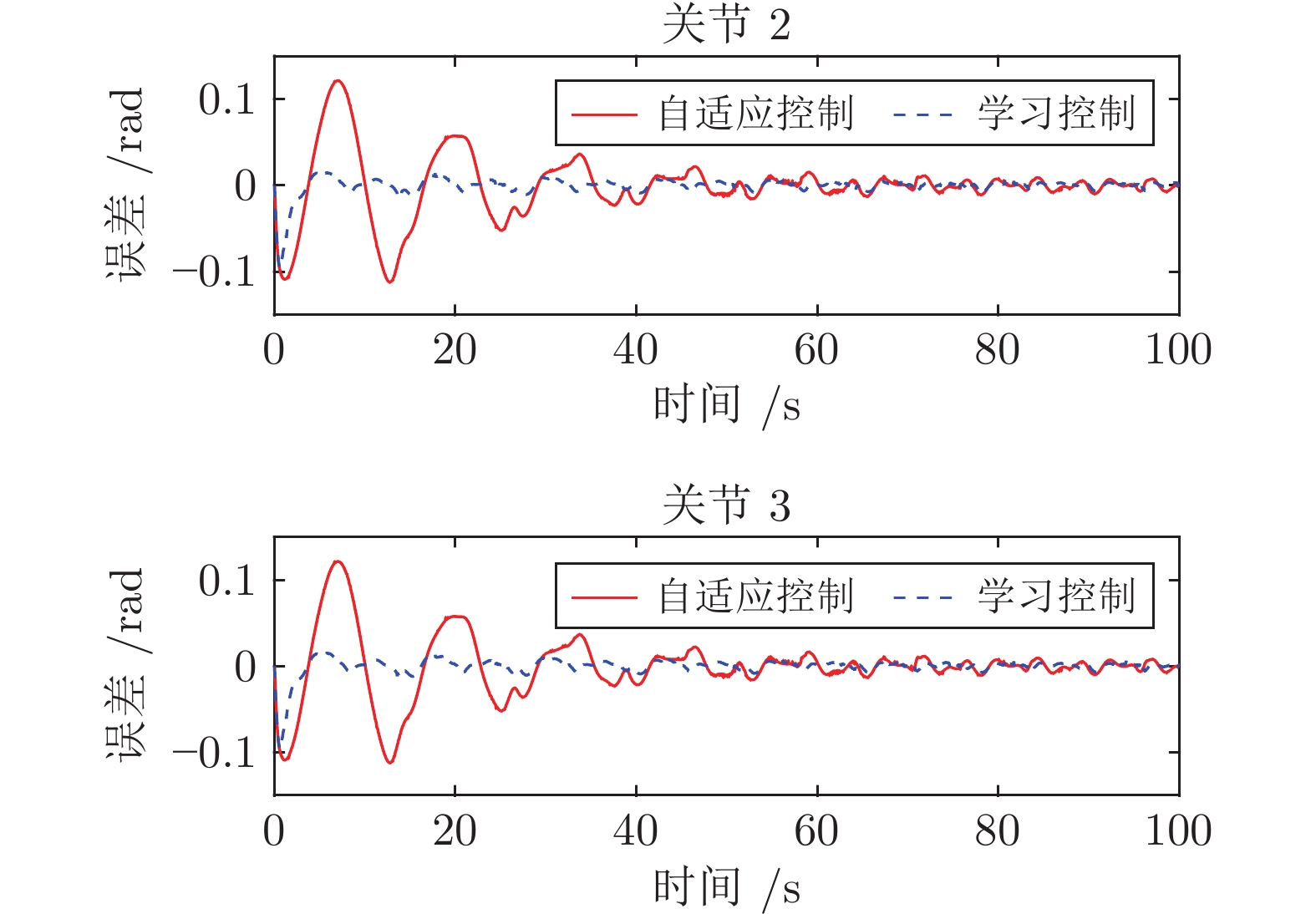
针对未开放力矩控制接口的一类封闭机器人系统, 提出一种基于外环速度补偿的确定学习控制方案. 该控制方案考虑机器人受到未知动力学影响, 且具有未知内环比例积分(Proportional-integral, PI)速度控制器. 首先, 利用宽度径向基函数(Radial basis function, RBF)神经网络对封闭机器人的内部未知动态进行逼近, 设计外环自适应神经网络速度控制指令. 在实现封闭机器人稳定控制的基础上, 结合确定学习理论证明了宽度RBF神经网络的学习能力, 提出基于确定学习的高精度速度控制指令. 该控制方案能够保证被控封闭机器人系统的所有信号最终一致有界且跟踪误差收敛于零的小邻域内. 在所提控制方案中, 通过引入外环补偿控制思想和宽度神经网络动态增量节点方式, 减小了设备计算负荷, 提高了速度控制下机器人的运动性能, 解决了市场上封闭机器人系统难以设计力矩控制的难题, 实现了不同工作任务下的高精度控制. 最后数值系统仿真结果和UR5机器人实验结果验证了该方案的有效性.
针对未开放力矩控制接口的一类封闭机器人系统, 提出一种基于外环速度补偿的确定学习控制方案. 该控制方案考虑机器人受到未知动力学影响, 且具有未知内环比例积分(Proportional-integral, PI)速度控制器. 首先, 利用宽度径向基函数(Radial basis function, RBF)神经网络对封闭机器人的内部未知动态进行逼近, 设计外环自适应神经网络速度控制指令. 在实现封闭机器人稳定控制的基础上, 结合确定学习理论证明了宽度RBF神经网络的学习能力, 提出基于确定学习的高精度速度控制指令. 该控制方案能够保证被控封闭机器人系统的所有信号最终一致有界且跟踪误差收敛于零的小邻域内. 在所提控制方案中, 通过引入外环补偿控制思想和宽度神经网络动态增量节点方式, 减小了设备计算负荷, 提高了速度控制下机器人的运动性能, 解决了市场上封闭机器人系统难以设计力矩控制的难题, 实现了不同工作任务下的高精度控制. 最后数值系统仿真结果和UR5机器人实验结果验证了该方案的有效性.


2023, 49(9): 1915-1927.
doi: 10.16383/j.aas.c210067
摘要:
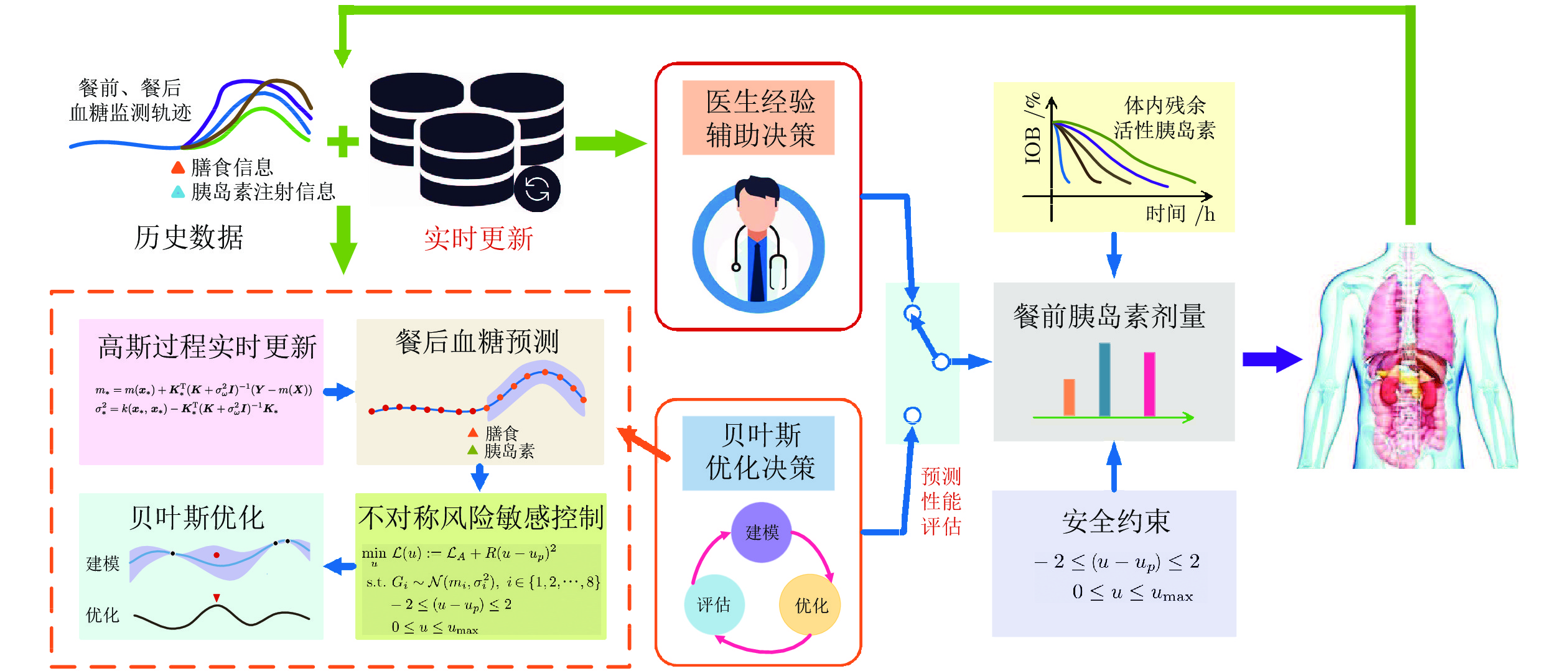
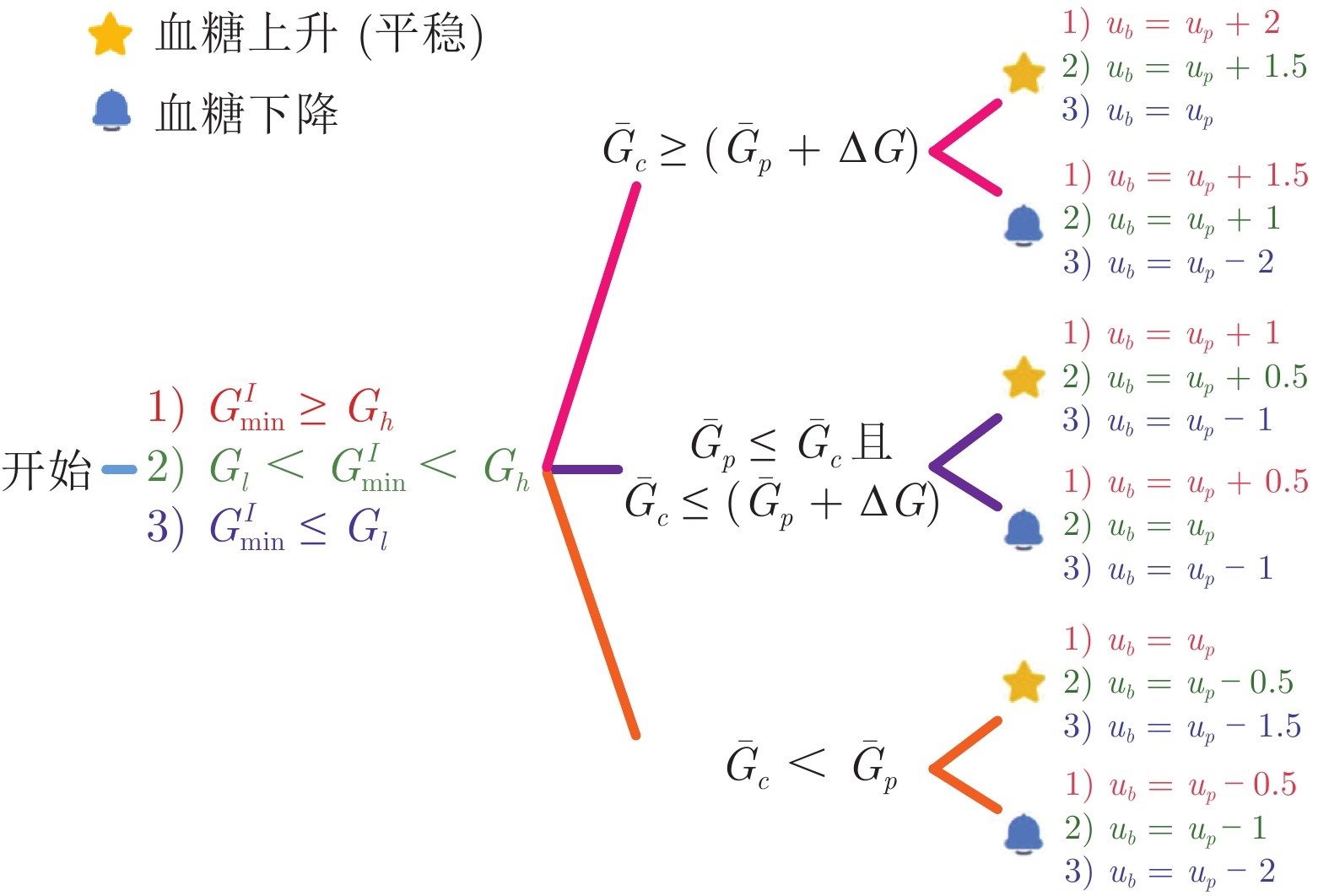
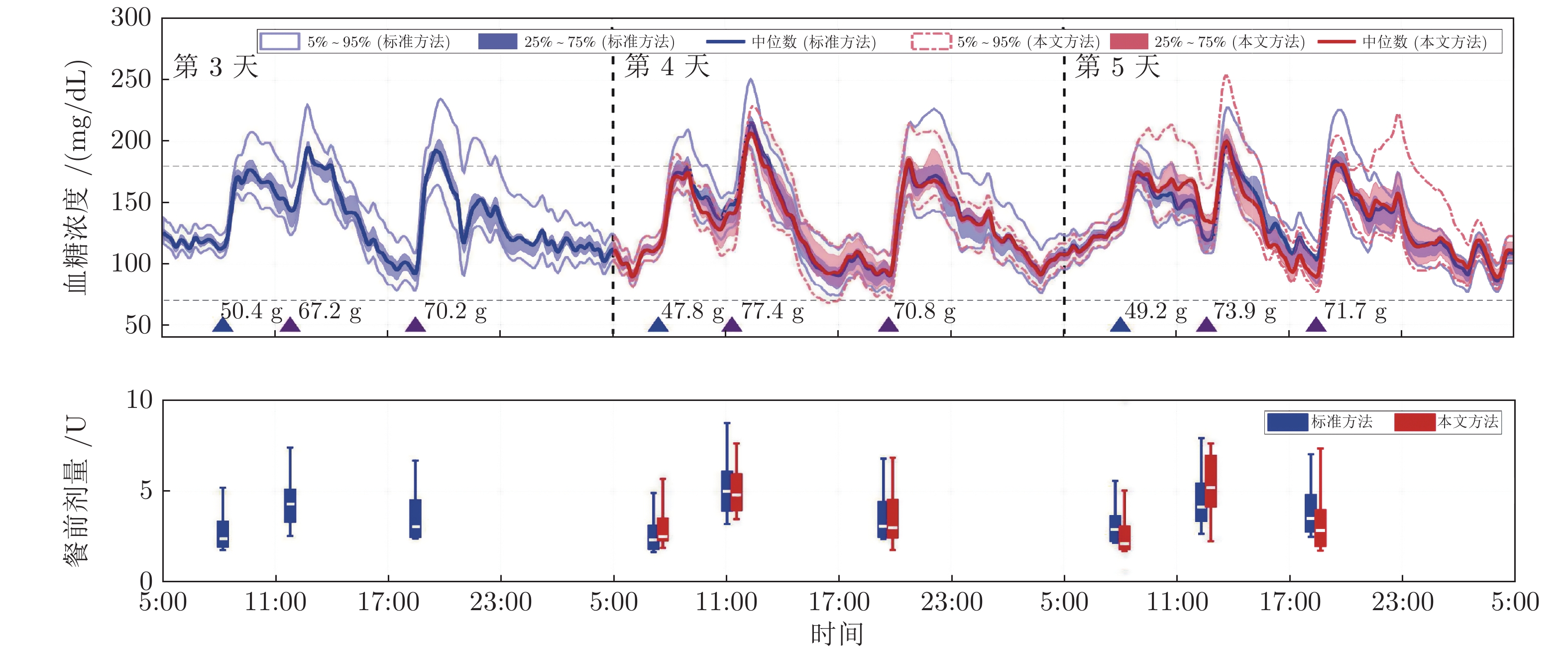
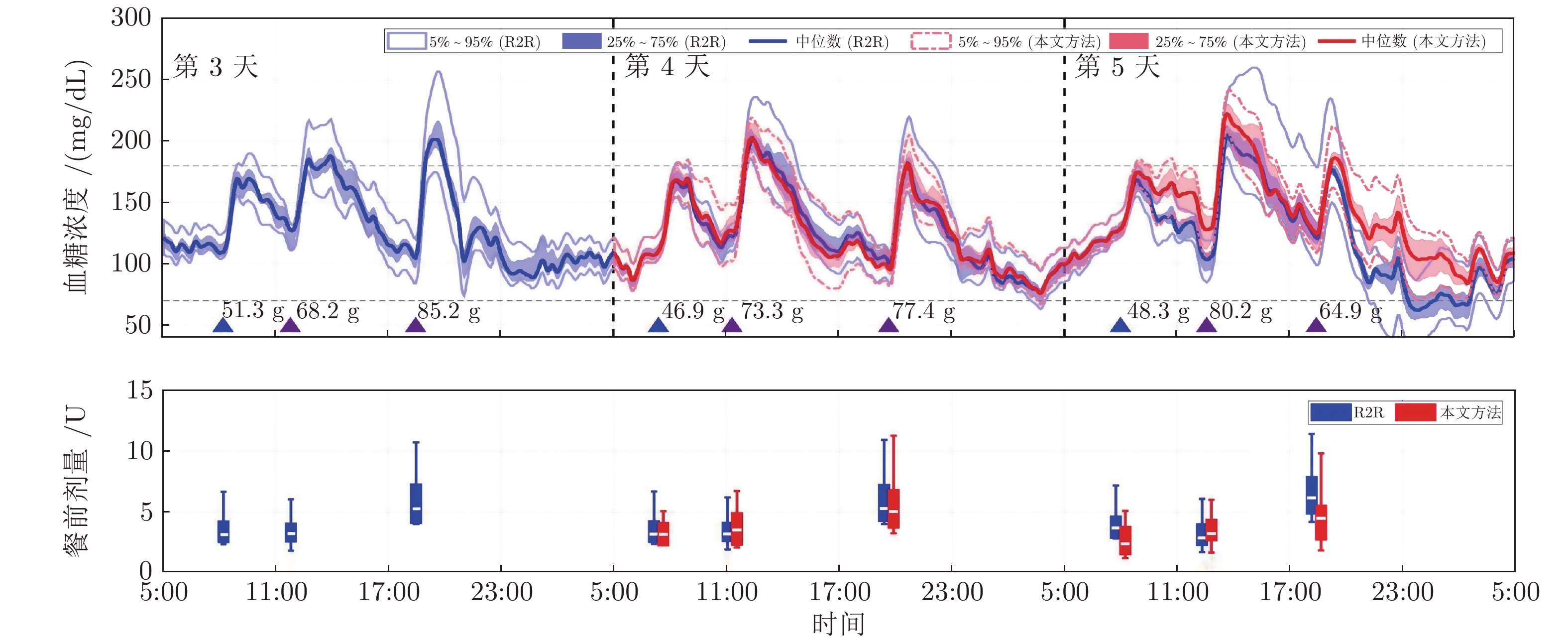
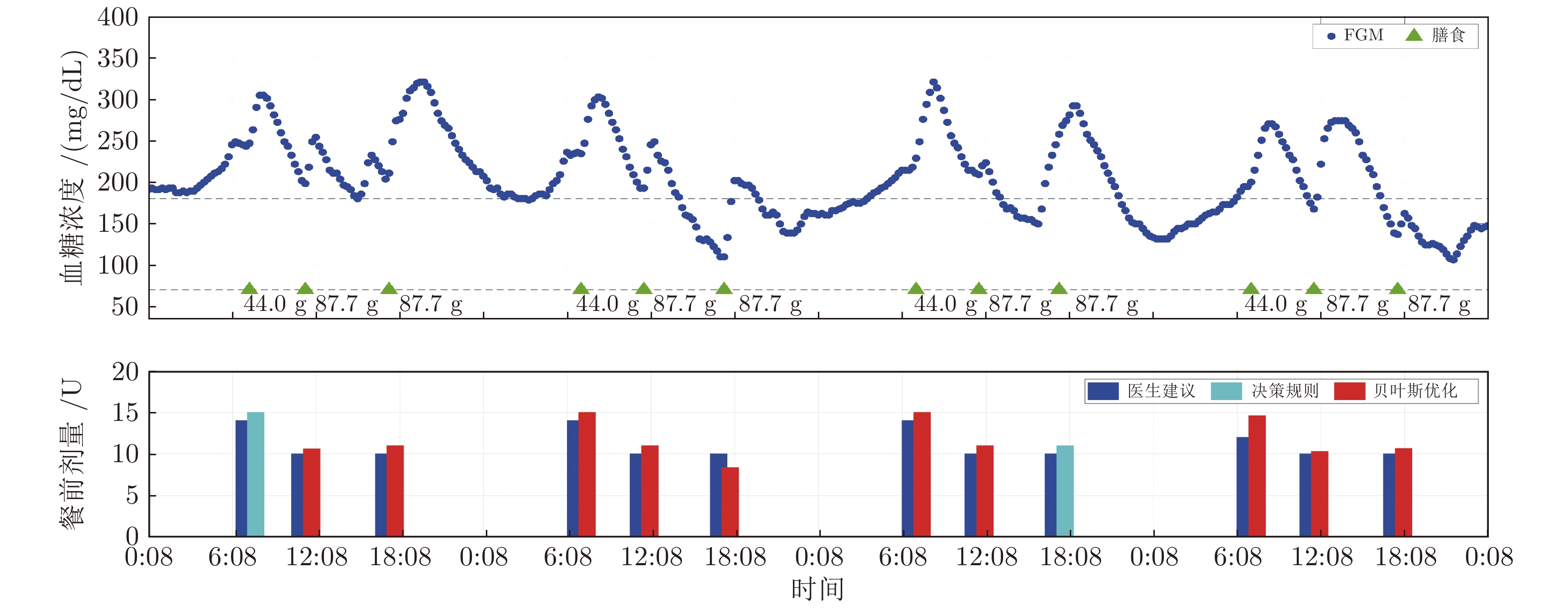
餐前胰岛素剂量精准决策是改善糖尿病患者血糖管理的关键. 临床治疗中胰岛素剂量调整一般在较短时间内完成, 具有典型的小样本特征; 数据驱动建模在该情形下无法准确学习患者餐后血糖代谢规律, 难以确保胰岛素剂量的安全和有效决策. 针对这一问题, 设计一种临床经验辅助的餐前胰岛素剂量自适应优化决策框架, 构建高斯过程血糖预测模型和模型有效性在线评估机制, 提出基于历史剂量和临床经验决策约束的贝叶斯优化方法, 实现小样本下餐后血糖轨迹的安全预测和餐前胰岛素注射剂量的优化决策. 该方法的安全性和有效性通过美国食品药品监督管理局接受的UVA/Padova T1DM平台测试结果和1型糖尿病患者实际临床数据决策结果充分验证. 可为餐前胰岛素剂量智能决策及临床试验提供方法基础和技术支持, 也为中国糖尿病患者血糖管理水平的有效改善, 提供了精准医学治疗手段.
餐前胰岛素剂量精准决策是改善糖尿病患者血糖管理的关键. 临床治疗中胰岛素剂量调整一般在较短时间内完成, 具有典型的小样本特征; 数据驱动建模在该情形下无法准确学习患者餐后血糖代谢规律, 难以确保胰岛素剂量的安全和有效决策. 针对这一问题, 设计一种临床经验辅助的餐前胰岛素剂量自适应优化决策框架, 构建高斯过程血糖预测模型和模型有效性在线评估机制, 提出基于历史剂量和临床经验决策约束的贝叶斯优化方法, 实现小样本下餐后血糖轨迹的安全预测和餐前胰岛素注射剂量的优化决策. 该方法的安全性和有效性通过美国食品药品监督管理局接受的UVA/Padova T1DM平台测试结果和1型糖尿病患者实际临床数据决策结果充分验证. 可为餐前胰岛素剂量智能决策及临床试验提供方法基础和技术支持, 也为中国糖尿病患者血糖管理水平的有效改善, 提供了精准医学治疗手段.




