

-
摘要: 主成分分析是信号处理和数据统计领域内非常重要的分析工具.针对现有多个主成分提取算法收敛速度慢的问题,提出了具有快速收敛速度的神经网络算法.该算法能够并行提取信号中的多个主成分,而不需要其他额外的操作.分别采用平稳点分析法和随机离散时间分析法对所提算法的收敛性和自稳定性进行了证明.仿真实验表明,相比现有算法,所提算法不仅具有较快的收敛速度,而且具有较高的收敛精度.Abstract: Principle component analysis is a powerful tool in signal processing and data analysis. Up to now, some existing algorithms for multiple principal components extraction have a slow convergence speed. In order to solve this problem, a faster convergence algorithm is proposed, which can extract multiple principal components from the input signal in parallel. The equilibrium point analysis method and stochastic discrete time method are adopted to analyze the convergence and self-stabilizing property of the proposed algorithm. Simulation results show that compared with some existing algorithms, the proposed algorithm not only has a faster convergence speed but also has a higher estimating accuracy.
-
网络控制系统(Networked control systems, NCSs)是一种空间分布式系统, 其控制回路中的传感器、控制器、执行器由有限带宽的通信网络相连接[1-3].与传统的控制系统相比, NCSs具有可靠性高、易于维护和扩展、能实现信息资源共享以及远程控制等优点[4-6].但网络特有的属性例如数据丢包、网络时滞等问题也给控制系统带来了不可忽视的负面影响.其中数据丢包是造成系统性能恶化甚至破坏系统稳定性的主要因素.很多学者研究了具有丢包的NCS的稳定性分析和控制器设计问题并得到了很有意义的结论[7-12], 其中文献[7]运用随机丢包模型研究了NCS的$H_\infty$控制问题.文献[8]研究了具有马尔科夫丢包的量化系统的预测控制综合问题.文献[9]研究了具有丢包和多包传输的NCS的稳定性问题.文献[10]研究了有界丢包网络环境下的多包不确定系统的鲁棒预测控制问题.然而文献[7-10]仅考虑了丢包存在于传感器与控制器之间即单边丢包的情况, 由于丢包往往同时存在于传感器与控制器、控制器与执行器之间, 即双边丢包, 因此文献[7-10]的结果有一定局限性.文献[11]考虑任意有界丢包过程, 解决了具有输入约束和状态约束的模型预测控制综合问题.文献[12]考虑有界丢包和马尔科夫丢包两种情况, 分析了系统的状态反馈镇定问题.
近年来, 由于有限精度算法在数字计算机中的应用, 大量学者开始研究量化反馈控制问题[13-22].在众多研究成果中, 主要采用了静态量化[23-27]和动态量化[28-32]两种量化方法.由于后者能动态调整量化水平而增加吸引域, 因此在处理系统稳定性问题上更具有优势.然而, 由于缺乏统一的研究方法导致其在控制性能问题上仍具有局限性.文献[23]基于模态依赖的对数量化器, 提出了马尔科夫非线性系统的量化动态输出反馈控制器设计方法.文献[24]研究了单输入单输出线性时不变系统的量化反馈镇定问题, 证明了对数量化器对于二次型稳定系统的必要性.文献[25]综合研究了关于带有对数量化器的单输入单输出系统和多输入多输出系统的状态反馈和输出反馈镇定问题, 文中量化误差被处理为区间不确定性, 由此将量化反馈控制问题转化为鲁棒控制问题.在文献[25]的基础上, 文献[26]提出了量化依赖Lyapunov函数方法, 用以处理单输入和多输入量化反馈系统的镇定问题和$H_\infty$控制问题.
本文考虑双边丢包的情况, 给出了单输入和多输入两种情况下的量化反馈网络系统的保成本控制器设计方法.在分别分析双边丢包过程的基础上, 建立了带有对数量化器的NCS数学模型, 进而将具有丢包和量化的NCS的镇定问题转化为镇定一系列系统的鲁棒控制问题.基于线性矩阵不等式(Linear matrix inequality, LMI)技术, 得到了保成本控制器的设计方法.本文最典型的特点是运用量化依赖Lyapunov函数得到了相较于文献[25]中二次型Lyapunov函数方法保守性更弱的结果.
注1. 本文中, $I$表示相应维数的单位阵, ${\bf R}^{n}$表示$n$维欧氏空间(${\bf R}$即${\bf R}^{1}$).对于向量${\pmb x}$, ${\pmb u}$和矩阵$\mathscr{W}$, $\mathscr{R}$, 有$\|{\pmb x}\|^2_{\mathscr{W}}:={\pmb x}^{\rm T}{\mathscr{W}}{\pmb x}$, $\|{\pmb u}\|^2_{\mathscr{R}}:={\pmb u}^{\rm T}{\mathscr{R}}{\pmb u}$.在对称矩阵中, 用星号$*$表示对称部分.
1. 问题阐述
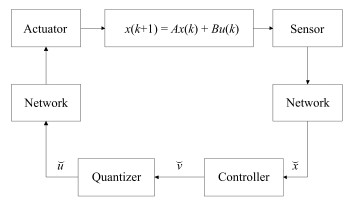
假设被控对象为如下线性离散时不变系统:
$ {\pmb x}(k+1)=A{\pmb x}(k)+Bu(k) $
(1) 其中, ${\pmb x}(k)\in{\bf R}^{n}$和$u(k)\in{\bf R}$分别表示可测系统状态和系统输入. NCS如图 1所示.考虑量化状态反馈为
$ \breve{u}(k)=f(\breve{v}(k)) $
(2) $ \breve{v}(k)=K \breve{\pmb x}(k) $
(3) 其中, $\breve{u}(k) $, $\breve{v}(k) $, $ {\breve{\pmb x}}(k) $分别表示量化器输出、量化器输入、控制器输入, $K$表示状态反馈增益.定义静态时不变对数量化器为[24-25]
$ \begin{align} f(\breve{v})= \begin{cases} \upsilon_i,&\mbox{若}~ \it \dfrac{\rm 1}{\rm 1+ \delta}\upsilon_i <\breve{v}\leq \dfrac{\rm1}{\rm1-\delta}\upsilon_i, \\ &\quad\, \breve{v}>\rm0\\ 0, &\mbox{若}~\it \breve{v}=\rm0\\ -f(-\breve{v}), &\mbox{若}~ \it \breve{v}<\rm0 \end{cases} \end{align} $
(4) 由上式可知, 量化器对称, 即$f(-\breve{v})=-f(\breve{v}) $.
量化水平集为
$ \begin{align} &\mathscr{V}=\{\pm \upsilon_{i}:\upsilon_{i}=\rho^{i}\upsilon_0, i=0, \pm1, \pm2, \cdots\}\cup \{0\}, \nonumber\\ &\qquad\qquad\qquad\qquad\qquad\qquad\quad 0<\rho<1, ~~\upsilon_0>0 \end{align} $
(5) 其中, $\rho$表示量化器密度. $\delta={(1-\rho)}/{(1+\rho)}$.假设$\rho$已知, 则$\delta$已知, 并且满足$0<\delta<1$.定义量化误差为
$ \begin{align} e(k)=&\ \breve{u}(k)-\breve{v}(k)=\nonumber\\ &\ f(K{ {\breve{\pmb x}}}(k))-K{ {\breve{\pmb x}}}(k)=\Delta(k)K{ {\breve{\pmb x}}}(k) \end{align} $
(6) 其中, $\Delta(k)\in[-\delta, \delta]$.
