2017年 第43卷 第5期
2017, 43(5): 685-696.
doi: 10.16383/j.aas.2017.c160581
cstr: 32138.14.j.aas.2017.c160581
摘要:
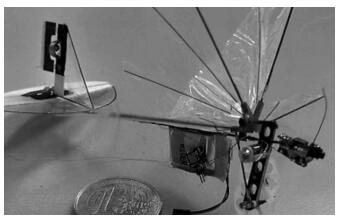
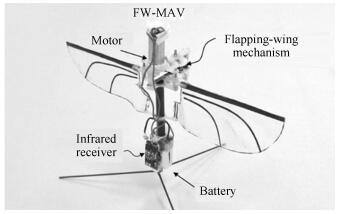
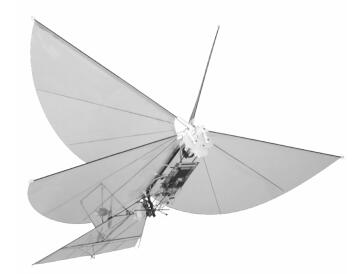
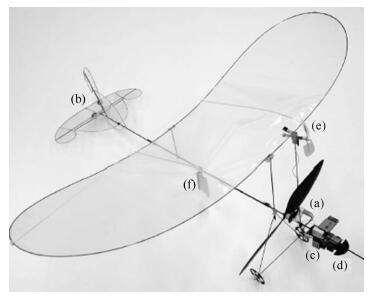
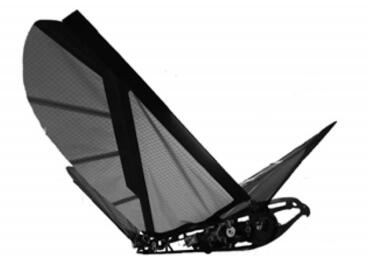
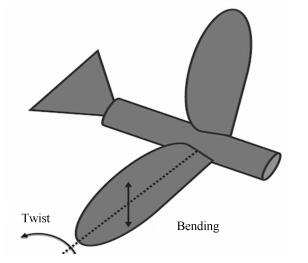
扑翼飞行器(Flapping-wing air vehicle,FAV)即通过模拟昆虫以及鸟类飞行方式而制造的仿生机器人.与常见的固定翼和旋翼飞行器相比,具有效率高、质量轻、机动性强、耗能低等显著优点,是飞行器发展的重要方向.关于扑翼机的研究始于上世纪后期,现如今从理论探索到机体开发都有了可喜的成果.本文首先介绍了世界领先的几款扑翼飞行器的特点,接着简述了扑翼飞行器在动力学、能源、控制等方面的发展现状,并对未来的研究方向做出了展望.
扑翼飞行器(Flapping-wing air vehicle,FAV)即通过模拟昆虫以及鸟类飞行方式而制造的仿生机器人.与常见的固定翼和旋翼飞行器相比,具有效率高、质量轻、机动性强、耗能低等显著优点,是飞行器发展的重要方向.关于扑翼机的研究始于上世纪后期,现如今从理论探索到机体开发都有了可喜的成果.本文首先介绍了世界领先的几款扑翼飞行器的特点,接着简述了扑翼飞行器在动力学、能源、控制等方面的发展现状,并对未来的研究方向做出了展望.









2017, 43(5): 697-709.
doi: 10.16383/j.aas.2017.c160629
cstr: 32138.14.j.aas.2017.c160629
摘要:
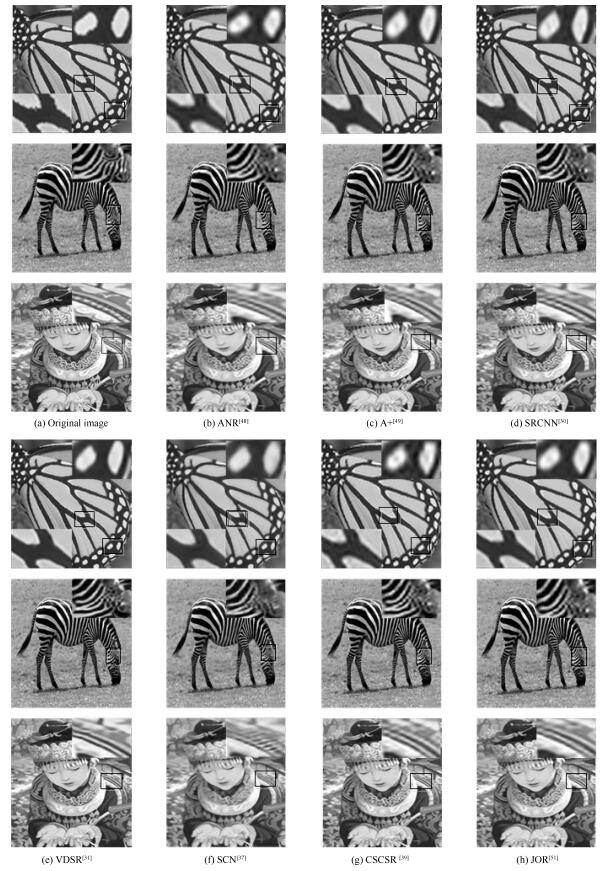
图像超分辨率复原(Super resolution restoration,SR)技术是图像处理领域的研究热点,在视频监控、图像处理、刑侦分析等领域具有广泛的应用需求.近年来,深度学习在多媒体处理领域迅猛发展,基于深度学习的图像超分辨率复原技术已逐渐成为主流技术.本文主要对现有基于深度学习的图像超分辨率复原工作进行综述.从网络类型、网络结构、训练方法等方面分析现有技术的优势与不足,对其发展脉络进行梳理.在此基础上,本文进一步指出了基于深度学习的图像超分辨率复原技术的未来发展方向.
图像超分辨率复原(Super resolution restoration,SR)技术是图像处理领域的研究热点,在视频监控、图像处理、刑侦分析等领域具有广泛的应用需求.近年来,深度学习在多媒体处理领域迅猛发展,基于深度学习的图像超分辨率复原技术已逐渐成为主流技术.本文主要对现有基于深度学习的图像超分辨率复原工作进行综述.从网络类型、网络结构、训练方法等方面分析现有技术的优势与不足,对其发展脉络进行梳理.在此基础上,本文进一步指出了基于深度学习的图像超分辨率复原技术的未来发展方向.
2017, 43(5): 710-724.
doi: 10.16383/j.aas.2017.c160262
cstr: 32138.14.j.aas.2017.c160262
摘要:
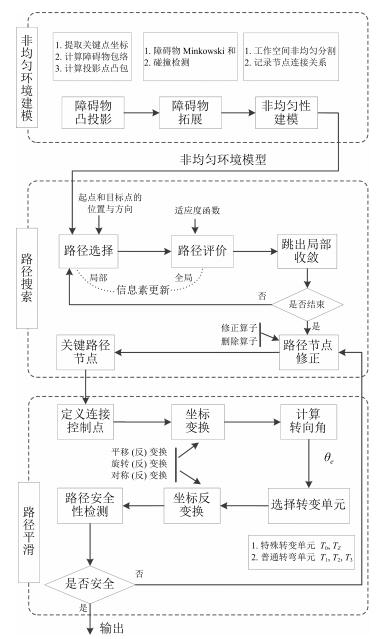
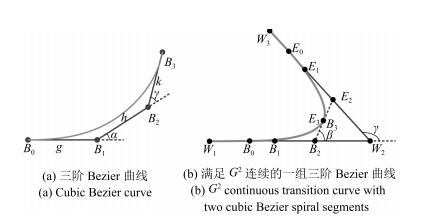
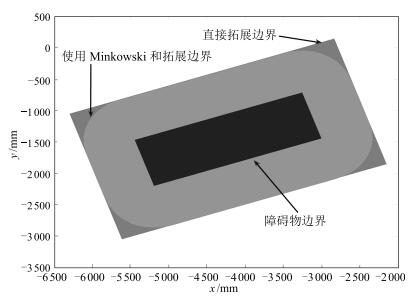
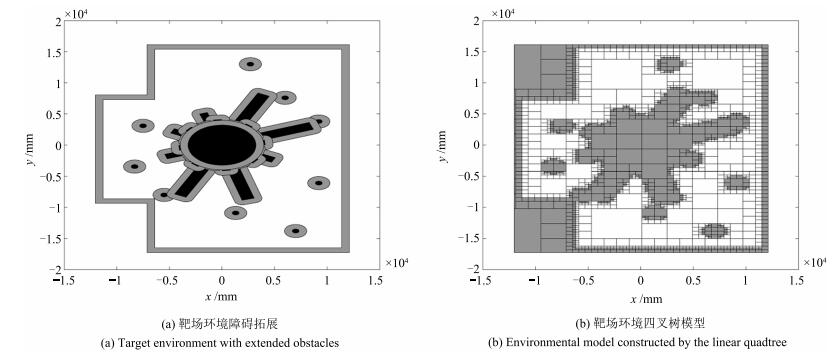
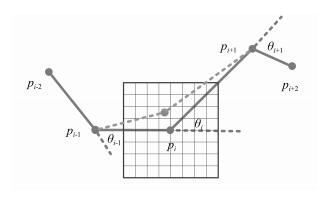
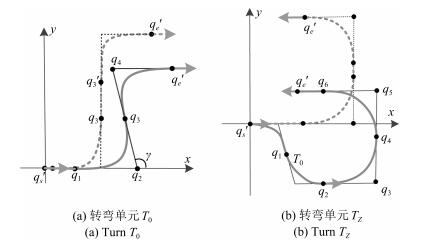
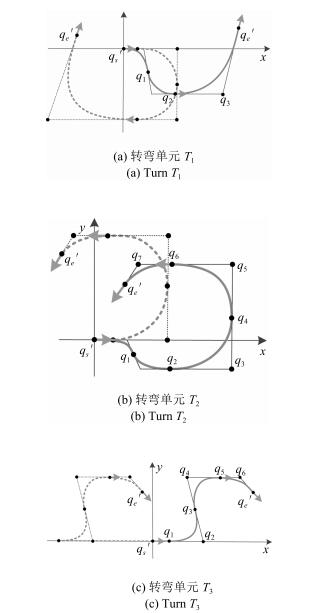
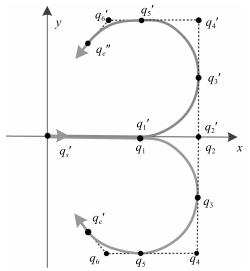
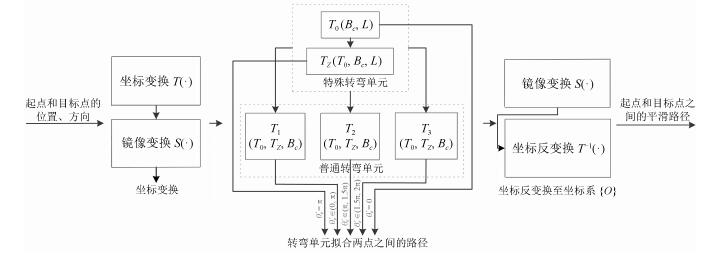
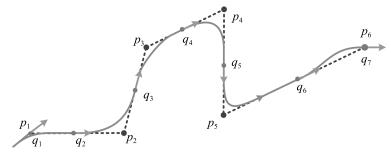
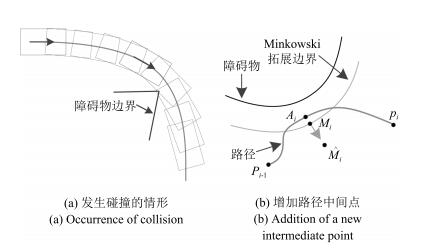
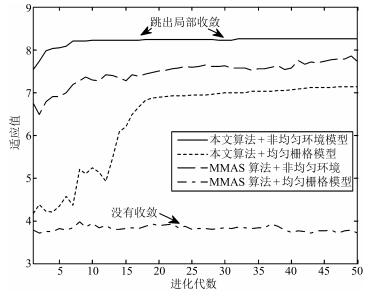
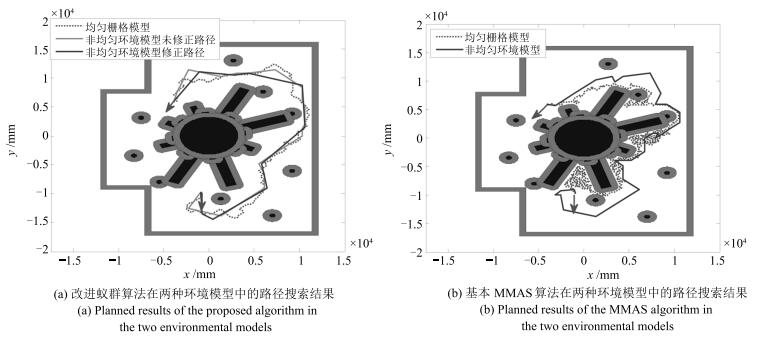
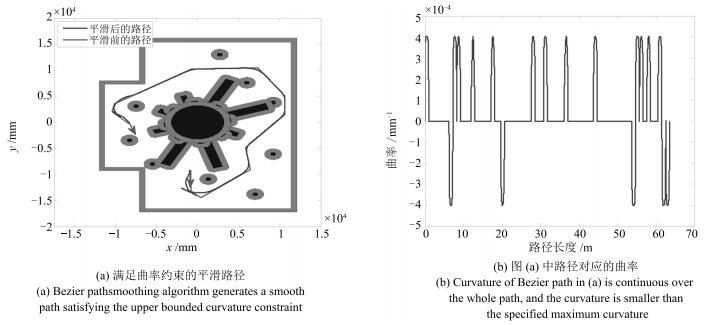
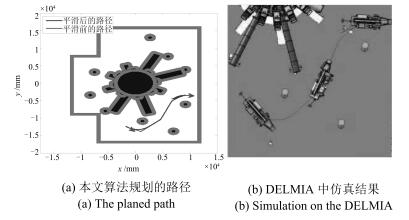
针对工作于复杂环境下的大型工装,本文提出了一种基于非均匀环境建模与三阶Bezier曲线的平滑路径规划算法,以指导工装的运动.在环境建模方面,利用四叉树建立环境的非均匀模型,能够有效压缩环境信息,提高搜索效率;在路径搜索方面,以非均匀环境模型为基础,提出一种距离启发搜索和信息素混合更新的蚁群算法,能够得到工装的安全可行路径点;在路径平滑方面,基于三阶Bezier曲线,提出能够连接任意位置和任意方向两点的转弯单元的设计方法,利用转弯单元连接路径搜索算法得到的路径点,能够获得满足工装非完整性约束的平滑路径.最后,以大型激光驱动器的靶场环境为对象,对本文算法的有效性和可靠性进行验证,并利用DELMIA平台进一步验证了规划路径的运动平滑性和安全性.