2023, 49(9): 1928-1940.
doi: 10.16383/j.aas.c210027
摘要:
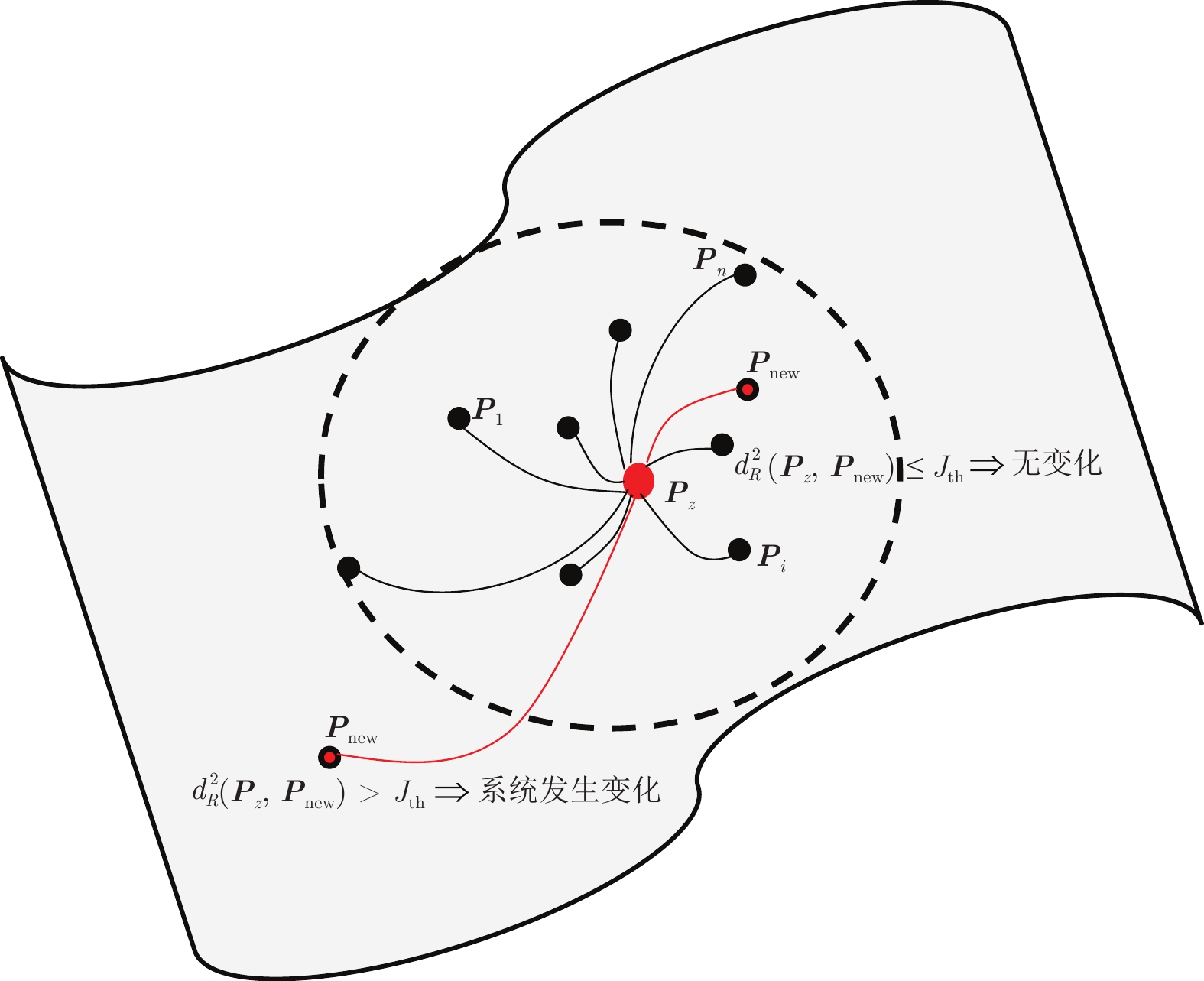
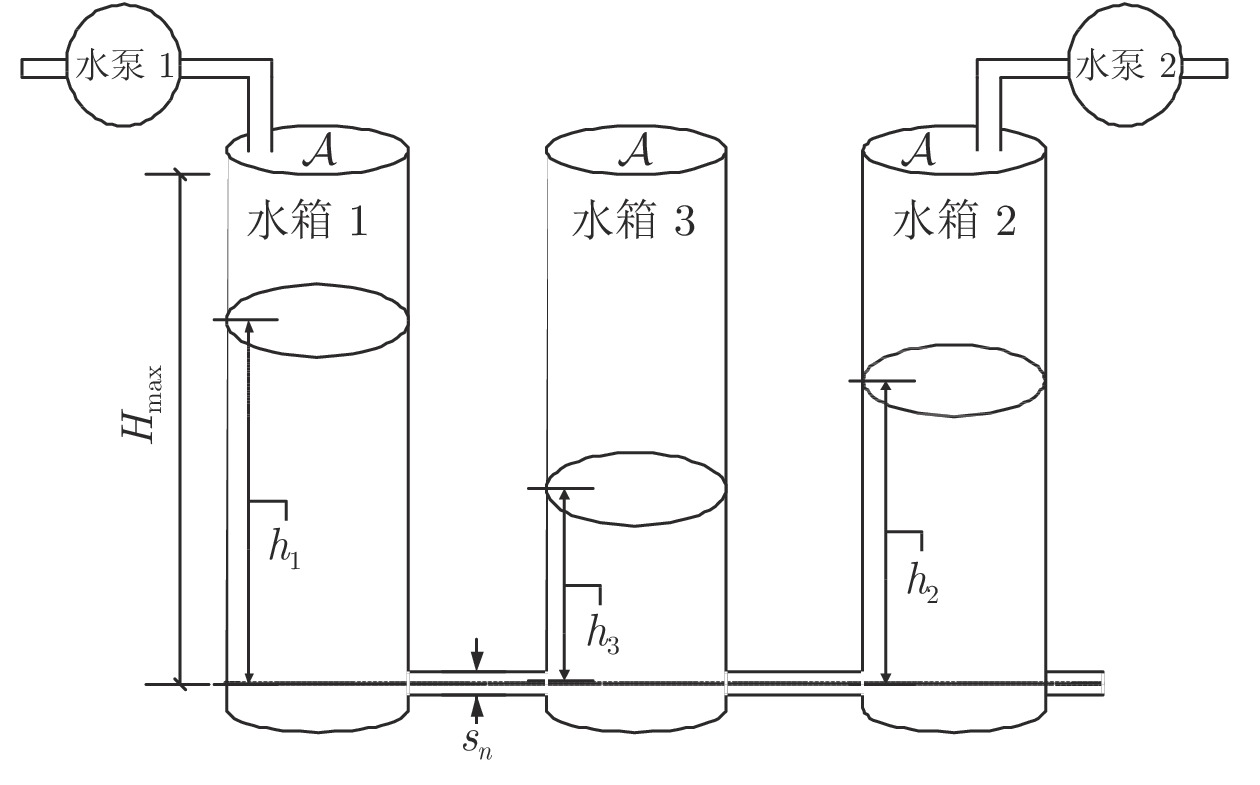
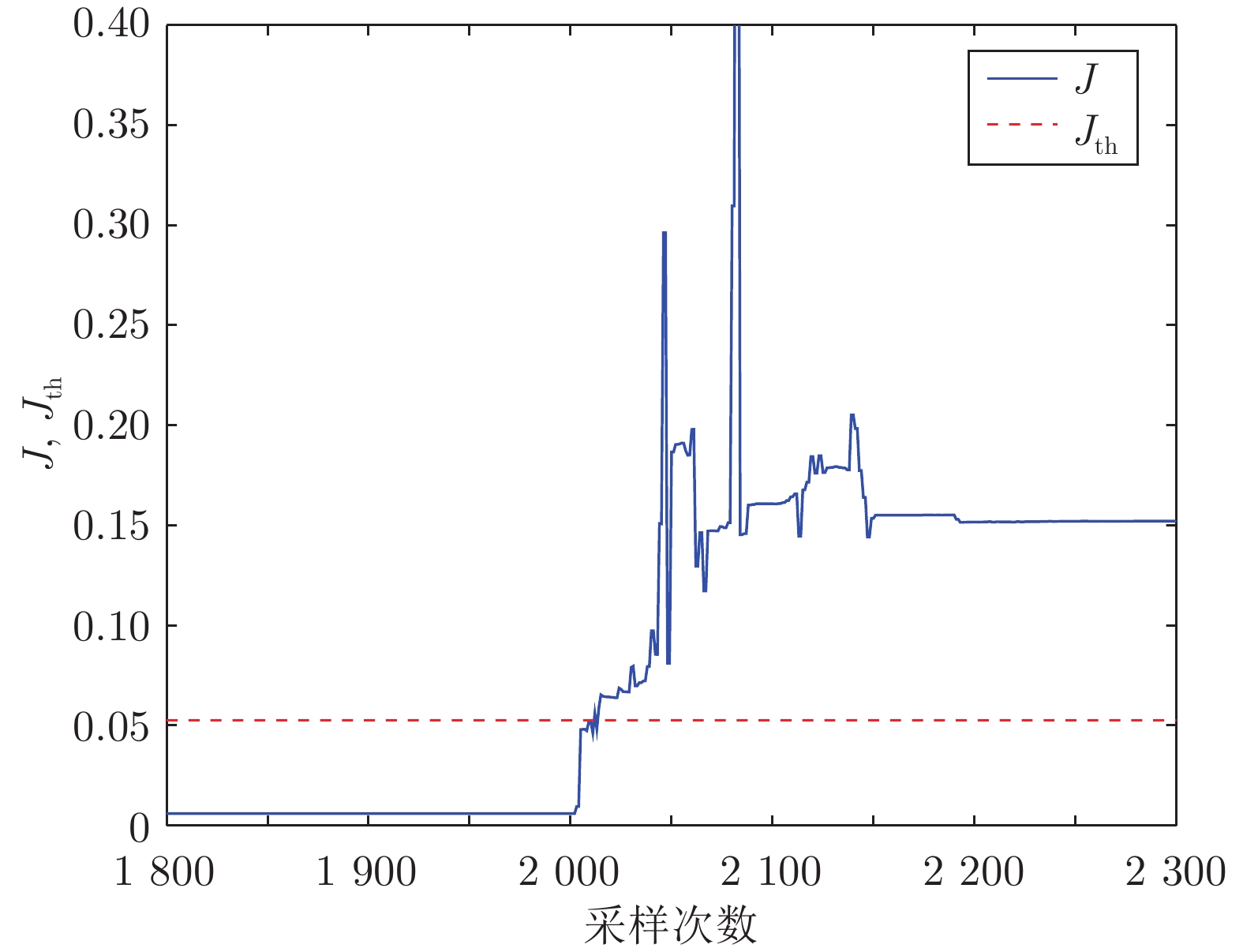
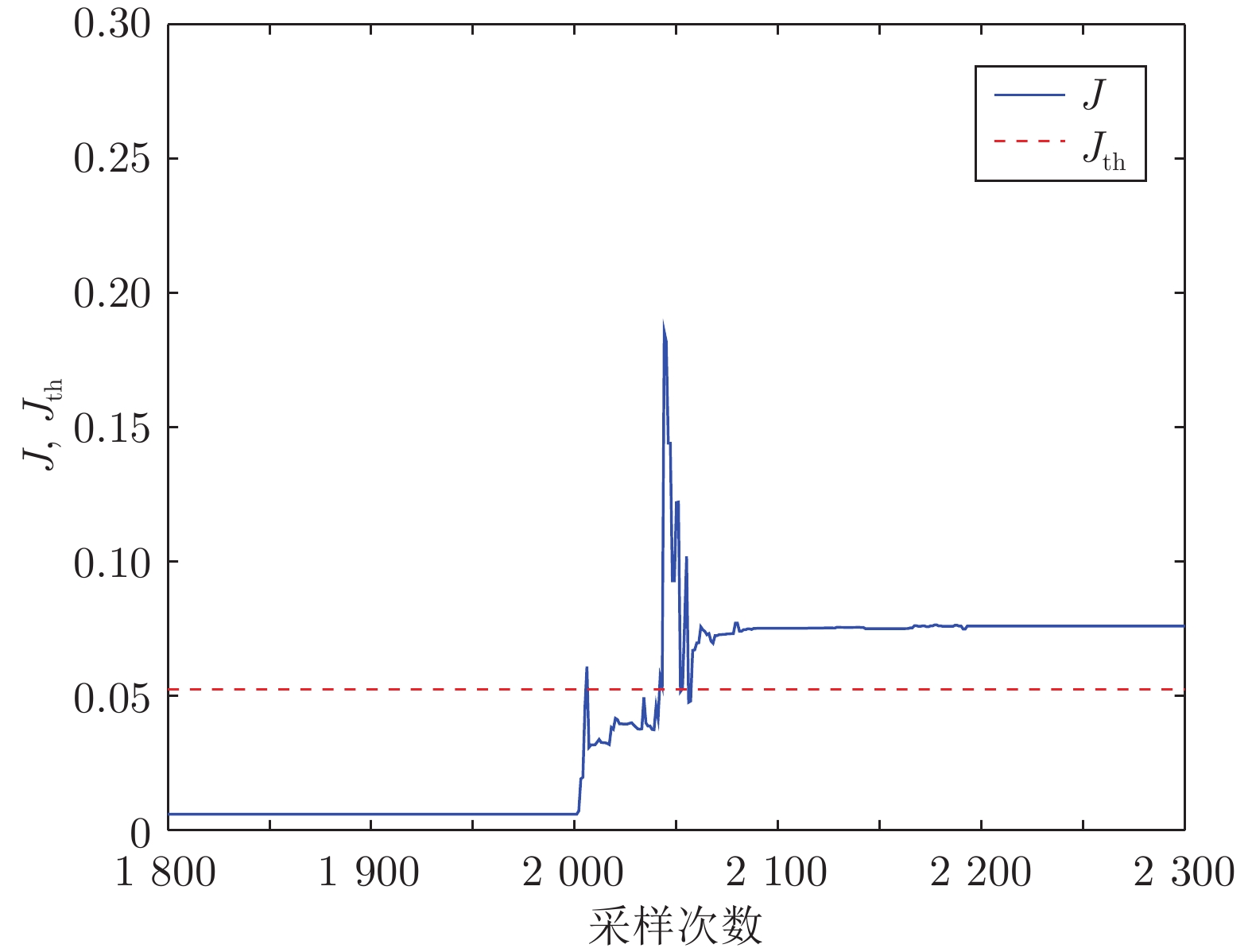
针对复杂工业系统对性能衰退的容忍度低等问题, 提出基于系统性能预测的一类反馈控制系统过程监测方法, 通过黎曼度量对控制性能衰退程度进行预测与监测, 并给出发生故障的类型, 以提升过程监测系统的实时性与准确性. 首先, 利用系统的实时数据, 计算系统性能衰退的预测指标; 其次, 利用黎曼度量对系统性能衰退程度进行预测与监测, 并利用随机算法给出对应的阈值来诊断系统性能衰退; 最后, 通过计算各类引发系统性能衰退的故障的性能预测指标集合的中心和阈值, 实现故障的实时定位. 所提出的方法通过三容水箱仿真实验平台进行验证.
针对复杂工业系统对性能衰退的容忍度低等问题, 提出基于系统性能预测的一类反馈控制系统过程监测方法, 通过黎曼度量对控制性能衰退程度进行预测与监测, 并给出发生故障的类型, 以提升过程监测系统的实时性与准确性. 首先, 利用系统的实时数据, 计算系统性能衰退的预测指标; 其次, 利用黎曼度量对系统性能衰退程度进行预测与监测, 并利用随机算法给出对应的阈值来诊断系统性能衰退; 最后, 通过计算各类引发系统性能衰退的故障的性能预测指标集合的中心和阈值, 实现故障的实时定位. 所提出的方法通过三容水箱仿真实验平台进行验证.



2023, 49(9): 1941-1950.
doi: 10.16383/j.aas.c220682
摘要:
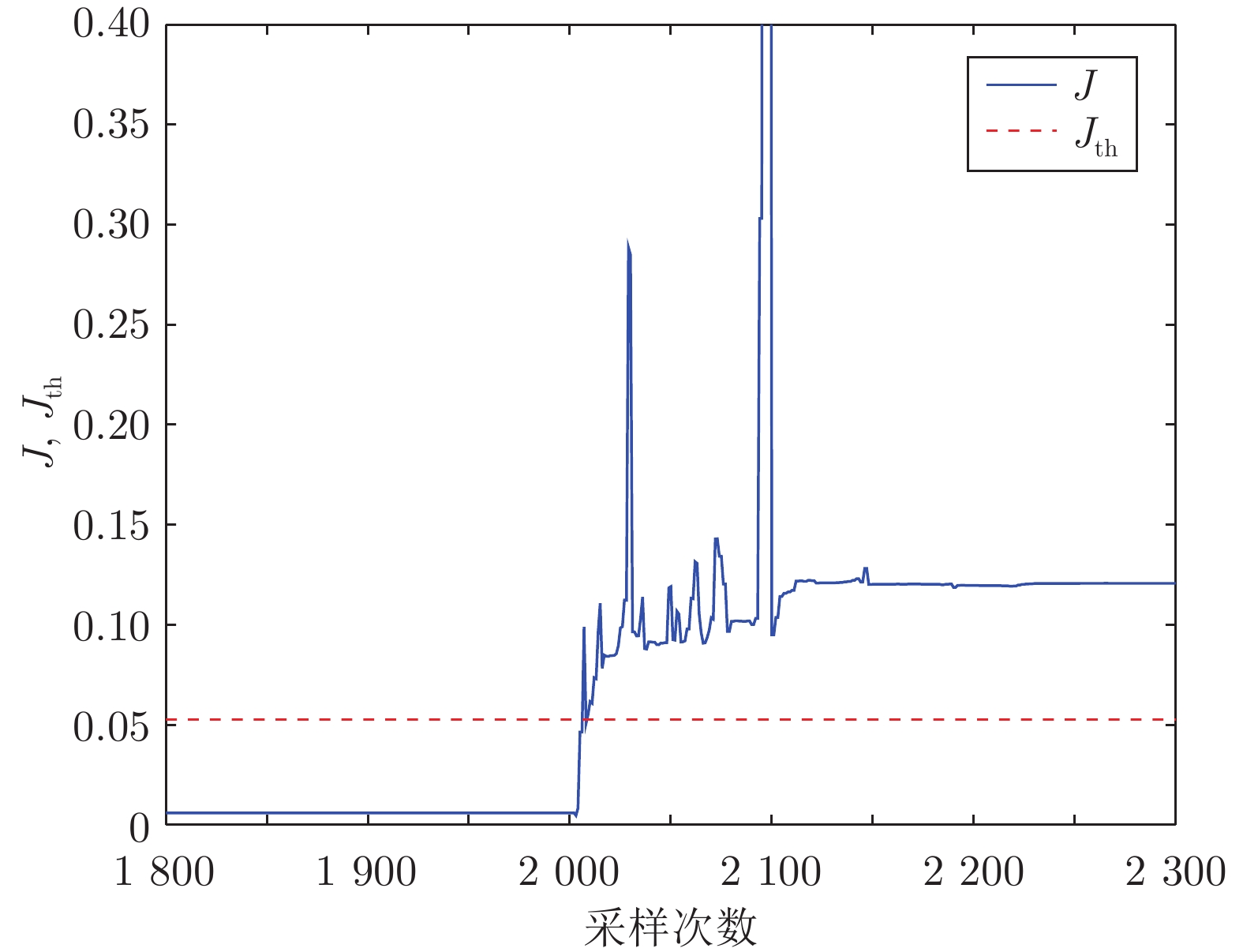