定义1[4].令 $\mathscr{J}:=\{j_1, j_2, \cdots\}$ 表示从传感器到控制器成功传输数据的时间点序列, 令 $\mathscr{I}:=\{i_1, i_2, \cdots\}$ 表示从控制器到执行器成功传输数据的时间点序列, $\mathscr{J}$ , $\mathscr{I}$ 都是序列 $\{0, 1, 2, 3, \cdots\}$ 的子序列.令 $d_1:= {\rm max}_{j_l\in\mathscr{J}}(j_{l+1}-j_l)$ 为数据从传感器到控制器的丢包上界, $ d_2:= {\rm max}_{i_l\in\mathscr{I}}(i_{l+1}-i_l) $ 为数据从控制器到执行器的丢包上界.有界丢包过程定义为 $\{\eta(j_l):=j_{l+1}-j_l|{j_l}\in\mathscr{J}\}$ , $\{\zeta(i_l):= i_{l+1}-{i_l}|{i_l}$ $\in\mathscr{I}\}$ , 其中, $\eta(j_l) $ 和 $\zeta(i_l)$ 分别从 $\mathscr{D}_1:=\{1, 2, \cdots, d_1\}$ 和 $\mathscr{D}_2:=\{1, 2, \cdots, d_2\}$ 中任意取值.
只有部分成功传输的数据能影响闭环系统, 因此引入排序因子${\rm {ord}}\{\cdot\}$来定义这部分数据.对于任意整数序列, 排序因子在不增加或减少任何元素的情况下, 对原有整数序列按从小到大的顺序进行排序, 将得到的序列称为有序序列.令$\mathscr{S}={\rm {ord}}\{\mathscr{J}$, $\mathscr{I}\}$, 其中, 对于两个不相等的正整数$a$, $b$, 如果出现$i_a$ $= j_b$的情况, 则在$\mathscr{S}$中$j_b$位于$i_a$之前.因此有序序列$\sigma= \{\nu_1, \mu_1, \nu_2, \mu_2, \cdots\}\subseteq\mathscr{S}$存在且唯一, 使$\{\nu_1, \nu_2, \cdots\}\in\mathscr{J}$, $\{\mu_1, \mu_2, \cdots\}\in\mathscr{I}$, 有序序列$\sigma$为实际影响闭环系统的时间序列.
引理1[11].对于定义1中的丢包过程, 有$\mu_r -$ $\nu_r+1\in \mathscr{D}_2$, $\mu_{r+1}-\nu_r\in\mathscr{D}$, 其中, $\mathscr{D}:=\{1, 2, \cdots$, $d_1$$+d_2-1\}$.
文中控制器为$\breve{u}=f(\breve{v})=f(K {\breve{\pmb x}}) $.在每个$j_l$时刻, 无论控制器是否成功从传感器接收到数据, 认为$\breve{u}(j_l)=f(K {\breve{\pmb x}}(j_l))=f(K{\pmb x}(j_l)) $.对于所有满足条件$j_l\leq k<j_{l+1}$的$k$时刻, 执行器收到数据$\breve{u}(k)$ $=$ $\breve{u}(j_l) $.系统闭环模型为
$ \begin{align} &\mu_r-\nu_r+1=t:\nonumber\\ &\begin{cases} \!{\pmb x}(\mu_{r+1})=\tilde{A}^1{\pmb x}(\mu_r)+\tilde{B}_1{\pmb x}(\nu_r), &\mu_{r+1}-\mu_r=1\\ \!{\pmb x}(\mu_{r+1})=\tilde{A}^2{\pmb x}(\mu_r)+\tilde{B}_2{\pmb x}(\nu_r), &\mu_{r+1}-\mu_r=2\\ \!~~~~~~~~~~~~~~~~~~~~~~~\vdots &~~~~~~~~~~\vdots\\ \!{\pmb x}(\mu_{r+1})=\tilde{A}^l{\pmb x}(\mu_r)+\tilde{B}_l{\pmb x}(\nu_r), &\mu_{r+1}-\mu_r=l \end{cases}\nonumber \end{align} $
其中, $t\in \mathscr{D}_2$, $l\in \mathscr{D}(t)$, $\tilde{A}^l=A^l$, $\tilde{B}_l={B}_l(1+\Delta(\mu_r))K$.
上式可以等价为如下模型:
$ \begin{align} {\pmb x}(k+1)=&\ A^{k-\mu_r+1}{\pmb x}(\mu_r)\, +\nonumber\\ &\ B_{k-\mu_r+1}(1+\Delta(k))K{\pmb x}(\nu_r) \end{align} $
(7) 其中, $\mu_r\leq k<\mu_{r+1}$, $r\geq1$, $B_j=\sum_{s=0}^{j-1}A^sB$, $j$ $\geq$ $1$.
取如下扩展状态变量:
$ \begin{align*} &{\pmb z}(k)=\nonumber\\ &\ \, [{\pmb x}^{\rm T}(k)~ {\pmb x}^{\rm T}(k-1)~ {\pmb x}^{\rm T}(k-2)~ \cdots~ {\pmb x}^{\rm T}(k-d_2+1)]^{\rm T} \end{align*} $
则系统(7)可改写为如下的等价模型:
$ \begin{align} &{\pmb z}(\mu_{r+1})=\sum\limits_{t\in\mathscr{D}_2}\sum\limits_{l\in\mathscr{D}(t)}\lambda_{t} (\mu_r)\omega_l(\mu_r)\Phi_{lt}{\pmb z}(\mu_r) \end{align} $
(8) 其中, $\Phi_{lt}=[[\Psi_{lt}^{1}~~\Psi_{lt}^{2}~~ \cdots~~ \Psi_{lt}^{d_2}]^{\rm T}~~~[I ~0]^{\rm T}]^{\rm T}$, $\Phi_{lt}\in{\bf R}^{(d_2n)\times(d_2n)}$, $\Psi_{lt}^{s}\in{\bf R}^{\left(\min\{l, d_2\}n\right)\times n}$, $s\in\mathscr{D}_2 $.