针对工作于复杂环境下的大型工装,本文提出了一种基于非均匀环境建模与三阶Bezier曲线的平滑路径规划算法,以指导工装的运动.在环境建模方面,利用四叉树建立环境的非均匀模型,能够有效压缩环境信息,提高搜索效率;在路径搜索方面,以非均匀环境模型为基础,提出一种距离启发搜索和信息素混合更新的蚁群算法,能够得到工装的安全可行路径点;在路径平滑方面,基于三阶Bezier曲线,提出能够连接任意位置和任意方向两点的转弯单元的设计方法,利用转弯单元连接路径搜索算法得到的路径点,能够获得满足工装非完整性约束的平滑路径.最后,以大型激光驱动器的靶场环境为对象,对本文算法的有效性和可靠性进行验证,并利用DELMIA平台进一步验证了规划路径的运动平滑性和安全性.



2017, 43(5): 725-734.
doi: 10.16383/j.aas.2017.c160413
cstr: 32138.14.j.aas.2017.c160413
摘要:
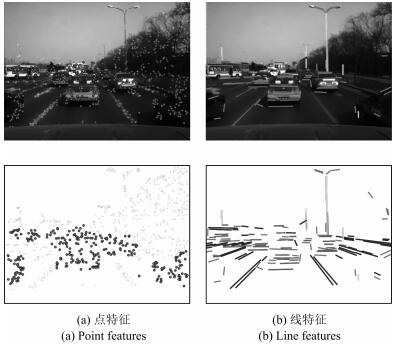
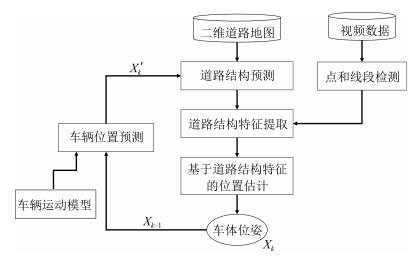
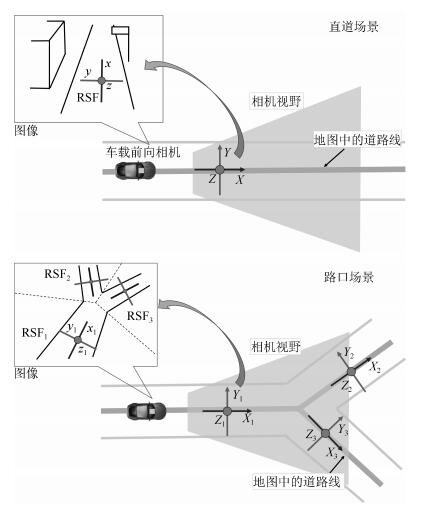
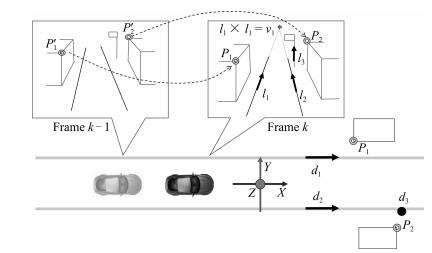
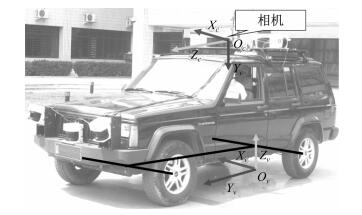
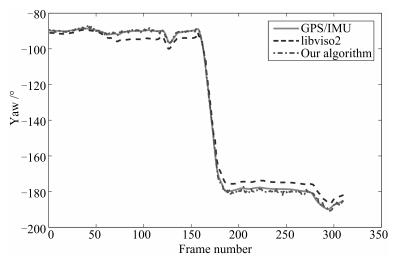
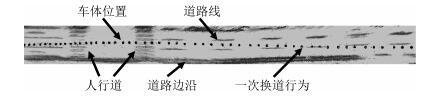
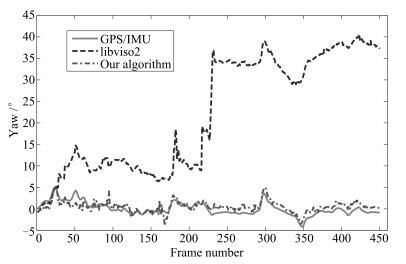
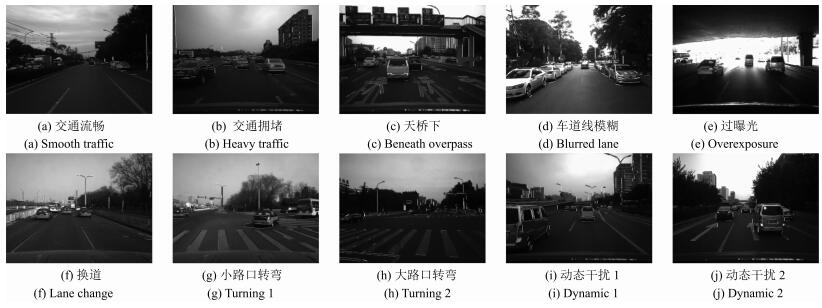
高精度定位是实现自动驾驶的关键.在城市密集区域,全球定位系统(Global positioning system,GPS)等卫星定位系统受到遮挡、干扰、多路径反射等影响,无法保障自动驾驶所需的定位精度.视觉定位技术通过图像特征匹配进行位置估计,被广泛研究.然而传统基于特征点的方法容易受到移动目标的干扰,在高动态交通场景中的应用面临挑战.在结构化道路场景中,车道等线特征普遍存在,为人类驾驶员的视觉理解与决策提供重要线索.受该思路的启发,本文利用场景中的三垂线和点特征构建道路结构特征(Road structural feature,RSF),并在此基础上提出一个基于道路结构特征的单目视觉定位算法.本文利用在北京市区的典型路口、路段、街道等场所采集的车载视频数据进行实验验证,以同步采集的高精度GPS惯性导航组合定位系统数据为参照,与传统视觉定位算法进行比较.结果表明,本文算法在朝向估计上明显优于传统算法,对环境中的动态干扰有更高的鲁棒性.在卫星信号易受干扰的区域,可以有效地弥补GPS等定位系统的不足,为满足自动驾驶所需的车道级定位要求提供重要的技术手段.
高精度定位是实现自动驾驶的关键.在城市密集区域,全球定位系统(Global positioning system,GPS)等卫星定位系统受到遮挡、干扰、多路径反射等影响,无法保障自动驾驶所需的定位精度.视觉定位技术通过图像特征匹配进行位置估计,被广泛研究.然而传统基于特征点的方法容易受到移动目标的干扰,在高动态交通场景中的应用面临挑战.在结构化道路场景中,车道等线特征普遍存在,为人类驾驶员的视觉理解与决策提供重要线索.受该思路的启发,本文利用场景中的三垂线和点特征构建道路结构特征(Road structural feature,RSF),并在此基础上提出一个基于道路结构特征的单目视觉定位算法.本文利用在北京市区的典型路口、路段、街道等场所采集的车载视频数据进行实验验证,以同步采集的高精度GPS惯性导航组合定位系统数据为参照,与传统视觉定位算法进行比较.结果表明,本文算法在朝向估计上明显优于传统算法,对环境中的动态干扰有更高的鲁棒性.在卫星信号易受干扰的区域,可以有效地弥补GPS等定位系统的不足,为满足自动驾驶所需的车道级定位要求提供重要的技术手段.



2017, 43(5): 735-742.
doi: 10.16383/j.aas.2017.c160527
cstr: 32138.14.j.aas.2017.c160527
摘要:
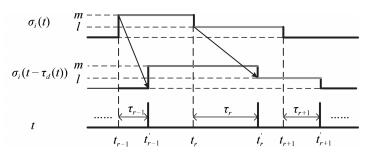
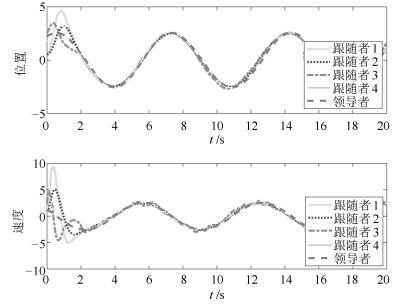
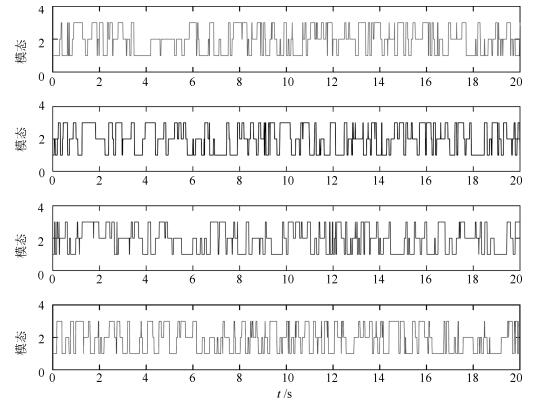
研究了一类控制器模态和系统模态不匹配的异步切换多智能体系统的输出调节问题.利用平均驻留时间和联合切换信号相结合的方法来处理由控制器与系统模态的切换存在时延引起的系统不稳定问题.提出一种基于输出反馈的切换控制策略,给出了异步切换多智能体输出调节问题可解的充分条件.最后,通过仿真实例验证结果的有效性.
研究了一类控制器模态和系统模态不匹配的异步切换多智能体系统的输出调节问题.利用平均驻留时间和联合切换信号相结合的方法来处理由控制器与系统模态的切换存在时延引起的系统不稳定问题.提出一种基于输出反馈的切换控制策略,给出了异步切换多智能体输出调节问题可解的充分条件.最后,通过仿真实例验证结果的有效性.