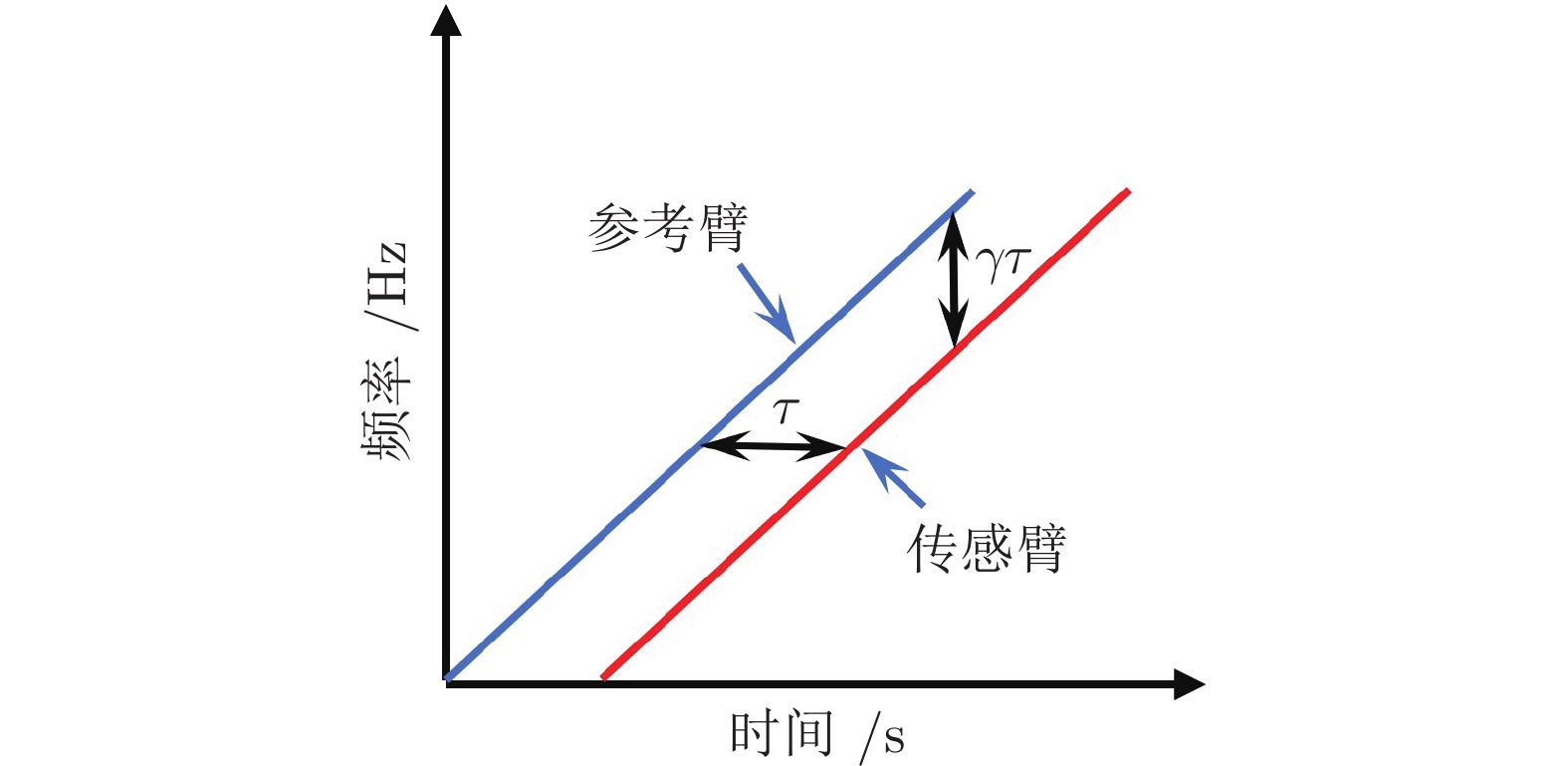
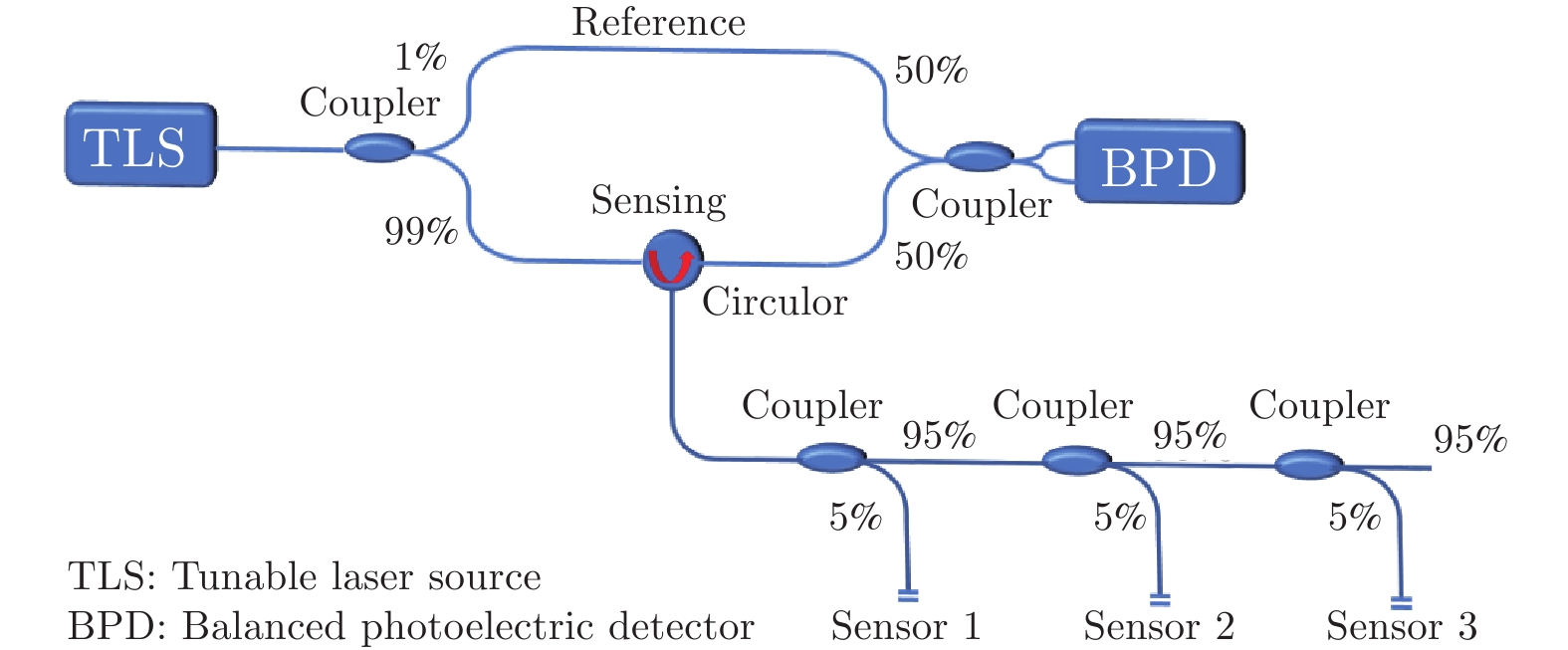
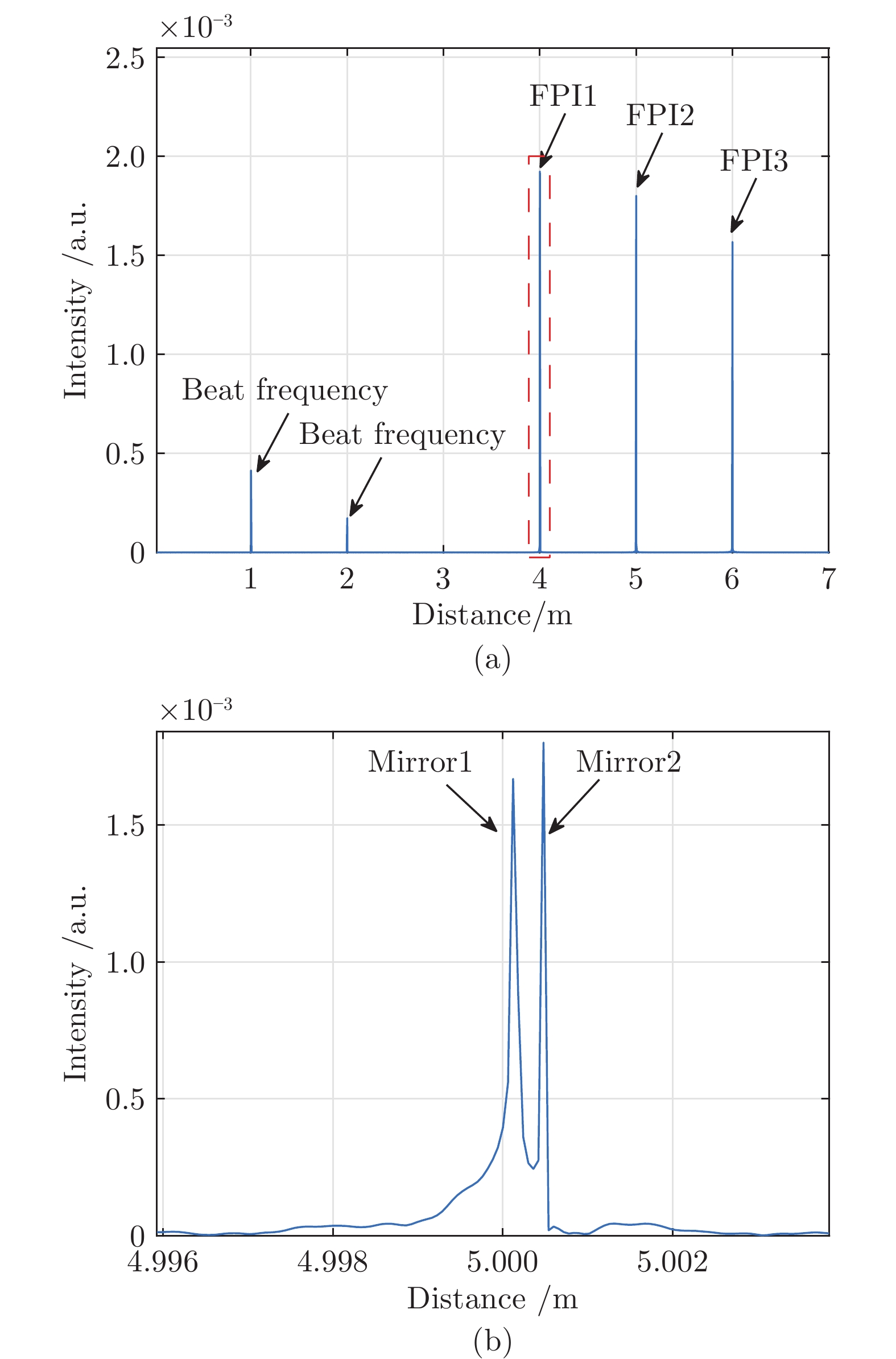
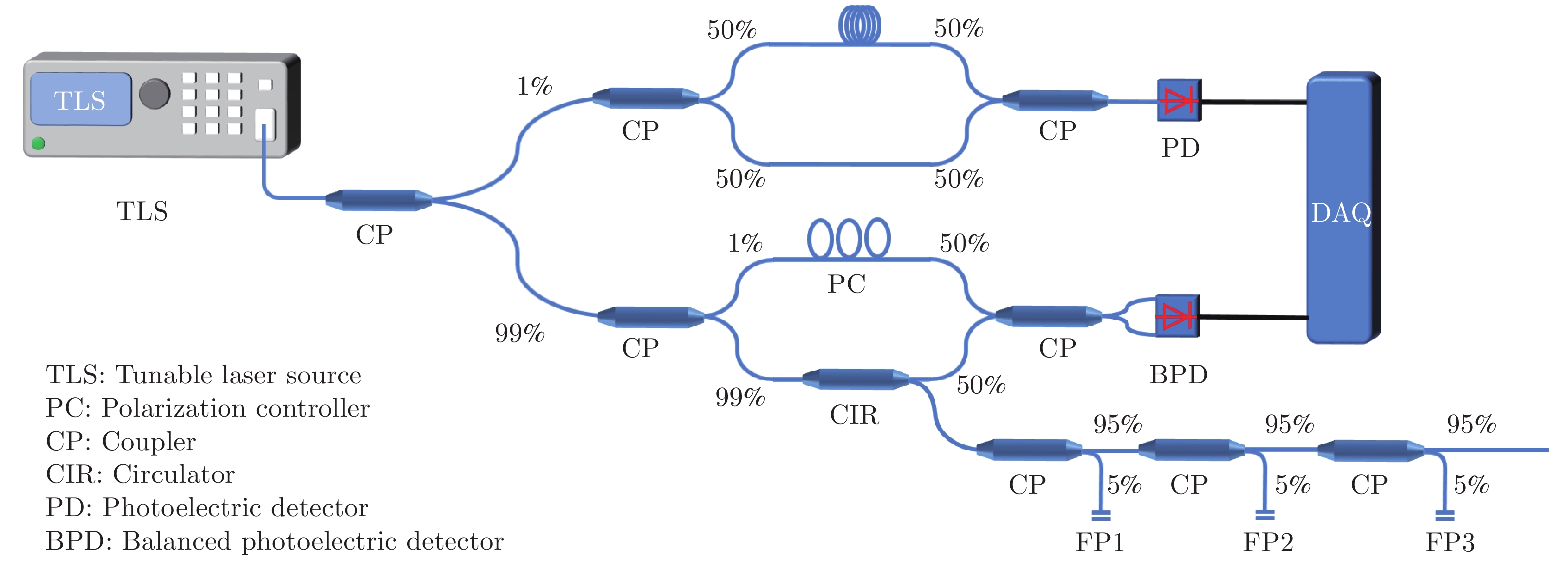
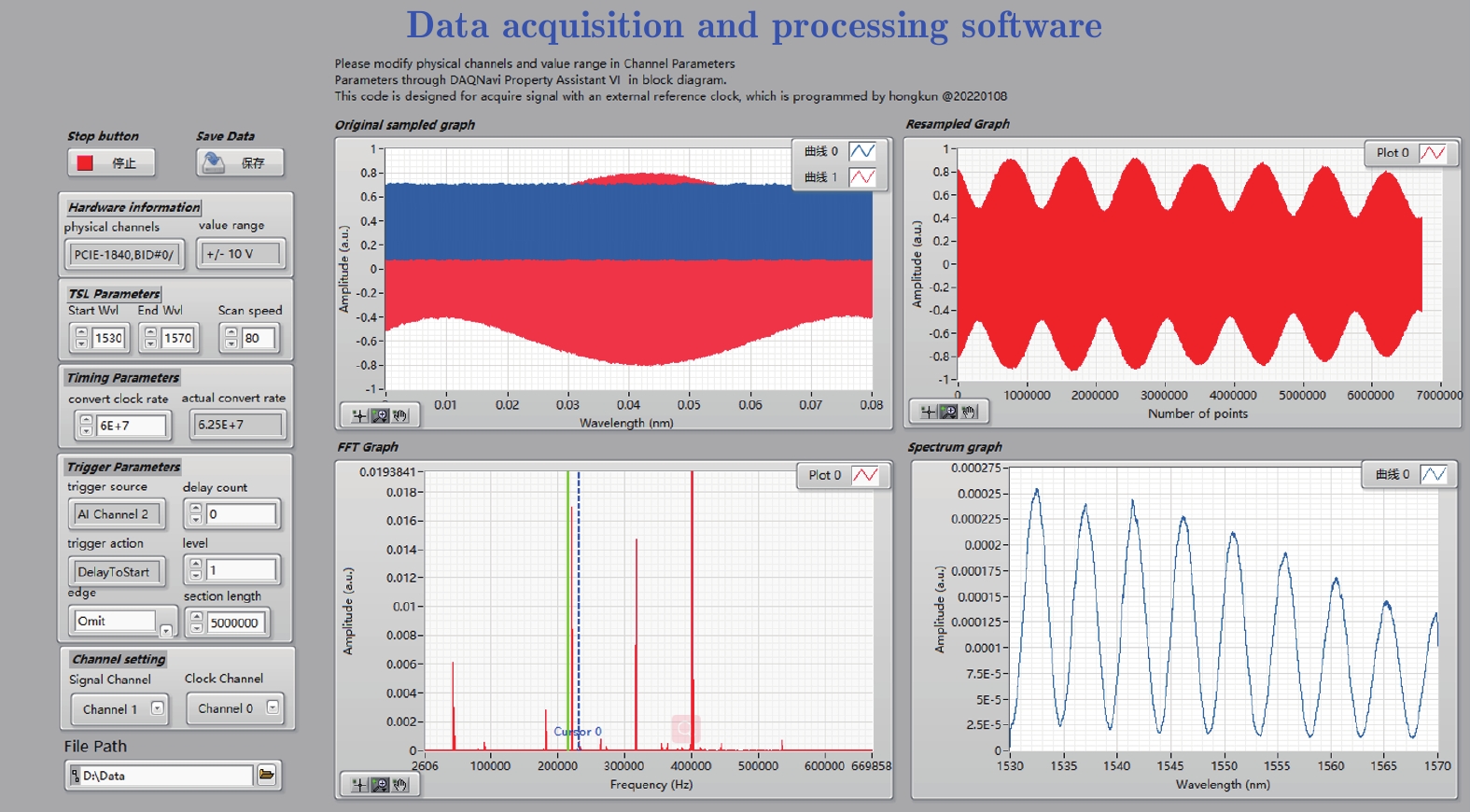
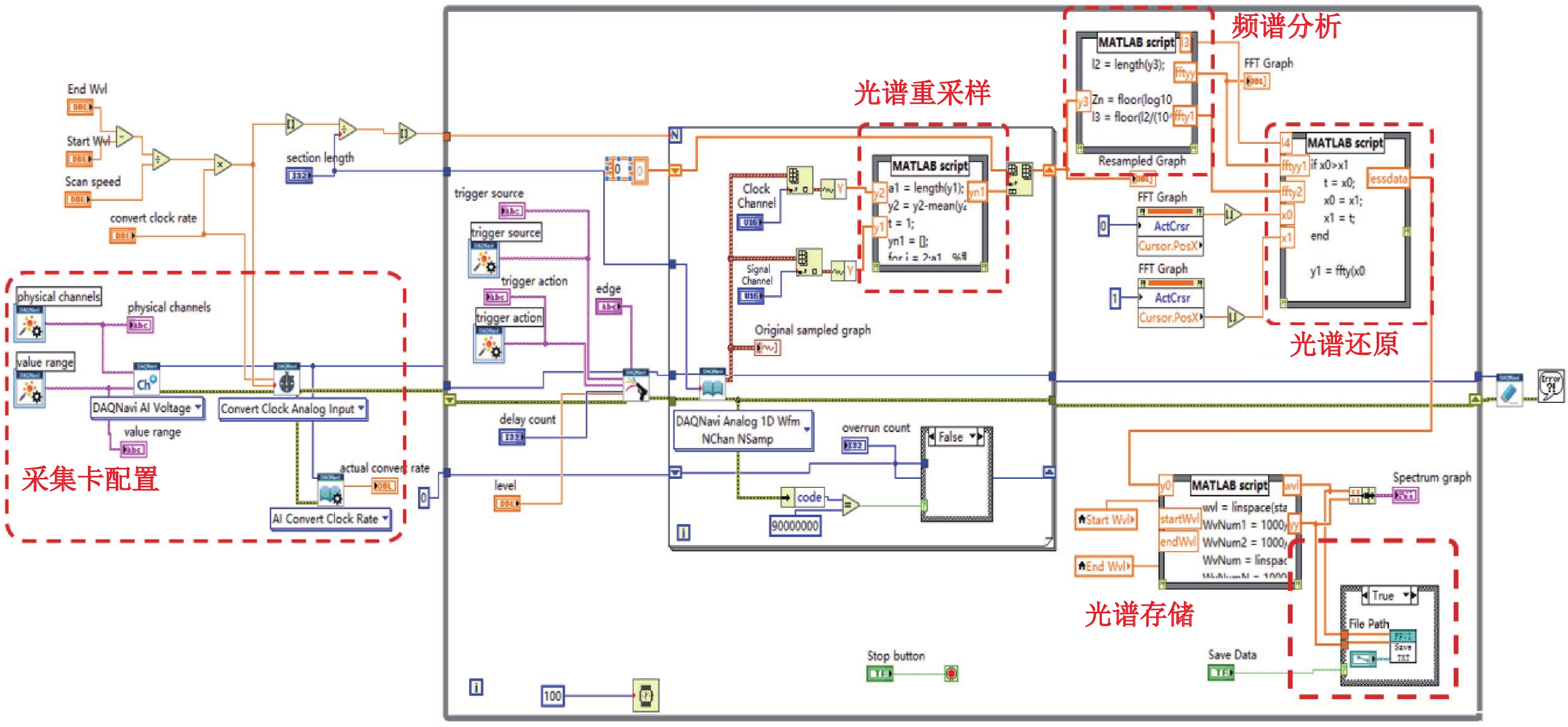
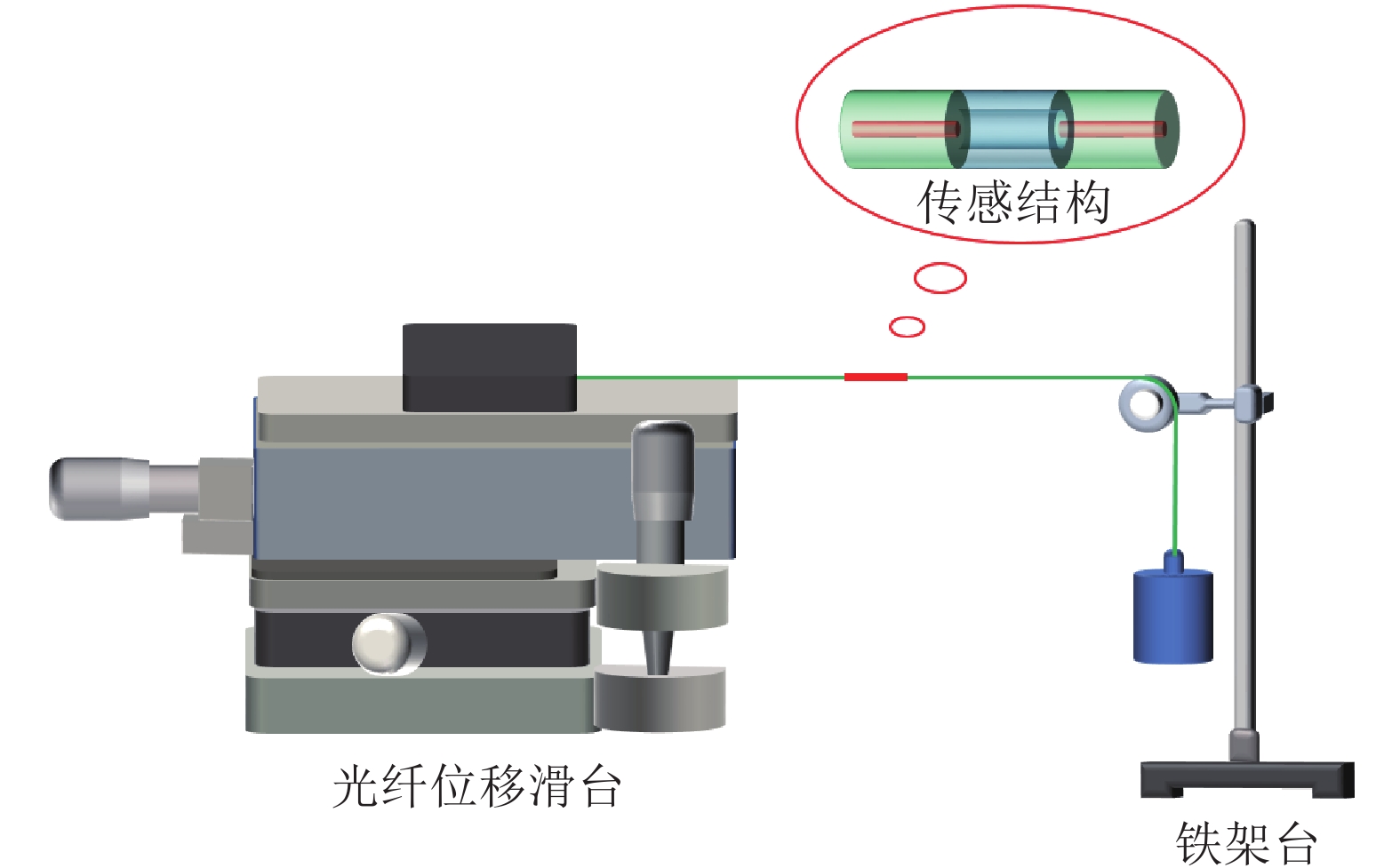
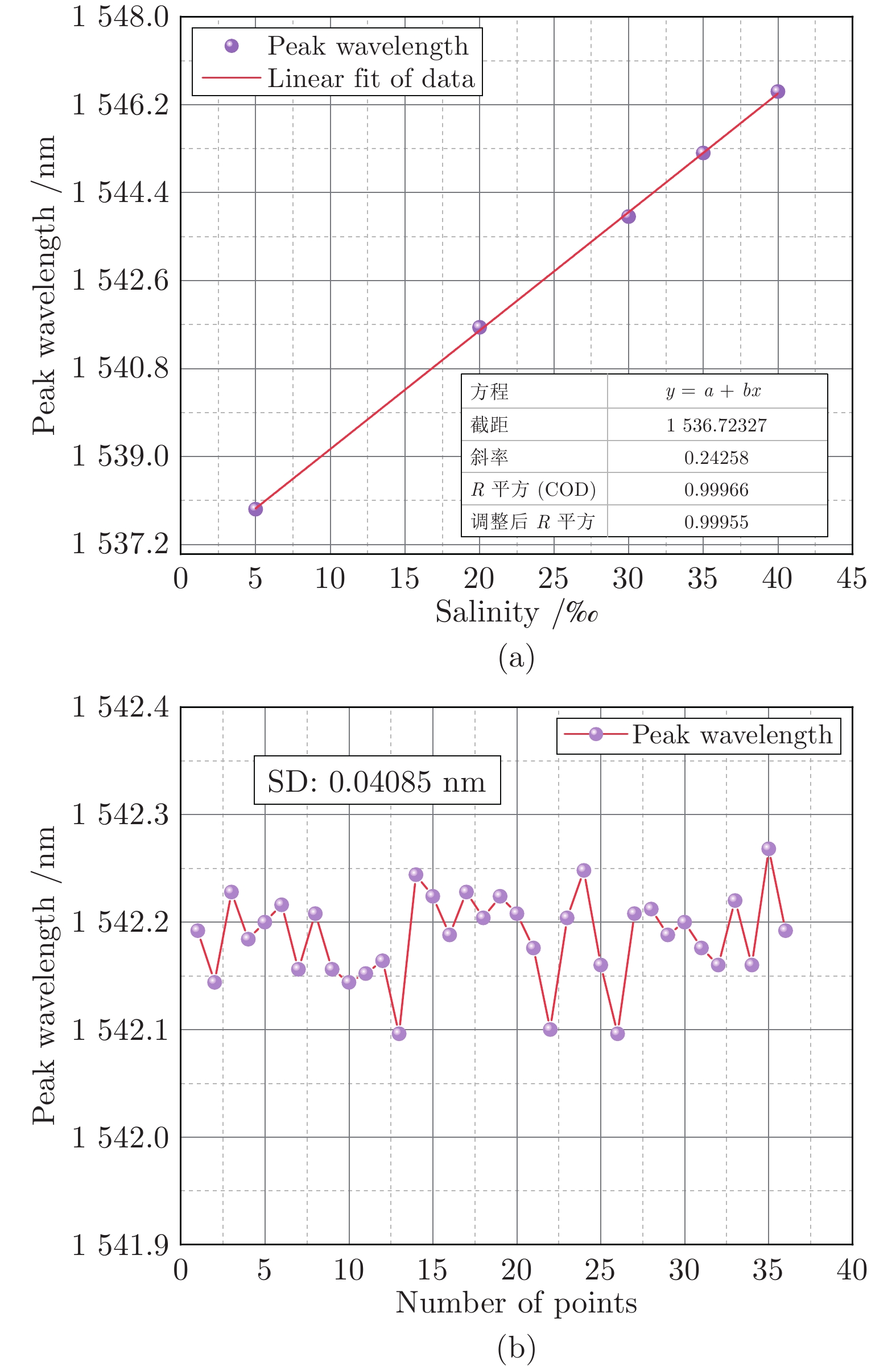
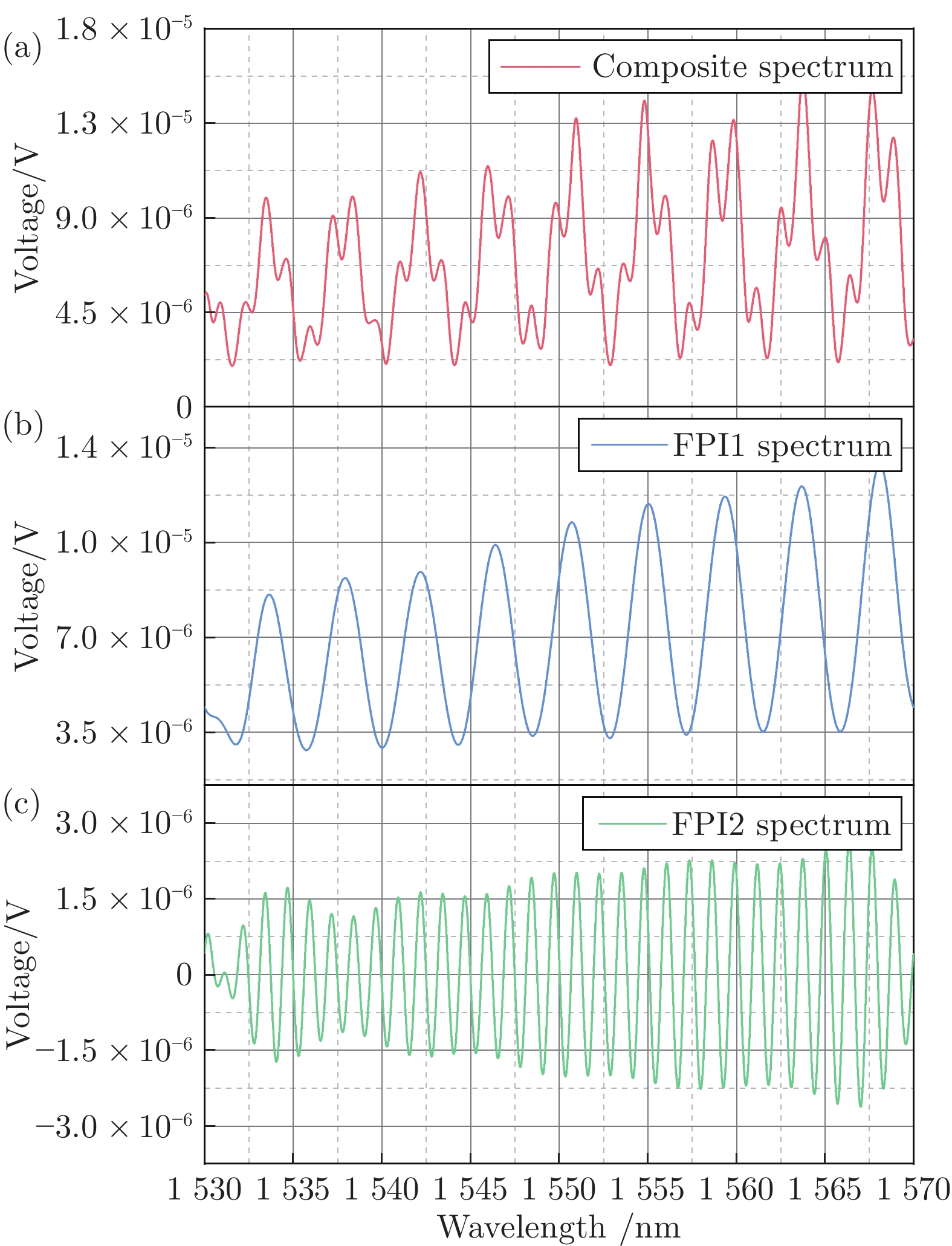
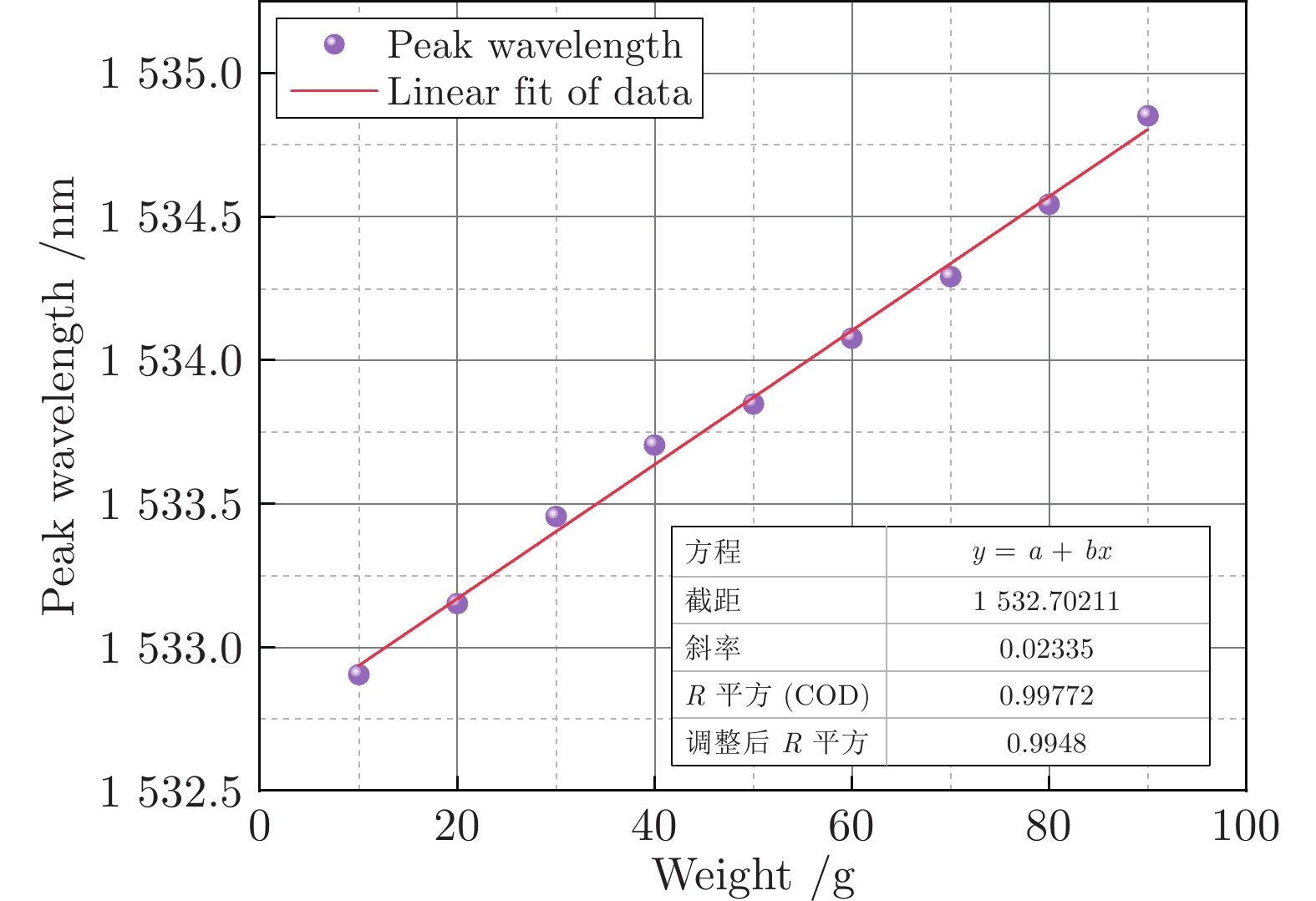
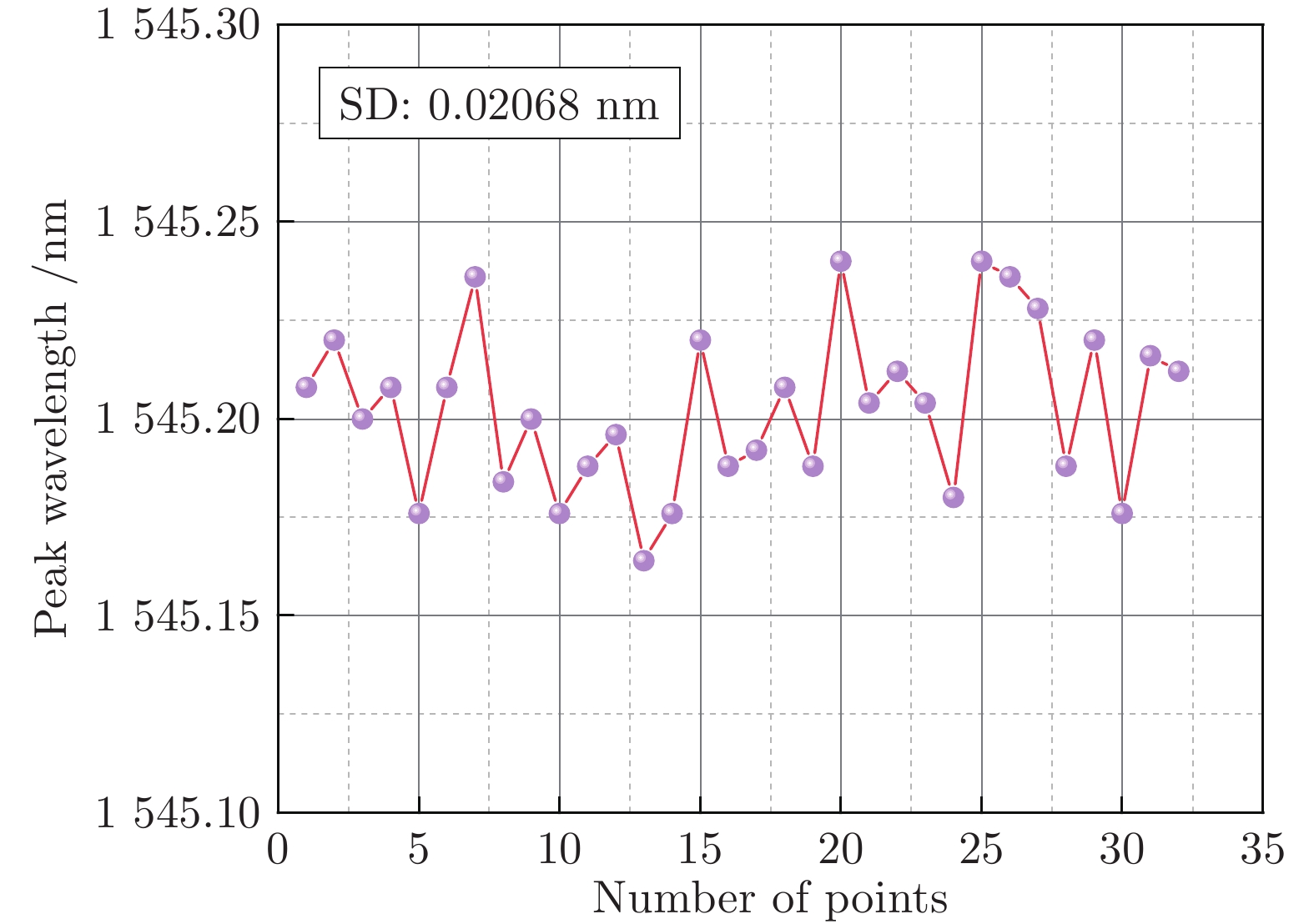
光纤传感器因其灵敏度高、体积小等优点在海洋监测领域得到了广泛关注. 目前高性能的海洋温盐深参数监测光纤传感器大都基于干涉原理, 难以实现同一系统内多个传感器的复用, 不能满足海洋环境参数高时空分辨力的监测需求. 基于调频连续波原理, 提出一种适用于干涉型海洋参数光纤传感器的大容量复用方法. 利用不同干涉仪端面反射光与参考光形成Mach-Zehnder干涉光谱的特征频率确定不同传感器的位置, 通过不同端面特征频率间的拍频还原了单个传感器的光谱. 设计并搭建了干涉型海洋参数传感器的分布式传感系统, 实现了系统中传感器的定位以及光谱信号还原, 并通过理论计算证明分布式传感系统中至少可以实现500个传感器的复用. 本论文的研究可以为高性能干涉型光纤传感器的海洋参数链式监测提供技术支持.