如果$t=1$,
$ \begin{align*} & \Psi_{lt}^{s}=\\ &\ \ \begin{cases} [\tilde{A}_1^{\rm T}+\tilde{B}_1^{\rm T} ~~ \tilde{A}_2^{\rm T}+\tilde{B}_2^{\rm T} ~~ \cdots ~~ \tilde{A}_{x}^{\rm T}+\tilde{B}_{x}^{\rm T}]^{\rm T},&s=1\\ 0,&s\neq1 \end{cases} \end{align*} $
如果$t\neq1$,
$ \begin{align*} &\Psi_{lt}^{s}= \begin{cases} [\tilde{A}_1^{\rm T} ~~ \tilde{A}_2^{\rm T} ~~ \cdots ~~ \tilde{A}_{x}^{\rm T}]^{\rm T},&s=1\\ [\tilde{B}_1^{\rm T} ~~ \tilde{B}_2^{\rm T} ~~ \cdots ~~ \tilde{B}_{x}^{\rm T}]^{\rm T},&s=t\\ 0,&s\neq1, t \end{cases} \end{align*} $
其中, $x=\min\{l, d_2\}$, $\tilde{A}_\alpha=A^{l+1-\alpha}$, $\tilde{B}_\alpha=$ $B_{l+1-\alpha}(1+\Delta(k))K$, $\alpha\in\{1, 2, \cdots, \min\{l, d_2\}\}$.注意到如果有$\mu_r-\nu_r+1=t$, 那么$\lambda_{t}(\mu_r)=1$; 如果有$\mu_{r+1}-\mu_r=l$, 那么$\omega_{l}(\mu_r)=1$, 否则$\lambda_{t}(\mu_r)=$ $\omega_{l}(\mu_r)$ $=0$.
2. 主要结果
2.1 单输入情况
本文采用量化依赖Lyapunov函数方法设计保成本控制器及分析具有双边丢包量化反馈系统的稳定性.构造如下形式的Lyapunov函数:
$ V({\pmb x}(\mu_r))={\pmb x}^{\rm T}(\mu_r)P(\Delta(\mu_r)){\pmb x}(\mu_r) $
(9) 其中, $P(\Delta(\mu_r)) $时变且依赖于量化误差$\Delta(\mu_r) $, 有如下形式:
$ P(\Delta(\mu_r))=\frac{\delta-\Delta(\mu_r)}{2\delta}P_1+\frac{\delta+\Delta(\mu_r)}{2\delta}P_2\nonumber $
其中, $P_1$和$P_2$正定.保成本性能指标为
$ J=\sum\limits_{\tau=0}^{\infty}[\|{\pmb x}(\mu_{r+\tau})\|^2_{\mathscr{W}}+\|u(\mu_{r+\tau})\|^2_{\mathscr{R}}]\nonumber $
其中, $u(\mu_{r+\tau})=f(v(\mu_{r+\tau})) $, $v(\mu_{r+\tau})=K{\pmb x}(\mu_{r+\tau}) $, ${\pmb x}(\mu_{r+\tau})=\Theta_t{\pmb z}(\mu_{r+\tau}) $, $\Theta_t$不确定但可表示为$\Theta_t=[\Theta_t^{1}~~ \Theta_t^{2}~~ \cdots~~ \Theta_t^{d_2}]$, $\Theta_t^{s}\in{\bf R}^{n\times n}$, $s\in{\mathscr{D}_2}$, $\Theta_t^{s}=0$, $s$ $\neq$ ${t}$, $\Theta_t^{t}=I$.设计保证闭环系统渐近稳定的保成本控制器, 有如下定理:
定理1. 考虑如图 1中的离散时间系统及对数量化器(4), 如果存在矩阵$Q_1>0$, $Q_2>0$, $Y$, $G_{lt}$和$\gamma$满足如下LMIs:
$ \begin{align} &\left[\begin{array}{cccccc} G_{lt}^{\rm T}+G_{lt}-Q_{1}& *& * & * \\ \Phi_{lt}G_{lt}& Q_{i}& * & * \\ \mathscr{W}^\frac{1}{2}G_{lt}^1& 0& \gamma I& * \\ \mathscr{R}^\frac{1}{2}(1-\delta)[Y~Y~\cdots~Y]& 0& 0& \gamma I \end{array}\right]>0, \nonumber \\ &\qquad\qquad\qquad\qquad\quad\ \ t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)}, ~i\in\{1, 2\}\end{align} $
(10) $ \begin{align} &\left[\begin{array}{cccccc} G_{lt}^{\rm T}+G_{lt}-Q_{2}& *& * & * \\ \Phi_{lt}G_{lt}& Q_{i}& * & * \\ \mathscr{W}^\frac{1}{2}G_{lt}^1& 0& \gamma I& * \\ \mathscr{R}^\frac{1}{2}(1+\delta)[Y~Y~\cdots~Y]& 0& 0& \gamma I \end{array}\right]>0, \nonumber\\ &\qquad\qquad\qquad\qquad\quad\ \ t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)}, ~i\in\{1, 2\} \end{align} $
(11) 那么, 存在保成本控制器(2)使闭环系统(8)渐近稳定, 且量化状态反馈控制器为
$ u(\nu_r)=(1+\Delta(\mu_r))YG^{-1}{\pmb x}(\mu_r) $
(12) 证明.闭环系统(8)渐近稳定, 如果有
$ \begin{align} &\Delta{V({\pmb z}(\mu_{r+\tau}))}=V({\pmb z}(\mu_{r+\tau+1}))-V({\pmb z}(\mu_{r+\tau}))=\nonumber\\ &\ \ \, {\pmb z}^{\rm T}(\mu_{r+\tau})\sum\limits_{t\in{\mathscr{D}_2}}\sum\limits_{l\in{\mathscr{D}(t)}}\lambda_t(\mu_{r+\tau})\omega_l(\mu_{r+\tau})\, \times\notag\\ &\ \ (\Phi^{\rm T}_{lt}P(\Delta(\mu_{r+\tau+1}))\Phi_{lt}-P(\Delta(\mu_{r+\tau}))) {\pmb z}(\mu_{r+\tau})=\nonumber\\ &\ \ {\pmb z}^{\rm T}(\mu_{r+\tau})\Bigg(\sum\limits_{t\in{\mathscr{D}_2}}\sum\limits_{l\in{\mathscr{D}(t)}}\lambda_t(\mu_{r+\tau})\omega_l(\mu_{r+\tau})(\Phi^{\rm T}_{lt}\, \times\nonumber\\ &\ \ (\frac{\delta-\Delta(\mu_{r+\tau+1})}{2\delta}P_1+\frac{\delta+\Delta(\mu_{r+\tau+1})}{2\delta}P_2)\Phi_{lt}\, -\nonumber\\ &\ \ (\frac{\delta-\Delta(\mu_{r+\tau})}{2\delta}P_1\!+\!\frac{\delta+\Delta(\mu_{r+\tau})}{2\delta}P_2))\!\Bigg){\pmb z}(\mu_{r+\tau})<\nonumber \\ &\ \, -({\pmb x}^{\rm T}(\mu_{r+\tau})\mathscr{W}{\pmb x}(\mu_{r+\tau})\, +\nonumber\\ &\ \ u^{\rm T}(\mu_{r+\tau})\mathscr{R}u(\mu_{r+\tau}))<\notag\\ &\ \, -{\pmb z}^{\rm T}(\mu_{r+\tau})([I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]\, +\nonumber\\ &\ \ (1+\Delta(\mu_{r+\tau}))^2\Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta){\pmb z}(\mu_{r+\tau})<0 \end{align} $
(13) 由此得到如下不等式:
$ \begin{align} &{\pmb x}^{\rm T}(\mu_{r+\tau})\mathscr{W}{\pmb x}(\mu_{r+\tau})+u^{\rm T}(\mu_{r+\tau})\mathscr{R}u(\mu_{r+\tau})<\nonumber\\ &\qquad -\Delta{V({\pmb z}(\mu_{r+\tau}))} \end{align} $
(14) 将式(14)从$\tau=0$到$\tau=\infty$累加, 得到性能指标满足$J=\sum_{\tau=0}^{\infty}[\|{\pmb x}(\mu_{r+\tau})\|^2_{\mathscr{W}}+\|u(\mu_{r+\tau})\|^2_{\mathscr{R}}]\leq V(z(\mu_r)) $以及
$ \begin{align} &\Phi^{\rm T}_{lt}(\frac{\delta-\Delta(\mu_{r+\tau+1})}{2\delta}P_1+\frac{\delta+\Delta(\mu_{r+\tau+1})}{2\delta}P_2)\Phi_{lt}\, -\nonumber\\ &\qquad (\frac{\delta-\Delta(\mu_{r+\tau})}{2\delta}P_1+\frac{\delta+\Delta(\mu_{r+\tau})}{2\delta}P_2)\, +\nonumber\\ &\qquad [I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]+(1+\Delta(\mu_{r+\tau}))^2\, \times\nonumber\\ &\qquad \Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta<0, \quad t\in{\mathscr{D}_2}, ~ l\in{\mathscr{D}(t)} \end{align} $
(15) 考虑如下四种情形:
情形1. $\Delta(\mu_{r+\tau})=-\delta$, $\Delta(\mu_{r+\tau+1})=-\delta$;
情形2. $\Delta(\mu_{r+\tau})=-\delta$, $\Delta(\mu_{r+\tau+1})=\delta$;
情形3. $\Delta(\mu_{r+\tau})=\delta$, $\Delta(\mu_{r+\tau+1})=-\delta$;
情形4. $\Delta(\mu_{r+\tau})=\delta$, $\Delta(\mu_{r+\tau+1})=\delta$.