2017, 43(5): 743-752.
doi: 10.16383/j.aas.2017.c160175
cstr: 32138.14.j.aas.2017.c160175
摘要:
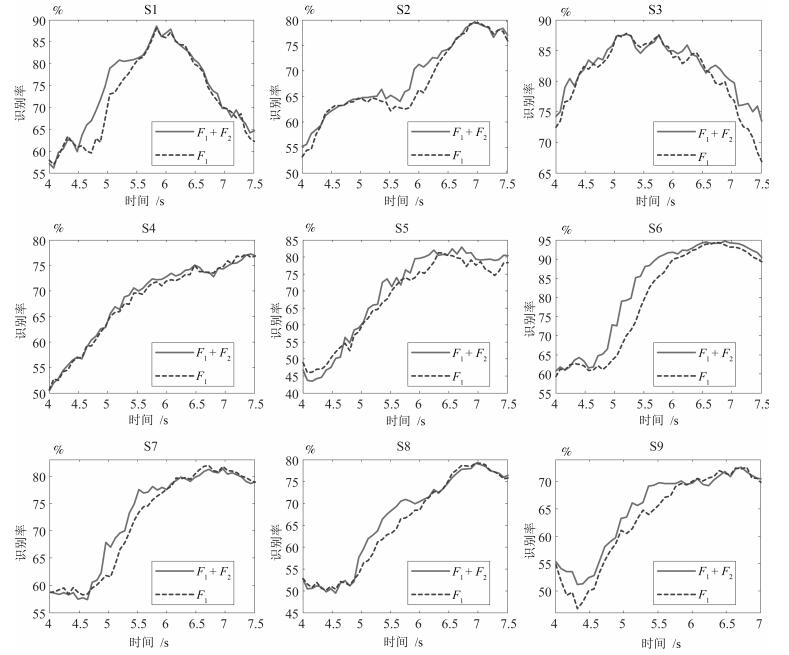
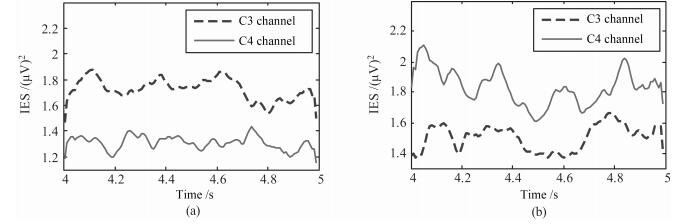
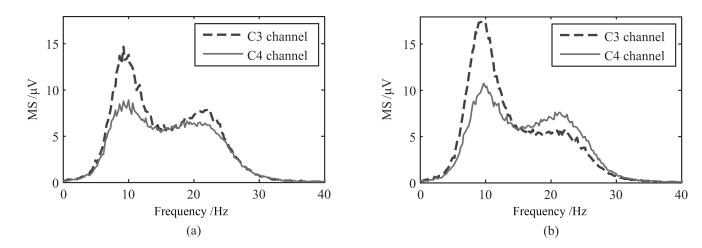
人的脑电信号(Electroencephalogram,EEG)复杂且具有非线性及非平稳性的特点使其不易分析处理,其识别效果也依赖于数据集的不同,而表现不稳定.本文中应用的总体经验模态分解(Ensemble empirical mode decomposition,EEMD)是一种具有强自适应性的信号处理方法,其在时频域展现的良好分辨率特别适合脑电识别任务处理.本文提出利用EEMD分解后得到的较具影响能力的固有模态函数(Intrinsic mode functions,IMFs),利用希尔伯特变换提取边际谱(Marginal spectrum,MS)及瞬时能谱(Instantaneous energy spectrum,IES)时频特征,同时通过加窗的方法提取非线性动力学特征近似熵特征,利用线性判别分类器(Linear discriminant analysis,LDA)作为分类器,实验结果得出,对于被试S2和被试S3可达到识别率分别为79.60%和87.77%,实验中9名被试的平均识别率为82.74%,得到平均识别率也高于近期使用相同数据集文献的其他方法.
人的脑电信号(Electroencephalogram,EEG)复杂且具有非线性及非平稳性的特点使其不易分析处理,其识别效果也依赖于数据集的不同,而表现不稳定.本文中应用的总体经验模态分解(Ensemble empirical mode decomposition,EEMD)是一种具有强自适应性的信号处理方法,其在时频域展现的良好分辨率特别适合脑电识别任务处理.本文提出利用EEMD分解后得到的较具影响能力的固有模态函数(Intrinsic mode functions,IMFs),利用希尔伯特变换提取边际谱(Marginal spectrum,MS)及瞬时能谱(Instantaneous energy spectrum,IES)时频特征,同时通过加窗的方法提取非线性动力学特征近似熵特征,利用线性判别分类器(Linear discriminant analysis,LDA)作为分类器,实验结果得出,对于被试S2和被试S3可达到识别率分别为79.60%和87.77%,实验中9名被试的平均识别率为82.74%,得到平均识别率也高于近期使用相同数据集文献的其他方法.
2017, 43(5): 753-764.
doi: 10.16383/j.aas.2017.c160326
cstr: 32138.14.j.aas.2017.c160326
摘要:
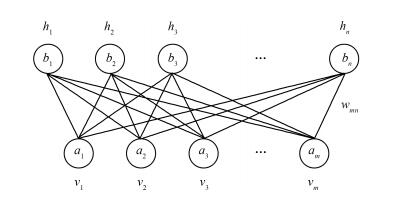
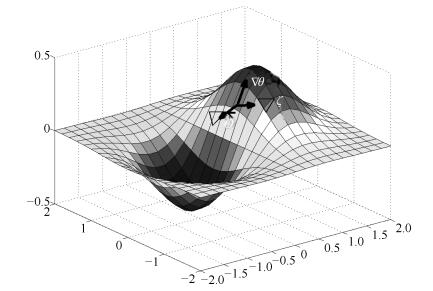
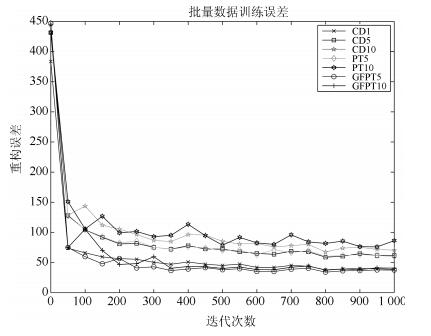
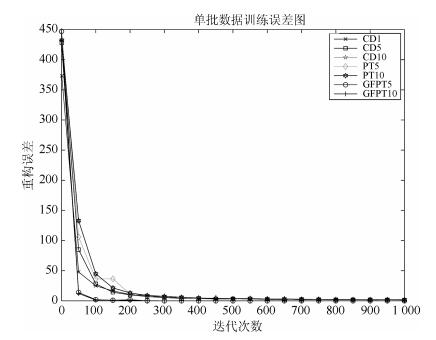
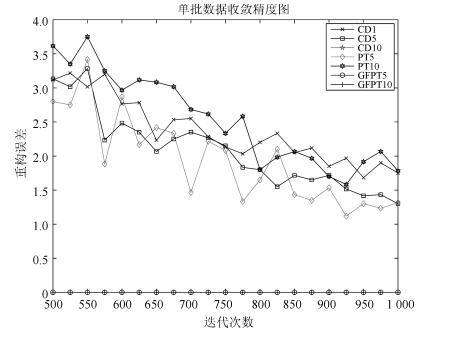
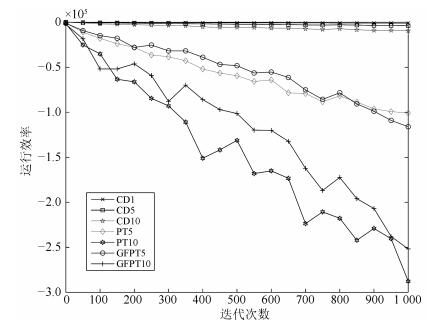
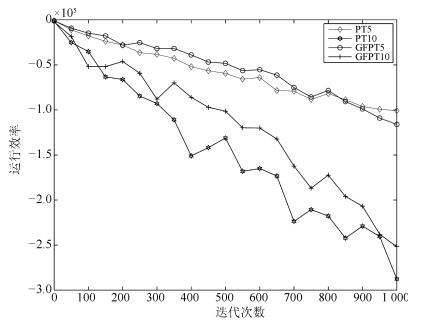
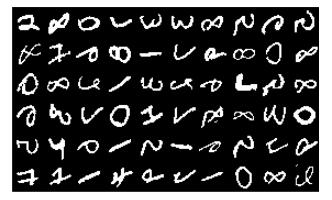
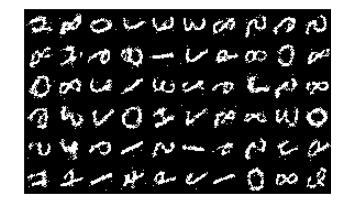
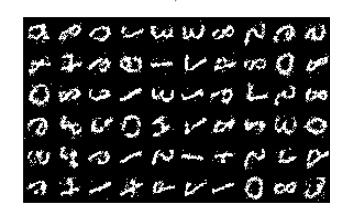
目前受限玻尔兹曼机网络训练算法主要是基于采样的算法.当用采样算法进行梯度计算时,得到的采样梯度是真实梯度的近似值,采样梯度和真实梯度之间存在较大的误差,这严重影响了网络的训练效果.针对该问题,本文首先分析了采样梯度和真实梯度之间的数值误差和方向误差,以及它们对网络训练性能的影响,然后从马尔科夫采样的角度对以上问题进行了理论分析,并建立了梯度修正模型,通过修正梯度对采样梯度进行数值和方向的调节,并提出了基于改进并行回火算法的训练算法,即GFPT(Gradient fixing parallel tempering)算法.最后给出GFPT算法与现有算法的对比实验,仿真结果表明,GFPT算法可以极大地减小采样梯度和真实梯度之间的误差,大幅度提升受限玻尔兹曼机网络的训练效果.
目前受限玻尔兹曼机网络训练算法主要是基于采样的算法.当用采样算法进行梯度计算时,得到的采样梯度是真实梯度的近似值,采样梯度和真实梯度之间存在较大的误差,这严重影响了网络的训练效果.针对该问题,本文首先分析了采样梯度和真实梯度之间的数值误差和方向误差,以及它们对网络训练性能的影响,然后从马尔科夫采样的角度对以上问题进行了理论分析,并建立了梯度修正模型,通过修正梯度对采样梯度进行数值和方向的调节,并提出了基于改进并行回火算法的训练算法,即GFPT(Gradient fixing parallel tempering)算法.最后给出GFPT算法与现有算法的对比实验,仿真结果表明,GFPT算法可以极大地减小采样梯度和真实梯度之间的误差,大幅度提升受限玻尔兹曼机网络的训练效果.


2017, 43(5): 765-777.