光纤传感器因其灵敏度高、体积小等优点在海洋监测领域得到了广泛关注. 目前高性能的海洋温盐深参数监测光纤传感器大都基于干涉原理, 难以实现同一系统内多个传感器的复用, 不能满足海洋环境参数高时空分辨力的监测需求. 基于调频连续波原理, 提出一种适用于干涉型海洋参数光纤传感器的大容量复用方法. 利用不同干涉仪端面反射光与参考光形成Mach-Zehnder干涉光谱的特征频率确定不同传感器的位置, 通过不同端面特征频率间的拍频还原了单个传感器的光谱. 设计并搭建了干涉型海洋参数传感器的分布式传感系统, 实现了系统中传感器的定位以及光谱信号还原, 并通过理论计算证明分布式传感系统中至少可以实现500个传感器的复用. 本论文的研究可以为高性能干涉型光纤传感器的海洋参数链式监测提供技术支持.






2023, 49(9): 1951-1966.
doi: 10.16383/j.aas.c200921
摘要:
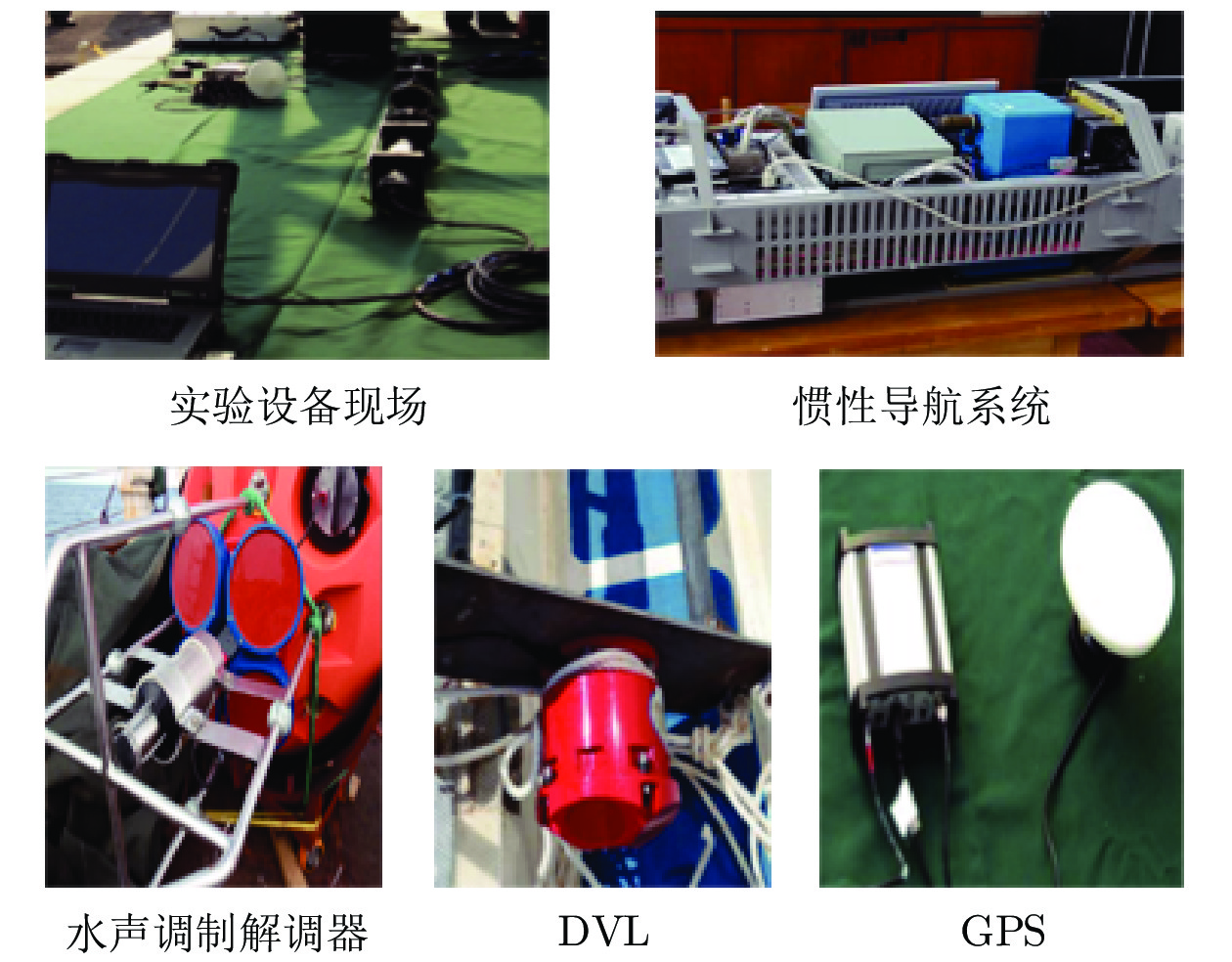
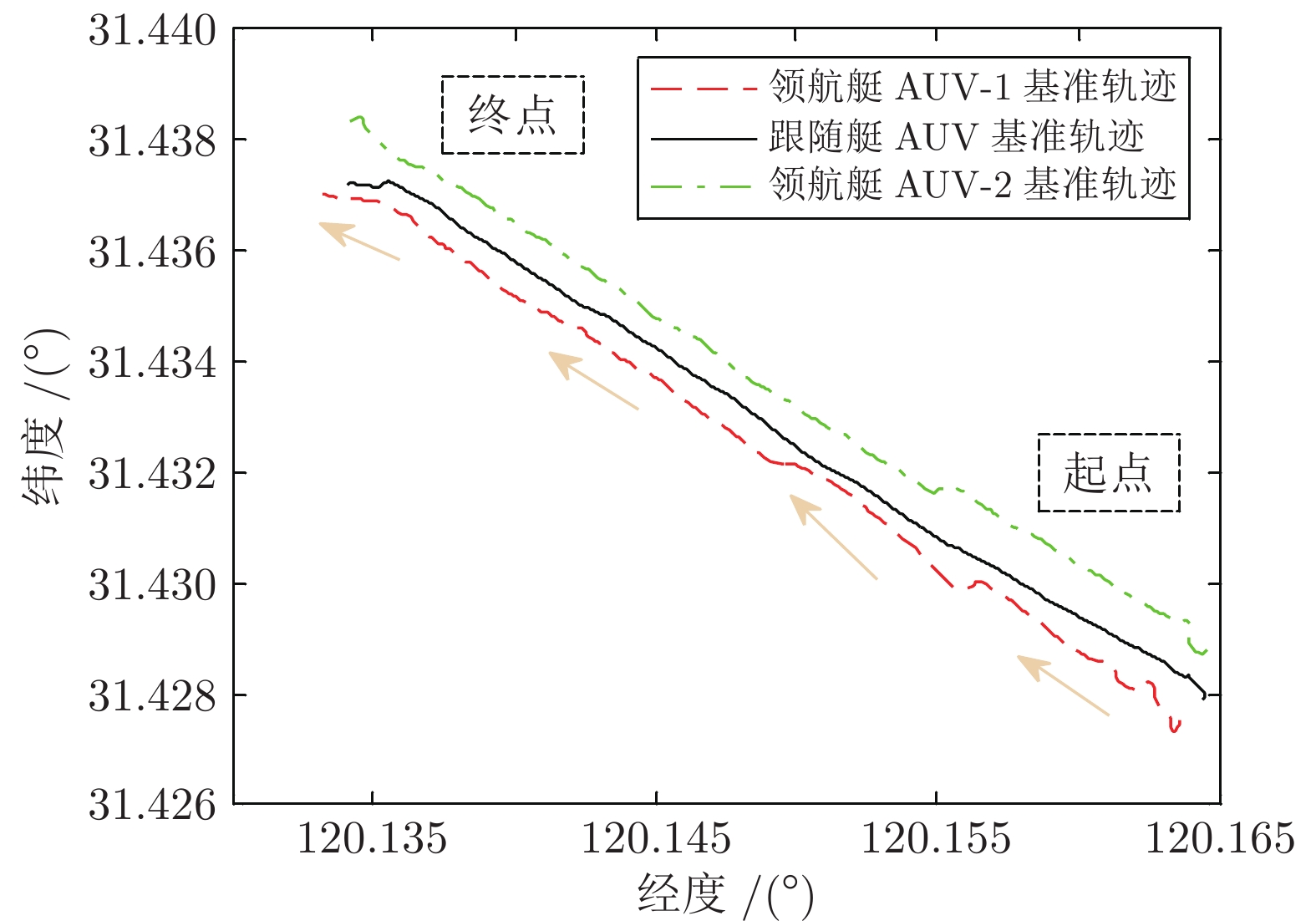
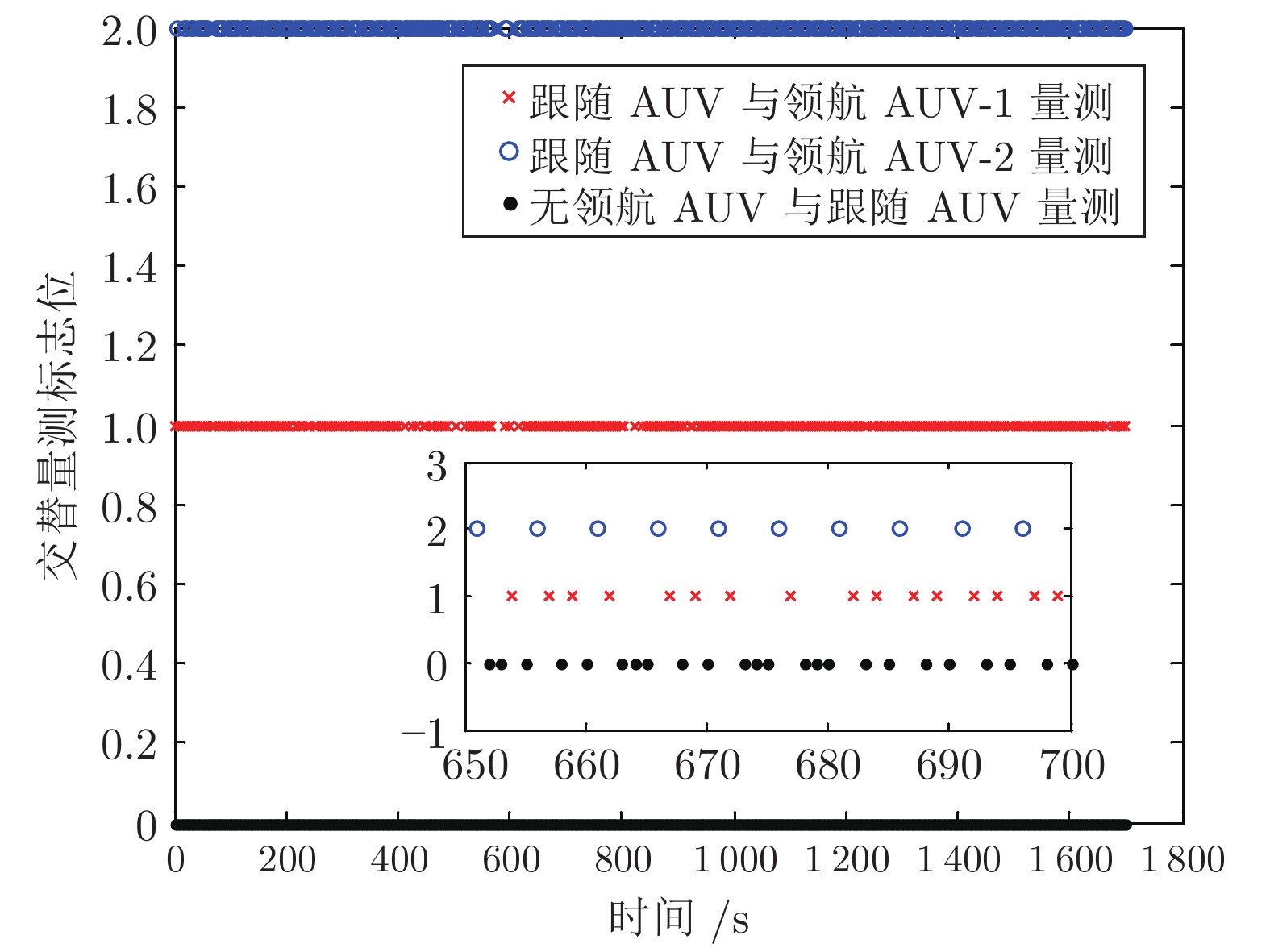
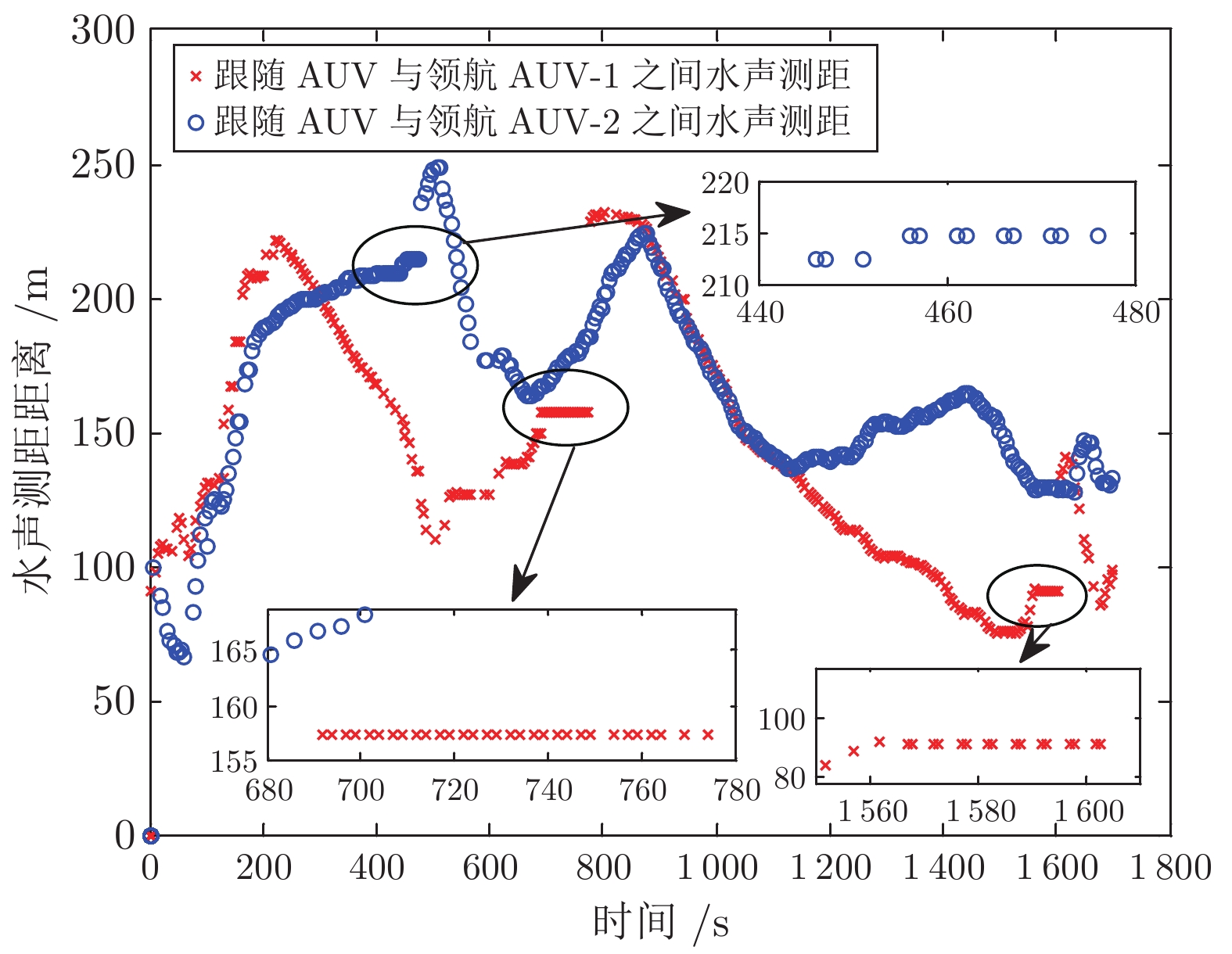
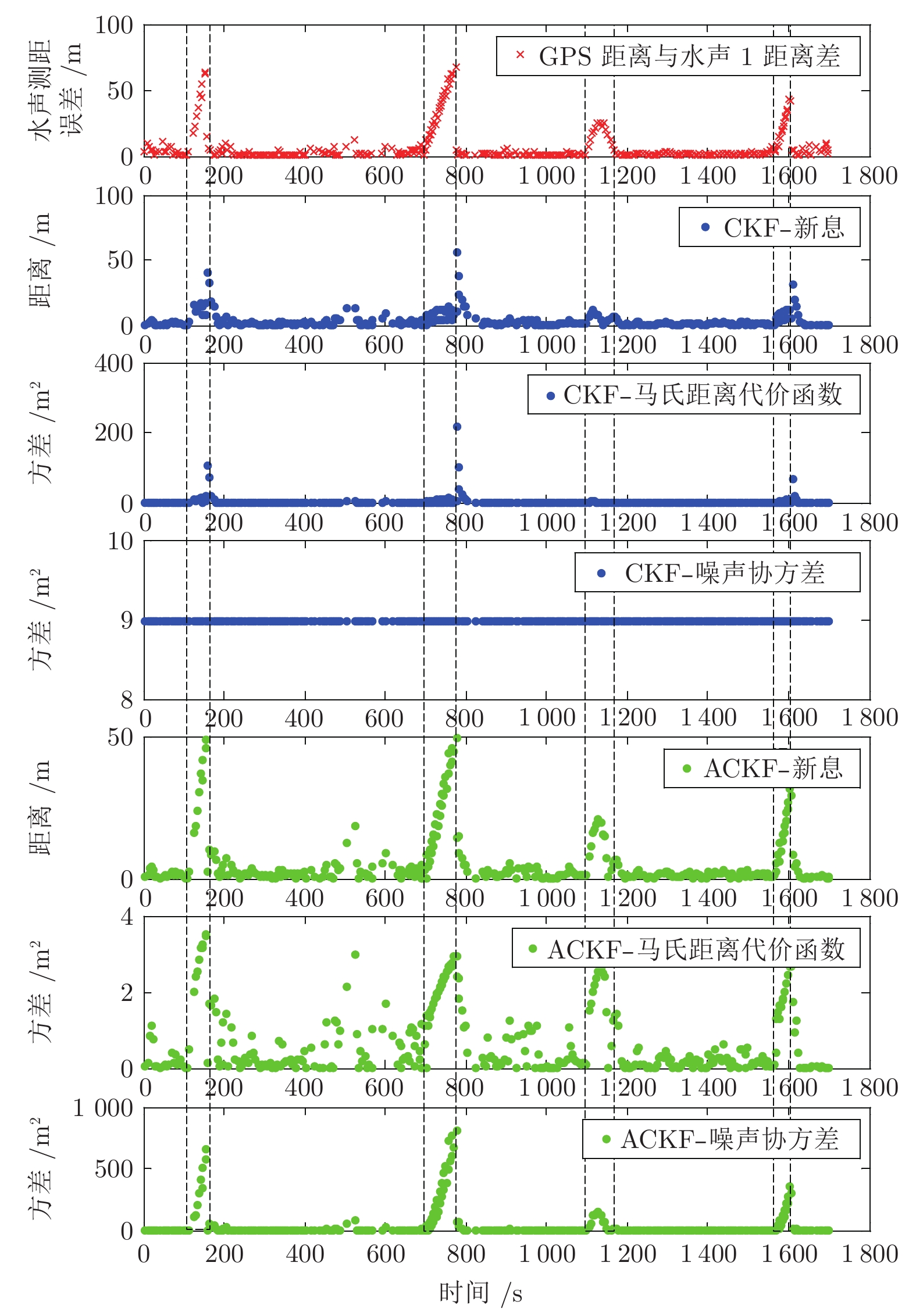
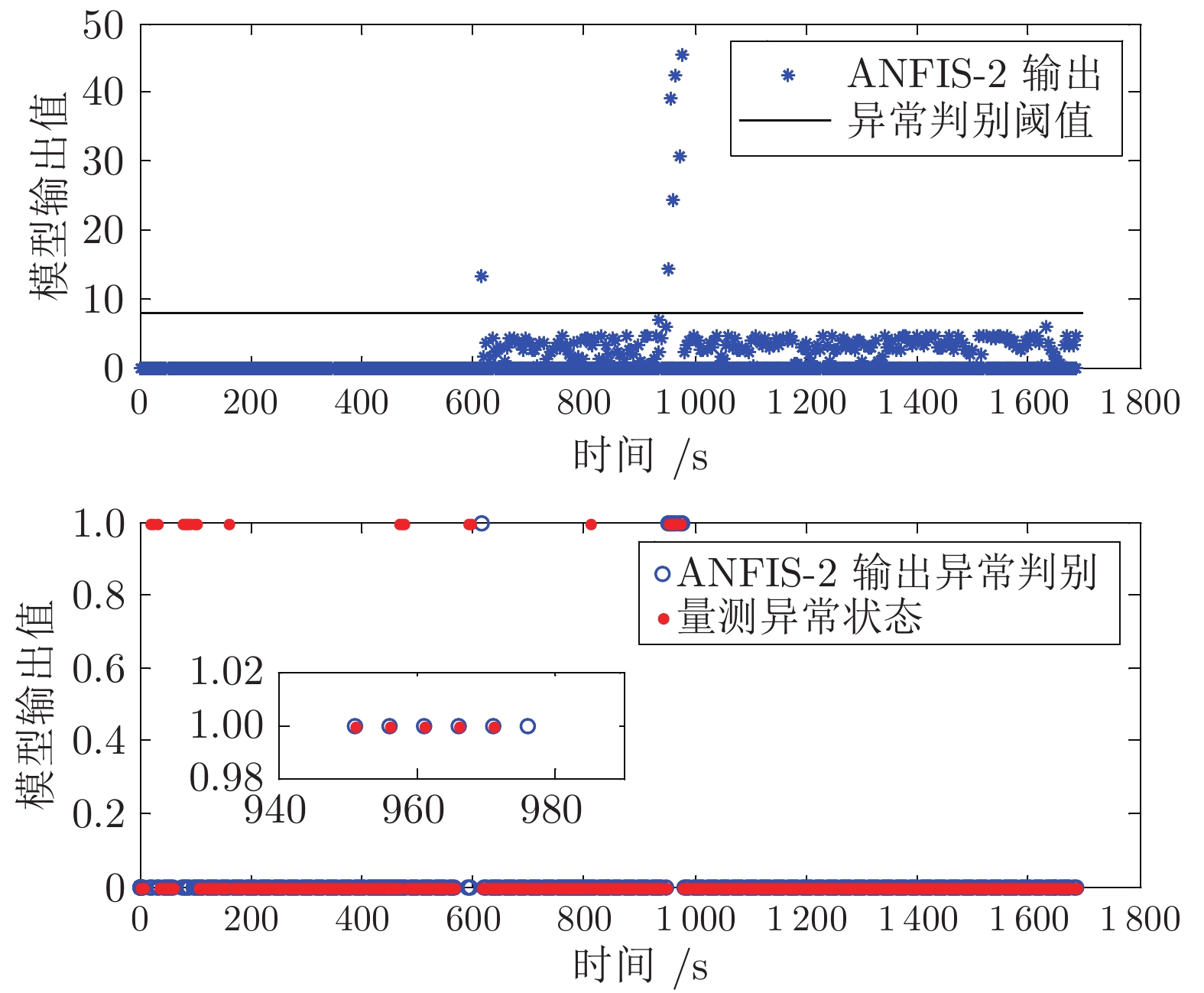
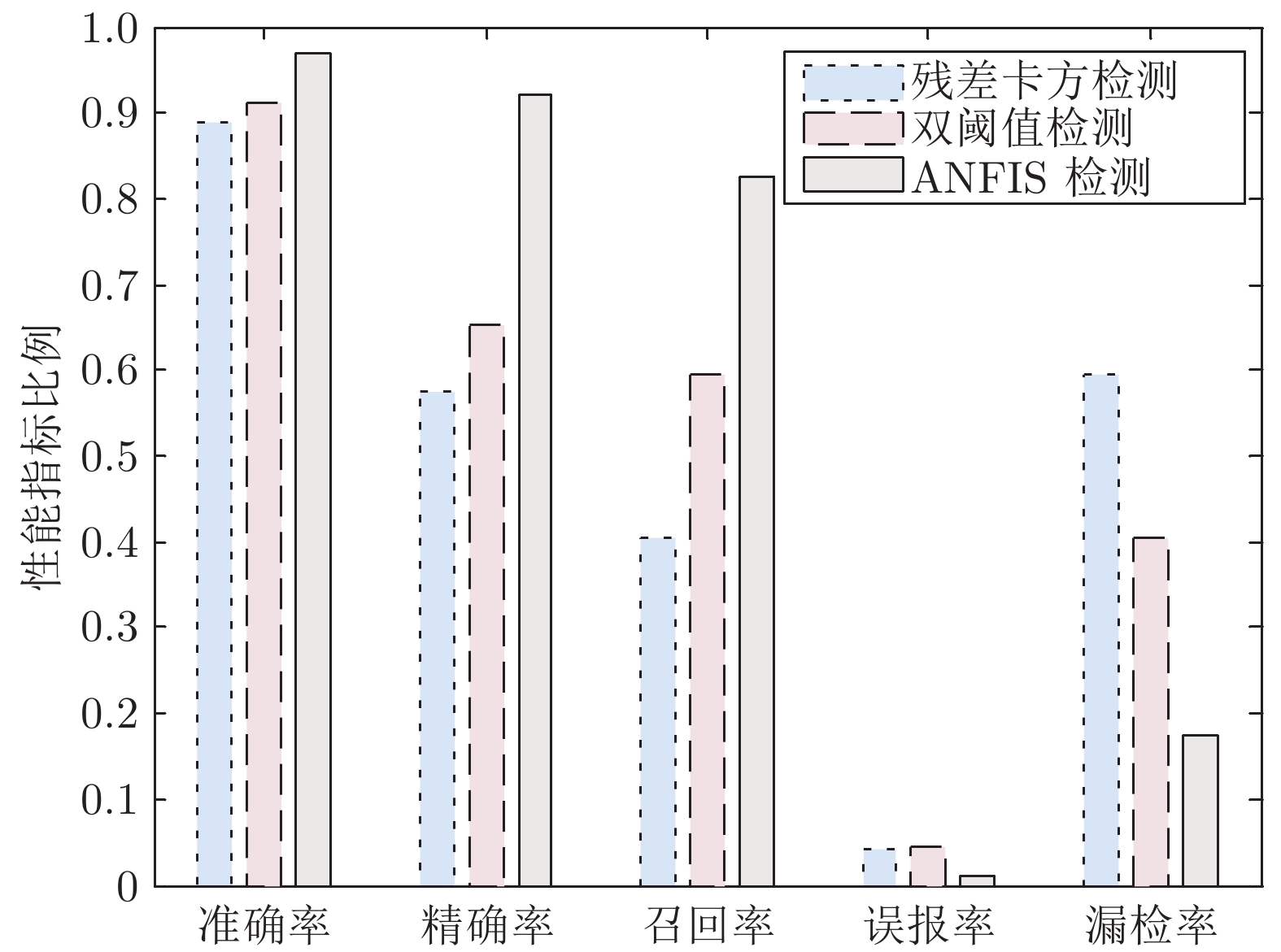
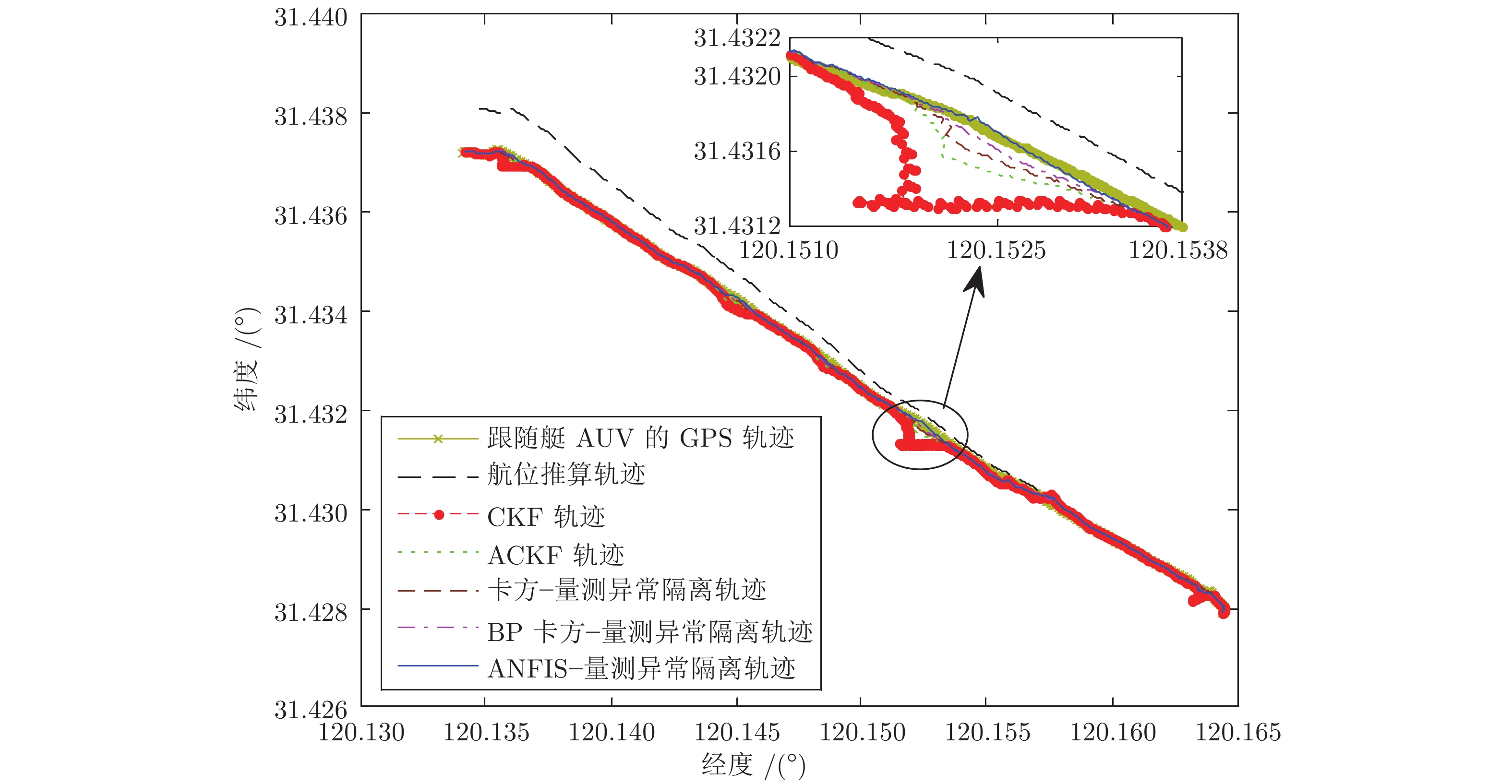
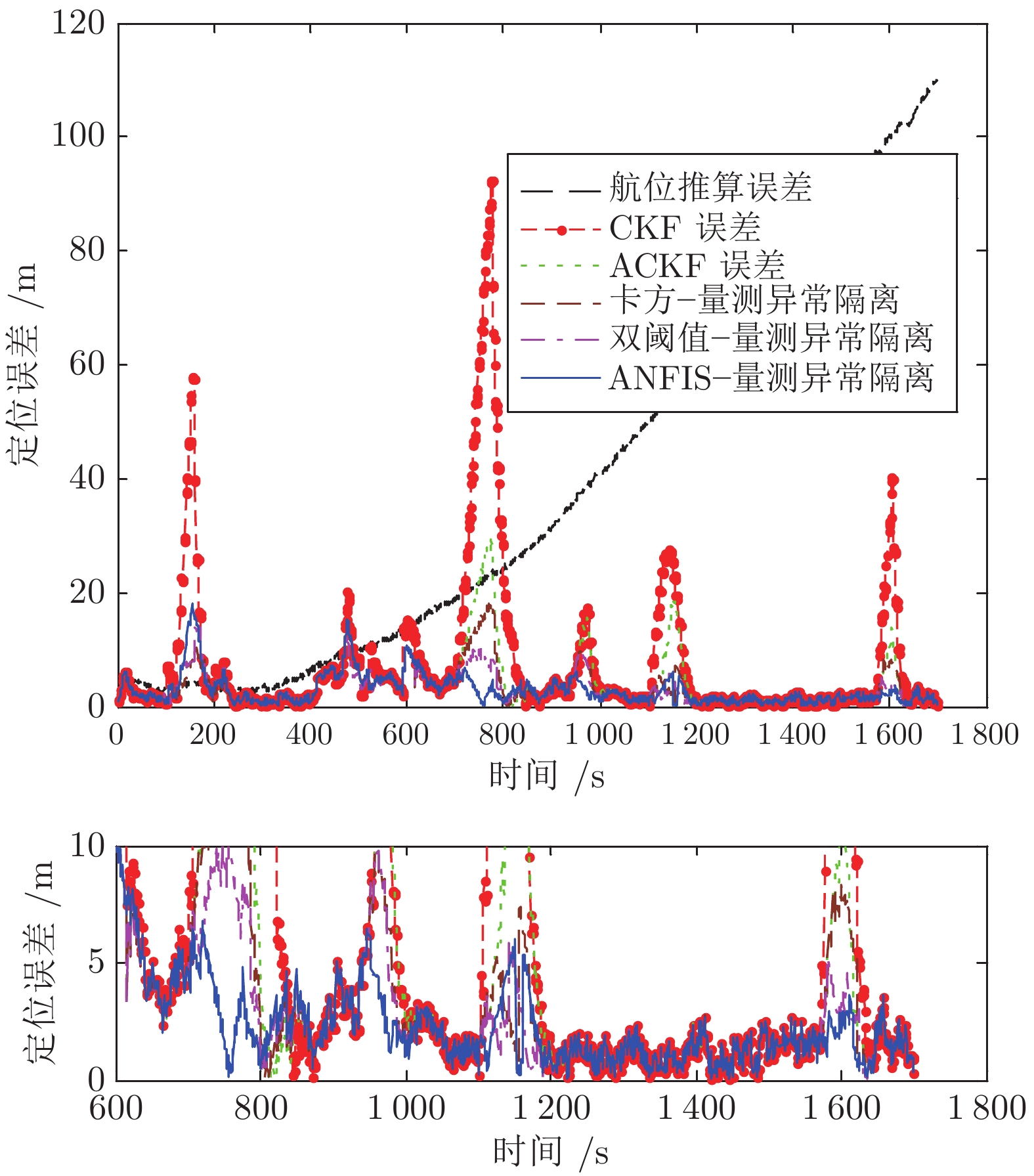
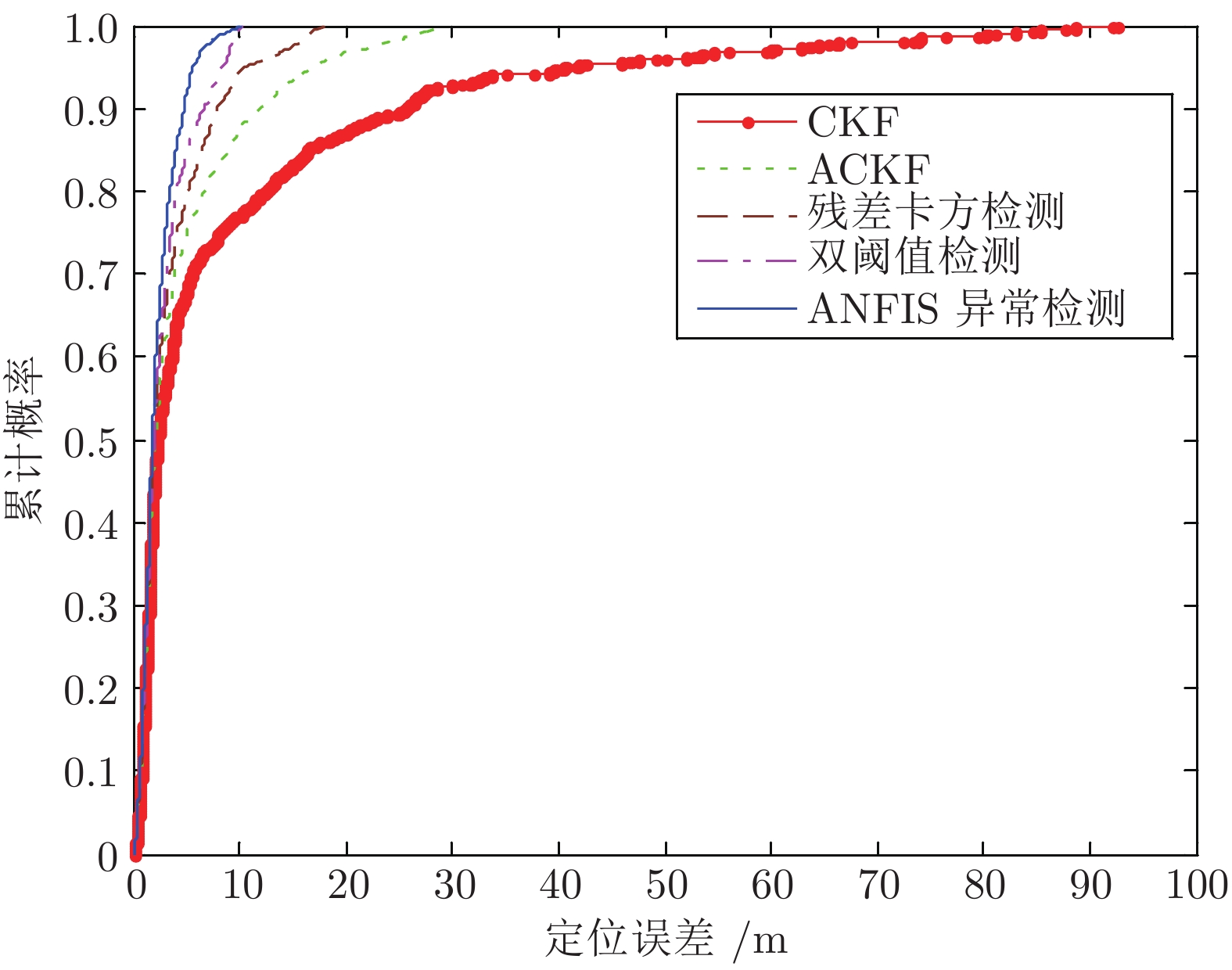