对于情形1和情形2, 由式(15), 得
$ \begin{align} &\Phi^{\rm T}_{lt}P_i\Phi_{lt}-P_1+[I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]\, +\nonumber\\ &\qquad (1-\delta)^2\Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta<0, \nonumber\\ &\qquad\qquad\qquad\qquad t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)}, ~i\in \{1, 2\} \end{align} $
(16) 对于情形3和情形4, 同样由式(15), 得
$ \begin{align} &\Phi^{\rm T}_{lt}P_i\Phi_{lt}-P_2+[I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]\, +\nonumber\\ &\qquad (1+\delta)^2\Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta<0, \nonumber\\ &\qquad\qquad\qquad\qquad t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)}, ~i\in \{1, 2\} \end{align} $
(17) 写出式(16)和式(17)包含的所有情况:
$ \Phi^{\rm T}_{lt}P_1\Phi_{lt}-P_1+[I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]\, +\nonumber\\ \;\;\;\;\;\;\ \ (1-\delta)^2\Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta<0, \quad t\in{\mathscr{D}_2}, ~ l\in{\mathscr{D}(t)} $
(18) $ \Phi^{\rm T}_{lt}P_2\Phi_{lt}-P_1+[I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]\, +\nonumber\\ \;\;\;\;\;\;\ \ (1-\delta)^2\Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta<0, \quad t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)} $
(19) $ \Phi^{\rm T}_{lt}P_1\Phi_{lt}-P_2+[I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]\, +\nonumber\\ \;\;\;\;\;\;\ \ (1+\delta)^2\Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta<0, t\in{\mathscr{D}_2}, ~ l\in{\mathscr{D}(t)} $
(20) $ \Phi^{\rm T}_{lt}P_2\Phi_{lt}-P_2+[I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W} [I~ 0~ \cdots~ 0]\, +\nonumber\\ \;\;\;\;\;\;\ \ (1+\delta)^2\Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta<0, t\in{\mathscr{D}_2}, ~ l\in{\mathscr{D}(t)} $
(21) 对任意$\Delta(\mu_{r+\tau})\in [-\delta, \delta]$, $\Delta(\mu_{r+\tau+1})\in [-\delta$, $\delta]$, 将式(18)和式(19)分别乘以$(\delta$ $-$ $\Delta(\mu_{r+\tau+1}))/$ ${(2\delta)}$和${(\delta+\Delta(\mu_{r+\tau+1}))}/{(2\delta)}$, 然后将其结果相加, 得
$ \begin{align} &\Phi^{\rm T}_{lt}P(\Delta(\mu_{r+\tau+1}))\Phi_{lt}-P_1+[I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}\, \times\nonumber\\ &\qquad [I~ 0~ \cdots~ 0]+(1-\delta)^2\Theta^{\rm T}K^{\rm T} \mathscr{R}K\Theta<0, \nonumber\\ &\qquad\qquad\qquad\qquad\qquad\qquad\ \ t\in{\mathscr{D}_2}, ~ l\in{\mathscr{D}(t)} \end{align} $
(22) 对式(20)和式(21)重复上述步骤, 得
$ \begin{align} &\Phi^{\rm T}_{lt}P(\Delta(\mu_{r+\tau+1}))\Phi_{lt}-P_2+[I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}\, \times\nonumber\\ &\qquad [I~ 0~ \cdots~ 0]+(1+\delta)^2\Theta^{\rm T}K^{\rm T} \mathscr{R}K\Theta<0, \nonumber\\ &\qquad\qquad\qquad\qquad\qquad\qquad\ \ t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)} \end{align} $
(23) 将式(22)和式(23)分别乘以${(\delta-\Delta(\mu_{r+\tau}))}/$ ${(2\delta)}$和${(\delta+\Delta(\mu_{r+\tau}))}/{(2\delta)}$, 然后将其结果相加, 得
$ \begin{align} &\Phi^{\rm T}_{lt}P(\Delta(\mu_{r+\tau+1}))\Phi_{lt}-P(\Delta(\mu_{r+\tau}))\, + \nonumber\\ &\qquad [I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]\, +\nonumber\\ &\qquad (1+2\Delta(\mu_{r+\tau})+\delta^2)\Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta<0, \nonumber\\ &\qquad\qquad\qquad\qquad\qquad\qquad\ \ t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)} \end{align} $
(24) 注意到$(\Delta(\mu_{r+\tau}))^2<\delta^2$, 因此得到
$ \begin{align} &\Phi^{\rm T}_{lt}P(\Delta(\mu_{r+\tau+1}))\Phi_{lt}-P(\Delta(\mu_{r+\tau}))\, +\nonumber\\ &\qquad [I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]\, +\nonumber\\ &\qquad (1+\Delta(\mu_{r+\tau}))^2\Theta^{\rm T}K^{\rm T}\mathscr{R}K\Theta<0, \nonumber\\ &\qquad\qquad\qquad\qquad\qquad\quad\ \ t\in{\mathscr{D}_2}, ~ l\in{\mathscr{D}(t)} \end{align} $
(25) 式(25)和式(13)等价.