doi: 10.16383/j.aas.2017.c160268
cstr: 32138.14.j.aas.2017.c160268
摘要:
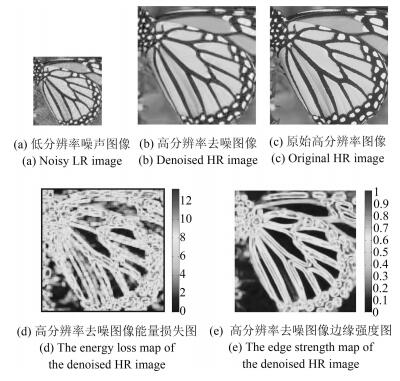
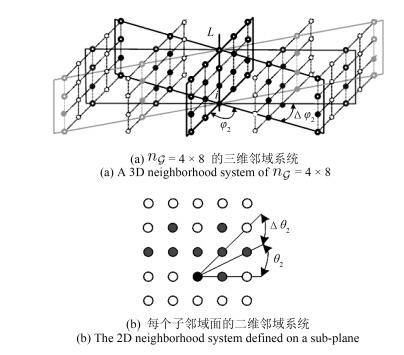
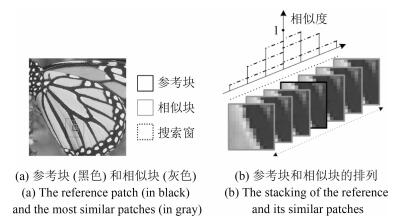
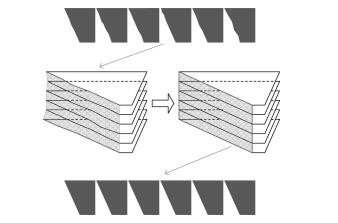
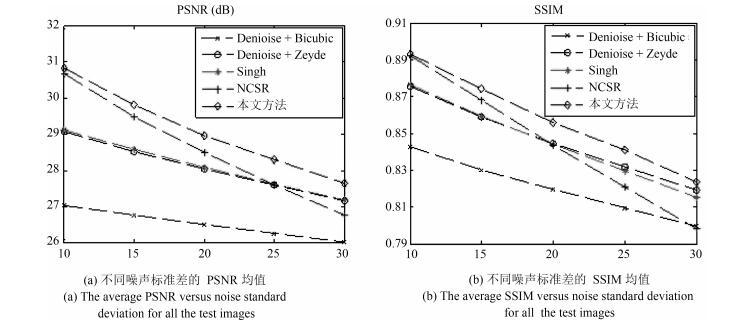
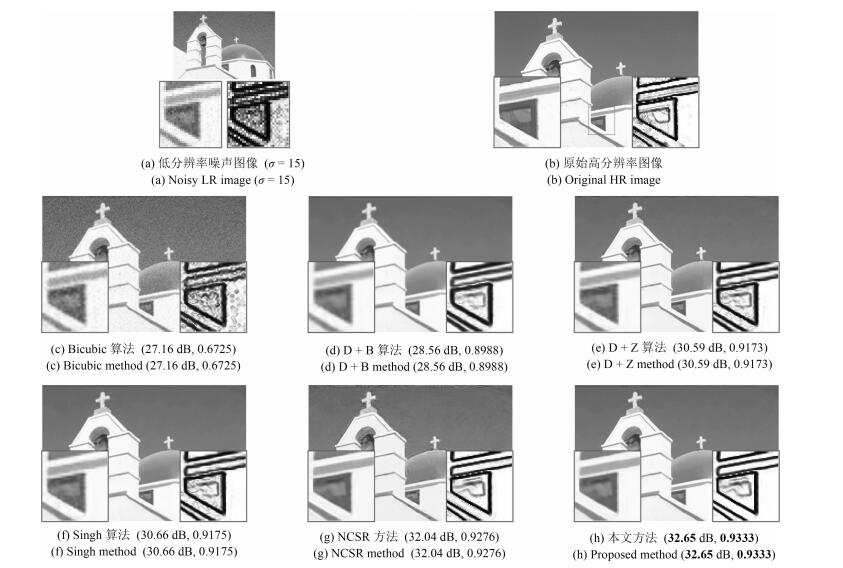
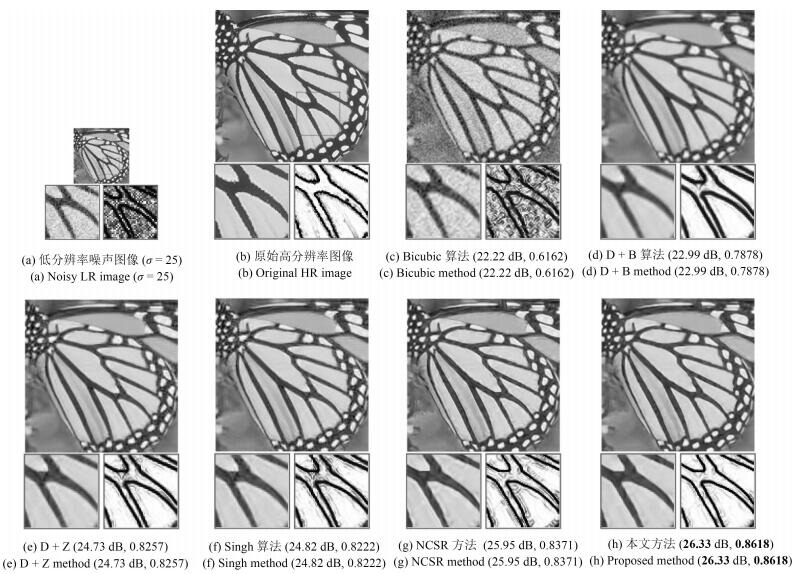
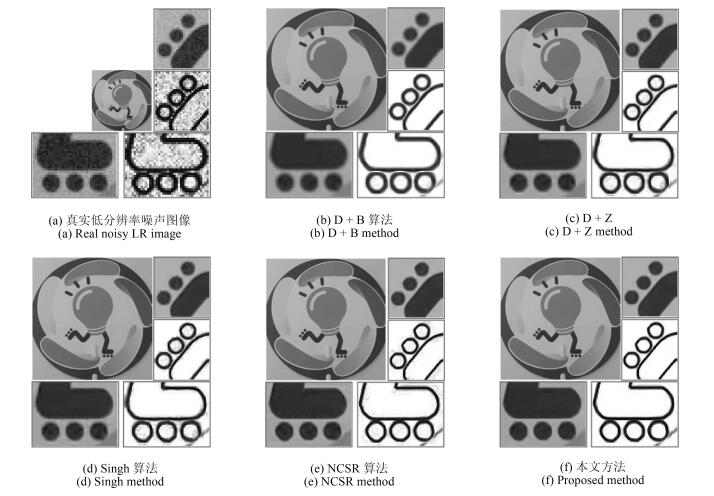
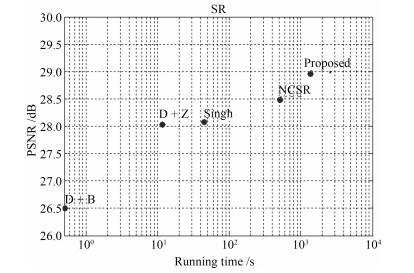
要增强噪声图像的分辨率,传统的串联方式依次进行去噪与超分辨率重建两个步骤,但去噪算法去除噪声的同时也损失了部分细节信息,影响了后续超分辨率重建的质量.为了使低分辨率噪声图像中所有细节信息都能参与超分辨率重建,本文以非局部中心化稀疏表示(Nonlocally centralized sparse representation,NCSR)模型为基础,提出了基于自适应块组割(Patch-group-cuts,PGCuts)先验的噪声图像超分辨率重建方法,同时实现去噪和超分辨率重建功能.块组割先验基于新颖的三维邻域系统和块组模型,能够达到图像去噪、边缘平滑和边缘清晰等效果.重建时以边缘强度为参考对块组割先验进行自适应约束,由于块组割在平滑区域约束力较低,采用分区域融合的方式进一步抑制噪声.本文对合成的低分辨率噪声图像和真实的低分辨率噪声图像进行了重建实验,实验表明,基于自适应块组割先验的噪声图像超分辨率重建算法,在丰富细节的同时能抑制噪声的干扰,不但具有较高的峰值信噪比和结构相似度等客观评价值,而且在非光滑区域具有很好的主观重建效果.
要增强噪声图像的分辨率,传统的串联方式依次进行去噪与超分辨率重建两个步骤,但去噪算法去除噪声的同时也损失了部分细节信息,影响了后续超分辨率重建的质量.为了使低分辨率噪声图像中所有细节信息都能参与超分辨率重建,本文以非局部中心化稀疏表示(Nonlocally centralized sparse representation,NCSR)模型为基础,提出了基于自适应块组割(Patch-group-cuts,PGCuts)先验的噪声图像超分辨率重建方法,同时实现去噪和超分辨率重建功能.块组割先验基于新颖的三维邻域系统和块组模型,能够达到图像去噪、边缘平滑和边缘清晰等效果.重建时以边缘强度为参考对块组割先验进行自适应约束,由于块组割在平滑区域约束力较低,采用分区域融合的方式进一步抑制噪声.本文对合成的低分辨率噪声图像和真实的低分辨率噪声图像进行了重建实验,实验表明,基于自适应块组割先验的噪声图像超分辨率重建算法,在丰富细节的同时能抑制噪声的干扰,不但具有较高的峰值信噪比和结构相似度等客观评价值,而且在非光滑区域具有很好的主观重建效果.
2017, 43(5): 778-788.
doi: 10.16383/j.aas.2017.c150838
cstr: 32138.14.j.aas.2017.c150838
摘要:
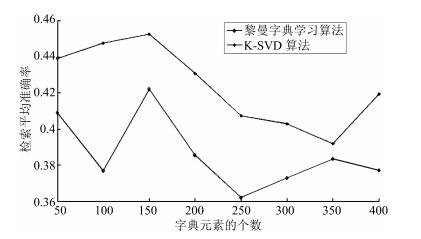
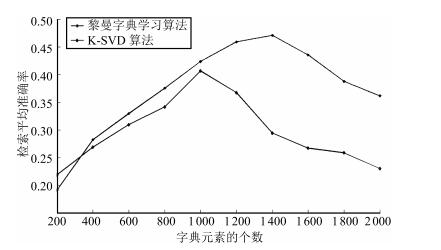
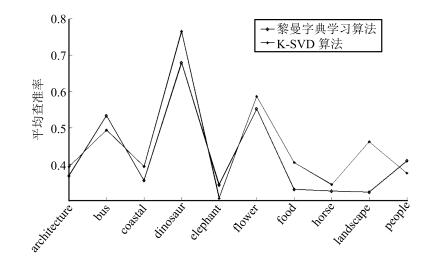
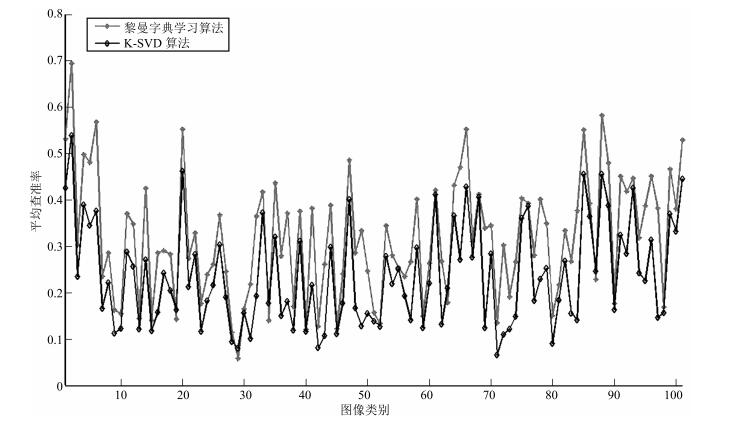
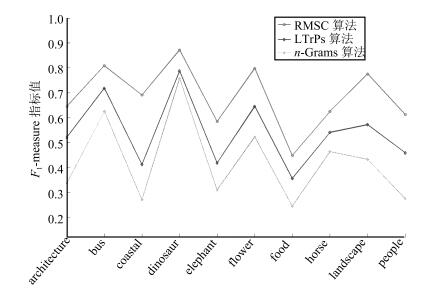
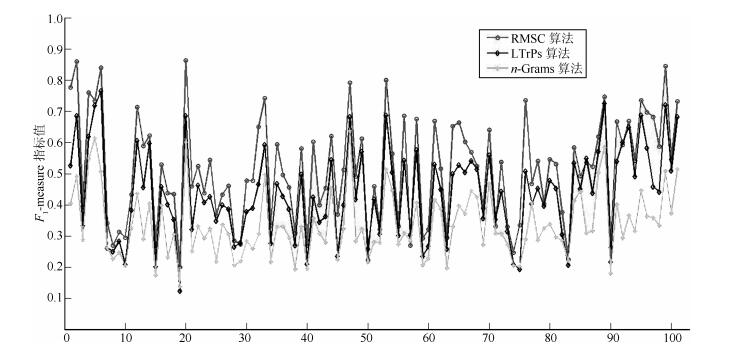
针对视觉词袋(Bag-of-visual-words,BOVW)模型直方图量化误差大的缺点,提出基于稀疏编码的图像检索算法.由于大多数图像特征属于非线性流形结构,传统稀疏编码使用向量空间对其度量必然导致不准确的稀疏表示.考虑到图像特征空间的流形结构,选择对称正定矩阵作为特征描述子,构建黎曼流形空间.利用核技术将黎曼流形结构映射到再生核希尔伯特空间,非线性流形转换为线性稀疏编码,获得图像更准确的稀疏表示.实验在Corel1000和Caltech101两个数据集上进行,与已有的图像检索算法对比,提出的图像检索算法不仅提高了检索准确率,而且获得了更好的检索性能.
针对视觉词袋(Bag-of-visual-words,BOVW)模型直方图量化误差大的缺点,提出基于稀疏编码的图像检索算法.由于大多数图像特征属于非线性流形结构,传统稀疏编码使用向量空间对其度量必然导致不准确的稀疏表示.考虑到图像特征空间的流形结构,选择对称正定矩阵作为特征描述子,构建黎曼流形空间.利用核技术将黎曼流形结构映射到再生核希尔伯特空间,非线性流形转换为线性稀疏编码,获得图像更准确的稀疏表示.实验在Corel1000和Caltech101两个数据集上进行,与已有的图像检索算法对比,提出的图像检索算法不仅提高了检索准确率,而且获得了更好的检索性能.