针对异常水声测距信息对多自主水下航行器(Autonomous underwater vehicles, AUV)协同定位系统的不利影响, 以及传统故障检测方法在多水声测距信息交替混淆的情况下检测效率低的问题, 提出一种基于自适应神经模糊推理系统(Adaptive neuro-fuzzy inference system, ANFIS)的量测异常检测方法. 首先, 分别建立与各水声测距系统相对应的ANFIS模型; 然后, 基于自适应容积卡尔曼滤波(Adaptive cubature Kalman filter, ACKF)和马氏距离构造反映量测异常的特征信息作为ANFIS的输入; 其次, 基于预定义的量测异常信息建立了初始混合数据库以训练ANFIS模型实现对量测异常的在线实时检测与隔离; 最后, 利用湖水实验数据进行了AUV协同定位仿真验证. 实验结果表明该方法可以准确识别异常水声测距信息, 与传统故障检测方法相比, 误报率(False positive rate, FPR)与漏检率(False negative rate, FNR)均减少70%以上.
针对异常水声测距信息对多自主水下航行器(Autonomous underwater vehicles, AUV)协同定位系统的不利影响, 以及传统故障检测方法在多水声测距信息交替混淆的情况下检测效率低的问题, 提出一种基于自适应神经模糊推理系统(Adaptive neuro-fuzzy inference system, ANFIS)的量测异常检测方法. 首先, 分别建立与各水声测距系统相对应的ANFIS模型; 然后, 基于自适应容积卡尔曼滤波(Adaptive cubature Kalman filter, ACKF)和马氏距离构造反映量测异常的特征信息作为ANFIS的输入; 其次, 基于预定义的量测异常信息建立了初始混合数据库以训练ANFIS模型实现对量测异常的在线实时检测与隔离; 最后, 利用湖水实验数据进行了AUV协同定位仿真验证. 实验结果表明该方法可以准确识别异常水声测距信息, 与传统故障检测方法相比, 误报率(False positive rate, FPR)与漏检率(False negative rate, FNR)均减少70%以上.