令$K=YG^{-1}$, $Q_i=\gamma P_i^{-1}$, $i\in\{1, 2\}$, 以及
$ \begin{align} &G_{lt}= \left[\begin{array}{ccccc} G_{lt}^{11} &G_{lt}^{12} &\cdots &G_{lt}^{1, d_2} \\ G_{lt}^{21} &G_{lt}^{22} &\cdots &G_{lt}^{2, d_2} \\ \vdots &\vdots &\ddots &\vdots \\ G_{lt}^{d_2, 1} &G_{lt}^{d_2, 2} &\cdots &G_{lt}^{d_2, d_2} \end{array}\right], ~~ G_{lt}^{ts}=G\nonumber \\ &\qquad\qquad\qquad\qquad\qquad\qquad\quad t, s\in\mathscr{D}_2, ~ l\in{\mathscr{D}(t)}\nonumber \end{align} $
其中, 矩阵$G_{lt}$中的每一块子矩阵具有相同维数.在式(16)和式(17)两边分别乘以和$\gamma^{-1/2}G_{lt}$, 得
$ \begin{align} &G^{\rm T}_{lt}\Phi^{\rm T}_{lt}Q^{-1}_i\Phi_{lt}G_{lt}-\gamma^{-1}G^{\rm T}_{lt}P_1G_{lt}+\gamma^{-1}{G_{lt}^1}^{\rm T}\mathscr{W}G_{lt}^1+\nonumber\\ &\qquad \gamma^{-1}(1-\delta)^2[Y~Y~\cdots~Y]^{\rm T}\mathscr{R}[Y~Y~\cdots~Y]<0, \nonumber\\ &\qquad\qquad\qquad\qquad\quad\ \ \, t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)}, ~i\in\{1, 2\}\end{align} $
(26) $ \begin{align} &G^{\rm T}_{lt}\Phi^{\rm T}_{lt}Q^{-1}_i\Phi_{lt}G_{lt}-\gamma^{-1}G^{\rm T}_{lt}P_2G_{lt}+\gamma^{-1}{G_{lt}^1}^{\rm T}\mathscr{W}G_{lt}^1+\nonumber\\ &\qquad c\gamma^{-1}(1+\delta)^2[Y~Y~\cdots~Y]^{\rm T}\mathscr{R}[Y~Y~\cdots~Y]<0, \nonumber\\ &\qquad\qquad\qquad\qquad\quad\ \ \, t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)}, ~i\in\{1, 2\} \end{align} $
(27) 由$\gamma^{-1}G^{\rm T}_{lt}P_iG_{lt}\geq G^{\rm T}_{lt}+G_{lt}-Q_i$, $i\in\{1, 2\}$及Schur补引理, 上述两式可转化为如下LMIs:
$ \begin{align} &\left[\begin{array}{cccccc} G_{lt}^{\rm T}+G_{lt}-Q_{1}& *& * & * \\ \Phi_{lt}G_{lt}& Q_{i}& * & * \\ \mathscr{W}^\frac{1}{2}G_{lt}^1& 0& \gamma I& * \\ \mathscr{R}^\frac{1}{2}(1-\delta)[Y~Y~\cdots~Y]& 0& 0& \gamma I \end{array}\right]>0, \nonumber\\ &\qquad\qquad\qquad\qquad\quad\ \ \, t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)}, ~i\in\{1, 2\}\nonumber\end{align} $
$ \begin{align} &\left[\begin{array}{cccccc} G_{lt}^{\rm T}+G_{lt}-Q_{2}& *& * & * \\ \Phi_{lt}G_{lt}& Q_{i}& * & * \\ \mathscr{W}^\frac{1}{2}G_{lt}^1& 0& \gamma I& * \\ \mathscr{R}^\frac{1}{2}(1+\delta)[Y~Y~\cdots~Y]& 0& 0& \gamma I \end{array}\right]>0, \nonumber\\ &\qquad\qquad\qquad\qquad\quad\ \ \, t\in{\mathscr{D}_2}, ~ l\in{\mathscr{D}(t)}, ~ i\in\{1, 2\}\nonumber \end{align} $
其中, .
2.2 多输入情况
以上考虑的是单输入的情形, 接下来将量化依赖Lyapunov函数方法拓展到多输入的情况.同样考虑线性离散时不变系统(1), 其中系统输入${\pmb u}(k)\in{\bf R}^m$, 量化反馈为
$ \begin{align} {\breve{\pmb u}}(k)=&\ f({\breve{\pmb v}}(k))=\nonumber\\ &\ [f_1(\breve{v}_1(k))~ f_2(\breve{v}_2(k))~ \cdots~ f_m(\breve{v}_m(k))~]^{\rm T} \end{align} $
(28) $ {\breve{\pmb v}}(k)=\ K{\breve{\pmb x}}(k) $
(29) 其中, $f_i(\cdot) $是量化器输入的第$i$行对应的量化器.同样假设为式(4)中的对数量化器, 则
$ {\breve{\pmb u}}(k)=(I+\Lambda(k))K{\breve{\pmb x}}(k) $
(30) $ \Lambda(k)={\rm diag}\{\Lambda_1(k), \Lambda_2(k), \cdots, \Lambda_m(k)\} $
(31) 其中, $\Lambda_i(k)\in[-\delta_i, \delta_i]$.可得系统闭环模型为
$ \begin{align} &{\pmb x}(k+1)=\nonumber\\ &\qquad A^{k-\mu_r+1}{\pmb x}(\mu_r)+B_{k-\mu_r+1}(I+\Lambda(k))K{\pmb x}(\nu_r) \end{align} $
(32) 通过研究发现, 式(31)中的$\Lambda(k) $可表示为
$ \begin{align} &\Lambda(k)=\sum\limits_{j=1}^{2^m}\lambda_j(k)\Lambda^{(j)}\nonumber\\ &\sum\limits_{j=1}^{2^m}\lambda_j(k)=1, ~~ \lambda_j(k)\geq0 \end{align} $
(33) 其中, $\Lambda^{(j)}$是对角矩阵, 只包含元素$-\delta_i$或$\delta_i$, $2^m$种$-\delta_i$或$\delta_i$的组合得到所有的$\Lambda^{(j)}$.因此系统闭环模型(32)可转化为