2017, 43(5): 789-794.
doi: 10.16383/j.aas.2017.c160026
cstr: 32138.14.j.aas.2017.c160026
摘要:
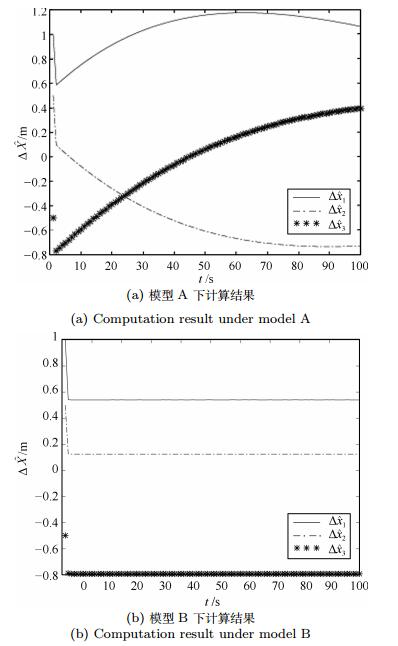
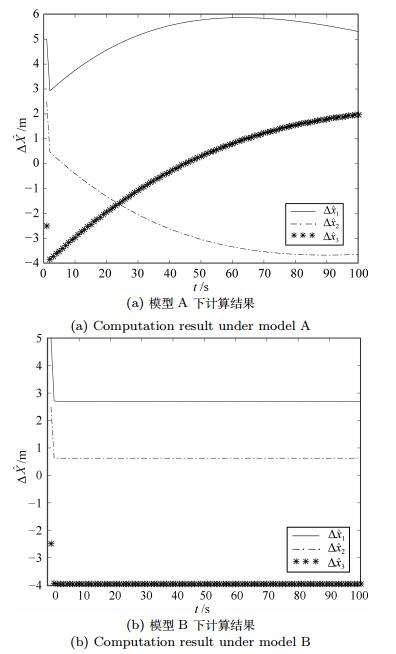
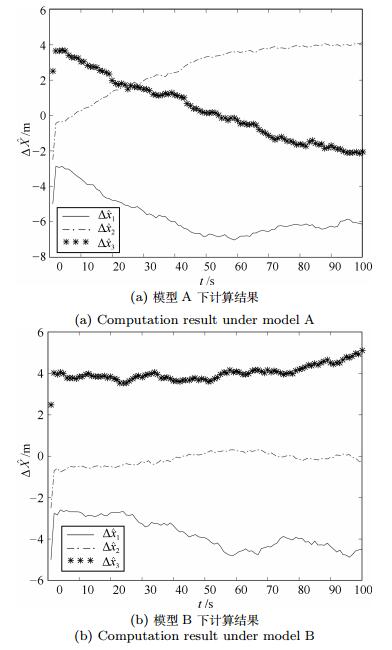
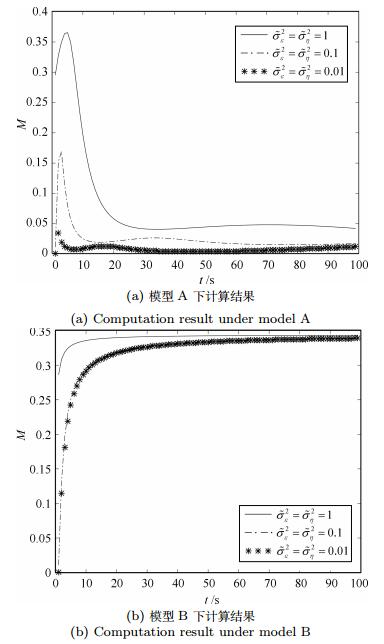
Kalman滤波在系统控制、信号处理和飞行器导航等领域有广泛应用.众所周知,Kalman滤波是建立在一组递推计算的滤波算法.不准确的初始值设置是否影响状态滤波结果,这是实际应用Kalman滤波时必须关注和解决的问题.本文在推导滤波初始值与系统真实初态之间偏差对滤波结果影响的基础上,建立了初始值偏差对后续滤波影响的传递关系,以及滤波结果收敛的充分条件;通过设置多组不同初始值偏差,分别对某三阶可观测系统和不可观测系统进行了仿真计算及结果分析,验证了滤波初始值偏差会导致滤波结果发生明显偏离.研究结果揭示,即使是可观测的线性系统,采用Kalman滤波时也必须尽可能选取准确的初始值.
Kalman滤波在系统控制、信号处理和飞行器导航等领域有广泛应用.众所周知,Kalman滤波是建立在一组递推计算的滤波算法.不准确的初始值设置是否影响状态滤波结果,这是实际应用Kalman滤波时必须关注和解决的问题.本文在推导滤波初始值与系统真实初态之间偏差对滤波结果影响的基础上,建立了初始值偏差对后续滤波影响的传递关系,以及滤波结果收敛的充分条件;通过设置多组不同初始值偏差,分别对某三阶可观测系统和不可观测系统进行了仿真计算及结果分析,验证了滤波初始值偏差会导致滤波结果发生明显偏离.研究结果揭示,即使是可观测的线性系统,采用Kalman滤波时也必须尽可能选取准确的初始值.

2017, 43(5): 795-805.
doi: 10.16383/j.aas.2017.c150851
cstr: 32138.14.j.aas.2017.c150851
摘要:
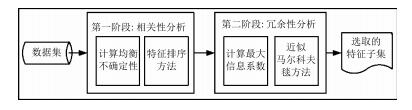
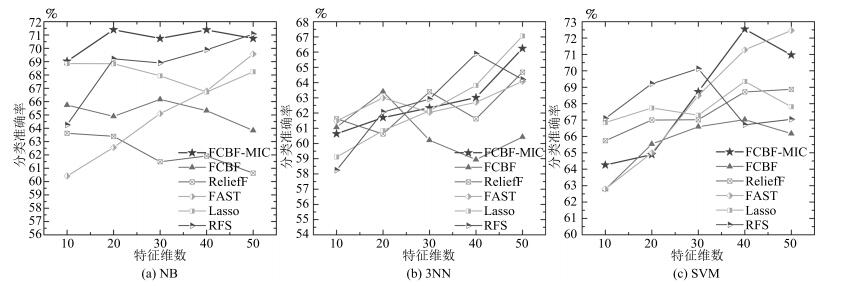
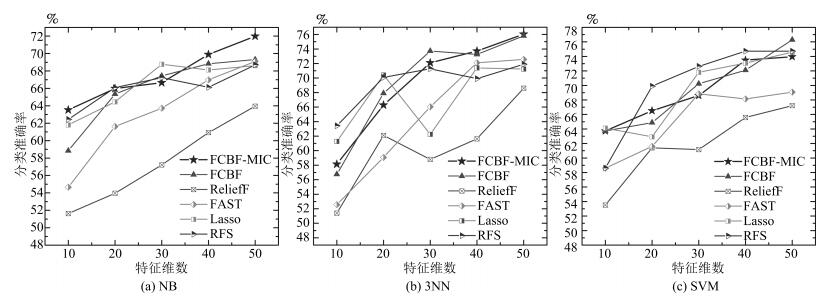
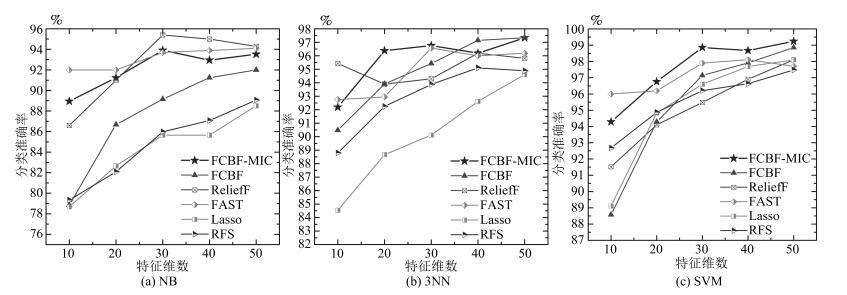
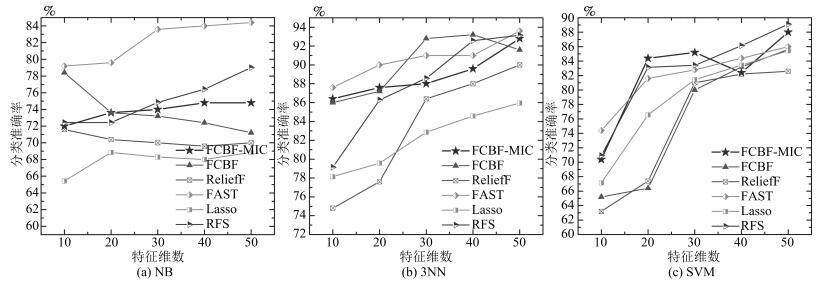
最大信息系数(Maximum information coefficient,MIC)可以对变量间的线性和非线性关系,以及非函数依赖关系进行有效度量.本文首先根据最大信息系数理论,提出了一种评价各维特征间以及每维特征与类别间相关性的度量标准,然后提出了基于新度量标准的近似马尔科夫毯特征选择方法,删除冗余特征.在此基础上提出了基于特征排序和近似马尔科夫毯的两阶段特征选择方法,分别对特征的相关性和冗余性进行分析,选择有效的特征子集.在UCI和ASU上的多个公开数据集上的对比实验表明,本文提出的方法总体优于快速相关滤波(Fast correlation-based filter,FCBF)方法,与ReliefF,FAST,Lasso和RFS方法相比也具有优势.
最大信息系数(Maximum information coefficient,MIC)可以对变量间的线性和非线性关系,以及非函数依赖关系进行有效度量.本文首先根据最大信息系数理论,提出了一种评价各维特征间以及每维特征与类别间相关性的度量标准,然后提出了基于新度量标准的近似马尔科夫毯特征选择方法,删除冗余特征.在此基础上提出了基于特征排序和近似马尔科夫毯的两阶段特征选择方法,分别对特征的相关性和冗余性进行分析,选择有效的特征子集.在UCI和ASU上的多个公开数据集上的对比实验表明,本文提出的方法总体优于快速相关滤波(Fast correlation-based filter,FCBF)方法,与ReliefF,FAST,Lasso和RFS方法相比也具有优势.
2017, 43(5): 806-813.
doi: 10.16383/j.aas.2017.c150787
cstr: 32138.14.j.aas.2017.c150787
摘要:
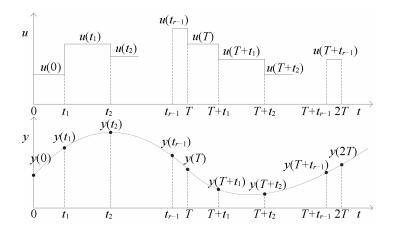
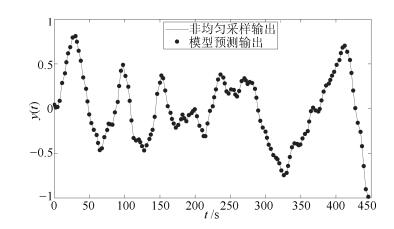
提升技术是处理非均匀采样数据(Non-uniformly sampled-data,NUSD)系统的标准工具.然而,提升状态空间模型存在因果约束问题,相应的提升传递函数模型结构复杂,且参数数目过多.因此,它们不便于非均匀采样数据系统的辨识与控制.通过引入时变后移算子,本文提出了一种输入输出表达的新型模型描述方法.该模型能够克服提升系统模型的缺点,使得传统单率系统的辨识和控制方法能够推广到非均匀采样数据系统中.仿真结果表明了新模型的优越性和有效性.
提升技术是处理非均匀采样数据(Non-uniformly sampled-data,NUSD)系统的标准工具.然而,提升状态空间模型存在因果约束问题,相应的提升传递函数模型结构复杂,且参数数目过多.因此,它们不便于非均匀采样数据系统的辨识与控制.通过引入时变后移算子,本文提出了一种输入输出表达的新型模型描述方法.该模型能够克服提升系统模型的缺点,使得传统单率系统的辨识和控制方法能够推广到非均匀采样数据系统中.仿真结果表明了新模型的优越性和有效性.

2017, 43(5): 814-821.