2023, 49(9): 1967-1975.
doi: 10.16383/j.aas.c211134
摘要:
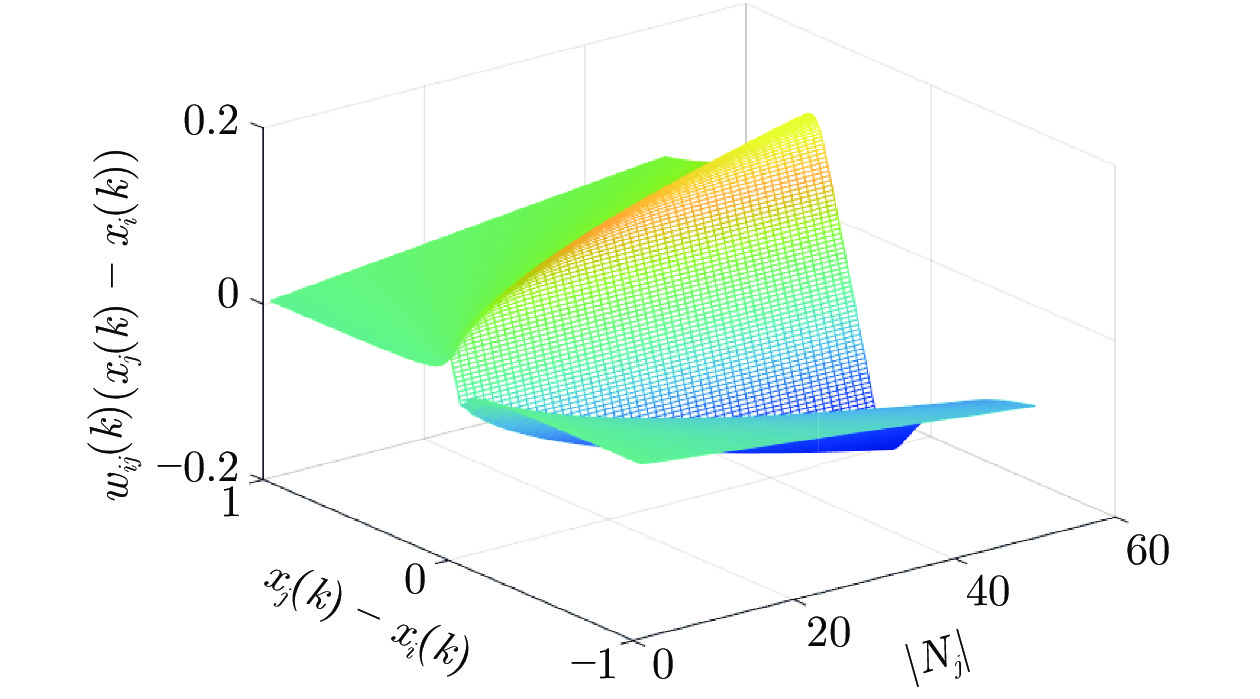
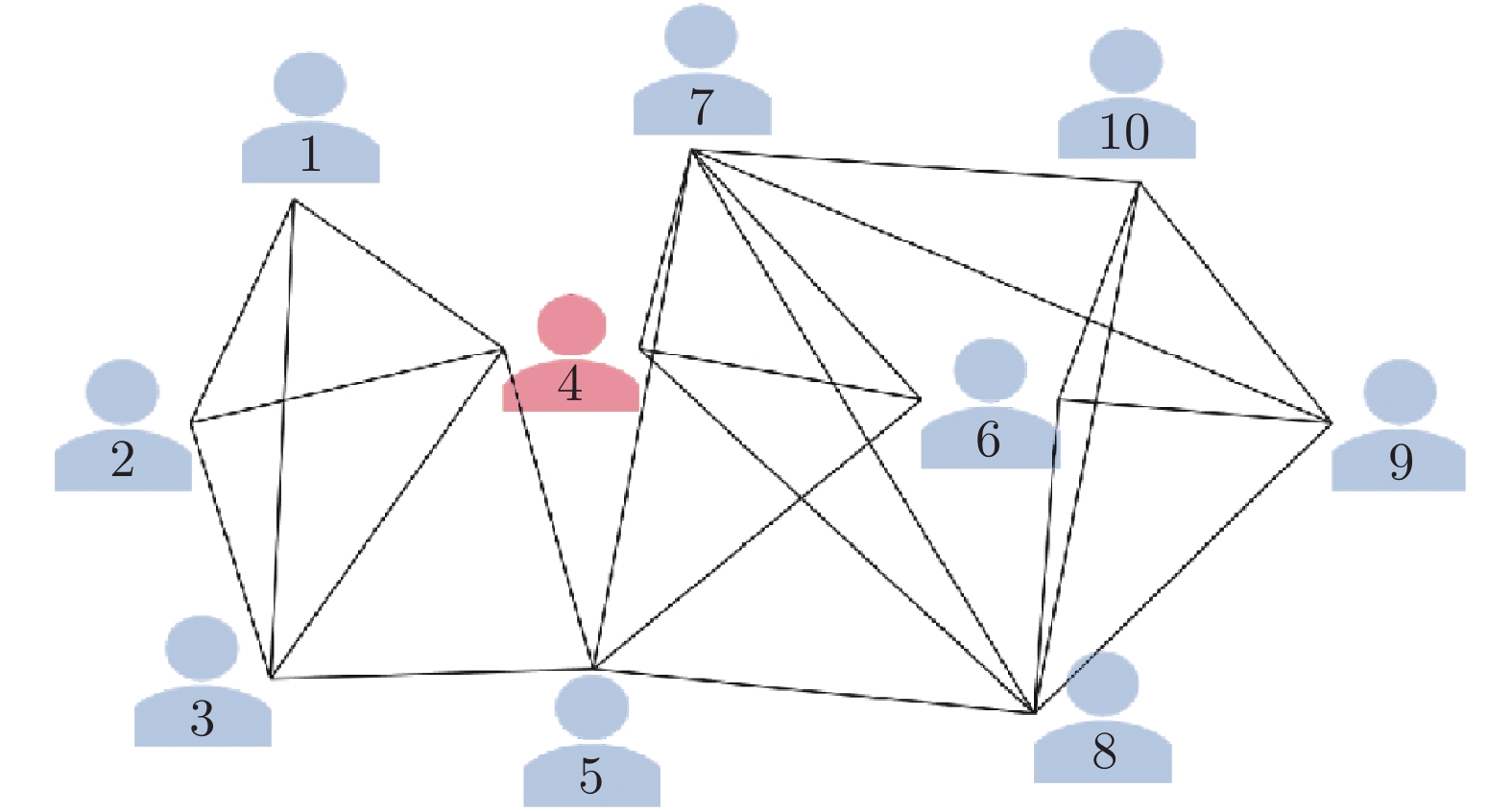
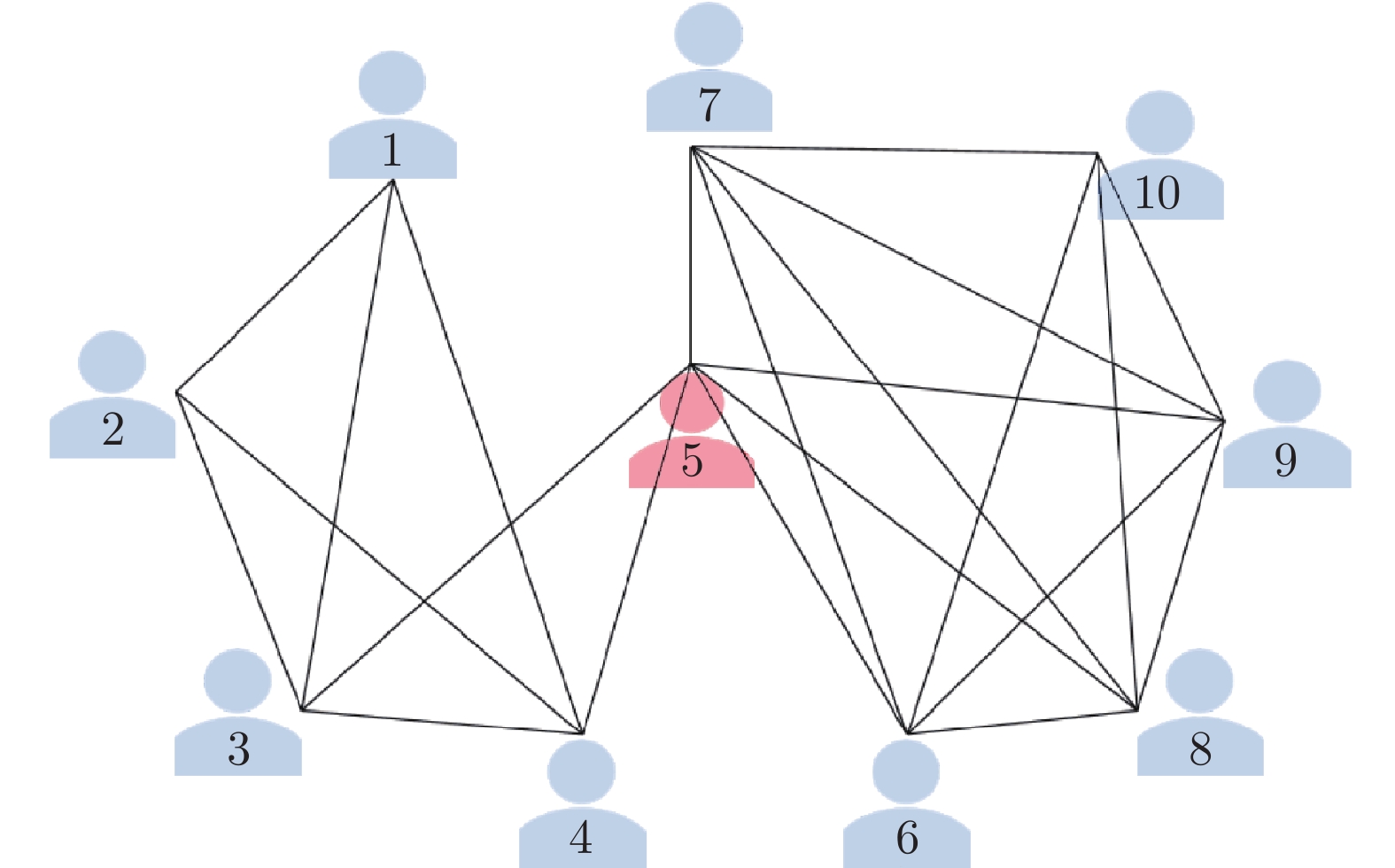
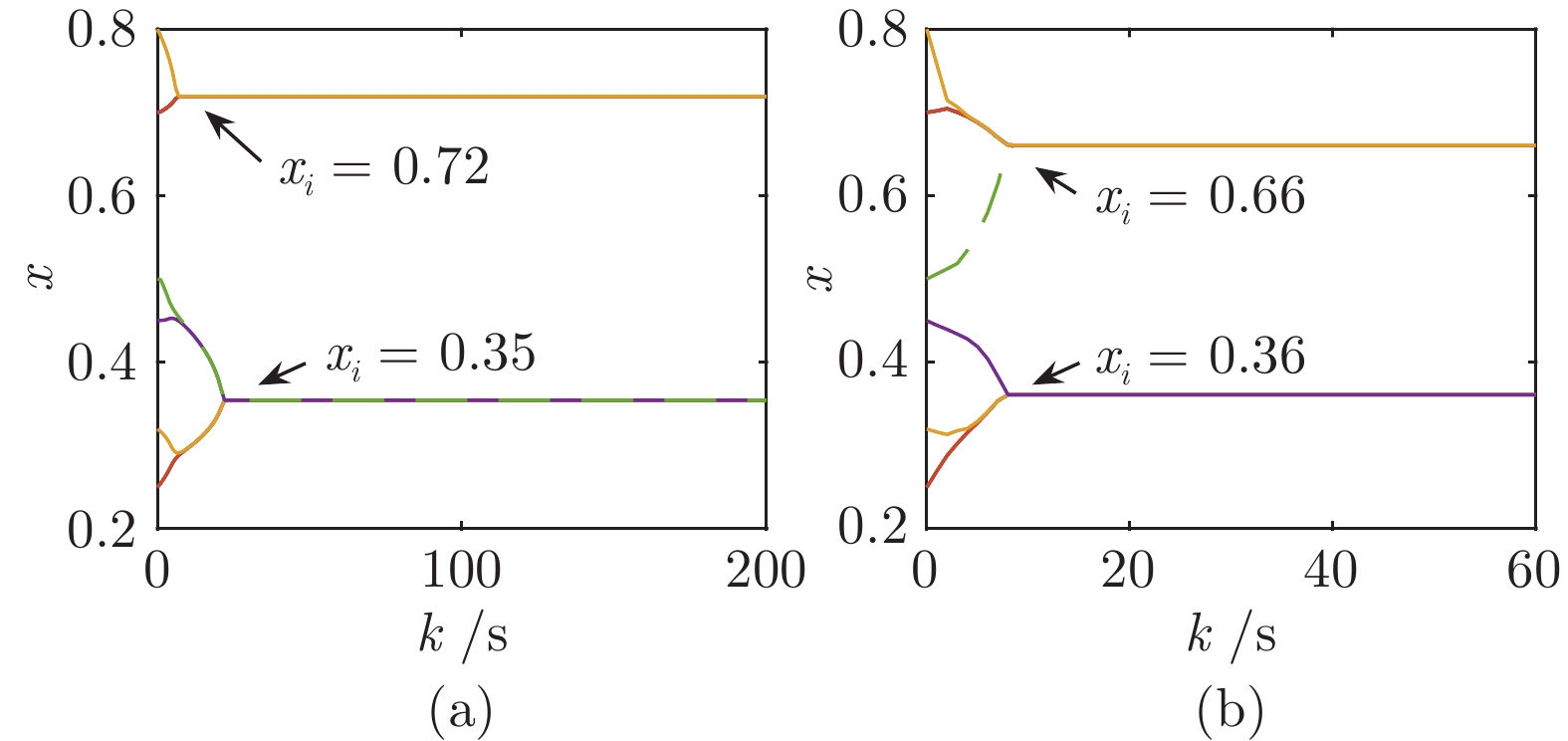
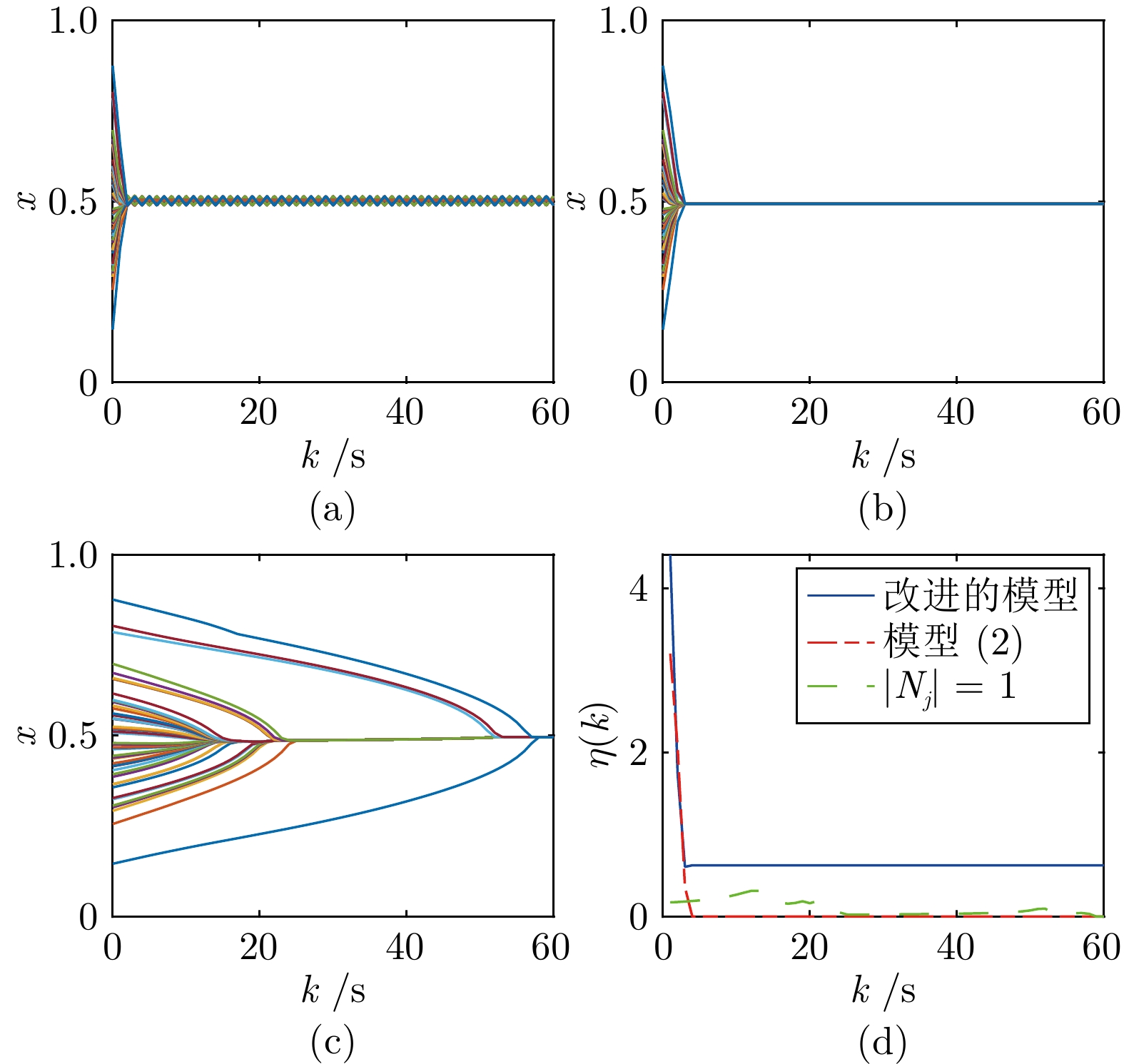
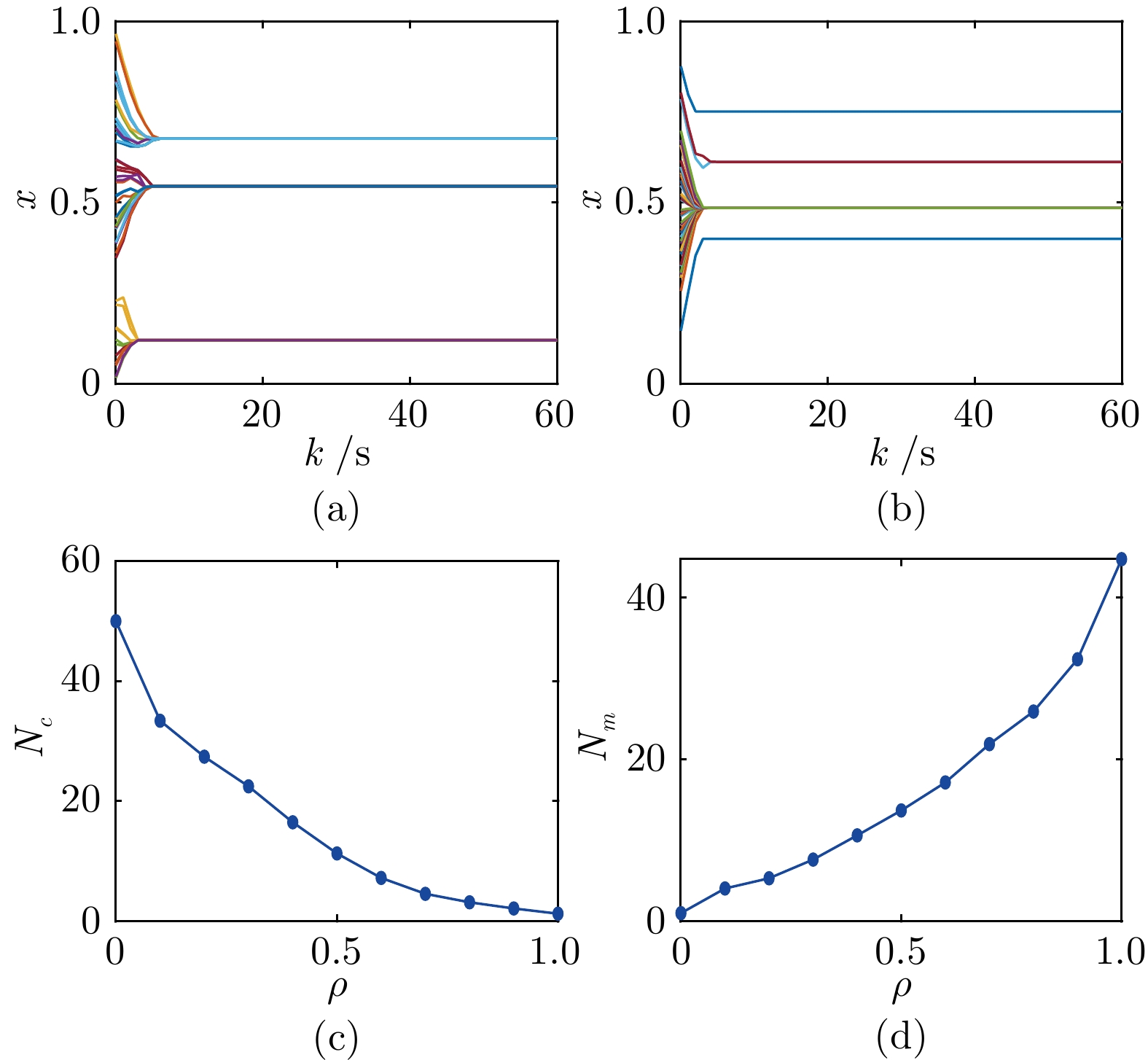
在社会网络中, Hegselmann-Krause模型描述了置信阈值内不同邻居对个体的观点影响权重都相同且邻居对个体的吸引力与它们的观点差值成正比, 这是不切实际的. 为了克服经典Hegselmann-Krause模型的不足, 提出具有类万有引力的有界置信观点动力学模型, 描述个体观点的更新依赖于观点之间的差值和邻居的权威性, 且不同邻居对个体的观点影响权重不同. 根据置信矩阵的性质证明观点的收敛性, 并分析具有衰减置信阈值的观点动力学行为, 给出观点收敛速率的显式解. 最后, 利用提出的观点动力学模型, 研究社会心理学中的“权威效应”和“非零和效应”. 仿真结果表明, 邻居的权威性有利于观点达成一致.
在社会网络中, Hegselmann-Krause模型描述了置信阈值内不同邻居对个体的观点影响权重都相同且邻居对个体的吸引力与它们的观点差值成正比, 这是不切实际的. 为了克服经典Hegselmann-Krause模型的不足, 提出具有类万有引力的有界置信观点动力学模型, 描述个体观点的更新依赖于观点之间的差值和邻居的权威性, 且不同邻居对个体的观点影响权重不同. 根据置信矩阵的性质证明观点的收敛性, 并分析具有衰减置信阈值的观点动力学行为, 给出观点收敛速率的显式解. 最后, 利用提出的观点动力学模型, 研究社会心理学中的“权威效应”和“非零和效应”. 仿真结果表明, 邻居的权威性有利于观点达成一致.




2023, 49(9): 1976-1988.