$ \begin{align} {\pmb x}(k+1)=&\ \sum\limits_{j=1}^{2^m}\lambda_j(k)(A^{k-\mu_r+1}{\pmb x}(\mu_r)+\nonumber\\ &\ B_{k-\mu_r+1}(I+\Lambda^{(j)})K{\pmb x}(\nu_r)) \end{align} $
(34) 针对多输入情况, 设计保成本控制器及分析具有双边丢包量化反馈系统的稳定性, 有如下定理:
定理2. 考虑如图 1中的离散时间系统及对数量化器$f_i(\cdot) $, 如果存在矩阵$Q_i>0$, $Q_j>0$, $Y$, $G_{lt}$和$\gamma$满足如下LMIs:
$ \begin{align} &\left[\begin{array}{cccccc} G_{lt}^{\rm T}+G_{lt}-Q_{i}& *& * & * \\ \Phi_{lt}G_{lt}& Q_{j}& * & * \\ \mathscr{W}^\frac{1}{2}G_{lt}^1& 0& \gamma I& * \\ \mathscr{R}^\frac{1}{2}(I+\Lambda^{(i)})[Y~Y~\cdots~Y]& 0& 0& \gamma I \end{array}\right]>0, \nonumber\\ &\qquad\qquad\qquad\quad\ \ \, t\in{\mathscr{D}_2}, ~ l\in{\mathscr{D}(t)}, ~ (i, j)\in\varphi\times\varphi \end{align} $
(35) 其中, $\varphi=\{1, 2, \cdots, 2^m\}$.那么, 存在保成本控制器(28)使闭环系统(32)渐近稳定, 且量化状态反馈控制器为
$ \pmb {u}(\nu_r)=(I+\Lambda(\mu_r))YG^{-1}\pmb {x}(\mu_r) $
(36) 证明.构造形如式(9)的Lyapunov函数
$ \begin{align} &V({\pmb x}(\mu_r))={\pmb x}^{\rm T}(\mu_r)P(\Lambda(\mu_r)){\pmb x}(\mu_r)\nonumber\\ &P(\Lambda(\mu_r))=\sum\limits_{i=1}^{2^m}\lambda_i(\mu_r)P_i\nonumber \end{align} $
其中, 矩阵$P_i>0$, 重复定理1的证明过程, 可得
$ \begin{align} &\left[\begin{array}{cccccc} G_{lt}^{\rm T}+G_{lt}-Q_{i}& *& * & * \\ \Phi_{lt}G_{lt}& Q_{j}& * & * \\ \mathscr{W}^\frac{1}{2}G_{lt}^1& 0& \gamma I& * \\ \mathscr{R}^\frac{1}{2}(I+\Lambda^{(i)})[Y~Y~\cdots~Y]& 0& 0& \gamma I \end{array}\right]>0, \nonumber\\ &\qquad\qquad\qquad\quad\ \ \, t\in{\mathscr{D}_2}, ~l\in{\mathscr{D}(t)}, ~(i, j)\in\varphi\times\varphi\nonumber \end{align} $
由此, 对于任意$\Lambda(\mu_{r+\tau}) $和, 有
$ \begin{align} &\Phi^{\rm T}_{lt}P(\Lambda(\mu_{r+\tau+1}))\Phi_{lt}-P(\Lambda(\mu_{r+\tau}))\, +\nonumber\\ &\ \ \ \ [I~ 0~ \cdots~ 0]^{\rm T}\mathscr{W}[I~ 0~ \cdots~ 0]\, +\nonumber\\ &\ \ \ \ \Theta^{\rm T}K^{\rm T}(I+\Lambda(\mu_{r+\tau}))^{\rm T}\mathscr{R}(I+\Lambda(\mu_{r+\tau}))K\Theta<0\nonumber \end{align} $
即$V({\pmb z}(\mu_{(r+\tau+1)}))-V({\pmb z}(\mu_{(r+\tau)}))<0$.由此保证了闭环系统(32)渐近稳定.
注2. 本文所谓保守性更弱的结论主要是针对文献[25]采用的二次型Lyapunov函数$V(x)=$ ${\pmb x}^{\rm T}P{\pmb x}$而言, 即对整个量化误差区间$\Delta(k)\in[-\delta$, $\delta]$取固定的Lyapunov矩阵$P$.而本文采用了新的量化依赖Lyapunov函数, $V({\pmb x}(\mu_r))={\pmb x}^{\rm T}(\mu_r)$ $\times$ $P(\Delta(\mu_r)){\pmb x}(\mu_r) $, Lyapunov矩阵$P(\Delta(\mu_r)) $依赖于量化误差, 即$P(\Delta(\mu_r))=(\delta-\Delta(\mu_r))P_1/(2\delta)+(\delta$ $+$ $\Delta(\mu_r))P_2/(2\delta)$, 在定理1和定理2中, 若取$Q_1$ $=$ $Q_2=P$, 则本文的结论可退化为文献[25]的结论.由此可知, 本文的方法保守性更弱.
3. 仿真例子
为验证定理1, 考虑如下单输入线性离散时不变系统:
$ \begin{align} {\pmb x}(k+1)= \left[\begin{array}{ccc} 1 & 0.1\\ 0 & 0.99 \end{array}\right]{\pmb x}(k)+ \left[\begin{array}{ccc} 0 \\ 0.0787 \end{array}\right]u(k)\nonumber \end{align} $
初始状态为${\pmb x}(0)=[0.01~ 0]^{\rm T}$, 两个通道丢包上界为$d_1$ $=d_2=3$.
为验证定理2, 考虑如下多输入线性离散时不变系统:
$ \begin{align} {\pmb x}(k+1)= \left[\begin{array}{ccc} 1 & 0.1\\ 0 & 0.99 \end{array}\right]{\pmb x}(k)+ \left[\begin{array}{ccc} 1 & 0 \\ 1 & 1 \end{array}\right]{\pmb u}(k)\nonumber \end{align} $
同样, 取初始状态为${\pmb x}(0)=[0.01~ 0]^{\rm T}$, 两个通道丢包上界为$d_1=d_2=3$.
系统网络数据传输状态如图 2所示, 其中, $s2c$ $=$ $1$表示控制器从传感器成功接收到数据, $s2c=0$则没有收到数据, $c2a$ $=$ $1$表示执行器从控制器成功接收到数据, $c2a=0$则没有收到数据.基于定理1和定理2, 得到了在不同量化密度下的单输入系统及多输入系统的状态响应和控制输入仿真结果分别如图 3和图 4所示, 并且列出其反馈增益$K$和性能指标$J$值如表 1.由此证明了本文NCS保成本控制器设计方法的有效性.与文献[25]中二次型Lyapunov函数方法相比, 不论是单输入系统还是多输入系统, 采用本文的量化依赖Lyapunov函数方法, 可以较好地改善控制性能.此外, 从仿真实验结果来看, 当量化密度取得较小时, 即量化器较粗糙, 可以得到文献[25]中二次型Lyapunov方法不可行, 而本文方法可以正常求解的结论, 因此本文方法保守性更弱.