doi: 10.16383/j.aas.2017.c150634
cstr: 32138.14.j.aas.2017.c150634
摘要:
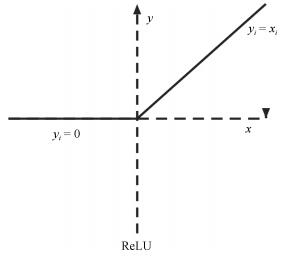
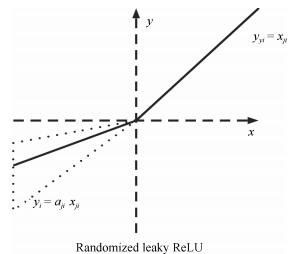
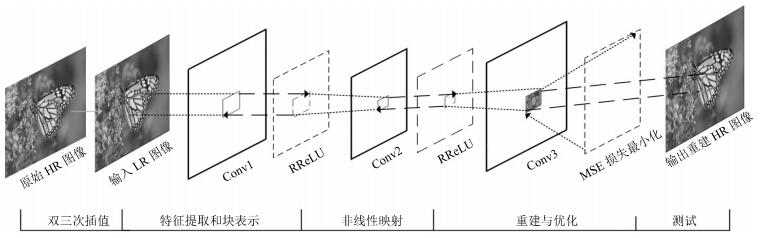
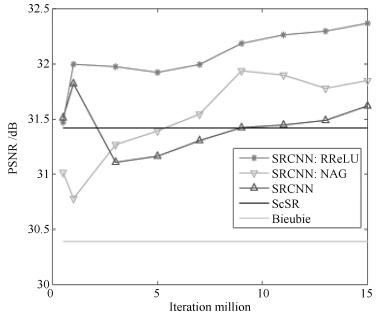
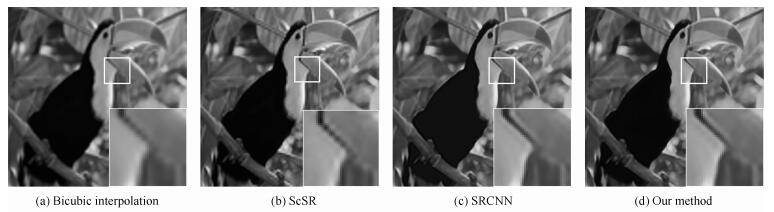
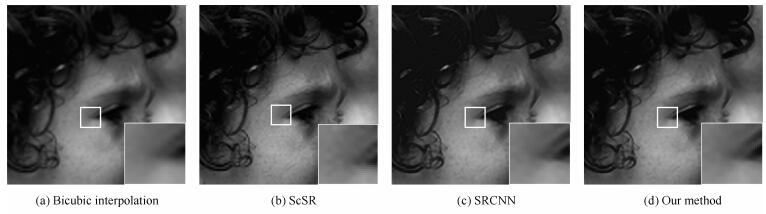
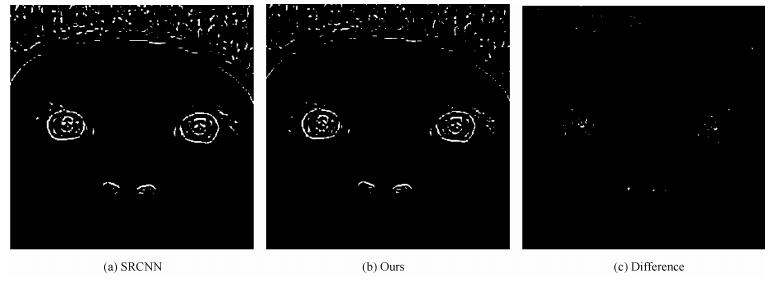
基于学习的图像超分辨率(Super-resolution,SR)算法利用样本先验知识来重建图像,相较于其他重建方法拥有明显的优势,也是近年来研究的热点.论文首先分析了影响图像重建质量的因素,然后对基于卷积神经网络的图像超分辨率重建算法(Super-resolution convolutional neural network,SRCNN)提出了两点改进:我们用随机线性纠正单元(Randomized rectified linear unit,RReLU)去避免原有网络学习中对图像某些重要的信息过压缩,同时我们用NAG(Nesterov's accelerated gradient)方法去加速网络的收敛并且避免了网络在梯度更新的时候产生较大的震荡.最后通过实验验证了我们改进网络可以获得更好的主观视觉评价和客观量化评价.
基于学习的图像超分辨率(Super-resolution,SR)算法利用样本先验知识来重建图像,相较于其他重建方法拥有明显的优势,也是近年来研究的热点.论文首先分析了影响图像重建质量的因素,然后对基于卷积神经网络的图像超分辨率重建算法(Super-resolution convolutional neural network,SRCNN)提出了两点改进:我们用随机线性纠正单元(Randomized rectified linear unit,RReLU)去避免原有网络学习中对图像某些重要的信息过压缩,同时我们用NAG(Nesterov's accelerated gradient)方法去加速网络的收敛并且避免了网络在梯度更新的时候产生较大的震荡.最后通过实验验证了我们改进网络可以获得更好的主观视觉评价和客观量化评价.




2017, 43(5): 822-834.
doi: 10.16383/j.aas.2017.c160052
cstr: 32138.14.j.aas.2017.c160052
摘要:
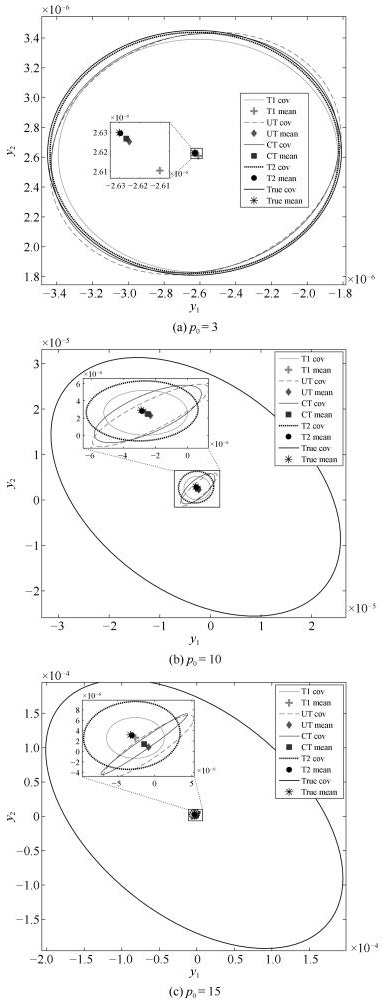
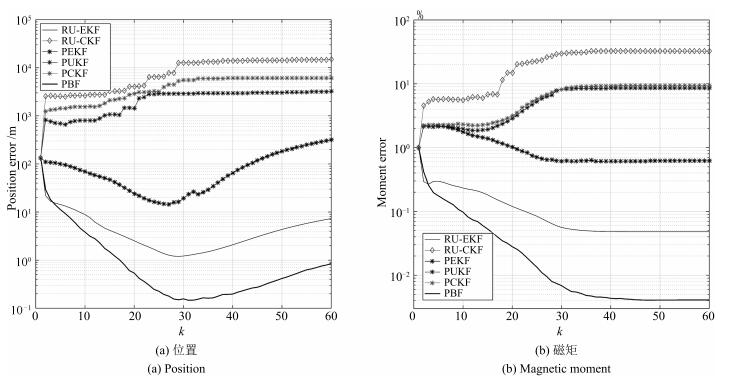
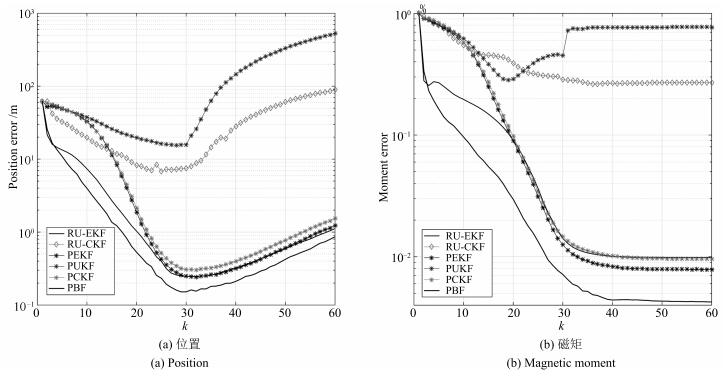
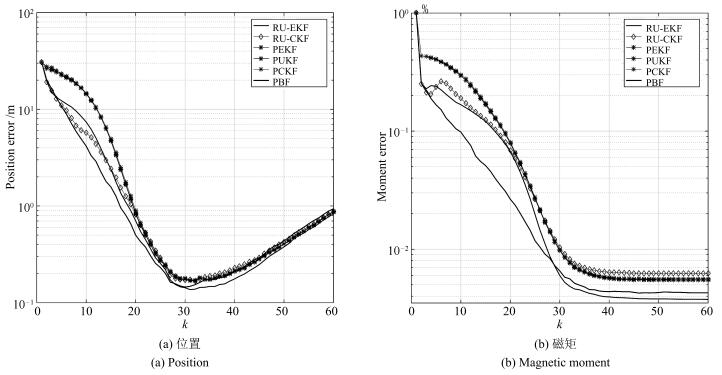
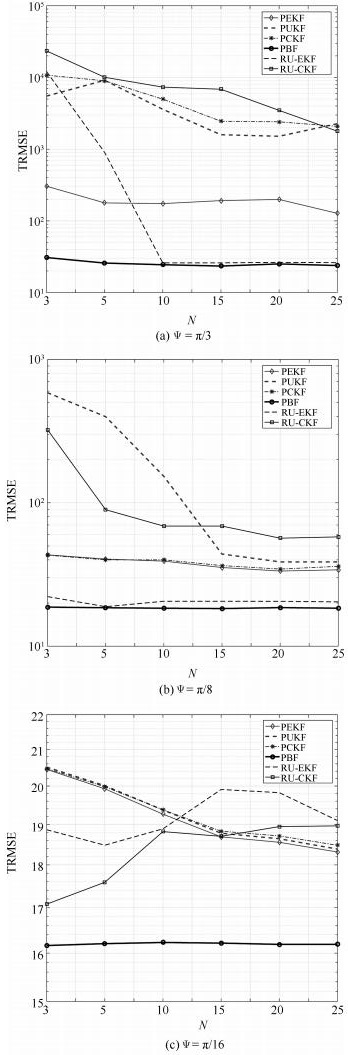
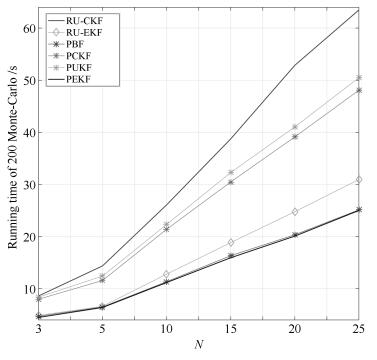
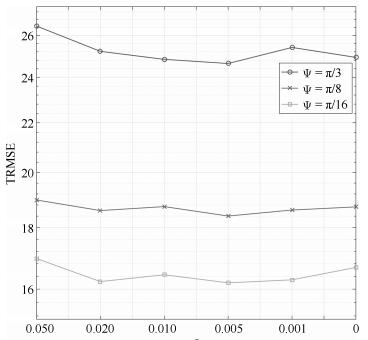
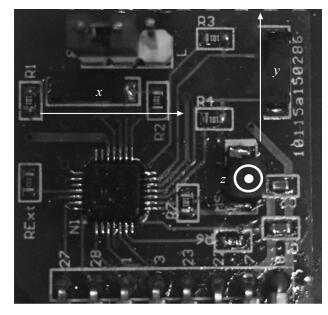
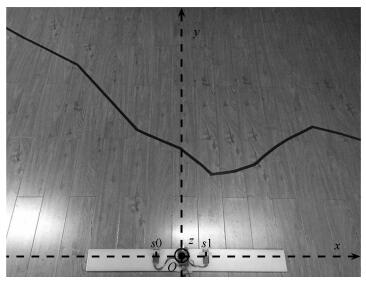
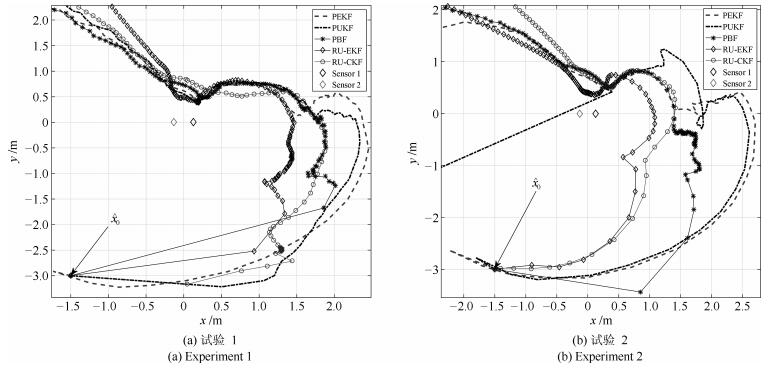
提出一种新的非线性滤波器应用于磁偶极子目标跟踪问题.建立了跟踪问题的状态空间模型, 在此基础上, 从高斯矩近似误差的角度分析了现有卡尔曼滤波更新在磁偶极子跟踪中的问题.对此, 将贝叶斯更新过程等效为求解连续时间上的渐进贝叶斯问题, 在线性高斯条件下推导了其解析解, 表明渐进贝叶斯更新可等效为定常系统的Kalman-Bucy滤波器; 进一步采用一阶Taylor展开得到非线性近似解表达式, 导出一种渐进贝叶斯滤波器, 从理论上分析了与现有方法的异同.仿真与实测磁目标跟踪试验结果表明, 渐进贝叶斯滤波器具有良好的精度和收敛性, 能够有效抑制磁目标跟踪中由于大初始误差导致的性能下降和滤波发散, 且计算效率与扩展卡尔曼滤波器相当, 适于实际应用.
提出一种新的非线性滤波器应用于磁偶极子目标跟踪问题.建立了跟踪问题的状态空间模型, 在此基础上, 从高斯矩近似误差的角度分析了现有卡尔曼滤波更新在磁偶极子跟踪中的问题.对此, 将贝叶斯更新过程等效为求解连续时间上的渐进贝叶斯问题, 在线性高斯条件下推导了其解析解, 表明渐进贝叶斯更新可等效为定常系统的Kalman-Bucy滤波器; 进一步采用一阶Taylor展开得到非线性近似解表达式, 导出一种渐进贝叶斯滤波器, 从理论上分析了与现有方法的异同.仿真与实测磁目标跟踪试验结果表明, 渐进贝叶斯滤波器具有良好的精度和收敛性, 能够有效抑制磁目标跟踪中由于大初始误差导致的性能下降和滤波发散, 且计算效率与扩展卡尔曼滤波器相当, 适于实际应用.