doi: 10.16383/j.aas.c220715
摘要:
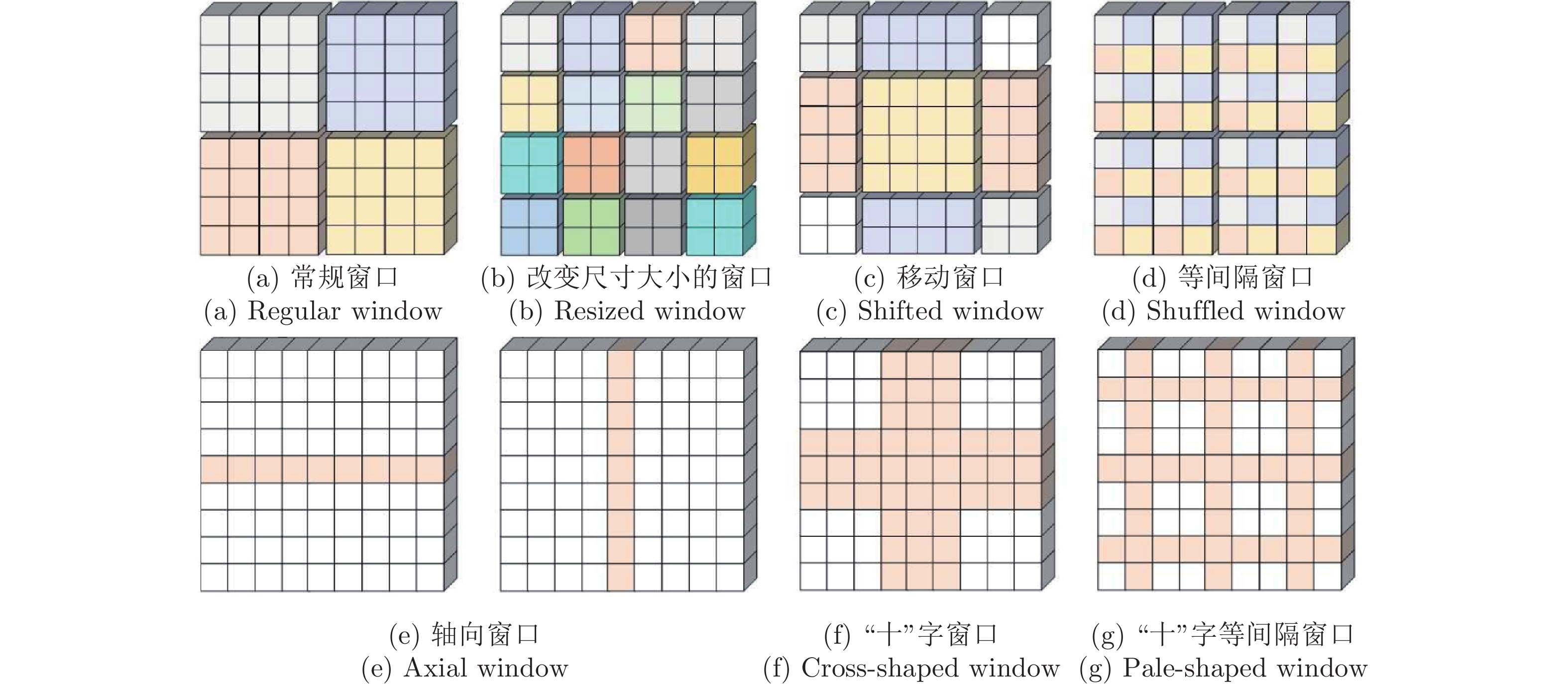
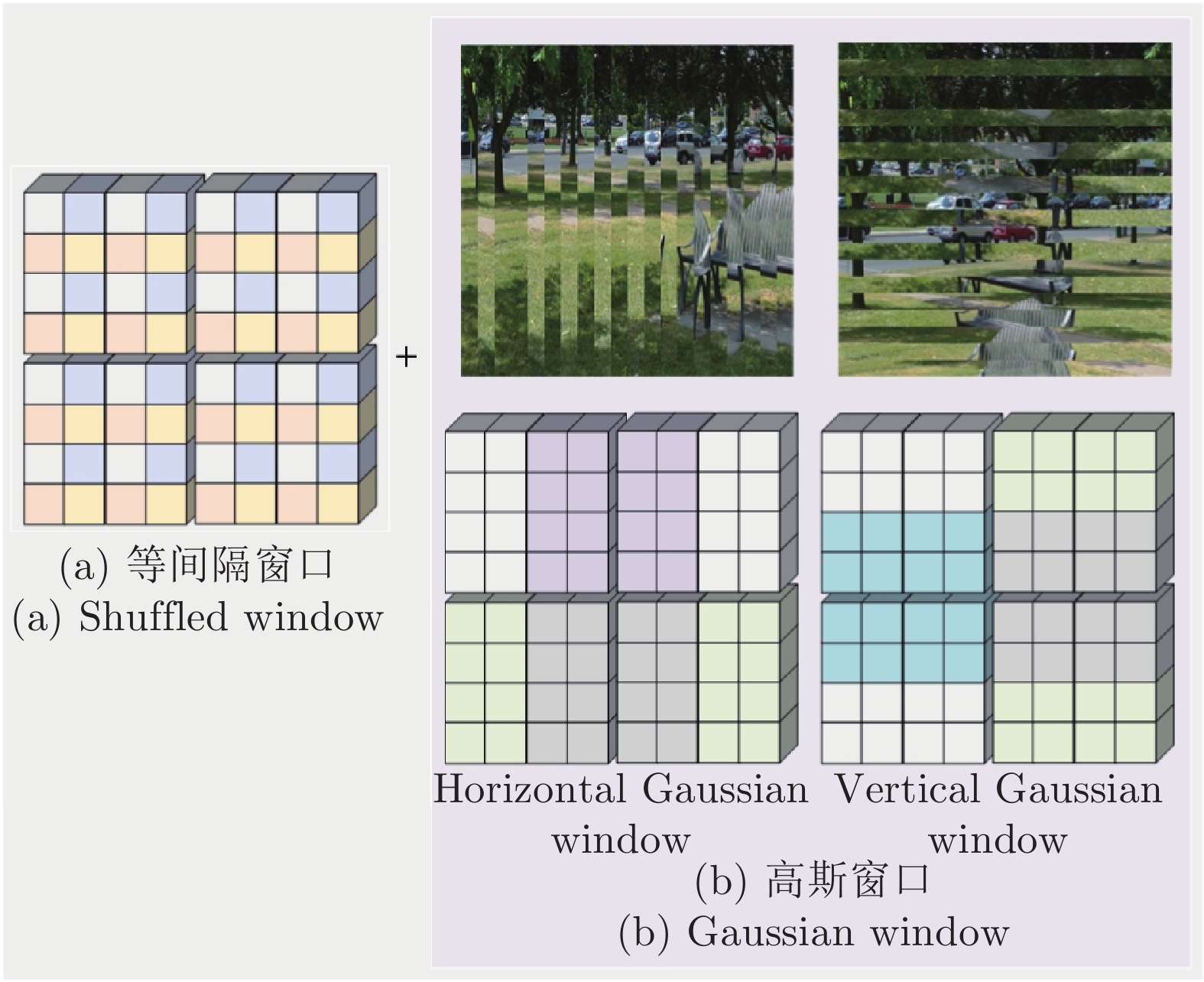
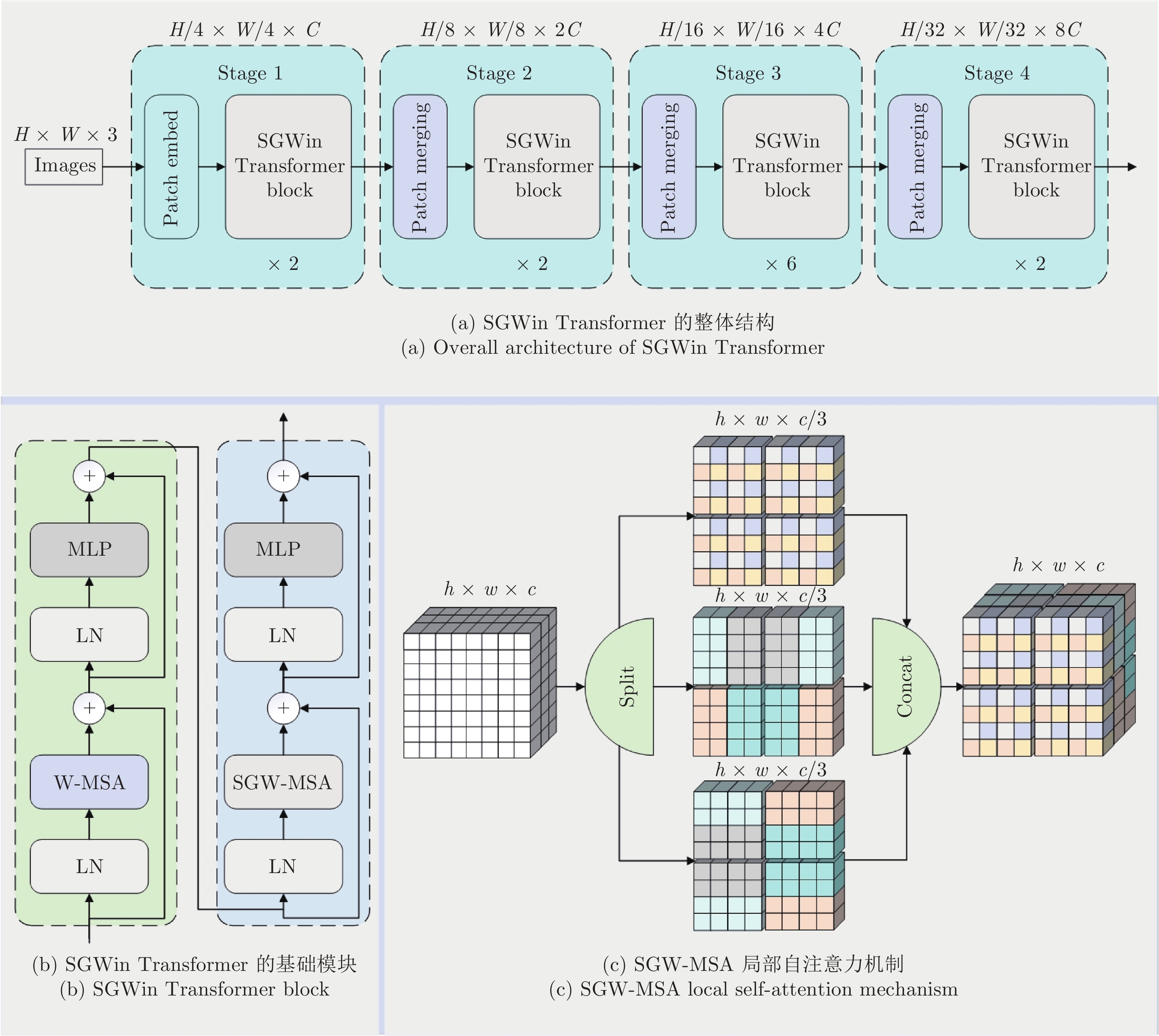
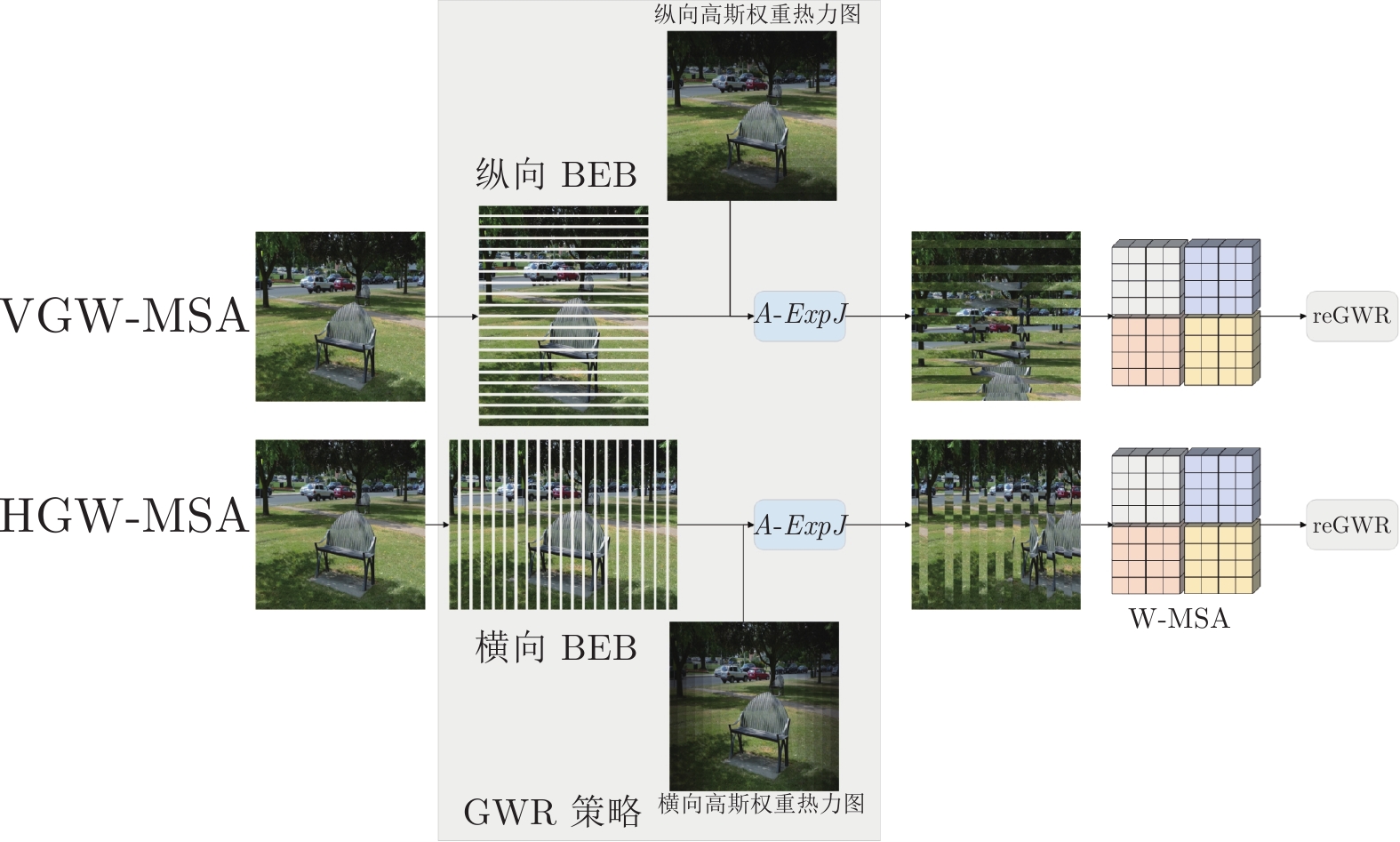
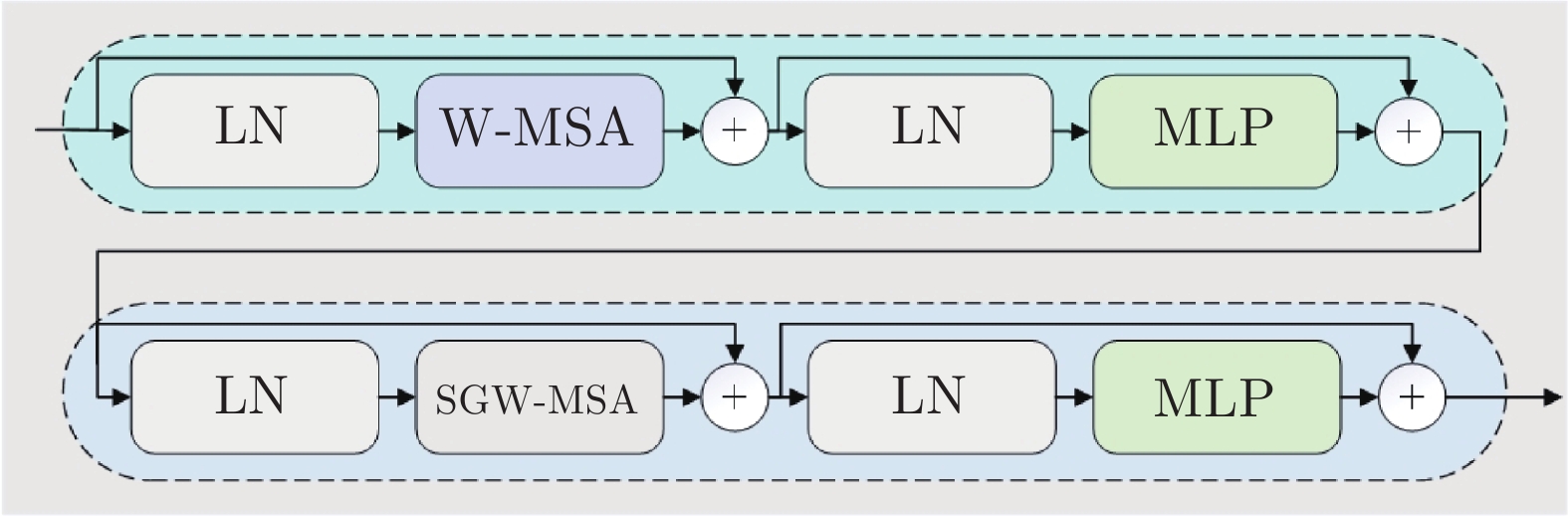
在目前视觉Transformer的局部自注意力中, 现有的策略无法建立所有窗口之间的信息流动, 导致上下文语境建模能力不足. 针对这个问题, 基于混合高斯权重重组(Gaussian weight recombination, GWR)的策略, 提出一种新的局部自注意力机制SGW-MSA (Shuffled and Gaussian window-multi-head self-attention), 它融合了3种不同的局部自注意力, 并通过GWR策略对特征图进行重建, 在重建的特征图上提取图像特征, 建立了所有窗口的交互以捕获更加丰富的上下文信息. 基于SGW-MSA设计了SGWin Transformer整体架构. 实验结果表明, 该算法在mini-imagenet图像分类数据集上的准确率比Swin Transformer提升了5.1%, 在CIFAR10图像分类实验中的准确率比Swin Transformer提升了5.2%, 在MS COCO数据集上分别使用Mask R-CNN和Cascade R-CNN目标检测框架的mAP比Swin Transformer分别提升了5.5%和5.1%, 相比于其他基于局部自注意力的模型在参数量相似的情况下具有较强的竞争力.
在目前视觉Transformer的局部自注意力中, 现有的策略无法建立所有窗口之间的信息流动, 导致上下文语境建模能力不足. 针对这个问题, 基于混合高斯权重重组(Gaussian weight recombination, GWR)的策略, 提出一种新的局部自注意力机制SGW-MSA (Shuffled and Gaussian window-multi-head self-attention), 它融合了3种不同的局部自注意力, 并通过GWR策略对特征图进行重建, 在重建的特征图上提取图像特征, 建立了所有窗口的交互以捕获更加丰富的上下文信息. 基于SGW-MSA设计了SGWin Transformer整体架构. 实验结果表明, 该算法在mini-imagenet图像分类数据集上的准确率比Swin Transformer提升了5.1%, 在CIFAR10图像分类实验中的准确率比Swin Transformer提升了5.2%, 在MS COCO数据集上分别使用Mask R-CNN和Cascade R-CNN目标检测框架的mAP比Swin Transformer分别提升了5.5%和5.1%, 相比于其他基于局部自注意力的模型在参数量相似的情况下具有较强的竞争力.





2023, 49(9): 1989-2002.
doi: 10.16383/j.aas.c200683
摘要:
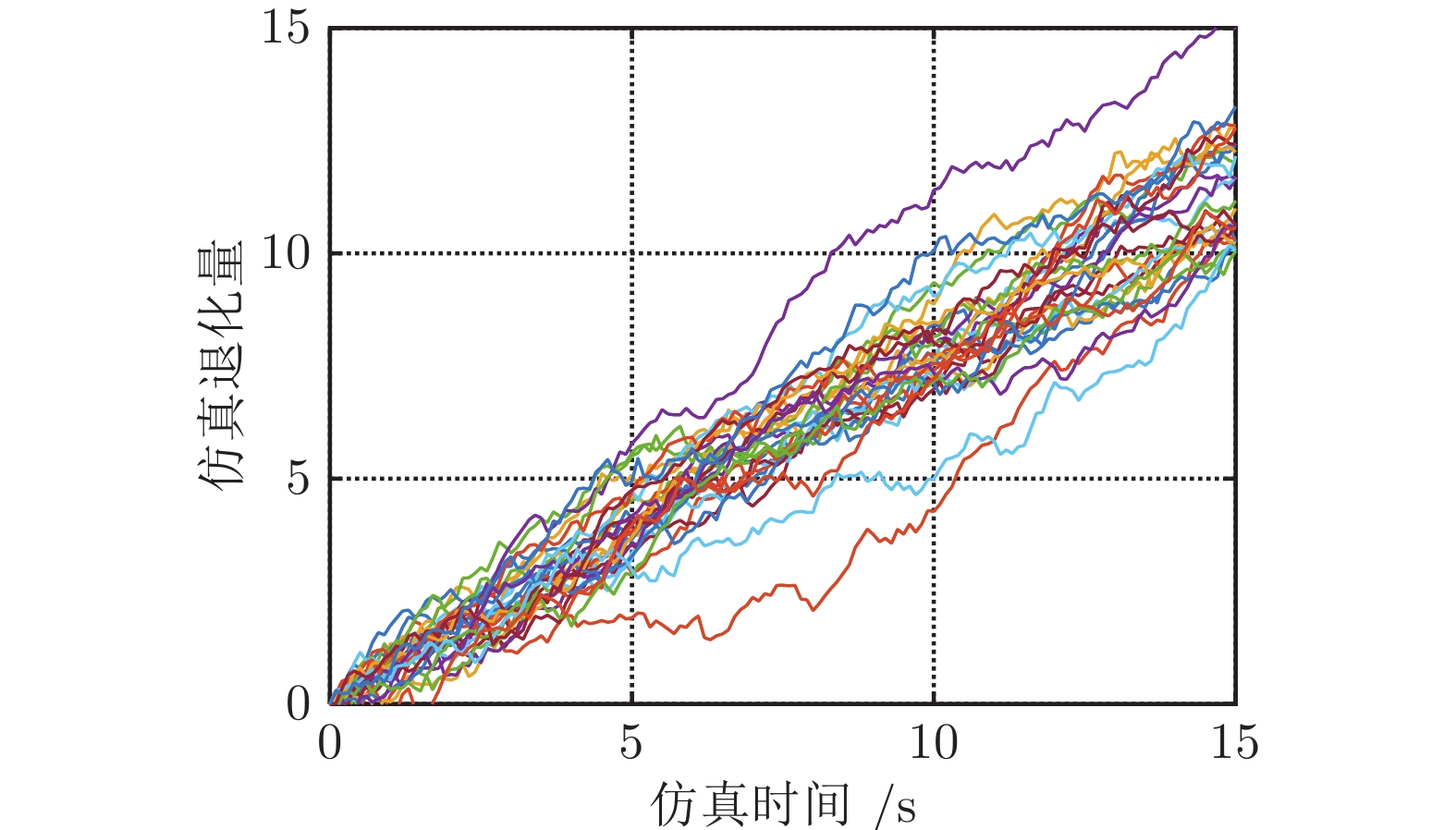
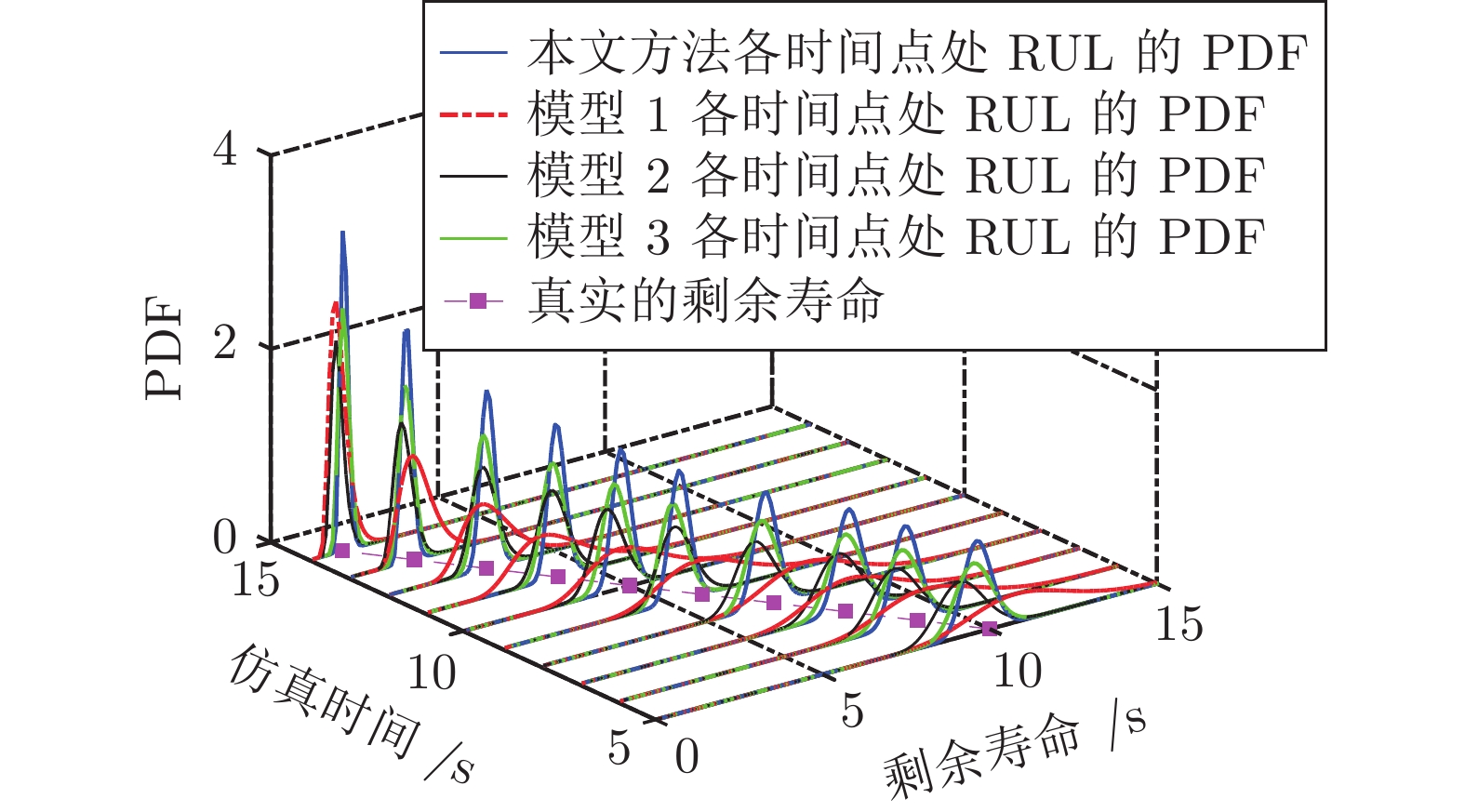
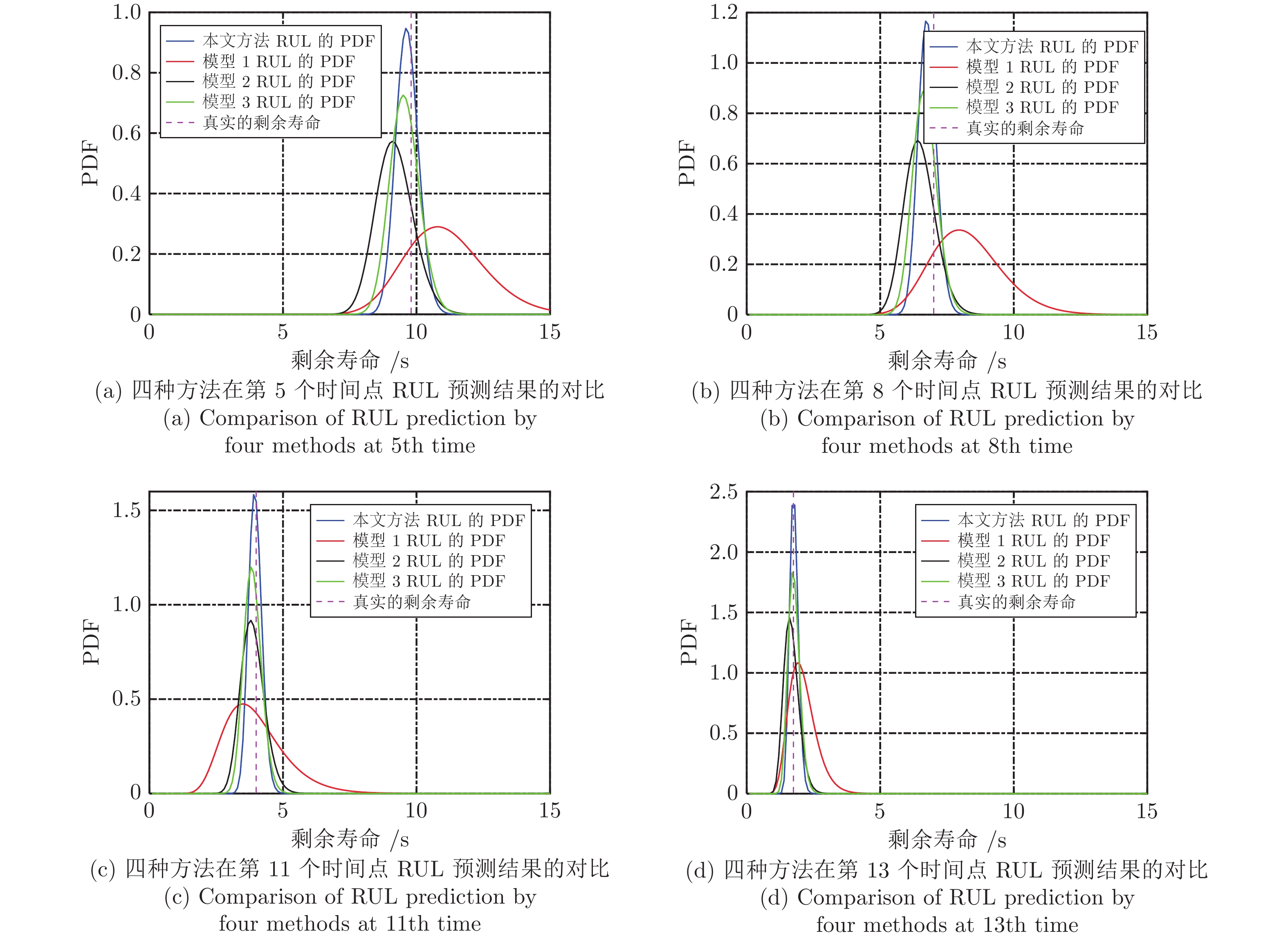
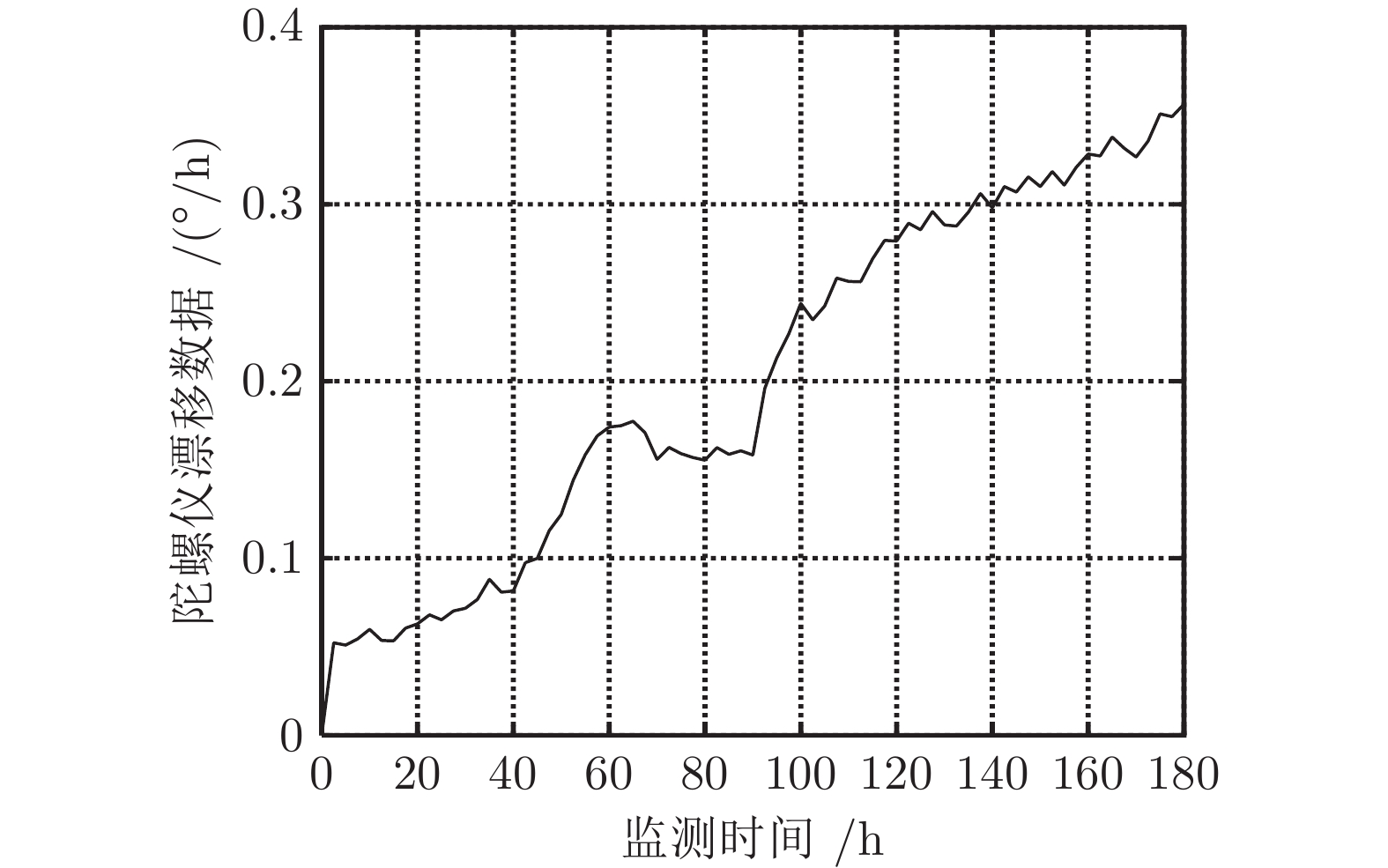
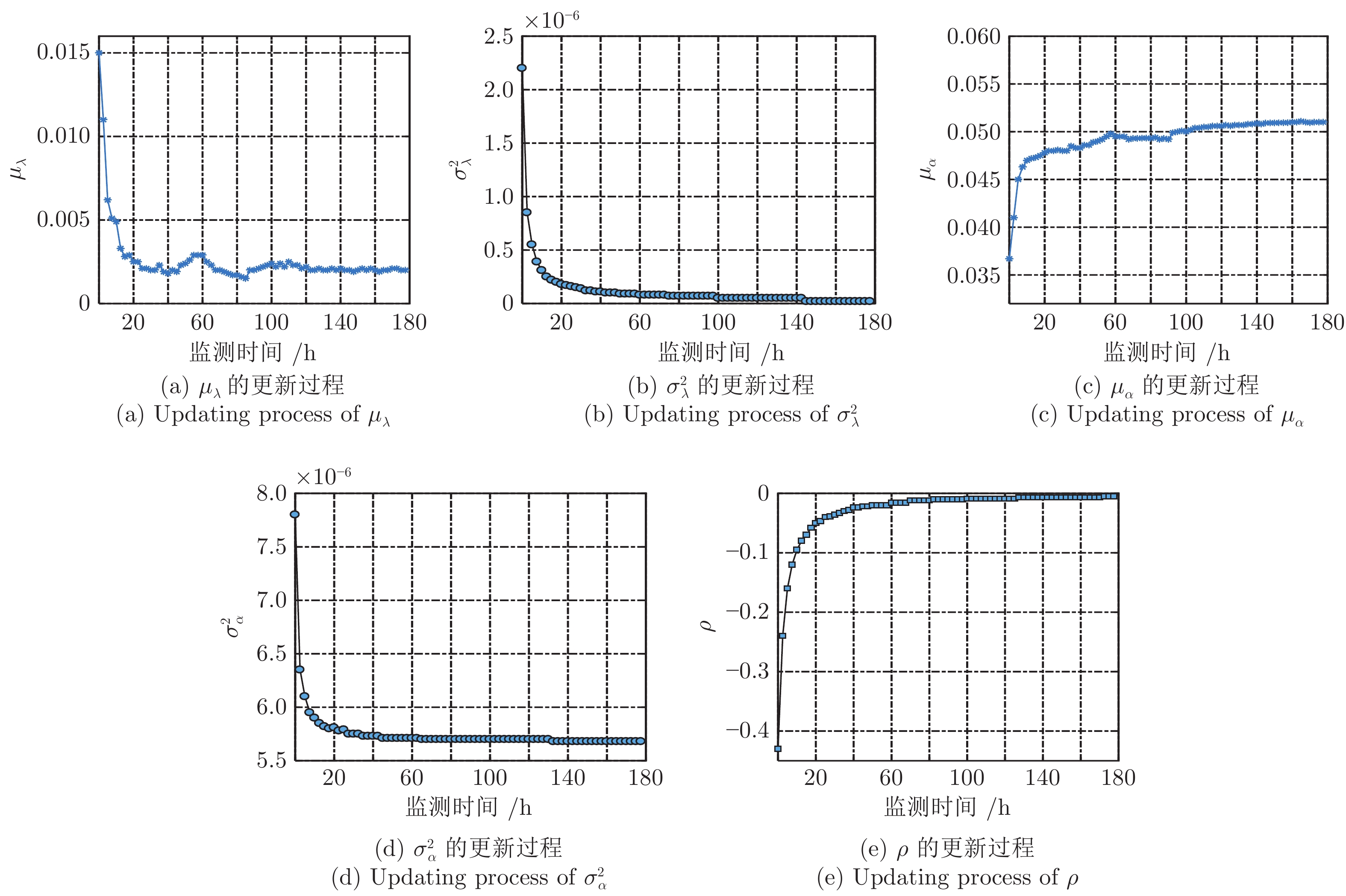
在实际工程中, 设备往往是由多个不同类型元件或部件构成的集合体, 其总体性能退化程度是由内部多种随机退化过程综合影响下的结果. 不同于现有文献主要采用无记忆效应的单一线性或非线性形式随机过程模型来描述设备的真实退化, 首先建立一种基于分数布朗运动(Fractional Brownian motion, FBM)的混合随机退化模型, 用以刻画退化过程中的记忆效应与长期依赖性; 进一步, 在退化模型里同时引入双随机效应, 用以描述不同设备之间的退化差异性, 并基于弱收敛性理论推导得到首达时间(First hitting time, FHT)意义下剩余寿命(Remaining useful life, RUL)概率密度函数(Probability density function, PDF)的近似解析表达形式; 然后, 给出一种共性参数离线估计和随机参数实时更新的策略, 进而实现了剩余寿命的实时预测; 最后, 通过数值仿真例子和陀螺仪的实际退化数据, 验证了该方法的有效性和具有潜在的工程应用价值.