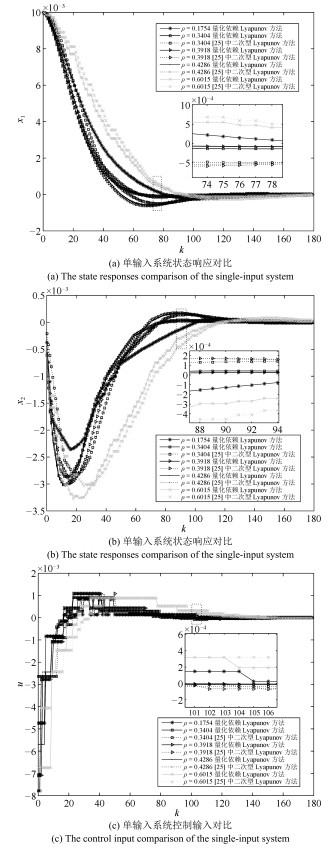 图 3 单输入系统状态响应及控制输入Fig. 3 The state responses and control input of the single-input system
图 3 单输入系统状态响应及控制输入Fig. 3 The state responses and control input of the single-input system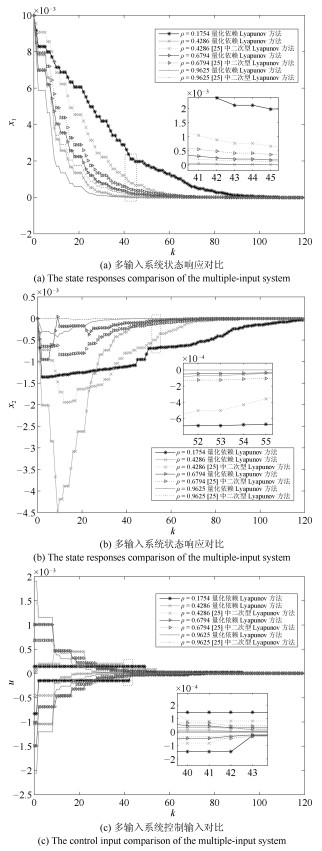 图 4 多输入系统状态响应及控制输入Fig. 4 The state responses and control input of the multiple-input system表 1 两种Lyapunov函数方法下的反馈增益$K$及性能指标$J$对比Table 1 Comparison of feedback gain $K$ and performance index $J$ values using two Lyapunov function methods
图 4 多输入系统状态响应及控制输入Fig. 4 The state responses and control input of the multiple-input system表 1 两种Lyapunov函数方法下的反馈增益$K$及性能指标$J$对比Table 1 Comparison of feedback gain $K$ and performance index $J$ values using two Lyapunov function methods系统 量化密度$\rho$值 方法 反馈增益$K$值 性能指标$J$值 单输入 $\rho=0.1754$ 量化依赖Lyapunov方法 $\left[{array}{ccc} -0.5888 & -1.6344 {array}\right]$ $0.0022$ [25]中二次型Lyapunov方法 不可行 不可行 $\rho=0.3404$ 量化依赖Lyapunov方法 $\left[{array}{ccc}-0.6563 & -1.5303{array}\right]$ $0.0020$ [25]中二次型Lyapunov方法 $\left[{array}{ccc}-0.4870 & -1.0089{array}\right]$ $0.0022$ $\rho=0.3918$ 量化依赖Lyapunov方法 $\left[{array}{ccc}-0.6691 & -1.5135{array}\right]$ $0.0018$ [25]中二次型Lyapunov方法 $\left[{array}{ccc}-0.5079 & -1.0487{array}\right]$ $0.0020$ $\rho=0.4286$ 量化依赖Lyapunov方法 $\left[{array}{ccc}-0.6764 & -1.5042{array}\right]$ $0.0019$ [25]中二次型Lyapunov方法 $\left[{array}{ccc}-0.5214 & -1.0764{array}\right]$ $0.0020$ $\rho=0.6015$ 量化依赖Lyapunov方法 $\left[{array}{ccc}-0.7054 & -1.4931{array}\right]$ $0.0034$ [25]中二次型Lyapunov方法 $\left[{array}{ccc}-0.5835 & -1.2062{array}\right]$ $0.0035$ 多输入 $\rho=0.1754$ 量化依赖Lyapunov方法 $\left[{array}{ccc} -0.0642 & -0.0508\\ 0.0173 & -0.0746 {array}\right]$ $0.0016$ [25]中二次型Lyapunov方法 不可行 不可行 $\rho=0.4286$ 量化依赖Lyapunov方法 $\left[{array}{ccc} -0.1380 & -0.0674\\ 0.0035 & -0.1285{array}\right]$ $0.0007$ [25]中二次型Lyapunov方法 $\left[{array}{ccc}-0.0717 & -0.0274\\0.0122 & -0.1371{array}\right]$ $0.0012$ $\rho=0.6794$ 量化依赖Lyapunov方法 $\left[{array}{ccc} -0.1286 & -0.0582\\ 0.1125 & -0.0763{array}\right]$ $0.0005$ [25]中二次型Lyapunov方法 $\left[{array}{ccc}-0.1085 & -0.0579\\0.0833 & -0.0777{array}\right]$ $0.0007$ $\rho=0.9625$ 量化依赖Lyapunov方法 $\left[{array}{ccc} -0.2041 & -0.0577\\ 0.1914 & -0.1517{array}\right]$ $0.0003$ [25]中二次型Lyapunov方法 $\left[{array}{ccc}-0.1455 & -0.0601\\0.1445 & -0.0785{array}\right]$ $0.0004$ 4. 结论
本文的主要目标是给出丢包网络系统的保成本控制器设计方法, 该方法的关键在于运用量化依赖Lyapunov函数来分析闭环系统的稳定性.本文基于鲁棒控制理论建立了包含对数量化器的网络控制系统数学模型, 得到了系统鲁棒稳定的充分条件和保成本控制器.仿真结果证明了设计方法的有效性和合理性, 并通过和文献[25]中二次型Lyapunov函数方法的比较, 说明了运用量化依赖的Lyapunov函数方法得到的结果保守性更弱.但同时也由于该Lyapunov函数引入了更多的决策变量, 使得本文方法付出了更大计算量的代价.