2017, 43(5): 835-842.
doi: 10.16383/j.aas.2017.c160299
cstr: 32138.14.j.aas.2017.c160299
摘要:
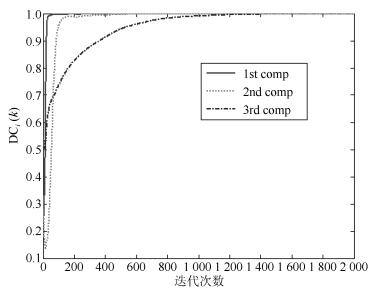
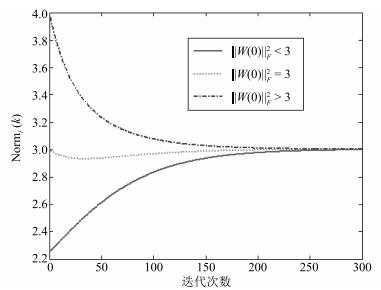
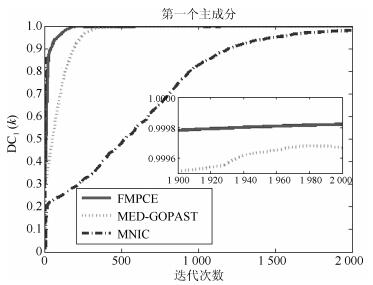
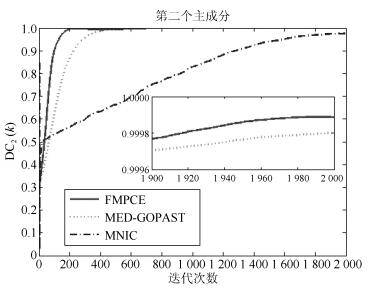
主成分分析是信号处理和数据统计领域内非常重要的分析工具.针对现有多个主成分提取算法收敛速度慢的问题,提出了具有快速收敛速度的神经网络算法.该算法能够并行提取信号中的多个主成分,而不需要其他额外的操作.分别采用平稳点分析法和随机离散时间分析法对所提算法的收敛性和自稳定性进行了证明.仿真实验表明,相比现有算法,所提算法不仅具有较快的收敛速度,而且具有较高的收敛精度.
主成分分析是信号处理和数据统计领域内非常重要的分析工具.针对现有多个主成分提取算法收敛速度慢的问题,提出了具有快速收敛速度的神经网络算法.该算法能够并行提取信号中的多个主成分,而不需要其他额外的操作.分别采用平稳点分析法和随机离散时间分析法对所提算法的收敛性和自稳定性进行了证明.仿真实验表明,相比现有算法,所提算法不仅具有较快的收敛速度,而且具有较高的收敛精度.

2017, 43(5): 843-854.
doi: 10.16383/j.aas.2017.c160077
cstr: 32138.14.j.aas.2017.c160077
摘要:
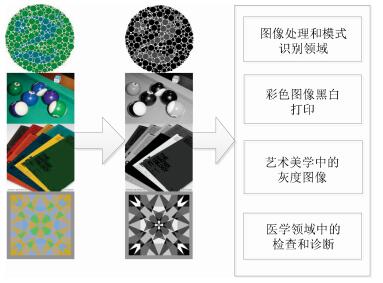
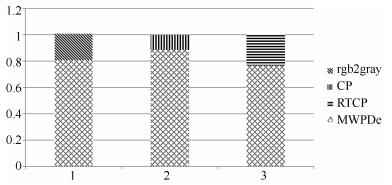
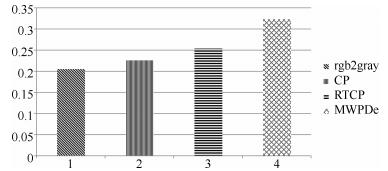
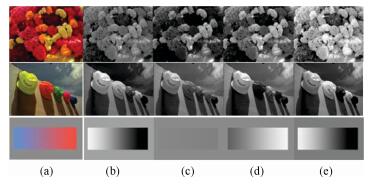
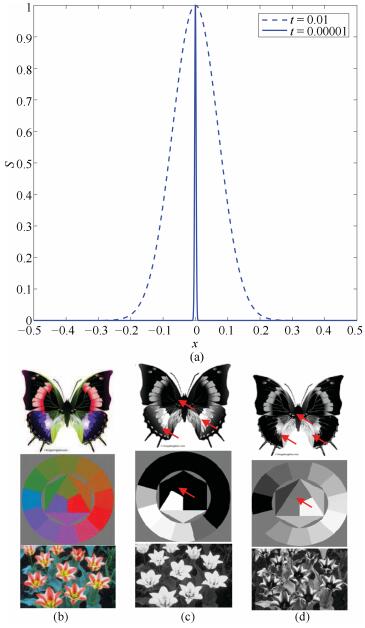
针对目前彩色图像灰度化难以充分保留原彩色图像对比度的问题,本文提出了基于最大加权投影求解的彩色图像灰度化模型及算法.首先,在好的彩色图像灰度化算法应使灰度化图像具有最大对比度的假设下,本模型提出最大加权投影的目标优化函数,并且将原始彩色图像梯度权重引入到最大化函数中,使得原彩色图像中对比度较小的区域也能够在灰度化后的图像中得到保持.每个彩色通道梯度的高斯加权系数反映灰度图像的对比度和原彩色图像的颜色顺序.其次,对所提模型使用参数离散搜索策略求解,通过对线性离散参数模型产生的候选图像进行搜索,由于只有几个算术运算,计算速度较快.最后,为评价所提出算法在复杂场景下图像灰度化对比度保持性能,本文对Cadik、CSDD和COLOR250数据集分别进行灰度化实验.定性和定量实验结果表明,所提算法相比于其他算法能较好地保留原彩色图像颜色对比度,同时具有对噪声鲁棒和运算速度快的优势.
针对目前彩色图像灰度化难以充分保留原彩色图像对比度的问题,本文提出了基于最大加权投影求解的彩色图像灰度化模型及算法.首先,在好的彩色图像灰度化算法应使灰度化图像具有最大对比度的假设下,本模型提出最大加权投影的目标优化函数,并且将原始彩色图像梯度权重引入到最大化函数中,使得原彩色图像中对比度较小的区域也能够在灰度化后的图像中得到保持.每个彩色通道梯度的高斯加权系数反映灰度图像的对比度和原彩色图像的颜色顺序.其次,对所提模型使用参数离散搜索策略求解,通过对线性离散参数模型产生的候选图像进行搜索,由于只有几个算术运算,计算速度较快.最后,为评价所提出算法在复杂场景下图像灰度化对比度保持性能,本文对Cadik、CSDD和COLOR250数据集分别进行灰度化实验.定性和定量实验结果表明,所提算法相比于其他算法能较好地保留原彩色图像颜色对比度,同时具有对噪声鲁棒和运算速度快的优势.




2017, 43(5): 855-865.
doi: 10.16383/j.aas.2017.c160375
cstr: 32138.14.j.aas.2017.c160375
摘要:
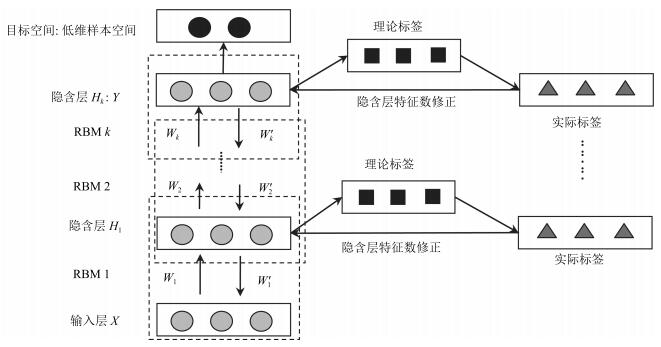
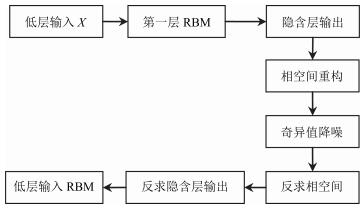
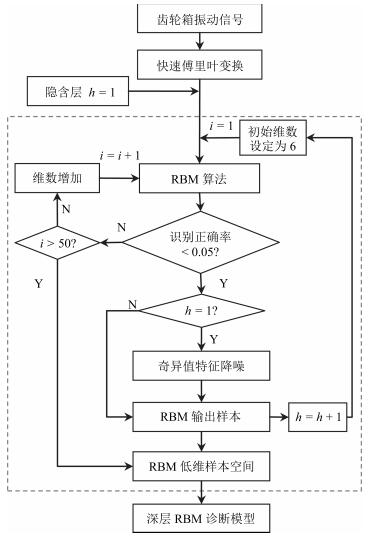
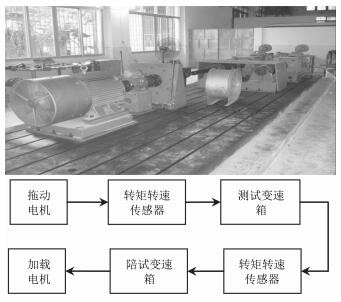
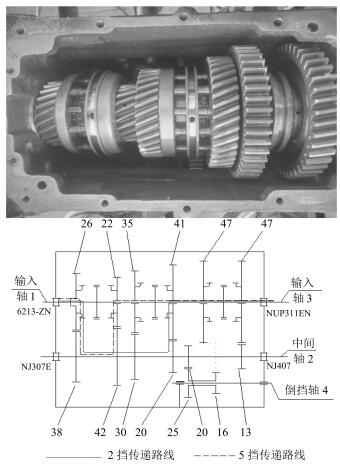