在实际工程中, 设备往往是由多个不同类型元件或部件构成的集合体, 其总体性能退化程度是由内部多种随机退化过程综合影响下的结果. 不同于现有文献主要采用无记忆效应的单一线性或非线性形式随机过程模型来描述设备的真实退化, 首先建立一种基于分数布朗运动(Fractional Brownian motion, FBM)的混合随机退化模型, 用以刻画退化过程中的记忆效应与长期依赖性; 进一步, 在退化模型里同时引入双随机效应, 用以描述不同设备之间的退化差异性, 并基于弱收敛性理论推导得到首达时间(First hitting time, FHT)意义下剩余寿命(Remaining useful life, RUL)概率密度函数(Probability density function, PDF)的近似解析表达形式; 然后, 给出一种共性参数离线估计和随机参数实时更新的策略, 进而实现了剩余寿命的实时预测; 最后, 通过数值仿真例子和陀螺仪的实际退化数据, 验证了该方法的有效性和具有潜在的工程应用价值.



2023, 49(9): 2003-2018.
doi: 10.16383/j.aas.c200533
摘要:
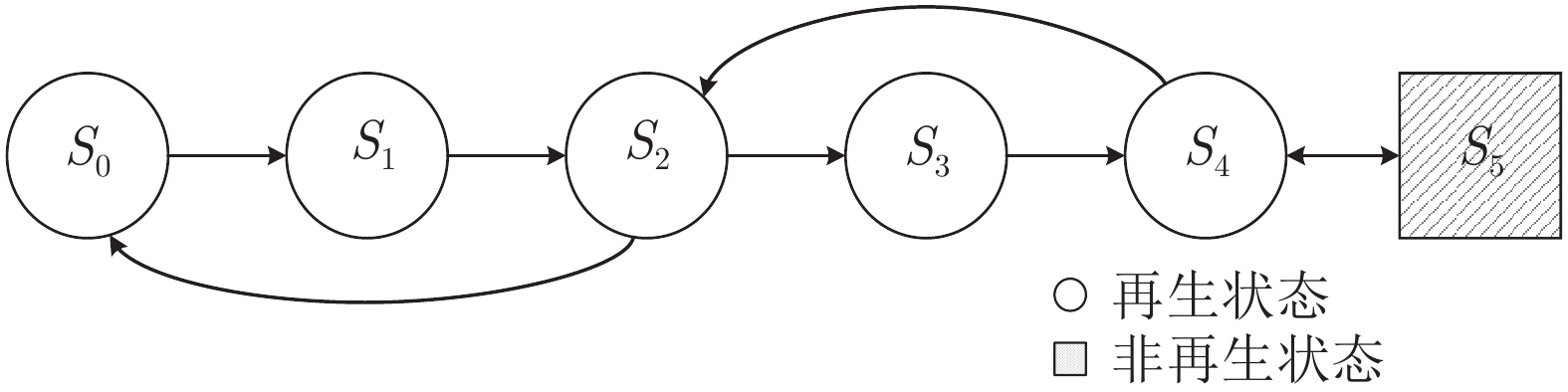
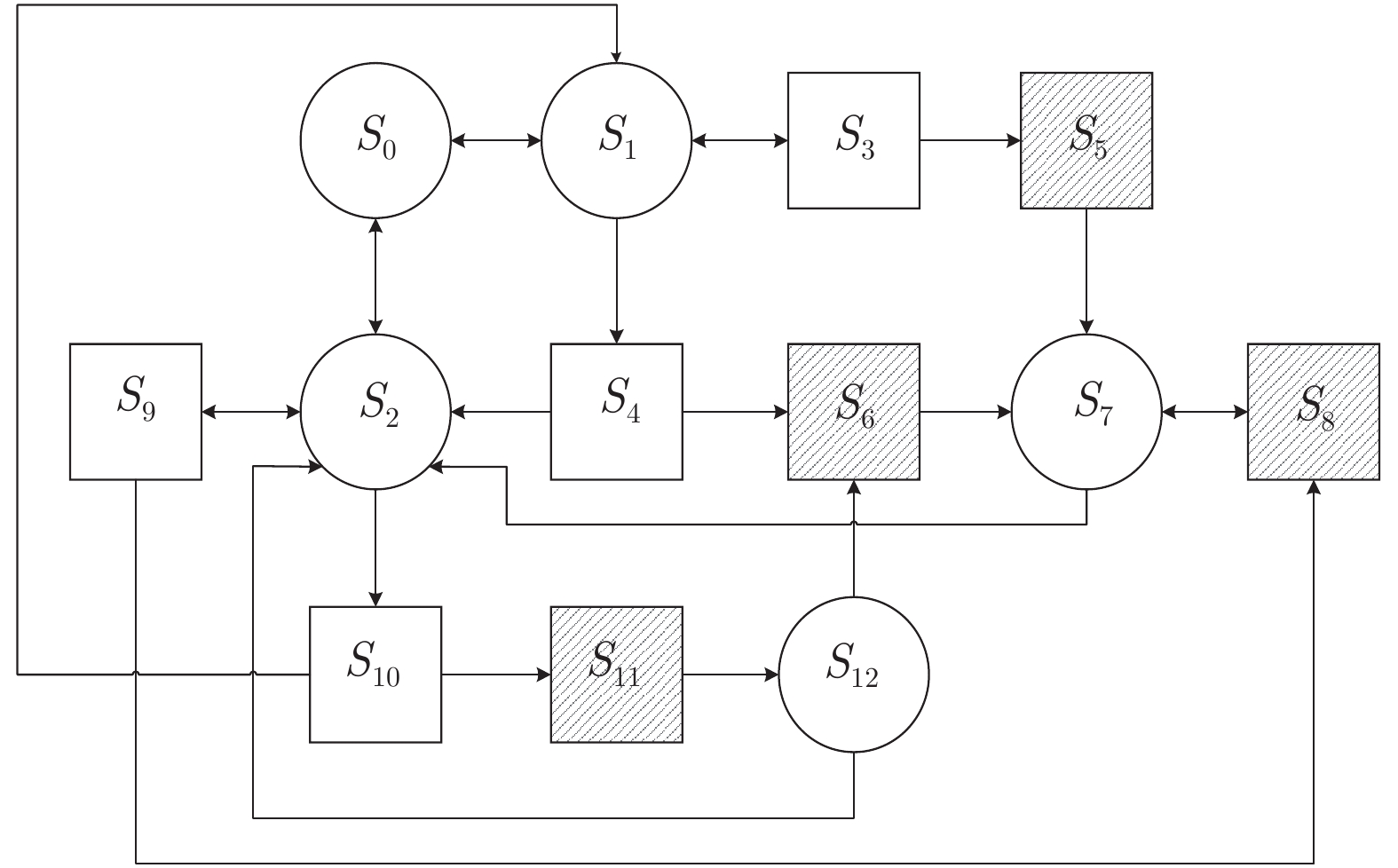
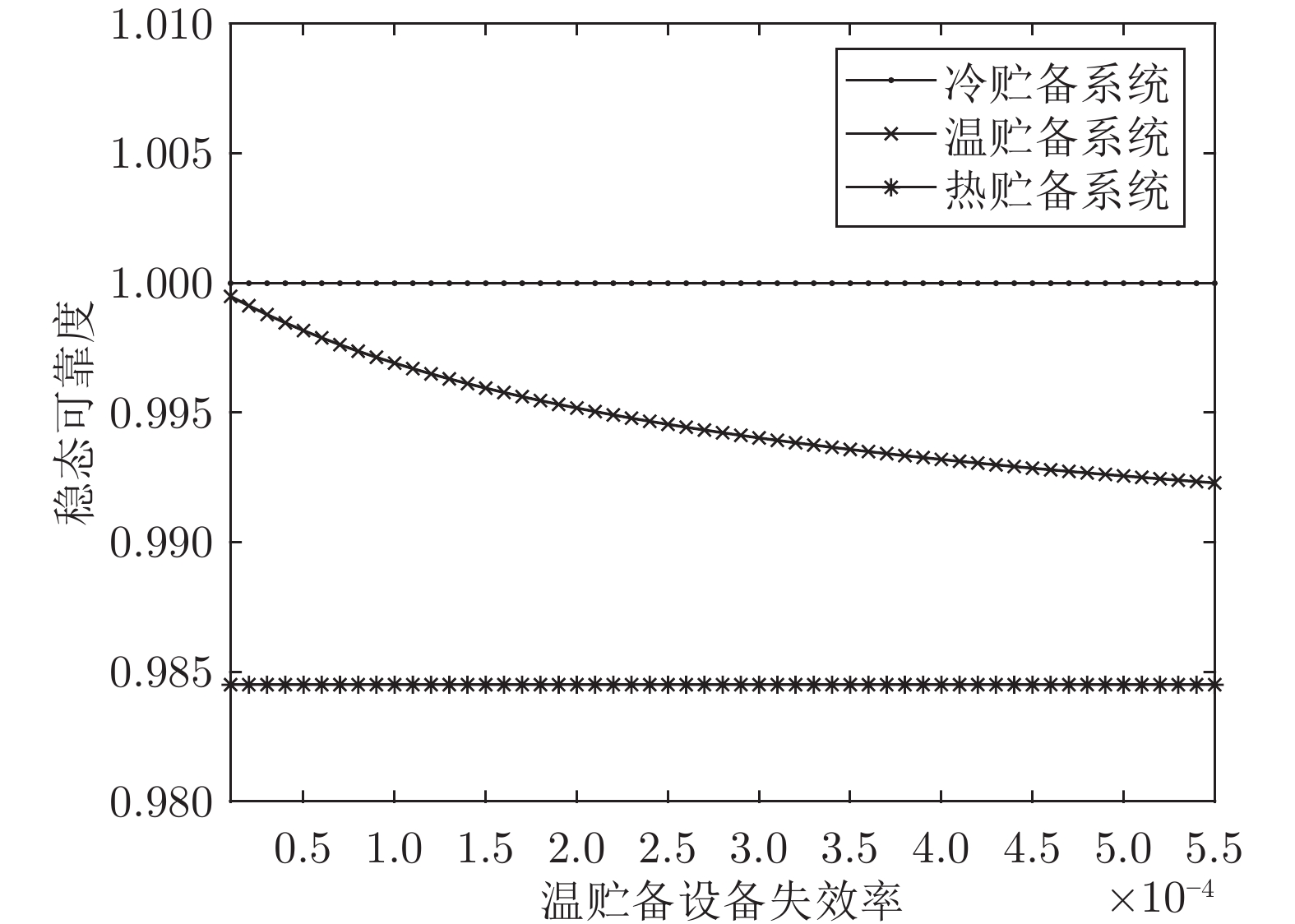
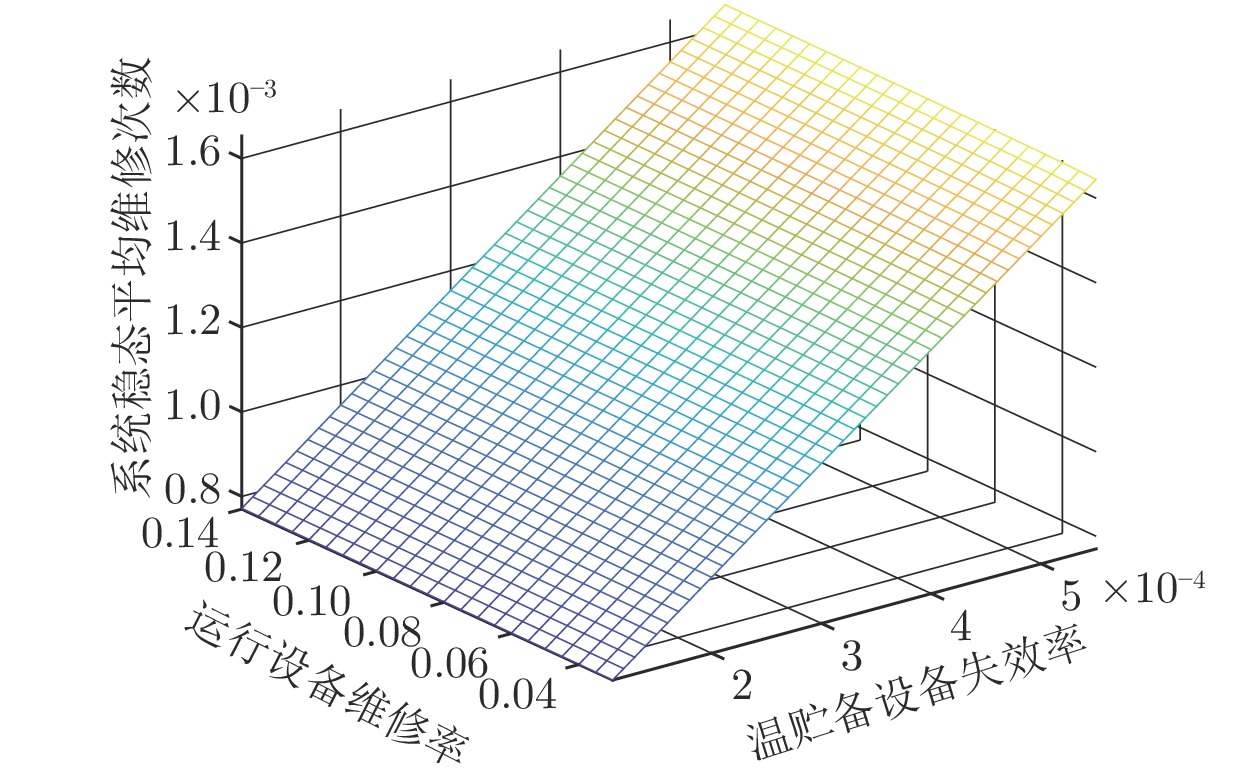
对运行设备安装双贮备设备是实现系统高可靠性的有效方法. 在双贮备系统冷/温/热三种贮备模型中, 选择哪种贮备模型对系统性能指标和经济指标均有重要影响, 因此对如何选择双贮备系统的贮备模型从而使系统性能最优或经济效益最大的问题进行研究具有现实意义. 而现有研究成果很少涉及双贮备系统贮备模型的优化选择问题. 为此, 本文创新性地提出一种确定双贮备系统最优贮备模型的选择方法. 分别建立系统冷/温/热贮备模型, 分析每个模型的系统状态及系统半Markov核函数, 利用Markov更新方程、Laplace变换以及Laplace-Stieltjes变换技术推导系统稳态可用度、稳态平均维修次数、维修人员稳态忙期概率以及冷贮备模型的平均激活时间, 并从经济角度给出系统单位时间内的净收益函数. 最后分别以性能指标和经济指标作为研究目标, 通过模型对比分析给出不同条件下的系统贮备模型的优化选择算法, 并对每个研究目标下的优化选择算法进行实例计算. 计算结果表明以不同性能指标和不同费用作为参考得出的最优贮备模型不尽相同, 从而验证了所提方法能够有效地确定不同衡量标准下的系统最优贮备模型.
对运行设备安装双贮备设备是实现系统高可靠性的有效方法. 在双贮备系统冷/温/热三种贮备模型中, 选择哪种贮备模型对系统性能指标和经济指标均有重要影响, 因此对如何选择双贮备系统的贮备模型从而使系统性能最优或经济效益最大的问题进行研究具有现实意义. 而现有研究成果很少涉及双贮备系统贮备模型的优化选择问题. 为此, 本文创新性地提出一种确定双贮备系统最优贮备模型的选择方法. 分别建立系统冷/温/热贮备模型, 分析每个模型的系统状态及系统半Markov核函数, 利用Markov更新方程、Laplace变换以及Laplace-Stieltjes变换技术推导系统稳态可用度、稳态平均维修次数、维修人员稳态忙期概率以及冷贮备模型的平均激活时间, 并从经济角度给出系统单位时间内的净收益函数. 最后分别以性能指标和经济指标作为研究目标, 通过模型对比分析给出不同条件下的系统贮备模型的优化选择算法, 并对每个研究目标下的优化选择算法进行实例计算. 计算结果表明以不同性能指标和不同费用作为参考得出的最优贮备模型不尽相同, 从而验证了所提方法能够有效地确定不同衡量标准下的系统最优贮备模型.