-
表 1 不同重构维数下三种算法的重构误差
Table 1 Reconstitution errors of the three algorithms with different reconstitution dimensions
重构维数 1 4 7 FMPCE 0.094 0.0837 0.0813 MED-GOPAST 0.0959 0.0852 0.0846 MNIC 0.1283 0.1015 0.0933  下载: 导出CSV
下载: 导出CSV
-
[1] Kong X Y, Hu C H, Ma H G, Han C Z. A unified self-stabilizing neural network algorithm for principal and minor components extraction. IEEE Transactions on Neural Networks and Learning Systems, 2012, 23(2): 185-198 doi: 10.1109/TNNLS.2011.2178564 [2] 李伟, 焦松, 陆凌云, 杨明.基于特征差异的仿真模型验证及选择方法.自动化学报, 2014, 40(10): 2134-2144 http://www.aas.net.cn/CN/abstract/abstract18488.shtmlLi Wei, Jiao Song, Lu Ling-Yun, Yang Ming. Validation and selection of simulation model based on the feature differences. Acta Automatica Sinica, 2014, 40(10): 2134-2144 http://www.aas.net.cn/CN/abstract/abstract18488.shtml [3] 潘宗序, 禹晶, 肖创柏, 孙卫东.基于光谱相似性的高光谱图像超分辨率算法.自动化学报, 2014, 40(12): 2797-2807 http://www.aas.net.cn/CN/abstract/abstract18558.shtmlPan Zong-Xu, Yu Jing, Xiao Chuang-Bai, Sun Wei-Dong. Spectral similarity-based super resolution for hyperspectral images. Acta Automatica Sinica, 2014, 40(12): 2797-2807 http://www.aas.net.cn/CN/abstract/abstract18558.shtml [4] 樊继聪, 王友清, 秦泗钊.联合指标独立成分分析在多变量过程故障诊断中的应用.自动化学报, 2013, 39(5): 494-501 http://www.aas.net.cn/CN/abstract/abstract17927.shtmlFan Ji-Cong, Wang You-Qing, Qin S J. Combined indices for ICA and their applications to multivariate process fault diagnosis. Acta Automatica Sinica, 2013, 39(5): 494-501 http://www.aas.net.cn/CN/abstract/abstract17927.shtml [5] 高全学, 高菲菲, 郝秀娟, 程洁.基于图像欧氏距离的二维局部多样性保持投影.自动化学报, 2013, 39(7): 1062-1070 http://www.aas.net.cn/CN/abstract/abstract18134.shtmlGao Quan-Xue, Gao Fei-Fei, Hao Xiu-Juan, Cheng Jie. Image Euclidean distance-based two-dimensional local diversity preserving projection. Acta Automatica Sinica, 2013, 39(7): 1062-1070 http://www.aas.net.cn/CN/abstract/abstract18134.shtml [6] Oja E. A simplified neuron model as a principal component analyzer. Journal of Mathematical Biology, 1982, 15(3): 267-273 doi: 10.1007/BF00275687 [7] Miao Y F, Hua Y B. Fast subspace tracking and neural network learning by a novel information criterion. IEEE Transactions on Signal Processing, 1998, 46(7): 1967-1979 doi: 10.1109/78.700968 [8] Peng D Z, Yi Z, Xiang Y. A unified learning algorithm to extract principal and minor components. Digital Signal Processing, 2009, 19(4): 640-649 doi: 10.1016/j.dsp.2009.03.004 [9] Kong X Y, Hu C H, Han C Z. A dual purpose principal and minor subspace gradient flow. IEEE Transactions on Signal Processing, 2012, 60(1): 197-210 doi: 10.1109/TSP.2011.2169060 [10] Ouyang S, Bao Z. Fast principal component extraction by a weighted information criterion. IEEE Transactions on Signal Processing, 2002, 50(8): 1994-2002 doi: 10.1109/TSP.2002.800395 [11] Oja E, Ogawa H, Wangviwattana J. Principal component analysis by homogeneous neural networks, Part I: the weighted subspace criterion. IEICE Transactions on Information and Systems, 1992, E75-D(3): 366-375 [12] Tanaka T. Generalized weighted rules for principal components tracking. IEEE Transactions on Signal Processing, 2005, 53(4): 1243-1253 doi: 10.1109/TSP.2005.843698 [13] Bartelmaos S, Abed-Meraim K. Fast principal component extraction using Givens rotations. IEEE Signal Processing Letters, 2008, 15: 369-372 doi: 10.1109/LSP.2008.920006 [14] Li J W, Li C X. Information criterion based fast PCA adaptive algorithm. Journal of Systems Engineering and Electronics, 2007, 18(2): 377-384 doi: 10.1016/S1004-4132(07)60101-7 [15] Thameri M, Abed-Meraim K, Belouchrani A. Low complexity adaptive algorithms for principal and minor component analysis. Digital Signal Processing, 2013, 23(1): 19-29 doi: 10.1016/j.dsp.2012.09.007 [16] Thameri M, Kammoun A, Abed-Meraim K, Belouchrani A. Fast principal component analysis and data whitening algorithms. In: Proceedings of the 7th International Workshop on Systems, Signal Processing and their Applications. Tipaza, Algeria: IEEE, 2011. 139-142 [17] Chen T P, Amari S I, Lin Q. A unified algorithm for principal and minor components extraction. Neural Networks, 1998, 11(3): 385-390 doi: 10.1016/S0893-6080(98)00004-5 [18] Kong X Y, An Q S, Ma H G, Han C Z, Zhang Q. Convergence analysis of deterministic discrete time system of a unified self-stabilizing algorithm for PCA and MCA. Neural Networks, 2012, 36: 64-72 doi: 10.1016/j.neunet.2012.08.016 [19] Oja E. Principal components, minor components and linear neural networks. Neural Networks, 1992, 5(6): 927-935 doi: 10.1016/S0893-6080(05)80089-9 [20] Kung S Y, Diamantaras K I, Taur J S. Adaptive principal component extraction (APEX) and applications. IEEE Transactions on Signal Processing, 1994, 42(5): 1202-1217 doi: 10.1109/78.295198 [21] Möller R. A self-stabilizing learning rule for minor component analysis. International Journal of Neural Systems, 2004, 14(1): 1-8 doi: 10.1142/S0129065704001863 [22] 方蔚涛, 马鹏, 成正斌, 杨丹, 张小洪.二维投影非负矩阵分解算法及其在人脸识别中的应用.自动化学报, 2012, 38(9): 1503-1512 http://www.aas.net.cn/CN/abstract/abstract17761.shtmlFang Wei-Tao, Ma Peng, Cheng Zheng-Bin, Yang Dan, Zhang Xiao-Hong. 2-dimensional projective non-negative matrix factorization and its application to face recognition. Acta Automatica Sinica, 2012, 38(9): 1503-1512 http://www.aas.net.cn/CN/abstract/abstract17761.shtml 期刊类型引用(9)
1. 王后能,牛松梅,李自成. 含丢包和量化的网络控制系统随机鲁棒稳定. 控制工程. 2024(02): 288-294 .  百度学术
百度学术2. 周颖,郑颖,肖敏. DoS攻击下的网络控制系统基于量化的输出反馈控制. 应用数学学报. 2023(02): 230-246 . 百度学术3. 赵华荣,彭力,于洪年,沈奕宏. 考虑量化的多智能体系统数据驱动双向一致性控制. 控制理论与应用. 2022(02): 336-342 . 百度学术4. 刘毅,梅玉鹏,李国燕,潘玉恒,梅树立. 基于T-S模糊模型的多时滞非线性网络切换控制系统非脆弱H_∞控制. 控制与决策. 2021(05): 1087-1094 . 百度学术5. 刘毅,梅玉鹏,李国燕,潘玉恒. 网络环境下切换模糊时滞系统的非脆弱控制. 计算机工程. 2020(03): 299-308 . 百度学术6. 张英,司瑞才,曹伟. 网络化控制系统研究综述. 电力科技与环保. 2020(02): 60-62 . 百度学术7. 罗明,黄晓鹏. 汽车FlexRay车载网络控制系统工作的稳定性和可靠性研究. 电子测量技术. 2020(12): 55-59 . 百度学术8. 周颖,刘璐璐,韩鹭. 基于量化依赖Lyapunov函数的时变时延网络控制系统的鲁棒控制. 南京邮电大学学报(自然科学版). 2020(04): 57-63 . 百度学术9. 陈贺婉,李虎,陆慧娟. 短距离无线通信CSD数据传输持续丢帧测试仿真. 计算机仿真. 2020(06): 142-146 . 百度学术其他类型引用(14)
-

 下载:
下载:







计量
- 文章访问数: 2726
- HTML全文浏览量: 368
- PDF下载量: 742
- 被引次数: 23