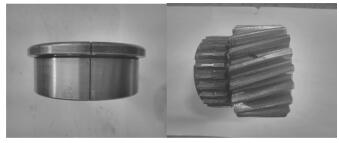
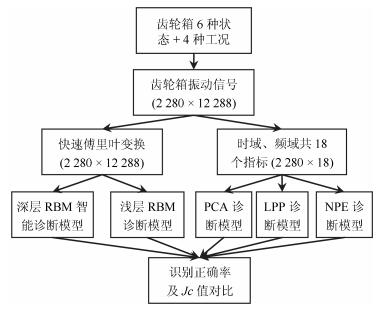
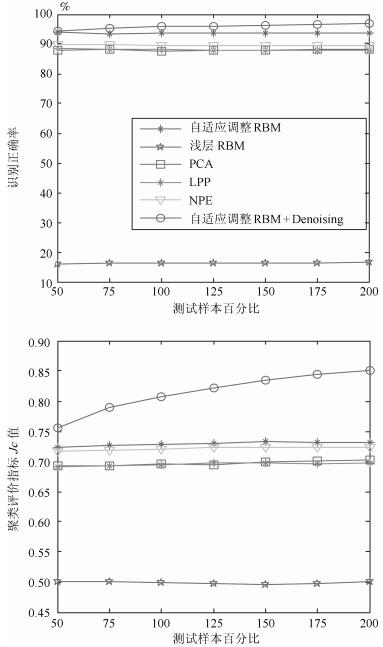
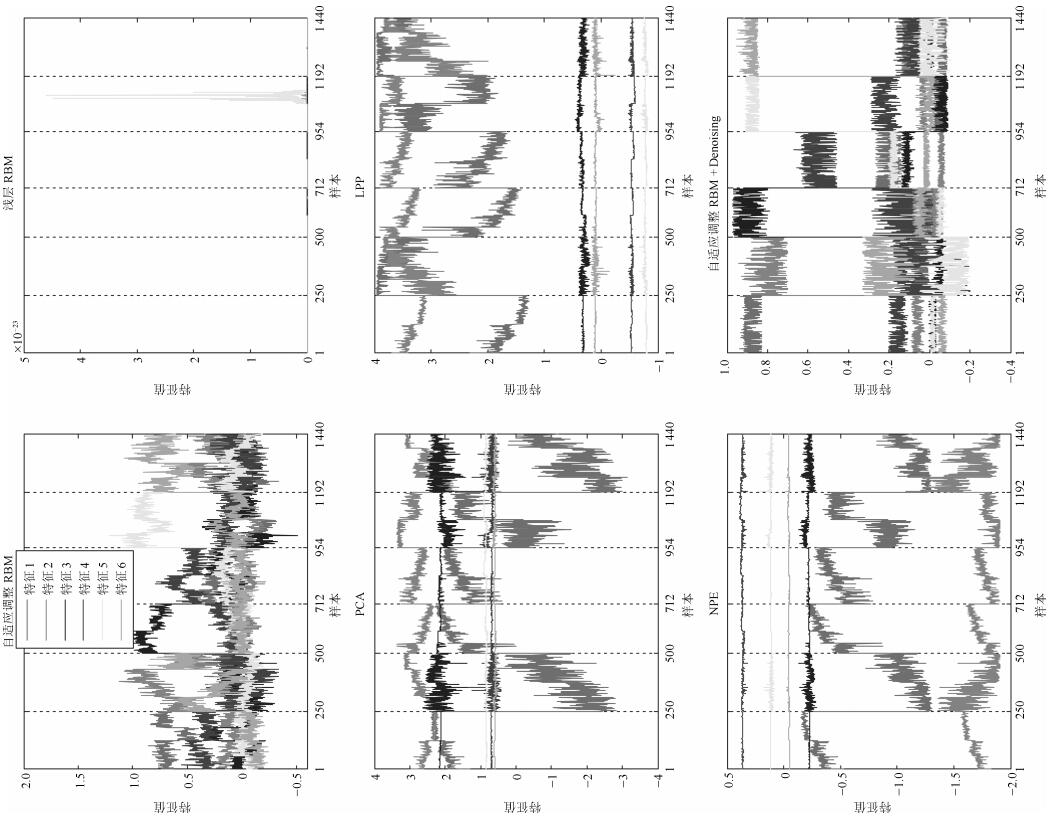
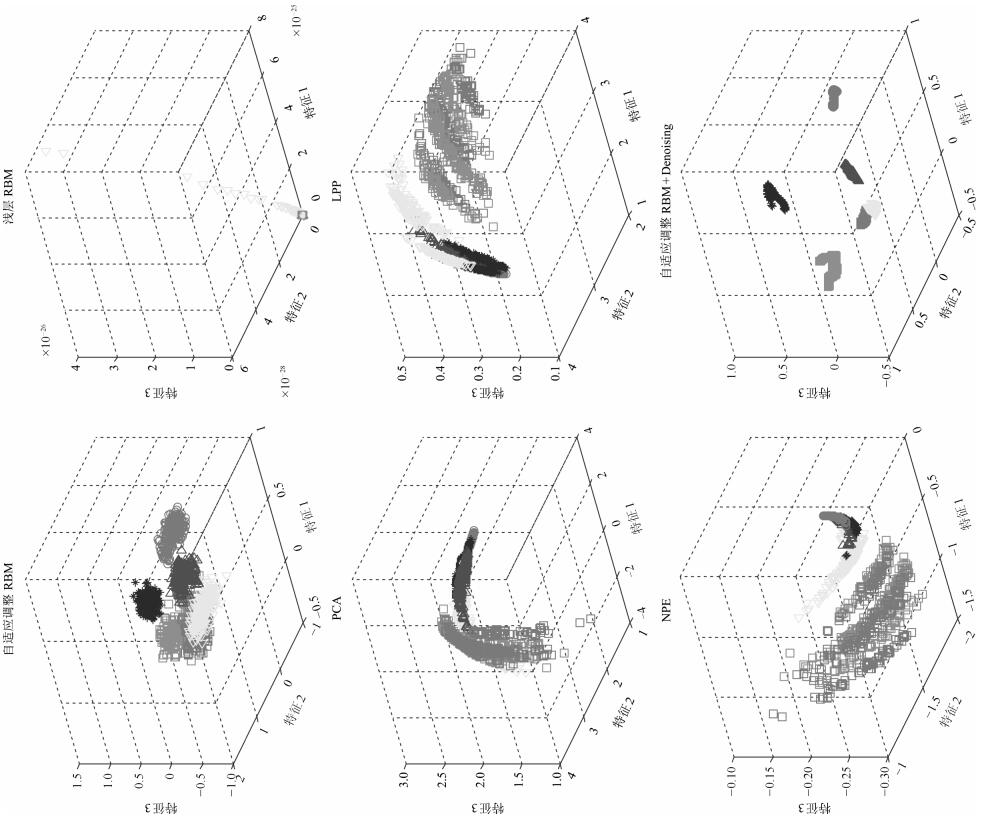
深度置信网络是由若干层无监督的限制玻尔兹曼机(Restricted Boltzmann machines,RBM)和一层有监督的反馈神经网络组成的深层结构,该结构通过对低层输入的逐层抽象转化提取复杂输入及复杂分类数据的有效信息.然而,深度置信网络模型存在隐含层数及特征维数难以确定,后向有监督过程存在“导数消亡”问题,使得低层结构参数得不到有效的训练,而且噪声干扰直接影响识别结果的问题.针对以上问题,提出以下解决方法:每个隐含层位置构建当前层输出与样本标签之间的映射转换矩阵,根据理论标签与实际标签之间的差异,实现隐含层特征维数的自适应调整,缓解“导数消亡”问题,同时在第一隐含层位置进行特征空间降噪,保证计算效率及提高诊断模型的识别效果.复杂工况的齿轮箱故障模拟实验,验证所提方法的有效性.
深度置信网络是由若干层无监督的限制玻尔兹曼机(Restricted Boltzmann machines,RBM)和一层有监督的反馈神经网络组成的深层结构,该结构通过对低层输入的逐层抽象转化提取复杂输入及复杂分类数据的有效信息.然而,深度置信网络模型存在隐含层数及特征维数难以确定,后向有监督过程存在“导数消亡”问题,使得低层结构参数得不到有效的训练,而且噪声干扰直接影响识别结果的问题.针对以上问题,提出以下解决方法:每个隐含层位置构建当前层输出与样本标签之间的映射转换矩阵,根据理论标签与实际标签之间的差异,实现隐含层特征维数的自适应调整,缓解“导数消亡”问题,同时在第一隐含层位置进行特征空间降噪,保证计算效率及提高诊断模型的识别效果.复杂工况的齿轮箱故障模拟实验,验证所提方法的有效性.
2017, 43(5): 866-876.
doi: 10.16383/j.aas.2017.c160120
cstr: 32138.14.j.aas.2017.c160120
摘要:
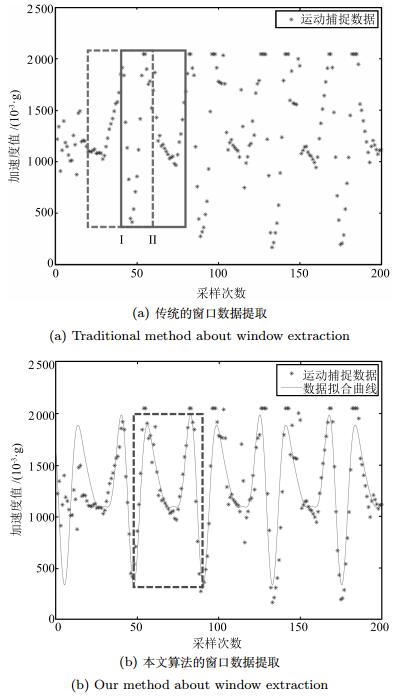
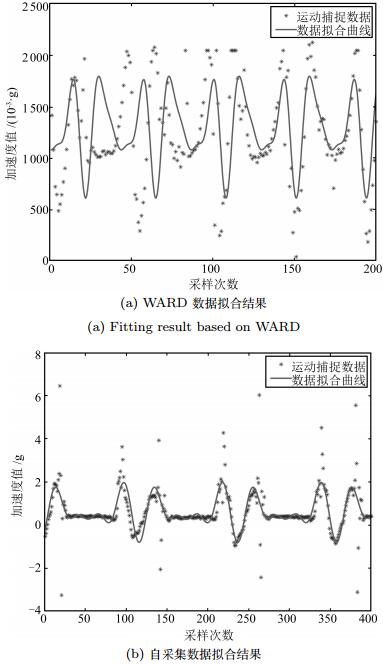
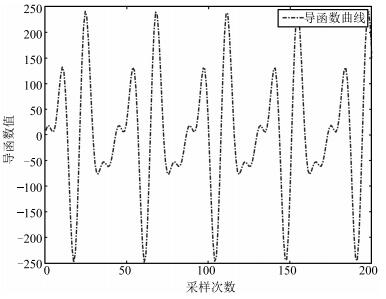
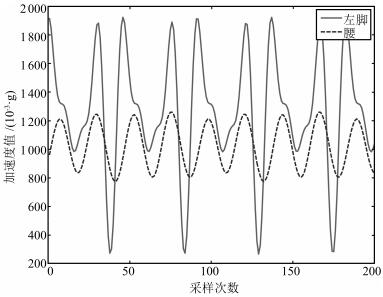
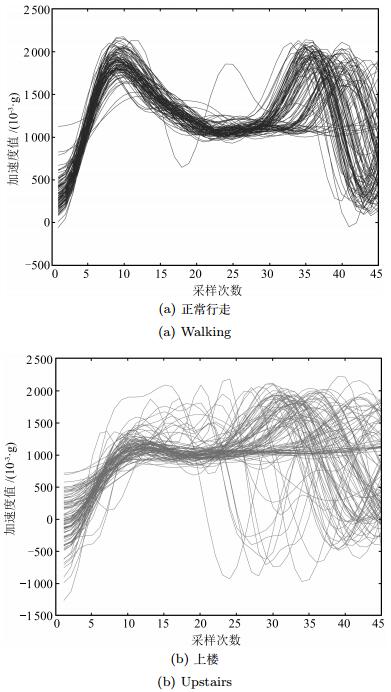
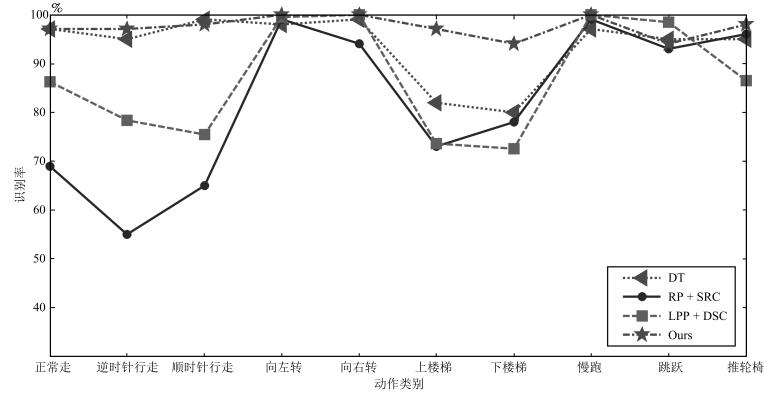
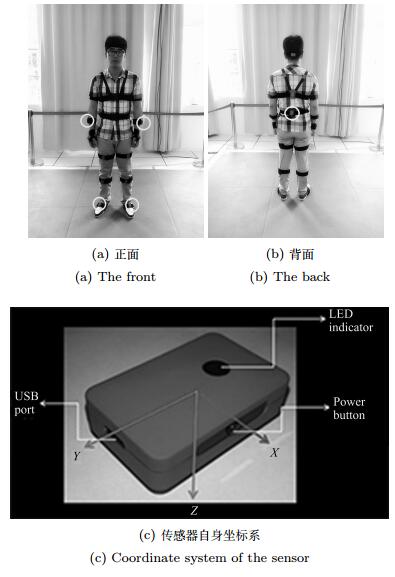
人体运动过程中,肢体的运动是连续的,而对应的运动捕捉数据是离散的.为了更好地分析人体日常运动行为的连续性与周期性,本文提出了一种基于函数型数据分析(Functional data analysis,FDA)的人体动态行为识别方法.首先,利用函数型数据分析方法,将可穿戴式运动捕捉系统采集的人体周期行为数据函数化,通过函数准确地定义数据的连续性与周期性;然后,根据导函数信息确定一个运动周期的起始点,并近似地提取出一个运动周期的数据序列;最后,根据不同行为一个周期内的曲线特征差异,利用支持向量机对动态行为进行分类识别.实验结果表明,本文的算法既能够较好地描述人体动态行为的连续性与周期性,又使得运动数据在标定的统一起始点处对齐,且在WARD数据集与自采集数据集上均取得了较好的识别率,分别达到97.5%与98.75%.
人体运动过程中,肢体的运动是连续的,而对应的运动捕捉数据是离散的.为了更好地分析人体日常运动行为的连续性与周期性,本文提出了一种基于函数型数据分析(Functional data analysis,FDA)的人体动态行为识别方法.首先,利用函数型数据分析方法,将可穿戴式运动捕捉系统采集的人体周期行为数据函数化,通过函数准确地定义数据的连续性与周期性;然后,根据导函数信息确定一个运动周期的起始点,并近似地提取出一个运动周期的数据序列;最后,根据不同行为一个周期内的曲线特征差异,利用支持向量机对动态行为进行分类识别.实验结果表明,本文的算法既能够较好地描述人体动态行为的连续性与周期性,又使得运动数据在标定的统一起始点处对齐,且在WARD数据集与自采集数据集上均取得了较好的识别率,分别达到97.5%与98.75%.